

Page 1

USER'S GUIDE
®
Vaisala WINDCAP
Ultrasonic Wind Sensor WMT50
M210736EN-B
Page 2

PUBLISHED BY
Vaisala Oyj Phone (int.): +358 9 8949 1
P.O. Box 26 Fax: +358 9 8949 2227
FIN-00421 Helsinki
Finland
Visit our Internet pages at http://www.vaisala.com/
© Vaisala 2006
No part of this manual may be reproduced in any form or by any means,
electronic or mechanical (including photocopying), nor may its contents
be communicated to a third party without prior written permission of the
copyright holder.
The contents are subject to change without prior notice.
Please observe that this manual does not create any legally binding
obligations for Vaisala towards the customer or end user. All legally
binding commitments and agreements are included exclusively in the
applicable supply contract or Conditions of Sale.
Page 3

________________________________________________________________________________
Table of Contents
CHAPTER 1
GENERAL INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
About This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Contents of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
General Safety Considerations . . . . . . . . . . . . . . . . . . . . . 10
ESD Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Recycling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Trademarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
License Agreement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
CHAPTER 2
PRODUCT OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Introduction to Ultrasonic Wind Sensor WMT50 . . . . . . . . 15
Optional Software for Easy Settings . . . . . . . . . . . . . . . . . 16
Heating Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Ultrasonic Wind Sensor WMT50 Components . . . . . . . . . . 17
CHAPTER 3
FUNCTIONAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Wind Measurement Principle . . . . . . . . . . . . . . . . . . . . . . . . 21
Heating (Optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
CHAPTER 4
INSTALLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Unpacking Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Selecting Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Installation Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Mounting to Vertical Pole Mast . . . . . . . . . . . . . . . . . . 26
Mounting with Optional Mounting Kit . . . . . . . . . . . . . . 27
Mounting To Horizontal Cross Arm . . . . . . . . . . . . . . . 28
Aligning WMT50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Compass Alignment. . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Wind Direction Correction . . . . . . . . . . . . . . . . . . . . . . 30
VAISALA ________________________________________________________________________ 1
Page 4
________________________________________________________________________________
CHAPTER 5
WIRING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Operating Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Heating Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
Wiring Using the Screw Terminals . . . . . . . . . . . . . . . . . . .35
Wiring Using the 8-pin M12 Connector (Optional) . . . . . . .37
External Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Internal Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
Data Communication Interfaces . . . . . . . . . . . . . . . . . . . . .39
CHAPTER 6
COMMUNICATION SETTINGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Communication Protocols . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Service Cable Connection . . . . . . . . . . . . . . . . . . . . . . . . . .42
Connection Through M12 Bottom Connector or Screw
Terminal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Communication Setting Commands . . . . . . . . . . . . . . . . . .44
Checking the Current Communication Settings (aXU) . . . .44
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Changing the Communication Settings . . . . . . . . . . . . . . .47
CHAPTER 7
GETTING THE DATA MESSAGES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
General Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
Reset (aXZ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
Measurement Reset (aXZM) . . . . . . . . . . . . . . . . . . . . . . .50
ASCII Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
Abbreviations and Units . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Device Address (?) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . .52
Supervisor Data Message (aR5) . . . . . . . . . . . . . . . . . . . .53
Combined Data Message (aR) . . . . . . . . . . . . . . . . . . . . . .54
Composite Data Message Query (aR0) . . . . . . . . . . . . . . . 54
Polling with CRC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55
Automatic Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
Automatic Composite Data Message . . . . . . . . . . . . . . . . .57
SDI-12 Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Address Query Command (?) . . . . . . . . . . . . . . . . . . . . . . 59
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . .60
Change Address Command (aAb) . . . . . . . . . . . . . . . . . . . 61
Send Identification Command (aI) . . . . . . . . . . . . . . . . . . .61
Start Measurement Command (aM) . . . . . . . . . . . . . . . . . .62
Start Measurement Command with CRC (aMC) . . . . . . . .64
Start Concurrent Measurement (aC) . . . . . . . . . . . . . . . . .64
Start Concurrent Measurement with CRC (aCC) . . . . . . . .65
Send Data Command (aD) . . . . . . . . . . . . . . . . . . . . . . . . .65
Examples of aM, aC and aD Commands . . . . . . . . . . . . . .67
Continuous Measurement (aR) . . . . . . . . . . . . . . . . . . . . . 68
2 _______________________________________________________________________________
Page 5

________________________________________________________________________________
Continuous Measurement with CRC (aRC) . . . . . . . . . . . . 69
Start Verification Command (aV) . . . . . . . . . . . . . . . . . . . . 69
NMEA 0183 V3.0 Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Device Address (?) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Acknowledge Active Command (a) . . . . . . . . . . . . . . . . . . 71
MWV Wind Speed and Direction Query . . . . . . . . . . . . . . . 71
XDR Transducer Measurement Query . . . . . . . . . . . . . . . 73
TXT Text Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Automatic Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Automatic Composite Data Message . . . . . . . . . . . . . . . . . 79
CHAPTER 8
SENSOR AND DATA MESSAGE SETTINGS . . . . . . . . . . . . . . . . . . . . . . 81
Wind Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Checking the Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Changing the Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Supervisor Message . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Checking the Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Setting Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Changing the Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Composite Data Message . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
CHAPTER 9
MAINTENANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Cleaning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Factory Calibration and Repair Service . . . . . . . . . . . . . . . 92
Vaisala Service Centers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Parts List for Consumables . . . . . . . . . . . . . . . . . . . . . . . . . 92
CHAPTER 10
TROUBLESHOOTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Self-Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Error Messaging/Text Messages . . . . . . . . . . . . . . . . . . . . 95
Wind Sensor Heating Control . . . . . . . . . . . . . . . . . . . . . . 97
Operating Voltage Control . . . . . . . . . . . . . . . . . . . . . . . . . 97
Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
CHAPTER 11
TECHNICAL SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
APPENDIX A
NETWORKING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Connecting Several WMT50s on the Same Bus . . . . . . . . 105
SDI-12 Serial Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
VAISALA ________________________________________________________________________ 3
Page 6

________________________________________________________________________________
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
Communication Protocol . . . . . . . . . . . . . . . . . . . . . . . . .106
RS-485 Serial Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
Communication Protocol . . . . . . . . . . . . . . . . . . . . . . . . .107
ASCII, Polled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .107
NMEA 0183 v3.0, Query . . . . . . . . . . . . . . . . . . . . . . . . .107
NMEA 0183 v3.0 Query with ASCII Query Commands . .110
APPENDIX B
SDI-12 PROTOCOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
SDI-12 Electrical Interface . . . . . . . . . . . . . . . . . . . . . . . . .113
SDI-12 Communications Protocol . . . . . . . . . . . . . . . . . .113
SDI-12 Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
APPENDIX C
CRC-16 COMPUTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Encoding the CRC as ASCII Characters . . . . . . . . . . . . . .118
NMEA 0183 v3.0 Checksum Computation . . . . . . . . . . . .118
APPENDIX D
WIND MEASUREMENT AVERAGING METHOD . . . . . . . . . . . . . . . . . . .119
4 _______________________________________________________________________________
Page 7

________________________________________________________________________________
List of Figures
Figure 1 Ultrasonic Wind Sensor WMT50 . . . . . . . . . . . . . . . . . . . . . . .15
Figure 2 WMT50 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 3 Sensor Bottom Assembly. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 4 Mounting Kit (Optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 5 Service Cable (Optional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 6 Location of Fixing Screw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 7 Mounting WMT50 to Pole Mast Using Optional Mounting Kit . 28
Figure 8 Mounting WMT50 to Cross Arm. . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 9 Mounting Screw Location in Cross Arm . . . . . . . . . . . . . . . . . . 29
Figure 10 Sketch of Magnetic Declination . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 11 Wind Direction Correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 12 Average Operational Current Consumption (with 4Hz Wind
Sensor Sampling) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Figure 13 Heating Current and Power Against Vh . . . . . . . . . . . . . . . . . . 35
Figure 14 Screw Terminal Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 15 Pins of 8-pin M12 Connector . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 16 Internal Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 17 Data Communication Interfaces. . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 18 WMT50 Dimensions in mm [inches]. . . . . . . . . . . . . . . . . . . . 102
Figure 19 Mounting Kit Dimensions in mm [inches] . . . . . . . . . . . . . . . . 103
Figure 20 Timing Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Figure 21 Wind Measurement Averaging Method . . . . . . . . . . . . . . . . . 120
VAISALA ________________________________________________________________________ 5
Page 8

________________________________________________________________________________
6 _______________________________________________________________________________
Page 9

________________________________________________________________________________
List of Tables
Table 1 Screw Terminal Pin-outs for WMT50 Serial Interfaces and
Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Table 2 Pin-outs for WMT50 Serial Interfaces and Power Supplies . . . . .37
Table 3 Available Serial Communication Protocols . . . . . . . . . . . . . . . . . 41
Table 4 Default Serial Communication Settings for M12/Screw Terminal
Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
Table 5 Abbreviations and Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 6 Transducer IDs of the Measurement Parameters . . . . . . . . . . . . 75
Table 7 Transducer Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Table 8 Available Spare Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Table 9 Data Validation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Table 10 Communication Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Table 11 Error Messaging/Text Messages Table . . . . . . . . . . . . . . . . . . . . 96
Table 12 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Table 13 Inputs and Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Table 14 Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Table 15 Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Table 16 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Table 17 Options and Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
VAISALA ________________________________________________________________________ 7
Page 10

________________________________________________________________________________
8 _______________________________________________________________________________
Page 11
Chapter 1 ________________________________________________________ General Information
CHAPTER 1
GENERAL INFORMATION
This chapter provides general notes for the product.
About This Manual
This manual provides information for installing, operating, and
maintaining the product.
Contents of This Manual
This manual consists of the following chapters:
- Chapter 1, General Information: This chapter provides general
notes for the product.
- Chapter 2, Product Overview: This chapter introduces the unique
features and advantages of the Vaisala Ultrasonic Wind Sensor
WMT50.
- Chapter 3, Functional Description: This chapter describes the
measurement principles and heating function of Ultrasonic Wind
Sensor WMT50.
- Chapter 4, Installation: This chapter provides you with information
that is intended to help you install Ultrasonic Wind Sensor
WMT50.
- Chapter 5, Wiring: This chapter provides you with instructions on
how to connect the power supply and the serial interfaces.
VAISALA ________________________________________________________________________ 9
Page 12
User’s Guide ______________________________________________________________________
- Chapter 6, Communication Settings: This chapter contains the
instructions for making the communication settings.
- Chapter 7, Getting the Data Messages: This chapter presents the
general and data message commands.
- Chapter 8, Sensor and Data Message Settings: This chapter
presents the sensor configuration and data message formatting
commands for all communications protocols: ASCII, NMEA 0183
and SDI-12.
- Chapter 9, Maintenance: This chapter contains instructions for the
basic maintenance of Ultrasonic Wind Sensor WMT50 and contact
information for Vaisala Service Centers.
- Chapter 10, Troubleshooting: This chapter describes common
problems, their probable causes and remedies, and includes contact
information for technical support.
- Chapter 11, Technical Specifications: This chapter provides the
technical data of Ultrasonic Wind Sensor WMT50.
Safety
WARNING
Feedback
Vaisala Customer Documentation Team welcomes your comments and
suggestions on the quality and usefulness of this publication. If you find
errors or have other suggestions for improvement, please indicate the
chapter, section, and page number. You can send comments to us by email: manuals@vaisala.com.
General Safety Considerations
Throughout the manual, important safety considerations are highlighted
as follows:
Warning alerts you to a serious hazard. If you do not read and follow
instructions very carefully at this point, there is a risk of injury or even
death.
10 ___________________________________________________________________M210736EN-B
Page 13
Chapter 1 ________________________________________________________ General Information
CAUTION
NOTE
Caution warns you of a potential hazard. If you do not read and follow
instructions carefully at this point, the product could be damaged or
important data could be lost.
Note highlights important information on using the product.
ESD Protection
Electrostatic Discharge (ESD) can cause immediate or latent damage to
electronic circuits. Vaisala products are adequately protected against
ESD for their intended use. However, it is possible to damage the
product by delivering electrostatic discharges when touching,
removing, or inserting any objects inside the equipment housing.
To make sure you are not delivering high static voltages yourself:
- Handle ESD sensitive components on a properly grounded and
protected ESD workbench. When this is not possible, ground
yourself with a wrist strap and a resistive connection cord to the
equipment chassis before touching the boards. When neither of the
above is possible, at least touch a conductive part of the equipment
chassis with your other hand before touching the boards.
Recycling
- Always hold the boards by the edges and avoid touching the
component contacts.
Recycle all applicable material.
Dispose of batteries and the unit according to statutory regulations.
Do not dispose of with regular household refuse.
VAISALA _______________________________________________________________________ 11
Page 14

User’s Guide ______________________________________________________________________
Trademarks
WINDCAP® is a registered trademark of Vaisala. Microsoft®,
Windows®, Windows NT® and Windows XP® are registered
trademarks of Microsoft Corporation in the United States and/or other
countries.
License Agreement
All rights to any software are held by Vaisala or third parties. The
customer is allowed to use the software only to the extent that is
provided by the applicable supply contract or Software License
Agreement.
12 ___________________________________________________________________M210736EN-B
Page 15

Chapter 1 ________________________________________________________ General Information
Warranty
Vaisala hereby represents and warrants all Products
manufactured by Vaisala and sold hereunder to be free
from defects in workmanship or material during a
period of twelve (12) months from the date of delivery
save for products for which a special warranty is given.
If any Product proves however to be defective in
workmanship or material within the period herein
provided Vaisala undertakes to the exclusion of any
other remedy to repair or at its own option replace the
defective Product or part thereof free of charge and
otherwise on the same conditions as for the original
Product or part without extension to original warranty
time. Defective parts replaced in accordance with this
clause shall be placed at the disposal of Vaisala.
Vaisala also warrants the quality of all repair and
service works performed by its employees to products
sold by it. In case the repair or service works should
appear inadequate or faulty and should this cause
malfunction or nonfunction of the product to which the
service was performed Vaisala shall at its free option
either repair or have repaired or replace the product in
question. The working hours used by employees of
Vaisala for such repair or replacement shall be free of
charge to the client. This service warranty shall be
valid for a period of six (6) months from the date the
service measures were completed.
This warranty does not however apply when the defect
has been caused through
a) normal wear and tear or accident;
b) misuse or other unsuitable or unauthorized use of
the Product or negligence or error in storing,
maintaining or in handling the Product or any
equipment thereof;
c) wrong installation or assembly or failure to service
the Product or otherwise follow Vaisala's service
instructions including any repairs or installation or
assembly or service made by unauthorized personnel
not approved by Vaisala or replacements with parts not
manufactured or supplied by Vaisala;
d) modifications or changes of the Product as well as
any adding to it without Vaisala's prior authorization;
e) other factors depending on the Customer or a third
party.
Notwithstanding the aforesaid Vaisala's liability under
this clause shall not apply to any defects arising out of
materials, designs or instructions provided by the
Customer.
This warranty is however subject to following
conditions:
a) A substantiated written claim as to any alleged
defects shall have been received by Vaisala within
thirty (30) days after the defect or fault became known
or occurred, and
b) The allegedly defective Product or part shall, should
Vaisala so require, be sent to the works of Vaisala or to
such other place as Vaisala may indicate in writing,
freight and insurance prepaid and properly packed and
labelled, unless Vaisala agrees to inspect and repair the
Product or replace it on site.
This warranty is expressly in lieu of and excludes all
other conditions, warranties and liabilities, express or
implied, whether under law, statute or otherwise,
including without limitation any implied warranties of
merchantability or fitness for a particular purpose and
all other obligations and liabilities of Vaisala or its
representatives with respect to any defect or deficiency
applicable to or resulting directly or indirectly from the
Products supplied hereunder, which obligations and
liabilities are hereby expressly cancelled and waived.
Vaisala's liability shall under no circumstances exceed
the invoice price of any Product for which a warranty
claim is made, nor shall Vaisala in any circumstances
be liable for lost profits or other consequential loss
whether direct or indirect or for special damages.
VAISALA _______________________________________________________________________ 13
Page 16

User’s Guide ______________________________________________________________________
14 ___________________________________________________________________M210736EN-B
Page 17

Chapter 2 __________________________________________________________ Product Overview
CHAPTER 2
PRODUCT OVERVIEW
This chapter introduces the unique features and advantages of the
Vaisala Ultrasonic Wind Sensor WMT50.
Introduction to Ultrasonic Wind Sensor WMT50
0601-016
Figure 1 Ultrasonic Wind Sensor WMT50
VAISALA _______________________________________________________________________ 15
Page 18

User’s Guide ______________________________________________________________________
Ultrasonic Wind Sensor WMT50 is a small and lightweight wind sensor
that measures wind speed and direction.
WMT50 powers up with 5 ... 30 VDC and outputs serial data with a
selectable communication protocol: SDI-12, ASCII automatic & polled
and NMEA 0183 with query option. Four alternative serial interfaces
are selectable: RS-232, RS-485, RS-422 and SDI-12.
The following options are available:
- Heating function
- Windows® based Vaisala Configuration Tool software and cable
- 8-pin M12 connector (also with 2 m/10 m cable)
- Mounting kit
Optional Software for Easy Settings
Windows® based Vaisala Configuration Tool is a user friendly
parameter setting software for WMT50. With this software tool you can
change the device and sensor settings easily in Windows® environment.
See list of options and accessories in Table 17 on page 101.
Heating Function
To improve the accuracy of measurements an optional heating function
is available. More about heating in section Heating (Optional) on page
23.
The heating function option must be chosen when placing the order.
16 ___________________________________________________________________M210736EN-B
Page 19
Chapter 2 __________________________________________________________ Product Overview
Ultrasonic Wind Sensor WMT50 Components
0601-017
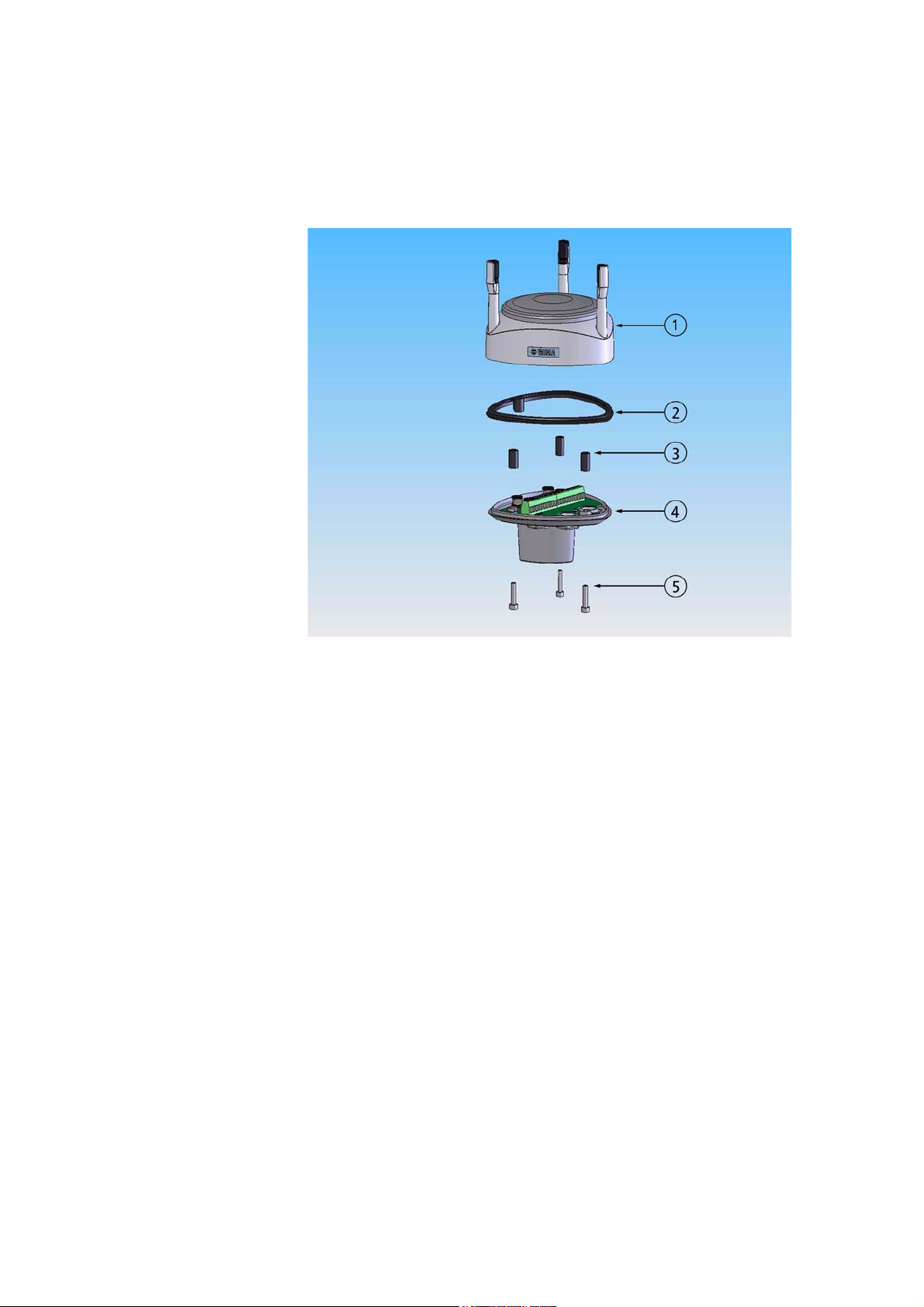
Figure 2 WMT50 Components
The following numbers refer to Figure 2 on page 17:
1 = Top assembly
2 = Silicon gasket
3 = Spacers
4 = Bottom assembly
5 = Allen screws
VAISALA _______________________________________________________________________ 17
Page 20
User’s Guide ______________________________________________________________________
0505-192
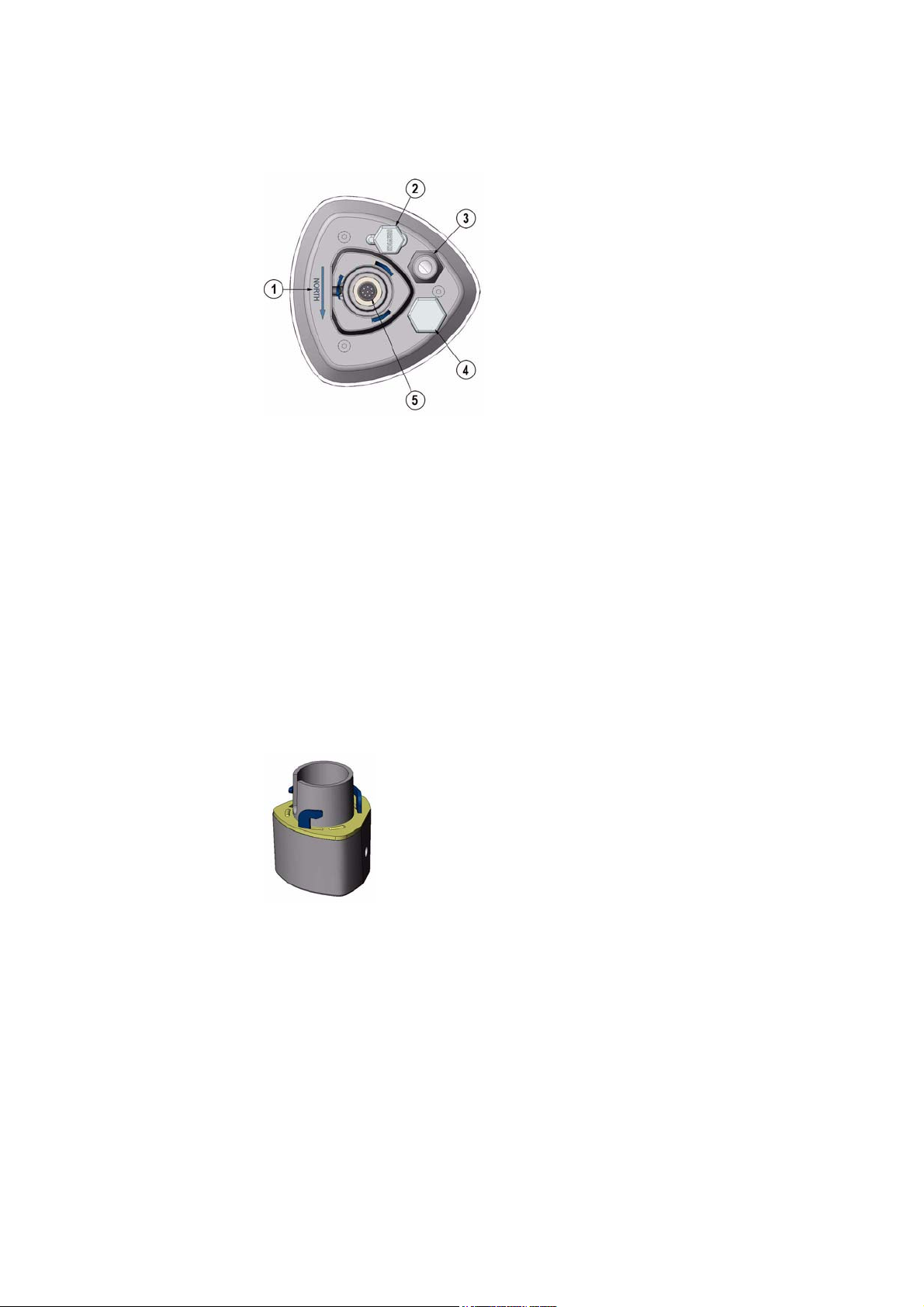
Figure 3 Sensor Bottom Assembly
The following numbers refer to Figure 3 on page 18:
1 = Alignment direction sign
2 = Service port
3 = Water tight cable gland (shown disassembled)
4 = Opening for cable gland (if unused, cover with hexagonal
plug)
5 = 8-pin M12 connector for power/datacom cable (optional,
cover with hexagonal plug if unused)
0505-193
Figure 4 Mounting Kit (Optional)
18 ___________________________________________________________________M210736EN-B
Page 21
Chapter 2 __________________________________________________________ Product Overview
0505-194
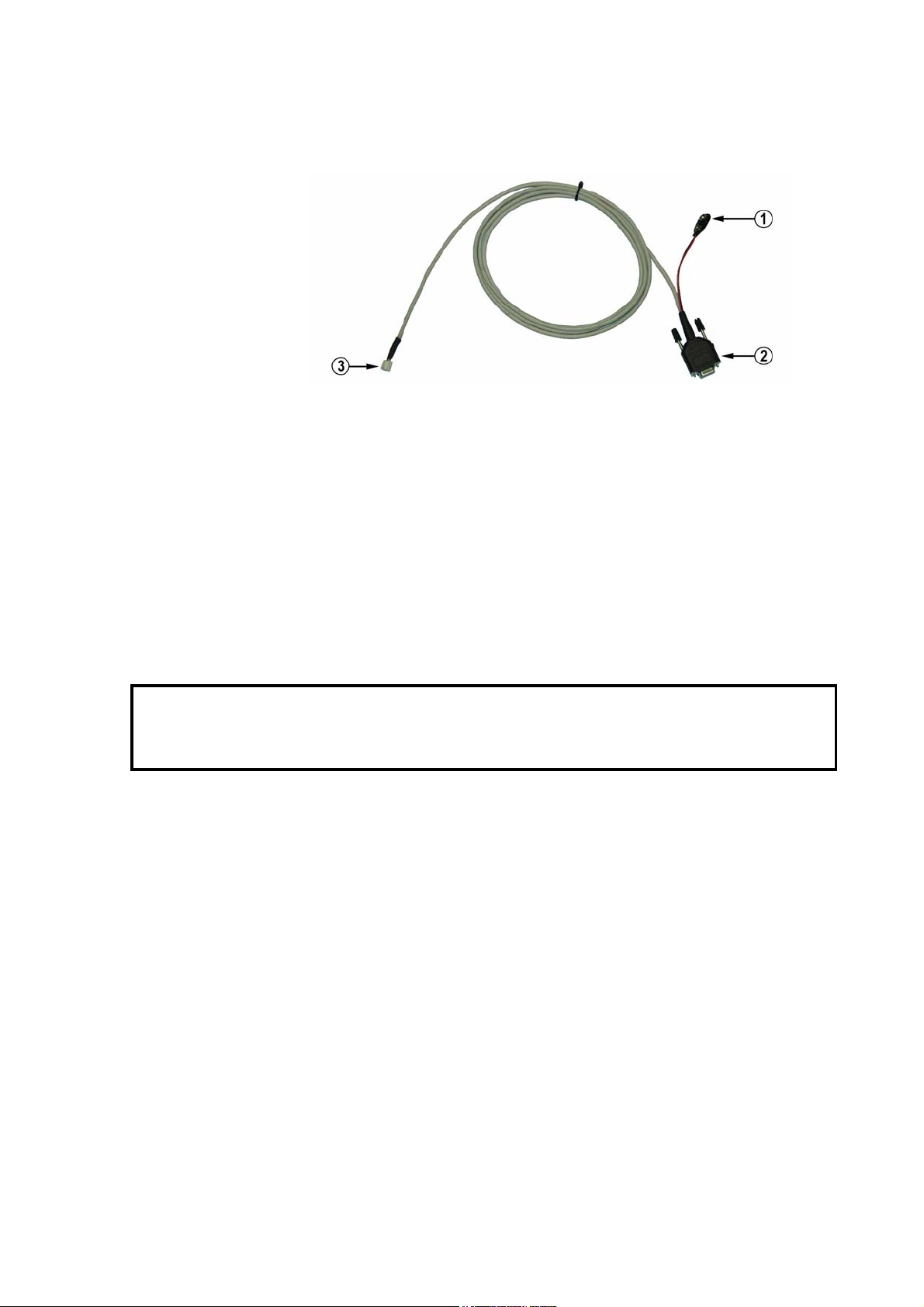
Figure 5 Service Cable (Optional)
The following numbers refer to Figure 5 on page 19:
1 = Battery connector
2 = D9-connector for PC serial port
3 = Connector for WMT50 service port (press the white flap
while disconnecting cable)
CAUTION
The service cable, while connected between the service port and PC,
forces the service port to RS-232 / 19200, 8, N, 1.
To prevent ingress of water, dust, and insects, cover the unused
openings at the sensor bottom assembly with hexagonal rubber plugs
included in the delivery.
VAISALA _______________________________________________________________________ 19
Page 22

User’s Guide ______________________________________________________________________
20 ___________________________________________________________________M210736EN-B
Page 23

Chapter 3 ______________________________________________________ Functional Description
CHAPTER 3
FUNCTIONAL DESCRIPTION
This chapter describes the measurement principles and heating function
of Ultrasonic Wind Sensor WMT50.
Wind Measurement Principle
The WMT50 uses Vaisala WINDCAP® sensor technology in wind
measurement.
The wind sensor has an array of three equally spaced ultrasonic
transducers on a horizontal plane. Wind speed and wind directions are
determined by measuring the time it takes the ultrasound to travel from
each transducer to the other two.
The wind sensor measures the transit time (in both directions) along the
three paths established by the array of transducers. This transit time
depends on the wind speed along the ultrasonic path. For zero wind
speed, both the forward and reverse transit times are the same. With
wind along the sound path, the up-wind direction transit time increases
and the down-wind transit time decreases.
VAISALA _______________________________________________________________________ 21
Page 24

User’s Guide ______________________________________________________________________
The wind speed is calculated from the measured transit times using the
following formula:
V
0505-216
0.5 L 1 tf1 tre–euu=
w
where:
Vw = Wind speed
L = Distance between the two transducers
tf = Transit time in forward direction
tr = Transit time in reverse direction
Measuring the six transit times allows Vw to be computed for each of
the three ultrasonic paths. The computed wind speeds are independent
of altitude, temperature and humidity, which are cancelled out when the
transit times are measured in both directions, although the individual
transit times depend on these parameters.
Using Vw values of two array paths is enough to compute wind speed
and wind direction. A signal processing technique is used so that wind
speed and wind direction are calculated from the two array paths of best
quality.
The wind speed is represented as a scalar speed in selected units (m/s,
kt, mph, km/h). The wind direction is expressed in degrees (°). The
wind direction reported by WMT50 indicates the direction that the wind
comes from. North is represented as 0°, east as 90°, south as 180°, and
west as 270°.
The wind direction is not calculated when the wind speed drops below
0.05 m/s. In this case, the last calculated direction output remains until
the wind speed increases again to the level of 0.05 m/s.
The average values of wind speed and direction are calculated as a
scalar average of of all samples over the selected averaging time
[1 ... 3600 s (= 60 min)]. The sample count depends on the selected
sampling rate: 4 Hz (default), 2 Hz or 1 Hz. The minimum and
maximum values of wind speed and direction represent the
corresponding extremes during the selected averaging time. See also
Appendix D, Wind Measurement Averaging Method, on page 119 for
averaging method.
22 ___________________________________________________________________M210736EN-B
Page 25

Chapter 3 ______________________________________________________ Functional Description
Heating (Optional)
Heating elements located inside the wind transducers keep the wind
sensors clean from snow and ice. A heating temperature sensor (Th)
controls the heating.
Three fixed temperature limits, namely +10 °C, +4 °C, and -50 °C
(+50 °F, +39 °F, -58 °F) control the heating power as follows:
Th > +10 °C: heating is off,
+4 °C < Th < +10 °C: 50 % heating power,
-50 °C < Th < +4 °C: 100 % heating power,
Th < -50 °C: 50 % heating power.
When the heating function is disabled the heating is off in all conditions,
see Supervisor Message on page 86.
VAISALA _______________________________________________________________________ 23
Page 26

User’s Guide ______________________________________________________________________
24 ___________________________________________________________________M210736EN-B
Page 27
Chapter 4 _______________________________________________________________ Installation
CHAPTER 4
INSTALLATION
This chapter provides you with information that is intended to help you
install Ultrasonic Wind Sensor WMT50.
Unpacking Instructions
Ultrasonic Wind Sensor WMT50 comes in a custom shipping container.
Be careful when removing the device from the container.
CAUTION
Beware of damaging any of the wind transducers located at the top of
the three antennas. Dropping the device can break or damage the
transducers. If the antenna bends or twists the re-aligning can be
difficult or impossible.
Selecting Location
Finding a suitable site for Ultrasonic Wind Sensor WMT50 is important
for getting representative ambient measurements. The site should
represent the general area of interest.
Ultrasonic Wind Sensor WMT50 needs to be installed in a location that
is free from turbulence caused by nearby objects, such as trees or
buildings.
VAISALA _______________________________________________________________________ 25
Page 28
User’s Guide ______________________________________________________________________
WARNING
To protect personnel (and the device), a lightning rod is recommended
to be installed with the tip at least one meter above the WMT50. The
rod must be properly grounded, compliant with all local applicable
safety regulations.
Installation Procedure
At the measurement site, WMT50 needs to be mounted, aligned, and
connected to the data logger and the power source.
Mounting
Ultrasonic Wind Sensor WMT50 can be mounted either onto a vertical
pole mast or onto a horizontal cross arm. When mounting WMT50 onto
a pole mast, an optional mounting kit can be used to ease mounting.
When using the optional mounting kit, alignment is needed only when
mounted for the first time.
NOTE
Each of the mounting options is further described in the following
sections.
Ultrasonic Wind Sensor WMT50 must be installed to an upright,
vertical position.
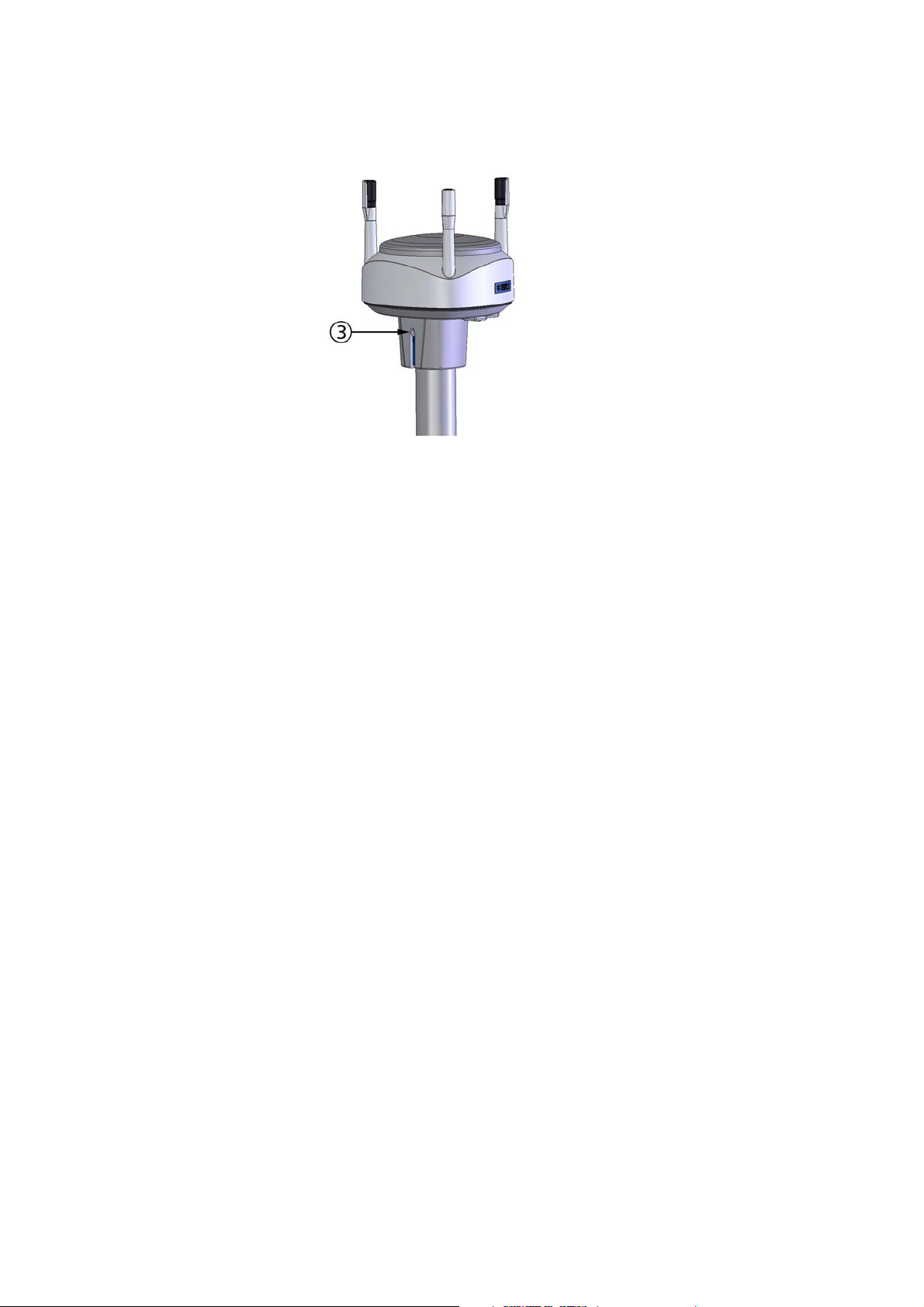
Mounting to Vertical Pole Mast
1. Remove the screw cover and insert the WMT50 to the pole mast.
2. Align the sensor in such a way that the arrow points to north.
3. Tighten the fixing screw (provided) and replace the screw cover.
26 ___________________________________________________________________M210736EN-B
Page 29
Chapter 4 _______________________________________________________________ Installation
0601-018
Figure 6 Location of Fixing Screw
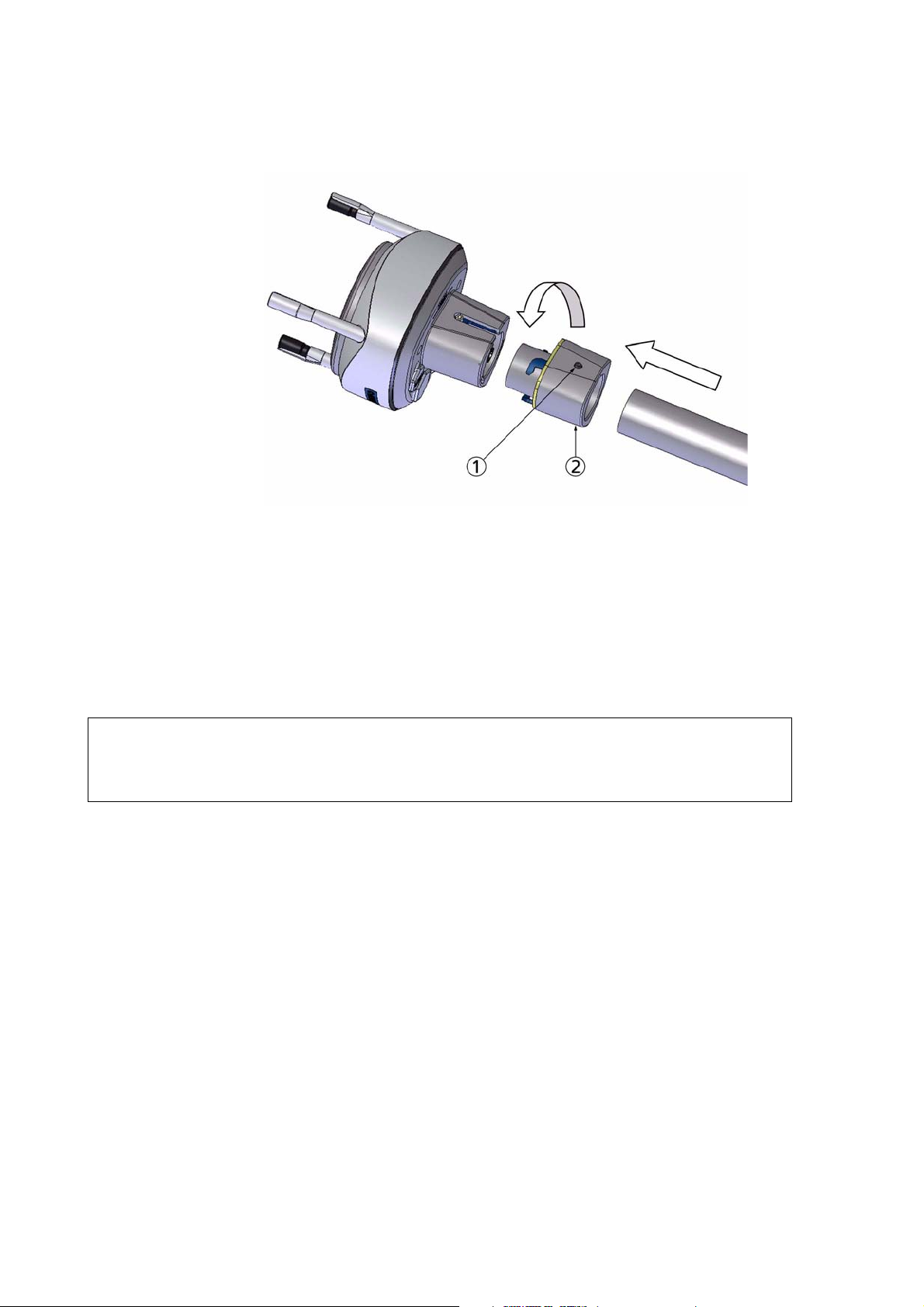
Mounting with Optional Mounting Kit
1. Insert the mounting kit adapter to the sensor bottom in the position
shown in the picture.
2. Turn the kit inside the bottom firmly until you feel that the adapter
snaps into the locked position.
3. Mount the adapter to the pole mast, do not tighten the fixing screw
(provided).
4. Align the sensor in such a way that the arrow points to north.
5. Tighten the fixing screw to fix the adapter firmly to the pole mast.
VAISALA _______________________________________________________________________ 27
Page 30
User’s Guide ______________________________________________________________________
0601-019
Figure 7 Mounting WMT50 to Pole Mast Using Optional
Mounting Kit
NOTE
The following numbers refer to Figure 7 on page 28:
1 = Fixing screw
2 = Mounting kit
When removing the WMT50 from the pole just turn the sensor so that
it snaps out from the mounting kit. When replacing the device the
alignment is not needed.
Mounting To Horizontal Cross Arm
1. Remove the screw cover.
2. Align the horizontal cross arm in south-north-direction, see
Aligning WMT50 on page 29.In case the cross arm cannot be
aligned, make the wind direction correction as instructed in section
Wind Direction Correction on page 30.
3. Mount the sensor into the cross arm by using the fixing screw (M6
DIN933) and a nut, see Figure 7 on page 28 and Figure 8 on page
29.
28 ___________________________________________________________________M210736EN-B
Page 31

Chapter 4 _______________________________________________________________ Installation
0601-020
Figure 8 Mounting WMT50 to Cross Arm
The following numbers refer to Figure 8 on page 29:
1=Nut
2 = Fixing screw (M6 DIN933)
22
0505-200
Figure 9 Mounting Screw Location in Cross Arm
Aligning WMT50
To help the alignment, there is an arrow and the text "North" on the
bottom of the sensor. WMT50 needs to be aligned in such a way that
this arrow points to the north.
Wind direction can be referred either to true north, which uses the
earth’s geographic meridians, or to the magnetic north, which is read
with a magnetic compass. The magnetic declination is the difference in
VAISALA _______________________________________________________________________ 29
Page 32

User’s Guide ______________________________________________________________________
degrees between the true north and magnetic north. The source for the
magnetic declination needs to be current as the declination changes over
time.
0003-011
Figure 10 Sketch of Magnetic Declination
Compass Alignment
To align Ultrasonic Wind Sensor WMT50, proceed as follows:
1. If the WMT50 is already mounted, loosen the fixing screw on the
bottom of the sensor so that you can rotate the device.
2. Use a compass to determine that the transducer heads of WMT50
are exactly in line with the compass and that the arrow on the
bottom of WMT50 points to the north.
3. Tighten the fixing screw on the bottom of the sensor when the
bottom arrow is exactly aligned to north.
Wind Direction Correction
Make a wind direction correction in case the WMT50 cannot be aligned
in such a way that the arrow on the bottom points to the north. In this
30 ___________________________________________________________________M210736EN-B
Page 33

Chapter 4 _______________________________________________________________ Installation
case, the deviation angle from the true north needs to be given to the
WMT50.
1. Mount the sensor to a desired position, see section Mounting on
page 26.
2. Define the deviation angle from the north-zero-alignment. Use the
± sign indication to express the direction from the north line (see
example pictures).
3. Feed the deviation angle to the device by using the wind message
formatting command aWU,D (direction correction), see section
Checking the Settings on page 81.
4. From now on, the WMT50 transmits the wind direction data by
using the changed zero-alignment.
0505-201
Figure 11 Wind Direction Correction
VAISALA _______________________________________________________________________ 31
Page 34

User’s Guide ______________________________________________________________________
32 ___________________________________________________________________M210736EN-B
Page 35

Chapter 5 ___________________________________________________________________ Wiring
CHAPTER 5
WIRING
This chapter provides you with instructions on how to connect the
power supply and the serial interfaces.
The WMT50 can be accessed through four different serial interfaces:
RS-232, RS-485, RS-422 and SDI-12. Each of them can be wired either
through the internal screw terminal or the 8-pin M12 connector
(optional). Only one serial interface can be used at a time.
CAUTION
Cover the unused cable openings (in the sensor bottom assembly) with
the hexagonal rubber plugs included in the accessories.
Power Supplies
Operating Voltage
Operating voltage Vin+: 5 ... 30 VDC
Notice that for the average current consumption, see the graphs in
Figure 12 on page 34. The minimum consumption graph is for SDI-12
standby mode.
The input power supply needs to be capable to deliver 60 mA (at 12 V)
or 100 mA (at 6 V) instant current spikes with duration of 30 ms. These
are drawn by the wind sensor (whenever enabled) at 4 Hz rate, which is
the default value for wind sampling. Wind sampling at 2 Hz or 1 Hz rate
VAISALA _______________________________________________________________________ 33
Page 36

User’s Guide ______________________________________________________________________
is also available (see Chapter 8, Sensor and Data Message Settings, on
page 81). The average current consumption will decrease almost in
proportion to the sampling rate, since wind measurement is the most
consuming operation in the system.
In most occasions the average consumption is less than 10 mA.
Typically, the higher the voltage the lower the current, but with voltages
above 18 V the current will gradually increase, adding to the usual
consumption an extra 4 mA at 24 V (see Figure 12 on page 34).
0505-202
Figure 12 Average Operational Current Consumption (with
4Hz Wind Sensor Sampling)
Heating Voltage
Heating voltage Vh+ (one of the following three alternatives):
- 5 ... 30 VDC;
- AC, max Vpeak-to-peak 84 V (= 30 VRMS); or
- Full-wave rectified AC, max Vpeak 42 V (= 30 VRMS).
The recommended DC voltage ranges are as follows:
- 12 VDC ± 20 % (max 1.1 A);
- 24 VDC ± 20 % (max 0.6 A).
At approx. 16 V heating voltage level the WMT50 automatically
changes the heating element combination in order to consume equal
34 ___________________________________________________________________M210736EN-B
Page 37

Chapter 5 ___________________________________________________________________ Wiring
power with 12 VDC and 24 VDC supplies. Input resistance (Rin) is
radically increased with voltages above 16 V (see the following graph).
The recommended ranges for AC or full-wave rectified AC are:
- 68 Vp-p ± 20 % (max 0.6 A), for AC;
- 34 Vp ± 20 % (max 0.6 A), for f/w rectified AC.
0505-203
Figure 13 Heating Current and Power Against Vh
CAUTION
WARNING
To avoid exceeding the maximum ratings in any condition, the
voltages must be checked with no load at the power supply output.
Make sure that you connect only de-energized wires.
Wiring Using the Screw Terminals
1. Loosen the three long screws at the bottom of the WMT50.
2. Pull out the bottom part of the sensor.
3. Insert the power supply wires and signal wires through the cable
gland(s) in the bottom of the sensor.
VAISALA _______________________________________________________________________ 35
Page 38

User’s Guide ______________________________________________________________________
4. Connect the wires according to Table 1 on page 36.
5. Replace the bottom part and tighten the three screws.
0505-204
Figure 14 Screw Terminal Block
Table 1 Screw Terminal Pin-outs for WMT50 Serial
Interfaces and Power Supplies
Screw Terminal Pin RS-232 SDI-12 RS-485 RS-422
1 RX- - - Data- Data in (RX-)
2 RX+ - - Data+ Data in (RX+)
3 TX- Data out (TxD) Data in/out (Tx) Data- Data out (TX-)
4 TX+ - - Data+ Data out (TX+)
5 RXD Data in (RxD) Data in/out (Rx) - 6 SGND GND for data GND for data - 17 HTG- GND for Vh+ GND for Vh+ GND for Vh+ GND for Vh+
18 HTG+ Vh+ (heating) Vh+ (heating) Vh+ (heating) Vh+ (heating)
19 VIN- GND for Vin+ GND for Vin+ GND for Vin+ GND for Vin+
20 VIN+ Vin+ (operating) Vin+ (operating) Vin+ (operating) Vin+ (operating)
NOTE
In the true SDI-12 mode the two Data in/out lines must be combined
either in the screw terminal or outside the WMT50.
NOTE
Short-circuit jumpers are required between pins 1-3 and 2-4 for the
RS-485 communication mode. For the RS-422 mode, the jumpers
need to be removed. In the other modes the jumpers may stay or they
can be removed.
36 ___________________________________________________________________M210736EN-B
Page 39

Chapter 5 ___________________________________________________________________ Wiring
Wiring Using the 8-pin M12 Connector (Optional)
External Wiring
If the WMT50 is provided with an optional 8-pin M12 connector, the
connector is located on the bottom of the sensor, see Figure 3 on page
18. The pins of the 8-pin M12 connector as seen from outside the sensor
are illustrated in the following figure.
0308-032
Figure 15 Pins of 8-pin M12 Connector
The pin connections for the 8-pin M12 connector and the wire colors of
the respective M12 cable (optional, 2/10 m) are listed in Table 2 on page
37.
Table 2 Pin-outs for WMT50 Serial Interfaces and Power
Supplies
/----------------Default wiring----------------\ RS-422 wiring
Wire Color M12 Pin# RS-232 SDI-12 RS-485 RS-422
Blue 7 Data out (TxD) Data in/out (Tx) Data- Data in (RX-)
Gray 5 - - Data+ Data in (RX+)
White 1 Data in (RxD) Data in/out (Rx) - Data out (TX-)
Green 3 GND for data GND for data - Data out (TX+)
Pink 6 GND for Vh+ GND for Vh+ GND for Vh+ GND for Vh+
Yellow 4 Vh+ (heating) Vh+ (heating) Vh+ (heating) Vh+ (heating)
1
Red/Clear
Brown 2 Vin+ (operating) Vin+ (operating) Vin+ (operating) Vin+ (operating)
1. Red in the internal wiring, clear in the cable (a non-insulated drain wire)
8 GND for Vin+ GND for Vin+ GND for Vin+ GND for Vin+
The signal names Data in (RxD) and Data out (TxD) in the table
describe the direction of data flow as seen from the WMT50.
VAISALA _______________________________________________________________________ 37
Page 40
User’s Guide ______________________________________________________________________
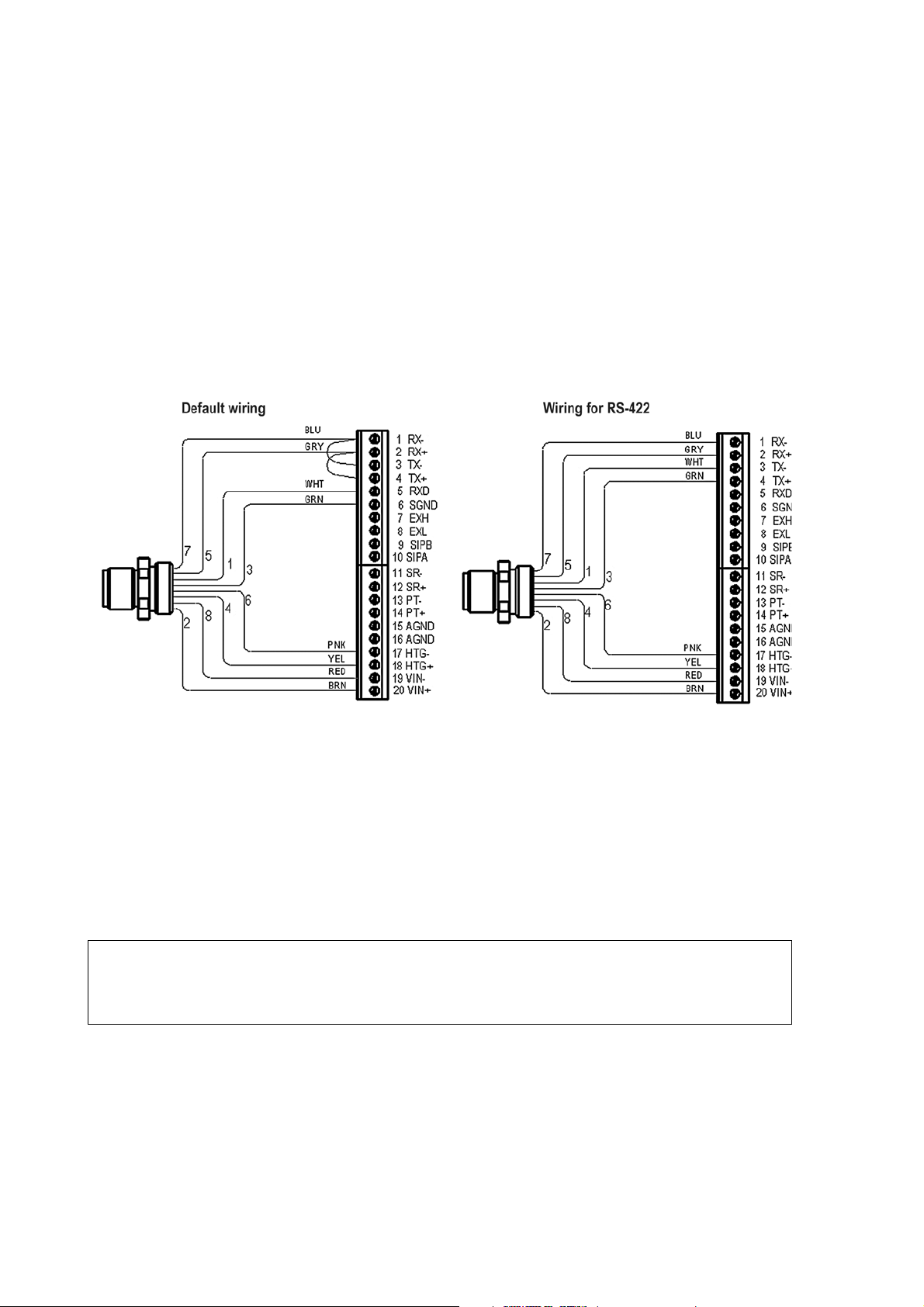
The terms "Default wiring" and "RS-422 wiring" refer to the two
internal wiring options, see the diagrams on the next page.
Internal Wiring
The 8-pin M12 connector is optional and hence may not be readily
installed. For retrofitting, make the wiring between the connector and
the screw terminal block according to one of the following pictures.
NOTE
0505-205
Figure 16 Internal Wiring
The telecommunication modes RS-232, SDI-12, and RS-485 can all be
accomplished with Default wiring, whereas the 4-wire RS-422 requires
a different internal wiring (see also Table 2 on page 37).
The RS-232 interface can be accessed with a standard PC ComPort,
right through the M12 connector. Same applies to the SDI-12 interface,
since the Rx and Tx lines are separate at the M12 connector.
The true SDI-12 line requires that the Rx and Tx wires are joined
together (outside the WMT50). See the interface diagrams in the next
section.
Bidirectional use of the RS-485 and RS-422 interface requires a proper
adapter module between the PC and the WMT50. For testing purposes,
the inverted output of either interface (screw terminal pin #3 TX-) is
38 ___________________________________________________________________M210736EN-B
Page 41

Chapter 5 ___________________________________________________________________ Wiring
directly readable with PC's Received Data line. In this case Signal
Ground for PC ComPort is taken from screw terminal pin #6 SGND (for
testing purposes pin #19 VIN- will also do).
For configuration work, the Service Port is most practical, since it has
constant and convenient line parameters: RS232/19200, 8, N, 1. See
Chapter 6, Communication Settings, on page 41 and Figure 3 on page
18.
Data Communication Interfaces
0505-206
Figure 17 Data Communication Interfaces
VAISALA _______________________________________________________________________ 39
Page 42

User’s Guide ______________________________________________________________________
With RS-485 and RS-422 interfaces, termination resistors need to be
used at both ends of the line, if data rate is 9600 Bd or higher and
distance is 600 m (2000 ft) or longer. Resistor range 100 ... 180 Ω is
suitable for twisted pair lines. Resistors are connected across RX- to
RX+ and across TX- to TX+ (with two-wire RS-485 only one resistor
needed).
The termination resistors will remarkably increase power consumption
during data transmission. If low power consumption is a must, a 0.1 μF
capacitor needs to be connected in series with each termination resistor.
Note that the RS-485 interface can be used as well with four wires (as
the RS-422). The basic difference between the RS-485 and RS-422 is
actually their protocol. Namely, in the RS-422 mode the transmitter is
held constantly enabled, while in the RS-485 mode it is enabled only
during transmission (for allowing the host’s transmission in the twowire case).
The RS-232 output swings only between 0 ... +4.5 V. This is enough for
modern PC inputs.The recommended maximum for RS-232 line length
is 100 m (300 ft) with 1200 Bd data rate. Higher rates require shorter
distance, for instance 30 m (100 ft) with 9600 Bd.
NOTE
When WMT50 is used on an RS-485 bus with other polled devices, the
error messaging feature shall always be disabled. This is done by the
following command: 0SU,S=N<crlf>.
40 ___________________________________________________________________M210736EN-B
Page 43

Chapter 6 ____________________________________________________ Communication Settings
CHAPTER 6
COMMUNICATION SETTINGS
This chapter contains the instructions for making the communication
settings.
Communication Protocols
As soon as WMT50 has been properly connected and powered the data
transmission can be started. The communication protocols available in
each of the serial interfaces are shown in the following table.
Table 3 Available Serial Communication Protocols
Serial Interface Communication Protocols Available
RS-232 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
RS-485 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
RS-422 ASCII automatic and polled
NMEA 0183 v3.0 automatic and query
SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
SDI-12 SDI-12 v1.3 and SDI-12 v1.3 continuous measurement
You have chosen the communication protocol (ASCII, NMEA 0183 or
SDI-12) when placing the order. In case you want to check and/or
change the protocol or other communication settings, see the following
sections.
VAISALA _______________________________________________________________________ 41
Page 44

User’s Guide ______________________________________________________________________
NOTE
NOTE
The RS-485 and RS-422 interfaces cannot be directly accessed with a
standard PC terminal. They require a suitable converter.
RS-232 and SDI-12 can be accessed with a standard PC terminal,
presuming that, for SDI-12, the Data in/out lines have not been
combined inside WMT50.
Service Cable Connection
The service cable connection with fixed serial port settings is
recommended for checking/changing the device settings. When making
the changes, use the Vaisala Configuration Tool or a standard PC
terminal program.
The service cable is included in the Vaisala Configuration Tool kit, see
Table 17 on page 101. For a picture of the service cable, see Figure 5 on
page 19.
When you connect the service cable between the service connector and
PC serial port, the serial port settings are forced automatically to RS232 / 19200, 8, N, 1. At the same time, the normal serial port at M12 and
at screw terminals is disabled. The battery (9 V) attached to a cable
provides the power to WMT50. Alternatively the normal power
connection through M12 or screw terminals can be used (simultaneous
use with 9 V battery is allowed).
1. Make a connection between the serial port of your PC and the
service port connector on the bottom plate of the transmitter (see
Figure 3 on page 18) by using the service cable.
2. Power-up WMT50 with a 9 V battery attached to the service cable
or by using the screw terminals/M12 connector.
3. Open the Vaisala Configuration Tool/terminal program. Select the
following default communication settings: 19200, 8, N, 1.
4. Make the desired changes. When working with a terminal program,
see section Communication Setting Commands on page 44.
42 ___________________________________________________________________M210736EN-B
Page 45

Chapter 6 ____________________________________________________ Communication Settings
NOTE
Changes in the serial interface/communication protocol/baud settings
take place when disconnecting the service cable or when resetting the
sensor.
If these settings are not changed during the service connection session,
original main port settings (at M12 and screw terminals) are returned,
as soon as the service cable is disconnected from either end.
Connection Through M12 Bottom Connector or Screw Terminal
Checking/changing the device settings can also be made through the
M12 bottom connector or screw terminal. Then you have to have know
the communication settings of the device, have a suitable cable between
the device and the host and, if needed, use a converter (for example, RS485/422 to RS-232 if the host is a PC). The factory defaults settings are
as follows:
Table 4 Default Serial Communication Settings for M12/
Screw Terminal Connection
Serial Interface Serial Settings
SDI-12 1200 baud, 7, E, 1
RS-232, ASCII 19200 baud, 8, N, 1
RS-485, ASCII 19200 baud, 8, N, 1
RS-422 ASCII 19200 baud, 8, N, 1
RS-422 NMEA 4800 baud, 8, N, 1
VAISALA _______________________________________________________________________ 43
Page 46

User’s Guide ______________________________________________________________________
Communication Setting Commands
NOTE
Hereafter the commands to be typed are presented in normal text while
the responses of the transmitter are presented in italic.
Checking the Current Communication Settings (aXU)
With this command you can request the current communication settings
of WMT50.
Command format in ASCII and NMEA 0183: aXU<cr><lf>
Command format in SDI-12: aXXU!
where
a = Device address, which may consist of the following
characters: 0 (default) ... 9, A ... Z, a ... z.
XU = Device settings command in ASCII and NMEA 0183
XXU = Device settings command in SDI-12
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
Example response in ASCII and NMEA 0183:
aXU,A=a,M=[M],T=[T],C=[C],I=[I],B=[B],D=[D],P=[P],S=[S],L
=[L],N=[N],V=[V]<cr><lf>
Example response in SDI-12:
aXXU,A=a,M=[M],T=[T],C=[C],B=[B],D=[D],P=[P],S=[S],
L=[L],N=[N],V=[V]<cr><lf>
44 ___________________________________________________________________M210736EN-B
Page 47

Chapter 6 ____________________________________________________ Communication Settings
Setting Fields
a = Device address
XU = Device settings command in ASCII and NMEA 0183
XXU = Device settings command in SDI-12
[A] = Address: 0 (default) ... 9, A ... Z, a ... z
[M] = Communication protocol:
A = ASCII, automatic
a = ASCII, automatic with CRC
P = ASCII, polled
p = ASCII, polled, with CRC
N = NMEA 0183 v3.0, automatic
Q = NMEA 0183 v3.0, query (= polled)
S = SDI-12 v1.3
R = SDI-12 v1.3 continuous measurement
[T] = Test parameter (for testing use only)
[C] = Automatic repeat interval for the Composite
Message: 0 ... 3600 s (0 = no automatic repeat). Does
not work in SDI-12 modes.
[I] = Serial interface: 1 = SDI-12, 2 = RS-232, 3= RS-485,
4 = RS-422
[B] = Baud rate: 1200, 2400, 4800, 9600, 19200, 38400,
57600, 115200
[D] = Data bits: 7/8
[P] = Parity: O = Odd, E = Even, N = None
VAISALA _______________________________________________________________________ 45
Page 48

User’s Guide ______________________________________________________________________
[S] = Stop bits: 1/2
[L] = RS-485 line delay: 0 ... 10000 ms
Defines the delay between the last character of the
query and the first character of the response message
from WMT50. During the delay, the WMT50's
transmitter is disabled. Effective in ASCII, polled
and NMEA 0183 query protocols. Effective when
RS-485 is selected (C = 3).
[N] = Name of the device: WMT50 (read only)
[V] = Software version: for example, 1.00 (read only)
<cr><lf> = Response terminator
NOTE
There are two different SDI-12 modes available for providing all the
functionality of the SDI-12 v1.3 standard.
The lowest power consumption is achieved with the Native SDI-12
mode (aXU,M=S), as it makes measurements and outputs data only on
request.
In the continuous SDI-12 mode (aXU,M=R) internal measurements
are made at a user-configurable update interval, see Chapter 8, Sensor
and Data Message Settings, on page 81. The data is outputted on
request.
Example (ASCII and NMEA 0183, device address 0):
0XU<cr><lf>
0XU,A=0,M=P,T=0,C=2,B=19200,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
Example (SDI-12, device address 0):
0XXU!0XXU,A=0,M=S,T=0,C=1,B=1200,D=7,P=E,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
46 ___________________________________________________________________M210736EN-B
Page 49

Chapter 6 ____________________________________________________ Communication Settings
Changing the Communication Settings
Make the desired setting with the following command. Select the
correct value/letter for the setting fields, see Setting Fields on page 45.
See also the examples.
Command format in ASCII and NMEA 0183:
aXU,A=x,M=x,C=x,B=x,D=x,P=x,S=x,L=x<cr><lf>
Command format in SDI-12:
aXXU,A=x,M=x,C=x,B=x,D=x,P=x,S=x,L=x!
where
NOTE
A, M, C, I,
B, D, P, S,L
x = Input value for the setting
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
When changing the serial interface and communication protocol, note
the following:
Each serial interface requires its specific wiring and/or jumper settings
described in Chapter 5, Wiring, on page 33.
Change first the serial interface field C and then the communication
protocol field M.
Changing the serial interface to SDI-12 (C=1) will automatically
change the baud settings to 1200, 7, E, 1 and the communication
protocol to SDI-12 (M=S).
= The communication setting fields, see Setting Fields
on page 45.
NOTE
VAISALA _______________________________________________________________________ 47
Reset the transmitter to validate the changes of communication
parameters by disconnecting the service cable or using the Reset
(aXZ) command, see Reset (aXZ) on page 49.
Page 50

User’s Guide ______________________________________________________________________
Example (ASCII and NMEA 0183, device address 0):
Changing the device address from 0 to 1:
0XU,A=1<cr><lf>
1XU,A=1<cr><lf>
Checking the changed settings:
1XU<cr><lf>
1XU,A=1,M=P,T=1,C=2,B=19200,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
Example (ASCII, device address 0):
Changing RS-232 serial interface with ASCII, polled communication
protocol and baud settings 19200, 8, N, 1 to RS-485 serial interface with
ASCII, automatic protocol and baud settings 9600, 8, N, 1.
NOTE
Checking the actual settings:
0XU<cr><lf>
0XU,A=0,M=P,C=2,B=19200,D=8,P=N,S=1,L=25,N=WMT50,
V=1.00<cr><lf>
You can change several parameters in the same command as long as
the command length does not exceed 32 characters (including
command terminator characters ! or <cr><lf>).You do not have to type
those setting fields that are not to be changed.
Changing several settings with one command:
0XU,M=A,C=3,B=9600<cr><lf>
0XU,M=A,C=3,B=9600<cr><lf>
Checking the changed settings:
0XU<cr><lf>
0XU,A=0,M=A,T=1,C=3,B=9600,D=8,P=N,S=1,L=25,
N=WMT50,V=1.00<cr><lf>
48 ___________________________________________________________________M210736EN-B
Page 51

Chapter 7 __________________________________________________ Getting the Data Messages
CHAPTER 7
GETTING THE DATA MESSAGES
This chapter presents the general and data message commands.
Each communication protocol has its own section for data message
commands.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 81.
NOTE
Type commands in CAPITAL letters.
General Commands
In case the error messaging is disabled (see Supervisor Message on page
86), WMT50 does not return any response message with the general
commands given in ASCII and NMEA-formats.
Reset (aXZ)
This command is used to perform software reset on the device.
Command format in ASCII and NMEA 0183: aXZ<cr><lf>
Command format in SDI-12: aXZ!
VAISALA _______________________________________________________________________ 49
Page 52

User’s Guide ______________________________________________________________________
where
a = Device address
XZ = Reset command
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
The response depends on the communication protocol, see the
examples.
Example (ASCII):
0XZ<cr><lf>
0TX,Start-up<cr><lf>
Example (SDI-12):
0XZ!0<cr><lf> (=device address)
Example (NMEA 0183):
0XZ<cr><lf>
$WITXT,01,01,07,Start-up*29
Measurement Reset (aXZM)
This command is used to interrupt all ongoing measurements of the
transmitter and start them from the beginning.
Command format in ASCII and NMEA 0183: aXZM<cr><lf>
Command format in SDI-12: aXZM!
where
a = Device address
XZM = Measurement break command
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
50 ___________________________________________________________________M210736EN-B
Page 53

Chapter 7 __________________________________________________ Getting the Data Messages
Example (ASCII):
0XZM<cr><lf>
0TX,Measurement reset<cr><lf>
Example (SDI-12):
0XZM!0 (= device address)
Example (NMEA 0183):
0XZM<cr><lf>
$WITXT,01,01,09,Measurement reset*50<cr><lf>
ASCII Protocol
This section presents the data commands and data message formats for
the ASCII communication protocols.
Abbreviations and Units
For changing the units, see Chapter 8, Sensor and Data Message
Settings, on page 81.
Table 5 Abbreviations and Units
Abbreviation Name Unit
Sn Wind speed minimum m/s, km/h, mph, knots #,M, K, S, N
Sm Wind speed average m/s, km/h, mph, knots #,M, K, S, N
Sx Wind speed maximum m/s, km/h, mph, knots #,M, K, S, N
Dn Wind direction minimum deg #, D
Dm Wind direction average deg #, D
Dx Wind direction
maximum
Th Heating temperature °C, °F #, C, F
Vh Heating voltage V
Vs Supply voltage V V
Vr 3.5 V ref. voltage V V
1. The letters in the status field indicate the Unit, the # character indicates invalid data.
deg #, D
Status
#, N, V, W, F
1
2
VAISALA _______________________________________________________________________ 51
Page 54

User’s Guide ______________________________________________________________________
2. For heating # = heating option is not available (has not been ordered). N = heating option is available
but have been disabled by user or the heating temperature is over the high control limit. V = heating is
on at 50% duty cycle and the heating temperature is between the high and middle control limits. W =
heating is on at 100% duty cycle and the heating temperature is between the low and middle control
limits. F = heating is on at 50% duty cycle and the heating temperature is below the low control limit.
Device Address (?)
This command is used to query the address of the device on the bus.
Command format: ?<cr><lf>
where
? = Device address query command
<cr><lf> = Command terminator
The response:
b<cr><lf>
where
b = Device address (default = 0)
<cr><lf> = Response terminator.
Example:
?<cr><lf>
0<cr><lf>
If more than one transmitter is connected to the bus, see Appendix A,
Networking, on page 105. If you need to change the device address, see
Changing the Communication Settings on page 47.
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another device. It asks a device to acknowledge its presence
on the bus.
52 ___________________________________________________________________M210736EN-B
Page 55

Chapter 7 __________________________________________________ Getting the Data Messages
Command format: a<cr><lf>
where
a = Device address
<cr><lf> = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0<cr><lf>
0<cr><lf>
Supervisor Data Message (aR5)
With this command you can request a supervisor data message
containing self-check parameters of the heating system and power
supply voltage.
Command format: aR5<cr><lf>
where
a = Device address
R5 = Supervisor message query command
<cr><lf> = Command terminator
Example of the response (the parameter set is configurable):
0R5,Th=25.9C,Vh=12.0N,Vs=15.2V,Vr=3.475V<cr><lf>
VAISALA _______________________________________________________________________ 53
Page 56

User’s Guide ______________________________________________________________________
where
a = Device address
R5 = Supervisor message query command
Th = Heating temperature (C = °C)
Vh = Heating voltage (N = heating is off)
Vs = Supply voltage (V = V)
Vr = 3.5 V reference voltage (V = V)
<cr><lf> = Response terminator
To change the parameters and units in the response message and to
make other settings, see section Supervisor Message on page 86.
Combined Data Message (aR)
With this command you can request all individual messages aR1 and
aR5 with just one command.
Command format: aR<cr><lf>
where
a = Device address (default = 0)
R = Combined message query command
<cr><lf> = Command terminator
Example of the response:
0R1,Dm=027D,Sm=0.1M<cr><lf>
0R5,Th=76.1F,Vh=11.5N,Vs=11.5V,Vr=3.510V<cr><lf>
Composite Data Message Query (aR0)
This command is used to request a combined data message with user
configurable set of wind and supervisor data.
54 ___________________________________________________________________M210736EN-B
Page 57

Chapter 7 __________________________________________________ Getting the Data Messages
Command format: aR0<cr><lf>
where
a = Device address
R0 = Composite data message query command
<cr><lf> = Command terminator
Example of the response (the parameters included can be chosen
from the full parameter set of the commands aR1 and aR5):
0R0,Dx=005D,Sx=2.8M,Th=23.6C<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 81.
Polling with CRC
Use the same data query commands as in the previous sections but type
the first letter of the command in lower case and add a correct threecharacter CRC before the command terminator. The response contains
also a CRC. For more information about the CRC-computation see
Appendix C, CRC-16 Computation, on page 117.
Requesting a wind data message with a CRC:
Command format: ar1xxx<cr><lf>
where
0 = Device address
r1 = Wind message query command
xxx = Three-character CRC for ar1 command
<cr><lf> = Command terminator
Example of the response (the parameter set is configurable):
0r1,Dn=236D,Dm=283D,Dx=031D,Sn=0.0M,Sm=1.0M,Sx=2.2MLFj
<cr><lf>
where the three characters before <cr><lf> are the CRC for the
response.
VAISALA _______________________________________________________________________ 55
Page 58

User’s Guide ______________________________________________________________________
NOTE
The correct CRC for each command can be requested by typing the
command with an arbitrary three-character CRC.
Example of asking the CRC for the wind data message query ar1:
Command format: 0r1yyy<cr><lf>
where
0 = Device address
r1 = Wind message query command
yyy = Arbitrary three-character CRC
<cr><lf> = Command terminator
Response:
atX,Use chksum GoeIU~<cr><lf>
where
0 = Device address
tX,Use
= Text prompt
chksum
Goe = Correct three-character CRC for the ar1 command
IU~ = Three-character CRC for the response message
<cr><lf> = Response terminator
Example of the other data query commands with CRC (when the
device address is 0):
Supervisor query = 0r5Kcd<cr><lf>
Combined message query = 0rBVT<cr><lf>
Composite data message query = 0r0Kld<cr><lf>
In every case the response contains a three-character CRC before the
<cr><lf>.
56 ___________________________________________________________________M210736EN-B
Page 59

Chapter 7 __________________________________________________ Getting the Data Messages
For selecting the parameters to be included in the response messages,
changing the units and making other configurations of the measured
parameters, see Chapter 8, Sensor and Data Message Settings, on page
81.
Automatic Mode
When automatic ASCII protocol is selected the transmitter sends data
messages at user configurable update intervals. The message structure
is same as with data query commands aR1 and aR5. You can choose an
individual update interval for each sensor, see Chapter 8, Sensor and
Data Message Settings, on page 81, sections Changing the Settings.
Example:
0R1,Dm=027D,Sm=0.1M<cr><lf>
NOTE
0R5,Th=76.1F,Vh=11.5N,Vs=11.5V,Vr=3.510V<cr><lf>
Example (with CRC):
0r1,Sn=0.1M,Sm=0.1M,Sx=0.1MGOG<cr><lf>
0r5,Th=25.0C,Vh=10.6#,Vs=10.8V,Vr=3.369VO]T<cr><lf>
Stop the automatic output by changing the communication protocol to
polled mode (aXU,M=P).
Polling commands aR1 and aR5 can be used also in ASCII automatic
protocol for requesting data.
Automatic Composite Data Message
When automatic composite data messaging is selected, the transmitter
sends composite data messages at user configurable intervals. The
message structure is the same as with the composite data query
command aR0 and contains a user configurable set of wind and
supervisor data.
VAISALA _______________________________________________________________________ 57
Page 60

User’s Guide ______________________________________________________________________
Example (the parameters included can be chosen from the full
parameter set of the commands aR1 and aR5):
0R0,Dx=005D,Sx=2.8M,Th=23.6C<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 81.
Automatic composite data messaging is a concurrent, not an alternate
mode to either the polled or automatic modes.
58 ___________________________________________________________________M210736EN-B
Page 61

Chapter 7 __________________________________________________ Getting the Data Messages
SDI-12 Protocol
There are two different SDI-12 modes available for providing all the
functionality of the SDI-12 v1.3 standard.The lowest power
consumption is achieved with the Native SDI-12 v1.3 mode
(aXU,M=S), as it makes measurements and outputs data only when
requested. In this mode all the commands presented in this chapter are
available except those for the Continuous Measurement.In SDI-12 v1.3
continuous mode (aXU,M=R) the transmitter makes internal
measurements at update intervals configurable by the user, see Chapter
8, Sensor and Data Message Settings, on page 81. The data is outputted
when requested. In this mode all the commands presented in this
chapter are available.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 81.
In the Native SDI-12 mode (aXU,M=S) the WMT50 is in idle state
most of the time (power consumption < 1 mW). More power is
consumed only during the measurements and data transmit requested by
the host device. Especially, the wind measurement typically consumes
60 mW average power (with 4 Hz sampling rate), throughout the
averaging period. In the Continuous mode (aXU,M=R) the power
consumption is determined by the internal update intervals of the sensor
and wind averaging time. These have certain limits so very long
measurement intervals cannot be achieved in this mode. Also the power
consumption between the measurements is about three times that of the
Native mode.
Address Query Command (?)
This command is used to query the address of the device on the bus.
If more than one sensor is connected to the bus, they will all respond,
causing a bus collision.
Command format: ?!
where
? = Address query command
! = Command terminator
VAISALA _______________________________________________________________________ 59
Page 62

User’s Guide ______________________________________________________________________
The response:
a<cr><lf>
where
a = Device address (default = 0)
<cr><lf> = Response terminator
Example (device address 0):
?!0<cr><lf>
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another SDI-12 device. It asks a device to acknowledge its
presence on the SDI-12 bus.
Command format: a!
where
a = Device address
! = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0!0<cr><lf>
60 ___________________________________________________________________M210736EN-B
Page 63

Chapter 7 __________________________________________________ Getting the Data Messages
Change Address Command (aAb)
This command changes the device address. After the command has
been issued and responded to, the sensor is not required to respond to
another command for one second time in order to ensure writing the
new address to the non-volatile memory.
Command format: aAb!
where
a = Device address
A = Change address command
b = Address to change to
! = Command terminator
The response:
b<cr><lf>
where
b = Device address = the new address (or the original
address, if the device is unable to change it)
<cr><lf> = Response terminator
Example (changing address from 0 to 3):
0A3!3<cr><lf>
Send Identification Command (aI)
This command is used to query the device for the SDI-12 compatibility
level, model number, and firmware version and serial number.
Command format: aI!
VAISALA _______________________________________________________________________ 61
Page 64

User’s Guide ______________________________________________________________________
where
a = Device address
I = Send identification command
! = Command terminator
The response:
a13ccccccccmmmmmmvvvxxxxxxxx<cr><lf>
where
a = Device address
13 = The SDI-12 version number, indicating SDI-12
version compatibility; for example, version 1.3 is
encoded as 13
cccccccc = 8-character vendor identification Vaisala_
mmmmmm = 6 characters specifying the sensor model number
vvv = 3 characters specifying the firmware version
xxxxxxxx = 8-character serial number
<cr><lf> = Response terminator
Example:
0I!013VAISALA_WMT50103Y2630000<cr><lf>
Start Measurement Command (aM)
This command asks the device to make a measurement. The measured
data are not sent automatically and should be requested with a separate
Send data command aD.
The host device is not allowed to send any commands to other devices
on the bus until the measurement is completed. When several devices
are connected to the same bus and simultaneous measurements from the
different devices are needed, Start concurrent measurement aC or Start
concurrent measurement with CRC aCC should be used, see the next
sections.
See Examples of aM, aC and aD Commands on page 67.
62 ___________________________________________________________________M210736EN-B
Page 65

Chapter 7 __________________________________________________ Getting the Data Messages
Command format: aMx!
where
a = Device address
M = Start measurement command
x = The desired sensor to make the measurement
1 = Wind
5 = Supervisor
If x is left out, the query refers to the combined data
message used for requesting data from several
sensors with just one command. See Examples of
aM, aC and aD Commands on page 67.
! = Command terminator
The response is sent in two parts:
NOTE
The response part one:
atttn<cr><lf>
The response part two (indicates that the data is ready to be requested):
a<cr><lf>
where
a = Device address
ttt = The measurement completing time in seconds
n = The number of the measured parameters available
(maximum number is 9)
<cr><lf> = Response terminator
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 81.
NOTE
When the measurement takes less than one second, the response part
two is not sent.
VAISALA _______________________________________________________________________ 63
Page 66

User’s Guide ______________________________________________________________________
NOTE
The maximum number of parameters that can be measured with aM
and aMC commands is nine (9). If more parameters are to be
measured, Start concurrent measurement commands aC and aCC
should be used (for which the maximum number of parameters to be
measured is 20), see the following sections.
Start Measurement Command with CRC (aMC)
Command format: aMCx!
This command has the same function as the aM but a three-character
CRC is added to the response data strings before <cr><lf>. In order to
request the measured data, Send data command aD should be used, see
the following sections.
Start Concurrent Measurement (aC)
This command is used when there are several devices on the same bus
and simultaneous measurements are needed from the devices, or if more
than nine (9) measurement parameters are requested from a single
device.
The measured data is not sent automatically and it should be requested
with separate Send data command aD. See Examples of aM, aC and aD
Commands on page 67.
Command format: aCx!
where
a = Device address
C = Start concurrent measurement command
x = The desired measurement
1 = Wind
5 = Supervisor
If x is left out, the query refers to combined data
message in which the user can request data from
several sensors with just one command. See the
examples below.
64 ___________________________________________________________________M210736EN-B
Page 67

Chapter 7 __________________________________________________ Getting the Data Messages
! = Command terminator
The response:
atttnn<cr><lf>
where
a = Device address
ttt = The measurement completing time in seconds
nn = The number of the measured parameters available
(maximum number is 20)
<cr><lf> = Response terminator
NOTE
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 81.
Start Concurrent Measurement with CRC (aCC)
Command format: aCCx!
This command has the same function as aC but a three-character CRC
is added to the response data strings before <cr><lf>.
In order to request the measured data, Send data command aD should
be used, see the following sections.
Send Data Command (aD)
This command is used to request the measured data from the device. See
Examples of aM, aC and aD Commands on page 67.
VAISALA _______________________________________________________________________ 65
Page 68

User’s Guide ______________________________________________________________________
NOTE
Start measurement command tells the number of parameters available.
However, the number of the parameters that can be included in a single
message depends on the number of characters in the data fields. If all
the parameters are not retrieved in a single response message, repeat
the Send data commands until all the data is obtained.
Command format: aDx!
where
a = Device address
D = Send data command
x = The order of consecutive Send data commands.
Always, the first Send data command should be
addressed with x=0. If all the parameters are not
retrieved, the next Send data command is sent with
x=1 and so on. The maximum value for x is 9. See
Examples of aM, aC and aD Commands on page 67.
! = Command terminator
NOTE
The response:
a+<data fields><cr><lf>
where
a = Device address
<data
fields>
= The measured parameters in selected units, separated
with '+' marks (or - marks in case of negative
parameter values).
<cr><lf> = Response terminator
aD0 command can also be used to break the measurement in progress
started with commands aM, aMC, aC or aCC.
66 ___________________________________________________________________M210736EN-B
Page 69

Chapter 7 __________________________________________________ Getting the Data Messages
NOTE
NOTE
In SDI-12 v1.3 Continuous measurement mode (aXU,M=R) the
sensor makes measurements at configurable update intervals. The aD
command following the aM, aMC, aC or aCC command always
returns the latest updated data. Thus in aXU,M=R mode issuing
consecutive aD commands may result in different data strings if the
value(s) happen to be updated between the commands.
Examples of aM, aC and aD Commands
The parameter order in the wind and supervisor data messages are as
presented in the parameter selection setting field, see Chapter 8,
Sensor and Data Message Settings, on page 81.
The device address is 0 in all examples.
Example 1:
Start a wind measurement and request the data (all six wind parameters
are enabled in the message):
0M1!00036<cr><lf> (measurement ready in 3 seconds and 6
parameters available)
0<cr><lf> (measurement completed)
0D0!0+339+018+030+0.1+0.1+0.1<cr><lf>
Example 2:
Start a supervisor measurement with CRC and request the data:
0MC5!00014<cr><lf> (measurement ready in one second and 4
parameters available)
0<cr><lf> (measurement completed)
0D0!0+34.3+10.5+10.7+3.366DpD<cr><lf>
VAISALA _______________________________________________________________________ 67
Page 70

User’s Guide ______________________________________________________________________
Continuous Measurement (aR)
The device can be configured so that all the parameters can be requested
instantly with the command aR instead of the two phase request
procedure of commands aM, aMC, aC, aCC + aD. In this case the
obtained parameter values are are those from the latest internal updating
(for setting of update intervals, see Chapter 8, Sensor and Data Message
Settings, on page 81).
NOTE
For using Continuous measurement commands for wind and
supervisor parameters the respective protocol must be selected
(aXU,M=R).
The M=S selection requires use of aM, aMC, aC, aCC + aD
commands.
Command format: aRx!
where
a = Device address
R = Start continuous measurement command:
x = The desired sensor to make the measurement:
1 = Wind
5 = Supervisor
If x is left out, the query refers to the combined data
message used for requesting data from several
sensors with just one command.
! = Command terminator
The response:
a+<data fields><cr><lf>
where
a = Device address
<data
fields>
<cr><lf> = Response terminator
68 ___________________________________________________________________M210736EN-B
= The measured parameters in selected units, separated
with '+' marks (or '-' marks in case of negative
parameter values). The maximum number of
parameters to be measured with one reqeust is 15.
Page 71

Chapter 7 __________________________________________________ Getting the Data Messages
Examples (device address 0):
0R1!0+323+331+351+0.0+0.4+3.0<cr><lf>
0R5!0+20.3+12.0+12.2+3.530<cr><lf>
0R!0+178+288+001+15.5+27.4+38.5+23.9+35.0+1002.1+0.00+0+
0.0+23.8<cr><lf>
Continuous Measurement with CRC (aRC)
Command format: aRCx!
Has the same function as the Continuous measurement command aR
but a three-character CRC is added to the response data strings before
<cr><lf>.
Example (device address 0):
0RC3!0+0.04+10+14.8+0.0+0+0.0INy
Start Verification Command (aV)
This command is used to query self diagnostic data from the device.
However, the command is not implemented in WMT50. The selfdiagnostic data can be requested with aM5 command.
VAISALA _______________________________________________________________________ 69
Page 72

User’s Guide ______________________________________________________________________
NMEA 0183 V3.0 Protocol
This section presents the data query commands and data message
formats for the NMEA 0183 v3.0 query and automatic protocols.
For changing the message parameters, units and other settings, see
Chapter 8, Sensor and Data Message Settings, on page 81.
A two-character checksum (CRC) field is transmitted in all data request
sentences. For definition of the CRC, see Appendix C, CRC-16
Computation, on page 117.
Device Address (?)
This command is used to query the address of the device on the bus.
Command format: ?<cr><lf>
where
? = Device address query command
<cr><lf> = Command terminator
The response:
b<cr><lf>
where
b = Device address (default = 0)
<cr><lf> = Response terminator.
Example:
?<cr><lf>
0<cr><lf>
If more than one transmitter is connected to the bus, see Appendix A,
Networking, on page 105. If you need to change the device address, see
Changing the Communication Settings on page 47.
70 ___________________________________________________________________M210736EN-B
Page 73

Chapter 7 __________________________________________________ Getting the Data Messages
Acknowledge Active Command (a)
This command is used to ensure that a device is responding to a data
recorder or another device. It asks a sensor to acknowledge its presence
on the bus.
Command format: a<cr><lf>
where
a = Device address
<cr><lf> = Command terminator
The response:
a<cr><lf>
where
a = Device address
<cr><lf> = Response terminator
Example:
0<cr><lf>
0<cr><lf>
MWV Wind Speed and Direction Query
Request the wind speed and direction data with a MWV query
command. For using MWV query the NMEA Wind formatter
parameter in the wind sensor settings shall be set to W (see section
Wind Sensor on page 81). With MWV query only wind speed and
direction average values can be requested. For obtaining min and max
data for speed and direction, see section XDR Transducer Measurement
Query on page 73.
VAISALA _______________________________________________________________________ 71
Page 74

User’s Guide ______________________________________________________________________
Command format: $--WIQ,MWV*hh<cr><lf>
where
$ = Start of the message
-- = Device identifier of the requester
WI = Device type identifier (WI = weather instrument)
Q = Defines the message as Query
MWV = Wind speed and direction query command
* = Checksum delimiter
hh = Two-character checksum for the query command.
<cr><lf> = Command terminator
The response format:
$WIMWV,x.x,R,y.y,M,A*hh<cr><lf>
where
$ = Start of the message
WI = Talker identifier (WI = weather instrument)
MWV = Wind speed and direction response identifier
x.x =
Wind direction value
1
R = Wind direction unit (R = relative)
y.y = Wind speed value
M = Wind speed unit (m/s)
A = Data status: A = valid, V = Invalid
* = Checksum delimiter
hh = Two-character checksum for the response
<cr><lf> = Response terminator
1. Wind direction is given in relation to the devices north-south axis. An
offset value to the measured direction can be set, see section Chapter 8,
section Wind Sensor.
The checksum to be typed in the query depends on the device identifier
characters. The correct checksum can be asked from WMT50 by typing
any three characters after the $--WIQ,MWV command.
72 ___________________________________________________________________M210736EN-B
Page 75

Chapter 7 __________________________________________________ Getting the Data Messages
Example:
Typing the command $--WIQ,MWVxxx<cr><lf> (xxx arbitrary
characters) WMT50 responds
$WITXT,01,01,08,Use chksum 2F*72<cr><lf>
which tells that *2F is the correct checksum for the $--WIQ,MWV
command.
Example of the MWV Query:
$--WIQ,MWV*2F<cr><lf>
$WIMWV,282,R,0.1,M,A*37<cr><lf>
(Wind angle 282 degrees, Wind speed 0.1 m/s)
XDR Transducer Measurement Query
XDR query command outputs the data of all other sensors except wind.
When requesting also wind data with the XDR command the NMEA
Wind formatter parameter in the wind sensor settings shall be set to T
(see section Wind Sensor on page 81).
Command format: $--WIQ,XDR*hh<cr><lf>
where
$ = Start of the message
-- = Device identifier of the requester
WI = Device type identifier (WI = weather instrument)
Q = Defines the message as Query
XDR = Transducer measurement command
* = Checksum delimiter
hh = Two-character checksum for the query command.
<cr><lf> = Command terminator
The response includes the parameters activated in the data messages
(see Chapter 8, Sensor and Data Message Settings, on page 81).
VAISALA _______________________________________________________________________ 73
Page 76

User’s Guide ______________________________________________________________________
NOTE
The parameter order in the output is as shown in the parameter
selection setting field, see Chapter 8, sections Setting the Fields.
The response format:
$WIXDR,a1,x.x1,u1,c--c1, ... ... ..an,x.xn,un,c--cn*hh<cr><lf>
where
$ = Start of the message
WI = Device type identifier (WI = weather instrument)
XDR = Transducer measurement response identifier
1
a
= Transducer type for the first transducer, see the
following transducer table.
x.x
1
u
1
= Measurement data from the first transducer
= Units of the first transducer measurement, see the
following transducer table.
c--c
1
= First transducer identification (id). WMT50's address
aXU,A is added as a base number to the transducer
id. For changing the address, see Checking the
Current Communication Settings (aXU) on page 44
(command aXU,A= [0 ... 9/A ... Z/a ... z]1.
...
an = Transducer type for the transducer n, see the
following transducer table.
x.xn = Measurement data from the transducer n
un = Units of the transducer n measurement, see the
following transducer table.
c--cn = Transducer n id. WMT50's address aXU,A is added
as a base number to the Transducer #ID. The address
is changeable, see command aXU,A= [0 ... 9/A ... Z/
a ... z]1.
* = Checksum delimiter
hh = Two-character checksum for the response
<cr><lf> = Response terminator
1. NMEA-format transmits only numbers as transducer ids. If WMT50
address is given as a letter, it will be shown as a number (0 ... 9, A = 10,
B = 11, a = 36, b = 37 etc.)
74 ___________________________________________________________________M210736EN-B
Page 77

Chapter 7 __________________________________________________ Getting the Data Messages
The checksum to be typed in the query depends on the device identifier
characters and can be asked from WMT50, see example below.
Example:
Typing the command $--WIQ,XDRxxx<cr><lf> (xxx arbitrary
characters) WMT50 responds
$WITXT,01,01,08,Use chksum 2D*72<cr><lf>
indicating that *2D is the correct checksum for the $--WIQ,XDR
command.
If there are several distinct measurements of the same parameter
(according to the transducer table below), they are assigned with
different transducer ids. For example, minimum, average and maximum
wind speed are measurements of the same parameter (wind speed) so if
all three are configured to be shown in the XDR message, they get
transducer ids A, A+1 and A+2, respectively, where A is WMT50
address aXU,A. The same applies for the wind direction.
For example, for a WMT50 with device address 0 the transducer ids of
all the measurement parameters are as follows:
Table 6 Transducer IDs of the Measurement Parameters
Measurement Transducer ID
Wind direction min 0
Wind direction average 1
Wind direction max 2
Wind speed min 0
Wind speed average 1
Wind speed max 2
Heating temperature 2
Supply voltage 0
Heating voltage 1
3.5 V reference voltage 2
Example of the XDR Query (all parameters of each sensor enabled
and NMEA wind formatter set to T):
$--WIQ,XDR*2D<cr><lf>
VAISALA _______________________________________________________________________ 75
Page 78

User’s Guide ______________________________________________________________________
Example of the response when all the parameters of each sensor are
enabled (NMEA wind formatter set to T):
Wind sensor data
$WIXDR,A,302,D,0,A,320,D,1,A,330,D,2,S,0.1,M,0,S,0.2,M,1,S,0.2,
M,2*57<cr><lf>
Supervisor data
$WIXDR,C,25.5,C,2,U,10.6,N,0,U,10.9,V,1,U,3.360,V,2*71<cr><lf>
The structure of the wind sensor response message:
where
$ = Start of the message
WI = Device type (WI = weather instrument)
XDR = Transducer measurement response identifier
A = Transducer id 0 type (wind direction), see the
following Transducer table
302 = Transducer id 0 data (min wind direction)
D = Transducer id 0 units (degrees, min wind direction)
0 = Transducer id for min wind direction
A = Transducer id 1 type (wind direction)
320 = Transducer id 1 data (average wind direction)
D = Transducer id 1 units (degrees, average wind
direction)
1 = Transducer id for average wind direction
A = Transducer id 2 type (wind direction)
330 = Transducer id 2 data (max wind direction)
D = Transducer id 2 units (degrees, max wind direction)
2 = Transducer id for max wind direction
S = Transducer id 0 type (wind speed)
0.1 = Transducer id 0 data (min wind speed)
M = Transducer id 0 units (m/s, min wind speed)
0 = Transducer id for min wind speed
S = Transducer id 1 type (wind speed)
0.2 = Transducer id 1 data (average wind speed)
76 ___________________________________________________________________M210736EN-B
Page 79

Chapter 7 __________________________________________________ Getting the Data Messages
M = Transducer id 1 units (m/s, average wind speed)
1 = Transducer id for average wind speed
S = Transducer id 2 type (wind speed)
0.2 = Transducer id 2 data (max wind speed)
M = Transducer id 2 units (m/s, max wind speed)
2 = Transducer id for max wind speed
* Checksum delimiter
57 = Two-character checksum for the response
<cr><lf> = Response terminator
The structure of the supervisor response message:
where
$ = Start of the message
WI = Device type (WI = weather instrument)
XDR = Transducer measurement response identifier
C = Transducer id 2 type (temperature), see the following
Transducer table
25.5 = Transducer id 2 data (Heating temperature)
C = Transducer id 2 units (C, Heating temperature)
2 = Transducer id for Heating temperature
U = Transducer id 0 type (voltage)
10.6 = Transducer id 0 data (Heating voltage)
M = Transducer id 0 units (N = heating disabled or
1
heating temperature too high
, Heating voltage)
0 = Transducer id for Heating voltage
U = Transducer id 1 type (Supply voltage)
10.9 = Transducer id 1 data (voltage)
V = Transducer id 1 units (V, Supply voltage)
1 = Transducer id for Supply voltage
U = Transducer id 2 type (voltage)
3.360 = Transducer id 2 data (3.5V reference voltage)
V = Transducer id 2 units (V, 3.5V reference voltage)
2 = Transducer id for 3.5V reference voltage
VAISALA _______________________________________________________________________ 77
Page 80

User’s Guide ______________________________________________________________________
* Checksum delimiter
71 = Two-character CRC for the response.
<cr><lf> = Response terminator
1. See Chapter 8, section Supervisor Message, Setting Fields for definitions
of the Heating voltage field.
Table 7 Transducer Table
Transducer Type Units Field Comments
Temperature C C = Celsius
F = Fahrenheit
Angular displacement
(wind direction)
Wind speed S K = km/h, M = m/s, N =
Voltage U V = volts (also 50 %
1. Not specified in the NMEA 0183 Standard.
A D = degrees
knots
duty cycle for heating)
S = mph, nonstandardized
N = not in use, F = 50%
duty cycle for heating,
W = full power for
heating
1
TXT Text Transmission
These short text messages and their interpretation are shown in Table 11
on page 96.
The text transmission response format:
$WITXT,xx,xx,xx,c--c*hh<cr><lf>
where
$ = Start of the message
WI = Talker identifier (WI = weather instrument)
TXT = Text transmission identifier.
xx = Total number of messages, 01 to 99
xx = Message number.
xx = Text identifier (see text message table)
c---c = Text message (see text message table)
* Checksum delimiter
78 ___________________________________________________________________M210736EN-B
Page 81

Chapter 7 __________________________________________________ Getting the Data Messages
hh = Two-character checksum for the query command.
<cr><lf> = Response terminator
Examples:
$WItXT,01,01,01,Unable to measure error*6D<cr><lf> (wind data
request when all the wind parameters were disabled from the wind
message).
$WITXT,01,01,03,Unknown cmd error*1F (unknown command
0XO!<cr><lf>).
$WITXT,01,01,08,Use chksum 2F*72 (wrong checksum used in MWV
query command)
Automatic Mode
When NMEA 0183 v3.0 automatic protocol is selected, the transmitter
sends data messages at user configurable update intervals. The message
format is the same as in the MWV and XDR data queries. The NMEA
wind formatter parameter in the wind sensor settings determines
whether the wind messages are sent in MWV or XDR format.
You can use ASCII data query commands aR1, aR5, aR, aR0 and their
CRC-versions ar1, ar5, ar and ar0 also in NMEA 0183 protocol. The
responses to these commands will be in standard NMEA 0183 format.
For formatting the messages, see Chapter 8, Sensor and Data Message
Settings, on page 81.
Automatic Composite Data Message
When automatic composite data messaging is selected, the transmitter
sends composite data messages at user configurable intervals. The
message structure is the same as with the composite data query
command aR0 and contains a user configurable set of wind and
supervisor data.
VAISALA _______________________________________________________________________ 79
Page 82

User’s Guide ______________________________________________________________________
Example (the parameters included can be chosen from the full
parameter set of the commands aR1 and aR5):
0R0,Dx=005D,Sx=2.8M,Th=23.6C<cr><lf>
For selecting the parameter set in the response message, see Chapter 8,
Sensor and Data Message Settings, on page 81.
Automatic composite data messaging is a concurrent, not an alternate
mode to either the polled or automatic modes.
80 ___________________________________________________________________M210736EN-B
Page 83

Chapter 8 ____________________________________________ Sensor and Data Message Settings
CHAPTER 8
SENSOR AND DATA MESSAGE
SETTINGS
This chapter presents the sensor configuration and data message
formatting commands for all communications protocols: ASCII,
NMEA 0183 and SDI-12.
Sensor and data message settings can also be done by using the Vaisala
Configuration Tool software.With this software tool you can change the
device and sensor settings easily in Windows® environment. See Table
17 on page 101.
Wind Sensor
Checking the Settings
With the following command you can check the current wind sensor
settings.
Command format in ASCII and NMEA 0183: aWU<cr><lf>
Command format in SDI-12: aXWU!
VAISALA _______________________________________________________________________ 81
Page 84

User’s Guide ______________________________________________________________________
where
a = Device address
WU = Wind sensor settings command in ASCII and NMEA
0183
XWU = Wind sensor settings command in SDI-12
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
The response in ASCII and NMEA 0183:
aWU,R=[R],I=[I],A=[A],U=[U],D=[D],N=[N],F=[F]<cr><lf>
The response in SDI-12:
aXWU,R=[R],I=[I],A=[A],U=[U],D=[D],N=[N],F=[F]<cr><lf>
where [R][I][A][U][D][N] are the setting fields, see the following
sections.
Example (ASCII and NMEA 0183, device address 0):
0WU<cr><lf>
0WU,R=01001000&00100100,I=60,A=10,U=N,D= 90,N=W,F=4<cr><lf>
Example (SDI-12, device address 0):
0XWU!0XWU,R=11111100&01001000,I=10,A=3,U=M,D=0,N=W,
F=4<cr><lf>
82 ___________________________________________________________________M210736EN-B
Page 85

Chapter 8 ____________________________________________ Sensor and Data Message Settings
Setting Fields
[R] = Parameter selection: This field consists of 16 bits
defining the wind parameters included in the data
messages. The bit value 0 disables and the bit value 1
enables the parameter.
The parameter order is shown in the following table:
The bits 1-8 determine the
parameters in the data
message obtained with the
following commands:
-ASCII: aR1 and ar1
-NMEA 0183: $--WIQ,XDR*hh
-SDI-12: aM1, aMC1, aC1, and
aCC1
-SDI-12 continuous: aR1 and
aRC1
The bits 9-16 determine the
wind parameters in the
composite data message
obtained with the following
commands:
-ASCII: aR0, ar0
-NMEA 0183: aR0, ar0
-SDI-12: aM, aMC, aC, and aCC
-SDI-12 continuous: aR and
aRC
[I] = Update interval: 1 ... 3600 seconds
1st bit (most left) Dn Direction minimum
2nd bit Dm Direction average
3rd bit Dx Direction maximum
4th bit Sn Speed minimum
5th bit Sm Speed average
6th bit Sx Speed maximum
7th bit spare
8th bit spare
& delimiter
9th bit Dn Wind direction minimum
10th bit Dm Wind direction average
11th bit Dx Wind direction maximum
12th bit Sn Speed minimum
13th bit Sm Speed average
14th bit Sx Speed maximum
15th bit spare
16th bit (most right) spare
[A] = Averaging time: 1 ... 3600 seconds
Defines the period over which the wind speed and
direction averaging is calculated. See also Appendix
D for averaging method.
[U] = Speed unit: M = m/s, K = km/h, S = mph, N = knots
[D] = Direction correction: -180 ... 180°, see Wind
Direction Correction on page 30.
VAISALA _______________________________________________________________________ 83
Page 86

User’s Guide ______________________________________________________________________
[N] = NMEA wind formatter: T = XDR (Transducer
syntax), W = MWV (Wind speed and angle)
Determines whether the wind message in NMEA
0183 (automatic) is sent in XDR or MWV format.
[F] = Sampling rate: 1, 2, or 4 Hz
Defines how often the wind measurement is
performed. By selecting lower sampling rate the
power consumption of the device diminishes (the
representativeness of the measurement decreases as
well if short averaging time is used with low
sampling rate).
<cr><lf> = Response terminator
NOTE
NOTE
When using MWV wind messages in NMEA 0183, one of the [R]
field's bits 1-6 must be 1.
If you want representing values for wind speed and direction min and
max values, use long enough averaging time in relation to sampling
rate (at least four samples during the averaging time).
Changing the Settings
You can change the following settings:
- parameters included in the wind data message,
- update interval,
- averaging time,
- speed unit,
- direction correction, and
- NMEA wind formatter.
Make the desired setting with the following command. Select the
correct value/letter for the setting fields, see Setting Fields on page 83.
See the examples.
84 ___________________________________________________________________M210736EN-B
Page 87

Chapter 8 ____________________________________________ Sensor and Data Message Settings
Command format in ASCII and NMEA 0183:
aWU,R=x,A=x,U=x,D=x,N=x,F=x<cr><lf>
Command format in SDI-12:
aXWU, R=x,A=x,U=x,D=x,N=x,F=x!
where
NOTE
R, I, A, U,
D, N, F
= The wind sensor setting fields, see Setting Fields on
page 83.
x = Value for the setting
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
If averaging time [A] is greater than update interval [I], it shall be a
whole multiple of the update interval and at maximum 12 times
greater. Example: If I = 5 s, A
max
= 60 s.
Examples (ASCII and NMEA 0183, device address 0):
You need 20 seconds averaging time for wind speed and direction data
to be available both in wind data message and composite data message
in every 60 seconds. Wind speed in knots and wind direction correction
+10°.
Changing the measurement interval to 60 seconds:
0WU,I=60<cr><lf>
0WU,I=60<cr><lf>
NOTE
Several parameters can be changed with the same command as long as
the command length does not exceed 32 characters, see below.
Changing the averaging time to 20 seconds, the wind speed units to
knots, and making the direction correction:
0WU,A=20,U=N,D=10<cr><lf>
0WU,A=20,U=N,D=10<cr><lf>
VAISALA _______________________________________________________________________ 85
Page 88

User’s Guide ______________________________________________________________________
Changing the wind parameter selection:
0WU,R=0100100001001000<cr><lf>
0WU,R=01001000&00100100<cr><lf>
NOTE
Character '&' is not allowed in the command.
The response after the change:
0R1<cr><lf>
0R1,Dm=268D,Sm=1.8N<cr><lf>
Example (SDI-12, device address 0):
Changing the measurement interval to 10 seconds:
0XWU,I=10!0<cr><lf>
In SDI-12 mode a separate enquiry (0XWU!) must be given to check the
data content.
Supervisor Message
Checking the Settings
With this command you can check the current supervisor settings.
Command format in ASCII and NMEA 0183: aSU<cr><lf>
Command format in SDI-12: aXSU!
where
a = Device address
SU = Supervisor settings command in ASCII and NMEA
0183
XSU = Supervisor settings command in SDI-12
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
86 ___________________________________________________________________M210736EN-B
Page 89

Chapter 8 ____________________________________________ Sensor and Data Message Settings
The response in ASCII and NMEA 0183:
aSU,R=[R],I=[I],S=[S],H=[Y]<cr><lf>
The response in SDI-12:
aXSU,R=[R],I=[I],S=[S],H=[Y]<cr><lf>
VAISALA _______________________________________________________________________ 87
Page 90

User’s Guide ______________________________________________________________________
Setting Fields
[R] = Parameter selection: This field consists of 16 bits
defining the supervisor parameters included in the
data messages. The bit value 0 disables and the bit
value 1 enables the parameter.
The bits 1-8 determine the
parameters included in the
message obtained with the
following commands:
-ASCII: aR5 and ar5
-NMEA 0183: $--WIQ,XDR*hh
-SDI-12: aM5, aMC5, aC5, and
aCC5
-SDI-12 continuous: aR5 and
aRC5
The bits 9-16 determine the
supervisor parameters
included in the composite data
message obtained with the
following commands:
-ASCII: aR0 and ar0
-NMEA 0183: aR0, ar0
-SDI-12: aM, aMC, aC, and aCC
-SDI-12 continuous: aR and
aRC
[I] = Update interval: 1 ... 3600 seconds. When the
1st bit (most left) Th Heating temperature
2nd bit Vh Heating voltage
3rd bit Vs Supply voltage
4th bit Vr 3.5 V reference voltage
5th bit spare
6th bit spare
7th bit spare
8th bit spare
&delimiter
9th bit Th Heating temperature
10th bit Vh Heating voltage
11th bit Vs Supply voltage
12th bit Vr 3.5 V reference voltage
13th bit spare
14th bit spare
15th bit spare
16th bit (most right) spare
heating is enabled the update interval is forced to 15
seconds.
[S] = Error messaging: Y = enabled, N = disabled
[H] = Heating control enable: Y = enabled, N = disabled
Heating enabled: The control between full and half
heating power is on as described in Heating
(Optional) on page 23.
Heating disabled: Heating is off in all conditions.
<cr><lf> = Response terminator
88 ___________________________________________________________________M210736EN-B
Page 91

Chapter 8 ____________________________________________ Sensor and Data Message Settings
Example (ASCII and NMEA 0183, device address 0):
0SU<cr><lf>
0SU,R=11110000&11000000,I=15,S=Y,H=Y<cr><lf>
Example (SDI-12, device address 0):
0XSU!0XSU,R=11110000&11000000,I=15,S=Y,H=Y<cr><lf>
Changing the Settings
You can change the following settings:
- parameters included in the supervisor data message,
- update interval,
- error messaging on/off, and
- heating control.
Make the desired setting with the following command. Select the
correct value/letter for the setting fields, see Setting Fields on page 88.
See the examples.
Command format in ASCII and NMEA 0183:
aSU,R=x,S=x,H=x<cr><lf>
Command format in SDI-12;
aXSU,R=x,S=x,H=x!
where
R, I, S, H = The supervisor setting fields, see Setting Fields on
page 88.
x = Value for the setting
<cr><lf> = Command terminator in ASCII and NMEA 0183
! = Command terminator in SDI-12
VAISALA _______________________________________________________________________ 89
Page 92

User’s Guide ______________________________________________________________________
Example (ASCII and NMEA 0183, device address 0):
Disabling the heating and error messaging:
0SU,S=N,H=N<cr><lf>
0SU,S=N,H=N<cr><lf>
Example (SDI-12, device address 0):
Changing the update interval to 10 seconds:
0XSU,I=10!0<cr><lf>
In SDI-12 mode a separate enquiry (0XSU!) must be given to check the
data content.
Composite Data Message
NOTE
The parameters to be included in the composite data message aR0 can
be defined in the parameter selection fields of each parameter (aWU,R
and aSU,R). See parameter tables of wind sensor and supervisor
message in the previous sections. See the following examples.
When changing the bits 9-16 of the parameter selection of any sensor,
the command can be shortened by replacing the bits 1-8 with a single
'&' character, see the examples.
Example (ASCII and NMEA 0183, device address 0):
Change the maximum wind direction (Dx) and speed (Sx) to average
wind direction (Dm) and average wind speed (Sm):
0RU,R=&01001000<cr><lf>
0RU,R=11110000&01001000<cr><lf>
Remove the heating voltage (Vh) and temperature (Th) data from the
composite data message:
0SU,R=&00000000<cr><lf>
0SU,R=11110000&00000000<cr><lf>
90 ___________________________________________________________________M210736EN-B
Page 93

Chapter 9 ______________________________________________________________ Maintenance
CHAPTER 9
MAINTENANCE
This chapter contains instructions for the basic maintenance of
Ultrasonic Wind Sensor WMT50 and contact information for Vaisala
Service Centers.
Cleaning
CAUTION
To ensure the accuracy of measurement results, Ultrasonic Wind Sensor
WMT50 needs to be cleaned when it gets contaminated. Leaves and
other such particles need to be removed from the wind transducers and
the sensor is recommended to be cleaned carefully with a soft, lint-free
cloth moistened with mild detergent.
Be extremely careful when cleaning the wind transducers. The
transducers must not be rubbed nor twisted.
VAISALA _______________________________________________________________________ 91
Page 94

User’s Guide ______________________________________________________________________
Factory Calibration and Repair Service
Send the device to Vaisala Instruments Service Centre for calibration
and adjustment, see contact information below.
Vaisala Service Centers
NORTH AMERICAN SERVICE CENTER
Vaisala Inc., 10-D Gill Street, Woburn, MA 01801-1068, USA.
Phone: +1 781 933 4500, Fax: +1 781 933 8029
E-mail: us-customersupport@vaisala.com
EUROPEAN SERVICE CENTER
Vaisala Instruments Service, Vanha Nurmijärventie 21 FIN-01670 Vantaa, FINLAND.
Phone: +358 9 8949 2658, Fax: +358 9 8949 2295
E-mail: instruments.service@vaisala.com
TOKYO SERVICE CENTER
Vaisala KK, 42 Kagurazaka 6-Chome, Shinjuku-Ku, Tokyo 162-0825, JAPAN.
Phone: +81 3 3266 9617, Fax: +81 3 3266 9655
E-mail: aftersales.asia@vaisala.com
BEIJING SERVICE CENTER
Vaisala China Ltd., Floor 2 EAS Building, No. 21 Xiao Yun Road, Dongsanhuan Beilu,
Chaoyang District, Beijing, P.R. CHINA 100027.
Phone: +86 10 8526 1199, Fax: +86 10 8526 1155
E-mail: china.service@vaisala.com
www.vaisala.com
Parts List for Consumables
Table 8 Available Spare Parts
Spare Part Order Code
215194 Vaisala Configuration Tool (software
215191 2-meter cable with 8-pin M12 female
215193 10-meter cable with 8-pin M12
217020 40-meter cable, open ends
215190 Bushing accessory kit
WXT510BOTTOMSP WXT510 Bottom assembly (with M12
212792 Mounting Kit
and service cable)
connector
female connector
connector)
92 ___________________________________________________________________M210736EN-B
Page 95

Chapter 10 __________________________________________________________ Troubleshooting
CHAPTER 10
TROUBLESHOOTING
This chapter describes common problems, their probable causes and
remedies, and includes contact information for technical support.
Table 9 Data Validation
Problem Interpretation Action
Wind measurement failure. Both
the speed and direction units are
replaced by a # sign or the data
values are irrelevant.
Blockage (trash, leaves,
branches, bird nests) between
the wind transducers.
Check that the wind transducers
are not damaged.
Incorrect <cr><lf> settings in the
terminal program.
Remove the blockage.
Note! The direction unit is # for
the wind speeds less than 0.05
m/s.
In ASCII and NMEA protocols
both <cr> and <lf> are required
after each command. Check that
your terminal program sends
both when pressing enter.
VAISALA _______________________________________________________________________ 93
Page 96

User’s Guide ______________________________________________________________________
Table 10 Communication Problems
Problem Interpretation Action
No response to any commands. Wrong wiring or operation
voltage not connected.
Baud rate/start bits/parity/stop bit
settings do not match between
the device and the host.
Incorrect <cr><lf> settings in the
terminal program.
Connection works but data
messages not available.
Wrong device address in a SDI12 command or a mistyped SDI12 command (in SDI-12 a
mistyped command is in no way
responded).
A command mistyped in ASCII/
NMEA mode while error
messaging/text messages is
disabled (aSU,S=N).
Check the wiring and operation
voltage, see Chapter 5, Wiring,
on page 33.
Connect the service cable, use
the communication settings
19200,8 N,1. Check the serial
port settings of the device with
Configuration Tool or with
terminal program. Use command
aXU! (SDI-12) or aXU<cr><lf>
(ASCII/NMEA). Change the
values if needed. A software/
hardware reset is needed to
validate the changes.
When you have no service
cable, try typing address query
commands ?! and ?<cr><lf> with
different serial settings in
terminal program. When the
communication parameters
match, the device responds with
its address. The settings can
now be changed using aXU!
(SDI-12) or aXU<cr><lf> (ASCII/
NMEA) commands. A software/
hardware reset is needed to
validate the changes.
In ASCII and NMEA protocols
both <cr> and <lf> are required
after each command. Check that
your terminal program sends
both when pressing enter.
Request the device address with
?! command and then retype the
command now with the correct
address. Check the data query
commands from Chapter 7,
Getting the Data Messages, on
page 49.
Enable the error messaging
using the Vaisala Configuration
Tool or any terminal by setting
aSU,S=Y, then try the command
again.
94 ___________________________________________________________________M210736EN-B
Page 97

Chapter 10 __________________________________________________________ Troubleshooting
Table 10 Communication Problems (Continued)
Problem Interpretation Action
Data messages are not in
expected format.
Some parameters are missing
from the data messages.
An error message as a response
to a command.
WMT50 keeps sending the
message "TX Sync/address
error".
The communication protocol
may not be the one you want.
The formatting of the data
messages is not what you
expect.
See section Error Messaging/
Text Messages on page 95.
The polling address and WMT50
address do not match.
The WMT50 is on an RS-485
bus with other polled devices
and Error Messages are
enabled.
Check the communication
protocol of the device by using
the Vaisala Configuration Tool or
any terminal with command
aXU,M! (SDI-12)
aXU,M<cr><lf> (ASCII/NMEA)
and change it if needed. See
Chapter 6, Communication
Settings, on page 41.
Format the data messages of the
concern by using the Vaisala
Configuration Tool or any
terminal program. See Chapter
8, Sensor and Data Message
Settings, on page 81.
See section Error Messaging/
Text Messages on page 95.
Set correct address either for the
WMT50 or to the polling request.
Disable the Error Messages with
the command aSU,S=N <crlf>.
Self-Diagnostics
Error Messaging/Text Messages
WMT50 sends a text message when certain type of errors occur. This
function works in all communication modes except in the SDI-12 mode.
You may disable error messaging by using the supervisor message aSU,
S=N, see Changing the Settings on page 89.
Examples:
0R1!0TX,Unable to measure error<cr><lf> (request of wind data
while all the wind parameters were disabled from the wind message)
VAISALA _______________________________________________________________________ 95
Page 98

User’s Guide ______________________________________________________________________
1XU!0TX,Sync/address error<cr><lf> (wrong device address. Ask
the correct address with ? or ?! command.
0XP!0TX,Unknown cmd error<cr><lf>
0xUabc!0TX,Use chksum CCb<cr><lf> (wrong checksum applied to
the 0xU command)
Table 11 Error Messaging/Text Messages Table
Text message identifier (in
NMEA 0183 v3.0 protocol only)
01 Unable to measure error The requested parameters are
02 Sync/address error The device address in the
03 Unknown cmd error The command is not supported,
04 Profile reset Checksum error in configuration
05 Factory reset Checksum error in calibration
06 Version reset New software version in use.
07 Start-up Software reset. Program starts
08 Use chksum xxx Given checksum not correct for
09 Measurement reset The ongoing measurement of all
Text Message Interpretation and action
not activated in the message,
see Chapter 8, Sensor and Data
Message Settings, on page 81,
and check the parameter
selection fields.
beginning of the command is
invalid. Ask the device address
with the ?! (SDI-12) or ?<cr><lf>
(ASCII and NMEA) command
and retype the command with
the correct address.
use the correct command format,
see Chapter 7, Getting the Data
Messages, on page 49.
settings during power-up.
Factory settings used instead.
settings during power-up.
Factory settings used instead.
from the beginning.
the command. Use the proposed
checksum.
the sensors interrupted and
started from the beginning.
See also Chapter 10, Troubleshooting, on page 93. In case of constant
error, please contact Vaisala Service Center, see Vaisala Service
Centers on page 92.
96 ___________________________________________________________________M210736EN-B
Page 99

Chapter 10 __________________________________________________________ Troubleshooting
Wind Sensor Heating Control
The supervisor message aSU (see Supervisor Message on page 86)
shows you continuously monitored information about wind sensor
heating (heating temperature Th and heating voltage Vh).
The heating temperature should stay above 0 °C when the heating is on
(except in extremely cold conditions where the heating power is not
sufficient). The heating voltage Vh should correspond to the heating
voltage supplied. If there is a remarkable deviation, check the wiring.
Note that wire gauge needs to be large enough to avoid remarkable
voltage drop in the cable.
NOTE
In case AC or full-wave rectified (f/w) AC is used for the heating, the
Vh measurement behaves as follows:
While heating is off, Vh indicates the positive peak value (Vp) of the
heating voltage waveform.
While heating is on, Vh indicates:
- 0.35 x Vp in case of AC voltage
- 0.70 x Vp in case of f/w rectified AC voltage
Operating Voltage Control
The supervisor message aSU (see Supervisor Message on page 86)
shows you continuously monitored supply voltage level (Vs). In case of
deviations between the supplied voltage and monitored voltage, check
the wiring and the power supply.
Technical Support
For technical questions, contact the Vaisala technical support:
E-mail helpdesk@vaisala.com
Fax +358 9 8949 2790
VAISALA _______________________________________________________________________ 97
Page 100

User’s Guide ______________________________________________________________________
98 ___________________________________________________________________M210736EN-B
 Loading...
Loading...