

Omron MP2100 DATASHEET
MP2100 - MECHATROLINK-II
PC motion controller
PC based solution for advanced
motion control
• Up to 32 axes controlled with minimum wiring
• Motion APIs are available for customised control
aplications. Motion commands can be input from either
the PC application or the MP2100 program
• Self configuration of nodes for an easy setup
• Supports position, speed and torque control
• Electronic CAM profiles and axes synchronization
• The high-speed bus MECHATROLINK-II is specially
designed for motion control
• Support for I/Os locally and over the network
• Access to the complete system from one point
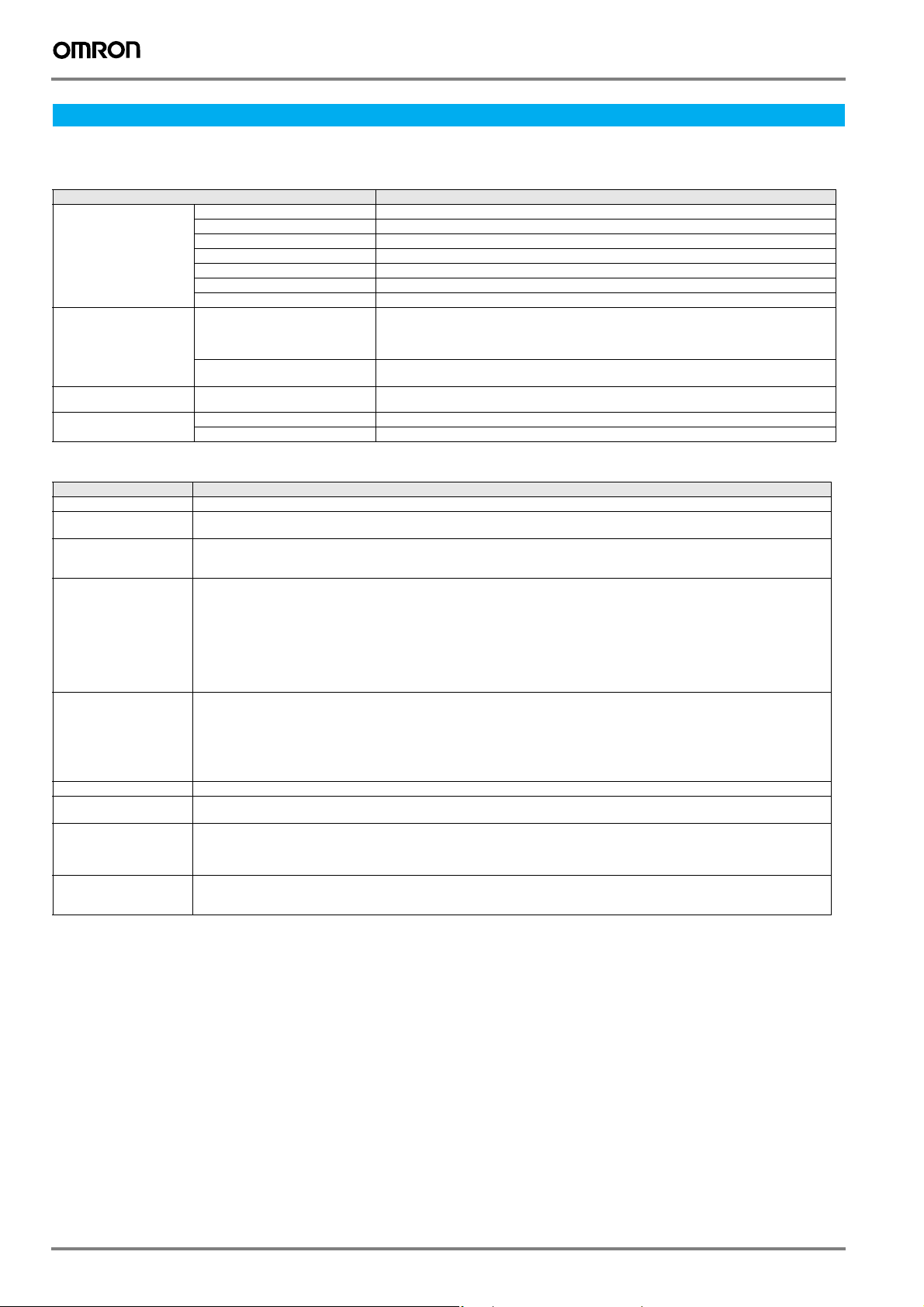
System configuration
Motion controller MP2100
(The MP2100M can
handle up to 2
Mechatrolink-II network)
Local I/Os
Sigma-II series
Servo Drive
Input
Limit switches
contact sensors
SGDH-
Ver.
CHARGE POWER
CN3
CN1
CN2
SERVOPACK
200V
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
JUSP-NS115
Mechatrolink-II
unit
Sigma-II series
Servo Motor
MECHATROLINK-II
SERVOPACK
NS115
SGDH-
S
200V
Ver.
W
1
A
R
S
W
2
CHARGE POWER
CN3
C
N
6
A
CN1
C
N
6
B
C
N
4
CN2
Personal computer
Software: MPE720 tool
Motion API
SERVOPACK
NS115
SGDH-
S
200V
Ver.
W
1
A
R
S
W
2
CHARGE POWER
CN3
C
N
6
A
CN1
C
N
6
B
C
N
4
CN2
21 nodes max.
16 servo axes max. + I/O stations
Totel length: 50 m
I/O module
RUNTX 1 2 3 4 5 6 7 8 120DDI 343 30
C
N
1
C
N
2
SERVOPACK
SGDH-
Ver.
CHARGE POWER
CN3
CN1
CN2
NS115
S
200V
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Terminator
Sigma-II series
Linear Motor
77PC motion controller
Specifications
General specifications
Hardware specifications
Items Specifications
Environmental
conditions
Mechanical operating
conditions
Electrical operating
conditions
Installation
requirements
Sequential function specifications
Items Specifications
Control method Sequence: High-speed and low-speed scan methods
Programming language Ladder diagram: Relay circuit
Scanning Two scan levels: High-speed scan and low-speed scan
User drawings, functions
and motion programs
Data memory Common data (M) registers:
Trace memory Data trace: 128 Kwords (32 Kwords / 4 groups), 16 points defined
Memory backup Program memory: Flash memory: 8 MBytes (User area: 5.5 MBytes) definition files, ladder programs, motion programs, etc.
Data types Bit (relay): ON/OFF
Register designation
method
Ambient operating temperature 0 to 55 °C
Ambient storage temperature -25 to 85 °C
Ambient operating humidity 30% to 95% (with no condensation)
Ambient storage humidity 5% to 95% (with no condensation)
Pollution level Pollution level 1 (conforming to JIS B 3501)
Corrosive gas There must be no combustible or corrosive gas.
Operating altitude 2,000 m above sea level or lower
Vibration resistance Conforming to JIS B 3502:
Shock resistance Conforming to JIS B 3502:
Noise resistance Conforming to EN 61000-6-2, EN 55011 (Group 1, Class A)
Ground Ground to 100 Ω max.
Cooling method Natural cooling
Text-type language: Numeric operations, logic operations, etc.
High-speed scan time setting: 1 to 32 ms (Integral multiple of MECHATROLINK communication cycle)
Low-speed scan time setting: 2 to 300 ms (Integral multiple of MECHATROLINK communication cycle)
Startup drawings (DWG.A):
Interrupt processing drawings (DWG.I):
High-speed scan process drawings (DWG.H):
Low-speed scan process drawings (DWG.L):
Number of steps:
User functions:
Motion programs:
Revision history of drawings and motion programs
Security function for drawings and motion programs
System (S) registers:
Drawing local (D) registers:
Drawing constant (#) registers:
Input (I) registers:
Output (O) registers:
Constant (C) registers:
Data memory: Battery backup: 256 Kbytes, M registers, S registers, alarm history, trace data
Integer: -32768 to +32767
Double-length integer: -2147483648 to +2147483647
Real number: ± (1.175E-38 to 3.402E+38)
Register number: Direct designation of register number
Symbolic designation: Up to 8 alphanumeric characters (up to 200 symbols per drawing)
With automatic number or symbol assignment
10 to 57 Hz with single-amplitude of 0.075 mm
57 to 150 Hz with fixed acceleration of 1 G
10 sweeps each in X, Y, and Z directions (sweep time: 1 octave/min)
2
Peak acceleration of 147 m/s
(15 G) twice for 11 ms each in the X, Y, and Z directions
64 drawings max. up to three hierarchical drawing levels
64 drawings max. up to three hierarchical drawing levels
200 drawings max. up to three hierarchical drawing levels
500 drawings max. up to three hierarchical drawing levels
Up to 1,000 steps per drawing
Up to 500 functions
Up to 256
64 Kwords
8 Kwords
Up to 16 Kwords per drawing
Up to 16 Kwords per drawing
5 Kwords (including internal input registers)
5 Kwords (including internal output registers)
16 Kwords
78 Motion controllers
Motion control function specifications
Item Specifications
Interface MECHATROLINK-I, MECHATROLINK-II
Number of controlled axes/module Up to 16 axes
Control
specifications
Reference unit mm, inch, deg, or pulse
Reference unit minimum setting 1, 0.1, 0.01, 0.001, 0.0001, 0.00001
Maximum programmable value -2147483648 to +2147483647 (signed 32-bit value)
Speed reference unit Reference unit/s designation: mm/s, inch/s, deg/s, pulse/s
Acceleration/deceleration type Linear, asymmetric, S-curve, exponent
Acceleration/deceleration reference unit Reference unit/s
Override function Positioning: 0.01% to 327.67% by axis
Coordinate system Rectangular coordinates
Zero point re-
turn
Applicable servo drives SGDH-@@@E-OY + NS115
Applicable frequency inverters Varispeed V7, F7, G7 with MECHATROLINK-II Interface
Encoders Incremental encoder
PTP control Linear, rotary, and infinite-length
Interpolation Up to 16 linear axes, 2 circular axes, and 3 helical axes
Speed reference output Yes
Torque reference output Yes
Phase control Yes
Position
control
DEC1+ phase-C pulse Yes
ZERO signal Yes
DEC1+ ZERO signal Yes
Phase-C pulse Yes
Only phase-C pulse Yes
POT and
POT Yes
Home limit switch and
HOME Yes
NOT and
NOT Yes
INPUT and
INPUT Yes
Positioning Yes
External positioning Yes
Zero point return Yes
Interpolation Yes
Interpolation with position
detection function
JOG operation Yes
STEP operation Yes
Parameter changes during
motion command execution
phase-C pulse
phase-C pulse
phase-C pulse
phase-C pulse
.
Yes
Yes
Reference unit/min. designation: mm/min, inch/ min, deg/min, pulse/min
Percentage designation: Percentage of rated speed
2
Acceleration/deceleration time constant: Time from 0 to rated speed (ms)
(for inverter’s version supported contact your OMRON sales office)
Yaskawa absolute encoder
designation: mm/s2, inch/s2, deg/s2, pulse/s
Yes
Yes
Yes
Yes
2
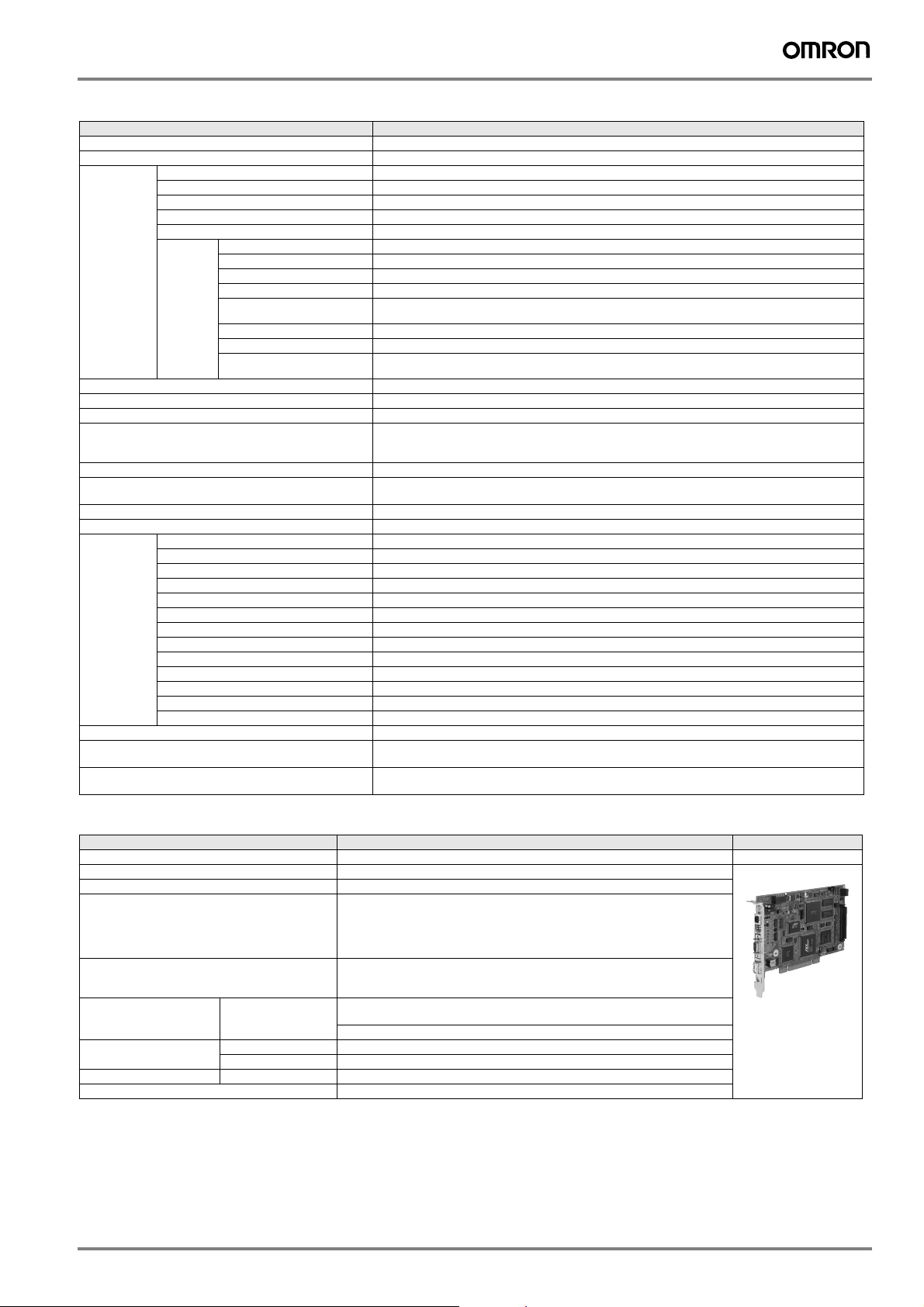
MP2100, MP2100M boards
Items Specifications Appearance
Model JAPMC-MC2100, JAPMC-MC2140
Power supply Input supply voltage: 5 VDC±5%
Dimensions 106.68x174.63 mm half the size of a standard PCI
Motion network MECHATROLINK-II: One channel with MP2100, two channels with MP2100M
I/O signals Digital input: 5 points (one point can be used for interrupts),
Electrical
operating
conditions
Mechanical operating
conditions
Installation requirements Ground Follows the personal computer’s requirements
Environmental conditions Same as the general specifications
Noise
resistance
Vibration resistance Not specified
Shock resistance Not specified
Twenty-one stations, including servo drives, inverters and I/O equipment, can be
connected. (16 axes for servo drives and inverters)
Transmission speed: 10Mbps (MECHATROLINK-II)
Transmission distance: See “MECHATROLINK-II repeater”
Digital output: 4 points, 24 VDC, 100 mA, open collector, and sink mode output
Radiation noise (FT noise): 1 kV or more for 1 min.
Static noise (contact discharging method): 6 kV or more for 10 times
Other noise: Not specified
24 VDC, 4 mA, and source mode or sink mode input
PC motion controller 79
 Loading...
Loading...