


SERVOSISTEMA SMARTSTEP 2
Un nuevo paso en sencillez
Preciso y económico »
Diseño ultracompacto »
Fácil de configurar y usar »

SmartStep 2:
El paso correcto...
En Omron somos conscientes de que la
sencillez y la precisión son esenciales en una
aplicación de posicionamiento.
Los nuevos servosistemas SmartStep ofrecen
la solución perfecta para aplicaciones
de movimiento punto a punto en las que
sencillez es esencial. SmartStep 2 es una
la
solución rentable que conserva la sencillez
a la
vez que proporciona un alto rendimiento.
SmartStep 2 tiene un diseño compacto
completamente nuevo que permite ahorrar un
50% de espacio en comparación con el modelo
anterior. También dispone de nuevas funciones
y características que le ayudarán a aumentar la
eficiencia y la rentabilidad de su maquinaria.
Características principales:
•
Servodrive con control de pulsos
•
Tamaño ultracompacto
•
Auto-tuning
•
Supresión de vibraciones
•
Filtro adaptativo de supresión de resonancia
•
Dos límites de par programables
•
Salida de pulsos de realimentación
•
Gama de potencia de 50 W a 750 W
•
Servomotores cilíndricos y planos
•
Reductor electrónico
•
10.000 pasos por revolución
…hacia un desarrollo más rápido y sencillo
Iniciación rápida
CX-Drive es una herramienta de software independiente y fácil de utilizar
para configurar, poner en marcha y realizar el mantenimiento de servos
y variadores.
SmartStep 2 es completamente compatible con una amplia gama
de funciones que permiten una configuración del servodrive más sencilla
y rápida que nunca:
•
Auto-tuning
•
Edición y supervisión de parámetros
•
Diagramas de velocidad y posición
•
Alarmas y estado de E/S
•
Seguimiento de datos en tiempo real
Seguimiento de datos en tiempo real
Análisis de frecuencia

Diseño compacto
de fácil conexión
Aun teniendo mayor funcionalidad que los modelos
anteriores, SmartStep 2 posee un diseño compacto con
dimensiones ultrapequeñas que hacen posible ahorrar
un espacio considerable.
Además, SmartStep 2 se puede integrar fácilmente con
otros dispositivos de automatización como el
controlador compacto de máquinas CP1L y los
terminales de operador NS, lo que contribuye a ofrecer
un diseño de la máquina eficaz y rentable.
Características adicionales:
•
Control de posición mediante entrada de pulsos
de 500 kpps
•
Velocidad nominal de 4.000 rpm, con un máximo
de 5.000 rpm
•
Amplia gama de configuraciones de pulsos
•
Cuatro ajustes de velocidad interna que se conmutan
por señal externa para un control sencillo
•
Servomotores compatibles con SmartStep
130 mm
105 mm
160 mm
55 mm
120 mm
35 mm
Diseño compacto que ahorra espacio
Las dimensiones de SmartStep 2 son un 48%
más pequeñas que los modelos anteriores
y su volumen es un 39% menor. De está forma
ahorra gastos y espacio de armario.
Pulsos de comando
Pulsos de realimentación
CP1H-Yxx
Salida de pulsos de realimentación
Permite enviar información de la posición
del servo al controlador para un control
de posición de lazo cerrado y control del
posicionamiento real; también se puede
usar para sincronizar con otro eje.
AUTOMÁTICO
Funcionamiento sin ajustes
En función de las variaciones de carga, la
función de autotuning en tiempo real calcula
automáticamente y ajusta los valores de
ganancia óptimos para la máquina.
Supresión rápida de vibracionesVibración
Supresión de vibraciones
Un filtro adaptativo garantiza el seguimiento
automático de los cambios de frecuencia
resonante para reducir el efecto de las
vibraciones debido a la baja rigidez mecánica.
Un filtro adicional reduce al mínimo la
vibración para un mejor posicionamiento
al detener la carga.
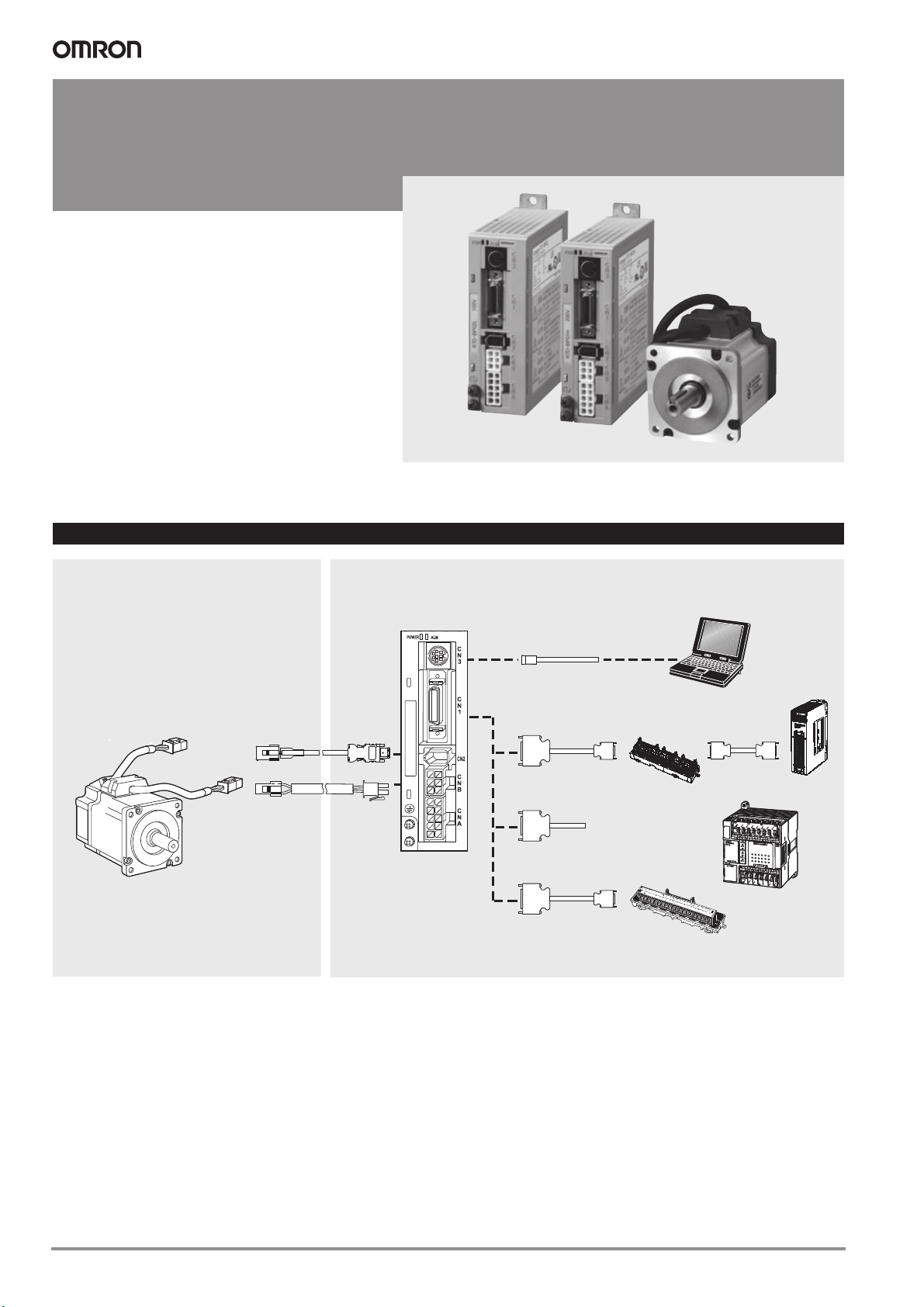
R7D-BP@, R88D-GP@, R88M-G@
Configuración del sistema
Servosistema SmartStep 2
Otro paso adelante en sencillez
• Fácil instalación y autotuning on-line
• Tamaño ultracompacto. Ocupa tan sólo el 48% de
superficie en comparación con la serie SmartStep
• Dos límites de par
• Reductor electrónico, cuatro velocidades internas y
amplio rango de configuración de pulsos
• Filtro adaptativo para supresión de vibración y
resonancia
• Servomotores con IP65 de serie y disponibilidad de
junta de aceite en el eje
• Opción de motores con freno
Valores nominales
• Monofásico 230 Vc.a. de 50 W a 750 W
(de 0,16 a 2,4 Nm)
(Consulte el capítulo
Servomotores SmartStep)
Servomotor
SmartStep 2
Cable de encoder
Cable de potencia
Servodrive
SmartStep 2
Software de ordenador
personal: CX-One
Unidad de control
de posición
Unidad de
control de posición
Bloque de terminales
Controlador de empleo general
(con salida de pulsos)
6 Servosistemas de c.a.
Referencia del servodriver
Servodriver
SmartStep 2
R7D-BP01H
Tipo de drive
P: Control por entrada de pulsos
Tensión de alimentación
H: Monofásica
230Vc.a para 100/400W
HH: Monofásica
Capacidad
100 W
01
200 W
02
04
400 W
230Vc.a. para 200W
R88D-GP08H
Servodrive
SmartStep 2 (750 W)
Tipo de drive
P: Control por entrada de pulsos
Capacidad
08
750 W
Especificaciones del servodrive
Especificaciones generales
Elemento Especificación
Temperatura ambiente de funcionamiento De 0 a 55 °C
Humedad ambiente de funcionamiento Máx. 90% (sin condensación)
Temperatura ambiente de almacenamiento De -20 a 65 °C
Humedad ambiente de almacenamiento Máx. 90% (sin condensación)
Atmósfera de almacenamiento/funcionamiento Sin gases corrosivos
Resistencia a vibraciones De 10 a 60 Hz; aceleración: de 5,9 m/s
Resistencia a golpes Aceleración de 19,6 m/s
Resistencia de aislamiento Entre los terminales de la línea de alimentación y la tierra de bastidor: 0,5 MΩ min. (a 500 Vc.c.)
Rigidez dieléctrica Entre los terminales de la línea de alimentación y la tierra de bastidor: 1.500 Vc.a. durante 1 min a 50/60 Hz
Entre cada señal de control y tierra de bastidor: 500 Vc.a. durante 1 minuto
Grado de protección Incorporada en el panel (IP10)
Estándares internacionales Homologación obtenida para UL: UL 508C; cUL: cUL C22.2 n.º 14
Homologación de EC: EMC EN55011 clase A Grupo 1, EN 61000-6-2, baja tensión EN50178
2
, 3 veces en cada una de las direcciones X, Y y Z
2
(0,6 G) máx.
Tensión de alimentación
H: 230 V
Especificaciones de funcionamiento
Elemento Tipo de entrada de 200 Vc.a.
Corriente de salida nominal (rms) 1,0 A 1,6 A 2,5 A 4 A
Corriente de salida máxima instantánea (rms) 3,3 A 4,9 A 7,8 A 14.1 A
Fuente de alimentación del circuito principal Monofásica de 200 a 240 Vc.a. (de 170 a 264 V), 50/60 Hz Monofásicas/trifásicas de
100 W 200 W 400 W 750 W
R7D-BP01H R7D-BP02HH R7D-BP04H R88D-GP08H
200 a 240 Vc.a. (de 170 a
264 V), 50/60 Hz
Servosistema SmartStep 2 7
Elemento Tipo de entrada de 200 Vc.a.
100 W 200 W 400 W 750 W
R7D-BP01H R7D-BP02HH R7D-BP04H R88D-GP08H
Fuente alimentación del circuito de control - Monofásica de 200 V a
240 Vc.a. (de 170 a 264 V)
Método de control Servo totalmente digital
Realimentación 10.000 pulsos/revolución, encoder incremental
Funcionamiento del inversor Método PWM basado en IGBT
Frecuencia de PWM 12 kHz 6 kHz
Peso 0,35 kg 0,42 kg 0,42 kg 1,5 kg
Tensión del motor compatible 200 V
Respuesta de comando de pulsos Line Driver: 500 kpps
Capacidad del motor compatible 50 W
200 W 400 W 750 W
100 W
Servomotor aplicable
(R88M-)
G05030H
G10030H
G020030H
GP20030H
G40030H
GP40030H
G75030H
GP10030H
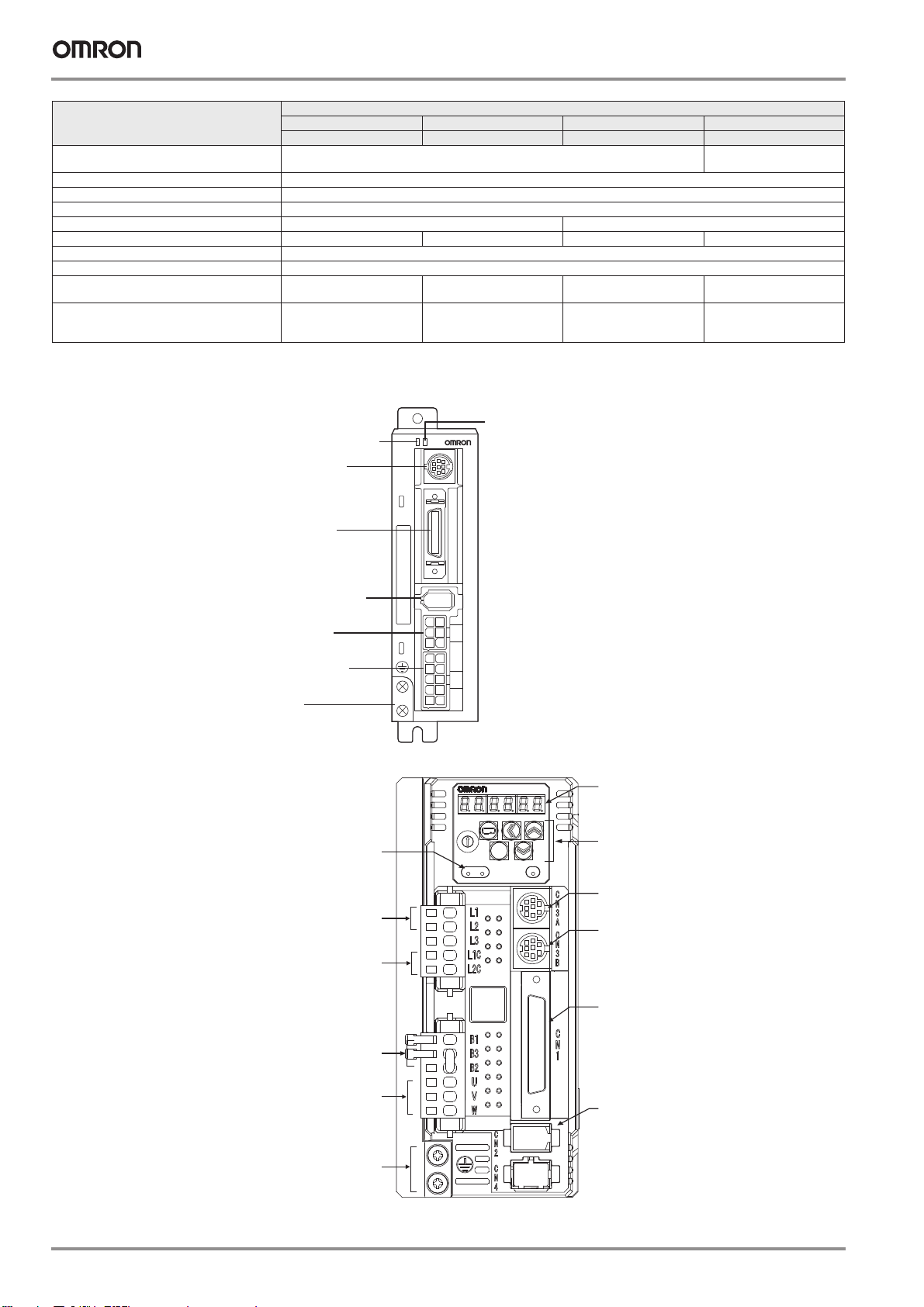
Nombres de las piezas del servodrive
Servodrive SmartStep 2 (modelos de 100 a 400 W)
Indicador de alarma (ALM)
Indicador de fuente de alimentación
Conector de comunicaciones
(CN3)
PWR
ALM
C
N
3
Conector de E/S de control
(CN1)
Conector de entrada del encoder
(CN2)
Conector del motor (CNB)
Conector de circuito principal
(CNA)
Terminales FG para
fuente de alimentación y
alimentación del servomotor
Servodrive SmartStep 2 (modelo de 750 W)
Salidas de monitorización analógica
Terminales de alimentación del circuito principal
Terminales de alimentación del circuito de control
UNTINo.
C
N
1
C
N
2
C
N
B
C
N
A
AC SERVO DRIVER
DATA
Área de visualización
Área de configuración
RS-485
Conector de comunicaciones
(CN3A)
RS-232
Conector de comunicaciones/
Conector del operador digital
(CN3B)
Conector de E/S de control
(CN1)
Terminales de conexión de la
resistencia de regeneración externa
Terminales de conexión del servomotor
Conector del encoder (CN2)
Terminales de puesta a tierra de protección
8 Servosistemas de c.a.

Modelo de servomotor
R88M-GP10030H-BOS2
Servomotor SmartStep2
Tipo de motor
En blanco: tipo cilíndrico
P: tipo plano
Capacidad
050
50 W
100 W
100
200
200 W
400 W
400
750 W
750
Velocidad nominal (rpm)
3.000
30
Especificaciones del eje
En blanco
Especificaciones de junta de aceite
En blanco
Especificaciones del freno
En blanco
Eje recto, sin chaveta
Recto, chaveta, roscado
S2
Sin junta de aceite
Junta de aceite
O
Sin freno
Freno
B
Especificaciones de tensión y encoder
H: 230 V con encoder incremental
Combinación de servomotor / servodrive
Servomotor
Familia Tensión Velocidad Par nominal Capacidad Modelo
Cilíndrico De 50 a 750 W 230 V 3.000 min
Plano De 100 a 400 W 0,32 Nm 100 W R88M-GP10030H-@S2
-1
0,16 Nm 50 W R88M-G05030H-@S2
0,32 Nm 100 W R88M-G10030H-@S2
0,64 Nm 200 W R88M-G20030H-@S2
1,3 Nm 400 W R88M-G40030H-@S2
2,4 Nm 750 W R88M-G75030H-@S2
0,64 Nm 200 W R88M-GP20030H-@S2
1,3 Nm 400 W R88M-GP40030H-@S2
Servosistema SmartStep 2 9

Especificaciones del servomotor
Especificaciones generales
Elemento Especificación
Temperatura ambiente de funcionamiento De 0 a 40 °C
Humedad ambiente de funcionamiento Máx. 85% (sin condensación)
Temperatura ambiente de almacenamiento De −20 a 65 °C
Humedad ambiente de almacenamiento Máx. 85% (sin condensación)
Atmósfera de almacenamiento/funcionamiento Sin gases corrosivos
Resistencia a vibraciones Máx. 49 m/s
Resistencia a golpes Aceleración máx. de 98 m/s
Resistencia de aislamiento 20 MΩ mín. a 500 Vc.c. entre los terminales de alimentación y el terminal FG
Rigidez dieléctrica 1.500 Vc.a. (50 o 60 Hz) durante 1 minuto entre los terminales de alimentación y el terminal FG
Posición de funcionamiento Cualquier dirección
Grado de aislamiento Tipo B
Estructura Totalmente cerrado y autorrefrigerado
Grado de protección IP65 (excluyendo la parte del eje)
Grado de vibración V-15
Método de montaje Montaje de brida
Estándares internacionales Homologación obtenida para UL, cUL y EN (directiva CEM y directiva de baja tensión)
Especificaciones de funcionamiento
Servomotores cilíndricos
Elemento Unidad R88M-G05030H R88M-G10030H R88M-G20030H R88M-G40030H R88M-G75030H
Potencia nominal W 50 100 200 400 750
Par nominal N·m 0,16 0,32 0,64 1,3 2,4
Velocidad nominal rpm 3.000
Velocidad máxima instantánea rpm 5.000 4500
Par máximo instantáneo N·m 0,48 0,95 1,78 3,60 7,05
Corriente nominal A (rms) 1,1 1,6 2,6 4
Corriente máxima instantánea A (rms) 3,4 4,9 7,9 12,1
Inercia del rotor
Relación de potencia kW/s 10,4 20,1 30,3 62,5 66
Carga radial admisible N 68 245 392
Carga axial admisible N 58 98 147
Peso Sin freno kg 0,3 0,5 0,8 1,2 2,3
Con freno kg 0,5 0,7 1,3 1,7 3,1
Resolución del encoder --- Fase A y B: 2.500 pulsos/rotación; Fase Z: 1 pulso/rotación
Dimensiones de la protección contra radiación --- 100 × 80 × t10 (Al) 130 × 120 × t12 (Al) Especifica-
ciones
del freno
Inercia del freno
Tensión de excitación V 24 Vc.c. ±10%
Consumo eléctrico (a 20 °C) W 7 9 10
Consumo de corriente (a 20 °C) A 0,30 0,36 0,42
Par de fricción estática N·m 0,29 mín. 1,27 mín. 2,45 mín.
Tiempo de atracción ms 35 máx. 50 máx. 70 máx.
Tiempo de desconexión ms 20 máx. 15 máx. 20 máx.
Holgura - ±1° máx.
Valor nominal - Continuo
Vida útil del freno - 10.000.000 de operaciones mínimo
Servodriver aplicable R7D-BP01H R7D-BP02HH R7D-BP04H R88D-GP08H
kg·m
kg·m
2
en cada una de las direcciones X, Y y Z
2
2,5 × 10
2
2,0 × 10
2
3 veces en cada una de las direcciones X, Y y Z
-6
-7
5,1 × 10
2,0 × 10
-6
-7
1,4 × 10
1,8 × 10
-5
-6
2,6× 10
7,5 × 10
-5
-6
8,7× 10
25 × 10
-5
-6
Características de par/velocidad
R88M-G05030H
(N·m)
0,5
0,4
Uso repetitivo
0,3
0,2
0,1
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
0,160,16
0,48
0,09
(rpm)
R88M-G10030H
(N·m)
1,0
0,8
Uso repetitivo
0,6
0,4
0,2
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
R88M-G20030H
(N·m)
2,0
0,95
0,320,32
0,19
(rpm)
1,82
1,5
Uso repetitivo
1,0
0,64
0,5
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
1,82/4300
0,64
1,65
0,36
(rpm)
R88M-G40030H
(N·m)
4,0
3,60
3,0
Uso repetitivo
2,0
1,0
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
R88M-G75030H
(N·m)
3,60
(3.200)
1,31,3
2,1
0,88
(rpm)
8,0
7,05
Uso repetitivo
4,0
2,4 2,4
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
7,05 (3600)
4,0
1,0
(rpm)
10 Servosistemas de c.a.

Servomotores planos
Elemento Unidad R88M-GP10030H R88M-GP20030H R88M-GP40030H
Potencia nominal W 100 200 400
Par nominal N·m 0,32 0,64 1,3
Velocidad nominal rpm 3.000
Velocidad máxima instantánea rpm 5.000
Par máximo instantáneo N·m 0,90 1,82 3,60
Corriente nominal A (rms) 1,0 1,6 4,4
Corriente máxima instantánea A (rms) 4,3 6,8 18,6
Inercia del rotor
kg·m
2
9,0 × 10
-6
3,4 × 10
-5
6,4 × 10
Relación de potencia kW/s 11,4 11,8 25,5
Carga radial admisible N 68 245
Carga axial admisible N 58 98
Peso Sin freno kg 0,7 1,3 1,8
Con freno kg 0,9 2,0 2,5
Resolución del encoder --- Fase A y B: 2.500 pulsos/rotación; Fase Z: 1 pulso/rotación
Dimensiones de la protección contra radiación --- 130 × 120 × t10 (Al) 170 × 160 × t12 (Al)
Especifica-
ciones
del freno
Inercia del freno
Tensión de excitación V 24 Vc.c. ±10%
Consumo eléctrico (a 20 °C) W 7 10
kg·m
2
3,0 × 10
-6
9,0 × 10
-6
9,0 × 10
Consumo de corriente (a 20 °C) A 0,29 0,41
Par de fricción estática N·m 0,29 mín. 1,27 mín.
Tiempo de atracción ms 50 máx. 60 máx.
Tiempo de desconexión ms 15 máx.
Holgura - ±1° máx.
Valor nominal - Continuo
Vida útil del freno - 10.000.000 de operaciones mínimo
Servodrive aplicable (R7D-) BP01H BP02HH BP04H
Características de par/velocidad
R88M-GP10030H
(N·m)
1,0
0,90
0,8
0,6
0,4
0,2
Uso repetitivo
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
0,90
0,320,32
0,16
(rpm)
R88M-GP20030H
(N·m)
2,0
1,82
1,5
1,0
0,5
Uso repetitivo
0,64
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
0,64
1,82 (4.700)
1,75
0,28
(rpm)
R88M-GP40030H
(N·m)
4,0
3,60
3,0
2,0
1,0
Uso repetitivo
Uso continuado
0
1.000 2.000 3.000 4.000 5.000
3,60
(3.600)
2,0
1,31,3
0,64
(rpm)
-5
-6
Servosistema SmartStep 2 11

Dimensiones
R7D-BP01H R7D-BP02HH/ 04H
R88D-GP08H
R7A-FIB104-RE R88A-FIK107-RE
Servodrives
35
15
20
5
5
5,2 diám.
PWR
ALM
C
N
3
C
N
1
130
120
140
C
N
2
C
N
B
C
N
A
5,1
5,2
70
105
65
AC SERVc.a.O DRIVc.a.ER
UNITNo.
DATA
IMSPG
Dimensiones de
taladro de montaje
Dos, M4
140
130±0,5 55
15 20
17070
140
40
15
20
5
5
5,2 diám.
ALMPWR
C
N
3
C
N
1
130
120
C
N
2
C
N
B
C
N
A
5,1
5,2
70
4
105
Dos, M4
Dimensiones de
taladro de montaje
Dos, M4
55
140
130±0,5
15 25
150
150
7,5
Filtros
44±1
terminales
de entrada
terminales
de entrada
40±1
montajes
de drive
2 x M4
165±1
179±1
190
180
cables
de salida
1 x 130 mm
2 x 170 mm
M4
entrada de
alimentación de
conector a servodrive
cables
de salida
20
±0,5
50
65
64
40
montajes
de drive
cables
de salida
±0,5
140
35
Modelo de filtro Corriente nominal Corriente de fuga Tensión nominal
R7A-FIB104-RE 4 A 3,5 mA Monofásica de 250 Vc.a.
R88A-FIK107-RE 6,6 A 3,5 mA Monofásica de 250 Vc.a.
12 Servosistemas de c.a.

Servomotores
Tipo cilíndrico, 3.000 rpm (230 V, 50 - 100W)
Dimensiones (mm) Sin freno Con freno LN Peso aprox. en kg
Modelo LL LL Sin freno Con freno
R88M-G05030H-@S2 72 102 26,5 0,3 0,5
R88M-G10030H-@S2 92 122 46,5 0,5 0,7
Conector
de encoder
230
Conector de freno
Conector del motor
LL 25
200
LN
36
8 diám., altura: 6
40 × 40
30 diám., altura: 7
32
Dos, 4,3 diám.
(Dimensiones del extremo del eje
con chaveta y roscado)
12,5
46 diám.
3
3, altura: 9
1,8
M3
(profundidad: 6)
Tipo cilíndrico, 3.000 rpm (230 V, de 200 a 750 W)
Dimensiones (mm) Sin freno Con freno LR KL1 Superficie de brida Extremo del eje Peso aprox. en kg
Modelo LL LL D1 D2 C G Z S QK b h M t1 L Sin freno Con freno
R88M-G20030H-@S2 79,5 116 30 43 70 50 60 6,5 4,5 11 18 4h9 4 M4 2,5 8 0,8 1,3
R88M-G40030H-@S2 99 135,5 14 22,5 5h9 5 M5 3 10 1,2 1,7
R88M-G75030H-@S2 112,2 149,2 35 53 90 70 80 8 6 19 22 6h9 6 M5 3,5 10 2,3 3,1
Conector de encoder
220
Conector de freno
LL LR
Conector de servomotor
200
3G
(Eje recto con chaveta)
Cuatro,
Z diám.
C × C
QK
h
b
t1
M (profundidad: L)
KL1
S diám., altura: 6
D2 diám., altura: 7
D1 diám.
Tipo plano, 3000 rpm (230 V, 100 W - 400 W)
Dimensiones (mm) Sin freno Con freno LR KL1 Superficie de brida Extremo del eje Peso aprox. en kg
Modelo LL LL D1 D2 C F G Z S QK b h t1 Cubier-
ta x
profun-
didad
R88M-GP10030H-@S2 60,5 84,5 25 43 70 50 60 3 7 4,5 8 12,5 3h9 3 1,8 M3 x 6 0,7 0,9
R88M-GP20030H-@S2 67,5 100 30 53 90 70 80 5 8 5,5 11 18 4h9 4 2,5 M4 x 8 1,3 2
R88M-GP40030H-@S2 82,5 115 14 22,5 5h9 5 3,0 M5 x 10 1,8 2,5
Conector
de encoder
220
(7)
Conector de servomotor
LL LR
F
G
(7)
200
Conector de break
Cuatro,
Z-diám.
S diám., altura: 6
KL1
D2 diám., altura: 7
C x C
D1 diám.
(Eje recto con chaveta)
QK
h
b
t1
Métrica x profundidad
Sin freno Con freno
Servosistema SmartStep 2 13

Instalación
Monofásico 230 Vc.a.
L1
L2
L3
N
Conmutador
térmico
Contactor
Filtro
de ruido
Resistencia de
regeneración *1
Pulso
inverso
Pulso
directo
De 12 a 24 Vc.c.
Entrada de
comando RUN
Entrada de reset
de alarma
Entrada de reset
del contador
de error
Entrada de
selección de
ganancia
Entrada de
selector de relación
de reductor
electrónico
Entrada de
prohibición de
marcha inversa
Entrada de
prohibición de
marcha directa
+CW
−CW
+CCW
−CCW
24VIN
RUN
RESET 3
ECRST 4
GSEL 5
GESEL 6
NOT 7
POT 8
L1
L3
22
23
24
25
1
2
P
B1
CNA
4,7 kΩ
220 Ω
220 Ω
4,7 kΩ
4,7 kΩ
4,7 kΩ
4,7 kΩ
4,7 kΩ
4,7 kΩ
4,7 kΩ
Servomotor
CNB
U
V
W
Servodriver
SMARTSTEP 2
(100-400 W)
CN2
CN1
9
/ALM
10
INP
BKIR
11
.
WARN
12
13
OGND
21
Z
14
GND
15
+A
16
−A
18
+B
17
−B
19
+Z
20
−Z
FGCarcasa, 26
Tierra de bastidor
Encoder óptico
Salida de alarma
Salida de
posicionado
completado
Bloqueo del freno
Salida de advertencia
Salida de fase Z
(salida de colector abierto)
Salida de
fase A del encoder
Salida de Line-driver
Salida de
fase B del encoder
Conforme a
EIA RS-422A
(Resistencia de carga:
220 Ω mín.)
Salida de
fase Z del encoder
Tensión máxima
de funcionamiento: 30 Vc.c
Corriente máxima
de salida: 50 mA CC
*1. Se puede conectar una resistencia de regeneración externa. Conecte esta resistencia si la energía regenerativa supera a la capacidad de absorción de regene-
ración del servodrive.
Nota: 1.El freno dinámico funciona cuando la fuente de alimentación del circuito principal o la fuente de alimentación del circuito de control está
en OFF.
Nota: 2.Cuando la fuente de alimentación del circuito principal esté en OFF, desactive al mismo tiempo la señal de entrada del comando RUN
(RUN).
14 Servosistemas de c.a.

Conmutador
Referencia
de posición
L1
L2
L3
N
térmico
Contactor
500 kpps máx.
2 Mpps máx.
Filtro
de ruido
Monofásico
De 200 a 230 Vc.a.
Pulso inverso
Pulso directo
Pulso inverso
Pulso directo
De 12 a 24 Vc.c.
Servo ON
Cambio de
de control
Selección de
ganancia
Selector de
relación de reductor
electrónico
Reset del contador
de error
Reset de alarma
Cambio de modo
de control
Prohibición de pulso
Marcha inversa
prohibida
Marcha directa
prohibida
+24 VCW
+CW
-CW
+24 VCCW
+CCW
-CCW
+CWLD
-CWLD
+CCWLD
-CCWLD
DFSEL
GSEL
1
3
4
2
5
6
44
45
46
47
7+24 VIN
29RUN
26
27
28GESEL
30ECRST
31RESET
32TVSEL
33IPG
8NOT
9POT
L1
L3
L1C
L2C
2.2 kΩ
220 Ω
2.2 kΩ
220 Ω
3 kΩ
110 Ω
3k Ω
3k Ω
110 Ω
3 kΩ
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
4,7 k
CNA
Servodrive
SMARTSTEP 2
(750 W)
43 kΩ
43 kΩ
43 kΩ
43 kΩ
Ω
Ω
Ω
Ω
Ω
Ω
Ω
Ω
Ω
Ω
*1
B1
B3
B2
CNB
U
V
W
Servomotor
Encoder óptico
CN2
CN1
BKIR
1 µF
100 Ω
4,7 kΩ
11
10
35
34
36
38
12
40
41
19
25 ZCOM
24
20
13
42
43
50
Salida de señal
de liberación de freno
BKIRCOM
READY
Salida de servo preparado
READYCOM
/ALM37
Salida de alarma
ALMCOM
INP39
Salida de posicionado completado
INPCOM
OUTM1
Entrada de propósito general 1
OUTM2
Salida de propósito general 2
COM-
Z
Salida de fase Z
(salida del colector abierto)
+A21
Salida de la fase A del encoder
-A22
+B49
Salida de la fase B del encoder
-B48
+Z23
Salida de fase Z del encoder
-Z
SEN
BAT
Sensor ON
SENGND
BATGND
Batería de reserva
(3,6 V)
Fuente de alimentación externa de 12 a 24 Vc.c.
Tensión
máxima de servicio: 30 Vc.c.
Corriente
máxima de salida 50 mAc.c.
*3
*3
Salida de line driver correspondiente
con la norma EIA RS-422A de comunicaciones
(resistencia de carga 120 Ω mín.)
*2
Carcasa
*1 B3-B2 no están cortocircuitados. Si la resistencia regenerativa interna es insuficiente, elimine el cable entre B2 y B3 y conecte una resistencia
regenerativa externa entre B1 y B2.
*2 Utilizar sólo en caso de encoder absoluto. Si se conecta una batería de reserva, no será necesario un cable de encoder con una batería.
*3 Los valores predeterminados son ZSP (detección de velocidad cero) para OUTM1 y T-LIMIT (con límite de par) para OUTM2.
Servosistema SmartStep 2 15

Tabla de selección
B
C
D
Unidad de
control de posición
K
K
L
N
M
O
Servodrive SmartStep 2
(modelos de 100 a 400 W)
Servomotor
SmartStep 2
(Consulte el capítulo
Servomotores SmartStep)
Bloque de terminales
Señales de propósito
general
(con salida de pulsos)
Unidad de control
de posición
Software de ordenador
personal: CX-One
A
E
F
G
H
I
J
Cable de encoder
Cable de potencia
Cable de freno
Filtro
Unidad de control de posición
-Tipo de alta velocidad-
P
Configuración de servodrive SmartStep 2 (de 100 a 400 W)
Nota: Los símbolos ABCDE... muestran la secuencia recomendada para seleccionar los componentes del servosistema SmartStep 2
Servomotor
Servomotores cilíndricos (3.000 rpm)
Símbolo Especificaciones Modelo de servomotor Servodrivers compatibles E
A
Diseño Par nominal Capacidad SmartStep 2
Eje recto con
chaveta y roscado
Sin freno 0,16 Nm 50 W R88M-G05030H-S2 R7D-BP01H
0,32 Nm 100 W R88M-G10030H-S2
0,64 Nm 200 W R88M-G20030H-S2 R7D-BP02HH
1,3 Nm 400 W R88M-G40030H-S2 R7D-BP04H
Con freno 0,16 Nm 50 W R88M-G05030H-BS2 R7D-BP01H
0,32 Nm 100 W R88M-G10030H-BS2
0,64 Nm 200 W R88M-G20030H-BS2 R7D-BP02HH
1,3 Nm 400 W R88M-G40030H-BS2 R7D-BP04H
Servomotores planos (3.000 rpm)
Símbolo Especificaciones Modelo de servomotor Servodrivers compatibles E
A
Diseño Par nominal Capacidad SmartStep 2
Eje recto con
chaveta y roscado
Sin freno 0,32 Nm 100 W R88M-GP10030H-S2 R7D-BP01H
0,64 Nm 200 W R88M-GP20030H-S2 R7D-BP02HH
1,3 Nm 400 W R88M-GP40030H-S2 R7D-BP04H
Con freno 0,32 Nm 100 W R88M-GP10030H-BS2 R7D-BP01H
0,64 Nm 200 W R88M-GP20030H-BS2 R7D-BP02HH
1,3 Nm 400 W R88M-GP40030H-BS2 R7D-BP04H
Servodrives
Símbolo Especificaciones Modelo de drive SmartStep 2 Servomotores compatibles A
E
Cables de alimentación (para CNA)
Símbolo Especificaciones Modelo Aspecto
E
200 Vc.a. 100 W R7D-BP01H R88M-G05030H-@ -
200 W R7D-BP02HH R88M-G20030H-@ R88M-GP20030H-@
400 W R7D-BP04H R88M-G40030H-@ R88M-GP40030H-@
Cable de entrada de alimentación para alimentación monofásica
(conectores incorporados)
R7A-CLB002S2
16 Servosistemas de c.a.
Tipo cilíndrico Tipo plano
R88M-G10030H-@ R88M-GP10030H-@

Cables de servomotor
Cables de potencia (para CNB)
Símbolo Especificaciones Modelo Aspecto
B
Cables de potencia para servomotores SmartStep 2 1,5 m R7A-CAB001-5SR-E
3 m R7A-CAB003SR-E
5 m R7A-CAB005SR-E
10 m R7A-CAB010SR-E
15 m R7A-CAB015SR-E
20 m R7A-CAB020SR-E
Cables de freno
Símbolo Especificaciones Modelo Aspecto
C
Cables de freno para servomotores SmartStep 2 1,5 m R88A-CAGA001-5BR-E
3 m R88A-CAGA003BR-E
5 m R88A-CAGA005BR-E
10 m R88A-CAGA010BR-E
15 m R88A-CAGA015BR-E
20 m R88A-CAGA020BR-E
Cables de encoder (para CN2)
Símbolo Especificaciones Modelo Aspecto
D
Cables de encoder para servomotores SmartStep 2 1,5 m R88A-CRGB001-5CR-E
3 m R88A-CRGB003CR-E
5 m R88A-CRGB005CR-E
10 m R88A-CRGB010CR-E
15 m R88A-CRGB015CR-E
20 m R88A-CRGB020CR-E
Nota: B, D Cable flexible y apantallado
C Cable flexible
Cables de control (para CN1)
Símbolo Descripción Conexión Modelo
F
G
H
I
J
Cable de control
(salida de line driver para 1 eje)
Cable de control
(salida de colector abierto para 1 eje)
Cable de control
(salida de line driver para 2 ejes)
Cable de control
(salida de colector abierto para 2 ejes)
Cable del bloque de terminales para señales externas
(para común de entradas, entradas de marcha directa/inversa prohibidas,
entrada de parada de emergencia, entrada de proximidad de origen y
entrada de interrupción)
Bloque de terminales para señales externas (con tornillo M3 y para
terminales de pines)
Bloque de terminales para señales ext. (con tornillo M3.5 y para
terminales tipo horquilla/redondos)
Bloque de terminales para señales ext. (con tornillo M3 y para terminales
tipo horquilla/redondos )
Cable desde bloque de terminales hasta servodrive CS1W-NC1@3, CJ1W-NC1@3,
Bloque de terminales CS1W-NC1@3, CJ1W-NC1@3 o
Unidad de control de posición (tipo de alta
velocidad)
CJ1W-NC234
CJ1W-NC434
Unidad de control de posición (tipo de alta
velocidad)
CJ1W-NC214
CJ1W-NC414
Unidad de control de posición (tipo de alta
velocidad)
CJ1W-NC234
CJ1W-NC434
Unidad de control de posición (tipo de alta
velocidad)
CJ1W-NC214
CJ1W-NC414
Unidades de control de posición (tipo de alta
velocidad)
CJ1W-NC234
CJ1W-NC434
CJ1W-NC214
CJ1W-NC414
C200HW-NC113, CS1W-NC2@3/4@3,
CJ1W-NC2@3/4@3, C200HW-NC213/413,
CQM1H-PLB21 or CQM1-CPU43-V1
CJ1M-CPU21/22/23 1 m XW2Z-100J-B32
unidad de control de posición C200HWNC113
Unidad de control de posición CS1WNC2@3/4@3, CJ1W-NC2@3/4@3 o
C200HW-NC213/413
CQM1H-PLB21 o CQM1-CPU43-V1 - XW2B-20J6-3B (1 eje)
CJ1M-CPU21/22/23 - XW2B-20J6-8A (1 eje)
1 m XW2Z-100J-G12
5 m XW2Z-500J-G12
10 m XW2Z-10MJ-G12
1 m XW2Z-100J-G16
3 m XW2Z-300J-G16
1 m XW2Z-100J-G4
5 m XW2Z-500J-G4
10 m XW2Z-10MJ-G4
1 m XW2Z-100J-G8
3 m XW2Z-300J-G8
0,5 m XW2Z-C50X
1 m XW2Z-100X
2 m XW2Z-200X
3 m XW2Z-300X
5 m XW2Z-500X
10 m XW2Z-010X
-XW2B-20G4
-XW2B-20G5
- XW2D-20G6
1 m XW2Z-100J-B29
2 m XW2Z-200J-B29
2 m XW2Z-200J-B32
- XW2B-20J6-1B (1 eje)
- XW2B-40J6-2B (2 ejes)
XW2B-40J6-9A (2 ejes)
Servosistema SmartStep 2 17

Símbolo Descripción Conexión Modelo
K
L
M
N
Cable de conexión de unidad de control de posición CJ1W-NC133 0,5 m XW2Z-050J-A18
CJ1W-NC233/433 0,5 m XW2Z-050J-A19
CS1W-NC133 0,5 m XW2Z-050J-A10
CS1W-NC233/433 0,5 m XW2Z-050J-A11
CJ1W-NC113 0,5 m XW2Z-050J-A14
CJ1W-NC213/413 0,5 m XW2Z-050J-A15
CS1W-NC113
C200HW-NC113
CS1W-NC213/413
C200HW-NC213/413
CJ1M-CPU21/22/23 0,5 m XW2Z-050J-A33
CQM1H-PLB21
CQM1-CPU43-V1
Cable de propósito general Para controladores de propósito general 1 m R7A-CPB001S
Cable del bloque de terminales Para controladores de propósito general 1 m XW2Z-100J-B28
Bloque de terminales (con tornillo M3 y para terminales de pines) - XW2B-34G4
Bloque de terminales (con tornillo M3.5 y para terminales tipo horquilla/
redondos)
Bloque de terminales (con tornillo M3 y para terminales tipo horquilla/
redondos)
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
0,5 m XW2Z-050J-A6
1 m XW2Z-100J-A6
0,5 m XW2Z-050J-A7
1 m XW2Z-100J-A7
1 m XW2Z-100J-A33
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
2 m R7A-CPB002S
2 m XW2Z-200J-B28
- XW2B-34G5
-XW2D-34G6
Cable para CN3
Símbolo Nombre Longitud Modelo
O
Cable de monitor de ordenador personal 2 m R88A-CCG002P2
Filtros
Símbolo Servodrives aplicables Corriente nominal Tensión nominal Modelo de filtro
P
R7D-BP01H/ 02HH/ 04H 4 A 1 pH, 230 V R7A-FIB104-RE
Conectores
Especificaciones Modelo
Conector de circuito principal (CNA) R7A-CNB01P
Conector de servomotor (CNB) R7A-CNB01A
Conector de E/S de control (CN1) R88A-CNW01C
Conector de entrada del encoder (CN2) R88A-CNW01R
Conector de servomotor para cable del encoder R88A-CNG02R
Conector de servomotor para cable de potencia del servomotor R88A-CNG01A
Conector del cable de freno R88A-CNG01B
Resistencia de regeneración externa
Especificación Modelo
80 W, 50 Ω R88A-RR08050S
80 W, 100 Ω R88A-RR080100S
220 W, 47 Ω R88A-RR22047S
Cable de resistencia regenerativa externa
Especificaciones Modelo
Cable de resistencia regenerativa externa, 2 metros R7A-CLB002RG
Operador digital y software informático
Especificaciones Modelo
Unidad de copia de parámetros (con cable) R88A-PR02G
Herramienta de software de configuración y monitorización de servodrives y variadores. (CX-Drive versión 1.8 o posterior) CX-Drive
18 Servosistemas de c.a.

Configuración de servodrive SmartStep 2 (750 W)
Unidad de
control de posición
Cable de
potencia
Servodrive SmartStep 2
(modelo de 750 W)
Servomotor
SmartStep 2 (750 W)
(Consulte el capítulo
Servomotores SmartStep)
Bloque de terminales
Señales de propósito general
(con salida de pulsos)
Unidad de
control de posición
Software de ordenador
personal: CX-One
Cable de freno
A
B
D
I
L
K
M
F
J
N
Filtro
Resistencia regenerativa
exter na
Unidad de control de posición
-Tipo de alta velocidad-
O
Bloque de terminales
para señales externas
G
H
P
Q
Cable de
encoder
C
E
Nota: Los símbolos ABCDE... muestran la secuencia recomendada para seleccionar los componentes del servosistema SmartStep 2.
Servodrives
Símbolo Especificaciones Modelo de servodrive A Servomotores rotativos compatibles
B
Monofásico 200 Vc.a. 750 W R88D-GP08H R88M-G75030H-@
Tipo cilíndrico
Cables de encoder
Símbolo Especificaciones Modelo Aspecto
C
Cables de potencia
Símbolo Especificaciones Modelo Aspecto
D
Cable de freno
Símbolo Especificaciones Modelo Aspecto
E
Cables de control (para CN1)
Símbolo Descripción Conexión Modelo
F
Servosistema SmartStep 2 19
Cable de encoder
R88M-G75030H-@
Para servomotores de 750 W sin freno
R88M-G75030H-S2
Para servomotores con freno, se necesita un cable aparte
(R88A-CAGA@BR-E)
Sólo cable de freno.
Para servomotores R88M-G75030H-BS2.
Cable de control
(salida de line driver para 1 eje)
Cable de control
(salida de colector abierto para 1 eje)
Cable de control
(salida de line driver para 2 ejes)
Cable de control
(salida de colector abierto para 2 ejes)
1,5 m R88A-CRGB001-5CR-E
3 m R88A-CRGB003CR-E
5 m R88A-CRGB005CR-E
10 m R88A-CRGB010CR-E
15 m R88A-CRGB015CR-E
20 m R88A-CRGB020CR-E
1,5 m R88A-CAGA001-5SR-E
3 m R88A-CAGA003SR-E
5 m R88A-CAGA005SR-E
10 m R88A-CAGA010SR-E
15 m R88A-CAGA015SR-E
20 m R88A-CAGA020SR-E
1,5 m R88A-CAGA001-5BR-E
3 m R88A-CAGA003BR-E
5 m R88A-CAGA005BR-E
10 m R88A-CAGA010BR-E
15 m R88A-CAGA015BR-E
20 m R88A-CAGA020BR-E
Unidades de control de posición (tipo de alta velocidad)
CJ1W-NC234
CJ1W-NC434
Unidades de control de posición (tipo de alta velocidad)
CJ1W-NC214
CJ1W-NC414
Unidades de control de posición (tipo de alta velocidad)
CJ1W-NC234
CJ1W-NC434
Unidades de control de posición (tipo de alta velocidad)
CJ1W-NC214
CJ1W-NC414
1 m XW2Z-100J-G9
5 m XW2Z-500J-G9
10 m XW2Z-10MJ-G9
1 m XW2Z-100J-G13
3 m XW2Z-300J-G13
1 m XW2Z-100J-G1
5 m XW2Z-500J-G1
10 m XW2Z-10MJ-G1
1 m XW2Z-100J-G5
3 m XW2Z-300J-G5

Símbolo Descripción Conexión Modelo
G
H
I
J
K
L
M
N
Cable del bloque de terminales para señales externas
(para común de entradas, entradas de marcha directa/
inversa prohibidas, entrada de parada de emergencia,
entrada de proximidad de origen y entrada de
interrupción)
Bloque de terminales para señales externas (tornillo M3,
terminales de pines)
Bloque de terminales para señales ext.
terminales tipo horquilla/redondos)
Bloque de terminales para señales ext.
terminales tipo horquilla/redondos)
Cable desde bloque de terminales hasta servodrive CS1W-NC1@3, CJ1W-NC1@3, C200HW-NC113/213/413,
Bloque de terminales CS1W-NC1@3, CJ1W-NC1@3 o C200HW-NC113
Cable de conexión de unidad de control de posición CQM1H-PLB21 0,5 m XW2Z-050J-A3
Cable de propósito general Para controladores de propósito general 1 m R88A-CPG001S
Cable del bloque de terminales Para controladores de propósito general 1 m XW2Z-100J-B24
Bloque de terminales (tornillo M3 y para terminales de
pines)
Bloque de terminales (tornillo M3.5 y para terminales tipo
horquilla/redondos)
Bloque de terminales (tornillo M3 y para terminales tipo
horquilla/redondos)
(tornillo M3.5,
(tornillo M3,
Unidades de control de posición (tipo de alta velocidad)
CJ1W-NC234
CJ1W-NC434
CJ1W-NC214
CJ1W-NC414
CS1W-NC2@3/4@3, CJ1W-NC2@3/4@3 o
CQM1H-PLB21
CJ1M-CPU21/22/23 1 m XW2Z-100J-B31
unidad de control de posición
Unidad de control CS1W-NC2@3/4@3, CJ1W-NC2@3/
4@3 o C200HW-NC213/413
CQM1H-PLB21 - XW2B-20J6-3B (1 eje)
CJ1M-CPU21/22/23 - XW2B-20J6-8A (1 eje)
CS1W-NC113 o C200HW-NC113 0,5 m XW2Z-050J-A6
CS1W-NC213/413 o C200HW-NC213/413 0,5 m XW2Z-050J-A7
CS1W-NC133 0,5 m XW2Z-050J-A10
CS1W-NC233/433 0,5 m XW2Z-050J-A11
CJ1W-NC113 0,5 m XW2Z-050J-A14
CJ1W-NC213/413 0,5 m XW2Z-050J-A15
CJ1W-NC133 0,5 m XW2Z-050J-A18
CJ1W-NC233/433 0,5 m XW2Z-050J-A19
CJ1M-CPU21/22/23 0,5 m XW2Z-050J-A33
0,5 m XW2Z-C50X
1 m XW2Z-100X
2 m XW2Z-200X
3 m XW2Z-300X
5 m XW2Z-500X
10 m XW2Z-010X
-XW2B-20G4
-XW2B-20G5
- XW2D-20G6
1 m XW2Z-100J-B25
2 m XW2Z-200J-B25
2 m XW2Z-200J-B31
- XW2B-20J6-1B (1 eje)
- XW2B-40J6-2B (2 ejes)
XW2B-40J6-9A (2 ejes)
1 m XW2Z-100J-A3
1 m XW2Z-100J-A6
1 m XW2Z-100J-A7
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A33
2 m R88A-CPG002S
2 m XW2Z-200J-B24
-XW2B-50G4
-XW2B-50G5
- XW2D-50G6
Cable de ordenador (para CN3)
Símbolo Nombre Modelo
O
Cable de ordenador
RS232
2 m R88A-CCG002P2
Filtro
Símbolo Servodrive
P
aplicable
R88D-GP08H R88A-FIK107-RE 6,6 A 3,5 mA Mono-
Modelo de filtro Corri-
ente
nominal
Corriente
de fuga
Resistencia regenerativa externa
Símbolo Modelo de unidad de resistencia
Q
regenerativa
R88A-RR08050S 50 Ω, 80 W
R88A-RR080100S 100 Ω, 80 W
R88A-RR22047S 47 Ω, 220W
R88A-RR50020S 20 Ω, 500 W
Especificaciones
Tensión
nominal
fásico
250 Vc.a.
Conectores
Especificaciones Modelo
Kit de conectores de E/S de 50 pines (para CN1) R88A-CNU11C
Conector de cable de alimentación (lado del motor) R88A-CNG01A
Conector de encoder (lado del servodrive CN2) R88A-CNW01R
Conector de cable del encoder incremental (lado del
motor)
R88A-CNG02R
Software
Especificaciones Modelo
Herramienta de software de configuración y monitorización
de servodrives y variadores (CX-drive versión 1.91 o
superior).
CX-Drive
20 Servosistemas de c.a.

OMRON EUROPE B.V.
Wegalaan 67-69, NL-2132 JD, Hoofddorp, Países Bajos. Tel: +31 (0) 23 568 13 00 Fax: +31 (0) 23 568 13 88 www.industrial.omron.eu
OMRON ELECTRONICS IBERIA S.A.
ESPAÑA
c/Arturo Soria 95, E-28027 Madrid
Tel: +34 913 777 900
Fax: +34 913 777 956
omron@omron.es
www.industrial.omron.es
Madrid Tel: +34 913 777 913
Barcelona Tel: +34 932 140 600
Sevilla Tel: +34 954 933 250
Valencia Tel: +34 963 530 000
Vitoria Tel: +34 945 296 000
PORTUGAL
Torre Fernão Magalhães
Avenida D. João II, Lote 1.17.02, 6˚ Piso
1990 - 084 - Lisboa
Tel: +351 21 942 94 00
Fax: +351 21 941 78 99
info.pt@eu.omron.com
www.industrial.omron.pt
Lisboa Tel: +351 21 942 94 00
Oporto Tel: +351 22 715 59 00
Alemania
Tel: +49 (0) 2173 680 00
www.industrial.omron.de
Austria
Tel: +43 (0) 2236 377 800
www.industrial.omron.at
Bélgica
Tel: +32 (0) 2 466 24 80
www.industrial.omron.be
Dinamarca
Tel: +45 43 44 00 11
www.industrial.omron.dk
Finlandia
Tel: +358 (0) 207 464 200
www.industrial.omron.fi
Francia
Tel: +33 (0) 1 56 63 70 00
www.industrial.omron.fr
Hungría
Tel: +36 1 399 30 50
www.industrial.omron.hu
Italia
Tel: +39 02 326 81
www.industrial.omron.it
Noruega
Tel: +47 (0) 22 65 75 00
www.industrial.omron.no
Países Bajos
Tel: +31 (0) 23 568 11 00
www.industrial.omron.nl
Polonia
Tel: +48 (0) 22 645 78 60
www.industrial.omron.pl
Reino Unido
Tel: +44 (0) 870 752 08 61
www.industrial.omron.co.uk
República Checa
Tel: +420 234 602 602
www.industrial.omron.cz
Rusia
Tel: +7 495 648 94 50
www.industrial.omron.ru
Sudáfrica
Tel: +27 (0)11 579 2600
www.industrial.omron.co.za
Suecia
Tel: +46 (0) 8 632 35 00
www.industrial.omron.se
Suiza
Tel: +41 (0) 41 748 13 13
www.industrial.omron.ch
Turquía
Tel: +90 216 474 00 40
www.industrial.omron.com.tr
Más representantes de Omron
www.industrial.omron.eu
KPP_SmartStep2_ES01A
Sistemas de automatización
• Autómatas programables (PLC) • Interfaces hombre-máquina (HMI) • E/S remotas
• PC industriales • Software
Control de velocidad y posición
• Controladores de movimiento • Servosistemas • Convertidores de frecuencia
Componentes de control
• Controladores de temperatura • Fuentes de alimentación • Temporizadores • Contadores
• Relés programables • Procesadores de señal • Relés electromecánicos • Monitorización
• Relés de estado sólido • Interruptores de proximidad • Pulsadores • Contactores
Detección & Seguridad
• Sensores fotoeléctricos • Sensores inductivos • Sensores de presión y capacitativos
• Conectores de cable • Sensores para medición de anchura y desplazamiento
• Sistemas de visión • Redes de seguridad • Sensores de seguridad
• Unidades y relés de seguridad • Finales de carrera y de seguridad
A pesar de que nos esforzamos por lograr la perfección, Omron Europe BV y sus compañías subsidiarias o asociadas
no garantizan ni se responsabilizan con respecto a la exactitud o integridad de la información descrita en este documento.
Nos reservamos el derecho a realizar cualquier cambio en cualquier momento sin previo aviso.
 Loading...
Loading...