


TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
1
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
features
D
Dual 10-Bit Voltage Output DAC
D
Programmable Settling Time
– 2.5 µs in Fast Mode
– 12 µs in Slow Mode
D
Compatible With TMS320 and SPI Serial
Ports
D
Differential Nonlinearity <0.2 LSB Typ
D
Monotonic Over Temperature
applications
D
Digital Servo Control Loops
D
Digital Offset and Gain Adjustment
D
Industrial Process Control
D
Machine and Motion Control Devices
D
Mass Storage Devices
description
The TL V5617A is a dual 10-bit voltage output DAC
with a flexible 3-wire serial interface. The serial
interface is compatible with TMS320, SPI,
QSPI, and Microwire serial ports. It is
programmed with a 16-bit serial string containing
4 control and 10 data bits.
The resistor string output voltage is buffered by an x2 gain rail-to-rail output buffer. The buffer features a
Class-AB output stage to improve stability and reduce settling time. The programmable settling time of the DAC
allows the designer to optimize speed versus power dissipation.
Implemented with a CMOS process, the device is designed for single supply operation from 2.7 V to 5.5 V. It
is available in an 8-pin SOIC package in standard commercial and industrial temperature ranges.
AVAILABLE OPTIONS
PACKAGE
T
A
SOIC
(D)
0°C to 70°C TLV5617ACD
–40°C to 85°C TLV5617AID
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
Copyright 2000, Texas Instruments Incorporated
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
1
2
3
4
8
7
6
5
DIN
SCLK
CS
OUTA
V
DD
OUTB
REF
AGND
D PACKAGE
(TOP VIEW)
SPI and QSPI are trademarks of Motorola, Inc.
Microwire is a trademark of National Semiconductor Corporation.
TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
2
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
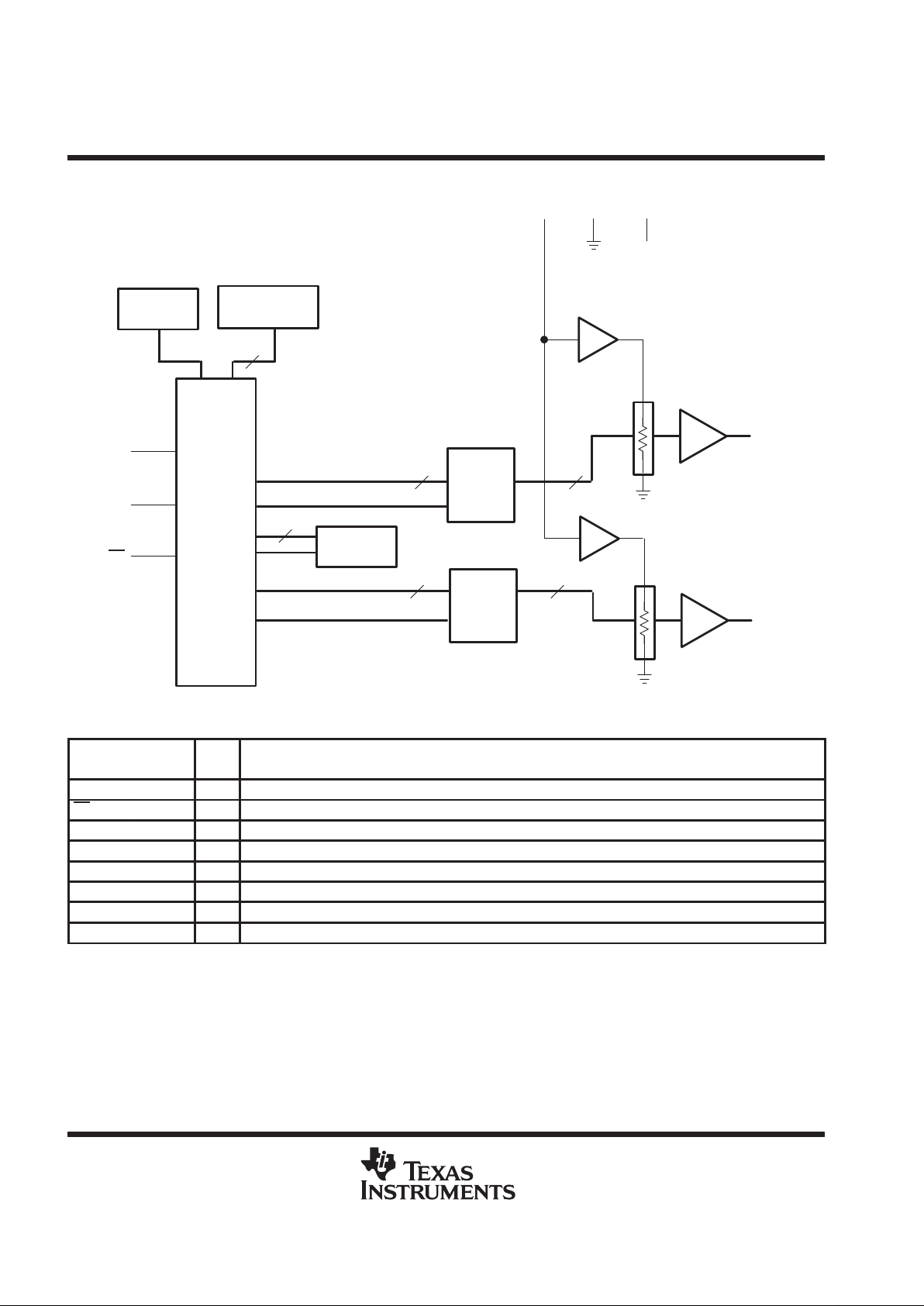
functional block diagram
Serial
Interface
and
Control
10-Bit
DAC B
Latch
SCLK
DIN
CS
OUTA
Power-On
Reset
x2
10
Power and
Speed Control
2
10-Bit
DAC A
Latch
10
REF AGND V
DD
10 10
OUTB
x2
Buffer
10
Terminal Functions
TERMINAL
NAME NO.
I/O/P
DESCRIPTION
AGND 5 P Ground
CS 3 I Chip select. Digital input active low, used to enable/disable inputs.
DIN 1 I Digital serial data input
OUTA 4 O DAC A analog voltage output
OUTB 7 O DAC B analog voltage output
REF 6 I Analog reference voltage input
SCLK 2 I Digital serial clock input
V
DD
8 P Positive power supply
TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
3
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
†
Supply voltage (VDD to AGND) 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reference input voltage range – 0.3 V to VDD + 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Digital input voltage range – 0.3 V to V
DD
+ 0.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range, TA: TLV5617AC 0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TLV5617AI –40°C to 85°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storage temperature range, T
stg
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 260°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
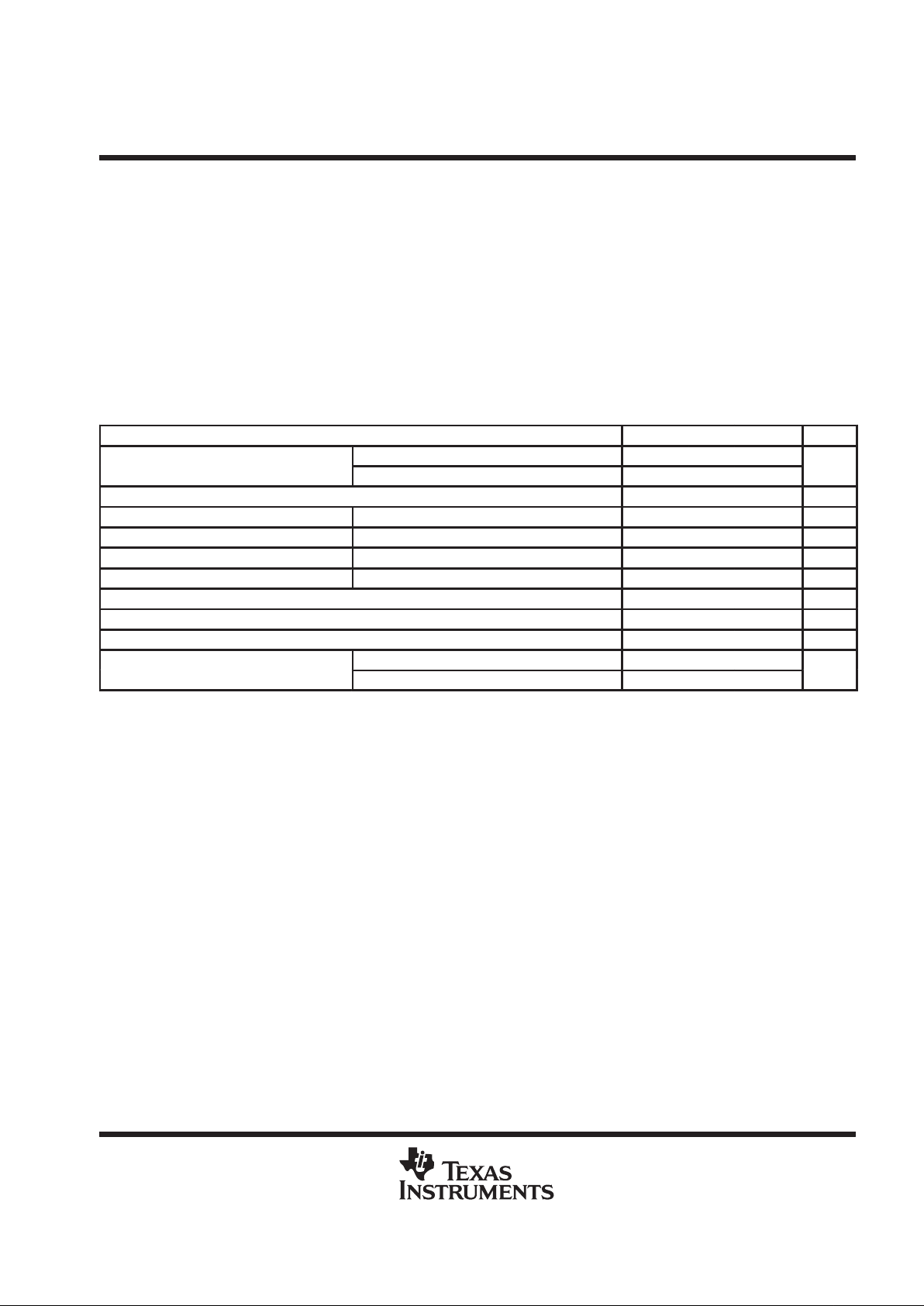
recommended operating conditions
MIN NOM MAX UNIT
pp
VDD = 5 V 4.5 5 5.5
V
Suppl
y v
oltage, V
DD
VDD = 3 V 2.7 3 3.3
Power on reset, POR 0.55 2 V
High-level digital input voltage, V
IH
VDD = 2.7 V to 5.5 V 2 V
Low-level digital input voltage, V
IL
VDD = 2.7 V to 5.5 V 0.8 V
Reference voltage, V
ref
to REF terminal VDD = 5 V (see Note 1) AGND 2.048 VDD–1.5 V
Reference voltage, V
ref
to REF terminal VDD = 3 V (see Note 1) AGND 1.024 VDD–1.5 V
Load resistance, R
L
2 kΩ
Load capacitance, C
L
100 pF
Clock frequency, f
CLK
20 MHz
p
p
TLV5617AC 0 70
°
Operating free-air temperature, T
A
TLV5617AI –40 85
°C
NOTE 1: Due to the x2 output buffer, a reference input voltage ≥ (VDD–0.4 V)/2 causes clipping of the transfer function.
TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
4
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
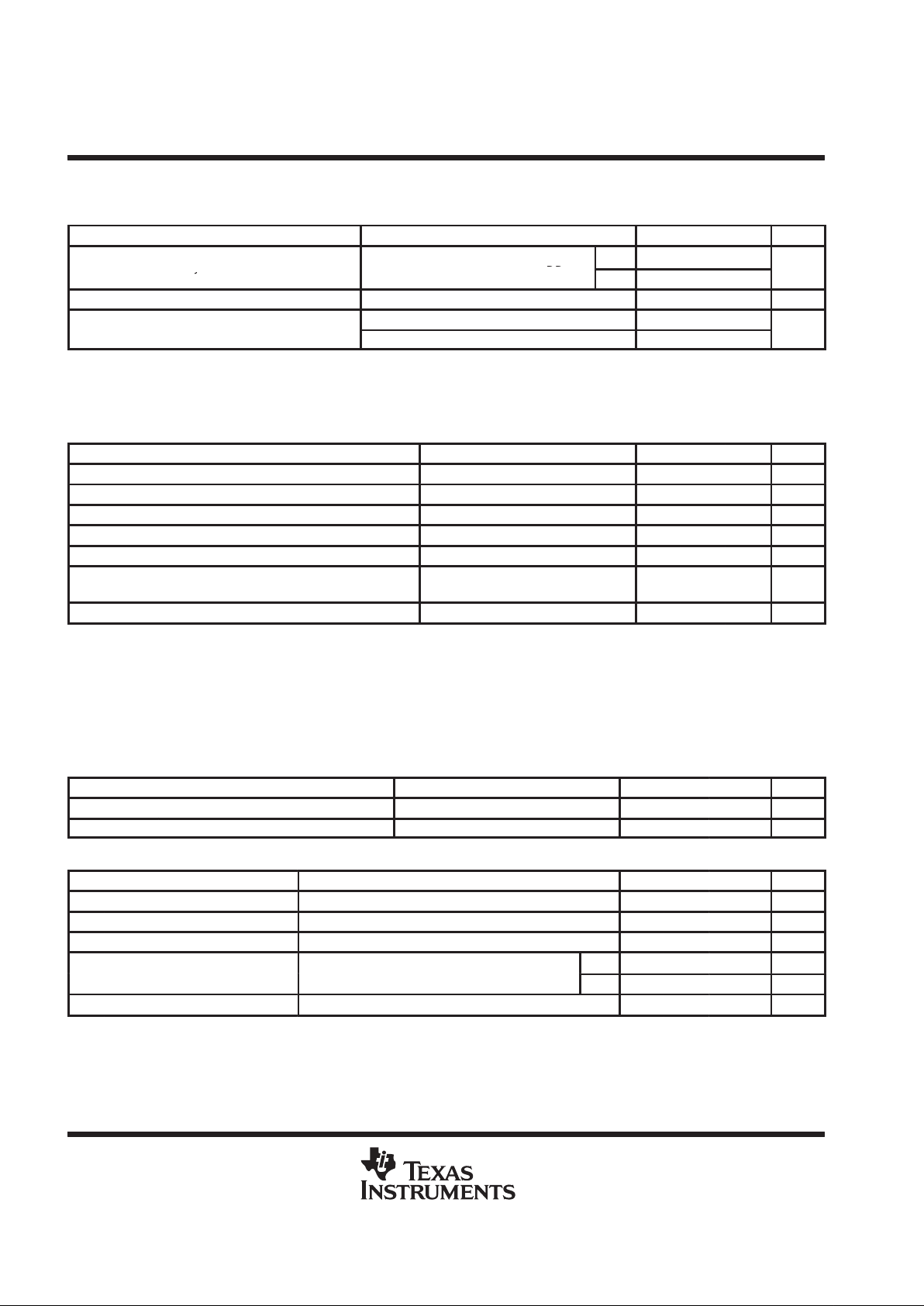
electrical characteristics over recommended operating conditions (unless otherwise noted)
power supply
PARAMETER TEST CONDITIONS MIN TYP MAX
UNIT
pp
No load, All inputs = AGND or VDD,
Fast 1.7 2.5
I
Power su ly current
DD
mA
DD
y
DAC latch
= 0x
800
Slow
0.7
1
Power down supply current 1 µA
pp
Zero scale, See Note 2 –65
PSRR
Power supply rejection ratio
Full scale, See Note 3 –65
dB
NOTES: 2. Power supply rejection ratio at zero scale is measured by varying VDD and is given by:
PSRR = 20 log [(EZS(VDDmax) – EZS(VDDmin)/VDDmax]
3. Power supply rejection ratio at full scale is measured by varying VDD and is given by:
PSRR = 20 log [(EG(VDDmax) – EG(VDDmin)/VDDmax]
static DAC specifications
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Resolution 10 bits
INL Integral nonlinearity See Note 4 ±0.7 ±1 LSB
DNL Differential nonlinearity See Note 5 ±0.1 ±1 LSB
E
ZS
Zero-scale error (offset error at zero scale) See Note 6 ±12 mV
EZS TC Zero-scale-error temperature coefficient See Note 7 10 ppm/°C
E
G
Gain error See Note 8 ±0.6
% full
scale V
EG TCGain-error temperature coefficient See Note 9 10 ppm/°C
NOTES: 4. The relative accuracy of integral nonlinearity (INL), sometimes referred to as linearity error , is the maximum deviation of the output
from the line between zero and full scale, excluding the effects of zero-code and full-scale errors.
5. The differential nonlinearity (DNL), sometimes referred to as differential error, is the difference between the measured and ideal
1-LSB amplitude change of any two adjacent codes.
6. Zero-scale error is the deviation from zero voltage output when the digital input code is zero.
7. Zero-scale-error temperature coef ficient is given by: EZS TC = [EZS (T
max) – EZS
(T
min
)]/2V
ref
× 106/(T
max
– T
min
).
8. Gain error is the deviation from the ideal output (2V
ref
– 1 LSB) with an output load of 10 kΩ.
9. Gain temperature coefficient is given by: EG TC = [EG (T
max) – Eg
(T
min
)]/2V
ref
× 106/(T
max
– T
min
).
output specifications
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
O
Output voltage range RL = 10 kΩ VDD–0.4 V
Output load regulation accuracy VO = 4.096 V , 2.048 V RL = 2 kΩ ±0.29 % FS
reference input
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
VIInput voltage range 0 V
DD–1.5
V
RIInput resistance 10 MΩ
CIInput capacitance 5 pF
p
Fast 1.3 MHz
Reference input bandwidth
REF
= 0.2
V
pp
+ 1.
024 V dc
Slow 525 kHz
Reference feedthrough REF = 1 Vpp at 1 kHz + 1.024 V dc (see Note 10) –80 dB
NOTE 10: Reference feedthrough is measured at the DAC output with an input code = 0x000.
TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
5
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
electrical characteristics over recommended operating conditions (unless otherwise noted)
(Continued)
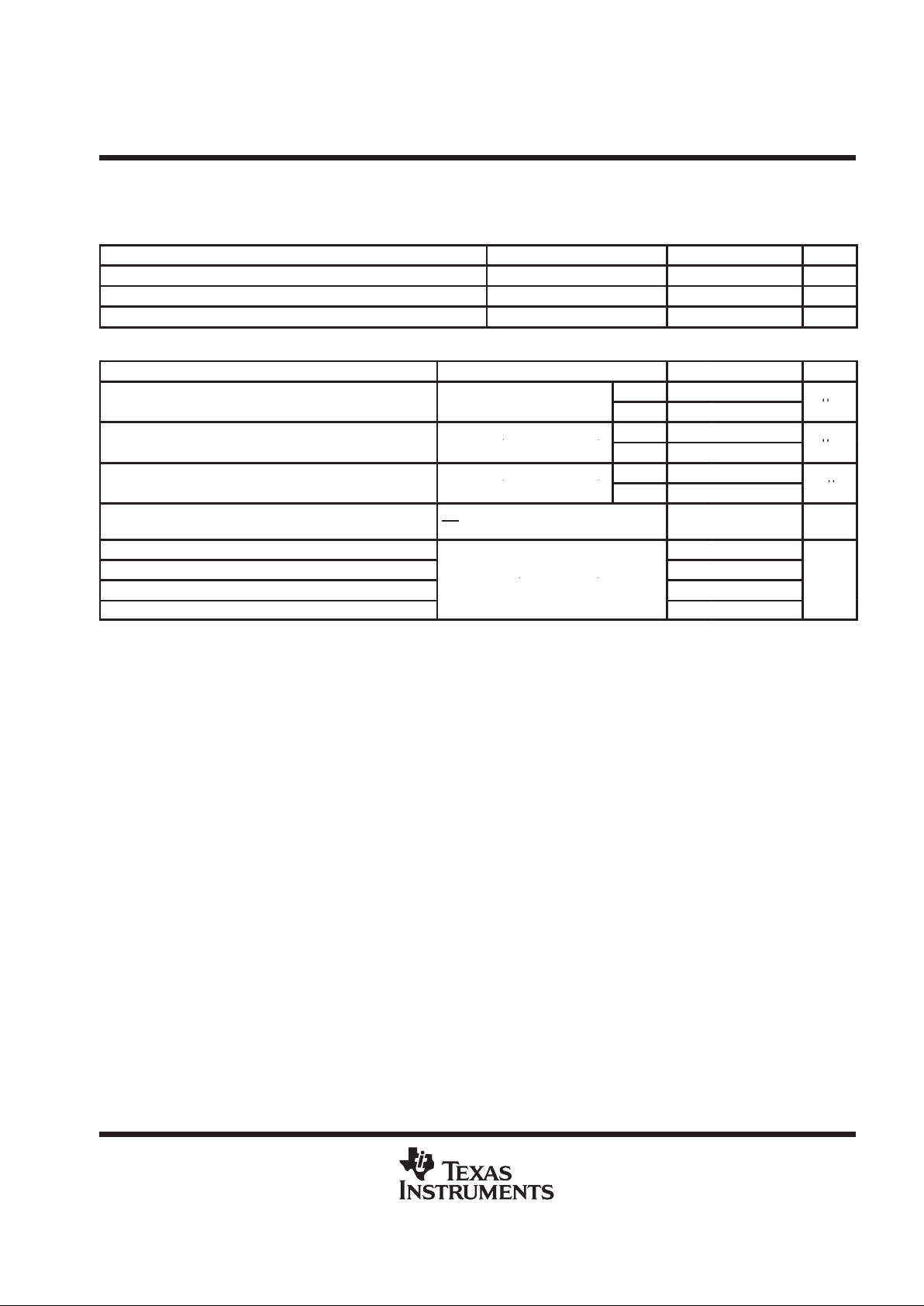
digital inputs
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
I
IH
High-level digital input current VI = V
DD
1 µA
I
IL
Low-level digital input current VI = 0 V –1 µA
C
i
Input capacitance 8 pF
analog output dynamic performance
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
p
R
= 10 kΩ,C
= 100 pF,
Fast 2.5
t
s(FS)
Output settling time, full scale
L
,
L
,
See Note 11
Slow 12
µ
s
p
R
= 10 kΩ,C
= 100 pF,
Fast 1
t
s(CC)
Output settling time, code to code
L
,
L
,
See Note 12
Slow 2
µ
s
R
= 10 kΩ,C
= 100 pF,
Fast 3
SR
Slew rate
L
,
L
,
See Note 13
Slow 0.5
V/µs
Glitch energy
DIN = 0 to 1, FCLK = 100 kHz,
CS
= V
DD
5 nV–s
SNR Signal-to-noise ratio 56
SINAD Signal-to-noise + distortion
f
= 102 kSPS, f
= 1 kHz,
55
THD Total harmonic distortion
s
,
out
,
RL = 10 kΩ,CL = 100 pF
–62
dB
SFDR Spurious free dynamic range 64
NOTES: 11. Settling time is the time for the output signal to remain within ±0.5 LSB of the final measured value for a digital input code change
of 0x020 to 0xFDC and 0xFDC to 0x020 respectively. Not tested, assured by design.
12. Settling time is the time for the output signal to remain within ± 0.5 LSB of the final measured value for a digital input code change
of one count. Not tested, assured by design.
13. Slew rate determines the time it takes for a change of the DAC output from 10% to 90% of full-scale voltage.

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
6
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
digital input timing requirements
MIN NOM MAX UNIT
t
su(CS–CK)
Setup time, CS low before first negative SCLK edge 10 ns
t
su(C16-CS)
Setup time, 16th negative SCLK edge before CS rising edge 10 ns
t
wH
SCLK pulse width high 25 ns
t
wL
SCLK pulse width low 25 ns
t
su(D)
Setup time, data ready before SCLK falling edge 10 ns
t
h(D)
Hold time, data held valid after SCLK falling edge 5 ns
timing requirements
t
wL
SCLK
CS
DIN
D15 D14 D13 D12 D1 D0 XX
1
X
2 3 4 5 15 16
X
t
wH
t
su(D)th(D)
t
su(CS-CK)
t
su(C16-CS)
Figure 1. Timing Diagram

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
7
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 2
2.046
2.044
2.040
2.038
2.036
2.050
2.042
0 –0.01 –0.02 –0.05 –0.10 –0.20 –0.51
2.048
Load Current - mA
OUTPUT VOLTAGE
vs
LOAD CURRENT
–1.02 –2.05
– Output Voltage – V
V
O
VDD=3 V
V
REF
=1 V
Full scale
3 V Slow Mode, SOURCE
3 V Fast Mode, SOURCE
Figure 3
4.095
4.090
4.080
4.075
4.070
4.105
4.085
4.100
OUTPUT VOLTAGE
vs
LOAD CURRENT
– Output Voltage – V
V
O
VDD=5 V
V
REF
=2 V
Full scale
5 V Slow Mode, SOURCE
5 V Fast Mode, SOURCE
0.00 –0.02–0.04–0.10–0.20–0.41–1.02
Load Current - mA
–2.05–4.10
Figure 4
0.16
0.14
0.10
0.08
0.06
0.20
0.12
0.00 0.01 0.02 0.05 0.10 0.20 0.51
0.18
Load Current - mA
OUTPUT VOLTAGE
vs
LOAD CURRENT
1.02 2.05
– Output Voltage – V
V
O
3 V Slow Mode, SINK
3 V Fast Mode, SINK
0.04
0.02
0.00
VDD=3 V
V
REF
=1 V
Zero scale
Figure 5
0.25
0.20
0.10
0.05
0.00
0.35
0.15
0.00 0.02 0.04 0.10 0.20 0.41 1.02
0.30
Load Current - mA
OUTPUT VOLTAGE
vs
LOAD CURRENT
2.05 4.09
– Output Voltage – V
V
O
5 V Slow Mode, SINK
5 V Fast Mode, SINK
VDD=5 V
V
REF
=2 V
Zero scale

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
8
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 6
0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
–40 –20 0 20 40 60 80 100 120
SUPPLY CURRENT
vs
FREE-AIR TEMPERATURE
TA - Free-Air Temperature - C
VDD=3 V
V
REF
=1 V
Full scale
Fast Mode
Slow Mode
I
DD
– Supply Current – mA
Figure 7
0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
–40 –20 0 20 40 60 80 100 120
SUPPLY CURRENT
vs
FREE-AIR TEMPERATURE
TA - Free-Air Temperature - C
VDD=5 V
V
REF
=2 V
Full scale
Fast Mode
Slow Mode
I
DD
– Supply Current – mA
–90
–80
–70
–60
–50
–40
–30
–20
–10
0
1 10 100
TOTAL HARMONIC DISTORTION
vs
FREQUENCY
V
REF
= 1 V + 1 V
P/P
Sinewave,
Output Full Scale
3 V Fast Mode
5 V Fast Mode
THD
-
T
o
t
a
l
H
armon
i
c
Di
s
t
or
ti
on -
dB
Figure 8
f - Frequency - kHz
–90
–80
–70
–60
–50
–40
–30
–20
–10
0
1 10 100
TOTAL HARMONIC DISTORTION
vs
FREQUENCY
V
REF
= 1 V + 1 V
P/P
Sinewave,
Output Full Scale
5 V Slow Mode
THD - Total Harmonic Distortion - dB
3 V Slow Mode
f - Frequency - kHz
Figure 9

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
9
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
–3
–2.5
–2.0
–1.5
–1.0
–0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0 128 256 384 512 640 768 896 1024
INL - Integral Nonlinearity Error - LSB
INTEGRAL NONLINEARITY ERROR
vs
DIGITAL CODE
Digital Code
Figure 10
–0.5
–0.4
–0.3
–0.2
–0.1
–0.0
0.1
0.2
0.3
0.4
0.5
0 128 256 384 512 640 768 896 1024
DNL - Differential Nonlinearity Error - LSB
DIFFERENTIAL NONLINEARITY ERROR
vs
DIGITAL CODE
Digital Code
Figure 11

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
10
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
general function
The TL V5617A is a dual 10-bit, single-supply DAC, based on a resistor-string architecture. It consists of a serial
interface, a speed and power-down control logic, a resistor string, and a rail-to-rail output buffer.
The output voltage (full scale determined by the reference) is given by:
2REF
CODE
0x1000
[V]
Where REF is the reference voltage and CODE is the digital input value in the range 0x000 to 0xFFC. A
power-on reset initially puts the internal latches to a defined state (all bits zero).
serial interface
A falling edge of CS starts shifting the data bit-per-bit (starting with the MSB) to the internal register on the falling
edges of SCLK. After 16 bits have been transferred or CS
rises, the content of the shift register is moved to the
target latches (DAC A, DAC B, BUFFER, CONTROL), depending on the control bits within the data word.
Figure 12 shows examples of how to connect the TLV5617A to TMS320, SPI, and Microwire.
TMS320
DSP
FSX
CLKX
DX
TLV5617A
SCLK
DIN
CS
SPI
I/O
SCK
MOSI
TLV5617A
SCLK
DIN
CS
Microwire
I/O
SK
SO
TLV5617A
SCLK
DIN
CS
Figure 12. Three-Wire Interface
Notes on SPI and Microwire: Before the controller starts the data transfer, the software has to generate a
falling edge on the pin connected to CS
. If the word width is 8 bits (SPI and Microwire) two write operations
must be performed to program the TL V5617A. After the write operation(s), the holding registers or the control
register are updated automatically on the 16th positive clock edge.
serial clock frequency and update rate
The maximum serial clock frequency is given by:
f
sclkmax
+
1
t
whmin
)
t
wlmin
+
20 MHz
The maximum update rate is:
f
updatemax
+
1
16ǒt
whmin
)
t
wlmin
Ǔ
+
1.25 MHz
Note that the maximum update rate is just a theoretical value for the serial interface, as the settling time of the
TLV5617A should also be considered.

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
11
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
data format
The 16-bit data word for the TLV5617A consists of two parts:
D
Program bits (D15..D12)
D
New data (D11..D0)
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
R1 SPD PWR R0 MSB 12 Data bits LSB 0 0
SPD: Speed control bit 1 → fast mode 0 →slow mode
PWR: Power control bit 1 → power down 0 → normal operation
On power up, SPD and PWD are reset to 0 (slow mode and normal operation)
The following table lists all possible combination of register-select bits:
register-select bits
R1 R0 REGISTER
0 0 Write data to DAC B and BUFFER
0 1 Write data to BUFFER
1 0 Write data to DAC A and update DAC B with BUFFER content
1 1 Reserved
The meaning of the 12 data bits depends on the register. If one of the DAC registers or the BUFFER is selected,
then the 12 data bits determine the new DAC value:
examples of operation
D
Set DAC A output, select fast mode:
Write new DAC A value and update DAC A output:
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
1 1 0 0 New DAC A output value 0 0
The DAC A output is updated on the rising clock edge after D0 is sampled.
D
Set DAC B output, select fast mode:
Write new DAC B value to BUFFER and update DAC B output:
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
0 1 0 0 New BUFFER content and DAC B output value 0 0
The DAC A output is updated on the rising clock edge after D0 is sampled.
D
Set DAC A value, set DAC B value, update both simultaneously, select slow mode:
1. Write data for DAC B to BUFFER:
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
0 0 0 1 New DAC B value 0 0
2. Write new DAC A value and update DAC A and B simultaneously:
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
1 0 0 0 New DAC A value 0 0

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
12
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
examples of operation (continued)
Both outputs are updated on the rising clock edge after D0 from the DAC A data word is sampled.
D
Set powerdown mode:
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
X X 1 X X X X X X X X X X X X X
X = Don’t care
linearity, offset, and gain error using single ended supplies
When an amplifier is operated from a single supply , the voltage offset can still be either positive or negative. With
a positive offset, the output voltage changes on the first code change. With a negative offset, the output voltage
may not change with the first code, depending on the magnitude of the offset voltage.
The output amplifier attempts to drive the output to a negative voltage. However, because the most negative
supply rail is ground, the output cannot drive below ground and clamps the output at 0 V.
The output voltage then remains at zero until the input code value produces a sufficient positive output voltage
to overcome the negative offset voltage, resulting in the transfer function shown in Figure 13.
DAC Code
Output
Voltage
0 V
Negative
Offset
Figure 13. Effect of Negative Offset (Single Supply)
This offset error, not the linearity error , produces this breakpoint. The transfer function would have followed the
dotted line if the output buffer could drive below the ground rail.
For a DAC, linearity is measured between zero-input code (all inputs 0) and full-scale code (all inputs 1) after
offset and full scale are adjusted out or accounted for in some way . However , single supply operation does not
allow for adjustment when the offset is negative due to the breakpoint in the transfer function. So the linearity
is measured between full-scale code and the lowest code that produces a positive output voltage.
definitions of specifications and terminology
integral nonlinearity (INL)
The relative accuracy or integral nonlinearity (INL), sometimes referred to as linearity error, is the maximum
deviation of the output from the line between zero and full scale excluding the effects of zero code and full-scale
errors.
differential nonlinearity (DNL)
The differential nonlinearity (DNL), sometimes referred to as differential error, is the difference between the
measured and ideal 1 LSB amplitude change of any two adjacent codes. Monotonic means the output voltage
changes in the same direction (or remains constant) as a change in the digital input code.

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
13
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
definitions of specifications and terminaology (continued)
zero-scale error (EZS)
Zero-scale error is defined as the deviation of the output from 0 V at a digital input value of 0.
gain error (EG)
Gain error is the error in slope of the DAC transfer function.
total harmonic distortion (THD)
THD is the ratio of the rms value of the first six harmonic components to the value of the fundamental signal.
The value for THD is expressed in decibels.
signal-to-noise ratio + distortion (S/N+D)
S/N+D is the ratio of the rms value of the output signal to the rms sum of all other spectral components below
the Nyquist frequency, including harmonics but excluding dc. The value for S/N+D is expressed in decibels.
spurious free dynamic range (SFDR)
Spurious free dynamic range is the difference between the rms value of the output signal and the rms value of
the largest spurious signal within a specified bandwidth. The value for SFDR is expressed in decibels.

TLV5617A
2.7-V TO 5.5-V LOW-POWER DUAL 10-BIT DIGITAL-TO-ANALOG
CONVERTER WITH POWER DOWN
SLAS234B – JULY 1999 – REVISED MARCH 2000
14
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
MECHANICAL DATA
D (R-PDSO-G**) PLASTIC SMALL-OUTLINE PACKAGE
14 PIN SHOWN
4040047/D 10/96
0.228 (5,80)
0.244 (6,20)
0.069 (1,75) MAX
0.010 (0,25)
0.004 (0,10)
1
14
0.014 (0,35)
0.020 (0,51)
A
0.157 (4,00)
0.150 (3,81)
7
8
0.044 (1,12)
0.016 (0,40)
Seating Plane
0.010 (0,25)
PINS **
0.008 (0,20) NOM
A MIN
A MAX
DIM
Gage Plane
0.189
(4,80)
(5,00)
0.197
8
(8,55)
(8,75)
0.337
14
0.344
(9,80)
16
0.394
(10,00)
0.386
0.004 (0,10)
M
0.010 (0,25)
0.050 (1,27)
0°–8°
NOTES: A. All linear dimensions are in inches (millimeters).
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusion, not to exceed 0.006 (0,15).
D. Falls within JEDEC MS-012

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICA TIONS IS UNDERSTOOD T O
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 2000, Texas Instruments Incorporated
 Loading...
Loading...