


Série SYSMAC CQM1H
CQM1H-CPU Manuel de programmation
CQM1H- Cartes internes spéciales
Manuel de programmation
Produit en septembre 1999

iv
Avis :
Les produits OMRON sont conçus pour être utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce manuel, les conventions suivantes permettent de spécifier et de classer les précautions.
Toujours faire très attention aux informations qui sont données. Le non–respect des précautions stipulées peut entraîner des blessures corporelles ou endommager des biens.
DANGER Indique une situation dangereuse imminente qui, si elle n’est pas évitée, peut entraîner des
!
blessures graves ou mortelles.
AVERTISSEMENT Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
!
provoquer des blessures graves ou mortelles
Attention Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
!
provoquer des blessures moins sérieuses ou endommager des biens.
Références des produits OMRON
Dans ce manuel, tous les noms de produits OMRON sont écrits en majuscules. Le mot “ unité” désigne une produit OMRON, que la désignation de ce produit apparaisse ou non dans le texte.
L’abréviation “Ch”, qui figure sur certains affichages et sur certains produits OMRON signifie souvent
“ word” (“ mot”) et, dans la documentation, il est souvent remplacé par l’abréviation “Wd”.
L’abréviation “API” signifie Automate Programmable Industriel et n’est jamais utilisée comme abréviation d’un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaissent dans la colonne de gauche du manuel, pour vous aider à trouver
différents types d’informations.
1, 2, 3... Indique une liste, quelqu’en soit le type, comme des procédures, des check-
OMRON, 1999
Tous droits réservés. Aucune partie de cette publication ne peut être, stockée dans un système à mémoire ou transmise,
sous aucune forme et par aucun moyen mécanique, électronique, photocopie, enregistrement sans l’accord écrit préalable
d’OMRON.
L’utilisation des informations contenues ci–après ne peut engendrer aucune responsabilité. De plus, dans la mesure où
OMRON travaille constamment à l’amélioration de ses produits de haute qualité, les informations contenues dans ce manuel sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l’élaboration de ce manuel.
Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions. Les dommages résultant de l’utilisation des
informations contenues dans cette publication ne peuvent engendrer aucune responsabilité.
Rem. Désigne des informations particulièrement intéressantes pour utiliser le produit
de façon pratique et efficace.
lists, etc.
v

vi

TABLE DES MATIERES
CONSEILS D’UTILISATION xiii. . . . . . . . . . . . . . . . . . . . .
1 Public visé xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Conseils d’utilisation généraux xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Conseils d’utilisation de sécurité xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xvi. . . . . . . . . . . . . . . . . . . . . . .
5 Conseils d’utilisation xvi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Conformité aux directives communautaires xx. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-1 Directives applicables xx. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Concepts xx. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Conformité aux directives communautaires xx. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4 Méthodes de réduction des parasites des sorties à relais xxi. . . . . . . . . . . . . . . . . . .
CHAPITRE 1
Setup de l’API et autres caractéristiques 1. . . . . . . . . . . . .
1-1 Setup de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-1 Modification du Setup de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-2 Paramétrage de la carte de communication série 4. . . . . . . . . . . . . . . . . . . . . . . .
1-1-3 Paramétrage du Setup de l’API 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Paramétrage de la carte interne 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-1 Paramétrage de la carte de communication série 10. . . . . . . . . . . . . . . . . . . . . . . .
1-2-2 Paramétrage de la carte du compteur à grande vitesse 11. . . . . . . . . . . . . . . . . . . .
1-2-3 Paramétrage de la carte de gestion d’axes 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-4 Paramétrage de la carte codeur absolu 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-5 Paramétrage de la carte E/S analogiques 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Fonctionnement de l’API de base et traitements des E/S 14. . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Mode démarrage 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Etat du bit de maintien 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Temps de service du port RS-232C 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Temps de service du port périphérique 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-5 Temps de cycle minimal 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-6 Constantes du temps d’entrée16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-7 Temporisations à grande vitesse 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-8 digits d’entrée DSW(87) et méthode de rafraîchissement de sortie 18. . . . . . . . . .
1-3-9 Paramétrage du port périphérique 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-10 Paramétrage du journal d’erreurs 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Fonctions d’interruption 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-1 Types d’interruptions 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-2 Interruptions d’entrée23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-3 Masquage de toutes les interruptions 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-4 Interruptions de la temporisation cyclique 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-5 Interruptions du compteur à grande vitesse 0 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-6 Dépassements positif/négatif du compteur à grande vitesse 0 44. . . . . . . . . . . . . .
1-5 Fonctionnement de la sortie d’impulsions 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Fonctions de communication 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-1 Paramétrage de la liaison à l’ordinateur et des communications sans protocole 50
1-6-2 Procédures et paramétrage des communications de la liaison à l’ordinateur 52. . .
1-6-3 Procédures et paramétrage de communication sans protocole 55. . . . . . . . . . . . . .
1-6-4 Liaisons de données inter API 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-5 Communication en mode 1:1 liaison NT 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-6 Câblage des ports 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7 Calcul avec les données binaires signées 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7-1 Définition des données binaires signées 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vii

TABLE DES MATIERES
1-7-2 Drapeaux arithmétiques 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7-3 Réception des données binaires signées utilisant des valeurs décimales 63. . . . . .
1-7-4 Utilisation des instructions d’extensions binaires signées 63. . . . . . . . . . . . . . . . . .
1-7-5 Exemple d’application utilisant les données binaires signées 64. . . . . . . . . . . . . .
CHAPITRE 2
Cartes internes 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1 Carte du compteur à grande vitesse 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Modèle 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Fonctions 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-3 Exemple de configuration du système 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-4 Emplacements des cartes internes concernées 68. . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-5 Noms et fonctions 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-6 Caractéristiques techniques 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-7 Compteurs à grande vitesse 1 à 472. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Carte de gestion d’axes 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 Modèle 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 Fonction 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 Configuration du système 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-4 Emplacement carte interne concerné 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-5 Noms et fonctions 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-6 Caractéristiques techniques 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-7 Compteurs à grande vitesse 1 et 2 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-8 Fonctions 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-9 Sortie d’impulsions à rapport cyclique fixe 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-10 Sorties d’impulsions à rapport cyclique variable 124. . . . . . . . . . . . . . . . . . . . . . . .
2-2-11 Détermination de l’état des ports 1 et 2 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-12 Précautions d’utilisation des fonctions de la sortie d’impulsions 128. . . . . . . . . . . .
2-3 Carte codeur absolu 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-1 Modèle 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-2 Fonctions 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-3 Configuration du système 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-4 Emplacements concernés de la carte interne 130. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-5 Dénominations et fonctions 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-6 Caractéristiques techniques de l’entrée du codeur absolu 131. . . . . . . . . . . . . . . . . .
2-3-7 Interruptions du compteur à grande vitesse 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Carte de réglage analogique 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-1 Modèle 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-2 Fonction 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-3 Emplacements concernés de la carte interne 144. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-4 Dénominations et fonctions 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-5 Caractéristiques techniques 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Carte des E/S analogiques 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-1 Modèle 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-2 Fonction 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-3 Configuration du système 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-4 Emplacement de la carte interne concerné 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-5 Dénominations et fonctions 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-6 Caractéristiques techniques 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-7 Procédure de l’application 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6 Cartes de communications série 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-1 Numéro du modèle 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-2 Cartes de communications série 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
viii

TABLE DES MATIERES
2-6-3 Caractéristiques 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-4 Configuration du système 151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 3
Zones mémoire 153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 Structure de la zone mémoire 154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Zone IR 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-1 Zones d’entrée et de sortie 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-2 Zones de travail 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-3 Attribution des E/S 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-4 Drapeaux/bits pour une carte interne dans l’emplacement 1 (IR 200 à IR 215) 163
3-2-5 Drapeaux/bits pour une carte interne dans l’emplacement 2 (IR 232 à IR 243) 166
3-2-6 Drapeaux/bits pour les unités de communication 168. . . . . . . . . . . . . . . . . . . . . . . .
3-3 Zone SR 169. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4 Zone AR 172. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-5 Zone HR 172. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6 Zone AR 173. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6-1 Drapeaux/bits partagés (AR 00 à AR 04) 173. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6-2 Drapeaux/bits pour les cartes internes (AR 05 et AR 06) 174. . . . . . . . . . . . . . . . . .
3-6-3 Drapeaux/bits partagés (AR 07 à AR 27) 175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6-4 Utilisation de l’horloge 179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-7 Zone LR 180. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-8 Zone temporisation/compteur 181. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-9 Zone DM 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-10 Zone EM 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-11 Utilisation de cassettes mémoire 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-11-1 Cassettes mémoire et contenu 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-11-2 Capacité de la cassette mémoire et taille du programme 185. . . . . . . . . . . . . . . . . .
3-11-3 Ecriture dans la cassette mémoire 186. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-11-4 Lecture à partir de la cassette mémoire 187. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-11-5 Comparaison du contenu de la cassette mémoire 188. . . . . . . . . . . . . . . . . . . . . . . .
Utilisation de cassettes mémoire 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 4
Programmation en schéma à contacts 189. . . . . . . . . . . . . . .
4-1 Procédure fondamentale 190. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Terminologie de l’instruction 190. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Bases du schéma à contacts 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Terminologie fondamentale 192. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Code mnémonique 192. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Instructions à contacts 194. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-4 SORTIE et NON SORTIE 197. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-5 L’instruction FIN 198. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-6 Instructions de bloc logique 198. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-7 Codage d’instructions multiples de droite 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-8 Lignes secondaires 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-9 Sauts 212. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4 Commande de l’état des bits 214. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-1 PARAMETRAGE ON et PARAMETRAGE OFF 214. . . . . . . . . . . . . . . . . . . . . . . .
4-4-2 CHANGEMENT D’ETAT FRONT MONTANT et CHANGEMENT D’ETAT FRONT
DESCENDANT 215. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-3 CONSERVER 215. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-4 Bits à auto-maintien (scellement) 216. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ix

TABLE DES MATIERES
4-5 Bits de travail (relais internes) 216. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-6 Conseils d’utilisation à la programmation 219. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7 Exécution du programme 221. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 5
Ensemble d’instructions 223. . . . . . . . . . . . . . . . . . . . . . . . . .
5-1 Notation 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2 Format d’instruction 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Zones de données, valeurs des données d’opérande et drapeaux 227. . . . . . . . . . . . . . . . . . .
5-4 Variantes d’instructions 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Instructions d’extension 230. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Codage des Instructions Right-hand 231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7 Tableaux d’instructions 234. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-1 Instructions classées par codes de fonctions 234. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-2 Instructions d’extension 235. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-3 Liste alphabétique des mnémoniques 235. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-8 Instructions de schéma à contacts 239. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-8-1 CHARGER, NON CHARGER, ET, NON ET, OU et NON OU 239. . . . . . . . . . . . .
5-8-2 ET CHARGER et OU CHARGER 240. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-9 Instructions de contrôle de bit 241. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-9-1 SORTIE et NON SORTIE – OUT et OUT NOT 241. . . . . . . . . . . . . . . . . . . . . . . . .
5-9-2 PARAMETRAGE ON et PARAMETRAGE OFF – SET et RSET 241. . . . . . . . . . .
5-9-3 CONSERVER – KEEP(11) 242. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-9-4 CHANGEMENT D’ETAT FRONT MONTANT et DESCENDANT
– DIFU(13) et DIFD(14) 243. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-10 AUCUNE OPERATION – NOP(00) 244. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-11 FIN – END(01) 244. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-12 VERROUILLAGE et DEVERROUILLAGE – IL(02) et ILC(03) 245. . . . . . . . . . . . . . . . . .
5-13 SAUT et FIN DE SAUT – JMP(04) et JME(05) 247. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-14 Instructions d’erreurs utilisateur :
ALARME DE PANNE MINEURS ET DE REINITIALISATION – FAL(06) et ALARME DE PANNE
GRAVE – FALS(07) 248. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-15 Instructions de pas :
DEFINITION ET DEMARRAGE D’UN PAS – STEP(08)/SNXT(09) 249. . . . . . . . . . . . . .
5-16 Instructions de comptage et de temporisation 251. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-1 TEMPORISATION – TIM 252. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-2 COMPTEUR – CNT 253. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-3 COMPTEUR REVERSIBLE – CNTR(12) 255. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-4 TEMPORISATION GRANDE VITESSE – TIMH(15) 256. . . . . . . . . . . . . . . . . . . .
5-16-5 TEMPORISATION ADDITION – TTIM(––) 257. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-6 TEMPORISATION DE TRAME – STIM(69) 258. . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-7 CHARGE TABLEAU DE COMPARAISON – CTBL(63) 260. . . . . . . . . . . . . . . . .
5-16-8 CONTROLE DE MODE – INI(61) 273. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-16-9 LECTURE PV DU COMPTEUR GRANDE VITESSE – PRV(62) 275. . . . . . . . . .
5-17 Instructions de décalage 279. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17-1 REGISTRE A DECALAGE – SFT(10) 279. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17-2 DECALAGE DE MOT – WSFT(16) 280. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17-3 DECALAGE ARITHMETIQUE A GAUCHE – ASL(25) 281. . . . . . . . . . . . . . . . .
5-17-4 DECALAGE ARITHMETIQUE A DROITE – ASR(26) 281. . . . . . . . . . . . . . . . . .
5-17-5 ROTATION A GAUCHE – ROL(27) 282. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17-6 ROTATION A DROITE – ROR(28) 282. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17-7 DECALAGE A GAUCHE D’UN DIGIT – SLD(74) 283. . . . . . . . . . . . . . . . . . . . .
5-17-8 DECALAGE A DROITE D’UN DIGIT – SRD(75) 284. . . . . . . . . . . . . . . . . . . . . .
x

TABLE DES MATIERES
5-17-9 REGISTRE A DECALAGE REVERSIBLE – SFTR(84) 284. . . . . . . . . . . . . . . . . .
5-17-10 REGISTRE A DECALAGE ASYNCHRONE – ASFT(17) 286. . . . . . . . . . . . . . . .
5-18 Instructions de transfert de données 287. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-1 TRANSFERT – MOV(21) 287. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-2 NON TRANSFERT – MVN(22) 288. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-3 TRANSFERT PAR BLOCS – XFER(70) 289. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-4 PARAMETRAGE DE BLOCS – BSET(71) 290. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-5 ECHANGE DE DONNEES – XCHG(73) 291. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-6 DISTRIBUTION D’UN SEUL MOT – DIST(80) 291. . . . . . . . . . . . . . . . . . . . . . .
5-18-7 COLLECTE DE DONNEES – COLL(81) 293. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-8 TRANSFERT DE BIT – MOVB(82) 295. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-9 TRANSFERT DE DIGIT – MOVD(83) 296. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18-10 BITS DE TRANSFERT – XFRB(––) 297. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19 Instructions de comparaison 299. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19-1 COMPARAISON – CMP(20) 299. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19-2 TABLEAU DE COMPARAISON – TCMP(85) 300. . . . . . . . . . . . . . . . . . . . . . . . .
5-19-3 COMPARAISON DE BLOC – BCMP(68) 301. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19-4 DOUBLE COMPARAISON – CMPL(60) 303. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19-5 COMPARAISON MULTI-MOTS – MCMP(19) 304. . . . . . . . . . . . . . . . . . . . . . . . .
5-19-6 COMPARAISON BINAIRE SIGNEE – CPS(––) 305. . . . . . . . . . . . . . . . . . . . . . . .
5-19-7 COMPARAISON BINAIRE SIGNEE DOUBLE – CPSL(––) 306. . . . . . . . . . . . . .
5-19-8 COMPARAISON DE PLAGES DE ZONES – ZCP(––) 308. . . . . . . . . . . . . . . . . .
5-19-9 COMPARAISON DE PLAGES DE ZONES DOUBLES – ZCPL(––) 309. . . . . . . .
5-20 Instructions de conversion 310. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-1 BCD EN BINAIRE – BIN(23) 310. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-2 BINAIRE EN BCD – BCD(24) 311. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-3 BCD DOUBLE EN BINAIRE DOUBLE – BINL(58) 311. . . . . . . . . . . . . . . . . . .
5-20-4 BINAIRE DOUBLE EN BCD DOUBLE – BCDL(59) 312. . . . . . . . . . . . . . . . . . .
5-20-5 DECODEUR 4 A 16 – MLPX(76) 313. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-6 CODEUR 16 A 4 – DMPX(77) 315. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-7 DECODEUR A 7 SEGMENTS – SDEC78) 317. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-8 CONVERSION ASCII – ASC(86) 320. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-9 ASCII EN HEXADECIMAL – HEX(––) 321. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-10 MISE A L’ECHELLE – SCL(66) 324. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-11 MISE A L’ECHELLE DE VALEUR BINAIRE SIGNEE VERS BCD
5-20-12 MISE A L’ECHELLE DE VALEUR BCD VERS VALEUR BINAIRE SIGNEE
5-20-13 HEURES EN SECONDES – SEC(––) 330. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-14 SECONDES EN HEURES – HMS(––) 331. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-15 COLONNE EN LIGNE – LINE(––) 332. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-16 LIGNE EN COLONNE – COLM(––) 333. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-17 COMPLEMENT A 2 – NEG(––) 334. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20-18 COMPLEMENT A 2 DOUBLE – NEGL(––) 335. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21 Instructions de calcul BCD 337. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-1 REPORT DE DEFINITION – STC(40) 337. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-2 ANNULATION REPORT – CLC(41) 337. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-3 ADDITION VALEUR BCD – ADD(30) 337. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-4 SOUSTRACTION VALEUR BCD – SUB(31) 338. . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-5 MULTIPLICATION VALEUR BCD – MUL(32) 340. . . . . . . . . . . . . . . . . . . . . . . .
5-21-6 DIVISION VALEUR BCD – DIV(33) 341. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21-7 ADDITION VALEUR BCD DOUBLE – ADDL(54) 342. . . . . . . . . . . . . . . . . . . . .
5-21-8 SOUSTRACTION VALEUR BCD DOUBLE – SUBL(55) 344. . . . . . . . . . . . . . . .
– SCL2(––) 326. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– SCL3(––) 328. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xi

TABLE DES MATIERES
5-21-9 MULTIPLICATION VALEUR BCD DOUBLE – MULL(56) 345. . . . . . . . . . . . . .
5-21-10 DIVISION VALEUR BCD DOUBLE – DIVL(57) 346. . . . . . . . . . . . . . . . . . . . . . .
5-21-11 RACINE CARREE – ROOT(72) 347. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22 Instructions de calcul binaire 348. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22-1 ADDITION VALEUR BINAIRE – ADB(50) 348. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22-2 SOUSTRACTION VALEUR BINAIRE – SBB(51) 349. . . . . . . . . . . . . . . . . . . . . .
5-22-3 MULTIPLICATION BINAIRE – MLB(52) 350. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22-4 DIVISION BINAIRE – DVB(53) 351. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22-5 ADDITION VALEUR BINAIRE DOUBLE – ADBL(––) 352. . . . . . . . . . . . . . . . .
5-22-6 SOUSTRACTION VALEUR BINAIRE DOUBLE – SBBL(––) 353. . . . . . . . . . . .
5-22-7 MULTIPLICATION BINAIRE SIGNEE – MBS(––) 355. . . . . . . . . . . . . . . . . . . . .
5-22-8 MULTIPLICATION VALEUR BINAIRE SIGNEE DOUBLE – MBSL(––) 356. . .
5-22-9 DIVISION BINAIRE SIGNEE – DBS(––) 357. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22-10 DIVISION VALEUR BINAIRE SIGNEE DOUBLE – DBSL(––) 358. . . . . . . . . . .
5-23 Instructions mathématiques spéciales 359. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23-1 TROUVER MAXIMUM – MAX(––) 359. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23-2 TROUVER MINIMUM – MIN(––) 360. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23-3 VALEUR MOYENNE – AVG(––) 361. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23-4 SOMME – SUM(––) 363. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23-5 PROCESSUS ARITHMETIQUE – APR(––) 365. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24 Instructions mathématiques à virgule flottante 368. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-1 VIRGULE FLOTTANTE VERS 16 BITS : FIX(––) 373. . . . . . . . . . . . . . . . . . . . .
5-24-2 VIRGULE FLOTTANTE VERS 32 BITS : FIXL(––) 374. . . . . . . . . . . . . . . . . . . .
5-24-3 16 BITS VERS VIRGULE FLOTTANTE : FLT(––) 375. . . . . . . . . . . . . . . . . . . . .
5-24-4 32 BITS VERS VIRGULE FLOTTANTE : FLTL(––) 376. . . . . . . . . . . . . . . . . . . .
5-24-5 ADDITION DE VIRGULE FLOTTANTE : +F(––) 377. . . . . . . . . . . . . . . . . . . . . .
5-24-6 SOUSTRACTION DE VIRGULE FLOTTANTE : –F(––) 378. . . . . . . . . . . . . . . . .
5-24-7 MULTIPLICATION DE VIRGULE FLOTTANTE : *F(––) 379. . . . . . . . . . . . . . .
5-24-8 DIVISION DE VIRGULE FLOTTANTE : /F(––) 381. . . . . . . . . . . . . . . . . . . . . . .
5-24-9 DEGRES EN RADIANS : RAD(––) 382. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-10 RADIANS EN DEGRES : DEG(––) 383. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-11 SINUS : SIN(––) 384. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-12 COSINUS : COS(––) 385. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-13 TANGENTE : TAN(––) 386. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-14 ARC SINUS : ASIN(––) 387. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-15 ARC COSINUS : ACOS(––) 388. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-16 ARC TANGENTE : ATAN(––) 389. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-17 RACINE CARREE : SQRT(––) 391. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-18 EXPONENTIELLE : EXP(––) 392. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24-19 LOGARITHME : LOG(––) 393. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25 Instructions Logiques 394. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25-1 COMPLEMENT – COM(29) 394. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25-2 ET LOGIQUE – ANDW(34) 395. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25-3 OU LOGIQUE – ORW(35) 396. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25-4 OU EXCLUSIF – XORW(36) 397. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25-5 NON OU EXCLUSIF – XNRW(37) 397. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-26 Instructions d’incrémentation/décrémentation 398. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-26-1 INCREMENT BCD – INC(38) 398. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-26-2 DECREMENT BCD – DEC(39) 399. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-27 Instructions de sous–programme 400. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-27-1 SAISIE DU SOUS–PROGRAMME – SBS(91) 400. . . . . . . . . . . . . . . . . . . . . . . . .
5-27-2 DEBUT DE SOUS–PROGRAMME et RETOUR AU PROGRAMME PRINCIPAL –
SBN(92)/RET(93) 402. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xii

TABLE DES MATIERES
5-28 Instructions spéciales 402. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-1 ECHANTILLONNAGE DE MEMOIRE DE TRACAGE – TRSM(45) 402. . . . . .
5-28-2 MESSAGE – MSG(46) 404. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-3 RAFRAICHISSEMENT E/S – IORF(97) 405. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-4 MACRO – MCRO(99) 406. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-5 COMPTEUR DE BITS – BCNT(67) 408. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-6 CONTROL DE TRAME – FCS(––) 409. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-7 DETECTION DE POINT DE PANNE – FPD(––)411. . . . . . . . . . . . . . . . . . . . . . .
5-28-8 COMMANDE D’INTERRUPTION – INT(89) 415. . . . . . . . . . . . . . . . . . . . . . . . .
5-28-9 PARAMETRAGE DES IMPULSIONS – PULS(65) 417. . . . . . . . . . . . . . . . . . . . .
5-28-10 SORTIE DE VITESSE– SPED(64) 419. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-11 SORTIE D’IMPULSION – PLS2(––) 422. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-12 COMMANDE D’ACCELERATION – ACC(––) 424. . . . . . . . . . . . . . . . . . . . . . . .
5-28-13 IMPULSION A RAPPORT CYCLIQUE VARIABLE – PWM(––) 427. . . . . . . . . .
5-28-14 RECHERCHE DE DONNEE – SRCH(––) 428. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28-15 COMMANDE PID – PID(––) 429. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-29 Instructions de réseau 431. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-29-1 TRANSMISSION RESEAU – SEND(90) 431. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-29-2 RECEPTION RESEAU – RECV(98) 435. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-29-3 COMMANDE LIVREE : CMND(––) 438. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-30 Instructions de communication 441. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-30-1 RECEIVE (RECEPTION) – RXD(47) 441. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-30-2 TRANSMIT – TXD(48) 443. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-30-3 CHANGEMENT DU PARAMETRAGE DU PORT SERIE – STUP(––) 446. . . . .
5-30-4 MACRO–PROTOCOLE – PMCR(––) 448. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-31 Instructions avancées d’E/S 451. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-31-1 SORTIE D’AFFICHAGE 7 SEGMENTS – 7SEG(88) 451. . . . . . . . . . . . . . . . . . . .
5-31-2 ENTREE COMMUTATEUR NUMERIQUE – DSW(87) 455. . . . . . . . . . . . . . . . .
5-31-3 ENTREE D’UNE TOUCHE HEXADECIMALE – HKY(––) 459. . . . . . . . . . . . . .
5-31-4 ENTREE TOUCHE DECIMALE – TKY(18) 462. . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 6
Commandes de liaison à l’ordinateur 465. . . . . . . . . . . . . . .
6-1 Résumé des commandes de liaison à l’ordinateur 466. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Codes de fin 467. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2-1 Codes 467. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2-2 Codes et commandes applicables. 469. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Procédure de communication 469. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4 Formats de commande et de réponse 471. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4-1 Commandes de l’ordinateur 471. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4-2 Commandes de l’API 474. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5 Commandes de liaison à l’ordinateur 475. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-1 LECTURE DES ZONES IR/SR - RR 475. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-2 LECTURE DE LA ZONE LR - RL 475. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-3 LECTURE DE LA ZONE HR - RH 476. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-4 LECTURE DE LA PV - RC 476. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-5 LECTURE DE L’ETAT DE TC - RG 476. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-6 LECTURE DE LA ZONE DM - RD 477. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-7 LECTURE DE LA ZONE EM - RE 477. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-8 LECTURE DE LA ZONE AR - RJ 478. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-9 ECRITURE DES ZONES IR/SR - WR 478. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-10 ECRITURE DE LA ZONE LR - WL 479. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-11 ECRITURE DE LA ZONE HR - WH 479. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xiii

TABLE DES MATIERES
6-5-12 ECRITURE DE LA PV - WC 480. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-13 ECRITURE DE L’ETAT DE TC - WG 480. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-14 ECRITURE DE LA ZONE DM - WD 481. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-15 ECRITURE DE LA ZONE EM - WE 482. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-16 ECRITURE DE LA ZONE AR - WJ 482. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-17 LECTURE 1 DE SV - R# 483. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-18 LECTURE 2 DE SV - R$ 484. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-19 LECTURE 3 DE SV - R% 485. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-20 CHANGEMENT 1 DE SV - W# 486. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-21 CHANGEMENT 2 DE SV - W$ 486. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-22 CHANGEMENT 3 DE SV - W% 487. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-23 LECTURE D’ETAT - MS 488. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-24 ECRITURE D’ETAT - SC 489. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-25 LECTURE D’ERREUR - MF 490. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-26 PARAMETRAGE FORCE - KS 491. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-27 REINITIALISATION FORCEE - KR 492. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-28 PARAMETRAGE/REINITIALISATION FORCES MULTIPLES - FK 493. . . . . . .
6-5-29 ANNULATION DE PARAMETRAGE/REINITIALISATION
FORCES - KC 494. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-30 LECTURE DU MODELE DE L’API - MM 495. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-31 TEST- TS 495. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-32 LECTURE DE PROGRAMME - RP 496. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-33 ECRITURE DU PROGRAMME - WP 496. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-34 COMMANDE COMPOSEE - QQ 497. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-35 ARRÊTER - XZ 499. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-36 INITIALISER - :: 499. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-37 REPONSE TXD - EX 500. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-5-38 COMMANDE NON DEFINIE - IC 500. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 7
Fonctionnement de l’UC et durée du traitement 501. . . . . . .
7-1 Fonctionnement de l’Unité centrale 502. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-2 Interruptions d’alimentation 503. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-2-1 Fonctionnement en cas d’interruption d’alimentation 503. . . . . . . . . . . . . . . . . . . .
7-2-2 Opération de démarrage après une interruption d’alimentation 505. . . . . . . . . . . . .
7-3 Temps de cycle 507. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-1 Vue d’ensemble 507. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-2 Temps d’exécution de l’instruction 509. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-3 Temps de réponse d’E/S 522. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-4 Temps de réponse d’E/S de liaison inter-API 523. . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-5 Temps de traitement d’interruption 525. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 8
Dépannage 529. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-1 Introduction 530. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-2 Erreurs de fonctionnement de la console de programmation 530. . . . . . . . . . . . . . . . . . . . . .
8-3 Erreurs de programmation 531. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-4 Erreurs définissables par l’utilisateur 532. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-5 Erreurs de fonctionnement 533. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-5-1 Erreurs non fatales 534. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-5-2 Erreurs fatales 535. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6 Journal d’erreurs 536. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-7 Diagrammes de dépannage 538. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xiv

TABLE DES MATIERES
Annexes
A Instructions de programmation 545. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BOpération de drapeau d’erreur et d’arithmétique 555. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C Zones mémoire 559. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Utilisation de l’horloge 581. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E Feuille d’affectation des Entrées/Sorties 583. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
F Feuille de codage de programme 585. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
G Liste des numéros FAL 589. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
H ASCII étendu 591. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Glossaire 593. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Historique des révisions 613. . . . . . . . . . . . . . . . . . . . . . . . . . .
xv

A propos de ce manuel :
Ce manuel décrit la programmation de l’automate programmable CQM1H, l’organisation et le contenu de
la mémoire, les instructions de programmation des schémas à contact, etc., ainsi que les chapitres
décrits ci–dessous. Se reporter au Manuel de fonctionnement du CQM1H pour des informations sur la
partie matériel et les procédures de fonctionnement de la console de programmation.
Lire ce manuel avec attention et s’assurer de bien en comprendre les informations avant de commencer
la programmation ou de faire fonctionner le CQM1H.
Le Chapitre 1 explique le Setup de l’API et ses fonctions associées, y compris le traitement des
interruptions et des communications. Le Setup de l’API peut être utilisé pour contrôler les paramètres de
fonctionnement de l’API.
Le Chapitre 2 décrit les cartes internes pouvant être installées dans l’Unité centrale pour étendre ses
fonctionnalités. Se reporter au Manuel de fonctionnement des cartes de communication série (W365)
pour plus d’informations sur la carte de communications séries. Une présentation succinte de la carte est
donnée dans ce Chapitre 2.
Le Chapitre 3 décrit l’organisation des zones mémoires de l’API et explique comment les utiliser . Il décrit
également le fonctionnement des cassettes mémoire utilisées pour transférer des données entre l’Unité
centrale et la cassette mémoire.
Le Chapitre 4 explique les étapes nécessaires et les concepts utilisés pour l’écriture de schémas à
contact de base. Il introduit les instructions utilisées pour construire la structure de base du schéma à
contact et en contrôler son exécution.
Le Chapitre 5 décrit une à une les instructions de programmation des schémas à contact pouvant être
utilisées pour programmer le CQM1H.
Le Chapitre 6 explique les méthodes et les procédures pour l’utilisation des commandes de liaison hôte,
lequelles peuvent être utilisées pour les communications de liaison hôte par les ports de l’API.
Le Chapitre 7 explique le traitement interne de l’API et le temps nécessaire pour le traitement et
l’exécution. Se reporter à ce Chapitre pour obtenir une compréhension des timing de fonctionnement de
l’API.
Le Chapitre 8 décrit comment diagnostiquer et corriger les erreurs matérielles et logicielles pouvant
survenir pendant le fonctionnement de l’API.
Les annexes suivantes comprennent : A Instructions de Programmation , B Fonctionnement des
drapeaux arithmétiques et d’erreur, C Zones mémoire, D Utilisation de l’horloge, E Fiches
d’attribution des E/S, F Fiche de codage du programme, G Liste des numéros FAL et H ASCII
Etendu.
AVERTISSEMENT : Omettre de lire et comprendre les informations contrenues dans ce manuel
!
peut entraîner la mort, des blessures corporelles, risque d’endommager le
produit ou de le provoquer des pannes. Lire chaque chapitre, ainsi que les
chapitres auxquels il est fait référence dans leur totalité et s’assurer d’une
bonne compréhension des informations qui s’y sont contenues avant la mise
en oeuvre des procédures ou fonctionnalités décrites.
xvii

CONSEILS D’UTILISATION
Cette section expose les précautions générales à prendre pour utiliser l’automate programmable série CQM1H (API) et les
dispositifs associés.
Les informations données dans cette partie sont importantes pour assurer une utilisation fiable et sans danger de l’automate pr ogrammable. Vous devez lire cette section et comprendre les informations qui y sont exposées avant de tenter
de paramétrer et d’utiliser un système API.
1 Public visé xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Conseils d’utilisation généraux xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Conseils d’utilisation de sécurité xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xvi. . . . . . . . . . . . . . . . . . . . . . . . .
5 Conseils d’utilisation xvi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Conformité aux directives communautaires xix. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-1 Directives applicables xix. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Concepts xix. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Conformités aux directives communautaires xix. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4 Méthodes de réduction du bruit des sorties à relais xix. . . . . . . . . . . . . . . . . . . . . . . .
xiii

1 Public visé
Ce manuel est destiné aux personnels suivants qui doivent aussi avoir des
connaissances portant sur les systèmes électriques (ingénieur ou technicien en
électricité ou équivalent) :
• Personnel chargé d’installer des systèmes d’automatisme.
• Personnel chargé de concevoir des systèmes d’automatisme.
• Personnel chargé de la gestion de sites et de systèmes d’automatisme.
2 Conseils d’utilisation généraux
L’utilisateur doit se servir du produit en conformité avec les spécifications de
performances exposées dans les manuels d’exploitation.
Avant d’utiliser le produit dans des conditions non décrites dans le manuel ou de
l’utiliser avec des systèmes de pilotage d’installations nucléaires, des chemins
de fer, des véhicules, systèmes à combustion, équipements médicaux, machines et appareils pour le divertissement, équipements de sécurité ainsi qu’avec
d’autres systèmes, machines et équipements qui peuvent exercer une forte
influence sur la vie humaine et les biens s’ils sont utilisés incorrectement, veuillez consulter votre représentant OMRON.
Vérifier que les caractéristiques nominales et performances du produit sont
suffisantes pour les systèmes, machines et équipements. Et ne pas oublier de
munir les systèmes, machines et équipements de double mécanismes de
sécurité.
Ce manuel donne des informations sur la programmation et l’utilisation de
l’Unité. Vous devez absolument lire ce manuel avant d’essayer d’utiliser l’unité,
et conserver ce manuel à portée de la main pour, si nécessaire, vous y reporter
pendant l’exploitation du système.
3Conseils d’utilisation de sécurité
AVERTISSEMENT Il est extrêmement important qu’un API et toutes les unités API soient utilisées
!
pour la mise en œuvre prévue et dans les conditions spécifiées, en particulier
lorsqu’il s’agit d’applications susceptibles d’affecter directement ou
indirectement la vie de l’homme. Avant d’utiliser un système API dans le cadre
des applications mentionnées ci–dessus, vous devez absolument consulter
votre représentant OMRON.
3 Conseils d’utilisation de sécurité
AVERTISSEMENT L’unité centrale régénère les E/S même lorsque le programme est arrêté
!
(c.-à-d., même en mode PROGRAMME). Confirmer préalablement la sûreté
avant de changer le statut de toute partie de mémoire dédiée unités d’E/S,
unités d’E/S spécifiques ou cartes internes. Tout changement des données
assignées à n’importe quelle unité peut provoquer un fonctionnement inattendu
des charges connectées à l’unité. Chacune des opérations suivantes peut
provoquer un changement du statut de la mémoire.
• Transférer des données de mémoire d’E/S à l’unité centrale depuis un
dispositif de programmation.
• Changer les valeurs actuelles dans la mémoire depuis un dispositif de
programmation.
• Forcer l’initialisation/ la réinitialisation de bits depuis un dispositif de
programmation.
• Transférer la mémoire d’E/S à partir d’un micro-ordinateur ou d’un autre API
sur un réseau.
xiv
AVERTISSEMENT Ne jamais tenter de démonter une Unité ou de toucher l’intérieur pendant qu’elle
!
est sous tension. Cela pourrait provoquer une décharge électrique.
AVERTISSEMENT Ne jamais toucher des bornes ou borniers pendant que le système est sous
!
tension. Cela pourrait provoquer une décharge électrique.
AVERTISSEMENT Ne jamais tenter de démonter , de réparer ou de modifier une Unité quelconque.
!
Toute tentative de ce type d’opération peut provoquer un dysfonctionnement, un
incendie ou être à l’origine d’une décharge électrique.
AVERTISSEMENT Prévoir des mesures de sécurité pour les circuits extérieurs (c’est–à–dire non
!
dans l’automate programmable), y compris dans les articles suivants, afin
d’assurer la sécurité du système si une anomalie intervient à la suite d’un
dysfonctionnement de l’API ou d’un autre facteur externe affectant le
fonctionnement de l’automate. Le non–respect de cet avertissement peut se
traduire par des accidents graves.
• Des circuits d’arrêt d’urgence, des circuits à verrouillage réciproque, des
limiteurs et des mesures de sécurité similaires doivent être mis en place sur
tous les circuits de pilotage externes.
• L’API met toutes ses sorties à l’état OFF lorsque sa fonction de diagnostic
intégrée détecte une erreur ou bien à l’exécution d’une instruction d’alarme de
défaillance grave (FALS). Pour se protéger contre ces erreurs, des mesures
de sécurité externes doivent être prises pour assurer la sécurité du système.
• Les sorties de l’automate peuvent rester ON ou OFF du fait de l’encrassement
ou de la dégradation des relais de sortie ou de la destruction des transistors de
sortie. Pour se prémunir contre ce type de problèmes, des mesures de
sécurité externes doivent être prises pour assurer la sécurité du système.
• Lorsque la sortie 24 V continue (alimentation électrique de service de
l’automate) est surchargée ou court–circuitée, il peut y avoir une baisse de
tension et, par suite, les sorties passent à l’état OFF. Pour se prémunir contre
ce type de problèmes, des mesures de sécurité externes doivent être prises
pour assurer la sécurité du système.
3Conseils d’utilisation de sécurité
AVERTISSEMENT Ne pas toucher l’unité d’alimentation pendant que la tension est appliquée ou
!
juste après que la tension ait été mise sur OFF. Cela pourrait provoquer des
brûlures.
Attention Pour exécuter une édition en ligne, il faut d’abord s’assurer que cette opération
!
n’aura pas d’effets néfastes suite à l’allongement de la durée des cycles. Autre-
ment, il se peut que les signaux d’entrée soient illisibles.
Attention Confirmer la s ûreté à la station de destination avant de transférer un programme
!
à une autre station ou avant de changer le contenu de la zone de mémoire d’E/S.
Dans l’un de ces deux cas, cela pourrait provoquer des dommages.
Attention Serrer les vis du bornier de l’unité d’alimentation en courant alternatif en
!
respectant le couple spécifié dans le manuel d’exploitation. Des vis mal serrées
peuvent provoquer une surchauffe ou un dysfonctionnement.
xv

4 Conseils d’utilisation relatifs à l’environnement
d’exploitation
Attention Ne pas utiliser l’automate dans les endroits suivants :
!
• Endroits recevant directement la lumière du soleil.
• Endroits présentant des températures ou une humidité à l’extérieur de la plage
figurant dans les caractéristiques techniques.
• Endroits présentant de la condensation provoquée par de fortes variations de
température.
• Endroits soumis à des gaz corrosifs ou inflammables.
• Endroits poussiéreux (en particulier limaille de fer) ou contenant des sels.
• Endroits exposés à l’eau, à l’huile ou à des produits chimiques.
• Endroits soumis à des chocs ou à des vibrations.
Attention Prendre des mesures de protection ad hoc et suf fisantes lors de l’installation des
!
systèmes dans les endroits suivants :
• Endroits présentant de l’électricité statique ou d’autres formes de parasites.
• Endroits soumis à des champs électromagnétiques puissants.
• Endroits susceptibles d’être soumis à de la radioactivité.
• Endroits proches d’alimentations électriques.
5Conseils d’utilisation
Attention L’environnement opératoire d’un système API peut affecter fortement sa
!
longévité et sa fiabilité. Un environnement opératoire hostile peut provoquer des
dysfonctionnements, des défaillances et d’autres problèmes imprévisibles
affectant le système API. Bien vérifier qu’à l’installation, l’environnement
opératoire est conforme aux conditions spécifiées et qu’il présente toujours les
mêmes conditions pendant la vie du système.
5 Conseils d’utilisation
Lors de l’utilisation du système API, toujours suivre les conseils d’utilisation
suivants.
AVERTISSEMENT Toujours observer ces conseils. Le non–respect des précautions énumérées
!
ci–dessous peut être à l’origine de blessures sérieuses ou même mortelles.
• Lors de l’installation du système, le relier systématiquement à une terre
présentant une résistance inférieure ou égale à 100 Ω de manière à prévenir
les chocs électriques.
• Une terre présentant une résistance inférieure ou égale à 100 Ω doit être
installée en court–circuitant les bornes de GR et LG sur l’unité d’alimentation.
• Toujours mettre l’alimentation électrique de l’API à l’état OFF avant de tenter
de faire n’importe laquelle des opérations suivantes. Si l’alimentation n’est pas
à OFF, cela pourrait provoquer un dysfonctionnement ou une décharge électri-
que.
• Montage ou démontage d’Unités d’E/S, Unité Centrale, Cartes internes,
ou toute autre unité.
• Assemblage des unités.
• Réglages de micro-interrupteurs ou de commutateurs rotatifs.
• Branchement ou débranchement de tous câblages ou faisceaux
électriques.
xvi

• Connexion ou déconnexion des connecteurs.
Attention Le non–respect des précautions suivantes peut entraîner un fonctionnement
!
défectueux de l’API ou du système, ou bien endommager l’API ou les unités du
ou des API. Il faut toujours respecter les précautions indiquées.
• Toujours mettre l’API sous tension avant de mettre le syst ème de commande
sous tension. Si l’alimentation de l’API est établie après celle de la commande,
des erreurs temporaires peuvent provoquer des signaux du système de commande parce que les bornes de sortie sur des unités de sortie c.c. et d’autres
unités seront momentanément à ON lorsque l’alimentation sera établie sur
l’API.
• Des mesures doivent être prises par le client pour assurer la sécurité au cas où
les sorties des unités de sorties demeureraient à l’état ON en raison des
échecs inte r n es d e circuit, pouvant se produire dans des relais, des transistors
et d’autres éléments.
• Des mesures doivent être prises par le client pour assurer la sécurité en
présence de signaux manquants, incorrects ou anormaux provoqués par une
rupture de lignes de transmission de signaux, par des micro–coupures du
courant ou d’autres causes.
• Ne pas mettre l’alimentation de l’API à OFF pendant le transfert de données.
En particulier, ne pas arrêter l’alimentation pendant la lecture ou l’écriture
d’une carte mémoire. Aussi, ne pas enlever la carte mémoire lorsque l’indicateur BUSY est allumé. Pour enlever une carte mémoire, appuyer d’abord sur le
commutateur d’alimentation de carte mémoire et attendre ensuite que l’indicateur BUSY s’éteigne avant d’enlever la carte mémoire.
• Si le bit de maintien des E/S (SR 25212) est mis à ON, les sorties de l’API ne
seront pas mises à OFF et conserveront leur statut précédent lorsque l’API
sera commuté du mode RUN ou MONITOR au mode PROGRAMME. S’assurer que les charges externes ne produisent pas de conditions dangereuses
lorsque ceci se produit (lorsque l’opération s’arrête pour une erreur fatale, y
compris celles produites avec l’instruction FALS(07), toutes les sorties de
l’unité de sortie seront à l’état OFF et seul le statut interne de sortie sera maintenu).
• En assurant une alimentation de 200–240 Vc.c. à partir d’une unité d’alimentation CQM1–PA216, toujours enlever le cavalier en métal des bornes du sélecteur de tension. Le produit sera détruit si cette alimentation de 200–240 Vc.c.
est assurée tandis que le cavalier en métal est présent.
• Toujours utiliser les tensions d’alimentation indiquées dans les guides d’instal-
lation. Une tension incorrecte peut provoquer un dysfonctionnement ou une
surchauffe.
• Prendre les mesures appropriées pour s’assurer que la puissance indiquée
est assurée avec la tension et la fréquence assignées. Faire particulièrement
attention aux endroits où l’alimentation est instable. Une alimentation incor-
recte peut provoquer un dysfonctionnement.
• Installer des disjoncteurs externes et prendre d’autres mesures de sécurité
contre les courts-circuits dans le câblage externe. Des mesures de sécurité
insuffisantes contre les courts-circuits peuvent provoquer une surchauffe.
• Ne pas appliquer des tensions aux unités d’entrée supérieures à la tension
d’entrée assignée. Des tensions excessives peuvent provoquer une surchauffe.
• Ne pas appliquer des tensions ou ne pas relier des charges aux unités de sor-
tie supérieures à la capacité maximum de commutation. La tension ou les
charges excessives peuvent provoquer une surchauffe.
5Conseils d’utilisation
xvii

5Conseils d’utilisation
• Débrancher la prise de terre fonctionnelle lors de l’exécution de tests de tenue
en tension. Ne pas débrancher la prise de terre fonctionnelle peut provoquer
une surchauffe.
• Installer les unités correctement comme indiqué dans les guides d’installation.
L’installation incorrecte des unités peut provoquer un dysfonctionnement.
• Vérifier que toutes les vis support, les vis du bornier et les vis des connecteurs
de câble sont serrées au couple indiqué dans les manuels appropriés. Un cou-
ple de serrage incorrect peut provoquer un dysfonctionnement.
• Laisser l’étiquette attachée à l’unité pendant le câblage. La suppression de
l’étiquette peut provoquer un dysfonctionnement si les corps étrangers pénètrent dans l’unité.
• Lorsque le câblage est terminé, enlever l’étiquette pour assurer une bonne
dissipation thermique. Ne pas enlever l’étiquette peut provoquer un dysfonc-
tionnement.
• Utiliser des cosses à fourche pour le câblage. Ne pas relier les fils dénudés
directement aux bornes. Le raccordement des fils dénudés peut provoquer
une surchauffe.
• Câbler correctement toutes les connexions.
• Faire un double contrôle de tout le câblage et de toutes les configurations des
commutateurs avant de mettre sous tension. Un câblage incorrect ou une
mauvaise configuration des commutateurs peut provoquer une dégradation
du produit.
• Monter les unités seulement après avoir vérifié complètement les borniers et
les connecteurs.
• Avant de toucher une unité, vérifier d’abord de toucher un objet métallique relié
à la masse afin de décharger toute électricité statique, qui risquerait de provo-
quer un dysfonctionnement ou des dommages.
• Être sûr que les borniers, unités de mémoire, câbles d’expansion et autres arti-
cles avec dispositifs de verrouillage sont correctement verrouillés à leur place.
Un verrouillage incorrect peut provoquer un dysfonctionnement.
• Vérifier les positions des commutateurs, le contenu de la zone DM et d’autres
préparatifs avant de lancer le fonctionnement. Lancer le fonctionnement sans
les réglages ou les données appropriés peut provoquer un fonctionnement
inattendu.
• Vérifier le programme utilisateur pour une exécution correcte avant de l’exécu-
ter réellement sur l’unité. La non vérification du programme peut provoquer un
fonctionnement inattendu.
• Confirmer qu’aucun effet nuisible ne se produira dans le système avant d’es-
sayer une des opérations suivantes. Sinon cela peut provoquer un fonctionnement inattendu.
• Changement du mode de fonctionnement de l’API.
• Initialisation / réinitialisation forcée de tout bit de la mémoire.
• Changement de la valeur actuelle de tout mot ou de toute valeur de consi-
gne dans la mémoire.
• Reprendre le fonctionnement seulement après avoir transféré à la nouvelle
unité centrale le contenu de la zone DM, de la zone HR et des autres données
nécessaires pour reprendre l’opération. Ne pas faire ainsi peut provoquer un
fonctionnement inattendu.
• Ne pas tirer sur les câbles ou plier les câbles au delà de leur limite naturelle au
risque de les casser.
• Ne pas placer des objets sur les câbles ou d’autres câblage au risque de les
casser.
xviii

• Lors du remplacement de pièces, confirmer que les conditions nominales de
fonctionnement de la nouvelle pièce sont correctes. Ne pas s’en assurer peut
provoquer un dysfonctionnement ou une surchauffe.
• Lors du transport ou du stockage des cartes, les couvrir de matériau antistati-
que pour les protéger contre l’électricité statique et maintenir la température
appropriée pour le stockage.
• Ne pas toucher les cartes ou les composants à mains nues. Des brins pointus
et d’autres parties sur les cartes peuvent causer des blessures s’ils sont mani-
pulés incorrectement.
• Ne pas court-circuiter les bornes de la batterie ou charger, démonter , chauf fer
ou brûler la batterie. Ne pas soumettre la batterie à des chocs forts. Ne pas
respecter ces consignes peut provoquer une fuite, une rupture, une génération de chaleur ou l’inflammation de la batterie. Se débarrasser de toute batterie ayant chuté brusquement sur le sol ou ayant été soumise à un choc excessif. Les batteries ayant été soumises à un choc peuvent fuir lors de leur utilisa-
tion.
• Les normes UL exigent que les batteries soient remplacées seulement par des
techniciens expérimentés. Ne pas permettre aux personnes non qualifiées de
remplacer des batteries.
5Conseils d’utilisation
xix
6 Conformité aux directives communautaires
6-1 Directives applicables
• Directives sur la CEM (Compatibilité électromagnétique)
• Directive sur les basses tensions
6-2 Concepts
Directives sur la CEM
Les appareils OMRON qui sont en conformité avec les directives communautai-
res sont aussi conformes aux normes de la CEM connexes pour faciliter leur
intégration dans d’autres dispositifs ou dans une machine. Les produits commercialisés ont fait l’objet d’un contrôle de conformité aux normes de la CEM
(voir la remarque suivante). C’est au client qu’il appartient de s’assurer que les
produits sont en conformité avec les normes du système qu’il utilise.
Les performances vis–à–vis des CEM des dispositifs OMRON qui sont en
conformité avec les directives communautaires varient selon la configuration, le
câblage et d’autres particularités de l’équipement, du tableau de commande sur
lequel sont installés les dispositifs OMRON. Le client doit donc faire un contrôle
final pour s’assurer que les dispositifs et l’ensemble de la machine sont en
conformité avec les normes applicables à la CEM.
6Conformité aux directives communautaires
Rem. Les normes CEM applicables sont, comme suit :
EMS (Susceptibilité électromagnétique) : EN61131-2
EMI (Interférences électromagnétiques) : EN50081-2
(Emission rayonnée : réglementation 10 m)
Directive sur les basses tensions
S’assurer toujours que les dispositifs fonctionnant à des tensions comprises
entre 50 et 1.000 V c.a. en alternatif et 75 à 1.500 V c.c. sont en conformité avec
les normes de sécurité requises pour l’automate. (EN61131-2).
6-3 Conformité aux directives communautaires
Les API séries CQM1H sont conformes aux dispositifs des directives commu-
nautaires. Pour s’assurer que la machine ou le dispositif dans lequel est utilisé
l’API séries CQM1H est en conformité avec les directives communautaires, l’installation de l’automate doit être faite en respectant les indications suivantes :
1, 2, 3... 1. L’API doit être installé avec un tableau de commande et de contrôle.
2. Pour les alimentations en courant continu utilisées pour les alimentations
des communications et des E/S, il faut utiliser un isolement renforcé ou un
double isolement.
3. Les API conformes aux directives communautaires doivent aussi être en
conformité avec la Norme EN50081-2. Lorsqu’un API est intégré dans une
machine, cependant, des parasites peuvent être produit en commutant des
dispositifs utilisant des sorties relais et faire que la machine globale n’attei-
gne pas les normes. Si ceci se produit, des écrêteurs de pointe de tension
doivent être reliés ou d’autres mesures externes à l’API doivent être prises.
Les méthodes suivantes représentent des méthodes typiques pour réduire
les parasites et peuvent ne pas être suffisantes dans tous les cas. Les
contre-mesures exigées changeront selon les dispositifs reliés au pupitre
de commande, le câblage, la configuration du système et d’autres condi-
tions.
xx
6-4 Méthodes de réduction des parasites des sorties à relais
Les API série CQM1H sont en conformité avec la norme EN50081–2 des directives de la CEM. Toutefois, les parasites générés par le basculement de l’API à
l’état ON ou OFF à l’aide de la sortie à relais n’est peut être pas en conformité
avec ces normes. Dans ce cas, un filtre anti-parasitage doit être relié au côté
charge ou bien d’autres mesures externes spécifiques doivent être mises en
œuvre.
Les contre-mesures prises pour être en conformité avec les normes varient en
fonction des dispositifs qui sont du côté charge, du câblage de la configuration
des machines, etc. Les exemples suivants décrivent des contre-mesures permettant de réduire les parasites générés.
Contre-mesures
Pour plus de détails, consulter EN50081-2.
Les contre-mesures sont inutiles si la fréquence de commutation de la charge
du système (API inclus) est inférieure à 5 fois par minute.
Des contre-mesures sont obligatoires si la fréquence de commutation de la
charge du système (API inclus) est 5 fois par minute ou plus.
6Conformité aux directives communautaires
xxi
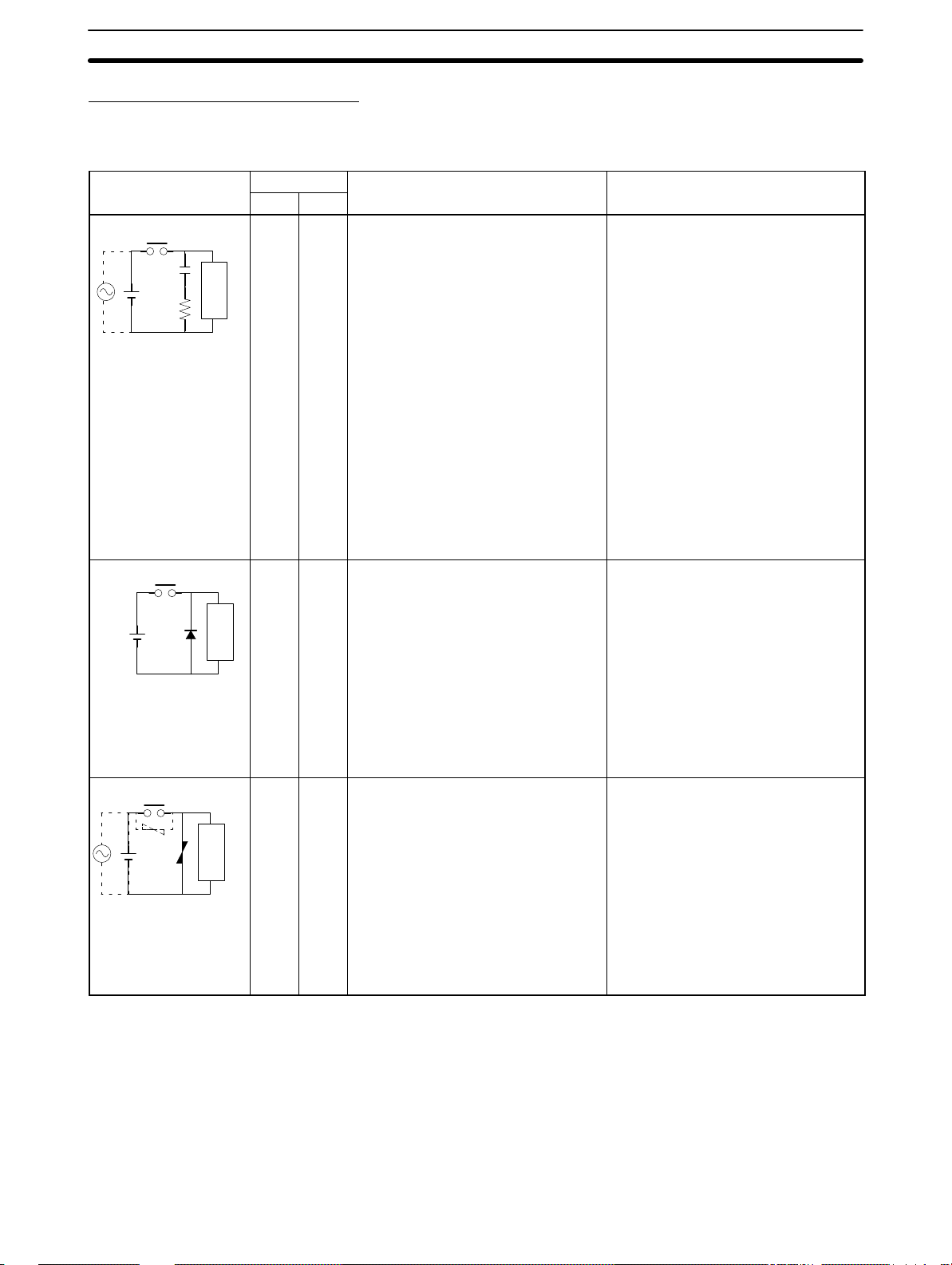
Exemples de contre–mesures
Lors de la commutation d’une charge inductive, connecter un limiteur de tension, des diodes, etc. en parallèle avec la charge ou le contact, comme indiqué
ci-dessous.
Circuit Courant Caractéristiques Eléments requis
Alt. Cont.
Méthode CR
Alimen–
tation
Méthode avec diode
Alimen–
tation
Méthode avec varistor
Alimen–
tation
Oui Oui Si la charge est un relais ou un
Charge
inductive
Non Oui La diode connectée en parallèle avec
Charge
inductive
Oui Oui La méthode de la résistance variable
Charge
inductive
solénoïde, il y a un retard entre le
moment de l’ouverture du circuit et le
moment de la remise à zéro de la
charge.
Si la tension d’alimentation est
comprise entre 24 et 48 V, mettre le
limiteur de tension en parallèle avec la
charge. Si la tension d’alimentation
est entre 100 et 200 V, mettre le
limiteur entre les contacts.
la charge transforme l’énergie
accumulée par la bobine en un
courant, qui circule dans
l’enroulement, afin d’être converti en
chaleur par la résistance de la charge
inductive.
Le retard entre l’ouverture du circuit et
la remise à zéro de la charge, qui est
provoqué par cette méthode est plus
long que celui obtenu par la méthode
CR.
empêche l’imposition d’une haute
tension entre les contacts grâce à la
caractéristique de tension constante
de la résistance variable. Il y a un
retard entre l’ouverture du circuit et la
remise à zéro de la charge.
Si la tension d’alimentation est entre
24 et 48 V, mettre la résistance
variable en parallèle avec la charge.
Si la tension d’alimentation est entre
100 et 200 V, mettre la résistance
variable entre les contacts.
6Conformité aux directives communautaires
La capacité du condensateur doit être
de 1 à 0,5 µF pour un courant de
contact de 1 A et la résistance du
composant résistif doit être de 0,5 à
1 Ω pour une tension de contact de
1 V. Toutefois, ces valeurs peuvent
varier selon la charge et avec les
caractéristiques du relais. Ces valeurs
doivent être choisies à partir
d’expérimentations en tenant compte
du fait que la capacité supprime la
décharge à étincelles lorsque les
contacts sont séparés et que la
résistance limite le courant qui circule
dans la charge lorsque le circuit est à
nouveau fermé.
La résistance disruptive du
condensateur doit être comprise entre
200 et 300 V. S’il s’agit d’un circuit en
courant alternatif, il faut utiliser un
condensateur sans polarité.
La valeur de la résistance disruptive
inverse de la diode doit être au moins
10 fois plus grande que la valeur de la
tension du circuit. Le courant direct de
la diode doit être supérieur ou égal au
courant de la charge.
La valeur de la résistance disruptive
inverse de la diode peut être deux ou
trois fois plus grande que la tension
d’alimentation si le limiteur de tension
travaille sur des circuits électroniques
présentant de faibles tensions de
circuits.
---
xxii
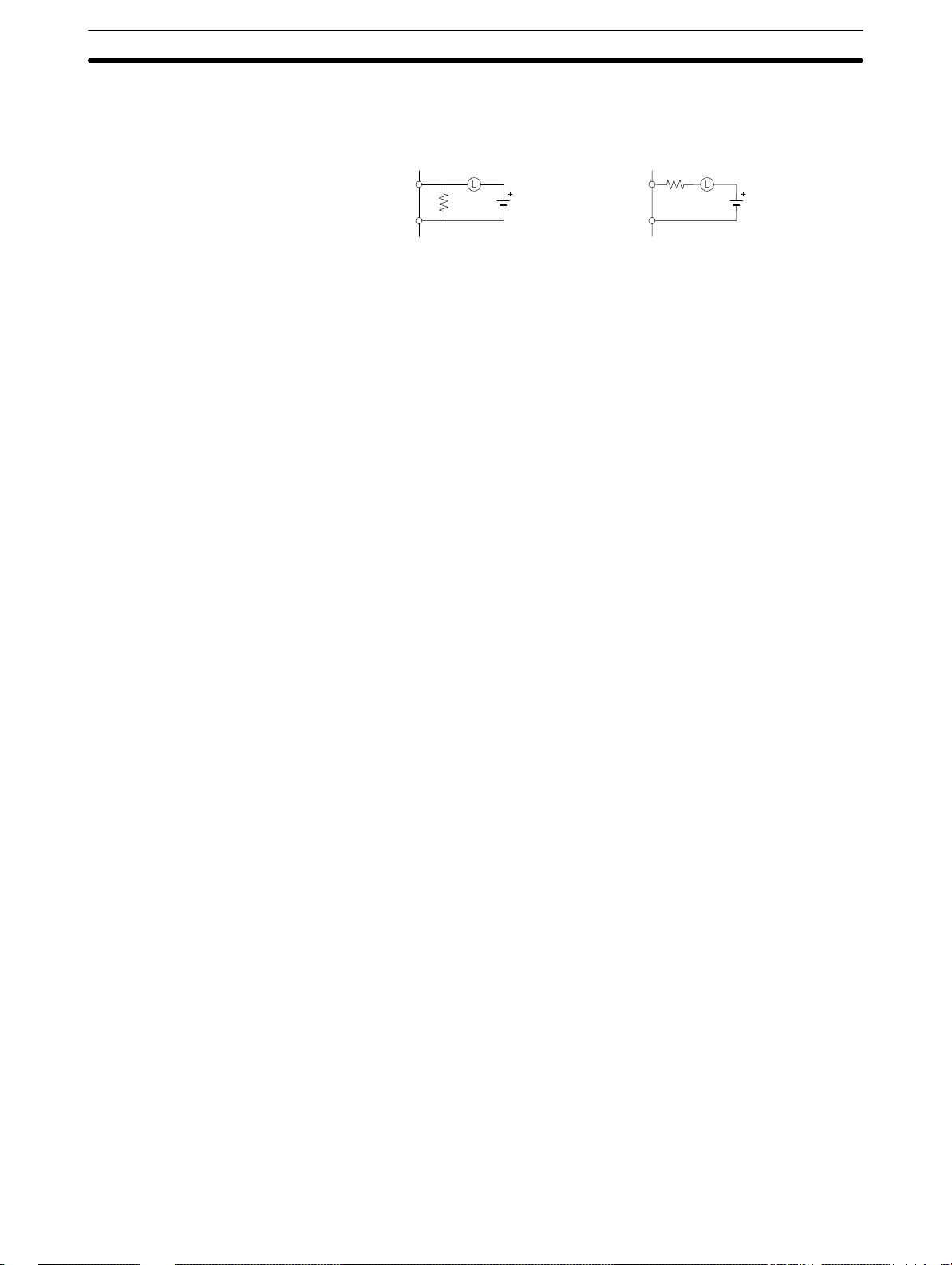
En commutant une charge avec un courant élevé induit tel qu’une lampe à
incandescence, supprimer le courant induit comme montré ci–dessous.
6Conformité aux directives communautaires
Contre mesure 1
OUT
R
COM
Fournissant un courant d’obscurité
approximativement d’un tiers de la
valeur évaluée par une lampe à
incandescence
Contre mesure 2
R
OUT
COM
Fournissant une résistance limitée
xxiii

CHAPITRE 1
Setup de l’API et autres caractéristiques
Ce chapitre décrit le Setup de l’API et les autres caractéristiques du CQM1H, y compris le processus d’interruption et de
communication. Le Setup de l’API est utilisé pour contrôler les paramètres de fonctionnement du CQM1H. Pour modifier
le Setup de l’API, se reporter au Manuel d’utilisation du CQM1H pour les procédures propres à la console de programma-
tion. Se reporter au Manuel d’utilisation du logiciel CX–Programmer, ou SYSWIN pour les procédures propres au logiciel
CX–Programmer, ou SYSWIN.
Pour posséder une bonne maîtrise des API d’OMRON ou de la programmation à contacts avant de s’attaquer à ce chapitre,
lire le paragraphe 1-4 Setup de l’API afin d’avoir un aperçu général des paramètres de fonctionnement disponibles pour le
CQM1H et également le Chapitre 3 Zones de mémoires, le Chapitre 4 Programmation de schéma à contacts ainsi que les
instructions concernant le Chapitre 5 Ensemble d’instructions.
1-1 Setup de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-1 Modification du Setup de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-2 Paramétrage de la carte de communication série 4. . . . . . . . . . . . . . . . . . . . . . . .
1-1-3 Paramétrage du Setup de l’API 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Paramétrage de la carte interne 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-1 Paramétrage de la carte de communication série 10. . . . . . . . . . . . . . . . . . . . . . . .
1-2-2 Paramétrage de la carte du compteur à grande vitesse 11. . . . . . . . . . . . . . . . . . . .
1-2-3 Paramétrage de la carte de gestion d’axes 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-4 Paramétrage de la carte codeur absolu 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-5 Paramétrage de la carte E/S analogiques 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Fonctionnement de l’API de base et traitements des E/S 14. . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Mode démarrage 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Etat du bit de maintien 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Temps de service du port RS-232C 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Temps de service du port périphérique 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-5 Temps de cycle minimal 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-6 Constantes du temps d’entrée16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-7 Temporisations à grande vitesse 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-8 digits d’entrée DSW(87) et méthode de rafraîchissement de sortie 18. . . . . . . . . .
1-3-9 Paramétrage du port périphérique 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-10 Paramétrage du journal d’erreurs 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Fonctions d’interruption 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-1 Types d’interruptions 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-2 Interruptions d’entrée23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-3 Masquage de toutes les interruptions 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-4 Interruptions de la temporisation cyclique 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-5 Interruptions du compteur à grande vitesse 0 35. . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-6 Dépassements positif/négatif du compteur à grande vitesse 0 44. . . . . . . . . . . . . .
1-5 Fonctionnement de la sortie d’impulsions 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Fonctions de communication 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-1 Paramétrage de la liaison à l’ordinateur et des communications sans protocole 50
1-6-2 Procédures et paramétrage des communications de la liaison à l’ordinateur 52. . .
1-6-3 Procédures et paramétrage de communication sans protocole 55. . . . . . . . . . . . . .
1-6-4 Liaisons de données inter API 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-5 Communication en mode 1:1 liaison NT 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6-6 Câblage des ports 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7 Calcul avec les données binaires signées 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7-1 Définition des données binaires signées 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7-2 Drapeaux arithmétiques 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-7-3 Réception des données binaires signées utilisant des valeurs décimales 63. . . . . .
1-7-4 Utilisation des instructions d’extensions binaires signées 63. . . . . . . . . . . . . . . . . .
1-7-5 Exemple d’application utilisant les données binaires signées 64. . . . . . . . . . . . . .
1

1-1ChapitreSetup de l’API
1-1 Setup de l’API
Le Setup de l’API contient les paramètres de fonctionnement contrôlant le fonctionnement du CQM1H. Pour utiliser au maximum les fonctionnalités du
CQM1H lors d’utilisation du traitement d’interruption et des fonctions de communication, le Setup de l’API peut être personnalisé en fonction des conditions
de fonctionnement.
Les réglages du Setup général de l’API sont contenus dans les zones DM 6600
au DM 6655 et les réglages de la carte de communication série sont contenus
dans les zones DM 6550 au DM 6559. A proprement parler, les réglages de la
carte de communication série font parties de la zone DM en lecture seule et non
du Setup de l’API, mais elles sont inclues ici parce qu’elles sont semblables aux
réglages du Setup de l’API.
Le Setup de l’API est réglé par défaut pour des conditions de fonctionnement
générales, afin d’utiliser le CQM1H sans devoir modifier les réglages. Il est forte-
ment conseillé de vérifier les valeurs par défaut avant de tenter de le faire fonctionner.
Valeurs par défaut Les valeurs par défaut du Setup de l’API sont 0000 pour tous les mots. Les
valeurs par défaut pour les zones DM 6600 au DM 6655 peuvent être réinitiali-
sées à tout moment en activant le SR 25210.
Attention Lorsque la m émoire de données (DM) est effacée du périphérique de program-
!
mation, les réglages du Setup de l’API sont également remis à zéro.
1-1-1 Modification du Setup de l’API
Les réglages du Setup de l’API sont lus à des moment différents selon le
réglage, comme indiqué ci–dessous :
• DM 6550 au DM 6559 : Lu régulièrement lorsque l’alimentation est à ON.
• DM 6600 au DM 6614 : Lu seulement lorsque l’alimentation de l’API est sur
• DM 6615 au DM 6644 : Lu seulement lorsque l’exécution du programme
• DM 6645 au DM 6655 : Lu régulièrement lorsque l’alimentation est à ON.
Les modifications du Setup de l’API ne deviennent effectives qu’aux moments
indiqués ci–dessus. Le CQM1H aura ainsi à redémarrer pour ef fectuer les modifications dans les zones effectives du DM 6600 au DM 6614 et l’exécution de
programme devra redémarrer pour effectuer les modifications dans les zones
effectives du DM 6615 au DM 6644.
Effectuer les modifications
à partir d’un périphérique
de programmation
Le Setup de l’API est lisible mais pas modifiable à partir du programme de l’utilisateur. L’écriture s’effectue seulement en utilisant une console de programma-
tion ou autre périphérique de programmation.
Les DM 6600 à DM 6644 sont paramétrés ou modifiés uniquement lors du mode
PROGRAM. Les DM 6550 à DM 6559 et les DM 6645 à DM 6655 sont paramétrés ou modifiés lors du mode PROGRAM ou du mode MONITOR.
ON.
commence.
Protection d’écriture du
Setup de l’API
2
Dès que les réglages du Setup de l’API sont effectués, le sélecteur 1 du micro–
interrupteur à l’avant de l’unité centrale est activé pour éviter aux périphériques
de programmation d’écraser le Setup de l’API. Lorsque le sélecteur 1 est à ON,
le programme de l’utilisateur, la zone DM lecture seule (DM 6144 au DM 6568)
et le Setup de l’API (DM 6600 au DM 6655) ne sont pas écrasés par le périphérique de programmation.
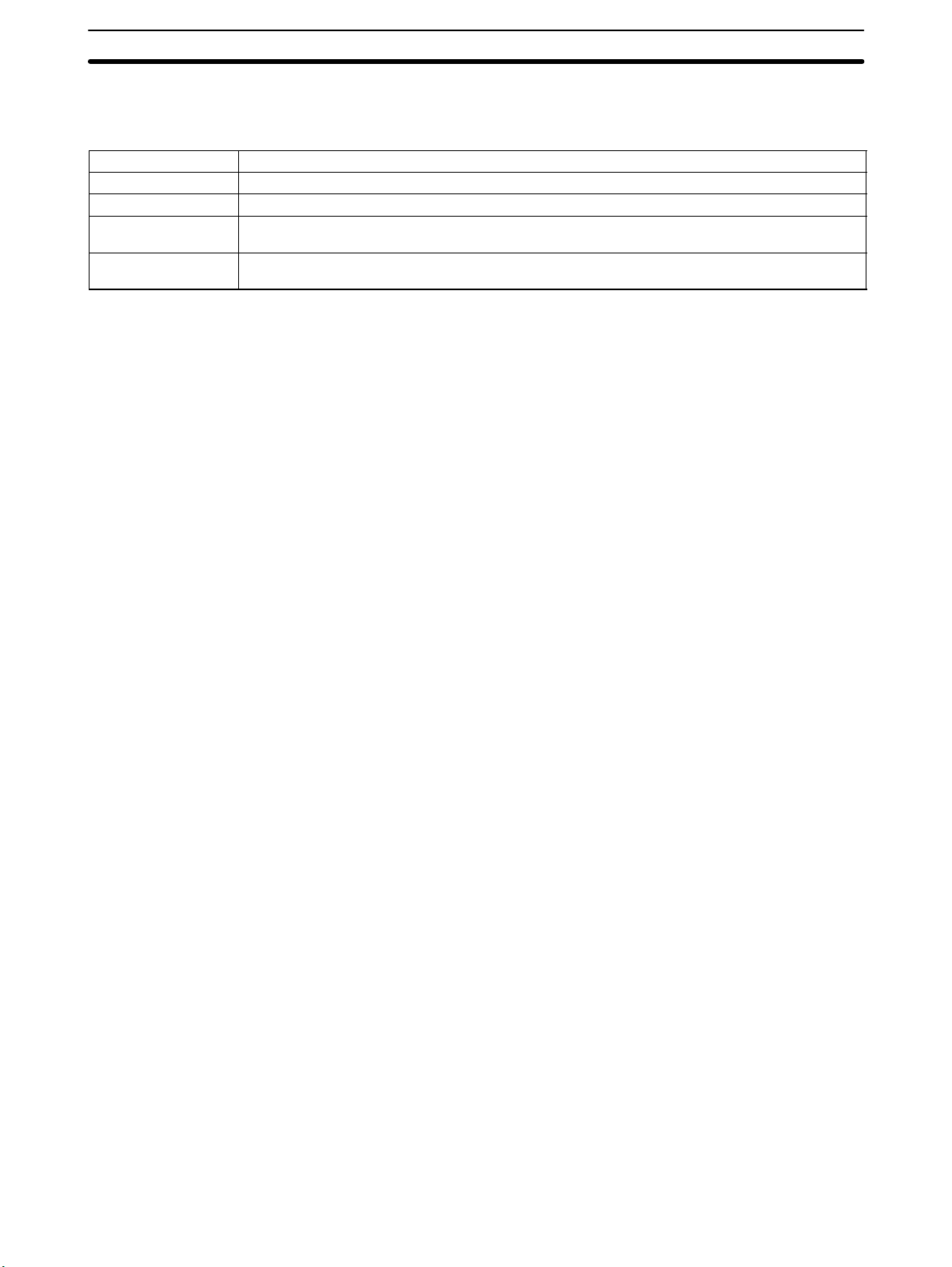
1-1ChapitreSetup de l’API
Erreurs dans le Setup de
l’API
Si un réglage du Setup de l’API incorrect est effectué, une erreur non fatale
(code erreur 9B) sera générée, le drapeau d’erreur correspondant sera activé et
le réglage par défaut sera utilisé..
Drapeau(x) Fonction
AR 2400 Activé lorsqu’une erreur survient du DM 6600 au DM 6614 (lu lorsque l’alimentation est à ON).
AR 2401 Activé lorsqu’une erreur survient du DM 6615 au DM 6644 (lu au début du fonctionnement).
AR 2402 Activé lorsqu’une erreur survient du DM 6645 au DM 6655 (lu régulièrement lorsque l’alimenta-
tion est à ON).
AR 0400 à AR 0407 Un code erreur 10 est écrit dans cet octet lorsqu’une erreur survient du DM 6550 au DM 6559 (lu
régulièrement lorsque l’alimentation est à ON).
3
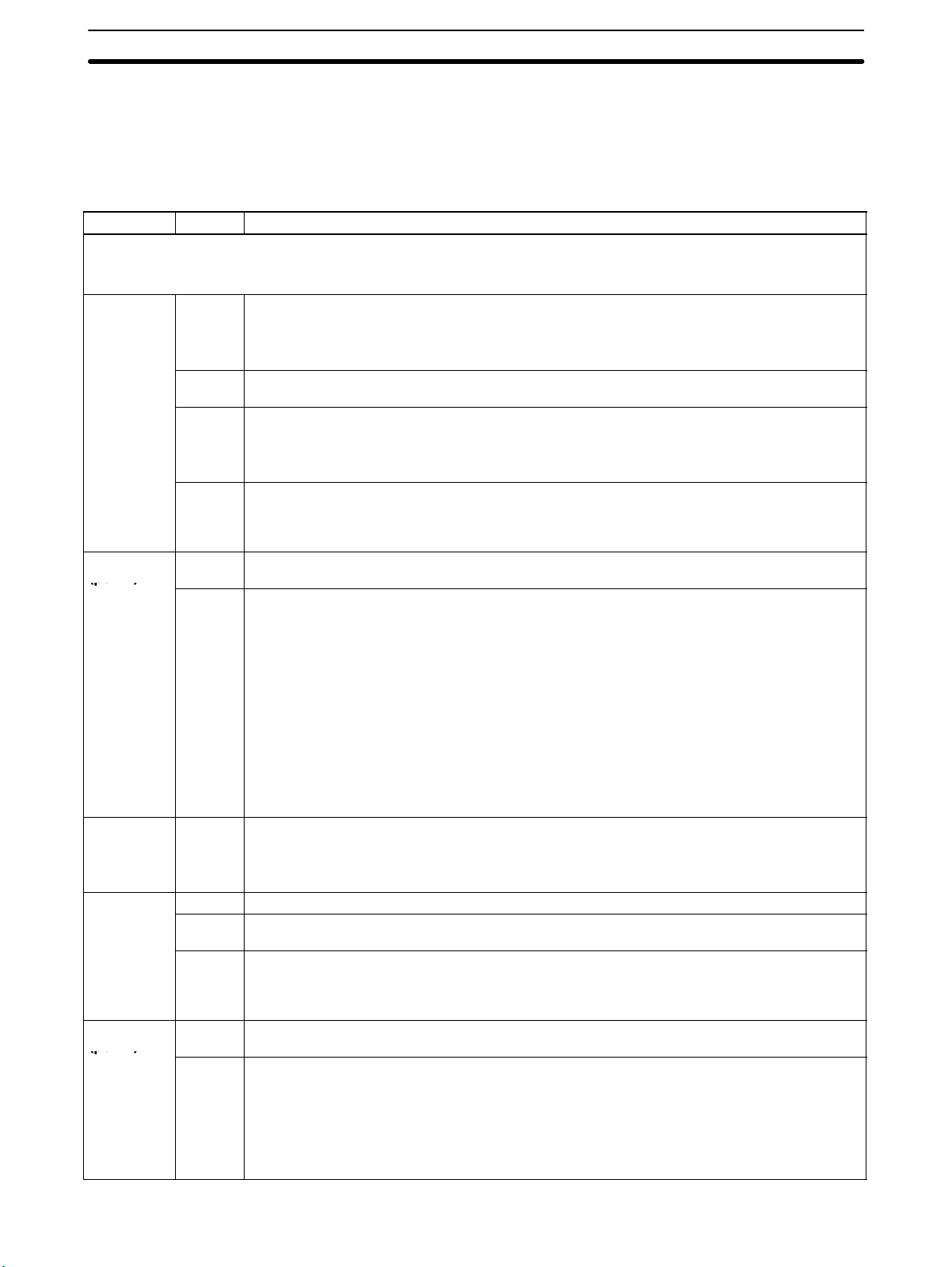
(port 2)
(port 2)
1-1ChapitreSetup de l’API
1-1-2 Paramétrage de la carte de communication série
Le tableau suivant présente le paramétrage de la carte de communication série
dans la zone DM. Pour plus d’informations, se reporter au Manuel de program-
mation de la carte de communication série.
Mot(s) Bit(s) Fonction
Paramétrage de la carte de communication série
Les sélections suivantes sont effectives après le transfert à l’API. (Les sélections du port 2 sont contenues dans les mots
du DM 6550 au DM 6554 et les sélections du port 1 sont contenues dans les mots du DM 6555 au DM 6559).
DM 6550
(port 2)
DM 6555
(port 1)
DM 6551
(port 2)
DM 6556
(port 1)
DM 6552
(port 2)
DM 6557
(port 1)
DM 6553
(port 2)
DM 6558
DM 6558
(port 1)
DM 6554
(port 2)
DM 6559
(port 1)
00 à 03 Sélections de port
0 : Standard (1 bit de démarrage, données à 7 bits, parité pair, 2 bits d’arrêt, 9 600 bps)
1 : Sélections du DM 6551 (DM 6556 pour port 1)
04 à 07 Sélections de commande CTS
0 : Désactivé ; 1 : Réglé
08 à 11 Mots de liaisons pour liaison de données 1 :1 (lorsque les bits 12 à 15 sont à 3)
0 : LR 00 à LR 63 ; 1 : LR 00 à LR 31 ; 2 : LR 00 à LR 15
Nombre d’unités maximal de stations programmables (lorsque les bits 12 à 15 sont à 5)
1 à 7
12 à 15 Mode de communication
0 : Liaison à l’ordinateur ; 1 : Sans protocole ; 2 : Liaison Esclave 1:1 de données ; 3 : Liaison
Maître 1:1 de données ; 4 : Liaison NT en mode 1:1 ; 5 : Liaison NT en mode 1:N ;
6 : Protocole–Macro
00 à 07 Vitesse
00 : 1,2K, 01 : 2,4K, 02 : 4,8K, 03 : 9,6K, 04 : 19,2K
08 à 15 Format d’unité d’information
Début Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Pair
01 : 1 bit 7 bits 1 bit Impair
02 : 1 bit 7 bits 1 bit Aucun
03 : 1 bit 7 bits 2 bits Pair
04 : 1 bit 7 bits 2 bits Impair
05 : 1 bit 7 bits 2 bits Aucun
06 : 1 bit 8 bits 1 bit Pair
07 : 1 bit 8 bits 1 bit Impair
08 : 1 bit 8 bits 1 bit Aucun
09 : 1 bit 8 bits 2 bits Pair
10 : 1 bit 8 bits 2 bits Impair
11 : 1 bit 8 bits 2 bits Aucun
00 à 15 Délais de transmission (Liaison à l’ordinateur ou Sans protocole)
0000 à 9999 (BCD) : Régler dans les unités de 10 ms, e.x., un réglage du 0001 égal à 10 ms
00 à 07 Numéro de station (Liaison à l’ordinateur) 00 à 31 (BCD)
08 à 11 Active code de début (Sans-protocole)
0 : Désactivé; 1 : Réglé
12 à 15 Active code fin (Sans protocole)
0 : Désactivé (nombre d’octets reçus)
1 : Réglé (code fin spécifié)
2 : CR, LF
00 à 07 Code de début (Sans protocole)
00 à FF (hexadécimal)
08 à 15 Lorsque les bits 12 à 15 de DM 6553 ou DM 6558 sont à 0 :
Nombre d’octets reçus
00 : Réglage par défaut (256 octets)
01 à FF : 1 à 255 octets
Lorsque les bits 12 à 15 de DM 6553 ou DM 6558 sont à 1 :
Code de fin (Sans protocole)
00 à FF (hexadécimal)
4
1-1-3 Paramétrage du Setup de l’API
Le tableau suivant présente le paramétrage du Setup de l’API en fonction de la
zone DM. Pour plus d’informations, se reporter aux numéros de pages indiqués
ci–après.
Mot(s) Bit(s) Fonction Page
Traitement du démarrage (DM 6600 au DM 6614)
Les sélections suivantes sont effectives après le transfert à l’API dès que l’API redémarre.
DM 6600
DM 6601
DM 6602 au
DM 6603
DM 6604 au
DM 6610
DM 6611 au
DM 6612
DM 6613 00 à 15 Gestion du paramétrage du temps de service pour la carte de communication
DM 6614 00 à 15 Gestion du paramétrage du temps de service pour la carte de communication
Paramétrage de la sortie d’impulsions et du temps de cycle (DM 6615 au DM 6619)
Les sélections suivantes sont effectives après le transfert à l’API lors du prochain démarrage.
DM 6615
DM 6616
DM 6617
00 à 07 Mode démarrage (effectif lorsque les bits 08 à 15 sont à 02).
00 : PROGRAM ; 01 : MONITOR 02 : RUN
08 à 15 Désignation du Mode démarrage
00 : En fonction du sélecteur 7 du micro–interrupteur de l’UC et du paramétrage du
commutateur de la console de programmation
01 : Mode fonctionnement continu utilisé juste avant la désactivation de l’alimentation
02 : Paramétage des bits 00 à 07 de DM 6600
00 à 07 Non utilisé.
08 à 11 Etat du bit de maintien des E/S (SR 25212)
0 : Réinitialisé ; 1 : Maintenu
12 à 15 Etat forcé de l’état du bit de maintien (SR 25211)
0 : Réinitialisé ; 1 : Maintenu
00 à 15 Paramétrage de l’emplacement 1 de la carte interne
(Voir le paragraphe 1-2 Paramétrage de la carte interne pour de plus d’informations).
00 à 15 Non utilisé.
00 à 15 Paramétrage de l’emplacement 2 de la carte interne
(Voir le paragraphe 1-2 Paramétrage de la carte interne pour de plus d’informations).
série port 2
série port 1
00 à 07 Mot pour sortie d’impulsions
00 : IR 100 ; 01 : IR101 ; 02 : IR 102... 15 : IR 115
Règle le mot utilisé pour la sortie d’impulsions à partir de la sortie sur l’Unité de sortie
transistor. Les impulsions sont émises uniquement d’une sortie à la fois.
08 à 15 Non utilisé. Réglé à 00.
00 à 07 Temps de service pour le port RS-232C (lorsque les bits de 08 à 15 sont à 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour gérer le port RS-232C. Le
temps de service doit s’effectuer entre 0,256 ms et 65,536 ms.
08 à 15 Active le paramétrage du temps de service du port RS-232C
00 : 5% du temps de cycle
01 : Utilise le temps de service de 00 à 07.
(Lorsque l’API est interrompu, le temps de service est toujours de 10 ms).
00 à 07 Le temps de service pour un port périphérique
(lorsque les bits 08 à 15 sont à 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour gérer un port périphérique.
Le temps de service doit s’effectuer entre 0,256 ms et 65,536 ms.
08 à 15 Active le paramétrage du temps de service du port périphérique
00 : 5% du temps de cycle
01 : Utilise le réglage du temps aux bits 00 à 07.
(Lorsque l’API est interrompu, le temps de service est toujours de 10 ms).
1-1ChapitreSetup de l’API
14
15
10
10
10
48
15
16
5

Mot(s) PageFonctionBit(s)
DM 6618
DM 6619 00 à 15 Temps de cycle
Traitement d’interruption (DM 6620 au DM 6639)
Les sélections suivantes sont effectives après le transfert à l’API lors du démarrage suivant.
DM 6620
DM 6621
DM 6622
DM 6623
DM 6624
DM 6625
DM 6626
DM 6627
DM 6628
DM 6629
00 à 07 Temps de surveillance de cycle
(lorsque les bits 08 à 15 sont à 01, 02 ou 03)
00 à 99 (BCD) × paramètre des unités (V oir bits 08 à 15).
08 à 15 Active la surveillance de cycle
00 : 120 ms (réglage des unités 00 à 07 désactivés)
01 : Réglage des unités : 10 ms
02 : Réglage des unités : 100 ms
03 : Réglage des unités : 1 s
0000 : Variable (sans minimum)
0001 à 9999 (BCD) : Temps de cycle minimum en ms
00 à 03 Constante du temps d’entrée pour les IR 00000 à IR 00007
0 : 8 ms ; 1 : 1 ms ; 2 : 2 ms ; 3 : 4 ms ; 4 : 8 ms ; 5 : 16 ms ; 6 : 32 ms ; 7 : 64 ms ; 8 :
128 ms
04 à 07 Constante du temps d’entrée pour les IR 00008 à IR 00015
(Même paramétrage que pour les bits de 00 à 03)
08 à 11 Constante du temps d’entrée pour l’IR 001
(Même paramétrage que pour bits de 00 à 03)
12 à 15 Non utilisé. Réglé à 0.
00 à 07 Constante d’entrée pour l’IR 002
00 : 8 ms ; 01 : 1 ms ; 02 : 2 ms ; 03 : 4 ms ; 04 : 8 ms ; 05 : 16 ms ; 06 : 32 ms ; 07 :
64 ms ; 08 : 128 ms
08 à 15 Constante d’entrée pour l’IR 003 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 004 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 005 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 006 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 007 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 008 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 009 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 010 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 011 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 012 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 013 (Même paramétrage que pour l’IR 002).
00 à 07 Constante d’entrée pour l’IR 014 (Même paramétrage que pour l’IR 002).
08 à 15 Constante d’entrée pour l’IR 015 (Même paramétrage que pour l’IR 002).
00 à 03 Active l’interruption pour l’IR 00000
0 : Entrée normale ; 1 : Entrée d’interruption en Mode entrée d’interruption ou en Mode
Compteur
04 à 07 Active l’interruption pour l’IR 00001
0 : Entrée normale ; 1 : Entrée d’interruption en Mode entrée d’interruption ou en Mode
Compteur
08 à 11 Active l’interruption pour l’IR 00002
0 : Entrée normale ; 1 : Entrée d’interruption en Mode entrée d’interruption ou en Mode
Compteur
12 à 15 Active l’interruption pour l’IR 00003
0 : Entrée normale ; 1 : Entrée d’interruption en Mode entrée d’interruption ou en Mode
Compteur
00 à 07 Nombre de temporisations à grande vitesse TIMH(15) à actualiser en réactuali-
sant les interruptions
00 à 15 (BCD ; ex., réglé à 3 pour les temporisations de 00 à 02)
08 à 15 Active l’actualisation d’interruption de la temporisation à grande vitesse
00 : 16 temporisations (paramétrage des bits de 00 à 07 désactivé)
01 : Utilise le paramétrage de 00 à 07
1-1ChapitreSetup de l’API
19
16
16
16
27
17
6

Mot(s) PageFonctionBit(s)
DM 6630
DM 6631
DM 6632
DM 6633
DM 6634
DM 6635
DM 6636
DM 6637
DM 6638
DM 6639
Paramétrage du compteur à grande vitesse (DM 6640 au DM 6644)
Les sélections suivantes sont effectives après le transfert à l’API lors du prochain démarrage.
DM 6640 au
DM 6641
DM 6642
00 à 07 Premier mot de rafraîchissement d’entrée pour l’interruption 0 d’E/S :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour l’interruption 0 d’E/S :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour l’interruption 1 d’E/S :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour l’interruption 1 d’E/S :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour l’interruption 2 d’E/S :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour l’interruption 2 d’E/S :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour l’interruption 3 d’E/S :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour l’interruption 3 d’E/S :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour le compteur à grande vitesse 1 :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour le compteur à grande vitesse
1 :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour le compteur à grande vitesse 2 :
00 à 11 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour le compteur à grande vitesse
2 :
00 à 12 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour la temporisation cyclique 0 :
00 à 15 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour la temporisation cyclique 0 :
00 à 16 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour la temporisation cyclique 1 :
00 à 15 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour la temporisation cyclique 1 :
00 à 16 (BCD)
00 à 07 Premier mot de rafraîchissement d’entrée pour la temporisation cyclique 2 ou
pour le compteur à grande vitesse 0 :
00 à 15 (BCD)
08 à 15 Nombre de mots de rafraîchissement d’entrée pour la temporisation cyclique 2
ou pour le compteur à grande vitesse 0 :
00 à 16 (BCD)
00 à 07 Méthode de rafraîchissement de sortie
00 : Cyclique ; 01 : Direct
08 à 15 Nombre de digits pour l’instruction digit AL SWITCH (commutateur analogique)
(DSW(87))
00 : 4 digits ; 01 : 8 digits
00 à 15 Paramétrage de l’emplacement 1 de la carte interne
(Voir le paragraphe 1-2 Paramétrage de la carte interne pour plus d’informations).
00 à 03 Mode d’entrée du compteur à grande vitesse 0
0 : Mode phase bidirectionnelle ; 4 : Mode incrémentation
04 à 07 Mode de rafraîchissement du compteur à grande vitesse 0
0 : Phase Z et réinitialisation par programme ; 1 : Seulement réinitialisation par
programme
08 à 15 Active le compteur à grande vitesse 0
00 : Ne pas utiliser le compteur à grande vitesse 0 ; 01 : Utiliser le compteur à grande
vitesse 0.
1-1ChapitreSetup de l’API
27
27
27
32, 38
18,
503
18,
455
10
38
7

Mot(s) PageFonctionBit(s)
DM 6643 au
DM 6644
Paramétrage du port RS-232C
Les sélections suivantes sont effectives après le transfert à l’API.
DM 6645 00 à 03 Paramétrage du port (Liaison à l’ordinateur ou mode sans protocole)
DM 6646
DM 6647 00 à 15 Délais de transmission (Liaison à l’ordinateur ou sans protocole)
DM 6648
DM 6649
00 à 15 Paramétrage de l’emplacement 2 de la carte interne
(Voir le paragraphe 1-2 Paramétrage de la carte interne pour plus d’informations).
0 : Standard (1 bit de démarrage, données à 7 bits, parité pair, 2 bits d’arrêt,
9 600 bps)
1 : paramétrage du DM 6646
04 à 07 Paramétrage de commande CTS (liaison à l’ordinateur ou mode sans protocole)
0 : Désactivé; 1 : Réglé
08 à 11 Mots de liaisons pour 1 :1 liaison de données ( mode liaison maître de données1:1)
0 : LR 00 à LR 63 ; 1 : LR 00 à LR 31 ; 2 : LR 00 à LR 15
12 à 15 Mode de communication
0 : Liaison à l’ordinateur ; 1 : Sans protocole ; 2 : Liaison esclave de données 1:1 ;
3 : Liaison Maître 1 :1 de données ; 4 : Liaison NT en Mode 1 :1
00 à 07 Vitesse
00 : 1,2 kbps, 01 : 2,4 kbps, 02 : 4,8 kbps, 03 : 9,6 kbps, 04 : 19,2 kbps
08 à 15 Format de trame
Démarrage Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Pair
01 : 1 bit 7 bits 1 bit Impair
02 : 1 bit 7 bits 1 bit Aucun
03 : 1 bit 7 bits 2 bits Pair
04 : 1 bit 7 bits 2 bits Impair
05 : 1 bit 7 bits 2 bits Aucun
06 : 1 bit 8 bits 1 bit Pair
07 : 1 bit 8 bits 1 bit Impair
08 : 1 bit 8 bits 1 bit Aucun
09 : 1 bit 8 bits 2 bits Pair
10 : 1 bit 8 bits 2 bits Impair
11 : 1 bit 8 bits 2 bits Aucun
0000 à 9999 (BCD) : Régle l’unité à 10 ms, ex., un paramétrage à 0001 est égal à
10 ms
00 à 07 Numéro de station (Liaison à l’ordinateur) :
00 à 31 (BCD)
08 à 11 Start Code Enable (Sans protocole)
0 : Désactivé; 1 : Réglé
12 à 15 Active code de fin (Sans protocole)
0 : Désactivé (nombre d’octets reçus) 1 : Réglé (code de fin spéficié) 2 : CR, LF
00 à 07 Code de début (Sans protocole)
00 à FF (hexadécimal)
08 à 15 Lorsque les bits 12 à 15 du DM 6648 sont à 0 :
Nombre d’octets reçus
00 : paramétrage par défaut (256 octets)
01 à FF : 1 à 255 octets
Lorsque les bits 12 à 15 du DM 6648 sont à 1 :
Code de fin (Sans protocole)
00 à FF (hexadécimal)
1-1ChapitreSetup de l’API
10
49
49
8

Mot(s) PageFonctionBit(s)
Paramétrage du port périphérique
Les sélections suivantes sont effectives après le transfert à l’API.
1-1ChapitreSetup de l’API
DM 6650
DM 6651
DM 6652 00 à 15 Délai de transmission
DM 6653
00 à 03 Paramétrage du port (Liaison à l’ordinateur ou mode sans protocole)
0 : Standard (1 bit de démarrage, données à 7 bits, parité pair, 2 bits d’arrêt,
9 600 bps)
1 : Paramétrage du DM 6651
04 à 07 Paramétrage de la commande CTS (Liaison à l’ordinateur ou mode sans protocole)
0 : Désactivé ; 1 : Réglé
08 à 11 Non utilisé.
12 à 15 Mode de communication (lorsque les bits 00 à 03 sont à 1)
0 : Liaison à l’ordinateur ; 1 : Sans protocole
Lorsqu’une console de programmation est reliée au port périphérique, désactiver le
sélecteur 7 du micro–interrupteur de l’unité centrale. Le sélecteur 5 et le Setup de l’API
sont alors désactivés.
Lors de la connexion à l’ordinateur au port périphérique pour l’utiliser comme périphéri-
que de programmation, mettre le sélecteur 7 sur ON et régler le mode de communica-
tion à la “liaison à l’ordinateur“. Lorsque ce paramétrage est effectué et dès le réglage
de l’ordinateur pour fonctionner en bus périphérique, le mode de communication du
port périphérique de l’unité centrale commute automatiquement en mode bus périphé-
rique.
00 à 07 Vitesse (Liaison à l’ordinateur, bus périphérique ou mode sans protocole)
00 : 1,2 kbps,
01 : 2,4 kbps,
02 : 4,8 kbps,
03 : 9,6 kbps,
04 : 19,2 kbps
08 à 15 Format de trame (Liaison à l’ordinateur ou mode sans protocole)
Démarrage Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Pair
01 : 1 bit 7 bits 1 bit Impair
02 : 1 bit 7 bits 1 bit Aucun
03 : 1 bit 7 bits 2 bits Pair
04 : 1 bit 7 bits 2 bits Impair
05 : 1 bit 7 bits 2 bits Aucun
06 : 1 bit 8 bits 1 bit Pair
07 : 1 bit 8 bits 1 bit Impair
08 : 1 bit 8 bits 1 bit Aucun
09 : 1 bit 8 bits 2 bits Pair
10 : 1 bit 8 bits 2 bits Impair
11 : 1 bit 8 bits 2 bits Aucun
(Sans protocole ou seulement communication par liaison à l’ordinateur initié par la station esclave)
0000 à 9999 (BCD) : Régler dans les unités de 10 ms, ex., un paramétrage de 0001
est égal à 10 ms
00 à 07 Numéro de station (Liaison à l’ordinateur) :
00 à 31 (BCD)
08 à 11 Active code de début (Sans protocole)
0 : Désactivé ; 1 : Réglé
12 à 15 Active code de fin (Sans protocole)
0 : Désactivé (nombre d’octets reçus) 1 : Règle (code de fin spécifié) 2 : CR, LF
19, 49
49
DM 6654
00 à 07 Code de début (Sans protocole)
00 à FF (hexadécimal)
08 à 15 Lorsque les bits 12 à 15 du DM 6653 sont à 0 :
Nombre d’octets reçus
00 : Paramétrage par défaut (256 octets)
01 à FF : 1 à 255 octets
Lorsque les bits 12 à 15 du DM 6653 sont à 1 :
Code de fin (Sans protocole)
00 à FF (hexadécimal)
49
9

Mot(s) PageFonctionBit(s)
Paramétrage du journal d’erreur (DM 6655)
Les sélections suivantes sont effectives après le transfert à l’API.
DM 6655
00 à 03 Style
0 : Bascule dès que les 10 enregistrements sont sauvegardés
1 : Sauvegarde uniquement les 10 premiers enregistrements (sans basculement)
2 à F : Ne sauvegarde pas les enregistrements
04 à 07 Non utilisé. Réglé à 0.
08 à 11 Active la surveillance de temps de cycle
0 : Détecte les cycles longs en tant qu’erreurs fatales
1 : Ne détecte pas les cycles longs
12 à 15 Active l’erreur de batterie faible
0 : Détecte la tension de la batterie faible comme une erreur non fatale
1 : Ne détecte pas la tension de la batterie faible
1-2 Paramétrage de la carte interne
Ce chapitre décrit le paramétrage du Setup de l’API concernant les cartes internes montées dans les emplacements 1 et 2 de la carte interne.
1-2ChapitreParamétrage de la carte interne
19
1-2-1 Paramétrage de la carte de communication série
Utilise les paramétrages des DM 6613 et DM 6614 pour régler la gestion des
temporisations pour une carte de communication série montée dans l’emplacement 1 de la carte interne. Une carte de communication série ne peut pas être
montée dans l’emplacement 2.
Mot Bits Fonction
DM 6613
DM 6614
00 à 07 Temps de service du port 2 de la carte communication
série (activé par les bits 08 à 15)
00 à 99 (BCD) : Régle le pourcentage du temps de cycle
utilisé pour gérer le port 2. Le temps de service doit être comprise entre 0,256 ms et 65,536 ms.
08 à 15 Paramétrage du temps de service du port 2 de la carte
communication série
00 : fixe à 5% du temps de cycle.
01 : Utilise le réglage du temps en bits 00 à 07.
(Lorsque l’API est interrompu, Le temps de service est toujours de 10 ms).
00 à 07 Temps de service pour port 1 de la carte de communica-
tion série (activé par les bits 08 à 15)
00 à 99 (BCD) : Règle le pourcentage du temps de cycle
utilisé pour gérer le port 1.
Le temps de service doit être comprise entre 0,256 ms et
65,536 ms.
08 à 15 Paramétrage du temps de service du port 1 de la carte
communication série
00 : fixe à 5% du temps de cycle.
01 : Utilise le paramétrage du temps en bits 00 à 07.
(Lorsque l’API est interrompu, le temps de service est
toujours de 10 ms).
10

1-2-2 Paramétrage de la carte du compteur à grande vitesse
(Empla-
(Empla-
Le paramétrage des DM 6602, DM 6640 et DM 6641 détermine le fonctionne-
ment de la carte du compteur à grande vitesse montée dans l’emplacement 1 de
la carte interne. Le paramétrage des DM 6611, DM 6643 et DM 6644 détermine
le fonctionnement de la carte du compteur à grande vitesse montée dans l’em-
placement 2 de la carte interne.
Mot Bits Fonction Paramétrage
DM 6602
(Empla–
cement
1)
DM 6611
(Emplacement
2)
DM 6640
(Emplacement
1)
DM 6643
DM 6643
(Emplacement
2)
DM 6641
(Emplacement
1)
DM 6644
DM 6644
(Emplacement
2)
00 à 03 Format des données de la PV des
compteurs à grande vitesse 1 à 4
04 à 07 Non utilisé Réglé à 0.
08 à 11 Sélecteur transistor de sorties exter-
nes 1 à 4
12 à 15 Non utilisé. Réglé à 0.
00 à 03 Mode entrée du compteur à grande
vitesse 1
04 à 07 Fréquence de comptage du compteur
à grande vitesse 1, plage numérique
et mode réinitialisation du compteur
08 à 11 Mode entrée du compteur à grande
vitesse 2
12 à 15 Fréquence de comptage du compteur
à grande vitesse 2, plage numérique
et mode réinitialisation du compteur
00 à 03 Mode entrée du compteur à grande
vitesse 3
04 à 07 Fréquence de comptage du compteur
à grande vitesse 3, plage numérique
et mode réinitialisation du compteur
08 à 11 Mode entrée du compteur à grande
vitesse 4
12 à 15 Fréquence de comptage du compteur
à grande vitesse 4, plage numérique
et mode réinitialisation du compteur
1-2ChapitreParamétrage de la carte interne
0 : hexadécimal à 8
digits
1 : BCD à 8 digits
0 : Emetteur
1 : Récepteur
Voir Rem. 1.
Voir Rem. 2.
Voir Rem. 1.
Voir Rem. 2.
Voir Rem. 1.
Voir Rem. 2.
Voir Rem. 1.
Voir Rem. 2.
Rem. 1. Le paramétrage du mode entrée du compteur à grande vitesse est le sui-
vant :
Para–
mètre
0 Entrées de phase bidirectionnelle, 1x
1 Entrées de phase bidirectionnelle, 2x
2 Entrées de phase bidirectionnelle, 4x
3 Entrée avance/retour
4 Entrée impulsion/direction
Mode entrée
11

1-2ChapitreParamétrage de la carte interne
circulaire
circulaire
2. Les paramétrages de la fréquence de comptage du compteur à grande
vitesse, de la plage numérique et du mode réinitialisation du compteur sont
les suivants :
Para–
mètre
0
1 Uniquement réinitialisation
2
3
4
5 Uniquement réinitialisation
6
7
Fréquence de
comptage
50 kHz Comptage linéaire
500 kHz Comptage linéaire
Plage numérique Mode réinitialisation
Comptage
circulaire
Comptage
circulaire
1-2-3 Paramétrage de la carte de gestion d’axes
Le paramétrage des DM 6611, DM 6643 et DM 6644 détermine le fonctionne-
ment de la carte de gestion d’axes montée dans l’emplacement 2 de la carte
interne. Une carte de gestion d’axes ne peut pas être montée dans l’emplace-
ment 1.
Phase Z + réinitialisation
par programme
par programme
Phase Z + réinitialisation
par programme
Uniquement réinitialisation
par programme
Phase Z + réinitialisation
par programme
par programme
Phase Z + réinitialisation
par programme
Uniquement réinitialisation
par programme
Mot Bits Fonction
DM 6611 00 à 15 Mode paramétrage des ports 1 et 2
0000 : Mode comptage à grande vitesse
0001 : Mode positionnement simple
DM 6643
DM 6644
00 à 03 Mode entrée du port 1
0 : Mode phase bidirectionnelle
1 : Mode impulsion/direction
2 : Mode avance/retour
04 à 07 Méthode de réinitialisation du compteur du port 1
0 : Phase Z et réinitialisation par programme ;
1 : Réinitialisation par programme
08 à 11 Plage numérique du port 1
0 : Comptage linéaire ;
1 : Comptage circulaire
12 à 15 Coefficient cyclique de sortie d’impulsions du port 1
0 : Coefficient cyclique fixe ;
1 : Coefficient cyclique variable
00 à 03 Mode entrée du port 2
0 : Mode phase bidirectionnelle
1 : Mode impulsion/direction
2 : Mode avance/retour
04 à 07 Méthode réinitialisation du compteur du port 2
0 : Phase Z et réinitialisation par programme ;
1 : Réinitialisation par programme
08 à 11 Plage numérique du port 2
0 : Comptage linéaire ;
1 : Comptage circulaire
12 à 15 Coefficient cyclique de sortie d’impulsions du port 2
0 : Coefficient cyclique fixe ;
1 : Coefficient cyclique variable
12

1-2-4 Paramétrage de la carte codeur absolu
bits comme suit :
d’entrée (utilisé).
Le paramétrage des DM 6611, DM 6612, DM 6643 et DM 6644 détermine le
fonctionnement de la carte codeur absolu monté dans l’emplacement 2 de la
carte interne. Une carte codeur absolu ne peut pas être montée dans l’emplacement 1.
Mot Bits Fonction
DM 6611 00 à 15 Compensation d’origine pour le port 1 (BCD à 4 digits )
L’origine est compensée lorsque le bit de compensation d’origine du port 1 (SR 25201) est à ON. La valeur de compensation est enregistrée en BCD entre 0000 et 4095 lorsque le
compteur est réglé en mode BCD ou mode 360°.
DM 6612 00 à 15 Compensation d’origine pour le port 2 (BCD à 4 digits )
L’origine est compensée lorsque le bit de compensation d’origine du port 2 (SR 25202) est à ON. La valeur de compensation est enregistrée en BCD entre 0000 et 4095 lorsque le
compteur est réglé en mode BCD ou mode 360°.
DM 6643
DM 6644
00 à 07 Résolution d’entrée du port 1
00 : 8 bits ; 01 : 10 bits ; 02 : 12 bits
08 à 15 Mode fonctionnement du port 1
00 : mode BCD ; 01 : mode 360°
00 à 07 Résolution d’entrée du port 2
00 : 8 bits ; 01 : 10 bits ; 02 : 12 bits
08 à 15 Mode fonctionnement du port 2
00 : mode BCD ; 01 : mode 360°
1-2ChapitreParamétrage de la carte interne
1-2-5 Paramétrage de la carte E/S analogiques
Le paramétrage du DM 6611 détermine le fonctionnement de la carte E/S analo-
giques montée dans l’emplacement 2 de la carte interne. La carte E/S analogiques ne peut pas être montée dans l’emplacement 1.
Mot Bits Fonction Paramétrage
DM 6611
00 à 01 Plage du signal d’entrée, entrée
analogique 1
02 à 03 Plage du signal d’entrée, entrée
analogique 2
04 à 05 Plage du signal d’entrée, entrée
analogique 3
06 à 07 Plage du signal d’entrée, entrée
analogique 4
08 Sélection d’usage, entrée analogi-
que 1
09 Sélection d’usage, entrée analogi-
que 2
10 Sélection d’usage, entrée analogi-
que 3
11 Sélection d’usage, entrée analogi-
que 4
12 à 15 Non utilisé. Réglé à 0.
Régle l’état des deux
bits comme suit :
00 : –10 à +10 V
01 : 0 à 10 V
01 : 0 à 10 V
10 : 0 à 5 V ou 0 à
20 mA
0 : Prise en charge
d’entrée (utilisé).
1 : Pas de prise en
charge d’entrée.
13

1-3 Fonctionnement de l’API de base et traitements des E/S
Ce chapitre décrit le paramétrage du Setup de l’API concernant le fonctionne-
ment de base et les traitements des E/S.
1-3-1 Mode démarrage
Le mode de fonctionnement de l’API démarre lorsque l’alimentation activée est
paramétrée de la manière suivante :
Bit
15
DM 6600
Désignation du mode démarrage
00 : Dépend du périphérique
de programmation et du paramétrage des micro–interrupteurs
(Voir tableau ci–dessous).
01 : Mode de fonctionnement utilisé avant de désactiver l’alimentation
02 : Mode réglé pour les bits de 00 à 07
Mode démarrage (Bits de 08 à 15 : Valable lorsque les bits de 00 à 07
sont réglés à 02)
00 : Mode PROGRAM
01 : Mode MONITOR
02 : ModeRUN
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
0
Par défaut : Mode fonctionnement déterminé par le périphérique de programma-
Périphérique de pro-
grammation connecté
Aucune connexion.
Console de
programmation
connectée.
Autre périphérique de
programmation
connecté.
tion et le paramétrage des micro–interrupteurs comme indiqué dans le tableau
ci–dessous.
au démarrage
Sélecteur 7 du
micro-interrupteur
de l’UC
OFF Mode PROGRAM
ON Mode RUN
OFF Mode fonctionnement réglé à partir
du mode commutation de la console
de programmation
ON Mode PROGRAM (Voir Rem.1).
OFF Mode PROGRAM (Voir Rem.1).
ON Dépend du câble de connexion
utilisé (Voir Rem.2).
Mode démarrage
Rem. Dans ce cas, le CQM1H n’est pas capable de communiquer avec le
périphérique de programmation connecté.
Attention Le mode démarrage est en mode PROGRAM ou en mode RUN, selon le
!
câblage de connexion utilisé.
14
Câble de connexion Mode démarrage
CS1W-CN114 + CQM1-CIF01/02
CS1W-CN118 + XW2Z-200/500S(-V)
CS1W-CN226/626
CS1W-CN118 + XW2Z-200/500S-CV
Mode PROGRAM
Mode PROGRAM
Mode RUN
Mode RUN

1-3-2 Etat du bit de maintien
Effectuer le paramétrage présenté ci–dessous pour déterminer si, lors de l’acti-
vation de l’alimentation, le bit de maintien de l’état forcé (SR 25211) et/ou le bit
de maintien d’E/S (SR 25212) conserve l’état prenant effet lorsque l’alimenta-
tion est désactivée ou lors de la suppression de l’état précédent.
Bit
DM 6601
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
15 0
00
Paramètre SR 25211
0 : Supprime l’état
1 : Conserve l’état
Paramètre SR 25212
0 : Supprime l’état
1 : Conserve l’état
Par défaut : Supprimer les deux.
Le bit de maintien de l’état forcé (SR 25211) détermine si l’état réglé/réinitialisé
forcé est ou non conservé lors de la modification du mode PROGRAM en mode
MONITOR.
Le bit de maintien d’E/S (SR 25212) détermine si l’état des bits IR et des bits LR
est ou non conservé lorsque le fonctionnement de l’API démarre ou s’arrête.
1-3-3 Temps de service du port RS-232C
La configuration suivante est utilisée pour déterminer le pourcentage du temps
de cycle dédié au temps de service du port RS-232C.
Active le paramétrage du temps de service
00 : Désactivé (5% du temps de cycle)
01 : Activé (paramétrage des bits 00 à 07 utilisés)
Temps de service
(%, valable lorsque les bits 08 à 15 sont à 01)
00 à 99 (BCD, deux digits)
Toujours 00
Bit
DM 6616
15 0
Par défaut : 5% du temps de cycle
Exemple : Si le DM 6616 est réglé à 0110, le port RS-232C gère 10% du temps
de cycle.
Le temps de service minimal est de 0,256 ms.
Le temps de service total n’est pas utilisable à moins que les requêtes de traite-
ment existent.
15

1-3-4 Temps de service du port périphérique
La configuration suivante est utilisée pour déterminer le pourcentage du temps
de cycle dédié au temps de service du port périphérique.
Active le paramétrage du temps de service
00 : Désactivé (5% du temps de cycle)
01 : Activé (paramétrage des bits de 00 à 07 utilisés)
Temps de service
(%, valable lorsque les bits de 08 à 15 sont à 01)
00 à 99 (BCD, deux digits)
Par défaut : 5% du temps de cycle
Exemple : Si DM 6617 est réglé à 0115, le port périphérique gère 15% du temps
de cycle.
Le temps de service minimal est de 0,256 ms.
Le temps de service total n’est pas utilisable à moins que les requêtes de traite-
ment existent.
1-3-5 Temps de cycle minimal
Effectuer le paramétrage décrit ci–dessous pour homogénéiser le temps de
cycle et pour supprimer l’apparition de variations dans le temps des réponses
des E/S en paramétrant un temps de cycle minimal.
Bit
DM 6617
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
15 0
Temps de cycle (BCD à 4 digits)
0000 : Variable du temps de cycle
0001 à 9999 : Temps de cycle minimal
(Unité : 1 ms)
Par défaut : Variable du temps de cycle
Si le temps de cycle réel est plus court que le temps de cycle minimal, l’exécution attend que le temps minimal ait expiré. Si le temps de cycle réel est plus long
que le temps de cycle minimal, alors le fonctionnement poursuit selon le temps
de cycle réel. L’AR 2405 est activé si le temps de cycle minimal est dépassé.
1-3-6 Constantes du temps d’entrée
Effectuer le paramétrage présenté ci-dessous pour régler le temps pour lequel
entrées réelles de l’unité d’entrée C.C. sont activées ou désactivées jusqu’à ce
que l’entrée correspondante soit mise à jour (c.–à–d., jusqu’à ce que leur état
“ON/OFF” soit modifié). Effectuer ces paramétrages lorsque le temps est à
ajuster pour que les entrées se stabilisent.
L’augmentation de la constante de temps d’entrée peut réduire les effets de
vibration et de parasite externe.
Bit
DM 6619
15 0
16
Entrée à partir d’un périphérique d’entrée tel
qu’un commutateur de fin
de course
Etat du bit
d’entrée
t
t
Constante de temps d’entrée

Constantes de temps d’entrée pour les IR 000 et IR 001
Bit
DM 6620
Constante d e temps pour les IR 00100 à I R 00 115 (BCD à 1digit ; voir ci–dessous).
Constante de temps pour les IR 00008 à IR 00015 (BCD à 1digit ; voir ci–dessous).
Constante de temps pour les IR 00000 à IR 00007 (BCD à 1digit ; voir ci–dessous).
Par défaut : 0000 (8 ms chacun)
Constantes de temps d’entrée pour les IR 002 à IR 015
DM 6621 : IR 002 et IR 003
DM 6622 : IR 004 et IR 005
DM 6623 : IR 006 et IR 007
DM 6624 : IR 008 et IR 009
DM 6625 : IR 010 et IR 011
DM 6626 : IR 012 et IR 013
DM 6627 : IR 014 et IR 015
DM 6621 au DM 6627
Bit
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
15 0
0
15 0
Constante de temps pour les IR 003, IR 005, IR 007, IR 009, IR 011, IR 013 et IR 015
Constante de temps pour les IR 002, IR 004, IR 006, IR 008, IR 010, IR 012 et IR 014
Par défaut : 0000 (8 ms chacun)
Les neuf paramétrages possibles pour la constante de temps d’entrée sont pré-
sentés ci–dessous. Régler seulement le digit à l’extrême droite pour l’IR 000.
0 : 8 ms 1 : 1 ms 2 : 2 ms 3 : 4 ms 4 : 8 ms
5 : 16 ms 6 : 32 ms 7 : 64 ms 8 : 128 ms
1-3-7 Temporisations à grande vitesse
Effectuer les paramétrages présentés ci-dessous pour régler le nombre de tem-
porisations à grande vitesse créé avec TIMH(15) qui utilisent le traitement d’interruption.
Active le paramétrage d’interruption de la temporisation à grande vitesse
00 : Paramétrage désactivé
(Traitement d’interruption pour toutes les temporisations à grande vitesse, TIM 000 à TIM 015)
01 : Activé (Utilise le pramétrage des bits de 00 à 07).
Nombre de temporisation à grande vitesse par interruptions
(valable lorsque les bits de 08 à 15 sont à 01)
00 à 15 (BCD à 2digits)
Bit
DM 6629
15 0
Par défaut : Traitement d’interruption pour toutes les temporisations à grande vitesse,
TIM 000 à TIM 015.
Le paramétrage indique le nombre de temporisations utilisant le traitement d’interruption comm e n çant par TIM 000. Par exemple, si “0108 ” est sélectionné, les
huit temporisations, TIM 007 à TIM 000 utilisent le traitement d’interruption.
17

Rem. 1. Les temporisations à grande vitesse ne sont pas précises sans traitement
d’interruption à moins que le temps de cycle soit d’au plus 10 ms.
2. Si l’instruction SPED(64) est utilisée et si les impulsions sont émises à une
fréquence d’au moins 500 Hz, régler alors le nombre de temporisations à
grande vitesse avec au plus quatre traitements d’interruption. Pour plus
d’informations, se reporter à l’instruction SPED(64).
3. Le temps de réponse d’interruption pour d’autres interruptions est amélioré
si le traitement d’interruption est réglé à 00 lorsque le traitement de la temporisation à grande vitesse n’est pas exigé. Ceci comprend le durée où le
temps de cycle est inférieur à 10 ms.
1-3-8 digits d ’entrée DSW(87) et méthode de rafraîchissement de sortie
Effectuer les paramétrages présentés ci–dessous pour régler le nombre de
digits d’entrée de l’instruction DSW(87) et pour régler la méthode de rafraîchis-
sement de sortie.
Bit
15 0
DM 6639
Nombre de digits d’entrée pour la DSW(87)
00 : 4 digits
01 : 8 digits
Méthode de rafraîchissement de sortie
00 : Cyclique
01 : Directe
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
Par défaut : Le nombre de digits d’entrée de l’instruction
DSW(87) est réglé à “4” et la méthode de rafraîchissement de
sortie est cyclique.
Se reporter à la page 455 pour plus d’informations sur l’instruction DSW(87) et
au Chapitre 7 - Fonctionnement de l’API et temporisation du traitement pour
plus d’informations sur les méthodes de rafraîchissement d’E/S.
18

1-3-9 Paramétrage du port périphérique
Le paramétrage des communications séries du port périphérique est déterminé
par les sélecteurs 5 et 7 du micro-interrupteur de l’unité centrale, le paramétrage
hexadécimal du DM 6650 et le périphérique connecté au port périphérique.
Paramétrage du
micro-inter-
rupteur
Sél.5 Sél.7
OFF OFF Ignoré Console de pro-
OFF ON
ON OFF Ignoré Console de pro-
ON ON Ignoré Périphérique de
Paramétrage du
DM 6650
grammation
0000
0001 Liaison à l’ordinateur,
10 Sans protocole
Périphérique de
programmation autre
qu’une console de
programmation (tel
qu’un ordinateur)
grammation
programmation autre
qu’une console de
programmation (tel
qu’un ordinateur)
Périphérique con-
necté
1-3ChapitreFonctionnement de l’API de base et traitements des E/S
Mode de communication
série
Bus de console de program–
mation
Liaison à l’ordinateur,
paramétrage Mode standard si
les logiciels CX–Programmer,
ou SYSWIN sont effectués
pour le bus périphérique.
paramétrages clients les
logiciels CX–Programmer, ou
SYSWIN sont effectués pour le
bus périphérique.
Bus de console de program–
mation
Liaison à l’ordinateur,
paramétrage Mode standard si
les logiciels CX–Programmer,
ou SYSWIN sont effectués
pour le bus périphérique.
1-3-10Paramétrage du journal d’erreurs
Effectuer le paramétrage indiqué ci-dessous pour détecter les erreurs et sauvegarder le journal d’erreurs.
Temps de surveillance de
cycle (DM 6618)
Le temps de surveillance de cycle est utilisé pour vérifier les temps de cycles
très longs, cela peut survenir lorsque le programme entre dans une boucle infinie. Si le temps de cycle excède le paramétrage de surveillance du cycle, une
erreur fatale (FALS 9F) se produit.
Active l a d u r ée de surveillance de cycle et précise l’unité
00 : Paramétrage désactivé (durée fixee à 120 ms)
01 : Paramétrage de 00 à 07 activé ; unité :10 ms
02 : Paramétrage de 00 à 07 activé ; unité :100 ms
03 : Paramétrage de 00 à 07 activé ; unité :1 s
Paramétrage de la durée de surveillance de cycle
(lorsque les bits 08 à 15 ne sont pas à 00)
00 à 99 (BCD à 2 digits ; unité réglée pour les bits 08 à 15).
Par défaut : 120 ms.
Rem. 1. Les unités utilisées pour le temps de cycle actuel et maximal enregistré
dans les AR 26 et AR 27 (BCD à 4 digits) dépendent du paramétrage du
temps de surveillance de cycle de l’unité du DM 6618, comme indiqué ci–
dessous.
Bits 08 à 15 réglés à 01 : 0,1 ms
Bits 08 à 15 réglés à 02 : 1 ms
Bits 08 à 15 réglés à 03 : 10 ms
Bit
DM 6618
15 0
19

1-3ChapitreFonctionnement de l’API de base et traitements des E/S
2. Si le temps de cycle est d’1 s ou plus, le temps de cycle lu par le périphérique
de programmation est de 999,9 ms. Le bon maximum et le temps de cycle
actuel s’enregistrent dans la zone AR.
Exemple Si 0230 est réglé dans le DM 6618, une erreur FALS 9F ne se produit
pas tant que le temps de cycle n’excède 3 s. Si le temps réel de cycle est 2,59 s,
le temps actuel du cycle sauvegardé dans la zone AR est de 2590 (ms), mais le
temps de cycle lu par un périphérique de programmation est de 999,9 ms.
Une erreur de ”Temps de cycle terminé” (non fatale) se produit lorsque le temps
de cycle excède 100 ms à moins que la détection d’un temps de cycle long soit
désactivée en utilisant le paramétrage du DM 6655.
Détection d’erreur et
fonctionnement du
journal d’erreurs
(DM 6655)
Effectuer les paramétrages présentés ci-dessous pour déterminer si une erreur
non fatale a été générée lorsque le temps de cycle excède 100 ms ou lorsque la
tension de batterie intégrée chute, pour paramétrer la méthode de sauvegarde
des enregistrements dans le journal d’erreurs dès que les erreurs se produisent.
Bit
15 0
DM 6655
Détection d e l a tension de batterie faible
0 : Détecté
1 : Non détecté
Détection de dépassement du temps de cycle
0 : Détecté
1 : Non détecté
Méthode de stokage du journal d’erreur
0 : Enregistrement des erreurs, les 10 erreurs les plus récentes sont toujours
sauvegardées (les erreurs les plus anciennes sont supprimées).
1 : Seuls les 10 premiers enregistrements sont sauvegardés (aucune erreur n’est
sauvegardée au-delà de ce point).
2 à F : Erreurs enregistrées non sauvegardées.
Par défaut : Tension de batterie faible et erreurs de dépassement du temps de cycle
détectées, et enregistre les erreurs sauvegardées pour les 10 erreurs les plus récentes.
0
Toujours 0
Les erreurs de la batterie et les erreurs de dépassement du temps de cycle sont
des erreurs non fatales. Pour plus d’informations sur le journal d’erreurs, se
reporter au Chapitre 8 Dépannage.
20

1-4 Fonctions d’interruption
Ce chapitre explique les paramétrages et les méthodes d’utilisation des fonctions d’interruption CQM1H.
1-4-1 Types d’interruptions
Le CQM1H possède quatre types d’interruptions présentées ci-après :
• Interruptions d’entrée :
Traitement d’interruption exécuté lorsqu’une entrée provenant d’une source
externe vers un des bits IR 00000 à IR 00003 de l’UC est activée.
• Interruptions de temporisation cyclique :
Traitement d’interruption exécuté par une temporisation cyclique avec une
précision de 0,1 ms.
• Interruptions du compteur à grande vitesse :
Traitement d’interruption exécuté selon la valeur en cours (PV) du compteur à
grande vitesse intégré. Les unités centrales du CQM1H sont équipées des 3
types d’interruptions du compteur à grande vitesse suivants. Tous peuvent
fonctionner en tant qu’interruptions de valeur spécifiée ou interruptions de
comparaison de plage. L’interruption de valeur spécifiée se produit lorsque la
PV correspond à la SV, et l’interruption de comparaison de plage se produit
lorsque la PV se trouve dans une plage de SV prédéfinie.
1-4ChapitreFonctions d’interruption
1, 2, 3... 1. Compteur à grande vitesse 0 (intégré à l’UC) Le compteur à grande vitesse
0 compte les entrées d’impulsions 4 à 6 de l’UC. Les impulsions biphasées
atteignant 2,5 kHz sont comptées.
2. Compteurs à grande vitesse 1 et 2 (carte de gestion d’axes) Les compteurs
à grande vitesses 1 et 2 comptent les entrées d’impulsions à grande vitesse
des ports 1 et 2 de la carte de gestion d’axes. Les impulsions biphasées
atteignant 2,5 kHz sont comptées.
3. Compteurs à grande vitesse absolus 1 et 2 (carte codeur absolu) Les compteurs à grande vitesses 1 et 2 comptent l’entrée des codes du codeur rotatif
absolu des ports 1 et 2 de la carte codeur absolu.
Rem. Le traitement d’interruption n’est pas effectué pour les compteurs à grande
vitesse 1, 2, 3 e t 4 d e l a carte du compteur à grande vitesse. La carte du comp-
teur à grande vitesse compte les impulsions pouvant atteindre 50 kHz ou
500 kHz. Les PV du compteur à grande vitesse sont vérifiées par rapport à la
valeur spécifiée ou à la plage des SV et un ensemble de bits est produit en
interne ou en externe au lieu de produire une interruption.
• Interruptions de la carte de communication série :
Le traitement d’interruption est demandé par l’unité centrale lorsque la carte
de communication série reçoit le message voulu.
Traitement d’interruption Lorsqu’une interruption est produite, le sous-programme d’interruption spécifié
est exécuté.
Définition des sous-programmes
Tout comme des sous–programmes ordinaires, les sous–programmes d’inter-
ruption sont définis en utilisant SBN(92) et RET(93) à la fin du programme principal.
Lorsque les sous–programmes d’interruption sont exécutés, une plage spéci-
fiée de bits d’entrée est rafraîchie.
Lorsqu’un sous–programme d’interruption est défini, une erreur du “no SBS
error” (sans erreur SBS) est produite pendant le contrôle du programme mais
l’exécution se poursuit normalement. Si cette erreur se produit, vérifier tous les
sous–programmes pour s’assurer que le SBS(91) a été programmé avant de
poursuivre.
21

1-4ChapitreFonctions d’interruption
Priorité des interruptions
Les interruptions ont l’ordre de priorité suivant. Les interruptions d’entrée et les
interruptions des compteurs à grande vitesse 1 et 2 ont la priorité la plus élevée
et l’avis d’interruption d’une carte de communication série a la priorité la plus
basse.
Instructions de sortie
d’impulsions et
interruptions
Interrup-
tions
d’entrée
Interruptions du
compteur à grande
vitesse 1 ou 2 (à
=
partir de la carte de
gestion d’axes ou
de la carte codeur
absolu)
Interruptions
>=
de la
temporisation
cyclique
interruption
du comp-
teur à
grande
vitesse 0
d’interruption de
>
la carte des
communications
Avis
série
Lorsqu’une interruption avec une priorité supérieure est reçue pendant le traitement de l’interruption, les processus actuels sont arrêtés et l’interruption nouvellement reçue est traitée à la place. Dès que le programme a été entièrement
exécuté, alors le traitement de l’interruption précédente est repris.
Lorsqu’une interruption avec une priorité inférieure ou égale est reçue pendant
le traitement de l’interruption, l’interruption nouvellement reçue est alors traitée
dès que le programme actuellement traité est entièrement exécuté.
Si deux interruptions ayant le même niveau de priorité se produisent simultané-
ment, les interruptions sont exécutées dans l’ordre suivant :
1, 2, 3... 1. Interruption d’entrée 0 > Interruption d’entrée 1 > Interruption d’entrée 2 >
Interruption d’entrée 3 > Interruption du compteur à grande vitesse 1 >
Interruption du compteur à grande vitesse 2
2. Interruption de la temporisation cyclique 0 > Interruption de la temporisation
cyclique 1 > Interruption de la temporisation cyclique 2 (l’interruption de la
temporisation cyclique 2 est une interruption du compteur à grande vitesse
0).
Les instructions suivantes ne peuvent pas être exécutées dans un sous–pro-
gramme d’interruption lorsqu’une instruction commandant les E/S d’impulsions
ou les compteurs à grande vitesse est exécutée dans le programme principal :
(la SR 25503 est activée)
INI(89), PR V(62), CTBL(63), SPED(64), PULS(65), PWM( ––), PLS2(––) et
ACC(––)
Les méthodes suivantes sont utilisées pour circonvenir cette limitation :
22

1-4ChapitreFonctions d’interruption
Méthode 1
Tout traitement d’interruptions peut être masqué tandis que l’instruction est exé-
cutée.
@INT(89)
100
000
000
@PLS2(––)
001
000
DM 0010
@INT(89)
200
000
000
Méthode 2
Exécuter de nouveau l’instruction dans le programme principal.
Voici la section de programme provenant du programme principal :
@PRV(62)
001
002
DM 0000
@CTBL(63)
001
000
DM 0000
RSET LR 0000
Voici la section de programme provenant du sous-programme d’interruptions :
SBN(92) 000
25313
25313
@CTBL(63)
001
000
DM 0000
LR
0000
1-4-2 Interruptions d’entrée
Les entrées de l’unité centrale attribuées aux IR 00000 à IR 00003 sont utilisées
pour des interruptions provenant de sources externes. Les interruptions d’entrée 0 jusqu’à 3 correspondent respectivement à ces bits et sont toujours utilisées pour appeler respectivement les sous–programmes de 000 à 003. Lorsque les interruptions d’entrée sont non utilisé, les sous–programmes de 000 à
003 sont utilisés en tant que sous–programmes ordinaires.
23

1-4ChapitreFonctions d’interruption
Traitement Il existe deux modes pour le traitement des interruptions d’entrée. Le premier
est le mode interruption d’entrée, au sein duquel l’interruption est effectuée en
réponse à une entrée externe. Le second est le mode compteur, au sein duquel
les signaux provenant d’une source externe sont comptés à grande vitesse, et
une interruption est effectuée une fois pour un certain nombre de signaux.
L’instruction INT(89) détermine le mode utilisé.
En mode interruption d’entrée, les signaux avec une durée d’au moins 100 ms
sont détectés. En mode compteur, des signaux jusqu’à 1 kHz sont comptés.
Procédure (Mode
interruption d’entrée)
Suivre les étapes décrites ci–dessous en utilisant des interruptions d’entrée
dans le mode interruption d’entrée.
1, 2, 3... 1. Déterminer le numéro de l’interruption d’entrée.
Bornier Adresse des bits
correspondants
B0 IN0 IR 00000 000
A0 IN1 IR 00001 001
B1 IN2 IR 00002 002
A1 IN3 IR 00003 003
Numéro de sous-programme
2. Câbler l’entrée. (Voir page 26 pour plus d’informations).
3. Effectuer le paramétrage du Setup de l’API (Voir page 26 pour plus d’infor-
mations).
a) Ecrire 1 dans le digit correspondant du DM 6628 pour indiquer que l’en-
trée est utillisée en tant qu’interruption d’entrée (Interruption d’entrée ou
mode compteur).
b) les bits des DM 6630 à DM 6633 sont activés pour provoquer la réactua-
lisation de l’entrée avant l’exécution du sous-programme d’interruption.
4. Programmer les sections de programme associées.
a) Utiliser INT(89) pour démasquer l’interruption d’entrée (Voir page 27
pour plus d’informations).
24
Interruption
d’entrée 0
b) Ecrire un sous-programme d’interruption dans SBN(92) et RET(93).
Interruption 0
1
2
3
Interruption 1
Interruption 2
Interruption 3
Setup de l’API
DM 6628
Programme à contacts
COMMANDE
D’INTERRUPTION
Active les interruptions.
Interruption générée.
Exécute sous-programme spécifié.
Sous-programme
d’interruption

1-4ChapitreFonctions d’interruption
Procédure (Mode
compteur)
Suivre les étapes décrites ci–dessous en utilisant des interruptions d’entrée en
mode compteur.
1, 2, 3... 1. Déterminer le numéro de l’interruption d’entrée.
Bornier Adresse des bits
correspondants
B0 IN0 IR 00000 000
A0 IN1 IR 00001 001
B1 IN2 IR 00002 002
A1 IN3 IR 00003 003
Numéro de sous-programme
2. Déterminer la SV du comptage initial.
3. Câbler l’entrée (Voir page 26 pour plus d’informations).
4. Effectuer le paramétrage de l’API (Voir page AUCUN LIEN pour plus d’in-
formations).
a) Ecrire 1 dans le digit correspondant au DM 6628 pour indiquer que l’en-
trée est utilisée comme interruption d’entrée (interruption d’entrée ou
mode compteur).
b) Les bits des DM 6630 à DM 6633 sont à ON pour provoquer l’actualisa-
tion de l’entrée avant l’exécution du sous-programme d’interruption.
Interruption
d’entrée 0
5. Programmer les sections de programme associées.
a) Utiliser INT(89) pour actualiser la SV du compteur en mode compteur.
(Voir page 28 pour plus d’informations).
b) Ecrire un sous-programme d’interruption avec SBN(92) et RET(93)
(seulement lors de l’utilisation d’interruptions de comptage).
Compteur 0
1
2
3
Compteur1
Compteur 2
Compteur 3
Setup de l’API
DM 6628
Interruption d’entrée (mode compteur)
Programme à contacts
COMMANDE
D’INTERRUPTION
Actualiser SV compteur
(mode décrémentation).
SV du compteur
Compteur 0
Compteur 1
Compteur 2
Compteur 3
Chaque cycle
PV du compteur – 1
Compteur 0
Compteur 1
Compteur 2
Compteur 3
SR 248
SR 249
SR 250
SR 251
SR 244
SR 245
SR 246
SR 247
Interruption générale
Exécuter le sousprogramme spécifié.
Sous-programme
Seulement lors de l’utilisation
des interruptions.
25

1-4ChapitreFonctions d’interruption
Entrées de câblage Avant d’utiliser des interruptions d’entrée, câbler le signal d’interruption d’entrée
ou le signal d’entrée de comptage du bornier d’entrée de l’unité centrale comme
indiqué ci–dessous.
Exemple de câblage du signal interruption d’entrée
(Mode interruption d’entrée)
Bornier Adresse des bits
correspondants
B0 (IN0) IR 00000
A0 (IN1) IR 00001
B1 (IN2) IR 00002
A1 (IN3) IR 00003
Signal interruption
d’entrée
Unité centrale
Exemple de câblage du signal d’entrée de compteur (Mode compteur)
Bornier Adresse des bits corres-
pondants
B0 (IN0) IR 00000
A0 (IN1) IR 00001
B1 (IN2) IR 00002
A1 (IN3) IR 00003
Signal d ’entrée de
compteur
Mode décrémentation
Entrées d’impulsions
(4 entrées max).
Unité centrale
Paramètres du Setup de l’API Avant d’exécuter le programme, effectuer le paramétrage suivant dans le Setup
de l’API en mode PROGRAM.
Paramétrage d’entrée d’interruption (DM 6628)
Si ce paramétrage n’est pas effectué, les interruptions ne sont pas utilisées
dans le programme.
Bit
15 0
DM 6628
Paramétrage d’interruption d’entrée 3
Paramétrage d’interruption d’entrée 2
Paramétrage d’interruption d’entrée 1
Paramétrage d’nterruption d’entrée 0
0 : Entrée normale
1 : Entrée d’interruption
Par défaut : Toutes les entrées normales.
26

1-4ChapitreFonctions d’interruption
Paramétrage de mot de rafraîchissement d’entrée (DM 6630 au DM 6633)
Effectuer ce paramétrage lorsque l’actualisation des entrées est nécessaire
pour l’interruption d’entrée ou le mode compteur.
Bit
15 0
DM 6630 : Interruption 0
DM 6631 : Interruption 1
DM 6632 : Interruption 2
DM 6633 : Interruption 3
Nombre de mots (BCD à 2 digits) 00 à 16
Mot de début (BCD à 2 digits)
00 à 15 (IR 000 à IR 015)
Par défaut : Sans actualisation d’entrée
Exemple Si le DM 6630 est réglé à 0100, l’IR 000 est rafraîchi lorsqu’un signal
est reçu pour l’interruption 0.
Rem. Si l’actualisation d’entrée n’est pas utilisée, l’état du signal d’entrée dans le pro-
gramme d’interruption n’est pas fiable. Ceci inclut même l’état du bit d’interrup-
tion d’entrée activant l’interruption. Par exemple, l’IR 00000 n’est pas activé
dans le programme d’interruption pour l’interruption d’entrée 0 à moins d’être
rafraîchi (dans ce cas–ci, le drapeau toujours ON, SR 25313 peut être utilisé au
lieu de l’IR 00000).
DM 6630 au DM 6633
Mode interruption d’entrée Utiliser les instructions pour programmer l’interruption d’entrée en utilisant le
mode interruption d’entrée.
Masquage des interruptions
A partir de l’instruction INT(89), régler ou supprimer les masques d’interruption
d’entrée voulus.
(@)INT(89) 000
000 D
Effectuer le paramétrage dans les bits de D0 à 3, qui correspond aux interruptions d’entrée 0 à 3.
0 : Masquage actif (interruption d’entrée autorisée).
1 : Masquage inactif (interruption d’entrée non autorisée).
Au début du fonctionnement, toutes les interruptions d’entrée sont masquées.
Utiliser INT(89) pour démasquer les interruptions d’entrée avant d’utiliser le
mode interruption d’entrée.
Suppression des interruptions masquées
Si le bit correspondant à une interruption d’entrée est à ON alors qu’il est masqué, cette interruption d’entrée est sauvegardée dans la mémoire et exécutée
dès que le masquage est supprimé. Afin que cette interruption d’entrée ne soit
exécutée lorsque le masquage est supprimé, l’interruption doit être effacée de la
mémoire.
Seulement un signal d’interruption est sauvegardé dans la mémoire pour cha-
que nombre d’interruption.
Avec l’instruction INT(89), supprimer l’interruption d’entrée de la mémoire.
(@)INT(89) 001
000 D
Si les bits D 0 à 3, correspondant aux interruptions d’entrée 0 à
3, sont à “1,” l’interruption d’entrée est supprimée de la mémoire.
0 : Interruption d’entrée active.
1 : Interruption d’entrée inactive.
27

Lecture de l’état de masquage
Avec l’instruction INT(89), lire l’état de masquage d’interruption d’entrée.
1-4ChapitreFonctions d’interruption
(@)INT(89) 002
000 D
L’état des digits à l’extrême droite des données sauvegardées
dans le mot D (bits 0 à 3) présente l’état du masquage.
0 : Masquage inactif (interruption d’entrée autorisée).
1 : Masquage actif (interruption d’entrée non autorisée).
Mode compteur Utiliser les étapes suivantes pour programmer l’utilisation des interruptions
d’entrée en mode interruption d’entrée.
Rem. Les mots de SR utilisés dans le mode compteur (SR 244 à SR 251) contiennent
toutes les données (hexadécimales) binaires (sans BCD).
1, 2, 3... 1. Ecrire les valeurs de consigne du fonctionnement du compteur dans les
mots SR correspondant aux interruptions 0 à 3. Les valeurs de consigne
sont écrites entre 0000 et FFFF (0 à 65 535). La valeur 0000 neutralise
l’opération de comptage jusqu’à ce qu’une nouvelle valeur soit réglée et
l’étape 2, ci–dessous, est répétée.
Rem. Ces bits SR sont supprimés au début de l’opération et doivent être
écrits à partir du programme.
Le calcul maximal du signal d’entrée est de 1 kHz.
Interruption Mot contenant la SV du compteur
Interruption d’entrée 0 SR 244
Interruption d’entrée 1 SR 245
Interruption d’entrée 2 SR 246
Interruption d’entrée 3 SR 247
Si le mode compteur n’est pas utilisé, ces bits SR sont utilisés comme bits
de travail.
2. Avec l’instruction INT(89), actualiser la valeur de consigne du mode compteur et activer les interruptions.
(@)INT(89) 003
000 D
Si les bits D 0 à 3, correspondant aux interruptions d’entrée
0 à 3, sont à “0”, alors la valeur de consigne est rafraîchie
et les interruptions sont autorisées.
0 : Valeur de consigne du mode compteur rafraîchie et
masque inactif.
1 : Rien ne survient. Régler les bits à 1 pour toutes les
interruptions non modifiées.
L’interruption d ’entrée pour laquelle la valeur de consigne est rafraîchie est acti-
vée en mode compteur. Lorsque le compteur atteint la valeur de consigne, une
interruption se produit, le compteur est remis à zéro et le comptage/interruptions
continuent jusqu’à ce que le compteur soit arrêté.
Rem. 1. Si l’instruction INT(89) est utilisé lors du comptage, la valeur en cours (PV)
est renvoyée à la valeur de consigne (SV). Utiliser donc la forme d’instruction simple ou une interruption risque de ne jamais se produire.
2. La valeur de consigne est placée lorsque l’instruction INT(89) est exécutée.
Si les interruptions sont déjà en fonction, alors la valeur de consigne n’est
pas modifiée juste en modifiant le contenu des SR 244 à SR 247, c.-à-d. si le
contenu est modifié, la valeur de consigne doit être rafraîchie en exécutant
de nouveau l’instruction INT(89).
Des interruptions peuvent être masquées en utilisant le même processus que
pour le mode interruption d’entrée, mais si le masquage est supprimé en utilisant le même processus, le mode compteur n’est pas maintenu et le mode inter-
ruption d’entrée est utilisé à la place. Les signaux d’interruption reçus pour des
interruptions masquées peuvent également être supprimés en utilisant le même
processus que pour le mode interruption d’entrée .
28

1-4ChapitreFonctions d’interruption
PV du compteur en mode
compteur
Lorsque des interruptions d’entrée sont utilisées en mode compteur, la PV du
compteur est sauvegardée dans le SR du mot correspondant aux interruptions
d’entrée 0 à 3. Les valeurs sont comprisent entre 0000 et FFFE (0 à 65 534) et
sont égales à la PV du compteur moins un.
Interruption Mot contenant la PV – 1 du compteur
Interruption d’entrée 0 SR 248
Interruption d’entrée 1 SR 249
Interruption d’entrée 2 SR 250
Interruption d’entrée 3 SR 251
Exemple : La valeur en cours pour une interruption dont la valeur de consigne
est 000A est enregistrée en tant que 0009 juste après qu’INT(89) soit exécutée.
Rem. Même si les interruptions d’entrées ne sont pas utilisées en mode compteur, ces
bits SR ne sont pas utilisés comme bits de travail.
29

1-4ChapitreFonctions d’interruption
Exemple d’application Dans cet exemple, l’interruption d’entrée 0 est utilisée dans le mode interruption
d’entrée et l’interruption d’entrée 1 est utilisée en mode compteur. Avant d’exé-
cuter le programme, vérifier le Setup de l’API.
Setup de l ’API : DM 6628 : 001 1 (les IR 00000 et IR 00001 sont utilisés pour des
interruptions d’entrée) le paramétrage par défaut est utilisé pour tous les autres
paramètres du Setup de l’API. Les entrées ne sont pas rafraîchies lors du traitement de l’interruption.
25315 (ON pour 1 balayage)
MOV(21) #000A
245
Règle 10 comme la SV du mode compteur pour l’interruption
d’entrée 1.
00100
00100
(@)INT(89) 001
000 #0003
(@)INT(89) 000
000 #000E
(@)INT(89) 003
000 #000D
BCD (24) 249
D0000
INC(38) D0000
(@)INT(89) 000
000 #000F
Lorsque l’IR 00100 est activé : Les interruptions masquées
pour les interruptions d’entrée 0 et 1 sont supprimées.
Les interruptions sont permises en mode interruption d’entrée
pour l’interruption 0.
Les interruptions sont activées en mode compteur pour
l’interruption 1 (SV : 10).
Le contenu du SR 249 (PV – 1) est converti en BCD et
sauvegardé dans le DM 0000.
Le contenu de DM 0000 est incrémenté pour l’API.
Si l’IR 00100 est désactivé, les interruptions d’entrée 0 et 1
sont masquées et les interruptions sont interdites.
30
25313 (toujours ON)
SBN(92) 000
ADB(50) 245
#000A 245
INT(89) 003
000 #000D
RET(93)
SBN(92) 001
RET(93)
Lorsque l’interruption d’entrée est exécutéé pour l’interruption 0 , l e s o u s –programme 000 est appelé et le mode
compteur est rafraîchi avec la SV pour l’interruption d’entrée 1 avec 10 en plus (SV = 20)
Lorsque le compte est atteint pour le compteur d’interruption d ’entrée 1, le sous–programme 001 est appelé et
le sous–programme d’interruption est exécuté.

Lorsque le programme est exécuté, le fonctionnement sera comme indiqué
dans le schéma suivant.
00000
Sous-programme
000
00001
Sous-programme
001
00100
10 comptages
10 comptages
(Voir Rem.1) (Voir Rem.1)
Rem. 1. Le compteur continue de fonctionner même lorsque le programme d’inter-
ruption est exécutée.
2. L’interruption d’entrée demeure masquée.
1-4-3 Masquage de toutes les interruptions
L’instruction INT(89) est utilisée pour masquer et démasquer toutes les interruptions par groupe, y compris les interruptions d’entrée, les interruptions de tem-
porisation cyclique et les interruptions de compteur à grande vitesse. Le mas-
que s’ajoute à tous les masques des différents types d’interruptions. En outre,
supprimer les masques de toutes les interruptions ne supprime pas les masques des différents types d’interruptions, mais les restaurent aux précédentes
conditions de masquage, avant qu’INT(89) soit exécuté pour les masquer par
groupe.
1-4ChapitreFonctions d’interruption
20 comptages
(Voir Rem. 2)
Interruptions masquées/démasquées
par INT(89)
Interruptions d’entrées
Interruptions de la temporisation cyclique
Interruptions du compteur à
grande vitesse 0
Interruptions des compteurs à grande
vitesse 1 et 2
Interruptions des compteurs à grande
vitesse 1 et 2
Unité centrale
Carte de gestion d’axes
Carte codeur absolu
Unité source ou carte
Ne pas utiliser INT(89) pour masquer les interruptions à moins qu’il soit nécessaire de masquer temporairement toutes les interruptions et toujours utiliser les
même instructions INT(89), en utilisant la première instruction INT(89) pour le
masquage et la deuxième interruption pour démasquer les interruptions.
INT(89) ne peut pas être utilisé pour masquer et démasquer toutes les interruptions à partir des programmes d’interruption.
Masquage des interruptions Utiliser l’instruction INT(89) pour désactiver toutes les interruptions.
(@)INT(89) 100
000 000
Si une interruption se produit tandis que des interruptions sont masquées, le
traitement d’interruption n’est pas exécuté mais l’interruption est enregistrée
pour l’entrée, la temporisation cyclique et les interruptions du compteur à
grande vitesse. Les interruptions sont gèrées alors dès que les interruptions
sont démasquées.
31

1-4ChapitreFonctions d’interruption
Interruptions démasquées Utiliser l’instruction INT(89) pour démasquer les interruptions de la manière sui-
vante :
(@)INT(89) 200
000 000
1-4-4 Interruptions de la temporisation cyclique
Le traitement d’interruption de la temporisation à grande vitesse et à haute pré-
cision peut être exécuté en utilisant des temporisations de trame. Le CQM1H
fournit trois temporisations de trame numérotées de 0 à 2.
Rem. 1. La temporisation cyclique 0 n’est pas utilisée lorsque les impulsions sont
émises vers une Unité de sortie transistor au moyen de l’instruction
SPED(64) .
2. La temporisation cyclique 2 n’est pas utilisée en même temps que le compteur à grande vitesse 0.
Traitement Il existe deux modes de fonctionnement de la temporisation cyclique, le mode
non répétitif pour lequel seulement une interruption est exécutée à la fin du
temps et le mode “interruption programmée” pour lequel l’interruption est répé-
tée à intervalle fixe.
Procédure Suivre les étapes décrites ci–dessous lors de l’utilisation d’interruptions de la
temporisation cyclique.
1, 2, 3... 1. Déterminer si la temporisation fonctionne en mode non répétitif ou en mode
d’interruption programmée.
2. Programmer les sections de programme associées.
a) Utiliser STIM(69) pour régler la SV de la temporisation et démarrer la
temporisation en mode non répétitif ou en mode interruption program-
mée.
b) Ecrire un sous–programme d’interruption dans SBN(92) et RET(93).
Temporisations de
trame 0 à 3 (Voir
Rem. 1 et 2).
Programme à contacts
TEMPORISATION
D’INTERVALLE
Démarrer la temporisation.
mode non répétitif
Mode interruption programmée
Lecture du temps écoulé.
Interruption générée
Exécute le sous–programme
spécifié.
Rem. 1. La temporisation cyclique 2 et le compteur à grande vitesse 0 ne peuvent
pas être utilisés en même temps.
2. La temporisation cyclique 0 ne peut pas être utilisée en même temps que les
sorties d’impulsions provenant du SPED(64) des Unités de sortie transistor .
Setup de l’API Lors de l’utilisation des interruptions de la temporisation cyclique, effectuer le
paramétrage suivant dans le Setup de l’API en mode PROGRAM avant d’exécuter le programme.
32

1-4ChapitreFonctions d’interruption
Paramétrage du mot de rafraîchissement d’entrée (DM 6636 au DM 6638)
Effectuer le paramétrage lorsqu’il est nécessaire d’actualiser des entrées.
Bit
15 0
DM 6636 au DM 6638
DM 6636 : Temporisation 0
DM 6637 : Temporisation 1
DM 6638 : Temporisation 2
Nombre de mots (BCD à 2 digits) 00 à 16
Début du mot (BCD à 2 digits)
00 à 15 (IR 000 à IR 015)
Par défaut : Sans actualisation d’entrée
Paramétrage du compteur à grande vitesse (DM 6642)
lors de l’utilisation de la temporisation cyclique 2, s’assurer avant de commen-
cer le fonctionnement de régler le compteur à grande vitesse (Setup de l’API :
DM 6642) sur le paramètre par défaut (0000 : Compteur à grande de vitesse non
utilisé).
Opération Utiliser l’instruction suivante pour activer et commander la temporisation cycli-
que.
Démarrage en mode non répétitif
Utiliser l’instruction STIM(69) pour démarrer la temporisation cyclique en mode
non répétitif.
(@)STIM(69) C1
C2 C
Mot Fonction
C
2
Valeur de consigne du décompteur (BCD à 4 digits) : 0000 à 9999
C2 + 1 Intervalle de temps décrémentant (BCD à 4 digits ; unité : 0,1 ms) :
0005 à 0320 (0,5 ms à 32 ms)
Rem. Si une constante est utilisée pour C
mentation est fixe à 0010 ou 1 ms, afin d’obtenir une valeur de con-
signe en C
C1 : Nº de la temporisation cyclique
3
C2 : Valeur de consigne de la temporisation
(première adresse de mot ou constante)
C3 : Nº du sous–programme (BCD à 4 digits) :
0000 à 0255
exprimée en ms.
2
temporisation cyclique 0 : 000
temporisation cyclique 1 : 001
temporisation cyclique 2 : 002
, l’intervalle de temps de décré-
2
Chaque fois que l’intervalle indiqué dans le mot C2 + 1 s’écoule, le décompteur
décrémente de un la valeur en cours. Lorsque la PV atteint 0, le sous–programme désigné est appelé une seule fois et la temporisation s’arrête.
Lorsqu’une adresse de mot est utilisée pour le C2, calculer le temps d’exécution
de l’instruction STIM(69) :
(contenu du mot C2) x (contenu du mot C2 + 1) x 0,1 ms = (0,5 à 319 968 ms )
33

1-4ChapitreFonctions d’interruption
Démarrage en mode d’interruption programmée
Utiliser l’instruction STIM(69) pour démarrer la temporisation cyclique en mode
interruption programmée.
(@)STIM(69) C1
C2 C
C1 : Nº de la temporisation cyclique + 3
3
C2 : Valeur de consigne de la temporisation
(première adresse de mot ou constante)
C3 : Nº du sous–programme (BCD à 4 digits) :
0000 à 0255
temporisation cyclique 0 : 003
temporisation cyclique 1 : 004
temporisation cyclique 2 : 005
Mot Fonction
C
2
Valeur de consigne du décompteur (BCD à 4 digits) : 0000 à 9999
C2 + 1 Intervalle de temps décrémentant (BCD à 4 digits ; unité : 0,1 ms) : 0005
à 0320 (0,5 ms à 32 ms)
Rem. Si une constante est utilisée pour le C
, l’intervalle de temps décré-
2
mentant est fixe à 0010 ou 1 ms, ainsi la valeur de consigne du C
s’exprime en ms.
La signification des paramètres est la même que pour le mode non répétitif,
mais en mode interruption programmé la PV de la temporisation est réinitialisée
par rapport à la valeur de consigne et la décrémentation recommence après que
le sous–programme soit appelé. En mode interruption planifiée, les interruptions continuent à se répéter à intervalles fixes jusqu’à ce que le fonctionnement
s’arrête.
Lecture du temps écoulé de la temporisation
Utiliser l’instruction STIM(69) pour lire le temps de la temporisation qui s’est
écoulé.
2
(@)STIM(69) C1
C2 C
C1 : Nº de la temporisation cyclique + 6
3
C2 : Première adresse de mot du paramètre 1
C3 : Paramètre 2
temporisation cyclique 0 : 006
temporisation cyclique 1 : 004
temporisation cyclique 2 : 008
Mot Fonction
C
2
Nombre de fois où le compteur a été décrémenté (BCD à 4 digits)
C2 + 1 Intervalle de temps du décompteur (BCD à 4 digits ; unité : 0,1 ms)
C
3
Temps écoulé depuis la dernière décrémentation
(BCD à 4 digits ; unité : 0,1 ms)
Rem. Cette valeur est inférieure à l’intervalle de temps du décompteur.
Le laps de temps durant lequel la temporisation cyclique démarre jusqu’à l’exé-
cution de cette instruction est calculé comme suit :
{(contenu de mot C2) x (contenu de mot C2 + 1) + (contenu de mot C3)} x 0,1 ms
Si la temporisation cyclique indiquée est arrêté, alors la valeur “0000” est sauve-
gardé.
Interruption des temporisation
Utiliser l’instruction STIM(69) pour arrêter la temporisation cyclique.
(@)STIM(69) C1
000 000
C1 : Nº de la temporisation cyclique + 10
temporisation cyclique 0 : 010
temporisation cyclique 1 : 011
temporisation cyclique 2 : 012
34
La temporisation cyclique spécifiée s’arrête.

1-4ChapitreFonctions d’interruption
Exemple d’application Dans cet exemple, une interruption est exécutée toutes les 2,4 ms (0,6 ms x 4)
au moyen de la temporisation cyclique 1. En supposant le paramétrage par
défaut pour toute le Setup de l’API (les entrées ne sont pas rafraîchies pour le
traitement de l’interruption).
25315 Premier drapeau de cycle
à ON pour 1 cycle
00100
00100
MOV(21) #0004
DM 0010
MOV(21) #0006
DM 0011
@STIM(69) 004
DM 0010 #0023
@STIM(69) 011
000 000
SBN(92) 023
RET(93)
Valeurs de consigne de la
temporisation cyclique :
Règle 4 pour la valeur de consigne du
décompteur.
Règle 0,6 ms pour l’intervalle de temps
décrémentant.
La temporisation cyclique 1 démarre lorsque
l’IR 00100 est à ON.
La temporisation cyclique 1 s’arrête lorsque
l’IR 00100 est sur OFF.
Chaque 2,4 ms le comptage est atteint pour la
temporisation cyclique 1, le sous–programme
023 est appelé, et le traitement d’interruption est
exécuté.
Lorsque le programme est exécuté, le sous–programme 023 est lancé chaque
2,4 ms tandis que l’IR 00100 est à ON.
IR 00100
Sous programme 023
2,4 ms
2,4 ms
2,4 ms
1-4-5 Interruptions du compteur à grande vitesse 0
Les signaux d’impulsions du codeur d’impulsions des bits de l’unité centrale
(00004 à 00006) peuvent être comptés à grande vitesse en utilisant le compteur
à grande vitesse 0 (compteur à grande vitesse intégré) et le traitement d’interruption peut être exécuté en fonction du comptage.
Types de signal d’entrée
et modes d’entrée
Deux types de signaux peuvent être entrés à partir d’un codeur d’impulsions. Le
mode d’entrée utilisé pour le compteur à grande vitesse 0 dépend du type de
signal.
Mode Fonctionnement
Mode phase
bidirectionnelle
Mode incré-
mentation
Un signal biphasé de la différence de phase 4X (phase A et
phase B) et le signal phase Z sont utilisés pour les entrées. Le
comptage est incrémenté ou décrémenté en fonction des différences
entre les signaux biphasés.
Un signal d’impulsions monophasé et un signal réinitialisé de comptage sont utilisés pour les entrées. Le comptage est incrémenté en
fonction du signal monophasé.
35

1-4ChapitreFonctions d’interruption
Phase A
Phase B
Comptage
Mode phase bidirectionnelle
1234567876543210–1 –2
Incrémenté Décrémenté
Entrée
d’impulsions
Comptage
Mode incrémentation
1 2 3 4
Incrémente seulement
Rem. Une des méthodes du chapitre suivant doit toujours être utilisée pour remettre à
zéro le compteur lors du redémarrage. Le compteur est automatiquement remis
à zéro lorsque l’exécution du programme est commencée ou arrêtée.
Les transitions des signaux suivants sont manipulées en tant qu’impulsions
avant (incrémentation) : front avant phase A au front avant phase B au front
arrière phase A au front arrière phase B. Les transitions de signaux suivants
sont manipulées en tant qu’impulsions arrières (décrémentation) : front avant
phase B au front avant phase A au front arrière phase B au front arrière phase A.
La plage du compteur va de –32 767 à 32 767 pour le mode phase bidirectionnelle et de 0 à 65 535 pour le mode incrémentation. Les signaux d’impulsions
sont comptés jusqu’à 2,5 kHz en mode phase bidirectionnelle et jusqu’à 5,0 kHz
en mode incrémentation.
Le mode phase bidirectionnelle utilise toujours une entrée de différence de
phase 4x. Le nombre de comptages pour chaque révolution du codeur est 4 fois
la résolution du compteur. Sélectionner le codeur basé sur les plages comptables.
36

1-4ChapitreFonctions d’interruption
Méthodes de réinitialisation
L’une ou l’autre des deux méthodes décrites ci–dessous peut être sélectionnée
pour réinitialiser la PV du comptage (c.–à–d. paramétrage à 0).
Méthode Fonctionnement
Signal phase Z
+ réinitialisation
par programme
Réinitialisation
par programme
La PV est réinitialisée lorsque le signal de la phase Z (entrée réinitialisée) est activé après l’activation du compteur à grande
vitesse 0 (SR 25200).
La PV est réinitialisée lorsque le bit de réinitialisation du compteur
à grande vitesse 0 (SR 25200) est activé.
Phase Z
(entrée
réinitialisée)
SR25200
au moins un cycle
Réinitialisation
d’interruption.
Signal phase Z + réinitialisation par programme
au moins un cycle
Au sein
d’un cycle
Réinitialiser
lors de cycle.
Non réinitialisé.
SR25200
Au sein d’un cycle
Réinitialisation
par programme
au moins un cycle
Réinitialiser
lors de cycle.
Rem. Le bit de réinitialisation du compteur à grande vitesse 0 (SR 25200) est rafraîchi
une fois par cycle ; afin de rendre la lecture fiable, il doit être à ON pour au moins
un cycle.
Le “Z ” de la “Phase Z ” est une abréviation pour “Zéro”. Ce signal présente le
codeur ayant accompli un cycle.
Comptage d’interruption du compteur à grande vitesse 0
Pour les interruptions du compteur à grande vitesse 0, un tableau de comparaison est utilisé au lieu d’une incrémentation. La vérification du comptage est
effectuée par l’une ou l’autre des deux méthodes décrites ci–dessous. Dans le
tableau de com p a r aison, les conditions de comparaison (pour comparaison par
rapport à la PV) et les combinaisons de sous-programme d’interruptions sont
sauvegardées.
Méthode Fonctionnement
Valeur
spécifiée
Comparaison de
plage
Un maximum de 16 conditions de comparaison (des valeurs cibles et
des directions de comptage) et des combinaisons de sous–programme d’interruption sont sauvegardés dans le tableau de
comparaison. Lorsque la PV du compteur et la direction de comptage
correspondent aux conditions de comparaison, le programme d’interruption spécifié est alors exécuté.
8 conditions de comparaison (limites supérieures et inférieures) et
des combinaisons de programme d’interruption sont sauvegardées
dans le tableau de comparaison. Lorsque la PV est inférieure à la
limite inférieure et est supérieur à la limite supérieure, le sous-programme d’interruption spécifié n’est pas exécuté.
Comparaisons de valeurs cibles
Le comptage courant est comparé aux valeurs cibles afin que les valeurs cibles
soient paramétrées dans le tableau de comparaison et des interruptions sont
produites dès que le comptage correspond à chaque valeur spécifiée. Dès que
le comptage est égal à toutes les valeurs cibles du tableau, la valeur spécifiée
est réglée à la première valeur spécifiée du tableau, de nouveau comparé au
comptage courant jusqu’à ce que les deux valeurs soient égales.
37

1-4ChapitreFonctions d’interruption
Valeur initiale
Comptage
Valeur spécifiée
Interruptions
12 3 4 5
Tableau de comparaison
Valeur spécifiée 1
Valeur spécifiée 2
Valeur spécifiée 3
Valeur spécifiée 4
Valeur spécifiée 5
Comparaisons de plage
Le comptage courant est comparé dans le mode cyclique à toutes les plages au
même moment et les interruptions produites sont basées sur les résultats des
comparaisons.
Tableau de comparaison
0
Comptage
13
24
Valeur spécifiée 1
Valeur spécifiée 2
Valeur spécifiée 3
Valeur spécifiée 4
Rem. En effectuant des comparaisons de valeur spécifiée, ne pas utiliser de façon
répétitive l’instruction INI(61) pour modifier la valeur courante du comptage et
démarrer l’opération de comparaison. La fonction d’interruption peut ne pas
fonctionner correctement si l’opération de comparaison est commencée juste
après la modification de la valeur en cours à partir du programme. L’opération d e
comparaison renvoie automatiquement à la première valeur spécifiée une fois
que l’interruption a été produite pour la dernière valeur spécifiée. Le fonctionne-
ment à répétition est ainsi possible simplement en modifiant la valeur en cours.
Procédure Suivre les étapes décrites ci–dessous lors de l’utilisation du compteur à grande
vitesse 0 (compteur à grande vitesse intégré de l’unité centrale).
1, 2, 3... 1. Déterminer le mode d’entrée (mode phase bidirectionnelle ou mode d’incré-
mentation) et la méthode de réinitialisation (signal de phase Z + réinitialisa-
tion du programme ou réinitialisation du programme) à utiliser.
2. Déterminer les caractéristiques d’interruption.
a) Aucune interruption (lecture de la PV du compteur à grande vitesse ou
résultats de comparaison de plage).
b) Utiliser les interruptions de valeur spécifiée ou les interruptions de com-
paraison de plage.
3. Câbler les entrées (se reporter au Manuel de programmation CQM1H pour
plus d’informations).
Bornier Adresse des bits
correspondant
B2 IN4 IR 00004
A2 IN5 IR 00005
B3 IN6 IR 00006
4. Effectuer la configuration du Setup de l’API dans le DM 6642 (voir l a p ag e 4 1
pour plus d’informations).
a) Régler 01 à l’extrême gauche de l’octet pour indiquer l’utilisation du
compteur à grande vitesse 0.
b) Régler le mode d’entrée (mode phase bidirectionnelle ou mode d’incré-
mentation).
38

c) Régler la méthode de réinitialisation (signal de phase Z + réinitialisation
du programme ou réinitialisation du programme).
Rem. Le compteur à grande vitesse 0 ne peut pas être utilisé tant que la
temporisation cyclique 2 est utilisé. Le paramétrage à l’extrême gau-
che de l’octet du DM 6642 détermine si le compteur à grande vitesse
0 ou la temporisation cyclique 2 peut être utilisé.
5. Programmer les sections de programme associées.
a) Utiliser CTBL(63) pour enregistrer le tableau de comparaison et com-
mencer la comparaison.
b) Utiliser INI(61) pour modifier la PV du compteur à grande vitesse ou
commencer la comparaison.
c) Utiliser PRV(62) pour lire la PV du compteur à grande vitesse, l’état de la
comparaison ou les résultats de la comparaison.
d) Ecrire un sous–programme d’interruption dans SBN(92) et RET(93)
(seulement en utilisant l’interruption du compteur à grande vitesse 0).
1-4ChapitreFonctions d’interruption
Entrées
du
codeur
Mode entrée
Incrémentation
Phase bidirectionnelle
Setup de l’API
DM 6642 bits
00 à 03
Compt. à gde. vitesse 0
Setup de l’API
DM 6642 bits
08 à 15
Méthode de réinitialisation
Phase Z + programme
Programme
Setup de l’API
DM 6642 bits
04 à 07
Chaque cycle
PV du compteur
SR 231 et SR 230
Comptage
Chaque e x écution
Programme à contacts
ENREG. TABLEAU COMP.
Enreg. tableau.
Début de comparison.
COMMANDE DE MODE
Modif. PV du compteur.
Début/fin comp.
Résultats de
comparison de
plage
LECTURE PV COMPTEUR
GRANDE VITESSE
Lecture PV du compteur.
Lecture d’état de comp.
Lecture résultats de comp.
Générer
interruption
Execute sous-programme spécifié
Sous-prog. d’interruption
Lors de l’utilisation des interruptions.
AR 1100 à
AR 1107
Les instructions suivantes sont utilisées pour commander le fonctionnement du
compteur à grande vitesse.
Instruction Fonction de commande
CTBL(63)
INI(61)
PRV(62)
Enregistrer un tableau de comparaison de valeur spécifiée et commencer la comparaison.
Enregistrer un tableau de comparaison de plage et commencer la
comparaison.
Enregistrer un tableau de comparaison de valeur spécifiée. (démarrer la comparaison avec INI(61)).
Enregistrer un tableau de comparaison de plage. (démarrer la
comparaison avec INI(61)).
Commencer la comparaison avec le tableau de comparaison enregistré.
Arrêter la comparaison.
Modifier la PV du compteur à grande vitesse.
Lire la PV du compteur à grande vitesse.
Lire les résultats de comparaison de plage.
39

1-4ChapitreFonctions d’interruption
Les drapeaux et les bits de commande suivants sont utilisés pour surveiller et
commander le fonctionnement du compteur à grande vitesse.
Mot Bits Dénomination Fonction
SR 230 00 à 15 PV du compteur à grande
vitesse 0 (4 digits à
l’extrême droite)
SR 231 00 à 15 PV du compteur à grande
vitesse 0 (4 digits à
l’extrême gauche)
SR 252 00 Bit de réinitialisation du
compteur à grande
vitesse 0
AR 11 00 à 07 Drapeaux de
comparaison de plage du
compteur à grande
vitesse 0
Câblage Selon le mode d’entrée, les signaux d’entrée du codeur d’impulsions vers le bor-
nier d’entrée de l’unité centrale sont comme indiqué ci–dessous.
Contient la valeur en cours du
compteur à grande vitesse 0
(compteur à grande vitesse intégré
de l’unité centrale).
Réinitialise la PV du compteur à
grande vitesse 0.
Indique les résultats de
comparaison de plage pour le
compteur à grande vitesse 0.
0 : Condition de plage non
satisfaite.
1 : Condition de plage satisfaite.
Bornier Adresse de
bits attribuée
Mode de phase
bidirectionnelle
Mode incrémentation
B2 (IN4) 00004 Phase A du codeur Entrée du compteur d’im-
pulsions
A2 (IN5) 00005 Phase B du codeur --B3 (IN6) 00006 Phase Z du codeur Entrée réinitialisée
Si la réinitialisation par programme doit être effectuée, l’IR 00006 peut être utilisé comme entrée ordinaire.
Rem. 1. Lorsque le mode d’entrée est réglé en mode incrémentation, l’IR 00005 est
utilisé comme entrée ordinaire.
2. Lorsque la méthode de réinitialisation est réglée pour la réinitialisation par
programme, l’IR 00006 est utilisé comme entrée ordinaire.
Le schéma suivant indique un exemple de câblage avec une sortie du collecteur
ouvert NPN du E6B2–CWZ6C.
Unité centrale
(Mode phase bidirectionnelle)
IN4 (Phase A du codeur)
IN5 (Phase B du codeur)
IN6 (Phase C du codeur)
COM
Codeur (Tension : 12 V)
Noir
Blanc
Orange
Marron
Bleu
Phase A
Phase B
Phase Z
+Vc.c.
0 V (COM)
Alimentation 12Vc.c.
Setup de l’API lors de l’utilisation des interruptions du compteur à grande vitesse 0, effectuer le
paramétrage en mode PROGRAM présenté ci–dessous avant d’exécuter le
programme.
40

1-4ChapitreFonctions d’interruption
Paramétrage du mot de rafraîchissement d’entrée (DM 6638)
Effectuer le paramétrage lorsque les entrées doivent être rafraîchies. Le para-
métrage est identique à celui de la temporisation cyclique 2.
Bit
15 0
DM 6638
Nombre de mots (BCD à 2 digits) 00 à 16
Début de mot (BCD à 2 digits)
00 à 15 (IR 000 à IR 015)
Par défaut : Sans actualisation d’entrée
Paramétrage du compteur à grande vitesse 0 (DM 6642)
Si ce paramétrage n’est pas effectué, le compteur à grande vitesse 0 ne peut
pas être utilisé dans le programme.
Bit
15 0
DM 6642
Utiliser le compteur à grande vitesse 0.
Méthode de réinitialisation
0 : Phase Z et réinitialisation par programme
1 : Réinitialisation par programme
Mode d’entrée
0 : Mode phase bidirectionnelle
4 : Mode incrémentation
01
Par défaut : Compteur à grande vitesse 0
non utilisé.
La modification du paramétrage du DM 6642 ne devient effective que lorsque
l’alimentation est désactivée ou l’exécution du programme de l’API est démarrée.
Programmation Suivre les étapes suivantes pour programmer le compteur à grande vitesse 0.
Le compteur à grande vitesse 0 commence l’opération de comptage lorsque la
configuration correcte du Setup de l’API est effectuée, mais les comparaisons
ne sont pas effectuées avec le tableau de comparaison et les interruptions ne
sont pas produites à moins que l’instruction CTBL(63) soit exécutée.
Le compteur à grande vitesse 0 est à “0” lorsque l’alimentation est activée et
lorsque l’opération commence.
La valeur en cours du compteur à grande vitesse 0 est maintenue en SR 230 et
SR 231.
Contrôle des interruptions du compteur à grande vitesse 0
1, 2, 3... 1. Utiliser l’instruction CTBL(63) pour sauvegarder le tableau de comparaison
dans le CQM1H et commencer les comparaisons.
(@)CTBL(63) 000
C TB
C : (BCD à 3 digits)
000 : Régler le tableau cible et commencer la comparison
001 : Régler le tableau cible et commencer la comparison
002 : Régler le tableau cible seulement
003 : Régler le tableau cible seulement
TB : Début de mot du tableau de comparison
Si C est à 000, les comparaisons sont alors effectuées à l’aide de la
méthode de comparaison de cibles ; si C est à 001, alors elles sont effectuées à l’aide de la méthode de comparaison de plage. Le tableau de com-
41

1-4ChapitreFonctions d’interruption
paraison est sauvegardé et, lorsque l’opération de sauvegarde est terminée, alors les comparaisons commencent. Tandis que des comparaisons
sont exécutées, des interruptions à grande vitesse sont lancées en fonction
du tableau de comparaison. Pour plus d’informations sur les contenus des
tableaux de comparaison sauvegardés, se reporter à la présentation de
l’instruction CTBL(63) du Chapitre 5 Ensemble d’instruction.
Rem. Les résultats de comparaison sont normalement sauvegardés de
l’AR 1100 à l’AR 1 107 tandis que la comparaison de plage est exécu-
tée.
Si C est à 002, les comparaisons sont alors effectuées à l’aide de la
méthode de comparaison de cible ; si C à 003, elles sont alors effectuées
par la méthode de comparaison de plage. Pour l’un ou l’autre de ces paramétrages, le tableau de comparaison est sauvegardé, mais les comparaisons ne commencent pas, et l’instruction INI(61) doit être utilisée pour com-
mencer des comparaisons.
2. Pour arrêter les comparaisons, exécuter l’instruction INI(61) comme indiqué ci–dessous :
(@)INI(61) 000
001 000
Pour recommencer les comparaisons, régler le deuxième opérande à “000”
(exécuter la comparaison) et exécuter l’instruction INI(61).
Une fois qu’un tableau a été sauvegardé, il est enregistré dans le CQM1H
lors du fonctionnement (c.–à–d. pendant l’exécution du programme) aussi
longtemps qu’aucun autre tableau n’est sauvegardé.
Lecture de la PV
Il existe deux manières de lire la PV . La première est de la lire dans les SR 230 et
SR 231, et la deuxième est d’utiliser l’instruction PRV(62).
1, 2, 3... 1. Lecture de la PV.
La première est de la lire dans les SR 230 et SR 231, et la deuxième est
d’utiliser l’instruction PRV(62).
4 digits à
l’extrême gauche
SR 231 SR 230
4 digits
à l’extrême droite
Rem. Ces mots sont rafraîchis seulement une fois par cycle, pour ne pas
différer de la PV réelle.
Lorsque le compteur à grande vitesse 0 n’est pas utilisé, les bits dans ces
mots sont utilisés comme bits de travail.
2. Utilisation de l’instruction PRV(62)
Lire la P V d u compteur à grande vitesse 0 en utilisant l’instruction PRV(62).
Mode phase bidirectionnelle
F0032768 à 00032767
(–32 768)
Mode incrémentation
00000000 à 00065535
42
(@)PRV(62) 000
000 P1
P1 : Première adresse de mot de la PV

1-4ChapitreFonctions d’interruption
La PV du compteur à grande vitesse 0 est sauvegardée comme indiqué ci–
dessous. Le digit à l’extrême gauche est F pour les valeurs négatives.
4 digits à
l’extrême gauche
P1+1 P1
4 digits à
l’extrême droite
Mode phase bidirectionnelle
F0032768 à 00032767
(–32 768)
Mode incrémentation
00000000 à 00065535
La PV est lue lorsque l’instruction PRV(62) est réellement exécutée.
Modification de la PV
Il existe deux manières de modifier la PV du compteur à grande vitesse 0. La
première est de la réinitialiser en utilisant les méthodes de réinitialisation. Dans
ce cas la PV est remise à 0. La deuxième est d’utiliser l’instruction INI(61).
La méthode utilisant l’instruction INI(61) est expliquée ici. Pour l’explication de la
méthode de réinitialisation, se reporter au début de la description du compteur à
grande vitesse 0.
Modifier la PV de la temporisation en utilisant l’instruction INI(61) comme indi-
qué ci–dessous :
(@)INI(61) 000
002 D
4 digits à
l’extrême gauche
D+1 D F0032768 à 00032767 00000000 à 00065535
4 digits à
l’extrême droite
D : Première adresse du mot pour sauvegarder la PV des données
modifiées
Mode phase bidirectionnelle Mode incrémentation
Pour indiquer un nombre négatif, régler F dans le digit à l’extrême gauche.
Exemple de fonctionnement Cet exemple présente un programme pour utiliser le compteur à grande vitesse
0 en mode incrémentation, effectuer les comparaisons en appliquant la
méthode de comparaison de cibles et modifier la fréquence des sorties d’impulsions en fonction de la PV du compteur. A vant d’exécuter le programme, régler
le Setup de l’API comme suit :
DM 6642 : 0114 (compteur à grande vitesse 0 utilisé en réinitialisant le pro-
gramme et en mode incrémentation). Pour tous les autres Setup de l’API, utili-
ser le paramétrage par défaut. Les entrées ne sont pas rafraîchies au moment
du traitement de l’interruption et des sorties d’impulsions sont exécutées pour
l’IR 100.
43

25315 (ON pour 1 scan)
25313 (toujours ON)
1-4ChapitreFonctions d’interruption
En outre, les données suivantes sont sauvegardées pour le tableau de comparaison :
DM 0000 : 0002 — Nombre de conditions de comparaison : 2
DM 0001 : 1000 — Valeur spécifiée 1 : 1000
DM 0002 : 0000
DM 0003 : 0101 — Sous–programme d’interruption de la comparaison 1 : 101
DM 0004 : 2000 — Valeur spécifiée 1 : 2000
DM 0005 : 0000
DM 0006 : 0102 — Sous–programme d’interruption de la comparaison 2 : 102
CTBL(63) 000
000 DM 0000
SPED(64) 020
001 #0050
SBN(92) 101
SPED(64) 020
001 #0020
Sauvegarde le tableau de comparaison dans le format
correspondant aux cibles et commence à comparer.
Commence l a sortie d’impulsions continue de l’IR10002
à 500 Hz.
Lorsque la valeur du compteur à grande vitesse atteint 1000, le
sous–programme 101 est appelé et la fréquence de sortie d’impulsions est modifié en 200 Hz.
RET(93)
25313 (toujours ON)
SBN(92) 102
SPED(64) 020
001 #0000
RET(93)
Lorsque la valeur du compteur à grande vitesse atteint 2000, le
sous–programme 102 est appelé et la sortie d’impulsions est interrompue e n paramétrant la fréquence à 0.
Lorsque le programme est exécuté, l’opération est comme suit :
Fréquence d’impulsions (Hz)
500
200
0
Temps écoulés (s)
1-4-6 Dépassements positif/négatif du compteur à grande vitesse 0
Si la plage de comptage autorisée pour le compteur à grande vitesse 0 est
dépassée et les états de dépassements positif ou négatif se produisent et la PV
du compteur reste sur 0FFF FFFF pour des dépassements positifs et FFFF
FFFF pour des dépassements négatifs jusqu’à ce que les deux types d’états
soient supprimés en réinitialisant le compteur. Les plages de comptage autori-
sées sont les suivantes :
Mode de phase bidirectionnelle : F003 2768 à 0003 2767
Mode incrémentation : 0000 0000 à 0006 5535
44

1-4ChapitreFonctions d’interruption
Rem. 1. Les valeurs indiquées ci–dessus sont théoriques et supposent un temps de
cycle raisonnablement court. Les valeurs sont réellement celles existant
dans un cycle avant l’existence de dépassements positif/négatif.
2. Les 6ème et 7ème digits de la PV du compteur à grande vitesse 0 sont nor-
malement 00, mais peuvent être utilisés comme ”Drapeaux de dépasse-
ment positif/négatif” en détectant les valeurs au–delà des plages de comp-
tage autorisées.
Le compteur à grande vitesse 0 est réinitialisé comme décrit dans le chapitre
précédent ou est automatiquement réinitialisé en redémarrant le programme.
Le compteur à grande vitesse 0 et les fonctions s’y rapportant ne fonctionnent
pas normalement tant que l’état de dépassement positif/négatif n’est pas supprimé. Les fonctions en cours lors de l’état de dépassement positif/négatif sont
les suivantes :
• Le fonctionnement du tableau de comparaison s’arrête.
• Le tableau de comparaison n’est pas supprimé.
• Les programmes d’interruption du compteur à grande vitesse ne sont pas exé-
cutés.
• CTBL(63) est seulement utilisé pour enregistrer le tableau de comparaison. Si
une tentative est effectuée pour lancer la fonction du tableau de comparaison,
le tableau de comparaison n’est pas enregistré.
• INI(61) ne peut pas être utilisée pour démarrer ou interrompre la fonction du
tableau de comparaison ou pour modifier la valeur en cours.
• PRV(62) lit seulement 0FFF FFFF ou FFFF FFFF comme valeur en cours.
Récupération Utiliser les procédures suivantes pour récupérer l’état de dépassement positif/
négatif.
A partir du tableau de comparaison enregistré
1, 2, 3... 1. Réinitialiser le compteur.
2. Régler la PV avec au besoin PRV(62).
3. Régler le tableau de comparaison avec au besoin CTBL(63).
4. Démarrer le fonctionnement du tableau de comparaison avec INI(61).
Sans le tableau de comparaison enregistré
1, 2, 3... 1. Réinitialiser le compteur.
2. Régler la PV avec au besoin PRV(62).
3. Régler le tableau de comparaison et l’opération de démarrage avec au
besoin CTBL(63) et INI(61).
Rem. Les résultats de comparaison de plage de l’AR 11 demeurent après récupéra-
tion. Le programme d’interruption pour une condition d’interruption rencontrée
juste après la récupération n’est pas exécuté si la condition d’interruption a déjà
été rencontrée avant l’apparition de l’état de dépassement positif/négatif. Si
l’exécution du programme d’interruption est nécessaire, supprimer l’AR 11
avant de poursuivre.
Opération de
réinitialisation
Lorsque le compteur à grande vitesse 0 est réinitialisé, la PV est à 0, le comp-
tage commence de 0, et le tableau de comparaison, l’état d’exécution et les
résultats d’exécution sont maintenus.
Etat du compteur au
démarrage
Lorsque le compteur à grande vitesse 0 est démarré, le mode compteur dans le
Setup de l’API est lu et utilisé, la PV est à 0, l’état du dépassement positif/négatif
est supprimé, l’enregistrement du tableau de comparaison et l’état d’exécution
sont supprimés, les résultats d’exécution de plage sont également supprimés.
Les résultats d’exécution de plage sont toujours supprimés lorsque l’opération
est démarrée ou lorsque le tableau de comparaison est enregistré.
45

1-5ChapitreFonctionnement de la sortie d’impulsions
Etat du compteur à
l’arrêt
Lorsque le compteur à grande vitesse 0 est interrompu, la PV est maintenue,
l’enregistrement du tableau de comparaison et l’état d’exécution sont supprimés, et les résultats d’exécution de plage sont maintenus.
1-5 Fonctionnement de la sortie d’impulsions
Ce chapitre décrit le paramétrage et les méthodes d’utilisation des fonctions d e
la sortie d’impulsions de CQM1H. Se reporter au Manuel de programmation du
CQM1H pour plus d’informations sur les connexions du matériel aux points de
sortie et aux ports.
Des impulsions standard sont émises par la sortie d’une Unité de sortie transi-
stor en utilisant SPED(64). Des impulsions sont émises bit à bit. Le coefficient
cyclique de l a sortie d’impulsions est de 50% et la fréquence est réglée de 20 Hz
à 1 kHz.
Unité de sortie transistor
t
on
+ 50% (0, 5)
T
Caractéristiques
Unité concernée Unité de sortie transistor
Sortie d’impul-
sions
Aspect Fréquence : 20 Hz à 1 kHz
Instructions
concernées
Sortie d’impulsions de bit spécifié
Tout mot de sortie des IR 100 à IR 115 est spécifié, mais les
impulsions sont émises bit à bit.
Coefficient cyclique : 50%
Caractéristique du mot : Setup de l’API(DM 6615)
Caractéristique de bit : Dans l’instruction à
contacts
Paramétrage du nunéro des impulsions : PULS(65)
Démarrage de la sortie d’impulsions : SPED(64)
Modification de la fréquence : SPED(64)
Interruption de la sortie d’impulsions : SPED(64) ou INI(61)
Unité de sortie transistor
Pilote du moteur
24 V c.c.
46

1-5ChapitreFonctionnement de la sortie d’impulsions
Fonctionnement de
sortie d’impulsions
Le tableau suivant indique les opérations de sortie d’impulsions s’effectuant
avec les combinaisons de PULS(65), de SPED(64) et d’INI(61).
Modification de fréquence Instruction Paramétrage d’opérande
Commencer la sortie d’impulsions à la
fréquence indiquée.
Des sorties sans interruption (mode continu)
ou jusqu’ au nombre indiqué d’impulsions
sont émises (mode indépendant).
(Exécuter PULS(65) et puis SPED(64) en
utilisant le mode indépendant).
Modifier la fréquence (dans les pas) des
impulsions émises.
Arrêter la sortie d’impulsions avec une
instruction.
(Exécuter SPED(64) ou INI(61)).
PULS(65) Nombre d’impulsions
(mode indépendant seulement)
SPED(64) Port
Mode
Fréquence
SPED(64) Port
Mode
Fréquence
SPED(64) Port
Fréquence = 0
INI(61) Mot de commande=003
Rem. Une Unité de sortie transistor doit être utilisée pour cette application.
Lors de l’émission des impulsions à partir d’un point de sortie, la fréquence est
modifiée par pas en exécutant SPED(64) de nouveau avec différentes fréquences, comme indiqué dans le schéma suivant :
Procédure
Fréquence
Temps
Les impulsions sont émises d’une sortie en mode continu ou en mode indépendant.
Mode continu
Les impulsions sont émises sans interruption jusqu’à ce qu’elles soient arrêtées
avec SPED(64) ou INI(61).
Mode indépendant
La sortie d’impulsions s’interrompt automatiquement une fois que le nombre
d’impulsions indiquées en SPED(64) a été émis. La sortie d’impulsions peut
également être arrêtée prématurément avec SPED(64) ou INI(61)).
Suivre les étapes décrites ci–dessous lors de l’émission des impulsions à partir
d’une Unité de sortie transistor. Les impulsions sont émises à partir d’un seul
bornier à la fois de l’Unité de sortie transistor.
1, 2, 3... 1. Déterminer le mot IR (IR 100 à IR 115) à utiliser pour la sortie d’impulsions.
2. Câbler l’Unité de sortie transistor. Câbler le bornier correspondant au bit uti-
lisé réellement dans le mot sélectionné.
3. Régler l’adresse IR du mot voulu dans le DM 6615 du Setup de l’API. Le
paramétrage BCD de 0000 à 0015 correspond aux IR : IR 100 à IR 115 (voir
la page 48 pour plus d’informations).
4. Programmer les sections de programme associées.
a) PULS(65) est utilisée pour régler le nombre de sortie d’impulsions.
b) SPED(64) est utilisée pour commander la sortie d’impulsions (une
impulsion émise sans accélération ni décélération).
47

Nombre d’impulsions
c) INI(61) est utilisée pour interrompre la sortie d’impulsions.
Sortie d’impulsions transistor (à
partir d’une unité de sortie affectée
à un mot entre les IR 100 et
IR 115)
Fréquence
1-5ChapitreFonctionnement de la sortie d’impulsions
Sortie
d’impulsions
Programme à contacts
IMPULSIONS PARAMETREES
Règle le nombre d’impulsions émises (BCD à
8 digits).
COMMANDE DE MODE
Interromp la sortie
d’impulsions.
Paramétrage du Setup de
l’API
Programme à contacts
VITESSE D’EMISSION
Règle le mode sortie (continu ou
indépendent).
Règle la fréquence d’impulsions
(20 Hz à 1 kHz).
Démarre la sortie d’impulsions.
Chaque cycle
Etat de sortie
d’impulsions
Setup de l’API
DM 6615
bits 00 à 07
Avant d’exécuter SPED(64) pour émettre des impulsions à partir d’une Unité de
sortie, régler l’API en mode PROGRAM et effectuer le paramétrage suivant
dans le Setup de l’API :
Dans le DM 6615, indiquer le mot de sortie utilisé pour l’émission d’impulsions
SPED(64) vers les unités de sortie. Le bit est indiqué dans le premier opérande
de SPED(64).
Le contenu de DM 6615 (0000 à 0015) indique les mots de sortie de l’IR 100 à
l’IR 115. Par exemple, si le DM 6615 est à 0002, les impulsions sont émises sur
l’IR 102.
Bit
15 0
DM 6615
00
Toujours 00
Mot de sortie
(BCD à l’extrême droite à 2 digits) : 00 à 15
Par défaut : Sortie d’impulsions sur l’IR 100.
Sortie d’impulsions continue Les impulsions commencent à être émises au bit de sortie indiqué lorsque
SPED(64) est exécutée. Régler le bit de sortie de 00 à 15 (D=000 à 150) et la
fréquence de 20 Hz à 1000 Hz (F=0002 à 0100). Régler le mode en mode
continu (M=001).
Condition d’exécution
@SPED(64)
D
M
F
La sortie d’impulsions est arrêtée en exécutant INI(61) avec C=003 ou en exé-
cutant SPED(64) de nouveau avec la fréquence à 0. La fréquence est modifiée
en exécutant SPED(64) de nouveau avec un paramétrage de fréquence diffé-
rent.
48

1-6ChapitreFonctions de communication
Paramétrage du nombre
d’impulsions
Le nombre total d’impulsions émis est réglable par PULS(65) avant d’exécuter
SPED(64) en mode indépendant. La sortie d’impulsions s’arrête automatiquement lorsque le nombre d’impulsions réglé par PULS(65) a été émis.
Condition d’exécution
@PULS(65)
000
000
P1
PULS(65) règle le nombre d’impulsions à 8 digits P1+1, P1. Ces impulsions sont
réglées de 00000001 à 16777215. Le nombre d’impulsions réglé par PULS(65)
est atteint lorsque SPED(64) est exécutée en mode indépendant. Le nombre
d’impulsions ne peut pas être modifié pour les impulsions en cours d’émission.
Condition d’exécution
@SPED(64)
D
M
F
Lorsque SPED(64) est exécutée, les impulsions commencent à être émises a u
bit de sortie spécifié (D=000 à 150 : bit 00 à 15) à la fréquence indiquée (F=0002
à 0100 : 20 Hz à 1000 Hz). Régler le mode en mode indépendant (M=000) pour
émettre le nombre d’impulsions réglé par PULS(65). La fréquence peut être
modifiée en exécutant SPED(64) de nouveau avec un paramétrage de fréquence différent.
Modification de fréquence La fréquence de sortie d’impulsions peut être modifiée en exécutant SPED(64)
de nouveau avec un paramétrage de fréquence différent. Utiliser les mêmes bits
de sortie (P) et le paramétrage du mode (M) utilisés pour démarrer la sortie d’im-
pulsions. La nouvelle fréquence peut être une fréquence de 20 Hz à 1000 Hz
(F=0002 à 0100).
1-6 Fonctions de communication
Le tableau suivant présente les modes de communication pris en charge par les
ports de communication de l’unité centrale CQM1H. L’unité centrale
CQM1H–CPU11 n’est pas équipée d’un port RS–232C.
Le paramétrage du Setup de l’API et les procédures de communication pour ces
modes de communication sont décrits plus loin dans ce chapitre.
49

1-6ChapitreFonctions de communication
Communication Usage
Bus de console de
programmation
Bus de périphérique Connexion à un ordinateur
Liaison à l’ordinateur Liaison à l’ordinateur ou
Protocole–Macro Transfert de données avec les
Sans protocole Communication sans protocole
Liaison de donnée 1:1 Établissement d’une liaison de
Liaison NT en
mode 1:1
Liaison NT en
mode 1:N
Connexion à une console de
programmation.
avec le logiciel SYSWIN.
connexion à la console de
programmation.
périphériques externes standard en utilisant un protocole
arbitraire.
avec périphériques externes
standard.
données 1:1 avec une autre
unité centrale.
Établissement une liaison de
données 1:1 avec un terminal
programmable.
Établissement une liaison de
données 1:1 avec une console
de programmation ou une connexion 1:N avec deux terminaux programmables ou plus.
Périphéri-
OUI Non
OUI Non
OUI OUI
Non Non
OUI OUI
Non OUI
Non OUI
Non Non
Port
RS-232C
que
(Voir
Rem.).
Rem. 1. Les fonctions du terminal programmable peuvent être utilisées, mais le
sélecteur 7 du micro–interrupteur doit être à ON.
2. Passer à ON le sélecteur 7 du micro–interrupteur de l’unité centrale lors de
l’utilisation du port périphérique de n’importe quel périphérique autre qu’une
console de programmation.
1-6-1 Paramétrage de la liaison à l’ordinateur et des communications
sans protocole
Ce paragraphe présente le paramétrage du Setup de l’API partagé par la liaison
à l’ordinateur et les modes de communication sans protocole. Effectuer le para-
métage voulu du Setup de l’API avant d’essayer de réaliser la liaison à l’ordina-
teur et aux communication sans protocole.
Rem. Si le sélecteur 5 du micro–interrupteur du CQM1H est passé à ON, les paramè-
tres des communications du Setup de l’API sont ignorés et le paramétrage sui-
vant est utilisé :
Paramètre Paramétrage lorsque le sélecteur 5 du
micro–interrupteur est sur ON
Modes de communication
Numéro de station 00
Bits de démarrage 1 bit
Longueur des données 7 bits
Bits d’arrêt 2 bits
Parité Pair
Vitesse 9 600 bps
Durée de transmission Aucune
Les paramètres du Setup de l’API du DM 6645 au DM 6654 sont utilisés pour
paramétrer les ports de communication.
Liaison à l’ordinateur
50

1-6ChapitreFonctions de communication
Paramétrage des
communications
(DM 6645 et DM 6650)
Le paramétrage des DM 6645 et DM 6650 détermine les paramètres principaux
de communication, comme indiqué dans le schéma suivant :
Bit
15 0
DM 6645 : port RS-232C
DM 6650 : port périphérique
Modes d e communication
0 : Liaison à l’ordinateur
1 : Sans protocole
2 : Liaison de données Esclave inter API*
3 : Liaison de données Maître inter API*
4 : Liaison NT en mode 1:1*
Mots de liaison pour liaison de
données 1:1*
0 : LR 00 à LR 63
1 : LR 00 à LR 31
2 : LR 00 à LR 15
Paramétrage de
commande CTS
0 : Désactivé
1 : Activé
Paramétrage de port
0 : Conditions de communication standard
1 : Selon le paramétrage : DM 6646 ou DM 6651
Par défaut (0000) : Liaison à l’ordinateur utilisant les paramètres
standard, sans commande CTS
Rem. *Ce paramétrage est effectué pour le port RS-232C (DM 6645),
mais pas pour le port périphérique (DM 6650).
Paramétrage des
communications
(DM 6646 et DM 6651)
Lorsque le sélecteur 5 du micro–interrupteur de l’unité centrale est à OFF et le
paramétrage du D M 6646 (ou du DM 6651) est permis das le DM 6645 (ou le DM
6650), le paramétrage détermine le format de la trame de transmission et la
vitesse, comme indiqué dans le schéma suivant :
Bit
DM 6646 : Port RS-232C
DM 6651 : Port périphérique
Format d e trame de transmission
(voir tableau ci–dessous).
Vitesse (voir tableau ci–dessous).
Par défaut : conditions de communication standard.
15 0
Format de trame de transmission
Configuration Bits d’arrêt Longueur des
données
00 1 7 1 Pair
01 1 7 1 Impair
02 1 7 1 Aucun
03 1 7 2 Pair
04 1 7 2 Impair
05 1 7 2 Aucun
06 1 8 1 Pair
07 1 8 1 Impair
08 1 8 1 Aucun
09 1 8 2 Pair
10 1 8 2 Impair
11 1 8 2 Aucun
Bits d’arrêt Parité
51

Vitesse
TXD(48), il n’envoie pas de nouvelles données tant
Paramétrage Vitesse
00 1 200 bps
01 2 400 bps
02 4 800 bps
03 9 600 bps
04 19 200 bps
1-6ChapitreFonctions de communication
Retard de transmission
(DM 6647 et DM 6652)
Retard de transmission
Selon les périphériques connectés au port de communication, il peut s’avérer
nécessaire d’accorder un certain temps pour la transmission. Lorsque le cas se
présente, régler le retard de transmission pour adopter le délai nécessaire.
Bit
15 0
DM 6647 : Port RS-232C
DM 6652 : Port périphérique
Retard de tansmission
(BCD à 4 digits ; unité : 10 ms)
Par défaut : Sans retard
Le retard de transmission est réglé dans le Setup de l’API pour créer un inter-
valle minimal entre les envois de données depuis l’API. Le retard de transmission est utilisé pour les modes de communication série suivants :
Mode de communication
série
Réponses de la liaison à
l’ordinateur
Communication initiée par
l’API de liaison à l’ordinateur
Communication sans
protocole
Dès que l’API a envoyé une réponse à l’ordinateur, il
n’envoie pas de nouvelle réponse tant que le délai
défini pour le retard de transmission n’a pas pris fin.
Dès que l’API a envoyé des données en utilisant
TXD(48), il n’envoie pas de nouvelles données tant
que le délai défini pour le retard de transmission n’a
pas pris fin.
Application
Le retard n’est pas utilisé lorsque les données sont envoyées pour la première
fois de l’API. Le retard affecte les autres envois seulement si la durée normale
pour l’envoi survient avant l’expiration du délai défini pour le retard de transmission.
Si le temps de retard est déjà expiré lorsque les prochains envois sont prêts, les
données sont immédiatement envoyées. Si le temps de retard n’est pas expiré,
l’envoi est retardé jusqu’à l’expiration du délai défini pour le retard de transmission.
L’opération d u retard de transmission pour l’envoi des données de l’API est illus-
trée ci–dessous :
Retard de transmission Retard de transmission
Envoi de réponse/
données
1er envoi de
l’API
2ème envoi
de l’API
1-6-2 Procédures et paramétrage des communications de la liaison à
l’ordinateur
Paramétrage du Setup de
l’API
52
Envoi de réponse/
données
Envoi de réponse/
données
3ème envoi
de l’API
Envoi de réponse/
données
4ème envoi
de l’API
Temps
Ce paragraphe présente le paramétrage du Setup de l’API et la procédure exigée pour des communications de la liaison à l’ordinateur.
S’assurer d’écrire 00 dans les digits à l’extrême gauche du DM 6645 (port
RS–232C) ou d u D M 6650 (port périphérique) pour indiquer les communications

1-6ChapitreFonctions de communication
de la liaison à l’ordinateur. D’autres paramètres de communications de liaison à
l’ordinateur sont réglés dans les deux digits à l’extrême droite des DM 6645/DM
6650 et des DM 6646/DM 6651.
Un nombre de station doit être défini pour des communications de liaison à l’ordinateur afin de différencier les stations lorsque plusieurs stations participent
aux communications. Ce paramétrage est exigé seulement pour des communications de liaison à l’ordinateur .
Bit
DM 6648 : Port RS-232C
DM 6653 : Port périphérique
Nombre d e stations (BCD à 2 digits) : 00 à 31
Par défaut : 00
Le nombre de station est normalement à 00. Un autre paramétrage n’est pas
exigé à moins que plusieurs stations soient reliées en réseau.
15 0
00
Aspect général des
communications de la
liaison à l’ordinateur
Procédures de
communication
Les communications de liaison à l’ordinateur sont développées par OMRON
afin de relier des API et un ou plusieurs ordinateurs par un câble RS–232C, et
pouvoir commander les communications de l’API à partir de l’ordinateur. Normalement, l’ordinateur transmet un ordre à l’API, et l’API renvoie automatique-
ment une réponse. Ainsi les communications sont effectuées sans implication
active des API. Les API ont également la capacité d’initialiser les transmissions
de données lorsqu’ une implication directe est nécessaire.
En général, il existe deux moyens de mettre en application des communications
de liaison à l’ordinateur. L’un des moyens est basé sur des commandes de
mode C, et l’autre sur les commandes FINS (mode CV). Le CQM1H prend en
charge uniquement les commandes de mode C. Pour plus d’informations sur
des communications de liaison à l’ordinateur, se reporter au Chapitre 6 Com-
mandes de liaison à l’ordinateur.
Ce paragraphe explique comment utiliser la liaison à l’ordinateur pour effectuer
des transmissions de données à partir de CQM1H. Utiliser cette méthode per-
met la transmission de données automatique à partir du CQM1H lorsque les
données sont modifiées, et simplifie ainsi les procédure de communication en
éliminant la surveillance constante de l’ordinateur.
1, 2, 3... 1. Vérifier que l’AR 0805 (drapeau activé de transmission par port RS–232C)
est à ON.
2. Utiliser l’instruction TXD(48) pour transmettre les données.
(@)TXD(48) S
C N
S : Première adresse du mot de données de transmission
C : Données de commande
0000 : Port RS-232C
1000 : Port périphérique
N : Nombre d’octets des données à envoyer (BCD à 4 digits)
0000 à 0061
A partir du moment où l’instruction est exécutée jusqu’à ce que la transmission
de données soit terminée, l’AR 0805 (ou l’AR 0813 pour le port périphérique)
reste à OFF. Elle bascule à ON de nouveau dès l’accomplissement de la trans-
mission de données. L’instruction TXD(48) ne fournit pas de réponse, ainsi pour
recevoir la confirmation que l’ordinateur a reçu les données, le programme de
l’ordinateur doit être écrit afin d’aviser lorsque des données sont écrites en pro-
venance du CQM1H.
53

1-6ChapitreFonctions de communication
La trame de données de transmission concerne les données transmises dans le
mode liaison à l’ordinateur au moyen de l’instruction TXD(48), comme indiqué
ci–dessous :
@ EX
x 10
1
x 10
Nº de
station
0
Code d’en-tête
(doit être “EX”)
Données (jusqu’à 122 caractères)
FCS Terminaison
↵
Pour réinitialiser le port RS–232C (c.-à-d. rétablir l’état initial), passer le SR
25209 à ON. Pour réinitialiser le port périphérique, passer le SR 25208 à ON.
Ces bits passent automatiquement à OFF après la réinitialisation.
Si l’instruction TXD(48) est exécutée tandis que le CQM1H est au milieu d’une
réponse à une commande de l’ordinateur, la transmission de réponse est
d’abord terminée avant d’exécuter la transmission selon l’instruction TXD(48).
Dans tous les autres cas, la transmission de données basée sur l’instruction
TXD(48) passe en priorité.
Exemple d’application Cet exemple présente le programme nécessaire pour utiliser le port RS–232C
dans le mode liaison à l’ordinateur afin de transmettre 10 octets de données
(DM 0000 au DM 0004). Les valeurs par défaut concernent l’ensemble du Setup
de l’API (c.-à.-d. le port RS–232C est utilisé en mode liaison à l’ordinateur, le
numéro de station est 00 et les conditions de communication standard sont utilisées). Du DM 0000 au DM 0004, ”1234” est sauvegardé dans chaque mot. A
partir de l’ordinateur, lancer un programme pour recevoir les données de
CQM1H aux conditions de communication standard.
00100 AR0805
@TXD(48) DM 000
0 #0000
#0010
Si l’AR 0805 (le drapeau transmission activée)
est à ON lorsque l’IR 00100 passe à ON, les
dix octets de données (DM 0000 au DM 0004)
sont transmis.
54

Le type de programme présenté ci–après doit être préparé dans l’ordinateur
pour la réception des données. Ce programme permet à l’ordinateur de lire et
d’afficher les données reçues de l’API tandis qu’une commande de lecture de la
liaison à l’ordinateur est lancée pour lire les données provenant de l’API.
10 ’CQM1H SAMPLE PROGRAM FOR EXCEPTION
20 CLOSE 1
30 CLS
40 OPEN ”COM :E73” AS #1
50 KEYIN
60 INPUT ”DATA ––––––––”,S$
70 IF S$=” ” THEN GOTO 190
80 PRINT ”SEND DATA = ” ;S$
90 ST$=S$
100 INPUT ”SEND OK? Y or N?=”,B$
110 IF B$=”Y” THEN GOTO 130 ELSE GOTO KEYIN
120 S$=ST$
130 PRINT #1,S$ ’Emet la commande à l’API
140 INPUT #1,R$ ’Reçoit la réponse de l’API
150 PRINT ”RECV DATA = ” ;R$
160 IF MID$(R$,4,2)=”EX” THEN GOTO 210
’Identifie la commande de l’API
170 IF RIGHT$(R$,1)<>” ” THEN S$=” ” :GOTO 130
180 GOTO KEYIN
190 CLOSE 1
200 END
210 PRINT ”EXCEPTION!! DATA”
220 GOTO 140
Les données reçues par l’ordinateur sont comme indiquées ci–dessous
(la FCS est “59”).
“@00EX1234123412341234123459 CR
”
1-6ChapitreFonctions de communication
1-6-3 Procédures et paramétrage de communication sans protocole
Ce paragraphe explique le paramétrage du Setup de l’API et la procédure exigée pour des communications sans protocole. Les communications sans protocole permettent aux données d’être échangées avec les périphériques standard. Par exemple, les données peuvent être émises vers l’imprimante ou
reçues d’un lecteur de code barres.
Paramétrage du Setup de
l’API
S’assurer d’écrire 10 dans les digits à l’extrême gauche du DM 6645 (port
RS–232C) ou du DM 6650 (port périphérique) pour préciser les communications sans protocole. D’autres paramètres de communication sont réglés sur les
deux digits à l’extrême droite des DM 6645/DM 6650 et des DM 6646/DM 6651.
Les codes de début et de fin ou la quantité des données reçues peuvent être
réglés comme indiqué dans les diagrammes suivants, si nécessaire, pour des
communications sans protocole. Ce paramétrage est nécessaire seulement
pour des communications sans protocole. Ce paramétrage est valable seulement lorsque le sélecteur 5 du micro–interrupteur est à OFF.
55

1-6ChapitreFonctions de communication
Activation des codes de début et de fin
Bit
DM 6648 : Port RS-232C
DM 6653 : Port périphérique
Code de f i n
0 : Non réglé (quantité de données reçue spécifiée).
1 : Réglé (code de fin spécifié).
2 : CR/LF
Code de début
0 : Non réglé
1 : Réglé (code de début spécifié).
Par défaut : Sans code de début ou de fin (Spécifer le nombre d’octets
reçus).
Indiquer si un code de début est ou non à régler au début des données, et si un
code de fin est ou non à régler à la fin des données. Au lieu de régler le code de
fin, indiquer le nombre d’octets à recevoir avant que l’opération de réception se
termine. Les codes et le nombre d’octets de données à recevoir sont réglés
dans le DM 6649 ou le DM 6654.
Paramétrage du code de début, du code de fin et de la quantité de
données reçues
15 0
00
Procédures de communication
1, 2, 3... 1. Vérifier que l’AR 0805 (le drapeau activé de la transmission du port
Bit
DM 6649 : Port RS-232C
DM 6654 : Port périphéri-
que
Code de fin ou nombre d’octets à recevoir
Pour le code de fin : (00 à FF)
Pour le quantité de données reçues : hexadécimal à 2 digits,
00 à FF (00 : 256 octets)
Code de début 00 à FF
Par défaut : Sans code de début ; réception de données terminée
à 256 octets.
15 0
Transmissions
RS–232C) passe à ON.
2. Utiliser l’instruction TXD(48) pour transmettre les données.
(@)TXD(48) S
C N
S : Mot d’en-tête de données à transmettre
C : Données de commande
N : Nombre d’octets à transmettre (BCD à 4 digits), 0000 à 0256
56
Entre le moment où l’instruction est exécutée jusqu’à ce que la transmission de
données soit terminée, l’AR 0805 (ou l’AR0813 pour le port périphérique) reste à
OFF. Cette zone s’allume de nouveau lorsque la transmission de données est
terminée.

1-6ChapitreFonctions de communication
Les codes de début et de fin ne sont pas inclus lorsque le nombre d’octets à
transmettre est défini. La plus grande transmission pouvant être effectuée avec
ou sans code de début et de fin dans 256 octets, est N comprid entre 254 et 256
octets selon les désignations des codes de début et de fin. Si le nombre d’octets
à transmettre est à 0000, seuls les codes de début et de fin sont transmis.
256 octets max.
Code de d ébut Données Code de fin
Pour réinitialiser le port de RS–232C (c.-à-d. rétablir le statut initial), passer le
SR 25209 à ON. Pour réinitialiser le port périphérique, passer le SR 25208 à
ON. Ces bits basculent automatiquement à OFF après la réinitialisation.
Réceptions
1, 2, 3... 1. Confirmer le passage à ON de l’AR 0806 (drapeau terminé de la réception
de RS–232C) ou de l’AR 0814 (drapeau terminé de la réception périphérique).
2. Utiliser l’instruction RXD(47) pour recevoir les données.
(@)RXD(47) D
C N
D : Mot d’en–tête pour sauvegarder les données reçues
C : Données de commande
Bits 00 à 03
0 : Premiers octets à l’extrême gauche
1 : Premiers octets à l’extrême doite
Bits 12 à 15
0 : Port RS-232C
1 : Port périphérique
N : Nombre d’octets sauvegardés (BCD à 4 digits), 0000 à 0256
3. Les résultats de lecture des données reçues sont sauvegardés dans la
zone AR. Vérifier que l’opération s’est terminée avec succès. Le contenu
des bits est réinitialisé chaque fois que RXD(47) est exécutée.
Port
RS-232C
AR 0800 à
AR 0803
AR 0804 AR0812 Erreur de communication
AR 0807 AR0815 Drapeau de dépassement à la réception. (Une
AR 09 AR10 Nombre d’octets reçu (BCD à 4 digits)
Port périphérique
AR 0808 à
AR 0811
Erreur
Code d’erreur du port RS-232C (BCD à 1 digit)
0 : Normalement terminé ; 1 : Erreur de parité ;
2 : Erreur de trame ; 3 : erreur de dépassement
fois la réception terminée, les données concernées sont reçues avant la lecture des données
par l’instruction RXD(47)).
Pour réinitialiser le port RS–232C (c.-à-d. rétablir le statut initial), passer le
SR 25209 à ON. Pour réinitialiser le port périphérique, passer le SR 25208 à
ON. Ces bits basculent automatiquement à OFF après la réinitialisation.
Le code de début et le code de fin ne sont pas inclus dans l’AR 09 ou l’AR 10
(nombre d’octets reçus).
Exemple d’application Cet exemple présente un programme d’utilisation du port RS–232C en mode
sans protocole transmettant 10 octets de données (DM 0104 au DM 0100) à
l’ordinateur, et sauvegardant les données reçues de l’ordinateur dans la zone
DM commençant par le DM 0200. Avant d’exécuter le programme, le paramé-
trage du Setup de l’API à effectuer est le suivant :
57

1-6ChapitreFonctions de communication
DM 6645 : 1000 (port RS-232C en mode sans protocole ; conditions standard de
communication)
DM 6648 : 2000 (Sans code de début ; CR/LF en code de fin)
Les valeurs par défaut sont définies pour tous les autres paramètres du Setup
de l’API. Du DM 0104 au DM 0100, 3132 est sauvegardé dans chaque mot. A
partir de l’ordinateur, lancer le programme pour recevoir les données du
CQM1H avec les conditions standard de communication.
00100
00101 AR0805
AR0806
Les données sont les suivantes : “31323132313231323132CR LF”
DIFU(13) 00101
@TXD(48) DM 010
0 #0000
#0010
@RXD(47) DM 020
0 #0000
AR09
Si l’AR 0805 (drapeau activé de transmission)
est à ON lorsque l’IR 00100 passe à ON, les dix
octets de données (DM 0100 au DM 0104) sont
transmis, premier octets à l’extrême gauche.
Lorsque l ’AR 0806 (drapeau terminé de réception)
passe à ON, le nombre d’octets de données spéci-
fiées dans l’AR 09 est lu à partir du buffer de récep-
tion CQM1H et sauvegardé dans la mémoire de
démarrage du DM 0200, premier octets à
l’extrême gauche.
1-6-4 Liaisons de données inter API
Si un CQM1H est relié à une autre unité centrale par son port RS–232C, ils peuvent partager des zones LR communes. Un des API sert de maître et l’autre
d’esclave. Un CQM1H peut être relié à n’importe lequel des API suivants :
CQM1H, CQM1, C200HX/HG/HE, C200HS, CPM1, CPM1A, CPM2A, CPM2C
ou SRM1(–V2).
Rem. Le port périphérique n’est pas utilisé pour des liaisons de données 1:1. Utiliser le
port intégré RS–232C de l’unité centrale ou l’un des ports RS–232C ou
RS–422A/485 de la carte de communication série.
Liaisons de données
inter API
Zone maître
Zone esclave
Une liaison de données 1:1 permet aux deux CQM1H de partager les données
communes dans leurs zones LR. Comme illustré dans le schéma ci-dessous,
lorsque des données sont écrites dans un mot de la zone LR d’une des Unités
reliées, il est automatiquement écrit à l’identique dans le même mot de l’autre
Unité. Chaque API a des mots spécifiques dans lesquels il peut écrire et des
mots spécifiques écrits par l’autre API. Chacun peut lire, mais ne peut pas écrire
dans les mots écrits par l’autre API.
Maître Esclave
Ecrire “1”
Ecrit automatiquement.
Zone esclave
1
11
Ecrire
Zone maître
58
Le mot utilisé par chaque API dépend, comme indiqué dans le tableau suivant,
du paramétrage du maître, de l’esclave et des mots de liaison. Régler la zone de
liaison du LR 15 au LR 00, si le CQM1H est relié avec un API CPM1, CPM1A,
CPM2A ou SRM1(–V2).
Paramétrage du
DM 6645
LR 00 à LR 15 LR 00 à LR 07 LR 08 à LR 15
LR 00 à LR 31 LR 00 à LR 15 LR 16 à LR 31
LR 00 à LR 63 LR 00 à LR 31 LR 32 à LR 63
Zone maître Zone esclave

1-6ChapitreFonctions de communication
Paramétrage du Setup de
l’API
Pour utiliser une liaison de données 1:1, le seul paramétrage nécessaire
concerne le mode de communication et les mots de liaison. Régler le mode de
communication pour un des API, en tant que liaison de données 1:1 maître et
pour l’autre en tant que liaison de données 1:1 esclave, puis régler les mots d e
liaison dans l’API désigné comme maître.
Bit
15 0
DM 6645
Mode de communication
2 : Liaison de données inter API esclave
3 : Liaison de données inter API maître
Mots de liaison
0 : LR 00 à LR 63
1 : LR 00 à LR 31
2 : LR 00 à LR 15
Par défaut : Mode de communication = 0 (Liaison à l’ordinateur)
00
Rem. Ce paramétrage est valable seulement lorsque le sélecteur 5 du micro–interrup-
teur de l’unité centrale est à OFF. Les bits 08 à 11 sont valables seulement pour
la liaison de données 1:1 maître.
Procédure de communication Si le paramétrage pour le maître et l’esclave sont effectués correctement, la liai-
son de données inter API démarre automatiquement en alimentant les deux unités centrales et le fonctionnement est indépendant des modes de fonctionnement des unités centrales.
Erreurs de liaison Si un esclave ne reçoit pas de réponse du maître dans un délai d’une seconde,
le drapeau erreur de liaison de données 1:1 (AR 0802) et le drapeau erreur de
communication (AR 0804) passent à ON.
Exemple d’application Cet exemple présente un programme de vérification des conditions d’exécution
d’une liaison de données inter API utilisant les ports RS–232C. Avant d e lancer
le programme, régler les paramètres suivants du Setup de l’API :
Maître : DM 6645 : 3200
(liaison de données maître 1:1 ; zone utilisée : LR 15 à LR 00)
Esclave : DM 6645 : 2000
(liaison de données esclave 1:1)
Tous les autres paramètres du Setup de l’API sont définis par défaut. Les mots
utilisés pour la liaison de données inter API sont comme indiqué ci–dessous :
LR 00
LR 07
LR 08
LR 15
Maître
Zone d’écriture
Zone de lecture
Esclave
Zone de lecture
Zone d’écriture
LR 00
LR 07
LR 08
LR 15
Lorsque le programme est lancé à la fois pour le maître et l’esclave, l’état de
l’IR 001 de chaque Unité est repris dans l’IR 100 de l’autre Unité. De même,
l’état de l’autre IR 001 de l’Unité est repris dans l’IR 100 de chaque Unité.
L’IR 001 est un mot d’entrée et l’IR 100 est un mot de sortie.
59

Dans le maître
Dans l’esclave
1-6ChapitreFonctions de communication
25313 (toujours ON)
MOV(21) 001
LR00
MOV(21) LR08
100
25313 (toujours ON)
MOV(21) 001
LR08
MOV(21) LR00
100
1-6-5 Communication en mode 1:1 liaison NT
Ce paragraphe présente les communications avec un terminal programmable à
partir du mode de communication réglé en mode 1:1 liaison NT. Le port périphé-
rique ne peut pas être utilisé pour des communications de liaison NT.
Paramétrage Régler le mode de communication en mode 1:1 liaison NT en paramétrant les
DM 6645 au DM 4000. S’assurer que le sélecteur 5 du micro–interrupteur est à
OFF.
Pour plus d’informations sur le paramétrage du terminal programmable, se
reporter au Manuel de programmation du teminal programmable.
Aspect général des
communications en
mode liaison 1:1 NT
Procédure de
communication
Des communications en liaison NT ont été développées par OMRON pour fournir des communications à grande vitesse entre l’API et un terminal programmable. Il existe deux types de communication en liaison NT : en mode 1:1 où un
terminal programmable est connecté à l’API et en mode 1:N où plusieurs termi-
naux programmables sont connectés à l’API. Les ports intégrés RS–232C du
CQM1H prennent en charge seulement les communications en mode 1:1, mais
les modes 1:1 et 1:N peuvent tous deux être utilisés si une carte de communication série est installée dans l’API.
Quelques terminaux programmables sont équipés des fonctions de la console
de programmation permettant au terminal programmable de programmer et de
surveiller le CQM1H. Les fonctions console de programmation du terminal programmable ne peuvent pas être utilisées si une console de programmation est
connectée au port périphérique du CQM1H. Se reporter au Manuel de programmation du terminal programmable pour plus d’information sur son fonctionnement.
Avec des communications de liaison NT, l’API répond automatiquement aux
commandes provenant du terminal programmable et ainsi la programmation
des communications n’est pas nécessaire dans le CQM1H et il n’y a aucune procédure de communication de liaison NT à effectuer.
1-6-6 Câblage des ports
Se reporter au Manuel de programmation du CQM1H pour plus d’informations
sur le câblage des ports de communication.
60

1-7 Calcul avec les données binaires signées
Les API CQM1H permettent des calculs sur des données binaires signées. Les
instructions suivantes manipulent des données binaires signées en utilisant des
compléments à 2.
Les instructions binaires signées suivantes sont disponibles dans les API
CQM1H :
Instructions de mots simples
• COMPLEMENT A 2 (2’S COMPLEMENT) – NEG(––)
• ADDITION BINAIRE (BINARY ADD) – ADB(50)
• SOUSTRACTION BINAIRE (BINARY SUBTRACT) – SBB(51)
• MULTIPLICATION BINAIRE SIGNEE
(SIGNED BINARY MULTIPLY) – MBS(––)
• DIVISION BINAIRE SIGNEE (SIGNED BINARY DIVIDE) – DBS(––)
Instructions de mots doubles (long)
• DOUBLE COMPLEMENT A 2 (DOUBLE 2’S COMPLEMENT) – NEGL(––)
• DOUBLE ADDITION BINAIRE (DOUBLE BINARY ADD) – ADBL(––)
• DOUBLE SOUSTRACTION BINAIRE
(DOUBLE BINARY SUBTRACT) – SBBL(––)
• DOUBLE MULTIPLICATION BINAIRE SIGNEE
(DOUBLE SIGNED BINARY MULTIPLY) – MBSL(––)
• DOUBLE DIVISION BINAIRE SIGNEE
(DOUBLE SIGNED BINARY DIVIDE) – DBSL(––)
1-7ChapitreCalcul avec les données binaires signées
1-7-1 Définition des données binaires signées
Le CQM1H fournit les instructions fonctionnant dans un ou deux mots de données. Des données binaires signées sont manipulées en utilisant les compléments à 2 et le MSB de un ou deux mots est utilisé comme bit de signe. La plage
des données pouvant être exprimée à l’aide d’un ou deux mots correspond donc
à ce qui suit :
• Données à un mot : –32 768 à 32 767 (hexadécimal 8000 à 7FFF )
• Données à deux mots : –2 147 483 648 à 2 147 483 647
(hexadécimal 8000 0000 à 7FFF FFFF )
61

1-7ChapitreCalcul avec les données binaires signées
Le tableau suivant indique les équivalences entre les données décimales et
hexadécimales :
Décimale 16 bit Hex 32 bit Hex
2 147 483 647
2 147 483 646
.
.
.
32 768
32 767
32 766
.
.
.
2
1
0
–1
–2
.
.
.
–32 767
–32 768
–32 769
.
.
.
–2 147 483 647
–2 144 483 648
–––
–––
–––
7FFF
7FFE
0002
0001
0000
FFFF
FFFE
8001
8000
–––
–––
–––
.
.
.
.
.
.
.
.
.
.
.
.
7FFF FFFF
7FFF FFFE
.
.
.
0000 8000
0000 7FFF
0000 7FFE
.
.
.
0000 0002
0000 0001
0000 0000
FFFF FFFF
FFFF FFFE
.
.
.
FFFF 8001
FFFF 8000
FFFF 7FFF
.
.
.
8000 0001
8000 0000
1-7-2 Drapeaux arithmétiques
Les résultats des instructions binaires signées exécutées se retrouvent dans les
drapeaux arithmétiques. Les drapeaux et les conditions dans lesquels ils pas-
sent à ON sont donnés dans le tableau suivant. Les drapeaux sont à OFF lorsque ces conditions ne sont pas réunies.
Drapeau poursuite (SR 25504) Poursuivre une addition.
Drapeau égalité (SR 25506) Les résultats de l’addition, de la soustraction,
Dapeau de dépassement positif
(SR 25404)
Drapeau de dépassement négatif
(SR 25405)
Drapeaux Conditions à ON
Résultats négatifs pour la soustraction.
de la multiplication ou de la division sont 0.
Les résultats de conversion en complément à 2
sont 0.
32 767 (7FFF) a été dépassé dans les résultats
de l’addition ou de la soustraction de 16 bits.
2 147 483 647 (7FFF FFFF) a été dépassé
dans les résultats de l’addition ou de la
soustraction de 32 bits.
–32 768 (8000) a été dépassé dans les
résultats de l’addition ou de la soustraction de
16 bits ou lors de la conversion du complément
à 2.
–2 147 483 648 (8000 0000) a été dépassé
dans les résultats de l’addition ou de la
soustraction de 32 bits ou lors de la conversion
du complément à 2.
62

1-7ChapitreCalcul avec les données binaires signées
1-7-3 Réception des données binaires signées utilisant des valeurs
décimales
Bien que les calculs pour des données binaires signées utilisent des expressions hexadécimales, les entrées de la console de programmation ou par programme CX–Programmer, ou SYSWIN sont ef fectuées en utilisant pour les instructions, les entrées et la mnémonique décimales. La procédure d’utilisation du
terminal programmable pour recevoir à l’aide des valeurs décimales est présentée dans le Manuel de programmation du CQM1H. Se reporter au Manuel de
programmation du logiciel CX–Programmer , ou SYSWIN : API série C pour plus
d’informations sur l’utilisation du logiciel CX–Programmer, ou SYSWIN.
Instructions d’entrée Seuls les opérandes à 16 bits sont reçus pour les instructions suivantes : NEG(–
–), ADB(50), SBB(51), MBS(– –) et DBS(– –). Se reporter au Manuel de pro-
grammation du CQM1H pour plus d’informations sur la réception des instruc-
tions provenant de la console de programmation.
1-7-4 Utilisation des instructions d’extensions binaires signées
Les instructions CQM1H suivantes doivent être des codes de fonction attribués
dans le tableau des instructions avant qu’elles puissent être utilisées.
• COMPLEMENT A 2 (2’S COMPLEMENT) – NEG(––)
• DOUBLE COMPLEMENT A 2 (DOUBLE 2’S COMPLEMENT) – NEGL(––)
• DOUBLE ADDITION BINAIRE (DOUBLE BINARY ADD) – ADBL(––)
• DOUBLE SOUSTRACTION BINAIRE (BINARY SUBTRACT) – SBBL(––)
• MULTIPLICATION BINAIRE SIGNEE
(SIGNED BINARY MULTIPLY) – MBS(––)
• DOUBLE MULTIPLICATION BINAIRE SIGNEE
(DOUBLE SIGNED BINARY MULTIPLY) – MBSL(––)
• DIVISION BINAIRE SIGNEE (SIGNED BINARY DIVIDE) – DBS(––)
• DOUBLE DIVISION BINAIRE SIGNEE
(DOUBLE SIGNED BINARY DIVIDE) – DBSL(––)
Affectation des codes de
fonction
La procédure pour utiliser la console de programmation afin d’attribuer les
codes de fonction est présentée dans le Manuel de programmation du CQM1H.
S’assurer que le sélecteur 4 du micro-interrupteur du CQM1H est à ON pour
activer l’utilisation du tableau d’instructions réglé par l’utilisateur avant d’effec-
tuer cette opération.
63

1-7-5 Exemple d’application utilisant les données binaires signées
La programmation suivante est utilisée pour effectuer dans le CQM1H des calculs comme ceux qui suivent :
((1234 + (–123)) x 1212 – 12345) (–1234) = –1081, Reste 232
000 = 04D2 ← 1234
001 = FF85 ← –123
LR00 = 04BC ← 1212
HR50 = 3039 ← 12345
HR51 = 0000 ←
DM1000 = FB2E ← –1234
DM1001 = FFFF ←
1-7ChapitreCalcul avec les données binaires signées
10000
CLC(41)
ADB(50) 000
001 010
MBS(––) 010
LR00 020
CLC(41)
SBBL(––) 020
HR50 030
DBSL(––) 030
DM1000 040
04D2 FF85 X
0 0457
0457 X 04BC
00148BE4
00148BE4
00003039 –
0 00145BAB
00145BAB
FFFFFB2E
FFFFFBC7
000000E8
Résultat
Reste
64

CHAPITRE 2
Cartes internes
Ce chapitre fournit les informations sur les applications du matériel pour les cartes internes suivantes : carte du compteur à
grande vitesse, carte de gestion d’axes, carte codeur absolu, carte de réglage analogique, carte des E/S analogiques et carte
de communications série. Se reporter au Manuel d’utilisation du CQM1H pour de plus amples informations sur le matériel.
2-1 Carte du compteur à grande vitesse 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Modèle 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Fonctions 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-3 Exemple de configuration du système 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-4 Emplacements des cartes internes concernées 67. . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-5 Noms et fonctions 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-6 Caractéristiques techniques 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-7 Compteurs à grande vitesse 1 à 471. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Carte de gestion d’axes 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 Modèle 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 Fonction 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 Configuration du système 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-4 Emplacement carte interne concerné 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-5 Noms et fonctions 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-6 Caractéristiques techniques 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-7 Compteurs à grande vitesse 1 et 2 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-8 Fonctions 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-9 Sortie d’impulsions à rapport cyclique fixe 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-10 Sorties d’impulsions à rapport cyclique variable 123. . . . . . . . . . . . . . . . . . . . . . . .
2-2-11 Détermination de l’état des ports 1 et 2 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-12 Précautions d’utilisation des fonctions de la sortie d’impulsions 127. . . . . . . . . . . .
2-3 Carte codeur absolu 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-1 Modèle 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-2 Fonctions 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-3 Configuration du système 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-4 Emplacements concernés de la carte interne 129. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-5 Dénominations et fonctions 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-6 Caractéristiques techniques de l’entrée du codeur absolu 130. . . . . . . . . . . . . . . . . .
2-3-7 Interruptions du compteur à grande vitesse 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Carte de réglage analogique 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-1 Modèle 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-2 Fonction 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-3 Emplacements concernés de la carte interne 143. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-4 Dénominations et fonctions 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-5 Caractéristiques techniques 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Carte des E/S analogiques 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-1 Modèle 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-2 Fonction 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-3 Configuration du système 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-4 Emplacement de la carte interne concerné 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-5 Dénominations et fonctions 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-6 Caractéristiques techniques 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5-7 Procédure de l’application 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6 Cartes de communications série 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-1 Numéro du modèle 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-2 Cartes de communications série 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6-3 Caractéristiques 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65

Chapitre
2-6-4 Configuration du système 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66

2-1 Carte du compteur à grande vitesse
2-1-1 Modèle
Dénomination Modèle Caractéristiques techniques
Carte du compteur à grande
vitesse
2-1-2 Fonctions
La carte du compteur à grande vitesse est une carte interne qui traite quatre
entrées d’impulsions.
Entrées d’impulsions 1 à 4 du compteur à grande vitesse
La carte du compteur à grande vitesse compte des impulsions à grande vitesse
de 50 à 500 kHz entrant par les ports 1 à 4 et accomplit des tâches selon le
nombre d’impulsions comptées.
Modes d’entrée
Les trois modes d’entrée suivants sont disponibles :
• Mode bidirectionnel (1x/2x/4x)
• Mode incrémental/décrémental
• Mode impulsion/direction
Opération de comparaison
Lorsque la P V (valeur en cours) du compteur à grande vitesse atteint une valeur
spécifiée ou se trouve en dessous d’une plage indiquée, l’ensemble de bits indi-
qué dans le tableau de comparaison est sauvegardé dans les bits internes de
sortie et les bits externes de sortie. Un ensemble de bits est réglé pour chaque
résultat de comparaison et le bit externe de sortie est produit par un bornier de
sortie externe comme décrit ci-dessous.
Sorties externes
Jusqu’à quatre sorties externes sont produites lorsque la valeur spécifiée est
atteinte ou lorsqu’une condition de comparaison de plage est satisfaite.
CQM1H-CTB41 Quatre entrées d’impulsions
2-1ChapitreCarte du compteur à grande vitesse
Quatre sorties externes de résultat de
comparaison
Rem. La carte du compteur à grande vitesse ne fournit pas d’interruptions du comp-
teur à grande vitesse. Elle compare simplement la PV aux valeurs spécifiées o u
aux plages de comparaison et produit des sorties de bits internes et externes.
2-1-3 Exemple de configuration du système
Carte du compteur à grande vitesse
Carte du compteur à grande vitesse
Codeurs incrémentaux
(8 maximum)
67

2-1-4 Emplacements des cartes internes concernées
La carte du compteur à grande vitesse est montée dans l’emplacement 1
(emplacement gauche) ou l’emplacement 2 (emplacement droit) de l’unité cen-
trale du CQM1H–CPU51/61. Les deux emplacements sont utilisés en même
temps.
Emplacement 1 Emplacement 2
Carte du compteur à grande vitesse
2-1-5 Noms et fonctions
2-1ChapitreCarte du compteur à grande vitesse
Voyants LED
Une carte de compteur à grande vitesse fournit deux connecteurs qui acceptent
les entrées d’impulsions à grande vitesse. CN1 est utilisé pour les entrées 1 et 2
et CN2 est utilisé pour les entrées 3 et 4.
Carte du compteur à grande vitesse du CQM1H-CTB41
CN1
Entrée d’impulsions 1
Entrée d’impulsions 2
CN2
Entrée d’impulsions 3
Entrée d’impulsions 4
RDY : Opérationnel (Vert)
Allumé lorsque des entrées d’impulsions sont reçues.
Entrées d’impulsions (Orange)
A1, A2, A3, A4 :
Allumé lorsque l’entrée de phase A est à ON dans les ports 1, 2, 3 ou 4.
B1, B2, B3, B4 :
Allumé lorsque l’entrée de phase B est à ON dans les ports 1, 2, 3 ou 4.
Z1, Z2, Z3, Z4 :
Allumé lorsque l’entrée de phase Z est à ON dans les ports 1, 2, 3 ou 4.
Sorties externes (Orange)
OUT1, OUT2, OUT3, OUT4 :
ERR : Erreur (Rouge)
Allumé lorsqu’une erreur est détectée dans les réglages du Setup de l’API pour la fonction d’impulsion
d’entrée ou lorsqu’un dépassement positif ou négatif se produit dans la valeur en cours du compteur à
grande vitesse.
Allumé lorsque la sortie correspondante (1, 2, 3 ou 4) est à ON.
Connecteur compatible
Fiche : XM2D-1501 (OMRON)
Capot : XM2S-1511 (OMRON)
Deux ensembles de fiche+capot sont
fournis en tant qu’accessoires standard.
68

2-1-6 Caractéristiques techniques
chaque port de la carte du compteur à
Instructions
Instruction Signification
CTBL(63) Utilisée pour enregister des tableaux de comparaison de cible ou
de plage ou utilisé pour commencer les comparaisons des
tableaux de comparaison précédemment enregistrés. Un tableau
est enregistré et la comparaison commence avec les instructions
séparées ou la même instruction.
INI(61) Utilisée pour commencer ou arrêter la comparaison en utilisant le
tableau de comparaison enregistré ou utilisé pour modifier la PV
d’un compteur à grande vitesse.
PRV(62) Utilisée pour lire la PV ou l’état d’un compteur à grande vitesse.
Bits de contrôle relatif, drapeaux et information d’état
2-1ChapitreCarte du compteur à grande vitesse
Mots
Empl. 1 Empl. 2
IR 200 IR 232 00 à 15
IR 201 IR 233 00 à 15 PV (quatre digits à
IR 202 IR 234 00 à 15
IR 203 IR 235 00 à 15 PV (quatre digits à
IR 204 IR 236 00 à 15
IR 205 IR 237 00 à 15 PV (quatre digits à
IR 206 IR 238 00 à 15
IR 207 IR 239 00 à 15 PV (quatre digits à
IR 208 :
Compteur 1
IR 209 :
Compteur 2
IR 210 :
Compteur 3
IR 211 :
Compteur 4
IR 240 :
Compteur 1
IR 241 :
Compteur 2
IR 242 :
Compteur 3
IR 243 :
Compteur 4
Bits Dénominations Fonction
Compteur 1
Compteur 2
Compteur 3
Compteur 4
00 à 07 Résultats de comparaison : Bits 00 à
07 de sortie interne
08 à 11 Résultats de comparaison : Bits pour
les sorties externes 1 à 4
12 Drapeau de fonctionnement du
compteur
PV (quatre digits à
l’extrême droite)
l’extrême gauche)
PV (quatre digits à
l’extrême droite)
l’extrême gauche)
PV (quatre digits à
l’extrême droite)
l’extrême gauche)
PV (quatre digits à
l’extrême droite)
l’extrême gauche)
La PV du compteur à grande vitesse sur
chaque port de la carte du compteur à
grande vitesse est sauvegardée après
chaque cycle.
Rem. La forme dans laquelle les données
sont sauvegardées (BCD ou hexa-
décimales) est indiquée dans le
Setup de l’API (DM 6602 et
DM 6611).
Contient l’ensemble des bits indiqué par
l’opérande dans CTBL(63) lorsqu’une
condition est satisfaite.
Contient l’ensemble des bits indiqué par
l’opérande dans CTBL(63) lorsqu’une
condition est satisfaite.
0 : Arrêté
1 : En fonction
13 Drapeau de comparaison Indique si une comparaison est en
marche.
0 : Arrêté
1 : En fonction
14 Drapeau de dépassement
positif/négatif de la PV
15 Drapeau d’erreur SV 0 : Normal
Indique si un dépassement négatif ou
positif s’est produit.
0 : Normal
1 : Un dépassement positif ou négatif
s’est produit
1 : Erreur de réglage
69

2-1ChapitreCarte du compteur à grande vitesse
0 : Compteur non réinitialisé en phase
1 → 0 : La comparaison s’arrête
1 : Le fonctionnement s’arrête
1 : Force la sortie à ON
01 ou 02 Hex : Erreur matériel
Mots FonctionDénominationsBits
Empl. 1
IR 212 AR 05
IR 213 AR 06
SR 254 15 Drapeau d’erreur de la carte interne 0 : Pas d’erreur
AR 04
Empl. 2
00 Bit de réinitialisation du compteur à
grande vitesse 1
01 Bit de réinitialisation du compteur à
grande vitesse 2
02 Bit de réinitialisation du compteur à
grande vitesse 3
03 Bit de réinitialisation du compteur à
grande vitesse 4
08 Bit de début de comparaison du
compteur à grande vitesse 1
09 Bit de début de comparaison du
compteur à grande vitesse 2
10 Bit de début de comparaison du
compteur à grande vitesse 3
11 Bit de début de comparaison du
compteur à grande vitesse 4
12 Bit d’arrêt du compteur à grande
vitesse 1
13 Bit d’arrêt du compteur à grande
vitesse 2
14 Bit d’arrêt du compteur à grande
vitesse 3
15 Bit d’arrêt du compteur à grande
vitesse 4
00 Bit de paramétrage forcé de la sortie
externe 1
01 Bit de paramétrage forcé de la sortie
externe 2
02 Bit de paramétrage forcé de la sortie
externe 3
03 Bit de paramétrage forcé de la sortie
externe 4
04 Bit d’activation du paramétrage forcé
de la sortie externe
00 à 07 Code d’erreur pour la carte interne
dans l’emplacement 1
08 à 15 Code d’erreur pour la carte interne
dans l’emplacement 2
Phase Z et réinitialisation duprogramme
0 : Compteur non réinitialisé en phase
Z
1 : Compteur réinitialisé en phase Z
Réinitialisation du programme seulement
0 : Compteur non réinitialisé
0→1 : Compteur réinitialisé
0 → 1 : La comparaison commence
1 → 0 : La comparaison s’arrête
0 : Le fonctionnement continue
1 : Le fonctionnement s’arrête
0 : Pas d’effet sur l’état de la sortie
1 : Force la sortie à ON
0 : Réglage forcé des sorties 1 à 4
interdit
1 : Réglage forcé des sorties 1 à 4
autorisé
1 : Erreur
Passe à ON lorsqu’une erreur se produit
dans une carte interne montée dans
l’emplacement 1 ou 2.
Le code d’erreur pour l’emplacement 1
est sauvegardé de l’AR 0400 à l’AR 0407
et le code d’erreur pour l’emplacement 2
est sauvegardé de l’AR 0408 à
l’AR 0415.
00 Hex : Normal
01 ou 02 Hex : Erreur matériel
03 Hex : Erreur Setup de l’API
FonctionDénominationsBits
70

Paramétrages relatifs au Setup de l’API
Mots
Empl. 1 Empl. 2
DM 6602 DM 6611
DM 6640 DM 6643
DM 6641 DM 6644
Bits Fonction Quand le
00 à 03 Format des données dans lequelles les PV des
compteurs à grande vitesse 1 à 4 sont sauvegardées
0 : Hexadécimale à huit digits (BIN)
1 : BCD à huit digits
04 à 07 Inutilisé.
08 à 11 Paramétrage émetteur/récepteur pour les sorties
externes 1 à 4
0 : Emetteur (PNP)
1 : Récepteur (NPN)
12 à 15 Inutilisé.
00 à 03 Mode d’entrée pour le compteur à grande vitesse 1
0 Hex : Entrée bidirectionnelle 1x
1 Hex : Entrée bidirectionnelle 2x
2 Hex : Entrée bidirectionnelle 4x
3 Hex : Entrée d’impulsions incrémentale/décrémentale
4 Hex : Entrée impulsion/direction
04 à 07 Fréquence de comptage, mode de plage numérique et
méthode de réinitialisation du compteur à grande vitesse
1. Se reporter au tableau suivant.
08 à 11 Mode d’entrée pour le compteur à grande vitesse 2
(Se reporter à l’explication donnée ci–dessus pour le
compteur à grande vitesse 1).
12 à 15 Fréquence de comptage, mode de plage numérique et
méthode de réinitialisation du compteur à grande vitesse
2
(Se reporter à l’explication donnée ci-dessus pour le
compteur à grande vitesse 1).
00 à 03 Mode d’entrée pour le compteur à grande vitesse 3
(Se reporter à l’explication donnée ci-dessus pour le
compteur à grande vitesse 1).
04 à 07 Fréquence de comptage, mode de plage numérique et
méthode de réinitialisation du compteur à grande vitesse
3
(Se reporter à l’explication donnée ci-dessus pour le
compteur à grande vitesse 1).
08 à 11 Mode d’entrée pour le compteur à grande vitesse 4
(Se reporter à l’explication donnée ci-dessus pour le
compteur à grande vitesse 1).
12 à 15 Fréquence de comptage, mode de plage numérique et
méthode de réinitialisation du compteur à grande
vitesse 4
(Se reporter à l’explication donnée ci-dessus pour le
compteur à grande vitesse 1).
2-1ChapitreCarte du compteur à grande vitesse
paramétrage
est lu ?
Lorsque
l’alimentation est
mise sur ON.
Lorsque le
fonctionnement
commence.
71

Fréquence de comptage, mode de plage numérique et méthode de réinitialisation du compteur des
compteurs à grande vitesse
Valeur Fréquence de comptage Mode de plage numérique Méthode de réinitialisation du
compteur
0 Hex
1 Hex Réinitialisation du programme
2 Hex
3 Hex Réinitialisation du programme
4 Hex
5 Hex Réinitialisation du programme
6 Hex
7 Hex Réinitialisation du programme
50 KHz Mode linéaire
Mode circulaire
500 KHz Mode linéaire
Mode circulaire
Phase Z + réinitialisation du
programme
seulement
Phase Z + réinitialisation du
programme
seulement
Phase Z + réinitialisation du
programme
seulement
Phase Z + réinitialisation du
programme
seulement
2-1-7 Compteurs à grande vitesse 1 à 4
La carte du compteur à grande vitesse compte les signaux d’entrée entrant par
les ports 1 à 4 à partir des codeurs rotatifs et produit des ensembles de bits de
sortie interne/externe selon le nombre d’impulsions comptées. Les quatre ports
sont utilisés indépendamment. Une vue générale du traitement effectu é par les
compteurs à grande vitesse 1 à 4 est fournie ci–dessous.
2-1ChapitreCarte du compteur à grande vitesse
Vue d’ensemble du processus
Signaux d’entrée et
modes d’entrée
Les compteurs à grande vitesse 1 à 4 sont réglés sur différents modes d’entrée
en réponse au type d’entrée de signal.
Mode bidirectionnel (Vitesse de comptage : 25 kHz ou 250 kHz)
Deux signaux de phases (phase A et phase B) avec des différences de phases
multiples de 1, 2 ou 4 sont utilisés ensemble avec un signal de phase Z pour les
entrées. Le compte est incrémenté ou décrémenté selon les différences dans
les deux signaux de phases.
Mode incrémental/décrémental (Vitesse de comptage : 50 kHz ou 500 kHz)
La phase A est l’impulsion d’incrémentation et la phase B est l’impulsion de
décrémentaton. Le compteur incrémente ou décrémente selon l’impulsion
détectée.
Mode impulsion/direction (Vitesse de comptage : 50 kHz ou 500 kHz)
La phase A est le signal d’impulsions et la phase B est le signal de direction. Le
compteur incrémente ou décrémente lorsque le signal de phase B est à ON et
décrémente lorsqu’il est à OFF.
Mode bidirectionnel
Phase A
Phase B
72
1x
2x
4x

Phase A Phase B 1x 2x 4x
↑ L Incrémentation Incrémentation Incrémentation
H ↑ --- --- Incrémentation
↓ H --- Incrémentation Incrémentation
L ↓ --- --- Incrémentation
L ↑ --- --- Décrémentation
↑ H --- Décrémentation Décrémentation
H ↓ --- --- Décrémentation
↓ L Décrémentation Décrémentation Décrémentation
2-1ChapitreCarte du compteur à grande vitesse
Mode
incrémental/décrémental
Entrée du codeur A
(entrée HAUT)
Entrée du codeur B
(entrée BAS)
Plages numériques
Mode impulsion/direction
Entrée du codeur A
(entrée d’impulsions)
Entrée du codeur B
(entrée de direction)
Décrémentation
DécrémentationIncrémentationIncrémentation
Les valeurs comptées par les compteurs à grande vitesse 1 à 4 sont comptées
en utilisant les deux paramétrages de plage suivants :
Mode circulaire
En mode circulaire, la valeur maximale d’une plage numérique est réglée en utilisant CTBL(63), et lorsque la plage est incrémentée au-delà de cette valeur
maximale, elle revient à zéro. La plage ne devient jamais négative. De même, si
la plage est décrémentée au dessous de 0, elle revient à la valeur maximale. Le
nombre de points sur le circulaire est déterminé en réglant la valeur maximale
(c.–à–d., la valeur circulaire) à une valeur entre 1 et 8388607 BCD ou entre 1 et
7FFFFFFF Hex. Lorsque la valeur maximale est réglée à 8388607, la plage est
de 0 à 8388607 BCD.
Mode linéaire
En mode linéaire, la plage de comptage est toujours de -8388608 à 8388607
BCD ou F8000000 à 07FFFFFF Hex. Lorsque la plage décrémente en-dessous
de -8388608 BCD ou F8000000 Hex, un dépassement négatif se produit et si
elle incrémente au–dessus de 8388607 BCD ou 07FFFFFF Hex, un dépassement positif se produit.
Mode circulaire
Valeur de comptage max.
(valeur circulaire)
Décrémentation Incrémentation
Dépassement négatif Dépassement positif
Lorsqu’un dépassement positif se produit, la PV du compte reste à 08388607
BCD ou 07FFFFFF Hex, et lorsqu’un dépassement négatif se produit, elle reste
à F8388608 BCD ou F8000000 Hex. Dans l’un ou l’autre cas, le comptage et la
comparaison s’arrêtent, mais le tableau de comparaison est maintenu dans la
mémoire. Le drapeau de dépassement positif/négatif de la PV montré
ci-dessous passe à ON pour indiquer le dépassement négatif ou positif.
F8000000 Hex
-8388608 BCD
Mode linéaire
07FFFFFF Hex
73

2-1ChapitreCarte du compteur à grande vitesse
Méthodes de
réinitialisation
Compteur
Compteur à grande vitesse 1 IR 20814 IR 24014
Compteur à grande vitesse 2 IR 20914 IR 24114
Compteur à grande vitesse 3 IR 21014 IR 24214
Compteur à grande vitesse 4 IR 21114 IR 24314
Drapeau de dépassement positif/négatif de la PV
Emplacement 1 Emplacement 2
Lors du red émarrage de l’opération de comptage, utiliser les méthodes de réini-
tialisation données ci–dessous pour réinitialiser les compteurs à grande vitesse
1 et 2 (les compteurs sont réinitialisés automatiquement lorsque l’exécution du
programme commence et finit).
Les deux méthodes suivantes sont réglées pour déterminer la temporisation à
laquelle la PV du compteur est réinitialisée (c.-à-d. réglée à 0) :
• Signal de phase Z + réinitialisation du programme
• Réinitialisation du programme
Signal de phase Z (entrée de réinitialisation) + réinitialisation du
programme
La PV du compteur à grande vitesse est réinitialisée lors de la première montée
du signal de phase Z après le passage à ON du bit de réinitialisation du compteur à grande vitesse correspondant (voir ci–dessous).
Au moins 1 cycle
(entrée de réinitialisation)
Bit de réinitialisation du
compteur à grande vitesse
Phase Z
Au moins un cycle
Réinitialisation
par interruption.
En moins d’un
cycle
Réinitialisation
par cycle.
Non réinitialisé.
Réinitialisation du programme
La PV est réinitialisée lorsque le bit de réinitialisation du compteur à grande
vitesse passe à ON. Il y a des bits de réinitialisation séparés pour chaque compteur à grande vitesse 1 à 4.
Au moins un cycle
Bit de réinitialisation du
compteur à grande vitesse
En moins d’un cycle
Réinitialisation par cycle.
Les bits de réinitialisation des compteurs à grande vitesse 1 à 4 sont donnés
dans le tableau suivant :
Compteur
Emplacement 1 Emplacement 2
Compteur à grande vitesse 1 IR 21200 AR 0500
Compteur à grande vitesse 2 IR 21201 AR 0501
Compteur à grande vitesse 3 IR 21202 AR 0502
Compteur à grande vitesse 4 IR 21203 AR 0503
Bit de réinitialisation
74
Les bits de réinitialisation pour les compteurs à grande vitesse 1 à 4 sont actualisés seulement une fois par cycle. Un bit de réinitialisation doit être à ON pendant
au minimum 1 cycle pour être lu de façon fiable.

2-1ChapitreCarte du compteur à grande vitesse
Rem. La condition d’exécution d’enregistrement et de comparaison du tableau de
comparaison ne change pas lorsque la PV est réinitialisée. Lorsqu’une
comparaison s’exécute avant la réinitialisation, elle continue.
Méthodes de vérification
pour les interruptions du
compteur à grande
vitesse
Comparaison
PV du compteur à
grande vitesse
Les deux méthodes suivantes sont disponibles pour vérifier la PV des compteurs à grande vitesse 1 à 4 (ce sont les mêmes méthodes que celles utilisées
pour le compteur à grande vitesse intégré 0).
• Méthode de la valeur spécifiée
• Méthode de la plage de comparaison
Se reporter à la page 37 pour une description de chaque méthode.
Pour la méthode de la valeur spécifiée, un maximum de 48 valeurs spécifiées
peut être enregistré dans le tableau de comparaison. Lorsque la PV du compteur atteint une des 48 valeurs spécifiées enregistrées, l’ensemble de bits cor-
respondant (1 à 48) est produit aux bits spécifiques dans la mémoire
Si correspondance
Valeur cible (1)
Valeur cible (2)
Valeur cible (48)
Ensemble de bits (1)
Ensemble de bits (2)
Ensemble de bits (48)
208 à 211/240 à 243 Mt
Bits de sortie
externe
Bits de sortie
interne (8 bits)
Un OR est pris des
bits correspondants
de l’IR 208 à
l’IR 211, ou l’IR 240
à l’IR 243.
Sorties externes
(quatre sorties)
Lors de l’utilisation de valeurs spécifiées, la comparaison est faite à chaque
valeur spécifiée dans l’ordre du tableau de comparaison jusqu’à ce que toutes
les valeurs aient été rencontrées, et alors la comparaison revient à la première
valeur dans le tableau. Avec la carte du compteur à grande vitesse, elle ne
différencie pas si la valeur spécifiée est atteinte comme un résultat d’incrémentation ou de décrémentation de la PV.
Rem. Avec le compteur à grande vitesse 0 dans l’unité centrale ou le compteur à
grande vitesse 1 ou 2 sur la carte de gestion d’axes ou la carte codeur absolu, l e
bit à l’extrême gauche du mot contenant le nombre de sous–programme dans le
tableau de comparaison détermine si les valeurs spécifiées sont valides pour
incrémenter ou pour décrémenter la PV.
75
 Loading...
Loading...