

Page 1

ACS350
Kullanım Kılavuzu
ACS350 Sürücüleri (0,37…7.5 kW, 0.5…10 HP)
Page 2

Page 3

ACS350 Sürücüleri
0,37…7.5 kW
0.5…10 HP
Kullanım Kılavuzu
„ 2005 ABB Oy. Tüm Hakları Saklıdır.
3AFE68462401 Rev A
TR
GEÇERLİLİK TARİHİ: 20.07.2005
Page 4

Page 5
Güvenlik
Bu bölümün içindekiler
Bu bölüm, sürücüyü çalıştırırken, kurulum ve servis işlemlerini yaparken izlemeniz
gereken güvenlik talimatlarını içerir. Bu talimatlara uyulmaması, fiziksel yaralanmalar
veya ölümlere yol açabilir ya da sürücü, motor veya tahrik edilen ekipman hasar
görebilir. Sürücü üzerinde çalışmadan önce güvenlik talimatlarını okuyun.
Uyarı simgelerinin kullanımı
Bu kılavuz iki çeşit güvenlik uyarısı içerir:
Tehlike; elektrik, fiziksel yaralanmalara ve/veya hasara yol açabilen
tehlikeli gerilimlere dair uyarı niteliğindedir.
5
Genel tehlike, elektriksel olmayan yollardan oluşabilecek yaralanma
ve/veya hasar durumlarına dair uyarıdır.
Kurulum ve bakım çalışmaları
Bu uyarılar, sürücü, motor kablosu ve motor üzerinde çalışma yapan kişiler içindir.
UYARI! Aşağıdaki talimatlara uyulmaması, fiziksel yaralanmalar veya ölümlere yol
açabilir ya da ekipman hasar görebilir.
Sürücünün bakımı sadece yetkili bir elektrikçi tarafından yapılmalıdır!
• Besleme gerilimi verildiğinde sürücü, motor kablosu ve motor üzerinde işlem
yapmayın. Besleme gerilimini kestikten sonra sürücü, motor kablosu veya motor
üzerinde işlem yapmadan önce ara devre kondansatörlerinin yükü boşaltmaları
için 5 dakika bekleyin.
Multimetreyle aşağıdakileri her zaman ölçün (en az 1 Mohm empedans): 1.
Sürücü U1, V1 ve W1 ile toprak hattı giriş fazları arasında gerilim olmadığını.
2. BRK+ ve BRK- ile toprak hattı arasında gerilim olmadığını.
• Sürücü veya harici kontrol devrelerine enerji verilirken kontrol kabloları üzerinde
işlem yapmayın. Harici olarak sağlanan kontrol devreleri, sürücü besleme gerilimi
kesilmiş olsa biler tehlikeli gerilim taşıyabilir.
• Sürücü üzerinde yalıtım veya gerilim dayanım testleri yapmayın.
Not:
• Motor durmuş olsa dahi, U1, V1, W1 ve U2, V2, W2 Güç Devresi terminallerinde
ve kasa boyutuna ba
terminallerinde tehlikeli düzeyde gerilim bulunur.
ğlı olarak UDC+ ve UDC- veya BRK+ ve BRK-
Güvenlik
Page 6
6
UYARI! Aşağıdaki talimatlara uyulmaması, fiziksel yaralanmalar veya ölümlere yol
açabilir ya da ekipman hasar görebilir.
• Sürücü sahada tamir edilemez. Arızalı bir cihazı onarma girişiminde bulunmayın;
değiştirme için fabrikaya veya yerel Yetkili Servis Merkezine başvurun.
•Delme işleminin sonucunda meydana gelen tozun kurulum sırasında sürücünün
içine kaçmamasını sağlayın. Sürücünün içinde bulunan ve elektrik açısından
iletken olan toz hasara veya arızaya neden olabilir.
• Yeterli soğutma sağlayın.
Çalıştırma ve devreye alma
Bu uyarılar, çalıştırma işlemini planlayan, sürücüyü çalıştıran veya kullanan kişiler
içindir.
UYARI! Aşağıdaki talimatlara uyulmaması, fiziksel yaralanmalar veya ölümlere yol
açabilir ya da ekipman hasar görebilir.
• Sürücüyü ayarlamadan ve hizmete almadan önce, motor ve tahrik edilen tüm
ekipmanın sürücünün tüm hız aralıklarında çalışmaya uygun olduğundan emin
olun. Sürücü, motorun doğrudan elektrik hattına bağlanmasıyla, sağlanan hızların
altında ve üstünde çalışması için ayarlanabilir.
• Tehlikeli durumların meydana gelme ihtimali varsa, otomatik arıza resetleme
fonksiyonlarını etkinleştirmeyin. Etkinleştirildiklerinde, bu fonksiyonlar sürücüyü
resetler ve hatadan sonra çalışmaya devam eder.
• Motoru AC kontaktörü veya kesme cihazıyla kontrol etmeyin (kesme yöntemleri);
bunun yerine kontrol panelindeki start ve stop tuşlarını ve veya harici
komutları kullanın (I/O veya fieldbus). DC kondansatörlerin izin verilen maksimum
şarj döngüsü (güç vererek çalıştırma) dakika da ikidir ve maksimum toplam şarj
sayısı 15 000'dir.
Not:
• Start komutu için harici bir besleme seçilirse ve ON konumundaysa, sürücü 3
kablolu (darbe) start/stop için konfigüre edilmediyse, giriş geriliminin kesilmesi
veya ar
ızanın resetlenmesinden sonra derhal çalışacaktır.
• Kontrol konumu lokal olarak ayarlanmadıysa (ekranda LOC yazmıyorsa), kontrol
panelindeki stop tuşu sürücüyü durdurmaz. Cihazı kontrol panelinden durdurmak
için, LOC/REM tuşuna ve ardından stop tuşuna basın.
LOC
REM
Güvenlik
Page 7

İçindekiler
Güvenlik
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Uyarı simgelerinin kullanımı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Kurulum ve bakım çalışmaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Çalıştırma ve devreye alma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
İçindekiler
Kılavuz hakkında
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Uyumluluk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Kullanıcı profili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Kasa boyutuna göre sınıflandırma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Kurulum ve devreye alma akış diyagramı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7
Donanım açıklamaları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Genel bilgiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Genel bilgiler: Bağlantılar, anahtarlar ve LED'ler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Tip kodu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Mekanik kurulum
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Sürücünün paketinin açılması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Kurulumdan önce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Sürücünün monte edilmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Elektrik kurulumunun planlanması
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Motor seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
AC güç hattı bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Besleme kesme cihazı
Termik aşırı yük ve kısa devre koruması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Güç kablolarının seçilmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Endüktif yük durumunda röle çıkış kontağının korunması ve kesintilerin azaltılması . . . . . . . . . . . 27
Kaçak akım cihazı (RCD) uyumluluğu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Kontrol kablosu seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Motor sıcaklık sensörünün sürücü I/O'suna bağlanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Kabloların yönlendirilmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
İçindekiler
Page 8

8
Elektrik kurulumu
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Tertibat yalıtımının kontrol edilmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Güç kablolarının bağlanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Kontrol kablolarının bağlanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Kurulum kontrol listesi
Kontrol listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Devreye alma, I/O ve ID Run ile kontrol
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Sürücünün çalıştırılması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Sürücü, I/O arayüzü ile nasıl kontrol edilir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
ID Run nasıl gerçekleştirilir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Kontrol panelleri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Kontrol panelleri hakkında . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Uyumluluk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Temel Kontrol Paneli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Gelişmiş Kontrol Paneli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Uygulama makroları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Makrolar hakkında genel bilgiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Uygulama makrolarının I/O bağlantıları hakkında kısa bilgi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
ABB Standart makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3 kablolu makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Alternatif makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Motor Potansiyometre makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Man/Oto makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 81
PID Kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Moment Kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Kullanıcı makroları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Program özellikleri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Devreye Alma Asistanı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Lokal kontrol – harici kontrol karşılaştırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Referans tipleri ve işleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Referans trimleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Programlanabilir analog girişler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Programlanabilir analog çıkış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Programlanabilir dijital girişler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
İçindekiler
Page 9

Programlanabilir röle çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Frekans girişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Transistör çıkışı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Gerçek sinyaller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Motor tanımlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Güç kaybında çalışmaya devam etme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
DC Mıknatıslama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Bakım tetikleyici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
DC Tutma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Hız dengeli durdurma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Akı Frenleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Akı Optimizasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Hızlanma ve yavaşlama rampaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Kritik Hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Sabit hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Özel U/f oranı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Hız kontrolörü ayarı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Skaler kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Skaler olarak kontrol edilen sürücü için IR kompanzasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Programlanabilir koruma fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Ön programlı hatalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Çalışma limitleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Güç limiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Otomatik resetler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Denetimler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Parametre kilidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
PID kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Proses PID (PID1) kontrolü için uyku fonksiyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Standart I/O üzerinden motor sıcaklık ölçümü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Mekanik bir frenin kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Joglama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Zamana bağlı fonksiyonlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Zamanlayıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Sayaç . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Ardışık programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
9
Gerçek sinyal ve parametreler
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Fieldbus adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Fieldbus eşdeğeri. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Farklı makrolara sahip hazır değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
01 OPERATING DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
03 FB ACTUAL SIGNALS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
04 FAULT HISTORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
10 START/STOP/DIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
11 REFERENCE SELECT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
12 CONSTANT SPEEDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
13 ANALOG INPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
İçindekiler
Page 10

10
14 RELAY OUTPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
15 ANALOG OUTPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
16 SYSTEM CONTROLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
18 FREQ INPUT & TRANSISTOR OUTPUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
19 TIMER & COUNTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
20 LIMITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
21 START/STOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
22 ACCEL/DECEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
23 SPEED CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
24 TORQUE CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
25 CRITICAL SPEEDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
26 MOTOR CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
29 MAINTENANCE TRIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
30 FAULT FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
31 AUTOMATIC RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
32 SUPERVISION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
33 INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
34 PANEL DISPLAY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
35 MOTOR TEMP MEAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
36 TIMED FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
40 PROCESS PID SET 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
41 PROCESS PID SET 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
42 EXT / TRIM PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
43 MECH BRK CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
51 EXT COMM MODULE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
52 PANEL COMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
53 EFB PROTOCOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
54 FBA DATA IN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
55 FBA DATA OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
84 SEQUENCE PROG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
98 OPTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
99 START-UP DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
Dahili fieldbus'lı fieldbus kontrolü
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
Sisteme genel bir bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
Dahili modbus üzerinden iletişimin kurulması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
Sürücü kontrol parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
Fieldbus kontrol arayüzü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
Fieldbus referansları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Modbus eşleştirme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
Haberleşme profilleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
Fieldbus adaptörlü fieldbus kontrolü
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Sisteme genel bir bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Haberle
şmeyi bir fieldbus adaptör modülü kullanarak ayarlamak . . . . . . . . . . . . . . . . . . . . . . . . 234
Sürücü kontrol parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
İçindekiler
Page 11

11
Fieldbus kontrol arayüzü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
Haberleşme profili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
Fieldbus referansları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
Hata izleme
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Alarm ve hata göstergeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Resetleme nasıl yapılır . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Hata tarihçesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Sürücü tarafından oluşturulan alarm mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
Temel Kontrol Paneli tarafından oluşturulan alarmlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
Sürücü tarafından oluşturulan hata mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
Dahili fieldbus arızaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
Bakım ve donanım diagnostiği
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Bakım aralıkları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Fan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Kondansatörler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Kontrol paneli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
LED'ler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
Teknik veriler
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Nominal değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Giriş gücü kablosu sigortaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
Güç kablosu boyutları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
Güç kabloları: terminal boyutları, maksimum kablo çapları ve sıkma momentleri . . . . . . . . . . . . . 258
Boyutlar, a
ğırlıklar ve gürültü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
Giriş gücü bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
Motor bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
Kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Fren direnci bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Verim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Soğutma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Koruma sınıfları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Ortam koşulları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
Malzemeler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
CE işareti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
Yürürlükteki standartlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
C-Tick işareti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
UL işareti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
Fren dirençleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
İçindekiler
Page 12

12
Boyutlar
R0 ve R1 kasa boyutları, IP20 (pano kurulumu) / UL açık . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
R0 ve R1 kasa boyutları, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
R2 kasa boyutu, IP20 (pano kurulumu) / UL açık . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
R2 kasa boyutu, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
R3 kasa boyutu, IP20 (pano kurulumu) / UL açık . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
R3 kasa boyutu, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
İçindekiler
Page 13

Kılavuz hakkında
Bu bölümün içindekiler
Bu bölümde kullanıcı profili, uyumluluk ve bu kılavuzun içerdiği konular hakkında
bilgi verilmektedir. Sürücünün teslimatı, kurulumu ve devreye alınmasını kontrol
etmek için adımlardan oluşan bir akış şeması içermektedir. Akış şeması, bu
kılavuzdaki bölümler/kısımlara referans vermektedir.
Uyumluluk
Bu kılavuz, ACS350 sürücü belleniminin 2,21b veya üzeri versiyonuyla uyumludur.
Bkz. 3301 FW VERSION parametresi.
Kullanıcı profili
Bu kılavuz, sürücü kurulumunu planlayan, kuran, devreye alan, kullanan ve bakımını
yapan kişiler içindir. Sürücü üzerinde çalışmaya başlamadan önce kılavuzu okuyun.
Okuyucunun, elektrik, kablo bağlantısı, elektrik parçaları ve elektrik şema
simgelerinin temellerini bildiği kabul edilmektedir.
13
Bu kılavuz dünyanın dört bir yanındaki okuyucular için hazırlanmıştır. Hem SI hem
de İngiliz ölçü birimleri kullanılmaktadır. Amerika'daki tesisler için özel ABD
talimatları sağlanmaktadır.
Kasa boyutuna göre sınıflandırma
ACS350, R0...R3 kasa boyutlarında üretilmektedir. Sadece belirli kasa boyutlarını
ilgilendiren bazı talimatlar, teknik veriler ve boyutsal çizimler söz konusu kasa
boyutunun işaretiyle (R0...R3) işaretlenmiştir. Sürücünüzün kasa boyutunu
öğrenmek için sayfa 253 bölüm Teknik veriler içindeki değer tablosuna başvurun.
Kılavuz hakkında
Page 14
14
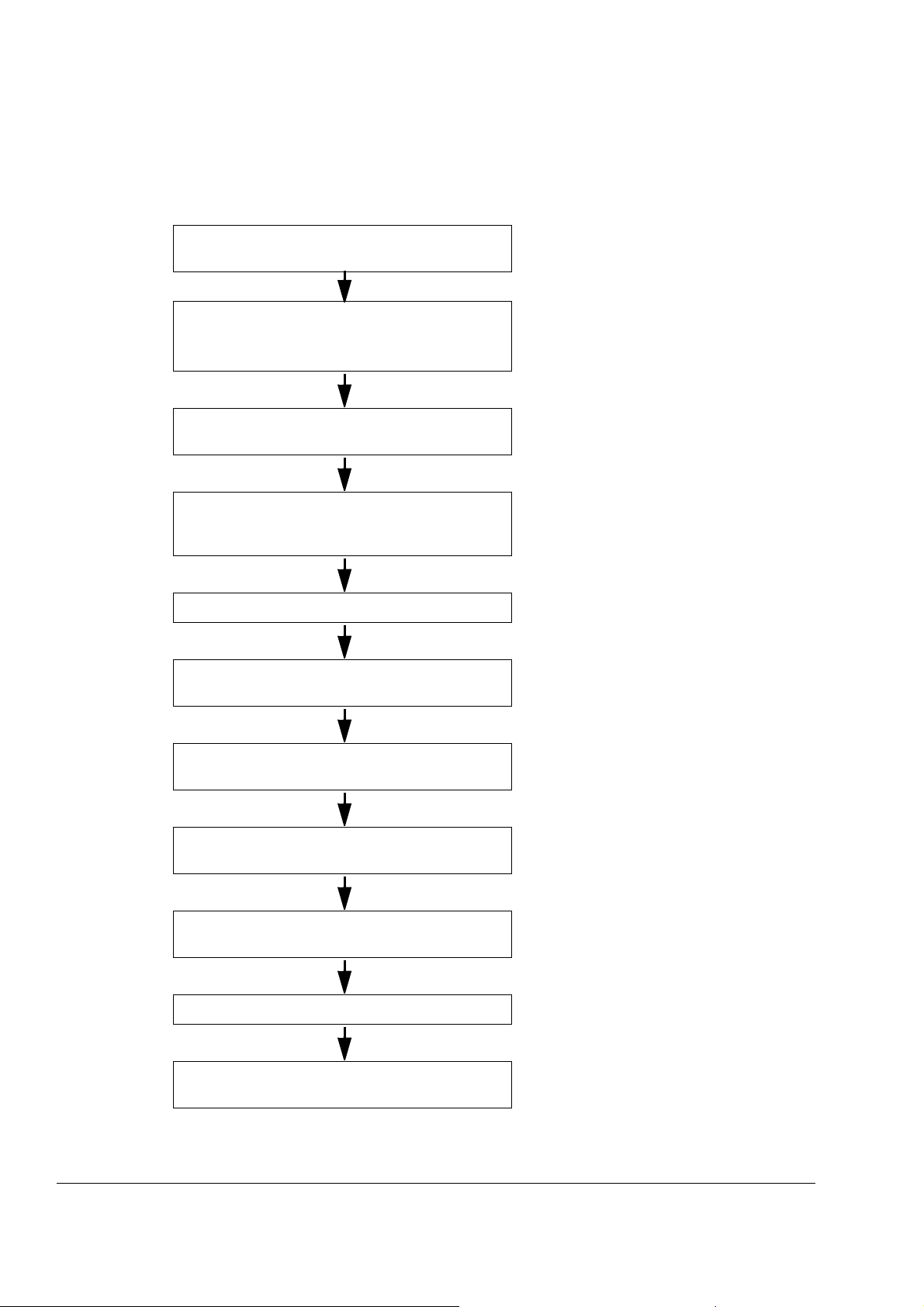
Kurulum ve devreye alma akış diyagramı
Görev Bkz.
Sürücünüzün kasa boyutunun tespit edilmesi:
R0…R3.
Kurulumun planlanması: Kablo seçimi, vb.
Ortam koşullarını, değerleri ve gerekli soğutma
havası akışını kontrol edin.
Sürücüyü paketten çıkarın ve kontrol edin. Mekanik kurulum: Sürücünün paketinin
Sürücü, IT (topraklamasız) veya köşede topraklamalı
sisteme bağlanacaksa dahili EMC filtresinin bağlı
olmadığından emin olun.
Sürücüyü bir duvara veya bir panoya monte edin. Mekanik kurulum
Kabloları yönlendirin. Elektrik kurulumunun planlanması: Kabloların
Teknik veriler: Nominal Değerler sayfa 253
Elektrik kurulumunun planlanması sayfa 23
Teknik veriler sayfa 253
açılması sayfa 19
Donanım açıklamaları: Tip kodu sayfa 17
Elektrik kurulumu: Güç kablolarının bağlanması
sayfa 32
sayfa 19
yönlendirilmesi sayfa 28
Kılavuz hakkında
Giriş kablosu, motor ve motor kablosunun yalıtımını
kontrol edin.
Güç kablolarını bağlayın. Elektrik kurulumu: Güç kablolarının bağlanması
Kontrol kablolarını bağlayın. Elektrik kurulumu: Kontrol kablolarının
Montajı kontrol edin. Kurulum kontrol listesi sayfa 37
Sürücüyü devreye alın. Devreye alma, I/O ve ID Run ile kontrol sayfa
Elektrik kurulumu: Tertibat yalıtımının kontrol
edilmesi sayfa 31
sayfa 32
bağlanması sayfa 34
39
Page 15
Donanım açıklamaları
Bu bölümün içindekiler
Bu bölüm, kısaca yapı ve tip kodu bilgilerine değinir.
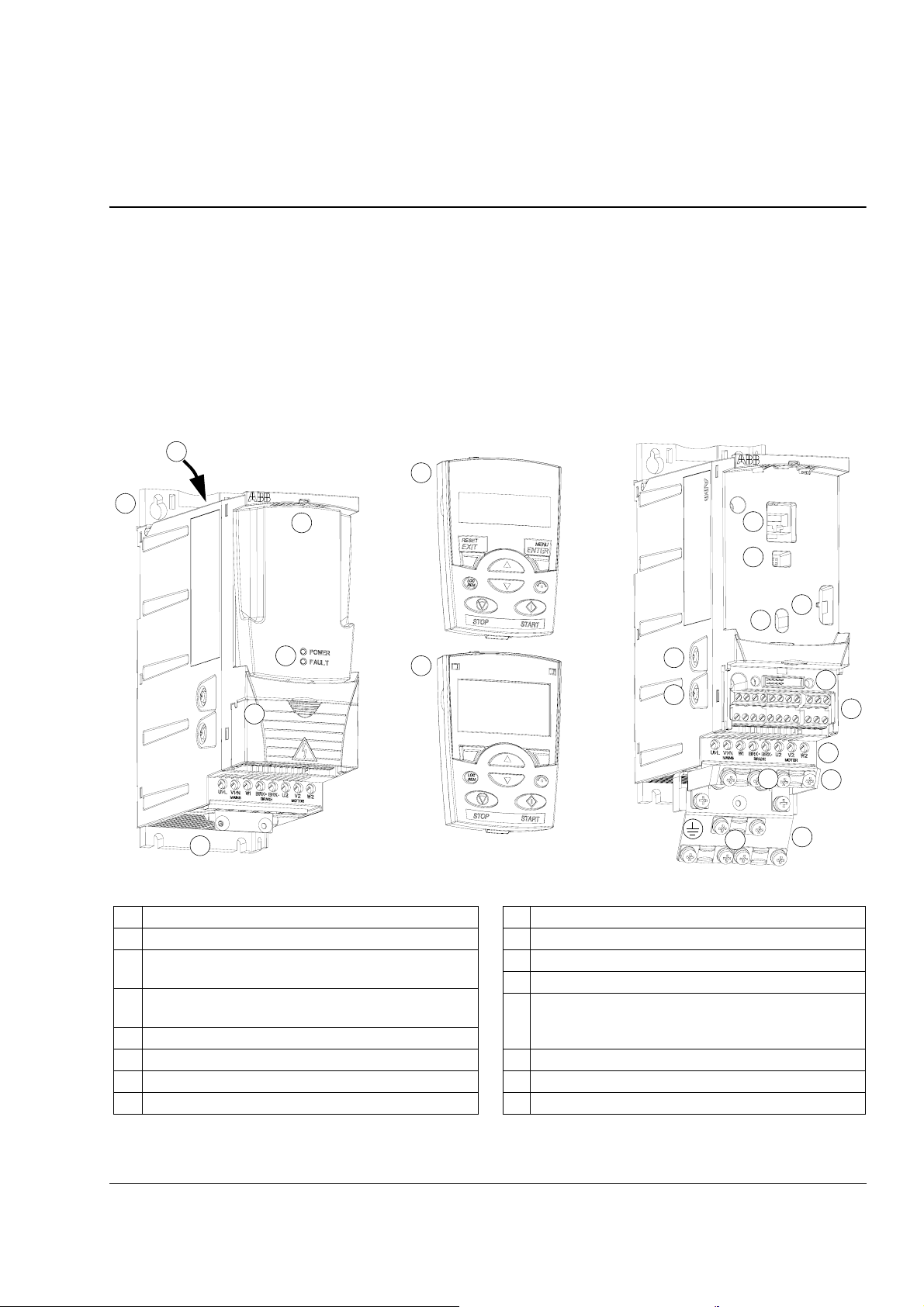
Genel Bilgiler
ACS350, AC motorlarını kontrol etmek için kullanılan duvar veya kabine monte
edilebilen sürücüdür. R0…R3 kasa boyutlarının yapısı belirli bir seviyeye kadar
değişiklik gösterebilir.
1
3b
2
3a
15
5
8
EMC VAR
4
2
1 Üst kapak üzerinden soğutma çıkışı
2 Montaj delikleri
3 Panel kapağı (a) / Temel Kontrol Paneli (b) / Yardımcı
Kontrol Paneli (c)
4 Terminal kapağı (veya opsiyonel potansiyometre
ünitesi MPOT-01)
5 Panel bağlantısı
6 Opsiyonel bağlantı
7FlashDrop bağlantısı
8 Güç Tamam ve Hata LED'leri (bkz. LED sayfa 251)
3c
6
7
8
EMC VAR
9
10
16
16
11
12
13
14
15
Kapaklar kapalı (R0 ve R1)Kapaklar açık (R0 ve R1)
9 EMC filtre topraklama vidası (EMC)
10 Varistör topraklama vidası (VAR)
11 Fieldbus adaptörü (seri iletişim modülü) bağlantısı
12 I/O bağlantıları
13 Besleme gerilimi bağlantısı (U1, V1, W1), fren direnci
bağlantısı (BRK+, BRK-) ve motor bağlantısı (U2, V2,
W2)
14 I/O kelepçe plakası
15 Kelepçe plakası
16 Kelepçeler
Donanım açıklamaları
Page 16
16
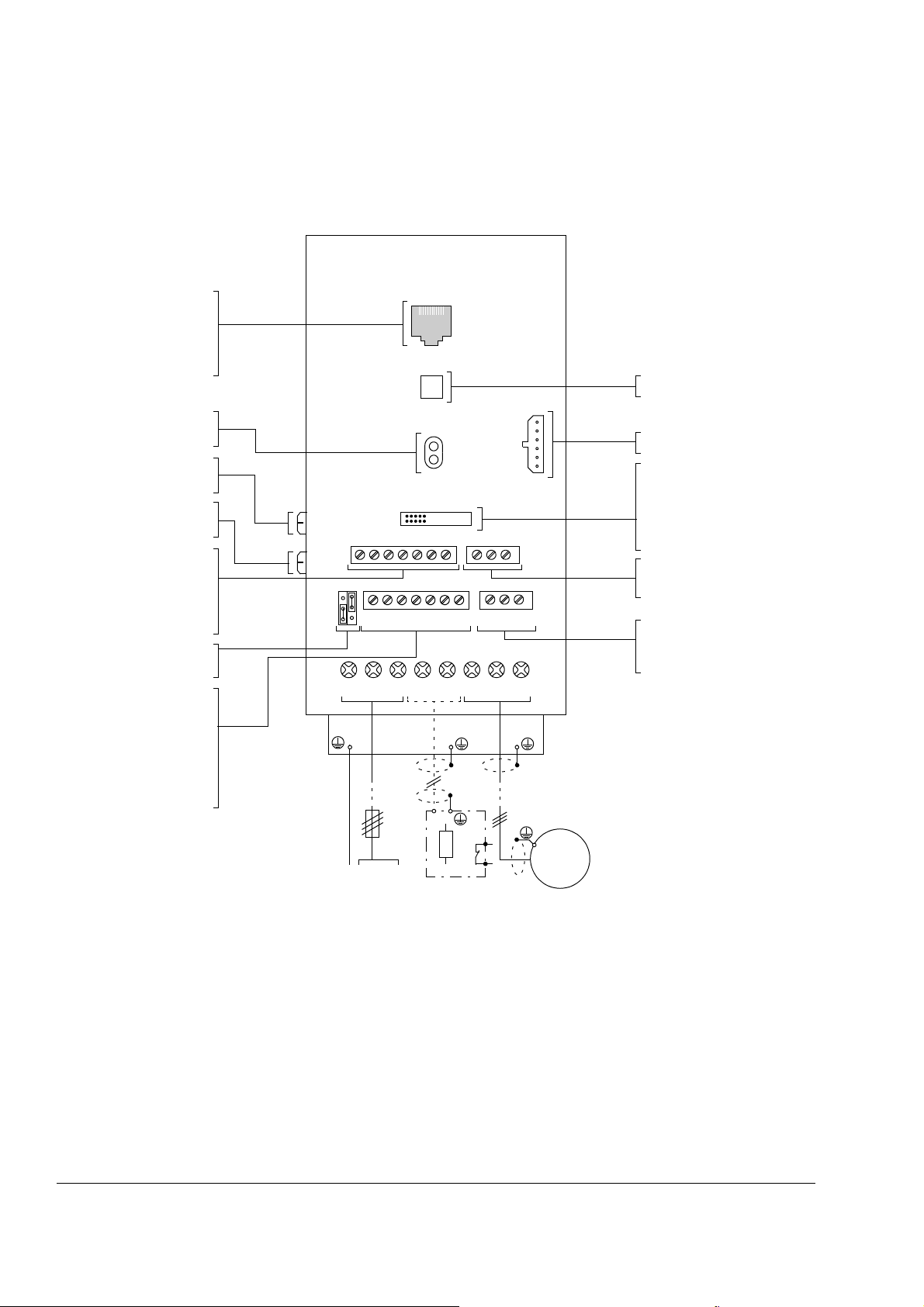
Genel bilgiler: Bağlantılar, anahtarlar ve LED'ler
Şemada ACS350 bağlantıları, anahtarları ve LED'leri gösterilmektedir.
RS-232 konnektör
Temel Kontrol Paneli
Geliþmiþ Kontrol Paneli
PC
Modbus RTU (RS-232)
Durum LED'leri
Güç Tamam, Hata
EMC filtre topraklama
vidası
Varistör topraklama
vidası
İki analog giriş
0/2/-10…+10 VDC veya
0/4/-20…+20 mA
Bir analog çıkış
0/4/…20 mA
AI türü seçimi
V / mA
Beş dijital giriş
DI5, frekans girişi olarak
da kullanılabilir
PNP veya NPN
12…24 VDC
dahili veya harici
besleme
1
91620
VmA
U1 V1 W1 BRK+BRK- U2 V2 W2
817
19
22
Opsiyonel bağlantı
FlashDrop bağlantısı
Fieldbus adaptör
DeviceNet
PROFIBUS DP
CANopen
Modbus RTU (RS-485)
Röle çıkışı
250 VAC / 30 VDC
Dijital çıkış,
transistör tipi
Dijital veya frekans
Donanım açıklamaları
PE L1 L2 L3
AC güç
hattý
Fren
direnç
t°
M
~3
Motor
Page 17
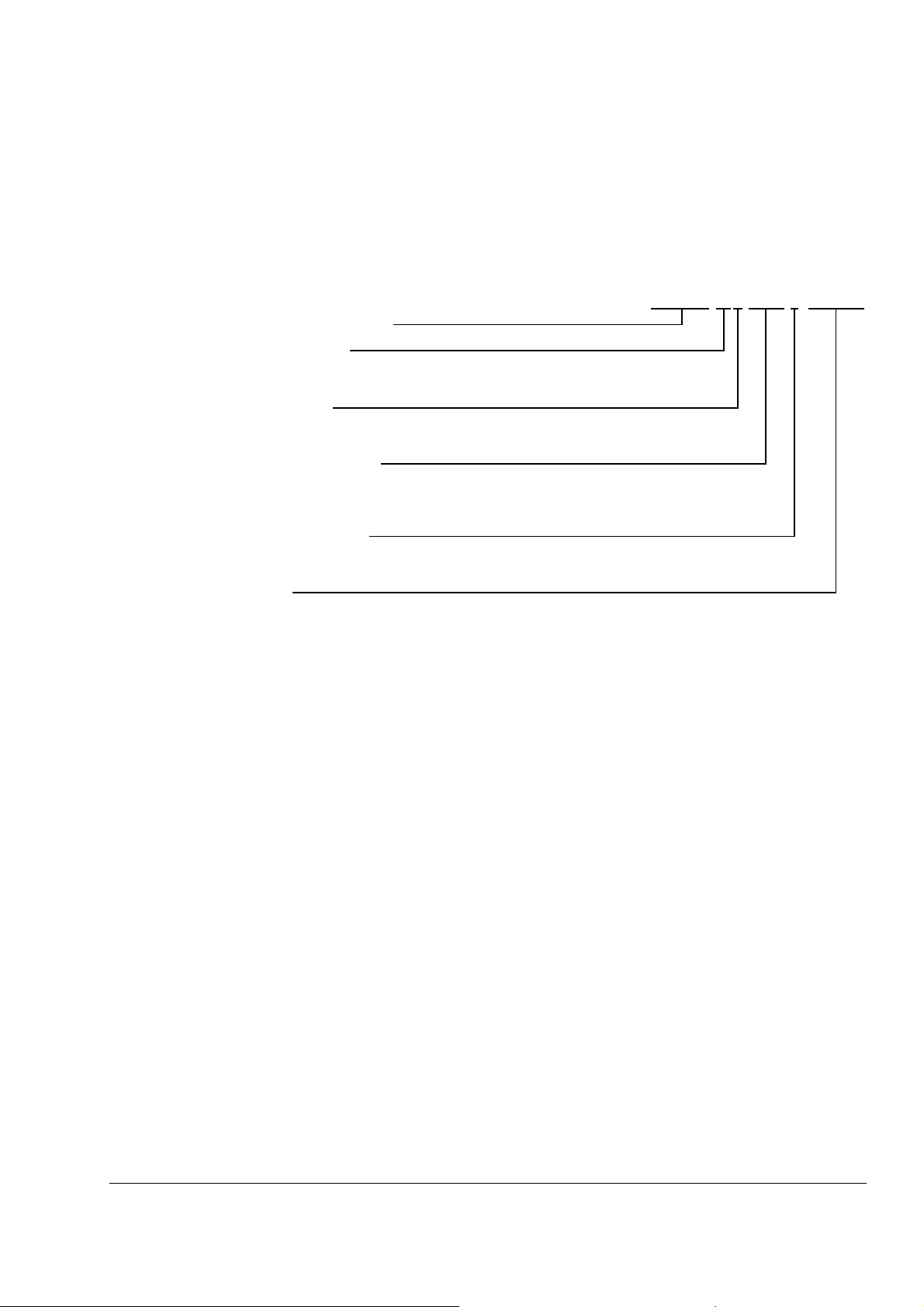
Tip kodu
17
Tip kodu, sürücünün spesifikasyonları ve konfigürasyonu hakkında bilgiler içerir. Tip
kodunu, ürün üzerindeki tip etiketinde bulabilirsiniz. Soldaki ilk basamaklar temel
konfigürasyonu belirtir; örneğin, ACS350-03E-08A8-4. Opsiyonel seçimler bundan
sonra verilir ve + işaretleriyle ayrılı, örneğin, +J404. Tip kodu seçimlerine dair
açıklamalar, aşağıda belirtilmiştir.
ACS350-03E-08A8-4+J404+...
ACS350 ürün serisi
1-faz/3-faz
01 = 1 fazlı giriş
03 = 3 fazlı giriş
Konfigürasyon
E = EMC filtresi bağlı, 50 Hz frekans
U = EMC filtresi bağlı değil, 60 Hz frekans
Çıkış akım değerleri
xxAy formatında, xx tam sayı değerini ve y kesirli bölümü belirtir;
örneğin; 08A8 8.8 A anlamına gelir. Daha fazla bilgi için,
bkz. Nominal Değerler sayfa 253.
Giriş gerilimi aralığı
2 = 200…240 VAC
4 = 380…480 VAC
Opsiyonl
B061 = NEMA 1 kiti
J400 = AOP (Gelişmiş Kontrol Paneli)
J402 = Potansiyometre
J404 = BOP (Temel Kontrol Paneli)
K451 = DeviceNet
K454 = PROFIBUS DP
K457 = CANopen
K458 = Modbus RTU
Donanım açıklamaları
Page 18

18
Donanım açıklamaları
Page 19

Mekanik kurulum
Bu bölümün içindekiler
Bu bölüm, sürücünün mekanik kurulum prosedürü hakkında bilgi vermektedir.
Sürücünün paketinin açılması
Sürücü (1), aşağıdakileri de içeren bir pakette sunulmaktadır (R1 kasa boyutu
şekilde gösterilmektedir):
• kelepçe plakası (R3 kasa boyutunda I/O kabloları için de kullanılır), I/O kelepçe
plakası (R0…R2 kasa boyutları için), fieldbus seçeneği topraklama plakası,
kelepçeler ve vidaları içeren plastik çanta (2)
• panel kapağı (3)
•montaj şablonu pakete (4) dahildir
• kullanım kılavuzu (5)
19
• teslimat belgeleri
•olası seçenekler (talimatlarla birlikte fieldbus, talimatlarla birlikte potansiyometre,
Temel Kontrol Paneli (BOP) veya Yardımcı Kontrol Paneli (AOP)).
1
4
2 53
P
O
W
E
R
H
A
T
A
Mekanik kurulum
Page 20
20
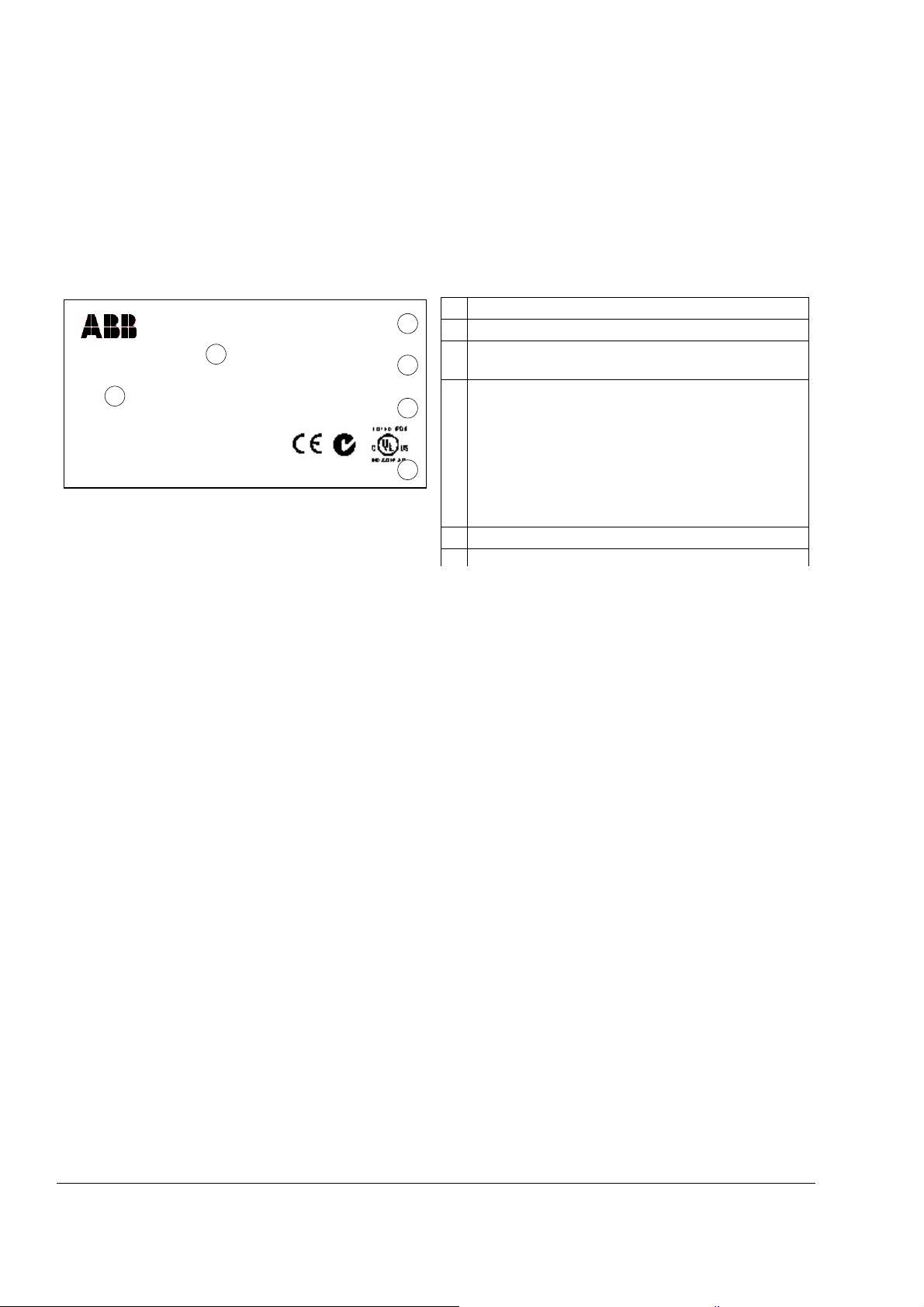
Teslimat irsaliyesi
Hasar izi bulunmadığını kontrol edin. Hasarlı bileşenler tespit edilirse, gönderene
hemen haberdar verin.
Kuruluma ve çalıştırmaya başlamadan önce, sürücü tipinin doğru olduğunu kontrol
etmek için tip etiketi bilgilerini kontrol edin. Tip etiketi, sürücünün sol tarafındadır.
Örnek etiket ve etiket içeriğinin açıklaması aşağıda gösterilmektedir.
IP20 / UL Open type
4 kW (5 HP)
U1 3~380...480 V
3
I1 13.6 A
f1 48 ... 63 Hz
U2 3~0...U1 V
I2 8.8 A (150% 1/10min)
f2 0 …500 Hz
2
Tip etiketi
-
-
-
lllllllllllllllllllllllllllllllllllllll
lllllllllllllllllllllllllllllllllllllll
1 Tip kodu, bkz. bölüm Tip kodu, sayfa 17
1
2 Koruma seviyesi (IP ve UL/NEMA)
3 Nominal değerleri, bkz. bölüm Nominal Değerler,
4
5
6
sayfa 253
4 YWWRXXXXWS formatındaki seri numarada,
aşağıdaki kısaltmaların anlamları şu şekildedir.
Y: 2005…2009, 2010 … için 5…9, A, …
WW: hafta 1, hafta 2, hafta 3 için …01, 02, 03 …
R: ürün revizyon numarası için A, B, C, …
XXXX: Her hafta 0001 değerinden başlayan tamsayı
WS: Üretim fabrikası
5 Sürücünün ABB MRP kodu
6CE işareti ve C-Tick ve C-UL US işaretleri
Kurulumdan önce
ACS350 duvara veya kabine monte kurulabilir. Duvar kurulumlarında NEMA 1
seçeneğinin kullanılması için muhafaza gereksinimlerini kontrol edin (bkz. bölüm
Teknik veriler).
Sürücü, kasa boyutuna bağlı olarak üç farklı şekilde monte edilebilir:
a) arkaya montaj (tüm kasa boyutları)
b) yana montaj (R0…R2 kasa boyutları)
c) DIN rayına montaj (tüm kasa boyutları).
Sürücü dik olarak kurulmalıdır. Kurulum sahasını aşağıdaki gereksinimlere göre
kontrol edin. Kasa ayrıntıları için Boyutlar bölümüne göz atın.
Kurulum sahası için gereksinimler
Sürücünün onaylanan çalışma koşulları için, Teknik veriler bölümüne göz atın.
Duvar
Duvar olabildiğince eğimsiz ve pürüzsüz, yanmayan materyalden ve sürücünün
ağırlığını taşıyabilecek kadar dayanıklı olmalıdır.
Zemin
Kurulumun üzerinde bulunduğu zemin/materyal yanmaz nitelikte olmalıdır.
Mekanik kurulum
Page 21
Sürücü çevresindeki boş alan
Soğutma için sürücünün alt ve üst kısmında 75 mm (3 inç) boş alan bulunmalıdır.
Sürücünün yanlarında boş alan bulunması gerekmediği için yan yana monte
edilebilirler.
Sürücünün monte edilmesi
Sürücüyü monte edin
Not: Delme işleminin sonucunda meydana gelen tozun kurulum sırasında
sürücünün içine kaçmamasını sağlayın.
Vidalar ile
1. Pakette bulunan örneğin montaj şablonu parçasını kullanarak deliklerin yerlerini
işaretleyin. Deliklerin yerleri, Boyutlar bölümündeki çizimlerde gösterilmektedir.
Deliklerin sayısı ve yerleri kasa boyutuna bağlıdır:
a) arkaya montaj: dört delik (R0…R3)
b) yana montaj: üç delik; alttaki deliklerden biri kelepçe levhası üzerinde yer alır
(R0…R2).
21
2. Vida veya cıvataları işaretli konumlara sabitleyin.
3. Sürücüyü duvardaki vidalara yerleştirin.
4. Duvardaki vidaları iyice sıkın.
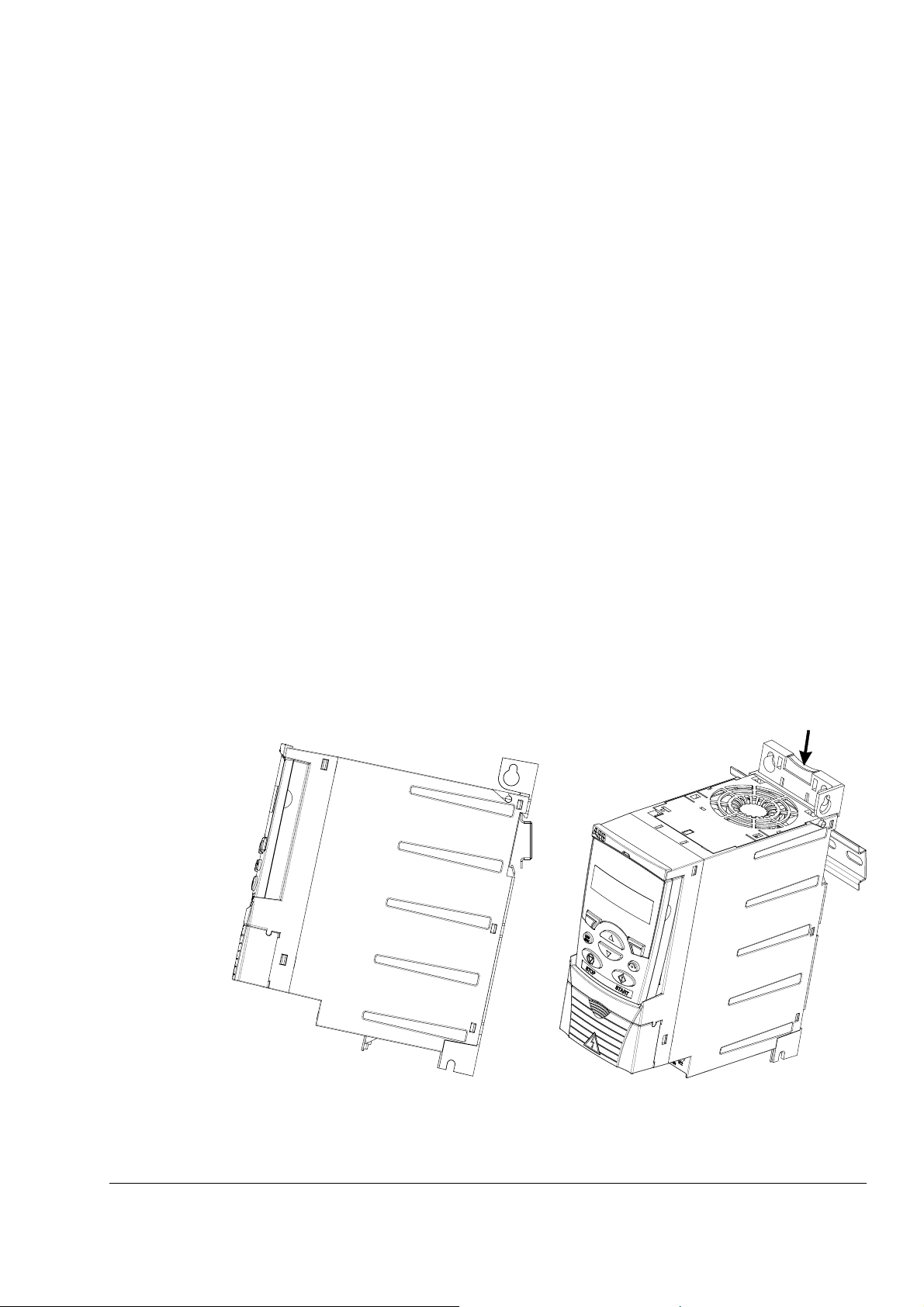
DIN rayında
1. Cihazı aşağıdaki Şekil a'da gösterilen şekilde yerine oturtun. Cihazı sökmek için,
cihazın üzerindeki kola Şekil b'deki gibi basın.
ab
Mekanik kurulum
Page 22
22
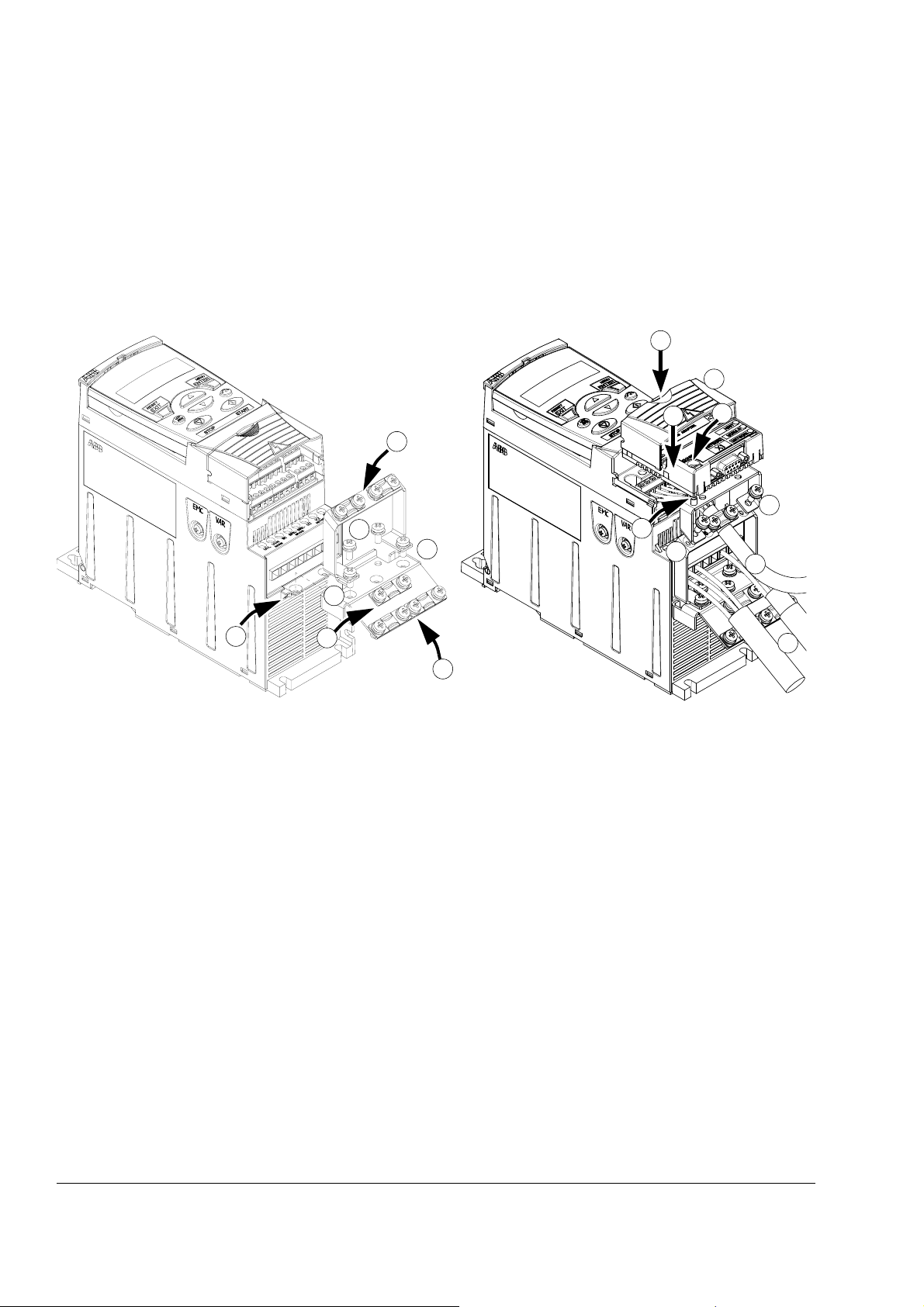
Kelepçe levhalarını sabitleyin
Bkz. aşağıdaki şekil.
1. Kelepçeleri, sağlanana vidaları kullanarak kelepçe plakalarına gevşek şekilde
sabitleyin.
2. Kelepçe levhasını, verilen vidalarla sürücünün altındaki levhaya sabitleyin.
3. I/O kelepçe levhasını, verilen vidalarla kelepçe levhasına (kasa tipi R0…R2)
sabitleyin.
a b
1
2
3
3
2
1
1
Opsiyonel fieldbus modülünü bağlayın
Bkz. aşağıda Şekil b.
6
9
7
5
5
8
8
4
4
Mekanik kurulum
4. Güç ve kontrol kablolarını Elektrik kurulumu bölümünde anlatıldığı gibi bağlayın.
5. Fieldbus modülünü, opsiyonel topraklama plakasına yerleştirin ve fieldbus
modülünün sol köşesindeki topraklama vidasını sıkın. Bu, modülün opsiyonel
topraklama plakasına sabitlenmesini sağlayacaktır.
6. Terminal kapağı çıkarılmam
ışsa kapaktaki girintiye basın ve aynı anda kapağı
kasadan kaydırarak çıkarın.
7. Opsiyonel topraklama plakasına bağlı fieldbus modülünü, sürücü ön kısmındaki
bağlantıya takılacak ve opsiyonel topraklama plakası üzerindeki vida delikleri ve I/
O kelepçe plakası hizalanacak şekilde yerleştirin.
8. Opsiyonel topraklama plakasını sağlanan vidaları kullanarak I/O kelepçe
plakasına sabitleyin.
9. Terminal kapağını kaydırarak geri takın.
Page 23
Elektrik kurulumunun planlanması
Bu bölümün içindekiler
Bu bölüm, motoru, kabloları, koruyucuları, kablo yollarını ve sürücünün kullanım
yollarını seçerken izlemeniz uymanız gereken talimatları içermektedir. ABB
tarafından verilen talimatlar izlenmezse, cihazda garanti kapsamı dışında kalan
sorunlar meydana gelebilir.
Not: Kurulum her zaman yürürlükteki yerel yasa veya düzenlemelere uygun olarak
gerçekleştirilmelidir. ABB, yerel yasaları ve/veya diğer düzenlemeleri ihlal eden
kurulumlar için hiçbir şekilde sorumluluk kabul etmemektedir.
Motor seçimi
253. sayfadaki Teknik veriler bölümündeki değer tablosuna göre 3 fazlı AC
endüksiyon motorunu seçin. Tablo, her sürücü tipi için tipik motor gücünü listeler.
23
AC besleme gerilim bağlantısı
AC besleme gerilim hattına giden sabit bağlantı kullanın.
UYARI! Cihazın sızıntı akımı genelde 3.5 mA değerini geçtiği için, IEC 61800-5-1'e
uygun sabit kurulum gereklidir.
Besleme kesme cihazı
AC güç kaynağı ve sürücü arasına manuel olarak çalıştırılan (kesme yöntemleri)
giriş kesme cihazı takın. Kurulum ve bakım çalışmaları için, kesme cihazı açık
konumda kilitlenebilecek tipte olmalıdır.
• Avrupa: Avrupa Birliği Yönergeleriyle uyumluluk için, EN 60204-1 Makine
Güvenliği standardına uygun olarak, kesme cihazının tipi aşağıdakilerden biri
olmalıdır:
- AC-23B (EN 60947-3) kullanım kategorisinden bir anahtar ayırıcı
- her durumda ayırıcının ana kontakları açılmadan anahtarlama cihazlarının yük
devresini kırmayı sağlayan yardımcı kontak içeren bir ayırıcı
- EN 60947-2 ile uyumlu yalıtıma için uygun bir devre kesici
(EN 60947-3)
• Diğer bölgeler: Kesme cihazı yürürlükteki güvenlik düzenlemeleriyle uyumlu
olmalıdır.
Elektrik kurulumunun planlanması
Page 24
24
Termik aşırı yük ve kısa devre koruması
Kablo boyutları sürücünün nominal akımına uygun olduğunda, sürücü kendisini,
girişi ve motor kablolarını termik aşırı yüke karşı korur. Ek termik koruma cihazları
kullanmak gerekli değildir.
UYARI! Sürücü birden fazla motora bağlıysa, her kablo ve motorun korunması için
ayrı termik aşırı yük rölesi veya devre kesici kullanılmalıdır. Bu cihazlar, kısa devre
akımını kesmek için ayrı bir sigorta kullanılmasını gerektirebilir.
Motor kablosu sürücünün nominal akımına uygun boyutlara sahipse, kısa devre
durumunda sürücü motor kablosunu ve motoru korur.
Giriş besleme kablosu (AC hattı kablosu) kısa devre koruması
Giriş kablosunu her zaman sigortalarla koruyun. Sigortaları yerel güvenlik
düzenlemelerine, uygun giriş gerilimine ve sürücünün nominal akımına uygun
olmalıdır (bkz. Teknik veriler bölümü).
Dağıtım panosuna konulduğunda standart IEC gG sigortaları veya UL tipi T
sigortalar, kısa devre durumlarında giriş kablosunu koruyacak, sürücüye hasarı
sınırlandıracak ve sürücü içinde kısa devre olduğunda diğer cihazlara hasar
gelmesini engelleyecektir.
Sigortaları çalışma süresi
Sigortaların çalışma süresinin 0,5 saniyenin altında olduğundan emin olun.
Çalışma süresi sigorta tipine, besleme şebekesi empedansına, çapraz kesim
alanına, besleme kablosu malzemesine ve uzunluğuna bağlıdır. US sigortaları
“zaman gecikmesiz” tipinde olmalıdır.
Sigorta değerleri için, bkz. Teknik veril er bölümü.
Devre kesiciler (TBD)
ABB tarafından test edilen devre kesiciler ACS350 ile kullanılabilir. Sigortalar, başka
devre kesicilerle kullanılmalıdır. Onaylanan kesici tipi ve besleme şebekesi özellikleri
için yerel ABB temsilcinizle irtibat kurun.
Devre kesicilerin koruyucu özellikleri kesicilerin tipine, yapısına ve ayarlarına
bağlıdır. Besleme şebekesinin kısa devre kapasitesine bağlı olarak sınırlamalar
mevcuttur.
Elektrik kurulumunun planlanması
Page 25
Güç kablolarının seçilmesi
Genel kurallar
Giriş besleme ve motor kablolarının boyutlarını yerel düzenlemelere uygun olarak
belirleyin.
• Kablo, sürücü yük akımını her zaman taşıyabilecek nitelikte olmalıdır. Nominal
akımlar için, bkz. Teknik veriler bölümü.
25
• Sürekli kullanımda, kablo iletken için izin verilen maksimum 70
değerde olmalıdır. ABD için, bkz. bölüm Ek ABD gereksinimleri sayfa 26.
• PE iletkeninin iletkenlik seviyesi, faz iletkeninin iletkenlik seviyesine eşit olmalıdır
(aynı çapraz kesit alanı).
• 600 VAC kablosu 500 VAC değerine kadar uygundur.
• EMC gereksinimleri için Teknik veriler tablosuna göz atın.
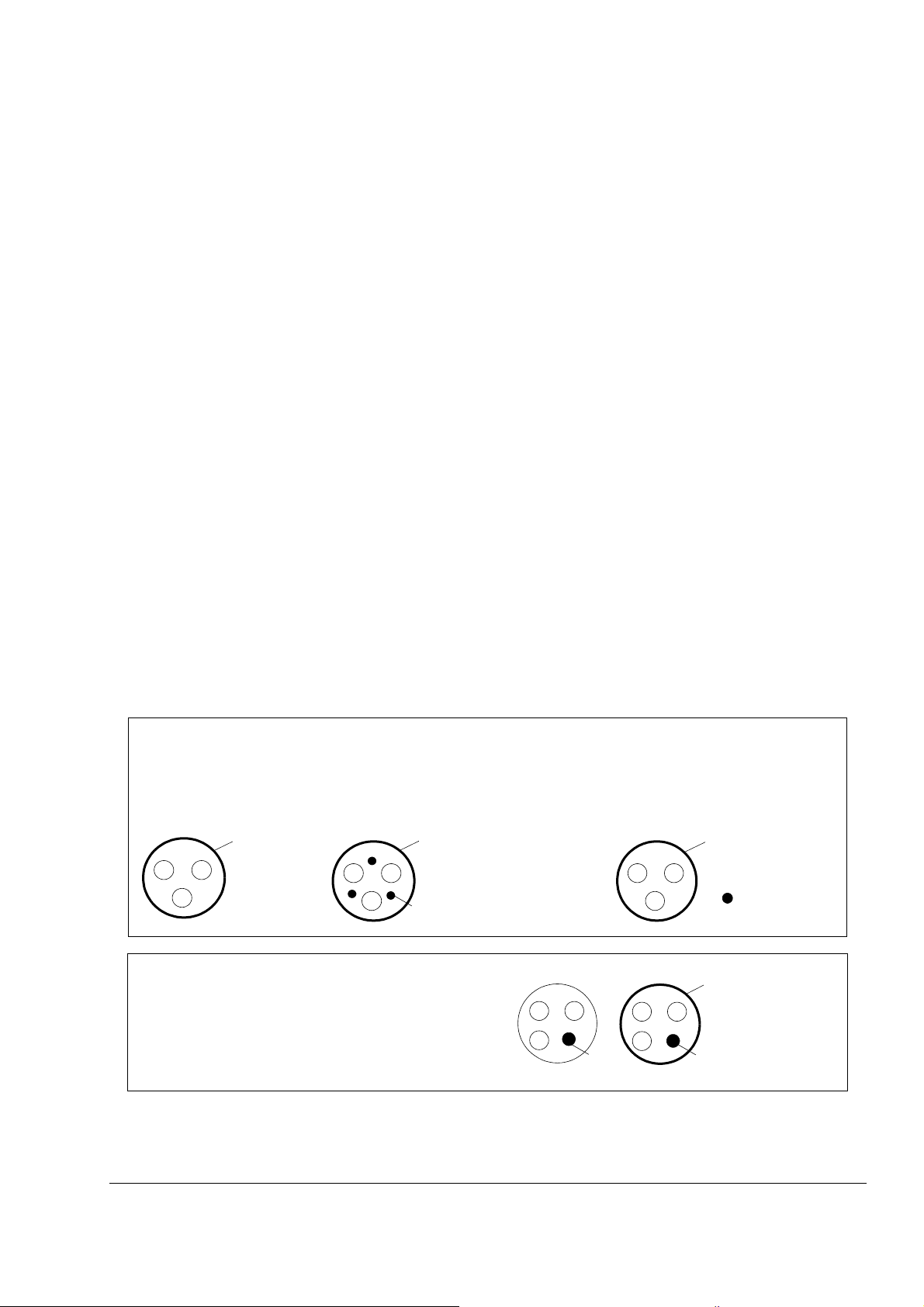
CE ve C-tick işaretlerinin EMC gereksinimlerini karşılamak için simetrik ekranlı motor
kablosu (bkz. aşağıdaki şekil) kullanılmalıdır.
Giriş kablosu için dört iletkenli bir sisteme izin verilmektedir ancak ekranlı simetrik
kablo tavsiye edilmektedir.
Dört iletkenli bir sistemle karşılaştırıldığında simetrik ekranlı kablo kullanılması tüm
sürücü sistemindeki elektromanyetik emisyon ve bunun yanı sıra motor rulman
akımları ve aş
ınmayı da azaltır.
Alternatif güç kablosu tipleri
Sürücü ile birlikte kullanılabilen güç kablosu tipleri aşağıda verilmektedir.
Motor kabloları
(giriş kabloları için de tavsiye edilmektedir)
Simetrik ekranlı kablo: üç fazlı iletkenler, bir
eşmerkezli veya simetrik yapılı PE iletkeni ve bir ekran
°C sıcaklığa uygun
Not: Kablo ekranının iletkenliği yetersizse ayrı bir PE
iletkeni gerekir.
PE iletkeni
ve ekran
Giriş kablosu olarak kullanılabilir
Dört iletkenli sistem: üç fazlı iletkenler ve koruyucu
iletken
Ekran
PE
Ekran
PE
Ekran
PEPE
Elektrik kurulumunun planlanması
Page 26

26
Motor kablosu ekranı
Koruyucu bir iletken olarak görev görmesi için ekranın çapraz kesit alanı aynı
metalden yapıldıklarında faz iletkenleriyle aynı olmalıdır.
Yayımlanan ve iletilen radyo frekansı emisyonlarını etkin şekilde önlemek için ekran
iletkenliği, faz iletkeninin iletkenliğinin en az 1/10'u olmalıdır. Söz konusu
gereksinimler, bakır veya alüminyum ekranla kolay bir şekilde karşılanır. Sürücünün
motor kablosu ekranı için minimum gereksinim aşağıda verilmektedir. Eşmerkezli
bakır tel katmanı ve açık bakır şerit burgusundan oluşmaktadır. Ekran ne kadar iyi ve
sıkıysa emisyon seviyesi ve yatak akımları da o kadar düşüktür.
Dış yalıtım Bakır tel ekran Bakır şerit burgusu
İç yalıtım
İletkenler
Ek ABD gereksinimleri
Metal kanal kullanılmıyorsa motor kablosu için simetrik topraklamalı MC tipi sürekli
oluklu alüminyum koruma kablosu veya ekranlı güç kablosu tavsiye edilmektedir.
Güç kabloları
75°C (167°F) seviyesinde olmalıdır.
Kanal
Kanalların birbirine bağlanması gereken yerlerde mafsalın her bir tarafındaki kanala
bağlı toprak iletkeniyle mafsalında köprü oluşturun. Sürücü muhafazasına gelen
kanalları da bağlayın. Giriş gücü, motor, fren dirençleri ve kontrol kablo bağlantısı
için ayrı kanallar kullanın. Aynı kaynak üzerinde birden fazla sürücüden motor kablo
bağlantısı çekmeyin.
Korumalı kablo / ekranlı güç kablosu
Simetrik topraklamalı, altı iletkenli (üç faz ve üç toprak) MC tipi sürekli oluklu
alüminyum korumalı kablo aşağıdaki sağlayıcılardan temin edilebilir (ticari adlar
parantez içindedir):
• Anixter Wire & Cable (Philsheath)
• BICC General Corp (Philsheath)
• Rockbestos Co. (Gardex)
• Oaknite (CLX).
Ekranlı güç kabloları Belden, LAPPKABEL (ÖLFLEX) ve Pirelli'den temin edilebilir.
Elektrik kurulumunun planlanması
Page 27
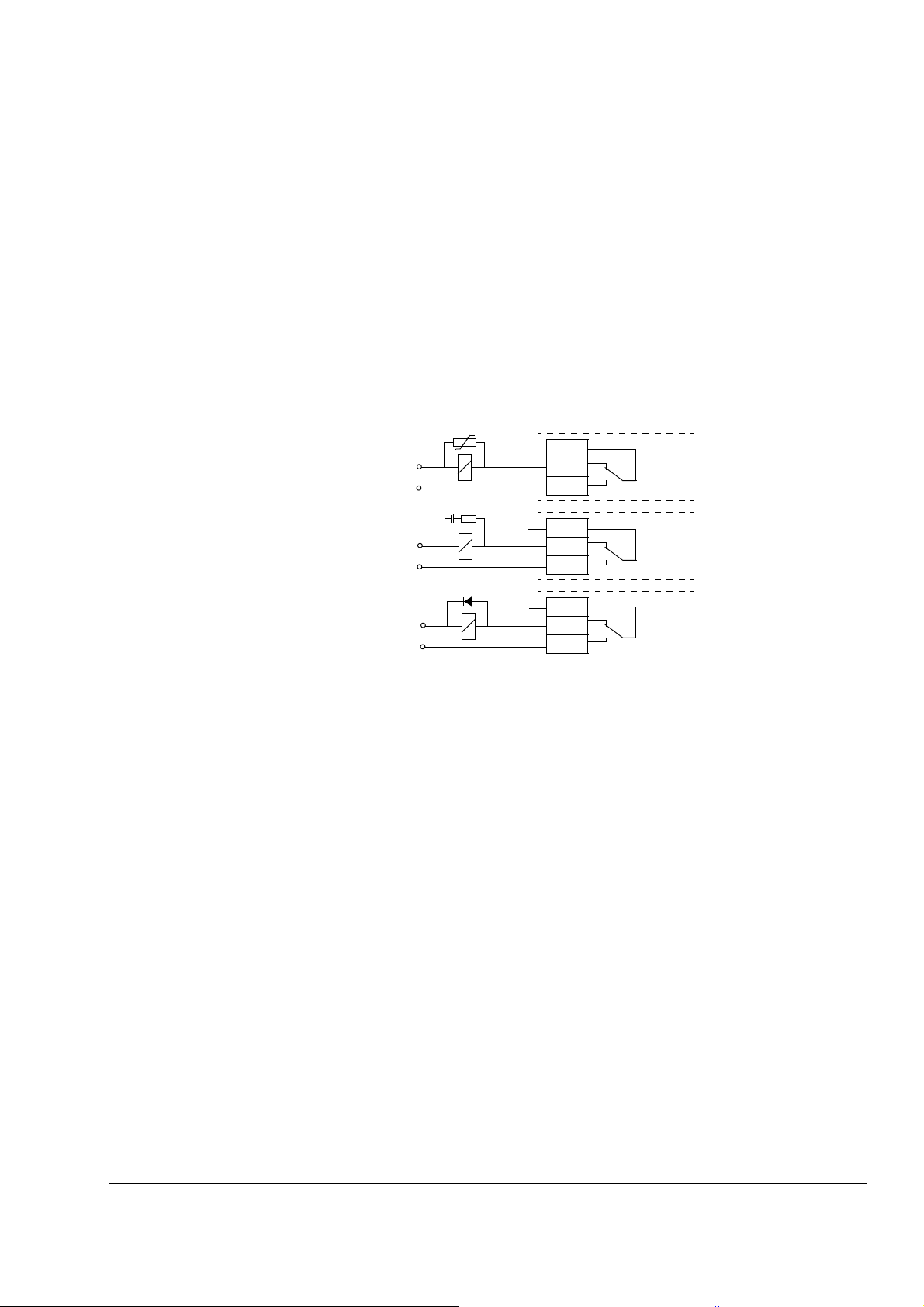
Endüktif yük durumunda röle çıkış kontağının korunması ve kesintilerin
azaltılması
Endüktif yükler (röleler, kontaktörler, motorlar) kapatıldıklarında geçici gerilimlere
neden olurlar.
Kapanma durumunda EMC emisyonunu minimuma indirmek için endüktör yükleri,
gürültü azaltıcı devrelerle donatın [varistörler, RC filtreleri (AC) veya diyotlar (DC)].
Engellenmemeleri durumunda kesintiler, kapasitif veya endüktif olarak kontrol
kablosundaki diğer iletkenlerle bağlantı kurabilir ve sistemin diğer parçalarında arıza
riski oluşturabilirler.
Koruyucu parçayı, mümkün olduğu kadar endüktif yüke yakın monte edin. Koruyucu
parçaları I/O terminal bloğuna monte etmeyin.
Var istö r
Sürücü
230 VAC
RC filtresi
230 VAC
röle
çıkışı
Sürücü
röle
çıkışı
27
Diyot
24 VDC
Kaçak akım cihazı (RCD) uyumluluğu
ACS350-01x sürücüleri Tip A kaçak akım cihazlarıyla ve ACS350-03x sürücüleri Tip
B kaçak akım cihazlarıyla kullanım için uygundur. ACS350-03x sürücüleri için,
doğrudan veya dolaylı kontak durumunda çift veya takviyeli yalıtımla ortadan ayırma
veya bir transformatör tarafından besleme sisteminden izolasyon gibi başka
önlemler de alınabilir.
Kontrol kablosu seçimi
Tüm analog kontrol kabloları ve frekans girişi için kullanılan kablo ekranlı olmalıdır.
Analog sinyaller için çift ekranlı bükümlü çift kablo kullanın (Şekil a, örneğin, NK
Cables firmasının JAMAK ürününü). Her bir sinyal için ayrı ekranlı bir çift kullanın.
Farklı analog sinyaller için ortak dönüş kullanmayın.
Sürücü
röle
çıkışı
Elektrik kurulumunun planlanması
Page 28

28
Alçak gerilim dijital sinyalleri için çift ekranlı kablo en uygun alternatiftir ancak tek
ekranlı veya ekransız bükümlü çok çiftli kablo da (Şekil b) kullanılabilir. Bununla
birlikte, frekans girişi için mutlaka ekranlı bir kablo kullanılmalıdır.
a
Çift ekranlı bükümlü çok
çiftli kablo
Analog ve dijital sinyaller için ayrı kablolar çekilmelidir.
Gerilimleri 48 V değerini aşmaması koşuluyla röle tarafından kontrol edilen sinyaller,
dijital giriş sinyalleriyle aynı kablolar içinde kullanılabilir. Röle tarafından kontrol
edilen sinyallerin bükümlü çift olarak kullanılması tavsiye edilir.
24 VDC ve 115/230 VAC sinyalleri asla aynı kabloda taşınmamalıdır.
Röle kablosu
Örme metalik ekranlı kablo tipi (örneğin, LAPPKABEL'in ÖLFLEX ürünü, Almanya)
ABB tarafından test edilmiş ve onaylanmıştır.
Kontrol paneli kablosu
Uzaktan kullanımda kontrol panelini sürücüye bağlayan kablo 3 m'den (10 ft) daha
uzun olmamalıdır. ABB tarafından test edilen ve onaylanan kablo tipi kontrol panel
opsiyonel setlerinde kullanılır.
Tek ekranlı bükümlü çok
b
çiftli kablo
Motor sıcaklık sensörünün sürücü I/O'suna bağlanması
Motor sıcaklık sensörünün sürücü I/O'suna bağlanması hakkında bilgi için bkz.
bölüm Standart I/O üzerinden motor sıcaklık ölçümü sayfa 113.
Kabloların yönlendirilmesi
Motor kablosunu diğer kablo yollarından ayrı olarak yönlendirin. Birçok sürücünün
motor kabloları birbirlerinin yanında paralel olarak kurulabilir. Motor kablosu, giriş
besleme kablosu ve kontrol kablolarının farklı tepsilerde kurulması tavsiye
edilmektedir. Sürücü çıkış geriliminde aniden oluşan değişikliklerin neden olduğu
elektromanyetik parazitleri azaltmak amacıyla motor kablolarının diğer kablolarla
birlikte çok uzun bir şekilde paralel olarak döşememeye özen gösterin.
Kontrol kablolarının güç kablolarıyla kesişmesi gereken yerlerde, bunları mümkün
olduğunca 90 derecelik açıyla yerleştirin.
Kablo tepsileri birbirleri ve topraklama elektrotları ile düzgün bir elektrik bağlantısına
sahip olmalıdır. Potansiyelin lokal olarak eşitlemek için alüminyum tepsiler
kullanılabilir.
Elektrik kurulumunun planlanması
Page 29
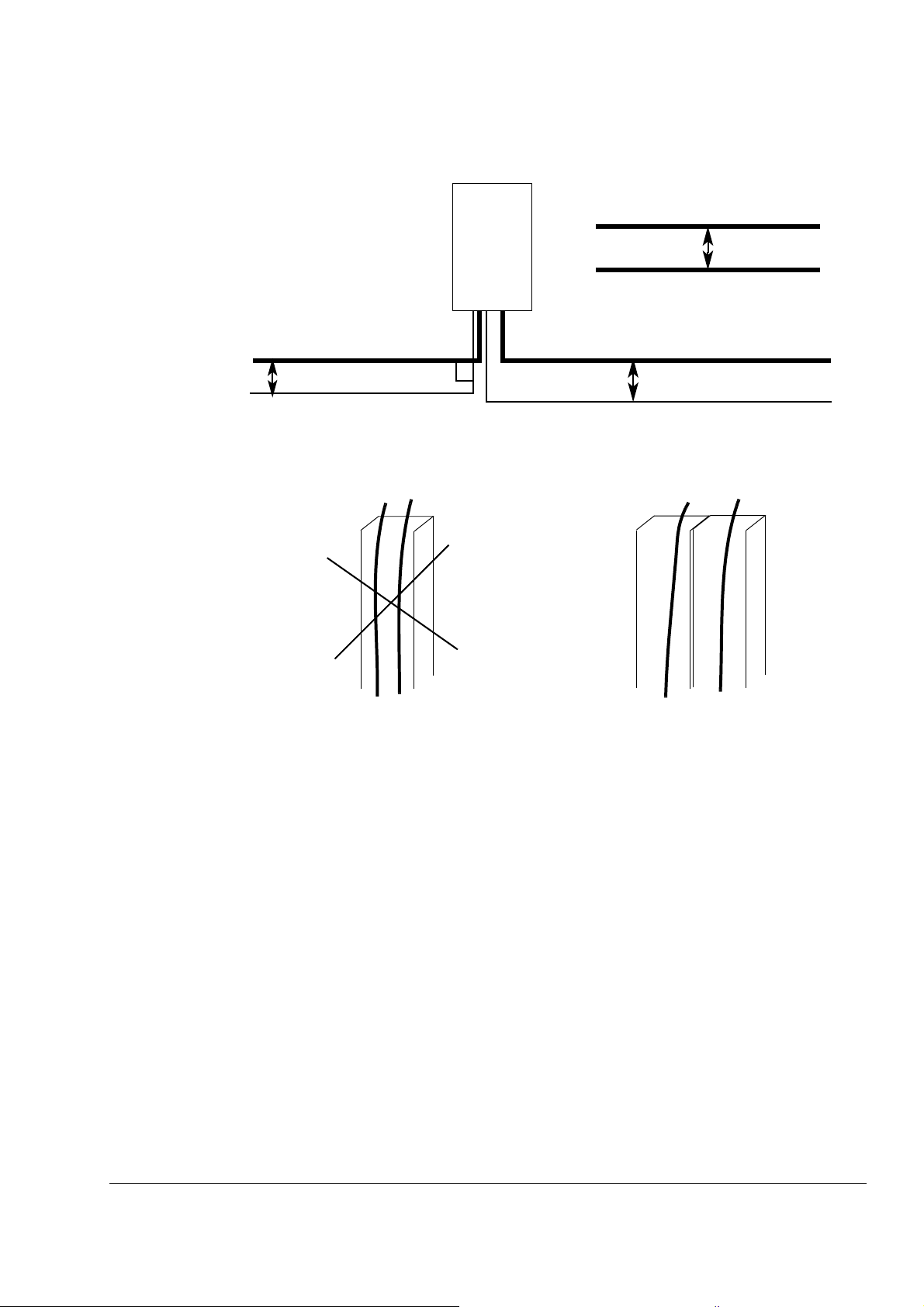
Kablo yollarının şeması aşağıda gösterilmektedir.
Motor kablosu
Sürücü
Güç kablosu
29
min. 300 mm (12 inç)
Giriş besleme kablosu
min. 200 mm (8 inç)
Kontrol kablosu olukları
24 V kablosu 230 V için yalıtılmamışsa veya
230 V için bir yalıtım manşonuyla
yalıtılmamışsa yasaktır.
90 °
Kontrol kablolarý
Motor kablosu
dak. 500 mm (20 inç)
230 V24 V24 V 230 V
Pano içinde farklı oluklarda 24 V ve 230 V
kurşun kontrol kabloları.
Elektrik kurulumunun planlanması
Page 30
30
Elektrik kurulumunun planlanması
Page 31

Elektrik kurulumu
Bu bölümün içindekiler
Bu bölüm, sürücünün elektrik kurulum prosedürü hakkında bilgi vermektedir.
UYARI! Bu bölümde anlatılan çalışmalar sadece yetkili bir elektrik teknisyeni
tarafından gerçekleştirilmelidir. Bu kılavuzun ilk sayfalarında yer alan Güvenlik
bölümü içindeki talimatları uygulayın. Güvenlik talimatlarını dikkate almamak
yaralanma veya ölüm ile sonuçlanabilir.
Kurulum sırasında sürücünün besleme gücüyle bağlantısının kesilmiş
olduğundan emin olun. Sürücü zaten giriş gücüne bağlıysa giriş gücü
bağlantısını kestikten sonra 5 dak. boyunca bekleyin.
Tertibat yalıtımının kontrol edilmesi
31
ohm
Sürücü
Her sürücünün, ana devre ve şasi arasındaki yalıtımı (1 saniye için 2500 V rms
50 Hz) fabrikada test edilmiştir. Dolayısıyla, sürücünün herhangi bir parçasında
herhangi bir gerilim toleransı testi veya yalıtım direnç testi (örneğin hi-pot veya
megger) gerçekleştirmeyin.
Giriş kablosu
Sürücüye bağlamadan önce yerel yasalara uygun olarak giriş kablosunun yalıtımını
kontrol edin.
Motor ve motor kablosu
Motor ve motor kablosu yalıtımını aşağıdaki şekilde kontrol edin:
1. Motor kablosunun motora bağlı ve U2, V2 ve W2 sürücü çıkış terminalleriyle
M
PE
bağlantısının kesik olduğundan emin olun.
2. 1 kV DC değerinde bir ölçüm gerilimi kullanarak her bir faz ve Koruyucu
Topraklama arasındaki motor kablosu ve motor yalıtım dirençlerini ölçün. Yalıtı
direnci 1 Mohm'dan yüksek olmalıdır.
m
Elektrik kurulumu
Page 32

32
Güç kablolarının bağlanması
Bağlantı şeması
GİRİŞ ÇIKIŞ
PE
1)
U1 V1 W1
Sürücü
BRK-
BRK+
U2 V2 W2
2)
Alternatifler için, bkz.
bölüm Besleme kesme
cihazı sayfa 23.
1)
Dağıtım panosunda PE iletkeninin diğer ucunu topraklayın.
2)
Kablo ekranının iletkenliği yetersiz ise (faz iletkeninin iletkenliğinden daha azsa) ve kabloda simetrik olarak oluşturulmuş
topraklama iletkeni yoksa ayrı bir topraklama kablosu kullanın (bkz. bölüm Güç kablolarının seçilmesi sayfa 25).
Not:
Asimetrik olarak oluşturulmuş motor kablosu kullanmayın.
İletken ekran dışında motor kablosunda simetrik olarak oluşturulmuş topraklama iletkeni varsa topraklama iletkenini sürücü
ve motor uçlarındaki topraklama terminaline bağlayın.
Motor kablo ekranının motor ucunda topraklanması
Minimum radyo frekansı paraziti için:
• kabloyu, ekranı aşağıdaki gibi bükerek topraklayın: yassılaşmış genişlik >
uzunluk
• veya kablo ekranını, motor terminal kutusunun kurşun geçişinde 360 derece
topraklayın.
PE
L1 L2 L3
Opsiyonel fren
direnci
1/5 ·
U1
V1
3 ~
Motor
W1
b > 1/5 · a
a
b
Elektrik kurulumu
Page 33

Prosedür
Şekilde R0…R2 kasa boyutu gösterilmektedir. R3 boyutunda, giriş gücü, fren direnci
ve motor bağlantıları terminal kapağının sol tarafında yer almaktadır (I/O
bağlantıları).
1. IT (topraklamasız) sistemler ve köşede topraklamalı TN sistemlerde, EMC'deki
vidayı sökerek dahili EMC filtresini çıkarın.
UYARI! EMC filtresi sökülmemiş bir sürücünün IT sisteminde [topraklamasız güç
sistemi veya yüksek direnç topraklamalı (30 ohm üzerinde) güç sistemi] kurulması
durumunda sistem, sürücünün EMC filtresi kondansatörleri üzerinden toprak
potansiyeline bağlanacaktır. Bu, tehlikeye veya sürücüde hasara neden olabilir.
EMC filtresi sökülmemiş bir sürücünün köşede topraklamalı TN sistemine kurulması
durumunda sürücü hasar görecektir.
2. Topraklama kelepçesi altındaki giriş gücü kablosunun topraklama iletkenini (PE)
bağlayın. Faz iletkenlerini U1, V1 ve W1 terminallerine bağlayın. R0…R2 kasa
boyutları için 0,8 Nm (7 lbf inç) ve R3 için 1,7 Nm (15 lbf inç) değerinde bir sıkma
torku kullanın.
33
3. Motor kablosunu soyun ve kısa bir saç örgüsü oluşturacak şekilde ekranı bükün.
Bükülü olan ekranı topraklama kelepçesi altına sabitleyin. Faz iletkenlerini U2, V2
ve W2 terminallerine bağlayın. R0…R2 kasa boyutları için 0,8 Nm (7 lbf inç) ve
R3 için 1,7 Nm (15 lbf inç) değerinde bir sıkma torku kullanın.
4. Adım 3'teki motor kablosu prosedürlerini kullanarak ekranlı bir kabloyla opsiyonel
fren direncini BRK+ ve BRK- terminallerine bağlayın.
5. Sürücünün dışında yer alan kabloları mekanik olarak sabitleyin.
1
EMC VA R
EMC
VAR
Sıkma momenti:
R0…R2: 0.8 Nm (7 lbf in.)
R3: 1.7 Nm (15 lbf in.)
2
2
34
3
Elektrik kurulumu
Page 34

34
Kontrol kablolarının bağlanması
I/O terminalleri
Aşağıdaki şekilde I/O bağlantıları gösterilmektedir.
12345678
S1
mA
V
9 10111213141516 202122
AI1
AI2
17 18 19
X1BX1A
X1A: 1: SCR
2: AI1
3: GND
4: +10 V
5: AI2
6: GND
7: AO
8: GND
9: +24 V
10: GND
11: DCOM
12: DI1
13: DI2
14: DI3
15: DI4
16: DI5
X1B: 17: ROCOM
18: RONC
19: RONO
20: DOSRC
21: DOOUT
22: DOGND
Kontrol sinyallerinin varsayılan bağlantısı 9902 parametresi ile seçilen kullanılan
uygulama makrosuna göre değişir. Bağlantı şemaları için bkz. bölüm Uygulama
makroları.
S1 anahtarı, AI1 ve AI2 analog girişleri için sinyal tipleri olarak gerilim (0 (2)…10 V)
veya akımı (0 (4)…20 mA) seçer. Fabrika ayarları AI1 için gerilim ve AI2 için akımdır
ve bunlar da uygulama makrolarındaki varsayılan kullanıma karşılık gelmektedir.
Üst konum: I [0 (4)…20 mA], AI2 için varsayılan
Alt konum: U [0 (2)…10 V], AI1 için varsayılan
AI1
AI2
Varsayılan olarak, tek kutuplu gerilim AI1 için ve tek kutuplu akım AI2 için kullanılır.
Çift kutuplu gerilim (-10 V…10 V) ve akım (-20 mA…20 mA) da mümkündür. Tek
kutuplu bağlantı yerine çift kutuplu bağlantı kullanılması durumunda parametrelerin
nasıl ayarlanaca
ğı hakkında bilgi için bkz. bölüm Programlanabilir analog girişler
sayfa 92.
Elektrik kurulumu
Tek kutuplu gerilim İki kutuplu gerilim
1…10 kohm
SCR
AI
GND
+10V
+10 V GND -10 V
SCR
AI
GND
Tek kutuplu/İki kutuplu akım
SCR
AI
GND
Harici güç kaynağı kullanın.
Frekans girişi olarak DI5 kullanılırsa parametrelerin nasıl ayarlanacağı hakkında bilgi
için bkz. bölüm Frekans girişi sayfa 95.
Page 35

Prosedür
1. Aynı anda kasadaki girintiye basarak ve kapağı çıkararak terminal kapağını
çıkarın.
2. Analog sinyal: Analog sinyal kablosunun dış yalıtımını 360 derece soyun ve
çıplak ekranı kelepçe altında topraklayın.
3. İletkenleri uygun terminallere bağlayın.
4. Analog sinyal kablosundaki her bir çiftin topraklama iletkenlerini bükün ve demeti
SCR terminaline bağlayın.
5. Dijital sinyaller: Kablonun iletkenlerini uygun terminallere bağlayın.
6. Dijital sinyal kablolarının topraklama iletkenleri ve ekranlarını (varsa) bir demet
şeklinde bükün ve SCR terminaline bağlayın.
7. Sürücünün dış kısmındaki tüm kabloları mekanik olarak sabitleyin.
8. Opsiyonel fieldbus modülünü bağlamanız gerekmiyorsa (bkz. sayfa 22), terminal
kapağını geri koyun.
2
4
35
3
5
EMC VA R
1
2
Elektrik kurulumu
Page 36

36
Elektrik kurulumu
Page 37

Kurulum kontrol listesi
Kontrol listesi
Devreye almadan önce sürücünün mekanik ve elektriksel kurulumunu kontrol edin.
Kontrol listesini başka biriyle birlikte gözden geçirin. Sürücü üzerinde çalışmaya
başlamadan önce bu kılavuzun ilk sayfalarındaki Güvenlik bölümü okuyun.
Kontrol
MEKANİK KURULUM
Ortam çalışma koşulları uygun. (Bkz. Mekanik kurulum: Kurulum sahası için gereksinimler
sayfa 20, Teknik veriler: Soğutma hava akışı gereksinimleri sayfa 255 ve Ortam Koşulları
sayfa 261.)
Sürücü, dikey ve yanmayan bir duvara düzgün bir şekilde monte edilmiş. (Bkz. Mekanik
kurulum.)
37
Soğutma havası serbest şekilde akıyor. (Bkz. Mekanik kurulum: Sürücü çevresindeki boş
alan sayfa 21.)
Motor ve yük çalıştırmaya hazır. (Bkz. Elektrik kurulumunun planlanması: Motor seçimi
sayfa 23 ve
ELEKTRİK KURULUMU (Bkz. Elektrik kurulumunun planlanması ve Elektrik kurulumu.)
Topraklamasız ve köşede topraklamalı sistemler için: Dahili EMC filtresi çıkarılmış (EMC
vidası sökülür).
Sürücü iki yılın üzerinde bir süre boyunca saklandıysa kondansatörler yenilenmiş.
Sürücü uygun biçimde topraklanmış.
Giriş besleme geriliminin, sürücünün nominal giriş gerilimine uyuyor.
U1, V1 ve W1'deki giriş gücü bağlantıları düzgündür ve doğru moment değerinde sıkılmış.
Uygun giriş gücü sigortaları ve ayırıcı takılmış.
U2, V2 ve W2 motor bağlantıları düzgün ve doğ
Motor kablosu diğer kablolardan uzağa döşenmiş.
Harici kontrol (I/O) bağlantıları düzgün.
Tekni k veri ler: Motor bağlantısı sayfa 259.)
ru moment değerinde sıkılmış.
Giriş besleme gerilimi sürücünün çıkışına uygulanamaz (bypass bağlantısıyla).
Terminal kapağı ve NEMA 1 için başlık ve bağlantı kutusu yerinde.
Kurulum kontrol listesi
Page 38

38
Kurulum kontrol listesi
Page 39

Devreye alma, I/O ve ID Run ile kontrol
Bu bölümün içindekiler
Bu bölüm aşağıdakilerin nasıl yapılacağını açıklar:
• devreye alma
• start, stop, dönüş yönünü değiştirme ve I/O arayüzü ile motorun hız ayarı.
• sürücü için bir ID RUN (Motor tanımlama) gerçekleştirme.
Sürücünün devreye alınması
Sürücüyü nasıl devreye alacağınız, eğer varsa, sahip olduğunuz kontrol paneline
bağlıdır.
• Eğer kontrol paneliniz yoksa, bkz. talimatlar, bölüm Sürücünün kontrol paneli
olmadan devreye alınması, sayfa 39.
39
• Eğer Temel Kontrol Paneliniz varsa, bkz. talimatlar, bölüm Sınırlı devreye
almanın gerçekleştirilmesi, sayfa 40.
• Eğer Gelişmiş Kontrol Paneliniz varsa, Devreye Alma Asistanını (bkz. bölüm
Yönlendirmeli devreye almanın gerçekleştirilmesi, sayfa 45) çalıştırabilir ya da
sınırlı devreye alma gerçekleştirebilirsiniz (bkz. bölüm Sınırlı devreye almanın
gerçekle
Devreye Alma Asistanı, yapılması gereken tüm ayarlar konusunda size rehberlik
eder. Sınırlı devreye alma sırasında sürücü sizi herhangi bir şekilde
yönlendirmez; kılavuzdaki talimatlara göre en temel ayarları yapabilirsiniz.
Sürücünün kontrol paneli olmadan devreye alınması
Devreye alma sadece yetkili bir elektrikçi tarafından gerçekleştirilebilir.
Devreye alma prosedürü boyunca Güvenlik bölümünde verilen güvenlik talimatları
uygulanmalıdır.
Montajı kontrol edin. Bkz. Kurulum kontrol listesi bölümündeki kontrol listesi.
Motoru start etmenin bir tehlikeye yol açıp açmadığını kontrol edin.
Hatalı dönüş yönü durumunda hasar riski varsa motor ile makine arasındaki bağlantıyı
sökün.
ştirilmesi, sayfa 40). Yalnızca Gelişmiş Kontrol Panelinde bulunan
GÜVENLİK
ENERJİ VERME
Giriş besleme gerilimini uygulayın ve bir süre bekleyin.
Kırmızı LED'in yanmadığından, yeşil LED'in ise yanmış ancak yanıp sönmekte olmadığından
emin olun.
Devreye alma, I/O ve ID Run ile kontrol
Page 40

40
Sürücü artık kullanıma hazırdır.
Sınırlı devreye almanın gerçekleştirilmesi
Sınırlı devreye alma için Temel Kontrol Panelini ya da Sınırlı Kontrol Panelini kontrol
edebilirsiniz. Aşağıdaki talimatlar her iki kontrol paneli için geçerlidir, ancak yalnızca
Gelişmiş Kontrol Paneli için geçerli olan talimatlar hariç gösterilen tüm ekranlar
Temel Kontrol Paneli ekranlarıdır.
Başlamadan önce motor plaka değerlerinin elinizde olduğuna emin olun.
GÜVENLİK
Devreye alma sadece yetkili bir elektrikçi tarafından gerçekleştirilebilir.
Devreye alma prosedürü boyunca Güvenlik bölümünde verilen güvenlik talimatları
uygulanmalıdır.
Montajı kontrol edin. Bkz. Kurulum kontrol listesi bölümündeki kontrol listesi.
Motoru start etmenin bir tehlikeye yol açıp açmadığını kontrol edin.
Aşağıdaki durumlarda motor ile makine arasındaki mekanik bağlantıyı sökün :
•yanlış yönde dönüş durumunda hasar tehlikesi varsa, veya
• sürücü devreye alma esnasında bir ID Run gerçekleştirilmesi gerekiyorsa. ID Run sadece
maksimum motor kontrol hassasiyeti gerektiren uygulamalarda gereklidir.
ENERJİ VERME
Giriş besleme gerilimini uygulayın.
Temel Kontrol Paneli Çıkış moduna geçer.
Gelişmiş Kontrol Paneli, Devreye Alma Asistanını çalıştırmak
isteyip istemediğinizi sorar. Eğer tuşuna basarsanız,
EXIT
Devreye Alma Asistanı çalışmaz ve aşağıda, Temel Kontrol
Panelinde anlatılan şekilde manuel devreye alma ile devam
edebilirsiniz.
MANUEL DEVREYE ALMA VERİ GİRİŞİ (parametre grubu 99)
Eğer Gelişmiş Kontrol Paneliniz varsa, dili seçin (Temel Kontrol
Panelinde dil desteği bulunmamaktadır). Kullanılabilecek
dillerle ilgili değerler için 9901 parametresine bakın.
Genel parametre ayarı prosedürü aşağıda Temel Kontrol Paneli için
açıklanmıştır. Temel Kontrol Paneli ile ilgili daha ayrıntılı talimatlar için bkz.
55. Gelişmiş Kontrol Paneli ile ilgili talimatlar için bkz. 66.
Genel parametre ayar işlemleri:
1. Ana menüye gitmek için alt satırda OUTPUT yazıyorsa tuşuna basın;
aksi takdirde alt kısımda MENU yazısı görülene kadar tuşuna art
arda basın.
2. “PAr” yazısını görünceye kadar
tuşuna basın.
/ tuşlarına basın ve
LOC
Hz
000
OUTPUT FWD
LOC
Devreye alma
asistanýný kullanmak
istiyor musunuz?
LOC
9901 LANGUAGE
[0]
LOC
MENU FWD
LOC
PAR FWD
CHOICE
Var
Hayýr
EXIT
PAR EDIT
ENGLISH
CANCEL SAVE00:00
rEF
-01-
.
OK00:00
Devreye alma, I/O ve ID Run ile kontrol
Page 41

3. / tuşlarına basarak uygun parametre grubunu bulun ve
tuşuna basın.
4.
5. Parametre değeri, alt kısmında ile gösterilene kadar tuşuna
6. Değeri
7. Parametre değerini, tuşuna basarak kaydedin.
/ tuşlarını kullanarak grup içinde uygun parametreyi bulun.
SET
basın ve iki saniye kadar basılı tutun.
/ tuşlarını kullanarak değiştirin. Tuşa basılı
tuttuğunuzda değer daha hızlı değişecektir.
Uygulama makrosunu seçin (parametre 9902). Genel
parametre ayar işlemleri yukarıda açıklanmıştır.
Hazır değer 1 (ABB STANDARD) birçok durumda uygundur.
Motor kontrol modunu seçin (parametre 9904).
1 (VECTOR:SPEED) birçok durum için uygundur.2 (VECTOR:TORQ) tork
kontrol uygulamaları için uygundur.3 (SCALAR:FREQ) önerilir
• sürücüye bağlanan motorların sayısının değişken olduğu çoklu motor
sürücüleri için
• motorun nominal akım değeri, sürücünün nominal akımının %20’sinden
küçük olduğunda
• sürücü, motor bağlanmadan test amaçlı kullanıldığında
LOC
2001
PAR FWD
LOC
2002
PAR FWD
LOC
1500
rpm
PAR SET FWD
LOC
1600
rpm
PAR SET FWD
LOC
2002
PAR FWD
LOC
9902
PAR FWD
LOC
9904
PAR FWD
41
Motor plakasından motor değerlerini girin:
ABB Motors
3
motor
V
690 Y
400 D
660 Y
380 D
415 D
440 D
Cat. no
• motor nominal gerilimi (parametre 9905)
• motor nominal akımı (parametre 9906)
9904 parametresinin 1 (VECTOR:SPEED) ya da 2 (VECTOR:TORQ)
olarak ayarlanması halinde izin verilen aralık: 0,2…2,0 · I
M2AA 200 MLA 4
IEC 200 M/L 55
Hz kW
30
50
50
30
50
30
30
50
50
30
35
60
3GAA 202 001 - ADA
No
r/min A
1475
1475
1470
1470
1475
1770
6210/C36312/C3
Ins.cl. F
32.5
56
34
59
54
59
cos
0.83
0.83
0.83
0.83
0.83
0.83
IEC 34-1
IP 55
IA/IN
180
t
E/s
380 V
besleme
gerilim
A
2N
Not: Motor değerini motor
plakasındaki değerin aynısına
ayarlayın. Örneğin plakadaki
motor nominal hızı 1440 rpm ise
9908 MOTOR NOM SPEED
parametresinin değerini
1500 rpm olarak ayarlamak
sürücüde yanlış çalışmaya yol
açar.
LOC
9905
PAR FWD
LOC
9906
PAR FWD
Devreye alma, I/O ve ID Run ile kontrol
Page 42

42
• motor nominal frekansı (parametre 9907)
• motor nominal hızı (parametre 9908)
• motor nominal gücü (parametre 9909)
Motor tanımlama yöntemini (parametre 9910) seçin.
Varsayılan değer olan 0 (OFF) birçok uygulama için uygundur. Temel devreye alma
işlemlerinde uygulanır. Ancak bunun için 9904 parametresinin 3 (SCALAR: FREQ) olarak
ayarlanmış olması halinde, 2101 parametresinin 3 (SCALAR FLYSTART) ya da 5 (FLY +
BOOST) olarak ayarlanması gerektiğini unutmayın.
Eğer seçiminiz 0 (OFF) ise sonraki adıma geçin.
Değer 1 (ON) aşağıdaki hallerde seçilmelidir:
- çalışma noktası sıfır hız etrafında ise ve/veya
- motor nominal momentinin üzerinde geniş hız aralığı içinde ve ölçülmüş herhangi bir geri
besleme olmadan moment aralığında çalışma gerektiğinde.
Eğer ID Run çalıştırma (değer 1 (ON)) yapmaya karar verirseniz, bölüm ID Run nasýl
gerçekleþtirilir sayfa 48'de verilen özel talimatları uygulayın ve sayfa 43'deki
DÖNÜÞ YÖNÜ. adıma geçin.
LOC
9907
PAR FWD
LOC
9908
PAR FWD
LOC
9909
PAR FWD
MOTOR
ID RUN SEÇİMİ 0 (OFF) İKEN TANIMLAMA MIKNATISLAMA
Lokal kontrole geçmek için tuşuna basın (sol tarafta LOC
tuşu görüntülenir).
Sürücüyü start etmek için tuşuna basın. Motor modeli,
motoru sıfır hızda 10-15 s arasında mıknatıslayarak
hesaplanır.
LOC
REM
Devreye alma, I/O ve ID Run ile kontrol
Page 43

43
MOTOR DÖNÜŞ YÖNÜ
Motor dönüş yönünü kontrol edin.
• Sürücü, uzaktan kontroldeyse (REM sol tarafta gösterilir),
LOC
tuşuna basarak lokal kontrole geçin.
REM
• Ana menüye gitmek için alt satırda OUTPUT yazıyorsa
tuşuna basın; aksi takdirde alt kısımda MENU yazısı
görülene kadar tuşuna art arda basın.
• “rEF” yazısını görünceye kadar / tuşlarına basın
ve tuşuna basın.
• Frekans referansını sıfırdan küçük bir değere yükseltmek için
tuşunu kullanın.
• Motoru start etmek için tuşuna basın.
• Motorun gerçek yönünün, ekranda görüntülenenle aynı olup
olmadığını kontrol edin (FWD, ileri ve REV geri anlamına
gelmektedir).
• Motoru stop etmek için tuşuna basın.
Motor dönme yönünü değiştirmek için:
•Giriş gücünün bağlantısını sürücüden ayırın ve ara devre
kondansatörlerinin yükü boşaltmaları için 5 dakika bekleyin.
Her bir giriş terminali (U1, V1 ve W1) arasındaki gerilimi
ölçün ve sürücü yükünün boşaltıldığından emin olmak için bir
multimetre ile topraklayın.
• Sürücü çıkış terminallerinde veya motor bağlantı kutusunda
bulunan iki motor kablo faz iletkeninin yerini değiştirin.
•Giriş gücünü uygulayarak ve kontrolü yukarıda tarif edildiği
gibi tekrarlayarak yaptığınızın doğruluğunu kontrol edin.
LOC
Hz
xxx
SET FWD
.
ileri yön
geri yön
HIZ LİMİTLERİ VE HIZLANMA/YAVAŞLAMA RAMPALARI
Minimum hızı ayarlayın (parametre 2001).
Maksimum hızı ayarlayın (parametre 2002).
Hızlanma zamanı 1'i (parametre 2202) ayarlayın.
Not: Eğer uygulamada iki hızlanma rampası kullanılacaksa
aynı zamanda hızlanma rampası 2’yi de (parametre 2205)
kontrol edin.
Yavaşlama zamanı 1'i (parametre 2203) ayarlayın.
Not: Eğer uygulamada iki yavaşlama rampası kullanılacaksa
aynı zamanda yavaşlama rampası 2’yi de (parametre 2206)
ayarlayın.
Devreye alma, I/O ve ID Run ile kontrol
LOC
2001
PAR FWD
LOC
2002
PAR FWD
LOC
2202
PAR FWD
LOC
2203
PAR FWD
Page 44

44
KULLANICI MAKROSU KAYDEDİLİYOR VE SON KONTROL
Devreye alma artık tamamlanmıştır. Ancak, bu aşamada
uygulamanın gerektirdiği parametrelerin ayarlanması ve
ayarların, sayfa 84 bölüm Kullanıcı makroları'nda belirtilen
şekilde kullanıcı makrosu olarak kaydedilmesi faydalı olabilir.
Sürücü durumunun tamam olup olmadığını kontrol edin.
Temel Kontrol Paneli: Ekranda hata veya alarm gösterilip
gösterilmediğini kontrol edin. Sürücünün ön tarafındaki LED'leri
kontrol etmek için, paneli sökerek kırmızı LED'in yanmadığını,
yeşil LED'in ise yandığını ancak yanıp sönmekte olmadığından
emin olmadan önce uzaktan kumandaya geçin (aksi taktirde bir
hata oluşturur).
Gelişmiş Kontrol Paneli: Ekranda herhangi bir arıza ya da
alarmın görüntülenmediğinden ve panel LED'inin yeşil renkte
olduğundan ve yanıp sönmekte olmadığından emin olun.
Sürücü artık kullanıma hazırdır.
LOC
9902
PAR FWD
Devreye alma, I/O ve ID Run ile kontrol
Page 45

Yönlendirmeli devreye almanın gerçekleştirilmesi
y
Yönlendirmeli devreye almayı gerçekleştirebilmek için Gelişmiş Kontrol Paneline
ihtiyacınız bulunmaktadır.
Başlamadan önce motor plaka değerlerinin elinizde olduğuna emin olun.
GÜVENLİK
Devreye alma sadece yetkili bir elektrikçi tarafından gerçekleştirilebilir.
Devreye alma prosedürü boyunca Güvenlik bölümünde verilen güvenlik talimatları
uygulanmalıdır.
Montajı kontrol edin. Bkz. Kurulum kontrol listesi bölümündeki kontrol listesi.
Motoru start etmenin bir tehlikeye yol açıp açmadığını kontrol edin.
Aşağıdaki durumlarda motor ile makine arasındaki mekanik bağlantıyı sökün :
• yanlış yönde dönüş durumunda hasar tehlikesi varsa, veya
• sürücü devreye alma esnasında bir ID Run gerçekleştirilmesi gerekiyorsa. ID Run sadece
maksimum motor kontrol hassasiyeti gerektiren uygulamalarda gereklidir.
ENERJİ VERME
45
Giriş besleme gerilimini uygulayın. Kontrol paneli öncelikle,
Devreye Alma Asistanını çalıştırmak isteyip istemediğinizi sorar.
• Devreye Alma Asistanını çalıştırmak için tuşuna basın (
OK
Var
vurgulanmış halde iken).
• Devreye Alma Asistanını çalıştırmak istemiyorsanız tuşuna
EXIT
basın.
•
tuşuna basarak seçeneğini vurgulayın ve panelin,
sürücüyü tekrar açtığınızda Devreye Alma Asistanı ile ilgili
soruyu sorması (ya da sormaması) için tuşuna basın.
Ha
OK
DİL SEÇİMİ
Devreye Alma Asistanını çalıştırmaya karar verdiğinizde, ekranda
dili seçmeniz istenir. / tuşlarıyla istediğiniz dile gelin ve
SAVE
tuşuna basarak onaylayın.
EXIT
tuşuna basmanız halinde Devreye Alma Asistanı durdurulur.
YÖNLENDİRMELİ SET-UP İŞLEMİNİ BAŞLATMA
Devreye Alma Asistanı, motor ayarlarından başlayarak ayarlama
görevlerinde sizi yönlendirecektir. Motor değerini motor
plakasındaki değerin aynısına ayarlayın.
/ tuşlarını kullanarak istediğiniz parametre değerine
gelin ve tuşuna basarak onaylayın ve Devreye Alma
SAVE
Asistanına devam edin.
Not: Herhangi bir zamanda tuşuna bastığınızda, Devreye
EXIT
Alma Asistanı durdurulur ve ekran Çıkış moduna geçer.
LOC
Devreye alma
asistanýný kullanmak
istiyor musunuz?
LOC
Sonraki çalýþtýrmada
devreye alma asistaný
gösterilsin mi?
LOC
9901 LANGUAGE
[0]
LOC
9905 MOTOR NOM VOLT
CHOICE
Var
Hayýr
EXIT
Var
Hayýr
EXIT
00:00
CHOICE
PAR EDIT
OK
OK00:00
ENGLISH
EXIT SAVE
00:00
PAR EDIT
220 V
EXIT SAVE
00:00
Devreye alma, I/O ve ID Run ile kontrol
Page 46

46
Görev tamamlandıktan sonra panelde sonraki ayarlama göreviyle
devam etmek isteyip istemediğiniz sorulur.
• Devreye Alma Asistanının çalışmaya devam etmesi için
tuşuna basın (
•
tuşuna basarak seçeneğini vurgulayın ve
Devam
( vurgulanmış halde iken).
Geç
OK
OK
tuşuna basarak bu görevi tamamlamadan sonrakine geçin.
• Devreye Alma Asistanını durdurmak için tuşuna basın.
EXIT
KULLANICI MAKROSU KAYDEDİLİYOR VE SON KONTROL
Devreye alma artık tamamlanmıştır. Ancak, bu aşamada
uygulamanın gerektirdiği parametrelerin ayarlanması ve ayarların,
sayfa 84 bölüm Kullanıcı makroları'nda belirtilen şekilde kullanıcı
makrosu olarak kaydedilmesi faydalı olabilir.
Ayarlar tamamlandığında, ekranda herhangi bir arıza ya da alarmın
görüntülenmediğinden ve panel LED'inin yeşil renkte olduğundan
ve yanıp sönmekte olmadığından emin olun.
Sürücü artık kullanıma hazırdır.
LOC
Uygulama ayarlarý
ile devam etmek
istiyor musunuz?
Devam
Geç
EXIT
CHOICE
OK00:00
Devreye alma, I/O ve ID Run ile kontrol
Page 47

Sürücü I/O arayüzü ile nasıl kontrol edilir
Aşağıdaki tablo belirtilen durumlarda sürücünün dijital ve analog girişlerle nasıl
çalıştırılacağını anlatır:
• motorun devreye alması gerçekleştirildiğinde ve
• hazır değer (standart) parametre ayarları geçerli olduğunda.
Temel Kontrol paneli Ekranları örnek olarak verilmiştir.
ÖN AYARLAMALAR
Eğer dönüş yönünü değiştirmeniz gerekiyorsa 1003 parametre
ayarını 3'e (REQUEST) getirin.
47
Kontrol bağlantılarının ABB Standart makrosu için verilmiş bağlantı
şemasındaki gibi yapıldığına emin olun.
Sürücünün uzaktan kontrolde olduğundan emin olun. Uzaktan ve
lokal kontrol arasında geçiş için tuşuna basın.
MOTORUN HIZINI KONTROL ETMEK VE START ETME
DI1 dijital girişini açarak start edin.
Temel Kontrol Paneli: FWD yazısı hızlı şekilde yanıp sönmeye başlar
ve set değerine ulaşıldıktan sonra durur
Gelişmiş Kontrol Paneli: Ok dönmeye başlar. Set değerine erişilene
kadar noktalıdır.
AI1 analog girişinin gerilimini ayarlayarak sürücü çıkış frekansını
(motor hızı) ayarlayın.
Ters yön: DI2 dijital girişi ON.
İleri yön: DI2 dijital girişi OFF.
LOC
REM
MOTOR DÖNÜŞ YÖNÜNÜ DEĞİŞTİRME
Bkz. ABB Standart makrosu,
sayfa 77.
Uzaktan kontrolde, panel
ekranında REM yazısı
görüntülenir.
REM Hz
000
OUTPUT FWD
REM Hz
500
OUTPUT FWD
REM Hz
500
OUTPUT REV
REM Hz
500
OUTPUT FWD
.
.
.
.
MOTORU STOP ETME
DI1 dijital girişi OFF.
Temel Kontrol Paneli: FWD metni yavaşça yanıp sönmeye başlar.
Gelişmiş Kontrol Paneli: Ok dönmeyi durdurur.
Devreye alma, I/O ve ID Run ile kontrol
REM Hz
000
OUTPUT FWD
.
Page 48

48
ID Run nasıl gerçekleştirilir
Sürücü ilk kez çalıştırıldığında ve motor parametrelerinde (grup 99 START-UP
DATA) değişiklik yapıldığında motor özelliklerini otomatik olarak tahmin eder.. Bu
durum 9910 parametresi ID RUN değeri 0 (OFF) olduğunda geçerlidir.
Birçok uygulamada ayrı bir ID Run gerçekleştirmeye gerek yoktur. ID Run aşağıdaki
durumlarda geçerlidir:
•çalışma noktası sıfır hız yakınlarında olduğunda ve/veya
• motor nominal momentin üzerinde geniş hız aralığı içinde ve ölçülmüş herhangi
bir geri besleme olmadan moment aralığında çalışma gerektiğinde.
Not: ID Run işleminden sonra motor parametreleri (grup 99 START-UP DATA)
değiştirildiğinde işlem tekrarlanmalıdır.
ID Run işlemleri
Genel parametre ayarları prosedürü burada tekrar edilmez. Temel Kontrol Paneli için
bkz. sayfa 55. Gelişmiş Kontrol Paneli için bkz. sayfa 66. ID Run işlemi kontrol paneli
olmadan gerçekleştirilemez.
ÖZ KONTROL
UYARI! ID Run sırasında motor nominal hızın yaklaşık %50...80 arasında çalışır.
Motor öne doğru dönecektir. ID Run gerçekleştirmeden önce motoru
çalıştırmanın güvenli olup olmadığını kontrol edin!
Aşağıdaki durumlarda motor ile ekipman arasındaki bağlantıyı sökün.
Eğer ID Run öncesinde parametre değerleri (grup 01 OPERATING DATA - grup 98
OPTIONS) değiştirilmişse yeni ayarların aşağıdaki koşulara uyup uymadığını kontrol edin:
2001 MINIMUM SPEED <
0 rpm
2002 MAXIMUM SPEED > motor nominal devrinin %80'i
2003 MAXIMUM CURRENT >
I
2N
2017 MAX TORQUE 1 > %50 veya 2018 MAX TORQUE 2 > %50, 2014 MAX TORQUE
SEL parametresine göre hangi yükün kullanımda olduğuna bağlı olarak
Çalışma İzni sinyalinin açık olup olmadığını kontrol edin (parametre 1601).
Panelin lokal kontrolde olup olmadığını kontrol edin (LOC ifadesi sol / üst tarafta
görüntülenir). Lokal ve uzaktan kontrol arasında geçiş yapmak için tuşuna basın
LOC
REM
Devreye alma, I/O ve ID Run ile kontrol
Page 49

49
TEMEL KONTROL PANELİ İLE ID RUN
9910 parametresi ID RUN işlevini 1 (ON) konumuna getirin.
Yeni ayarları tuşuna basarak kaydedin.
ID Run sırasında gerçekleşen değerleri izlemek isterseniz,
Çıkış moduna ulaşana kadar art arda tuşuna basın.
ID Run işlevini başlatmak için tuşuna basın. Panel, ID
Run işlevini ilk başlattığınızda görüntülenmekte olan ekran ile
sağ tarafta görüntülenen alarm ekranı arasında geçiş yapmaya
devam eder.
Genelde ID Run esnasında hiçbir kontrol panel tuşuna
basılmaması tavsiye edilir. Ancak tuşuna basarak ID Run
işlemini her an durdurabilirsiniz.
ID Run tamamlandıktan sonra alarm ekranı görüntülenmeye
devam etmez.
ID Run işleminin başarısız olması halinde sağ tarafta arıza
ekranı görüntülenir.
LOC
9910
PAR FWD
LOC
1
PAR SET FWD
LOC
Hz
000
OUTPUT FWD
LOC
A2019
FWD
LOC
F0011
FWD
.
GELİŞMİŞ KONTROL PANELİ İLE ID RUN
9910 parametresi ID RUN işlevini 1 (ON) konumuna getirin.
Yeni ayarları tuşuna basarak kaydedin.
ID Run sırasında gerçekleşen değerleri izlemek isterseniz,
Çıkış moduna ulaşana kadar art arda tuşuna basın.
ID Run işlevini başlatmak için tuşuna basın. Panel, ID
Run işlevini ilk başlattığınızda görüntülenmekte olan ekran ile
sağ tarafta görüntülenen alarm ekranı arasında geçiş yapmaya
devam eder.
Genelde ID Run esnasında hiçbir kontrol panel tuşuna
basılmaması tavsiye edilir. Ancak tuşuna basarak ID Run
işlemini her an durdurabilirsiniz.
ID Run tamamlandıktan sonra alarm ekranı görüntülenmeye
devam etmez.
ID Run işleminin başarısız olması
ekranı görüntülenir.
SAVE
EXIT
halinde sağ tarafta arıza
LOC
9910 ID RUN
[1]
LOC
LOC
PAR EDIT
ON
CANCEL SAVE
00:00
0.
0.
50,0Hz
0 Hz
0 A
% 0 0.
DIR
ALARM
MENU00:00
ALARM 2019
ID run
00:00
LOC
HATA
FAULT 11
ID RUN FAIL
00:00
Devreye alma, I/O ve ID Run ile kontrol
Page 50

50
Devreye alma, I/O ve ID Run ile kontrol
Page 51

Kontrol panelleri
Bu bölümün içindekiler
Bu bölümde, kontrol panel tuşları, LED göstergeleri ve ekran alanları anlatılmaktadır.
Ayrıca, ayarları kontrol etme, izleme ve değiştirme konularında panelin kullanımı
hakkında talimatlar sağlamaktadır.
Kontrol panelleri hakkında
ACS350’yi kontrol etmek, durum verilerini okumak ve parametreleri ayarlamak için
bir kontrol paneli kullanılmalıdır. ACS350, iki farklı tip kontrol panelinden biri ile
kontrol edilebilir:
• Temel Kontrol Paneli ÷ Bu panelde (aşağıda açıklanmıştır), parametre
değerlerinin manuel olarak girilmesinde kullanılan temel araçlar bulunur.
•Gelişmiş Kontrol Paneli ÷ Bu panelde (bölüm Gelişmiş Kontrol Paneli, sayfa 59'da
anlatılmıştır) en sık kullanılan parametre ayarlarını otomatikleştirecek önceden
programlanmış asistanlar bulunmaktadır.
49
Uyumluluk
Kılavuz aşağıdaki versiyonlar ile uyumludur:
Temle Kontrol Paneli: ACS-CP-C Rev. C,
• panel programlama yazılımı sürüm 1.11 ya da daha yeni.
Gelişmiş Kontrol Paneli: ACS-CP-A Rev. O,
• panel programlama yazılımı sürüm 1.57 ya da daha yeni.
• panel flash konfigürasyon dosyası sürüm 1.12.2.0 ya da daha yeni.
Gelişmiş Kontrol Paneli sürümünü nasıl belirleyebileceğiniz konusunda bkz. sayfa
62.
Temel Kontrol Paneli
Özellikler
Temel Kontrol Paneli aşağıdaki özelliklere sahiptir:
• LCD ekranlı nümerik kontrol paneli
• kopyalama fonksiyonu – Parametreler, daha sonra başka sürücülere aktarmak
veya belirli bir sistemi yedeklemek amacıyla kontrol paneli belleğine
kopyalanabilir.
Kontrol panelleri
Page 52

50
Genel Bilgiler
Aşağıdaki tabloda, Ana Kontrol Panelindeki temel fonksiyonlar ve ekranlar hakkında özet
bilgiler sağlamaktadır.
LOC
1a
1c
OUTPUT FWD
1d
RESET
EXIT
2
6 7
8 9
1.1
MENU
ENTER
4
5
No. Kullanımı
1LCD ekran ÷ Beş alana ayrılmıştır:
A
1b
1e
3
a. Sol üst ÷ Kontrol konumu:
LOC: sürücü kontrolü lokal, yani kontrol panelinde
REM. sürücü kontrolü, sürücü I/O'ları ve fieldbus gibi uzaktandır.
b. Sağ üst ÷ Görüntülenen değerin birimi.
c. Orta ÷ Değişken; genelde, parametre ve sinyal değerlerini, menüleri veya
listeleri gösterir. Ayrıca, kontrol paneli hataları için bir kod gösterir.
d. Sol alt ve orta ÷ Panel çalışma durumu:
OUTPUT: Çıkış modu
PAR: Parametre modu
MENU: Ana menü.
e. Sağ alt ÷ Göstergeler:
FWD (ileri) / REV (geri): motor dönme yönü
Yavaş yanıp sönme: durmuş
Hızlı yanıp sönme: çalışıyor, set değerinde değil
Sabit: çalışıyor, set değerinde
SET
: Görüntülenen değer değiştirilebilir (Parametre ve Referans
modlarında).
2 RESET/EXIT ÷ Değiştirilmiş değerleri kaydetmeden bir üst menüye geçer.
Çıkış ve Hata modlarında hataları resetler.
3 MENU/ENTER ÷ Menünün alt menülerine girmek için kullanılır. Parametre
modunda görüntülenen değeri, yeni ayar olarak kaydeder.
4 Yukarı ÷
• Bir menü veya listede yukarı doğru ilerlemek için kullanılır.
• Bir parametre seçilmişse, değeri artırmak için kullanılır.
• Referans modunda referans değerini artırır.
Tuşun aşağı doğru tutulması değerin daha hızlı şekilde değişmesine neden
olur.
5Aşağı ÷
• Bir menü veya listede aşağı doğru ilerleme.
• Bir parametre seçilmişse, değeri azaltmak için kullanılır.
• Referans modunda referans değerini azalt
Tuşun aşağı doğru tutulması değerin daha hızlı şekilde değişmesine neden
olur.
6 LOC/REM ÷ Sürücü çalışma modunu lokal kontrolden uzaktan kontrole
değiştirir.
7 DIR ÷ Motor yönünü değiştirir.
ır.
Kontrol panelleri
Page 53

Çalışma prensipleri
Kontrol paneli, menüler ve tuşlar yardımıyla çalıştırılır. Seçenek ekranda belirene
kadar
ve ok tuşlarını kaydırıp tuşuna basarak bir seçenek seçin
(örneğin, çalıştırma modu veya parametre).
tuşuyla yapılan değişiklikler kaydedilmeden bir önceki çalışma düzeyine geri
dönülür.
Temel Kontrol Panelinin beş adet panel modu bulunmaktadır: Çıkış, Referans,
Parametre, Kopyalama ve Hata. İlk dört modun çalıştırılma yöntemi bu bölümde
anlatılmaktadır. Bir hata ya da meydana geldiğinde panel, hata veya alarm kodunu
gösteren Hata moduna otomatik olarak geçer. Çıkış veya Hata modunda hata veya
alarmı resetleyebilirsiniz (bkz. bölüm Hata izleme).
Güç açıkken panel Çıkış modundadır; burada çalıştırma, durdurma işlemlerini
gerçekleştirebilir, yönü değiştirebilir, lokal ve uzaktan kontrol modları arasında geçiş
yapabilir, üç adete kadar değeri izleyebilirsiniz (aynı anda bir tane). Diğer görevleri
gerçekleştirmek için ilk olarak Ana menüye gidin ve uygun modu seçin.
Genel görevler hakkında bilgiler
Aşağıdaki tabloda genel görevler, bunları gerçekleştirebileceğiniz modlar ve söz
konusu görevler hakkında ayrıntılı bilgilerin sağlandığı sayfa numaraları
verilmektedir.
51
Görev Mod Sayfa
Lokal ve uzaktan kontrol arasında geçiş Hepsi 52
Sürücü start/stop Hepsi 52
Motor dönme yönünün değiştirilmesi Hepsi 52
İzlenen sinyallerin taranması Çıkış 53
Hız, frekans ya da tork referansının ayarlanması Referans 54
Parametre değerinin değiştirilmesi Parametre 55
İzlenen sinyallerin seçilmesi Parametre 56
Hataların ve alarmların resetlenmesi Çıkış, Hata 239
Parametrelerin sürücüden kontrol paneline kopyalanması Kopyala 58
Parametrelerin kontrol panelinden sürücüye kopyalanması Kopyala 58
Kontrol panelleri
Page 54

52
Start/stop ve lokal uzaktan kontroller arasında geçiş
İstediğiniz mod içinde start/stop edebilir ve lokal ve uzaktan modları arasında geçiş
yapabilirsiniz. Sürücüyü start veya stop etmek için sürücünün lokal kontrolde olması
gerekir.
Adım Eylem Gösterge
1. • Uzaktan kontrol (REM solda gösterilmektedir) ve lokal kontrol (LOC solda
gösterilmektedir) arasında geçiş yapmak için tuşuna basın.
Not: Lokal kontrole geçiş, 1606 LOCAL LOCK parametresi ile devre dışı
bırakılabilir.
Tuşa bastıktan sonra önceki ekrana dönmeden önce kısa bir süre için
duruma göre “LoC” veya “rE” mesajı görüntülenir.
Sürücü ilk kez açıldığında uzaktan kontroldedir (REM) ve sürücünün I/O
terminalleri ile kontrol edilir. Lokal kontrol (LOC) moduna geçmek ve
sürücülü kontrol panelini kullanarak kontrol etmek için basın. Sonuç,
tuşa ne kadar süre boyunca bastığınıza göre değişir:
•Tuşu hemen bırakırsanız ekranda “LoC”) mesajı görüntülenir ve sürücü
durur. Kontrol referansını sayfa 54'de anlatılan şekilde ayarlayın.
•Tuşa yaklaşık iki saniye basarsanız (ekrandaki metin “LoC” yerine “LoC r”
şeklinde değiştiğ
eder. Sürücü, çalışma/durma durumu ve referans için geçerli uzaktan
kumanda değerlerini kopyalar ve bunları ilk lokal kontrol ayarları olarak
kullanır.
• Lokal kontrolde sürücüyü durdurmak için tuşuna basın.
• Lokal kontrolde sürücüyü çalıştırmak için tuşuna basın.
inde bırakırsanız), sürücü daha önceki şekilde devam
LOC
REM
LOC
REM
LOC
Hz
491
OUTPUT FWD
LOC
LoC
FWD
Alt satırdaki FWD veya REV
metinleri yavaş şekilde yanıp
sönmeye başlar.
Alt satırdaki FWD veya REV
metinleri hızlı şekilde yanıp
sönmeye başlar. Sürücü set
değerine ulaştığında yanıp
sönmeye son verir.
.
Motor dönme yönünün değiştirilmesi
Motorun dönme yönünü herhangi bir mod içinden değiştirebilirsiniz.
Adım Eylem Gösterge
1. Sürücü, uzaktan kontroldeyse (REM sol tarafta gösterilir), tuşuna
basarak lokal kontrole geçin. Önceki ekrana dönmeden önce kısa bir süre
için “LoC” mesajı görüntülenir.
2. Yönü, ileriden (FWD alt kısımda gösterilir) geriye (REV alt kısımda
gösterilir) veya tersi şekilde değiştirmek için tuşuna basın.
Not: 1003 parametresi 3 (REQUEST) olarak ayarlanmalıdır.
Kontrol panelleri
LOC
REM
LOC
Hz
491
OUTPUT FWD
LOC
Hz
491
OUTPUT REV
.
.
Page 55

Çıkış modu
Çıkış modunda aşağıdakileri gerçekleştirebilirsiniz:
•aynı anda bir sinyal olmak üzere üç adete kadar 01 OPERATING DATA gurubu
sinyalinin gerçek değerlerini izleme
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Çıkış moduna ekranın alt kısmında OUTPUT metni gösterilene kadar tuşuna
basarak geçebilirsiniz.
53
Ekranda bir 01 OPERATING DATA grubu sinyalinin
değeri görüntülenir. Birim, sağ tarafta görüntülenir. 56.
sayfa, izlemek amacıyla Çıkış modunda üç adete
kadar sinyalin nasıl seçileceğini açıklamaktadır.
Aşağıdaki tabloda, aynı anda bir adet olmak üzere bunların nasıl görüntüleneceği
gösterilmektedir.
İzlenen sinyallerin taranmas
Adım Eylem Gösterge
1. İzlemek için birden fazla sinyal seçilmişse (bkz. sayfa 56), bunlara Çıkış
modunda göz atabilirsiniz.
Sinyallere ileri doğru göz atmak için tuşuna art arda basın. Geri
doğru göz atmak için tuşuna art arda basın.
ı
REM Hz
491
OUTPUT FWD
REM Hz
491
OUTPUT FWD
A
REM
05
OUTPUT FWD
REM %
107
OUTPUT FWD
.
.
.
.
Kontrol panelleri
Page 56

54
Referans Modu
Referans modunda aşağıdakileri gerçekleştirebilirsiniz:
• frekans ya da tork referansını ayarlama
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Hız, frekans ya da tork referansının ayarlanması
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi
takdirde alt kısımda MENU yazısı görünene kadar tuşuna basın.
SET
LOC
REM
2. Sürücü, uzaktan kontroldeyse (REM sol tarafta gösterilir), tuşuna
basarak lokal kontrole geçin. Lokal kontrole geçmeden önce ekranda kısa
süre boyunca “LoC” yazısı görüntülenir.
Not: grup 11 REFERENCE SELECT ile, uzaktan kumanda (REM) ile
referans değişikliği yapılabilir.
3. Panel, Referans modunda değilse (“rEF” görünmüyorsa) veya
tuşuna basın ve “rEF” görüntülendiğinde tuşuna basın.
Ekranda, geçerli referans değeri ve değerin altında gösterilir.
4. • Referans değerini artırmak için tuşuna basın.
• Referans değerini azaltmak için tuşuna basın.
Tuşa basılır basılmaz değer değ
kapatıldığında otomatik olarak geri yüklenir.
işir. Sürücü kalıcı belleğinde saklanır ve
REM
PAr
MENU FWD
LOC
PAr
MENU FWD
LOC
rEF
MENU FWD
LOC
Hz
491
SET FWD
LOC
Hz
500
SET FWD
.
.
Kontrol panelleri
Page 57

Parametre modu
Parametre modunda aşağıdakileri gerçekleştirebilirsiniz:
• parametre değerlerini görüntüleme ve değiştirme
•Çıkış modunda görüntülenen sinyalleri seçme ve değiştirme
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Parametre seçme ve değerini değiştirme
Adım Eylem Gösterge
55
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi
takdirde alt kısımda MENU yazısı görünene kadar tuşuna basın.
2. Panel, Parametre modunda değilse (“PAr” görünmüyorsa) veya
tuşuna basın ve “PAr” görüntülendiğinde tuşuna basın.
Ekranda parametre gruplarından birinin sayısı görüntülenir.
3. İstenilen parametre grubunu bulmak için ve tuşlarını kullanın.
4. tuşuna basın. Ekranda seçilen gruptaki parametrelerden biri
gösterilir.
5. İstenilen parametreyi bulmak için ve tuşlarını kullanın.
6. Ekranda parametre değeri ve alt kısımda değerin değiştirilmesini artık
mümkün olduğunu belirten gösterilene kadar tuşuna basın ve
lı tutun.
bası
SET
Not: gösterildiğinde ve tuşlarına aynı anda basılması
görüntülenen değerin parametrenin hazır değerine değiştirir.
7. Parametre değerini seçmek için ve tuşlarına basın.
Parametre değerini değiştirdiğinizde yanıp sönmeye başlar.
• Görüntülenen parametre değerini kaydetmek için tuşuna basın.
• Yeni değeri iptal etmek ve orijinali saklamak için tuşuna basın.
SET
SET
LOC
rEF
MENU FWD
LOC
PAr
MENU FWD
LOC
-01-
PAR FWD
LOC
-11-
PAR FWD
LOC
1101
PAR FWD
LOC
1103
PAR FWD
LOC
1
PAR SET FWD
LOC
2
PAR SET FWD
LOC
1103
PAR FWD
Kontrol panelleri
Page 58

56
İzlenen sinyallerin seçilmesi
Adım Eylem Gösterge
1. Çıkış modunda hangi sinyallerin izleneceğini ve 34 PANEL DISPLAY grubu
parametreleriyle nasıl görüntüleneceğini seçebilirsiniz. Parametre
değerlerinin değiştirilmesi hakkında daha fazla bilgi için, bkz. sayfa 55.
Varsayılan olarak, göz atarak üç sinyali izleyebilirsiniz. Varsayılan
sinyallerin hangileri olacağı 9902 APPLIC MACRO parametresinin
değerine bağlıdır: varsayılan 9904 MOTOR CTRL MODE parametre değeri
1 (VECTOR:SPEED) olan makrolarda sinyal 1 için varsayılan değer 0102
SPEED, diğerleri için 0103 OUTPUT FREQ şeklindedir. 2 ve 3 sinyalleri
varsayılan değerleri her zaman sırasıyla 0104 CURRENT VE 0105
TORQUE şeklindedir.
Varsayılan sinyalleri değiştirmek için grup 01 OPERATING DATA içinden
göz atmak için üç adete kadar sinyal seçin.
Sinyal 1: 3401 SIGNAL1 PARAM parametresinin değerini
DATA grubundaki sinyal parametresinin indeksine değiştirin (= baştaki sıfır
haricinde parametrenin numarası), örneğin, 105 0105 TORQUE
parametresini göstermektedir. 100 değeri, hiçbir sinyalin
görüntülenmediğini gösterir.
2 (3408 SIGNAL2 PARAM) ve 3 (3415 SIGNAL3 PARAM) sinyalleri için bu
işlemleri tekrarlayın. Örneğin, eğer 3401 = 100 ve 3415 = 100 ise göz atma
devre dışı bırakılır ve sadece 3408 tarafından belirtilen sinyal ekranda
görüntülenir.
01 OPERATING
LOC
103
PAR SET FWD
LOC
104
PAR SET FWD
LOC
105
PAR SET FWD
2. Sinyallerin görüntülenme şeklini seçin. Temel İşletim Panelinde çubuk
grafikler bulunmamaktadır. Daha fazla bilgi için, bkz. 3404 parametresi.
Sinyal 1: parametre 3404 OUTPUT1 DSP FORM
Sinyal 2: parametre 3411 OUTPUT2 DSP FORM
Sinyal 3: parametre 3418 OUTPUT3 DSP FORM.
3. Sinyaller için görüntülenecek birimleri seçer. Daha fazla bilgi için, bkz. 3405
parametresi.
Sinyal 1: parametre 3405 OUTPUT1 UNIT
Sinyal 2: parametre 3412 OUTPUT2 UNIT
Sinyal 3: parametre 3419 OUTPUT3 UNIT.
4. Minimum ve maksimum görüntüleme değerlerini belirleyerek sinyallerin
ölçeklendirmesini belirler. Daha fazla bilgi için, bkz. 3406 ve 3407
parametreleri.
Sinyal 1: 3406 OUTPUT1 MIN ve 3407 OUTPUT1 MAX parametreleri
Sinyal 2: 3413 OUTPUT2 MIN ve 3414 OUTPUT2 MAX parametreleri
Sinyal 3: 3420 OUTPUT3 MIN ve 3421 OUTPUT3 MAX parametreleri.
LOC
9
PAR SET FWD
LOC
3
PAR SET FWD
LOC
Hz
00
PAR SET FWD
LOC
Hz
5000
PAR SET FWD
.
.
Kontrol panelleri
Page 59

Kopyalama modu
Temel Kontrol Paneli, bir adet tam sürücü parametreleri setini ve üç adete kadar
sürücü parametreleri kullanıcı setini kontrol panelinde saklayabilir. Kontrol paneli
belleği uçucu değildir.
Kopyalama modunda aşağıdaki işlemleri gerçekleştirebilirsiniz:
• Tüm parametrelerin sürücüden kontrol paneline kopyalanması (uL ÷ Karşıya
Yükleme). Bunların arasında kullanıcı parametre setleri ve ID Run tarafından
oluşturulanlar gibi dahili (kullanıcı tarafından değiştirilemeyen) parametreler de
bulunmaktadır.
• Tam parametre setinin kontrol panelinden sürücüye geri yüklenmesi (rE A ÷
Tümünü Geri Yükleme). Dahili, kullanıcı tarafından değiştirilemeyen motor
parametreleri de dahil olmak üzere tüm parametreler sürücüye yazılır. Bu,
kullanıcının parametre setlerini içermez.
Not: Bu fonksiyonu sadece bir sürücüyü geri yüklemek veya parametreleri orijinal
sistem ile benzer sistemlere aktarmak için kullanın.
• Kontrol panelinden bir parametre setinin sürücüye kısmi olarak kopyalanması (dL
P ÷ Kısmi Yükleme). Kısmi set kullanıcı setlerini, dahili motor parametrelerini,
9905…9909, 1605, 1607, 5201 parametrelerini ve grup 51 EXT COMM MODULE
ve 53 EFB PROTOCOL parametrelerini içermez.
57
Kaynak ve hedef sürücüler ile motor boyutlarının aynı olmasına gerek
bulunmamaktadır.
• KULLANıCı S1 parametrelerini kontrol panelinden sürücüye kopyalanması (dL u1
÷ Kullanıcı Seti 1'i Yükle). Kullanıcı seti grup 99 START-UP DATA parametrelerini
ve dahili motor parametrelerini içerir.
Fonksiyon menüde yalnızca Kullanıcı Seti 1'in 9902 APPLIC MACRO
parametresi kullanılarak kaydedilmiş olması durumunda görüntülenir (bkz.
Kullanıcı makroları, sayfa 84).
• KULLANıCı S2 parametrelerini kontrol panelinden sürücüye kopyalanması (dL u2
÷ Kullanıcı Seti 2'yi Yükle). As dL u1 ÷ yukarıdaki Kullanıcı Seti 1'i yükle.
• KULLANıCı S3 parametrelerini kontrol panelinden sürücüye kopyalanması (dL u3
÷ Kullanıcı Seti 3'ü Yükle). As dL u1 ÷ yukar
ıdaki Kullanıcı Seti 1'i yükle.
•Çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Kontrol panelleri
Page 60

58
Parametrelerin karşıya yüklenmesi ve yüklenmesi
Karşıya yükleme ve yükleme işlevlerinin kullanılabilir olması için yukarıya bakın.
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi
takdirde alt kısımda MENU yazısı görünene kadar tuşuna basın.
2. Eğer panel Kopyalama modunda değilse (“CoPY” ifadesi görünmüyorsa),
“CoPY” ifadesi görüntülenene kadar veya tuşuna basın.
tuşuna basın.
3. • Tüm parametreleri sürücüden kontrol paneline yüklemek için (kullanıcı
setleri de dahil olmak üzere), ve tuşlarını kullanarak “uL”
seçeneğine gidin.
tuşuna basın. Aktarım sırasında, aktarma durumu ekranda
tamamlama yüzdesi olarak gösterilir.
•Yükleme işlemleri gerçekleştirmek için, uygun işleme
Tümünü geri yükleme örnek olarak kullanılmıştır) ve
tuşlarını kullanarak geçin.
tuşuna basın. Aktarım sırasında, aktarma durumu ekranda
tamamlama yüzdesi olarak gösterilir.
(burada “rE A”,
LOC
PAr
MENU FWD
LOC
CoPY
MENU FWD
LOC
dL u1
MENU FWD
LOC
uL
MENU FWD
LOC
%
uL 50
FWD
LOC
rE A
MENU FWD
LOC
%
rE 50
FWD
Temel Kontrol Paneli alarm kodları
Sürücü tarafından oluşturulan hatalar ve alarmlara ek olarak (bkz. bölüm Hata
izleme) Temel Kontrol Panelinde, A5xxx formatında kontrol paneli alarmları
görüntülenir. Alarm kodları ve açıklamalarının listesi için, bkz. bölüm Temel Kontrol
Paneli tarafından oluşturulan alarmlar, sayfa 242.
Kontrol panelleri
Page 61

Gelişmiş Kontrol Paneli
Özellikler
Gelişmiş Kontrol Paneli aşağıdaki özelliklere sahiptir:
• LCD ekranlı alfanümerik kontrol paneli
• ekran dili seçimi
• Sürücüyü devreye almayı kolaylaştıran Devreye Alma Asistanı
• kopyalama fonksiyonu – Parametreler, daha sonra başka sürücülere aktarmak
veya belirli bir sistemi yedeklemek amacıyla kontrol paneli belleğine
kopyalanabilir.
•koşullara duyarlı yardım
• gerçek zamanlı saat.
Genel Bilgiler
59
Aşağıdaki tabloda, Asistan Kontrol Panelindeki temel fonksiyonlar ve ekranlar
1
2a
LOC
400RPM
1200 RPM
2b
12.4 A
405 dm3/s
2c
DIR 12:45 MENU
3
9 10
5
67 8
No. Kullanımı
1 Durum LED'i ÷ Normal çalışma için yeşil. LED yanıp sönüyorsa ya da kırmızı
renkte ise bkz LED, sayfa 251.
2 LCD ekran ÷ Üç ana alana ayrılmıştır:
a. Durum satırı ÷ çalışma moduna göre değişir, bkz. Durum satýrý, sayfa 60.
b. Orta ÷ değişken; genelde, sinyal ve parametre değerlerini, menüleri veya
listeleri gösterir.
c. Alt satır ÷ iki fonksiyon butonunun geçerli fonksiyonunu ve etkinleştirilmişse
saati gösterir.
4
3 Program tuşu 1 ÷ Fonksiyon koşullara bağlıdır. LCD ekranın sol alt
köşesindeki metin fonksiyonu gösterir.
4 Program tuşu 2 ÷ Fonksiyon koşullara bağlıdır. LCD ekranın sağ alt
köşesindeki metin fonksiyonu gösterir.
5Yukarı ÷
• LCD ekran
için kullanılır.
• Bir parametre seçilmişse, değeri artırmak için kullanılır.
•Sağ üst köşe vurgulanmış ise referans değerini artırır.
Tuşun aşağıda tutulması değerin daha hızlı şekilde değişmesine neden olur.
6Aşağı ÷
• LCD ekranın ortasında gösterilen menü veya listede aşağı doğru ilerlemek
için kullanılır.
• Bir parametre seçilmişse, değeri azaltmak için kullanılır.
•Sağ üst köşe vurgulanmış ise referans değ
Tuşun aşağıda tutulması değerin daha hızlı şekilde değişmesine neden olur.
7 LOC/REM ÷ Sürücü çalışma modunu lokalden uzaktan kontrole değiştirir.
8 Help (Yardım) ÷ Tuşa basıldığında, koşullara duyarlı bilgileri gösterir.
Gösterilen bilgiler, ekranın ortasındaki alanda vurgulanan öğeyi açıklar.
9 STOP ÷ Sürücüyü lokal kontrolde durdurur.
10 START ÷ Sürücüyü lokal kontrolde başlatır.
ın ortasında gösterilen menü veya listede yukarı doğru ilerlemek
erini azaltır.
hakkında özet bilgiler sağlamaktadır.
Kontrol panelleri
Page 62

60
Durum satırı
LCD ekranın üst satırında sürücünün temel durum bilgileri gösterilir.
49,1HzLOC
1 2 4
No. Saha Seçenekler Anlamı
1 Göstergede
Kontrol yeri
2 Durum Şaft yönü ileri
3 panel çalışma
modu
4 Seçilen madde
için referans
değer ya da
numara
LOC Sürücü kontrolü lokal, yani kontrol panelinde.
REM Sürücü kontrolü, sürücü I/O'ları ve fieldbus gibi
Dönen ok Sürücü çalışır durumda ve set değerindedir.
Noktalı dönen ok Sürücü çalışır durumdadır ancak set değerinde
Sabit ok Sürücü stop eder.
Noktalı sabit ok Başlat komutu var ama motor, örn. başlat izni
LOC MAIN MENU 1
1 2 3 4
uzaktandır.
Şaft yönü geri
değildir.
olmadığından çalışmıyor.
• Geçerli modun adı
• Görüntülenen liste ya da menünün adı
• Çalışma durumunun adı, örn. PAR EDIT.
• Çıkış modunda referans değer
• Vurgulanan maddenin numarası, örn. mod,
parametre grubu ya da hata.
Çalışma prensipleri
Kontrol paneli, menüler ve tuşlar yardımıyla çalıştırılır. Tuşlar arasında, geçerli
işlevleri üstlerindeki göstergedeki metinle belirtilen iki adet içeriğe duyarlı program
tuşu bulunmaktadır.
Çalışma modu ya da parametre gibi bir seçeneği seçmek için, seçenek vurgulanana
kadar
ve ok tuşları ile hareket edin ve ilgili program tuşuna basın. Sağ
program tuşu genellikle mod girmek, bir seçeneği onaylamak ya da değişiklikleri
kaydetmek için kullanılır. Sol program tuşu yapılan değişiklikleri iptal etmek ve
önceki çalışma düzeyine geri dönmek için kullanılır.
Gelişmiş Kontrol Panelinde beş panel modu bulunmaktadır: Çıkış, Parametreler,
Asistanlar, Değiştirilmiş Parametreler, Hata Kayıt, Saat Ayarlama, Parametre
Yedekleme, I/O Ayarları ve Hata. İlk sekiz modun çalıştırılma yöntemi bu bölümde
anlatılmaktadır. Bir hata ya da meydana geldiğinde panel, hata veya alarmı gösteren
Hata moduna otomatik olarak geçer. Çıkış ya da Hata modunda resetleyebilirsiniz
(bkz. bölüm Hata izleme).
İlk olarak panel çalıştırabileceğiniz, durdurabileceğiniz, yönü de
ğiştirebileceğiniz,
lokal ve uzaktan kumanda arasında geçiş yapabileceğiniz, referans değeri
değiştirebileceğiniz ve üç adete kadar gerçek değeri izleyebileceğiniz Çıkış
modundadır. Diğer görevleri gerçekleştirmek için ilk olarak Ana menüye gidin ve
menüde uygun modu seçin. Durum satırı (bkz. bölüm Durum satırı, sayfa 60) geçerli
menü, mod, madde ya da durumun adını gösterir.
Kontrol panelleri
Page 63

Genel görevler hakkında bilgiler
Aşağıdaki tabloda genel görevler, bunları gerçekleştirebileceğiniz modlar ve söz
konusu görevler hakkında ayrıntılı bilgilerin sağlandığı sayfa numaraları
verilmektedir.
Görev Mod Sayfa
Yar dım alma Hepsi 62
Panel sürümünü bulma Çalıştırma 62
Ekran kontrastını ayarlama Çıkış 65
Lokal ve uzaktan kontrol arasında geçiş Hepsi 63
Sürücü start/stop Hepsi 64
Motor dönme yönünün değiştirilmesi Çıkış 64
Hız, frekans ya da tork referansının ayarlanması Çıkış 65
Parametre değerinin değiştirilmesi Parametreler 66
İzlenen sinyallerin seçilmesi Parametreler 67
Asistanlarla yönlendirmeli görevlerin (ilgili parametre setinin
spesifikasyonları) gerçekleştirilmesi
Değiştirilen parametrelerin görüntülenmesi ve düzenlenmesi Değiştirilen Parametreler 69
Hataları görüntüleme Hata Kayıt 70
Hataların ve alarmların resetlenmesi Çıkış, Hata 239
Saati görüntüleme/gizleme, tarih ve saat formatlar
saati ayarlama
Parametrelerin sürücüden kontrol paneline kopyalanması Parametre Yedekleme 73
Parametrelerin kontrol panelinden sürücüye kopyalanması Parametre Yedekleme 73
I/O terminalleriyle ilişkili olarak parametre ayarlarını düzenleme ve
değiştirme
ını değiştirme ve
Asistanlar 68
Saat Ayarlama 71
I/O Ayarları 74
61
Kontrol panelleri
Page 64

62
Yardım alma
Adım Eylem Gösterge
1. Vurgulanmış olan madde ile ilgili içeriğe duyarlı yardım metinlerini
görüntülemek için tuşuna basın.
?
LOC
01 OPERATING DATA
03 FB ACTUAL SIGNALS
04 FAULT HISTORY
10 START/STOP/DIR
90 REFERENCE SELECT
PAR GROUPS 10
EXIT SEL00:00
Eğer madde ile ilgili yardım metni bulunuyorsa, ekranda görüntülenir.
2. Metnin tamamı görüntülenmiyorsa, ve tuşları ile satırları kaydırın.
This group defines
external sources
(EXT1 and EXT2) for
commands that enable
start, stop and
LOC
external sources
(EXT1 and EXT2) for
commands that enable
start, stop and
direction changes.
EXIT
YARD
00:00
YARD
LOC
EXIT 00:00
3. Metni okuduktan sonra tuşuna basarak önceki ekrana dönün.
EXIT
LOC
01 OPERATING DATA
03 FB ACTUAL SIGNALS
04 FAULT HISTORY
10 START/STOP/DIR
90 REFERENCE SELECT
PAR GROUPS 10
EXIT SEL00:00
Panel sürümünü bulma
Adım Eylem Gösterge
1. Eğer güç açıksa kapatın.
2. Gücü açarken ve bilgileri okurken tuşunu basılı tutun. Ekranda aşağıdaki
?
panel bilgileri görüntülenir:
Panel SW: panel programlama yazılımı sürümü
PANEL VERSION INFO
Panel SW: x.xx
ROM CRC: xxxxxxxxxx
Flash Rev: x.xx
ROM CRC: ROM kontrol değeri
Flash Rev: flash sürümü.
Tuşu bıraktığınızda, panel Çıkış moduna geçer.
Kontrol panelleri
Page 65

Start/stop ve lokal uzaktan kontroller arasında geçiş
İstediğiniz mod içinde start/stop edebilir ve lokal ve uzaktan modları arasında geçiş
yapabilirsiniz. Sürücüyü start veya stop etmek için sürücünün lokal kontrolde olması
gerekir.
Adım Eylem Gösterge
LOC
1. • Uzaktan kontrol (durum satırında REM gösterilmektedir) ve lokal kontrol
(durum satırında LOC gösterilmektedir) arasında geçiş yapmak için
LOC
REM
tuşuna basın.
Switching to the
local control mode.
MESSAGE
63
Not: Lokal kontrole geçiş, 1606 LOCAL LOCK parametresi ile devre dışı
bırakılabilir.
Sürücü ilk kez açıldığında uzaktan kontroldedir (REM) ve sürücünün I/O
terminalleri ile kontrol edilir. Lokal kontrol (LOC) moduna geçmek ve sürücülü
kontrol panelini kullanarak kontrol etmek için basın. Sonuç, tuşa ne kadar
LOC
REM
süre boyunca bastığınıza göre değişir:
•Tuşu hemen bırakırsanız (ekranda “Lokal kontrol moduna geçiliyor” ifadesi
yanıp söner) sürücü durur. Kontrol referansını sayfa 65'de anlatılan şekilde
ayarlayın.
•Tuşa yaklaşık iki saniye basarsanız sürücü daha önce olduğu şekilde devam
eder. Sürücü, çalı
şma/durma durumu ve referans için geçerli uzaktan
kumanda değerlerini kopyalar ve bunları ilk lokal kontrol ayarları olarak
kullanır.
• Lokal kontrolde sürücüyü durdurmak için tuşuna basın.
• Lokal kontrolde sürücüyü çalıştırmak için tuşuna basın.
00:00
Durum satırındaki ok (
veya ) dönmeyi durdurur.
Durum satırındaki ok (
veya ) dönmeye başlar.
Sürücü set noktasına
ulaşana kadar noktalıdır.
Kontrol panelleri
Page 66

64
Çıkış modu
Çıkış modunda aşağıdakileri gerçekleştirebilirsiniz:
• 01 OPERATING DATA grubunda üç adete kadar sinyalin gerçek değerini izleme
• motor dönme yönünü değiştirme
• frekans ya da tork referansını ayarlama
• ekran kontrastını ayarlama
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
EXIT
tuşuna arka arkaya basarak Çıkış moduna geçebilirsiniz.
Ekranın sağ köşesinde referans
değeri görüntülenir. Orta kısım
üç adete kadar sinyal değerini
ya da çubuk grafiği
görüntüleyecek şekilde
konfigüre edilebilir; izlenen
sinyallerin seçilmesi ve değiştirilmesi ile ilgili talimatlar için bkz. sayfa 67.
Motor dönme yönünün değiştirilmesi
Adım Eylem Gösterge
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene kadar tuşuna
basın.
2. Sürücü, uzaktan kontroldeyse (durum satırında REM gösterilir), tuşuna
basarak lokal kontrole geçin. Ekranda mod değiştirilmesi ile ilgili kısa bir mesaj
görüntülenir ve Çıkış moduna dönülür.
3. Yönü ileriden (durum satırında görüntülenir) geriye (durum satırında
görüntülenir) almak ya da tam tersi için tuşuna basın.
Not: 1003 parametresi 3 (REQUEST) olarak ayarlanmalıdır.
DIR
LOC
49.
0.
DIR
EXIT
1 Hz
5 A
% 710.
LOC
REM
49,1Hz
MENU00:00
LOC
HZ %50
DIR
REM
DIR
LOC
DIR
LOC
DIR MENU00:00
0.
49.
0.
49.
0.
49.
0.
4 A
% 424.
1 Hz
5 A
% 710.
1 Hz
5 A
% 710.
1 Hz
5 A
% 710.
5.0Hz
MENU00:00
49,1Hz
MENU00:00
49,1Hz
MENU00:00
49,1Hz
Kontrol panelleri
Page 67

Hız, frekans ya da tork referansının ayarlanması
Adım Eylem Gösterge
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene kadar tuşuna
basın.
2. Sürücü, uzaktan kontroldeyse (durum satırında REM gösterilir), tuşuna
basarak lokal kontrole geçin. Ekranda mod değiştirilmesi ile ilgili kısa bir mesaj
görüntülenir ve Çıkış moduna dönülür.
Not: grup 11 REFERENCE SELECT ile, uzaktan kumanda ile referans
değişikliği yapılabilir.
EXIT
LOC
REM
REM
1 Hz
49.
5 A
DIR
DIR
0.
00:00
49.
0.
00:00
% 710.
1 Hz
5 A
% 710.
LOC
65
49,1Hz
MENU
49,1Hz
MENU
3. • Ekranın sağ üst köşesinde görüntülenen vurgulanan değeri artırmak için
tuşuna basın. Değer hemen değişir. Sürücü kalıcı belleğinde saklanır
ve kapatıldığında otomatik olarak geri yüklenir.
•Değeri azaltmak için tuşuna basın.
Ekran kontrastını ayarlama
Adım Eylem Gösterge
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene kadar tuşuna
basın.
2. • Kontrastı artırmak için ve tuşlarına aynı anda basın.
• Kontrastı azaltmak için ve tuşlarına aynı anda basın.
MENU
MENU
EXIT
LOC
0 Hz
50.
DIR
LOC
DIR
LOC
DIR
0.
49.
0.
00:00
49.
0.
00:00
5 A
% 710.
1 Hz
5 A
% 710.
1 Hz
5 A
% 710.
50,0Hz
MENU00:00
49,1Hz
MENU
49,1Hz
MENU
Kontrol panelleri
Page 68

66
Parametreler modu
Parametreler modunda aşağıdakileri gerçekleştirebilirsiniz:
• parametre değerlerini görüntüleme ve değiştirme
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma
Parametre seçme ve değerini değiştirme
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER00:00
2. Menüde ve tuşları ve tuşuna basarak PARAMETERS
seçeneğini seçin ve Parametreler moduna geçin.
3. ve tuşlarını kullanarak uygun parametre grubunu seçin.
SEL
tuşuna basın.
4. ve tuşlarını kullanarak uygun parametreyi seçin. Geçerli
parametre değeri, seçilen parametrenin altında görüntülenir.
EDIT
tuşuna basın.
ENTER
LOC
01 OPERATING DATA
03 FB ACTUAL SIGNALS
04 FAULT HISTORY
10 START/STOP/DIR
11 REFERENCE SELECT
LOC
99 START-UP DATA
01 OPERATING DATA
03 FB ACTUAL SIGNALS
04 FAULT HISTORY
10 START/STOP/DIR
LOC
9901 LANGUAGE
9902 APPLIC MACRO
9904 MOTOR CTRL MODE
9905 MOTOR NOM VOLT
LOC
9901 LANGUAGE
9902 APPLIC MACRO
9904 MOTOR CTRL MODE
9905 MOTOR NOM VOLT
LOC
9902 APPLIC MACRO
[1]
PAR GROUPS 01
EXIT
EXIT
EXIT
EXIT
00:00
PAR GROUPS 99
00:00
PARAMETERS
ENGLISH
00:00
PARAMETERS
ABB STANDARD
00:00
PAR EDIT
ABB STANDARD
CANCEL SAVE00:00
SEL
SEL
EDIT
EDIT
5. ve tuşlarını kullanarak parametre için yeni bir değer belirleyin.
Tuşa bir kez basıldığında değer artar ya da azalır. Tuşun aşağı doğru tutulması
değerin daha hızlı
basıldığında görüntülenen değer, varsayılan değerle değiştirilir.
6. • Yeni değeri kaydetmek için tuşuna basın.
• Yeni değeri iptal etmek ve orijinali saklamak için tuşuna basın.
şekilde değişmesine neden olur. Tuşlara aynı anda
SAVE
CANCEL
Kontrol panelleri
LOC
9902 APPLIC MACRO
[2]
LOC
9901 LANGUAGE
9902 APPLIC MACRO
9904 MOTOR CTRL MODE
9905 MOTOR NOM VOLT
PAR EDIT
3-WIRE
CANCEL SAVE
EXIT
00:00
PARAMETERS
3-WIRE
00:00
EDIT
Page 69

İzlenen sinyallerin seçilmesi
67
Adım Eylem Gösterge
1. Çıkış modunda hangi sinyallerin izleneceğini ve 34 PANEL DISPLAY grubu
parametreleriyle nasıl görüntüleneceğini seçebilirsiniz. Parametre değerlerinin
değiştirilmesi hakkında daha fazla bilgi için, bkz. sayfa 66.
Fabrikasyon ayarı olarak, ekranda üç sinyal gösterilir. Varsayılan sinyallerin
hangileri olacağı 9902 APPLIC MACRO parametresinin değerine bağlıdır:
varsayılan 9904 MOTOR CTRL MODE parametre değeri 1 (VECTOR:SPEED)
olan makrolarda sinyal 1 için varsayılan değer 0102 SPEED, diğerleri için 0103
OUTPUT FREQ şeklindedir. 2 ve 3 sinyalleri varsayılan değerleri her zaman
sırasıyla 0104 CURRENT ve 0105 TORQUE şeklindedir.
Var sayılan sinyalleri değiştirmek için grup 01 OPERATING DATA içinden
görüntülenmek için üç adete kadar sinyal seçin.
Sinyal 1: 3401 SIGNAL1 PARAM parametresinin değerini 01 OPERATING
DATA grubundaki sinyal parametresinin indeksine değiştirin (= baştaki sıfır
haricinde parametrenin numarası), örneğin, 105 0105 TORQUE parametresini
göstermektedir. 100 değeri, hiçbir sinyalin görüntülenmediğini gösterir.
2 (3408 SIGNAL2 PARAM) ve 3 (3415 SIGNAL3 PARAM) sinyalleri için bu
işlemleri tekrarlayın.
2. Sinyallerin nasıl görüntülenmesini istediğinizi seçin: ondalık sayı a da çubuk
grafik olarak. Ondalık sayılarda, ondalık ayracının yerini belirleyebilirsiniz. Daha
fazla bilgi için, bkz. 3404 parametresi.
Sinyal 1: parametre 3404 OUTPUT1 DSP FORM
Sinyal 2: parametre 3411 OUTPUT2 DSP FORM
Sinyal 3: parametre 3418 OUTPUT3 DSP FORM.
LOC
3401 SIGNAL1 PARAM
[103]
LOC
3408 SIGNAL2 PARAM
[104]
LOC
3415 SIGNAL3 PARAM
[105]
LOC
3404 OUTPUT1 DSP FORM
[9]
PAR EDIT
OUTPUT FREQ
CANCEL SAVE
00:00
PAR EDIT
CURRENT
CANCEL SAVE
00:00
PAR EDIT
TORQUE
CANCEL SAVE
00:00
PAR EDIT
DIRECT
CANCEL SAVE00:00
3. Sinyaller için görüntülenecek birimleri seçer. Daha fazla bilgi için, bkz. 3405
parametresi.
Sinyal 1: parametre 3405 OUTPUT1 UNIT
Sinyal 2: parametre 3412 OUTPUT2 UNIT
Sinyal 3: parametre 3419 OUTPUT3 UNIT.
4. Minimum ve maksimum görüntüleme değerlerini belirleyerek sinyallerin
ölçeklendirmesini belirler. Daha fazla bilgi için, bkz. 3406 ve 3407 parametreleri.
Sinyal 1: 3406 OUTPUT1 MIN ve 3407 OUTPUT1 MAX parametreleri
Sinyal 2: 3413 OUTPUT2 MIN ve 3414 OUTPUT2 MAX parametreleri
Sinyal 3: 3420 OUTPUT3 MIN ve
3421 OUTPUT3 MAX parametreleri.
LOC
3405 OUTPUT1 UNIT
[3]
LOC
3406 OUTPUT1 MIN
LOC
3407 OUTPUT1 MAX
PAR EDIT
Hz
CANCEL SAVE00:00
PAR EDIT
0.0 Hz
CANCEL SAVE
00:00
PAR EDIT
500,0 Hz
CANCEL SAVE
00:00
Kontrol panelleri
Page 70

68
Asistan modu
Sürücü ilk çalıştırıldığında, Devreye Alma Asistanı temel parametreleri ayarlarken
sizi yönlendirir. Devreye Alma Asistanı, her biri Motor Seti ya da PID Kontrolü gibi
ilgili parametre setinin spesifikasyonlarından sorumlu olan iki adet asistana
ayrılmıştır. Devreye Alma Asistanı bu asistanları art arda etkinleştirir. Asistanları
bağımsız olarak da kullanabilirsiniz. Asistanların görevleri hakkında daha fazla bilgi
almak için bkz. bölüm Devreye Alma Asistanı, sayfa 85.
Asistan modunda aşağıdakileri gerçekleştirebilirsiniz:
•asistanları kullanarak bir temel parametre setinin spesifikasyonları ile ilgili yardım
alma
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Asistanları kullanma
Aşağıdaki tabloda, asistanlar ile ilgili olarak size yardımcı olacak temel çalışma
sekansı verilmektedir. Motor Ayarları Asistanı örnek olarak kullanılmıştır.
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
2. Menüde ve tuşları ve tuşuna basarak ASSISTANTS
seçeneğini seçin ve Asistanlar moduna geçin.
3. ve tuşlarıyla asistanı seçin ve tuşuna basın.
Devreye Alma Asistanı dışında bir asistanı seçmeniz halinde bu asistan,
aşağıdaki 4. ve 5. işlemlerinde gösterildiği gibi parametre setinin spesifikasyonu
konusunda size yardımcı olacaktır. Bundan sonra Asistanlar menüsünde bir
başka asistan seçebilir ya da Asistanlar modundan çıkabilirsiniz. Motor Ayarları
Asistanı burada örnek olarak kullanılmıştır.
Devreye Alma Asistanını seçmeniz halinde bu asistan, aşağıdaki 4. ve
işlemlerinde gösterildiği gibi parametre setinin spesifikasyonu konusunda size
yardımcı olacak olan ilk asistanı etkinleştirir. Devreye Alma Asistanı daha sonra
sizden sonraki asistanla devam etmek ya da bu asistanı geçmek arasında
seçim yapmanızı ister; ve tuşlarını kullanarak uygun yanıtı seçin
SEL
ve tuşuna basın. Geçmeyi seçerseniz Devreye Alma Asistanı aynı soruyu
bir sonraki asistan için sorar ve bu şekilde devam eder.
ENTER
SEL
5.
EXIT ENTER
LOC
Devreye alma asistaný
Motor Ayarlarý
Uygulama
Hýz kontrolü EXT1
Hýz kontrolü EXT2
EXIT
LOC
9905 MOTOR NOM VOLT
EXIT SAVE00:00
LOC
Uygulama ayarlarý
ile devam etmek
istiyor musunuz?
Devam
Geç
EXIT
00:00
ASSISTANTS 1
00:00
PAR EDIT
220 V
CHOICE
SEL
OK00:00
4. • Yeni bir değer belirlemek için ve tuşlarına basın.
Kontrol panelleri
LOC
9905 MOTOR NOM VOLT
PAR EDIT
240 V
EXIT SAVE00:00
Page 71

Adım Eylem Gösterge
LOC
• Gerekli parametre hakkında bilgi istemek için tuşuna basın. ve
tuşlarına basarak yardım metni içinde ilerleyin. tuşuna basarak
yardımı kapatın.
5. • Yeni değeri onaylamak ve sonraki parametrenin ayarlanması işlemiyle devam
etmek için tuşuna basın.
•Asistanı durdurmak için tuşuna basın.
SAVE
EXIT
?
EXIT
Set exactly as given
on the motor
nameplate
If connected to
multiple motors
LOC
9906 MOTOR NOM CURR
YARD
EXIT
00:00
PAR EDIT
1.2 A
EXIT SAVE00:00
Değiştirilen Parametreler modu
Değiştirilmiş parametreler modunda aşağıdakileri gerçekleştirebilirsiniz:
• makro hazır değerlerinden değiştirilmiş tüm parametrelerin listesini görüntüleme
• bu parametreleri değiştirme
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
69
Değiştirilen parametrelerin görüntülenmesi ve düzenlenmesi
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
SAVE
ENTER
CANCEL
ın.
2. Menüde ve tuşları ve tuşuna basarak CHANGED PAR
seçeneğini seçin ve Değiştirilen Parametreler moduna geçin.
3. ve tuşlarını kullanarak değiştirilen parametreyi listede seçin.
Seçilen parametrenin değeri parametrenin altında görüntülenir. Değeri
değiştirmek için tuş
4. ve tuşlarını kullanarak parametre için yeni bir değer belirleyin.
Tuşa bir kez basıldığında değer artar ya da azalır. Tuşun aşağı doğru tutulması
değerin daha hızlı şekilde değişmesine neden olur. Tuşlara aynı anda
basıldığında görüntülenen değer, varsayılan değerle değiştirilir.
5. • Yeni değeri kabul etmek için tuşuna basın. Eğer yeni değer varsayılan
değer ise parametre, değiştirilen parametreler listesinden çıkarılır.
• Yeni değeri iptal etmek ve orijinali saklamak için tuşuna bas
EDIT
una basın.
EXIT ENTER
LOC
1203 CONST SPEED 1
10,0 Hz
1203 CONST SPEED 2
1203 CONST SPEED 3
9902 APPLIC MACRO
EXIT
LOC
1202 CONST SPEED 1
CANCEL SAVE00:00
LOC
1202 CONST SPEED 1
CANCEL SAVE00:00
LOC
1203 CONST SPEED 1
15,0 Hz
1203 CONST SPEED 2
1203 CONST SPEED 3
9902 APPLIC MACRO
EXIT
00:00
CHANGED PAR
PAR EDIT
10,0 Hz
PAR EDIT
15,0 Hz
CHANGED PAR
EDIT00:00
EDIT00:00
Kontrol panelleri
Page 72

70
Hata Kayıt modu
Hata Kayıt modunda aşağıdakileri gerçekleştirebilirsiniz:
• maksimum on hata ya da alarma kadar sürücü hata geçmişini görüntüleme (güç
kapatıldıktan sonra, yalnızca en son üç hata ya da alarm bellekte saklanır)
• en son üç hata ya da alarmın ayrıntılarını görme (güç kapatıldıktan sonra,
yalnızca en son hata ya da alarmın ayrıntıları bellekte saklanır)
• hata ya da alarm ile ilgili yardım metnini okuma
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Hataların ve alarmların görüntülenmesi
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
2. Menüde ve tuşları ve tuşuna basarak FAULT LOGGER
seçeneğini seçin ve Hata Kayıt moduna geçin. Ekranda, en son hata ya da
alarmdan başlayarak hata kayıtları görüntülenir.
Sırada görüntülenen rakam, Hata izleme bölümünde listelenen nedenler ve
çözüm yolları arasından uygun olanını seçebileceğiniz hata ya da alarm
kodudur.
ENTER
EXIT ENTER
LOC
10: PANEL LOSS
19.03.05 13:04:57
6: DC UNDERVOLT
6: AI1 LOSS
EXIT
00:00
FAULT LOG
00:00
DETAIL
3. Hata ya da alarmın ayrıntılarını görüntülemek için ve tuşlarıyla
seçin ve tuşuna basın.
4. Yardım metnini görüntülemek için tuşuna basın. ve
tuşlarına basarak yardım metni içinde ilerleyin.
Yar dım metnini okuduktan sonra tuşuna basarak önceki ekrana
dönebilirsiniz.
DETAIL
DIAG
OK
LOC
FAULT
10
FAULT TIME 1
13:04:57
FAULT TIME 2
LOC
Check: Comm lines
and connections,
parameter 3002,
parameters in groups
10 and 11.
PANEL LOSS
EXIT
DIAGNOSTICS
EXIT OK
00:00
DIAG00:00
Kontrol panelleri
Page 73

Saat Ayarlama modu
L
Saat Ayarlama modunda aşağıdakileri gerçekleştirebilirsiniz:
• saati görüntüleme ya da gizleme
• tarih ve saat görüntüleme formatını değiştirme
• tarih ve saat ayarı yapmak
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma
Gelişmiş Kontrol Panelinde, panele sürücü tarafından enerji sağlanmadığı
durumlarda da saatin çalışmasını sağlayan bir pil bulunmaktadır.
Saat görüntüleme veya gizleme, görüntüleme formatını değiştirme, saat ve tarih ayarı
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
2. Menüde ve tuşları ve tuşuna basarak CLOCK SET
seçeneğini seçin ve Saat Ayarlama moduna geçin.
ENTER
EXIT ENTER
LOC
CLOCK VISIBILITY
TIME FORMAT
DATE FORMAT
SET TIME
SET DATE
EXIT
00:00
TIME & DATE 1
00:00
71
SEL
3. • Saati görüntülemek (gizlemek) için menüde CLOCK VISIBLILITY seçeneğini
seçin, tuşuna basın, Saati göster (Saati gizle) seçeneklerini seçin ve
• Tarih formatını belirlemek için menüde DATE FORMAT seçeneğini seçin,
• Saat formatını belirlemek için menüde TIME FORMAT seçeneğini seçin,
tuşuna basın ve uygun bir format seçin. Değişiklikleri kaydetmek için , ya
da iptal etmek için tuşuna basın.
• Saati ayarlamak için menüde SET TIME seçeneğini seçin ve tuşuna
bas
basın. Daha sonra dakikayı ayarlayın. Değişiklikleri kaydetmek için , ya
da iptal etmek için tuşuna basın.
• Tarihi ayarlamak için menüde SET DATE seçeneğini seçin ve tuşuna
basın. ve tuşlarını kullanarak tarihin ilk bölümünü (seçilen tarih
formatına göre değişir) ayarlayın ve tuşuna basın. Aynı işlemi ikinci
kısım için tekrarlayın. Yılı ayarladıktan sonra tuşuna basın. Değişiklikleri
iptal etmek için tuşuna basın.
SEL
SEL
tuşuna basın ya da değişiklik yapmadan önceki ekrana dönmek için
EXIT
tuşuna basın.
SEL
tuşuna basın ve uygun bir format seçin. Değişiklikleri kaydetmek için
OK CANCE
, ya da iptal etmek için tuşuna basın.
CANCEL
SEL
ın. ve tuşlarına basarak saati ayarlayın ve tuşuna
CANCEL
OK
OK
CANCEL
OK
SEL
SEL
OK
OK
LOC
Saati göster
Saati gizle
LOC
gg.aa.yy
aa/gg/yy
gg.aa.yyyy
aa/gg/yyyy
LOC
24 saat
12 saat
LOC
LOC
CLOCK VISIB 1
EXIT
CANCEL
CANCEL
CANCEL
CANCEL
00:00
DATE FORMAT 1
00:00
TIME FORMAT 1
00:00
SET TIME
15:41
SET DATE
19.03,05
SEL
OK
OK
OK00:00
OK00:00
Kontrol panelleri
Page 74

72
Parametre Yedekleme modu
Gelişmiş Kontrol Paneli, bir adet tam sürücü parametreleri setini ve üç adete kadar
sürücü parametreleri kullanıcı setini kontrol panelinde saklayabilir. Kontrol panelinin
belleği uçucu olmayan bellektir ve panel piline bağlı değildir.
Parametre Yedekleme modunda aşağıdaki işlemleri gerçekleştirebilirsiniz:
• Tüm parametrelerin sürücüden kontrol paneline kopyalanması (UPLOAD TO
PANEL). Bunların arasında kullanıcı parametre setleri ve ID Run tarafından
oluşturulanlar gibi dahili (kullanıcı tarafından değiştirilemeyen) parametreler de
bulunmaktadır.
• Parametre setinin tamamını kontrol panelinden sürücüye yükleyin (DOWNLOAD
FULL SET). Dahili, kullanıcı tarafından değiştirilemeyen motor parametreleri de
dahil olmak üzere tüm parametreler sürücüye yazılır. Bu, kullanıcının parametre
setlerini içermez.
Not: Bu fonksiyonu sadece bir sürücüyü geri yüklemek veya parametreleri orijinal
sistem ile benzer sistemlere aktarmak için kullanın.
• Kontrol panelinden bir parametre setini sürücüye kısmi olarak kopyalayın
(UYGULAMA YÜKLEME). K
ısmi set kullanıcı setlerini, dahili motor
parametrelerini, 9905…9909, 1605, 1607, 5201 parametrelerini ve grup 51 EXT
COMM MODULE ve 53 EFB PROTOCOL parametrelerini içermez.
Kaynak ve hedef sürücüler ile motor boyutlarının aynı olmasına gerek
bulunmamaktadır.
• KULLANıCı S1 parametrelerini kontrol panelinden sürücüye kopyalanması
(DOWNLOAD USER SET1). Kullanıcı seti grup 99 START-UP DATA
parametrelerini ve dahili motor parametrelerini içerir.
Fonksiyon menüde yalnızca Kullanıcı Seti 1'in 9902 APPLIC MACRO
parametresi kullanılarak kaydedilmiş olması durumunda görüntülenir (bkz.
Kullanıcı makroları, sayfa 84).
• USER S2 parametrelerini kontrol panelinden sürücüye kopyalanması
(DOWNLOAD USER SET2). Yukarıdaki DOWNLOAD USER SET1 gibi.
• USER S3 parametrelerini kontrol panelinden sürücüye kopyalanması
(DOWNLOAD USER SET3). Yukarıdaki DOWNLOAD USER SET1 gibi.
•Çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
Kontrol panelleri
Page 75

Parametrelerin karşıya yüklenmesi ve yüklenmesi
Karşıya yükleme ve yükleme işlevlerinin kullanılabilir olması için yukarıya bakın.
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
2. Menüde ve tuşları ve tuşuna basarak PAR BACKUP
ENTER
seçeneğini seçin ve Parametre Yedekleme moduna geçin.
3. • Tüm parametreleri (kullanıcı setleri ve dahili parametreler de dahil olmak
üzere) kontrol panelinden sürücüye yüklemek için ve tuşlarını
kullanarak Kopyalama menüsünde UPLOAD TO PANEL seçeneğini seçin ve
SEL
tuşuna basın. Aktarım sırasında, aktarma durumu ekranda tamamlama
yüzdesi olarak gösterilir. İşlemi durdurmak için tuşuna basabilirsiniz.
Karşıya yükleme işlemi tamamlandıktan sonra ekranda bununla ilgili bir mesaj
görüntülenir. Kopyalama menüsüne geri dönmek için tuşuna basın.
ABORT
OK
EXIT ENTER
LOC
UPLOAD TO PANEL
DOWNLOAD FULL SET
DOWNLOAD APPLICATION
DOWNLOAD USER SET1
DOWNLOAD USER SET2
EXIT
LOC
Copying parameters
% 5 0
ABORT
LOC
Parameter upload
successful
00:00
COPY MENU 1
00:00
PAR BACKUP
00:00
MESSAGE
73
SEL
•Yükleme işlemleri gerçekleştirmek için
olarak verilmiştir) ve tuşlarını kullanarak Kopyalama menüsünde
uygun işlemi seçin ve tuşuna basın. Aktarma durumu ekranda
SEL
tamamlama yüzdesi olarak gösterilir. İşlemi durdurmak için tuşuna
(burada DOWNLOAD FULL SET örnek
ABORT
basabilirsiniz.
Yükleme işlemi tamamlandıktan sonra ekranda bununla ilgili bir mesaj
görüntülenir. Kopyalama menüsüne geri dönmek için tuşuna basın.
OK
OK 00:00
LOC
Downloading
parameters (full
set)
PAR BACKUP
% 5 0
ABORT 00:00
LOC
Parameter download
successfully
completed.
MESSAGE
OK 00:00
Kontrol panelleri
Page 76

74
I/O Ayarlar modu
I/O Ayarları modunda aşağıdaki işlemleri gerçekleştirebilirsiniz:
• herhangi bir I/O terminali ile ilgili parametre ayarlarını kontrol etme
• parametre ayarını düzenleme. Örneğin Ain1 (Analog giriş 1) altında “1103: REF1”
bulunuyorsa, yani 1103 REF 1 SELECT parametresi değeri AI1 ise, bu değeri
örn. AI2 olarak değiştirebilirsiniz. Ancak 1106 REF 2 SELECT parametresi
değerini AI1 olarak ayarlayamazsınız.
•çalıştırma, durdurma, yön değiştirme ve lokal ve uzaktan kontroller arasında
geçiş yapma
I/O terminalleriyle ilişkili olarak parametre ayarlarını düzenleme ve değiştirme
Adım Eylem Gösterge
1. Çıkış modundaysanız tuşuna basarak Ana menüye gidin, aksi takdirde
Ana menüye ulaşana kadar tuşuna basın.
MENU
EXIT
LOC
MAIN MENU 1
PARAMETERS
ASSISTANTS
CHANGED PAR
2. I/O Ayarları moduna geçmek için ve tuşlarını kullanarak menüde
I/O AYARLARı seçeneğini seçin ve tuşuna basın.
ENTER
EXIT ENTER
LOC
DIGITAL INPUTS (DI)
ANALOG INPUTS (AI)
RELAY OUTPUTS (ROUT)
ANALOG OUTPUTS (AOUT)
PANEL
EXIT
00:00
I/O SETTINGS 1
SEL00:00
3. ve tuşlarını kullanarak I/O grubunu, örn. DIJITAL GIRIŞLER
grubunu seçin ve tuşuna basın. Kısa bir duraklamanın ardından,
seçiminizle ilgili geçerli ayar ekranda gösterilir.
4. ve tuşlarıyla ayarı seçin (parametre numarası olan bir satır) ve
5. ve tuşlarını kullanarak ayar için yeni bir değer belirleyin.
6. • Yeni değeri kaydetmek için tuşuna basın.
EDIT
tuşuna basın.
Tuşa bir kez basıldığında değer artar ya da azalır. Tuşun a
değerin daha hızlı şekilde değişmesine neden olur. Tuşlara aynı anda
basıldığında görüntülenen değer, varsayılan değerle değiştirilir.
• Yeni değeri iptal etmek ve orijinali saklamak için tuşuna basın.
SEL
şağı doğru tutulması
SAVE
CANCEL
LOC
—DI1—
1001:START/STOP (E1)
—DI2—
—DI3—
LOC
1001 EXT1 COMMANDS
[1]
LOC
1001 EXT1 COMMANDS
[2]
LOC
—DI1—
1001:START/STOP (E1)
—DI2—
1001:DIR (E1)
—DI3—
SHOW I/O 1
EXIT 00:00
PAR EDIT
DI1
CANCEL SAVE
00:00
PAR EDIT
DI1,2
CANCEL SAVE
EXIT
00:00
SHOW I/O 1
00:00
Kontrol panelleri
Page 77

Uygulama makroları
Bu bölümün içindekiler
Bu bölümde, uygulama makroları anlatılmaktadır. Her bir makro için varsayılan
kontrol bağlantılarını gösteren (dijital ve analog I/O) bir bağlantı şeması
bulunmaktadır. Bu bölümde aynı zamanda bir makronun nasıl saklanıp geri
çağrılacağını anlatır.
Makrolara genel bir bakış
Uygulama makroları programlanmış parametrelerden oluşmuştur. Kullanıcı
sürücüyü devreye alırken makrolardan birini, amaca en uygun olanını, 9902 APPLIC
MACRO parametresiyle seçer, gerekli değişiklikleri yapar ve sonucu bir kullanıcı
makrosu olarak saklar.
ACS350 yedi standart makro ve üç kullanıcı makrosuna sahiptir. Aşağıdaki tablo
makroların bir özetini verir ve uygun uygulamaları açıklar.
75
Makro Uygun uygulamalar
ABB
Standardı
3 kablolu Bir, iki, üç sabit hızın kullanıldığı veya hiçbir sabit hızın kullanılmadığı sıradan hız
Değişimli Bir, iki, üç sabit hızın kullanıldığı veya hiçbir sabit hızın kullanı
Motor
Potansiyometr
esi
Man/Oto
(Hand/Auto)
PID Kontrol Proses kontrol uygulamaları ör. basınç kontrolü, seviye kontrolü ve akış kontrolü
Torque
Control
Bir, iki, üç sabit hızın kullanıldığı veya hiçbir sabit hızın kullanılmadığı sıradan hız
kontrol uygulamaları. Start/stop, bir dijital giriş ile kontrol edilir (seviye start ve
stop). İki hızlanma ve yavaşlama hız kullanımı arasında geçiş yapmak
mümkündür.
kontrol uygulamaları. Sürücü, butonlarla start veya stop edilir.
lmadığı hız kontrol
uygulamaları. Start, stop ve yön iki dijital giriş tarafından kontrol edilir (giriş
durumlarının kombinasyonu, çalışmayı belirler).
Sabit hızın kullanılmadığı veya bir sabit hızın kullanıldığı hız kontrol uygulamaları.
Hız, iki dijital giriş tarafından kontrol edilir (artırma / azaltma / değişmeden
bırakma).
İki kontrol cihazı arasında geçişin gerektiği hız kontrol uygulamaları. Bazı kontrol
sinyal terminalleri tek bir cihaz ve geri kalanı diğerleri için ayrılmıştır. Bir dijital giriş
kullanımda olan terminaller (cihazlar) arasında seçim yapar.
gibi farklı kapalı çevrim kontrol sistemleri. Süreç ve hız kontrolleri arasında geçiş
yapmak mümkündür: bazı kontrol sinyal terminalleri süreç kontrolü, bazıları ise hız
kontrolü için ayrılmıştır. Bir dijital giriş süreç ve hız kontrolü arasında seçim yapar.
Tork kontrol uygulamaları. Tork ve hız kontrolleri arasında geçiş yapmak
mümkündür: bazı kontrol sinyal terminalleri tork kontrolü, bazıları ise hız kontrolü
için ayrılmıştır. Bir dijital giriş tork ve hız kontrolü arasında seçim yapar.
Uygulama makroları
Page 78

76
Makro Uygun uygulamalar
Kullanıcı Kullanıcı kullanıma özel standart makroyu saklayabilir, yani grup 99 START-UP
DATA’u içeren parametre ayarı ve motor tanımlamayı kalıcı hafızaya saklayıp
veriyi daha sonraki bir zamanda geri alabilir.
Örneğin, üç farklı motor arasında geçiş yapabilmek gerektiğinde üç kullanıcı
makrosu kullanılabilir.
Uygulama makrolarının I/O bağlantıları hakkında kısa bilgi
Aşağıdaki tabloda, tüm uygulama makrolarının hazır değer I/O bağlantıları hakkında
özet bilgi sağlamaktadır.
Makro
Giriş/çıkış
ABB
Standardı
3 kablolu Değişimli
Motor
Potansiyom.
Man/Oto
(Hand/Auto)
PID Kontrol
Tor que
Control
AI1
(0…10 V)
AI2
(0…20 mA)
AO Çıkış frek. HızHızHızHızHızHız
DI1 Stop/Start Start (darbe) Start (ileri) Stop/Start Stop/Start
DI2 İleri/Geri Stop (darbe) Start (geri) İleri/Geri İleri/Geri
DI3 Sabit hız girişi 1İleri/Geri Sabit hız girişi 1Hız ref. yukarı Man/Oto
DI4 Sabit hız girişi 2Sabit hız girişi 1Sabit hız girişi 2Hız ref. aşağı İleri/Geri
DI5 Rampa çifti
RO Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1)
DO Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1) Hata (-1)
Frek. ref. Hız ref. Hız ref. - Hız ref.
(Manuel)
----Hız ref.
(Otomatik)
(Manuel)
(Manuel)
(Hand/Auto)
(Otomatik)
seçimi
Sabit hız girişi 2Rampa çifti
seçimi
Sabit hız 1 Stop/Start
(Otomatik)
Hız ref.
(Manuel) /
Pros. ref.
(PID)
Proses değeri Tork ref.
Stop/Start
(Manuel)
Manuel/PID İleri/Geri
Sabit hız 1 Hız/Moment
Çalışma izni Sabit hız 1
Stop/Start
(PID)
Hız ref. (Hız)
(Tork)
Stop/Start
(Hız)
Rampa çifti
seçimi
Uygulama makroları
Page 79

ABB Standart makrosu
1)
2)
Bu, fabrikasyon makrodur. Üç sabit hızla genel amaçlı bir I/O konfigürasyonu sağlar.
Parametre değerleri, Gerçek sinyal ve parametreler numaralı sayfadan başlayan
128 bölümünde verilen hazır değerlerdir.
Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız bkz. bölüm
I/O terminalleri sayfa 34.
Hazır değer I/O bağlantıları
1…10 kohm
maks. 500 ohm
X1A
1 SCR Sinyal kablo ekranı
2AI1 Çıkış frekansı referansı: 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Varsayılan olarak kullanımda değil. 0…10 V
6 GND Analog giriş devresi ortak ucu
7AO Çıkış frekansı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
4)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Stop (0) / Start (1)
13 DI2 İleri (0) / Geri (1)
14 DI3 Sabit hız seçimi
15 DI4 Sabit hız seçimi
16 DI5 Hızlanma ve yavaşlama seçimi
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
2)
2)
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
1)
3)
77
Vektör modunun seçilmiş olması halinde hız
referansı olarak AI1 kullanılır.
Bkz. 12 CONSTANT SPEEDS parametre
grubu:
DI3 DI4 Çalışma (parametre)
0 0 AI1 üzerinden hız ayarı
10Hız 1 (1202)
01Hız 2 (1203)
11Hız 3 (1204)
3)
0 = rampa zamanı 2202 ve 2203
parametrelerine göre.
Uygulama makroları
Page 80

78
3 kablolu makro
Bu makro, sürücü geçici butonlar ile kontrol edildiğinde kullanılır. Üç sabit hız sağlar.
Etkinleştirmek için 9902 parametresinin değerini 2 olarak ayarlayın(3-WIRE).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Not: Stop girişi (DI2) devre dışı bırakıldığında (giriş yokken), kontrol panelinin start
ve stop butonları devre dışı kalır.
Hazır değer I/O bağlantı
1…10 kohm
maks. 500 ohm
ları
X1A
1 SCR Sinyal kablo ekranı
2AI1 Motor hız referansı: 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Varsayılan olarak kullanımda değil. 0…10 V
6 GND Analog giriş devresi ortak ucu
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
2)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Start (darbe )
13 DI2 Stop (darbe )
14 DI3 İleri (0) / Geri (1)
15 DI4 Sabit hız seçimi
16 DI5 Sabit hız seçimi
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
1)
1)
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
1)
Uygulama makroları
Bkz. 12 CONSTANT SPEEDS parametre grubu:
DI3 DI4 Çalışma (parametre)
0 0 AI1 üzerinden hız ayarı
10Hız 1 (1202)
01Hız 2 (1203)
11Hız 3 (1204)
Page 81

Alternatif makro
Bu makro, sürücünün dönüş yönü değiştirilirken kullanılan bir DI kontrol sinyal sırası
için I/O konfigürasyonu yapılmasını sağlar. Etkinleştirmek için 9902 parametresinin
değerini 3 olarak ayarlayın (ALTERNATE).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Hazır değer I/O bağlantıları
1…10 kohm
maks. 500 ohm
X1A
1 SCR Sinyal kablo ekranı
2AI1 Motor hız referansı: 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Varsayılan olarak kullanımda değil. 0…10 V
6 GND Analog giriş devresi ortak ucu
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
3)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 İleri start: Eğer DI1 = DI2 ise sürücü durur.
13 DI2 Geri start
14 DI3 Sabit hız seçimi
15 DI4 Sabit hız seçimi
16 DI5 Hızlanma ve yavaşlama seçimi
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
1)
1)
2)
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
79
1)
Bkz. 12 CONSTANT SPEEDS parametre
grubu:
DI3 DI4 Çalışma (parametre)
0 0 AI1 üzerinden hız ayarı
10Hız 1 (1202)
01Hız 2 (1203)
11Hız 3 (1204)
2)
0 = rampa zamanı 2202 ve 2203
parametrelerine göre.
1 = rampa zamanı 2205 ve 2206
parametrelerine göre.
3)
Kelepçe altında 360 derece topraklama.
Uygulama makroları
Page 82

80
Motor Potansiyometre makrosu
Bu makro, sürücünün hızını sadece dijital sinyalleri kullanarak değiştiren PLC’ler için
düşük maliyetli bir arabirim sağlar. Etkinleştirmek için 9902 parametresinin değerini 4
olarak ayarlayın(MOTOR POT).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Hazır değer I/O bağlantıları
X1A
1 SCR Sinyal kablo ekranı
2AI1 Varsayılan olarak kullanımda değil: 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Varsayılan olarak kullanımda değil. 0…10 V
6 GND Analog giriş devresi ortak ucu
maks. 500 ohm
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
2)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Stop (0) / Start (1)
13 DI2 İleri (0) / Geri (1)
14 DI3 Hız referansı yukarı
15 DI4 Hız referansı aşağı
16 DI5 Sabit hız 1: parametre 1202
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
1)
1)
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
1)
Uygulama makroları
Hem DI3 hem de DI4 aktif veya devre dışıysa
hız referansı değişmez.
Mevcut hız referansı sürücü dururken ve
besleme gerilimi kesilirken saklanır.
2)
Kelepçe altında 360 derece topraklama.
Page 83

Man/Oto makrosu
1)
Bu makro, iki harici kontrol cihazı arasında geçiş yapmak gerektiğinde kullanılabilir.
Etkinleştirmek için 9902 parametresinin değerini 5 olarak ayarlayın (HAND/AUTO).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Not: 2108 ÇALIŞTIRMA ENGELLEME parametresinin değeri 0 (OFF) varsayılan
değerinde kalmalıdır.
Hazır değer I/O bağlantıları
1…10 kohm
maks. 500 ohm
X1A
1 SCR Sinyal kablo ekranı
2AI1 Motor hız referansı (Manuel): 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Motor hız referansı (Otomatik): 4…20 mA
6 GND Analog giriş devresi ortak ucu
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
1)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Stop (0) / Start (1) (Manuel)
13 DI2 İleri (0) / Geri (1) (Manuel)
14 DI3 Manuel (0) / Otomatik (1) kontrol seçimi
15 DI4 İleri (0) / Geri (1) (Otomatik)
16 DI5 Stop (0) / Start (1) (Otomatik)
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
81
Kelepçe altında 360 derece topraklama.
Uygulama makroları
Page 84

82
1)
2)
PID Kontrol makrosu
Bu makro, basınç kontrolü, debi kontrolü gibi kapalı devre kontrol sistemleri için
parametre ayarları sağlar. Kontrol, bir dijital giriş kullanılarak hız kontrolü olarak da
değiştirilebilir. Etkinleştirmek için 9902 parametresinin değerini 6 olarak
ayarlayın (PID CONTROL).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Not: 2108 ÇALIŞTIRMA ENGELLEME parametresinin değeri 0 (OFF) varsayılan
değerinde kalmalıdır.
Hazır değer I/O bağlantı
1…10 kohm
maks. 500 ohm
ları
X1A
1 SCR Sinyal kablo ekranı
2AI1 Motor hızı ref. (Manuel) / Süreç ref. (PID): 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Proses gerçek değeri: 4…20 mA
6 GND Analog giriş devresi ortak ucu
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
2)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Stop (0) / Start (1) (Manuel)
13 DI2 Manuel (0) / PID (1) kontrol seçimi
14 DI3 Sabit hız 1: parametre 1202
15 DI4 Çalışma izni
16 DI5 Stop (0) / Start (1) (PID)
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
1)
Manuel:0…10 V -> Hız referansı.
PID: 0…10 V -> %0…100 PID set değeri.
Uygulama makroları
Kelepçe altında 360 derece topraklama.
Page 85

Moment Kontrol makrosu
1)
2)
Bu makro, motorda moment kontrolü gerektiren uygulamalar için parametre ayarları
sağlar. Kontrol, bir dijital giriş kullanılarak hız kontrolü olarak da değiştirilebilir.
Etkinleştirmek için 9902 parametresinin değerini 8 olarak ayarlayın (TORQUE
CTRL).
Parametre hazır değerleri için, bkz. bölüm Farklı makrolara sahip hazır değerler
sayfa 128. Aşağıda verilen varsayılan bağlantıların dışında bağlantılar kullanırsanız
bkz. bölüm I/O terminalleri sayfa 34.
Hazır değer I/O bağlantıları
1…10 kohm
maks. 500 ohm
X1A
1 SCR Sinyal kablo ekranı
2AI1 Motor hız referansı (Hız): 0…10 V
3 GND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi: 10 VDC, maks. 10 mA
5AI2 Motor torku referansı (Tork): 4…20 mA
6 GND Analog giriş devresi ortak ucu
7AO Motor hızı değeri: 0…20 mA
8GNDAnalog çıkış devresi ortak ucu
3)
9 +24V Yardımcı gerilim çıkışı: +24VDC, maks. 200mA
10 GND Yardımcı gerilim çıkışı ortak ucu
11 DCOM Dijital giriş ortak ucu
12 DI1 Stop (0) / Start (1) (Hız)
13 DI2 İleri (0) / Geri (1)
14 DI3 Hız (0) / Tork (1) kontrol seçimi
15 DI4 Sabit hız 1: parametre 1202
16 DI5 Hızlanma ve yavaşlama seçimi
X1B
17 ROCOM Röle çıkışı
18 RONC
19 RONO
20 DOSRC Dijital çıkış, maks. 100 mA
21 DOOUT
22 DOGND
1)
2)
Hata yok [Hata (-1)]
Hata yok [Hata (-1)]
83
Hız kontrolü: Dönme yönünü değiştirir.
Tork kontrolü: Tork yönünü değiştirir.
0 = rampa zamanı 2202 ve 2203
parametrelerine göre.
1 = rampa zamanı 2205 ve 2206
parametrelerine göre.
3)
Kelepçe altında 360 derece topraklama.
Uygulama makroları
Page 86

84
Kullanıcı makroları
Standart uygulama makrolarına ek olarak üç kullanıcı makrosu yaratmak da
mümkündür. Kullanıcı, kullanıcı makro sayesinde grup 99 START-UP DATA’u içeren
parametre ayarları ve motor tanımlamayı kalıcı hafızaya saklayıp veriyi daha sonraki
bir zamanda geri alabilir. Panel referansı, makronun lokal kontrolle kaydedilmesi ve
yüklenmesi halinde de kaydedilir. Uzaktan kumanda ayarı kullanıcı makrosuna
kaydedilirken lokal kontrol ayarı kaydedilmez.
Aşağıdaki işlemler Kullanıcı makrosu 1'in nasıl oluşturulacağını ve çağırılacağını
anlatmaktadır. Diğer iki kullanıcı makrosu için de işlemler aynıdır, yalnızca
parametre 9902 değerleri farklı
Kullanıcı makro 1’i yaratmak için:
• Parametreleri ayarlayın. Uygulama gerektiriyorsa ve henüz yapılmamışsa, motor
tanımlama işlemini gerçekleştirin.
• Parametre ayarlarını ve motor tanımlama işleminin sonuçlarını kalıcı belleğe
kaydetmek için 9902 parametresinin değerini -1 olarak değiştirin (USER S1
SAVE).
SAVE ENTER
• (Gelişmiş Kontrol Paneli) veya (Temel Kontrol Paneli) tuşlarına basın.
dır.
MENU
Kullanıcı makro 1’i geri çağırmak için:
• 9902 parametresinin değerini 0 olarak değiştirin (USER S1 LOAD).
• Yüklemek için (Gelişmiş Kontrol Paneli) veya (Temel Kontrol Paneli)
SAVE ENTER
MENU
tuşlarına basın.
Kullanıcı makroları arası
ndaki seçim aynı zamanda dijital girişler yoluyla da
yapılabilir (Bkz. 1605parametresi ).
Not: Kullanıcı makro yükleme aynı zamanda 99 START-UP DATA grubundaki
parametre ayarlarını ve motor tanımlama sonuçlarını da tekrar yükler. Ayarların
kullanılan motora karşılık geldiğinden emin olun.
İpucu: Kullanıcı, her motor değiştirildiğinde motor tanımlamayı tekrarlamadan ve
motor parametrelerini ayarlamak zorunda kalmadan sürücüyü üç motor arasında
anahtarlayabilir. Kullanıcının yapması gereken ayarları düzenleyerek her bir motor
için de bir kerede motor tanımlama gerçekleştirmek sonra da veriyi iki kullanıcı
makrosu olarak saklamaktır. Motor değiştiğinde sadece ona karşılık gelen kullanıcı
makrosu yüklenmelidir bunun sonunda motor çalışmaya hazır hale gelir.
Uygulama makroları
Page 87

Program özellikleri
Bu bölümün içindekiler
Bu bölümde program özellikleri anlatılır. Her özellik için ilgili kullanıcı ayarlarının,
gerçek sinyallerin ve hata ve alarm mesajlarının bir listesi vardır.
Devreye Alma Asistanı
Giriş
Devreye Alma Asistanı (Gelişmiş Kontrol Paneli gereklidir), istenen verilerin
(parametre değerleri) sürücüye girilmesine yardımcı olarak kullanıcıyı devreye alma
işlemleri sırasında yönlendirir. Devreye Alma Asistanı aynı zamanda girilen
değerlerin doğruluğunu, yani izin verilen aralıkta olup olmadığını kontrol eder.
Devreye Alma Asistanı, her biri ilgili parametre setinin belirlenmesi işlemi konusunda
kullanıcıyı yönlendiren diğer asistanları çağırır. İlk start yapıldığında, sürücü
otomatik olarak ilk görev olan Dil Seçimi’ni girmeyi önerir. Kullanıcı görevleri,
Devreye Alma Asistanının önerilerine göre sırayla aktifleştirebileceği gibi, ayrı ayrı
da aktifleştirebilir. Kullanı
geleneksel yöntemlerle de ayarlayabilir.
85
cı sürücü parametrelerini, asistanı hiç kullanmadan
Devreye Alma Asistanının ve diğer asistanların çalıştırılması konusunda bilgi almak
için bkz. bölüm Asistan modu, sayfa 68.
Görevlerin hazır değer sıralaması
Uygulama görevinde (parametre 9902 APPLIC MACRO) yapılan seçime göre
Devreye Alma Asistanı önereceği bir sonraki göreve karar verir Hazır değer görevler
aşağıdaki tabloda gösterilmiştir.
Uygulama seçimi Hazır değer görevler
ABB STANDARD Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT1, Hız Kontrolü EXT2,
Start/Stop Kontrolü, Korumalar, Çıkış Sinyalleri
3-WIRE Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT1, Hız Kontrolü EXT2,
Start/Stop Kontrolü, Korumalar, Çıkış Sinyalleri
ALTERNATE Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT1, Hız Kontrolü EXT2,
Start/Stop Kontrolü, Korumalar, Çıkış Sinyalleri
MOTOR POT Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT1, Hız Kontrolü EXT2,
Start/Stop Kontrolü, Korumalar, Çıkış Sinyalleri
HAND/AUTO Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT1, Hız Kontrolü EXT2,
Start/Stop Kontrolü, Korumalar, Çıkış Sinyalleri
PID KONTROL Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, PID Kontrolü, Hız Kontrolü EXT2, Start/Stop
Kontrolü, Korumalar, Çıkış Sinyalleri
MOMENT KONTR Dil Seçimi, Motor Set-up, Uygulama, Opsiyon Modülleri, Hız Kontrolü EXT2, Start/Stop Kontrolü,
Korumalar, Çıkış Sinyalleri
Program özellikleri
Page 88

86
Görevlerin ve ilgili sürücü parametrelerinin listesi
Uygulama görevinde (parametre 9902 APPLIC MACRO) yapılan seçime göre
Devreye Alma Asistanı önereceği bir sonraki göreve karar verir
Adı Açıklama İlgili parametreler
Dil Seçimi Dilin seçilmesi 9901
Motor Ayarları Motor verilerinin girilmesi
Motor tanımlamanın gerçekleştirilmesi. (Eğer hız limitleri izin
verilen aralıkta değilse: Limitlerin ayarlanması.)
Uygulama Uygulama Makrosunun seçilmesi 9902, makro ile ilgili parametreler
Opsiyonel
Modüller
Speed Control
EXT1
Hız Kontrolü EXT2 Hız referansı için kaynak ayarlanması 1106
Torque C ontrol Moment referansı için kaynak seçilmesi 1106
PID Kontrol Proses referansı için kaynak seçilmesi 1106
Start/Stop
Kontrolü
Korumalar Akım ve moment limitlerinin ayarlanması 2003, 2017
Çıkış Sinyalleri Röle çıkışı RO aracılığı
Opsiyon modüllerinin aktifleştirilmesi Grup 35 MOTOR TEMP MEAS
Hız referansı için kaynak seçilmesi 1103
(Eğer AI1 kullanılıyorsa: AI1 analog giriş limitleri, ölçekleme, ters
çevirmenin ayarlanması)
Referans limitlerinin ayarlanması 1104, 1105
Hız (frekans) limitlerinin ayarlanması 2001, 2002, (2007, 2008)
Hızlanma ve yavaşlama rampa sürelerinin ayarlanması 2202,
(Eğer AI1 kullanılıyorsa: AI1 analog giriş limitleri, ölçekleme, ters
çevirmenin ayarlanması)
Referans limitlerinin ayarlanması 1107, 1108
(Eğer AI1 kullanılıyorsa: AI1 analog giriş limitleri, ölçekleme, ters
çevirmenin ayarlanması)
Referans limitlerinin ayarlanması 1107, 1108
Moment yukarı rampa ve aşağı rampa sürelerinin ayarlanması 2401, 2402
(Eğer AI1 kullanılıyorsa: AI1 analog giriş limitleri, ölçekleme, ters
çevirmenin ayarlanması)
Referans limitlerinin ayarlanması 1107, 1108
Hız (referans) limitlerinin ayarlanması 2001, 2002, (2007, 2008)
Proses gerçek değeri için kaynak ve limitlerin ayarlanması 4016, 4018, 4019
EXT1 ve EXT2 harici kontrol konumlarının start ve stop
sinyallerinin kaynak seçilmesi
EXT1 ve EXT2 arasında seçim yapılması 1102
Yön kontrolünün tanımlanması 1003
Start ve stop modlarının tanımlanması 2101...2103
Çalışma İzni sinyalinin kullanımının seçilmesi 1601
yla gösterilen sinyallerin seçilmesi Grup 14 RELAY OUTPUTS
Analog çıkış AO aracılığıyla gösterilen sinyallerin seçilmesi
Minimum, maksimum, ölçekleme ve ters çevirme değerlerinin
ayarlanması
9904...9909
9910
Grup 52 PANEL COMM
9802
(1301...1303, 3001)
2203
(1301...1303, 3001)
(1301...1303, 3001)
(1301...1303, 3001
1001, 1002
Grup 15 ANALOG OUTPUTS
)
Program özellikleri
Page 89

Asistan ekranının içeriği
Devreye Alma Asistanında iki tip ekran vardır: Ana ekranlar ve bilgi ekranları. Ana
ekranlar kullanıcıdan bilgi girişi yapmasını talep eder. Asistan, ana ekranlarda adım
adım ilerler. Bilgi ekranları ana ekranlar için gereken yardım metinleri verir.
Aşağıdaki şekilde her ikisinin de birer örneği verilerek içerikleri açıklanmıştır.
Ana ekran Bilgi ekraný
LOC
1
9905 MOTOR NOM VOLT
2
1 Parametre Yardım metni...
2Giriş alanı ... yardım metni devamı
PAR EDIT
240 V
EXIT SAVE00:00
LOC
Set exactly as given
on the motor
nameplate
If connected to
multiple motors
YARD
EXIT 00:00
Lokal kontrol – harici kontrol karşılaştırması
Sürücü, start, stop ve yön komutları ve referans değerlerini kontrol panelinden ya da
dijital ve analog girişler üzerinden alabilir. Dahili fieldbus veya opsiyonel bir fieldbus
adaptörü açık bir fieldbus hattından kontrol yapmayı sağlar. DriveWindow Light PC
aracını içeren bir PC de sürücüyü kontrol edebilir.
87
Kontrol paneli
veya
PC aracı
Lokal kontrol
Panel bağlantısı (X2)
ACS350
Panel bağlantısı (X2)
veya
FMBA adaptörü X3'e bağlı
Fieldbus adaptör bağlantısı (X3)
Harici KontrolYerel Kumanda
Dahili
fieldbus
(Modbus)
Fieldbus
adaptör
Standart I/O
Potansiyometre
Sürücü lokal kontrol konumundayken kontrol komutları kontrol panelinden verilir.
Panel göstergesindeki LOC, lokal kontrol olduğunu belirtir.
Yardımcı panel Ana panel
1 Hz
5 A
% 710.
49,1Hz
MENU00:00
LOC
Hz
491
OUTPUT FWD
.
LOC
49.
0.
DIR
Program özellikleri
Page 90

88
Kontrol paneli, lokal modda kullanıldığında, her zaman için harici kontrol sinyal
kaynaklarından öncelikli konumdadır.
Harici kontrol
Sürücü harici kontrol konumundayken, komutlar standart I/O terminalleri (dijital ve
analog girişler) ve/veya fieldbus arayüzünden verilir. Buna ek olarak, kontrol panelini
harici kontrol kaynağı olarak ayarlamak da mümkündür.
Harici kontrol, panel ekranında REM ile gösterilir.
Yardımcı panel Ana panel
1 Hz
5 A
% 710.
49,1Hz
MENU00:00
REM Hz
491
OUTPUT FWD
.
REM
49.
0.
DIR
Kullanıcı kontrol sinyallerini iki harici kontrol yerinden, EXT1 veya EXT2, birine
bağlayabilir. Kullanıcının seçimine bağlı olarak birinden biri etkin olur. Bu fonksiyon 2
ms süreli bir seviyede çalışır.
Ayarlar
Panel tuşu İlave bilgi
LOC/REM Lokal ve harici kontrol arasından birini seçmek
Parametre
1102 EXT1 ve EXT2 seçimi
1001/1002 EXT1/EXT2 için start, stop, yön kaynağı
1103/1106 EXT1/EXT2 için referans kaynağı
Diagnostik
Gerçek sinyaller İlave bilgi
0111 /0112 EXT1/EXT2 referansı
Program özellikleri
Page 91

Blok şeması: EXT1 için start, stop, yön kaynağı
Aşağıdaki şekilde, EXT1 harici kontrol yeri için start, stop ve yön arayüzünü seçen
parametreler gösterilmektedir.
89
DI1
DI5
Dahili fieldbus
Fieldbus adaptör
Kontrol paneli
Zamanlamalı işlev
Zamanlayıcı/Sayaç
Ardışık programlama
Fb. seçim
Bakınız bölüm Dahili
fieldbus'lı fieldbus
kontrolü ve Fieldbus
adaptörlü fieldbus
kontrolü.
DI1
DI5
COMM
KEYPAD
TIMER 1...4
START/STOP
SEQ PROG
Seçim
1001
Blok şeması: EXT1 için referans kaynağı
Aşağıdaki şekilde, EXT1 harici kontrol yerinin hız referansı için arayüz seçen
parametreler gösterilmektedir.
AI1
AI2
DI3
DI4
DI5
Dahili fieldbus
Fieldbus adaptör
Fb. seçim
Bakınız bölüm Dahili
fieldbus'lı fieldbus
kontrolü ve Fieldbus
adaptörlü fieldbus
kontrolü.
AI1, AI2, DI3, DI4, DI5
COMM
Seçim
110 3
EXT1
Start/stop/
yön
EXT1
Referans
REF1 (Hz/rpm)
Frekans girişi
Kontrol paneli
Ardışık programlama
FREQ INPUT
KEYPAD
SEQ PROG
Program özellikleri
Page 92

90
Referans türleri ve proses yapma
Sürücü, klasik analog giriş ve kontrol panel sinyallerine ek olarak çok çeşitli
referanslar da kabul edebilir:
• Sürücü referansı iki dijital girişle verilebilir: Bir dijital giriş hızı artırır ve diğeri
azaltır.
• Sürücü matematiksel fonksiyonları kullanarak iki analog sinyalden bir referans
oluşturabilir: Toplama, çıkarma, çarpma ve bölme.
• Sürücü matematiksel fonksiyonları kullanarak, seri haberleşme arayüzünden
gelen bir sinyal ve analog bir giriş sinyalinden bir referans oluşturabilir: Toplama
ve çarpma.
• Sürücü referansı, frekans girişiyle verilebilir.
• EXT1/2 harici kontrol konumunda sürücü, Toplama matematiksel işlemini
kullanarak analog giriş sinyali ve ardışık programlama aracılığıyla alınan sinyale
göre referans oluşturabilir.
Harici referansı, sinyal minimum ve maksimum değerleri, minimum ve maksimum
hız limitlerinden başka bir değere karşılık gelecek şekilde ölçeklemek mümkündür.
Ayarlar
Parametre İlave bilgi
Grup 11 REFERENCE SELECT Harici referans kaynağı, tipi ve ölçekleme
Grup 20 LIMITS Çalışma limitleri
Grup 22 ACCEL/DECEL Hız referansı hızlanma/yavaşlama rampaları
Grup 24 TORQUE CONTROL Moment referansı rampa süreleri
Grup 32 SUPERVISION Referans denetimi
Diagnostik
Gerçek sinyal İlave bilgi
0111 /0112 REF1/REF2 referansı
Grup 03 FB ACTUAL SIGNALS Referans işleme zincirinin farklı aşamalarındaki referanslar
Program özellikleri
Page 93

Referans trimleme
Referans trimlemede harici referans ikincil bir uygulama değişkeninin ölçülen
değerine göre düzeltilir. Aşağıdaki blok şeması fonksiyonu göstermektedir.
91
1105 REF1 MAX / 1108 REF 2 MAX
Anahtar
maks.frek
maks. hız
Anahtar
9904
maks. moment
4233
PID2 referansý
PID2 act
PID2
PID2 çıkışı
4232 CORRECTION SRC
REF1 (Hz/rpm) / REF2 (%) = Trimleme öncesi sürücü referansı
REF’ = Trimlemeden sonraki sürücü referansı
maks. hız= par. 2002 (veya 2001 mutlak değer daha büyük ise)
maks. frek = par. 2008 (veya 2007 mutlak değer daha büyük ise)
maks. tork = par. 2014 (veya 2013 mutlak değer daha büyük ise)
PID2 ref = par. 4210
PID2 act = par. 4214...4221
(1
Not: Tork referansı trimleme işlemi yalnızca REF2 (%) harici referansı içindir.
(2
REF1 veya REF2, hangisinin aktif olduğuna göre. Bkz. 1102 parametresi.
(3
Par. 4232 = PID2REF iken, maksimum trimleme referansı 1105 parametresi tarafından
belirlendiğinde, REF1 devrede iken ve 1108 parametresi tarafından belirlendiğinde ve REF2 devrede
iken.
Par. 4232 = PID2 OUTPUT iken, maksimum trimleme referansı 2002 parametresi tarafından
belirlendiğinde ve 9904 değeri VECTOR:SPEED ya da VECTOR:TORQ iken ve 2008 parametresi
tarafından belirlendiğinde ve 9904 değeri SCALAR:FREQ iken.
(1
(2
Anahtar
Anahtar
(3
REF1 (Hz/rpm) /
REF2 (%)
Seçim
DIRECT (2)
0
PROPOR. (1)
NOT SEL (0)
(2
4230
4231 TRIM SCALE
REF1 (Hz/rpm) /
REF2 (%)
Çarp.
(2
Çarp.
Toplama
REF’
Ayarlar
Parametre İlave bilgi
1102 REF1/2 seçimi
4230 …4233 Trimleme fonksiyon ayarları
4201 …4229 PID kontrolü ayarları
Grup 20 LIMITS Sürücü çalışma limitleri
Program özellikleri
Page 94

92
Örnek
Sürücü bir konveyör hattı çalıştırıyor. Hız kontrollüdür ancak hat gerilimi de hesaba
katılmalıdır: Ölçülen gerilim, gerilim set değerini aştığı takdirde hız hafifçe azaltılır
veya tam tersi.
İstenen hız düzeltimine ulaşabilmek için kullanıcı aşağıdakileri yapar
• trimleme fonksiyonunu aktifleştirerek gerilim set değeri ve ölçülen gerilim ile
bağlantısını yapar.
• trimlemeyi uygun bir seviyeye ayarlar.
Hız kontrollü konveyör hattı
Sürücü silindirleri (çekiş)
Gerilim ölçümü
Sadeleştirilmiş blok şeması
Hız referansı
Gerilim
ölçümü
Gerilim
set değeri
Programlanabilir analog girişler
Sürücünün iki adet programlanabilir analog gerilim/akım girişi bulunmaktadır. Girişler
terslenebilir, filtrelenebilir ve maksimum ve minimum değerler değiştirilebilir. Analog
giriş güncelleme zamanı 8 ms'dir (saniyede bir kez 12 ms zaman). Bilgiler
uygulamaya aktarıldığında zaman daha kısadır (8 ms -> 2 ms).
Ayarlar
Parametre İlave bilgi
Grup 11 REFERENCE SELECT Referans kaynağı olarak AI
Grup 13 ANALOG INPUTS Analog giriş sinyalini işleme
3001, 3021, 3022, 3107 AI kaybı izleme
Grup 35 MOTOR TEMP MEAS Motor sıcaklık ölçümünde AI
Grup 40 PROCESS PID SET 1
....42 EXT / TRIM PID
8420, 8425, 8426
8430, 8435, 8436
...
8490, 8495, 8496
Toplama
PID
Bir PID proses kontrol referansı veya gerçek değer kaynağı
olarak AI
Ardışık programlama referansı ya da tetikleme cihazı sinyali
olarak AI
Trimlenmiş
hız referansı
Program özellikleri
Page 95

Diagnostik
Gerçek değer İlave bilgi
0120, 0121 Analog giriş değerleri
1401 AI1/A2 sinyal kaybı
Alarm
AI1 LOSS / AI2 LOSS AI1/AI2 sinyali AI1/AI2 FAULT LIMIT (3021/3022) değerinin
Hata
AI1 LOSS / AI2 LOSS AI1/AI2 sinyali AI1/AI2 FAULT LIMIT (3021/3022) değerinin
PAR AI SCALE Hatalı AI sinyali ölçeklendirme (1302 < 1301 veya 1305 < 1304)
Programlanabilir analog çıkış
Bir programlanabilir akım çıkışı (0 - 20 mA) bulunmaktadır. Analog çıkış sinyali
terslenebilir, filtrelenebilir ve maksimum ve minimum değerler değiştirilebilir. Analog
çıkış sinyalleri, motor hızı, çıkış frekansı, çıkış akımı, motor momenti, motor gücü,
vs., ile orantılı olabilir. Analog çıkış güncelleme zamanı 2 ms'dir.
Analog çıkış ardışık programlama ile kontrol edilebilir. Analog bir çıkışa seri
haberleşme hattı aracılığıyla bir değer yazmak mümkündür.
93
altında
altında
Ayarlar
Parametre İlave bilgi
Grup 15 ANALOG OUTPUTS AO değer seçilmesi ve işlenmesi
Grup 35 MOTOR TEMP MEAS Motor sıcaklık ölçümünde AO
8423/8433/.../8493 Ardışık programlama ile AO kontrolü
Diagnostik
Gerçek değer İlave bilgi
0124 AO değeri
0170 AO kontrol değerleri ardışık programlama ile belirlenir
Hata
PAR AO SCALE Hatalı AO sinyal ölçeklendirmesi (1503 < 1502)
Programlanabilir dijital girişler
Sürücü beş adet programlanabilir dijital girişe sahiptir. Dijital giriş güncelleme süresi
2 ms'dir.
Bir dijital girişi (DI5) frekans girişi olarak programlanabilir. Bkz. bölüm Frekans girişi
sayfa 95.
Program özellikleri
Page 96

94
Ayarlar
Parametre İlave bilgi
Grup 10 START/STOP/DIR Start, stop, yön olarak DI
Grup 11 REFERENCE SELECT Referans veya referans kaynağı seçiminde DI
Grup 12 CONSTANT SPEEDS Sabit hız seçiminde DI
Grup 16 SYSTEM CONTROLS Harici Çalışma İzni, hata resetleme veya kullanıcı makro değişim
sinyali olarak DI
Grup 19 TIMER & COUNTER Zamanlayıcı ya da sayaç kontrol sinyali kaynağı olarak DI
2013, 2014 Tor k s ınır kaynağı olarak DI
2109 Harici acil durdurma komutu kaynağı olarak DI
2201 Hızlanma ve yavaşlama rampa seçim sinyali olarak DI
2209 Sıfır rampası güç sinyali olarak DI
3003 Harici bir hata kaynağı olarak DI
Grup 35 MOTOR TEMP MEAS Motor sıcaklık ölçümünde DI
3601 Zamanlayıcı devreye alma sinyal kaynağı olarak DI
3622 Yükseltici aktivasyon sinyali kaynağı olarak DI
4010/4110/4210 PID kontrol cihazı referans sinyal kaynağı olarak DI
4022/4122 PID1'de uyku fonksiyonu etkinleştirme sinyali olarak DI
4027 PID1 parametre seti 1/2 seçimi sinyal kaynağı olarak DI
4228 Harici PID2 fonksiyonu etkinleştirme sinyali kaynağı olarak DI
Grup 84 SEQUENCE PROG Ardışık programlama kontrol sinyali kaynağı olarak DI
Diagnostik
Gerçek değer İlave bilgi
0160 DI durumu
0414 Son hata gerçekleştiğinde DI durumu
Programlanabilir röle çıkışları
Sürücünün bir adet programlanabilir röle çıkışı bulunmaktadır. Bir parametre
ayarıyla, röle çıkışı üzerinden hangi bilginin gösterileceğini seçmek mümkündür:
Hazır, çalışıyor, hata, uyarı, motor sıkışma, vs. Röle çıkışı güncelleme süresi 2
ms'dir.
Röle çıkışına seri haberleşme hattı aracılığıyla bir değer yazmak mümkündür.
Ayarlar
Parametre İlave bilgi
Grup 14 RELAY OUTPUTS RO değer seçimleri ve çalışma süreleri
8423 Ardışık programlama ile RO kontrolü
Diagnostik
Gerçek değer İlave bilgi
0134 Fieldbus kontrolü aracılığıyla RO Control Word değeri
0162 RO durumu
Program özellikleri
Page 97

Frekans girişi
Frekans girişi (0...16000 Hz) harici referans sinyal kaynağı olarak kullanılabilir.
Frekans girişi güncelleme süresi 50 ms'dir. Bilgiler uygulamaya aktarıldığında
zaman daha kısadır (50 ms -> 2 ms).
Ayarlar
Parametre İlave bilgi
Grup 18 FREQ INPUT &
TRANSISTOR OUTPUT
1103/1106 Frekans girişi aracılığıyla harici referans REF1/2
4010, 4110, 4210 PID referans kaynağı olarak frekans girişi
Diagnostik
Gerçek değer İlave bilgi
0161 Frekans girişi değeri
Transistör çıkışı
95
Frekans girişi minimum ve maksimum değerleri ve filtreleme
Sürücünün bir adet programlanabilir transistör çıkışı bulunmaktadır. Çıkış, dijital
çıkış ya da frekans çıkışı olarak kullanılabilir (0...16000 Hz). Transistör/frekans çıkışı
güncelleme süresi 2 ms'dir.
Ayarlar
Parametre İlave bilgi
Grup 18 FREQ INPUT &
TRANSISTOR OUTPUT
8423 Ardışık programlamada transistör çıkışı kontrolü
Transistör çıkışı ayarları
Diagnostik
Gerçek değer İlave bilgi
0163 Transistör çıkışı durumu
0164 Transistör çıkışı frekansı
Program özellikleri
Page 98

96
Gerçek sinyaller
Bir çok gerçek sinyal mevcuttur:
• Sürücü çıkış frekansı, akım, gerilim ve güç
•Motor hızı ve momenti
• Ara devre DC gerilimi
• Aktif kontrol yeri (LOCAL, EXT1 veya EXT2)
• Referans değerleri
• Sürücü sıcaklığı
•Çalışma süresi sayacı (h), kWh sayacı
• Dijital I/O ve analog I/O durumu
• PID kontrol cihazı gerçek değerleri.
Gelişmiş kontrol paneli ekranında üç adet sinyal eşzamanlı olarak görüntülenebilir
(temel kontrol panelinde bir sinyal). Değerleri aynı zamanda seri haberleşme hattı
veya analog çıkışlardan okumak mümkündür.
Ayarlar
Parametre İlave bilgi
1501 AO için gerçek sinyal seçilmesi
1808 Frekans çıkışına gerçek sinyal seçilmesi
Grup 32 SUPERVISION Gerçek sinyal denetimi
Grup 34 PANEL DISPLAY Kontrol paneli üzerinde görüntülenecek sinyallerin seçilmesi
Diagnostik
Gerçek değer İlave bilgi
Grup 01 OPERATING DATA …
04 FAULT HISTORY
Motor tanımlama
Vektör kontrolünün performansı, motor devreye alma sırasında belirlenen doğru
motor modeline bağlıdır.
İlk start komutu verildiğinde otomatik olarak bir Tanımlama Mıknatıslama’sı yapılır.
İlk devreye alma sırasında motor sıfır hızda birkaç saniye süresince mıknatıslanır ve
böylece motor modeli yaratılır. Bu tanımlama yöntemi bir çok uygulama için
uygundur.
Daha zor uygulamalarda ayrı bir Tanımlama Çalıştırması (ID run) gerçekleştirilebilir.
Gerçek sinyallerin listesi
Ayarlar
Program özellikleri
Parametre 9910 ID RUN
Page 99

Güç kaybında çalışmaya devam etme (power loss ride-through)
Eğer gelen besleme gerilimi kesilirse sürücü dönen motorun kinetik enerjisinden
faydalanarak çalışmaya devam edecektir. Motor döndüğü ve sürücüye enerji ürettiği
sürece, sürücü çalışmaya devam eder. Eğer ana kontaktör kapalı kalmışsa sürücü
kesilmeden sonra çalışmaya devam edebilir.
U
T
M
(Nm)
160
120
80
40
f
çıkış
(Hz)
80
60
40
20
U
DC
(Vdc)
520
390
260
130
giriş gücü
U
DC
f
çýkýþ
T
M
97
00 0
UDC= Sürücünün ara devre gerilimi, f
TM = Motor momenti
Nominal yükte besleme gerilim kaybı (f
Kontrol cihazı şebeke kapalı olduğu sürece gerilimi sabit tutar. Sürücü motoru jeneratör modunda
çalıştırır. Motor hızı düşer ancak motor yeterli kinetik enerjiye sahip olduğu sürece sürücü çalışabilir.
Ayarlar
Parametre 2006 UNDERVOLT CTRL
DC Mıknatıslama
DC Mıknatıslama aktifleştirildiğinde sürücü start etmeden önce otomatik olarak
motoru mıknatıslar. Bu özellik en yüksek breakaway momentini, motor nominal
momentinin %180’ine kadar garantiler. Ön mıknatıslama süresini ayarlayarak motor
startını ve ör. mekanik bir freni serbest bırakmayı senkronize etmek mümkündür.
Otomatik Start özelliği ve DC Mıknatıslama aynı anda aktifleştirilemez.
Ayarlar
Parametreler 2101 START FUNCTION ve 2103 DC MAGN TIME
1,6 4,8 8 11,2 14,4
= sürücünün çıkış frekansı,
out
= 40 Hz). Ara devre DC gerilimi minimum limite düşer.
out
t (s)
Bakım mandalı
Sürücü güç tüketimi vs. belirlenen tetikleme noktasını aştığında panel ekranında
uyarı görüntüleyecek bir bakım tetikleyici devreye alınabilir.
Ayarlar
Parametre grubu 29 MAINTENANCE TRIG
Program özellikleri
Page 100

98
DC Tutma
Motor DC Tutma özelliğini aktifleştirerek rotoru sıfır
hızda kilitlemek mümkündür. Hem referans hem de
motor hızı önceden ayarlanmış DC tutma hızının altına
düştüğünde sürücü stop eder ve motora DC enjekte
eder. Referans hızı gene DC tutma hızını aştığında
normal sürücü çalışmasına geri dönülür.
Ayarlar
Parametreler 2104...2106
Hız dengeli durdurma
Ta şıyıcının durma komutunu aldıktan sonra
belirli bir mesafe hareket etmesi gereken
uygulamalar gibi durumlarda hız
kompanzasyonlu durdurma kullanılabilir.
Maksimum hızda motor, belirlenen
yavaşlama rampası boyunca normal şekilde
durdurulur. Maksimum hızın altında durma,
motor durma noktasına rampalanana kadar
sürücü mevcut hızda çalıştırılarak geciktirilir.
Aşağıdaki şekilde gösterildiği gibi, durma komutundan sonra kat edilen mesafe her
iki durumda aynıdır; örn. A alanı B alanına eşittir.
Hız
Maks. hız
Kullanılan hız
Motor
hız
DC tutma
hız
Hız
referans
DC tutma
hız
Stop komutu
DC Tutma
alan A = alan B
A
B
t
t
t
Ayarlar
Akı frenleme
Parametre 2102 STOP FUNCTION
Sürücü, motordaki mıknatıslama seviyesini arttırarak daha iyi bir yavaşlama sağlar.
Motor akısını arttırarak motorda frenleme sırasında üretilen enerji motor termik
enerjisine dönüştürülebilir.
t (s)
T
Br
(%)
T
N
60
40
20
Akı Frenleme yok
T
T
Akı frenleme
= Frenleme momenti
Br
= 100 Nm
N
f (Hz)
50 Hz / 60 Hz
Motor
hız
Akı Frenleme yok
Akı frenleme
Program özellikleri
 Loading...
Loading...