

Page 1

Operation and Service Manual
Stanford Research Systems
Analog PID Controller
SIM960
Revision 2.3 • October 10, 2013
Page 2

Certification
Stanford Research Systems certifies that this product met its published specifications at the time
of shipment.
Warranty
This Stanford Research Systems product is warranted against defects in materials and workmanship for a period of one (1) year from the date of shipment.
Service
For warranty service or repair, this product must be returned to a Stanford Research Systems
authorized service facility. Contact Stanford Research Systems or an authorized representative
before returning this product for repair.
Information in this document is subject to change without notice.
Copyrightc Stanford Research Systems, Inc., 2003 – 2013. All rights reserved.
Stanford Research Systems, Inc.
1290–D Reamwood Avenue
Sunnyvale, CA 94089 USA
Phone: (408) 744-9040 • Fax: (408) 744-9049
www.thinkSRS.com • e-mail: info@thinkSRS.com
Printed in U.S.A. Document number 9-01558-903
SIM960 Analog PID Controller
Page 3

Contents
General Information iii
Safety and Precautions for Use . . . . . . . . . . . . . . . . iii
Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . vi
1 Getting Started 1 – 1
1.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . 1–2
1.2 Front Panel Operation . . . . . . . . . . . . . . . . . . 1 – 2
1.3 Rear Panel Monitoring . . . . . . . . . . . . . . . . . . 1–7
1.4 SIM Interface . . . . . . . . . . . . . . . . . . . . . . . . 1 – 8
2 Advanced Topics 2 – 1
2.1 PID Tuning Basics . . . . . . . . . . . . . . . . . . . . . 2 – 2
2.2 Ziegler-Nichols’ Tuning . . . . . . . . . . . . . . . . . 2–5
2.3 Anti-Windup and Conditional Integration . . . . . . . 2–7
2.4 Bumpless Transfer . . . . . . . . . . . . . . . . . . . . . 2 – 8
3 Remote Operation 3 – 1
3.1 Index of Common Commands . . . . . . . . . . . . . . 3 – 2
3.2 Alphabetic List of Commands . . . . . . . . . . . . . . 3–4
3.3 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 3–7
3.4 Commands . . . . . . . . . . . . . . . . . . . . . . . . . 3–8
3.5 Status Model . . . . . . . . . . . . . . . . . . . . . . . . 3–25
4 Performance Tests 4 – 1
4.1 Getting Ready . . . . . . . . . . . . . . . . . . . . . . . 4 – 2
4.2 Performance Tests . . . . . . . . . . . . . . . . . . . . . 4–2
4.3 Calibration . . . . . . . . . . . . . . . . . . . . . . . . . 4 – 6
5 Circuitry 5 – 1
5.1 Circuit Descriptions . . . . . . . . . . . . . . . . . . . . 5 – 2
5.2 Parts Lists . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 4
5.3 Schematic Diagrams . . . . . . . . . . . . . . . . . . . 5 – 7
i
Page 4

ii Contents
SIM960 Analog PID Controller
Page 5

General Information
Safety and Precautions for Use
Because of the variety of uses for the SIM960, those responsible for
the application and use of this control equipment must satisfy themselves that all necessary steps have been taken to assure that each
application and use meets all performance and safety requirements,
including any applicable laws, regulations, codes and standards.
Service
WARNING
The SIM960 is not designed, intended, or sold for use in hazardous
environments requiring fail-safe operation, including without limitation, operation of nuclear facilities, aircraft or spacecraft control
systems, and life support or weapons systems. The user must assure
that any failure or misapplication of the SIM960 cannot lead to a consequential failure of any interconnected equipment that could lead
to loss of life or limb, or property damage.
The illustrations, charts, and discussions shown in this manual are
intended solely for purposes of example. Since there are many variables and requirements associated with any particular control application, Stanford Research Systems does not assume responsibility
or liability for actual use based upon the examples shown in this
publication.
Do not install substitute parts or perform any unauthorized modifications to this instrument.
The SIM960 is a double-wide module designed to be used inside the
SIM900 Mainframe. Do not turn on the power to the Mainframe or
apply voltage inputs to the module until the module is completely
inserted into the mainframe and locked in place. Do not exceed
±18 V at any input or output connector.
iii
Page 6

iv General Information
Symbol Description
Alternating current
Caution - risk of electric shock
Frame or chassis terminal
Caution - refer to accompanying documents
Earth (ground) terminal
Battery
Fuse
On (supply)
Off (supply)
Symbols you may Find on SRS Products
SIM960 Analog PID Controller
Page 7

General Information v
Notation
The following notation will be used throughout this manual.
WARNING
CAUTION
A warning means that injury or death is possible if the instructions
are not obeyed.
A caution means that damage to the instrument or other equipment
is possible.
Typesetting conventions used in this manual are:
• Front-panel buttons are set as [Button];
[Adjust ] is shorthand for “[Adjust ] & [Adjust ]”.
• Front-panel indicators are set as Overload.
• Remote command names are set as *IDN?.
• Literal text other than command names is set as OFF.
Remote command examples will all be set in monospaced font. In
these examples, data sent by the host computer to the SIM960 are set
as straight teletype font, while responses received by the host
computer from the SIM960 are set as slanted teletype font.
SIM960 Analog PID Controller
Page 8

vi General Information
Specifications
Performance Characteristics
Min Typ Max Units
Amplifier Settings Control type Analog, PID+Offset
Input Range −10 +10 V common mode
−1 +1 V differential
Proportional gain 10
Integral gain 10
eff. time const. 2 ×10
Derivative gain 10
−1
−2
−6
−6
Offset −10 +10 V
resolution 1 mV
Amplifier Performance Bandwidth 100 kHz
Propagation delay 1 µs
Noise (f > 20 Hz) 8 nV/√Hz, RTI
Output Range −10 +10 V
Configuration Parameter control Digital
Parameter accuracy 1 %
Stability 200 ppm/◦C
Display Resolution 4 digits
3
10
V/V
5 ×1051/s
2
10
s
10 s
Inputs Measure BNC, 1 MΩ, ±10 V range
Setpoint Generator Setting −10 +10 V
Operating Temperature [14] 0 40
General Characteristics
Ext. Setpoint BNC, 1 MΩ, ±10 V range
resolution 1 mV
Ramp Rate 10
−3
10
4
V/s
Noise (f > 100 Hz) 20 nV/√Hz, RTI
◦
C
Power ±15, +5 V DC
Supply current 150 (±15 V), 80 (+5 V) mA
Number of inputs 2
Interface Serial (RS-232) through SIM interface
Connectors BNC (3 front, 2 rear); DB–15 (male) SIM interface
Weight 2.1 lbs
Dimensions 3.000W ×3.600H ×7.000D
SIM960 Analog PID Controller
Page 9

1 Getting Started
In This Chapter
This chapter gives you the necessary information to get started
quickly with your SIM960 Analog PID Controller.
1.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 – 2
1.2 Front Panel Operation . . . . . . . . . . . . . . . . . . 1 – 2
1.2.1 Inputs . . . . . . . . . . . . . . . . . . . . . . . 1 – 4
1.2.2 Ramping . . . . . . . . . . . . . . . . . . . . . . 1 – 5
1.2.3 Connections . . . . . . . . . . . . . . . . . . . . 1 – 5
1.2.4 Bar displays . . . . . . . . . . . . . . . . . . . . 1 – 6
1.2.5 Restoring the default configuration . . . . . . 1 – 6
1.3 Rear Panel Monitoring . . . . . . . . . . . . . . . . . . 1 – 7
1.3.1 Error Monitor . . . . . . . . . . . . . . . . . . . 1 – 7
1.3.2 Input Setpoint Monitor . . . . . . . . . . . . . 1 – 7
1.4 SIM Interface . . . . . . . . . . . . . . . . . . . . . . . 1 – 8
1.4.1 SIM interface connector . . . . . . . . . . . . . 1–8
1.4.2 Direct interfacing . . . . . . . . . . . . . . . . . 1 – 8
1 – 1
Page 10

1 – 2 Getting Started
1.1 General
The SIM960 is designed to maintain stability in systems requiring
low noise and wide bandwidth. The controller design consists of
a front end differential input amplifier, followed by an integrator
and a differentiator, arranged in what is known as the “ideal” PID
topology. The input amplifier (the “error amplifier”) differences the
the two single ended inputs, Setpoint and Measure , and multiplies
the resulting error signal (ε) by the proportional gain. The amplified
error is then passed to three parallel control paths:
1. The proportional path, no change is made to the signal.
2. The integral path with gain I.
3. The derivative path gain D.
These three signals can be independently selected to combine at a
summing amplifier, which is then buffered to the output. A constant
offset can also be added, which can be useful in applications that do
not use the I term. Mathematically, the behavior is
where the three terms within the braces, and Offset, can be independently enabled or zeroed.
For internal stability, the actual differentiator is “rolled off” to limit
the derivative gain to +40 dB.
The output circuitry includes a soft limiter that turns on when the
output exceeds user specified upper and lower limits and clamps the
output to the limit level. The output bar display on the right side of
the front panel has red LEDs at each end to indicate when the output
is being limited.
1.2 Front Panel Operation
This section discusses the essentials of operating the SIM960 locally,
from the front panel. See Chapter 3 for remote operation.
ε ≡ Setpoint − Measure (1.1)
)
Output = P ×(ε + IZε dt + D
• Press [Select] to choose which configuration parameter to view
in the numerical display. The indicator to the left of each
descriptor shows which parameter is displayed. When Shift
is highlighted, pressing [Select] steps the parameter selection
backwards.
dε
+ Offset (1.2)
dt
SIM960 Analog PID Controller
Page 11

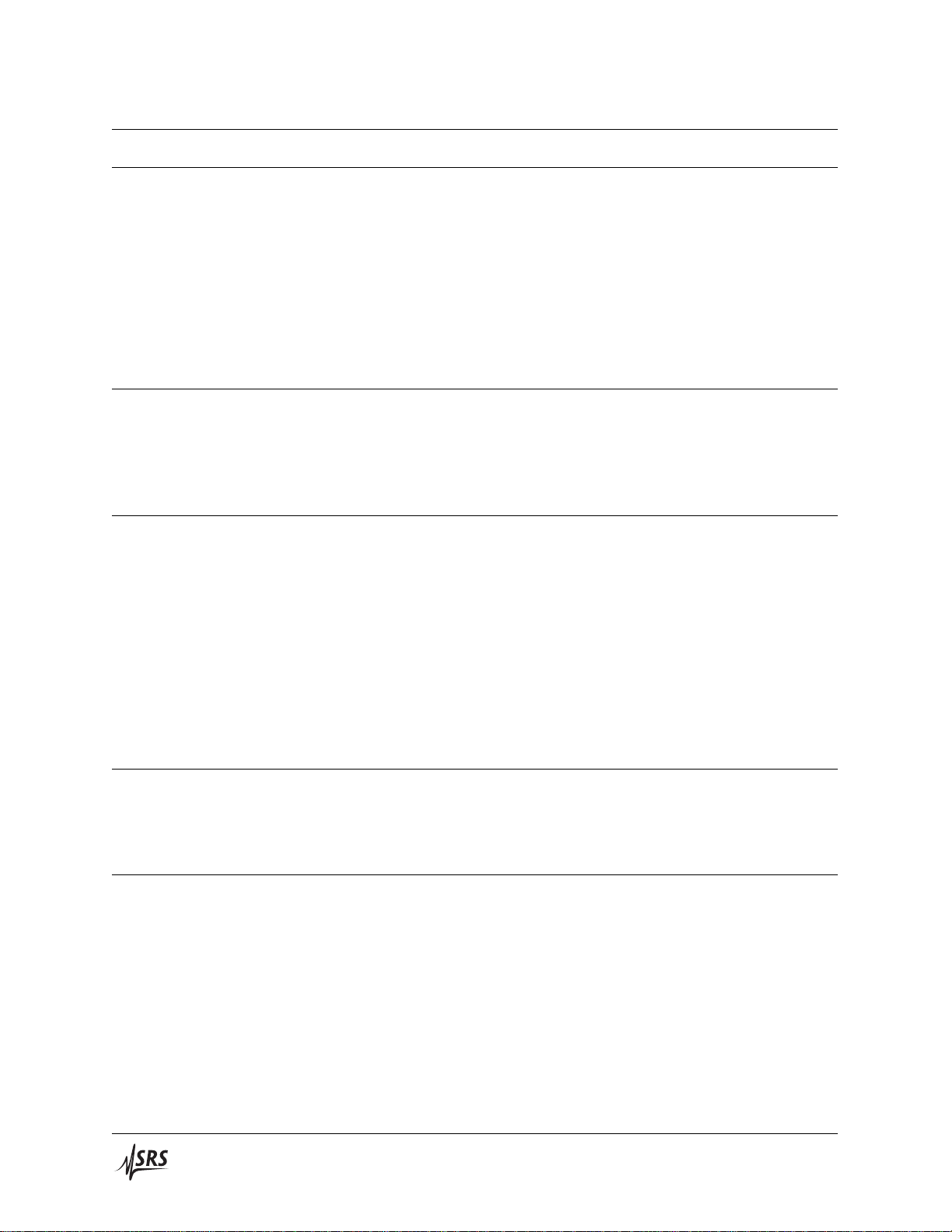
1.2 Front Panel Operation 1 – 3
Figure 1.1: The SIM960 front panel.
• The P, I, D, Offset, and SP Ramp parameters may be enabled/disabled with [On/Off]. Each of these parameters has an
additional indicator to the right of the descriptor to indicate the
on/off status.
• The Limits parameter has two sublevels: upper and lower
limit.
• The Setpoint , Measure, P × ε, and Output values are displayonly. All the other values can be changed using the [ ] buttons; the digit selected for adjustment is indicated by its flashing brightness. Change the digit selection while Shift is highlighted ([ ]).
• There are two formats for the numeric display: Exponential,
and fixed decimal. The format used for a particular parameter depends on its range. Parameters P, I, D and SP Ramp
(rate) vary by several orders of magnitude and are therefore
displayed in exponential format, while all other parameters
range from −10 V to +10 V and are displayed in fixed decimal
format.
SIM960 Analog PID Controller
• For exponential format, themantissa may bechanged using the
up/down arrow buttons. The active digit maybe selected using
the left/right buttons (= shift, followed by up/down button).
Page 12

1 – 4 Getting Started
The right-most digit (after ) is the power of ten exponent.
For example, the display = 1200.
• The P parameter has a selectable “±” indicator before the
mantissa.This allows the polarity of the controller to be tog-Polarity =⇒
gled by the user. All other exponentially displayed parameters
are unipolar, so no sign is displayed for these parameters.
• In fixed decimal format a value between −10 and +10 may be
selected using [ ] (and [Shift]).
• The two outputs, P × ε, and Output , are accompanied by bar
displays on the right side of the front panel. P × ε simply
ranges from −10 V to +10 V. However, since the controller output ranges between the user-programmed upper and lower
limits, the output bar display is normalized to that range. For
example, if the limits were set to +5 V and −1 V, the full range
of the bar display would be 6 V, and 0 V would no longer correspond to the center of the bar display, but would be1/6th of
the way up from the bottom. The default limits are ±10 V.
1.2.1 Inputs
• Use [Setpoint] in the INPUTS section of the front panel to
choose between an external setpoint input, and the internally
generated setpoint. An external setpoint can be supplied at the
Setpoint BNC input. When the internal setpoint is selected the
BNC connector is disconnected from the SIM960 circuitry.
• The Output BNC connector can be toggled between PID Control mode and Manual mode using [Output] (in the OUTPUT
section of the front panel). In manual mode, the SIM960 output
is set to the value indicated by the manual parameter.
The common mode range of the “Measure” and “Setpoint” inputs
extends from −10V to +10V. If either input is outside this range, the
overload LED indicator lights.
The differential input rangeis ±1 V. Whenever thedifference between
Setpoint and Measure exceeds this range, the overload LED indicator turns on. When connected with overall negative feedback and
reasonably well tuned, the SIM960 keeps the difference between the
setpoint and measure inputs as small as possible, so the differential
input range is unlikely to be exceeded. Before the SIM960 has been
tuned for a given system, however, this may not be true. It is helpful
to keep in mind that exceeding the ±1 V differential input range will
saturate the error amplifier, even if theoutput signalwouldotherwise
be within the upper and lower Limits setting. In such situations, the
controller will be effectively limited at some intermediate value.
SIM960 Analog PID Controller
Page 13

1.2 Front Panel Operation 1 – 5
1.2.2 Ramping
The ramping feature of the SIM960 PID Controller allows the user to
linearly slew the internally generated setpoint level from its current
value to a new value. The slew rate may be changed using the
SP Ramp parameter on the front panel.
The indicator to the right of SP Ramp shows whether ramping is enabled or disabled. Use [On/Off] (with SP Ramp selected) to enable/disable ramping. When disabled, changes to
the Internal Setpoint parameter take effect immediately. When
ramping is enabled, however, changes to Internal Setpoint do not
immediately take effect. Instead, Internal (in the Setpoint block of
the INPUTS section of the front panel) begins to blink, showing that
a new setpoint has been entered and a ramp event is now pending.
To begin the ramp, press [Ramp Start/Stop]. Now, the Internal blink
rate doubles, indicating that the setpoint is ramping. To pause the
ramp, press [Ramp Start/Stop]˙When the ramp is paused, the In-
ternal blink rate becomes uneven. To continue the ramp, press
[Ramp Start/Stop] again. When the setpoint reaches the new programmed value, the ramp automatically terminates, and Internal
stops blinking.
1.2.3 Connections
Note, SP Ramp has no sign in the numerical display. This is because the polarity of the ramp rate is unambiguously determined
by whether the newly entered setpoint is greater or less than the
current setpoint. The range of available ramp rates is from 1mV/s
to 10,000V/s. For ramp rates less than or equal to 1 V/s, the rate
is dynamically trimmed based on real-time measurements from the
onboard A-to-D converter.
Connect the sensor output of the system to be controlled to the “Measure”input of the SIM960˙If an external setpoint isto be supplied, connect this to the “Setpoint” input, and use the button in the INPUTS
section of the front panel to select “External” input. Before connecting the SIM960 output to the system to control, it may be necessary to
set the user programmable output upper and lower Limits to guard
against damaging the system. Care should be taken to insure that
the programmed output range is consistent with the system input
range. Once the limits have been programmed, connect the SIM960
output to the system input.
SIM960 Analog PID Controller
Page 14

1 – 6 Getting Started
1.2.4 Bar displays
Two LED bar displays have been included on the right side of the
SIM960 front panel to provide visual information about the P × ε
and Output signals. This reduces the need to frequently return to
those fields on the numerical display while trying to adjust other
tuning parameters. Some time should be taken to understand what
information these bar displays provide.
Each bar has two lighted LEDs; one for the maximum peak of the
signal, and one for the minimum peak. The peaks are determined
with respect to time variation of the signal, and they decay back to
the DC level with a decay time of ∼100 ms.
To understand how a signal is represented in the bar display, consider an input sine wave of frequency 1 Hz. Since frequency is low
compared to the inverse of the decay time, the maximum and minimum peak values are indistinguishable, and the signal appears as
a single LED that tracks the sine wave. As the frequency increases,
the maximum peak does not decay quickly enough to track the negative excursions the signal, and the minimum peak also fails to track
positive excursions. So there appear to be two lighted LEDs slightly
separated, roughly tracking the sine wave. As the frequency is further increased to well above the decay time inverse, the two lighted
LEDs no longer decay at all from their peak levels, so there appear
to be two lighted LEDs marking the maximum and minimum peaks
of the sine wave.
Thus, a slowly varying signal appears as a single lighted LED in the
display, tracking the signal changes with time. But a quickly varying
signal, however, appears as two lighted LEDs marking themaximum
and minimum excursions of the signal in time.
The range of the P × ε bar display is ±10 V. The Output bar display
has a range determined by the user programmed upper and lower
limits. For example, if the limits were set to +5 V and −1 V, the full
range of the bar display would be 6 V, and 0 V would no longer
correspond to the center of the bar display, but would be1/6th of the
way up fromthe bottom. Also, the Output bar display has a red LED
on each end to indicate whether the controller output is saturated at
its limit.
1.2.5 Restoring the default configuration
The default configuration of the SIM960 can be restored in either of
two ways: From the front panel, or via the remote interface.
To restore from the front panel, first turn off the power to the SIM960
by switching its SIM900 Mainframe to “Standby,” then switch the
SIM960 Analog PID Controller
Page 15

1.3 Rear Panel Monitoring 1 – 7
power on while holding down [Ramp Start/Stop]. Keep the button
depressed for about one second after power comes on.
The default configuration can also be restored via the remote interface
using the *RST command.
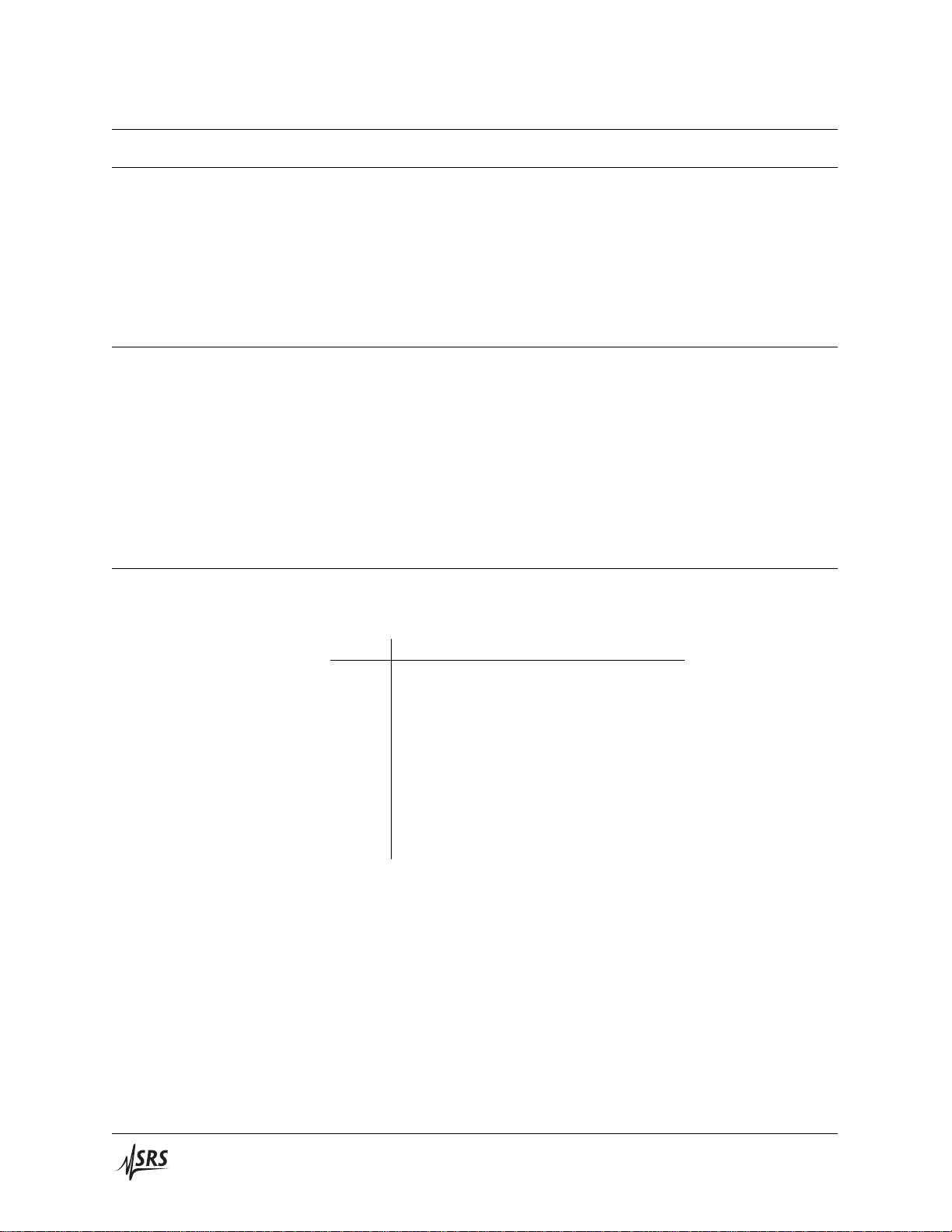
1.3 Rear Panel Monitoring
Two analog monitor signals are available at the rear panel of the
SIM960 (see Figure 1.2).
1.3.1 Error Monitor
The upper BNC connector carries a buffered copy of the P × ε output
of the error amplifier. This output is always available, even when
the P term is disabled from the control law. It is also active when the
main SIM960 output is set to Manual mode.
1.3.2 Input Setpoint Monitor
The lower BNC is a copy of the internally generated setpoint voltage.
This output is also always available, even when the Setpoint mode
is set to External.
SIM960 Analog PID Controller
Figure 1.2: The SIM960 rear panel.
Page 16

1 – 8 Getting Started
1.4 SIM Interface
The primary connection to the SIM960 Analog PID Controller is the
rear-panel DB–15 SIM interface connector. Typically, the SIM960 is
mated to a SIM900 Mainframe via this connection, either through
one of the internal mainframe slots, or the remote cable interface.
It is also possible to operate the SIM960 directly, without using the
SIM900 Mainframe. This section provides details on the interface.
CAUTION
The SIM960 has no internal protection against reverse polarity, missing
supply, or overvoltage on the power supply pins. Misapplication of power
may cause circuit damage. SRS recommends using the SIM960 together
with the SIM900 Mainframe for most applications.
1.4.1 SIM interface connector
The DB–15 SIM interface connector carries allthe power and communications lines to the instrument. The connector signals are specified
in Table 1.1
Pin Signal Src ⇒ Dest Description
1 SIGNAL GND MF ⇒SIM Ground reference for signal
2 −STATUS SIM ⇒ MF Status/service request (GND = asserted, +5 V= idle)
3 RTS MF ⇒ SIM HW Handshake (+5V= talk; GND = stop)
4 CTS SIM ⇒MF HW Handshake (+5 V= talk; GND= stop)
5 −REF 10MHZ MF ⇒ SIM 10 MHz reference (optional connection)
6 −5 V MF ⇒ SIM Power supply (no connection in SIM960)
7 −15 V MF ⇒ SIM Power supply (analog circuitry)
8 PS RTN MF ⇒ SIM Power supply return
9 CHASSIS GND Chassis ground
10 TXD MF ⇒ SIM Async data (start bit = “0”= +5V; “1” = GND)
11 RXD SIM ⇒ MF Async data (start bit = “0”= +5 V; “1” = GND)
12 +REF 10MHz MF ⇒ SIM 10MHz reference (optional connection)
13 +5 V MF ⇒ SIM Power supply (digital circuitry)
14
+15 V MF ⇒ SIM Power supply (analog circuitry)
15 +24 V MF ⇒ SIM Power supply (no connection in SIM960)
Direction
1.4.2 Direct interfacing
Table 1.1: SIM Interface Connector Pin Assignments, DB-15
The SIM960 is intended for operation in the SIM900 Mainframe, but
users may wish to directly interface the module to their own systems
without the use of additional hardware.
SIM960 Analog PID Controller
Page 17

1.4 SIM Interface 1 – 9
The mating connector needed is a standard DB–15 receptacle, such as
Amp part # 747909-2 (or equivalent). Clean, well-regulated supply
voltages of +5,±15VDC must be provided, following the pin-out
specified in Table 1.1. Ground must be provided on Pins 1 and 8,
with chassis ground on Pin 9. The −STATUS signal maybemonitored
on Pin 2 for a low-going TTL-compatible output indicating a status
message.
1.4.2.1 Direct interface cabling
If the user intends to directly wire the SIM960 independent of the
SIM900 Mainframe, communication is usually possible by directly
connecting the appropriate interface lines from the SIM960 DB–15
plug to the RS-232 serial port of a personal computer.1Connect RXD
from the SIM960 directly to RD on the PC, TXD directly to TD, and
similarly RTS→RTS and CTS→CTS. In other words, a null-modem
style cable is not needed.
To interface directly to the DB–9 male (DTE) RS-232 port typically
found on contemporary personal computers, a cable must be made
with a female DB–15 socket to mate with the SIM960, and a female
DB–9 socket to mate with the PC’s serial port. Separate leads from
the DB–15 need to go to the power supply, makingwhat is sometimes
know as a “hydra” cable. The pin-connections are given in Table 1.2.
DB–15/F to SIM960 Name
DB–9/F
3 ←→ 7 RTS
4 ←→ 8 CTS
10 ←→ 3 TxD
11 ←→ 2 RxD
5 Computer Ground
to P/S
7 ←→ −15 VDC
14 ←→ +15 VDC
13 ←→ +5 VDC
8,9 ←→ Ground (P/S return current)
1 ←→ Signal Ground (separate wire to Ground)
Table 1.2: SIM960 Direct Interface Cable Pin Assignments
1
Although the serial interface lines on the DB-15 do not satisfy the minimum
voltage levels of the RS-232 standard, they are typically compatible with desktop
personal computers
SIM960 Analog PID Controller
Page 18

1 – 10 Getting Started
1.4.2.2 Serial settings
The initial serial port settings at power-on are: 9600 Baud, 8–bits, no
parity, 1 stop bit, and RTS/CTS flow control. These may be changed
with the BAUD, FLOW, or PARI commands.
The maximum standard baud rate that the SIM960 supports is 38400.
The minimum baud rate is 110. Above 38400, the SIM960 can be
set to the following (non-RS–232-standard) baud rates: 62500, 78125,
104167, 156250. Note that these rates are typically not accessible on
a standard PC RS–232 port, but can be used between the SIM960 and
the SIM900 Mainframe.
SIM960 Analog PID Controller
Page 19

2 Advanced Topics
In This Chapter
This chapter discusses a simple “closed-loop” tuning procedure,
along with some of the advanced features of the SIM960 Analog
PID Controller.
2.1 PID Tuning Basics . . . . . . . . . . . . . . . . . . . . 2 – 2
2.2 Ziegler-Nichols’ Tuning . . . . . . . . . . . . . . . . . 2 – 5
2.2.1 Open-loop tuning . . . . . . . . . . . . . . . . . 2 – 5
2.2.2 Closed-loop tuning . . . . . . . . . . . . . . . . 2–6
2.3 Anti-Windup and Conditional Integration . . . . . . 2 – 7
2.4 Bumpless Transfer . . . . . . . . . . . . . . . . . . . . 2 – 8
2.4.1 Manual-to-PID . . . . . . . . . . . . . . . . . . 2 – 8
2.4.2 PID-to-Manual . . . . . . . . . . . . . . . . . . 2 – 8
2 – 1
Page 20

2 – 2 Advanced Topics
2.1 PID Tuning Basics
PID control provides a simple way to minimize the effect of disturbances to a system. The system consists of a closed feedback
loop between two elements, the SIM960 controller and the user pro-
cess. The controller has two inputs, Setpoint and Measure , and an
Output. The process consists of a power source that can be directly
changed by the controller, in conjunction witha sensor to monitor the
process behavior. The sensor signal, after any necessary conditioning, is the process output. This should be connected to the Measure
input of the SIM960, and the SIM960 Output should be connected to
the process input, forming a feedback loop.
The difference between the Setpoint and Measure inputs is the error
signal, ε ≡ Setpoint − Measure (Eqn 1.1). In the SIM960 the error
signal is amplified by the proportional gain. The controller uses the
amplified error, P × ε, to generate three control signals:
1. Proportional, the P amplified error with no changes.
2. Integral, the time integral of the amplified error signal multiplied by a gain coefficient I.
3. Derivative, the time derivative of the amplified error signal
multiplied by a gain coefficient D.
These signals, as well as an Offset, are combined at a summing
junction to produce the controller output (see Eqn 1.2). Figure 2.1
shows a schematic representation of the SIM960 controller topology.
Note the proportional gain coefficient is commontoall three terms, so
the net integral and derivative gains are P ×I and P ×D, respectively,
whether or not proportional control is enabled.
The controller monitors the process output and makes small adjustments to the process in order to minimize deviations of Measure
from Setpoint due to external disturbances. To accomplish this, the
controller must be properly tuned, meaning that the gains for each
of the three control signals—proportional, integral, and derivative—
must be chosen appropriately to match the behavior of the process.
A well-tuned controller should be able to maintain a stable process
output.
The control loop feedback should be negative. However, because
the polarity of the process response to the controller output is an
arbitrary function of the design of the system, it is vital that the
controller polarity be chosen properly. Based on the topology of the
SIM960 design, feedback polarity can be changed simplybychanging
the polarity of the proportional gain parameter P. The user must
first determine which polarity will provide negative feedback. If the
SIM960 Analog PID Controller
Page 21

2.1 PID Tuning Basics 2 – 3
Manual
Control
Output
P
ε
×
P
ε
×
+
−
× 1
D
I
Offset
Control
Σ
Internal
Setpoint/Ramp
Generator
SP
M
Monitor Output
(rear panel BNC)
P
External
Setpoint
Input
Measure
Input
ε
= SP − M
*
Output**
Selector
* Antiwindup circuitry (see text)
** Bumpless transfer when I is enabled
Output Buffer w/User
Controlled Limits
SIM960 Analog PID Controller
Figure 2.1: The SIM960 block diagram.
processisnoninverting, i.e. a small positive change at its input results
in a positive change at its output, then using positive P polarity will
ensure negative feedback in the loop. Tosee this, follow the effect of a
small positive change at the process output. Since the process output
is connected to the Measure input of the SIM960, a small positive
change would cause a negative change to ε. The resulting change at
the controller Outputwould also be negative, as would be that of the
process output. Thus, the initial small positive change at the process
output is “corrected” by a negative change after going around the
feedback loop. As a general rule, if the process is noninverting, then
the P-polarity should be positive. If the process is inverting, negative
P-polarity should be used.
Care should be taken in designing the process. The sensor should be
situated so that it is responsive to changes to the part of the system
under control. Placing the sensor too remotely can result in a time
delay which limits the quality of control. Also, the sensor should
primarily measure the system’s response to external changes, rather
than measure the changes directly. The latter can sometimes be used
to help the controller anticipate transients, but attheriskof sacrificing
accuracy in reaching the target setpoint.
Tuning a PID controller amounts to determining what the relative
contributions should be from each of the three types of control. The
simplest approach is to start with proportional control and add inte-
Page 22

2 – 4 Advanced Topics
gral and derivative one at a time. A simple P-controller generates a
control variable that is proportional to the error signal.
1
Increasing the P gain should cause the process output to respond
by moving closer to the setpoint. Generally, enough amplification
should be used so that the process output is broughtreasonably close
to the setpoint. Too much gain, however, will cause the system to
oscillate. Start with a small P gain, and increase by factors of two
until the system begins to oscillate. Then back off in small amounts
until stability is recovered.
While it is possible to maintain stability with a simple P controller,
in general this will lead to a finite, non-zero ε. Increasing P will
tend to reduce the resulting ε, but too much proportional gain will
eventually lead to oscillations.
One way to eliminate this nonzero error problem is to include an
offset at the controller output. The SIM960 Offset parameter can be
turned on and adjusted toholdthe process power at a level thatmaintains a smaller error. However, this is only a coarse improvement,
since the necessary power level may change with time.
Integral control provides an “automatic” way to dynamically adjust
the effective offset to zero the error; in older controllers, integral
action was called “automatic reset” for this reason. Integral control
simply integrates the error signal with respect to time. Thus the
controller output changes until the error has been reduced to zero,
near which point the controller output slows and stops changing. If
the error drifts over time, the integrator responds by adjusting the
controller output to cancel the error. So it is much like having a
dynamic output offset constantly responding to system changes. As
with proportional gain, too much integral gain can cause oscillation.
Again, start with a small I gain and increase by factors of two until
oscillation begins, then back off until stability is recovered.
Though integral control is effective at reducing the error, it is not as
effective as proportional control at responding quickly to changes.
This is because the integrator needs time to build up a response. To
further enhance the response of the process to rapid changes, derivative control is often employed. Derivative control is proportional
to the rate of change of the error, so it is relatively unresponsive to
slow changes, but rapid changes to the system produce a significant
response. Derivative control reduces oscillations that can resultfrom
step changes to a system.
1
During the tuning process, it is important to keep in mind that the differential
input range of the SIM960 is ±1.0 V. It is good practice to occasionally glance at
the OVLD indicator to ensure the input amplifier is not saturated.
SIM960 Analog PID Controller
Page 23

2.2 Ziegler-Nichols’ Tuning 2 – 5
2.2 Ziegler-Nichols’ Tuning
For many applications, a good starting point for tuning is one of
the two classic Ziegler-Nichols methods2. These two methods are
briefly described below; for more details, see, for example, Åstr¨om
& H¨agglund, PID Controllers: Theory, Design, and Tuning, Instru-
ment Society of America (1995).
2.2.1 Open-loop tuning
The open-loop Ziegler-Nichols method involves introducing a small
step change to the process under control, and making a few measurements from the response. The procedure is:
• Switch the SIM960 into Manual mode, and then adjust until
the process is stable and near the desired operating point.
• Now make a small, suddenstep change, ∆, in the control signal.
Call this time t = 0.
• Record the process response in the Measure signal. Define the
(dimensionless) process step-response function:
h(t) =
Measure(t) −Measure(0)
∆
• Observe the point of maximum slope in h. Extend a straight
line through this point, tangent to h, downward(see Figure2.2).
• Let L be the time coordinate where the straight line crosses
h = 0; and let a be the negative of the h–intercept (i. e., a > 0 in
Figure 2.2).
• Note thatit is not necessaryto wait for the processto completely
settle following the step change ∆—it is sufficient to simply wait
until the maximum slope is observed in Measure.
From a and L, Ziegler and Nichols suggest tuning for P, PI, and PID
control as shown in Table 2.1
Control P I D
P 1/a
PI 0.9/a 1/(3L)
PID 1.2/a 1/(2L) L/2
Table 2.1: Ziegler-Nichols open-loop tuning parameters
2
SIM960 Analog PID Controller
Ziegler, J. G., & Nichols, N. B. 1942, Trans. ASME, 64, 759
Page 24

2 – 6 Advanced Topics
t
h(t)=
L
a
t
0
Manual(t)
∆
∆
Meas–Meas(0)
0
maximum
slope
2.2.2 Closed-loop tuning
Figure 2.2: The open-loop step response of the process.
An alternate method, also due to Ziegler and Nichols, is based on
measuring the gain at which the process just begins to oscillate. The
procedure is:
• Switch the SIM960 into PID mode, with I and D both disabled.
Choose a value for Setpoint around the desired operating
point, and set P so some small value.
• Slowly increase P until the process starts to oscillate.
• Record this value of P as Ku, the “ultimate” gain. Also observe
the period of the oscillations, Tu.
From Kuand Tu, Ziegler and Nichols again suggest tuning for P, PI,
and PID control as shown in Table 2.2
Control P I D
P Ku/2
PI 2Ku/5 5/(4Tu)
PID 3Ku/5 2/T
Tu/8
u
Table 2.2: Ziegler-Nichols closed-loop tuning parameters
SIM960 Analog PID Controller
Page 25

2.3 Anti-Windup and Conditional Integration 2 – 7
2.3 Anti-Windup and Conditional Integration
For better integral performance, the SIM960 features anti-windup
circuitry in the form of conditional integration. The purpose of antiwindup is to improve the controller’s ability to recover from output
saturation. When the output saturates, the error is likely to be large,
since the process is unable to provide power fast enough to recover
the process output. However, the integrator contribution may not
account for the full amount of the controller output in this case.
Subsequently, the integrator continues to integrate the error until the
integrator output saturates. This “winding up” aspect of integral
control becomes a problem when the process recovers and the error
level passes through zero, because the error must move significantly
beyond zero for the integrator to “unwind” from saturation. In
general, once the controller output is clamped at a limit, nothing is
accomplished by drivingit harder into that limit by moreintegration.
In fact, it only makes it harder to recover from saturation, since the
result is usually large swings back and forth from limit to limit.
There are a variety of anti-windup strategies to mitigate this effect. A
simple way to implement anti-windup is to switch off the integrator
whenever the output saturates. This is not the same as resetting the
integrator (zeroing its output by discharging the feedback capacitance) because the output simply stops moving, but does not go to
zero. It is equivalent to momentarily zeroing the integrator input, so
that there is no signal to integrate while the output is saturated.
An improvement to this scheme comes from recognizing that not
all saturation conditions cause unwanted integrator wind-up. For
example, suppose the controller/process history were such as to produce the following conditions:
• Error signal negative
• Integrator output finite, not saturated
• Controller output saturated at the positive limit
Then, the integrator output would be moving in the negative direction, since its input, the error, is negative. This would not cause
the controller output to be pushed harder into saturation; in fact it
may eventually pull it out of saturation. So stopping the integrator
would hinder the controller’s effort to recover the process variable.
The SIM960 uses a technique called “conditional integration:” Con-
ditional integration only stops the integrator when the polarity of the error
is such as to drive the integrator toward the saturated limit.
SIM960 Analog PID Controller
Page 26

2 – 8 Advanced Topics
2.4 Bumpless Transfer
When switching the output mode between Manual and PID Control, transients on the output signal can disturb the system under
control. Minimizing these switching transients is known as “bumpless transfer.” The SIM960 supports bumpless transfer under certain
conditions, as described below.
2.4.1 Manual-to-PID
When switching from Manual output to PID Control output, bumpless transfer is only possible if the integral term is enabled.3When I
is turned on and the SIM960 is in Manual output mode, the input to
the integrator is rerouted to integrate the difference between Manual
and the (deselected) PID Control output. This effectively allows the
PID Control to “track” the Manual value, presetting the integrator
as necessary. Then, when the output is switched back to PID Control,
the controller output is already the same as the Manual output level.
Were this not the case, the integrator output would likely saturate
while in manual mode, and uponswitching to PID Controlmode, the
controller output would suddenly jump. Bumpless transfer insures
that the transition from Manual to PID Control mode is smooth.
2.4.2 PID-to-Manual
An additional feature of the SIM960 isthe ability to presetthe manual
level to the current PID control output level, so that switching from
PID mode to manual mode will also be smooth. With the module
in PID mode, select the Manual field. Press [On/Off] and hold it
down for at least one second. After one second the manual display
reading will shift to the current PID output level. The output mode
will remain in PID control mode until it is manually switched on the
front panel or through the remote interface. But the new manual
output level will be equal to the PID control output.
3
This can be understood mathematically, since only the integral term has an “unspecified” initial offset value that can be set to an arbitrary valuewithoutviolating
Eqn 1.2.
SIM960 Analog PID Controller
Page 27

3 Remote Operation
In This Chapter
This chapter describes operating the module over the serial interface.
3.1 Index of Common Commands . . . . . . . . . . . . . 3 – 2
3.2 Alphabetic List of Commands . . . . . . . . . . . . . 3 – 4
3.3 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 3 – 7
3.3.1 Power-on configuration . . . . . . . . . . . . . 3 – 7
3.3.2 Buffers . . . . . . . . . . . . . . . . . . . . . . . 3 – 7
3.3.3 Device Clear . . . . . . . . . . . . . . . . . . . . 3 – 7
3.4 Commands . . . . . . . . . . . . . . . . . . . . . . . . 3 – 8
3.4.1 Command syntax . . . . . . . . . . . . . . . . . 3 – 8
3.4.2 Examples . . . . . . . . . . . . . . . . . . . . . 3 – 9
3.4.3 Controller settings commands . . . . . . . . . 3 – 10
3.4.4 Controller configuration commands . . . . . . 3 – 12
3.4.5 Monitor commands . . . . . . . . . . . . . . . 3 – 14
3.4.6 Display commands . . . . . . . . . . . . . . . . 3 – 16
3.4.7 Serial communication commands . . . . . . . 3 – 17
3.4.8 Status commands . . . . . . . . . . . . . . . . . 3 – 17
3.4.9 Interface commands . . . . . . . . . . . . . . . 3–20
3.5 Status Model . . . . . . . . . . . . . . . . . . . . . . . 3 – 25
3.5.1 Status Byte (SB) . . . . . . . . . . . . . . . . . . 3 – 26
3.5.2 Service Request Enable (SRE) . . . . . . . . . . 3 – 26
3.5.3 Standard Event Status (ESR) . . . . . . . . . . 3 – 27
3.5.4 Standard Event Status Enable (ESE) . . . . . . 3 – 27
3.5.5 Communication Error Status (CESR) . . . . . . 3 – 27
3.5.6 Communication Error Status Enable (CESE) . 3 – 28
3.5.7 Instrument Status (INCR) . . . . . . . . . . . . 3 – 28
3.5.8 Instrument Status (INSR) . . . . . . . . . . . . 3–29
3.5.9 Analog to Digital Status Enable (INSE) . . . . 3–29
3.5.10 Analog to Digital Status (ADSR) . . . . . . . . 3 – 29
3.5.11 Analog to Digital Status Enable (ADSE) . . . . 3 – 30
3 – 1
Page 28

3 – 2 Remote Operation
3.1 Index of Common Commands
symbol definition
i,j Integers
f,g Floating-point values
z Literal token
(?) Required for queries; illegal for set commands
var Parameter always required
{var} Required parameter for set commands; illegal for queries
[var] Optional parameter for both set and query forms
Controller Settings
PCTL(?) z 3 – 10 Proportional action ON/OFF
ICTL(?) z 3 – 10 Integral action ON/OFF
DCTL(?) z 3 – 10 Derivative action ON/OFF
OCTL(?) z 3 – 10 Offset ON/OFF
GAIN(?) {f } 3 – 10 Proportional Gain
APOL(?) z 3 – 11 Controller Polarity
INTG(?) {f } 3 – 11 Integral Gain
DERV(?) {f } 3 – 11 Derivative Gain
OFST(?) {f } 3 – 11 Output Offset
Controller Configuration
AMAN(?) z 3 – 12 Output (Manual Output/PID Control)
INPT(?) z 3 – 12 Input (Internal/External Setpoint)
SETP(?) {f } 3 – 12 New setpoint
RAMP(?) z 3 – 12 Internal setpoint ramping ON/OFF
RATE(?) {f } 3 – 12 Setpoint ramping Rate
RMPS? 3 – 13 Setpoint ramping status
STRT z 3 – 13 Pause or continue ramping
MOUT(?) {f } 3 – 13 Manual Output
ULIM(?) {f } 3 – 13 Upper Output Limit
LLIM(?) {f } 3 – 14 Lower Output Limit
Monitor
SMON? [i] 3 – 14 Setpoint Input Monitor
MMON? [i] 3 – 14 Measure Input Monitor
EMON? [i] 3 – 15 Amplified Error Monitor
OMON? [i] 3 – 15 Output Monitor
RFMT(?) {z} 3 – 15 Output Streaming Records Format
SOUT [z] 3 – 16 Stop Streaming
FPLC(?) {i} 3 – 16 Frequency of Power Line Cycle
SIM960 Analog PID Controller
Page 29

3.1 Index of Common Commands 3 – 3
Display
DISP(?) {z} 3 – 16 Select Field
SHFT(?) {z} 3 – 16 Shift Status
DISX(?) {z} 3 – 17 Front Panel Display Enable
Serial Communications
BAUD(?) {i} 3 – 17 Baud Rate
FLOW(?) {z} 3 – 17 Flow Control
PARI(?) {z} 3 – 17 Parity
Status
*CLS 3 – 17 Clear Status
*STB? [i] 3 – 18 Status Byte
*SRE(?) [i,] {j} 3 – 18 Service Request Enable
*ESR? [i] 3 – 18 Standard Event Status
*ESE(?) [i,] {j} 3 – 18 Standard Event Status Enable
CESR? [i] 3 – 18 Comm Error Status
CESE(?) [i,]{j} 3 – 19 Comm Error Status Enable
INCR? [i] 3 – 19 Instrument condition register
INSR? [i] 3 – 19 Instrument status register
INSE(?) [i], {j} 3 – 19 Instrument status enable register
ADSR? [i] 3 – 19 A-to-D status register
ADSE(?) [i], {j} 3 – 19 A-to-D status enable register
PSTA(?) {z} 3 – 20 Pulse −STATUS Mode
Interface
*RST 3 – 20 Reset
CONS(?) {z} 3 – 21 Console Mode
*IDN? 3 – 21 Identify
*TST? 3 – 21 Self Test
*OPC(?) 3 – 22 Operation Complete
WAIT i 3 – 22 Wait
LEXE? 3 – 22 Execution Error
LCME? 3 – 23 Command Error
LBTN? 3 – 23 Last Button
TOKN(?) {z} 3 – 24 Token Mode
TERM(?) {z} 3 – 24 Response Termination
SIM960 Analog PID Controller
Page 30

3 – 4 Remote Operation
3.2 Alphabetic List of Commands
?
*CLS 3 – 17 Clear Status
*ESE(?) [i,] {j} 3 – 18 Standard Event Status Enable
*ESR? [i] 3 – 18 Standard Event Status
*IDN? 3 – 21 Identify
*OPC(?) 3 – 22 Operation Complete
*RST 3 – 20 Reset
*SRE(?) [i,] {j} 3 – 18 Service Request Enable
*STB? [i] 3 – 18 Status Byte
*TST? 3 – 21 Self Test
A
ADSE(?) [i], {j} 3 – 19 A-to-D status enable register
ADSR? [i] 3 – 19 A-to-D status register
AMAN(?) z 3 – 12 Output (Manual Output/PID Control)
APOL(?) z 3 – 11 Controller Polarity
B
BAUD(?) {i} 3 – 17 Baud Rate
C
CESE(?) [i,]{j} 3 – 19 Comm Error Status Enable
CESR? [i] 3 – 18 Comm Error Status
CONS(?) {z} 3 – 21 Console Mode
D
DCTL(?) z 3 – 10 Derivative action ON/OFF
DERV(?) {f } 3 – 11 Derivative Gain
DISP(?) {z} 3 – 16 Select Field
DISX(?) {z} 3 – 17 Front Panel Display Enable
E
EMON? [i] 3 – 15 Amplified Error Monitor
F
FLOW(?) {z} 3 – 17 Flow Control
FPLC(?) {i} 3 – 16 Frequency of Power Line Cycle
G
GAIN(?) {f } 3 – 10 Proportional Gain
SIM960 Analog PID Controller
Page 31

3.2 Alphabetic List of Commands 3 – 5
I
ICTL(?) z 3 – 10 Integral action ON/OFF
INCR? [i] 3 – 19 Instrument condition register
INPT(?) z 3 – 12 Input (Internal/External Setpoint)
INSE(?) [i], {j} 3 – 19 Instrument status enable register
INSR? [i] 3 – 19 Instrument status register
INTG(?) {f } 3 – 11 Integral Gain
L
LBTN? 3 – 23 Last Button
LCME? 3 – 23 Command Error
LEXE? 3 – 22 Execution Error
LLIM(?) {f } 3 – 14 Lower Output Limit
M
MMON? [i] 3 – 14 Measure Input Monitor
MOUT(?) {f } 3 – 13 Manual Output
O
OCTL(?) z 3 – 10 Offset ON/OFF
OFST(?) {f } 3 – 11 Output Offset
OMON? [i] 3 – 15 Output Monitor
P
PARI(?) {z} 3 – 17 Parity
PCTL(?) z 3 – 10 Proportional action ON/OFF
PSTA(?) {z} 3 – 20 Pulse −STATUS Mode
R
RAMP(?) z 3 – 12 Internal setpoint ramping ON/OFF
RATE(?) {f } 3 – 12 Setpoint ramping Rate
RFMT(?) {z} 3 – 15 Output Streaming Records Format
RMPS? 3 – 13 Setpoint ramping status
S
SETP(?) {f } 3 – 12 New setpoint
SHFT(?) {z} 3 – 16 Shift Status
SMON? [i] 3 – 14 Setpoint Input Monitor
SOUT [z] 3 – 16 Stop Streaming
STRT z 3 – 13 Pause or continue ramping
T
TERM(?) {z} 3 – 24 Response Termination
SIM960 Analog PID Controller
Page 32

3 – 6 Remote Operation
TOKN(?) {z} 3 – 24 Token Mode
U
ULIM(?) {f } 3 – 13 Upper Output Limit
W
WAIT i 3 – 22 Wait
SIM960 Analog PID Controller
Page 33

3.3 Introduction 3 – 7
3.3 Introduction
Remote operation of the SIM960 is through a simple command language documented in this chapter. Both set and query forms of most
commands are supported, allowing the user complete control of the
amplifier from a remote computer, either through the SIMmainframe
or directly via RS-232 (see section 1.4.2.1).
See Table 1.1 for the specification of the DB–15 SIM Interface Connector.
3.3.1 Power-on configuration
The settings for the remote interface are 9600 baud with no parity
and hardware flow control, and local echo disabled (CONS OFF).
Most of the SIM960 instrument settings are stored in non-volatile
memory, and at power-on the instrument returns to the state it was
last in when power was removed. Exceptions are noted in the command descriptions.
Reset values of parameters are shown in boldface.
3.3.2 Buffers
3.3.3 Device Clear
The SIM960 stores incoming bytes from the host interface in a 32byte Input Buffer. Characters accumulate in the Input Buffer until
a command terminator (either hCRi or hLFi) is received, at which
point the message is parsed and executed. Query responses from the
SIM960 are buffered in a 32-byte Output Queue.
If the Input Buffer overflows, then all data in both the Input Buffer
and the Output Queue are discarded, and an error is recorded in the
CESR and ESR status registers.
The SIM960 host interface can be asynchronously reset to its poweron configuration by sending an RS-232-style hbreakisignal. From the
SIM900 Mainframe, this is accomplished with the SRST command;
if directly interfacing via RS-232, then use a serial break signal. After
receiving the Device Clear, the interface is reset to 9600 baud and
CONS mode is turned OFF. Note that this only resets the communi-
cation interface; the basic function of the SIM960 is left unchanged;
to reset the meter, see *RST.
The Device Clear signal will also terminate any streaming outputs
fromtheSIM960duetoanSMON?, MMON?, EMON? and/or OMON?
query of multiple conversions.
SIM960 Analog PID Controller
Page 34

3 – 8 Remote Operation
3.4 Commands
This section provides syntax and operational descriptions for remote
commands.
3.4.1 Command syntax
The four letter mnemonic (shown in CAPS) in each command sequence specifies the command. The rest of the sequence consists of
parameters.
Commands may take either set or query form, depending on whether
the “?” character follows the mnemonic. Set only commands are
listed without the “?”, query only commands show the “?” after the
mnemonic, and optionally query commands are marked with a “(?)”.
Parameters shown in { } and [ ] are not always required. Parameters
in { } are required to set a value, and should be omitted for queries.
Parameters in [ ] are optional in both set and query commands.
Parameters listed without any surrounding characters are always
required.
Do not send ( ) or { } or [ ] as part of the command.
Multiple parameters are separated by commas. Multiple commands
may be sent on one command line by separating them with semicolons (;) so long as the Input Buffer does not overflow. Commands
are terminated by either hCRi or hLFi characters. Null commands
and whitespace are ignored. Execution of the command does not
begin until the command terminator is received.
Token parameters (generically shown as z in the command de-tokens
scriptions) can be specified either as a keyword or integer value.
Command descriptions list the valid keyword options, with each
keyword followed by its corresponding integer value. For example,
to set the response termination sequence to hCRi+hLFi, the following
two commands are equivalent:
TERM CRLF —or— TERM 3
For queries that return token values, the return format (keyword or
integer) is specified with the TOKN command.
The following table summarizes the notation used in the command
descriptions:
SIM960 Analog PID Controller
Page 35

3.4 Commands 3 – 9
symbol definition
i,j Integers
f,g Floating-point values
z Literal token
(?) Required for queries; illegal for set commands
var Parameter always required
{var} Required parameter for set commands; illegal for queries
[var] Optional parameter for both set and query forms
3.4.2 Examples
Each command is provided with a simple example illustrating its
usage. In these examples, all data sent by the host computer to
the SIM960 are set as straight teletype font, while responses
received the host computer from the SIM960 are set as slanted
teletype font.
The usage examples vary with respect to set/query, optional parameters, and token formats. These examples are not exhaustive, but are
intended to provide a convenient starting point for user programming.
SIM960 Analog PID Controller
Page 36

3 – 10 Remote Operation
3.4.3 Controller settings commands
Proportional action ON/OFFPCTL(?) z
Set (query) the proportional control {to z=(OFF 0, ON 1)}.
When ON, the PID Control path includes the proportional control
term.
PCTL 1Example:
Integral action ON/OFFICTL(?) z
Set (query) the integral control {to z=(OFF 0, ON 1)}.
When ON, the PID Control path includes the integral control term.
ICTL?Example:
0
Derivative action ON/OFFDCTL(?) z
Set (query) the derivative control {to z=(OFF 0, ON 1)}.
When ON, the PID Control path includes the derivative control term.
DCTL OFFExample:
Offset ON/OFFOCTL(?) z
Set (query) the offset control {to z=(OFF 0, ON 1)}.
When ON, the PID Control path includes the constant output offset.
OCTL?Example:
ON
Proportional GainGAIN(?) {f }
Set (query) the proportional gain (P) {to f }, in V/V.
Values may be entered in decimal or exponential format, and are
signed.
GAIN may be set with 2 digits of resolution for 1.0 ≤ |P| ≤ 103, and
with single-digit resolution for 0.1 ≤ |P| ≤ 0.9. Note that setting
GAIN does not modify whether the proportional term is enabled or
disabled. For on/off control, see PCTL.
Setting GAIN overrides the previous setting of APOL.
The allowed range for GAIN is 10−1≤ |P| ≤ 103.
GAIN +2.5E+2Example:
SIM960 Analog PID Controller
Page 37

3.4 Commands 3 – 11
Controller PolarityAPOL(?) z
Set (query) the proportional gain polarity {to z=(POS 1, NEG 0)}. Set-
ting APOL will override the sign of a previously-commanded GAIN.
APOL?Example:
POS
Integral GainINTG(?) {f }
Set (query) the integral gain (I) {to f }, in V/(V·s).
INTG may be set with 2 digits of resolution for 10−1≤ I ≤ 5 × 105,
and with single-digit resolution for 10−2≤ I ≤ 9 × 10−2. Integral
gains are unsigned (positive values only). Note that setting INTG
does not modify whether the integrator is enabled or disabled. For
on/off control, see ICTL.
The allowed range for INTG is 10−2≤ I ≤ 5 × 105.
INTG?Example:
+1.5E+3
Derivative GainDERV(?) {f }
Set (query) the derivative gain {to f }, in V/(V/s).
DERV may be set with 2 digits of resolution for 10−5≤ D ≤ 10, and
with single-digit resolution for 10−6≤ I ≤ 9 × 10−6. Derivative gains
are unsigned (positive values only). Note that setting DERV does
not modify whether the derivative is enabled or disabled. For on/off
control, see DCTL.
The allowed range for DERV is 10−6≤ D ≤ 10.
DERV 0.000015Example:
DERV?
+1.5E-5
Output OffsetOFST(?) {f }
Set (query) the output offset {to f }, in volts.
The offset voltage can be set with millivolt resolution. Note that setting OFST does not modify whether the offset is enabled or disabled.
For on/off control, see OCTL.
The allowed range is −10.000 ≤ OFST +10.000.
OFST -12.3E-2; OFST?Example:
-0.123
SIM960 Analog PID Controller
Page 38

3 – 12 Remote Operation
3.4.4 Controller configuration commands
Output (Manual Output/PID Control)AMAN(?) z
Set (query) controller output state {to z=(MAN 0, PID 1)}.
AMAN?Example:
1
Input (Internal/External Setpoint)INPT(?) z
Set (query) setpoint input state {to z=(INT 0, EXT 1)}.
INPT INTExample:
New setpointSETP(?) {f }
Set (query) the setpoint value {to f }, in volts.
The setpoint can be set with millivolt resolution. If ramping is enabled (see RAMP), SETP will initiate a ramp to f. Otherwise, the
setpoint value changes immediately to the new value.
The allowed range is −10.000 ≤ SETP ≤ +10.000.
SETP -1.234Example:
Internal setpoint ramping ON/OFFRAMP(?) z
Set (query) internal setpoint ramping {to z=(OFF 0, ON 1)}.
When ON, the changes to the internal setpoint are made with constant
slew-rate ramping enabled.
RAMP 1Example:
Setpoint ramping RateRATE(?) {f }
Set (query) the setpoint rate {to f }, in V/s.
RATE may be set with 2 digits of resolution for values above 10−2,
and with signle-digit resolution below that. Note that setting RATE
does not modify whether setpoint changes are made with constant
slew-rate ramping or not. For on/off control of linear ramping, see
RAMP.
The allowed range is 10−3≤ RATE ≤ 104.
RATE 2.2E-3Example:
RATE?
+0.2E-2
SIM960 Analog PID Controller
Page 39

3.4 Commands 3 – 13
Setpoint ramping statusRMPS?
Query the ramp status.
For slow ramps of the internal setpoint, the RMPS? query will monitor the real-time status of a setpoint transition.
The response is one of the following token values: IDLE 0, PENDING
1, RAMPING 2, PAUSED 3.
RMPS?Example:
RAMPING
Pause or continue rampingSTRT z
Cause a setpoint ramping event in progress to pause (STOP) or con-
tinue (START). z=(STOP 0, START 1).
Note that STRT cannot be used to initiate a new setpoint transition
from the RMPS PENDING state—this can only be accomplished by
pressing [Ramp Start/Stop] on the front panel.
STRT STARTExample:
Manual OutputMOUT(?) {f }
Set (query) the manual output value {to f }, in volts.
The manual output can be set with millivolt resolution. Note that
setting MOUT does not modify whether the controller is in manual or
PID control mode. For on/off control of manual output, see AMAN.
The allowed range for MOUT is −10.000 ≤ MOUT ≤ +10.000.
MOUT?Example:
+8.000
Upper Output LimitULIM(?) {f }
Set (query) the upper output limit {to f }, in volts.
The upper limit can be set with 10mV resolution. Note that, regardless of the operating mode of the SIM960 (see AMAN), the output voltage will always be clamped to remain less positive than the
ULIM limit. Combined with the LLIM limit, this results in the output
obeying:
The allowed range is LLIM ≤ ULIM ≤ +10.00.
SIM960 Analog PID Controller
−10.00 ≤ LLIM ≤ Output ≤ ULIM ≤ +10.00
Page 40

3 – 14 Remote Operation
Lower Output LimitLLIM(?) {f}
Set (query) the lower output limit {to f }, in volts.
The lower limit can be set with 10 mV resolution. The output voltage
of the SIM960 will always be clamped to remain less negative than
the LLIM limit. See ULIM for more details.
The allowed range is −10.00 ≤ LLIM ≤ ULIM.
3.4.5 Monitor commands
Setpoint Input MonitorSMON? [i]
Query the Setpoint input voltage to the error amplifier, in volts.
If INPT INT is set, then SMON? monitors the value of the internallygenerated setpoint. If INPT EXT, then SMON? monitors the voltage
applied at the front-panel Setpoint BNC input.
i is an optional parameter that causes streaming of Setpoint data.
If i is specified, then i measurements will be output at a rate of
approximately two measurements per second. If i is specified as 0,
then measurements will be output indefinitely. The SOUT command
can be used to stop streaming.
SETP 1.2; SMON? 5Example:
+01.004496
+01.066567
+01.128909
+01.191273
+01.200073
Measure Input MonitorMMON? [i]
Query the Measure input voltage to the error amplifier, in volts.
MMON? always reports the voltage applied at the front-panel Measure BNC input.
i is an optional parameter that causes streaming of Measure data.
If i is specified, then i measurements will be output at a rate of
approximately half a second per measurement. If i is specified as 0,
then measurements will be output indefinitely. The SOUT command
can be used to stop streaming.
MMON?Example:
-00.005900
SIM960 Analog PID Controller
Page 41

3.4 Commands 3 – 15
Amplified Error MonitorEMON? [i]
Query the P × ε voltage, in volts.
i is an optional parameter that causes streaming of (P × ε) data. If i
is specified, then i measurements will be output at a rate of approximately half a second per measurement. If i is specified as 0, then
measurements will be output indefinitely. The SOUT command can
be used to stop streaming.
EMON?Example:
+00.105537
Output MonitorOMON? [i]
Query the Output voltage, in volts.
OMON? alwaysreportsthevoltagegeneratedatthefront-panelOUTPUT BNC connector (regardless of the state of AMAN).
i is an optional parameter that causes streaming of Output data.
If i is specified, then i measurements will be output at a rate of
approximately half a second per measurement. If i is specified as 0,
then measurements will be output indefinitely. The SOUT command
can be used to stop streaming.
OMON?Example:
+01.106139
Output Streaming Records FormatRFMT(?) {z}
Set (query) the output streaming record format {to z=(OFF 0, ON 1)}.
When ON, data are output on a single line with three comma delimiters. Since there are four monitor channels that can be streamed to
output, and any combination of the four may be streamed, thecomma
delimiters allow unambiguous identification of channel data.
The record format is hSMONi,hMMONi,hEMONi,hOMONi
RFMT ONExample:
SMON? 3; MMON? 3; EMON? 3; OMON? 3
+00.099909,-00.006053,+00.105601,+01.106135
+00.099909,-00.006031,+00.105615,+01.106123
+00.099915,-00.006001,+00.105636,+01.106151
SIM960 Analog PID Controller
Page 42

3 – 16 Remote Operation
Stop StreamingSOUT [z]
Turn off streaming (of channel z= (SMN 0, MMN 1, EMN 2, OMN 3)).
If the optional parameter z is not specified, then all streaming outputs
are turned off.
SOUTExample:
Frequency of Power Line CycleFPLC(?) {i}
Set (query) the power line cycle frequency {to i=(50, 60)} Hz.
FPLC is used to program the power-line rejection frequency for the
precision voltage monitors (SMON?, MMON?, EMON?, OMON?).
FPLC?Example:
60
3.4.6 Display commands
Select FieldDISP(?) {z}
Set (query) the field level to be displayed {to z}. Allowed values of z
are
PRP 0 Proportional gain
IGL 1 Integral gain
DER 2 Derivative gain
OFS 3 Output offset
RTE 4 Setpoint rate
STP 5 Setpoint value
MNL 6 Manual output value
ULM 7 Upper limit of output
LLM 8 Lower limit of output
SMN 9 ADC measurement of Setpoint input
MMN 10 ADC measurement of Measure input
EMN 11 ADC measurement of P-Amplified error
OMN 12 ADC measurement of PID/Manual Output
DISP 1Example:
Shift StatusSHFT(?) {z}
Set (query) the current shift status {to i=(OFF 0, ON 1)}.
SHFT?Example:
OFF
SIM960 Analog PID Controller
Page 43

3.4 Commands 3 – 17
Front Panel Display EnableDISX(?) {z}
Set (query) the front panel display status {to z=(OFF 0, ON 1)}.
When the display is turned off (DISX OFF), all front panel indicators
and buttons are disabled.
DISX OFFExample:
3.4.7 Serial communication commands
Baud RateBAUD(?) {i}
Set (query) the baud rate {to i}.
At power-on, the baud rate defaults to 9600. Changing baud
rate must be carefully orchestrated to ensure proper connectivity
throughout the transaction (see the SIM900 manual discussion of the
BAUD command for more examples).
BAUD 38800Example:
3.4.8 Status commands
Flow ControlFLOW(?) {z}
Set (query) flow control {to z=(NONE 0, RTS 1, XON 2)}.
At power-on, the SIM960 defaults to FLOW RTS flow control.
FLOW 0Example:
ParityPARI(?) {z}
Set (query) parity {to z = (NONE 0, ODD 1, EVEN 2, MARK 3, SPACE 4)}.
At power-on, the SIM960 defaults to PARI NONE.
PARI?Example:
NONE
The Status commands query and configure registers associated with
status reporting of the SIM960.
Clear Status*CLS
*CLS immediately clears the ESR, CESR, and the SIM960 status reg-
isters.
*CLSExample:
SIM960 Analog PID Controller
Page 44
3 – 18 Remote Operation
Status Byte*STB? [i]
Reads the Status Byte register [bit i].
Execution of the *STB? query (without the optional bit i) always
causes the −STATUS signal to be deasserted. Note that *STB? i will
not clear −STATUS, even if bit i is the only bit presently causing the
−STATUS signal.
*STB?Example:
16
Service Request Enable*SRE(?) [i,] {j}
Set (query) the Service Request Enable register [bit i] {to j}.
*SRE 32; *SRE? 5Example:
1
Standard Event Status*ESR? [i]
Reads the Standard Event Status Register [bit i].
Upon executing *ESR?, the returned bit(s) of the ESR register are
cleared.
GAIN 0Example:
ESR?
16
The binary value (16) corresponds to anExecutionError, since GAIN 0
is an illegal value (minimum gain is 0.1).
Standard Event Status Enable*ESE(?) [i,] {j}
Set (query) the Standard Event Status Enable Register [bit i] {to j}.
*ESE 16Example:
Comm Error StatusCESR? [i]
Query Comm Error Status Register [for bit i].
Upon executing a CESR? query, the returned bit(s) of the CESR
register are cleared.
CESR?Example:
0
SIM960 Analog PID Controller
Page 45

3.4 Commands 3 – 19
Comm Error Status EnableCESE(?) [i,]{j}
Set (query) Comm Error Status Enable Register [bit i] {to j}.
CESR 0Example:
Instrument condition registerINCR? [i]
Query the instrument condition register [bit i].
The values of the bits in the instrument condition register are determined by the current (real-time) condition of the events defined in
the instrument status register (see Section 3.5.8).
Reading the instrument condition register does not affect the register.
INCR?Example:
16
Instrument status registerINSR? [i]
Query the instrument status register [bit i].
INSR?Example:
16
Instrument status enable registerINSE(?) [i], {j}
Set (query) the instrument status enable register [bit i] {to j}.
INSE 16Example:
A-to-D status registerADSR? [i]
Query the analog to digital status register [bit i].
When new data become available from the A-to-D converter, the Ato-D status register bit corresponding to the channel of the new data
is set (see Section 3.5.10).
ADSR?Example:
15
A-to-D status enable registerADSE(?) [i], {j}
Set (query) the A-toD status enable register [bit i] {to j}.
ADSE 2Example:
SIM960 Analog PID Controller
Page 46

3 – 20 Remote Operation
Pulse −STATUS ModePSTA(?) {z}
Set (query) the Pulse −STATUS Mode {to z=(OFF 0, ON 1)}.
When PSTA ON is set, any new service request will only pulse the
−STATUS signal low (for a minimum of 1 µs). The default behavior
is to latch −STATUS low until a *STB? query is received.
At power-on, PSTA is set to OFF.
PSTA?Example:
OFF
3.4.9 Interface commands
The Interface commands provide control over the interface between
the SIM960 and the host computer.
Reset*RST
Reset the SIM960 to its default configuration. The effect of this com-
mand is equivalent to the following sequence of commands:
• DISX ON
• DISP PRP
• SHFT OFF
• GAIN 1.0
• APOL POS
• INTG 1.0
• DERV 1.0E-6
• OFST 0.0
• RATE 1.0
• PCTL ON
• ICTL OFF
• DCTL OFF
• OCTL OFF
• RAMP OFF
• SETP 0.0 (must not precede RAMP OFF)
• MOUT 0.0
• ULIM +10.0
SIM960 Analog PID Controller
Page 47

3.4 Commands 3 – 21
• LLIM -10.0
• INPT EXT
• AMAN PID
• TOKN OFF
• SOUT
The baud rate of the SIM960 is unaffected by *RST. The entire status
model is also unaffected by *RST.
*RSTExample:
Console ModeCONS(?) {z}
Set (query) the Console mode {to z=(OFF 0, ON 1)}.
CONS causes each character received at the Input Buffer to be copied
to the Output Queue.
At power-on, CONS is set to OFF.
CONS ONExample:
Identify*IDN?
Read the device identification string.
The identification string is formatted as:
Stanford Research Systems,SIM960,s/n******,ver#.#
where SIM960 is the model number, ****** is the 6-digit serial number, and #.# is the firmware revision level.
*IDN?Example:
Stanford Research Systems,SIM960,s/n003173,ver2.15
Self Test*TST?
There is no internal self-test in the SIM960, so this query always
returns 0.
*TST?Example:
0
SIM960 Analog PID Controller
Page 48
3 – 22 Remote Operation
Operation Complete*OPC(?)
Operation Complete. Sets the OPC flag in the ESR register.
The query form *OPC? writes a 1 in the Output Queue when complete, but does not affect the ESR register.
*OPC?Example:
1
WaitWAIT i
Wait i milliseconds before processing morecommands from the host.
When using the WAIT command, be careful to not overflow the input
buffer of the SIM960 (see section 3.3.2).
SETP 0Example:
RATE 0.1
SETP 1.0; WAIT 5000; SMON?
+00.483159
Execution ErrorLEXE?
Query the last execution error code. Valid codes are:
Value Definition
0 No execution error since last LEXE?
1 Illegal value
2 Wrong token
3 Invalid bit
16 Invalid parameter
17 Missing parameter
18 No change
20 Ramp in progress
21 Limits conflict
*STB? 12; LEXE?; LEXE?Example:
3
0
The error (3, “Invalid bit,”) is because *STB? only allows bit-specific
queries of 0–7. The second read of LEXE? returns 0.
SIM960 Analog PID Controller
Page 49

3.4 Commands 3 – 23
Command ErrorLCME?
Query the last command error code. Valid codes are:
Value Definition
0 No execution error since last LCME?
1 Illegal command
2 Undefined command
3 Illegal query
4 Illegal set
5 Missing parameter(s)
6 Extra parameter(s)
7 Null parameter(s)
8 Parameter buffer overflow
9 Bad floating-point
10 Bad integer
11 Bad integer token
12 Bad token value
13 Bad hex block
14 Unknown token
*IDNExample:
LCME?
4
The error (4, “Illegal set”) is due to the missing “?”.
Last ButtonLBTN?
Query the last button that was pressed. The values returned are:
Value Button
0 no button pressed since last LBTN?
1 [Setpoint]
2 [Output]
3 [Ramp Start/Stop]
4 [Shift]
5 [Select]
6 [On/Off]
7 [ ]/ [ ]
8 [ ]/ [ ]
LBTN?Example:
5
SIM960 Analog PID Controller
Page 50

3 – 24 Remote Operation
Token ModeTOKN(?) {z}
Set (query) the Token Query mode {to z=(OFF 0, ON 1)}.
If TOKN ON is set, then queries to the SIM960 that return tokens will
return the text keyword; otherwise they return the decimal integer
value.
Thus, the only possible responses to the TOKN? query are ON and 0.
At power-on, TOKN is set to OFF.
TOKN OFFExample:
Response TerminationTERM(?) {z}
Set (query) the htermi sequence {to z=(NONE 0, CR 1, LF 2, CRLF 3,
LFCR 4)}.
The htermi sequence is appended to all query responses sent by
the module, and is constructed of ASCII character(s) 13 (carriage
return) and 10 (line feed). The token mnemonic gives the sequence
of characters.
At power-on, the default is TERM CRLF.
TERM?Example:
3
SIM960 Analog PID Controller
Page 51

3.5 Status Model 3 – 25
7
X
5
4
3
2
1
0
CESB
MSS
ESB
IDLE
undef
undef
ADSB
INSB
7
6
5
4
3
2
1
0
Status Byte
SB SRE
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
OPC: Operation Complete
INP: Input Buffer Error
DDE: Device Error
EXE: Execution Error
CME: Command Error
URQ: User Request
PON: Power On
QYE: Query Error
ESR ESE
Standard Event Status
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
PARITY: Parity Error
FRAME: Framing Error
HWOVRN: Hardware Overrun
OVR: Input Buffer Overrun
RTSH: RTS Halted
CTSH: CTS Halted
DCAS: Device Clear
NOISE: Noise Error
CESR CESE
Communication Error Status
-
STATUS
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
ADSETP: Setpoint Mon
ADMEAS: Measure Mon
ADOUT: Output Mon
undef
undef
undef
undef
ADERR: Error Signal Mon
ADSR ADSE
Analog to Digital Status
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
OVLD
ULIMIT
ANTIWIND
RSTOP
undef
undef
undef
LLIMIT
Instrument Status
INSEINSR
7
6
5
4
3
2
1
0
INCR
3.5 Status Model
The SIM960 status registers follow the hierarchical IEEE–488.2 format. AblockdiagramofthestatusregisterarrayisgiveninFigure3.1.
Condition Registers : These read-only registers correspond to the real-time condi-
Event Registers : These read-only registers record the occurrence of defined
SIM960 Analog PID Controller
Enable Registers : These read/write registers define a bitwise mask for their cor-
Figure 3.1: Status Register Model for the SIM960 Analog PID Controller.
There are three categories of registers in the SIM960 status model:
tion of some underlying physical property being monitored.
Queries return the latest value of the property, and have no
other effect. Condition register names end with CR.
events. If the event occurs, the corresponding bit is set to
1. Upon querying an event register, any set bits within it are
cleared These are sometimes known as “sticky bits,” since once
set, a bit can only be clearedby reading its value. Event register
names end with SR.
responding event register. If any bit position is set in an event
register while the same bit position is also set in the enable
register, then the corresponding summary bit message is set.
Enable register names end with SE.
Page 52

3 – 26 Remote Operation
3.5.1 Status Byte (SB)
The Status Byte is the top-level summary of the SIM960 status model.
When masked by the Service Request Enable register, a bit set in the
Status Byte causes the −STATUS signal to be asserted on the rearpanel SIM interface connector.
Weight Bit Flag
1 0 INSB
2 1 ADSB
4 2 undef (0)
8 3 undef (0)
16 4 IDLE
32 5 ESB
64 6 MSS
128 7 CESB
INSB : Instrument Status SummaryBit. Indicates whether one or more
of the enabled flags in the Instrument Status Register has become true.
ADSB : Analog to Digital Status Bit. Indicates whether one or more of
the enabled flags in the Analog to Digital Status Register has
become true.
IDLE : Indicates that the Input Buffer is empty and the command
parser is idle. Can be used to help synchronize SIM960 query
responses.
ESB : Event Status Bit. Indicates whether one or more of the enabled
events in the Standard Event Status Register is true.
MSS : Master Summary Status. Indicates whether one or more of the
enabled status messages in the Status Byte register is true.
CESB : Communication Error Summary Bit. Indicates whether one or
more of the enabled flags in the Communication Error Status
Register has become true.
3.5.2 Service Request Enable (SRE)
Each bit in the SRE corresponds one-to-one with a bit in the SB register, and acts as a bitwise AND of the SB flags to generate MSS/RQS.
Bit 6 of the SRE is undefined—setting it has no effect, and reading it
always returns 0. This register is set and queried with the *SRE(?)
command.
This register is cleared at power-on.
SIM960 Analog PID Controller
Page 53

3.5 Status Model 3 – 27
3.5.3 Standard Event Status (ESR)
The Standard Event Status register consists of 8 event flags. These
event flags areall “sticky bits” that are set by the corresponding event,
and cleared only by reading or with the *CLS command. Reading a
single bit (with the *ESR? i query) clears only bit i.
Weight Bit Flag
1 0 OPC
2 1 INP
4 2 QYE
8 3 DDE
16 4 EXE
32 5 CME
64 6 URQ
128 7 PON
OPC : Operation Complete. Set by the *OPC command.
INP : Input Buffer Error. Indicates data has been discarded from the
Input Buffer.
QYE : Query Error. Indicates data in the Output Queue has been lost.
DDE : Device Dependent Error. Undefined for SIM960.
EXE : Execution Error. Indicates an error in a command that was
successfully parsed. Out-of-range parameters are an example.
The error code can be queried with LEXE?.
CME : Command Error. Indicates a parser-detected error. The error
code can be queried with LCME?.
URQ : User Request. Indicates a front-panel button was pressed.
PON : Power On. Indicates that an off-to-on transition has occurred
3.5.4 Standard Event Status Enable (ESE)
The ESE acts as a bitwise AND with the ESR register to produce the
single bit ESB message in the Status Byte Register (SB). It can be set
and queried with the *ESE(?) command.
This register is cleared at power-on.
3.5.5 Communication Error Status (CESR)
The Communication Error Status register consists of 8 event flags;
each of which is set by the corresponding event, and cleared only by
reading or with the *CLS command. Reading a single bit (with the
CESR? i query) clears only bit i.
SIM960 Analog PID Controller
Page 54

3 – 28 Remote Operation
Weight Bit Flag
1 0 PARITY
2 1 FRAME
4 2 NOISE
8 3 HWOVRN
16 4 OVR
32 5 RTSH
64 6 CTSH
128 7 DCAS
PARITY : Parity Error. Set by serial parity mismatch on incoming data
byte.
FRAME : Framing Error. Set when an incoming serialdata byteis missing
the STOP bit.
NOISE : Noise Error. Set when an incoming serial data byte does not
present a steady logic level during each asynchronous bitperiod window.
HWOVRN : Hardware Overrun. Set when an incoming serial data byte is
lost due to internal processor latency. Causes the Input Buffer
to be flushed, and resets the command parser.
OVR : Input Buffer Overrun. Set when the Input Buffer is overrun
by incoming data. Causes the Input Buffer to be flushed, and
resets the command parser.
RTSH : Undefined for the SIM960. Command Error. Indicates a parser-
detected error.
CTSH : Undefined for the SIM960.
DCAS : Device Clear. Indicates the SIM960 received the Device Clear
signal (an RS-232 hbreaki). Clears the Input Buffer and Output
Queue, and resets the command parser.
3.5.6 Communication Error Status Enable (CESE)
The CESE acts as a bitwise AND with the CESR register to produce
the single bit CESB message in the Status Byte Register (SB). It can
be set and queried with the CESE(?) command.
This register is cleared at power-on.
3.5.7 Instrument Status (INCR)
The Instrument Condition Register consists of 5 single-bit monitors
of condition events within the SIM960. Bits in the INCR reflect the
real-time values of their corresponding signals. Reading the entire
register, or individualbits within it, does not affect thevalue of INCR.
SIM960 Analog PID Controller
Page 55

3.5 Status Model 3 – 29
Weight Bit Flag
1 0 OVLD
2 1 ULIMIT
4 2 LLIMIT
8 3 ANTIWIND
16 4 RSTOP
32 5 undef (0)
64 6 undef (0)
128 7 undef (0)
OVLD : Amplifier Overload. Set to indicate an overload (either differ-
ential or common-mode) is presently occurring in the front-end
amplifier.
ULIMIT : Upper Limit Reached. Set to indicate the output signal is
presently saturated into the programmable upper-limit voltage.
LLIMIT : Lower Limit Reached. Set to indicate the output signal is
presently saturated into the programmable lower-limit voltage.
ANTIWIND : Anti-windup Active. Set to indicate the anti-windup circuit is
actively inhibiting integration of the error signal.
RSTOP : Ramp Stopped. Set to indicate that no internal setpoint ramp is
in progress; cleared to indicate ramping is presently underway.
3.5.8 Instrument Status (INSR)
The Instrument Status Register consists of (latching) event flags that
correspond one-to-one with the bits of the INCR (see above). Upon
the transition 0 → 1 of any bit within the INCR, the corresponding
bit in the INSR becomes set.
Bits in the INSR are unaffected by the 1 → 0 transitions in the INCR,
and are cleared onlyby reading or with the *CLS command. Reading
a single bit (with the INSR? i query) clears only bit i.
3.5.9 Analog to Digital Status Enable (INSE)
The INSE acts as a bitwise AND with the INSR register to produce
the single bit INSB message in the Status Byte Register (SB). It can be
set and queried with the INSE(?) command.
This register is cleared at power-on.
3.5.10 Analog to Digital Status (ADSR)
The Analog to Digital Status Register consists of 4 event flags; each
of which is set by a corresponding conversion completion for one of
SIM960 Analog PID Controller
Page 56

3 – 30 Remote Operation
the 4 monitored analog signals. Bits in the ADSR are cleared only by
reading or with the *CLS command. Reading a single bit (with the
ADSR? i query) clears only bit i.
Weight Bit Flag
1 0 ADSETP
2 1 ADMEAS
4 2 ADERR
8 3 ADOUT
16 4 undef (0)
32 5 undef (0)
64 6 undef (0)
128 7 undef (0)
ADSETP : Setpoint Monitor Conversion Complete. Indicates a new con-
version result is available for SMON?.
ADMEAS : Measure Monitor Conversion Complete. Indicates a new con-
version result is available for MMON?.
ADERR : Amplified Error Monitor Conversion Complete. Indicates a
new conversion result is available for EMON?.
ADOUT : Output Monitor Conversion Complete. Indicates a new con-
version result is available for OMON?.
While reading this register (with the ADSR? query) will clear any
Tripn bit(s) that are set, it will not reset the overvoltage protection
circuit. To do that, the user must issue the TRIP command. As long
as a channel remains tripped off, the Tripn bit will continuously be
reasserted.
3.5.11 Analog to Digital Status Enable (ADSE)
The ADSE acts as a bitwise AND with the ADSR register to produce
the single bit ADSB message in the Status Byte Register (SB). It can
be set and queried with the ADSE(?) command.
This register is cleared at power-on.
SIM960 Analog PID Controller
Page 57

4 Performance Tests
In This Chapter
This chapter describes the tests necessary to verify the SIM960 is
operating correctly and within specified calibration.
4.1 Getting Ready . . . . . . . . . . . . . . . . . . . . . . . 4 – 2
4.2 Performance Tests . . . . . . . . . . . . . . . . . . . . 4 – 2
4.2.1 Input Amplifier Offset . . . . . . . . . . . . . . 4 – 2
4.2.2 A to D Converter test . . . . . . . . . . . . . . . 4–2
4.2.3 Proportional Gain Accuracy . . . . . . . . . . . 4 – 3
4.2.4 Derivative Gain Accuracy . . . . . . . . . . . . 4–4
4.2.5 Integral Gain Accuracy . . . . . . . . . . . . . 4 – 5
4.2.6 Ramp Rate Accuracy . . . . . . . . . . . . . . . 4 – 5
4.2.7 Offset Control Accuracy . . . . . . . . . . . . . 4 – 6
4.2.8 Manual Output Accuracy . . . . . . . . . . . . 4 – 6
4.3 Calibration . . . . . . . . . . . . . . . . . . . . . . . . 4 – 6
4 – 1
Page 58

4 – 2 Performance Tests
4.1 Getting Ready
Recommended instruments include:
1. SRS SIM900 Mainframe
2. Agilent 3458A 81/2 digit multimeter
3. SRS SR620 Time interval counter
4. SRS SR785 Dynamic signal analyzer
5. PC with remote interface to SIM900 Mainframe
Also needed is a 96:1 resistive divider formed by soldering two resistors, a 210.0 Ω and a 20.00 kΩ resistor (both ±0.1%) in series. The
resulting three conductors of this network will be labeled for future
reference as follows: The conductor running between the resistors
will be called the “center”, the conductor on the 210 Ω end will be
the “bottom”, and the conductor on the 20 kΩ end will be the “top”.
This divider will be used externally to the SIM960 to test the integral
gain accuracy.
The SIM960 should begiven at least onehour to warm upafter power
is turned on, and careshould be taken not to constrict the ventillation
holes in the SIM900 mainframe. It should be located in a room with
stable temperature, preferably from 65 to 75 degrees F.
4.2 Performance Tests
4.2.1 Input Amplifier Offset
4.2.2 A to D Converter test
The various subsystems of the SIM960 can be tested with the following procedures. In all cases, if the measurement is outside the
tolerance or range indicated, then the SIM960 is out of calibration.
Ground the two inputs, ’Setpoint’ and ’Measure’ of the SIM960 using
BNC grounding caps or 50 Ω terminators. Using the remoteinterface,
reset the SIM960 using the *RST command. Select ’External’ by
pressing [Setpoint] on the front panel. Adjust the P (gain) parameter
to 1000 (maximum gain). Use the Multimeter to measure the Error
output at the rear panel BNC of the SIM960. Switch the polariy of the
P (gain) parameter and observe the change at the rear panel Error
BNC. The readings for both polarities should be within ±10 mV of
zero.
• Reset the SIM960 using the *RST command.
SIM960 Analog PID Controller
Page 59

4.2 Performance Tests 4 – 3
• Set the P (gain) parameter to +8 using GAIN 8.0.
• Turn off P control using PCTL OFF.
• Set the I parameter to 105using INTG 1.0E5.
• Turn on I control using ICTL ON.
• Use a short BNC cable to connect the SIM960 Output to the
Measure input.
• Select “Internal” by pressing [Setpoint] on the front panel.
• Select “Setpoint” and observe the displayed value. It should
be within ±10 mV of 0.000 V.
• Select “Measure”. It should also be within ±10 mV of 0.000 V.
• Select “Output”. It should also be within ±10 mV of 0.000 V.
• Set the internal setpoint to +8.000 V by sending SETP +8.0,
and repeat the previous three steps, each time observing that
the displayed value is within ±10 mV of +8.000 V.
• Set the internal setpoint to −8.000V by sending SETP -8.0, and
repeating the same three measurements, each time observing
that the displayed value is within ±10 mV of −8.000 V.
• Now disconnect the Output from the Measure input, and
ground the Measure input using a BNC grounding cap or
50 Ohm terminator.
• Turn off I control using ICTL OFF, and turn on P control using
PCTL ON. The P (gain) parameter should still be 8.0.
• Change theinternalsetpoint to 0.000 V using SETP 0, and select
the P × ε display level. The value displayed should be within
±50 mV of 0.000 V.
• Now change the internal setpoint to +1.000 V using SETP +1.
The P × ε value should be within ±50 mV of +8.000 V.
• Change the internal setpoint to −1.000 V using SETP -1. The
P × ε value should be within ±50 mV of -8.000 V.
4.2.3 Proportional Gain Accuracy
Reset the SIM960 via the remote interface using *RST. Ground the
Measure input. Connect the Source output of the SR785 to the SR785
Channel 1A input, and to the SIM960 Setpoint input. Connect the
SIM960 ouput to the SR785 Channel 2A input. With the SR785 in
swept sine mode measure the frequency response at 1 kHz, adjusting
SIM960 Analog PID Controller
Page 60
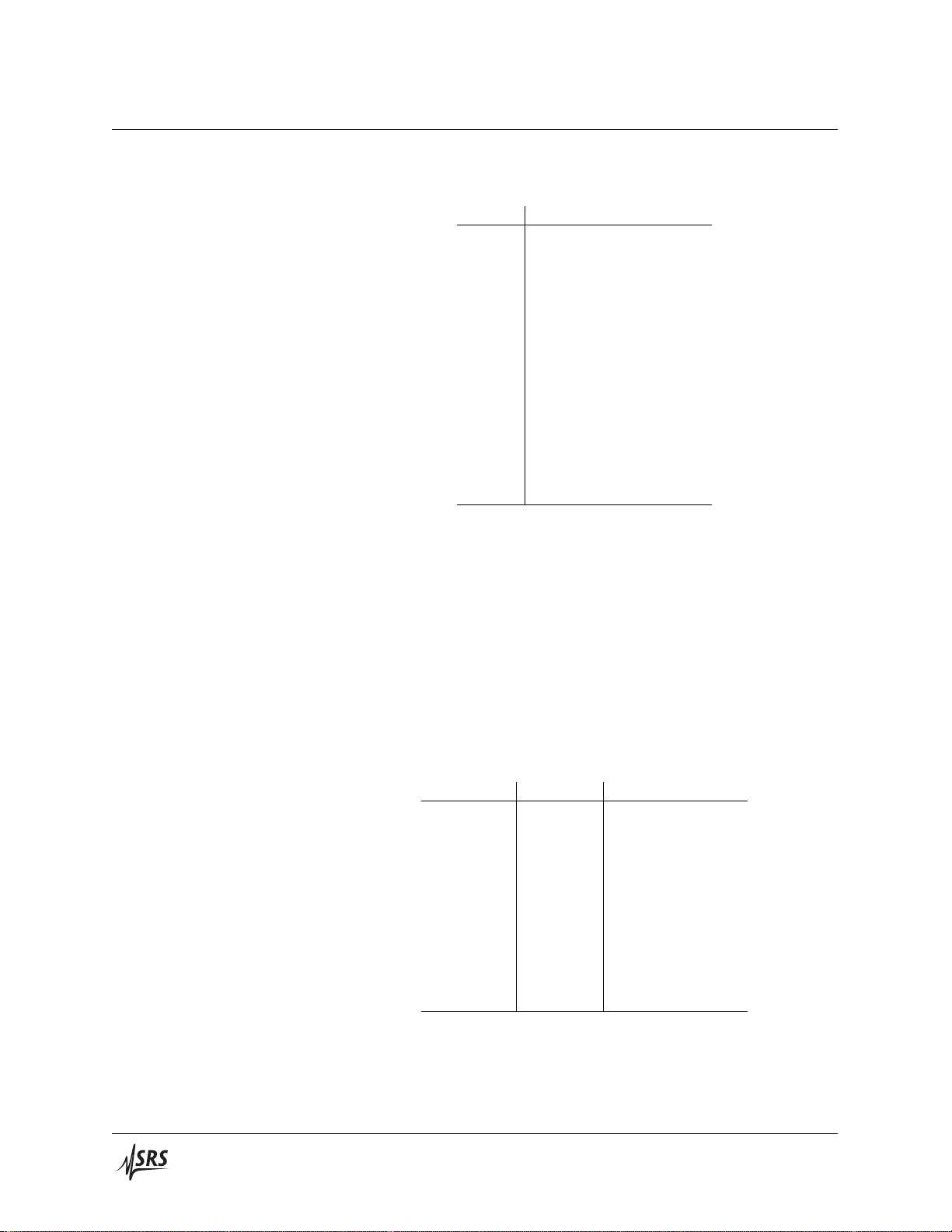
4 – 4 Performance Tests
the source output amplitude for each P (gain) setting from the table
below.
P(gain) Source amplitude (volts)
8 0.5
8.1 0.5
16 0.3
16.1 0.3
32 0.15
33 0.15
64 0.08
65 0.08
128 0.04
129 0.04
250 0.02
260 0.02
510 0.01
520 0.01
1000 0.005
In each case the frequency response should be within ±1% of the
programmed gain value. The gain should not vary by more than
±1% over the full 100 kHz bandwidth at the P (gain) = 8 setting.
4.2.4 Derivative Gain Accuracy
Use the same connections as for the proportional gain accuracy
test. Reset the SIM960 via the remote interface using *RST. Turn
off the P (gain) control using PCTL OFF. Turn on the D control using
DCTL ON. With the SR785 in swept sine mode and the source output
amplitude at 0.5 V, measure the frequency response atthe frequencies
below for each D setting.
In each case the frequency response should be within ±2% of the
programmed gain value.
D (sec) frequency expected response
1.00 × 10
1.01 × 10
1.00 × 10
1.01 × 10
1.00 × 10
1.01 × 10
1.00 × 10
1.01 × 10
1.00 × 10
1.01 × 10
−5
1.600 kHz 0.10053
−5
1.600 kHz 0.10154
−4
1.600 kHz 1.0053
−4
1.600 kHz 1.0154
−3
160 Hz 1.0053
−3
160 Hz 1.0154
−2
−2
−1
−1
16 Hz 1.0053
16 Hz 1.0154
1.6 Hz 1.0053
1.6 Hz 1.0154
SIM960 Analog PID Controller
Page 61

4.2 Performance Tests 4 – 5
4.2.5 Integral Gain Accuracy
Use the same connections as for the proportional and derivative gain
accuracy tests, but now add the divider network to form a closedloop configuration.
• Connect the top of the divider to the Output of the SIM960,
connect the center of the divider to the Measure input of the
SIM960, and connect the bottom of the divider to ground. This
ground should be accessed at one of the BNC shields.
• Reset the SIM960 via the remote interface using *RST.
• Set the P (gain) parameter to 8.0 using GAIN 8.0.
• Turn off the P (gain) control using PCTL OFF.
• Turn on the I control using ICTL ON.
• With the SR785 in swept sine mode and the source output
amplitude at 0.5 V, measure the frequency response at the frequencies below for each I setting.
4.2.6 Ramp Rate Accuracy
I (1/sec) frequency expected response
5 10 Hz 0.6366
100 150 Hz 0.8488
2×1033.0 kHz 0.8488
5×104100 kHz 0.6366
5×105100 kHz 6.366
In each case the frequency response should be within ±2% of the
programmed gain value.
To test the ramp rate, wire the SIM960 as a ’follower’ by connecting
the output to the Measure input. Reset the SIM960 using *RST. Set
the P (gain) to 8.0 using GAIN 8.0, and turn off the P control using
PCTL OFF. Turn on I control using ICTL ON, and set the I parameter
to 105using INTG 1.0E5.
The Setpoint input should be set to Internal using INPT INT, and
ramping should be enabled using RAMP ON. The Multimeter can
be used to measure the SIM960 output during a ramp. Set up the
multimeter to take 10-20 samples at a known time interval during
a ramp, based on the ramp rate being tested, and the range of the
ramp. Then extract the ramp rate by calculating the average slope of
the ramp data using a least squares fit routine. For each ramp rate
being tested, measure both a positive going ramp and a negative one,
and calculate the average ramp rate magnitude.
SIM960 Analog PID Controller
Page 62

4 – 6 Performance Tests
Rate (V/sec)
0.01
0.1
0.101
2.0
2.1
35
36
600
610
10000
In each case the ramp rate magnitude should be within ±2% of the
programmed value.
4.2.7 Offset Control Accuracy
• Ground both the Measure and Setpoint inputs of the SIM960
using either BNC grounding caps or 50 Ω terminators.
• Reset the SIM960 using *RST.
• Turn off P control using PCTL OFF.
In each case, the output display value should be within ±5 mV of the
programmed offset.
4.2.8 Manual Output Accuracy
In each case, the output display value should be within ±5 mV of the
programmed manual output value.
4.3 Calibration
• Turn on Offset control using OCTL ON.
• Change the Offset value to 0.000 V, +8.000 V, and −8.000 V, us-
ing the OFST command, and observe the ’Output’ display at
each level.
• Reset the SIM960 using *RST.
• Select Manual output using AMAN MAN.
• Use the MOUT command to change the manual output level
to 0.000 V, +8.000 V, and −8.000 V, and observe the ’Output’
display value for each level.
If any of the preceeding tests fail, the SIM960 should be returned to
the factory for recalibration. Contact Stanford Research Systems or
an authorized representative before returning the SIM960.
SIM960 Analog PID Controller
Page 63

5 Parts Lists and Schematics
This chapter presents a brief description of the SIM960 circuit design.
A complete parts list and circuit schematics are included.
In This Chapter
5.1 Circuit Descriptions . . . . . . . . . . . . . . . . . . . 5 – 2
5.1.1 Microcontroller . . . . . . . . . . . . . . . . . . 5 – 2
5.1.2 Front Panel Display . . . . . . . . . . . . . . . 5 – 2
5.1.3 Input Amplifier . . . . . . . . . . . . . . . . . . 5 – 2
5.1.4 Proportional–Integral–Derivative . . . . . . . . 5 – 3
5.1.5 Output Circuitry . . . . . . . . . . . . . . . . . 5 – 3
5.2 Parts Lists . . . . . . . . . . . . . . . . . . . . . . . . . 5 – 4
5.2.1 Digital Board & Front Panel . . . . . . . . . . . 5 – 5
5.2.2 Analog Board . . . . . . . . . . . . . . . . . . . 5–6
5.3 Schematic Diagrams . . . . . . . . . . . . . . . . . . . 5 – 7
5 – 1
Page 64

5 – 2 Circuitry
5.1 Circuit Descriptions
The SIM960 consists of three separate printed circuit boards: the
digital board, the front-panel board, and the analog board. The
digital board is directly beneath the left-hand cover (as viewed from
the front of the module).
Pages 1–3 of the schematics correspond to the digital board. Page 4
is the front-panel board, and pages 5–9 are the analog board.
5.1.1 Microcontroller
The SIM960 is controlled by microcontroller U103. It is clocked at
10 MHz by the oscillator built around U102, which will track the
reference +REF 10MHZ signal (if present) on JP103.
5.1.2 Front Panel Display
The front panel display is illuminated by successively strobing eight
digital lines from U301. Each strobe line consists of an NPN emitterfollower (Q301 through Q308) that energizes one seven segment display chip and a set of eight LEDs in parallel. The eight cathodes from
the segment display are held high or low at U302 based on a pattern
from the controller. Similarly U303 controls the eight lines from the
LED cathodes, using NPN open-collectors (Q309 through Q316) as
output current buffers.
5.1.3 Input Amplifier
The Measure and Setpoint single ended inputs of the SIM960 are
differenced to form the error signal, ε, with a standard three op-amp
instrumentation amplifier (U512, U513), operating at 9× gain. R544,
R549, R553, & R558 are high-stability resistors (0.1 %, 5 ppm/◦C),
used to reduce offset drift and to improve common mode rejection
(CMRR). R550 is a 10 Ω trimpot for trimming the CMRR.
Polarity control is implemented at U514, which switches between
gain +1× and −1× with U501A.
Next, U505B is a 12-bit multiplying D-to-A converter (DAC), which
together with U504 is used as a vernier attenuator in the error amplifier. Finally, there are three inverting amplifiers in series, each of
which may be switched between gain −1×and some larger gain. The
three amplifier gains (−16×, −4×, and −2×) allow the total amplifier
gain to be switched by factors of two up to approximately 128×. The
order of the amplifiers, largest first, is intended to optimize noise
referred to input.
SIM960 Analog PID Controller
Page 65

5.1 Circuit Descriptions 5 – 3
5.1.4 Proportional–Integral–Derivative
The resulting amplified error signal P × ε (inverted at this point) is
then distributed to the three paths, P, I, and D (see schematic page
6). The P path is unchanged, while the other two paths, I and D,
each use 12-bit DACs (U606A and U606B) for vernier attenuation of
the I and D gains.
Integral action is achieved using a multiplexed feedback capacitor
design. U602 is addressed to choose one of four capactors, all of
which are parallel to the fixed feedback capacitor C643, whose small
capacitance sets the maximum integral gain value. A similar switching method is employed in the derivative path to choose the input
capacitance of the differentiating amplifier U609B. Note R617, which
limits the maximum derivative gain to just over +40 dB.
Each of the three signal paths, P, I and D, passes through an analog
switch (U601A, U601B, and U601C, respectively) before being combined at the summing junction, theinverting input of op-amp U605B.
These switches allow individual signals (P, I or D) to be switched on
or off at the summing junction. Manual offset control also enters the
summing junction, though no switch is used since zeroing the offset circuit (U610 with U611) is equivalent to switching out the offset
signal. Note that R643 is placed in series with the feedback resistor
R615 in order to roughly match the switch resistance of each of the
switches in U601.
5.1.5 Output Circuitry
U807 is used to switch the ouput of the SIM960 between Manual
and PID modes. The signal then passes through two cascaded diode
limiter circuits.
D801 and D802 clamp the output signal with respect to the upper
limit voltage generated by U508A, together with U509B and U509C.
The effect of cascading two diode limiter circuits is to narrow the
clamping range by roughly a factor of two, down to about 100 mV.
Comparator U805 switches high when the output signal (going into
the limiter circuit at R823) exceeds the upper limit voltage. The inverting input ofU805 is referenced to the upper limit voltage through
the divider combination R844 and R845, effectively shifting the saturation turn-on location with respect to the clamping “knee”. The
lower limit clamp is similarly implemented by D803 and D804.
The output of the limiter circuit is buffered by a composite amplifier
consisting of U821 and U822. This arrangement provides the driving
capability of the LT1010 without suffering its large input offset voltage, since the output of U822 is servoed to the noninverting input to
SIM960 Analog PID Controller
Page 66

5 – 4 Circuitry
U821 via the feedback resistor R819.
U823 is a photo-MOS switch that remains off during power-up until
the ±15 V rails reach about ±13 V. By then, the output of the Manual
DAC, which is driving the SIM960 output during power-up, will
have settled to near ground level and may be passed on to the output
connector BNC without large start-up transients. Until switch U823
closes, the SIM960 output is referenced to ground via R863 (100k).
U820A provides a buffered analog output of the P × ε signal at the
back panel of the SIM960. Also, the output of U731A is passed to the
back panel to provide an analog output of the internally generated
setpoint signal.
5.2 Parts Lists
The parts list for the analog board is separate from the digital &
front-panel boards.
SIM960 Analog PID Controller
Page 67

5.2 Parts Lists 5 – 5
Part Reference SRS P/N Value Part Reference SRS P/N Value
C102 5-00366-100 18P R220,R221,R222,R223,R224, 4-01136-110 1.58K
C104 5-00376-100 120P R225,R226,R227
C105 5-00368-100 27P R228 4-01244-110 21.0K
C107,C108,C110 5-00102-030 4.7U R232 4-01117-110 1.00K
C116,C117,C118,C216,C220 5-00387-100 1000P R234,R236,R238,R240,R275 4-01146-110 2.00K
C119 5-00345-090 4.0-34P R243,R248,R259 4-01184-110 4.99K
C201,C202,C203,C204 5-00466-120 .1U R249,R250,R254,R255 4-01243-110 20.5K
C301,C221 5-00318-110 2.2U/T35 R251,R260,R270,R271,R272, 4-01242-110 20.0K
C222 5-00522-110 47U/T R273
C227,C228 5-00375-100 100P R257 4-01211-110 9.53K
C241,C233 5-00367-100 22P R262,R263 4-00925-110 10
C240 5-00454-120 .01U R274 4-01670-121 20K 1% 2PPM
D101,D102,D464,D465,D466, 3-00945-143 BAT54S R280,R277 4-01280-110 49.9K
D467,D468,D469,D470,D471 R283,R285 4-01288-110 60.4K
D201,D202,D203,D204 3-01430-143 BAS40-05 R284,R287 4-01088-110 499
D205 3-01409-145 BAV99DW R288,R289 4-01271-110 40.2K
D401-D420, 3-00424-060 GREEN R301,R302,R303,R304,R305, 4-01459-100 150
D421,D422,D424,D427,D428, R306,R307,R308
D429-D443, R309,R310,R311,R312,R313, 4-01462-100 200
D444,D445,D446,D448,D449, R314,R315,R316
D450,D451,D452,D453,D454, R319,R321,R323,R325,R327, 4-01496-100 5.1K
D455,D456,D457,D458,D459, R329,R331,R333
D460,D461,D462 S401,S402,S403,S404,S405, 2-00053-000 B3F-1052
D426,D447,D463 3-00425-060 RED S406,S407,S408
JP101 1-00302-010 6 PIN DIF CES U101 3-00903-124 MAX6348
JP103 1-00367-040 15 PIN D U102 3-01378-103 74HCU04
JP104 1-00086-002 3 PIN SI U103 3-01379-114 68HC912B32
J202 1-01014 30 PIN 3x10 F U104 3-00662-103 74HC14
J301 1-00593-009 HEADER_SIL26 U201,U202 3-01380-120 LF444CM
J401 1-00594-019 HEADER_SIF26 U203,U212 3-00731-120 5534
L102,L103,L105 6-00174-051 BEAD U204 3-01386-122 DG408
L301 6-00236-130 BEAD U205 3-01425-170 LTC2415CGN
Q201 3-00927-150 MMBT2907ALT1 U206 3-01383-123 REF02
Q301-Q316 3-01421-150 MMBT2222 U207 3-00663-103 74HC08
R101 4-01495-100 4.7K U208 3-00116-030 78L05
R102,R106 4-01479-100 1.0K U209 3-00952-120 OPA2277
R103 4-01431-100 10 U210 3-00727-121 LM339
R105 4-01511-100 22K U211 3-00724-120 LF353
R107 4-01057-110 237 U213 3-00728-121 LM393
R109 4-01405-110 1.00M U301 3-01433-103 74HC259
R110,R116,R120,R121,R318, 4-01455-100 100 U302,U303 3-00751-103 74HC574
R320,R322,R324,R326,R328, U401 3-01424-061 HDSP-A107
R330,R332 U402,U403,U404,U405,U406 3-00290-061 HDSP-A101
R111,R114,R118,R123,R151, 4-01503-100 10K
R152,R153,R154,R155,R276, X101-X314 (41 total) 5-00299-100 .1U
R334 Y101 6-00571-020 10.000MHZ
R112,R113,R122 4-01527-100 100K Y104,Y108,Y202,Y203,Y204, 4-01213-110 10.0K
R115,R117,R119 4-01465-100 270 Y206,Y207,Y208,Y210,Y211,
R128,R242 4-01309-110 100K Y229,Y252,Y253,Y256,Y258,
R201,R205,R209,R212,R233, 4-01405-110 1.00M Y261,Y282,Y283,Y284,Y285
R235,R237,R239,R282,R286 PCB, SIM960 Digital Board 7-01258
5.2.1 Digital Board & Front Panel
SIM960 Analog PID Controller
Page 68

5 – 6 Circuitry
Part Reference SRS P/N Value Part Reference SRS P/N Value
C502,C504,C506,C507,C536, 5-00365-100 15P R702 4-01050-110 200
C537,C538,C541,C608,C637, R704 4-01195-110 6.49K
C638 R708 4-01287-110 59.0K
C511,C521,C618,C708,C816 5-00369-100 33P R711,R712,R719,R720,R761, 4-01088-110 499
C602,C702,C832 5-00026-100 22P R803,R809,R811
C603,C616,C712 5-00072-050 10U R723,R724,R725,R726,R740, 4-00218-000 10.00K
C610 5-00025-100 100P R744,R866
C611 5-00442-120 .001U R746 4-00011-053 10K
C612 5-00454-120 .01U R748 4-00014-053 5K
C613 5-00466-120 .1U R748 4-00014-053 5K
C614 5-00538-050 1.0U R760 4-01128-110 1.30K
C640 5-00350 .56U R763,R762 4-01021-110 100
C641 5-00582 .033U R764 4-01169-110 3.48K
C642 5-00048-050 .0015U R765 4-01455-100 100
C643 5-00583 100P R804,R812 4-01551-100 1.0M
C740 5-00059-051 .47U R808,R810,R814,R815 4-01486-100 2.0K
C741,C742 5-00098-030 10U R817,R826 4-01111-110 866
C811,C821,C903,C904,C906 5-00102-030 4.7U R821 4-01038-110 150
C834 5-00377-100 150P R837,R840,R842 4-00913-000 49.9 FP
D802,D801 3-01430 BAS40-05 R844,R847 4-01142-110 1.82K
D804,D803 3-00901-145 BAS40-06 R863 4-01309-110 100K
D808,D807 3-01487 12V zener R865,R864 4-00219-000 20.00K
J505,J506,J701,J804,J805 1-00073 Insulated BNC U501 3-01358-122 DG444
J901 1-01015 30 PIN 3x10 M U504,U506,U513,U605 3-01361-120 OPA2228
K502 3-00308-203 DS2E-ML2-DC5V U505,U508,U606 3-01363-171 LTC1590
Q504,Q505,Q802 3-00927-150 MMBT2907A U509 3-01364-120 OPA4277
Q801 3-01421-150 MMBT2222 U514,U512 3-01360-120 OPA228
R502,R507,R542,R547 4-01175-110 4.02K U601 3-01365-122 DG411DY
R510,R533,R534,R819 4-01146-110 2.00K U702,U602 3-01366-122 DG333ADW
R527 4-01158-110 2.67K U603,U604,U807 3-01367-122 DG419DY
R528 4-01149-110 2.15K U701,U607 3-01398 OPA2131
R530 4-01204-110 8.06K U608 3-01386-122 DG408DY
R531 4-01262-110 32.4K U609 3-01361-120 OPA2228
R535,R536,R538,R539,R641, 4-01242-110 20.0K U610 3-01431 LTC1595
R642,R816,R829 U611,U708,U720,U809 3-00952-120 OPA2277
R541,R566 4-00012-053 20K U703 3-01369-122 DG409/SO
R544,R549,R553,R558 4-01649-000 1.000K U808,U707 3-01372-171 LTC1596-1
R545,R556,R710,R839,R860 4-01405-110 1.00M U709 3-01374-103 74HC132A
R548 4-01418-100 3 U710 3-00742-103 74HC74
R550 4-01614-053 10 U711 3-01375-103 74HC86
R551,R617,R709,R713,R721, 4-01117-110 1.00K U712,U802,U803,U805 3-00813-121 LM311M
R862 U823,U730 3-01488 AQY221R2S
R557,R554 4-01067-110 301 U731 3-01387-120 LT1097S8
R559,R563,R564,R565 4-00925-110 10 U732 3-00133 OPA131
R560,R561,R562,R718,R747, 4-01184-110 4.99K U804 3-00744-103 74HC151
R806,R813,R823,R824 U820 3-01370-120 OPA277UA
R602,R614,R615,R619,R628, 4-01163-110 3.01K U821 3-00998-120 OPA227UA
R845,R846 U822 3-00279-340 LT1010CN8
R616 4-01317-110 121K U901 3-01432 OPA4131
R618,R620,R621,R622,R623, 4-01561-100 2.7M U903,U902 3-00787-103 74HC595
R624,R717,R805 X509-X910 (90 total) 5-00299-100 .1U
R644,R643 4-00997-110 56.2 Y537-Y827 (16 total) 4-01213-110 10.0K
R645,R646,R647,R648 4-01503-100 10K PCB, SIM960 Analog Board 7-01259
5.2.2 Analog Board
SIM960 Analog PID Controller
Page 69

5.3 Schematic Diagrams 5 – 7
5.3 Schematic Diagrams
Schematic diagrams follow this page.
SIM960 Analog PID Controller
 Loading...
Loading...