

Page 1

Позиционер Profibus
тип 3785
PA-профиль прибора, версия 2.0
Рис.1 • Позиционер тип 3785
Инструкция по монтажу и
эксплуатации
EB 8382-1 RU
Версия микропрограммного обеспечения R 1.42/K 1.60
Издание: январь 2003
Page 2
- 2 -
Содержание
Содержание
страница
1. Конструкция и принцип действия
1.1 Дополнительное оснащение 8
1.2 Осуществление связи 8
2. Установка позиционера на клапан
2.1 Прямой монтаж на привод тип 3277 10
2.2 Монтаж согласно IEC 60534-6 (NAMUR) 14
2.2.1 Последовательность операций при монтаже 14
2.2.2 Предварительная установка рабочего хода 16
2.3 Монтаж на поворотные приводы 18
2.3.1 Монтаж рычага контактного ролика 18
2.3.2 Монтаж промежуточной вставки 18
2.3.3 Установка и закрепление кулачкового диска 20
2.3.4 Обратный усилитель в приводах двойного действия 22
10
8
2.4 Положение безопасности привода 22
3. Подключения
3.1 Пневматические подключения 24
3.1.1 Манометры 24
3.1.2 Питающее давление 25
3.2 Электрические подключения 25
3.2.1 Принудительный сброс воздуха 27
3.2.2 Граничные контакты 28
3.2.3 Установка соединения для связи (шинный адрес) 28
3.2.4 Локальный интерфейс (SSP) 28
4. Эксплуатация позиционера
4.1 Контрольные светодиоды 30
4.2 Защита от записи 31
4.3 Активация или деактивация принудительного сброса воздуха 31
4.4 Базовая установка 31
4.4.1 Установка механики в нулевую точку 32
24
30
4.4.2 Инициализация 32
4.5 Установка индуктивных концевых датчиков 34
5. Техническое обслуживание
6. Ремонтные работы при наличии Ех-приборов
7. Инструментальные особенности PROFIBUS Master Class 1
35
35
36
EB 8382-1 RU
Page 3
- 3 -
р
7.1 Базовые параметры прибора 36
7.2 Обмен данными DATA EXCHANGE 36
7.3 Описание параметров 40
7.4 Кодирование статуса измеряемого параметра 42
7.5 Режимы работы 43
8. Перечень параметров 46
9. Сообщения и диагностика прибора 60
9.1 Сообщения диагностики 60
9.2 Сообщения расширенной диагностики 62
9.3 Сообщения “CHECK-BACK” 63
9.4 Сообщения в процессе инициализации 65
Замечания по технике безопасности
Монтажные размеры прибора 68
Свидетельства об испытаниях 69
¾ Монтаж и пуск прибора в эксплуатацию могут осуществлять
только специалисты, имеющие право на проведение монтажных
и пусконаладочных работ и на эксплуатацию такого
оборудования.
Под специалистами настоящей инструкцией подразумеваются
лица, кото
опыта, а также знаний действующих норм и стандартов,
регламентирующих их работу, могут предусмотреть возможные
угрозы безопасности персонала.
¾ При использовании приборов в искрозащищенном исполнении
персонал должен иметь необходимое образование или
свидетельство, подтверждающее право работы с
взрывозащищенными приборами на взрывоопасных установках,
см. также гл.6.
¾
Следует принять необходимые меры по предотвращению угроз
безопасности, которые в регулирующем клапане могут быть
обусловлены рабочим давлением и подвижными частями
механизмов.
¾ Если из-за чрезмерного питающего давления в исполнительном
приводе могут возникать недопустимые перемещения или усилия
перестановки, такое давление следует предварительно
ограничивать в редукционных станциях.
¾ Соответственно должны быть
транспортировка и хранение таких приборов.
¾ Примечание. Прибор, маркированный СЕ-знаком, соответствует
требованиям руководящих документов 94/9/EG и 89/336/EGW.
Ознакомиться и скопировать сертификат соответствия можно
в Internet по адресу:
ые на основе своего специального образования и
предусмотрены специальная
http://www.samson.de
EB 8382-1 RU
Page 4
- 4 -
Изменения программных версий
Изменения микропрограммного обеспечения позиционера относительно
предыдущей версии
Старая версия Новая версия
Регулирование R 1.23
R 1.31
Новая версия для согласования с новой версией аппаратного
обеспечения, версия аппаратного обеспечения –приборы с
индексом .01.
Регулирование R 1.31 R 1.4
Разновидность привода
Переключение вида привода с «прямоходного привода» на
«поворотный привод» вызывает:
Метод инициализации ……… по максимальному диапазону
Коэффициент передачи…… S90
Номинальный угол ………….. 90°
Конечное положение при w< 1%
Конечное положение при w> 99%
Диапазон угла поворота.
начало ………………………… 0°
Диапазон угла поворота,
окончание ……………………. 90°
Переключение вида привода с «поворотного привода» на
«прямоходный привод» вызывает:
Монтаж Интегрированный по NAMUR
Метод инициализации по номинальному диапазону по номинальному диапазону
Положение при монтаже стрелка к приводу стрелка от привода
Коэффициент передачи D1 ……………………………… _
Позиция штифта _ ……………………………….. А
Номинальный ход 15 мм ………………………….. 15 мм …………………………..
Конечное положение при w< 1% …………………………….. 1% ……………………………..
Конечное положение при w> 125% ………………………….. 125% …………………………..
Диапазон хода, начало 0 мм …………………………… 0 мм ……………………………
Диапазон хода, окончание 15 мм ………………………….. 15 мм …………………………..
Длина рычага _ ……………………………….. 42 мм …………………………..
Метод инициализации Изменение метода инициализации с «максимальный диапазон»
на «номинальный диапазон» вызывает:
Конечное положение при w< 1%; Конеч. положение при w>125%
Изменение метода инициализации с «номинальный диапазон»
на «максимальный диапазон» вызывает:
Конечное положение при w< 1%; Конеч. положение при w>99%
Необходимое время
срабатывания ОТКР/ЗАКР
Диапазон установки необходимого времени срабатывания был
ограничен до 75сек.
Инициализация В ходе инициализации определяются минимальные
управляющие импульсы для участка 20…80% диапазона
регулирования и записываются в энергонезависимой памяти
EEPROM.
EB 8382-1 RU
Page 5
- 5 -
Коэффициент
пропорциональности
KP_Y1 и KP_Y2
Регулирование R 1.41 R 1.42
Коррекция согласования нулевой точки, запущенная через
Коммуникация К 1.34 К 1.41
Новая версия для согласования с новой версией аппаратного
Коммуникация К 1.14 К 1.51
В седьмом бите параметра Checkback передается текущее
Коммуникация К 1.51 К 1.60
При статусе заданного значения BAD позиционер больше не
Эти коэффициенты согласуются с выбранным видом привода и
с замеренными временами срабатывания.
коммуникации.
обеспечения, версия аппаратного обеспечения – приборы с
индексом .01.
состояние контроля контура регулирования.
В отличие от передачи через 13-й бит это сообщение
сбрасывается автоматически, как только наступает состояние,
при котором контроль регулирующего контура не обнаруживает
никаких ошибок. Функция 13-го бита остается неизменной.
Передача в седьмом бите поддерживается только, начиная с
версии регулирования R 1.41.
Сообщение «
сбрасывается автоматически через 10 сек.
При активном режиме работы «Локальная перегрузка» в
параметре Checkback устанавливается бит 2.
переходит во всех случаях в положение безопасности, а
поведение его определяется параметром FSAVE_TYPE.
Через серийный интерфейс, при наличии сервисной программы
TROVIS-VIEW, разработанной фирмой SAMSON, можно
проводить обслуживание позиционера и установку его
параметров.
Горячий старт» в параметре Диагностика, бит 11,
Изменения программных версий
EB 8382-1 RU
Page 6
- 6 -
Технические характеристики
Позиционер
Номинальный ход,
прямой монтаж тип 3277
монтаж по 605347-6 (NAMUR)
Шинное подключение Интерфейс полевой шины согласно IEC 61158-2
Допустимое рабочее напряжение 9…32 V DC1), питание по шинным коммуникациям
Граница разрушения 35V
Максимальный рабочий ток 10 мА
Ток ошибки 0 мА
Питающая энергия Воздух 1,4…6 бар (20…90 psi); качество воздуха по ISO 8573-1
Управляющее давление (выход) от 0 бар до уровня питающего давления
Характеристика,
задается по выбору
Мертвая зона
(по отношению к номинальному
ходу, ном. углу поворота)
Разрешающая способность ≤ 0,05% (внутреннее определение измеряемого значения)
Время срабатывания до 240 сек; задается раздельно для подачи и сброса воздуха
Направление движения обратимое, установка программными средствами
Расход воздуха независимо от питающего давления, < 90 ln/h
Подача воздуха
на привод
с привода
Допустимая окружающая
температура
Влияние температуры: ≤0,15 % / 10 К;
Взрывозащита II 2 G EEx ia II C T6 согласно ATWX, см. сертификат образцовых
Степень защиты IP65, посредством прилагаемого фильтра-вентиля защиты от
Электромагнитная совместимость выполняется согласно требованиям EN 50081/ 50082
Двоичный вход внутреннее питание 5V DC, Ri = 100 kOm
Принудительная вентиляция
(активируется через внутренний
переключатель)
Регулируемый
7,5…30 мм,
7,5…120 мм,
или 30…120º для поворотных приводов
Полевой прибор согласно FISCO (Fieldbus intrinsically safe
concept)
макс. размер и плотность частиц: класс 2, налич. масла: класс 3.
Точка росы питающего давления должна быть на 10ºC ниже
наименьшей ожидаемой окружающей температуры.
линейная/ равнопроцентная/ инверсная равнопроцентная/
свободно программируемая;
отклонение характеристики ≤ 1%
устанавливается от 0,1 до 10%.
Предварительное значение 0,5%
при ∆р = 6 бар: 9,3m
при ∆р
= 6 бар: ≤ 15,5m
3
/h • при ∆р = 1,4 бар: 3,5 m
n
3
/h • при ∆р = 1,4 бар: 5,8 m
n
3 /
h
n
3 /
h
n
от -40 до +80°C • для Ех-приборов действуют отдельные
данные европейского сертификата образцовых испытаний
энергии питания: отсутствует;
вибраций: отсутствует до 250 Гц и ускорения 4 g.
испытаний
обратного удара
для функций сигнализации, например, подключения
пневматического сигнализатора (коммутатора)
вход: 6…24V DC, Ri≈6кОм при 24V DC (зависит от напряжения);
точка включения «1»-сигнал ≥3V, «0»-сигнал около 0V, значение
Kv 0,17;
граничное разрушающее напряжение 45V
EB 8382-1 RU
Page 7
- 7 -
Технические характеристики
Осуществление связи Передача данных согласно PROFIBUS-PA, профиль класс
В, версия 2.0 согласно DIN EN 50170 и DIN 19245,часть 4
(также поставляется версия 3.0)
Локальный интерфейс Интерфейс SAMSON SSP для конфигурирования и пуска в
эксплуатацию
Шинный адрес Устанавливается программными средствами или
микропереключателями (DIP-переключателями),
состояние при поставке 126
Дополнительное оснащение
Индуктивные концевые датчики два шлицевых инициатора тип SJ 2 SN для подключения
релейных усилителей согласно EN 60947-5-6
Принудительный сброс воздуха вход: 6…24 В постоянного тока 1) • Граница пробоя 45 В •
Ri ≈ 6k • точка включения около 3 В • значение Kv = 0,17
Материалы
Корпус Алюминий, литье под давлением, хроматированный и с
синтетическим покрытием
Наружные детали Коррозионно-стойкая сталь
WN 1.4571 и WN 1.4301
Вес около 1,3 кг
1)
для искрозащищенного исполнения 3785-1… действуют данные сертификата образцовых испытаний
(см. приложение)
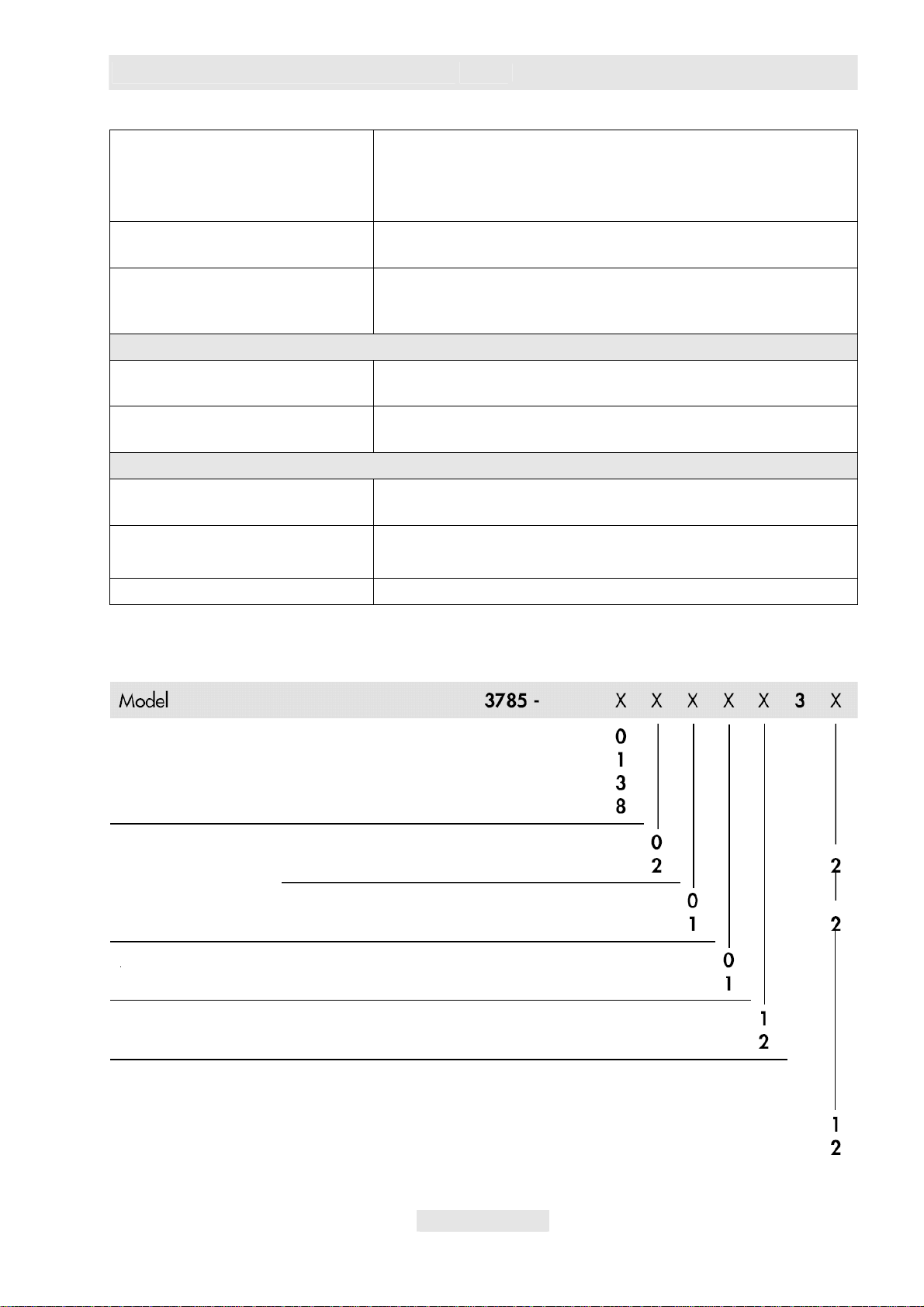
Исполнения позиционера
Ех-защита нет
Ex II 2 G Ex iA IIC T6 согласно ATEX
с Ex ia CSA/FM
Ex II 3 G Ex nA II T6 согласно ATEX
Концевые контакты нет
Дополн. оснащение 2 индуктивных
Принудит. вентиляция нет
есть
РА-профиль Версия 2.0
прибора Версия 3.0
Пневматические NPT 1/4-18
подключения ISO 228/1-G ¼
Электрические Резьбовой ввод М20х1,5 с
подключения экранированием, латунь, никелированная
количество 1
количество 2
EB 8382-1 RU
Page 8

- 8 -
д
1. Конструкция и принцип
действия
Цифровой позиционер PROFIBUS-PA
устанавливается на пневматические
клапаны и предназначен для создания
функциональной зависимости между
положением клапана (регулируемый
параметр) и сигналом управления (входной
параметр). При этом цифровой сигнал
управления, поступающий от какого-либо
регулирующего или управляющего
устройства, сравнивается с рабочим ходом
клапана и при этом в позиционере
вырабатывается соответствующее
управляющее давление (выходной
параметр
давление воздуха от 1,4 до 6 бар.
Электропитание позиционера поступает по
шинным коммуникациям PROFIBUS-PAсегмента, техника передачи согласно IEC
61158-2.
В состав позиционера в основном входят:
индуктивная неподвижная система
измерения перемещений, вентильный блок
электрического управления с двумя
ключевыми вентилями, а также электронная
часть, включающая два микроконтроллера,
один для обработки алгоритма
регулирования,
связи в PROFIBUS-коммуникациях.
При возникновении некоторого
рассогласования в ходе сравнения
задающего и текущего параметров
микроконтроллер вырабатывает
импульсные фазомодулированные сигналы
для управления двух ключевых вентилей
через соответствующие усилители
мощности. Один вентиль управляет подачей
питающего воздуха, другой сбросом
воздуха.
Вентиль питающего воздуха (3) открывает
соединение между источником питающего
воздуха (7, питающее давление
и исполнительным приводом. Вентиль
сброса (4) соединяет привод с окружающей
атмосферой. В результате возникают
состояния длительно ОТКР, длительно
ЗАКР либо отдельные импульсы
изменяющейся продолжительности. В ходе
управления указанными вентилями
достигается положение штока конуса
клапана, соответствующее величине
управляющего входного сигнала.
). Для этого требуется питающее
другой для осуществления
1,4…6 бар)
Конструкция и принцип действия
В установившемся состоянии оба вентиля
закрыты.
Позиционер стандартно оснащен двоичным
входом с беспотенциальными контактами,
который служит для дополнительной
сигнализации через PROFIBUSкоммуникации о состояния другого внешнего
прибора.
Имеющийся на крышке позиционера, рядом
с установкой шинного адреса, тумблер
защиты от записи, в случае его активации,
препятствует внесению изменений в
установленные параметры позиционера по
линиям связи, использующим PROFIBUSкоммуникации.
Позиционер с принудительным сбросом воздуха
Позиционер управляется электрическими
сигналами от 6 до 24V от которых
соответствующее давление поступает на
исполнительный привод. При отключении
электрического сигнала управляющее
давление отсекается, а давление с привода
сбрасывается. Регулирующий клапан под
ействием установленных в приводе пружин
перемещается в положение безопасности.
Функция принудительного сброса встроена в
прибор и может по выбору пользователя
активироваться и деактивироваться
посредством специального тумблера,
подробно см. раздел 4.3.
1.1 Дополнительное оснащение
В дальнейшем, в качестве расширения
стандартной комплектации позиционера, он
может оснащаться для сигнализации
граничных положений двумя концевыми
датчиками на основе шлицевых
инициаторов.
1.2 Осуществление связи
Комплексное управление позиционером
осуществляется в режиме цифровой
передачи данных согласно PROFIBUS-PAпрофилю, класс В, по DIN EN 50170 и DIN
19245, часть 4.
EB 8382-1 RU
Page 9
- 9 -
к
Передача данных происходит в виде
синхронной модуляции тока со скоростью
31,25кбит/сек по двухпроводной витой паре
согласно IEC 61158-2. Программирование
характеристик позиционера, как правило,
производится через персональный
компьютер. В ходе программирования к
персональному компьютеру могут быть
подключены через сегментный коммутатор
PROFIBUS-сегмента один или несколько
позиционеров.
Позиционер имеет возможность после
механической установки
автоматически входить в рабочий режим
после выполнения инициализации. При этом
автоматически устанавливается нулевая
точка и проверяется заданный рабочий
диапазон. Позиционер поставляется со
стандартной конфигурацией под
регулирующий клапан для интегрированного
монтажа с 15-мм ходом.
нулевой точки
Конструкция и принцип действия
Индивидуальное конфигурирование
позиционера под приводы, отличающиеся от
заданных в заводской конфигурации,
производится по коммуникациям.
Конфигурирование
Конфигурация и техническое обслуживание
позиционера производятся при помощи
персонального компьютера и программы
TROVIS-VIEW через SSP-интерфейс (13).
Однако эти операции можно выполнять и
через сегментный коммутатор, например, с
помощью сервисной программы
COMMUNWIN II (продукт фирмы
Endress+Hauser) или программы SIMATIC
PDM (продукт фирмы SIEMENS).
В ходе конфигурирования позиционера
можно устанавливать такие параметры, ка
характеристика, направление движения,
ограничение рабочего хода, диапазон
рабочего хода, время перестановки и
сигнализацию неисправностей и др.
PROFIBUS-PA
двоичный вход
принудительный
сброс воздуха
питающее
давление
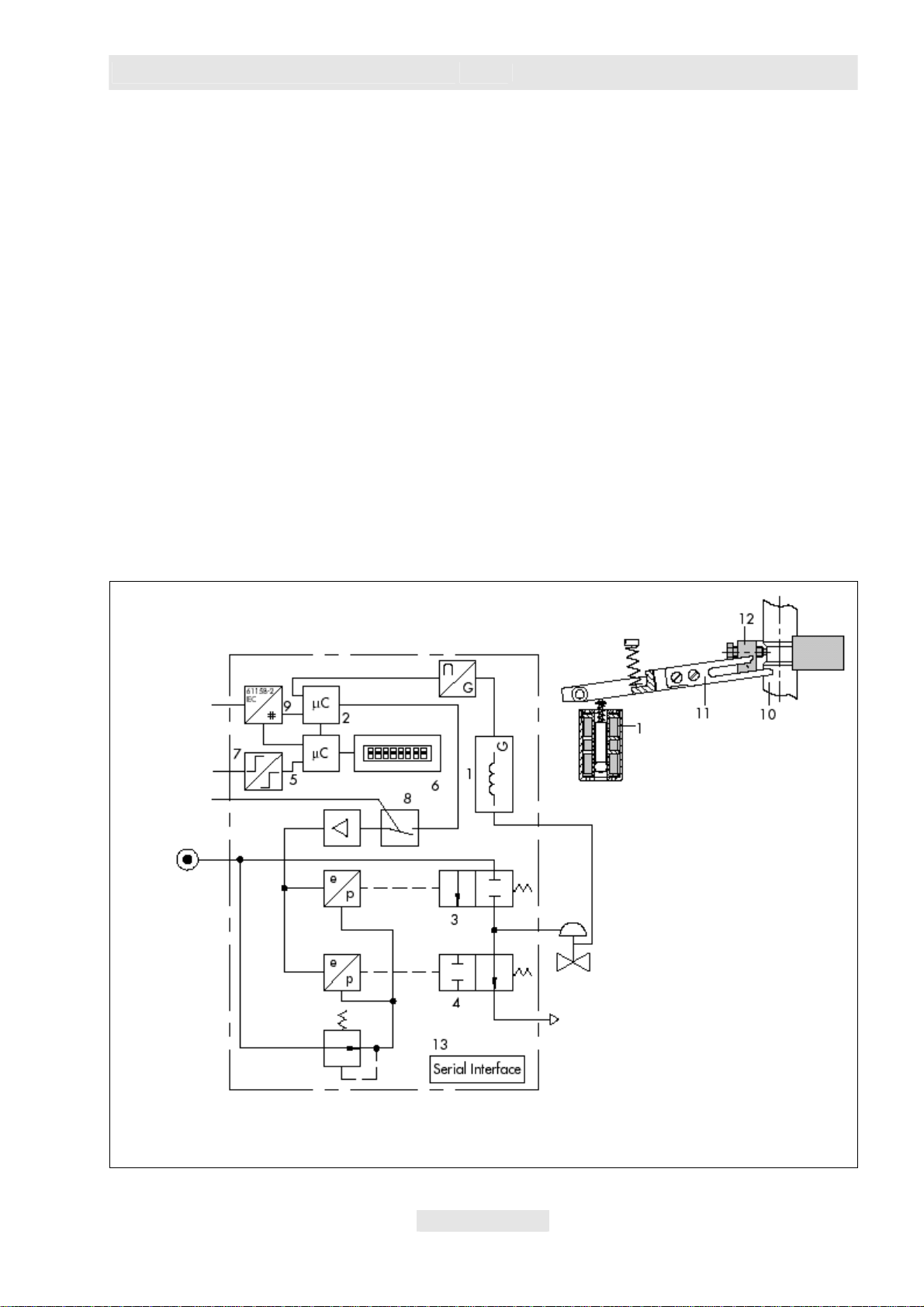
Рис.2 • Блок-схема позиционера
1. Индуктивный путевой
датчик
2. Микроконтроллер
3. Ключевой вентиль
подачи давления
4. Ключевой вентиль
сброса давления
5. Микроконтроллер
6. Переключатель шинного
адреса и защиты от
записи
7. Двоичный вход
8. Принудительный сброс
воздуха
отработанный
воздух
9. Интерфейсный модуль
IEC61158-2
10. Шток привода
11. Рычаг
12. Зажимная скоба
13. SSP-интерфейс
EB 8382-1 RU
Page 10
- 10 -
3
к
д
к
2. Установка позиционера на
клапан
Установка позиционера производится либо
прямым монтажом на SAMSON-привод тип
3277, либо согласно NAMUR (IEC 60534-6)
на клапаны в исполнении с литой рамой, а
также на стержневые клапаны.
В соединении с промежуточной вставкой
прибор может использоваться в качестве
поворотного позиционера, монтируемого на
поворотных приводах.
Ввиду того, что позиционер поставляется
единым блоком, без дополнительных
принадлежностей,
детали с их заказными номерами
необходимо найти в приведенных ниже
таблицах.
Внимание:
Позиционер не имеет собственной
заглушки сброса воздуха. Отработанный
воздух выводится из позиционера наружу
через вентиляционные пробки
дополнительного оснащения, см. также
рис. 3, 5 и 6.
К каждому позиционеру для сброса воздуха
прилагается фильтр-вентиль от
обратного удара (под прозрачной
защитной крышкой на обратной стороне
регулятора).
Стандартную пробку сброса из
дополнительного оснащения следует
заменить этим фильтром-вентилем.
Только после этого будет обеспечиваться
степень защиты IP65 от проникновения
грязи и влаги.
необходимые монтажные
Установка позиционера на клапан
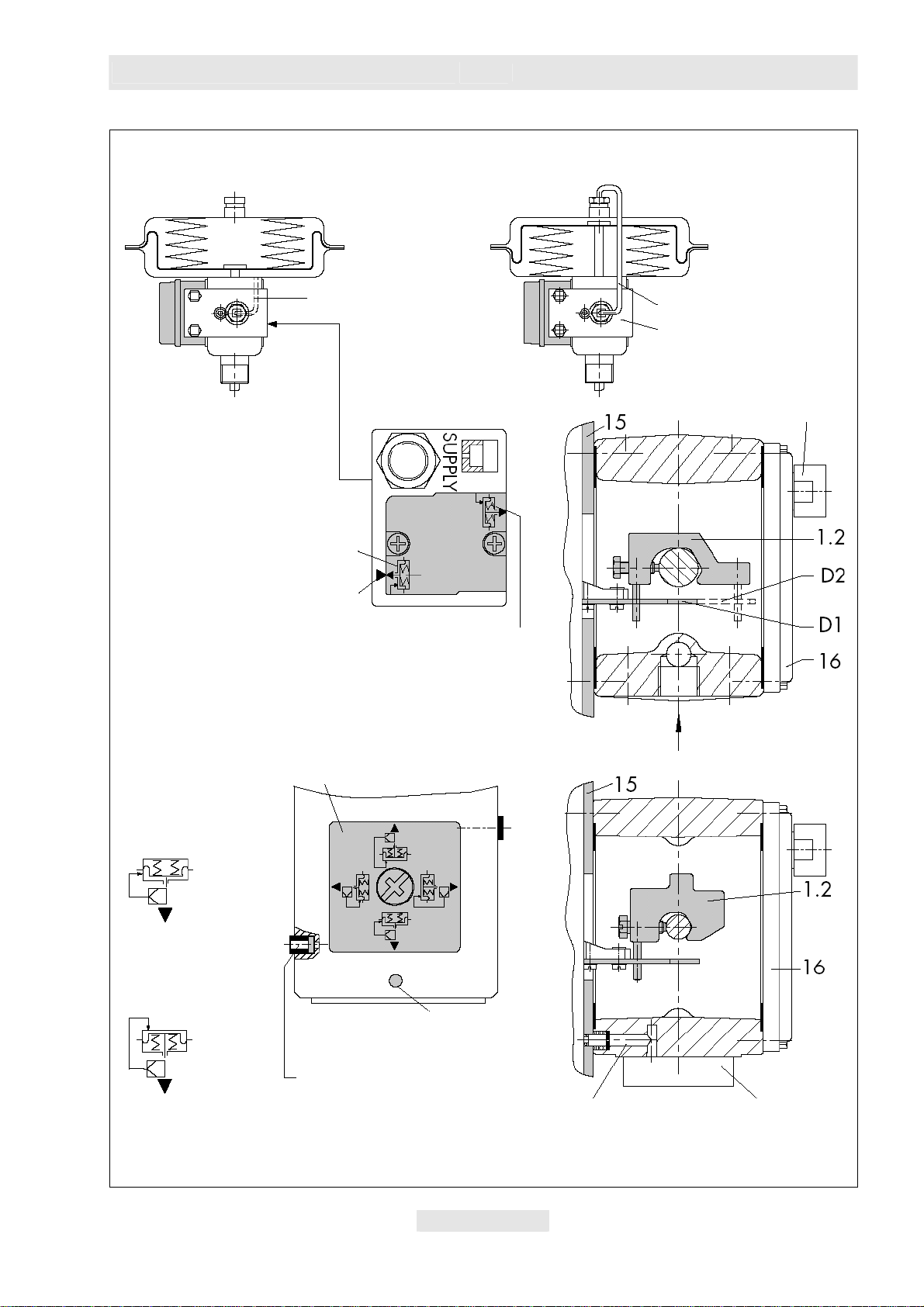
2.1 Прямой монтаж
на привод тип 3277
Необходимое дополнительное
оснащение приведено в таблицах 1, 2 и
на стр. 13.
Если смотреть со стороны подачи
управляющего давления или платы
переключения (привод 120см
позиционера должна выполняться на левой
стороне привода.
При этом стрелка на черной крышке
прибора (рис. 11) указывает на
мембранную камеру.
Исключение! Регулирующие клапаны, в
которых седло перекрывается
исключительно при втягивании штока
привода. В данном случае монтаж должен
выполняться справа, а стрелка направлена
в противоположную сторону от мембранной
камеры.
1. Привинтить
зажимную скобу (1.2) на
шток привода таким образом, чтобы
крепежный винт вошел в углубление
штока привода.
2. Привинтить необходимый рычаг
путевого перемещения D1 или D2
передаточному рычагу позиционера.
3. Укрепить промежуточную плату (15) с
уплотнением на раме привода.
4. Установить позиционер таким образом,
чтобы рычаг D1 или D2 скользил по
средине штифта зажимной скобы, а
затем привинтить на промежуточной
плате (15).
5. Установить крышку (16).
Приводы с эффективной площадью 240,
350 и 700 см
2
6. Установить боковую плату
подключения на соединительном блоке
(рис. 3) по направлению стрелки,
изображенной на этом блоке, таким
образом, чтобы символ привода для
конструкции «шток приво
выдвигается» (соответственно «што
привода втягивается») совпадал с
конструкцией исполнительного
привода.
2
), то установка
а
EB 8382-1 RU
Page 11
- 11 -
Установка позиционера на клапан
Шток привода выдвигается Шток привода втягивается
соединение упр. давления
внутри
1.2 Зажимная скоба
D1 Рычаг
D2 Рычаг
15 Промежуточная плата
16 Крышка
символ «шток привода
выдвигается»
маркировка
плата
переключения
вид сбоку:
соединительный блок с
платой подключения
символ «шток привода
втягивается»
соединение упр. давления
через трубку
соединительный блок
сброс воздуха
вход управляющего
давления
шток привода
выдвигается
шток привода
втягивается
маркировка
вход управляющего
давления; при
необходимости с
латунным дросселем
канал управляющего
давления
Рис.3 • Монтаж позиционера и подключение управляющего давления
для приводов тип 3277 (вверху) и тип 3277-5 площадью 120 см
2
(внизу)
EB 8382-1 RU
плата
переключения
Page 12
- 12 -
у
Д
и
у
t
я
При необходимости вывинтить оба
крепежных винта и, повернув плату
подключения на 180º, закрепить ее
снова.
7. Установить соединительный блок с
его уплотнительными кольцами на
позиционер и раму привода и
затянуть крепежный винт. Для
привода с положением безопасности
«шток привода втягивается»
смонтировать предварительно
подготовленную проводку
управляющего давления.
Привод с эффективной площадью
В приводе тип 3277-5 площадью 120 см
120см2
2
управляющее давление подается в
мембранную камеру через плату
переключения (рис.3).
Важно!
При номинальном рабочем ходе 7,5 мм на
входе шланга управляющего давления, на
раме привода, необходимо установить
латунный дроссель (см. таблицу
принадлежностей на стр. 13).
При величине рабочего хода 15 мм эта
операция необходима лишь при давлении
питания свыше 4 бар.
6. Удалить винт-заглушку на обратной
стороне позиционера и закрыть
выход управляющего давления со
стороны “Output” (36) пробкойзаглушкой из комплекта
дополнительных принадлежностей.
7. Смонтировать позиционер таким
образом, чтобы отверстие в
промежуточной плате (15)
накрывалось уплотнительным
шлангом в отверстии рамы привода.
Установка позиционера на клапан
8. Выровнить плату переключения по
соответствующему символу, для
монтажа слева согласно маркировке и
привинтить ее накрепко к раме
привода.
Примечание.
Если на 120см
позиционеру предполагается установка
магнитного клапана или др. устройства,
то запрещается удалять на обратной
стороне винт-заглушку М3.
В этом случае управляющее давление
должно подаваться на исполнительный
привод с выхода “Output” через
дополнительную соединительную плат
(таблица 2).
В этом случае плата переключения не
требуется.
Важно! (для всех приводов)
ля быстрых клапанов (время
срабатывания <0,6 сек) пр
необходимости придется заменить сетк
на выходе управляющего давления (Outpu
36) на завинчивающийся дроссель (см.
таблицу дополнительного оснащения) дл
улучшения характеристики регулирования.
Вентиляция
Если в случае применения привода тип 3277
имеется необходимость вентиляции его
пружинной камеры выходным воздухом
позиционера, то этот воздух может
подаваться (в конструкции «шток привода
выдвигается) через соединительную трубку
(таблица 3) на соединительном блоке. Для
этого следует удалить заглушку на
соединительном блоке.
Для тип 3277-5 в исполнении «шток привода
втягивается» пружинная
находится под давлением выходящего из
позиционера воздуха, который поступает
через внутренний канал.
2
-приводе дополнительно к
камера постоянно
EB 8382-1 RU
Page 13
- 13 -
Установка позиционера на клапан
Таблица 1
Требующийся рычаг с соответствующей зажимной скобой
и промежуточной платой
D1 (33 mm длиной с зажимной скобой высотой 17 mm)
Размер привода
2
cm
120(G1/4)
120(NPT1/4)
Зак.Nr.
монтажного
комплекта
1400-6790
1400-6791
D1 (33 mm длиной с зажимной скобой высотой 17 mm) 240 и 350 1400-6370
D2 (44 mm длиной с зажимной скобой высотой 13 mm) 700 1400-6371
Таблица 2
Плата переключения для 1202смпривода
привод 3277-5хххххх.00 (старый) 1400-6819
Зак.Nr.
Плата переключения новая от привода модельного индекса .01 (новый) 1400-6822
Соединительная плата для
установки дополнительного
оборудования, например,
3277-5-хххххххх.00 G 1/8
(старый) NPT 1/8
1400-6820
1400-6821
магнитного клапана
Соединительная плата новая от привода модельного индекса .01 (новый) 1400-6823
Примечание: для новых приводов (индекс .01) могут применяться только новые соединительные
платы и платы переключения, старые и новые платы не являются взаимозаменяемыми.
Требующийся соединительный блок для привода 240, 350
и 700 cm
2
(включая уплотнения и крепежный винт)
G-резьба 1400-6955
NPT-резьба 1400-6956
Таблица 3
Необходимая соединительная
трубка, включая резьбовое
соединение
для привода:
«шток привода втягивается»
или
при вентиляции верхней мембранной
камеры
Размер привода
cm
2
240 сталь 1400-6444
240 нерж. 1400-6445
350 сталь 1400-6446
350 нерж. 1400-6447
700 сталь 1400-6448
700 нерж. 1400-6449
Материал Зак.Nr.
Дополнительные принадлежности
Комплект манометров для:
питающего и управляющего давления
Niro/Ms (нерж./ латунь)
Niro/Niro(нерж./нерж)
Дроссели для управляющего давления (резьбовой дроссель и дроссель из
латуни)
Фильтр-вентиль защиты от обратного удара, заменяет пробку сброса и
повышает степень защиты прибора до IP65 (один экземпляр прилагается к
каждому позиционеру)
1400-6957
1400-6958
1400-6964
1790-7408
EB 8382-1 RU
Page 14
- 14 -
д
д
Д
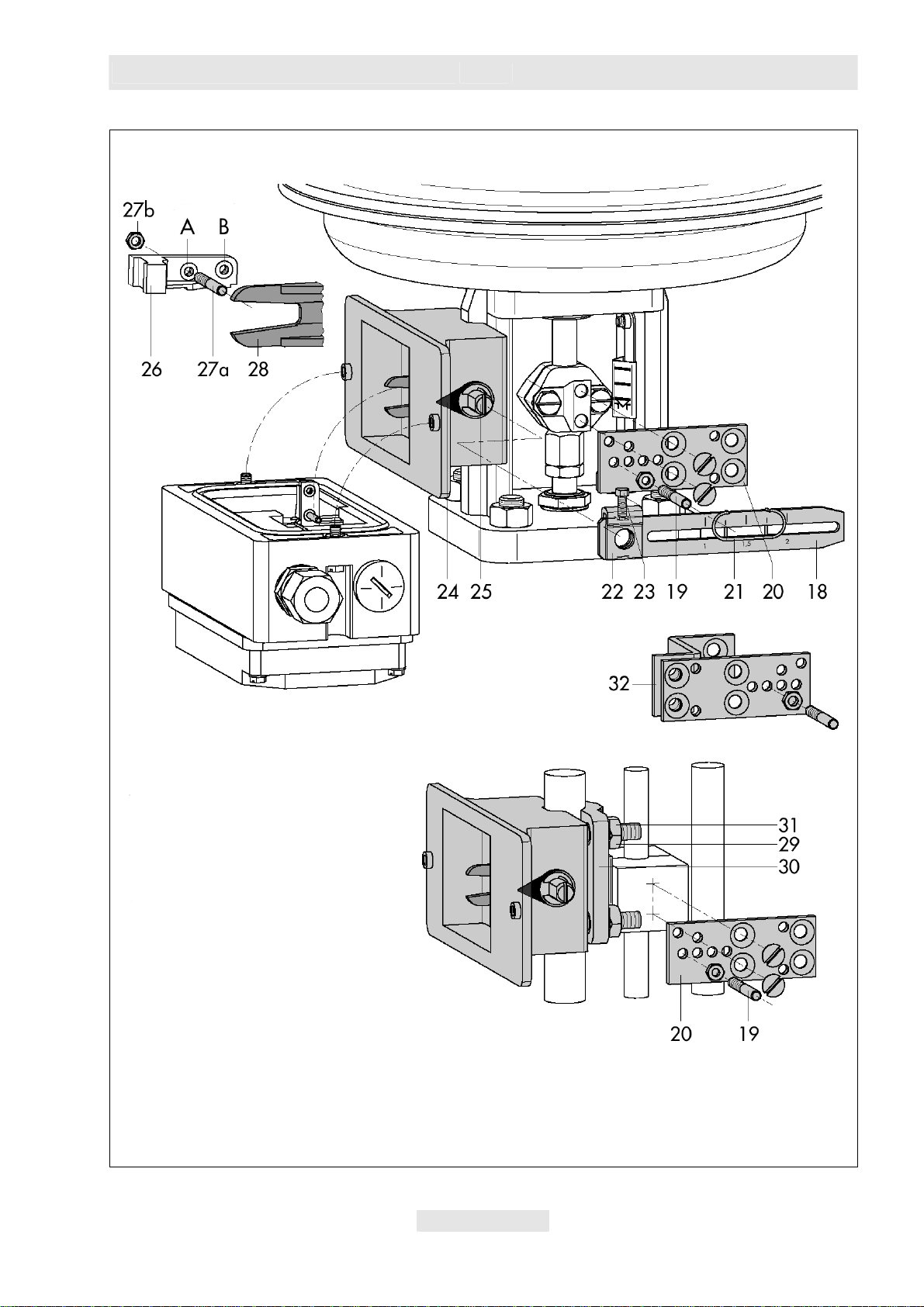
2.2 Монтаж согласно IEC 60534-6
(NAMUR)
Необходимое дополнительное
оснащение приведено в таблицах 4 и 5
на стр. 17.
Установка по NAMUR осуществляется, как
показано на рисунке 4, с помощью адаптера.
При этом рабочий ход клапана передается
через рычаг (18) и вал (25) на уголок (28)
адаптера и далее, на передаточный штифт
(27) на рычаге позиционера.
Для установки позиционера потребуются
монтажные детали, указанные в таблице 4 и
рычаг, соответствующий величине рабочего
хода клапана.
Монтаж позиционера на
корпусе адаптера
должен осуществляться таким образом,
чтобы стрелка на черной крышке корпуса
показывала вниз от мембранного привода
к клапану.
Исключение. Регулирующие клапаны, у
которых седло закрывается исключительно
лишь при втягивании штока привода. В
данном случае стрелка должна указывать в
сторону мембранного привода.
Если установка корпуса адаптера между
приводом и клапаном
не представляется
возможной (например, приводы от других
производителей), то стрелка на крышке
корпуса должна указывать в направлении
клапана!
2.2.1 Последовательность операций
при монтаже
Важно!
Перед установкой монтажных деталей
следует подать на привод такое
управляющее давление, чтобы он
установился в положение,
соответствующее 50% рабочего хода.
Только в этом случае возможна точная
установка рычага (18) и уголка (28).
Установка позиционера на клапан
Регулирующий клапан в исполнении
на литой раме
1. Привинтить с помощью шестигранных
винтов плату (20) на муфту,
соединяющую штоки привода и конуса
клапана. Для приводов 2100 и 2800см
ополнительно используется уголок
(32).
2. Удалить резиновые пробки в корпусе
адаптера и укрепить его винтами на
ребре NAMUR.
Регулирующий клапан в стержневом
исполнении
1. Привинтить плату (20) на поводке
штока конуса.
2. Завинтить штифтовые винты (29) в
корпус адаптера.
3. Приложить корпус с крепежной платой
(30) слева или справа к стержню
клапана и привинтить его гайками (31).
При этом выровнить по высоте таким
образом, чтобы монтируемый
впоследствии рычаг (18) располагался
горизонтально.
4. Завинтить и законтрить штифт (19) в
среднем из последовательности
отверстий платы (20) так, чтобы он
стоял приблизительно над
маркировкой правильного положения
рычага (от 1 до 2) согласно таблице 5
ля соответствующего положения
рабочего хода.
ля промежуточных значений следует
выполнить интерполяцию.
Предварительно сдвинуть скобу (21)
так, чтобы она обжимала штифт.
5. Измерить расстояние от средины вала
(25) до средины штифта (19). Позднее
величину этого расстояния
потребуется ввести при
конфигурировании позиционера.
2
EB 8382-1 RU
Page 15
- 15 -
расположение
деталей при
монтаже
Установка позиционера на клапан
установка
на ребре NAMUR
18. Рычаг N1, N2
19. Штифт
20. Плата
21. Скоба
22. Зажимная плата
23. Винт
24. Указатель
25. Вал
26. Рычаг позиционера
27а Передаточный штифт
27b Гайка
28. Уголок
29. Штифтовые винты
30. Плата
31. Гайки
32. Монтажный уголок
Рис.4 • Монтаж согласно IEC 60534-6 (NAMUR)
установка на стержне
EB 8382-1 RU
Page 16

- 16 -
2.2.2 Предварительная
установка рабочего хода
1. Установить вал (25) в корпусе
адаптера таким образом, чтобы
черный указатель (24) совпадал с
литой маркировкой на корпусе
адаптера.
2. В этом положении зафиксировать
зажимную плату (22) с помощью
винта (23).
3. Завинтить передаточный штифт (27)
на рычаге позиционера (26) со
стороны запрессованных гаек и
законтрить его с обратной стороны
гайкой. При этом следует соблюдать
монтажное положение
согласно таблице 5 и в соответствии
с рисунком 5.
4. Установить так позиционер на
корпусе адаптера, чтобы
передаточный штифт (27) оказался
внутри выреза уголка (28). Для
этого с передней стороны вставить
отвертку или торцевой ключ 2,5мм в
отверстие, видимое под длинным
углублением в крышке и установите
рычаг позиционера в необходимое
положение.
5. Привинтить
адаптера.
6. Сбросить давление с привода.
позиционер к корпусу
А или В
Установка позиционера на клапан
EB 8382-1 RU
Page 17
- 17 -
Таблица 4
Монтаж по NAMUR
Клапан на литой раме
NAMUR-комплект для монтажа
Детали см. на рис.4
Монтаж на прямоходные приводы от Fisher и Masoneilan
(на привод требуется оба монтажных комплекта, по одному)
Стержневой
клапан
с диаметром
стержня в
мм
Клапан
20 … 25 N1 1400-6436
20 … 25 N2 1400-6437
25 … 30 N1 1400-6438
25 … 30 N2 1400-6439
30 … 35 N1 1400-6440
30 … 35
Установка позиционера на клапан
ход в
с рычагом Зак.-Nr.
мм
7,5 до 60 N1 (125mm) 1400-6787
30 до 120 N2 (212mm) 1400-6789
N2 1400-6441
1400-6771
и
1400-6787
Дополнительное оснащение
монтажный блок манометра
комплект манометров
дроссели управляющего давления (резьбовой и дроссель из латуни) 1400-6964
Фильтр-вентиль защиты от обратного удара, заменяет пробку сброса и повышает
степень защиты прибора до IP65 (один экземпляр прилагается к каждому позиционеру)
G1/4
NPT 1/4
нерж/лат
нерж./нерж.
Зак.-Nr.
1400-7106
1400-7107
1400-6957
1400-6958
1790-7408
Таблица 5 Монтаж по NAMUR
Ход mm *) 7,5 15 15 30 30 60 30 60 60 120
Штифт по маркировке *) 1 1 2 1 2 1 2 1 2
Расстояние штифт/точка вращения
рычага
С рычагом N1 (125 mm длины) N2 (212 mm длины)
Передаточный штифт (27) на
позиции
*) для величин рабочего хода, отличающихся от приведенных (промежуточные значения), следует
провести соответствующую интерполяцию.
42 42 84 42 84 84 168 84 168
A A В A В
EB 8382-1 RU
Page 18
- 18 -
д
Д
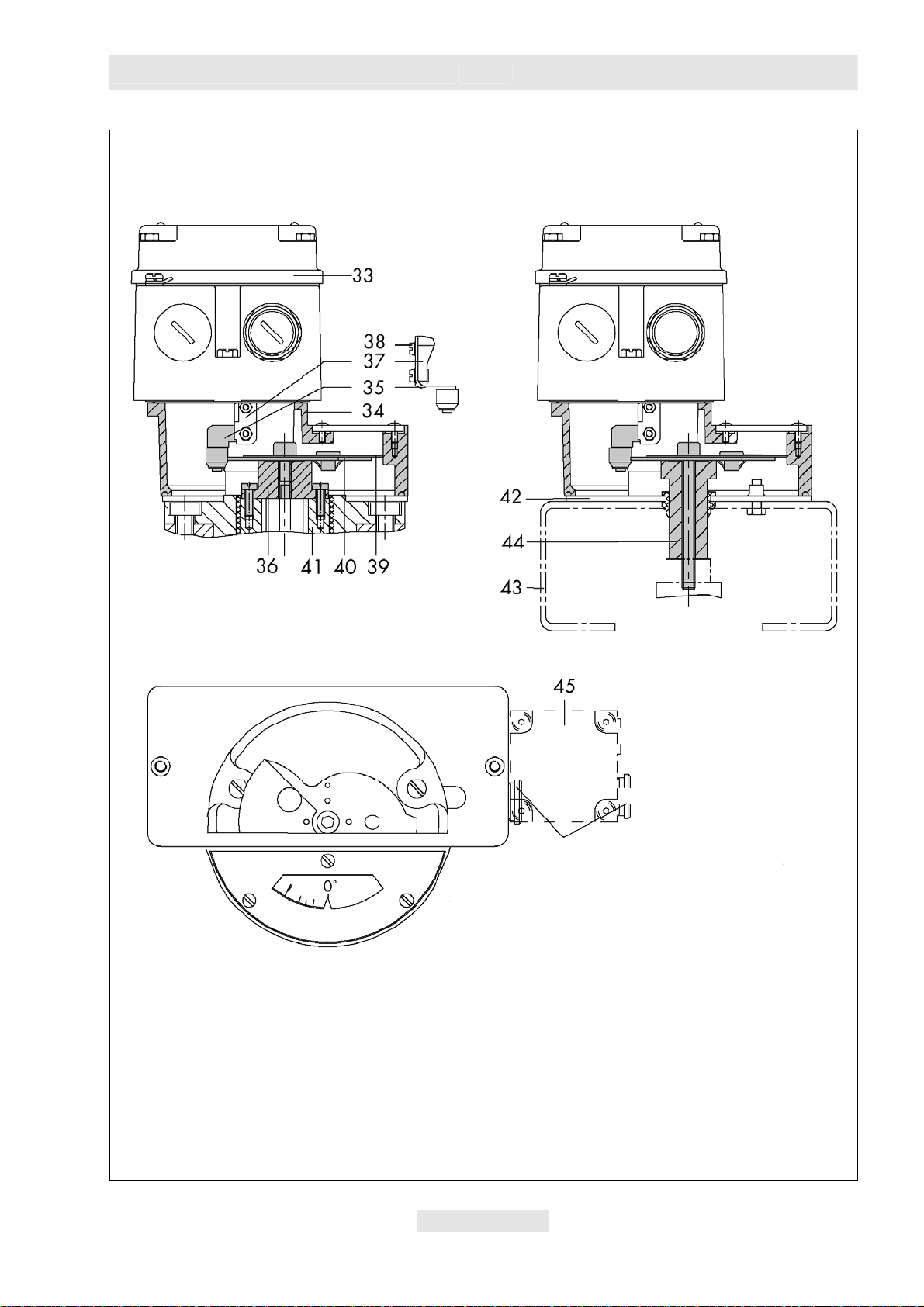
2.3 Монтаж на поворотные приводы
Необходимое дополнительное
оснащение приведено в таблице 6 на
стр. 21.
С помощью приведенных в таблице 6
монтажных и дополнительных деталей
позиционер может устанавливаться
согласно VDI/ VDE 3845 на поворотные
приводы. При этом вращательное движение
поворотного привода через кулачковый
диск на его валу и контактный ролик на
рычаге позиционера преобразуется в
прямолинейное движение, необходимое
для работы индуктивной системы датчика
перемещения.
На одном кулачковом диске имеются
шаблона на диапазоны поворота 0 …90° и
0 …120°.
Для приводов двойного действия, не
имеющих пружин, потребуется обратный
усилитель на стороне соединения корпуса
позиционера (подробнее об этом см.
раздел 2.3.4).
При монтаже на поворотный SAMSONпривод тип 3278 его внутреннее
пространство и обратная сторона
мембраны продуваются выходным
воздухом позиционера без использования
отдельной соединительной трубки.
Если позиционер
устанавливается на
приводы (NAMUR) от других
производителей, вентиляция обратной
стороны мембраны может производиться
через соединительную трубку и Т-образное
соединение между приводом и штуцером
выходящего воздуха промежуточной
вставки.
два
Установка позиционера на клапан
2.3.1 Монтаж рычага контактного
ролика
1. Установить рычаг контактного ролика
(35) на передаточном рычаге (37) и
закрепить с помощью прилагаемых
винтов (38) и шайб.
2.3.2 Монтаж промежуточной вставки
SAMSON-привод тип 3278:
1. Привинтить двумя винтами адаптер
(36) на свободном конце вала
поворотного привода.
2. Установить промежуточную вставку
(34) на корпусе привода и закрепить ее
вумя винтами. При этом следует так
выровнить промежуточную вставку,
чтобы пневматические соединения
позиционера были обращены в
сторону корпуса мембраны.
Приводы других производителей:
1. Установить комплектную
промежуточную вставку (34, 42 и 44) на
монтажную консоль (установочная
поверхность 1 VDI/ VDE 3845) и
накрепко привинтить ее.
2. Выровнять кулачковый диск (40) и
шкалу согласно разделу 2.3.3 и
привинтить его.
ля приводов, не имеющих пружин, следует
со стороны корпуса позиционера
привинтить обратный усилитель (45), см.
раздел 2.3.4.
EB 8382-1 RU
Page 19
- 19 -
Установка позиционера на клапан
Установка на SAMSON-привод тип 3278 Установка по VDI/VDE 3845 (NAMUR)
Рис.5 • Монтаж на поворотные приводы
Монтаж
с обратным
усилителем
EB 8382-1 RU
33 Позиционер
34 Промежуточная вставка
35 Рычаг с контактным роликом
36 Адаптер
37 Передаточный рычаг
38 Винты
39 Шкала
40 Кулачковый диск
41 Вал привода
42 Шайба
43 Скоба (повернуто на 90°)
44 Муфта
45 Обратный усилитель
Page 20
- 20 -
у
д
Д
к
2.3.3 Установка и закрепление
кулачкового диска
В поворотных приводах возвратные
пружины, установленные с обратной от
управляющего давления стороны,
определяют положение безопасности и
направление вращения (вправо, влево)
регулирующего клапана.
В поворотных приводах двойного действия
пружины отсутствуют, а направление
вращения зависит от конструкции
применяемого привода и клапана.
Выходное положение – это закрытый
клапан!
Принцип действия, как должен работать
клапан
возрастании управляющего сигнала, устанавливается через электронные
коммуникации с помощью
соответствующего программного
обеспечения (направление движения:
растет/растет или растет/снижается).
Кулачковый диск имеет две траектории
перемещения, начальные точки которых
помечены маленькими
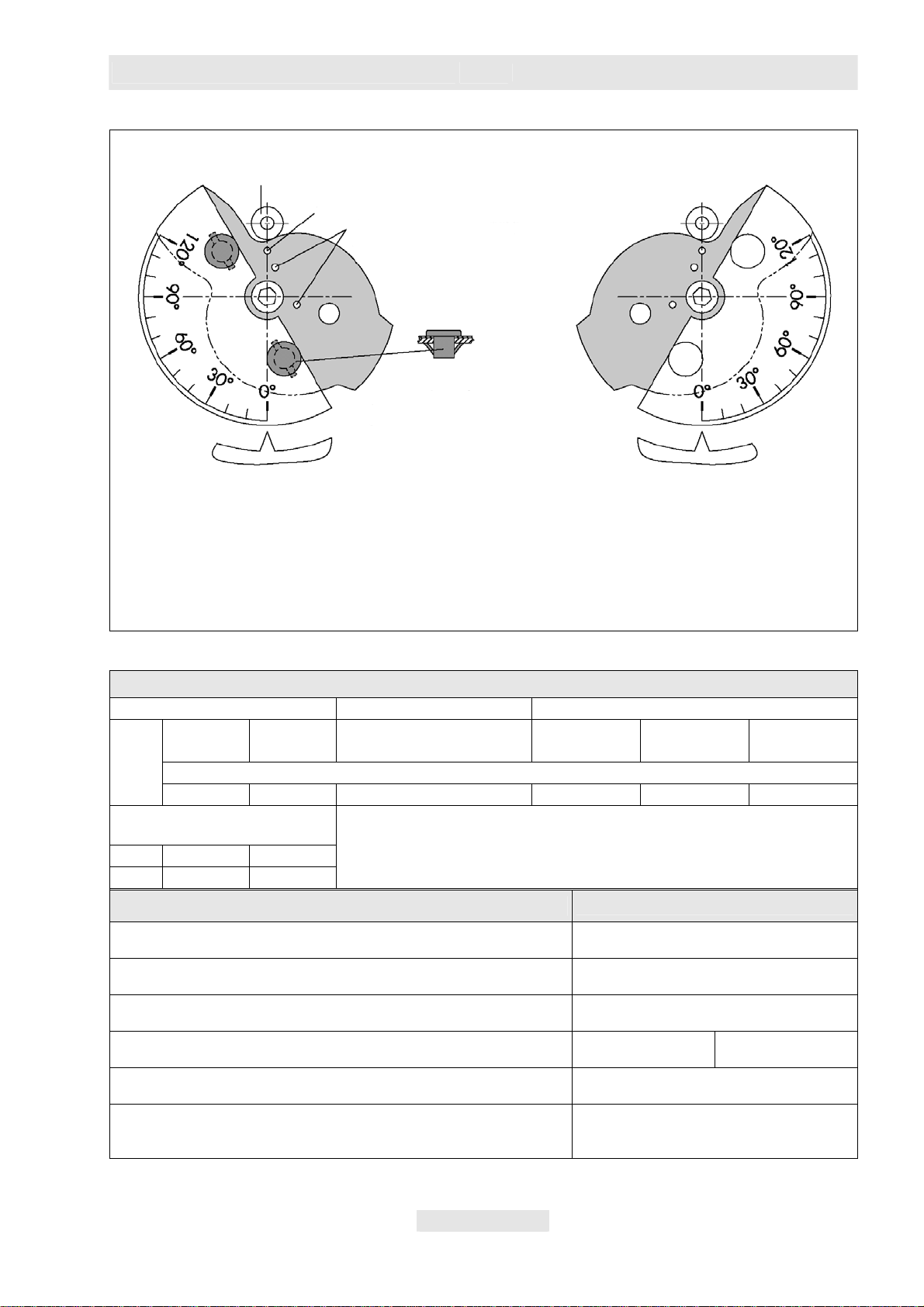
Важно!
В закрытом положении клапана начальная
точка (отверстие) траектории должна
быть установлена так, чтобы точка
вращения кулачкового диска, 0º-положение
шкалы, и носик стрелки на диске
располагались на одной прямой линии.
Категорически запрещается располагать
начальную точку для закрытого
положения клапана ниже 0º-положения
, - открываться или закрываться при
1. Установить кулачковый диск со
шкалой на адаптер (36) или муфту
(44), а крепежный винт слегка
завинтить.
отверстиями.
Установка позиционера на клапан
На приводы с положением безопасности
«клапан
становкой кулачкового диска следует
подать максимальное управляющее
давление.
К приводам, не имеющим пружин, должно
быть подведено питающее давление.
2. При установке кулачкового диска
открыт» (ОТКР) перед
необходимо вставить двухстороннюю
шкалу так, чтобы ее показания
совпадали с направлением вращения
клапана. При таком положении
кулачкового диска крепко завинтите
крепежные винты.
Закрепление кулачкового диска
Чтобы дополнительно пре
кулачковый диск от проворачивания
необходимо предпринять следующее.
На кулачковом диске вокруг оси
расположено четыре отверстия, одно,
которое подходит, следует выбрать для
фиксации.
Через выбранное отверстие следует
просверлить адаптер (36) или муфту (44),
чтобы установить там стопорный 2ммштифт.
3. Установить позиционер на
промежуточную вставку (34) так, чтобы
рычаг контактного ролика (35) своим
роликом прилегал
ля этого с передней стороны вставьте
отвертку или торцевой ключ 2,5мм в
отверстие, видимое под длинным
углублением в крышке и установите
рычаг позиционера в требующееся Вам
положение.
4. Привинтить накрепко позиционер
промежуточной вставке
к кулачковому диску.
охранить
EB 8382-1 RU
Page 21
- 21 -
Установка позиционера на клапан
контактный
ролик
начальная точка
отверстия для фиксации
кулачкового диска
после установки крепежных
защелок их лапки выдавить
наружу!
Вид на вал привода со стороны позиционера
Клапан открывается Клапан открывается
поворотом влево поворотом вправо
Рис.6 • Установка кулачкового диска
Таблица 6 поворотные приводы (монтажные детали, полностью, но без кулачкового диска)
SAMSON-привод тип 3278 Привод по VDI/VDE 3845 монтаж привода Masoneilan
G 1400-6670 1400-6672
NPT 1400-6669 1400-6671
привод
160 см
1400-7103 1400-7104 1400-7105 1400-7118 1400-7119 1400-7120
Оснащение трубной
арматурой 8х1 нерж.
2
привод
320 см2
Camflex I
Ду 25…100
Зак. №
Camflex I
Ду 125…250
Camflex II
Дополнительное оснащение
Обратный усилитель для приводов двойного действия без
пружин
Кулачковый диск с принадлежностями, диапазон угла
поворота 0…90° и 0…120°
Монтажный блок манометра G ¼ :
Монтажный комплект манометра нерж./латунь:
Дроссель управляющего давления (резьбовой и латунный
дроссель)
Фильтр-вентиль защиты от обратного удара, заменяет пробку
сброса и повышает степень защиты прибора до IP65 (один
экземпляр прилагается к каждому позиционеру)
G-резьба:
1079-1118
1400-6959
1400-7106
1400-6957
1400-6964
1790-7408
EB 8382-1 RU
Зак. №
NPT:
1079-1119
NPT ¼ :
14007107
нерж./нерж.
1400-6958
Page 22

- 22 -
у
2.3.4 Обратный усилитель в
приводах двойного действия
Для использования с приводами двойного
действия позиционер должен оснащаться
обратным усилителем.
Обратный усилитель относится к
приборам дополнительного оснащения и
приведен в таблице 6 на стр. 21.
На выходе А1 обратного усилителя
приложено управляющее давление
позиционера, на выходе А2 – давление в
противоположном направлении, которое
вместе с давлением А1 составляет
величину давления питающего воздуха.
Имеет место соотношение А1 + А2 = Z.
(Z – питающее давление-Zuluftdruck)
Монтаж
1. Завинтить в резьбовые соединения
позиционера специальные гайки (1.3)
из комплекта дополнительного
оснащения обратного усилителя.
2. Перед монтажом обратного усилителя
удалить его уплотнительную заглушку
(1.5), но уплотнительная резинка (1.4)
при этом должна оставаться на месте.
3. Вставить плоское уплотнение (1.2) в паз
обратного усилителя и задвинуть оба
специальных винта (1.1) со сквозными
каналами в отверстия
и Z.
4. Установить обратный усилитель на
позиционере и накрепко привинтить
обоими специальными винтами (1.1).
5. Заменить заглушку сброса воздуха в
обратном усилителе на прилагаемый
фильтр-вентиль от обратного удара.
подключения А1
Обратный усилитель в приводах
двойного действия
Подключения управляющего давления
А1: Выход А1 соединяется с
подключением управляющего давления
привода, которое предназначено для
открывания клапана при повышении
управляющего
А2: Выход А2 соединяется с
подключением управляющего давления
привода, которое предназначено для
закрывания клапана при повышении
управляющего давления.
¾ На соответствующем уровне
обслуживания позиционера в меню
“InbetriebnahmeÆ Bauart” («Пуск в
эксплуатацию» -> «Конструкция»)
становить конструкцию привода:
«Двойного действия, без пружин».
давления.
2.4 Положение безопасности
привода
Важно!
Если впоследствии положение
безопасности привода будет изменено
посредством перестановки пружин из
положения «шток привода пружинами
выдвигается» на положение «шток
привода пружинами втягивается», то
необходимо заново провести
механическую коррекцию нулевой точки и
заново провести процесс инициализации.
EB 8382-1 RU
Page 23

- 23 -
от позиционера
Обратный усилитель в приводах
двойного действия
сигналы управления
на привод
1. Обратный усилитель
1.1 Специальные винты
1.2 Плоское уплотнение
1.3 Специальные гайки
1.4 Уплотнительная резинка
1.5 Заглушка
Рис.7 • Монтаж обратного усилителя
EB 8382-1 RU
Page 24

- 24 -
Д
Д
д
3. Подключения
3.1 Пневматические подключения
Пневматические подключения выполняются
либо как отверстия с резьбой NPT ¼, либо
как отверстия с резьбой G ¼.
Могут применяться обычные резьбовые
штуцерные соединения для металлических,
медных трубок или шлангов из
синтетических материалов.
Важно!
Воздух питающего давления должен быть
сухим, без примесей масла и пыли.
Обязательно следует соблюдать
предписания по техническому
обслуживанию установленных на входе
редукционных станций.
Воздушные коммуникации перед
подключением необходимо тщательно
продувать.
Подключение управляющего давления в
случае прямого монтажа на привод тип
3277 жестко определено, при монтаже
согласно NAMUR подключение
располагается в зависимости от положения
безопасности «шток втягивается или
выдвигается» на нижней или на верхней
стороне привода.
Выход отработанного воздуха:
подключение выхода отработанного
воздуха позиционера располагается на
монтажном дополнительном оснащении.
В случае прямого монтажа
воздуха находится на пластиковой крышке
исполнительного привода, при NAMURмонтаже на корпусе адаптера, а при
установке на поворотном приводе на
промежуточной вставке или обратном
усилителе.
Для обеспечения степени защиты IP65
пробку сброса воздуха необходимо
заменить фильтром-вентилем от обратного
удара, прилагаемым к позиционеру (см. гл.2
на стр.10).
пробка сброса
Подключения
гайка дроссель с сеткой
Рис.8 • Установка манометра
(1790-6121)
3.1.1 Манометры
ля контроля работы позиционера
рекомендуется устанавливать манометры
питающего и управляющего давления.
етали приведены в качестве
ополнительных принадлежностей в
таблицах 3, 4 и 6.
EB 8382-1 RU
Page 25

- 25 -
3.1.2 Питающее давление
Необходимое питающее давление
определяется номинальным диапазоном
сигналов и направлением действия
(положением безопасности) привода.
Номинальный диапазон сигналов нанесен
на типовом шильдике и представлен в виде
диапазона усилия пружин или диапазона
управляющего давления.
Шток привода выдвигается (FA):
необходимое давление питания =
конечное значение номинального
диапазона сигналов + 0,2 бар, но не менее
1,4 бар.
Шток привода
необходимое давление питания для плотно
закрытого клапана с запасом определяется
исходя из максимального управляющего
давления p
d = диаметр седла (см)
Δp = перепад давления на клапане (бар)
А = площадь привода (см
F = конечное значение номинального
диапазона сигналов привода (бар)
При отсутствии исходных данных
руководствуемся следующим:
необходимое давление питания = конечное
значение номинального диапазона
сигналов + 1 бар.
втягивается (FE):
:
stmax
2
)
Подключения
3.2 Электрические подключения
Для электрического подключения
прибора следует
руководствоваться
действующими
электротехническими
предписаниями и местными
правилами техники безопасности.
В Германии – это VDE-предписания
и правила техники безопасности
объединения профсоюзов.
При установке и монтаже во
взрывоопасных зонах действуют
нормы EN 60079-14: 1997;
VDE 0165 часть 1/8.98 –
«Электрические средства
производства для зон с
взрывоопасными газами», а также
EN 50281-1-2: VDE 0165, часть
2/11.99- «Электрические средства
производства для
возгораемой пылью».
Для искрозащищенных
электрических устройств,
сертифицированных по
предписаниям 79/196 EWG, при их
подключении в искрозащищенных
цепях, служат данные
сертификата соответствия.
Для искрозащищенных
электрических устройств,
сертифицированных по
предписаниям 94/9 EG, при их
подключении в искрозащищенных
цепях, служат данные
сертификата образцовых
испытаний Европейского
Сообщества.
Внимание. Обязательно следует
соблюдать приведенную в
сертификате схему расположения
клеммных подключений.
Изменение электрических
подключений может привести к
ликвидации Ех-защиты!
Не допускается поворачивать или
ослаблять лакированные винты
снаружи и внутри корпуса.
зон с
EB 8382-1 RU
Page 26

- 26 -
Д
д
д
Указания по выбору кабеля и
электрических проводов:
Для прокладки большого количества
искрозащищенных электрических цепей в
многожильном кабеле следует соблюдать
раздел 12 предписаний EN 60079-14; VDE
0165/8.98.
В особенности необходимо соблюдать
минимальную толщину изоляции
отдельного провода, составляющую не
менее 0,2 мм. Под изоляцией
подразумеваются широко применяемые
изолирующие материалы, такие, как,
например, полиэтилен.
Диаметр отдельного проводника
тонкожильного провода
составлять не менее 0,1 мм.
Окончания проводников следует
предохранять от обламывания, например,
с помощью концевых гильз.
При подключении более двух отдельных
кабелей можно смонтировать
дополнительное винтовое кабельное
крепление. Неиспользуемые кабельные
жилы должны изолироваться с помощью
глухих гильз-заглушек.
Приборы, работающие при окружающих
температурах до 40°C должны иметь
металлические кабельные вводы.
Расположение клемм подключения прибора
приводится на рис. 9 настоящей инструкции
или на крышке корпуса прибора.
должен
Подключения
Шинные коммуникации
Экранированный соединительный
PROFIBUS-кабель следует заводить на
клеммы подключения через резьбовой,
латунный EMV-совместимый кабельный
ввод позиционера. При этом проходящий
через уплотнительное пространство экран
должен по своей плоскости быть соединен с
корпусом и резьбовым вводом
.
Подключение кабеля производится
следующим образом:
ля подключения шинных коммуникаций
1.
отвинтить гайку и зажимной корпус от
резьбового ввода позиционера и
удалить защитный пыльник.
2. Пропустить соединительный кабель
через гайку и зажимной корпус.
3. Удалить изоляцию с конца кабеля на
лину, необходимую для подключения,
и укоротить экран на длину около 13 мм.
Также отрезать возможные проводники,
не задействованные при монтаже.
4. Разъединить провода экранной оплетки
и завернуть их, уложив на зажимной
корпус.
5. Вставить зажимной корпус в резьбовой
ввод и затянуть гайку до состояния,
когда кабель окажется прочно зажатым.
6. Подвести двухпроводное шинное
соединение
без учета полярности к
винтовым клеммам, обозначенным EN
61158-2.
В исключительных случаях, если указанное
соединение невозможно выполнить ввиду
специфики конструкции оборудования,
опускается пропустить кабельный экран
через резьбовой ввод и выполнить его
емкостное соединение с клеммой “S”.
При этом следует точно убедиться, что не
образовалась гальванической связи между
экраном и резьбовым соединением или
корпусом.
EB 8382-1 RU
Page 27

- 27 -
Д
Д
у
р
д
р
у
Подробную информацию см. PROFIBUS-PA
/ Руководство по вводу в эксплуатацию
(PNO, журнал 2.091).
На двоичном входе может устанавливаться
пассивный беспотенциальный контакт.
Позиционер сигнализирует состояние
электрического контура по шинному
протоколу.
Важно!
Для подключения двоичного входа,
принудительного сброса воздуха и
граничных контактов потребуется
дополнительный резьбовой кабельный
ввод, который устанавливается вместо
имеющихся заглушек.
ополнительное оснащение:
резьбовой кабельный ввод М20х1,5,
никелированная латунь, зак.№ 8808-0143.
латунный резьбовой ввод экран зажимной корпус резьбовая гайка
Подключения
Принудительный сброс воздуха
ля обеспечения принудительного сброса
воздуха на соответствующие клеммы
должно подаваться напряжение между 6 и
24V DC.
Принудительный сброс может
активироваться или деактивироваться с
помощью внутреннего переключателя (см.
раздел 4.3).
Примечание!
При отсутствии или отключении
напряжения позиционер сбрасывает
давление с привода и не реагир
входной сигнал управления.
ет на
шинные провода
Рис.9 • Электрические подключения (обозначение подключений согласно DIN EN 45140)
релейный усилитель
согласно EN 60947-5-6
аничные контакты
г
EB 8382-1 RU
воичный вход
принудительный
сб
ос возд
ха
Page 28

- 28 -
к
к
3.2.2 Граничные контакты
Для работы граничных контактов следует
устанавливать в выходных цепях релейные
усилители. Для обеспечения надежной
работы позиционера усилители должны
удовлетворять граничным значениям цепи
управляющего тока согласно NAMUR.
При установке во взрывоопасных зонах
следует учитывать действующие
технические условия.
3.2.3 Установка соединения для связи
(шинный адрес)
Установка соединения между регулятором,
автоматизированной системой,
персональным компьютером, рабочей
станцией с одной стороны и
позиционером/позиционерами с другой
стороны осуществляется при помощи
сегментного коммутатора (см. рис. 10)
согласно PROFIBUS-предписаниям.
При использовании позиционера во
взрывоопасных зонах следует применять
сегментные коммутаторы в Ех-защищенном
исполнении.
На одном сегментном коммутаторе может
работать в параллельном
PROFIBUS-PA-сегменте максимум 32
позиционера. Количество подключаемых
позиционеров снижается при использовании
в Ех-зонах.
Каждому позиционеру в сегменте
необходимо присваивать уникальный
(неповторяющийся) шинный адрес в
диапазоне значений от 0 до 125. Для этого в
позиционере на внутренней стороне крышки
установлено 7 микротумблеров, положения
которых определяют шинный адрес
позиционера.
Адрес образуется суммированием значений
всех разрядов.
режиме на одном
Подключения
При поставках позиционера изготовителем
устанавливается шинный адрес 126.
Обязательно следует помнить, что
микротумблеры должны принимать
положение, соответствующее 0 или 1, и
никогда не устанавливаться в
промежуточном положении.
Примечание!
В случае установки нового шинного адреса
прибор воспринимает его после
повторного пуска!
3.2.4 Локальный интерфейс (SSP)
На внутренней стороне крышки прибора
находится локальный интерфейс. Он
соединяется при помощи специального
интерфейсного адаптера (зак.№ 1400-7700)
с персональным компьютером.
Через интерфейсное соединение и при
наличии программного пакета TROVIS-VIEW
производится подготовка позиционера
вводу в эксплуатацию.
Подключение с этой целью позиционера
PROFIBUS DP/PA-сегменту больше не
является необходимым. Прибор следует
только обеспечить питанием по шинным
клеммам (любой источник постоянного
напряжения от 9 до 32 V DC).
Программный пакет TROVIS-VIEW и
приборный модуль 3785 должны иметь
уровень 2.02.
Доступ через SSP-интерфейс также может
осуществляться, если позиционер
подключен в шинном сегменте.
Цикличный и ацикличный обмен данными не
оказывают влияния, для параметров
прибора служит записанное на последний
момент значение.
EB 8382-1 RU
Page 29

- 29 -
(
р
(
р
р
у
р
р
(
р
р
у
р
р
регулятор/SPS/сист. управления
масте
, класс 1)
те
минирование
Подключения
компоненты индикации и обслуживания
масте
, класс 2)
термини
ование
10.1 Подключение позиционера тип 3785-1
регулятор/SPS/сист. управления
масте
, класс 1)
сегментный Ех- комм
термини
ование
сегментный комм
тато
тато
те
минирование
компоненты индикации
и обслуживания
(мастер, класс 2)
безопасная
зона
Ех-зона
10.2 Подключение позиционера тип 3785-1 во взрывоопасной зоне
Рис.10 • PROFIBUS-подключения
EB 8382-1 RU
Page 30

- 30 -
Д
д
4. Эксплуатация позиционера
Предупреждение!
Перед вводом в эксплуатацию
следует осторожно перевести
клапан в конечное положение
посредством ручного управления
(отверстие на крышке
позиционера, см. рис. 11). В ходе
этой операции контролируйте
рычажный механизм на предмет
его безупречной работы.
Превышение максимального угла
поворота вследствие
неправильного выбора или
ошибочного расчета рычажной
механики может повредить
позиционер.
Эксплуатация позиционера
4.1 Контрольные светодиоды
ля контроля функционирования
позиционера в ходе пуска в эксплуатацию и
альней шей работы, а также при
возникновении возможных неисправностей,
на внутренней стороне крышки прибора
расположены два светодиода.
В качестве общих значений сигнализации
используются следующие цвета:
Красный – запуск прибора или ошибка;
невозможен режим
регулирования.
Зеленый – ошибок не обнаружено; режим
регулирования или положение
безопасности (например, если не
проведена инициализация).
Красный и зеленый –
Подробные значения цветовой индикации
приведены в таблице.
обнаружена ошибка,
возможен режим
регулирования
Значение Светодиод
Пуск прибора:
Ошибок не обнаружено:
прибор на шине, выполнен холодный старт,
требуется инициализация
идет инициализация или коррекция нулевой точки зеленый, быстро мерцает
прибор инициализирован, нет допустимого значения зеленый, мерцает 3-х быстро +
прибор инициализирован, допустимое значение,
режим регулирования
Ошибки в режиме регулирования:
ошибка нулевой точки красный и зеленый мерцают
ошибка контура регулирования красный и зеленый мерцают быстро
Ошибки, приводящие к срыву первой
инициализации (прибор не входит в штатный режим)
ошибка нулевой точки красный, медленно мерцает
ошибка в механике/пневматике красный
ошибка контура регулирования красный, мерцает быстро
Ошибки в приборе, которые приводят к выходу из
режима регулирования:
прибор обнаружил внутреннюю ошибку красный, мерцает 3-х быстро +
красный
зеленый, постоянно
зеленый, медленно мерцает
длинная пауза
зеленый
красный и зеленый
медленно
красный постоянно
длинная пауза
EB 8382-1 RU
Page 31

- 31 -
к
я
и
х
Эксплуатация позиционера
4.2 Защита от записи
На внутренней стороне крышки последним
после семи переключателей шинного
адреса располагается микротумблер для
активирования защиты от записи,
обозначенный, как “write protection”.
В положении ON (ВКЛ) тумблера защиты от
записи параметры, заданные в позиционере,
защищены от случайной перезаписи и не
могут быть изменены по коммуникациям
через PROFIBUS-протокол.
Если имеется необходимость изменить по
линии связи
параметры позиционера,
указанный тумблер следует установить в
положение OFF (ВЫКЛ).
4.3 Активация и деактивация
принудительного сброса воздуха
Начиная с модельного индекса .03.
1. Удалить плату с внутренней стороны
крышки позиционера путем
вывинчивания четырех винтов.
стрелка-указатель
положения ручное шинный тумблер
при монтаже указатель управление адрес защиты от записи
2. Удалить центральный винт на плате и
откинуть плату.
3. Установить переключатель в
необходимое положение согласно
маркировке:
1.ENABLED > функция активирована
2.DISABLED > функция деактивирована
4.4 Базовая установка
При поставке позиционера все его
переменные параметры сброшены
значениям холодного старта, см. главу 8 с
перечнем параметров.
Внимание!
Ручное управление и активные
перемещения в конечное положение
могут привести к тому, что на
привод будет подано максимальное
питающее давление.
Во избежание возникновени
недопустимых усилий перестановк
питающее давление следует
ограничивать в соответствующи
редукционных станциях.
рычаг управляющие регулировочные светодиоды кнопка инициализации
нулевой флажки винты GW или коррекции нулевой
точки точки
Рис.11 • Позиционер, внутренний вид
EB 8382-1 RU
Page 32

- 32 -
Д
х
4.4.1 Установка механики в нулевую
точку
Важно!
Коррекцию нулевой точки следует
проводить при закрытом клапане.
(в 3-ходовых клапанах при выведенном
штоке привода).
¾ На крышке прибора один раз
сильно нажать до упора рычаг
нулевой точки в направлении
стрелки, после чего желтый
указатель установится на белой
линии.
Для тех регулирующих клапанов, которые в
своем выходном состоянии находятся в
открытом положении, например, для
привода с положением безопасности «шток
втягивается» следует предварительно
подать на позиционер
питающее давление.
Когда затем будет активировано ручное
управление, установится управляющее
давление и клапан перейдет в закрытое
положение. Теперь можно будет привести в
действие рычаг нулевой точки.
4.4.2 Инициализация
После подключения питающего давления и
подачи электрического сигнала управления
следует запустить процесс инициализации.
При этом позиционер оптимально
подстраивается к характеристикам трения в
механизмах и потребностям регулирующего
клапана в управляющем давлении.
Предупреждение!
Инициализация протекает
несколько минут. При этом
регулирующий клапан
стремительно перемещается
относительно своего текущего
положения.
По этой причине категорически
запрещается производить
инициализацию в ходе текущего
производственного процесса.
Эксплуатация позиционера
опускается запуск инициализации
при закрытых отсечных вентиля
или в демонтированном виде на
испытательном стенде.
¾ При помощи сервисной программы в
меню «Пуск в эксплуатацию»
(
Inbetriebname) ввести параметры
клапана и привода.
¾ Установить опцию «Инициализация»
(
Initialisierung) в состояние
«Номинальный диапазон»
(
Nennbereich). Опцию «Максимальный
диапазон» (
Maximalbereich) следует
выбирать только для 3-ходовых
клапанов.
¾ Запустить процесс инициализации.
Успешное завершение инициализации будет
сигнализироваться в сервисной программе и
контрольным светодиодом (см. раздел 4.1).
¾ В завершение выполнить
необходимое конфигурирование,
соответствующее конструкции
клапана.
Рекомендуются следующие установки:
¾ Положение безопасности «шток
привода выдвигается» (FA):
Направление движения
растет/растет (>>), с увеличением
управляющего сигнала открывается
проходной клапан.
Конечное положение при
управляющем сигнале менее 1%
(плотно закрывается).
Конечное положение при
управляющем сигнале более 125%
(функция деактивируется).
¾ Положение безопасности «шток
привода втягивается» (FE):
Направление движения
растет/падает (<>), с увеличением
управляющего сигнала закрывается
проходной клапан.
Конечное положение при
управляющем сигнале менее –2,5%
(функция деактивируется).
Конечное положение при
управляющем сигнале
более 99%
(плотно закрывается).
EB 8382-1 RU
Page 33

- 33 -
f
Д
¾ Установить время задержки не
менее 30сек.
¾ Ввести обозначение
технологической позиции.
¾ Дополнительное
конфигурирование, например,
специальные характеристики для
поворотных клапанов, при
необходимости.
Если на клапане не имеется
коммуникаций (
связи с управляющим или сервисным
оборудованием
непосредственно на позиционере.
¾ Подать энергию на
несмонтированный позиционер и
выполнить параметрирование
согласно разделу 4.3.2.
Если вообще отсутствует
возможность установления
коммуникации, то работать можно
только с записанными в приборе
заводскими установками параметров
(параметры холодного старта).
¾ Смонтировать позиционер и
выполнить установку механики в
нулевую точку согласно разделу
4.3.1.
Начать процесс инициализации, для
¾
запуска которого следует нажать
подходящим инструментом кнопку
Init/Zero на крышке позиционера,
обозначенную как
«Initialisierung/Nullabgleich»
(инициализация/ коррекция нулевой
точки).
Процесс инициализации считается
оконченным, когда позиционер займет
положение, соответствующее
управляющему входному сигналу.
Примечание!
Если прибор был один раз успешно
инициализирован, то нажатие кнопки
Init/Zero «Initialisierung/ Nullabgleich»
(инициализация/коррекция нулевой точки)
обеспечивает только коррекцию нулевой
точки.
нет возможности установления
), возможна инициализация
Эксплуатация позиционера
Новая инициализация может проводиться
через подключенные коммуникации.
Процесс инициализации можно повторить
по коммуникациям, если выполнить сброс
параметров позиционера к значениям
холодного старта (
Kaltstartwerte). В этом случае при нажатии
Ruecksetzen au
кнопки Init/Zero (инициализация/коррекция
нулевой точки) вновь производится
полноценная инициализация.
Электрическая коррекция нулевой точки
Если в процессе эксплуатации клапана
произойдет смещение механической
нулевой точки, то можно предпринять
электрическую коррекцию нулевой точки.
ля этого следует использовать кнопку, на
внутренней крышке прибора обозначенную
как Init/Zero (инициализация/коррекция
нулевой точки), см. рис.11.
Предупреждение!
Клапан переводится в конечное
положение.
¾ В направлении стрелки один раз до
упора сильно нажать рычаг нулевой
точки, расположенный на крышке
прибора, после чего желтый указатель
установится на белой линии.
¾ Нажать еще раз кнопку для
выполнения электрической коррекции.
После второго нажатия кнопка блокируется
примерно на 1 минуту!
Электрическая коррекция заканчивается,
когда позиционер займет положение,
соответствующее управляющему сигналу.
EB 8382-1 RU
Page 34

- 34 -
ж
Д
4.4 Установка индуктивных концевых
датчиков
В конструкции с индуктивными концевыми
датчиками на поворотной оси
передаточного рычага позиционера
располагаются два регулируемых флажка,
которые приводят в действие
соответствующие шлицевые инициаторы.
Для работы индуктивных концевых
датчиков в выходной электрической цепи
следует использовать развязывающие
усилители (см. раздел 3.2.2).
Когда флажок находится в поле шлицевого
инициатора, тот обладает высоким
электрическим
флажок выходит из поля, электрическое
сопротивление инициатора падает.
В стандартном случае концевые датчики
устанавливаются так, чтобы в обоих
граничных положениях позиционера
вырабатывался соответствующий сигнал.
Однако точки срабатывания можно
устанавливать и для сигнализации
промежуточных положений.
Требуемая функция коммутации (должно ли
выходное реле притягиваться или
отпускаться при погружении флажка
инициатор) в случае необходимости
выбирается с помощью развязывающего
усилителя.
сопротивлением. Как только
в
Установка индуктивных
концевых датчиков
Установка точки срабатывания:
Концевые датчики обозначены внутри
крышки прибора, как GW1 и GW2. В
прорезях под этими обозначениями видны
елтые флажки и соответствующие
регулировочные винты (см. рис. 12).
В каждом положении срабатывания может
выдаваться сигнализация либо при
погружении, либо при выходе
управляющего флажка из шлицевого
инициатора.
¾ Перевести клапан в положение, при
котором требуется, чтобы сработала
сигнализация. Затем посредством
вращения регулировочного винта
выбранного Вами концевого датчика
GW1 или GW2 так установить
управляющий флажок, чтобы достичь
точки срабатывания сигнализации, от
чего загорится светодиод на ключевом
(релейном) усилителе.
При этом кромка желтого флажка станет на
одну линию с белой прямой горизонтальной
отметкой на крышке корпуса. Это
показывает также, с какой стороны
управляющий флажок погружается в
шлицевой инициатор.
ля того чтобы обеспечить надежное
срабатывание при любых окружающих
условиях, точка срабатывания должна
устанавливаться, по меньшей мере, за 5%
хода до механического упора в положениях
ОТКР или ЗАКР.
EB 8382-1 RU
Page 35

- 35 -
5. Техническое обслуживание
Прибор не нуждается в техническом
обслуживании.
Со стороны пневматического подключения
9/Supply установлена сетчатая вставка с
размером ячейки 100мкм. При
необходимости вставку можно вывинтить и
почистить.
Однако предписания по техническому
обслуживанию редукционных станций
питающего давления, возможно,
установленных перед позиционером,
следует обязательно выполнять.
Техническое обслуживание
6. Ремонт Ех-приборов
Если выполнен ремонт позиционера,
входящего в состав Ех-оборудования, его
пуск в действие возможен только после
того как оборудование будет заново
проверено специалистами на соответствие
требованиям Ех-защиты, о чем должно
иметься необходимое свидетельство или
отметка об испытаниях.
Экспертная проверка оборудования может
быть исключена, если производителем это
оборудование перед новым
работу было подвергнуто поштучным
испытаниям и успешно их прошло, о чем на
оборудовании были проставлены
соответствующие отметки,
удостоверяющие этот факт.
Замена Ех-компонентов допускается
только на оригинальные, прошедшие
испытания экземпляры производителя
данного оборудования.
пуском в
EB 8382-1 RU
Page 36

- 36 -
Инструментальные особенности
PROFIBUS MasterСlass 1
7. Инструментальные особенности PROFIBUS Master Class 1
7.1 Базовые параметры прибора GSD (GeraeteStammDaten)
Базовые параметры прибора имеются в распоряжении в виде текстового файла
SAMS3785.GSD. Он может быть поставлен на основе магнитного носителя (дискета 1.44Мб
размером 3 ½”) под номером 1400-7417, либо «скачан» через Internet с сервера:
http://www.samson.de или http://www.profibus/com.
Базовые параметры прибора позволяют в стандартизованной форме осуществить
подключение SAMSOM PROFIBUS-позиционера тип 3785 в качестве “slave” (ведомого)
PROFIBUS-прибора в среде программирования и конфигурирования Мастер класса 1
(Master Class 1) (пример: SIEMENS Simatic Step 7, HWConfig).
Через GSD (базовые параметры прибора) для Master Class 1 обеспечиваются основные
возможности циклического обмена данных с «ведомым» прибором, в данном случае –
позиционером тип 3785. (Master – ведущий или первичный, slave – ведомый или вторичный).
7.2 Обмен данных DATA EXCHANGE
В соответствии с приборным профилем PROFIBUS PA для электропневматических
исполнительных устройств предлагается в общей сложности 7 различных структур
циклических параметров для обмена данных. В среде программирования и
конфигурирования Master Class 1 необходимо выбрать один из семи указанных вариантов.
Обозначения: выходное значение – Output и входное значение – Input относятся к системе
управления/ Master Class 1.
Вариант 1:
модуль = “SP” 0xA4
Выходное значение (Output)
Байт 0 1 2 3 4
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Вариант 2:
модуль = "RCAS_OUT, RCAS_JN" 0xB4
Входное значение (Input)
Байт 0 1 2 3 4
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
RCAS_OUT, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Octet 5
статус
EB 8382-1 RU
Page 37

- 37 -
Выходное значение (Output)
Байт 0 1 2 3 4
Инструментальные особенности
PROFIBUS MasterСlass 1
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
RCAS_IN, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Вариант 3:
модуль = "READBACK + POS_D, SP" 0x96, 0хА4
Входное значение (Input)
Байт 0 1 2 3 4 5 6
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
READ_BACK, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5 Octet 1 Octet 2
статус
POS_D
значение
Выходное значение (Output)
Байт 0 1 2 3 4
POS_D
статус
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Вариант 4:
модуль = "CHECKBACK, SP" 0x92, 0хА4
Входное значение (Input)
Байт 0 1 2
Octet 1 Octet 2 Octet 3
CHECK_
BACK[0]
CHECK_
BACK[1]
CHECK_
BACK[2]
Octet 5
статус
EB 8382-1 RU
Page 38

- 38 -
Выходное значение (Output)
Байт 0 1 2 3 4
Инструментальные особенности
PROFIBUS MasterСlass 1
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Вариант 5:
модуль = "READBACK + POS_D + CHECKBACK, SP" 0x99, 0xА4
Входное значение (Input)
Байт 0 1 2 3 4 5 6 7 8 9
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
READ_BACK, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5 Octet 1 Octet 2 Octet 1 Octet 2 Octet 3
статус
POS_D
значение
POS_D
статус
CHECK_
BACK[0]
CHECK_
BACK[1]
Выходное значение (Output)
Байт 0 1 2 3 4
CHECK_
BACK[2]
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Вариант 6:
модуль = "RCAS_OUT + CHECKBACK, RCAS_IN" 0x97, 0xА4
Входное значение (Input)
Байт 0 1 2 3 4 5 6 7
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
READ_BACK, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5 Octet 1 Octet 2 Octet 1
статус
CHECK_
BACK[0]
CHECK_
BACK[1]
CHECK_
BACK[2]
EB 8382-1 RU
Page 39

- 39 -
Выходное значение (Output)
Байт 0 1 2 3 4
Инструментальные особенности
PROFIBUS MasterСlass 1
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Вариант 7:
модуль = "READBACK + RCAS_OUT + POS_D + CHECKBACK, SP + RCAS_IN" 0x99, 0xА4
Входное значение (Input)
Байт 0 1 2 3 4 5 6 7 8 9
Octet 1
Sign,
Exponent
Байт 10 11 12 13 14
Octet 2
Exponent,
Fraction
READ_BACK, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5 Octet 1
статус
Sign,
Exponent
Octet 2
Exponent,
Fraction
RCAS_OUT, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
Octet 1
POS_D
значение
Octet 2 Octet 1 Octet 2 Octet 3
POS_D
статус
CHECK_
BACK[0]
CHECK_
BACK[1]
CHECK_
BACK[2]
Выходное значение (Output)
Байт 0 1 2 3 4 5 6 7 8 9
Octet 1
Sign,
Exponent
Octet 2
Exponent,
Fraction
SP, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5 Octet 1
Sign,
Exponent
статус
Octet 2
Exponent,
Fraction
RCAS_OUT, значение
(Floating Point, IEEE)
Octet 3
Fraction
Octet 4
Fraction
Octet 5
статус
EB 8382-1 RU
Page 40

- 40 -
Инструментальные особенности
PROFIBUS MasterСlass 1
7.3 Описание параметров
SP – заданное значение и статус: входной сигнал w в режиме работы “Auto”
Входной сигнал w позиционера в автоматическом режиме (“Auto”) задается в виде
параметра SP.
SP включает в себя число с плавающей запятой (4 байта) и соответствующий статус (1
байт).
Число и статус передаются вместе (данные длиной 5 байт). Если статус входного сигнала
имеет значение “bad”/ «плохой» (десятич. значение < 64), позиционер
безопасности, предусмотренном конструкцией привода.
RCAS_IN / RCAS_OUT: входной сигнал w в режиме работы “RCAS”
Входной сигнал позиционера в режиме работы REMOTE_CASCADE “RCAS” задается в виде
параметра RCAS_IN/RCAS_OUT.
RCAS_IN/RCAS_OUT включает в себя число с плавающей запятой (4 байта) и
соответствующий статус (1 байт).
Число и статус передаются вместе (данные длиной 5 байт). Если статус входного сигнала
имеет значение “bad”/ «плохой» (
десятич. значение < 64dez.), позиционер остается в
положении безопасности, предусмотренном конструкцией привода.
Режим работы RCAS имеет аппаратную реализацию с версии К1.60.
READBACK – текущее положение и статус: регулируемый параметр х
Обратная связь о текущем положении осуществляется в параметре READBACK, который
включает число с плавающей запятой (4 байт) и соответствующий статус (1 байт).
POS_D – информация о перестановке, дискретно, со
статусом: сигнализация о
конечном положении
Сигнализация о конечном положении осуществляется параметром POS_D и включает
информационное слово (1 байт) и соответствующий статус (1 байт).
Информационное слово кодируется следующим образом:
0 = не инициализировано,
1 = закрыто (х<0,5%),
2 = открыто (х>99,5%),
3 = промежуточное положение.
CHACKBACK – статус прибора: детальная информация о приборе, кодировка в битах
№ бита Название Описание байт
0 CB_FAIL_SAFE Fail safe position (MODE = out of service)
1 CB_REQ_LOC_OP Request for local Operation
2 CB_LOCAL_OP Прибор в local mode (локальный режим)
3 CB_OVERRIDE Неотложное обслуживание / принудительный сброс воздуха
4, 5, 6 не используются
остается в положении
0
EB 8382-1 RU
Page 41

- 41 -
Инструментальные особенности
PROFIBUS MasterСlass 1
7 CB_TRAV_TIME статус контроля перемещения (сбрасывается автоматически)0 0
8, 9 не используется
10 CB_UPDATE_EVT устанавливается при изменении статических данных
11 CB_SIMULATE режим симуляции, т.е. значения не обусловлены конкретным
процессом
12 CB_DISTURBANCE неисправность, причина – см. параметры диагностики
(DIAGNOSIS)
13 CB_CONTR_ERR Неисправность внутреннего позиционирования (должно
подтверждаться через Class 2 Master). Сигнализация
светодиодом, сбрасывается автоматически, как только контроль
контура регулирования больше не обнаружит ошибок.
14 CB_CONTR_INACT Позиционер инактивирован (MODE = out of service) [режим =вне
обслуживания]
15 CB_SELFTEST Прибор в режиме самотестирования (MODE = out of service)
[режим =вне обслуживания]
16 CB_TOT_VALVE_TRAV Было превышено граничное значение абсолютного путевого
интеграла
17…23 не используются
1
2
Сообщения диагностики прибора “Slave Diagnostic Information”
Со стороны позиционера, наряду со стандартными сообщениями диагностики, имеются в
распоряжении расширенные (дополнительные) сообщения “Ext_Diag_Data”. Они также
имеют битовое кодирование и соответствуют PROFIBUS PA профильному параметру
“Diagnosis”
№
бита
Название Описание
0 DIA_HV_ELECTR Ошибка в электронике прибора
1 DIA_HV_MECH Ошибка в механике прибора
4 DIA_MEM_CHKSUM Ошибка контрольной суммы памяти данных
5 DIA_MEASUREMENT Ошибка определения измеряемого значения
6 DIA_NOT_INIT Прибор не инициализирован (не выполнена автокоррекция)
7 DIA_INIT_ERR Ошибка автокоррекции
8 DIA_ZERO_ERR Ошибка нулевой точки
10 DIA_CONF_INVAL Недопустимая конфигурация
11 DIA_WARMSTART Выполнен повторный запуск (горячий старт),
см. определение повторного старта в Profil A
12 DIA_COLDSTART Выполнен новый запуск (холодный старт),
см. определение нового старта в Profil A
13 DIA_MAINTAINANCE Требуется техническое обслуживание
14 DIA_CHARACT Недопустимая характеристика
31 EXTENSION_AVAILABLE Имеется дополнительная информация
EB 8382-1 RU
Page 42

- 42 -
Инструментальные особенности
PROFIBUS MasterСlass 1
7.4 Кодирование статуса измеряемого параметра
Позиционером тип 3785 используются следующие кодировки статуса (в десятичных
значениях):
BAD (плохой):
0 = non-specific – статус «плохой», без точного значения
4 = Configuration Error – ошибка в конфигурации прибора
12 = Device Failure – ошибка прибора
16/17/18/19 = Sensor Failure – ошибка измерения значения (превышение граничного
значения). В битах граничного значения зафиксировано нарушение границы
измеряемого значения.
20 = No Communication, with last usable value – (внутреннее) ошибка передачи, прибор
работает с действовавшим на последний момент значением
24 = No Communication, with no usable value – (внутреннее) ошибка передачи, прибор не
имеет допустимого значения.
28 = Out of Service – нет допустимого значения, прибор вне режима
Uncertain (неуверенно):
64 = non-specific – статус «недостоверный», без точного значения
68 = Last Usable Value – значение неопределенное, прибор работает с
действовавшим на последний момент значением
76 = Initial Value – начальное значение (
возможно, значение холодного старта)
Good (Non-cascade) (хороший, нет каскада):
128 = O.K. – статус «в порядке».
160 = Initiate Fail Safe (IFS) – если входной сигнал (параметр) имеет этот статус и не
передается (не появляется) дольше, чем время FSAVE_TIME, то выполняется
действие, сконфигурированное в параметре FSAVE_TYPE.
Limit-Bits (биты ограничения):
Оба младших бита статуса измеряемого значения применяются в качестве указателей
выхода измеряемого значения за установленные границы.
бит 0 = Low limited – падение
ниже заданной границы.
бит 1 = High limited – превышение заданной границы.
бит 0 и 1 = Constant (high and low limited) – значение блокировано.
.
EB 8382-1 RU
Page 43

- 43 -
Инструментальные особенности
PROFIBUS MasterСlass 1
7.5 Режимы работы
Возможные режимы работы
В профиле АО (Analog Output) определены следующие режимы работы:
¾ Automatic (Auto)
¾ Manual (Man)
¾ Remote Cascade (RCas)
¾ Local Override (LO)
¾ Out of Service (OS)
В позиционерах 3785 поддерживаются режимы:
- до версии микропрограммного обеспечения К 1.20 режимы: OS, AUTO,
- с версии микропрограммного обеспечения К 1.30 режимы: OS, LO, MAN, AUTO
Automatic (Auto)
В этом режиме работы позиционер отслеживает передаваемое через параметр SP (w)
циклически или ациклически значение управляющего сигнала в
диапазона, определяемых через PV_SCALE (диапазон входного сигнала).
Local Override (LO) или Manual (Man)
В этом режиме работы позиционер отслеживает передаваемое через параметр OUT
циклически или ациклически значение перестановки в пределах величин (мм или град) и
диапазона, определяемых через OUT_SCALE (ход/угол поворота). В случае
деактивированной характеристики это значение соответствует фактическому положению
клапана в мм или
градусах.
Параметр INCREASE_CLOSE (направление движения) не обрабатывается. Контроль
коммуникаций (FSAVE_TIME, FSAVE_TYPE, FSAVE_VALUE) также не обрабатывается.
Remote Cascade (RCas)
В этом режиме работы позиционер отслеживает передаваемое через параметр RCAS_IN
(w_
) циклически или ациклически значение управляющего сигнала в пределах величин и
rcas
диапазона, определяемых через PV_SCALE (диапазон входного сигнала).
Out of Service (OS)
Режим работы – положение безопасности, клапан переводится в механически заданное
положение безопасности.
пределах величин и
EB 8382-1 RU
Page 44

- 44 -
Перезапуск прибора (горячий старт)
Реакция позиционера после выполнения горячего старта жестко задается в параметре
FSAVE_TYPE («реакция безопасности»).
Если в параметре FSAVE_TYPE задано “regeln auf Sicherheitswert” («регулировать по
«значению безопасности») прибор переходит в автоматический режим и переводится в
состояние, заданное через параметр FSAVE_VALUE («значение безопасности»).
Если в параметре FSAVE_TYPE задано “regeln auf letzten Sollwert” («регулировать по
действовавшему на последний момент управляющему
vorgegebene Sicherheitsstellung” («определяемое пружинами положение безопасности»),
прибор остается в положении безопасности. Как только на прибор будет передано
допустимое значение управляющего сигнала, устанавливается режим Automatik
(автоматический).
Если статус передаваемого управляющего сигнала определяется как «плохой» или прибор
еще не прошел успешную инициализацию, он остается в положении безопасности (Out of
Service – вне режима), что относится к
Начиная с версии К1.6 реагирование прибора при статусе управляющего сигнала «плохой»
определяется через параметр FSAVE_TYPE.
Функции контроля FSAVE_TIME, FSAVE_TYPE, FSAVE_VALUE
Характер действий, задаваемых в параметре FSAVE_TYPE («реакция безопасности»),
определяется следующими событиями:
¾ Перезапуск прибора (горячий старт)
¾ Истечение DP-Watchdog вследствие прерывания циклической коммуникации (связи)
посредством Master Class 1 (не выполняется, если связь
¾ Истечение FSAVE_TIME («время безопасности») в режимах работы Automatik или
Remote Cascade, если статус допустимого в этих режимах входного (управляющего)
сигнала SP или RCAS_IN устанавливается в состояние “Initiate Fail Save”.
¾ Прием сигнала DP-“Global Control”-службы при котором устанавливается CLEAR-Bit
(но не для версии К1.30).
Вследствие установки в текущем режиме работы позиционера статуса управляющего
сигнала в состояние «плохой» прибор всегда
определяемое действием пружин (от версии К1.30 до К1.51). Начиная с версии К1.6
реагирование прибора при статусе управляющего сигнала «плохой» определяется через
параметр FSAVE_TYPE.
версии микропрограммного обеспечения до К1.51.
переходит в положение безопасности,
Инструментальные особенности
PROFIBUS MasterСlass 1
сигналу») либо “durch Federwirkung
регулярно возобновляется).
EB 8382-1 RU
Page 45

- 45 -
д
у
(
)
Блок-схема прибора
равнопроцент.
начало
конец
диапазон
входного
управляющего
сигнала
направление
движения
значение
управляющего
сигнала
инверсная
равнопроцент.
конечное
положен.
> при
конечное
положен.
< при
время
срабатывания
ограничение
скорости
функции
конечного
Блок-схема прибора
снизу,
сверху
ограничение
хода
положения
диапазон
рабочего
хода
коррекц.
рабоч.
хо
а
вентиль
подачи
вентиль
сброса
ход
параметры
инициализации
расчет
рабочего
хода
принудит. сброс
фильтр
действие пружин:
шток выдвигается
втягивается
характеристика
управления
положение безопасности
возд
ха
опция
диапаз.
рабочего
отказ аппаратуры или
системного прогр. обеспеч.
хода
EB 8382-1 RU
Page 46

- 46 -
Перечень параметров
8. Перечень параметров
Здесь приводится перечень параметров согласно их применению.
Настоящий перечень содержит в алфавитном порядке (
латинского алфавита
модифицироваться через коммуникации PROFIBUS, например, посредством персонального
компьютера (РС).
Специфические параметры изготовителя данного прибора SAMSON тип 3785 PROFIBUSPA-позиционера отмечены буквой (Н).
Обзор параметров:
Идентификация прибора
Обозначение технологической позиции
Программная версия (коммуникации/регулирование) SW_REVISION
Версия аппаратной реализации (электроника/механ.) HW_REVISION
) описание всех параметров позиционера, которые могут отображаться и
TAG_DESC
согласно порядку следования букв
Изготовитель позиционера DEVICE_MAN
Изготовитель клапана VALVE_MAN
Изготовитель привода ACTUATOR_MAN
Типовой номер регулятора DEVICE_ID
Серийный номер регулятора DEVICE_SER_NUM
Серийный номер привода ACTUATOR_SER_NUM
Серийный номер клапана VALVE_SER_NUM
Вид искрозащиты DEVICE_CERTIFICATION
Описание DESCRIPTOR
Информация DEVICE_MESSAGE
Дата инсталляции (установки) DEVICE_INSTALL_DATE
Идентификация принудительного сброса воздуха IDENT_FORCED_VENTING (H)
Двоичный вход IDENT_BINARY_INPUT (H)
Идентификация граничных контактов IDENT_LIMIT_SWITCHES (H)
Производственный номер позиционера DEVICE_PRODUKT_NUM (H)
Текстовые поля TEXT_INPUT1 … TEXT_INPUT_3 (H)
Дата последнего техобслуживания VALVE_MAINT_DATE
Дата последней калибровки DEVICE_CALIB_DATE
Дата последнего конфигурирования DEVICE_CONFIG_DATE
EB 8382-1 RU
Page 47

- 47 -
Пуск в эксплуатацию
Предохранительная блокировка
Холодный старт FACTORY_RESET
Горячий старт DEVICE_RESET_CMD
Вид привода ACTUATOR_TYPE
Вид клапана VALVE_TYPE
Положение безопасности ACTUATOR_ACTION
Монтаж ATTACHMENT (H)
Конструкция ACTUATOR_VERSI ON (H)
Положение при монтаже MOUNTING_POSITION (H)
Время срабатывания, мин. на ОТКР ACT_STROKE_TIME_INC
Время срабатывания, мин. на ЗАКР ACT_STROKE_TIME_DEC
Калибровка, команда SELF_CALIB_CMD
SECURITY_LOCKING
Перечень параметров
Калибровка, статус SLF_CALIB_STATUS
Коэффициент передачи (код передаточного рычага) TRANSM_CODE (H)
Длина передаточного рычага TRANSM_LENGTH (H)
Позиция передаточного штифта TRANSM_PIN_POS (H)
Метод инициализации INIT_METOD
Установки прибора
Конфигурация
Защита от записи WRITE_PROTECT_SWITCH (H)
Диапазон управляющего сигнала PV_SCALE
Значение безопасности управляющего сигнала FSAVE_VALUE
Реакция безопасности FSAVE_TYPE
Время безопасности FSAVE_TIME
Диапазон рабочего хода / угла поворота OUT_SCALE
Направление движения INCREASE_CLOSE
Разрешение локального сервиса LOCAL_OP_ENA
Номинальный ход / номинальный угол RATET_TRAVEL
Ограничение хода/ угла снизу TRAVEL_LIMIT_LOW
Ограничение хода/угла сверху TRAVEL_LIMIT_UP
Необходимое время срабатывания на ЗАКР TRAVEL_RATE_DEC
Необходимое время срабатывания на ОТКР TRAVEL_RATE_INC
EB 8382-1 RU
Page 48

- 48 -
Перечень параметров
Конечное положение, если сигнал управления
меньше заданного значения
SETP_CUTOFF_DEC
Конечное положение, если сигнал управления
больше заданного значения
SETP_CUTOFF_INC
Выбор характеристики CHARACT
Тип характеристики CHARACT_TYPE
Параметры регулятора
Коэффициент пропорциональности KP_Y1 SERVO_GAIN
Коэффициент усиления KD SERVO-RATE
Мертвая зона Xtot DEADBAND
Коэффициент пропорциональности KP_Y2 KP_Y2
Допустимое избыточное отклонение TOL_OVERSHOOT (H)
Режим
Режим работы, необходимый/текущий MODE_BLK/TARGET-MODE
Регулируемый параметр х READBACK
Управляющий параметр w SP
Управляющий параметр w_
RCAS_IN/RCAS_OUT
rcas
Сигнализация положения, дискретно POS_D
Рассогласование е SETP_DEVIATION
Значение перестановки OUT
Рабочее состояние TRANSDUCER_STATE (H)
Диагностика
Диагностика DIAGNOSIS
Расширенная диагностика DIAGNOSIS_EXTENSION
Симуляция SIMULATE
Статус прибора CHECK_BACK
Путевой интеграл, абсолютный TOTAL_VALVE_TRAVEL
Путевой интеграл, граничное значение TOT_VALVE_TRAV_LIMIT
Время задержки DELAY_TIME (H)
Допустимый диапазон TOLERANCE_BAND (H)
Калибровка, предупреждающее сообщение SELF_CALIB_WARNING (H)
Состояние двоичного входа BINARY_INPUT (H)
Макс. возможный ход/угол поворота MAX_HUB (H)
EB 8382-1 RU
Page 49

- 49 -
Таблица параметров
Монтаж
ATTACHMENT (H)
состояния:
значение холодного старта:
Положение при монтаже
MOUNTING_POSITION (H)
(прямоходный привод)
состояния:
значение холодного старта:
Вид привода
ACTUATOR_TYPE
состояния:
значение холодного старта:
Конструкция
ACTUATOR_VERSION (H)
состояния:
значение холодного старта:
Описание
DESCRIPTOR
Реж. работы,
требующийся/
Реж. работы, текущий
MODE_BLK/
TARGET_MODE
Назначается вид монтажа позиционера на регулирующем
клапане в случае использования прямоходного привода.
Для поворотного привода возможен только монтаж по VDI/VDE 3845
(NAMUR).
В отношении монтажа см. раздел 2.1 и 2.1.
0=интегрированный – монтаж в соединении с SAMSON-приводом 3277
1=NAMUR – монтаж по DIN/IEC534 (NAMUR)
0
На плате крышки позиционера нанесена стрелка, которая указывает
правильное положение для установки на приводе.
В случае прямого монтажа эта стрелка должна быть обращена к
приводу, а при монтаже по NAMUR направлена в обратную от привода
сторону.
0=стрелка направлена в сторону от
1= стрелка направлена к приводу
1
Это описание конструкции привода
Данная информация предназначена только для ее прочтения и
определяется конструкцией привода.
0=электропневматический
1=электрический
2=электрогидравлический
3=другое
0
Привод, оснащенный возвратными пружинами или без них.
0=простого действия с возвратными пружинами
1=двойного действия без пружин
0
Текст произвольного содержания для описания приложений,
заносится в полевой прибор, имеет объем 32 знака.
Режим работы позиционера
До версии К1.20: OS, AUTO
От версии К1.30: OS, LO, MAN, AUTO
Режимы работы позиционера:
Automatic (AUTO): В этом режиме работы позиционер отслеживает
передаваемое через параметр SP (w) циклически или ациклически
значение управляющего сигнала в пределах величин и диапазона,
определяемых через PV_SCALE (диапазон входного сигнала).
Manual (MAN): В этом режиме работы
передаваемое через параметр SP (w) циклически или ациклически
значение управляющего сигнала в пределах величин и диапазона,
определяемых через PV_SCALE (диапазон входного сигнала).
Параметр INCREASE_CLOSE (направление движения) не
обрабатывается.
Контроль коммуникаций (FSAVE_TIME, FSAVE_TYPE,
FSAVE_VALUE) также не обрабатывается.
Перечень параметров
привода
позиционер отслеживает
EB 8382-1 RU
Page 50

- 50 -
Перечень параметров
Local Override (LO): В этом режиме работы позиционер отслеживает
передаваемое через параметр OUT циклически или ациклически
значение перестановки в пределах величин (мм или град) и
диапазона, определяемых через OUT_SCALE (ход/угол поворота).
В случае деактивированной характеристики это значение
соответствует фактическому положению клапана в мм или градусах.
Параметр INCREASE_CLOSE (направление движения) не
обрабатывается. Контроль коммуникаций (FSAVE_TIME,
FSAVE_TYPE, FSAVE_VALUE) также
не обрабатывается.
Out of Service (OS): Режим работы – положение безопасности, клапан
переводится в механически заданное положение безопасности.
Remote Cascade (RCas): В этом режиме работы позиционер
отслеживает передаваемое через параметр RCAS_IN (w_
rcas
)
циклически или ациклически значение управляющего сигнала в
пределах величин и диапазона, определяемых через PV_SCALE
(диапазон входного сигнала).
Перезапуск прибора (горячий старт)
Реакция позиционера после выполнения горячего старта жестко
задается в параметре FSAVE_TYPE («реакция безопасности»).
Если в параметре FSAVE_TYPE задано “regeln auf Sicherheitswert”
(«регулировать по «значению безопасности») прибор переходит в
автоматический режим и переводится в состояние, заданное через
параметр FSAVE_VALUE («значение безопасности»).
Если в параметре FSAVE_TYPE задано “regeln auf letzten Sollwert”
(«регулировать по действовавшему на последний момент
управляющему сигналу») либо “durch Federwirkung vorgegebene
Sicherheitsstellung” («определяемое пружинами положение
безопасности»), прибор остается в положении безопасности. Как
только на прибор будет передано допустимое значение управляющего
сигнала, устанавливается режим Automatik (автоматический).
Если статус передаваемого управляющего сигнала определяется как
«плохой» (значение <64) или прибор еще не прошел успешную
инициализацию, он остается в положении безопасности (Out of Service
– вне режима)
Характер действий, задаваемых в параметре FSAVE_TYPE («реакция
безопасности»), определяется следующими событиями:
¾ Перезапуск прибора (горячий старт)
¾ Истечение DP-Watchdog вследствие прерывания циклической
коммуникации (связи) посредством Master Class 1 (не
выполняется, если связь регулярно возобновляется).
¾ Истечение FSAVE_TIME («время безопасности») в режимах
работы Automatik или Remote Cascade, если статус
допустимого в этих режимах входного (управляющего) сигнала
SP или RCAS_IN устанавливается в состояние “Initiate Fail
Save”.
¾ Прием сигнала DP-“Global Control”-службы при котором
устанавливается CLEAR-Bit (но не для версии К1.30).
Вследствие установки в текущем режиме работы позиционера статуса
управляющего сигнала в состояние «плохой» прибор всегда
переходит в положение безопасности, определяемое действием
пружин (от версии К1.30).
EB 8382-1 RU
Page 51

- 51 -
Рабочее состояние
TRANDUCER_STATE (H)
состояния:
Направление движения
INCREASE_CLOSE (H)
состояния:
значение холодного старта:
Двоичный вход
IDENT_BINARY_INPUT
состояния:
значение холодного старта:
Дата калибровки
DEVICE_CALIB_DATE
Дата конфигурирования
DEVICE_CONFIG_DATE
Дата установки
DEVICE_INSTALL_DATE
Дата техобслуживания
DEVICE_MAINT_DATE
Диагностика
DIAGNOSIS
вид сообщения:
состояния:
Расширенная диагностика
DIAGNOSIS_EXTENSION
вид сообщения:
состояния:
Текущее состояние регулирования
0= см. текущий режим работы
1=активен принудительный сброс воздуха
2=активно ограничение хода снизу
3=активно ограничение хода сверху
4=активно конечное положение при <
5=активно конечное положение при >
Определяет связь управляющего сигнала ходом/углом поворота.
0=растет/растет (при увеличении управляющего сигнала клапан
открывается; в 3-ходовых клапанах шток привода втягивается)
1=растет/падает (при увеличении управляющего сигнала клапан
закрывается; в 3-ходовых клапанах шток привода выдвигается)
0
Указывает оценку состояния двоичного входа
0=не определено
1=активно открыт
2=активно закрыт
0
Дата последней калибровки полевого прибора
Дата последнего конфигурирования прибора
Дата установки полевого прибора
Дата последнего технического обслуживания полевого прибора
Детальная информация о приборе, кодируется побитно, поэтому
возможно одновременно получить много сообщений. См. также гл. 9.
А: динамические сообщения, которые автоматически сбрасываются в
ходе прочтения.
R: статические сообщения, остаются до тех пор, пока в полевом
приборе произошло и имеет место какое-либо событие.
0: нет сообщений
1: активна сигнализация о диагностике
Дополнительная, специфическая для конкретного изготовителя
оборудования информация, кодируется побитно, поэтому возможно
одновременно получить много сообщений. См. также гл. 9.
А: динамические сообщения, которые автоматически сбрасываются в
ходе прочтения.
R: статические сообщения, остаются до тех пор, пока в полевом
приборе произошло и имеет место какое-либо
0: нет сообщений
1: актива сигнализация о диагностике
EB 8382-1 RU
Перечень параметров
событие.
Page 52

- 52 -
Конечное положение при
сигнале управления
больше заданного
значения
SETP_CUTOFF_INC
значение холодного старта:
Конечное положение при
сигнале управления
меньше заданного
значения
SETP_CUTOFF_DEC
значение холодного старта:
Производственный номер
DEVICE_PRODUKT_NUM (H)
Программная версия
SW_REVISION
Разрешение локального
сервиса
LOCAL_OP_EN
состояния:
значение холодного старта:
Диапазон управляющего
(входного) сигнала
PV_SCALE
значение холодного старта:
Управляющий сигнал w
SP
Управляющий сигнал
w_rcas
RCAS_IN/RCAS_OUT
Как только управляющий сигнал превышает заданное значение,
клапан переводится в направлении конечного положения,
соответствующего 100% управляющего сигнала.
Гистерезис 1%
При значении = 125% функция деактивируется.
99%
Внимание. Так как действием функций «Конечное положение при…»
исполнительный привод полностью нагружается давлением или
давление сбрасывается с
абсолютные конечные положения.
Ограничения посредством функций «Диапазон хода» или
«Ограничение хода» к этому случаю не относятся.
Если из-за полной подачи или сброса воздуха с привода будут
возникать недопустимо высокие усилия перестановки, эту функцию
следует деактивировать.
Как только управляющий сигнал упадет ниже заданного значения,
клапан переводится в направлении конечного положения,
соответствующего 0% управляющего сигнала.
Гистерезис 1%
При значении = -2,5% функция деактивируется.
1%
Внимание. Так как действием функций «Конечное положение при…»
исполнительный привод полностью нагружается давлением или
давление
абсолютные конечные положения.
Ограничения посредством функций «Диапазон хода» или
«Ограничение хода» к этому случаю не относятся.
Если из-за полной подачи или сброса воздуха с привода будут
возникать недопустимо высокие усилия перестановки, эту функцию
следует деактивировать.
Производственный номер изготовителя позиционера
Версия микропрограммного обеспечения
Конфигурация/Регулирование.
Разрешение локального сервиса (кнопка нулев. точки/инициализации)
При отказе (отключении) коммуникаций через 30 сек возможно
местное обслуживание прибора.
0=блокировано
1=доступ разрешен
1
Диапазон и величина управляющего сигнала w/w_rcas (SP или
RCAS_IN)
0…100%
Заданное значение управляющего сигнала и статус
Управляющий сигнал w в режиме работы “AOTO”/”MANUAL”
См. также диапазон управляющего сигнала.
Заданное значение управляющего сигнала и статус
Управляющий сигнал w в режиме работы “RCAS”
См. также диапазон управляющего сигнала.
сбрасывается с него, регулирующий клапан переводится в
Перечень параметров
него, регулирующий клапан переводится в
EB 8382-1 RU
Page 53

- 53 -
Статус прибора
CHECK_BACK
вид сообщения:
состояния:
Версия аппаратной
реализации
HW_REVISION
Изготовитель привода
ACTUATOR_MAN
Изготовитель
позиционера
DEVICE_MAN_ID
Изготовитель клапана
VALVE_MAN
Ограничение хода/угла
сверху
TRAVEL_LIMIT_UP
значение холодного старта:
Ограничение хода/угла
снизу
TRAVEL_LIMIT_LOW
значение холодного старта:
Диапазон хода или
диапазон угла поворота
OUT_SCALE
значение холодного старта:
Макс. ход/макс. угол
поворота
MAX_HUB (H)
Идентификация
граничных контактов
IDENT_LIMIT_SWITCHES (H)
состояния:
значение холодного старта:
Идентификация
принудительного сброса
воздуха
IDENT_FORCED_VENTING (H)
состояния:
Детальная информация о приборе, кодируется побитно, поэтому
возможно одновременно получить много сообщений. См. также гл. 9.
А: динамические сообщения, которые автоматически сбрасываются в
ходе прочтения.
R: статические сообщения, остаются до тех пор, пока в полевом
приборе произошло и имеет место какое-либо событие.
сообщений
0: нет
1: активна сигнализация о статусе прибора
Версия аппаратной реализации прибора, электроника/механика
Однозначно отображает информацию об изготовителе привода.
Длина: 16 знаков
Однозначно отображает информацию об изготовителе полевого
прибора. Информация только для чтения.
Однозначно отображает информацию об изготовителе клапана.
Длина : 16 знаков
Ограничение хода/угла поворота сверху на заданном уровне
(значении). Диапазон 0.0…120.0%. Характеристика не согласуется.
100.0%
Ограничение хода/угла поворота снизу на заданном уровне
(значении). Диапазон –20…99.9%. Характеристика не согласуется.
0.0%
Нижнее и верхнее устанавливаемое значение фактического рабочего
диапазона в (мм) или (град), при нелинейной характеристике
осуществляется согласование характеристики с пониженным рабочим
ходом.
Если была инициализация по максимальному диапазону, то диапазон
хода/диапазон угла поворота всегда относительно заданного
номинального
Не допускается выбирать рабочий диапазон менее ¼ хода/угла
поворота.
Диапазон: 0.0…255.9мм/0.0…120.0град
Начало: 0 Конец:15мм/90.0град
В процессе инициализации определяется максимальный ход/угол в
процентах от заданного номинального хода/номинального угла.
Примечание. При успешной инициализации по номинальному ходу
максимально возможный ход/угол не определяется.
Описывает, имеется ли опция индуктивных граничных контактов,
автоматически не определяется.
0=не установлены
1=установлены
0
Описывает, имеется ли опция принудительного сброса воздуха.
Информация только для чтения, автоматически устанавливается в
приборе.
0=не установлен
1=установлен
хода/угла поворота.
Перечень параметров
EB 8382-1 RU
Page 54

- 54 -
Метод инициализации
INIT_METHOD (H)
состояния:
значение холодного старта:
Калибровка
SELF_CALIB_CMD
состояния:
Статус калибровки
SELF_CALIB_STATUS
состояния:
Калибровка,
предупреждающие
сообщения
SELF_CALIB_WARNING (H)
состояния:
значение холодного старта:
Холодный старт
FACTORY_RESET
состояния:
значение холодного старта:
Метод инициализации в отношении номинального или максимального
диапазона.
При инициализации по номинальному диапазону учитывается только
диапазон, заданный номинальным ходом/углом поворота (например,
проходной клапан с односторонним механическим упором).
При инициализации по максимальному диапазону применяется
максимально возможный диапазон перестановки (например, 3ходовой клапан с
0=инициализация по максимальному диапазону
1=инициализация по номинальному диапазону
0
Команда на выполнение предусмотренных изготовителем
последовательностей операций калибровки в полевом приборе.
0=нет тестов, штатный режим регулирования
1=коррекция нулевой точки
2=инициализация
7=сброс абсолютного путевого интеграла
10=сброс сообщения «неисправность контура регулирования»
255=текущее действие прервано
Определяемый изготовителем статус последовательности
запускаемой через SELF_CALIB_CMD
0=не определено
2=прервано
4=ошибка в механике/пневматике
11=Timeout (превышение времени)
17=статус инициализации: определение механических упоров
19=статус инициализации: определение минимального времени
срабатывания (действия)
20=инициализация прервана из-за активации принуд. сброса воздуха
30=ошибка нулевой точки
254=успешно
Дополнительные предупреждающие сообщения в ходе стартовавшей
последовательности операций калибровки.
0=не определено
13=ошибка выбора номинального хода или механич. тяги
15=утечка пневмосистемы (при инициализации)
254=успешно
255=нет допустимых данных в приложении
0
Команда сброса к значениям холодного старта
0=нет действий
1=сброс приложений к значениям холодного старта. Все данные в
приборе будут сброшены к значениям холодного старта. Позиционер
переходит в положение безопасности. Требуется новая
инициализация. Сохраняются только данные описания прибора.
2=сброс описаний прибора к значениям холодного старта. Все
параметры описания прибора сбрасываются. Параметры приложений
сохраняются.
0
двусторонними механическими упорами)
Перечень параметров
EB 8382-1 RU
Page 55

- 55 -
Выбор характеристики
CHRACT
состояния:
значение холодного старта:
Тип характеристики
CHARACT_TYPE
Необходимое время
срабатывания на ОТКР
TRAVEL_RATE_INC
значение холодного старта:
Необходимое время
срабатывания на ЗАКР
TRAVEL_RATE_DEC
значение холодного старта:
Минимальное время
срабатывания на ОТКР
ACT_STROKE_TIME_INC
Минимальное время
срабатывания на ЗАКР
ACT_STROKE_TIME_DEC
Обозначение
технологической позиции
TAG_DESC
Время задержки
DELAY_TIME
значение холодного старта:
Сообщение
DEVICE_MESSAGE
Номинальный ход
RATED_TRAVEL
значение холодного старта:
Выбор характеристики для установления функциональной
зависимости между сигналом управления рабочим ходом/углом
поворота клапана.
0=линейная
1=равнопроцентная
2=инверсная (обратная) равнопроцентная
3=определяется пользователем (будет поддерживаться в будущей
версии прибора)
4=регулирующая SAMSON-заслонка, линейная
5= регулирующая SAMSON-заслонка, равнопроцентная
6=Vetec-клапан с поворотным конусом, линейный
7=Vetec-клапан, равнопроцентный
0
Текстовое поле (32 знака) для описания установленной
характеристики.
Необходимое время срабатывания на ОТКР – это устанавливаемое
минимальное время в секундах для прохождения диапазона
перестановки в направлении 100%-позиции. Диапазон установки от 0
до 240 секунд.
0 сек.
Необходимое время срабатывания на ЗАКР – это устанавливаемое
минимальное время в секундах для прохождения диапазона
перестановки в направлении 0%-позиции. Диапазон установки от 0 до
240 секунд.
0 сек.
Минимальное время срабатывания на ОТКР (в направлении 100%позиции) – это фактическое время в секундах, которое необходимо
системе позиционер-привод-клапан для прохождения номинального
хода/угла поворота в направлении открывания (измеряется в ходе
ввода в эксплуатацию).
Минимальное время срабатывания на
позиции) – это фактическое время в секундах, которое необходимо
системе позиционер-привод-клапан для прохождения номинального
хода/угла поворота в направлении закрывания (измеряется в ходе
ввода в эксплуатацию).
Данные только для чтения.
Обозначение технологической позиции прибора.
Размер: 32 знака.
Критерий сброса для текущего контроля контура регулирования. Если
заданное время задержки DELAY_TIME прошло, а рассогласование
при этом не укладывается в допустимом диапазоне
TOLERANCE_BAND, то выдается сообщение о сбое контура
регулирования. Диапазон задержки от 0 до 240 секунд.
Этот параметр определяется в ходе инициализации на основе
минимального времени срабатывания и может корректироваться.
10 сек
Текст произвольного содержания, записывается в полевом приборе.
Размер: 32 знака.
Номинальный ход [мм] или номинальный угол [град] клапана.
Номинальный рабочий диапазон 0.0…255.9 мм или 0.0…120.0 град.
15 мм
Перечень параметров
ЗАКР (в направлении 0%-
EB 8382-1 RU
Page 56

- 56 -
Коэффициент пропорциональности KP_Y1
SERVO_GAIN
Коэффициент пропорциональности KP_Y2
значение холодного старта:
Вид
привода
поворот-
ный
прямо-
ходный
Номинал.
ход/-угол
-
≥60 мм
< 60 мм
<10сек - 0.12 0.5 0.5
≥10сек - 0.12 3.0 4.0
<10сек
≥10 сек - 0.12 3.0 4.0
Коэффициент пропорциональности для подачи воздуха.
При записи значение заносятся в KP_Y1 (подача) и KP_Y2 (сброс).
Коэффициент пропорциональности для сброса воздуха.
При записи значение заносится в KP_Y2 (сброс). KP_Y1 остается
неизменным.
При подгонке значений коэффициентов в диапазоне от 0.01 до 10.0
рекомендуется делать изменения с
Повышение значения вызывает ускоренное достижение заданного
значения перестановки.
Диапазон 0.01…10.0
1.2
Примечание.
Коэффициенты пропорциональности KP_Y1 и KP_Y2определяются в
ходе первоначальной инициализации позиционера.
Приведенные в следующей таблице значения инициализации следует
при необходимости скорректировать в соответствии и измененными
условиями работы для достижения оптимальной характеристики
регулирования позиционера.
Время срабатывания
мин.
Действие
пружин
- >0.7сек >0.7сек 0.12 0.5 0.5
закрывает >0.7сек <0.7сек 0.12 0.5 0.1
закрывает <0.7сек >0.7сек 0.12 0.1 0.5
- <0.7сек <0.7сек 0.12 0.1 0.1
открывает >0.7сек <0.7сек 0.12 0.1 0.5
открывает <0.7сек >0.7сек 0.12 0.5 0.1
- >0.7сек >0.7сек 0.12 0.5 1.2
выдвигает >0.7сек <0.7сек 0.12 0.5 0.8
выдвигает <0.7сек >0.7сек 0.12 0.3 1.2
- <0.7сек <0.7сек 0.12 0.3 0.8
втягивает >0.7сек <0.7сек 0.12 0.3 1.2
втягивает <0.7сек >0.7сек 0.12 0.5 0.8
ОТКР ЗАКР
шагом 0.1.
KD
Перечень параметров
KP_Y1
подача
давления
KP_Y2
сброс
давления
EB 8382-1 RU
Page 57

- 57 -
Рассогласование
SETP_DEVIATION
Регулируемый
параметр х
READBACK
Защита от записи
WRITE_PROTECTSWITCH (H)
состояния:
Серийный № привода
ACTUATOR_SER_NUM
Серийный № регулятора
DEVICE_SER_NUM
Серийный № клапана
VALVE_SER_NUM
Реакция безопасности
FSAVE_TYPE
состояния:
значение холодного старта:
Положение безопасности
ACTUATOR_ACTION
состояния:
Защитная блокировка
(пароль)
SECURITY_LOCKING
значение холодного старта:
«Значение безопасности»
управляющего сигнала
FSAVE_VALUE
значение холодного старта:
Резервное время
FSAVE_TIME
диапазон:
значение холодного старта:
Simulation
SIMULATE
Рассогласование в %
Текущее значение и статус
Регулируемый параметр в % от диапазона рабочего хода/угла
поворота
Положение тумблера защиты от записи в приборе.
При активированной защите от записи, данные, занесенные в прибор,
доступны только для чтения и не могут модифицироваться.
Активирование защиты может осуществляться только от тумблера,
установленного в полевом приборе.
0=нет защиты от записи
1=есть защита от записи
Серийный номер привода, относящегося к позиционеру
Размер: 16 знаков
Серийный номер позиционера.
Позволяет в комбинации с названием изготовителя и типовым №
однозначно идентифицировать полевой прибор.
Серийный номер клапана, относящегося к позиционеру.
Размер: 16 знаков
Устанавливает реакцию прибора в случае его перезапуска или
обнаружения отказа в коммуникациях.
0=регулировать по «значению безопасности»
1=регулировать по действовавшему на последний момент значению
2=занять положение безопасности, определяемое пружинами
1
Положение безопасности привода в случае отсутствия воздуха или
питающей энергии, а также при перезапуске прибора. Данные только
для чтения, определяются в процессе инициализации.
0=не инициализирован
1=открывается в направлении 100%-позиции
2=закрывается в направлении 0%-позиции
3=отсутствует/запоминается (позиция сохраняется)
Разряд в памяти для хранения пароля, служит для контроля права
доступа (формат 16 бит, целое число)
0х2457
Имитация значения управляющего сигнала (w или w_rcas) при
обнаружении неполадок в коммуникациях.
0
Если через DP-Watchdog выявляются нарушения в коммуникациях, то
по истечении резервного времени выполняется реакция безопасности.
0…3600 сек
10 сек
Возможность имитации параметра текущего положения READ_BACK,
включая задаваемый статус
Перечень параметров
EB 8382-1 RU
Page 58

- 58 -
Сигнализация положения,
дискретно
POS_D
состояния:
Значение перестановки
OUT
Текстовые поля
TEXT_INPUT_1…(H)
TEXT_INPUT_3
Допустимый диапазон
TOLERANCE_BAND (H)
диапазон:
значение холодного старта:
Допустимое избыточное
отклонение
TOL_OVERSHOOT (H)
значение холодного старта:
Мертвая зона Xtot
DEAD_BAND
значение холодного старта:
Тип.№ регулятора
DEVICE_ID
Коэффициент передачи
(код передаточного рычага)
TRANSM_CODE (H)
состояния:
состояния:
значение холодного старта:
Длина передаточного
рычага
TRANSM_LENGTH (H)
диапазон:
значение холодного старта:
Дискретная сигнализация о положении и статус.
0=не инициализирован
1=закрыт (x < 0,5%)
2=открыт (x > 99,5%)
Исходящее из функционального блока значение перестановки в [мм]
[град], рассчитываемое на основе задающего сигнала. В режиме
работы “Local override” (LO) может задаваться это значение.
Текстовые поля для ввода текста произвольного содержания.
Размер: 32 знака.
Критерий сброса для текущего контроля контура регулирования. Ввод
допустимого рассогласования. См. Также время задержки
DELAY_TIME.
0.1…10.0%
5%
Если величина рассогласования «е» превышает допустимое
избыточное отклонение, то производится коррекция минимальных
импульсов управления в направлении движения, которое вызвало это
превышение.
Если величина рассогласования «е» превышает размер мертвой зоны
Xtot, но остается при этом в пределах избыточного отклонения, то
коррекция уменьшает минимальные импульсы
движения только после первых двух колебаний в пределах
избыточного отклонения. Диапазон установки: 0.01…10.0% от
номинального хода/угла поворота.
0.5%
Мертвая зона характеристики управления в диапазоне 0.1…10.00% от
номинального хода/угла поворота.
0,5%
Обозначение полевого прибора.
Для прямоходного привода интегрированной конструкции:
Задаются геометрические размеры механизма, воспринимающего
величину рабочего хода в случае интегрированного монтажа.
1 = D1, рычаг 64 мм
2 = D2, рычаг 106 мм
Для поворотного привода:
Максимальный угол поворота выбранного сегмента кулачкового диска.
3 = S90, 90-градусный сегмент
4 = S120, 120-градусный сегмент
1
Только для прямоходного привода с монтажом по NAMUR.
Длина рычага – расстояние между точкой восприятия перемещения и
точкой вращения рычага.
0.0…1023.0 мм
42.0 мм
Перечень параметров
в обоих направлениях
EB 8382-1 RU
Page 59

- 59 -
Позиция передаточного
штифта
TRANSM_PIN_POS (H)
состояния:
значение холодного старта:
Вид клапана
VALVE_TYPE
состояния:
значение холодного старта:
Коэффициент
усиления KD
SERVO_RATE
диапазон:
значение холодного старта:
Горячий старт
DEVICE_RESET_CMD
состояния:
значение холодного старта:
Абсолютный путевой
интеграл
TOTAL_VALVE_TRAVEL
Граничное значение
путевого интеграла
TOTAL_VALVE_TRAVEL_LIM
значение холодного старта:
Вид искрозащиты
DEVICE_CERTIFICATION
Состояние двоичного
входа
BINARY_INPUT (H)
состояния:
значение холодного старта:
Только для прямоходного привода с монтажом по NAMUR.
Позиция штифта на рычаге позиционера, см. маркировку на рычаге.
0 = А
1 = В
0
Описание конструкции клапана.
0=клапан с прямоходным движением дроссельного элемента
1=клапан с поворотным движением дроссельного элемента, Part-Turn,
с отклонением дроссельного элемента
0
Коэффициент усиления дифференцирующей цепочки. При коррекции
оптимального значения рекомендуются изменения с шагом 0.02.
Повышение значения коэффициента приводит к более сильному
«торможению» вблизи заданного значения.
0.0…1.00
0.12
Команда на выполнение горячего старта.
0=действие отсутствует
1=выполнить горячий старт
0
Абсолютный путевой интеграл, сумма циклов номинальной нагрузки
(двойных ходов).
Максимальное значение: 16 500 000
Граничное значение абсолютного путевого интеграла.
Диапазон от 0 до 16 500 000
1 000 000
Описание вида искрозащиты прибора
Состояние двоичного коммутатора
0=не активно
1=активно
254=не определено
0
Перечень параметров
EB 8382-1 RU
Page 60

- 60 -
Сообщения и диагностика прибора
9. Сообщения и диагностика прибора
Наилучшие возможности диагностика позиционер PROFIBUS-PA 3785 предоставляет в фазе
выполнения инициализации. В этой фазе автоматически протекают детальные тесты,
проверяющие ситуацию с монтажом оборудования и оценивающие реакцию регулирующего
клапана с учетом имеющихся или специально заданных в позиционере характеристик.
Поэтому в ходе периодических проверок технического состояния оборудования, при
наличии неясных сообщений в отношении ошибок, следует
чтобы лучше оценить параметры регулирующей системы.
9.1 Сообщения диагностики
Ошибка электронной части прибора
Появляется, если в ходе циклической проверки будет обнаружен дефект электронного
модуля.
Потребуется ремонт.
Ошибка механической части прибора
Появляется, если в ходе циклической проверки будет обнаружен дефект механического
модуля.
Потребуется ремонт.
Ошибка памяти
Появляется, если в ходе циклической проверки будет обнаружено, что ячейка памяти была
неконтролируемо
Статическое сообщение, остается до тех пор, пока данное событие имеет место в полевом
приборе.
Ошибка определения измеряемого значения
Неисправности в работе АЦП (аналого-цифровой преобразователь) в отведенном для него
временном окне (интервале), либо измеряемые значения находятся вне физических границ
диапазона измерений АЦП. Если сброс не удается выполнить посредством «горячего»
старта, потребуется ремонт прибора.
Статическое сообщение, остается до тех пор, пока данное событие имеет место в полевом
приборе.
Прибор не инициализирован (не выполнена автокоррекция)
Прибор еще не прошел инициализацию или был выполнен холодный старт.
Сброс производится автоматически после успешной инициализации.
модифицирована.
выполнять инициализацию,
EB 8382-1 RU
Page 61

- 61 -
Ошибка автокоррекции
Инициализация не может успешно завершиться.
Конкретные сообщения об ошибках см. раздел 9.4.
Ошибка нулевой точки
Система контроля нулевой точки сообщает пользователю об изменении положения нулевой
точки в пределах более ±5% от положения, определенного прибором в ходе инициализации.
Возможные причины ошибки:
- износ конуса / седла клапана
- инородные частицы, попавшие
Сброс сообщения происходит после успешной электрической коррекции нулевой точки.
Недопустимая конфигурация
Сообщения об ошибках при вводе параметров.
После передачи на прибор информации появляется ответное сообщение, что переданное
значение находится вне допустимого диапазона. Действующим остается предыдущее
значение.
Сброс производится подтверждением.
Выполнен перезапуск (горячий старт)
Сообщение появляется, если
старта.
Эта команда RESET выполняется при повторном включении после отключения питания
(электрического) или производится через “DEVICE_RESET_CMD = 1”.
Сброс происходит автоматически по прочтении сообщения.
Выполнен новый запуск (холодный старт)
Сообщение появляется, если выполнена команда RESET (сброс) посредством холодного
старта.
Эта команда RESET выполняется через “FACTORY_RESET = 2”.
Прибор должен заново пройти инициализацию.
Сброс происходит
Требуется техническое обслуживание
Текущее значение путевого интеграла превышает заданное или имеющееся значение. Если
установить это значение несколько меньшим, того расчетного, которое приводит к
неисправности клапана, позиционер самостоятельно предупреждает о необходимости
технического обслуживания до наступления вероятного отказа.
Сброс выполняется командой “SELF_CALIB_CMD=7” (сброс абсолют. путевого интеграла).
автоматически по прочтении сообщения.
выполнена команда RESET (сброс) посредством горячего
в зазор плунжерной пары
Сообщения и диагностика прибора
EB 8382-1 RU
Page 62

- 62 -
Недопустимая характеристика
Сообщение появляется, если
- обнаружена ошибка при передаче характеристики на прибор или
- при установке «характеристики пользователя» опорные точки вводятся не в порядке
возрастания или
- в параметрах «характеристики пользователя» отмечается рост более чем на 16.
При появлении ошибки «недопустимая характеристика» прибор автоматически
переключается с «характеристики пользователя» на линейную
Сброс происходит автоматически после правильной передачи характеристики.
Имеется дополнительная информация
Сообщение появляется, если имеется информация расширенной диагностики.
Сообщения и диагностика прибора
характеристику.
9.2 Сообщения расширенной диагностики
Активен двоичный вход
Сообщение появляется, если выполняются условия для такой установки двоичного входа.
Нет допустимых значений для мин. управляющего импульса в диапазоне 1
Определение необходимого импульса для диапазона 0…20% хода/угла в ходе коррекции
фазоимпульсных соотношений еще не завершено.
Сброс происходит автоматически после успешной коррекции импульсов подачи и сброса
воздуха.
Нет допустимых
Определение необходимого импульса для диапазона 20…80% хода/угла в ходе коррекции
фазоимпульсных соотношений еще не завершено.
Сброс происходит автоматически после успешной коррекции импульсов подачи и сброса
воздуха.
Нет допустимых значений для мин. управляющего импульса в диапазоне 3
Определение необходимого импульса для диапазона 80…100% хода/угла в
фазоимпульсных соотношений еще не завершено.
Сброс происходит автоматически после успешной коррекции импульсов подачи и сброса
воздуха.
значений для мин. управляющего импульса в диапазоне 2
ходе коррекции
EB 8382-1 RU
Page 63

- 63 -
Ошибка опции принудительного сброса воздуха
Модуль данной опции недостаточно крепко привинчен, либо кодирующая перемычка при
отсутствующей опции принудительного сброса не установлена.
Сообщения и диагностика прибора
9.3 Сообщения CHACK-BACH
Положение безопасности (вне режима = OUT OF SERVICE)
Прибором выполнено положение безопасности. Это может быть вызвано путем выбора
режима “OUT OF SERVICE” (вне режима) или активированием опции принудительного
сброса воздуха или вследствие нарушения связи по коммуникациям.
Прибор переходит в состояние “OUT OF SERVICE” (вне режима).
Режим: «требуется локальный сервис»
Сообщение устанавливается, если было затребовано локальное обслуживание, однако не
имеется разрешения
Сброс происходит автоматически по прочтении сообщения.
Прибор в режиме локального сервиса
Активен принудительный сброс воздуха
Был выполнен принудительный сброс воздуха, т.е. сигнал на клеммах +81 и –82 меньше 3
вольт. Клапан независимо от условий регулирования переходит в положение безопасности.
Сброс происходит автоматически при наличии на клеммах +81 и –82 сигнала от 6 до 24
вольт.
Изменение статических данных
Сообщение устанавливается, если данные в приборе были изменены. Прибор, таким
образом, предоставляет возможность контроля за (несанкционированными,
неавторизованными) изменениями первоначально установленных данных.
Сброс происходит автоматически по прочтении сообщения.
Режим имитации (Simulation), т.е. данные поступают не от реального процесса
Сообщение устанавливается, если прибор находится в режиме Simulation (имитации). В
этом случае задается регулируемый параметр «х».
Неисправность, причину см. в сообщениях диагностики DIAGNOSE
В приборе имеется неисправность. Точная локализация неисправности осуществляется
через сообщения диагностики.
для него – (LOCAL_OP_ENA=0).
EB 8382-1 RU
Page 64

- 64 -
Помеха внутреннего позиционирования
Сообщение появляется, если позиционер в течение установленного времени задержки не
может в установленном допустимом диапазоне контролировать ошибку рассогласования.
Возможные источники ошибки:
- возникновение колебательных явлений вследствие «быстрого» привода (малый ход).
Устранение неисправности: понизить питающее давление согласно разделу 3.1.2 или
установить дроссель в магистрали управляющего давления.
- отсутствие
- добавлен фильтр.
- замаслены магнитные вентили.
- повреждена мембрана привода.
- повреждены пружины привода.
- резкое возрастание трения в регулирующем клапане.
- блокирован клапан.
Сообщение осуществляется через бит 7 и бит 13 из CHECKBACK (см. табл. на стр. 38/39).
В бите 7 статус будет автоматически сброшен, в бите 13 сброс производится
“SELF_CALIB_CMD=10” (сброс «неисправности контура регулирования»).
Позиционер неактивен (состояние OUT OF SERVICE – вне режима)
Сообщение появляется, если позиционер находится в состоянии OUT_OF_SERVICE” (вне
режима).
Позиционер в режиме самотестирования (состояние OUT OF SERVICE – вне режима)
Сообщение появляется, если позиционер выполняет последовательность операций
инициализации или производит электрическую коррекцию нулевой точки.
Превышено граничное значение абсолютного путевого интеграла
Текущее значение путевого
заданное граничное значение.
Если это значение установить несколько меньшим, того расчетного, которое приводит к
неисправности клапана, тогда позиционер самостоятельно предупреждает о необходимости
технического обслуживания до наступления вероятного отказа.
Сброс производится командой: “SELF_CALIB_CMD=7” (сброс абсолютного путевого
интеграла).
питающего давления/ недостаточно питающее давление.
интеграла превышает имеющееся или предварительно
Сообщения и диагностика прибора
командой:
EB 8382-1 RU
Page 65

- 65 -
Сообщения и диагностика прибора
9.4 Сообщения в процессе инициализации
не определено
Позиционер еще не прошел инициализацию или был выполнен холодный старт.
Сброс происходит автоматически после подтверждения.
прервано
Последовательность операций инициализации была прервана пользователем.
Сброс происходит автоматически после подтверждения.
Если позиционер уже был успешно инициализирован и не выполняется холодный старт, то
снова наступает режим регулирования.
ошибка в механике/пневматике
В процессе операций инициализации не отмечается изменений в измерении регулируемого
параметра (хода/угла), либо измерения имеют постоянное значение.
Инициализация прерывается.
Возможные причины неисправности:
- недостаточно питающее давление/ питающее давление нестабильно
- недостаточно мощности питающего воздуха
- неправильная механическая установка
- неправильно подвешен рычаг передачи перемещения
- при монтаже по NAMUR: рычаг
валу адаптерного корпуса
- расстыкован соединительный кабель между логическим модулем и платой измерения
путевого перемещения.
Timeout (превышение времени)
В процессе инициализации клапан не может переместиться в конечное положение за время
в пределах до 240 сек.
Инициализация прерывается.
Возможные причины:
- в клапана имеет место большая разница
схватывании (колебания) (генерируется отдельное сообщение)
- нестабильно питающее давление
- недостаточна мощность питающего воздуха.
передачи перемещения неправильно закреплен на
между силами трения при скольжении и при
EB 8382-1 RU
Page 66

- 66 -
Неправильно выбран номинальный ход или передаточное отношение
Расчетный максимальный ход, выдаваемый в процентном соотношении от номинального
хода/угла поворота, получается меньше выбранного номинального хода/угла поворота.
Появляется предупреждение, инициализация не прерывается.
Возможные причины:
- неправильная механическая установка
- задано неправильное передаточное отношение
- при монтаже по NAMUR: неправильно задана позиция
- клапан блокирован
- слишком мало питающее давление. Питающее давление должно не менее чем на 0,4
бар превышать давление, соответствующее конечному значению рабочего диапазона
пружин (см. раздел 3.1.2).
Утечка пневмосистемы
При первоначальном определении минимальных импульсов управления клапан должен в
течение нескольких секунд удерживаться в стабильном положении. Это время используется
для проверки
перемещается более чем на 9,3% от своего положения покоя, то генерируется
соответствующее сообщение и выдается дополнительно в виде предупреждения в ходе
иниициализации. Имеет место предупреждение, но инициализация не прерывается.
Возможные причины:
- утечки в приводе
- утечка в магистрали управляющего давления.
Статус
При определении механических упоров в ходе инициализации посредством подачи полного
давления и полного сброса рассчитывается усилие пружин и нулевая точка. Дополнительно
проверяется, проходит ли позиционер 100% номинального хода/угла поворота.
Инициализация прервана из-за активации принудительного сброса
Если активирована опция принудительного сброса воздуха, то инициализация срывается.
При
присутствовать напряжение в пределах от 6 до 24 вольт.
инициализации: определение механических упоров
наличии опции принудительного сброса воздуха на клеммах +81 и –82 должно
пневмосистемы на наличие утечки. Если в течение 7 секунд клапан
Сообщения и диагностика прибора
штифта
EB 8382-1 RU
Page 67

- 67 -
Ошибка нулевой точки
Расчетная нулевая точка находится вне допустимых пределов ±5% от внутреннего
измеренного абсолютного значения. Инициализация срывается.
Для устранения этой неполадки следует провести механическую коррекцию нулевой точки
согласно указаниям раздела 4.4.1.
В завершение желтый штифт путевого датчика необходимо приблизительно совместить на
одной линии с белой маркированной линией на плате позиционера.
Сильно ограничен диапазон пропорциональности
Это значит, что даже минимально допустимые импульсы управления (перестановки)
вызывают чрезмерно большие изменения рабочего хода. Инициализация срывается.
Возможные причины:
- чрезмерно высокое питающее давление
- отсутствие дросселя в случае использования привода с малым объемом
- ошибка в механике, специально при монтаже по DIN IEC 534 (NAMUR)
- установлен усилительный
приоткрыть байпас.
Успешно
Инициализация прошла в полном объеме, ошибок не обнаружено.
клапан в приводе с большим объемом, следует больше
Сообщения и диагностика прибора
EB 8382-1 RU
Page 68

- 68 -
прямой монтаж
Монтажные размеры прибора
пневматические соединения
G ¼ или NPT ¼
монтаж с промежуточной вставкой
для поворотных приводов
точка вращения
приводного вала
монтаж по IEC 60534-6 с корпусом адаптера
пневматическое соединение
обратного реле
EB 8382-1 RU
Page 69

- 69 -
Свидетельства об испытаниях
EB 8382-1 RU
Page 70

- 70 -
Свидетельства об испытаниях
SAMSON AG • MESS- UND REGELTECHNIK
Weismüllerstraße 3 • 60314 Frankfurt am Main
Telefon 069 4009-0 • Telefax 069 4009-1507
Internet: http://www.samson.de
EB 8382-1 RU
 Loading...
Loading...