

Page 1

Серия 430
Показывающие пневматические регуляторы
Тип 3430
Регулирующая станция тип 3432
- с преобразовательным модулем для давления тип 3435
- с преобразовательным модулем для температуры тип 3436
- с преобразовательным модулем для температуры (Pt 100) тип 3438
- для унифицированных сигналов
Изображено исполнение с защитной крышкой и
встроенным преобразовательным модулем для
температуры тип 3436
Рис. 1 · Регулирующие станции
Type 3431 Controller Station
- для унифицированного сигнала
Инструкция по монтажу и
эксплуатации
EB 7030 RU
Издание: декабрь 2008
Page 2

Содержание
Содержание Страница
1 Применение 4
2 Управление . . 4
2.1 Настройка регулирующих модулей 4
2.1.1 Направление действия . 4
2.1.2 Пневмопитание . 5
2.1.3 Коэффициент пропорциональности Kp . 6
2.1.4 Время регулирования Tn . 6
2.1.5 Время дифференцирования Tv 6
2.1.6 Рабочая величина 6
2.2 Настройка конечных выключателей 7
3 Ввод в эксплуатацию. . . 8
3.1 Настройка регулятора 8
3.1.1 Настройка рабочей величины в П- и ПД- регуляторах. 9
3.2 Плавное переключение режима Автоматический/Ручной 10
3.3 Плавное перекл-е между внутренним и внешнем управляющем воздей-и 10
3.4 Настройка нулевой точки регулятора 10
4 Конструкция 11
5 Принцип действия . 11
5.1 Преобразовательные модули . 11
5.2 Регулирующая станция 12
5.3 Регулирующие модули 14
5.3.1 Регулирующие модули тип 3433. . . 14
5.3.2 Регулирующие модули тип 3434. . . 17
5.4 Дополнительные модули . 18
5.4.1 i/p- преобразователь тип 6112. . . 18
5.4.2 Позиционный переключатель
5.4.3 Регуляторы давления воздуха питания. 18
5.4.4 Индуктивные концевые выключатели. 19
6 Установка . 20
6.1 Монтаж . . . 20
6.1.1 Замена шкал 22
6.2 Установка температурного датчика . 22
7 Подключение 24
7.1 Пневматические подключения 24
7.1.1
7.1.2 Уст-ка пневмопитания для исполн. с регул-м давления воздуха питания. 25
7.2 Электрические подключения. 26
2
EB 7030 RU
Основные применения . 24
wвнутр/wвнеш.
18
Page 3
Содержание
8 Техническое обслуживание . . . 27
8.1 Проверка пневмопитания . 27
9 Замена . . 28
9.1 Замена функции регулирования . 28
9.2 Замена преобразовательного модуля. 30
9.3 Проверка функции регулирования . 30
10 Использование во взрывоопасных зонах. . . 31
10.1 Обслуживание взрывозащищенных приборов 31
11 Технические характеристики 32
Сертификаты . 35
Внимание
Монтаж и пуск в эксплуатацию прибора могут осуществлять только
специалисты, имеющие право на проведение монтажных и пусконаладочных
работ и на эксплуатацию такого оборудования.
Под специалистами настоящей инструкцией подразумеваются лица, которые
на основе своего специального образования и опыта, а также знаний
действующих норм и стандартов, регламентирующих их работу, могут
предусмотреть возможные угрозы безопасности персонала.
При использовании приборов в искрозащищенном исполнении персонал
должен иметь необходимое образование или свидетельство,
подтверждающее право работы с взрывозащищенными приборами на
искрозащищенных установках.
Следует принять необходимые меры по предотвращению угроз
безопасности, которые могут быть обусловлены давлением.
Соответственно должны быть предусмотрены специальная
транспортировка и хранение таких приборов.
EB 7030 RU
3
Page 4

Применение
1 Применение
Показывающие пневматические
регуляторы серии 430 используются в
опытно-технических и промышленных
установках.
Регуляторы измеряют значение
регулируемой величину (давление,
температура, электрический или
пневматический унифицированный сигнал)
и отображают её значение. Они сравнивают
измеренное значение с заданной величиной
и вырабатывают соответствующий
управляющий пневматический сигнал от 0.2
до 1 бар (3 до 15 psi).
При установке регуляторов давления
воздуха питания требуется пневмопитание
от 1.4 бар (20 psi) или управляющее
давление от 2 до 12 бар (30 до 180 psi).
4
EB 7030 RU
2 Управление
2.1 Настройки регулирующих модулей
Для того, чтобы получить доступ к
регулирующему модулю станции,
необходимо открыть защелку (рис.2) и
открыть показывающую панель (5).
Необходимо сделать настройку
направления действия (переключатель А) и
пневмопитания (переключатель В).
Открутить монтажный винт (6) на
регулирующем модуле. Извлечь его из
уплотнённого присоединения и достать из
регулирующей станции
2.1.1 Направление действия
Направление действия контура регулирования
настраивается переключателем А (рис.2), и
определяется направлением указательных стрелок
на регулирующем модуле регулятора.
Стрелки направлены в разных
направлениях:
Направление действия:
Возрастает/уменьшается =
При возрастании регулируемой величины x,
выходной сигнал давления y уменьшается.
Стрелки направлены в одном
направлении:
Направление действия:
Возрастает/ возрастает
При возрастании регулируемой величины x,
выходной сигнал давления y возрастает.
Page 5
Настройка или изменение направления
действия:
Открутить винт переключателя А (рис.2) и
вытащить вместе с переключателем. Если
потребуется, можно воспользоваться
рычагом сбоку.
Не потеряйте резиновое уплотнение.
Повернуть переключатель на 90° так,
чтобы требуемая стрелка совпала со
стрелкой на основной плате.
Вставить переключатель и закрутить винтом.
Вставить регулирующий модуль в
регулирующую станцию.
2.1.2 Пневмопитание
(только с регулирующим модулем тип 3433)
Направление переключателя В (рис.2) со
стрелками определяет пневмопитание с
сильфонами обратной связи. К этому можно
получить доступ после отключения
компаратора (блок сравнения) (3.1)
►yA Нормальное пневмопитание, около 1
мн³/ч в % от рассогласования в
системе
►
R
Большое пневмопитание,
мн³/ч в % от рассогласования в
системе
регулирующим модулем)
(не с П- или ПИ-
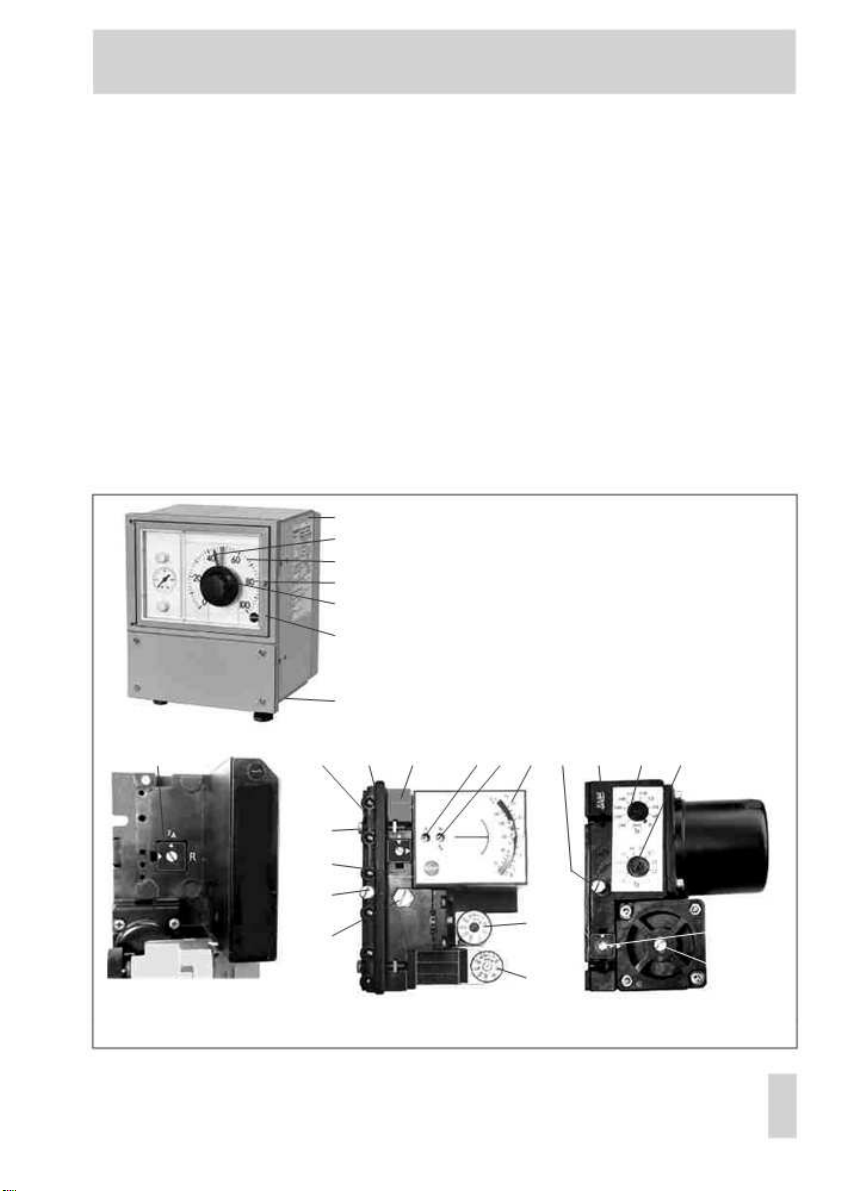
1
1.3
1.1
4
1.4
5
2
Пневмопитание Направл.действия
B A 3.2
1 Регулир. станция (Type 3432)
1.1 Шкала
1.3
Указ-ль текущ.знач. (красный)
1.4 Регулятор заданного значения
2 Преобразовательный модуль
3 Регулирующий модуль
3.1 Компаратор (блок сравнения)
3.2 Присоединительная плата
3.3 Шестигранные винты
3.4 Винты (внутри )
3.4 8
9 3.1
4 Защелка
5 Показывающая панель
6 Монтажный винт
7 Ограничитель
8 Нулевой задатчик
9 Задатчик Kp
10 Задатчик Tn
11 Задатчик Tv (только в ПД /
ПИД регуляторах)
12 Задатчик рабочей величины
(только в П/ПД регул-ах)
3 10 9
6
3.3
3
6
7
10
12
Регулирующий модуль тип 3432
Вид сбоку без компаратора Регулирующий модуль тип 3433-2 (ПИ) Регулирующий модуль тип 3434-2 (ПИ)
Рис. 2 · Переключатели и задатчики
11
Управление
около 3
Напр.действия
A
8
EB 7030 RU
5
Page 6

Управление
Открутить винты (3.3) и отсоединить
присоединительную плату (3.2) от
регулирующего модуля вместе с гайками и
болтами
Открутить шестигранные винты сбоку
(3.4) и извлечь компаратор (3.1) из
регулирующего модуля
Настройка и преобразование
пневмопитания:
Открутить винт в переключателе В и
вытащить вместе с ним. Если потребуется,
воспользоваться рычагом сбоку.
Не потеряйте резиновое уплотнение.
Повернуть переключатель так, чтобы
стрелка указывала на символ yA или R
на регулирующем модуле. Вставить
переключатель и затянуть винтом.
Собрать регулирующий модуль с
регулирующей станцией.
2.1.3 Коэффициент
пропорциональности Kp
Настройка KP (задатчик 9) определяет
коэффициент усиления регулятора и связана с
настраиваемой системой управления (раздел
3.1)
2.1.5 Время дифференцирования Tv
Регуляторы тип 3433 с дифференциальной
составляющей требуют установки времени
дифференцирования Tv на задатчике (11).
Настройка зависит от настраиваемой
системы управления (раздел 3.1).
2.1.6 Рабочая величина
У регулирующих модулей без
интегрирующей составляющей, таких как П
или ПД регуляторов, имеется рабочая
величина. В регулирующем модуле тип 3433
это можно установить между 0 и 100%,
соответствующие от 0.2 до 1 бар, с помощью
задатчика рабочей величины (12). Настройка
зависит от регулируемой величины y (раздел
3.1.1). В П-регулирующем модуле тип 3434,
рабочая величина установлена на 0.6 бар.
2.1.4 Время регулирования Tn
В регуляторах с интегральной
составляющей время регулирования
задается на задатчике (10). Настройка
зависит от настраиваемой системы
управления (раздел 3.1).
6
EB 7030 RU
Page 7
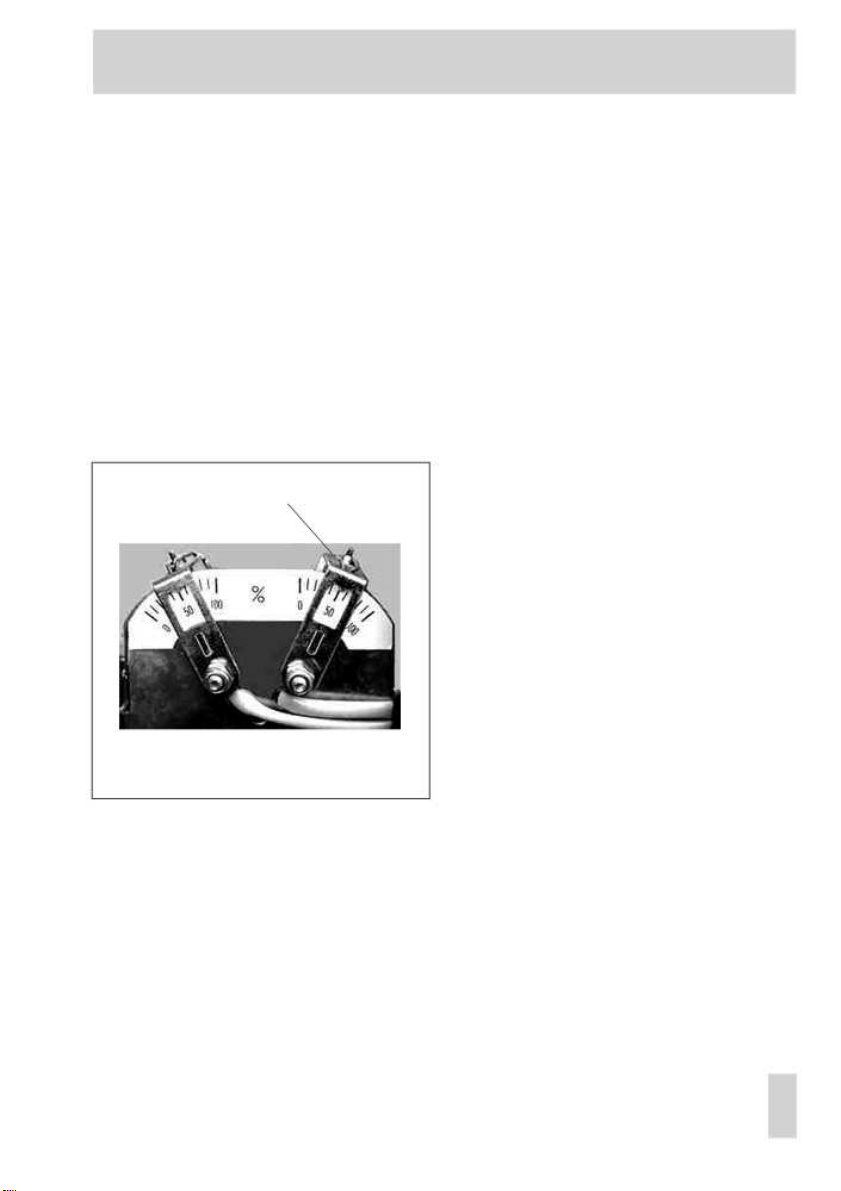
2.2 Настройка конечных
выключателей
Применяется в регулирующих станциях с опцией
конечных выключателей:
Для настройки конечных выключателей в начале
нужно открыть защелку (4, рис. 2) и открыть
показывающую панель (5). Контакты
подключаются с тыльной стороны.
Настройте отверткой конечные выключатели
передвигая зажим шкалы диапазона от 0 до
100%, передвигать только когда контакты
находятся над концевым настройщиком.
Зажимы с конечным выключателем
Рис. 3 · Конечные выключатели
Управление
EB 7030 RU
7
Page 8
Ввод в эксплуатацию
3 Ввод в эксплуатацию
Перед вводом в эксплуатацию контура
регулирования, убедитесь в правильности
присоединения всех устройств, отсутствии
протечек.
Открыть защелку (4) и открыть
показывающую панель (5) для легкого
доступа к панели управления регулятора.
Убедиться в правильности установки
переключателя направления действия
регулятора (см. раздел 2.1.1).
3.1 Настройка регулятора
Регулятор нужно настроить в соответствии с
характеристиками системы регулирования с
помощью задатчиков регулирующего
модуля KP и Tn и/или Tv, чтобы убедиться,
что регулятор может сводить любые
рассогласования в системе, вызванные
переменными возмущениями, к нулю или по
крайней мере минимизировать их, для всех
заданных значений.
Если у регулирующей станции есть
переключатель ручн./автомат. режима
(1.6), установку можно запускать в
ручном режиме.
Рекомендуется определять параметры
настройки с помощью настраивающегося
теста (в соответствии с методом ЦиглераНикольса), который в большинстве случаев
приводит к обоснованным результатам:
1. Подать пневмопитание (1.4 ±0.1 бар).
2. Установить на компараторе коэф.
пропорциональности KP на минимальное
значение.
3. Установить задатчик T
значение, Tv на минимальное значение
(применяется только к ПИ- и ПИДрегуляторам)
8
EB 7030 RU
на максимальное
n
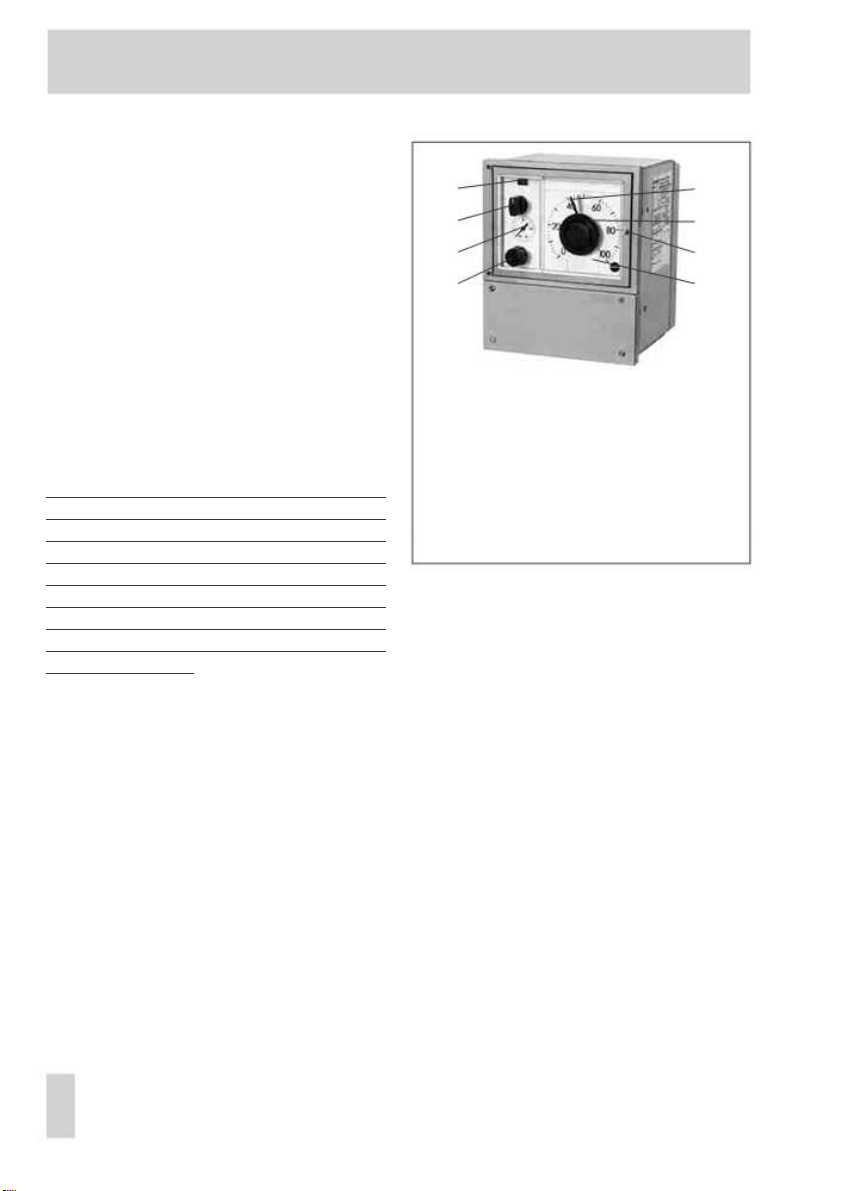
1.8 1.3
1.6 1.4
1.5 4
1.7 5
1.3 Указатель текущего значения (красный)
1.4 Регулятор заданного значения с зелен. указат.
1.5 Индикатор пневматического сигнала
1.6 Переключатель ручн./автомат.
1.7 Задатчик для пневматического сигнала (ручной)
1.8 Индикатор перепада давления
4 Защелка
5 Показывающая панель
Рис. 4 · Вид спереди
Настройка в ручном режиме:
4.Установить переключатель
ручн./автомат. в положение ручн.
5. Настроить ручной задатчик (1.7)
управляющего сигнала так, чтобы
регулируемая величина (указатель
текущего значения 1.3) постепенно
установился на заданную величину
(указатель заданного значения 1.4).
Индикатор перепада давления (1.8)
должен приблизиться к нулю, включить
переключатель ручн./автомат. (1.6) в
режим автомат.
Следовать пункту 6 и 7.
Настройка в автоматическом режиме:
4. Установить заданное значение
регулятором (1.4) на показывающей
панели.
5. Постепенно установить задатчик Tn на
его нижнее значение (полностью
открытый) перемещая красный
указатель текущего значения к зеленому
указателю заданного значения. Снова
закрыть ограничитель T
.
n
Page 9
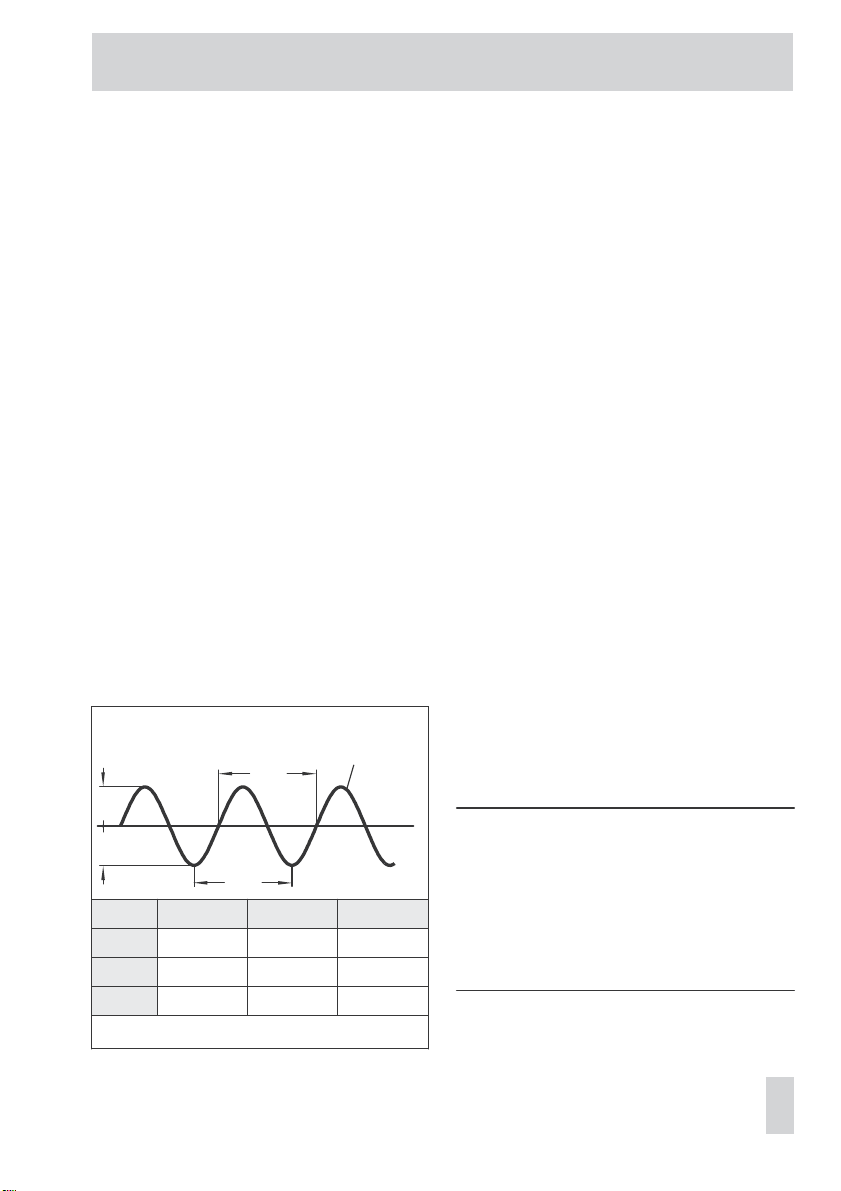
6. Начиная с минимального значения,
увеличивать коэффициент
пропорциональности KP пока на
указателе текущего значения не появится
гармонических колебаний (однородные
амплитуды колебаний, как на рис.5)
регулируемой величины.
Если колебаний не возникает с большой
установкой KP, слегка повернуть
регулятор заданного значения и вернуть
на предыдущее положение. Возможно
нужно будет слегка увеличить
коэффициент усиления (KP) до
возникновения гармонического
колебания.
7. Записать только что зафиксированное
значения KP как критическое значение
коэффициента пропорциональности
(усиления) K
. Зафиксировать
Pкрит
секундомером период одного полного
колебания как T
ПИД- регулятора).
(только для ПИ и
крит
Регулируемая величина
(текущее значение)
T
крит
+
T
крит
Регулятор K
П 0.50 · K
ПИ 0.45 · K
ПИД 0.59 · K
Рис. 5 · Гармонические колебания, настройки
P
P,крит
P,крит
P,крит
T
0.85 · T
0.50 · T
n
крит
крит
T
0.12 · T
v
крит
Ввод в эксплуатацию
Перемножить оба значения со
значениями из таблицы (рис.5) и
выставить оптимальные настройки
регулятора KP, Tn, и T
Если колебания все еще наблюдаются,
нужно слегка уменьшить KP и увеличить
Tn. Если потребуется, повторять эти шаги
до выхода контура регулирования в
нормальную работу. Оставлять достаточно
времени для стабилизации регулятора
между настройками.
3.1.1 Настройка рабочей величины
в П и ПД- регуляторах.
(только для регулирующего модуля тип 3433)
После настройки коэффициента усиления KP, в
соответствии с описанием выше, настроить
рабочую величину, вместо постоянной времени
Tn, для П и ПД- регуляторов.
Снять значение регулируемой величины
yA с дисплея (1.5) регулятора, когда
установка находится в устойчивом
состоянии и установить это значение на
задатчике рабочей величины (12, рис. 2).
(настройка от 0.2 до 1 бар = 0 до 100 %).
Отрегулировать так, чтобы
рассогласование сравнялось с нулем.
Если индикатор давления отклоняется,
нужно усреднить значение.
Внимание!
При изменении заданной величины или
управляющей величины, необходимо
заново выставлять рабочую величину, в
соответствии с описанием выше.
Если управляющая величина изменяется
более часто, необходимо установить
рабочую величину до 0.6 бар=50% (среднее
значение).
v
.
EB 7030 RU
9
Page 10

Ввод в эксплуатацию
Внимание!
Задатчик Tn должен быть полностью открыт
с П/ПИ- регулятором, переключенным на П
режим для работы задатчика рабочей
величины без запаздывания.
Исполнение с w-зависимой рабочей
величиной.
Это исполнение не требует выставления
зад.величины, так как рабочая величина
автоматически сводится к заданной
величине w.
3.2 Плавное переключение
режима автоматический/ручной
(только для регулирующей станции с
переключателем ручн./автомат., рис.4)
Плавное переключение гарантирует
исключение возникновений скачков
давления на клапане, когда переключатель
ручн./автомат. включен следующим
образом:
Переключение с автомат. на ручной
Ручным задатчиком (1.7) отрегулировать
пневматический сигнал (ручн.) yH так,
чтобы на индикаторе перепада давления
(1.8) был отображен нуль. Переключить
переключатель на Ручной
Индикатор перепада давления
С Без отклонения
Переключение с ручного на автомат.
Если установка управляется вручную до
требуемого значения, следует сравнять
пневматический сигнал (автомат.) yA с
пневматическим сигналом (ручной) yH с
помощью регулятора заданного
10
EB 7030 RU
значения (1.4).
Переключатель (1.6) можно переключить на
автомат. только когда на индикаторе
перепада давления (1.8) отобразится нуль.
Снова установить заданную величину на
требуемое значение.
3.3 Плавное переключение
между внутренним и внешним
управляющим воздействии.
Когда регулятор с заданной установкой
объединен с регулятором с входным
параметром, регулирующая станция тип
3432 оснащается переключателем
wвнутр/wвнеш, задатчиком давления и
индикатором перепада давления (рис.10).
Для переключения управляющего
воздействия, индикатор перепада давления
нужно подвести к нулю с помощью
задатчика давления.
3.4 Настройка нулевой точки
регуляторов
Если в процессе эксплуатации возникнет
отклонение между текущим значением и
заданной величиной, нужно отрегулировать
задатчик нулевой точки, с помощью
«нулевого» винта с тыльной стороны панели
(5) до выравнивания текущего значения и
заданной величины на передней панели.
Отклонение между текущим значением и
заданной величиной можно также
откорректировать с помощью регулятора
нулевой точки (8, рис. 2) в регулирующем
модуле.
Page 11

4 Конструкция
Регуляторы изготавливаются в модульной
конструкции, представляют собой
самостоятельный узел управления,
состоящий из регулирующей станции,
регулирующего модуля, настроенных на
локальные условия и если требуется, из
преобразователя и других дополнительных
модулей.
Регуляторы с регулирующими станциями
тип 3432 в основном разработаны для
оснастки преобразовательным модулем тип
3435 для давления или преобразовательным
модулем тип 3436 для температуры с
непосредственным присоединением к
процессу.
Регулирующая станция тип 3431 получает
управляющее воздействие через
унифицированный сигнал от 0.2 до 1 бар
или 3 до 15 psi. Управляющее воздействие
также можно передавать с помощью
токового сигнала 4 или 0 до 20 мА или
1 до 5 мА через встроенный i/pпреобразователь.
Регулирующая станция может быть
оснащена регулирующим модулем тип
3433 или тип 3434.
Для специальных задач регулирования
регулирующий модуль тип 3433 может быть
комбинирован дополнительными модулями
тип 3437 для ограничения давления,
переключения режима управления или
плавного переключения ручн./автомат.
Регулирующая станция, по требованию,
также может оснащаться
многопозиционным переключателем
ручн./автомат., задатчиком для ручного
режима и индикатором перепада давления.
При использовании комбинированного
регулятора с заданной установкой и
входным параметром, регулирующая
станция должна оснащаться
дополнительным модулем для переключения
w
внутр./wвнеш. При использовании регулятора
с входным параметром, также требуется
дополнительный пневматический или
электрический выход для внешнего
Конструкция
управляющего воздействия
внеш. (например, 0.2 до 1 бар или 4 (0) до 20
w
мA). Дополнительно могут быть встроены
настраиваемые на шкале индуктивные
конечные выключатели на показывающей
панели 1 или 2.
Внимание! Для подробной информации о
регулирующих станциях и их регулирующих
модулях воспользуйтесь соответствующими
типовыми листами.
T 7030 RU · Пневматические показывающие
регуляторы – Информационный лист с
обзором продукции.
T 7032 RU· Пневматические показывающие
регуляторы для давления
T 7034 RU · Пневматические показывающие
регуляторы для температуры с капиллярным
датчиком.
T 7036 RU · Пневматические
показывающие регуляторы для
температуры с термометром
сопротивления Pt 100
T 7038 RU · Пневматические
показывающие регуляторы для
унифицированных сигналов
T 7040 RU · Пневматические
регулирующие модули тип 3433 и
дополнительные модули тип 3437
T 7041 RU · Пневматические
регулирующие модули тип 3434
T 7045 RU · i/p-преобразовательный
модуль тип 6112
5 Принцип действия
5.1
Преобразовательные модули
Для давления тип 3435
Давление среды Р передается на
преобразовательный модуль (2), где
воздействует на измерительную систему
трубки Бурдона (2.1).
EB 7030 RU
11
Page 12

Принцип действия
Пневматическая система регулирования
(2.2) преобразует рассогласование в
пневматический сигнал (регулируемая
величина x), пропорциональный давлению
Р. Сигнал передается в сильфонную
измерительную систему указателя
текущего значения (1.3) и в регулирующий
модуль (3).
Для температуры тип 3436 с
капиллярным датчиком
Температура среды вырабатывает давление в
газонаполненном датчике (2.3)
преобразовательного модуля, которое
пропорционально температуре. Это усилие
компенсируется усилием коромысла (2.4) и
передается в выходное давление pA
сильфона обратной связи (2.6).
Пневмопитание проходит через
ограничитель (2.9) и форсунку (2.8) и
попадает в соплозаслонку (2.7).
При увеличении температуры,
соплозаслонка перемещается, закрывая
форсунку. Благодаря чему увеличивается
выходное давление pA , поступающее в
сильфон (2.6), до состояния равновесия, т.е.
пока выходной сигнал не станет
пропорциональным измеренной
температуре. Этот сигнал, как текущее
значение (регулирующая величина x),
передается в сильфонную измерительную
систему указателя текущего значения (1.3) и
регулирующего модуля (3).
Для температуры тип 3438 с
термометром сопротивления Pt 100
Преобразовательный модуль тип 3438
состоит из электрического преобразователя
и выходного i/p-преобразования для
соединения датчика Pt 100. Омический
сигнал датчика Pt 100 преобразуется в
токовый сигнал 4 до 20 мА в электрическом
преобразователе. Этот выходной сигнал (4
до 20 мA) преобразуется в пневматический
сигнал от 0.2 до 1 бар в i/p-преобразователе.
Выходное давление, пропорциональное
температуре, поступает в сильфонную
12
EB 7030 RU
измерительную систему индикатора
регулируемой величины и регулирующего
модуля, как пневматический управляющий
сигнал (регулируемая величина x).
5.2 Регулирующая станция
Текущий сигнал x вызывает рассогласование в
сильфонной измерительной системе указателя
текущего значения (1.3), которое передается
на указатель через зубчатую передачу.
Заданная величина (управляющий сигнал w)
может быть установлена на шкале (1.2) с
передней стороны. Положение регулятора
заданной величины (1.4) передается в
преобразователь заданной величины через
зубчатую передачу. Эта пневматическая
система регулирования (1.41) преобразует
установленную заданную величину в
пневматический заданный сигнал (w),
который передается в регулирующий модуль.
Регулирующий модуль сравнивает текущее
значение (x) с заданным параметром (w) и
управляет с помощью управляющего сигнала
yA в зависимости от рассогласования в
системе и заданного регулирующего
параметра. Управляющий сигнал связан с
индикатором пневматического сигнала (1.5) и
выходом y.
Регулирующая станция с переключателем
ручн./автомат (рис. 2 и 4) оснащается
переключателем ручн./автомат (1.6),
задатчиком для ручного режима (1.7) и
индикатором перепада давления (1.8).
В режиме «автомат» индикатор
пневматического сигнала (1.5) и выход y
соединены с «автоматическим» выходным
сигналом yA, а в режиме «ручной» с
«ручным» выходным сигналом yH,
установленном на задатчике (1.7).
Плавное переключение с ручного режима на
автоматический возможно, когда на
индикаторе перепада давления (1.8)
показатели y
A и yH равны.
Page 13
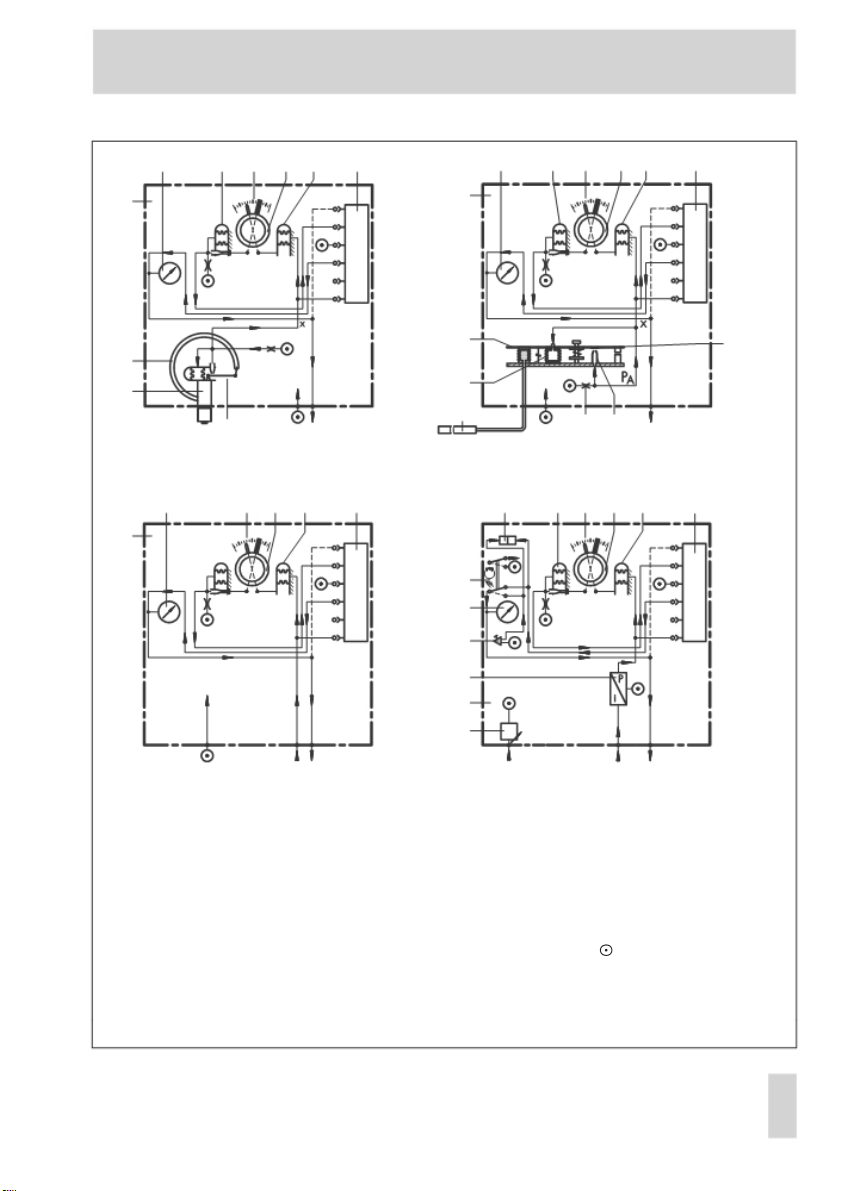
1.5 1.41
1
y w
2.1
2
Тип 3432 с преобразователем для давления тип 3435
1.5 1.2 1.4 1.3 3
1
y w
1.2 1.4 1.3
x w
2.2
x w
Z x
Z y
3 1.5 1.41
R
w
PI
z
P
y
A
P/ PI
PID
S
x
R
w
z PI
yA P
P/ PI
S PID
x
1.2
1
w
2.4
2.6
Z
2.3
Тип 3432 с преобразователем для температуры тип 3436
1.8 1.41 1.2 1.4 1.3 3
yH y
A
x w
S
1.6
1.5
1.7
4
1
w
y
H
Z
1.9
P
B
Тип 3431 и 3432 для пнев-их унифицированных сигналов Тип 3432 с переключателем ручн./автомат (1.6),
регулятором давления воздуха КИП (1.9) и i/p-преобр-ем
1 Регулирующая станция
1.2 Шкала
1.3 Указатель текущего значения с
стрелкой, зубчатая передача и сильфинная
измерительная система.
1.4 Регулятор заданного значения с
стрелкой, зубчатая передача (1.41),
указатель заданного значения (только в
регуляторах с вх.параметром).
1.5 Индикатор пневматического сигнала
Рис. 6 · Принцип действия регуляторов
1.8 Индикатор перепада давления
для плавного переключения
ручн./автомат
1.9 Регул. давления воздуха КИП
2 Преобразов-ый модуль
2.1 Измерительная система
трубки Бурдона
2.2 Пневм. система регулир-ия
2.3 Датчик температуры
2.4 К оромысло
2.6 Сильфон обратной связи
Принцип действия
1.41.3
x w
2.9 2.8
x y
2.7 Соплоз аслонка
2.8 Форсун ка
2.9 Ограничитель
3 Регулирующий модуль
4 i/p-преобразователь тип 6112
Z=Пневмопитани е 1.4бар
= Выходное давление
P
A
P
= Сжатый воздух
B
3
R
w
z PI
P
y
A
P/ PI
S PID
x
y
R
w
z PI
yA P
P/ PI
S PID
x
x
EB 7030 RU
2.7
13
Page 14
Принцип действия
5.3 Регулирующие модули
Регулирующие модули поставляются со
штепсельным присоединением. Их
присоединяют в уплотнительное
присоединение регулирующей станции и
фиксируют монтажным винтом
5.3.1 Регулирующие модули тип
3433
Регулирующие модули состоят из
компаратора, оснащенного 4-мя
металлическими сильфонами,
упорядоченными в квадрат, и несущей
платы со штепсельным подключением.
Несущая плата состоит компонентов,
необходимых для соответствующих
функций, таких как реле или
ограничители. Компоненты могут
заменяться или модифицироваться для
обновления устройства (подробно см.
раздел 9.1).
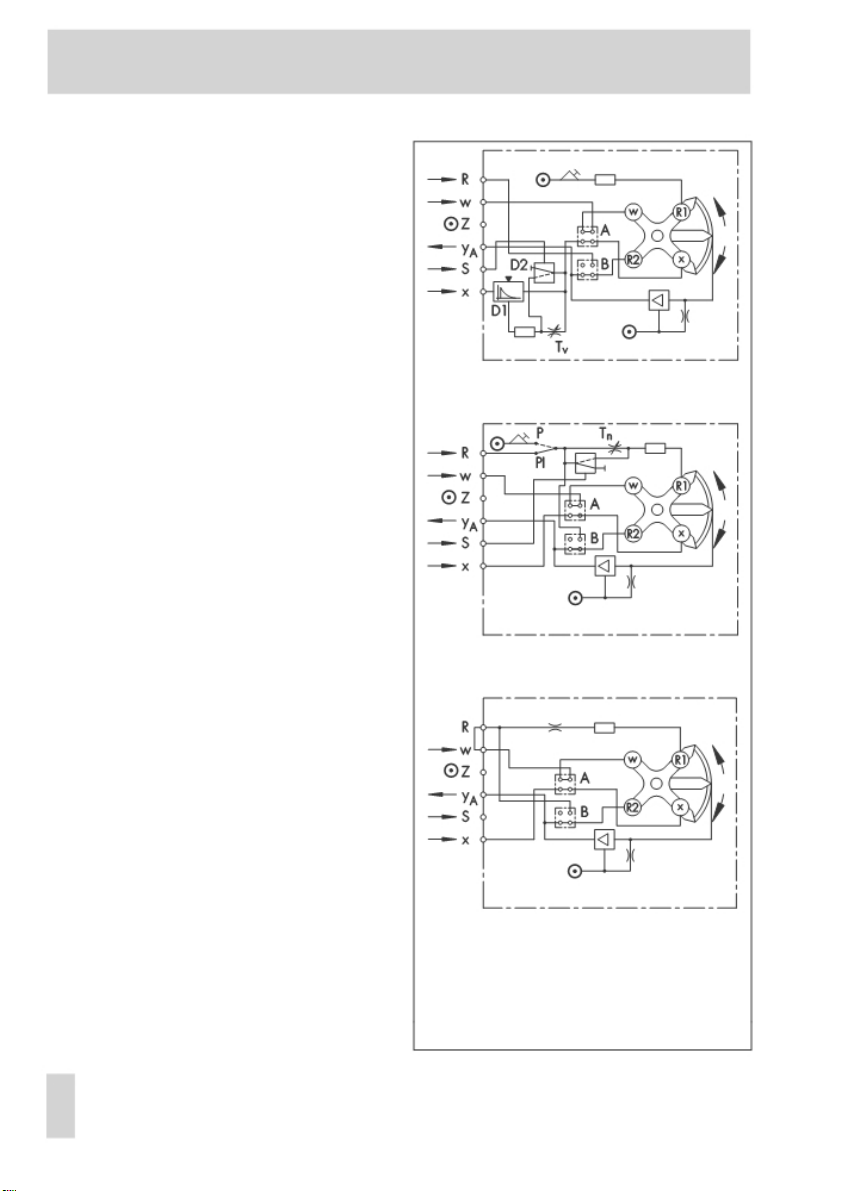
ПИ-регулятор тип 3433-2 (рис. 7, сверху)
Регулируемая величина x (текущее
значение) и управляющий сигнал w
(зад.величина) передаются через
пневматический сигнал от 0.2 до 1 бар на
метал.сильфоны w и x через переключатель
А. Когда x больше w, текущая величина
сильфона отклоняет поворотную плату
через поворотную ось к заданной величине
сильфона. В результате выходное давление
сопла повышается, которое связано с
поворотной платой через штифт, в
результате чего компаратор увеличивает
выходное давление yA. Выходное давление
связано с сильфоном R2 на поворотной
плате по обратной связи через
переключатель В.
Давление и положение поворотной платы
продолжают изменяться пока расстояние
между соплом и соплозаслонкой не
достигнет начального значения и выходное
14
EB 7030 RU
давление yA не достигнет связанного
значения регулируемой величины x и
коэф.пропорциональности Kp ,
установленного винтом.
С внешней стороны регулирующего модуля
yA присоединен к R, соответственно
выходное давление yA также соединено по
обратной связи с сильфоном R1 через порт
R и регулируемый задатчик Tn. В результате
достигается выравнивание давлений в
сильфонах R1 и R2 и рассогласование в
системе устраняется.
Если после переключения регулирующей
станции в ручной режим переключающее
давление присутствует в порте S, то
ограничение Tn переходит по байпасу через
пусковое реле Tn.
Переключателем А задается направление
действия регулятора, изменяется
вращением переключателя. См. раздел
2.1.1.
Переключателем В задается
пневмопитание на сильфон обратной
связи.
Изначально, в приборе это
устанавливается в yA, т.е. выходное
давление поступает в сильфон R2, тогда
как, он питается из сильфона R1 через
ручной блок управления из порта R. С
помощью этого достигается нормальное
пневмопитание регулятора и амортизация
выходного давления.
Приведение этого к R приводит к тому, что
выходное давление yA проходит по
обратной связи через R1 и R2 из порта R,
который обеспечивает большее
пневмопитание.
Этот вид настройки переключения
применим в случаях, когда большое
расстояние до рабочего элемента и
больших присоединительных объёмах так
же как в малоинерционных системах.
Пневмопитание устанавливается или
изменяется поворотом переключателя В, в
соответствии с разделом 2.1.2.
Page 15
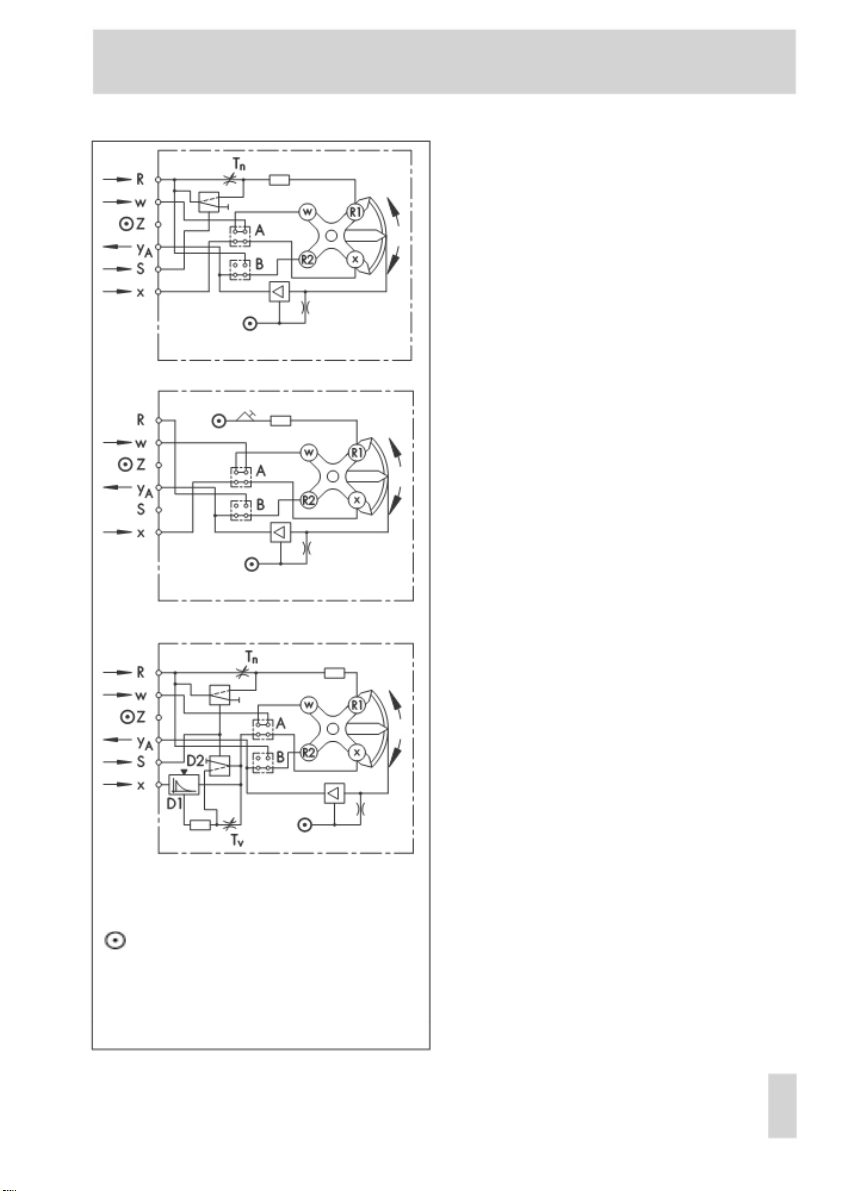
0.2
Kp
20
0.2
Kp
20
0.2
Kp
R Обратная связь Переключатели
R1/R2 Сильфоны обр. связи
Z=Пневмопитание1.4бар
YA Выходное давление
S Переключающее давление
Рис. 7 ·Регулирующие модули тип 3433
A Напр. действия
B Пневмопитания
20
Принцип действия
ПИ-регулирующий модуль тип 3433-2
Эти_регулирующие модули схожи по
многим аспектам с ПИ-регулирующими
модулями тип 3433-2, однако, оснащаются,
например, задатчиком рабочей величины,
дифференцирующим звеном или
многопозиционным переключателем, в
зависимости от применения.
П-регулирующий модуль тип 3433-1
соответствует типу 3433-2.
Задатчик рабочей величины используется
вместо интегрированного элемента
ПИД-регулирующий модуль тип 3433-3
соответствует типу 3433-2.
Дополнительно имеет дифференциальное
звено которое ускоряет примерно в 10 раз
на входе регулируемой величины х.
Дифференциальная составляющая времени
устанавливается на задатчике TV.
EB 7030 RU
15
Page 16
Принцип действия
ПД-Регулирующий модуль тип 3433-4
соответствует типу 3433-1.
Дополнительно имеет дифференциальное
звено которое ускоряет примерно в 10 раз на
входе регулируемой величины х.
Дифференциальная составляющая времени
устанавливается на задатчике TV.
П/ПИ-Регулирующий модуль тип 3433-5
с переключателем П/ПИ может
дополнительно использоваться как Прегулятор с задатчиком рабочей величины
или как ПИ-регулятор.
Конструкция такая же как в ПИ- и Прегулирующем модуле.
ПД/ПИД-регулирующий модуль тип 3433-6
с переключателем ПД/ПИД может
дополнительно использоваться как ПД- или
ПИД-регулятор.
0.2
Kp
20
0.2
Kp
20
П-Регулирующий модуль тип 3433-9
С рабочей величиной, зависимой от заданной
величины, соответствует регулирующему
модулю тип 3433-1 за исключением
пропорционально сохраняющейся рабочей
величины от заданной величины w.
16
EB 7030 RU
0.2
Kp
20
Рис. 8 · Регулирующие модули тип 3433
Page 17

Принцип действия
5.3.2 Регулирующие модули тип
3434
В регулирующих модулях циклический
компаратор работает по принципу
компенсации.
Коэффициент пропорциональности Kp
настраиваться в диапазоне от 1 до 25.
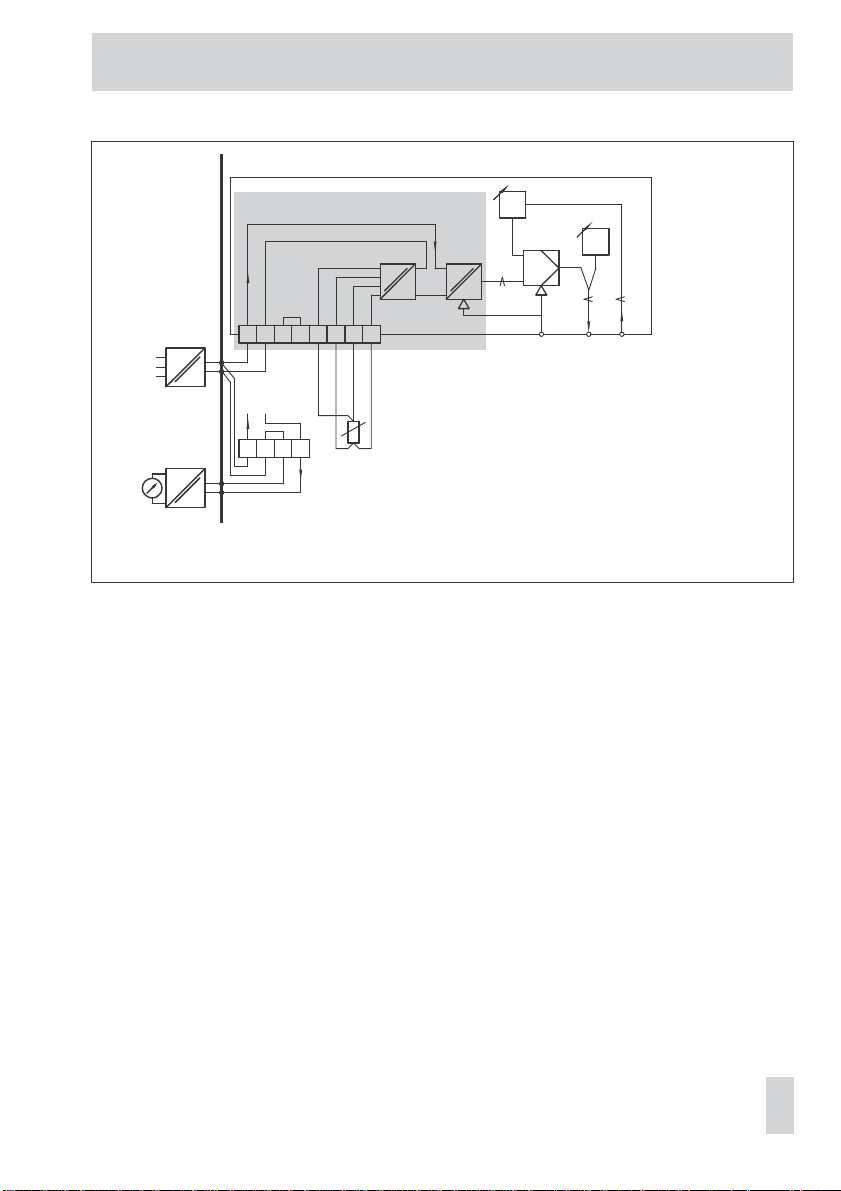
ПИ-регулирующий модуль тип 3434-2
(рис. 9)
Регулируемая величина х и управляющий
сигнал w передаются пневматическим
сигналом от 0.2 до 1 бар или от 3 до
15 psi на мембранные сосуды (R1 и
R2) через переключатель А. Когда х больше
w, датчик усилия (23) опускается и плунжер
открывается. Пневмопитание поступает в
мембранный сосуд R2 и выходное давление
yA возрастает. Это давление передается
через ограничитель Tn (10) в бустерный
усилитель 1:1 (24). Это выходное давление
передается по обратной связи в мембранный
сосуд R1.
R
w
Z
y
A
S
x
Рис. 9 · Регулир-ий модуль тип 3434-2
24 10
T
n
A
9 8
K
p
В результате, давления в мембранных
сосудах R1 и R2 уравниваются. Положение
датчика усилия продолжает изменяться,
пока выходное давление регулятора не
достигнет значения, соответствующего
регулируемой величине x и установленного
коэффициента пропорциональности Kp, т.е.
до устранения рассогласования в системе.
Коэф.пропорциональности Kp
устанавливается на задатчике (9) и
постоянная времени Tn на задатчике (10).
Регулятор нулевой точки (8) используется
для настройки прибора.
Переключателем А задается направление
действие регулятора, вращая
переключатель (раздел 2.1.1).
П-Регулирующий модуль тип 3434-1
Конструкция и принцип действия
аналогичен во многих аспектах с ПИрегулирующим модулем тип 3434-2
Однако, вместо обратной связи с
ограничителем Tn используется пружина
для рабочей величины 0,6 бар.
8 Задатчик нулевой точки
10 Задатчик Tn
21 Мембраны
R1
23 Датчик усилия
21
24 Бустер
R2
23
R1 Мембранный сосуд
R2 Мембранный сосуд
A Переключатель направления
действия
EB 7030 RU
17
Page 18

Принцип действия
5.4 Дополнительные модули
5.4.1 i/p-преобразователь тип 6112
Внешний управляющий сигнал wвнеш и/или
регулируемая величина х могут передаваться
токовым сигналом 4(0) до 20 мA или 1 до 5
мA и преобразованным через i/pпреобразователь пневматическим
унифицированным сигналом 0.2 до 1 бар.
Дополнительный i/p-модуль с одним или
двумя преобразователями интегрируется в
регулирующую станцию и может
использоваться только с регулирующими
модулями тип 3433.
5.4.2 Переключатель w
внутр/wвнеш
При использовании комбинированного
регулятора с заданной установкой и с
входным параметром, регулятор оснащается
позиционным переключателем wint/wext.
Объединенный регулятор заданной
величины с индикатором перепада давления
позволяют плавно переключать, когда
индикатор на нуле. См.раздел 3.3.
Присоед-ая плата с двумя i/p-преобразователями
для регулируемой величины x и внеш.зад.величины
5.4.3 Регулятор давления воздуха
питания
Когда регулятор давления воздуха питания
монтируется на регулирующую станцию тип
3432, возможно подключение рабочего
давления от 2.0 до 12 бар.
Регулятор давления воздуха питания тип
3708-5003 редуцирует и регулирует рабочее
давление до требуемого пневмопитания от
1.4 бар.
18
EB 7030 RU
Задатчик для внутр.зад.величины
Переключатель w
Регулятор давления воздуха питания
Рис. 10 · Дополнительные модули
внутр/wвнеш
Page 19

5.4.4 Индуктивные конечные
выключатели
Индуктивные конечные выключатели
отображают когда регулируемая величина х
превышает и/или падает ниже
установленного граничного значения.
Две матал.консоли, закрепленные на оси
указателя регулируемой величины х,
активируют связанные граничные контакты.
Когда метал.консоль передвигается к полю
индуктивного датчика, сопротивление
увеличивается, и когда метал.консоль
передвигается от поля, сопротивление
уменьшается.
Граничные контакты закрепляются в
регулируемых креплениях. Требуемая точка
переключения может быть установлена с
помощью регулировки крепления. Для
подробной информации см.раздел 2.2.
Принцип действия
EB 7030 RU
19
Page 20

Установка
6
Установка
6.1 Монтаж
Регулирующая станция изготавливается для
монтажа на трубах, стенах или щитах.
Для соответствующих габаритов см. рис. 11
и 12.
Активная длина датчика
Пневмодатчик
Ø19.5
G¾ 31
Преобразователь температуры тип 3432 с тип 3436
Порты:
26 x Регулируемая величина
27 w
Внеш. зад.величина
внеш
8/9 Пневмопитание Z
38 y Регулируемая перемен-я
Рис. 11 · Габаритные размеры регулирующей станции тип 3432
20
EB 7030 RU
Ø12
Ø7
Присоединение к процессу
Преобразователь давления тип 3432 с тип 3435
192
30
3030
26278/938
124 10
29 36
5
26278/938
Трубный монтаж
Монтаж на горизонтальных или
вертикальных трубах 2" используется с
монтажной деталью и крепежом.
Требуемая монтажная деталь:
Зак.номер. 1400-6302.
Монтажная плата Защитная крышка
Крепеж
труба 2”
16 40
45 28
Кабельный ввод M 20x1.5
Пневмоприсоединения
резьба 1/8 NPT
69 160 13
28
160
13
Page 21

Трубный монтаж
Монтируется с помощью трех хомутов
Требуемая монт.деталь: Зак.номер.1400-6301
Щитовой монтаж
Монтируется с помощью с помощью 4х монтажных элементов (DIN 43835).
Расстояния от осевых линий до крышки
около 235 мм.
Плотное размещ-е в пазах без крышки в
соотв. с DIN IEC 61554 (DIN 43700).
192
303030
труба 2”
Кабельные вводы
M20x1.5
Порты:
26 x Регулируемая величина
27 w
Внеш. зад.величина
внеш
8/9
Пневмопита ние Z
38 y Регулируемая перемен-я
Рис. 12 · Габаритные размеры регулирующей станции тип 3431
Ø7
26278/9 38
124
5
26278/9 38
Тип 3432:
Щитовой проем 188+1 x 255+1 мм,
Требуемый щитовые монт.детали:
Зак.номер. 1400-6300.
Тип 3431:
Щитовой проем 188+1 x 138+1 мм,
Требуемый щитовые монт.детали:
Зак.номер. 1400-6303
Защитная крышка (аксессуар):
Зак.номер. 1400-6311
Защитная крышка
Монтажная плата
Крепеж
труба 2”
16
45 28
69 160 13
10
Пневмоприсоединения
резьба 1/8 NPT
160 13
EB 7030 RU
Установка
28
21
Page 22

Установка
6.1.1 Замена шкал
После открытия крышки (4, Рис. 4), шкалу
можно удалить с задней стороны дисплея
и заменить специальной шкалой.
Масштабирование шкалы должно
соответствовать измеряемому диапазону
присоединенного или интегрированного
преобразователя.
Клейкие полоски для маркировки
масштаба вложены внутри корпуса.
Обрезать полоски до требуемого
размера и приклеить на шкалу.
22
EB 7030 RU
6.2
Установка температурного
датчика
Применяется только к регулирующим
станциям с преобразовательным
модулем тип 3436.
Датчик Ø 12 мм, длина 425 мм (актив-
ная длина 300 мм)
Датчик можно устанавливать в любом
положении. Однако, вся длина датчика
должна быть помещена в измеряемую
среду.
Выбрать место установки, где не может
быть перегрева или продолжительных
временных задержек.
Проложить импульсную линию так, чтобы
она не испытывала больших температурных
отклонений (окр. температура около 20 °C) и
трубку нельзя повреждать.
Радиус изгиба не должен превышать 50 мм.
В месте измерения требуется отверстие с
внутренней резьбой G ½ или G ¾, для
установки датчика. Закрутить или
уплотнить одну из монтажных деталей,
отображенных на рис.13, в это место.
Внимание!
Монтажные детали не включаются к
датчику. Они должны заказываться
отдельно. Нужно выбрать какие монтажные
детали требуются, в зависимости от условий
эксплуатации в месте измерения.
Page 23

Монтажные детали для датчика Ø 12 мм, длина
425 мм
Прижимный фланец
Для настенного монтажа, например, контейнер без
давления или канал трубопровода
Зак. номер 1090-9547
Фланец смонтировать на стену двумя винтами и
закрепить датчик температуры в фланце двумя
другими винтами.
Резьбовой ввод
G½
Зак. номер
G¾
Зак. номер
Уплотнить резьбу уплотнением. Вставить датчик с
резьбовым вводом и накидной гайкой.
Затянуть накидную гайку.
Резьбовой ввод (Ру 40) с зажимной гайкой
G½
Зак. номер
G¾
Зак. номер
Устанавливается как описано выше. Затягивается зажимная гайка
вместо накидной гайки.
Резьбовая защитная гильза
G½
Зак. номер
G¾
Зак. номер
Использовать защитную гильзу при повышенных
условных давлениях, присутствии коррозийных сред
или когда требуется замена датчика без остановки
установки.
Правильно вставить датчик в основание защитной гильзы.
Затянуть накидную гайку.
Приварная защитная гильза
Зак. номер 1080-4890
Фланцевая защитная гильза
Зак. номер 1080-4891 (Ру 40)
Внимание: Все соприкасающиеся с влагой части
резьбового ввода и защитной гильзы сделаны из
нержавеющей стали 1.4571.
Рис. 13 · Монтажные детали для датчика
(Ру 10)
1080-4881
1080-4882
1080-4884
1080-4885
1080-4888
1080-4889
1080-4892 (Ру 100)
(Ру 63)
(Ру
63)
32
8 Ø50
G
G
SW 32 G¾ 12
385
375
335 40
SW 32
G¾
1 36
30
G SW 32
SW 32
SW 32
EB 7030 RU
Установка
23
Page 24

Подключения
7 Подключения
7.1 Пневматическое подключение
Пневматические подключения прибора
изготавливаются с резьбой 1/8 NPT. Можно
использовать обычные штуцеры для трубок
или пластиковые шланги.
Внимание!
Пневмопитание должно быть осушено и
очищено от масла и пыли. Нужно
соблюдать инструкцию по монтажу
регулирующей станции воздуха питания.
Продуть все пневмотрубки и шланги перед
их соединением.
Назначение присоединений маркировано
знаками и отображено снизу корпуса.
Их можно дополнительно маркировать на
тыльной стороне корпуса, используя
специальные наклейки, которые поставляются
с регулирующей станцией.
38 Выход y – Регулируемая переменная,
Выходной сигнал регулятора для управления
регулирующим клапаном или позиционером.
8/9 Питание – Пневмопитание ,
Пневмопитание 1.4 ±0.1 бар или 2 до 12 бар
для исполнения с регулятором давления
пневмопитания (см. раздел 5.4.3).
27 Вход w
Закрыт в регуляторе с установкой задания и
открыт для прис-ия внешней заданной
величины в регулятор со следящей системой.
26 Вход x – Регулируемая величина,
Закрыт с регулятором давления или
температуры (регулируемая величина
выдается преобразовательным модулем).
Открыт с унифицированным регулятором.
24
EB 7030 RU
внеш
– Внешняя заданная величина,
7.1.1 Основные применения
Регулятор для унифицированных сигналов
MU - Преобразователь
STR - Позиционер
26 8/9 38
MU x Z y
0.2...1 бар Пнев-е 0.2 ...1 bar STR
Регулятор температуры (с тип 3436)
Датчик
8/9 38
Пневмопитание 0.2 ...1 бар
Регулятор давления (с тип 3435)
Присоединение к процессу
для измерения давления:
Присоединение к трубопроводу,
сосуду высокого давления и т.д..
Рис. 14 · Стандартные применения
Z y
8/9 38
Z y
Пневмопитание 0.2 ...1 бар
STR
STR
Page 25

7.1.2 Установка пневмопитания
для исполнения с регулятором
давления воздуха питания
Применяется только в регулирующих
станциях тип 3432 с регулятором давления
воздуха питания (1.9).
Шланговые присоединения для
пневмопитания расположены прямо выше
углов регулирующей станции на переходу
присоединительной станции (внутри
корпуса). Присоединения уплотняются
шланговыми фитингами.
Снять левый крайний фитинг и
присоединить с помощью шланга к
проверочному манометру.
В регулирующей станции, с
переключателем ручной/автомат, есть
присоединение для проверки (желтое),
внутри показывающей панели.
Использовать вложенное для этого
исполнения присоединение для
проверки (Рис. 15).
Открутить крышку регулятора
давления. Ослабить стопорную гайку
шпинделя и отрегулировать шпиндель:
Повернуть шпиндель по часовой
стрелке для увеличения пневмопитания
и против часовой стрелки для его
уменьшения.
Зафиксировать положение шпинделя
стопорной гайкой и закрутить заднюю
крышку, когда пневмопитание на
проверочном манометре покажет
давление от 1.4 ±0.1 бар (20 ±1.5 psi).
Подключения
Рис. 15 · Проверочное
присоединение с проверочным
соединителем.
EB 7030 RU
25
Page 26

Подключение
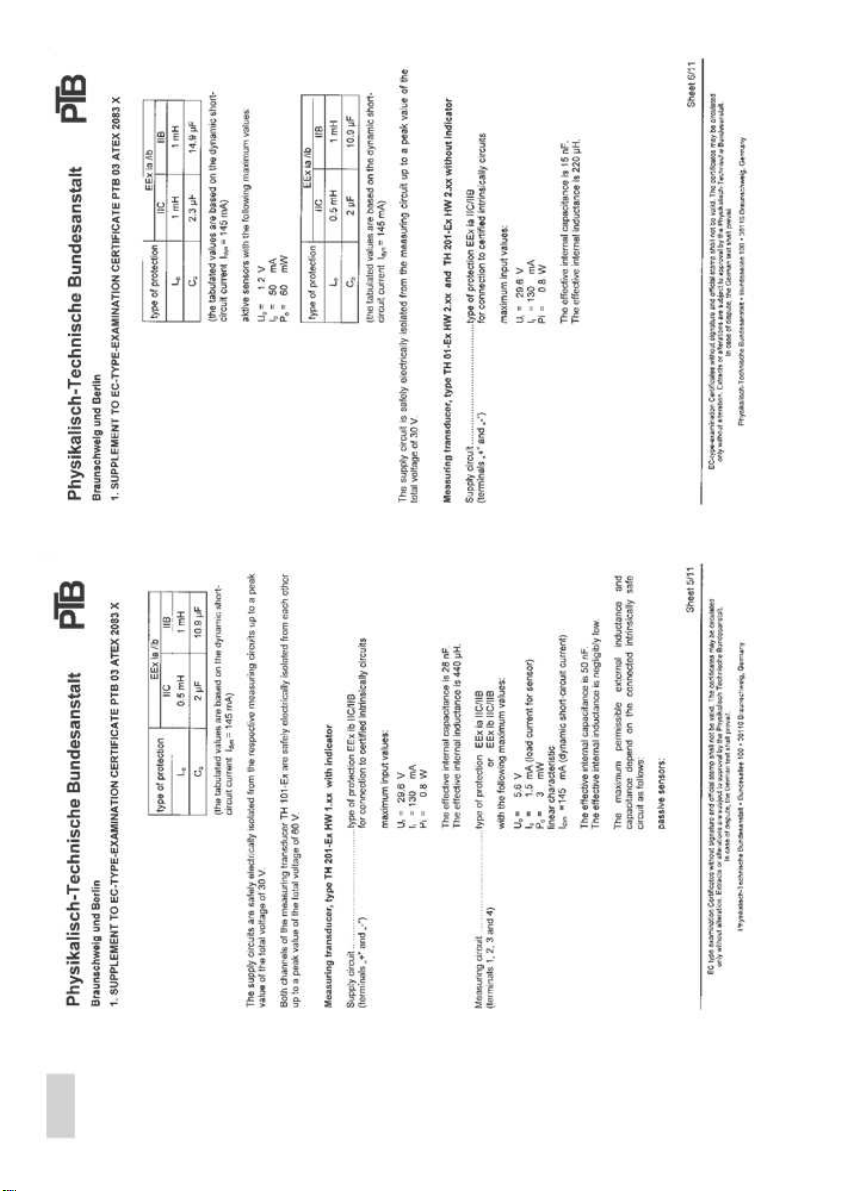
7.2 Электрические подключения
Электрические компоненты применяются в
регулирующих станциях с i/p- преобр-ми
дополнительными модулями для
регулируемой величины х, внешней
управляющей величины wвнеш и/или с
индуктивными конечными выключателями.
Предупреждение!
Для электрического подключения
прибора следует руководствоваться
действующими электротехническими
предписаниями и местными
правилами техники безопасности. В
Германии – это VDE-предписания и
правила техники безопасности
объединения профсоюзов.
При установке и монтаже во взрывоопасных
зонах действуют нормы: EN 60079-14: 2003
(VDE 0165 часть 1/8.98) "Электрические
средства производства для зон с
взрывоопасными газами" и EN 50281-1-2:
1999(VDE 0165 часть 2/11.99)
"Электрические средства производства
для зон с возгораемой пылью".
Для искрозащищенных электрических
устройств допустимые максимальные
значения указаны в сертификатах
соответствия ЕС (Ui или U0; Ii или I0; Pi или
P0; Ci или C0, и Li или L0).
Внимание! Обязательно следует
соблюдать приведенную в инструкции по
монтажу и эксплуатации схему клеммных
подключений.
Изменение схемы может привести к утрате
взрывозащиты.
Не нарушать покрытие окрашенных винтов.
26
EB 7030 RU
Указ-ия по выбору кабеля и элек-х проводов:
Для прокладки искрозащищенных цепей смотрите
раздел 12 стандарта EN 60079-14: 2003 (VDE 0165
часть 1). Для прокладки многожильных кабелей
или линий с несколькими искрозащищенными
цепями смотрите раздел 12.2.2.7 того же
стандарта.
Устройства, используемые при окр. температуре
вплоть до -40 °C должны иметь металлические
кабельные вводы.
Для доступа к контактам на основной плате
нужно открутить переднюю крышку под
дисплеем. Для настройки конечных
выключателей, усилители коммутации,
соответствующие EN 60947-5-6, должны
быть соединены в выходной цепи.
Регулирующая
станция
тип 3432
Регулир-ая
станция
тип 3431
Рис. 16 · Подкл-ие i/p- преобр-ля и конечных выкл-ей
12 11
2122
- + + x wвнеш
4(0)...20 мA
1...5 мA
+
+
-
Усил.коммутац.
Конечные выключатели 1...5 мA
42 41 52 51
- + - +
Усил.коммутац.
Конечные выключатели
+
+
-
wвнеш x
4(0)...20 мA
Page 27
L
~
N
PE
- –
+
Безопасная зона Ex- Зона 1
EEx i
24VEEx i
Тип 3438
+
-
+ - 3 4
+
+ - 3 4 11 12 13 14
ϑ
Pt 100
- +
T I
I
+ -
4...20 мA
W
X
P
PID
Z Y W
8/9 38 27
Пневм-е Выход Внешняя
Подключение датчика: Четырехпроводное
подключение не требует компенсации линии.
Сопротивление проводов должно быть идентично и не
должно превышать допустимого: 50 Ом для провода
Линии датчика должны быть проложены отдельно от
реле или линии замыкания.
Техническое обслуживание
Y
H
Y
A
внеш
зад.величина
Рис. 17 · Электропроводка регулирующей станции тип 3432 с преобразовательным модулем тип 3438
Этот фильтр нужно очищать или заменять,
8 Техническое обслуживание
когда индикатор регулируемой величины не
работает (зак.номер. 0550-0193).
8.1 Проверка пневмопитания
Модули пневматических регуляторов
обычно не требуют тех.обслуживания.
Однако, пневмопитание следует проверять
регулярно.
Нормальное функционирование прибора
гарантируется когда сжатый воздух,
питающий прибор, всегда чистый.
Регулярно проверять фильтрующий
элемент редуцирующей станции. Если
потребуется, очистить или заменить
соответствующим фильтром.
Преобразовательный модуль:
Шланговая прокладка в пневмошланге для
Регулирующий модуль тип 3433:
Если регулирующий модуль работает не
нормально или выходной сигнал отсутствует,
нужно открутить ограничитель (7, рис. 2 и
17) внизу слева компаратора и очистить или
заменить его (зак.номер.1390-0183). Извлечь
фильтр и если требуется, заменить
(зак.номер. 0550-0193).
Шланговое присоединение регулирующего
модуля также оснащено фильтрами (зак.
номер. 0550-0186).
Дополнительно, нижние порты корпуса
оснащены пластиковыми кольцевыми
фильтрами, которые можно открутить и
очистить (зак.номер. 0550-0189).
пневмопитания с фильтром.
EB 7030 RU
27
Page 28

Замена
9 Замена
Отвинтить болты (3.3) и вытащить
присоединительную плату вместе с болтами
и гайками из регулирующего модуля.
9.1 Замена функции регулятора
Функции регулятора можно заменить как
заменой всего модуля (тип 3434-1 или тип
3434-2), так и обновлением или заменой (тип
3433) таких компонентов как задатчики,
ограничители или различные усилители.
Регулирующий модуль тип 3433:
Снять и закрепить соответствующую
крышку и задатчик отвинтив шестигранные
винты М3 внутри корпуса.
П в ПИ: Открутить задатчик рабочей
величины (12) и заменить ограничителем
(10).
П в П/ПИ: Открутить задатчик рабочей
величины (12) и заменить переключателем
Открутить монтажный винт (6)
регулирующего модуля и извлечь из
уплотнительного фитинга. Достать из
регулирующей станции.
с задатчиком рабочей величины (13) и
ограничителем Tn (10).
П в ПД: Открутить крышку (14.1).
Вытащить уплотнительное кольцо (14.3) и
вставить туда два уплотнительных кольца
(14.4). Завинтить дифференциальный
Номер Количество Описание Order no.
10 1 Ограничитель
10.1 2 Винты M3x8 8333-0479
10.2 3 Уплотнительные кольца 1.78 x 1.02 8421-0010
11 1
11.1 1 Крышка 0360-1597
11.2 2 Винты M3x8 8333-0479
11.3 4 Уплотнительные кольца 2 x 1.5 8421-0023
12 1 Задатчик рабочей величины 1.4 бар 1070-4583
12 1 20 psi 1070-6413
12.1 2 Винты M3x8 8333-0479
12.2 4 Уплотнительные кольца 1.78 x 1.02 8421-0010
13 1 Переключатель с задатчиком рабочей величины 1180-3615
13.1 2 Винты M3x30 8333-0482
13.2 4 Уплотнительные кольца 1.78 x 1.02 8421-0010
14 1 Дифференциальный усилитель 1080-6924
14.1 1 Крышка 0360-1598
14.2 1 Винты M3x16 8333-0476
14.3 1 Уплотнительное кольцо 14 x 1.5 для платы 8421-0070
14.4 4 (2) Уплотнительные кольца 2 x 15 8421-0023
15 1 Плата с огранич-ем рабочей величины зависимой от заданного значения 1590-1089
Ограничитель
T
n
Tv
1070-4584
1070-4585
28
EB 7030 RU
Page 29

усилитель (14). Открутить крышку (11.1)
и установить ограничитель Tv (11).
П в ПИД: Изменяется как П в ПД.
Дополнительно, заменить задатчик (12) с
ограничителем Tn (10).
П-регулятор с рабочей величиной,
зависимой от заданного значения:
П в ПИ П/ПИ
6
3.2
3.3
10
12
(15)
14.1,14.2 11.1,11.2
Фильтр
Ограничитель (7)
14.3 14.4 10.2 14.4 10.2
Рис. 18 · Изменение функции регулятора тип 3433
Замена
Закрепить плату с ограничителем (15)
вместо задатчика рабочей величины (12).
Внимание!
Мы рекомендуем замену старых
уплотнительных колец, а также фильтр в
ограничителе (7), новыми.
13
10
12
14.1,14.2 11.1,11.2
П в ПД
10
12
14
11
EB 7030 RU
29
Page 30

Замена
9.2 Замена преобразовательного
модуля
Преобразовательный модуль тип 3435 и тип
3436 крепится к регулирующей станции тип
3432 шестью винтами.
Пневмопитание x присоединяется двумя
силиконовыми трубками.
Преобразовательный модуль можно заменить
когда измерительный элемент поврежден или
диапазон измерений нужно изменить.
Когда Вы заказываете новый модуль, нужно
указать исполнение датчика и требуемый
диапазон измерения. Дополнительно,
укажите, пожалуйста, информацию с
шильдика старого преобразовательного
модуля.
1 Открутить переднюю панель,
расположенную под дисплеем. Отсоединить
соответствующие электрические клеммы
модуля.
2 Отсоединить трубки регулируемой
величины х и пневмопитания Z от
присоединительной платы корпуса.
3 Открутить шесть монтажных винтов
снизу регулирующей станции и снять
преобразовательный модуль.
4 В обратном порядке установить новый
преобразователь.
При присоединении трубок к порту x
и Z, важно не перепутать их. Трубка
пневмопитания включает в себя
шланговую прокладку с
ограничителем и фильтром.
Шланговая прокладка
Регулируемая величина x Пневмопитание Z
Рис. 19 · Присоединительная плата
9.3 Проверка функций
регулятора
Проверить чтобы регулятор, регулируемая
величина и регулируемая переменная были
байпасно связана в портах x (26) и y (38)
снизу регулирующей станции.
Установить переключатель A на
увеличение/уменьшение,
ограничитель Tn на “полностью
открытый” и ограничитель Tv на
“закрыт”.
Изменять управляющую величину на
регуляторе заданного значения через весь
диапазон. Регулятор работает нормально,
если указатель регулируемой величины
(красный) и указатель регулируемой
переменной (маленький манометр)
следуют за управляющей величиной
через весь отображаемый диапазон.
30
EB 7030 RU
Page 31

Использование во взрывоопасных зонах
10 Использование во
взрывоопасных зонах
Регулирующую станцию тип 3430 можно
использовать во взрывоопасных зонах Зона
1 и 2, не смотря на то, что у нее нет своего
сертификата образцовых испытаний ЕС.
Регулирующей станции не требуется
сертификат образцовых испытаний ЕС в
соответствии с директивой 94/9/EC
(ATEX).
Условия использования во взрывоопасных
зонах:
Регулирующая станция не имеет
маркировки взрывозащищенного прибора
с помощью специальной маркировки.
Все установленные взрывозащищенные
модули имеют свои сертификаты
образцовых испытаний ЕС.
Соблюдаются максимальные значения,
указанные в соответствующих
сертификатах образцовых испытаний ЕС
при присоединении к искробезопасной
цепи.
Монтаж, подключения, клеммы,
кабельные воды и другие компоненты,
имеющие отношение к взрывозащите,
удовлетворяют нормам DIN EN 50014,
DIN EN 50020 и DIN EN 60079-14 (VDE
0615).
Прозрачная крышка или окно
регулирующей станции имеет
электропроводное покрытие для
предотвращения электризации.
Измерительный контур TH01-Ex
преобразовательного модуля имеет
искрозащиту “ia” и присоединяется к
датчикам в Зоне 0. Сам преобразователь
должен быть установлен в помещениях с
Зоной 1 или Зоной 2.
Предупреждение!
Для монтажа в взрывоопасных помещениях,
следить: при монтаже и эксплуатации
устройства убедиться, что возникновение
электризации, в следствие большого
поверхностного удельного сопротивления,
исключено(R
= 1012 Ом).
удел.
10.1 Обсл-ие взрывозащ. приборов
Если часть прибора подвергается ремонту в
составе устройства, имеющего
взрывозащищенное исполнение, то он
может быть снова введен в эксплуатацию
только после проведения ответственным
специалистом повторных испытаний
производственного оборудования на
соответствие действующим требованиям по
защите от взрыва, о чем должно быть
выдано соответствующее свидетельство,
или оборудование должно иметь
необходимый знак об успешном
прохождении испытаний.
Указанная проверка может быть исключена,
если перед новым пуском произв-го
оборудования оно было подвергнуто
произв-ем этой техники соответствующим
испытаниям и свидетельством успешного
прохождения испытаний является
нанесенным на оборудовании спец. знак.
Взрывозащищенные детали могут быть
заменены только на оригинальные,
заказанные у производителя.
Устройства, которые уже использовались
вне взрывоопасных зон, и которые
планируется разместить во взрывоопасных
зонах, должны соответствовать требованиям
безопасности для ремонтируемых устройств.
Перед пуском в эксплуатацию они должны
быть протестированы в соответствии в
соответствии с требованиями спецификации
“Ремонт взрывозащищенных устройств”
EB 7030 RU
31
Page 32

Технические характеристики
11 Технические характеристики
Регулирующая станция тип 3432 и тип 3431
Дисплей текущ. знач-я Диапазон измерения 0.2...1.0 бар (3...15 psi) · Класс точности 1.6 · Длина шкалы 212 мм
Регулятор зад. вел-ны Выход 0.2 до 1.0 бар (3...15 psi) · Длина шкалы 212 мм · Класс точности 1.6
Задатчик для
ручного режима
Конечные выключ-ли 1 или 2 индуктивных конечных выключателя SC 3.5-NO в соотв. с EN 60947-5-6 (NAMUR)
i/p- преобразователь Вход 4 (0)...20 мA (Ri = 200 Ом) или 1...5 мA (Ri = 880 Ом)
Оснащается:
Регул.модуль тип 3434-1 3434-2 3433-1 3433-2 3433-3 343-4 3433-5 3436-6 3433-9
Функция регулятора П ПИ П ПИ ПИД ПД П/ПИ ПД/ПИД П
Коэф. пропор-ти
Пост.времени T
Время диф-ия [мин] - 0.01 до 10 · Коэффициент усиления x:около 10
По запросу с Огран-ль сигнала Переключатель Переключатель Ручн./Автом.
дополнит-м модулем 3437-1
Тип
Выход 0.2 до 1 бар (3 до 15 psi) · Макс. 0.02 до 1.35 бар
Пневмопит-е с регул. Стандартное исполнение: Пневмопитание1.4 бар(20 psi) · Расход воздуха < 0.6 м
давл.возд.питания Рабочий воздух 2.0...12 бар(30...180 psi) · Расход воздуха < 0.75 м
/p преобразователь w
Доп.темпер-ра окр.ср. -20 ...+60 °C (-40 °C по запросу)
Степень защиты IP 40 без крышки, IP 65 с передней крышкой
Общий вес, около 6 кг
Преобразовательный модуль для давления
Диапазон измерения
[бар] (диап.зад.знач.)
Перегрузка до 1.25 раз от верхнего значения диапазона измерения
Предел прочности Не более чем в 2 раза от верхнего знач-я диапазона измерения (макс. 63 бар при от 0 до 40 бар)
Характеристика Отклонение от линейной характеристики: ≤ 0.3 % от заданного значения
Влияние Окружающая температура: ≤ 0.04 %/°C
32
EB 7030 RU
[мин] - 0.05...20 0.03...50
n
Выход 0.2...1.0 бар (3...15 psi) · Макс. 0.02...1.35 бар · Макс. пневмопитание: >1.5 м
= 1...20 Kp = 0.2...20 или 0.4...40
K
p
режима управления
3437-2
3
: +0.13 м
внеш
0 до 1.6 0 до 2.5 0 до 4 0 до 6 0 до 16 0 до 25 0 до 40
Гистерезис: ≤ 0.5 % · Зона нечувствительности: ≤ 0.1 %
Воздух питания: ≤ 0.25 %/0.1 bar
Перегрузка допустимого значения ≤ 0.1 %
/ч
н
тип 3435
3437-3
3
/ч
н
3
/ч
н
3
/ч
н
Page 33

Преобразовательный модуль для температуры тип 3436
Интервал измерения °C 50 100 150 200
Предел измерения °C -40 до +200 или -40 до +300
Стандартные диапазоны °С -20 до +30 0 до 100 50 до 100 0 до 200
Предел перегрузки 350 °C
Допуст. давление на датчике Без защитной гильзы: Ру 16 С защитной гильзой Ру 63 или Ру 100
Пневмопитание Пневмопитание 1.4 ± 0.1 бар (20 ±1.5 psi)
Выход 0.2...1.0 бар (3...15 psi)
Отклонение от линейной
характеристики
Гистерезис < 0.25 %
Влияние Supply air: < 0.25 %/0.1 bar
Давление на датчике < 0.6 %/10 бар < 0.25 %/10 бар < 0.15 %/10 бар
Окружающая температура < 0.6 %/°C < 0.03 %/°C
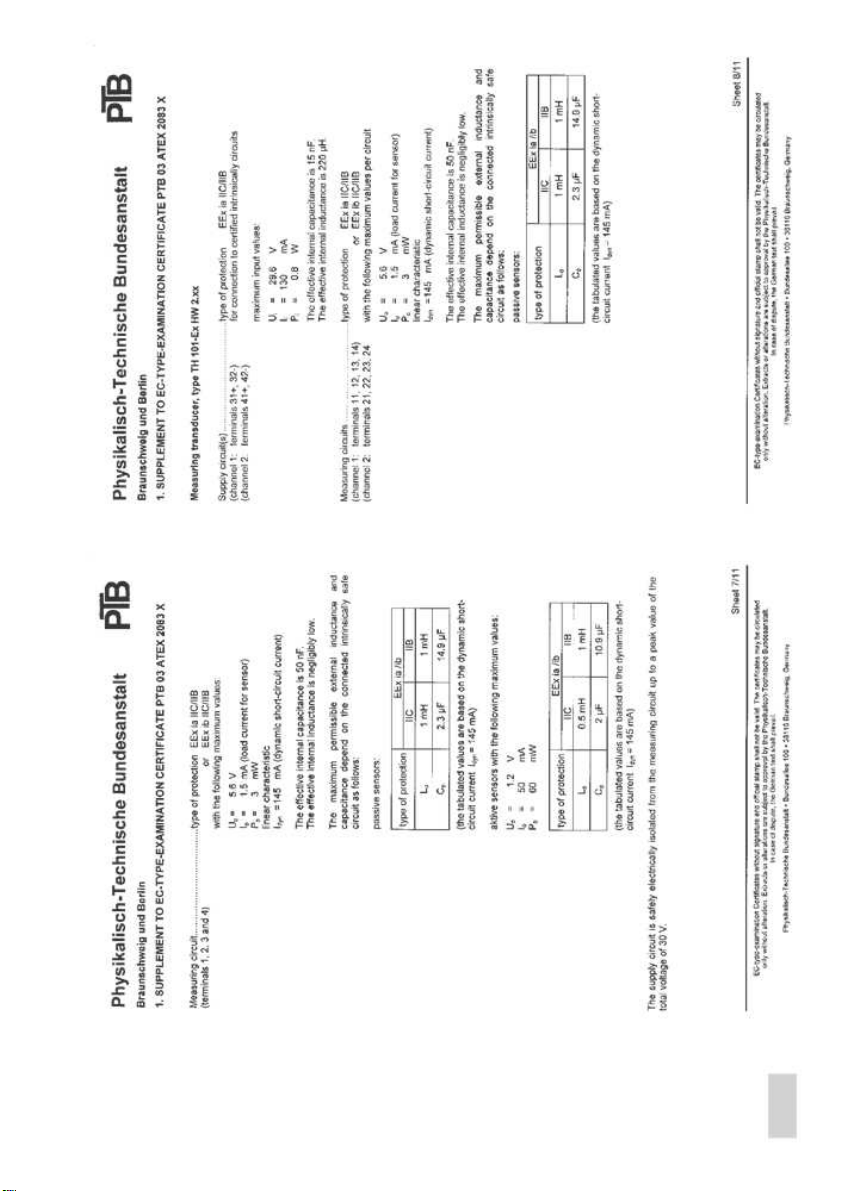
Преобразовательный модуль тип 3438, состоящий из преобразователя температуры TH01-Ex с
i/p– преобразовательным модулем тип 6112
Электрический преобразователь температуры TH01-Ex
Вход Термометр сопротивления Pt 100 (RTD)
Диапазон измерения -30 до 60 °C, 0 до 40 °C, 0 до 100 °C, 0 до 150 °C, 0 до 200 °C, 0 до 400 °C
Присоединение Четырехпроводная цепь, сопротивление провода < 50 Ом
Измерительный ток 0.3 мA
Выход 4 до 20 мA, линеен температуре
Потребление тока < 3.6 мA
Максимальный выходной ток 23.6 мA
Напряжение питания Двухпроводная система: Линия питания = Сигнальная линия
Использ. в безоп-х помещ-ях
Использ. во взрыв-ых помещ.
Макс. нагрузка R
Взрывозащита II 2(1) G EEx [ia] ib IIC T6 в соотв. с ATEX
Сертификат образцовых
испытаний EC
Окружающая температура во
взрывоопасных зонах
B
150 до 300
0.6 % от заданного значения
= 16 до 30 V
U
= 16 до 28 (25) VDC, см. сертификат образцовых испытаний EC
U
S
Напряжение питания US опред-ет макс. нагрузку: RB <
T6: макс. 50 °C · T5: макс. 65 °C · T1 до T4: макс. 80 °C
S
PTB 03 ATEX 2083 X
Технические характеристики
DC
(U
S
−
16 V)
0.022 мA
EB 7030 RU
33
Page 34

Технические характеристики
Электрический преобразователь температуры TH01-Ex
Индикация неисправностей
Поломка датчика > 22 мA
Короткое замыкание датчика < 3.6 мA
Обрыв цепи датчика < 3.6 мA or > 22 мA
Напряжение питания с 0 мA
обратной полярностью
Отклонение от линейной ≤ 0.1% или ≤ 0.2 K (какое-либо большее значение)
характеристики
Влияние окружающей ≤ 0.08 %/10 K для нижнего значения диапазона измерения и интервала изм-я,
температуры основанного на 20 °C
Влияние напряжения питания < 0.5 %/10 В
Обновляемость вых-го сигнала 0.4 с когда входной сигнал изменяется < 0.25 K/с
Электр-ая изоляция (Вх./Выход) 1.5 kВAC (60 с)
Продолжительность стабильности ≤ 0.05 % или 0.1 K в год (какое-либо большее значение)
i/p- преобразовательный модуль тип 6112- …
Тип 6112-02
без взрывозащиты
Тип 6112-22
с взрывозащитой
Взрывозащита II 2 G EEx ia IIC T6
Серт-ат образц-ых испытаний EC
Вход 4 до 20 мA или 0 до 20 мA
Выход 0.2 до 1 бар или 3 до 15 psi
Пневмопитание 1.4 бар ± 0.1 бар (20 psi ± 1.5 psi), расход воздуха < 0.1 м
Эффективность Характеристика: Выход линеен входу
Влияние
Пневмопитание 0.1 %/0.1 бар
Окружающая температура < 0.03 %/K для нижнего знач. диапазона измер-я и интервала изм-я, осн. на 20 °C
Допустимая температура
окружающей среды
1)
Для подробной информации см. вложенные сертификаты образцовых испытаний ЕС (допустимые температуры,
эффективная внутренняя емкость и индуктивность)
1)
PTB 00 ATEX 2021
Искробезопасная входная цепь ·
Гистерезис ≤ 0.3 % ·
Входное полное сопротивление 200 Ом и ~5.9 мH
Вх. полное сопр-ие
Отклонение от линейной хар-ки
-20 до +60 °C
≤
0.1 % (с установкой задания)
1)
200 Ом и ~0 мH
3
/ч
н
34
EB 7030 RU
Page 35

EB 7030 RU
35
Page 36

36
EB 7030 RU
Page 37

EB 7030 RU
37
Page 38

38
EB 7030 RU
Page 39

EB 7030 RU
39
Page 40

40
EB 7030 RU
Page 41

EB 7030 RU
41
Page 42
42
EB 7030 RU
Page 43
EB 7030 RU
43
Page 44

44
EB 7030 RU
Page 45

EB 7030 RU
45
Page 46
46
EB 7030 RU
Page 47

EB 7030 RU
47
Page 48

48
EB 7030 RU
Page 49

EB 7030 RU
49
Page 50

50
EB 7030 RU
Page 51

EB 7030 RU
51
Page 52

SAMSON AG · MESS- UND REGELTECHNIK
Weismüllerstraße 3 · 60314 Frankfurt am Main · Germany Phone:
+49 69 4009-0 · Fax: +49 69 4009-1507
Internet: http://www.samson.de
EB 7030 RU
 Loading...
Loading...