

SEW-Eurodrive 31C014-503-4-21, 31C005-503-4-21, MOVITRAC, 31C007-503-4-21, 31C011-233-4-21 User Manual
...Page 1

08/198/96
T
MOVITRAC® 31..
Frequency Inverters
I
NTERBUS
Fieldbus Interface
(FFI31.. option and size 0/I
NTERBUS
)
Manual
Edition 1/99
0922 6915 / 199
U
L
®
C
U
L
®
Page 2
2
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
Important Notes
Important Notes
• Read this user manual carefully before you start installation and commissioning work on
MOVITRAC
®
frequency inverters with fieldbus options.
This user manual assumes that the user is familiar with and has at his disposal all relevant
documentation on the MOVITRAC
®
system, particularly the installation and operating
instructions.
• Safety notes:
Always follow the safety notes contained in this user manual.
Safety notes are marked as follows:
Electrical hazard, e.g. during live working
Mechanical hazard, e.g. when working on hoists.
Important instructions for the safe and fault-free operation of the system, e.g. pre-
setting before commissioning.Failure to follow these instructions may result in injury to
people and damage to property.
• General safety notes for bus systems:
The fieldbus option gives you a communications system which allows you to match the
MOVITRAC
®
31.. drive system to the specifics of your application to a very high degree. As
with all bus systems there is, however, the risk of parameters being changed, which will not
show outside (i.e. the inverter) but affect the behaviour of the inverter. This may result in
unexpected (not uncontrolled, though) system behaviour.
• In these instructions, cross-references are marked with an →, e.g.,
(→ MC_SHELL) means: Please refer to the MC_SHELL User Manual for detailed information
or information on how to carry out this instruction.
(→ section x.x) means: Further information can be found in section x.x of this user manual.
• Each unit is manufactured and tested to current SEW-EURODRIVE technical standards and
specifications.
The manufacturer reserves the right to make changes to the technical data and designs as
well as the user interface herein described, which are in the interest of technical progress.
A requirement for fault-free operation and fulfilment of any rights to claim under guarantee
is that these instructions and notes are followed.
These instructions contain important information for servicing, they should therefore be
kept near the unit.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 3

Contents
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
3
Page
1 Introduction ..............................................................................................4
2 Assembly / Installation Instructions .................................................................6
2.1 Fitting the FFI31.. interface...............................................................................................6
2.1.1 Scope of Delivery...................................................................................................6
2.1.2 Supported Inverter Types......................................................................................6
2.1.3 Fitting the Interface PCB........................................................................................6
2.2 Installing the MOVITRAC
®
31.. size 0 with I
NTERBUS
......................................................7
2.3 Pin Assignment................................................................................................................8
2.4 Screening and Laying of the Bus Cables..........................................................................9
2.5 Setting the Process Data Length......................................................................................9
2.6 Display Elements ...........................................................................................................10
3 Configuring and Commissioning ................................................................... 11
3.1 Inverter Control Mode ‘Fieldbus’....................................................................................11
3.2 Parameter P801 “Save” .................................................................................................12
3.3 Bus Topologies with MOVITRAC
®
31............................................................................13
3.3.1 Direct Connection to DCB Master Modules..........................................................13
3.3.2 Direct Connection to DAB Master Modules..........................................................14
3.3.3 Integration in 8-Wire Remote Bus Systems.........................................................14
3.4 Inverter Module Identity.................................................................................................15
3.5 Configuring the Master Module .....................................................................................15
3.5.1 Configuring for 1 Process Data Word..................................................................16
3.5.2 Configuring for 2 Process Data Words................................................................17
3.5.3 Configuring for 3 Process Data Words................................................................18
4 The PMS Interface .................................................................................... 19
4.1 PMS Services ................................................................................................................19
4.1.1 Initiate .................................................................................................................19
4.1.2 Abort ...................................................................................................................20
4.1.3 Reject ..................................................................................................................20
4.1.4 Identify ................................................................................................................20
4.1.5 Get-0V .................................................................................................................20
4.1.6 Status..................................................................................................................20
4.1.7 Read....................................................................................................................20
4.1.8 Write....................................................................................................................20
4.2 Object List......................................................................................................................21
4.2.1 Object Description of the Drive Parameters........................................................21
4.2.2 “Download Parameter Block” Object...................................................................22
4.2.3 “Universal Write Parameter” Object.....................................................................23
4.2.4 “Universal Read” Functionality Objects................................................................24
5 Parameter Adjustment Return Codes.............................................................. 27
5.1 Internal Communications Error......................................................................................27
6 Technical Data ........................................................................................ 28
6.1 FFI31.. Interface Technical Data.....................................................................................28
6.2 Technical Data MOVITRAC
®
31.. BG0/I
NTERBUS
............................................................29
Appendix A............................................................................................. 30
Index .................................................................................................... 31
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 4

4
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
1 Introduction
1 Introduction
This FFI 31.. I
NTERBUS
Interface Manual describes the procedure for installing the FFI 31C I
NTER-
BUS Interface in the inverter and for commissioning the MOVITRAC® 31.. size 0 inverter with
integrated I
NTERBUS
interface when connected to an I
NTERBUS
fieldbus system.
In addition to describing all the settings on the fieldbus interface, this manual further discusses the
various options for connecting the inverter to I
NTERBUS
in the form of brief commissioning
examples.
In addition to this I
NTERBUS
Interface Manual, you should order the following more detailed docu-
mentation on the I
NTERBUS
fieldbus interface in order to connect the MOVITRAC® 31.. simply and
efficiently to the I
NTERBUS
fieldbus system
• MOVITRAC
®
31.. Fieldbus Unit Profile Manual (Order no. 0922 7016)
• MOVITRAC
®
31.. Communications Interfaces and Parameter List (Order no. 0923 0580)
The MOVITRAC
®
31.. Fieldbus Unit Profile Manual gives a detailed description of the fieldbus
parameters and their codings and discusses various control concepts and application options in
the form of brief commissioning examples.
The MOVITRAC
®
31.. Parameter List contains a list of all the inverter’s parameters that can be read
or written via the various communication interfaces such as the RS-232, RS-483 and via the fieldbus interface.
The MC_Shell software makes it straight forward and easy to operate the inverter and set the
parameters, including the parameters for the fieldbus. This software can be ordered from SEW
under the number 0921 2949.
MOVITRAC
®
31.. and I
NTERBUS
The inverter unit profile for I
NTERBUS
mode, i.e. the way the inverter operates and responds when
in I
NTERBUS
mode, is independent of the type of fieldbus, and thus consistent for all fieldbus types.
This allows the user to develop his drive applications independent of a particular fieldbus or change
to another bus system, e.g. the open standardized PROFIBUS-DP/FMS (FFP 31C option) fieldbus
system.
MOVITRAC
®
31.. offers digital access to all drive parameters and functions via the I
NTERBUS
Interface. The inverter is controlled by the high-speed cyclic process data. This process data channel
provides the facility to specify setpoints such as setpoint speeds, ramp generator times for acceleration and deceleration etc., as well as various drive functions such as enable, controller inhibit,
stop, rapid stop, etc. to be triggered. This channel can also be used to read back actual values from
the inverter, such as actual speed, current, unit status, error number or reference messages.
Whereas process data are generally exchanged in cycles, the drive parameters can only be read
and written acyclically via the READ and WRITE services. This exchange of parameter data enables
applications where all major drive parameters are stored in the higher-level automation unit to be
implemented, thus avoiding manual adjustment of parameters on the inverter itself, which can
often be very time-consuming.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 5

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
5
Introduction 1
00469AEN
Fig. 1: I
NTERBUS
with MOVITRAC® 31..
The I
NTERBUS
Interface option pcb is designed so that all I
NTERBUS
specific settings, such as the
process data length, can be made on the interface by means of a hardware switch. These manual
settings enable the inverter to be integrated into the I
NTERBUS
system and switched on in a very
short space of time. Parameters can be set fully automatically by the higher-level I
NTERBUS
master
(parameter download). This forward-looking version offers the benefits of a shorter commissioning period for the plant as well as simpler documentation of the application program, as all major
drive parameter data can now be recorded directly in the control program.
The use of a fieldbus system in drive technology requires additional monitoring functions, such as
fieldbus timeout or special emergency stop concepts. The monitoring functions of the MOVITRAC
®
31.. can be matched to the specific application for which it is to be used. This feature enables you,
for instance, to specify which error response the inverter should trigger if an error should occur in
the bus. A rapid stop will be practical for many applications, but it is also possible to freeze the last
setpoints, so that the drive can continue with the last valid setpoints (e.g. conveyor belt). As the
functionality of the control terminals is also ensured when the inverter is operated in the fieldbus
mode, fieldbus-independent emergency stop concepts can still be implemented via the inverter’s
terminals.
The MOVITRAC
®
31.. inverter offers numerous diagnostic facilities for commissioning and servicing. For instance, both the setpoints transmitted from the higher-level control unit as well as the
actual values can be checked with the fieldbus monitor in the hand-held keypad. It also provides
you with a lot of additional information on the status of the fieldbus option pcb. The PC software
MC_SHELL offers even more convenient diagnostic facilities in that it provides a detailed display of
the fieldbus and unit status information as well as the facility to set all the drive parameters (including the fieldbus parameters).
P P P P
INTERBUS
P
INTERBUS
EURODRIVE
SEW
841 FELDBUS
STEUERM O DE
EQ
EURODRIVE
SEW
EURODRIVE
SEW
841 FELDBUS
STEUERMODE
EQ
EURODRIVE
SEW
EURODRIVE
SEW
841 FELDBUS
STEUER MO DE
EQ
EURODRIVE
SEW
MOVITRAC
MOVITRAC
MOVITRAC
841
EQ
841
EQ
INTERBUS-S
ModuleIdent.
227
Fieldbus
CONTROL MODE
Frequency inverter
Input/output modules
Controller
I B Master
NTER US
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 6

6
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
2
Assembly / Installation
Instructions
2 Assembly / Installation Instructions
The following section describes assembly and installation of the MOVITRAC® 31.. inverter for integration in an Interbus system.
Sizes 1...4 of the MOVITRAC
®
31.. inverter are connected to the I
NTERBUS
via the FFI31 interface.
The standard basic unit of the MOVITRAC
®
31.. Size 0 contains an integrated Interbus interface.
To set the fieldbus parameters you will need the FBG31.. keypad for MOVITRAC
®
31.. and/or the
latest version of the MC_SHELL software.
2.1 Fitting the FFI31.. interface
This option is either delivered separately, so that you will have to install it yourself, or you can
order an inverter which comes complete with the FFI31 interface installed.
2.1.1 Scope of Delivery
The FFI31 interface comprises the following components:
– 1 FFI31C (INTERBUS) interface pcb
– 3 fastening screws
– 1 housing cover
– earthing clamp for the outgoing remote bus
Please check to see that delivery is complete.
2.1.2 Supported Inverter Types
The FFI31.. interface for connection to an I
NTERBUS
system can be operated with the MOVITRAC
®
31 inverters sizes 1...4 as follows:
FFI31A interface: for MOVITRAC
®
31B inverters when the service code of the size 4 group is
greater than or equal to 14 (→ Assembly and Installation of MOVITRAC
®
31B,
Sec. 4).
FFI31C interface: for all MOVITRAC
®
31C inverters, sizes 1...4.
2.1.3 Fitting the Interface PCB
Before you begin:
• Before touching the pcb discharge yourself with the appropriate measures (earthing band,
conductive shoes, etc.)
• Store the pcb in the original package and only unpack immediately before installation.
• Do not touch the pcb more often than necessary and hold only by the edges. Do not touch
components.
Installation of the pcb:
• Disconnect inverter from the supply. Switch off mains supply and, if applicable, the 24 V supply.
• Take off the lower protective cover.
• Unscrew and remove the housing (screw located under the cover for the keypad).
• Unscrew the EPROM pcb and remove it from the X20 connector.
• Push the FFI31.. pcb into the X20 connector and fasten with the screws.
• Take the fitted cover out of the housing and replace it with the cover delivered with the option.
• Replace the housing and fasten with the screws.
• Replace the lower protective cover.
The FFI31.. is now completely fitted.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 7

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
7
Assembly / Installation
Instructions
2
00305AEN
Fig. 2: FFI31.. option
2.2 Installing the MOVITRAC® 31.. size 0 with I
NTERBUS
Size 0 inverters (MOVITRAC® 31.. Size 0 with I
NTERBUS
) have the I
NTERBUS
interface already
installed as a standard in the basic unit (→ Fig. 3).
02125AXX
Fig. 3: MOVITRAC
®
Inverter with I
NTERBUS
interface and the FBG31 keypad.
EPROM
DPRAM
Supi
S1
X2: X3:
X20:
X9: X10:
Two-wire
remote bus input
Two-wire
remote bus output
LED green:
LED green:
LED green:
LED green:
LED red:
UL
RC
BA
TR
RD
Flash EPROM
Processor
Process data length
MOVITRAC processor pcb
®
1
2
3
4
1 DIP switch for setting the pro-
cess data length.
2 Five LEDs for diagnosis of the
I
NTERBUS
system.
3 9-pin sub-D connector, male
(input for remote bus).
4 9-pin sub-D connector, female,
(output for remote bus).
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 8

8
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
2
Assembly / Installation
Instructions
2.3 Pin Assignment
The MOVITRAC
®
31.. inverter is connected to the I
NTERBUS
system via the 2-wire remote bus by a
6-core screened cable with twisted-pair signal leads. The 2-wire remote bus basically consists of
an RS-485 Data Out channel (signal lines DO and DO
) as well as of the RS-485 Data In channel
(signal lines DI and DI
).
There is a 9-pin sub-D connector (male) for the remote bus output and a 9-pin sub-D connector
(female) for the remote bus input on the inverter itself. The incoming remote bus cable must have
a female 9-pin sub-D connector and the outgoing remote bus cable must have a male 9-pin sub-D
connector.
Incoming remote bus on the remote bus input.
02092AEN
Fig. 4: Assignment of the 9-pin sub-D connector of the incoming remote bus cable
Outgoing remote bus on the remote bus output.
02093AEN
Fig. 5: Assignment of the 9-pin sub-D connector of the outgoing remote bus cable
6
1
7
2
3
DO
DO
DI
DI
COM
1
2
3
4
5
6
7
8
9
Brown
Grey
Pink
Yellow
Green
connector housing and screen.
Conductive connection between
connector (female)
9-pin sub-D
Twisted-pair signal
cables
1
2
3
4
5
6
7
8
9
6
1
7
2
3
5
9
DO
DO
DI
DI
COM
Brown
Grey
Pink
Yellow
Green
connector housing, cable shield.
Conductive connection between
Bridged
cables
Twistet -pair signal
connector (male)
9-pin sub-D
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 9
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
9
Assembly / Installation
Instructions
2
2.4 Screening and Laying of the Bus Cables
The I
NTERBUS
Interface supports RS-485 transmission technology and requires as a physical
medium the 6-core, screened, two-wire twisted-pair cable specified for I
NTERBUS
.
Technically correct screening of the bus cable absorbs the electrical interference that can occur in
an industrial environment. You will achieve the best screening results if you adopt the following
measures:
• Hand-tighten the fixing screws of plugs, modules and equipotential bonding conductors
• Only use plugs with metal or metal-plated housings
• Connect the screening in the plug over as large an area as possible
• Connect the screening at both ends of the bus cable
• Do not lay signal and bus cables parallel to power cables (motor leads), but wherever possible in
separate cable conduits
• In an industrial environment use metallic, earthed cable trays
• Run signal cables and the associated equipotential bonding conductor as close as possible to
each other, using the shortest route
• Avoid extending bus cables through the use of connectors
• Run the bus cables close to existing earthed surfaces
IMPORTANT!
In the event of fluctuations in the earth potential, a circulating current may flow through any
screening which may be connected at both ends and connected to the earth potential (PE). In this
case, ensure there is adequate equipotential bonding in accordance with the relevant safety provisions.
In the event of further questions regarding the installation of the bus system, refer to the I
NTERBUS
installation manual IBS SYS INST UM (Order No. 2754286, PHOENIX CONTACT), from which the
points mentioned above were also taken.
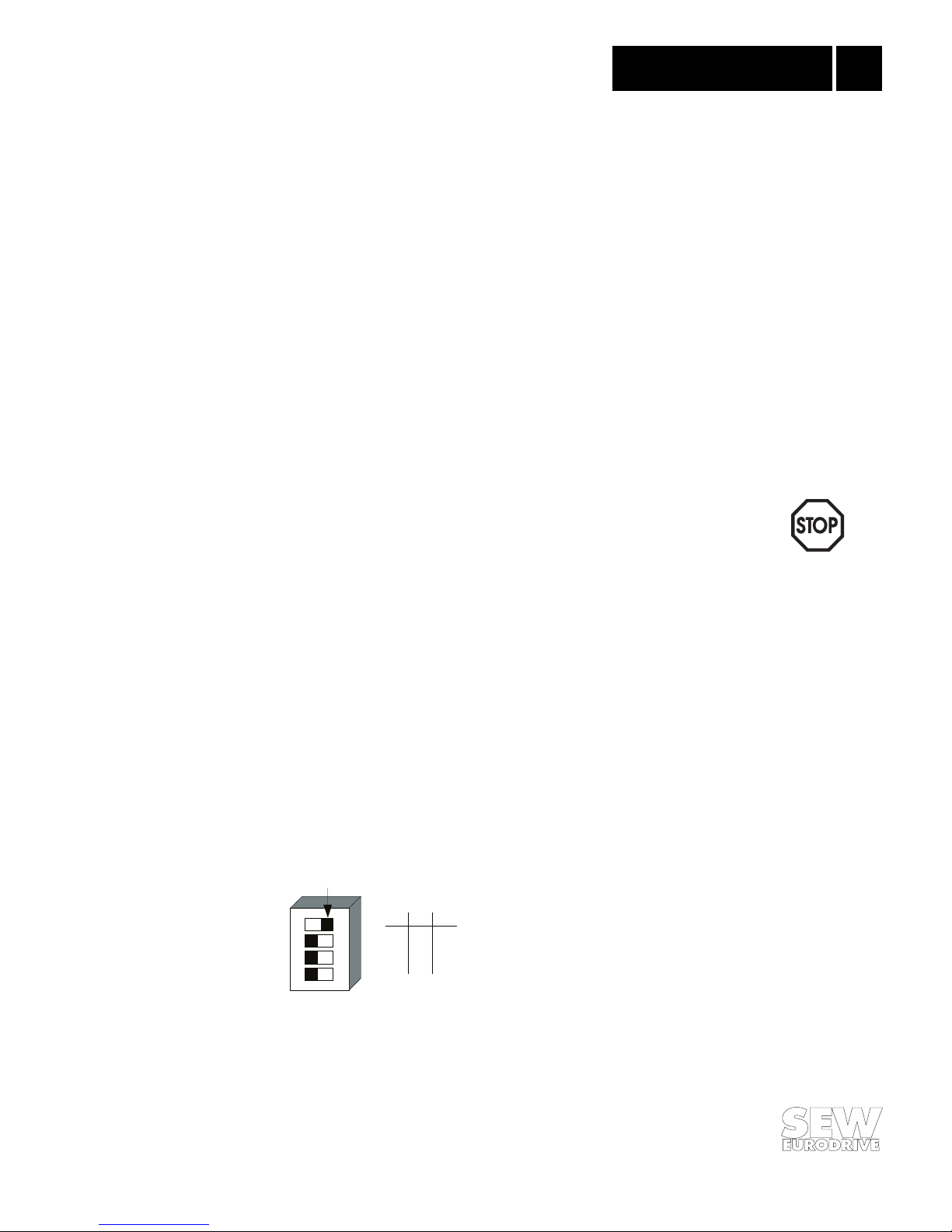
2.5 Setting the Process Data Length
The MOVITRAC
®
31.. inverter communicates via I
NTERBUS
with the higher-level control both via the
rapid cyclical process data channel and via the acyclical parameter channel (PCP, Peripherals
Communication Protocol). The number of process data words to be transmitted in the process
data channel is variable and can be adjusted using the DIP switches on the I
NTERBUS
Interface. In
general you have a choice between one, two and three process data words. In all three cases, the
inverter can be parameterized at any time via the PCP channel.
00308AEN
Fig. 6: Setting the process data length in process data words
OPEN
1 2 3 4
ON
S1
S2
S3
S4
S1 S2
OFF
OFF
OFF
OFF
ON ON
ON
ON 1PD
2PD
3PD
--
Setting as supplied: 2PD
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 10

10
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
2
Assembly / Installation
Instructions
An example of the DIP switch settings for all three data process lengths is shown in Fig. 7 below.
Switches S3 and S4 are not allocated. These DIP switches are only evaluated when the inverter is
started up, i.e. when power is connected (mains and external 24 V supply). This means that the
inverter has to be switched on again when the process data length is changed (mains and 24 V).
00309AEN
Fig. 7: Example for setting the process data length
2.6 Display Elements
The FFI 31C.. interface has five LEDs for diagnosing the I
NTERBUS
system. These LEDs provide infor-
mation about the status of the I
NTERBUS
system. The meaning of each LED is shown in Table 1.
Table 1: Meaning of the diagnostic LEDs for I
NTERBUS
Order of LEDs in
the MOVITRAC
®
31.. sizes 1...4 the MOVITRAC® 31.. size 0
00310BXX
Fig. 8: Display elements
LED Name Colour Status Meaning
UL (green) green on Logic voltage FFI 31 C interface
RC (green) green on Incoming remote bus ready for operation (remote bus link o.k.)
BA green on Bus in operation
TR green on / flickering Parameter data exchange via PCP channel
RD red on Onward remote bus off
1 2 3 4
1 2 3 4
1 2 3 4
OPEN
OPEN
OPEN
S1
S2
S3
S4
S1
S2
S3
S4
S1
S2
S3
S4
ON ON ON
Setting:
3 process data words
Setting:
2 process data words
Setting:
1 process data word
UUL
L
RRC
C
BBA
A
TTR
R
RRD
D
INTERBUS-S
Module Ident.
227
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 11

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
11
Configuring and
Commissioning
3
3 Configuring and Commissioning
This section shows you how to configure and commission the MOVITRAC® 31.. inverter with the
I
NTERBUS
interface in the I
NTERBUS
master module.
3.1 Inverter Control Mode ‘Fieldbus’
After installing the I
NTERBUS
interface and setting the process data length (using the DIP switches),
the MOVITRAC
®
31.. inverter parameters can be set immediately via the fieldbus system without
any further manual intervention. This means, for example, that after switching on the inverter, all
drive parameters can be downloaded directly from the higher-level control via the I
NTERBUS
system.
To control the inverter via I
NTERBUS
, however, it must first be switched to the appropriate control
mode. This is possible using the parameter P841 Control Mode. The factory setting for this parameter is STANDARD (control and setpoint processing via input terminals). Using the parameter P841
Control Mode = FIELDBUS, the inverter is programmed to accept setpoints from the fieldbus.
MOVITRAC
®
31.. now responds to process data sent from the higher-level control.
The activation of fieldbus control mode is signalled to the higher-level control by the Fieldbus Mode
Active bit in the status word.
For safety reasons, the inverter must also be enabled on the terminal side as well to permit control
via the fieldbus system. The terminals are therefore to be wired or programmed in such a way that
the inverter is enabled via the input terminals. The easiest way of enabling the inverter on the terminal side is, for example, to connect input terminal 41 (CW/STOP function) to a +24 V signal and
program input terminals 42 and 43 to NO FUNCTION. Fig. 9 shows an example of the commissioning procedure for the MOVITRAC
®
31.. inverter with a fieldbus interface.
Important!
The inverter must be disconnected from the mains supply during commissioning. Commissioning
must be carried out only with the 24 V supply. This ensures that the drive will not start up unintentionally during reprogramming. Only turn the mains supply on when all the parameters have been
set.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 12

12
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
3
Configuring and
Commissioning
00312BEN
Fig. 9: Activating the FIELDBUS control mode
For further information on commissioning and controlling the MOVITRAC® 31.. inverter, please
refer to the Fieldbus Unit Profile manual, available from SEW under the number 0922 7016.
3.2 Parameter P801 “Save”
The service life of an EEPROM (parameter memory) is limited by the number of save operations
carried out on it. In fieldbus operations with “acyclical writing of Parameters”, the parameter values
are changed frequently. In this case it is necessary to set
Parameter P801 to “Save” = “OFF”
when commissioning has been completed.
31
34
35065
40
44
41
42
43
47
60
30
61
62
48
49
X2 X3
+24 V
31
34
35065
40
44
41
42
43
47
60
30
61
62
48
49
60
30
X2 X3 X14
841 FIELDBUS
CONTROL MODE
no function
no function
1/0 CW/STOP
+24 V
Program functionality of input terminal 43 to NO FUNCTION in parameter P601.
5. Input terminal 43 = NO FUNCTION:
Program functionality of input terminal 42 to NO FUNCTION in parameter P600.
4. Input terminal 42 = NO FUNCTION:
Set control and setpoint processing of the drive inverter to FIELDBUS in parameter P841.
3. Control mode = fieldbus
2. For setting inverter parameter only switch on 24 V supply (no mains voltage!)
Apply a +24 V signal on input terminal 41 (Function CW/STOP) (e.g. set jumper as shown below).
1. ENABLE the inverter on the terminal side
601 NO FUNCT.
TERMINAL 43
600 NO FUNCT.
TERMINAL 42
Size 0 Size 1 - 4
Jumper installed when supplied
Use this jumper to enable the
inverter via terminal side
no function
no function
1/0 CW/STOP
Jumper installed when supplied
Use this jumper to enable the
inverter via terminal side
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 13

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
13
Configuring and
Commissioning
3
3.3 Bus Topologies with MOVITRAC® 31..
The I
NTERBUS
interface enables the MOVITRAC® 31.. inverter to be integrated directly into the
I
NTERBUS
2-wire remote bus. This results in much easier installation of the inverter in the switch
cabinet, because, as the maximum remote bus length is 400 metres, the drives can also be
installed further apart from each other without any difficulty. As a result, the connecting costs are
significantly reduced in comparison with an I
NTERBUS
local bus interface, since no bus terminals
are required any more for connecting the inverters.
For historical reasons, the I
NTERBUS
sensor/actuator bus distinguishes between two types of
remote buses, both of which still exist today: the 8-wire and the 2-wire remote bus. The essential
difference between the (older) 8-wire remote bus and the newer 2-wire remote bus is in the number of signal lines in the remote bus cable. Whereas there was a relatively large amount of wiring
work required in preparing the 8-wire remote bus cable with its 25-pin connectors, 9-pin sub-D
connectors can now be used with the 2-wire remote bus. With only 5 signal lines, these connectors
can be quickly fitted to the remote bus cable.
The IBS BK LC/2 bus terminal was developed to ensure as simple a transition as possible between
these two types of remote bus. This terminal provides a simple and user-friendly way of converting
from one type of remote bus to the other.
Different I
NTERBUS
topologies involving MOVITRAC® 31.. are shown below as examples in which
both types of remote bus are used.
3.3.1 Direct Connection to DCB Master Modules
The second generation I
NTERBUS
master modules, such as the IBS S5 DCB module for Simatic S5,
are always equipped with the 2-wire remote bus. Thus the inverter can be connected directly to the
DCB master module as shown in Fig. 10.
.
00470AEN
Fig. 10: Direct connection of the inverter to DCB modules with 2-wire remote bus
Since these DCB master modules generally support up to 256 remote bus stations, they are
superbly suited for high-performance drive applications with many inverters.
EURODRIVE
SEW
841 FELDBUS
STEUERM ODE
EQ
EURODRIV E
SEW
EURODRIVE
SEW
841 FELDBUS
STEUERM ODE
EQ
EURODRI VE
SEW
EURODRIVE
SEW
841 FELDBUS
STEU ERMO DE
EQ
EURODRIVE
SEW
MOVITRAC
MOVITRAC
MOVITRAC
0140
- -
INTERBUS master module
with 2-wire remote bus,
e.g. IBS S5 DCB
2-wire remote bus
(max. 400 m)
2-wire remote bus
(max. 400 m)
2-wire remote bus
(max. 400 m)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 14

14
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
3
Configuring and
Commissioning
3.3.2 Direct Connection to DAB Master Modules
First generation I
NTERBUS
diagnostics interfaces (DAB), e.g. the IBS S5 DAB module for Simatic
S5, only support the old 8-wire fieldbus and 25-pin sub-D connector. MOVITRAC
®
31.. inverters
are connected by using an IBS BK LC/2 bus terminal. This bus terminal makes possible the conversion from the old 8-wire remote bus to the new 2-wire system. Fig. 11 shows the connection of the
MOVITRAC
®
31.. to the DAB modules. A standard cable for the 8-wire remote bus is employed
from the DAB master module to the bus terminal.
The connection from the bus terminal to the inverter is achieved by an adapter cable from 25-pin
sub-D to 9-pin sub-D.
00471AEN
Fig. 11: Connection of the inverter to DAB master modules via IBS BK LC/2 bus terminal
3.3.3 Integration in 8-Wire Remote Bus Systems
Conversion from both the 8-wire to the 2-wire remote bus, as well as from the 2-wire to the 8-wire
remote bus, is achieved using the IBS BK LC/2 bus terminal. This means, for example, that
MOVITRAC
®
31.. inverters can also be integrated into existing I
NTERBUS
networks employing the
old 8-wire remote bus. Fig. 12 shows the integration options in an already existing system with an
8-wire remote bus.
00472AEN
Fig. 12: Integrating MOVITRAC® 31.. inverters in already existing 8-wire remote bus systems
EURODRIVE
SEW
841 FELDBUS
STEUERM O DE
EQ
EURODRIV E
SEW
EURODRIVE
SEW
841 FELDBUS
STEUERM ODE
EQ
EURODRIV E
SEW
EURODRIVE
SEW
841 FELDBUS
STEU ER MO DE
EQ
EURODRIVE
SEW
MOVITRAC
MOVITRAC
MOVITRAC
01 4 0
- -
P
IBS BK
LC/2
INTERBUS master module
with 8-wire remote bus
e.g. IBS S5 DAB
2-wire remote bus
(max. 400 m)
2-wire remote bus
(max. 400 m)
2-wire remote bus
(max. 400 m)
8-wire remote bus
(max. 400 m)
Bus terminal
IBS BK LC/2
EURODRIVE
SEW
841 FELDBUS
STEUERM O DE
EQ
EURODRIVE
SEW
EURODRIVE
SEW
841 FELDBUS
STEUERMODE
EQ
EURODRIVE
SEW
EURODRIVE
SEW
841 FELDBUS
STEUER MO DE
EQ
EURODRIVE
SEW
MOVITRAC
MOVITRAC
MOVITRAC
P
IBSBK
LC/2
P
IBS BK
LC/2
Incoming
8-wire remote bus
Onward
8-wire remote bus
Bus terminal
IBS BK LC/2
Bus terminal
IBS BK LC/2
8-wire
remote bus
8-wire remote bus
2-wire remote bus 2-wire remote bus 2-wire remote bus 2-wire remote bus
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 15

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
15
Configuring and
Commissioning
3
MOVITRAC® 31.. inverters can be integrated into the existing 8-wire remote bus system at any
point by splitting the 8-wire remote bus. This is done by feeding the incoming 8-wire remote bus to
an IBS BK LC/2 bus terminal. Using an appropriate adapter cable, you can now connect the first
MOVITRAC
®
31.. inverter to the bus terminal and network all the other inverters using the standard
2-wire remote bus cable. A further IBS BK LC/2 bus terminal must then be connected following the
last inverter. This handles the conversion back to the 8-wire remote bus. Both the local bus interfaces of the newly inserted bus terminals can naturally also be used.
When extending an already existing INTERBUS 8-wire remote bus system, bear in mind that
master modules with 8-wire remote bus interfaces generally support only 64 remote bus subscribers. More detailed information can be found in the master module documentation.
3.4 Inverter Module Identity
With the I
NTERBUS
interface MOVITRAC® 31.. is assigned the following identity code.
Module Ident: 227
dec
= E3
hex
You must enter this identity code into the configuration list of the I
NTERBUS
master module.
3.5 Configuring the Master Module
To initialise the I
NTERBUS
master module, you must draw up various lists containing all the
modules connected to the I
NTERBUS
. These lists are made up of the following entries.
• Process data width with module ident code
• Peripheral bus address
• Input address
• Output address
• Group number (optional)
• Communication reference (optional)
The modules are shown in the configuration list in the order corresponding to their physical posi-
tion in the I
NTERBUS
. During the initialisation of the bus system, the master module checks the
planned bus configuration against the I
NTERBUS
configuration read-in. If these configurations are
different, the bus system will not start. This situation is indicated by an appropriate error message
on the master module.
There are three initialisation options for a MOVITRAC
®
31.. inverter with the I
NTERBUS
interface.
Which option is used depends on the process data length selected.
While configuring, bear in mind that process data length 3 provides the most powerful application
potential for the MOVITRAC
®
31.. inverter with I
NTERBUS
. As a consequence of the direct insertion
of process data into the I/O and/or peripherals area of the control, you should generally select
process data length 3 if your application concept is not yet complete and if you do not definitely
know with which process data length the inverter is to be controlled.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 16

16
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
3
Configuring and
Commissioning
3.5.1 Configuring for 1 Process Data Word
Setting the DIP switches on the option pcb to give process data length 1 requires that 1 process data
word is specified in the ID code list. Fig. 13 shows examples of entries in the ID code list.
00473AEN
Fig. 13: Example of ID code list with process data length set at 1
I
NTERBUS
master modules for programmable controllers (e.g. IBS S5 DAB/DCB for Simatic S5)
map the process data to the I/O and/or peripheral area of the control. You must therefore specify
the start addresses for the input and output data in the I/O address list of the I
NTERBUS
master
module. Fig. 14 shows an example of how the process data word transferred via I
NTERBUS
is
mapped in the control.
00474AEN
Fig. 14: Process data word mapping in the PLC peripheral area
In this example, only one process data word is exchanged between the higher-level control and the
inverter. With this configuration, for example, the inverter could be controlled using control word 1
and status word 1 (see SEW documentation Fieldbus Unit Profile User Manual). By specifying
address 140 in both the input and output address list, the process data word is mapped to the
peripheral word PW 140. The PLC access command will decide in this case whether the process
input data word (e.g. status word 1 of the inverter) is to be read with the load command L PW 140
or whether the process data output word (e.g. control word 1) is to be written with the transfer
command T PW 140.
You can read out the current process data configuration on the inverter at any time using the handheld keypad or the MC_SHELL option under menu item P070 PD Configuration on the PC (Fig. 15).
The display signals that the current process data width is set at 1 PD and the inverter can be
parameterized via the PCP channel of the I
NTERBUS
(identification PARAM).
00475AEN
Fig. 15: PD configuration for 1 process data word as displayed on the keypad
1 234
OPEN
ON
Setting:
1 process data word
ID code list:
Process data width: 1 (word)
Module Ident: 227
Example for S5 data module:
DW n: KY = 001, 227 MC31.. : 1 PD, ID22
7
PW 140
PW 140
T PW 140
L PW 140
PD 1
PD 1
PD 1
PD 1
EURODRIVE
SEW
841 FELDBUS
STEU ERMO DE
EQ
EURODRIVE
SEW
MOVITRAC
PLC adress area
Output adress for MOVITRAC 31.. : PW 140
®
Input adress for MOVITRAC 31.. : PW 140
®
070 1PD+PARAM
PD CONFIGURATION
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 17

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
17
Configuring and
Commissioning
3
3.5.2 Configuring for 2 Process Data Words
Setting the DIP switches on the option pcb to give process data length 2 requires that 2 process
data words are specified in the ID code list. Fig. 16 shows examples of entries in the ID code list.
00477AEN
Fig. 16: Example of ID code list with process data length set at 2
With this setting, the inverter uses two words in the peripheral area of the PLC. Fig. 17 shows an
example of how the process data words transferred by I
NTERBUS
are mapped in the control.
00478AEN
Fig. 17: Process data word mapping in the PLC peripheral area
In this example, two process data words are exchanged between the higher-level control and the
inverter. With this configuration, for example, the higher-level control could send the process
output data Control Word 1 and Speed Setpoint to the inverter and read the process input data
Status Word 1 and Speed Actual Value (see SEW documentation Fieldbus Unit Profile User
Manual). By specifying address 140 in both the input and output address list, the process data
words are mapped from peripheral word PW 140. The PLC access command will again decide
whether the process input data words (e.g. status word and speed actual value) are to be read or
whether the process data output words (e.g. control word and speed actual value) are to be
written.
The display on the hand-held keypad (Fig. 18) then signals that the current process data width is
set at 2 PD and the inverter can be parameterized via the PCP channel of the I
NTERBUS
.
00476AEN
Fig. 18: PD configuration for 2 process data words as displayed on the keypad
1 234
OPEN
ON
Setting:
2 process data words
ID code list:
Process data width: 2 (word)
Module Ident: 227
Example for S5 data module:
DW n: KY = 002, 227 MC31.. : 2 PD, ID22
7
PW 140
PW 142
PW 140
PW 142
T PW 140
L PW 140
PD 1
PD 2
PD 1
PD 2
PD 1
PD 1
EURODRIVE
SEW
841 FELDBUS
STEU ERMO DE
EQ
EURODRIVE
SEW
MOVITRAC
PD 2
PD 2
PLC address area
Output address for MOVITRAC 31.. : PW 140
®
Input address for MOVITRAC 31.. : PW 140
®
070 2PD+PARAM
PD CONFIGURATION
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 18

18
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
3
Configuring and
Commissioning
3.5.3 Configuring for 3 Process Data Words
Setting the DIP switches on the option pcb to give process data length 3 requires that 3 process
data words are specified in the ID code list. This configuration will allow you to implement very
powerful drive applications. Fig. 19 shows examples of entries in the ID code list.
00479AEN
Fig. 19: Example of ID code list with process data length set at 3
With this setting, the inverter uses three words in the peripheral area of the PLC. Fig. 20 shows an
example of how the process data words transferred by I
NTERBUS
are mapped in the control.
00480AEN
Fig. 20: Process data word mapping in the PLC peripheral area
In this example, two process data words are exchanged between the higher-level control and the
inverter. With this configuration, for example, the higher-level control could send the process output data Control Word 1, Speed Setpoint and Process Ramp to the inverter and read the process
input data Status Word 1 and Speed Actual Value and Apparent Current Actual Value (see SEW
documentation Fieldbus Unit Profile User Manual).
By specifying address 140 in both the input and output address list, the process data words are
mapped from peripheral word PW 140. The PLC access command will again decide whether the
process input data words (e.g. status word and speed actual value) are to be read or whether the
process data output words (e.g. control word and speed actual value) are to be written.
00482AEN
Fig. 21: PD configuration for 3 process data words as displayed at the keypad
1 234
OPEN
ON
S1
S2
S3
S4
Setting:
3 process data words
ID code list:
Process data width: 3 (word)
Module Ident: 227
Example for S5 data module:
DW n: KY = 003, 227 MC31.. : 3 PD, ID22
7
PW 140
PW 142
PW 144
PW 140
PW 142
PW 144
T PW 140
L PW 140
PD 1
PD 2
PD 3
PD 1
PD 2
PD 3
PD 1
PD 1
EURODRIVE
SEW
841 FELDBUS
STEUER MO DE
EQ
EURODRIVE
SEW
MOVITRAC
PD 2
PD 2
PD 3
PD 3
PLC address area
Output address for MOVITRAC 31.. : PW 140
®
Input address for MOVITRAC 31.. : PW 140
®
070 3PD+PARAM
PD CONFIGURATION
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 19

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
19
The PMS Interface 4
4 The PMS Interface
The MOVITRAC® 31.. inverter offers via the I
NTERBUS
interface a PMS (Peripherals Message
Specification) interface conforming to the DIN 19245 Part 2. You can fully access all the drive
parameters of the MOVITRAC
®
31.. via this I
NTERBUS
communication channel.
4.1 PMS Services
With the I
NTERBUS
interface, the MOVITRAC® 31.. inverter supports the PMS services shown in
Fig. 22.
00481AXX
Fig. 22: PMS services supported by the MOVITRAC® 31.. inverter
4.1.1 Initiate
With the PMS service, Initiate (establish link), a communications link is established between an
INTERBUS-S master and the MOVITRAC
®
31.. inverter.
The establishment of the link is always performed by the I
NTERBUS
master. As the link is being
established, various conventions regarding the communications link are checked, e.g. PMS
services supported, user data length, etc. If the link is successfully established, the inverter
answers with a positive Initiate Response.
If the link could not be established, then the conventions regarding the communications link
between the I
NTERBUS
master and MOVITRAC® 31.. inverter do not match. The inverter will answer
with an Initiate Error Response. In this event, compare the configured communications relationship list of the I
NTERBUS
master with that of the inverter (see Section Appendix A).
The attempt to establish an already existing communications link again generally leads to Abort.
The communications link will then no longer exist so the PMS service Initiate will have to be
performed a third time to reinstate the communications link.
I B MasterNTER US
I BNTER US
I B SlaveNTER US
EURODRIVE
SEW
841 FELDBUS
STEUER MO DE
EQ
EURODRIVE
SEW
MOVITRAC
Initiate
Abort
Abort/Reject
Identify
Get-0V
Status
Read
Write
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 20

20
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
4 The PMS Interface
4.1.2 Abort
An existing communications link between the I
NTERBUS
master and the MOVITRAC® 31.. inverter is
cleared using the PMS service Abort. Abort is an unacknowledged PMS service and can be initiated
both by the I
NTERBUS
-S master as well as by the MOVITRAC® 31.. .
The attempt to establish an already existing communications link again generally leads to Abort.
The communications link will then no longer exist so the PMS service Initiate will have to be
performed a third time to reinstate the communications link.
4.1.3 Reject
With the PMS service Reject, the MOVITRAC
®
31.. rejects an inadmissible PMS service. In this
way, the inverter signals to the I
NTERBUS
master that the service is either not admissible or cannot
be carried out.
4.1.4 Identify
With the PMS service Identify, the MOVITRAC
®
31.. inverter passes the following data to the I
NTER-
BUS master for definitive identification:
4.1.5 Get-0V
With the PMS service Get-OV, the I
NTERBUS
master can retrieve the object description of the
MOVITRAC
®
31.. inverter. In general all drive parameters are described as communications
objects. More precise information about object descriptions can be found in the section Object List.
The MOVITRAC
®
31.. inverter supports both the short as well as the long form of the PMS service
Get-OV.
4.1.6 Status
With the PMS service Status, the I
NTERBUS
master can check the logical communications status of
the FFI 31C option of the MOVITRAC
®
31.. inverter. The Local Detail attribute is not supported by
the inverter.
4.1.7 Read
With the PMS service Read, the I
NTERBUS
master can read all the communications objects of the
MOVITRAC
®
31.. inverter. All drive parameters as well as their codings are listed in detail in the
documentation MOVITRAC
®
31.. Parameter List.
4.1.8 Write
With the PMS service Write, the I
NTERBUS
master can write all the drive parameters of the
MOVITRAC
®
31... If a drive parameter is assigned an invalid value (e.g. value too high), the inverter
generates a Write Error Response giving the precise cause of the error.
vendor_name SEW-EURODRIVE GmbH & Co
model_name MOVITRAC
®
revision 821XXXYYZZ (Number of inverter system software)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 21

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
21
The PMS Interface 4
4.2 Object List
With the PMS services Read and Write, the I
NTERBUS
master can access all the communications
objects defined in the object list.
All drive parameters that can be accessed via the bus system are described as communications
objects in the static object list. All objects in the static object list are addressed via a fieldbus index.
Table 2 shows the structure of the object list of the MOVITRAC
®
31.. inverter.
Normally, the whole object list is always generated when the inverter is switched on. To also be
able to guarantee full access to all parameters via I
NTERBUS
if additional drive parameters are added
in the future, the generated object list is larger than the number of drive parameters implemented.
Access to objects that cannot be directly mapped to a drive parameter is rejected with a negative
response.
The index area is divided into two logical areas. The drive parameters are addressed with indices
from 1000
dec
. The parameter index can be obtained from the SEW manual MOVITRAC® 31..
Parameter List. Indices below 1000
dec
are handled directly by the option pcb and should not be
regarded as drive parameters of the inverter.
Table 2: Structure of the MOVITRAC
®
static object list
4.2.1 Object Description of the Drive Parameters
The drive parameters of the MOVITRAC
®
31.. inverter are described in detail in the SEW documen-
tation MOVITRAC
®
31.. Parameter List. In addition to the parameter index, i.e. the number with
which you can address the appropriate parameter via the communications interfaces of the
inverter, you will find further information about the coding, range of values and meaning of the
parameter data.
To access all drive parameters via I
NTERBUS
, you must add the value 1000
dec
to the index shown in
the parameter list to access the fieldbus index. In general, then, you can therefore read or write the
drive parameters according to the formula:
Fieldbus Index = Parameter Index + 1000
dec
The object description in the object list is identical for all drive parameters. Even parameters that
can only be read are given the attribute Read All/Write All in the object list, as the inverter itself
carries out the appropriate testing and if necessary supplies a return code. Table 3 shows the
object descriptions of all drive parameters.
Table 3: Object description of the MOVITRAC® 31.. drive parameters
Fieldbus index (decimal) Name of the communications object
996 Download Parameter Block
997 Universal Write parameter
998 Universal Read pointer
999 Universal Read parameter
1000 + parameter index Drive parameters for MOVITRAC
®
31.. (Parameter index see SEW documentation
MOVITRAC
®
31.. Parameter List)
Index: Parameter-Index + 1000
dez
Object code: 7 (Simple variable)
Data type index: 10 (Octet string)
Length: 4
Local address: –
Password: –
Access groups: –
Access rights: Read all/Write all
Name[16]: –
Extension length: –
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 22

22
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
4 The PMS Interface
4.2.2 “Download Parameter Block” Object
The “Download Parameter Block” object enables a maximum of 38 MOVITRAC
®
31.. drive parameters to be written at the same time with a single execution of the Write service. This means you can
use this object to parameterize the inverter in the start-up phase with only one Write service call.
Since, as a rule, only a few parameters have to be altered, this parameter block with a maximum of
38 parameters is adequate for almost all applications. The user data area is fixed at 38 x 6 + 2 Byte
= 230 Byte (octet string type). Fig. 23 shows the structure of the “Download Parameter
Block”object.
00955AEN
Fig. 23: Structure of the “Download Parameter Block” object
The “Download Parameter Block” object is only handled locally on the fieldbus option pcb and is
defined as shown in Table 4.
Table 4: Definition of the “Download Parameter Block” object"
With the WRITE service to the “Download Parameter Block” object, a parameter setting mechanism is started in the fieldbus option pcb that successively transmits to the inverter all the parameters in the user data area of the object.
Index: 8296
Object code: 7 (Simple variable)
Data type index: 10 (Octet string)
Length: 230
Local address: Password: Access groups: Access rights: Write all
Name[16]: Extension length: -
Octet 1:
Octet 2:
Octet 3:
Octet 4:
Octet 5:
Octet 6:
Octet 7:
Octet 8:
Octet 9:
Octet 10:
Octet 225:
Octet 226:
Octet 227:
Octet 228:
Octet 229:
Octet 230:
Byte
parameters 1-38
1st parameter
38th parameter
Reserved
Index high
Index low
Data MSB
Data
Data
Data LSB
Index high
Index low
Number of parameters
Index high
Index low
Data MSB
Data
Data
Data LSB
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 23

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
23
The PMS Interface 4
After successfully processing the Download Parameter Block, i.e. all parameters transferred from
the I
NTERBUS
master have been written, the Write service is ended with a positive Write Response.
In the event of an error, a negative Write Response is returned. In this event, the return code will
contain more precise details about the type of error and, in addition, the parameter number (1-38)
where the error occurred (see Example 1).
When using the Download Parameter Block, note the following:
1. Do not carry out any factory setting within the Download Parameter Block.
2. After deactivating the EEPROM memory function (change parameter P 801, index 236 to NO),
all parameters subsequently written will not be memory-resident.
3. After activating the parameter lock, all parameters subsequently written will be rejected.
4.2.3 “Universal Write Parameter” Object
This object permits any parameter to be written, regardless of the size and content of the object list
on the fieldbus option pcb.
The parameter value to be written is shown together with the index in a 10-byte data area of the
“Universal Write” object. The parameter values can be four or eight bytes long depending on the
drive parameter. The length can be obtained from the current parameter list for the respective unit.
The parameter data must be entered left justified in every case (Fig. 24).
01203AEN
Fig. 24: Structure of the “Universal Write” object
The “Universal Write” object is only handled locally on the fieldbus option pcb; i.e. it does not
represent a drive parameter and is defined as shown in Table 5.
Table 5: Definition of the “Universal-Write” object
Example 1: Error writing the 11th parameter
Write Error Response
Error Class: 8 Other
Error Code: 0 Other
Additional Code High: 11dec Error writing parameter 11
Additional Code Low: 15hex Value too large
Index: 997
Object code: 7 (Simple variable)
Data type index: 10 (Octet string)
Length: 10
Local address: –
Password: –
Access groups: –
Access rights: Write all
Name[16]: –
Extension length: –
Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 Octet 9 Octet 10
4-byte data
8-byte data
Index
High
Index
Low
Data
MSB
Data Data Data Data Data Data
LSB
Data
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 24

24
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
4 The PMS Interface
4.2.4 “Universal Read” Functionality Objects
The Universal Read objects form the counterpart to Universal Write. The Universal Read objects
permit indirect reading of any parameter independent of the object list being used. The execution of
a Universal Read takes place in two steps using both the “Universal Read Pointer” and “Universal
Read Data” objects.
In the “Universal Read Pointer” object, the desired fieldbus index to be read by the inverter (read
pointer) is first entered using the Write service. The value of the drive parameter is then read using
the Read service via the “Universal Read Data” object. To avoid having to write the Read pointer
again before reading consecutive parameters, the functionality of the Universal Read can also be
carried out in what is known as auto-increment mode. Here, the Read pointer (“Universal Read
Pointer” object) is increased by a predefined number each time it reads the “Universal Read Data”
object. The number, together with the Read pointer, is set in the “Universal Read Pointer” object.
Fig. 25 shows an example of how Universal Read works without the auto-increment function.
01205AEN
Fig. 25: Universal Read service without auto-increment function
MOVITRAC 31..
(Slave)
Controller
(Master)
1. Writing the universal read pointer parameter with data
(Index: 1020, increment value = 0 (auto-increment OFF))
2. Reading parameter 1020 via universal read data
WRITE_998(1020.0)
OK
Read_999
Data of parameter 1020
3. Writing the universal read pointer parameter with data
(Index: 1025, increment value = 0 (auto-increment OFF))
WRITE_998(1025.0)
OK
4. Reading parameter 1025 via universal read data
Read_999
Data of parameter 1025
etc.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 25

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
25
The PMS Interface 4
Fig. 26 shows an example of how Universal Read works using the auto-increment function.
01206AEN
Fig. 26: Universal Read service with auto-increment function
“Universal Read Pointer”Object
The “Universal Read Pointer” object contains within its 4 data bytes both the fieldbus index to be
read as a read pointer as well as the number used in auto-increment mode. Fig. 27 shows the
structure of this object.
01208AEN
Fig. 27: Structure of the Universal Read Pointer parameter
When auto-increment mode is active (increment value greater than 0), the index is increased after
reading the “Universal Read Data” object by the predefined increment value. The default value of
this object is
Index: 1000
dec
Auto-increment: 0 = OFF
MOVITRAC 31..
(Slave)
Controller
(Master)
1. Writing the universal read pointer parameter with data
(Index: 1020, increment value = 5 (auto-increment ON))
2. Reading parameter 1020 via universal read data
WRITE_998(1020.5)
OK
Read_999
Data of parameter 1020
etc.
Read pointer:
1020
+5
1025:2. Reading parameter 1025 via universal read data
Read_999
Data of parameter 1025
2. Reading parameter 1030 via universal read parameter
Read_999
Data of parameter 1030
+5
1030:
Octet 0 Octet 1 Octet 2 Octet 3
Octet 0 Octet 1 Octet 2 Octet 3
00hex04hex 01hex04hex
00 00 = Auto-increment = OFF
00 01 = +1
00 02 = +2
etc.
Index
Index
High
Index
Low
Increment value
High Low
Auto-increment = +1Index 1025
Example:
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 26

26
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
4 The PMS Interface
The auto-increment value is generally treated as having no sign, i.e. the value is generally added.
The “Universal Read Pointer” object is only handled locally on the fieldbus option pcb and is
defined as shown in Table 6.
Table 6: Definition of the “Universal Read Pointer” object
“Universal Read Data” Object
Accessing this parameter using the Read service returns the value of the read pointer held in the
“Universal Read Pointer” object. Fig. 28 shows the structure of this object.
01209AEN
Fig. 28: Structure of the Universal Read Data parameter
The length of the data can be determined from the SEW documentation MOVITRAC® 31.. Parameter List. Data are generally entered left justified, i.e. beginning with the most significant byte in
octet 1.
The “Universal Read-Data” object is only handled locally on the fieldbus option pcb and is defined
as shown in Table 7.
Table 7: Object description of the Universal Read Data parameter
Index: 998
Object code: 7 (Simple variable)
Data type index: 10 (Octet string)
Length: 4
Local address: –
Password: –
Access groups: –
Access rights: Read all / Write all
Name[16]: –
Extension length: –
Index: 999
Object code: 7 (Simple variable)
Data type index: 10 (Octet string)
Length: 8
Local address: –
Password: –
Access groups: –
Access rights: Read all / Write all
Name[16]: –
Extension length: –
Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8
4-byte data
8-byte data
Data
MSB
Data Data Data Data Data Data
LSB
Data
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 27

MOVITRAC® 31.. Feldbus-Schnittstelle I
NTERBUS
27
Parameter Adjustment
Return Codes
5
5 Parameter Adjustment Return Codes
The return codes returned by the inverter in the event of incorrect parameterization are clearly
described in the Fieldbus Unit Profile Manual and are not part of this document. However, the
following special case can arise in connection with I
NTERBUS
.
5.1 Internal Communications Error
The return code listed in Table 8 is returned if a communications error has occurred between the
option pcb and the inverter system. The PMS service transferred by the fieldbus has possibly not
been executed and should be repeated. If this error occurs repeatedly the inverter must be
switched off and on again so that initialisation is repeated.
Table 8: Return code for a communcations error between fieldbus option pcb and inverter
Error Rectification:
Repeat the Read or Write service. If the error recurs, you should briefly disconnect the inverter
from the mains supply and switch it on again. If the error persists, consult the SEW Service Department.
Code (dez) Bedeutung
Error Class: 6 Access
Error Code: 2 Hardware Fault
Add. Code high: 0 –
Add. Code low: 0 –
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 28

28
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
6 Technical Data
6 Technical Data
6.1 FFI31.. Interface Technical Data
Interface pcb type
Part no.
FFI31A
822 199 5
FFI31C
822 316 5
Supported inverter types For MOVITRAC
®
31B inverter with size 4 a
service code equal to or greater than 4
(→ Installation and Commissioning,
MOVITRAC
®
31B, sec. 4).
All MOVITRAC
®
31C inverters from size
1...4
Commissioning and
diagnostic tools
FBG31B keypad
MC_SHELL software, version 2.40 and
higher
FBG31C keypad
MC_SHELL software, version 2.40 and
higher
Module Idents 227
dec
= E3
hex
No. of process data words 1, 2 or 3 process data words, set via
DIP switch setting as supplied: 2 PD
PCP channel:
Connection technology
Parameter setting is supported by one PCP word.
Connection technology 2-wire remote bus interface with 9-pin sub-D connector (male) for remote bus input
and 9-pin sub-D connector (female) for remote bus output.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 29

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
29
Technical Data 6
6.2 Technical Data MOVITRAC® 31.. BG0/I
NTERBUS
Part numbers:
V
N
= 3 × 230 V VN = 3 × 380...500 V
Dimensions:
01125AXX
Fig. 29: Dimensions of the MOVITRAC® 31C BG0/I
NTERBUS
in mm (in)
Supported Inverter Types MOVITRAC® 31C, size 0 with integrated I
NTERBUS
Interface
Commissioning and
diagnostic tools
FBG31C keypad
MC_SHELL, version 2.40 and higher
Module ident 227
dec
= E3
hex
No. of process data words 1, 2 or 3 process data words, set via the DIP switch
PCP channel Parameter setting is supported by one PCB word
Connection technology Two-wire remote bus interface with 9-pin sub-D connector (male) for remote bus input
and 9-pin sub-D connector (female) for the remote bus output
MOVITRAC® Type Part No. MOVITRAC® Type Part No.
31C005-233-4-21 826 636 0 31C005-503-4-21 826 638 7
31C011-233-4-21 826 637 9 31C007-503-4-21 826 639 5
31C011-503-4-21 826 640 9
31C014-503-4-21 826 641 7
189 (7.44)
57 (2.24)
105 (4.13)
127 (5.0)
188 (7.4)
175 (6.89)
6
(0.24)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 30

30
MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
Appendix A
Appendix A
Even though the communications relationship list (KBL) of the MOVITRAC
®
31.. inverter complies
with standard I
NTERBUS
conventions it is fully described in Table 9. The meaning of the individual
KBL indications can be found in DIN 19245 Part 2.
Table 9: I
NTERBUS
KBL for MOVITRAC® 31.. with I
NTERBUS
interface
KR Type ATTR RADR
SCC
RCC SAC RAC ACI/CCI
0MMAZD0
1
1110
max PDU size: Features supported Supported PMS services
Send HiPrio 0 00 00 00 00 80 30 Get-OV.indication
Read.indication
Write.indication
Send LoPrio 243
Rec. HiPrio 0
Rec. LoPrio 243
Max. number of outstanding client services: 1
Max. number of outstanding server services: 1
Type of communication: Connection oriented
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 31

MOVITRAC® 31.. I
NTERBUS Fieldbus Interface
31
Index
Index
8-Wire Fieldbus Systems - Integration 14
B
Bus Topologies 13
C
Commissioning 11
Communication interface
19
Communications relationship list (KBL)
30
Configuring
11
Configuring the Master Module
15
D
DAB Master Modules 14
Diagnosis
of the I
NTERBUS
application, see Fieldbus Unit
Profile User Manual
Dimensions of the MOVITRAC
®
31.. BG0/
I
NTERBUS
29
Display Elements
10
Documentation on the fieldbus interface
4
Download Parameter Block
22
F
FFI31.. Interface Technical Data 28
I
Identity code 15
Incoming remote bus
8
Installing the MOVITRAC
®
31.. size 0 with INTERBUS
7
M
Module Identity 15
O
Object “Universal Read Data” 26
Object “Universal Read Pointer”
25
Object List
21
Outgoing remote bus
8
P
Parameter adjustment
Abort
20
Communication Error Rectification
27
Communications Error
27
Download Parameter Block
22
Get-0V
20
Identify
20
Initiate
19
of the Drive Parameters
21
Read
20
Reject
20
Services
19
Status
20
Universal Read
24
Universal Write Parameter
23
Write
20
Parameter P801 “Save”
12
Pin Assignment
8
PMS Interface
19
Process data length
1 PD
16
2 PD
17
3 PD
18
Process Data Length – Setting
9
R
Read 20
Return
27
Return Codes
27
S
Screening and Laying of the Bus Cables 9
T
Technical Data 28
Technical Data MOVITRAC
®
31.. BG0/I
NTERBUS
29
W
Write 20
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
 Loading...
Loading...