

CS1W-MCH71 - MECHATROLINK-II
Motion-Controller-Baugruppe
Mehrachs-Motion Control über Hochgeschwindigkeits-Bus MECHATROLINK-II
• Bis zu 30 Achsen können bei einem Minimum an
Verdrahtung gesteuert werden
• Der Hochgeschwindigkeits-Bus MECHATROLINK-II
ist speziell für Motion Control entwickelt
• Unterstützt Positionierung, Drehzahl- und Drehmomentregelung
• Elektronische Kurvenscheibenemulation und
Achsensynchronisierung
• Hardware-Druckmarkeneingang für jede Achse
• Maximale Programmeffizienz durch Programmierung
von Programmsteuerungsbefehlen, wie z. B. Multitask-Programmierung und Verzweigungsbefehle
sowie verschiedene arithmetische Operationen
• Zentraler Zugriff auf das gesamte System von einem
Punkt aus
Funktion
Durch die freie Kombination von Steuerungsachsen wird die Mehrachs-Steuerung vereinfacht. Es können bis zu 32 Achsen verwendet werden,
darunter 30 reale und zwei virtuelle Achsen, wobei jede Achse individuell einstellbar ist. Positionierungssteuerung, synchronisierte Steuerung
(elektronisches Getriebe, elektronische Kurvenscheibe, Follow-Up), Drehzahl- und Drehmomentregelung werden unterstützt, woraus sich ein breiter Anwendungsbereich ergibt. Durch die Nutzung des schnellen Servo-Kommunikationsbus MECHATROLINK-II können Bewegungsprogramme,
Systemparameter, Systemdaten und Servoantriebs-Parameter über das Software-Tool eingerichtet und gelesen werden.
Motion Control
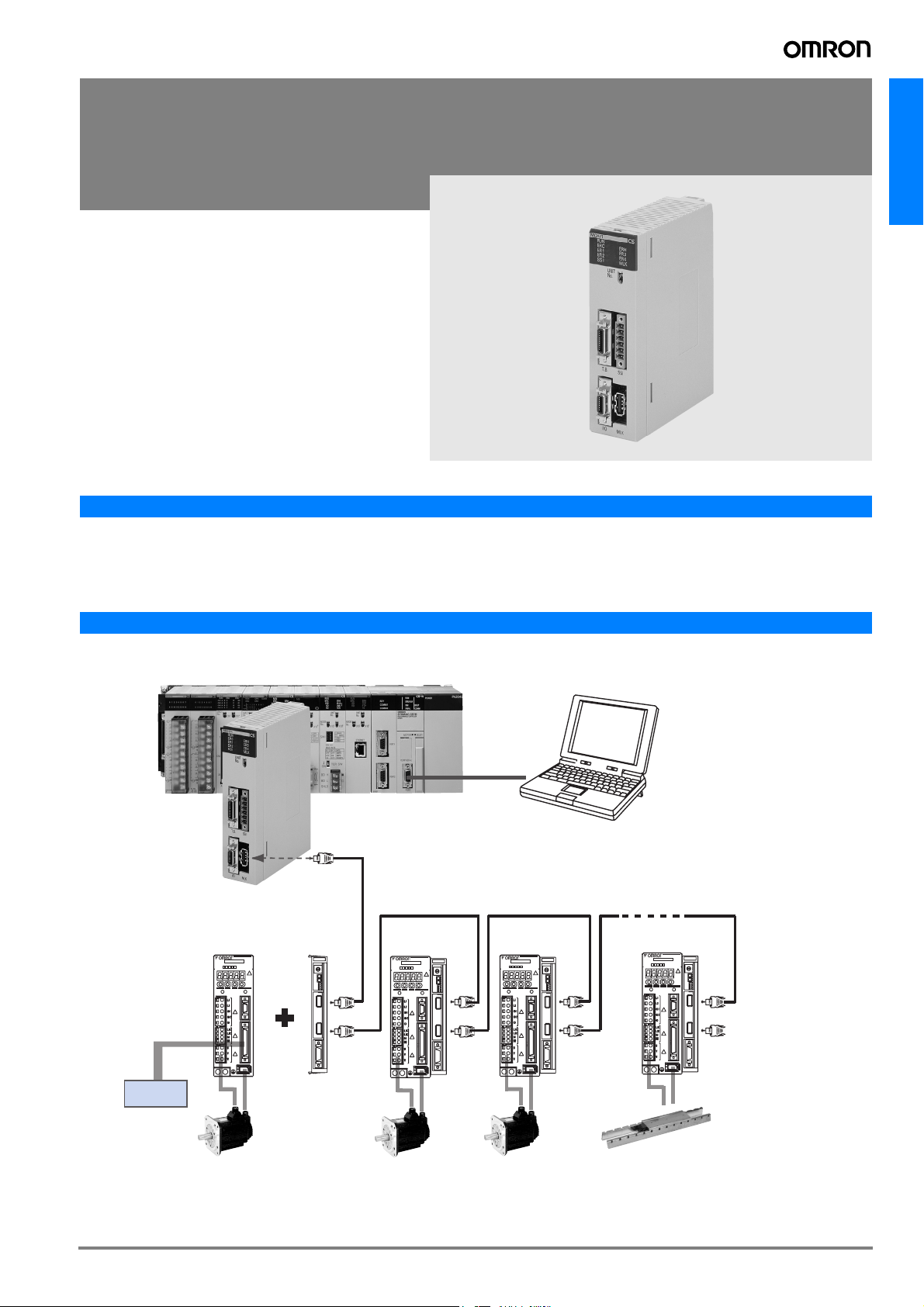
Systemkonfiguration
SPS der CS-Serie
PROFIBUS-DP-Master
Sigma II-Serie
Servoantrieb
Endlagenschalter,
Kontaktsensoren
SERVOPACK
SGDH-
Ver.
CHARGE POWER
CN3
CN1
CN2
JUSP-NS115
Mechatrolink-II-Baugruppe
200V
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Sigma II-Serie
Servomotor
Programmiersoftware
(MC-Miel für MCH)
MECHATROLINK-II
max. 30 Knoten;
Gesamtlänge: 50 m
SERVOPACK
NS115
SGDH-
Ver.
CHARGE POWER
CN2
S
200V
W
1
A
R
S
W
2
CN3
C
N
6
A
CN1
C
N
6
B
C
N
4
SERVOPACK
NS115
SGDH-
Ver.
CHARGE POWER
CN2
S
200V
W
1
A
R
S
W
2
CN3
C
N
6
A
CN1
C
N
6
B
C
N
4
Sigma-Serie
Linearmotor
SERVOPACK
NS115
SGDH-
200V
Ver.
CHARGE POWER
CN2
CN3
CN1
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
Abschluss-
C
N
4
widerstand
45Motion-Controller-Baugruppe

Technische Daten
Motion-Controller-Baugruppe
Produktbezeichnung CS1W-MCH71
Klassifizierung CS-Serie CPU-Bus-Baugruppe
Geeignete SPS CS-Serie, neue Version (CS1@-CPU@@H)
Für die Montage der MC-Baugruppe geeignete
Baugruppenträger
Steuerungsart MECHATROLINK-II (Positionierung, Drehzahl- und Drehmomentregelung)
Gesteuerte Geräte Servoantriebe der Sigma-II-Serie (ab Version 38) mit MECHATROLINK-II-Schnittstelle und verschiedenen
Programmiersprache BASIC-Dialekt für Motion Controller
Gesteuerte Achsen max. 32, darunter 30 reale oder virtuelle Achsen und zwei virtuelle Achsen
Betriebsarten RUN-Betriebsart, CPU-Betriebsart, Tool-Betriebsart/System (abhängig vom Tool)
Automatischer/manueller Betrieb Automatik-Modus: Modus zur Ausführung von Programmen in der Baugruppe
Minimale Einstelleinheit 1 / 0,1 / 0,01 / 0,001 / 0,0001 (Einheit: mm, Zoll, Grad, Impulse)
Maximaler Sollwert –2.147.483.648 bis 2.147.483.647 Impulse (32 Bits mit Vorzeichen); unendlicher Achsenvorschubmodus wird
Steuerungsfunktionen
über Befehl der
CPU-Baugruppe
Steuerungsfunktionen
über Bewegungsprogramm
Beschleunigungs-/Verzögerungskurve,
Beschleunigungs-/Verzögerungszeit
Externe E/A Eine Schnittstelle für MECHATROLINK-II-Servo-Kommunikation, ein Verzögerungsstopp-Eingang, zwei allge-
Vorschubgeschwindigkeit Schnelle Interpolations-Vorschubgeschwindigkeit: 1 bis 2.147.483.647 (Sollwerteinheiten/min)
Override in % 0,00% bis 327,67% (Einstelleinheit: 0,01%; kann für jede Achse oder Task eingestellt werden).
Motion Control-
Programme
Datenaustausch
mit CPU-Baugruppe
Speichern von Programmen und Daten Sicherung auf Speicherkarte (in CPU-Baugruppe, max. 100.000 Mal überschreibbar).
Selbstdiagnosefunktionen Watchdog, RAM-Prüfung, usw.
Fehlererkennungsfunktionen Verzögerungsstopp-Eingänge, Baugruppennummer-Fehler, CPU-Fehler, Software-Grenzfehler, usw.
Fehlerprotokoll Gelesen durch IORD-Befehl von CPU-Baugruppe.
Programmiersoftware Microsoft Windows 2000 oder NT 4.0 (Prozessor: Pentium, min. 100 MHz,
Externe Versorgungsspannung 24 V DC (21,6 bis 26,4 V DC)
Interne Stromaufnahme max. 0,8 A bei 5 V DC; max. 0,3 A bei 24 V DC
Gewicht (ohne Stecker) max. 300 g
Servo-Sperre/-Freigabe Sperrt den Servotreiber oder gibt ihn frei.
Tippbetrieb Ausführung von fortlaufendem, unabhängigem Vorschub für jede Achse unabhängig von Geschwindigkeit/
Nullpunktsuche Bestimmt den Maschinennullpunkt in der in den Systemparametern festgelegten Richtung. Kann mit einem
Einrichtung des absoluten
Nullpunkts
Maschinensperre Stoppt die Ausgabe von Bewegungsbefehlen an die Achsen.
Einzelblock Führt Bewegungsprogramme Block für Block aus.
Positionierung
(Punkt-zu-Punkt)
Lineare Interpolation Lineare Interpolation für bis zu acht Achsen gleichzeitig bei der spezifizierten Interpolations-Vorschub-
Kreisinterpolation Kreisinterpolation für zwei Achsen im oder gegen den Uhrzeigersinn bei der spezifizierten Interpolations-Vor-
Weitere Funktionen Nullpunktsuchen, Interrupt-gesteuerte Positionierung, zeitgesteuerte Positionierung, Traversen-Positionie-
Anzahl der Tasks, Anzahl
der Programme
Programmnummern 0000 bis 0499 für Hauptprogramm; 0500 bis 0999 für Unterprogramm
Programmkapazität Konvertiert als Motion-Programm, max. 8.000 Blöcke je Baugruppe (2 MB); Anzahl der Blöcke: 800
Datenkapazität Positionsdaten: 10.240 Punkte/Baugruppe; Kurvenscheibendaten: max. 32; 16.000 Punkte je Baugruppe
Unterprogramm-
Verschachtelung
Start Programme in anderen Tasks können aus einem Programm heraus gestartet werden.
Verzögerungsstopp Verzögerung zum Stillstand, unabhängig vom Block
Block-Stopp Verzögerung zum Stillstand, nachdem der ausgeführte Block beendet ist.
Einzelblock Führt das Programm Block für Block aus.
Der Baugruppe im CIOBereich zugeordnete Worte
Der Baugruppe im DM-
Bereich zugeordnete Worte
Beliebiger Bereich (Bits) Achsen: 0 bis 64 Worte (abhängig von der maximal verwendeten Anzahl an Achsen)
Beliebiger Bereich (Daten) Achsen: 0 bis 128 Worte (abhängig von der maximal verwendeten Anzahl an Achsen)
Beliebiger Bereich (Daten) Allgemeine E/A: 0 bis 1.280 Worte (abhängig von den Einstellungen)
Hinweis: 1. Berücksichtigen Sie die folgenden Punkte bei der Montage von Motion-Controller-Baugruppen an einer einzelnen CPU-Baugruppe:
- Die maximale Anzahl an CPU-Bus-Baugruppen, denen in der CPU-Baugruppe Worte zugeordnet werden können
- Die Leistung der Spannungsversorgungs-Baugruppe für jedes CPU-Rack oder E/A-Erweiterungs-Rack und die Stromaufnahme
der im Rack installierten Baugruppen (weitere Einzelheiten finden Sie im Bedienerhandbuch der CPU-Baugruppe).
2. Die erforderliche Spannungsversorgung muss der Benutzer zur Verfügung stellen.
3. Eine Speicherkarte muss verwendet werden, um die CPU-Baugruppe mit Systemsoftware-Funktionen wie IOWR und IORD zu nutzen.
CPU-Baugruppenträger oder E/A-Erweiterungs-Baugruppenträger der CS-Serie
E/A-Baugruppen.
Manueller Modus: Modus zur Ausführung von Befehlen von der CPU-Baugruppe
(über zugeordnete Worte)
unterstützt.
Beispiel: 16.384 Impulse/Umdrehung nach Multiplikation, eine minimale Einstelleinheit von 0,001 mm und
1 mm/Umdrehung
ergibt –1.310.720.000 bis 1.310.719.999 Sollwerteinheiten.
Drehzahl-Systemparameter oder Override.
Absolutwertgeber ausgeführt werden.
Richtet den Nullpunkt bei Verwendung eines Absolutwertgebers ein. (Offset-Wert: 32 Bits [Impulse] mit Vor-
zeichen)
Unabhängige Positionierung für jede einzelne Achse mit einer spezifizierten Geschwindigkeit/Drehzahl oder
durch Geschwindigkeit/Drehzahl-Systemparameter.
(Simultanspezifikation: Bis zu acht Achsen je Block, Simultanausführung: Bis zu 32 Blöcke je Baugruppe)
geschwindigkeit.
(Simultanspezifikation: Bis zu acht Achsen je Block, Simultanausführung: Bis zu 32 Blöcke je System)
schubgeschwindigkeit. Spiralinterpolation bei zusätzlicher linearer 1-Achs-Interpolation ebenfalls möglich.
(Simultanspezifikation: Zwei oder drei Achsen je Block, Simultanausführung: Bis zu 16 Blöcke je System)
rung, unabhängige elektronische Kurvenscheibe, synchronisierte elektronische Kurvenscheibe, Link-Betrieb,
elektronisches Getriebe, Follow-Up-Synchronisierung, Drehzahlsollwert, Drehmomentsollwert
Trapezförmig oder S-Kurve, max. 60.000 ms (S-Kurve: Konstant max. 30.000 ms).
meine Eingänge, zwei allgemeine Ausgänge
Bis zu 8 Tasks und 256 Programme je Baugruppe (max. 8 parallele Verzweigungen je Task)
max. fünf Ebenen
Verwendet eine Baugruppennummer (25 Worte). Für Baugruppen und Tasks verwendet: 11 bis 25 Worte
(abhängig von der Anzahl an Tasks)
Verwendet eine Baugruppennummer (100 Worte). Für Baugruppen und Tasks verwendet: 32 bis 74 Worte
(abhängig von der Anzahl an Tasks)
mit mindestens 64 MB Arbeitsspeicher)
46 Motion Control
 Loading...
Loading...