

Spektrum SPMAR6300 User Manual
Servo Connectors
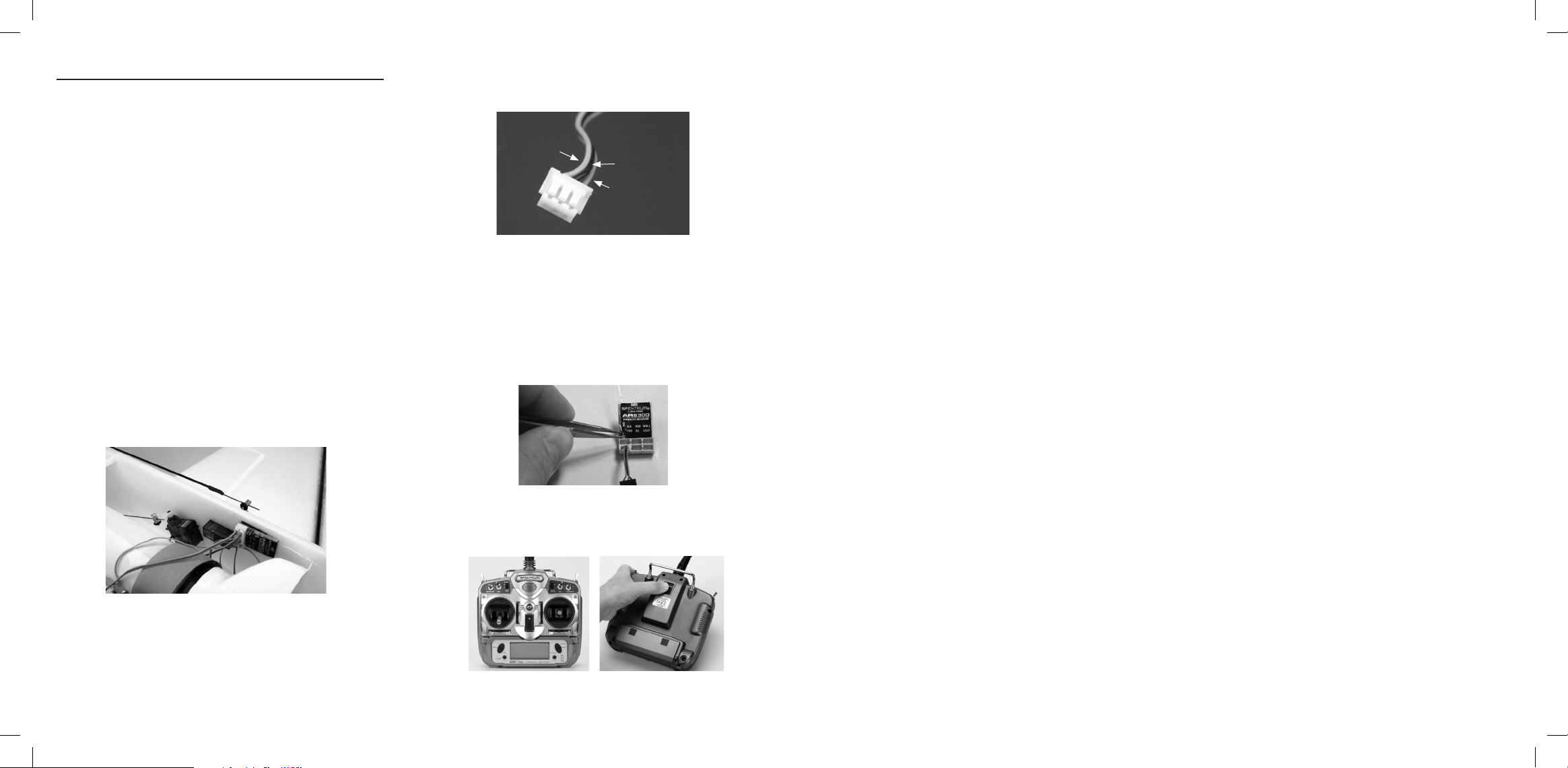
The AR6300 uses JST micro connectors offering the lightest and most compact installation. Note that
servos must have micro JST-type connectors to be compatible with the receiver. Note that some JSTtype servos have a different polarity than Spektrum servos. See photo for correct connector polarity.
Plugging In the Leads
Plug the servo leads into the appropriate servo ports in the receiver noting the polarity of the servo
connector.
Binding
The AR6300 receiver must be bound to the transmitter before it will operate. Binding is the process
of teaching the receiver the specific code of the transmitter so it will only connect to that specific
transmitter.
1. To bind an AR6300 to a DSM2 transmitter, with the power off, short the bind pins together with tweezers,
hemostat or small needle-nose pliers.
2. Power on the receiver. If the receiver is installed in an electric aircraft, turn on the speed controller
to power up the receiver. If the receiver is going to be powered by a separate battery, plug the battery
into any unused port. The amber light will blink, indicating the AR6300 is in bind mode.
3. Position the transmitter’s control sticks and switches in the desired failsafe positions (normally low
throttle and all other controls at neutral).
4. Follow the procedures of your specific transmitter to enter Bind Mode; the system will connect
within a few seconds. Once connected, the LED on the receiver will go solid indicating the system
is connected.
AR6300 User Guide
The AR6300 Nanolite 6-channel micro receiver is designed for micro, ultra light foamie and
parkflyer aircraft. Featuring DSM2™ technology the AR6300 is compatible with all Spektrum™ and
JR® aircraft radios that support DSM2 technology including:
JR12X, JRX9303, Spektrum DX7, Spektrum DX6i, Spektrum DX5e, Spektrum Module Systems.
Note: The AR6300 receiver is not compatible with the Spektrum DX6 parkflyer transmitter.
Features:
• 6-channel micro receiver
• Weight 2 grams
• Micro antenna
• JST servo connectors
• SmartSafe™ failsafe system
• QuickConnect™ with brownout detection
Applications
The AR6300 receiver is designed for Micro, Foamie and Slow Flyer aircraft only. While the AR6300
receiver has more than adequate range for these types of aircraft, it is imperative that it not be used
in larger aircraft that could exceed its operational range.
Specifications:
Type: DSM2 Micro Parkyer range
Channels: 6
Modulation: DSM2
Dimension (WxLxH): 18.3 x 28.5 x 7.0mm
Weight: .07 oz (2 grams)
Input Voltage Range: 3.5–9.6V
Resolution: 1024
Compatibility: All DSM2 Aircraft Transmitters and Module Systems
Receiver Installation
The AR6300 Nanolite receiver is designed for micro light, foam and slow flyer aircraft. Use doublesided foam tape to mount the receiver in place.
5. After you’ve set up your model, it’s important to rebind the system so the true low throttle and
neutral control surface positions are set.
ModelMatch
™
Some Spektrum transmitters (such as the DX7) offer a patent pending feature called ModelMatch.
ModelMatch prevents the possibility of operating a model using the wrong model memory, potentially
preventing a crash. With ModelMatch each model memory has its own unique code (GUID) and during
the binding process the code is programmed into the receiver. Later, when the system is turned on, the
receiver will only connect to the transmitter if the corresponding model memory is programmed on
the screen.
Note: If at any time you turn on the system and it fails to connect, check to be sure the correct model
memory is selected in the transmitter.
SmartSafe™ Failsafe
Your AR6300 features SmartSafe failsafe programming. SmartSafe prevents accidental motor operation
before the system connects and, in the unlikely event of signal loss, SmartSafe drives the throttle to a
preset (off) position. With SmartSafe, if the receiver is turned on before the transmitter, all channels but
throttle will go to their failsafe positions stored during binding. The throttle channel will not generate
a pulse so as to not arm the electronic speed control. After the system is connected, if loss of signal
occurs, the throttle will be driven to a preset failsafe position, normally low throttle (set during binding)
while all other channels will hold their last known position.
Range Check
Before each flying session and especially with a new model, it is important to perform a range check.
Follow the procedures as outlined in the radio instruction manual.
Receiver Power System Requirements
Inadequate power systems that are unable to provide the necessary minimum voltage to the receiver
during flight have become the number one cause of in-flight failures. Some of the power system
components that affect the ability to properly deliver adequate power include:
• Receiver battery pack (number of cells, capacity, cell type, state of charge)
• The ESC’s capability to deliver current to the receiver in electric aircraft
• The switch harness, battery leads, servo leads, regulators, etc.
The AR6300 has a minimum operational voltage of 3.5 volts. If the voltage drops below 3.5 volts
the system will connect when power is restored and the LEDs will flash indicating a brownout. See
QuickConnect below.
Recommended Power System Test Guidelines
If a questionable power system is being used (e.g. small or old battery, an ESC that may not have a
BEC that will support current draw, etc.), it is recommended that a voltmeter be used to perform the
following tests.
Plug the voltmeter into an open channel port in the receiver and with the system on, load the control
surfaces (apply pressure with your hand) while monitoring the voltage at the receiver. The voltage
should remain above 4.8 volts even when all servos are heavily loaded.
QuickConnect™ With Brownout Detection
Your AR6300 features QuickConnect with Brownout Detection.
• Should an interruption of power occur (brownout), the system will reconnect immediately when
power is restored (QuickConnect).
• The LED on the receiver will ash slowly indicating a power interruption (brownout) has occurred.
• Brownouts can be caused by an inadequate power supply (weak battery or regulator), a loose
connector, a bad switch, an inadequate BEC when using an Electronic speed controller, etc.
• Brownouts occur when the receiver voltage drops below 3.5 volts thus interrupting control as the
servos and receiver require a minimum of 3.5 volts to operate.
How QuickConnect With Brownout Detection Works
• When the receiver voltage drops below 3.5 volts the system drops out (ceases to operate).
• When power is restored the receiver immediately attempts to reconnect to the last two frequencies
that it was connected to.
• If the two frequencies are present (the transmitter was left on) the system reconnects typically in
about 4/100 of a second.
QuickConnect with Brownout Detection is designed to allow you to y safely through most short
duration power interruptions, however, the root cause of these interruptions must be corrected before
the next flight to prevent a crash.
Note: If a brownout occurs in flight it is vital that the cause of the brownout be determined and corrected.
Tips on Using Spektrum 2.4GHz
While your DSM-equipped 2.4GHz system is intuitive to operate, functioning nearly identically to
72MHz systems, following are a few common questions from customers.
1. Q: Which do I turn on rst, the transmitter or the receiver?
A: If the receiver is turned on first —all servos except for the throttle will be driven to their preset
failsafe positions set during binding. At this time the throttle channel doesn’t output a pulse
position preventing the arming of electronic speed controllers or in the case of an engine
powered aircraft the throttle servo remains in its current position. When the transmitter is
then turned on the transmitter scans the 2.4GHz band and acquires two open channels. Then
the receiver that was previously bound to the transmitter scans the band and finds the GUID
(Globally Unique Identifier code) stored during binding. The system then connects and
operates normally.
If the transmitter is turned on first—the transmitter scans the 2.4GHz band and acquires two
open channels. When the receiver is then turned on for a short period (the time it takes to
connect) all servos except for the throttle are driven to their preset failsafe positions while the
throttle has no output pulse. The receiver scans the 2.4GHz band looking for the previously
stored GUID and when it locates the specific GUID code and confirms uncorrupted repeatable
packet information, the system connects and normal operation takes place. Typically this takes
2 to 6 seconds.
2. Q: Sometimes the system takes longer to connect and sometimes it doesn’t connect
at all?
A: In order for the system to connect (after the receiver is bound) the receiver must receive a large
number of consecutive uninterrupted perfect packets from the transmitter in order to connect.
This process is purposely critical of the environment ensuring that it’s safe to fly when the system
does connect. If the transmitter is too close to the receiver (less than 4 ft) or if the transmitter
is located near metal objects (metal Tx case, the bed of a truck, the top of a metal work bench,
etc.) connection will take longer and in some cases connection will not occur as the system is
receiving reflected 2.4GHz energy from itself and is interpreting this as unfriendly noise. Moving
the system away from metal objects or moving the transmitter away from the receiver and
powering the system again will cause a connection to occur. This only happens during the initial
connection. Once connected the system is locked in and should a loss of signal occur, (failsafe)
the system connects immediately (4ms) when signal is regained.
3. Q: I’ve heard that the DSM system is less tolerant of low voltage. Is that correct?
A: All DSM receivers have an operational voltage range of 3.5 to 9 volts. With most systems this is
not a problem as in fact most servos cease to operate at around 3.8 volts. When using multiple
high-current draw servos with a single or inadequate battery/power source, heavy momentary
loads can cause the voltage to dip below this 3.5-volt threshold thus causing the entire system
(servos and receiver) to brown out. When the voltage drops below the low voltage threshold
(3.5 volts), the DSM receiver must reboot (go through the startup process of scanning the band
and finding the transmitter) and this can take several seconds. Please read the receiver power
requirement section as this explains how to test for and prevent this occurrence.
4. Q: Sometimes my receiver loses its bind and won’t connect requiring rebinding.
What happens if the bind is lost in ight?
A: The receiver will never lose its bind unless it’s instructed to. It’s important to understand that
during the binding process the receiver not only learns the GUID (code) of the transmitter but
the transmitter learns and stores the type of receiver that it’s bound to. If the transmitter is placed
into bind mode, the transmitter looks for the binding protocol signal from a receiver. If no signal
is present, the transmitter no longer has the correct information to connect to a specific receiver
and in essence the transmitter has been “unbound” from the receiver. We’ve had several DX7
customers that use transmitter stands or trays that unknowingly depress the bind button and the
system is then turned on losing the necessary information to allow the connection to take place.
We’ve also had DX7 customers that didn’t fully understand the range test process and pushed the
bind button before turning on the transmitter also causing the system to “lose its bind.”
Red wire: Positive
Brown wire: Negative
(middle wire)
Orange wire: Signal

FCC Information
This device complies with part 15 of the FCC rules. Operation is subject to the following two
conditions: (1) This device may not cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause undesired operation.
Caution: Changes or modications not expressly approved by the party responsible for
compliance could void the user’s authority to operate the equipment.
This product contains a radio transmitter with wireless technology which has been tested and found
to be compliant with the applicable regulations governing a radio transmitter in the 2.400GHz to
2.4835GHz frequency range.
Declaration of Conformity
(in accordance with ISO/IEC 17050-1)
No. HH20081212
Product(s): AR6300 Receiver
Item Number(s): SPMAR6300
The object of declaration described above is in conformity with the requirements of the specifica-
tions listed below, following the provisions of the European R&TTE directive 1999/5/EC:
EN 301 489-1, 301 489-17 General EMC requirements for Radio equipment
Signed for and on behalf of:
Horizon Hobby, Inc.
Champaign, IL USA
Dec. 12, 2008
Steven A. Hall
Vice President
International Operations and Risk Management
Horizon Hobby, Inc.
Revised 12/08 11133.1
© 2009 Horizon Hobby, Inc. Spektrum radios and accessories are distributed exclusively by Horizon Hobby, Inc.
4105 Fieldstone Road, Champaign, IL 61822 Call toll-free, 877-504-0233.
DSM and DSM2 are trademarks or registered trademarks of Horizon Hobby, Inc.
The Spektrum trademark is used with permission of Bachmann Industries, Inc.
US patent number 7,391,320. Other patents pending.
Warranty Inspection and Repairs
To receive warranty service, you must include your original sales receipt verifying the proof-of-purchase
date. Provided warranty conditions have been met, your Product will be repaired or replaced free of charge.
Repair or replacement decisions are at the sole discretion of Horizon Hobby.
Non-Warranty Repairs
Should your repair not be covered by warranty the repair will be completed and payment will be required
without notification or estimate of the expense unless the expense exceeds 50% of the retail purchase cost.
By submitting the item for repair you are agreeing to payment of the repair without notification. Repair
estimates are available upon request. You must include this request with your repair. Non-warranty repair
estimates will be billed a minimum of ½ hour of labor. In addition you will be billed for return freight.
Please advise us of your preferred method of payment. Horizon accepts money orders and cashiers checks,
as well as Visa, MasterCard, American Express, and Discover cards. If you choose to pay by credit card,
please include your credit card number and expiration date. Any repair left unpaid or unclaimed after 90
days will be considered abandoned and will be disposed of accordingly. Please note: non-warranty repair is
only available on electronics and model engines.
Electronics and engines requiring inspection or repair should be shipped to the following address:
Horizon Service Center
4105 Fieldstone Road
Champaign, Illinois 61822
All other Products requiring warranty inspection or repair should be shipped to the following address:
Horizon Product Support
4105 Fieldstone Road
Champaign, Illinois 61822
Please call 877-504-0233 or e-mail us at productsupport@horizonhobby.com with any questions or
concerns regarding this product or warranty.
European Union:
Electronics and engines requiring inspection or repair should be shipped to one of the following addresses:
Warranty Period
Exclusive Warranty- Horizon Hobby, Inc., (Horizon) warranties that the Products purchased (the “Product”)
will be free from defects in materials and workmanship for a period of 1 year from the date of purchase by
the Purchaser.
Limited Warranty
(a) This warranty is limited to the original Purchaser (“Purchaser”) and is not transferable. REPAIR OR
REPLACEMENT AS PROVIDED UNDER THIS WARRANTY IS THE EXCLUSIVE REMEDY OF THE
PURCHASER. This warranty covers only those Products purchased from an authorized Horizon dealer.
Third party transactions are not covered by this warranty. Proof of purchase is required for warranty claims.
Further, Horizon reserves the right to change or modify this warranty without notice and disclaims all other
warranties, express or implied.
(b) Limitations- HORIZON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED,
ABOUT NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF THE
PRODUCT. THE PURCHASER ACKNOWLEDGES THAT THEY ALONE HAVE DETERMINED THAT THE
PRODUCT WILL SUITABLY MEET THE REQUIREMENTS OF THE PURCHASER’S INTENDED USE.
(c) Purchaser Remedy- Horizon’s sole obligation hereunder shall be that Horizon will, at its option, (i)
repair or (ii) replace, any Product determined by Horizon to be defective. In the event of a defect, these are
the Purchaser’s exclusive remedies. Horizon reserves the right to inspect any and all equipment involved
in a warranty claim. Repair or replacement decisions are at the sole discretion of Horizon. This warranty
does not cover cosmetic damage or damage due to acts of God, accident, misuse, abuse, negligence,
commercial use, or modification of or to any part of the Product. This warranty does not cover damage due
to improper installation, operation, maintenance, or attempted repair by anyone other than Horizon. Return
of any goods by Purchaser must be approved in writing by Horizon before shipment.
Damage Limits
HORIZON SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT OR CONSEQUENTIAL DAMAGES, LOSS OF
PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN ANY WAY CONNECTED WITH THE PRODUCT,
WHETHER SUCH CLAIM IS BASED IN CONTRACT, WARRANTY, NEGLIGENCE, OR STRICT LIABILITY.
Further, in no event shall the liability of Horizon exceed the individual price of the Product on which liability
is asserted. As Horizon has no control over use, setup, final assembly, modification or misuse, no liability
shall be assumed nor accepted for any resulting damage or injury. By the act of use, setup or assembly, the
user accepts all resulting liability.
If you as the Purchaser or user are not prepared to accept the liability associated with the use of this Product,
you are advised to return this Product immediately in new and unused condition to the place of purchase.
Law: These Terms are governed by Illinois law (without regard to conflict of law principals).
Safety Precautions
This is a sophisticated hobby Product and not a toy. It must be operated with caution and common sense
and requires some basic mechanical ability. Failure to operate this Product in a safe and responsible
manner could result in injury or damage to the Product or other property. This Product is not intended
for use by children without direct adult supervision. The Product manual contains instructions for safety,
operation and maintenance. It is essential to read and follow all the instructions and warnings in the
manual, prior to assembly, setup or use, in order to operate correctly and avoid damage or injury.
Questions, Assistance, and Repairs
Your local hobby store and/or place of purchase cannot provide warranty support or repair. Once assembly,
setup or use of the Product has been started, you must contact Horizon directly. This will enable Horizon to
better answer your questions and service you in the event that you may need any assistance. For questions
or assistance, please direct your email to productsupport@horizonhobby.com, or call 877.504.0233 toll
free to speak to the Product Support department.
Inspection or Repairs
If this Product needs to be inspected or repaired, please call for a Return Merchandise Authorization (RMA).
Pack the Product securely using a shipping carton. Please note that original boxes may be included, but
are not designed to withstand the rigors of shipping without additional protection. Ship via a carrier that
provides tracking and insurance for lost or damaged parcels, as Horizon is not responsible for merchandise
until it arrives and is accepted at our facility. A Service Repair Request is available at www.horizonhobby.
com on the “Support” tab. If you do not have internet access, please include a letter with your complete
name, street address, email address and phone number where you can be reached during business days,
your RMA number, a list of the included items, method of payment for any non-warranty expenses and a
brief summary of the problem. Your original sales receipt must also be included for warranty consideration.
Be sure your name, address, and RMA number are clearly written on the outside of the shipping carton.
Horizon Hobby UK
Units 1-4 Ployters Rd
Staple Tye, Harlow
Essex CM18 7NS
United Kingdom
Please call +44 (0) 1279 641 097 or email sales@horizonhobby.co.uk
with any questions or concerns regarding this product or warranty.
Horizon Technischer Service
Hamburger Str. 10
25335 Elmshorn
Germany
Please call +49 4121 46199 66 or email service@horizonhobby.de
with any questions or concerns regarding this product or warranty.
Instructions for Disposal of WEEE by Users in the
European Union
This product must not be disposed of with other waste. Instead, it is the user’s responsibility
to dispose of their waste equipment by handing it over to a designated collection point for the
recycling of waste electrical and electronic equipment. The separate collection and recycling of your
waste equipment at the time of disposal will help to conserve natural resources and ensure that it is
recycled in a manner that protects human health and the environment. For more information about
where you can drop off your waste equipment for recycling, please contact your local city office,
your household waste disposal service or where you purchased the product.
Age Recommendation: 14 years or over. This is not a toy. This product is not intended for use by
children without direct adult supervision.
 Loading...
Loading...