

Page 1
VEGA Grieshaber KG
Electronic level measurement
Am Hohenstein 113
Postfach 11 42
D-77757 Schiltach
Phone 0 78 36/50-0
Fax 0 78 36/50-201
4
1
1 2 3
2
VEGASON
VEGASON
71 - 2 … 75 - 2
TIB • Technical Information • Operating Instructions
Pulse-Echo
measuring system
Two channel operation
2-wire level measurement or
differential measurement
Operating range up to
-5 m
- 10 m
- 20 m
- 30 m
Compact unit with modules
for relay and current outputs
Linearization
Sensor optimization
VEGASON 71 - 2 and 73 - 2
approved in hazardous areas
of Ex - zone 1
5.00
5.00
Page 2

Contents
2 71 - 2 … 75 - 2
Introduction Contents of the instruction manual .....................................................4
Safety information ...............................................................................4
Special instructions for use in Ex-Zone 1 ...........................................4
Product description .............................................................................4
Technical Information Configuration of measuring system ....................................................5
Technical data ....................................................................................6
Dimensional drawing ..........................................................................8
Measuring range .................................................................................9
Installation examples - for liquid tanks ..........................................10
- for solids ..................................................11
Installation errors (tanks or silos) ......................................................11
Electrical connections .......................................................................12
Operating surface Indication and operating elements ....................................................13
Operating ..........................................................................................14
Start-up Flow diagram for start-up ..................................................................15
Mode listing 0, general parameter adjustments ................................16
Adjustment Level measurement ........................................................................20
Selection of the adjustment procedure .............................................20
Adjustment in m without level change ..............................................21
Adjustment in % with level change ...................................................21
Differential measurement ..............................................................22
Selection of the adjustment procedure .............................................22
Adjustment in m without level change ..............................................23
Linearization Adapting to the vessel geometry ......................................................24
Selection of the linearization curves 4 … 6 ......................................24
Mode listing 4 (5 and 6) ....................................................................25
Display demonstration ......................................................................25
Operation ..........................................................................................25
Determination of the index markers ..................................................26
Linearity protocol ..............................................................................27
Programming example .....................................................................28
Outputs Display function
Allocation of a multiplication factor ........................................29
Measuring units and pattern ..................................................29
Decimal point ........................................................................29
Module for relay outputs 1 … 4
Two-point level switch ...........................................................31
Pump function .......................................................................33
Tendency determination ........................................................35
Module for current output 1 and 2
Coordination and course of characteristics ...........................37
Page 3

Contents
71 - 2 … 75 - 2 3
Supplementary
programming
Failure processing ............................................................................38
Simulation .........................................................................................39
Basic adjustment ..............................................................................40
Keyword ............................................................................................40
Sensor optimization Selection of sensor optimization .......................................................41
Mode listing 1 (2) sensor optimization ..............................................41
Information for sensor optimization ..................................................43
Limitation of the operating range
Start of operating range / end of operating range .............................44
Adapting
to the
product type ..........................................................................45
to the vessel geometry (liquid) ..........................................................45
to solids ............................................................................................46
Reduction of echo amplification
Multiple false echo reduction ............................................................47
Storage
of a false echo profile
False echo learn ....................................................................48
Profile interpolation ...............................................................49
Adapting
to filling and emptying speed
Rate of product level change ................................................50
Limitation
of the echo amplification
Max. gain ...............................................................................51
Supplementary optimization
Measuring window ............................................................................52
Fail safe ............................................................................................52
Real distance ....................................................................................53
Basic adjustment ..............................................................................53
Supplement
Protocol of sensor optimization ........................................................54
Error codes .......................................................................................55
Page 4
Product description
Introduction
4 71 - 2 … 75 - 2
Contents of the instruction manual
The Technical Information / Operating Instruc-
tions is just called TIB. It contains all necessary
information for correct:
- installation
- connection
- start-up
- linearization
- optimization
the Pulse-Echo-measuring system
VEGASON 71 - 2 … 75 - 2.
This TIB is supplied as part of the order. Knowledge
of the contents is important for correct operation of
the indicating instrument.
This TIB accompanies the product and is
addressed to technical qualified staff which are
trained or have knowledge of the use of level
measurement and control equipment.
Safety information
The described module must only be inserted and
operated as described in this TIB. Please note that
other action can cause damage for which VEGA
does not take liability.
VDE-regulations and the security measures valid
for the respective applications should be observed.
Special instructions for the use in Ex-Zone 1
The transducers SW 71 … SW 73 (SW 71 applied)
are also available in the Ex-flame proofing encapsulation "m". With the type designation SW 72 R
and SW 73 R they have the flame proofing
EEx m II T6 and can be used in Ex-Zone 1.
For these applications the regulations of the conformity certificate PTB-no. Ex–92.C.2113 as well as
the special regulations acc. to VDE have to be
observed. The above mentioned conformity certificate accompanies the instrument.
The Pulse-Echo-measuring system VEGASON
71 – 2 … 75 – 2 enables
- two channel level measurement or
- one differential measurement.
The running periods of reflected sound impulse are
evaluated.
The running period is a measure of the distance
between sensor (transducer) and product.
The central electronics determines these distances
for each channel and converts them into the
respective level.
Measurements are indicated on two integral LCdisplays and are either available as current or relay
outputs.
A measuring system consists of
- one central electronics and
- two sensors (transducer).
Each sensor has its own temperature sensor for
compensation of the temperature influence on the
running period. The measuring data and temperature information are conducted via coax connection
cable.
The measuring system is provided with factory-set
parameters so that immediate use is possible for
most applications.
The adjustment procedures and sensor optimizations etc. can be programmed directly via a
keyboard on the central electronics.
Page 5
Technical Information
71 - 2 … 75 - 2 5
Configuration of a measuring system
Inputs Central electronics Outputs
Measuring data of
transducer 1
channel 1
Measuring data of
transducer 2
channel 2
Multi function indicator
Module for relay output 1 and 2
Module for relay output 3 and 4
Module for current output 1 and 2
0 … 20 mA
Fail safe relay and
fail safe-LEDs
4
1
1 2 3
2
VEGASON
Central electronics consists of:
- plastic housing with cover and integral
- operating elements (5 buttons)
- diodes (LED-indication)
- two multi function indications (LC-displays)
- power supply
- memory (EEPROM, no buffer battery required)
- outputs as modules (see above)
- terminals for power supply, inputs and outputs
Further instruments (option):
- indicating instrument VEGADIS 171 A
(connection to 0 … 20 mA)
- overvoltage arrester
Transducer
Page 6
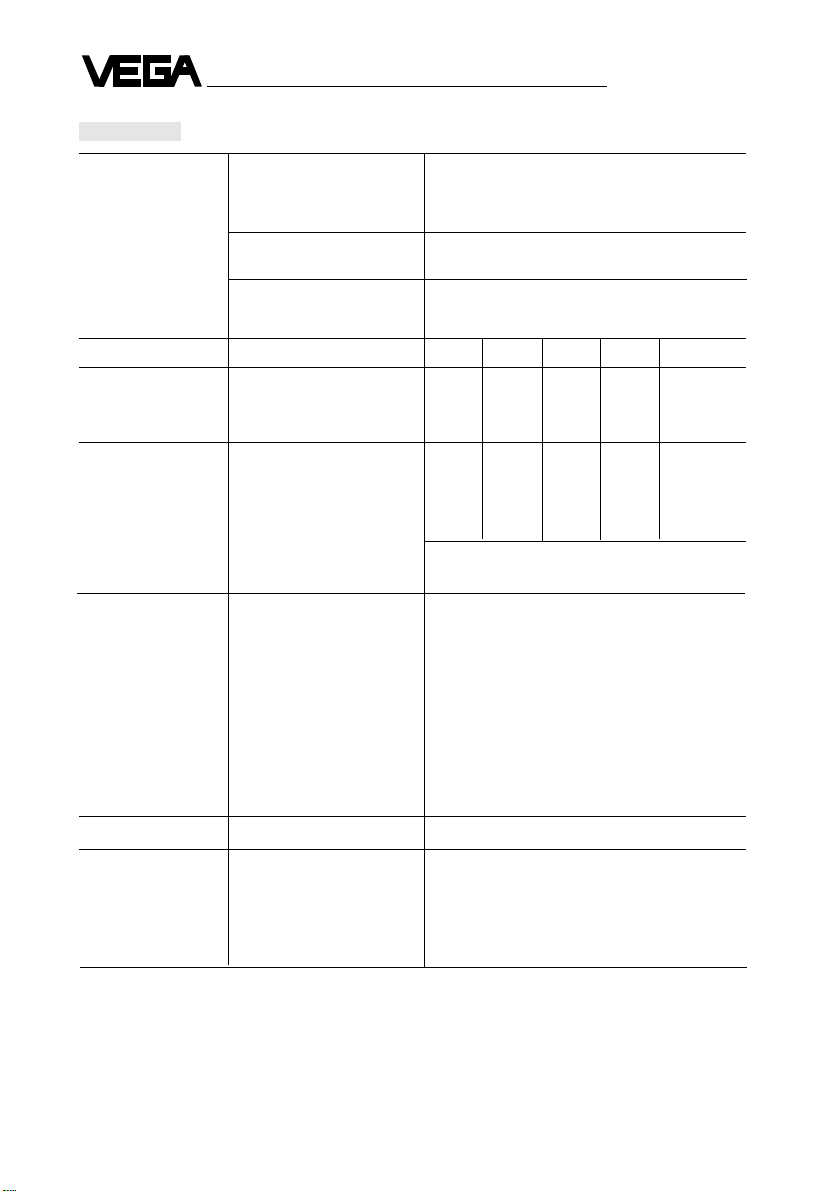
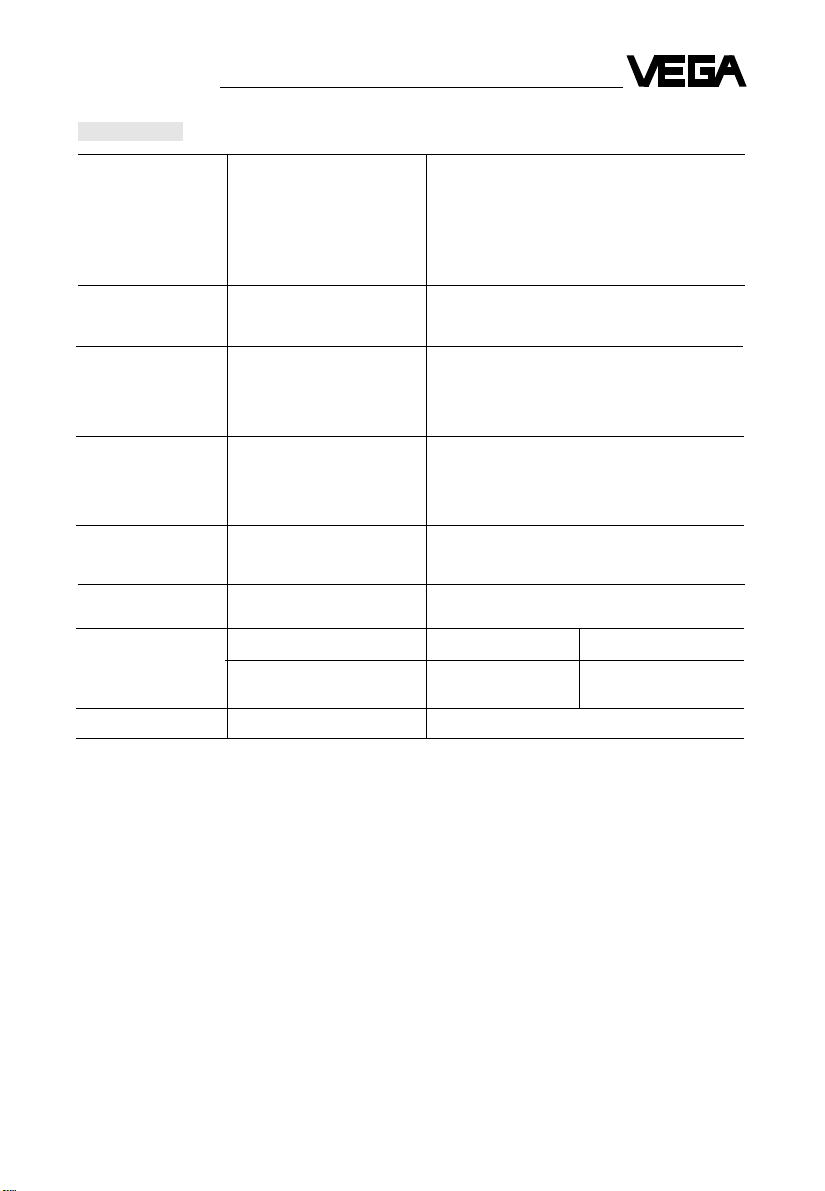
Technical data
Power supply operating voltage
standard U
nenn
= 24 V AC (16 … 42 V), 50 / 60 Hz
= 24 V DC (16 … 60 V)
option U
nenn
= 230 V AC (90 … 250 V), 50 / 60 Hz
power consumption
at U
nenn
and at max. load 12 VA / 5 W
fuse
for version 16 … 42 V AC or 16 … 60 V DC = 2 A
for version 90 … 250 V AC = 500 mA
Type VEGASON 71 - 2 72 - 2 73 - 2 74 - 2 75 - 2
Minimum distance at liquids or 0,3 m 0,5 m –– –– ––
solids particle size ≥ 5 mm –– –– 0,8 m 0,8 m 1,0 m
particle size ≤ 5 mm –– –– 1,0 m 1,1 m 1,2 m
Maximum distance product and process dependent 5 m 5 m 10 m 20 m 30 m
Input data min. measuring distance 10 cm 10 cm 10 cm 10 cm 10 cm
display in mm cm cm cm cm
scanning 3 mm 3 mm 3 mm 3 mm 3 mm
measuring frequency 50 kHz 40 kHz 33 kHz 22 kHz 16 kHz
measuring rate 0,4 sec. 0,4 sec. 0,4 sec. 0,5 sec. 0,7 sec.
angle of reflection at –3 dB) 7° 9° 12° 12° 12°
linearity error acc. to
empty / full adjustment < 0,1 % of measuring range
temperature error of electronics 0,1 % / 10 k of measuring range
Sensor data number of transducer 2
transducer housing PVDF
impedance adapter PE
mounting tube type 71 … 73 PVDF, thread 1" BSP
type 74 and 75 RCH 1000, thread 1" BSP
temperature sensor integrated in transducer
permissible excess pressure
in the vessel
- transducer 71 … 75 max. 1 bar
- transducer 71 R … 73 R max. 1 bar
connection cable coax line type RG 58
line length standard 5 m
maximum 300 m
cable diameter approx. 5 mm
Indication LC-display 2, 4-digits each
Relay output max. 2 modules 2 relay 1 spdt per relay each
contact material AgCdO and Au plated
min. turn-on voltage 10 mV
switching current 10 µA
max. turn-on voltage 250 V AC, 60 V DC
switching current 2 A AC, 1 A (DC)
max. breaking capacity 125 VA, 60 W
Technical Information
6 71 - 2 … 75 - 2
Page 7
Current outputs module - with 2 outputs
- range 0/4 … 20 mA
- resolution 0,05 % of range
- load max. 500 Ohm
- load dependent
failure at 0 … 500 Ohm, < 0,2 % related to the range
or
module - as above however with 2 floating outputs each
Fail safe function 1 relay for both channels 1 spdt
contact data as described under relay outputs
2 fail safe-LEDs separately per channel
Ambient ambient temperature on
conditions - transducer 71 … 75 –20°C … +80°C / -4 … 176°F
- transducer 71 R … 73 R –20°C … +55°C / -4 … 131°F
- central electronics –20°C … +60°C / -4 … 140°F
storage and transport temperature –20°C … +80°C / -4 … 176°F
Environmental protection
protection - transducer 71 … 75 IP 68
- transducer 71 R … 73 R IP 68
- housing of central electronics IP 65
protection class II
Electrical terminals for max. 1 x 1,5 mm
2
connection cable entry 2 x Pg 7
1 x Pg 13,5, max. 5 x Pg 13,5
Material transducer PVDF
housing of central electronics Polycarbonate
Weight VEGASON 71 … 73 74 and 75
1 transducer (without cable) approx. 0,8 kg approx. 1,5 kg
central electronics approx. 1,9 kg approx. 1,9 kg
Dimensions see dimensional drawing on following page
Technical Information
71 - 2 … 75 - 2 7
Technical data
(continuation)
Page 8
Technical Information
8 71 - 2 … 75 - 2
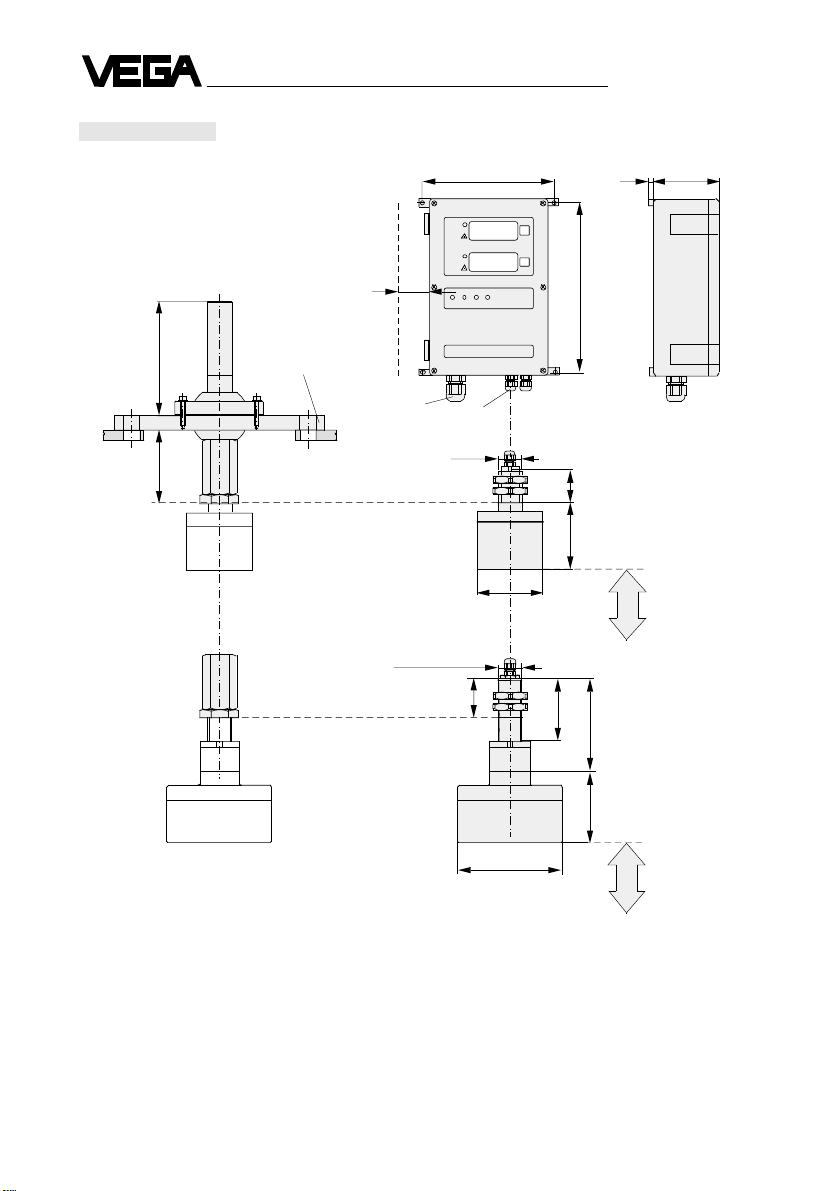
Dimensional drawing
(dimensions in mm)
411 2 3
2
VEGASON
*174
* Mounting dimensions
45
91
90
*229
Min. distance for
further instruments
40
5
ø95
appr. 100
Flange
DN 150
PN 16
appr. 155
133
93
ø145
Sensor
SW 72 / 73
Pg 13,5
Pg 7
Central electronics
G 1 A
Thread
1" BSP
0,5…0,8 m
90
0,8…1,2 m
Sensor
SW 74 / 75
54
Flanged
gimbal
Min. distance
Min. distance
Sensor SW
71 … 73
71 R … 73 R
Page 9
Technical Information
71 - 2 … 75 - 2 9
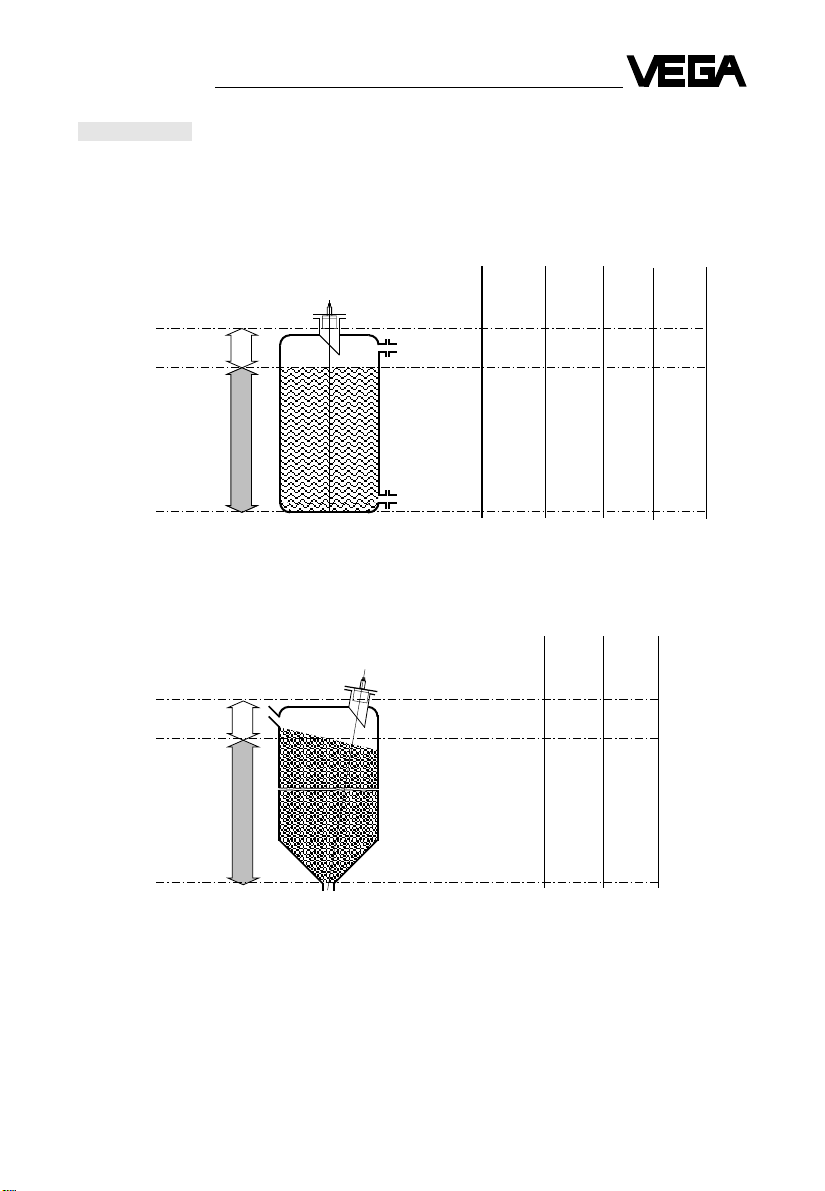
Measuring range
The measuring ranges described below are max.
values and can change dependent on process
conditions.
The location of the sensors should be carefully
selected and it should be noted that no struts,
edges or material inflow impede the measurement
(see installation recommendations page 10
and 11).
for liquids
VEGASON 71 - 2 72 - 2 73 - 2 74 - 2 75 - 2
Reference pane
Min.
distance 0,3 m 0,5 m 0,8 m 0,8 m 1,0 m
Measuring
range
5 m 5 m 10 m 20 m 30 m
for solids
VEGASON 73 - 2 74 - 2 75 - 2
Reference pane
Min.
distance particle size≥ 5 mm 0,8 m 0,8 m 1,0 m
particle size≤ 5 mm 1,0 m 1,1 m 1,2 m
Measuring
range
10 m 20 m 30 m
Page 10
Technical Information
10 71 - 2 … 75 - 2
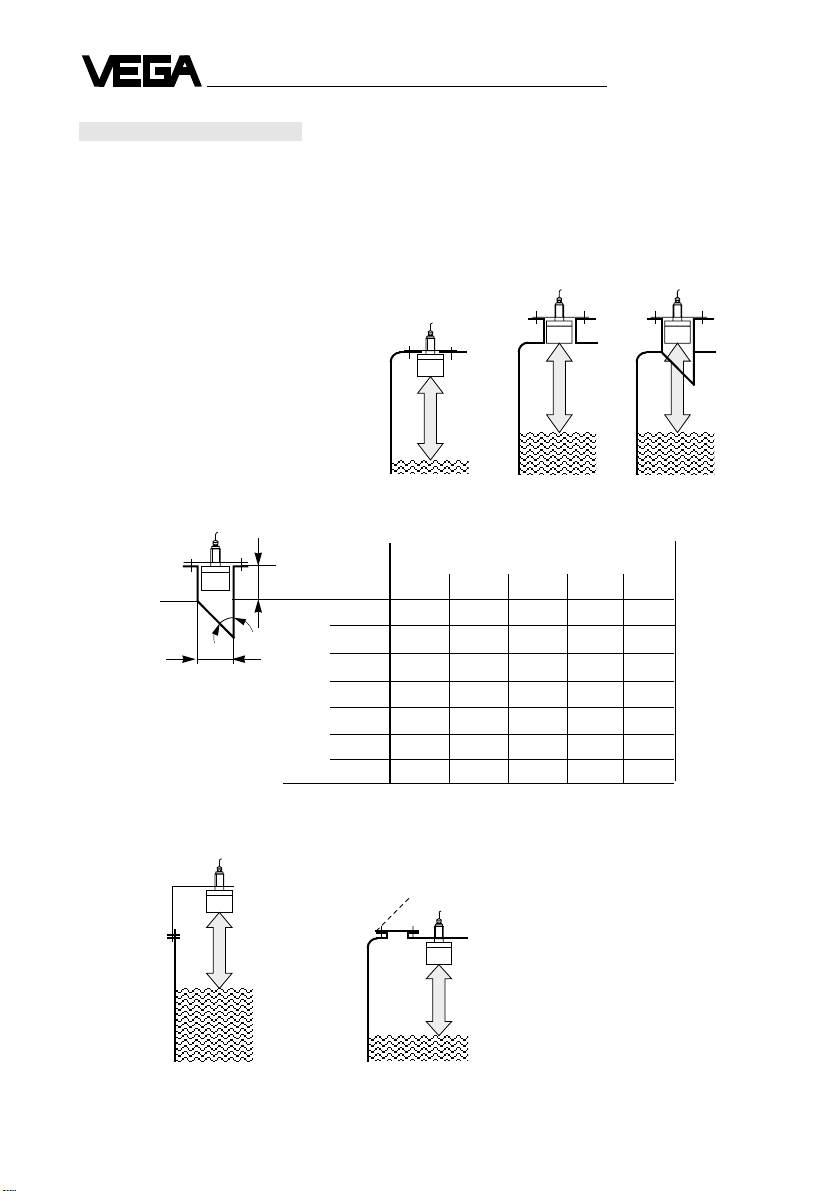
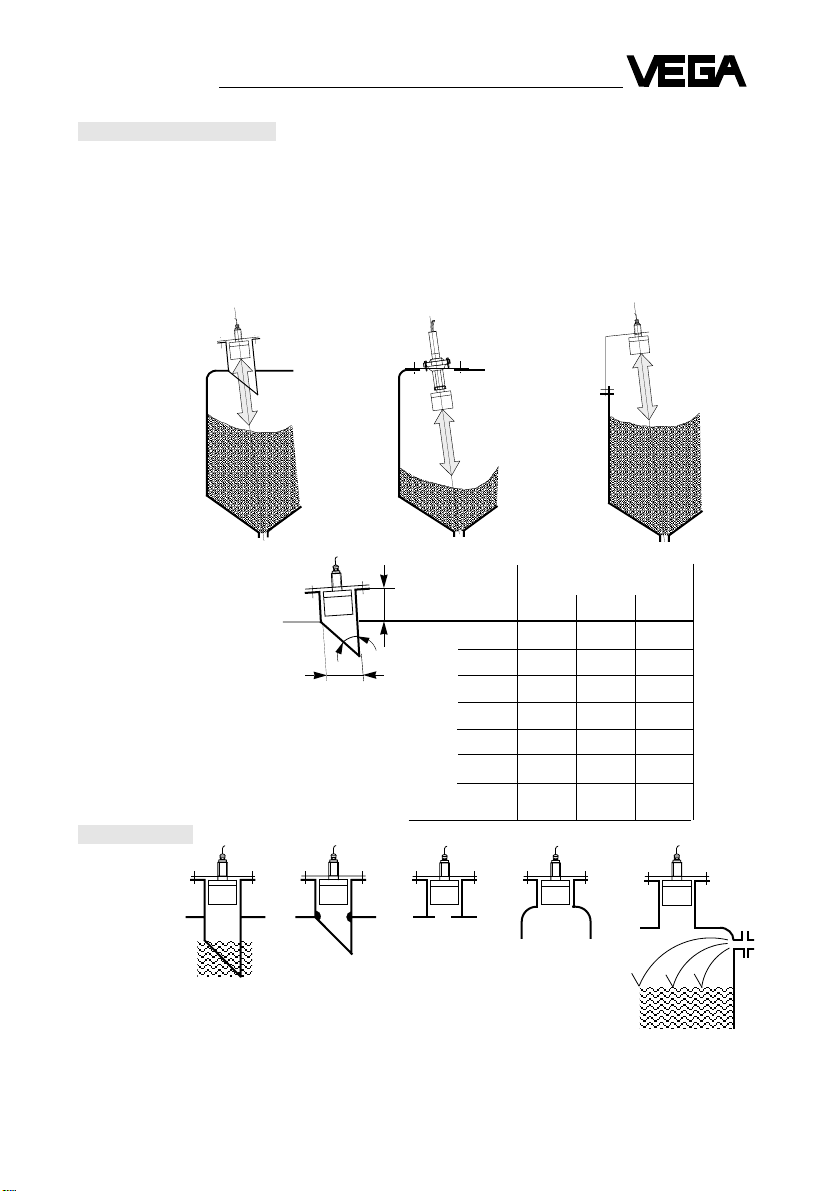
Installation example for liquid tanks
- Select sensor type and installation in relation to
max. level to be measured.
- Protect the inner side of the socket piece for
corrosion or use non-corrosive material.
- In case of round tank ceilings, the sensor should
be installed on a socket piece not located in the
centre or on an opening (on half radius).
In closed vessels:
Tube or direct mounting. If socket
piece length > 100 mm or for
VEGASON 72 / 73 or > 150 mm for
VEGASON 74 / 75 are required
(max. level). Note the dimensions
in the following table.
in open vessels: Mounting via
Mounting by means access hatch:
of bracketry Simple direct mounting
Max. socket piece length L at:
(dimensions in mm)
VEGASON 71 - 2 72 - 2 73 - 2 74 - 2 75 - 2
at socket 100 300 400 400 ––– –––
piece ø
150 300 500 400 300 300
200 ––– ––– 500 400 400
250 ––– ––– 600 500 500
300 ––– ––– ––– 600 600
350 ––– ––– ––– 700 700
Min. distance 300 500 800 800 1000
L
ø
45°
Socket piece length
Page 11
Technical Information
71 - 2 … 75 - 2 11
Installation examples for solids
- Select sensor type and installation in relation to
max. level to be measured.
- Protect the inner side of the socket piece from
corrosion or use non-corrosive material.
- Always direct the sensor (sound pulse) to the
centre of the silo.
- Install sensor as far as possible from the filling
entry.
- When using round ceilings, mount the sensor
half way between silo middle and edge.
Installation with cylindrical
socket piece
Installation with flanged
gimbal
Installation in open silos via
bracketry
socket piece length L at:
(dimensions in mm)
VEGASON 73 - 2 74 - 2 75 - 2
at socket 100 400 ––– –––
piece ø
150 400 300 300
200 500 400 400
250 600 500 500
300 ––– 600 600
350 ––– 700 700
Min. distance 800 … 800 … 1000 …
1000 1100 1200
Installation errors
(at tanks or silos)
L
45°
ø
The socket piece
should not be
covered by the
product.
The socket piece
should not have
weldment joints.
Access too small. Socket pieces in
the centre of
round tank ceilings
are not recommended for the
sensor installation.
The beam should
not cross the
material inflow.
Page 12
2
1
3
4
5
91011
12
13 14
21 22
23
15 16
17
18
19
20
24
+ - + -
6
7
8
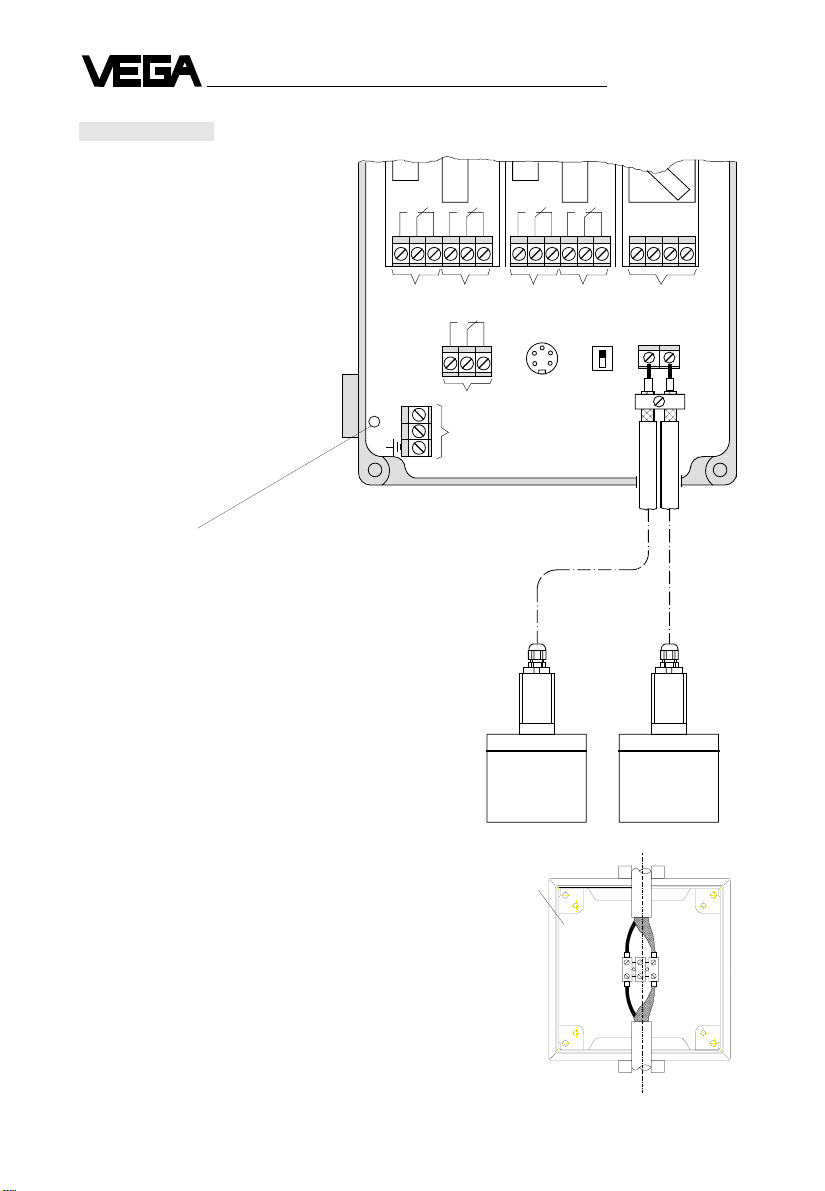
Fail safe relay output
Supply voltage
Service socket
1
2
Service
switch
1…………2 …………… 3………...4
Relay output
1………2
Current output
respective max.
line length = 300 m
Sensor 1 Sensor 2
Channel 1
Channel 2
Technical Information
12 71 - 2 … 75 - 2
Electrical connection
Note:
During operation the transducer is pulsed with high
voltages. It is therefore recommended that first all
electrical connections are provided and then the
power supply for the instrument switched on.
Attention!
Fuse
Type TR5
Manufacturer e.g. Messrs. Wickmann
Current values see technical data page 6
The connection line to the respective sensors can
be extended afterwards as shown.
If must be observed that the max. line length of
300 m is not exceeded.
Standard
waterproof
dividing box
Page 13
Operating surface
71 - 2 … 75 - 2 13
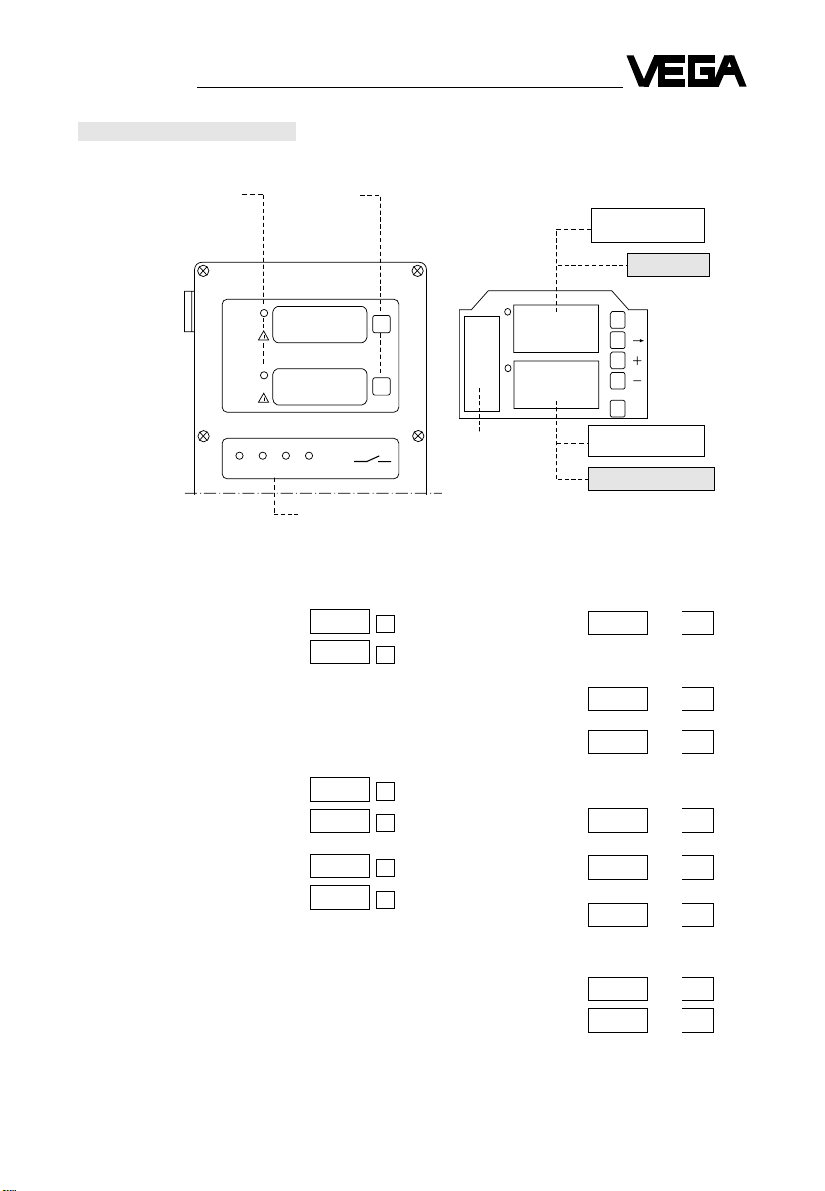
Indication and operating elements
Outer view Inner view
Indication of measured values
5.00 m
e.g. level 1 … 9 m
5.00 m
Demonstration form after
programming of - multiplier
- allocation of decimal point
- decimal point e.g.
50.0 %
level 0 … 100 %
5.00 %
2000 hl
level 0 … 4000 hl
2000 hl
Mode range
general reset 0 - 00 … 99
sensor optimization 1 1 - 01 … 27
sensor optimization 2 2 - 01 … 27
linearization curve 4 4.H.01 … 32
linearization curve 5 5.H.01 … 32
linearization curve 6 6.H.01 … 32
fault signals
channel 1 E2.01 … .04
channel 2 E2.01 … .04
4
1
1 2 3
2
1
MOD
STO
2
MODEFIELD
Indication of
measured values 1
PARAMETER FIELD
Indication of
measured values 2
8888
8888
8888
8888
LED-indication of
relay outputs 1…4
Operating
scheme
LED-indication
fault signal
channel 1 and 2
Units indicator
visible in slot
behind window
Selection of
mode
Cursor position
Figures raise
Figures lower
Storage
Page 14
Operating surface
14 71 - 2 … 75 - 2
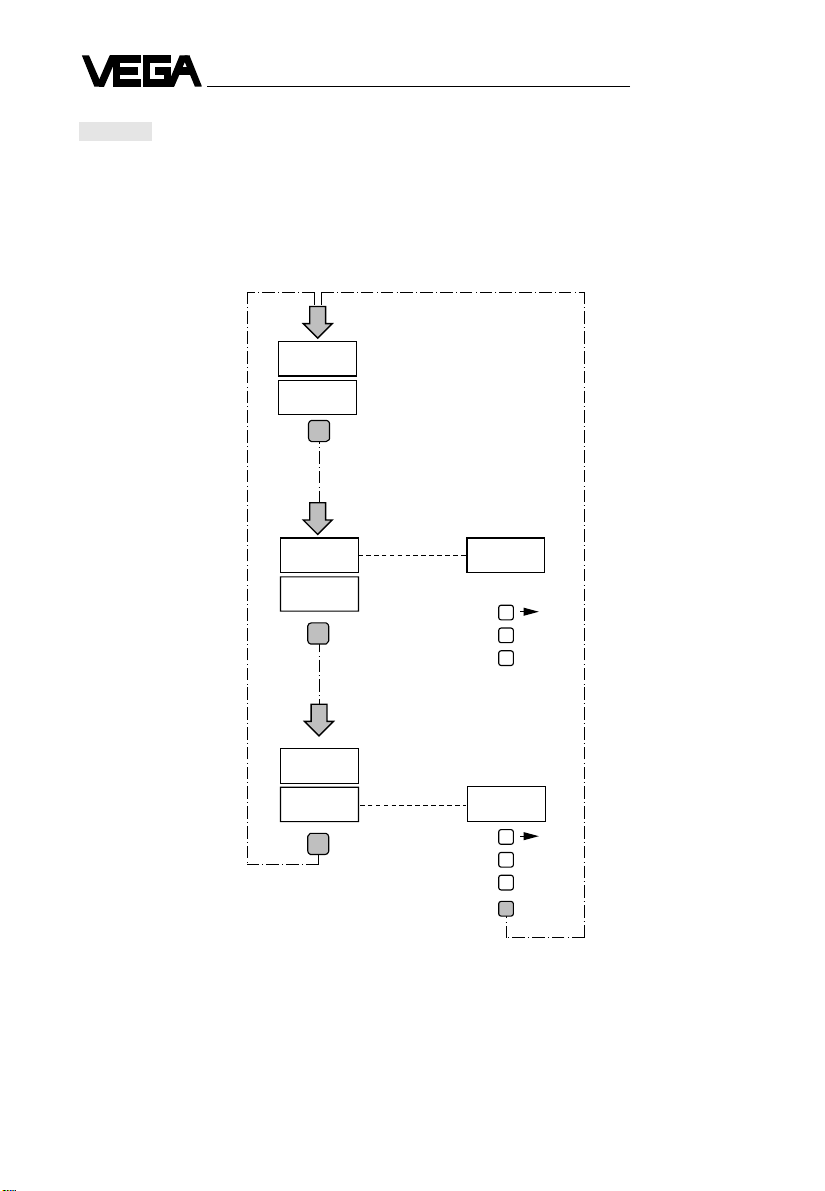
The VEGASON 71 - 2 … 75 - 2 has 3 modes which
can be accessed (scrolling) via the MOD-button:
Mode: 1. indication of measured values
2. mode range
3. parameter input
If no push button is used for a 60 minutes period,
the VEGASON 71 - 2 … 75 - 2 times out and
reverts to the input value display.
Operating
In mode 99 the main stage 0 can be left and stage
1 and 4 … 6 can be selected. The reset to main
stage 0 is done in the respective mode 99.
During a parameter adjustment the last mode
number used is activated again after each STOcommand and entry to the mode range.
Indication of measured
values:
level in m
level in %
and acc. to the demonstration form e.g.
quantity in hl.
For selection of the mode
numbers see
MODEFIELD. The parameters of the selected
mode numbers can be
checked or modified in
mode 3.
Programming of parameters see PARAMETER
FIELD. The parameters of
the selected mode can be
modified and stored with
STO-button. With STO
reset to mode 1.
MOD
MOD
+
-
MOD
STO
+
-
Cursor position
Figures raise
Figures lower
Cursor position
Figures raise
Figures lower
5.00
5.00
0 00000
16.93
0 99
0 - 00
– – – –
0
1. Indication
of
measured
values
2. Mode range
3. Parameter
adjustment
Page 15
Start-up
71 - 2 … 75 - 2 15
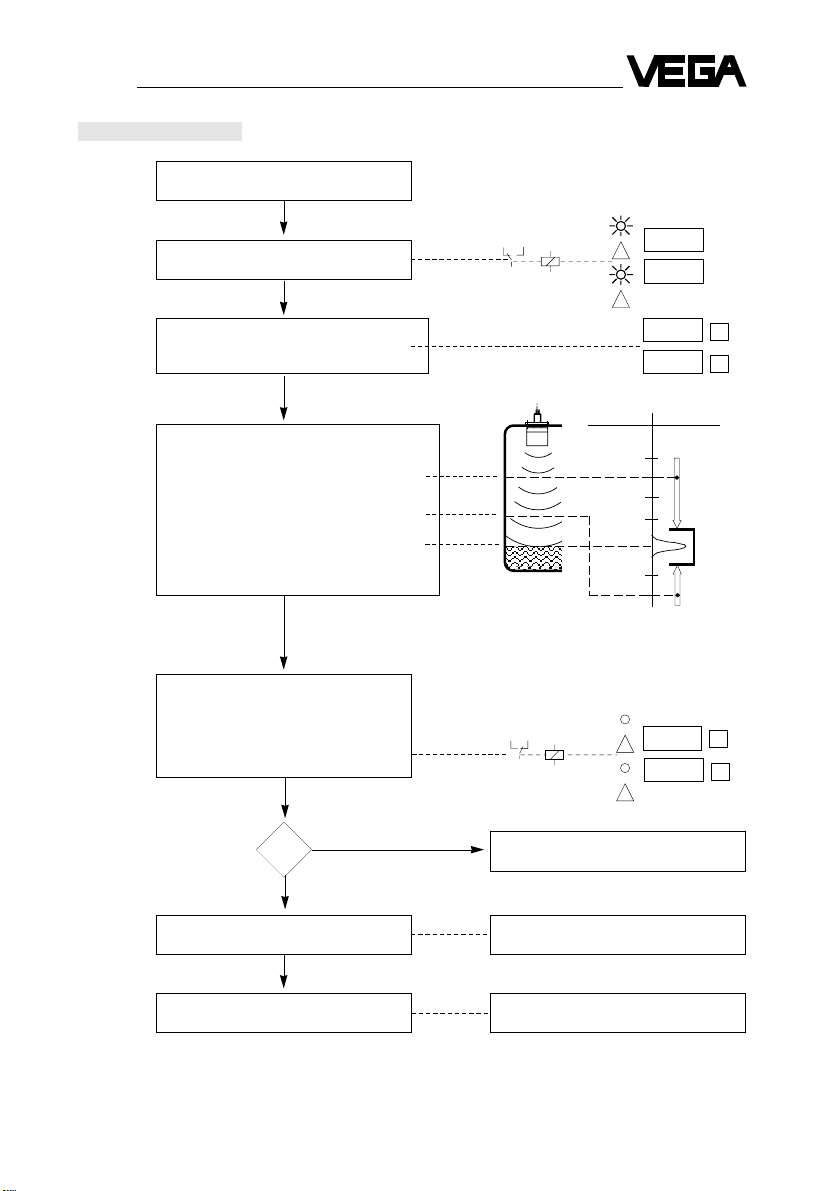
Flow diagram for start-up
Connect sensors with central electronics
and supply with operating voltage.
The software version is indicated and the
fault signal reacts.
The measuring system is now ready and
starts for each separate channel with the
commissioning preliminary indication: 0.00 m.
Commissioning, i.e.:
1. Echo limitation from top to bottom.
2. Echo limitation from bottom to top.
3. Formation of a measuring window within
which an evaluation of the echo is carried
out.
After approx. 1 … 3 minutes the measuring
system is ready. The fault signal extinguishes. The sensors 1 and 2 adapted to
the vessel feature and operate with the
parameters of the VEGA-adjustments.
Level measurement 1
Level measurement 2
Sensor 2 determines in vessel 2 the actual
distance of 9,50 m
Sensor 1 determines in vessel 1 the actual
distance of 9,20 m
Optimizations are necessary for sensor 1
and / or sensor 2
NO
YES
?
!
!
1
2
5 6
4
14.94
!
!
1
2
5 6
4
9.20
9.50
0.00
0.00
m
m
m
m
Page 16
Start-up
16 71 - 2 … 75 - 2
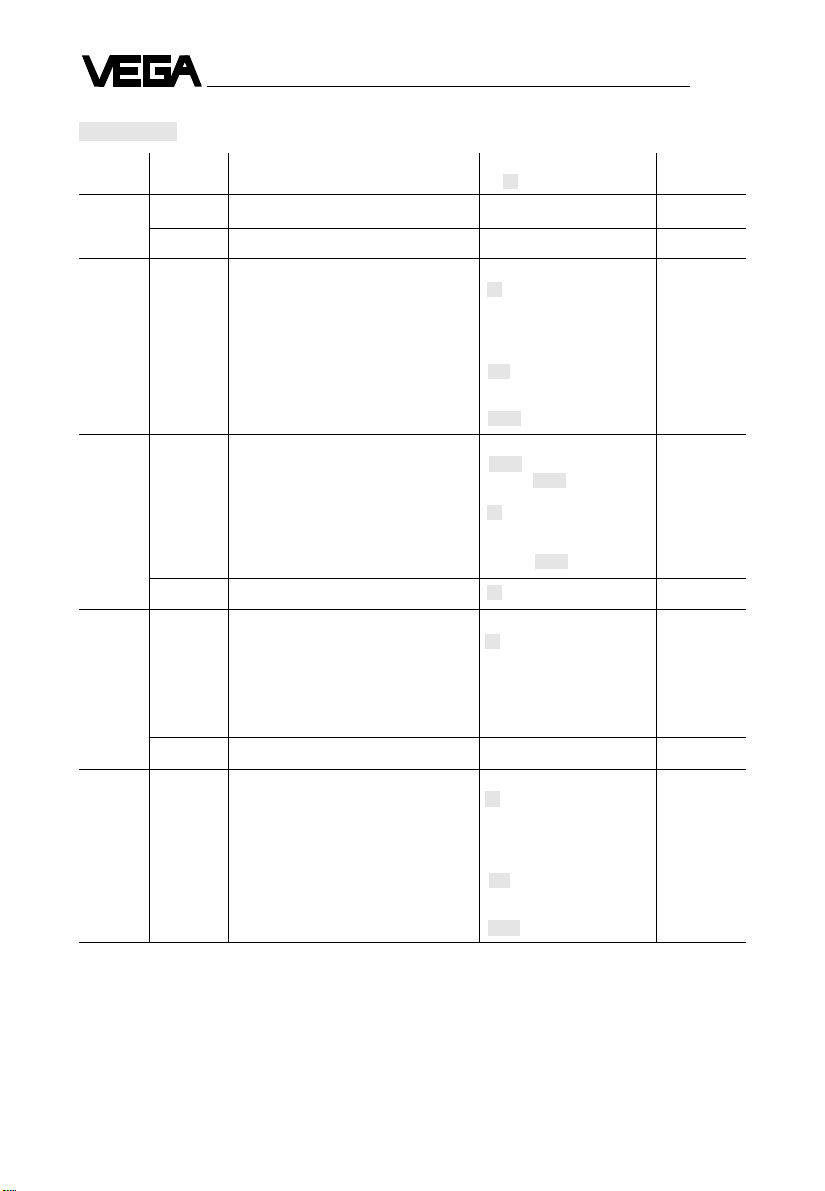
Mode listing 0
Function Mode-no. Mode description Parameter Page
( = factory preset)
0 - 00 Software version ........................................ e.g. 16.93
0 - 01
… 09 not used ..................................................... – – – –
Adjustment 0 - 10 Selection of adjustment procedure
channel 1
- in m without level change ....................... 1
- per cent correction .................................. 2
- in % with level change ........................... 3
0 - 11
Empty adjustment
- distance in m........................................... sensor specific p. 20
- level in % ................................................ 0.0 … 80.0
0 - 12
Full adjustment
- distance in m........................................... sensor specific
- level in % ................................................ 100.0 … 20.0
Display Multiplier
function 0 - 13 - related to 0 % ......................................... 0000 … 9999
0 - 14 - related to 100 % ..................................... 0000 … 1000 … 9999
0 - 15 Measuring unit
- level percentage in m ............................. 1 p. 29
- level percentage in % ............................. 2
- volume percentage (scaled) ................... 3
0 - 16 Decimal point............................................ 0.000 … 000.0 … 0000
0 - 17 Integration time ........................................ 0 … 900
Lineari- 0 - 18 Linearization curves
zation - linear ...................................................... 1
- cylindrical tank ........................................ 2
- not used ................................................. 3 p. 24
- individually programmable curve 4 ......... 4
- individually programmable curve 5 ......... 5
- individually programmable curve 6 ......... 6
0 - 19 not used ..................................................... – – – –
Adjustment 0 - 20 Selection of adjustment procedure
channel 2 - in m without level change ....................... 1
- per cent correction ................................. 2
- in % with level change ........................... 3
0 - 21 Empty adjustment
- distance in m........................................... sensor specific p. 20
- level in % ................................................ 0.0 … 80.0
0 - 22 Full adjustment
- distance in m........................................... sensor specific
- level in % ................................................ 100.0 … 20.0
general parameters
Page 17
Start-up
71 - 2 … 75 - 2 17
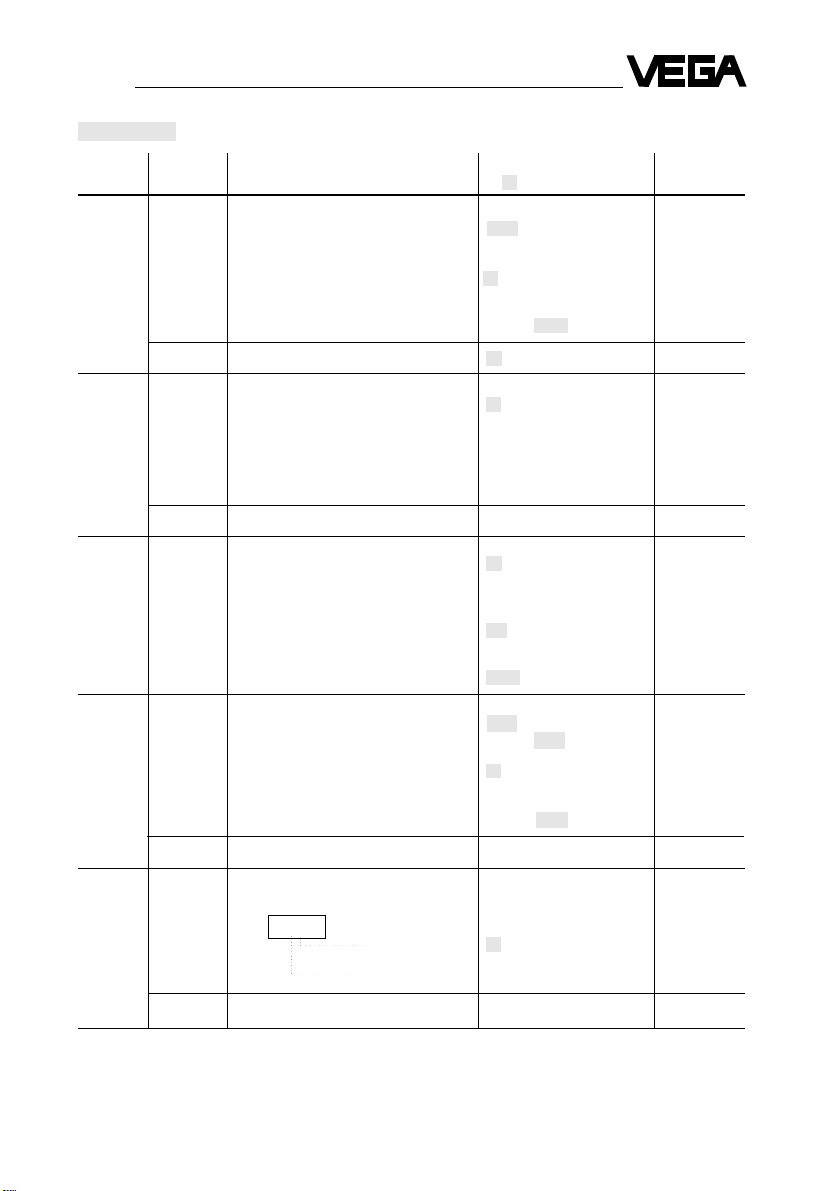
Mode listing 0 general parameters
Display Multiplier
function 0 - 23 - related for 0 % ........................................ 0000 … 9999
0 - 24
- related for 100 % .................................... 0000 … 1000 … 9999
0 - 25
Measuring unit
- level percentage in m ............................. 1 p. 29
- level percentage in % .............................
2
- volume percentage (scaled) ................... 3
0 - 26 Decimal point ........................................... 0.000 … 000.0 … 0000
0 - 27 Integration time ........................................ 0 … 900
Lineari- 0 - 28 Linearization curves
zation - linear ...................................................... 1
- cylindrical tank ........................................ 2
- not used ................................................. 3 p. 24
- individually programmable curve 4 .........
4
- individually programmable curve 5 ......... 5
- individually programmable curve 6 ......... 6
0 - 29 not used ..................................................... – – – –
Adjustment 0 - 30 Selection of adjustment procedure
differential - in m without level change ....................... 1
measure- - percent correction .................................. 2
ment 0 - 31 Adjustment min. difference
- in m ......................................................... sensor specific p. 22
- percent correction .................................. 0.0 … 80.0
0 - 32 Adjustment max. difference
- in m ......................................................... sensor specific
- percent correction .................................. 100.0 … 20.0
Display Multiplier
function 0 - 33 - related to 0 % ......................................... 0000 … 9999
0 - 34 - related to 100 % ..................................... 0000 … 1000 … 9999
0 - 35 Measuring unit
- level percentage in m ............................. 1 p. 29
- level percentage in % ............................. 2
- volume percentage (scaled) ................... 3
0 - 36 Decimal point ........................................... 0.000 … 000.0 … 0000
0 - 37 … 39 not used ..................................................... ––––
Display 0 - 40 Display coordination
1 1 0 = inactive p. 22
Display 2 1 = level indication
(channel specific)
Display 1
2 = differential indication
0 - 41 u. 42 not used ..................................................... – – – –
Function Mode-no. Mode description Parameter Page
( = factory preset)
(continuation)
Page 18

Start-up
18 71 - 2 … 75 - 2
Mode listing 0 general parameters
Function Mode-no. Mode description Parameter Page
( = factory preset)
(continuation)
Relay 0 - 43 Coordination
output 1 - channel 1 ................................................ in m = 1 in % = 2
- channel 2 ................................................ 34
- difference ............................................... 56p. 31
0 - 44 Mode
- two-point level switch ............................. 1
- pump function switch .............................. 2
- tendency determination raising .............. 3
- tendency determination lowering ........... 4
0 - 45 Switching 1 (on) ............................. sensor specific
0 - 46 command 2 (off) ............................. sensor specific
0 - 47 Indication of running period ....................... indication in 10 h-units
Relay 0 - 48 Coordination
output 2 - channel 1 ................................................ in m = 1 in % = 2
- channel 2 ................................................ 34
- difference ............................................... 56p. 31
0 - 49 Mode
- two-point level switch ............................. 1
- pump function switch .............................. 2
- tendency determination raising .............. 3
- tendency determination lowering ........... 4
0 - 50 Switching 1 (on) ............................. sensor specific
0 - 51 command 2 (off) ............................. sensor specific
0 - 52 Indication of running period........................ indication in 10 h-units
Relay 0 - 53 Coordination
output 3 - channel 1 ................................................ in m = 1 in % = 2
- channel 2 ................................................ 34
- difference ............................................... 56p. 31
0 - 54 Mode
- two-point level switch.............................. 1
- pump function switch .............................. 2
- tendency determination raising .............. 3
- tendency determination lowering ........... 4
0 - 55 Switching 1 (on) ............................. sensor specific
0 - 56 command 2 (off) ............................. sensor specific
0 - 57 Indication of running period ....................... indication in 10 h-units
Relay 0 - 58 Coordination
output 4 - channel 1 ................................................ in m = 1 in % = 2
- channel 2 ................................................ 34
- difference ............................................... 56p. 31
0 - 59 Mode
- two-point level switch ............................. 1
- pump function switch .............................. 2
- tendency determination raising .............. 3
- tendency determination lowering ........... 4
0 - 60 Switching 1 (on) ............................. sensor specific
0 - 61 command 2 (off) ............................. sensor specific
0 - 62 Indication of running period ....................... indication in 10 h-units
0 - 63 Interval time for pump function .................. 0000 … 9999 p. 34
Page 19

Start-up
71 - 2 … 75 - 2 19
Mode listing 0 general parameters
Function Mode-no. Mode description Parameter Page
( = factory preset)
(continuation)
Current 0 - 64 Coordination - channel 1 ..................... 1
output 1 - channel 2 ..................... 2
- difference ..................... 3 p. 37
0 - 65 Charac- - end ............................... 20.00 … 00.00
0 - 66
teristics - start .............................. 00.00 … 04.00 … 20.00
0 - 67
not used ..................................................... – – – –
Current 0 - 68 Coordination - channel 1 ..................... 1
output 2 - channel 2 ..................... 2
- difference...................... 3 p. 37
0 - 69 Charac- - end................................ 20.00 … 00.00
0 - 70
teristics - start .............................. 00.00 … 04.00 … 20.00
0 - 71 … 92 not used ..................................................... – – – –
0 - 93 Fault signal processing
store actual current
1 1 1 switching relay p. 38
difference unchanged = 1
channel 2 current 0 mA
channel 1 switching relay
de-energizes = 2
current goes to 0 %
switching relay
de-energizes = 3
current goes to 100 %
switching relay
de-energizes = 4
0 - 94 Simulation - channel 1
0 - 95 - channel 2 sensor specific in m p. 39
0 - 96 - difference
0 - 97 Basic - switched off .................. 0 p. 40
adjustment - switched on .................. 1
0 - 98 Keyword - switched off ................... 0 p. 40
- switched on .................. 1
0 - 99 Change - general parameter ................ 0
- sensor optimization 1 ........... 1
- sensor optimization 2 ........... 2 p. 41
- linearization curve 4 ............. 4
- linearization curve 5 ............. 5
- linearization curve 6 ............. 6
Page 20

Adjustment at level measurement
20 71 - 2 … 75 - 2
Level measurement
Two separate level measurements can be obtained
with the VEGASON 71 - 2 … 75 - 2 (measuring
system).
The adjustment is carried out for
- level measurement 1 = measuring channel 1
in mode range no. 10 … 12
- level measurement 2 = measuring channel 2
in mode range no. 20 … 22
The adjustment procedures are carried out separately for each sensor.
The display coordination is programmable and
supplied as factory preset in mode 40 as follows:
0 – 4 0
1 1
level 2 (display 2)
level 1 (display 1)
Selection of adjustment procedure
The type of empty adjustment (mode 11) and full
adjustment (mode 12) is determined with the parameter adjustment of this mode.
The type of adjustment depends on the local
conditions.
Mode description
Mode 10 = 1 means adjustment in m without product level change, i.e.
- with this adjustment procedure the distances in m determined from the vessel drawings
are programmed relating to the levels 0 % and 100 %
- level is not important
Mode 10 = 3 means adjustment in % without product level change, i.e.
- with this adjustment procedure the levels are programmed in % and the respective
measured distance (sensor … level) is calculated automatically
- product level change is needed.
Programming example
Change of mode 10 = 3 of mode 10 = 1 .................. • select mode 0 - 10 in MODEFIELD
• program figure1 in PARAMETER FIELD
• then store with STO-button
Same procedure for channel 2, however mode 0 - 20.
Demonstration
Mode 10 = 1 Mode 10 = 3
Min. distance
^ 100 %
partly filling
= e.g. 75 %
partly emptying
= e.g. 25 %
Max. distance
^0 %
MODE 0 - 10
Page 21

Adjustment at level measurement
71 - 2 … 75 - 2 21
Empty / full adjustment in m without product level change
Programming pre-requirement
Mode 10 = 1
Mode 40 = 11
With this adjustment procedure two distances
(sensor … product surface) are defined in m
relating to the levels of 0 % and 100 %.
MODE 0 - 11 and 0 - 12
Programming example with VEGASON 73 - 2 (individual programming sequence of the empty /
full adjustment)
• select mode 0 - 12 in MODEFIELD
• program 01.00 m in PARAMETER FIELD
• then store with STO-button
• select mode 0 - 11 in MODEFIELD
• program 09.00 m in PARAMETER FIELD
• then store with STO-button
Empty / full adjustment in % with product level change
Programming pre-requirement
Mode 10 = 3
Mode 40 = 11
MODE 0 - 11 and 0 - 12
Programming example with VEGASON 73 - 2 (individual programming sequence of the empty /
full adjustment)
• select mode 0 - 12 in MODEFIELD
• program 075.0 % in PARAMETER FIELD
• then store with STO-button
• select mode 0 - 11 in MODEFIELD
• program 025.0 % in PARAMETER FIELD
• then store with STO-button
With this adjustment procedure two levels are
defined in % relating to two different, actually
measured distances (sensor … product surface).
The difference should be as large as possible. The
central electronics determines the adjusted range
(e.g. 25 … 75 %) from the total range (0 … 100 %).
Same procedure for channel 2, however
mode 0 - 21 and 0 - 22.
1
distance
9
100
m0%
0
25
50
75
5
7
3
1 m distance
^ 100 %
9 m distance
^0 %
19100
0
25
50
75
5
7
3
measured
distance
^ 75 %
measured
distance
^ 25 %
m0%
level
distance level
Page 22

Adjustment at differential measurement
22 71 - 2 … 75 - 2
Differential measurement
A differential measurement can be obtained with
the measuring system VEGASON 71 - 2 … 75 - 2.
The difference is formed out of the values of channel 2 minus channel 1. If possible, mount the
sensors at the same height.
The adjustment is made for both measuring channels together in mode range no. 30 … 32.
It is possible to adjust channels 1 and 2 separately
as described under level measurement.
The display coordination is defined as follows in
mode 0 - 40:
0 - 4 0
1 1
0 = display 2 switched off
1 = display 2 indicates level
of channel 2
2 = display 2 indicates difference
0 = display 1 switched off
1 = display 1 indicates level
of channel 1
2 = display 1 indicates difference
The pre-adjustment 1 for mode 0 - 30 should not be
changed.
Mode description
Mode 0 - 30 = 1 mean adjustment in m without product level change, i.e.
- with this adjustment procedure various differences (levels, gauges etc.) are
programmed relating to the values 0 % and 100 %
- already available levels or water gauges are unimportant
Selection of adjustment procedure MODE 0 - 30
MODE 0 - 40
Programming example
for - differential level on display 1
- level 2 (downstream water) on display 2 ....... • select mode 0 - 40 in MODEFIELD
• program figure 21 in PARAMETER FIELD
• then store with STO-button
Page 23

Adjustment at differential measurement
71 - 2 … 75 - 2 23
Differential adjustment in m without differential measurement
Programming as pre-requirement
Mode 30 = 1
Mode 40 = 21 or 12, display coordination
With this adjustment procedure two differences
in m are defined, relating to the values of 0 % and
100 %.
MODE 0 - 31 and 0 - 32
Programming example 1
with VEGASON 71 - 2 mounted at the same height
for weir control.
(Individual programming sequence of the min. /
max. difference)
• select mode 0 - 31 in MODEFIELD
• program 00.00 m in PARAMETER FIELD
• then store with STO-button
• select mode 0 - 32 in MODEFIELD
• program 01.00 m in PARAMETER FIELD
• then store with STO-button
The level difference can occur within the whole
range (in the example e.g. 0 … 5 m) and can be
detected.
Programming example 2 as above, however
sensors mounted at different height
program 0 m + 0,5 m = 0,5 m respective 0 %
in mode 31 = 00.50 m
program 1 m + 0,5 m = 1,5 m respective 100 %
in mode 32 = 01.50 m
Further adjustment of channel 1 and 2
Upstream adjustment Full adjustment mode 0 - 12 = 01.00 m program distance
(channel 1) Empty adjustment mode 0 - 11 = 05.00 m program distance
Downstream adjustment Full adjustment mode 0 - 22
(channel 2) example 1 = 01.00 m or
example 2 = 01.50 m program distance
Empty adjustment mode 0 - 21
example 1 = 05.00 m or
example 2 = 05.50 m program distance
m
0
%
distance level
5
0
channel 1
upstream
liquid
Max-difference 1 m
^ 100 %
Min-difference 0 m
^0 %
downstream
liquid
∆ = 1m
4
3
2
1
100
channel 2
+ 0,5
m
0
%
100
5
0
channel 1
distance level
upstream
liquid
min-difference
max-difference
downstream
liquid
4
3
2
1
channel 2
The value of the sensor in the plus range of
channel 2 must be added to the min. and max.
distance
Page 24

Linearization
24 71 - 2 … 75 - 2
Linearization
Adapting to vessel geometry (channel 1)
The most usual vessel geometries are adjusted as
fixed curves in mode 0 - 18.
Mode 0 - 18 = 1 Fixed curve (linear) level percentage
for cylindrical tank output
Mode 0 - 18 = 2 Fixed curve for volume percentage
cylindrical tank output
It is also possible to program three customer
specific curves by accessing linearization 4 … 6
and to activate them in mode 18.
Each linearization curve consists of max. 32 index
markers, each index marker of a H/L-pair.
Mode 0 - 18 = 4 linearization curve 4 volume percentage
5 5 output
66
Output condition for the level in litres see
page 26, related to channel 1
- adjustment related to 0 % and 100 %, is carried
out
- Mode 0 - 15 = 3 (1 level percentage)
- Mode 0 - 18 = 1
- total volume of the vessel is known (for the
following example 100 m
3
)
- part volume for gauging the capacitance in litres
is known (for the following example = 5 m
3
)
Same procedure for channel 2.
MODE 0 - 18
Selection of linearization curve 4 … 6
Each linearization curve 4 … 6 can be accessed in
mode 0 - 99 and the reset carried out.
MODE 0 - 99
Programming example Linearization 4 ............. • select mode 0 - 99 in MODEFIELD
• program figure 4 in PARAMETER FIELD
• then store with STO-button
• push MOD-button to select index markers
Reset in mode 99 with figure 0 in PARAMETER
FIELD.
Selection of linearization curve 4 … 6
Reset to general parameter adjustment
0 - 99
0 - 01
4
5
4H.01
5H.01
6H.01
32
4 - 99
6
0
Page 25

Linearization
71 - 2 … 75 - 2 25
Display
number of the linearization curve 4 … 6
indication for level percentage = H
indication for volume percentage = L
number of index marker 01 … 32
Display 1 4 . H . 0 1 MODEFIELD
Display 2 1 0 0 . 0 PARAMETER FIELD
Mode listing 4 Linearization curve 4 … 6
Function Mode-no. Mode description Parameter
( = factory preset)
Index 4.H.01 1. index - level percentage ........... 000.0 … 100.0
marker 4.L.01 marker - volume percentage ...... 000.0 … 100.0
•
•
•
4.H.32 32. index - level percentage ........... 000.0 … 100.0
4.L.32
marker - volume percentage ...... 000.0 … 100.0
4 - 33
… 98 not used ..................................................... – – – –
4 - 99 Change - general parameter ............. 0
- sensor optimization 1 .......... 1
- sensor optimization 2 .......... 2
- linearization curve 4 ............ 4
- linearization curve 5 ............ 5
- linearization curve 6 ............ 6
Linearization curve 4
Linearization curve 5 see above, however 5.H.01 … 5.H.32
5.L.01 … 5.L.32 5 - 99
Linearization curve 6 see above, however 6.H.01 … 6.H.32
6.L.01 … 6.L.32 6 - 99
Proceeding
4.H.011
11
4.HHHH.01 4.H.00001 4.H.011
11
scrolling with
button
→
100.0
4.LLLL.01 4.H.99991 4.H.099
99
by scrolling with
button plus or minus
Page 26

Linearization
26 71 - 2 … 75 - 2
Determination of the index markers
Gauging the level in litres
- mode 40: coordinate display 1 to level 1
- mode 99: select linearization curve 4
- fill or empty step by step with part volume
- note the respectively measured values for H %
(level percentage) of display 1 on the linearity
protocol
- the respective value for L % (volume percentage) should be calculated as follows
100 % x part volume1 (…32)
L % = ––––––––––––––––––––––––
vessel volume
e.g. volume percentage for 1 part volume:
100 % x 5 m
3
L % = –––––––––––– = 5 % (acc. to example)
100 m
3
- note the calculated values for L % in the linearity
protocol
- continue the procedure of "gauging the level in
litres" with the same part volume until H 100 %
and L 100 % as described above.
- Attention:
The linearization curves must ALWAYS be
finished with H 100 % and L 100 %. This finish
can be programmed after any number of index
markers.
Demonstration to the following programming example (see page 27)
Heights %
Volume
%
5
etc.
level perc. 02
level perc. 01
0
30
40
50
70
80
60
90
100
10 20 30 40 50 60 70 80 90
100
20
10
100.0
12.0
4.H.01
4.L.01
4.L.32
5.0 100.0
4H.32
index marker
01 … 32
index marker
01 … 32
Page 27

Linearization
71 - 2 … 75 - 2 27
Linearity protocol
Linearization curve
index level percentage volume perc.
marker no. H L
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Date
Name
Linearization curve
index level percentage volume perc.
marker no. H L
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Date
Name
Page 28

Linearization
28 71 - 2 … 75 - 2
Programming example:
Index marker 01........................................................ • index marker 01 4.H.01
select level percentage
MODEFIELD
Level percentage ...................................................... • acc. to linearity protocol program 12.0 % in
PARAMETER FIELD
• then store with STO-button
• index marker 01 4.L.01
select volume percentage
MODEFIELD
Volume percentage................................................... • acc. to linearity protocol program 5 % in
PARAMETER FIELD
• then store with STO-button
Index marker 02 ....................................................... • index marker 02 4.H.02
select and program the data as
described above etc.
After programming is finished .................................. i.e. transmission of all data noted in the linearity
protocol,
- reset factory settings
- mode 0 - 15 = 3 (volume percentage)
- activate linearization curve 4 in mode 0 - 18
(mode 0 - 18 = 4)
Same procedure for linearization curve 5 and 6.
Page 29

Measurement, Display function
71 - 2 … 75 - 2 29
Multiplier
for 0 % and 100 % (channel 1)
(channel 1)
(channel 1)
MODE 0 - 13 and 0 - 14
Values of 0000 … 9999 can be coordinated to
levels 0 % and 100 % after the adjustment procedure.
The central electronics calculates all intermediate
values out of this data.
Measuring units and pattern MODE 0 - 15
Programming possibilities:
Mode combination
Demonstration / vessel geometry Measuring unit Measuring unit Linearization
0 - 15 0 - 18
Percentage level m / % / scaled m 1
%2
1
scaled 3
(Mode 0 - 13,
0 - 14 and 0 - 16)
Percentage volume % / scaled % 2
2
scaled 3 and
(Mode 0 - 13, 4 … 6
0 - 14 and 0 - 16)
Decimal point MODE 0 - 16
Summary
The display can be adjusted to a specific application by combinations of these modes and adaption
of their parameters.
Mode 0 - 13 and 0 - 14
values of
0000 … 9999
2005 hl
Mode 0 - 16
position of decimal point
Mode 0 - 15
measuring unit (pattern)
The position of the decimal point can be determined
in mode 16.
In mode 0 - 15 the signal conditioning instrument
can be defined for the display either (proportional)
volume or level.
Measuring units can be selected and slotted into
the window.
Pattern for:
% m cm ft kg t gal hl m
3
l
Page 30

Measurement, Display function
30 71 - 2 … 75 - 2
Programming example
After multiplying
- the distance corresponds
to 9 … 1 m
- the level corresponds to
10 … 4000 hl
(10 hl = min. quantity)
Example display
10 hl … 4000 hl
Multiplier for 0 % ...................................................... • select mode 0 - 13 in MODEFIELD
• program the value 001.0 in PARAMETER FIELD
• then store with STO-button
The actual distance of 5.00 (m)
remains indicated on display 1.
Multiplier for 100 % .................................................. • select mode 0 - 14 in MODEFIELD
• program the value 400.0 in PARAMETER FIELD
• then store with STO-button
The actual distance of 5.00 (m)
remains indicated on display 1.
Measuring unit and pattern ...................................... • select mode 0 - 15 in MODEFIELD
• program the figure 3 in PARAMETER FIELD
• then store with STO-button
50 % of the previously programmed
multiplication factor (
^ 199.5) plus
the min. quantity (
^ 1,0) is indicated
on the display, i.e.
Position of decimal point .......................................... • select mode 0 - 16 in MODEFIELD
• shift with button
→ the position of the decimal
point 1 x to the right
• then store with STO-button
The desired range is displayed.
Insert pattern hl.
Follow the same procedure for channel 2, but use
modes 0 - 23 … 0 - 26 or for differential measurement, modes 0 - 33 … 0 - 36.
100 %
50
Mode 14
Mode 13
4000 hl
2005
100
Mode 15+16
1 m
5 m
9 m
NiveauDistanz
hl
5.00
2005
5.00
5.00
200.5
2005
Distance level
(linearized)
Page 31

Measurement, Relay output
71 - 2 … 75 - 2 31
Module for relay output 1 … 4
The pulse-echo measuring system can be equipped
with max. two relay modules.
Each module has two relay outputs.
Two-point level switch
Mode coordination / meaning module relay coordi- mode switching command
output nation 1 and 2
1 1 0 - 43 0 - 44 = 1 0 - 45 and 0 - 46
2 0 - 48 0 - 49 = 1 0 - 50 and 0 - 51
2 3 0 - 53 0 - 54 = 1 0 - 55 and 0 - 56
4 0 - 58 0 - 59 = 1 0 - 60 and 0 - 61
Coordination
(Module 1, relay output 1)
MODE 0 - 43
For each relay output the coordination can be
programmed separately and relates to:
- measurement (channel 1, 2 and difference)
- measuring unit
- level / volume percentage
vessel geometry / measuring result measuring unit coordination linearization
(channel definition) 0 - 43 0 - 18, 0 - 28
level percentage channel 1 m = 1
% = 2 0 - 18 = 1
channel 2 m = 3
% = 4 0 - 28 = 1
difference m = 5
%= 6
volume percentage channel 1 % = 2 0 - 18 = 2
or 4 … 6
channel 2 % = 4 0 - 28 = 2
or 4 … 6
difference % = 6
Mode
(Module 1, relay output 1)
MODE 0 - 44
Mode 0 - 44 = 1
two-point level switch
switching command 2 via
switching command 1
correspond to function A
(overfill protection)
0
25
75
100
50
% m
distance acc.t o sensor type
mode combination
switching command 2,
mode 0-46
switching command 1,
mode 0-45
(off)
(on)
Page 32

Measurement, Relay output
32 71 - 2 … 75 - 2
Mode
(Module 1, relay output 1) continuation
Mode 0 - 44 = 1
two-point level switch
switching command 1 via
switching command 2
correspond to function B
(protection against dry
running of pumps)
Switching command 1 and 2
(Module 1, relay output 1)
MODE 0 - 45 and 0 - 46
Mode 0 - 43 defines the measurement units
coordinated to the relay output.
Mode 0-44 determines the function of the relay
output.
Mode 0-45 = switching command 1 corresponds
relay switched on (on)
Mode 0-46 = switching command 2 corresponds
relay switched off (off)
With the operating sequence of the switching
commands, the A- or B-function i.e. overfill protection or protection against dry running of pumps is
determined.
See page 31 and 32.
The min. ∆ for the switching commands is 10 cm or
0,5 %.
Programming example for relay output 1 ............... - coordination to channel 1 with units in %
- mode 1
- two-point level switch in function A
(see page 31)
Coordination (channel 1 in %) .................................. • select mode 0 - 43 in MODEFIELD
• program figure 2 in PARAMETER FIELD
• then store with STO-button
Mode (two-point level switch).................................... • select mode 0 - 44 in MODEFIELD
• program figure 1 in PARAMETER FIELD
• then store with STO-button
Switching command 1 (on) ...................................... • select mode 0 - 45 in MODEFIELD
• program 025.0 % in PARAMETER FIELD
• then store with STO-button
Switching command 2 (off) ....................................... • select mode 0 - 46 in MODEFIELD
• program 050.0 % in PARAMETER FIELD
• then store with STO-button
Same function and procedure
for module 1, relay output 2
and module 2, relay output 3 and 4, however
with respective modes, see page 31.
0
25
75
100
50
% m
distance acc. to sensor type
switching command 1,
Mode 0-45
switching command 2,
Mode 0-46
(off)
(on)
Page 33

Measurement, Relay output
71 - 2 … 75 - 2 33
Using the VEGASON-measuring system in pump
stations allows several pumps to be used independent of the level. Due to the different switching
commands there could be unequal pump running
times (and wear).
With programming the mode "pump function" the
switch on period of the respective relay outputs is
monitored via the central electronics. An automatic
change-over (priority determination) ensures
equality of pump running periods. See the following
example with three pumps.
Priority determination by:
- switching on the measuring system
- all relay outputs concerned in the pump function
switched off, i.e. with all pumps
- with time interval, the time interval is active if
within the time programmed in mode 63 all
pumps are
not stopped.
In this case first all relay outputs are switched
off, the actual priority will be determined and the
pumps will be switched on again in new
sequence after 10 secs.
Factory preset of mode 0 - 63 with 9999 minutes
^ approx. 1 week to the max interval time.
Note:
Before changing this time, it should be checked
if the (10 secs.) switch off of all pumps will create
a problem.
P3 on
% m
100
80
60
40
20
0
P2 on
P1 on
P3 off
P2 off
P1 off
P1 on
P2 on
P3 on
P1 off
P2 off
P3 off
P3
P2
P1
2h
4h
6h
6h
4h
2h
h
distance acc. to sensor type
running periods
= 8 h
= 8 h
= 8 h
Two-point level switch with pump function switch
Page 34

Measurement, Relay output
34 71 - 2 … 75 - 2
Note
- The relay output included in the pump function
must be coordinated to one channel.
- The switch points 1 (on) must be always above
the switching commands 2 (off) (function B).
- When adding or cancelling a relay output of the
pump function, first all relays and therefore all
pumps de-energize and are switched on again
after 10 secs. with new priority.
Before a manipulation of this type, the impact
should be checked.
Indication of the running period
(maintenance info)
The switching on period of the individual relay
outputs, i.e. the running period of the respective
pump is determined by a software operating hour
counter. This period can be indicated on the display
in the mode range under various mode numbers
(see table below).
The time unit corresponds to 10
1
h.
Programming example for relay output 1 … 3 ....... - mode2
- two-point level switch with pump function switch
in function B
- time interval 1,5 days
Coordination ............................................................. as described on page 31, but also for mode 0 - 48
and 0 - 53
Mode relay output 1 .......................... • select mode 0 - 44 in MODEFIELD
• program figure 2 in PARAMETER FIELD
• then store with STO-button
relay output 2 .......................... • as above, however mode 0 - 49
relay output 3 .......................... • as above, however mode 0 - 54
Switching command 1 and 2 for relay output 1 … 3 as described on page 32 (diagram), however for all
relay outputs with adapted % or m-values.
Time interval ............................................................. • select mode 0 - 63 in MODEFIELD
• program e.g. 2160 min. (1,5 days) in
PARAMETER FIELD
• then store with STO-button
Indication of running period for relay output 1 .......... • select e.g. mode 0 - 47 in MODEFIELD on
display 2 to switch on time of relay output 1 is
indicated, i.e. the running period of pump 1
(example indication 12
^ 120 hours).
Same procedure for all relay outputs, with
associated mode, numbers see above.
Mode coordination / meaning
module relay coordi- mode switching com- indication of time interval
output nation mand 1 and 2 running period
1 1 0 - 43 0 - 44 = 2 0 - 45 and 0 - 46 0 - 47
2 0 - 48 0 - 49 = 2 0 - 50 and 0 - 51 0 - 52
0 - 63
2 3 0 - 53 0 - 54 = 2 0 - 55 and 0 - 56 0 - 57
4 0 - 58 0 - 59 = 2 0 - 60 and 0 - 61 0 - 62
Two-point level switch with pump function switch
(continuation)
Page 35

Measurement, Relay output
71 - 2 … 75 - 2 35
By parameter adjustment it is possible to define for
each relay output the tendency determination mode
and to coordinate this relay output to a channel.
The information for tendency determination is
formed of the rate of level change per time unit
(cm / min) and can be taken for raising and lowering tendency.
The adjustment is made in cm / min. and detects a
range of 000.1 … 999.9 cm / min.
Programming example for tendency determination, e.g. 50 cm / min.
Coordination as described on page 31
Mode for relay output 1 ..................................... • select mode 0 - 44 in MODEFIELD
• program figure 3 in PARAMETER FIELD
• then store with STO-button
Tendency determination for relay output 1................ • select mode 0 - 45 in MODEFIELD
• program e.g. 050.0 (cm / min.) in PARAMETER
FIELD
• then store with STO-button
After above programming the relay output reacts as
follows:
with raising rate of level change ≤ 50 cm / min.
> 50 cm / min.
Same procedure for relay output 2 … 4, however
with respective modes, see above.
Mode coordination / meaning module relay coordi- mode tendency
output nation
1 1 0 - 43 0 - 44 = 3 or 4 0 - 45
2 0 - 48 0 - 49 = 3 or 4 0 - 50
2 3 0 - 53 0 - 54 = 3 or 4 0 - 55
4 0 - 58 0 - 59 = 3 or 4 0 - 60
Tendency determination
relating to increasing level
example relay output 1
Requirement:
- enquire mode 3 (parameter 3) in mode 0 - 44
- program the value of the required tendency
determination in mode 0 - 45
Procedure:
- relay is not operated
- if the level raises quicker than programmed in
mode 0 - 45, the relay energizes
- if the filling speed is the same or lower than the
given value, the relay de-energizes again
11
9
10
11
9
10
Tendency determination
Page 36

Measurement, Relay output
36 71 - 2 … 75 - 2
Programming example for tendency determination, e.g. 8 cm / Min.
Coordination as described on page 31
Mode for relay output 1 ..................................... • select mode 0 - 44 in MODEFIELD
• program figure 4 in PARAMETER FIELD
• then store with STO-button
Tendency determination for relay output 1................ • select mode 0 - 45 in MODEFIELD
• program e.g. 008.0 (cm / min.) in PARAMETER
FIELD
• then store with STO-button
After programming as above the relay output reacts
as follows:
with reducing rate of level change ≤ 8 cm / min.
> 8 cm / min.
Tendency determination (continuation)
relating to reducing level
example for relay output 1
Requirement:
- enquire mode 4 (parameter 4) in mode 0 - 44
- program the value of the required tendency
determination in mode 0 - 45
Procedure:
- relay is not operated
- if the level reduces quicker than programmed in
mode 0 - 45, the relay energizes
- if the filling speed is the same or lower than the
given value, the relay de-energizes again
Note
(for rising or falling tendency determination)
If in case of fluctuating product surfaces of small
values are given for the tendency determination, it
is useful to program additional integration time.
Uncontrolled and undesired operation of the relay
output is then suppressed.
Same procedure for relay output 2 … 4, using
associated modes, see page 35.
Example as guideline:
at tendency determination < 10 cm / min. recommended integration time: 10 … 30 sec.
With < 10 cm / Min. the response time of the
tendency determination can be several minutes.
11
9
10
11
9
10
Page 37

Measurement, Current output
71 - 2 … 75 - 2 37
The pulse-echo measuring system can be equipped
with a current module.
The module has two current outputs.
Coordination MODE 0 - 64
Each current output can be coordinated separately
to either channel (or difference).
Same procedure for current output 2, but with
respective modes, see above.
Mode coordination / meaning current coordination range of characteristics
output final value initial value
1 0 - 64 = 1 channel 1
2 channel 2 0 - 65 0 - 66
3 difference
2 0 - 68 = 1 channel 1
2 channel 2 0 - 69 0 - 70
3 difference
Programming example
Coordinate current output 1, channel 2 .................... • select mode 0 - 64 in MODEFIELD
• program figure 2 in PARAMETER FIELD
• then store with STO-button
Output characteristic MODE 0 - 65 and 0 - 66
The characteristic of the current output is fixed by
an initial and final point.
The factory preset defines a course of 4 … 20 mA
acc. to 0 … 100 %.
Within the total range of 0.00 … 20.00 mA each
current value can be programmed for a rising or
falling level.
The current-∆ between initial and final value must
be min. 1 mA.
• select mode 0 - 65 in MODEFIELD
• program 16.00 mA in PARAMETER FIELD
• then store with STO-button
• select mode 0 - 66 in MODEFIELD
• program 00.00 mA in PARAMETER FIELD
• then store with STO-button
%
100
0
mA
20
4
End of characteristic
100 %
^ 16 mA
Start of characteristic
0 %
^ 0 mA
Factory preset Programming example
Module for current output 1 and 2
Page 38

Supplementary programmings
38 71 - 2 … 75 - 2
Signal processing MODE 0 - 93
The parameter adjustment of mode 0 - 93 defines
the condition of
- the relay outputs and
- the current outputs in case of failure.
In the parameter field a figure is coordinated to
each channel (level measurement 1, 2 and difference). The parameter adjustment can differ for
each channel.
0 - 9 3
1 1 1
difference
level 2, channel 2
level 1, channel 1
Programming possibilities
Mode 0 - 93 relay output / LED current output
1 no change actual current is stored
2 operated current - 0 mA
3 relays / current acc. to 0 %
4 de-energized current acc. to 100 %
Programming example
Changeover of the signal processing
relating to channel 1 (input the figure 4) ................... • select mode 0 - 93 in MODEFIELD
• program figure 4 in PARAMETER FIELD
• then store with STO-button
Note:
When adjusting the signal processing note the table of
error codes on page 55.
Page 39

Supplementary programmings
71 - 2 … 75 - 2 39
Simulation MODE 0 - 94 … 0 - 96
These modes enable the outputs for each channel
to be simulated over the whole range of the
distance in m, to test the function of the connected
instrumentation.
The simulation influences the selected channel and
therefore the outputs coordinated to this channel,
i.e. the
- relay outputs
- current outputs and
- the indication (display 2).
Mode coordination / meaning mode function simulation range
no. 72 / 73 - 2 74 - 2 75 - 2
94 level 1 / channel 1 0 … 11 m
95 level 2 / channel 2 0 … 22 m
96 difference 0 … 33 m
Operation
The plus button increases, the
minus button reduces the
outputs.
The simulation operates first of
all 0,05 m steps and is
accelerated to 0,25 m steps
after approx. 10 secs.
Note
The active simulation is recognized by
- selection of mode 94, 95 or 96
- flashing indication of all figures, e.g. .....................................................15.25 m.
Note:
If the simulation is active the measured values from
the sensor are NOT transmitted.
Mode 0 - 94, 0 - 95 or 0 - 96 must therefore be
immediately quit after the simulation is carried out.
The timer reset (after 60 minutes) should only be
used if absolutely necessary.
After having finished the simulation all outputs are
up-dated with the valid measured value.
Simulation example, e.g. channel 1 ....................... • select mode 0 - 94 in MODEFIELD
• activate simulation with button MOD, the actual
measurement flashes in PARAMETER FIELD
• modify the outputs with button Plus or Minus
• After having finished the test procedures quit the
simulation with MOD or STO-button.
relay output
measured value
sensor
current output
Simulation:
indication (in m)
15.25
0 - 94 96
Page 40

Supplementary programmings
40 71 - 2 … 75 - 2
Basic adjustment MODE 0 - 97
After having finished the parameter adjustments of
one or several modes it may be necessary to reset
the parameters of these modes to factory preset
values.
Mode 0 - 97 offers this possibility. Previously
adjusted parameters are cancelled. Cancellation is
indicated with CAL on the display (approx. 5 secs.).
Programming example .......................................... • select mode 0 - 97 in MODEFIELD
• program figure 1 in PARAMETER FIELD
• then store with STO-button, CAL is displayed for
5 secs. in the PARAMETER FIELD
Keyword MODE 0 - 98
Description
Acc. to the factory preset the keyword is switched
off and therefore data input is adjustable.
All mentioned modes can be selected as described
before and their parameters indicated on the
display of the sensors and perhaps modified.
The activation of the keyword (mode 0 - 98 = 1)
ensures the protection of the parameters for unauthorized modifications.
Adjustment of the data input is possible only after
programming the keyword (over writing of the
indicated key symbol).
This programming can be carried out in each mode,
the whole mode range is then accessible (mode 98
will be 0).
The keyword is: 0070
Activate keyword ...................................................... • select mode 0 - 98 in MODEFIELD
• program figure 1 in PARAMETER FIELD
• then store with STO-button
Adjust keyword ......................................................... • select the mode requested for parameter
adjustment, here in the example mode 0 - 40 in
MODEFIELD
• select data input, the key symbol 0 – – n is
indicated in the PARAMETER FIELD
• program
0070 as keyword
• then store with STO-button
• the parameter adjustment of e.g. mode 0 - 40 can
be continued
Page 41

Sensor optimization
71 - 2 … 75 - 2 41
Selection of sensor optimization
In mode 0 - 99 the sensor optimization 1 and 2 and
also the reset to the general parameter adjustment
can be carried out.
Programming example sensor optimization 1 ....... • select mode 0 - 99 in MODEFIELD
• program e.g. figure 1 in PARAMETER FIELD
• then store with STO-button
• operate MOD-button to enquire the sensor
optimization
Reset in mode 99, however with figure 0 in the
PARAMETER FIELD.
Same procedure for sensor optimization 2 (however
figure 2).
Mode listing 1
Mode-no. Mode description Parameter Page
( = factory preset)
1 - 01
1 - 02
not used ..................................................... – – – –
1 - 03 sensor type ................................................. 71 - 2 … 75 - 2
1 - 04 not used ..................................................... – – – –
1 - 05 - indication, distance in m
1 - 06 - indication, gain in dB p. 44
Working range
1 - 07 - start of working range ............................ 0 m
1 - 08 - end of working range ............................ 6 / 12 / 24 / 36 m
Product type
1 - 09 - liquids / solids ........................................ VEGASON 71 and 72 1 / 0 p. 45
VEGASON 73 … 75 1 / 0
Liquid
1 - 10 - vessel top flat / dished .......................... 1 / 0 p. 45
Solids
1 - 10 - angle of repose ..................................... 0 … 50 degrees p. 46
1 - 11 - particle size............................................ 1 … 11 mm
Sensor optimization 1, channel 1
0 - 99
0 - 01
1
2
1 - 01
2 - 01
27
1 - 99
0
MODE 0 - 99
Sensor optimization
Reset
Page 42

Sensor optimization
42 71 - 2 … 75 - 2
Mode listing 1
Sensor optimization 1, channel 1 (continuation)
Multiple echo
1 - 12 - reduction ............................................... 0.00 … 1.25 V p. 47
1 - 13 - optimization ........................................... 0.00 … 1.25 V
False echo learn
1 - 14 - indication, gain
1 - 15 - learn distance ........................................ 0,3 m … 12 / 24 / 36 m 2 m p. 48
1 - 16 - delete learn cycle .................................. 0 / 1
1 - 17 - activate learn cycle ............................... 0 / 1
Profile interpolation
1 - 18 - switched off / switched on ..................... 0 / 1 p. 49
1 - 19 Rate of product level change ..................... 0.01 … 11 cm / s (4 cm / s) p. 50
Max. gain
1 - 20 - indication, gain
1 - 21 - limitation................................................. 0.03 … 4.95 V p. 51
1 - 22 - optimization ........................................... 0.03 … 4.95 V
Measuring window
1 - 23 - switched on / switched off ..................... 1 / 0 p. 52
Fault signals
1 - 24 - switched on / switched off ..................... 0 / 1 p. 52
1 - 25 Real distance ............................................. 0,3 m … 12 / 24 / 36 m 2 m p. 53
1 - 26 not used ..................................................... – – – –
Basic adjustment (factory preset)
1 - 27 - switched off / switched on ..................... 0 / 1 p. 53
1 - 51 … 75 Service activities ........................................ PASS
1 - 99 Change
- general parameter ................................. 0
- sensor optimization 1 ............................ 1
- sensor optimization 2 ............................ 2
- linearization curve 4 .............................. 4
- linearization curve 5 .............................. 5
- linearization curve 6 .............................. 6
sensor optimization 2, channel 2 as above, however 2 - 01 … 2 - 99
Mode-no. Mode description Parameter Page
( = factory preset)
Page 43

Sensor optimization
71 - 2 … 75 - 2 43
Information for sensor optimization 1
If optimization is required, always compare the local
conditions with the programmed parameters - if
necessary correct or adapt.
Basic test of
Mode-no. Information Selection / measures Page
1 - 09 product type liquids or solids p. 45
1 - 10 vessel geometry vessel top flat or dished p. 45
1 - 10 solid define particle size / p. 46
1 - 11 angle of repose
1 - 19 rate of level change define in cm / sec. p. 50
False echo tests
Mode-no. Mode description Page
False echo BEFORE useful echo (output too high)
1 - 07 start of working range define p. 44
1 - 14 …17 false echo learn (activate) p. 48
1 - 18 profile interpolation activate p. 49
False echo AFTER useful echo (output too low)
1 - 08 end of working range define p. 44
1 - 12 / 13 multiple false echo reduce p. 47
1 - 21 / 22 max. gain limited p. 51
Supplementary programmings
1 - 23 measuring window switched on or off p. 52
1 - 24 false echo determine p. 52
1 - 25 real distance program p. 53
1 - 27 basic adjustment define p. 53
Above information for sensor optimization, relate to
sensor 1, channel 1.
Sensor optimization for sensor 2, channel 2 as
described on page 43 … 45, however mode
2 - 01 … 2 - 27.
Page 44

Working range reduction
44 71 - 2 … 75 - 2
Working range MODE 1 - 05 … 1 - 08
The working range can be limited in this mode by
programming of
- start of working range and
- end of working range in case of failure.
Echoes outside this limitation are ignored, e.g.
- false echoes in the narrow range
- multiple echoes by reflection in empty vessels
(see programming example)
Note:
In case of multiple reflections, a limited operating
range may not be sufficient. The end of working
range should be programmed min. 10 % > than the
max. vessel height.
min. distance (e.g. VEGASON 74 - 2)
max. vessel distance
end of working range
max. distance (e.g. VEGASON 74 - 2)
Programming example:
Indication of distance in m ........................................ • can be indicated in mode 1 - 05
Indication of gain in dB ............................................. • can be indicated in mode 1 - 06
Start of working range............................................... • mode 1 - 07 is here indicated as programming
example
End of working range................................................ • select mode 1 - 08 in MODEFIELD
• program 14.00 m in PARAMETER FIELD
• then store with STO-button
0 m
Mode 07 / 08
12
14
0,8
20
false echo by
reflections
Page 45

Adaption to the product
71 - 2 … 75 - 2 45
Product type MODE 1 - 09
The product type together with the vessel geometry
can generate different reflections and therefore
multiple echoes.
The available product type can be selected in this
mode. With this selection the data of the factory
preset of mode 1 - 10 and 1 - 11 can be activated.
The echo amplification is reduced or adapted after
the measuring window.
Programming example:
Change of liquids to solids ....................................... • select mode 1 - 09 in MODEFIELD
• program figure 0 in PARAMETER FIELD
• then store with STO-button
(Requirement for page 45)
Product type ................................ Mode 1 - 09 = 1 = liquids Mode 1 - 09 = 0 = solids
Liquid Solid
vessel geometry solid features
- flat vessel top - particle size > 10 mm
- dished vessel top - angle of repose 0°
Liquid MODE 1 - 10
The vessel geometries of tank ceilings generate
characteristic multiple echoes.
They can be suppressed by adaption. A flat ceiling
is programmed as factory preset.
Features:
Mode 10 = 1 flat vessel top ............................... = weak tendency to multiple echoes
= 0 dished vessel top ......................... = strong tendency to multiple echoes
(parabolic effects in the top area of tank)
Programming example:
Change of flat to dished vessel top .......................... • select mode 1 - 10 in MODEFIELD
• program figure 0 in PARAMETER FIELD
• then store with STO-button
Adaption to the vessel geometry
Page 46

Adaption to the solid
46 71 - 2 … 75 - 2
Solid MODE 1 - 10 and 1 - 11
Certain characteristics can cause different multiple
echoes, e.g.:
- surface structure of the solid
- type of filling / emptying
- angle of repose
- particle size of the solid.
In case the factory preset
- angle of repose 0°
- particle size > 11 mm
do not ensure a reliable suppression of the multiple
echoes, they can be adapted.
Min. distance e.g. VEGASON 74 - 2,
(at particle size < 5 mm)
Real echo
Multiple false echo
Max. distance (e.g. VEGASON 74 - 2)
Programming example:
Requirement: Solids activated (see page 45)
Programming the angle of repose (e.g. 30°) ............ • select mode 1 - 10 in MODEFIELD
• program angle of repose 30 degrees in
PARAMETER FIELD
• then store with STO-button
Programming the particle size (e.g. 2 mm) .............. • select mode 1 - 11 in MODEFIELD
• program particle size 02 mm in PARAMETER
FIELD
• then store with STO-button
0 m
1,1
20
Angle of
repose
Page 47

Reduction of gain
71 - 2 … 75 - 2 47
Multiple false echo reduction MODE 1 - 12 and 1 - 13
Tanks with arched ceilings and therefore strong
parabolic effects or silos with fine ground solids can
cause strong multiple echoes.
If the measures carried out in mode 1 - 09 … 11 are
not sufficient, an additional reduction by OFFSET
can be carried out.
Reduction range (Offset range)
= 0.00 … 1.25
Practice values = 0.00 … 0.20
The reduction (offset) is carried out independent of
the function and starts with the end of the measuring window
Programming example:
Reduction and optimization of e.g. 0,20
Reduction ................................................................. • select mode 1 - 12 in MODEFIELD
• program reduction 0.12 (V) in PARAMETER
FIELD
• then store with STO-button
Optimization ............................................................. • select mode 1 - 13 in MODEFIELD
• activate optimization with MOD-button (the whole
parameter indication 0,12 flashes)
• optimize with Plus-button up to e.g. 0,20 (V) (the
optimization is operated in 0,01 V steps)
If during the optimization a modification to the opposite direction is required, this can be made with the
minus button.
Real echo
Multiple false
echo
Page 48

Storage of a false echo profile
48 71 - 2 … 75 - 2
False echo learn MODE 1 - 14 … 1 - 17
Construction details inside the vessel such as e.g.
- weldment joints
- edges
- ladders
- struts etc.
create false echoes.
In a learn cycle these echoes can be determined
and stored on
- location and
- strength (amplitude).
In a later measuring cycle the stored false echoes
are gated out.
Requirements
- The strength (amplitude) of the useful echo must
be larger in the interference position than that of
the false echo.
- The vessel must be emptied to a minimum and
the distance to the product must be determined,
e.g. sounded.
Procedure
- program dipped value for the learn distance
- activate learn cycle
With varying product surfaces the learn cycle
can be repeated. The data is up-dated.
Programming example (with VEGASON 75 - 2)
Indication of gain ...................................................... • can be displayed in mode 1 - 14
Program learn distance ............................................ • select mode 1 - 15 in MODEFIELD
• program learn distance 24.00 in PARAMETER
FIELD
• then store with STO-button
Activate cycle ........................................................... • select mode 1 - 17 in MODEFIELD
• select learn cycle in PARAMETER FIELD with
the figure 1
• then store with STO-button, activate learn cycle
During the learn cycle (approx. 3 … 4 Min.) CAL
flashes.
Delete false echo data ............................................. • the delete procedure can be triggered in mode
1–16
0 m
24
~
Real echo
False echo
sounding e.g. 24 m
Page 49

Storage of a false echo profile
71 - 2 … 75 - 2 49
Profile interpolation MODE 1 - 18
With the function "false echo learn" gaps can exist
between the false echoes gated out.
With the activation of the profile interpolation, gaps
smaller 3 m will be closed.
Build-up around struts, weldment joints etc. caused
after the time cycle, generate additional false
echoes.
Demonstration as comparison
Additional false echoes
by build-up
Programming example .......................................... • select mode 1 - 18 in MODEFIELD
• program with figure 1 the profile interpolation in
PARAMETER FIELD
• then store with STO-button
Profile interpolation ......................................... off .............. on
Page 50

Adaptation to filling and emptying speed
50 71 - 2 … 75 - 2
Rate of product level change MODE 1 - 19
The rate of product level change is factory set by
VEGA within the adjustment range
- 0.01 … 11 cm / sec. with
- 4.00 cm / sec.
This adjustment should only be changed if this
seems useful in case the actual rate of product
level change exceeds the standard value.
Programming example
Change to 0,50 cm / sec. ......................................... • select mode 1 - 19 in MODEFIELD
• program 0.50 in PARAMETER FIELD
• then store with STO-button
Conversion schedule ............................................. cm / sec. m / hours
Adjustment range ........ 0,01 0,36
0,05 1,8
0,1 3,6
0,5 18,0
1,0 36,0
2,0 72,0
4,0 144,0
6,8 216,0
8,0 288,0
10,0 360,0
Page 51

Limitation of the echo gain
71 - 2 … 75 - 2 51
Max. gain MODE 1 - 20 … 1 - 22
By using the whole gain, the pulse echo measuring
system tries to detect an echo. This means that in
empty vessels the gain can be bigger than required
for the useful echo.
This is why sound reflections are detected as false
echoes. Therefore it is necessary to limit the control
range of the gain.
Note:
- The limitation is adjustable from 0.03 V to
4.50 V, as optimization up to 4.95 V.
- The optimum adjustment of this mode is only
possible with empty vessel.
- For orientation a d is displayed as long as an
echo (false echo) is detected with actual gain.
Programming example:
Indication of echo gain ............................................. • select mode 1 - 20 in MODEFIELD
• e.g. 2.00 is indicated in the PARAMETER FIELD,
i.e. a false echo is detected with a gain of
2.00 Volt
Limitation .................................................................. • select mode 1 - 21 in MODEFIELD
• program as limitation in PARAMETER FIELD e.g.
2.30
• then store with STO-button
Optimization ............................................................. • select mode 1 - 22 in MODEFIELD
• e.g. d 2.30 is displayed in the PARAMETER
FIELD
• activate the optimization with MOD-button
• optimize with Plus-button the gain as long as the
d extinguishes
(the optimization is made in 0,02 V-steps)
If during the optimization a modification to the
opposite direction is required, this can be made
with the minus button.
Page 52

Supplementary optimization
52 71 - 2 … 75 - 2
Fault signal MODE 1 - 24
The fault signal is triggered when the reliability
cannot be guaranteed. The reliability is calculated
from the ratio between echo measurement to noise
level measurement.
The fault signal can be modified as follows:
Explanation in case of failure
Fault signal off = 0 (factory preset):
- no fault signal is indicated
- the last correctly detected measured value is
stored
- with the detection of new correct echo, the last
stored value is cancelled and the actual one
indicated
The relay and current outputs react in both cases
acc. to their channel coordinations and to the failure
actions adjusted in mode 0 - 93.
Fault signal on = 1:
- no fault signal is indicated
- fail safe relay de-energizes
- the failure LED of the concerned channel lights
- with the correction of a new correct echo, the
feeding phase is automatically started and after
it is finished, an actual measured value is
indicated
Programming example
for fault signal on ...................................................... • select mode 1 - 24 in MODEFIELD
• program fault signal on 1 in PARAMETER FIELD
• then store with STO-button
Measuring window MODE 1 - 23
The measuring window must be switched off to
achieve reliable measuring results in case of level
changes > 10 cm / sec. or fluctuating level
changes.
Attention:
When switching off the measuring window always
the first large echo is detected within the working
range.
Programming example .......................................... • select mode 1 - 23 in MODEFIELD
• program measuring window off 0 in
PARAMETER FIELD
• then store with STO-button
Any learn cycle already activated in mode 17 is not
used, however its data is not lost.
Page 53

Supplementary optimization
71 - 2 … 75 - 2 53
Basic adjustment MODE 1 - 27
All parameters, the data of which had been modified during start-up or sensor optimization, can be
reset to the factory preset if necessary.
Note:
- the data of the false echo memory determined in
mode 17 is not detected
- switching to of the basic adjustments triggers a
new start-up condition
- the fail safe relay de-energizes
Result:
- the display indicates for approx. 3 secs. CAL
(flashing)
- all modes of sensor optimization 1 or 2 are reset
to factory preset (see protocol page 54)
- the respective sensor starts operating, therefore
the fail safe relay de-energizes and the failure
LED lights
- CAL extinguishes after approx. 3 secs. and the
figures 0.000 are indicated
- this means that the basic adjustment is activated
- acc. to the time schedule a measurement is
indicated or the measuring system repeats its
operation (E2.01) using the basic adjustment
(factory preset)
Programming example .......................................... • select mode 1 - 27 in MODEFIELD
• in PARAMETER FIELD change the figure 0 to
figure 1 (prepare basic adjustment for activation)
• then store with STO-button the basic adjustment
Real distance MODE 1 - 25
As described before, all echoes within the measuring window are evaluated (useful and false echo).
Therefore the measuring window can position on a
false echo for different reasons. The cause is a
false measurement.
In these cases an actual value can be defined by
correction of the distance, i.e. by positioning the
measuring window correctly and updating the
measurement. To avoid repetition it is useful that
the respective optimizations are carried out, e.g.
Preventive optimizations
- angle of repose adapted (mode 1 - 10)
- particle size adapted (mode 1 - 11)
- start false echo learn (mode 1 - 17)
- switch on profile interpolation (mode 1 - 18)
- adjust rate of product level change very precisely
(mode 1 - 19)
Procedure
- determine the actual distance to the product
surface (e.g. dip etc.).
- program this value in mode 1 - 25
With reducing level a build-up of e.g. 10 m is
detected and evaluated. The actual level however
is lowered to 23 m.
Programming example .......................................... • select mode 1 - 25 in MODEFIELD
• program the real distance of 23.00 (real echo) in
PARAMETER FIELD
• then store with STO-button
Page 54

Supplement
54 71 - 2 … 75 - 2
Mode-no. Mode description Factory preset Sensor optimization
1 - or 2 - 123
Working range
07 - start ....................................................... 0.00 m
08 - end 71 - 2 ................................... 6.00 m
72 - 2 ................................... 12.00 m
73 - 2 ................................... 12.00 m
74 - 2 ................................... 24.00 m
75 - 2 ................................... 36.00 m
Product type
09 - liquid / solid
for VEGASON 72 .................................. 1 (liquid)
for VEGASON 73 … 75 ........................ 0 (solid)
Solid
10 - angle of repose in degrees ................... 0 degrees
11 - particle size ........................................... 11 mm
Liquid
10 - vessel top flat / dished .......................... 1 (flat)
Multiple false echo
12 - reduction in Volt .................................... 0.00
13 - optimization ........................................... 0.00
False echo learn
15 - learn distance in m ................................ 2.00
16 - delete learn cycle .................................. 0 (off)
17 - activate learn cycle ............................... 0 (off)
18 Profile interpolation .................................... 0 (off)
19 Rate of product level change in cm / sec. .. 4.00
Max. gain
21 - limitation in Volt ..................................... 0.03
22 - optimization in Volt ................................ 0.03
23 Measuring window ..................................... 1 (on)
24 Fault signal ................................................ 0 (off)
25 Real distance in m ..................................... 2.00
27 Basic adjustment ....................................... 0 (off)
Date
Name
Protocol of the sensor optimization
Page 55

Supplement
71 - 2 … 75 - 2 55
Error codes
Problems during measurement or faulty adjustments during the programming are indicated on the
display with a fault signal.
Fault signals are made in the measured value
(mode) with channel specific indication via the
respective display.
The following fixed coordination is valid:
- display 1 indicates fault signals of channel 1
- display 2 indicates fault signals of channel 2,
also if the differential result has been coordinated to
the respective display (mode 40).
Acc. to the table below, fault signals can cause the
fail safe relay to de-energize and the failure LEDs
light (channel 1 = LED 1, channel 2 = LED 2).
The current outputs as well as the switching relays
react channel specific acc. to the table below or
their parameter adjustment in mode 93.
After removing the failure (e.g. repair of a line
break) the fault signal extinguishes automatically.
Example of a fault signal:
1 E 3 . 0 4 Fault in channel 1:
line break / temperature
sensor defect
= coding of the error
= error class
= E = Error
Error
E3.04
- is undelayed with the switch on,
- is indicated during operation after approx.
15 secs.
error error preset fail safe relay output /
code meaning mode 1 - 24 relay / -LED current output
or 2 - 24
E2.01 signal- / noise = 0
distance < 1 dB acc. to parameter adjustment
in mode 93
= 1
E2.02 echo in dead band no modification corresponds to
E2.03 postoscillation influence the value for 100 %
> 1,8 m
E3.01 data loss in the no
E3.02 data memory influence no modification
E3.03
E3.04 line break / = 0
temperature acc. to parameter adjustment
sensor defect in mode 93
= 1
ERR parameter range no
exceeded by influence no modification
adjustment
Page 56

VEGA Grieshaber KG
Electronic level measurement
Am Hohenstein 113
Postfach 11 42
D-77757 Schiltach
Phone 0 78 36/50-0
Fax 0 78 36/50-201
2.14 655 / April '94Technical data subject to alterations
 Loading...
Loading...