

Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
1
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
D
Processed to MIL–PRF–38535 (QML)
D
High-Performance Static CMOS T echnology
D
Includes the T320C2xLP Core CPU
– Object Compatible With the TMS320C2xx
Family
– Source Code Compatible With
SMJ320C25
– Upwardly Compatible With SMJ320C50
– 50-ns Instruction Cycle Time
D
Memory
– 544 Words × 16 Bits of On-Chip
Data/Program Dual-Access RAM
– 16K Words × 16 Bits of On-Chip Program
Flash EEPROM
– 224K Words × 16 Bits of Total Memory
Address Reach (64K Data, 64K Program
and 64K I/O, and 32K Global Memory
Space)
D
Event-Manager Module
– 12 Compare/Pulse-Width Modulation
(PWM) Channels
– Three 16-Bit General-Purpose Timers
With Six Modes, Including Continuous
Upand Up/Down Counting
– Three 16-Bit Full-Compare Units With
Deadband
– Three 16-Bit Simple-Compare Units
– Four Capture Units (Two With
Quadrature Encoder-Pulse Interface
Capability)
D
Dual 10-Bit Analog-to-Digital Conversion
Module
D
28 Individually Programmable, Multiplexed
I/O Pins
D
Phase-Locked-Loop (PLL)-Based Clock
Module
D
Watchdog Timer Module (With Real-Time
Interrupt)
D
Serial Communications Interface (SCI)
Module
D
Serial Peripheral Interface (SPI) Module
D
Six External Interrupts (Power Drive
Protect, Reset, NMI, and Three Maskable
Interrupts)
D
Four Power-Down Modes for Low-Power
Operation
D
Scan-Based Emulation
D
Development Tools Available:
– Texas Instruments (TI) ANSI
C Compiler, Assembler/Linker, and
C-Source Debugger
– Scan-Based Self-Emulation (XDS510)
– Third-Party Digital Motor Control and
Fuzzy-Logic Development Support
D
–55°C to 125°C Operating Temperature
Range, QML Processing
D
132-Pin Ceramic Quad Flat Package
(HFP Suffix)
description
The SMJ320F240 is the first member of a new family of digital signal processor (DSP) controllers based on the
TMS320C2xx generation of 16-bit fixed-point DSPs. This new family is optimized for digital motor/motion control
applications and contains 16K words of flash memory on chip. The DSP controller combines the enhanced
TMS320 architectural design of the ’C2xLP core CPU for low-cost, high-performance processing capabilities
and several advanced peripherals optimized for motor/motion control applications. These peripherals include
the event manager module, which provides general-purpose timers and compare registers to generate up to
12 PWM outputs, and a dual 10-bit analog-to-digital converter (ADC), which can perform two simultaneous
conversions within 6.1 µs.
On products compliant to MIL-PRF-38535, all parameters are tested
unless otherwise noted. On all other products, production
processing does not necessarily include testing of all parameters.
Copyright 1999, Texas Instruments Incorporated
TI and XDS510 are trademarks of Texas Instruments Incorporated.
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
2
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Table of Contents
Description 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pinout 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminal Functions Table 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Functional Block Diagram 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Device Memory Map 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Device Reset and Interrupts 16. . . . . . . . . . . . . . . . . . . . . . . . . . .
Clock Generation 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Low-Power Modes 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Functional Block Diagram of the CPU 30. . . . . . . . . . . . . . . . . . .
DSP Core CPU 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Internal Memory 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Peripherals 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Scan-based Emulation 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SMJ320F240 Instruction Set 49. . . . . . . . . . . . . . . . . . . . . . . . . . .
Absolute Maximum Ratings 57. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Recommended Operating Conditions 57. . . . . . . . . . . . . . . . . . .
Electrical Characteristics 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Signal Transition Levels 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Clock Options 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory and Peripheral Interface Timing 66. . . . . . . . . . . . . . . . .
I/O Timing V ariation: SPICE Simulation Results 70. . . . . . . . . . .
READY Timings 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RS and PORESET Timings 72. . . . . . . . . . . . . . . . . . . . . . . . . . . .
XF, BIO, and MP/MC Timings 73. . . . . . . . . . . . . . . . . . . . . . . . . .
Timing Event Manager Interface 75. . . . . . . . . . . . . . . . . . . . . . . .
PWM/CMP Timings 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capture and QEP Timings 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Timings 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
General-Purpose Input/Output Timings 77. . . . . . . . . . . . . . . . . .
Serial Communications Interface (SCI) I/O Timings 78. . . . . . . .
Timing Characteristics for SCI 78. . . . . . . . . . . . . . . . . . . . . . . . . .
SPI Master Mode Timing Parameters 79. . . . . . . . . . . . . . . . . . . .
SPI Slave Mode Timing Parameters 83. . . . . . . . . . . . . . . . . . . . .
10-Bit Dual Analog-to-Digital Converter (ADC) 87. . . . . . . . . . . .
ADC Input Pin Circuit 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ADC Timing Requirements 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Flash EEPROM 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programming Operation 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Erase Operation 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Flash-write Operation 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Register File Compilation 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mechanical Data 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
description (continued)
Table 1. Characteristics of the ’F240 DSP Controller
ON-CHIP MEMORY (WORDS)
DEVICE
RAM
FLASH
EEPROM
POWER
SUPPLY
CYCLE
TIME
PACKAGE
TYPE
DATA DATA/ PROG PROG
(V)
(ns)
PIN COUNT
SMJ320F240 288 256 16K 5 50 HFP 132–P
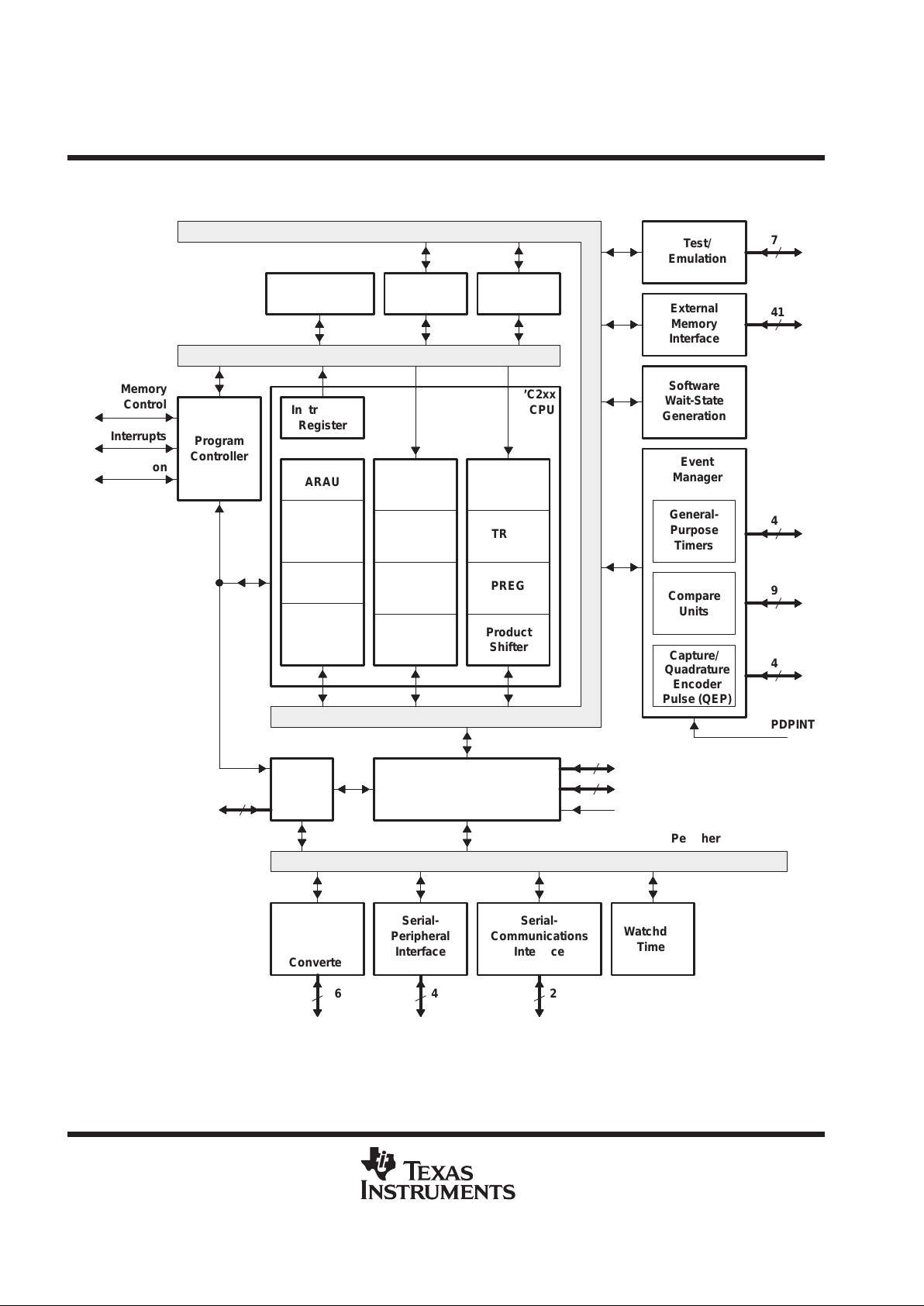
The functional block diagram provides a high-level description of each component in the ’F240 DSP controller.
The SMJ320F240 device is composed of three main functional units: a ’C2xx DSP core, internal memory , and
peripherals. In addition to these three functional units, there are several system-level features of the ’F240 that
are distributed. These system features include the memory map, device reset, interrupts, digital input/output
(I/O), clock generation, and low-power operation.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
3
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
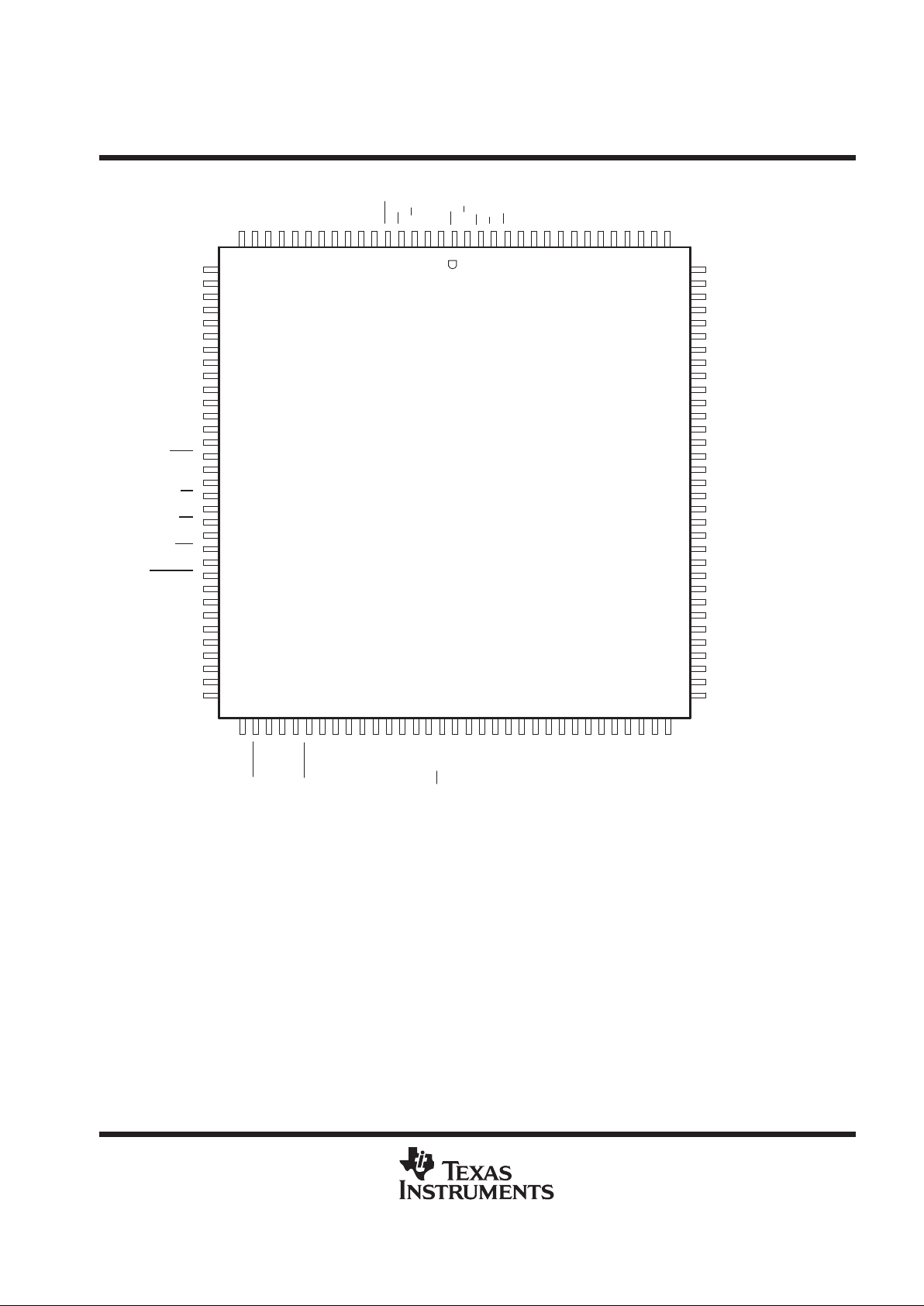
pinout
WE
W/R
D7
D8
V
SS
DV
DD
D9
D10
D11
D12
D13
D14
D15
V
SS
TCK
TDI
TRST
TMS
TDO
RS
READY
MP/MC
EMU0
EMU1/OFF
NMI
PORESET
RESERVED
SCIRXD/IO
SCITXD/IO
SPISIMO/IO
V
SS
DV
DD
SPISOMI/IO
SPICLK/IO
V
CCP
/WDDIS
D5
D4
D3D6D2
STRBBRR/W
V
DV
PS
D1
SS
DD
A5
A4
A3
V
SS
A2
A1
A0
TMRCLK/IOPB7
TMRDIR/IOPB6
T3PWM/T3CMP/IOPB5
T2PWM/T2CMP/IOPB4
T1PWM/T1CMP/IOPB3
V
SS
DV
DD
PWM9/CMP9/IOPB2
PWM8/CMP8/IOPB1
PWM7/CMP7/IOPB0
PWM6/CMP6
PWM5/CMP5
PWM4/CMP4
PWM3/CMP3
PWM2/CMP2
PWM1/CMP1
DV
DD
V
SS
ADCIN8/IOPA3
ADCIN9/IOPA2
ADCIN10
ADCIN11
V
SSA
V
REFLO
V
REFHI
V
CCA
V
SS
D0
CV
SS
CV
DD
ISDSA15
A14
A13
A12
A11
A10
A9
A8A7A6
V
SS
XTAL1/CLKIN
XTAL2
OSCBYP
XINT3/IO
XINT2/IO
XINT1
SPISTE/IO
CAP1/QEP1/IOPC4
CAP3/IOPC6
CAP4/IOPC7
CAP2/QEP2/IOPC5
BIO/IOPC3
XF/IOPC2
CLKOUT/IOPC1
ADCSOC/IOPC0
ADCIN5
ADCIN7
ADCIN15
ADCIN6
ADCIN4
ADCIN3
ADCIN1/IOPA1
ADCIN0/IOPA0
ADCIN14
ADCIN12
ADCIN13
ADCIN2
VSSV
SS
V
SS
PDPINT
DV
DD
DV
DD
DV
DD
CV
DD
132
131
130
129
128
127
126
125
124
123
122
121
120
119
118
117
116
115
114
113
112
111
110
109
108
107
106
105
104
103
102
101
100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
5251 83828180797877767574737271706968676665646362616059585756555453
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
1716151413121110 9 8 7 6 5 4 3 2
1
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
4
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
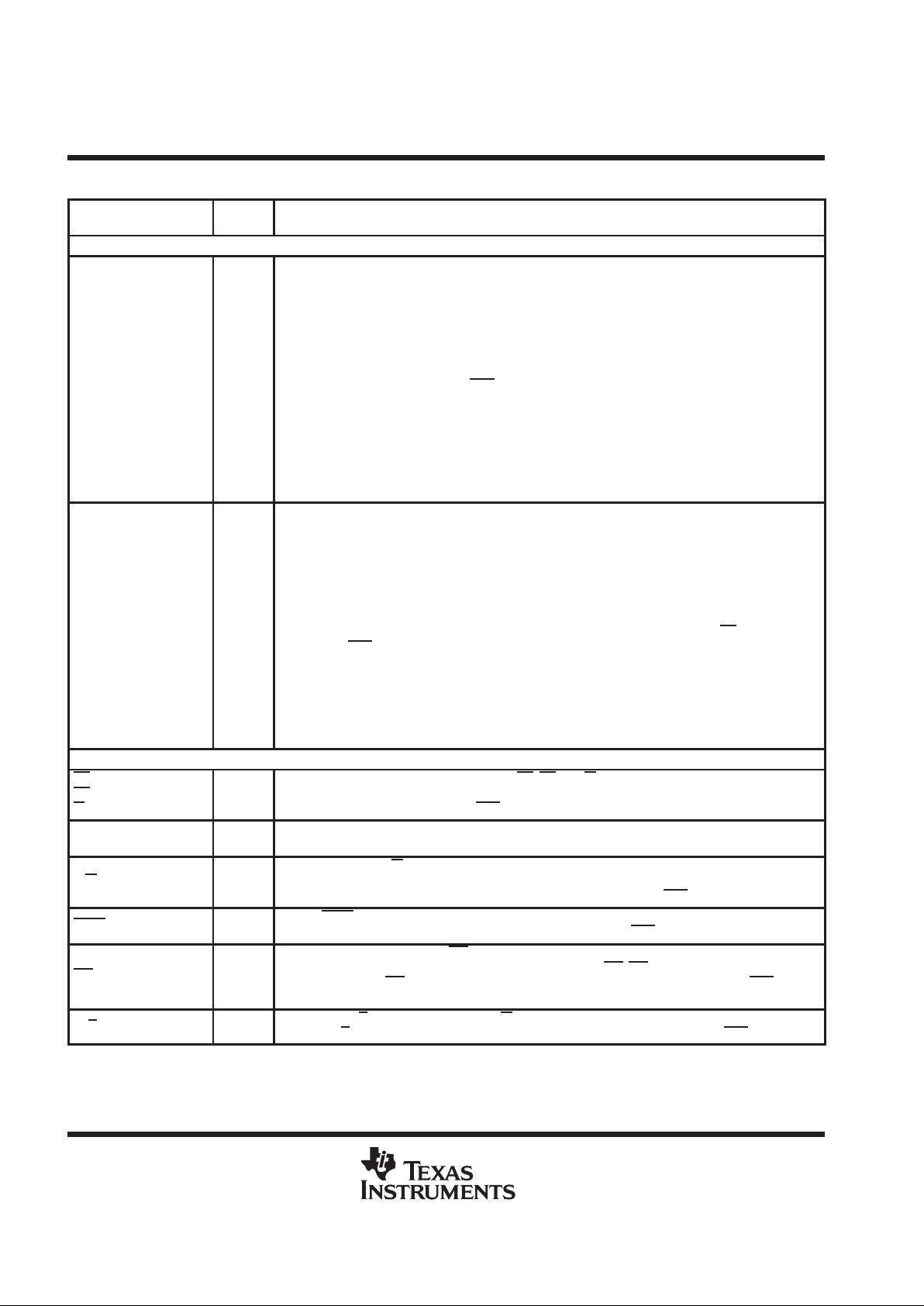
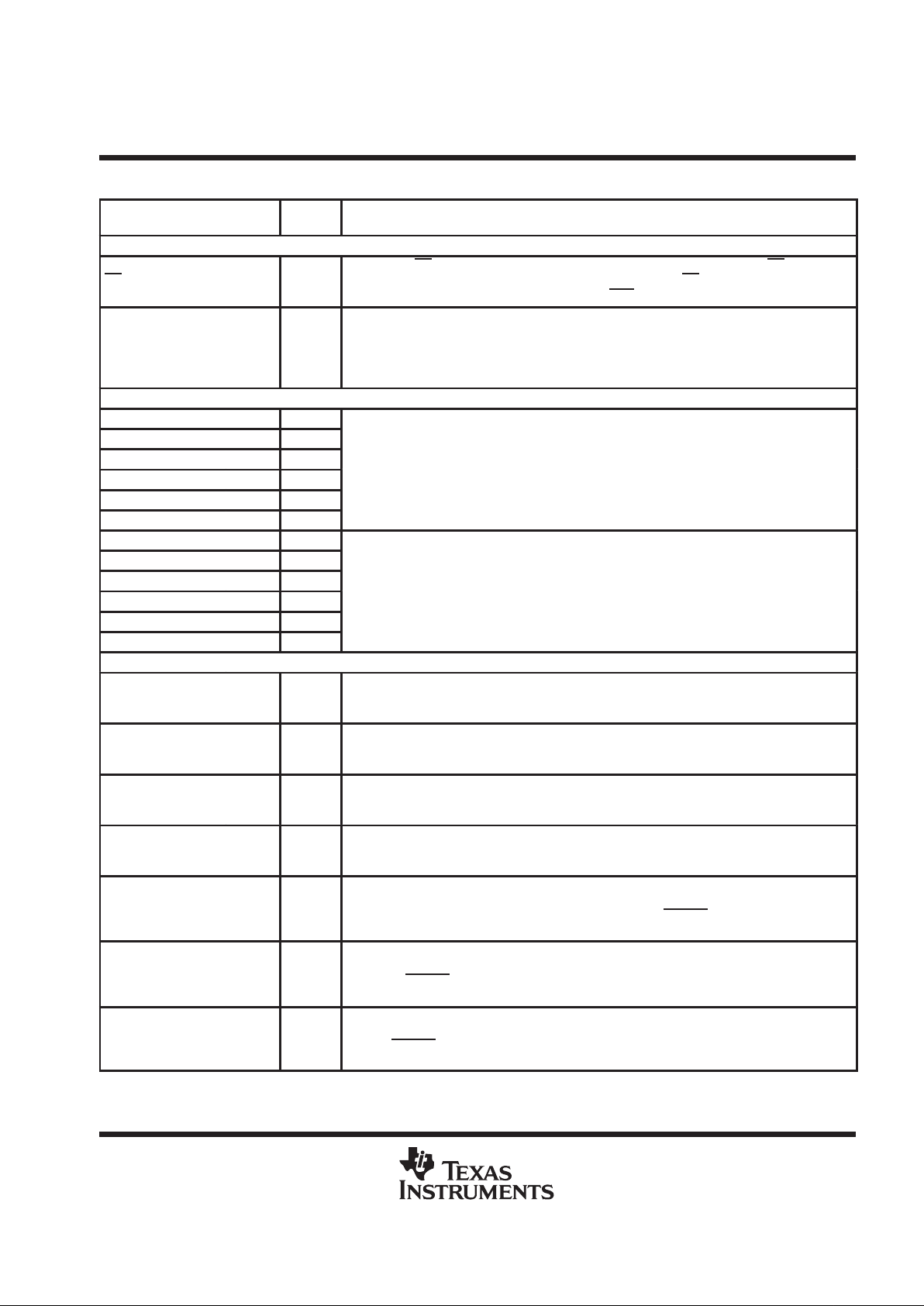
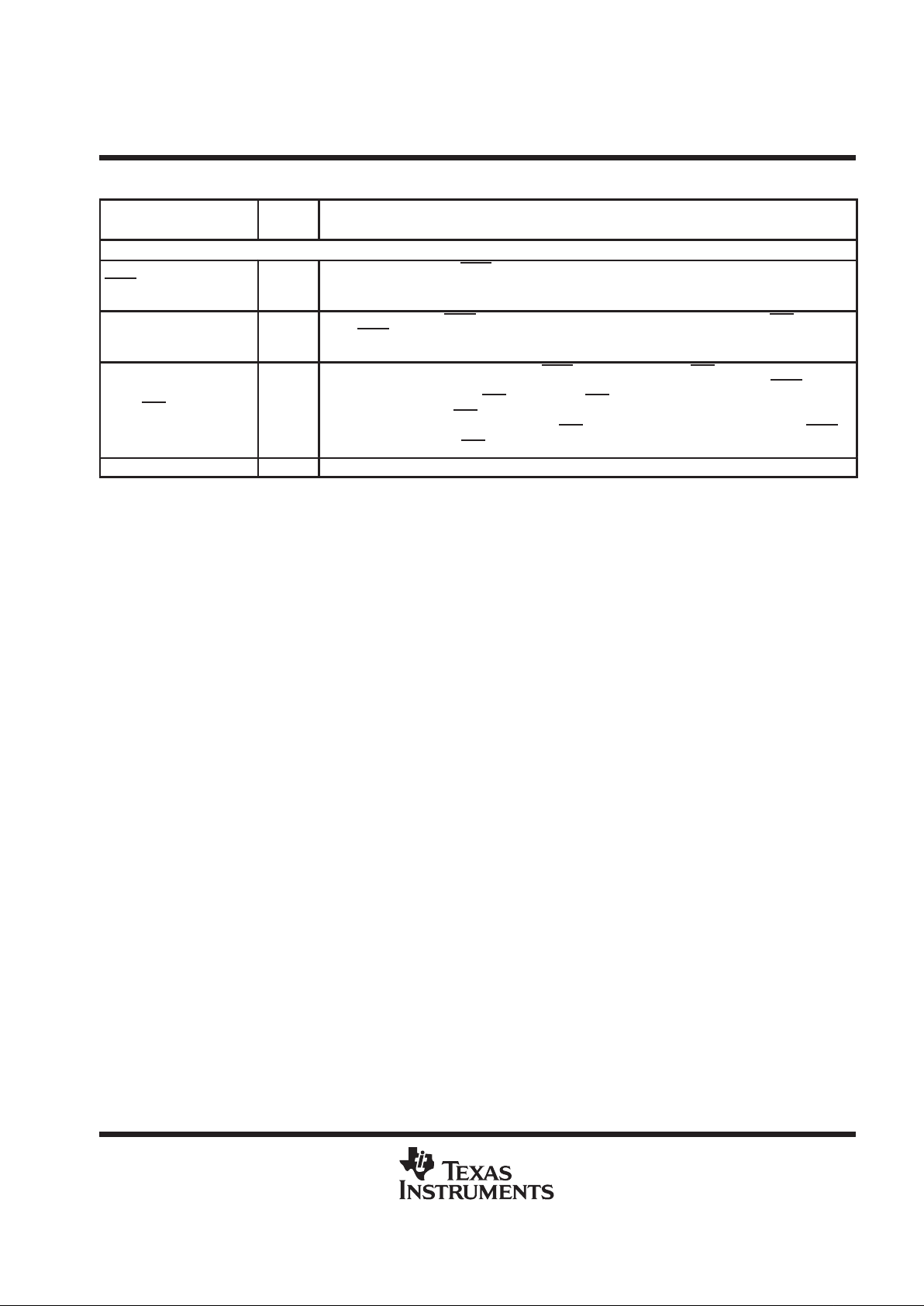
Terminal Functions
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
EXTERNAL INTERFACE DATA/ADDRESS SIGNALS
A0 (LSB)
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15 (MSB)
110
111
112
114
115
116
117
118
119
122
123
124
125
126
127
128
O/Z
Parallel address bus A0 [least significant bit (LSB)] through A15 [most significant bit (MSB)]. A15–A0
are multiplexed to address external data/program memory or I/O. A15–A0 are placed in the
high-impedance state when EMU1/OFF
is active low and hold their previous states in power-down
modes.
D0 (LSB)
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15 (MSB)
9
10
11
12
15
16
17
18
19
22
23
24
25
26
27
28
I/O/Z
Parallel data bus D0 (LSB) through D15 (MSB). D15–D0 are multiplexed to transfer data between the
SMJ320F240 and external data/program memory and I/O space (devices). D15–D0 are placed in the
high-impedance state when not outputting, when in power-down mode, when reset (RS
) is asserted, or
when EMU1/OFF
is active low.
EXTERNAL INTERFACE CONTROL SIGNALS
DS
PS
IS
129
131
130
O/Z
Data, program, and I/O space select signals. DS, PS, and IS are always high unless low-level asserted
for communication to a particular external space. They are placed in the high-impedance state during
reset, power down, and when EMU1/OFF
is active low.
READY 36 I
Data ready. READY indicates that an external device is prepared for the bus transaction to be completed.
If the device is not ready (READY is low), the processor waits one cycle and checks READY again.
R/W 4 O/Z
Read/write signal. R/W indicates transfer direction during communication to an external device. It is
normally in read mode (high), unless low level is asserted for performing a write operation. It is placed
in the high-impedance state during reset, power down, and when EMU1/OFF
is active low.
STRB 6 O/Z
Strobe. STRB is always high unless asserted low to indicate an external bus cycle. It is placed in the
high-impedance state during reset, power down, and when EMU1/OFF
is active low.
WE 1 O/Z
Write enable. The falling edge of WE indicates that the device is driving the external data bus (D15–D0).
Data can be latched by an external device on the rising edge of WE
. WE is active on all external program,
data, and I/O writes. WE
goes in the high-impedance state following reset and when EMU1/OFF is active
low.
W/R 132 O/Z
Write/read. W/R is an inverted form of R/W and can connect directly to the output enable of external
devices. W/R
is placed in the high-impedance state following reset and when EMU1/OFF is active low.
†
I = input, O = output, Z = high impedance
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
5
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
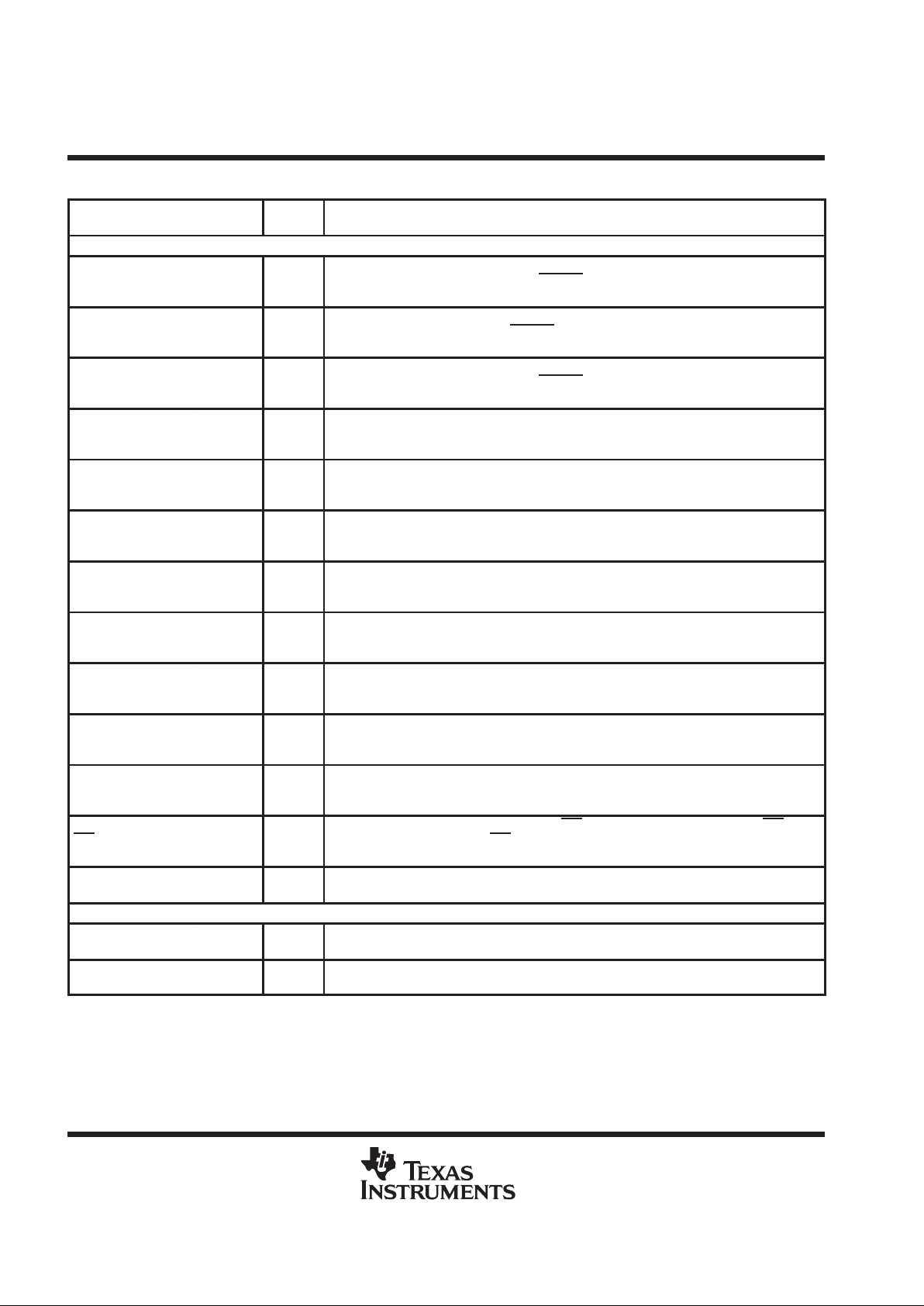
Terminal Functions (Continued)
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
EXTERNAL INTERFACE CONTROL SIGNALS (CONTINUED)
BR 5 O/Z
Bus request. BR is asserted during access of external global data memory space. BR can be used
to extend the data memory address space by up to 32K words. BR
goes in the high-impedance
state during reset, power down, and when EMU1/OFF
is active low.
V
CCP
/WDDIS 50 I
Flash-programming voltage supply. If V
CCP
= 5 V, then WRITE/ERASE can be made to the
ENTIRE on-chip flash memory block—that is, for programming the flash. If V
CCP
= 0 V, then
WRITE/ERASE of the flash memory is not allowed, thereby protecting the entire memory block
from being overwritten. WDDIS also functions as a hardware watchdog disable. The watchdog
timer is disabled when V
CCP
/WDDIS = 5 V and bit 6 in WDCR is set to 1.
ADC INPUTS (UNSHARED)
ADCIN2 74 I
ADCIN3 75 I
ADCIN4 76 I
p
ADCIN5 77 I
Analog inputs to the first ADC
ADCIN6 78 I
ADCIN7 79 I
ADCIN10 89 I
ADCIN11 88 I
ADCIN12 83 I
p
ADCIN13 82 I
Analog inputs to the second ADC
ADCIN14 81 I
ADCIN15 80 I
BIT I/O AND SHARED FUNCTIONS PINS
ADCIN0/IOPA0 72 I/O
Bidirectional digital I/O.
Analog input to the first ADC.
ADCIN0/IOPA0 is configured as a digital input by all device resets.
ADCIN1/IOPA1 73 I/O
Bidirectional digital I/O.
Analog input to the first ADC.
ADCIN1/IOPA1 is configured as a digital input by all device resets.
ADCIN9/IOPA2 90 I/O
Bidirectional digital I/O.
Analog input to the second ADC.
ADCIN9/IOPA2 is configured as a digital input by all device resets.
ADCIN8/IOPA3 91 I/O
Bidirectional digital I/O.
Analog input to the second ADC.
ADCIN8/IOPA3 is configured as a digital input by all device resets.
PWM7/CMP7/IOPB0 100 I/O/Z
Bidirectional digital I/O. Simple compare/PWM 1 output. The state of PWM7/CMP7/IOPB0 is determined by the simple compare/PWM and the simple action control register (SACTR). It goes to
the high-impedance state when unmasked PDPINT
goes active low.
PWM7/CMP7/IOPB0 is configured as a digital input by all device resets.
PWM8/CMP8/IOPB1 101 I/O/Z
Bidirectional digital I/O. Simple compare/PWM 2 output. The state of PWM8/CMP8/IOPB1 is determined by the simple compare/PWM and the SACTR. It goes to the high-impedance state when
unmasked PDPINT
goes active low. PWM8/CMP8/IOPB1 is configured as a digital input by all
device resets.
PWM9/CMP9/IOPB2 102 I/O/Z
Bidirectional digital I/O. Simple compare/PWM 3 output. The state of PWM9/CMP9/IOPB2 is determined by the simple compare/PWM and SACTR. It goes to the high-impedance state when unmasked PDPINT
goes active low. PWM9/CMP9/IOPB2 is configured as a digital input by all de-
vice resets.
†
I = input, O = output, Z = high impedance
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
6
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Terminal Functions (Continued)
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
BIT I/O AND SHARED FUNCTIONS PINS (CONTINUED)
T1PWM/T1CMP/
IOPB3
105 I/O/Z
Bidirectional digital I/O. Timer 1 compare output. T1PWM/T1CMP/IOPB3 goes to the
high-impedance state when unmasked PDPINT
goes active low. This pin is configured as a
digital input by all device resets.
T2PWM/T2CMP/
IOPB4
106 I/O/Z
Bidirectional digital I/O. Timer 2 compare output. T2PWM/T2CMP/IOPB4 goes to the highimpedance state when unmasked PDPINT
goes active low. This pin is configured as a digital
input by all device resets.
T3PWM/T3CMP/
IOPB5
107 I/O/Z
Bidirectional digital I/O. Timer 3 compare output. T3PWM/T3CMP/IOPB5 goes to the
high-impedance state when unmasked PDPINT
goes active low. This pin is configured as a
digital input by all device resets.
TMRDIR/IOPB6 108 I/O
Bidirectional digital I/O. Direction signal for the timers. Up-counting direction if TMRDIR/IOPB6
is low, down-counting direction if this pin is high.
This pin is configured as a digital input by all device resets.
TMRCLK/IOPB7 109 I/O
Bidirectional digital I/O.
External clock input for general-purpose timers.
This pin is configured as a digital input by all device resets.
ADCSOC/IOPC0 63 I/O
Bidirectional digital I/O.
External start of conversion input for ADC.
This pin is configured as a digital input by all device resets.
CAP1/QEP1/IOPC4 67 I/O
Bidirectional digital I/O.
Capture 1 or QEP 1 input.
This pin is configured as a digital input by all device resets.
CAP2/QEP2/IOPC5 68 I/O
Bidirectional digital I/O.
Capture 2 or QEP 2 input.
This pin is configured as a digital input by all device resets.
CAP3/IOPC6 69 I/O
Bidirectional digital I/O.
Capture 3 input.
This pin is configured as a digital input by all device resets.
CAP4/IOPC7 70 I/O
Bidirectional digital I/O.
Capture 4 input.
This pin is configured as a digital input by all device resets.
XF/IOPC2 65 I/O
Bidirectional digital I/O. External flag output (latched software-programmable signal). XF is
used for signaling other processors in multiprocessing configurations or as a general-purpose
output pin. This pin is configured as an external flag output by all device resets.
BIO/IOPC3 66 I/O
Bidirectional digital I/O. Branch control input. BIO is polled by the BIOZ instruction. If BIO is low,
the CPU executes a branch. If BIO
is not used, it should be pulled high. This pin is configured
as a branch-control input by all device resets.
CLKOUT/IOPC1 64 I/O
Bidirectional digital I/O. Clock output. Clock output is selected by the CLKSRC bits in the
SYSCR register. This pin is configured as a DSP clock output by a power-on reset.
SERIAL COMMUNICATIONS INTERFACE (SCI) AND BIT I/O PINS
SCITXD/IO 44 I/O
SCI asynchronous serial port transmit data, or general-purpose bidirectional I/O. This pin is
configured as a digital input by all device resets.
SCIRXD/IO 43 I/O
SCI asynchronous serial port receive data, or general-purpose bidirectional I/O. This pin is
configured as a digital input by all device resets.
†
I = input, O = output, Z = high impedance
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
7
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
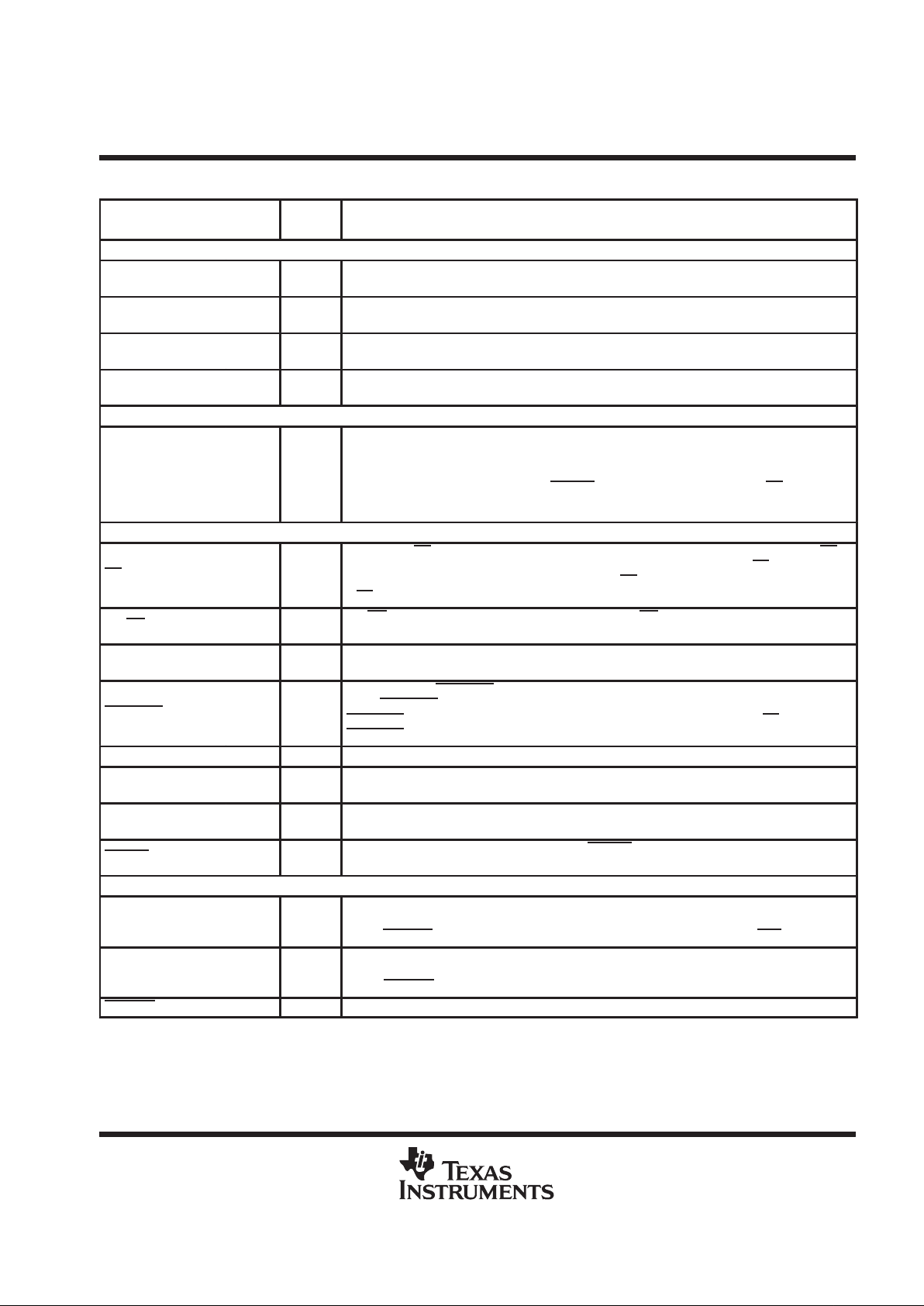
Terminal Functions (Continued)
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
SERIAL PERIPHERAL INTERFACE (SPI) AND BIT I/O PINS
SPISIMO/IO 45 I/O
SPI slave in, master out , or general-purpose bidirectional I/O. This pin is configured as a digital
input by all device resets.
SPISOMI/IO 48 I/O
SPI slave out, master in, or general-purpose bidirectional I/O. This pin is configured as a digital
input by all device resets.
SPICLK/IO 49 I/O
SPI clock, or general-purpose bidirectional I/O. This pin is configured as a digital input by all device
resets.
SPISTE/IO 51 I/O
SPI slave transmit enable (optional), or general-purpose bidirectional I/O. This pin is configured
as a digital input by all device resets.
COMPARE SIGNALS
PWM1/CMP1
PWM2/CMP2
PWM3/CMP3
PWM4/CMP4
PWM5/CMP5
PWM6/CMP6
94
95
96
97
98
99
O/Z
Compare units compare or PWM outputs. The state of these pins is determined by the
compare/PWM and the full action control register (ACTR). CMP1–CMP6 go to the
high-impedance state when unmasked PDPINT
goes active low, and when reset (RS) is asserted.
INTERRUPT AND MISCELLANEOUS SIGNALS
RS 35 I/O
Reset input. RS causes the SMJ320F240 to terminate execution and sets PC = 0. When RS is
brought to a high level, execution begins at location zero of program memory . RS
affects (or sets
to zero) various registers and status bits. In addition, RS
is a bidirectional (open-drain output) pin.
If RS
is left undriven, then a 20-Ω pull-up resistor should be used.
MP/MC 37 I
MP/MC (microprocessor/microcomputer) select. If MP/MC is low, internal program memory is
selected. If it is high, external program memory is selected.
NMI 40 I
Nonmaskable interrupt. When NMI is activated, the device is interrupted regardless of the state
of the INTM bit of the status register. NMI has programmable polarity.
PORESET 41 I
Power-on reset. PORESET causes the SMJ320F240 to terminate execution and sets PC = 0.
When PORESET
is brought to a high level, execution begins at location zero of program memory.
PORESET
affects (or sets to zero) the same registers and status bits as RS. In addition,
PORESET
initializes the PLL control registers.
XINT1 53 I External user interrupt no. 1
XINT2/IO 54 I/O
External user interrupt no. 2. General-purpose bidirectional I/O. This pin is configured as a digital
input by all device resets.
XINT3/IO 55 I/O
External user interrupt no. 3. General-purpose bidirectional I/O. This pin is configured as a digital
input by all device resets.
PDPINT 52 I
Maskable power-drive protection interrupt. If PDPINT is unmasked and it goes active low, the
timer compare outputs immediately go to the high-impedance state.
CLOCK SIGNALS
XTAL2 57 O
PLL oscillator output. XT AL2 is tied to one side of a reference crystal when the device is in PLL
mode (CLKMD[1:0] = 1x, CKCR0.7 –6). This pin can be left unconnected in oscillator bypass
mode (OSCBYP
≤ VIL). This pin goes in the high-impedance state when EMU1/OFF is active low.
XTAL1/CLKIN 58 I/Z
PLL oscillator input. XTAL1/CLKIN is tied to one side of a reference crystal in PLL mode
(CLKMD[1:0] = 1x, CKCR0.7–6), or is connected to an external clock source in oscillator bypass
mode (OSCBYP
≤ VIL).
OSCBYP 56 I Bypass oscillator if low
†
I = input, O = output, Z = high impedance
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
8
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
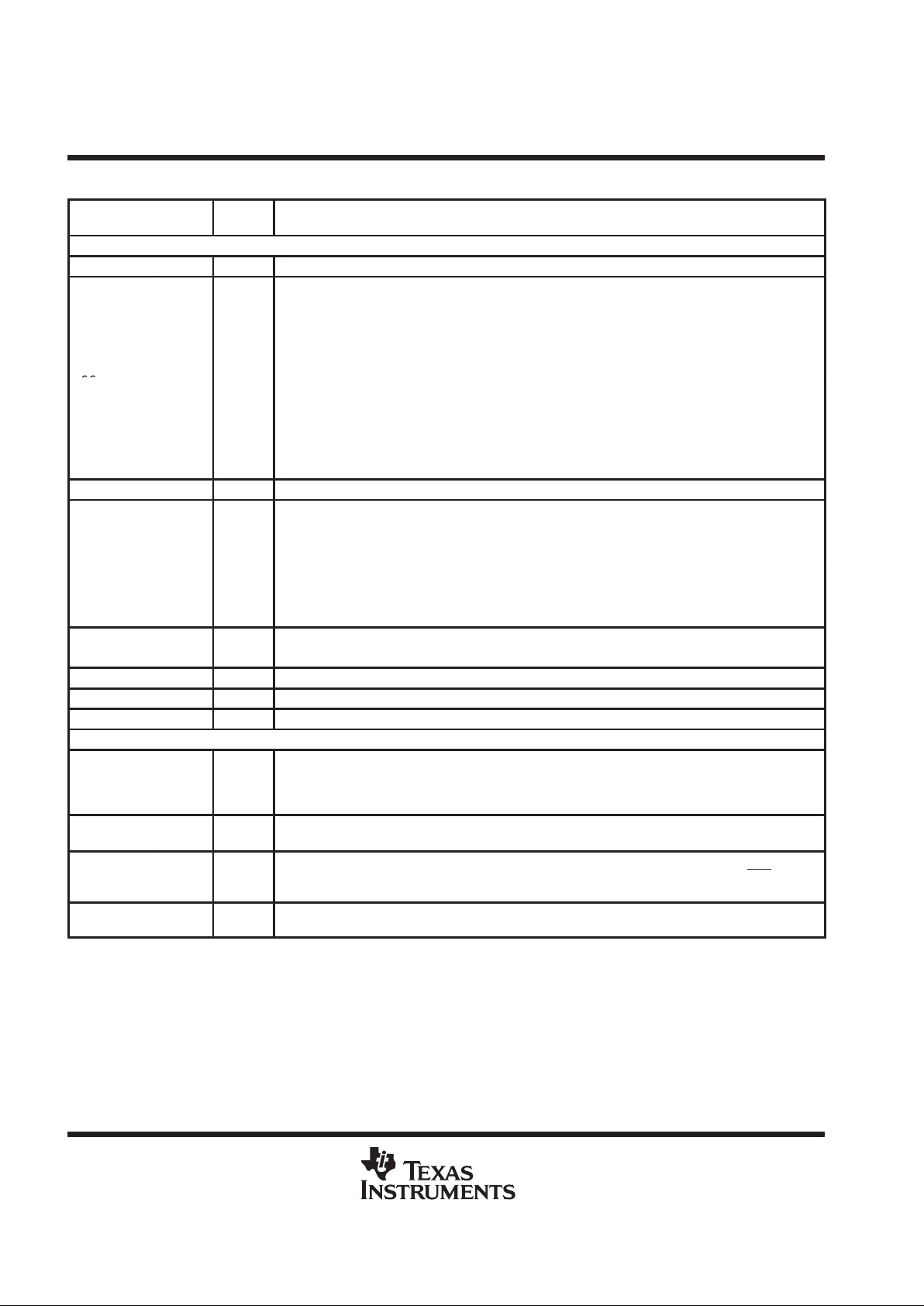
Terminal Functions (Continued)
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
SUPPLY SIGNALS
CV
SS
8 I Digital core logic ground reference
3
14
20
29
46
59
V
SS
61
71
92
104
113
120
I
Digital logic ground reference
V
SSA
87 I Analog ground reference
DV
2
13
21
47
pp
DD
(See Note 1)
62
93
103
121
I
Digital I/O logic suppl
y v
oltage
CV
7
pp
DD
(See Note 1)
60
I
Digital core logic suppl
y v
oltage
V
CCA
84 I Analog supply voltage
V
REFHI
85 I ADC analog voltage reference high
V
REFLO
86 I ADC analog voltage reference low
TEST SIGNALS
TCK 30 I
IEEE standard test clock. TCK is normally a free-running clock signal with a 50% duty cycle. The changes
on test-access port (TAP) input signals (TMS and TDI) are clocked into the TAP controller, instruction
register, or selected test data register of the ’C2xx core on the rising edge of TCK. Changes at the TAP
output signal (TDO) occur on the falling edge of TCK.
TDI 31 I
IEEE standard test data input (TDI). TDI is clocked into the selected register (instruction or data) on a
rising edge of TCK.
TDO 34 O/Z
IEEE standard test data output (TDO). The contents of the selected register (instruction or data) are
shifted out of TDO on the falling edge of TCK. TDO is in the high-impedance state when OFF
is active
low.
TMS 33 I
IEEE standard test mode select. This serial control input is clocked into the TAP controller on the rising
edge of TCK.
†
I = input, O = output, Z = high impedance
NOTE 1: VDD refers to supply voltage types CVDD (digital core supply voltage), DVDD (digital I/O supply voltage), and V
DDP
(programming voltage
supply). All voltages are measured with respect to VSS.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
9
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Terminal Functions (Continued)
TERMINAL
NAME NO.
TYPE
†
DESCRIPTION
TEST SIGNALS (CONTINUED)
TRST 32 I
IEEE standard test reset. TRST, when active low, gives the scan system control of the operations of
the device. If this signal is not connected or driven low, the device operates in its functional mode, and
the test reset signals are ignored.
EMU0 38 I/O/Z
Emulator pin 0. When TRST is driven low, EMU0 must be high for activation of the OFF condition.
When TRST
is driven high, EMU0 is used as an interrupt to or from the emulator system and is defined
as input/output through the scan.
EMU1/OFF 39 I/O/Z
Emulator pin 1/disable all outputs. When TRST is driven high, EMU1/OFF is used as an interrupt to
or from the emulator system and is defined as input/output through JTAG scan. When TRST
is driven
low, this pin is configured as OFF
. When EMU1/OFF is active low, it puts all output drivers in the
high-impedance state. OFF
is used exclusively for testing and emulation purposes (not for
multiprocessing applications); therefore, for OFF
condition, the following conditions apply: TRST =
low, EMU0 = high, EMU1/OFF
= low.
RESERVED 42 I Reserved for test. This pin has an internal pulldown and must be left unconnected for the ’F240.
†
I = input, O = output, Z = high impedance
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
10
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
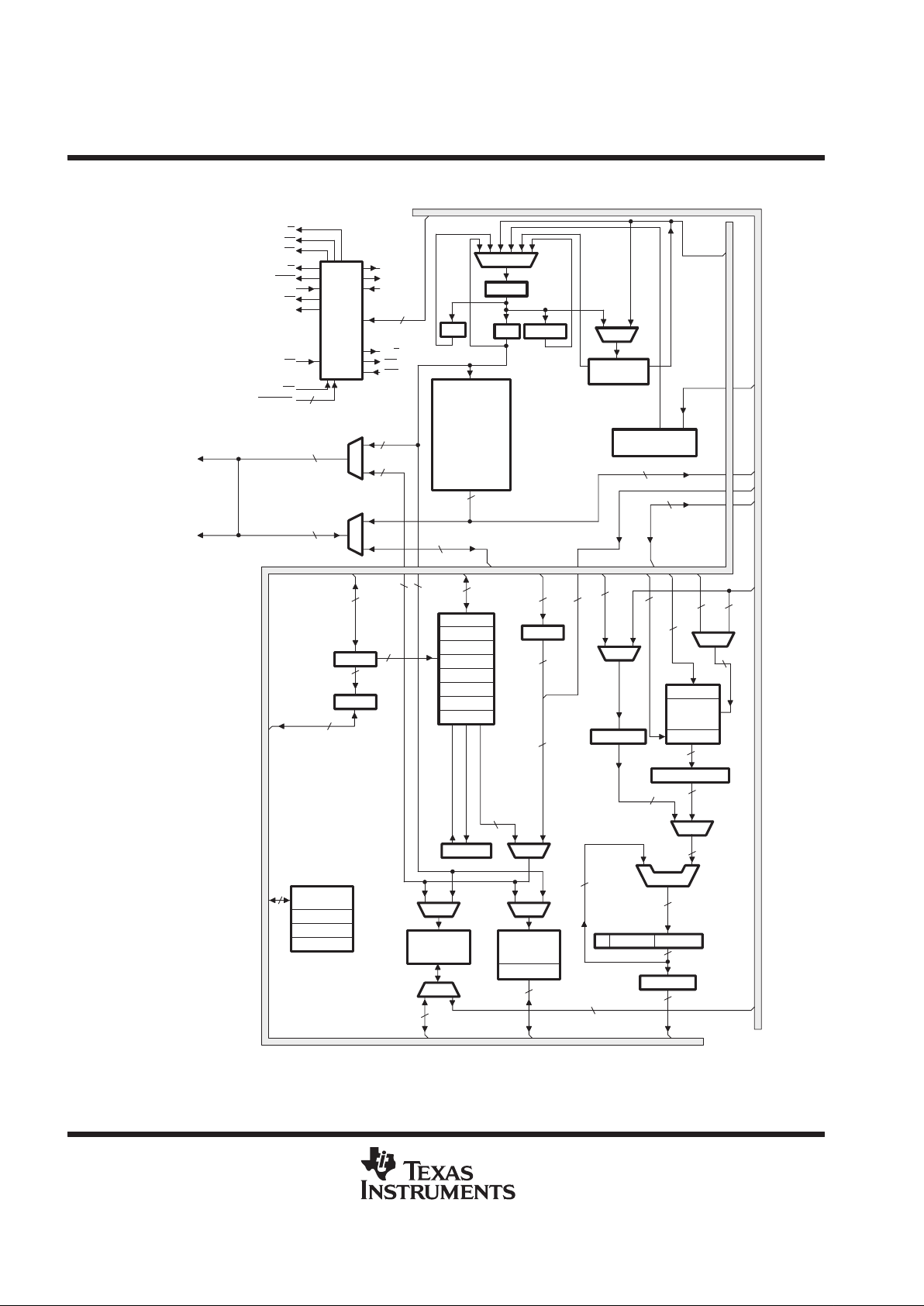
functional block diagram
4
216
PDPINT
4
4
9
41
7
Quadrature
Encoder
Pulse (QEP)
Capture/
Units
Compare
Timers
Purpose
General-
Manager
Event
Software
Wait-State
Generation
External
Memory
Interface
Emulation
Test/
Peripheral Bus
Timer
Watchdog
Interface
Communications
Serial-
Interface
Peripheral
Serial-
Converter
to-Digital
Analog-
Dual 10-Bit
Data Bus
3
Reset
Digital Input/Output
Interrupts
20
4
Module
System-Interface
Module
Clock
Program Bus
B1/B2
DARAM
B0
DARAMFlash
EEPROM
Initialization
Interrupts
Control
Memory
Controller
Program
CPU
’C2xx
Shifter
Product
PREG
TREG
Multiplier
Shifter
Output
Accumulator
ALU
Shifter
Input
Registers
Mapped
Memory-
Registers
Auxiliary
Registers
Control
Status/
ARAU
Register
Instruction

SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
11
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
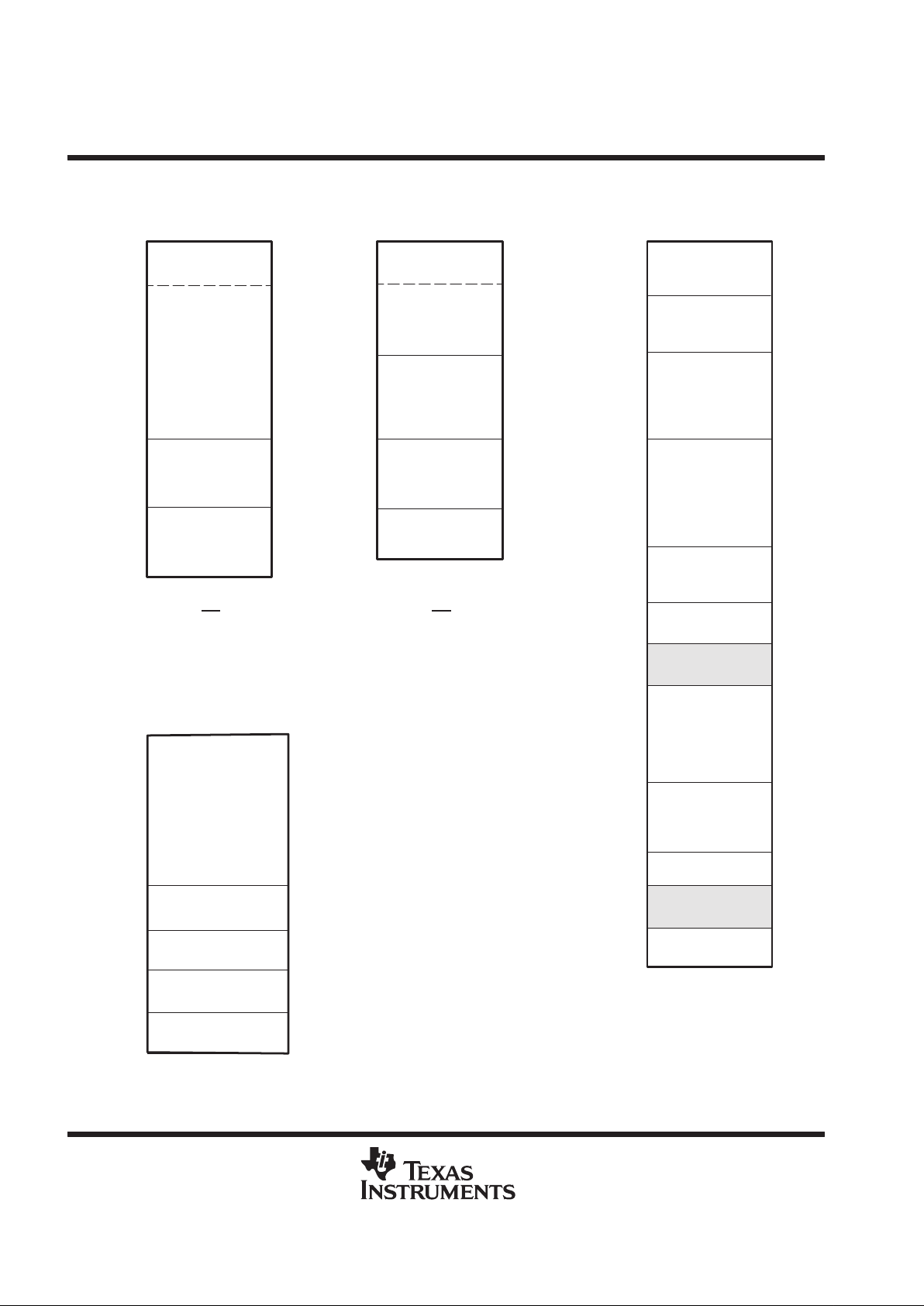
device memory map
The SMJ320F240 implements three separate address spaces for program memory, data memory, and I /O.
Each space accommodates a total of 64K 16-bit words. Within the 64K words of data space, the 256 to
32K words at the top of the address range can be defined to be external global memory in increments of powers
of two, as specified by the contents of the global memory allocation register (GREG). Access to global memory
is arbitrated using the global memory bus request (BR) signal.
On the ’F240, the first 96 (0–5Fh) data memory locations are either allocated for memory-mapped registers
or are reserved. This memory-mapped register space contains various control and status registers including
those for the CPU.
All the on-chip peripherals of the ’F240 device are mapped into data memory space. Access to these registers
is made by the CPU instructions addressing their data-memory locations. Figure 1 shows the memory map.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
12
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
device memory map (continued)
0000
Interrupts
(External)
003F
0040
External
FDFF
0000
Interrupts
(On-Chip)
003F
0040
0000
005F
0060
01FF
FE00
FFFF
02FF
0300
FEFF
FF00
0200
03FF
0400
07FF
Reserved
7000
Peripheral Memory-
Mapped Registers
(System, WD,
ADC, SPI, SCI,
Interrupts, I/O)
73FF
7400
743F
7440
77FF
0000
External
FF0E
FEFF
FF00
Reserved
Reserved
4000
External
3FFF
FDFF
FE00
FFFF
FEFF
FF00
Reserved
I/O
Hex
†
Flash memory includes
address range 0000h–003Fh
Hex
Data
Hex
007F
0080
Reserved
Hex
8000
External
FFFF
7800
7FFF
FF0F
On-Chip DARAM B0
(CNF = 1)
or
External (CNF = 0)
On-Chip
Flash EEPROM
†
(8 x 2K Segments)
MP/MC
= 1
Microprocessor
Mode
MP/MC = 0
Microcomputer
Mode
Program
Program
Wait-state Generator
Control Register
Memory-Mapped
Registers and
Reserved
On-Chip
DARAM B2
On-Chip DARAM B0
(CNF = 0)
or
Reserved (CNF = 1)
On-Chip
DARAM B1
0800
6FFF
Illegal
Peripheral
Memory-Mapped
Registers
(Event Manager)
On-Chip DARAM B0
(CNF = 1)
or
External (CNF = 0)
Reserved
Illegal
Flash Control
Mode Register
Reserved
FF10
FFFF
FFFE
Figure 1. SMJ320F240 Memory Map
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
13
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
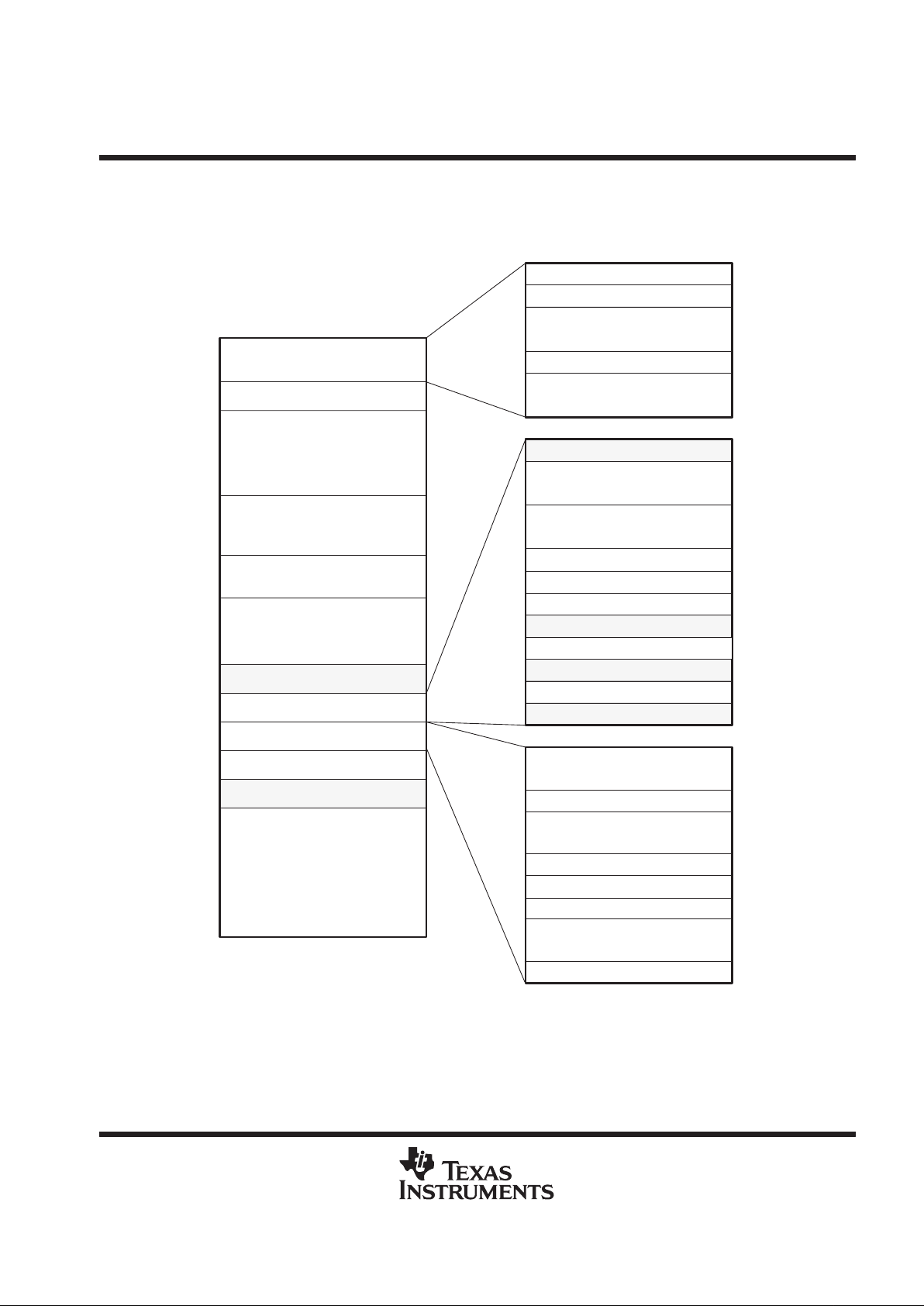
peripheral memory map
The SMJ320F240 system and peripheral control register frame contains all the data, status, and control bits
to operate the system and peripheral modules on the device (excluding the event manager).
Global-Memory Allocation
Register
0000
0003
0004
0005
0000
Memory-Mapped Registers
and Reserved
005F
0060
On-Chip DARAM B2
02FF
0300
01FF
0200
03FF
On-Chip
DARAM B1
0400
Reserved
73FF
Peripheral Frame 1
7400
77FF
7800
External
FFFF
7000–700F
Reserved
0007
Emulation Registers
and Reserved
Peripheral Frame 2
Reserved
On-Chip DARAM
B0 (CNF = 0)
Reserved (CNF = 1)
Interrupt-Mask Register
Illegal
System Configuration and
Control Registers
Watchdog Timer and
PLL Control Registers
Illegal
Digital-I/O Control Registers
Illegal
Reserved
Reserved
Interrupt Mask, Vector and
Flag Registers
0006
005F
007F
0080
07FF
7000
743F
7440
7010–701F
7020–702F
7030–703F
7040–704F
7050–705F
7060–706F
7070–707F
7080–708F
7090–709F
7400–740C
7411–741C
7420–7426
7427–742B
742C–7434
7435–743F
Interrupt Flag Register
SPI
SCI
Illegal
External-Interrupt Registers
ADC
General-Purpose
Timer Registers
Capture & QEP Registers
Compare, PWM, and
Deadband Registers
Reserved
7FFF
8000
Illegal
0800
6FFF
Illegal
Hex
Hex
70A0–73FF
Reserved
Reserved
741D–741F
740D–7410
Figure 2. Peripheral Memory Map
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
14
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
digital I/O and shared pin functions
The ’F240 has a total of 28 pins shared between primary functions and I/Os. These pins are divided into two
groups:
D
Group1 — Primary functions shared with I/Os belonging to dedicated I/O ports, Port A, Port B, and Port C.
D
Group2 — Primary functions belonging to peripheral modules which also have a built-in I/O feature as a
secondary function (for example, SCI, SPI, external interrupts, and PLL clock modules).
group1 shared I/O pins
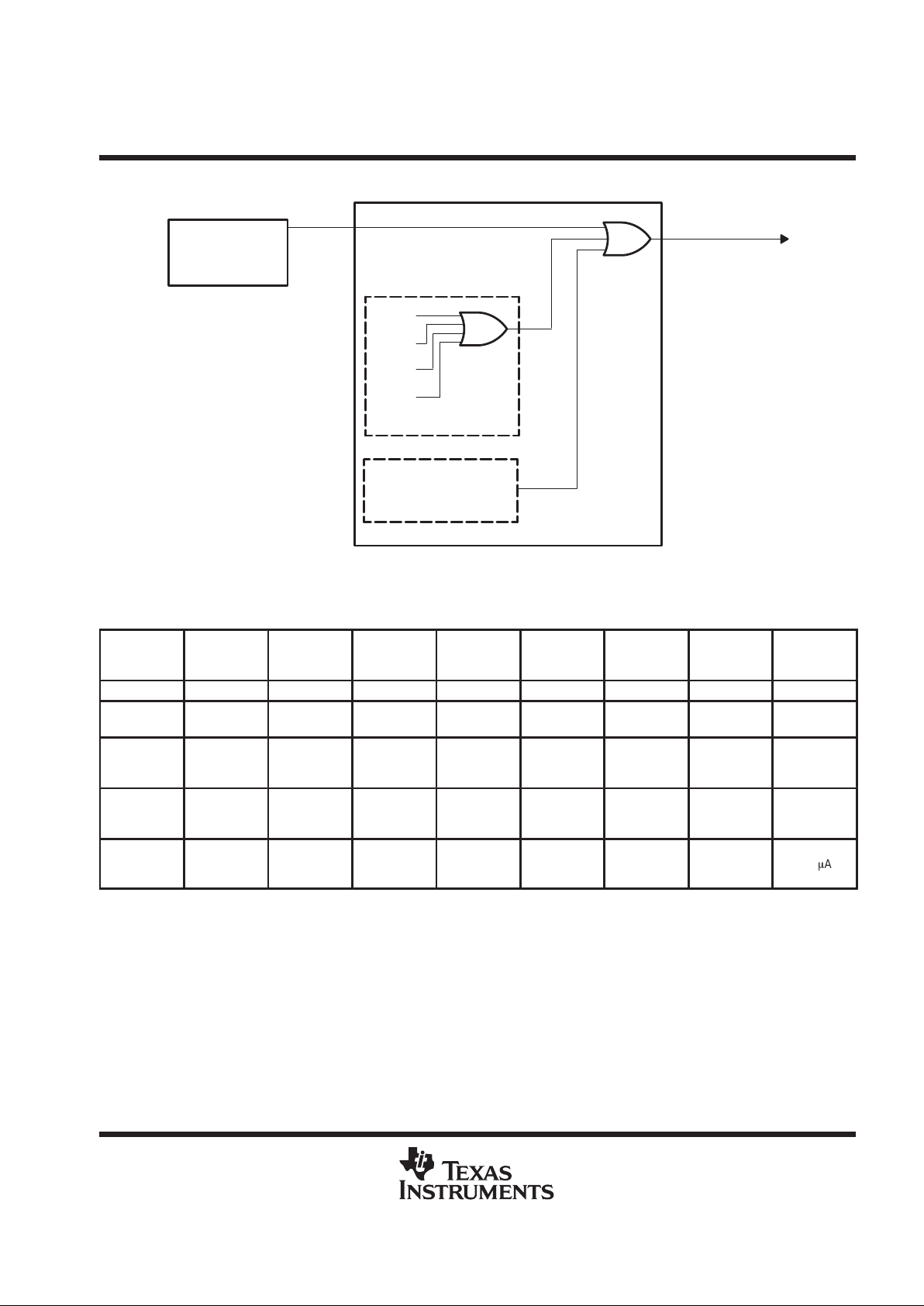
The control structure for Group1 type shared I/O pins is shown in Figure 3. The only exception to this
configuration is the CLKOUT/IOPC1 pin. In Figure 3, each pin has three bits that define its operation:
D
Mux control bit — this bit selects between the primary function (1) and I/O function (0) of the pin.
D
I/O direction bit — if the I/O function is selected for the pin (mux control bit is set to 0), this bit determines
whether the pin is an input (0) or an output (1).
D
I/O data bit — if the I/O function is selected for the pin (mux control bit is set to 0) and the direction selected
is an input, data is read from this bit; if the direction selected is an output, data is written to this bit.
The mux control bit, I/O direction bit, and I/O data bit are in the I/O control registers.
Primary
Function
Pin
(Read/Write)
IOP Data Bit
In Out
0 = Input
1 = Output
01
MUX Control Bit
0 = I/O Function
1 = Primary Function
IOP DIR Bit
Primary
Function
or I/O Pin
When the MUX control bit = 1, the primary
function is selected in all cases except
for the following pins:
1. XF/IOPC2 (0 = Primary Function)
2. BIO
/IOPC3 (0 = Primary Function)
Note:
Figure 3. Shared Pin Configuration
A summary of Group1 pin configurations and associated bits is shown in Table 2.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
15
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
group1 shared I/O pins (continued)
Table 2. Group1 Shared Pin Configurations
MUX CONTROL
PIN FUNCTION SELECTED I/O PORT DATA AND DIRECTION
†
PIN #
REGISTER
(name.bit #)
(CRx.n = 1) (CRx.n = 0) REGISTER DATA BIT # DIR BIT #
72 OCRA.0 ADCIN0 IOPA0 PADATDIR 0 8
73 OCRA.1 ADCIN1 IOPA1 PADATDIR 1 9
90 OCRA.2 ADCIN9 IOPA2 PADATDIR 2 10
91 OCRA.3 ADCIN8 IOPA3 PADATDIR 3 11
100 OCRA.8 PWM7/CMP7 IOPB0 PBDATDIR 0 8
101 OCRA.9 PWM8/CMP8 IOPB1 PBDATDIR 1 9
102 OCRA.10 PWM9/CMP9 IOPB2 PBDATDIR 2 10
105 OCRA.11 T1PWM/T1CMP IOPB3 PBDATDIR 3 11
106 OCRA.12 T2PWM/T2CMP IOPB4 PBDATDIR 4 12
107 OCRA.13 T3PWM/T3CMP IOPB5 PBDATDIR 5 13
108 OCRA.14 TMRDIR IOPB6 PBDATDIR 6 14
109 OCRA.15 TMRCLK IOPB7 PBDATDIR 7 15
63 OCRB.0 ADCSOC IOPC0 PCDATDIR 0 8
64 SYSCR.7–6
0 0 IOPC1 PCDATDIR 1 9
0 1 WDCLK — — —
1 0 SYSCLK — — —
1 1 CPUCLK — — —
65 OCRB.2 IOPC2 XF PCDATDIR 2 10
66 OCRB.3 IOPC3 BIO PCDATDIR 3 11
67 OCRB.4 CAP1/QEP1 IOPC4 PCDATDIR 4 12
68 OCRB.5 CAP2/QEP2 IOPC5 PCDATDIR 5 13
69 OCRB.6 CAP3 IOPC6 PCDATDIR 6 14
70 OCRB.7 CAP4 IOPC7 PCDATDIR 7 15
†
Valid only if the I/O function is selected on the pin.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
16
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
group2 shared I/O pins
Group2 shared pins belong to peripherals that have built-in general-purpose I/O capability. Control and
configuration for these pins are achieved by setting the appropriate bits within the control and configuration
registers of the peripherals. Table 3 lists the Group2 shared pins.
Table 3. Group2 Shared Pin Configurations
PIN # PRIMARY FUNCTION REGISTER ADDRESS PERIPHERAL MODULE
43 SCIRXD SCIPC2 705Eh SCI
44 SCITXD SCIPC2 705Eh SCI
45 SPISIMO SPIPC2 704Eh SPI
48 SPISOMI SPIPC2 704Eh SPI
49 SPICLK SPIPC1 704Dh SPI
51 SPISTE SPIPC1 704Dh SPI
54 XINT2 XINT2CR 7078h External Interrupts
55 XINT3 XINT3CR 707Ah External Interrupts
digital I/O control registers
Table 4 lists the registers available to the digital I/O module. As with other ’F240 peripherals, the registers are
memory-mapped to the data space.
Table 4. Addresses of Digital I/O Control Registers
ADDRESS REGISTER NAME
7090h OCRA I/O mux control register A
7092h OCRB I/O mux control register B
7098h P ADATDIR I/O port A data and direction register
709Ah PBDATDIR I/O port B data and direction register
709Ch PCDATDIR I/O port C data and direction register
device reset and interrupts
The SMJ320F240 software-programmable interrupt structure supports flexible on-chip and external interrupt
configurations to meet real-time interrupt-driven application requirements. The ’F240 recognizes three types of
interrupt sources:
D
Reset (hardware- or software-initiated) is unarbitrated by the CPU and takes immediate priority over any
other executing functions. All maskable interrupts are disabled until the reset service routine enables them.
D
Hardware-generated interrupts are requested by external pins or by on-chip peripherals. There are two
types:
–
External interrupts
are generated by one of five external pins corresponding to the interrupts XINT1,
XINT2, XINT3, PDPINT , and NMI. The first four can be masked both by dedicated enable bits and by t he
CPU’ s interrup t mask regi ster (IMR ), which c an mask ea ch maskab le interr upt line at t he DSP cor e. NMI,
which is not maskable, takes priority over peripheral interrupts and software-generated interrupts. It can
be locked out only by an already executing NMI or a reset.
–
Peripheral interrupts
are initiated internally by these on-chip peripheral modules: the event manager,
SPI, SCI, watchdog/real-time interrupt (WD/RTI), and ADC. They can be masked both by enable bits
for each event in each peripheral and by the CPU’s IMR, which can mask each maskable interrupt line at
the DSP core.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
17
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
device reset and interrupts (continued)
D
Software-generated interrupts for the ’F240 device include:
–
The INTR instruction.
This instruction allows initialization of any ’F240 interrupt with software. Its
operand indicates to which interrupt vector location the CPU branches. This instruction globally
disables maskable interrupts (sets the INTM bit to 1).
–
The NMI instruction.
This instruction forces a branch to interrupt vector location 24h, the same location
used for the nonmaskable hardware interrupt NMI. NMI can be initiated by driving the NMI pin low or by
executing an NMI instruction. This instruction globally disables maskable interrupts.
–
The TRAP instruction.
This instruction forces the CPU to branch to interrupt vector location 22h. The
TRAP instruction does
not
disable maskable interrupts (INTM is not set to 1); therefore, when the CPU
branches to the interrupt service routine, that routine can be interrupted by the maskable hardware
interrupts.
–
An emulator trap.
This interrupt can be generated with either an INTR instruction or a TRAP instruction.
reset
The reset operation ensures an orderly startup sequence for the device. There are five possible causes of a
reset, as shown in Figure 4. Three of these causes are internally generated; the other two causes, the RS and
PORESET pins, are controlled externally.
Signal
Reset
To Reset Out
To Device
Watchdog Timer Reset
Software-Generated Reset
Illegal Address Reset
Reset (RS
) Pin Active
Power-On Reset (PORESET
) Pin
Active
Figure 4. Reset Signals
The five possible reset signals are generated as follows:
D
Watchdog timer reset. A watchdog-timer-generated reset occurs if the watchdog timer overflows or an
improper value is written to either the watchdog key register or the watchdog control register. (Note that
when the device is powered on, the watchdog timer is automatically active.)
D
Software-generated reset. This is implemented with the system control register (SYSCR). Clearing the
RESET0 bit (bit 14) or setting the RESET1 bit (bit 15) causes a system reset.
D
Illegal address reset. The system and peripheral module control register frame address map contains
unimplemented address locations in the ranges labeled illegal. Any access to an address located in the
Illegal ranges generate an illegal-address reset.
D
Reset pin active. To generate an external reset pulse on the RS pin, a low-level pulse duration of as little
as a few nanoseconds is usually effective; however , pulses of one SYSCLK cycle are necessary to ensure
that the device recognizes the reset signal.
D
Power-on reset pin active. To generate a power-on reset pulse on the PORESET pin, a low-level pulse
of one SYSCLK cycle is necessary to ensure that the device recognizes the reset signal.
Once a reset source is activated, the external RS
pin is driven (active) low for a minimum of eight SYSCLK
cycles. This allows the SMJ320F240 device to reset external system components. Additionally , if a brown-out
condition (VCC < VCCmin for several microseconds causing PORESET to go low) occurs or the RS pin is held
low, then the reset logic holds the device in a reset state for as long as these actions are active.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
18
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
reset (continued)
The occurrence of a reset condition causes the SMJ320F240 to terminate program execution and affects
various registers and status bits. During a reset, RAM contents remain unchanged, and all control bits that are
affected by a reset are initialized to their reset state. In the case of a power-on reset, the PLL control registers
are initialized to zero. The program needs to recognize power-on resets and configure the PLL for correct
operation.
After a reset, the program can check the power-on reset flag (PORST flag, SYSSR.15), the illegal address flag
(ILLADR flag, SYSSR.12), the software reset flag (SWRST flag, SYSSR.10), and the watchdog reset flag
(WDRST flag, SYSSR.9) to determine the source of the reset. A reset does not clear these flags.
RS
and PORESET must be held low until the clock signal is valid and VCC is within the operating range. In
addition, PORESET must be driven low when VCC drops below the minimum operating voltage.
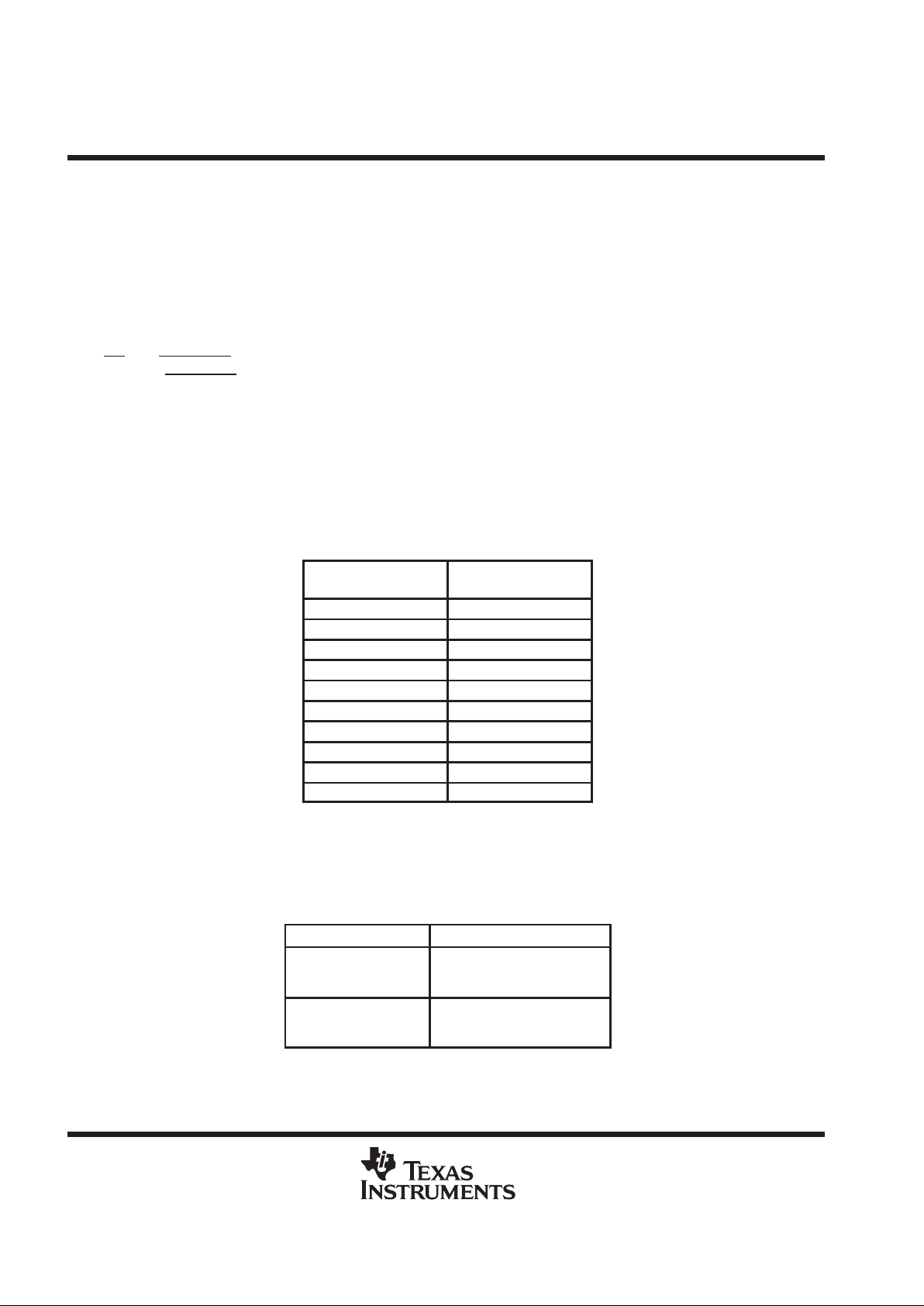
hardware-generated interrupts
All the hardware interrupt lines of the DSP core are given a priority rank from 1 to 10 (1 being highest). When
more than one of these hardware interrupts is pending acknowledgment, the interrupt of highest rank gets
acknowledged first. The others are acknowledged in order after that. Of those ten lines, six are for maskable
interrupt lines (INT1–INT6) and one is for the nonmaskable interrupt (NMI) line. INT1–INT6 and NMI have the
priorities shown in Table 5.
Table 5. Interrupt Priorities at the Level of the DSP Core
INTERRUPT
PRIORITY AT THE
DSP CORE
RESET 1
TI RESERVED
†
2
NMI 3
INT1 4
INT2 5
INT3 6
INT4 7
INT5 8
INT6 9
TI RESERVED
†
10
†
TI Reserved means that the address space is
reserved for Texas Instruments.
The inputs to these lines are controlled by the system module and the event manager as summarized in T able 6
and shown in Figure 5.
Table 6. Interrupt Lines Controlled by the System Module and Event Manager
PERIPHERAL INTERRUPT LINES
System Module
INT1
INT5
INT6
NMI
Event Manager
INT2
INT3
INT4
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
19
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
hardware-generated interrupts (continued)
DSP Core
5
INTC INTB INTA
Address
Lines 5–1
INT6 INT5 INT4 INT3 INT2 INT1 NMI
Address
Lines 5–1
System Module Event Manager
IACK
INT6 INT5 INT4 INT3 INT2 INT1 NMIIACK
NC NC NC
Figure 5. DSP Interrupt Structure
At the level of the system module and the event manager, each of the maskable interrupt lines (INT1–INT6) is
connected to multiple maskable interrupt sources. Sources connected to interrupt line INT1 are called Level 1
interrupts; sources connected to interrupt line INT2 are called Level 2 interrupts; and so on. For each interrupt
line, the multiple sources also have a set priority ranking. The source with the highest priority has its interrupt
request responded to by the DSP core first.
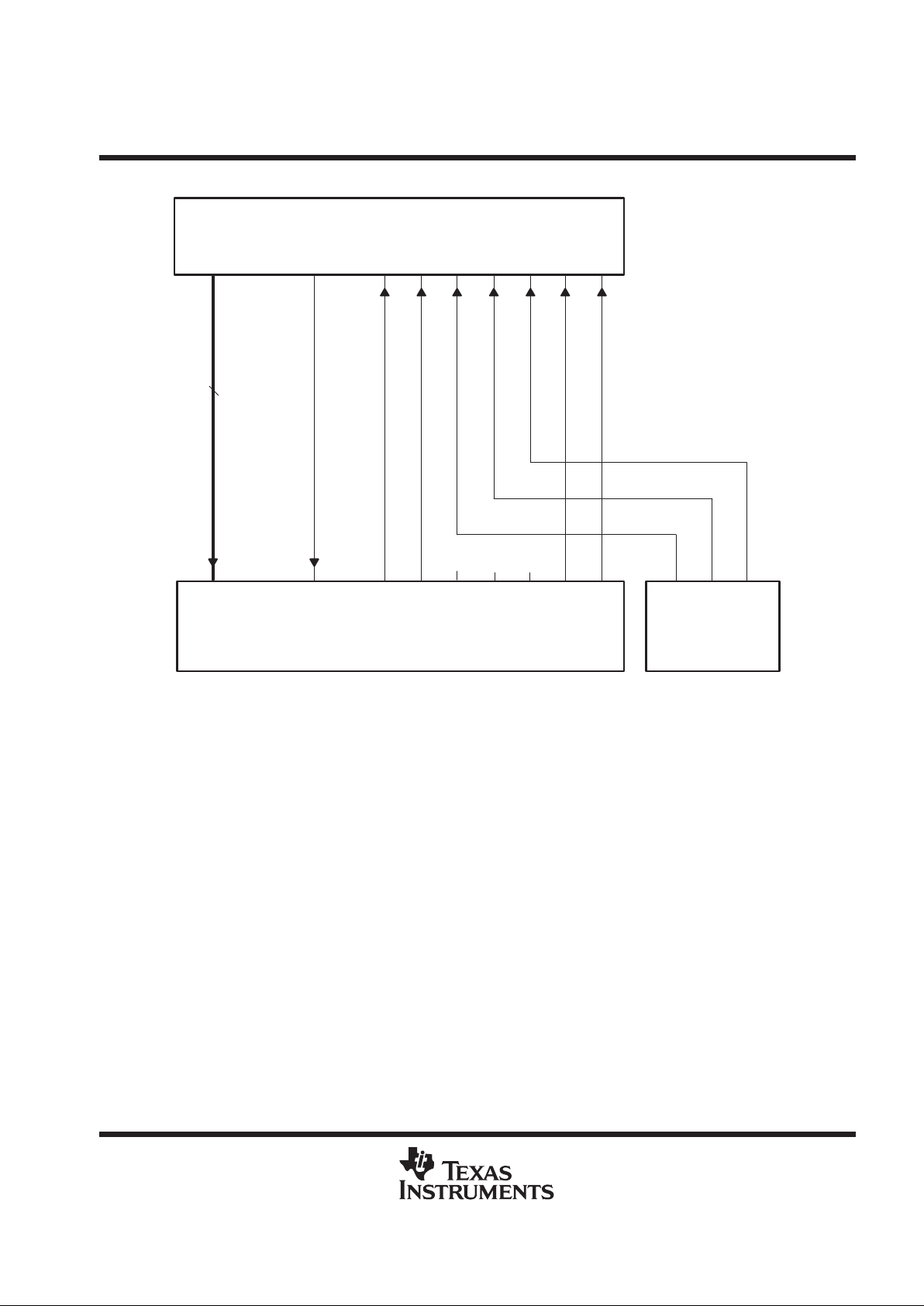
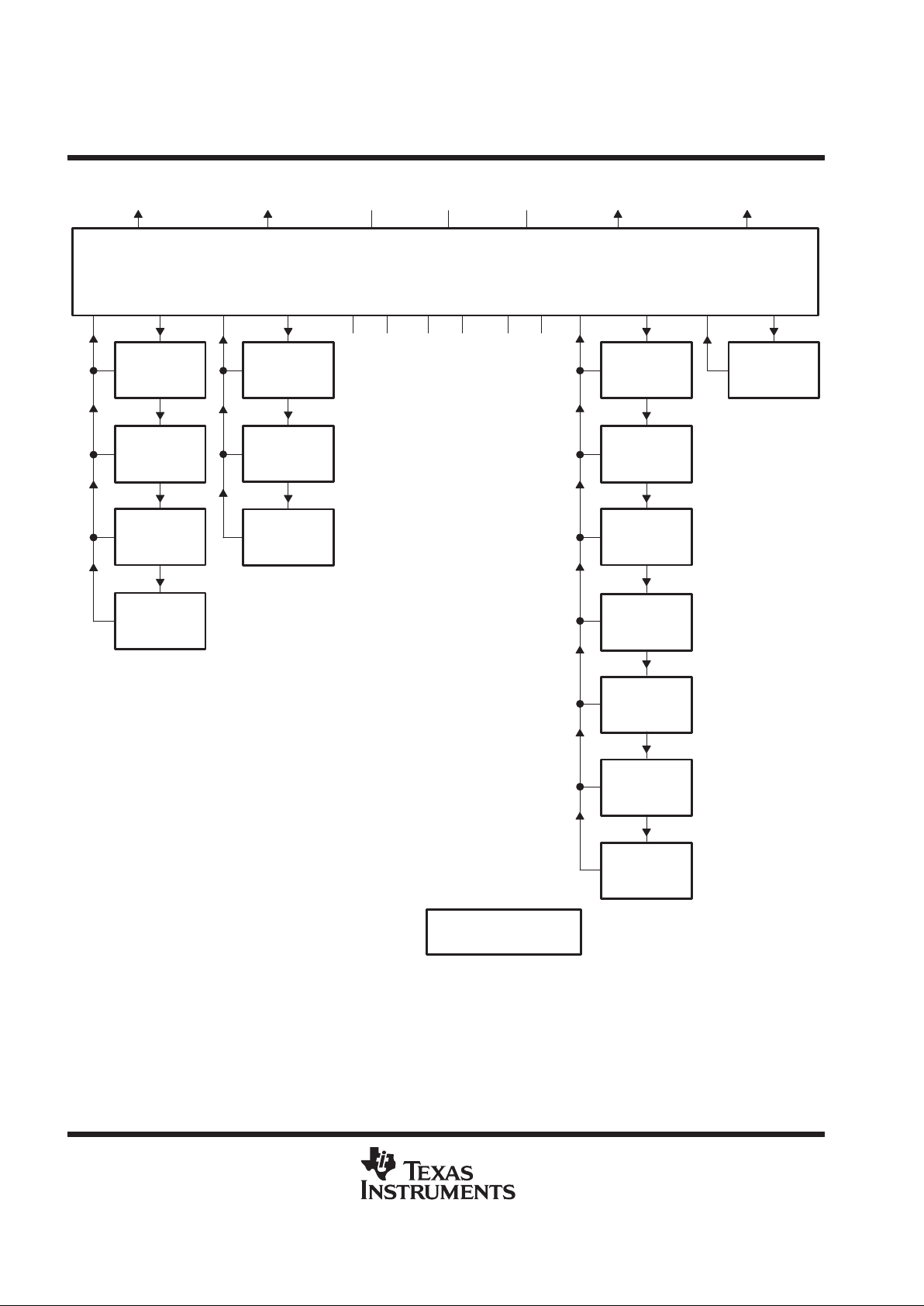
Figure 6 shows the sources and priority ranking for the interrupts controlled by the system module. For each
interrupt chain, the interrupt source of highest priority is at the top. Priority decreases from the top of the chain
to the bottom. Figure 7 shows the interrupt sources and priority ranking for the event manager interrupts.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
20
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
hardware-generated interrupts (continued)
IACK1IRQ1IACK5IRQ5IACK6IRQ6
NMIINT1INT6
System-Module
External Interrupt
NMI
To DSP INT6 To DSP INT1 To DSP NMI
NC = No connection
IACK = interrupt acknowledge
IRQ = interrupt request
Legend:
System-Module
External Interrupt
XINT1
(high priority)
System-Module
External Interrupt
XINT2
(high priority)
System-Module
External Interrupt
XINT3
(high priority)
SPI
Interrupt
(high priority)
SCI
Receiver
Interrupt
(low priority)
SPI
Interrupt
(low priority)
System-Module
External Interrupt
XINT1
(low priority)
System-Module
External Interrupt
XINT2
(low priority)
System-Module
External Interrupt
XINT3
(low priority)
Dual ADC
Interrupt
IACK_NMIIRQ_NMIIACK2IRQ2IACK3IRQ3IACK4IRQ4
NCNCNCNCNCNC
INT5
To DSP INT5
INT2INT3INT4
NCNCNC
Watchdog
Timer
Interrupt
SCI
Transmitter
Interrupt
(low priority)
SCI
Receiver
Interrupt
(high priority)
SCI
Transmitter
Interrupt
(high priority)
System Module
Figure 6. System-Module Interrupt Structure
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
21
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
hardware-generated interrupts (continued)
IACKAIRQAIACKBIRQBIACKCIRQC
INTAINTBINTC
Power-Drive
Protection
Interrupt
Compare1
Interrupt
Compare 2
Interrupt
Compare 3
Interrupt
Simple-
Compare 1
Interrupt
Simple-
Compare 2
Interrupt
Simple-
Compare 3
Interrupt
Timer 1
Period
Interrupt
Timer 1
Compare
Interrupt
Timer 1
Underflow
Interrupt
Timer 1
Overflow
Interrupt
Timer 2
Period
Interrupt
Timer 2
Compare
Interrupt
Timer 2
Underflow
Interrupt
Timer 2
Overflow
Interrupt
Timer 3
Period
Interrupt
Timer 3
Compare
Interrupt
Timer 3
Underflow
Interrupt
Timer 3
Overflow
Interrupt
Capture 1
Interrupt
Capture 2
Interrupt
Capture 3
Interrupt
Capture 4
Interrupt
To DSP INT4 To DSP INT3 To DSP INT2
IACK = Interrupt acknowledge
IRQ = Interrupt request
Legend:
Event Manager
Figure 7. Event-Manager Interrupt Structure
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
22
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
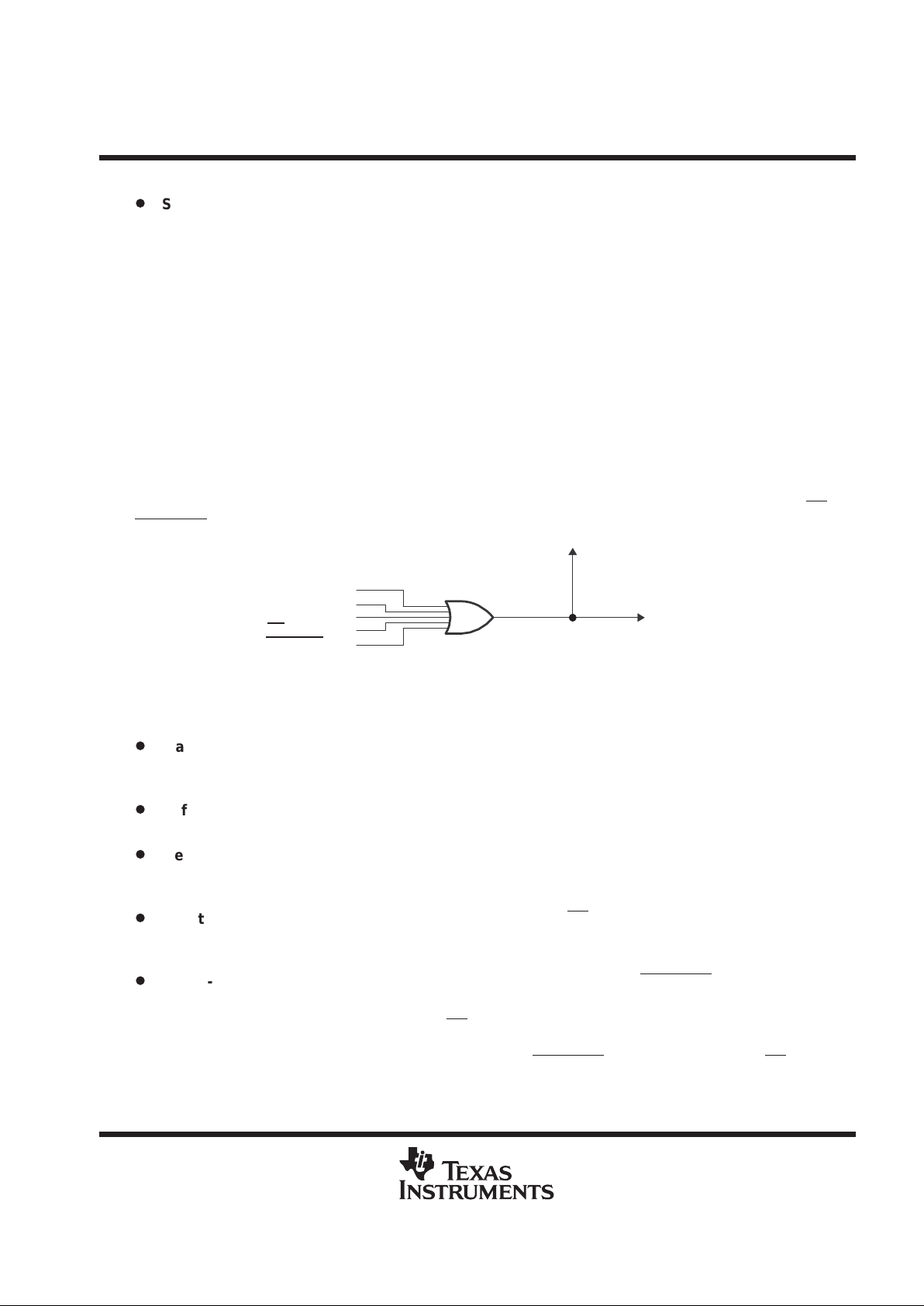
hardware-generated interrupts (continued)
Each of the interrupt sources has its own control register with a flag bit and an enable bit. When an interrupt
request is received, the flag bit in the corresponding control register is set. If the enable bit is also set, a signal
is sent to arbitration logic, which can simultaneously receive similar signals from one or more of the other control
registers. The arbitration logic compares the priority level of competing interrupt requests, and it passes the
interrupt of highest priority to the CPU. The corresponding flag is set in the interrupt flag register (IFR), indicating
that the interrupt is pending. The CPU then must decide whether to acknowledge the request. Maskable
hardware interrupts are acknowledged only after certain conditions are met:
D
Priority is highest. When more than one hardware interrupt is requested at the same time, the ’F240
services them according to the set priority ranking.
D
INTM bit is 0. The interrupt mode (INTM) bit, bit 9 of status register ST0, enables or disables all maskable
interrupts:
– When INTM = 0, all unmasked interrupts are enabled.
– When INTM = 1, all unmasked interrupts are disabled.
INTM is set to 1 automatically when the CPU acknowledges an interrupt (except when initiated by the TRAP
instruction) and at reset. It can be set and cleared by software.
D
IMR mask bit is 1. Each of the maskable interrupt lines has a mask bit in the interrupt mask register (IMR).
To unmask an interrupt line, set its IMR bit to 1.
When the CPU acknowledges a maskable hardware interrupt, it jams the instruction bus with the INTR
instruction. This instruction forces the PC to the appropriate address from which the CPU fetches the software
vector. This vector leads to an interrupt service routine.
Usually, the interrupt service routine reads the peripheral-vector-address offset from the peripheral-vectoraddress register (see Table 7) to branch to code that is meant for the specific interrupt source that initiated the
interrupt request. The ’F240 includes a phantom-interrupt vector offset (0000h), which is a system interrupt
integrity feature that allows a controlled exit from an improper interrupt sequence. If the CPU acknowledges a
request from a peripheral when, in fact, no peripheral has requested an interrupt, the phantom-interrupt vector
is read from the interrupt-vector register.
Table 7 summarizes the interrupt sources, overall priority, vector address/offset, source, and function of each
interrupt available on the SMJ320F240.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
23
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
hardware-generated interrupts (continued)
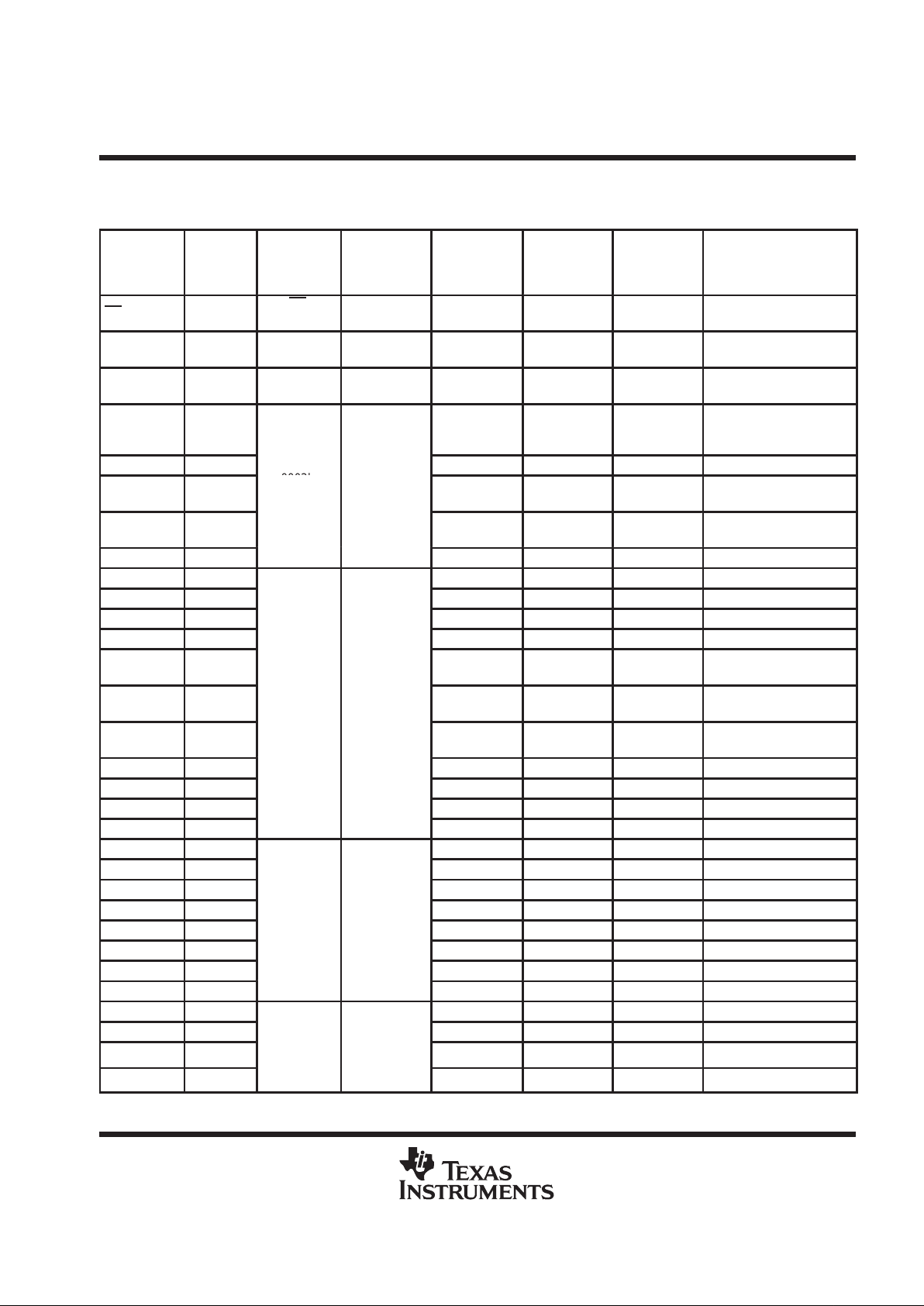
Table 7. ’F240 Interrupt Locations and Priorities
INTERRUPT
NAME
OVERALL
PRIORITY
DSP-CORE
INTERRUPT,
AND
ADDRESS
PERIPHERAL
VECTOR
ADDRESS
PERIPHERAL
VECTOR
ADDRESS
OFFSET
MASKABLE?
’F240
SOURCE
PERIPHERAL
MODULE
FUNCTION
INTERRUPT
RS
1
Highest
RS
0000h
N/A N Core, SD
External, system reset
(RESET)
RESERVED 2
INT7
0026h
N/A N/A N DSP Core Emulator trap
NMI 3
NMI
0024h
N/A 0002h N Core, SD External user interrupt
XINT1
XINT2
XINT3
4
5
6
0001h
0011h
001Fh
Y SD
High-priority external user
interrupts
SPIINT 7
INT1
0005h Y SPI High-priority SPI interrupt
RXINT 8
0002h
SYSIVR
(701Eh)
0006h Y SCI
SCI receiver interrupt
(high priority)
TXINT 9
(System)
0007h Y SCI
SCI transmitter interrupt
(high priority)
WDTINT 10 0010h Y WDT Watchdog timer interrupt
PDPINT 11 0020h Y External Power-drive protection Int.
CMP1INT 12 0021h Y EV.CMP1 Full Compare 1 interrupt
CMP2INT 13 0022h Y EV.CMP2 Full Compare 2 interrupt
CMP3INT 14 0023h Y EV.CMP3 Full Compare 3 interrupt
SCMP1INT 15
INT2
0024h Y EV.CMP4
Simple compare 1
interrupt
SCMP2INT 16
0004h
(Event
EVIVRA
(7432h)
0025h Y EV.CMP5
Simple compare 2
interrupt
SCMP3INT 17
Manager
Group A)
0026h Y EV.CMP6
Simple compare 3
interrupt
TPINT1 18 0027h Y EV.GPT1 Timer1-period interrupt
TCINT1 19 0028h Y EV.GPT1 Timer1-compare interrupt
TUFINT1 20 0029h Y EV.GPT1 Timer1-underflow interrupt
TOFINT1 21 002Ah Y EV.GPT1 Timer1-overflow interrupt
TPINT2 22 002Bh Y EV.GPT2 Timer2-period interrupt
TCINT2 23
002Ch Y EV.GPT2 Timer2-compare interrupt
TUFINT2 24
INT3
002Dh Y EV.GPT2 Timer2-underflow interrupt
TOFINT2 25
0006h
EVIVRB
002Eh Y EV.GPT2 Timer2-overflow interrupt
TPINT3 26
(Event
(7433h)
002Fh Y EV.GPT3 Timer3-period interrupt
TCINT3 27
M
anager
p
0030h Y EV.GPT3 Timer3-compare interrupt
TUFINT3 28
Grou B)
0031h Y EV.GPT3 Timer3-underflow interrupt
TOFINT3 29 0032h Y EV.GPT3 Timer3-overflow interrupt
CAPINT1 30 INT4 0033h Y EV.CAP1 Capture 1 interrupt
CAPINT2 31 0008h
EVIVRC
0034h Y EV.CAP2 Capture 2 interrupt
CAPINT3 32
(Event
(7434h)
0035h Y EV.CAP3 Capture 3 interrupt
CAPINT4 33
M
anager
Group C)
0036h Y EV.CAP4 Capture 4 interrupt
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
24
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
hardware-generated interrupts (continued)
Table 7. ’F240 Interrupt Locations and Priorities (Continued)
INTERRUPT
NAME
OVERALL
PRIORITY
DSP-CORE
INTERRUPT,
AND
ADDRESS
PERIPHERAL
VECTOR
ADDRESS
PERIPHERAL
VECTOR
ADDRESS
OFFSET
MASKABLE?
’F240
SOURCE
PERIPHERAL
MODULE
FUNCTION
INTERRUPT
SPIINT 34 INT5
0005h Y SPI Low-priority SPI interrupt
RXINT 35
000Ah
SYSIVR
(701Eh)
0006h Y SCI
SCI receiver interrupt
(low priority)
TXINT 36
(System)
0007h Y SCI
SCI transmitter interrupt
(low priority)
ADCINT 37 INT6 SYSIVR 0004h Y ADC Analog-to-digital interrupt
XINT1
38
000Ch
0001h
Y
External Low-priority external
XINT2
XINT3
39
40
(System)
(701Eh)
0011h
001Fh
Y
Y
pins
y
user interrupts
RESERVED 41 000Eh N/A Y DSP Core Used for analysis
TRAP N/A 0022h N/A N/A TRAP instruction vector
external interrupts
The ’F240 has five external interrupts. These interrupts include:
D
XINT1. Type A interrupt. The XINT1 control register (at 7070h) provides control and status for this interrupt.
XINT1 can be used as a high-priority (Level 1) or low-priority (Level 6) maskable interrupt or as a
general-purpose input pin. XINT1 can also be programmed to trigger an interrupt on either the rising or the
falling edge.
D
NMI. T ype A inter rupt. The NMI control register (at 7072h) provides control and status for this interrupt. NMI
is a nonmaskable external interrupt or a general-purpose input pin. NMI can also be programmed to trigger
an interrupt on either the rising or the falling edge.
D
XINT2. Type C interrupt. The XINT2 control register (at 7078h) provides control and status for this interrupt.
XINT2 can be used as a high-priority (Level 1) or low-priority (Level 6) maskable interrupt or a
general-purpose I/O pin. XINT2 can also be programmed to trigger an interrupt on either the rising or the
falling edge.
D
XINT3. Type C interrupt. The XINT3 control register (at 707Ah) provides control and status for this interrupt.
XINT3 can be used as a high-priority (Level 1) or low-priority (Level 6) maskable interrupt or as a
general-purpose I/O pin. XINT3 can also be programmed to trigger an interrupt on either the rising or the
falling edge.
D
PDPINT. This interrupt is provided for safe operation of the power converter and motor drive. This maskable
interrupt can put the timers and PWM output pins in the high-impedance state and inform the CPU in case
of motor drive abnormalities such as overvoltage, overcurrent, and excessive temperature rise. PDP IN T is
a Lev el 2 interrupt.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
25
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
external interrupts (continued)
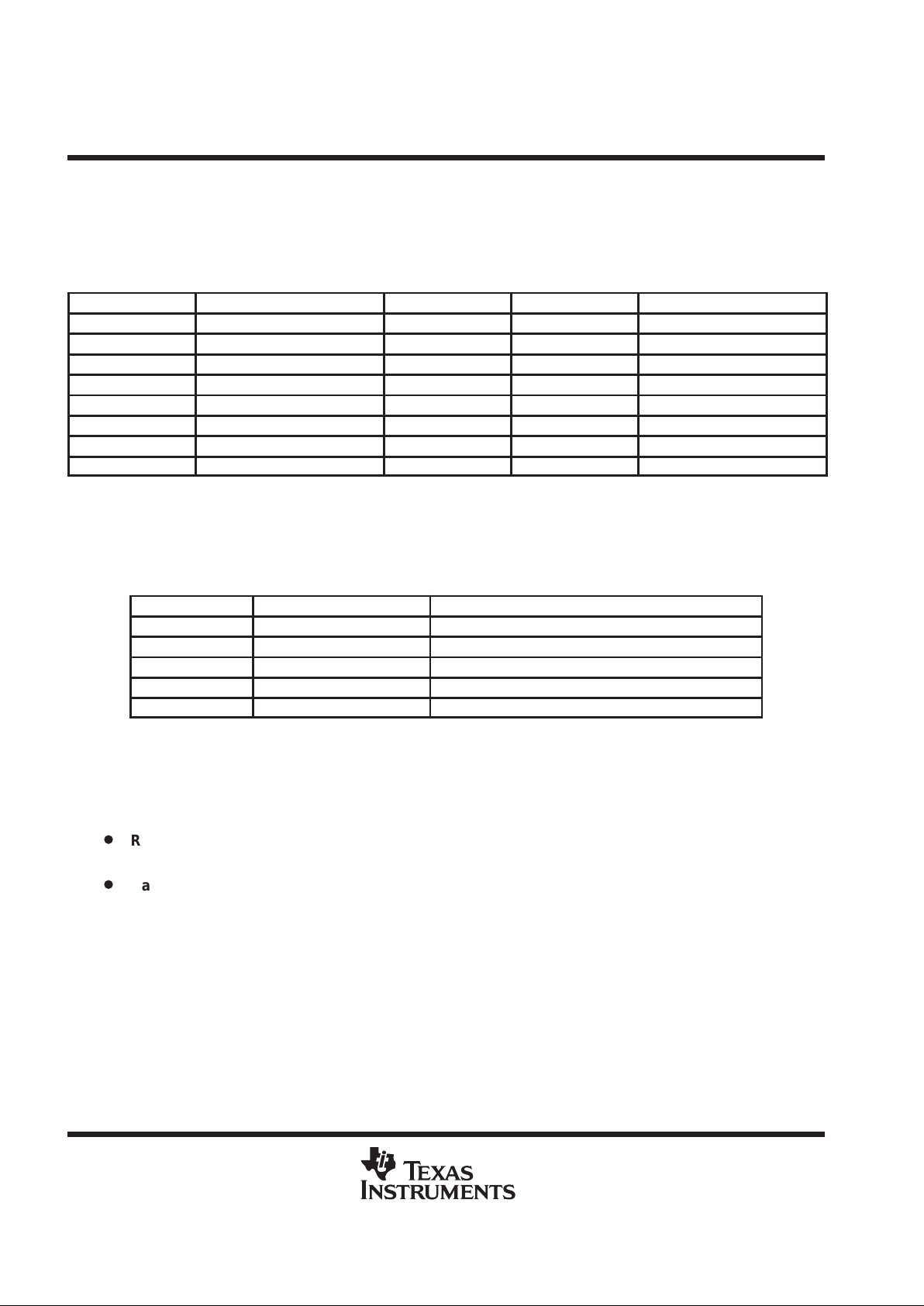
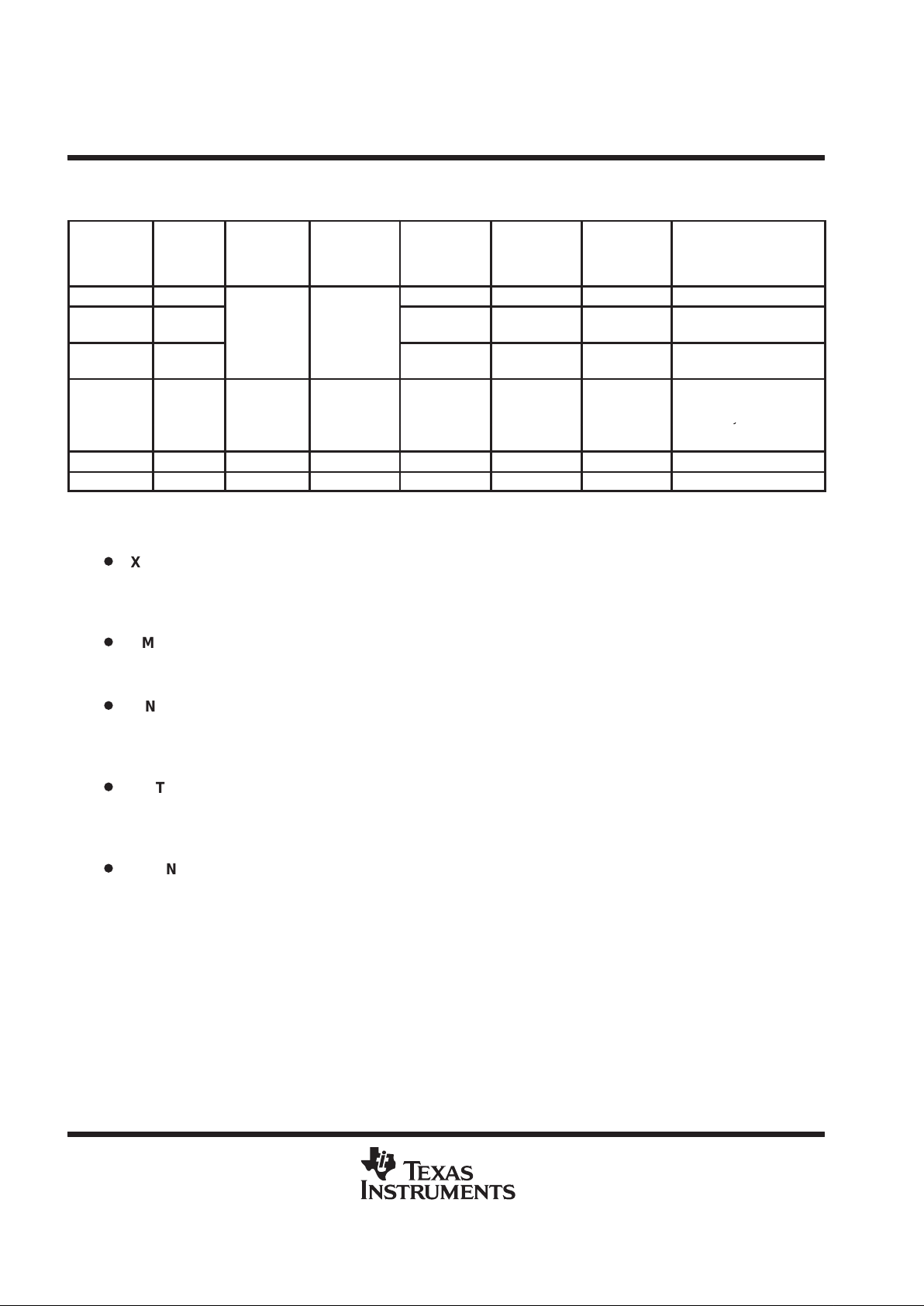
Table 8 is a summary of the external interrupt capability of the ’F240.
Table 8. External Interrupt Types and Functions
EXTERNAL
INTERRUPT
CONTROL
REGISTER
NAME
CONTROL
REGISTER
ADDRESS
INTERRUPT
TYPE
CAN DO
NMI?
DIGITAL
I/O PIN
MASKABLE?
XINT1 XINT1CR 7070h A No Input only
Yes
(Level 1 or 6)
NMI NMICR 7072h A Yes Input only No
XINT2 XINT2CR 7078h C No I/O
Yes
(Level 1 or 6)
XINT3 XINT3CR 707Ah C No I/O
Yes
(Level 1 or 6)
PDPINT EVIMRA 742Ch N/A N/A N/A
Yes
(Level 2)
clock generation
The SMJ320F240 has an on-chip, PLL-based clock module. This module provides all the necessary clocking
signals for the device, as well as control for low-power mode entry . The only external component necessary for
this module is an external fundamental crystal, or oscillator.
The PLL-based clock module provides two basic modes of operation: oscillator mode and clock-in mode.
D
oscillator mode
This mode allows the use of a 4-, 6-, or 8-MHz external reference crystal to provide the time base to the
device. The internal oscillator circuitry is initialized by software to select the desired CPUCLK frequency,
which can be the input clock frequency , the input clock frequency divided by 2 (default), or a clock frequency
determined by the PLL.
D
Clock-in mode
This mode allows the internal crystal oscillator circuitry to be bypassed. The device clocks are generated
from an external clock source input on the XTAL1/CLKIN pin. The device can be configured by software
to operate on the input clock frequency, the input clock frequency divided by 2, or a clock frequency
determined by the PLL.
The ’F240 runs on two clock frequencies: the CPU clock (CPUCLK) frequency , and the system clock (SYSCLK)
frequency . The CPU, memories, external memory interface, and event manager run at the CPUCLK frequency .
All other peripherals run at the SYSCLK frequency . The CPUCLK runs at 2x or 4x the frequency of the SYSCLK;
for example, for 2x, CPUCLK = 20 MHz and SYSCLK = 10 MHz. There is also a clock for the watchdog timer,
WDCLK. This clock has a nominal frequency of 16384 Hz (214 Hz) when XTAL1/CLKIN is a power of two or
a sum of two powers of two; for example, 4194304 Hz (222 Hz), 6291456 (222 + 221 Hz), or 8388608 Hz
(223 Hz).
The clock module includes three external pins:
1. XTAL1/CLKIN clock source/crystal input
2. XTAL2 output to crystal
3. OSCBYP oscillator bypass
For the external pins, if OSCBYP ≥ VIH, then the oscillator is enabled and if OSCBYP ≤ VIL, then the oscillator
is bypassed and the device is in clock-in mode. In clock-in mode, an external TTL clock must be applied to the
XTAL1/CLKIN pin. The XTAL2 pin can be left unconnected.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
26
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
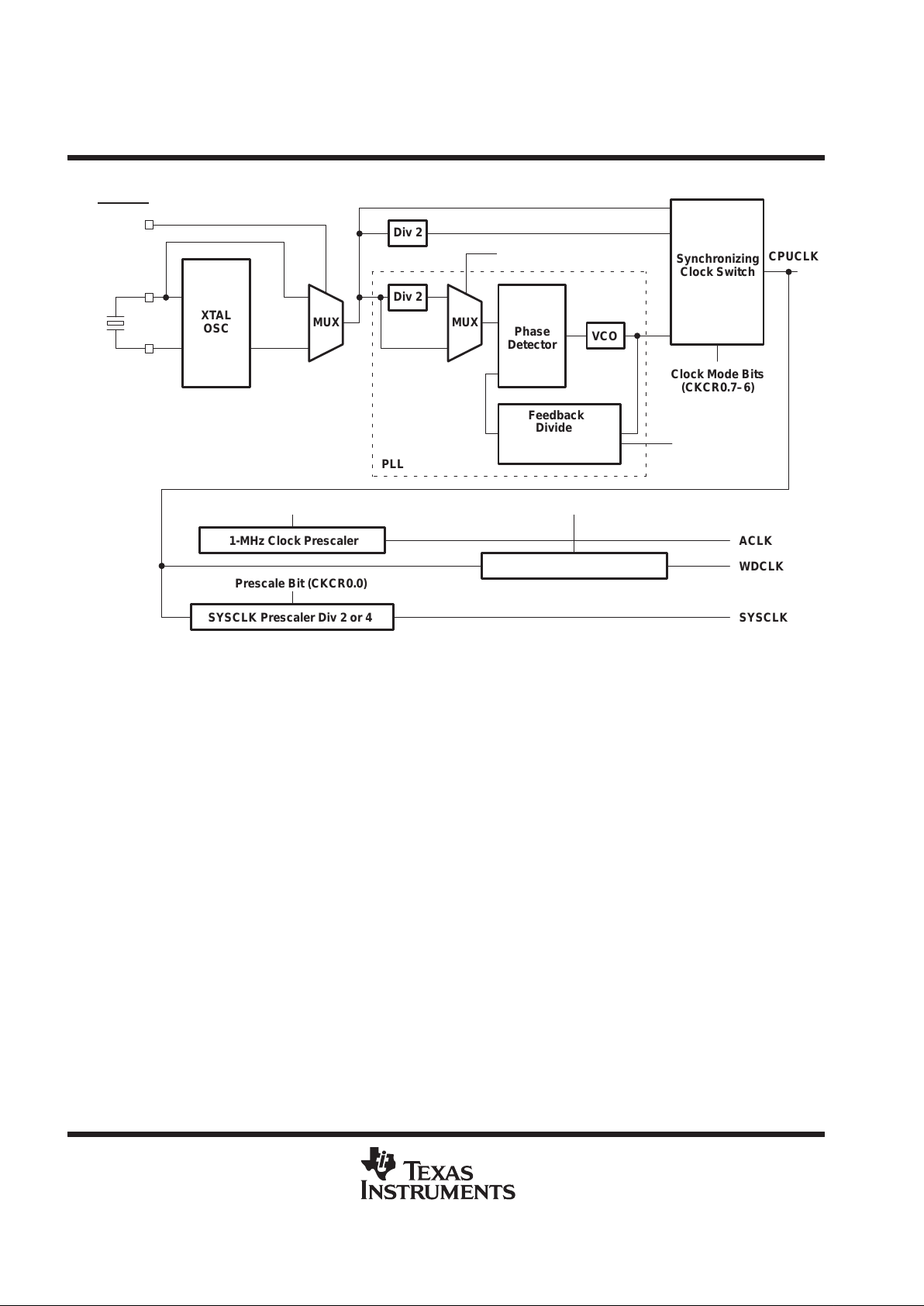
clock generation (continued)
CPUCLK
Synchronizing
Clock Switch
VCO
ACLK
WDCLK
SYSCLK
Clock Mode Bits
(CKCR0.7–6)
Div 2
MUXMUX
Div 2
XTAL
OSC
PLL
1-MHz Clock Prescaler
SYSCLK Prescaler Div 2 or 4
Prescale Bit (CKCR0.0)
Phase
Detector
Feedback
Divider
Div 1, 2, 3, 4, 5,
or 9
Watchdog Clock Prescaler
Clock Frequency and PLL Multiply Bits (CKCR1.7–4)
XTAL2
XTAL1/CLKIN
OSCBYP
PLL divide-by-2 bit
(CKCR1.3)
PLL multiply ratio
(CKCR1.2–0)
Figure 8. PLL Clock Module Block Diagram
low-power modes
The SMJ320F240 has four low-power modes (idle 1, idle 2, PLL power down, and oscillator power down). The
low-power modes reduce the operating power by reducing or stopping the activity of various modules (by
stopping their clocks). The two PLLPM bits of the clock module control register, CKCR0, select which of the
low-power modes the device enters when executing an IDLE instruction. Reset or an unmasked interrupt from
any source causes the device to exit from idle 1 low-power mode. A real-time interrupt from the watchdog timer
module causes the device to exit from all low-power modes except oscillator power down. This is a wake-up
interrupt. When enabled, reset or any of the four external interrupts (NMI, XINT1, XINT2, or XINT3) causes the
device to exit from any of the low-power modes (idle 1, idle 2, PLL power down, and oscillator power down).
The external interrupts are all wake-up interrupts. The maskable external interrupts (XINT1, XINT2, and XINT3)
must be enabled individually and globally to bring the device out of a low-power mode properly . It is, therefore,
important to ensure that the desired low-power-mode exit path is enabled before entering a low-power mode.
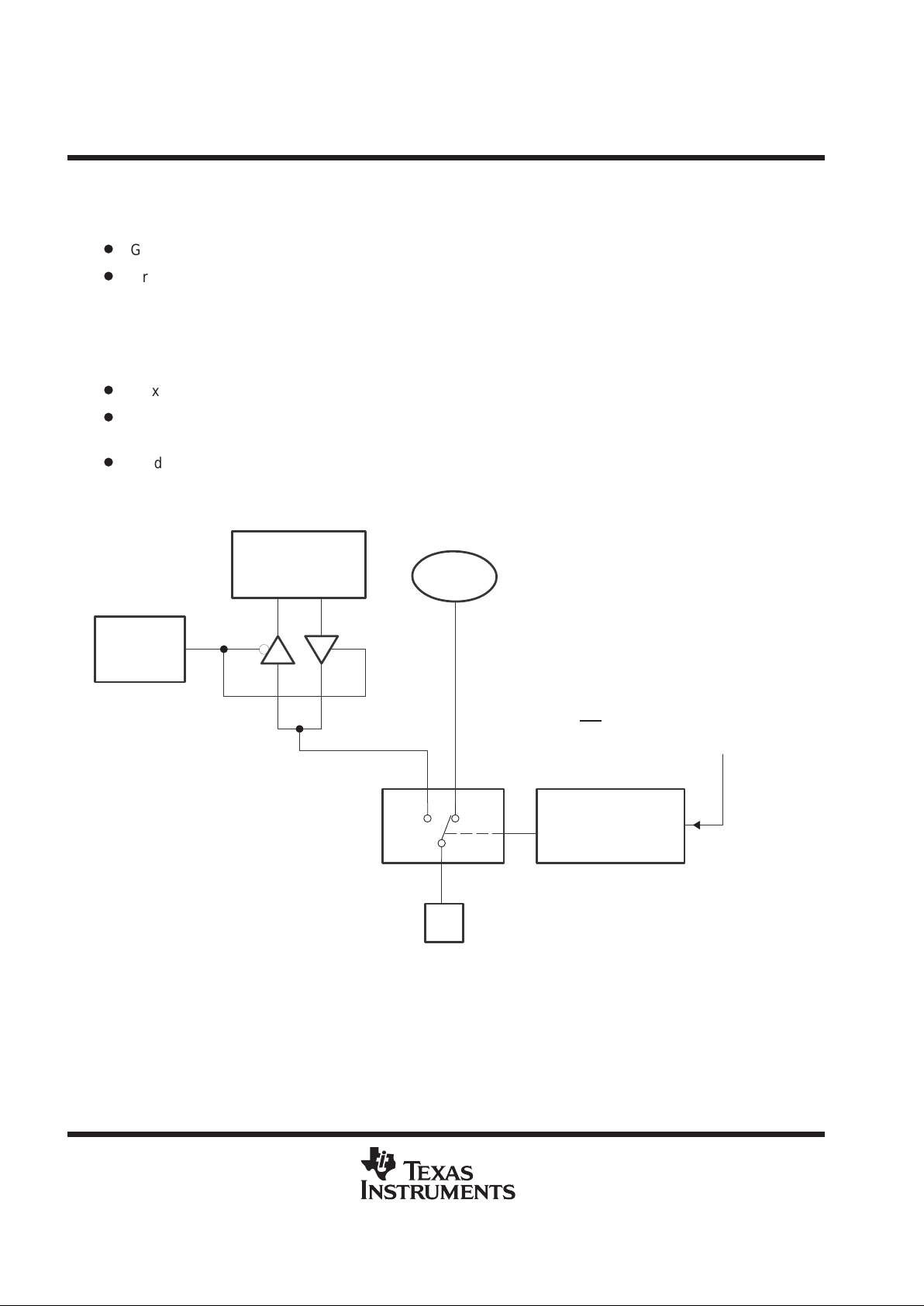
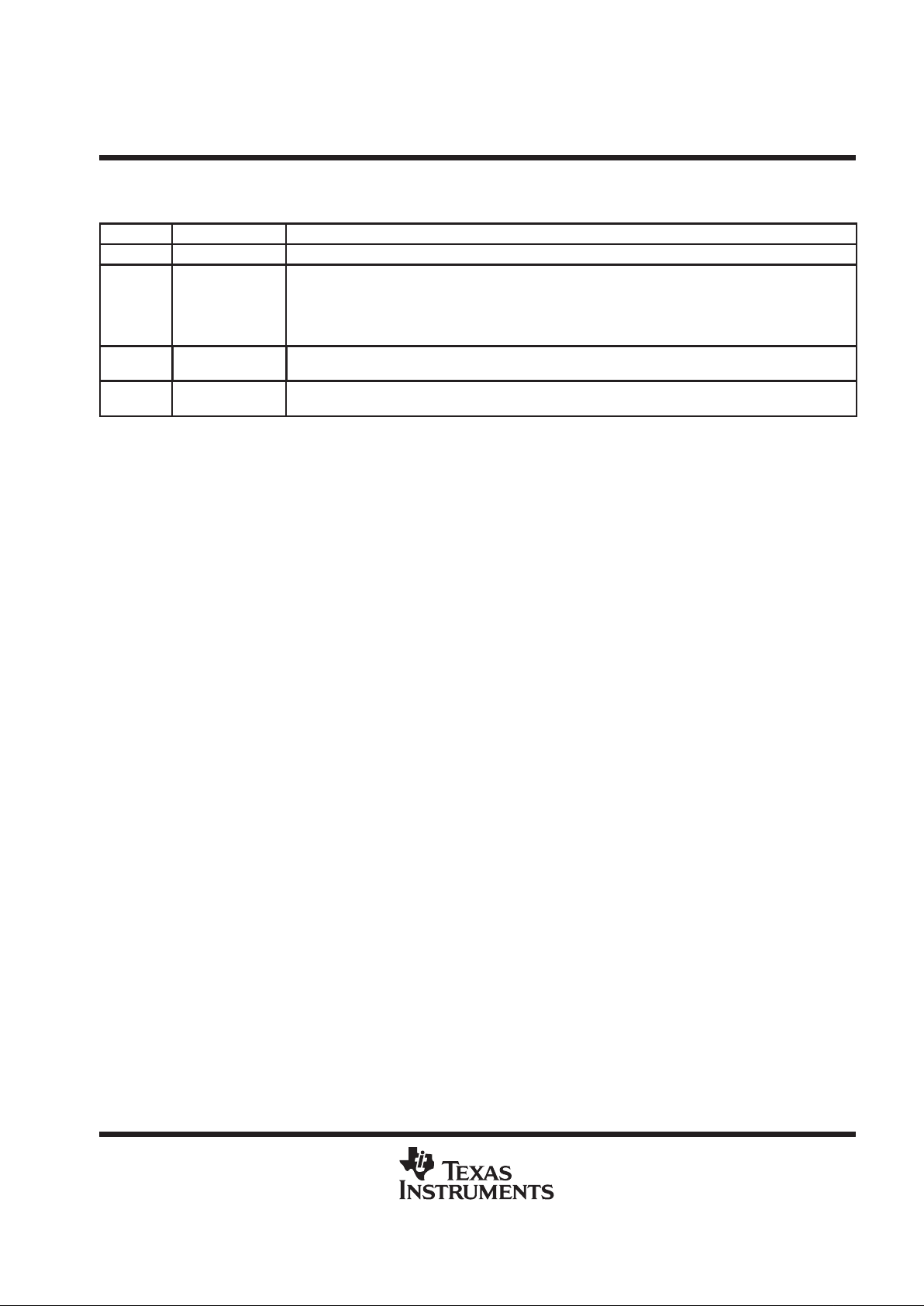
Figure 9 shows the wake-up sequence from a power down. Table 9 summarizes the low-power modes.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
27
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
low-power modes (continued)
Watchdog Timer
and
Real-Time Interrupt
Module
NMI
XINT1
XINT2
XINT3
External-Interrupt Logic
Reset Logic
Reset
Signal
Wake-up Signal
to CPU
Wake-up
Signal
System Module
Figure 9. Waking Up the Device From Power Down
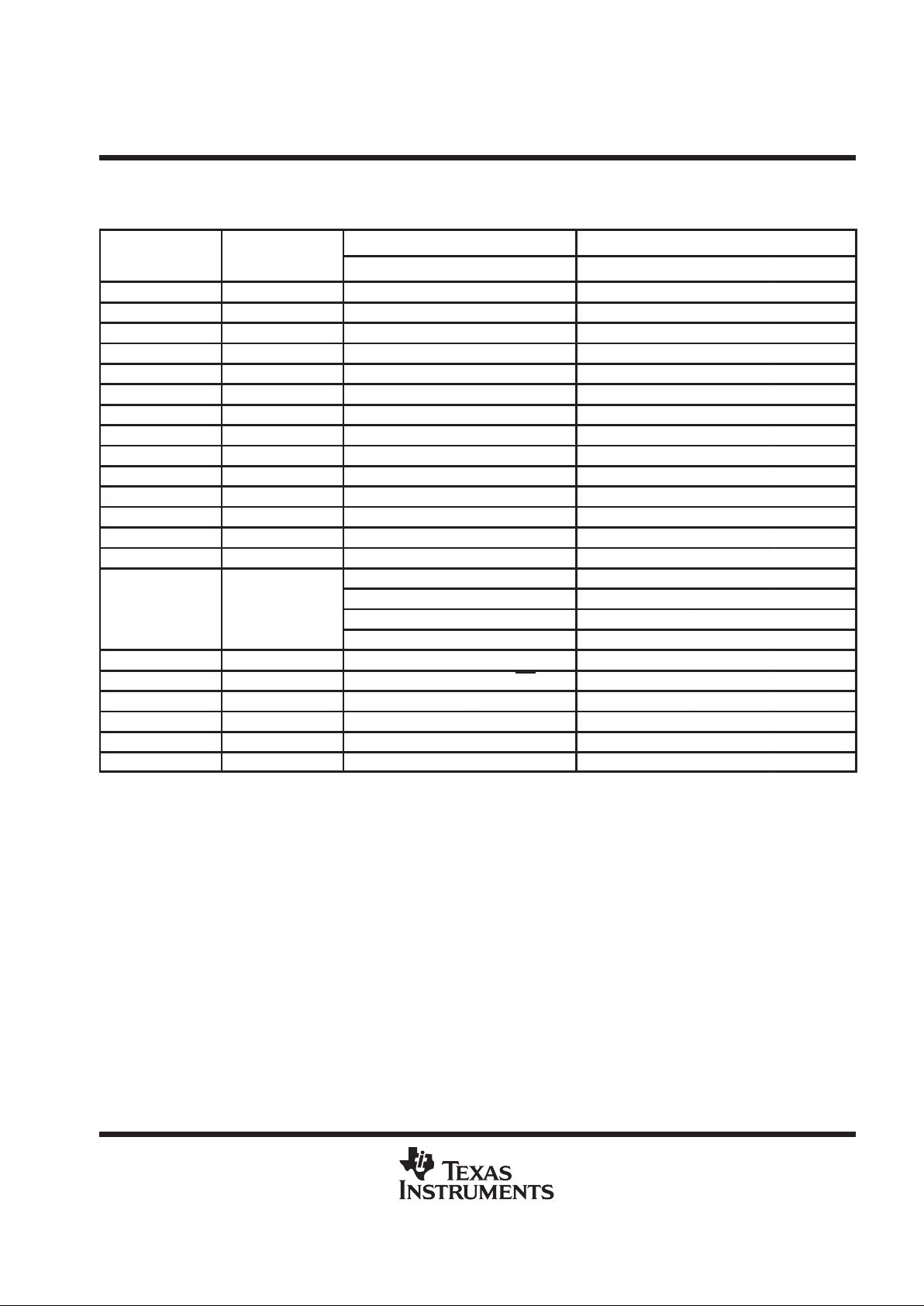
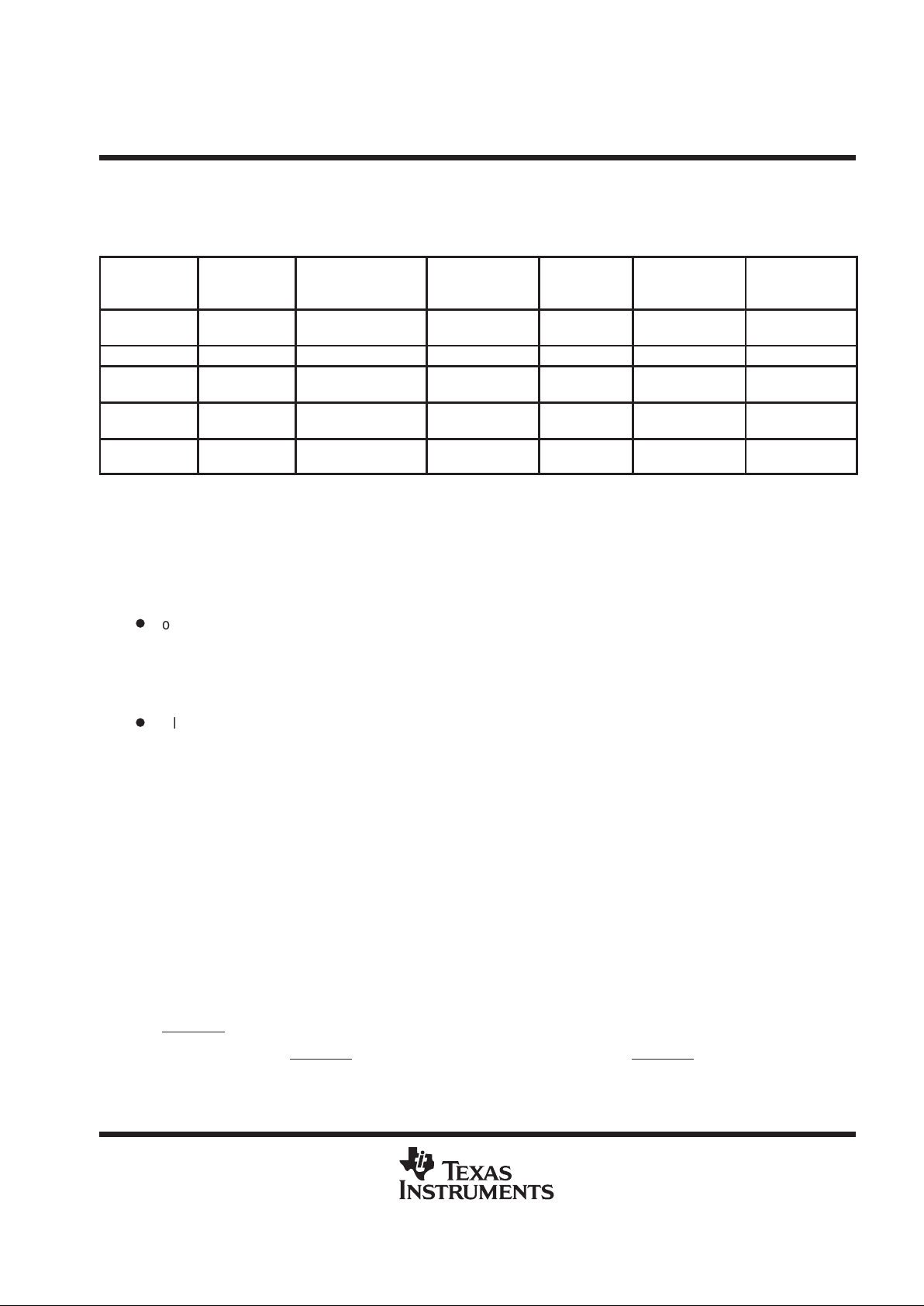
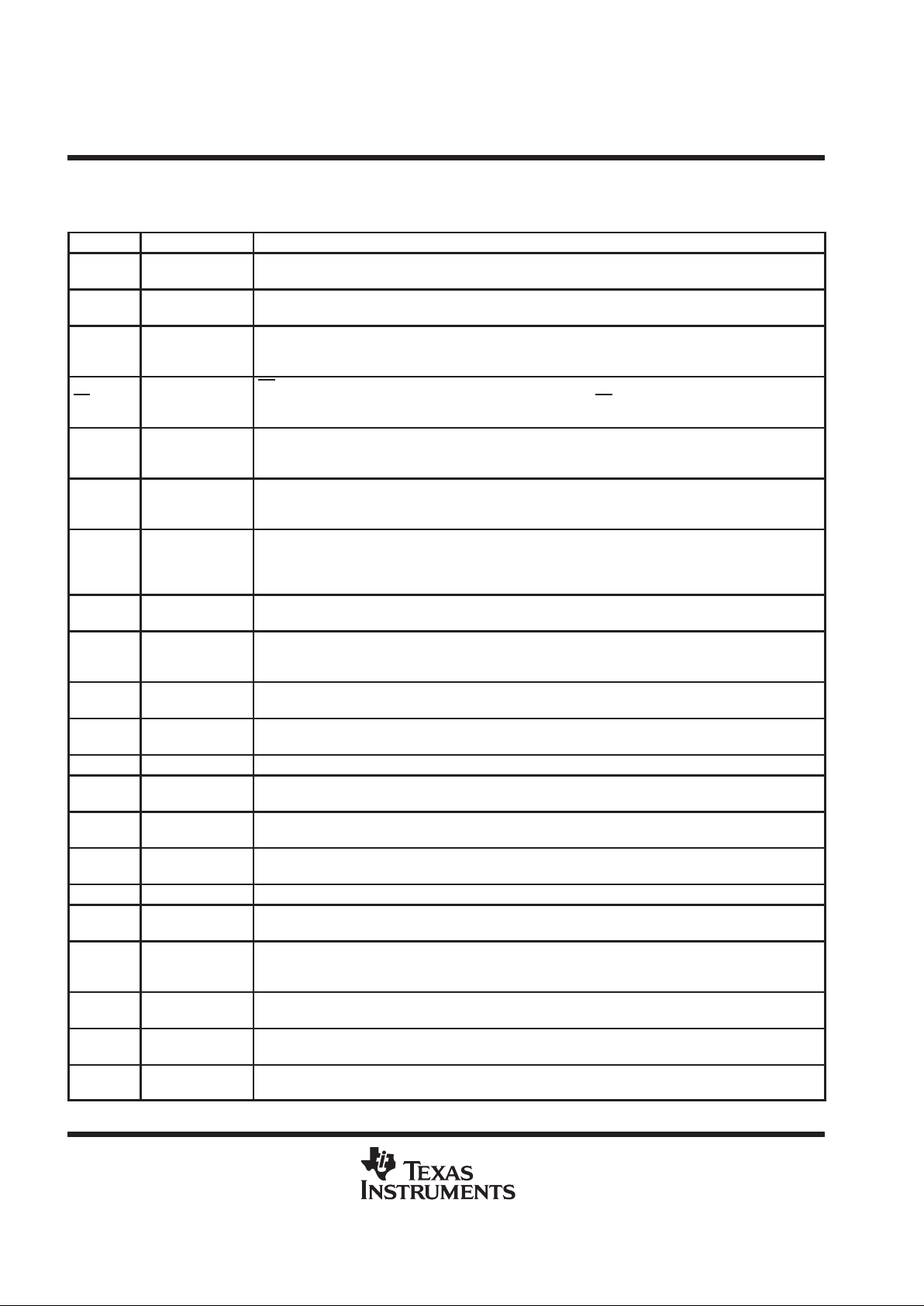
Table 9. Low-Power Modes
LOW-
POWER
MODE
PLLPM(x)
BITS IN
CKCR0[2:3]
CPUCLK
STATUS
SYSCLK
STATUS
WDCLK
STATUS
PLL
STATUS
OSC
STATUS
EXIT
CONDITION
TYPICAL
POWER
Run XX On On On On On — 80 mA
Idle 1 00 Off On On On On
Any interrupt
or reset
50 mA
Idle 2 01 Off Off On On On
Wake-up
interrupt or
reset
7 mA
PLL Power
Down
10 Off Off On Off On
Wake-up
interrupt or
reset
1 mA
OSC Power
Down
11 Off Off Off Off Off
Wake-up
interrupt or
reset
400 mA
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
28
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
low-power modes (continued)
Table 10. Legend for the ’F240 Internal Hardware Functional Block Diagram
SYMBOL NAME DESCRIPTION
ACC Accumulator
32-bit register that stores the results and provides input for subsequent CALU operations. Also includes shift
and rotate capabilities
ARAU
Auxiliary Register
Arithmetic Unit
An unsigned, 16-bit arithmetic unit used to calculate indirect addresses using the auxiliary registers as inputs
and outputs
AUX
REGS
Auxiliary Registers
0–7
These 16-bit registers are used as pointers to anywhere within the data space address range. They are
operated upon by the ARAU and are selected by the auxiliary register pointer (ARP). AR0 can also be used
as an index value for AR updates of more than one and as a compare value to AR.
BR
Bus Request
Signal
BR is asserted during access of the external global data memory space. READY is asserted to the device
when the global data memory is available for the bus transaction. BR
can be used to extend the data memory
address space by up to 32K words.
C Carry
Register carry output from CALU. C is fed back into the CALU for extended arithmetic operation. The C bit
resides in status register 1 (ST1), and can be tested in conditional instructions. C is also used in accumulator
shifts and rotates.
CALU
Central Arithmetic
Logic Unit
32-bit-wide main arithmetic logic unit for the SMJ320C2xx core. The CALU executes 32-bit operations in a
single machine cycle. CALU operates on data coming from ISCALE or PSCALE with data from ACC, and
provides status results to PCTRL.
DARAM Dual Access RAM
If the on-chip RAM configuration control bit (CNF) is set to 0, the reconfigurable data dual-access RAM
(DARAM) block B0 is mapped to data space; otherwise, B0 is mapped to program space. Blocks B1 and B2
are mapped to data memory space only, at addresses 0300–03FF and 0060–007F, respectively. Blocks 0
and 1 contain 256 words, while Block 2 contains 32 words.
DP
Data Memory
Page Pointer
The 9-bit DP register is concatenated with the seven LSBs of an instruction word to form a direct memory
address of 16 bits. DP can be modified by the LST and LDP instructions.
GREG
Global Memory
Allocation
Register
GREG specifies the size of the global data memory space.
IMR
Interrupt Mask
Register
IMR individually masks or enables the seven interrupts.
IFR
Interrupt Flag
Register
The 7-bit IFR indicates that the SMJ320C2xx has latched an interrupt from one of the seven maskable
interrupts.
INT# Interrupt Traps A total of 32 interrupts by way of hardware and/or software are available.
ISCALE
Input Data-Scaling
Shifter
16 to 32-bit barrel left-shifter. ISCALE shifts incoming 16-bit data 0 to16 positions left, relative to the 32-bit
output within the fetch cycle; therefore, no cycle overhead is required for input scaling operations.
MPY Multiplier
16 × 16-bit multiplier to a 32-bit product. MPY executes multiplication in a single cycle. MPY operates either
signed or unsigned 2s-complement arithmetic multiply.
MSTACK Micro Stack
MSTACK provides temporary storage for the address of the next instruction to be fetched when program
address-generation logic is used to generate sequential addresses in data space.
MUX Multiplexer Multiplexes buses to a common input
NPAR
Next Program
Address Register
NPAR holds the program address to be driven out on the PAB on the next cycle.
OSCALE
Output
Data-Scaling
Shifter
16 to 32-bit barrel left-shifter. OSCALE shifts the 32-bit accumulator output 0 to 7 bits left for quantization
management and outputs either the 16-bit high- or low-half of the shifted 32-bit data to the Data-Write Data
Bus (DWEB).
PAR
Program Address
Register
PAR holds the address currently being driven on P AB for as many cycles as it takes to complete all memory
operations scheduled for the current bus cycle.
PC Program Counter
PC increments the value from NPAR to provide sequential addresses for instruction-fetching and sequential
data-transfer operations.
PCTRL
Program
Controller
PCTRL decodes instruction, manages the pipeline, stores status, and decodes conditional operations.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
29
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
low-power modes (continued)
Table 10. Legend for the ’F240 Internal Hardware Functional Block Diagram (Continued)
SYMBOL NAME DESCRIPTION
PREG Product Register 32-bit register holds results of 16 × 16 multiply.
PSCALE
Product-Scaling
Shifter
0-, 1- or 4-bit left shift, or 6-bit right shift of multiplier product. The left-shift options are used to manage the
additional sign bits resulting from the 2s-complement multiply. The right-shift option is used to scale down
the number to manage overflow of product accumulation in the CALU. PSCALE resides in the path from the
32-bit product shifter and from either the CALU or the Data-Write Data Bus (DWEB), and requires no cycle
overhead.
STACK Stack
STACK is a block of memory used for storing return addresses for subroutines and interrupt-service
routines, or for storing data. The ’C20x stack is 16-bit wide and eight-level deep.
TREG
Temporary
Register
16-bit register holds one of the operands for the multiply operations. TREG holds the dynamic shift count
for the LACT, ADDT, and SUBT instructions. TREG holds the dynamic bit position for the BITT instruction.
SMJ320F240
DSP CONTROLLER
SGUS029 – APRIL 1999
30
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
functional block diagram of the SMJ320F240 DSP CPU
32
16
Data Bus
16
OSCALE (0–7)
D15–D0
A15–A0
16
1616
32
32
ACCL(16)ACCH(16)C
32
CALU(32)
3232
MUX
ISCALE (0–16)
16
MUX
PREG(32)
Multiplier
TREG0(16)
MUX
16
16
MUX
B1 (256 × 16)
B2 (32 × 16)
DARAM
B0 (256 × 16)
DARAM
7
LSB
from
IR
MUX
DP(9)
9
9
MUX
1616
ARAU(16)
16
3
3
3
3
ARB(3)
ARP(3)
Program Bus
16
16
16
16
AR7(16)
AR6(16)
AR5(16)
AR3(16)
AR2(16)
AR1(16)
AR0(16)
Stack 8 × 16
PC
MUX
NMI
WE
W/R
16
CLKIN/X2
CLKOUT1
X1
3
XINT[1–3]
MP/MC
RS
XF
BR
READY
STRB
R/W
PS
DS
IS
Control
Data Bus
Program Bus
Data Bus
AR4(16)
16
MUXMUX
Data/Prog
16
PSCALE (–6, 0,1,4)
16
Data
32
16
16
16
16
16
FLASH EEPROM
MUX
MUX
NPAR
PAR MSTACK
Program Control
(PCTRL)
Memory Map
Register
IMR (16)
IFR (16)
GREG (16)
16
Program Bus
NOTES: A. Symbol descriptions appear in Table 10.
B. For clarity the data and program buses are shown as single buses although they include address and data bits.
 Loading...
Loading...