

Page 1
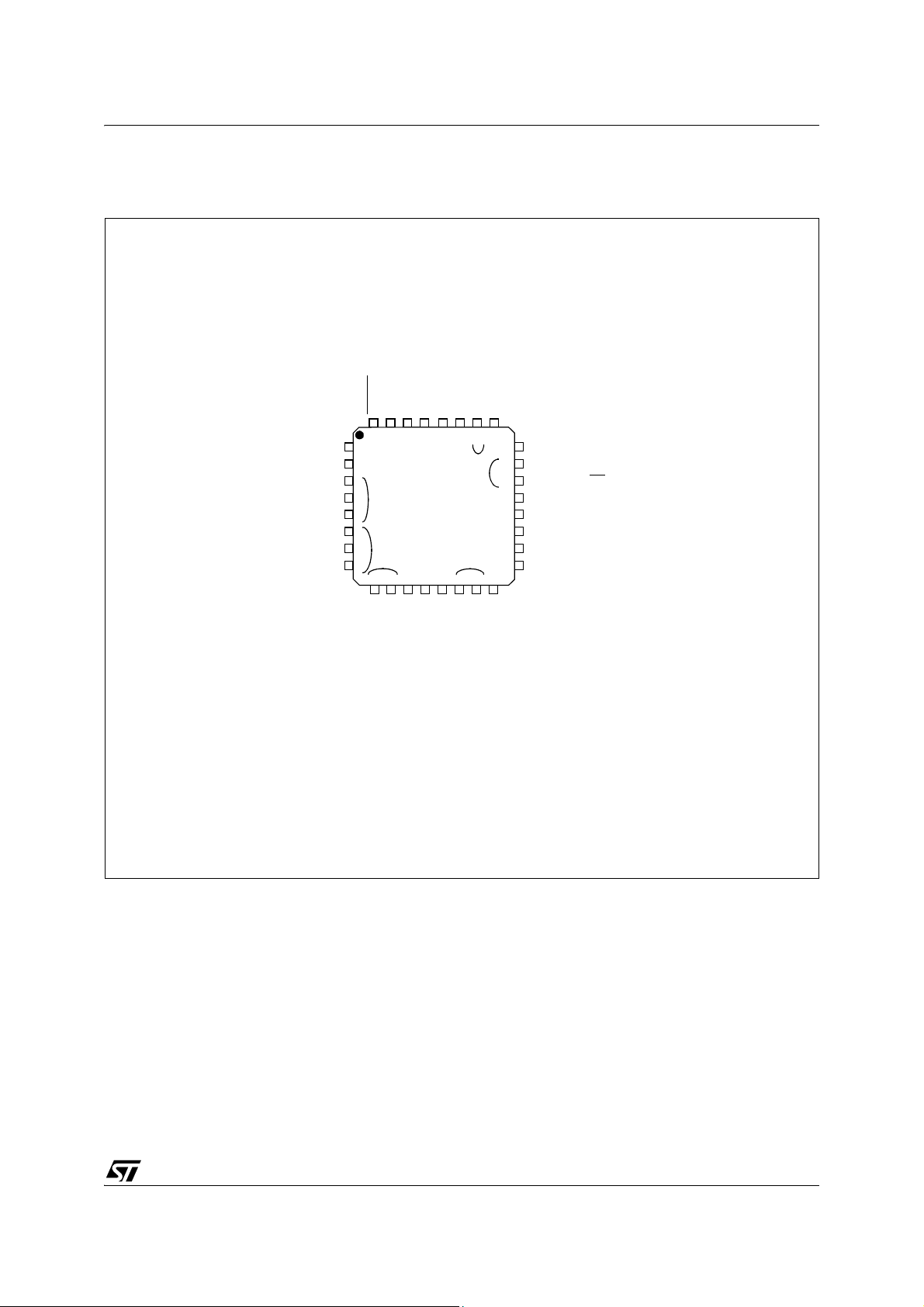
10-bit ADC, 5 timers, SPI, 2x LINSCI
LQFP32
7x7mm
LQFP44
10x10mm
LQFP64
10x10mm
Features
■ Memories
– 16K to 60K High Density Flash (HDFlash) or
ROM with read-out protection capability. InApplication Programming and In-Circuit Pro
gramming for HDFlash devices
– 1.5 to 2K RAM
– HDFlash endurance: 100 cycles, data reten-
tion 40 years at 85°C
■ Clock, Reset and Supply Management
– Low power crystal/ceramic resonator oscilla-
tors and bypass for external clock
– PLL for 2x frequency multiplication
– 5 power saving modes: Halt, Auto Wake Up
From Halt, Active Halt, Wait and Slow
■ Interrupt Management
– Nested interrupt controller
– 14 interrupt vectors plus TRAP and RESET
– TLI top level interrupt (on 64-pin devices)
– Up to 21 external interrupt lines (on 4 vectors)
■ Up to 48 I/O Ports
– Up to 48 multifunctional bidirectional I/O lines
– Up to 36 alternate function lines
– Up to 6 high sink outputs
■ 5 Timers
– 16-bit timer with 2 input captures, 2 output
compares, external clock input, PWM and
pulse generator modes
– 8-bit timer with 1 or 2 input captures, 1 or 2
output compares, PWM and pulse generator
modes
– 8-bit PWM auto-reload timer with 1 or 2 input
captures, 2 or 4 independent PWM output
channels, output compare and time base in
terrupt, external clock with event detector
ST72361
8-bit MCU with Flash or ROM,
™
-
– Main clock controller with real-time base and
clock output
– Window watchdog timer
■ Up to 3 Communications Interfaces
– SPI synchronous serial interface
– Master/slave LINSCI™ asynchronous serial
interface
– Master-only LINSCI™ asynchronous serial in-
terface
■ Analog Peripheral (Low Current Coupling)
– 10-bit A/D converter with up to 16 inputs
– Up to 9 robust ports (low current coupling)
■ Instruction Set
– 8-bit data manipulation
– 63 basic instructions
– 17 main addressing modes
-
– 8 x 8 unsigned multiply instruction
■ Development Tools
– Full hardware/software development package
Table 1. Device Summary
Features
Program memory - bytes 60K 48K 32K
RAM (stack) - bytes 2K (256) 2K (256) 1.5K (256)
Operating Supply 4.5V to 5.5 V
CPU Frequency External Resonator Osc. w/ PLLx2/8 MHz
Max. Temp. Range -40°C to +125°C
Packages LQFP64 10x10mm (AR), LQFP44 10x10mm (J), LQFP32 7x7mm (K)
October 2008 1/225
ST72361AR9/ST72361J9/
ST72361K9
ST72361AR7/ST72361J7/
ST72361K7
ST72361AR6/ST72361J6/
ST72361K6
Rev. 4
1
Page 2

Table of Contents
1 DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 PIN DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 REGISTER AND MEMORY MAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 FLASH PROGRAM MEMORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2 MAIN FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.3 STRUCTURE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.4 ICC INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.5 ICP (IN-CIRCUIT PROGRAMMING) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.6 IAP (IN-APPLICATION PROGRAMMING) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.7 RELATED DOCUMENTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.8 REGISTER DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5 CENTRAL PROCESSING UNIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2 MAIN FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.3 CPU REGISTERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6 SUPPLY, RESET AND CLOCK MANAGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.1 PHASE LOCKED LOOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.2 MULTI-OSCILLATOR (MO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.3 RESET SEQUENCE MANAGER (RSM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.4 SYSTEM INTEGRITY MANAGEMENT (SI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7 INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
7.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
7.2 MASKING AND PROCESSING FLOW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
7.3 INTERRUPTS AND LOW POWER MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.4 CONCURRENT & NESTED MANAGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.5 INTERRUPT REGISTER DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7.6 EXTERNAL INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8 POWER SAVING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.2 SLOW MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.3 WAIT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
8.4 HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
8.5 ACTIVE HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
8.6 AUTO WAKE-UP FROM HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
9 I/O PORTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.2 FUNCTIONAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.3 I/O PORT IMPLEMENTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
9.4 LOW POWER MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
9.5 INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
9.6 I/O PORT REGISTER CONFIGURATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
225
2/225
2
Page 3

Table of Contents
10 ON-CHIP PERIPHERALS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
10.1 WINDOW WATCHDOG (WWDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
10.2 MAIN CLOCK CONTROLLER WITH REAL TIME CLOCK MCC/RTC . . . . . . . . . . . . . . . 58
10.3 PWM AUTO-RELOAD TIMER (ART) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
10.4 16-BIT TIMER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
10.5 8-BIT TIMER (TIM8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
10.6 SERIAL PERIPHERAL INTERFACE (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
10.7 LINSCI SERIAL COMMUNICATION INTERFACE (LIN MASTER/SLAVE) . . . . . . . . . . . 120
10.8 LINSCI SERIAL COMMUNICATION INTERFACE (LIN MASTER ONLY) . . . . . . . . . . . . 151
10.9 10-BIT A/D CONVERTER (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
11 INSTRUCTION SET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
11.1 CPU ADDRESSING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
11.2 INSTRUCTION GROUPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
12 ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
12.1 PARAMETER CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
12.2 ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
12.3 OPERATING CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
12.4 SUPPLY CURRENT CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
12.5 CLOCK AND TIMING CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
12.6 AUTO WAKEUP FROM HALT OSCILLATOR (AWU) . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
12.7 MEMORY CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
12.8 EMC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
12.9 I/O PORT PIN CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
12.10CONTROL PIN CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
12.11TIMER PERIPHERAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
12.12COMMUNICATION INTERFACE CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . 202
12.1310-BIT ADC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
13 PACKAGE CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
13.1 PACKAGE MECHANICAL DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
13.2 THERMAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
13.3 SOLDERING AND GLUEABILITY INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
14 DEVICE CONFIGURATION AND ORDERING INFORMATION . . . . . . . . . . . . . . . . . . . . . . . 210
14.1 FLASH OPTION BYTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
14.2 TRANSFER OF CUSTOMER CODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
15 DEVELOPMENT TOOLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
16 IMPORTANT NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
16.1 ALL DEVICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
16.2 FLASH/FASTROM DEVICES ONLY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
16.3 ROM DEVICES ONLY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
17 REVISION HISTORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
3/225
Page 4
ST72361
8-BIT CORE
ALU
ADDRESS AND DATA BUS
OSC1
OSC2
RESET
PORT A
CONTROL
RAM
PA7:0
(8 bits)
1
PROGRAM
(16 - 60 Kbytes)
MEMORY
PLL x 2
PWM
8-Bit
PORT B
PORT C
SPI
LINSCI2
PB7:0
(8 bits)
1
PC7:0
(8 bits)
1
OSC
PORT D
PD7:0
(8 bits)
1
/2
option
LINSCI1
16-Bit
TIMER
(LIN master)
(LIN master/slave)
V
SS
V
DD
POWER
SUPPLY
PORT E
PE7:0
(8 bits)
1
PORT F
PF7:0
(8 bits)
1
TIMER
ART
MCC
(Clock Control)
1
On some devices only (see Device Summary on page 1)
TLI
1
WATCHDOG
WINDOW
(1.5 - 2 Kbytes)
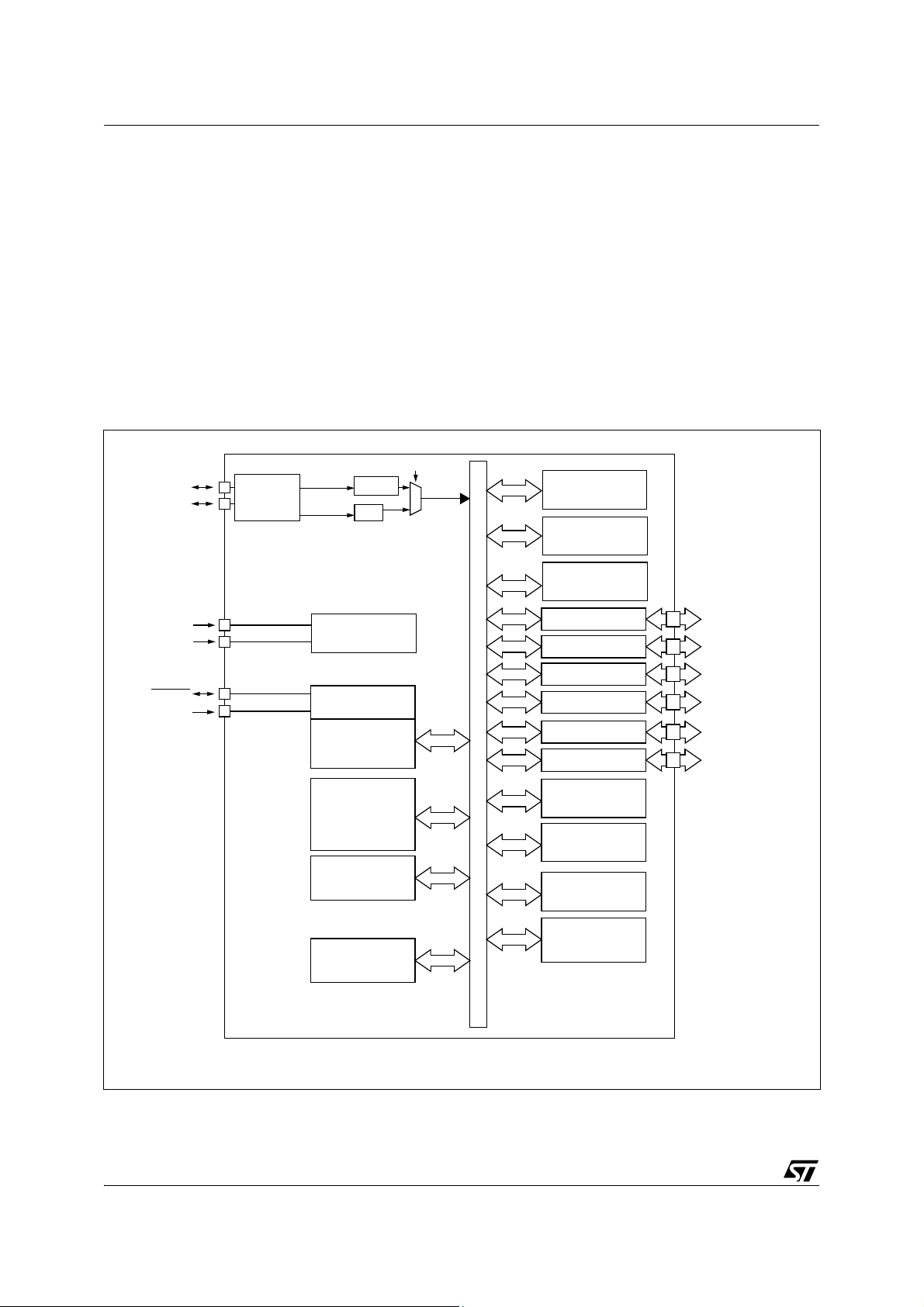
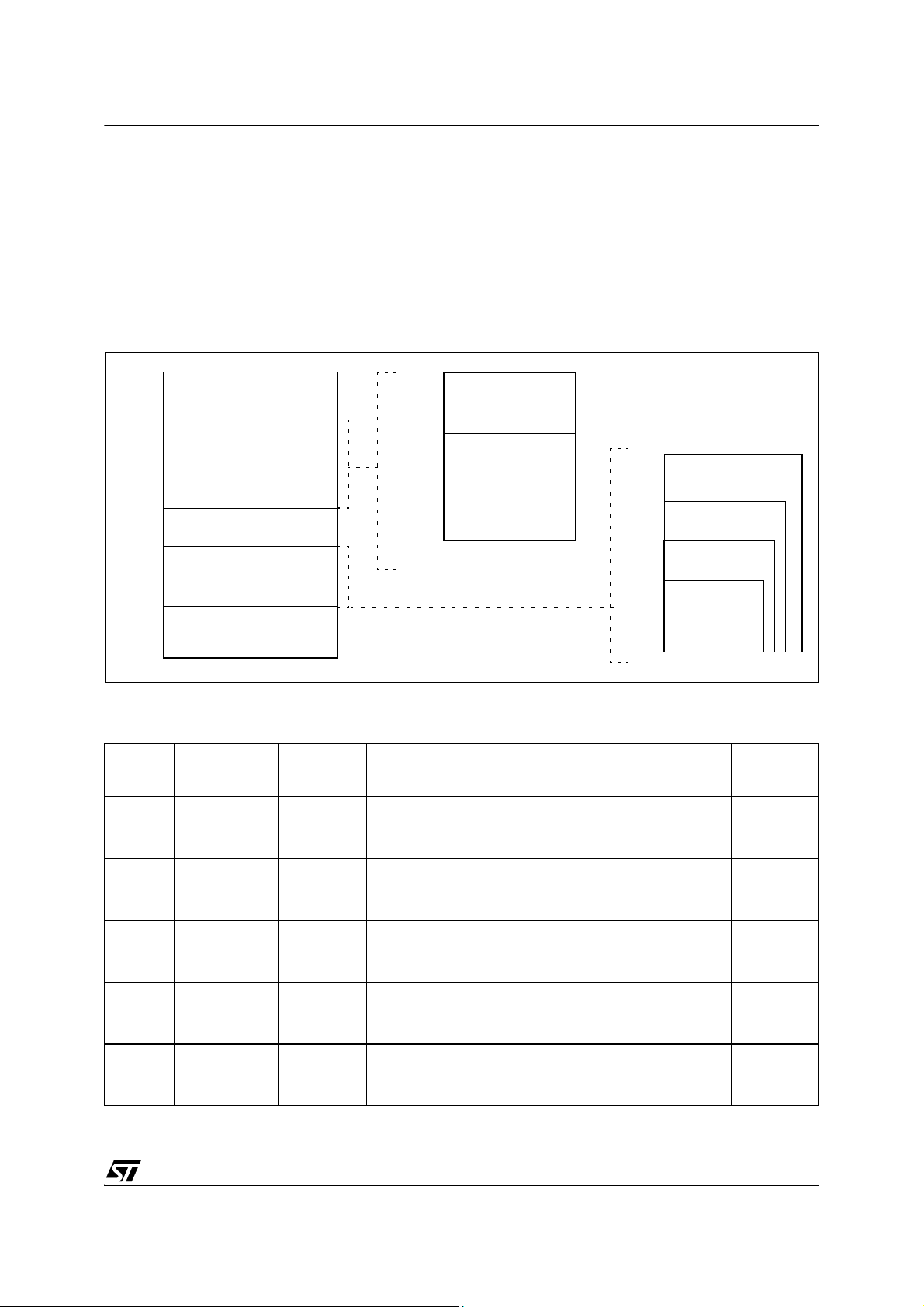
1 DESCRIPTION
The ST72361 devices are members of the ST7 microcontroller family designed for mid-range applications with LIN (Local Interconnect Network) interface.
All devices are based on a common industrystandard 8-bit core, featuring an enhanced instruc
tion set and are available with Flash or ROM program memory. The ST7 family architecture offers
both power and flexibility to software developers,
enabling the design of highly efficient and compact
application code.
Figure 1. Device Block Diagram
The on-chip peripherals include an A/D converter,
a PWM Autoreload timer, 2 general purpose tim
ers, 2 asynchronous serial interfaces, and an SPI
interface.
For power economy, microcontroller can switch
-
dynamically into WAIT, SLOW, Active-Halt, Auto
Wake-up from HALT (AWU) or HALT mode when
the application is in idle or stand-by state.
Typical applications are consumer, home, office
and industrial products.
-
4/225
3
Page 5
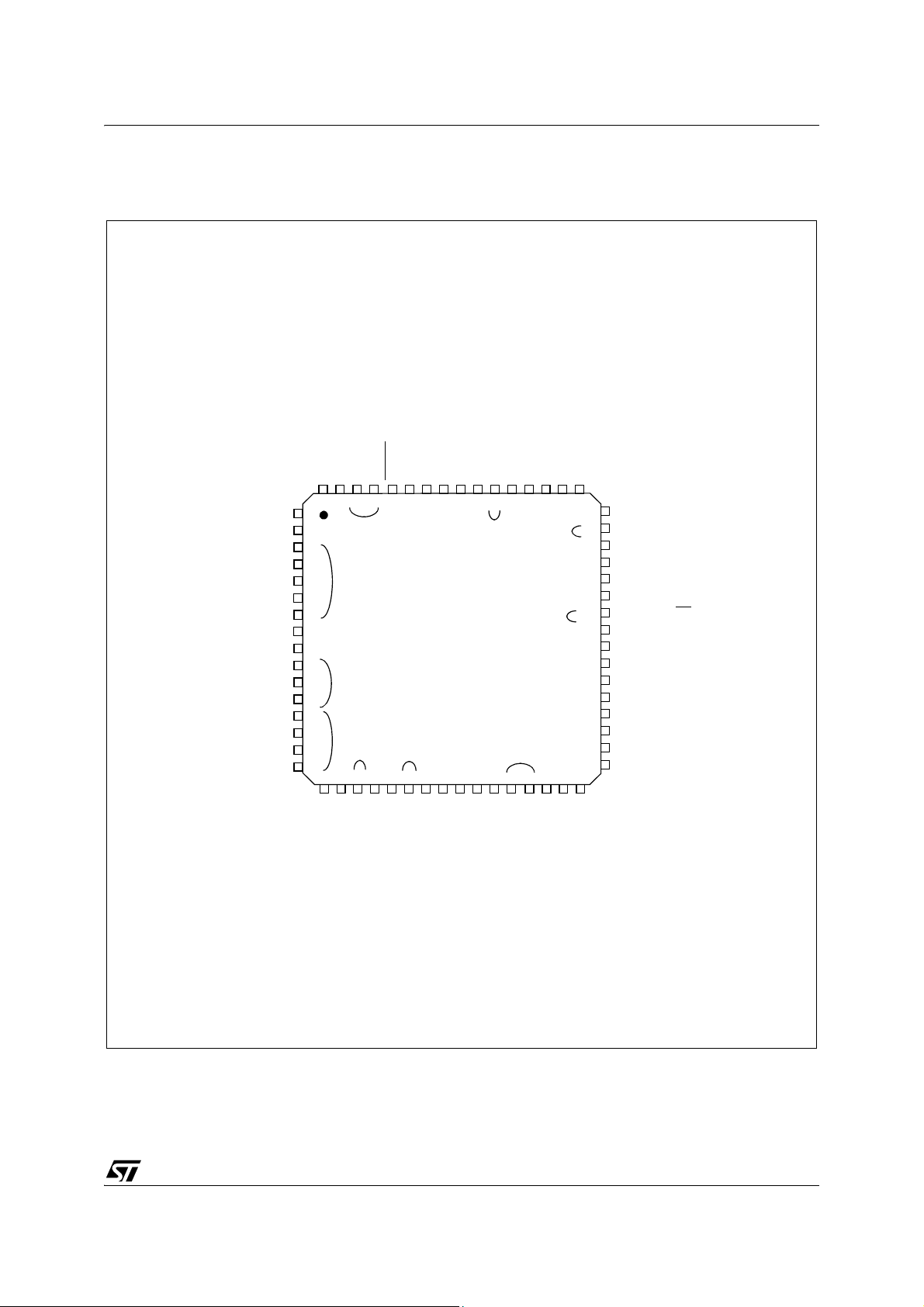
2 PIN DESCRIPTION
AIN15 / PE3
ICCDATA / AIN1 / PB5
(*)T16_OCMP1 / AIN2 / PB6
V
SS_2
V
DD_2
(*)T16_OCMP2 / AIN3 / PB7
(*)T16_ICAP1 / AIN4 / PC0
(*)T16_ICAP2 / (HS) PC1
T16_EXTCLK / (HS) PC2
PE4
NC
ICCSEL/V
PP
AIN12 / PE0
AIN13 / PE1
ICCCLK / AIN0 / PB4
AIN14 / PE2
64 63 62 61 60 59 58 57 56 55 54 53 52 51 50 49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
17 18 19 20 21 22 23 24 29 30 31 3225 26 27 28
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
PWM1 / (HS) PA2
PWM2 / PA3
PWM3 / PA4
V
SS_3
V
DD_3
ARTCLK / (HS) PA5
ARTIC2 / (HS) PA6
T8_OCMP2 / PA7
T8_ICAP2 / PB0
T8_OCMP1 / PB1
T8_ICAP1 / PB2
MCO / PB3
OSC1
OSC2
ARTIC1 / PA0
PWM0 / PA1
PF0
PE7
PD0 / SPI_SS / AIN6
VDD_1
VSS_1
PC7 / SPI_SCK
PC6 / SPI_MOSI
PC5 / SPI_MISO
PE6 / AIN5
PE5
PC4
PC3
PD2 / LINSCI1_TDO
PD1 / LINSCI1_RDI
PF2 / AIN8
PF1 / AIN7
RESET
PD5 / LINSCI2_TDO
V
DD_0VDDAVSS_0VSSA
PD4 / LINSCI2_RDI
PD3 (HS)/ LINSCI2_SCK
PF5
TLI
PF4
PF3 / AIN9
PF7
PF6
PD7 / AIN11
PD6 / AIN10
ei0
(HS) 20mA high sink capability
eix associated external interrupt vector
ei3
ei1
ei1
ei3
ei3
ei2
ei3
ei0
ei1
(*) : by option bit:
T16_ICAP2 can be moved to PD1
T16_OCMP1 can be moved to PD3
T16_OCMP2 can be moved to PD5
T16_ICAP1 can be moved to PD4
Figure 2. LQFP 64-Pin Package Pinout
ST72361
5/225
Page 6
ST72361
V
SS_2
V
DD_2
(*)T16_OCMP2 / AIN3 / PB7
(*)T16_ICAP1 / AIN4 / PC0
(*)T16_ICAP2 / (HS) PC1
T16_EXTCLK / (HS) PC2
PE4
ICCSEL/V
PP
ICCCLK / AIN0 / PB4
ICCDATA / AIN1 / PB5
(*)T16_OCMP1 / AIN2 / PB6
44 43 42 41 40 39 38 37 36 35 34
33
32
31
30
29
28
27
26
25
24
23
12 13 14 15 16 17 18 19 20 21 22
1
2
3
4
5
6
7
8
9
10
11
PWM2 / PA3
PWM3 / PA4
ARTCLK / (HS) PA5
ARTIC2 / (HS) PA6
T8_OCMP1 / PB1
T8_ICAP1 / PB2
MCO / PB3
OSC1
OSC2
PWM0 / PA1
PWM1 / (HS) PA2
PD0 / SPI_SS / AIN6
PC7 / SPI_SCK
PC6 / SPI_MOSI
PC5 / SPI_MISO
PE6 / AIN5
PC4
PC3
PD2 / LINSCI1_TDO
PD1 / LINSCI1_RDI
PF2 / AIN8
PF1 / AIN7
V
DD_0VDDAVSS_0VSSA
PD4 / LINSCI2_RDI
PD3 (HS) / LINSCI2_SCK
PF5
PD7 / AIN11
PD6 / AIN10
RESET
PD5 / LINSCI2_TDO
1
(HS) 20mA high sink capability
eix associated external interrupt vector
ei0
ei3
ei3
ei1
ei3
ei1
ei2
ei3
(*) : by option bit:
T16_ICAP2 can be moved to PD1
T16_OCMP1 can be moved to PD3
T16_OCMP2 can be moved to PD5
T16_ICAP1 can be moved to PD4
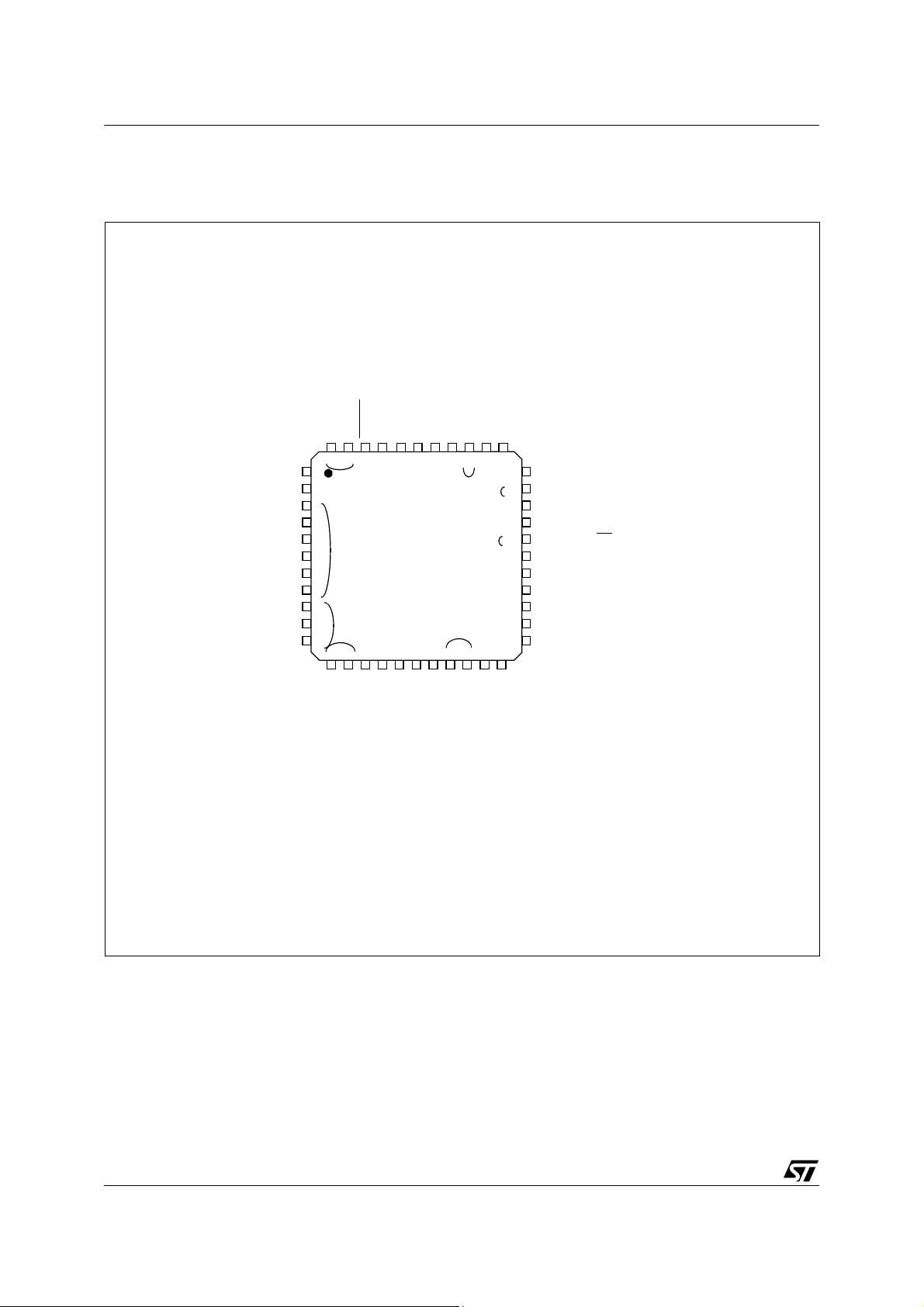
PIN DESCRIPTION (Cont’d)
Figure 3. LQFP 44-Pin Package Pinout
6/225
Page 7
PIN DESCRIPTION (Cont’d)
T16_OCMP2 / AIN3 / PB7
T16_ICAP1 / AIN4 / PC0
T16_ICAP2 / (HS) PC1
T16_EXTCLK / (HS) PC2
ICCSEL/V
PP
ICCCLK / AIN0 / PB4
ICCDATA / AIN1 / PB5
T16_OCMP1 / AIN2 / PB6
32 31 30 29 28 27 26 25
24
23
22
21
20
19
18
17
9 10111213141516
1
2
3
4
5
6
7
8
ARTCLK / (HS) PA5
T8_OCMP1 / PB1
T8_ICAP1 / PB2
MCO / PB3
OSC1
OSC2
PWM0 / PA1
PWM1 / (HS) PA2
PC6 / SPI_MOSI
PC5 / SPI_MISO
PC4
PC3
PD2 /
LINSCI1_TDO
PD1 / LINSCI1_RDI
PD0 / SPI_SS / AIN6
PC7 / SPI_SCK
V
SS_0VSSA
PD4 / LINSCI2_RDI
PD3 (HS) / LINSCI2_SCK
1
RESET
PD5 / LINSCI2_TDO
V
DD_0VDDA
(HS) 20mA high sink capability
eix associated external interrupt vector
ei0
ei1
ei3
ei3
ei1
ei2
(*) : by option bit:
T16_ICAP2 can be moved to PD1
T16_OCMP1 can be moved to PD3
T16_OCMP2 can be moved to PD5
T16_ICAP1 can be moved to PD4
Figure 4. LQFP 32-Pin Package Pinout
ST72361
For external pin connection guidelines, refer to “ELECTRICAL CHARACTERISTICS” on page 178.
7/225
Page 8
ST72361
PIN DESCRIPTION (Cont’d)
For external pin connection guidelines, refer to “ELECTRICAL CHARACTERISTICS” on page 178.
Legend / Abbreviations for Table 2:
Type: I = input, O = output, S = supply
In/Output level: CT= CMOS 0.3VDD/0.7VDD with Schmitt trigger
TT= TTL 0.8V / 2V with Schmitt trigger
Output level: HS = 20mA high sink (on N-buffer only)
Port and control configuration:
– Input: float = floating, wpu = weak pull-up, int = interrupt1), ana = analog, RB = robust
– Output: OD = open drain, PP = push-pull
Refer to “I/O PORTS” on page 45 for more details on the software configuration of the I/O ports.
The RESET configuration of each pin is shown in bold which is valid as long as the device is in reset state.
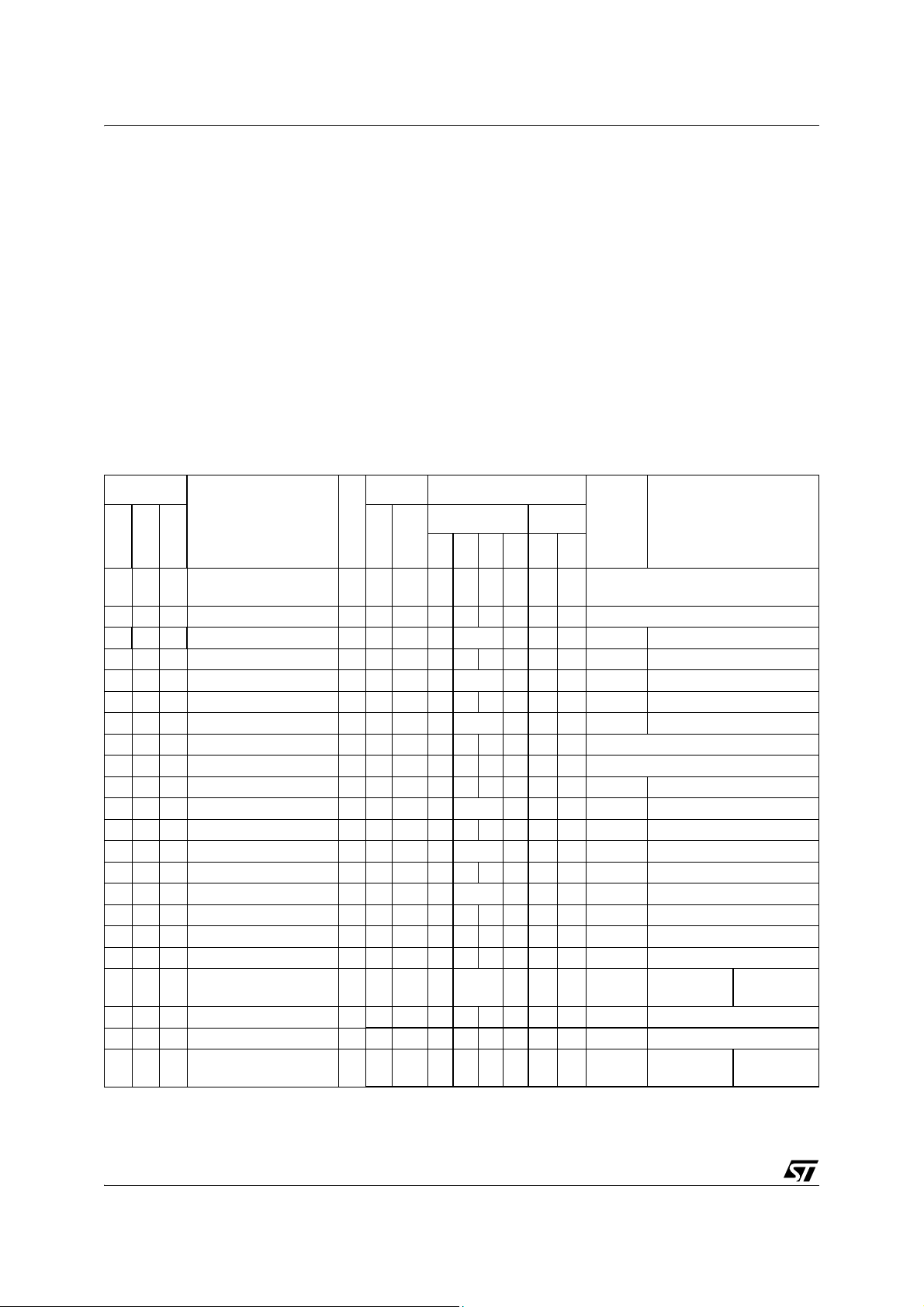
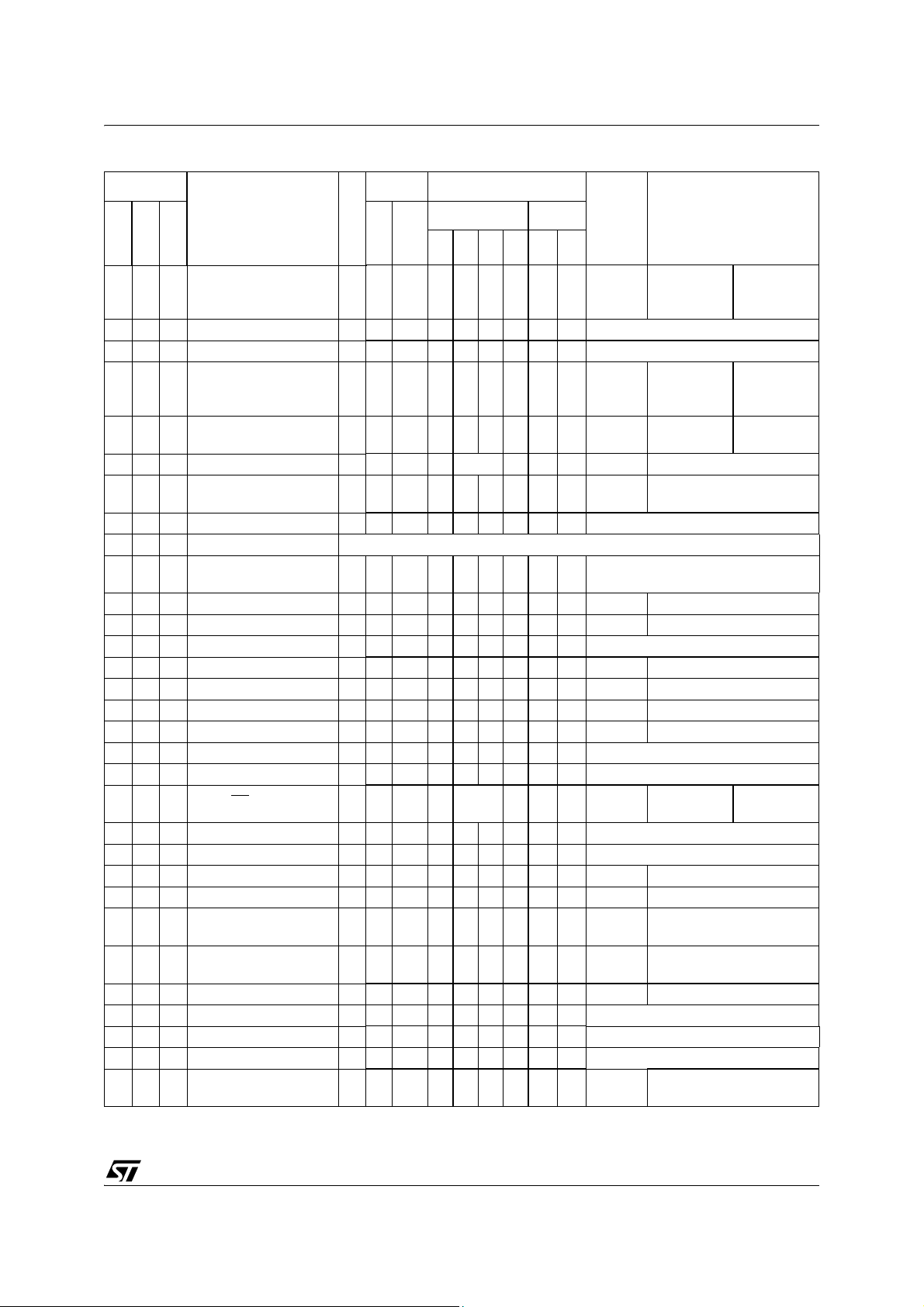
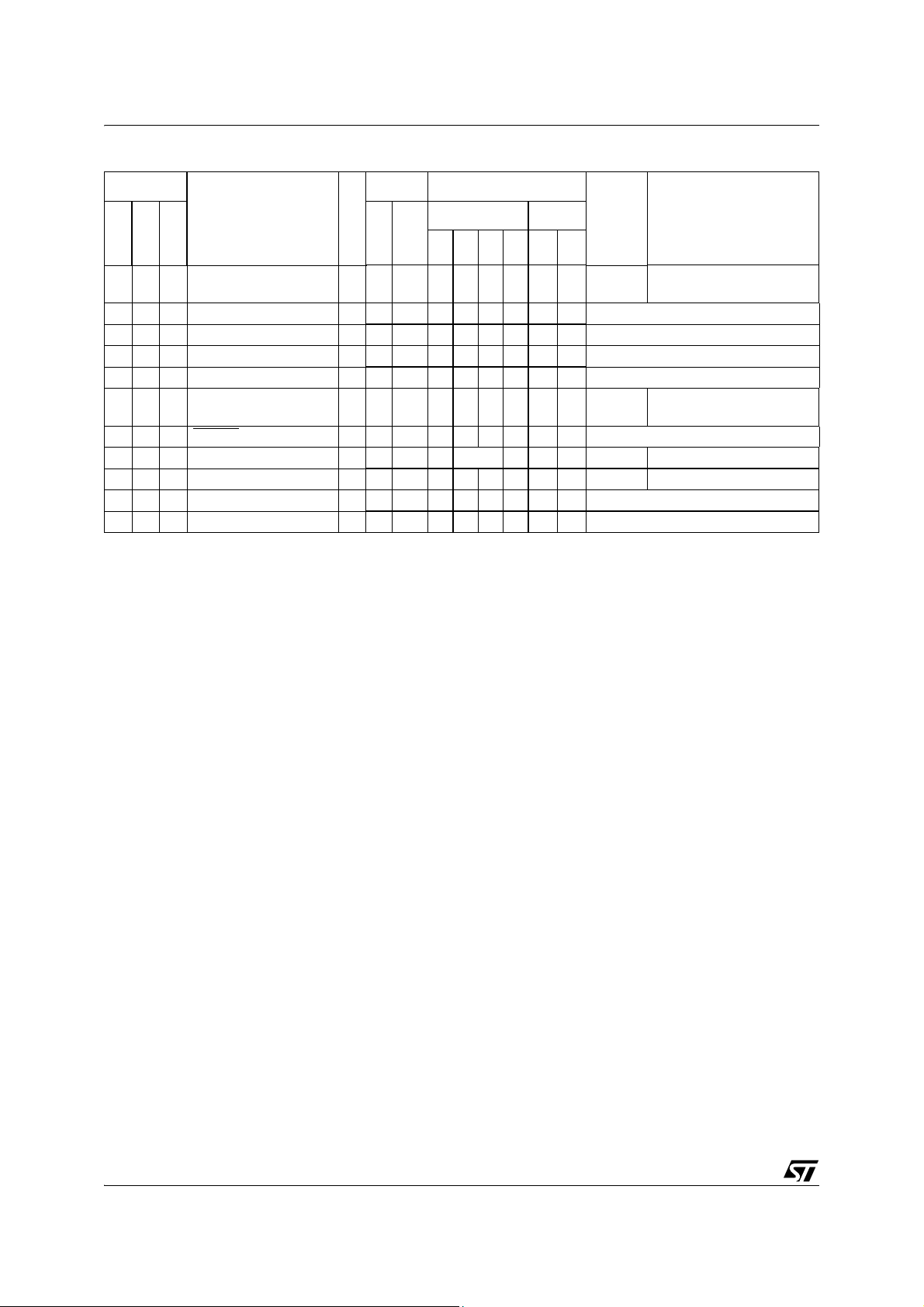
Table 2. Device Pin Description
Pin n°
Pin Name
LQFP64
LQFP44
LQFP32
1 1 1 OSC1
2 2 2 OSC2
3)
3)
3 - - PA0 / ARTIC1 I/O C
4 3 3 PA1 / PWM0 I/O C
Level Port
Type
Input
Output
float
I
Input Output
wpu
int
ana
OD
Main
function
(after
reset)
PP
Alternate function
External clock input or Resonator oscillator inverter input
I/O Resonator oscillator inverter output
T
T
X ei0 X X Port A0 ART Input Capture 1
X ei0 X X Port A1 ART PWM Output 0
5 4 4 PA2 (HS) / PWM1 I/O CTHS X ei0 X X Port A2 ART PWM Output 1
6 5 - PA3 / PWM2 I/O C
7 6 - PA4 / PWM3 I/O C
8 - - V
9 - - V
SS_3
DD_3
S Digital Ground Voltage
S Digital Main Supply Voltage
T
T
X ei0 X X Port A3 ART PWM Output 2
X ei0 X X Port A4 ART PWM Output 3
10 7 5 PA5 (HS) / ARTCLK I/O CTHS X ei0 X X Port A5 ART External Clock
11 8 - PA6 (HS) / ARTIC2 I/O CTHS X ei0 X X Port A6 ART Input Capture 2
12 - - PA7 / T8_OCMP2 I/O C
13 - - PB0 /T8_ICAP2 I/O C
14 9 6 PB1 /T8_OCMP1 I/O C
15 10 7 PB2 / T8_ICAP1 I/O C
16 11 8 PB3 / MCO I/O C
17 - - PE0 / AIN12 I/O T
18 - - PE1 / AIN13 I/O T
19 12 9 PB4 / AIN0 / ICCCLK I/O C
20 - - PE2 / AIN14 I/O T
21 - - PE3 / AIN15 I/O T
22 13 10 PB5 / AIN1 / ICCDATA I/O C
T
T
T
T
T
T
T
T
T
T
T
X ei0 X X Port A7 TIM8 Output Compare 2
X ei1 X X Port B0 TIM8 Input Capture 2
X ei1 X X Port B1 TIM8 Output Compare 1
X ei1 X X Port B2 TIM8 Input Capture 1
X ei1 X X Port B3 Main clock out (f
OSC2
X X RB X X Port E0 ADC Analog Input 12
X X RB X X Port E1 ADC Analog Input 13
X ei1 RB X X Port B4
ICC Clock
input
ADC Analog
Input 0
X X RB X X Port E2 ADC Analog Input 14
X X RB X X Port E3 ADC Analog Input 15
X ei1 RB X X Port B5
ICC Data input
ADC Analog
Input 1
)
8/225
Page 9
ST72361
Pin n°
LQFP64
LQFP44
LQFP32
23 14 11
24 15 - V
25 16 - V
26 17 12
27 18 13
Pin Name
PB6 / AIN2 /
T16_OCMP1
SS_2
DD_2
PB7 /AIN3 /
T16_OCMP2
PC0 / AIN4 /
T16_ICAP1
Level Port
Input Output
Type
Input
Output
float
wpu
int
ana
OD
Main
function
(after
reset)
PP
Alternate function
TIM16 Out-
I/O C
T
X X RB X X Port B6
put Compare 1
S Digital Ground Voltage
S Digital Main Supply Voltage
TIM16 Out-
I/O C
T
X X RB X X Port B7
put Compare 2
I/O C
T
X X RB X X Port C0
TIM16 Input
Capture 1
ADC Analog
Input 2
ADC Analog
Input 3
ADC Analog
Input 4
28 19 14 PC1 (HS) / T16_ICAP2 I/O CTHS X ei2 X X Port C1 TIM16 Input Capture 2
29 20 15
30 21 - PE4 I/O T
PC2 (HS) /
T16_EXTCLK
I/O CTHS X ei2 X X Port C2 TIM16 External Clock input
T
X X X X Port E4
31 - - NC Not Connected
32 22 16 V
PP
33 23 17 PC3 I/O C
34 24 18 PC4 I/O C
35 - - PE5 I/O T
36 25 - PE6 / AIN5 I/O T
37 26 19 PC5 /MISO I/O C
38 27 20 PC6 / MOSI I/O C
39 28 21 PC7 /SCK I/O C
40 - - V
41 - - V
SS_1
DD_1
42 29 22 PD0 / SS/ AIN6 I/O C
43 - - PE7 I/O T
44 - - PF0 I/O T
45 30 - PF1 / AIN7 I/O T
46 31 - PF2 / AIN8 I/O T
47 32 23 PD1 / SCI1_RDI I/O C
48 33 24 PD2 / SCI1_TDO I/O C
49 - - PF3 / AIN9 I/O T
50 - - PF4 I/O T
51 - - TLI I C
52 34 - PF5 I/O T
I
T
T
T
T
T
T
T
X X X X Port C3
X X2)Port C4
X X X X Port E5
X X X X X Port E6 ADC Analog Input 5
X X X X Port C5 SPI Master In/Slave Out
X X X X Port C6 SPI Master Out/Slave In
X X X X Port C7 SPI Serial Clock
S Digital Ground Voltage
S Digital Main Supply Voltage
T
T
T
T
T
T
T
T
T
T
T
X ei3 X X X Port D0
X X X X Port E7
X X X X Port F0
X X X X X Port F1 ADC Analog Input 7
X X X X X Port F2 ADC Analog Input 8
X ei3 X X Port D1
X X X X Port D2
X X X X X Port F3 ADC Analog Input 9
X X X X Port F4
X X Top level interrupt input pin
X X X X Port F5
53 35 25 PD3 (HS) / SCI2_SCK I/O CTHS X X X X Port D3
Flash programming voltage. Must be
tied low in user mode.
SPI Slave
Select
ADC Analog
Input 6
LINSCI1 Receive Data input
LINSCI1 Transmit Data
output
LINSCI2 Serial Clock Output
9/225
Page 10
ST72361
Pin n°
Pin Name
LQFP64
LQFP44
LQFP32
54 36 26 PD4 / SCI2_RDI I/O C
55 37 27 V
56 38 28 V
57 39 29 V
58 40 30 V
SSA
SS_0
DDA
DD_0
59 41 31 PD5 / SCI2_TDO I/O C
60 42 32 RESET I/O C
61 43 - PD6 / AIN10 I/O C
62 44 - PD7 / AIN11 I/O C
63 - - PF6 I/O T
64 - - PF7 I/O T
Level Port
Input Output
Type
Input
Output
float
T
X ei3 X X Port D4
wpu
int
ana
OD
Main
function
(after
reset)
PP
Alternate function
LINSCI2 Receive Data input
S Analog Ground Voltage
S Digital Ground Voltage
I Analog Reference Voltage for ADC
S Digital Main Supply Voltage
T
T
T
T
T
T
X X X X Port D5
Top priority non maskable interrupt.
X ei3 X X X Port D6 ADC Analog Input 10
X ei3 X X X Port D7 ADC Analog Input 11
X X X X Port F6
X X X X Port F7
LINSCI2 Transmit Data
output
Notes:
1. In the interrupt input column, “eiX” defines the associated external interrupt vector. If the weak pull-up column (wpu) is
merged with the interrupt column (int), then the I/O configuration is pull-up interrupt input, else the configuration is floating
interrupt input.
2. Input mode can be used for general purpose I/O, output mode cannot be used.
3. OSC1 and OSC2 pins connect a crystal/ceramic resonator, or an external source to the on-chip oscillator; see Section
6 and Section 12.5 "CLOCK AND TIMING CHARACTERISTICS" for more details.
4. On the chip, each I/O port has eight pads. Pads that are not bonded to external pins are in input pull-up configuration
after reset. The configuration of these pads must be kept at reset state to avoid added current consumption.
10/225
Page 11
3 REGISTER AND MEMORY MAP
0000h
RAM
Program Memory
(60K, 48K, 32K, 16K)
Interrupt & Reset Vectors
HW Registers
0080h
007Fh
0FFFh
(see Table 3)
1000h
FFDFh
FFE0h
FFFFh
(see Table 9)
0880h
Reserved
087Fh
Short Addressing
RAM (zero page)
256 bytes Stack
16-bit Addressing
RAM
0100h
01FFh
0080h
0200h
00FFh
1000h
32 Kbytes
60 Kbytes
FFDFh
8000h
or 087Fh
16 Kbytes
C000h
48 Kbytes
4000h
(2048/1536 bytes)
067Fh
ST72361
As shown in Figure 5, the MCU is capable of addressing 64 Kbytes of memories and I/O registers.
The available memory locations consist of 128
bytes of register locations, up to 2 Kbytes of RAM
and up to 60 Kbytes of user program memory.
Figure 5. Memory Map
The RAM space includes up to 256 bytes for the
stack from 0100h to 01FFh.The highest address
bytes contain the user reset and interrupt vectors.
IMPORTANT: Memory locations marked as “Reserved” must never be accessed. Accessing a reseved area can have unpredictable effects on the
device.
Table 3. Hardware Register Map
Address Block
0000h
0001h
0002h
0003h
0004h
0005h
0006h
0007h
0008h
0009h
000Ah
000Bh
000Ch
000Dh
000Eh
Port A
Port B
Port C
Port D
Port E
Register
Label
PADR
PADDR
PAOR
PBDR
PBDDR
PBOR
PCDR
PCDDR
PCOR
PDDR
PDDDR
PDOR
PEDR
PEDDR
PEOR
Register Name
Port A Data Register
Port A Data Direction Register
Port A Option Register
Port B Data Register
Port B Data Direction Register
Port B Option Register
Port C Data Register
Port C Data Direction Register
Port C Option Register
Port D Data Register
Port D Data Direction Register
Port D Option Register
Port E Data Register
Port E Data Direction Register
Port E Option Register
Reset
Status
1)
00h
00h
00h
1)
00h
00h
00h
1)
00h
00h
00h
1)
00h
00h
00h
1)
00h
00h
00h
Remarks
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
2)
R/W
11/225
Page 12
ST72361
Address Block
000Fh
0010h
Port F
0011h
Register
Label
PFDR
PFDDR
PFOR
Register Name
Port F Data Register
Port F Data Direction Register
Port F Option Register
Reset
Status
1)
00h
00h
00h
0012h
to
Reserved Area (15 bytes)
0020h
0021h
0022h
0023h
SPI
SPIDR
SPICR
SPICSR
SPI Data I/O Register
SPI Control Register
SPI Control/Status Register
xxh
0xh
00h
0024h FLASH FCSR Flash Control/Status Register 00h R/W
0025h
0026h
0027h
0028h
0029h
002Ah
002Bh
002Ch
002Dh
002Eh
ITC
AWU
CKCTRL
ISPR0
ISPR1
ISPR2
ISPR3
EICR0
EICR1
AWUCSR
AWUPR
SICSR
MCCSR
Interrupt Software Priority Register 0
Interrupt Software Priority Register 1
Interrupt Software Priority Register 2
Interrupt Software Priority Register 3
External Interrupt Control Register 0
External Interrupt Control Register 1
Auto Wake up f. Halt Control/Status Register
Auto Wake Up From Halt Prescaler
System Integrity Control / Status Register
Main Clock Control / Status Register
FFh
FFh
FFh
FFh
00h
00h
00h
FFh
0xh
00h
Remarks
2)
R/W
2)
R/W
2)
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
002Fh
0030h
0031h
0032h
0033h
0034h
0035h
0036h
0037h
0038h
0039h
003Ah
003Bh
003Ch
003Dh
003Eh
003Fh
0040h
0041h
0042h
0043h
0044h
0045h
0046h
0047h
WWDG
PWM
ART
8-BIT
TIMER
ADC
WDGCR
WDGWR
PWMDCR3
PWMDCR2
PWMDCR1
PWMDCR0
PWMCR
ARTCSR
ARTCAR
ARTARR
ARTICCSR
ARTICR1
ARTICR2
T8CR2
T8CR1
T8CSR
T8IC1R
T8OC1R
T8CTR
T8ACTR
T8IC2R
T8OC2R
ADCCSR
ADCDRH
ADCDRL
Watchdog Control Register
Watchdog Window Register
Pulse Width Modulator Duty Cycle Register 3
PWM Duty Cycle Register 2
PWM Duty Cycle Register 1
PWM Duty Cycle Register 0
PWM Control register
Auto-Reload Timer Control/Status Register
Auto-Reload Timer Counter Access Register
Auto-Reload Timer Auto-Reload Register
ART Input Capture Control/Status Register
ART Input Capture Register 1
ART Input Capture register 2
Timer Control Register 2
Timer Control Register 1
Timer Control/Status Register
Timer Input Capture 1 Register
Timer Output Compare 1 Register
Timer Counter Register
Timer Alternate Counter Register
Timer Input Capture 2 Register
Timer Output Compare 2 Register
Control/Status Register
Data High Register
Data Low Register
7Fh
7Fh
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
xxh
00h
FCh
FCh
xxh
00h
00h
00h
00h
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Read Only
Read Only
R/W
R/W
Read Only
Read Only
R/W
Read Only
Read Only
Read Only
R/W
R/W
Read Only
Read Only
12/225
Page 13
ST72361
Address Block
0048h
0049h
004Ah
004Bh
004Ch
004Dh
004Eh
004Fh
0050h Reserved Area (1 byte)
0051h
0052h
0053h
0054h
0055h
0056h
0057h
0058h
0059h
005Ah
005Bh
005Ch
005Dh
005Eh
005Fh
LINSCI1
(LIN Master/
Slave)
16-BIT
TIMER
Register
Label
SCI1ISR
SCI1DR
SCI1BRR
SCI1CR1
SCI1CR2
SCI1CR3
SCI1ERPR
SCI1ETPR
T16CR2
T16CR1
T16CSR
T16IC1HR
T16IC1LR
T16OC1HR
T16OC1LR
T16CHR
T16CLR
T16ACHR
T16ACLR
T16IC2HR
T16IC2LR
T16OC2HR
T16OC2LR
Register Name
SCI1 Status Register
SCI1 Data Register
SCI1 Baud Rate Register
SCI1 Control Register 1
SCI1 Control Register 2
SCI1Control Register 3
SCI1 Extended Receive Prescaler Register
SCI1 Extended Transmit Prescaler Register
Timer Control Register 2
Timer Control Register 1
Timer Control/Status Register
Timer Input Capture 1 High Register
Timer Input Capture 1 Low Register
Timer Output Compare 1 High Register
Timer Output Compare 1 Low Register
Timer Counter High Register
Timer Counter Low Register
Timer Alternate Counter High Register
Timer Alternate Counter Low Register
Timer Input Capture 2 High Register
Timer Input Capture 2 Low Register
Timer Output Compare 2 High Register
Timer Output Compare 2 Low Register
Reset
Status
C0h
xxh
00h
xxh
00h
00h
00h
00h
00h
00h
00h
xxh
xxh
80h
00h
FFh
FCh
FFh
FCh
xxh
xxh
80h
00h
Remarks
Read Only
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Read Only
Read Only
R/W
R/W
Read Only
Read Only
Read Only
Read Only
Read Only
Read Only
R/W
R/W
0060h
0061h
0062h
0063h
0064h
0065h
0066h
0067h
0068h
to
007Fh
LINSCI2
(LIN Master)
SCI2SR
SCI2DR
SCI2BRR
SCI2CR1
SCI2CR2
SCI2CR3
SCI2ERPR
SCI2ETPR
SCI2 Status Register
SCI2 Data Register
SCI2 Baud Rate Register
SCI2 Control Register 1
SCI2 Control Register 2
SCI2 Control Register 3
SCI2 Extended Receive Prescaler Register
SCI2 Extended Transmit Prescaler Register
Reserved area (24 bytes)
C0h
xxh
00h
xxh
00h
00h
00h
00h
Read Only
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Legend: x = undefined, R/W = read/write
Notes:
1. The contents of the I/O port DR registers are readable only in output configuration. In input configuration, the values
of the I/O pins are returned instead of the DR register contents.
2. The bits associated with unavailable pins must always keep their reset value.
13/225
Page 14
ST72361
4 Kbytes
4 Kbytes
2Kbytes
SECTOR 1
SECTOR 0
16 Kbytes
SECTOR 2
8K 16K 32K 60K
FLASH
FFFFh
EFFFh
DFFFh
3FFFh
7FFFh
1000h
24 Kbytes
MEMORY SIZE
8 Kbytes 40 Kbytes
52 Kbytes
9FFFh
BFFFh
D7FFh
4K 10K 24K 48K
4 FLASH PROGRAM MEMORY
4.1 INTRODUCTION
The ST7 dual voltage High Density Flash
(HDFlash) is a non-volatile memory that can be
electrically erased as a single block or by individu
al sectors and programmed on a Byte-by-Byte basis using an external VPP supply.
The HDFlash devices can be programmed and
erased off-board (plugged in a programming tool)
or on-board using ICP (In-Circuit Programming) or
IAP (In-Application Programming).
The array matrix organisation allows each sector
to be erased and reprogrammed without affecting
other sectors.
4.2 MAIN FEATURES
■ 3 Flash programming modes:
– Insertion in a programming tool. In this mode,
all sectors including option bytes can be pro
-
grammed or erased.
– ICP (In-Circuit Programming). In this mode, all
sectors including option bytes can be pro
-
grammed or erased without removing the device from the application board.
– IAP (In-Application Programming) In this
mode, all sectors except Sector 0, can be pro
-
grammed or erased without removing the device from the application board and while the
application is running.
■ ICT (In-Circuit Testing) for downloading and
executing user application test patterns in RAM
■ Read-out protection
■ Register Access Security System (RASS) to
prevent accidental programming or erasing
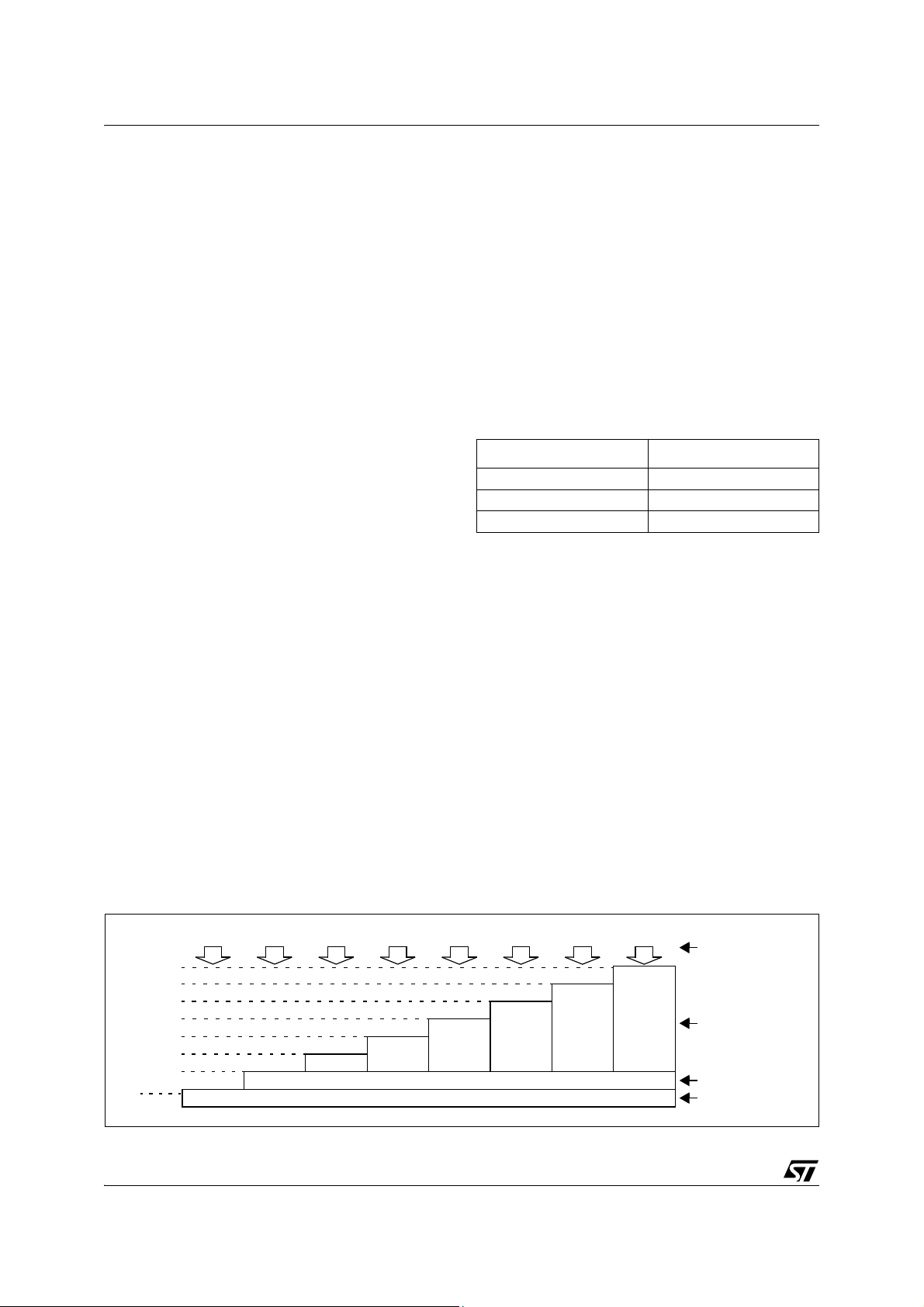
4.3 STRUCTURE
The Flash memory is organised in sectors and can
be used for both code and data storage.
Depending on the overall Flash memory size in the
microcontroller device, there are up to three user
sectors (see Table 3). Each of these sectors can
be erased independently to avoid unnecessary
erasing of the whole Flash memory when only a
partial erasing is required.
The first two sectors have a fixed size of 4 Kbytes
(see Figure 6). They are mapped in the upper part
of the ST7 addressing space so the reset and in
terrupt vectors are located in Sector 0 (F000hFFFFh).
Table 4. Sectors available in Flash devices
Flash Size (bytes) Available Sectors
4K Sector 0
8K Sectors 0,1
> 8K Sectors 0,1, 2
4.3.1 Read-out Protection
Read-out protection, when selected, provides a
protection against Program Memory content ex
traction and against write access to Flash memory. Even if no protection can be considered as totally unbreakable, the feature provides a very high
level of protection for a general purpose microcon
troller.
In Flash devices, this protection is removed by reprogramming the option. In this case, the entire
program memory is first automatically erased and
the device can be reprogrammed.
Read-out protection selection depends on the device type:
– In Flash devices it is enabled and removed
through the FMP_R bit in the option byte.
– In ROM devices it is enabled by mask option
specified in the Option List.
Figure 6. Memory Map and Sector Address
14/225
Page 15
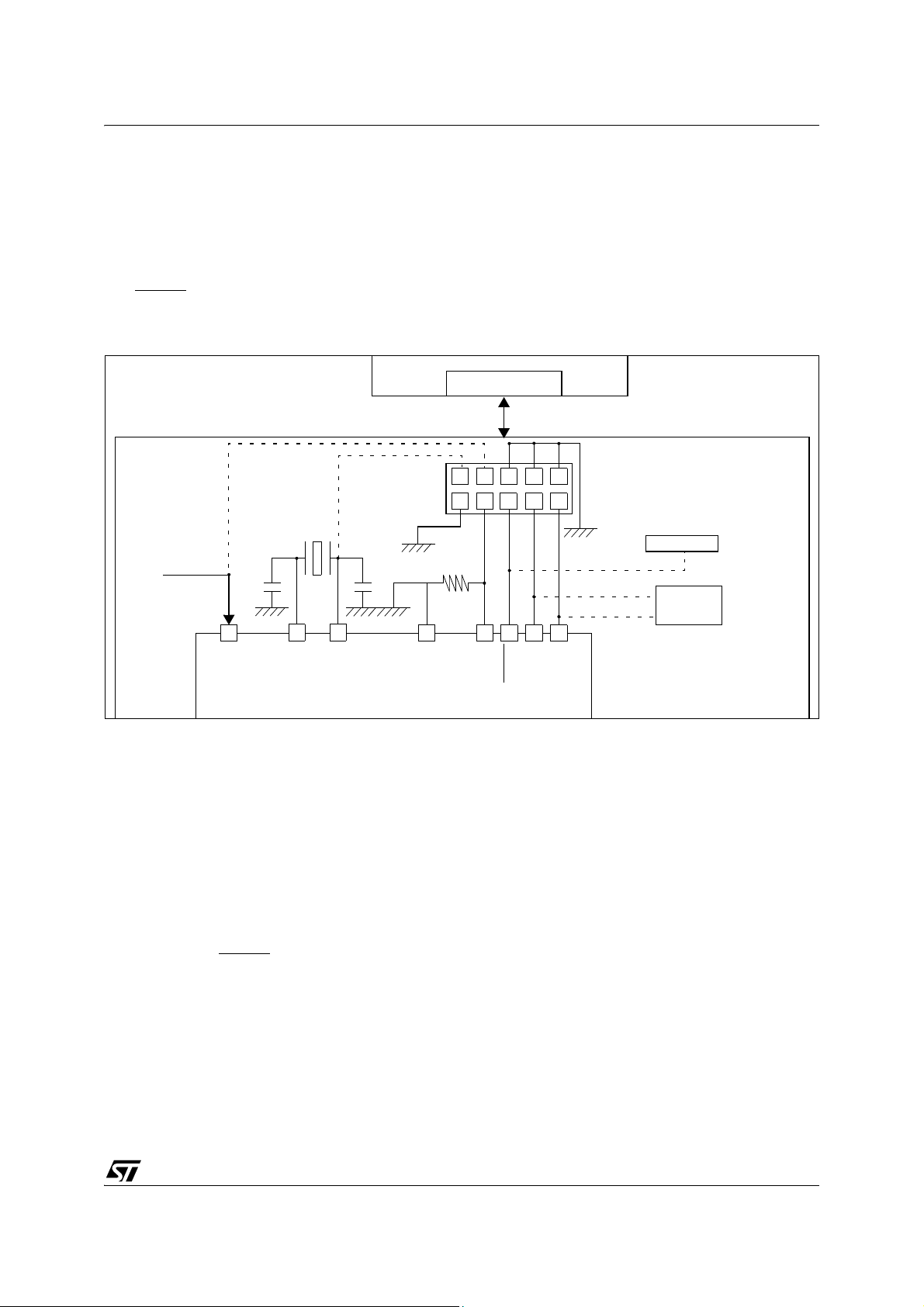
FLASH PROGRAM MEMORY (Cont’d)
ICC CONNECTOR
ICCDATA
ICCCLK
RESET
V
DD
HE10 CONNECTOR TYPE
APPLICATION
POWER SUPPLY
1
246810
975 3
PROGRAMMING TOOL
ICC CONNECTOR
APPLICATION BOARD
ICC Cable
(See Note 3)
10kΩ
V
SS
ICCSEL/VPP
ST7
C
L2
C
L1
OSC1
OSC2
OPTIONAL
See Note 1
See Note 2
APPLICATION
RESET SOURCE
APPLICATION
I/O
(See Note 4)
ST72361
4.4 ICC INTERFACE
ICC (In-Circuit Communication) needs a minimum
of four and up to six pins to be connected to the
programming tool (see Figure 7). These pins are:
– RESET: device reset
–VSS: device power supply ground
Figure 7. Typical ICC Interface
– ICCCLK: ICC output serial clock pin
– ICCDATA: ICC input/output serial data pin
– ICCSEL/VPP: programming voltage
– OSC1(or OSCIN): main clock input for exter-
nal source (optional)
–VDD: application board power supply (see Fig-
ure 7, Note 3)
Notes:
1. If the ICCCLK or ICCDATA pins are only used
as outputs in the application, no signal isolation is
necessary. As soon as the Programming Tool is
plugged to the board, even if an ICC session is not
in progress, the ICCCLK and ICCDATA pins are
not available for the application. If they are used as
inputs by the application, isolation such as a serial
resistor has to implemented in case another de
vice forces the signal. Refer to the Programming
Tool documentation for recommended resistor val
ues.
2. During the ICC session, the programming tool
must control the
flicts between the programming tool and the application reset circuit if it drives more than 5mA at
high level (push pull output or pull-up resistor<1K).
A schottky diode can be used to isolate the appli
cation RESET circuit in this case. When using a
classical RC network with R
RESET pin. This can lead to con-
> 1K or a reset man-
agement IC with open drain output and pull-up
resistor
> 1K, no additional components are needed. In all cases the user must ensure that no external reset is generated by the application during the
ICC session.
3. The use of Pin 7 of the ICC connector depends
on the Programming Tool architecture. This pin
must be connected when using most ST Program
ming Tools (it is used to monitor the application
power supply). Please refer to the Programming
Tool manual.
4. Pin 9 has to be connected to the OSC1 or OSCIN pin of the ST7 when the clock is not available
in the application or if the selected clock option is
not programmed in the option byte. ST7 devices
with multi-oscillator capability need to have OSC2
grounded in this case.
-
15/225
Page 16
ST72361
FLASH PROGRAM MEMORY (Cont’d)
4.5 ICP (IN-CIRCUIT PROGRAMMING)
To perform ICP the microcontroller must be
switched to ICC (In-Circuit Communication) mode
by an external controller or programming tool.
Depending on the ICP code downloaded in RAM,
Flash memory programming can be fully custom
-
ized (number of bytes to program, program locations, or selection serial communication interface
for downloading).
When using an STMicroelectronics or third-party
programming tool that supports ICP and the spe
-
cific microcontroller device, the user needs only to
implement the ICP hardware interface on the ap
-
plication board (see Figure 7). For more details on
the pin locations, refer to the device pinout de
-
scription.
4.6 IAP (IN-APPLICATION PROGRAMMING)
This mode uses a BootLoader program previously
stored in Sector 0 by the user (in ICP mode or by
plugging the device in a programming tool).
This mode is fully controlled by user software. This
allows it to be adapted to the user application, (us
-
er-defined strategy for entering programming
mode, choice of communications protocol used to
fetch the data to be stored, etc.). For example, it is
possible to download code from the SPI, SCI or
other type of serial interface and program it in the
Flash. IAP mode can be used to program any of
the Flash sectors except Sector 0, which is write/
erase protected to allow recovery in case errors
occur during the programming operation.
4.7 RELATED DOCUMENTATION
For details on Flash programming and ICC protocol, refer to the ST7 Flash Programming Refer-
ence Manual and to the ST7 ICC Protocol Reference Manual.
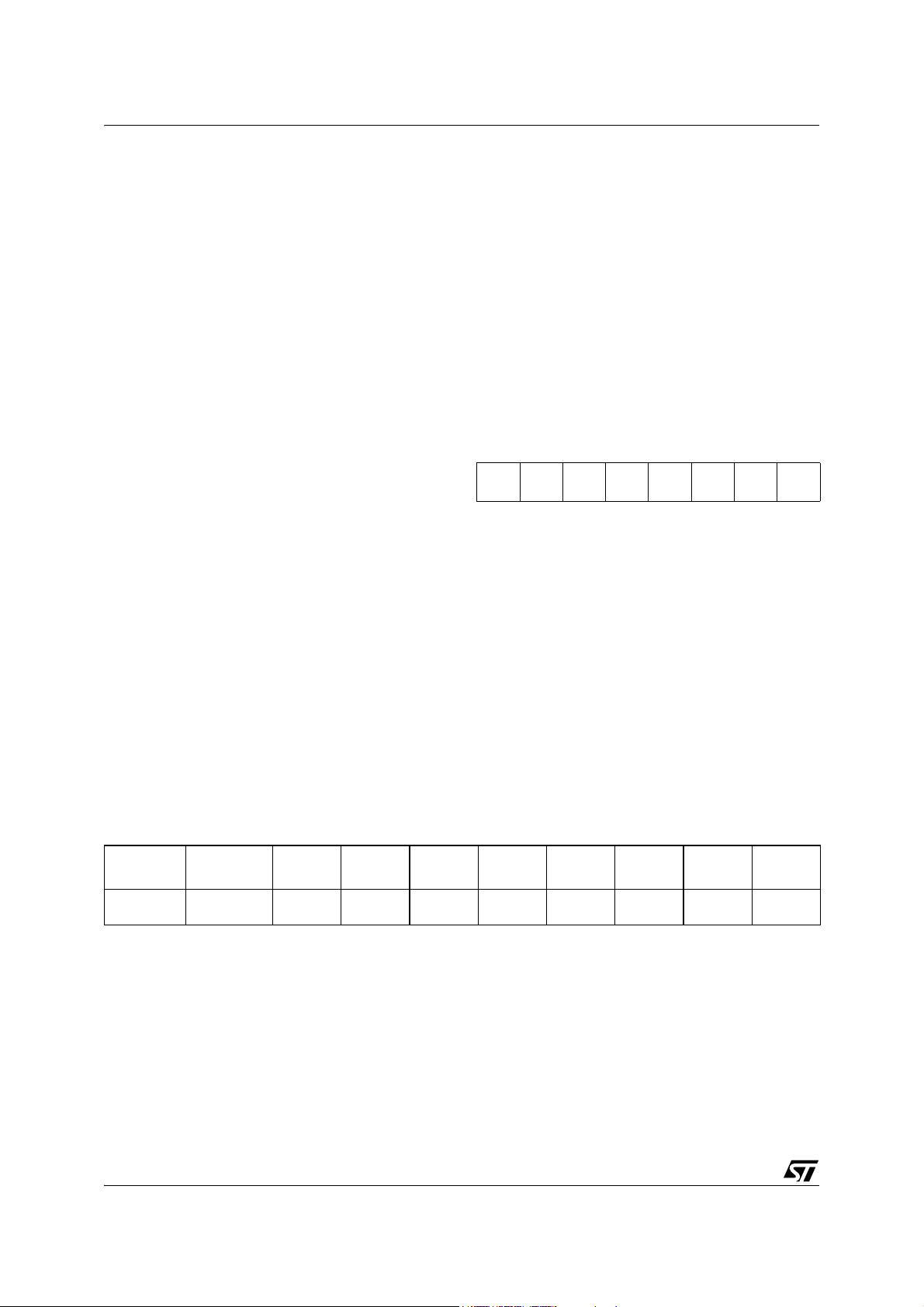
4.8 REGISTER DESCRIPTION
FLASH CONTROL/STATUS REGISTER (FCSR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
0 0 0 0 0 0 0 0
This register is reserved for use by Programming
Tool software. It controls the Flash programming
and erasing operations.
Table 5. Flash Control/Status Register Address and Reset Value
Address
(Hex.)
0024h
16/225
Register
Label
FCSR
Reset Value 0 0 0 0 0 0 0 0
7 6 5 4 3 2 1 0
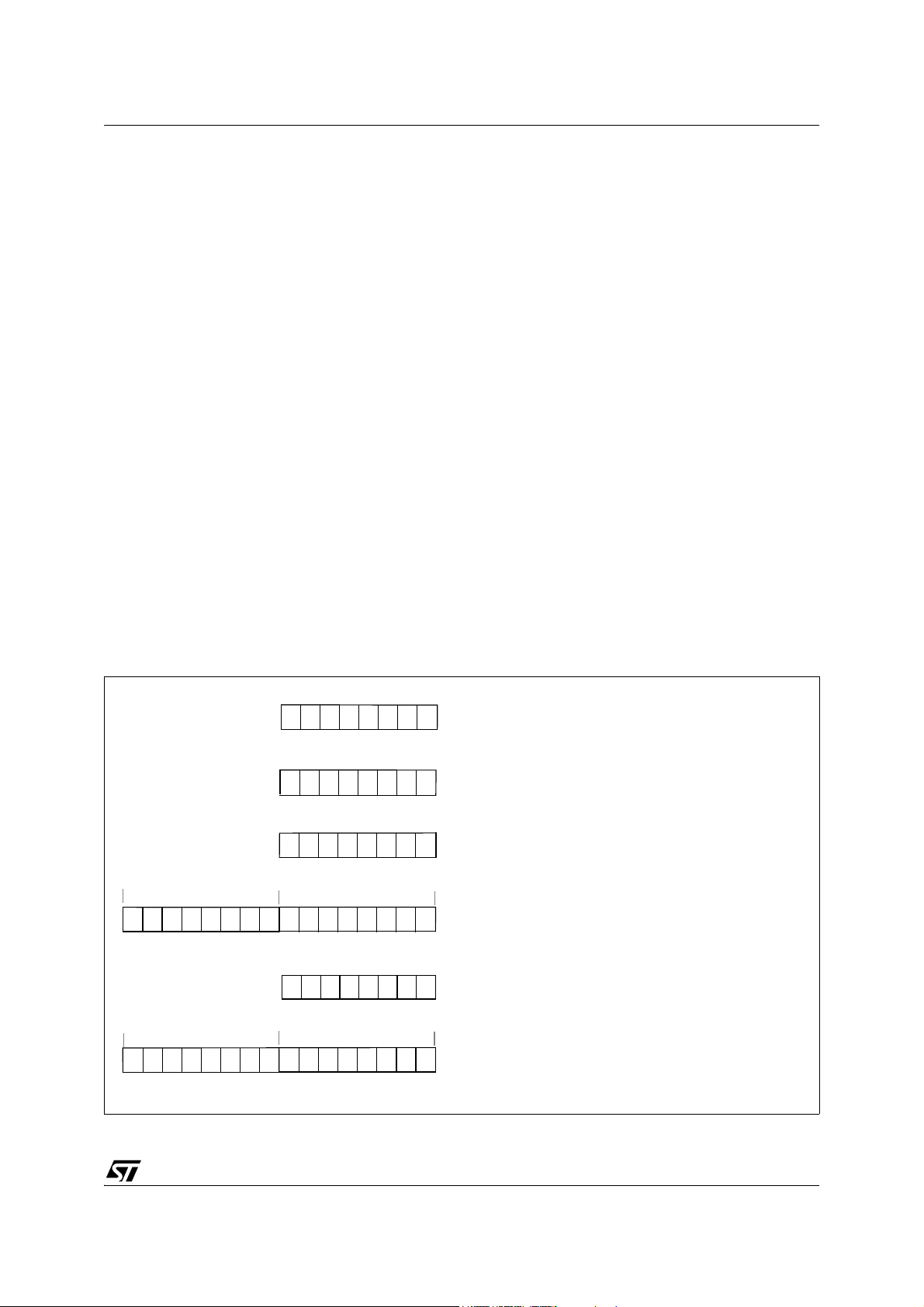
Page 17
5 CENTRAL PROCESSING UNIT
ACCUMULATOR
X INDEX REGISTER
Y INDEX REGISTER
STACK POINTER
CONDITION CODE REGISTER
PROGRAM COUNTER
70
1C1I1HI0NZ
RESET VALUE = RESET VECTOR @ FFFEh-FFFFh
70
70
70
0
7
15 8
PCH
PCL
15
8
70
RESET VALUE = STACK HIGHER ADDRESS
RESET VALUE =
1X11X1XX
RESET VALUE = XXh
RESET VALUE = XXh
RESET VALUE = XXh
X = Undefined Value
ST72361
5.1 INTRODUCTION
This CPU has a full 8-bit architecture and contains
six internal registers allowing efficient 8-bit data
manipulation.
5.2 MAIN FEATURES
■ Enable executing 63 basic instructions
■ Fast 8-bit by 8-bit multiply
■ 17 main addressing modes (with indirect
addressing mode)
■ Two 8-bit index registers
■ 16-bit stack pointer
■ Low power HALT and WAIT modes
■ Priority maskable hardware interrupts
■ Non-maskable software/hardware interrupts
Figure 8. CPU Registers
5.3 CPU REGISTERS
The six CPU registers shown in Figure 8 are not
present in the memory mapping and are accessed
by specific instructions.
Accumulator (A)
The Accumulator is an 8-bit general purpose register used to hold operands and the results of the
arithmetic and logic calculations and to manipulate
data.
Index Registers (X and Y)
These 8-bit registers are used to create effective
addresses or as temporary storage areas for data
manipulation. (The Cross-Assembler generates a
precede instruction (PRE) to indicate that the fol
lowing instruction refers to the Y register.)
The Y register is not affected by the interrupt automatic procedures.
Program Counter (PC)
The program counter is a 16-bit register containing
the address of the next instruction to be executed
by the CPU. It is made of two 8-bit registers PCL
(Program Counter Low which is the LSB) and PCH
(Program Counter High which is the MSB).
-
17/225
Page 18
ST72361
CENTRAL PROCESSING UNIT (Cont’d)
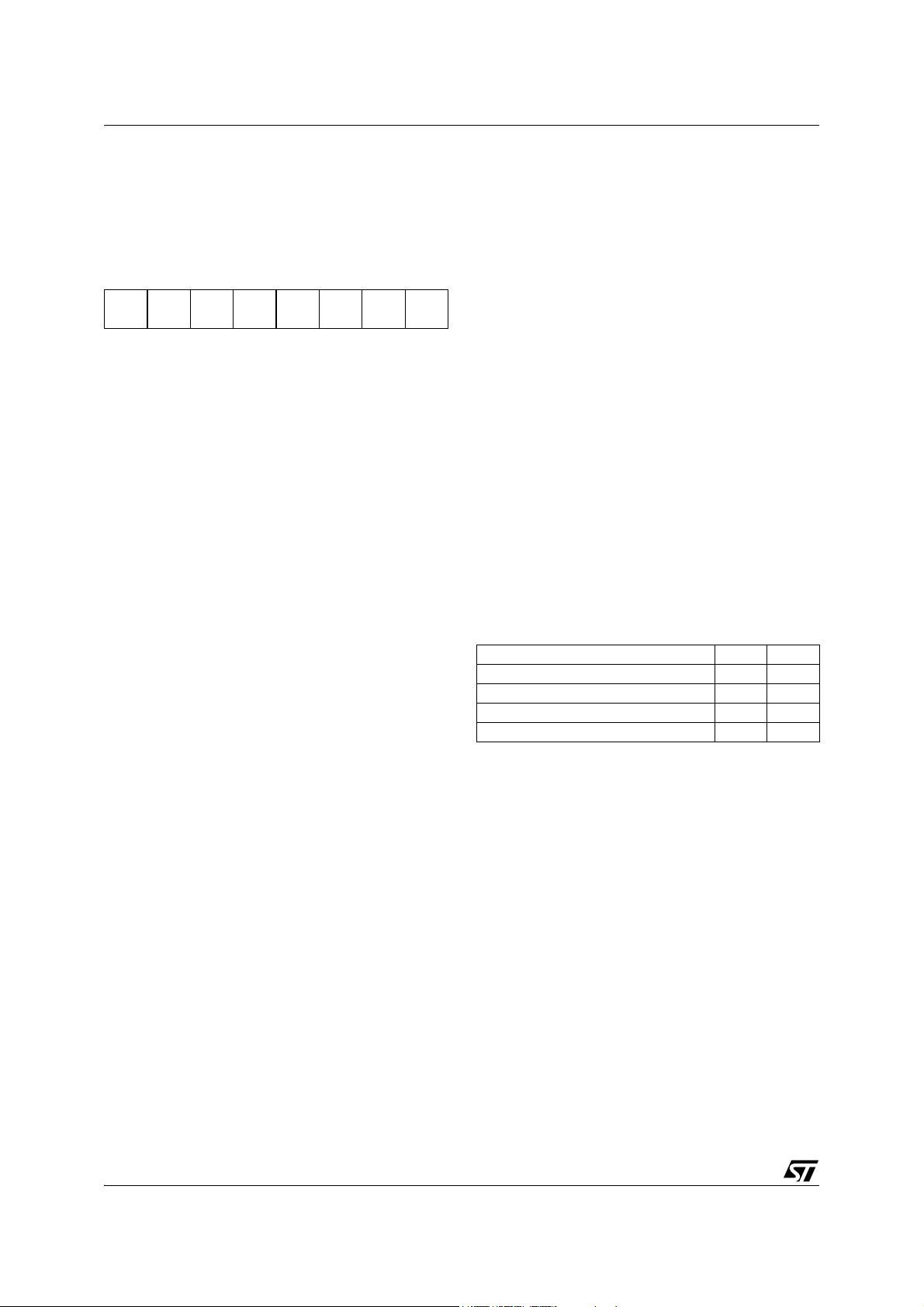
Condition Code Register (CC)
Read/Write
Reset Value: 111x1xxx
7 0
1 1 I1 H I0 N Z
The 8-bit Condition Code register contains the interrupt masks and four flags representative of the
result of the instruction just executed. This register
can also be handled by the PUSH and POP in
structions.
These bits can be individually tested and/or controlled by specific instructions.
Arithmetic Management Bits
Bit 4 = H Half carry.
This bit is set by hardware when a carry occurs be-
tween bits 3 and 4 of the ALU during an ADD or
ADC instructions. It is reset by hardware during
the same instructions.
0: No half carry has occurred.
1: A half carry has occurred.
This bit is tested using the JRH or JRNH instruction. The H bit is useful in BCD arithmetic subroutines.
Bit 2 = N Negative.
This bit is set and cleared by hardware. It is repre-
sentative of the result sign of the last arithmetic,
logical or data manipulation. It’s a copy of the re
sult 7th bit.
0: The result of the last operation is positive or null.
1: The result of the last operation is negative
(that is, the most significant bit is a logic 1).
This bit is accessed by the JRMI and JRPL instructions.
C
Bit 1 = Z Zero.
This bit is set and cleared by hardware. This bit indicates that the result of the last arithmetic, logical
or data manipulation is zero.
0: The result of the last operation is different from
zero.
1: The result of the last operation is zero.
This bit is accessed by the JREQ and JRNE test
instructions.
Bit 0 = C Carry/borrow.
This bit is set and cleared by hardware and soft-
ware. It indicates an overflow or an underflow has
occurred during the last arithmetic operation.
0: No overflow or underflow has occurred.
1: An overflow or underflow has occurred.
This bit is driven by the SCF and RCF instructions
and tested by the JRC and JRNC instructions. It is
also affected by the “bit test and branch”, shift and
rotate instructions.
Interrupt Management Bits
Bit 5,3 = I1, I0 Interrupt
The combination of the I1 and I0 bits gives the cur-
rent interrupt software priority.
Interrupt Software Priority I1 I0
Level 0 (main) 1 0
Level 1 0 1
Level 2 0 0
Level 3 (= interrupt disable) 1 1
These two bits are set/cleared by hardware when
entering in interrupt. The loaded value is given by
the corresponding bits in the interrupt software pri
ority registers (IxSPR). They can be also set/
cleared by software with the RIM, SIM, IRET,
HALT, WFI and PUSH/POP instructions.
See the interrupt management chapter for more
details.
-
18/225
Page 19
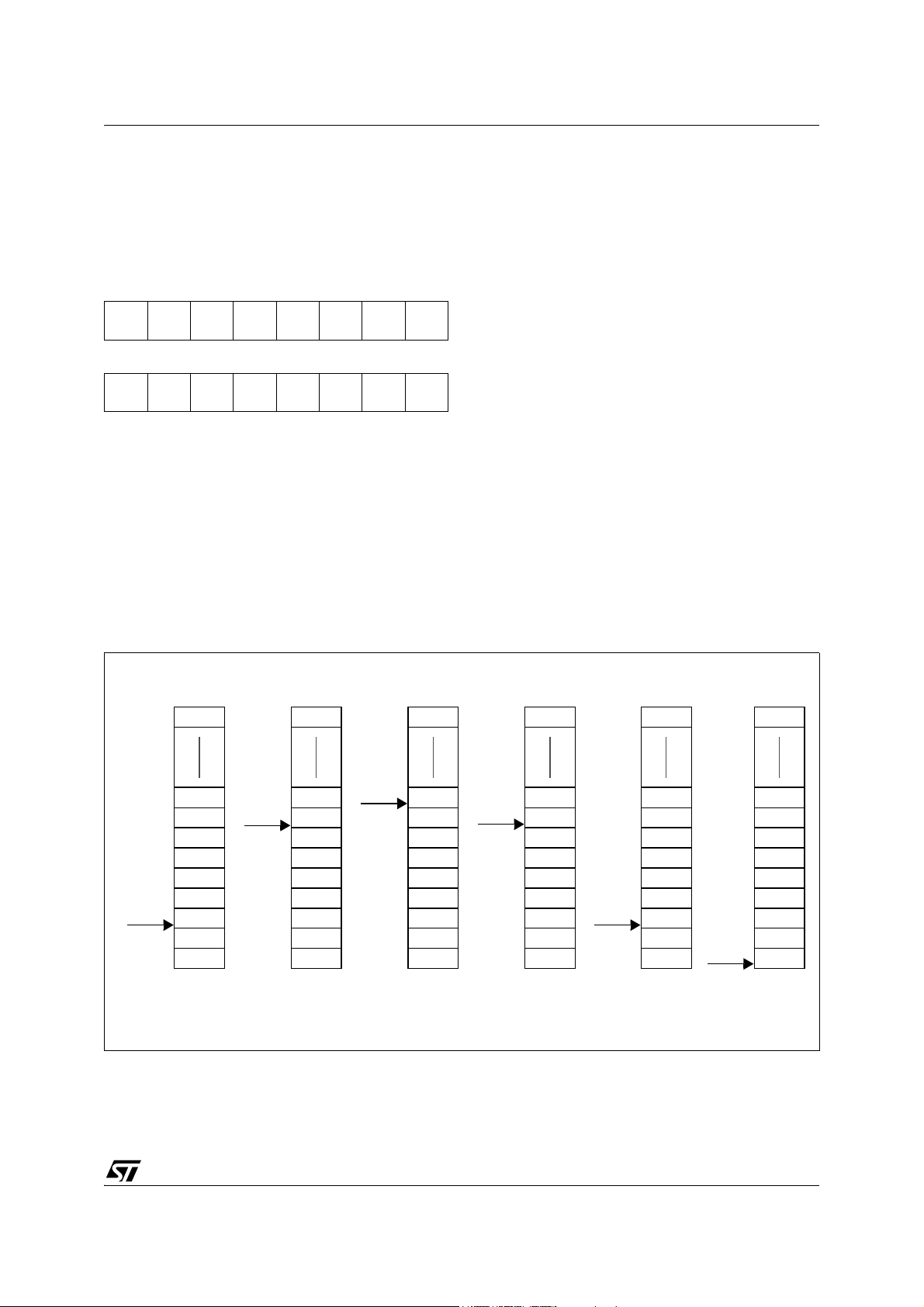
CENTRAL PROCESSING UNIT (Cont’d)
PCH
PCL
SP
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
SP
Y
CALL
Subroutine
Interrupt
Event
PUSH Y POP Y IRET
RET
or RSP
@ 01FFh
@ 0100h
Stack Higher Address = 01FFh
Stack Lower Address =
0100h
ST72361
Stack Pointer (SP)
Read/Write
Reset Value: 01 FFh
15 8
0 0 0 0 0 0 0 1
7 0
SP7 SP6 SP5 SP4 SP3 SP2 SP1
SP0
The Stack Pointer is a 16-bit register which is always pointing to the next free location in the stack.
It is then decremented after data has been pushed
onto the stack and incremented before data is
popped from the stack (see Figure 9).
Since the stack is 256 bytes deep, the 8 most significant bits are forced by hardware. Following an
MCU Reset, or after a Reset Stack Pointer instruc
-
tion (RSP), the Stack Pointer contains its reset value (the SP7 to SP0 bits are set) which is the stack
higher address.
Figure 9. Stack Manipulation Example
The least significant byte of the Stack Pointer
(called S) can be directly accessed by a LD in
-
struction.
Note: When the lower limit is exceeded, the Stack
Pointer wraps around to the stack upper limit, with
out indicating the stack overflow. The previously
stored information is then overwritten and there
fore lost. The stack also wraps in case of an underflow.
The stack is used to save the return address during a subroutine call and the CPU context during
an interrupt. The user may also directly manipulate
the stack by means of the PUSH and POP instruc
tions. In the case of an interrupt, the PCL is stored
at the first location pointed to by the SP. Then the
other registers are stored in the next locations as
shown in Figure 9.
– When an interrupt is received, the SP is decre-
mented and the context is pushed on the stack.
– On return from interrupt, the SP is incremented
and the context is popped from the stack.
A subroutine call occupies two locations and an interrupt five locations in the stack area.
19/225
Page 20
ST72361
0
1
PLL OPTION BIT
PLL x 2
f
OSC2
/ 2
f
OSC
LOW VOLTAGE
DETECTOR
(LVD)
AUXILIARY VOLTAGE
DETECTOR
(AVD)
MULTI-
OSCILLATOR
(MO)
OSC1
RESET
V
SS
V
DD
RESET SEQUENCE
MANAGER
(RSM)
OSC2
MAIN CLOCK
AVD Interrupt Request
CONTROLLER
PLL
SYSTEM INTEGRITY MANAGEMENT
WATCHDOG
SICSR
TIMER (WDG)
WITH REALTIME
CLOCK (MCC/RTC)
AVD AVD
LVD
RF
IE
WDG
RF
f
OSC
f
OSC2
(option)
0
0
F
f
CPU
00
8-BIT TIMER
/ 8000
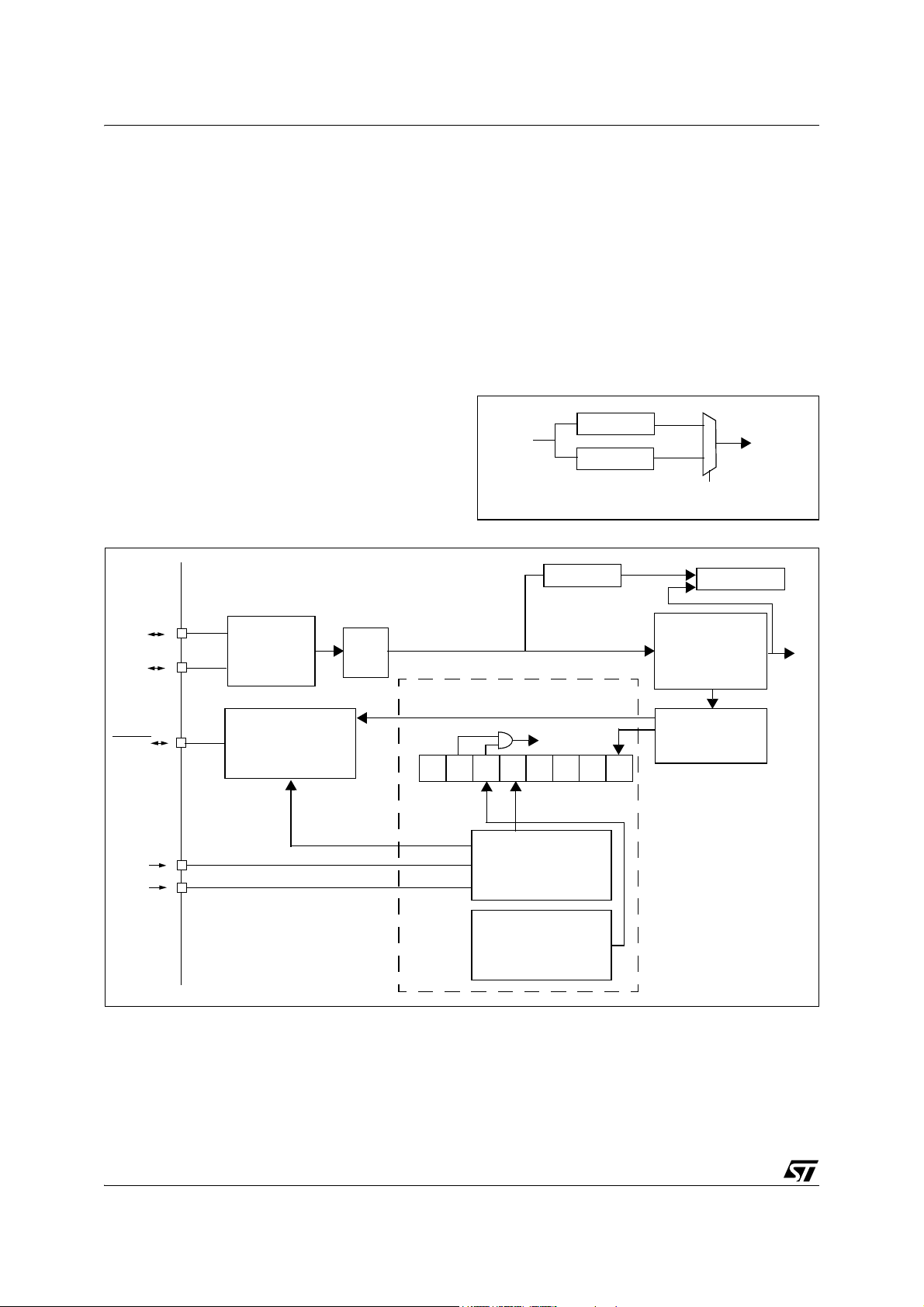
6 SUPPLY, RESET AND CLOCK MANAGEMENT
The device includes a range of utility features for
securing the application in critical situations (for
example, in case of a power brown-out), and re
ducing the number of external components. An
overview is shown in
Figure 11.
For more details, refer to dedicated parametric
section.
Main features
■ Optional PLL for multiplying the frequency by 2
■ Reset Sequence Manager (RSM)
■ Multi-Oscillator Clock Management (MO)
– 4 Crystal/Ceramic resonator oscillators
■ System Integrity Management (SI)
– Main supply Low voltage detection (LVD)
– Auxiliary Voltage detector (AVD) with interrupt
capability for monitoring the main supply
Figure 11. Clock, Reset and Supply Block Diagram
6.1 PHASE LOCKED LOOP
If the clock frequency input to the PLL is in the
range 2 to 4 MHz, the PLL can be used to multiply
the frequency by two to obtain an f
OSC2
of 4 to 8
MHz. The PLL is enabled by option byte. If the PLL
is disabled, then f
OSC2
= f
OSC
/2.
Caution: The PLL is not recommended for applications where timing accuracy is required. See
“PLL Characteristics” on page 187.
Figure 10. PLL Block Diagram
20/225
Page 21
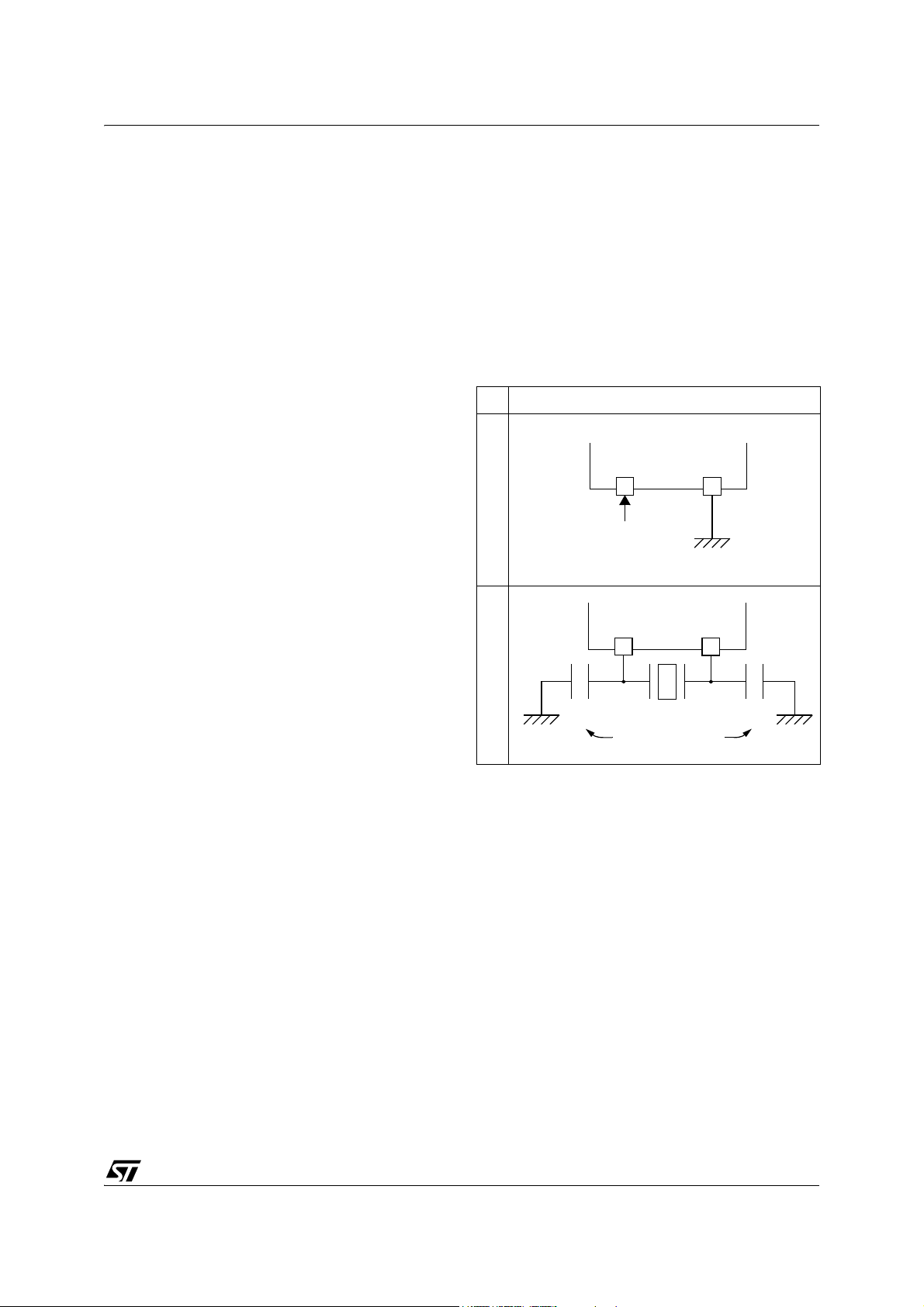
6.2 MULTI-OSCILLATOR (MO)
OSC1 OSC2
EXTERNAL
ST7
SOURCE
OSC1 OSC2
LOAD
CAPACITORS
ST7
C
L2
C
L1
ST72361
The main clock of the ST7 can be generated by
two different source types coming from the multioscillator block:
■ an external source
■ a crystal or ceramic resonator oscillator
Each oscillator is optimized for a given frequency
range in terms of consumption and is selectable
through the option byte. The associated hardware
configuration are shown in
Table 6. Refer to the
electrical characteristics section for more details.
Caution: The OSC1 and/or OSC2 pins must not
be left unconnected. For the purposes of Failure
Mode and Effect Analysis, it should be noted that if
the OSC1 and/or OSC2 pins are left unconnected,
the ST7 main oscillator may start and, in this con
figuration, could generate an f
in excess of the allowed maximum (>
clock frequency
OSC
16 MHz),
-
putting the ST7 in an unsafe/undefined state. The
product behavior must therefore be considered
undefined when the OSC pins are left unconnect
-
ed.
External Clock Source
In external clock mode, a clock signal (square, sinus or triangle) with ~50% duty cycle has to drive
the OSC1 pin while the OSC2 pin is tied to ground.
Crystal/Ceramic Oscillators
This family of oscillators has the advantage of producing a very accurate rate on the main clock of
the ST7. The selection within a list of five oscilla
tors with different frequency ranges must be done
by option byte in order to reduce consumption (re
fer to Section 14.1 on page 210 for more details on
the frequency ranges). The resonator and the load
capacitors must be placed as close as possible to
the oscillator pins in order to minimize output dis
tortion and start-up stabilization time. The loading
capacitance values must be adjusted according to
the selected oscillator.
These oscillators are not stopped during the
RESET phase to avoid losing time in the oscillator
start-up phase.
Table 6. ST7 Clock Sources
Hardware Configuration
External ClockCrystal/Ceramic Resonators
21/225
Page 22
ST72361
RESET
Active Phase
INTERNAL RESET
256 or 4096 CLOCK CYCLES
FETCH
VECTOR
RESET
R
ON
V
DD
WATCHDOG RESET
LVD RESET
INTERNAL
RESET
PULSE
GENERATOR
Filter
6.3 RESET SEQUENCE MANAGER (RSM)
6.3.1 Introduction
The reset sequence manager includes three RESET sources as shown in Figure 2:
■ External RESET source pulse
■ Internal LVD RESET (Low Voltage Detection)
■ Internal WATCHDOG RESET
These sources act on the RESET pin and it is always kept low during the delay phase.
The RESET service routine vector is fixed at addresses FFFEh-FFFFh in the ST7 memory map.
The basic RESET sequence consists of three
phases as shown in Figure 1:
■ Active Phase depending on the RESET source
■ 256 or 4096 CPU clock cycle delay (selected by
option byte)
■ RESET vector fetch
The 256 or 4096 CPU clock cycle delay allows the
oscillator to stabilize and ensures that recovery
has taken place from the Reset state. The shorter
or longer clock cycle delay should be selected by
option byte to correspond to the stabilization time
of the external oscillator used in the application.
The RESET vector fetch phase duration is two
clock cycles.
Figure 12. RESET Sequence Phases
Caution: When the ST7 is unprogrammed or fully
erased, the Flash is blank and the RESET vector
is not programmed. For this reason, it is recom
mended to keep the RESET pin in low state until
programming mode is entered, in order to avoid
unwanted behavior.
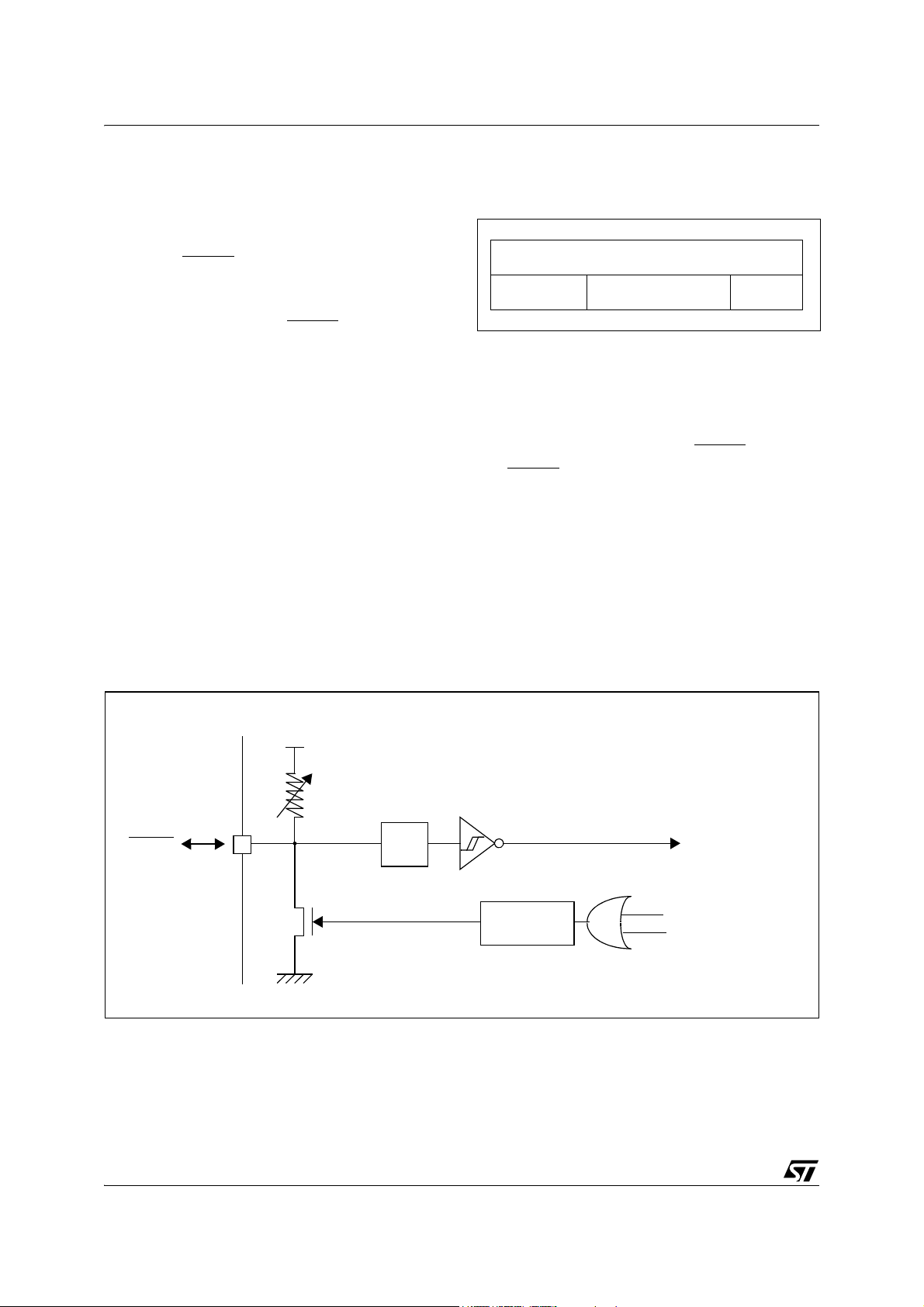
6.3.2 Asynchronous External RESET pin
The RESET pin is both an input and an open-drain
output with integrated R
This pull-up has no fixed value but varies in ac
weak pull-up resistor.
ON
cordance with the input voltage. It can be pulled
low by external circuitry to reset the device. See
Electrical Characteristic section for more details.
A RESET signal originating from an external
source must have a duration of at least t
h(RSTL)in
order to be recognized (see Figure 3). This detec
in
tion is asynchronous and therefore the MCU can
enter reset state even in HALT mode.
Figure 13. Reset Block Diagram
22/225
Page 23
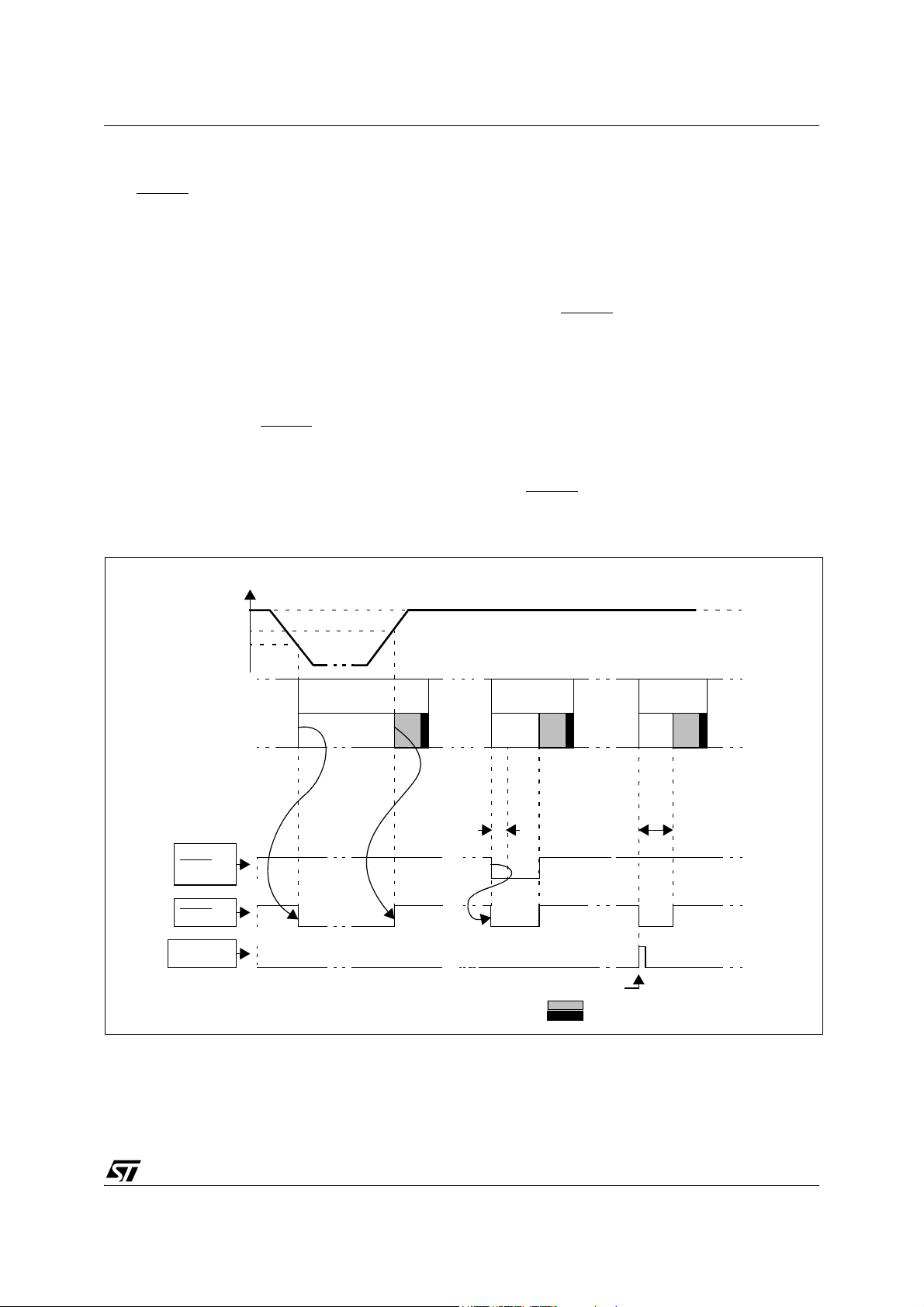
RESET SEQUENCE MANAGER (Cont’d)
V
DD
RUN
RESET PIN
EXTERNAL
WATCHDOG
ACTIVE PHASE
V
IT+(LVD)
V
IT-(LVD)
t
h(RSTL)in
RUN
WATCHDOG UNDERFLOW
t
w(RSTL)out
RUN RUN
RESET
RESET
SOURCE
EXTERNAL
RESET
LVD
RESET
WATCHDOG
RESET
INTERNAL RESET (256 or 4096 T
CPU
)
VECTOR FETCH
ACTIVE
PHASE
ACTIVE
PHASE
The RESET pin is an asynchronous signal which
plays a major role in EMS performance. In a noisy
environment, it is recommended to follow the
guidelines mentioned in the electrical characteris
-
tics section.
6.3.3 External Power-On RESET
If the LVD is disabled by option byte, to start up the
microcontroller correctly, the user must ensure by
means of an external reset circuit that the reset
signal is held low until V
level specified for the selected f
is over the minimum
DD
frequency.
OSC
A proper reset signal for a slow rising VDD supply
can generally be provided by an external RC net
-
work connected to the RESET pin.
Figure 14. RESET Sequences
ST72361
6.3.4 Internal Low Voltage Detector (LVD) RESET
Two different RESET sequences caused by the internal LVD circuitry can be distinguished:
■ Power-On RESET
■ Voltage Drop RESET
The device RESET pin acts as an output that is
< V
pulled low when V
< V
V
DD
(falling edge) as shown in Figure 3.
IT-
DD
The LVD filters spikes on V
avoid parasitic resets.
6.3.5 Internal Watchdog RESET
The RESET sequence generated by a internal
Watchdog counter overflow is shown in Figure 3.
Starting from the Watchdog counter underflow, the
device
low during at least t
RESET pin acts as an output that is pulled
w(RSTL)out
(rising edge) or
IT+
larger than t
DD
g(VDD)
.
to
23/225
Page 24
ST72361
V
DD
V
IT+
(LVD)
RESET
V
IT-
(LVD)
V
hys
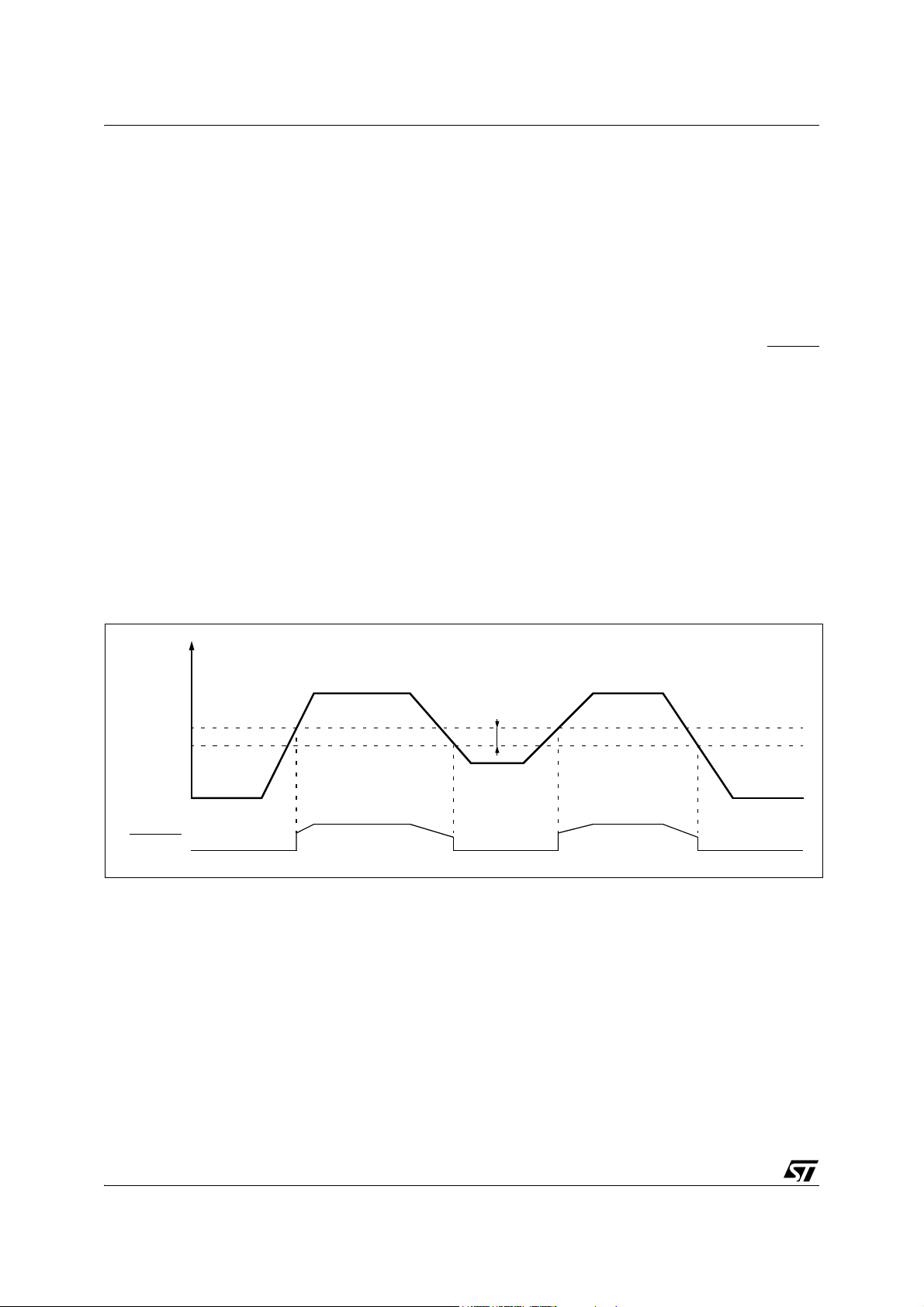
6.4 SYSTEM INTEGRITY MANAGEMENT (SI)
The System Integrity Management block contains
the Low Voltage Detector (LVD) and Auxiliary Volt
age Detector (AVD) functions. It is managed by
the SICSR register.
6.4.1 Low Voltage Detector (LVD)
The Low Voltage Detector function (LVD) generates a static reset when the VDD supply voltage is
below a V
IT-(LVD)
reference value. This means that
it secures the power-up as well as the power-down
keeping the ST7 in reset.
The V
IT-(LVD)
lower than the V
reference value for a voltage drop is
IT+(LVD)
reference value for poweron in order to avoid a parasitic reset when the
MCU starts running and sinks current on the sup
-
ply (hysteresis).
The LVD Reset circuitry generates a reset when
is below:
V
DD
–V
–V
IT+(LVD)
IT-(LVD)
when VDD is rising
when VDD is falling
The LVD function is illustrated in Figure 15.
Figure 15. Low Voltage Detector vs Reset
Provided the minimum VDD value (guaranteed for
the oscillator frequency) is above V
IT-(LVD)
, the
MCU can only be in two modes:
– under full software control
– in static safe reset
In these conditions, secure operation is always ensured for the application without the need for external reset hardware.
During a Low Voltage Detector Reset, the RESET
pin is held low, thus permitting the MCU to reset
other devices.
Notes:
The LVD allows the device to be used without any
external RESET circuitry.
The LVD is an optional function which can be se-
lected by option byte.
It is recommended to make sure that the V
DD
supply voltage rises monotonously when the device is
exiting from Reset, to ensure the application func
tions properly.
-
24/225
Page 25
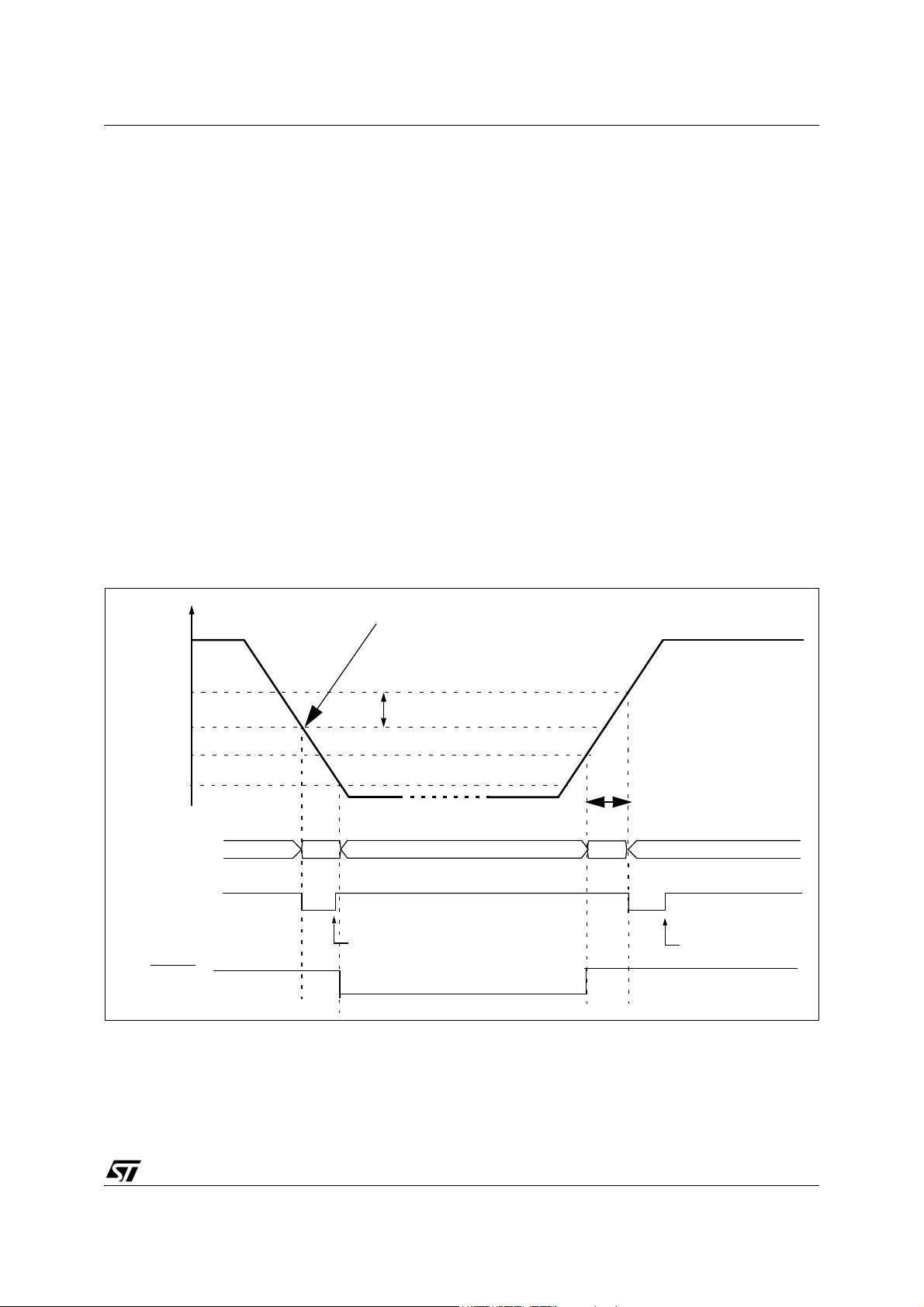
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
V
DD
V
IT+(AVD)
V
IT-(AVD)
AVDF bit 0 0RESET VALUE
IF AVDIE bit = 1
V
hyst
AVD INTERRUPT
REQUEST
INTERRUPT PROCESS
INTERRUPT PROCESS
V
IT+(LVD)
V
IT-(LVD)
LVD RESET
Early Warning Interrupt
(Power has dropped, MCU not
not yet in reset)
1
1
t
rv
VOLTAGE RISE TIME
6.4.2 Auxiliary Voltage Detector (AVD) The Voltage Detector function (AVD) is based on
an analog comparison between a V
V
IT+(AVD)
ply. The V
age is lower than the V
reference value and the VDD main sup-
IT-(AVD)
reference value for falling volt-
IT+(AVD)
reference value for
IT-(AVD)
and
rising voltage in order to avoid parasitic detection
(hysteresis).
The output of the AVD comparator is directly readable by the application software through a real
time status bit (AVDF) in the SICSR register. This
bit is read only.
Caution: The AVD function is active only if the
LVD is enabled through the option byte.
6.4.2.1 Monitoring the VDD Main Supply
If the AVD interrupt is enabled, an interrupt is generated when the voltage crosses the V
V
IT-(AVD)
threshold (AVDF bit toggles).
IT+(AVD)
or
In the case of a drop in voltage, the AVD interrupt
acts as an early warning, allowing software to shut
ST72361
down safely before the LVD resets the microcon
troller. See Figure 16.
The interrupt on the rising edge is used to inform
the application that the V
warning state is over.
DD
If the voltage rise time trv is less than 256 or 4096
CPU cycles (depending on the reset delay select
ed by option byte), no AVD interrupt will be generated when V
IT+(AVD)
is reached.
If trv is greater than 256 or 4096 cycles then:
– If the AVD interrupt is enabled before the
V
IT+(AVD)
threshold is reached, then two AVD interrupts will be received: The first when the
AVDIE bit is set and the second when the thresh
old is reached.
– If the AVD interrupt is enabled after the V
IT+(AVD)
threshold is reached, then only one AVD interrupt occurs.
-
-
-
Figure 16. Using the AVD to Monitor V
DD
25/225
Page 26
ST72361
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
6.4.3 Low Power Modes
Mode Description
WAIT
HALT The SICSR register is frozen.
6.4.3.1 Interrupts
The AVD interrupt event generates an interrupt if
the AVDIE bit is set and the interrupt mask in the
CC register is reset (RIM instruction).
No effect on SI. AVD interrupts cause the
device to exit from Wait mode.
Flag
Enable
Control
Bit
Interrupt Event
AVD event AVDF AVDIE Yes No
Event
Exit
from
Wait
Exit
from
Halt
26/225
Page 27
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
6.4.4 Register Description SYSTEM INTEGRITY (SI) CONTROL/STATUS REGISTER (SICSR)
Read / Write
Reset Value: 000x 000x (00h)
Bits 3:1 = Reserved, must be kept cleared.
ST72361
7 0
AVD
IE
AVDFLVD
RF
0 0 0
0
WDG
RF
Bit 7 = Reserved, must be kept cleared.
Bit 6 = AVDIE Voltage Detector interrupt enable
This bit is set and cleared by software. It enables
an interrupt to be generated when the AVDF flag
changes (toggles). The pending interrupt informa
tion is automatically cleared when software enters
the AVD interrupt routine.
0: AVD interrupt disabled
1: AVD interrupt enabled
Bit 5 = AVDF Voltage Detector flag
This read-only bit is set and cleared by hardware.
If the AVDIE bit is set, an interrupt request is gen
erated when the AVDF bit changes value. Refer to
Figure 16 and to Section 6.4.2.1 for additional de-
tails.
0: VDD over V
IT+(AVD)
1: VDD under V
Bit 4 = LVDRF LVD reset flag
IT-(AVD)
threshold
threshold
This bit indicates that the last Reset was generated by the LVD block. It is set by hardware (LVD reset) and cleared by software (writing zero). See
WDGRF flag description for more details. When
the LVD is disabled by OPTION BYTE, the LVDRF
bit value is undefined.
Bit 0 = WDGRF Watchdog reset flag
This bit indicates that the last Reset was generated by the Watchdog peripheral. It is set by hardware (watchdog reset) and cleared by software
(writing zero) or an LVD Reset (to ensure a stable
cleared state of the WDGRF flag when CPU
starts).
Combined with the LVDRF flag information, the
flag description is given by the following table.
-
RESET Sources LVDRF WDGRF
External RESET pin 0 0
Watchdog 0 1
LVD 1 X
Application notes
The LVDRF flag is not cleared when another RESET type occurs (external or watchdog), the
LVDRF flag remains set to keep trace of the origi
nal failure.
In this case, a watchdog reset can be detected by
software while an external reset can not.
CAUTION: When the LVD is not activated with the
associated option byte, the WDGRF flag can not
be used in the application.
-
27/225
Page 28
ST72361
“IRET”
RESTORE PC, X, A, CC
STACK PC, X, A, CC
LOAD I1:0 FROM INTERRUPT SW REG.
FETCH NEXT
RESET
TLI
PENDING
INSTRUCTION
I1:0
FROM STACK
LOAD PC FROM INTERRUPT VECTOR
Y
N
Y
N
Y
N
Interrupt has the same or a
lower software priority
THE INTERRUPT
STAYS PENDING
than current one
Interrupt has a higher
software priority
than current one
EXECUTE
INSTRUCTION
INTERRUPT
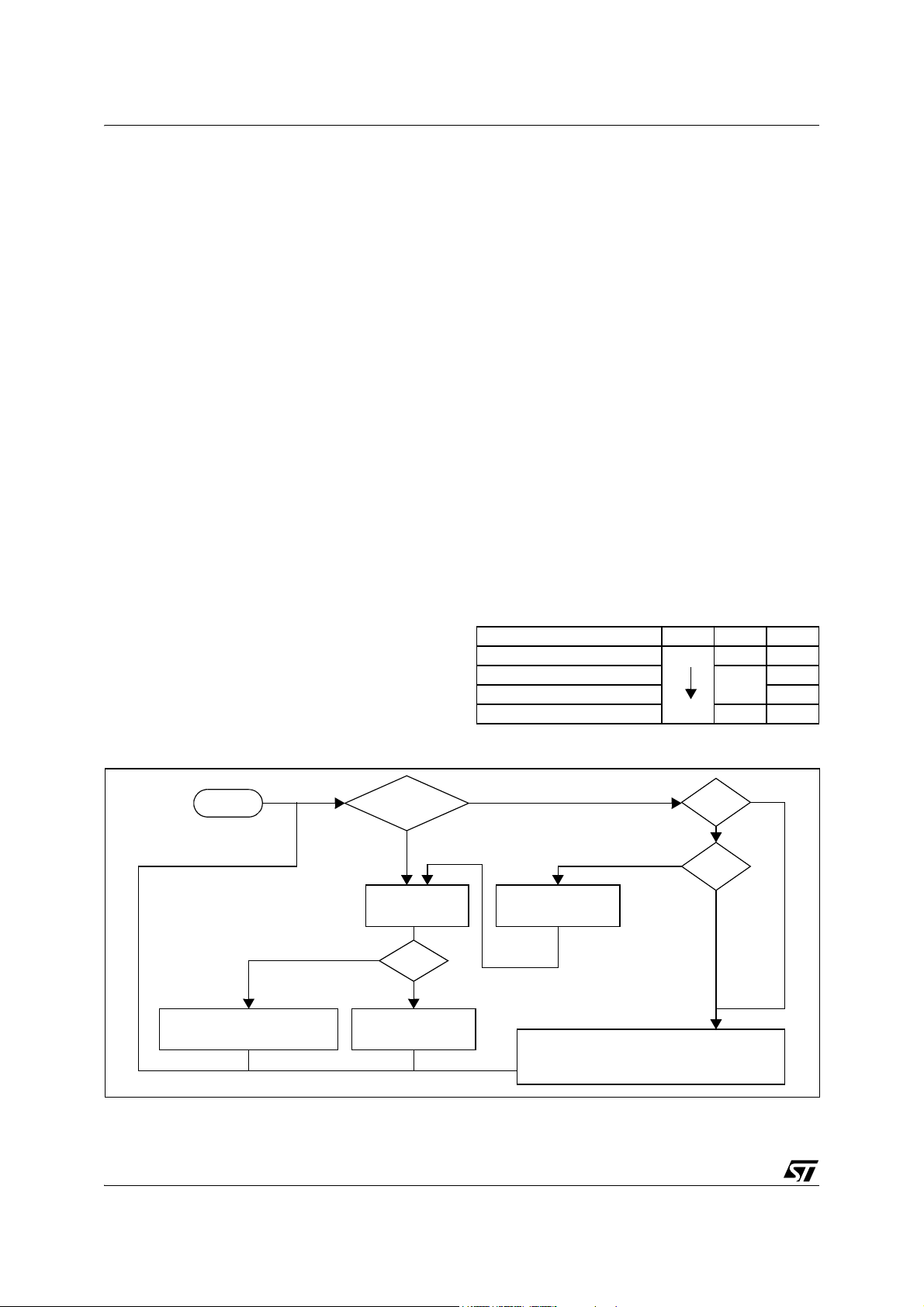
7 INTERRUPTS
7.1 INTRODUCTION
The ST7 enhanced interrupt management provides the following features:
■ Hardware interrupts
■ Software interrupt (TRAP)
■ Nested or concurrent interrupt management
with flexible interrupt priority and level
management:
– Up to 4 software programmable nesting levels
– Up to 16 interrupt vectors fixed by hardware
– 2 non maskable events: RESET, TRAP
– 1 maskable Top Level Event: TLI
This interrupt management is based on:
– Bit 5 and bit 3 of the CPU CC register (I1:0),
– Interrupt software priority registers (ISPRx),
– Fixed interrupt vector addresses located at the
high addresses of the memory map (FFE0h to
FFFFh) sorted by hardware priority order.
This enhanced interrupt controller guarantees full
upward compatibility with the standard (not nest
-
ed) ST7 interrupt controller.
7.2 MASKING AND PROCESSING FLOW
The interrupt masking is managed by the I1 and I0
bits of the CC register and the ISPRx registers
which give the interrupt software priority level of
each interrupt vector (see Table 6). The process
ing flow is shown in Figure 17.
When an interrupt request has to be serviced:
– Normal processing is suspended at the end of
the current instruction execution.
– The PC, X, A and CC registers are saved onto
the stack.
– I1 and I0 bits of CC register are set according to
the corresponding values in the ISPRx registers
of the serviced interrupt vector.
– The PC is then loaded with the interrupt vector of
the interrupt to service and the first instruction of
the interrupt service routine is fetched (refer to
“Interrupt Mapping” table for vector addresses).
The interrupt service routine should end with the
IRET instruction which causes the contents of the
saved registers to be recovered from the stack.
Note: As a consequence of the IRET instruction,
the I1 and I0 bits will be restored from the stack
and the program in the previous level will resume.
Table 7. Interrupt Software Priority Levels
Interrupt software priority Level I1 I0
Level 0 (main)
Level 1
Level 2 0
Level 3 (= interrupt disable) 1 1
Low
High
1 0
0
1
-
Figure 17. Interrupt Processing Flowchart
28/225
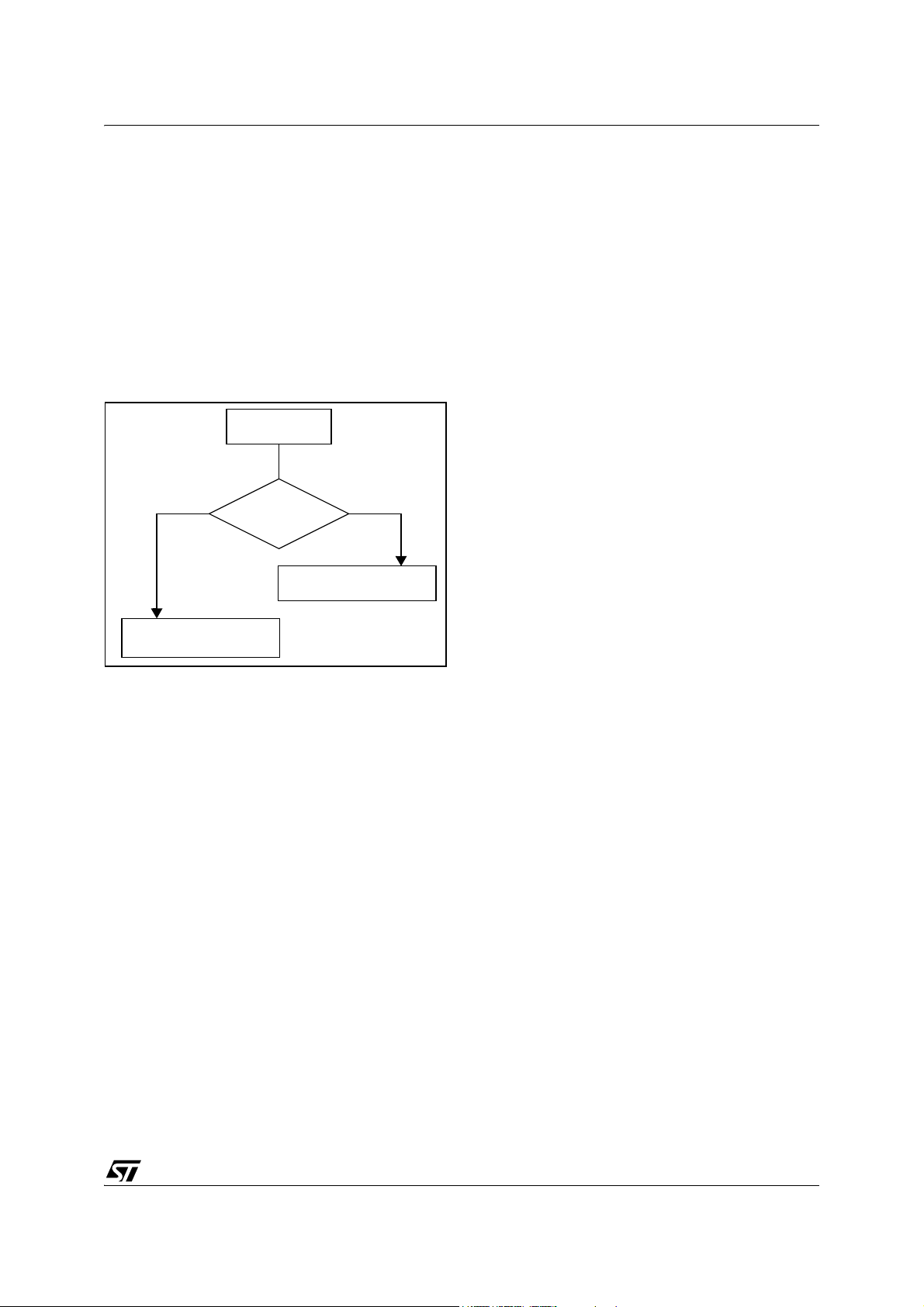
Page 29
INTERRUPTS (Cont’d)
PENDING
SOFTWARE
Different
INTERRUPTS
Same
HIGHEST HARDWARE
PRIORITY SERVICED
PRIORITY
HIGHEST SOFTWARE
PRIORITY SERVICED
ST72361
Servicing Pending Interrupts
As several interrupts can be pending at the same
time, the interrupt to be taken into account is deter
-
mined by the following two-step process:
– the highest software priority interrupt is serviced,
– if several interrupts have the same software pri-
ority then the interrupt with the highest hardware
priority is serviced first.
Figure 18 describes this decision process.
Figure 18. Priority Decision Process
When an interrupt request is not serviced immediately, it is latched and then processed when its
software priority combined with the hardware pri
-
ority becomes the highest one.
Note 1: The hardware priority is exclusive while
the software one is not. This allows the previous
process to succeed with only one interrupt.
Note 2: RESET, TRAP and TLI can be considered
as having the highest software priority in the deci
-
sion process.
Different Interrupt Vector Sources
Two interrupt source types are managed by the
ST7 interrupt controller: the non-maskable type
(RESET, TRAP) and the maskable type (external
or from internal peripherals).
Non-Maskable Sources
These sources are processed regardless of the
state of the I1 and I0 bits of the CC register (see
Figure 17). After stacking the PC, X, A and CC
registers (except for RESET), the corresponding
vector is loaded in the PC register and the I1 and
I0 bits of the CC are set to disable interrupts (level
3). These sources allow the processor to exit
HALT mode.
■ TRAP (Non Maskable Software Interrupt)
This software interrupt is serviced when the TRAP
instruction is executed. It will be serviced accord
-
ing to the flowchart in Figure 17 as a TLI.
Caution: TRAP can be interrupted by a TLI.
■ RESET
The RESET source has the highest priority in the
ST7. This means that the first current routine has
the highest software priority (level 3) and the high
-
est hardware priority.
See the RESET chapter for more details.
Maskable Sources
Maskable interrupt vector sources can be serviced
if the corresponding interrupt is enabled and if its
own interrupt software priority (in ISPRx registers)
is higher than the one currently being serviced (I1
and I0 in CC register). If any of these two condi
tions is false, the interrupt is latched and thus remains pending.
■ TLI (Top Level Hardware Interrupt)
This hardware interrupt occurs when a specific
edge is detected on the dedicated TLI pin.
Caution: A TRAP instruction must not be used in a
TLI service routine.
■ External Interrupts
External interrupts allow the processor to exit from
HALT low power mode.
External interrupt sensitivity is software selectable
through the External Interrupt Control register
(EICR).
External interrupt triggered on edge will be latched
and the interrupt request automatically cleared
upon entering the interrupt service routine.
If several input pins of a group connected to the
same interrupt line are selected simultaneously,
these will be logically ORed.
■ Peripheral Interrupts
Usually the peripheral interrupts cause the MCU to
exit from HALT mode except those mentioned in
the “Interrupt Mapping” table.
A peripheral interrupt occurs when a specific flag
is set in the peripheral status registers and if the
corresponding enable bit is set in the peripheral
control register.
The general sequence for clearing an interrupt is
based on an access to the status register followed
by a read or write to an associated register.
Note: The clearing sequence resets the internal
latch. A pending interrupt (that is, waiting for being
serviced) will therefore be lost if the clear se
quence is executed.
29/225
Page 30
ST72361
MAIN
IT4
IT2
IT1
TLI
IT1
MAIN
IT0
I1
HARDWARE PRIORITY
SOFTWARE
3
3
3
3
3
3/0
3
11
11
11
11
11
11 / 10
11
RIM
IT2
IT1
IT4
TLI
IT3
IT0
IT3
I0
10
PRIORITY
LEVEL
USED STACK = 10 BYTES
MAIN
IT2
TLI
MAIN
IT0
IT2
IT1
IT4
TLI
IT3
IT0
HARDWARE PRIORITY
3
2
1
3
3
3/0
3
11
00
01
11
11
11
RIM
IT1
IT4
IT4
IT1
IT2
IT3
I1 I0
11 / 10
10
SOFTWARE
PRIORITY
LEVEL
USED STACK = 20 BYTES
INTERRUPTS (Cont’d)
7.3 INTERRUPTS AND LOW POWER MODES
All interrupts allow the processor to exit the WAIT
low power mode. On the contrary, only external
and other specified interrupts allow the processor
to exit from the HALT modes (see column “Exit
from HALT” in “Interrupt Mapping” table). When
several pending interrupts are present while exit
ing HALT mode, the first one serviced can only be
an interrupt with exit from HALT mode capability
and it is selected through the same decision proc
ess shown in Figure 18.
Note: If an interrupt, that is not able to Exit from
HALT mode, is pending with the highest priority
when exiting HALT mode, this interrupt is serviced
after the first one serviced.
Figure 19. Concurrent Interrupt Management
7.4 CONCURRENT & NESTED MANAGEMENT
The following Figure 19 and Figure 20 show two
different interrupt management modes. The first is
called concurrent mode and does not allow an in
terrupt to be interrupted, unlike the nested mode in
Figure 20. The interrupt hardware priority is given
in this order from the lowest to the highest: MAIN,
IT4, IT3, IT2, IT1, IT0, TLI. The software priority is
given for each interrupt.
Warning: A stack overflow may occur without notifying the software of the failure.
-
Figure 20. Nested Interrupt Management
30/225
Page 31

INTERRUPTS (Cont’d)
ST72361
7.5 INTERRUPT REGISTER DESCRIPTION
CPU CC REGISTER INTERRUPT BITS
Read / Write
Reset Value: 111x 1010 (xAh)
7 0
1 1 I1 H I0 N Z C
Bit 5, 3 = I1, I0 Software Interrupt Priority
These two bits indicate the current interrupt soft-
ware priority.
Interrupt Software Priority Level I1 I0
Level 0 (main)
Level 1
Level 2 0
Level 3 (= interrupt disable*) 1 1
Low
High
1 0
0
1
These two bits are set/cleared by hardware when
entering in interrupt. The loaded value is given by
the corresponding bits in the interrupt software pri
ority registers (ISPRx).
They can be also set/cleared by software with the
RIM, SIM, HALT, WFI, IRET and PUSH/POP in
structions (see “Interrupt Dedicated Instruction
Set” table).
*Note: TLI, TRAP and RESET events can interrupt
a level 3 program.
INTERRUPT SOFTWARE PRIORITY REGISTERS (ISPRX)
Read/Write (bit 7:4 of ISPR3 are read only)
Reset Value: 1111 1111 (FFh)
7 0
ISPR0 I1_3 I0_3 I1_2 I0_2 I1_1 I0_1 I1_0 I0_0
ISPR1 I1_7 I0_7 I1_6 I0_6 I1_5 I0_5 I1_4 I0_4
ISPR2 I1_11 I0_11 I1_10 I0_10 I1_9 I0_9 I1_8 I0_8
ISPR3 1 1 1 1 I1_13 I0_13 I1_12 I0_12
These four registers contain the interrupt software
priority of each interrupt vector.
– Each interrupt vector (except RESET and TRAP)
has corresponding bits in these registers where
its own software priority is stored. This corre
-
spondence is shown in the following table.
Vector address ISPRx bits
FFFBh-FFFAh I1_0 and I0_0 bits*
FFF9h-FFF8h I1_1 and I0_1 bits
... ...
FFE1h-FFE0h I1_13 and I0_13 bits
– Each I1_x and I0_x bit value in the ISPRx regis-
ters has the same meaning as the I1 and I0 bits
in the CC register.
– Level 0 cannot be written (I1_x = 1, I0_x = 0). In
this case, the previously stored value is kept (Ex
-
ample: previous = CFh, write = 64h,
= 44h)
result
The RESET, TRAP and TLI vectors have no software priorities. When one is serviced, the I1 and I0
bits of the CC register are both set.
*Note: Bits in the ISPRx registers which correspond to the TLI can be read and written but they
are not significant in the interrupt process man
-
agement.
Caution: If the I1_x and I0_x bits are modified
while the interrupt x is executed the following be
havior has to be considered: If the interrupt x is still
pending (new interrupt or flag not cleared) and the
new software priority is higher than the previous
one, the interrupt x is re-entered. Otherwise, the
software priority stays unchanged up to the next
interrupt request (after the IRET of the interrupt x).
31/225
Page 32

ST72361
INTERRUPTS (Cont’d)
Table 8. Dedicated Interrupt Instruction Set
Instruction New Description Function/Example I1 H I0 N Z C
HALT Entering Halt mode 1 0
IRET Interrupt routine return Pop CC, A, X, PC I1 H I0 N Z C
JRM Jump if I1:0 = 11 (level 3) I1:0 = 11 ?
JRNM Jump if I1:0 <> 11 I1:0 <> 11 ?
POP CC Pop CC from the Stack Mem => CC I1 H I0 N Z C
RIM Enable interrupt (level 0 set) Load 10 in I1:0 of CC 1 0
SIM Disable interrupt (level 3 set) Load 11 in I1:0 of CC 1 1
TRAP Software trap Software NMI 1 1
WFI Wait for interrupt 1 0
Note: During the execution of an interrupt routine, the HALT, POPCC, RIM, SIM and WFI instructions change the current
software priority up to the next IRET instruction or one of the previously mentioned instructions.
32/225
Page 33

INTERRUPTS (Cont’d)
Table 9. Interrupt Mapping
ST72361
N°
Source
Block
Description
RESET Reset
TRAP Software interrupt no FFFCh-FFFDh
0 TLI External top level interrupt EICR yes FFFAh-FFFBh
1 MCC/RTC Main clock controller time base interrupt MCCSR yes FFF8h-FFF9h
2 ei0/AWUFH External interrupt ei0/ Auto wake-up from Halt
3 ei1/AVD External interrupt ei1/Auxiliary Voltage Detector
Register
Label
N/A
EICR/
AWUCSR
EICR/
SICSR
Priority
Order
Highest
Priority
Exit
from
HALT
1)
Address
Vector
yes FFFEh-FFFFh
FFF6h-FFF7h
2)
yes
FFF4h-FFF5h
4 ei2 External interrupt ei2 EICR FFF2h-FFF3h
5 ei3 External interrupt ei3 EICR FFF0h-FFF1h
6 not used FFEEh-FFEFh
7 not used FFECh-FFEDh
8 SPI SPI peripheral interrupts SPICSR yes FFEAh-FFEBh
9 TIMER8 8-bit TIMER peripheral interrupts T8_TCR1 no FFE8h-FFE9h
10 TIMER16 16-bit TIMER peripheral interrupts TCR1 no FFE6h-FFE7h
11 LINSCI2 LINSCI2 Peripheral interrupts SCI2CR1 no FFE4h-FFE5h
12 LINSCI1
13 PWM ART 8-bit PWM ART interrupts PWMCR yes FFE0h-FFE1h
LINSCI1 Peripheral interrupts (LIN Master/
Slave)
SCI1CR1 no
Lowest
Priority
3)
FFE2h-FFE3h
Notes:
1. Valid for HALT and ACTIVE HALT modes except for the MCC/RTC interrupt source which exits from ACTIVE HALT
mode only.
2. Except AVD interrupt
3. It is possible to exit from Halt using the external interrupt which is mapped on the RDI pin.
33/225
Page 34

ST72361
IS10 IS11
EICR
SENSITIVITY
CONTROL
PBOR.0
PBDDR.0
PB0
ei1 INTERRUPT SOURCE
PORT B [5:0] INTERRUPTS
PB0
PB1
PB2
PB3
IS20 IS21
EICR
SENSITIVITY
CONTROL
PCOR.7
PCDDR.7
PC1
ei2 INTERRUPT SOURCE
PORT C [2:1] INTERRUPTS
PC1
PC2
IS00 IS01
EICR
SENSITIVITY
CONTROL
PAOR.0
PADDR.0
PA0
ei0 INTERRUPT SOURCE
PORT A [7:0] INTERRUPTS
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
/ AWUPR
AWUFH
Oscillator
To Timer Input Capture 1
PB4
PB5
IS30 IS31
EICR
SENSITIVITY
CONTROL
PDOR.0
PDDDR.0
PD0
ei3 INTERRUPT SOURCE
PORT D [7:6, 4, 1:0] INTERRUPTS
PD0
PD1
PD4
PD6
PD7
INTERRUPTS (Cont’d)
7.6 EXTERNAL INTERRUPTS
7.6.1 I/O Port Interrupt Sensitivity
The external interrupt sensitivity is controlled by
the ISxx bits in the EICR register (
control allows up to four fully independent external
interrupt source sensitivities.
Each external interrupt source can be generated
on four (or five) different events on the pin:
■ Falling edge
■ Rising edge
Figure 21. External Interrupt Control Bits
Figure 21). This
■ Falling and rising edge
■ Falling edge and low level
To guarantee correct functionality, the sensitivity
bits in the EICR register can be modified only
when the I1 and I0 bits of the CC register are both
set to 1 (level 3). This means that interrupts must
be disabled before changing sensitivity.
The pending interrupts are cleared by writing a different value in the ISx[1:0] of the EICR.
34/225
Page 35

INTERRUPTS (Cont’d)
7.6.2 Register Description EXTERNAL INTERRUPT CONTROL
REGISTER 0 (EICR0)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
IS31 IS30 IS21 IS20 IS11 IS10 IS01 IS00
Bits 7:6 = IS3[1:0] ei3 sensitivity
The interrupt sensitivity, defined using the IS3[1:0]
bits, is applied to the ei3 external interrupts:
ST72361
These 2 bits can be written only when I1 and I0 of
the CC register are both set to 1 (level 3).
Bits 1:0 = IS0[1:0] ei0 sensitivity
The interrupt sensitivity, defined using the IS0[1:0]
bits, is applied to the ei0 external interrupts:
IS01 IS00 External Interrupt Sensitivity
0 0 Falling edge & low level
0 1 Rising edge only
1 0 Falling edge only
1 1 Rising and falling edge
IS31 IS30 External Interrupt Sensitivity
0 0 Falling edge & low level
0 1 Rising edge only
1 0 Falling edge only
1 1 Rising and falling edge
These 2 bits can be written only when I1 and I0 of
the CC register are both set to 1 (level 3).
Bits 5:4 = IS2[1:0] ei2 sensitivity
The interrupt sensitivity, defined using the IS2[1:0]
bits, is applied to the ei2 external interrupts:
IS21 IS20 External Interrupt Sensitivity
0 0 Falling edge & low level
0 1 Rising edge only
1 0 Falling edge only
1 1 Rising and falling edge
These 2 bits can be written only when I1 and I0 of
the CC register are both set to 1 (level 3).
Bits 3:2 = IS1[1:0] ei1 sensitivity
The interrupt sensitivity, defined using the IS1[1:0]
bits, is applied to the ei1 external interrupts:
IS11 IS10 External Interrupt Sensitivity
0 0 Falling edge & low level
0 1 Rising edge only
1 0 Falling edge only
1 1 Rising and falling edge
These 2 bits can be written only when I1 and I0 of
the CC register are both set to 1 (level 3).
EXTERNAL INTERUPT CONTROL REGISTER 1
(EICR1)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
0 0 0 0 0 0 TLIS TLIE
BIts 7:2 = Reserved
Bit 1 = TLIS Top Level Interrupt sensitivity
This bit configures the TLI edge sensitivity. It can
be set and cleared by software only when TLIE bit
is cleared.
0: Falling edge
1: Rising edge
Bit 0 = TLIE Top Level Interrupt enable
This bit allows to enable or disable the TLI capability on the dedicated pin. It is set and cleared by
software.
0: TLI disabled
1: TLI enabled
Notes:
– A parasitic interrupt can be generated when
clearing the TLIE bit.
– In some packages, the TLI pin is not available. In
this case, the TLIE bit must be kept low to avoid
parasitic TLI interrupts.
35/225
Page 36

ST72361
INTERRUPTS (Cont’d)
Table 10. Nested Interrupts Register Map and Reset Values
Address
(Hex.)
0025h
0026h
0027h
0028h
0029h
002Ah
Register
Label
ISPR0
Reset Value
ISPR1
Reset Value
ISPR2
Reset Value
ISPR3
Reset Value 1 1 1 1
EICR0
Reset Value
EICR1
Reset Value 0 0 0 0 0 0
7 6 5 4 3 2 1 0
ei1 ei0 CLKM TLI
I1_3
1
I1_7
1
LINSCI 2 TIMER 16 TIMER 8 SPI
I1_11
1
IS31
0
I0_3
1
I0_7
1
I0_11
1
IS30
0
I1_2
1
I1_6
1
I1_10
1
IS21
0
I0_2
1
I0_6
1
I0_10
1
IS20
0
I1_1
1
I1_5
1
I1_9
1
I1_13
1
IS11
0
I0_1
ei3 ei2
I0_5
I0_9
ART LINSCI 1
I0_13
IS10
1
1
1
1
0
1 1
I1_4
1
I1_8
1
I1_12
1
IS01
0
TLIS
0
I0_4
1
I0_8
1
I0_12
1
IS00
0
TLIE
0
36/225
Page 37

8 POWER SAVING MODES
POWER CONSUMPTION
WAIT
SLOW
RUN
ACTIVE HALT
High
Low
SLOW WAIT
AUTO WAKE-UP FROM HALT
HALT
00 01
SMS
CP1:0
f
CPU
NEW SLOW
NORMAL RUN MODE
MCCSR
FREQUENCY
REQUEST
REQUEST
f
OSC2
f
OSC2
/2 f
OSC2
/4 f
OSC2
ST72361
8.1 INTRODUCTION
To give a large measure of flexibility to the application in terms of power consumption, five main power saving modes are implemented in the ST7 (see
Figure 22):
■ Slow
■ Wait (and Slow-Wait)
■ Active Halt
■ Auto Wake-up From Halt (AWUFH)
■ Halt
After a RESET the normal operating mode is selected by default (RUN mode). This mode drives
the device (CPU and embedded peripherals) by
means of a master clock which is based on the
main oscillator frequency divided or multiplied by 2
).
(f
OSC2
From RUN mode, the different power saving
modes may be selected by setting the relevant
register bits or by calling the specific ST7 software
instruction whose action depends on the oscillator
status.
Figure 22. Power Saving Mode Transitions
8.2 SLOW MODE
This mode has two targets:
– To reduce power consumption by decreasing the
internal clock in the device,
– To adapt the internal clock frequency (f
CPU
) to
the available supply voltage.
SLOW mode is controlled by three bits in the
MCCSR register: the SMS bit which enables or
disables Slow mode and two CPx bits which select
the internal slow frequency (f
In this mode, the master clock frequency (f
can be divided by 2, 4, 8 or 16. The CPU and pe
CPU
).
)
OSC2
ripherals are clocked at this lower frequency
).
(f
CPU
Note: SLOW-WAIT mode is activated by entering
WAIT mode while the device is in SLOW mode.
Figure 23. SLOW Mode Clock Transitions
37/225
Page 38

ST72361
WFI INSTRUCTION
RESET
INTERRUPT
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
ON
10
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
OFF
10
ON
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
ON
XX
1)
ON
256 OR 4096 CPU CLOCK
CYCLE DELAY
POWER SAVING MODES (Cont’d)
8.3 WAIT MODE
WAIT mode places the MCU in a low power consumption mode by stopping the CPU.
This power saving mode is selected by calling the
‘WFI’ instruction.
All peripherals remain active. During WAIT mode,
the I[1:0] bits of the CC register are forced to ‘10’,
to enable all interrupts. All other registers and
memory remain unchanged. The MCU remains in
WAIT mode until an interrupt or RESET occurs,
whereupon the Program Counter branches to the
starting address of the interrupt or Reset service
routine.
The MCU will remain in WAIT mode until a Reset
or an Interrupt occurs, causing it to wake up.
Refer to Figure 24
Figure 24. WAIT Mode Flow-chart
38/225
Note:
1. Before servicing an interrupt, the CC register is
pushed on the stack. The I[1:0] bits of the CC reg
ister are set to the current software priority level of
the interrupt routine and recovered when the CC
register is popped.
-
Page 39

POWER SAVING MODES (Cont’d)
HALTRUN RUN
256 OR 4096 CPU
CYCLE DELAY
RESET
OR
INTERRUPT
HALT
INSTRUCTION
FETCH
VECTOR
[MCCSR.OIE=0]
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
2)
I[1:0] BITS
OFF
OFF
10
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
OFF
XX
4)
ON
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
ON
XX
4)
ON
256 OR 4096 CPU CLOCK
DELAY
WATCHDOG
ENABLE
DISABLE
WDGHALT
1)
0
WATCHDOG
RESET
1
CYCLE
HALT INSTRUCTION
(MCCSR.OIE=0)
(AWUCSR.AWUEN=0)
ST72361
8.4 HALT MODE
The HALT mode is the lowest power consumption
mode of the MCU. It is entered by executing the
‘HALT’ instruction when the OIE bit of the Main
Clock Controller Status register (MCCSR) is
cleared (see
tails on the MCCSR register) and when the
AWUEN bit in the AWUCSR register is cleared.
The MCU can exit HALT mode on reception of either a specific interrupt (see Table 9, “Interrupt
Mapping,” on page 33) or a RESET. When exiting
HALT mode by means of a RESET or an interrupt,
the oscillator is immediately turned on and the 256
or 4096 CPU cycle delay is used to stabilize the
oscillator. After the start up delay, the CPU
resumes operation by servicing the interrupt or by
fetching the reset vector which woke it up (see
ure 26).
When entering HALT mode, the I[1:0] bits in the
CC register are forced to ‘10b’ to enable interrupts.
Therefore, if an interrupt is pending, the MCU
wakes up immediately.
In HALT mode, the main oscillator is turned off
causing all internal processing to be stopped, in
cluding the operation of the on-chip peripherals.
All peripherals are not clocked except the ones
which get their clock supply from another clock
generator (such as an external or auxiliary oscilla
tor).
The compatibility of Watchdog operation with
HALT mode is configured by the “WDGHALT” op
tion bit of the option byte. The HALT instruction
when executed while the Watchdog system is en
abled, can generate a Watchdog RESET (see
Section 10.1 on page 52 for more details).
Figure 25. HALT Timing Overview
Section 10.2 on page 58 for more de-
Fig-
Figure 26. HALT Mode Flow-chart
-
-
-
-
Notes:
1. WDGHALT is an option bit. See option byte sec-
tion for more details.
2. Peripheral clocked with an external clock source
can still be active.
3. Only some specific interrupts can exit the MCU
from HALT mode (such as external interrupt). Re
fer to Table 9, “Interrupt Mapping,” on page 33 for
more details.
4. Before servicing an interrupt, the CC register is
pushed on the stack. The I[1:0] bits of the CC reg
ister are set to the current software priority level of
the interrupt routine and recovered when the CC
register is popped.
-
-
39/225
Page 40

ST72361
POWER SAVING MODES (Cont’d)
Halt Mode Recommendations
– Make sure that an external event is available to
wake up the microcontroller from Halt mode.
– When using an external interrupt to wake up the
microcontroller, reinitialize the corresponding I/O
as “Input Pull-up with Interrupt” before executing
the HALT instruction. The main reason for this is
that the I/O may be wrongly configured due to ex
ternal interference or by an unforeseen logical
condition.
– For the same reason, reinitialize the level sensi-
tiveness of each external interrupt as a precautionary measure.
– The opcode for the HALT instruction is 0x8E. To
avoid an unexpected HALT instruction due to a
program counter failure, it is advised to clear all
occurrences of the data value 0x8E from memo
ry. For example, avoid defining a constant in
ROM with the value 0x8E.
– As the HALT instruction clears the interrupt mask
in the CC register to allow interrupts, the user
may choose to clear all pending interrupt bits be
fore executing the HALT instruction. This avoids
entering other peripheral interrupt routines after
executing the external interrupt routine corre
sponding to the wake-up event (reset or external
interrupt).
-
8.5 ACTIVE HALT MODE
ACTIVE HALT mode is the lowest power consumption mode of the MCU with a real time clock
available. It is entered by executing the ‘HALT’ in
struction when MCC/RTC interrupt enable flag
(OIE bit in MCCSR register) is set and when the
AWUEN bit in the AWUCSR register is cleared
See “Register Description” on page 44.)
(
-
MCCSR
OIE
Power Saving Mode entered when HALT
bit
0 HALT mode
1 ACTIVE HALT mode
instruction is executed
The MCU can exit ACTIVE HALT mode on reception of the RTC interrupt and some specific inter-
rupts (see Table 9, “Interrupt Mapping,” on page
33) or a RESET. When exiting ACTIVE HALT
mode by means of a RESET a 4096 or 256 CPU
cycle delay occurs (depending on the option byte).
After the start up delay, the CPU resumes opera
-
tion by servicing the interrupt or by fetching the reset vector which woke it up (see Figure 28).
When entering ACTIVE HALT mode, the I[1:0] bits
in the CC register are are forced to ‘10b’ to enable
interrupts. Therefore, if an interrupt is pending, the
MCU wakes up immediately.
In ACTIVE HALT mode, only the main oscillator
and its associated counter (MCC/RTC) are run
ning to keep a wake-up time base. All other peripherals are not clocked except those which get their
clock supply from another clock generator (such
as external or auxiliary oscillator).
The safeguard against staying locked in ACTIVE
HALT mode is provided by the oscillator interrupt.
Note: As soon as active halt is enabled, executing
a HALT instruction while the Watchdog is active
does not generate a RESET.
This means that the device cannot spend more
than a defined delay in this power saving mode.
-
-
-
40/225
Page 41

POWER SAVING MODES (Cont’d)
HALTRUN RUN
256 OR 4096 CYCLE
DELAY (AFTER RESET)
RESET
OR
INTERRUPT
HALT
INSTRUCTION
FETCH
VECTOR
ACTIVE
(Active Halt enabled)
HALT INSTRUCTION
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
2)
I[1:0] BITS
ON
OFF
10
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
OFF
XX
4)
ON
CPU
OSCILLATOR
PERIPHERALS
I[1:0] BITS
ON
ON
XX
4)
ON
256 OR 4096 CPU CLOCK
CYCLE DELAY
(MCCSR.OIE=1)
(AWUCSR.AWUEN=0)
ST72361
Figure 27. ACTIVE HALT Timing Overview
Figure 28. ACTIVE HALT Mode Flow-chart
Notes:
1. This delay occurs only if the MCU exits ACTIVE
HALT mode by means of a RESET.
2. Peripheral clocked with an external clock
source can still be active.
3. Only the RTC interrupt and some specific inter-
rupts can exit the MCU from ACTIVE HALT
mode (such as external interrupt). Refer to
Table 9, “Interrupt Mapping,” on page 33 for
more details.
4. Before servicing an interrupt, the CC register is
pushed on the stack. The I[1:0] bits in the CC
register are set to the current software priority
level of the interrupt routine and restored when
the CC register is popped.
41/225
Page 42

ST72361
AWU RC
AWUFH
f
AWU_RC
AWUFH
(ei0 source)
oscillator
prescaler
interrupt
/64
divider
to Timer input capture
/1 .. 255
AWUFH interrupt
f
CPU
RUN MODE HALT MODE 256 or 4096 t
CPU
RUN MODE
f
AWU_RC
Clear
by software
t
AWU
POWER SAVING MODES (Cont’d)
8.6 AUTO WAKE-UP FROM HALT MODE
Auto Wake-Up From Halt (AWUFH) mode is similar to Halt mode with the addition of an internal RC
oscillator for wake-up. Compared to ACTIVE
HALT mode, AWUFH has lower power consump
-
tion because the main clock is not kept running,
but there is no accurate realtime clock available.
It is entered by executing the HALT instruction
when the AWUEN bit in the AWUCSR register has
been set and the OIE bit in the MCCSR register is
cleared (see
Section 10.2 on page 58 for more de-
tails).
Figure 29. AWUFH Mode Block Diagram
As soon as HALT mode is entered, and if the
AWUEN bit has been set in the AWUCSR register,
the AWU RC oscillator provides a clock signal
(f
AWU_RC
). Its frequency is divided by a fixed divider and a programmable prescaler controlled by the
AWUPR register. The output of this prescaler pro
vides the delay time. When the delay has elapsed
the AWUF flag is set by hardware and an interrupt
wakes up the MCU from Halt mode. At the same
time the main oscillator is immediately turned on
and a 256 or 4096 cycle delay is used to stabilize
it. After this start-up delay, the CPU resumes oper
ation by servicing the AWUFH interrupt. The AWU
flag and its associated interrupt are cleared by
software reading the AWUCSR register.
To compensate for any frequency dispersion of
the AWU RC oscillator, it can be calibrated by
measuring the clock frequency f
AWU_RC
and then
calculating the right prescaler value. Measurement
mode is enabled by setting the AWUM bit in the
AWUCSR register in Run mode. This connects
f
AWU_RC
lowing the f
to the ICAP1 input of the 16-bit timer, al-
AWU_RC
to be measured using the main
oscillator clock as a reference timebase.
Similarities with Halt mode
The following AWUFH mode behavior is the same
as normal Halt mode:
– The MCU can exit AWUFH mode by means of
any interrupt with exit from Halt capability or a re
-
set (see Section 8.4 "HALT MODE").
– When entering AWUFH mode, the I[1:0] bits in
the CC register are forced to 10b to enable inter
rupts. Therefore, if an interrupt is pending, the
MCU wakes up immediately.
– In AWUFH mode, the main oscillator is turned off
causing all internal processing to be stopped, in
cluding the operation of the on-chip peripherals.
None of the peripherals are clocked except those
which get their clock supply from another clock
generator (such as an external or auxiliary oscil
lator like the AWU oscillator).
– The compatibility of Watchdog operation with
AWUFH mode is configured by the WDGHALT
option bit in the option byte. Depending on this
setting, the HALT instruction when executed
while the Watchdog system is enabled, can gen
erate a Watchdog RESET.
Figure 30. AWUF Halt Timing Diagram
42/225
Page 43

POWER SAVING MODES (Cont’d)
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
MAIN OSC
PERIPHERALS
2)
I[1:0] BITS
OFF
OFF
10
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
MAIN OSC
PERIPHERALS
I[1:0] BITS
ON
OFF
XX
4)
ON
CPU
MAIN OSC
PERIPHERALS
I[1:0] BITS
ON
ON
XX
4)
ON
256 OR 4096 CPU CLOCK
DELAY
WATCHDOG
ENABLE
DISABLE
WDGHALT
1)
0
WATCHDOG
RESET
1
CYCLE
AWU RC OSC ON
AWU RC OSC OFF
AWU RC OSC OFF
HALT INSTRUCTION
(MCCSR.OIE=0)
(AWUCSR.AWUEN=1)
Figure 31. AWUFH Mode Flow-chart Notes:
1. WDGHALT is an option bit. See option byte sec-
tion for more details.
2. Peripheral clocked with an external clock source
can still be active.
3. Only an AWUFH interrupt and some specific interrupts can exit the MCU from HALT mode (such
as external interrupt). Refer to Table 9, “Interrupt
Mapping,” on page 33 for more details.
4. Before servicing an interrupt, the CC register is
pushed on the stack. The I[1:0] bits of the CC reg
ister are set to the current software priority level of
the interrupt routine and recovered when the CC
register is popped.
ST72361
-
43/225
Page 44

ST72361
t
AWU
64 A W UPR×
1
f
AWURC
--------------------------t
RCSTRT
+×=
POWER SAVING MODES (Cont’d)
8.6.1 Register Description AWUFH CONTROL/STATUS REGISTER
(AWUCSR)
Read / Write (except bit 2 read only)
Reset Value: 0000 0000 (00h)
7 0
0: AWUFH (Auto Wake-Up From Halt) mode disa-
bled
1: AWUFH (Auto Wake-Up From Halt) mode ena-
bled
AWUFH PRESCALER REGISTER (AWUPR)
Read / Write
Reset Value: 1111 1111 (FFh)
0 0 0 0 0
AWUFAWUMAWU
EN
Bits 7:3 = Reserved.
Bit 2 = AWUF Auto Wake-Up Flag
This bit is set by hardware when the AWU module
generates an interrupt and cleared by software on
reading AWUCSR.
0: No AWU interrupt occurred
1: AWU interrupt occurred
Bit 1 = AWUM Auto Wake-Up Measurement
This bit enables the AWU RC oscillator and connects its output to the ICAP1 input of the 16-bit timer. This allows the timer to be used to measure the
AWU RC oscillator dispersion and then compen
sate this dispersion by providing the right value in
the AWUPR register.
0: Measurement disabled
1: Measurement enabled
Bit 0 = AWUEN Auto Wake-Up From Halt Enabled
This bit enables the Auto Wake-Up From Halt feature: once HALT mode is entered, the AWUFH
wakes up the microcontroller after a time delay de
fined by the AWU prescaler value. It is set and
cleared by software.
7 0
AWU
AWU
AWU
AWU
AWU
AWU
AWU
PR7
PR6
PR5
PR4
PR3
PR2
PR1
Bits 7:0 = AWUPR[7:0] Auto Wake-Up Prescaler
These 8 bits define the AWUPR Dividing factor (as
explained below:
AWUPR[7:0] Dividing factor
00h Forbidden (See note)
01h 1
... ...
FEh 254
FFh 255
In AWU mode, the period that the MCU stays in
Halt Mode (t
in Figure 30) is defined by
AWU
This prescaler register can be programmed to
modify the time that the MCU stays in Halt mode
before waking up automatically.
Note: If 00h is written to AWUPR, depending on
the product, an interrupt is generated immediately
after a HALT instruction or the AWUPR remains
unchanged.
AWU
PR0
Table 11. AWU Register Map and Reset Values
Address
(Hex.)
002Bh
002Ch
44/225
Register
Label
AWUCSR
Reset Value
AWUPR
Reset Value
7 6 5 4 3 2 1 0
0 0 0 0 0
AWUPR71AWUPR61AWUPR51AWUPR41AWUPR31AWUPR21AWUPR11AWUPR0
AWUF0AWUM0AWUEN
0
1
Page 45

9 I/O PORTS
ST72361
9.1 INTRODUCTION
The I/O ports offer different functional modes:
– transfer of data through digital inputs and outputs
and for specific pins:
– external interrupt generation
– alternate signal input/output for the on-chip pe-
ripherals.
An I/O port contains up to 8 pins. Each pin can be
programmed independently as digital input (with or
without interrupt generation) or digital output.
9.2 FUNCTIONAL DESCRIPTION
Each port has two main registers:
– Data Register (DR)
– Data Direction Register (DDR)
and one optional register:
– Option Register (OR)
Each I/O pin may be programmed using the corre-
sponding register bits in the DDR and OR registers: Bit X corresponding to pin X of the port. The
same correspondence is used for the DR register.
The following description takes into account the
OR register, (for specific ports which do not pro
vide this register refer to the I/O Port Implementation section). The generic I/O block diagram is
shown in Figure 32
9.2.1 Input Modes
The input configuration is selected by clearing the
corresponding DDR register bit.
In this case, reading the DR register returns the
digital value applied to the external I/O pin.
Different input modes can be selected by software
through the OR register.
Notes:
1. Writing the DR register modifies the latch value
but does not affect the pin status.
2. When switching from input to output mode, the
DR register has to be written first to drive the cor
rect level on the pin as soon as the port is configured as an output.
3. Do not use read/modify/write instructions (BSET
or BRES) to modify the DR register as this might
corrupt the DR content for I/Os configured as input.
External interrupt function
When an I/O is configured as Input with Interrupt,
an event on this I/O can generate an external inter
rupt request to the CPU.
Each pin can independently generate an interrupt
request. The interrupt sensitivity is independently
programmable using the sensitivity bits in the
EICR register.
Each external interrupt vector is linked to a dedicated group of I/O port pins (see pinout description
and interrupt section). If several input pins are se
lected simultaneously as interrupt sources, these
are first detected according to the sensitivity bits in
the EICR register and then logically ORed.
The external interrupts are hardware interrupts,
which means that the request latch (not accessible
directly by the application) is automatically cleared
when the corresponding interrupt vector is
fetched. To clear an unwanted pending interrupt
by software, the sensitivity bits in the EICR register
must be modified.
9.2.2 Output Modes
The output configuration is selected by setting the
corresponding DDR register bit. In this case, writ
ing the DR register applies this digital value to the
I/O pin through the latch. Then reading the DR reg
ister returns the previously stored value.
Two different output modes can be selected by
software through the OR register: Output push-pull
and open-drain.
DR register value and output pin status:
DR Push-pull Open-drain
0 V
1 V
SS
DD
Vss
Floating
9.2.3 Alternate Functions
When an on-chip peripheral is configured to use a
pin, the alternate function is automatically select
ed. This alternate function takes priority over the
standard I/O programming.
When the signal is coming from an on-chip peripheral, the I/O pin is automatically configured in output mode (push-pull or open drain according to the
peripheral).
When the signal is going to an on-chip peripheral,
the I/O pin must be configured in input mode. In
this case, the pin state is also digitally readable by
addressing the DR register.
Note: Input pull-up configuration can cause unexpected value at the input of the alternate peripheral
input. When an on-chip peripheral use a pin as input and output, this pin has to be configured in input floating mode.
45/225
Page 46

ST72361
DR
DDR
OR
DATA BUS
PAD
V
DD
ALTERNATE
ENABLE
ALTERNATE
OUTPUT
1
0
OR SEL
DDR SEL
DR SEL
PULL-UP
CONDITION
P-BUFFER
(see table below)
N-BUFFER
PULL-UP
(see table below)
1
0
ANALOG
INPUT
If implemented
ALTERNATE
INPUT
V
DD
DIODES
(see table below)
EXTERNAL
SOURCE (eix)
INTERRUPT
CMOS
SCHMITT
TRIGGER
REGISTER
ACCESS
I/O PORTS (Cont’d)
Figure 32. I/O Port General Block Diagram
Table 12. I/O Port Mode Options
Input
Output
Configuration Mode Pull-Up P-Buffer
Floating with/without Interrupt Off
Pull-up with/without Interrupt On
Push-pull
Open Drain (logic level) Off
True Open Drain NI NI NI (see note)
Legend: NI - not implemented
Off - implemented not activated
On - implemented and activated
46/225
Off
Note: The diode to VDD is not implemented in the
true open drain pads. A local protection between
the pad and V
vice against positive stress.
Diodes
to V
DD
Off
On
is implemented to protect the de-
SS
On
to V
On
SS
Page 47

I/O PORTS (Cont’d)
CONDITION
PAD
V
DD
R
PU
EXTERNAL INTERRUPT
DATA B U S
PULL-UP
INTERRUPT
DR REGISTER ACCESS
W
R
SOURCE (eix)
DR
REGISTER
CONDITION
ALTERNATE INPUT
NOT IMPLEMENTED IN
TRUE OPEN DRAIN
I/O PORTS
ANALOG INPUT
PAD
R
PU
DATA B U S
DR
DR REGISTER ACCESS
R/W
V
DD
ALTERNATEALTERNATE
ENABLE OUTPUT
REGISTER
NOT IMPLEMENTED IN
TRUE OPEN DRAIN
I/O PORTS
PAD
R
PU
DATA B U S
DR
DR REGISTER ACCESS
R/W
V
DD
ALTERNATEALTERNATE
ENABLE OUTPUT
REGISTER
NOT IMPLEMENTED IN
TRUE OPEN DRAIN
I/O PORTS
Table 13. I/O Port Configurations
1)
INPUT
ST72361
Hardware Configuration
2)
2)
Notes:
1. When the I/O port is in input configuration and the associated alternate function is enabled as an output,
2. When the I/O port is in output configuration and the associated alternate function is enabled as an input,
OPEN-DRAIN OUTPUT
PUSH-PULL OUTPUT
reading the DR register will read the alternate function output status.
the alternate function reads the pin status given by the DR register content.
47/225
Page 48

ST72361
01
floating/pull-up
interrupt
INPUT
00
floating
(reset state)
INPUT
10
open-drain
OUTPUT
11
push-pull
OUTPUT
XX
= DDR, OR
I/O PORTS (Cont’d)
CAUTION: The alternate function must not be ac-
tivated as long as the pin is configured as input
with interrupt, in order to avoid generating spurious
interrupts.
Analog alternate function
When the pin is used as an ADC input, the I/O
must be configured as floating input. The analog
multiplexer (controlled by the ADC registers)
switches the analog voltage present on the select
ed pin to the common analog rail which is connected to the ADC input.
It is recommended not to change the voltage level
or loading on any port pin while conversion is in
progress. Furthermore it is recommended not to
have clocking pins located close to a selected an
alog pin.
WARNING: The analog input voltage level must
be within the limits stated in the absolute maxi
mum ratings.
9.3 I/O PORT IMPLEMENTATION
The hardware implementation on each I/O port depends on the settings in the DDR and OR registers
and specific feature of the I/O port such as ADC In
put or true open drain.
Switching these I/O ports from one state to another should be done in a sequence that prevents unwanted side effects. Recommended safe transitions are illustrated in Figure 33 on page 49. Other
transitions are potentially risky and should be
avoided, since they are likely to present unwanted
side-effects such as spurious interrupt generation.
-
-
-
-
Figure 33. Interrupt I/O Port State Transitions
9.4 LOW POWER MODES
Mode Description
WAIT
HALT
No effect on I/O ports. External interrupts
cause the device to exit from WAIT mode.
No effect on I/O ports. External interrupts
cause the device to exit from HALT mode.
9.5 INTERRUPTS
The external interrupt event generates an interrupt
if the corresponding configuration is selected with
DDR and OR registers and the interrupt mask in
the CC register is not active (RIM instruction).
Interrupt Event
External interrupt on
selected external
event
Event
Flag
-
Enable
Control
Bit
DDRx
ORx
Exit
from
Wait
Exit
from
Halt
Yes
48/225
Page 49

I/O PORTS (Cont’d)
9.6 I/O PORT REGISTER CONFIGURATIONS
The I/O port register configurations are summarized as follows.
9.6.1 Standard Ports
PB7:6, PC0, PC3, PC7:5, PD3:2, PD5, PE7:0,
PF7:0
MODE DDR OR
floating input 0 0
pull-up input 0 1
open drain output 1 0
push-pull output 1 1
9.6.2 Interrupt Ports PA0,2,4,6; PB0,2,4; PC1; PD0,6 (with pull-up)
MODE DDR OR
floating input 0 0
pull-up interrupt input 0 1
open drain output 1 0
push-pull output 1 1
ST72361
PA1,3,5,7; PB1,3,5; PC2; PD1,4,7
(without pull-up)
MODE DDR OR
floating input 0 0
floating interrupt input 0 1
open drain output 1 0
push-pull output 1 1
9.6.3 Pull-up Input Port PC4
MODE
pull-up input
The PC4 port cannot operate as a general purpose output. If DDR = 1 it is still possible to read
the port through the DR register.
49/225
Page 50

ST72361
I/O PORTS (Cont’d)
Table 14. Port Configuration
Port Pin name
PA0
PA1 floating interrupt (ei0)
PA2 pull-up interrupt (ei0)
Port A
Port B
Port C
Port D
Port E
Port F
PA3 floating interrupt (ei0)
PA4 pull-up interrupt (ei0)
PA5 floating interrupt (ei0)
PA6 pull-up interrupt (ei0)
PA7 floating interrupt (ei0)
PB0
PB1 floating interrupt (ei1)
PB2 pull-up interrupt (ei1)
PB3 floating interrupt (ei1)
PB4 pull-up interrupt (ei1)
PB5 floating interrupt (ei1)
PC0
PC1 pull-up interrupt (ei2)
PC2 floating interrupt (ei2)
PC3 pull-up
PC4 pull-up N/A
PC7:5 floating pull-up open drain push-pull
PD0
PD1 floating interrupt (ei3)
PD3:2 pull-up
PD4 floating interrupt (ei3)
PD5 pull-up
PD6 pull-up interrupt (ei3)
PD7 floating interrupt (ei3)
PE7:0 floating (TTL) pull-up (TTL) open drain push-pull
PF7:0 floating (TTL) pull-up (TTL) open drain push-pull
Input Output
OR = 0 OR = 1 OR = 0 OR = 1
pull-up interrupt (ei0)
floating
pull-up interrupt (ei1)
floating
pull-up
floating
pull-up interrupt (ei3)
floating
open drain push-pull
open drain push-pull
open drain push-pull
open drain push-pull
50/225
Page 51

I/O PORTS (Cont’d)
Table 15. I/O Port Register Map and Reset Values
ST72361
Address
(Hex.)
Reset Value
of all IO port registers
0000h PADR
0002h PAOR
0003h PBDR
0005h PBOR
0006h PCDR
0008h PCOR
0009h PDDR
000Bh PDOR
000Ch PEDR
000Eh PEOR
000Fh PFDR
0011h PFOR
Register
Label
7 6 5 4 3 2 1 0
0 0 0 0 0 0 0 0
MSB LSB0001h PADDR
MSB LSB0004h PBDDR
MSB LSB0007h PCDDR
MSB LSB000Ah PDDDR
MSB LSB000Dh PEDDR
MSB LSB0010h PFDDR
51/225
Page 52

ST72361
RESET
WDGA
6-BIT DOWNCOUNTER (CNT)
T6
T0
WATCHDOG CONTROL REGISTER (WDGCR)
T1
T2
T3
T4
T5
-
W6
W0
WATCHDOG WINDOW REGISTER (WDGWR)
W1
W2
W3
W4
W5
comparator
T6:0 > W6:0
CMP
= 1 when
Write WDGCR
WDG PRESCALER
DIV 4
f
OSC2
12-BIT MCC
RTC COUNTER
MSB
LSB
DIV 64
0
5
6
11
MCC/RTC
TB[1:0] bits
(MCCSR
Register)
10 ON-CHIP PERIPHERALS
10.1 WINDOW WATCHDOG (WWDG)
10.1.1 Introduction
The Window Watchdog is used to detect the occurrence of a software fault, usually generated by
external interference or by unforeseen logical con
ditions, which causes the application program to
abandon its normal sequence. The Watchdog cir
cuit generates an MCU reset on expiry of a programmed time period, unless the program refreshes the contents of the downcounter before the T6
bit becomes cleared. An MCU reset is also gener
ated if the 7-bit downcounter value (in the control
register) is refreshed before the downcounter has
reached the window register value. This implies
that the counter must be refreshed in a limited win
dow.
10.1.2 Main Features
■ Programmable free-running downcounter
■ Conditional reset
– Reset (if watchdog activated) when the down-
counter value becomes less than 40h
– Reset (if watchdog activated) if the down-
Figure 34. Watchdog Block Diagram
counter is reloaded outside the window (see
Figure 4)
■ Hardware/Software Watchdog activation
-
-
(selectable by option byte)
■ Optional reset on HALT instruction
(configurable by option byte)
10.1.3 Functional Description
The counter value stored in the WDGCR register
(bits T[6:0]), is decremented every 16384 f
cycles (approx.), and the length of the timeout pe-
riod can be programmed by the user in 64 increments.
If the watchdog is activated (the WDGA bit is set)
and when the 7-bit downcounter (T[6:0] bits) rolls
over from 40h to 3Fh (T6 becomes cleared), it ini
tiates a reset cycle pulling low the reset pin for typically 30μs. If the software reloads the counter
while the counter is greater than the value stored
in the window register, then a reset is generated.
OSC2
-
52/225
Page 53

WINDOW WATCHDOG (Cont’d)
The application program must write in the
WDGCR register at regular intervals during normal
operation to prevent an MCU reset. This operation
must occur only when the counter value is lower
than the window register value. The value to be
stored in the WDGCR register must be between
FFh and C0h (see Figure 2):
– Enabling the watchdog:
When Software Watchdog is selected (by option
byte), the watchdog is disabled after a reset. It is
enabled by setting the WDGA bit in the WDGCR
register, then it cannot be disabled again except
by a reset.
When Hardware Watchdog is selected (by option
byte), the watchdog is always active and the
WDGA bit is not used.
– Controlling the downcounter:
This downcounter is free-running: It counts down
even if the watchdog is disabled. When the
watchdog is enabled, the T6 bit must be set to
prevent generating an immediate reset.
The T[5:0] bits contain the number of increments
which represents the time delay before the
watchdog produces a reset (see Figure 2. Ap
proximate Timeout Duration). The timing varies
-
ST72361
between a minimum and a maximum value due
to the unknown status of the prescaler when writ
ing to the WDGCR register (see Figure 3).
The window register (WDGWR) contains the
high limit of the window: To prevent a reset, the
downcounter must be reloaded when its value is
lower than the window register value and greater
than 3Fh. Figure 4 describes the window watch
dog process.
Note: The T6 bit can be used to generate a software reset (the WDGA bit is set and the T6 bit is
cleared).
– Watchdog Reset on Halt option
If the watchdog is activated and the watchdog reset on halt option is selected, then the HALT instruction will generate a Reset.
10.1.4 Using Halt Mode with the WDG
If Halt mode with Watchdog is enabled by option
byte (no watchdog reset on HALT instruction), it is
recommended before executing the HALT instruc
tion to refresh the WDG counter, to avoid an unexpected WDG reset immediately after waking up
the microcontroller.
-
-
-
53/225
Page 54

ST72361
CNT Value (hex.)
Watchdog timeout (ms) @ 8 MHz f
OSC2
3F
00
38
128
1.5 65
30
28
20
18
10
08
503418 82 98 114
WINDOW WATCHDOG (Cont’d)
10.1.5 How to Program the Watchdog Timeout
Figure 2 shows the linear relationship between the
6-bit value to be loaded in the Watchdog Counter
(CNT) and the resulting timeout duration in milli
seconds. This can be used for a quick calculation
without taking the timing variations into account. If
Figure 35. Approximate Timeout Duration
more precision is needed, use the formulae in Fig
ure 3.
Caution: When writing to the WDGCR register, al-
-
ways write 1 in the T6 bit to avoid generating an
immediate reset.
-
54/225
Page 55

WINDOW WATCHDOG (Cont’d)
WHERE:
t
min0
= (LSB + 128) x 64 x t
OSC2
t
max0
= 16384 x t
OSC2
t
OSC2
= 125ns if f
OSC2
= 8 MHz
CNT = Value of T[5:0] bits in the WDGCR register (6 bits)
MSB and LSB are values from the table below depending on the timebase selected by the TB[1:0] bits
in the MCCSR register
To calculate the minimum Watchdog Timeout (t
min
):
IF THEN
ELSE
To calculate the maximum Watchdog Timeout (t
max
):
IF THEN
ELSE
Note: In the above formulae, division results must be rounded down to the next integer value.
Example:
With 2ms timeout selected in MCCSR register
TB1 Bit
(MCCSR Reg.)
TB0 Bit
(MCCSR Reg.)
Selected MCCSR
Timebase
MSB LSB
0 0 2ms 4 59
0 1 4ms 8 53
1 0 10ms 20 35
1 1 25ms 49 54
Value of T[5:0] Bits in
WDGCR Register (Hex.)
Min. Watchdog
Timeout (ms)
t
min
Max. Watchdog
Timeout (ms)
t
max
00 1.496 2.048
3F 128 128.552
CNT
MSB
4
-------------
<
t
mintmin0
16384 CNT t
osc2
××+
=
t
mintmin0
16384 CNT
4CNT
MSB
-----------------
–
⎝⎠
⎛⎞
× 192 LS B+()64
4CNT
MSB
-----------------
××
+ t
osc2
×+=
CNT
MSB
4
-------------
≤
t
maxtmax0
16384 CNT t
osc2
××+=
t
maxtmax0
16384 CNT
4CNT
MSB
-----------------
–
⎝⎠
⎛⎞
× 192 LS B+()64
4CNT
MSB
-----------------
××
+ t
osc2
×+=
ST72361
Figure 36. Exact Timeout Duration (t
min
and t
max
)
55/225
Page 56

ST72361
T6 bit
Reset
WDGWR
T[5:0] CNT downcounter
time
Refresh WindowRefresh not allowed
(step = 16384/f
OSC2
)
3Fh
WINDOW WATCHDOG (Cont’d)
Figure 37. Window Watchdog Timing Diagram
10.1.6 Low Power Modes
Mode Description
SLOW No effect on Watchdog: The downcounter continues to decrement at normal speed.
WAIT No effect on Watchdog: The downcounter continues to decrement.
OIE bit in
MCCSR
register
HALT
0 0
0 1 A reset is generated instead of entering halt mode.
ACTIVE
HALT
10.1.7 Hardware Watchdog Option
1 x
If Hardware Watchdog is selected by option byte,
the watchdog is always active and the WDGA bit in
the WDGCR is not used. Refer to the Option Byte
description.
WDGHALT bit
in Option
Byte
No Watchdog reset is generated. The MCU enters Halt mode. The Watchdog counter is decremented once and then stops counting and is no longer
able to generate a watchdog reset until the MCU receives an external inter
rupt or a reset.
If an interrupt is received (refer to interrupt table mapping to see interrupts
which can occur in halt mode), the Watchdog restarts counting after 256 or
4096 CPU clocks. If a reset is generated, the Watchdog is disabled (reset
state) unless Hardware Watchdog is selected by option byte. For applica
tion recommendations see Section 0.1.8 below.
No reset is generated. The MCU enters Active Halt mode. The Watchdog
counter is not decremented. It stop counting. When the MCU receives an
oscillator interrupt or external interrupt, the Watchdog restarts counting im
mediately. When the MCU receives a reset the Watchdog restarts counting
after 256 or 4096 CPU clocks.
10.1.8 Using Halt Mode with the WDG (WDGHALT option)
The following recommendation applies if Halt
mode is used when the watchdog is enabled.
– Before executing the HALT instruction, refresh
the WDG counter, to avoid an unexpected WDG
reset immediately after waking up the microcon
troller.
-
-
-
-
56/225
Page 57

WINDOW WATCHDOG (Cont’d)
10.1.9 Interrupts
None.
10.1.10 Register Description CONTROL REGISTER (WDGCR)
Read / Write
Reset Value: 0111 1111 (7F h)
7 0
WDGA T6 T5 T4 T3 T2 T1 T0
Bit 7 = WDGA Activation bit.
This bit is set by software and only cleared by
hardware after a reset. When WDGA
= 1, the
watchdog can generate a reset.
0: Watchdog disabled
1: Watchdog enabled
Note: This bit is not used if the hardware watch-
dog option is enabled by option byte.
Bits 6:0 = T[6:0] 7-bit counter (MSB to LSB).
These bits contain the value of the watchdog
counter. It is decremented every 16384 f
OSC2
cycles (approx.). A reset is produced when it rolls
over from 40h to 3Fh (T6 becomes cleared).
ST72361
WINDOW REGISTER (WDGWR)
Read/Write
Reset Value: 0111 1111 (7Fh)
7 0
- W6 W5 W4 W3 W2 W1 W0
Bit 7 = Reserved
Bits 6:0 = W[6:0] 7-bit window value
These bits contain the window value to be compared to the downcounter.
Figure 38. Watchdog Timer Register Map and Reset Values
Address
(Hex.)
2F
30
Register
Label
WDGCR
Reset Value
WDGWR
Reset Value
7 6 5 4 3 2 1 0
WDGA
0
-
0
T6
1
W6
1
T5
1
W5
1
T4
1
W4
1
T3
1
W3
1
T2
1
W2
1
T1
1
W1
1
T0
1
W0
1
57/225
Page 58

ST72361
DIV 2, 4, 8, 16
MCC/RTC INTERRUPT
SMSCP1 CP0 TB1 TB0 OIE OIF
CPU CLOCK
MCCSR
RTC
COUNTER
TO CPU AND
PERIPHERALS
f
OSC2
f
CPU
MCO
MCO
TO
WATCHDOG
TIMER
ON-CHIP PERIPHERALS (Cont’d)
10.2 MAIN CLOCK CONTROLLER WITH REAL TIME CLOCK MCC/RTC
The Main Clock Controller consists of three different functions:
■
a programmable CPU clock prescaler
■
a clock-out signal to supply external devices
■
a real time clock timer with interrupt capability
Each function can be used independently and simultaneously.
10.2.1
Programmable CPU Clock Prescaler
The programmable CPU clock prescaler supplies
the clock for the ST7 CPU and its internal periph
erals. It manages SLOW power saving mode (See
Section 8.2 "SLOW MODE" for more details).
The prescaler selects the f
main clock frequen-
CPU
cy and is controlled by three bits in the MCCSR
register: CP[1:0] and SMS.
10.2.2
The clock-out capability is an alternate function of
an I/O port pin that outputs a f
external devices. It is controlled by the MCO bit in
the MCCSR register.
10.2.3
The counter of the real time clock timer allows an
interrupt to be generated based on an accurate
real time clock. Four different time bases depend
ing directly on f
-
functionality is controlled by 4 bits of the MCCSR
register: TB[1:0], OIE and OIF.
When the RTC interrupt is enabled (OIE bit set),
the ST7 enters ACTIVE HALT mode when the
HALT instruction is executed. See
"ACTIVE HALT MODE" for more details.
Clock-out Capability
Real Time Clock Timer (RTC)
Figure 39. Main Clock Controller (MCC/RTC) Block Diagram
clock to drive
OSC2
are available. The whole
OSC2
Section 8.5
-
58/225
Page 59

MAIN CLOCK CONTROLLER WITH REAL TIME CLOCK (Cont’d)
10.2.4
Low Power Modes
Mode Description
No effect on MCC/RTC peripheral.
WAIT
ACTIVE HALT
HALT
and
AWUF HALT
MCC/RTC interrupt cause the device to
exit from WAIT mode.
No effect on MCC/RTC counter (OIE bit
is set), the registers are frozen.
MCC/RTC interrupt cause the device to
exit from ACTIVE HALT mode.
MCC/RTC counter and registers are frozen.
MCC/RTC operation resumes when the
MCU is woken up by an interrupt with
“exit from HALT” capability.
Bits 6:5 = CP[1:0] CPU clock prescaler
These bits select the CPU clock prescaler which is
applied in the different slow modes. Their action is
conditioned by the setting of the SMS bit. These
two bits are set and cleared by software
f
in SLOW mode CP1 CP0
CPU
f
f
f
f
OSC2
Bit 4 = SMS Slow mode select
10.2.5
Interrupts
The MCC/RTC interrupt event generates an interrupt if the OIE bit of the MCCSR register is set and
the interrupt mask in the CC register is not active
(RIM instruction).
Interrupt Event
Time base overflow
event
Event
Enable
Control
Flag
OIF OIE Yes No
Bit
Exit
from
Wait
Exit
from
Halt
1)
Note:
The MCC/RTC interrupt wakes up the MCU from
ACTIVE HALT mode, not from HALT or AWUF
HALT mode.
10.2.6
Register Description
MCC CONTROL/STATUS REGISTER (MCCSR)
This bit is set and cleared by software.
0: Normal mode. f
1: Slow mode. f
See Section 8.2 "SLOW MODE" and Section 10.2
"MAIN CLOCK CONTROLLER WITH REAL TIME
CLOCK MCC/RTC" for more details.
Bits 3:2 = TB[1:0] Time base control
These bits select the programmable divider time
base. They are set and cleared by software.
Counter
Prescaler
16000 4ms 2ms 0 0
32000 8ms 4ms 0 1
80000 20ms 10ms 1 0
200000 50ms 25ms 1 1
f
Read / Write
Reset Value: 0000 0000 (00h)
A modification of the time base is taken into account at the end of the current period (previously
7 0
set) to avoid an unwanted time shift. This allows to
use this time base as a real time clock.
/ 2 0 0
OSC2
/ 4 0 1
OSC2
/ 8 1 0
OSC2
/ 16 1 1
= f
OSC2
is given by CP1, CP0
Time Base
=8 MHz
OSC2
OSC2
CPU
CPU
=4 MHz f
ST72361
TB1 TB0
MCO CP1 CP0 SMS TB1 TB0 OIE OIF
Bit 7 = MCO Main clock out selection
This bit enables the MCO alternate function on the
corresponding I/O port. It is set and cleared by
software.
0: MCO alternate function disabled (I/O pin free for
general-purpose I/O)
1: MCO alternate function enabled (f
OSC2
on I/O
port)
Bit 1 = OIE Oscillator interrupt enable
This bit set and cleared by software.
0: Oscillator interrupt disabled
1: Oscillator interrupt enabled
This interrupt can be used to exit from ACTIVE
HALT mode.
When this bit is set, calling the ST7 software HALT
instruction enters the ACTIVE HALT power saving
.
mode
59/225
Page 60

ST72361
MAIN CLOCK CONTROLLER WITH REAL TIME CLOCK (Cont’d)
Bit 0 = OIF Oscillator interrupt flag
This bit is set by hardware and cleared by software
reading the CSR register. It indicates when set
that the main oscillator has reached the selected
elapsed time (TB1:0).
0: Timeout not reached
1: Timeout reached
Table 16. Main Clock Controller Register Map and Reset Values
CAUTION: The BRES and BSET instructions
must not be used on the MCCSR register to avoid
unintentionally clearing the OIF bit.
Address
(Hex.)
002Dh
002Eh
Register
Label
SICSR
Reset Value
MCCSR
Reset Value
7 6 5 4 3 2 1 0
0 AVDIE AVDF LVDRF 0
MCO
0
CP1
0
CP0
0
SMS
0
TB1
0
0 0
TB0
0
OIE
0
WDGRF
x
OIF
0
60/225
Page 61

ON-CHIP PERIPHERALS (Cont’d)
OVF INTERRUPT
EXCL CC2 CC1 CC0 TCE FCRL OIE OVF
ARTCSR
f
INPUT
PWMx
PORT
FUNCTION
ALTERNATE
OCRx
COMPARE
REGISTER
PROGRAMMABLE
PRESCALER
8-BIT COUNTER
(CAR REGISTER)
ARR
REGISTER
ICRx
REGISTER
LOAD
OPx
POLARITY
CONTROL
OEx
PWMCR
MUX
f
CPU
DCRx
REGISTER
LOAD
f
COUNTER
ARTCLK
f
EXT
ARTICx
ICFxICSx
ICCSR
LOAD
ICx INTERRUPT
ICIEx
INPUT CAPTURE
CONTROL
10.3 PWM AUTO-RELOAD TIMER (ART)
10.3.1 Introduction
The Pulse Width Modulated Auto-Reload Timer
on-chip peripheral consists of an 8-bit auto reload
counter with compare/capture capabilities and of a
7-bit prescaler clock source.
These resources allow five possible operating
modes:
– Generation of up to four independent PWM sig-
nals
Figure 40. PWM Auto-Reload Timer Block Diagram
ST72361
– Output compare and Time base interrupt
– Up to two input capture functions
– External event detector
– Up to two external interrupt sources
The three first modes can be used together with a
single counter frequency.
The timer can be used to wake up the MCU from
WAIT and HALT modes.
61/225
Page 62

ST72361
COUNTER
FDh FEh FFh FDh FEh FFh FDh FEh
ARTARR=FDh
f
COUNTER
OCRx
PWMDCRx
FDh
FEh
FDh
FEh
FFh
PWMx
PWM AUTO-RELOAD TIMER (Cont’d)
10.3.2 Functional Description
Counter
The free running 8-bit counter is fed by the output
of the prescaler, and is incremented on every ris
-
ing edge of the clock signal.
It is possible to read or write the contents of the
counter on the fly by reading or writing the Counter
Access register (ARTCAR).
When a counter overflow occurs, the counter is
automatically reloaded with the contents of the
ARTARR register (the prescaler is not affected).
Counter clock and prescaler
The counter clock frequency is given by:
f
COUNTER
= f
INPUT
The timer counter’s input clock (f
/ 2
CC[2:0]
INPUT
) feeds the
7-bit programmable prescaler, which selects one
of the eight available taps of the prescaler, as de
fined by CC[2:0] bits in the Control/Status Register
(ARTCSR). Thus the division factor of the prescal
er can be set to 2n (where n = 0, 1,..7).
This f
frequency source is selected through
INPUT
the EXCL bit of the ARTCSR register and can be
either the f
or an external input frequency f
CPU
EXT
.
The clock input to the counter is enabled by the
TCE (Timer Counter Enable) bit in the ARTCSR
register. When TCE is reset, the counter is
stopped and the prescaler and counter contents
are frozen. When TCE is set, the counter runs at
the rate of the selected clock source.
Counter and Prescaler Initialization
After RESET, the counter and the prescaler are
cleared and f
INPUT
= f
CPU
.
The counter can be initialized by:
– Writing to the ARTARR register and then setting
the FCRL (Force Counter Re-Load) and the TCE
(Timer Counter Enable) bits in the ARTCSR reg
ister.
– Writing to the ARTCAR counter access register,
In both cases the 7-bit prescaler is also cleared,
whereupon counting will start from a known value.
Direct access to the prescaler is not possible.
Output compare control
The timer compare function is based on four different comparisons with the counter (one for each
PWMx output). Each comparison is made be
tween the counter value and an output compare
register (OCRx) value. This OCRx register can not
be accessed directly, it is loaded from the duty cy
cle register (PWMDCRx) at each overflow of the
counter.
This double buffering method avoids glitch generation when changing the duty cycle on the fly.
-
-
-
Figure 41. Output Compare Control
62/225
Page 63

PWM AUTO-RELOAD TIMER (Cont’d)
DUTY CYCLE
REGISTER
AUTO-RELOAD
REGISTER
PWMx OUTPUT
t
255
000
WITH OEx=1
AND OPx=0
(ARTARR)
(PWMDCRx)
WITH OEx=1
AND OPx=1
COUNTER
COUNTER
PWMx OUTPUT
t
WITH OEx=1
AND OPx=0
FDh FEh FFh FDh FEh FFh FDh FEh
OCRx=FCh
OCRx=FDh
OCRx=FEh
OCRx=FFh
ARTARR=FDh
f
COUNTER
ST72361
Independent PWM signal generation
This mode allows up to four Pulse Width Modulated signals to be generated on the PWMx output
pins with minimum core processing overhead.
This function is stopped during HALT mode.
Each PWMx output signal can be selected independently using the corresponding OEx bit in the
PWM Control register (PWMCR). When this bit is
set, the corresponding I/O pin is configured as out
-
put push-pull alternate function.
The PWM signals all have the same frequency
which is controlled by the counter period and the
ARTARR register value.
f
PWM
= f
COUNTER
/ (256 - ARTARR)
When a counter overflow occurs, the PWMx pin
level is changed depending on the corresponding
OPx (output polarity) bit in the PWMCR register.
Figure 42. PWM Auto-reload Timer Function
When the counter reaches the value contained in
one of the output compare register (OCRx) the
corresponding PWMx pin level is restored.
It should be noted that the reload values will also
affect the value and the resolution of the duty cycle
of the PWM output signal. To obtain a signal on a
PWMx pin, the contents of the OCRx register must
be greater than the contents of the ARTARR reg
-
ister.
The maximum available resolution for the PWMx
duty cycle is:
Resolution = 1 / (256 - ARTARR)
Note: To get the maximum resolution (1/256), the
ARTARR register must be 0. With this maximum
resolution, 0% and 100% can be obtained by
changing the polarity.
Figure 43. PWM Signal from 0% to 100% Duty Cycle
63/225
Page 64

ST72361
COUNTER
t
FDh FEh FFh FDh
OVF
ARTCSR READ
INTERRUPT
ARTARR=FDh
f
EXT=fCOUNTER
FEh FFh FDh
IF OIE=1
INTERRUPT
IF OIE=1
ARTCSR READ
PWM AUTO-RELOAD TIMER (Cont’d)
Output compare and Time base interrupt
On overflow, the OVF flag of the ARTCSR register
is set and an overflow interrupt request is generat
ed if the overflow interrupt enable bit, OIE, in the
ARTCSR register, is set. The OVF flag must be re
set by the user software. This interrupt can be
used as a time base in the application.
External clock and event detector mode
Using the f
-
auto-reload timer can be used as an external clock
event detector. In this mode, the ARTARR register
-
is used to select the n
be counted before setting the OVF flag.
n
EVENT
Caution: The external clock function is not available in HALT mode. If HALT mode is used in the application, prior to executing the HALT instruction,
the counter must be disabled by clearing the TCE
bit in the ARTCSR register to avoid spurious coun
ter increments.
Figure 44. External Event Detector Example (3 counts)
external prescaler input clock, the
EXT
EVENT
= 256 - ARTARR
number of events to
-
64/225
Page 65

PWM AUTO-RELOAD TIMER (Cont’d)
04h
COUNTER
t
01h
f
COUNTER
xxh
02h 03h 05h 06h 07h
05h
ARTICx PIN
CFx FLAG
ICAP SAMPLED
INTERRUPT
f
CPU
ICAP SAMPLED
ST72361
Input Capture Function
Input Capture mode allows the measurement of
external signal pulse widths through ARTICRx
registers.
Each input capture can generate an interrupt independently on a selected input signal transition.
This event is flagged by a set of the corresponding
CFx bits of the Input Capture Control/Status regis
-
ter (ARTICCSR).
These input capture interrupts are enabled
through the CIEx bits of the ARTICCSR register.
The active transition (falling or rising edge) is soft-
ware programmable through the CSx bits of the
ARTICCSR register.
The read only input capture registers (ARTICRx)
are used to latch the auto-reload counter value
when a transition is detected on the ARTICx pin
(CFx bit set in ARTICCSR register). After fetching
the interrupt vector, the CFx flags can be read to
identify the interrupt source.
Note: After a capture detection, data transfer in
the ARTICRx register is inhibited until the next
read (clearing the CFx bit).
The timer interrupt remains pending while the CFx
flag is set when the interrupt is enabled (CIEx bit
set). This means, the ARTICRx register has to be
read at each capture event to clear the CFx flag.
The timing resolution is given by auto-reload counter cycle time (1/f
COUNTER
).
Note: During HALT mode, input capture is inhibited (the ARTICRx is never reloaded) and only the
external interrupt capability can be used.
Note: The ARTICx signal is synchronized on CPU
clock. It takes two rising edges until ARTICRx is
latched with the counter value. Depending on the
prescaler value and the time when the ICAP event
occurs, the value loaded in the ARTICRx register
may be different.
If the counter is clocked with the CPU clock, the
value latched in ARTICRx is always the next coun
ter value after the event on ARTICx occurred (Fig-
ure 45).
If the counter clock is prescaled, it depends on the
position of the ARTICx event within the counter cy
cle (Figure 46).
-
-
Figure 45. Input Capture Timing Diagram, f
COUNTER
= f
CPU
65/225
Page 66

ST72361
04h
COUNTER
t
f
COUNTER
xxh
03h
04h
ARTICx PIN
CFx FLAG
ICRx REGISTER
INTERRUPT
f
CPU
ICAP SAMPLED
05h
04h
COUNTER
t
f
COUNTER
xxh
03h
05h
ARTICx PIN
CFx FLAG
ICRx REGISTER
INTERRUPT
f
CPU
ICAP SAMPLED
05h
ARTICx PIN
CFx FLAG
t
INTERRUPT
PWM AUTO-RELOAD TIMER (Cont’d)
Figure 46. input Capture Timing Diagram, f
COUNTER
= f
CPU
/ 4
External Interrupt Capability
This mode allows the Input capture capabilities to
be used as external interrupt sources. The inter
rupts are generated on the edge of the ARTICx
signal.
The edge sensitivity of the external interrupts is
programmable (CSx bit of ARTICCSR register)
and they are independently enabled through CIEx
bits of the ARTICCSR register. After fetching the
interrupt vector, the CFx flags can be read to iden
tify the interrupt source.
During HALT mode, the external interrupts can be
used to wake up the micro (if the CIEx bit is set). In
66/225
this case, the interrupt synchronization is done di
rectly on the ARTICx pin edge (Figure 47).
-
Figure 47. ART External Interrupt in Halt Mode
-
-
Page 67

ON-CHIP PERIPHERALS (Cont’d)
10.3.3 Register Description
ST72361
CONTROL / STATUS REGISTER (ARTCSR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
EXCL CC2 CC1 CC0 TCE FCRL OIE OVF
Bit 7 = EXCL External Clock
This bit is set and cleared by software. It selects the
input clock for the 7-bit prescaler.
0: CPU clock.
1: External clock.
Bit 6:4 = CC[2:0] Counter Clock Control
These bits are set and cleared by software. They
determine the prescaler division ratio from f
f
COUNTER
f
INPUT
f
INPUT
f
INPUT
f
INPUT
f
INPUT
f
INPUT
f
INPUT
f
INPUT
/ 2
/ 4
/ 8
/ 16
/ 32
/ 64
/ 128
With f
=8 MHz CC2 CC1 CC0
INPUT
8 MHz
4 MHz
2 MHz
1 MHz
500 kHz
250 kHz
125 kHz
62.5 kHz
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
INPUT
0
1
0
1
0
1
0
1
.
0: New transition not yet reached
1: Transition reached
COUNTER ACCESS REGISTER (ARTCAR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
CA7 CA6 CA5 CA4 CA3 CA2 CA1 CA0
Bit 7:0 = CA[7:0] Counter Access Data
These bits can be set and cleared either by hard-
ware or by software. The ARTCAR register is used
to read or write the auto-reload counter “on the fly”
(while it is counting).
AUTO-RELOAD REGISTER (ARTARR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
AR7 AR6 AR5 AR4 AR3 AR2 AR1 AR0
Bit 3 = TCE Timer Counter Enable
This bit is set and cleared by software. It puts the
timer in the lowest power consumption mode.
0: Counter stopped (prescaler and counter frozen).
1: Counter running.
Bit 2 = FCRL Force Counter Re-Load
This bit is write-only and any attempt to read it will
yield a logical zero. When set, it causes the contents
of ARTARR register to be loaded into the counter,
and the content of the prescaler register to be
cleared in order to initialize the timer before starting
to count.
Bit 1 = OIE Overflow Interrupt Enable
This bit is set and cleared by software. It allows to
enable/disable the interrupt which is generated
when the OVF bit is set.
0: Overflow Interrupt disable.
1: Overflow Interrupt enable.
Bit 0 = OVF Overflow Flag
This bit is set by hardware and cleared by software
reading the ARTCSR register. It indicates the tran
sition of the counter from FFh to the ARTARR value.
Bit 7:0 =
AR[7:0]
Counter Auto-Reload Data
These bits are set and cleared by software. They
are used to hold the auto-reload value which is au
tomatically loaded in the counter when an overflow
occurs. At the same time, the PWM output levels
are changed according to the corresponding OPx
bit in the PWMCR register.
This register has two PWM management functions:
– Adjusting the PWM frequency
– Setting the PWM duty cycle resolution
PWM Frequency vs Resolution:
f
ARTARR
value
0 8-bit ~0.244 kHz 31.25 kHz
[ 0..127 ] > 7-bit ~0.244 kHz 62.5 kHz
[ 128..191 ] > 6-bit ~0.488 kHz 125 kHz
[ 192..223 ] > 5-bit ~0.977 kHz 250 kHz
[ 224..239 ] > 4-bit ~1.953 kHz 500 kHz
Resolution
PWM
Min Max
-
67/225
Page 68

ST72361
ON-CHIP PERIPHERALS (Cont’d)
PWM CONTROL REGISTER (PWMCR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
OE3 OE2 OE1 OE0 OP3 OP2 OP1 OP0
Bit 7:4 = OE[3:0] PWM Output Enable
These bits are set and cleared by software. They
enable or disable the PWM output channels inde
pendently acting on the corresponding I/O pin.
0: PWM output disabled.
1: PWM output enabled.
Bit 3:0 = OP[3:0] PWM Output Polarity
These bits are set and cleared by software. They
independently select the polarity of the four PWM
output signals.
PWMx output level
Counter <= OCRx Counter > OCRx
1 0 0
0 1 1
OPx
Note: When an OPx bit is modified, the PWMx out-
put signal polarity is immediately reversed.
DUTY CYCLE REGISTERS (PWMDCRx)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
DC7 DC6 DC5 DC4 DC3 DC2 DC1 DC0
Bit 7:0 = DC[7:0] Duty Cycle Data
These bits are set and cleared by software.
A PWMDCRx register is associated with the OCRx
register of each PWM channel to determine the
second edge location of the PWM signal (the first
edge location is common to all channels and given
by the ARTARR register). These PWMDCR regis
ters allow the duty cycle to be set independently
for each PWM channel.
-
68/225
Page 69

ON-CHIP PERIPHERALS (Cont’d)
ST72361
INPUT CAPTURE
CONTROL / STATUS REGISTER (ARTICCSR)
Read / Write
Reset Value: 0000 0000 (00h)
7 0
0 0 CS2 CS1 CIE2 CIE1 CF2 CF1
Bit 7:6 = Reserved, always read as 0.
Bit 5:4 = CS[2:1] Capture Sensitivity
These bits are set and cleared by software. They
determine the trigger event polarity on the corre
sponding input capture channel.
0: Falling edge triggers capture on channel x.
1: Rising edge triggers capture on channel x.
Bit 3:2 = CIE[2:1] Capture Interrupt Enable
These bits are set and cleared by software. They
enable or disable the Input capture channel inter
rupts independently.
0: Input capture channel x interrupt disabled.
1: Input capture channel x interrupt enabled.
INPUT CAPTURE REGISTERS (ARTICRx)
Read only
Reset Value: 0000 0000 (00h)
7 0
IC7 IC6 IC5 IC4 IC3 IC2 IC1 IC0
Bit 7:0 = IC[7:0] Input Capture Data
These read only bits are set and cleared by hard-
ware. An ARTICRx register contains the 8-bit
auto-reload counter value transferred by the input
capture channel x event.
-
-
Bit 1:0 = CF[2:1] Capture Flag
These bits are set by hardware and cleared by
software reading the corresponding ARTICRx reg
-
ister. Each CFx bit indicates that an input capture x
has occurred.
0: No input capture on channel x.
1: An input capture has occurred on channel x.
69/225
Page 70

ST72361
PWM AUTO-RELOAD TIMER (Cont’d)
Table 17. PWM Auto-Reload Timer Register Map and Reset Values
Address
(Hex.)
0031h
0032h
0033h
0034h
0035h
0036h
0037h
0038h
0039h
003Ah
003Bh
Register
Label
PWMDCR3
Reset Value
PWMDCR2
Reset Value
PWMDCR1
Reset Value
PWMDCR0
Reset Value
PWMCR
Reset Value
ARTCSR
Reset Value
ARTCAR
Reset Value
ARTARR
Reset Value
ARTICCSR
Reset Value
ARTICR1
Reset Value
ARTICR2
Reset Value
7 6 5 4 3 2 1 0
DC7
0
DC7
0
DC7
0
DC7
0
OE3
0
EXCL
0
CA7
0
AR7
0
0 0
IC7
0
IC7
0
DC6
0
DC6
0
DC6
0
DC6
0
OE2
0
CC2
0
CA6
0
AR6
0
IC6
0
IC6
0
DC5
0
DC5
0
DC5
0
DC5
0
OE1
0
CC1
0
CA5
0
AR5
0
CE2
0
IC5
0
IC5
0
DC4
0
DC4
0
DC4
0
DC4
0
OE0
0
CC0
0
CA4
0
AR4
0
CE1
0
IC4
0
IC4
0
DC3
0
DC3
0
DC3
0
DC3
0
OP3
0
TCE
0
CA3
0
AR3
0
CS2
0
IC3
0
IC3
0
DC2
0
DC2
0
DC2
0
DC2
0
OP2
0
FCRL
0
CA2
0
AR2
0
CS1
0
IC2
0
IC2
0
DC1
0
DC1
0
DC1
0
DC1
0
OP1
0
RIE
0
CA1
0
AR1
0
CF2
0
IC1
0
IC1
0
DC0
0
DC0
0
DC0
0
DC0
0
OP0
0
OVF
0
CA0
0
AR0
0
CF1
0
IC0
0
IC0
0
70/225
Page 71

10.4 16-BIT TIMER
ST72361
10.4.1 Introduction
The timer consists of a 16-bit free-running counter
driven by a programmable prescaler.
It may be used for a variety of purposes, including
pulse length measurement of up to two input sig
-
nals (input capture) or generation of up to two output waveforms (output compare and PWM).
Pulse lengths and waveform periods can be modulated from a few microseconds to several milliseconds using the timer prescaler and the CPU
clock prescaler.
Some ST7 devices have two on-chip 16-bit timers.
They are completely independent, and do not
share any resources. They are synchronized after
a MCU reset as long as the timer clock frequen
-
cies are not modified.
This description covers one or two 16-bit timers. In
ST7 devices with two timers, register names are
prefixed with TA (Timer A) or TB (Timer B).
10.4.2 Main Features
■ Programmable prescaler: f
■ Overflow status flag and maskable interrupt
■ External clock input (must be at least four times
slower than the CPU
clock speed) with the choice
divided by 2, 4 or 8
CPU
of active edge
■ 1 or 2 Output Compare functions each with:
– 2 dedicated 16-bit registers
– 2 dedicated programmable signals
– 2 dedicated status flags
– 1 dedicated maskable interrupt
■ 1 or 2 Input Capture functions each with:
– 2 dedicated 16-bit registers
– 2 dedicated active edge selection signals
– 2 dedicated status flags
– 1 dedicated maskable interrupt
■ Pulse width modulation mode (PWM)
■ One Pulse mode
■ Reduced Power Mode
■ 5 alternate functions on I/O ports (ICAP1, ICAP2,
OCMP1, OCMP2, EXTCLK)*
When reading an input signal on a non-bonded
pin, the value will always be ‘1’.
10.4.3 Functional Description
10.4.3.1 Counter
The main block of the Programmable Timer is a
16-bit free running upcounter and its associated
16-bit registers. The 16-bit registers are made up
of two 8-bit registers called high and low.
Counter Register (CR):
– Counter High Register (CHR) is the most sig-
nificant byte (MS Byte).
– Counter Low Register (CLR) is the least sig-
nificant byte (LS Byte).
Alternate Counter Register (ACR)
– Alternate Counter High Register (ACHR) is the
most significant byte (MS Byte).
– Alternate Counter Low Register (ACLR) is the
least significant byte (LS
Byte).
These two read-only 16-bit registers contain the
same value but with the difference that reading the
ACLR register does not clear the TOF bit (Timer
overflow flag), located in the Status register, (SR),
(see note at the end of paragraph titled 16-bit read
sequence).
Writing in the CLR register or ACLR register resets
the free running counter to the FFFCh value.
Both counters have a reset value of FFFCh (this is
the only value which is reloaded in the 16-bit tim
er). The reset value of both counters is also
FFFCh in One Pulse mode and PWM mode.
The timer clock depends on the clock control bits
of the CR2 register, as illustrated in Table 17 Clock
Control Bits. The value in the counter register re
peats every 131072, 262144 or 524288 CPU clock
/2, f
CPU
/4, f
CPU
/8
cycles depending on the CC[1:0] bits.
The timer frequency can be f
CPU
or an external frequency.
The Block Diagram is shown in Figure 48.
*Note: Some timer pins may not be available (not
bonded) in some ST7 devices. Refer to the device
pin out description.
71/225
Page 72

ST72361
MCU-PERIPHERAL INTERFACE
COUNTER
ALTERNATE
OUTPUT
COMPARE
REGISTER
OUTPUT COMPARE
EDGE DETECT
OVERFLOW
DETECT
CIRCUIT
1/2
1/4
1/8
8-bit
buffer
ST7 INTERNAL BUS
LATCH1
OCMP1
ICAP1
EXTCLK
f
CPU
TIMER INTERRUPT
ICF2ICF1
TIMD
0
0
OCF2OCF1 TOF
PWMOC1E
EXEDG
IEDG2CC0CC1
OC2E
OPMFOLV2ICIE OLVL1IEDG1OLVL2FOLV1OCIE TOI E
ICAP2
LATCH2
OCMP2
8
8
8 low
16
8 high
16 16
16
16
(Control Register 1) CR1
(Control Register 2) CR2
(Control/Status Register)
6
16
8 8 8
88 8
high
low
high
high
high
low
low
low
EXEDG
TIMER INTERNAL BUS
CIRCUIT1
EDGE DETECT
CIRCUIT2
CIRCUIT
1
OUTPUT
COMPARE
REGISTER
2
INPUT
CAPTURE
REGISTER
1
INPUT
CAPTURE
REGISTER
2
CC[1:0]
COUNTER
pin
pin
pin
pin
pin
REGISTER
REGISTER
Note: If IC, OC and TO interrupt requests have separate vectors
then the last OR is not present (See device Interrupt Vector Table)
(See note)
CSR
16-BIT TIMER (Cont’d)
Figure 48. Timer Block Diagram
72/225
Page 73

16-BIT TIMER (Cont’d)
is buffered
Read
At t0
Read
Returns the buffered
LS Byte value at t0
At t0 +Δt
Other
instructions
Beginning of the sequence
Sequence completed
LS Byte
LS Byte
MS Byte
16-bit read sequence: (from either the Counter
Register or the Alternate Counter Register).
The user must read the MS Byte first, then the LS
Byte value is buffered automatically.
This buffered value remains unchanged until the
16-bit read sequence is completed, even if the
user reads the MS Byte several times.
After a complete reading sequence, if only the
CLR register or ACLR register are read, they re
turn the LS Byte of the count value at the time of
the read.
Whatever the timer mode used (input capture, output compare, One Pulse mode or PWM mode) an
overflow occurs when the counter rolls over from
FFFFh to 0000h then:
– The TOF bit of the SR register is set.
– A timer interrupt is generated if:
– TOIE bit of the CR1 register is set and
– I bit of the CC register is cleared.
If one of these conditions is false, the interrupt remains pending to be issued as soon as they are
both true.
ST72361
Clearing the overflow interrupt request is done in
two steps:
1. Reading the SR register while the TOF bit is set.
2. An access (read or write) to the CLR register.
Notes: The TOF bit is not cleared by accesses to
ACLR register. The advantage of accessing the
ACLR register rather than the CLR register is that
it allows simultaneous use of the overflow function
and reading the free running counter at random
times (for example, to measure elapsed time) with
out the risk of clearing the TOF bit erroneously.
The timer is not affected by WAIT mode.
In HALT mode, the counter stops counting until the
mode is exited. Counting then resumes from the
previous count (MCU awakened by an interrupt) or
from the reset count (MCU awakened by a Reset).
10.4.3.2 External Clock
The external clock (where available) is selected if
= 1 and CC1 = 1 in the CR2 register.
CC0
The status of the EXEDG bit in the CR2 register
determines the type of level transition on the exter
nal clock pin EXTCLK that will trigger the free running counter.
The counter is synchronized with the falling edge
of the internal CPU clock.
A minimum of four falling edges of the CPU clock
must occur between two consecutive active edges
of the external clock; thus the external clock fre
quency must be less than a quarter of the CPU
clock frequency.
-
-
-
73/225
Page 74

ST72361
CPU CLOCK
FFFD
FFFE FFFF 0000 0001 0002 0003
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
FFFC FFFD 0000 0001
CPU CLOCK
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
CPU CLOCK
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
FFFC FFFD
0000
16-BIT TIMER (Cont’d)
Figure 49. Counter Timing Diagram, Internal Clock Divided by 2
Figure 50. Counter Timing Diagram, Internal Clock Divided by 4
Figure 51. Counter Timing Diagram, Internal Clock Divided By 8
Note: The MCU is in reset state when the internal reset signal is high, when it is low the MCU is running.
74/225
Page 75

16-BIT TIMER (Cont’d)
10.4.3.3 Input Capture
In this section, the index, i, may be 1 or 2 because
there are two input capture functions in the 16-bit
timer.
The two 16-bit input capture registers (IC1R and
IC2R) are used to latch the value of the free run
ning counter after a transition is detected on the
ICAPi pin (see Figure 52).
MS Byte LS Byte
ICiR ICiHR ICiLR
ICiR register is a read-only register.
The active transition is software programmable
through the IEDGi bit of Control Registers (CRi).
Timing resolution is one count of the free running
f
counter: (
CPU
/CC[1:0]).
Procedure:
To use the input capture function select the following in the CR2 register:
– Select the timer clock (CC[1:0]) (see Table 17
Clock Control Bits).
– Select the edge of the active transition on the
ICAP2 pin with the IEDG2 bit (the ICAP2 pin
must be configured as floating input or input with
pull-up without interrupt if this configuration is
available).
And select the following in the CR1 register:
– Set the ICIE bit to generate an interrupt after an
input capture coming from either the ICAP1 pin
or the ICAP2 pin
– Select the edge of the active transition on the
ICAP1 pin with the IEDG1 bit (the ICAP1pin must
be configured as floating input or input with pull-
up without interrupt if this configuration is availa
-
ble).
ST72361
When an input capture occurs:
– ICFi bit is set.
– The ICiR register contains the value of the free
running counter on the active transition on the
ICAPi pin (see Figure 53).
– A timer interrupt is generated if the ICIE bit is set
and the I bit is cleared in the CC register. Other
wise, the interrupt remains pending until both
conditions become true.
Clearing the Input Capture interrupt request (that
is, clearing the ICFi bit) is done in two steps:
1. Reading the SR register while the ICFi bit is set.
2. An access (read or write) to the ICiLR register.
Notes:
1. After reading the ICiHR register, transfer of
input capture data is inhibited and ICFi will
never be set until the ICiLR register is also
read.
2. The ICiR register contains the free running
counter value which corresponds to the most
recent input capture.
3. The two input capture functions can be used
together even if the timer also uses the two out
put compare functions.
4. In One Pulse mode and PWM mode only Input
Capture 2 can be used.
5. The alternate inputs (ICAP1 and ICAP2) are
always directly connected to the timer. So any
transitions on these pins activates the input
capture function.
Moreover if one of the ICAPi pins is configured
as an input and the second one as an output,
an interrupt can be generated if the user tog
gles the output pin and if the ICIE bit is set.
This can be avoided if the input capture function i is disabled by reading the ICiHR (see note
1).
6. The TOF bit can be used with interrupt generation in order to measure events that go beyond
the timer range (FFFFh).
-
-
-
75/225
Page 76

ST72361
ICIE
CC0
CC1
16-BIT FREE RUNNING
COUNTER
IEDG1
(Control Register 1) CR1
(Control Register 2) CR2
ICF2ICF1 000
(Status Register) SR
IEDG2
ICAP1
ICAP2
EDGE DETECT
CIRCUIT2
16-BIT
IC1R Register
IC2R Register
EDGE DETECT
CIRCUIT1
pin
pin
FF01 FF02 FF03
FF03
TIMER CLOCK
COUNTER REGISTER
ICAPi PIN
ICAPi FLAG
ICAPi REGISTER
Note: The rising edge is the active edge.
16-BIT TIMER (Cont’d)
Figure 52. Input Capture Block Diagram
Figure 53. Input Capture Timing Diagram
76/225
Page 77

16-BIT TIMER (Cont’d)
Δ OCiR =
Δt * f
CPU
PRESC
Δ OCiR = Δt
* fEXT
10.4.3.4 Output Compare
In this section, the index, i, may be 1 or 2 because
there are two output compare functions in the 16bit timer.
This function can be used to control an output
waveform or indicate when a period of time has
elapsed.
When a match is found between the Output Compare register and the free running counter, the output compare function:
– Assigns pins with a programmable value if the
OCiE bit is set
– Sets a flag in the status register
– Generates an interrupt if enabled
Two 16-bit registers Output Compare Register 1
(OC1R) and Output Compare Register 2 (OC2R)
contain the value to be compared to the counter
register each timer clock cycle.
MS Byte LS Byte
OCiR OCiHR OCiLR
These registers are readable and writable and are
not affected by the timer hardware. A reset event
changes the OC
iR value to 8000h.
Timing resolution is one count of the free running
counter: (
f
CPU/
CC[1:0]
).
Procedure:
To use the output compare function, select the following in the CR2 register:
– Set the OCiE bit if an output is needed then the
OCMPi pin is dedicated to the output compare i
signal.
– Select the timer clock (CC[1:0]) (see Table 17
Clock Control Bits).
And select the following in the CR1 register:
– Select the OLVLi bit to applied to the OCMPi pins
after the match occurs.
– Set the OCIE bit to generate an interrupt if it is
needed.
When a match is found between OCiR register
and CR register:
– OCFi bit is set.
ST72361
– The OCMPi pin takes OLVLi bit value (OCMPi
pin latch is forced low during reset).
– A timer interrupt is generated if the OCIE bit is
set in the CR1 register and the I bit is cleared in
the CC register (CC).
The OCiR register value required for a specific timing application can be calculated using the following formula:
Where:
Δt = Output compare period (in seconds)
f
= CPU clock frequency (in hertz)
CPU
PRESC
= Timer prescaler factor (2, 4 or 8 de-
pending on CC[1:0] bits, see Table 17
Clock Control Bits)
If the timer clock is an external clock, the formula
is:
Where:
Δt = Output compare period (in seconds)
f
= External timer clock frequency (in hertz)
EXT
Clearing the output compare interrupt request
(that is, clearing the OCFi bit) is done by:
1. Reading the SR register while the OCFi bit is
set.
2. An access (read or write) to the OCiLR register.
The following procedure is recommended to prevent the OCFi bit from being set between the time
it is read and the write to the OC
– Write to the OCiHR register (further compares
are inhibited).
– Read the SR register (first step of the clearance
of the OCFi bit, which may be already set).
– Write to the OCiLR register (enables the output
compare function and clears the OCFi bit).
iR register:
77/225
Page 78

ST72361
OUTPUT COMPARE
16-bit
CIRCUIT
OC1R Register
16 BIT FREE RUNNING
COUNTER
OC1E CC0CC1
OC2E
OLVL1OLVL2OCIE
(Control Register 1) CR1
(Control Register 2) CR2
000OCF2OCF1
(Status Register) SR
16-bit
16-bit
OCMP1
OCMP2
Latch
1
Latch
2
OC2R Register
Pin
Pin
FOLV2
FOLV1
16-BIT TIMER (Cont’d)
Notes:
1. After a processor write cycle to the OCiHR reg-
ister, the output compare function is inhibited
until the OCiLR register is also written.
2. If the OCiE bit is not set, the OCMPi pin is a
general I/O port and the OLVLi bit will not
appear when a match is found but an interrupt
could be generated if the OCIE bit is set.
3. In both internal and external clock modes,
OCFi and OCMPi are set while the counter
CPU
-
/2
-
value equals the OCiR register value (see Fig
ure 55 on page 80 for an example with f
and Figure 56 on page 80 for an example with
/4). This behavior is the same in OPM or
f
CPU
PWM mode.
4. The output compare functions can be used both
for generating external events on the OCMPi
pins even if the input capture mode is also
used.
5. The value in the 16-bit OCiR register and the
OLVi bit should be changed after each suc
cessful comparison in order to control an output
waveform or establish a new elapsed timeout.
Forced Compare Output capability
When the FOLVi bit is set by software, the OLVLi
bit is copied to the OCMPi pin. The OLVi bit has to
be toggled in order to toggle the OCMPi pin when
it is enabled (OCiE bit
= 1). The OCFi bit is then
not set by hardware, and thus no interrupt request
is generated.
The FOLVLi bits have no effect in both One Pulse
mode and PWM mode.
Figure 54. Output Compare Block Diagram
78/225
Page 79

16-BIT TIMER (Cont’d)
INTERNAL CPU CLOCK
TIMER CLOCK
COUNTER REGISTER
OUTPUT COMPARE REGISTER i (OCRi)
OUTPUT COMPARE FLAG i (OCFi)
OCMPi PIN (OLVLi =1)
2ED3
2ED0 2ED1 2ED2
2ED3
2ED42ECF
INTERNAL CPU CLOCK
TIMER CLOCK
COUNTER REGISTER
OUTPUT COMPARE REGISTER i (OCRi)
2ED3
2ED0 2ED1 2ED2
2ED3
2ED42ECF
OUTPUT COMPARE FLAG i (OCFi)
OCMPi PIN (OLVLi =1)
ST72361
Figure 55. Output Compare Timing Diagram, f
Figure 56. Output Compare Timing Diagram, f
TIMER
TIMER
= f
= f
CPU
CPU
/2
/4
79/225
Page 80

ST72361
event occurs
Counter
= OC1R
OCMP1 = OLVL1
When
When
on ICAP1
One Pulse mode cycle
OCMP1 = OLVL2
Counter is reset
to FFFCh
ICF1 bit is set
ICR1 = Counter
OCiR Value =
t
*
f
CPU
PRESC
- 5
OCiR = t
* fEXT
-5
16-BIT TIMER (Cont’d)
10.4.3.5 One Pulse Mode
One Pulse mode enables the generation of a
pulse when an external event occurs. This mode is
selected via the OPM bit in the CR2 register.
The One Pulse mode uses the Input Capture1
function and the Output Compare1 function.
Procedure:
To use One Pulse mode:
1. Load the OC1R register with the value corresponding to the length of the pulse (see the formula in the opposite column).
2. Select the following in the CR1 register:
– Using the OLVL1 bit, select the level to be ap-
plied to the OCMP1 pin after the pulse.
– Using the OLVL2 bit, select the level to be ap-
plied to the OCMP1 pin during the pulse.
– Select the edge of the active transition on the
ICAP1 pin with the IEDG1 bit (the ICAP1 pin
must be configured as floating input).
3. Select the following in the CR2 register:
– Set the OC1E bit, the OCMP1 pin is then ded-
icated to the Output Compare 1 function.
– Set the OPM bit.
– Select the timer clock CC[1:0] (see Table 17
Clock Control Bits).
Clearing the Input Capture interrupt request (that
is, clearing the ICFi bit) is done in two steps:
1. Reading the SR register while the ICFi bit is set.
2. An access (read or write) to the ICiLR register.
The OC1R register value required for a specific
timing application can be calculated using the fol
lowing formula:
Where:
t = Pulse period (in seconds)
f
= CPU clock frequency (in hertz)
CPU
PRESC
= Timer prescaler factor (2, 4 or 8 depend-
ing on the CC[1:0] bits, see Table 17
Clock Control Bits)
If the timer clock is an external clock the formula is:
Where:
t = Pulse period (in seconds)
f
= External timer clock frequency (in hertz)
EXT
When the value of the counter is equal to the value
of the contents of the OC1R register, the OLVL1
bit is output on the OCMP1 pin, (See Figure 57).
-
Then, on a valid event on the ICAP1 pin, the counter is initialized to FFFCh and OLVL2 bit is loaded
on the OCMP1 pin, the ICF1 bit is set and the val
ue FFFDh is loaded in the IC1R register.
Because the ICF1 bit is set when an active edge
occurs, an interrupt can be generated if the ICIE
bit is set.
80/225
Notes:
1. The OCF1 bit cannot be set by hardware in
One Pulse mode but the OCF2 bit can generate
an Output Compare interrupt.
2. When the Pulse Width Modulation (PWM) and
One Pulse mode (OPM) bits are both set, the
PWM mode is the only active one.
3. If OLVL1 = OLVL2 a continuous signal will be
seen on the OCMP1 pin.
4. The ICAP1 pin can not be used to perform input
capture. The ICAP2 pin can be used to perform
input capture (ICF2 can be set and IC2R can be
loaded) but the user must take care that the
counter is reset each time a valid edge occurs
-
on the ICAP1 pin and ICF1 can also generates
interrupt if ICIE is set.
5. When One Pulse mode is used OC1R is dedicated to this mode. Nevertheless OC2R and
OCF2 can be used to indicate a period of time
has been elapsed but cannot generate an out
put waveform because the level OLVL2 is dedicated to the One Pulse mode.
-
Page 81

ST72361
COUNTER
FFFC FFFD FFFE 2ED0 2ED1 2ED2
2ED3
FFFC FFFD
OLVL2
OLVL2OLVL1
ICAP1
OCMP1
compare1
Note: IEDG1 = 1, OC1R = 2ED0h, OLVL1 = 0, OLVL2 = 1
01F8
01F8
2ED3
IC1R
COUNTER
34E2
34E2 FFFC
OLVL2
OLVL2OLVL1
OCMP1
compare2 compare1 compare2
Note: OC1R = 2ED0h, OC2R = 34E2, OLVL1 = 0, OLVL2 = 1
FFFC FFFD FFFE
2ED0
2ED1
2ED2
16-BIT TIMER (Cont’d)
Figure 57. One Pulse Mode Timing Example
Figure 58. Pulse Width Modulation Mode Timing Example with 2 Output Compare Functions
Note: On timers with only one Output Compare register, a fixed frequency PWM signal can be generated
using the output compare and the counter overflow to define the pulse length.
81/225
Page 82

ST72361
Counter
OCMP1 = OLVL2
Counter
= OC2R
OCMP1 = OLVL1
When
When
= OC1R
Pulse Width Modulation cycle
Counter is reset
to FFFCh
ICF1 bit is set
OCiR Value =
t
*
f
CPU
PRESC
- 5
OCiR = t
* fEXT
-5
16-BIT TIMER (Cont’d)
10.4.3.6 Pulse Width Modulation Mode
Pulse Width Modulation (PWM) mode enables the
generation of a signal with a frequency and pulse
length determined by the value of the OC1R and
OC2R registers.
Pulse Width Modulation mode uses the complete
Output Compare 1 function plus the OC2R regis
ter, and so this functionality can not be used when
PWM mode is activated.
In PWM mode, double buffering is implemented on
the output compare registers. Any new values writ
ten in the OC1R and OC2R registers are taken
into account only at the end of the PWM period
(OC2) to avoid spikes on the PWM output pin
(OCMP1).
Procedure
To use Pulse Width Modulation mode:
1. Load the OC2R register with the value corresponding to the period of the signal using the
formula in the opposite column.
2. Load the OC1R register with the value corresponding to the period of the pulse if
(OLVL1
= 0 and OLVL2 = 1) using the formula
in the opposite column.
3. Select the following in the CR1 register:
– Using the OLVL1 bit, select the level to be ap-
plied to the OCMP1 pin after a successful
comparison with the OC1R register.
– Using the OLVL2 bit, select the level to be ap-
plied to the OCMP1 pin after a successful
comparison with the OC2R register.
4. Select the following in the CR2 register:
– Set OC1E bit: the OCMP1 pin is then dedicat-
ed to the output compare 1 function.
– Set the PWM bit.
– Select the timer clock (CC[1:0]) (see Table 17
Clock Control Bits).
-
-
If OLVL1 = 1 and OLVL2 = 0 the length of the positive pulse is the difference between the OC2R and
OC1R registers.
If OLVL1 = OLVL2 a continuous signal will be
seen on the OCMP1 pin.
The OCiR register value required for a specific timing application can be calculated using the following formula:
Where:
t = Signal or pulse period (in seconds)
f
= CPU clock frequency (in hertz)
CPU
PRESC
= Timer prescaler factor (2, 4 or 8 depend-
ing on CC[1:0] bits, see Table 17 Clock
Control Bits)
If the timer clock is an external clock the formula is:
Where:
t = Signal or pulse period (in seconds)
f
= External timer clock frequency (in hertz)
EXT
The Output Compare 2 event causes the counter
to be initialized to FFFCh (See Figure 58)
Notes:
1. After a write instruction to the OCiHR register,
the output compare function is inhibited until the
OCiLR register is also written.
2. The OCF1 and OCF2 bits cannot be set by
hardware in PWM mode therefore the Output
Compare interrupt is inhibited.
3. The ICF1 bit is set by hardware when the counter reaches the OC2R value and can produce a
timer interrupt if the ICIE bit is set and the I bit is
cleared.
4. In PWM mode the ICAP1 pin can not be used
to perform input capture because it is discon
nected to the timer. The ICAP2 pin can be used
to perform input capture (ICF2 can be set and
IC2R can be loaded) but the user must take
care that the counter is reset each period and
ICF1 can also generates interrupt if ICIE is set.
5. When the Pulse Width Modulation (PWM) and
One Pulse mode (OPM) bits are both set, the
PWM mode is the only active one.
82/225
Page 83

16-BIT TIMER (Cont’d)
10.4.4 Low Power Modes
Mode Description
WAIT
HALT
No effect on 16-bit Timer.
Timer interrupts cause the device to exit from WAIT mode.
16-bit Timer registers are frozen.
In HALT mode, the counter stops counting until Halt mode is exited. Counting resumes from the previous
count when the MCU is woken up by an interrupt with “exit from HALT mode” capability or from the counter
reset value when the MCU is woken up by a RESET.
If an input capture event occurs on the ICAPi pin, the input capture detection circuitry is armed. Consequently, when the MCU is woken up by an interrupt with “exit from HALT mode” capability, the ICFi bit is set, and
the counter value present when exiting from HALT mode is captured into the ICiR register.
10.4.5 Interrupts
Interrupt Event
Input Capture 1 event/Counter reset in PWM mode ICF1
Input Capture 2 event ICF2
Output Compare 1 event (not available in PWM mode) OCF1
Output Compare 2 event (not available in PWM mode) OCF2
Timer Overflow event TOF TOIE
Event
Flag
Enable
Control
Bit
ICIE
OCIE
ST72361
Exit
from
Wait
Yes No
Exit
from
Halt
Note: The 16-bit Timer interrupt events are connected to the same interrupt vector (see Interrupts chap-
ter). These events generate an interrupt if the corresponding Enable Control Bit is set and the interrupt
mask in the CC register is reset (RIM instruction).
10.4.6 Summary of Timer Modes
MODES
Input Capture (1 and/or 2)
Output Compare (1 and/or 2)
One Pulse Mode
PWM Mode Not Recommended
Input Capture 1 Input Capture 2 Output Compare 1 Output Compare 2
Yes Yes Yes Yes
No
Not Recommended
TIMER RESOURCES
1)
3)
No
Partially
No
2)
1) See note 4 in Section 10.4.3.5 "One Pulse Mode"
2) See note 5 in Section 10.4.3.5 "One Pulse Mode"
3) See note 4 in Section 10.4.3.6 "Pulse Width Modulation Mode"
83/225
Page 84

ST72361
16-BIT TIMER (Cont’d)
10.4.7 Register Description
Each Timer is associated with three control and
status registers, and with six pairs of data registers
(16-bit values) relating to the two input captures,
the two output compares, the counter and the al
ternate counter.
Bit 4 = FOLV2 Forced Output Compare 2.
This bit is set and cleared by software.
0: No effect on the OCMP2 pin.
1: Forces the OLVL2 bit to be copied to the
-
OCMP2 pin, if the OC2E bit is set and even if
there is no successful comparison.
CONTROL REGISTER 1 (CR1)
Read/Write
Reset Value: 0000 0000 (00h)
7 0
ICIE OCIE TOIE FOLV2 FOLV1 OLVL2 IEDG1 OLVL1
Bit 7 = ICIE Input Capture Interrupt Enable.
0: Interrupt is inhibited.
1: A timer interrupt is generated whenever the
ICF1 or ICF2 bit of the SR register is set.
Bit 6 = OCIE Output Compare Interrupt Enable.
0: Interrupt is inhibited.
1: A timer interrupt is generated whenever the
OCF1 or OCF2 bit of the SR register is set.
Bit 5 = TOIE Timer Overflow Interrupt Enable.
0: Interrupt is inhibited.
1: A timer interrupt is enabled whenever the TOF
bit of the SR register is set.
Bit 3 = FOLV1 Forced Output Compare 1.
This bit is set and cleared by software.
0: No effect on the OCMP1 pin.
1: Forces OLVL1 to be copied to the OCMP1 pin, if
the OC1E bit is set and even if there is no suc
cessful comparison.
Bit 2 = OLVL2 Output Level 2.
This bit is copied to the OCMP2 pin whenever a
successful comparison occurs with the OC2R reg
ister and OCxE is set in the CR2 register. This value is copied to the OCMP1 pin in One Pulse mode
and Pulse Width Modulation mode.
Bit 1 = IEDG1 Input Edge 1.
This bit determines which type of level transition
on the ICAP1 pin will trigger the capture.
0: A falling edge triggers the capture.
1: A rising edge triggers the capture.
Bit 0 = OLVL1 Output Level 1.
The OLVL1 bit is copied to the OCMP1 pin whenever a successful comparison occurs with the
OC1R register and the OC1E bit is set in the CR2
register.
-
-
84/225
Page 85

16-BIT TIMER (Cont’d)
CONTROL REGISTER 2 (CR2)
Read/Write
Reset Value: 0000 0000 (00h)
7 0
OC1E OC2E OPM PWM CC1 CC0 IEDG2 EXEDG
ST72361
Bit 4 = PWM Pulse Width Modulation.
0: PWM mode is not active.
1: PWM mode is active, the OCMP1 pin outputs a
programmable cyclic signal; the length of the
pulse depends on the value of OC1R register;
the period depends on the value of OC2R regis
ter.
-
Bit 7 = OC1E Output Compare 1 Pin Enable.
This bit is used only to output the signal from the
timer on the OCMP1 pin (OLV1 in Output Com
pare mode, both OLV1 and OLV2 in PWM and
one-pulse mode). Whatever the value of the OC1E
bit, the Output Compare 1 function of the timer re
mains active.
0: OCMP1 pin alternate function disabled (I/O pin
free for general-purpose I/O).
1: OCMP1 pin alternate function enabled.
Bit 6 = OC2E Output Compare 2 Pin Enable.
This bit is used only to output the signal from the
timer on the OCMP2 pin (OLV2 in Output Com
pare mode). Whatever the value of the OC2E bit,
the Output Compare 2 function of the timer re
mains active.
0: OCMP2 pin alternate function disabled (I/O pin
free for general-purpose I/O).
1: OCMP2 pin alternate function enabled.
Bit 5 = OPM One Pulse Mode.
0: One Pulse mode is not active.
1: One Pulse mode is active, the ICAP1 pin can be
used to trigger one pulse on the OCMP1 pin; the
active transition is given by the IEDG1 bit. The
length of the generated pulse depends on the
contents of the OC1R register.
Bit 3, 2 = CC[1:0] Clock Control.
The timer clock mode depends on these bits:
-
Table 18. Clock Control Bits
Timer Clock CC1 CC0
-
External Clock (where available) 1
f
/ 4
CPU
f
/ 2 1
CPU
f
/ 8
CPU
0
1
Note: If the external clock pin is not available, programming the external clock configuration stops
the counter.
-
Bit 1 = IEDG2 Input Edge 2.
This bit determines which type of level transition
on the ICAP2 pin will trigger the capture.
0: A falling edge triggers the capture.
1: A rising edge triggers the capture.
Bit 0 = EXEDG External Clock Edge.
This bit determines which type of level transition
on the external clock pin EXTCLK will trigger the
counter register.
0: A falling edge triggers the counter register.
1: A rising edge triggers the counter register.
0
0
85/225
Page 86

ST72361
16-BIT TIMER (Cont’d)
CONTROL/STATUS REGISTER (CSR)
Read/Write (bits 7:3 read only)
Reset Value: xxxx x0xx (xxh)
7 0
ICF1 OCF1 TOF ICF2 OCF2 TIMD 0 0
Bit 7 = ICF1 Input Capture Flag 1.
0: No input capture (reset value).
1: An input capture has occurred on the ICAP1 pin
or the counter has reached the OC2R value in
PWM mode. To clear this bit, first read the SR
register, then read or write the low byte of the
IC1R (IC1LR) register.
Bit 6 = OCF1 Output Compare Flag 1.
0: No match (reset value).
1: The content of the free running counter has
matched the content of the OC1R register. To
clear this bit, first read the SR register, then read
or write the low byte of the OC1R (OC1LR) reg
ister.
Bit 5 = TOF Timer Overflow Flag.
0: No timer overflow (reset value).
1: The free running counter rolled over from FFFFh
to 0000h. To clear this bit, first read the SR reg
ister, then read or write the low byte of the CR
(CLR) register.
-
-
Note: Reading or writing the ACLR register does
not clear TOF.
Bit 4 = ICF2 Input Capture Flag 2.
0: No input capture (reset value).
1: An input capture has occurred on the ICAP2
pin. To clear this bit, first read the SR register,
then read or write the low byte of the IC2R
(IC2LR) register.
Bit 3 = OCF2 Output Compare Flag 2.
0: No match (reset value).
1: The content of the free running counter has
matched the content of the OC2R register. To
clear this bit, first read the SR register, then read
or write the low byte of the OC2R (OC2LR) reg
-
ister.
Bit 2 = TIMD Timer disable.
This bit is set and cleared by software. When set, it
freezes the timer prescaler and counter and disa
bled the output functions (OCMP1 and OCMP2
pins) to reduce power consumption. Access to the
timer registers is still available, allowing the timer
configuration to be changed, or the counter reset,
while it is disabled.
0: Timer enabled
1: Timer prescaler, counter and outputs disabled
Bits 1:0 = Reserved, must be kept cleared.
86/225
Page 87

16-BIT TIMER (Cont’d)
INPUT CAPTURE 1 HIGH REGISTER (IC1HR)
Read Only
Reset Value: Undefined
This is an 8-bit read only register that contains the
high part of the counter value (transferred by the
input capture 1 event).
ST72361
OUTPUT COMPARE 1 HIGH REGISTER
(OC1HR)
Read/Write
Reset Value: 1000 0000 (80h)
This is an 8-bit register that contains the high part
of the value to be compared to the CHR register.
7 0
MSB LSB
INPUT CAPTURE 1 LOW REGISTER (IC1LR)
Read Only
Reset Value: Undefined
This is an 8-bit read only register that contains the
low part of the counter value (transferred by the in
put capture 1 event).
7 0
MSB LSB
7 0
MSB LSB
OUTPUT COMPARE 1 LOW REGISTER
(OC1LR)
Read/Write
Reset Value: 0000 0000 (00h)
-
This is an 8-bit register that contains the low part of
the value to be compared to the CLR register.
7 0
MSB LSB
87/225
Page 88

ST72361
16-BIT TIMER (Cont’d)
OUTPUT COMPARE 2 HIGH REGISTER
(OC2HR)
Read/Write
Reset Value: 1000 0000 (80h)
This is an 8-bit register that contains the high part
of the value to be compared to the CHR register.
ALTERNATE COUNTER HIGH REGISTER
(ACHR)
Read Only
Reset Value: 1111 1111 (FFh)
This is an 8-bit register that contains the high part
of the counter value.
7 0
MSB LSB
OUTPUT COMPARE 2 LOW REGISTER
(OC2LR)
Read/Write
Reset Value: 0000 0000 (00h)
This is an 8-bit register that contains the low part of
the value to be compared to the CLR register.
7 0
MSB LSB
COUNTER HIGH REGISTER (CHR)
Read Only
Reset Value: 1111 1111 (FFh)
This is an 8-bit register that contains the high part
of the counter value.
7 0
MSB LSB
7 0
MSB LSB
ALTERNATE COUNTER LOW REGISTER
(ACLR)
Read Only
Reset Value: 1111 1100 (FCh)
This is an 8-bit register that contains the low part of
the counter value. A write to this register resets the
counter. An access to this register after an access
to CSR register does not clear the TOF bit in the
CSR register.
7 0
MSB LSB
INPUT CAPTURE 2 HIGH REGISTER (IC2HR)
Read Only
Reset Value: Undefined
This is an 8-bit read only register that contains the
high part of the counter value (transferred by the
Input Capture 2 event).
COUNTER LOW REGISTER (CLR)
Read Only
Reset Value: 1111 1100 (FCh)
This is an 8-bit register that contains the low part of
the counter value. A write to this register resets the
counter. An access to this register after accessing
the CSR register clears the TOF bit.
7 0
MSB LSB
88/225
7 0
MSB LSB
INPUT CAPTURE 2 LOW REGISTER (IC2LR)
Read Only
Reset Value: Undefined
This is an 8-bit read only register that contains the
low part of the counter value (transferred by the In
put Capture 2 event).
7 0
MSB LSB
-
Page 89

16-BIT TIMER (Cont’d)
Table 19. 16-Bit Timer Register Map
ST72361
Address
(Hex.)
51 CR2 OC1E OC2E OPM PWM CC1 CC0 IEDG2 EXEDG
52 CR1 ICIE OCIE TOIE FOLV2 FOLV1 OLVL2 IEDG1 OLVL1
53 CSR ICF1 OCF1 TOF ICF2 OCF2 TIMD
54 IC1HR MSB LSB
55 IC1LR MSB LSB
56 OC1HR MSB LSB
57 OC1LR MSB LSB
58 CHR MSB LSB
59 CLR MSB LSB
5A ACHR MSB LSB
5B ACLR MSB LSB
5C IC2HR MSB LSB
5D IC2LR MSB LSB
5E OC2HR MSB LSB
5F OC2LR MSB LSB
Register
Name
7 6 5 4 3 2 1 0
89/225
Page 90

ST72361
10.5 8-BIT TIMER (TIM8)
10.5.1 Introduction
The timer consists of a 8-bit free-running counter
driven by a programmable prescaler.
It may be used for a variety of purposes, including
pulse length measurement of up to two input sig
nals (input capture) or generation of up to two output waveforms (output compare and PWM).
Pulse lengths and waveform periods can be modulated from a few microseconds to several milliseconds using the timer prescaler and the clock
prescaler.
10.5.2 Main Features
■ Programmable prescaler: f
or f
■ Overflow status flag and maskable interrupt
■ Output compare functions with
divided by 8000.
OSC2
divided by 2, 4 , 8
CPU
– 2 dedicated 8-bit registers
– 2 dedicated programmable signals
– 2 dedicated status flags
– 1 dedicated maskable interrupt
■ Input capture functions with
– 2 dedicated 8-bit registers
– 2 dedicated active edge selection signals
– 2 dedicated status flags
– 1 dedicated maskable interrupt
■ Pulse width modulation mode (PWM)
■ One pulse mode
■ Reduced Power Mode
■ 4 alternate functions on I/O ports (ICAP1, ICAP2,
OCMP1, OCMP2)*
When reading an input signal on a non-bonded
pin, the value will always be ‘1’.
10.5.3 Functional Description
10.5.3.1 Counter
The main block of the Programmable Timer is a 8-
bit free running upcounter and its associated 8-bit
registers.
These two read-only 8-bit registers contain the
same value but with the difference that reading the
ACTR register does not clear the TOF bit (Timer
overflow flag), located in the Status register, (SR).
Writing in the CTR register or ACTR register resets the free running counter to the FCh value.
Both counters have a reset value of FCh (this is
the only value which is reloaded in the 8-bit timer).
The reset value of both counters is also FCh in
One Pulse mode and PWM mode.
The timer clock depends on the clock control bits
of the CR2 register, as shown in Table 19 Clock
Control Bits. The value in the counter register re
peats every 512, 1024, 2048 or 20480000 f
clock cycles depending on the CC[1:0] bits.
The timer frequency can be f
or f
For example, if f
f
OSC2
/8000.
OSC2
/8000 is selected, and
OSC2
= 8 MHz, the timer frequency will be 1 ms.
CPU
/2, f
CPU
Refer to Table 19 on page 105.
/4, f
CPU
CPU
-
/8
The Block Diagram is shown in Figure 59.
*Note: Some timer pins may not be available (not
bonded) in some ST7 devices. Refer to the device
pin out description.
90/225
Page 91

8-BIT TIMER (Cont’d)
MCU-PERIPHERAL INTERFACE
COUNTER
ALTERNATE
OUTPUT
COMPARE
REGISTER
OUTPUT COMPARE
EDGE DETECT
OVERFLOW
DETECT
CIRCUIT
1/2
1/4
1/8
ST7 INTERNAL BUS
LATCH1
OCMP1
ICAP1
f
CPU
TIMER INTERRUPT
ICF2ICF1
TIMD
0
0
OCF2OCF1 TOF
PWMOC1E
0
IEDG2CC0CC1
OC2E
OPMFOLV2ICIE OLVL1IEDG1OLVL2FOLV1OCIE TOIE
ICAP2
LATCH2
OCMP2
8
8
8
8 8
8
8
(Control Register 1) CR1
(Control Register 2) CR2
(Control/Status Register)
6
8
8
8
TIMER INTERNAL BUS
CIRCUIT1
EDGE DETECT
CIRCUIT2
CIRCUIT
1
OUTPUT
COMPARE
REGISTER
2
INPUT
CAPTURE
REGISTER
1
INPUT
CAPTURE
REGISTER
2
CC[1:0]
COUNTER
pin
pin
pin
pin
REGISTER
REGISTER
Note: If IC, OC and TO interrupt requests have separate vectors
then the last OR is not present (See device Interrupt Vector Table)
(See note)
CSR
1/8000
f
OSC2
Figure 59. Timer Block Diagram
ST72361
91/225
Page 92

ST72361
8-BIT TIMER (Cont’d)
Whatever the timer mode used (input capture, output compare, one pulse mode or PWM mode) an
overflow occurs when the counter rolls over from
FFh to 00h then:
– The TOF bit of the SR register is set.
– A timer interrupt is generated if:
– TOIE bit of the CR1 register is set and
– I bit of the CC register is cleared.
If one of these conditions is false, the interrupt remains pending to be issued as soon as they are
both true.
Clearing the overflow interrupt request is done in
two steps:
1. Reading the SR register while the TOF bit is set.
2. An access (read or write) to the CTR register.
Notes: The TOF bit is not cleared by accesses to
ACTR register. The advantage of accessing the
ACTR register rather than the CTR register is that
it allows simultaneous use of the overflow function
and reading the free running counter at random
times (for example, to measure elapsed time) with
out the risk of clearing the TOF bit erroneously.
The timer is not affected by WAIT mode.
In HALT mode, the counter stops counting until the
mode is exited. Counting then resumes from the
previous count (MCU awakened by an interrupt) or
from the reset count (MCU awakened by a Reset).
-
92/225
Page 93

8-BIT TIMER (Cont’d)
f
CPU
CLOCK
FD
FE FF 00 01 02 03
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
FC FD 00 01
f
CPU
CLOCK
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
f
CPU
CLOCK
INTERNAL RESET
TIMER CLOCK
COUNTER REGISTER
TIMER OVERFLOW FLAG (TOF)
FC FD
00
Figure 60. Counter Timing Diagram, Internal Clock Divided by 2
Figure 61. Counter Timing Diagram, Internal Clock Divided by 4
ST72361
Figure 62. Counter Timing Diagram, Internal Clock Divided by 8
Note: The MCU is in reset state when the internal reset signal is high, when it is low the MCU is running.
93/225
Page 94

ST72361
8-BIT TIMER (Cont’d)
10.5.3.2 Input Capture
In this section, the index, i, may be 1 or 2 because
there are two input capture functions in the 8-bit
timer.
The two 8-bit input capture registers (IC1R and
IC2R) are used to latch the value of the free run
ning counter after a transition is detected on the
ICAPi pin (see Figure 63).
ICiR register is a read-only register.
The active transition is software programmable
through the IEDGi bit of Control Registers (CRi).
Timing resolution is one count of the free running
counter (see Table 19 Clock Control Bits).
-
When an input capture occurs:
– ICFi bit is set.
– The ICiR register contains the value of the free
running counter on the active transition on the
ICAPi pin (see Figure 64).
– A timer interrupt is generated if the ICIE bit is set
and the interrrupt mask is cleared in the CC reg
ister. Otherwise, the interrupt remains pending
until both conditions become true.
Clearing the Input Capture interrupt request (that
is, clearing the ICFi bit) is done in two steps:
1. Reading the SR register while the ICFi bit is set.
2. An access (read or write) to the ICiR register.
-
Procedure:
To use the input capture function select the following in the CR2 register:
– Select the timer clock (CC[1:0]) (see Table 19
Clock Control Bits).
– Select the edge of the active transition on the
ICAP2 pin with the IEDG2 bit (the ICAP2 pin
must be configured as floating input or input with
pull-up without interrupt if this configuration is
available).
And select the following in the CR1 register:
– Set the ICIE bit to generate an interrupt after an
input capture coming from either the ICAP1 pin
or the ICAP2 pin
– Select the edge of the active transition on the
ICAP1 pin with the IEDG1 bit (the ICAP1 pin
must be configured as floating input or input with
pull-up without interrupt if this configuration is
available).
Notes:
1. The ICiR register contains the free running
counter value which corresponds to the most re
cent input capture.
2. The two input capture functions can be used together even if the timer also uses the two output
compare functions.
3. Once the ICIE bit is set both input capture features may trigger interrupt requests. If only one is
needed in the application, the interrupt routine
software needs to discard the unwanted capture
interrupt. This can be done by checking the ICF1
and ICF2 flags and resetting them both.
4. In One pulse Mode and PWM mode only Input
Capture 2 can be used.
5. The alternate inputs (ICAP1 and ICAP2) are always directly connected to the timer. So any transitions on these pins activates the input capture
function.
Moreover if one of the ICAPi pins is configured as
an input and the second one as an output, an inter
rupt can be generated if the user toggles the output
pin and if the ICIE bit is set.
6. The TOF bit can be used with interrupt generation in order to measure events that go beyond the
timer range (FFh).
-
-
94/225
Page 95

8-BIT TIMER (Cont’d)
ICIE
CC0
CC1
8-bit FREE RUNNING
COUNTER
IEDG1
(Control Register 1) CR1
(Control Register 2) CR2
ICF2ICF1 000
(Status Register) SR
IEDG2
ICAP1
ICAP2
EDGE DETECT
CIRCUIT2
8-bit
IC1R Register
IC2R Register
EDGE DETECT
CIRCUIT1
pin
pin
01 02 03
03
TIMER CLOCK
COUNTER REGISTER
ICAPi PIN
ICAPi FLAG
ICAPi REGISTER
Note: The rising edge is the active edge.
Figure 63. Input Capture Block Diagram
ST72361
Figure 64. Input Capture Timing Diagram
95/225
Page 96

ST72361
Δ OCiR =
Δt * f
CPU
PRESC
8-BIT TIMER (Cont’d)
10.5.3.3 Output Compare
In this section, the index, i, may be 1 or 2 because
there are two output compare functions in the 8-bit
timer.
This function can be used to control an output
waveform or indicate when a period of time has
elapsed.
When a match is found between the Output Compare register and the free running counter, the output compare function:
– Assigns pins with a programmable value if the
OCiE bit is set
– Sets a flag in the status register
– Generates an interrupt if enabled
Two 8-bit registers Output Compare Register 1
(OC1R) and Output Compare Register 2 (OC2R)
contain the value to be compared to the counter
register each timer clock cycle.
These registers are readable and writable and are
not affected by the timer hardware. A reset event
changes the OC
Timing resolution is one count of the free running
counter: (f
Procedure:
To use the output compare function, select the following in the CR2 register:
– Set the OCiE bit if an output is needed then the
OCMPi pin is dedicated to the output compare i
signal.
– Select the timer clock (CC[1:0]) (see Table 19
Clock Control Bits).
And select the following in the CR1 register:
iR value to 00h.
CPU/CC[1:0]
).
– Select the OLVLi bit to applied to the OCMPi pins
after the match occurs.
– Set the OCIE bit to generate an interrupt if it is
needed.
When a match is found between OCRi register
and CR register:
– OCFi bit is set.
– The OCMPi pin takes OLVLi bit value (OCMPi
pin latch is forced low during reset).
– A timer interrupt is generated if the OCIE bit is
set in the CR1 register and the I bit is cleared in
the CC register (CC).
The OCiR register value required for a specific timing application can be calculated using the following formula:
Where:
Δt = Output compare period (in seconds)
f
= PLL output x2 clock frequency in hertz
CPU
(or f
PRESC
= Timer prescaler factor (2, 4, 8 or 8000
depending on CC[1:0] bits, see Table
19 Clock Control Bits)
Clearing the output compare interrupt request
(that is, clearing the OCFi bit) is done by:
1. Reading the SR register while the OCFi bit is
set.
2. An access (read or write) to the OCiR register.
/2 if PLL is not enabled)
OSC
96/225
Page 97

8-BIT TIMER (Cont’d)
OUTPUT COMPARE
8-bit
CIRCUIT
OC1R Register
8 BIT FREE RUNNING
COUNTER
OC1E CC0CC1
OC2E
OLVL1OLVL2OCIE
(Control Register 1) CR1
(Control Register 2) CR2
000OCF2OCF1
(Status Register) SR
8-bit
8-bit
OCMP1
OCMP2
Latch
1
Latch
2
OC2R Register
Pin
Pin
FOLV2 FOLV1
Notes:
1. Once the OCIE bit is set both output compare
features may trigger interrupt requests. If only
one is needed in the application, the interrupt
routine software needs to discard the unwanted
compare interrupt. This can be done by check
ing the OCF1 and OCF2 flags and resetting
them both.
2. If the OCiE bit is not set, the OCMPi pin is a
general I/O port and the OLVLi bit will not
appear when a match is found but an interrupt
could be generated if the OCIE bit is set.
3. When the timer clock is f
/2, OCFi and
CPU
OCMPi are set while the counter value equals
the OCiR register value (see Figure 66 on page
99). This behaviour is the same in OPM or
PWM mode.
When the timer clock is f
8000, OCFi and OCMPi are set while the coun
CPU
/4, f
CPU
/8 or f
CPU
/
ter value equals the OCiR register value plus 1
(see Figure 67 on page 99).
4. The output compare functions can be used both
for generating external events on the OCMPi
pins even if the input capture mode is also
used.
5. The value in the 8-bit OCiR register and the
OLVi bit should be changed after each suc
-
ST72361
cessful comparison in order to control an output
waveform or establish a new elapsed timeout.
Forced Compare Output capability
When the FOLVi bit is set by software, the OLVLi
bit is copied to the OCMPi pin. The OLVi bit has to
be toggled in order to toggle the OCMPi pin when
it is enabled (OCiE bit
= 1). The OCFi bit is then
not set by hardware, and thus no interrupt request
is generated.
The FOLVLi bits have no effect in both one pulse
mode and PWM mode.
Figure 65. Output Compare Block Diagram
97/225
Page 98

ST72361
f
CPU
CLOCK
TIMER CLOCK
COUNTER REGISTER
OUTPUT COMPARE REGISTER i (OCRi)
OUTPUT COMPARE FLAG i (OCFi)
OCMPi PIN (OLVLi =1)
D3
D0 D1 D2
D3
D4CF
f
CPU
CLOCK
TIMER CLOCK
COUNTER REGISTER
OUTPUT COMPARE REGISTER i (OCRi)
COMPARE REGISTER i LATCH
D3
D0 D1 D2
D3
D4CF
OCMPi PIN (OLVLi =1)
OUTPUT COMPARE FLAG i (OCFi)
8-BIT TIMER (Cont’d)
Figure 66. Output Compare Timing Diagram, f
Figure 67. Output Compare Timing Diagram, f
TIMER
TIMER
= f
= f
CPU
CPU
/2
/4
98/225
Page 99

8-BIT TIMER (Cont’d)
event occurs
Counter
= OC1R
OCMP1 = OLVL1
When
When
on ICAP1
One pulse mode cycle
OCMP1 = OLVL2
Counter is reset
to FCh
ICF1 bit is set
ICR1 = Counter
OCiR Value =
t
* fCPU
PRESC
- 5
10.5.3.4 One Pulse Mode
One Pulse mode enables the generation of a
pulse when an external event occurs. This mode is
selected via the OPM bit in the CR2 register.
The one pulse mode uses the Input Capture1
function and the Output Compare1 function.
Procedure:
To use one pulse mode:
1. Load the OC1R register with the value corresponding to the length of the pulse (see the formula in the opposite column).
2. Select the following in the CR1 register:
– Using the OLVL1 bit, select the level to be ap-
plied to the OCMP1 pin after the pulse.
– Using the OLVL2 bit, select the level to be ap-
plied to the OCMP1 pin during the pulse.
– Select the edge of the active transition on the
ICAP1 pin with the IEDG1 bit (the ICAP1 pin
must be configured as floating input).
3. Select the following in the CR2 register:
– Set the OC1E bit, the OCMP1 pin is then ded-
icated to the Output Compare 1 function.
– Set the OPM bit.
– Select the timer clock CC[1:0] (see Table 19
Clock Control Bits).
Then, on a valid event on the ICAP1 pin, the counter is initialized to FCh and OLVL2 bit is loaded on
the OCMP1 pin, the ICF1 bit is set and the value
FFFDh is loaded in the IC1R register.
Because the ICF1 bit is set when an active edge
occurs, an interrupt can be generated if the ICIE
bit is set.
ST72361
Clearing the Input Capture interrupt request (that
is, clearing the ICFi bit) is done in two steps:
1. Reading the SR register while the ICFi bit is set.
2. An access (read or write) to the ICiLR register.
The OC1R register value required for a specific
timing application can be calculated using the fol
lowing formula:
Where:
t = Pulse period (in seconds)
f
= PLL output x2 clock frequency in hertz
CPU
PRESC
(or f
= Timer prescaler factor (2, 4, 8 or 8000
depending on the CC[1:0] bits, see Ta
/2 if PLL is not enabled)
OSC
ble 19 Clock Control Bits)
When the value of the counter is equal to the value
of the contents of the OC1R register, the OLVL1
bit is output on the OCMP1 pin, (See Figure 68).
Notes:
1. The OCF1 bit cannot be set by hardware in one
pulse mode but the OCF2 bit can generate an
Output Compare interrupt.
2. When the Pulse Width Modulation (PWM) and
One Pulse Mode (OPM) bits are both set, the
PWM mode is the only active one.
3. If OLVL1=OLVL2 a continuous signal will be
seen on the OCMP1 pin.
4. The ICAP1 pin can not be used to perform input
capture. The ICAP2 pin can be used to perform
input capture (ICF2 can be set and IC2R can be
loaded) but the user must take care that the
counter is reset each time a valid edge occurs
on the ICAP1 pin and ICF1 can also generates
interrupt if ICIE is set.
5. When one pulse mode is used OC1R is dedicated to this mode. Nevertheless OC2R and
OCF2 can be used to indicate a period of time
has been elapsed but cannot generate an out
put waveform because the level OLVL2 is dedicated to the one pulse mode.
-
-
-
99/225
Page 100

ST72361
COUNTER
FC
FD FE D0
D1
D2
D3
FC FD
OLVL2
OLVL2OLVL1
ICAP1
OCMP1
compare1
Note: IEDG1 = 1, OC1R = D0h, OLVL1 = 0, OLVL2 = 1
F8
F8
D3
IC1R
COUNTER
E2
E2 FC
OLVL2
OLVL2OLVL1
OCMP1
compare2 compare1 compare2
Note: OC1R = D0h, OC2R = E2, OLVL1 = 0, OLVL2 = 1
FC FD FE
D0 D1 D2
8-BIT TIMER (Cont’d)
Figure 68. One Pulse Mode Timing Example
Figure 69. Pulse Width Modulation Mode Timing Example
100/225
 Loading...
Loading...