

Omron CS1W-MCH71 DATASHEET

CS1W-MCH71 - MECHATROLINK-II
Carte de contrôle d’axes
Contrôle multiaxes via le bus haute vitesse
MECHATROLINK-II
• Contrôle jusqu’à 30 axes avec un câblage minimum
• Bus MECHATROLINK-II haute vitesse spécialement
conçu pour le contrôle d'axes.
• Supporte le contrôle de position, de vitesse et de couple
• Synchronisation d'axes et profils de came électronique
• Entrée d’enregistrement matériel pour chaque axe
• Commandes de contrôle de programme, comme la programmation multitâche, la programmation parallèle et
des opérations arithmétiques variées pour une efficacité maximale du programme
• Smart Active Parts pour IHM Omron
• Accès au système complet à partir d'un point du réseau
Fonction
Le contrôle multiaxes est facilité grâce à la combinaison libre des axes de contrôle. Jusqu’à 32 axes peuvent être utilisés, comprenant 30 axes
physiques et deux axes virtuels, chaque axe étant paramétré de façon indépendante. Prise en charge du contrôle de position, du contrôle synchronisé (réduction électronique, came électronique, suivi), du contrôle de vitesse et de couple, ce qui permet le développement d’une grande
variété d’applications. En utilisant le bus MECHATROLINK-II de communications servo à grande vitesse, les programmes d’axes, les paramètres
système, les données système et les paramètres du servodriver peuvent être lus et modifiés à partir du logiciel.
Contrôleurs d'axes
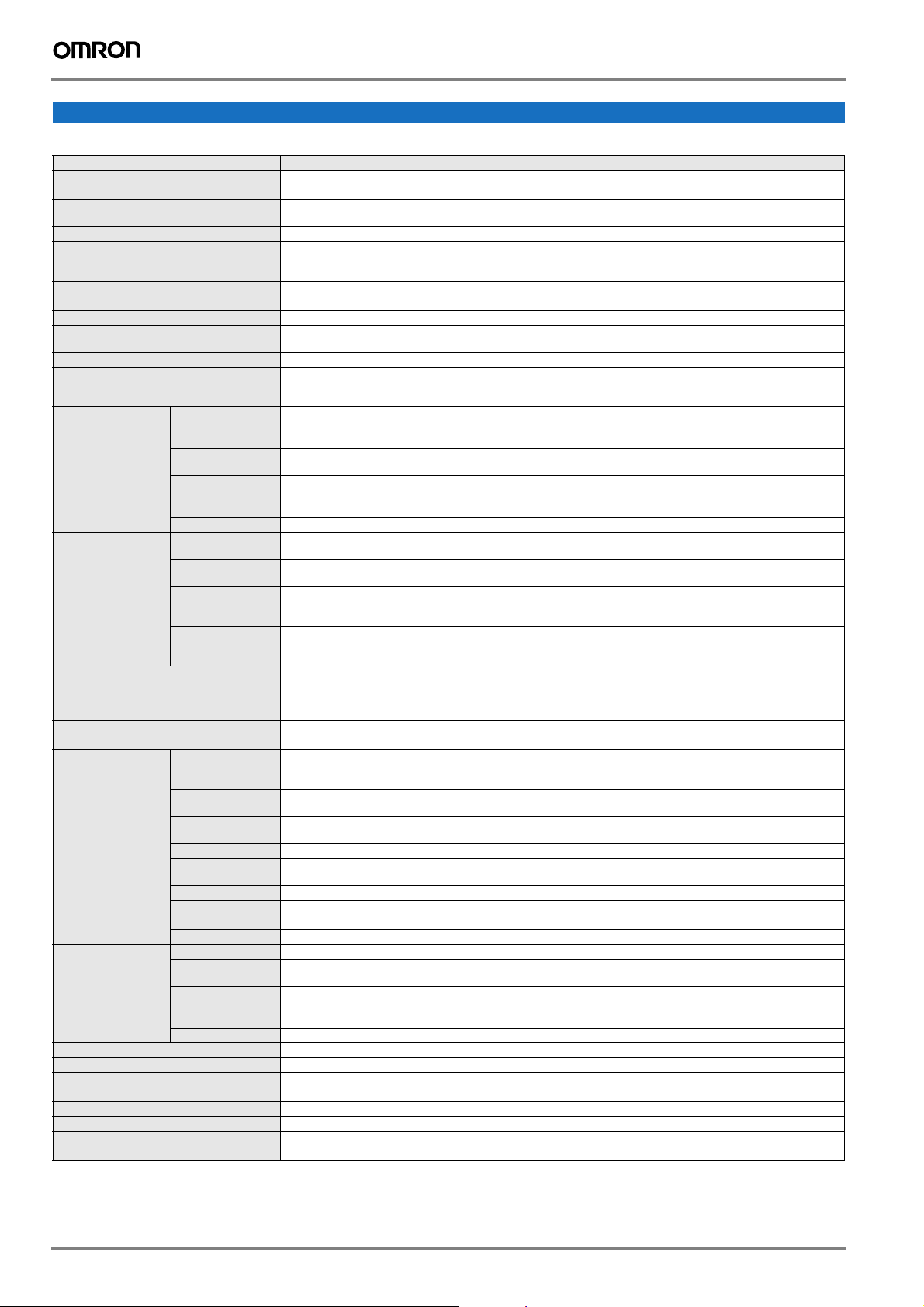
Configuration du système
Configuration du système
Carte de contrôle d'axes
Interrupteurs de position
capteurs de contact
série CS1
CS1W-MCH71
Entrée
Servodriver
série Sigma-II
SERVOPACK
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
CN2
Servomoteur
série Sigma-II
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Carte
Mechatrolink-II
JUSP-NS115
MECHATROLINK-II
SERVOPACK
NS115
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
CN2
Logiciel
PC : CX-One
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
30 axes maxi.
Longueur totale : 50 m
Module d'E/S
SERVOPACK
NS115
SGDH-
S
200V
Ver.
W
1
A
R
S
W
2
CHARGE POWER
CN3
C
N
6
A
CN1
C
N
6
B
C
N
4
CN2
RUNTX12345678120DDI34330
C
N
1
C
N
2
SERVOPACK
NS115
SGDH-
S
200V
Ver.
W
1
A
R
S
W
2
CHARGE POWER
CN3
C
N
6
A
CN1
C
N
6
B
Terminaison
C
N
4
CN2
Moteur linéaire
série Sigma-II
49Carte de contrôle d’axes
Caractéristiques
Carte de contrôle d’axes
Modèle CS1W-MCH71
Catégorie Carte de communications série CS
API utilisables Série CS, (CS1@-CPU@@H)
Racks arrière sur lesquels il est possible de
monter des cartes MC.
Méthode de contrôle MECHATROLINK-II (contrôle de position, de vitesse et de couple)
Périphériques contrôlés Servodrivers Sigma-II (ver. 38 ou ultérieure) avec interface MECHATROLINK-II, différentes cartes d’E/S et variateurs
Langage de programmation Langage de contrôle d’axes de type BASIC
Axes contrôlés 32 maxi., comprenant 30 axes physiques ou virtuels et 2 axes virtuels
Modes de fonctionnement Mode RUN, mode CPU, mode/système Tool (selon l’outil)
Mode manuel / automatique Mode automatique :mode pour l’exécution de programmes dans la carte
Unité de réglage minimum 1, 0,1, 0,01, 0,001, 0,0001 (unité : mm, pouce, degré, impulsion)
Valeur de commande maximale -2 147 483 648 à 2 147 483 647 impulsions (32 bits avec signe), mode d’alimentation d’axe infini pris en charge.
Fonctions de contrôle
par commande depuis
l’UC
Fonctions de contrôle
par programme d’axes
Courbe d'accélération/de décélération
Temps d'accélération/de décélération
E/S externe Un port pour communications servo MECHATROLINK-II, une entrée d’arrêt de décélération, deux entrées générales,
Alimentation Rapide, taux de vitesse d’interpolation : 1 à 2 147 483 647 (unités de commande/min)
Override 0,00 à 327,67 % (unité de configuration : 0,01 %; peut être configuré pour chaque axe ou tâche).
Programmes
d’axes
Echange de données
avec l'UC
Sauvegarde des programmes et des données Sauvegarde sur carte mémoire (dans l’UC, 100 000 fois maxi.)
Fonctions d’autodiagnostic Chien de garde, contrôle de RAM, etc.
Fonctions de détection d’erreur Entrée d’arrêt par décélération, erreurs de numéro de carte, erreurs UC, erreurs de limite de logiciel, etc.
Fonction de journal d'erreurs Lu par l’instruction IORD à partir de l’UC.
Logiciel de prise en charge Microsoft Windows 2000 ou NT 4.0 (processeur : Pentium, 100 MHz mini., 64 Mo de mémoire au moins)
Tension d'alimentation externe 24 Vc.c. (21,6 à 26,4 Vc.c.)
Consommation interne 0,8 A ou moins pour 5 Vc.c., 0,3 A ou moins pour 24 Vc.c.
Poids (connecteurs non compris) 300 g maxi.
Verrouillage / Déverrouillage de servo
Jogging Exécute une alimentation continue pour chaque axe de manière indépendante à vitesse sélectionnable.
Recherche d'origine Détermine l’origine de la machine dans la direction définie dans les paramètres système.
Configuration de
l’origine absolue
Verrouillage machine Arrête la sortie des commandes vers les axes.
Bloc unique Exécute les programmes d’axes, un bloc à la fois.
Positionnement (PTP) Exécute un positionnement indépendant pour chaque axe à une vitesse spécifiée ou à la vitesse spécifiée par le pa-
Interpolation linéaire Exécute une interpolation linéaire pour jusqu’à huit axes à la fois à la vitesse d’interpolation spécifiée
Interpolation circulaire Exécute une interpolation circulaire pour deux axes, soit dans le sens horaire soit dans le sens contraire, à la vitesse
Autres fonctions Recherche d’origine, alimentation par interruption, positionnement temporisé, positionnement à traverse, came élec-
Nombre de tâches,
nombre de
programmes
Numéros de
programme
Capacité programme En conversion de programme de contrôle d’axes, 8 000 blocs/carte max. (2 méga-octets) ; nombre de blocs :
Capacité de données Données de position : 10 240 points/carte, données de came : 32 maxi., 16 000 points/carte
Imbrication de
sous-programmes
Démarrage Les programmes d’autres tâches peuvent être démarrés à partir d’un programme ou de l’API.
Arrêt par décélération Décélère pour s’arrêter quel que soit le bloc.
Arrêt de bloc Décélère pour s’arrêter après la fin du bloc en cours d’exécution.
Bloc unique Exécute le programme, un bloc à la fois.
Zone BIT de carte Utilise un numéro de carte (25 mots). Utilisé pour carte et tâches : 11 à 25 mots (selon le nombre de tâches)
Zone de données de
carte
Zone BIT d’axes Axes : 0 à 64 mots (selon le nombre d’axes maxi. utilisé). Configurable par l’utilisateur.
Zone de données
d’axe
Utilisation standard E/S générales : 0 à 1280 mots (selon la configuration). Configurable par l’utilisateur.
Rack arrière d’UC ou à rack arrière d'E/S d’extension série CS1
V7, F7, G7 avec interface MECHATROLINK-II (contactez votre revendeur Omron pour connaître le support de version
des variateurs)
Mode manuel : mode d’exécution de commandes à partir de l’UC (via des mots affectés)
Exemple : 16 384 impulsions/tr après multiplication, par unité mini. de réglage de 0,001 mm et 1 mm/tr devraient
donner des unités de commande de -1 310 720 000 à 1 310 719 999.
Verrouille et déverrouille le servodriver.
Peut être exécutée avec un codeur absolu.
Définie l’origine lorsqu’un codeur absolu est utilisé (valeur de décalage : 32 bits [impulsions] avec signe).
ramètre système (spécification simultanée : jusqu’à huit axes/blocs, exécution simultanée : jusqu’à 32 blocs/carte).
(spécification simultanée : jusqu’à huit axes/bloc, exécution simultanée : jusqu’à 32 blocs/système).
d’interpolation spécifiée. L’interpolation circulaire hélicoïdale est également possible en ajoutant une interpolation linéaire
sur un seul axe (spécification simultanée : deux ou trois axes/bloc, exécution simultanée : jusqu’à 16 blocs/système).
tronique indépendante, came électronique synchronisée, opération de liaison, réduction électronique, synchronisation
de suivi, référence de vitesse, référence de couple
En S ou trapézoïdale, 60 000 ms maxi. (courbe en S : constante 30 000 ms maxi.)
deux sorties générales
Jusqu’à 8 tâches et 256 programmes/carte (8 branches parallèles maxi.par tâche).
0000 à 0499 pour programme principal, 0500 à 0999 pour sous-programme
800 par programme
Cinq niveaux maxi.
Utilise un numéro de carte (100 mots). Utilisé pour carte et tâches : 32 à 74 mots (selon le nombre de tâches)
Axes : 0 à 128 mots (selon le nombre d’axes maxi. utilisé). Configurable par l’utilisateur.
50 Contrôleurs d'axes

MECHATROLINK-II, carte d’interface servodriver (JUSP-NS115)
Type JUSP-NS115
Servodrivers applicables Modèles SGDH-@@@E (version 38 ou ultérieure)
Méthode d'installation Monté sur le côté servodriver du SGDH : CN10.
Caractéristiques
de base
Communications
MECHATROLINK-II
Format des commandes Caractéristiques de
Fonctions de
contrôle de position
Spécifications
du système
complètement fermé
Signaux d’entrée
dans le servodriver
Fonctions internes Fonction de verrouillage
Méthode d’alimentation Fournie par l’alimentation de contrôle du servodriver.
Consommation 2 W
Vitesse / Cycle de transmission 10 Mbps / 1 ms ou plus. Communications MECHATROLINK-II
fonctionnement
Entrée de référence Communications MECHATROLINK-I/II
Méthode d’accélération/
de décélération
Contrôle complètement fermé Le contrôle de position avec rétroaction complètement fermée est
Sortie d’impulsions du codeur
dans le servodriver
Signal d’impulsions de codeur
complètement fermé
Fréquence maximale recevable
pour servodriver
Alimentation pour codeur
complètement fermé
Changements d’affectation
de signaux possibles.
des données de position
Protection Changement des paramètres, erreurs de configuration des paramètres,
Voyants LED A : alarme, R : communications MECHATROLINK-I/II
Détails
Positionnement utilisant les communications MECHATROLINK-I/II
Commandes : sortie de surveillance, position, vitesse, couple,
Linéaire à première/deuxième étape, asymétrique, exponentielle,
courbe en S
possible.
Sortie driver de ligne différentielles 5 V (en accord avec les normes
EIA RS-422A)
Driver de ligne A quad B
1 Mpps
A préparer par le client.
Marche avant/arrière interdite, décélération LS pour retour au point zéro
Signaux de verrouillage externes 1, 2, 3
Contrôle de couple de marche avant/arrière
Le verrouillage des données de position est possible grâce à la phase C
et aux signaux externes 1, 2, 3.
erreurs de communication, erreurs WDT, détection de déconnexion du
codeur complètement fermé
lecture/écriture de paramètres
NS115
Contrôleurs d'axes
MECHATROLINK-II, module d’E/S 64 points (IO2310)
Caractéristiques techniques Présentation
Modèle JEPMC-IO2310
Signaux E/S Entrée : 64 points, 24 Vc.c., 5 mA, entrée mode NPN/PNP
Alimentation module 24 Vc.c. (20,4 à 28,8 V)
Poids 590 g
Sortie : 64 points, 24 Vc.c., 50 mA lorsque tous les points sont ON,
(valeur nominale maxi. 100 mA par point) sortie mode NPN)
Méthode de connexion des signaux : connecteur (série FCN360)
Courant nominal : 0,5 A
Courant d'appel : 1 A
MECHATROLINK-II, module compteur (PL2900)
Caractéristiques techniques Présentation
Modèle JEPMC-PL2900
Nombre de canaux
d’entrée
Fonctions Compteur d’impulsions, sortie encoche
Méthode d'entrée
d'impulsions
Vitesse de compteur
maxi. :
Tension d'entrée
d’impulsion
Alimentation externe 24 Vc.c., 120 mA au plus
Poids 300 g
2 (1 peut être utilisé avec MCH)
Signe (1/2 multiplicateurs), A/B (1/2/4 multiplicateurs), UP/DOWN (1/2 multiplicateurs)
1200 kpps (multiplicateur x 4)
3/5/12/24 Vc.c.
MECHATROLINK-II, module de sortie d’impulsion (PL2910)
Caractéristiques techniques Présentation
Modèle JEPMC-PL2910
Nombre de canaux
de sortie
Fonctions Impulsions de positionnement, JOG run, retour au point zéro
Méthode de sortie
d'impulsion
Vitesse de sortie maxi. 500 kpps
Tension de sortie
d’impulsion
Circuit d’interface
d’impulsion
Signal de contrôle
externe
Poids 300 g
2
Impulsions horaires/antihoraires, signe
5 Vc.c.
Sortie collecteur ouvert
5 Vc.c., 10 mA/circuit
Entrée numérique : 8 points/module, 5 Vc.c. x 4 points, 24 Vc.c. x 4 points
Sortie numérique : 6 points/module, 5 Vc.c. x 4 points, 24 Vc.c. x 2 points
Carte de contrôle d’axes 51
 Loading...
Loading...