

Page 1
Cat. No. W363-E1-1
Série SYSMAC CQM1H
Automates programmables
Cartes internes CQM1H-jjjjj
GUIDE
D’INSTALLATION
Page 2
SYSMAC Séries CQM1H
CQM1H-CPU
CQM1H-
Guide d’installation
Réalisé en Septembre 1999
jjjjj
jj
Automates programmables
Cartes internes
Page 3

iv
Page 4
Avis :
Les produits OMRON sont conçus pour être utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce guide, les conventions suivantes permettent de spécifier et de classer les précautions. Toujours faire très attention aux informations qui sont données. Le non–respect des précautions stipulées
peut blesser des personnes ou endommager des biens.
DANGER
!
A VERTISSEMENT
!
Attention
!
Indique une situation dangereuse imminente qui, si elle n’est pas évitée, peut
entraîner des blessures graves ou mortelles.
Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
provoquer des blessures graves ou mortelles
Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
provoquer des blessures moins sérieuses ou endommager des biens.
Références des produits OMRON
Dans ce guide, tous les noms de produits OMRON sont écrits en majuscules. Le mot “ unité ” désigne
une produit OMRON, que la désignation de ce produit apparaisse ou nom dans le texte.
L’abréviation “Ch,” qui figure sur certains affichages et sur certains produits OMRON signifie souvent
“ word ” (“ mot ”) et, dans la documentation, il est souvent remplacé par l’abréviation “Wd”.
L’abréviation “API” signifie Automate programmable industriel et n’est jamais utilisée comme abréviation d’un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaissent dans la colonne de gauche du guide, pour vous aider à trouver
différents types d’informations.
OMRON, 1999
Tous droits réservés. Aucune partie de cette publication ne peut être, stockée dans u n système à mémoire ou transmise,
sous aucune forme et par aucun moyen mécanique, électronique, photocopie, enregistrement sans l’accord écrit préalable
d’OMRON.
L’utilisation des informations contenues ci–après ne peut engendrer aucune responsabilité. De plus, la mesure où
OMRON travaille constamment à l’amélioration de ses produits de haute qualité, les informations contenues dans ce
guide sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l’élaboration de ce guide.
Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions. Les dommages résultant de l’utilisation des
informations contenues dans cette publication ne peuvent engendrer aucune responsabilité.
Rem.
1, 2, 3...
Désigne des informations particulièrement intéressantes pour utiliser le produit
de façon pratique et efficace.
1. Indique une liste, quelqu’en soit le type, comme des procédures, des
checklists, etc.
v
Page 5

vi
Page 6

TABLE DES MATIERES
CONSEILS D’UTILISATION xi.....................
1 Public visé xii.................................................................
2 Conseils d’utilisation généraux xii.................................................
3 Conseils d’utilisation de sécurité xii...............................................
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xiv.......................
5 Conseils d’utilisation xiv.........................................................
6 Conformité aux directives communautaires xviii.......................................
6-1 Directives applicables xviii.............................................
6-2 Concepts xviii........................................................
6-3 Conformité aux directives communautaires xviii............................
6-4 Méthodes anti--parasites des sorties relais xviii.............................
CHAPITRE 1
Introduction 1....................................
1-1 Description 2.............................................................
1-2 Configuration du système 8.................................................
1-2-1 Configuration de base 8.............................................
1-2-2 Connexions aux appareils de programmation 8...........................
1-2-3 Unité Centrale 9...................................................
1-2-4 Cartes internes 10...................................................
1-2-5 Unités de communications 10..........................................
1-2-6 Cassettes mémoire 11..............................................
1 - 2 - 7 Un ités d ’alim en tatio n s 11.............................................
1-2-8 Unités d’E/S 12.....................................................
1-2-9 Unités d ’E/S spéciales 13..............................................
1-2-10 Accessoires 15......................................................
1-2-11 Nombre maximum d’unités d’E/S et de points d’E/S 16.....................
1-3 Configuration de système étendu 17............................................
1-3-1 Système de communications série 17....................................
1-3-2 Réseaux de communications 23........................................
1-4 Fonctions listées par objet 25.................................................
1-4-1 Compteur à grande vitesse 33..........................................
1-4-2 Sorties à impulsions 34...............................................
1-5 Comparaison CQM1-CQM1H 35..............................................
1-6 Procédure d’application de vue d’ensemble 41...................................
CHAPITRE 2
Caractéristiques techniques 43.......................
2-1 Caractéristiques des unités 44.................................................
2-1-1 Unités d’alimentation 44..............................................
2-1-2 Caractéristiques des Unités centrales 45.................................
2-2 Caractéristiques des Unités d’entrée 51.........................................
2-2-1 Entrées 24 Vc.c. intégrées de l’Unité centrale 51..........................
2-2-2 Unités d’entrée c.c. 54...............................................
2-2-3 Unités d’entrée c.a. 59...............................................
2-3 Caractéristiques des Unités de sortie 60.........................................
2-3-1 Unités de sortie à contacts 60..........................................
2-3-2 Unités de sortie à transistors 64........................................
2-3-3 Unités de sortie à triacs 73............................................
vii
Page 7

TABLE DES MATIERES
CHAPITRE 3
Unités 75.........................................
3-1 Unités Centrales 76.........................................................
3-1-1 Voyants 77.........................................................
3-1-2 Couvercle de compartiment batterie 78..................................
3-1-3 Batterie 78.........................................................
3-1-4 Micro--interrupteurs 79...............................................
3-1-5 Cassettes mémoire 79................................................
3-1-6 Ports de communications séries 82......................................
3-1-7 Port périphérique 82.................................................
3-1-8 Port RS-232C intégré 83..............................................
3-1-9 Cartes internes pour emplacements 1 et 2 84..............................
3-1-10 Entrées intégrées 85.................................................
3-2 Unités d’alimentation 85.....................................................
3-2-1 Composantes des Unités d’alimentation 85...............................
3-2-2 Choix d’une Unité d’alimentation 86....................................
3-2-3 Poids des Unités 87..................................................
3-3 Unités d’E/S 89............................................................
3-4 Cartes Internes 89..........................................................
3-5 Equipements de Programmation 90............................................
3-5-1 Consoles de programmation 91........................................
3-5-2 Logiciel de programmation 92.........................................
CHAPITRE 4
Installation 99.....................................
4-1 Circuits de sécurité 100.......................................................
4-2 Conseils d’installation 101....................................................
4-3 Dimensions de Montage 104...................................................
4-4 Connexion des composants de l’API 107.........................................
4-5 Installation de cartes internes 108...............................................
4-6 Installation sur rail DIN 109...................................................
4-7 Câblage et connexions 110....................................................
4-7-1 Câblage de l’unité d’alimentation 110....................................
4-7-2 Câblage des Unités d’E/S 114..........................................
4-7-3 Préparation des câbles pour les Unités d’E/S de 32 points 117.................
4-8 Précautions de câblage des Unités d’E/S 119......................................
4-9 Connexion de périphériques de programmation 121................................
4-10 Connexion à un Terminal Opérateur Programmable 122.............................
CHAPITRE 5
Vue d’ensemble du fonctionnement 125.................
5-1 Structure interne de l’unité centrale 126..........................................
5-1-1 Zones de mémoire 126................................................
5-1-2 Micro-interrupteur 127................................................
5-1-3 Cassette de Mémoire 127..............................................
5-2 Modes de fonctionnement 127.................................................
5-2-1 Description des modes de fonctionnement 127.............................
5-2-2 Initialisation de la mémoire des E/S 128..................................
5-2-3 Mode de démarrage 129...............................................
5-2-4 Fonctionnement sans batterie 129.......................................
viii
Page 8

TABLE DES MATIERES
CHAPITRE 6
Réglages du micr o -interrupteur 131....................
6-1 Réglages d es micro-interrupteurs 132...........................................
6-2 Réglages du port de communications et des modes de démarrage 133..................
CHAPITRE 7
Utilisation d’une console de programmation 137..........
7-1 Programmation 138..........................................................
7-2 Connexion de la console de programmation 138...................................
7-2-1 Consoles de programmation compatibles 140..............................
7-2-2 Changement du mode du CQM1H avec le commutateur de mode 144...........
7-2-3 Mode de fonctionnement au démarrage 145...............................
7-2-4 Préparation au fonctionnement 146......................................
7-2-5 Introduction du mot de passe 147........................................
7-3 Fonctions de la console de programmation 147....................................
7-3-1 Vue d’ensemble 147..................................................
7-3-2 Effacement de la mémoire 149..........................................
7-3-3 Lecture/effacement des messages d’erreur 150.............................
7-3-4 Fonction du buzzer 151................................................
7-3-5 Lecture et affectation des codes d’instruction d’expansion 152................
7 - 3 - 6 Rég lag e et lectu r e d ’u n e ad resse d e m ém o ire d e p ro g r am m e et su rv eillan ce
7-3-7 Saisie o u édito n d es programmes 153....................................
7-3-8 Recherche d’instruction 157............................................
7-3-9 Recherche d’opérande de bit 158........................................
7-3-10 Insertion et suppression d’instructions 158................................
7-3-11 Vérification du programme 159.........................................
7-3-12 Surveillance de bit, de chiffre, de mot 160.................................
7-3-13 Surveillance binaire 162...............................................
7-3-14 Surveillance de trois mots 163..........................................
7-3-15 Surveillance de décimale signée 163.....................................
7-3-16 Surveillance de décimale non signée 164..................................
7-3-17 Surveillance de différentiation 165.......................................
7-3-18 Changement de la SV de la temporisation et du compteur 165.................
7-3-19 Modification de données hexadécimales, DCB 166..........................
7-3-20 Modification de données binaires 167....................................
7-3-21 Modification des données décimales signées 168...........................
7-3-22 Modification des données décimales non signées 169........................
7-3-23 Modification des données trois mots 169..................................
7-3-24 Paramétrage/réinitialisation forcée 170...................................
7-3-25 Effacement du paramétrage/réinitialisation forcé 171........................
7-3-26 Changement d’affichage Hex--ASCII 172.................................
7-3-27 Lecture et configuration de l’horloge 172.................................
7-3-28 Affichage du temps de cycle 173........................................
7-4 Exemple de programmation 173................................................
7-4-1 Opérations préparatoires 173...........................................
7-4-2 Messages d’erreur de la console de programmation 174......................
7-4-3 Exemple de programme 175............................................
7-4-4 Procédures de programmation 176.......................................
7-4-5 Vérification du programme 179.........................................
7-4-6 Essai en mode MONITOR 181..........................................
d e l’état d e b it .................................................................................................. 153
ix
Page 9

TABLE DES MATIERES
CHAPITRE 8
Cartes internes 183..................................
8-1 Carte de compteur à grande vitesse 184..........................................
8-1-1 Modèle 184.........................................................
8-1-2 Fonctions 184.......................................................
8-1-3 Exemple de configuration du système 184.................................
8-1-4 Emplacements de la carte interne concernés 185............................
8-1-5 Dénominations et fonctions 185.........................................
8-1-6 Disposition d es broches des connecteurs CN1 et CN2 186....................
8-1-7 Exemples de câblage 187..............................................
8-1-8 Caractéristiques techniques 192......................................
8-1-9 Circuirts internes 196.................................................
8-2 Cartes de gestion d’axes 196...................................................
8-2-1 Modèle 196.........................................................
8-2-2 Fonction 196........................................................
8-2-3 Configuration du système 198..........................................
8-2-4 Emplacement de la carte interne concerné 198.............................
8-2-5 Dénominations et fonctions 198.........................................
8-2-6 Dispositions des b roches des connecteurs CN1 et CN2 199...................
8-2-7 Exemples de câblage 200..............................................
8-2-8 Caractéristiques techniques 205.........................................
8-3 Carte d’interface du codeur absolu 208..........................................
8-3-1 Modèle 208.........................................................
8-3-2 Fonctions 208.......................................................
8-3-3 Configuration du système 208..........................................
8-3-4 Emplacements de la carte interne concernés 209............................
8-3-5 Dénominations et fonctions 209.........................................
8-3-6 Disposition d es broches des connecteurs CN1 et CN2 210....................
8-3-7 Exemples de câblage 210..............................................
8-3-8 Caractéristiques techniques 211.........................................
8-3-9 Configuration d u circuit interne 212.....................................
8-4 Carte de réglage analogique 213................................................
8-4-1 Modèle 213.........................................................
8-4-2 Fonction 213........................................................
8-4-3 Emplacements de la carte interne 213....................................
8-4-4 Dénominations et fonctions 214.........................................
8-4-5 Caractéristiques techniques 214.........................................
8-5 Carte des E/S analogiques 215.................................................
8-5-1 Modèle 215.........................................................
8-5-2 Fonction 215........................................................
8-5-3 Configuration du système 215..........................................
8-5-4 Emplacement de la carte interne concerné 216.............................
8-5-5 Dénominations et fonctions 216.........................................
8-5-6 Disposition d es broches des connecteurs CN1 et CN2 217....................
8-5-7 Exemples de câblage 218..............................................
8-5-8 Caractéristiques techniques 219.........................................
8-5-9 Configuration d u circuit interne 220.....................................
8-6 Carte de communications série 221.............................................
8-6-1 Numéro du modèle 221................................................
8-6-2 Cartes de communications série 221.....................................
8-6-3 Aspects 221.........................................................
8-6-4 Configuration du système 222..........................................
x
Page 10

TABLE DES MATIERES
CHAPITRE 9
Maintenance de la batterie 223........................
9-1 Remplacement de la batterie 224...............................................
9-2 Durée de vie de la batterie 224.................................................
9-3 Procédure de remplacement 225................................................
Annexes
A Préparation des câbles pour les cartes internes 227....................................
Glossaire 229.......................................
Historique des révisions 249...........................
xi
Page 11
A propos de ce guide :
Le CQM1H est un automate programmable (API) compact et ultra rapide conçu pour exécuter des opérations avancées de pilotage sur des systèmes qui exigent de 16 à 256 points d’E/S par API. Deux guides
décrivent la préparation, le paramétrage et l’exploitation du système CQM1H : Le Guide d’installation du
CQM1H (ce guide) et le Manuel de programmation CQM1H. Le Guide d’installation des unités d’E/S spécifiques pour les séries CQM1 est également disponible.
Ce guide décrit la configuration du système et l’installation du CQM1H et fournit une explication de base
des modes opératoires pour les consoles de programmation et présente les possibilités du logiciel de
programmation. Pour faire connaissance avec le CQM1H, vous devez d’abord lire ce guide.
Le Manuel de programmation CQM1H offre des descriptions détaillées des fonctions de programmation
du CQM1H.
Veuillezlire ce manuel attentivement et s’assurer d’avoir bien compris les informations qu’il apporte avant
de tenter d’installer et d’utiliser le CQM1H.
Chapitre 1
Le
possibles du système et donne une idée des opérations nécessaires avant la mise en marche. Il fournit
également une liste de fonctions de CQM1H par action et une comparaison entre le CQM1H et le CQM1.
Chapitre 2
Le
CQM1H et fournit les caractéristiques fonctionnelles des zones de mémoire.
Chapitre 3
Le
CQM1H et fournit également des informations sur les périphériques de programmation et les
caractéristiques de communications.
Chapitre 4
Le
entrée--sortie et connecter les périphériques de programmation. Les conseils et les dimensions
d’installation sont également fournies. Respecter les instructions scrupuleusement afin qu’il fonctionne
correctement. Une mauvaise installation risue d’entrainer un dysfonctionnement de l’API.
Chapitre 5
Le
structure interne de l’unité centrale (UC) et décrit les différents modes de fonctionnement.
Chapitre 6
Le
plupart des opérations de l’API sont commandées par l’ensemble de paramètres du Setup de l’API. Se
reporter au Manuel de programmation de CQM1H pour de plus ample information sur le Setup de l’API.
Chapitre 7
Le
Se reporte au paragraphe 6--4--2 Messages d’erreur de la console de programmation pour plus
d’information sur les erreurs qui pourraient se produire pendant le fonctionnement de la console de
programmation.
Chapitre 8
Le
Carte de communications série, la Carte de compteur à grande vitesse, la Carte de gestion d’axes, la
Carte codeur absolu, la Carte potentiomètres analogiques et la carte d’E/S analogiques. Se reporter au
Manuel de programmation de CQM1H pour de plus amples informations sur l’application du logiciel.
Chapitre 9
Le
également la procédure d’exchange.
Les Annexes décrit la préparation des câbles pour les Cartes internes.
décrit les caractéristiques et fonctions spéciales du CQM1H, indique les configurations
présente les caractéristiques techniques des Unités qui participent à l’élaboration d’un API
fournit des détails sur les fonctions et la nomenclature des Unités qui composent le
décrit comment installer l’API CQM1H, y compris comment monter les Unités, câbler les
donne une vue d’ensemble du fonctionneemnt de CQM1H et comprend des détails sur la
décrit la configuration des microinterrupteurs DIP situés sur l’avant de l’unité centrale. La
fournit des informations sur la connexion et l’utilisation d’une console de programmation.
présente des informations concernant le matériel pour les cartes internes suivantes: la
décrit la maintenance de la batterie qui sauvegarde la mémoire dans l’unité centrale et
A VERTISSEMENT : Omettre de lire et comprendre les informations contrenues dans ce guide peut
!
entraîner la mort, des blessures corporelles, risque d’endommager le produit
ou de provoquer des pannes. Lire chaque chapitre, ainsi que les chapitres
auxquels il est fait référence dans leur totalité et s’assurer d’une bonne
compréhension des informations qu’ils contiennent avant la mise en oeuvre
des procédures ou fonctionnalités décrites.
xiii
Page 12

CONSEILS D’UTILISATION
Cette section expose les précautions générales à prendre pour utiliser l’automate programmable série CQM1H (API) et les
dispositifs associés.
Les informations données dans cette partie sont importantes pour assurer une utilisation fiable et sans danger de l’automate programmable.Vous devez lirecette section et comprendre les informations qui y sont exposées avant de tenter
de paramétrer et d’utiliser un système API.
1 Public visé xii..................................................................
2 Conseils d’utilisation généraux xii..................................................
3 Conseils d’utilisation de sécurité xii.................................................
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xiv.........................
5 Conseils d’utilisation xiv..........................................................
6 Conformité aux directives communautaires xviii........................................
6-1 Directives applicables xviii..............................................
6-2 Concepts xviii.........................................................
6-3 Conformité aux directives communautaires xviii.............................
6-4 Méthodes anti--parasites des sorties relais xviii..............................
xi
Page 13

Conseils d’utilisation de sécurité
1 Public visé
Ce guide est destiné aux personnels suivants qui doivent aussi avoir des
connaissances portant sur les systèmes électriques (ingénieur ou technicien en
électricité ou équivalent) :
x Personnel chargé d’installer des systèmes d’automatisme.
x Personnel chargé de concevoir des systèmes d’automatisme.
x Personnel chargé de la gestion de sites et de systèmes d’automatisme.
2 Conseils d’utilisation généraux
L’utilisateur doit se servir du produit en conformité avec les spécifications de
performances exposées dans les manuels d’exploitation.
Avant d’utiliser le produit dans des conditions non décrites dans le manuel ou de
l’utiliser avec des systèmes de pilotage d’installations nucléaires, des chemins
de fer, des véhicules, systèmes à c ombustion, équipements médicaux,
machines et appareils de divertissement, équipements de sécurité ainsi
qu’avec d’autres systèmes, machines et équipements qui peuvent exercer une
forte influence sur la vie humaine et les biens s’ils sont utilisés incorrectement,
veuillez consulter votre représentant OMRON.
Vérifier que les caractéristiques nominales et les performances du produit sont
suffisantes pour les systèmes, machines et équipements. Et ne pas oublier de
munir les systèmes, machines et équipements de double mécanismes de
sécurité.
Ce manuel donne des informations sur la programmation et l’utilisation de
l’Unité. Vous devez absolument lire ce manuel avant d’essayer d’utiliser l’unité,
et conserver ce manuel à portée de la main pour, si nécessaire, vous y reporter
pendant l’exploitation du système.
6
A VERTISSEMENT Il est extrêmement important qu’un API et toutes les unités API soient
!
utilisés pour la mise en œuvre prévue et dans les conditions spécifiées,
en particulier lors qu’il s’agit d’applications susceptibles d’affecter
directement ou indirectement la vie de l’homme. Avant d’utiliser un
système API dans le cadre des applications mentionnées ci–dessus,
vous devez absolument consulter votre représentant OMRON
3 Conseils d’utilisation de sécurité
A VERTISSEMENT L’unité centrale régénère les E/S même lorsque le programme est arrêté
!
(c.-à-d., même en mode PROGRAMME). Confirmer préalablement la
sûreté avant de changer le statut de toute partie de mémoire dédiée à
des unités d’E/S, des unités d’E/S spécifiques ou des cartes internes.
Tout changement de données assignées à n’importe quelle unité peut
provoquer un fonctionnement inattendu des charges connectées à
l’unité. Chacune des opérations suivantes peut provoquer un
changement du statut de la mémoire.
x Transférer des données de mémoire d’E/S à l’unité centrale depuis un
dispositif de programmation.
x Changer les valeurs actuelles dans la mémoire depuis un dispositif de
programmation.
x Forcer l’initialisation/ la réinitialisation de bits depuis un dispositif de
programmation.
x Transférer la mémoire d’E/S à partir d’un micro-ordinateur ou d’un
autre API sur un réseau.
xii
Page 14
Conseils d’utilisation de sécurité
A VERTISSEMENT Ne jamais tenter de démonter une Unité ou de toucher l’intérieur
!
A VERTISSEMENT Ne jamais toucher des bornes ou borniers pendant que le système est
!
A VERTISSEMENT Ne jamais tenter de démonter, de réparer ou de modifier une Unité
!
A VERTISSEMENT Prévoir des mesures de sécurité pour les circuits extérieurs
!
3
pendant qu’elle est sous tension. Cela pourrait provoquer une décharge
électrique.
sous tension. Cela pourait provoquer une décharge électrique.
quelconque. Toute tentative de ce type d’opération peut provoquer un
dysfonctionnement, un incendie ou être à l’origine d’une décharge
électrique.
(c’est–à–dire non dans l’automate programmable), y compris dans les
articles suivants, afin d’assurer la sécurité du système s i une anomalie
intervient à la suite d’un dysfonctionnement de l’API ou d’un autre
facteur externe affectant le fonctionnement de l’automate. Le
non–respect de cet avertissement peut se traduire par des accidents
graves.
x Des circuits d’arrêt d’urgence, des circuits à verrouillage réciproque,
des limiteurs et des mesures de sécurité similaires doivent être mis en
place sur tous les circuits de pilotage externes.
x L’API met toutes ses sorties à l’état OFF lorsque sa fonction de
diagnostic intégrée détecte une erreur ou bien à l’exécution d’une
instruction d’alarme de défaillance grave (FALS). Pour se protéger
contre ces erreurs, des mesures de sécurité externes doivent être
prises pour assurer la sécurité du système.
x Les sorties de l’automate peuvent rester ON ou OFF du fait de
l’encrassement ou de la dégradation des relais de sortie ou de la
destruction des transistors de sortie. Pour se prémunir contre ce type
de problèmes, des mesures de sécurité externes doivent être prises
pour assurer la sécurité du système.
x Lorsque la sortie 24 V continue (alimentation électrique de service de
l’automate) est surchargée ou court--circuitée, il peut y avoir une
baisse de tension et, par suite, les sorties passent à l’état OFF. Pour se
prémunir contre ce type de problèmes, des mesures de sécurité
externes doivent être prises pour assurer la sécurité du système.
A VERTISSEMENT Ne pas toucher l’unité d’alimentation d’éner gie pendant qu e la
!
puissance est assurée ou juste après que la puissance ait été mise sur
OFF. Cela pourait provoquer une surchauffe.
Attention Pour exécuter une édition en ligne, il faut d’abord s’assurer que cette opération
!
n’aura pas d’effets néfastes suite à l’allongement de la durée des cycles. Autrement, il se peut que les signaux d’entrée soient illisibles.
Attention Confirmerla sûreté à la station de destination avant de transférer un programme
!
à une autre station ou avant de changer le contenu de la zone de mémoire d’E/S.
Dans l’un de ces deux cas, cela pourait provoquer des dommages.
Attention Serrer les vis du bornier de l’unité d’alimentation en courant alternatif en
!
respectant le couple spécifié dans le manuel d’exploitation. Des vis mal serrées
peuvent provoquer une surchauffe ou un dysfonctionnement.
xiii
Page 15
Conseils d’utilisation
4 Conseils d’utilisation relatifs à l’environnement
d’exploitation
Attention Ne pas utiliser le système de pilotage dans les endroits suivants :
!
x Endroits recevant directement la lumière du soleil.
x Endroits présentant des températures ou unehumidité à l’extérieur de la plage
figurant dans les caractéristiques techniques.
x Endroits présentant de la condensation provoquée par de fortes variations de
température.
x Endroits soumis à des gaz corrosifs ou inflammables.
x Endroits poussiéreux (en particulier limaille de fer) ou contenant des sels.
x Endroits exposés à l’eau, à l’huile ou à des produits chimiques.
x Endroits soumis à des chocs ou à des vibrations.
Attention Prendredes mesures de protection ad hoc et suffisantes lors de l’installation des
!
systèmes dans les endroits suivants :
x Endroits présentant de l’électricité statique ou d’autres formes de parasites.
x Endroits soumis à des champs électromagnétiques puissants.
x Endroits susceptibles d’être soumis à de la radioactivité.
x Endroits proches d’alimentations électriques.
5
Attention L’environnement opératoire d’un système API peut affecter fortement sa
!
longévité et sa fiabilité. Un environnement opératoire hostile peut provoquer des
dysfonctionnements, des défaillances et d’autres problèmes imprévisibles
affectant le système API. Bien vérifier qu’à l’installation, l’environnement
opératoire est conforme aux conditions spécifiées et qu’il présente toujours les
mêmes conditions pendant la vie du système.
5 Conseils d’utilisation
Lors de l’utilisation du système API, toujours suivre les conseils d’utilisation
suivants.
A VERTISSEMENT Toujours observer c es conseils. Le non–respect des précautions
!
énumérées ci–dessous peut être à l’origine de blessures sérieuses ou
même mortelles.
x Lors de l’installation du système, le relier systématiquement à une
terre présentant une résistance inférieure ou égale à 100 : de manière
à prévenir les chocs électriques.
x Une terre présentant une résistance inférieure ou égale à 100 : doit
être installée en court--circuitant les bornes de GR et LG sur l’unité
d’alimentation d’énergie.
x Toujours mettre l’alimentation électrique de l’API à l’état OFF avant de
tenter de faire une des opérations suivantes. Si l’alimentation n’est pas
sur OFF, cela pourait provoquer un dysfonctionnement ou provoquer
une décharge électrique.
x Montage ou démontage d’Unités d’E/S, Unité Centrale, Cartes
x Assemblage des unités.
internes, ou toute autre unité.
xiv
Page 16

Conseils d’utilisation
Attention Le non–respect des précautions suivantes peut entraîner un fonctionnement
!
5
x Réglages de micro-interrupteurs ou de commutateurs rotatifs.
x Connexion ou déconnexion de tous câblages ou faisceaux électri-
ques.
x Connexion ou déconnexion des connecteurs.
défectueux de l’API ou du système, ou bien endommager l’API ou les unités du
ou des API. Il faut toujours respecter les précautions indiquées.
x Toujours mettre l’API sous tension avant de mettre le système de commande
sous tension. Si l’alimentation de l’API est établie après celle de la commande,
des erreurs temporaires peuvent provoquer des signaux du système de
commande parce que les bornes de sortie sur des unités de sortie c.c. et
d’autres unités seront momentanément sur ON lorsque l’alimentation sera
établie sur l’API.
x Des mesures doivent être prises par le client pour assurer la sécurité au cas où
les sorties des unités de sorties demeureraient à l’état ON en raison des
échecs internes de circuit, pouvant se produire sur des relais, des transistors
et d’autres éléments.
x Des mesures doivent être prises par le client pour assurer la sécurité en pré-
sence de signaux manquants, incorrects ou anormaux provoqués par une rupture de lignes de transmission de signaux, par des microcoupures de courant
ou d’autres causes.
x Ne pas mettre l’alimentation de l’API sur OFF pendant le transfert de données.
En particulier, ne pas arrêter l’alimentation pendant la lecture ou l’écriture
d’une carte mémoire. Aussi, ne pas enlever la carte mémoire lorsque
l’indicateur BUSY est allumé. Pour enlever une carte mémoire, appuyer
d’abord sur le commutateur d’alimentation de carte mémoire et attendre
ensuite que l’indicateur BUSY s’éteigne avant d’enlever la carte mémoire.
x Si le bit de maintien d’E/S (SR 25212) est mis à ON, les sorties de l’API ne
seront pas mises sur OFF et conserveront leur statut précédent lorsque l’API
sera commuté du mode RUN ou MONITOR au mode PROGRAMME.
S’assurer que les charges externes ne produissent pas des conditions
dangereuses lorsque ceci se produit (lorsque l’opération s’arrête pour une
erreur fatale, y compris celles produites avec l’instruction FALS(07), toutes les
sorties de l’unité de sortie seront à l’état OFF et seul le statut interne de sortie
sera maintenu).
x En assurant une alimentation de 200 à 240 V c.c. à partir d’une unité
d’alimentation CQM1--PA216, toujours enlever le cavalier métallique des
bornes du sélecteur de tension. Le produit sera détruit si l’alimentation de 200
à 240 V c.c. est assurée tandis que le cavalier métallique est présent.
x Toujours utiliser les tensions d’alimentation indiquées dans les guides
d’installation. Une tension incorrecte peut provoquer un dysfonctionnement
ou une surchauffe.
x Prendre les mesures appropriées pour s’assurer que la puissance indiquée
est assurée avec la tension et la fréquence assignées. Faire particulièrement
attention dans les endroits où l’alimentation est instable. Une alimentation
incorrecte peut provoquer un dysfonctionnement.
x Installer des disjoncteurs externes et prendre d’autres mesures de sécurité
contre les court-circuits dans le câblage externe. Des mesures de sécurité
insuffisantes contre les court-circuits peuvent provoquer une surchauffe.
x Ne pas appliquer des tensions aux unités d’entrée supérieures à la tension
d’entrée assignée. Des tensions excessives peuvent provoquer une
surchauffe.
xv
Page 17

Conseils d’utilisation
5
x Ne pas appliquer des tensions ou relier des charges aux unités de sortie
supérieures à la capacité maximum de commutation. La tension ou les
charges excessives peuvent provoquer une surchauffe.
x Débrancher la prise de terre fonctionnelle lors de l’exécution de tests de tenue
en tension. Ne pas débrancher la prise de terre fonctionnelle peut provoquer
une surchauffe.
x Installer les unités correctement comme indiqué dans les guides d’installation.
L’installation incorrecte des unités peut provoquer un dysfonctionnement.
x Vérifier que toutes les vis du support, les vis des borniers et les vis des
connecteurs de câble sont serrées au couple indiqué dans les manuels
appropriés. Un couple de serrage incorrect peut provoquer un
dysfonctionnement.
x Laisser l’étiquette attachée à l’unité pendant le câblage. La suppression de
l’étiquette peut provoquer un dysfonctionnement si les corps étrangers
pénètrent dans l’unité.
x Lorsque le câblage est terminé, enlever l’étiquette pour assurer une bonne
dissipation thermique. Le fait de ne pas enlever l’étiquette peut provoquer un
dysfonctionnement.
x Utiliser des cosses à fourche pour le câblage. Ne pas relier les fils dénudés
directement aux bornes. Le raccordement des fils dénudés peut provoquer
une surchauffe.
x Câbler correctement toutes les connexions.
x Faire un double contrôle de tout le câblage et de toutes les configurations des
commutateurs avant de mettre sous tension. Un câblage incorrect ou une
mauvaise configuration des commutateurs peut provoquer une dégradation
du produit.
x Monter les unités seulement après avoir vérifié complètement les borniers et
les connecteurs.
x Avant de toucher une unité, vérifier d’abord de toucher un objet métallique relié
à la masse afin de décharger toute l’électricité statique, pour ne pas risquer de
provoquer un dysfonctionnement ou des dommages.
x Être sûr que les borniers, unités de mémoire, câbles d’expansion et autres
articles avec les dispositifs de verrouillage sont correctement verrouillés à leur
place. Un verrouillage incorrect peut provoquer un dysfonctionnement.
x Vérifier les positions des commutateurs, le contenu de la zone DM et d’autres
préparatifs avant de lancer le programme. Lancer le programme sans les
réglages ou les données appropriés peut provoquer un fonctionnement
inattendu.
x Vérifier le programme utilisateur pour une exécution correcte avant de
l’exécuter réellement sur l’unité. La non vérification du programme peut
provoquer un fonctionnement inattendu.
x Confirmer qu’aucun effet nuisible ne se produira dans le système avant
d’essayer une des opérations suivantes. Si cette condition n’est pas
respectée, un fonctionnement inattendu risque de survenir.
x Changement du mode de fonctionnement de l’API.
x Initialisation / réinitialisation forcée de tout bit de la mémoire.
x Changement de la valeur actuelle de tout mot ou de toute valeur de
consigne dans la mémoire.
x Reprendre le fonctionnement seulement après avoir transféré à la nouvelle
unité centrale le contenu de la zone DM, de la zone HR et des autres données
nécessaires pour reprendre l’opération. Si cette condition n’est pas respectée,
un fonctionnement inattendu risque de survenir.
x Ne pas tirer sur les câbles ou plier les câbles au delà de leur limite naturelle.
Faire l’un ou l’autre peut endommager les câbles.
xvi
Page 18

Conseils d’utilisation
5
x Ne pas placer des objets sur les câbles ou d’autres lignes de câblage. Cela
pourrait endommager les câbles.
x Lors du remplacement de pièces, confirmer que les conditions nominales de
fonctionnement de la nouvelle pièce sont correctes. Ne pas s’en assurer peut
provoquer un dysfonctionnement ou une surchauffe.
x Lors du transport ou du stockage des cartes, les couvrir d’un matériau
antistatique pour les protéger contre l’électricité statique et les maintenir à la
température appropriée pour le stockage.
x Ne pas toucher les cartes ou les composants montés dessus à mains nues.
Des brins pointus et d’autres parties sur les cartes peuvent causer des
blessures si elles sont manipulées incorrectement.
x Ne pas court-circuiter les bornes de la batterie ou charger, démonter,chauffer
ou incinérer la batterie. Ne pas soumettre la batterie à des chocs forts. Ne pas
respecter ces consignes peut provoquer une fuite, une rupture, une
génération de chaleur ou l’inflammation de la batterie. Se débarasser de toute
batterie ayant chuté brusquement au sol ou ayant été soumise à un choc
excessif. Les batteries ayant été soumises à un choc peuvent fuir lors de leur
utilisation.
x Les normes UL exigent que les batteries soient remplacées seulement par des
techniciens expérimentés. Ne pas permettre aux personnes non qualifiées de
remplacer des batteries.
xvii
Page 19
Conformité aux directives communautaires
6 Conformité aux directives communautaires
6-1 Directives applicables
x Directives sur la CEM
x Directive sur les basses tensions
6-2 Concepts
Directives sur la CEM
Les appareils OMRON qui sont en conformité avec les directives
communautaires sont aussi conformes aux normes de la CEM connexes pour
faciliter leur intégration dans d’autres dispositifs ou dans une machine. Les
produits commercialisés ont fait l’objet d’un contrôle de conformité aux normes
de la CEM (voir la remarque suivante). C’est au client qu’il appartient de
s’assurer que les produits sont en conformité avec les normes du système qu’il
utilise.
Les performances vis–à–vis des CEM des dispositifs OMRON qui sont en
conformité avec les directives communautaires varient selon la configuration, le
câblage et autres particularités de l’équipement, du tableau de commande sur
lequel sont installés les dispositifs OMRON. Le client doit donc faire un contrôle
final pour s’assurer que les dispositifs et l’ensemble de la machine sont en
conformité avec les normes applicables à la CEM.
Rem. Les normes CEM (Compatibilité électromagnétique) applicables sont :
EMS (Susceptibilité électromagnétique) : EN61131-2
EMI (Interférences électromagnétiques) : EN50081-2
(Emission rayonnée : réglementation 10 m)
Directive sur les basses tensions
Toujours s’assurer que les dispositifs fonctionnant à des tensions comprises
entre 50 et 1.000 V c.a. en alternatif et 75 à 1.500 V c.c. sont en conformité avec
les normes de sécurité requises pour l’automate. (EN61131-2).
6
6-3 Conformité aux directives communautaires
Les API série CQM1H sont conformes aux dispositifs des directives communautaires. Pour s’assurer que la machine ou le dispositif dans lequel est utilisé
l’API série CQM1H est en conformité avec les directives communautaires, l’installation de l’automate doit être faite en respectant les indications suivantes :
1, 2, 3... 1. L’API doit être installé avec un tableau de commande et de contrôle.
2. Pour les alimentations en courant continu utilisées pour les alimentations
des communications et des E/S, il faut utiliser un isolement renforcé ou un
double isolement.
3. Les API conformes aux directives communautaires doivent aussi être en
conformité avec la Norme EN50081-2. Lorsqu’un API est intégré dans une
machine, du parasite peut être produit en commutant des dispositifs
utilisant des sorties relais et faire que la machine globale ne soit pas aux
normes. Si ceci se produit, des écrêteurs de pointes de tension doivent être
reliés ou d’autres mesures doivent être prises de façon externe à l’API.
Les méthodes suivantes représentent des méthodes typiques pour réduire
le parasite et peuvent ne pas être suffisantes dans tous les cas. Les
contre-mesures exigées changeront selon les dispositifs reliés au pupitre
de commande, le câblage, la configuration du système et d’autres conditions.
6-4 Méthodes anti--parasites des sorties relais
Les API séries CQM1H sont en conformité avec la norme EN50081–2 des
directives de la CEM. Toutefois, les parasites générés par le basculement de
xviii
Page 20
Conformité aux directives communautaires
l’API à l’état ON ou OFF à l’aide des sorties relais n’est peut être pas en
conformité avec ces normes. Dans ce cas, un filtre anti-parasites doit être relié
au côté charge ou bien d’autres mesures spécifiques doivent être mises en
œuvre à l’extérieur de l’API.
Les contre-mesures prises pour être en conformité avec les normes varient en
fonction des dispositifs qui sont du côté charge, du câblage de la configuration
des machines, etc. Les exemples suivants décrivent des contre-mesures
permettant de réduire le parasite généré.
Contre-mesures
Pour plus de détails, consulter EN50081-2.
Les contre-mesures sont inutiles si la fréquence de commutation de la charge
pour tout le système (API inclus) est inférieure à 5 fois par minute.
Des contre-mesures sont obligatoires si la fréquence de commutation de la
charge pour tout le système (API inclus) est supèrieure ou égale à 5 fois par
minute.
6
xix
Page 21
Conformité aux directives communautaires
6
Exemples de contre–mesure
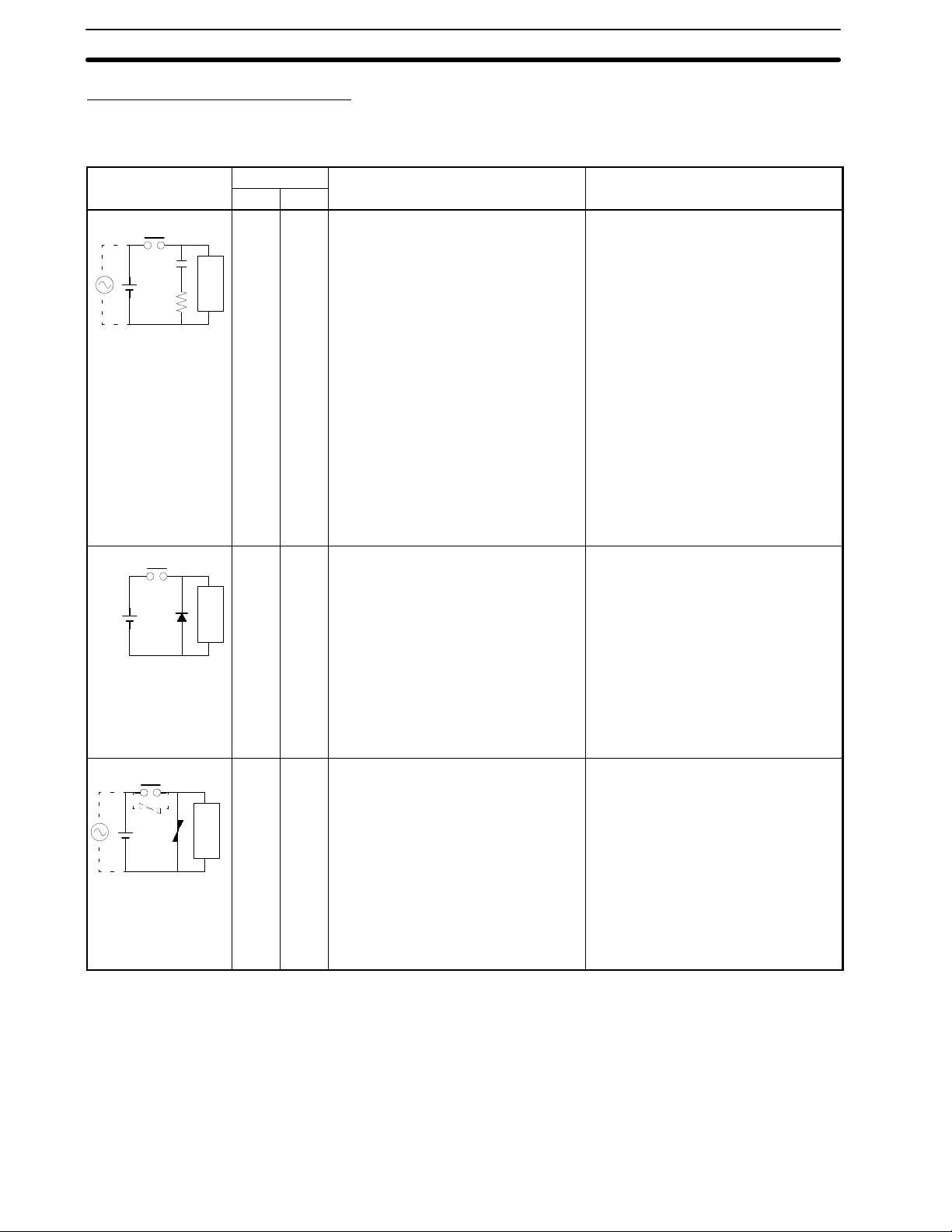
Lors de la commutation d’une charge inductive, connecter un limiteur de tension, des diodes, etc. en parallèle avec la charge ou le contact, comme indiqué
ci-dessous.
Circuit Courant Caractéristique Elément requis
Alt. Cont.
Méthode RC
Alimentation
Méthode avec diode
Alimentation
Méthode avec varistor
Alimentation
Oui Oui Si la charge est un relais ou un
Charge
inductive
Non Oui La diode connectée en parallèle avec
Charge
inductive
Oui Oui La méthode de la résistance variable
Charge
inductive
s
solénoïde, il y a un retard entre le
moment de l’ouverture du circuit et le
moment de la remise à zéro de la
charge.
Si la tension d’alimentation est
comprise entre 24 et 48 V, mettre le
limiteur de tension en parallèle avec la
charge. Si la tension d’alimentation est
entre 100 et 200 V, mettre le limiteur
entre les contacts.
la charge transforme l’énergie
accumulée par la bobine en un
courant, qui circule dans l’enroulement,
afin d’être converti en chaleur par la
résistance de la charge inductive.
Le retard entre l’ouverture du circuit et
la remise à zéro de la charge, qui est
provoqué par cette méthode est plus
long que celui obtenu par la méthode
RC.
empêche l’imposition d’une haute
tension entre les contacts grâce à la
caractéristique de tension constante de
la résistance variable. Il y a un retard
entre l’ouverture du circuit et la remise
à zéro de la charge.
Si la tension d’alimentation est entre 24
et 48 V, mettre la résistance variable
en parallèle avec la charge. Si la
tension d’alimentation est entre 100 et
200 V, mettre la résistance variable
entre les contacts.
La capacité du condensateur doit être
de 1 à 0,5PF pour un courant de
contact de 1 A et la résistance du
composant résistif doit être de 0,5 à
1:pour une tension de contact de
1 V. Toutefois, ces valeurs peuvent
varier selon la charge et avec les
caractéristiques du relais. Ces valeurs
doivent être choisies à partir
d’expérimentations en tenant compte
du fait que la capacité supprime la
décharge à étincelles lorsque les
contacts sont séparés et que la
résistance limite le courant qui c ircule
dans la charge lorsque le circuit est à
nouveau fermé.
La résistance disruptive du
condensateur doit être comprise entre
200 et 300 V. S’il s’agit d’un circuit en
courant alternatif, il faut utiliser un
condensateur sans polarité.
La valeur de la résistance disruptive
inverse de la diode doit être au moins
10 fois plus grande que la valeur de la
tension du circuit. Le courant direct de
la diode doit être s upérieur ou égal au
courant de la charge.
La valeur de la résistance disruptive
inverse de la diode peut être deux ou
trois fois plus grande que la tension
d’alimentation si le limiteur de tension
travaille sur des circuits électroniques
présentant de faibles tensions de
circuit.
---
xx
Page 22
Conformité aux directives communautaires
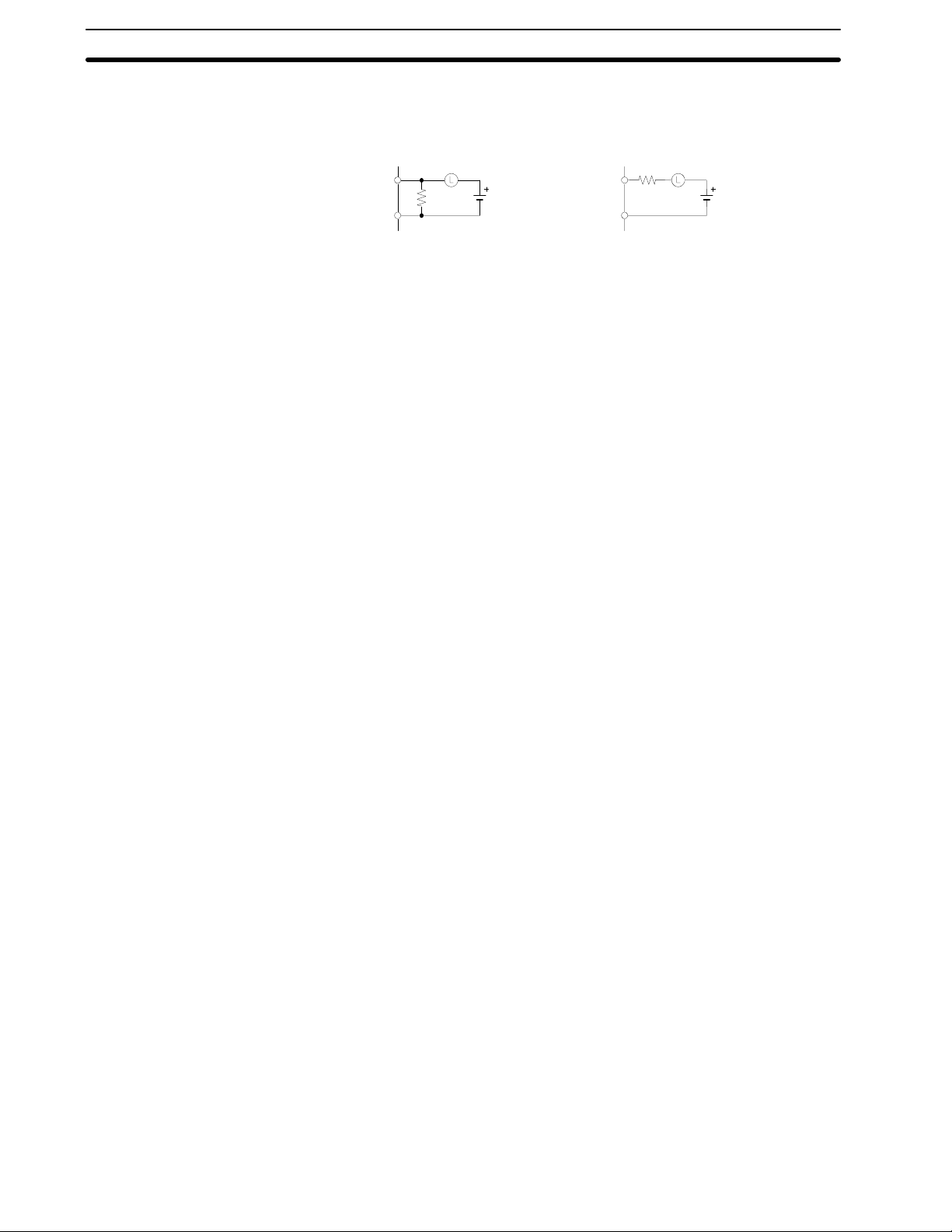
En commutant une charge avec un courant élevé induit tel qu’une lampe incandescente, supprimer le courant induit comme montré ci--dessous.
6
Contre mesure 1
OUT
R
COM
Fournissant un courant d’obscurité
approximativement d’un tiers de la
valeur évaluée par une lampe
incandescente
Contre mesure 2
R
OUT
COM
Fournissant une résistance limitée
xxi
Page 23

CHAPITRE 1
Introduction
Ce chapitre décrit les caractéristiqueset les fonctionsspéciales du CQM1H, indique les configurations possiblesdu système et
donne les opérations nécessairesavant la mise en marche. Il fournit également une liste de fonctions du CQM1H et compare le
CQM1H avec le CQM1. Lire d’abord ce chapitre lors de l’utilisation du CQM1H pour la première fois.
Se référer au Guide de programmation du CQM1H pour obtenir des détails sur la programmation.
1-1 Description 2..............................................................
1-2 Configuration du système 8...................................................
1-2-1 Configuration de base 8..............................................
1-2-2 Connexions aux appareils de programmation 8............................
1-2-3 Unité Centrale 9....................................................
1-2-4 Cartes internes 10....................................................
1-2-5 Unités de communications 10...........................................
1-2-6 Cassettes de mémoire 11...............................................
1-2-7 Unités d’alimentations 11..............................................
1-2-8 Unités d’E/S 12......................................................
1-2-9 Unités d ’E/S spéciales 13...............................................
1-2-10 Accessoires 15......................................................
1-2-11 Nombre maximum d’unités d’E/S et de points d’E/S 16......................
1-3 Configuration de système étendu 17.............................................
1-3-1 Système de communications série 17.....................................
1-3-2 Réseaux de communications 23.........................................
1-4 Fonctions listées par objet 25..................................................
1-4-1 Compteur à grande vitesse 33...........................................
1-4-2 Sorties à impulsions 34................................................
1-5 Comparaison CQM1-CQM1H 35...............................................
1-6 Procédure d’application d e vue d’ensemble 41....................................
1
Page 24
1-1 Description
1-1ChapitreDescription
Le CQM1H est un automate programmable compact intelligent (API) prenant en
charge les communications et d’autres fonctions avancées. C’est un API de type
paquet monté sur rail DIN pour commander des machines de petite à moyenne
taille.
Une configuration de système flexible est améliorée par des communications
séries avec une fonction protocole macro , des cartes installées par l’utilisateur
appelés cartes internes, des communications en réseau, un éventail de
méthodes de surveillance et de paramétrage, une vitesse plus élevée et une
plus grande capacité. Ces dispositifs permettent la commande de machine à
valeur ajoutée.
x Monter jusqu’à deux cartes internes pour ajouter des communications ou des
fonctions de commande.
Fonctions de communication : Carte de communication série
Fonctions de commande : Carte de compteur à grande vitesse, carte de
gestion d’axes, carte codeur absolu, carte potentiomètres analogiques et
carte d’E/S analogiques
x Monter une Unité inter--API ”controller link” pour se connecter à un réseau
inter--automate.
x Connecter simultanément à un dispositif de programmation et à un terminal
programmable (TOP).
x Obtenir une vitesse et une capacité plus élevées par rapport au CQM1 : 1,25
fois plus rapide, deux fois la capacité de programme (15,2 Kmots), deux fois la
capacité d’E/S (512 points) et deux fois la capacité mémoire de données
(12 Kmots).
x Employer de nouvelles instructions.
x Maintenir la compatibilité avec les modèles précédents d’API.
Configuration de
système flexible
Unité
d’alimentation
Des vitesses plus
élevées et une plus
grande capacité
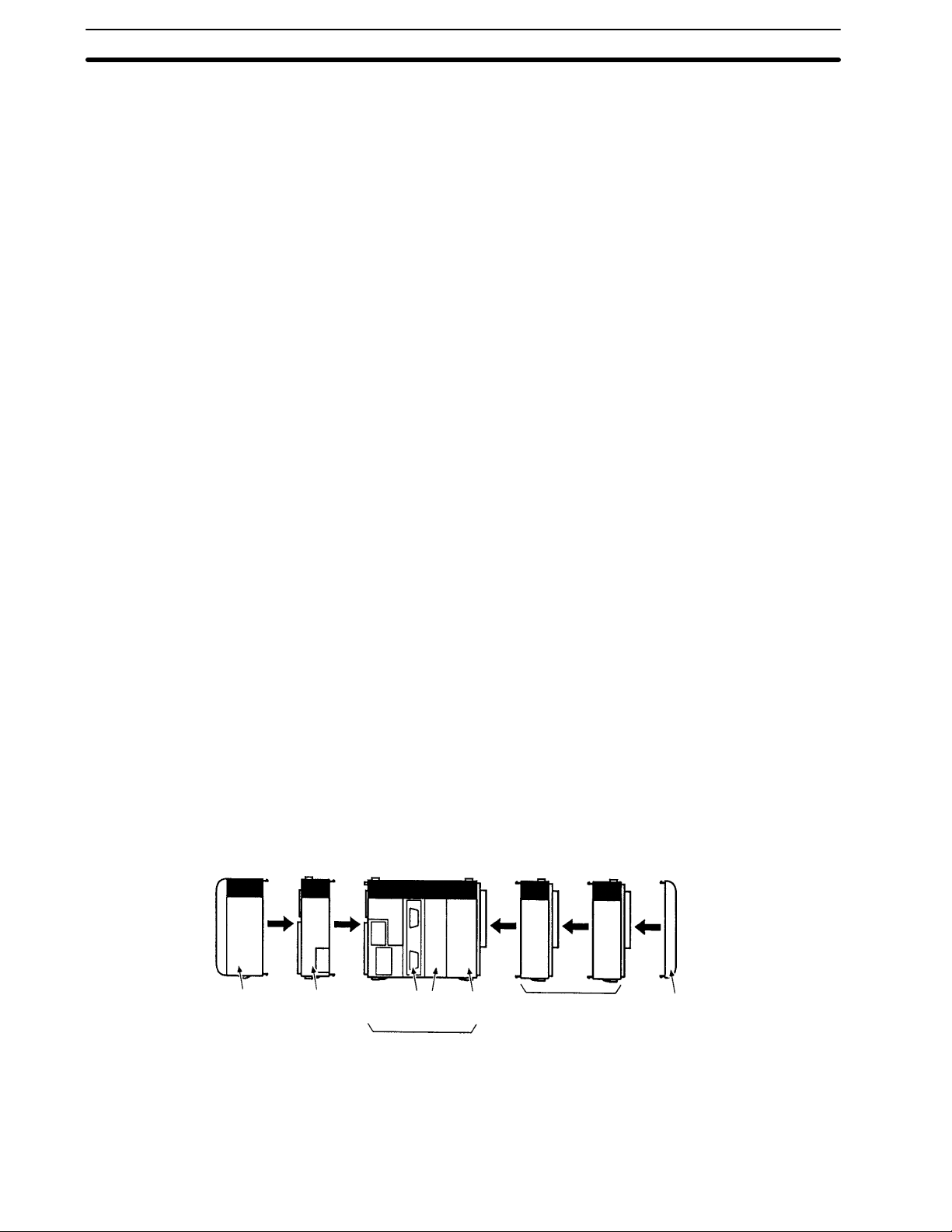
Le CQM1H n’exige pas un fond de panier et est construit en connectant des
unités par l’intermédiaire des connecteurs sur les côtés des unités. Il permet une
configuration de système flexible. L’UC contient 16 points d’entrée de c.c.
intégrés. Deux cartes internes peuvent être montées dans l’UC. Une Unité
inter--API ”controller link” (une unité de communication) et un maximum
combiné de sept ou onze unités d’E/S et d’unités d’E/S spécifiées peuvent
également être reliées.
Rem.
1. Le CQM1H est monté sur un rail DIN.
2. Seules les UC CQM1H--UC51/61 prennent en charge les cartes internes et
l’Unité inter--API ”controller link”.
Unités assemblées par des connecteurs sur leurs faces arrière.
Unité
inter--API
”controller
link”
Cartes
internes
UC
16 entrées
intégrées
Unités d’E/S et
Unités d’E/S
Spécifiées
Capot terminal
Les temps d’exécution ont été réduits à 0,375 Ps pour l’instruction LOAD
(0,50 Ps pour le CQM1), à 17,7 Ps pour l’instruction MOVE (23,5 Ps) et à
0,60 ms pour surveiller (0,70 ms), réduisant la durée de cycle
d’approximativement 25%.
2
Page 25

1-1ChapitreDescription
x La capacité de programme, la capacité d’E/S et la capacité de mémoire de
données ont toutes été approximativement doublées. La capacité de
programme a été augmentée à 15,2 Kmots (7,2 Kmots pour le CQM1) ; la
capacité d’E/S, à 512 points (256 points) ; et la capacité de mémoire de
données, à 6 Kmots de DM et à 6 Kmots d’EM (6 Kmots de DM seulement).
x Une cassette mémoire de 16 Kmot peut être montée dans le CQM1H pour
exécuter de grands programmes utilisateurs ou plus de données. Ces
dispositifs assurent un niveau plus élevé de commande de machine et une
plus grande facilité d’utilisation.
Fonctionnalité accrue
avec des cartes internes
Le CQM1H comporte des cartes internes qui permettent des communications
séries, des entrées multipoint de compteur à grande vitesse (codeur rotatif), le
positionnement simple (des Sorties à impulsions à accélération/décélération
trapézoïdale), des changements de vitesse, des sorties PWM (modulation à
largeur d’impulsion), des entrées absolues de codeur rotatif, des E/S
analogiques (4 entrées, 2 sorties) et des réglages analogiques.
Une Carte communications série, une carte de compteur à grande vitesse, une
carte d’E/S d’impulsions, une Carte de codeur absolu, une carte analogique
d’E/S et une Carte potentiomètres analogiques sont utilisables. Ces cartes
internes peuvent être combinées, montées et utilisées comme le nécessite la
machine à commander (certaines cartes internes ont des restrictions de
montage).
Rem.
L’UC présente aussi 16 entrées intégrées, ainsi que des fonctions de compteur
à grande vitesse et d’interruption d’entrée. Les Sorties à impulsions sont
également prises en charge en utilisant une unité de sortie transistor standard.
3
Page 26
1-1ChapitreDescription
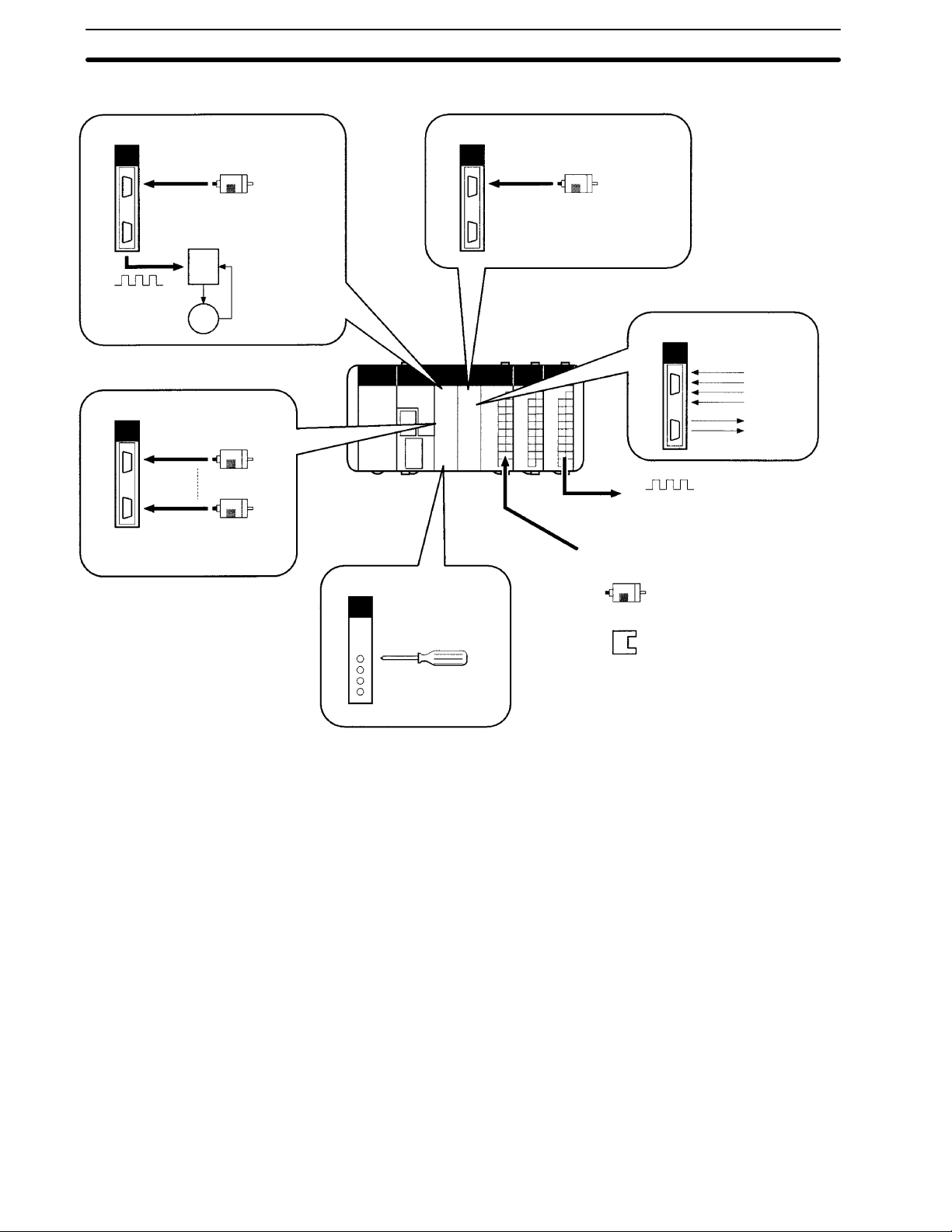
Positionnement simple, Commande à
vitesse simple, Comptage à grande vitesse
Carte de gestion d’axes
Codeur rotatif. Deux codeurs
peuvent être connectés.
(Monophasé: 50 kHz; différence
de phase: 25 kHz.)
Pilote de moteur
Deux sorties
d’impulsion
(50 kHz max.)
Servomoteur ou
Moteur pas à
pas
Compteur à grande vitesse
Carte compteur à grande vitesse
Codeur rotatif
Quatre codeurs peuvent être connectés.
(Monophasé: 50 kHz/500 kHz commutable;
différence de phase: facteur multiplicateur 1/2/4,
25 kHz/250 kHz commutable)
Réglages
analogiques
Carte potentiomètres
analogiques
Régler avec un
tournevis cruciforme
Entrées de codeur absolu
Carte de codeur absolu
Codeur absolu
Deux codeurs peuvant être
connectés.
(4 kHz max ; code binaire gray)
ou Entrées d’interruption (4 entrées max.)
E/S analogiques
Carte d’E/S analogiques
Entrées
analogiques
4 entrées
max.
Sorties
analogiques
2 sorties max.
Sorties à impulsions également prises en
charge depuis une unité de sortie transistor
(20 Hz à 1 kHz max).
Entrées intégrées à l’UC : Compteur à grande vitesse
(1 seulement)
(Monophasé 5 kHz ; différence de phase 2,5 kHz)
Codeur rotatif
(1 seulement)
De meilleures
connexions aux
composants de
machines avec des
communications séries
Les 4 réglages sont
sauvegardés dans la zone AR
dans l’UC. Ces valeurs
peuvent être utilisées pour les
réglages du temporisation ou
d’autres dispositifs.
Exemple: microcapteur photo
Des connexions peuvent être facilement établies aux composants de machine
d’usage général et aux contrôleurs spécifiés. La Carte communications séries
(une carte interne) prend en charge une fonction protocole macro. Des macros
peuvent être créées pour des protocoles selon les caractéristiques de
communications du dispositif externe, permettant aux transferts de données
avec les dispositifs d’usage général d’être exécutés avec une instruction simple
PMCR. Il est possible de communiquer avec n’importe quel dispositif ayant un
port série, comme des contrôleurs de température, des lecteurs de code-barres
et des contrôleurs numériques dédiés.
4
Page 27
Communications séries
Carte communications séries
Les modes de communication
série suivants sont possibles :
Macro protocole
S
Liaison hôte
S
Sans protocole
S
Inter--API 1:1
S
Liaison NT (mode 1:1/mode 1:N)
S
1-1ChapitreDescription
RS-232C
ou
Commande distribuée
avec des API compacts
par communications de
réseau
RS-422A/485
Contrôleur de température
Dispositifs externes à usage général avec port RS--232C ou RS--422A/485.
Lecteur de code-barre
Contrôleur dédié
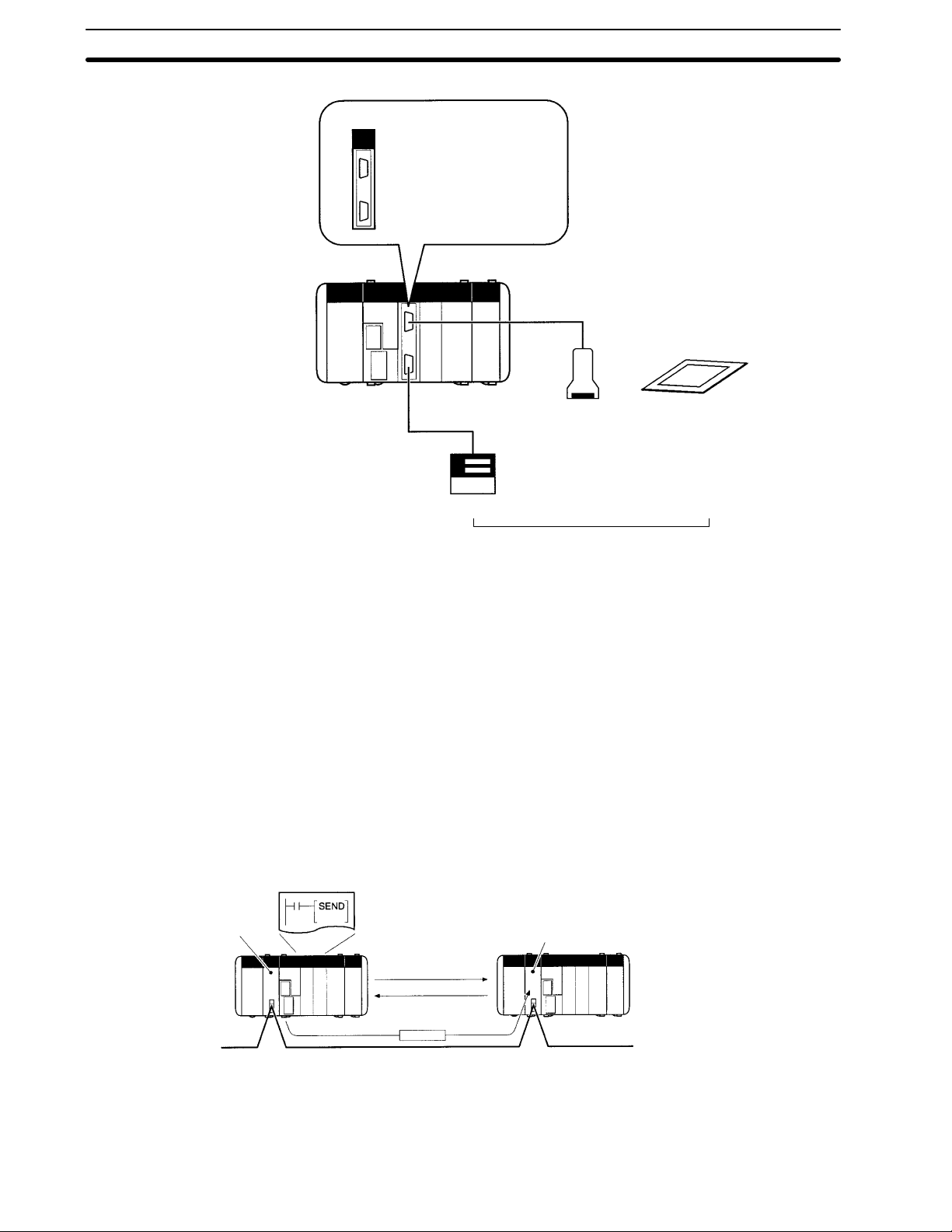
Une unité de liaison inter--APIpeut être incluse dans le CQM1H. Des données
peuvent être échangées entre plusieurs API en utilisant un réseau inter--API.
Des liaisons de transmission de données sont prises en charge pour créer des
zones de données partagées et des communications de messages sont prises
en charge pour permettre d’envoyer les données et les commandes requises en
utilisant des instructions de communications de réseau. Le réseau inter--API
peut être facilement construit en utilisant le câble en paire torsadée. L’ échange
de données est également pris en charge avec des API C200HX/HG/HE, CS1,
CVM1 et série V, aussi bien qu’avec des ordinateurs personnels.
Rem.
Des liaisons inter--API peuvent être créées avec un autre CQM1H ou avec un
CQM1, un CPM1, un CPM1A, un CPM2A, un CPM2C, un SRM1, un
C200HX/HG/HE ou un C200HS simplement en établissant une connexion 1:1
entre les ports RS-232C intégrés dans les UC.
Instructions de communications en
réseau, comme SEND, RECV et CMND
Unité inter--API
”controller
link”(CLK)
CQM1H
Vitesse : 2 Mbps; distance de transmission : 1 km (lorsque la vitesse est de 500 kbps) ;
nombre max de stations : 32.
Un maximum de 8.000 mots par station peuvent être envoyés pour le CQM1H.
L’échange de données est pris en charge pour les API CQM1, CQM1H, CS1, C200HX/HG/HE et
CVM1/séries CV.
Liaison de
données
Communications
de messages
Réseau inter--API
CQM1H
Unité inter--API ”controller link”
5
Page 28
1-1ChapitreDescription
Communications grande
vitesse/longue distance
avec CompoBus/S
Un large éventail de
surveillance HMI et de
méthodes de réglage
Une ou plusieurs unité maître CompoBus/S peuvent être incluse dans le
CQM1H. Des communications d’E/S déportées à grande vitesse ou à longue
distance peuvent être effectuées avec des CompoBus/S esclaves (l’unité
maître CompoBus/S est une unité d’E/S spéciale pour le CQM1H).
CQM1H
Unité maître CompoBus/S
CompoBus/S (E/S déportée grande vitesse ou longue distance)
CompoBus/S Esclaves
Bornier d’E/S déportés, bornier connecteurs, bornier
capteurs, bornier analogiques, etc.
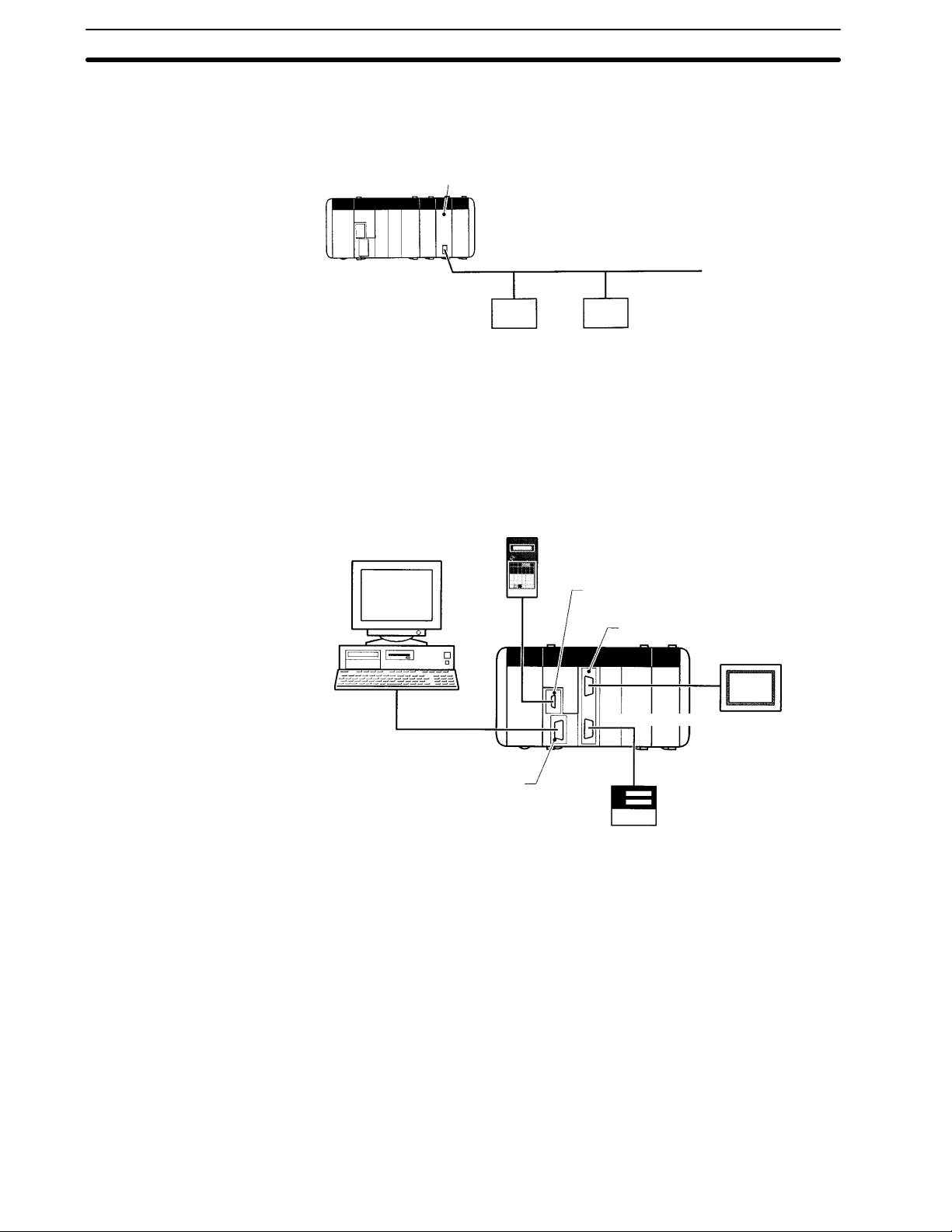
Des dispositifs de programmation et des terminaux opérateur programmables
(TOP) peuvent être connectés à quatre ports, deux ports sur l’UC et deux ports
sur une Carte communications série. Il est ainsi possible d’installer et de
surveiller la commande d’une machine depuis un TOP tout en surveillant ou en
programmant à partir d’une console de programmation ou d’un
micro--ordinateur.
Console de programmation
Micro--ordinateur
Port périphérique sur l’UC
Port RS-232C sur la Carte
communications série
TOP
Port RS-422A/485
Port RS-232C sur l’UC
Contrôleur de température ou autre appareil
Connexion simultanée possible
Il est également possible de programmer et de surveiller à distance à partir d’un
micro--ordinateur et d’un modem. Lorsqu’il est utilisé en combinaison avec la
fonction protocole macro, l’micro--ordinateur peut également être appelé du
CQM1H en utilisant l’instruction PMCR(----), et lorsque la connexion est établie,
commuter le mode de communications série sur connexion à un
micro-ordinateur (pour programmation/surveillance à distance) en utilisant
l’instruction STUP(-- --).
Si une carte de réglage analogique est montée, les ajustements fins des
réglages, tels que les réglages de vitesse de rotation ou de temporisation, sont
possibles sur site en utilisant les potentiomètres sur l’avant de la carte.
Le statut ON/OFF d’un sélecteur de micro-interrupteur programmable par
l’utilisateur est stocké dans la zone AR. La configuration de ce sélecteur peut
être utilisée sur site pour commuter entre le fonctionnement d’essai et le
fonctionnement réel, changer les valeurs de consigne ou pour exécuter
n’importe quelle autre fonction qui peut être programmée en réponse aux
6
Page 29

1-1ChapitreDescription
changements du statut du bit AR correspondant à ce sélecteur de
micro-interrupteur.
Une programmation plus
facile avec un ensemble
d’instructions complet et
des fonctions
d’interruption
Cassettes mémoire pour
la gestion de
programmes/données ;
Horloge Incluse
Des instructions mathématiques (telles que mathématiques à virgule flottante,
fonctions exponentielles, fonctions logarithmiques et fonctions
trigonométriques), une instruction TOTALIZING TIMER (TTIM(----)) (totalisation
du temporisation), une instruction CHANGE RS-232C SETUP (STUP(----))
(changer la configuration du port RS--232C) et des instructions de
communications de réseau ont été ajoutées. En outre, des fonctions complètes
d’interruption pour l’UC sont prises en charge, y compris des interruptions
d’entrée, des interruptions de compteur à grande vitesse et des interruptions de
temporisation cyclique (avec des interruptions programmées et des
interruptions à une impulsion). Des interruptions des communications séries
utilisant une protocole macro (avis d’interruption) sont également prises en
charge. Ces interruptions permettent une commande plus facile et plus flexible
de la machine.
Une cassette mémoire (EEPROM ou mémoire flash) peut être montée dans
l’avant de l’UC. Des programmes utilisateur, de la mémoire de données (DM à
lecture seule, configuration de l’API) et de l’information d’instruction étendue
peuvent être sauvés et lus par lots. Il est également possible de faire des
réglages de sorte que les données contenues dans la cassette mémoire soient
chargées automatiquement au démarrage. Ce dispositif signifie que, en cas
d’expiration de batterie ou d’opérations négligentes de
programmation/surveillance, les données pour les programmes utilisateur et la
mémoire de données ne sont pas perdues. Cela signifie également que des
changements dans les programmes utilisateur nécessaires pour différentes
machines commandées peuvent être faits facilement. De plus, en utilisant une
cassette mémoire avec une horloge, les heures et les dates peuvent être
utilisées dans le programme utilisateur.
Compatibilité avec les
unités CQM1
UC
Cassette mémoire
EEPROM/mémoire flash
Programme utilisateur,
Configuration de l’API, etc.
Les unités d’alimentation, les unités d’E/S de base et les unités d’E/S dédiées
pour le CQM1 peuvent être utilisées dans leCQM1H. Par conséquant, les unités
d’E/S dédiées comme les unités de commande de la température, les unités de
capteur, les unités d’interface B7A et les unités de liaison CompoBus/D
(DeviceNet) peuvent toutes être employées. En outre, les programmes
utilisateur utilisés avec le CQM1, les consoles de programmation pour le CQM1
et les cassettes de mémoire conventionnelles peuvent également être utilisés
(un connecteur de conversion est nécessaire pour utiliser la console de
programmation).
7
Page 30
1-2 Configuration du système
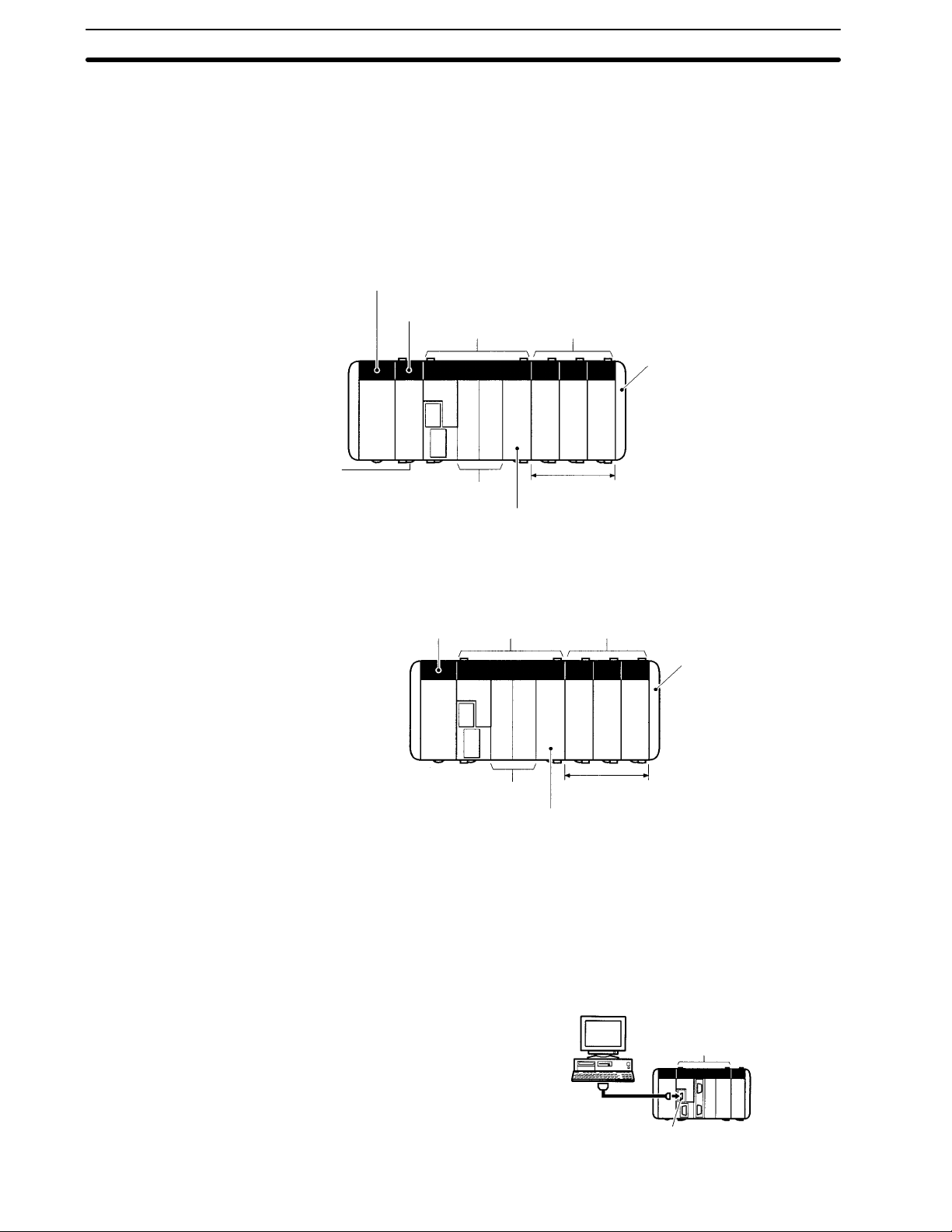
1-2-1 Configuration de base
Les deux types de configurations disponibles pour le CQM1H sont montrés
ci--dessous.
1-2ChapitreConfiguration du système
CQM1H-UC51/61
Une unité de
communication connectable
CQM1H-UC11/21
Jusqu’à deux cartes internes peuvent être montées et une unité de
communication peut être connectée à l’UC CQM1H--UC51 ou CQM1H--UC61.
La configuration est montrée ci--dessous.
Unité d’alimentation
Unité de communication
UC Unités d’E/S ou Unités d’E/S spéciales
Capot terminal
Deux cartes
internes
montables
Jusqu’à onze unités connectables
16 entrées intégrées à l’UC
Les UC CQM1H--UC11et CQM1H--UC21 ne prennent pas en charge les cartes
internes ou les unités de communication. La configuration est montrée
ci--dessous.
Unité d’alimentation UC Unités d’E/S ou Unités d’E/S spéciales
(Cartes
internes non
montables)
Jusqu’à onze unités connectables
16 entrées intégrées à l’UC
1-2-2 Connexions aux appareils de programmation
Les connexions aux micro--ordinateurs utilisant le logiciel de programmationet
les connexions aux consoles de programmation sont montrées ci-dessous.
Micro--ordinateur :
connexion au port périphérique de l’UC
IBM PC/AT ou
compatible
Logiciel de programmation
CS1W-CN
ou CS1W-CN114
+CQM1-CIF
jjj
jj
Capot terminal
UC
Port périphérique
8
Page 31

Connexion au port RS--232C de l’UC
p
p
g
()(
)
g
g
g
IBM PC/AT ou
compatible
1-2ChapitreConfiguration du système
Rem.
Console de programmation
C200H-PRO27-E
CS1W-CNj24
ou CS1W-CN114
+ C200H-CNj22
1-2-3 Unité Centrale
Logiciel de programmation
XW2Z-
jjj
S(-V)
UC
Port RS-232C
Il est également possible de se connecter au port RS--232C sur une Carte
communications séries.
CQM1-PRO01-E
UC
Port périphérique
(Câble de connexion fourni comme accessoire)
CS1W-CN114
Caractéristiques de base
Modèle Nombre
de
points
d’E/S
(voir
Rem.)
CQM1HUC61
CQM1HUC51
CQM1HUC21
CQM1HUC11
512
256 3,2 K 3K Non prisenNon pris
Capacité
program-
(mots)
15,2 K
7,2 K 6K
Nombre maximum
d’unités
de
me
Rem.
Points
d’entrée
externes
de l’UC
c.c. : 16
Capacité
DM
(mots)
6K 6K
Capacité
(mots)
Aucun
EM
Ports de
communications
séries intégrés
Port
périphé-
rique
Avec Avec Pris en
Port
RS-232C
Sans
Cartes
internes
charge
charge
Unité de
communi-
cations
Pris en
charge
en charge
Nombre de points d’E/S = Nombre de points d’entrée (d 256) + Nombre de
points de sortie (d 256).
UC
CQM1H-UC61
CQM1H-UC51
CQM1H-UC21
CQM1H-UC11
communications
1 2 11
Aucune Aucune
Nombre maximum d’unités connectables
Unité de
Cartes
internes
Unités
d’E/S
Unités
d’E/S
dédiées
9
Page 32

1-2-4 Cartes internes
p
Dénomination Caractéristiques Nº du modèle
Carte compteur à grande vitesse Entrées d’impulsions (compteur à grande vitesse) : 4 points
(monophasé : 50 kHz/500 kHz commutable ;
différence de phase : facteur multiplicatif 1x/2x/4x,
25 kHz/250 kHz commutable)
Sorties externes : 4 points
Carte de gestion d’axes Entrées d’impulsions (compteur à grande vitesse) : 2 points
(monophasé : 50 kHz, différence de phase : 25 kHz)
Sorties à impulsions : 2 points (50 kHz)
(Coefficient d’exploitation fixe et variable supportés)
Carte de codeur absolu Entrées de codeur absolu (code binaire gris) : 2 points (4 kHz) CQM1H-ABB21
Carte potentiomètres
analogiques
Carte d’E/S analogiques Entrées analogiques de 0 à 5 V, 0 à 20 mA, -10 à +10 V : 4 points
Carte communications séries Un port RS-232C et un port RS-422A/485 CQM1H-SCB41
Réglages analogiques : 4 points CQM1H-AVB41
Sorties analogiques de 0 à 20 mA, -10 à +10 V : 2 points
Associations de montage
UC et emplacement
CQM1HUC61/51
CQM1H-UC21/11
Emplacement 1
(emplacement
gauche)
Emplacement 2
(emplacement
droit)
Carte
compteur à
grande
vitesse
CQM1H-
CTB41
OK Impossible Impossible OK Impossible OK
OK OK OK OK OK Impossible
Impossible Impossible Impossible Impossible Impossible Impossible
Carte de
gestion
d’axes
CQM1H-
PLB21
Carte Interne
Carte de
codeur
absolu
CQM1H-
ABB21
Carte
potentiomèt
res
analogiques
CQM1H-
AVB41
Carte d’E/S
analogiques
CQM1H-
MAB42
CQM1H-CTB41
CQM1H-PLB21
CQM1H-MAB42
Carte de
communi-
cations
séries
CQM1H-
SCB41
1-2ChapitreConfiguration du système
Rem.
1. Les cartes compteur à grande vitesse peuvent être montées dans les deux
emplacements du CQM1H--UC51/61 simultanément.
2. Les cartes de réglage analogiques ne peuvent pas être montées dans les
deux emplacements du CQM1H--UC51/61 simultanément.
Emplacement 1 pour cartes internes
(emplacement gauche)
1-2-5 Unités de communications
Dénomination Caractéristiques Modèle
Unité inter--API ”controller
link” (câblée)
Liaison de transmission de données (Nombre maximum de mots
par station : 8.000)
Communications de messages (instructions SEND/RECV/CMND)
Rem.
Une unité de communication est connectée entre l’unitée d’alimentation et l’UC.
UC CQM1H
Emplacement 2 pour cartes internes
(emplacement droit)
CQM1H-CLK21
10
Page 33

1-2-6 Cassettes mémoire
flash
cassett
e
lami
cassett
e
émoire
mémoire
o
(
1-2ChapitreConfiguration du système
Nº du modèle Mémoire Capacité Horloge
CQM1H-ME16K
CQM1H-ME16R
CQM1H-ME08K
CQM1H-ME08R Oui
CQM1H-ME04K
CQM1H-ME04R Oui
CQM1H-MP08K
CQM1H-MP08R
Mémoire
flash
EEPROM 8Kmots
EPROM 8K/16
16 Kmots
4Kmots
Kmots
(selon le
réglage des
sélecteurs)
Non
Oui
Non
Non
Non
Oui
Données sauvegardables
(sauvées ensemble)
Programme
utilisateurs
Oui Oui Oui Zone AR :
Oui Oui Oui Lecture seule :
Mémoire de
données
(zones à
lecture seule,
configuration
de l’API)
Information
d’instruction
étendue
Lecture/
écriture
cassette
mémoire
UC
(comparaison
possible)
Transfert
automatique à
tension :
cassette
mémoire
UC
cassette
m
UC
l
se sous
o
o
1-2-7 Unités d’alimentations
Dénomination
Unités
d’alimentation c.a.
Unités
d’alimentation c.c.
Tension
d’alimentation
100 à 240 Vc.a.,
50/60 Hz (bande
large)
100 ou 230 Vc.a.
(sélectionnable),
50/60 Hz
24 Vc.c. 20à28Vc.c. 30 W
Plage de tension
fonctionnement
85 à 265 Vc.a.
Caractéristiques
de
5 Vc.c. : 3,6 A
(18 W)
5 Vc.c. : 6 A
24 Vc.c. : 0,5 A
(30 W au total)
5 Vc.c. : 6 A
24 Vc.c. : 0,5 A
(30 W au total)
5 Vc.c. : 6 A
Capacité de
sortie
Nº du modèle
Alimentation
d’entretien
Aucun CQM1-PA203
24 Vc.c. : 0,5 A
Aucun CQM1-PD026
CQM1-PA206
CQM1-PA216
11
Page 34

1-2-8 Unités d’E/S
1-2ChapitreConfiguration du système
Nom Nombre
points
Unités
d’entrée
c.c.
Unités
d’entrée
c.a.
Unités de
sortie
contact
Unités de
sortie
transistor
Unités de
sortie
Triac
8 12 à 24 Vc.c., communs
16
32
8
8 2Aà250Vc.a.(cosI=1,0)
16 2Aà250Vc.a.(cosI=1,0)
8 2Aà250Vc.a.(cosI=1,0)
8 2Aà24Vc.c.
16 50 mA/4,5 Vc.c. à
32
16 300 mA/24 Vc.c., sortie
8 1,0 A/24 Vc.c., sortie
8 0,4 A de 100 à 240 Vc.a.,
6 0,4 A de 100 à 240 Vc.a. CQM1-OA222
de
Caractéristiques Méthode de
Bornier
indépendants (1 point par
commun, 8 circuits)
12 Vc.c. (16 points par
commun, 1 circuit)
24 Vc.c. (16 points par
commun, 1 circuit)
12 Vc.c. (32 points par
commun)
24 Vc.c. (32 points par
commun)
24 Vc.c. (32 points par
commun)
100 à 120 Vc.a. (8 points
par commun)
200 à 240 Vc.a. (8 points
par commun)
2Aà250Vc.a.(cosI=0,4)
2Aà24Vc.c.
(16 A par unité), communs
indépendants
2Aà250Vc.a.(cosI=0,4)
2Aà24Vc.c.
(8 A par unité)
2Aà250Vc.a.(cosI=0,4)
2Aà24Vc.c.
(16 A par unité), communs
indépendants
(5 A par unité)
8 points par commun
300 mA/26,4 Vc.c.
16 points par commun
16 mA/4,5 Vc.c. à
100 mA/26,4 Vc.c.
500 mA/24 Vc.c., sortie
émetteur (PNP)
émetteur (PNP)
émetteur (PNP) (4 A par
unité), protection contre les
court-circuits
4 points par commun,
2 circuits
Connecteur
Bornier
Connecteur
Bornier
connexion
Nº du modèle Mots d’entrée
alloués
depuis IR 001
CQM1-ID211
CQM1-ID111
CQM1-ID212
CQM1-ID112
CQM1-ID213
CQM1-ID214
CQM1-IA121
CQM1-IA221
CQM1-OC221
CQM1-OC222
CQM1-OC224
CQM1-OD211
CQM1-OD212
CQM1-OD213
CQM1-OD216
CQM1-OD214
CQM1-OD215
CQM1-OA221
1mot ---
2mots
1mot
--- 1mot
Mots de
sortie alloués
depuis IR 100
2mots
1mot
12
Page 35

1-2-9 Unités d’E/S spéciales
gqgq(
1-2ChapitreConfiguration du système
Dénomination Caractéristiques Nº du modèle Mots d’entrée
alloués
depuis IR 001
Unité d’entrée
analogique
Unité de sortie
analogique
Unité d’alimentation
analogique
Unités d’interface B7A
Unités d’interface G730
Unité de liaison d’E/S
(unité esclave câblée
SYSMAC BUS)
Unité capteur Points d’entrée capteur : 4 max.
Module
photoélectrique à
fibre optique
Module
photoélectrique avec
amplificateur séparé
Module de proximité
avec amplificateur
séparé
Module fictif Monté comme entretoise sur les
Console déportée Connectée à une unité capteur pour
4 points d’entrée analogiques
--10à+10V,0à10V,1à5V,4à
20 mA
2 points de sortie analogiques
--10à+10V,0à20mA
Alimentation pour unité d’entrée ou de
sortie analogique (nécessaire lors de
l’utilisation d’une unité d’entrée ou de
sortie)
16 points de sortie CQM1-B7A02 --- 1mot
16 points d’entrée CQM1-B7A12 1mot --32 points de sortie CQM1-B7A03 --- 2mots
32 points d’entrée CQM1-B7A13 2mots --16 points d’entrée et 16 points de sortie CQM1-B7A21 1mot 1mot
Unité maître G730 terminal de
transmission à 2 câbles (32 entrées/32
sorties max.)
32 points/16 points commutables
Pour entrée maître d’extension
(32 points max.), 32 points/16 points
commutables
Pour sortie maître d’extension
(32 points max.), 32 points/16 points
commutables
Pour unité esclave câblée SYSMAC
BUS 32 points d’entrée et 32 points de
sortie
Utilisé avec module(s) capteur(s).
Jusqu’à quatre modules capteurs
peuvent être montés sur une unité
capteur simple.
Pour unités à fibre de série E32.
L’apprentissage automatique est
supporté.
Pour capteurs photoélectriques de
série E3C. Une fonction
d’apprentissage automatique est
incluse.
Pour capteurs de proximité de série
E2C. L’apprentissage automatique est
supporté.
emplacements ouverts du CQM1
lorsqu’aucun module capteur n’est
monté sur le CQM1H.
l’ajustement de la sensibilité des
modules incorporés par l’unité capteur,
la lecture et le c hangement de la valeur
de consigne et l’apprentissage.
Longueur de câble : 3 m
CQM1-AD041 2ou4mots ---
CQM1-DA021 --- 2mots
CQM1-IPS01
(Alimente 1 unité)
CQM1-IPS02
(Alimente 2 unités)
CQM1-G7M21 1ou2mots 1ou2mots
CQM1-G7N11 1ou2mots ---
CQM1-G7N01 --- 1ou2mots
CQM1-LK501 2mots 2mots
CQM1-SEN01 1mot
E3X-MA11 1mot ---
E3C-MA11 1mot ---
E2C-MA11 1mot ---
E39-M11 1mot ---
CQM1-TU001 --- ---
--- ---
(Jusqu’à 5
mots avec 4
des modules
suivants)
Mots de
sortie alloués
depuis IR 100
---
13
Page 36

1-2ChapitreConfiguration du système
Dénomination Mots de
Unités de contrôle de
température
Unités d’interface de
capteur linéaire
Unité maître
CompoBus/S
Unité de liaison d’E/S
CompoBus/D
(DeviceNet)
Entrée thermocouple (J/K), ON/OFF ou
contrôle PID avancé, sortie transistor
(émetteur, PNP), 2 boucles
Entrée thermocouple (J/K), ON/OFF ou
contrôle PID avancé, sortie transistor
(émetteur, PNP), 2 boucles
Entrée sonde à résistance de platine
(Pt, JPt), ON/OFF ou contrôle PID
avancé, sortie transistor (récepteur,
NPN), 2 boucles
Entrée sonde à résistance de platine
(Pt, JPt), ON/OFF ou contrôle PID
avancé, sortie transistor (récepteur,
NPN), 2 boucles
Mesure la tension ou le courant
d’entrée des capteurs linéaires et
converti les mesures en données
numériques pour un traitement de
décision comparative.
Type standard
Avec sortie moniteur
(--9 999 V à 9 999 V).
128 points (64 entrées et 64 sorties),
64 points (32 entrées et 32 sorties), ou
32 points (16 entrées et 16 sorties)
sélectionnable avec un commutateur.
CompoBus/D Esclave: 32 points
(16 entrées et 16 sorties)
Nº du modèleCaractéristiques
CQM1-TC001 1ou2mots 1ou2mots
CQM1-TC002 1ou2mots 1ou2mots
CQM1-TC101 1ou2mots 1ou2mots
CQM1-TC102 1ou2mots 1ou2mots
CQM1-LSE01 1mot 1mot
CQM1-LSE02 1mot 1mot
CQM1-SRM21-V1 1,2ou4mots 1,2ou4mots
CQM1-DRT21 1mot 1mot
Mots d’entrée
alloués
depuis IR 001
sortie alloués
depuis IR 100
14
Page 37

1-2-10 Accessoires
g
Cartedegestio
n
chaquecarte
g
Q
/
CQM
1-OD213
(
)
(32sorties)
desborniers(32entrées
)
1-2ChapitreConfiguration du système
Rail DIN
Connecteurs de cartes
internes
Dénomination Caractéristiques Nº du modèle
Rail DIN
Attaches de rail DIN Attaches de montage accrochées
Carte interne Dénomination du
Carte compteur à
grande vitesse,
Carte de
d’axes, Carte de
codeur absolu, carte
d’E/S analogiques
estion
Longueur de rail : 1 m PFP-100N
Longueur de rail : 50 cm PFP-50N
Longueur de rail : 1 m PFP-100N2
PFP-M
des deux côtés de l’API pour
l’empêcher de glisser à gauche ou à
droite. Deux sont fournies avec l’UC.
connecteur sur le
câble
Socle XM2D-1501
Capot XM2S-1511
Nº du modèle Remarques
Accessoires
standards pour
chaque carte
Câbles pour connexion des cartes d’E/S d’impulsions aux variateurs pour servomoteurs OMRON
Carte interne Câble relais Unité relais du
servomoteur
Carte de
gestion d’axes
(sorties à
impulsions)
XW2Z-
jjj
J-A3 XW2B-20J6-3B
Servomoteurs de série U :
XW2Z-
Servomoteurs de série M :
XW2Z-
Servomoteurs de série H :
XW2Z-
Câble Servomoteurs
jjj
jjj
jjj
jjj
jjj
jjj
R88D-UP
J-B1
R88D-MT
J-B2
R88D-H
J-B3
Câbles pour connexion
des cartes de codeur
absolu aux codeurs
absolus OMRON
Carte interne Câble Codeur absolu
Carte de codeur absolu E69-DC5 E6F-AG5C-C
Connecteurs pour unités d’E/S 32 points
Unité d’E/S Type de connecteur Nº du modèle
CQM1-ID112/213
(32 entrées)
32 sorties
Soudé
(accessoire standard)
Serti
Serré (câble plat) FCN-367J040-AU C500-CE403
Socle FCN-361J040-AU
Capot de connecteur FCN-360C040-J2
Boîtier FCN-363J040
Contact FCN-363J-AU
Capot de connecteur FCN-360C040-J2
Câbles pour unités d’E/S 32 points
Objet Unité d’E/S Câble de connexion Unité de conversion connecteur-bornier
Pour connexions à
des borniers
CQM1-ID112/213
(32 entrées)
CQM1-OD213
(32 sorties)
CQM1-ID112/213
(32 entrées)
XW2Z-
XW2Z-
jjj
B
jjj
D XW2C-20G5-IN16 Type commun
XW2B-40G5 Vis borne M3,5
XW2B-40G4 Vis borne M2,5
(par Fujitsu)
compatible OMRON
E6CP-AG5C-C
E6C2-AG5C-C
Nº du modèle
d’ensemble
(d’OMRON)
C500-CE404
C500-CE405
15
Page 38

Objet Unité d’E/S Câble de connexion Bornier relais d’E/S pour
(
)
(
)
p
(
)
(
)
Pour connexion à des
borniers relais
CQM1-ID112/213 (32 entrées) G79-IjCCQM1-OD213 (32 sorties) G79-OjC-
j
j
G7TC-Ij16
G7TC-OCjj, G70D, G70A
1-2-11 Nombre maximum d’unités d’E/S et de points d’E/S
Le nombre maximum d’unités d’E/S, d’unités d’E/S dédiées, d’unité de
communication et de cartes internes pouvant être reliées et le nombre
maximum de points d’E/S (c.-à-d., de mots alloués) pouvant être commandés
sont énumérés dans le tableau suivant.
1-2ChapitreConfiguration du système
entrée ou sortie
UC Nombre d’unités
CQM1H-CPU61
CQM1H-CPU51
CQM1H-CPU21
CQM1H-CPU11
Unité de communication
UC
Unité d’alimentation
Cartes internes
(2 emplacements)
Dépassement du nombre
maximum d’unités d’E/S
d’E/S et d’unités
d’E/S spéciales
11 ma x. 1max. 2max. 512 (32 mots)
Rem.
*Nombre de points d’E/S = Nombre de points d’entrée (d 256) + Nombre de
Nombre d’unités
de
communication
Connexion non
prise en charge prise en charge
Nombre de
cartes internes
Connexion non
Points d’E/S max.*
(mots alloués)
256 (16 mots)
points de sortie (d 256).
11 unités max.
16 entrées intégrées
(1 mot)
Un maximum de 11 Unités d’E/S et d’unités d’E/S dédiées peut être connectées
à l’API CQM1H. Si cette limite est dépassée, le CQM1H peut ne pas fonctionner
correctement en raison de la baisse de tension d’alimentation interne en 5 V.Le
CQM1H détectera si le nombre maximum de points d’E/S est dépassé (comme
expliqué ci-dessous), mais ne détectera pas si le nombre maximum d’unités a
été dépassé. Concevoir par conséquent le système de sorte que le nombre
maximum d’unités ne soit pas dépassé.
Dépassement du nombre
maximum de points d’E/S
Quand le nombre maximum des points d’E/S est dépassé, un message “I/O
UNIT OVER” s’affiche et le fonctionnement s’arrête. Pour plus de détails sur les
erreurs I/O UNIT OVER, se référer au Guide de programmation du CQM1H.
Le rapport entre le nombre maximum de points d’E/S et l’allocation de mot de
l’unité est montré dans le tableau suivant. L’UC a 16 entrées intégrées pour
lesquels un mot est assigné.
UC Nombre max. de
CQM1H-CPU61
CQM1H-CPU51
CQM1H-CPU21
CQM1H-CPU11
512 (32 mots) 1mot nmots mmots 1+n+md32
256 (16 mots) 1mot nmots mmots 1+n+md16
points d’E/S
Allocation d’entrée Allocation de
sortie
UC Unités
connectées
Unités
connectées
Nécessité
(n, md16)
(n, md16)
16
Page 39

1-3ChapitreConfiguration de système étendu
Se référer au Guide de programmation du CQM1H pour le nombre de mots
alloués à chaque unité et pour toute autre information sur l’allocation de
mémoire aux unités.
Rem.
1. Il est possible de dépasser le nombre maximum d’unités sans dépasser le
nombre maximum de points d’E/S (et de mots alloués). Par exemple, avec
les CQM1H--CPU61, si 12 unités pour chacune desquelles est assigné 1
mot sont connectées, lenombre total de mots alloués sera de 13 (dont 1 mot
alloué pour les entrées intégrées à l’UC), ce qui est inférieur au maximum
indiqué. Le nombre d’unités, cependant, dépasse le maximum de 11.
2. Il est également possible de dépasser le nombre maximum de points d’E/S
(et de mots alloués) sans dépasser le nombre maximum d’unités. Par
exemple, avec les CQM1H--CPU61, si 8 unités se voyant alloués 4 mots
chacune sont connectées, le nombre maximum d’unités n’est pas dépassé.
Cependant, l’allocation totale de mot sera (4 x 8) + 1 = 33 mots (dont 1 mot
alloué pour les entrées intégrées à l’UC), et par conséquent le nombre
maximum de 32 mots est dépassé.
1-3 Configuration de système étendu
1-3-1 Système de communications série
La configuration du système CQM1H peut être étendue en utilisant les ports de
communications séries suivants.
x Ports intégrés à l’UC, 2 ports : port périphérique et port RS-232C
x Ports de Carte communications séries, 2 ports : port RS-232C et port
RS--422/485 (CQM1H-CPU51/61 seulement)
micro--ordinateur Console de programmation
ou
Bus de console de
programmation
Bus periphérique
Liaison hôte
Sans protocole
Liaison hôte
Sans protocole
Inter--API 1:1
Liaison NT (mode
1:1/mode 1:N)
Port RS-232C
(UC)
Port RS-422A/485
(Carte
communications
séries)
Protocole macro
Liaison hôte
Sans protocole
Inter--API 1:1
Liaison NT (mode 1:1/
mode 1:N)
Port périphérique (UC)
Port RS-232C (Carte communications séries)
Protocole macro
Liaison hôte
Sans protocole
Inter- -API 1:1
Liason NT (mode 1:1/mode 1:N)
17
Page 40

Modes des ports de communications et des communications séries (protocoles)
p
p
Protocole de
communications
séries
Bus de console de
programmation
Bus périphérique Communications
Liaison hôte
(SYSMAC WAY)
protocole macro Emission et
Sans protocole Communications
inter--API 1:1 Liaisons de
Liaison NT
(mode 1:1)
Liaison NT
(mode 1:N)
Application
Communications
avec consoles de
programmation
avec des appareils
de programmation
Communications
avec un ordinateur
hôteouunTOP
réception de
messages
conformément aux
caractéristiques de
communications
des appareils
externes
sans protocole
avec des appareils
d’usage général
données avec
d’autres UC
Communications
un-à-un avec un
TOP
Communications
un-à-un ou
un-à-plusieurs
avec des TOP
Port
périphérique
Oui Non Non Non
Oui Non Non Non
Oui Oui Oui Oui
Non Non Oui Oui
Oui Oui Oui Oui
Non Oui Oui Oui
Non Oui (Voir Rem.) Oui Oui
Non Non Oui Oui
UC Carte communications séries
Port RS-232C
(Pas sur le
CQM1H-CPU11)
Port RS-232C
(port 1)
1-3ChapitreConfiguration de système étendu
Port
RS-422A/485
(port 2)
Rem.
Les fonctions de programmation de la console sont possibles avec un TOP. Ils
sont cependant impossibles quand le sélecteur 7 du micro-interrupteur à l’avant
de l’UC est sur OFF.
18
Page 41

1-3ChapitreConfiguration de système étendu
Protocoles
Le protocole du port de communications série peut être sélectionné dans les
fonctions de paramétrage de l’UC de l’API. Selon le protocole choisi, les
systèmes suivants peuvent être configurés pour soutenir des communications
séries.
Protocole Connexion principale Application Commandes applicables,
Bus console de
programmation
Bus périphérique
(voir Rem.)
Liaison hôte micro--ordinateur
Protocole macro Appareils externes à usage
Communications sans
protocole
Inter--API 1:1 API de série C Mots de liaison partagée
Liaison NT (1:1) bornier OMRON
Liaison NT (1: N) bornier OMRON
Console de programmation Communications entre
console de programmation
et API
Appareils de
programmation, par ex. CX
programmeur
bornier OMRON
Programmables
général
Appareils externes à usage
général
Programmables
Programmables
Communications entre
appareils de programmation
et API depuis l’ordinateur
Communications entre
ordinateur hôte et API
Les commandes peuvent
être envoyées à l’ordinateur
depuis l’API.
Emission et réception de
messages (cadres de
communications)
conformément aux
caractéristiques des
communications des
apprareils externes.
Communications sans
protocole avec des
appareils à usage général
entre API
Communications grande
vitesse un-à-un avec un
terminal programmable
utilisant un accès direct
Communications grande
vitesse un-à-un ou
un-à-plusieurs avec des
terminaux opérateur
programmables utilisant un
accès direct
instructions de
communications
Aucune
Aucune
Commandes de liaison
hôte/ commandes FINS
Les commandes peuvent
être transférées de l’API à
l’ordinateur.
Instruction PMCR(----)
Instructions TXD(----) et
RXD(----)
Aucune
Aucune
Aucune
Rem.
Le mode bus périphérique est utilisé pour les périphériques de programmation autres que les consoles de
programmation (par exemple, CX programmeur).
Système de liaison hôte
(mode SYSMAC WAY,
1:N)
Le système de liaison hôte permet à la mémoire d’E/S de l’API d’être lue/écrite,
de modifier le mode de fonctionnement à partir d’un ordinateur hôte
(micro--ordinateur ou terminal programmable) en exécutant les commandes de
liaison hôte. D’autres périphériques de programmation peuvent également être
connectés par l’intermédiaire d’un ordinateur utilisant ce mode.
Alternativement, il est également possible d’envoyer des données de l’UC du
CQM1H à l’ordinateur hôte en utilisant des instructions TXD(-- --) pour initialiser
les communications depuis l’API. Ce mode est pris en charge par le port
19
Page 42

1-3ChapitreConfiguration de système étendu
périphérique et le port RS-232C sur l’UC, aussi bien que par le port RS-232C et
le port RS-422A/485 sur la Carte communications série.
Communications sans
protocole
Micro--ordinateur hôte
TOP
CQM1H
Pour plus de détails sur les câbles nécessaires pour connecter l’ordinateur hôte
au CQM1H en mode liaison hôte, se référer au chapitre 3--5 Périphériques de
programmation.
Les instructions TXD(-- --) et RXD(- - --) dans le programme à contact peuvent
être utilisées sans protocole ni conversion de communication pour transférer
des données avec un appareil externe à usage général équipé d’un port
RS-232C. Il est possible d’attacher un code de début au commencement et un
code de fin à la fin des données (ou indiquer la quantité de données) lors de
l’émission/réception. À la différence de la protocole macro, il n’est pas possible
de construire un cadre de communications (message) selon les
caractéristiques de communications de l’associé de communications. En outre,
il n’y a aucune procédure pour le traitement de nouvelles tentatives, le
traitement de conversion de format de données ou le traitement de branches
(contacts) pour recevoir des données. Ce mode de communications est ainsi
utilisé pour les transmissions de données simples, telles que des données
d’entrée de code barres et des données de sortie d’impression. Ce mode est pris
en charge par le port périphérique et le port RS-232C sur l’UC, aussi bien que le
port RS-232C et le port RS-422A/485 sur la Carte communications série.
Système de inter--API 1:1
20
Instructions TXD(----) ou RXD(----)
Lecteur de code-barre Imprimante
Si deux API sont reliés un-à-un en les connectant ensemble par leurs ports
RS-232C, ils peuvent partager jusqu’à 64 mots de zone LR. Un des API servira
de maître et l’autre d’esclave.
L’une des trois plages de mots suivantes peut être définie pour être liée :
LR00àLR63,LR00àLR31ouLR00àLR15
Page 43

Un système de communications de inter--API 1:1 peut être crééentre le CQM1H
et un autre CQM1H ou entre le CQM1H et un CQM1, C200HX/HG/HE, C200HS,
CPM1, CPM1A, CPM2A, CPM2C ou SRM1(-V2).
Rem.
La zone de liaison sera toujours LR 00 à LR 15 (16 mots) pour des
communications de inter--API1:1 avec un CPM1, CPM1A, CPM2A, CPM2C ou
SRM1(-V2).
1-3ChapitreConfiguration de système étendu
Unité CQM1H Maître
LR 00
à
LR 31
LR 32
à
LR 63
Zone Maître
(émission)
Zone Esclave
(réception)
Unité CQM1H Esclave
Zone Maître
(réception)
Zone Esclave
(émission)
LR 00
à
LR 31
LR 32
à
LR 63
Ce mode est pris en charge par le port RS-232C de l’UC, aussi bien que par le
port RS-232C et le port RS-422A/485 de la Carte communications série.
CQM1H
Câble RS-232C
CQM1H ou autre API de série C
Câblage
Connecter les unités avec les fils câblés comme montré ci-dessous.
Abb.
signal
FG
SD
RD
RTS
CTS
--
--
--
SG
CQM1H
Nº de
sél.
Capot
2
3
4
5
6
7
8
9
CQM1H ou autre API de série C
Nº de
sél.
Capot
2
3
4
5
6
7
8
9
9
Abb.
signal
FG
SD
RD
RTS
CTS
--
--
--
SG
Système de liaison NT
Câbles recommandés
UL2464 AWG28x5P IFS-RVV-SB (UL approuvé, Fujikura Ltd.)
AWG28x5P IFVV-SB (hors norme UL) ( UL non approuvé, Fujikura Ltd.)
UL2464-SB (MA) 5Px28AWG (7/0.127) (UL approuvé, Hitachi Cable, Ltd.)
CO-MA-VV-SB 5Px28AWG (7/0.127) (UL non approuvé, Hitachi Cable, Ltd.)
Connecteurs utilisables (Accessoires standards pour le CQM1H)
Socle : XM2A-0901 (OMRON) ; Capot : XM2S-0911-E (OMRON)
Si un API et un terminal programmable (TOP) sont connectés ensemble par un
port RS-232C ou un port RS-422A/485, les affectations pour la zone de contrôle
d’état du TOP, la zone d’information d’état et des objets (tels que des
commutateurs à contact, des voyants et des cartes de mémoire) peuvent être
allouées dans la mémoire d’E/S de l’API. Le système de liaison NT permet au
TOP d’être commandé par l’API et le TOP peut périodiquement lire des données
21
Page 44

1-3ChapitreConfiguration de système étendu
de la zone de contrôle d’état de l’API pour effectuer des opérations nécessaires
s’il y a des changements dans la zone. Le TOP peut communiquer avec l’API en
écrivant des données dans la zone d’information d’état ou dans la mémoire
d’E/S de l’API depuis le TOP. Le système de liaison NT permet à l’état du TOP
d’être commandé et surveillé sans utiliser de programme à contact de l’API.
Il y a deux modes de liaison NT : l’un est pour des communications entre un API
et un TOP (mode 1:1) et l’autre est pour des communications entre un API et un
ou plusieurs TOP (mode 1:N). Ces modes prennent en charge des
communications complètement différentes.
Liaison NT : mode 1:1
Ce mode est utilisé pour des communications entre un API et un TOP. Ce mode
est pris en charge par le port RS-232C de l’UC, aussi bien que par le port
RS-232C et le port RS-422A/485 de la Carte communications série. Le mode de
liaison NT 1:1 est pris en charge pour des communications entre seulement un
API et un TOP. Définir les paramètres de communications du TOP pour une
liaison 1:1.
UC
Port RS-232C
TOP
Liaison NT: mode 1:N
Connexion au port RS-232C de la
Carte communications séries
Carte communications séries
Port RS-232C
RS-422A
NT-AL001
RS-232C-à-RS-422/485
Adaptateur de conversion
Mode de liaison : mode 1:N
Ce mode est utilisé pour des communications entre un API et n (8tnt1) TOP. Ce
mode est pris en charge par le port RS-232C de l’UC, aussi bien que par le port
RS-232C et le port RS-422A/485 de la Carte communications série. Le mode de
liaison NT 1:N est pris en charge pour des communications entre un API et un ou
plusieurs TOP. Définir les paramètres de communications du TOP pour une
liaison NT 1:N.
Liaison NT : mode 1:1
Carte communications séries
Port RS-232C
TOP
Connexion au port RS-422A/485 de
la Carte communications séries
Carte communications séries
TOP TOP
Port RS422A/485
RS-422A/485
TOP TOP
RS-422A/485
22
Rem.
Le mode de liaison NT 1:1 et le mode de liaison NT 1:N utilisent différents types
de communications séries et il n’y a aucune compatibilité de données entre eux.
Page 45

1-3ChapitreConfiguration de système étendu
Macros de protocole
Le protocole CX est utilisé pour créer des ensembles de procédures de
transmission de données appelées protocoles pour les appareils externes
d’usage général selon leurs caractéristiques de communications. Les
communications doivent être en semi-duplex et doivent utiliser la
synchronisation marche/arrêt. Les protocoles créés sont enregistrés dans une
Carte communications série, permettant aux données d’être envoyées et
reçues des appareils externes en exécutant simplement l’instruction PMCR(-- --)
dans l’UC. Les protocoles pour des communications de données avec des
appareils OMRON, tels que des contrôleurs de température, des processeurs
de signaux intelligents, des lecteurs de code-barres etdes modems, sont pris en
charge en tant que protocoles standards (voir Rem. 1). Ces protocoles peuvent
être changés pour s’adapter aux besoins de l’utilisateur. Des macros de
protocole sont prises en charge par le port RS-232C et le port RS-422A/485 sur
la Carte communications série (voir Rem. 2).
Rem.
1. Les protocoles standards sont fournis en standard avec le protocole CX et
les cartes de communications séries.
2. Macros de protocole non prises en charge par les ports intégrés de l’UC.
Instruction PMCR(----)
Messages définis par
l’utilisateur
(Cadres de communications)
Appareil externe à
usage général
Rem. CompoWay/F (Fonction hôte)
Une UC CQM1H peut fonctionner comme hôte pour envoyer des commandes
CompoWay/F aux composants d’OMRON connectés dans le système. Les
commandes CompoWay/F sont exécutées en utilisant les séquences
émission/réception CompoWay/F dans l’un des protocoles standards fournis
dans les macros de protocole.
1-3-2 Réseaux de communications
Avec l’UC CQM1H, des réseaux peuvent être créés en utilisant les unités de
communications suivantes :
x Unité Maître CompoBus/S
x Unité de liaison contrôleur (CQM1H-CPU51/61 seulement)
Réseau CompoBus/S
CompoBus/S est un bus ON/OFF à grande vitesse pour des communications à
distance d’E/S. Connecter une unité maître CompoBus/S CQM1-SRM21-V1
(une unité d’E/S dédiée) au réseau permet des communications d’E/S à
distance, sans programmation dans l’UC, entre l’API et les esclaves. Les
communications à grande vitesse sont effectuées avec 256 points dans une
durée de cycle de 1 ms maximum. Avec le CQM1H-SRM21-V1, un mode de
communications à longue distance est également disponible en plus du mode
Carte communications séries
23
Page 46

1-3ChapitreConfiguration de système étendu
précédent de communications à grande vitesse, permettant des
communications sur une ligne de raccordement allant jusqu’à 500 m.
Réseau inter--automate
CQM1H
Unité maître CompoBus/S
CompoBus/S
E/S déportées
E/S déportées et autres esclaves
RLe réseau de liaison du contrôleur est le réseau de base des réseaux FA d’API
OMRON. Lors de l’utilisation d’une UC CQM1H-CPU51/61, le CQM1H peut être
connecté au réseau en utilisant une unité inter--API “controller link”. Ceci permet
le transfert flexible et simple de grandes quantités de données avec d’autres API
OMRON (par exemple des API CQM1H, CS1, C200HX/HG/HE, CVM1 et de
série CV) ou avec des micro-ordinateurs. Des liaisons de données peuvent être
créées entre les API de sorte que les données puissent être partagées sans
programmation et que des communications de message FINS puissent être
exécutées, permettant un contrôle séparé et un transfert de données lorsqu’ils
sont requis. En particulier, un réglage direct utilisant des liaisons de données
permet la création d’un système flexible de inter--API avec l’utilisation efficace
des zones de données.
Unité de liaison contrôleur Unité de liaison contrôleur
CQM1H
Les liaisons de
données transfèrent
automatiquement les
données à chaque
cycle.
CQM1H
Messages envoyés à d’autres
stations lorsque c’est nécessaire.
Unité de liaison contrôleur
API CS1, C200HX/HG/
HE,CVM1ousérieCV
Liaison contrôleur (câblé)
24
Page 47

1-4 Fonctions listées par objet
Objet Unité/Carte Fonction Détails
Réglage du
temps de cycle
Méthode de
réactualisation
Debugging
Création d’un temps de
cycle minimum
Arrêt du fonctionnement
si le temps de cycle
dépasse une durée
prédéfinie
Détection d’un temps
de cycle supérieur à
100 ms
Détection du maximum
et de la valeur actuelle
du temps de cycle
Réactualise une sortie
lorsque une instruction
OUTPUT est exécutée
Réactualise les entrées
lorsqu’une interruption
intervient
Mise sur OFF des
sorties depuis les unités
de sortie dans tous les
modes de
fonctionnement (arrêt
de la réactualisation
des sorties)
Détection des
transitions ON-à-OFF
et OFF-à-ON pour les
bits spécifiés
Echantillonnage des
données de mémoire
d’E/S spécifiées
Changement de
programme durant le
fonctionnement
UC
UC
UC
1-4ChapitreFonctions listées par objet
Configuration de l’API :
Temps de cycle, temps
de cycle minimum
Configuration de l’API :
Temps de surveillance
de cycle
Zone SR : Drapeau
temps de cycle
dépassé
Zone AR : Temps de
cycle maximum, temps
de cycle actuel
Configuration de l’API :
Méthode de
réactualisation de
sortie,directe
Configuration de l’API :
Premier mot de
réactualisation
d’entrées et nombre de
mots de réactualisation
d’entrées pour les
interruptions
Zone SR : Bit de sortie
OFF
Surveillance
différentielle (depuis
l’appareil de
programmation)
Suivi de données L’échantillonnage peut être défini
Edition en ligne (depuis
un appareil de
programmation)
Défini en DM 6619
(0001 à 9999 ms).
Défini en DM 6618 (00 à 99;
unités de réglage : 10 ms, 100
ms, 1 s).
SR 25309 passe sur ON.
Le temps de cycle maximum est
enregistré dans l’AR 26 e t le
temps de cycle actuel est
enregistré dans l’AR 27.
Défini une méthode de
réactualisation de sortie directe
en DM 6639 bits 00 à 07.
La sortie est réactualisée lorsque
OUT est exécuté dans le
programme utilisateur.
Défini le mot de réactualisation
d’entrées pour chaque
interruption dans les DM 6630 à
DM 6638.
Les entrées pour les mots
spécifiés sont réactualisées
avant l’exécution du
sous-programme d’interruption
lors de l’occurence d’une
interruption d’entrée, d’une
interruption de temporisation
cyclique ou d’une interruption de
compteur à grande vitesse.
SR 25215 passe sur ON.
---
pour être exécuté à intervalles
réguliers, à la fin de chaque
cycle ou en accord avec une
périodicité définie par l’utilisateur.
---
25
Page 48

Maintenance
diagnostique
d’échec
Objet DétailsFonctionUnité/Carte
Maintien de l’état de
toutes les sorties lors
d’un arrêt de
fonctionnement
Début de
fonctionnement avec la
mémoire d’E/S à l’état
sauvegardé
Maintien de l’état de la
mémoire d’E/S lorsque
le courant est établi
Autorisation du réglage
de l’état d’entrée à
l’aide du sélecteur du
micro-interrupteur au
lieu des unités d’entrée
(par ex. commutation
entre les
fonctionnements
d’essai et réel)
Protection en écriture
de la mémoire du
programme et des
données DM en lecture
seule (zone à lecture
seule d’usage général
et configuration de l’API
seulement) depuis un
appareil périphérique
Caractéristiques du
mode de démarrage
Comptage des
coupures d’alimentation
Traitement des erreurs
définies par l’utilisateur
et continuation ou arrêt
du fonctionnement de
l’API en accord
Exécution d’un
diagnostique de temps
et d’un diagnostique
logique pour une
section du programme
Enregistrement des
erreurs horodaté, y
compris les erreurs
définies par l’utilisateur
UC Zone SR : Bit de
UC
1-4ChapitreFonctions listées par objet
SR 25212 passe sur ON.
maintien d’E/S
Zone SR : Bit de
maintien d’E/S
Configuration de l’API :
Etat du bit d’E/S,
Maintien
Micro-interrupteur : le
sélecteur du
micro-interrupteur
personnalisé pour une
opération utilisateur est
enregistré dans la zone
AR.
Micro-interrupteur :
Protection en écriture
du programme et des
données
Configuration de l’API :
Mode de démarrage
Zone AR : Compteur
de coupures
d’alimentation
Instructions d’erreurs
utilisateur
Instruction FPD(----) ---
Journal d’erreur Une fonction journal pour les bits
SR 25212 passe sur ON et
réglage de DM 6601 bits 08 à 11
dans la configuration de l’API
pour maintenir l’état maintien du
bit d’E/S au démarrage.
Le réglage du sélecteur 6 est
enregistré en AR 0712.
Le sélecteur 1 du
micro-interrupteur passe sur ON
pour interdire l’écriture.
Défini en DM 6600, bits de 00 à
07
Surveillance de l’AR 23.
FAL(06) et FALS(07)
d’entrée utilisant les instructions
FAL(06) et FALS(07) est
également prise en charge.
26
Page 49

Objet DétailsFonctionUnité/Carte
g
Instructions
Cassette
mémoire
Autres Réduction de l’influence
Création de
programmes de
contrôle par étapes
Exécution de calculs à
virgule flottante
Exécution de fonctions
trigonométriques,
logarithmiques ou
exponentielles sur des
données numériques
Création de
sous-programmes à
contact pouvant être
utilisés à différents
endroits dans le
programme à contact,
en changeant
seulement les
opérandes.
Changement de
systèmes lors du
changement de
processus ou de
machines
Transfert et vérification
de données entre une
cassette mémoire et
l’UC en fonction des
paramètres de la zone
AR
Utilisation des fonctions
d’horloge pour
sauvegarder les
données, comme les
journaux d’erreur, avec
l’heure d’occurrence de
l’erreur
des vibrations des
points d’entrée et du
parasite externe
UC
Cassette
mémoire
cassette
mémoire avec
horloge
UC Configuration de l’API :
Instructions de
programmation par
étapes
Instructions de calculs
à virgule flottante
Instruction MACRO (MCRO(99))
Micro-interrupteur :
Transfert automatique
du contenu de la
cassette mémoire
Zone AR : Fonctions
de sauvegarde
Zone AR : Fonction
horloge
constantes de temps
d’entrée
1-4ChapitreFonctions listées par objet
---
---
Le sélecteur 2 du
micro-interrupteur passe sur ON
pour un transfert automatique du
contenu de la cassette mémoire.
Au démarrage, les programmes
utilisateur, une partie de la zone
DM (DM à lecture seule et
configuration de l’API) et les
informations des instructions
étendue seront lus
automatiquement depuis la
cassette mémoire vers l’UC.
AR 1400 passe sur ON pour
transférer les données depuis
l’UC vers la cassette mémoire.
AR 1401 passe sur ON pour
transférer les données depuis la
cassette mémoire vers l’UC.
AR 1402 passe sur ON pour
comparer les contenus de la
cassette mémoire et les données
de l’UC. (Résultats en AR 1403.)
Utiliser une cassette mémoire
avec une horloge pour
enregistrer les données de
temps (minutes, heures,
secondes, jour du mois, mois,
année, jour de la semaine) en
AR 17 à AR 21.
Définir les constantes de temps
d’entrée pour les unités d’entrée
c.c. duDM 6620 au DM 6627.
Réglages valides :
1, 2, 4, 8, 16, 32, 64, 128 ms.
27
Page 50

Fonctions
d’interruption
Objet DétailsFonctionUnité/Carte
Traitement d’une
interruption lorsqu’une
entrée passe sur ON
Exemple : traitement
couper-à-la-longueur
(envoie d’instructions à
un outil lorsqu’une
entrée d’interruption est
reçue d’un capteur de
proximité ou
photoélectrique)
Traitement
d’interruptions à
intervales réguliers
Exemple : calcul de
vitesse de plaque
(calcule la vitesse à
l’aide des signaux
d’entrée d’un codeur à
intervales réguliers)
Traitement d’une
interruption après un
temps fixé
Exemple : arrêt du
convoyeur avec grande
précision après
détection d’une pièce
(indépendemment de la
durée du cycle)
Traitement d’une
interruption lorsque la
PV d’un compteur à
basse vitesse (1 kHz)
atteint 0
Exemple : Comptage
des pièces (par ex. de
composants), et arrêt
d’alimentation
lorsqu’une valeur de
consigne est atteinte
Traitement d’une
interruption lorsque la
PV du compteur à
grande vitesse
correspond à une
certaine valeur
Exemple : Exécution
d’un traitement
nécessité pour couper
une pièce (par ex. un
câble) lorsqu’il est à
une certaine longueur
UC (entrées
intégrées)
UC (entrées
intégrées)
Carte de
gestion
d’axes
Carte de
codeur absolu
Interruptions d’entrées
(4 entrées) : Mode
interruption d’entrées
Interruption d’entrée
permise par
effacement du masque
à l’aide de l’instruction
INT(89) avec CC=000.
Interruption de la
temporisation cyclique :
mode d’interruption
programmé
Spécifié avec la
première opérande de
l’instruction STIM(69).
Interruption de la
temporisation cyclique :
mode à une impulsion
Trois temporisations
cycliques (0 à 2) (la
temporisation cyclique
2 ne peut pas être
utilisé en même temps
que le compteur à
grande vitesse 0).
Caractérisé par la
première opérande de
STIM(69).
Interruptions d’entrée
(4 entrées) : Mode
compteur
(décrémentation)
La valeur de consigne
du mode compteur est
mise à jour et le
masque est effacé à
l’aide de l’instruction
INT(89) avec CC=003.
Interruption du
compteur à grande
vitesse : comparaison
de la valeur à atteindre
1-4ChapitreFonctions listées par objet
Le sous-programme
d’interruption est exécuté lorsque
l’entrée intégrée à l’UC
(IR 00000 à IR 00003) passe sur
ON.
Le sous-programme
d’interruption est exécuté à
intervales réguliers.
Le sous-programme
d’interruption est exécuté une
fois lorsque le temps expire.
Décrémentation de la PV à
chaque fois que l’entrée intégrée
de l’UC (IR 00000 à IR 00003)
passe sur ON et exécution du
sous-programme lorsque la PV
atteint 0.
Le sous-programme
d’interruption est exécuté lorsque
la PV correspond à une valeur
enregistrée dans la table de
comparaison.
28
Page 51

Fonctions du
compteur à
grande vitesse
Objet DétailsFonctionUnité/Carte
Traitement d’une
interruption lorsque la
PV du compteur à
grande vitesse est
comprise dans une
certaine plage
Exemple : saisie de
pièces (par ex. des
câbles) comprises entre
des longueurs
spécifiées à grande
vitesse
Interruption du
programme lorsque les
données sont reçues
via les communications
série
Détection de position et de longueur lorsqu’une entrée est reçue d’un codeur rotatif incrémental
Comptage de
fréquence basse
vitesse (1 kHz)
Comptage de
fréquence basse
vitesse
(2,5 kHz/ 5 kHz)
Comptage de
fréquence grande
vitesse (25 kHz/
50 kHz ou 250 kHz/
500 kHz)
Comptage de
fréquence grande
vitesse (25 kHz/
50 kHz)
Carte de
communications séries
UC (entrées
intégrées)
Carte
compteur à
grande
vitesse
Carte de
gestion
d’axes
Interruption du
compteur à grande
vitesse : comparaison
de plage
Notification
d’interruption de
protocole macro
Interruption d’entrée :
Mode compteur
(décrémental, 1 kHz)
Compteur à grande
vitesse 0 :
Mode phase
différentielle (2,5 kHz)
Mode incrémental
(5 kHz)
Compteur à grande
vitesses1à4:
Mode phase
différentielle
(25 kHz/250 kHz,
facteur multiplicatif :
1/2/4)
Mode impulsions +
direction
(50 kHz/500 kHz)
Mode haut/bas
(50 kHz/500 kHz)
Compteur à grande
vitesses 1 et 2 :
Mode phase
différentielle (25 kHz)
Mode impulsions +
direction (50 kHz)
Mode haut/bas
(50 kHz)
Le sous-programme
d’interruption est exécuté lorsque
la PV du compteur est comprise
entre des limites supérieure et
inférieure prédéfinies.
---
Les entrées intégrées de l’UC
(IR 00000 à IR 00003) peuvent
être utilisées comme compteur à
grande vitesses sans exécuter
d’interruption. Les PV sont
mémorisées en SR 244 à
SR 247.
L’Entrée à impulsions à grande
vitesse des entrées intégrées de
l’UC (IR 00004 à IR 00006) est
comptée. Les PV sont
mémorisées en SR 230 et
SR 231.
L’Entrée à impulsions à grande
vitesse des ports 1, 2, 3 et 4 de
la carte compteur à grande
vitesse est comptée. Pour
l’emplacement 1, les PV sont
mémorisées de l’IR 200 à l’IR
207 et pour l’emplacement 2, du
SR 232 au SR 239 (le mode
circulaire ou le mode linéaire
peut être défini comme la plage
numérique).
L’Entrée à impulsions à grande
vitesse des ports 1 et 2 de la
carte compteur à grande vitesse
est comptée. Pour
l’emplacement 1, les PV sont
mémorisées de l’IR 200 à l’IR
207 et pour l’emplacement 2, du
SR 232 au SR 239 (le mode
circulaire ou le mode linéaire
peut être défini comme la plage
numérique).
1-4ChapitreFonctions listées par objet
29
Page 52

Objet DétailsFonctionUnité/Carte
Comptage à grande
vitesse des signaux
d’un codeur rotatif
absolu
Carte de
codeur absolu
Compteur à grande
vitesses 1 et 2 :
Modes d’entrée :
Mode DCB et mode
360
q
Réglages de
résolution : 8 bit (0 à
255), 10 bit (0 à 1023),
12 bit (0 à 4095)
Règle la résolution
pour correspondre au
codeur connecté.
1-4ChapitreFonctions listées par objet
L’entrée de code Gray binaire
d’un codeur rotatif absolu est
compté. Les PV sont
mémorisées du SR 232 au
SR 235.
Fonctions Sortie
à impulsions
Sorties à impulsions
simples
Sortie vers un
entraînement de moteur
d’entrée de train
d’impulsion (pilote de
servomoteur ou pilote
de moteur de
progression) pour
positionnement
Exécution d’un contrôle
de température
proportionnel au temps
à l’aide d’une fonction
Sortie à impulsions à
coefficient d’exploitation
variable
UC Configuration de l’API
et instructions
SPED(64)/PULS(65) :
les Sorties à
impulsions peuvent
être produites par des
unités de sortie à
transistor standards.
Carte de
gestion
d’axes
Ports 1 et 2 :
Sortie à impulsions
monophasé sans
accélération /
décélération (à l’aide
de l’instruction
SPED(64))
Sortie à impulsions
trapézoïdale
monophasée avec
mêmes taux
d’accélération et de
décélération (à l’aide
de l’instruction
PLS2(--))
Sortie à impulsions
trapézoïdale
monophasée avec taux
différents
d’accélération et de
décélération (à l’aide
de l’instruction ACC(--))
Ports 1 et 2 :
Sortie à impulsions à
coefficient
d’exploitation variable
(à l’aide de l’instruction
PWM(--))
Définir l’adresse de mot de s ortie
à impulsions (spécifier un mot de
l’IR 100 à l’IR 115).
Fréquence : 20 Hz à 1 kHz
Coefficient d’exploitation : 50%
Fréquence :
10 Hz à 50 kHz pour variateur
pour servomoteur ;
10 Hz à 20 kHz pour moteur de
progression
Coefficient d’exploitation : 50%
Les PV de Sortie à impulsions
sont mémorisées du SR 236 au
SR 239.
Fréquence : 5,9 kHz, 1,5 kHz,
91,6 Hz
Coefficient d’exploitation : 1% à
99%
Les PV de la Sortie à impulsions
sont mémorisées du SR 236 au
SR 239.
Réglage
analogique
30
En réglant le temps
pour lequel un
convoyeur est
temporairement arrêté,
le taux d’alimentation
basse vitesse sur une
distance fixe peut
facilement être contrôlé
à l’aide de l’ajusteur.
Carte
potentiomètre
analogique
Fonction réglage
analogique
Les valeurs indiquées par
l’ajusteur sont converties en
valeurs numériques entre 0 et
200 (DCB) et sont mémorisées
de l’IR 220 à l’IR 223.
Page 53

Objet DétailsFonctionUnité/Carte
E/S analogiques Obtenir des données de
Communications
séries
Communications
de réseau
temperature, des
données de pression,
etc.
Changement de
protocoles pendant le
fonctionnement (par ex.
une liaison hôte via un
modem)
Emission et réception
de messages en accord
avec le protocole de
communications du
partenaire de
communications
Effectuer des liaisons
de données un-à-un
avec d’autres API
Emission et réception
de données sans
protocole (pas de
conversion)
Ordinateur hôte Communications
Exécution d’un transfert
de données avec un
TOP (Terminal OMRON
Programmable)
Exécution de liaisons
de données (zone de
données partagées) via
la réseau FA
Exécution de
communications de
messages (émission et
réception de données
lorsque c’est
nécessaire) via le
réseau FA
Programmation ou
surveillance déportée
d’un autre API sur l e
réseau via une liaison
hôte ou un bus
périphérique
Carte d’E/S
analogiques
UC STUP(--) ---
Carte de
communications séries
Carte de
communications séries
Unité
inter--API
”controller
link”
Fonction d’E/S
analogiques
Contrôle analogique
également possible
lorsqu’utilisé en
combinaison avec
PID(--).
Fonction protocole
macro
inter--API 1:1 ---
Sans protocole
(TXD(48) et RXD(47))
initiées par un API
(TXD(48))
Liaison NT (mode 1:1
ou mode 1:N
possibles)
Liaison de transmission
de données
Communications de
messages (SEND(90),
RECV(98), et
CMND(----))
Programmation/
surveillance déportée
Deux points d’entrée et un point
de sortie pour les v aleurs
analogiques (0-5 V, 0-20 mA,
0-10 V)
---
---
---
---
---
---
---
1-4ChapitreFonctions listées par objet
31
Page 54

Communications
d’E/S
Entrée de
capteur de
détection
Objet DétailsFonctionUnité/Carte
Réduction du câblage à
l’aide de bus ON/OFF à
grande vitesse dans la
machine
Modularisation de
machine et réduction de
câblage à l’aide du
contrôle distribué de
l’UC par le Maître.
Conforme au bus
DeviceNet
multiconstructeur,
produisant une
compatibilité de
données avec des
appareils d’autres
sociétés.
Réduction du câblage
Exemple :
communications
simples entre API,
connexions entre API et
robots etc.
Réduction du câblage
et de l’espace
nécessaire pour la
sortie du capteur
Unité Maître
CompoBus/S
Unité de
liaison d’E/S
CompoBus/D
Unité
d’interface
B7A
Unité capteur Fonction entrée pour
1-4ChapitreFonctions listées par objet
CompoBus/S Maître Agit comme un CompoBus/S
Maître avec jusqu’à 64 entrées
et 64 sorties.
CompoBus/D Esclaves Agissent comme des
CompoBus/D Esclaves avec 16
entrées et 16 sorties.
Communications d’E/S Cinq types d’unités peuvent être
module photoélectrique
à fibre optique, module
photoélectrique avec
amplificateur séparé et
module de proximité
avec amplificateur
séparé (fonction
amplificateur)
utilisés en accord avec l’échelle
de contrôle. Connexions
possibles avec une station de
liaison B7A jusqu’à une distance
de 500 m.
Jusqu’à quatre modules capteurs
(sections amplifiées) de trois
sortes de capteurs (capteur
photoélectrique à fibre, capteur
photoélectrique avec
amplificateur séparé et capteur
de proximité avec amplificateur
séparé) peuvent être montés sur
une unité capteur simple. Les
modules capteurs peuvent être
sélectionnés et combinés en
accord avec l’objet à détecter et
la distance.
32
Page 55

Entrée capteur
/
analogique
Fonctions de
contrôle de
température
Objet DétailsFonctionUnité/Carte
Lecture de signaux
tension ou de courant
analogiques depuis des
capteurs ou des
appareils de mesure, et
sortie de signaux
analogiques vers les
variateurs de fréquence
ou les appareils de
contrôle analogiques
Lecture de données de
distance comme des
différences de hauteur
et des épaisseurs de
panneaux, utilisées en
combinaison avec des
capteurs de
déplacement
Lecture de données de
deux contrôleurs de
température avec une
unité
Unité d’entrée
analogique ou
Unité de
sortie
analogique
(Unité
d’alimentation
nécessaire)
Unité
d’interface de
capteur
linéaire
Unité de
contrôle de
température
1-4ChapitreFonctions listées par objet
E/S analogiques Entrée analogique : 4 points (0 à
20mA,0à5V,--10à+10V)
Sortie analogique: 2 points (0 à
20 mA, --10 à +10 V)
Fonction entrée/
fonctionnement pour
les données des
capteur/amplificateur
linéaire
Fonction contrôle de
température
Une mesure de tension ou de
courant d’entrée grande vitesse,
haute-précision depuis des
capteurs linéaires (de
déplacement) est exécutée et les
mesures sont converties en
données numériques pour
traitement de décision
comparative. L’entrée peut être
maintenue en accord avec les
signaux de temps externes.
Cycle d’échantillonnage : 1 ms ;
temps d’échantillonage de temps
externe : 0,3 ms
Nombre de boucles : 2
Entrée: Thermocouple (K, J) ou
thermomètre à résistance (Pt,
JPt)
Sortie: ON/OFF ou contrôle PID
avancé (proportionnel au temps)
1-4-1 Compteur à grande vitesse
UC / Carte Dénomination Nº de
compteur
UC :
Interruptions
d’entrée (Mode
compteur)
UC : compteur
à grande
vitesse intégré
Carte
compteur à
grande vitesse
Carte de
gestion d’axes
Interruptions
d’entrée (Mode
compteur)
Compteur à
grande vitesse
0
Compteurs à
grande vitesse
1, 2, 3 et 4
Compteur à
grande vitesse
1et2
4 --- --- --- --- 1kHz
1 2,5 k Hz --- --- 5kHz ---
4 25 kHz ou
2 25 kHz 50 kHz 50 kHz --- ---
Fréquence de comptage max. pour chaque mode d’entrée
Phase
différentielle
250 kHz ;
facteur
multiplicatif :
1/2/4
Impulsion
+ direction
50 kHz ou
500 kHz
Haut/bas Incrémental Décrémental
50 kHz
ou
500 kHz
--- ---
33
Page 56

Configurations de systèmes prenant en charge les compteurs à grande vitesse
p
Configuration du
système
Configuration A
(13 compteurs au
total)
Configuration B
(11 compteurs au
total)
Unité/Carte Fonction Modes d’entrée et
UC
Carte compteur à
grande vitesse
(montée dans
l’emplacement 1)
Carte compteur à
grande vitesse
(montée dans
l’emplacement 2)
UC
Carte compteur à
grande vitesse
(montée dans
l’emplacement 1)
Carte compteur à
grande vitesse
(montée dans
l’emplacement 2)
Compteurs
décrémentaux pour
interruptions d’entrée
(mode compteur)
Compteur à grande
vitesse 0 pour
entrées intégrées
(IR 00004 à
IR 00006)
Compteurs à grande
vitesse 1, 2, 3 et 4
Compteurs à grande
vitesse 1, 2, 3 et 4
Compteurs
décrémentaux pour
interruptions d’entrée
(mode compteur)
Compteur à grande
vitesse 0 pour
entrées intégrées
(IR 00004 à
IR 00006)
Compteurs à grande
vitesse 1, 2, 3 et 4
Compteurs à grande
vitesse 1 et 2
fréquence de comptage max.
Compteur décrémental : 1 kHz 4
Mode phase différentielle :
2,5 kHz
Mode incrémental: 5 kHz
Mode phase différentielle
(facteur multiplicatif: 1/2/4) :
25 kHz ou 250 kHz, mode
impulsion et direction, mode
haut/bas: 50 kHz ou 500 kHz
Mode phase différentielle
(facteur multiplicatif: 1/2/4) :
25 kHz ou 250 kHz, mode
impulsion et direction, mode
haut/bas : 50 kHz ou 500 kHz
Compteur décrémental : 1 kHz 4
Mode phase différentielle :
2,5 kHz
Mode incrémental : 5 kHz
Mode phase différentielle
(facteur multiplicatif: 1/2/4) :
25 kHz ou 250 kHz, mode
impulsion et direction, mode
haut/bas : 50 kHz ou 500 kHz
Mode phase différentielle :
25 kHz
Mode impulsion et direction,
Mode haut/bas 50 kHz
1-4ChapitreFonctions listées par objet
Nombre de
compteurs
1
4
4
1
4
2
1-4-2 Sorties à impulsions
Unité/Carte Dénomination Nombre de
Unité de sortie
transistor
Carte Sortie à
impulsions
Sorties à
impulsions depuis
un point de sortie
Sorties à
impulsions depuis
le port 1 ou 2
points de Sortie
à impulsions
1 20 Hz à 1 kHz --- ---
2 10 Hz à 50 kHz
34
Fréquence de Sortie à impulsions
Sans
accélération/
décélération
(20 kHz pour un
moteur de
progression)
standard
Avec
accélération/
décélération
trapézoïdale
Accélération ou
décélération
seulement : 0 à
50 kHz
Accélération/
décélération
ensemble : 100
Hzà50kHz
Fréquence de
Sortie à
impulsions à
coefficient
d’exploitation
variable
91,6 Hz, 1,5 kHz,
5,9 kHz
Page 57

Configuration de système prenant en chargre les Sorties à impulsions
Configuration de
système
Configuration A
(3 sorties au total)
Unité/Carte Fonction Sortie Nombre
UC Sorties à impulsions du
Carte de gestion d’axes
(dans l’emplacement 2)
point de sortie d’une
unitée de sortie à
transistor
Sorties à impulsions 1 et2Sortie à impulsions
1-5 Comparaison CQM1-CQM1H
Les différences entre le CQM1H et le CQM1 sont listées dans le tableau suivant.
CQM1H CQM1
Structure de montage
Montage
Capacité E/S
Capacité de
programme
Capacité mémoire de
données
Longueurs des
instructions
Nombre d’instructions
dans un ensemble
d’instructions
Temps d’exécution des
instructions
Temps de surveillance
Points d’entrée
Nombre maximum
d’unités
Cartes internes
Compteurs à grande
vitesse
E/S d’impulsions
Pas de fond de panier (utiliser les connecteurs pour le montage)
Montage sur rail DIN (montage par vis impossible)
CQM1H-CPU11/21 : 256 points
CQM1H-CPU51/61 : 512 points
CQM1H-CPU11/21 : 3,2 Kmots
CQM1H-CPU51 : 7,2 Kmots
CQM1H-CPU61 : 15,2 Kmots
CQM1H-CPU11/21 : 3 Kmots
CQM1H-CPU51 : 6 Kmots
CQM1H-CPU61 : 12 Kmots
(Zone DM : 6 Kmots ; Zone EM : 6 Kmots)
1 pas par instruction, 1 à 4 mots par instruction
162
(14 de base, 148 instructions spéciales)
Instruction LD : 0,375Ps
Instruction MOV: 17,6Ps
0,60 ms 0,80 ms
16 points
Le nombre d’unités d’E/S ou d’unités d’E/S
spécifiées pouvant être connectées aux UC
CQM1H est comme suit :
CQM1H-CPU11/21/51/61 : 11 unités max.
CQM1H-UC51/61 : 2 emplacements Aucune
Pris en charge si la carte compteur à grande
vitesse CQM1H-CTB41 est montée.
Prises en charge si la carte 1 d’E/S à
impulsions CQM1H-PLB2 est montée.
CQM1-CPU11/21-EV1 : 128 points
CQM1-CPU41/42/43/44/45-EV1 :256 points
CQM1-CPU11/21-EV1 : 3,2 Kmots
CQM1-CPU41/42/43/44/45-EV1 :7,2 Kmots
CQM1-CPU11/21-EV1 : 1 Kmot
CQM1-CPU41/42/43/44/45-EV1 :6 Kmots
CQM1-CPU11/21-EV1 : 117
(14 de base, 103 instructions spéciales)
CQM1-CPU41/42/43/44/45-EV1 :137
(14 de base, 123 instructions spéciales)
Instruction LD : 0,5Ps
Instruction MOV : 23,5Ps
Le nombre d’unités d’E/S ou d’unités d’E/S
spécifiées pouvant être connectées aux UC
CQM1 est comme suit :
CQM1-CPU11/21-EV1 : 7 unités max.
(unités d’E/S seulement)
CQM1-CPU41/42/43/44-EV1 : 11 unités max.
(unités d’E/S ou unités d’E/S spécifiées)
Non pris en charge
Prises en charge pour l’UC
CQM1-CPU43-EV1.
Sortie à impulsions
standard sans
accélération/
décélération : 20 Hz à
1kHz
standard sans
accélération/
décélération : 10 Hz à
50 kHz
Sortie à impulsions
standard avec
accélération/décélération
trapézoïdale : 0 Hz à
50 kHz
Sortie à impulsions à
coefficient d’exploitation
variable
1-5ChapitreComparaison CQM1-CQM1H
de points
1
2
35
Page 58

Interface codeur
i
t
absolu
Réglages analogiques
E/S analogiques
Protocole macros
Unité de
communications
Liaison contrôleur
Conn-exions au
port
périphérique
Interruptions
Bits d’E/S
Points d’E/S pour
l’emplacement 1 de
carte interne
micro-ordinateur
Câble de
connexion
pour
console
de
programmation
Interruptions
d’entrée
(4 points
max.)
Interruptions de
temporisateur
cyclique
(3 points
max.)
Interruptions de
compteur
à grande
v
esse
Carte de
communications
séries
1-5ChapitreComparaison CQM1-CQM1H
CQM1CQM1H
Prise en charge si la Carte de codeur absolu
CQM1H-ABB21 est montée.
Pris en charge si la Carte potentiomètres
analogiques CQM1H-AVB41 est montée.
Priseenchargesilacarted’E/S
analogiques CQM1H-MAB42 est montée.
Pris en charge si la Carte communications
séries CQM1H-SCB41 est montée.
CQM1H-UC51/61 : 1 unité Aucune
Prise en charge si CQM1H-CLK21 Unité
inter--API ”controller link” est connectée.
CS1W-CN
Rem.
Console de programmation CQM1-PRO01 :
Utiliser le câble fourni avec la console ou le
CS1W-CN114.
Console de programmation C200H-PRO27 :
CS1W-CN224/624
Rem.
Mode interruption d’entrée : Les interruptions sont exécutées depuis les points d’entrée
intégrés à l’UC (4 points) en réponse aux entrées de sources externes.
Mode compteur : Les interruptions sont exécutées depuis les points d’entrée intégrés
internes à l’UC (4 points) en réponse aux entrées reçues un certain nombre de fois,
décompte.
Mode interruptions programmées : Le programme est interrompu à intervales réguliers
mesurés par l’horloge interne.
Mode interruption à une impulsion : Une interruption est exécutée après un certain temps,
mesuré par l’horloge interne.
Comparaison de valeur cycle : Les interruptions sont exécutées lorsque la PV du compteur à
grande vitesse est égale à une valeur spécifique.
Comparaison de plage : Les interruptions sont exécutées lorsque la PV du compteur à
grande vitesse est comprise dans une plage spécifiée.
Le comptage est possible pour l’entrée du
compteur à grande vitesse depuis les points
d’entrée internes à l’UC, les cartes d’E/S à
impulsions ou les cartes de codeur absolu.
Les sous-programmes d’interruption
peuvent être appelés depuis la Carte
communications séries à l’aide de la
fonction de notification d’interruption.
CQM1H-UC11/21 : 256 points
CQM1H-UC51/61 : 512 points
256 points (16 mots)
Mots utilisés par la carte interne dans
l’emplacement 1 : IR 200 à IR 215
jjj
Connection à un micro--ordinateur
également possible avec le
CQM1-CIF01/02 via un câble de
conversion CS1W-CN114.
Connexion à la console de programmation également possible avec le
C200H-CN222/422 via le câble de
conversion CS1W-CN114.
Prise en charge pour l’UC
CQM1-CPU44-EV1.
Pris en charge pour l’UC CQM1-CPU42-EV1.
Prises en charge pour l’UC
CQM1-CPU45-EV1.
Non prises en charge
Non prise en charge
CQM1-CIF01/02
Console de programmation CQM1-PRO01 :
Utiliser le câble fourni avec la console.
Console de programmation C200H-PRO27 :
C200H-CN222/422
Le comptage est possible pour l’entrée du
compteur à grande vitesse depuis les points
d’entrée internes à l’UC et, pour le
CQM1-CPU43/44-EV1, pour l’entrée des
ports 1 et 2.
Non prise en charge
CQM1-CPU11/21-EV1 : 128 points
CQM1-CPU41/42/43/44/45-EV1 :256 points
Aucun
36
Page 59

Points d’E/S pour
l’emplacement 2 de la
carte interne
Valeurs de consigne
analogiques
192 points (12 mots)
Mots utilisés par la carte interne montée à
l’emplacement 2 : IR 232 à IR 243
64 points (4 mots)
Mots où les valeurs de c onsigne
analogiques sont mémorisées lors de
l’utilisation de la carte de réglages analogiques CQM1-AVB41 : IR 220 à IR 223
64 points
(4 mots)
64 points
(4 mots)
96 points
(6 mots)
64 points
(4 mots)
1-5ChapitreComparaison CQM1-CQM1H
CQM1CQM1H
CQM1-CPU43/44-EV1 :
les PV des compteur à
grande vitesse 1 et 2 sont
mémorisées de l’IR 232 à
l’IR 235.
Autres UC : les IR 232 à
IR 235 peuvent être utilisés
comme bits de travail.
CQM1-CPU43-EV1 :
les PV de Sorties à
impulsions sont mémorisées de l’IR 236 à
l’IR 239.
Autres UC : les IR 236 à IR
239 peuvent être utilisés
par le système ou comme
bits de travail.
CQM1-CPU45-EV1 :
les valeurs de c onversion
des entrées analogiques et
les valeurs de sortie
analogiques sont mémorisées de l’IR 232 à
l’IR 237.
Autres UC : les IR 232 à
IR 237 peuvent être utilisés
comme bits de travail.
CQM1-CPU42-EV1 :
les valeurs de c onsigne
analogiques sont mémorisées de l’IR 220 à l’IR
223.
Autres UC : les IR 220 à
IR 223 peuvent être utilisés
comme bits de travail.
37
Page 60

Zone DM
Zone EM
CQM1HUC51/61 :
6 656 mots
CQM1HUC11/21 :
3 584 mots
Lecture/
écriture
Lecture seule DM 6144 à DM 6568
Zone de
paramètres
DM de liaison
du contrôleur
Zone de table
de routage
Carte de
communications séries
Zone
historique
d’erreurs
Configuration
de l’API
6 144 mots Les données de la zone EM
L’accès aux données de la
zone DM (lecture/écriture)
se fait en unités de mots
(16 bits). Les valeurs des
mots sont maintenues
lorsque l’alimentation est
coupée ou lorsque le mode
est changé.
CQM1H-UC51/61 :
DM 0000 à DM 6143
(6.144 mots)
CQM1H-UC21/11 :
DM 0000 à DM 3071
(3.072 mots)
Peut être écrit par le
programme.
(425 mots)
Ne peut pas être écrit par le
programme.
CQM1H-UC51/61 :
DM 6400 à DM 6409
(11 mots)
CQM1H-UC11/21 : Aucune
CQM1H-UC51/61 :
DM 6450 à DM 6499
(50 mots)
CQM1H-UC11/21 : Aucune
CQM1H-UC51/61 :
DM 6550 à DM 6559
(10 mots)
CQM1H-UC11/21 : Aucune
DM 6569 à DM 6599
(31 mots)
DM 6600 à DM 6655
(56 mots)
peuvent être lues ou écrites
en unités de mots (16 bits).
Le contenu est maintenu
lorsque l’alimentation est
coupée ou lorsque le mode
est changé. Accessible en
utilisant les instructions du
programme ou d’appareils
de programmation.
Mots en lecture/ écriture :
EM 0000 à EM 6143
(6 144 mots)
CQM1CQM1H
CQM1UC4j-EV1 :
6.656 mots
CQM1-
UC11/21-EV1:
1.536 mots
Lecture/écriture CQM1-
Lecture seule DM 6144 à DM 6568
Aucune ---
Aucune ---
Aucune ---
Zone historique
d’erreurs
Configuration
de l’API
Aucune ---
L’accès aux données de la
zone DM (lecture/écriture)
se fait seulement en unités
de mots (16 bits). Les
valeurs des mots sont
maintenues lorsque
l’alimentation est coupée ou
lorsque le mode est
changé.
UC4j-EV1 : DM 0000 à
DM 6143 (6.144 mots)
CQM1-CPU11/21-EV1:
DM 0000 à DM 1023
(1 024 mots)
Peut être écrit par le
programme.
(425 mots)
Ne peut pas être écrit par le
programme.
DM 6569 à DM 6599
(31 mots)
DM 6600 à DM 6655
(56 mots)
1-5ChapitreComparaison CQM1-CQM1H
38
Page 61

Cassette mémoire
(EEPROM ou mémoire
flash)
Mémoire d’analyse
Nouvelles instructions
Ports communications
séries
1-5ChapitreComparaison CQM1-CQM1H
CQM1CQM1H
Montée à l’avant de l’UC. Les cassettes de mémoire sont utilisées pour sauvegarder et lire
les programmes utilisateur, les DM (données à lecture seule et configuration de l’API) et les
informations d’instructions expansion (comme un block de données).
Il est possible de régler l’UC afin que lorsque l’alimentation est établie, les données stockées
dans la cassette mémoire (programme utilisateur, DM, informations d’instructions étendue)
soient automatiquement transférées, en un block, à l’UC (auto-boot). Le transfert
deux-directions et la comparaison de données entre l’UC et la cassette mémoire s ont
possibles à l’aide des paramètres de la zone AR.
En supplément aux cassettes mémoire
EEPROM 4 Kmots et 8 Kmots, des
cassettes mémoire flash de 15,2 Kmots sont
également disponibles.
1 024 mots (données de comparaison
d’analyse : 12 points, 3 mots)
Instruction TTIM (TOTALIZING TIMER),
instructions
SEND(90)/RECV(98)/CMND(----)
(communications réseau), instruction PMCR
(PROTOCOL MACRO), instruction
STUP(----) (CHANGE RS-232C SETUP) et
instructions mathématiques flottantes à 19
points possibles.
Un port périphérique intégré
Prend en charge les communications suivantes : bus périphérique, bus de console de
programmation, liaison hôte, sans protocole
Un port
RS-232C
intégré
Carte de
communications séries
(disponible
séparément) :
1 port
RS-232C et
1 port
RS-422A/485
CQM1H-UC61/51/21 :
Prend en charge les
communications liaison
hôte, sans protocole, liaison
NT (mode 1:1) et inter--API
1:1.
CQM1H-UC11 : Aucun
Rem.
Fonctions de la
console de
programmation prises
en charge par un
TOP (sauf lorsque le
sélecteur 7 du
micro-interrupteur est
sur OFF).
Communications liaison
hôte, sans protocole,
inter--API 1:1, liaison NT
(mode 1:1, mode 1:N) et
protocole macro pris en
charge.
Les cassettes mémoire EEPROM 4 Kmots et
8 Kmots sont disponibles.
CQM1-CPU4j-EV1 : 1 024 mots (données
de comparaison d’analyse : 12 points, 3 mots)
Les instructions de gauche ne sont pas prises
en charge par le CQM1.
Un port
RS-232C
intégré
Aucune ---
Prend en charge les
communications liaison
hôte, sans protocole (sauf
le CQM1-CPU11/21-EV1).
Le CQM1-CPU4j-EV1
prend également en charge
les inter--API 1:1, et les
liaison NT (mode 1:1)
Rem.
Le
CQM1-CPU4j-EV1
prend en charge les
fonctions de la
console de
programmation
depuis un TOP.
39
Page 62

Modes de
communications
séries
Temps de détection de
défaut d’alimentation
Accessoires standards
1-5ChapitreComparaison CQM1-CQM1H
CQM1CQM1H
Sans protocole
Jusqu’à 256 octets peuvent être envoyés ou reçus avec une instruction spéciale. Des codes
titre et des codes de fin peuvent être définis. Paramètres de temps de délai de transmission
disponibles.
Liaison hôte
Il est possible d’accéder à toutes les zones mémoire d’E/S de l’UC et au programme
utilisateur à l’aide des commandes le liaison hôte.
Liaison NT
(mode 1:1,
mode 1:N)
protocole
macro
Alimentation c.a. : 10 à 25 ms
Alimentationc.c.:5à25ms
Ensemble batterie : CPM2A-BAT01 Ensemble batterie : C500-BAT08
Le transfert de données est
possible sans programme
entre l’API et un TOP. Le
rapport API à TOP peut être
un-à-un ou un-à-plusieurs.
Les connections de liaison
NT mode 1:N sont
possibles seulement pour le
port RS-232C ou le port
RS-422A/485 sur la Carte
communications séries.
Les communications
protocole macro sont prises
en charge en utilisant le
port RS-232C ou le port
RS-422A/485 sur la Carte
communications séries
(CQM1H-UC51/61
seulement).
L’émission et la réception
de données sont possibles
en utilisant une instruction
via un protocole défini par
l’utilisateur depuis un
programme à contact.
Liaison NT
(mode 1:1
seulement)
Non pris en
charge
CQM1-CPU4j-EV1
seulement
---
40
Page 63

1-6 Procédure d’application de vue d’ensemble
La procédure suivante décrit les étapes nécessaires pour installer,programmer
et utiliser un système de commande CQM1H.
1, 2, 3... 1. Déterminer la configuration du système.
Décider si une ou plusieurs cartes internes sont nécessaires dans le
système et si elles doivent être montées dans l’emplacement gauche ou
droit. Les cartes utilisables sont les suivantes :
x Carte communications séries pour des communications séries.
x Carte compteur à grande vitesse ou Carte de gestion d’axes pour entrées
compteur à grande vitesse.
x Carte de gestion d’axes ou Sorties à impulsions.
x Carte de codeur absolu pour entrées de codeur absolu.
x Carte potentiomètres analogiques pour entrer des réglages via des
résistances variables.
x Carte d’E/S analogiques pour des E/S analogiques.
En outre, décider s’il sera nécessaire de se connecter au réseau
inter--automate “controller link”.
1-6ChapitreProcédure d’application de vue d’ensemble
2. Assigner les E/S.
Rien n’est exigé pour assigner les E/S avec le CQM1H. Les tableaux d’E/S
ne sont pas exigés et toute E/S est assignée automatiquement. Les mots
sont assignés aux unités d’E/S en commençant par l’UC et en allant vers la
droite, avec les unités d’entrée se voyant assignés les mots commençant à
l’IR 001 et les unités de sortie se voyant assignés les mots commençant à
l’IR 100.
3. Définir les paramètres dans la configuration de l’API.
La configuration de l’API peut être utillisée pour contrôler les fonctions de
l’UC et des cartes internes. Les paramètres par défaut dans la configuration
de l’API doivent être confirmés et si des changements sont nécessaires, ils
doivent être faits à partir d’un appareil de programmation avant de démarrer
le fonctionnement. Le configuration de l’API doit être changée pour utiliser
des cartes internes.
4. Assembler l’API.
5. Mettre l’API sous tension.
6. Ecrire le programme à contact.
7. Transférer le programme à l’UC.
8. Tester le fonctionnement.
Les étapes suivantes doivent être exécutées dans l’opération d’essai.
a) Vérifier le câblage des E/S.
b) Définir les bits nécessaires dans la mémoire (tel que le bit de maintien
des E/S).
c) Surveiller le fonctionnement et corriger le système en mode MONITOR.
9. Corriger le programme et revenir à l’étape 7., ci-dessus.
10. Enregistrer/imprimer le programme.
11. Commencer le fonctionnement réel.
41
Page 64

CHAPITRE 2
Caractéristiques techniques
Ce chapitre présente les caractéristiques techniques des unités utilisables dans un API CQM1H ainsi que les caractéristiques
fonctionnelles des zones mémoires.
2-1 Caractéristiques des unités 44..................................................
2-1-1 Unités d’alimentation 44...............................................
2-1-2 Caractéristiques des Unités centrales 45...................................
2-2 Caractéristiques des Unités d’entrée 51..........................................
2-2-1 Entrées 24 Vc.c. intégrées de l’Unité centrale 51............................
2-2-2 Unités d’entrée c.c. 54................................................
2-2-3 Unités d’entrée c.a. 59................................................
2-3 Caractéristiques des Unités de sortie 60..........................................
2-3-1 Unités de sortie à contacts 60...........................................
2-3-2 Unités de sortie à transistors 64.........................................
2-3-3 Unités de sortie à triacs 73.............................................
43
Page 65

2-1 Caractéristiques des unités
2-1-1 Unités d’alimentation
Objet CQM1-P A203 CQM1-PA206 CQM1-P A216 CQM1-PD026
Tension d’alimentation 100 à 240 Vc.a., 50/60 Hz 100 ou 230 Vc.a.
Plage de tension
permise
Plage de fréquence de
fonctionnement
Puissance consommée 60 VA max. 120 VA max. 50 W max.
Courant d’appel 30 A max.
Capacité de sortie 5 Vc.c. : 3,6 A
Résistance d’isolement 20 MΩ min. (à 500 Vc.c.) entre les bornes externes AC et les
Rigidité diélectrique 2 300 Vc.a. 50/60 Hz pendant 1 mn entre les bornes externes AC et les bornes GR, (voir
Immunité au bruit 1 500 Vc-c, largeur d’impulsion : 100 ns à 1 μs, temps de montée : 1 ns (par simulation de
Résistance aux
vibrations
Résistance aux chocs 147 m/s2(118 m/s2pour les unités de sorties à contact) 3 fois dans chaque directions X, Y,
Température ambiante Fonctionnement : 0 à 55 qC
Humidité 10% à 90% (sans condensation)
Atmosphère Sans aucun gaz corrosif
Prise de terre Inférieure à 100 Ω
Type de boîtier Montage en panneau
Poids 5kgmax.
Dimensions
(sans câbles)
85 à 264 Vc.a. 85 à 132 Vc.a. ou 170
47à63Hz ---
5 Vc.c. : 6 A
(18 W)
bornes GR (voir Rem. 1)
Rem. 1) Courant de fuite : 10 mA max.
1 000 Vc.a. 50/60 Hz pendant 1 mn entre les bornes externes DC et les bornes GR, (voir
Rem. 1) Courant de fuite : 20 mA max.
bruit)
10 à 57 Hz, amplitude de 0,075 mm, 57 à 150 Hz, accélération : 9,8 m/s2(voir Rem. 2) dans
les directions X, Y et Z pendant 80 minutes chaque (coefficient de temps de 8 minutes ¢
coefficient de 10 = temps total de 80 minutes)
et Z
Stockage : --20 à 75 qC (sauf pour la pile)
187 à 603 ¢ 110 ¢ 107 mm (L¢H¢P)
24 Vc.c. : 0,5 A
(30 W total)
(sélectionnable),
50/60 Hz
à 264 Vc.a.
24 Vc.c.
20à28Vc.c.
5 Vc.c. : 6 A (30 W)
20 MΩ min. (à
500 Vc.c.) entre les
bornes externes AC
et les bornes GR (voir
Rem. 1)
2-1ChapitreCaractéristiques des unités
44
Rem. 1. Pour les tests d’isolement ou de rigidité diélectrique, déconnecter la borne
LG de l’Unité d’alimentation de la borne GR. Si les tests sont effectués avec
les bornes LG et GR reliées, les composants internes peuvent être
endommagés.
2.
Accélération (m/s2)
9.8
Amplitude (0,075)
Fréquence (Hz)
Page 66

2-1-2 Caractéristiques des Unités centrales
Caractéristiques générales
Objet Caractéristiques
Méthode de contrôle Méthode à programme mémorisé
Méthode de contrôle des E/S Balayage cyclique avec sortie directe et interruption immédiate traitées ensemble
Langage de programmation Schéma à contact
Capacité des E/S CQM1H-CPU11/21 : 256
Capacité de programme CQM1H-CPU11/21 : 3,2 Kmots
Capacité de la mémoire de données CQM1H-CPU11/21 : 3 Kmots
Longueur des instructions 1à4motsparinstruction
Nombre d’instructions 162 instructions (14 de base, 148 spéciales)
Temps d’exécution d’une instruction Instructions de base : 0,375 à 1,125 Ps
Temps de cycle 0,70 ms
Type d’assemblage Sans fond de panier (les unités sont reliées ensembles horizontalement par leur
Montage Montage sur rail DIN (montage par vis impossible)
Nb de points d’entrée c .c. 16
Nombre maximum d’unités CQM1H-CPU11/21/51/61:11 unités d’E/S ou spécifiques maximum
Cartes internes CQM1H-CPU11/21 : Aucune
Unités de communications CQM1H-CPU11/21 : Aucune
Types
d’interruptions
Affectations des E/S Les E/S sont automatiquement attribuées à l’unité la plus proche de l’unité
par entrées
(4 points max.)
par
temporisateur
(3 points max.)
par compteur à
grande vitesse
CQM1H-CPU51/61 : 512
CQM1H-CPU51 : 7,2 Kmots
CQM1H-CPU61 : 15,2 Kmots
CQM1H-CPU51 : 6 Kmots
CQM1H-CPU61 : 12 Kmots (DM : 6 Kmots ; EM : 6 Kmots)
Instructions spéciales : 17,7 Ps (instruction MOV)
connecteur)
CQM1H-CPU51/61 : 2 cartes
CQM1H-CPU51/61:1 unité
Mode interruption par entrée : L’interruption est déclenchée par une entrée issue
d’une source externe à l’unité centrale.
Mode par comptage : L’interruption est déclenchée par une entrée reçue
plusieurs fois (décomptage) sur les points (4 points) d’entrée de l’unité centrale.
Mode interruption programmée : Le programme est interrompu à intervalles
réguliers déterminés par un des temporisateurs de l’unité centrale.
Mode interruption unique : Une interruption est générée au bout d’un temps
déterminé par un des temporisateurs de l’unité centrale.
Comparaison à une valeur cible : L’interruption est générée lorsque la PV du
compteur à grande vitesse atteint la valeur préréglée.
Comparaison à une plage : L’interruption est générée lorsque la PV du compteur
à grande vitesse atteint la plage préréglée.
Rem. Le comptage est possible pour les entrées du compteur à grande vitesse à
partir des points d’entrée interne de l’unité centrale, des cartes d’E/S
impulsion, ou des cartes d’interface de codeur absolu (la carte de comptage
grande vitesse ne dispose pas de fonction d’interruption et ne peut qu’émettre
des bits en interne ou en externe).
centrale (du fait qu’il n’existe pas de table d’E/S, il n’est ni nécessaire ni possible
de créer des tables d’E/S à partir de l’équipement de programmation).
2-1ChapitreCaractéristiques des unités
45
Page 67

Structure de la zone mémoire
p
i
lmi
(
(Re
m
Zone de
données
Zone IR
(Rem. 1)
Zone d’état du
contrôleur de
liaison
Zone
opérande
MACRO
(Rem. 2)
Zone
emplacement 1
carte interne
Zone réglage
analogique
(Rem. 1)
La PV du
compteur 0 à
grande vitesse
(Rem. 1)
Zone
des
entrées
Zone
des
sorties
Zones
de
trava
Zone
des
entrées
Zone
des
sorties
Taille Mots Bits Fonction
256
bits
256
bits
2 528
bits
Rem.
2)
96 bits IR 090 à IR 095 IR 09000 à IR 09515 Utilisés pour indiquer les états des données de
96 bits IR 190 à IR 195 IR 19000 à IR 19515 Utilisés pour indiquer les erreurs de liaison du
64 bits IR 096 à IR 099 IR 09600 à IR 09915
64 bits IR 196 à IR 199 IR 19600 à IR 19915
256
bits
64 bits IR 220 à IR 223 IR 22000 à IR 22315 Utilisés pour sauvegarder les paramètres
32 bits IR 230 à IR 231 IR 23000 à IR 23115 Utilisés pour sauvegarder les valeurs courantes
IR 000 à IR 015 IR 00000 à IR 01515 Les bits d’entrée peuvent être attribués à des
IR 100 à IR 115 IR 10000 à IR 11515 Les bits de sortie peuvent être attribués aux
IR 016 à IR 089 IR 01600 à IR 08915
IR116àIR189 IR 11600 à IR 18915
n.
IR 216 à IR 219 IR 21600 à IR 21915
.
IR 224 à IR 229 IR 22400 à IR 22915
IR 200 à IR 215 IR 20000 à IR 21515 Ces bits sont attribués à la carte interne
2-1ChapitreCaractéristiques des unités
unités d’entrée ou à des unités d’E/S. Les 16
bits en IR 000 sont toujours attribués aux
entrées de l’unité centrale intégrée.
unités de sortie ou aux unités d’E/S.
Les bits de travail n’ont pas de fonction
particulière et peuvent être librement utilisés
parle programme.
liaison (ils peuvent servir comme bits de travail
si l’unité inter API ”controller link” n’est pas
utilisée).
contrôleur et les informations de participation
au réseau (ils peuvent servir comme bits de
travail si l’unité inter API ”controller link” n’est
pas utilisée).
Utilisés lorsque l’instruction de MACRO
MCRO(99) est employée (ils peuvent servir
comme bits de travail si l’instruction MACRO
n’est pas utilisée).
installée dans l’emplacement 1 du
CQM1H-CPU51/61. (ils peuvent servir comme
bits de travail si l’emplacement 1 n’est pas
utilisé).
Carte de comptage à grande vitesse
CQM1H-CTB41 :
IR 200 à IR 213 (14 mots) : Utilisés par la carte
IR 214 et IR 215 (2 mots) : Non utilisés.
Carte de communications série
CQM1H-SCB41 :
IR 200 à IR 207 (8 mots) : Utilisés par la carte
IR 208 à IR 215 (8 mots) : Non utilisés.
analogiques lorsqu’une carte de paramétrage
analogique CQM1H-AVB41 est installée (ils
peuvent servir comme bits de travail si la carte
n’est pas installée).
du compteur 0 grande vitesse (ils peuvent
servir comme bits de travail si le compteur n’est
pas utilisé).
46
Page 68

2-1ChapitreCaractéristiques des unités
Zone de
données
Zone
emplacement 2
carte interne
Zone SR 184
Zone HR 1600
Zone AR 448
Zone TR 8bits --- TR0àTR7 Ces bits sauvegardent temporairement l’état
Zone LR
(Rem. 1)
Zone
Temporisateur/
Compteur
(Rem. 3)
192
bits
bits
bits
bits
1024
bits
512
bits
IR 232 à IR 243 IR 23200 à IR 24315 Ces bits sont attribués à la carte interne
installée dans l’emplacement 2 (ils peuvent
servir comme bits de travail si l’emplacement 2
n’est pas utilisé ou si un CQM1H-CPU11/21 a
été utilisé).
Carte compteur à grande vitesse
CQM1H-CTB41 :
IR 232 à IR 243 (12 mots) : Utilisés par la carte
Interface codeur absolu CQM1H-ABB21 :
IR 232 à IR 239 (8 mots) : Utilisés par la carte
IR 240 à IR 243 (4 mots) : Non utilisés
Carte d’E/S à impulsions CQM1H-PLB21 :
IR 232 à IR 239 (8 mots) : Utilisés par la carte
IR 240 à IR 243 (4 mots) : Non utilisés
Carte des E/S analogiques CQM1H-MAB42 :
IR 232 à IR 239 (8 mots) : Utilisés par la carte
IR 240 à IR 243 (4 mots) : Non utilisés
SR 244 à
SR 255
HR 00 à HR 99 HR 0000 à HR 9915 Ces bits sauvegardent les données ainsi que
AR00àAR27 AR 0000 à AR 2715 Ces bits sont utilisés comme drapeau et
LR 00 à LR 63 LR 0000 à LR 6315 Utilisés pour une liaison inter API 1:1 par le port
TIM/CNT 000 à TIM/CNT 511
(numéro temporisateur / compteur)
SR 24400 à
SR 25515
Ces bits sont utilisés comme drapeau et
comme bits de contrôle.
leur état (ON/OFF) lors de la mise hors tension.
comme bits de contrôle.
(ON/OFF) lors d’un branchement.
RS-232 ou par une unité inter automate
“controller link”
Le même numéro est utilisé pour le
temporisateur et le compteur. Lorsque
TIMH(15) est utilisé, les numéros des
temporisateurs 000 à 015 peuvent être
réinitialisés pendant un temps du cycle long.
FonctionBitsMotsTaille
47
Page 69

2-1ChapitreCaractéristiques des unités
Zone de
données
Zone
DM
Zone EM 6 144
Lect./
Ecrit.
Lect.
seule
(Rem.
4)
Zone
histori-que
erreurs
(Rem.
4)
Setup
de
l’API
(Rem.
4)
3072
mots
3072
mots
425
mots
31
mots
56
mots
mots
DM 0000 à
DM 3071
DM 3072 à
DM 6143
DM 6144 à
DM 6568
DM 6569 à
DM 6599
DM 6600 à
DM 6655
EM 0000 à
EM 6143
--- Seul un mot entier peut accéder à la zone de
données des DM. La valeur des mots est
sauvegardée lors de la mise hors tension.
--- Disponible uniquement sur les unités centrales
CQM1H-CPU51/61.
--- Ne peuvent pas être écrits par le programme
(seulement à partir d’un appareil de
programmation).
DM 6400 à DM 6409 (10 mots) :
Paramètres inter API ”controller link”
DM 6450 à DM 6499 (50 mots) :
Tables de routage
DM 6550 à DM 6559 (10 mots) :
Réglages des cartes de
communications séries
--- Utilisés pour sauvegarder le nombre
d’occurrences et le code d’erreur des erreurs.
--- Utilisés pour sauvegarder les paramètres de
contrôle du fonctionnement de l’API.
--- Seul un mot entier peut accéder à la zone de
données des DM. La valeur des mots est
sauvegardée lors de la mise hors tension.
Disponible uniquement sur les unités centrales
CQM1H-CPU61.
Rem. 1. Les bits IR et LR qui ne sont pas utilisés par leur fonction peuvent être
utilisés comme bits de travail.
2. 2528 bits au minimum sont disponibles comme bits de travail. Les autres
bits non utilisés par leur fonction peuvent être pris comme bits de travail.
Ainsi le nombre de bits de travail dépends de la configuration de l’API.
3. Lors de l’accès à la PV, les numéros TIM/CNT sont utilisés comme mots
d’adresses ; lors de l’accès aux drapeaux , ils sont utilisés comme bit
d’adresse.
4. Les DM 6144 à DM 6655 ne peuvent pas être écrits par le programme.
Autres caractéristiques mémoire
Détails
Cassette mémoire
(EEPROM ou mémoire
flash)
Mémoire de trace 1 024 mots (données de comparaison de trace : 12 points, 3 mots)
Les cassettes mémoire sont installées sur la face avant de l’unité centrale. Elles sont
utilisées pour sauvegarder et lire le programme utilisateur, le DM (DM lecture seule et Setup
de l’API) et les informations des instructions étendues comme un bloc. Il est possible de
paramétrer l’unité centrale pour qu’à la mise sous tension les données sauvegardées sur la
cassette (programme utilisateur, DM, informations des instructions étendues) soient
automatiquement envoyées à l’unité centrale (auto-boot). Deux types de transfert et de
comparaison de données entre l’unité centrale et la cassette sont possibles en utilisant la
zone AR de contrôle de bit.
Caractéristiques fonctionnelles
Caractéristiques
Macro
instructions
Constante de
temps du cycle
Sous--programme appelé par des instructions à arguments.
1 à 9 999 ms (Unité : 1 ms)
FonctionBitsMotsTaille
48
Page 70

2-1ChapitreCaractéristiques des unités
Caractéristiques
Surveillance
temps du cycle
Rafraîchissement
des E/S
Maintien de la
mémoire des E/S
lors d’un
changement de
mode
Chargement OFF Les sorties de l’unité de sortie peuvent être mises sur OFF lorsque l’unité centrale est en mode
Réglage
personnalisé des
micro-interrupteurs
Réglage du mode
àlamisesous
tension
Mise au point du
programme
Modification en
ligne
Protection du
programme
Vérification des
erreurs
Journal d’erreurs Jusqu’à 10 erreurs (y compris les erreurs utilisateur) peuvent être sauvegardées dans le journal. Les
Ports de
communications
série
Lorsque le temps du cycle dépasse 100 ms, le drapeau de dépassement du temps du cycle est mis
sur ON et le fonctionnement est poursuivi (le paramétrage du Setup de l’API permet d’empêcher la
génération de cette erreur).
Lorsque le temps du cycle dépasse le temps du cycle choisi, le fonctionnement est arrêté.
Réglage du temps du cycle : de 0 à 990 ms par pas de 10 ms, de 0 à 9 990 ms par pas de 100 ms,
de 0 à 99 s par pas de 1 s .
Rem. Les valeurs maximale et actuelle du temps du cycle sont sauvegardées en zone AR.
Rafraîchissement cyclique par l’instruction IORF(097) des sorties directes (réglé lors du Setup de
l’API) et des entrées d’interruption (les entrées rafraîchies peuvent être réglées séparément, lors du
Setup de l’API, pour les entrées interruption, les interruptions des compteurs à grande vitesse et des
temporisateurs d’intervalle).
Dépends de l’état ON/OFF du bit maintien des E/S (SR 25212).
RUN, MONITOR, ou PROGRAM (utilisé lors d’un arrêt d’urgence, pendant la mise au point du
programme, etc).
L’utilisation personnalisée des micro--interrupteurs de face avant de l’unité centrale est effectuée en
AR 0712. Ce réglage peut être utilisé comme condition ON/OFF (c.a.d commutation entre le
fonctionnement d’essai et le fonctionnement courant).
Possible
Commandes paramétrage/réinitialisation, surveillance différentielle, trace des données (préventive,
pour chaque cycle ou à l’exécution de l’instruction).
Dans le mode MONITOR de l’unité centrale, le programme utilisateur peut être corrigé par blocs.
Avec le logiciel CX programmateur, plusieurs blocs peuvent être modifiés à la fois.
La protection en écriture du programme, de la mémoire de données (DM 6144 à DM 6655 : zone en
lecture seule) et du Setup de l’API (DM 6600 à DM 6655) est effectuée en utilisant la broche 1 du
micro--interrupteur.
Les types d’erreurs sont définis par l’utilisateur (c.a.d. l’utilisateur peut définir des erreurs fatales et
non fatales par les instructions FAL(06) et FALS(07)).
Rem. Il est possible d’arrêter le fonctionnement par des instructions utilisateur lors d’erreurs fatales.
Un journal des erreurs définies par l’utilisateur peut être créé par des bits spécifiques (logging) en
utilisant des instructions utilisateur pour des erreurs non fatales.
informations comprennent le code erreur, le détail des erreurs et le temps d’occurence de l’erreur.
Port périphérique intégré : connexions d’appareils de programmation (y compris la console de
programmation), liaisons hôtes, communications sans protocole
Port RS-232C intégré : connexions d’appareils de programmation (y compris la console de
programmation), liaisons hôtes, communications sans protocole, liaisons NT (mode 1:1), liaison de
données 1:1
Ports RS-232C et RS-422A/485 par carte de communications série (vendue séparément) : appareils
de programmation (non compris la console de programmation), liaisons hôtes, communications
sans protocole, liaisons NT (modes 1:1 et 1: N), liaison données 1:1, macros de protocole
49
Page 71

Caractéristiques
Modes de communications série
Bus console de
programmation
Bus
périphérique
Liaison hôte
(SYSMAC
WAY)
Sans protocole Utilisé pour l’émission ou la réception de
Liaison
données 1:1
Liaison NT
(modes 1:1 et,
1:N)
Macro de
protocole
Horloge Des cassettes mémoires s ont équipées d’une horloge.
Constante de
temps d’entrée
Tem ps de
détection de
coupure
d’alimentation
Protection
mémoire
Envoi de
commandes à un
ordinateur de
liaison hôte
Programmation
et surveillance à
distance
Utilisé pour les communications avec la
console de programmation.
Utilisé pour les communications avec un
appareil de programmation, comme par
exemple le logiciel CX programmateur.
Utilisée pour accéder à la mémoire des
E/S et au programme par utilisation de
commandes de liaison hôte. Accepte les
communications avec les appareils de
programmation et les TOP d’OMRON.
Les communications peuvent être
initialisées par le CQM1H dans ce mode.
256 octets maxi. de données
d’instructions spéciales et ce sans
protocole ni conversion.
Utilisée pour les communications inter
API 1:1 CQM1H ou avec un CQM1, un
CPM1, un C200HX/HG/HE ou un
C200HS.
Utilisée pour les échanges de données
sans programme avec un TOP
d’OMRON. Les connexions un vers un,
ou un vers X (API : TOP) sont acceptées.
Rem. Les modes 1:1 et 1:N sont
incompatibles. S’assurer d’utiliser le
bon port de communication du TOP.
Utilisée lors d’échange de données avec
un appareil externe standard par le port
série RS-232C.
Rem. Ce mode est accepté uniquement
par la carte de communications
série.s
Rem. Utiliser pour sauvegarder l’heure pendant une erreur.
Utilisé pour mettre sur ON (ou OFF) le temps de réponse des unités d’entrée c.c.
Temps permis : 1, 2, 4, 8, 16, 32, 64, 128 ms.
Alimentation c.a. : 10 à 25 ms,
Alimentation c.c. : 5 à 25 ms
Sauvegarde des zones : bits de maintien, contenus des mémoires de données et des mémoires de
données étendues ainsi que l’état de fin de comptage et de sa valeur courante.
Rem. Si le bit de maintien des E/S (SR 25212) est mis sur ON et que le Setup de l’API est paramétré
pour sauvegarder l’état du bit de maintien des E/S à la mise sous tension de l’API, le contenu des
zones IR et LR sera sauvegardé.
Les réponses à des commandes de liaison hôte peuvent être envoyées à un ordinateur relié par le
système de liaison hôte en utilisant l’instruction TXD(----) (sortie du port de communications).
La liaison hôte ou les communications de bus périphérique par le port de communications série de
l’unité centrale peuvent être utilisés pour surveiller ou programmer l’API par le système de liaison
hôte (ces fonctions sont toutefois non supportées par les ports de communications série de la carte
de communications série).
Ports intégrés de l’unité centrale
Port périphérique
intégré
Oui (SW7 : ON) Non Non
Oui (SW7 : ON) Non Non
Oui (SW7 : ON) Oui Oui
Oui (SW7 : ON) Oui Oui
Non Oui Oui
Non Oui
Non Non Oui
Port RS-232C
intégré
(mode 1:1 seul)
2-1ChapitreCaractéristiques des unités
Ports sur la carte
de
communications
séries
Oui
(mode 1:1 ou
mode 1:N)
50
Page 72

Caractéristiques
Vérification de
programme
Durée de vie de
la batterie
Auto-diagnostiques
Autres fonctions Sauvegarde du nombre d’arrêts de l’alimentation (sauvegarde en zone AR).
Consommation
du courant
interne
Dimensions CQM1H-CPU11/21:187 à 571 u 11 0 u 107 mm (L u H u P)
Accessoires
standard
La vérification du programme est effectuée en début de fonctionnement pour les lignes n’ayant pas
d’instruction END(01) ou d’instructions d’erreur.
Le logiciel CX programmateur peut être également utilisé comme vérificateur de programme (le
niveau de vérification du programme peut être paramétré).
5 ans à 25_C
(fonction de la température ambiante et des conditions d’alimentation. Minimum : 1 an).
Le remplacement de la batterie doit être effectué en moins de 5 minutes.
Erreurs d’unité centrale (temporisateur du chien de garde), erreurs de vérification des E/S, erreurs
de bus d’E/S, erreurs de mémoire, erreurs du système FALS (d’éxécution d’instruction FALS ou
dépassement du temps de surveillance de cycle), erreurs du système FAL (d’éxécution d’instruction
FAL ou erreur du Setup de l’API etc.), erreurs de batterie, erreur de dépassement de temps du cycle
et erreurs du port de communications.
CQM1H-CPU21/51/61 : 5 Vc.c. : 840 mA max.
CQM1H-CPU11 : 5 Vc.c. : 820 mA max.
CQM1H-CPU51/61:187 à 603 u 110 u 107 mm (L u H u P)
Un connecteur pour le port RS-232C (sauf CQM1H-CPU11).
Prise : XM2A-0901 ; Capot : XM2S-0911-E.
Un ensemble batterie CPM2A-BAT01 (installé dans l’unité centrale lors de la livraison).
2-2ChapitreCaractéristiques des Unités d’entrée
2-2 Caractéristiques des Unités d’entrée
2-2-1 Entrées 24 Vc.c. intégrées de l’Unité centrale
CQM1H-CPU11/21/51/61
Tension d’entrée 24 Vc.c.
Impédance d’entrée IN4 et IN5 : 2,2 k:autres entrées : 3,9 k:
Courant d’entrée IN4 et IN5 : 10 mA typique ; autres entrées : 6 mA typique (à 24 Vc.c.)
Tension ON 17,4 Vc.c. min.
Tension OFF 5,0 Vc.c. max.
Temps de réponse ON Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API ; voir
Rem.)
Temps de réponse OFF Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API ; voir
Rem.)
Nb d’entrées 16 points (16 entrées/commun, 1 circuit)
Configuration de circuit
+10%
/
--15%
IN0 à
IN15
COM
3.9 k
:
(2.2 k:)
560
LED
d’entrée
:
Circuits
internes
Rem. La valeur entre parenthèses est pour IN4 et IN5. La
polarité de l’alimentation d’entrée peut être connectée
dans n’importe quel sens.
51
Page 73

Connexions du bornier
comptage):paramétréeslorsduSetu
p
de(668)
p
g
l’API(DM6
642
)
q
,
2-2ChapitreCaractéristiques des Unités d’entrée
CQM1H-CPU11/21/51/61
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
--
COM
--
Des IR de IR 00000 à IR 00015 sont toujours attribués aux 16 points d’entrée de
l’unité centrale intégrée.
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
x
Les entrées IN0 à IN 3 (correspondant aux IR de IR 00000 à IR 00003) peuvent
être paramétrées lors du Setup de l’API comme entrées d’interruptions.
x
Les entrées IN4 à IN7 (correspondant aux IR de IR 00004 à 00007) peuvent
être utilisées comme compteur 0 à grande vitesse.
Borne Numéro
d’entrée
B0 IN0 IR 00000
A0 IN1 IR 00001
B1 IN2 IR 00002
A1 IN3 IR 00003
B2 IN4 IR 00004
A2 IN5 IR 00005
B3 IN6 IR 00006
A3 IN7 IR 00007
à à à
B7 IN14 IR 00014
A7 IN15 IR 00015
Bit
d’entrée
Fonction
Entrées standard ou entrées
d’interruptions (modes interruption ou
de l’API (DM 6628).
Entrées standard ou compteur 0 à grande
vitesse : paramétrées lors du Setup de
’
.
Utilisables uniquement en entrées.
Rem. Si lors du Setup de l’API, les IN de IN0 à IN3 sont paramétrées comme entrées
d’interruption, les temps de réponse ON et OFF des entrées sont fixés
respectivement à 0,1 ms max. et 0,5 ms max. Si les IN de IN4 à IN6 sont
paramétrées comme interruptions de compteur à grande vitesse, les temps de
réponse sont indiqués dans le tableau suivant.
Entrée Mode incrémental Mode phase différentielle
IN4 (A) 5kHz
2,5 kHz
IN5 (B) Entrée standard
IN6 (Z) ON : 100 μs min. nécessaire ; Temps de réponse OFF : 500 μsmin.
nécessaire
52
Page 74

L’impulsion de réponse minimale est montrée ci--dessous.
Entrée A (IN4), Entrée B (IN5)
Mode incrémental (5 kHz max.)
200Psmin.
90Psmin.
ON
Phase A
OFF
90Psmin.
Mode phase différentielle (2,5 kHz max.)
400Psmin.
ON
Phase A 50%
OFF
ON
Phase B 50%
OFF
2-2ChapitreCaractéristiques des Unités d’entrée
T
Entrée Z (IN6)
Phase Z
1,T2,T3,T4
ON
OFF
:90Psmin.
100Psmin.
T1T2T3T
500Psmin.
4
53
Page 75

2-2-2 Unités d’entrée c.c.
CQM1-ID211 CQM1-ID212
Nom Unité d’entrée 8 points 12 à 24 Vc.c. Unité d’entrée 16 points 24 Vc.c.
Tension
d’entrée
12à24Vc.c.
+10%
/
--15%
24 Vc.c.
+10%
/
--15%
2-2ChapitreCaractéristiques des Unités d’entrée
Impédance
2,4 k: 3,9 k:
d’entrée
Courant
10 mA typique (à 24 Vc.c.) 6 mA typique (à 24 Vc.c.)
d’entrée
Tension ON 10,2 Vc.c. min. 14,4 Vc.c. min.
Tension OFF 3,0 Vc.c. max. 5,0 Vc.c. max.
Temps de
réponse ON
Temps de
réponse OFF
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API, voir Rem.)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API, voir Rem.)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API, voir Rem.)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API, voir Rem.)
Nb d’entrée 8 points (communs indépendants) 16 points (16 points/commun, 1 circuit)
Consommation
50 mA max. à 5 Vc.c. 85 mA max. à 5 Vc.c.
de courant
interne
Poids 180 grammes max. 180 grammes max.
Configuration
des Circuits
IN0
COM0
IN7
COM7
2,2 k
560
2,2 k
560
Ω
Ω
Ω
Ω
LED
d’entrée
Circuits
internes
LED
d’entrée
Circuits
internes
IN0 à
IN15
COM
3,9 k
560
Ω
Ω
Rem. La polarité de l’alimentation d’entrée peut
être connectée dans n’importe quel sens.
LED
d’entrée
Circuits
internes
Connexions du
bornier
54
Rem. La polarité de l’alimentation d’entrée peut
être connectée dans n’importe quel sens.
IN0
+--
COM0
+
-IN1
+--
COM1
+
-IN2
+--
COM2
--
+
IN3
+--
COM3
--
+
IN4
+--
COM4
--
+
IN5
+--
COM5
--
+
IN6
+--
COM6
--
+
IN7
+--
COM7
--
+
NC
NC
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
IN1
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
--
COM
--
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
Page 76

Nom Unité d’entrée 16 points 12 Vc.c.
Tension
12 Vc.c.
+10%
/
--15%
d’entrée
Impédance
1,8 k:
d’entrée
Courant
6 mA typique (à 24 Vc.c.)
d’entrée
Tension ON 8,0 Vc.c. min.
Tension OFF 3,0 Vc.c. max.
Temps de
Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API, voir Rem.)
réponse ON
Temps de
Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API, voir Rem.)
réponse OFF
Nb d’entrées 16 points (16 points/commun, 1 circuit)
Consommation
85 mA max. à 5 Vc.c.
du courant
interne
Poids 180 grammes max.
Configuration
des Circuits
IN0 à
IN15
1,8 k
Ω
2-2ChapitreCaractéristiques des Unités d’entrée
CQM1-ID111
LED
d’entrée
Connexions du
bornier
COM
Ω
internes
620
Rem. La polarité de l’alimentation d’entrée peut
être connectée dans n’importe quel sens.
Circuits
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
--
COM
--
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
55
Page 77

CQM1-ID112
Nom Unité d’entrée 32 points 12 Vc.c.
Tension d’entrée 12 Vc.c.
+10%
/
--15%
Impédance d’entrée 2,2 k:
Courant d’entrée 4 mA typique (à 12 Vc.c.)
Tension ON 8,0 Vc.c. min.
Tension OFF 3,0 Vc.c. max.
Temps de réponse ON Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API)
Temps de réponse OFF Par défaut : 8 ms max. (peut être réglé entre 1 et 128 ms lors du Setup de l’API)
Nb d’entrées 32 points (32 entrées/commun, 1 circuit)
Consommation interne 5 Vc.c., 170 mA max.
Poids 160 g max.
Configuration des circuits
Connexions du bornier
Wd m Wd (m+1)
++
12 Vc.c.
+
COM
IN10
IN11
IN12
IN13
IN14
IN15
COM
NC
NC
A
B
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
COM
IN00
IN07
COM
IN08
IN15
COM
IN00
IN07
COM
IN08
IN15
AB
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
11 11
12 12
13 13
14 14
15 15
16 16
17 17
18 18
19 19
20 20
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
COM
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
NC
NC
750
2,2 k
750
2,2 k
:
LED
:
d’entrée
Circuits
internes
:
LED
:
12 Vc.c.12 Vc.c.
d’entrée
La polarité de l’alimentation d’entrée
peut être soit positive soit négative.
Par contre, la polarité des communs
doit être identique.
Les bornes COM sont reliées en
interne et doivent être câblées.
12 Vc.c.
+
2-2ChapitreCaractéristiques des Unités d’entrée
56
Page 78

CQM1-ID213 CQM1-ID214
Nom Unité d’entrée 32 points 24 Vc.c. Unité d’entrée 32 points 24 Vc.c.
Tension
24 Vc.c.
+10%
/
--15%
24 Vc.c.
+10%
/
--1 5 %
d’entrée
Impédance
5,6 k: 3,9 k:
d’entrée
Courant
4 mA typique (à 24 Vc.c.) 6 mA typique (à 24 Vc.c.)
d’entrée
Tension ON/
14,4 Vc.c. min. 15,4 Vc.c./3,5 mA min.
Courant
Tension OFF/
5,0 Vc.c. max. 5,0 Vc.c./1 mA max.
Courant
Temps de
réponse ON
Temps de
réponse OFF
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API)
Par défaut : 8 ms max. (peut être réglé entre 1 et
128 ms lors du Setup de l’API)
Nb d’entrées 32 points (32 entrées/commun, 1 circuit) 32 points (32 entrées/commun, 1 circuit)
Le nombre d’entrées simultanément sur ON est
limité par la température ambiante. Voir la courbe
à la fin des tableaux.
Consommation
5 Vc.c., 170 mA max. 5 Vc.c., 170 mA max.
interne
Poids 160 g max. 160 g max.
Configuration
des circuits
COM
IN00
IN07
A
COM
IN08
IN15
COM
IN00
IN07
B
COM
IN08
IN15
620
5,6 k
620
5,6 k
:
LED
:
:
:
d’entrée
Circuits
internes
LED
d’entrée
COM
IN00
IN07
A
COM
IN08
IN15
COM
IN00
IN07
B
COM
IN08
IN15
620
3,9 k
620
3,9 k
:
LED
:
:
:
d’entrée
LED
d’entrée
2-2ChapitreCaractéristiques des Unités d’entrée
Circuits
internes
57
Page 79

Connexions
des borniers
Wd m Wd (m+1)
++
24 Vc.c.
+
COM
IN10
IN12
IN13
IN14
IN15
COM
NC
NC
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
IN11
AB
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
11 11
12 12
13 13
14 14
15 15
16 16
17 17
18 18
19 19
20 20
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
COM
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
NC
NC
24 Vc.c.24 Vc.c.
24 Vc.c.
+
La polarité de l’alimentation d’entrée peut être soit
positive soit négative. Par contre, la polarité des
communs doit être identique. Les bornes COM
sont reliées en interne et doivent être câblées.
2-2ChapitreCaractéristiques des Unités d’entrée
CQM1-ID214CQM1-ID213
Wd m Wd (m+1)
++
24 Vc.c.
+
La polarité de l’alimentation d’entrée peut être soit
positive soit négative. Par contre, la polarité des
communs doit être identique. Les bornes COM
sont reliées en interne et doivent être câblées.
COM
IN10
IN11
IN12
IN13
IN14
IN15
COM
NC
NC
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
IN8
IN9
AB
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
11 11
12 12
13 13
14 14
15 15
16 16
17 17
18 18
19 19
20 20
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
COM
IN8
IN9
IN10
IN11
IN12
IN13
IN14
IN15
COM
NC
NC
24 Vc.c.24 Vc.c.
24 Vc.c.
+
Nombre d’entrées simultanément sur ON pour le CQM1-ID214
Température ambiante pour des points simultanément sur ON
Tension d’entrée : 24,0 Vc.c.
Points simultanément à ON
Température ambiante (qC)
Tension d’entrée : 26,4 Vc.c.
Points simultanément à ON
Température ambiante (qC)
58
Page 80

2-2-3 Unités d’entrée c.a.
CQM1-IA121 CQM1-IA221
Nom Unité d’entrée 8 points 100 à 120 Vc.a. Unité d’entrée 8 points 100 à 120 Vc.a.
Tension
100 à 120 Vc.a.
+10%
/
, 50/60 Hz 200 à 240 Vc.a.
--1 5 % ,
d’entrée
Impédance
20 k: (50Hz),17k: (60 Hz) 38 k: (50Hz),32k: (60 Hz)
d’entrée
Courant
5 mA typique (à 100 Vc.a.) 6 mA typique (à 200 Vc.a.)
d’entrée
Tension ON 60 Vc.a. min. 150 Vc.a. min.
Tension OFF 20 Vc.a. max. 40 Vc.a. max.
Temps de
35 ms max. 35 ms max.
réponse ON
Temps de
55 ms max. 55 ms max.
réponse OFF
Nb d’entrées 8 points (8 points/commun, 1 circuit) 8 points (8 points/commun, 1 circuit)
Consommation
50 mA max. à 5 Vc.c. 50 mA max. à 5 Vc.c.
du courant
interne
Poids 210 grammes max. 210 grammes max.
Configuration
des Circuits
IN0
IN7
COM
470
0,15PF
LED
d’entrée
68 k
:
:
Circuits
internes
2,7 k
:
IN0
IN7
COM
+10%
820
:
0,082PF
/
220 k
8,2 k
--1 5 % ,
:
, 50/60 Hz
LED
d’entrée
:
2-2ChapitreCaractéristiques des Unités d’entrée
Circuits
internes
Connexions du
bornier
La polarité de l’alimentation d’entrée peut être soit
positive soit négative. Par contre, la polarité des
communs doit être identique.
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
NC
NC
NC
NC
NC
NC
NC
NC
COM
COM
100 à 120 Vc.a.
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
La polarité de l’alimentation d’entrée peut être soit
positive soit négative. Par contre, la polarité des
communs doit être identique.
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
NC
NC
NC
NC
NC
NC
NC
NC
COM
COM
200 à 240 Vc.a.
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
59
Page 81

2-3 Caractéristiques des Unités de sortie
2-3-1 Unités de sortie à contacts
CQM1-OC221 CQM1-OC222
Nom Unité de s ortie à contact 8 points Unité de sortie à contact 16 points
Capacité
maximale de
commutation
Capacité
minimale de
commutation
Relais G6D-1A G6D-1A
Temps de
service des
relais
Temps de
réponse ON
Temps de
réponse OFF
Nb de sorties 8 points (communs indépendants) 16 points (16 points/commun, 1 circuit)
Consommation
du courant
interne
Poids 200 grammes max. 230 grammes max.
Configuration
des circuits
2 A, 250 Vc.a. (cosI =1)
2 A, 250 Vc.a. (cosI =0,4)
2 A, 24 Vc.c. (16 A/Unité)
2 A, 250 Vc.a. (cosI =1)
2 A, 250 Vc.a. (cosI =0,4)
2A,24Vc.c.(8A/Unité)
10 mA, 5 Vc.c. 10 mA, 5 Vc.c.
Electrique : 300 000 manœuvres (charge
résistive) 100 000 manœuvres (charge
inductive)
Mécanique : 20 000 000 manœuvres
Electrique : 300 000 manœuvres (charge résistive)
100 000 operations (charge inductive)
Mécanique : 20 000 000 manœuvres
(voir Rem.).
(voir Rem.).
10 ms max. 10 ms max.
5msmax. 5msmax.
430 mA max. à 5 Vc.c. 850 mA max. à 5 Vc.c.
LED de
Circuits
internes
Circuits
internes
sortie
LED de
sortie
OUT0
Circuits
internes
COM0
Maximum
250 Vc.a. : 2 A
24Vc.c.:2A
OUT7
COM7
sortie
OUT0LED de
OUT15
COM
2-3ChapitreCaractéristiques des Unités de sortie
Maximum
250 Vc.a. : 2 A
24 Vc.c. : 2 A
Connexion du
bornier
60
OUT0
COM0
OUT1
COM1
OUT2
COM2
OUT3
COM3
OUT4
COM4
OUT5
COM5
OUT6
COM6
OUT7
COM7
NC
NC
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
COM
COM
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
Page 82

Rem. Les temps de service des relais du tableau ci--dessus sont des temps minimum.
La courbe suivante donne les valeurs de références pour les valeurs courantes.
Temps de service des relais pour CQM1-OC221/222
Temps de service (x10 000 manoeuvres)
2-3ChapitreCaractéristiques des Unités de sortie
250 Vc.a. ou 24 Vc.c. charge résistive
250 Vc.a. charge inductive avec cosI=0,4ou
24 Vc.c. charge inductive avec L/R = 7 ms
Courant de commutation (A)
61
Page 83

Nom Unité de sortie à contact 8 points
Capacité maximale de
commutation
2 A, 250 Vc.a. (cosI =1)
2 A, 250 Vc.a. (cosI =0,4)
2 A, 24 Vc.c. (16 A/Unité)
Capacité minimale de
10 mA, 5 Vc.c.
commutation
Relais G6R-1A ou G6RN-1A
Temps de service des
relais
Electrique : 300 000 manœuvres
Mécanique : 10 000 000 manœuvres
(voir Rem.).
Temps de réponse ON 15 ms max.
Temps de réponse OFF 5msmax.
Nb de sorties 8 points (communs indépendants)
Consommation du courant
440 mA max. à 5 Vc.c.
interne
Poids 270 grammes max.
Configuration des circuits
Circuits
internes
Circuits
internes
CQM1-OC224
LED de
sortie
LED de
sortie
2-3ChapitreCaractéristiques des Unités de sortie
OUT0
COM0
Maximum
250 Vc.a. : 2 A
24Vc.c.:2A
OUT7
COM7
Connexions du bornier
OUT0
COM0
OUT1
COM1
OUT2
COM2
OUT3
COM3
OUT4
COM4
OUT5
COM5
OUT6
COM6
OUT7
COM7
NC
NC
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
Rem. Les temps de service des relais du tableau ci--dessous sont des temps
minimum. La courbe suivante donne les valeurs de références pour les valeurs
courantes.
62
Page 84

Temps de service des relais pour CQM1-OC224
2-3ChapitreCaractéristiques des Unités de sortie
250 Vc.a. charge résistive
24 Vc.c. charge résistive
Temps de service (x10 000 manoeuvres)
Courant de commutation (A)
63
Page 85

2-3-2 Unités de sortie à transistors
Nom Unité de sortie à transistor 8 points
Capacité maximale de
commutation
2Aà24Vc.c.
5 A/Unité
Courant de fuite 0,1 mA max.
Tension résiduelle 0,7 V max.
Temps de réponse ON 0,1 ms max.
Temps de réponse OFF 0,3 ms max.
Nb. de sorties 8 points (8 points/commun, 1 circuit)
Consommation interne 90 mA max. à 5 Vc.c. max.
Fusible 7 A (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Alimentation de service
15 mA min. à 24 Vc.c.
Poids 200 grammes max.
Configuration des circuits
+10%
LED de
sortie
Circuits
internes
/
--1 5 %
+10%
/
--1 5 %
2-3ChapitreCaractéristiques des Unités de sortie
CQM1-OD211
(1,9 mA ¢ nombre de points ON)
+V
OUT0
à
OUT07
Connexions du bornier
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
COM
--
NC
NC
NC
NC
NC
NC
NC
NC
+DC
COM
24 Vc.c.
Fusible
7A
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
Rem. Ne pas inverser les connexions
entre le +DC (c.c.) et le
commun. Si le +DC et le
commun sont mal connectés,
les circuits internes peuvent
être endommagés.
64
Page 86

CQM1-OD212
Nom Unité de sortie à transistor 16 points
Capacité maximale de
50 mA à 4,5 Vc.c. à 300 mA à 26,4 V (voir schéma ci--dessous)
commutation
Courant de fuite 0,1 mA max.
Tension résiduelle 0,8 V max.
Temps de réponse ON 0,1 ms max.
Temps de réponse OFF 0,4 ms max.
Nb. de sorties 16 points (16 points/commun, 1 circuit)
Consommation interne 170 mA max. à 5 Vc.c.
Fusible 5 A (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Alimentation de service
40 mA min. à 5 à 24 Vc.c. r10% (2,5 mA ¢ nombre de points sur ON)
Poids 180 grammes max.
Configuration des circuits
LED de
sortie
2-3ChapitreCaractéristiques des Unités de sortie
+V
OUT0
Connexions du bornier
Circuits
internes
Capacité de commutation max. (par Point)
300
Ic max. (mA)
50
4,5 20,4 26,4 0 45 55
+V (V)
à
OUT15
4,5 à
COM
Fusible
26,4
Vc.c.
5A
Capacité de commutation max. (total par Unité)
5,0
4,8
3,0
2,8
Ic max. (A)
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
+DC
COM
--
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
(_C)
65
Page 87

CQM1-OD213
Nom Unité de sortie à transistor 32 points
Capacité maximale de
16 mA à 4,5 Vc.c. à 100 mA à 26,4 V (voir schéma ci--dessous)
commutation
Courant de fuite 0,1 mA max.
Tension résiduelle 0,8 V max.
Temps de réponse ON 0,1 ms max.
Temps de réponse OFF 0,4 ms max.
Nb. de sorties 32 points (32 points/commun, 1 circuit)
Consommation du courant
240 mA max. à 5 Vc.c.
interne
Fusible 3,5 A (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Alimentation de service
110mAmin.à5à24Vc.c.r10% (3,4 mA ¢ nombre de points sur ON)
Poids 180 grammes max.
Configuration des circuits
LED de
sortie
Circuits
internes
+V
OUT00
OUT07
COM
+V
OUT08
OUT15
COM
+V
2-3ChapitreCaractéristiques des Unités de sortie
A
OUT00
OUT07
COM
+V
+V (V)
OUT08
OUT15
COM
+V
LED de
sortie
Capacité de commutation max. (par Point)
100
50
Ic max. (mA)
16
4,5 20,4 26,4
10
Fusible
3,5 A
B
66
Page 88

Connexions du bornier
CQM1-OD213
Wd m Wd (m+1)
++
+
AB
OUT0
L
OUT1
L
OUT2
L
OUT3
L
OUT4
L
OUT5
L
OUT6
L
OUT7
L
COM
+DC +DC
OUT8
L
OUT9
L
OUT10
L
OUT11
L
OUT12
L
OUT13
L
OUT14
L
OUT15
L
COM
+DC +DC
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
11 11
12 12
13 13
14 14
15 15
16 16
17 17
18 18
19 19
20 20
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
COM
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
COM
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
4,5 à
26,4 Vc.c.
Les bornes COM sont connectées en
interne, mais doivent être câblées.
L
L
L
L
+
L
L
L
L
2-3ChapitreCaractéristiques des Unités de sortie
67
Page 89

CQM1-OD214
Nom Unité de sortie à transistor PNP 16 points
Capacité maximale de
50 mA à 4,5 Vc.c. à 300 mA à 26,4 V (voir schéma ci--dessous)
commutation
Courant de fuite 0,1 mA max.
Tension résiduelle 0,8 V max.
Temps de réponse ON 0,1 ms max.
Temps de réponse OFF 0,4 ms max.
Nb de sorties 16 points (16 points/commun, 1 circuit)
Consommation du courant
170 mA max. à 5 Vc.c.
interne
Fusible 3,5 A (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Alimentation de service
60 mA min. à 5 à 24 Vc.c. r10% (3,5 mA ¢ nombre de points sur ON)
Poids 210 grammes max.
Configuration des circuits
LED
de
sortie
Fusible
3,5 A
+V
OUT0
(+)
(--)
2-3ChapitreCaractéristiques des Unités de sortie
4,5 à
26,4
Vc.c.
Connexions du bornier
Circuits
internes
Capacité de commutation max. (par Point)
300
Ic max. (mA)
50
4,5 20,4 26,4 0 39 55
+V (V)
--
Fusible
3,5 A
OUT15
0V
Capacité de commutation max. (Total par Unité)
5,0
4,8
3,6
Ic max. (A)
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
OUT15
COM
+
0V
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
(_C)
68
Page 90

CQM1-OD215
Nom Unité de sortie à transistor PNP 8 points
Capacité maximale de
commutation
1,0Aà24Vc.c.
4 A/Unité
+10%
/
-- 1 5 %
Courant de fuite 0,1 mA max.
Tension résiduelle 1,2 V max.
Temps de réponse ON 0,2 ms max.
Temps de réponse OFF 0,8 ms max.
Nb de sorties 8 points (8 points/commun, 1 circuit)
Consommation du courant
110 mA max. à 5 Vc.c. max.
interne
Alimentation de service
24 mA min. à 24 Vc.c.
+10%
/
(3 mA ¢ nombre de points sur ON)
--1 5 %
Poids 240 grammes max.
Sortie alarme
Nb de sorties 2 sorties
ALM0:SortiealarmeOUT0à3
ALM1:SortiealarmeOUT4à7
Caractéristique
sdesortie
Capacité maximale de commutation : 100 mA à 24 Vc.c.
Courant de fuite : 0,1 mA max.
Tension résiduelle : 0,7 V max.
Entrée de réinitialisation
Nb d’entrées 2 entrées
RST0 : Entrée de réinitialisation OUT 0 à 3
RST1 : Entrée de réinitialisation OUT 4 à 7
Caractéristique
s d’entrée
Tension d’entrée : 24 Vc.c.
Courant d’entrée : 7 mA, typique (24 Vc.c.)
Tension ON : 16,0 Vc.c. min.
Tension OFF : 5,0 Vc.c. max.
Protection contre les
Détection de courant : 2 A (valeur minimum), 1,6 A (typique)
court--circuits (voir Rem.)
Configuration des circuits
LED de
sortie
Circuit de
détection
surcourant
+10%
+V
OUT0
/
--1 5 %
24 Vc.c.
(+)
(--)
+10%
/
--1 5 %
2-3ChapitreCaractéristiques des Unités de sortie
Circuits
internes
LED de sortie
560
3,3 k
:
OUT07
ALM0
ALM1
RST0
:
RST1
0V
Sortie alarme
Sortie réinit.
69
Page 91

2-3ChapitreCaractéristiques des Unités de sortie
Connexions du bornier
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
RST0
ALM0
RST1
ALM1
NC
NC
COM
0V
--
COM
0V
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
Rem. Si le courant d’une sortie excède le courant de détection, les quatre sorties
respectives(OUT0à3ouOUT4à7)passentàOFF.Danslemêmetemps,
l’alarme de sortie (ALM0 ou ALM 1) passe sur ON et le voyant d’alarme s’allume.
Si une sortie alarme passe sur ON, éliminer en premier la cause du court--circuit.
Mettre ensuite les entrées de réinitialisation (RST0 ou RST1) de ON à OFF sur
la sortie alarme à ON. Le voyant de sortie alarme passe à OFF, la sortie alarme
retourne à OFF et les contacts de sortie sont restaurés.
70
Page 92

CQM1-OD216
Nom Unité de sortie à transistor PNP 32 points
Capacité maximale de
commutation
0,5Aà24Vc.c.
5 A/Unité
+10%
/
-- 1 5 %
Courant de fuite 0,1 mA max.
Tension résiduelle 0,8 V max.
Temps de réponse ON 0,1 ms max.
Temps de réponse OFF 0,3 ms max.
Nb. de sorties 32 points (32 points/commun, 1 circuit)
Consommation interne 240 mA max. à 5 Vc.c. max.
Fusible 7 A (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Alimentation de service
160 mA min. à 24 Vc.c.
+10%
/
(5 mA ¢ nombre de points sur ON)
--1 5 %
Poids 210 grammes max.
Sortie d’alarme
Nb. de sorties 1 sortie (PNP) : mise à ON lorsqu’un court--circuit ou un courant
excessif est détecté.
Caractéristiques
de sortie
Capacité maximale de commutation : 50 mA à 24 Vc.c.
Courant de fuite : 0,1 mA max.
Tension résiduelle : 0,8 V max.
Protection contre les
court--circuits (voir Rem.)
Configuration des circuits
Détection de courant : 0,7 à 2,5 A (le fonctionnement est rétabli automatiquement après
la suppression de la cause).
Circuit de protection
contre les court--circuits
Fusible 7 A
+10%
/
--1 5 %
2-3ChapitreCaractéristiques des Unités de sortie
Circuits internes
LED de
sortie
LED de
sortie
Circuit de protection
contre les court--circuits
(Sortie alarme)
71
Page 93

Connexions du bornier
2-3ChapitreCaractéristiques des Unités de sortie
CQM1-OD216
Wd m Wd (m+1)
24 Vc.c.
24 Vc.c.
Les bornes COM et 0 V sont
connectées en interne, mais doivent
être câblées.
24 Vc.c.
24 Vc.c.
Rem. Si le courant d’une sortie excède le courant de détection, la sortie passe à OFF.
Dans le même temps, l’alarme de sortie (ALM) passe sur ON (bas).
Si une sortie alarme passe à ON, éliminer en premier à cause du court--circuit.
La température interne de l’élément chute et l’alarme est automatiquement
arrêtée.
72
Page 94

2-3-3 Unités de sortie à triacs
CQM1-OA221
Nom Unité de sortie à triac 8 points
Capacité maximale de
commutation
Courant de fuite 1 mA max. à 100 Vc.a. et 2 mA max. à 200 Vc.a.
Tension résiduelle 1,5 V max. (0,4 A)
Temps de réponse ON 6msmax.
Temps de réponse OFF 1/2 cycle + 5 ms max.
Nb de sorties 8 points (4 points/commun, 2 circuits)
Consommation interne 110 mA max. à 5 Vc.c.
Fusible 2 A (un par commun), un seul utilisé.
Poids 240 grammes max.
Configuration des circuits
0,4 A à 100 à 240 Vc.a.
Le fusible n’est pas remplaçable par l’utilisateur.
LED
de
sortie
2-3ChapitreCaractéristiques des Unités de sortie
OUT00
OUT03
Connexions du bornier
Circuits
internes
OUT0
COM0
OUT1
COM0
OUT2
COM0
OUT3
COM0
OUT4
COM1
OUT5
COM1
OUT6
COM1
OUT7
COM1
NC
NC
A0
A1
A2
A3
A4
A5
A6
A7
A8
Fusible2A
Fusible2A
B0
B1
B2
B3
B4
B5
B6
B7
B8
COM0
100 à 240 Vc.a.
OUT04
OUT07
COM1
100 à 240 Vc.a.
Les bornes COM0 et COM1 ne
sont pas reliées en interne.
73
Page 95

Nom Unité de sortie à triac 6 points
Capacité maximale de
0,4 A à 100 à 240 Vc.a. (50/60 Hz)
commutation
2-3ChapitreCaractéristiques des Unités de sortie
CQM1-OA222
Capacité minimale de
commutation
100 mA à 10 Vc.a.
50mAà24Vc.a.
10 mA à 100 Vc.a.
10 mA à 240 Vc.a.
Courant de fuite 1 mA max. à 100 Vc.a. et 2 mA max. à 200 Vc.a.
Tension résiduelle 1,5 V max. (0,4 A)
Temps de réponse ON 1msmax.
Temps de réponse OFF Fréquence de charge de 1/2 cycle + 1 ms max.
Nb de sorties 6 points (4 points/commun, 1 circuit ; 2 points/commun, 1 circuit)
Courant de rupture 6Aà100ms
15 A à 10 ms
Consommation interne 250 mA max. à 5 Vc.c.
Fusible 5 A à 250 V (un par commun), un seul utilisé.
Le fusible n’est pas remplaçable par l’utilisateur.
Poids 240 grammes max.
Configuration des circuits
LED de
sortie
Circuits
internes
Fusible
5A
OUT00
OUT03
COM0
OUT04
100 à 240 Vc.a.
Connexions du bornier
OUT0
COM0
OUT1
COM0
OUT2
COM0
OUT3
COM0
OUT4
COM1
OUT5
COM1
NC
NC
NC
NC
NC
NC
OUT05
100 à 240 Vc.a.
COM1
Fusible
5A
B0
A0
B1
A1
B2
A2
B3
A3
B4
A4
B5
A5
B6
A6
B7
A7
B8
A8
COM0 et COM1 ne sont pas
reliées en interne.
74
Page 96

CHAPITRE 3
Unités
Ce chapitre détaille les fonctions et les nomenclatures des Unités composant le CQM1H, donne les informations sur les
appareils de programmation et fournit les caractéristiques techniques des communications.
3-1 Unités Centrales 76..........................................................
3-1-1 Voyants 77..........................................................
3-1-2 Couvercle de compartiment batterie 78...................................
3-1-3 Batterie 78..........................................................
3-1-4 Micro--interrupteurs 79................................................
3-1-5 Cassettes mémoire 79.................................................
3-1-6 Ports de communications séries 82.......................................
3-1-7 Port périphérique 82..................................................
3-1-8 Port RS-232C intégré 83...............................................
3-1-9 Cartes internes pour emplacements 1 et 2 84...............................
3-1-10 Entrées intégrées 85..................................................
3-2 Unités d’alimentation 85......................................................
3-2-1 Composantes des Unités d’alimentation 85................................
3-2-2 Choix d’une Unité d’alimentation 86.....................................
3-2-3 Poids des Unités 87...................................................
3-3 Unités d’E/S 89.............................................................
3-4 Cartes Internes 89...........................................................
3-5 Equipements de Programmation 90.............................................
3-5-1 Consoles de programmation 91.........................................
3-5-2 Logiciel de programmation 92..........................................
75
Page 97

3-1 Unités Centrales
dèle(poi
intégré
(
K
)(K
)
Il existe quatre types d’Unités Centrales. Elles sont listées dans le tableau
suivant. Les quatre types peuvent être classés en deux groupes : les Unités
acceptant des cartes internes et une Unité de Communication et celles qui ne
l’acceptent pas. Les autres différences dans les Unités Centrales sont dans la
capacité de programme, la capacité des E/S, la disponibilté des EM, et la
disponibilité d’un port RS-232C intégré.
3-1ChapitreUnités Centrales
NumérodeCapacité
des E/S
mo
voir
Rem.)
CQM1H-
512
nts,
Capacité
de pro-
gramme
(Kmots)
15,2
Points
d’entrée
de l’Unité
Centrale
c.c. : 16
CPU61
CQM1H-
7,2 6
CPU51
CQM1H-
256 3,2 3 NON NON
CPU21
CQM1HCPU1 1
Rem.
capacité des E/S = Nb de points d’entrée (d 256) + Nb de points de sortie (d 256).
Composants des Unités Centrales
Couvercle du compartiment batterie
Ouvrir ce couvercle pour accéder à la
batterie, aux micro--interrupteurs et à la
cassette mémoire.
Port Périphérique
Utilisé pour relier un appareil de
programmation comme une console
de programmation ou un
micro--ordinateur PC utilisant un
logiciel CX programmateur. Permet
également une Liaison inter API et des
communications sans protocole.
Port RS-232C
Utilisé pour la Liaison inter API, sans
protocole, liaison données 1:1, ou liaison NT
(mode 1:1) communications avec des
équipements externes ou d’autres API.
(sauf CQM1H-CPU11-E)
Capacité
des DM
s
6 6
mots
Capacité
des EM
mots
Ports de communica-
tions séries intégrés
Port Péri-
phérique
Port
RS-232C
Cartes
Internes
OUI OUI OUI OUI
Aucun
NON
Glissières
Utilisées pour verrouiller
plusieurs Unités contigües
Voyants LED
Connecteur
Ajout d’Unités à l’horizontal par
liaison des connecteurs.
16 Entrées intégrées
dans l’Unité Centrale
Couvercles de cartes internes
Retirer ces couvercles
Carte interne emplacement 2
Utiliser cet emplacement pour monter une carte compteur
à grande vitesse, une Carte de gestion d’axes, une Carte
codeur absolu, une Carte potentiomètres analogiques, ou
une carte d’E/S analogique.
Carte interne emplacement 1
Utiliser cet emplacement pour monter une carte
compteur à grande vitesse, une Carte potentiomètres
analogiques, ou une carte de communication série.
(emplacement droit)
(emplacement gauche)
Unité de
Commu-
nications
76
Page 98

3-1-1 Voyants
Voyant RUN (Vert)
S’allume quand l’Unité Centrale est en fonctionnement normal.
3-1ChapitreUnités Centrales
Voyants des états d’entrée
Indique l’état ON/OFF des bits d’entrée de l’IR 000
correspondant aux points d’entrée intégrés de l’Unité
Centrale
Voyant Erreur/Alarme
(Rouge)
Clignote lors d’une erreur
non--fatale. L’Unité Centrale
continue de fonctionner.
Allumé lors d’une erreur fatale.
Le voyant RUN passe à OFF,
l’Unité Centrale s’arrête et
toutes les sorties passent à
OFF.
Voyant Couleur Etat Signification
RUN Vert
ERR/ALM Rouge
INH Jaune
PRPHL Jaune
COMM Jaune
Voyant d’entrée inhibée (INH) (Jaune)
S’allume quand le bit OFF de sortie (SR 25212) passe à ON. Les
sorties de toutes les Unités de sortie passent à OFF.
Voyant de port périphérique (PRPHL) (Jaune)
Clignote quand l’Unité Centrale est en communication avec un
autre équipement via le port périphérique.
Voyant de port RS-232C intégré (COMM) (Jaune)
Clignote quand l’Unité Centrale est en communication avec un autre
équipement via le port RS--232C (non disponible sur CQM1H-CPU11).
Allumé L’API fonctionne normallement dans les modes MONI-
TOR ou RUN.
Eteint L’API ne fonctionne plus dans le mode PROGRAM, ou a
été arrêté à cause d’une erreur fatale.
Allumé Une erreur fatale est apparue.
L’Unité Centrale ne fonctionne plus, et les sorties des
Unités de Sortie passe à OFF.
Clignotant
Une erreur non--fatale est apparue.
L’Unité Centrale est toujours en fonctionnement.
Eteint L’Unité Centrale fonctionne normallement ou une erreur
de chien de garde est apparue.
Allumé Le bit OFF de sortie (SR 25212) est passé à ON.
Les sorties des Unités de Sortie sont passées à OFF.
Eteint Le bit OFF de sortie (SR 25212) est à OFF.
Allumé L’Unité Centrale est en émission ou en réception sur le
port périphérique.
Eteint L’Unité Centrale n’est pas en communication avec le port
périphérique.
Allumé L’Unité Centrale est en émission ou en réception avec le
port RS-232C intégré.
Eteint L’Unité Centrale n’est pas en communication avec le port
RS-232C intégré.
77
Page 99

3-1-2 Couvercle de compartiment batterie
Pour ouvrir le couvercle de compartiment batterie, introduire l’extrémité du doigt
ou un petit tournevis dans le trou du haut du couvercle et l’ouvrir vers le haut.
Couvercle de Compartiment batterie
3-1ChapitreUnités Centrales
Micro--interrupteur
3-1-3 Batterie
Remplacement de l’ensemble
batterie
Batterie
Emplacement de montage de la cassette
mémoire
(à l’intérieur du compartiment)
L’Unité Centrale dispose d’une batterie interne sauvegardant les données
suivantes.
x mémoire des E/S (y compris le Setup de l’API)
x programme utilisateur
x données d’horloge (lorsqu’une cassette mémoire avec une horloge est
installée)
La durée de vie de la batterie à une température ambiante de 25qC est de 5 ans.
Lorsque la batterie est usée, l’indicateur ERR/ALM sur la face avant de l’Unité
Centrale s’allume. Remplacer la batterie dans un délai d’une semaine.
Unité Centrale
Modèle numéro : CPM2A-BAT01
Programme
Utilisateur
Sauvegarde
78
Mémoire
d’E/S
Données
d’horloge
Cassette mémoire
Batterie
Page 100

Rem.
Ne pas retirer la batterie, sauf si c’est pour la remplacer. Si la batterie n’est pas
remplacée en moins de 5 minutes, les données internes peuvent être perdues.
Pour plus de détail sur la procédure de remplacement, se reporter au
paragraphe 6-2 Remplacement de la Batterie.
3-1-4 Micro--interrupteurs
Les micro--interrupteurs sont utilisés pour paramétrer : la protection en écriture
de la mémoire, l’auto-transfert des données à partir de la cassette mémoire, le
langage d’affichage pour la console de programmation, le réglage des
instructions étendues, le réglage des communications, les réglages particuliers
d’un utilisateur ainsi que le type d’équipement connecté au port périphérique.
Pour plus de détails, se reporter au paragraphe 6-1 Réglages par les
Micro--interrupteurs.
3-1-5 Cassettes mémoire
Une cassette mémoire peut être installée dans l’Unité Centrale pour transférer
ou comparer les données suivantes entre l’Unité Centrale et la cassette
mémoire.
x Programme utilisateur
x Mémoire de données
(DM en lecture seule : DM 6144 à DM 6568; Setup de l’API : DM 6600 à DM
6655)
x Information sur les instructions étendues
Il n’est pas nécessaire de spécifier la zone de lecture ou d’écriture. Toutes les
données sont transférées en un seul lot. Une cassette mémoire doit être
achetée séparément.
3-1ChapitreUnités Centrales
Cassette Mémoire
Types de cassette
mémoire
Unité Centrale
Programme
Utilisateur
Mémoire d’E/S
Mémoire données
(DM en lecture
seule, Setup API)
Information
instruction
étendue
Transfert ou
comparaison
Cassette mémoire
Il existe trois types de cassettes mémoire : EEPROM, EPROM et mémoire flash.
Les modèles disponibles de cassette mémoire sont listés dans le tableau
suivant.
Mémoire Modèle Caractéristiques
1, 3
1
CQM1-ME04K 4 Kmots sans horloge
CQM1-ME04R 4 Kmots avec horloge
CQM1-ME08K 8 Kmots sans horloge
CQM1-ME08R 8 Kmots avec horloge
2
CQM1-MP08K 8 Kmots, 16 Kmots, ou 32 Kmots sans horloge
CQM1-MP08R 8 Kmots, 16 Kmots, ou 32 Kmots avec horloge
CQM1H-ME16K 16 Kmots sans horloge
CQM1H-ME16R 16 Kmots avec horloge
EEPROM
EPROM
Flash
79
 Loading...
Loading...