

Page 1

STÖBER CombiDrive
SIEMENS Micromaster integrated
Installation and Commissiong instructions
It ist essential to read and comply with these
instructions prior to installation and commissioning!
®
01/2001
Page 2

Contents
Safety precautions................................................................................................ ..1
1. OVERVIEW ..................................................................................................... ..2
2. INSTALLATION............................................................................................... ..3
3.OPERATING INFORMATION ........................................................................... 10
4. CLEAR TEXT DISPLAY MODULE & SYSTEM PARAMETERS............................. 15
5. FAULT CODES ............................................................................................... 30
6. SPECIFICATIONS............................................................................................ 31
7. SUPPLEMENTARY INFORMATION................................................................ 34
8. ACCESSOIRES................................................................................................ 37
Page 3

8
Safety Precautions
d
s
e
s
n
r
d
s
r
o
s
e
r
g
e
e
a
t
s
d
e
n
s
e
n
e
l
e
d
e
t
n
,
e
e
e
f
e
s
y
Before installing and putting this equipment into operation, please read these safety precautions and
warnings carefully and all the warning signs attached to the equipment. Make su re that the warning signs
are kept in a legible condition and replace missing or damaged signs.
WARNING
This equipment contains hazardous voltages an
controls hazardous rotati ng mec hanical part s. Los
of life, severe personal i njury or property damag
can result if the instructions contained in thi
manual are not followed.
Only suitable qualified personnel should work o
this equipment, and only after becoming familia
with all safety notices, installation, operation an
maintenance procedures contai ned in this manual.
The successful and safe operation of thi
equipment is dependent upon its proper handling,
installation, operation and m ai nt enance.
• The CombiDrive
• ALWAYS isolate the equipment from the powe
supply before starting any work on it.
• The dc-link capacitor remains charged t
dangerous voltages even when the power i
removed. For this reason it is not perm issibl
to open the equipment until one minute afte
the power has been turned off. When handlin
the open equipment it should be noted that liv
parts are exposed. Do not touch these liv
parts.
• The equipment must not be connected to
supply via an ELCB (Earth Leakage Circui
Breaker - see DIN VDE 0160, section 6.5).
• The following terminals can carry dangerou
voltages even if the inverter is inoperative:
-the power supply terminals L1, L2, L3.
-the motor terminals U, V, W.
• Ensure that the inverter’s cover has been fi tte
correctly before applying mains power to th
CombiDrive®. If a Braking Unit has bee
supplied, ensure that the term inal connection
fitted to the underside of the cover mat
correctly with those on the inverter whe
refitting the cover.
• Only qualified personnel may connect, st art t h
system up and repair faults. These personne
must be thoroughly acquainted with all th
warnings and operating procedures containe
in this manual.
• Certain parameter settings may cause th
motor to restart automatically after an inpu
power failure.
• This equipment must not be used as a
‘emergency stop’ mechani sm (see EN 60204
9.2.5.4).
®
operates at high voltages.
CAUTION
• Children and the general public must b
prevented from accessing or approaching t h
equipment!
• This equipment may only be used for th
purpose specified by the manufacturer.
Unauthorised modifications and the use o
spare parts and accessori es that are not sold
or recommended by the manufacturer of th
equipment can cause fires, electric shock
and injuries.
• Keep these operating instruc tions within eas
reach and give them to all users!
European Low Voltage & EMC Directives
The CombiDrive® product complies with the requirements of the Low
Voltage Directive 73/23/EEC and the EMC Directive 89/336/EEC.
The units are certified for compliance with the followi ng standards:
EN 60204-1 Safety of machinery - E l ectrical equipment of
machines
EN 60146-1-1 Semiconductor convert ers - General
requirements and line commutated converters
BS EN50081-2: 1995 Generic Emission St andard - Industrial
Environment
BS EN50082-2: 1995 Generic Immunity St andard - Industrial
Environment
®
Proviso: The CombiDrive
an OPm2 is connected.
European Machinery Directive
The CombiDrive® product (combined inverter and motor ass embly) is
suitable for incorporation into machinery.
The CombiDrive
which it is incorporated has been certified to be in c ompliance with the
provisions of the European Directive 89/392/EEC.
Note: Only valid for machinery to be operated in the European
®
must not be put into serv ice until the machi nery i nto
Community.
European EMC Directive
When installed according to the recommendations described in this
manual, the Co mb iD ri ve
defined by the EMC Product Standard for Power Drive Systems
EN61800-3.
does not meet CE requirements when
®
fulfills all requirements of the EMC directive as
05.02.01
© STÖBER plc 199
Page 4
English 2. Installation
8
1. OVERVIEW
The CombiDrive® is an integrated motor/inverter for variable speed applications.
The inverter is microproc ess or -c ontr olled and us es s tate of the ar t IG BT tec hnology for r eliability and flex ibility.
A special pulse-width modulation method with ultrasonic pulse frequency permits extremely quiet motor
operation. Inverter and motor protection is provided by comprehensive protective functions.
Features:
• Easy to install and commission.
• Closed loop control using a Proportional, Integral (PI) control loop function.
• High starting torque with programmable starting boost.
• Remote control capability via RS485 serial link using the USS protocol.
• Ability to control up to 31 CombiDrive
• Optional remote control capability via RS485 serial link using PROFIBUS-DP.
• Factory default parameter settings pre-programmed for European and North American requirements.
• Output frequency (and hence motor speed) can be controlled by one of four methods:
(1) Built-in potentiometer.
®
via the USS protocol.
(2) High resolution analogue setpoint (voltage or current input).
(3) Fixed frequencies via binary inputs.
(4) Serial interface.
• Built-in dc injection braking.
• Acceleration/deceleration times with programmable smoothing.
• Single signal relay output incorporated.
• External connection for optional Clear Text Display (OPm2) or for use as external RS485 interface.
• Fast Current Limit (FCL) for reliable trip-free operation.
• Optional factory-fitted resistive braking unit (also available as a separate post-sale option).
• Optional motor brake and interface.
• Integral class A or class B filter options.
05.02.01
2
© STÖBER plc 199
Page 5

2. Installation English
y
e
2. INSTALLATION
WARNING
To guarantee the safe operation of the equipment it must be installed and commissioned b
qualified personnel only.
Take particular note of the general and regional installation and safety regulations regarding
work on high voltage installations (e.g. VDE), as well as the relevant regulations r egarding th
correct use of tools and personal protective gear.
Use the lifting eyes provided if the motor has to be lifted. Do not lift machine s ets (e.g. built- on
gearboxes, fan units) by suspending the individual machines!
If the PROFIBUS option has been fitted, remove the PROFIBUS module before attaching
cables or chains to the lifting eyes.
Always check the capacity of the hoist before lifting any equipment.
2.1 Wiring Guidelines to Minimise the Effects of EMI
The CombiDrive® are designed to operate in an industrial environment where a high level of Electro Magnetic
Interference (EMI) can be expected. Usually, good installation practices will ensure safe and trouble free
operation. However, if problems are encountered, the following guidelines may prove useful. In particular,
grounding of the system 0V at the inverter, as described below, may prove effective.
(1) Ensure that all equipment is well earthed using short, thick earthing c able connec ted to a c ommon s tar
point or busbar. It is particularly important that any control equipment that is connected to the inverter
(such as a PLC) is connected to the s ame earth or st ar point as the inv erter via a s hort, thick link. Flat
conductors (e.g. metal brackets) are preferred as they have lower impedance at high frequencies.
(2) Wherever possible, use screened leads for connections to the contr ol circuitry. Terminate the ends of
the cable neatly, ensuring that long strands of unscreened wire are not left visible.
(3) Separate the control cables from the power connections as much as possible, using separate trunking,
etc. If control and power cables cross, arrange the cables so that they cross at 90°.
(4) Ensure that contactors in the cubicle are suppressed, either with R-C s uppressors for AC contactors
or ‘flywheel’ diodes for DC contactors, fitted to the coils. Varistor suppressor s are als o effectiv e. This
is particularly important if the contactors are controlled from the relay connection on the CombiDrive
(5) Use screened or armoured cables for the power c onnections and ground the screen at both ends v ia
the cable glands.
On no account must safety regulations be compromised when installing the
CombiDrive
®
!
®
.
© STÖBER plc 1997
3
05.02.01
Page 6

English 2. Installation
8
e
e
2.2 Mechanical Installation
Figures 1 and 2 show dimensional information for all CombiDrive® variants.
Note: ‘Case size’ refers to the type of inverter box mounted on the motor. ‘Motor frame’ refers to the motor
frame size only.
®
Remove or tighten down screw-in lifting eyes prior to using the CombiDrive
Stable foundations or mounting conditions, exact alignment of the motors and a well-balanced tr ansmission
element are essential for quiet, vibration-free running. If necessary, insert shims under the motor's feet to
prevent strain, or balance the whole rotor and transmission element.
Always use the correct tools for fitting and removing transmission elements (coupling halv es, pulleys, pinions,
etc.).
The rotors are dynamically balanced with the full featherkey inserted as standard. Since 1991 the type of
balance has been marked on the drive end of the shaft (shaft end face). F denotes balanced with full
featherkey; H denotes balanced with half featherkey. Bear in mind the type of balance used when fitting the
transmission element.
Poor running characteristics can arise in cases where the trans mission elements have a length ratio of hub
length to length of shaft end < 0.8 and they run at speeds of > 1500 rpm. In such cases r ebalancing may be
necessary, e.g. by reducing the dis tance by whic h the featherk ey protr udes fr om the tr ansmis s ion element and
the shaft surface.
.
WARNING
Take suitable precautions to prevent transmission elements from being touched. If th
CombiDrive
secured in position to prevent it from flying off while the shaft is rotating.
Please check the following prior to commissioning:
• The rotor turns freely without rubbing.
• The motor is assembled and aligned properly.
• The transmission elements are adjusted correctly (e.g. belt tension) and the transmission element is
suitable for the given operating conditions.
• All electrical connections, mounting screws and connecting elements are tightened and fitted correctly.
• All protective conductors are installed properly.
• Any auxiliary equipment that might be fitted (e.g. brakes) is in working order.
• Protection guards are installed around all moving and live parts.
• The maximum speed (see rating plate) is not exceeded. Note that the maximum speed is the highest
operating speed permitted for short periods. Remember that motor noise and vibration are wors e at this
speed and bearing life is reduced.
The above list is not meant to be exhaustive - additional checks may also be required.
®
is started up without a transmission element attached, the featherkey must b
05.02.01
4
© STÖBER plc 199
Page 7

2. Installation English
CombiDrive® – Dimension (Only dimensions of the motor, total dimensions of the gear motor see
MGS-catalog, Impr.-No. 440 637)
qx = Max. dimension; Given either through the inverter or through the fan cowl.
single-phase
three-phase
Motor-type
71 K 0,25 kW PM 25/1 122 182 237
71 L 0,37 kW PM 37/1 122 182 237
80 K 0,55 kW PM 55/1 122 193 259,5
80 L 0,75 kW PM 75/1 122 193 259,5
Motor-type
71 L 0,37 kW PM 37/3 122 182 237
80 K 0,55 kW PM 55/3 122 193 259,5
80 L 0,75 kW PM 75/3 122 193 259,5
90 K 1,1 kW PM 110/3 171 201 296
90 L 1,5 kW PM 150/3 171 201 296
100 K 2,2 kW PM 220/3 171 234 328,5
100 L 3,0 kW PM 300/3 171 234 328,5
112 K 4,0 kW PM 400/3 171 248,5 353
132 K 5,5 kW PM 550/3 171 264,5 372,5
132 L 7,5 kW PM 750/3 171 264,5 372,5
Motor
output rating
Motor
output rating
Inverter type Width (b)
Inverter type Width (b)
Dimension
w´
Dimension
w´
qx
qx
Dimension in mm
Installation notes
The position of the inverter related to the gearbox, see MGS-catalog (Impr.-No. 440 637).
The rotation of the terminal box is not possible.
© STÖBER plc 1997
5
05.02.01
Page 8

English 2. Installation
8
c
l
2.3 Electrical Installation
Remove the four M5 cross-head screws on the inverter's cover to access the electrical terminals (see Figure 3
and Figure 4).
Notes: (1) Refer to the electrical data table for cable sizes (see section 6).
(2) We recommend introducing a `drip loop' when connecting the mains and c ontrol c ables (see
Figure 5).
CAUTION
The printed circuit boards contain CMOS components that are particularly sensitive to stati
electricity. For this reason, avoid touc hing the boards or components with your hands or meta
objects.
Mains Connector *
L1 L2 L3
Jumpers for
PI Input Type
Default = V
V
I
Control Cable Connector
(PL800)
112
Jumpers for
Analogue Input Type
Default = V
JP303
JP303
JP302
V
I
LED
(Green)
1 4
OPm2 Connector
(SK200)
JP303
JP301
JP300
LED
(Yellow)
-+
Contr ol
Potentiometer
(R314)
IMPORTANT
Ensure that the following tightening torques are used:
Electrical terminal screws: 1.1 Nm
Access cover retaining screws: 4.0 Nm
Gland hole covers: 1.0 Nm
Jumper in ‘V’ positi on = voltage input (default)
Not e:
Jumper in ‘I’ position = current input
Figure 1: Electrical Connection Diagram
05.02.01
Check that the supply voltage is correct for t he
*
COMBIMASTER used by referring to the voltage
code part of t he or der number (see section 6).
© STÖBER plc 199
6
Page 9

2. Installation English
h
2.3.1 Mains Cable Connections
Ensure that the power source supplies the correct voltage and is designed for the necessary current. Ens ure
that the appropriate circuit-breakers with the s pecified current rating are connected between the power supply
and CombiDrive
®
(see section 6).
Use Class 1 60/75oC copper wire only.
Use a 4-core screened cable (for cross-section of each c ore see section 6). If crimp terminals are used then
they must be insulated. If crimps are not used, the strip length must not exceed 5 mm.
Feed the power cable into the inverter via the gland hole nearest to the motor shaft (see Figure 3). Connect the
power leads to terminals L1, L2, L3 and the separate earth.
Use a 4 - 5 mm cross-tip screwdriver to tighten the terminal screws.
2.3.2 Control Cable Connections
CAUTION
The control and power supply cables must be laid separately. They must not be fed throug
the same cable conduit/trunking.
Use screened cable for the control lead.
Feed the control cable into the inverter via the appropriate gland hole (s ee Figure 3). Unplug connector block
PL800 from the PCB and connect the control wires in acc ordance with the inform ation given in F igures 4a and
4b (also see Figure 3).
IMPORTANT: A wire link must be fitted between control terminals 5 (DIN1) and 8 (P15+) otherwise the
CombiDrive
®
will not operate when control potentiometer R314 is used. The wire link must be
removed when operation via a run/stop switch is required.
Plug the connector block back into the PCB, refit the cover and tighten the four securing screws.
Rel ay
(24 V dc, 1 A max.)
P10+0VAIN+AIN-DI N1DIN2
123456
Power Supply
for
Analogue Input
1234
0V
N (- )
For USS
Protocol
5V
(250 mA max.)
P (+)
RL1B
RL1C
(COM)
(0 - 10 V or 0 - 20 mA)
(NO)
PI +ve Input
P15+PI-PI+
8
9101112
OR
Power Supply
(+15 V, max. 50 mA)
DIN3
7
Dig it al
Inputs
(7.5 - 33 V, max. 5 mA)
Analogue
Input
(0/2 - 10 V or
0/4 - 20 mA)
(+10 V, max. 10 mA)
PL800
Control Terminals
Figure 4a: Control Terminal Connections
© STÖBER plc 1997
SK200
Telephone Socket
(FCC 68 Type 4/4)
7
05.02.01
Page 10

English 2. Installation
8
3
1. 8 mm ma x.
1
2
OR
Figure 4b: Connecting Control Wires to PL800
1
3
2
Figure 2: Cable Connections with Drip Loop
05.02.01
© STÖBER plc 199
8
Page 11

2. Installation English
, V,
)
V
V
V
V
A
A
+
)
)
3
V
t
ype
2.3.3 Block Diagram
PE
3 AC 380 - 500 V
SI
Power supply for
PI feedback
transducer or
other load
PI -ve Inpu
PI +ve Input
: 0 - 10
2 - 10
I: 0 - 20 m
4 - 20 m
-
24 V
+
OR
OR
Relay
Connections
Connections for
Serial Link or OPm2
OR
PL800
AIN
AIN-
DIN1
DIN2
DIN
RL1B
RL1C
SK200
5V
0V
N (-
P (+
1
2
3
4
5
6
7
8
9
10
11
12
1
2
3
4
+10V (10 mA max.
0
A/D
+15
A/D
RS485
PE
CPU
I
V
JP302 JP303
JP300 JP301
PI Input T
Analogue Input Type
PE
PE
~
M
3 ~
L1, L2, L3
3 ~
U
GR
ZK
WR
W
AD
CPU
GR
M
RS485
SI
WR
ZK
Analogue to Digital Converter
Microprocessor
Rect if ier
Mot or
Serial Interface
Mai ns Fuse
Inverter
DC Link Capacitor
Figure 3: Block Diagram
© STÖBER plc 1997
9
05.02.01
Page 12

English 3. Operating Information
8
r
k
e
3. OPERATING INFORMATION
WARNING
The equipment must not be switched on until after its cover has been fitted and the cove
screws have been tightened to the correct torque.
After the power has been turned off, you must always wait one minute so that the dc-lin
capacitors can discharge. Do not remove the cover until this time has elapsed.
All settings must only be entered by qualified personnel, paying particular attention to th
safety precautions and warnings.
3.1 General
(1) The CombiDrive® does not have a main power switch and is therefore live when the mains supply is
connected.
(2) When delivered, the inverter has a frequency setpoint range of between 0 Hz and 50 Hz. Regar dless
of its initial position, internal potentiometer R314 must be turned fully counter-clockwise before the
CombiDrive
R314 can be accessed by removing the right-hand gland hole cover (see Figure 3).
(3) Parameter settings can only be changed by using either the serial interface (SK200) or an optional
Clear Text Display (OPm2). Refer to the parameter list in section 4 for a full description of each
available parameter.
Connecting a serial link or the OPm2 to the serial interface is made simple by removing the appropriate gland
hole cover (see Figure 3) and plugging a suitably terminated interface cable into the telephone soc ket
(SK200).
(4) Analogue input type selection is determined by jumpers JP300 and JP301. JP300 closed selects
current input, JP301 closed (default) selec ts voltage input. T hese jumpers can only be ac cess ed while
the cover is removed (see Figure 3).
(5) If the CombiDrive
change P077 from 0 to 1 (requires OPm2).
®
can be started.
®
is run unloaded (e.g. for test purposes) and vibration or trip conditions occur,
3.2 Basic Operation
There are two basic modes of operation for the CombiDrive®. Neither mode requires the use of an OPm2 or
serial link connection:
(1) Using the internal potentiometer only:
(a) For forward rotation, ensure that a link is fitted between DIN1 (pin 5) and P15+ (pin 8) on PL800 (see
Figure 4a). For reverse rotation, connect the link to DIN2 (pin 6) instead of DIN1.
(b) Apply mains power. The green and yellow LEDs will illuminate to show that power is applied. Turn
potentiometer R314 fully counter-clockwise, otherwise the CombiDrive
(c) Turn the potentiometer clockwise until the yellow LED extinguishes. This indicates that power is now
applied to the motor. Continue turning clockwise to increase the speed of the motor.
(d) Turn the potentiometer counter-clockwise to reduce the speed of the motor . Turning the potentiometer
fully counter-clockwise causes the motor to slow to a complete stop. Check that both LEDs are
illuminated (STANDBY mode).
05.02.01
10
®
cannot be started.
© STÖBER plc 199
Page 13

3. Operating Information English
(2) Using a combination of the internal potentiometer and a run/stop switch:
(a) Connect a run/stop switc h between DIN1 (pin 5) and P15+ (pin 8) on PL800 (see Figur e 4a) if
forward rotation is required. If reverse rotation is required instead, connect the s witch to DIN2
(pin 6) instead of DIN1.
IMPORTANT
In either case, if a link has been fitted between pin 5 and pin 8 it must be remov ed before the
run/stop switch is fitted.
(b) Apply mains power. The green and yellow LEDs will illuminate to show that power is applied.
(c) Set the external run/stop switch to ON.
(d) Turn potentiometer R314 clockwise to set the required motor speed.
(e) Stop the motor by setting the external on/off switch to OFF. When the switch is set to ON
again, it will run at the speed previously set using the potentiometer.
3.3 Operation - External Analogue Control
The method of setting up the CombiDrive® for use with external analogue voltage control is des cribed below.
This method can use both the internal potentiometer and external analogue voltage control. It does not require
the use of an OPm2 or serial link connection.
(1) Connect a 4.7 kΩ potentiometer to the control terminals as shown in Figure 3 or connect pin 2 (0V) to pin 4
(AIN-) and a 0 - 10 V signal between pin 2 (0V) and pin 3 (AIN+).
(2) Ensure that a link is fitted between pin 5 (DIN1) and pin 8 (P15+).
(3) Check that voltage input is selected by ensuring that the jumper is fitted to JP301.
(4) Refit the cover, tighten the cover screws to the correct torque and then apply mains power to the inverter.
(5) Turn the external potentiometer (or adjust the analogue control voltage) until the desired frequency is
achieved. The unit will not switch on until a minimum of 2 V has been applied.
Note
The frequency set by the external voltage is added to the frequency set by the internal potentiometer.
As with Basic Operation (2), a run/stop switch can be used to start and stop the motor, or the direction of
rotation can be changed by connecting the link to DIN2 instead of DIN1.
3.4 Operation - Digital Control
This method of operation requires either a Clear Tex t Display (OPm2) or a se rial link connection. Fo r a basic
startup configuration using digital control, proceed as follows:
(1) Remove the link that connects control terminal 5 to terminal 8 (if one has been fitted).
(2) Connect control terminal 5 to terminal 8 via a s imple on/off switch. This sets up the inver ter for clock wise
rotation (default). If counter-clockw ise operation is required, connect a s witch between contr ol terminals 6
and 8.
(3) Connect the OPm2 or serial link to SK200. Refit the cov er, tighten the cover screws to the correct torque
and then apply mains power to the inverter.
(4) Set parameter P006 to 000 to specify digital setpoint.
(5) Set parameter P005 to the desired frequency setpoint.
(6) Set the external on/off switch to ON or pr ess the ON button on the OPm2 (set P007 = 001 to use the
OPm2). The CombiDrive
®
will now run at the frequency set by P005.
3.5 Stopping the Motor
Via the external on/off switch: setting the switch to OFF overrides the setting on the potentiometer and
causes the motor to come to a controlled stop.
Via the potentiometer: turning the potentiometer counter-clockwise until the input voltage drops below 1 V
causes the motor to slow to a stop.
© STÖBER plc 1997
11
05.02.01
Page 14
English 3. Operating Information
8
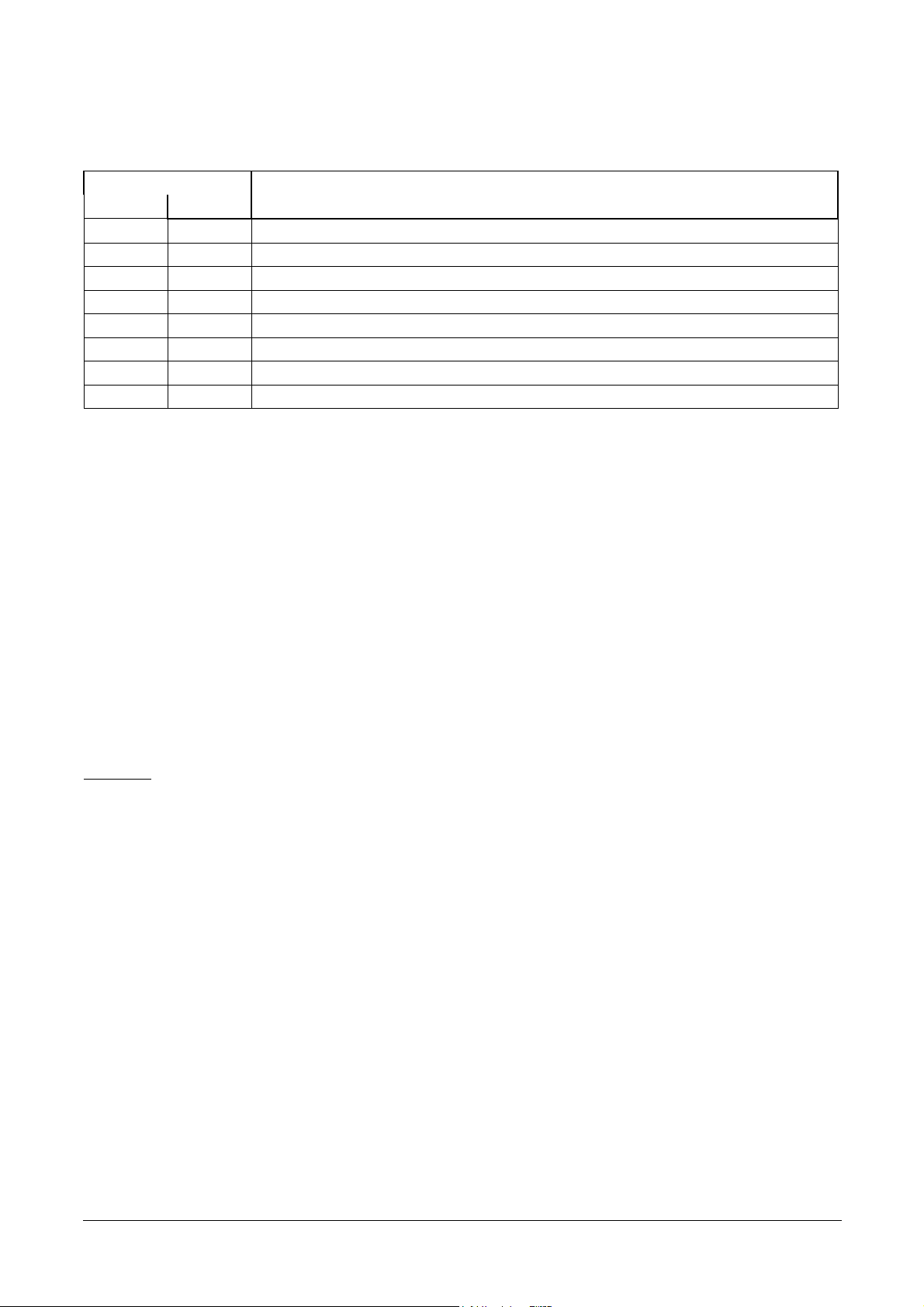
3.6 If the Motor Does Not Start Up
Check the LEDs on the side of the inverter:
LED State CombiDrive
Green Yellow
ON ON Mains power on, CombiDrive® not running (STANDBY)
ON OFF CombiDrive® running, as per control commands (ON)
Flashing Flashing Current limit warning
Flashing ON CombiDrive® overtemperature
ON Flashing Motor overtemperature
OFF ON Other fault (e.g. tripped)
OFF Flashing Mains undervoltage
OFF OFF Mains supply fault (e.g. faulty external switch)
If a fault occurs: switch off, dis connect and then reconnec t the power and then switch on again. Switc h off if
the fault condition persists. Trips can be reset by connecting a switch to DIN3 (see parameter P053).
If a warning occurs: switch off, disconnect and reconnect the power and then switch on again.
In either of the above cases, if the fault/warning persists then further investigation requires an OPm2 or a serial
link connection.
®
Status
3.7 Local and Remote Control
The inverter can be controlled either loca lly (default), or remotely v ia a USS data line connected to the inter nal
RS485 telephone socket (SK200).
When local control is used (P910 = 0), the motor c an only be controlled via the internal potentiometer or the
control terminals. Control commands, setpoints or parameter changes received via the RS485 interface have
no effect.
For remote control, the serial interface is designed as a 2- wire connection for bi-direc tional data transmission.
Refer to parameter P910 in section 4 for the available remote control options.
When operating via remote control the inverter will not accept control commands from the terminals.
Exception: OFF2 or OFF3 c an be activated via parameter P051 to P053 ( refer to parameters P051 to P053 in
section 4).
Several CombiDrive
individually.
Note: If the inverter has been set up to operate via the serial link but does not run when an ON command is
received, try reversing the connections to terminals 3 and 4 on SK200.
For further information, refer to the following documents:
E20125-B0001-S302-A1 Application of the USS Protocol in SIMOVERT Units 6SE21 and
E20125-B0001-S302-A1-7600 Application of the USS Protocol in SIMOVERT Units 6SE21 and
®
can be connected to an external control unit at the same time and can be addressed
MICROMASTER (German)
MICROMASTER (English)
05.02.01
12
© STÖBER plc 199
Page 15

3. Operating Information English
–
3.8 Closed Loop Control
Closed loop control is only possible when an OPm2 or a serial link is connected to the CombiDrive®.
3.8.1 General Description
The CombiDrive® provides a Proportional/Integral (PI) control function for closed loop control ( see Figure 7) . PI
control is ideal for temperature or press ur e contr ol, or other applic ations where the c ontr olled var iable changes
slowly or where transient errors are not critical. This control loop is not suitable for use in systems where fast
response times are required.
Note: The closed loop function is not designed for speed control, but can be us ed for this prov ided that fast
response times are not required.
When closed loop PI control is enabled (P201 = 002), all setpoints are calibrated between zero and 100%, i.e.
a setpoint of 50.0 = 50%. This allows general purpose control of any process variable that is actuated by motor
speed and for which a suitable transducer is available.
Setpoint
Acceleration/
Low Pass
Filter
Scaling
+
P
P202
Decel er ati on
Ramp
Mot or
M
Process
e.g. fan
P002, P003
Feedback
(e.g. duct pressure)
Transducer
P208
P205
P206
Feedback
Sampl e
Rat e
P211, P212
I
P203, P207
Closed Loop Mode Disabled
P201 = 000
Closed Loop Mode Enabled
P201 = 002
P210
Feedback
Monitor
Figure 7: Closed Loop Control
3.8.2 Hardware Setup
Connect the signal wire from the external feedback transducer to control terminal 10. Set jumper JP303 if
voltage input type is required (default) or set JP302 if current input type is required.
15 V dc power for the feedback transducer can be supplied from control terminal 8.
3.8.3 Parameter Settings
Closed loop control cannot be used unless P201 is fir st set to 001. Most of the parameters associated with
closed loop control are shown in Figure 7. Other parameters which are also associated with closed loop
control are as follows:
P001 (value = 007)
P061 (value = 012 or 013)
P210
P220
Descriptions of all closed loop control parameters are provided in section 4. For further detailed information
about PI operation, refer to the Siemens DA 64 Catalogue.
© STÖBER plc 1997
13
05.02.01
Page 16

English 4. Clear Text Display Module & System Parameters
8
E
4. CLEAR TEXT DISPLAY MODULE & SYSTEM PARAMETERS
4.1 Clear Text Display Module (OPm2)
This section only applies for users who intend using the optional Clear Text Display module (OPm2) to
control the operation of the CombiDrive
The OPm2 module provides a multi-language user-friendly interface to the CombiDr ive
®
.
®
. The display is menu-
driven and provides information in simple text form. It also includes built-in context-sensitive Help screens.
As well as enabling direct control of the motor, the OPm2 extends the functionality of the CombiDrive
®
by
providing access to a comprehens ive range of adjustable parameters. Setting these par ameters will allow you
to customise the operation of the CombiDrive
JOG
1
But to n
RUN / STOP
Inducator
2
STOPPED →
P000 F=0.00Hz
=0.0A RPM=0
I
V=0.0V
RUN
But to n
3
RUN STOP
®
to meet almost any application requirement.
M
▼
M
LCD
Scre en
P
▲
▼
FORWARD / REVERSE
But to n
6
Jog
STOP
4
But ton
Menu
P
UP / INCREASE
Freque ncy
7
MENU
5
But ton
1
Pressing thi s but ton while the motor is stopped causes i t to
start and run at the pr eset jog frequency. The motor stops as
soon as the button is rel eased. Pressing this butt on while t he
motor is running has no effect. Disabled if P007 or 123 = 0.
2
indi cates that t he motor is running.
Gre en
Flashing green
indicates that the motor is ramping up or
down.
indi cates that the motor is stationary.
Red
Flashing red
3
Press to star t the i nverter. Disabled if P007 or P121 = 0.
4
Press to stop t he i nverter.
5
Changes the display to show the menu opti ons. Pressi ng and
indi cates a fault condi tion.
holding this button down and then pressing the ∇ button
causes the Help screen to be displayed.
DOWN / DECREAS
Freque ncy
Parameterisation
6
Press to change the dir ection of rotat ion of t he motor.
But to n
8
9
REVERSE is indicated by a minus sign (values <100) or a
flashing decimal point (values > 100). Disabled i f P007 or
P122 = 0.
7
Press to INCREASE frequency. Used to change parameter
numbers or values to higher settings duri ng the
parameterisati on procedure. Disabled i f P124 = 0.
8
Press to DECREASE frequency. Used t o change parameter
numbers or values t o lower settings during the
parameterisati on procedure. Disabled i f P124 = 0.
9
Press to access par ameters. Disabled if P051 - P053 = 14
when using di gital inputs.
Figure 8: Clear Text Display Module (OPm2)
05.02.01
© STÖBER plc 199
14
Page 17

4. Clear Text Display Module & System Parameters English
R
4.2 System Parameters
The parameters listed here can only be accessed via the OPm2 or a serial link to the CombiDrive®. If the
CombiDrive
®
is to be operated only using analogue control within the 0 - 50 Hz frequenc y range then ac c es s to
these parameters is not required.
Note: The control buttons on the OPm2 (RUN, REVERSE and JOG) are disabled by default and cannot be
used until P007 has been set to ‘1’.
Access to parameters is determined by the value set in P009. Check that the key par ameters necessary for
your application have been programmed.
P009 options are:
0 = Only the parameters from P001 to P009 can be read and set.
1 = Parameters P001 to P009 can be set and all other parameters can only be read.
2 = All parameters can be set, but P009 resets to 0 the next time power is removed from the inverter.
3 = All parameters can always be set.
Note: In the following parameter table:
‘•' Indicates parameters that can be changed during operation.
‘✩✩✩' Indicates that the value of this factory setting depends on the rating of the motor.
Parameter Function Range
Description / Notes
[Default]
P000
Operating display - This displays the output selected in P001 on the second line of the
LCD screen.
If output frequency has been selected (P001 = 0) and the inverter is
OFF, the display alternates between the current frequency (F) and the
frequency that the inverter will run at when the RUN button is pressed
(S). If P001 is set to any other value then only the actual value is
displayed on this line of the display.
In the event of a fault, the relevant fault code (Fxxx) is displayed (see
section 5). In the event of a warning the display flashes.
P001 ••••
P002 ••••
Display mode 0 - 8
[0]
Ramp up time (seconds) 0 - 650.00
[10.00]
Display selection:
0 = Output frequency (Hz)
1 = Frequency setpoint (i.e. speed at which inverter is set to run)
(Hz)
2 = Motor current (A)
3 = DC-link voltage (V)
4 = Motor torque (% nominal)
5 = Motor speed (RPM)
6 = USS status (see section 7.2)
7 = Closed loop control setpoint (% of full scale)
8 = Output voltage
This is the time taken for the motor to accelerate from standstill to the
maximum frequency as set in P013.
Setting the ramp up time too short can cause the inverter to trip (fault code
F002 - overcurrent).
Frequency
f
max
0 Hz
amp up
time
(0 - 650 s)
Time
© STÖBER plc 1997
15
05.02.01
Page 18

English 4. Clear Text Display Module & System Parameters
8
R
4
4
Parameter Function Range
[Default]
P003 ••••
Ramp down time (seconds) 0 - 650.00
[25.00]
P004 ••••
Smoothing (seconds) 0 - 40.0
[0.0]
Description / Notes
This is the time taken for the motor to decelerate from maximum frequency
(P013) to standstill.
Setting the ramp down time too short can cause the inverter to trip (fault
code F001 - overvoltage).
This is also the period for which DC injection braking is applied (see P073)
Frequency
f
max
0 Hz
amp down
time
(0 - 650 s)
Time
Used to smooth the acceleration/deceleration of the motor (useful in
applications where it is important to avoid ‘jerking’, e.g. conveyor
systems, textiles, etc.).
Smoothing is only effective if the ramp up/down time exceeds 0.3 s.
Frequency
f
max
(P013)
P002 = 10 s
P005 ••••
P006
Digital frequency setpoint (Hz) 0 - 120.00
[50.00]
Frequency setpoint source
selection
0 - 2
[1]
0 Hz
P00
= 5 s
Total acceleration time
= 15 s
P00
= 5 s
Time
Note: The smoothing curve for deceleration is based on the ramp
up gradient (P002) and is added to the ramp down time set
by P003. Therefore, the ramp down time is affected by
changes to P002.
Sets the frequency that the inverter will run at when operated in digital
mode. Only effective if P006 set to ‘0’.
Sets the control mode of the inverter.
0 = Digital. The inverter runs at the frequency set in P005.
If P007 is set to zero, the frequency may be adjusted by setting
any two of digital inputs P051 - P053 to values of 11 and 12.
1 = Analogue. The frequency is set via an analogue input signal
or the internal potentiometer.
2 = Fixed frequency or motor potentiometer. Fixed frequency is
only selected if the value of at least one binary input (P051 P053) = 6, 17 or 18.
Notes: (1) If P006 = 1 and the inverter is set up for remote
control operation, the analogue inputs remain active
(added to the serial setpoint).
(2) Motor potentiometer setpoints via digital inputs
are stored when P011 = 1.
05.02.01
16
© STÖBER plc 199
Page 19

4. Clear Text Display Module & System Parameters English
Parameter Function Range
[Default]
P007
P009 ••••
P011
P012 ••••
Keypad control 0 - 1
[0]
Parameter protection setting 0 - 3
[0]
Frequency setpoint memory 0 - 1
[0]
Minimum motor frequency (Hz) 0 - 120.00
[0.00]
Description / Notes
0 = The RUN, REVERSE and JOG buttons are disabled. Control is
via digital inputs (see parameters P051 - P053). ∆ and ∇ may
still be used to control frequency provided that P124 = 1 and a
digital input has not been selected to perform this function.
1 = OPm2 buttons are enabled (can be individually disabled
depending on the setting of parameters P121 - P124). The
digital inputs for RUN, JOG and ∆ / ∇ are disabled.
Determines which parameters can be adjusted:
0 = Only parameters from P001 to P009 can be read/set.
1 = Parameters from P001 to P009 can be set and all other
parameters can only be read.
2 = All parameters can be read/set but P009 automatically
resets to 0 when power is removed.
3 = All parameters can be read/set.
0 = Disabled
1 = Enabled. The setpoint alterations made with the ∆ / ∇ buttons or
digital inputs are stored even when power has been removed
from the inverter.
Sets the minimum motor frequency (must be less than the value of
P013).
P013 ••••
P014 ••••
P015 ••••
P016 ••••
P017 ••••
Maximum motor frequency (Hz) 0 - 120.00
[50.00]
Skip frequency 1 (Hz) 0 - 120.00
[0.00]
Automatic restart after mains
failure.
Start on the fly 0 - 2
Smoothing type 1 - 2
0 - 1
[0]
[0]
[1]
Sets the maximum motor frequency.
A skip frequency can be set with this parameter to avoid the effects of
mechanical resonance. Frequencies within +/-(value of P019) of this
setting are suppressed. Stationary operation is not possible within the
suppressed frequency range - the range is just passed through.
Setting this parameter to ‘1’ enables the inverter to restart
automatically after a mains break or ‘brownout’, provided the run/stop
switch is still closed or the link is fitted, P007 = 0 and P910 = 0, 2 or 4.
0 = Disabled
1 = Automatic restart
Allows the inverter to start onto a spinning motor.
Under normal circumstances the inverter runs the motor up from 0 Hz.
However, if the motor is still spinning or is being driven by the load, it will
undergo braking before running back up to the setpoint - this can cause an
overvoltage trip. By using a flying restart, the inverter ramps up the output
voltage at the setpoint for the period defined by P020.
0 = Normal restart
1 = Flying restart after power up, fault or OFF2 ( if P018 = 1).
2 = Flying restart every time (useful in circumstances where the
motor can be driven by the load).
1 = Continuous smoothing (as defined by P004).
2 = Discontinuous smoothing. This provides a fast unsmoothed
response to STOP commands and requests to reduce frequency.
Note: P004 must be set to a value > 0.0 for this parameter to have
any effect.
© STÖBER plc 1997
17
05.02.01
Page 20

English 4. Clear Text Display Module & System Parameters
8
Parameter Function Range
[Default]
P018 ••••
P019 ••••
P020
P021 ••••
P022 ••••
Automatic restart after fault 0 - 1
[0]
Skip frequency bandwidth (Hz) 0 - 10.00
[2.00]
Flying start ramp time (seconds) 0.50 - 25.0
[5.0]
Minimum analogue frequency
(Hz)
Maximum analogue frequency
(Hz)
0 - 120.00
[0.00]
0 - 120.00
[50.00]
Description / Notes
Automatic restart after fault:
0 = Disabled
1 = The inverter will attempt to restart up to 5 times after a fault.
If the fault is not cleared after the 5th attempt, the inverter
will remain in the fault state until reset.
There is an increasing time delay between each restart
attempt.
Frequencies set by P014, P027, P028 or P029 that are within +/- the
value of P019 are suppressed.
Used in conjunction with P016 (set longer times if persistent F002
trips occur).
Frequency corresponding to the lowest analogue input value, i.e.
0 V / 0 mA or 2 V / 4 mA. This can be set to a higher value than P022
to give an inverse relationship between analogue input and frequency
output (see diagram in P022).
Frequency corresponding to the highest analogue input value, i.e.
10 V / 20 mA, determined by P023. This can be set to a lower value
than P021 to give an inverse relationship between analogue input and
frequency output.
i.e.
f
P021
P022
P023 ••••
P024 ••••
Analogue input type 0 - 2
[2]
Analogue setpoint addition 0 - 2
[0]
P022
P021
V / I
Note: The output frequency is limited by values entered for
P012/P013.
Selects analogue input type according to the setting of jumpers
JP300/JP301:
JP301 closed OR JP300 closed
0 = 0 V to 10 V 0 mA to 20 mA
1 = 2 V to 10 V 4 mA to 20 mA
2 = [2 V* to 10 V] 4 mA* to 20 mA
* The inverter will come to a controlled stop if V < 1 V or 2 mA.
WARNING: The motor can automatically run without a
potentiometer or voltage source connected
between pins 3 and 4.
With P023=2, the motor will automatically start
when V exceeds 2 V. This equally applies to
analogue and digital control (i.e. P006 = 0 or 1).
If the inverter is not in analogue mode (P006 = 0 or 2), setting this
parameter to ‘1’ causes the analogue input value to be added.
0 = No addition.
1 = Addition of the analogue setpoint (defined by P023) to the
fixed frequency or the motor potentiometer frequency.
2 = Scaling of digital/fixed setpoint by analogue input (P023) in
the range 0 - 100%.
Note: By selecting a combination of reversed negative fixed
frequency settings and analogue setpoint addition, it is
possible to configure the inverter for ‘centre zero’ operation
with a +/-5 V supply or a 0 - 10 V potentiometer so that the
output frequency can be 0 Hz at any position, including the
centre position.
05.02.01
18
© STÖBER plc 199
Page 21

4. Clear Text Display Module & System Parameters English
Parameter Function Range
[Default]
P027 ••••
P028 ••••
P029 ••••
P031 ••••
P032 ••••
P035
P041 ••••
P042 ••••
P043 ••••
P044 ••••
P045
P046 ••••
P047 ••••
P048 ••••
P050
Skip frequency 2 (Hz)
Skip frequency 3 (Hz) 0 - 120.00
Skip frequency 4 (Hz) 0 - 120.00
Jog frequency right (Hz) 0 - 120.00
Jog frequency left (Hz) 0 - 120.00
Reverse motor direction 0 - 1
Fixed frequency 1 (Hz) 0 - 120.00
Fixed frequency 2 (Hz) 0 - 120.00
Fixed frequency 3 (Hz) 0 - 120.00
Fixed frequency 4 (Hz) 0 - 120.00
Inversion fixed setpoints for
fixed frequencies 1 - 4
Fixed frequency 5 (Hz) 0 - 120.00
Fixed frequency 6 (Hz) 0 - 120.00
Fixed frequency 7 (Hz) 0 - 120.00
Inversion fixed setpoints for
fixed frequencies 5 - 7
0 - 120.00
[0.00]
[0.00]
[0.00]
[5.00]
[5.00]
[0]
[5.00]
[10.00]
[15.00]
[20.00]
0 - 7
[0]
[25.00]
[30.00]
[35.00]
0 - 7
[0]
Description / Notes
See P014.
See P014.
See P014.
Jogging is used to advance the motor by small amounts. It is
controlled via the JOG button or with a non-latching switch on one of
the digital inputs (P051 to P053).
If jog right is enabled (DINn = 7), this parameter controls the frequency at
which the inverter will run when the switch is closed. Unlike other setpoints, it
can be set lower than the minimum frequency.
If jog left is enabled (DINn = 8), this parameter controls the frequency at which
the inverter will run when the switch is closed. Unlike other setpoints, it can be
set lower than the minimum frequency.
0 = Normal direction control.
1 = Direction control is reversed.
Valid if P006 = 2 and P053 = 6 or 18 or P051 = P052 = P053 = 17.
Valid if P006 = 2 and P052 = 6 or 18 or P051 = P052 = P053 = 17.
Valid if P006 = 2 and P051 = 6 or 18 or P051 = P052 = P053 = 17.
Valid if P006 = 2 and P051 = P052 = P053 = 17.
Sets the direction of rotation for the fixed frequency:
FF 1 FF 2 FF 3 FF 4
P045 = 0 ⇒⇒ ⇒⇒
P045 = 1 ⇐ ⇒⇒⇒
P045 = 2 ⇒ ⇐ ⇒⇒
P045 = 3 ⇒⇒ ⇐ ⇒
P045 = 4 ⇒⇒ ⇒⇐
P045 = 5 ⇐⇐⇒⇒
P045 = 6 ⇐⇐⇐⇒
P045 = 7 ⇐⇐⇐⇐
⇒ Fixed setpoints not inverted.
⇐ Fixed setpoints inverted.
Valid if P006 = 2 and P051 = P052 = P053 = 17.
Valid if P006 = 2 and P051 = P052 = P053 = 17.
Valid if P006 = 2 and P051 = P052 = P053 = 17.
Sets the direction of rotation for the fixed frequency:
FF 5 FF 6 FF 7
P050 = 0 ⇒⇒ ⇒
P050 = 1 ⇐ ⇒⇒
P050 = 2 ⇒ ⇐ ⇒
P050 = 3 ⇒⇒ ⇐
P050 = 4 ⇒⇒ ⇒
P050 = 5 ⇐⇐⇒
P050 = 6 or 7 ⇐⇐⇐
⇒ Fixed setpoints not inverted.
⇐ Fixed setpoints inverted.
© STÖBER plc 1997
19
05.02.01
Page 22

English 4. Clear Text Display Module & System Parameters
8
Parameter Function Range
[Default]
P051 Selection control function, DIN1 0 - 19
(terminal 5), fixed frequency 3 [1]
or binary fixed frequency bit 0.
P052 Selection control function, DIN2 0 - 19
(terminal 6), fixed frequency 2. [2]
or binary fixed frequency bit 1.
P053 Selection control function, DIN3 0 - 19
(terminal 7), fixed frequency 1 [10]
or binary fixed frequency bit 2.
Description / Notes
Function of P051 to P053
Value
Input disabled
0
ON right
1
ON left
2
Reverse
3
OFF2 *
4
OFF3 *
5
Fixed frequencies 1 - 3
6
Jog right
7
Jog left
8
Remote operation
9
Fault code reset
10
Increase frequency **
11
Decrease frequency **
12
Disable analogue input
13
(setpoint is 0.0 Hz)
Disable the ability to change
14
parameters
Enable dc brake
15
Do not use
16
Binary fixed frequency control
17
(fixed frequencies 1 - 7)
As 6, but input high will also
18
request RUN *
External trip/PTC
19
Function,
low state
Off
Off
Normal
OFF2
OFF3
Off
Off
Off
Local
Off
Off
Off
Analogue
on
‘P’ Enabled
Off
Off
Off
Yes (F012)
Function,
high state
On right
On left
Reverse
On
On
On
Jog right
Jog left
Remote
Reset on
rising edge
Increase
Decrease
Analogue
disabled
‘P’ Disabled
Brake on
On
On
No
P056
P058 ●
Digital input debounce time 0 - 2
[0]
RUN command delay (seconds) 0.0 - 650.0
[0.0]
* See section 3.7.
** Only effective when P007 = 0.
Binary Coded Fixed Frequency Mapping
(P051, P052, P053 = 17)
DIN3 (P053) DIN2 (P052) DIN1 (P051)
STOP 000
RUN to FF1 (P041) 0 0 1
RUN to FF2 (P042) 0 1 0
RUN to FF3 (P043) 0 1 1
RUN to FF4 (P044) 1 0 0
RUN to FF5 (P046) 1 0 1
RUN to FF6 (P047) 1 1 0
RUN to FF7 (P048) 1 1 1
Use a fast response time only when a ‘clean’ input signal
is used, e.g. from a PLC. Use a slow response time to
allow filtering of the signal if a noisy input (e.g. a switch) is
used.
0 = 12.5 ms
1 = 7.5 ms
2 = 2.5 ms
Sets a time delay before the RUN command takes effect.
This parameter affects run commands from all sources
except the RUN button on the OPm2 (this activates the
drive immediately)..
05.02.01
20
© STÖBER plc 199
Page 23

4. Clear Text Display Module & System Parameters English
t
t
f
Parameter Function Range
[Default]
P061
P062
P063
P064
Selection relay output RL1 0 - 13
[6]
Electro-mechanical brake option
control
External brake release delay
(seconds)
External brake stopping time
(seconds)
0 - 4
[0]
0 - 20.0
[1.0]
0 - 20.0
[1.0]
Description / Notes
Value Relay function Active
0 No function assigned (relay not active) Low
1 Inverter is running High
2 Inverter frequency 0.0 Hz Low
3 Motor run right has been selected High
4 External brake on (see parameters P063/P064)
5 Inverter frequency less than or equal to minimum
1
Low
Low
frequency
6 Fault indication
2
Low
7 Inverter frequency greater than or equal to setpoint High
8 Warning active
3
Low
9 Output current greater than or equal to P065 High
10 Motor current limit (warning)
11 Motor over temperature (warning)
3
3
Low
Low
12 Closed loop motor LOW speed limit High
13 Closed loop motor HIGH speed limit High
1
External brake requires 24 V (max.) dc slave relay.
2
Inverter switches off (see parameter P930 and section 5).
3
Inverter does not switch off (see parameter P931).
4
‘Active low’ = relay OPEN. ‘Active high’ = relay CLOSED.
This enables or disables the electro-mechanical brake option.
Operation is the same as for P061 = 4, except that the brake control
voltage is supplied directly.
0 = Disabled
1 - 3 = Do not use
4 = Enabled
Only effective if the relay output is set to control an external brake (P061
= 4) or the electro-mechanical brake option is used (P062 = 4). In this
case when the inverter is switched on, it will run at the minimum
frequency for the time set by this parameter before releasing the brake
control relay and ramping up (see illustration in P064).
As P063, only effective if the relay output is set to control an external
brake (P061 = 4) or the electro-mechanical brake option is used (P062 =
4). This defines the period for which the inverter continues to run at
the minimum frequency after ramping down and while the external
brake is applied.
4
ON OFF
f
min
t
P063
A
B
A = Brake applied
P064
B = Brake removed
A
Notes: (1) Settings for P063 and P064 should be slightly longer
than the actual time taken for the external brake to
apply and release respectively.
(2) Setting P063 or P064 to too high a value, especially
with P012 set to a high value, can cause an
overcurrent warning or trip as the inverter attempts to
move a locked motor shaft.
© STÖBER plc 1997
21
05.02.01
Page 24

English 4. Clear Text Display Module & System Parameters
8
Parameter Function Range
[Default]
P065
Current threshold for relay (A) 0 - 99.9
[1.0]
P071 ••••
P072 ••••
P073 ••••
Slip compensation (%) 0 - 200
[0]
Slip limit (%) 0 - 500
[250]
DC injection braking (%) 0 - 250
[0]
P074 ••••
I2t motor derating 0 - 1
[1]
P077
Control mode 0 - 2
[0]
Description / Notes
This parameter is used when P061 = 9. The relay switches on when
the motor current is greater than the value of P065 and switches off
when the current falls to 90% of the value of P065 (hysteresis).
The inverter can estimate the amount of slip in an
asynchronous motor at varying loads and increase its
output frequency to compensate. This parameter `fine
tunes' the compensation for different motors in the range
0 - 200% of the inverter's nominal estimate.
This limits the slip of the motor to prevent `pull-out'
(stalling), which can occur if slip is allowed to increase
indefinitely. When the slip limit is reached, the inverter
reduces the frequency until the level of slip is acceptable.
This stops the motor by applying a DC current. This causes heat to be
generated in the motor rather than the inverter and holds the shaft
stationary until the end of the braking period. Braking is effective for
the period of time set by P003.
The DC brake can be activated using DIN1 - DIN3 (braking is active
for as long as the DIN is high - see P051 - P053).
WARNING: Frequent use of long periods of dc injection
braking can cause the motor to overheat.
If DC injection braking is enabled via a digital
input then DC current is applied for as long as the
digital input is high. This causes heat in the
motor.
0 = Disabled
2
1 = Enabled. Causes an F074 trip if the motor I
t calculation reaches its
limit. The time taken to trip is dependent on the difference between
the overload current and the nominal motor current rating stored in
P083 - typically a 150% overload will result in a switch-off in 1-2
minutes.
WARNING: For safety-critical applications, it is recommended
that a motor PTC is used to protect the motor from
overheating.
Controls the relationship between the speed of the motor and the
voltage supplied by the inverter.
0 = Linear voltage/frequency.
Use this curve for synchronous motors or motors connected
in parallel.
1 = Linear voltage/frequency with energy saving.
Output voltage is reduced at low load (not recommended for
dynamic loads).
2 = Quadratic voltage/frequency relationship.
This is suitable for centrifugal pumps and fans.
V
N
V
max
VN (P084)
0/1
2
f
(P081)
N
05.02.01
22
f
© STÖBER plc 199
Page 25

4. Clear Text Display Module & System Parameters English
Parameter Function Range
[Default]
P078 ••••
P079 ••••
P081
P082
P083
P084
P085
P086 ••••
P087
P089 ••••
P091 ••••
P092 ••••
Continuous boost (%) 0 - 250
[100]
Starting boost (%) 0 - 250
[0]
Nominal frequency for motor
(Hz)
Nominal speed for motor (RPM)
Nominal current for motor (A)
Nominal voltage for motor (V)
Nominal power for motor
(kW/hp)
Motor current limit (%) 0 - 250
Motor PTC enable 0 - 1
Stator resistance (Ω)
Serial link slave address 0 - 30
Serial link baud rate 3 - 7
0 - 120.00
[]
0 - 9999
[]
0.1 - 99.9
[]
0 - 1000
[]
0 - 100.0
[]
[150]
[0]
0.01-
100.00
[]
[0]
[6]
Description / Notes
Operates continuously over the whole frequency range.
For many applications it is necessary to increase low frequency
torque. This parameter sets the start-up voltage at 0 Hz to adjust the
available torque for low frequency operation. 100% setting will
produce rated motor current at low frequencies.
WARNING: If P078 is set too high, overheating of the motor
and/or an overcurrent trip (F002) can occur.
For drives which require a high initial starting torque, it is possible to
set an additional current (added to the setting in P078) during
ramping. This is only effective during initial start up and until the
frequency setpoint is reached.
Note: This increase is in addition to P078, but the total is limited to
250%.
‘These parameters are set in the factory and should not be changed
under normal circumstances.
The motor current can be limited with this parameter. If the set value
is exceeded, the output frequency is reduced until the current falls
below this limit. During this process, both LEDs will flash (see section
3.6).
Change this parameter only when the PTC option is fitted.
0 = Disabled
1 = Motor PTC enabled
Note: If P087 = 1 and the PTC input goes high then the inverter will
trip (fault code F004). Note that if the internal PTC gets too
hot, the inverter will trip (fault code F005).
Set in the factory. Do not adjust!
Up to 31 CombiDrive
controlled by a computer or PLC using the USS protocol. This
parameter sets a unique address for the inverter.
Sets the baud rate of the RS485 serial interface (USS protocol):
3 = 1200 baud
4 = 2400 baud
5 = 4800 baud
6 = 9600 baud
7 = 19200 baud
Note: Some RS232 to RS485 converters are not capable of
baud rates higher than 4800.
®
can be connected via the serial link and
© STÖBER plc 1997
23
05.02.01
Page 26
English 4. Clear Text Display Module & System Parameters
8
Parameter Function Range
[Default]
P093 ••••
P094 ••••
P095 ••••
P099 ••••
P101 ••••
P111
P112
P113
P121
P122
Serial link timeout (seconds) 0 - 240
[0]
Serial link nominal system
setpoint (Hz)
USS compatibility 0 - 2
Communication adapter type 0 - 1
Operation for Europe or USA 0 - 1
Inverter power rating (kW/hp) 0.0 - 10.00
Inverter type 1 - 8
COMBIMASTER model 24 - 29
Enable/disable RUN button 0 - 1
Enable/disable
FORWARD/REVERSE button
0 - 120.00
[50.00]
[0]
[0]
[0]
[]
[8]
[-]
[1]
0 - 1
[1]
Description / Notes
This is the maximum permissible period between two incoming data
telegrams. This feature is used to turn off the inverter in the event of a
communications failure.
Timing starts after a valid data telegram has been received and if a
further data telegram is not received within the specified time period,
the inverter will trip and display fault code F008.
Setting the value to zero switches off the control.
Setpoints are transmitted to the inverter via the serial link as
percentages. The value entered in this parameter represents 100%
(HSW = 4000H).
0 = Compatible with 0.1 Hz resolution
1 = Enable 0.01 Hz resolution
2 = HSW is not scaled but represents the actual frequency value to
a resolution of 0.01 Hz (e.g. 5000 = 50 Hz).
0 = Option module not present
1 = PROFIBUS module (enables parameters relating to PROFIBUS)
This sets the inverter for European or USA supply and motor
frequency:
0 = Europe (50 Hz)
1 = USA (60 Hz)
Note: After setting P101 = 1 the CombiDrive
factory defaults. i.e. P944 = 1 to automatically set P013 =
60 Hz, P022 = 60 Hz, P081 = 60 Hz, P082 = 1680 rpm and
P085 will be displayed in hp.
Read-only parameter that indicates the power rating of the inverter in
kW. e.g. 0.55 = 550 W
Note: If P101 = 1 then the rating is displayed in hp.
Read-only parameter.
1 = MICROMASTER series 2 (MM2)
2 = CombiDrive
3 = MIDIMASTER
4 = MICROMASTER Junior (MMJ)
5 = MICROMASTER series 3 (MM3)
6 = MICROMASTER Vector (MMV)
7 = MIDIMASTER Vector (MDV)
8 = CombiDrive
Read-only parameter.
24 = CM150/3
25 = CM220/3
26 = CM300/3
27 = CM400/3
28 = CM550/3
29 = CM750/3
0 = RUN button disabled.
1 = RUN button enabled (only possible if P007 = 1).
0 = FORWARD/REVERSE button disabled.
1 = FORWARD/REVERSE button enabled (only possible if P007 = 1).
®
®
series 2
®
must be reset to
05.02.01
24
© STÖBER plc 199
Page 27

4. Clear Text Display Module & System Parameters English
Parameter Function Range
[Default]
P123
P124
P125
P131
P132
P134
P135
P137
P140
P141
P142
P143
P151 ••••
P152 ••••
P201
P202 ••••
Enable/disable JOG button 0 - 1
[1]
Enable/disable ∆ and ∇ buttons
Reverse direction inhibit 0 - 1
Frequency setpoint (Hz)
Motor current (A)
DC link voltage (V)
Motor RPM
Output voltage (V)
Most recent fault code 0 - 9999
Most recent fault code -1 0 - 9999
Most recent fault code -2 0 - 9999
Most recent fault code -3 0 - 9999
Green LED function 0 - 5
Yellow LED function 0 - 5
PI closed loop mode 0 - 2
P gain (%) 0.0 - 999.9
0 - 1
[1]
[1]
0.00 -120.00
[-]
0.0 - 99.9
[-]
0 - 1000
[-]
0 - 40000
[-]
0 - 1000
[-]
[-]
[-]
[-]
[-]
[4]
[5]
[0]
[1.0]
Description / Notes
0 = JOG button disabled.
1 = JOG button enabled (only possible if P007 = 1).
0 = ∆ and ∇ buttons disabled.
1 = ∆ and ∇ buttons enabled (only possible if P007 = 1).
Note: This applies for frequency adjustment only. The buttons can
still be used to change parameter values.
0 = Reverse direction disabled. Inhibits reverse commands from
ALL sources (reverse RUN commands result in forward rotation)
1 = Normal operation (FORWARD/REVERSE operation allowed)
Read-only parameters. These are copies of the values selected
by P001 but can be accessed directly via the serial link.
The last recorded fault code (see section 5) is stored in this
parameter. It is cleared when the inverter is reset.
This is a copy of the code stored in P930.
This parameter stores the last recorded fault code prior to that stored
in P140/P930.
This parameter stores the last recorded fault code prior to that stored
in P141.
This parameter stores the last recorded fault code prior to that stored
in P142.
0 =Off
1 =On
2 = Fault mode: On = Tripped
Flashing = Warning
3 = Running mode:On = Motor running
Flashing = Inverter on but motor
stationary
4 = Default mode (see table in section 3.6)
5 = Not used
0 =Off
1 =On
2 = Fault mode: On = Tripped
Flashing = Warning
3 = Running mode:On = Motor running
Flashing = Inverter on but motor
stationary
4 = Not used
5 = Default mode (see table in section 3.6)
0 = Normal operation (closed loop control disabled).
1 = Not used
2 = Closed loop control using PI input for transducer feedback.
Proportional gain.
© STÖBER plc 1997
25
05.02.01
Page 28

English 4. Clear Text Display Module & System Parameters
8
Parameter Function Range
[Default]
P203 ••••
P205 ••••
P206 ••••
P207 ••••
P208
P210
P211 ••••
P212 ••••
P220 ••••
P331
P332
I gain (%) 0.00 -
99.99
[0.00]
Sample interval (x 25 ms) 1 - 2400
[1]
Transducer filtering 0 - 255
[0]
Integral capture range (%) 0 - 100
[100]
Transducer type 0 - 1
[0]
Transducer reading (%) 0.0 - 100.0
[-]
0% setpoint 0.00-
100.00
[0.00]
100% setpoint 0.00-
100.00
[100.00]
PI frequency cut-off 0 - 1
[0]
Analogue mode 0 - 4
[2]
Fine adjustment (%) 0 - 100
[10]
Description / Notes
Integral gain.
0.01% corresponds to the longest integral response time.
Sampling interval of feedback sensor.
0 = Filter off.
1 - 255 = Low pass filtering applied to transducer.
Percentage error above which integral term is reset to zero.
0 = An increase in motor speed causes an increase in sensor
voltage/current output.
1 = An increase in motor speed causes a decrease in sensor
voltage/current output.
Read only. Value is a percentage of full scale of the PI input.
Value of P210 to be maintained for 0% setpoint.
Value of P210 to be maintained for 100% setpoint.
0 = Normal operation
1 = Switch off inverter at or below minimum frequency.
0 = Internal potentiometer only
1 = External analogue input only
2 = Internal potentiometer + external analogue input
3 = Internal potentiometer fine, external input coarse
4 = Internal potentiometer coarse, external input fine
Percentage of fine tuning adjustment for P331 = 3 or 4.
P700
P701 ••••
P702
P723
P880
State of digital inputs 0 - 7
[-]
Specific to PROFIBUS-DP. See PROFIBUS Handbook for further
details. (Access only possible with P099 = 1.)
DIN3 DIN2 DIN1
0 =0 0 0
1 =0 0 1
2 =0 1 0
3 =0 1 1
4 =1 0 0
5 =1 0 1
6 =1 1 0
7 =1 1 1
Specific to PROFIBUS-DP. See PROFIBUS Handbook for further
details. (Access only possible with P099 = 1.)
05.02.01
26
© STÖBER plc 199
Page 29

4. Clear Text Display Module & System Parameters English
Parameter Function Range
[Default]
P910 ••••
Local/Remote mode 0 - 4
[0]
P918 ••••
P922
P923 ••••
Software version 0.00 -
99.99
[-]
Equipment system number 0 - 255
[0]
P927 ••••
P928 ••••
P930
P931
P944
Most recent fault code 0 - 9999
[-]
Most recent warning type 0 - 9999
[-]
Reset to factory default settings 0 - 1
[0]
Description / Notes
Sets the inverter for local control or remote control over the serial link:
0 = Local control
1 = Remote control (and setting of parameter values)
2 = Local control (but remote control of frequency)
3 = Remote control (but local control of frequency)
4 = Local control (but remote read and write access to
parameters and facility to reset trips)
Note: When operating the inverter via remote control (P910 = 1
or 3), the analogue input remains active when P006 = 1
and is added to the setpoint.
Specific to PROFIBUS-DP. See PROFIBUS Handbook for further
details. (Access only possible with P099 = 1.)
Contains the software version number and cannot be changed.
You can use this parameter to allocate a unique reference number to
the inverter. It has no operational effect.
Specific to PROFIBUS-DP. See PROFIBUS Handbook for further
details. (Access only possible with P099 = 1.)
The last recorded fault code (see section 5) is stored in this
parameter. It is cleared when the inverter is reset.
The last recorded warning is stored in this parameter until power is
removed from the inverter:
002 = Current limit active
003 = Voltage limit active
005 = Inverter over temperature (internal PTC)
Set to ‘1’ and then press P to reset all parameters except P101 to the
factory default settings.
P947
P958
P963
P967
P968
P970
P971 ••••
EEPROM storage control 0 - 1
[1]
Specific to PROFIBUS-DP. See PROFIBUS Handbook for further
details. (Cannot be accessed unless P099 = 1.)
0 = Changes to parameter settings (including P971) are lost when
power is removed.
1 = Changes to parameter settings are retained during periods
when power is removed.
IMPORTANT
Take care not to exceed the EEPROM write cycle limit of
50,000/parameter (approx.) when using the serial link to update
parameters, otherwise data loss or corruption may occur. Read cycles
are unlimited.
© STÖBER plc 1997
27
05.02.01
Page 30

English 5. Fault Codes
8
5. FAULT CODES
Fault codes are only available when an OPm2 is connected to the CombiDrive®.
®
In the event of a failure, the CombiDrive
fault that occurred is stored in parameter P930. e.g. ‘0003' indicates that the last error was F003.
Fault Code Cause Corrective Action
F001
F002
F003
F004
F005
F006
F008
F009
F010
F011
F012
F013
F018
F030
F031
F033
F036
F074
F106
F112
F151 - F153
F201
F212
Overvoltage Check whether supply voltage is within the limits indicated on the rating plate.
Overcurrent Check motor lead and motor for short-circuits and earth faults.
Overload Check whether the motor is overloaded.
Overheating of motor
(monitoring with PTC)
Inverter overtemperature
(internal PTC)
Power module overtemperature Check that the ambient temperature is not too high.
USS protocol timeout Check the serial interface.
Undervoltage Check that the power supply is supplying enough voltage to the inverter.
Initialisation fault / Parameter loss * Check the entire parameter set. Set P009 to `0000' before power down.
Internal interface fault * Switch off power and switch on again.
External trip Source of trip is digital input (configured as an external trip input) going low -
Programme fault * Switch off power and switch on again.
Auto restart after fault Automatic restart after fault (P018) is pending.
PROFIBUS link failure Check the integrity of the link.
Option module link failure Check the integrity of the link.
PROFIBUS configuration error Check the PROFIBUS configuration.
PROFIBUS module watchdog trip Replace PROFIBUS module
Motor overtemperature by I2t
calculation
Parameter fault P006 Parameterise fixed frequency(ies) and/or motor potentiometer on the digital
Parameter fault P012/P013 Set parameter P012 < P013.
Digital input parameter fault Check the settings of digital inputs P051 to P053.
P006 = 1 while P201 = 2 Change parameter P006 and/or P201.
Parameter fault P211/P212 Set parameter P211 < P212.
switches off and a fault code appears on the LCD screen. The last
Increase the ramp down time (P003).
Check whether the required braking power is within the specified limits.
Increase the ramp-up time (P002).
Reduce the boost set in P078 and P079.
Check whether the motor is obstructed or overloaded.
Check if motor is overloaded.
Check the connections to the PTC.
Has P087 been set to 1 without a PTC being connected?
Check that the ambient temperature is not too high.
The motor speed may be too low for a given load.
Check the settings of the bus master and P091 - P093.
Check whether the timeout interval is too short (P093).
check the external source.
WARNING: The motor shaft may start to rotate at any time.
Check that the motor current does not exceed the value set in P083.
inputs.
* Ensure that the wiring guidelines described in section 2.1 have been complied with.
When the fault has been corrected, restart the inverter and the motor will run if the fault has been cleared.
05.02.01
28
© STÖBER plc 199
Page 31

6. Specifications English
6. SPECIFICATIONS
CSA-single-phase device
Model PM25/1 PM37/1 PM55/1 PM75/1
Motor frame size: 4 pole 71K 71L 80K 80L
Motor output rating: 0.25 kW 0.37 kW 0.55 kW 0.75 kW
Operating input voltage: 1ø AC 208 - 240 V
Operating input frequency: 47 - 63 Hz
Output frequency: 0 - 150 Hz
Output frequency with.
OPm2 or serial link: 4 pole
0 - 140 Hz
Input current: 3.2 A
rms
0 - 140 Hz 0 - 140 Hz 0 - 140 Hz
4.6 A
rms
Main fuse: 10 A 16 A
Min lead cross-secti on:
1 mm
2
CSA-three-phase device
Model PM37/3 PM55/3 PM75/3 PM110/3 PM150/3
Motor frame size: 4 pole 71L 80K 80L 90S 90L
Motor output rating: 0.37 kW 0.55 kW 0.75 kW 1.1 kW 1.5 kW
Operating input voltage: 3ø AC 380 - 480 V
± 10% (all units) 3ø AC 460 - 500 V
rms
Operating input frequency: 47 - 63 Hz
Output frequency: 0 - 50 Hz
Output frequency with.
OPm2 or serial li nk: 4 pole 140 H z 140 Hz
Input current: 2.2 A
rms
2.8 A
rms
140 Hz
3.7 A
Main fuse: 10 A
Min lead cross-secti on:
1 mm
± 10%
rms
6.2 A
rms
± 10% (unfiltered only)
rms
8.2 A
1.5 mm
rms
2
140 Hz 140 Hz
rms
4.9 A
rms
5.9 A
rms
2
CSB-three-phase device
Model PM220/3 PM300/3 PM400/3 PM550/3 PM750/3
Motor frame size: 4 pole 100K 100L 112M 132S 132M
Motor output rating: 2.2 kW 3. 0 kW 4.0 kW 5.5 kW 7.5 kW
Operating input voltage: 3ø AC 380 - 480 V
± 10% (all units) 3ø AC 460 - 500 V
rms
± 10% (unfiltered only)
rms
Operating input frequency: 47 - 63 Hz
Output frequency: 0 - 50 Hz
Output frequency with.
OPm2 or serial li nk: 4 pole 140 Hz 140 Hz 140 Hz 140 Hz 140 Hz
Input current: 4.7 A 6.4 A 10.0 A 12.2 A 16.0 A
Main fuse: 10 A 16 A 20 A
Min lead cross-secti on:
1 mm
2
1.5 mm
2
2.5 mm
2
© STÖBER plc 1997
29
05.02.01
Page 32

English 6. Specifications
8
Input frequency: 47 Hz to 63 Hz
Power factor: λ ≥ 0.7
Output frequency range: 0 Hz to 50 Hz (0 Hz to 120 Hz using OPm2 or serial link)
Resolution: 0.01 Hz
Overload capability: 150% for 60 s, related to nominal current
Protection against: Inverter overtemperature
Motor overtemperature
Overvoltage and undervoltage
Additional protection: Against short-circuits and locked motor shaft
Analogue Input: 0 - 10 V/2 - 10 V (recommended potentiometer 4.7 kΩ)
0 - 20 mA/4 - 20 mA
PI Input: 0 - 10 V
0 - 20 mA
Analogue setpoint resolution: 10-bit
Setpoint stability: Analogue < 1%
Digital < 0.02%
Motor temperature monitoring: l2t control
PTC input
Ramp times: 0 - 650 s
Control outputs: 1 relay 24 V DC / 1 A
WARNING:External inductive loads must be suppressed in an
appropriate manner (see section 2.1 (4)).
Interface: RS485
Inverter effi ciency: 97%
Operating temperature: -10oC to +40oC
Storage/transport temperature: -40oC to +70oC
Humidity: 99% non-condensing
Installation height above sea level: < 1000 m
Degree of protection: IP55
IP65 (inverter housing)
Protective separation of circuits: Double insulation or protective screening
Electro-magnetic compatibility (EMC): See section 7.3
05.02.01
30
© STÖBER plc 199
Page 33

6. Specifications English
Options / Accessories
Clear Text Display (OPm2) 6SE3290-0XX87-8BF0
Interface cable for OPm2 (length = 1 m) 6SE9090-0XX87-8SK0
Interface cable for OPm2 (length = 3 m, shielded + gland) 6SE9996-0XA30
PROFIBUS Module (CB155) 6SE9996-0XA20
Pulse Resistor Braking Unit (incl. E-M brake control) * 6SE9996-0XA11
Electro-mechanical Brake Control Unit * 6SE9996-0XA10
SIMOVIS PC Software 6SE3290-0XX87-8SA0
* Case size B
Pulse Resistor Braking Unit Option
The pulse resistor braking unit prov ides the CombiDrive® with up to 3 kW (peak) of braking power for stopping
the system more quickly than would otherwise be possible. It has all the functionality of the electro mechanical
brake control unit (see below) and also provides increased immunity to overvoltage trips.
The braking unit replaces the standard cover for the inv erter unit and requires no wiring. It houses the brak ing
control electronics and a 3 kW braking resistor with heatsink. Full IP65 environmental protection is maintained.
Electro-mechanical Brake Control Unit Option
The electro-mechanical brake control unit allows the CombiDrive® to control an electro-mechanical brake
directly. The unit provides an output to drive the coil of a 180 V DC electro-mechanical brake. It can be
configured for both fast and slow operation of the coil. The unit is configured using parameters P062, P063 and
P064. These provide full control of the brake release time and brake stopping time.
The brake control unit replaces the s tandard cover for the inverter unit. Full IP65 envir onmental protection is
maintained.
PROFIBUS Module Option
This option allows the CombiDrive® to be controlled via a PROFIBUS-DP serial bus (SINEC L2-DP). The
PROFIBUS module fits to the side of the CombiDrive
Features:
• Permits fast cyclic communications via a PROFIBUS connection.
• Supports all PROFIBUS baud rates up to 12 MBaud.
• Control of up to 125 inverters using PROFIBUS-DP protocol (with repeaters).
• Conforms to the relevant parts of DIN 19245 and EN50170, guaranteeing open communications on a serial
bus system. It can be used with other PROFIBUS-DP/SINEC L2-DP peripheral devices on the serial bus.
Data format conforms to the VDI/VDE directive 3689 ‘PROFIBUS Profile for Variable Speed Drives’.
• Can be configured easily using Siemens COM ET 200, COM ET Windows or S7 Manager software.
• Simple integration into a SIMATIC S5 or S7 PLC system using specially designed functional blocks (S5) and
software modules (S7).
• Simple connection to the CombiDrive
®
(same as Clear Text Display module).
• No separate power supply required.
• Digital and analogue inputs can be read and digital and analogue outputs controlled via the serial bus.
• Approx. 5 ms response time to process data
• Motor speed can be controlled locally on the drive or via the serial bus.
• Multi-mode operation is possible - c ontrol data can be input via the terminal block (digital inputs) and the
setpoint transmitted via the serial bus. Alternatively, the s etpoint can be set locally (analogue input) with the
control data transmitted via the serial bus.
®
using two screws.
• All drive parameters are accessible over the serial link.
© STÖBER plc 1997
31
05.02.01
Page 34

English 7. Supplementary Information
8
7. SUPPLEMENTARY INFORMATION
7.1 Application Example
Setup procedure for a simple application
Application requirements: Normal operating frequency set within range 15 - 50 Hz via potentiometer.
Counter-clockwise rotation required.
CombiDrive
Procedure: (1) Remove the link (if fitted) between control terminals 5 and 8.
®
used: Any model.
(2) Connect a simple on/off switch to control terminals 6 and 8 for reverse
rotation.
(3) Connect a 4.7 kΩ potentiometer to the control terminals (see Figure 4).
(4) Set jumper JP301 (‘V’ - voltage) - see Figure 3.
(5) Set the internal and external potentiometers fully counter-clockwise and
then apply mains power and switch on.
(6) Turn the internal potentiometer clockwise until the motor rotates at a
speed that approximates to 15 Hz.
(7) The external potentiometer now has a range of between 15 Hz at its
lowest setting and 50 Hz at its highest setting.
7.2 USS Status Codes
The following list gives the meaning of status codes displayed on the OPm2 when the serial link is in use and
parameter P001 is set to 006:
001 Message OK
002 Slave address received
100 Invalid start character
101 Timeout
102 Checksum error
103 Incorrect message length
104 Parity fail
Notes
(1) The display flashes whenever a byte is received, thus giving a basic indication that a serial link
connection is established.
(2) If ‘100’ flashes on the display continuously, this usually indicates a bus termination fault.
05.02.01
32
© STÖBER plc 199
Page 35

7. Supplementary Information English
7.3 Electro-Magnetic Compatibility (EMC)
Class 2: Filtered Industrial ( Cl ass A)
This level of performance will allow the manufacturer /assembler to self-certify their apparatus for c ompliance
with the EMC directive for the industrial environment as regards the EMC performanc e characteristics of the
power drive system. Performance limits are as specified in the Generic Industrial Emissions and Immunity
standards EN 50081-2 and EN 50082-2.
EMC Phenomenon Standard Level
Emissions:
Radiated Emissions EN 55011 Level A1
Conducted Emissions EN 55011 Level A1
Immunity:
Supply Voltage Distortion IEC 1000-2-4 (1993)
Voltage Fluctuations, Dips, Unbalance,
Frequency Variations
Magnetic Fields EN 61000-4-8 50 Hz, 30 A/m
Electrostatic Discharge EN 61000-4-2 8 kV air discharge
Burst Interference EN 61000-4-4 2 kV power cables, 2 kV control
Radio Frequency Electromagnetic Field,
amplitude modulated
IEC 1000-2-1
ENV 50 140 27-1000 MHz, 10 V/m, 80% AM,
power and signal lines
Class 3: Filtered - for residential , commercial and light industry (Class B)
This level of performance will allow the manufacturer / as sembler to self-certify compliance of their apparatus
with the EMC directive for the residential, commercial and light industrial environment as regards the EMC
performance characteristics of the power drive system. Performance limits are as specified in the generic
emission and immunity standards EN 50081-1 and EN 50082-1.
EMC Phenomenon Standard Level
Emissions:
Radiated Emissions EN 55022 Level B1
Conducted Emissions EN 55022 Level B1
Immunity:
Electrostatic Discharge EN 61000-4-2 8 kV air discharge
Burst Interference EN 61000-4-4 1 kV power cables, 0.5 kV control
Note: The CombiDrive® is intended exclusively for professio nal applications. Therefore, it does not fall
within the scope of the harmonics emissions specification EN 61000-3-2.
7.4 Environmental Aspects
Transport and Storage
Protect the CombiDrive® against physical shocks and vibration during transport and storage. The unit must also
be protected against water (rainfall) and excessive temperatures (see section 6).
The packaging is re-usable. Retain the packaging or return it to the manufacturer for future use.
Dismantling and Disposal
The component parts can be recycled, disposed of in accordance with local requirements or returned to the
manufacturer.
Documentation
This handbook is printed on chlorine-free paper which has been pr oduced from managed sustainable fores ts.
No solvents have been used in the printing or binding process.
© STÖBER plc 1997
33
05.02.01
Page 36

English 7. Supplementary Information
8
7.5 User's Parameter Settings
Record your own parameter settings in the table below:
Parameter Your
setting
P000 P001 0
P002 10.0
P003 25.0
P004 0.0
P005 50.00
P006 1
P007 0
P009 0
P011 0
P012 0.00
P013 50.00
P014 0.00
P015 0
P016 0
P017 1
P018 0
P019 2.00
P020 5.00
P021 0.00
P022 50.00
P023 2
P024 0
P027 0.00
P028 0.00
P029 0.00
P031 5.00
P032 5.00
P035 0
P041 5.00
P042 10.00
P043 15.00
P044 20.00
P045 0
P046 25.00
P047 30.00
P048 35.00
P050 0
P051 1
P052 2
P053 10
P056 0
Default
Parameter Your
setting
P058 0.0
P061 6
P062 0
P063 1.0
P064 1.0
P065 1.0
P071 0
P072 250
P073 0
P074 1
P077 0
P078 100
P079 0
P081
P082
P083
P084
P085
P086 150
P087 0
P089
P091 0
P092 6
P093 0
P094 50.00
P095 0
P099 0
P101 0
P111
P112 8
P113 P121 1
P122 1
P123 1
P124 1
P125 1
P131 P132 P134 P135 P137 P140 -
Default
Parameter Your
Default
setting
P141 P142 P143 P151 4
P152 5
P201 0
P202 1.0
P203 0.00
P205 1
P206 0
P207 100
P208 0
P210 P211 0.00
P212 100.00
P220 0
P331 2
P332 10
P700 * P701 * 0
P702 * -
P723 P880 * -
P910 0
P918 * -
P922 -
P923 0
P927 * 0
P928 * 0
P930 -
P931 -
P944 0
P947 * P958 * P963 * P967 * P968 * P970 * 1
P971 1
* Parameters specific to
PROFIBUS-DP.
= Value depends on the
rating of the inverter.
05.02.01
34
© STÖBER plc 199
Page 37

8. Accessoires
3
j
8.1
Control box (Steuerbox) for CombiDrive® integrated / connection diagram
Function Farben Number Designation
Dir. of rotation / r.p.m, green 1 P10+
Dir. of rotation / r.p.m, grey 1 P10+
Dir. of rotation pink 5 DIN1
Dir. of rotation yellow 6 DIN2
r.p.m white 3 AIN+
r.p.m. brown 4 AIN
Caution
JP304 jump OV and
AIN.
Terminal 1 and 5 must be
umped.
Notes
It is essential to read and
combly with these instructions
prior to installation and
commissioning.
Notes:
Since the terminals are equipped with wire protection, multi-core wire should be twisted to
fit the terminals. An additional conector sleeve is not required.
© STÖBER plc 1997
35
02.07.0
Page 38

8. Accessoires
8
q
y
q
y
8.2 Clear text Display Module (Opm2) in IP55 housi ng
see chap. 4.1.
This section only applies for users who intend using the optional Clear Text Display module (OPm2) to
®
control the operation of the CombiDrive
The OPm2 module provides a multi-language user-fr iendly interfac e to the CombiDrive
driven and provides information in simple text form. It also includes built-in context-sensitive Help screens.
As well as enabling direct control of the motor, the OPm2 extends the functionality of the CombiDrive
providing access to a comprehens ive range of adjustable parameters. Setting these par ameters will allow you
to customise the operation of the CombiDrive
JOG
Button
.
®
to meet almost any application requirement.
®
. The display is menu-
LCD
Screen
®
by
RUN / STOP
Inducator
1
Pressing this button while the motor is stopped causes it to start and run at the
preset jog frequency. The motor stops as soon as the button is released. Pressing
this button while the motor is running has no effect. Disabled if P007 or 123 = 0.
2
Green indicates that the motor is running.
Flashing green indicates that the motor is ramping up or down.
Red indicates that the motor is stationary.
Flashing red indicates a fault condition.
3
Press to start the inverter. Disabled if P007 or P121 = 0.
4
Press to stop the inverter.
5
Changes the display to show the menu options. Pressing and holding this button
down and then pressing the
2
RUN
Button
STOP
Button
MENU
Button
3
4
4
∇
button causes the Help screen to be displayed.
FORWARD / REVERSE
UP / INCREASE
DOWN / DECREASE
Fre
6
Press to change the direction of rotation of the motor. REVERSE is
indicated by a minus sign (values <100) or a flashing decimal point
(values > 100). Disabled if P007 or P122 = 0.
7
Press to INCREASE frequency. Used to change parameter numbers
or values to higher settings during the parameterisation procedure.
Disabled if P124 = 0.
9
Press to access parameters. Disabled if P051 - P053 = 14 when using
digital inputs.
6
Button
7
uenc
Fre
8
uenc
Parameterisation
Button
9
05.02.01
36
© STÖBER plc 199
Page 39

Page 40

STÖBER ANTRIEBSTECHNIK
GmbH + Co. KG
Kieselbronner Strasse 12 · 75177 Pforzheim
Postfach 910103 · 75091 Pforzheim
Fon +49 (0) 7231 582-0, Fax +49 (0) 7231 582-1000
Internet: http://www.stoeber.de / e-Mail: mail@stoeber.de
GERMANY
Presented by:
© 2001 STÖBER ANTRIEBSTECHNIK GmbH + Co. KG
Impressum: Nr.: 441554.00.00 · 01.2001
- Subject to change without prior notice -
 Loading...
Loading...