

Page 1

USER'S GUIDE
®
Vaisala WINDCAP
Ultrasonic Wind Sensor WMT52
M210925EN-B
Page 2

PUBLISHED BY
Vaisala Oyj Phone (int.): +358 9 8949 1
P.O. Box 26 Fax: +358 9 8949 2227
FIN-00421 Helsinki
Finland
Visit our Internet pages at http://www.vaisala.com/
© Vaisala 2012
No part of this manual may be reproduced in any form or by any means,
electronic or mechanical (including photocopying), nor may its contents
be communicated to a third party without prior written permission of the
copyright holder.
The contents are subject to change without prior notice.
Please observe that this manual does not create any legally binding
obligations for Vaisala towards the customer or end user. All legally
binding commitments and agreements are included exclusively in the
applicable supply contract or Conditions of Sale.
Page 3

________________________________________________________________________________
Table of Contents
CHAPTER 1
GENERAL INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
About This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Contents of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
General Safety Considerations . . . . . . . . . . . . . . . . . . . . . 10
Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
ESD Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Recycling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Trademarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
License Agreement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Regulatory Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
CHAPTER 2
PRODUCT OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Introduction to Ultrasonic Wind Sensor WMT52 . . . . . . . . 15
Heating Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Optional Software for Easy Settings . . . . . . . . . . . . . . . . . . 16
Ultrasonic Wind Sensor WMT52 Components . . . . . . . . . . 17
CHAPTER 3
FUNCTIONAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Wind Measurement Principle . . . . . . . . . . . . . . . . . . . . . . . . 23
Heating (Optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
CHAPTER 4
INSTALLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Unpacking Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Selecting the Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Installation Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Mounting to Vertical Pole Mast . . . . . . . . . . . . . . . . . . 30
Mounting with Optional Mounting Kit . . . . . . . . . . . . . . 31
Mounting To Horizontal Cross Arm . . . . . . . . . . . . . . . 32
Grounding the WMT52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Grounding using the Bushing and Grounding Kit. . . . . 34
Marine Grounding Jumper . . . . . . . . . . . . . . . . . . . . . . 35
Aligning the WMT52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Compass Alignment. . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Wind Direction Offset . . . . . . . . . . . . . . . . . . . . . . . . . . 37
VAISALA________________________________________________________________________ 1
Page 4

________________________________________________________________________________
CHAPTER 5
WIRING AND POWER MANAGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . .39
Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Operating Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
Heating Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Wiring Using the 8-pin M12 Connector . . . . . . . . . . . . . . . .42
External Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42
Internal Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Wiring Using the Screw Terminals . . . . . . . . . . . . . . . . . . .44
Data Communication Interfaces . . . . . . . . . . . . . . . . . . . . .46
Power Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
CHAPTER 6
CONNECTION OPTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
Communication Protocols . . . . . . . . . . . . . . . . . . . . . . . . . .51
Connection cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Installing the Driver for the USB Cable . . . . . . . . . . . . . . .53
Service Cable Connection . . . . . . . . . . . . . . . . . . . . . . . . . .54
Connection Through M12 Bottom Connector
or Screw Terminal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Communication Setting Commands . . . . . . . . . . . . . . . . . .56
Checking the Current Communication Settings (aXU) . . . .56
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
Changing the Communication Settings (aXU) . . . . . . . . . .59
CHAPTER 7
GETTING THE DATA MESSAGES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
General Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Reset (aXZ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
Measurement Reset (aXZM) . . . . . . . . . . . . . . . . . . . . . . .63
ASCII Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Abbreviations and Units . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Device Address (?) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . .65
Wind Data Message (aR1) . . . . . . . . . . . . . . . . . . . . . . . . .66
Supervisor Data Message (aR5) . . . . . . . . . . . . . . . . . . . . 67
Combined Data Message (aR) . . . . . . . . . . . . . . . . . . . . . .68
Composite Data Message Query (aR0) . . . . . . . . . . . . . . .68
Polling with CRC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
Automatic Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
Automatic Composite Data Message (aR0) . . . . . . . . . . . .71
SDI-12 Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Address Query Command (?) . . . . . . . . . . . . . . . . . . . . . .72
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . .73
Change Address Command (aAb) . . . . . . . . . . . . . . . . . . .73
Send Identification Command (aI) . . . . . . . . . . . . . . . . . . .74
Start Measurement Command (aM) . . . . . . . . . . . . . . . . . .75
Start Measurement Command with CRC (aMC) . . . . . . . .76
2 _______________________________________________________________________________
Page 5

________________________________________________________________________________
Start Concurrent Measurement (aC) . . . . . . . . . . . . . . . . . 76
Start Concurrent Measurement with CRC (aCC) . . . . . . . . 77
Send Data Command (aD) . . . . . . . . . . . . . . . . . . . . . . . .78
Examples of aM, aC and aD Commands . . . . . . . . . . . . . . 79
Continuous Measurement (aR) . . . . . . . . . . . . . . . . . . . . . 80
Continuous Measurement with CRC (aRC) . . . . . . . . . . . . 81
Start Verification Command (aV) . . . . . . . . . . . . . . . . . . . .81
NMEA 0183 V3.0 Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Device Address (?) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . . 83
MWV Wind Speed and Direction Query . . . . . . . . . . . . . . .83
XDR Transducer Measurement Query . . . . . . . . . . . . . . . 85
TXT Text Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . .91
Automatic Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Automatic Composite Data Message (aR0) . . . . . . . . . . . .93
CHAPTER 8
SENSOR AND DATA MESSAGE SETTINGS . . . . . . . . . . . . . . . . . . . . . .95
Wind Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Checking the Settings (aWU) . . . . . . . . . . . . . . . . . . . . . . . 95
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Changing the Settings (aWU) . . . . . . . . . . . . . . . . . . . . . .99
Supervisor Message . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
Checking the Settings (aSU) . . . . . . . . . . . . . . . . . . . . . . 101
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Changing the Settings (aSU) . . . . . . . . . . . . . . . . . . . . . . 103
Composite Data Message (aR0) . . . . . . . . . . . . . . . . . . . . .104
CHAPTER 9
MAINTENANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Cleaning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Factory Calibration and Repair Service . . . . . . . . . . . . . . 108
Vaisala Service Centers . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
CHAPTER 10
TROUBLESHOOTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
Self-Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Error Messaging/Text Messages . . . . . . . . . . . . . . . . . . . 111
Wind Sensor Heating Control . . . . . . . . . . . . . . . . . . . . . 113
Operating Voltage Control . . . . . . . . . . . . . . . . . . . . . . . . 113
Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
CHAPTER 11
TECHNICAL SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .115
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .115
Options and Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
VAISALA________________________________________________________________________ 3
Page 6

________________________________________________________________________________
APPENDIX A
NETWORKING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
Connecting Several WMT52s on the Same Bus . . . . . . . .121
SDI-12 Serial Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
Communication Protocol . . . . . . . . . . . . . . . . . . . . . . . . . 122
RS-485 Serial Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .122
Communication Protocol . . . . . . . . . . . . . . . . . . . . . . . . . 123
ASCII, Polled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123
NMEA 0183 v3.0, Query . . . . . . . . . . . . . . . . . . . . . . . . .124
NMEA 0183 v3.0 Query with ASCII Query Commands . .126
APPENDIX B
SDI-12 PROTOCOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .129
SDI-12 Electrical Interface . . . . . . . . . . . . . . . . . . . . . . . . .129
SDI-12 Communications Protocol . . . . . . . . . . . . . . . . . .130
SDI-12 Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131
APPENDIX C
CRC-16 COMPUTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133
Encoding the CRC as ASCII Characters . . . . . . . . . . . . . .134
NMEA 0183 v3.0 Checksum Computation . . . . . . . . . . . .134
APPENDIX D
WIND MEASUREMENT AVERAGING METHOD . . . . . . . . . . . . . . . . . . .135
APPENDIX E
FACTORY CONFIGURATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .137
General Unit Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
Wind Configuration Settings . . . . . . . . . . . . . . . . . . . . . . .138
Supervisor Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4 _______________________________________________________________________________
Page 7

________________________________________________________________________________
List of Figures
Figure 1 Ultrasonic Wind Sensor WMT52 . . . . . . . . . . . . . . . . . . . . . . . 15
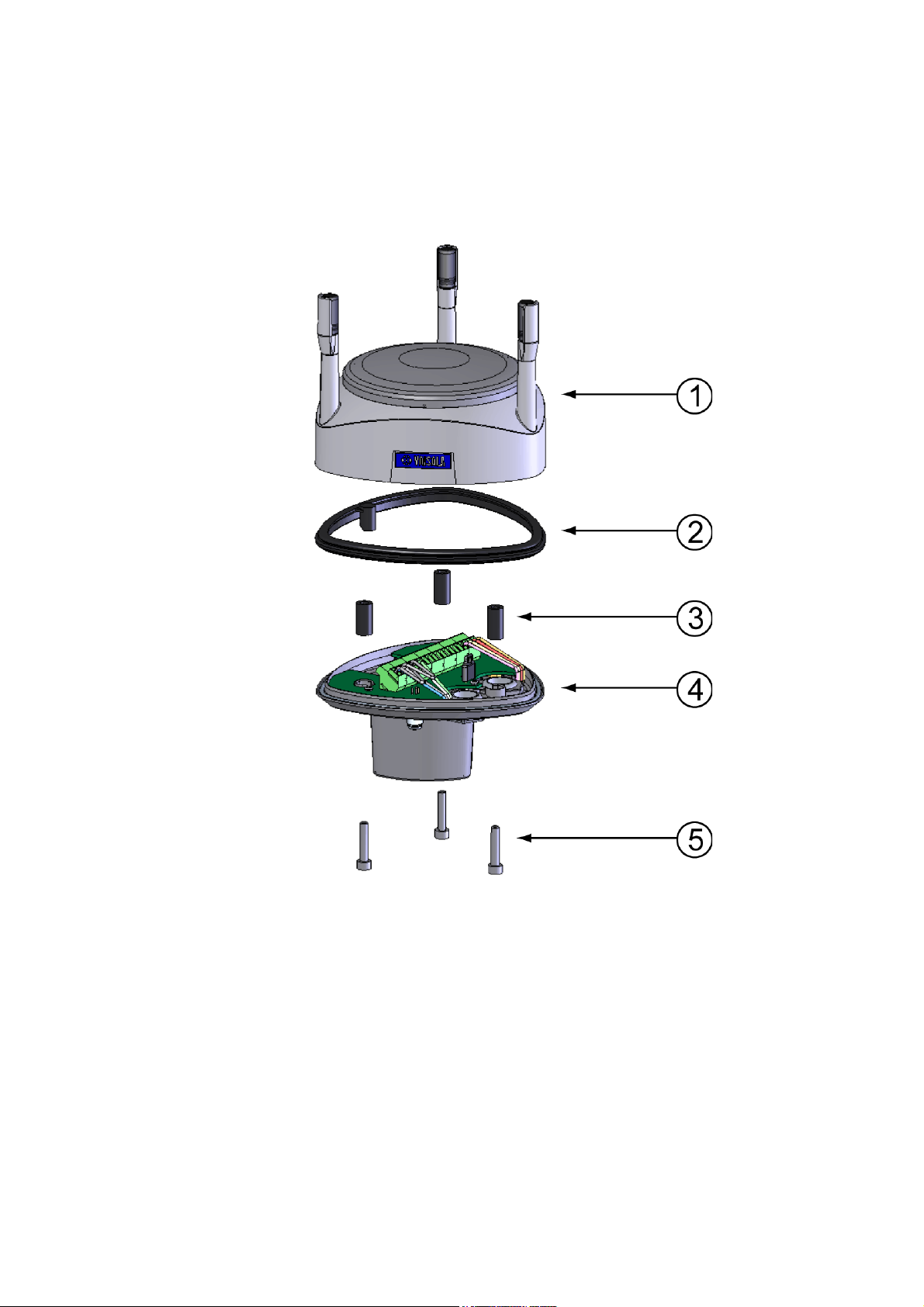
Figure 2 WMT52 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
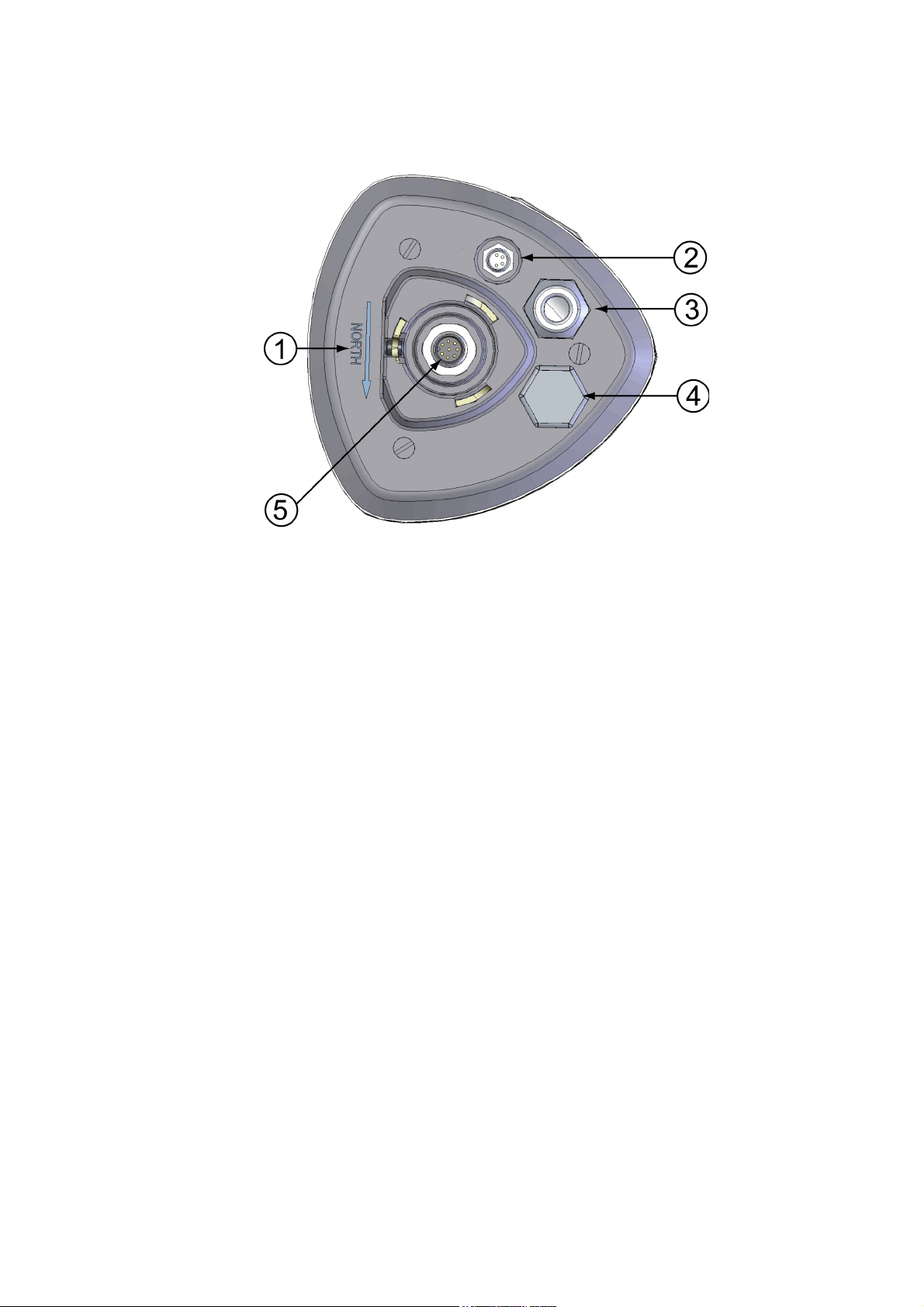
Figure 3 Bottom of the Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Figure 4 Mounting Kit (Optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Figure 5 USB Cables (optional). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 6 Bird Spike Kit (optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 7 Surge Protector (optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 8 Heating Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 9 Recommended Mast Location in an Open Area . . . . . . . . . . . 28
Figure 10 Recommended Mast Length on Top of a Building. . . . . . . . . . 29
Figure 11 Location of Fixing Screw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 12 Mounting WMT52 to Pole Mast Using Optional Mounting Kit .32
Figure 13 Mounting WMT52 to Cross Arm. . . . . . . . . . . . . . . . . . . . . . . .33
Figure 14 Mounting Bolt Location in Cross Arm. . . . . . . . . . . . . . . . . . . .33
Figure 15 Grounding Using the Bushing and Grounding Kit . . . . . . . . . . 34
Figure 16 Grounding Jumper Location. . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figure 17 Sketch of Magnetic Declination . . . . . . . . . . . . . . . . . . . . . . . .36
Figure 18 Wind Direction Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 19 Average Operational Current Consumption (with 4Hz
Wind Sensor Sampling) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 20 Heating Current and Power vs Vh . . . . . . . . . . . . . . . . . . . . . . 41
Figure 21 Pins of 8-pin M12 Connector . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Figure 22 Internal Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Figure 23 Screw Terminal Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
Figure 24 Data Communication Interfaces. . . . . . . . . . . . . . . . . . . . . . . . 46
Figure 25 WMT52 Dimensions in mm (inch) . . . . . . . . . . . . . . . . . . . . . 119
Figure 26 Mounting Kit Dimensions in mm (inch). . . . . . . . . . . . . . . . . .120
Figure 27 SDI-12 Timing Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Figure 28 Wind Measurement Averaging Method . . . . . . . . . . . . . . . . .136
VAISALA________________________________________________________________________ 5
Page 8

________________________________________________________________________________
6 _______________________________________________________________________________
Page 9

________________________________________________________________________________
List of Tables
Table 1 Pin-outs for WMT52 Serial Interfaces and Power Supplies . . . . . 42
Table 2 Screw Terminal Pin-outs for WMT52 Serial Interfaces and
Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Table 3 Available Serial Communication Protocols . . . . . . . . . . . . . . . . . 51
Table 4 Connection Cable Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
Table 5 Default Serial Communication Settings for M12/Screw
Terminal Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 6 Abbreviations and Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Table 7 Transducer IDs of the Measurement Parameters . . . . . . . . . . . . 87
Table 8 Transducer Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Table 9 Data Validation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
Table 10 Communication Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Table 11 Error Messaging/Text Messages Table . . . . . . . . . . . . . . . . . . . . 112
Table 12 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Table 13 Inputs and Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
Table 14 Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
Table 15 Electromagnetic Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Table 16 Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Table 17 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .117
Table 18 Options and Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Table 19 General Unit Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Table 20 Wind Configuration Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Table 21 General Unit Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
VAISALA________________________________________________________________________ 7
Page 10

________________________________________________________________________________
8 _______________________________________________________________________________
Page 11

Chapter 1 ________________________________________________________ General Information
CHAPTER 1
GENERAL INFORMATION
This chapter provides general notes for the product.
About This Manual
This manual provides information for installing, operating, and
maintaining the product.
Contents of This Manual
This manual consists of the following chapters:
- Chapter 1, General Information: This chapter provides general
notes for the product.
- Chapter 2, Product Overview: This chapter introduces the unique
features and advantages of the Vaisala Ultrasonic Wind Sensor
WMT52.
- Chapter 3, Functional Description: This chapter describes the
measurement principles and heating function of Ultrasonic Wind
Sensor WMT52.
- Chapter 4, Installation: This chapter provides you with information
that is intended to help you install Ultrasonic Wind Sensor
WMT52.
- Chapter 5, Wiring and Power Management: This chapter provides
you with instructions on how to connect the power supply and the
VAISALA________________________________________________________________________ 9
Page 12
User’s Guide ______________________________________________________________________
serial interfaces, and how to manage and estimate the average
power consumption.
- Chapter 6, Connection options: This chapter contains instructions
for configuring the communication with the sensor.
- Chapter 7, Getting the Data Messages: This chapter presents the
general and data message commands.
- Chapter 8, Sensor and Data Message Settings: This chapter
presents the sensor configuration and data message formatting
commands for all communications protocols: ASCII, NMEA 0183
and SDI-12.
- Chapter 9, Maintenance: This chapter contains instructions for the
basic maintenance of Ultrasonic Wind Sensor WMT52 and contact
information for Vaisala Service Centers.
- Chapter 10, Troubleshooting: This chapter describes common
problems, their probable causes and remedies, and includes contact
information for technical support.
WARNING
CAUTION
NOTE
- Chapter 11, Technical Specifications: This chapter provides the
technical data of Ultrasonic Wind Sensor WMT52.
General Safety Considerations
Throughout the manual, important safety considerations are highlighted
as follows:
Warning alerts you to a serious hazard. If you do not read and follow
instructions very carefully at this point, there is a risk of injury or even
death.
Caution warns you of a potential hazard. If you do not read and follow
instructions carefully at this point, the product could be damaged or
important data could be lost.
Note highlights important information on using the product.
10 ___________________________________________________________________M210925EN-B
Page 13
Chapter 1 ________________________________________________________ General Information
Recycle all applicable material.
Dispose of batteries and the unit according to statutory regulations.
Do not dispose of with regular household refuse.
Feedback
Vaisala Customer Documentation Team welcomes your comments and
suggestions on the quality and usefulness of this publication. If you find
errors or have other suggestions for improvement, please indicate the
chapter, section, and page number. You can send comments to us by email: manuals@vaisala.com.
ESD Protection
Electrostatic Discharge (ESD) can cause immediate or latent damage to
electronic circuits. Vaisala products are adequately protected against
ESD for their intended use. However, it is possible to damage the
product by delivering electrostatic discharges when touching,
removing, or inserting any objects inside the equipment housing.
Recycling
To make sure you are not delivering high static voltages yourself:
- Handle ESD sensitive components on a properly grounded and
protected ESD workbench. When this is not possible, ground
yourself with a wrist strap and a resistive connection cord to the
equipment chassis before touching the boards. When neither of the
above is possible, at least touch a conductive part of the equipment
chassis with your other hand before touching the boards.
- Always hold the boards by the edges and avoid touching the
component contacts.
VAISALA_______________________________________________________________________ 11
Page 14

User’s Guide ______________________________________________________________________
Trademarks
WINDCAP® is a registered trademark of Vaisala. Microsoft®,
Windows®, Windows 2000®, Windows XP®, Windows Server 2003®,
and Windows Vista® are registered trademarks of Microsoft
Corporation in the United States and/or other countries.
License Agreement
All rights to any software are held by Vaisala or third parties. The
customer is allowed to use the software only to the extent that is
provided by the applicable supply contract or Software License
Agreement.
Regulatory Compliance
The electromagnetic compatibility of the WMT52 has been tested
according to the following product family standard:
IEC 61326-1 Electrical equipment for measurement, control and
laboratory use - EMC requirements - for use in industrial locations.
Additionally, the EMC specification and vibration tolerance of the
WMT52 has been enhanced for marine use according to the following
sections of the IEC 60945 Maritime Navigation and
Radiocommunication Equipment and Systems - General requirements Methods of testing and required test results:
- IEC 60945 / 61000-4-4 (EFT burst)
- IEC 60945 / 61000-4-2 (Marine ESD)
- IEC 60945, paragraph 8, vibration
A summary of the EMC test results is presented in Table 15 on page
117.
The WMT52 is in conformance with the provisions of the RoHS
directive of the European Union:
Directive on the Restriction of the Use of Certain Hazardous Substances
in Electrical and Electronic Equipment (2002/95/EC)
12 ___________________________________________________________________M210925EN-B
Page 15

Chapter 1 ________________________________________________________ General Information
Warranty
Vaisala hereby represents and warrants all Products
manufactured by Vaisala and sold hereunder to be free
from defects in workmanship or material during a
period of twelve (12) months from the date of delivery
save for products for which a special warranty is given.
If any Product proves however to be defective in
workmanship or material within the period herein
provided Vaisala undertakes to the exclusion of any
other remedy to repair or at its own option replace the
defective Product or part thereof free of charge and
otherwise on the same conditions as for the original
Product or part without extension to original warranty
time. Defective parts replaced in accordance with this
clause shall be placed at the disposal of Vaisala.
Vaisala also warrants the quality of all repair and
service works performed by its employees to products
sold by it. In case the repair or service works should
appear inadequate or faulty and should this cause
malfunction or nonfunction of the product to which the
service was performed Vaisala shall at its free option
either repair or have repaired or replace the product in
question. The working hours used by employees of
Vaisala for such repair or replacement shall be free of
charge to the client. This service warranty shall be
valid for a period of six (6) months from the date the
service measures were completed.
This warranty does not however apply when the defect
has been caused through
a) normal wear and tear or accident;
b) misuse or other unsuitable or unauthorized use of
the Product or negligence or error in storing,
maintaining or in handling the Product or any
equipment thereof;
c) wrong installation or assembly or failure to service
the Product or otherwise follow Vaisala's service
instructions including any repairs or installation or
assembly or service made by unauthorized personnel
not approved by Vaisala or replacements with parts not
manufactured or supplied by Vaisala;
d) modifications or changes of the Product as well as
any adding to it without Vaisala's prior authorization;
e) other factors depending on the Customer or a third
party.
Notwithstanding the aforesaid Vaisala's liability under
this clause shall not apply to any defects arising out of
materials, designs or instructions provided by the
Customer.
This warranty is however subject to following
conditions:
a) A substantiated written claim as to any alleged
defects shall have been received by Vaisala within
thirty (30) days after the defect or fault became known
or occurred, and
b) The allegedly defective Product or part shall, should
Vaisala so require, be sent to the works of Vaisala or to
such other place as Vaisala may indicate in writing,
freight and insurance prepaid and properly packed and
labelled, unless Vaisala agrees to inspect and repair the
Product or replace it on site.
This warranty is expressly in lieu of and excludes all
other conditions, warranties and liabilities, express or
implied, whether under law, statute or otherwise,
including without limitation any implied warranties of
merchantability or fitness for a particular purpose and
all other obligations and liabilities of Vaisala or its
representatives with respect to any defect or deficiency
applicable to or resulting directly or indirectly from the
Products supplied hereunder, which obligations and
liabilities are hereby expressly cancelled and waived.
Vaisala's liability shall under no circumstances exceed
the invoice price of any Product for which a warranty
claim is made, nor shall Vaisala in any circumstances
be liable for lost profits or other consequential loss
whether direct or indirect or for special damages.
VAISALA_______________________________________________________________________ 13
Page 16

User’s Guide ______________________________________________________________________
14 ___________________________________________________________________M210925EN-B
Page 17

Chapter 2 __________________________________________________________ Product Overview
CHAPTER 2
PRODUCT OVERVIEW
This chapter introduces the unique features and advantages of the
Vaisala Ultrasonic Wind Sensor WMT52.
Introduction to Ultrasonic Wind Sensor WMT52
0806-009
Figure 1 Ultrasonic Wind Sensor WMT52
VAISALA_______________________________________________________________________ 15
Page 18

User’s Guide ______________________________________________________________________
Ultrasonic Wind Sensor WMT52 is a small and lightweight wind sensor
that measures wind speed and direction. The sensor housing is IP65/
IP66 rated.
WMT52 powers up with 5 ... 32 VDC and outputs serial data with a
selectable communication protocol: SDI-12, ASCII automatic & polled
and NMEA 0183 with query option. Four alternative serial interfaces
are selectable: RS-232, RS-485, RS-422 and SDI-12.
The following options are available:
- Heating function
- Service Pack 2: Windows® based Vaisala Configuration Tool
software with USB service cable (1.4m)
- USB RS-232/RS-485 cable (1.4m)
- Mounting kit
- Bird spike kit
- Surge protector
- Shielded cables (2m, 10m, 40m)
- Bushing and grounding kit
Heating Function
To improve the accuracy of measurements an optional heating function
is available. More about heating in section Heating (Optional) on page
25.
The heating function option must be chosen when placing the order.
Optional Software for Easy Settings
Windows® based Vaisala Configuration Tool is a user friendly
parameter setting software for WMT52. With this software tool you can
change the device and sensor settings easily in Windows® environment.
See list of options and accessories in Table 18 on page 118.
16 ___________________________________________________________________M210925EN-B
Page 19
Chapter 2 __________________________________________________________ Product Overview
Ultrasonic Wind Sensor WMT52 Components
0803-041
Figure 2 WMT52 Components
The following numbers refer to Figure 2 on page 17:
1 = Top assembly
2 = Silicon gasket
3 = Spacers
4 = Bottom assembly
5 = Allen screws
VAISALA_______________________________________________________________________ 17
Page 20
User’s Guide ______________________________________________________________________
0803-029
Figure 3 Bottom of the Sensor
The following numbers refer to Figure 3 on page 18:
1 = Alignment direction sign
2 = 4-pin M8 connector for Service Port
3 = Water tight cable gland (optional, included in the Bushing and
Grounding Kit)
4 = Opening for cable gland (if unused, cover with a hexagonal
plug)
5 = 8-pin M12 connector for power/datacom cable (optional)
18 ___________________________________________________________________M210925EN-B
Page 21

Chapter 2 __________________________________________________________ Product Overview
0505-193
Figure 4 Mounting Kit (Optional)
The optional mounting kit can be used to ease the mounting of the
WMT52 on a pole mast. When using the optional mounting kit,
alignment is needed only when mounting for the first time. Using the
mounting kit also improves the IP classification of the WMT52 to IP66.
Without the mounting kit, the WMT52 is IP65.
0804-022
Figure 5 USB Cables (optional)
The following numbers refer to Figure 5 on page 19:
1 = USB RS-232/RS-485 cable with 8-pin M12 threaded
connector (1.4 m)
2 = USB service cable with 4-pin M8 snap-on connector (1.4 m)
The service cable, while connected between the service port and PC,
forces the service port to RS-232 / 19200, 8, N, 1.
VAISALA_______________________________________________________________________ 19
Page 22

User’s Guide ______________________________________________________________________
0804-007
Figure 6 Bird Spike Kit (optional)
The optional Bird Spike Kit for WXT transmitters and WMT sensors is
designed to reduce the interference that birds cause to the wind and rain
measurement. The kit consists of a metallic band with spikes pointing
upward. The kit is installed on top of the sensor, and attached with a
screw. The shape and location of the spikes has been designed so that
the interference with wind and rain measurement is minimal.
The spikes are designed not to hurt the birds; they are simply a barrier
to make it more difficult for birds to land on top of the sensor. Note that
the bird spike kit does not provide complete protection against birds, but
it does render the sensor unsuitable for roosting and nest building.
Note that when the kit is in place, more snow can accumulate on the
sensor, and the snow may melt slower.
20 ___________________________________________________________________M210925EN-B
Page 23

Chapter 2 __________________________________________________________ Product Overview
0806-001
Figure 7 Surge Protector (optional)
The following surge protectors are available from Vaisala:
- Vaisala Surge Protector WSP150 is a compact transient
overvoltage suppressor designed for outdoor use. It can be used
with all Vaisala wind and weather instruments. The WSP150
should be installed close to the protected instrument (max 3 m).
- Vaisala Surge Protector WSP152 is designed to be used with
Vaisala WXT transmitters and WMT sensors, to protect the host
PC against surges entering through the USB port. The WSP152
should be installed close to the PC, no further than the USB cable
can reach (1.4 m).
Vaisala recommends using surge protectors when weather instruments
are installed on top of high buildings or masts and in open grounds, that
is, anywhere with an elevated risk of lightning strike. Also use the surge
protectors if your cable length exceeds 30 m or you have unshielded,
open-wire lines.
VAISALA_______________________________________________________________________ 21
Page 24

User’s Guide ______________________________________________________________________
22 ___________________________________________________________________M210925EN-B
Page 25

Chapter 3 ______________________________________________________ Functional Description
CHAPTER 3
FUNCTIONAL DESCRIPTION
This chapter describes the measurement principles and heating function
of Ultrasonic Wind Sensor WMT52.
Wind Measurement Principle
The WMT52 uses Vaisala WINDCAP® sensor technology in wind
measurement.
The wind sensor has an array of three equally spaced ultrasonic
transducers on a horizontal plane. Wind speed and wind directions are
determined by measuring the time it takes the ultrasound to travel from
each transducer to the other two.
The wind sensor measures the transit time (in both directions) along the
three paths established by the array of transducers. This transit time
depends on the wind speed along the ultrasonic path. For zero wind
speed, both the forward and reverse transit times are the same. With
wind along the sound path, the up-wind direction transit time increases
and the down-wind transit time decreases.
VAISALA_______________________________________________________________________ 23
Page 26

User’s Guide ______________________________________________________________________
V
w
0.5 L 1 tf1 tre–euu=
The wind speed is calculated from the measured transit times using the
following formula:
0505-216
where:
Vw = Wind speed
L = Distance between the two transducers
tf = Transit time in forward direction
tr = Transit time in reverse direction
Measuring the six transit times allows Vw to be computed for each of
the three ultrasonic paths. The computed wind speeds are independent
of altitude, temperature and humidity, which are cancelled out when the
transit times are measured in both directions, although the individual
transit times depend on these parameters.
Using Vw values of two array paths is enough to compute wind speed
and wind direction. A signal processing technique is used so that wind
speed and wind direction are calculated from the two array paths of best
quality.
The wind speed is represented as a scalar speed in selected units (m/s,
kt, mph, km/h). The wind direction is expressed in degrees (°). The
wind direction reported by WMT52 indicates the direction that the wind
comes from. North is represented as 0°, east as 90°, south as 180°, and
west as 270°.
The wind direction is not calculated when the wind speed drops below
0.05 m/s. In this case, the last calculated direction output remains until
the wind speed increases again to the level of 0.05 m/s.
The average values of wind speed and direction are calculated as a
scalar average of of all samples over the selected averaging time
(1 ... 3600 s) with a selectable updating interval. The sample count
depends on the selected sampling rate: 4 Hz (default), 2 Hz or 1 Hz. The
minimum and maximum values of wind speed and direction represent
the corresponding extremes during the selected averaging time. See also
Appendix D, Wind Measurement Averaging Method, on page 135.
24 ___________________________________________________________________M210925EN-B
Page 27
Chapter 3 ______________________________________________________ Functional Description
Depending on user selection the wind speed extreme values can be
computed in two alternative ways; either with the traditional minimum/
maximum calculation or with the 3-second gust & lull calculation
recommended by the WMO (World Meteorological Organization). In
the latter case the highest and lowest 3-second average values (updated
once a second) replace the maximum and minimum values in reporting
of wind speed, while the wind direction variance is returned in the
traditional way.
The WMT52 constantly monitors the wind measurement signal quality.
If poor quality is detected, the wind values are marked as invalid. If over
half of the measurement values can be considered as invalid, the last
valid wind values are returned as missing data. However, in the SDI-12
protocol the invalid values will be marked as zeroes.
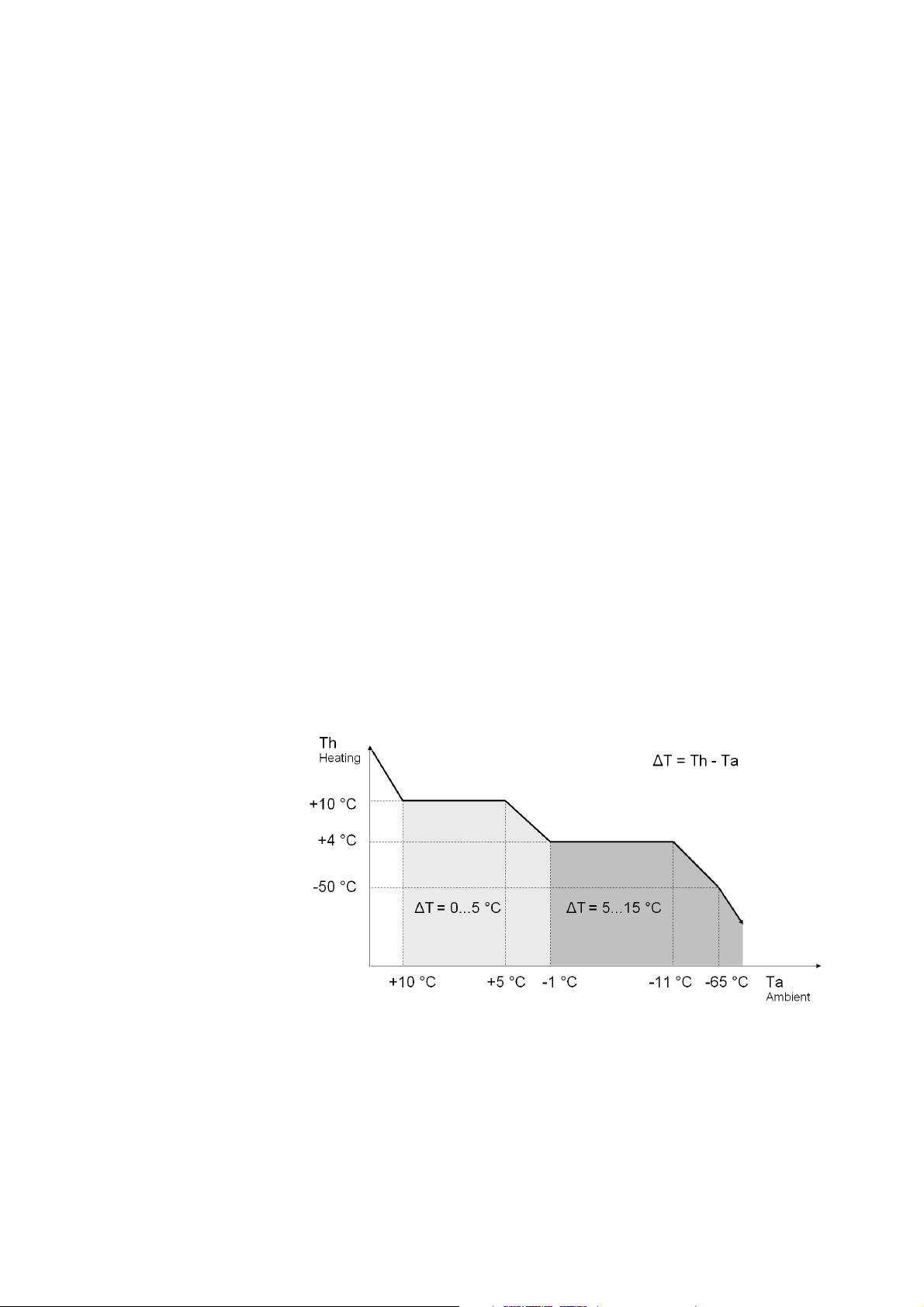
Heating (Optional)
Heating elements located inside the wind transducers keep the wind
sensors clean from snow and ice. A heating temperature sensor (Th)
controls the heating. Th is measured inside the sensor, where
temperature is much higher than the ambient temperature (Ta).
Three fixed temperature limits, namely +10 °C, +4 °C, and -50 °C
(+50 °F, +39 °F, -58 °F) control the heating as follows:
0806-010
Figure 8 Heating Control
VAISALA_______________________________________________________________________ 25
Page 28
User’s Guide ______________________________________________________________________
The following example shows how heating behaves as Ta starts to fall:
- When Ta falls below +10 °C, heating is enabled.
- Heating keeps Th > +4 °C until Ta < -11 °C.
- Between -11 ... -65 °C, Th is approximately 15 °C warmer
than Ta.
When the heating function is disabled the heating is off in all conditions,
see Supervisor Message on page 101.
NOTE
Snow accumulation may cause a temporary wind measurement
problem even when the heating is enabled.
26 ___________________________________________________________________M210925EN-B
Page 29
Chapter 4 _______________________________________________________________ Installation
CHAPTER 4
INSTALLATION
This chapter provides you with information that is intended to help you
install Ultrasonic Wind Sensor WMT52.
Unpacking Instructions
Ultrasonic Wind Sensor WMT52 comes in a custom shipping container.
Be careful when removing the device from the container.
CAUTION
Beware of damaging any of the wind transducers located at the top of
the three antennas. Dropping the device can break or damage the
transducers. If the antenna bends or twists the re-aligning can be
difficult or impossible.
VAISALA_______________________________________________________________________ 27
Page 30
User’s Guide ______________________________________________________________________
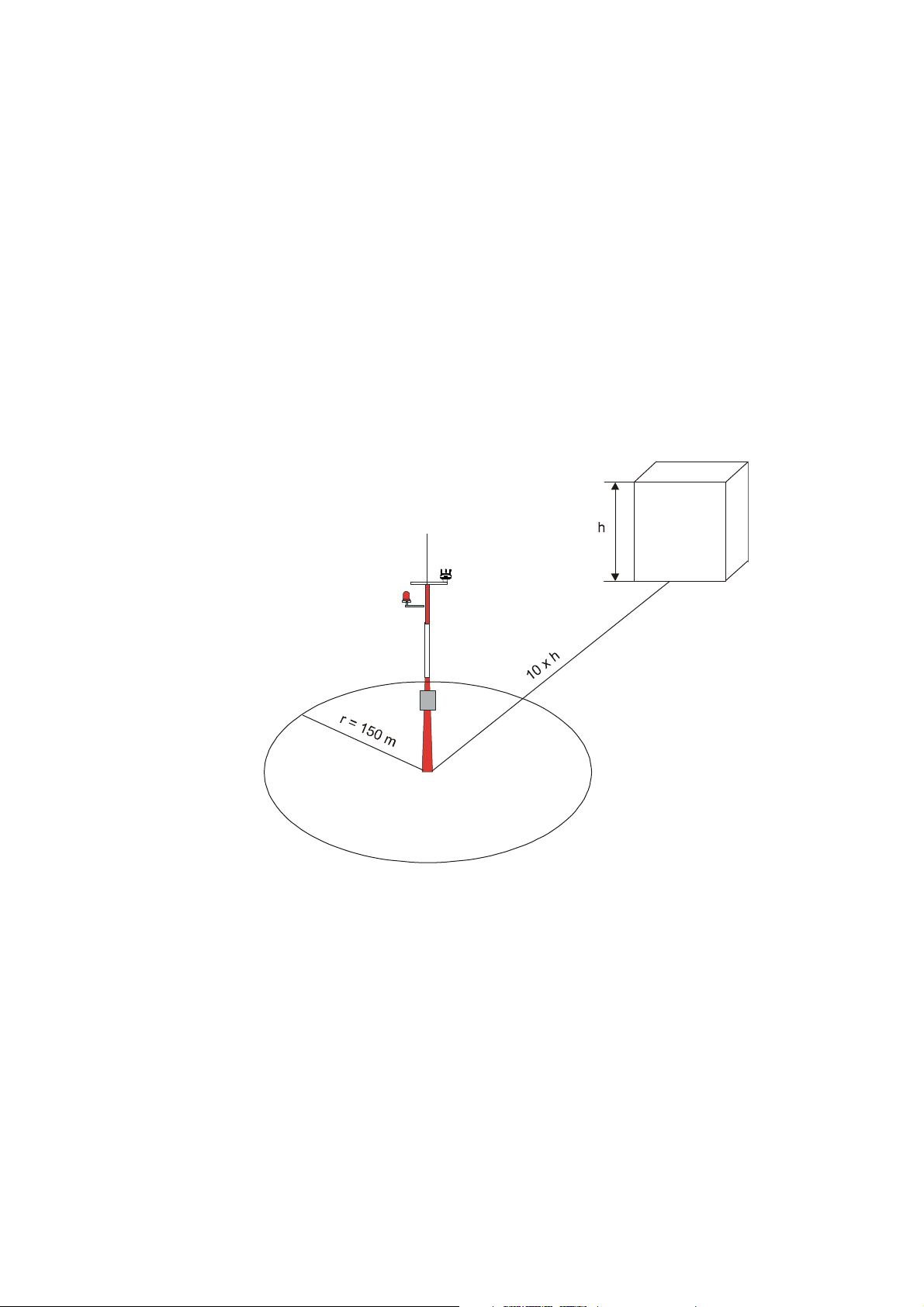
Selecting the Location
Finding a suitable site for WMT52 is important for getting
representative ambient measurements. The site should represent the
general area of interest.
The WMT52 should be installed in a location that is free from
turbulence caused by nearby objects, such as trees and buildings. In
general, any object of height (h) will not remarkably disturb wind
measurement at a minimum distance of 10 h. There should be at least
150 m open area in all directions from the mast. Refer to Figure 9 on
page 28.
0806-004
Figure 9 Recommended Mast Location in an Open Area
28 ___________________________________________________________________M210925EN-B
Page 31

Chapter 4 _______________________________________________________________ Installation
0806-005
Figure 10 Recommended Mast Length on Top of a Building
CAUTION
WARNING
The recommended minimum length (marked with the letter h in Figure
10 on page 29) for the mast that is installed on top of a building is 1.5
times the height of the building (H). When the diagonal (W) is less than
the height (H), the minimum length of the mast is 1.5 W.
Installations on top of high buildings or masts and in sites on open
grounds are vulnerable to lightning strikes. A nearby lightning strike
may induce a high-voltage surge not tolerable by the internal surge
suppressors of the instrument.
Additional protection is needed in regions with frequent, severe
thunderstorms, especially when long line cables (> 30m) are used.
Vaisala recommends using a surge protectors such as the WSP150 and
WSP152 in all sites where there is an elevated risk of lightning strike.
To protect personnel (and the device), a lightning rod should be
installed with the tip at least one meter above WMT52. The rod must
be properly grounded, compliant with all applicable local safety
regulations.
VAISALA_______________________________________________________________________ 29
Page 32

User’s Guide ______________________________________________________________________
Installation Procedure
At the measurement site, WMT52 needs to be mounted, grounded,
aligned, and connected to the data logger and the power source.
Mounting
Ultrasonic Wind Sensor WMT52 can be mounted either onto a vertical
pole mast or onto a horizontal cross arm. When mounting WMT52 onto
a pole mast, an optional mounting kit can be used to ease mounting.
When using the optional mounting kit, alignment is needed only when
mounted for the first time.
Each of the mounting options is further described in the following
sections.
NOTE
Ultrasonic Wind Sensor WMT52 must be installed to an upright,
vertical position.
Mounting to Vertical Pole Mast
1. Remove the screw cover and insert the WMT52 to the pole mast.
2. Align the sensor in such a way that the arrow points to north.
3. Tighten the fixing screw (provided) and replace the screw cover.
30 ___________________________________________________________________M210925EN-B
Page 33

Chapter 4 _______________________________________________________________ Installation
0803-043
Figure 11 Location of Fixing Screw
Mounting with Optional Mounting Kit
1. Insert the mounting kit adapter to the sensor bottom in the position
shown in the picture.
2. Turn the kit inside the bottom firmly until you feel that the adapter
snaps into the locked position.
3. Mount the adapter to the pole mast, do not tighten the fixing screw
(provided).
4. Align the sensor in such a way that the arrow points to north.
5. Tighten the fixing screw ot the mounting adapter to fix the adapter
firmly to the pole mast.
VAISALA_______________________________________________________________________ 31
Page 34

User’s Guide ______________________________________________________________________
0601-019
Figure 12 Mounting WMT52 to Pole Mast Using Optional
Mounting Kit
NOTE
The following numbers refer to Figure 12 on page 32:
1 = Fixing screw
2 = Mounting kit
When removing the WMT52 from the pole just turn the sensor so that
it snaps out from the mounting kit. When replacing the device the
alignment is not needed.
Mounting To Horizontal Cross Arm
1. Remove the screw cover.
2. Align the horizontal cross arm in south-north-direction, see
Aligning the WMT52 on page 36. In case the cross arm cannot be
aligned, make the wind direction offset as instructed in section
Wind Direction Offset on page 37.
3. Mount the sensor into the cross arm by using a mounting bolt
(M6 DIN933) and a nut, see Figure 13 on page 33 and Figure 14 on
page 33.
32 ___________________________________________________________________M210925EN-B
Page 35

Chapter 4 _______________________________________________________________ Installation
0803-044
Figure 13 Mounting WMT52 to Cross Arm
The following numbers refer to :
1 = Nut (M6 DIN934)
2 = Mounting bolt (M6 DIN933)
0803-042
Figure 14 Mounting Bolt Location in Cross Arm
The following numbers refer to Figure 14 on page 33:
1 = Nut (M6 DIN934)
2 = Mounting Bolt (M6 DIN933)
VAISALA_______________________________________________________________________ 33
Page 36

User’s Guide ______________________________________________________________________
Grounding the WMT52
The normal way to ground the WMT52 is to install it on a mast or a
cross arm that provides a good connection to earth ground. The
grounding is provided via the fixing screw (or mounting bolt), so it is
important that it makes a good ground connection. If the surface of the
mounting point is painted or has some other finishing that prevents a
good electrical connection, consider using the Bushing and Grounding
Kit and a cable to provide the ground connection.
Grounding using the Bushing and Grounding Kit
If necessary, you can run a cable from the fixing screw to a grounding
point. A Bushing and Grounding Kit (Vaisala order code: 222109) is
available for this purpose. The kit includes a longer fixing screw, two
nuts and washers, and an Abiko connector for the grounding cable.
Refer to Figure 15 on page 34 for an illustration on how to assemble and
install the kit.
The kit does not include the grounding cable. Use a 16 mm2 (AWG 5)
conductor to achieve a good ground connection.
0806-006
Figure 15 Grounding Using the Bushing and Grounding Kit
The following numbers refer to Figure 15 on page 34:
1 = Fixing screw
2=Nut
3 = Abiko connector between two washers
34 ___________________________________________________________________M210925EN-B
Page 37

Chapter 4 _______________________________________________________________ Installation
Marine Grounding Jumper
The WMT52 should be properly grounded also in marine applications.
If it is grounded to the hull of a ship (ship’s ground) you must remove
the grounding jumper inside the WMT52. When the jumper is removed,
the signal ground is DC isolated from the chassis ground
(> 500 VDC, fulfilling the marine EMC specifications), but AC surge
currents will still be flowing, thus helping the WMT52 survive transient
overvoltages.
The jumper is located inside the sensor, on the same component board
as the screw terminals. The location of the jumper is indicated in Figure
16 on page 35.
0803-048
Figure 16 Grounding Jumper Location
The following numbers refer to Figure 16 on page 35:
1 = Grounding jumper (remove for marine applications)
To remove the jumper, you must open the sensor. If you need to access
the screw terminals, you should remove the jumper at the same time.
1. Loosen the three allen screws at the bottom of WMT52.
2. Pull out the bottom part of the sensor.
3. Remove the grounding jumper from the PCB.
4. Replace the bottom part and tighten the three screws. Do not
overtighten.
VAISALA_______________________________________________________________________ 35
Page 38

User’s Guide ______________________________________________________________________
Aligning the WMT52
To help the alignment, there is an arrow and the text "North" on the
bottom of the sensor. WMT52 needs to be aligned in such a way that
this arrow points to the north.
Wind direction can be referred either to true north, which uses the
earth’s geographic meridians, or to the magnetic north, which is read
with a magnetic compass. The magnetic declination is the difference in
degrees between the true north and magnetic north. The source for the
magnetic declination needs to be current as the declination changes over
time.
0003-011
Figure 17 Sketch of Magnetic Declination
Compass Alignment
To align Ultrasonic Wind Sensor WMT52, proceed as follows:
1. If the WMT52 is already mounted, loosen the fixing screw on the
bottom of the sensor so that you can rotate the device.
36 ___________________________________________________________________M210925EN-B
Page 39

Chapter 4 _______________________________________________________________ Installation
2. Use a compass to determine that the transducer heads of WMT52
are exactly in line with the compass and that the arrow on the
bottom of WMT52 points to the north.
3. Tighten the fixing screw on the bottom of the sensor when the
bottom arrow is exactly aligned to north.
Wind Direction Offset
Make a wind direction correction in case the WMT52 cannot be aligned
in such a way that the arrow on the bottom points to the north. In this
case, the deviation angle from the true north needs to be given to the
WMT52.
1. Mount the sensor to a desired position, see section Mounting on
page 30.
2. Define the deviation angle from the north-zero-alignment. Use the
± sign indication to express the direction from the north line (see
example pictures).
3. Feed the deviation angle to the device by using the wind message
formatting command aWU,D (direction offset), see section
Checking the Settings (aWU) on page 95.
4. From now on, the WMT52 transmits the wind direction data by
using the changed zero-alignment.
0505-201
Figure 18 Wind Direction Offset
VAISALA_______________________________________________________________________ 37
Page 40

User’s Guide ______________________________________________________________________
38 ___________________________________________________________________M210925EN-B
Page 41

Chapter 5 _______________________________________________ Wiring and Power Management
CHAPTER 5
WIRING AND POWER MANAGEMENT
This chapter provides you with instructions on how to connect the
power supply and the serial interfaces, and how to manage and estimate
the average power consumption.
The WMT52 can be accessed through four different serial interfaces:
RS-232, RS-485, RS-422 and SDI-12. Each of them can be wired either
through the internal screw terminal or the 8-pin M12 connector
(optional). Only one serial interface can be used at a time.
CAUTION
The cable openings in the sensor bottom assembly are covered with
hexagonal rubber plugs. If you are not using the cable glands (included
in the Bushing and Grounding Kit), keep the openings covered.
Power Supplies
Operating Voltage
Operating voltage Vin+: 5 ... 32 VDC
Notice that for the average current consumption, see the graphs in
Figure 19 on page 40. The minimum consumption graph is for SDI-12
standby mode.
The input power supply needs to be capable to deliver 60 mA (at 12 V)
or 100 mA (at 6 V) instant current spikes with duration of 30 ms. These
VAISALA_______________________________________________________________________ 39
Page 42

User’s Guide ______________________________________________________________________
are drawn by the wind sensor (whenever enabled) at 4 Hz rate, which is
the default value for wind sampling. Wind sampling at 2 Hz or 1 Hz rate
is also available (see Chapter 8, Sensor and Data Message Settings, on
page 95). The average current consumption will decrease almost in
proportion to the sampling rate, since wind measurement is the most
consuming operation in the system.
In most occasions the average consumption is less than 10 mA.
Typically, the higher the voltage the lower the current (see Figure 19 on
page 40).
0805-023
Figure 19 Average Operational Current Consumption (with
4Hz Wind Sensor Sampling)
Heating Voltage
Heating voltage Vh+ (one of the following three alternatives):
- 5 ... 32 VDC;
- AC, max V
peak-to-peak
- Full-wave rectified AC, max V
40 ___________________________________________________________________M210925EN-B
84 V; or
peak
42 V.
Page 43

Chapter 5 _______________________________________________ Wiring and Power Management
Typical DC voltage ranges are as follows:
- 12 VDC ± 20 % (max 1.1 A);
- 24 VDC ± 20 % (max 0.6 A).
Maximum heating power is achieved at voltages 15.5 V and 32 V.
Nominally at 15.7 V heating voltage level the WMT52 automatically
changes the heating element combination in order to consume equal
power with 12 VDC and 24 VDC supplies. Input resistance (Rin) is
radically increased with voltages above 16 V (see the following graph).
The recommended ranges for AC or full-wave rectified AC are:
- 68 Vp-p ± 20 % (max 0.6 A), for AC;
- 34 Vp ± 20 % (max 0.6 A), for f/w rectified AC.
0805-22
Figure 20 Heating Current and Power vs Vh
CAUTION
To avoid exceeding the maximum ratings in any condition, the
voltages must be checked with no load at the power supply output.
WARNING
VAISALA_______________________________________________________________________ 41
Make sure that you connect only de-energized wires.
Page 44

User’s Guide ______________________________________________________________________
Wiring Using the 8-pin M12 Connector
External Wiring
The 8-pin M12 connector (optional) is located on the bottom of the
sensor, see Figure 3 on page 18. The pins of the 8-pin M12 connector as
seen from outside the sensor are illustrated in the following figure.
0308-032
Figure 21 Pins of 8-pin M12 Connector
The pin connections for the 8-pin M12 connector and the wire colors of
the respective M12 cable (optional, 2/10 m) are listed in the table below.
Table 1 Pin-outs for WMT52 Serial Interfaces and Power
Supplies
/----------------Default wiring----------------\ RS-422 wiring
Wire Color M12 Pin# RS-232 SDI-12 RS-485 RS-422
Blue 7 Data out (TxD) Data in/out (Tx) Data- Data in (RX-)
Gray 5 - - Data+ Data in (RX+)
White 1 Data in (RxD) Data in/out (Rx) - Data out (TX-)
Green 3 GND for data GND for data - Data out (TX+)
Pink 6 GND for Vh+ GND for Vh+ GND for Vh+ GND for Vh+
Yellow 4 Vh+ (heating) Vh+ (heating) Vh+ (heating) Vh+ (heating)
1
Red/Clear
Brown 2 Vin+ (operating) Vin+ (operating) Vin+ (operating) Vin+ (operating)
1. Red in the internal wiring, clear in the cable (a non-insulated drain wire)
8 GND for Vin+ GND for Vin+ GND for Vin+ GND for Vin+
The signal names Data in (RxD) and Data out (TxD) in the table
describe the direction of data flow as seen from the WMT52.
The terms "Default wiring" and "RS-422 wiring" refer to the two
internal wiring options, see the diagrams on the next page.
42 ___________________________________________________________________M210925EN-B
Page 45

Chapter 5 _______________________________________________ Wiring and Power Management
Internal Wiring
The 8-pin M12 connector is wired for RS-232, SDI-12, and RS-485
modes by default. The 4-wire RS-422 requires a different internal
wiring (see also Table 1 on page 42). Refer to the figure below if you
need to change the wiring of the M12 connector.
NOTE
0505-205
Figure 22 Internal Wiring
The RS-232 interface can be accessed through the M12 connector using
a standard PC serial port. Same applies to the SDI-12 interface, since the
Rx and Tx lines are separate at the M12 connector.
The true SDI-12 line requires that the Rx and Tx wires are joined
together (outside the WMT52). See the interface diagrams in the next
section.
Bidirectional use of the RS-485 and RS-422 interface requires a proper
adapter module between the PC and the WMT52. For testing purposes,
the inverted output of either interface (screw terminal pin #3 TX-) is
directly readable with PC's Received Data line. In this case Signal
Ground for PC ComPort is taken from screw terminal pin #6 SGND (for
testing purposes pin #19 VIN- will also do).
For configuration work, the Service Port is most practical, since it has
constant and convenient line parameters: RS232/19200, 8, N, 1. See
Chapter 6, Connection Options, on page 51 and Figure 3 on page 18.
VAISALA_______________________________________________________________________ 43
Page 46

User’s Guide ______________________________________________________________________
Wiring Using the Screw Terminals
1. Loosen the three screws at the bottom of the WMT52.
2. Pull out the bottom part of the sensor.
3. Insert the power supply wires and signal wires through the cable
gland(s) in the bottom of the sensor. Cable glands are included in
the optional Bushing and Grounding Kit (order code 222109).
4. Connect the wires according to Table 2 on page 45.
5. Replace the bottom part and tighten the three screws. Do not
overtighten.
0803-035
Figure 23 Screw Terminal Block
The following numbers refer to Figure 23 on page 44:
1 = Screw terminals
44 ___________________________________________________________________M210925EN-B
Page 47

Chapter 5 _______________________________________________ Wiring and Power Management
Table 2 Screw Terminal Pin-outs for WMT52 Serial
Interfaces and Power Supplies
Screw Terminal Pin RS-232 SDI-12 RS-485 RS-422
1 RX- - - Data- Data in (RX-)
2 RX+ - - Data+ Data in (RX+)
3 TX- Data out (TxD) Data in/out (Tx) Data- Data out (TX-)
4 TX+ - - Data+ Data out (TX+)
5 RXD Data in (RxD) Data in/out (Rx) - 6 SGND GND for data GND for data - 17 HTG- GND for Vh+ GND for Vh+ GND for Vh+ GND for Vh+
18 HTG+ Vh+ (heating) Vh+ (heating) Vh+ (heating) Vh+ (heating)
19 VIN- GND for Vin+ GND for Vin+ GND for Vin+ GND for Vin+
20 VIN+ Vin+ (operating) Vin+ (operating) Vin+ (operating) Vin+ (operating)
NOTE
NOTE
In the true SDI-12 mode the two Data in/out lines must be combined
either in the screw terminal or outside the WMT52.
Short-circuit jumpers are required between pins 1-3 and 2-4 for the
RS-485 communication mode. For the RS-422 mode, the jumpers
need to be removed. In the other modes the jumpers may stay or they
can be removed.
VAISALA_______________________________________________________________________ 45
Page 48

User’s Guide ______________________________________________________________________
Data Communication Interfaces
0505-206
Figure 24 Data Communication Interfaces
With RS-485 and RS-422 interfaces, termination resistors need to be
used at both ends of the line, if data rate is 9600 Bd or higher and
distance is 600 m (2000 ft) or longer. Resistor range 100 ... 180 Ω is
suitable for twisted pair lines. Resistors are connected across RX- to
RX+ and across TX- to TX+ (with two-wire RS-485 only one resistor
needed).
46 ___________________________________________________________________M210925EN-B
Page 49

Chapter 5 _______________________________________________ Wiring and Power Management
The termination resistors will remarkably increase power consumption
during data transmission. If low power consumption is a must, a 0.1 μF
capacitor needs to be connected in series with each termination resistor.
Note that the RS-485 interface can be used as well with four wires (as
the RS-422). The basic difference between the RS-485 and RS-422 is
actually their protocol. Namely, in the RS-422 mode the transmitter is
held constantly enabled, while in the RS-485 mode it is enabled only
during transmission (for allowing the host’s transmission in the twowire case).
The RS-232 output swings only between 0 ... +4.5 V. This is enough for
modern PC inputs.The recommended maximum for RS-232 line length
is 100 m (300 ft) with 1200 Bd data rate. Higher rates require shorter
distance, for instance 30 m (100 ft) with 9600 Bd.
NOTE
When WMT52 is used on an RS-485 bus with other polled devices, the
error messaging feature shall always be disabled. This is done by the
following command: 0SU,S=N<crlf>.
Power Management
The power consumption of the WMT52 varies depending on the
selected operating mode or protocol, the data interface type, and the
measurement and reporting intervals. Lowest consumption is achieved
with the Native SDI-12 mode, typically about 1 mW in standby
(0.1 mA @ 12 V), while with ASCII RS-232 or Continuous SDI-12
modes it is about 3 mW in standby.
Some hints for economic power management are given below. The
current consumption values are all defined for 12 V supply. For 6 V
supply, multiply the values by 1.9. For 24 V supply multiply the values
by 0.65 (see Figure 19 on page 40).
- Wind measurement is absolutely the most consuming operation
in the system. So, it all depends on how the wind is to be reported.
If long time averages are needed, the wind must be constantly
measured - then it makes no big difference, which requesting
period or mode is used. Fully continuous wind measurement with
4 Hz sampling rate adds 2 ... 5 mA to the standby current
(depending on the wind and some other climatic conditions). But
for instance 10-second average requested every 2 minutes
VAISALA_______________________________________________________________________ 47
Page 50

User’s Guide ______________________________________________________________________
consumes 12 times less. And 1 Hz sampling rate makes it further
decrease to one fourth.
- ASCII RS-232 Standby consumption with baud rates 4800 and
higher is typically 0.24 mA. With a low baud rate selection (1200
or 2400 Bd) this is reduced to less than 0.19 mA. The jumper wires
across TX+/RX+ and TX-/RX- add an extra 0.02 mA (they are
necessary only in 2-wire RS-485 mode).
- ASCII RS-232 Polling mode and Automatic mode have equal
consumption. Thus Automatic mode is a little more economic,
since interpreting the poll takes more prosessing time than starting
the Automatic message. However, care should be taken when
selecting Precipitation Autosend mode, where the submodes M=R
and M=C may cause extra consumption in rainy conditions, as
triggered to send messages by the rain incidents.
- ASCII RS-232 Data transmission adds 1 ... 2 mA to the standby
consumption during the message sending time. Also it should be
noted that the host device's input (data logger or PC) may
constantly draw some current from the TX line.
NOTE
- RS-485 and RS-422 Data interfaces consume about the same as
RS-232. But with long data cables the consumption during data
transmission may be much higher, especially when termination
resistors are used. On the other hand, the RS-485 driver is in high
impedance state when not transmitting - thus in idle state no current
can be drawn by the host input.
- NMEA modes consume about the same as ASCII modes.
- SDI-12 Native mode (M=S, C=1) has the lowest standby
consumption, about 0.1 mA. Note that it can also be used with RS232 terminals (PC or equivalent), see the SDI-12 connection
diagram in Figure 24 on page 46. In this case the commands must
be in SDI-12 format, but no special line break signals are required.
The SDI-12 mode is for polling only.
- SDI-12 Continuous mode (M=R) consumes about the same as the
ASCII RS-232 mode.
If Heating function is enabled, SDI-12 Native mode consumes the
same as ASCII RS-232 mode.
When heating is on (or temperature is such it should be on), some
0.08 mA additional current is drawn from the operational power
supply.
48 ___________________________________________________________________M210925EN-B
Page 51

Chapter 5 _______________________________________________ Wiring and Power Management
NOTE
While in Service mode and/or while supplied through the Service port
the WMT52 consumes 0.3 ... 0.6 mA more than in normal mode, when
supplied through the Main port (M12 connector or screw terminals).
When supplied through the Service port the minimum voltage level for
reliable operation is 6V. This can also be seen in the supply voltage
reading of the Supervisor message - the Vs value is 1V lower than the
actual input voltage.
VAISALA_______________________________________________________________________ 49
Page 52

User’s Guide ______________________________________________________________________
50 ___________________________________________________________________M210925EN-B
Page 53

Chapter 6 ________________________________________________________ Connection Options
CHAPTER 6
CONNECTION OPTIONS
This chapter contains instructions for configuring the communication
with the sensor.
Communication Protocols
As soon as WMT52 has been properly connected and powered the data
transmission can be started. The communication protocols available in
each of the serial interfaces are shown in the following table.
Table 3 Available Serial Communication Protocols
Serial Interface Communication Protocols Available
RS-232 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
RS-485 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
RS-422 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
SDI-12 SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
You have chosen the communication protocol (ASCII, NMEA 0183 or
SDI-12) when placing the order. In case you want to check and/or
change the protocol or other communication settings, see the following
sections.
VAISALA_______________________________________________________________________ 51
Page 54

User’s Guide ______________________________________________________________________
NOTE
The RS-485 and RS-422 interfaces cannot be directly accessed with a
standard PC terminal. They require a suitable converter. For accessing
the RS-485 interface, you can use the USB RS-232/RS-485 Cable; see
section Connection cables on page 52.
NOTE
RS-232 and SDI-12 can be accessed with a standard PC terminal,
presuming that, for SDI-12, the Data in/out lines have not been
combined inside WMT52.
Connection cables
The connection cable options for WMT52 are listed in the table below.
The USB cables allow the sensor to be connected to a PC using a
standard USB port. The USB cables also provide operation power to the
sensor when connected. Note that the USB cables do not provide power
to the heating.
Table 4 Connection Cable Options
Cable Name Connector on
Sensor End
USB Service Cable (1.4m) M8 female USB type A 220614 (also includes
USB Service Cable Adapter for
WXT510/WMT50
USB RS232/RS485 Cable
(1.4m)
2-meter Cable M12 female No connector;
10-meter Cable M12 female No connector;
10-meter extension cable M12 male M12 female 215952
40-meter cable No connector;
NOTE
If you use the USB RS232/RS485 cable for a permanent installation,
WXT510/WMT50
service connector
M12 female USB type A 220782
open end wires
Connector on
User End
M8 male 221523
open end wires
open end wires
No connector;
open end wires
Order Code
Vaisala Configuration
Tool software)
222287
222288
217020
it is recommended that you use the WSP152 Surge Protector to protect
the host PC against surges entering through the USB port.
52 ___________________________________________________________________M210925EN-B
Page 55

Chapter 6 ________________________________________________________ Connection Options
Installing the Driver for the USB Cable
Before taking the USB cable into use, you must install the provided
USB driver on your PC. When installing the driver, you must
acknowledge any security prompts that may appear. The driver is
compatible with Windows 2000, Windows XP, Windows Server 2003,
and Windows Vista.
1. Check that the USB cable is not connected. Disconnect the cable if
you have already connected it.
2. Insert the media that came with the cable, or download the driver
from www.vaisala.com.
3. Execute the USB driver installation program (setup.exe), and
accept the installation defaults. The installation of the driver may
take several minutes.
4. After the driver has been installed, connect the USB cable to a USB
port on your PC. Windows will detect the new device, and use the
driver automatically.
5. The installation has reserved a COM port for the cable. Verify the
port number, and the status of the cable, using the Vaisala USB
Instrument Finder program that has been installed in the
Windows Start menu. The reserved ports are also visible in the
Ports section of the Windows Device Manager.
Remember to use the correct port in the settings of your terminal
program. Windows will recognize each individual cable as a different
device, and reserve a new COM port.
There is no reason to uninstall the driver for normal use. However, if
you wish to remove the driver files and all Vaisala USB cable devices,
you can do so by uninstalling the entry for Vaisala USB Instrument
Driver from the Add or Remove Programs (Programs and Features
in Windows Vista) in the Windows Control Panel.
VAISALA_______________________________________________________________________ 53
Page 56

User’s Guide ______________________________________________________________________
Service Cable Connection
The USB Service Cable has a snap-on connector for the M8 connector
of the service port. The service cable connection is recommended for
checking and changing the device settings. When making the changes,
use the Vaisala Configuration Tool or a standard PC terminal program.
The USB service cable is included in the Service Pack 2, see Table 18
on page 118. For a picture of the service cable, see Figure 5 on page 19.
When you connect the USB service cable between the service connector
and PC USB port, the service port settings are forced automatically to
RS-232 / 19200, 8, N, 1. At the same time, the main serial port at M12
connector and at screw terminals is disabled.
1. Make a connection between the USB port of your PC and the M8
service port connector on the bottom plate of the sensor by using
the USB service cable. See Figure 3 on page 18.
NOTE
2. Open the Vaisala Configuration Tool, or a terminal program.
3. Select the COM port that has been reserved for the USB cable, and
select the following default communication settings:
19200, 8, N, 1.
4. Use the Vaisala Configuration Tool or a terminal program to make
the desired configuration changes. When working with a terminal
program, see section Communication Setting Commands on page
56.
5. When removing the service cable, support the sensor while pulling
on the snap-on connector. The connection is tight, and it is possible
to change the alignment of the sensor if you pull too hard.
Changes in the serial interface/communication protocol/baud settings
take place when disconnecting the service cable or when resetting the
sensor.
If these settings are not changed during the service connection session,
original main port settings (at M12 and screw terminals) are returned,
as soon as the service cable is disconnected from either end.
54 ___________________________________________________________________M210925EN-B
Page 57

Chapter 6 ________________________________________________________ Connection Options
Connection Through M12 Bottom Connector or Screw Terminal
Checking/changing the device settings can also be made through the
M12 bottom connector or screw terminal. Then you have to have know
the communication settings of the device, have a suitable cable between
the device and the host and, if needed, use a converter (for example, RS485/422 to RS-232, if the host is a PC). The factory defaults settings are
as follows:
Table 5 Default Serial Communication Settings for M12/
Screw Terminal Connection
Serial Interface Serial Settings
SDI-12 1200 baud, 7, E, 1
RS-232, ASCII 19200 baud, 8, N, 1
RS-485, ASCII 19200 baud, 8, N, 1
RS-422 ASCII 19200 baud, 8, N, 1
RS-422 NMEA 4800 baud, 8, N, 1
VAISALA_______________________________________________________________________ 55
Page 58

User’s Guide ______________________________________________________________________
Communication Setting Commands
NOTE
Hereafter the commands to be typed are presented in normal text while
the responses of the sensor are presented in italic.
Checking the Current Communication Settings (aXU)
With this command you can request the current communication settings
of WMT52.
Command format in ASCII and NMEA 0183: aXU<cr><lf>
Command format in SDI-12: aXXU!
where
a = Device address, which may consist of the following
characters: 0 (default) ... 9, A ... Z, a ... z.
XU = Device settings command in ASCII and NMEA 0183
XXU = Device settings command in SDI-12
NOTE
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
Example response in ASCII and NMEA 0183:
aXU,A=a,M=[M],T=[T],C=[C],I=[I],B=[B],D=[D],P=[P],S=[S],L
=[L],N=[N],V=[V]<cr><lf>
Example response in SDI-12:
aXXU,A=a,M=[M],T=[T],C=[C],B=[B],D=[D],P=[P],S=[S],
L=[L],N=[N],V=[V]<cr><lf>
You can add the Id information field in the supervisor data message to
provide identifying information in addition to the sensor address. See
section Supervisor Message on page 101. The information field is set
as part of the factory settings (see General Unit Settings on page 138).
You can only modify it using the Vaisala Configuration Tool.
56 ___________________________________________________________________M210925EN-B
Page 59

Chapter 6 ________________________________________________________ Connection Options
Setting Fields
a = Device address
XU = Device settings command in ASCII and NMEA 0183
XXU = Device settings command in SDI-12
[A] = Address: 0 (default) ... 9, A ... Z, a ... z
[M] = Communication protocol:
A = ASCII, automatic
a = ASCII, automatic with CRC
P = ASCII, polled
p = ASCII, polled, with CRC
N = NMEA 0183 v3.0, automatic
Q = NMEA 0183 v3.0, query (= polled)
S = SDI-12 v1.3
R = SDI-12 v1.3 continuous measurement
[T] = Test parameter (for testing use only)
[C] = Automatic repeat interval for the Composite
Message: 0 ... 3600 s (0 = no automatic repeat). Does
not work in SDI-12 modes.
[I] = Serial interface: 1 = SDI-12, 2 = RS-232, 3= RS-485,
4 = RS-422
[B] = Baud rate: 1200, 2400, 4800, 9600, 19200, 38400,
57600, 115200
[D] = Data bits: 7/8
[P] = Parity: O = Odd, E = Even, N = None
[S] = Stop bits: 1/2
[L] = RS-485 line delay: 0 ... 10000 ms
Defines the delay between the last character of the
query and the first character of the response message
from WMT52. During the delay, the WMT52's
transmitter is disabled. Effective in ASCII, polled
and NMEA 0183 query protocols. Effective when
RS-485 is selected (C = 3).
[N] = Name of the device: WMT52 (read only)
[V] = Software version: for example, 1.00 (read only)
<cr><lf> = Response terminator
VAISALA_______________________________________________________________________ 57
Page 60

User’s Guide ______________________________________________________________________
NOTE
There are two different SDI-12 modes available for providing all the
functionality of the SDI-12 v1.3 standard.
The lowest power consumption is achieved with the Native SDI-12
mode (aXU,M=S), as it makes measurements and outputs data only on
request.
In the continuous SDI-12 mode (aXU,M=R) internal measurements
are made at a user-configurable update interval, see Chapter 8, Sensor
and Data Message Settings, on page 95. The data is outputted on
request.
Example (ASCII and NMEA 0183, device address 0):
0XU<cr><lf>
0XU,A=0,M=P,T=0,C=2,B=19200,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
Example (SDI-12, device address 0):
0XXU!0XXU,A=0,M=S,T=0,C=1,B=1200,D=7,P=E,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
58 ___________________________________________________________________M210925EN-B
Page 61

Chapter 6 ________________________________________________________ Connection Options
Changing the Communication Settings (aXU)
Make the desired setting with the following command. Select the
correct value/letter for the setting fields, see Setting Fields on page 57.
See also the examples.
Command format in ASCII and NMEA 0183:
aXU,A=x,M=x,C=x,B=x,D=x,P=x,S=x,L=x<cr><lf>
Command format in SDI-12:
aXXU,A=x,M=x,C=x,B=x,D=x,P=x,S=x,L=x!
where
NOTE
A, M, C, I,
B, D, P, S,L
x = Input value for the setting
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
When changing the serial interface and communication protocol, note
the following:
Each serial interface requires its specific wiring and/or jumper settings
described in Chapter 5, Wiring and Power Management, on page 39.
Change first the serial interface field C and then the communication
protocol field M.
Changing the serial interface to SDI-12 (C=1) will automatically
change the baud settings to 1200, 7, E, 1 and the communication
protocol to SDI-12 (M=S).
= The communication setting fields, see Setting Fields
on page 57.
NOTE
VAISALA_______________________________________________________________________ 59
Reset the sensor to validate the changes of communication parameters
by disconnecting the service cable or using the Reset (aXZ)
command, see Reset (aXZ) on page 62.
Page 62

User’s Guide ______________________________________________________________________
Example (ASCII and NMEA 0183, device address 0):
Changing the device address from 0 to 1:
0XU,A=1<cr><lf>
1XU,A=1<cr><lf>
Checking the changed settings:
1XU<cr><lf>
1XU,A=1,M=P,T=1,C=2,B=19200,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
Example (ASCII, device address 0):
Changing RS-232 serial interface with ASCII, polled communication
protocol and baud settings 19200, 8, N, 1 to RS-485 serial interface with
ASCII, automatic protocol and baud settings 9600, 8, N, 1.
NOTE
Checking the actual settings:
0XU<cr><lf>
0XU,A=0,M=P,C=2,B=19200,D=8,P=N,S=1,L=25,N=WMT50,
V=1.00<cr><lf>
You can change several parameters in the same command as long as
the command length does not exceed 32 characters (including
command terminator characters ! or <cr><lf>).You do not have to type
those setting fields that are not to be changed.
Changing several settings with one command:
0XU,M=A,C=3,B=9600<cr><lf>
0XU,M=A,C=3,B=9600<cr><lf>
Checking the changed settings:
0XU<cr><lf>
0XU,A=0,M=A,T=1,C=3,B=9600,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
60 ___________________________________________________________________M210925EN-B
Page 63

Chapter 7 __________________________________________________ Getting the Data Messages
CHAPTER 7
GETTING THE DATA MESSAGES
This chapter presents the general and data message commands.
NOTE
NOTE
Each communication protocol has its own section for data message
commands.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 95.
Type commands in CAPITAL letters.
The parameter order in messages is as follows:
Wind (M1): Dn Dm Dx Sn Sm Sx
Supv (M5): Th Vh Vs Vr Id
Comp (M): Wind Supv (parameters in above order)
The parameters are in the same order as in the Setting Field tables in
chapter Sensor and Data Message Settings on page 95. The order of the
parameters is fixed, but you can exclude any parameter from the list
when configuring the sensor.
VAISALA_______________________________________________________________________ 61
Page 64

User’s Guide ______________________________________________________________________
General Commands
In case the error messaging is disabled (see Supervisor Message on page
101), WMT52 does not return any response message with the general
commands given in ASCII and NMEA-formats.
Reset (aXZ)
This command is used to perform software reset on the device.
Command format in ASCII and NMEA 0183: aXZ<cr><lf>
Command format in SDI-12: aXZ!
where
a = Device address
XZ = Reset command
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
The response depends on the communication protocol, see the
examples.
Example (ASCII):
0XZ<cr><lf>
0TX,Start-up<cr><lf>
Example (SDI-12):
0XZ!0<cr><lf> (=device address)
Example (NMEA 0183):
0XZ<cr><lf>
$WITXT,01,01,07,Start-up*29
62 ___________________________________________________________________M210925EN-B
Page 65

Chapter 7 __________________________________________________ Getting the Data Messages
Measurement Reset (aXZM)
This command is used to interrupt all ongoing measurements of the
sensor and start them from the beginning.
Command format in ASCII and NMEA 0183: aXZM<cr><lf>
Command format in SDI-12: aXZM!
where
a = Device address
XZM = Measurement break command
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
Example (ASCII):
0XZM<cr><lf>
0TX,Measurement reset<cr><lf>
Example (SDI-12):
0XZM!0 (= device address)
Example (NMEA 0183):
0XZM<cr><lf>
$WITXT,01,01,09,Measurement reset*50<cr><lf>
VAISALA_______________________________________________________________________ 63
Page 66

User’s Guide ______________________________________________________________________
ASCII Protocol
This section presents the data commands and data message formats for
the ASCII communication protocols.
Abbreviations and Units
For changing the units, see Chapter 8, Sensor and Data Message
Settings, on page 95.
Table 6 Abbreviations and Units
Abbreviation Name Unit
Sn Wind speed minimum m/s, km/h, mph, knots #,M, K, S, N
Sm Wind speed average m/s, km/h, mph, knots #,M, K, S, N
Sx Wind speed maximum m/s, km/h, mph, knots #,M, K, S, N
Dn Wind direction minimum deg #, D
Dm Wind direction average deg #, D
Dx Wind direction
maximum
Th Heating temperature °C, °F #, C, F
Vh Heating voltage V
Vs Supply voltage V V
Id Information field alphanumeric
1. The letters in the status field indicate the Unit, the # character indicates invalid data.
2. For heating # = heating option is not available (has not been ordered). N = heating option is available
but have been disabled by user or the heating temperature is over the high control limit. V = heating is
on at 50% duty cycle and the heating temperature is between the high and middle control limits. W =
heating is on at 100% duty cycle and the heating temperature is between the low and middle control
limits. F = heating is on at 50% duty cycle and the heating temperature is below the low control limit.
deg #, D
Status
#, N, V, W, F
1
2
Device Address (?)
This command is used to query the address of the device on the bus.
Command format: ?<cr><lf>
where
? = Device address query command
<cr><lf> = Command terminator
64 ___________________________________________________________________M210925EN-B
Page 67

Chapter 7 __________________________________________________ Getting the Data Messages
The response:
b<cr><lf>
where
b = Device address (default = 0)
<cr><lf> = Response terminator.
Example:
?<cr><lf>
0<cr><lf>
If more than one sensor is connected to the bus, see Appendix A,
Networking, on page 121. If you need to change the device address, see
Changing the Communication Settings (aXU) on page 59.
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another device. It asks a device to acknowledge its presence
on the bus.
Command format: a<cr><lf>
where
a = Device address
<cr><lf> = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0<cr><lf>
0<cr><lf>
VAISALA_______________________________________________________________________ 65
Page 68

User’s Guide ______________________________________________________________________
Wind Data Message (aR1)
With this command you can request the wind data message.
Command format: aR1<cr><lf>
where
a = Device address
R1 = Wind message query command
<cr><lf> = Command terminator
Example of the response (the parameter set is configurable):
0R1,Dn=236D,Dm=283D,Dx=031D,Sn=0.0M,Sm=1.0M,
Sx=2.2M<cr><lf>
where
a = Device address
R1 = Wind message query command
Dn = Wind direction minimum (D = degrees)
Dm = Wind direction average (D = degrees)
Dx = Wind direction maximum (D = degrees)
Sn = Wind speed minimum (M = m/s)
Sm = Wind speed average (M = m/s)
Sx = Wind speed maximum (M = m/s)
<cr><lf> = Response terminator
To change the parameters and units in the response message and to
make other sensor settings, see section Wind Sensor on page 95.
66 ___________________________________________________________________M210925EN-B
Page 69

Chapter 7 __________________________________________________ Getting the Data Messages
Supervisor Data Message (aR5)
With this command you can request a supervisor data message
containing self-check parameters of the heating system and power
supply voltage.
Command format: aR5<cr><lf>
where
a = Device address
R5 = Supervisor message query command
<cr><lf> = Command terminator
Example of the response (the parameter set is configurable):
0R5,Th=25.9C,Vh=12.0N,Vs=15.2V,Vr=3.475V,Id=HEL___<cr><lf
>
where
a = Device address
R5 = Supervisor message query command
Th = Heating temperature (C = °C)
Vh = Heating voltage (N = heating is off)
Vs = Supply voltage (V = V)
Vr = 3.5 V reference voltage (V = V)
<cr><lf> = Response terminator
Id = Information field
To change the parameters and units in the response message and to
make other settings, see section Supervisor Message on page 101.
The content of the parameter "Id" is a text string which can be modified
by using the Vaisala Configuration Tool only. Field can include
customer-specific, additional information. For more information on
changing the settings, refer to the Vaisala Configuration Tool on-line
help for the Info field in the Device Settings window.
VAISALA_______________________________________________________________________ 67
Page 70

User’s Guide ______________________________________________________________________
Combined Data Message (aR)
With this command you can request all individual messages aR1 and
aR5 with just one command.
Command format: aR<cr><lf>
where
a = Device address (default = 0)
R = Combined message query command
<cr><lf> = Command terminator
Example of the response:
0R1,Dm=027D,Sm=0.1M<cr><lf>
0R5,Th=76.1F,Vh=11.5N,Vs=11.5V,Vr=3.510V,Id=HEL__<cr><lf>
Composite Data Message Query (aR0)
This command is used to request a combined data message with user
configurable set of wind and supervisor data.
Command format: aR0<cr><lf>
where
a = Device address
R0 = Composite data message query command
<cr><lf> = Command terminator
Example of the response (the parameters included can be chosen
from the full parameter set of the commands aR1 and aR5):
0R0,Dx=005D,Sx=2.8M,Th=23.6C<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 95.
68 ___________________________________________________________________M210925EN-B
Page 71

Chapter 7 __________________________________________________ Getting the Data Messages
Polling with CRC
Use the same data query commands as in the previous sections but type
the first letter of the command in lower case and add a correct threecharacter CRC before the command terminator. The response contains
also a CRC. For more information about the CRC-computation see
Appendix C, CRC-16 Computation, on page 133.
Requesting a wind data message with a CRC:
Command format: ar1xxx<cr><lf>
where
a = Device address
r1 = Wind message query command
xxx = Three-character CRC for ar1 command
NOTE
<cr><lf> = Command terminator
Example of the response (the parameter set is configurable):
0r1,Dn=236D,Dm=283D,Dx=031D,Sn=0.0M,Sm=1.0M,Sx=2.2MLFj
<cr><lf>
where the three characters before <cr><lf> are the CRC for the
response.
The correct CRC for each command can be requested by typing the
command with an arbitrary three-character CRC.
Example of asking the CRC for the wind data message query ar1:
Command format: ar1yyy<cr><lf>
where
a = Device address
r1 = Wind message query command
yyy = Arbitrary three-character CRC
<cr><lf> = Command terminator
VAISALA_______________________________________________________________________ 69
Page 72

User’s Guide ______________________________________________________________________
Response:
atX,Use chksum GoeIU~<cr><lf>
where
a = Device address
tX,Use
chksum
Goe = Correct three-character CRC for the ar1 command
IU~ = Three-character CRC for the response message
<cr><lf> = Response terminator
Example of the other data query commands with CRC (when the
device address is 0):
Supervisor query = 0r5Kcd<cr><lf>
Combined message query = 0rBVT<cr><lf>
Composite data message query = 0r0Kld<cr><lf>
In every case the response contains a three-character CRC before the
<cr><lf>.
For selecting the parameters to be included in the response messages,
changing the units and making other configurations of the measured
parameters, see Chapter 8, Sensor and Data Message Settings, on page
95.
= Text prompt
Automatic Mode
When automatic ASCII protocol is selected the sensor sends data
messages at user configurable update intervals. The message structure
is same as with data query commands aR1 and aR5. You can choose an
individual update interval for each sensor, see Chapter 8, Sensor and
Data Message Settings, on page 95, sections Changing the Settings.
Example:
0R1,Dm=027D,Sm=0.1M<cr><lf>
0R5,Th=76.1F,Vh=11.5N,Vs=11.5V,Vr=3.510V<cr><lf>
70 ___________________________________________________________________M210925EN-B
Page 73

Chapter 7 __________________________________________________ Getting the Data Messages
Example (with CRC):
0r1,Sn=0.1M,Sm=0.1M,Sx=0.1MGOG<cr><lf>
0r5,Th=25.0C,Vh=10.6#,Vs=10.8V,Vr=3.369VO]T<cr><lf>
NOTE
Stop the automatic output by changing the communication protocol to
polled mode (aXU,M=P).
Polling commands aR1 and aR5 can be used also in ASCII automatic
protocol for requesting data.
Automatic Composite Data Message (aR0)
When automatic composite data messaging is selected, the sensor sends
composite data messages at user configurable intervals. The message
structure is the same as with the composite data query command aR0
and contains a user configurable set of wind and supervisor data.
Example (the parameters included can be chosen from the full
parameter set of the commands aR1 and aR5):
0R0,Dx=005D,Sx=2.8M,Th=23.6C<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 95.
Automatic composite data messaging is a concurrent, not an alternate
mode to either the polled or automatic modes.
SDI-12 Protocol
There are two different SDI-12 modes available for providing all the
functionality of the SDI-12 v1.3 standard.
The lowest power consumption is achieved with the Native SDI-12 v1.3
mode (aXU,M=S), as it makes measurements and outputs data only
when requested. In this mode all the commands presented in this
chapter are available except those for the Continuous Measurement.In
SDI-12 v1.3 continuous mode (aXU,M=R) the sensor makes internal
measurements at update intervals configurable by the user, see Chapter
VAISALA_______________________________________________________________________ 71
Page 74

User’s Guide ______________________________________________________________________
8, Sensor and Data Message Settings, on page 95. The data is outputted
when requested. In this mode all the commands presented in this
chapter are available.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 95.
In the Native SDI-12 mode (aXU,M=S) the WMT52 is in idle state
most of the time (power consumption < 1 mW). More power is
consumed only during the measurements and data transmit requested by
the host device. Especially, the wind measurement typically consumes
60 mW average power (with 4 Hz sampling rate), throughout the
averaging period. In the Continuous mode (aXU,M=R) the power
consumption is determined by the internal update intervals of the sensor
and wind averaging time. These have certain limits so very long
measurement intervals cannot be achieved in this mode. Also the power
consumption between the measurements is about three times that of the
Native mode.
Address Query Command (?)
This command is used to query the address of the device on the bus.
If more than one sensor is connected to the bus, they will all respond,
causing a bus collision.
Command format: ?!
where
? = Address query command
! = Command terminator
The response:
a<cr><lf>
where
a = Device address (default = 0)
<cr><lf> = Response terminator
Example (device address 0):
72 ___________________________________________________________________M210925EN-B
Page 75

Chapter 7 __________________________________________________ Getting the Data Messages
?!0<cr><lf>
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another SDI-12 device. It asks a device to acknowledge its
presence on the SDI-12 bus.
Command format: a!
where
a = Device address
! = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0!0<cr><lf>
Change Address Command (aAb)
This command changes the device address. After the command has
been issued and responded to, the sensor is not required to respond to
another command for one second time in order to ensure writing the
new address to the non-volatile memory.
Command format: aAb!
where
a = Device address
A = Change address command
b = Address to change to
! = Command terminator
VAISALA_______________________________________________________________________ 73
Page 76

User’s Guide ______________________________________________________________________
The response:
b<cr><lf>
where
b = Device address = the new address (or the original
address, if the device is unable to change it)
<cr><lf> = Response terminator
Example (changing address from 0 to 3):
0A3!3<cr><lf>
Send Identification Command (aI)
This command is used to query the device for the SDI-12 compatibility
level, model number, and firmware version and serial number.
Command format: aI!
where
a = Device address
I = Send identification command
! = Command terminator
The response:
a13ccccccccmmmmmmvvvxxxxxxxx<cr><lf>
where
a = Device address
13 = The SDI-12 version number, indicating SDI-12
version compatibility; for example, version 1.3 is
encoded as 13
cccccccc = 8-character vendor identification Vaisala_
mmmmmm = 6 characters specifying the sensor model number
vvv = 3 characters specifying the firmware version
xxxxxxxx = 8-character serial number
<cr><lf> = Response terminator
74 ___________________________________________________________________M210925EN-B
Page 77

Chapter 7 __________________________________________________ Getting the Data Messages
Example:
0I!013VAISALA_WMT50103Y2630000<cr><lf>
Start Measurement Command (aM)
This command asks the device to make a measurement. The measured
data are not sent automatically and should be requested with a separate
Send data command aD.
The host device is not allowed to send any commands to other devices
on the bus until the measurement is completed. When several devices
are connected to the same bus and simultaneous measurements from the
different devices are needed, Start concurrent measurement aC or Start
concurrent measurement with CRC aCC should be used, see the next
sections.
See Examples of aM, aC and aD Commands on page 79.
Command format: aMx!
where
a = Device address
M = Start measurement command
x = The desired sensor to make the measurement
1 = Wind
5 = Supervisor
If x is left out, the query refers to the combined data
message used for requesting data from several
sensors with just one command. See Examples of
aM, aC and aD Commands on page 79.
! = Command terminator
The response is sent in two parts. The response part one:
atttn<cr><lf>
The response part two (indicates that the data is ready to be requested):
a<cr><lf>
where
a = Device address
VAISALA_______________________________________________________________________ 75
Page 78

User’s Guide ______________________________________________________________________
ttt = The measurement completing time in seconds
n = The number of the measured parameters available
(maximum number is 9)
<cr><lf> = Response terminator
NOTE
NOTE
NOTE
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 95.
When the measurement takes less than one second, the response part
two is not sent.
The maximum number of parameters that can be measured with aM
and aMC commands is nine (9). If more parameters are to be
measured, Start concurrent measurement commands aC and aCC
should be used (for which the maximum number of parameters to be
measured is 20), see the following sections.
Start Measurement Command with CRC (aMC)
Command format: aMCx!
This command has the same function as the aM but a three-character
CRC is added to the response data strings before <cr><lf>. In order to
request the measured data, Send data command aD should be used, see
the following sections.
Start Concurrent Measurement (aC)
This command is used when there are several devices on the same bus
and simultaneous measurements are needed from the devices, or if more
than nine (9) measurement parameters are requested from a single
device.
76 ___________________________________________________________________M210925EN-B
Page 79

Chapter 7 __________________________________________________ Getting the Data Messages
The measured data is not sent automatically and it should be requested
with separate Send data command aD. See Examples of aM, aC and aD
Commands on page 79.
Command format: aCx!
where
a = Device address
C = Start concurrent measurement command
x = The desired measurement
1 = Wind
5 = Supervisor
If x is left out, the query refers to combined data
message in which the user can request data from
several sensors with just one command. See the
examples below.
! = Command terminator
NOTE
The response:
atttnn<cr><lf>
where
a = Device address
ttt = The measurement completing time in seconds
nn = The number of the measured parameters available
(maximum number is 20)
<cr><lf> = Response terminator
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 95.
Start Concurrent Measurement with CRC (aCC)
Command format: aCCx!
VAISALA_______________________________________________________________________ 77
Page 80

User’s Guide ______________________________________________________________________
This command has the same function as aC but a three-character CRC
is added to the response data strings before <cr><lf>.
In order to request the measured data, Send data command aD should
be used, see the following sections.
Send Data Command (aD)
This command is used to request the measured data from the device. See
Examples of aM, aC and aD Commands on page 79.
NOTE
Start measurement command tells the number of parameters available.
However, the number of the parameters that can be included in a single
message depends on the number of characters in the data fields. If all
the parameters are not retrieved in a single response message, repeat
the Send data commands until all the data is obtained.
Command format: aDx!
where
a = Device address
D = Send data command
x = The order of consecutive Send data commands.
Always, the first Send data command should be
addressed with x=0. If all the parameters are not
retrieved, the next Send data command is sent with
x=1 and so on. The maximum value for x is 9. See
Examples of aM, aC and aD Commands on page 79.
! = Command terminator
The response:
a+<data fields><cr><lf>
where
a = Device address
<data
fields>
78 ___________________________________________________________________M210925EN-B
= The measured parameters in selected units, separated
with '+' marks (or - marks in case of negative
parameter values).
Page 81

Chapter 7 __________________________________________________ Getting the Data Messages
<cr><lf> = Response terminator
NOTE
NOTE
NOTE
aD0 command can also be used to break the measurement in progress
started with commands aM, aMC, aC or aCC.
In SDI-12 v1.3 Continuous measurement mode (aXU,M=R) the
sensor makes measurements at configurable update intervals. The aD
command following the aM, aMC, aC or aCC command always
returns the latest updated data. Thus in aXU,M=R mode issuing
consecutive aD commands may result in different data strings if the
value(s) happen to be updated between the commands.
Examples of aM, aC and aD Commands
The parameter order in messages is as follows:
Wind (M1): Dn Dm Dx Sn Sm Sx
Supv (M5): Th Vh Vs Vr Id
Comp (M): Wind Supv (parameters in above order)
The parameters are in the same order as in the Setting Field tables in
chapter Sensor and Data Message Settings on page 95. The order of the
parameters is fixed, but you can exclude any parameter from the list
when configuring the sensor.
The device address is 0 in all examples.
Example 1:
Start a wind measurement and request the data (all six wind parameters
are enabled in the message):
0M1!00036<cr><lf> (measurement ready in 3 seconds and 6
parameters available)
0<cr><lf> (measurement completed)
0D0!0+339+018+030+0.1+0.1+0.1<cr><lf>
VAISALA_______________________________________________________________________ 79
Page 82

User’s Guide ______________________________________________________________________
Example 2:
Start a supervisor measurement with CRC and request the data:
0MC5!00014<cr><lf> (measurement ready in one second and 4
parameters available)
0<cr><lf> (measurement completed)
0D0!0+34.3+10.5+10.7+3.366DpD<cr><lf>
Continuous Measurement (aR)
The device can be configured so that all the parameters can be requested
instantly with the command aR instead of the two phase request
procedure of commands aM, aMC, aC, aCC + aD. In this case the
obtained parameter values are those from the latest internal updating
(for setting of update intervals, see Chapter 8, Sensor and Data Message
Settings, on page 95).
NOTE
For using Continuous measurement commands for wind and
supervisor parameters the respective protocol must be selected
(aXU,M=R).
The M=S selection requires use of aM, aMC, aC, aCC + aD
commands.
Command format: aRx!
where
a = Device address
R = Start continuous measurement command:
x = The desired sensor to make the measurement:
1 = Wind
5 = Supervisor
If x is left out, the query refers to the combined data
message used for requesting data from several
sensors with just one command.
! = Command terminator
The response:
80 ___________________________________________________________________M210925EN-B
Page 83

Chapter 7 __________________________________________________ Getting the Data Messages
a+<data fields><cr><lf>
where
a = Device address
<data
fields>
<cr><lf> = Response terminator
Examples (device address 0):
0R1!0+323+331+351+0.0+0.4+3.0<cr><lf>
0R5!0+20.3+12.0+12.2+3.530<cr><lf>
0R!0+178+288+001+15.5+27.4+38.5+23.9+35.0+1002.1+0.00+0+
0.0+23.8<cr><lf>
= The measured parameters in selected units, separated
with '+' marks (or '-' marks in case of negative
parameter values). The maximum number of
parameters to be measured with one reqeust is 15.
Continuous Measurement with CRC (aRC)
Command format: aRCx!
Has the same function as the Continuous measurement command aR
but a three-character CRC is added to the response data strings before
<cr><lf>.
Example (device address 0):
0RC3!0+0.04+10+14.8+0.0+0+0.0INy
Start Verification Command (aV)
This command is used to query self diagnostic data from the device.
However, the command is not implemented in WMT52. The selfdiagnostic data can be requested with aM5 command.
VAISALA_______________________________________________________________________ 81
Page 84

User’s Guide ______________________________________________________________________
NMEA 0183 V3.0 Protocol
This section presents the data query commands and data message
formats for the NMEA 0183 v3.0 query and automatic protocols.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 95.
A two-character checksum (CRC) field is transmitted in all data request
sentences. For definition of the CRC, see Appendix C, CRC-16
Computation, on page 133.
Device Address (?)
This command is used to query the address of the device on the bus.
Command format: ?<cr><lf>
where
? = Device address query command
<cr><lf> = Command terminator
The response:
b<cr><lf>
where
b = Device address (default = 0)
<cr><lf> = Response terminator.
Example:
?<cr><lf>
0<cr><lf>
If more than one sensor is connected to the bus, see Appendix A,
Networking, on page 121. If you need to change the device address, see
Changing the Communication Settings (aXU) on page 59.
82 ___________________________________________________________________M210925EN-B
Page 85

Chapter 7 __________________________________________________ Getting the Data Messages
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another device. It asks a sensor to acknowledge its presence
on the bus.
Command format: a<cr><lf>
where
a = Device address
<cr><lf> = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0<cr><lf>
0<cr><lf>
MWV Wind Speed and Direction Query
Request the wind speed and direction data with a MWV query
command. For using MWV query the NMEA Wind formatter
parameter in the wind sensor settings shall be set to W (see section
Wind Sensor on page 95). With MWV query only wind speed and
direction average values can be requested. For obtaining min and max
data for speed and direction, see section XDR Transducer Measurement
Query on page 85.
VAISALA_______________________________________________________________________ 83
Page 86

User’s Guide ______________________________________________________________________
Command format: $--WIQ,MWV*hh<cr><lf>
where
$ = Start of the message
-- = Device identifier of the requester
WI = Device type identifier (WI = weather instrument)
Q = Defines the message as Query
MWV = Wind speed and direction query command
* = Checksum delimiter
hh = Two-character checksum for the query command.
<cr><lf> = Command terminator
The response format:
$WIMWV,x.x,R,y.y,M,A*hh<cr><lf>
where
$ = Start of the message
WI = Talker identifier (WI = weather instrument)
MWV = Wind speed and direction response identifier
x.x =
Wind direction value
1
R = Wind direction unit (R = relative)
y.y = Wind speed value
M = Wind speed unit (m/s)
A = Data status: A = valid, V = Invalid
* = Checksum delimiter
hh = Two-character checksum for the response
<cr><lf> = Response terminator
1. Wind direction is given in relation to the devices north-south axis. An
offset value to the measured direction can be set, see section Chapter 8,
section Wind Sensor.
The checksum to be typed in the query depends on the device identifier
characters. The correct checksum can be asked from WMT52 by typing
any three characters after the $--WIQ,MWV command.
84 ___________________________________________________________________M210925EN-B
Page 87

Chapter 7 __________________________________________________ Getting the Data Messages
Example:
Typing the command $--WIQ,MWVxxx<cr><lf> (xxx arbitrary
characters) WMT52 responds
$WITXT,01,01,08,Use chksum 2F*72<cr><lf>
which tells that 2F is the correct checksum for the $--WIQ,MWV
command.
Example of the MWV Query:
$--WIQ,MWV*2F<cr><lf>
$WIMWV,282,R,0.1,M,A*37<cr><lf>
(Wind angle 282 degrees, Wind speed 0.1 m/s)
XDR Transducer Measurement Query
XDR query command outputs the data of all other sensors except wind.
When requesting also wind data with the XDR command the NMEA
Wind formatter parameter in the wind sensor settings shall be set to T
(see section Wind Sensor on page 95).
Command format: $--WIQ,XDR*hh<cr><lf>
where
$ = Start of the message
-- = Device identifier of the requester
WI = Device type identifier (WI = weather instrument)
Q = Defines the message as Query
XDR = Transducer measurement command
* = Checksum delimiter
hh = Two-character checksum for the query command.
<cr><lf> = Command terminator
The response includes the parameters activated in the data messages
(see Chapter 8, Sensor and Data Message Settings, on page 95).
VAISALA_______________________________________________________________________ 85
Page 88

User’s Guide ______________________________________________________________________
NOTE
The parameter order in the output is as shown in the parameter
selection setting field, see Chapter 8, sections Setting the Fields.
The response format:
$WIXDR,a1,x.x1,u1,c--c1, ... ... ..an,x.xn,un,c--cn*hh<cr><lf>
where
$ = Start of the message
WI = Device type identifier (WI = weather instrument)
XDR = Transducer measurement response identifier
1
a
= Transducer type for the first transducer, see the
following transducer table.
x.x
1
u
1
= Measurement data from the first transducer
= Units of the first transducer measurement, see the
following transducer table.
c--c
1
= First transducer identification (id). WMT52's address
aXU,A is added as a base number to the transducer
id. For changing the address, see Checking the
Current Communication Settings (aXU) on page 56
(command aXU,A= [0 ... 9/A ... Z/a ... z]1.
...
an = Transducer type for the transducer n, see the
following transducer table.
x.xn = Measurement data from the transducer n
un = Units of the transducer n measurement, see the
following transducer table.
c--cn = Transducer n id. WMT52's address aXU,A is added
as a base number to the Transducer #ID. The address
is changeable, see command aXU,A= [0 ... 9/A ... Z/
a ... z]1.
* = Checksum delimiter
hh = Two-character checksum for the response
<cr><lf> = Response terminator
1. NMEA-format transmits only numbers as transducer ids. If WMT52
address is given as a letter, it will be shown as a number (0 ... 9, A = 10,
B = 11, a = 36, b = 37 etc.)
86 ___________________________________________________________________M210925EN-B
Page 89

Chapter 7 __________________________________________________ Getting the Data Messages
The checksum to be typed in the query depends on the device identifier
characters and can be asked from WMT52, see example below.
Example:
Typing the command $--WIQ,XDRxxx<cr><lf> (xxx arbitrary
characters) WMT52 responds
$WITXT,01,01,08,Use chksum 2D*72<cr><lf>
indicating that 2D is the correct checksum for the $--WIQ,XDR
command.
If there are several distinct measurements of the same parameter
(according to the transducer table below), they are assigned with
different transducer ids. For example, minimum, average and maximum
wind speed are measurements of the same parameter (wind speed) so if
all three are configured to be shown in the XDR message, they get
transducer ids A, A+1 and A+2, respectively, where A is WMT52
address aXU,A. The same applies for the wind direction.
For example, for a WMT52 with device address 0 the transducer ids of
all the measurement parameters are as follows:
Table 7 Transducer IDs of the Measurement Parameters
Measurement Transducer ID
Wind direction min 0
Wind direction average 1
Wind direction max 2
Wind speed min 0
Wind speed average 1
Wind speed max 2
Heating temperature 2
Supply voltage 0
Heating voltage 1
3.5 V reference voltage 2
Information field 4
Example of the XDR Query (all parameters of each sensor enabled
and NMEA wind formatter set to T):
$--WIQ,XDR*2D<cr><lf>
Example of the response when all the parameters of each sensor are
enabled (NMEA wind formatter set to T):
VAISALA_______________________________________________________________________ 87
Page 90

User’s Guide ______________________________________________________________________
Wind sensor data
$WIXDR,A,302,D,0,A,320,D,1,A,330,D,2,S,0.1,M,0,S,0.2,M,1,S,0.2,
M,2*57<cr><lf>
Supervisor data
$WIXDR,C,20.4,C,2,U,12.0,N,0,U,12.5,V,1,U,3.460,V,2,G,HEL/
___,,4*2D
88 ___________________________________________________________________M210925EN-B
Page 91

Chapter 7 __________________________________________________ Getting the Data Messages
The structure of the wind sensor response message:
where
$ = Start of the message
WI = Device type (WI = weather instrument)
XDR = Transducer measurement response identifier
A = Transducer id 0 type (wind direction), see the
following Transducer table
302 = Transducer id 0 data (min wind direction)
D = Transducer id 0 units (degrees, min wind direction)
0 = Transducer id for min wind direction
A = Transducer id 1 type (wind direction)
320 = Transducer id 1 data (average wind direction)
D = Transducer id 1 units (degrees, average wind
direction)
1 = Transducer id for average wind direction
A = Transducer id 2 type (wind direction)
330 = Transducer id 2 data (max wind direction)
D = Transducer id 2 units (degrees, max wind direction)
2 = Transducer id for max wind direction
S = Transducer id 0 type (wind speed)
0.1 = Transducer id 0 data (min wind speed)
M = Transducer id 0 units (m/s, min wind speed)
0 = Transducer id for min wind speed
S = Transducer id 1 type (wind speed)
0.2 = Transducer id 1 data (average wind speed)
M = Transducer id 1 units (m/s, average wind speed)
1 = Transducer id for average wind speed
S = Transducer id 2 type (wind speed)
0.2 = Transducer id 2 data (max wind speed)
M = Transducer id 2 units (m/s, max wind speed)
2 = Transducer id for max wind speed
* Checksum delimiter
57 = Two-character checksum for the response
<cr><lf> = Response terminator
VAISALA_______________________________________________________________________ 89
Page 92

User’s Guide ______________________________________________________________________
The structure of the supervisor response message:
where
$ = Start of the message
WI = Device type (WI = weather instrument)
XDR = Transducer measurement response identifier
C = Transducer id 2 type (temperature), see the following
Transducer table
20.4 = Transducer id 2 data (Heating temperature)
C = Transducer id 2 units (C, Heating temperature)
2 = Transducer id for Heating temperature
U = Transducer id 0 type (voltage)
12.0 = Transducer id 0 data (Heating voltage)
M = Transducer id 0 units (N = heating disabled or
heating temperature too high1, Heating voltage)
0 = Transducer id for Heating voltage
U = Transducer id 1 type (Supply voltage)
12.5 = Transducer id 1 data (Supply voltage)
V = Transducer id 1 units (V, Supply voltage)
1 = Transducer id for Supply voltage
U = Transducer id 2 type (voltage)
3.460 = Transducer id 2 data (3.5V reference voltage)
V = Transducer id 2 units (V, 3.5V reference voltage)
2 = Transducer id for 3.5V reference voltage
G = Transducer id 4 type (generic)
HEL/___ = Transducer id 4 data (info field)
Transducer id 4 units (none, null)
4 = Transducer id for generic field
* Checksum delimiter
2D = Two-character CRC for the response.
<cr><lf> = Response terminator
1. See Chapter 8, section Supervisor Message, Setting Fields for definitions
of the Heating voltage field.
90 ___________________________________________________________________M210925EN-B
Page 93

Chapter 7 __________________________________________________ Getting the Data Messages
Table 8 Transducer Table
Transducer Type Units Field Comments
Temperature C C = Celsius
F = Fahrenheit
Angular displacement
(wind direction)
Wind speed S K = km/h, M = m/s, N =
Voltage U V = volts (also 50 %
Generic G None (null)
1. Not specified in the NMEA 0183 Standard.
A D = degrees
knots
duty cycle for heating)
P=percent
S = mph, nonstandardized
N = not in use, F = 50%
duty cycle for heating,
W = full power for
heating
1
TXT Text Transmission
These short text messages and their interpretation are shown in Table 11
on page 112.
The text transmission response format:
$WITXT,xx,xx,xx,c--c*hh<cr><lf>
where
$ = Start of the message
WI = Talker identifier (WI = weather instrument)
TXT = Text transmission identifier.
xx = Total number of messages, 01 to 99
xx = Message number.
xx = Text identifier (see text message table)
c---c = Text message (see text message table)
* Checksum delimiter
hh = Two-character checksum for the query command.
<cr><lf> = Response terminator
VAISALA_______________________________________________________________________ 91
Page 94

User’s Guide ______________________________________________________________________
Examples:
$WItXT,01,01,01,Unable to measure error*6D<cr><lf> (wind data
request when all the wind parameters were disabled from the wind
message).
$WITXT,01,01,03,Unknown cmd error*1F (unknown command
0XO!<cr><lf>).
$WITXT,01,01,08,Use chksum 2F*72 (wrong checksum used in MWV
query command)
Automatic Mode
When NMEA 0183 v3.0 automatic protocol is selected, the sensor
sends data messages at user configurable update intervals. The message
format is the same as in the MWV and XDR data queries. The NMEA
wind formatter parameter in the wind sensor settings determines
whether the wind messages are sent in MWV or XDR format.
You can use ASCII data query commands aR1, aR5, aR, aR0 and their
CRC-versions ar1, ar5, ar and ar0 also in NMEA 0183 protocol. The
responses to these commands will be in standard NMEA 0183 format.
For formatting the messages, see Chapter 8, Sensor and Data Message
Settings, on page 95.
92 ___________________________________________________________________M210925EN-B
Page 95

Chapter 7 __________________________________________________ Getting the Data Messages
Automatic Composite Data Message (aR0)
When automatic composite data messaging is selected, the sensor sends
composite data messages at user configurable intervals. The message
structure is the same as with the composite data query command aR0
and contains a user configurable set of wind and supervisor data.
Example (the parameters included can be chosen from the full
parameter set of the commands aR1 and aR5):
$WIXDR,A,322,D,0,A,036,D,1,A,084,D,2,S,0.2,M,0,S,0.4,M,1,S,0.9,M,
2,C,21.0,C,2,U,12.0,N,0,U,12.5,V,1,U,3.514,V,2,G,Vaisala,,4*4D<cr
><lf>
Example (only wind direction, speed averages, and heating
temperature included):
$WIXDR,A,037,D,1,S,0.3,M,1,C,21.2,C,2*7F<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 95.
Automatic composite data messaging is a concurrent, not an alternate
mode to either the polled or automatic modes.
VAISALA_______________________________________________________________________ 93
Page 96

User’s Guide ______________________________________________________________________
94 ___________________________________________________________________M210925EN-B
Page 97

Chapter 8 ____________________________________________ Sensor and Data Message Settings
CHAPTER 8
SENSOR AND DATA MESSAGE
SETTINGS
This chapter presents the sensor configuration and data message
formatting commands for all communications protocols: ASCII,
NMEA 0183 and SDI-12.
Sensor and data message settings can also be done by using the Vaisala
Configuration Tool software.With this software tool you can change the
device and sensor settings easily in Windows® environment. See Table
18 on page 118.
Wind Sensor
Checking the Settings (aWU)
With the following command you can check the current wind sensor
settings.
VAISALA_______________________________________________________________________ 95
Page 98

User’s Guide ______________________________________________________________________
Command format in ASCII and NMEA 0183: aWU<cr><lf>
Command format in SDI-12: aXWU!
where
a = Device address
WU = Wind sensor settings command in ASCII and NMEA
0183
XWU = Wind sensor settings command in SDI-12
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
The response in ASCII and NMEA 0183:
aWU,R=[R],I=[I],A=[A],G=[G,U=[U],D=[D],N=[N],F=[F]<cr><
lf>
The response in SDI-12:
aXWU,R=[R],I=[I],A=[A],G=[G],U=[U],D=[D],N=[N],F=[F]<cr
><lf>
where [R][I][A][G][U][D][N] are the setting fields, see the following
sections.
Example (ASCII and NMEA 0183, device address 0):
0WU<cr><lf>
0WU,R=01001000&00100100,I=60,A=10,G=1,U=N,D=
90,N=W,F=4<cr><lf>
Example (SDI-12, device address 0):
0XWU!0XWU,R=11111100&01001000,I=10,A=3,
G=1,U=M,D=0,N=W,F=4<cr><lf>
96 ___________________________________________________________________M210925EN-B
Page 99

Chapter 8 ____________________________________________ Sensor and Data Message Settings
Setting Fields
[R] = Parameter selection: This field consists of 16 bits
defining the wind parameters included in the data
messages. The bit value 0 disables and the bit value 1
enables the parameter.
The parameter order is shown in the following table:
The bits 1-8 determine the
parameters in the data
message obtained with the
following commands:
-ASCII: aR1 and ar1
-NMEA 0183: $--WIQ,XDR*hh
-SDI-12: aM1, aMC1, aC1, and
aCC1
-SDI-12 continuous: aR1 and
aRC1
The bits 9-16 determine the
wind parameters in the
composite data message
obtained with the following
commands:
-ASCII: aR0, ar0
-NMEA 0183: aR0, ar0
-SDI-12: aM, aMC, aC, and aCC
-SDI-12 continuous: aR and
aRC
[I] = Update interval: 1 ... 3600 seconds
1st bit (most left) Dn Direction minimum
2nd bit Dm Direction average
3rd bit Dx Direction maximum
4th bit Sn Speed minimum
5th bit Sm Speed average
6th bit Sx Speed maximum
7th bit spare
8th bit spare
& delimiter
9th bit Dn Wind direction minimum
10th bit Dm Wind direction average
11th bit Dx Wind direction maximum
12th bit Sn Speed minimum
13th bit Sm Speed average
14th bit Sx Speed maximum
15th bit spare
16th bit (most right) spare
[A] = Averaging time: 1 ... 3600 seconds
Defines the period over which the wind speed and
direction averaging is calculated. Same period is also
used for maximum and minimum calculation. See
also Appendix D Wind Measurement Averaging
Method on page 135 for difference in averaging
practices when A<I and A>I.
VAISALA_______________________________________________________________________ 97
Page 100

User’s Guide ______________________________________________________________________
[G] = Wind speed max/min calculation mode: 1 or 3
seconds
G =1: Traditional max/min calculation is performed
both for speed and direction.
G =3: Gust & lull are calculated for wind speed,
while direction calculation is as it is with G =1. In
the output messages, gust & lull replace the wind
speed max/min values (Sx, Sn), respectively.
For more detailed definitions of max/min and gust &
lull calculations see section Wind Measurement
Principle on page 23.
[U] = Speed unit: M = m/s, K = km/h, S = mph, N = knots
[D] = Direction offset: -180 ... 180°, see Wind Direction
Offset on page 37.
[N] = NMEA wind formatter: T = XDR (transducer
syntax), W = MWV (wind speed and angle)
Defines whether the wind message is sent in XDR or
MWV format.
NOTE
NOTE
[F] = Sampling rate: 1, 2, or 4 Hz
Defines how frequently the wind is measured. Lower
sampling rate reduces the power consumption, but it
also weakens the measurement representativeness..
<cr><lf> = Response terminator
When using MWV wind messages in NMEA 0183, one of the [R]
field's bits 1-6 must be 1.
For representative wind values, , use long enough averaging time in
relation to sampling rate (at least four samples per averaging time).
98 ___________________________________________________________________M210925EN-B
 Loading...
Loading...