

Page 1
E6581738
TOSVERT VF-MB1/S15
PROFIBUS-DP Option Function Manual
PDP003Z
1. Read this manual before installing or operating. Keep this instruction manual on hand
of the end user, and make use of this manual in maintenance and inspection.
2. All information contained in this manual will be changed without notice. Please
contact your Toshiba distributor to confirm the latest information.
NOTICE
Page 2

E6581738
Contents
1.
Introduction ..............................................................................................................................................1
2. Connection Information............................................................................................................................6
2.1. Exterior features...........................................................................................................................6
2.2. Status indicator ............................................................................................................................7
2.3. VF-MB1/S15 Communication parameters ...................................................................................8
3. Profile.......................................................................................................................................................9
3.1. Telegram ......................................................................................................................................9
3.2. STW Control Word Data ............................................................................................................10
3.3. ZSW Status Word Data..............................................................................................................11
3.4. State Machine ............................................................................................................................13
3.5. Access to the PROFIBUS parameter ........................................................................................15
3.6. PROFIBUS parameter (PNU) ....................................................................................................16
3.7. Access to VF-MB1/S15 parameter ............................................................................................18
4. Vendor Spec. Profile..............................................................................................................................20
4.1. How to use .................................................................................................................................21
4.2. The overview of the VF-MB1/S15 parameter ............................................................................22
5. Diagnostic ..............................................................................................................................................29
6. DP-V1 function.......................................................................................................................................30
6.1. Example1. Read the PROFIdrive parameter .............................................................................31
6.2. Example 2. Change the PROFIdrive parameter ........................................................................32
6.3. Example 3. Read the VF-MB1/S15 parameter ..........................................................................33
6.4. Example 4. Change the VF-MB1/S15 parameter ......................................................................34
7. PROFIBUS Local/Remote Operation ....................................................................................................35
8. GSD file..................................................................................................................................................35
9. Appendix................................................................................................................................................36
Page 3

E6581738
1. Introduction
Thank you for purchasing the PROFIBUS-DP option “PDP003Z” for the VF-MB1/S15.
Before using the PROFIBUS-DP option, please familiarize yourself with the product and
be sure to thoroughly read the instructions and precautions contained in this manual.
This option needs the option adaptor to connect VF-S15 which type form is SBP009Z.
Please match here and buy it when SBP009Z is not at hand yet.
In addition, please make sure that this manual and “Installation Manual” is delivered to
the customer, and keep this function manual in a safe place for future reference or
drive/interface inspection.
This manual describes the supported functions for the “PDP003Z”.
In conjunction with this manual, the following manuals are supplied by Toshiba, and they
are essential both for ensuring a safe, reliable system installation as well as for realizing
the full potential of the “PDP003Z”:
- TOSVERT VF-MB1 Instruction Manual................................................E6581697
- TOSVERT VF-S15 Instruction Manual.................................................E6581611
- TOSVERT VF-MB1/S15 communication option Precautions Manual· E6581739
- 1 -
Page 4
E6581738
Safety precautions
On the drive and in its instruction manual, important information is contained for
preventing injuries to users and damages to assets and for proper use of the device.
Read the instruction manual attached to VF-MB1/S15 along with this instruction manual
for completely understanding the safety precautions and adhere to the contents of these
manuals.
Explanation of markings
Marking Meaning of marking
Warning
Caution
(*1) Such things as injury, burns or shock that will not require hospitalization or long periods of
outpatient treatment.
(*2) Physical property damage refers to wide-ranging damage to assets and materials.
Meanings of symbols
Marking Meaning of marking
Indicates prohibition (Don't do it).
Indicates something mandatory (must be done).
Indicates warning.
Indicates that errors in operation may lead to death or serious injury.
Indicates that errors in operation may lead to injury (*1) to people or that these errors
may cause damage to physical property. (*2)
What is prohibited will be described in or near the symbol in either text or picture
form.
What is mandatory will be described in or near the symbol in either text or picture form.
What is warned will be described in or near the symbol in either text or picture form.
Indicates caution.
What the caution should be applied to will be described in or near the symbol in
either text or picture form.
- 2 -
Page 5
E6581738
■ General Operation
Disassembly
prohibited
Prohibited
Mandatory
■ Transportation & installation
Prohibited
Mandatory
▼ Never disassemble, modify or repair.
Doing so could result in electric shock, fire and injury. For repairs, call your sales
agency.
▼ Do not attach this option to any drive other than the VF- MB1/S15.
Doing so could result in electric shock or fire.
▼ When the drive is energized, never detach the this option from the VF- MB1/S15.
Doing so could result in electric shock.
▼ Don't place or insert any kind of object into the PDP003Z (electrical wire cuttings, rods,
wires).
Doing so could result in electric shock or fire.
▼ Do not allow water or any other fluid to come in contact with the PDP003Z.
Doing so could result in electric shock or fire.
▼ Turn off the VF- MB1/S15 when installing and wiring this option.
▼ If the drive begins to emit smoke or an unusual odor, or unusual sounds, immediately
turn power off.
If the equipment is continued in operation in such a state, the result may be fire. Call
your local sales agency for repairs.
▼ Do not operate the drive if it is damaged or any component is missing.
Doing so could result in electric shock or fire. Call your local sales agency for repairs.
▼ Do not place any inflammable substances near the VF- MB1/S15 drive.
If an accident occurs in which flame is emitted, this could lead to fire.
▼ Do not install in any location where the drive could come into contact with water or other
fluids.
Doing so could result in electric shock or fire.
▼ When installing this option, be careful not to touch the leads from parts on the reverse
side of its circuit board.
Doing so could result in injury.
▼ Operate under the environmental conditions prescribed in the instruction manual.
Operations under any other conditions may result in malfunction.
Warning
Warning
- 3 -
Page 6
E6581738
■ Wiring
▼ Shut off power when installing and wiring this option.
Mandatory
Wait at least 15 minutes and check to make sure that the charge lamp (VF- MB1/S15) is
no longer lit.
▼ Electrical construction work must be done by a qualified expert.
Installation or connection of input power by someone who does not have that expert
knowledge may result in fire or electric shock.
■ Operations
Prohibited
▼ Do not touch switches when the hands are wet and do not try to clean the drive with a
damp cloth.
Doing so could result in electric shock.
▼ Do not pull on any cable it self.
Doing so could result in damage or malfunction.
■ Cautions for the communication
Prohibited
Mandatory
▼ Do not set the value that exceeds an effective range as data.
The motor may suddenly restart or stop and that could result in injury.
▼ Check PROFIBUS state (using below status word bit) when the option unit is
deactivated by an unusual event such as an operating error, power outage, failure, etc.
- ZSW Status Word Bit 3 (Fault), Bt 7 (Warning)
(The communication error occurs when "1" as value or this value cannot be read.)
Deactivated option unit may cause an accident, if the PROFIBUS state is not checked.
▼ Make sure that the operation signals are STOP before clearing the drive’s fault.
The motor may suddenly start and that may result in injuries.
■ Disposal
▼ For safety's sake, do not dispose of the disused drive yourself but ask an industrial
Mandatory
waste disposal agent (*).
If the collection, transport and disposal of industrial waste is done by someone who is
not licensed for that job, it is a punishable violation of the law. (Laws in regard to
cleaning and processing of waste materials)
(*) Persons who specialize in the processing of waste and known as “industrial waste
product collectors and transporters” or “industrial waste disposal persons.”
Warning
Warning
Warning
Caution
- 4 -
Page 7
E6581738
Notes on use
Notes
▼ Do not install the drive where the temperature or the humidity will change rapidly.
▼ Keep a distance of 20cm or more between the drive 's power cable and the data
transmission cable.
Or the drive might malfunction because of noise.
▼ Insert a magnetic contactor or similar device between the drive and the power supply to
ensure that power is turned off if an emergency stop command is entered through the
network.
- 5 -
Page 8
E6581738
2. Connection Information
This option allows the VF-MB1/S15 drive to be communicated with the cyclic command
transmission and monitoring of the original profile ("Vendor spec.", refer to Section 4) of
our company other than application profile "Profile for Variable Speed Drives PROFIdrive
(3.072), refer to Section 3" which PROFIBUS defines.
When you use VF-MB1, the shielding is connected to the drive ground. When you use
VF-S15, the shielding is connected to the grounding terminal of option adapter.
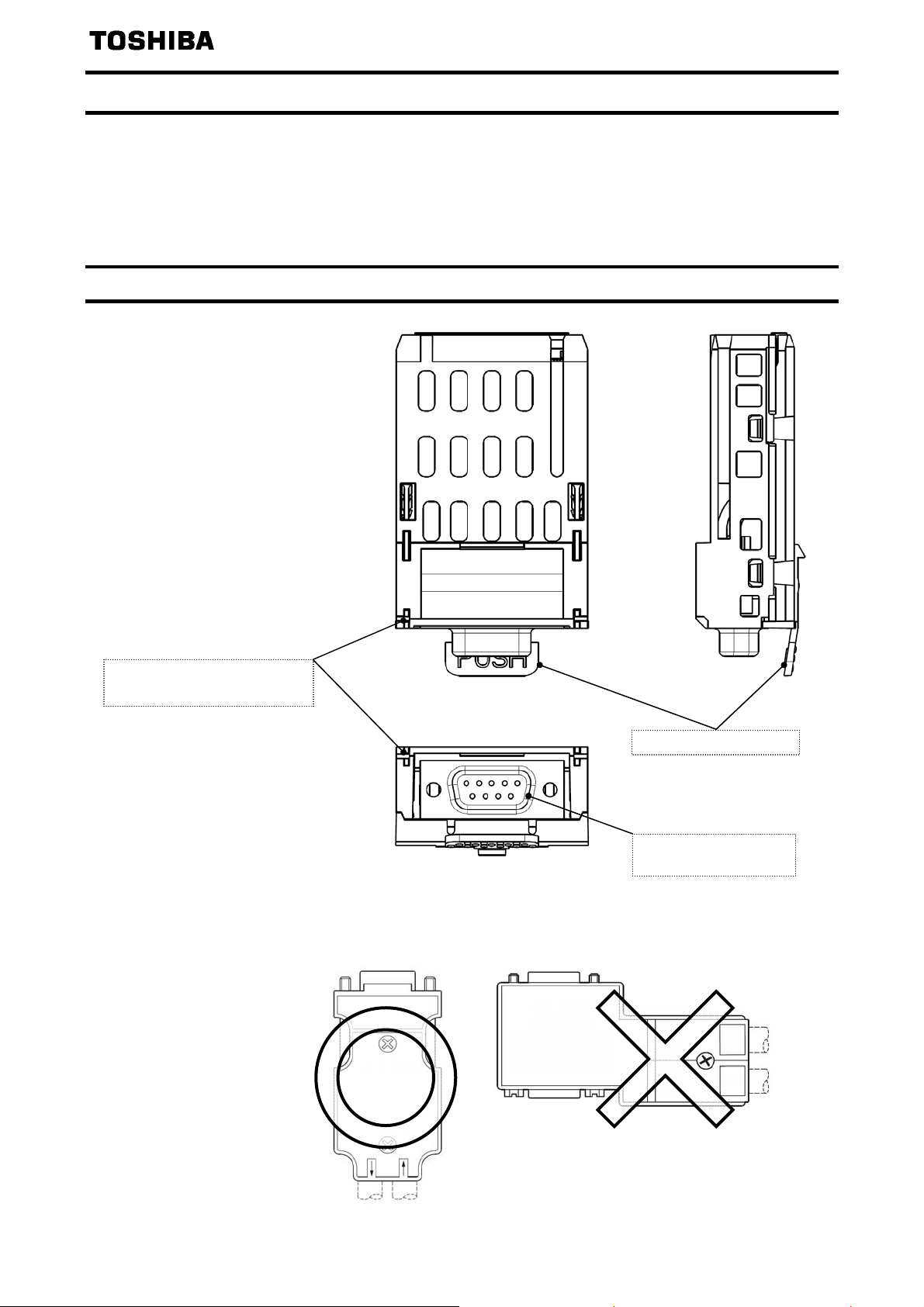
2.1. Exterior features
Status LED indicator
(Refer to Section 2.2)
To align VF-MB1/S15 side-by-side horizontally, "Vertical" type PROFIBUS connector is
necessary.
Release Tab
PROFIBUS connector
(D-Sub 9pin)
- 6 -
Page 9
E6581738
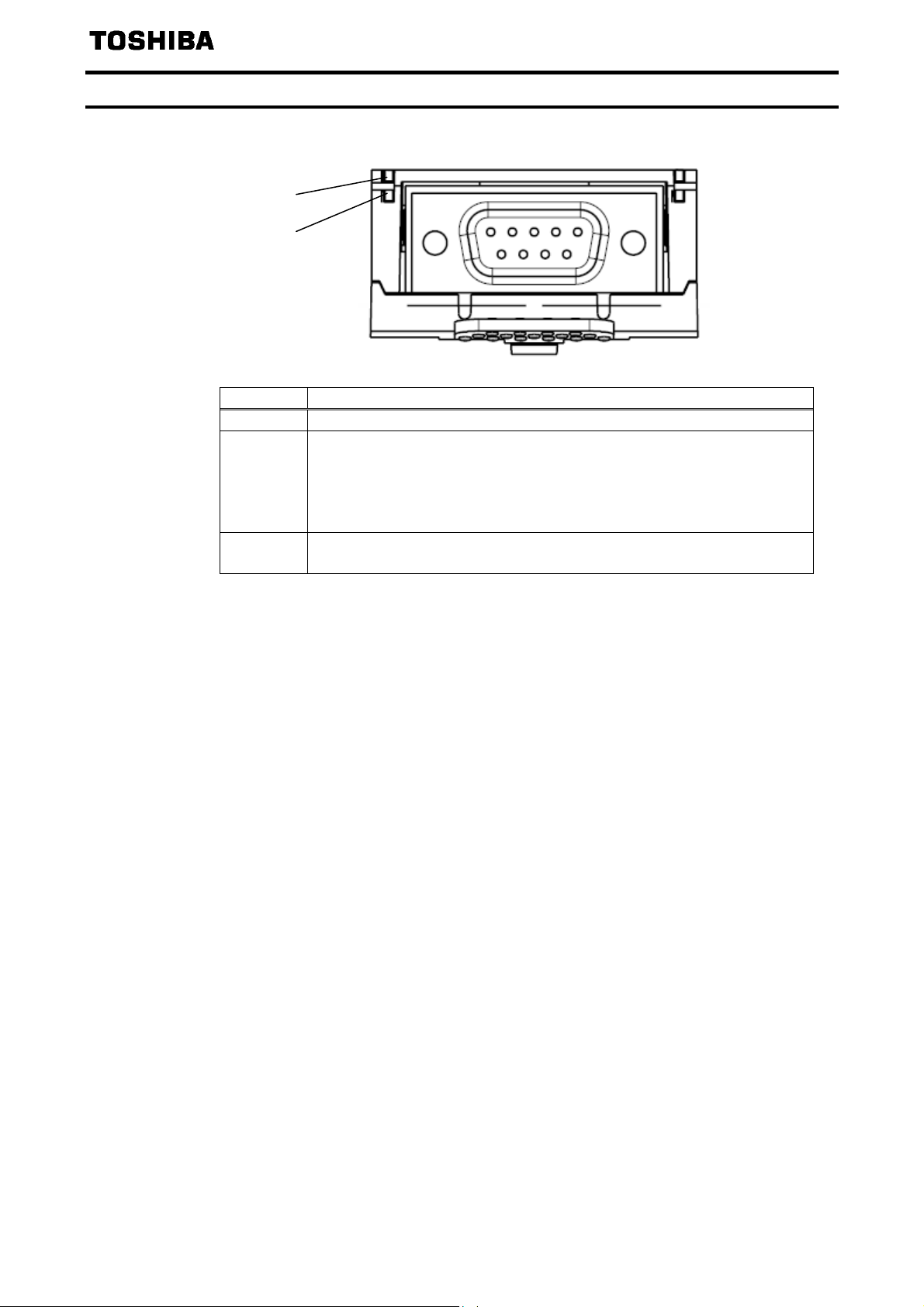
2.2. Status indicator
The PDP003Z has two LEDs, ST (status) and DX (data exchange) to indicate the
statuses of PROFIBUS-DP and the PDP003Z itself.
ST (status)
DX (data Exchange)
ST (Status): Red LED
LED Meanings
Off No diagnostics present
Flashes
Lights
DX (Data exchange): Green LED.
Indicates the status of the PROFIBUS network.
It lights when the PDP003Z is on-line and data exchange is possible.
8 Hz (Blinking 4 times/1sec.):
Waiting for parameterization or configuration
2 Hz (Blinking 1 times/1sec.):
PDP003Z station address is "126".
(Refer to 2.3 section .)
DP status error
* For example, a station address is not setcorrectly.
- 7 -
Page 10
E6581738
2.3. VF-MB1/S15 Communication parameters
In a network, VF-MB1/S15 (PDP003Z) serves as a PROFIBUS slave device. PDP003Z
configuration is set by the following parameters.
Parameter Function Adjustment range
c150 PDP003Z
Station address
c151 PDP003Z
Baud rate Monitor
c152 PDP003Z
Profile Monitor
c154 JOG1 Frequency
(STW.8)
c155 JOG2 Frequency
(STW.9)
c156 Tmax
(ZSW.8)
c157 Tolerance
(ZSW.8)
c100 Communication error
detection delay time
c101
Drive operation at the
communications
loss action
(Network wire breaks)
c102 Preset speed
operation selection
c103 ** Communication
time-out condition
selection
f899
Network option
reset setting
fd67 PDP003Z versioon PDP003Z firmware version
* Do not set at VF-MB1 V1.00.
** It is necessary to enable "Watchdog" function with the configurator.
*** When the parameters are changed or to reset
After reset, the parameter changes become effective.
Set 1 to f899 by the PROFIBUS communication might not be able to be set.
**** When
fmod or cmod is set to “Communication option”, VF-MB1/S15 drives without Net Reference
(STW Bit 13) or
Net Control (STW Bit 12) at PROFIdrive.
Please note that drive keeps driving when the communication is lost if
the parameter
Caution
2 to 126
The station address "126" cannot exchange data.
0: 12 Mbit/s
1: 6 Mbit/s
2: 3 Mbit/s
3: 1.5 Mbit/s
4: 500 kbit/s
5: 187.5 kbit/s
6: 93.75 kbit/s
7: 19.2 kbit/s
8: 9.6 kbit/s
0:Telegram 1 (PROFIdrive)
1:Telegram 100 (Vender Spec. 1)
2:Telegram 101 (Vender Spec. 2)
3:Telegram 102 (Vender Spec. 3)
0.0 to 20.0Hz 5.0Hz
0.0 to 20.0Hz 5.0Hz
0.1 to 60.0s 10.0s
0.1 to 99.0% 50.0%
0.0 to 100.0 sec 0.0
0: Stop and Communication release *
(follows
cmod and fmod setting)
1: None
2: Deceleration stop
3: Coast stop
4: Emergency stop
5: Preset speed operation command
(Operating at the preset speed operation frequency
set with
c102)
0: None
1 to 15: Preset speed (
sr1 - sr7, f287 - f295)
0: Disconnection detection
1: When communication mode enable (Both
fmod are set CANopen or COM option)
and
2: 1+Driving operation
0: None
1: Resetting the PDP003Z and the drive
(ex. 0x1101 means "V1.01")
err8, the power must be cycled (or set f899 to 1).
c101 (Drive operation at the communications loss action).
Default
setting
126
-
-
4
0
1
cmod
0
-
1 (None) is set to
- 8 -
Page 11
E6581738
3. Profile
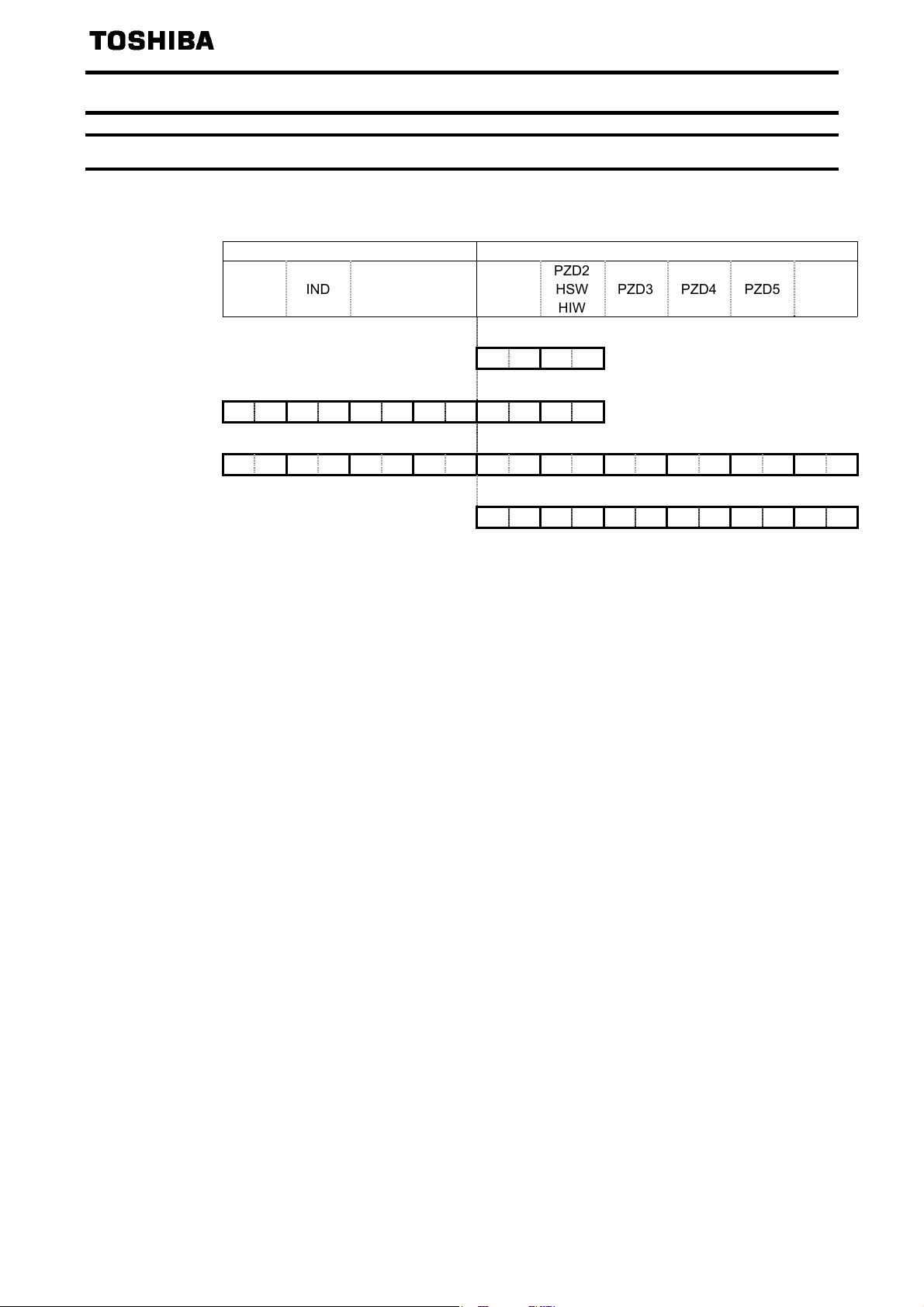
3.1. Telegram
Telegram of PDP003Z is set up by the configurator.
The figures below show the Telegrams and configurations that the PDP003Z supports
Telegram 1: PROFIdrive (PPO TYPE 3, 2PZD)
Telegram 100: Vendor Spec. (PPO TYPE 1, 4PKW / 2PZD)
Telegram 101: Vendor Spec. (PPO TYPE 2, 4PKW / 6PZD)
Telegram 102: Vendor Spec. (PPO TYPE 4, 6 ZD)
PKW: Parameter ID/value
PZD: Process Data, cyclically transferred
PKE: Parameter ID (1st and 2nd octet)
IND: Sub-index (3rd octet), 4th octet is reserved
PWE: Parameter value (5th until 8th octet)
STW: Control word
HSW: Main setpoint
ZSW: Status word
HIW: Main actual value
* There are some by which a high byte / low byte is conversely treated depending on a
master.
PKW PZD
PKE IND PWE
.
PZD1
STW
ZSW
PZD2
HSW
HIW
PZD3 PZD4 PZD5 PZD6
- 9 -
Page 12
E6581738
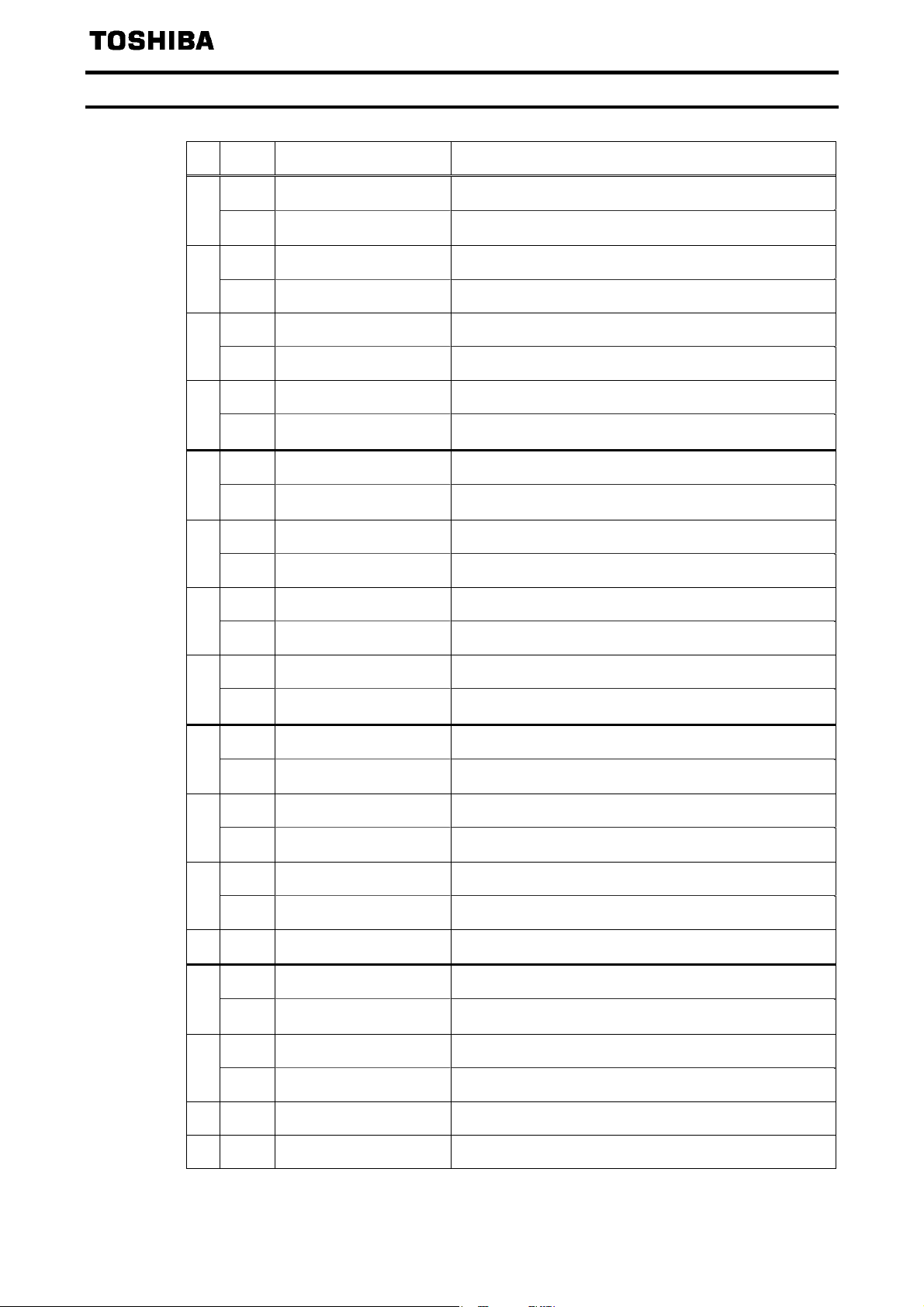
3.2. STW Control Word Data
PDP003Z supports only speed control mode.
Bit Value Name Note
1
ON
“Switched on” condition
0
0
1
OFF Normal stop.
No Coast Stop
All "Coast Stop (OFF2)" commands are withdrawn
1
0
1
Coast Stop (OFF 2) Coast stop.
No Quick Stop
All "Quick Stop (OFF3)" commands are withdrawn.
2
0
1
Quick Stop (OFF 3) Quick Stop
Enable Operation
The drive then runs-up to the setpoint.
3
0
Disable Operation Normal stop.
1 Enable Ramp Generator -
4
0
Reset Ramp Generator Output of the RFG is set to 0.
1 Unfreeze Ramp Generator -
5
Freeze Ramp Generator Freeze the actual setpoint entered by the RFG *.
0
1
Enable Setpoint The value selected at the input of the RFG is switched-in.
6
0
Disable Setpoint The value selected at the input of the RFG is set to 0.
1
7
0
1
8
0
1
9
0
1
10
0
11 ---
1 Net Control PDP003Z control is enabled.
12
0 Local Control PDP003Z control is disabled.
1 Net Reference PDP003Z reference is enabled.
13
0 Local Reference PDP003Z reference is disabled.
14 ---
Fault Acknowledge Fault reset (0 -> 1)
No meaning -
JOG 1 ON ** VF-MB1/S15 drives with JOG 1 speed 1 (c154).
JOG 1 OFF
JOG 2 ON ** VF-MB1/S15 drives with JOG 2 speed 2 (c155).
JOG 2 OFF
Control By PLC The control word and main setpoint are activated.
No Control By PLC The control word and main setpoint are inactivated.
Device-specification (Reserved.)
Device-specification (Reserved.)
Jogging stop, if "JOG 1" was previously ON. Stop drive
according to VF-MB1/S15 setting parameter.
Jogging stop, if "JOG 2" was previously ON. Stop drive
according to VF-MB1/S15 setting parameter.
15 ---
* RFG: Ramp Function Generator
** Operation is enabled, drive is in standstill and STW1 bit 4, 5, 6 = 0.
Device-specification (Reserved.)
- 10 -
Page 13

E6581738
3.3. ZSW Status Word Data
Bit Valure Name Note
0
1
2
3
4
5
6
7
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Ready To Switch-on Power supply is switched on
Not Ready To Switch-on -
Ready To Operate Refer to control word, bit 1.
Not Ready To Operate -
Operation Enabled
Operation Disabled -
Fault Present VF-MB1/S15 tripped.
No Fault VF-MB1/S15 is not tripped.
Coast Stop Not Activated -
Coast Stop Activated (OFF 2) "Coast Stop (OFF 2)" command is present.
Quick Stop Not Activated -
Quick Stop Activated (OFF 3) "Quick Stop (OFF 3)" command is present
Switching On Inhibited
Switching On Not Inhibited -
Warning Present
No Warning Alarm not present or alarm has disappeared again
Drive follows setpoint.
(Refer to control word 1, bit 3)
Control word bit1 or 2 is set to 0
or fault trip has been acknowledged.
Drive still operational: Alarm in service parameter: No
acknowledgement.
1
8
0
1
Speed Error
Within Tolerance Range
Speed Error
Out Of Tolerance Range
Control Requested VF-MB1/S15 is controlled by PROFIBUS master.
Refer to section 3.3.1.
9
0
1
No Control Requested VF-MB1/S15 is controlled by another interface.
f Or n Reached Or Exceeded Actual value ≥ Comparison value (setpoint)
10
0
11 ----
12 ----
13 ----
14 ----
15 ----
f Or n Not Reached -
Device-specification (Reserved.)
Device-specification (Reserved.)
Device-specification (Reserved.)
Device-specification (Reserved.)
Device-specification (Reserved.)
- 11 -
Page 14

E6581738
3.3.1. Tolerance Range (ZSW Bit 8)
If the setpoint is changed:
1. ZSW Bit 8 is set 0
2. Calculate the tolerance.
3. Start the timer which will time-out based on parameter Tmax.
PDP003Z checks that the timer (Tmax) has not timed-out and if the actual value is within
the tolerance. If both conditions are fulfilled ZSW Bit 8 is set 1 and the timer is stopped.
Tolerance
= 0x4000 * 50%
HIW
The figure shows ZSW 8 when Tolerance (
setpoint
20s 25s 30s15s
Tmax
Tmax Tmax
= 3s
c157) is 50% and Tmax (c151) is 3s.
actual value
HIW = 0x4000
HIW = 0x3000
HIW = 0x2000
HIW = 0x1000
HIW = 0x0000
Time
ZSW Bit 8
- 12 -
Page 15

E6581738
3.4. State Machine
MAINS OFF
A B C D
OPERATION
INHIBIT
from any state
OFF1
ACTIVE
STW Bit 4 = 0
STW Bit 5 = 0
STW Bit 6 = 0
Power ON
STW Bit 3 = 0
ZSW Bit 2 = 0
STW Bit 0 = 0
ZSW Bit 1 = 0
Normal Stop
Frequency = 0
B C D
C D
D
SWITCH-ON
NOT READY TO
SWITCH-ON
READY TO
SWITCH-ON
READY TO
OPERATION
A
RFG: ENABLE
B
RFG: ENABLE
C
OPERATING
D
ZSW Bit 6 = 1
INHIBIT
STW Bit 0 = 0
ZSW Bit 0 = 0
STW: xxxx xxxx xxxx x110
ZSW Bit 0 = 1
STW: xxxx xxxx xxxx x111
ZSW Bit 1 = 1
OPERATE
STW Bit 3 = 1
from any state
ACTIVE
ENABLE
OUTPUT
RUN UP
ZSW Bit 2 = 1
STW Bit 4 = 1
STW Bit 5 = 1
STW Bit 6 = 1
ZSW Bit 8 = 1
from any state
FAULT
FAULT
STW Bit 7 = 1
0 -> 1
from any state
STW Bit 2 = 0 STW Bit 1 = 0
OFF3
ZSW Bit 5 = 0
Emergency Stop Coast stop
Jogging 1 or 2
ACTIVE
Jogging 1 or 2
PAUSE
OFF2
ACTIVE
STW Bit 4 = 0, Bit 5 = 0, Bit 6 = 0
STW Bit 8 (or Bit 9)= 1
Jogging ON
STW Bit 8 (or Bit 9) = 0
Jogging OFF
STW: Control Word
ZSW: Status Word
: State
: Condition
ZSW Bit 3 = 1
ZSW Bit 4 = 0
Notes
STW Bit 10, 12 = 1 or cmod = 4 is needed for above control.
If cmod is set to Local (0, 1, 2 or 3), set 1 to STW Bit10 and 12 first after turning on the
power supply of VF-MB1/S15.
Check ZSW always and take care to give the command to STW.
- 13 -
Page 16

E6581738
3.4.1. Examples of driving by the State Machine
When using the PROFIdrive profile, the frequency reference is set to HSW. The setting
value “0x0000” - ”0x4000” is equivalent to ”0” - ”Base frequency (parameter
When the reverse operation, the frequency reference is set with two's complement of the
forward frequency reference. During running, HIW shows a output frequency.
*
fmod or cmod is set to “Communication option” on these examples.
3.4.1.1. Example 1. 60Hz Forward running and Deceleration stop
Set ”0x4000” to HSW and the following is set to STW in order.
① 0000 0100 0000 0110 (= 0x0406)
“READY TO SWITCH-ON”
② 0000 0100 0000 0111 (= 0x0407)
“READY TO OPERATE”
③ 0000 0100 0111 1111 (= 0x047F)
“OPERATION”
④ 0000 0100 0111 1110 (= 0x047E)
“OFF1 ACTIVE (Normal Stop)”
3.4.1.2. Example 2. 30Hz Reverse running
When the reverse operation, “0xE000” is set to HSW. “0xE000” is two's complement of
the “0x2000” as the forward frequency reference 30Hz.
The Setup to STW is same as the Example 1.
3.4.1.3. Example 3. Inching and pause
the following is set to STW in order.
① 0000 0100 0000 0110 (= 0x0406)
“READY TO SWITCH-ON”
② 0000 0100 0000 0111 (= 0x0407)
“READY TO OPERATE”
③ 0000 0101 0000 1111 (= 0x050F)
“Jogging 1 ACTIVE”
④ 0000 0100 0100 1111 (= 0x040F)
“Jogging 1 PAUSE”
* The inching frequency is according to the parameter
fh)”.
c154, c155 on VF-MB1/S15.
- 14 -
Page 17

E6581738
3.5. Access to the PROFIBUS parameter
In the cyclic PROFIBUS-DP communication, the parameter data is transferred via Telegram
100, 101. If the requirement is not executed, the cause is distinguished by octet 7 and 8.
PKW
(Parameter ID/value)
PKE IND PWE
Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8
PKE (Parameter ID)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Process data (cyclically)
PZD1
STW
ZSW
(Task ID/Response ID)
AK
SPM
(Parameter number)
AK (Request from Master to PDP003Z)
Request ID Function Note
0 No task
1 Request parameter value for PNU access
2 Change parameter value (word) for PNU access
6 Request parameter value (array) for PNU access, VF-MB1/S15 parameter
7 Change parameter value (array) for PNU access, VF-MB1/S15 parameter
AK (Response from PDP003Z to Master)
Response ID Function
0 No response
1 Transfer parameter value (word)
4 Transfer parameter value (array)
7 Task can not be executed, followed by error number
0 = Illegal parameter number
1 = Parameter value cannot be changed
2 = Lower or upper limit violated
3 = Erroneous sub index
11 = No parameter change rights
17 = Task cannot be executed due to operating status
(e.g. parameter is currently read-only)
18 = Other error
102 = Request not supported
SPM: always 0.
PZD
PZD2
HSW
HIW
PNU
access
access
- 15 -
Page 18

E6581738
3.6. PROFIBUS parameter (PNU)
PNU R/W data type Note
915 R Array [6]
Unsigned16
916 R Array [6]
Unsigned16
918 R Unsigned16 Station address monitor (same as the drive parameter c150).
922 R Unsigned16 Telegram selection
927 R/W Unsigned16 Operator control rights (parameter identification, PKW).
928 R Unsigned16 Control rights (process data, PZD).
930 R Unsigned16 Operating mode
944 R Unsigned16 Fault message counter
947 R Array [1]
Unsigned16
963 R Unsigned16 Detected baud rate:
964 R
965 R Octet String2 Profile number of the PDP003Z (Profidrive, V4.1)
Array [5]
Unsigned16
PNU 915, IND 0 = the drive parameter c001
PNU 915, IND 1 = the drive parameter c002
PNU 915, IND 2 = the drive parameter c003
PNU 915, IND 3 = the drive parameter c004
PNU 915, IND 4 = the drive parameter c005
PNU 915, IND 5 = the drive parameter c006
PNU 916, IND 0 = the drive parameter c021
PNU 916, IND 1 = the drive parameter c022
PNU 916, IND 2 = the drive parameter c023
PNU 916, IND 3 = the drive parameter c024
PNU 916, IND 4 = the
PNU 916, IND 5 = the
Value: Mode
1 : supports the speed control mode and the speed
Fault number
Drive Unit identification
drive parameter c025
drive parameter c026
1, 100, 101, 102
0: Parameters cannot be written, only read
(927 can be written).
1: Parameters can be written and read (default).
1: PZD part is enabled.
setpoint channel comprises RFG functionality.
0 = 9.6 kbit/s
1 = 19.2 kbit/s
2 = 93.75 kbit/s
3 = 187.5 kbit/s
4 = 500 kbit/s
6 = 1.5 Mbit/s
7 = 3 Mbit/s
8 = 6 Mbit/s
9 = 12 Mbit/s
IND 0 = PDP003Z ID (0x0C24)
IND 1 = Manufacturer-ID (0x0190)
IND 2 = VF-MB1/S15 CPU1 version
IND 3 = VF-MB1/S15 firmware release year (yyyy)
IND 4 = VF-MB1/S15 firmware release date (ddmm)
- 16 -
Page 19

E6581738
3.6.1. Examples of reading the PROFIdrive parameter
3.6.1.1. Example 1. Reading the PNU 922 (Telegram)
AK = 1 (Request parameter value)
SPM = 0
PNU = 922 (0x039A)
PKE
0 0 0 1 0 0 1 1 1 0 0 1 1 0 1 0
1 3 9 A
Requirement
PKW PZD
PKE IND PWE
13 9A 00 00 00 00 00 00 ・・・ ・・・
Response (Value: 0x0065 = 101)
13 9A 00 00 00 00 00 65 ・・・ ・・・
3.6.1.2. Example 2. Reading the PNU 964, IND 0
AK = 6 (Request parameter value (array))
SPM = 0
PNU = 964 (0x03C4)
IND = 0 (PDP003Z ID)
PKE
0 1 1 0 0 0 1 1 1 1 0 0 0 1 0 0
6 3 C 4
Requirement
PKW PZD
PKE IND PWE
63 C4 00 00 00 00 00 00 ・・・ ・・・
Response (Value: 0x0C24 = PDP003Z ID)
43 C4 00 00 00 00 0C 24 ・・・ ・・・
- 17 -
Page 20

E6581738
3.7. Access to VF-MB1/S15 parameter
When access to VF-MB1/S15 parameter, set “1” to the PNU. The communication number
of the drive parameter is set to the subindex IND.
Refer to the drive instruction manual about the communication number and unit.
* This procedure changes the value of VF-MB1/S15 EEPROM.
3.7.1. Examples of reading or changing VF-MB1/S15 parameter
3.7.1.1. Example 1. Reading the basic parameter (cmod (command mode selection))
AK = 6 (Request parameter value (array))
SPM = 0
PNU = 1
IND = 0x0003 (
PKE
0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
Requirement
PKW PZD
PKE IND PWE
60 01 00 03 00 00 00 00 ・・・ ・・・
Response (Value: 0x0001 = Operation panel))
40 01 00 03 00 00 00 01 ・・・ ・・・
cmod communication number)
6 0 0 1
3.7.1.2. Example 2. Reading the extended parameter (f219 (VIC input point 2 frequency))
AK = 6 (Request parameter value (array))
SPM = 0
PNU = 1
IND = 0x0219 (
PKE
0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
Requirement
PKW PZD
PKE IND PWE
60 01 02 19 00 00 00 00 ・・・ ・・・
Response (Value: 0x1770 (= 6000 -> 60.00Hz *))
40 01 02 19 00 00 17 70 ・・・ ・・・
* “0x1770” as reading value of “VIC input point 2 frequency” is
0x1770 = 6000 (decimal number)
Since the unit of “VIC input point 2 frequency” is 0.01Hz, set the following value.
6000×0.01 = 60.00Hz
f219 communication number)
6 0 0 1
- 18 -
Page 21

E6581738
3.7.1.3. Example 3. Reading the status monitor parameter (fe02 (The operation frequency))
AK = 6 (Request parameter value (array))
SPM = 0
PNU = 1
IND = 0xFE02(fe02 communication number)
PKE
0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
6 0 0 1
Requirement
PKW PZD
PKE IND PWE
60 01 FE 02 00 00 00 00 ・・・ ・・・
Response (Value: 0x03E8 (= 1000 -> 10.00Hz))
40 01 FE 02 00 00 03 E8 ・・・ ・・・
* The status monitor parameter can not be changed.
3.7.1.4. Example 4. Changing the basic parameter (acc (acceleration time))
AK = 7 (Change parameter value (array))
SPM = 0
PNU = 1
IND = 0x0009 (
PKE
0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 1
Requirement (
PKW PZD
PKE IND PWE
70 01 00 09 00 00 00 46 ・・・ ・・・
Response
40 01 00 09 00 00 00 46 ・・・ ・・・
* When the “Acceleration time” is set to 7.0 sec., set the following value.
(The unit of the “Acceleration time” is according to the parameter
7.0/0.1 = 70 = 0x0046 (hexadecimal number)
acc communication number)
7 0 0 1
acc = 7.0 sec. -> 70 (= 0x0046) *)
f519.)
Notes
When the control power is shut off by the instantaneous power failure,
communication will be unavailable for a while.
The Life of EEPROM is approximately 100,000 times. Avoid writing a command more
than 100,000 times to the same parameter of the drive and the communication board.
- 19 -
Page 22

E6581738
4. Vendor Spec. Profile
Cyclic command transmission (the value of the parameter c001 - c006) and
monitoring (the value of the parameter
the original profile
Select the ”Telegram 100”, ”Telegram 101” or ”Telegram 102” as the profile on the
configuration. Refer to the PLC configurator documents.
c001 - c006 setup value c021 - c026 setup value
c021 - c026) are possible for PDP003Z by
0: No action
fa06 (Communication command 1)
1:
fa23 (Communication command 2)
2:
fa07 (Fequency command, 0.01Hz)
3:
fa50 (Terminal output data)
5:
fa51 (FM analog output)
6:
f601 (Stall prevention level, %)
8:
acc (Acceleration time 1, 0.1s)*
13:
dec (Deceleration time 1, 0.1s) *
14:
ul (Upper limit,0.01Hz)
15:
vb (Torque boost value 1,0.1%)
16:
vlv (Base frequency voltage 1, 0.1V)
17:
0: No action
fd01 (Status information 1)
1:
fd00 (Output frequency, 0.01Hz)
2:
fd03 (Output current, 0.01%)
3:
fd05 (Output voltage, 0.01%)
4:
fc91 (Alarm information)
5:
fd22 (PID feedback value, 0.01Hz)
6:
fd06 (Input terminal board status)
7:
fd07 (Output terminal status)
8:
fe36 (VIB input, 0.01%)
9:
fe35 (VIA input, 0.01%)
10:
fe37 (VIC input, 0.01%)
11:
fd04 (Input voltage (DC detection), 0.01%)
12:
13: fd16 (Estimated speed (real-time value), 0.01Hz)
14: fd18 (Torque, 0.01%)
f880 (Free notes)
19:
fd29 (Input power, 0.01kW)
20:
fd30 (Output power, 0.01kW)
21:
fe14 (Cumulative operation time, hour)
22:
fe40 (FM terminal output monitor, 0.01%)
23:
fd20 (Torque current, 0.01%)
25:
26:
fd23 (Motor overload factor, 0.01%)
27:
fd24 (Drive overload factor, 0.01%)
28:
fd25 (PBR overload factor, %)
29:
fd26 (Motor load factor, %)
30:
fd27 (Drive load factor, %)
31:
fe56 (Pulse train input, pps)
32:
fe70 (Drive rated current, 0.1A)
33:
fe76 (Input Watt-hour, 0.1kWh 10
34:
fe77 (Output Watt-hour, 0.1kWh 10
35:
fd83 (IGBT temperature, degree C)
* The unit of acc, dec is according to the parameter f519.
** The unit of
fe76, fe77 is according to the parameter f749.
f749
f749
) **
) **
- 20 -
Page 23

E6581738
4.1. How to use
The purposes are adjustment by real time command transmission, and the monitor of an
operation state by using cyclic communication of PROFIBUS.
Example 1: Command transmitting
When you want to set "0xC400" to parameter fa06, set “1 (fa06)” to parameter
c001.
And Since 0 and 1 byte of the PZD1 supports the parameter
here, "0xC400" will be set as
VF-MB1
Parameter Value
c001 1 (FA06)
c002 ...
c003 ...
... ...
"0xC400" is set as parameter fa06
Example 2: State monitoring
When you want to monitor the output current, set “3 (FD03)” to parameter
The value of the parameter
parameter
c021 is inputted.
VF-MB1
Parameter Value
c021 3 (FD03)
c022 ...
c023 ...
... ...
The value of a parameter fd03 is outputted.
c001, if "0xC400" is set up
fa06.
PDP003Z
C4 00 ... ... ... ...
fd03 specified as 0 and1 byte of the PZD1 with the
PROFIBUS Master
PZD1 PZD2 PZD3
c021.
PROFIBUS Master
PDP003Z
PZD1 PZD2 PZD3
xx xx ... ... ... ...
- 21 -
Page 24

E6581738
4.2. The overview of the VF-MB1/S15 parameter
Refer to a communication functional description (E6581726/E6581913) for details.
4.2.1. fa06 (Communication command1)
bit Function 0 1 Note
Preset speed
0
operation frequencies
1
Preset speed
1
operation frequencies
2
Preset speed
2
operation frequencies
3
Preset speed
3
operation frequencies
4
Motor selection (1 or 2)
4
(THR 2 selection)
5 PI D control Normal operation PI D off -
Acceleration/deceleration pattern selection
6
(1 or 2)
(AD2 selection)
7 DC braking OFF
8 Jog run OFF Jog run -
Forward/reverse run
9
selection
10 Run/stop Stop Run 11 Coast stop command Standby Cost stop 12 Emergency stop OFF Emergency stop Always enable, "E" trip
13 Fault reset OFF Reset No data is returned from the drive
Frequency priority
14
selection
Command priority
15
selection
* VF-S15:When 14(sr0) is set to fmod, preset speed operation frequency 0 is selected.
Preset speed operation is disabled
or preset speed operation
frequencies (1-15) are set by
specifying bits for preset speed
operation frequencies 1-4.
(0000: Preset speed operation OFF,
001-1111: Setting of preset speed
operation frequencies (1-15)
Motor 1
(THR 1)
Acceleration/decel
eration pattern 1
(AD1)
Forward run Reverse run -
OFF Enabled
OFF Enabled
Motor 2
(THR 2)
Acceleration/dec
eleration pattern
2
(AD2)
Forced DC
braking
THR 1: pt = setting value, thr
THR 2: pt = 0, f170,
f171, f172, f173
AD1: acc, dec
AD2: f500, f501
Enabled regardless of the setting
of fmod
Enabled regardless of the setting
of cmod
-
- 22 -
Page 25

E6581738
4.2.2. fa23 (Communication command 2)
bit Function 0 1 Note
0 (Reserved) - - -
Electric power quantity
1
reset
OFF Reset
Electric power quantity (fe76,
fe77) reset
2 (Reserved) - - 3 (Reserved) - - 4 (Reserved) - - 5 (Reserved) - - 6 (Reserved) - - -
Maximum deceleration
7
forced stop
Acceleration/decele-
8
ration selection 1
Acceleration/decele-
9
ration selection 2
Normal Enabled -
Select acceleration/deceleration
00: Acceleration/deceleration 1
01: Acceleration/deceleration 2
10: Acceleration/deceleration 3
1-4 by combination of two bits..
AD1: acc, dec
AD2: f500, f501
AD3: f510, f511
10 (Reserved) - - 11 (Reserved) - - -
12 OC stall level switch OC stall 1 OC stall 2
OC stall 1: f601
OC stall 2: f185
13 (Reserved) - - 14 (Reserved) - - 15 (Reserved) - - -
Note: Set 0 to reserved bit.
- 23 -
Page 26

E6581738
4.2.3. fa07 (frequency reference from internal option)
Frequency reference is set up by 0.01Hz unit and the hexadecimal number.
For example, when "Frequency reference" is set up to 80Hz, since the minimum unit is 0.01Hz,
80 / 0.01 = 8000 = 0x1F40 (Hex.)
4.2.4. fa50 (Terminal output data from communication)
By setting up the data of the bit 0 - 1 of terminal output data (fa50) from communication, setting data
(OFF or ON) can be outputted to the output terminal.
Please select the functional number 92 - 95 as the selection (f130 - f138) of the output terminal
function before using it.
bit Output TB function name 0 1
0
1
2-15 (Reserved) - -
Specified data output 1
(Output terminal No.: 92, 93)
Specified data output 2
(Output terminal No.: 94, 95)
OFF ON
OFF ON
Note: Set 0 to reserved bit
4.2.5. fa51 (Analog output (FM) data from communication)
Use this function, set the FM terminal meter selection parameter (fmsl) to 18 (communication data
output).
This makes it possible to send out the data specified as FM analog output data (fa51) though the FM
analog output terminal. Data can be adjusted in a range of 0 to 1000 (resolution of 10 bit).
Please refer to "Meter setting and adjustment" Section of the VF-MB1/S15 instruction manual for details.
- 24 -
Page 27

E6581738
4.2.6. fd01 (Inverter operating status 1 (real time))
bit Function 0 1 Note
0 Failure FL No output
Under in
progress
-
Trip status includes rtry and
1 Failure Not tripped Tripped
the trip retention status are also
regarded as tripped statuses.
2 Alarm No alarm Alarm issued 3 Under voltage (moff) Normal Under voltage -
THR1: pt = setting value, vl,
Motor selection (1 or 2)
4
(THR 2 selection)
Motor 1 (THR1) Motor 2 (THR2)
vlv, vb, thr
THR2: pt = 0, f170, f171,
f172, f173
5 PID control off
Acceleration/deceleratio
6
n pattern selection (1 or
2)
PID control
permitted
Acceleration/dec
eleration pattern
1 (AD1)
7 DC braking OFF
PID control
prohibits
Acceleration/dec
eleration pattern
2 (AD2)
Forced DC
braking
-
AD1: acc, dec
AD2: f500, f501
-
8 Jog run OFF Jog run -
9 Forward / reverse run Forward run Reverse run 10 Run/stop Stop Run 11 Coast stop (ST = OFF) ST=ON ST=OFF -
12 Emergency stop
No emergency
stop status
Emergency
stop status
-
Standby: Initialization
completed, not failure stop
13 Standby ST=ON Start-up process Standby
status, not alarm stop status
(moff, ll forced stop),
ST=ON, and RUN=ON
Standby: Initialization completed,
14 Standby Start-up process Standby
not failure stop status and not
alarm stop status (moff, ll
forced stop)
15 (Undefined) - - -
Note: The bit described "Undefined" is unstable. Don't use the bit for the judgment.
4.2.7. fd00 (Output frequency (real time))
The current output frequency is read into 0.01Hz of units and by the hexadecimal number.
For example, when the output frequency is 80Hz, 0x1F40 (hexadecimal number) are read.
Since the minimum unit is 0.01%,
0x1F40 (Hex.) = 8000(Dec.) * 0.01 = 80 (Hz)
Also about the following parameters, these are the same as this.
- fd22 (Feedback value of PID (real time)) ............................. Unit: 0.01Hz
- fd16 (Estimated speed (real time))....................................... Unit: 0.01Hz
- fd29 (Input power (real time)) ............................................... Unit: 0.01kW
- fd30 (Output power (real time)) ............................................ Unit: 0.01kW
- 25 -
Page 28

E6581738
4.2.8. fd03 (Output current (real time))
The output current is read into 0.01% of units and by the hexadecimal number.
For example, when the output current of the rated current 4.8A drive is 50% (2.4A), 0x1388 (hexadecimal
number) is read out.
Since the minimum unit is 0.01%,
0x1388 (Hex.) = 5000 (Dec.) * 0.01 = 50 (%)
Also about the following parameters, these are the same as this.
- fd05 (Output voltage (real time))............................................. Unit: 0.01% (V)
- fd04 (Voltage at DC bus (real time)) ....................................... Unit: 0.01% (V)
- fd18 (Torque) ..........................................................................Unit: 0.01% (Nm)*
* When the motor information connected to the drive set to the parameter (f405 - f415), torque
monitor value "100%" is same as the rated torque of a motor in general.
4.2.9. fe35, fe36, fe37 (Monitoring of the analog input VIA, VIB, VIC)
VIA terminal board monitor: "Communication Number fe35"
VIB terminal board monitor: "Communication Number fe36"
VIC terminal board monitor: "Communication Number fe37"
These monitors can also be used as A/D converters irrespective of the drive's control.
VIA / VIC terminal board monitor is capable of reading the data from external devices in a range of 0.01
to 100.00% (unsigned data: 0x0000 to 0x2710).
VIB terminal board monitor is capable of reading the data from external devices in a range of -100.00 to
100.00% (signed data: 0xD8F0 to 0x2710).
If analog input mode is selected with the frequency setting mode selection parameter, however, keep in
mid that any data entered via an analog terminal is regarded as a frequency command.
4.2.10. fe14 (Cumulative run time)
The operated cumulative time is read by the hexadecimal number.
For example, when cumulative operation time is 18 hours, 0x12 (18 hours) is read.
0x12 (Hex.) = 18 (Dec., hour)
4.2.11. fe40 (Analog output (FM))
The output value of FM terminal is read.
The value range is set to 0 to 10000 (0x2710).
- 26 -
Page 29

E6581738
4.2.12. fc91 (Alarm code)
Remarks
bit
Function 0 1
(Code displayed on
the panel)
0 Over-current alarm Normal Alarming c flicking
1 Inverter over load alarm Normal Alarming l flicking
2 Motor over load alarm Normal Alarming l flicking
3 Over heat alarm Normal Alarming h flicking
4 Over voltage alarm Normal Alarming p flicking
5 Main circuit undervoltage alarm Normal Alarming -
6 main device overheat alarm Normal Alarming l flicking
7 Under current alarm Normal Alarming -
8 Over-torque alarm Normal Alarming -
9 Braking resistor overload alarm Normal Alarming 10 Cumulative operation hours alarm Normal Alarming 11 Option communication alarm Normal Alarming 12 Serial communication alarm Normal Alarming 13 MOFFMS (MSrelay off or MOFF) Normal Alarming -
14 Stop after instantaneous power off -
15 Stop after LL continuance time -
Dec., Under
stop
Dec., Under
stop
Refer to f302
Refer to f256
4.2.13. fd06 (Input TB Status)
bit TB Name Function (Parameter) 0 1
0 F Input terminal function selection 1 (f111)
1 R Input terminal function selection 2 (f112)
2 RES Input terminal function selection 3 (f113)
3 S1 Input terminal function selection 4 (f114)
4 S2 Input terminal function selection 5 (f115)
OFF ON
5 S3 Input terminal function selection 6 (f116)
6 VIB*1 Input terminal function selection 7 (f117)
7 VIA*1 Input terminal function selection 8 (f118)
5 to 15 (Undefined) - - -
Note: The bit described "Undefined" is unstable. Do not use the bit for the judgment.
*1: VIA/ VIB are input terminal function when f109 is logic input.
*The input terminal function is selected by each parameter.
value
value
- 27 -
Page 30

E6581738
4.2.14. fd07 (Output TB Status)
bit TB Name Function (Parameter) 0 1
0 RY-RC Output terminal function selection 1A (f130) OFF ON
1 OUT Output TB Function select 2A (f131) OFF ON
2 FL Output TB Function select 3 (f132) OFF ON
3 - 15 (Undefined) - - -
Note: The bit described "Undefined" is unstable. Do not use the bit for the judgment.
- 28 -
Page 31

E6581738
5. Diagnostic
When the communication loss occurs, PDP003Z returns the diagnosis telegram including
the following information.
Byte 1: Station Status 1
Byte 2: Station Status 2
Byte 3: Station Status 3
Byte 4: Master station address
Byte 5: PDP003Z Ident Number high byte (0x0C)
Byte 6: PDP003Z Ident Number low byte (0x24)
Byte 7: Diagnostic data lengh
Byte 8: Status Type (Status message = 0x81)
Byte 9: Slot Number (Slot number = 0x00)
Byte 10: Specifier (0=No further diff, 1=Status comes, 2=Status goes)
Byte 11: External diagnostic data length
Byte 12: PDP003Z Station Address
Byte 13: PDP003Z Profile
Byte 14: Drive CPU1 Major version
Byte 15: Drive CPU1 Minor version
Byte 16: PDP003Z software version
Byte 17: PDP003Z communication network Fault
Byte 18: PDP003Z internal link Fault
* It is necessary to set the parameter
* It is necessary to set it by the configuration to include Byte 7 or more in the response.
(The figure below is a setting for SIMATEC Step7.)
c101 to "4".
- 29 -
Page 32

E6581738
6. DP-V1 function
DP-V1 acyclic communication is mainly used to read/write the parameter. VF-MB1/S15
parameter and the PROFIBUS parameter can be read/written using PDP003Z.
The following setting is necessary in the configuration to communicate DP-V1.
(The figure below is a setting for SIMATEC Step7.)
Time
Parameter access sequence to VF-MB1/S15 takes place as described in the following
figure.
VF-MB1/S15 PROFIBS DP-V1 Communication Master
Parameter
Request
Parameter
Response
Write Request
Write Response (without Data)
Read Request (without Data)
Read Response (with Data)
Parameter
Request
Parameter
Processing
Parameter
Response
- 30 -
Page 33

E6581738
6.1. Example1. Read the PROFIdrive parameter
6.1.1. Write Request data table (Read PNU 964 (0x03C4) IND 4)
Field Description Value
Header DU0 Function number 0x5F
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x0E
Request Header (Byte 1) Request Reference 0x01
Request Header (Byte 2) Request ID (0x01: Request) 0x01
Request Header (Byte 3) Axis 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Address (Byte 1) Attribute (0x10: Value) 0x10
Parameter Address (Byte 2) Number of Elements 0x01
Parameter Address (Byte 3) Parameter number (PNU), High byte 0x03
Parameter Address (Byte 4) Parameter number (PNU), Low byte 0xC4
Parameter Address (Byte 5) Subindex (IND), High byte 0x00
Parameter Address (Byte 6) Subindex (IND), Low byte 0x04
6.1.2. Read Response data table (positive)
Field Description Value
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x08
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID * 0x01
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Value (Byte 1) Format * 0x06
Parameter Value (Byte 2) Number of Values 0x01
Parameter Value (Byte 3) Values, High byte 0x0A **
Parameter Value (Byte 4) Values, Low byte 0x90 **
* Refer to Appendix.
** Value 0x0A90 is "2704" in decimal. This means "April 27".
- 31 -
Page 34

E6581738
6.2. Example 2. Change the PROFIdrive parameter
6.2.1. Write Request data table (Change, set 0 to PNU 927 (0x039F))
Field Description Value
Header (DU0) Function number 0x5F
Header (DU1) Slot number (0) 0x00
Header (DU2) Index (47) 0x2F
Header (DU3) Length 0x0E
Request Header (Byte 1) Request Reference 0x01
Request Header (Byte 2) Request ID (0x02: Change) * 0x02
Request Header (Byte 3) Axis 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Address (Byte 1) Attribute 0x10
Parameter Address (Byte 2) Number of Elements 0x01
Parameter Address (Byte 3) Parameter number (PNU), High byte 0x03
Parameter Address (Byte 4) Parameter number (PNU), Low byte 0x9F
Parameter Address (Byte 5) Subindex (IND), High byte 0x00
Parameter Address (Byte 6) Subindex (IND), Low byte 0x00
Parameter Value (Byte 1) Format * 0x06
Parameter Value (Byte 2) Number of Value 0x01
Parameter Value (Byte 3) Values, High byte 0x00
Parameter Value (Byte 4) Values, Low byte 0x00
* Refer to Appendix.
Read Response data table (positive)
Field Description
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x04
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID (0x02: Positive) 0x02
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
6.2.2. Read Response data table (negative, set 2 to PNU 927)
Field Description Value
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x08
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID (0x82: Negative) * 0x82
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Value (Byte 1) Format (0x44: Error) * 0x44
Parameter Value (Byte 2) Numner of Vlaues 0x01
Parameter Value (Byte 3) Error number, High byte 0x00
Parameter Value (Byte 4) Error number, Low byte 0x01
* Refer to Appendix.
Value
- 32 -
Page 35

E6581738
6.3. Example 3. Read the VF-MB1/S15 parameter
When access to VF-MB1/S15 parameter, set “1000” to the PNU.
6.3.1. Write Request data table (Read
Field Description Value
Header DU0 Function number 0x5F
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x0A
Request Header (Byte 1) Request Reference 0x01
Request Header (Byte 2) Request ID (0x01: Request) * 0x01
Request Header (Byte 3) Axis 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Address (Byte 1) Attribute 0x10
Parameter Address (Byte 2) Number of Elements 0x01
Parameter Address (Byte 3) Parameter number, High byte ** 0x03
Parameter Address (Byte 4) Parameter number, Low byte ** 0xE8
Parameter Address (Byte 5) VF-MB1/S15 Parameter number, High byte 0xFD
Parameter Address (Byte 6) VF-MB1/S15 Parameter number, Low byte 0x04
* Refer to Appendix.
** Parameter number is fixed to 0x03E8 (1000) for accessing to VF-MB1/S15 parameter.
6.3.2. Read Response data table (positive)
Field Description Value
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x08
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID * 0x01
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Value (Byte 1) Format * 0x42
Parameter Value (Byte 2) Number of Values 0x01
Parameter Value (Byte 3) Values, High byte 0x31 **
Parameter Value (Byte 4) Values, High byte 0xEC **
* Refer to Appendix.
** Value 0x31EC is "12780" in decimal. This means "127.80 (%)".
fd04 (Input voltage))
- 33 -
Page 36

E6581738
6.4. Example 4. Change the VF-MB1/S15 parameter
When access to VF-MB1/S15 parameter, set “1000” to the PNU.
* This procedure changes the value of VF-MB1/S15 EEPROM.
6.4.1. Write Request data table (Change, set 7 to VF-MB1/S15 parameter
Field Description Value
Header DU0 Function number 0x5F
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x0E
Request Header (Byte 1) Request Reference 0x01
Request Header (Byte 2) Request ID (0x02: Change) * 0x02
Request Header (Byte 3) Axis 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Address (Byte 1) Attribute 0x10
Parameter Address (Byte 2) Number of Elements 0x01
Parameter Address (Byte 3) Parameter number, High byte ** 0x03
Parameter Address (Byte 4) Parameter number, Low byte ** 0xE8
Parameter Address (Byte 5) VF-MB1/S15 Parameter number, High byte 0x01
Parameter Address (Byte 6) VF-MB1/S15 Parameter number, Low byte 0x30
Parameter Value (Byte 1) Format * 0x42
Parameter Value (Byte 2) Number of Value 0x01
Parameter Value (Byte 3) Value, High byte 0x00
Parameter Value (Byte 4) Value, Low byte 0x07
* Refer to Appendix.
** Parameter number is fixed to 0x03E8 (1000) for accessing to VF-MB1/S15 parameter.
6.4.2. Read Response data table (positive)
Field Description Value
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x04
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID * 0x02
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
* Refer to Appendix.
6.4.3. Read Response data table (negative,at set 256 to
Field Description Value
Header DU0 Function number 0x5E
Header DU1 Slot number (0) 0x00
Header DU2 Index (47) 0x2F
Header DU3 Length 0x08
Request Header (Byte 1) Request Reference (mirrored) 0x01
Request Header (Byte 2) Response ID * 0x82
Request Header (Byte 3) Axis (mirrored) 0x01
Request Header (Byte 4) Number of Parameters 0x01
Parameter Value (Byte 1) Format * (= Error) 0x44
Parameter Value (Byte 2) Numner of Vlaues 0x01
Parameter Value (Byte 3) Error number, High byte * 0x00
Parameter Value (Byte 4) Error number, Low byte * 0x02
* Refer to Appendix.
f130)
f130)
- 34 -
Page 37

E6581738
7. PROFIBUS Local/Remote Operation
The example below shows how to configure the VF-MB1 for local/remote operation.
<Terminal function>
F terminal ............ RUN command
R terminal............ Local (Terminal in this example) / PROFIBUS switching
VIA terminal ........ Operation frequency command
<Wiring>
<Parameter setting>
cmod (command mode selection) = 0 (terminal board)
fmod (frequency setting mode selection 1) = 1 (VIA)
f112 (input terminal selection 2 (R)) = 48 (Local/PROFIBUS control)
<Operation>
R-CC terminal open:
R-CC terminal closed:
Variable resistor for adjustment
10k ohm
Operation command
Local/PROFIBUS
Switch
VF-MB1 is controlled as slave device of PROFIBUS.
F-CC terminal short to RUN
F-CC terminal open to STOP
Output frequency is set up by the VIA signal input.
PP
VIA
CC
F
R
P24
OUT
VF-MB1
SW1
SOURCE
SINK
8. GSD file
As for acquisition of an GSD file for VF-MB1 and VF-S15, please contact your Toshiba
distributor.
- 35 -
Page 38

E6581738
9. Appendix
Function number
0x5E: Read Request
0x5F: Write Request
0x5E: Positive response for Read request
0x5F: Positive response for Write request
0xDE: Negative response for Read request
0xDF: Negative response for Write request
Request ID
0x01: Request the value
0x02: Change the value
Response ID
0x01: Positive response for Request the value
0x02: Positive response for Change the value
0x81: Negative response for Request the value
0x82: Negative response for Change the value
Axis
0x00: (Fixed for PDP003Z)
Error number
0x00: Impermissible parameter number
0x01: Impermissible parameter number
0x02: Low or High limit exceeded
0x03: Faulty subindex
0x04: No array
0x05: Incorrect data type
0x06: Setting not permitted (may only be reset)
0x07: Description element cannot be changed
0x09: No description data available
0x0B: No operation priority
0x0F: No text array available
0x11: Request cannot be executed because of operating state
0x14: Value impermissible
0x15: Response too long
0x17: Write Req., Illegal format/format of the parameter data is not supported
0x18: Number of values are not consistent
0x19: Axis/DO non existent
0x20: Parameter text element cannot be changed
Format
0x01: Boolean
0x02: Integer 8
0x03: Integer 16
0x04: Integer 32
0x05: Unsigned 8
0x06: Unsigned 16
0x07: Unsigned 32
0x08: FloatingPoint
0x09: VisibleString
0x10: OctetString
0x12 TimeOfDay (with date indication)
0x13: TimeDifference
0x40: Zero
0x41: Byte
0x42: Word
0x43: Double word
0x44: Error
- 36E -
- 36 -
 Loading...
Loading...