

Page 1
<<Contents>> <<Index>>
General
Specifications
Model UT320
Digital Indicating Controller
GS 05D01D02-02E
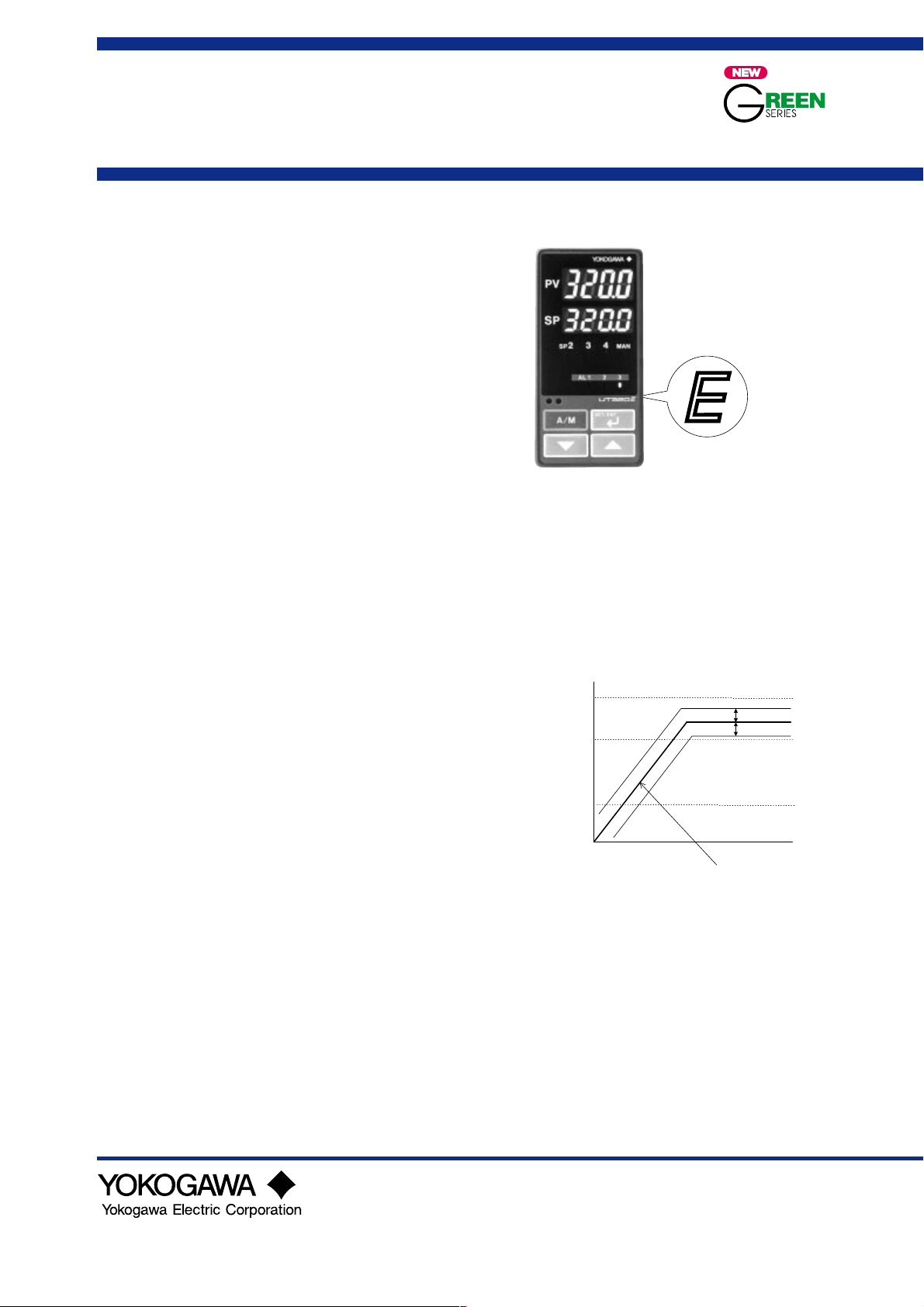
■General
Model UT320 Digital Indicating Controller is a highly
accurate 1/8 DIN controller, provided with universal input/
output. It has a large display for readings and excellent
monitoring operability with the Auto/Man switching key. In
addition, heating/cooling control, including PID control
with auto-tuning, the overshoot suppressing function
“SUPER” and the hunting suppressing function “SUPER2”
are available as control functions, and a retransmission of
variables or a 15V DC loop power supply are also
equipped as standard. A communication function or 24V
DC loop power supply is available optionally. As described
above, the UT320 is a controller provided with higher
functions and capability than conventional similar-size
controllers.
■Main Features
• The latest in large digital displays has been realized and a
large PV display with characters 12 mm in height has been
employed to be clearly readable from distant locations.
• Universal input and output enable users to set or change
freely the type of measured inputs (thermocouple, RTD or
DCV), measurement range, type of control output (4 to 20
mA current, voltage pulse, or relay contact), etc. from the
front panel.
• Parameters can be easily set using a personal computer.
("Parameter setting tool (model LL100)" sold separately is
required.)
• Various communication function are provided. Communication is possible with personal computer, programable
logic controller, and other controllers.
■Function Specifications
UT320
UT320E
“E” indicates the model
with expanded functions.
Reference point = Measuring input range (0%)
Reference point hysteresis = Fixed to 0.5% of the
Reference deviation method:
Reference deviation = OFF or 0.1 to 100.0% of
Measuring input range (100%)
Reference point 2
Reference point 1 Reference point 2
Measuring input range (100%)
measured input range width.
PID parameters (No. 4 PID) are selected
when the deviation exceeds the reference
deviation. This process takes precedence
over the reference point method.
measured input range width
Reference deviation
Reference deviation
No.3PID
● Control Computation Functions
Control computation:
Can be selected from the following types:
Continuous PID control, Time-proportional PID
control, Heating/Cooling control (for heating/
cooling type only) or Relay ON/OFF control.
Control cycle time: 250 ms
Number of sets of target setpoints and PID parameters: 4
Target setpoint and PID selection:
PID parameters are provided for every target
setpoint and the set of PID parameters are
selected at the same time that the setpoint
number is selected.
Zone PID selection:
PID parameters are selected depending on the
value of the PV. For selection, the reference
point (PID parameter selection setpoint) or the
reference deviation is used.
Reference point method:
The measuring input range is divided into a
maximum of three zones with up to two
reference points, and PID parameters are
selected (No. 1 PID to No. 3 PID) for every
zone.
No.2PID
Reference point 1
No.1PID
Measuring input range (0%)
Measured value (PV)
Auto-tuning:
Available as standard. If auto-tuning is
operated, PID parameters are automatically set
(limit cycle method).
“SUPER” function:
Overshoots generated by abrupt changes in the
target setpoint or by disturbances can be
suppressed.
“SUPER2” function:
The function stabilizes the state of control that
is unstable due to hunting, etc. without
requiring any change in PID constants, when
the load and/or gain varies greatly, or when
there is a difference between the characteristics of temperature zones.
GS 05D01D02-02E
©Copyright Feb. 2000
3rd Edition Jul. 2004
Page 2

<<Contents>> <<Index>>
2
Control Parameters Setting Range
Proportional band = 0.1 to 999.9%
0.0 to 999.9% (for heating/cooling control,
0.0% for ON/OFF control)
Integral time = 1 to 6,000 s, or OFF (manual reset)
Derivative time = 1 to 6,000 s, or OFF
Manual reset value = -5.0 to 105.0% of output range
(functions when integral time is off.)
ON/OFF control hysteresis = 0.0 to 100.0% of measured
input range width (0.1 to 0.5% for heating/
cooling control)
Setpoint rate-of-change setting = off, or 0.0 to 100.0%/h or
min. of measured input range width
A PV tracking function operates automatically
when the setpoint is changed, the power is
turned on, or the mode is changed from
manual to automatic.
Direct/reverse action:
The output increase/decrease direction can be
defined corresponding to a positive or
negative deviation.
For heating/cooling control, it is fixed; for the
heating side output, reverse, for the cooling
side output, direct.
Anti-reset windup:
When controller output is limited, normal
integration is superseded by an anti-reset
windup computation to suppress overintegration.
Control output cycle time = 1 to 1000 s (for Time-
proportional PID control) and (the cooling
side output cycle time is also the same when
heating/cooling control is used).
Preset output value = -5.0 to 105.0% of output range
Output tracking: Whether the output bump is provided or
not can be selected by changing the PID
control mode.
Output limiter
Upper limit = Lower limit to 105.0% of output
range
Lower limit = -5.0% of output range to upper
limit
Heating/cooling dead band = -100.0 to 50.0% for output
range
● Signal Computation Functions
Measured input computation:
Bias addition (-100.0 to 100.0% of measured
input range width), and first-order lag filter
(time constant off or 1 to 120 s)
Contact input function:
Target setpoint selection, Auto/Man operating
mode switching, key lock parameter display/
non-display switching
Target setpoint selection can be done for
either a 2-setpoint or 4-setpoint selection.
• If the 2-setpoint selection is set, Auto/Man
mode switching can be used as well.
• If the 4-setpoint selection is set, Auto/Man
switching and key lock parameter display/non-
display switching cannot be used together.
If key lock parameter display/non-display
switching is used, target setpoint selection and
Auto/Man mode switching cannot be used.
● Alarm Functions
Eighteen types of alarm functions are provided. The alarm
status is indicated by the alarm lamp on the front panel.
Also, three points among them can be output as relay contact
outputs.
Alarm types:
PV high limit, PV low limit, Deviation high
limit, Deviation low limit, Deenergized on
deviation high limit, Deenergized deviation
low limit, Deviation high and low limits, High
and low limits within deviation, Deenergized
on PV high limit, Deenergized on PV low
limit, SP high limit, SP low limit, Output high
limit, Output low limit,Heater disconnection
alarm, Sensor prounding alarm,FAIL output.
Alarm output:
3 points. Any three points can be output as
contact outputs among the above alarm. For
heating/cooling control, if cooling side output
is output as a relay contact, up to two alarm
outputs can be used.
Setting ranges for PV, deviation, setpoint and output alarms:
PV/setpoint alarm:
-100.0 to 100.0% of measured input range
Deviation alarm:
-100.0 to 100.0% of measured input range
width
Output alarm:
-5.0 to 105.0% of output range
Alarm hysteresis width:
0.0 to 100.0% of measured input range width
Delay timer:
0.00 to 99.59 (minute, second)
An alarm is output when the delay timer
expires after the alarm setpoint is reached.
Setting for each alarm is possible.
Stand-by action:
Stand-by action can be set to make PV/
deviation alarm OFF during start-up or after
SP change until SP reaches the normal region.
Heater disconnection alarm (optional):
two circuits incorporated
A heater disconnection alarm is output if the
heater current consumption is the disconnection detection value or less. This alarm can be
used for Relay ON/OFF control or timeproportional PID control.
Heater current setting range: 0.0 to 50.0 A
Setting accuracy: ±5% of span ± 1 digit
Heater current detecting resolution: 0.5 A
Time required until disconnection detection is on: 0.2 s
minimum
Disconnected sensor model: CTL-6-S-H (URD Co. Ltd.)
Sensor grounding alarm:
An alarm is output after detecting a change in
control output. If the moving average * of
control output is out of the setting range
(between the high and low limits of the on/off
rate) in spite of the deviation being within a
fixed range (on/off rate detection width) and
control being in stable condition, the sensor is
judged to be in a grounding condition.
* Moving a ver age refers to the av erage value for output
values sampled (fiv e times) in ev ery cycle time .
High- and low-limit setting range of on/off rate:
-5.0 to 105.0% of output range
Detection width of on/off rate:
0.0 to 100.0% of measured input range
width.
Fault diagnostic alarm:
Input burnout, A/D conversion error,
thermocouple reference junction compensation error
FAIL output: Software failure and/or hardware failure
When in Fail, control output, retransmission
output and alarm output become 0% or off.
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 3

<<Contents>> <<Index>>
● Display and Operation Function
PV display: In 4-digit digital display for engineering data
Setpoint display:
Various data, such as the setpoint (SP), are
displayed by selection on the 4-digit digital
display.
Status indicating lamps:
3 alarm indicator lamps: AL1, AL2, AL3
3 setpoint number indicator lamps:
SP2, SP3, SP4 (Go out when SP1 is selected.)
MAN operation mode lamp: MAN (lit in MAN mode)
Operation keys:
쑶 and 쑴 keys:
Increases or decreases setpoints and various
parameters.
SET/ENT key:
For data setting or call-up/selection of
various parameters
A/M key: Switching of operation mode (Auto/Man)
SELECT display:
A panel where operating parameters that are
frequently changed during operation can be
selected and registered. For example, by
registering the alarm -1 setpoint in the
SELECT display, the setpoint can easily be
displayed during operation.
Security function:
An operation-inhibiting mode using a
password is provided.
3
Status lamps
Alarm (AL1, 2, 3), Manual (MAN).
Setpoint No (SP2, 3, 4). in use.
Communication port for light loader
Parameters are set via communication
from a personal computer.
Operational keys
Increase/Decrease the setting data (쑶,쑴)
Select parameter/Enter the setting data (SET/ENT)
A/M mode switching (A/M)
LED display unit (for PV)
Display PV, and error code when
error is detected.
LED display unit (for SP)
Display setpoint (SP), output value,
and setting item/value of parameters.
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 4
<<Contents>> <<Index>>
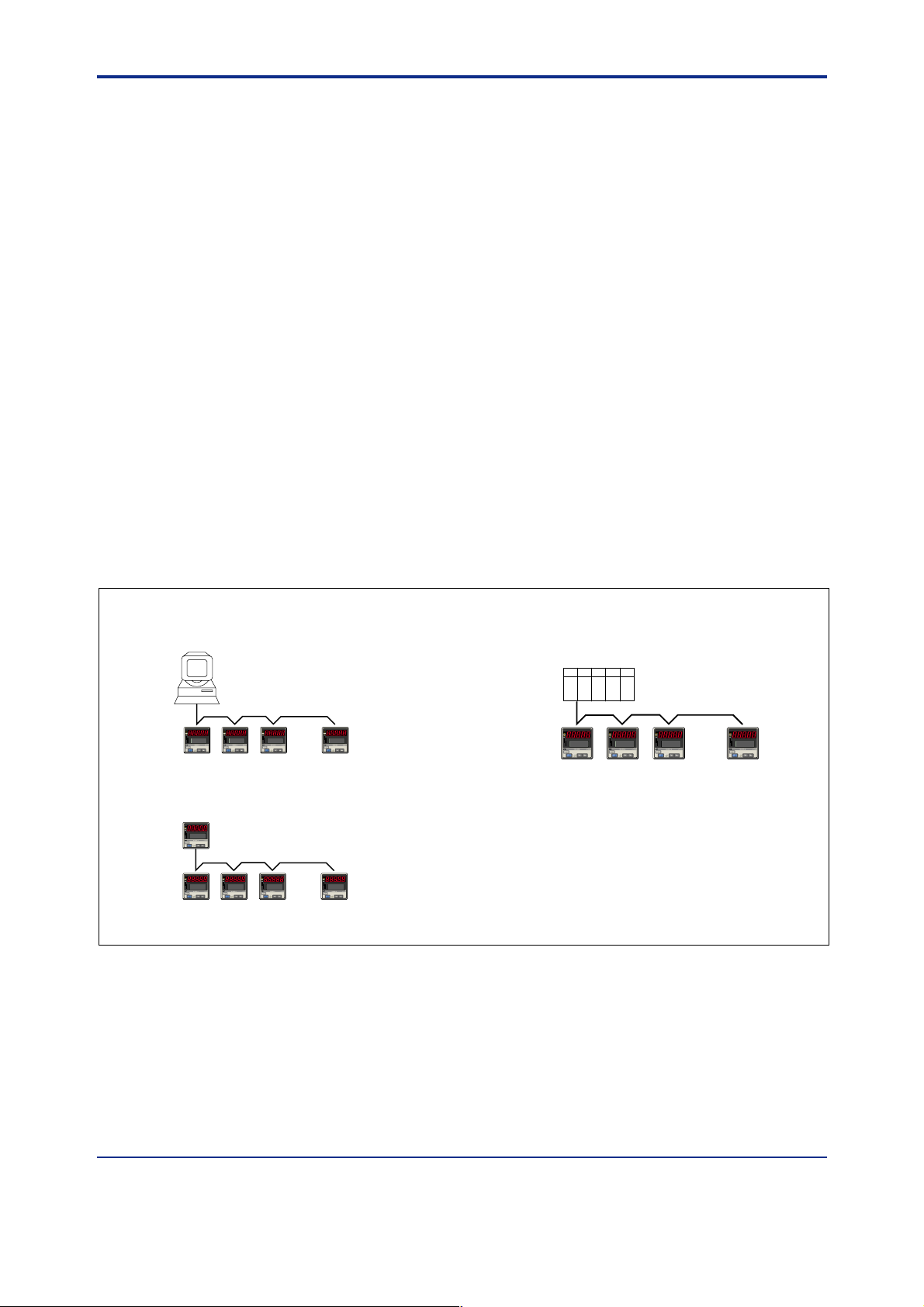
● Communication Functions (optional)
This controller has a communication function and can be
connected to a personal computer, programmable logic
controller, or other /GREEN series controllers.
Communication protocol
Computer link communication:
Communication protocol with a personal
computer.
Ladder communication:
Communication protocol with programmable logic controller made.
MODBUS communication:
Communication protocol with a personal
computer or PCL.
Coordinated operation:
Communication protocol to coordinate
operation with two or more GREEN series
controllers. The UT320 can be connected as
a master station or a slave station.
Communication interface
Communication protocol:
Computer link, ladder communication,
MODBUS communication or coordinated
operation
Standards: EIA RS485
Maximum number of connectable controllers:
31 GREEN series controllers
Maximum communication distance: 1,200 m
Communication method:
Two-wire half duplex or four-wire half
duplex, start-stop synchronization, non-
procedural
Communication rate:
600, 1200, 2400, 4800, 9600 bps
4
Examples of Communication System Configuration Diagram
(1) Computer link communication/MODBUS communication (2) Ladder communication
Personal computer
PV
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
PV
PV2
PV2
AL
AL
1
1
2
2
3
3
REM
REM
4
4
MAN1
MAN1
MAN2
MAN2
STP
STP
CAS
CAS
A/M
A/M
DISP
DISP
SET/ENT
SET/ENT
UT350/UT320
Digital indicating controller
(3) Coordinated operation
PV
PV2
AL
1
2
3
REM
4
MAN1
UP350 Program controller
MAN2
STP
CAS
A/M
DISP
SET/ENT
or UT350/UT320 Digital indicating controller
PV
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
PV
PV2
PV2
AL
AL
1
1
2
2
3
3
REM
REM
4
4
MAN1
MAN1
MAN2
MAN2
STP
STP
CAS
CAS
A/M
A/M
DISP
DISP
SET/ENT
SET/ENT
UT350/UT320
Digital indicating controller
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
MELSEC-A
PLC
PV
PV
PV2
PV2
AL
AL
1
1
2
2
3
3
REM
REM
4
4
MAN1
MAN1
MAN2
MAN2
STP
STP
CAS
CAS
A/M
A/M
DISP
SET/ENT
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
DISP
SET/ENT
UT350/UT320
Digital indicating controller
PV
PV2
AL
1
2
3
REM
4
MAN1
MAN2
STP
CAS
A/M
DISP
SET/ENT
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 5

<<Contents>> <<Index>>
■Hardware Specifications
Measured Input Signal
Number of input points: 1
Input system:
The types of input/measurement ranges can be
set using Key operation or software from a list
of inputs.
Input type, measurement ranges and measurement
accuracy:
Refer to the table below.
5
Input Type Instrument range (˚C)
Unspecified(when shipped from the factry)
Thermocouple
RTD
Standard
signal
DC voltage
*1: Performance in the standard operating conditon (at 23°C ±2°C, 55±10%RH, and 50/60Hz power frequency)
Note 1: The accuracy is ±0.3°C of instrument range ±1 digit for a temperature range from 0 to 100°C.
Note 2: The accuracy is ±0.5°C of instrument range ± 1 digit for an temperature range from -100 to 0°C and 100 to 200°C.
K
J
T
B
S
R
N
E
L (DIN)
U (DIN)
W (DIN)
Platinel 2
PR20-40
W97Re3-W75Re25
JPt100
Pt100
0.4 to 2V
1 to 5V
0 to 2V
0 to 10V
-10 to 20mV
0 to 100mV
Input range
code
OFF Set the data item PV input Type"IN" to the OFF option to leave the PV input type undefined.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
30
31
35
36
37
40
41
50
51
55
56
-200 to 1370˚C
-199.9 to 999.9˚C
-199.9 to 500.0˚C
-199.9 to 999.9˚C
-199.9 to 400.0˚C
0.0 to 400.0˚C
0 to 1800˚C
0 to 1700˚C
0 to 1700˚C
-200 to 1300˚C
-199.9 to 999.9˚C
-199.9 to 900.0˚C
-199.9 to 400.0˚C
0.0 to 400.0˚C
0 to 2300˚C
0 to 1390˚C
0 to 1900˚C
0 to 2000˚C
-199.9 to 500.0˚C
-150.0 to 150.0˚C
-199.9 to 850.0˚C
-199.9 to 500.0˚C
-150.0 to 150.0˚C
0.400 to 2.000
1.000 to 5.000
0.000 to 2.000
0.00 to10.00
-10.00 to 20.00
0.0 to 100.0
Instrument range (˚F)
-300 to 2500˚F
0 to 2300˚F
-199.9 to 999.9˚F
-300 to 2300˚F
-300 to 750˚F
-199.9 to 750.0˚F
32 to 3300˚F
32 to 3100˚F
32 to 3100˚F
-300 to 2400˚F
-300 to 1800˚F
-300 to 1300˚F
-300 to 750˚F
-199.9 to 750.0˚F
32 to 4200˚F
32 to 2500˚F
32 to 3400˚F
32 to 3600˚F
-199.9 to 999.9˚F
-199.9 to 300.0˚F
-300 to 1560˚F
-199.9 to 999.9˚F
-199.9 to 300.0˚F
Scaling is enable in the following
4 range.
-1999 to 9999
-199.9 to 999.9
-19.99 to 99.99
-1.999 to 9.999
±0.1% of instrument range ±1 digit for
temperatures equal to or higher than 0 ˚C,
±0.2% of instrument range ±1 digit for
temperatures below 0 ˚C
±0.15% of instrument range ±1 digit for
temperatures equal to or higher than 400 ˚C
±5% of instrument range ±1 digit for
temperatures below 400 ˚C
±0.15% of instrument range ±1 digit
±0.1% of instrument range ±1 digit
±0.25% of instrument range ±1 digit for
temperature below 0 ˚C
±0.1% of instrument range ±1 digit for
temperatures equal to or higher than 0˚C
±0.2% of instrument range ±1 digit for
temperatures below 0˚C
±0.2% of instrument range ±1 digit
±0.1% of instrument range ±1 digit
±0.5% of instrument range ±1 digit for
temperatures equal to or higher than 800˚C
No guarantee of accuracy for temperatures
below 800˚C
±0.2% of instrument range ±1 digit
±0.1% of instrument range ±1 digit (Note 1)
(Note 2)
±0.2% of instrument range ±1 digit (Note 1)
±0.1% of instrument range ±1 digit (Note 1)
(Note 2)
±0.2% of instrument range ±1 digit (Note 1)
±0.1% of instrument range ±1 digit
The read-out range can be scaled between 1999 and 9999.
Measurement accuracy
*1
Sampling period: 250 ms
Burnout detection:
Functions with a thermocouple (TC), RTD,
standard signal 0.4 to 2 V DC, and 1 to 5 V
DC.
Can be specified as upscale, downscale, and off.
For standard signal, judged as burnout at 0.1
V or less.
Input bias current: 0.05 µA (for TC/RTD b-terminal)
Measuring current(RTD): about 0.13mA
Input resistance:
1 MΩ or more for TC/mV input
About 1 MΩ for DC voltage input
Allowable signal source resistance:
250 Ω or less; effect of permissible signal
source resistance 0.1 µV/Ω or less for TC/mV
input
2 kΩ or less; effect of permissible signal
source resistance 0.01%/100 Ω or less for
DC voltage input
Allowable leadwire resistance:
Max. of 150 Ω/wire (resistance in each of
three wires must be equal) for RTD input
However, 10 Ω/wire for a maximum range of
-150.0 to 150.0°C.
Effect of permmisible leadwire resistance
±0.1°C/10Ω or less
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 6

<<Contents>> <<Index>>
6
Allowable input voltage:
±10 V DC for TC/mV/RTD input
±20 V DC for DC voltage input
Noise rejection ratio:
Normal mode 40 dB (50/60 Hz) or more
Common mode 120 dB (50/60 Hz) or
more
Reference-junction compensation error:
±1.0°C (15 to 35°C),
±1.5°C (0 to 15°C, 35 to 50°C)
Applicable standards: JIS, IEC, or DIN (ITS-90) for TC
and RTD
24V DC Loop Power Supply for Sensor
The controller supplies power to a two-wire transmitter.
Place a resistor (10 to 250Ω)between the controller and the
transmitter, convert a current signal to a voltage signal, and
read it from the PV input.
21.6 to 28.0V DC, maximum supply current is about 30mA
(only for models with 24V DC loop power supply).
Ambient temperature should be 0 to 40°C when using 24V
DC loop power supply for UT320.
■
24 V DC Power Supply Wiring to Two-wire Sensor
250Ω
12
PV input
1 to 5 V DC signal
13
21
Loop power
28.0 V DC
22
supply
21.6 to
External
resistor
(Note)
Two-wire transmitter
4-20mADC
Note: Connecting a 250 Ω resistor to the terminals is optional.
Model: X010-250-2 (resistor with M3.5 crimp-on terminal lugs)
Retransmission Output
Either PV, target setpoint, or control output is output. Either
the retransmission output or the 15V DC loop power supply
can be used.
Number of output points: 1
Output signal: 4 to 20 mA DC
Load resistance: 600 Ω or less
Output accuracy: ±0.3% of span
* Performance in the standard operating
conditions (at 23± 2°C, 55± 10% RH, and 50/
60 Hz power frequency)
15V DC loop power supply:
Supply voltage is 14.5 to 18.0 V DC. Maximum supply
current is about 21 mA (with a protection circuit for a
field short-circuit).
Control Outputs
The control output is of a universal scheme and can be
selected from the following types of outputs. In the case of
heating/cooling control, it is also selectable from these
outputs. However, if the cooling side output is a relay
contact output, the alarm-3 cannot be used, and similarly if
the cooling side output is a voltage pulse or current output,
the retransmission output/15V DC sensor power supply
cannot be used.
Current output
Number of output points: 1 or 2 (2 for heating/cooling),
Output signal: 4 to 20 mA
Load resistance: 600 Ω or less
Swiched between voltage pulse output and
current output.
Output accuracy: ±0.3% of span
Performance in the standard operating
conditions (at 23± 2°C, 55± 10% RH, and
50/60 Hz power frequency)
Voltage pulse output
Number of output points: 1 or 2 (2 for heating/cooling type),
Swiched between voltage pulse output and
current output.
Output signal:
On voltage = 12 V DC or more (load
resistance of 600Ω or more; current on
short-circuiting about 30 mA)
Off voltage = 0.1 V DC or less
Resolution: 10 ms
Relay contact output
Number of output points: 1 or 2 (2 for heating/cooling type)
Output signal:
Three terminals for NC, NO, and Common
transfer-contact
Contact rating:
250 V AC, 3 A or 30 V DC, 3 A (resistive
load)
Resolution: 10 ms
Contact Inputs
Usage:
Target setpoint selection, Auto/Man mode
switching, or Key lock parameter display/non-
display switching
Number of input points: 2
Input type: Non-voltage contact input or transistor open
collector input
Input contact rating: 12 V DC, 10 mA or more (for non-
voltage contact input)
On/off determination:
For non-voltage contact input,
ON= contact resistance of 1 kΩ or less,
OFF= contact resistance of 20 kΩ or more.
For transistor contact input,
ON= 2 V or less,
OFF= leakage current of 100 µA or less.
Minimum retention time for status detection: About 1
second
Contact Outputs
Usage: Alarm output, FAIL output, and others
Number of relay contact output points: 3
Relay contact rating: 240 V AC, 1 A or 30 V DC, 1 A
(COM terminals is common for every contact
output.)
● Display Specifications
PV display:
4-digit, 7-segment red LED; character height -
12 mm
Setpoint display:
4-digit, 7-segment red LED; character height -
9.3 mm
Status indicating lamps: LEDS
● Conformance to Safety and EMC Standards
Safety:Compliant with IEC/EN61010-1: 2001, approved
by CSA1010, approved by UL508.
Installation category : CAT. II (IEC/EN61010,
CSA1010) Pollution degree : 2 (IEC/
EN61010, CSA1010)
Measurement category : I (CAT. I : IEC/
EN61010)
Rated measurement input voltage : 10V DC
max.(across terminals), 300V AC max.(across
ground)
Rated transient overvoltage : 1500V (Note)
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 7

<<Contents>> <<Index>>
7
Note : It is a value on the safety standard
which is assumed by IEC/EN61010-1 in
measurement category I, and is not the value
which guarantees an apparatus performance.
EMC standards:Complies with EN61326
During test, the controller continues to operate
with the measurement accuracy within ±20%
of the range.
● Construction, Mounting, and Wiring
Construction: Dust-proof and Drip-proof front panel
Material: ABS resin and polycarbonate
Case color: Black
Weight: Approx. 1 kg or less
External dimensions:
Mounting: Direct panel mounting; mounting bracket, one
Panel cutout dimensions:
Mounting attitude:
Wiring: M3.5 (ISO 3.5 mm) screw terminals (signal
conforming to IP55.
For side-by-side close installation, controller
loses its dust-proof and drip-proof protection.
48 (width) × 96 (height) × 100 (depth) mm
each for upper and lower mounting
45
+0.6
(width) ×
0
92
+0.8
0
(height) mm
Up to 30 degrees above the horizontal. No
downward tilting allowed.
wiring and power/ground wiring as well)
● Power Supply Specifications and Isolation
Power supply: Rated at 100 to 240 V AC (±10%), 50/60
Power consumption: MAX. 20 VA (MAX. 8.0W)
Internal fuse rating: 250 VAC, 16.A time-lug fuse
Memory back-up: Non-volatile memory (Service life
Withstanding voltage:
Primary terminals = Power and relay output terminals
Secondary terminals = Analog I/O signal terminals,
Isolation resistance:
Grounding:
Hz
approx. 1000,000 times of writings)
1500 V AC for 1 minute between primary and
secondary terminals
1500 V AC for 1 minute between primary and
ground terminals
1500 V AC for 1 minute between ground and
secondary terminals.
500V AC for 1minute between two secondary
terminals
voltage pulse output terminals,
contact input terminals
20 MΩ or more when 500 V DC voltage is
applied between the power terminals and
ground terminal.
Class D grounding (grounding resistance of
100 Ω or less)
● Isolation specifications
Measured input terminal:
15 V DC loop power supply terminals:
24V DC loop power supply terminals:
Control output (current or voltage pulse) and retransmis-
Isolated from other I/O terminals. Not
isolated from internal circuits.
Not isolated from 4-20mA analog output
and voltage pulse control output. Isolated
from other I/O terminals and internal circuit.
Isolated from other I/O terminals and
internal circuit.
sion terminals:
Not isolated between control output
terminals and retransmission output
terminal. Isolated from other I/O terminals
and internal circuits.
Relay contact control output terminals:
Isolated from other I/O terminals and
internal circuits.
Contact input terminals:
Not isolated from other contact input
terminals mutually, and communication
terminals. Isolated from other I/O terminals
and internal circuits.
Relay contact alarm output terminals:
Isolated from other I/O terminals and
internal circuits.
RS-485 communication terminals:
Not isolated from contact input terminals.
Isolated from other I/O terminals and
internal circuits.
Power terminals:
Isolated from other I/O terminals, ground
terminal, and internal circuits.
Ground terminal:
Isolated from other I/O terminals, power
terminals, and internal circuits.
● Environmental Conditions
Normal operating conditions:
Ambient temperature: 0 to 50°C (40°C or less for
Ambient temperature change limit:10°C/h or less
Ambient humidity: 20 to 90% RH (no condensing)
Magnetic field: 400 A/m or less
Continuous vibration (5 to 14 Hz):
Continuous vibration (14 to 150 Hz):
Short-period vibration: 14.7 m/s
Shock: 147 m/s
Installation altitude : 2,000 m or less above sea
Warm-up time 30 minutes or more
Transportation and storage conditions:
Temperature: -25 to 70°C
Temperature change limit:20°C/h or less
Humidity: 5 to 95% RH
Effect of operating conditions
Effect of ambient temperature:
For voltage or TC inputs:
For RTD inputs:
For analog output:
Effect of power supply fluctuation (within rated voltage
For analog input:
For analog output: ±0.05% of F.S./10 V or less
mounting of instruments side-by-side)
The operating ambient temperature range is
between 0°C and 40°C when the 24VDC
loop power supply.
Peak-to-peak amplitude of 1.2 mm or less
2
or less
4.9 m/s
2
or less, 11 ms
2
or less, 15 s
level
Whichever is greater, ±1 µV/°C or ±0.01%
of F.S./°C
±0.05°C/°C (ambient temperature) or less
for RTD input
±0.05% of F.S./°C
±0.05% of F.S./°C or less
range):
Equal to or less than whichever is greater,
± 1 µV/10 V or
± 0.01% of F.S./10 V
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 8

<<Contents>> <<Index>>
■Function Block Diagram for Standard Type
8
PV input
terminals
12 1311
, and
PV INPUT
Input selection
Unit selection
Input range conversion
Input bias
Input filter
Communication
terminals to
RS485
Control computationManual operation
A/M
2723
LOCALREMOTE
SP.NO=0 SP.NO=1 to 4
Target setpoint
ramp-rate function
AUTOMAN
AUTO (ON)/MAN (OFF) switching
Contact input
DI1 DI2
SP.NO
Target setpoints 1 to 4
Preset output Output limiter
STOP
RUN
*1
24 V loop
power supply
OT
Control
output
LPS
OUTPUT1 OUTPUT1
Terminals
21
22
and
Current or pulse
terminals
1716
and
terminals
, and
*1: If the setup parameter DIS (DI function selection) is set to “4”,
when the contact input 2 is ON (run state), that controller outputs the preset output value.
Terminal Parameter Function
Legend
Analog signal Contact signal Front panel key
Relay
2 31
15 V loop
power supply
terminals
Retransmission
OUTPUT2
/LPS
Current
1514
and
output
RET
Alarm function
DO3DO2DO1
Alarm 1 Alarm 2 Alarm 3
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 9

<<Contents>> <<Index>>
■Function Block Diagram for Heating/Cooling Type
9
PV input
terminals
12 1311
, and
PV INPUT
terminals to
Input selection
Unit selection
Input range conversion
Input bias
Input filter
Communication
RS485
Control computationManual operation
A/M
2723
LOCALREMOTE
SP.NO=0
SP.NO=1 to 4
Target setpoint
ramp-rate function
AUTOMAN
AUTO (ON)/MAN (OFF) switching
Contact input
DI1 DI2
SP.NO
Target setpoints 1 to 4
Heating-side
preset output
OUTPUT1 OUTPUT1
Current or pulse
terminals
and
Heating/cooling
computation
Heating-side
output limiter
Cooling-side
output limiter
*1 *1
OT
Heating-side
OT
Cooling-side
output
OUTPUT2
1716
Relay
terminals
2 31
, and
Current or pulse
terminals
1514
and
*1: If the setup parameter DIS (DI function selection) is set to “4”,
when the contact input 2 is ON (run state), that controller outputs the preset output value.
output
DO3
Relay
Cooling-side
preset output
15 V loop
power supply
OUTPUT2
terminals
and
Retransmission
/LPS
Current
1514
output
RET
Alarm function
DO2DO1
Alarm 1 Alarm 2
Legend
Terminal Parameter Function
Analog signal Contact signal Front panel key
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
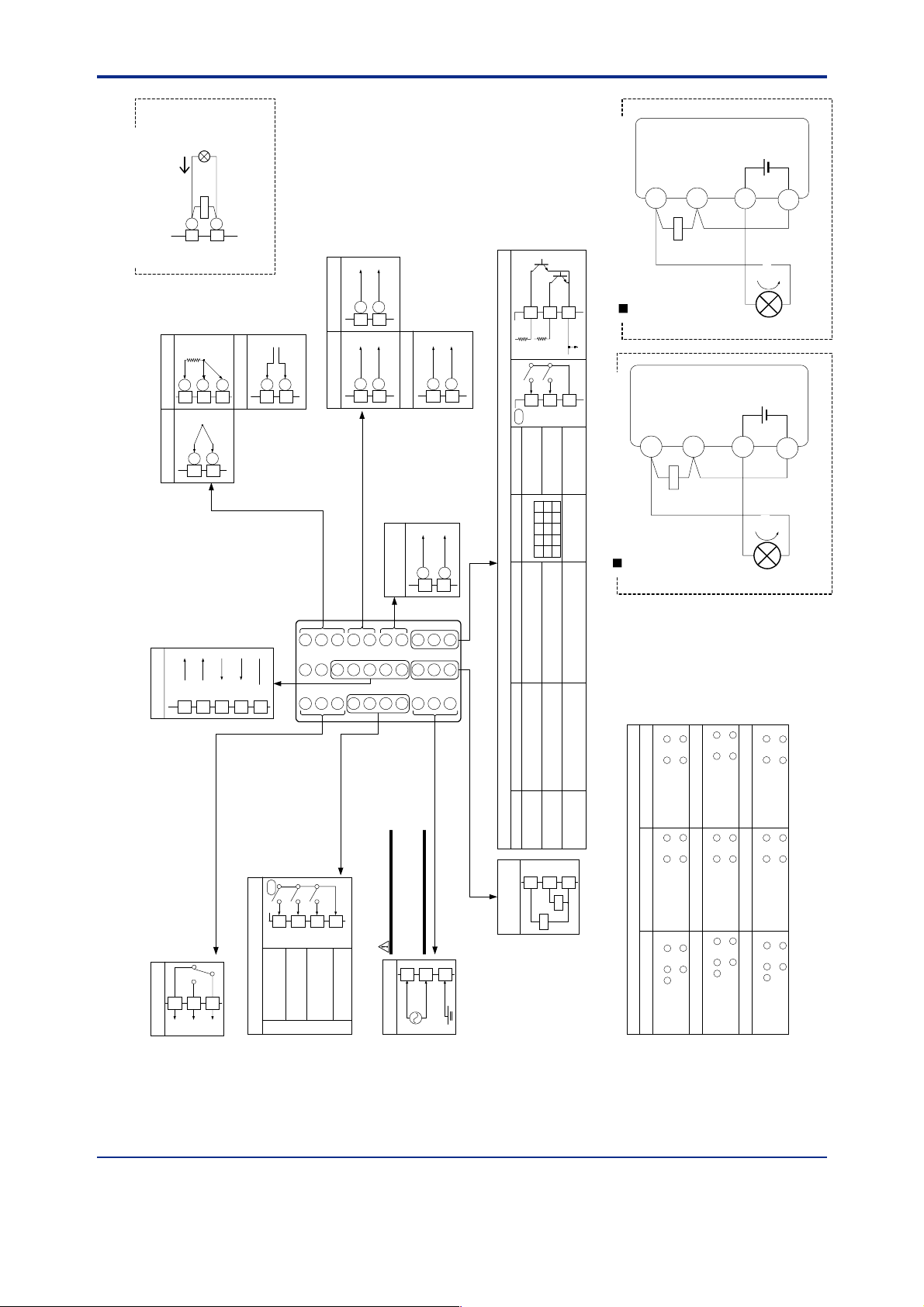
Page 10

<<Contents>> <<Index>>
1
2
Relay contact output
3
Control output
NC
NO
COM
Contact rating: 250 V AC, 3 A
30 V DC, 3 A (resistance load)
Note: Select this option from
the OT parameter.
* Time proportional PID
relay contact output is
configured at factory
before shipment.
23
24
RS-485 communication
* Wiring can only be carried out
for controllers with
communication functions.
Maximum baud rate: 9600 bps
25
26
27
SDB(+)
SDA(-)
RDB(+)
RDA(-)
SG
* Wiring can only be carried
out for controllers with
24 V DC loop power supply.
8
9
Power supply
10
L
N
Allowable range: 100 to 240 V AC (
10%)
(free voltage)
50/60 Hz shared
Power supply
CAUTION
Before carrying out wiring, turn off the power
to the controller and check that cables to be
connected are not alive with a tester or the like
because there is a possibility of electric shock.
6
5
Alarm output
4
7
AL1
AL2
AL3
COM
Relay contact rating: 240 V AC, 1 A
30 V DC, 1 A (resistance load)
Relay
Alarm-1 output
Alarm-2 output
Alarm-3 output
Common
UT
16
17
Current/voltage
pulse output
4-20 mA DC,
voltage pulse
(12 V)
Control output
+
-
Note:Select this option
from the OT
parameter.
12
13
TC input
11
12
RTD input
13
12
13
mV/V input
A
b
B
-
+
-
+
12
13
Note: Connecting a 250
Ω resistor to the terminals is
optional.
Model: X010-250-2 (resistor with M3.5 crimp-on terminal
lugs)
*
When receiving 4-20 mA DC current signals,
set the PV input type to 1-5 V DC (setpoint
“41”).
䊏
Receiving 4-20 mA DC Current
Signals with the Controller
250 Ω
4-20mA
PV input
* Not configured at factory before shipment
See “2. Initial Settings,
” for more
information.
-
+
14
15
Retransmission output
4-20 mA DC
14
15
15 V DC loop power supply
14.5-18.0VDC
(21 mA DC max.)
* PV retransmission is configured at factory
before shipment.
Load resistance: 600
Ω or less
* If 15 V DC loop power supply is used,
retransmission output cannot be used.
-
+
-
+
* This wiring is only
possible for a controller
with a heater burnout
alarm.
29
28
Heater current
detection input
30
CT2
CT1
COM
CT
CT
OT=0 (factory-shipped setting)
Time proportional control
Relay output (terminals , and )
OT=1
Correspondence between parameter OT and control output types
Time proportional control
Voltage pulse output (terminals and )
OT=2
Current output
(terminals and )
OT=3
On-off control
Relay output (terminals , and )
* OT is a setup parameter. You can change the settings of the parameter OT to change the control output type.
See “2. Initial Settings,
” for more information.
1
2
3
16
17
16
17
1
2
3
When switching target
SP 1 to 4:
DI1
DI2
1.SP
2.SP3.SP
4.SP
OFF
OFFOFF
ON ON
ON
OFF
ON
Contact rating: 12 V DC, 10 mA or more
Correspondence between parameter DIS and external contact input functions
When DIS=4
DI1
DI2
COM
Common
When DIS=3
2.SP when DI1=ON
1.SP when DI1=OFF
STOP when DI2=ON
RUN when DI2=OFF
Common
When DIS=2
Hides the LOCK parameter when DI1=ON.
Shows the LOCK parameter when DI1=OFF.
Common
When DIS=1 (Factory-shipped setting)
2.SP when DI1=ON
1.SP when DI1=OFF
AUTO when DI2=ON
MAN when DI2=OFF
Common
When DIS=OFF
No function
No function
Common
DI1
DI2
COM
+5V
+5V
Contact
Transistor contact
*
DIS is a setup parameter.
Changing DIS setpoint allows you to change the function of external contact input.
No function
19
18
20
UT
19
18
20
1
2
3
4
5
6
7
8
9
10
21
22
23
24
25
26
27
28
29
30
11
12
13
14
15
16
17
18
19
20
24 V DC loop
power supply
21
22
21.6-28.0VDC
(30 mA DC max.)
-
+
Note: External Contact Input
If the power is turned on when the external contact input is OFF, the
mode (SP.NO or A/M) existing before the power is turned off will be
continued. (except for RUN/STOP)
10
■Standard Type, Terminal Arrangements
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 11
<<Contents>> <<Index>>
Heating-side control output
1
2
3
NC
NO
COM
Relay contact output
* Time proportional PID relay contact
output is configured at factory
before shipment.
* Available if 4, 7 or 10 is set in the OT
(Control Output Type) setup parameter.
Contact rating: 250 V AC, 3 A
30 V DC, 3 A (resistance load)
23
24
25
26
27
SDB(+)
SDA(-)
RDB(+)
RDA(-)
SG
* Wiring can only be carried out
for controllers with communication
functions.
Maximum baud rate: 9600 bps
RS-485 communication
12
13
11
12
13
12
13
A
b
B
+
-
+
-
TC input
RTD input
mV/V input
12
13
*
When receiving 4-20 mA DC current signals,
set the PV input type to 1-5 V DC (setpoint
“41”).
䊏
Receiving 4-20 mA DC Current
Signals with the Controller
250 Ω
4-20mA
-
+
Note: Connecting a 250
Ω resistor to the terminals is
optional.
Model: X010-250-2 (resistor with M3.5 crimp-on terminal
lugs)
PV input
* Not configured at factory before shipment
14
15
14
15
+
-
+
-
Retransmission output
4-20 mA DC
15 V DC loop power supply
14.5-18.0VDC
(21 mA DC max.)
* PV retransmission is configured at factory before shipment.
* If 15 V DC loop power supply is used,
retransmission output cannot be used.
* The retransmission output and 15 V DC
loop power supply are not available
if the cooling-side control output is set to
“continuous output
” and “voltage pulse output.
”
Heating-side control output
16
17
Current/voltage
pulse output
4-20 mA DC,
voltage pulse
(12 V)
+
-
* Available if 5, 6, 8, 9,
11 or 12 is set in the OT
(Control Output Type)
setup parameter.
When switching target
SP 1 to 4:
DI1
DI2
1.SP
2.SP3.SP4.SP
OFF
OFFOFF
ON ON
ON
OFF
ON
Contact rating: 12 V DC, 10 mA or more
Correspondence between parameter DIS and external contact input functions
When DIS=4
DI1
DI2
COM
Common
When DIS=3
2.SP when DI1=ON
1.SP when DI1=OFF
STOP when DI2=ON
RUN when DI2=OFF
Common
When DIS=2
Hides the LOCK parameter when DI1=ON.
Shows the LOCK parameter when DI1=OFF.
Common
When DIS=1 (Factory-shipped setting)
2.SP when DI1=ON
1.SP when DI1=OFF
AUTO when DI2=ON
MAN when DI2=OFF
Common
When DIS=OFF
No function
No function
Common
DI1
DI2
COM
+5V
+5V
Contact
Transistor contact
*
DIS is a setup parameter.
Changing DIS setpoint allows you to change the function of external contact input.
No function
19
18
20
UT
19
18
20
Note: The cooling-side control output
is selected if 4, 5 or 6 is set in
the OT (Control Output
Type) setup parameter.
The alarm-3 output is not
available. The controller is
factory-set to the cooling-side
control output (time proportional
PID relay contact output).
8
9
10
L
N
CAUTION
Before carrying out wiring, turn off the power
to the controller and check that cables to be
connected are not alive with a tester or the like
because there is a possibility of electric shock.
Power supply
Power supply
Allowable range: 100 to 240 V AC (
10%)
(free voltage)
50/60 Hz shared
29
28
Heater current
detection input
30
CT2
CT1
COM
CT
CT
*
This wiring is only possible
for a controller with a
heater burnout alarm.
OT=4 (factory-shipped setting) OT=5
OT=6
* OT is a setup parameter.
You can change the settings of the parameter OT to change the control output type.
Heating side: Relay output
(terminals , and )
Cooling side: Relay output
(terminals and )
1
2
3
Heating side: Voltage pulse output
(terminals and )
Cooling side: Relay output
(terminals and )
16 17
Heating side: Current output
(terminals and )
Cooling side: Relay output
(terminals and )
16
17
Correspondence between parameter OT and heating-side/cooling-side output types
OT=7 OT=8 OT=9
Heating side: Relay output
(terminals , and )
Cooling side: Voltage pulse output
(terminals and )
1
2
3
Heating side: Voltage pulse output
(terminals and )
Cooling side: Voltage pulse output
(terminals and )
16
17
Heating side: Current output
(terminals and )
Cooling side: Voltage pulse output
(terminals and )
16 17
OT=10 OT=11 OT=12
The control output types,
“relay output
” and “voltage pulse output
” shown in the table above refer to those of time proportional control.
To change the type to a relay output for on-off control, select
“Relay Terminals
” and change the setpoint of the proportional band to
“0.”
Heating side: Relay output
(terminals , and )
Cooling side: Current output
(terminals and )
1
2
3
Heating side: Voltage pulse output
(terminals and )
Cooling side: Current output
(terminals and )
16 17
Heating side: Current output
(terminals and )
Cooling side: Current output
(terminals and )
16 17
12
13
14
15
100
Two-wire transmitter
PV input
0.4 to 2.0 V DC signal
Loop power
supply
14.5 to
18.0 V DC
External
resistor
(Note)
Note: Connecting a 100
resistor to the terminals is optional.
Model: X010-100-2 (resistor with M3.5 crimp-on terminal lugs)
15 V DC Power Supply Wiring to Two-wire Sensor
4-20 mA DC
12
13
21
22
250
Two-wire transmitter
PV input
1 to 5 V DC signal
Loop power
supply
21.6 to
28.0 V DC
External
resistor
(Note)
Note: Connecting a 250
resistor to the terminals is optional.
Model: X010-250-2 (resistor with M3.5 crimp-on terminal lugs)
24 V DC Power Supply Wiring to Two-wire Sensor
* Wiring can only be carried out for controllers with 24 V DC
loop power supply.
4-20 mA DC
1
2
3
4
5
6
7
8
9
10
21
22
23
24
25
26
27
28
29
30
11
12
13
14
15
16
17
18
19
20
6
5
4
7
AL1
AL2
AL3
COM
Relay
Alarm output/cooling-side control output
Alarm-1 output
Alarm-2 output
Alarm-3 output
or cooling-side control
output (Note)
Common
Relay contact rating: 240 V AC, 1 A
30 V DC, 1 A (
resistance
load)
UT
4
7
4
7
4
7
14 15
14 15
14
15
14 15
14 15
14
15
14
15
+
-
4-20 mA DC,
voltage pulse (12 V)
Cooling-side control output
Note: External Contact Input
If the power is turned on when the
external contact input is OFF, the
mode (SP.NO or A/M) existing before
the power is turned off will be
continued. (except for RUN/STOP)
11
■Heating/Cooling, Terminal Arrangements
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
Page 12

<<Contents>> <<Index>>
■External Dimensions and Panel Cutout Dimensions
12
Unit: mm
10048 11
96
Small bracket
112
91.8
Small bracket
1 to 10 mm (Panel thickness)
General installation Side-by-side close installation
92
(53)
+0.8
70 min.
0
+0.8
92
145 min.
"N" stands for the number of controllers to be
installed.
However, the measured value applies if N 5.
0
[(N-1)48+45]
+0.6
0
+0.6
45
0
(25)
■Model and Suffix codes
Model Suffix Code Description
UT320
Type
Optional functions
-0 Standard type
-2 Heating/cooling type
-3 Standard type (with 24 V DC loop power supply)
Digital indicating controller (provided with retransmission output and 15 V
DC loop power supply as standard)
0 None
1 With communication, heater burnout alarm
2 With heater burnout alarm
Standard accessories: Brackets (mounting hardware), Unit label, User’s manuals, and User’s Manual
(reference) (CD-ROM version)
■Items to be specified when ordering
Model and suffix codes, necessary/unnecessary of User’s Manual or QIC.
All Rights Reserved. Copyright © 2000, Yokogawa Electric Corporation
GS 05D01D02-02E 3rd Edition Jul. 30, 2004-00
 Loading...
Loading...