

Page 1

Цифровой позиционер тип 3787
TM
на шине FOUNDATION
Fieldbus
•
Инструкция
по монтажу и эксплуатации
EB 8383-1 RU
Версия микропрограммного
обеспечения: R 1.41/K 1.00
Издание: март 2001
Page 2
Содержание
1.
1.1
1.2
2.
2.1
2.2
2.2.1
2.2.2
2.3
2.3.1
2.3.2
2.3.3
2.4
3.
3.1
3.1.1
3.1.2
3.2
3.2.1
3.2.2
3.2.3
4.
4.1
4.2
4.3
4.3.1
4.3.2
4.4
5.
6.
Конструкция и принцип действия
Коммуникации
Опции
Уст ан ов ка позиционера на клапан
Прямой монтаж на привод тип 3277
Монтаж согласно DIN IEC 534
Последовательность операций при монтаже
Предварительная установка рабочего хода
Монтаж на поворотные приводы
Монтаж рычага контактного ролика
Монтаж промежуточной вставки
Уст ан ов ка и закрепление кулачкового диска
Положение безопасности привода
Подключения
Пневматические подключения
Манометры
Питающее давление
Электрические подключения
Концевые контакты
Принудительный сброс воздуха
Осуществление связи
Эксплуатация позиционера
Светодиоды
Защита от записи и тумблер имитации
Базовая установка
Уст ан ов ка механической нулевой точки
Инициализация
Уст ан ов ка индуктивных концевых контактов
Техническое обслуживание
Ремонт Ех-приборов
2
Содержание
страница
8
8
9
10
10
14
14
16
18
18
18
20
21
22
22
22
22
23
24
24
24
26
26
27
27
27
28
29
30
30
EB 8383-1 RU
Page 3
3
Содержание
7.
7.1
7.2
7.3
7.3.1
7.4
7.4.1
7.4.2
7.4.3
7.4.3.1
7.4.3.2
7.5
7.5.1
7.5.2
7.5.3
8.
8.1
8.2
Описание параметров
Общие положения
Описание прибора (DD)
Пояснения к параметрам
Обозначение параметров
Блок-схема прибора
Приборный блок (Resource Block)
Блок обработки (Transducer Block)
Функциональные бло ки (Functional Blocks)
Функциональный блок «Аналоговый выход» (Analog Output Function Block)
Параметры функционального блока «Аналоговый выход» (Analog Output
Function Block)
Функциональный PID-блок (PID-регулятор)
Другие параметры
Stale Counter
Link Objekte
LAS-функциональность
Сообщения диагностики
Сообщения в параметре XD_ERROR_EXT (блок обработки – Transducer Block)
Сообщения в параметре XD_ERROR (блок обработки – Transducer Block)
32
32
32
32
33
33
35
41
52
52
54
60
73
73
73
73
74
74
75
EB 8383-1 RU
Page 4
4
Замечания по технике безопасности
¾ Монтаж и пуск прибора в эксплуатацию могут осуществлять
только специалисты, имеющие право на монтаж, запуск и
эксплуатацию такого оборудования.
Под специалистами настоящей инструкцией подразумеваются
лица, которые на основе своего специального образования, знаний и
опыта, а также знаний действующих норм и стандартов,
регламентирующих их работу, могут предусмотреть возможные
опасности.
¾ Для работы на взрывоопасных установках с приборами, имеющими
взрывозащищенное исполнение, специалисты должны иметь
соответствующее образование либо свидетельство и
необходимый допуск.
¾ Угрозы безопасности, которые могут быть вызваны в
регулирующем клапане свойствами регулируемой среды,
управляющим давлением и подвижными частями механизмов,
должны быть предусмотрены в необходимых мерах по технике
безопасности.
¾ Если из-за высокого давления питания в приборе могут возникать
и развиваться недопустимо большие величины рабочего хода и
усилия перестановки, давление питания должно быть снижено в
соответствующих редукционных станциях.
¾ Соответственно должны быть предусмотрены специальная
транспортировка и хранение таких приборов.
EB 8383-1 RU
Page 5
5
Изменения программных версий
Изменения микропрограммного обеспечения позиционера относительно
предыдущей версии
Старая версия Новая версия
Регулирование
R 1.41
Коммуникация (связь)
К 1.00
EB 8383-1 RU
Page 6
6
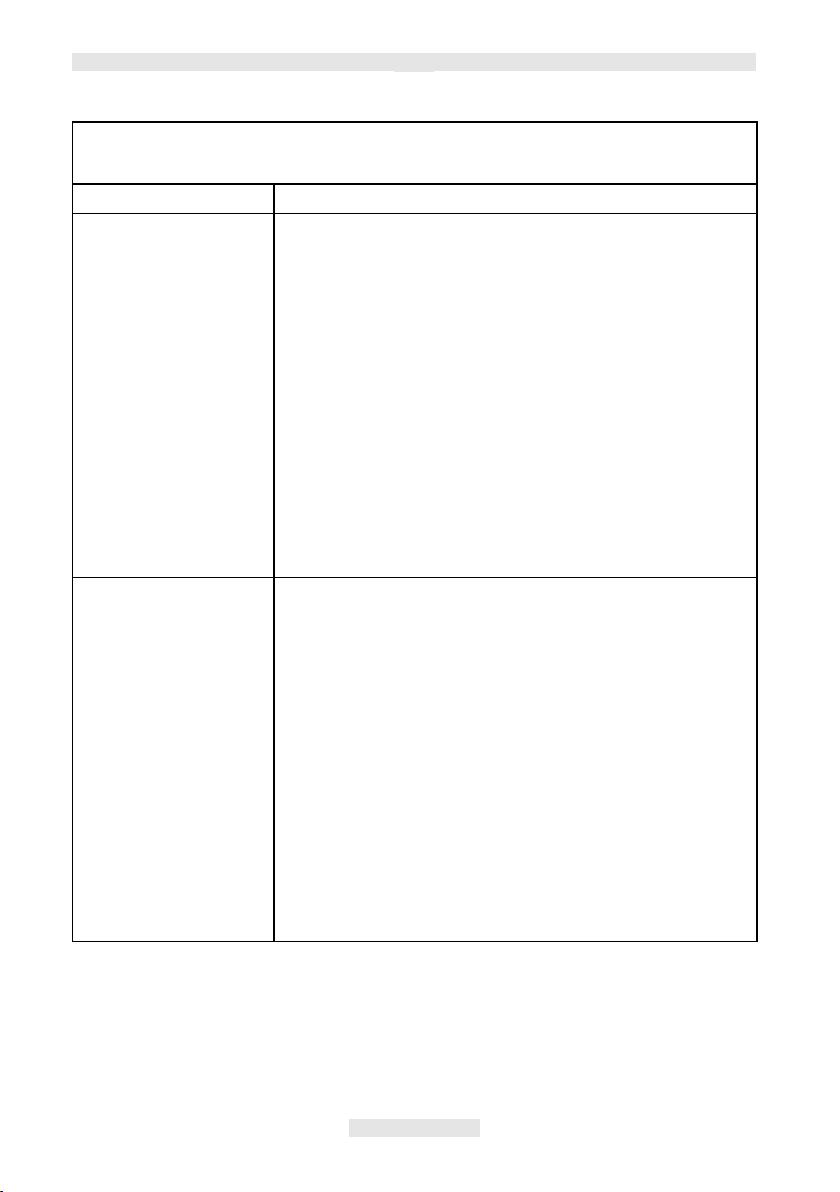
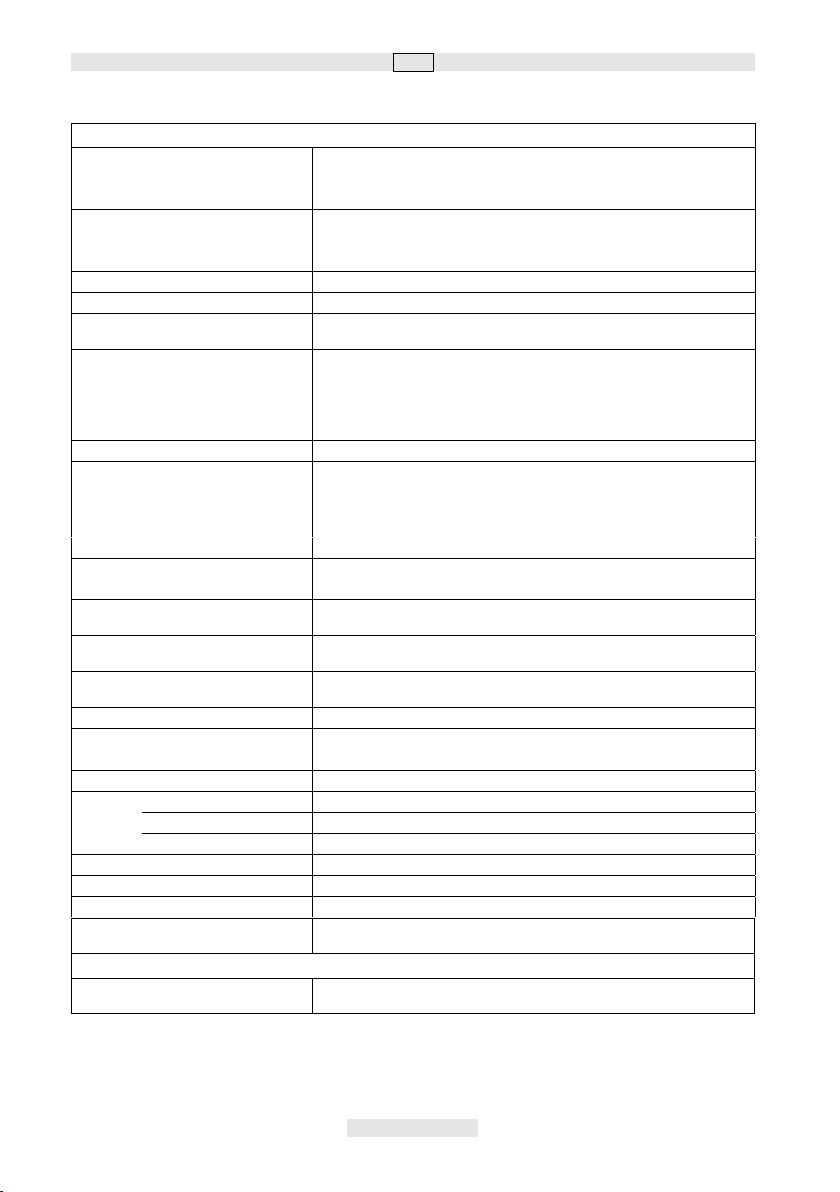
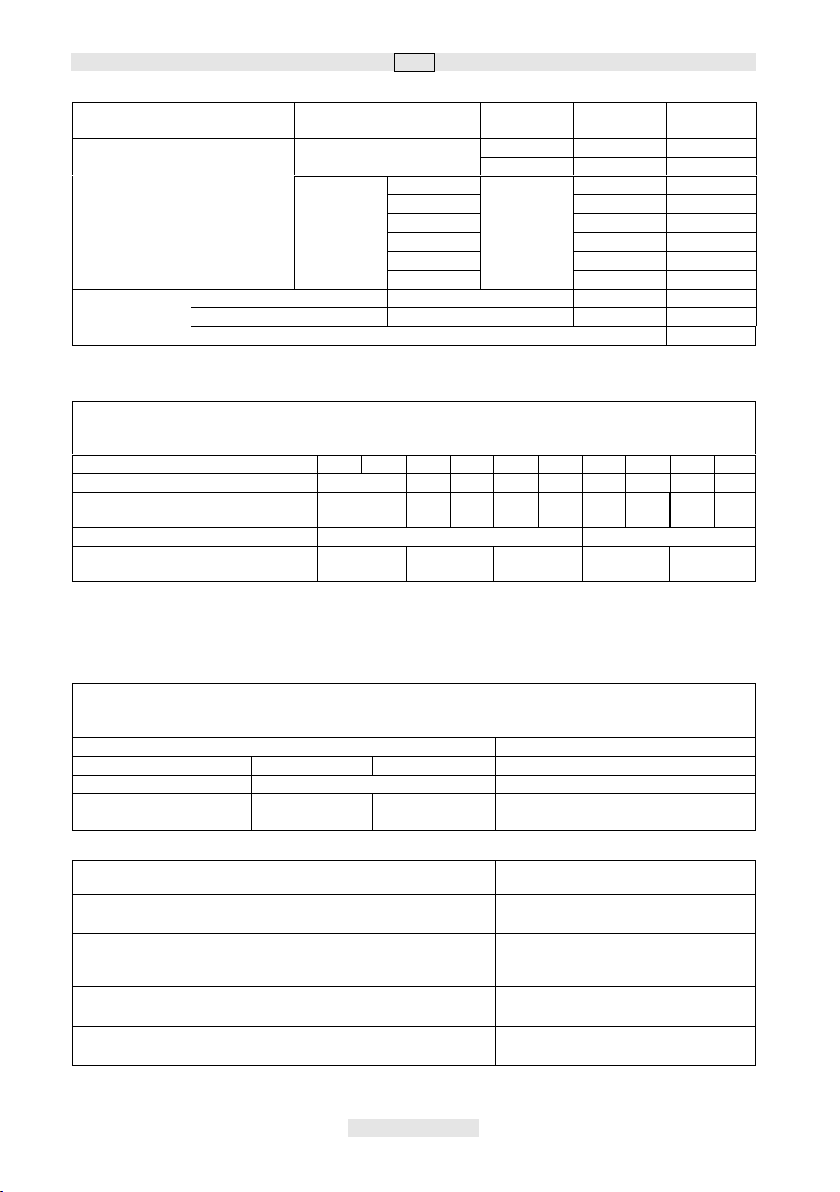
Технические характеристики
Позиционер
Ход
Прямой монтаж на привод тип 3277
Монтаж согласно DIN IEC 5347
Шинное подключение Интерфейс полевой шины согласно EN 61158-2; питание через шину
Допустимое напряжение питания 9…32 V DC1) • питание через шину
Максимальное токопотребление 15 мА
Дополнительный ток при
неисправности
Давление питания 1,4…7 бар (20…90 psi); качество воздуха согласно ISO 8573-1:
Управляющее давление (выход) от 0 бар до максимального давления питания
Характеристика регулируемая Прямоходный клапан: линейная • равнопроцентная • инверсная
отклонение характеристики < 1%
Мертвая зона (относительно
номинального хода/ -угла поворота) Устанавливается от 0,1 до 10,0% • значение холодного старта 0,5%
Разрешение (внутренняя погрешность
измерения)
Время срабатывания При времени хода клапана до 240 с • отдельная установка функции
Направление движения Обратимое • возможна установка с помощью программного
Расход воздуха Независимый от давления питания <90 ln/час
Подача
воздуха
на привод подается при ∆р = 6 бар: 9,3 m
с привода сбрасывается при ∆р = 6 бар: 15,5 m
Допустимая окружающая температура -20…+60ºС1) • расширенный диапазон температур по запросу
температуры ≤ 0,015%/10K
Влияние
давления питания нет
вибраций Отсутствует до частоты 250 Гц и ускорения 4g
Защита от взрыва Eex ia IIC T6 по заявке
Класс защиты IP 54 • IP 65 в виде специального исполнения
Электромагнитная совместимость Согласно нормам EN 50081 и EN 50082
Двоичный вход
Коммуникации
Передача данных
Регулируемый
7,5…30 мм
7,5…120 мм или для поворотных приводов 30…120º
Physical Layer Class: 113 (не Ех-исполнения) и 111 (в Ех-исполнении)
Полевой прибор по FM 3610/FISCO
0 мА
Макс. плотность и размер частиц по классу 2, содержание масла по
классу 3.
Точка росы питающего давления должна быть на 10ºC ниже
наименьшей ожидаемой окружающей температуры.
равнопроцентная.
SAMSON-заслонка: линейная • равнопроцентная.
VETEC-клапан с поворот. затвором: линейная • равнопроцентная.
<0,05%
Rampe для сброса и подачи давления
обеспечения
3
/час • при ∆р = 1,4 бар: 3,5 m
n
3
/час • при ∆р = 1,4 бар: 5,8 m
n
1)
Внутреннее питание 5 В постоянного тока
функции
согласно спецификации FOUNDATION
Profile Class: 31 PS, 32
TM
1)
• Ri ≈ 100k для сигнальной
Fieldbus • Communication
3
/час
n
3
/час
n
EB 8383-1 RU
Page 7
7
Исполнения
Дополнительное оснащение
Индуктивные концевые датчики
Принудительный сброс воздуха
два шлицевых инициатора тип SJ 2 SN для подключения ключевых
NAMUR-усилителей по DIN 50 227
вход: 6…24 В постоянного тока
включения около 3 В • значение Kv = 0,17
1)
• Граница пробоя 45 В • Ri ≈ 6k • точка
Материалы
Корпус Алюминий, литье под давлением, хроматированный и с синтетическим
Наружные детали Коррозионно-стойкая сталь WN 1.4571 и WN 1.4301
Вес около 1,3 кг
1)
Для искрозащищенного исполнения 3787-1… служат данные сертификата образцовых испытаний
покрытием
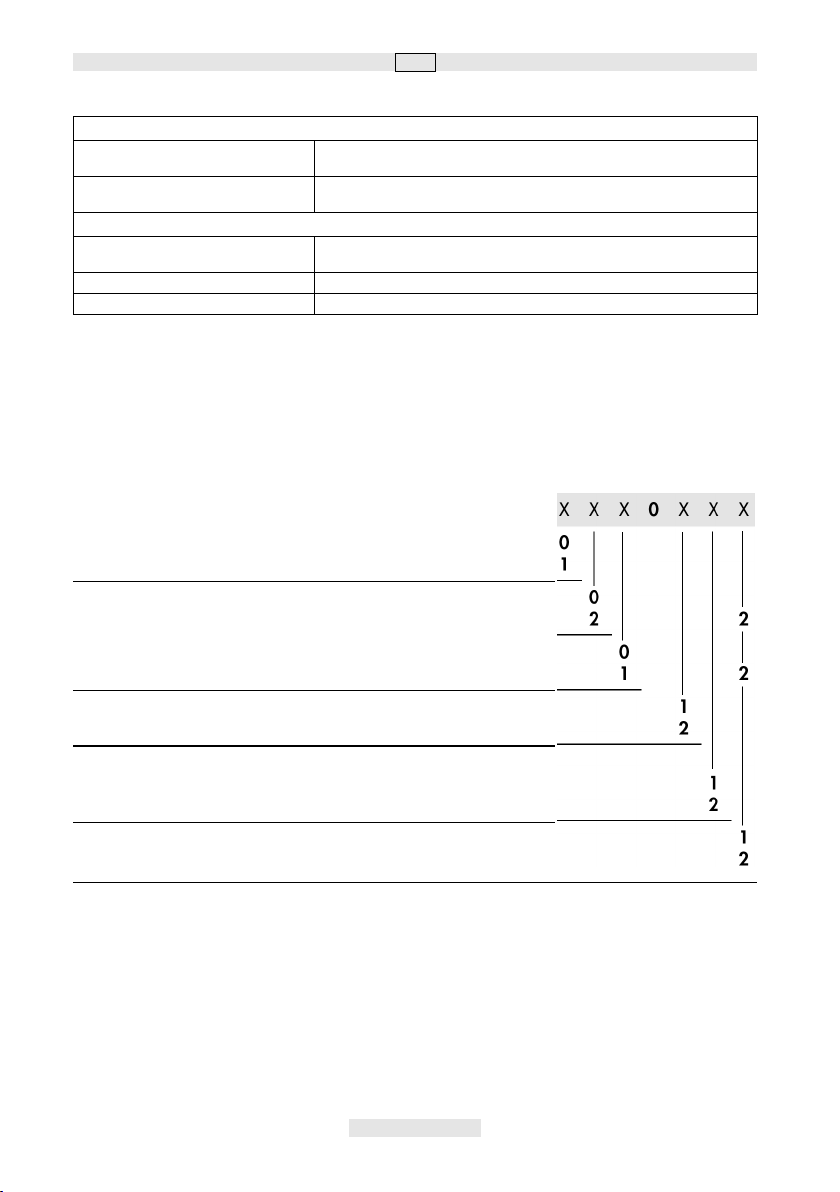
Варианты исполнения позиционера
Модель 3787 -
Ех-защита без
с защитой (E Ex ia IIC)
концевые контакты без
Доп. оснащение: 2 индуктивных
принудит.сброс воздуха без
с
Пневматические NPT ¼-18
подключения ISO 228/1-G ¼
резьбовое соединение М20х1,5
голубой
Электр. соединения черный
количество: 1
2
EB 8383-1 RU
Page 8
8
TM
TM
TM
TM
TM
TM
TM
Конструкция и принцип действия
1. Конструкция и принцип
действия
Цифровой позиционер сравнивает
задающий (входной) параметр,
периодически поступающий по шине
FOUNDATION
хода или угла поворота регулирующего
клапана и для коррекции
рассогласования вырабатывает
необходимое управляющее давление.
Позиционер предназначен для
установки на прямоходные или
поворотные приводы.
Позиционер тип 3787 устанавливает
связь с полевыми приборами,
устройствами накопленияпрограммирования и системами
управления процессом согласно
спецификации FOUNDATION
Интегрированный в позиционере
функциональный PID-бок позволяет
осуществлять регулирование
необходимого параметра процесса
непосредственно в полевых условиях.
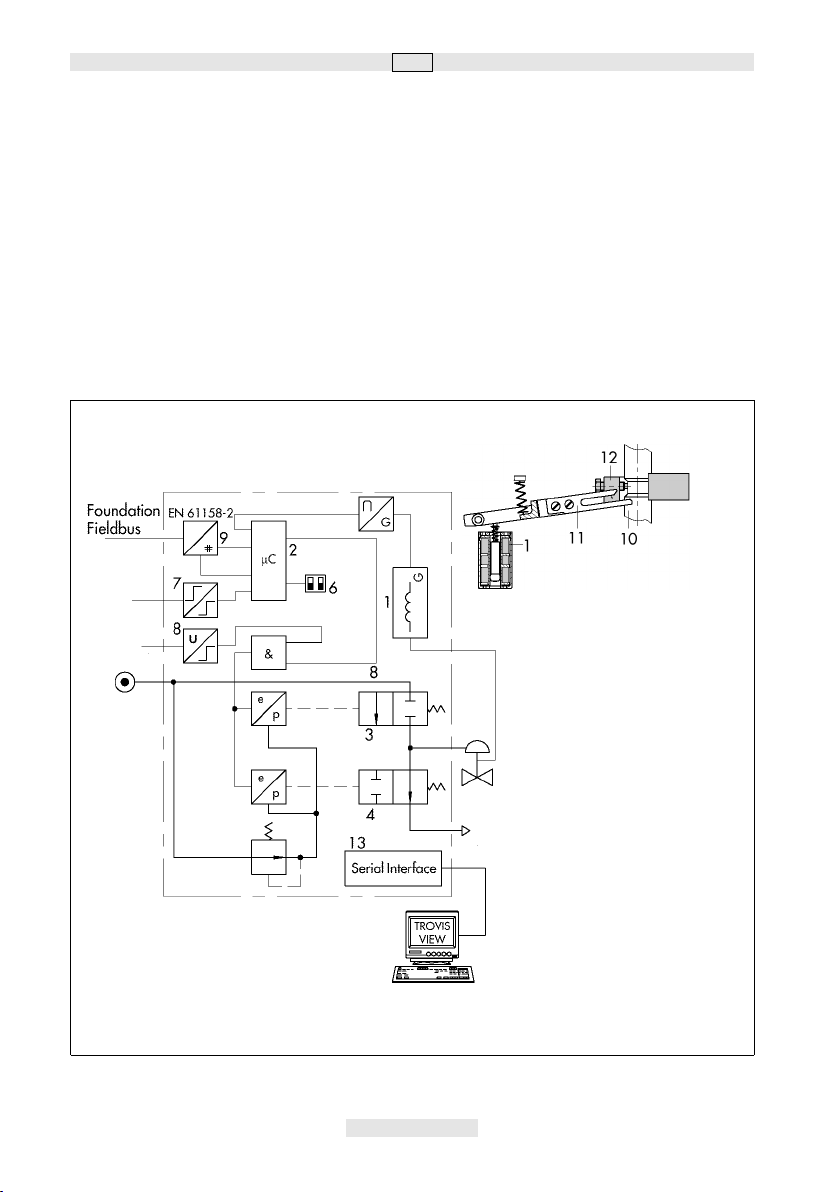
Величина рабочего хода регулирующего
клапана воспринимается бесконтактным
индуктивным путевым датчиком (1) и
через преобразователь подается на
микроконтроллер (2). Микроконтроллер
производит сравнение величины хода с
задающим параметром и при наличии
рассогласования управляет ключевыми
2/2-ходовыми вентилями (3, 4).
Ключевые вентили нагнетают (3) или
сбрасывают (4) давление с
пневмопривода, в зависимости от
величины и знака рассогласования.
Светодиоды, расположенные внутри
прибора сигнализируют рабочее
состояние позиционера.
В стандартном случае позиционер
имеет один цифровой вход, на который
по шине FOUNDATION
передаваться любая информация,
касающаяся управления процессами.
Микротумблер (6), расположенный на
внутренней стороне крышки,
предохраняет данные об установленной
конфигурации позиционера от
случайной перезаписи.
Fieldbus, с величиной
Fieldbus.
Fieldbus может
1.1 Коммуникации
Комплексное управление позиционером
осуществляется в процессе цифровой
передачи сигналов по спецификации
FOUNDATION
протоколу E EN 50170/A1. Передача
данных производится синхронно, по
витой паре, согласно EN 61158-2, в виде
модуляции тока со скоростью 31,25
кбит/сек.
Конфигурирование с помощью
программного пакета TROVIS-VIEW
Конфигурирование позиционера можно
проводить с помощью программного
пакета TROVIS-VIEW фирмы SAMSON.
Для этого дополнительный цифровой
интерфейс позиционера соединяется
специальным кабелем с серийным
интерфейсом персонального
компьютера RS-232. После адаптации
позиционера к требованиям
регулируемого процесса контроль
процесса может осуществляться с
помощью программы TROVIS-VIEW в
Online-режиме.
Примечание:
работа с пакетом TROVIS-VIEW
описана в инструкции ЕВ 8383-2.
NI-FBUSTM-конфигуратор
Установка конфигурации позиционера
может также выполняться посредством
NI-FBUS
National Instruments.
При этом для соединения с шиной
FOUNDATION
установка специальной интерфейсной
платы в компьютере.
С помощью NI-FBUS
можно осуществлять проектирование
комплексных сетей на основе шины
FOUNDATION
Fieldbus, согласно
-конфигуратора фирмы
Fieldbus потребуется
-конфигуратора
TM
Fieldbus.
EB 8383-1 RU
Page 9
9
Конструкция и принцип действия
1.2 Опции
В качестве дополнения к стандартной
комплектации прибор может
оснащаться дополнительными
функциями.
Позиционер с концевыми датчиками:
Для сигнализации конечных положений
позиционер может оборудоваться
шлицевыми инициаторами,
обеспечивающими работу различных
предохранительных устройств.
Двоичный
вход
Принудит.
сброс
Питающее
давление
Позиционер с принудительным
сбросом воздуха
Позиционер управляется сигналом
6…24В, вследствие чего
соответствующее давление подается на
регулирующий привод. При отсутствии
сигнала по напряжению управляющее
давление отсекается, а с привода
давление сбрасывается так, что
регулирующий клапан переводится в
положение безопасности независимо от
управляющего воздействия
микроконтроллера.
1. Индуктивный путевой
датчик
2. Микроконтроллер
3. Ключевой вентиль подачи
давления
4. Ключевой вентиль сброса
давления
5. Микроконтроллер
6. Переключатель защиты от
записи и режима имитации
7. Двоичный вход
Выход
воздуха
8. Принудительный сброс
давления
9. Модуль интерфейса EN
61158-2
10. Шток привода
11. Рычаг
12. Зажимная скоба
Интерфейс
13.
конфигурирования
Рис.2 • Блок-схема позиционера
EB 8383-1 RU
Page 10

10
2
Установка позиционера на клапан
2. Установка позиционера на
клапан
Установка позиционера производится
либо прямым монтажом на SAMSONпривод тип 3277, либо согласно NAMUR
(DIN IEC 534) на клапаны в исполнении с
литой рамой, а также на стержневые
клапаны. В соединении с промежуточной
вставкой прибор может использоваться
в качестве поворотного позиционера,
монтируемого на поворотных приводах.
Ввиду того, что позиционер
поставляется единым блоком, но без
дополнительных принадлежностей,
необходимые монтажные детали с их
заказными номерами надо взять из
следующих ниже таблиц.
Внимание:
Позиционер не имеет собственной
заглушки сброса воздуха. Выход наружу
воздуха из позиционера
осуществляется через каналы
монтажных деталей, см. также рис. 3 и
5.
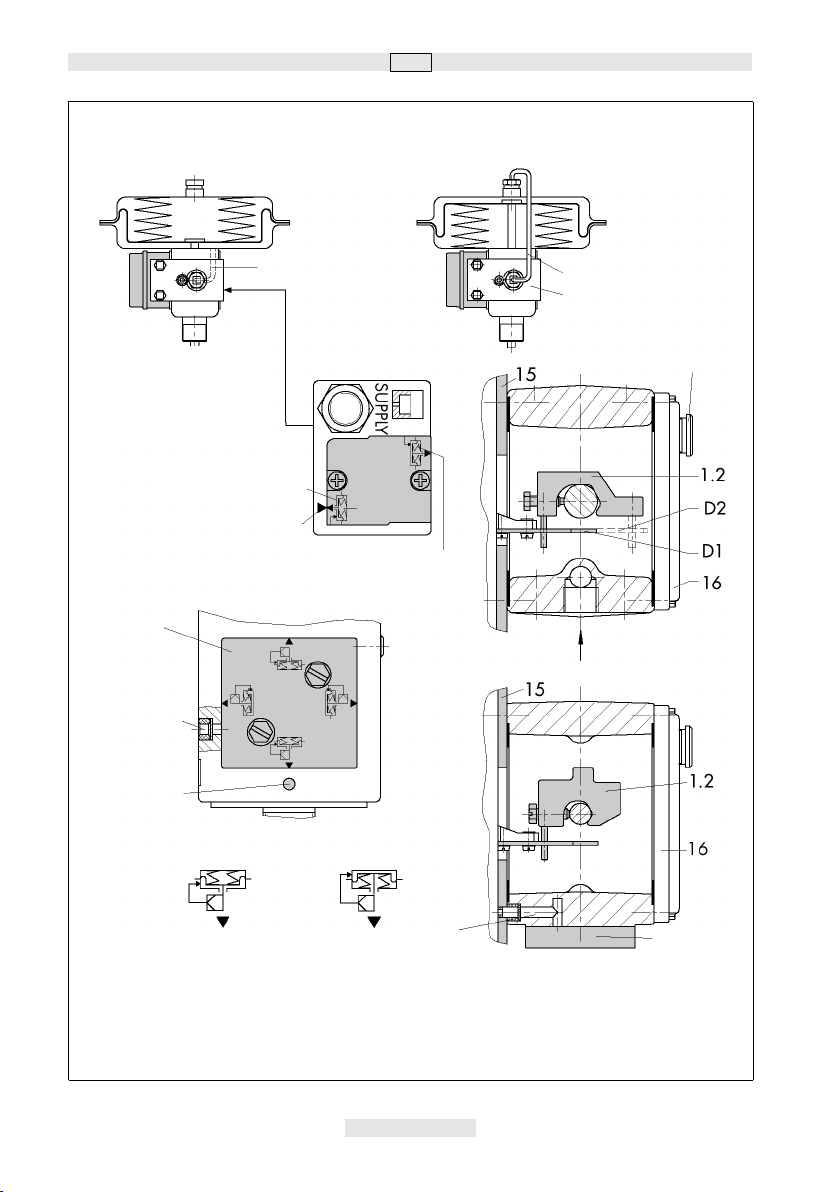
2.1 Прямой монтаж на привод
тип 3277
Если смотреть со стороны подачи
управляющего давления или платы
переключения (для привода 120 см
установка позиционера должны
выполняться на левой стороне привода.
При этом стрелка на черной крышке
прибора (рис. 10) указывает на
мембранную камеру.
Исключение! Регулирующие клапаны, в
которых седло перекрывается
исключительно при втягивании штока
привода. В данном случае монтаж
должен выполняться справа, а стрелка
направлена в противоположную сторону
от мембранной камеры.
), то
1. Привинтить зажимную скобу (1.2) на
шток привода таким образом, чтобы
крепежный винт вошел в углубление
штока привода.
2. Привинтить необходимый рычаг
путевого перемещения D1 или D2 к
передаточному рычагу позиционера.
3. Укрепить промежуточную плату (15) с
уплотнением на раме привода.
4. Установить позиционер таким
образом, чтобы рычаг D1 или D2
скользил по средине штифта
зажимной скобы, а затем привинтить
на промежуточной плате (15).
5. Установить крышку (16).
Приводы с эффективной площадью
от 240 до 700 см
2
6. Установить боковую плату
подключения на соединительном
блоке (рис. 3) по направлению
стрелки, изображенной на этом блоке
таким образом, чтобы символ
привода для конструкции «Шток
привода выдвигается»
(соответственно «Шток привода
втягивается») совпадал с
конструкцией исполнительного
привода. В противном случае
вывинтить оба крепежных винта и,
повернув плату подключения на 180º,
закрепить ее снова.
7. Установить соединительный блок с
его уплотнительными кольцами на
позиционер и раму привода и
затянуть крепежный винт.
Для привода с положением
безопасности «Шток привода
втягивается» смонтировать
предварительно подготовленную
проводку управляющего давления.
EB 8383-1 RU
Page 11
11
д
Установка позиционера на клапан
Шток привода выдвигается Шток привода втягивается
1.2 Зажимная скоба
D1 Рычаг
D2 Рычаг
15 Промежуточная плата
16 Крышка
символ «шток привода
плата
переключения
вход управляющего
давления; при
необходимости с
латунным
дросселем
маркировка
соединение упр. давления
внутри
вид сбоку:
соединительный блок
с платой подключения
выдвигается»
маркировка
символ «шток привода
втягивается»
соединение упр. давления
через трубку
соединительный блок
сброс воздуха
вход управляющего давления
шток привода
канал управ-
вигается втягивается
вы
Рис.3 • Монтаж позиционера и подача управляющего давления для приводов тип 3277 (вверху)
и тип 3277-5 площадью 120 см
ляющего
давления
2
(внизу)
плата
переключения
EB 8383-1 RU
Page 12
Привод с эффективной площадью
2
120 см
В приводе тип 3277-5 площадью 120 см
управляющее давление подается в
мембранную камеру через плату
переключения (рис. 3 внизу).
Важно!
При номинальном рабочем ходе 7,5 мм
во входном шланге управляющего
давления, на раме привода, необходимо
установить латунный дроссель (см.
таблицу принадлежностей на стр. 13).
При величине рабочего хода 15 мм эта
операция необходима лишь при
давлении питания свыше 4 бар.
6. Удалить винт-заглушку на
обратной стороне позиционера и
заглушить выход управляющего
давления со стороны “Output”
(36) пробкой-заглушкой из
комплекта дополнительных
принадлежностей.
7. Смонтировать позиционер таким
образом, чтобы отверстие в
промежуточной плате (15)
накрывалось уплотнительным
шлангом в отверстии рамы
привода.
8. Выровнять плату переключения
по соответствующему символу,
для монтажа слева согласно
маркировке и привинтить ее
накрепко к раме привода.
12
Примечание.
Если на 120см
2
к позиционеру предполагается
Установка позиционера на клапан
2
-приводе дополнительно
установка магнитного клапана или др.
устройства, то запрещается удалять
на обратной стороне винт-заглушку
М3. В этом случае управляющее
давление должно подаваться на
исполнительный привод с выхода
“Output” через дополнительную
соединительную плату (таблица 2). В
этом случае черная плата
переключения не требуется.
Важно! (для всех приводов)
Для «быстрых» клапанов (время
срабатывания <0,6с), при
необходимости улучшения
характеристик регулирования,
сетку, установленную на выходе
управляющего давления (Output 36),
можно заменить навинчивающимся
дросселем (из таблицы
принадлежностей).
Вентиляция
Если в случае применения привода тип
3277 имеется необходимость
вентиляции его пружинной камеры
выходным воздухом позиционера, то
этот воздух может подаваться (в
конструкции «шток привода
выдвигается) через соединительную
трубку (таблица 3) на соединительном
блоке. Для этого следует удалить
заглушку на соединительном блоке.
Для тип 3277-5 в исполнении «шток
привода втягивается» пружинная камера
постоянно находится под давлением
выходящего из позиционера воздуха,
который поступает через внутренний
канал.
EB 8383-1 RU
Page 13
13
Установка позиционера на клапан
Таблица 1
Зак.Nr. монтажного
Требующийся рычаг с соответствующей зажимной скобой
Размер привода cm
2
комплекта
и промежуточной платой
D1 (33 mm длиной с зажимной скобой высотой 17 mm) 120(G1/4)
120(NPT1/4)
1400-6790
1400-6791
D1 (33 mm длиной с зажимной скобой высотой 17 mm) 240 и 350 1400-6370
D2 (44 mm длиной с зажимной скобой высотой 13 mm) 700 1400-6371
Таблица 2
Требующаяся плата переключения для 120cm2-привода
или соединительная плата для установки
дополнительного оборудования, например, магнитного
клапана
Требующийся соединительный блок для привода 240, 350
2
и 700 cm
Таблица 3
Необходимая соединительная
трубка, включая резьбовое
соединение
для привода:
«шток привода втягивается»
или
при вентиляции верхней мембранной
камеры
(включая уплотнения и крепежный винт)
Размер привода
cm
240 сталь 1400-6444
240 нерж. 1400-6445
350 сталь 1400-6446
350 нерж. 1400-6447
700 сталь 1400-6448
700 нерж. 1400-6449
2
Комплект манометров для:
Дополнительные
принадлежности
питающего и управляющего давления
Дроссели для управляющего давления (резьбовой
дроссель и дроссель из латуни)
G 1 /8
NPT 1/8
G-резьба 1400-6955
NPT-резьба 1400-6956
Материал
Niro/Ms: 1400-6957
Зак.Nr.
1400-6819
1400-6820
1400-6821
Зак.Nr.
нерж./нерж: 1400-
6958
1400-6964
EB 8383-1 RU
Page 14

14
2
Установка позиционера на клапан
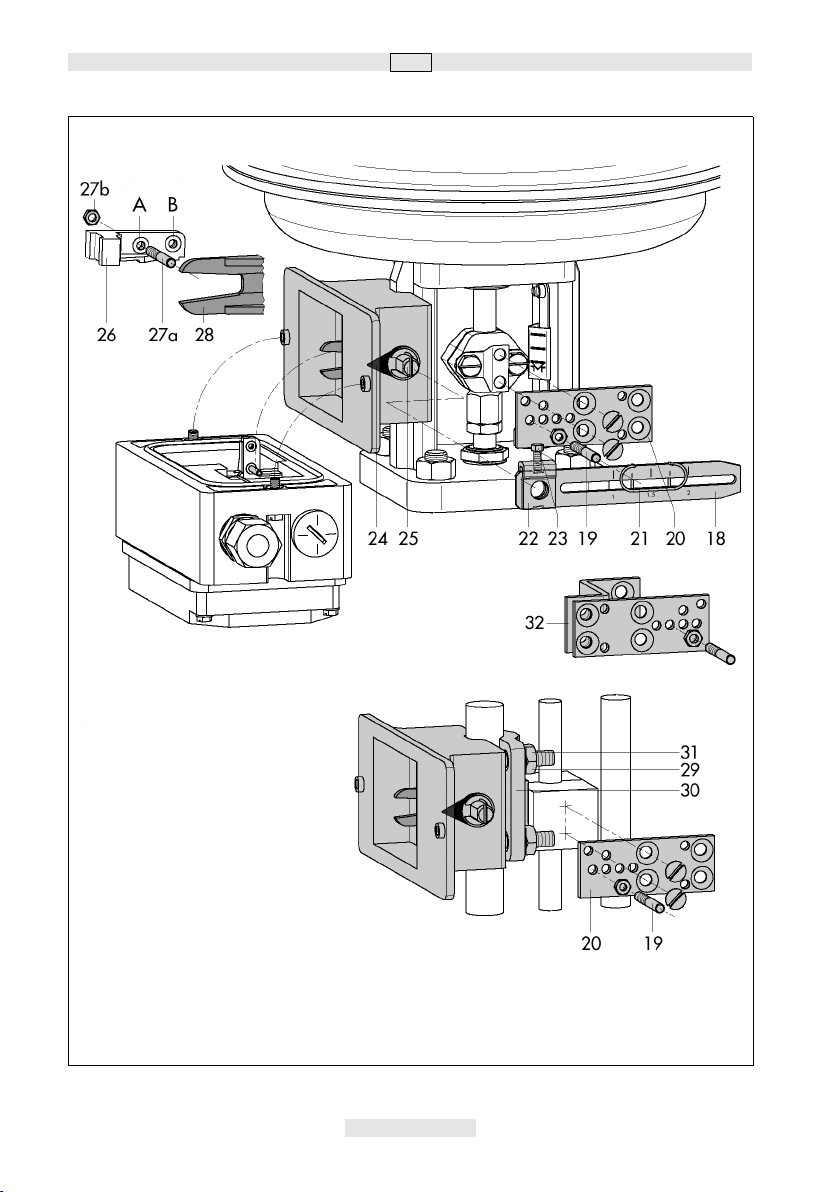
2.2 Монтаж согласно DIN IEC 534
Установка по NAMUR осуществляется,
как показано на рисунке 4, с помощью
адаптера. При этом рабочий ход
клапана передается через рычаг (18) и
вал (25) на уголок (28) адаптера и далее,
на передаточный штифт (27) на рычаге
позиционера.
Для установки позиционера потребуются
монтажные детали, указанные в таблице
4 и рычаг, соответствующий величине
рабочего хода клапана.
Монтаж позиционера на корпусе
адаптера должен осуществляться таким
образом, чтобы стрелка на черной
крышке корпуса показывала вниз от
мембранного привода к клапану.
Исключение. Регулирующие клапаны, у
которых седло закрывается
исключительно лишь при втягивании
штока привода. В данном случае
стрелка должна указывать в сторону
мембранного привода.
Если установка корпуса адаптера между
приводом и клапаном не представляется
возможной (например, приводы от
других производителей), то стрелка на
крышке корпуса должна указывать в
направлении клапана!
2.2.1 Последовательность
операций при монтаже
Найдите необходимые монтажные
детали в таблице 4.
Важно!
Перед установкой монтажных деталей
следует подать на привод такое
управляющее давление, чтобы он
установился в положение,
соответствующее 50% рабочего хода.
Только в этом случае возможна точная
установка рычага (18) и уголка (28).
Регулирующий клапан в исполнении
на литой раме
1. Привинтить с помощью
шестигранных винтов плату (20) на
муфту, соединяющую штоки привода
и конуса клапана. Для приводов 2100
и 2800см
дополнительно
используется уголок (32).
2. Удалить резиновые пробки в корпусе
адаптера и укрепить его винтами на
ребре NAMUR.
Регулирующий клапан в стержневом
исполнении
1. Привинтить плату (20) на поводке
штока конуса.
2. Завинтить штифтовые винты (29) в
корпус адаптера.
3. Приложить корпус с крепежной
платой (30) слева или справа к
стержню клапана и привинтить его
гайками (31). При этом выровнять по
высоте таким образом, чтобы
монтируемый впоследствии рычаг
(18) располагался горизонтально.
4. Завинтить и законтрить штифт (19) в
среднем из последовательности
отверстий платы (20) так, чтобы он
стоял приблизительно над
маркировкой правильного положения
рычага (от 1 до 2) согласно таблице 5
для соответствующего положения
рабочего хода.
Для промежуточных положений
следует выполнять интерполяцию.
Предварительно сдвинуть скобу (21)
так, чтобы она обжимала штифт.
5. Измерить расстояние от средины
вала (25) до средины штифта (19).
Позднее величину этого расстояния
потребуется ввести при
конфигурировании позиционера.
EB 8383-1 RU
Page 15
расположение
деталей при
монтаже
15
Установка позиционера на клапан
установка
на ребре NAMUR
18. Рычаг N1, N2
19. Штифт
20. Плата
21. Скоба
22. Зажимная плата
23. Винт
24. Указатель
25. Вал
26. Рычаг позиционера
27а Передаточный винт
27b Гайка
28. Уголок
29. Штифтовые винты
30. Плата
31. Гайки
32. Монтажный уголок
Рис.4 • Монтаж согласно DIN IEC 534 (NAMUR)
установка на стержне
EB 8383-1 RU
Page 16

2.2.2 Предварительная
установка рабочего хода
1. Установить вал (25) в корпус
адаптера таким образом, чтобы
черный указатель (24) совпадал с
литой маркировкой на корпусе
адаптера.
2. В этом положении зафиксировать
зажимную плату (22) с помощью
винта (23).
3. Завинтить передаточный штифт
(27) на рычаге позиционера (26)
со стороны запрессованных гаек и
законтрить его с обратной
стороны гайкой. При этом следует
соблюдать монтажное положение
А или В согласно таблице 5 и в
соответствии с рисунком 4.
4. Установить так позиционер на
корпусе адаптера, чтобы
передаточный штифт (27)
оказался внутри уголка (28).
Для этого с передней стороны
вставьте отвертку или торцевой
ключ 2,5мм в отверстие, видимое
под длинным углублением в
крышке и установите рычаг
позиционера в необходимое
положение.
5. Привинтить позиционер к корпусу
адаптера
6. Сбросить давление с привода.
16
Установка позиционера на клапан
EB 8383-1 RU
Page 17
17
Установка позиционера на клапан
Таблица 4
Монтаж согласно DIN IEC 534
NAMUR-комплект для монтажа
Детали см. на рис.4
Клапан
Клапан на литой раме
20 … 25 N1 1400-6436
Стержневой
клапан
с диаметром
стержня mm
20 … 25 N2 1400-6437
25 … 30 N1 1400-6438
25 … 30 N2 1400-6439
30 … 35 N1 1400-6440
ход в
mm
с рычагом
Зак.-Nr.
7,5 bis 60 N1 (125mm) 1400-6787
30 bis 120 N2 (212mm) 1400-6789
30 … 35 N2 1400-6441
Дополнительные
принадлежности
Таблица 5
Монтаж согласно DIN IEC 534
монтажный блок манометра
комплект манометров
дроссели управляющего давления (резьбовой и дроссель из латуни)
G1/4: 1400-7106 NPT1/4: 1400-7107
нерж/лат.: 1400-6957 нерж./нерж.: 1400-6958
1400-6964
Ход mm *) 7,5 15 15 30 30 60 30 60 60 120
Штифт по маркировке *) 1 121212 12
Расстояние штифт/точка вращения
рычага
42 42 84 42 84 84 168 84 168
С рычагом N1 (125 mm длины) N2 (212mm длины)
Передаточный штифт (27) на
позиции
*) для величин рабочего хода, отличающихся от приведенных, (промежуточные значения) следует провести
соответствующую интерполяцию
AAВ A В
Таблица 6
Площадь привода 160 cm
Поворотные приводы
SAMSON-привод тип 3278 Привод согласно VDI/VDE 3845
2
320cm
Зак.-Nr. Зак.Nr.
Монтажные детали, но
без кулачкового диска
1400-7103 1400-7104 1400-7105
Дополнительные принадлежности
Обратный усилитель для приводов двойного действия, не
имеющих пружин
Кулачковый диск с принадлежностями, диапазон угла
поворота:
0 …90° и 0 …120°
Монтажный блок манометра
Комплект манометров
EB 8383-1 RU
2
Зак.-Nr.
G-резьба:
1079-1118
NPT:
1079-1119
1400-6959
G1/4:
1400-7106
нерж./лат.:
1400-6957
NPT ¼:
1400-7107
нерж./нерж.:
1400-6958
Page 18

18
Установка позиционера на клапан
2.3 Монтаж на поворотные
приводы
С помощью приведенных в таблице 6
монтажных и дополнительных деталей
позиционер может устанавливаться
согласно VDI/ VDE 3845 на поворотные
приводы. При этом вращательное
движение поворотного привода через
кулачковый диск на его валу и
контактный ролик на рычаге
позиционера преобразуется в
прямолинейное движение, необходимое
для работы индуктивной системы
датчика перемещения.
На одном кулачковом диске имеются два
шаблона на диапазоны поворота 0 …90°
и 0 …120°.
Для приводов двойного действия, не
имеющих пружин, потребуется обратный
усилитель на стороне соединения
корпуса позиционера.
При монтаже на поворотный SAMSONпривод тип 3278 его внутреннее
пространство и обратная сторона
мембраны продуваются выходным
воздухом позиционера без
использования отдельной
соединительной трубки.
Если позиционер устанавливается на
приводы (NAMUR) от других
производителей, вентиляция обратной
стороны мембраны может
производиться через соединительную
трубку и Т-образное соединение между
приводом и штуцером выходящего
воздуха промежуточной вставки.
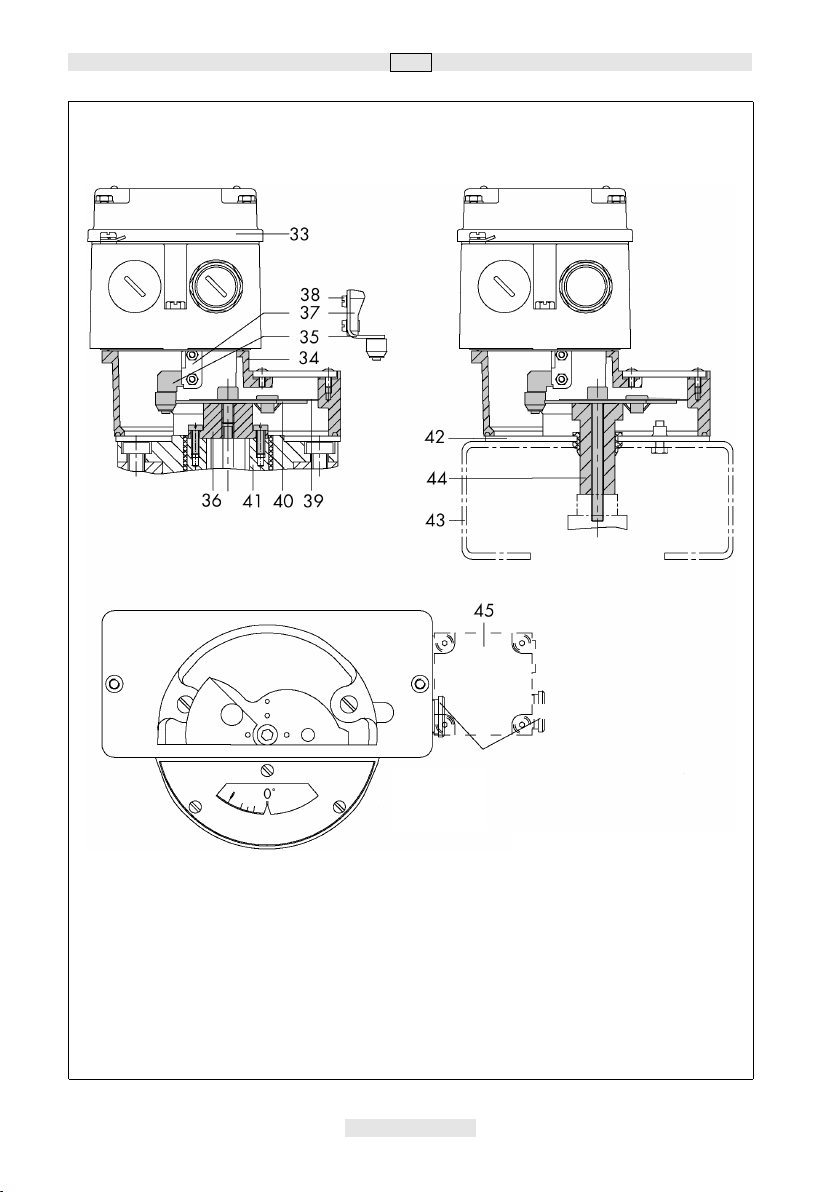
2.3.1 Монтаж рычага контактного
ролика
1. Установить рычаг контактного ролика
(35) на передаточном рычаге (37) и
закрепить с помощью прилагаемых
винтов (38) и шайб.
2.3.2 Монтаж промежуточной
вставки
SAMSON-привод тип 3278:
1. Привинтить двумя винтами адаптер
(36) на свободном конце вала
поворотного привода.
2. Установить промежуточную вставку
(34) на корпусе привода и закрепить
ее двумя винтами. При этом следует
так выровнять промежуточную
вставку, чтобы пневматические
соединения позиционера были
обращены в сторону корпуса
мембраны.
Приводы согласно VDI/ VDE 3845:
1. Установить комплектную
промежуточную вставку (34, 42 и 44)
на монтажную консоль с
установочной поверхностью 1 VDI/
VDE 3845 и накрепко привинтить ее.
2. Выровнять кулачковый диск (40) и
шкалу согласно гл.2.3.3 и привинтить
его.
Для приводов, не имеющих пружин,
следует со стороны корпуса
позиционера привинтить обратный
усилитель (45).
1. Завинтить в соединительных
отверстиях позиционера
прилагаемые гайки с двойной
резьбой.
2. Закрепить обратный усилитель с
помощью просверленных винтов и
уплотнения на позиционере, чтобы
отверстие вентиляции на
промежуточной вставке оказалось
закрытым.
3. Соединить камеры привода с
выходами А1 и А2 в соответствии с
направлением вращения
EB 8383-1 RU
Page 19
19
Установка позиционера на клапан
Установка на SAMSON-привод тип 3278 Установка по VDI/VDE 3845 (NAMUR)
Рис.5 • Монтаж на поворотные приводы
Монтаж
с обратным
усилителем
33 Позиционер
34 Промежуточная вставка
35 Рычаг с контактным роликом
36 Адаптер
37 Передаточный рычаг
38 Винты
39 Шкала
40 Кулачковый диск
41 Вал привода
42 Шайба
43 Скоба (повернуто на 90°)
44 Муфта
45 Обратный усилитель
EB 8383-1 RU
Page 20
20
Установка позиционера на клапан
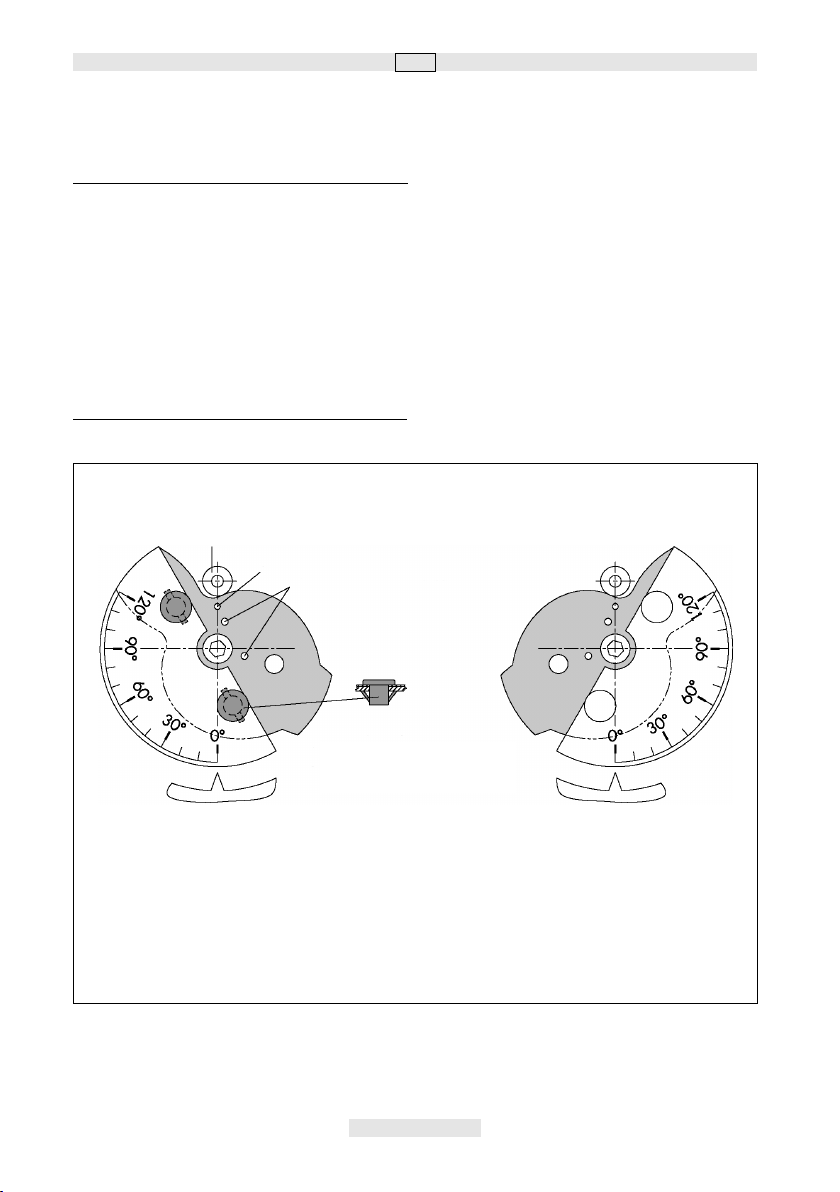
2.3.3 Установка и закрепление
кулачкового диска
В поворотных приводах возвратные
пружины, установленные с обратной от
управляющего давления стороны,
определяют положение безопасности и
направление вращения (вправо, влево)
регулирующего клапана.
В поворотных приводах двойного
действия пружины отсутствуют, а
направление вращения зависит от
конструкций применяемого привода и
клапана.
Выходное положение – это закрытый
клапан!
Принцип действия, как должен работать
клапан, - открываться или закрываться
при возрастании управляющего сигнала,
- устанавливается через электронные
коммуникации с помощью
соответствующего программного
обеспечения (направление движения:
растет/растет или растет/снижается).
1. Установить кулачковый диск со
шкалой на адаптер или муфту
(34), а крепежный винт слегка
завинтить.
Кулачковый диск имеет две траектории
перемещения, начальные точки которых
помечены маленькими отверстиями.
На приводы с положением
безопасности «клапан открыт» (ОТКР)
перед установкой кулачкового диска
следует подать максимальное
управляющее давление.
К приводам, не имеющим пружин,
должно быть подведено питающее
давление.
2. При установке кулачкового диска
необходимо вставить
двухстороннюю шкалу так, чтобы
ее показания совпадали с
направлением вращения
клапана. При таком положении
кулачкового диска крепко
завинтите крепежные винты.
Укрепление кулачкового диска
Чтобы дополнительно предохранить
кулачковый диск от проворачивания
необходимо предпринять следующее.
На кулачковом диске вокруг оси
расположено четыре отверстия, одно из
которых следует выбрать для фиксации.
Через выбранное отверстие следует
просверлить адаптер (36) или муфту
(44), чтобы установить там стопорный
2мм-штифт.
Важно!
В закрытом положении клапана
начальная точка (отверстие)
траектории должна быть установлена
так, чтобы точка вращения
кулачкового диска, 0º-положение шкалы
и носик стрелки на диске
располагались на одной прямой линии.
Категорически запрещается
располагать начальную точку для
закрытого положения клапана ниже 0ºположения!
EB 8383-1 RU
3. Установить позиционер на
промежуточную вставку (34) так,
чтобы рычаг контактного ролика
(35) своим роликом прилегал к
кулачковому диску. Для этого с
передней стороны вставьте
отвертку или торцевой ключ
2,5мм в отверстие, видимое под
длинным углублением в крышке
и установите рычаг позиционера
в требующееся Вам положение.
4. Привинтить накрепко позиционер
к промежуточной вставке.
Page 21
2.4 Положение безопасности
привода
Важно!
Если впоследствии положение
безопасности привода «шток привода
пружинами выдвигается» будет
изменено на положение «шток привода
пружинами втягивается», то
потребуется заново уточнить
положение механической нулевой точки
и заново инициализировать
позиционер.
контактный
ролик
начальная точка
отверстия для фиксации
кулачкового диска
21
Установка позиционера на клапан
после установки крепежных
защелок их лапки выдавить
Вид на вал привода со стороны позиционера
наружу!
Клапан открывается Клапан открывается
поворотом влево поворотом вправо
Рис.6 • Установка кулачкового диска
EB 8383-1 RU
Page 22
22
Подключения
3. Подключения
3.1 Пневматические
подключения
Пневматические подключения
выполняются либо как отверстия с
резьбой NPT ¼, либо как отверстия с
резьбой G ¼. Могут применяться
обычные резьбовые штуцерные
соединения для металлических, медных
трубок или шлангов из синтетических
материалов.
Важно!
Питающее давление должно иметь
сухой воздух без примесей масла и
пыли. Обязательно следует
соблюдать предписания по
техническому обслуживанию
установленных на входе редукционных
станций. Воздушные коммуникации
перед подключением необходимо
тщательно продувать.
Подключение управляющего давления в
случае прямого монтажа на привод тип
3277 жестко задано, при монтаже
согласно NAMUR подключение
располагается в зависимости от
положения безопасности «шток
втягивается или выдвигается» на
нижней или на верхней стороне привода.
Выход воздуха: подключение выхода
воздуха позиционера располагается на
монтажном дополнительном оснащении.
В случае прямого монтажа пробка
сброса воздуха находится на
пластиковой крышке исполнительного
привода, при NAMUR-монтаже на
корпусе адаптера, а при установке на
поворотном приводе на промежуточной
вставке или обратном усилителе.
3.1.2 Питающее давление
Необходимое питающее давление
определяется номинальным диапазоном
сигналов и направлением действия
(положением безопасности) привода.
Номинальный диапазон сигналов
нанесен на типовом шильдике и
представлен в виде диапазона усилия
пружин или управляющего давления.
Шток привода выдвигается (FA):
необходимое давление питания =
конечное значение номинального
диапазона сигналов + 0,2 бар, но не
менее 1,4 бар.
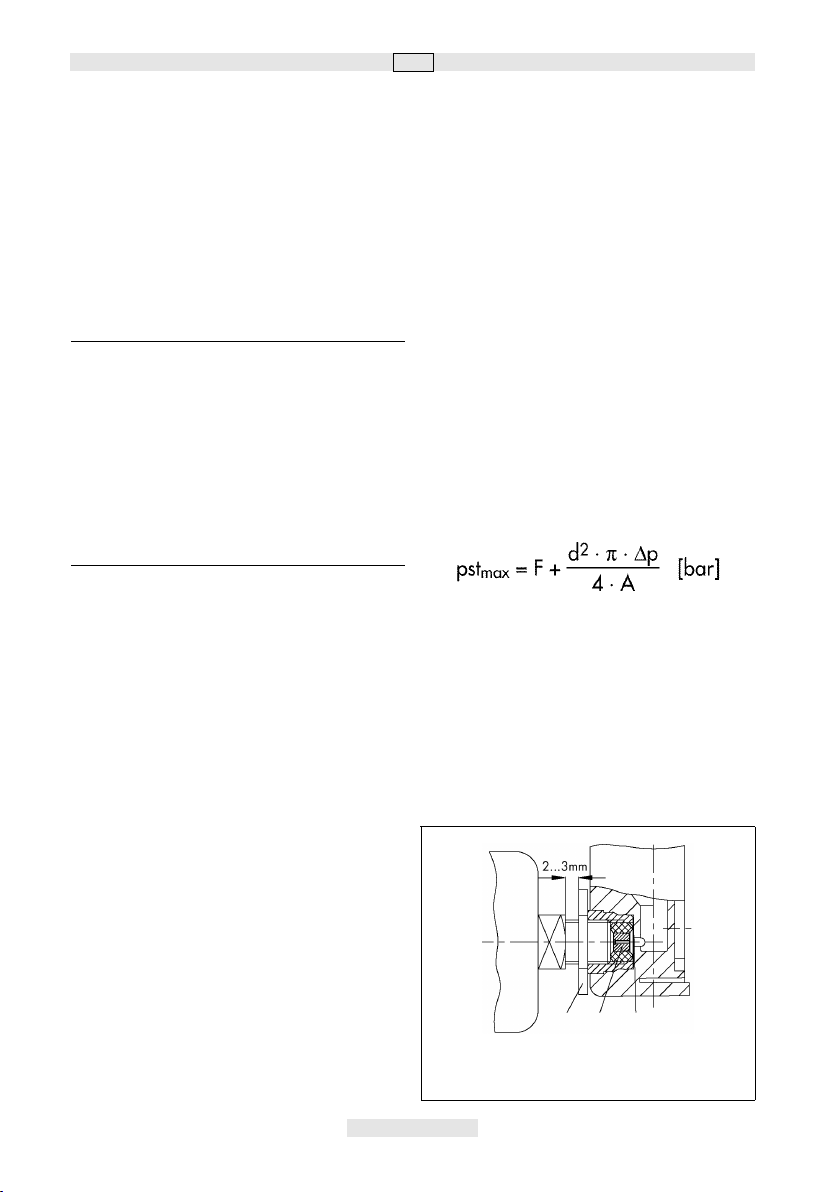
Шток привода втягивается (FE):
необходимое давление питания для
плотно закрытого клапана с запасом
определяется исходя из максимального
управляющего давления p
d = диаметр седла (см)
∆p = перепад давления на клапане (бар)
А = площадь привода (см
F = конечное значение номинального
диапазона сигналов привода (бар)
При отсутствии исходных данных
руководствуемся следующим:
необходимое давление питания =
конечное значение номинального
диапазона сигналов + 1 бар.
stmax
2
)
:
3.1.1 Манометры
Для контроля работы позиционера
рекомендуется устанавливать
манометры питающего и управляющего
давления. Детали приведены в качестве
дополнительных принадлежностей в
таблицах 3, 4 и 6.
EB 8383-1 RU
гайка дроссель с сеткой
Зак.№ 0259-1090 1790-6121
Рис.7 • Установка манометра
Page 23
23
Подключения
3.2 Электрические подключения
Для электрического
подключения прибора следует
руководствоваться
действующими
электротехническими
предписаниями и местными
правилами техники
безопасности.
В Германии – это VDEпредписания и правила техники
безопасности объединения
профсоюзов.
При установке и монтаже во
взрывоопасных зонах
действуют нормы EN 60079-14:
1997; VDE 0165 часть 1/8.98.
Для подключения
искрозащищенных
электрических цепей служат
данные сертификата
соответствия или данные
сертификата образцовых
испытаний Европейского
Сообщества.
Замена электрических
подключений может привести
к ликвидации Ех-защиты..
Покрытые лаком винты на
корпусе или внутри него не
допускается ослаблять и
вывинчивать.
Шинные провода следует подключать к
винтовым зажимам, обозначенным
согласно EN 61158-2. При этом
полярность не имеет значения.
Экранировку шинных проводов надо
соединить с клеммой РЕ.
Дополнительную информацию см.
FF/проводное соединение и
инсталляция AG-140.
На двоичном входе может
использоваться пассивный
беспотенциальный контакт. Позиционер
через шинный протокол передает
информацию о своем состоянии.
Расположение выводов приводится на
рисунке 8 и на крышке, внутри
позиционера.
EB 8383-1 RU
Page 24
24
Подключения
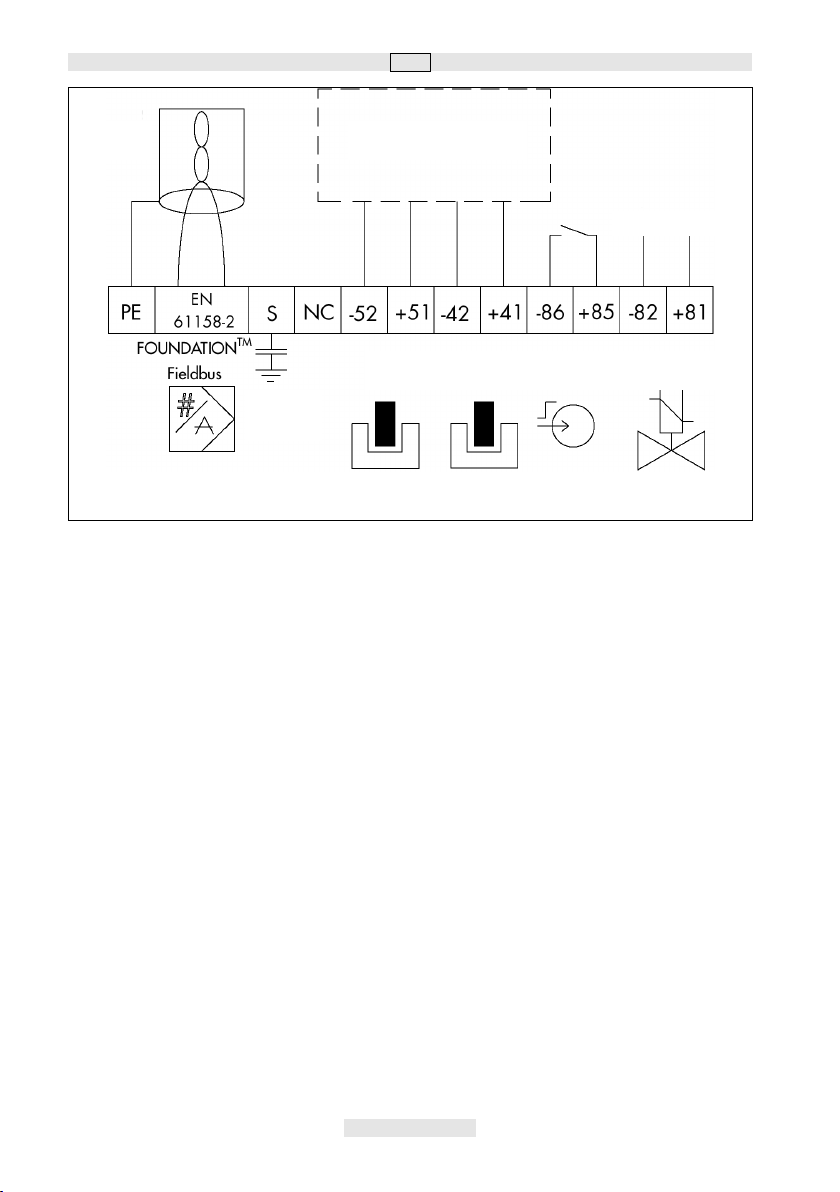
Кабель
шины
Емкостное
заземление
экрана
Развязывающий усилитель
согласно EN 50 227
от 6 до 24 V DC
Концевые контакты Двоичный Принудит.
вход сброс воздуха
Рис.8 • Электрические подключения (изображение подключений согласно DIN 45140)
EB 8383-1 RU
Page 25

25
Подключения
Указания по выбору кабеля и
электрических проводов:
Для прокладки большого количества
искрозащищенных электрических цепей
в многожильном кабеле следует
соблюдать раздел 12 предписаний EN
60079-14; VDE 0165/8.98.
В особенности необходимо соблюдать
минимальную толщину изоляции
отдельного провода, составляющую не
менее 0,2 мм. Под изоляцией
подразумеваются широко применяемые
изолирующие материалы, такие, как,
например, полиэтилен.
Диаметр отдельного проводника
тонкожильного провода должен
составлять не менее 0,1 мм.
Окончания проводников следует
предохранять от обламывания,
например, с помощью концевых гильз
на каждой жиле кабеля.
При подключении более двух
отдельных кабелей можно
смонтировать дополнительное
винтовое кабельное крепление.
Неиспользуемые кабельные жилы
должны изолироваться с помощью
глухих гильз-заглушек.
Дополнительные принадлежности:
Кабельное винтовое соединение М20х1,5
синтетический материал
черный Зак.№. 1400-6785
голубой Зак.№. 1400-6786
3.2.1 Концевые контакты
Для использования концевых контактов
необходимо в выходной электрической
цепи устанавливать развязывающие
усилители. Они обеспечивают рабочую
безопасность позиционера,
поддерживая предельные параметры
управляющей электрической цепи
согласно NAMUR.
При проведении работ на
взрывоопасном оборудовании следует
соблюдать действующие предписания.
3.2.2 Принудительный сброс
воздуха
При наличии опции принудительного
сброса воздуха на соответствующие
клеммы 81 и 82 должно быть
подключено постоянное напряжение в
пределах от 6 до 24 вольт.
Внимание!
Если указанное напряжение не
подключено или по какой-либо причине
пропало, позиционер не сбрасывает с
привода воздух и не реагирует на
управляющий сигнал.
3.2.3 Осуществление связи
Установление связи между регулятором,
программатором, системой
автоматического управления,
персональным компьютером, рабочей
станцией с одной стороны и с другой
стороны отдельным или несколькими
позиционерами осуществляется
согласно EN 61158-2.
Для того, чтобы применять позиционеры
в Ех-зонах, следует применять Ехразделители.
В одном сегменте может обслуживаться
работа максимум 32 регулирующих
клапанов.
Количество подключаемых
позиционеров уменьшается при
использовании их в Ех-условиях.
EB 8383-1 RU
Page 26

26
Подключения
система
9.2 Подключение позиционеров тип 3787 в Ех-зоне
управления
терминирование
терминирование
9.1 Подключение позиционеров тип 3787
система
управления
терминирование
блок
питания
блок
питания
Ех-барьер полевой шины
безопасная зона
Ех-зона
Рис.9 • Подключение согласно спецификации FOUNDATION
EB 8383-1 RU
TM
Fieldbus
Page 27

27
Эксплуатация позиционера
4. Эксплуатация позиционера
4.1 Светодиоды
Для наблюдения за функционированием
позиционера при его вводе в
Предупреждение!
Перед вводом в эксплуатацию
следует перевести
регулирующий клапан в его
конечное положение через
закрытое заслонкой отверстие
(ручное управление) на крышке
(рис. 10). При этом следует
проверить безупречность
функционирования рычажной
механики.
Превышение максимального
угла поворота вследствие
ошибочного выбора или расчета
рычажной механики может
привести к поломке
позиционера.
эксплуатацию, последующей его работе
и возможных неисправностях на
внутренней стороне крышки
расположены два светодиода.
В качестве общего пояснения характера
функционирования используется
следующая цветовая сигнализация:
красный цвет:
пуск прибора или неисправность,
режим регулирования невозможен
зеленый цвет:
неисправность отсутствует, режим
регулирования или положение
безопасности
красный и зеленый цвет:
установлена неисправность,
возможен режим регулирования.
Детально показания светодиодов см. в
нижеследующей таблице.
Значение
Пуск прибора:
Неисправности отсутствуют:
Прибор на шине, выполняется холодный старт,
требуется инициализация зеленый мерцает медленно
Выполняется инициализация или коррекция нулевой
точки
Прибор инициализирован, нет действующего
параметра
Прибор инициализирован, действующий параметр,
режим регулирования
Неисправность в режиме регулирования:
Ошибка нулевой точки
Неисправность в цепи регулирования красный и зеленый мерцают быстро
Неисправности, ведущие к срыву первичной
инициализации
(прибор не входит в штатный режим)
Ошибка нулевой точки красный мерцает медленно
Неисправность пневматики/механики красный начинает гореть постоянно
Неисправность в цепи регулирования красный мерцает быстро
Неисправности, ведущие к выходу из режима
регулирования
Прибор обнаружил внутреннюю неисправность красный мерцает быстро 3 раза +
Светодиод
красный начинает гореть постоянно
зеленый постоянно
зеленый мерцает быстро
зеленый мерцает 3 раза быстро +
длинная пауза
зеленый начинает гореть постоянно
красный с зеленым
красный и зеленый мерцают
медленно
красный постоянно
длинная пауза
EB 8383-1 RU
Page 28

28
Эксплуатация позиционера
4.2 Защита от записи и тумблер
имитации
На внутренней стороне крышки
располагается микротумблер для
активирования защиты от записи (Write
protection) и тумблер имитации
(Simulation enable).
В положении ON (ВКЛ) тумблера защиты
от записи (тумблер 2) параметры,
заданные в позиционере, защищены от
случайной перезаписи и не могут быть
изменены. Если имеется необходимость
изменить по линии связи параметры
позиционера, указанный тумблер
следует установить в положение OFF
4.3 Базовая установка
Все переменные параметры
сбрасываются к значениям холодного
старта. Инициализации относительно
максимального диапазона позволяет
осуществлять универсальный ввод в
эксплуатацию.
Позиционер в процессе инициализации
самостоятельно определяет нулевую
точку и максимальный диапазон между
механическими конечными
положениями. Установки, выполняемые
с отклонениями от указанных,
необходимо осуществлять через
коммуникационные инструменты.
(ВЫКЛ).
Тумблер имитации (тумблер 1) дает
разрешение на свободный ввод
симуляции параметра положения для
4.3.1 Установка механической
нулевой точки
внутреннего модуля “Analog Output”
(аналоговый выход) через параметр
“Simulate”.
Важно!
Коррекцию нулевой точки следует
проводить при закрытом клапане
(в 3-ходовых клапанах при выведенном
штоке привода).
стрелка-указатель
положения указатель ручное серийный тумблер
при монтаже управление интерфейс Simulation
рычаг управляющие регулировочные светодиоды кнопка инициализации
нулевой флажки винты GW тумблер или коррекции
точки защиты от записи нулевой точки
Рис.10 • Позиционер, внутренний вид
EB 8383-1 RU
Page 29

29
Эксплуатация позиционера
¾ На крышке прибора один раз сильно
нажать до упора рычаг нулевой точки
в направлении стрелки, после чего
желтый указатель установится на
белой линии.
Для тех регулирующих клапанов,
которые в своем выходном состоянии
находятся в открытом положении,
например, для привода с положением
безопасности «шток втягивается»
следует предварительно подать на
позиционер питающее давление. Когда в
этом случае активируется ручное
дублирование, установится
управляющее давление и клапан
перейдет в закрытое положение. Теперь
можно будет привести в действие рычаг
нулевой точки.
4.3.2 Инициализация
После подключения питающего
давления и подачи электроэнергии на
шинное соединение можно запустить
процесс инициализации. При этом
позиционер оптимально подстраивается
к характеристикам трения в механизмах
и потребностям регулирующего клапана
в управляющем давлении.
Предупреждение!
Инициализация протекает
несколько минут. При этом
регулирующий клапан
стремительно перемещается
относительно своего
текущего положения. По этой
причине категорически
запрещается производить
инициализацию в ходе
текущего производственного
процесса.
Допускается запуск
инициализации при закрытых
отсечных вентилях или в
демонтированном виде на
испытательном стенде.
Прямая инициализация на
позиционере
Инициализация на позиционере
возможна только, как ее первичный этап.
(Успешная инициализация может
происходить через коммуникации).
¾ Начать процесс инициализации, для
запуска которого следует нажать
подходящим инструментом кнопку на
крышке позиционера, обозначенную
как «Initialisierung/Nullabgleich»
(инициализация/коррекция нулевой
точки)
Процесс инициализации считается
оконченным, когда позиционер займет
положение, соответствующее
задающему входному сигналу.
Примечание!
Если прибор был один раз успешно
инициализирован, то при нажатии
кнопки
«Initialisierung/Nullabgleich»
(инициализация/коррекция нулевой
точки) выполняется только коррекция
нулевой точки.
Новая инициализация может
выполняться через подключенные
коммуникации.
Электрическая коррекция нулевой
точки
Если в процессе эксплуатации клапана
произойдет смещение механической
нулевой точки, то можно предпринять
электрическую коррекцию нулевой
точки. Для этого следует использовать
кнопку, на внутренней крышке прибора
обозначенную как
«Initialisierung/Nullabgleich»
(инициализация/коррекция нулевой
точки), см. рис.10.
Предупреждение!
Клапан переводится в конечное
положение.
EB 8383-1 RU
Page 30

30
Эксплуатация позиционера
¾ На крышке прибора один раз нажать
сильно до упора рычаг нулевой точки
в направлении стрелки, после чего
желтый указатель установится на
белой линии.
¾ Еще раз нажать кнопку, чтобы
выполнить электрическую коррекцию.
Кнопка после второго нажатия будет
заблокирована приблизительно на 1
минуту!
Электрическая коррекция закончится,
когда позиционер займет положение
соответствующее задающему входному
сигналу.
4.4 Установка индуктивных
концевых контактов
В конструкции с индуктивными
концевыми контактами на поворотной
оси передаточного рычага позиционера
располагаются два регулируемых
флажка, которые приводят в действие
соответствующие шлицевые
инициаторы.
Для работы индуктивных концевых
контактов в выходной электрической
цепи следует использовать
развязывающие усилители (см. раздел
3.2.1).
Когда флажок находится в поле
шлицевого инициатора, тот обладает
высоким электрическим
сопротивлением. Как только флажок
выходит из поля, электрическое
сопротивление инициатора падает.
В стандартном случае концевые
контакты устанавливаются так, чтобы в
обоих граничных положениях
позиционера вырабатывался
соответствующий сигнал. Однако точки
срабатывания можно устанавливать и
для сигнализации промежуточных
положений.
Требуемая функция коммутации (должно
ли выходное реле притягиваться или
отпускаться при погружении флажка в
инициатор) в случае необходимости
выбирается с помощью развязывающего
усилителя.
Установка точки срабатывания:
Концевые контакты обозначены внутри
крышки прибора, как GW1 и GW2. В
прорезях под этими обозначениями
видны желтые флажки и
соответствующие регулировочные винты
(см. рис. 10).
Каждое положение срабатывания может
выдавать сигнализацию при погружении
или при выходе управляющего флажка
из инициатора.
¾ Перевести клапан в положение,
при котором требуется, чтобы
срабатывала сигнализация. Затем
посредством вращения
регулировочного винта
выбранного Вами концевого
контакта GW1 или GW2 так
установить управляющий флажок,
чтобы достичь точки
срабатывания, от чего загорится
светодиод на транзисторном реле.
При этом кромка желтого флажка станет
на одну линию с белой прямой
горизонтальной отметкой на крышке
корпуса. Это показывает также, с какой
стороны управляющий флажок
погружается в шлицевой инициатор.
Для того чтобы обеспечить надежное
срабатывание при любых окружающих
условиях, точка срабатывания должна
устанавливаться, по меньшей мере, за
5% хода до механического упора в
положениях ОТКР или ЗАКР.
EB 8383-1 RU
Page 31

31
Техническое обслуживание
5. Техническое обслуживание
Прибор не нуждается в техническом
обслуживании.
Со стороны пневматического
подключения 9/Supply установлена
сетчатая вставка с размером ячейки
100мкм. При необходимости вставку
можно вывинтить и почистить.
Однако предписания по техническому
обслуживанию редукционных станций
питающего давления, возможно,
установленных перед позиционером,
следует обязательно выполнять.
6. Ремонт Ех-приборов
Если выполнен ремонт позиционера,
входящего в состав Ех-оборудования,
его пуск в действие возможен только
после того как оборудование будет
заново проверено специалистами на
соответствие требованиям Ех-защиты, о
чем должно иметься необходимое
свидетельство или отметка об
испытаниях.
Экспертная проверка оборудования
может быть исключена, если
производителем оборудование перед
новым пуском в работу было
подвергнуто поштучным испытаниям и
успешно их прошло, о чем на
оборудовании были проставлены
соответствующие отметки,
удостоверяющие этот факт.
EB 8383-1 RU
Page 32

Обратное реле
(по выбору)
Прямой монтаж
32
Размеры
Пневматические подключения
G ¼ или NPT 1/4
Монтаж с промежуточной
вставкой для поворот. прив.
Точка вращения
приводного вала
Монтаж DIN IEC 534 с корпусом адаптера
Рис.11 • Размеры в мм
EB 8383-1 RU
Пневматическое подключение
обратного реле
Page 33

33
Описание параметров
7. Описание параметров
7.1 Общие положения
Основные положения этого документа:
Спецификация Fieldbus Foudation “Function Block Application Process Part 1…3”
Revision 1.4.
Спецификация Fieldbus Foudation “Transducer Block Application Process Part 1…2”
Revision PS 3.0.
7.2 Описание прибора (DD)
Для соединения описываемого здесь прибора в Fieldbus-Host-системы потребуются
два следующий файла с описанием прибора:
Device Description: <0201.ffo, <0201.sym>
Capabilities File: <020101.cff>
Указанные файлы под производственным номером 1400-7705 можно получить на
дискете от SAMSON, либо взять из Internet по адресу www.samson.de или
www.fieldbus.org.
Примечание.
Для интеграции в систему DeltaV от Fisher-Rosemount вместо файла
совместимости Fieldbus Foudation потребуется файл <Positioner 3787_Rev2.fhx>.
Этот файл может быть подготовлен фирмой SAMSON.
7.3 Пояснения к параметрам
Согласно Fieldbus-спецификации версии 1.4 все временные данные в приборном
блоке (Resource Block) представлены в размерности 1/32 мс.
В поставляемой от Fieldbus Foundation библиотеке Device Description Library,
отражающей также основы Device Discription 3787, параметры виртуально
отображаются в размерности мс. Вырабатываемые прибором цифровые значения
следует всегда представлять в размерности 1/32 мс.
По той же причине в АО-блоке параметр IO_OPTS “Fault state to value” показывается
как “Fault state type”.
Отдельные параметры могут изменяться только в определенных рабочих режимах
(см. «обращение» в описании параметров)
Решающим для этого является не текущий режим работы (Actual Mode), а заданный
целевой режим работы (Target Mode).
EB 8383-1 RU
Page 34

34
Описание параметров
7.3.1 Обозначение параметров
r=Обращение (операция) чтения
w=Обращение (операция) записи
Index =Относительный индекс параметра в каком-либо блоке
O/S =Режим работы «Ждущий режим»
MAN =Режим работы «Ручной доступ»
AUTO =Режим работы «Автоматический»
CAS =Режим работы «Каскадный»
RCAS =Режим работы «Внешний каскад»
ROUT =Режим работы «Внешний выход»
7.4 Блок-схема прибора
В системе Foundation Fieldbus все функции и параметры какого-либо прибора
сопоставляются трем различным типам блоков. Каждый тип блока в блочной модели
имеет свое назначение.
Прибор, работающий с Foundation Fieldbus, имеет следующие типы блоков:
¾ Один приборный блок “Resource Block”.
Приборный блок отличается свойствами, характерными данному конкретному
прибору.
¾ Один или несколько блоков обработки “Transducer Blocks”.
На блок обработки поступают все данные и свойственные прибору параметры
при связи с устройствами управления процессов (датчиками,
исполнительными устройствами).
¾ Один или несколько функциональных блоков “Funktion Blocks”.
Функциональные блоки обеспечивают специфические функции регулирования
и автоматизации производственных процессов.
Различают многообразные функциональные блоки, например:
функциональный аналоговый входной блок (Analog Input Function Block),
функциональный аналоговый выходной блок (Analog Output Function Block), PIDрегулятор (PID Function Block) и другие входные, выходные или преобразующие
блоки.
Каждый из этих функциональных блоков может применяться для реализации
разнообразных функций управления в пределах всей автоматизированной системы.
В зависимости от расположения и соединения отдельных блоков обеспечивается
решение многообразных задач регулирования и управления.
EB 8383-1 RU
Page 35

35
Описание параметров
Позиционер тип 3787 на шине Foundation Fieldbus содержит следующие блоки:
¾ Один приборный блок “Resource Block”.
¾ Один блок обработки для позиционера клапана “Advanced Positioner Valve
Transducer Block”.
¾ Два функциональных блока:
- функциональный блок «Аналоговый выход» (Analog Output),
- один функциональный PID-блок (PID-регулятор).
Рис.12 • Блок-схема прибора
EB 8383-1 RU
Page 36

36
Описание параметров
7.4.1 Приборный блок (Resource Block)
Приборный блок содержит все данные, которые исчерпывающим образом
характеризуют этот конкретный прибор. Приборный блок своего рода электронный
шильдик прибора.
Например, параметры приборного блока: тип прибора, название прибора,
идентификатор изготовителя, серийный номер, а также другие параметры,
характеризующие свойства всех других блоков прибора.
Параметры приборного блока (Resource Block)
ACK_OPTION
Индекс: 38
Обращение: r, w
Выбор:
Значение холодного
старта:
ALARM_SUM
Индекс: 37
Обращение: r, w
Показания индикации:
ALERT_KEY
Индекс: 4
Обращение: r, w
Значения ввода:
Значение холодного
старта:
BLOCK_ALARM
Индекс: 36
Обращение: r, w
BLOCK_ERR
Индекс: 6
Обращение: r
Показания индикации:
Через этот параметр можно выбирать, будет ли тревожная
сигнализация в момент ее возникновения автоматически
подтверждаться (квитироваться, сбрасываться?) в приборе, т.е.
без воздействия Fieldbus-Host-системы.
Undefined – не выбрано
DISC ALM – была изменена защита от записи
BLOCK ALM – блочная тревожная сигнализация
Undefined
Примечание: тревожное сигнализация посылается в Fieldbus-
Host-систему, однако системой его прием не подтверждается
(квитируется)
Индикация текущего статуса тревожной сигнализации процесса
в приборном блоке.
DISC ALM – была изменена защита от записи
BLOCK ALM – блочная тревожная сигнализация
Примечание:
дополнительно в этой группе параметров можно деактивировать
сигнализацию параметров процессов
Ввод идентификационного номера отдельного узла
оборудования. Эта информация может использоваться Fieldbus-
Host-системой для сортировки тревожных сигналов и событий.
1…255
0
Примечание: значение 0 (значение холодного старта) является
недопустимым и потому сопровождается записью в приборе
сообщения об ошибке.
Индикация текущего состояния блока с отображением
информации о возникающих системных, аппаратных ошибках и
ошибках конфигурации.
Примечание:
дополнительно в этой группе параметров можно вручную
подтверждать (квитировать) активную тревожную сигнализацию
в блоке.
Индикация активных (действующих) неисправностей блока.
SIMULATE ACTIVE – имитация возможна, т.к. установлено
разрешение “enable”
OUT OF SERVICE – блочный режим O/S (ждущий режим)
LOST STATIC DATA – потеря данных в памяти EEPROM
EB 8383-1 RU
Page 37

37
Описание параметров
CLR_FSTATE
Индекс: 30
Обращение: r, w
CONFIRM_TIME
Индекс: 33
Обращение:r, w
Значение холодного
старта:
CYCLE_TIME
Индекс: 20
Обращение: r, w
Выбор:
Значение холодного
старта:
CYCLE_TYPE
Индекс: 19
Обращение: r
Индикация:
DD_RESOURCE
Индекс: 9
Обращение: r
DD_REV
Индекс: 13
Обращение: r
DESCRIPTOR
Индекс: 46
Обращение: r, w
DEV_REV
Индекс: 12
Обращение: r
DEV_TYPE
Индекс: 11
Обращение: r
Индикация:
DEVICE_CERTIFICATION
Индекс: 45
Обращение: r
DEVICE_MESSEGE
Индекс: 47
Обращение: r, w
DEVICE_PRODUCT_NUM
Индекс: 48
Обращение: r
Через этот параметр можно вручную отключать защитные
свойства функционального блока «Аналоговый выход» (Analog
Output).
Задается время подтверждения для протокола событий.
Т.е. если в течение этого заданного временного интервала
прибор не получает подтверждения, протокол событий
передается заново.
640000 1/32ms
Задаваемый со стороны Fieldbus-Host-системы метод обработки
блоков.
SCHEDULED
COMPLETION OF BLOCK EXECUTION
SCHEDULED
Примечание: выбор метода обработки осуществляется
непосредственно в Fieldbus-Host-системе.
Индикация поддерживаемых прибором методов обработки
блоков
SCHEDULED
COMPLETION OF BLOCK EXECUTION
Указание расположения в приборе источников описания
прибора.
Примечание: если в приборе не имеется описания прибора, то
на индикаторе появляется сообщение (Null).
Индикация номера ревизии (версии) описания прибора.
Описание.
Текст произвольного содержания для описания приложения;
записан в полевом приборе.
Индикация номера ревизии (версии) прибора.
Индикация типа прибора в децимальном формате.
1 для тип 3787
Степень искрозащиты,
показывает имеются ли для полевого прибора Ех-допуски.
Сообщение.
Текст произвольного содержания, записанный в приборе.
Производственный номер позиционера.
EB 8383-1 RU
Page 38

38
Описание параметров
DEVICE_SER_NUM
Индекс: 44
Обращение: r
FAULT_STATE
Индекс: 28
Обращение: r
FEATURES
Индекс: 17
Обращение: r
FEATURES_SEL
Индекс: 18
Обращение: r, w
Выбор:
FREE_TIME
Индекс: 25
Обращение:r
FREE_SPACE
Индекс: 24
Обращение: r, w
GRANT_DENY
Индекс: 14
Обращение: r
HARD_TYPES
Индекс: 15
Обращение: r, w
Индикация:
HW_REVISION
Индекс: 43
Обращение: r
ITK_VER
Индекс: 41
Серийный номер прибора.
Позволяет в комбинации с данными MANUFAC_ID и DEV_TYPE
обеспечить однозначную идентификацию полевого прибора.
Индикация текущего статуса функции защитного реагирования
блока «Аналоговый выход» (Analog Output).
Индикация дополнительных функций, поддерживаемых
прибором. См. FEATURES_SEL.
Выбор функций, поддерживаемых прибором.
REPORTS – Fieldbus-Host-система должна подтвердить
получение протокола событий.
HARD W LOCK – микротумблер блокирует запись.
FAULTSTATE – можно активировать функции защитного
реагирования.
(см. SET_FSTATE/ CLR_FSTATE)
OUT READBACK – текущее положение клапана будет
выдаваться в виде PV (переменой процесса)
функционального блока «аналоговый выход»
(иначе, в виде SP).
Индикация свободного системного времени (в %), которое
имеется в распоряжении других функциональных блоков.
Примечание: этот параметр не поддерживается, так как
функциональные блоки прибора тип 3787 имеют фиксированную
конфигурацию.
Индикация свободной системной памяти (в %), которая имеется
для обеспечения работы других функциональных блоков.
Примечание: этот параметр не поддерживается, так как
функциональные блоки прибора тип 3787 имеют фиксированную
конфигурацию.
Разрешение или ограничение прав доступа к полевому прибору
со стороны Fieldbus-Host-системы.
Примечание: этот параметр в приборе тип 3787 не используется.
Индикация типа выходного сигнала для функционального блока
«Аналоговый выход» (Analog Output).
SCALAR OUTPUT - скалярный аналоговый выходной параметр.
Состав аппаратного обеспечения электроника/механика.
Номер версии интероперационной тестовой системы, на которой
проверялся данный прибор.
LIM_NOTIFY
Индекс: 32
Обращение: r, w
Выбор:
Значение холодного
старта:
Через этот параметр задается количество протоколов событий,
которое может одновременно оставаться неподтвержденным.
от 0 до 8
8
EB 8383-1 RU
Page 39

39
Описание параметров
MANUFAC_ID
Индекс: 10
Обращение: r
Индикация:
MAX_NOTIFY
Индекс: 31
Обращение: r
Индикация:
MEMORY_SIZE
Индекс: 22
Обращение: r
MIN_CYCLE_T
Индекс: 21
Обращение: r
Индикация:
MODE_BLK
Индекс: 5
Обращение: r, w
Индикация:
Индикация идентификационного номера изготовителя.
0 х 00Е099 = SAMSON AG
Индикация поддерживаемого прибором количества протоколов
событий, одновременно существующих неподтвержденными.
8
Индикация объема сконфигурированной памяти в килобайтах.
Примечание: этот параметр не поддерживается, т.к.
функциональные блоки прибора тип 3787 имеют фиксированную
конфигурацию.
Индикация наименьшего времени цикла, которое может
отрабатываться этим прибором (время исполнения
функционального АО-блока 50 мс) (
где АО, вероятно, Analog Output
)
1600 1/32 ms.
Индикация текущего режима работы приборного блока
(Resource Block); разрешенных режимов (Permitted),
поддерживаемых приборным блоком и стандартного (Normal)
режима работы.
AUTO
O/S
Приборный блок поддерживает следующие режимы работы:
AUTO – автоматический режим
В этом режиме работы разрешается работа
функциональных блоков (функциональные AO- и PIDблок). (
АО, вероятно Analog Output
).
O/S – Out of Service (ждущий режим)
В этом режиме работы действие функциональных
блоков (функциональные AO- и PID-блок) остановлено.
Эти блоки переходят в режим O/S.
NV_CICLE_T
Индекс: 23
Обращение: r
RESTART
Индекс: 16
Обращение: r, w
Выбор:
Индикация интервала времени, в течение которого данные
перезаписываются в энергонезависимой (долговременной)
памяти.
Примечание: для прибора тип 3787 долговременные данные
накапливаются непосредственно после их передачи.
Через этот параметр можно различным образов проводить
«сброс» работы прибора.
RUN – стандартное рабочее состояние
RESOURCE – (не поддерживается)
DEFAULTS – параметры прибора и подключение
функциональных блоков сбрасываются к
значениям, заданным в спецификации, т.е.
установка по умолчанию.
PROCESSOR – горячий старт прибора, повторный старт
процессора.
EB 8383-1 RU
Page 40

40
Описание параметров
RS_STATE
Индекс: 7
Обращение: r
Индикация:
SET_FSTATE
Индекс: 29
Обращение: r, w
SHED_RCAS
Индекс: 26
Обращение: r, w
SHED_ROUT
Индекс: 27
Обращение: r, w
Значение холодного
старта:
SW_REVISION
Индекс: 42
Обращение: r
STRATEGY
Индекс: 3
Обращение: r, w
Значение холодного
старта:
ST_REV
Индекс: 1
Обращение: r
TAG_DESC
Индекс: 2
Обращение: r, w
Значение холодного
старта:
TEST_RW
Индекс: 8
Обращение: r, w
Индикация текущего рабочего состояния приборного блока
(Resource Block).
ONLINE – нормальное рабочее состояние,
блок находится в режиме работы AUTO.
STAND_BY – приборный блок находится в режиме O/S.
ONLINE LINKING – сконфигурированные соединения между
функциональными блоками еще не
установлены.
Через этот параметр можно вручную активировать защитное
реагирование функционального блока «Аналоговый выход».
Задается контрольное время для проверки соединения между
Fieldbus-Host-системой и PID-блоком в режиме работы RCAS.
По истечении контрольного времени PID-блок изменяет RCASрежим работы на режим, выбранный в параметре SHED_OPT.
Задается контрольное время для проверки соединения между
Fieldbus-Host-системой и PID-блоком в режиме работы ROUT.
По истечении контрольного времени PID-блок изменяет ROUTрежим работы на режим, выбранный в параметре SHED_OPT.
640000 1/32
Версия микропрограммного обеспечения (Коммуникация/
Регулирование).
Параметр для группировки и, благодаря этому, ускоренной
обработки блоков. Группировка реализуется посредством
установки одинаковых численных значений в параметре
STRATEGY для каждого отдельного блока.
0
Примечание: эти данные приборным блоком ни проверяются, ни
обрабатываются.
Индикация результатов ревизии состояния статических данных.
Примечание: ревизия производится при каждом изменении
какого-либо статического параметра в блоке.
Ввод характерного для данного потребителя текста, максимум
32 знака, для более точной идентификации и «привязки» блока.
Текст отсутствует.
Примечание:
этот параметр требуется только для сертификационных
испытаний и в стандартном режиме работы значения не имеет.
TEXT_INPUT_1
Индекс: 50
Обращение: r, w
TEXT_INPUT_2
Индекс: 51
Обращение: r, w
Текстовое поле для информации произвольного содержания.
Текстовое поле для информации произвольного содержания.
EB 8383-1 RU
Page 41

41
Описание параметров
TEXT_INPUT_3
Индекс: 52
Обращение: r, w
UPDATE_EVT
Индекс: 35
Обращение: r
WRITE_ALM
Индекс: 40
Обращение: r, w
WRITE_LOCK
Индекс: 34
Обращение: r, w
Выбор:
WRITE_PRI
Индекс: 39
Обращение: r, w
Установка:
Значение холодного
старта:
WRITE_PROTECT_SWITCH
Индекс: 49
Обращение: r
Текстовое поле для информации произвольного содержания.
Индикация в случае изменения статических данных, включая
дату и время.
Индикация статуса для сигнализации защиты от записи.
Примечание: сигнализация будет активирована, если снята
защита от записи.
Дополнительно в этой группе параметров можно вручную
подтверждать (квитировать, сбрасывать?) активную
сигнализацию защиты от записи.
Для защиты от записи в аппаратном обеспечении (Hardware):
индикация статуса защиты от записи
Для защиты от записи в программном обеспечении (Software):
активация/деактивация защиты от записи.
LOCKED
NOT LOCKED
Установка характеристики сигнализации защиты от записи
(параметр WRITE_ALM).
0 сигнализация защиты от записи не используется.
1 нет оповещения Fieldbus-Host-системы при срабатывании
сигнализации защиты от записи.
2 зарезервировано для блочных сигнализаций
3…7 сигнализация защиты от записи с указанным приоритетом
(3=низкий приоритет, 7=высокий приоритет) выдается для
информирования пользователя.
8…15 сигнализация защиты от записи с указанным приоритетом
(8=низкий приоритет, 15=высокий приоритет) выдается как
критическая тревога.
0
Установленное в приборе положение тумблера защиты от
записи:
0=нет защиты от записи
1=установлена защита от записи.
EB 8383-1 RU
Page 42

42
Описание параметров
7.4.2 Блок обработки (Transducer Block)
Блок обработки осуществляет различные преобразования входных и выходных
сигналов от функциональных блоков. Благодаря этому реализуется калибровка
измеряемых параметров и данных регулирования, линеализация характеристик или
расчет физических величин на основе данных производственного процесса.
Параметрами этого блока является информация о типе привода, его соединении,
физических единицах, пуске в работу, диагностике, а также специфические
характеристики прибора.
Standard Advanced Positioner Valve Transducer Block (блок обработки для
позиционера клапана) получает управляющий сигнал от включенного перед ним
функционального блока Analog Output Function Block (Аналоговый выход). Этот
параметр используется для позиционирования регулирующего органа в клапане.
Блок содержит параметры, обеспечивающие согласование клапана с приводом и
параметры, относящиеся к вводу в эксплуатацию и диагностике регулирующего
клапана.
Параметры Standard Advanced Positioner Valve Transducer Block (блок обработки
для позиционера клапана)
Этот блок содержит параметры, характеризующие привод и клапан, на которых
смонтирован позиционер. Параметры этого блока предназначены для согласования
позиционера с клапаном, а также для пуска в производственный процесс и
диагностики комплектного состава всего регулирующего клапана.
Рис.13 • Блок обработки (Transducer Block)
EB 8383-1 RU
Page 43

43
Описание параметров
Примечание.
Для разновидности инициализации, относящейся к максимальному диапазону
(значения холодного старта), пуск в действие может осуществляться после
надлежащего механического монтажа непосредственно через параметры
SELF_CALIB_CMD.
Результат инициализации появляется в SELF_CALIB_STATUS. При такой
разновидности инициализации согласование остальных параметров этого блока,
в общем, не требуется.
ACT_FAIL_ACTION
Индекс: 21
Обращение: r
Индикация:
ACT_MAN_ID
Индекс: 22
Обращение: r, w
ACT_MODEL_NUM
Индекс: 23
Обращение: r, w
ACT_SN
Индекс: 24
Обращение: r, w
ACT_STROKE_TIME_DEC
Индекс: 59
Обращение: r
ACT_STROKE_TIME_INC
Индекс: 60
Обращение: r
ACTUATOR_TYPE
Индекс: 46
Обращение: r
Индикация:
ACTUATOR_VERSION
Индекс: 48
Обращение: r, w
Ввод:
Значение холодного
старта:
Положение безопасности привода при отсутствии питающей
энергии. Определяется автоматически в ходе инициализации.
UNINITIALIZED – не инициализировано, не назначено
SELF-CLOSING – закрывается (в направлении позиции 0%)
SELF-OPENING – открывается (в направлении позиции 100%)
INDETERMINATE – отсутствует
Изготовитель привода.
Характеризует изготовителя привода, работающего с
позиционером.
Тип / Исполнение привода, работающего с позиционером.
Серийный номер привода, работающего с позиционером.
Минимальное время срабатывания ЗАКР.
Минимальное время срабатывания ЗАКР (в направлении
позиции 0%) – это фактическое время в секундах, которое
требуется системе из позиционера, привода и клапана для того,
чтобы совершить номинальный рабочий ход/угол поворота в
направлении закрывания клапана (измеряется в ходе
инициализации).
Минимальное время срабатывания ОТКР.
Минимальное время срабатывания ОТКР (в направлении
позиции 100%) – это фактическое время в секундах, которое
требуется системе из позиционера, привода и клапана для того,
чтобы совершить номинальный рабочий ход/угол поворота в
направлении открывания клапана (измеряется в ходе
инициализации).
Разновидность привода, работающего с позиционером.
ELECTRO PNEUMATIC = электропневматический.
Серия привода; с возвратными пружинами или без них.
SINGLE ACTING – простого действия с возвратными пружинами
DOUBLE ACTING – двойного действия без пружин
SINGLE ACTING
EB 8383-1 RU
Page 44

44
Описание параметров
ALERT_KEY
Индекс: 4
Обращение: r, w
Ввод:
Значение холодного
старта:
ATTASHMENT
Индекс: 47
Обращение: r, w
Ввод:
Значение холодн. старта:
BINARY_INPUT
Индекс: 41
Обращение: r, w
Показания:
BLOCK_ALARM
Индекс: 8
Обращение: r, w
BLOCK_ERR
Индекс: 6
Обращение: r
Показания:
CHARACT
Индекс: 42
Обращение: r, w
Ввод:
Значение холодного
старта:
Ввод идентификационного номера отдельного узла
оборудования. Эта информация может использоваться Fieldbus-
Host-системой для сортировки тревожных сигналов и событий.
1…255
0
Примечание: Значение 0 (значение холодного старта) является
недопустимым и потому сопровождается записью в приборе
сообщения об ошибке.
Указывает вид монтажа позиционера на прямоходный клапан.
INTEGRATED – интегрированный монтаж в соединении с
приводом 3277,
NAMUR – по NAMUR; вид монтажа по DIN/IEC 534 (NAMUR)
INTEGRATED
Примечание: для поворотных приводов возможен только монтаж
по VDI/ VDE 3845 (NAMUR), тогда параметр не имеет влияния.
Состояние двоичного входа.
NOT ACTIVE – не активно
ACTIVE - активно
NOT EVALUATED – на определено
Индикация текущего состояния блока с информированием о
возникших системных ошибках, ошибках аппаратного и
программного обеспечения.
Примечание: дополнительно в этой группе параметров можно
вручную подтверждать (сбрасывать?) сработавшую блочную
сигнализацию (об ошибках).
Индикация возникшей блочной неисправности.
OUT OF SERVICE – режим блока O/S (ждущий режим).
DEVUCE NEEDS MAINTENANCE NOW – требуется техническое
обслуживание (ошибка в нулевой точке,
помехи позиционирования или ошибочная
инициализация).
LOCAL OVERRIDE – прибор находится в местном обслуживании.
INPUT FAILURE – ошибочна информация о позиционировании
(прибор не инициализирован).
MEMORY FAILURE – ошибка памяти.
LOST STATIC DATE – ошибка контрольной суммы.
Выбор характеристики для «привязки» регулирующего
параметра к диапазону рабочего хода или угла поворота.
LINEAR – линейная.
EQUAL PERCENTAGE – равнопроцентная.
EQUAL PERCENTAGE REVERSE – обратная равнопроцентная.
SAMSON BUTTERFLY LINEAR – SAMSON-заслонка, линейная.
SAMSON BUTTERFLY EQUAL PERCENTAGE – SAMSON-заслонка, равнопроц.
VETEC ROTARY LINEAR – VETEC поворотный конус, линейная.
VETEC ROTARY EQUAL PERCENTAGE – VETEC поворот. конус, равнопроц.
LINEAR.
EB 8383-1 RU
Page 45

45
Описание параметров
COLLECTION_DIRECTORY
Индекс: 12
Обращение: r
DEADBAND
Индекс: 35
Обращение: r, w
Диапазон:
Значение холодного
старта:
DELAY_TIME
Индекс: 37
Обращение: r, w
Диапазон:
Значение холодного
старта:
DEVIATION
Индекс: 34
Обращение: r
FINAL_VALUE
Индекс: 13
Обращение: r
FINAL_VALUE_CUTOFF_HI
Индекс: 15
Обращение: r, w
Диапазон:
Значение холодного
старта:
Примечание:
этот параметр прибором тип 3787 не поддерживается.
Мертвая зона в процентах от номинального хода/ номинального
угла поворота.
0,1…10%
0,5%
Время задержки.
Критерий сброса для текущего контроля регулирующего контура.
Когда установленное время задержки DELAY_TIME превышено,
а величина рассогласования в течение установленного времени
выходит за рамки заданного диапазона TOLERANCE_BAND,
вырабатывается сигнализация о неисправности контура
регулирования.
В процессе инициализации определяется исходя из
минимального времени срабатывания.
1…240 с
10 с
Рассогласование позиционера.
Этот параметр содержит управляющий сигнал, поступающий от
включенного на входе функционального блока «Аналоговый
выход» (Analog Output Function Block).
Конечное положение, если выше …
Если заданное значение превышает установленную величину,
то клапан переводится в направлении конечного положения, что
соответствует 100% управляющего сигнала. Это выполняется
посредством полного сброса или подачи давления на привод
(согласно положению безопасности).
0…125%
99%
Примечание:
при вводе значения -2,5% функция отключается
(деативируется).
Т.к. при этой функции привод полностью нагружается давлением
или давление с него полностью сбрасывается, регулирующий
клапан переводится в свое «абсолютное» конечное положение.
При этом ограничения, налагаемые функций «Диапазон
рабочего хода» (Hubbereich) или «Ограничение рабочего хода»
(Hubbegrenzung) здесь не действуют.
Если в этой связи могут возникнуть недопустимо большие
усилия перестановки, функцию следует отключить.
EB 8383-1 RU
Page 46

46
Описание параметров
FINAL_VALUE_CUTOFF_LO
Индекс: 16
Обращение: r, w
Диапазон:
Значение холодного
старта:
FINAL_VALUE_RANGE
Индекс: 14
Обращение: r
FINAL_POSITION_VALUE
Индекс: 17
Обращение: r
IDENT_BINARY_INPUT
Индекс: 44
Обращение: r, w
Ввод:
Значение холодного
старта:
IDENT_FORCED_VENTING
Индекс: 43
Обращение: r
Показания:
IDENT_LIMIT_SWITCHES
Индекс: 45
Обращение: r, w
Ввод:
Значение хол. старта:
INIT_METHOD
Индекс: 54
Обращение: r
Ввод:
Значение хол. старта:
Конечное положение, если меньше …
Если заданное значение падает ниже установленной величины,
то клапан переводится в направлении конечного положения, что
соответствует 0% управляющего сигнала. Это выполняется
посредством полного сброса или подачи давления на привод
(согласно положению безопасности).
-2,5%…100%
1%
Примечание: При вводе значения -2,5% функция отключается.
Т.к. при этой функции привод полностью нагружается давлением
или давление с него полностью сбрасывается, регулирующий
клапан переводится в свое «абсолютное» конечное положение.
При этом ограничения, налагаемые функций «Диапазон
рабочего хода» (Hubbereich) или «Ограничение рабочего хода»
(Hubbegrenzung) здесь не действуют.
Если в этой связи могут возникнуть недопустимо большие
усилия перестановки, функцию следует отключить.
Этот параметр содержит диапазон регулирования (XD_SCALE),
используемый в подключенном на входе функциональном блоке
«Аналоговый выход» (Analog Output Function Block).
Текущее положение клапана в значении FINAL_VALUE_RANGE.
Показывает, задействован ли двоичный вход и если да, то каким
образом.
NOT EVALUATED – не используется
ACTIVELY OPEN – активно открыт
ACTIVELY CLOSED – активно закрыт
NOT EVALUATED
Показывает, включена ли опция принудительного сброса
воздуха:
NOT IMPLEMENED –
IMPLEMENED –
опция не задействована, вход не используется.
опция задействована, вход используется.
Показывает, имеется ли опция индуктивных концевых контактов.
Автоматически не опознается.
NOT IMPLEMENED – концевые контакты не установлены.
IMPLEMENED – концевые контакты установлены.
согласно комплектации аппаратного обеспечения.
Разновидность инициализации. Инициализации относительно
номинального- или максимального диапазона. При
инициализации в номинальном диапазоне учитывается диапазон
регулирования в пределах номинального рабочего хода/угла
поворота (например, проходной клапан с механическим упором
с одной стороны).
При инициализации в максимальном диапазоне используется
максимально возможный диапазон перестановки (например, 3ходовой клапан с механическими упорами по обе стороны)
MAXIMUM RANGE – инициализации по максимальному диапазону.
NOMINAL RANGE – инициализация по номинальному диапазону.
MAXIMUM RANGE
EB 8383-1 RU
Page 47

47
Описание параметров
MAX_HUB
Индекс: 58
Обращение: r
MODE_BLK
Индекс: 5
Обращение: r, w
Выбор:
MOUNTING_POSITION
Индекс: 49
Обращение: r, w
Ввод:
Значение холодного
старта:
RATED_TRAVEL
Индекс: 50
Обращение: r, w
Диапазон:
Значение холодного
старта:
SELF_CALIB_CMD
Индекс: 55
Обращение: r, w
Выбор:
Максимально возможный ход/ угол поворота.
В ходе инициализации рассчитывается максимальный ход/угол
поворота в процентах от заданного номинального хода/
номинального угла.
Показания/выбор текущего режима работы приборного блока
(Resource Block), разрешенного режима (Permitted), который
поддерживается блоком обработки Transducer Block и
стандартный режим работы (Normal).
AUTO
O/S
Блок обработки поддерживает следующие режимы работы:
AUTO –
O/S –
LO –
автоматический (автоматический режим)
В этом режиме из управляющего сигнала, получаемого от АО блока
(вероятно, Analog Output), рассчитывается положение
позиционирования, в которое устанавливается регулирующий орган
(клапан).
Out of Service (ждущий режим)
В этом режиме управляющий сигнал, поступающий от АО блока, не
используется, а регулирующий орган (клапан) переходит в
механическое положение безопасности, задаваемое параметром
ACT_FAIL_ACTION. В любом случае активация принудительного сброса
воздуха приводит к переходу в режим O/S.
Local Override (локальная перезагрузка, наложение данных)
При активировании функций, например таких, как инициализация или
коррекция нулевой точки, а также при местном обслуживании прибора
(пакет TROVIS-VIEW) прибор переходит в режим LO. При выходе из
этого режима устанавливается заданный режим.
Положение при монтаже. Расположение позиционера
относительно привода (для случая прямоходного привода).
(Стандартное расположение:
интегрированный монтаж – стрелка в сторону к приводу;
монтаж по NAMUR – стрелка в сторону от привода).
ARROW POINTING AWAY FROM THE ACTUATOR – стрелка от привода
ARROW POINTING TOWARDS THE ACTUATOR – стрелка к приводу
ARROW POINTING TOWARDS THE ACTUATOR – стрелка к приводу
Примечание: для поворотных приводов этот параметр роли не играет.
Номинальный ход (мм) или номинальный угол поворота (град.)
клапана.
0…255.9
15.0 мм
Примечание: размерность параметра (мм или градусы) зависит от значения
параметра VALVE_TYPE.
Команда для запуска калибровочных операций в полевом
приборе.
NO TEST, STANDARD OPERATION – нет тестов, норм. режим регулирования
ZERO CALIBRATION – коррекция нулевой точки
INITIALISATION – инициализация
RESET TOTAL VALVA TRAVEL – сброс абсолютного путевого перемещения
RESET “CONTROL LOOP FAULT” – сброс состояния «неисправн. рег. контура»
RESET TRANSDUCER BLOCK TO DEFAULT – выполнить холодный старт
блока обработки со стандартными значениями параметров (по умолчанию)
ABORT PROCESS IN ACTION – прервать текущее действие
EB 8383-1 RU
Page 48

48
Описание параметров
SELF_CALIB_STATUS
Индекс: 56
Обращение: r
Показания:
SELF_CALIB_WARNING
Индекс: 57
Обращение: r
Показания:
SERVO_GAIN_1
Индекс: 18
Обращение: r, w
Диапазон:
Значение холодного
старта:
SERVO_GAIN_2
Индекс: 19
Обращение: r, w
Диапазон:
Значение холодного
старта:
Статус запущенной через SELF_CALIB_CMD
последовательности.
UNDETERMINED –не определено
RUNNING – исполняется
ABORTED – прервано
RANGE ERROR – ошибочный диапазон
DEFECTIVE MECHANICS/PNEUMATICS – неисправна механика/пневматика
TIMEOUT – превышение установленного времени
PROPORTIONAL RANGE RESTRICTED – пропорц. диап. слишком ограничен
RATED TRAVEL OR TRANSMISSION ERROR – ошибка выбора раб. хода или
MECHANICAL ERROR – заклинивание мех. системы (при инициализации)
PNEUMATICAL ERROR – нет герметичности пневмосистемы (при инициализ.)
INITIALISATION STATUS: DETERMINATION OF MECHNICAL STOPS –
(статус инициализации: определение механических упоров)
INITIALISATION STATUS: DETERMINATION OF MINIMUM PULSES –
(статус инициализации: определение мин. управляющего импульса)
INITIALISATION STATUS: DETERMINATION OF MINIMUM TRANSIT TIMES –
(статус инициализации: определение мин. времен срабатывания)
INITIALISATION ABORTED DUE TO ACTIVATED FORCED VENTING OPTION –
(инициализация прервана активированием принудительного сброса воздуха)
ZERO ERROR – ошибка нулевой точки
SUCCESSFUL – успешно
NO VALID DATA FROM APPLICATION – некорректные данные от приложений
передачи
Дополнительные сигналы предупреждения запущенной через
SELF_CALIB_CMD последовательности.
UNDETERMINED – не определено
WRONG SELECTION OF RATED TRAVEL OR TRANSMISSION –
ошибка выбора номинального хода или размера передачи (тяги).
AIR LECAGE OF PNEUMATIC SYSTEM – негерметичность
пневмосистемы (при
инициализации)
SUCCESSFUL - успешно
NO VALID DATE FROM APPLICATION – некорректные данные от
приложений.
Коэффициент пропорциональности питающего давления
0,01…10,0
0,5
Коэффициент пропорциональности выходного воздуха.
0,01…10,0
1,2
EB 8383-1 RU
Page 49

49
Описание параметров
SERVO_RATE
Индекс: 20
Обращение: r, w
Диапазон:
Значение холодного
старта:
STRATEGY
Индекс: 3
Обращение: r, w
Значение холодного
старта:
ST_REV
Индекс: 1
Обращение: r
TAG_DESC
Индекс: 2
Обращение: r, w
Значение холодного
старта:
TOL_OVERSHOOT
Индекс: 36
Обращение: r, w
Диапазон:
Значение холодного
старта:
Коэффициент усиления дифференцирующей цепочки.
0…1
0.12
Параметр для группировки и, благодаря этому, ускоренной
обработки блоков. Группировка реализуется посредством
установки одинаковых численных значений в параметре
STRATEGY для каждого отдельного блока.
0
Примечание: эти данные блоком обработки не проверяются и не
обрабатываются.
Индикация ревизии состояния статических данных.
Примечание: ревизия производится при каждом изменении
какого-либо статического параметра в блоке.
Ввод характерного для данного потребителя текста, максимум
32 знака, для более точной идентификации и «привязки» блока.
Текст отсутствует.
Допустимое перерегулирование (избыточное отклонение).
0.1…10%
0.5%
TOLERANCE_BAND
Индекс: 38
Обращение: r, w
Диапазон:
Значение холодного
старта:
TOTAL_VALVE_TRAVEL
Индекс: 39
Обращение: r
TOTAL_VALVE_TRAV_LIM
Индекс: 40
Обращение: r, w
Диапазон:
Значение холодного
старта:
TRANSDUCER_DIRECTORY
Индекс: 9
Обращение: r
Диапазон рассогласования.
Критерий сброса для текущего контроля контура регулирования.
Вводится допустимое рассогласование.
См. также параметр DELAY_TIME.
0,1…10%
5%
Абсолютное путевое перемещение (путевой интеграл).
Сумма рабочих перемещений (двойных ходов).
Предельная величина абсолютного путевого перемещения
(путевого интеграла).
0…16 500 000
1 000 000
Примечание:
этот параметр прибором тип 3787 не поддерживается.
EB 8383-1 RU
Page 50

50
Описание параметров
TRANSDUCER_STATE
Индекс: 32
Обращение: r
Показания:
TRANSDUCER_TUPE
Индекс: 10
Обращение: r
TRANSM_CODE
Индекс: 51
Обращение: r, w
Ввод:
Ввод:
TRANSM_LENGTH
Индекс: 52
Обращение: r, w
Диапазон:
Значение холодного
старта:
Состояние блока обработки.
SEE ACTUAL MODE OF TRANSDUCER BLOCK – см. режим работы
(MODE_BLK_ACTUAL)
FORCED VENTING ACTIVE – активирован принудительный сброс воздуха
LOWER TRAVEL LIMIT ACTIVE – активировано ограничение хода снизу
UPPER TRAVEL LIMIT ACTIVE – активировании ограничение хода сверху
END POSITION ACTIVE AT< - активировано «конечное положение при<»
END POSITION ACTIVE AT> - активировано «конечное положение при>»
Тип блока обработки. В данном случае “Standard Advanced
Positioner Valve”.
Код передачи (трансмиссии) (только для интегрированной
конструкции прямоходного привода). Установка
геометрических размеров прямоходной трансмиссии при
интегрированном монтаже.
D1, рычаг 64 мм
D2, рычаг 106 мм
Код передачи (только для поворотного привода).
Максимальный угол поворота выбранного сегмента кулачкового
диска.
S90, 90-градусный сегмент
S120, 120-градусный сегмент.
Примечание: для поворотных приводов этот параметр влияния
не имеет.
Длина передачи (только для конструкции прямоходного
привода по NAMUR) представляет расстояние между точкой
вращения рычага, передающего перемещение, и точкой рычага,
контактирующей со штифтом перемещения.
0…1023 мм
42 мм
Примечание: этот параметр применяется только для
прямоходного привода в конструкции по NAMUR, для других
видов монтажа он влияния не оказывает.
TRANS_PIN_POS
Индекс: 53
Обращение: r, w
Ввод:
Значение холодного
старта:
UPDATE_EVT
Индекс: 7
Обращение: r
VALVE_MAN_ID
Индекс: 25
Обращение: r, w
Положение штифта (только для конструкции прямоходного
привода по NAMUR). Положение штифта на рычаге
позиционера. См. маркировку на рычаге позиционера.
А
В
А
Примечание: этот параметр применяется только для
прямоходного привода в конструкции по NAMUR, для других
видов монтажа он влияния не оказывает.
Индикация об изменении статических данных блока, включая
дату и время.
Характеристика изготовителя клапана, работающего с
позиционером.
EB 8383-1 RU
Page 51

51
Описание параметров
VALVE_MODEL_NUM
Индекс: 26
Обращение: r, w
VALVE_SN
Индекс: 27
Обращение: r, w
VALVE_TYPE
Индекс: 28
Обращение: r, w
Ввод:
Значение холодного
старта:
XD_CAL_LOC
Индекс: 29
Обращение: r, w
XD_CAL_DATE
Индекс: 30
Обращение: r, w
XD_CAL_WHO
Индекс: 31
Обращение: r, w
XD_ERROR
Индекс: 11
Обращение: r
Показания:
Тип/конструкция клапана, работающего с позиционером.
Серийный номер клапана, работающего с позиционером.
Разновидность клапана
UNINITIALIZED – не определено
LINEAR – линейный (клапан с прямолинейно движущимся
регулирующим элементом, прямоходный клапан)
ROTARY – поворотный (клапан с регулирующим элементом,
совершающим вращательное движение)
OTHER – прочие
линейный
Примечание:
прибор тип 3787 может «различать» только прямоходную и
поворотную арматуру, значения «не определено» и «прочие»
может означать прямоходный клапан.
Место последней калибровки.
Время последней калибровки.
Лицо, выполнявшее последнюю калибровку.
Сигнализация неисправностей блока обработки.
NONE (0) – неисправность отсутствует.
UNSPECIFIED ERROR – непредусмотренная неисправность
(прибор не инициализируется,
происходит инициализация или
коррекция нулевой точки, либо
превышено абсолютное путевое
перемещение – путевой интеграл).
GENERAL ERROR – общая неисправность (неисправен весь
прибор).
CALIBLATION ERROR – ошибка калибровки (ошибка нулевой
точки, внутренней схемы регулирования
или инициализации).
CONFIGURATION ERROR – ошибка конфигурации (ошибочны
параметры или характеристика).
ELECTRONICS FAILURE – неисправность в электронике
MECHANICAL FAILURE – неисправность в механике
DATA INTEGRITY ERROR – нарушение целостности данных
(ошибка контрольной суммы).
ALGORITHM ERROR – динамические параметры вне
допустимого диапазона
EB 8383-1 RU
Page 52

52
Описание параметров
XD_ERROR_EXT
Индекс: 33
Обращение: r
Показания:
Сигнализация расширенного перечня неисправностей в блоке
обработки (Transducer Block).
NONE (0) – неисправность отсутствует.
FAILURE MECHANICS – неисправность в механике.
FAILURE IN MEASUREMENT – ошибка измерений.
NOT INITIALISED – позиционер не инициализирован.
SELFCALIBRATION FAILED – ошибка при самоадаптации
(инициализации).
ZERO POINT ERROR – ошибка нулевой точки.
INTERNAL CONTROL LOOP DISTURBED – внутренняя
неисправность позиционирования. (сброс сообщения о
SELF_CALIB_CMD --> RESET “CONTROL LOOP FAULT”).
TRAVEL TIME EXCEEDED – превышено время исполнения
команды (время срабатывания).
(ошибка регулирующего контура
сбрасывается самостоятельно).
CHARACTERIZATION INVALID – неправильная характеристика.
FORCED VENTING ACTIVE – активен принудительный сброс
воздуха.
DEVICE UNDER SELFTEST – полевой прибор находится в
режиме самотестирования
(инициализация или коррекция
нулевой точки).
TOTAL VALVE TRAVEL LIMIT EXCEEDED – превышено
граничное значение абсолютного путевого перемещения
(путевой интеграл).
EB 8383-1 RU
Page 53

53
Описание параметров
7.4.3. Функциональные блоки (Function Blocks)
Функциональные блоки обладают фундаментальными свойствами автоматизации в
данном полевом приборе. Используются различные функциональные блоки, такие,
например, как Analog Input Function Block (аналоговый вход), Analog Output Function
Block (аналоговый выход), PID Block (PID-регулятор).
Каждый из перечисленных функциональных блоков используется в составе всей
системы для обработки специфических функций автоматизации. Например,
непосредственно в поле могут быть реализованы местные функции регулирования,
самодиагностика прибора, а также передаваться на центральную станцию
управления информация о неисправностях контура управления.
Функциональные блоки обрабатывают входные сигналы по специальному,
характерному для них алгоритму, на основе записанных в блоках параметров. Они
вырабатывают выходные сигналы, которые поступают на обработку в другие
функциональные блоки, связанные друг с другом согласно установленной
конфигурации прибора.
7.4.3.1 Analog Output Function Block (аналоговый выход)
Функциональный блок «Аналоговый выход» получает аналоговый сигнал,
поступающий от какого-либо (например, PID-регулятора) включенного перед ним
блока и передает управляющий сигнал на другой блок обработки “Transducer Block”
(например, позиционер клапана). Блок обработки включает кроме прочего функции
масштабирования (умножения на постоянный коэффициент) и линейного
(пилообразного, ступенчатого) наложения – Rampenfunktion.
АО-блок получает заданный параметр в зависимости от режима работы
(MODE_BLK) из принимаемых параметров CAS_IN, RCAS_IN или SP. Исходя из
этого и при учете параметров PV_SCALE, SP_HI_LIM и SP_LO_LIM, SP_RATE_UP и
SP_RATE_DN в нем образуется соответствующий внутренний сигнал.
Согласно параметрам IO_OPTS и XD_SCALE формируется выходной сигнал OUT,
который направляется в подключенный через CHANNEL блок обработки.
АО-блок обладает свойством защитного реагирования (Fault State). Это свойство
активируется, когда условия, характеризующие неисправность, действуют дольше
определенного времени, которое задается параметром FSTATE_TIME, либо когда
активирован параметр SET_FSTATE в приборном блоке.
Свойство защитного реагирования устанавливается со значениями в параметрах
FSTATE_TIME, FSTATE_VAL и IO_OPTS.
EB 8383-1 RU
Page 54

54
Описание параметров
Рис.14 • Analog Output Function Block (функциональный блок «Аналоговый выход»)
EB 8383-1 RU
Page 55

55
Описание параметров
Параметры функционального блока «Аналоговый выход»
Output Function Block)
ALERT_KEY
Индекс: 4
Обращение: r, w
Ввод:
Значение холодн. старта:
BKCAL_OUT
Индекс: 25
Обращение: r
BLOCK_ALM
Индекс: 30
Обращение: r, w
BLOCK_ERR
Индекс: 6
Обращение: r
Показания:
CAS_IN
Индекс: 17
Обращение: r, w
CHANNEL
Индекс: 22
Обращение: r, w в реж O/S
Значение холодн. старта:
FSTATE_TIME
Индекс: 23
Обращение: r, w
Значение холодного
старта:
Ввод идентификационного номера отдельного узла
оборудования. Эта информация может использоваться Fieldbus-
Host-системой для сортировки тревожных сигналов и событий.
1…255
0
Примечание: Значение 0 (значение холодного старта) является
недопустимым и потому сопровождается записью в приборе
сообщения об ошибке.
Индицируется аналоговое выходное значение и статус, который
при каскадном регулировании будет передаваться в параметр
BKCAL_IN предварительно включенного функционального
блока.
Это значение препятствует интегральному насыщению
регулятора и обеспечивает таким образом «безударное»
переключение режимов.
Индицируется текущее состояние блока с информированием о
возникающих ошибках конфигурации, аппаратного обеспечения
или о системных ошибках, включая данные о времени
сигнализации (дата, время) при возникновении неисправности.
Примечание: дополнительно в этой группе параметров можно
вручную подтверждать (квитировать, сбрасывать?)
действующую блочную тревожную сигнализацию.
Индикация активной (действующей) блочной неисправности.
OUT OF SERVICE – режим блока «ждущий режим».
CONFIGURATION ERROR – в блоке ошибка конфигурации.
INPUT FAILURE – PV (обратная связь по сигналу положения)
OUTPUT FAILURE – регулирующий параметр OUT не может выдаваться,
имеет статус «неудовлетворительно», например, если блок
обработки находится в режиме O/S.
например, если блок обработки Transducer Block не
инициализирован или находится в режиме “LO”.
Индикация/ установка получаемого от предыдущего
функционального блока входного, управляющего сигнала и его
статуса.
Связь между выходом какого-либо функционального блока
«Аналоговый выход» (Analog Output Function Block) и
аппаратными логическими каналами (Transducer Blocks).
0
Примечание: чтобы иметь возможность ввода в действие
функционального АО-блока, параметр CHANNEL должен быть
установлен в корректное состояние. Т.к. в приборе тип 3787
имеется только один блок обработки (Standard Advanced
Positioner Valve) значение должно быть установлено = 1.
Установка времени (в секундах) от момента обнаружения
некорректности заданного для АО-блока значения в текущем
режиме работы до срабатывания предохранительной функции.
Если по истечении этого интервала времени неисправность
остается, предохранительная функция срабатывает.
0
Примечание: предохранительное свойство функционального
АО-блока назначается в параметре этого блока IO_OPTS.
(Analog
EB 8383-1 RU
Page 56

56
Описание параметров
FSTATE_VAL
Индекс: 24
Обращение: r, w
Ввод:
Значение холодного
старта:
GRANT_DENY
Индекс: 13
Обращение: r, w
IO_OPTS
Индекс: 14
Обращение: r, w в режиме
O/S
Выбор:
Установка заданного значения для функционального АО-блока
при активированном защитном реагировании.
Значение в пределах PV_SCALE±10%
0
Примечание: это значение применяется, когда в параметре
IO_OPTS выбрана опция “Fault State to value”.
Разрешение или ограничение прав доступа к полевому прибору
со стороны Fieldbus-Host-системы.
Примечание: этот параметр в приборе тип 3787 не используется.
Выбор характеристики вход-выход функционального АО-блока.
SP-PV Track in MAN SP отслеживает PV в режиме (ACTUAL_MODE) MAN
SP0PV Track in LO SP отслеживает PV в режиме (ACTUAL_MODE) LO
SP Track retained target: SP отслеживает RCAS_IN в зависимости от
Increase to close Инвертирование выходного значения к блоку
Fault State to value При активировании защитного реагирования, в
Use Fault State Value on restart:
Target to MAN if Fault State activated:
Use PV for BKCAL_OUT:
установленного TARGET_MODE в режиме работы
(ACTUAL_MODE) LO или MAN. Эта опция имеет
приоритет по отношению к SP_PV Track in MAN/ LO.
обработки Transducer Block (соответствует
направлению движения).
качестве заданного значения будет использоваться
FSTATE_VAL (см. FSTATE_VAL, FSTATE_TIME).
При входе прибора в режим параметр FSTATE_VAL
предлагается в качестве заданного значения, пока не
появится действительное значение.
При активировании защитного реагирования
значение TARGET_MODE (выбранный режим)
сбрасывается на MAN (ручной режим),
первоначальный целевой режим работы теряется.
После выхода из защитного реагирования блок
остается в режиме MAN и должен быть установлен
пользователем в выбранный им режим.
Через BKCAL_OUT вместо рабочего заданного
значения будет выдаваться PV. Если в приборном
блоке (Resource Block) параметр FEATURES_SEL
установлен в состояние OUT READBACK, тогда через
BKCAL_OUT будет выдаваться текущее положение
клапана.
EB 8383-1 RU
Page 57

57
Описание параметров
MODE_BLK
Индекс: 5
Обращение: r, w
Показания:
OUT
Индекс: 9
Обращение: r, w в режиме
MAN, O/S
PV (Process Variable)
Индекс: 7
Обращение: r
PV_SCALE
Индекс: 11
Обращение: r, w в режиме
MAN, O/S
Значение холодн.:
RCAS_IN
Индекс: 26
Обращение: r, w
Индикация текущего режима работы (Actual) АО-блока, выбранного режима
(Target), разрешенного режима (Permitted), которые поддерживаются АОблоком и стандартного режима (Normal).
RCAS
CAS
AUTO
MAN
O/S
АО-блок поддерживает следующие режимы работы:
O/S, Out of Service (ждущий режим)
АО-алгоритм этого модуля не выполняется. В параметре OUT выдается
последнее значение или при активной неисправности заданное значение.
MAN (ручное управление оператором)
Выходное значение АО-блока может задаваться непосредственно
пользователем через параметр OUT.
AUTO (автоматический режим)
Установленное пользователем заданное значение через параметр SP
применяется при обработке АО-блоком.
CAS (каскадный режим)
Функциональный АО-блок для внутреннего расчета управляющего
воздействия получает через параметр CAS_IN управляющий сигнал
непосредственно от впереди включенного функционального блока.
Используется АО-блок.
RCAS (внешний каскад)
Функциональный АО-блок для внутреннего расчета управляющего
воздействия получает через параметр RCAS_IN управляющий сигнал
непосредственно от Fieldbus-Host-системы. Используется АО-блок.
Индикация управляющего воздействия, его величины,
граничного значения и статуса функционального АО-блока.
Примечание: если в параметре MODE_BLK выбран режим
работы MAN (ручное вмешательство оператора), то выходное
значение OUT может задаваться вручную. Применяемая
размерность (величина) воспринимается от группы параметров
XD_SCALE, а диапазон ввода составляет OUT_SCALE ± 10%.
Индикация переменных процесса, используемых в
функциональном блоке, включая статус. Применяемая
размерность (величина) воспринимается от группы параметров
PV_SCALE.
Примечание: если в приборном блоке (Resource Block) в
параметре FEATURES_SEL выбрана опция OUT READBACK, то
PV приобретает текущее положение клапана (согласно
FINAL_POSITION_VALUE).
Назначается диапазон (начальное и конечное значения)
физической величины и точность после запятой в значении
переменных процесса (PV).
0…100%
В этом параметре считывается и показывается поступающий от
Fieldbus-Host-системы аналоговый управляющий сигнал
(величина и статус) для внутреннего расчета управляющего
воздействия.
Примечание: этот параметр активен только в режиме RCAS.
EB 8383-1 RU
Page 58

58
Описание параметров
RCAS_OUT
Индекс: 28
Обращение: r
READBACK
Индекс: 16
Обращение: r
SHED_OPT
Индекс: 27
Обращение: r, w
Выбор:
Значение холодного
старта:
Индицируется аналоговый управляющий (входной) сигнал после
воздействия Rampen-функции.
Его значение через этот параметр поступает в Fieldbus-Hostсистему, чтобы провести обратные вычисления при смене
рабочего режима или ограничении сигналов.
Примечание: этот параметр активен только в режиме RCAS.
Индицируется текущее положение клапана. Это положение
рассчитывается исходя из параметра FINAL_POSITION_VALUE
соответствующего блока обработки (Transducer Block).
Используемое значение воспринимается от группы параметров
XD_SCALE.
Выбор реагирования при превышении контрольного времени
(см. параметр SHED_RCAS в приборном блоке) в ходе проверки
соединения между Fieldbus-Host-системой и АО-блоком в
режиме работы RCAS. По истечении контрольного времени АОблок изменяет режим работы RCAS на выбранный здесь режим.
Также задается реагирование по окончании состояния ошибки.
Uninitialized: не инициализирован
NormalShed_NormalReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности следует возврат в
режим работы RCAS.
NormalShed_NoReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности режим блока не
изменяется.
ShedToAuto_NormalReturn:
смена на режим AUTO, а при исчезновении условий
неисправности возврат в режим работы RCAS.
ShedToAuto_NoReturn:
смена на режим AUTO, а при исчезновении условий
неисправности блок остается в режиме работы AUTO.
ShedToManual_NormalReturn:
смена на режим MANUAL, а при исчезновении условий
неисправности возврат в режим работы RCAS.
ShedToManual_NoReturn:
смена на режим MANUAL, а при исчезновении условий
неисправности блок остается в режиме работы
MANUAL.
ShedToRetainedTarget_NormalReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности следует возврат в
режим работы RCAS.
ShedToRetainedTarget_NoReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности режим блока не
изменяется.
Uninitialized
Примечание:
этот параметр АО-блока активен только в режиме работы RCAS.
Если установлено значение “Uninitialized”, то АО-блок
невозможно перевести в режим RCAS.
EB 8383-1 RU
Page 59

59
Описание параметров
SIMULATE
Индекс: 10
Обращение: r, w
SP
Индекс: 8
Обращение: r, w
в режимах AUTO, MAN, O/S
Ввод:
SP_HI_LIM
Индекс: 20
Обращение: r, w
Ввод:
Значение холодного
старта:
SP_LO_LIM
Индекс: 21
Обращение: r, w
Ввод:
Значение холодного
старта:
С помощью этой функции можно имитировать величину и статус
переменной процесса PV блока.
Примечание: в ходе имитации величина переменной от OUT не
передается на блок обработки (Transducer Block). Блок
обработки удерживает последнее действовавшее значение
перед активированием имитации. Активирование имитации
возможно только когда в приборе включен переключатель
разрешения имитации (см. также приборный блок).
Ввод заданного значения (управляющий, входной сигнал) в
режиме работы AUTO.
Применяемая величина воспринимается из группы параметров
PV_SCALE.
Значение и диапазон PV_SCALE ± 10%.
Ввод верхнего граничного значения управляющего (входного)
сигнала.
Значение и диапазон PV_SCALE ± 10%.
100
Примечание: если установка окончания шкалы в параметре
PV_SCALE будет изменена, то это значение должно быть
соответствующим образом согласовано.
Ввод нижнего граничного значения управляющего (входного)
сигнала.
Значение и диапазон PV_SCALE ± 10%.
0
Примечание: если установка окончания шкалы в параметре
PV_SCALE будет изменена, то это значение должно быть
соответствующим образом согласовано.
SP_RATE_DN
Индекс: 18
Обращение: r, w
Значение холодного
старта:
SP_RATE_UP
Индекс: 19
Обращение: r, w
Значение холодного
старта:
ST_REV
Индекс: 1
Обращение: r
Ввод Rampen-крутизны для спадающего изменения сигнала в
режиме работы AUTO.
3402823466 х 10
38
Примечание: при вводе значения, равного «0», сигнал заданного
значения используется напрямую.
Ограничение скорости изменения активно для выходных блоков
в режимах AUTO и CAS.
Ввод Rampen-крутизны для возрастающего изменения сигнала в
режиме работы AUTO.
3402823466 х 10
38
Примечание: при вводе значения, равного «0», сигнал заданного
значения используется напрямую.
Индикация состояния ревизии статических данных.
Примечание: ревизия производится при каждом изменении
какого-либо статического параметра в блоке.
EB 8383-1 RU
Page 60

60
Описание параметров
STATUS_OPTS
Индекс: 15
Обращение: r, w в O/S
Выбор:
Значение холодного
старта:
STRATEGY
Индекс: 3
Обращение: r, w
Значение холодного
старта:
TAG_DESK
Индекс: 2
Обращение: r, w
Значение холодного
старта:
UPDATE_EVT
Индекс: 29
Обращение: r
XD_SCALE
Индекс: 12
Обращение: r, w
в режимах AUTO, MAN, O/S
Значение холодного
старта:
Выбор имеющихся в распоряжении опций статуса,
предназначенных для установки вида его обработки:
Uninitialized – не инициализирован
Propagate Fault Backward – статус блока обработки через статус
BKCAL_OUT направляется на
впереди включенный блок.
Uninitialized
Параметр для группировки и, благодаря этому, ускоренной
обработки блоков. Группировка реализуется посредством
установки одинаковых численных значений в параметре
STRATEGY для каждого отдельного блока.
0
Примечание: эти данные приборным блоком ни проверяются, ни
обрабатываются.
Ввод характерного для данного потребителя текста, максимум
32 знака, для более точной идентификации и «привязки» блока.
текст отсутствует.
Индикация об изменении статических данных блока, включая
дату и время.
Назначается диапазон (начальное и конечное значения)
физической величины и точность после запятой в значении
управляющего параметра (OUT). Задается в [%], [mm] или
[градус].
0…100%
Примечание.
при использовании размерности [%] значение для OUT
масштабируется относительно 100%.
При использовании размерности [mm] (для прямоходного
клапана) или [градус] (для поворотного клапана) установленное
в параметре RATED_TRAVEL блока обработки значение
масштабируется как 100%.
EB 8383-1 RU
Page 61

61
Описание параметров
7.4.3.2 Функциональный PID-блок (PID-регулятор)
Функциональный PID-блок содержит входной канал, пропорциональный
интегродифференцирующий канал (PID) и аналоговый выходной канал.
Конфигурация PID-блока (PID-регулятора) зависит от конкретных задач
автоматизации.
Могут быть реализованы простые схемы регулирования: регулирования с подачей
возмущающего воздействия, каскадного регулирования с ограничением в
соединении с другим регулирующим блоком.
Для обработки измеряемого параметра в PID-блоке имеются следующие
возможности.
Масштабирование и ограничение сигнала, управление режимом работы, подача
возмущающего воздействия, ограничительное регулирование, определение
аварийной ситуации и трансляция статуса сигнала.
PID-блок (PID-регулятор) может обеспечивать различные стратегии регулирования.
Он обладает гибким алгоритмом регулирования, конфигурируемым в зависимости от
конкретного случая применения.
PID-блок получает регулирующий сигнал в зависимости от режима работы
(MODE_BLK) в виде входного параметра CAS_IN, RCAS_IN либо SP. Исходя из
этого, а также при учете PV_SCALE, SP_HI_LIM и SP_LO_LIM, SP_RATE_UP и
SP_RATE_DN вырабатывается внутренний сигнал заданного значения.
Текущее значение блок получает через входную переменную IN. Исходя из этого, и
при учете PV_SCALE и фильтра 1-го порядка PV_TIME образуется переменная
процесса PV.
Оба сигнала поступают на обработку согласно внутреннему PID-алгоритму. Этот
алгоритм (PID-регулирования) включает пропорциональную, интегрирующую и
дифференцирующую обработку сигнала. Управляющий сигнал рассчитывается на
основе величины рассогласования между сигналами заданного значения SP и
переменной процесса PV (текущее значение).
Отдельные части PID-регулятора следующим образом воздействуют на процесс
расчета управляющего сигнала.
¾ Пропорциональная часть.
На изменение заданного значения SP или переменной процесса PV (текущее
значение) пропорциональная часть реагирует линейно. Через коэффициент
пропорциональности GAIN происходит изменение управляющего сигнала,
который будучи умноженным на величину рассогласования соответствует
коэффициенту усиления. Если регулятор работает только с
пропорциональной частью, то процесс регулирования сопровождается
некоторой постоянной величиной рассогласования (ошибки).
¾ Интегрирующая часть.
Постоянная величина рассогласования (ошибки), возникающая при расчете
управляющего сигнала в пропорциональной части регулятора, поступает в
интегрирующую часть и подвергается интегрированию в течение такого
временного интервала, при котором величина ошибки окажется
пренебрежимо мала. Функция интегрирования корректирует управляющий
сигнал в зависимости от величины и длительности рассогласования. Если
величина временного интервала интегрирования RESET сбрасывается до
нуля, то регулятор будет работать как Р- или PD-регулятор.
EB 8383-1 RU
Page 62

62
Описание параметров
Влияние интегрирующей части на процесс регулирования возрастает, когда
величина времени интегрирования RESET увеличивается.
¾ Дифференцирующая часть.
В условиях регулирования с большой инерционностью процесса, например, при
регулировании температуры, имеет смысл использовать дифференцирующую
часть регулятора. Посредством дифференцирующей части с параметром RATE
производится расчет управляющего сигнала в зависимости от изменения
рассогласования.
Согласно параметрам OUT_SCALE, OUT_HI_LIM и OUT_LO_LIM из управляющего
сигнала выделяется выходное значение OUT, которое поступает на следующий
функциональный блок.
Через параметр STATUS_OPTS можно в зависимости от статуса входных сигналов
PID-блока влиять на статус выходного значения OUT. Посредством этого, например,
можно активировать защитное реагирование включенного после PID-блока
выходного блока.
Параметр BYPASS позволяет осуществлять прямую подачу внутреннего задающего
сигнала вместо управляющего сигнала.
Через входную переменную FF_VAL возможна подача возмущающего воздействия,
а TRK_IN_D и TRK_VAL прямое управление выходным сигналом.
возмущающее система
воздействие слежения
Рис.15 • Функциональный PID-блок (PID-регулятор)
EB 8383-1 RU
Page 63

63
Параметры функционального PID-блока
ACK_OPTION
Индекс: 46
Обращение: r, w
Выбор:
Значение холодн. старта:
Через этот параметр можно выбирать, будет ли ситуация
тревоги в момент ее выявления автоматически (без воздействия
Fieldbus-Host-системы) подтверждаться (сбрасываться?) в
самом приборе.
Undefined – выбор не установлен
HI_HI_ALM – тревога при верхнем граничном значении
HI_ALM – предупреждение о верхнем граничном значении
LO_LO_ALM – тревога при нижнем граничном значении
LO_ALM – предупреждение о нижнем граничном значении
DV_HI_ALM – тревога граничного значения для верхнего рассогласования
DV_LO_ALM – тревога граничного значения для нижнего рассогласования
BLOCK_ALM – блочная тревога
Undefined – выбор не установлен
Примечание:
тревожное сообщение посылается в Fieldbus-Host-систему, но
ею не подтверждается (квитируется, сбрасывается?).
Описание параметров
ALARM_HYS
Индекс: 47
Обращение: r, w
Ввод:
Значение холод. старта:
ALARM_SUM
Индекс: 45
Обращение: r, w
Показания:
Установка величины гистерезиса для верхней и нижней границ
тревоги. Условия аварийной ситуации остаются активны до тех
пор, пока измеряемый параметр находится в пределах зоны
гистерезиса. Величина гистерезиса действует в следующих
границах функционального PID-блока:
HI_HI_LIM
HI_LIM
LO_LO_LIM
LO_LIM
DV_HI_LIM
DV_LO_LIM
0…50%
0,5%
Примечание:
величина гистерезиса выражается в процентах от диапазона
группы параметров PV_SCALE функционального PID-блока.
Индикация текущего статуса тревожных сигнализаций процесса
в функциональном PID-блоке.
HI_HI_ALM – нарушение верхней границы тревоги
HI_ALM – нарушение верхней границы предупредительной тревоги
LO_LO_ALM – нарушение нижней границы тревоги
LO_ALM – нарушение нижней границы предупредительной тревоги
DV_HI_ALM – нарушение границы тревоги для верхнего рассогласования
DV_LO_ALM – нарушение границы тревоги для нижнего рассогласования
BLOCK_ALM – блочная тревога
Примечание:
дополнительно в этой группе параметров можно деактивировать
тревожные сигнализации процесса.
EB 8383-1 RU
Page 64

64
Описание параметров
ALERT_KEY
Индекс: 4
Обращение: r, w
Ввод:
Значение холодного
старта:
BAL_TIME
Индекс: 25
Обращение: r, w
Значение холодного
старта:
BKCAL_HYS
Индекс: 30
Обращение: r, w
Ввод:
Значение холодного
старта:
BKCAL_IN
Индекс: 27
Обращение: r, w
BKCAL_OUT
Индекс: 31
Обращение: r, w
BLOCK_ALM
Индекс: 44
Обращение: r, w
Ввод идентификационного номера отдельного узла
оборудования. Эта информация может использоваться Fieldbus-
Host-системой для сортировки тревожных сигналов и событий.
1…255
0
Примечание: Значение 0 (значение холодного старта) является
недопустимым и потому при записи в прибор сопровождается
сообщением об ошибке.
Ввод временной константы, посредством которой
обеспечивается противодействие насыщению интегрирующей
части регулятора (расчетный управляющий сигнал >
OUT_HI_LIM или < OUT_LO_LIM).
0
Примечание: при значении 0 (значение холодного старта)
насыщение немедленно снимается.
Ввод величины гистерезиса для верхней и нижней границы
управляющего сигнала OUT_HI_LIM и OUT_LO_LIM.
Если расчетный управляющий сигнал выходит за пределы
диапазона, то этот выход индицируется в параметре OUT и
передается на последующие блоки.
Это состояние выхода за границы диапазона остается активным
до тех пор, пока величина расчетного управляющего сигнала не
выйдет за границы заданного гистерезиса.
0…50%
0,5%
Индицируется аналоговое выходное значение и статус, который
при каскадном регулировании будет восприниматься от
параметра BKCAL_OUT последующего включенного
функционального блока.
Это значение обеспечивает отслеживание изменения выходного
сигнала и реализует, таким образом, «безударное»
переключение режимов.
Индицируется аналоговое выходное значение и статус, который
при каскадном регулировании будет передаваться в параметр
BKCAL_IN предварительно включенного функционального
блока. Этот параметр препятствует интегральному насыщению
регулятора и обеспечивает, таким образом, «безударное»
переключение режимов.
Индицируется текущее состояние блока с информированием о
возникающих ошибках конфигурации, аппаратного обеспечения
или о системных ошибках, включая данные о времени
сигнализации (дата, время) при возникновении неисправности.
BLOCK_ERR
Индекс: 6
Обращение: r
Показания:
Примечание: дополнительно в этой группе параметров можно
вручную подтверждать (сбрасывать?) действующую блочную
тревожную сигнализацию.
Индикация текущей блочной неисправности.
OUT OF SERVICE – блочный режим «Ждущий режим».
CONFIGURATION ERROR – в блоке присутствует ошибка конфигурации
EB 8383-1 RU
Page 65

65
Описание параметров
BYPASS
Индекс: 17
Обращение: r, w в режиме
MAN, O/S
Выбор:
Значение холодного
старта:
CAS_IN
Индекс: 18
Обращение: r, w
CONTROL_OPTS
Индекс: 13
Обращение: r, w в режиме
MAN, O/S
Выбор:
Через этот параметр можно включать или выключать расчет
управляющего сигнала через алгоритм PID-регулирования.
Uninitialized – соответствует состоянию ON (ВКЛ)
OFF (ВЫКЛ) – обход PID-регулятора выключен и вычисляемый
согласно PID – алгоритму управляющий сигнал
выдается через параметр OUT.
ON (ВКЛ) - включен BAYPASS (обход) PID-регулятора и
управляющий в виде SP напрямую выдается
через параметр OUT.
Uninitialized
Примечание: при установке «Uninitialized» блок остается в
ждущем режиме работы «O/S».
Для активирования состояния «BYPASS» (см. установку ON)
байпас необходимо задействовать в опциях регулирования
(параметр CONTROL_OPTS).
Индицируется/задается аналоговый управляющий сигнал (и его
статус), воспринимаемый от впереди включенного
функционального блока.
Выбор имеющихся опций регулятора для реализации
необходимой стратегии регулирования.
Bypass Enable: задействование параметра BYPASS.
Direct Acting: прямое управляющее воздействие.
Track Enable: задействование следящего регулирования.
Track in Manual: следящее регулирование вручную.
PV for BKCAL_OUT:использовать величину и статус параметра
PV для параметра BKCAL_OUT.
Значение холод. старта:
DV_HI_ALM
Индекс: 64
Обращение: r, w
DV_HI_LIM
Индекс: 57
Обращение: r, w
Значение холод. старта:
DV_HI_PRI
Индекс: 56
Обращение: r, w
Ввод:
No OUT Limits in Manual: нет выходного ограничения в режиме
работы «ВРУЧНУЮ».
None
Индикация статуса тревожной сигнализации для верхнего
рассогласования, включая данные момента тревоги (дата,
время) и параметра, который вызвал ее срабатывание.
Регулирующий параметр превосходит управляющий на
величину большую, чем заданную в параметре DV_HI_LIM.
Примечание: дополнительно в этой группе параметров можно
вручную подтверждать (квитировать) активную сигнализацию
тревоги.
Установка граничной величины для верхнего рассогласования.
Если регулируемый (выходной) параметр превосходит (входное)
управляющее воздействие на эту величину, вырабатывается
предварительная тревога DV_HI_ALM.
3402823466 х 10
38
Задается реагирование в случае превышения верхнего
рассогласования (DV_HI_LIM).
0 нарушение границы для верхнего рассогласования не
используется;
1 не извещается при нарушении граничного значения для
верхнего рассогласования;
EB 8383-1 RU
Page 66

Значение холод. старта:
DV_LO_ALM
Индекс: 65
Обращение: r, w
DV_LO_LIM
Индекс: 59
Обращение: r, w
Значение холод. старта:
DV_LO_PRI
Индекс: 58
Обращение: r, w
Ввод:
Значение холод. старта:
FF_GAIN
Индекс: 42
Обращение: r, w в режиме
MAN, O/S
Значение холод. старта:
FF_SCALE
Индекс: 41
Обращение: r, w в режиме
MAN, O/S
66
Описание параметров
2 резервируется для блочных сигнализаций;
3…7 о нарушении граничного значения для верхнего
рассогласования будет сообщаться в виде пояснения
пользователю согласно приоритету (3=низкий приоритет,
7=высокий приоритет);
8…15 о нарушении граничного значения для верхнего
рассогласования будет сообщаться в виде сигнализации
критической тревоги согласно приоритету (8=низкий
приоритет, 15=высокий приоритет).
0
Индикация статуса тревожной сигнализации для нижнего
рассогласования, включая данные момента тревоги (дата,
время) и параметра, который вызвал ее срабатывание.
Регулирующий параметр падает ниже управляющего на
величину большую, чем заданную в параметре DV_LO_LIM.
Примечание: дополнительно в этой группе параметров можно
вручную подтверждать (квитировать) активную сигнализацию
тревоги.
Установка граничной величины для нижнего рассогласования.
Если регулируемый (выходной) параметр падает ниже
(входного) управляющего воздействия на эту величину,
вырабатывается предварительная тревога DV_LO_ALM.
-3402823466 х 10
Задается реагирование в случае падения ниже
(
вероятно, ошибка в тексте, а должно быть «нижнего»)
38
верхнего
рассогласования (DV_HI_LIM).
0 нарушение границы для нижнего рассогласования не
используется;
1 не извещается при нарушении граничного значения для
нижнего рассогласования;
2 резервируется для блочных сигнализаций;
3…7 о нарушении граничного значения для нижнего
рассогласования будет сообщаться в виде пояснения
пользователю согласно приоритету (3=низкий приоритет,
7=высокий приоритет);
8…15 о нарушении граничного значения для нижнего
рассогласования будет сообщаться в виде сигнализации
критической тревоги согласно приоритету (8=низкий
приоритет, 15=высокий приоритет).
0
Задается усиление возмущающего воздействия.
0
Примечание: усиление возмущающего воздействия умножается
на величину возмущающего воздействия (FF_VAL). Результат
суммируется с выходным значением OUT.
Назначается диапазон измерений (нижняя или верхняя граница),
физическая размерность (единица) и точность после запятой в
значении возмущающего сигнала (FF_VAL).
Значение холод. старта:
0…100%
EB 8383-1 RU
Page 67

67
Описание параметров
FF_VAL
Индекс: 40
Обращение: r, w
Ввод:
GAIN
Индекс: 23
Обращение: r, w
Значение холод. старта:
GRANT_DENY
Индекс: 12
Обращение: r, w
HI_ALM
Индекс: 61
Обращение: r, w
HI_HI_ALM
Индекс: 60
Обращение: r, w
HI_HI_LIM
Индекс: 49
Обращение: r, w
Ввод:
Значение холод. старта:
HI_HI_PRI
Индекс: 48
Обращение: r, w
Ввод:
Значение холод. старта:
Индикация и ввод значения и статуса возмущающего
воздействия.
Диапазон и размерность в FF_SCALE.
Примечание: возмущающее воздействие умножается на
усиление (FF_GAIN). Результат суммируется на выходе OUT.
Ввод пропорционального усиления (коэффициент).
0
Примечание: параметр должен иметь значение не равное «0». В
противном случае в параметре BLOCK_ERR установится
состояние ошибки конфигурации и блок перейдет в режим O/S.
Разрешение или ограничение прав доступа к полевому прибору
со стороны Fieldbus-Host-системы.
Примечание: этот параметр в приборе тип 3787 не используется.
Индикация статуса тревоги для предупреждения о верхнем
граничном значении (HI_LIM), включая данные момента тревоги
(дата, время) и параметра, который вызвал ее срабатывание.
Примечание: значение параметра воспринимается из параметра
PV_SCALE. Дополнительно в этой группе параметров можно
вручную подтверждать (квитировать) активную сигнализацию
тревоги.
Индикация статуса тревоги для верхнего граничного значения
(HI_HI_LIM), включая данные момента тревоги (дата, время) и
параметра, который вызвал ее срабатывание.
Примечание: значение параметра воспринимается из параметра
PV_SCALE. Дополнительно в этой группе параметров можно
вручную подтверждать (квитировать) активную сигнализацию
тревоги.
Установка граничного значения для тревоги по верхнему
параметру (HI_HI_ALM).
Если PV превысит эту границу, будет выдан параметр статуса
тревоги HI_HI_ALM.
Диапазон и значение из PV_SCALE.
3402823466 х 10
38
Задается реагирование в случае превышения значения верхней
границы тревоги (HI_HI_LIM).
0 нарушение верхней границы тревоги не используется;
1 не извещается при нарушении верхней границы тревоги;
2 резервируется для блочных сигнализаций;
3…7 о нарушении верхней границы тревоги будет сообщаться
в виде пояснения пользователю согласно приоритету
(3=низкий приоритет, 7=высокий приоритет);
8…15 о нарушении верхней границы тревоги будет сообщаться
в виде сигнализации критической тревоги согласно
приоритету (8=низкий приоритет, 15=высокий приоритет).
0
EB 8383-1 RU
Page 68

68
Описание параметров
HI_LIM
Индекс: 51
Обращение: r, w
Ввод:
Значение холод. старта:
HI_PRI
Индекс: 50
Обращение: r, w
Ввод:
Значение холод. старта:
IN
Индекс: 15
Обращение: r, w
LO_ALM
Индекс: 62
Обращение: r, w
LO_LO_ALM
Индекс: 63
Обращение: r, w
Установка граничного значения для предупредительной
тревоги по верхнему параметру (HI_ALM).
Если PV превысит эту границу, будет выдан параметр статуса
тревоги HI_ALM.
Диапазон и значение из PV_SCALE.
3402823466 х 10
38
Задается реагирование в случае превышения верхней границы
предупредительной тревоги (HI_LIM).
0 нарушение верхней границы предупредительной тревоги не используется;
1 не извещается при нарушении верхней границы предупредит. тревоги;
2 резервируется для блочных сигнализаций;
3…7 о нарушении верхней границы предупредительной тревоги
будет сообщаться в виде пояснения пользователю согласно приоритету
(3=низкий приоритет, 7=высокий приоритет);
8…15 о нарушении верхней границы предупредительной тревоги
будет сообщаться в виде сигнализации критической тревоги согласно
приоритету (8=низкий приоритет, 15=высокий приоритет).
0
Индикация и ввод состояния аналоговой величины
регулируемого (выходного) параметра.
Индикация статуса тревоги для
предупреждения о нижнем
граничном значении (LO_LIM), включая данные момента тревоги
(дата, время) и параметра, который вызвал ее срабатывание.
Примечание: значение статуса параметра тревоги
воспринимается из параметра PV_SCALE.
Индикация статуса тревоги для нижнего граничного значения
(LO_LO_LIM) , включая данные момента тревоги (дата, время) и
параметра, который вызвал ее срабатывание.
LO_LO_LIM
Индекс: 55
Обращение: r, w
Ввод:
Значение холод. старта:
Примечание: значение параметра воспринимается из параметра
PV_SCALE. Дополнительно в этой группе параметров можно
вручную подтверждать (квитировать) активную сигнализацию
тревоги.
Установка граничного значения для тревоги по нижнему
параметру (LO_LO_ALM).
Если PV падает ниже этой границы, будет выдан параметр
статуса тревоги LO_LO_ALM.
Диапазон и значение из PV_SCALE.
-3402823466 х 10
38
EB 8383-1 RU
Page 69

69
Описание параметров
LO_LO_PRI
Индекс: 54
Обращение: r, w
Ввод:
Значение холодн. старта:
LO_LIM
Индекс: 53
Обращение: r, w
Ввод:
Значение холодн. старта:
LO_PRI
Индекс: 52
Обращение: r, w
Ввод:
Значение холодн. старта:
MODE_BLK
Индекс: 5
Обращение: r, w
Задается реагирование в случае падения ниже нижнего
граничного значения для тревоги по нижнему параметру
(LO_LO_LIM).
0 нарушение нижней границы тревоги не используется;
1 не извещается при нарушении нижней границы тревоги;
3 резервируется для блочных сигнализаций;
3…7 о нарушении нижней границы тревоги будет сообщаться
в виде пояснения пользователю согласно приоритету
(3=низкий приоритет, 7=высокий приоритет);
8…15 о нарушении нижней границы тревоги будет сообщаться
в виде сигнализации критической тревоги согласно
приоритету (8=низкий приоритет, 15=высокий приоритет).
0
Установка граничного значения для предупредительной
тревоги по нижнему параметру (LO_ALM).
Если величина PV упадет ниже значения этой границы, будет
выдан параметр статуса тревоги LO_ALM.
Диапазон и значение из PV_SCALE.
-3402823466 х 10
38
Задается реагирование в случае падения ниже нижней границы
предупредительной тревоги (LO_LIM).
0 нарушение нижней границы предупредительной тревоги не используется;
1 не извещается при нарушении нижней границы предупредит. тревоги;
2 резервируется для блочных сигнализаций;
3…7 о нарушении нижней границы предупредительной тревоги
будет сообщаться в виде пояснения пользователю согласно приоритету
(3=низкий приоритет, 7=высокий приоритет);
8…15 о нарушении нижней границы предупредительной тревоги
будет сообщаться в виде сигнализации критической тревоги согласно
приоритету (8=низкий приоритет, 15=высокий приоритет).
0
Индикация текущего (Actual) режима работы PID-блока,
назначенного (Target) режима, разрешенного (Permitted)
режима, которые поддерживает PID-блок, а также стандартного
(Normal) режима.
Показания:
ROUT
RCAS
CAS
AUTO
MAN
OOS
PID-блок поддерживает следующие режимы работы.
O/S, Out of Service (ждущий режим)
PID-алгоритм модуля не используется. В параметре OUT
содержится последнее значение, либо при
задействованной подаче возмущающего воздействия
выдается его заданная величина.
MAN (ручное управление со стороны оператора)
Выходной сигнал блока через параметр OUT может
устанавливаться непосредственно оператором.
EB 8383-1 RU
Page 70

70
Описание параметров
AUTO (автоматический режим)
Заданное пользователем значение регулирующего сигнала
используется через параметр SP для работы внутреннего
PID-алгоритма.
CAS (каскадный режим)
Функциональный PID-блок для внутреннего расчета
управляющего воздействия получает входной
управляющий сигнал через параметр CAS_IN
непосредственно от впереди включенного функционального
блока. Используется внутренний PID-алгоритм.
RCAS (внешний каскад)
Функциональный PID-блок для внутреннего расчета
управляющего воздействия получает входной
управляющий сигнал через параметр RCAS_IN
непосредственно от Fieldbus-Host-системы. Используется
внутренний PID-алгоритм.
ROUT (внешний выход)
Функциональный PID-блок для внутреннего расчета
управляющего воздействия получает входной
управляющий сигнал через параметр ROUT_IN
непосредственно от Fieldbus-Host-системы. Управляющее
воздействие выдается через параметр OUT, а обработка по
внутреннему PID-алгоритму исключается.
OUT
Индекс: 9
Обращение: r, w в режиме
MAN, O/S
OUT_HI_LIM
Индекс: 28
Обращение: r, w
Ввод:
Значение холод. старта:
OUT_LO_LIM
Индекс: 29
Обращение: r, w
Ввод:
Значение холод. старта:
OUT_SCALE
Индекс: 11
Обращение: r, w в режиме
MAN, O/S
Значение холод. старта:
PV
Индекс: 7
Обращение: r
PV_FTIME
Индекс: 16
Обращение: r, w
Значение холод. старта:
Индикация управляющего воздействия, величины, граничного
значения и статуса функционального PID-блока.
Примечание: если в параметре MODE_BLK выбран режим
работы MAN (ручное управление со стороны оператора), то
выходное воздействие OUT может устанавливаться вручную.
Используемая величина воспринимается от группы параметров
OUT_SCALE, а входной диапазон составляет OUT_SCALE± 10%.
Ввод верхнего граничного значения для аналоговой величины
управляющего сигнала OUT.
диапазон OUT_SCALE± 10%. величины OUT_SCALE.
100
Ввод нижнего граничного значения для аналоговой величины
управляющего сигнала OUT.
диапазон OUT_SCALE± 10%. величины OUT_SCALE.
0
Установка диапазона (начального и конечного значений)
физической величины и точности после запятой в значении
управляющего сигнала OUT.
100%
Индикация применяемой в данной конструкцией переменной
процесса PV, включая ее статус.
Примечание: используемая величина воспринимается из группы
параметров PV_SCALE.
Ввод постоянной времени (в сек) фильтра первого порядка.
Это время требуется, чтобы 63% от изменения регулируемого
параметра на входе IN оставить действующим в значении PV.
0 сек.
EB 8383-1 RU
Page 71

71
Описание параметров
PV_SCALE
Индекс: 10
Обращение: r, w в режиме
MAN, O/S
Значение холод. старта:
RATE
Индекс: 26
Обращение: r, w
Значение холод. старта:
RCAS_IN
Индекс: 32
Обращение: r, w
RCAS_OUT
Индекс: 35
Обращение: r
RESET
Индекс: 24
Обращение: r, w
Значение холод. старта:
ROUT_IN
Индекс: 33
Обращение: r, w
ROUT_OUT
Индекс: 36
Обращение: r
SHED_OPT
Индекс: 34
Обращение: r, w
Выбор:
Установка диапазона (начального и конечного значений)
физической величины и точности после запятой в значении
переменной процесса (PV).
100%
Установка постоянной времени для функции
дифференцирования.
0 сек.
В этом параметре аналоговый управляющий сигнал (величина и
статус), поступающий от Fieldbus-Host-системы, считывается и
индицируется с целью внутреннего расчета управляющего
воздействия.
Примечание: этот параметр активен только в режиме работы
RCAS.
Индицируется аналоговый управляющий (входной) сигнал после
воздействия Rampen-функции.
Его значение через этот параметр поступает в Fieldbus-Hostсистему, чтобы провести обратные вычисления при смене
рабочего режима или ограничении сигналов.
Примечание: этот параметр активен только в режиме RCAS.
Установка постоянной времени для функции интегрирования.
3402823466 х 10
38
Примечание: функция интегрирования выключается при вводе
постоянной времени 0 сек.
В этом параметре считывается и показывается поступающее от
Fieldbus-Host-системы управляющее воздействие (величина и
статус).
Примечание: этот параметр активен только в режиме ROUT.
В этом параметре считывается и показывается аналоговый
управляющий сигнал (величина и статус), который был прочитан
через параметр ROUT_IN.
Его величина предоставляется в распоряжение Fieldbus-Hostсистемы через этот параметр, чтобы провести обратные
вычисления при смене рабочего режима или ограничении
сигналов.
Примечание: этот параметр активен только в режиме ROUT.
Выбор реа
гирования при превышении контрольного времени
(см. параметр SHED_RCAS в приборном блоке) в ходе проверки
соединения между Fieldbus-Host-системой и PID-блоком в
режимах работы RCAS или ROUT. По истечении контрольного
времени PID-блок изменяет режим работы RCAS или ROUT на
выбранный здесь режим. Также задается реагирование по
окончании состояния ошибки.
Uninitialized: не инициализирован
NormalShed_NormalReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности следует возврат в
режим работы RCAS или ROUT.
NormalShed_NoReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности блок режима не
меняет.
EB 8383-1 RU
Page 72

72
Описание параметров
ShedToAuto_NormalReturn:
смена на режим AUTO, а при исчезновении условий
неисправности возврат в режим работы RCAS или ROUT.
ShedToAuto_NoReturn:
смена на режим AUTO, а при исчезновении условий
неисправности блок остается в режим работы AUTO.
ShedToManual_NormalReturn:
смена на режим MANUAL, а при исчезновении условий
неисправности возврат в режим работы RCAS или ROUT.
ShedToManual_NoReturn:
смена на режим MAN, а при исчезновении условий
неисправности блок остается в режим работы MAN.
ShedToRetainedTarget_NormalReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности следует возврат в
режим работы RCAS или ROUT.
ShedToRetainedTarget_NoReturn:
смена на следующий, возможный режим работы, а при
исчезновении условий неисправности блок режима работы
не меняет.
Значение холод. старта:
SP
Индекс: 8
Обращение: r, w в
режимах AUTO, MAN, O/S
Ввод:
SP_HI_LIM
Индекс: 21
Обращение: r, w
Ввод:
Значение холод. старта:
SP_LO_LIM
Индекс: 22
Обращение: r, w
Ввод:
Значение холод. старта:
SP_RATE_DN
Индекс: 19
Обращение: r, w
Значение холод. старта:
Uninitialized
Примечание: этот параметр PID-блока активен только в режиме
работы RCAS или ROUT. Если установлено значение
Uninitialized, то PID-блок невозможно перевести в режим RCAS
или ROUT.
Устанавливается заданное значение (управляющего
воздействия) в режиме работы AUTO.
значение и диапазон PV_SCALE ± 10%.
Установка верхней границы заданного значения (управляющего
воздействия).
значение и диапазон PV_SCALE ± 10%.
100
Примечание: если установка окончания шкалы в параметре
значение и диапазон PV_SCALE изменится, рассматриваемый
здесь параметр должен быть также согласован (подогнан).
Установка нижней границы заданного значения (управляющего
воздействия).
значение и диапазон PV_SCALE ± 10%.
0
Примечание: если установка окончания шкалы в параметре
значение и диапазон PV_SCALE изменится, рассматриваемый
здесь параметр должен быть также согласован (подогнан).
Установка крутизны Rampen-функции для спадающего
изменения заданного значения в режиме работы AUTO.
3402823466 х 10
38
Примечание: при вводе значения, равного «0», сигнал заданного
значения используется напрямую.
Ограничение скорости изменения активно для регулирующих
блоков только в режиме AUTO.
EB 8383-1 RU
Page 73

73
Описание параметров
SP_RATE_UP
Индекс: 20
Обращение: r, w
Значение холод. старта:
ST_REV
Индекс: 1
Обращение: r
STATUS_OPTS
Индекс: 14
Обращ.: r, w в режиме O/S
Выбор:
Значение холод. старта:
STRATEGY
Индекс: 3
Обращение: r, w
Установка крутизны Rampen-функции для возрастающего
изменения заданного значения в режиме работы AUTO.
3402823466 х 10
38
Примечание: при вводе значения, равного «0», сигнал заданного
значения используется напрямую.
Ограничение скорости изменения активно для регулирующих
блоков только в режиме AUTO.
Индикация состояния ревизии статических данных.
Примечание: ревизия производится при каждом изменении
какого-либо статического параметра в блоке.
Выбор имеющихся в распоряжении опций статуса для задания
обработки статуса.
Uninitialized: не инициализирован
IFS if Bad IN:
задействовать состояние включенного далее
функционального АО-блока как сбойное, если регулируемый
параметр (IN) изменит свой статус на BAD (плохой).
IFS if Bad CAS_IN:
задействовать состояние сбоя, если внешний управляющий
параметр (CAS_IN) изменит свой статус на BAD.
Use Uncertain as Good:
статус UNCERTAIN используется в качестве GOOD
(хороший).
Target In Manual if Bad IN:
переход в режим MAN, если регулируемый параметр
изменит свой статус на BAD.
Uninitialized
Параметр для группировки и, благодаря этому, ускоренной
обработки блоков. Группировка реализуется посредством
установки одинаковых численных значений в параметре
STRATEGY для каждого отдельного блока.
Значение холод. старта:
TAG_DESC
Индекс: 2
Обращение: r, w
Значение холод. старта:
TRK_IN_D
Индекс: 38
Обращение: r, w
TRK_SCALE
Индекс: 37
Обращение: r, w в
режимах MAN, O/S
Значение холод. старта:
TRK_VAL
Индекс: 39
Обращение: r, w
0
Примечание: эти данные PID-блоком ни проверяются, ни обрабатываются.
Ввод характерного для данного потребителя текста, максимум
32 знака, для более точной идентификации и «привязки» блока.
текст отсутствует.
Индикация и установк а дискретного входа (значения и статуса), который
активирует следящее регулирование от внешнего источника или от выходного
сигнала. После активирования следящего регулирования режим работы
изменяется на LO (локальное следящее регулирование). При этом
управляющий сигнал на выходе OUT принимает значение, установленное на
входе TRK_VAL.
Установка диапазона (начального и конечного значений)
физической величины и точности после запятой в значении
переменной процесса (PV).
100%
Индикация и ввод значения и статуса сигнала в аналоговой
форме, который будет сниматься с какого-либо другого
функционального блока и использоваться в качестве входного
для функции внешнего следящего регулирования.
EB 8383-1 RU
Page 74

74
Описание параметров
UPDATE_EVT
Индекс: 43
Обращение: r
Индикация, были ли изменены статические данные, включая
дату и время.
7.5 Другие параметры
7.5.1. Stale Counter
Stale Counter служит для оценки «качества» переменных процесса, получаемых по
конфигурируемому циклическому соединению (Publisher-Subscriber-соединение).
Посредством таких соединений осуществляется передача переменных процесса
между различными функциональными блоками.
С этой целью передающий блок (Publisher) в определенный момент времени
направляет данные переменной процесса на шину. Следующий блок или блоки
(Subscriber) в указанные момент времени «слушают» шину. Принимающие блоки
контролируют корректность информации, получаемой в назначенный момент
времени.
Информация корректна, если она в назначенный момент времени имеет статус
“Good” (хороший).
Параметр Stale Counter назначает, сколько должно быть принято следующих друг за
другом «плохих» (stale) значений, чтобы в блоке активировался механизм Fault State
(состояние ошибки).
Если значение Stale Counter установлено на «0», то указанный механизм контроля
отключается.
7.5.2 Link Objekte
Link-объекты служат для обеспечения соединений между входами и выходами
функциональных блоков (конфигурируемые циклические соединения).
Для каждого позиционера могут быть сконфигурированы 22 Link-объекта.
7.5.3 LAS-функциональность
Количество проектируемых соединений и планировщиков настраивается на
возможности DeltaV-системы от FISHER-ROSEMOUNT.
В качестве LAS-функциональности позиционером могут поддерживаться следующие
планировщики множеств:
¾ 1 планировщик
¾ 1 субспланировщик
¾ 25 последовательностей на субпланировщик
¾ 25 элементов на одну последовательность
EB 8383-1 RU
Page 75

8. Сообщения диагностики
75
Сообщения диагностики
8.1 Сообщения в параметре XD_ERROR_EXT
(блок обработки – Transducer
Block)
¾ Failure mechanics / неисправность механики
Это сообщение устанавливается, если при циклической проверке будет
выявлен дефект в модуле механики. Потребуется ремонт.
¾ Failure in measurement / ошибка выполнения измерений
Внутренний АЦП работает некорректно в пределах своего временного «окна»,
либо измеряемые значения лежат вне физических границ измерения АЦП.
Если при сбросе путем горячего перезапуска проблема не устраняется,
потребуется ремонт.
¾ Not initialized / прибор не инициализирован
Прибор еще не прошел инициализации.
¾ Selfcalibration failed / ошибка самокалибровки (коррекции)
Не удалось успешно выполнить инициализацию. Уточненные сведения
относительно причины сообщаются в параметре SELF_CALIB_STATUS.
¾ Zero point error / ошибка нулевой точки
Сообщение об изменении более чем на 5% параметра, определенного в ходе
инициализации или коррекции нулевой точки.
Возможные источники неисправности:
- износ конуса или седла клапана;
- инородные частицы в зазоре плунжерной пары.
Сброс осуществляется через успешную инициализацию.
¾ Internal Control Loop disturbed / помеха внутреннего позиционирования
Сообщение появляется, если позиционер не в состоянии в установленное
время отслеживания (Delay Time) осуществить регулирование в заданном
диапазоне допуска.
Сброс осуществляется через SELF_CALIB_CMD – “Reset Control Loop Fault”.
¾ Travel time exceeded / превышено время срабатывания
Было превышено рассчитанное в ходе инициализации время срабатывания.
EB 8383-1 RU
Page 76

76
¾ Forced venting active / активен принудительный сброс воздуха
Задействован принудительный сброс воздуха, т.е. сигнал на соединительных
клеммах +81 и -82 менее 3 В.
Регулирующий клапан независимо от условий регулирования переводится в
положение безопасности. Сброс происходит автоматически, при наличии
сигнала постоянного напряжения в пределах 6…24 V DC на соединительных
клеммах +81 и –82.
¾ Device under Selftest / полевой прибор в состоянии самотестирования
Сообщение устанавливается, когда прибор находится в состоянии
инициализации или электрической коррекции нулевой точки.
¾ Total valve travel limit exceeded / превышена граница абсолютного
путевого перемещения (путевого интеграла)
Текущая величина абсолютного путевого перемещения превышает заданное
граничное значение.
Сброс обеспечивается командой “SELF_CALIB_CMD=Reset total valve travel”.
Сообщения диагностики
8.2 Сообщения в параметре XD_ERROR
(блок обработки – Transducer
Block)
¾ Unspecified Error / непредусмотренная неисправность
Прибор не был инициализирован или превышено абсолютное путевое
перемещение.
¾ General Error / общая неисправность
Не выполнено согласование.
¾ Calibration Error / ошибка калибровки
Сообщение устанавливается при ошибке нулевой точки, неисправности
контура регулирования или, когда возникает ошибка при инициализации.
¾ Calibration Error / ошибка калибровки
Ошибка при передаче характеристики на прибор.
Сброс осуществляется автоматически после передачи корректной
характеристики.
¾ Electronics Failure / неисправность электроники
Сообщение устанавливается, когда в ходе циклической проверки выявляется
дефект электронного модуля. Потребуется ремонт.
EB 8383-1 RU
Page 77

77
Сообщения диагностики
¾ Mechanical Failure / неисправность механики
Сообщение устанавливается, когда в ходе циклической проверки выявляется
дефект механического модуля. Потребуется ремонт.
¾ Data Integrity Error / ошибка целостности данных
Ошибка контрольной суммы.
¾ Algorithm Error / ошибка вычислений
Ошибка вычислений задающего и текущего значений.
EB 8383-1 RU
Page 78

78
SAMSON AG • MESS- UND REGELTECHNIK
Weismüllerstraße 3 • 60314 Frankfurt am Main
Postfach 10 19 01 • 60019 Frankfurt am Main
Telefon 069 4009-0 • Telefax 069 4009-1507
EB 8383-1 RU
 Loading...
Loading...