

Page 1

ATV71L
电梯专用变频器
软件版本 V2.6
用户手册
Page 2

产品目录 ______________________________________________________________________________________
A
编程手册 ______________________________________________________________________________________
B
Page 3

目录
型号
_________________________________________________________________________________________________________________________ 2
特性
_________________________________________________________________________________________________________________________4
尺寸
_________________________________________________________________________________________________________________________8
接线图
______________________________________________________________________________________________________________________9
介绍
________________________________________________________________________________________________________________________ 10
附件
________________________________________________________________________________________________________________________ 12
安装建议
编码器接口卡特性
编码器接口卡接线图
___________________________________________________________________________________________________________________ 14
___________________________________________________________________________________________________________ 17
_________________________________________________________________________________________________________20
A
1
Page 4

型号
变频器 0
ATV 71
电源电压:
200
...
240 V,50/60 Hz
A
ATV71LU30M3Z
Isc
ATV 71
最大连续
电流
16 kHz
最大瞬时电流持
续时间
之间调节。
型号
(3)
VW3A1101
重量
。
电机功率 线路电源
铭牌上指示的
功率
(1)
kW HP A A kVA kA A A A kg
单相电源:
2.2 3 25.9 22.1 9.2 5 11 16.5 18.1 ATV 71LU30M3Z 4.000
3 – 25.9 22 9.1 5 13.7 20.6 22.6 ATV 71LU40M3Z 4.000
4 5 34.9 29.9 12.4 5 17.5 26.3 28.8 ATV 71LU55M3Z 5.500
5.5 7.5 47.3 40.1 16.7 22 27.5 41.3 45.3 ATV 71LU75M3Z 5.500
三相电源:
3 – 19.3 16.4 6.8 5 13.7 20.6 22.6 ATV 71LU30M3Z 4.000
4 5 25.8 22.9 9.5 5 17.5 26.3 28.8 ATV 71LU40M3Z 4.000
5.5 7.5 35 30.8 12.8 22 27.5 41.3 45.3 ATV 71LU55M3Z 5.500
7.5 10 45 39.4 16.4 22 33 49.5 54.5 ATV 71LU75M3Z 7.000
11 15 53.3 45.8 19 22 54 81 89.1 ATV 71LD11M3XZ 9.000
15 20 71.7 61.6 25.6 22 66 99 109 ATV 71LD15M3XZ 16.000
18.5 25 77 69 28.7 22 75 112 124 ATV 71LD18M3XZ 19.000
22 30 88 80 33.3 22 88 132 145 ATV 71LD22M3XZ 19.000
30 40 124 110 45.7 22 120 180 198 ATV 71LD30M3XZ 39.000
37 50 141 127 52.8 22 144 216 238 ATV 71LD37M3XZ 39.000
45 60 167 147 61.1 22 176 264 290 ATV 71LD45M3XZ 39.000
这些值是连续运行时对于
(1)
对于
ATV 71LD45M3XZ
超过
2.5或4 kHz
变频器的额定电流就会降低。
所指示的电机功率和最大预期线路电流
(2)
所有变频器在供货时都带有一个简易操作面板,如要订购高级图形显示终端,加订一个
(3)
线路电流
200 V 240 V 240 V 60 s 2 s
...
200
240V,50/60 Hz
...
200
240V,50/60 Hz
,由额定值决定,如果温升过高,变频器本身就会减小开关频率。 对于在额定开关频率之上的连续运行,
视在
(2)
功率
2.5或4 kHz
以下的变频器而言,开关频率可在1...
最大预期线
路电流
的额定开关频率而言的,由额定值决定。
的典型值。
Isc
2
Page 5

型号
(续)
变频器 0
ATV 71
电源电压:
380
...
480 V,50/60 Hz
ATV71LU40N4Z
电机功率 线路电源
铭牌上指示
的功率
kW HP A A kVA kA A A A kg
三相电源:
3 – 10.7 9 7 5 7.8 11.7 12.9 ATV 71LU30N4Z 4.000
4 5 14.1 11.5 9.3 5 10.5 15.8 17.3 ATV 71LU40N4Z 4.000
5.5 7.5 20.3 17 13.4 22 14.3 21.5 23.6 ATV 71LU55N4Z 5.500
7.5 10 27 22.2 17.8 22 17.6 26.4 29 ATV 71LU75N4Z 5.500
11 15 36.6 30 24.1 22 27.7 41.6 45.7 ATV 71LD11N4Z 7.000
15 20 48 39 31.6 22 33 49.5 54.5 ATV 71LD15N4Z 9.000
18.5 25 45.5 37.5 29.9 22 41 61.5 67.7 ATV 71LD18N4Z (3) 16.000
22 30 50 42 32.9 22 48 72 79.2 ATV 71LD22N4Z (3) 19.000
30 40 66 56 43.4 22 66 99 109 ATV 71LD30N4Z (3) 26.000
37 50 84 69 55.3 22 79 118.5 130 ATV 71LD37N4Z (3) 26.000
45 60 104 85 68.5 22 94 141 155 ATV 71LD45N4Z (3) 44.000
55 75 120 101 79 22 116 174 191 ATV 71LD55N4Z (3) 44.000
75 100 167 137 109.9 22 160 240 264 ATV 71LD75N4Z (3) 44.000
这些值是连续运行时对于
(1)
对于
超过
变频器的额定电流就会降低。
所指示的电机功率和最大预期线路电流
(2)
标准供货时变频器带有一个直流电抗器。
(3)
所有变频器在供货时都带有一个简易操作面板,如要订购高级图形显示终端,加订一个
(4)
线路电流
(1)
380 V 480 V 380 V 60 s 2 s
...
380
480V,50/60 Hz
ATV 71LD75N4Z
2.5或4 kHz
,由额定值决定,如果温升过高,变频器本身就会减小开关频率。 对于在额定开关频率之上的连续运行,
视在
(2)
功率
2.5或4 kHz
以下的变频器而言,开关频率可在1...
最大预期线
路电流
的额定开关频率而言的,由额定值决定。
的典型值。
Isc
ATV 71
最大连续电流 最大瞬时电流
Isc
之间调节。
16 kHz
持续时间
型号
VW3A1101
(4)
。
重量
A
3
Page 6

特性
变频器 0
ATV 71
环境特性
符合标准
A
抗干扰性和电磁散射性
EMC
针对变频器的传
导式和辐射式电
磁兼容性
电磁散射性
标记 按照欧洲低压
产品认证
保护等级
振动阻尼
冲击强度
最大环境污染
环境条件
相对湿度
设备附近的环境空气温度 运行
最大工作高度
工作位置
与正常垂直安装位置有关的最大恒定角度
ATV 71LU30N4Z...LU40N4Z
(EMC)
ATV 71LU30M3Z...LU75M3Z
ATV 71LU55N4Z...LD75N4Z
ppp
ATV 71L
ppp
ATV 71L
ATV 71LD11M3XZ...D45M3XZ
ATV 71LU30N4Z...D75N4Z
ppp
ATV 71L
ATV 71LD11M3XZ...D45M3XZ
ATV 71LU30N4Z...D75N4Z
ppp
ATV 71L
ATV 71LD11M3XZ...D45M3XZ
ATV 71LU30N4Z...D75N4Z
ppp
ATV 71L
ATV 71LD11M3XZ, LD15M3XZ
ATV 71LU30N4Z...LD75N4Z
ATV 71LD18M3XZ...D45M3XZ
ATV 71LD22N4Z...D75N4Z
ppp
ATV 71L
ppp
ATV 71L
贮存
M3XZ
M3Z
M3Z
M3Z
M3Z
M3Z, L
N4Z
ppp
M3XZ
°C
°C
m
符合最严格的电气工业控制设备国际标准与建议
ATV 71
61800-5-1,IEC/EN 61800-3 (
射性)。
IEC/EN 61800-3,类1与类2
IEC/EN 61000-4-2 类3
IEC/EN 61000-4-3 类3
IEC/EN 61000-4-4 类4
IEC/EN 61000-4-5 类3
IEC/EN 61000-4-6 类3
IEC/EN 61000-4-11
IEC/EN 61800-3, 环境1
EN 55011 A类 1组, IEC/EN 61800-3 类C2
带有附加的
EN 55011 B类1组, IEC/EN 61800-3 类C1
EN 55011 A类 2组, IEC/EN 61800-3 类C3
带有附加的
b
EN 55011 A类 1组, IEC/EN 61800-3 类C2
b
EN 55011 B类 1组, IEC/EN 61800-3 类C1
带有附加的
b
EN 55011 A类 1组, IEC/EN 61800-3 类C2
b
EN 55011 B类 1组, IEC/EN 61800-3 类C1
UL, CSA, DNV, C-Tick, NOM 117 与 GOST
IEC/EN 61800-5-1, IEC/EN 60529
IP 21与IP 41
,机壳的上部没有盖板
IP 20
带有附件
IP 21
1.5mm,峰-
,持续
15 gn
级,符合
2
级,符合
3
IEC 60721-3-3 类3C1与类3S2
...
,没有冷凝或滴水,符合
5
95%
...
-10
+ 50
带有与变频器额定值相对应的控制卡风扇工具包
会降低
...
-25
+70
,额定值不会降低
1000
...
1000
3000
2000 m
10° 10°
滤波器:
EMC
滤波器:
EMC
滤波器:
EMC
(73/23/EEC与93/68/EEC)以及EMC (89/336/EEC)
在上部
VW3 A9 1
峰值从3至
,符合
11 ms
IEC/EN 61800-5-1
IEC/EN 61800-5-1
,额定值不会降低
,每升高
。
传导式和辐射式电磁兼容性
与环境2, 类C1,类C2,类
pp,
NEMA 类型1
13Hz;1 gn,从13至200Hz, 符合IEC/EN 60068-2-6
IEC/EN 60068-2-27
,电流额定值下降1%。对于 “拐角接地”的电网,最高为
100 m
带有附件
IEC 60068-2-3
(IEC, EN)
C3
VW3 A9 2
VW3 A9 4
,特别是: 低压,
抗干扰性和电磁散
(EMC)
指导,变频器带有标记。
pp
pp 时最高可达
60
°C
,但额定值
IEC/EN
4
Page 7

特性
(续)
变频器 0
ATV 71
变频器特性
输出频率范围
可设置的开关频率
速度范围
速度精度 对于
转矩精度
瞬时过电压
制动转矩
最大瞬时电流
时的连续转矩
0 Hz
电机控制类型 异步电机
频率环
滑差补偿
ATV 71L
ATV 71LD11M3XZ...D37M3XZ
ATV 71LU30N4Z...D37N4Z
ATV 71LD45M3XZ
ATV 71LD45N4Z...D75N4Z
ATV 71L
ATV 71LD11M3XZ,LD15M3XZ
ATV 71LU30N4Z...D30N4Z
ATV 71LD18M3XZ...D45M3XZ
ATV 71LD37N4Z...D75N4Z
0.2 Tn至Tn
ATV 71LU30M3Z...D45M3XZ
ATV 71LU30N4Z...D75N4Z
同步电机
ppp
ppp
M3Z
M3Z
的转矩变化
Hz 0…1000
Hz 0…500
kHz
可在运行期间调节,1...8,
kHz
kHz
,连续运行时额定值不会降低
4
如超过此频率,查看第16页的额定值降低曲线
,连续运行时额定值不会降低
2.5
如超过此频率,查看第16页的额定值降低曲线
在带有编码器反馈的闭环模式下为1...
在开环模式下为
额定速度的 ±
额定滑差的 ±
在闭环模式下为 ±
在开环模式下为 ±
电机额定转矩的
电机额定转矩的
额定转矩的
带有可选制动电阻器时为
变频器额定电流的
变频器额定电流的
变频器可以连续提供变频器额定电流峰值
ATV 71
带有传感器的磁通矢量控制
无传感器的磁通矢量控制
电压/频率比(2或5个点
用于不平衡负载的
有或无速度反馈的矢量控制
结构可调的PI调节器,用于与机器相适应的速度响应(精度,速度
无论何种负载都自动进行。可被禁止或进行调节
在电压/频率比中不可用
...
1
100
,在带有增量式编码器反馈的闭环模式下
0.01%
,没有速度反馈
10%
5%
15%
170%(
220%(
,没有制动电阻器(典型值
30%
150%
165%
ENA (
...8 或1...16,由额定值决定
2.5
1000
典型值为 ±
典型值为 ±
150%
,持续
,持续
(FVC)(
(FVC) (
)
能量适配)系统
,持续
10%)
,持续
10%)
典型值
60 s (
典型值
2 s (
电流矢量
电压或电流矢量
)
)
)
)
60 s
2 s
A
)
)
电源特性
电源 电压
频率
信号传输
输出电压
变频器噪音等级
电气绝缘
V
200 - 15%
200 - 15%
380 - 15%
Hz 50 - 5%
个红色
1
最大3相电压等于线路电源电压
符合
在电源与控制元件之间(输入、输出、电源
接线电缆特性
电缆类型 在机柜中安装 单股
在带有
柜中安装
在带有
柜中安装
IP 21或IP 31
NEMA类型1
工具包的机
工具包的机
铜90°
3股IEC
3股UL 508
环境温度为
...
240 + 10%
...
240 + 10% 3
...
480 + 10% 3
...
60 + 5%
LED: LED
86-188/EEC
电缆,环境温度为
IEC
C XLPE/EPR或铜70 °C PVC
电缆,环境温度为
40 °C,铜75°C PVC
单相,对于
相,对于
相,对于
发光表示有变频器电压
指示
45 °C,
40 °C,铜70 °C PVC
电缆,除电抗器之外(2股
ATV 71LU30M3Z...LU75M3Z
ATV 71L
ATV 71L
ppp
ppp
)
UL 508电缆)
M3Z,L
N4Z
,
ppp
M3XZ
5
Page 8

特性
(续)
变频器 0
ATV 71
电气控制特性
可用的内部电源 短路与过载保护:
A
外部
未提供
(
模拟输入
可设置的电压与电流输出
可设置的继电器输出
逻辑输入
+ 24 V
电源
)
AI1-/AI1+
AI2
其它输入
AO1
其它输出
R1A, R1B, R1C
R2A, R2B
其它输出
...
LI1
LI5
LI6
正逻辑(源
负逻辑(漏
其它输入
)
)
b
1 x 10.5 V c ± 5%
b
1 x 24 V c (最小21 V
24 V c
(最小19 V
功率为
30 W
个双极性差分模拟输入
1
最大采样时间;
分辨率:11位
精度:±
0.6%
线性度: 最大值的 ±
个可使用软件设置的电流或电压模拟输入;
1
b
模拟电压输入0...
b
模拟电流输入
最大采样时间;
分辨率:
11
精度: ±
0.6%
线性度: 最大值的 ±
见可选卡
个可设置的电压或电流模拟输出:
1
b
模拟电压输出0...
b
模拟电流输出
最大采样时间;
分辨率:
10
精度: ±
1%
线性度:±
见可选卡
个继电器输出, 一个 “
1
最小开关能力:
最大开关能力:
b
在电阻负载上
在电感负载上
b
最大响应时间:
电气使用寿命:
个继电器逻辑输出,一个 “
1
最小开关能力:
最大开关能力:
b
在电阻负载上
在电感负载上
b
最大响应时间:
电气使用寿命:
见可选卡
个可编程逻辑输入,
5
阻抗:
最大电压:
最大采样时间:
多重分配使得能够在一个输入上设置几种功能(例如:
被分配给反向与预置速度
1
逻辑输入,与
可作为最多6个串联安装的
如果 y
如果 u
见可选卡
kΩ
3.5
个逻辑输入,可通过开关设置为逻辑输入或设置为
b
额定值
b
跳闸电阻为3 kΩ
b
短路保护
或逻辑输入没有接线,为状态0; 如果 u
5 V
16 V
电源,用于基准电位计(1至10 kΩ),最大电流为
,最大
,最大
30 V)
±
10 V c (
2 ms ± 0.5 ms
符号位
+ 1
,对于60°C 的温度变化
0.15%
c
10 V
X-Y mA ,X与Y
2 ms ± 0.5 ms
位
,对于 60 °C 的温度变化
0.15%
c
10 V
X-Y mA ,X与Y
2 ms ± 0.5 ms
位
,对于
0.2 %
30 V
< 1.5
或逻辑输入没有接线,为状态0; 如果 y
°C 的温度变化
60
N/C
,对于
3 mA
(cosϕ= 1): 5 A
(cosϕ= 0.4与L/R = 7 ms): 2 A
7 ms ± 0.5 ms
次运行(最大开关能力前提下
100,000
,对于
3 mA
(cosϕ= 1): 5 A
(cosϕ= 0.4与L/R = 7 ms): 2 A
7 ms ± 0.5 ms
次运行(最大开关能力前提下
100,000
24 V
2 ms ± 0.5 ms
...
的特性相同
LI1
LI5
kΩ
,复位值为
Ω
< 50
,最大电流为
27 V)
最大安全电压为
, 阻抗为30 kΩ (最大安全电压为
可通过编程设定,范围为0至
,最小负载阻抗为
可通过编程设定,范围为0至
”触点与一个带有公共点的 “
c
24 V
,对于
”触点
N/O
c
24 V
,对于
c
, 与1级
3)
探头的输入:
PTC
kΩ
1.8
470
250 V a 或30 V
,对于
a
或
250 V
,对于
PLC,IEC 65A-68
200 mA.
24 V)
Ω
30 V
11 V
10 mA
24 V)
,阻抗为
20 mA
,最大负载阻抗为
20 mA
”触点
N/O
c
a
或
250 V
)
c
a
250 V
)
标准一致
被分配给正向与预置速度2,
LI1
探头输入
PTC
,为状态
,为状态
10 V
c
30 V
或
c
30 V
1
1
242
Ω
500
Ω
LI3
安全输入
最大
接线能力与拧紧力矩
I/O
6
PWR
个用于断电安全功能的输入:
1
b
电源:
24 V c (最大30 V)
b
阻抗:
kΩ
1.5
b
如果
,为状态0; 如果
< 2 V
2.5 mm2 (AWG 14)
0.6 Nm
> 17 V
,为状态
1
Page 9

特性
(续)
变频器 0
ATV 71
电气控制特性
加速与减速斜坡 斜坡图:
制动,直至停止
主变频器保护与安全特性
电机保护 集成在变频器中的热保护,通过考虑速度,连续计算
ppp
绝缘强度
至地线的绝缘电阻
ATV 71
ATV 71
ATV 71
ppp
ppp
M3Z
M3XZ
N4Z
b
线性斜坡,可分别进行调节,调节范围为从
bS形斜坡,U形斜坡或定制的斜坡
如果超过制动能力,自动适应减速斜坡时间,此功能可被禁止(使用制动电阻器)。
通过直流注入:
b
通过可编程逻辑输入上的命令
b 一旦估计的输出频率下降至
或连续进行,电流可在0至
热保护:
b
防止过热
b
功率级保护
保护:
b
电机各相之间短路
b
输入相中断
b
输出相位与地线之间出现过电流
b
直流总线上出现过电压
b
控制电路断路
b
超过速度限幅
安全功能:
b
线路电源过电压与欠电压
b
输入缺相,使用3相电源时
b
变频器的电源出现故障时保存电机热态。
b
可通过操作者对话终端对功能进行修改,由电机的类型(强制冷却型或自冷却型)定。
防止电机相位中断
使用
地线与电源端子之间:
控制设备与电源端子之间:
地线与电源端子之间:
控制设备与电源端子之间:
> 1 MΩ (
探头进行保护
PTC
电气绝缘),
500 V 持续1
2830 V
4230 V
3535 V
5092 V
< 0.1 Hz
1.2 In
c
c
c
c
分钟
0.01至9999 s
,就自动进行直流注入,周期可在0至
之间调节(仅在开环模式下)。
A
之间调节
60 s
2
:
t
I
频率分辨率 显示单元
模拟输入
Hz 0.1
Hz
0.024/50 Hz(11位)
操作安全特性
保护 机器保护 强制停车与/或防止意外设备运行的 “断电”
系统过程保护
IEC/EN 61800-5-2
强制停车与/或防止意外设备运行的 “断电”
级标准和
标准草案。
IEC/EN 61800-5-2
标准草案。
(PWR)
(PWR)
安全功能符合
安全功能符合
EN 954-1类3
IEC/EN 61508的SIL2
标准和
7
Page 10

A
尺寸
ATV 71L
无可选卡
变频器 0
ATV 71
变频器
ppp
M3Z,ATV71LD11M3XZ,LD15M3XZ,ATV71LU30N4Z...LD18N4Z
个可选卡
1
(1) 2
个可选卡
(1)
公用正视图
K
b
c
ppp
ATV 71L
U30M3
U40N4
U55M3, U55N4, U75N4
U75M3, D11N4
D11M3X, D15M3X
D15N4, D18N4
Z a b c c1 c2 G H K Ø
...
U40M3, U30N4,
,
c1
155 260 187 210 233 138 249 4 5
175 295 187 210 233 158 283 6 6
210 295 213 236 259 190 283 6 6
230 400 213 236 259 210 386 8 6
ATV 71LD18M3XZ...D45M3XZ, ATV71LD22N4Z...LD37N4Z
无可选卡
b
个可选卡
1
(1) 2
个可选卡
H
4xØ
c2
(1)
4xØ
G
==
a
公用正视图
K
H
cc1c2
ppp
ATV 71L
D18M3X, D22M3X, D22N4
D30N4, D37N4
D30M3X…D45M3X
Z a b c c1 c2 G H k Ø
ATV 71LD45N4Z...LD75N4Z
无可选卡
630
290
可选卡:
(1)
扩展卡、通信卡或 “控制器内部”可编程卡 。
I/O
=
240 420 236 259 282 206 403 8.5 6
240 550 26 6 289 312 206 529 10 6
320 550 266 289 312 280 524.5 10 9
个可选卡
1
(1) 2
313 334
个可选卡
(1)
4xØ9
=
G
a
公用正视图
280
320
=
10
604.5
=
8
Page 11

接线图
变频器 0
ATV 71
示意图符合标准
ppp
ATV 71L
相电源,小惯量机器, 垂直运动
3
1
U1
2
R/L1
U/T1
3
4
S/L2
V/T2
V1
M
3
Q1
(4)
A1
EN 954-1
M3Z,ATV71L
L1 (
5
(1)
N (–)
S1
(3)
6
(6)
R1A
T/L3
W/T3POPC/–
L1
W1
(9)
+)
R1C
ppp
R1B
PA/+
的类别3、
M3XZ,ATV71L
F1
A2 A1
XPS AC
48 V, 115 V, 230 V
A2
R2A
+ 10
基准电位计
LI1
R2C
ATV 71Hppppp
+
AI1
AI1–
IEC/EN 61508 SIL2
ppp
N4Z
S2
(2)
ESC
(2)
Y1 13 23 33 Y43
T
LI2
+
–
LI3
AI2
(10)
X-Y mA
或
0…10 V
LI4
LI5
K1
PE
(7) (8)
LI6
COM
+ 24
AO1
逻辑
PWR
性能,按照标准
Y2
K1
K2
K2
14 24 34 Y44
COM
IEC/EN 60204-1
(5)
的类别0停车
ATV 71LU30M3Z...LU75M3Z
单相电源的动力部分
1
Q1
(4)
A1
3
2
4
S/L2
R/L1
W/T3
U/T1
V/T2
V1
U1
W1
M
3
5
6
A
备注:所有端子位于变频器的底部。给变频器附近的或在同一电路上连接的所有电感电路安装干扰抑制器,例如继电器、接触器、电磁阀、荧光照明设备等。
与变频器
型号 说明
A1
A2
F1
L1
Q1
S1
S2
电源:c 或 a
(1)
:在通电时或急停之后使
(2) S2
请求自由停车并激活 “断电”安全功能。
(3)
线路电抗器(单相或3相)。
(4)
逻辑输出可被用于发送机器处于安全停车状态的信号。
(5)
故障继电器触点,用于变频器状态的远程信号发送。
(6)
逻辑输入的公共连接,由
(7)
标准化的同轴电缆,类型为
(8)
直流电抗器,作为
(9)
接。
可使用软件设置的电流
(10)
一起使用的元件
ATV
24 V, a 48 V, a 115 V, a 230 V
ATV 71L
XPS AC
开关的位置决定。
SW1
RG174/U
pppp
M3Z,ATV71LD11M3XZ...LD45M3XZ,ATV71LU30N4Z...LD75N4Z
(0…20 mA)
变频器
ATV 71
用于监视紧急停车以及开关的
功能。
保险丝
直流电抗器
断路器
带有2个触点的急停按钮
XB4 B或XB5 A
模块复位。
,符合
MIL-C17
或电压
(0…10 V)
按钮
。
可被用于设置外部起动条件。
ESC
,或者为符合
模拟输入。
Preventa XPS AC
NF C 93-550的KX3B
安全模块。一个安全模块可以管理同一机器上几个变频器的 “断电”
同轴电缆,外径为
。变频器的一个选件。在PO与
2.54 mm
,最大长度为
。电缆屏蔽层必须接地。
2 m
端子之间的搭接线位置处连
PA/+
9
Page 12

介绍
变频器 0
ATV 71
A
1
Term
Term
+50.00Hz
+50.00Hz
SCF1
FAULT HISTORY
Short circuit
Overcurrent
External FLT
Overvoltage
Undervoltage
Help
故障记录
SCF1
MOTOR SHORT CIRCUIT
Check the connection cables
and the motor insulation.
Quick
0.0A
0.0A
对话工具
b 可通过导航按钮迅速且容易地对下拉菜单进行访问。
2
b 图形屏幕可显示8行、每行24个字符的纯文本。
b 显示设备上的高级功能可访问变频器的更多复杂功能。
b 可为用户或机器定制显示屏幕、菜单以及参数。
b 可使用在线帮助屏幕。
b 可对设置进行存储和下载(可存储四个设置文件)。
b 可通过多点连接线路将多个变频器连在一起。
b 可在机柜门上进行安装,带有
b 标准语言设置为6种语言(英语、法语、德语、意大利语、西班牙语和中文)。可将其它
语言装入闪存内。
3
可按照与所有其他
3对ATV 71
Bluetooth
3
维修
ATV 71
b 内置变频器测试功能,在远程图形显示终端上带有诊断屏幕
b
I/O
b 用于不同端口的通信映像
b 可使用
b 通过带闪存的处理器对安装变频器的基座进行管理。
b 通过
b 对所有变频器的零部件以及软件版本进行识别
b 出现故障时进行故障记录,并可最多显示16个变量值
b 显示装入闪存的终端语言
b 可在变频器内存储一条信息(最多5行、每行24个字符
IP 54或IP 65
Telemecanique
变频器进行设置、调节和测试。可通过直接连接、
®
(蓝牙)无线连接进行使用。
变频器和起动器相同的方法,使用
级保护。
内置了大量的维护、监视与诊断功能:
映像
PowerSuite
Modbus
软件包查看的示波器功能
端口将变频器连接至调制解调器,从而可以远程使用这些功能
)
PowerSuite
Ethernet
、调制解调器或
软件包
Perform the diagnostic test.
故障检修屏幕
Quick
10
Page 13

介绍
(续)
变频器 0
ATV 71
Premium
1
以太网
CANopen
主机
3
ATV 71
22
Modbus
Magelis
XBT
选件
变频器1 可最多同时集成3个可选卡,其中:
ATV 71
b2个可从下列中选择:
v
扩展卡
I/O
v 通信卡
DeviceNet, I
v 可编程 “内置控制器”卡2。 通过分散系统功能,此卡可被用于使变频器迅速、日益地
与特定应用相适应(使用
b1个为编码器接口卡
压器,
外部选件可与
b 制动设备与电阻器(标准或特殊提升设备
b 能量回馈设备
b 线路电抗器,直流电抗器与无源滤波器,可以减小谐波电流
b 电机电抗器与正弦滤波器,用于长电缆运行或免除屏蔽需要
b 附加的
集成在控制系统中
ATV 71
调节、监控与设置。另外一个端口可用于连接一个
可使用通信可选卡将变频器连接至其他通信网络。
可对控制元件进行单独供电,这样的话,即使功率元件供电中断,也可对通信(监视、
诊断)进行维护。
可编程 “内置控制器”卡可将变频器变为一个自动控制岛:
b 此卡本身具有
b 它包含有以
时间。
b 其
2
2 (Ethernet TCP/IP, Modbus/Uni-Telway, Fipio, Modbus Plus, Profibus DP,
sincos, endat, ssi等)
EMC
NTERBUS
ATV 71
输入滤波器
, 等
)
IEC 61131-3
3 (带有RS 422
。
联合使用:
适用语言编程) 。
兼容差分输出、集电极开路输出、推挽式输出旋转变
)
集成了一个组合的
,也能对变频器的
I/O
IEC 61131-3
CANopen
主端口能够控制其他变频器,并能与
Modbus或CANopen
I/O
适用语言开发的应用程序,此程序可以减小控制系统的响应
端口,用于进行迅速、准确的运动控制、
以及
I/O
终端,以便与机器进行对话。
Magelis
扩展卡进行管理。
模块以及传感器进行对话。
I/O
A
I/O STB
配备有通信卡以及可编程 “内置控制器卡”的变频器示例
ATV 31
I/O OTB
传感器
11
Page 14

附件
变频器 0
ATV 71
选件:对话工具
A
远程图形显示终端
此显示终端安装在变频器的前面。如果提供不带图形显示终端的变频器,则本终端将遮盖
变频器集成的7段显示终端。
它可以:
1
2
3
4
5
2
3
7
6
b 与适当的附件组合(见下面)远程使用
b 使用多点连接元件连接至几台变频器
用途:
b 控制、调节与设置变频器
b 显示当前值(电机,输入/输出值等
b 保存和下载设置;可保存4个设置文件。
终端的最高工作温度为 60°C,具有
说明
图形显示:
1
- 8行, 240 x 160
显示字符较大,可从5m远的地方看到
-
支持柱状图显示
-
可分配的功能键F1、F2、F3、F4:
2
对话功能:直接访问,帮助屏幕,导航
-
应用功能:“本机/远程”,预置速度
-
3“STOP/RESET
4“RUN
5
6“FWD/REV
7“ESC”:
备注: 键
远程图形显示终端
”:本机控制电机运行
导航按钮:
按下:保存当前值
-
旋转
±:增大或减小当前值,
-
放弃当前值、参数或菜单,返回先前的选择
, 键4与键
3
型号
说明
”:使电机的旋转方向反向
此显示终端需单独订购
(
)
级保护。
IP 54
像素
”:本机控制电机停车/故障复位
(ENT)
可被用于直接控制变频器。
6
转到下一行或上一行。
N°
1 VW3 A1 101 0.145
)
型号 重量
kg
图形显示终端附件
1
4
可用的附件有:
b 一个远程安装工具包,用于在具有
包括:
v 所有的机械零件
v 一些螺钉与螺栓
b 一个透明的门,用于安装到远程机构上以获得
b 一根带有两个
有1、3、5或
b 一个
RJ45 母/
缆
连接器的电缆,用于将图形显示终端连接至
RJ45
10 m)
母适配器,用于连接
级保护的机柜门上安装图形显示终端。
IP 54
VW3 A1 101
级保护
IP 65
图形显示终端与
变频器(可用长度
ATV 71
VW3 A1 104 R
ppp 远程电
型号
说明
5
1
4
12
远程安装工具包
门
(2)
远程电缆
带有2个
RJ45母/
在此情况下,使用一根
(1)
要被安装在远程安装工具包
(2)
(1)
连接器的
RJ45
母适配器
N°
2 –IP54VW3 A1 102 0.150
3 –IP65VW3 A1 103 0.040
4 1–VW3 A1 104 R10 0.050
4 3–VW3 A1 104 R30 0.150
4 5–VW3 A1 104 R50 0.250
4 10 – VW3 A1 104 R100 0.500
5 ––VW3 A1 105 0.010
VW3 A1 104 R pp
长度
m
VW3 A1 102 (
保护
等级
远程连接电缆,此电缆须单独订购(见上面)。
用于在机柜门上安装)上,须单独订购(见上面)。
型号 重量
kg
Page 15

附件
(续)
介绍
一般特性
设备周围的环境空气温度 运行
变频器 0
ATV 71
选件:制动电阻器
通过分散制动能量,制动电阻器可使
运行。
它能够获得最大瞬时制动转矩。
电阻器设计用于在机柜外部安装,但不禁止自然冷却。绝对不能堵塞进风口与出风口。
空气必须经过防尘、防腐蚀以及防冷凝处理。
应用
惯性机械,循环机械。
°C 0…+ 50
变频器在制动至静止时或在减速制动期间
ATV 71
A
机柜的保护等级
热保护
温度控制开关
动态制动晶体管的运行系数
要与
变频器类型
最小值
变频器类型
最小值
变频器类型
最小值
变频器类型
最小值
(1)
变频器连接的电阻器的最小欧姆值,在20°C时
ATV 71
ATV 71L
ATV 71L
ATV 71L
ATV 71L
贮存
跳闸温度
最大电压-最大电流
最小电压-最小电流
最大接触电阻
ppp
ppp
M3Z
M3XZ
,
,
ATV 71L
ATV 71L
ATV 71LU30N4Z...LD75N4Z
°C
°C
Ω
m
…+
- 25
70
IP 20 IP 23
通过温度控制开关或通过变频器 通过热过载继电器
120 –
a
250 V - 1 A
c
-
24 V
0.1 A
60 –
额定功率为
体管。
动态制动晶体管是经过定制的,可以承受:
b 连续的电机额定功率
b
的电机额定功率,持续
150%
160 kW
或更小的
ATV 71
60 s
(2)
ppp
Z
U30M3 U40M3 U55M3 U75M3
Ω
22 16 11 8
ppp
Z
D11M3X,
D15M3X
Ω
343.31.7
ppp
Z
U30N4,
U40N4
Ω
34 23 19 12 7 13.3
ppp
Z
D37N4
Ω
6.7 5 3.3
D18M3X D22M3X
U55N4 U75N4 D11N4
D45N4,
D55N4
D30M3X
D75N4
D37M3X
D45M3X
D15N4
D18N4
,
–
–
变频器的内部电路有一个内置的动态制动晶
D22N4,
D30N4
开关应按顺序连接 (对于信号发送使用或线路接触器控制)。
(1)
在温度低于
(2)
的环境下,一定要遵守此表中推荐的最小欧姆值。
20 °C
13
Page 16

安装建议
变频器 0
ATV 71
电磁兼容性
A
2
99
9
1
38
ppp
ATV 71L
ATV 71LU30N4Z...LD18N4Z
2
M3Z,ATV71LD11M3XZ,LD15M3XZ
5
674
接线,用于保证符合
原则
b 变频器、电机与电缆屏蔽层之间的地线必须具有 “高频”等电位。
b 对于电机电缆、制动电阻器电缆以及控制信号发送电缆,应使用两端屏蔽层
的屏蔽电缆。 如果接地连线没有中断,可使用导管或金属管作为屏蔽长度的一部分。
b 应保证电源电缆(线路电源)与电机电缆之间的最大距离。
ppppp 变频器安装图
ATV 71L
钢板
1
2 ATV 71
3
4
5
6
7
8
9
备注:变频器、电机与电缆屏蔽层之间的高频等电位地线连接并不意味着可以不用将PE保护导线(绿
-黄)
如果使用一个附加的
接。变频器上的连线3是通过滤波器输出电缆连接的。
,要被安装在变频器上(机器地线)。
(1)
变频器。
非屏蔽电源线或电缆。
用于故障继电器触点输出的非屏蔽线。
使电缆6, 7与8接地,并使这些电缆尽可能近地固定在变频器上:
剥开屏蔽层。
-
用夹子将屏蔽层的剥开部分系上,使电缆固定在钢板1上。
-
必须将屏蔽层夹得足够紧,以保证能够与钢板良好接触。
用于连接电机的屏蔽电缆。
用于连接控制/信号发送线的屏蔽电缆。
对于需要几种导线的应用,应使用小横截面积的电缆
用于连接制动电阻器的屏蔽电缆。
6,7,8
屏蔽层必须是连续的,中间端子必须放在
地脚螺钉。
电缆两端的屏蔽层必须与地线连接。
连接至每个设备上的合适端子。
输入滤波器,应安装在变频器的下面,并通过非屏蔽电缆直接与线路电源连
EMC
EMC
标准
金属屏蔽盒中。
EMC
(0.5 mm
°接地
360
2
。
)
9
1
76834
ATV 71LD18M3XZ...LD45M3XZ
ATV 71LD22N4Z...LD75N4Z
9
5
(1)对于ATV 71L
钢板。
ppp
M3Z,ATV71LD11M3XZ...LD45M3XZ与ATV71LU30N4Z...LD75N4Z
变频器提供的
14
Page 17

安装建议
变频器 0
ATV 71
安装建议
决定于变频器的使用条件,其安装需要一定的预防措施并需使用合适的附件。
设备垂直安装:
b 不能将其放在发热元件附近。
b 应留有足够的自由空间,以保证冷却所需的空气可以从设备底部向顶部流通。
ppp
ATV 71L
M3Z,ATV71LD11M3XZ...LD45M3XZ,ATV71LU30N4Z...LD75N4Z
100
u
100
u
10
A
对于以下型号,取下保护性的空盖板:
ppp
ATV 71L
ATV71LU30N4Z...LD18N4Z
对于以下型号,取下保护性的空盖板:
ATV 71LD18M3XZ...LD45M3XZ
ATV71LD22N4Z...LD75N4Z
M3Z,ATV71LD11M3XZ,LD15M3XZ
,
安装类型
b 安装类型
,
b 安装类型
b 安装类型
A
50
B
C
u 50
u 50
50
通过从变频器的顶部取下保护性的空盖板,变频器的保护等级变为
能会有所不同,由变频器的型号决定,见左面。
。保护性盖板可
IP 20
15
Page 18

安装建议
(续)
变频器 0
ATV 71
A
安装建议
(续)
降容曲线
变频器额定电流
ATV71LU30M3Z...LD15M3XZ 和ATV71LU30N4Z...LD18N4Z
I/In
%
In = 100
90
80
70
60
50
ATV71LD22N4Z与ATV71LD30N4Z (1)
I/In
%
In = 100
的降容曲线由温度、开关频率以及安装类型决定。
(In)
4 8 12 16 kHz
开关频率
安装类型
40oC
安装类型B与安装类型
50oC
o
安装类型
50
C
o
安装类型A,B与
C
60
A
A
C
C
90
80
70
60
50
4 8 12 16 kHz
开关频率
ATV71LD18M3XZ...LD45M3XZ与ATV71LD37N4Z...LD75N4Z (1)
I/In
%
In = 100
90
80
70
60
50
安装类型A,B与
40oC
安装类型A,B与
50oC
安装类型A,B与
60oC
安装类型A,B与
40oC
安装类型A,B与
50oC
安装类型A,B与
60oC
C
C
C
C
C
C
4 8 12 16 kHz
2.5
开关频率
对于中间温度(例如55°C),在两条曲线之间进行插值。
行安装。
之上,
ATV 71LD18M3XZ,LD22M3XZ,LD30N4Z...LD75N4Z
(1)在50°C
16
变频器应使用风扇控制组件进
Page 19

编码器接口卡特性
特性
带有
接口卡类型
电源
由卡提供
(
最大电缆长度
最大工作频率
输入信号
脉冲数目/编码器旋转次数
编码器的消耗电流
建议的导线最小横截面积 对于最大长度为
带有集电极开路输出的编码器接口卡
接口卡类型
电源
由卡提供
(
最大电缆长度
最大工作频率
输入信号
脉冲数目/编码器旋转次数
编码器的消耗电流
建议的导线最小横截面积 对于最大长度为
带有推挽式输出的编码器接口卡
接口卡类型
电源
由卡提供
(
最大电缆长度
最大工作频率
输入信号
脉冲数目/编码器旋转次数
编码器的消耗电流
建议的导线最小横截面积 对于最大长度为
编码器类型
差分输出的编码器接口卡
RS 422
)
)
)
电压
最大电流
阻抗
pppppp
ATV 71L
电缆
对于最大长度为
电缆
对于最大长度为
电缆
电压
最大电流
阻抗
pppppp
ATV 71L
电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
电压
最大电流
阻抗
状态
0
状态
1
pppppp
ATV 71L
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
Z
25m
50 m
100m
Z
100m
200m
500m
Z
100m
200m
500m
变频器 0
ATV 71
VW3 A3 401 VW3 A3 402
5 V c (最小5 V, 最大5.5 V) 15 V c (最小 15 V, 最大16 V)
200 mA 175 mA
短路与过载保护
50 m 100 m
300 kHz
__
A, A, B, B
Ω
440 k
最大
10000
最大的高速频率不应超过
4.5V时为100 mA 4.5V时为200 mA 8V时为100 mA 8V时为175 mA
2
0.2 mm
的
(AWG 24)
2
0.5 mm
的
(AWG 20)
– – 0.2 mm
的
VW3 A3 403 VW3 A3 404
12 Vc (最小 12 V
175 mA
短路与过载保护
500 m
300 kHz
__
/ AB / A
A, A, B, B
Ω
1 k
最大
10000
最大的高速频率不应超过
10V时为100 mA 10V时为175 mA 10V时为100 mA 10V时为175 mA
2
0.2 mm
的
(AWG 24)
0.5 mm2
(AWG 20)
2
1 mm
(AWG 17)
VW3 A3 405 VW3 A3 406 VW3 A3 407
12 V c (最小12 V
175 mA 100 mA
短路与过载保护
500 m
300 kHz
__
/ AB / A
A, A, B, B
Ω
1 k
如果
<1.5 V
如果
> 7.7 V且< 13 V
最大
10000
最大的高速频率不应超过
10V时为100 mA 10V时为175 mA 10V时为100 mA 10V时为175 mA 14V时为100 mA
2
0.2 mm
(AWG 24)
2
0.5 mm
(AWG 20)
2
1 mm
(AWG 17)
ppppppp
XCC 1
Y, K, KN
300 kHz
2
0.5 mm
(AWG 20)
2
0.75 mm
(AWG 18)
,最大
13 V) 15 V c (最小 15 V, 最大16 V)
300 kHz
2
0.5 mm
(AWG 20)
0.75 mm2
(AWG 18)
2
1.5 mm
(AWG 15)
,最大
13 V) 15 V c (最小15 V
如果
> 7.7 V且< 16 V
300 kHz
0.5 mm
(AWG 20)
0.75 mm2
(AWG 18)
2
1.5 mm
(AWG 15)
2
0.2 mm
(AWG 24)
0.2 mm
(AWG 24)
0.5 mm
(AWG 20)
2
2
2
2
0.2 mm
(AWG 24)
2
0.2 mm
(AWG 24)
2
(AWG 24)
2
0.2 mm
(AWG 24)
2
0.2 mm
(AWG 24)
2
0.5 mm
(AWG 20)
,最大
16 V) +24 Vc (最小20 V
Ω
1.6 k
如果
> 11.5 V且< 25 V
,最大
0.2 mm
(AWG 24)
2
A
30 V)
17
Page 20

编码器接口卡特性
(续)
变频器 0
ATV 71
特性
(续)
旋转变压器型接口卡
A
接口卡类型
激励电压
次级电压
激励频率
速度反馈分辨率
精度
编码器电极数量
变比
(Turn ratio)
脉冲数量/编码器分辨率
电缆最大长度
对应旋转变压器型编码器不同极数(对于12位的分辨率)的电机最高速度如下
编码器极数 电机最高速度 脉冲数量/转
2
4
6
8
与2极旋转变压器型编码器组合使用的电机的最高速度如下(对于12位的分辨率
电机极数 电机最高速度 脉冲数量/转
2
4
6
8
编码器的消耗电流
建议的导线最小横截面积
带有
SinCos、SinCos Hiperface
接口卡类型
电源
由卡提供
(
最大电缆长度
速度反馈分辨率 最大为
时钟频率
SinCos
SinCos Hiperface
EnDat
SSI
编码器的消耗电流
建议的导线最小横截面积
)
输出
®
输出 类型
输出 编码密钥
®
输出
(1)
(1)
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
®
、
EnDat
电压
最大电流
SinCos
线的数量
SinCos
帧的大小 最大为25位
每个编码器分辨率的位数
编码器分辨率数量的位数
奇偶性
帧的大小
每个编码器分辨率的位数
编码器分辨率数量的位数
对于最大长度为
电缆
对于最大长度为
电缆
®
或
线的数量
25m
50m
100m
200m
SSI
25m
50m
VW3 A3 408
1.25...5.6 V rms
对于激励电压为
4、8或12 kHz
位,最大为
12
± 1位
2、4、6或8
4:1、3:1、2:1与1:1
最大
200 m
7500 rpm 4096
3750 rpm 4096
2500 rpm 4096
1875 rpm 4096
7500 rpm 4096
3750 rpm 2048
2500 rpm 1024
1875 rpm 512
30 mA
0.2 mm
(AWG 24)
0.2 mm
(AWG 24)
0.5 mm
(AWG 20)
0.75 mm
(AWG 18)
,最大电流为
1.25...5.6 V rms
,可根据解码器调节,缺省值为
212(4092)
。电机极数必须是编码器极数的整数倍
4096
:
) :
2
2
2
2
50 mA
时设置为
,对于
360
;自动检测变比
1 V rms
电角度
输出的通用编码器接口卡
VW3 A3 409
13
(8196)
2
500 kHz
10000
10000
2
2
,最大
5.5V) 8Vc (最小8V
之间的双绞线。将屏蔽电缆两端接地。对于最小编码器电压
50mm
5Vc (最小5V
200 mA
短路与过载保护
50 m
固定为
最大为
最大为
EnDat 2.1
自动配置
自动配置
可设置为灰度或二进制
可设置为无奇偶校验、奇校验或偶校验
可设置为10至27位
可设置为10至25位
可设置为0至15位
4.75V、7.75V或14.75V时为100 mA 4.75V、7.75V或14.75V时为200 mA
0.5 mm
的
(AWG 20)
0.75 mm
的
(AWG 18)
屏蔽电缆包括3根节距在20与
(1)
所建议的最小导线横截面积,用于限制线路压降。
8 kHz
50 mA
2
0.5 mm
(AWG 20)
2
1 mm
(AWG 16)
,最大
8.5V) 12Vc (最小12V
2
1 mm
(AWG 17)
2
1.5 mm
(AWG 15)
,最大
12.5V)
18
Page 21

编码器接口卡特性
特性
(续)
带有
接口卡类型
电源
由卡提供
(
最大电缆长度
最大工作频率
输入信号
输出信号
脉冲数目/编码器旋转次数
使用5V电源时编码器的消耗电流
建议的导线最小横截面积
使用
15V
建议的导线最小横截面积
型号
差分输出及编码器分频功能
RS 422
)
(RS 422)
(1)
电源时编码器的消耗电流
(1)
(2)
(续)
变频器 0
ATV 71
(RS 422 ESIM)
电压
最大电流
阻抗
比率
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
对于最大长度为
的电缆
说明 电压
带有
差分输出的编码器接口卡
RS 422
的编码器接口卡
25 m
50 m
100m
200m
25 m
50 m
100m
200m
300m
VW3 A3 411
5 Vc (最小5 V, 最大5.5 V) 15 Vc
200 mA
短路与过载保护
50 m 100 m
300 kHz
,
A, A
B, B
Ω
440
A A / A A B B / A A B B Z Z
1、1/2、1/4、1/8、1/16、1/32或1/64
最大
10000
4.75V时为50 mA 4.75 V时为100 mA 4.75V时为200 mA
2
0.2 mm
(AWG 24)
2
0.5 mm
(AWG 20)
2
0.75 mm
(AWG 18)
2
1.5 mm
(AWG 15)
14.75V时为50 mA 14.7 5V时为100 mA 14.75V时为200 mA
2
0.2 mm
(AWG 24)
2
0.2 mm
(AWG 24)
2
0.5 mm
(AWG 20)
2
1 mm
(AWG 17)
2
1.5 mm
(AWG 15)
,Z, Z
,可通过开关调节
V
5 VW3 A3 401 0.200
(最小 15 V, 最大16 V)
,可通过开关调节
2
0.5 mm
(AWG 20)
2
0.75 mm
(AWG 18)
2
1.5 mm
(AWG 15)
- -
2
0.2 mm
(AWG 24)
2
0.5 mm
(AWG 20)
2
0.75 mm
(AWG 18)
2
1.5 mm
(AWG 15)
- -
型号 重量
2
1 mm
(AWG 17)
2
1.5 mm
(AWG 15)
-
0.5 mm
(AWG 20)
0.75 mm
(AWG 18)
2
1.5 mm
(AWG 15)
-
A
2
2
kg
屏蔽电缆包括3根节距在20与
(1)
(2) ATV 71
不支持多个编码器接口卡。
15 VW3 A3 402 0.200
带有集电极开路输出的编码器接口卡
带有推挽式输出的编码器接口卡
旋转变压器型接口卡
带有
SinCos、SinCos Hiperface
输出的通用编码器接口卡
SSI
带有
ESIM)
之间的双绞线。将屏蔽电缆两端接地。对于最小编码器电压所建议的最小导线横截面积,用于限制线路压降。
50mm
差分输出及编码器分频功能
RS 422
的编码器接口卡
®
、
EnDat
(RS 422
12 VW3 A3 403 0.200
15 VW3 A3 404 0.200
12 VW3 A3 405 0.200
15 VW3 A3 406 0.200
24 VW3 A3 407 0.200
1.25...5.6 VW3 A3 408 0.200
®
或
5、8或12
5或15
VW3 A3 409 0.200
VW3 A3 411 0.200
19
Page 22

编码器接口卡接线图
变频器 0
ATV 71
VW3 A3 401 ... 409
A
VW3 A3 401 ... 407 VW3 A3 408 ... 409
VW3 A3 401 ... 407
0Vs
+Vs
B
B
A
A
3
VW3 A3 408
3
4
-REF
+ REF
-COS
+COS
- SIN
+SIN
20
VW3 A3 409
0 (0V)
V+ (V+)
CL- (Clock -)
CL+ (Clock +)
D- (Data -)
D+ (Data +)
S- (Sin -)
S+ (Sin +)
C- (Cos -)
C+ (Cos +)
Endat
X
X
X
X
X
X
SSI
X
X
X
X
X
X
y 0.25 Nm (2.21 lb.in)
y 1.5 mm² (AWG 16)
Hiperface
X
X
X
X
X
X
X
X
SinCos
X
X
X
X
X
X
Page 23

编码器接口卡接线图
3
(续)
3
变频器 0
ATV 71
VW3 A3 411
A
15V 5V
4
ON
12345
y 0.25 Nm (2.21 lb.in)
y 1.5 mm² (AWG 16)
1
ON
ON
ON
ON
OFF
OFF
OFF
OFF
2
ON
ON
OFF
OFF
ON
ON
OFF
OFF
3
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Hz
(OA, OB) = (A, B) /1
(OA, OB) = (A, B) /2
(OA, OB) = (A, B) /4
(OA, OB) = (A, B) /8
(OA, OB) = (A, B) /16
(OA, OB) = (A, B) /32
(OA, OB) = (A, B) /64
(OA, OB) = OFF
4
5
ON
ON
ON
OFF
OFF
ON
OFF
OFF
A+
AB+
BZ+
ZP (+5V / +15V)
0 (0V)
OA+
OAOB+
OBOZ+
OZ-
A, B, Z
A, B
A, B
A
VW3 A3 411
A+A–B+B–Z+
A
A–
XCC .....
Z–P0
Z
B
B–
0V
Z–
+V
OA+
OA–
OB+
OB–
OZ+
OZ–
21
Page 24

Page 25

目录
开始之前
文档结构
介绍
词汇表
安装步骤
出厂设置
设置-初步建议
图形显示终端
集成显示终端
____________________________________________________________________________________________________________________ 2
___________________________________________________________________________________________________________________ 3
________________________________________________________________________________________________________________________ 4
_____________________________________________________________________________________________________________________ 5
___________________________________________________________________________________________________________________ 6
____________________________________________________________________________________________________________________ 7
_____________________________________________________________________________________________________________ 8
______________________________________________________________________________________________________________ 10
终端描述
图形显示屏描述
第一次通电
随后通电
编程:参数访问示例
快速导航
______________________________________________________________________________________________________________ 20
显示屏与按键的功能
访问菜单
_________________________________________________________________________________________________ 10
____________________________________________________________________________________________ 11
语言选择]菜单
- [5.
__________________________________________________________________________________________________ 15
________________________________________________________________________________________ 16
__________________________________________________________________________________________________ 17
_______________________________________________________________________________________ 20
__________________________________________________________________________________________________ 21
_____________________________________________________________________________ 14
B
访问菜单参数
访问等级
[2.
参数表结构
参数值之间的相互关联
在此文档中查找一个参数
[1.1 电梯] (LIF-)_____________________________________________________________________________________________________________ 29
[1.2 监视] (SUP-) __________________________________________________________________________________________________________ 105
[1.3 设置] (SEt-) ____________________________________________________________________________________________________________ 114
电机控制
[1.4
[1.5 输入/
故障处理
[1.8
[1.10 诊断] ________________________________________________________________________________________________________________ 160
软硬件识别
[1.11
[1.12
[3 打开/
[4 密码] (COd-) ___________________________________________________________________________________________________________ 169
监视配置
[6
] (LAC-) ________________________________________________________________________________________________________ 23
________________________________________________________________________________________________________________ 26
______________________________________________________________________________________________________ 27
] (drC-) ______________________________________________________________________________________________________ 120
输出设置
出厂设置
保存为
] (I-O-) __________________________________________________________________________________________________ 122
] (FLt-) _______________________________________________________________________________________________________ 138
] __________________________________________________________________________________________________________ 163
] (FCS-) _____________________________________________________________________________________________________ 164
] __________________________________________________________________________________________________________ 167
] _______________________________________________________________________________________________________________ 171
_____________________________________________________________________________________________ 22
____________________________________________________________________________________________________ 28
显示配置
[7
多点屏幕
[
维护
故障
] _______________________________________________________________________________________________________________ 175
] _______________________________________________________________________________________________________________ 180
_______________________________________________________________________________________________________________________ 181
原因-修复措施
-
_____________________________________________________________________________________________________ 182
1
Page 26

开始之前
在对此变频器进行任何操作之前,请您阅读并了解这些使用说明。
B
危险
危险电压
• 在安装或操作
维护。
• 用户应对与所有设备的保护地有关的大量国际和国内电气标准相符合进行负责。
• 此变频器的许多零件,包括印刷电路板,在线电压下工作,不能触摸这些零件,只能使用绝缘工具。
• 不能触摸那些未受保护的元件或带电的接线条螺钉。
• 不能将
• 在通电或启动与停止变频器之前应安装并关上所有机盖。
• 在对变频器进行维修之前
- 断开所有电源。
- 在变频器的断路器上放置一个 “不许合上”的标签。
- 将断路器锁定在打开位置。
• 维修变频器之前应断开所有电源,包括可能会带电的外部控制电源。须等15分钟,以便直流总线电容器放电,然后
按照安装手册中给出的直流总线电压测试程序来检查直流电压是否小于
压的精确指示器。
不按照这些使用说明会导致死亡或严重伤害。
PA/+
端与
变频器之前请您阅读并了解安装手册。只有专业人员才能对此变频器进行安装、调节、修理与
ATV71L
端或直流总线电容器短接。
PC/-
42 V
。变频器的
并不是有无直流总线电
LED
警告
损坏的设备
不要操作或安装任何看起来已损坏的变频器。
不按照使用说明会导致伤害与/或设备损坏。
2
Page 27

文档结构
下列
ATV 71L
技术文件可在施耐德电气站点
(www. schneider-electric.com)
以及随变频器一起提供的
CD-ROM
上获得。
安装手册
讲述如何安装以及连接变频器。
编程手册
讲述变频器终端(集成显示终端与图形显示终端)的功能、参数以及用法。
本手册没有讲述通信功能,而是在所使用的总线或网络的手册中讲述。
通信参数手册
此手册讲述:
• 带有通过总线或通信网络使用的特殊信息的变频器参数。
• 通信特定工作模式(状态图)。
• 通信与本地控制之间的交互作用。
Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO, Modbus Plus
这些手册讲述了装配、与总线或网络的连接、信号发送、诊断以及通过集成显示终端或图形显示终端的通信特定参数的配置。
这些手册也讲述了协议的通信服务。
B
等手册
3
Page 28

介绍
ATV71 LIFT
ATV71L
B
下列选件(从最低版本开始)与
专为电梯应用开发,因此能够满足安装人员的需求:
• 通过专用
• 变频器能够提供最适宜的舒适性。
• 综合
LIFT (
只能用于电梯。
变频器动作不当产生的风险
在
ATV71L
不按照使用说明会导致伤害与/或设备损坏。
图形显示终端,最低版本为
-
通用编码器接口卡
-
电梯)菜单可以进行快速、简单的变频器设置。
LIFT (
电梯)功能:特殊电梯斜坡、检查功能、倒溜管理、“半层”优化、
小心
中执行的速度环专门用于电梯应用,它只能用于电梯应用。
ATV71 LIFT
(VW3A3409)
兼容:
V1.1IE17
,最低版本为
,
V1.2IE01
。
不间断电源)撤出等。
UPS(
4
Page 29

词汇表
电梯控制卡
集成电梯应用智能程序的电子卡:呼叫管理、楼层显示。
电梯控制卡监视减速与停止指示器,以及控制变频器。
减速指示器
在每一层的上方和下方以精确距离(减速距离)放置的传感器。
当轿厢经过传感器前面时,电梯控制卡撤消高速(行进速度)命令,发出低速(平层速度)命令。
停止指示器
在每一层的平层位置上方和下方以精确距离(停止距离)放置的传感器。
当轿厢经过传感器前面时,电梯控制卡撤消运行命令。然后轿厢应舒适地停止在 [停止距离
] (StL)
之内。
倒溜
制动器释放时轿厢的运动。在无齿轮传动的应用场合,由于电机的惯量很大,必须专门控制制动器的释放,以消除倒溜运动(使用外部称重
传感器或倒溜管理功能)。
加加速度
加加速度是加速度变化的一种测量,经常与舒适度有关(当加加速度减小时舒适度提高)。
曳引机
控制柜
机房
开门机系统
轿厢操纵盘
轿厢底座
井道
轿厢导轨
曳引轮
限速器
曳引绳
轿顶检修盒
自动轿厢门
安全钳
配重导轨
B
电梯底坑
配重
缓冲器
5
Page 30

B
安装步骤
安装
参考安装手册
v
1
提示:
• 执行自整定操作以优化性能,第
编程
如果第7页的出厂设置以及使用
适用。
无运行命令通电
b
2
b
页。
49
电梯
[
v 如果控制部分使用单独电源,应按照第8页
的说明。
如果变频器有图形显示终端,请选
3
对于应用已经足够,则程序可以
] (LIF-)
择语言
设置菜单
b
4
b
[
5
电梯
起动
LIF-
] (
)
• 如有疑惑,返回出厂设置,第
.
注意:检查并确认变频器的连线与其配置
一致。
6
166
页。
Page 31

出厂设置
变频器出厂设置
ATV 71L
如果上述值与应用情况一致,不需改变设置就能使用变频器。
的出厂设置用于最常见的工作条件:
• 电机频率:
• 斜坡减速的正常停车模式
• 出现故障时的停车模式:自由停车
• 带有阶跃的减速斜坡
• 电机热电流= 变频器额定电流
• 静止注入制动电流
• 出现故障后不自动起动
• 开关频率为
• 逻辑输入:
-
-
-
-
-
• 模拟输入:
-
-
• 继电器R1:无
• 继电器R2:制动控制
• 模拟输出
50 Hz
8 kHz
:正转;
LI1
:未激活(未被赋值
LI3
:电梯速度
LI4
:检查模式
LI5
:未被赋值
LI6
AI1:
AI2: 0-20 mA
LI2
速度给定值
,未激活(未被赋值
AO1:dO1 (
变频器额定电流,持续
= 0.7 x
:反转
个运行方向),转换时2线控制
(2
)
0 +10 V
逻辑输出
)
秒
0.5
)
可选插件出厂设置
可选插件输入/ 输出没有出厂设置。
B
7
Page 32

设置- 初步建议
通电与设置变频器
意外的设备运行
不按照使用说明会导致死亡或严重伤害。
B
线电压不一致
在加电与配置变频器之前,应确保线电压与变频器铭牌上所示的电源电压范围适应。如果线电压与电源电压范围不一致,
就有可能损坏变频器。
不按照使用说明会导致设备损坏。
危险
• 在接通与配置
• 在接通变频器之前或在退出配置菜单时,因运行命令能使电机立即起动,故应检查并确认分配给运行命令的输入为
无效(状态0)。
之前,为了防止意外起动,应检查并确认
ATV71L
断电) 输入无效(状态0)。
PWR(
警告
单独的控制部分电源
当变频器控制部分的电源独立于电源部分
通常新卡不会被识别,也就不可能对其进行设置,因此使得变频器被锁定在故障模式。
(P24与0V端子)
时,无论何时添加或更换可选卡,在变频器下一次通电时仅有电源部分必须供电。
通过线路接触器进行功率转换
警告
• 应避免频繁操作接触器(滤波器电容会过早老化)。
• 循环时间小于
不按照使用说明会导致设备损坏。
用户调节与功能扩展
• 显示设备与按钮可用于修改设置以及扩展下面几页中描述的功能。
• 通过
• 参数类型有三种:
显示:通过变频器显示值
-
调节:可在运行期间或停车时改变
-
配置:只能在停车时以及无制动发生时才能进行修改。在运行期间可以显示出来。
-
[1.12
出厂设置
] (FCS-)
会导致预充电电阻损坏。
< 60s
菜单,可以很容易地恢复为出厂设置,见第
164
页。
危险
意外的设备运行
• 检查并确认在操作期间对设置的改变不会带来任何危险。
• 建议在做任何改动之前应停车。
不按照使用说明会导致死亡或严重伤害。
8
Page 33

设置- 初步建议
起动
重要注意事项:
• 在出厂设置模式下,只有在 “
- 变频器上电或手动故障复位时或停车命令之后
如果这些命令没有复位,变频器就会显示 “
• 如果已经设置了自动重起动功能
低功率电机测试或无电机测试
forward (
故障管理
[1.8
正转)”、“
”,但不会起动。
nSt
] (FLt-)
reverse (
反转)”以及 “直流注入停车”命令已经复位后,电机才会得电:
菜单中的参数
自动重起动
([
,这些命令就会被认为没有必要复位。
] (Atr)
• 在出厂设置模式下,[输出缺相
额定值的电机上(在大功率变频器的情况下特别有用),应使 [输出缺相]检测功能失效
] (OPL)
检测被激活
(OPL = YES)
。为了在测试或维护环境下检测变频器,不必转换到与变频器具有相同
警告
意外的设备运行
如果电机电流小于
不按照使用说明会导致设备损坏。
倍的变频器额定电流,变频器不会提供电机热保护。应提供一种热保护的备选方法。
0.2
使用电梯菜单
危险
变频器意外动作的危险
• 确定 [轿厢额定速度
• 通过计算(见菜单
如果 [轿厢额定速度
会被遵守。
预置速度环不适合于应用(存在不稳定与电梯轿厢滑移的危险)。
[1.1 电梯] (LIF-)
] (CSP) 或 [
与有效载荷[电梯承载能力
] (CSP)
、子菜单[电梯数据
电梯承载能力
的值不正确,减速距离
] (LCA)
] (LCA)
] (LdA-))
的精确值。
或测量来检查[轿厢额定速度
减速距离
([
(OPL = nO)
] (dEL) 与 [
。
] (CSP)
停止距离
。
] (StL) )
B
就不
不按照使用说明会导致死亡或严重伤害。
9
Page 34

图形显示终端
图形显示终端是一个可选件。通过使用电缆和其他可选附件(见产品目录),可远程断开和连接图形显示终端(例如在机柜的门上)。
终端描述
图形显示器
1
B
功能键F1、F2、F3、
2
F4, 见第13
3 STOP/RESET(
复位)按钮
页。
停车
按钮:放弃一个值、一个参
/
7 ESC
数或一个菜单,返回以前的选择
运行)按钮
4 RUN(
导航按钮:
5
• 按
• 顺时针/逆时针
转动:
注意:如果通过显示终端的控制功能被激活,按钮3、4、5 与6 可用于直接控制变频器。
(ENT)
:
保存当前值
-
进入所选菜单或参数
-
增大或减小一个值
-
转到下一行或前一行
-
增大或减小给定值,如果通过终端控制功能被激活
-
用于使电机旋转反向的按钮
6
10
Page 35

图形显示终端
图形显示屏描述
1
2
3
4
RDY Term +0.00Hz 0A
变频器菜单
1
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5 输入/
输出设置
Code << >> Quick
F1 F2 F3 F4
显示行。可对其内容进行设置;在出厂设置模式下显示:
1.
• 变频器状态(见第
• 有效控制通道:
-
:端子
Term
-
-
-
-
-
• 频率给定值
• 电机内的电流
HMI:
MDB
CAN
NET
APP:
:集成
:集成
:通信卡
图形显示终端
内置控制器卡
页
14
Modbus
CANopen
)
总线
总线
6
5
B
菜单行。显示当前菜单或子菜单的名称。
2.
菜单、子菜单、参数、值、柱状图等在下拉窗口中显示,每个窗口最多显示5行。导航按钮所选的行或值反白显示。
3.
显示分配给键F1至F4的功能,与这四个键上下对应,例如:
4.
•
Code F1
•
HELP F1
•
<< F2
•
>> F3
•
Quick F4
功能键是动态的,且具有前后关系。
可通过
[1.6 命令]
5.
指示在此显示窗口之下没有其他层。
指示在此显示窗口之下还有其他层。
:
显示所选参数的代码,即对应7段显示的代码。
:
上下文帮助
:
水平向左导航,或进入上级菜单/子菜单,或对于一个数值,转到上一位数上,反白显示(见第
:
水平向右导航,或进入下一个菜单/子菜单(在此示例中进入
上,反白显示(见第
:
快速导航,见第
菜单给这些键分配其他功能(应用功能)。
19
页。
页的示例)。
15
访问等级]菜单),或对于一个值,转到下一位数
[2
页的示例)。
15
6.
指示此窗口不能再向上滚动。
指示在此显示窗口之上还有其他层。
11
Page 36

图形显示终端
变频器状态代码:
-ACC
-CLI
-CTL
-DCB
-DEC
-FLU
-FST
-NLP
-NST
-OBR
B
-PRA
-RDY
-RUN
-SOC
-TUN
-USA
-ASA
:加速
:电流限幅
:输入缺相时受控停车
:直流注入制动进行中
:减速
:电机正在励磁
:快速停车
:无主电源
:自由停车
:自适应减速
:断电功能有效(变频器被锁定
:变频器已准备好
:变频器正在运行
:运行中输出断开
:自整定进行中
:欠压报警
:正在测量相移角度
(L1, L2, L3
上无主电源
)
)
12
Page 37

图形显示终端
设置窗口示例:
RDY Term +0.00Hz 0A
English
Français
Deutsch
Español
Italiano
Chinese
斜坡增量
加速时间
减速时间
第2加速时间
第2减速时间
语言选择
5
<< >> Quick
选择参数
设置
1.3
Edit
窗口示例:对值进行设置:
RDY Term +0.00Hz 0A
加速时间
9.51 s
Min = 0.01 Max = 99.99
<< >> Quick
当仅有一个选项可供选择时,此选项以
表示。
示例:只有一种语言可以选择。
当可以进行多项选择时,所进行的选择由
示例:可选择一系列参数来组成[用户菜单]。
RDY Term +0.00Hz 0A
加速时间
>>
9.51 s
Min = 0.01 Max = 99.99
<< >> Quick
B
表示。
<<与>>键(键F2与F3)
用于选择哪一位需要修改,转动导航按钮以增大或减小此数。
13
Page 38

图形显示终端
第一次通电
语言选择]菜单
- [5.
变频器第一次通电时,用户会被自动导入菜单,直至子菜单
在电机起动之前,必须对此子菜单中的参数进行设置,并执行自整定功能。
B
秒
3
English
Français
Deutsch
Español
Italiano
Chinese
RDY Term 0.00m/s 0.0A
基本权限
标准权限
高级权限
专家权限
电梯]。
[1.
ATV71LU30N4Z
3kW/3HP 380/480V
Config. n°1
语言选择
5
访问等级
2
通电后显示3秒钟
秒后自动转到[5语言选择]菜单。
3
选择语言并按
转到
访问等级]菜单(见第
[2
选择访问等级并按
ENT
。
ENT
。
23
页)。
RDY Term 0.00 m/s 0.0 A
电梯宏
电梯优化
电梯功能
监视
Code << >> Quick
ESC
电梯
1.1
转换到
[1.1 电梯]
ESC
RDY Term 0.00 m/s 0.0 A
变频器菜单
1
访问等级
2
3打开/
密码
4
语言选择
5
Code Quick
另存为
主菜单
按两次
返回[主菜单
ESC
]
14
Page 39
图形显示终端
随后通电
3
秒
ATV71LU30N4Z
3kW/3HP 380/480V
Config. n°1
B
RDY Term 0.00 m/s 0.0 A
电梯宏
电梯优化
电梯功能
监视
Code << >> Quick
秒
10
RDY Term 2.00 m/s 0.0 A
电梯
1.1
电梯速度
2.00 m/s
Min=0.00 Max=327.67
ENT 或 ESC
RD Y Te rm 0 .00 m /s 0 .0 A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code Quick
主菜单
另存为
Quick
秒后转到
3
电梯]菜单。
[1.1.
如果操作者没有进行输入,10秒后自动转到 “显示”
显示会根据所选设置而变化)。
(
通过按
ENT或ESC
,用户就可以返回 [主菜单]。
15
Page 40

图形显示终端
编程:参数访问示例
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5输入/
Code << >> Quick
B
访问轿厢额定速度
注意:
• 如要选择参数:
• 如要修改参数:
变频器菜单
1
输出设置
- 使导航按钮垂直滚动。
- 使用<<与>>键
(F2与F3)
- 转动导航按钮进行修改
RDY Term +0.00Hz 0A
电梯宏
ENT
电梯优化
电梯功能
ESC
监视
Code << >> Quick
RDY Term +0.00Hz 0A
轿厢额定速度
电梯承载能力
轿厢重量
配重
最大加速度
Code << >> Quick
电梯
1.1
电梯数据
1.00 m/s
400 kg
Auto
Auto
0.5 m/s²
ENT
ENT
ESC
ENT
ENT
ESC
RDY Term +0.00Hz 0A
输入/输出分配
编码器数据
电机数据
或
电梯数据
Code << >> Quick
RDY
或
Min = 0.01 Max = 10.00
电梯宏
Term +0.00Hz 0A
轿厢额定速度
1.50 m/s
<< >> Quick
,水平滚动选择要被修改的数位(在黑色背景下所选数位变为白色)。
ENT
ENT
ESC
或
• 如要取消修改:
- 按
ESC
。
• 如要保存修改:
- 按导航按钮
(ENT)
。
16
Page 41

图形显示终端
快速导航
如果 “
Quick
”功能在键
示例
RDY Term +0.00Hz 0A
电机控制
1.4
标准电机频率:
电机控制类型:
最大频率:
输出相位旋转
正弦滤波器:
Code << >> Quick
按F4访问
RDY Term +0.00Hz 0A
返回主菜单
直接访问
最近10次修改
进入多点屏幕
Code
50Hz IEC
SVC U
60 Hz
ABC
no
屏幕,有4个选项。
Quick
快速导航
...
之上显示,就可以从任何屏幕对参数进行快速访问。
F4
•[主菜单]: 返回[主菜单]。
RDY Term +0.00Hz 0A
ENT
变频器菜单
1
访问等级
2
3打开/
密码
4
语言选择
5
Code Quick
See page 180
•[直接访问
<<与>> (F2 与F3)
小数字:在下面的示例中为
另存为
主菜单
:打开直接访问窗口, 此窗口包含文本 “1”。功能键
...]
可用于选择每一个数字,导航按钮用于增大或减
。
1.3
B
RDY Term +0.00Hz 0A
直接访问
...
1.3
设置
<< >>
RDY Term +0.00Hz 0A
斜坡增量:
ENT
加速时间:
减速时间:
第2加速时间:
第2减速时间:
Code << >> Quick
1.3
设置
01
9.51 s
9.67 s
12.58 s
13.45 s
•[最近10次修改]:打开一个窗口,此窗口包含10个可直接访问的
最近修改的参数。
RDY Term +0.00Hz 0A
加速时间:
ENA
电机额定电流:
预置速度4:
预置速度5:
最近10次修改
10 s
比例增益:
2 0 Hz
30 Hz
Code
1.2
15 A
RDY Term +0.00Hz 0A
ENT
电机额定电流
15.0 A
ESC
<< >>
17
Page 42

图形显示终端
B
主菜单
[
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
另存为
3 打开/
密码
4
语言选择
5
Code Quick
监视设置
6
显示设置
7
主菜单]菜单的内容
[
变频器菜单
[1
访问等级
[2
打开/另存为
[3
菜单映像
] -
主菜单
]
]
]
[4 密码]
语言选择
[5
监视配置
[6
显示配置
[7
]
]
]
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5 输入/
Code << >> Quick
命令
1.6
应用功能
1.7
故障管理
1.8
通信
1.9
1.10
软硬件识别
1.11
出厂设置
1.12
用户菜单
1.13
内置控制器卡
1.14
诊断
变频器菜单
1
输出设置
见下一页
定义要访问哪些菜单(复杂性等级
)
用于保存与恢复变频器设置文件
对设置进行密码保护
选择语言
定制在运行期间要在图形显示终端上显示的信息
• 定制参数
• 创建用户定制菜单
• 定制菜单与参数的可见性与保护机制
18
Page 43

图形显示终端
变频器菜单
[1
]
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5输入/
Code << >> Quick
命令
1.6
应用功能
1.7
故障管理
1.8
通信
1.9
诊断
1.10
软硬件识别
1.11
出厂设置
1.12
用户菜单
1.13
内置控制器卡
1.14
变频器菜单]菜单的内容:
[1.
变频器菜单
1
输出设置
[1.1 电梯]
[1.2 监视]
[1.3 设置]
[1.4
[1.5 输入/
[1.6 命令]
[1.7
[1.8
[1.9 通信]
[1.10 诊断]
[1.11
[1.12
[1.13
[1.14
: 电梯菜单
: 显示电流、电机与输入/ 输出值
: 访问可在运行期间可修改的调整参数
电机控制]: 电机参数(电机铭牌,自整定,开关频率,控制算法等
输出设置]:
I/O 设置(
缩放比例,滤波,
线控制,
2
线控制等
3
: 命令与给定通道的设置(图形显示终端,端子,总线等
应用功能]: 应用功能设置(例如:预置速度,
,制动逻辑控制等
PID
故障管理]: 故障处理设置
: 通信参数(现场总线
:电机
变频器诊断
/
)
软硬件识别]: 变频器与内部可选件的识别
出厂设置]: 访问设置文件并返回出厂设置
用户菜单]: 用户在
显示设置]菜单中创建的特定菜单
[7.
内置控制器卡]: 设置内置控制器卡
B
)
)
)
)
19
Page 44

集成显示终端
ATV Lift
有一个带有7段4位数码管的集成显示终端。前几页中描述的图形显示终端也可以作为一个可选件连接至此变频器。
显示屏与按键的功能
•2个
状态
B
•4个7段显示屏
• 返回先前的菜单或参
数,或者增大所显示
的值
• 转到下一个菜单或参
数,或者减小所显示
的值
Modbus
LED
总线
•2个
CANopen
• 退出菜单或参数,或者放弃
显示值以返回内存中的先
前值
• 进入菜单或参数,或者保存
所显示的参数或值
总线状态
LED
注意:
如要保存和存储所显示的选择:按
当存储一个值时显示屏闪烁。
无故障出现且没有起动时正常显示:
-43.0:
-CLI
-CtL
-dCb
-FLU
-FSt
-nLP
-nSt
- Obr
-PrA
-rdY
-SOC
-tUn
-USA
-ASA
显示屏闪烁表示出现故障。
• 按
或
• 按住
或
显示在
:电流限幅。
:输入缺相时受控停车。
:直流注入制动进行中。
:电机正在励磁。
:快速停车。
:无主电源
:自由停车。
:自适应减速。
:断电功能有效(变频器被锁定)。
:变频器已准备好。
:运行中受控输出断开。
:自整定进行中。
:欠压报警。
:正在测量相移角度。
并不能保存选择。
一段时间
菜单中选择的参数(缺省选择:电梯速度)。
SUP
(L1, L2, L3
(>2 s)
键。
ENT
上无主电源)。
就可以快速翻动数据。
20
Page 45

集成显示终端
访问菜单
菜单
通电
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
XXX
ENT
LIF-
SUP-
SEt-
drC-
I-O-
CtL-
FUn-
FLt-
CON-
FCS-
USr-
PLC-
COd-
LAC-
显示变频器状态
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
电梯
监视
设置
电机控制
输入/输出设置
命令
应用功能
故障管理
通信
出厂设置
用户菜单
内置控制器卡
密码
访问等级
电梯菜单
显示电流、电机与输入/ 输出值
调整参数,可在运行期间修改
电机参数(电机铭牌、自整定、开关频率、控制算法等
I/O 设置(
缩放比例、滤波、2 线控制、3 线控制等
)
命令与给定通道的设置(图形显示终端、端子、总线等
应用功能设置(例如:预置速度、制动控制等
)
故障管理设置
通信参数(现场总线
)
访问设置文件与返回出厂设置
用户使用图形显示终端创建的特定菜单
用于内置控制器卡(如果有)的菜单
B
)
)
为了区分参数代码与菜单、子菜单代码,在菜单、子菜单代码后面加了一破折号。
示例:
FUn-
菜单,
ACC
参数
变灰的菜单不能被访问,由访问控制
(LAC)
设置决定。
21
Page 46

集成显示终端
访问菜单参数
保存并存储所显示的选择:按 。
ENT
菜单 值或赋值
SEt-
下一个参数
(
参数
ENT
ACC 15.0
ESC
dEC
)
B
菜单
给一个参数选择多个赋值
I-O-
ENT
ESC
ENT
ESC
ENT
ESC
26.0 26.0
ESC
ENT
第1个
第n个
最后一个
Alarm(
Alarm(
当存储一个值时显示屏闪烁。
闪烁1次
保存
(
)
所有菜单都是循环菜单,这表示当到达最后一个参数时,如果继续按 ,就会返回第一
个参数。同样,通过按 ,就可以从第一个参数转到最后一个参数。
示例: [输入/输出设置
菜单中的组1报警列表
] (I-O-)
可通过 “确认”报警来选择多个报警,如下所示。
右边的数字表示: 已选择
报警)未选择
报警)已选择
对于所有的多个选择,此规律同样适用。
未选择
22
Page 47

访问等级
[2.
用图形显示终端
] (LAC-)
基本权限
只能访问5个菜单,在
变频器菜单]中只能访问6个子菜单。
[1.
每个输入只能分配一个功能。
RDY Term +0.00Hz 0A
基本权限
标准权限
高级权限
专家权限
访问等级
2
<< >> Quick
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code << >> Quick
主菜单
另存为
标准权限
此为出厂设置等级,能访问所有菜单。
每个输入只能分配一个功能。
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code Quick
监视设置
6
主菜单
另存为
高级权限
可以访问所有菜单和子菜单。
每个输入可分配几个功能。
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code Quick
监视设置
6
显示设置
7
主菜单
另存为
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
软硬件识别
1.11
出厂设置
1.12
Code << >> Quick
用户菜单
1.13
变频器菜单
1.
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5 输入/
Code << >> Quick
命令
1.6
应用功能
1.7
故障管理
1.8
通信
1.9
1.10
软硬件识别
1.11
出厂设置
1.12
用户菜单
1.13
1.14
变频器菜单
1
输出设置
诊断
内置控制器卡
B
专家权限
与[高级权限]等级一样,可以访问所有的菜单与子菜单,并能访问附加的参数。
每个输入可分配几个功能。
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code Quick
监视设置
6
显示设置
7
主菜单
另存为
23
Page 48

访问等级
[2.
用集成显示终端:
ESC
B
ESC
ESC
通电
XXX
ENT
LIF-
COd-
LAC-
] (LAC-)
显示变频器状态
ENT
访问等级
ESC
代码 名称/说明 出厂设置
LAC-
bAS
Std
Adu
Epr
•
:限制访问
bAS
•
:可以访问集成显示终端上的所有菜单。每个输入只能分配一个功能。
Std
•
:可以访问集成显示终端上的所有菜单。每个输入可分配几个功能。
AdU
•
:可以访问集成显示终端上的所有菜单,并能访问附加参数。每个输入可分配几个功能。
EPr
SIM、SUP、SEt、FCS、USr、COd 与LAC
菜单。每个输入只能分配一个功能。
Std
24
Page 49

访问等级
[2.
] (LAC-)
可在图形显示终端/集成显示终端上访问的菜单对比
图形显示终端 集成显示终端
访问等级
[2
[3 打开/
[4 密码]
语言选择
[5
变频器菜单
[1
每个输入只能分配一个功能。 每个输入只能分配一个功能。
监视配置
[6
每个输入只能分配一个功能。 每个输入只能分配一个功能。
显示配置
[7
每个输入可分配几个功能。 每个输入可分配几个功能。
专家级参数 专家级参数
每个输入可分配几个功能。 每个输入可分配几个功能。
]
保存为
]
]
] [1.1 电梯]
]
]
监视
[1.2
[1.3
[1.11
[1.12
[1.13
[1.4
[1.5
[1.6 命令]
[1.7
[1.8
[1.9 通信]
[1.10 诊断]
[1.14
]
设置
]
软硬件识别
出厂设置
用户菜单
电机控制
输入/输出设置
应用功能
故障管理
内置控制器卡
]
]
]
]
]
]
]
] (1)
LAC-
-
COd-
-
LIF-
SUP-
SEt-
-
FCS-
USr-
drC-
I-O-
CtL-
FUn-
FLt-
COM-
-
PLC-
-
-
访问等级
(
密码
(
)
电梯
(
)
监视
(
)
设置
(
)
出厂设置
(
用户菜单
(
电机控制
(
输入/输出设置
(
命令
(
)
应用功能
(
故障管理
(
通信
(
)
内置控制器卡
(
)
)
)
)
)
)
)
) (1)
访问等级
bAS
B
)
基本权限
出厂设置
(
AdU
Std
标准权限
高级权限
EPr
专家权限
如果有内置控制器卡,则可进行访问。
(1)
25
Page 50

参数表结构
各种菜单中描述的参数表既可用于图形显示终端,也可用于集成显示终端。因此,与下面的描述一致,参数表包含用于这两种终端的信息。
示例:
5
B
[1.7
1
2
rEF-
3
4
1. 在4位-7
2. 在4位-7
3. 在4位-7
4. 在4位-7
应用功能
代码 名称/说明 调节范围 出厂设置
rCb
Fr1
Fr1b
段显示屏上的菜单名称。
段显示屏上的子菜单代码。
段显示屏上的参数代码。
段显示屏上的参数值。
] (FUn-)
给定通道切换
b
[
M [给定通道1B切换
v
通道1有效
[
v
通道1B有效
[
]
(Fr1):
]
(Fr1b):
]
]
不切换, [给定通道
不切换,
给定通道
[
在图形显示终端上的菜单名称。
5.
在图形显示终端上的子菜单名称。
6.
在图形显示终端上的参数名称。
7.
在图形显示终端上的参数值。
8.
6
7
1] (Fr1)
8
有效
(Fr1b) 有效
1B]
通道1有效
[
(Fr1)
]
注意:
• 在方括号
中的文本表示可以在图形显示终端上看到的信息。
[ ]
26
Page 51

参数值之间的相互关联
为了减少发生错误的危险,某些参数的设置会改变另外一些参数的设定范围。这会导致出厂设置或已经选定值发生改变。
示例:
电流限幅
1. [
开关频率
2. [
如果 [开关频率
3.
限幅
] (CLI)
] (CLI)
] (SFr)
。
设置为
设置为
] (SFr)
1.6 In
2.5kHz (
增加到
或保持
并经过 “
4 kHz,[
的出厂设置。
1.5 In
ENT
电流限幅
”确认),则将[电流限幅
] (CLI)
不再被限制, 但此时仍保持为
] (CLI)
限定为
1.36 In。
1.36 In
如果需要设为
。
,必 须 重新设置 [电流
1.6 In
B
27
Page 52

在此文档中查找一个参数
本文档对一个参数解释的查找提供如下帮助:
B
• 用图形显示终端:选择所需的参数并按
示例:
ACC
RDY Term +0.00Hz 0A
斜坡增量:
加速时间
减速时间:
第2加速时间:
第2减速时间:
Code << >> Quick
设置
1.3
01
9.51 s
9.67 s
12.58 s
13.45 s
代码
F1 F1
: [Code]。
RDY Term +0.00Hz 0A
斜坡增量:
加速时间
减速时间:
第2加速时间:
第2减速时间:
Code << >> Quick
在按下
设置
1.3
键的同时就会显示所选参数的代码,而不是显示其名称。
01
9.51 s
9.67 s
12.58 s
13.45 s
28
Page 53

电梯
[1.1
] (LIF-)
用图形显示终端:
RDY Term +0.00Hz 0A
变频器菜单
1
访问等级
2
3 打开/
密码
4
语言选择
5
Code Quick
主菜单
另存为
用集成显示终端:
通电
显示变频器状态
XXX
ENT
ESC
ESC
ESC
LIF-
SUP-
LAC-
ENT
ESC
ENT
电梯
RDY Term +0.00Hz 0A
电梯
1.1
监视
1.2
设置
1.3
电机控制
1.4
1.5输入/
Code << >> Quick
变频器菜单
1.
输出设置
ENT
RUN Term +50.00H z 80A
电梯宏
电梯优化
电梯功能
监视
Code << >> Quick
电梯
1.1
B
[1.1 电梯] (LIF-)
[1.1 电梯] (LIF-)
菜单中的参数,
(drC-)
就有可能发生改变。在修改完另一个变频器设置菜单之后没有必要返回
菜单被用于将设置运用于电梯。
注意:
[1.1 电梯] (LIF-)
菜单的参数必须按其出现的顺序进入,这是由于后边的参数依赖于前边的参数。
菜单应独立设置或在其他变频器设置菜单之前进行设置。如果先前这些菜单中的任意一个做了改动,特别是
[1.1 电梯] (LIF-)
菜单中的一些参数就可能发生改变,例如:如果选择了同步电机,则
[1.1 电梯] (LIF-)
菜单,当然这样做也不会带来任何危险。为了避免给
本节带来不必要的复杂性,本节没有描述在另一个设置菜单发生改变之后如何进行修改。
电机控制
[1.1 电梯] (LIF-)
[1.4
菜单中电机参数
]
29
Page 54

电梯
[1.1
电梯宏
] (LIF-)
为使
ATV71L
电梯菜单被设计为按照线性模式浏览。为了输入正确电梯设置所需的所有参数为了输入正确电梯宏所需的所有参数,需要逐步仔细检查此
菜单。
在开始对变频器进行编程之前须仔细确认下列数据:
代码 名称/说明 值
输入/输出分配
[
B
编码器数据
[
脉冲数量
[
解析器励磁频率
[
解析器电极数量
[
快速起动,必须按照如下说明执行。
] (LIO-) I/O
] (End-)
] (PGI)
] (FreS)
] (rppn)
菜单
赋值
LI1
赋值
LI2
赋值
LI3
赋值
LI4
赋值
LI5
赋值
LI6
赋值
AI1
赋值
AI2
赋值
R1
赋值
R2
编码器数据菜单
增量式编码器
脉冲数量
解析式编码器
解析器励磁频率
解析器电极数量
………
………
………
………
………
………
………
………
………
………
………
………
………
………
编码器电源电压
[
编码器线数
[Sincos
编码器线数
[Sincos
电机数据
[
电机控制类型
[
电机额定功率
[
电机额定电压
[
电机额定电流
[
电机额定频率
[
电机额定速度
[
电机转矩
[
同步电机额定电流
[
同步电机额定速度
[
同步电机极对数
[
电梯数据
[
轿厢额定速度
[
电梯承载能力
[
电梯最高速度
[
减速距离
[
平层运行时间
[
停止距离
[
平层速度
[
] (Mot-)
] (tqS)
] (LdA-)
] (dEL)
] (StL)
] (LLS)
] (UECU)
] (UELC)
] (UELC)
] (Ctt)
] (nPr)
] (UnS)
] (nCr)
] (FrS)
] (nSP)
] (nCrS)
] (nSPS)
] (PPnS)
] (CSP)
] (LCA)
] (LTS)
] (LLt)
编码器
SinCos
编码器电源电压
电线数量
SinCos EnDat
编码器线数
Sincos
sincos
线数
编码器
电机数据菜单
电机控制类型
异步电机
电机额定功率
电机额定电压
电机额定电流
电机额定频率
电机额定速度
或
同步电机
电机转矩
同步电机额定电流
同步电机额定速度
极对数
电梯数据菜单
电机以额定频率运行时的轿厢额定速度
有效载荷
行进速度
减速距离
平层运行时间
停止距离
平层速度
………
………
………
………
SVC V 或 FVC 或 FSY 或 SYN
………
kW
………
V
………
A
………
Hz
………
rpm
………
Nm
………
A
………
rpm
………
………
m/s
………
kg
………
m/s
………
cm
………
s
………
cm
………
m/s
30
Page 55

电梯
[1.1
] (LIF-)
输入/输出赋值
的出厂设置具有如下输入/输出赋值:
ATV71L
逻辑输入
•
正向
LI1:
•
反向
LI2:
•
未设置
LI3:
•
电梯速度管理
LI4:
•
检查模式
LI5:
•
未设置
LI6:
逻辑输出
•R1: 无
•R2: 制动序列
•
:输出接触器
dO1
模拟输入
•
AI1:
3
5
Q1
通道给定值
电梯命令控制卡
A1A2
KCA
1314
13
14
ATV71 L
220 V
单相紧急
备用电源
1
3
2
4
5
13
KS
(1)
6
14
RF
滤波器
RFI
(1)
1
3
5
KL
(1)
2
4
6
L1
L2 L3 +24 LI1LI6 LI3
U1 V1 W1 PB PA COM LO=OCC(4) +24
121
3434
5656
K1
K2
2
B
1
3
Q2
2
4
5
21222122
SE1
R2A
KCA
R1AR1C
(5)
SEn
(2)
I
II
1314
1314
1114
12
LI2
R2=BLC R1 = FLT
LI5
21222122
K1
K2
(4)
R2C
P1
Un
S1
Q3 Q4
Q2
6
P2
T
Uf
a
S2
S1
S2
~
-+
~
K1
87
K2
87
KF
21
KF
43
D1
1314
KCA
用于控制轿厢门
V
U
W
M
M
3
可选元件。
(1)
故障继电器触点,用于远程发送变频器的状态信号(可重新分配)。
(2)
(3)内部+24 V
用线连接至外部电源上的
可分配的继电器R2和逻辑输出LO。
(4)
安全电路。
(5)
电源。如果使用外部
+24 V
电源,应将外部电源上的
+24V
。
0 V
KF
连接至
A1A2
A1A2
K1
端子,不要使用变频器上的
COM
A1A2
K2
P<75 VA
A1A2
KL
(1)
A1A2
KS
(1)
端子,并将逻辑输入公
+24
制动器
31
Page 56

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
L1O-
INP-
Frd
rrS
nO
LI1
C101
Cd00
nO
LI1
C101
Cd00
电梯宏
[
输入/输出分配
[
输入
b
[
M [正转
v
v
-
-
v
v
v
-
-
-
v
v
v
v
-
v
M [反转
v
v
-
-
v
v
v
-
-
-
v
v
v
v
-
v
]
]
]
]
:未赋值
(nO)
[No]
(LI1) 至
[LI1]
[LI7]
[LI11]
[C101]
[C201]
[C301]
[C401]
[CD00]
[CD14]
读取正向命令赋值。
]
[No]
[LI1]
[LI7]
[LI11]
[C101]
[C201]
[C301]
[C401]
[CD00]
[CD14]
反向命令赋值。
(LI7) 至
(LI11) 至
(C101) 至
(C201) 至
(C301) 至
(C401) 至
(Cd00) 至
(Cd14) 至
(nO):
(LI1) 至
(LI7) 至
(LI11) 至
(C101) 至
(C201) 至
(C301) 至
(C401) 至
(Cd00) 至
(Cd14) 至
[LI6]
[LI10]
[LI14]
[C115]
[C215]
[C315]
未赋值
[LI6]
[LI10]
[LI14]
[C115]
[C215]
[C315]
(LI6)
(LI10)
(LI14)
[C415]
[CD13]
[CD15]
(LI6)
(LI10):
(LI14):
[C415]
[CD13]
[CD15]
:如果已插入
:如果已插入
(C115):在[I/O
(C215):在[I/O
(C315):在[I/O
(C415):在[I/O
(Cd13):在[I/O
(Cd15):在[I/O
如果已插入
如果已插入
(C115):在[I/O
(C215):在[I/O
(C315):在[I/O
(C415):在[I/O
(Cd13):在[I/O
(Cd15):在[I/O
VW3A3201
VW3A3202
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
VW3A3201
VW3A3202
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
模式
] (IO)
逻辑
中带有集成的
逻辑
中带有集成的
卡
I/O
扩展
中带有集成的
中带有通信卡
中带有内置控制器卡
中可不通过逻辑输入进行转换
扩展
中带有集成的
中带有通信卡
中带有内置控制器卡
中可不通过逻辑输入进行转换
卡
I/O
Modbus
中可通过不确定的逻辑输入进行转换
卡
I/O
卡
I/O
Modbus
中可通过不确定的逻辑输入进行转换
总线
CANopen
总线
CANopen
总线
总线
[LI1] (LI1)
[LI2] (LI2)
nSt
C101
Cd00
nO
LI1
M [自由停车分配
v
v
-
-
v
v
v
-
-
-
v
v
v
v
-
v
(nO):
[No]
(LI1) 至
[LI1]
(LI7) 至
[LI7]
(LI11) 至
[LI11]
(C101) 至
[C101]
[C201]
[C301]
[C401]
[CD00]
[CD14]
当输入或位为0时停车被激活。如果输入返回状态1且运行命令仍然有效,如果第
(tCC) = [2
否则必须发送新的运行命令。
(C201) 至
(C301) 至
(C401) 至
(Cd00) 至
(Cd14) 至
未赋值
[LI6]
[LI10]
线控制
]
(LI6)
(LI10):
(LI14)
[LI14]
[C115]
[C215]
[C315]
[C415]
[CD13]
[CD15]
] (2C) 以及[2
如果已插入
:如果已插入
(C115):在[I/O
(C215):在[I/O
(C315):在[I/O
(C415):在[I/O
(Cd13):在[I/O
(Cd15):在[I/O
线类型
VW3A3201
VW3A3202
模式
模式
模式
模式
模式
模式
] (tCt) = [
中带有集成的
] (IO)
] (IO)
] (IO)
] (IO)
] (IO)
] (IO)
电平
逻辑
] (LEL)或[
卡
I/O
扩展
中带有集成的
中带有通信卡
中带有内置控制器卡
中可不通过逻辑输入进行转换
卡
I/O
中可通过不确定的逻辑输入进行转换
正向优先
Modbus
CANopen
总线
总线
] (PFO)
[No] (nO)
页的
123
,则电机只能重新起动。
[2/3
线控制
]
32
Page 57

电梯
L
(m/s)
(s)
L
(s)
(s)
(s)
[1.1
] (LIF-)
电梯速度斜坡
对 [电梯速度管理
速度
LtS
给定值
LtS
进行赋值就会激活专门用于电梯的速度斜坡剖面。
] (LSM)
B
LS
时间
0
(m/s)
LS
0
LI (LSM)
1
0
LI (FW / REV)
1
0
时间
时间
时间
33
Page 58

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
L1O-
INP-
ISP
LSM
nO
LI1
LI14
nO
LI1
LI14
C101
Cd00
电梯宏
[
输入/输出分配
[
输入
b
[
M [检查
-
M [电梯速度管理
-
-
-
-
-
续
]
续
]
续
]
]
如果制动逻辑控制 [制动分配
v
[No]
v
[LI1]
v
[LI7]
v
[LI11] (LI11)
当被赋值的输入变为状态1时检查模式被激活。
:功能未分配
(nO)
(LI1) 至
(LI7) 至
(LI6)
[LI6]
[LI10]
至
[LI14] (LI14):
(LI10):
] (bLC) 与 [
如果已插入
如果已插入
输出接触器分配
VW3A3201
VW3A3202
]
管理电梯速度。
对
进行赋值就会激活电梯专用斜坡剖面。
LSM
v
[No]
v
[LI1]
v
[LI7]
v
[LI11]
v
[C101]
v
[C201]
v
[C301]
v
[C401]
v
[CD00]
v
[CD14] (Cd14)
:功能未分配
(nO)
(LI1) 至
(LI7) 至
(LI11) 至
(C101) 至
(C201) 至
(C301) 至
(C401) 至
(Cd00) 至
(LI6)
[LI6]
(LI10):
[LI10]
[LI14]
[C115]
[C215]
[C315]
[C415]
[CD13]
至
[CD15] (Cd15):在[I/O
如果已插入
(LI14):
如果已插入
(C115):在[I/O
(C215):在[I/O
(C315):在[I/O
(C415):在[I/O
(Cd13)
:在
VW3A3201
VW3A3202
模式
模式
模式
[I/O
模式
模式
模式
已经过赋值,则此参数可被访问。
] (OCC)
中带有集成的
] (IO)
] (IO)
] (IO)
] (IO)
] (IO)
] (IO)
逻辑
逻辑
卡
I/O
扩展
I/O卡
卡
I/O
扩展
中带有集成的
中带有通信卡
中带有内置控制器卡
中可不通过逻辑输入进行转换
卡
I/O
Modbus
中可通过不确定的逻辑输入进行转换
总线
CANopen
[LI5] (LI5)
[LI4] (LI4)
总线
rCA
rFt
nO
LI1
注意: 如果
该输入赋值给第
给定值
(1) LI (
停止
电梯最高速度
[
平层速度
[
55
] (LtS)
] (LLS)
M [输出接触器反馈
v
[No] (nO)
v
-
-
-
[LI1] (LI1)
:
:
v
[...] (...)
: 功能未激活
M [撤离功能分配
v
[No]
v
[LI1]
v
[LI7]
v
[LI11]
当所赋值的输入为1时,如果变频器处于静止状态,则撤离功能就会被激活。
当所赋值的输入为0时,只要变频器一停止,撤离功能就会被复位。
:功能未分配。
(nO)
至
(LI1)
[LI6]
至
(LI7)
至
(LI11)
没有被赋值,则标准斜坡有效
LSM
页电梯速度斜坡功能命令 [电梯最高速度
正向
或
反向
LI (
0X
11
10
]
]
(LI6)
[LI10]
[LI14]
(LI10)
(LI14)
:如果已插入
:如果已插入
VW3A3201
VW3A3202
。
] (LtS)
I/O
LI [
(LSM)
卡。
I/O
电梯速度管理
卡。
]
[No] (nO)
[No] (nO)
)
)
逻辑
扩展
注意:此表适用于2线控制。
(1)
34
Page 59

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
LCO-
L1O-
INP-
bCI
Fr1
PES
nO
LI1
AI1
AI2
AI3
AI4
LCC
Mdb
CAn
nEt
APP
PI
PG
nO
AI1
AI2
AI3
AI4
PI
PG
AIU1
电梯宏
[
输入/输出分配
[
输入
b
[
M [制动器返回触点
-
-
-
M [给定通道
M [称重传感器分配
续
]
续
]
续
]
]
如果制动器有一个监视触点(制动器释放时该触点闭合)。
v
[No] (nO)
v
[LI1]
:
:
v
[...]
(LI1)
(...)
: 功能未激活
1]
v
[AI1] (AI1)
v
[AI2] (AI2)
v
[AI3] (AI3)
v
[AI4] (AI4)
v
[HMI] (LCC)
v
[Modbus] (Mdb)
v
[CANopen] (CAn)
v
通信卡
[
v
内置控制器卡
[
v
[RP]
编码器
v
[
: 模拟输入
: 模拟输入
: 模拟输入,如果已插入
: 模拟输入,如果已插入
: 图形显示终端
:集成的
:集成的
: 通信卡(如果已插入
] (nEt)
(APP):
]
:频率输入,如果已插入
(PI)
:编码器输入,如果已插入编码器卡
] (PG)
VW3A3202
VW3A3202
Modbus
内置控制器卡(如果已插入
总线
CANopen
VW3A3202
总线
)
扩展卡
扩展卡
扩展卡
]
如果制动逻辑控制已被定义,则此功能可被访问。
如果 [称重传感器分配
v
[No] (nO):
v
[AI1] (AI1):
v
[AI2] (AI2):
v
[AI3] (AI3):
v
[AI4] (AI4):
v
[RP] (PI)
v
编码器
[
v
网络
[
功能未激活
模拟输入
模拟输入
模拟输入,如果已插入
模拟输入,如果已插入
:频率输入,如果已插入
] (PG):
AI] (AIU1)
] (PES) 不是 [No] (nO),则 [
VW3A3202
VW3A3202
VW3A3202
编码器输入,如果已插入编码器卡
:经由通信总线的虚拟输入,可使用[网络AI通道
运动类型
扩展卡
扩展卡
扩展卡
)
被强制为 [提升
] (bSt)
] (AIC1)
] (UEr)
来设置。
[No] (nO)
B
[AI1] (AI1)
[No] (nO)
。
警告
意外的设备运行
如果设备切换为强制本地模式,虚拟输入就会保持固定在最后传输的值。
不能在同一设置中使用虚拟输入和强制本地模式。
不按照这些使用说明会导致死亡或严重伤害。
35
Page 60

电梯
[1.1
] (LIF-)
速度选择器与电梯速度斜坡
仅当[访问等级
对于速度选择器来说有一种特殊的机制。
专家权限]时才能访问此功能。
] = [
速度选择器
选择器输入
[
LIx
LIy
(SPSA)
选择器输入
[
(SPSB)
B
可以选择2或4个速度,相应需要1或2个逻辑输入。
速度选择器组合表
参数 可能的赋值
[LTS 选择] (LtSS)
[LLS 选择] (LLSS)
停机选择
[
[ISP 选择] (ISPS)
(1)
A与B
] (StPS)
代表2个用作选择器的输入。
最高速度选择
A]
B]
(1) SPSA
no no no
A0B0 0 0
A1B0 1 0
A0B1 0 1
A1B1 1 1
no no no
A0B0 0 0
A1B0 1 0
A0B1 0 1
A1B1 1 1
no no no
A0B0 0 0
A1B0 1 0
A0B1 0 1
A1B1 1 1
no no no
A0B0 0 0
A1B0 1 0
A0B1 0 1
A1B1 1 1
停车选择
平层速度选择
检修速度选择
的状态
SPSB
电梯速度斜坡
检修模式
的状态
示例:如果
36
A x B x
这两个数字表示相应的逻辑输入的状态
SPSA = LI4与SPSB = LI5,则A0B1
表示
LI4 = 0与LI5 = 1
。
Page 61

[1.1
电梯
] (LIF-)
速度选择器与电梯速度斜坡(续
速度
LtS (m/s)
LLS (m/s)
0
所选的
LtSS = A0B0 (SPSA = 0 ; SPSB = 0)
或
A0B1 (SPSA = 0 ; SPSB = 1)
或
A1B0 (SPSA = 1 ; SPSB = 0)
或
A1B1 (SPSA = 1 ; SPSB = 1)
LtS
)
B
时间
所选的
LLSS = A0B0 (SPSA = 0 ; SPSB = 0)
或
A0B1 (SPSA = 0 ; SPSB = 1)
或
A1B0 (SPSA = 1 ; SPSB = 0)
或
A1B1 (SPSA = 1 ; SPSB = 1)
LLS
StPS = A0B0 (SPSA = 0 ; SPSB = 0)
或
A0B1 (SPSA = 0 ; SPSB = 1)
或
A1B0 (SPSA = 1 ; SPSB = 0)
或
A1B1 (SPSA = 1 ; SPSB = 1)
所选的停机
37
Page 62

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
L1O-
INP-
SPS-
SPSA
SPSB
LtSS
nO
LI1
LI14
C101
Cd00
nO
A0B0
A1B0
A0B1
A1B1
电梯宏
[
输入/输出分配
[
输入
b
[
速度选择器
b
[
如果第34页的 [电梯速度管理
M [选择器输入
-
-
-
-
-
M [选择器输入
M
[LTS
续
]
续
]
v
v
v
v
v
v
v
v
v
v
与 [选择器输入
v
v
v
v
v
(nO)
[No]
(LI1)
[LI1]
(LI7) 至
[LI7]
(LI11) 至
[LI11]
(C101) 至
[C101]
(C201)
[C201]
(C301) 至
[C301]
[C401] (C401)
[CD00] (Cd00)
[CD14] (Cd14)
选择
]
(nO):
[No]
[A0B0]
[A1B0]
[A0B1]
[A1B1]
(SPS A0 B0)
(SPS A1 B0)
(SPS A0 B1)
(SPS A1 B1)
续
]
]
A]
:未设置
至
(LI6)
[LI6]
(LI10)
[LI10]
(LI14)
[LI14]
(C115):在[I/O
[C115]
至
[C215]
[C315]
至
[C415] (C415):在[I/O
至
[CD13]
至
[CD15] (Cd15):在[I/O
B]
A] (SPSA)
未设置。
相同。
] (LSM) = [No] (nO)
:如果已插入
:如果已插入
(C215):在[I/O
(C315):在[I/O
(Cd13):在[I/O
VW3A3201
VW3A3202
模式
模式
模式
并且如果 [访问等级
逻辑
I/O
扩展
中带有集成的
] (IO)
中带有集成的
] (IO)
中带有通信卡
] (IO)
模式
模式
模式
中带有内置控制器卡
] (IO)
中可通过不确定的逻辑输入进行转换
] (IO)
中可不通过逻辑输入进行转换
] (IO)
I/O
卡
卡
专家权限],此菜单才可被访问。
] = [
[No] (nO)
Modbus
总线
CANopen总线
[No] (nO)
[No] (nO)
LLSS
StPS
ISPS
M
选择
[LLS
与
[LTS 选择] (Ltss)
M [停机选择
与
[LTS 选择] (Ltss)
M
选择
[ISP
与
[LTS 选择] (Ltss)
]
相同。
]
相同。
]
相同。
[No] (nO)
[No] (nO)
[No] (nO)
38
Page 63

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
LCO-
L1O-
OUt-
bLC
OCC
nO
r2
r4
LO1
LO4
dO1
nO
LO1
LO4
r1
r4
dO1
电梯宏
[
输入/输出分配
[
输出
b
[
M [制动分配
v
v
-
v
-
v
M [输出接触器分配
v
v
-
-
v
续
]
续
]
]
]
注意:如果已进行过制动分配,则只可能进行斜坡停机。检查 [停车类型
只有在 [电机控制类型
能对制动逻辑控制进行赋值。
逻辑输出或控制继电器
:功能未被赋值(在此情况下,此功能的任一参数均不能被访问
(nO)
[No]
(r2)
[R2]
至
:继电器(如果已插入一个或两个
(r4)
[R4]
(LO1)
[LO1]
至
[LO4]
[dO1]
逻辑输出或控制继电器
[No]
[LO1]
至
[LO4]
(r1)
[R1]
至
(r4)
[R4]
[dO1]
:逻辑输出(如果已插入一个或两个输入/输出卡,则可选择
(LO4)
:模拟输出
(dO1)
:功能未被赋值(在此情况下,此功能的任一参数均不能被访问)。
(nO)
(LO1)
(LO4):
:继电器(如果已插入一个或两个输入/输出卡,则可将选择R1扩展至R3或
(dO1):
] (Ctt) = [SVC V] (UUC)、 [SVC I] (CUC)、 [FVC] (FUC) 或 [
卡,则可将选择扩展至R3或
I/O
作为一个逻辑输出。只有在
AO1
[AO1 分配] (AO1) = [No] (nO)
]
逻辑输出(如果已插入一个或两个输入/输出卡,则可选择
模拟输出
作为一个逻辑输出。只有在
AO1
[AO1 分配] (AO1) = [No] (nO)
[R2] (R2)
。
] (Stt)
同步电机闭环
)
R4)
LO1至LO2或LO4)
LO1至LO2或LO4)
时才能选择。
[dO1] (dO1)
。
R4)
时才能选择。
] (FSY)
。
。
B
时才
39
Page 64

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
L1O-
OUt-
r1
nO
FLt
rUn
FtA
FLA
CtA
SrA
tSA
AP2
F2A
tAd
ttHA
ttLA
MFrd
MrrS
tS2
tS3
AtS
CnF0
CnF1
CnF2
CFP1
CFP2
CFP3
dbL
brS
PrM
FqLA
MCP
LSA
AG1
AG2
AG3
P1A
P2A
PLA
EFA
USA
UPA
AnA
tHA
bSA
bCA
SSA
rtA
tJA
bOA
APA
AP3
AP4
rdY
电梯宏
[
输入/输出分配
[
b
[
M
续
]
输出
[R1
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
续
]
设置
(nO)
[No]
变频器无故障
[
变频器正在运行
[
达到频率阈值
[
达到高速
[
达到电流阈值
[
达到频率给定值
[
达到电机热态
[
[AI2 4-20
达到频率阈值
[
达到变频器热态
[
达到高转矩
[
达到低转矩
[
正向
[
]
反向
[
]
达到电机2热态
[
达到电机3热态
[
负转矩
[
设置0有效
[
设置1有效
[
设置2有效
[
参数组1有效
[
参数组2有效
[
参数组3有效
[
直流母线充电
[
制动中
[
电源被切除
[
频率计报警
[
电流不为
[
限位到达
[
报警组
[
报警组
[
报警组
[
报警
[PTC1
报警
[PTC2
[LI6=PTC
外部故障报警
[
欠压报警
[
欠压警告
[
滑差报警
[
变频器过热
[
负载移动报警
[
制动触点报警
[
达到转矩限幅
[
转矩控制报警
[
报警
[IGBT
制动电阻器过热报警
[
可选卡报警
[
[AI3 4-20
[AI4 4-20
就绪
[
]
]
]
未赋值
:
(FLA)
]
报警
(ttHA)
]
(ttLA)
]
:电机正向转动
(MFrd)
:电机反向转动
(MrrS)
:负转矩(制动
(AtS)
]
(CnF0)
]
(CnF1): 设置1
]
(CnF2): 设置2
]
(brS):
]
(PRM)
]
(FqLA)
]
(MCP):
0]
(LSA):
]
(AGI)
1]
(AG2)
2]
(AG3)
3]
(P1A)
]
(P2A)
]
报警
]
(USA):
]
(UPA)
]
(AnA)
]
(tHA)
]
(tJA):IGBT
]
(APA)
]
报警
报警
:变频器已准备好
(rdY)
续
:变频器无故障(继电器正常加电,如有故障则会断电
(FLt)
]
]
(FtA)
]
:达到高速
(CtA)
]
]
(tSA):
]
(AP2)
]
(F2A)
2]
]
]
]
(CFP1)
]
(CFP2)
]
(CFP3)
]
(dbL):
]
变频器正在制动
:报警组
:报警组
:报警组
:探头报警
:探头报警
(PLA):LI6=PTC
(EFA)
]
:欠压警告
:滑差报警
(bSA)
]
(bCA)
]
(SSA)
]
(rtA)
]
(AP3)
]
(AP4)
]
变频器正在运行
(rUn):
:达到频率阈值 (见[频率阈值
:达到电流阈值 (见[电流阈值
:达到频率给定值
(SrA)
达到电机1热态
:报警,指示在
:达到频率阈值
:达到变频器热态
(tAd)
:电机转矩超过上限 [高转矩阈值
:电机转矩超过下限 [低转矩阈值
:达到电机2热态
(tS2)
:达到电机3热态
(tS3)
:设置0有效
:变频器被 “断电”输入锁定
:达到测量所得的速度阈值:见[脉冲报警阈值
出现电机电流
达到限位开关
欠压报警
:变频器过热
:转矩控制报警
:内置控制器卡发出的报警
)
有效
有效
:参数组1有效
:参数组2有效
:参数组3有效
直流母线正在充电
1
2
3
1
2
探头报警
:外部故障报警
:制动速度报警
:制动触点报警
:转矩限幅报警
报警
:制动电阻器过热报警
(bOA)
]
:报警,指示在
:报警,指示在
输入上没有
AI2
2 (见[
输入上没有
AI3
输入上没有
AI4
] (Ftd) )
] (Ctd) )
4-20 mA信号
频率阈值
] (ttL)
4-20 mA
2] (F2d) )
] (ttH)
4-20 mA
[No] (nO)
)
] (FqL)
信号
信号
40
Page 65

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
LCO-
L1O-
OUt-
r2
dO1
AO1
bLC
LLC
OCC
dCO
bLC
LLC
OCC
dCO
nO
OCr
OFr
OrP
trq
Stq
OrS
OPr
tHr
tHd
tqMS
OFrr
OFS
tHr2
tHr3
Utr
Str
tqL
UOP
dO1
电梯宏
[
输入/输出分配
[
b
[
M
M
M
续
]
输出
[R2
[DO1
[AO1
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
v
续
]
分配
与R1相同(见第40页),并增加了下列几项(仅作为信息显示,这些选项只能在
菜单中进行设置):
制动接触器控制
v
[
输入接触器
v
[
输出接触器分配
v
[
直流母线充电
v
[
设置
与R1相同(见第40页),并增加了下列几项(仅作为信息显示,这些选项只能在
菜单中进行设置):
制动接触器控制
v
[
输入接触器
v
[
输出接触器分配
v
[
直流母线充电
v
[
分配
(nO):
[No]
电机电流
[
之间。
电机频率
[
斜坡输出
[
电机转矩
[
有符号转矩
[
号对应于发电机模式(制动)。
-
有符号斜坡输出
[
电机功率
[
电机热态
[
变频器热态
[
[Torque 4Q]
物理方向,而不管处于何种模式(电机模式或发电机模式)。使用示例:带有[转矩控制
“主机-从机”。
电机频率测量值
[
输出频率
[+/-
电机热态
[
电机热态
[
无符号转矩给定值
[
有符号转矩给定值
[
转矩限幅
[
电机电压
[
(dO1):
[dO1]
这是唯一可能选择,仅作为信息显示。
续
]
]
(bLC)
]
:线路接触器控制
(LLC)
]
(OCC):
]
(dCO):
]
]
(bLC)
]
:线路接触器控制
(LLC)
]
(OCC):
]
(dCO):
]
]
未赋值。
:电机电流,在0至2倍
(OCr)
]
:输出频率,在0与 [最大频率
(OFr)
]
(OrP): 在0与 [
]
:电机转矩,在0至3倍的电机额定转矩之间。
(trq)
]
(OPr)
]
(tHr)
]
2]
3]
(tqL):
]
(UOP):
]
:有符号电机转矩,在-3与+3倍的电机额定转矩之间。+号对应于电机模式,
(Stq)
]
(OrS)
]
:电机功率,在0至
:电机热态,在0与
变频器热态,在0与
(tHd):
]
(tqMS):
(tHr2)
(tHr3)
定义为一个逻辑输出。如果
有符号电机转矩,在-3至+3倍的电机额定转矩之间。+号与-号对应于转矩的
(OFrr)
]
:有符号输出频率,在
(OFS)
]
:电机2的热态,在0至
:电机3的热态,在0至
(Utr):
]
(Str)
]
转矩限幅,在0至3倍的电机额定转矩之间
加在电机上的电压,在0与 [电机额定电压
[1.7
:制动接触器控制
输出接触器控制
直流母线预充电接触器控制。
[1.7
:制动接触器控制
输出接触器控制
直流母线预充电接触器控制。
安装手册与变频器铭牌上指示的变频器额定电流
In (In =
之间。
最大频率
:有符号斜坡输出,在-[最大频率
:测量所得的电机速度。
转矩给定值,在0至3倍的电机额定转矩之间
:有符号转矩给定值,在-3至+3倍的电机额定转矩之间。
] (tFr)
2.5倍的 [
200%
[DO1 分配] (dO1)
] (tFr)
之间。
电机额定功率
的额定热态之间。
的额定热态之间。
200%
最大频率
- [
200%
200%
] (tFr) 与 + [
的额定热态之间。
的额定热态之间。
已经过定义,才能出现此定义。在这种情况下
] (tFr) 与 + [
] (nPr)
] (UnS)
之间。
最大频率
最大频率
] (tFr)
之间。
制动接触器控制
[
(bLC)
应用功能
输出接触器分配
[
(OCC)
应用功能
[dO1] (dO1)
之间。
] (tFr)
] (tOr-)
之间。
.] (Fun-)
] (Fun-)
功能的
]
B
]
)
41
Page 66

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
End-
EnS
EnU
EnrI
PGI
PGA
EIL
EFr
EFI
nO
AAbb
Ab
nO
SEC
rEG
PGr
nO
YES
EnC
PtG
电梯宏
[
编码器数据
[
M [编码器类型
A
M [编码器用途
M [编码器反向旋转
M [脉冲数量
M [给定类型
M [频率最小值
M [频率最大值
M [频率信号滤波器
续
]
]
]
如果已插入增量式编码器卡,才可以访问此参数。
应根据所使用编码器的类型进行设置。
v
v
v
v
[No]
[AABB]
[AB]
(A)
[A]
功能未激活。
(nO):
(Ab)
:对于信号A。如果 [编码器用途
:对于信号A、A-、B、B-或A、A-、B、B-、Z、Z-。
(AAbb)
:对于信号A、B。
] (EnU) = [
速度反馈调节
,不能访问此值。
] (rEG)
]
只有在插入编码器卡时才能访问此参数
v
[No]
速度监视
v
[
速度反馈调节
v
[
制类型
] (Ctt) =[FVC] (FUC)或[
(Ctt)= [SVC V] (UUC)
类型
] (Ctt)
速度给定
v
[
功能未激活。
(nO):
值来说不能访问此配置。
:编码器仅为监视功能提供速度反馈。
(SEC)
]
,则编码器以速度反馈模式运行,并能进行静态速度校正。对于其它[电机控制
(PGr)
]
:编码器为调节和监视提供速度反馈。如果变频器设置为闭环运行([电机控
(rEG)
]
:编码器提供给定值。使用增量式编码器卡时只能选择此项。
同步电机闭环
(1)
。
,就会自动设为此设置。如果[电机控制类型
] (FSY))
]
只有在插入编码器卡时才能访问此参数。激活编码器旋转反向功能。
在一些装配体中,编码器正旋转方向与电机旋转方向相反。在这种情况下,为了使电机与编码器的旋转方
向相同,此参数需要被激活。
v
[No]
v
[Yes]
编码器每转一圈发出的脉冲数目。
如果已插入
:反向没有被激活
(nO)
(YES):
反向被激活
]
VW3 A3 401至407或VW3 A3 411
100 至 10000
卡,则此参数可以被访问。
]
如果[编码器用途
编码器
v
[
频率发生器
v
[
(EnC)
]
] (EnU) = [
(PtG)
]
]
如果 [编码器用途
参数。
频率对应于最小速度。
] (EnU) = [
]
如果 [编码器用途
参数。
频率对应于最大速度。
如果 [编码器用途
干扰滤除。
] (EnU) = [
] (EnU) = [
速度给定
:使用编码器(仅增量式编码器)。
:使用频率发生器(无符号给定值)。
速度给定
速度给定
,才可以访问此参数。
] (PGr)
] (PGr) 与 [
] (PGr) 与 [
给定类型
给定类型
]
速度给定
,才可以访问此参数。
] (PGr)
- 300 至 300 kHz
] (PGA) = [
] (PGA) = [
频率发生器
0.00 至 300.00 kHz
频率发生器
0 至 1000 ms
[AABB] (AAbb)
[No] (nO)
[No] (nO)
1024
编码器
[
0 kHz
,才可以访问此
] (PtG)
300.00 kHz
,才可以访问此
] (PtG)
0 ms
]
] (EnC)
只有在插入编码器卡时才能访问此编码器参数,且可用选择取决于所用的编码器卡的类型。也可在
(1)
问编码器设置。
42
输入/输出设置
[1.5 -
] (I/O)
菜单中访
Page 67

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
LCO-
End-
FrES
rPPn
UECP
UECU
UELC
SSCP
12
2P
4P
6P
8P
Und
End
SCHP
SC
SSI
EnSC
Und
5U
8U
12U
Und
Und
nO
Odd
EUEn
电梯宏
[
编码器数据
[
M [解析器励磁频率
4
8
M [解析器电极数量
M [编码器协议
M [编码器电源电压
M
-
M
续
]
续
]
]
解析器励磁频率。如果已插入
v
v
v
[4 kHz]
[8 kHz]
[12 kHz]
(4):4 kHz
(8):8 kHz
(12):12 kHz
VW3 A3 408
编码器卡(用于解析器),则此参数可被访问。
]
解析器电极数量。 如果已插入
个电极
v
[2
个电极
v
[4
个电极
v
[6
个电极
v
[8
如果电机电极的数量不是解析器电极数量的整数倍,则解析器就是一个相对的编码器,而不再是绝对编码
器。因此应设置参数 [角度设置有效
(2P): 2
]
(4P): 4
]
(6P): 6
]
(8P): 8
]
VW3 A3 408
个电极,最大速度
个电极,最大速度
个电极,最大速度
个电极,最大速度
编码器卡(用于解析器),则此参数可被访问。
7500 rpm
3750 rpm
2500 rpm
1875 rpm
] (AtA) 参数 = [
通电
] (POn) 或 [
运行命令
] (AUtO)
]
所用编码器的类型。
未定义
v
[
v
[EnDat 2.1]
v
[Hiperface]
v
[SinCos]
v
v
(SSI):SSI
[SSI]
[EndatSincos]
:未定义
(Und)
]
(End):Endat
(SCHP): Hiperface
(SC):SinCos
编码器
(EnSC):EndatSincos
编码器
编码器
编码器
编码器
]
所用编码器的额定电压。 如果 [编码器协议
未定义
v
[
伏特
v
[5
唯一的可能值。
v
[8
v
[12
使用集成显示终端对此参数作任意改动时,为使改动生效,需要将 “
用图形显示终端时,会请求进行确认。
[Sincos
线路数量。当 [编码器协议
v
[
v
1 至 10000
奇偶校验
[SSI
奇偶校验。当 [编码器协议
v
[
v
[
v
[
v
[
]
伏特
]
伏特
编码器线数
未定义
未定义
无奇偶校验
奇校验
偶校验
(Und)
]
(5U): 5
(8U): 8
(12U): 12
]
(Und)
]
:1至
]
(Und)
]
]
(Odd):
]
(EUEn):
]
:未定义
伏特。当 [编码器协议
伏特。
伏特。
]
] (UECP) = [SinCos] (SC) 或 [EndatSinCos](End)
:未定义
个线路
10,000
] (UECP) = [SSI] (SSI)
:未定义
无奇偶校验
(nO):
奇校验
偶校验
] (UECP) 不是 [
] (UECP) = [EnDat 2.1] (End) 或 [EndatSincos] (EnSC)
时此参数可被访问。
未定义
,则此参数可被访问。
] (Und)
”键按下并保持2秒钟。当使
ENT
时此参数可被访问。
[8 kHz] (8)
个电极
[2
。
未定义
[
未定义
[
未定义
[
未定义
[
B
] (2P)
] (Und)
] (Und)
时此为
] (Und)
] (Und)
43
Page 68

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
End-
SSFS
EnMr
Entr
SSCd
EnSP
FFA
FFr
Und
Und
Und
Und
bIn
GrAY
160
200
300
400
500
600
700
800
AUtO
nO
YES
电梯宏
[
编码器数据
[
M
-
M [转数
-
M [每转分辨率
-
M
M [时钟频率
M [激活编码器滤波器
M [编码器滤波常数
续
]
续
]
数据帧长度
[SSI
数据帧的长度(位数)。 当[编码器协议
未定义
v
[
v
10 至 27
当
奇偶校验
[SSI
(Und)
]
:当
[SSI
] (SSCP) = [
]
:未定义。当
奇偶校验
] (SSCP) = [
奇校验
]
转数的格式(以位数表示)。当 [编码器协议
未定义
v
v
当
[
0 至 15
奇偶校验
[SSI
:当
(Und)
]
[SSI
] (SSCP) = [
:未定义。当
奇偶校验
] (SSCP) = [
奇校验
]
每转分辨率(以位数表示)。当 [编码器协议
未定义
v
[
v
10 至 25
数据帧长度
[SSI
当
[SSI
数据帧长度
[SSI
代码类型
[SSI
代码的类型。 当 [编码器协议
v
[
v
[
v
[
:当
奇偶校验
未定义
二进制代码
格雷码
:未定义。当 [转数
(Und)
]
奇偶校验
[SSI
] (SSFS) - [
] (SSCP) = [
] (SSFS) - [
]
:未定义
(Und)
]
(bIn):
]
(GrAY):
]
格雷码。
] (SSCP) = [
转数
] (EnMr)
奇校验
转数
] (EnMr) - 2
] (UECP) = [SSI] (SSI)
二进制代码
]
当 [访问等级
时此参数可被访问。
(EnSC)
编码器、
Endat
v
[160 kHz]
v
[200 kHz]
v
[300 kHz]
v
[400 kHz]
v
[500 kHz]
v
[600 kHz]
v
[700 kHz]
v
[800 kHz]
v
[Auto]
此值才会出现。
专家权限],且 [编码器协议
] = [
编码器与
SSI
(160)
(200)
(300)
(400)
(500)
(600)
(700)
(800)
(AUtO) : 仅当 [
Endat Sincos
编码器协议
]
当 [访问等级
激活编码器反馈滤波器。
v
v
[No]
[Yes]
(no)
(YES)
专家权限] 时此参数可被访问。
] = [
:滤波器未被激活。
:滤波器被激活。
]
当 [访问等级
以毫秒表示的编码器反馈滤波器时间常数。
此参数可在运行期间进行修改。
专家权限] 与 [编码器滤波激活
] = [
] (UECP) = [SSI] (SSI)
奇偶校验
[SSI
] (Odd) 或 [
奇偶校验
[SSI
] (Odd) 或 [
。
] (Odd) 或 [
] (UECP) = [SSI] (SSI)
] (SSCP) = [
无奇偶校验
偶校验
] (UECP) = [SSI] (SSI)
] (SSFS) = [
无奇偶校验
偶校验
] (UECP) = [SSI] (SSI)
] (EnMr) = [
无奇偶校验
偶校验
。
] (UECP) = [SSI] (SSI) 或 [EnDat 2.1] (End) 或 [EndatSincos]
编码器的时钟频率。
] (FFA) = [Yes] (YES)
时此参数可被访问。
未定义
] (Und)
] (nO) 时为10至25
] (EUEn).
] (nO)时, 0至 [SSI
] (EUEn)
未定义
] (nO)
] (EUEn)
时此参数可被访问。
时为12至27。
时此参数可被访问。
未定义
] (Und)
时,0至
时此参数可被访问。
时此为唯一可能值。
] (Und)
时,最大值为:
时,最大值为:
且此编码器主板的版本等于或高于
0 至 50 ms
[
时此为唯一的可能值。
。
[
时此为唯一的可能值。
数据帧长度
数据帧长度
[SSI
时此参数可被访问。
] (SSFS) - 10
[
[
[500 kHz] (500)
[No] (nO)
取决于编码器
类型
未定义
] (Und)
未定义
] (Und)
。
] (SSFS) - 12。
未定义
] (Und)
未定义
] (Und)
V1.2IE01
时
44
Page 69

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
LCO-
MOt-
Ctt
UUC
CUC
FUC
UF2
UF5
SYn
电梯宏
[
电机数据
[
续
]
]
M [电机控制类型
v
[SVC V]
用该控制类型。支持多台电机同时并行连在同一台变频器(所有电机必须是相同的)。
v
[SVC I]
持多台电机并联在同一台变频器。
v
[FVC]
但是,当使用只产生 “A”相信号的增量式编码器时无法使用该功能。
当取代闭环配置的
也能提供转矩。但它并不支持多台电机并行连结在一台变频器上。
v
[2
关于此参数的更多信息。
v
[5
参数的更多信息,见第
同步电机
v
[
同步电机的参数则可以被访问。
(UUC)
(CUC)
(FUC)
注意:在选择
点压频比
点压频比
]
:开环电压矢量控制,能够根据负载自动进行滑差补偿。当用于取代
:开环电流矢量控制。 当取代使用开环配置的
:带有编码器的闭环电流矢量控制。只有当插入编码器卡的时候才能使用该控制类型。
ATV58F
]
]
(SYn)
]
时建议使此种控制类型。 它可以提供更好的速度和转矩精度,并且在0速度时
[FVC] (FUC)
简单的
(UF2):
(UF5):5段V/F
页。
45
:只针对正弦永磁同步电机
之前,请务必确保成功检测编码器。
控制,不具备滑差补偿。
V/F
控制:类似
点控制,但是支持消除共振(饱和)功能。关于此
V/F2
(EMF)
ATV58F
。该功能会导致异步电机的参数不可被访问,而
时建议使用该控制类型。 它不支
[SVC V] (UUC)
时建议使
ATV 58
B
FSY
同步电机闭环
v
[
该选项只有当插入编码器卡的时候才能起作用。该功能会导致异步电机的参数不可被访问,而同步电机的
参数则可以被访问。
但是,当使用只产生 “A”相信号的增量式编码器时无法使用该功能。
注意:在选择[同步电机闭环
:同步电机闭环。该功能只适用于带有编码器的正弦永磁同步电机
(FSY)
]
之前,请务必确保成功检测编码器。
] (FSY)
(EMF)
。
45
Page 70

电梯
[1.1
代码 名称/说明 调节范围 出厂设置
] (LIF-)
B
LCO-
MOt-
rEqP
rEtP
nO
YES
dOnE
tAb
PrOG
FAIL
dOnE
CUS
电梯宏
[
电机数据
[
续
]
]
M [读取电机参数
该参数只有在使用
只有当[编码器协议
请求从编码器的
v
[No]
v
[Yes]
完成
v
[
下列参数被加载:[角度偏置
步电机极对数
与的 [定子q轴电感
M [电机参数状态
只有当 [编码器协议
请求从编码器的
未完成
v
[
处理中
v
[
失败
v
[
完成
v
[
自定义
v
[
或者经由 [自整定
续
]
] (ASU), [
。
系列的
BDH、BRH与BSH
同步电机额定速度
] (PHS),[
时才能访问此参数。
] (dOnE)
同步电机定子电阻
Telemecanique
] (UECP) = [Hiperface] (SCHP)
EEPROM
:没有加载或加载失败。
(nO)
:尽快进行加载,然后参数变为 [完成
(YES)
(dOnE)
]
] (PPnS),[
注意:
• 在下载期间,电机停止且变频器处于 “自由停车”状态。
• 如果已经配置了 “进线继电器”或者 “输出继电器”功能,在下载期间继电器闭合。
存储器加载电机参数。
:加载完成。
同步电机电动势
] (LqS)
类型电机时才有效。
。
] (nSPS), [
同步电机额定电流
] (rSAS),[
]
时才能访问此参数。
(tAb)
]
(PrOG)
]
(FAIL)
]
(dOnE)
]
(CUS)
]
] (UECP) = [Hiperface] (SCHP)
EEPROM
存储器加载电机参数时出现的信息(不可修改)。
:加载没有执行,将会使用电机参数的缺省值。
:正在加载。
:加载失败。
:全部加载成功
:全部加载成功,但是一个或者多个参数被用户通过显示终端或者串行连接改变。
执行了自整定。
] (tUn)
[No] (nO)
] (nCrS),的 [
定子d 轴电感
未完成
[
同
] (LdS)
] (tAb)
46
Page 71

电梯
[1.1
] (LIF-)
异步电机参数:
当[电机控制类型
在此情况下不能访问同步电机参数。
] (Ctt) = [SVC V] (UUC)、 [SVC I] (CUC)、 [FVC] (FUC)、 [2
点压频比
] (UF2) 或 [5
点压频比
时可访问这些参数。
] (UF5)
代码 名称/说明
LCO-
MOt-
nPr
UnS
nCr
FrS
nSP
电梯宏
[
电机数据
[
续
]
]
M [电机额定功率
铭牌上给出的电机额定功率,如果 [标准电机频率
标准电机频率
[
nPr = Uns x nCr x
和:η
示例:
如果 [电机额定电压
nPr = 400 x 11 x
nPr = 4,54 kW
M [电机额定电压
铭牌上给出的电机额定电压。
ATV71L
ATV71L
M [电机额定电流
铭牌上给出的电机额定电流。
M [电机额定频率
铭牌上给出的电机额定频率。
出厂设置为
M [电机额定速度
铭牌上给出的电机额定速度。
在集成显示终端上显示为0至
如果铭牌上指示的是同步速度和以Hz或以百分比表示的滑差,而不是额定速度,可按照如下方式计算额
定速度:
续
] (bFr) = [60Hz NEMA] (60)
√
3 x η x cos
效率,
=
cos ϕ =
√
3 x 0,85 x 0,7
ppp
M3Z: 100 至 240 V
ppp
N4Z: 200 至 480 V
,如果[标准电机频率
50Hz
]
ϕ
功率因数
] (Uns) = 400 V、 [
]
]
]
]
9999 rpm
] (bFr) = [50Hz IEC] (50)
,则以HP为单位表示。
电机额定电流
] (bFr)
,然后
] (nCr) = 11 A
被设置为
10.00至65.53 krpm
60Hz
调节范围 出厂设置
取决于变频器额定值取决于变频器额
定值
,则以kW为单位表示;如果
,那么
取决于变频器额定值取决于变频器额
定值与 [标准电机
频率
0.25 至 1.5 In (1)
10 至 500 Hz
,则预置为
0 至 65535 rpm
。
60Hz
取决于变频器额
定值与 [标准电机
频率
50 Hz
。
取决于变频器额
定值
B
] (bFr)
] (bFr)
• 额定速度= 同步速度
或
• 额定速度= 同步速度
或
• 额定速度= 同步速度
如果电机为旧型号或者电机铭牌有误,则按照下式计算额定速度:
同步速度
nSP =
示例:
nSP = 1500 - 1,5 x (1500 - 1430)
nSP = 1395 RPM
等于安装手册与变频器铭牌上指示的变频器额定电流。
(1) In
- 1.5 x(
100 - 滑差(
x
50 -
x (50 Hz 电机)
60 -
x (60 Hz 电机)
同步速度
以百分数表示
100
滑差(以Hz为单位
50
滑差(以Hz为单位
60
名义速度
-
)
)
)
)
47
Page 72

电梯
[1.1
] (LIF-)
同步电机参数:
当[电机控制类型
] (Ctt) = [
同步电机
(SYn) 或 [
同步电机闭环
时可访问这些参数。此时无法访问异步电机的参数。
] (FSY)
B
重要提示:对于同步电机,设定电流限幅很重要 。见 [电流限幅
设备损坏的危险
检查确保电机能够经受该电流,尤其是对于永磁同步电机,可能导致退磁效应。
不按照使用说明会导致设备损坏。
代码 名称/说明
LCO-
MOt-
PPnS
nCrS
nSpS
tqS
电梯宏
[
电机数据
[
续
]
续
]
M [同步电机极对数
同步电机的电极对数。
M [同步电机额定电流
铭牌上给出的同步电机额定电流。
M [同步电机额定速度
铭牌上给出的同步电机额定速度。
在集成显示终端上:0至
M [电机转矩
铭牌上给出的电机额定转矩。
]
]
]
]
9999 rpm
。
] (CLI)
小心
以及
10.00至60.00 krpm
调节范围 出厂设置
1 至 50
0.25 至 1.5 In (1)
0 至 60000 rpm
。
1 至 65,535 Nm
取决于变频器额
定值
取决于变频器额
定值
取决于变频器额
定值
取决于变频器额
定值
等于安装手册与变频器铭牌上指示的变频器额定电流。
(1) In
48
Page 73

[1.1
电梯
] (LIF-)
代码 名称/说明
LCO-
MOt-
ItH
CLI
tUn
nO
YES
dOnE
电梯宏
[
电机数据
[
M [电机热保护电流
M [电流限幅
续
]
续
]
]
电机热保护电流,需被设置为铭牌上指示的额定电流。
]
用于限制电机电流。
注意 1: 如果设置小于
活。如果设置小于无负载电机电流,限幅就不再起作用。
注意 2:在同步模式下,此为电机的最大允许电流。如果此值没有定义,使用
额定电流
] (nCrs)
。
,变频器就会锁定在 [输出缺相
0.25 In
小心
检查电机可以承受此电流,对某些永磁同步电机可能会产生退磁效应。
不按照使用说明会导致设备损坏。
M [自整定
v
v
v
警告:
• 在开始自整定之前,必须正确设置所有电机参数([电机额定电压
• 如果没有停车命令被激活,才能执行自整定。如果 “自由停车”或 “快速停车”功能已被赋值给一个
• 自整定比任何运行命令或预磁命令都具有优先权,这些命令排在自整定之后。
• 如果自整定失败,变频器就会显示
• 自整定可能会持续1至2秒。不要中断此过程,等待显示变为“[完成
]
:不执行自整定。
(nO)
[No]
[Yes] (YES)
完成
[
额定电流
只要在自整定执行之后这些参数中至少有一个发生改变,[自整定
执行一次。
逻辑输入,此输入必须设置为
自整定
[
:尽快地执行自整定,然后参数自动变为
:使用上次执行自整定给出的值。
(dOnE)
]
] (nCr)、[
] (tnF)
注意:在自整定期间,电机以额定电流运行。
电机额定速度
故障模式。
] (nSP)、[
激活时为0)。
1 (
[No] (nO)
电机额定功率
,并 且 ,由 [自整定故障设置
调节范围 出厂设置
0.2 至 1.5 In (1)
0 至 1.65 In (1)
] (OPF)
[Done] (dOnE)
] (UnS)、[
。
] (nPr))
] (tUn)
取决于变频器额
定值
1.5 In (1)
故障模式,如果此模式已被激
150%的 [
[No] (nO)
。
电机额定频率
就会返回
] (tnL)
] (dOnE)
设置决定,可能会切换到
”或 “[未完成
] (FrS)、[
[No] (nO)
同步电机
电机
,必须再
] (nO)
B
”。
49
Page 74

电梯
[1.1
电梯数据
] (LIF-)
B
确定
轿厢额定速度
[
对于电机额定频率 [电机额定频率
变比
1:1
CSP [m/s]= 3.14 x
变比
1:2
CSP [m/s]= 1.57 x
FRS(S)
Hz
]
(CSP)
滑轮半径
滑轮半径
M
与有效载荷
电机 变速箱 滑轮
[m]x NSP(S)[rpm]/(60 x
[m]x NSP(S)[rpm]/(60 x
电梯承载能力
[
NSP(S)
rpm
] (FrS) / [
]
(LCA)
同步电机额定频率
变速箱半径
变速箱半径
] (FrSS)
)
)
绞盘与滑轮设
备的类型
(1:1 或 1:2)
M
M
,轿厢速度为 [轿厢额定速度
电梯轿厢
] (CSP) = ...... m/s
CSP
m/s
。
变比
1:1
轿厢移动距离等于被电机松开的缆绳
长度。
M
L/2
变比
1:2
轿厢移动距离等于被电机松开的缆绳长度
的一半。
L
50
Page 75

[1.1
电梯
] (LIF-)
代码 名称/说明
LCO-
LdA-
CSp
电梯宏
[
电梯数据
[
续
]
]
M [轿厢额定速度
轿厢额定速度对应于电机以额定速度(对于异步电机为[电机额定频率
额定频率
因此 [轿厢额定速度
] (FrSS) )
]
运行时轿厢的线速度。
综合了多种变比(滑轮大小、滑轮设备的类型、是否使用变速箱)。
] (CSP)
绞盘与滑轮设备的类型
(1:1 或 1:2)
M
调节范围 出厂设置
0.01 至 10.00 m/s
;对于同步电机为 [同步电机
] (FrS)
1.00 m/s
B
M
电梯承载能力
[
LCA = ......... kg
] (LCA)
配重
[
] (CtM)
CTM = ......... kg
轿厢重量
[
CMA = .........kg
] (CMA)
51
Page 76

[1.1
电梯
] (LIF-)
B
代码 名称/说明
LCO-
LdA-
LCA
CMA
AUtO
CtM
AUtO
ACM
电梯宏
[
电梯数据
[
续
]
]
M [电梯承载能力
有效载荷相当于电梯轿厢内的最大允许载荷,总是标示于电梯轿厢内(例如:
仅在下列情况下才能信任此值:
• 如果电梯经过正确平衡,即如果配重的重量近似于轿厢半载时的重量。换句话说,如果
+(LCA/2)
• 空厢重量近似于有效载荷
如果情况并非如此,则必须手动输入由变频器计算得出的
M [轿厢重量
当 [访问等级
电梯轿厢的重量。
当
CMA = AUTO
当
CMA <> AUTO
估计值
v
[
M [配重
]
当 [访问等级
配重的重量。
当
CtM = AUtO
当
CtM <> AUtO
估计值
v
[
M [最大加速时间
当 [访问等级
此参数规定了电梯运行期间所允许的最大加速度和最大减速度。
续
]
]
专家权限]时可以访问此参数。
] = [
时系统惯量计算使用估计的轿厢重量。
时系统惯量计算使用用户输入的轿厢重量。
(AUtO)
]
专家权限]时可以访问此参数。
] = [
时系统惯量计算使用估计的配重重量。
时系统惯量计算使用用户输入的配重重量。
(AUtO)
]
]
专家权限]时可以访问此参数。
] = [
调节范围 出厂设置
0 至 48,000 kg
CtM与CMA
0.10 至 5.00 m/s
值。
400 kg
630 kg - 8人)
CtM
估计值
[
估计值
[
2
0.50 m/s
。
近似于
CMA
] (AUtO)
] (AUtO)
2
52
Page 77
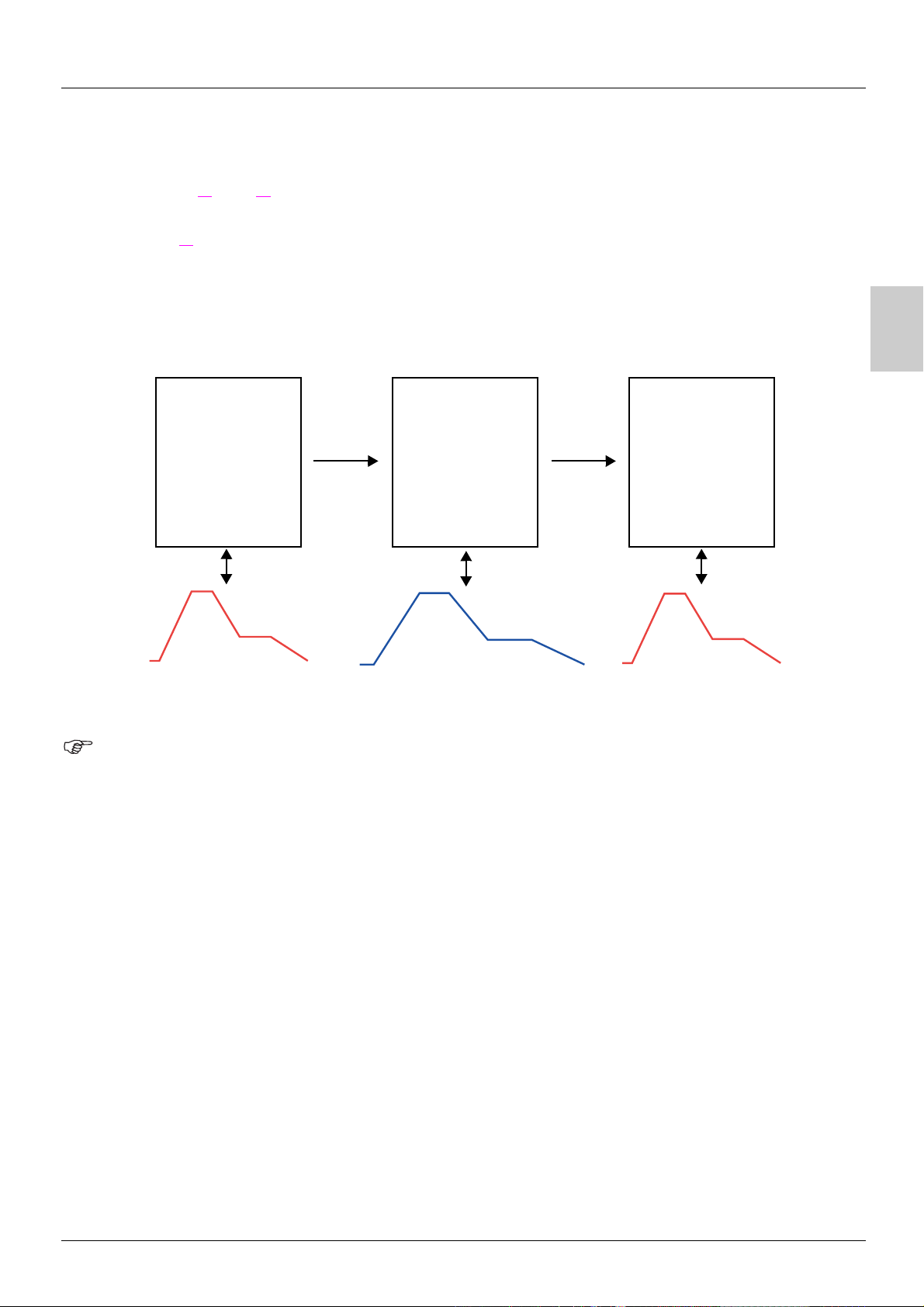
电梯
[1.1
] (LIF-)
参数管理
关于定义斜坡形状的参数,有两种类型:
• 应用说明参数:第
(LLt)、 [
• 优化参数:第
弧
当应用参数相同时变频器必须提供相同的缺省特性(就是说没有经过优化设置)。
在下图中,颜色相同表示数值与特性相同。
平层速度
] (JAr4)、 [
页至第56页的 [加速时间
55
] (LLS)、 [
页的 [加速过程起始圆弧
57
减速停止起始圆弧
应用说明参数
最大加速时间
] (JAr5)、 [
ACM
ACt
LtS
dEL
StL
LLt
LLS
] (ACt)、 [
] (ACM)
] (JAr1)、 [
减速停止结束圆弧
电梯最高速度
。
加速过程结束圆弧
] (JAr6)
应用说明参数
ACM
ACt
LtS
dEL
StL
LLt
LLS
] (LtS)、[
] (JAr2)、[
。
减速距离
] (dEL)、 [
减速平层起始圆弧
停止距离
应用说明参数
] (StL)、 [
] (JAr3)、 [
ACM
ACt
LtS
dEL
StL
LLt
LLS
平层运行时间
减速平层结束圆
]
B
应用说明参数一经设置,优化阶段就会开始。
注意:为了与所需的优化保持一致,调整优化参数与 [最大加速时间
最终会发生如下相互作用:
• 修改 [加速过程起始圆弧
• 修改 [减速平层起始圆弧
• 修改 [减速停止起始圆弧
• 修改 [最大加速时间
无论怎样进行优化选择, [最大加速时间
设置优化参数必须作为调试的最后一步来完成。在优化阶段,如果应用说明参数修改后的数值不可接受,则必须再次对其进行修改。
在此情况下,某一应用说明参数的任何修改与复位优化参数具有同样的结果。
] (JAr1) 与 [
] (JAr3) 与 [
] (JAr5) 与 [
] (ACM)
会更新 [加速时间
加速过程结束圆弧
减速平层结束圆弧
减速停止结束圆弧
] (ACt)、 [
] (ACM)、 [
电梯最高速度
参数会更新 [加速时间
] (JAr2)
] (JAr4)
] (JAr6)
参数会更新 [平层速度
参数会更新 [平层速度
平层速度
] (LLS) 与/或 [
] (LtS)、 [
减速距离
参数能够修改应用说明参数。
] (ACM)
] (ACt)
] (LLS) 与/或 [
] (LLS) 与/或 [
平层运行时间
] (dEL) 与 [
停止距离
。
] (LLt)
] (StL)
平层运行时间
平层运行时间
。
这几个参数不会发生变化。
] (LLt)
] (LLt)
。
。
53
Page 78

[1.1
电梯
] (LIF-)
参数管理(续
总之,电梯菜单允许分两步来调整斜坡。
第1步:仅调整应用说明参数。一旦这些参数调整完毕,进入第2步。
第2步:调整优化参数。
B
)
第1步
第2步
应用说明参数
ACM
ACt
LtS
dEL
StL
LLt
LLS
优化参数
JAr1
JAr2
JAr3
JAr4
JAr5
JAr6
54
Page 79

[1.1
电梯
] (LIF-)
代码 名称/说明
LCO-
LdA-
LtS
ACt
电梯宏
[
电梯数据
[
续
]
]
M [电梯最高速度
如果 [电梯速度管理
行进速度相当于稳态下轿厢的线性速度(高速度)。
如果安装的电机过大,则此速度可能会小于 [轿厢额定速度
M [加速时间
如果 [电梯速度管理
加速时间相当于轿厢达到其 [电梯最高速度
加速时间应与所要求的行进速度一致,以便轿厢能够在至少几秒钟内以恒定速度行进。
如果加速时间太短,加速度就必然很大,乘坐时就会感觉不舒服。
如果加速时间太长,就不能达到行进速度,半层功能就会被系统性地激活。因此正常楼层的行进时间就不
能被优化。
速度
LtS (m/s)
续
调节范围 出厂设置
]
] (LSM) 不是 [No] (nO)
,则此参数可被访问。
]
] (LSM) 不是 [No] (nO)
JAR2 JAR3
,则此参数可被访问。
时所花的时间。
] (LtS)
0.10 至 10.00 m/s
。
] (CSP)
0.50 至 60.00 s
1.00 m/s
3.10 s
B
StL
LLS (m/s)
0
JAR1
M [停止距离
如果 [电梯速度管理
停止距离相当于停机指示器与轿厢将要到达层的间隔距离。
变频器将 [停止距离
在计算减速特性曲线时需要将此距离考虑进去。
ACt (s)
]
JAR4 JAR5
LLt (s)
] (LSM) 不是 [No] (nO)
视为变频器失去运行命令时轿厢仍然要行进的距离。
] (StL)
,则此参数可被访问。
dEL (cm)
1.0 至 300, 0 cm
StL (cm)
JAR6
时间
10.0 cm
55
Page 80

[1.1
电梯
] (LIF-)
B
代码 名称/说明
LCO-
LdA-
LLS
LLt
dEL
电梯宏
[
电梯数据
[
续
]
]
M [平层速度
如果[电梯速度管理
数可被访问。
变频器自动计算平层速度。如果计算得出的速度不合适(例如:因为它相当于一个机械共振频率),则可
以手动重新输入。在此情况下应重新计算平层运行时间。
M [平层运行时间
如果 [电梯速度管理
平层运行时间相当于稳态下轿厢以平层速度行进时所花的时间。
如果电梯平层时间太短,乘坐时就会感觉不舒服(感觉摇摆)。
如果平层运行时间太长,
M [减速距离
如果 [电梯速度管理
减速距离相当于减速指示器与轿厢将要到达层的间隔距离。
变频器将
在计算减速特性曲线时需要将此距离考虑进去。
调节范围 出厂设置
续
]
] (LSM) 不是 [No] (nO)
,并且如果[平层运行时间
]
] (LSM) 不是 [No] (nO)
LtS与LLS
,则此参数可被访问。
之间的斜坡的斜率将会很大(失去舒适感)。
]
] (LSM) 不是 [No] (nO)
视为变频器收到低速信号(或失去高速信号)时轿厢仍然要行进的距离。
dEL
,则此参数可被访问。
0.01 至 0.50 m/s
] (LLt) 不是 [
0.50 至 10.00 s
10.0 至 999.9 cm
0.10 m/s
直接层
2.00 s
120.0 cm
] (dtF)
,则此参
56
Page 81

电梯
[1.1
斜坡优化
] (LIF-)
急拉
JAR1至JAR6
如果某一倒圆不能符合要求(例如:起动过猛),可以手动重新输入。在此情况下,相关的倒圆(例如以行进速度到达)会被自动修改,以
保持其一致性。某些应用数据(行进速度、平层运行时间、加速时间)也可被修改。但减速距离与停止距离始终保持不变。
代码 名称/说明
LCO-
LdA-
rOP-
JAr1
JAr2
JAr3
JAr4
JAr5
JAr6
相当于每次倒圆的最大允许急拉值。
电梯宏
[
电梯数据
[
b
[
续
]
续
]
斜坡优化
注意: 如果 [电梯速度管理
]
M [加速过程起始圆弧
减小
JAr1与JAr2
可能会增大加速时间[加速时间
M [加速过程结束圆弧
减小
JAr1与JAr2
可能会增大加速时间 [加速时间
M [减速平层起始圆弧
减小
JAr3与JAr4
可能会减小以 [平层速度
M [减速平层结束圆弧
减小
JAr3与JAr4
可能会减小以 [平层速度
M [减速停止起始圆弧
减小
JAr5与JAr6
M [减速停止结算
减小
JAr5与JAr6
可能会减小[平层速度
]
可能会减小 [平层速度
] (LSM) 不是 [No] (nO)
]
]
]
]
]
] (LLS)
] (LLS)
](LLS)
] (LLS)
,则此功能可被访问。
。
] (ACt)
。
] (ACt)
运行的时间。
运行的时间。
。
。
调节范围 出厂设置
3
0.01 至 3.00 m/s
0.01 至 3.00 m/s
0.01 至 3.00 m/s
0.01 至 3.00 m/s
0.01 至 3.00 m/s
0.01 至 3.00 m/s
取决于应用参数
3
取决于应用参数
3
取决于应用参数
3
取决于应用参数
3
取决于应用参数
3
取决于应用参数
B
57
Page 82

[1.1
电梯
] (LIF-)
B
代码 名称/说明
LCO-
LdA-
Inr
0.01
0.1
1
ACC
dEC
rPt
电梯宏
[
电梯数据
[
]
M [斜坡增量
如果 [电梯速度管理
v
[0.01]
v
v
:斜坡最高可达
[0.1]
:斜坡最高可达
[1]
此参数对于 [加速时间
M [加速时间
如果 [电梯速度管理
从0加速至 [电机额定频率
M [减速时间
如果 [电梯速度管理
从 [电机额定频率
M [斜坡类型
如果 [电梯速度管理
续
续
]
]
] (LSM) 等于 [No] (nO)
:斜坡最高可达
6000
]
]
]
秒
99.99
秒
999.9
秒
] (ACC)、 [
减速时间
] (LSM) 等于 [No] (nO)
] (FrS) (第47
] (LSM) 等于 [No] (nO)
] (FrS) (第47
页)减速至0所用的时间。应确保此值与被驱动的惯量一致。
] (LSM)等于 [No] (nO)
调节范围 出厂设置
0.01 - 0.1 - 1 0.1
,则此参数可被访问。
] (dEC)、 [第2
加速时间
] (AC2) 与 [
第二减速时间
0.01 至 6000 s (1)
,则此参数可被访问。
页)所用的时间。应确保此值与被驱动的惯量一致。
0.01 至 6000 s (1)
,则此参数可被访问。
,则此参数可被访问。
3.0 s
3.0 s
线性
[
] (dE2)
] (LIn)
有效。
LIn
CUS
v
线性
形斜坡
形斜坡
自定义
t2
t1
(LIn)
]
(S)
]
]
]
(CUS)
(U)
t
FrS
FrS
f (Hz)
0
f (Hz)
曲线的系数为固定的,
其中
t2 = 0.6 x t1
设定的斜坡时间。
t1 =
t
t2
t1
,
S
U
v
v
v
形斜坡
S
f (Hz)
FrS
0
形斜坡
U
f (Hz)
FrS
[S
[U
[
[
曲线的系数为固定的,
其中
t2 = 0.5 x t1
0
t1
0
t
t2
t2
t1
设定的斜坡时间。
t1 =
t
,
自定义斜坡
f (Hz)
FrS
0
tA1 tA2 tA3 tA4
t1
f (Hz)
FrS
0
t
t1
:调节范围为0至
tA1
:调节范围为0至
tA2
:调节范围为0至
tA3
:调节范围为0至
tA4
t
以t1的百分数表示,其中
100%
(100% - tA1)
100%
(100% - tA3)
设定的斜坡时间
t1 =
调节范围
(1)
58
0.01至99.99 s或0.1至999.9 s或1至6000s,由 [
斜坡增量
] (Inr)
决定。
Page 83

[1.1
电梯
] (LIF-)
代码 名称/说明
LCO-
LdA-
tA1
tA2
tA3
tA4
Frt
电梯宏
[
电梯数据
[
续
]
续
]
M [加速始端圆滑系数
如果 [电梯速度管理
加速斜坡开始平滑时间,以 [加速时间
设置范围为0至
M [加速末端圆滑系数
如果 [电梯速度管理
加速斜坡结束平滑时间,以 [加速时间
设置范围为0至
M [减速始端圆滑系数
如果 [电梯速度管理
减速斜坡开始平滑时间,以[减速时间
设置范围为0至
M [减速末端圆滑系数
如果[电梯速度管理
减速斜坡结束平滑时间,以 [减速时间
设置范围为0至
M [斜坡2切换阈值
如果 [电梯速度管理
斜坡切换阈值
如果
阈值斜坡切换可与 [斜坡切换设置
的值被设置为一个非0值(0使功能无效)且输出频率大于
Frt
]
] (LSM)等于 [No] (nO)
。
100%
]
] (LSM) 等于 [No] (nO)
(100% - [
加速始端圆滑系数
]
] (LSM) 等于 [No] (nO)
。
100%
]
] (LSM)等于 [No] (nO)
(100% - [
减速始端圆滑系数
]
] (LSM) 等于 [No] (nO)
,则此参数可被访问。
] (ACC) 或 [第2
,则此参数可被访问。
] (ACC) 或 [第2
,则此参数可被访问。
] (dEC) 或 [
,则此参数可被访问。
] (dEC) 或 [
,则此参数可被访问。
切换组合如下:
] (rPS)
调节范围 出厂设置
(1)
加速时间
(1) 50%
加速时间
。
] (tA1))
(1)
第二减速时间
(1) 60%
第二减速时间
。
] (tA3))
0 至 100%
斜坡时间的百分数表示。
] (AC2)
斜坡时间的百分数表示。
] (AC2)
0 至 100%
斜坡时间的百分数表示。
] (dE2)
斜坡时间的百分数表示。
] (dE2)
0至500 或
,取决于
1600 Hz
额定值
,则会切换到第二斜坡。
Frt
50%
B
40%
0 Hz
参数可在
(1)
rPS
nO
LI1
-
[1.3 设置] (SEt-)
逻辑输入或位 频率 斜坡
0<Frt
0>Frt
1<Frt
1>Frt
M [斜坡切换设置
斜坡切换阈值
如果 [电梯速度管理
v
[No]
v
[LI1]
:
v
[...]
• 当被赋值的输入或位为0时
• 当被赋值的输入或位为1时
菜单中访问。
(nO)
(LI1)
(...)
: 未设置。
]
] (LSM) 等于 [No] (nO)
ACC与dEC
AC2与dE2
ACC、 dEC
AC2、 dE2
AC2、 dE2
AC2、 dE2
[No] (nO)
,则此参数可被访问。
被激活。
被激活。
59
Page 84

[1.1
电梯
] (LIF-)
B
代码 名称/说明
LCO-
LdA-
AC2
g
dE2
g
调节范围
(1)
g
0.01至99.99 s或0.1至999.9 s或1至6000s,由 [
仅当相应的功能在另外的菜单中被选中时,这些参数才会出现。当可以从相应功能的设置菜单对这些参数进行访问和修改时,
为了帮助编程,这些参数的说明才会在所指示的页上的菜单中详细显示。
电梯宏
[
电梯数据
[
续
]
续
]
M [第2加速时间
如果 [电梯速度管理
从零加速至 [电机额定频率
M [第2减速时间
如果 [电梯速度管理
从 [电机额定频率
]
] (LSM)等于 [No] (nO)
所用的时间。应确保此值与被驱动的惯量一致。
] (FrS)
,则此参数可被访问。
]
] (LSM)等于 [No] (nO)
减速至零所用的时间。应确保此值与被驱动的惯量一致。
] (FrS)
,则此参数可被访问。
斜坡增量
] (Inr)
决定。
调节范围 出厂设置
0.01 至 6000 s (1)
0.01 至 6000 s (1)
5.0 s
5.0 s
60
Page 85

电梯
[1.1
电梯优化] 菜单被用于在必要时进行方便调节,以便优化电梯乘坐舒适性。
[
] (LIF-)
代码 名称/说明
LOP-
MCO-
tUS
tAb
PEnd
PrOG
FAIL
dOnE
Strd
CUS
电梯优化
[
电机优化
[
M [自整定状态
仅作为信息,不能被修改。
电阻未整定
v
[
整定等待中
v
[
整定进行中
v
[
失败
v
[
完成
v
[
输入的
v
[
自定义
v
[
参数然后变为
下列自整定参数会受到影响:
• 用于异步电机的参数[冷态定子电阻
• 用于同步电机的参数[同步电机定子电阻
]
注意:当 [访问等级
]
]
:默认的定子阻抗值用于控制电机。
(tAb)
(FAIL)
]
(dOnE)
]
R1]
(CUS) :
]
[No] (nO)
]
]
]
:自整定失败。
(Strd)
:已经请求自整定,但还未执行。
(PEnd)
:正在执行自整定。
(PrOG)
:自整定功能测出的定子阻抗被用于控制电机。
:变频器使用参数
已经执行自整定,但至少一个被此自整定操作设置的参数在随后被修改。[自整定
。
标准权限]时此菜单可见。
] = [
(rSC)
] (rSA)、 [Idw] (IdA)、 [LFw] (LFA) 与 [
] (rSAS)
使用异步电机时可在 [专家权限] 模式下对这些参数进行访问。
代码 名称/说明
给出的定子电阻。
。
调节范围 出厂设置
电阻未整定
[
(tAb)
转子时间常数
调节范围 出厂设置
] (trA)
。
]
B
] (tUn)
rSM
rSA
LFM
LFA
IdM
IdA
trM
M [测量所得定子电阻
在只读模式下,变频器计算出来的冷态定子电阻。功率小于等于
位;功率大于
M [冷态定子电阻
冷态定子电阻(每相绕组),值可修改。功率小于等于
大于
75 kW (100 HP)
以及
9999
M
[Lfr]
在只读模式下,变频器计算出来的定子漏电感,以mH为单位。
M
[Lfw]
定子漏电感,以mH为单位,值可修改。
M
[Idr]
在只读模式下,变频器计算出来的磁化电流,以A为单位。
M
[Idw]
磁化电流,以A为单位,值可修改。
M
[T2r]
在只读模式下,变频器计算出来的转子时间常数,以mS为单位。
75 kW (100 HP)
]
时,值以毫欧的百分之一
10.00至65.53 (10000至65536)
]
时,值以毫欧的百分之一
。
(m
Ω
/100)
75 kW(100 HP)
Ω
/100)
为单位。
时,值以毫欧
(m
75 kW (100 HP)
为单位。在集成显示终端上: 显示范围为0至
时,值以毫欧
Ω
为单位;功率
(m
)
(m
Ω
为单
)
trA
M [转子时间常数
转子时间常数,以mS为单位,值可修改。
]
61
Page 86

电梯
[1.1
] (LIF-)
使用同步电机时这些参数可被访问。
B
代码 名称/说明
LOP-
MCO-
rSMS
rSAS
LdMS
LdS
LqMS
LqS
pHS
IpHS
0.1
1
电梯优化
[
电机优化
[
M
[R1rS]
续
]
续
]
当 [访问等级
只读模式下的冷态定子电阻(每相绕组)。此为变频器出厂设置,或者是自整定运行的结果(如果已执行
自整定)。
值以毫欧
在集成显示终端上: 显示范围为0至
(m
专家权限] 时此参数可被访问。
] = [
Ω
为单位。
)
M [同步电机定子电阻
当 [访问等级
冷态定子电阻(每相绕组)。如果执行了自整定,出厂设置就会被自整定运行的结果所替代。
如果用户知道此值,也可由用户输入。
值以毫欧
在集成显示终端上: 显示范围为0至
(m
专家权限] 时此参数可被访问。
] = [
Ω
为单位。
)
M [测量所得的定子d轴电感
当[访问等级
M [定子d轴电感
定子 “d”轴电感,单位为
在带有平滑电极的电机上, [定子d轴电感
专家权限] 时此参数可被访问。
] = [
]
M [测量所得的定子q轴电感
当[访问等级
M [定子q轴电感
定子 “q”轴电感,单位为
在带有平滑电极的电机上, [定子d轴电感
M [同步电机电动势
同步电机的
的值。
(IPHS)
在集成显示终端上:0至
M
[EMF
增量
参数 [同步电机电动势
v
[0.1 mV/rpm] (0.1)
v
[1 mV/rpm] (1)
专家权限] 时此参数可被访问。
] = [
]
]
常数,以
EMF
]
:
1mV/rpm
9999
]
9999
]
每相)。
mH(
]
每相)。
mH (
0.1 mV/rpm或1 mV/rpm (
以及
9999
] (PHS)
:
0.1mV/rpm
10.00至65.53 (10000至65536)
的增量。
调节范围 出厂设置
以及
10.00至65.53 (10000至65536)
取决于变频器
额定值
以及
10.00至65.53 (10000至65536)
0 至 655.3
] (LdS) = [
] (LdS) = [
定子q轴电感
定子q轴电感
每一相的峰值电压)为单位表示,取决于
] (LqS) =
0 至 655.3
] (LqS) =
0 至 65535
。
。
取决于变频器
额定值
。
取决于变频器
额定值
定子电感L。
取决于变频器
额定值
定子电感L。
取决于变频器
额定值
[0.1mV/rpm] (0.1)
[EMF
增量
]
62
Page 87

[1.1
电梯
] (LIF-)
代码 名称/说明
LOP-
MCO-
bOO
FAb
SLp
电梯优化
[
电机优化
[
M [加强励磁
M [强励频率
M [滑差补偿
调节范围 出厂设置
续
]
续
]
]
当 [访问等级
调整低速时电机励磁电流,其值为额定励磁电流的百分比。该参数用来增加和减少建立转矩的时间,它允
许逐渐调整至 [强励频率
正[加强励磁
负 [加强励磁
专家权限] 和 [电机控制类型
] = [
设定的频率。负值专门用于锥形转子电机。
] (FAb)
励磁电流
] (bOO)
额定励磁电流
] (bOO)
0
强励频率
[
] (Ctt)不是 [
] (FAb)
]
当 [访问等级
该设定频率以上的励磁电流不再受 [加强励磁
专家权限] 和 [电机控制类型
] = [
] (Ctt) 不是 [
影响。
] (bOO)
]
如果[电机控制类型
在电机额定速度设置的值附近调整滑差补偿。
电机铭牌上给出的速度未必很精确。
• 如果滑差设置<实际滑差: 在稳定状态下电机不以正确的速度转动,而是以低于给定值的速度转动。
• 如果滑差设置>实际滑差: 电机被过度补偿,速度不稳定。
] (Ctt) 不是 [2
点压频比
] (UF2), [5
点压频比
- 100 至 100%
同步电机闭环
频率
0 至 500 Hz
同步电机闭环
0 至 300 %
] (UF5)
] (FSY)
] (FSY)
,则此参数可被访问。
0
时,该参数可被访问。
0 Hz
时,该参数可被访问。
100 %
B
63
Page 88

电梯
[1.1
速度环
] (LIF-)
当符合自动斜坡特性曲线生成的速度给定值时
变频器使用应用数据(轿厢速度与有效载荷)自动配置
在大多数应用中不需要重新输入速度环设置。如果对于电梯特性感到不满意,请参考第
ATV71L
速度环能够保证电梯轿厢的最佳舒适性。
速度环。
ATV71L
速度环说明
速度环由下列要素组成:
ATV71L
•[频率环稳定性
B
•[频率环增益
•[速度环滤波系数
•[实际电机惯量
•[系统惯量
速度环中使用的总惯量为
-
JMOt + JAPL(当JMOt
-
JCAL + JAPL(当JMOt =Auto时)
在专家权限模式下:
•[前馈
•[前馈滤波带宽
此速度环说明可能包括速度测量滤波器,这是因为它与此速度环的最终设置紧密相连:
•[编码器滤波常数
•[编码器滤波激活
下面为此速度环的方框图:
] (FLG)
] (JAPL):
:前馈量的增益
] (FFP)
:稳定性(衰减系数
] (StA)
:增益(通频带
:基准滤波器常数
] (SFC)
] (JMOt) 与 [
] (FFU)
] (FFr)
] (FFA)
估算的电机惯量
系统惯量(预先计算得出)。
不为0时
:前馈量的带宽
:滤波器时间常数
:激活滤波器
)
)
)
] (JCAL)
:电机惯量
能在读/写模式下访问,
(JMOt
页上的设置速度环程序。
68
JCAL
为只能读取)。
64
Page 89

电梯
[1.1
] (LIF-)
基本操作
在标准操作的情况下应使用 [电梯承载能力
使用 [电梯承载能力
1.
使用总重、[轿厢额定速度
2.
预先定义速度调节器带宽和衰减,使其适合于电梯应用
3.
对于同步电机,调节器被预先定义为一个PI速度调节器
4.
型的调节器
使用
5.
使用惯量、带宽和衰减来计算速度控制器的Kp与Ki增益
6.
对于加速与减速转矩,电梯速度环也有一个附加的前馈补偿条件。通常情况下此为无效,其增益可通过 [前馈
7.
(SFC = 65%)
来计算应用于速度给定值的滤波器常数
SFC
来估计系统总重
] (LCA)
] (CSP) 与 [
。注意:如果
] (LCA) 与 [
同步电机额定速度
SFC = 0%
置为0%。此条件基于一个加速度观测器,其预定义带宽相当于[前馈滤波带宽
当使用闭环控制时(带有速度反馈),有可能使用速度测量滤波器来减小测量噪声。根据 [电机转矩
8.
先设置此滤波器(自动检测分辨率)。
因此在变频器惯量与实际惯量非常相近的情况下,对于常用的电梯速度斜坡,编码器的分辨率
实际速度应准确跟随给定速度:
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
实际速度
测量速度
轿厢额定速度
] (nSPS) (或 [
参数对速度环进行预先设置,步骤如下:
] (CSP)
电机额定速度
(StA = 20%,FLG = 20%)
(SFC = 100%)
;对于异步电机,调节器被预先定义为一个介于PI和IP中间类
,则可获得一个IP速度调节器。
] (nSP)
(FFU) = 100%
]
>2^16 (=>[
,对于异步电机)来估计系统总的惯量
。必要时可进行修改。
来设置,初始设
] (FFP)
与所用编码器的分辨率来预
] (TqS)
编码器滤波常数
] (FFR) = 3 ms)
B
,
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
在以上示例中,缺省惯量为变频器惯量,惯量参数等于缺省惯量。圆滑过渡均在
,斜坡在3秒时。
50%
65
Page 90

电梯
[1.1
] (LIF-)
速度环设置程序
在检查模式下必须使用此程序(见第34页)。然后设置电梯速度斜坡。如有必要,在正常运行时可从设置项6重新输入。
正如前面章节之解释,惯量是必需设置的参数(且在大多数情况下是唯一的)。
从正确输入电梯承载能力 [电梯承载能力
1.
或 [同步电机额定速度
取决于[电梯承载能力
2.
重量与配重重量,最好单独输入这两个参数。
同步电机转矩 [电机转矩
3.
B
实际电机惯量
[
“长圆筒”类型的电梯电机考虑了进去,如果使用平板电梯电机,则必须填写此参数。
概括说来,为了得到惯量,您应该输入:
最少输入 优先输入
电梯承载能力
[
轿厢额定速度
[
电机额定速度
[
电机转矩
[
电机极对数
[
当对参数(重量、额定速度等)所知甚少时可按照如下所述直接设置总的系统惯量:
4.
5. StA、FLG、SFC
• 增大 [实际电机惯量
振动)。
• 减小 [实际电机惯量
速度缓慢振荡或发生速度超调(这很容易在轿厢中感受到),在此情况下应再次增大惯量。
] (JMOt) 为读/
] (LCA)
] (CSP)
] (nSP)
] (tqS)
] (PPn) 或 [
、
、以及异步电机的额定频率 [电机额定频率
] (nSPS)
] (LCA), [
] (tqS)
写模式)。如果电机惯量已知,最好将其输入 [实际电机惯量
同步电机额定速度
或 [
同步电机极对数
] (JMOt) 与/或 [
] (JMOt) 与/或 [
FFP、FFU
的缺省值适用于大多数情况。 [编码器滤波常数
开始,检查并确认已正确输入线性速度 [轿厢额定速度
] (LCA)
轿厢重量
与电机极对数 [电机极对数
] (CMA) 与[
] (nSPS)
] (PPnS)
电梯承载能力
电梯承载能力
配重
] (CtM)
] (PPn) 或 [
] (LCA) (
] (LCA) (
(JCAL
] (nSPS)
] (PPnS)
电机额定速度
] (PPnS)
为只读模式,
或同步电机的极对数 [同步电机极对数
] (FrS)
参数被再次更新 ,因此可以计算得出系统的总惯量。如果已知轿厢
同步电机极对数
电梯承载能力
[
轿厢额定速度
[
电机额定速度
[
电机转矩
[
电机极对数
[
轿厢重量
[
配重
[
实际电机惯量
[
为了增大 [系统惯量
为了减小 [系统惯量
] (tqS)
] (PPn) 或 [
] (CMA)
] (CtM)
] (FFR)
] (PPnS)
] (JMOt)
] (LCA)
] (CSP)
] (nSP) 或 [
] (JMOt)
同步电机额定速度
同步电机极对数
] (JAPL) )
] (JAPL) )
的预先计算值适用于大多数应用。
,以便消除强烈振动。减小这些参数直至
] (CSP)、 [
会更新电机惯量
。您应该知道在估算惯量时已将
直至系统稳定性极限(噪声与轿厢强烈
] (nSP)
。
例外情况:
检查模式下起动时产生非常大的噪声和快速振荡可能是因为高估了惯量(见第
6.
的影响”一节)。应对计算惯量所涉及的参数(第1项、第2项与第3项)进行审查。
如果修订过的惯量(第4项)不能给出满意的结果,可通过减小[频率环增益
7.
得松弛,或通过增大[频率环增益
环增益
通过增大[编码器滤波常数
8.
参数的影响”一节)。在此情况下,不要忘记必要时重新输入[频率环增益
如果必须减小用于反转的[编码器滤波常数
9.
益
] (FLG)
如果在某一特定速度下系统产生机械共振,可能会出现相当慢的振荡,这时可采取如下措施:
10.
• 减小[频率环增益
• 与/或增大[频率环稳定性
• 与/或增大[前馈
• 与/或减小[速度环滤波系数
的影响”一节)。
] (FLG)
,因为[频率环增益
] (FLG)
] (FFP) (
] (FLG)与/
参数可以使运行或反转期间的背景噪声(高频振动)减小(见第
] (FFr)
对于较小的[编码器滤波常数
] (FLG)
] (StA)
仅增大瞬态增益,不增大稳态增益
] (SFC) (
或减小[频率环稳定性
] (FFr) (
用于加快反应)且如果系统允许(不会增大背景噪声),则无需重新输入[频率环增
在此情况下需要重新输入斜坡设置,这是因为在速度随动期间可能会出现延时
] (StA)
] (FFr)
)
页的 “[频率环稳定性
73
] (FLG)与/
使系统反应性增强(见“[频率环稳定性
。
] (FLG)
来说也是正确的。
] (StA) 与 [
或增大[频率环稳定性
页的 “[编码器滤波常数
77
频率环增益
] (StA)
] (StA)与[
] (FLG)"
使控制系统变
频率
] (FFr)
)
66
Page 91

[1.1
电梯
] (LIF-)
频率环增益
[
](FLG) 与 [
频率环稳定性
] (StA)
参数的影响
这两个参数用于调整基于惯量的速度环的响应速度,尤其是在当惯量未知的前提下。
•[频率环稳定性
:该参数用于根据设备的动态特性,在速度瞬态过程后调节反馈信号使得系统稳定。逐渐增加系统稳定性来加
] (StA)
强控制速度环衰减,从而减少超调速度。
•[频率环增益
:该参数根据动态特性(通频带)来调节设备速度瞬态响应。对于具有高阻性转矩、大惯量或者快速循环的设备,
] (FLG)
应逐渐增大增益。
初始响应
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
初始响应
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
时间(单位:
时间(单位:
ms)
StA增大 StA增大
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
时间(单位:
FLG增大 FLG增大
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
ms)
时间(单位:
ms)
ms)
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
时间(单位:
时间(单位:
B
ms)
ms)
为了更好地理解 [频率环增益
] (FLG) 与 [
频率环稳定性
参数的影响,我们来看两种类型的示例:
] (StA)
• 非常短的线性斜坡(对于电梯来说出现这种情况的可能性很小,但作为示例来说非常有用
• 具有与前面所述(类似于电梯)相同的圆滑过渡
非常短的线性斜坡
1.
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
时间(单位:秒
实际速度
测量速度
4000
3000
2000
1000
0
-1000
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
缺省速度环设置,
1)
时间(单位:秒
Jvar = J real
)
)
(ACC = DEC = 3s)
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
实际速度
测量速度
4000
3000
2000
1000
0
-1000
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
2) 图1 + STA
增大到
80
)
时间(单位:秒
时间(单位:秒
)
)
67
Page 92

[1.1
电梯
] (LIF-)
B
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
实际速度
测量速度
6000
4000
2000
0
-2000
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
3) 图2 + FLG
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
增大到
60
给定速度
实际速度
测量速度
时间(单位:秒
时间(单位:秒
时间(单位:秒
60
50
40
30
20
10
0
-10
)
6000
4000
2000
0
-2000
-4000
)
4) 图3 + FLG
60
50
40
30
20
10
0
-10
)
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
时间(单位:秒
实际速度
测量速度
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
增大到
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
时间(单位:秒
100
时间(单 位:秒
实际速度
测量速度
)
4000
3000
2000
1000
-1000
)
5) 图4 + STA
60
50
40
30
20
10
-10
)
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
时间(单 位:秒
实际速度
测量速度
0
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
减小至
0
123456
0
给定速度
时间(单位:秒
20
时间(单位:秒
实际速度
测量速度
)
)
)
6000
4000
2000
0
-2000
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
6)图5 + STA
减小至
5
时间(单 位:秒
3000
2000
1000
0
-1000
)
7) 图6 + FLG
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
减小至
时间(单位:秒
20
800
600
400
200
0
-200
0
)
8) 图7 + FLG
123456
转矩
减小至
时间(单位:秒
5
)
68
Page 93

电梯
[1.1
斜坡圆滑过渡至
2.
] (LIF-)
3 s
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
实际速度
测量速度
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
缺省速度环设置
1)
60
50
40
30
20
10
0
-10
102435 9678 10
Jvar = J real
给定速度
实际速度
测量速度
时间(单 位:秒
时间(单位:秒
时间(单 位:秒
)
)
)
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
实际速度
测量速度
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
2) 图1 + STA
60
50
40
30
20
10
0
-10
增大到
80
102435 9678 10
给定速度
实际速度
测量速度
时间(单 位:秒
时间(单位:秒
时间(单 位:秒
60
50
40
30
20
10
0
-10
)
300
200
100
0
-100
-200
-300
)
3) 图2 + FLG
60
50
40
30
20
10
0
-10
)
102435 9678 10
给定速度
时间(单位:秒
实际速度
测量速度
102435 9678 10
转矩
增大到
102435 9678 10
给定速度
时间(单位:秒
60
时间(单位:秒
实际速度
测量速度
)
B
)
)
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
4)图3 + FLG
增大到
100
时间(单 位:秒
300
200
100
-100
-200
-300
)
5) 图4 + STA
0
102435 9678 10
转矩
减小至
时间(单位:秒
5
300
200
100
0
-100
-200
-300
)
6) 图7 + FLG
102435 9678 10
转矩
从最后这几个图形(除了最后一个)来看,当惯量经过合理定义时(变频器惯量适合于实际惯量), [频率环增益
不会产生多大影响。总的说来,只有[频率环增益
(StA)
] (FLG) (
带宽)减小较大才会使控制系统变得非常松弛,从而产生振荡。
减小至
] (FLG) 与 [
时间(单位:秒
5
频率环稳定性
)
]
69
Page 94

电梯
[1.1
] (LIF-)
基本运行的稳固性
当惯量发生大的变化时速度跟随非常稳定。让我们看看相同的示例(除惯量之外所有的缺省值均相同):
B
50
40
30
20
10
0
102435 9678 10
给定速度
实际速度
测量速度
1500
1000
500
0
-500
-1000
-1500
102435 9678 10
转矩
惯量被低估了系数5(实际惯量为
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
实际速度
测量速度
时间(单位:秒
时间(单位:秒
5 kg.m2)
几乎察觉不到。
时间(单位:秒
60
50
40
30
20
10
0
-10
)
102435 9678 10
给定速度
时间(单位:秒
)
实际速度
测量速度
30
20
10
0
-10
-20
-30
)
102435 9678 10
转矩
低估惯量(实际惯量为
0.1 kg.m2)
时间(单位:秒
)
会使系统逼近稳定性极限,
但系数10可以接受。
60
50
40
30
20
10
0
-10
)
102435 9678 10
给定速度
时间(单位:秒
)
实际速度
测量速度
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
高估实际惯量影响很大(比率为
时间(单位:秒
。
33.33)
)
5000
0
-5000
102435 9678 10
转矩
低估实际惯量影响很大 (比率为
时间(单位:秒
。
20)
)
注意:比率为30的低估比比率为30的高估要更为可取,这是因为控制系统能够保持稳定(警告:在此情况下可能会出现响应太慢,电梯
到达太晚的情况)。
70
Page 95

[1.1
电梯
] (LIF-)
频率环增益
[
] (FLG) 与 [
频率环稳定性
] (StA)
参数对于
从这些最后的结果可知,在大多数电梯应用中,改变 [频率环稳定性
此外,
StA/FLG
60
50
40
30
20
10
0
-10
102435 9678 10
的设置不同于缺省值
给定速度
,通常会掩盖非正确定义的惯量:
(20%)
时间(单位:秒
60
50
40
30
20
10
0
-10
102435 9678 10
)
实际速度
测量速度
3000
2000
1000
0
-1000
-2000
-3000
102435 9678 10
转矩
惯量被低估了比率
缺省的速度环数值
10 (
时间(单位:秒
)
)
3000
2000
1000
0
-1000
-2000
-3000
102435 9678 10
增加至
FLG
ATV71L
] (StA) 与 [
给定速度
实际速度
测量速度
转矩
100%
的影响
频率环增益
时间(单位:秒
就会解决产生转矩振荡时的速度跟随问题。
的设置没有什么意义。
] (FLG)
时间(单位:秒
)
)
B
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
时间(单位:秒
)
实际速度
测量速度
6
5
2
0
-2
-4
-6
102435 9678 10
时间(单位:秒
)
转矩
明显高估实际惯量(比率为
33.33)
。
因此应重新定义惯量,而不是改变增益 [频率环增益
但是,即使是在惯量经过合理定义的情况下,减小增益 [频率环增益
60
50
40
30
20
10
0
-10
10
5
0
-5
-10
FLG
的惯量估计。
] (FLG) 或 [
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
实际速度
测量速度
102435 9678 10
转矩
减小至5%就会解决速度跟随问题,但同时会掩盖不正确
频率环稳定性
] (FLG)
] (StA)
或增大稳定性 [频率环稳定性
系统更加松弛。例如松弛控制系统能够用于避免激发电梯或电机的机械共振频率。
。
时间(单位:秒
时间(单位:秒
)
)
有时是很有用的,可以使
] (StA)
71
Page 96

[1.1
示例
电梯
] (LIF-)
B
60
50
40
30
20
10
0
-10
102435 9678 10
给定速度
时间(单位:秒
)
实际速度
测量速度
300
200
100
0
-100
-200
-300
102435 9678 10
转矩
时间(单位:秒
)
我们认为机械系统所用的速度引发共振。即使速度的跟随情
况良好,转矩振荡仍然表现出不适。
60
50
40
30
20
10
0
-10
102435
给定速度
9678 10
时间(单位:秒
)
实际速度
测量速度
60
50
40
30
20
10
0
-10
102435
给定速度
实际速度
测量速度
300
200
100
0
-100
-200
-300
102435
转矩
将
FLG
减小至
,小幅振荡就会减少,轿厢中很少感觉到
10%
的大幅振荡就会出现。
9678 10
时间(单位:秒
9678 10
时间(单位:秒
)
)
300
200
100
0
-100
-200
-300
102435
torque
将
增加至
STA
72
9678 10
时间(单位:秒
,系统就会进一步衰减,这会减小振荡。
100%
)
Page 97

[1.1
电梯
] (LIF-)
松弛系统另一优点会在需要使用一个非常大的滤波器测量速度时体现出来(可参见 [编码器滤波常数
70
60
50
40
30
20
10
0
-10
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
给定速度
实际速度
测量速度
8000
6000
4000
2000
0
-2000
0.20 0.4 0.80.6 1 1.81.2 1.4 1.6 2
转矩
非常短的加速斜坡
(0.1 s)
时间(单位:秒
时间(单位:秒
,非常长的
FFR(40 ms)
)
)
。
70
60
50
40
30
20
10
0
-10
0 0.5 1 1.5 2 2.5 3 43.5
给定速度
实际速度
测量速度
2000
1500
1000
500
0
-500
0 0.5 1 1.5 2 2.5 3 43.5
转矩
通过减小通频带
调节器
PI
FLG = 5%
(SFC = 100)
的正常响应)。
,速度振荡就会消失(重新获得带有
一节):
] (FFR)
时间(单位:秒
时间(单位:秒
)
B
)
73
Page 98

[1.1
电梯
] (LIF-)
参数 [速度环滤波系数
速度给定滤波器将PI调节器
调节器绝对不会出现超调。代价是实际速度会发生延时(与给定速度相比)。
IP
] (SFC)
(SFC = 100%)
在大多数电梯应用中此参数应保持为缺省值:对于同步电机为
的影响
变为IP调节器
(SFC = 0%)
100%
。
,对于异步电机为
65%。
当使用急剧升降的斜坡特性曲线时此参数非常有用。但是,可以这样说,在此情况下,它掩盖了不正确的斜坡圆角定义。此外,它可以被看
作是增加舒适性的另外一个自由度。
60
50
50
40
40
30
30
20
20
10
10
0
0
102435 9678 10
102435 9678 10
给定速度
实际速度
测量速度
500
500
0
0
时间(单位:秒
)
B
60
50
40
30
20
10
0
102435 9678 10
给定速度
实际速度
测量速度
500
0
时间(单位:秒
)
-500
102435 9678 10
转矩
时间(单位:秒
惯量被低估(比率3),斜坡结束时圆滑过渡
60
50
40
30
20
10
0
102435 9678 10
时间(单位:秒
给定速度
实际速度
测量速度
500
500
0
0
-500
-500
102435 9678 10
102435 9678 10
时间(单位:秒
转矩
如果
SFC=0%
,速度超调就会消失,能够获得舒适的急拉。
)
10%,SFC=100%
)
)
-500
-500
102435 9678 10
102435 9678 10
转矩
如果
SFC=65%
,速度超调与获得命令的延时之间会达到很好
的折衷。
时间(单位:秒
)
减小 [速度环滤波系数
环增益
74
] (FLG)
一起使用。
也会提高出现机械共振时的特性。在此情况下,此参数甚至能与增大 [频率环稳定性
] (SFC)
] (StA) 与/
或减小 [频率
Page 99

[1.1
电梯
] (LIF-)
编码器滤波常数
[
] (FFr)
在电梯应用中, [编码器滤波常数
• 增大
值,从而减小电缆中的噪声和背景(高频)振动。此振动通常是由于测量噪声(编码器电缆的质量、
FFR
参数的影响
滤波器被预置为一个取决于编码器实际分辨率和电机额定转矩的值。 可进行如下修改:
] (FFR)
EMC
引起。
• 减小
值,从而能够增加(带有其它动态增益)响应的动态性能。
FFR
为了更好理解滤波器对于测量速度的影响,我们来看一个短斜坡示例(此参数对于平常电梯应用斜坡的影响少有发表):
示例:PI结构为
70
60
50
40
30
20
10
0
-10
0.20 0.6 2
5000
4000
3000
2000
1000
0
-1000
0.20 0.6 20.8 1 1.2 1.4 1.6 1.80.4
缺省速度环设置,
记住:可通过减小 [频率环增益
100%
0.8 1 1.2 1.4 1.6 1.80.4
给定速度
实际速度
测量速度
转矩
时间(单位:秒
时间(单位:秒
)
)
Jvar = J real, ACC = 0.1 s,FFR = 3 ms
来减少出现在后一种情况中的速度振荡(见第
] (FLG)
70
60
50
40
30
20
10
0
-10
0.20 0.6 2
0.8 1 1.2 1.4 1.6 1.80.4
给定速度
实际速度
测量速度
8000
6000
4000
2000
0
-2000
0.20 0.6 20.8 1 1.2 1.4 1.6 1.80.4
转矩
很长的
FFR(40 ms)
69
。
页 [频率环增益
时间(单位:秒
时间(单位:秒
] (FLG) 与 [
频率环稳定性
的优点一节)。
干扰、电缆长度等
)
)
] (StA)
)
B
示例:具有中间
70
60
50
40
30
20
10
0
-10
0.4
0.20 0.6 2
给定速度
实际速度
测量速度
4000
3000
2000
1000
0
0.20 0.6 20.8 1 1.2 1.4 1.6 1.80.4
转矩
SFC = 80%, FFR = 3 ms
在此情况下,为了减少振荡(和超调),必须减小 [频率环增益
结构
PI/IP
0.8 1 1.2 1.4 1.6 1.8
(SFC = 80%)
:
时间(单位:秒
时间(单位:秒
70
60
50
40
30
20
10
0
-10
0.20 0.60.4 2
)
0.8 1 1.2 1.4 1.6 1.8
给定速度
实际速度
测量速度
6000
4000
2000
0
-2000
0.20 0.6 20.8 1 1.2 1.4 1.6 1.80.4
)
转矩
SFC = 80%,FFR = 40 ms
的系统可以变为有超调、小幅振荡的系统。
。
] (FLG)
滤波时间常数太大会降低倒溜功能的性能,这是因为倒溜增益将会被施加至经过滤波的速度。
因此在正常运行和倒溜功能拒绝干扰时
设置是噪声和振荡二者的折衷。
FFR
时间(单位:秒
时间(单位:秒
)
)
:由于速度反馈上滤波太多,无超调
75
Page 100

[1.1
电梯
] (LIF-)
使用 [前馈
] (FFP) 与 [
前馈滤波带宽
] (FFU)
在诸如电梯之类的动态响应相当慢(斜坡为3秒、明显的圆滑过渡、大惯量)的应用中,此条件并非必需。
前馈
[
但是,如果
以及 [编码器滤波常数
FFP = 0
给定值分割
1,2
B
1
0,8
0,6
0,4
0,2
0
用于调整惯量加速和减速所需的动态前馈转矩。此参数对于斜坡的影响如下图所示。增加
] (FFP)
的值太高,就会发生超速。当速度准确跟随斜坡时就能获得最佳设置,这取决于第
FFP
时的初始响应
] (FFr)
的设置。
FFP增大 FFP增大
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0 50045040035030025020015010050
时间(单位:
ms)
0
0 50045040035030025020015010050
时间(单位:
ms)
FFP增大
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
时间(单位:
ms)
77
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
的值可以让速度更加贴近斜坡。
FFP
页的参数 [系统惯量
] (JAPL)
时间(单位:
的精度
ms)
如第
[
页的 “基本运行的稳固性”一节所述, [前馈
72
前馈
可被用于在加速/减速时以及稳态运行期间分散Kp与Ki速度调节器增益的影响(因为必定会说此参数仅在速度给定值变化时
] (FFP)
可被用于掩盖惯量估计误差。
] (FFP)
起作用,因此仅在瞬间运行时有效)。
前馈
[
前馈滤波带宽
[
参数在倒溜期间不起作用,这是由于没有给定加速(速度给定值为
] (FFP)
用于调整动态前馈转矩的带宽。此参数对于斜坡跟随的影响如下图所示。减小
] (FFU)
0 Hz)
。
FFU
声影响(转矩波动)。可是,斜坡设置减小太多(短斜坡)会导致延时,并对斜坡跟随产生不利影响。增加
坡,但同时容易产生噪声。最佳设置是在斜坡跟随和现有噪声敏感度之间找到一个平衡。
0 50045040035030025020015010050
时的初始响应
时间(单位:
ms)
FFU减小 FFU增大
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
时间(单位:
ms)
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
0 50045040035030025020015010050
FFU = 100%
给定值分割
1,2
1
0,8
0,6
0,4
0,2
0
的值将会降低速度给定值上的噪
的值可以让速度更加贴近斜
FFU
时间(单位:
ms)
76
 Loading...
Loading...