

Page 1
42 High Frequency Electronics
High Frequency Design
TRANSISTOR BIASING
Transistor Biasing Issues
for Linear Amplification
of Complex Signals
By Gary A. Breed
Editorial Director
T
ransistors are the
workhorse of RF
and microwave signal amplification. They
are everywhere, as discrete devices and incorporated into integrated circuits. Every transistor
must be provided with an operating voltage, a
signal input and bias.
This basic tutorial explores the last of
these—bias. Bias techniques have undergone
some changes in recent years to accommodate
the complexity of modern communications. We
will review some fundamentals, then offer an
overview of issues that effect the way transistor biasing is managed to maintain linearity
in today’s wireless systems.
Bias Fundamentals
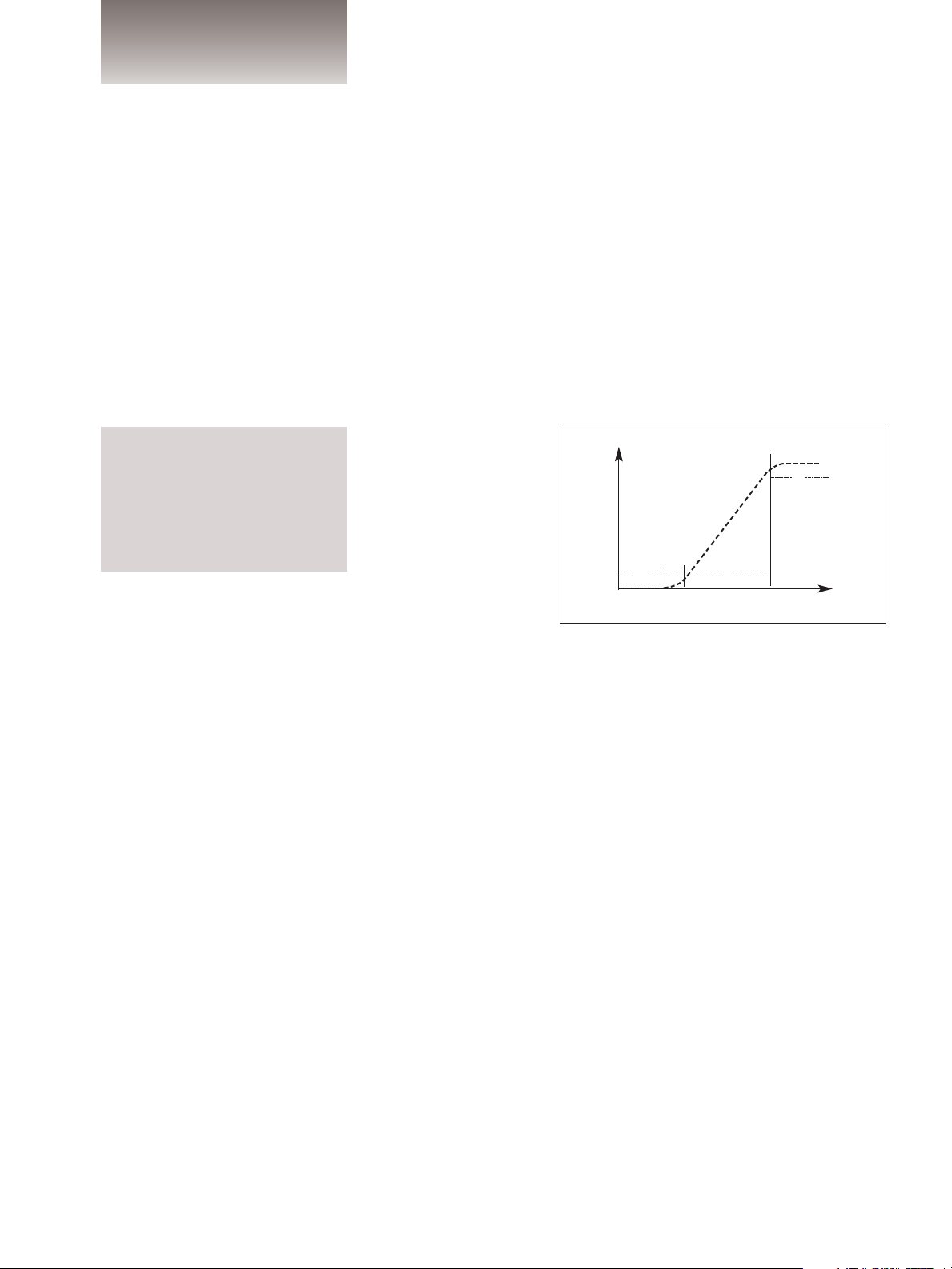
The purpose of bias is to establish operation on the desired portion of a transistor’s
input/output transfer function curve (Figure
1). Note that bias is almost always referenced
to voltage, even though BJTs are current-controlled devices. In these devices, the bias voltage establishes the base-emitter current that
is the input to the device. FETs are voltagecontrolled, so bias is a direct
Looking at Figure 1, and remembering
that the input signal is summed with the bias
voltage, let’s look at the operating regions:
Cutoff region “C”—We’ll start with this
region, since it has the least impact on linear
amplifiers. When the chosen bias sets operation in the cutoff region, a large contribution is
required from the input signal to create any
output at all. When no signal is present, there
will be no collector or drain current (other
than leakage). This situation is acceptable,
even preferred in two circumstances: Class C
power amplifiers and digital/switching applications, including switch-mode power amplifiers. This on/off step function is, by definition,
nonlinear. Thus, transistors biased at or below
cutoff are not suitable for linear applications
such as small signal amplifiers or linear
power amplifiers, and we require no further
discussion for this article.
Saturation region “D”—Each transistor
has a maximum collector or drain current it
can deliver. When the bias+input signal is
high enough to reach this output level, the
amplifier ceases to be linear. When dealing
with the saturation region, we are mainly concerned with the maximum power available
from the device. In modern wireless systems,
Here is tutorial review of
biasing issues for transistors,
with notes on the methods
that are used to control
bias in modern wireless
linear power amplifiers
Input
Output
C
B
A
D
Figure 1 · A highly simplified transistor transfer function curve. Input is base current for a
bipolar junction transistor (BJT), gate voltage
for a field-effect transistor (FET); Output is
collector current for a BJT, drain current for a
FET. “A” is the conduction region, “B” is the
transition region, “C” is the cutoff region and
“D” is the saturation region.
From March 2003 High Frequency Electronics
Copyright © 2003, Summit Technical Media, LLC
Page 2

44 High Frequency Electronics
High Frequency Design
TRANSISTOR BIASING
the maximum average power is of little concern, but peak power is important. Some complex signal waveforms
have average power as little as seven
percent of their peak power.
Rather that deal with peak power
as a biasing issue, most wireless
amplifier designers select (or design)
a transistor type that will support
the required peak power. For applications where it is required, there are
techniques that offer one to three dB
of compensation for the compression
of the signal at peak power
Conduction region “A”—When the
bias establishes the operating point
of a transistor within the conduction
region, the output is a linear function
of the input. Class A amplifiers are
biased to remain within the conduction region during the plus or minus
voltage swing of the input signal. The
range of the input swing is determined by how far the bias point is up
the curve. The cost of accommodating
higher input (and output) voltage
swing is higher no-signal output current. In short, class A amplifiers consume a lot of current, even when no
input signal is present.
The main issue with the conduction region is power consumption, or
efficiency. Yet, this type of operation
is normally chosen to obtain linear
operation. Since the most advanced
modulation methods used today
require linear amplification, this is a
major area of interest. In today’s
wireless systems, the main issue with
power amplification is how to maintain full class A performance while
mitigating its low efficiency.
Transition region “B”—The transition region is key to any discussion
of biasing for linear operation.
Semiconductor junctions never operate ideally, going from non-conduction
to conduction completely and exactly
at the threshold current or voltage.
So, there is a region in the transfer
curve where the output gradually
increases with increasing bias.
In audio and many RF applications, class B amplifiers have been
common for many years. These typically use two devices, operating in
push-pull (180 degree phasing). Each
device only needs to conduct during
half of the cycle of the input signal.
Each half-cycle will be amplified linearly in its associated device, with
only a small quiescent current during
the “off” portion of the cycle.
Although class B amplifiers are
much more efficient than class A,
other performance issues limit linearity, such as phase accuracy in the
180 degree dividing and combining
circuits, obtaining identical performance of the two devices, and the
effects of not-quite-complete cutoff
during the unused half-cycle. If we
can accept these imperfect behaviors,
class B push-pull amplifiers are a
useful way to get linear amplification
with good efficiency.
Next, if we change the bias of a
class A amplifier so that the swing of
the input signal sometimes reaches
into the transition region (class AB),
we lower the quiescent current,
improving efficiency, but like class B
push-pull, it is at the expense of some
nonlinearity. Some established applications can tolerate a degree of
imperfection in “linear” amplification. For example, single-sideband
(SSB) voice transmission can tolerate
some distortion and NTSC television
signals can use relatively simple
compensating circuits to minimize
observable effects.
Today’s Linearity Issues
Modern digital wireless signals
are sufficiently complex that they
require linear amplification with little compromise. In response to these
requirements, engineers have developed a number of techniques to
obtain an optimal balance between
linearity and efficiency. The major
techniques are outlined below:
Predistortion—The concept of predistortion is to modify the input signal in manner that is opposite of the
effects of the amplifier nonlinearity.
The amplifier transfer function can
be measured and a circuit devised
with the appropriate compensation.
Some types of predistortion also vary
the bias in proportion to the input
signal.
Although predistortion can be
highly effective, it has the limitation
that amplifier nonlinearities are not
constant. They vary with temperature, component aging and other factors. Some of these can be addressed
separately to help make predistortion
more effective.
Temperature compensation—To
make any linearization technique
more reliable, amplifiers must have
temperature compensation. The task
is getting harder with high peak-toaverage ratio of digital signals, since
the temperature of the transistor die
changes much faster than the temperature of the heat sink! Some transistors are being manufactured with
an integral diode or resistive thermal
sensor that is used with compensation circuitry that adjusts the bias to
maintain the same operating point
under varying conditions.
Degradation compensation—All
transistors change over their operating lifetime, but the popular LDMOS
devices have a significant rate of
change over time. Early devices even
had to be replaced as they fell out of
spec. Current production LDMOS
transistors have improved this performance problem, but most amplifier manufacturers have implemented
some type of bias adjustment to compensate for the remaining performance degradation over time.
There are other interesting techniques used for compensation of nonlinearities, such as feed-forward linearization and digital predistortion,
but as they are not directly related to
bias, are not discussed here.
This overview has identified some
of the power amplifier linearity
issues faced by today’s engineers. In
future issues, we will provide timely
technical articles on this subject that
show how specific problems are being
dealt with.
 Loading...
Loading...