

Page 1
BA 13.0011−EN
.CD(
Ä.CD(ä
Operating Instructions
SDS..
SDSGS
Synchronous servo motors
l
Page 2

, Please read these instructions before you start working!
Follow the enclosed safety instructions.
0Fig. 0Tab. 0
2
l
BA 13.0011−EN 1.0
Page 3
Contents i
1 About this documentation 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Document history 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Conventions used 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Abbreviations used 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Terminology used 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Notes used 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Safety instructions 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 General safety instructions for drive components 8 . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Application as directed 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Improper use 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Residual hazards 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Product description 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Identification 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Nameplate 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Product key 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Technical data 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 General data and operating conditions 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 General data 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Operating conditions 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Dimensions 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Rated data 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Rated data 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Shaft loads 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Mechanical installation 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Preparation 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Assembly of built−on accessories 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Installation 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Holding brake (option) 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Important notes 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Permanent magnet holding brakes 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3 Spring−applied holding brakes 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Electrical installation 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Important notes 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Wiring according to EMC 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Connection plan 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BA 13.0011−EN 1.0
l 3
Page 4

Contentsi
7 Commissioning and operation 33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Important notes 33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Before switching on 34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.1 Servo motor parameters 34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Functional test 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Functional test 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5 During operation 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Maintenance/repair 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Important notes 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Maintenance intervals 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Repair 37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Troubleshooting and fault elimination 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
l 4
BA 13.0011−EN 1.0
Page 5

1 About this documentation
Contents
ƒ The present operating instructions are intended for safe working on and with the
motors. They contain safety instructions that must be observed.
ƒ All personnel working on and with the motors must have the operating instructions
available during work and observe the information and notes relevant for them.
ƒ The operating instructions must always be complete and in a perfectly readable
state.
If the information and notes provided in this documentation do not meet your
requirements, please refer to the controller and/or gearbox documentation.
I Tip!
Documentation and software updates for further Lenze products can be found
on the Internet in the "Services & Downloads" area under
http://www.Lenze.com
About this documentation
Document history
1
Validity
This documentation is valid for synchronous servo motors:
Type Designation
SDSGSLL
035, 047, 056, 063
Target group
This documentation is directed at qualified skilled personnel according to IEC 60364.
Qualified skilled personnel are persons who have the required qualifications to carry out
all activities involved in installing, mounting, commissioning, and operating the product.
1.1 Document history
Material no. Version Description
13314243 1.0 07/2009 TD09 First edition of the operating instructions, separate
Synchronous servo motors
from three−phase AC motors
BA 13.0011−EN 1.0
l
5
Page 6

1
About this documentation
Conventions used
1.2 Conventions used
This documentation uses the following conventions to distinguish different types of
information:
Type of information Identification Examples/notes
Spelling of numbers
Decimal separator
Warnings
UL warnings
Icons
Page reference ^ Reference to another page with additional
1.3 Abbreviations used
Point In general, the decimal point is used.
For instance: 1234.56
J
Are only provided in English.
information
For instance: ^ 16 = see page 16
Abbreviations
P
r
M
I
r
U Rated voltage m
F Rated frequency N max. speed
J Moment of inertia M max. torque
w Angular velocity M
I
tot
Q Friction energy W Energy
U Resulting supply voltage L Cable length
U
L
phase
Rated power F
Rated torque F
n
Rated current n
Total moment of inertia M
Rated voltage of the brake I
B
Phase inductance R
1.4 Terminology used
Term In this text used for
Motor Synchronous motor, versions according to product key, ^ 15
Controller Any servo inverter
Drive system Drive systems with servo motors and other Lenze drive components
r1/Fr2
a
r
Mot
K
L
B
UV
Permissible radial load
Permissible axial load
Rated speed
Motor weight (mass)
Characteristic torque
Load torque
Rated current of the brake
Stator resistance
6
l
BA 13.0011−EN 1.0
Page 7
About this documentation
Notes used
1
1.5 Notes used
The following pictographs and signal words are used in this documentation to indicate
dangers and important information:
Safety instructions
Structure of safety instructions:
} Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent dangerous
situations)
Pictograph and signal word Meaning
{ Danger!
} Danger!
( Stop!
Danger of personal injury through dangerous electrical voltage.
Reference to an imminent danger that may result in death or
serious personal injury if the corresponding measures are not
taken.
Danger of personal injury through a general source of danger.
Reference to an imminent danger that may result in death or
serious personal injury if the corresponding measures are not
taken.
Danger of property damage.
Reference to a possible danger that may result in property
damage if the corresponding measures are not taken.
Application notes
Pictograph and signal word Meaning
) Note!
I Tip!
,
Special safety instructions and application notes for UL
Pictograph and signal word Meaning
J Warnings!
Important note to ensure troublefree operation
Useful tip for simple handling
Reference to another documentation
Safety note or application note for operating UL approved
devices in UL approved systems.
The operation of the drive system may not be UL compliant if
the corresponding measures are not taken.
BA 13.0011−EN 1.0
l
7
Page 8

2
Safety instructions
General safety instructions for drive components
2 Safety instructions
2.1 General safety instructions for drive components
(in accordance with Low−Voltage Directive 2006/95/EC)
At the time of dispatch, the drive components are in line with the latest state of the art and
can be regarded as operationally safe.
Scope
The following safety instructions generally apply to Lenze drive components.
The product−specific safety and application notes given in this documentation must be
observed!
General hazards
} Danger!
Disregarding the following basic safety measures may lead to severe personal
injury and damage to material assets!
ƒ Lenze drive components ...
... must only be applied as directed.
... must never be commissioned if visibly damaged.
... must never be technically modified.
... must never be commissioned if incompletely mounted.
... must never be operated without the required covers.
ƒ All specifications of the corresponding enclosed documentation must be observed.
This is vital for a safe and trouble−free operation as well as for achieving the specified
product features.
ƒ Only qualified, skilled personnel is permitted to work on and with Lenze drive
components.
According to IEC 60364 / CENELEC HD 384, these are persons who ...
... are familiar with the installation, mounting, commissioning, and operation of the
product.
... have the qualifications required for their occupation.
... know and are able to apply all national regulations for the preventions of accidents,
directives and laws applicable on site.
8
l
BA 13.0011−EN 1.0
Page 9

Safety instructions
General safety instructions for drive components
Transport, storage
ƒ Transport and storage in a dry, low−vibration environment without aggressive
atmosphere; preferably in the packaging provided by the manufacturer.
2
– Protect against dust and shocks
– Comply with climatic conditions according to the technical data.
ƒ Before transport
– Check that all transport locking devices are mounted.
– Tighten all transport aids.
.
) Note!
Do not apply extra loads to the product as the transport aids (such as eye bolts
or bearing plates) are designed for the weight of the motor only (refer to the
catalogue for the weight).
Mechanical installation
ƒ Install the product according to the regulations of the corresponding
documentation. In particular observe the section "Operating conditions" in the
chapter "Technical data".
ƒ Provide for a careful handling and avoid mechanical overload. During handling
neither bend components, nor change the insulation distances.
Electrical installation
ƒ Carry out the electrical installation according to the relevant regulations (e. g. cable
cross−sections, fusing, connection to the PE conductor). Additional notes are
included in the documentation.
ƒ The documentation contains notes for the EMC−compliant installation (shielding,
earthing, arrangement of filters and installation of the cables). The manufacturer of
the system or machine is responsible for the compliance with the limit values
required in connection with EMC legislation.
ƒ For compliance with the limit values for radio interference emission at the site of
installation, the components − if specified in the technical data − have to be mounted
in housings (e. g. control cabinets). The housings have to enable an EMC−compliant
installation. In particular observe that for example control cabinet doors preferably
have a circumferential metallic connection to the housing. Reduce openings or
cutouts through the housing to a minimum.
ƒ Only plug in or remove pluggable terminals in the deenergised state!
Commissioning
ƒ If required, you have to equip the system with additional monitoring and protective
devices in accordance with the respective valid safety regulations (e. g. law on
technical equipment, regulations for the prevention of accidents).
ƒ Before commissioning remove transport locking devices and keep them for later
transports.
BA 13.0011−EN 1.0
l
9
Page 10

2
2.2 Application as directed
Safety instructions
Application as directed
Low−voltage machines are no household appliances, they are designed as components for
industrial or professional use in terms of IEC/EN 61000−3−2 only.
They comply with the harmonised standards of the series IEC/EN60034.
Low−voltage machines are components for installation into machines as defined in the
Machinery Directive 2006/42/EC. Commissioning is prohibited until the conformity of the
end product with this directive has been established (follow i. a. IEC/EN 60204−1).
It is only permissible to use low−voltage machines with IP23 protection or less outdoors if
special protective measures are taken.
The integrated brakes must not be used as safety brakes. It cannot be ruled out that
interference factors which cannot be influenced cause a brake torque reduction.
ƒ Drives
– ... must only be operated under the operating conditions and power limits
specified in this documentation.
– ... comply with the protection requirements of the EC Low−Voltage Directive.
Any other use shall be deemed inappropriate!
2.3 Improper use
ƒ Do not operate the motors
– ... in explosion−protected areas
– ... in aggressive environments (acid, gas, vapour, dust, oil)
– ... in water
– ... in radiation environments
10
l
BA 13.0011−EN 1.0
Page 11

Safety instructions
Residual hazards
2
2.4 Residual hazards
Protection of persons
ƒ Do not use the integrated brakes as fail−safe brakes. It cannot be ruled out that
certain disruptive factors that cannot be influenced such as oil ingress due to a
defective shaft sealing ring at the drive end may reduce the braking torque.
Motor protection
ƒ Integrated temperature sensors do not provide full protection for the machine. If
necessary, limit the maximum current. Parameterise the controller so that the
motor will be switched off with I > I
there is a risk of blocking.
ƒ If deviations from normal operation occur, e.g. increased temperature, noise,
vibration, determine the cause and, if necessary, contact the manufacturer. If in
doubt, switch off the low−voltage machine.
ƒ Overload protection does not protect against overloading under all conditions.
after a few seconds of operation, especially if
r
BA 13.0011−EN 1.0
l
11
Page 12
3
Product description
Identification
Nameplate
3 Product description
3.1 Identification
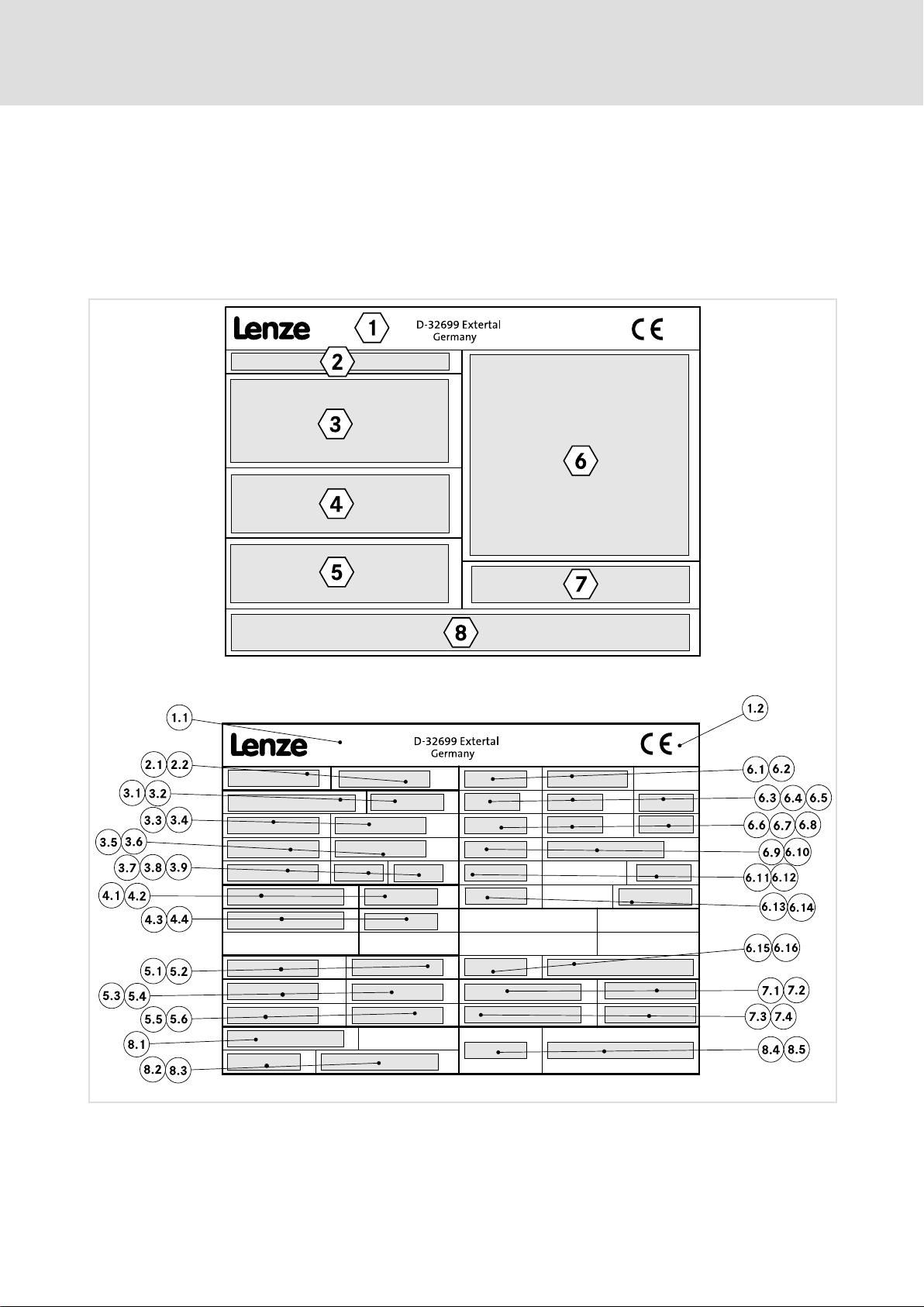
3.1.1 Nameplate
12
l
LKA−SDSGS−001.iso
BA 13.0011−EN 1.0
Page 13
Product description
Identification
Nameplate
1 General information
1.1 Manufacturer 1.2 Applicable conformity declarations and approvals
2 Data on the complete drive system
2.1 Drives 2.2 Type of drive
3 Inverter data
3.1 Inverter 3.6 Voltage / I=I
3.2 Type of inverter 3.7 Fieldbus
3.3 FW 3.8 RS232
3.4 HW 3.9 I/O
3.5 Input
4 Encoder data
4.1 Encoder / feedback 4.3 Encoder voltage
4.2 Type of encoder 4.4 Indicated voltage
5 Gearbox data
5.1 Gearbox 5.4 Ratio
5.2 Gearbox type 5.5 Lubricant
5.3 Torque M2 [Nm] 5.6 Type of lubricant
6 Motor data
6.1 Motor 6.9 n
6.2 Motor type 6.10 C86 code
6.3 Motor type 6.11 Circuit, rated voltage
6.4 Rated power [kW] 6.12 Rated frequency
6.5 Degree of protection 6.13 Rated current
6.6 Rated torque 6.14 Rated speed
6.7 Operating mode 6.15 Insulation class of the winding
6.8 cos j 6.16 Temperature sensor
7 Brake data
7.1 Brake 7.3 Voltage, current, braking torque
7.2 Type of brake 7.4 Material number
8 Production data
8.1 Customer order number 8.4 Serial number
8.2 Year of manufacture 8.5 Bar code
8.3 Ident no. of the drive
max
max
(mechanical)
3
BA 13.0011−EN 1.0
l
13
Page 14

3
Product description
Identification
Nameplate
Gearbox
Pos. Contents
1 Manufacturer
2 Gearbox type
3 Manufacturing date
4 Commission number
5 Torque M2 [Nm]
6 Ratio
7 CE designation
Brakes
Reference to installed brake
Pos. Contents
1 Type / size of brake
2 Voltage [V] DC
3 Electrical power [W]
4 Braking torque [Nm]
5 Material number
14
l
BA 13.0011−EN 1.0
Page 15

Product description
Identification
Product key
3
3.1.2 Product key
Synchronous servo motors S D S G S LL LLL − L L
0
1
2
3
4
5
6
7
8
Product key legend
0 Product group S Small drives
1 Current type D Three−phase AC current
2 Ventilation S Self ventilation (cooling by convection and radiation)
3 Design/housing G Smooth and round housing
4 Machine type S Synchronous machine
5 Built−on accessories RS
6 Frame size 035, 047, 056, 063
7 Overall length 1
8 Number of pole pairs 2
Resolver
AG
Absolute value encoder
BA
Brake and sin/cos absolute value encoder
BS
Brake and resolver
short
2
medium
3
long
BA 13.0011−EN 1.0
l
15
Page 16

4
Technical data
General data and operating conditions
General data
4 Technical data
4.1 General data and operating conditions
4.1.1 General data
Conformity and approval
Conformity
CE
Approvals
UL/CSA File no. E210321
Protection of persons and equipment
Degree of protection
Earth leakage current IEC/EN 61800−5−1 > 3.5 mA Observe stipulations and safety
Total fault current < 100 mA
Thermal class F (155 °C) IEC 60034 Exceeding the temperature limit weakens or destroys the
Insulation resistance IEC/EN 61800−5−1
Protective measures Short circuit on the motor side, earth fault when switching on
Permissible voltage IEC/EN 60034−25 1.5 kV peak value
Vibration Up to 2.0 g (20 m/s2) without resonance excitation, e.g. of the
2006/95/EC Low−Voltage Directive
See nameplate
Degrees of protection only apply to horizontal installation
All unused plug−in connections must be sealed with
protective caps or dummy connectors.
instructions!
Earth−leakage circuit breakers of type B can be used.
insulation
< 2000 m site altitude: overvoltage category III
> 2000 m site altitude: overvoltage category II
the mains and during operation, motor overtemperature
(input for PTC or thermal contact, I
10 kV/ms speed of increase
fan.
2
t monitoring)
16
EMC
Noise emission
Noise immunity
IEC/EN 61800−3
l
Depending on the controller, see documentation for the
controller.
BA 13.0011−EN 1.0
Page 17

4.2 Operating conditions
Ambient conditions
Climatic
Transport IEC/EN 60721−3−2 2K3 (−20 ... +70 °C)
Storage IEC/EN 60721−3−1
Operation IEC/EN 60721−3−3
Site altitude < 1000 m amsl − without power reduction
Humidity Average relative humidity 85 %, without condensation
Electrical
The motor connection type depends on the controller
Length of motor cable
Length of cable for speed feedback
Technical data
General data and operating conditions
General data
1K3 (−20 ... +60 °C) < 3 months
1K3 (−20 ... +40 °C) > 3 months
Without brake −15 °C ... +40 °C
With brake −10 °C ... +40 °C
> +40 °C With power reduction see,
> 1000 m amsl < 4000m amsl with power reduction, see
catalogue
See inverter instructions
Without power reduction
catalogue
4
Mounting conditions
Mechanical
Mounting positions
Motor Suitable for all mounting positions
Geared motor Only for the ordered mounting position, see nameplate
ƒ Other application conditions require a power derating or torque reduction using the
factors listed in table 2 and 3 (see below).
Power derating
Power derating for other application conditions
Cooling air temperature [°C] 40 45 50 55 60
Power derating [kυ
Installation height above sea level
[m]
Power derating [k
Tab. 1
]
h]
1.00 0.95 0.90 0.83 0.77
1000 2000 3000 4000 5000
1.00 0.92 0.83 0.77 0.67
BA 13.0011−EN 1.0
l
17
Page 18

4
Technical data
Dimensions
General data
4.3 Dimensions
Motor type Frame size a1 b1
SDSGSLL 035−22 IEC56C80 79 50 12 9 M3 65 2.5 65 95 58 20 224
SDSGSLL 047−22 IEC56C80 79 50 12 9 M3 65 2.5 75 101 58 20 253
SDSGSLL 047−22 IEC63C90 89 60 12 11 M4 75 2.5 75 101 58 23 256
SDSGSLL 056−22 IEC63C90 89 60 12 11 M4 75 2.5 85 106 58 23 271
SDSGSLL 063−22 IEC71C105 104 70 12 14 M5 85 2.5 95 111 58 30 283
Motor type Frame size k1 k3 k4 L l1 l2 s1 t U X Weight
RS AG XX BS BA approx.
SDSGSLL 035−22 IEC56C80 169 180 138 204 225 20 3 14 M5 10.2 3 95 1.9 − 2.9
SDSGSLL 047−22 IEC56C80 189 200 156 233 244 20 3 14 M5 10.2 3 115 3.0 − 4.0
SDSGSLL 047−22 IEC63C90 489 200 156 233 244 23 3 18 M5 12.5 4 115 3.0 − 4.0
SDSGSLL 056−22 IEC63C90 196 207 163 248 260 23 3 18 M5 12.5 4 120 4.0 − 5.5
SDSGSLL 063−22 IEC71C105 199 214 168 253 268 30 2.5 25 M6 16 5 130 5.3 − 6.7
Tab. 2 Dimensions in mm
j7
c1 d
d2 e1 f1 G g1 g2 i2 K
k6
BS
kg
18
l
BA 13.0011−EN 1.0
Page 19

4.4 Rated data
ƒ The most important rated data of the motor are indicated on the nameplate.
– Further technical data can be obtained from the catalogues.
ƒ The indicated torques and weights are guide values for the selection of the
transmission elements and foundations.
ƒ The rated data indicated on the nameplate refer to operation with Lenze servo
inverters of the 9300 and 9400 series at an inverter input voltage (mains voltage) of
400 V.
) Note!
ƒ The motors can also be connected to inverters others than servo inverters of
Technical data
Rated data
General data
the 9300 and 9400 series:
– Depending on the modulation and control performance of the inverter it
might be necessary to derate the power if excessive temperatures are
detected (see Tab. 1).
4
BA 13.0011−EN 1.0
l
19
Page 20

4
Technical data
Rated data
General data
4.5 Rated data
SDSGSLL 035−22
Rated power [W] 140 140 140 140 140
Rated frequency [Hz] 100 100 100 100 100
Rated current [A] 8.4 4.4 4.0 0.56 0.36
Power factor cosj 1 1 1 1 1
Rated speed [rpm] 3000 3000 3000 3000 3000
Rated torque [Nm] 0.45 0.45 0.45 0.45 0.45
Degree of protection 54/55 54/55 54/55 54/55 54/55
Thermal class F F F F F
Maximum current [A] 47.5 26.5 22 3.3 2.05
Demagnetising current [A] 86 48 40 6.0 3.8
Maximum torque [Nm] 1.6 1.15 2.0 2.46 2.15
Maximum speed [rpm] 6000 6000 6000 6000 6000
RUV at 20°C [W] 0.22 0.72 1.10 46.6 116.4
L
phase
Moment of inertia [kg cm2] 0.221 0.221 0.221 0.221 0.221
Unit
13 25 30 210 360
[mH] 0.18 0.59 0.85 37.6 96.3
Rated voltage [V] AC
SDSGSLL 047−22
Unit
25 30 210 360
Rated power [W] 170 210 250 250
Rated frequency [Hz] 67 83 100 100
Rated current [A] 6.2 6.2 1.1 0.71
Power factor cosj 1 1 1 1
Rated speed [rpm] 2000 2500 3000 3000
Rated torque [Nm] 0.8 0.8 0.8 0.8
Degree of protection 54/55 54/55 54/55 54/55
Thermal class F F F F
Maximum current [A] 31 31 5.5 3.55
Demagnetising current [A] 41 41 7.5 4.8
Maximum torque [Nm] 2.0 2.4 3.9 3.9
Maximum speed [rpm] 6000 6000 6000 6000
RUV at 20°C [W] 0.61 0.61 18.6 46.8
L
phase
Moment of inertia [kg cm2] 0.301 0.301 0.301 0.301
[mH] 0.846 0.846 25.7 63.85
Rated voltage [V] AC
20
l
BA 13.0011−EN 1.0
Page 21

SDSGSLL 056−22
Technical data
Rated data
General data
4
Unit
30 210 360
Rated power [W] 450 500 500
Rated frequency [Hz] 100 100 100
Rated current [A] 12.5 1.93 1.2
Power factorcosj 1 1 1
Rated speed [rpm] 3000 3000 3000
Rated torque [Nm] 1.6 1.6 1.6
Degree of protection 54/55 54/55 54/55
Thermal class F F F
Maximum current [A] 62.5 9.65 6
Demagnetising current [A] 146 14.6 9.1
Maximum torque [Nm] 3.0 8.6 8.52
Maximum speed [rpm] 6000 6000 6000
RUV at 20°C [W] 0.19 6.92 17.8
L
phase
Moment of inertia [kg cm2] 1.337 1.337 1.337
[mH] 0.28 10.85 27.8
Rated voltage [V] AC
Characteristics SDSGSLL 063−22
Unit
Rated power [W] 700 700
Rated frequency [Hz] 100 100
Rated current [A] 2.45 1.54
Power factor cosj 1 1
Rated speed [rpm] 3000 3000
Rated torque [Nm] 2.2 2.2
Degree of protection 54/55 54/55
Thermal class F F
Maximum current [A] 12.5 7.7
Demagnetising current [A] 14.0 8.4
Maximum torque [Nm] 11.5 11.8
Maximum speed [rpm] 6000 6000
RUV at 20°C [W] 3.98 10.4
L
phase
Moment of inertia [kg cm2] 2.032 2.032
[mH] 7.9 22.1
Rated voltage [V] AC
210 360
BA 13.0011−EN 1.0
l
21
Page 22

4
Technical data
Rated data
Shaft loads
4.5.1 Shaft loads
The permissible loads listed in the table (Tab. 3) are either radial forces or axial forces.
Fig. 1 Points of action of radial and axial loads
Motor type F
SDSGSLL
Tab. 3 Radial and axial forces
Permissible axial load
F
a
F
Permissible radial load, acts on the middle of the shaft
r1
F
Permissible radial load, acts on the end of the shaft
r2
F
r1 /
r2
N
035−22 350/300 250
047−22 560/530 430
056−22
063−22 / 32
650/605 510
Ref. to the nominal bearing
service life of 10,000 h
KL−SDS−001
F
a
N
22
l
BA 13.0011−EN 1.0
Page 23

5 Mechanical installation
5.1 Preparation
Remove the corrosion protection from the shaft ends and flanges. If necessary, remove dirt
using standard cleaning solvents.
( Stop!
Bearings or seals must not come into contact with the solvent − material
damages.
After a long storage period (> 1 year) you have to check whether moisture has entered
the motor. For this purpose, measure the insulation resistance (measuring voltage
500 VDC). In case of values £1kWper volt of rated voltage, dry the winding.
Mechanical installation
Preparation
5
5.2 Assembly of built−on accessories
) Note!
Follow these instructions carefully. Please note that the warranty and product
liability will become void in the event of impermissible alterations or
modifications to the motors.
Follow the instructions below carefully. Please note that, in the event of impermissible
alteration or modification of the motor, you will lose all entitlements to make claims under
warranty and to benefit from product liability obligations.
ƒ Mount the transmission elements:
– Shocks and impacts must be avoided! They could destroy the motor.
– Always use the centre bore in the motor shaft (in accordance with DIN 332, design
D) for mounting.
– Tolerances of the shaft ends:
£ Æ 50 mm: ISO k6, > Æ 50 mm: ISO m6.
ƒ Only use an extractor for the disassembly.
ƒ When using belts for torque/power transmission:
– Tension the belts in a controlled manner.
– Provide protection against accidental contact! During operation, surface
temperatures of up to 140°C are possible.
BA 13.0011−EN 1.0
l
23
Page 24

5
5.3 Installation
Mechanical installation
Installation
Important notes
ƒ The mounting surface must be dimensioned for the design, weight and torque of
the motor.
ƒ The foot and flange faces must rest flat on the mounting surface.
– Incorrect motor alignment reduces the service life of the roller bearings and
transmission elements.
Impacts on shafts can cause bearing damage.
ƒ Do not exceed the permissible range of ambient operating temperature
(¶ chapter 4.1).
ƒ Fasten the motor securely.
ƒ Ensure that the ventilation is not impeded. The exhaust air, also the exhaust air of
other machines next to the drive system, must not be taken in immediately.
ƒ During operation, surfaces are hot, up to 150 °C! Ensure that guard preventing
accidental contact is in place!
Ensure an even surface, solid foot/flange mounting and exact alignment if a direct clutch
is connected. Avoid resonances with the rotational frequency and double mains frequency
which may be caused by the assembly.
Use appropriate means to mount or remove transmission elements (heating) and cover
belt pulleys and clutches with a touch guard. Avoid impermissible belt tensions.
5.4 Holding brake (option)
5.4.1 Important notes
As an option, the motors can be fitted with a brake. The installation of brakes (in or on the
motor) increases the length of the motor.
) Note!
The brakes used are not fail−safe because interference factors, which cannot
be influenced (e.g. oil ingress), can lead to a reduction in torque.
The brakes are used as holding brakes and serve to hold the axes at standstill or in the
deenergised state.
Emergency stops at higher speeds are possible, but high switching energy increases wear
on the friction surfaces and the hub (see wear of brakes, page 27 and 28).
24
The brakes operate according to the closed−circuit principle, i.e. the brake is closed in the
deenergised state. The brakes for DC supply can be fed with a bridge−rectified DC voltage
(bridge rectifier) or with a smoothed DC voltage. Information on the permissible voltage
tolerance is provided in the respective motor catalogue.
l
BA 13.0011−EN 1.0
Page 25

Mechanical installation
Holding brake (option)
Important notes
If long motor supply cables are used, pay attention to the ohmic voltage drop along the
cable and compensate for it with a higher voltage at the input end of the cable.
The following applies to Lenze system cables:
5
U*+UB )
0.08W
ƪ
m
@L@I
ƫ
B
U* [V] Resulting supply voltage
UB [V] Rated voltage of the brake
l [m] Cable length
IB [A] Rated current of the brake
( Stop!
If no suitable voltage (incorrect value, incorrect polarity) is applied to the
brake, the brake will be applied and can be overheated and destroyed by the
motor continuing to rotate.
The shortest operating times of the brakes are achieved by DC switching of the voltage and
a suppressor circuit (varistor or spark suppressor). Without suppressor circuit, the
operating times may increase. A varistor/spark suppressor limits the breaking voltage
peaks. It must be ensured that the power limit of the suppressor circuit is not exceeded.
This limit depends on the brake current, brake voltage, disengagement time and the
switching operations per time unit.
Furthermore, the suppressor circuit is necessary for interference suppression and also
increases the service life of the relay contacts (external, not integrated in the motor).
, Please refer to the catalogue for servo motors for detailed information about
holding brakes.
) Note!
The brake cannot be readjusted. When the wear limit is reached, the brake has
to be replaced.
BA 13.0011−EN 1.0
l
25
Page 26

5
5.4.2 Permanent magnet holding brakes
Mechanical installation
Holding brake (option)
Permanent magnet holding brakes
These brakes are used as holding brakes and serve to hold the axes without backlash at
standstill or in the deenergised state.
When activating the brake, it must be ensured that the brake is released or engaged at zero
speed to avoid unnecessary and rapid wear of the brake.
When used solely as holding brakes, the brakes are virtually wear free on their friction
surfaces. If the max. permissible switching energy per emergency stop (see catalogue) is
not exceeded, at least 2000 emergency stop functions from a speed of 3000 rpm are
possible.
W +½@J
The holding torques specified in the catalogue only apply when the motor is at standstill.
In the case of a slipping brake, the dynamic braking torque always applies which depends
on the speed.
ges
@ w
2
W [J] Energy
J
[kgm2] Total moment of inertia
tot
w [1/s] Angular velocity w=2p n/60, n= speed [rpm]
( Stop!
The holding brake is only designed for a limited number of emergency stops.
Utilisation as a working brake, e.g. to decelerate a load, is not permissible.
) Note!
The brakes are maintenance−free and cannot be adjusted. In the event of wear,
e.g. through emergency stops, the brakes must be replaced.
These brakes operate according to the closed−circuit principle, i.e. the brake is closed in the
deenergised state.
Brakes with a rated voltage of DC 24 V are designed for smoothed DC voltages with a ripple
of <1 %. It must be ensured that the connector on the motor side is supplied with the
minimum voltage of DC 24 V −10 %. If necessary, the voltage drop in the cable should also
be considered. If the maximum voltage DC 24 V + 5 % is exceeded, the brake can close
again. Supplying the brake with bridge−rectified DC voltage (bridge rectifier without
additional smoothing) or a DC voltage with a ripple of >1 % can lead to a malfunctioning
of the brake or an increase in the engagement and disengagement times.
26
Brakes with a rated voltage of DC 205 V are designed for bridge−rectified DC voltage, i.e. for
supply via a bridge rectifier from the 230 V mains (half−wave rectifiers are not permissible).
Supplying the brake with smoothed DC voltage can lead to malfunctioning or an increase
in the engagement and disengagement times. With regard to the minimum and
maximum voltages, the same conditions apply as for brakes with 24 V, i.e. the permissible
voltage tolerance is 205 V DC +5 %, −10 %.
l
BA 13.0011−EN 1.0
Page 27

Mechanical installation
Holding brake (option)
Permanent magnet holding brakes
Wear of permanent magnet brakes
If applied as directed (application as holding brakes), the permanent magnet brakes of the
servo motors are wear free and intended for long operating times. The wear on the friction
lining is due to e.g. emergency stops.
The table below describes the different reasons for wear and their impact on the
components of the permanent magnet brakes.
Component Effect Influencing factors Cause
Friction lining /
friction surface at
the armature plate
and external pole
Springs Fatigue failure of the springs Number of switching
Permanent magnet Useless brake Temperature, overvoltage Excessive overvoltages /
Wear on the friction lining
Applied friction energy
operations of the brake
Braking during operation
(impermissible, holding
brakes!)
Emergency stops
Overlapping wear when the
drive starts and stops
Active braking by the drive
motor with the help of the
brake (quick stop)
Axial duty cycle of the
springs
temperatures
5
( Stop!
In case of wear above the maximum air gap (^ brake operating instructions),
application of the brake cannot be ensured. In this case, no braking process is
carried out.
BA 13.0011−EN 1.0
l
27
Page 28

5
Mechanical installation
Holding brake (option)
Spring−applied holding brakes
5.4.3 Spring−applied holding brakes
These brakes are used as holding brakes and serve to hold the axes without backlash at
standstill or in the deenergised state.
For permissible operating speeds and characteristics, please see the respective valid motor
catalogue. Emergency stops at higher speeds are possible, but high switching energy
increases wear on the friction surfaces and the hub.
( Stop!
The friction surfaces must always be free from oil and grease because even
small amounts of grease or oil will considerably reduce the braking torque.
The formula below provides a simplified way to calculate friction energy per switching
cycle which must not exceed the limit value for emergency stops that depends on the
operating frequency (^ motor catalogue; Lenze drive solutions: Formulas, dimensioning,
and tables).
Q +½@J
@ Dw2 @
ges
M
K
MK* M
Q [J] Friction energy
J
[kgm2] Total mass inertia (motor + load)
tot
L
Dw [1/s] Angular velocity w=2p n/60, n= speed [rpm]
MK [Nm] Characteristic torque
ML [Nm] Load torque
Depending on the operating conditions and possible heat dissipation, the surface
temperatures can be up to 130 °C.
The spring−applied brakes operate according to the closed−circuit principle, i.e. the brake is
closed in the deenergised state. The brakes can be fed with a bridge−rectified DC voltage
(bridge rectifier) or with a smoothed DC voltage. The permissible voltage tolerance is
±10%.
, For more information on spring−applied brakes, please refer to the
corresponding catalogues and operating instructions of the brakes.
Wear on spring−applied brakes
Spring−applied brakes are wear−resistant and designed for long maintenance intervals.
However, the friction lining, the teeth between the brake rotor and the hub, and also the
braking mechanism are naturally subject to wear due to the way in which the equipment
functions. In order to ensure safe and problem−free operation, the brake must therefore be
checked regularly and, if necessary, replaced.
28
If the brake is used purely as a holding brake, the amount of wear on the friction surfaces
is only very small. Emergency stops increase wear on the friction surfaces.
The following table describes the different causes of wear and their effect on the
components of the spring−applied brake. In order to calculate the service life of the rotor
and brake and determine the required maintenance intervals, the relevant influencing
factors must be quantified. The most important factors are the applied friction energy, the
starting speed of braking and the switching frequency. If several of the indicated causes of
wear on the friction lining occur in an application, their effects are to be added together.
l
BA 13.0011−EN 1.0
Page 29

Mechanical installation
Holding brake (option)
Spring−applied holding brakes
Component Cause Effect Influencing factors
Friction lining
Armature plate and
flange
Teeth of the brake
rotor
Armature plate
bracket
Springs Axial load cycle and shearing stress
Emergency stops Wear on the
friction lining
Overlapping wear when the drive
starts and stops
Active braking by the drive motor
with the help of the brake (quick
stop)
Starting wear if motor is mounted
in a position with the shaft vertical,
even if the brake is open
Rubbing of the brake lining Running−in of armature
Relative movement and impacts
between brake rotor and brake hub
Load changes and impacts due to
reversal error during interaction
between armature plate, cap
screws and guide bolts
on the springs due to radial
reversed error of the armature plate
plate and flange
Teeth wear (primarily at
the rotor end)
Armature plate, cap
screws and bolts are
deflected
Fatigue failure
of the springs
Applied friction energy
Number of start−stop
cycles
Applied friction energy
Number of start−stop
cycles,
level of the braking
torque
Number of start−stop
cycles,
level of braking torque
Number of switching
operations of the brake
5
BA 13.0011−EN 1.0
l
29
Page 30

6
Electrical installation
Important notes
6 Electrical installation
6.1 Important notes
{ Danger!
Hazardous voltage on the power connections even when disconnected from
mains: residual voltage >60 V!
Before working on the power connections, always disconnect the drive
component from the mains and wait until the motor is at standstill.
Verify safe isolation from supply!
( Stop!
Electrical connections must be carried out in accordance with the national and
regional regulations!
ƒ The connection must ensure a permanent and safe electrical supply, i.e.
– no loose wire ends,
– use assigned cable end fittings,
– establish a safe PE conductor connection,
– Tighten the plug−in connector to the limit stop.
ƒ The smallest air gaps between uncoated, live parts and against earth must not fall
below the following values:
Minimum requirements for basic
insulation according to IEC/EN
60664−1 (CE)
3.87 mm 6.4 mm < 178 mm
ƒ All unused cable entries must be sealed against dust and water.
Voltage supply
ƒ Inverter−optimised motors
– must be supplied by inverters.
– connect the encoders mounted to the motor with the corresponding connections
of the inverter.
ƒ Holding brake (as option)
Higher requirements for UL design Motor diameter
30
ƒ Follow the Operating Instructions for the inverter used to connect it.
l
BA 13.0011−EN 1.0
Page 31

Electrical installation
Wiring according to EMC
Cable cross−section
ƒ Select appropriate connection cables to avoid impermissible heating (DIN
57100/VDE 0100 T523).
ƒ When extremely long cables are used, we recommend to use the next cable cross
section up to reduce the power losses. Observe the minimum cross sections to DIN
VDE 0298−4.
ƒ Establish the electrical connection as shown in the circuit diagram attached to each
motor. The circuit diagrams for the standard designs can be found in chapter 6.3.
Motor protection
ƒ The motor cable cannot be protected by temperature monitorings or PTC thermistors
in the motor winding:
– Take measures to DIN 57100 / VDE 0530.
ƒ The inverter changes current and voltage such that the output current can be
considerably higher than the input current. The motor cable cannot be protected via
the mains input fuses of the inverter:
– Take measures to DIN 57100 / VDE 0530.
6
ƒ Ensure careful earthing of the motor housing!
– If the motor is inverter driven, high−frequency voltages may be capacitively
transferred to the motor housing.
6.2 Wiring according to EMC
The EMC−compliant wiring of the motors is described in detail in the Operating
Instructions for the Lenze controllers.
ƒ Use of metal EMC cable glands with shield connection.
ƒ Connect the shielding to the motor and to the device.
BA 13.0011−EN 1.0
l
31
Page 32

6
Electrical installation
Connection plan
6.3 Connection plan
... for motor and brake
SDSGSLL − Pin No. Connection name
1 Y1
035−22
047−22
056−22
063−22
063−22/32
... for resolver and thermal contact
SDSGSLL − Pin No. Connection name
035−22
047−22
056−22
063−22
063−22/32
2 Y2
PE PE
4 U
5 V
6 W
1 + Ref
2 − Ref
3
4 + cos
5 − cos
6 + sin
7 − sin
8
9
10
11 +
12 −
Connection to:
Brake
Circuit breaker
Motor phase
Connection to:
Resolver
Resolver
KTY/thermal switch
Pin assignment
Pin assignment
... for absolute value encoder and thermal contact
SDSGSLL − Pin No. Connection name
1 B
2 A
3 A
4 + 5V
035−22
047−22
056−22
063−22
063−22/32
5 GND
6 Z
7 Z
8
9 B
10
11 + KTY
12 − KTY
Connection to:
Track B /
+ SIN
Track A inverted / − COS
Track A
Supply + 5V + 8V
Earth
Zero track inverted /
− RS485
Zero track / + RS485
Not assigned
Track B inverted / − SIN
Not assigned
Thermal detector +
Thermal detector −
Pin assignment
32
l
BA 13.0011−EN 1.0
Page 33

Commissioning and operation
7 Commissioning and operation
7.1 Important notes
( Stop!
ƒ Ensure that the drives are disconnected from the power supply when
working on them!
ƒ The drive must only be commissioned by qualified personnel!
ƒ Do not use the drive in rooms exposed to explosion danger!
ƒ Danger of fire! Do not use flammable detergents or solvents to clean the
drive.
ƒ Avoid overheating! Deposits and dirt on the drives impede the necessary
heat dissipation and must be removed frequently.
Ensure that no foreign particles ingress into the motor!
7
Important notes
For trial run without output elements, lock the featherkey. Do not deactivate the
protective devices, not even in a trial run.
Check the correct operation of the brake before commissioning motors with brakes.
BA 13.0011−EN 1.0
l
33
Page 34

7
Commissioning and operation
Before switching on
Servo motor parameters
7.2 Before switching on
) Note!
Before switch−on, you must ensure that the motor starts with the intended
direction of rotation.
Lenze motors rotate CW (looking at the driven shaft) if a clockwise three−phase
field L1 W U1, L2 WV1, L3 W W1 is applied.
Before initial commissioning, before commissioning after an extended standstill period, or
before commissioning after an overhaul of the motor, the following must be checked:
ƒ Measure the insulation resistance, in case of values £1 kWper volt of rated voltage, dry
the winding.
ƒ Have all screwed connections of the mechanical and electrical parts been firmly
tightened?
ƒ Is the unrestricted supply and removal of cooling air ensured?
ƒ Has the PE conductor been connected correctly?
ƒ Have the protective devices against overheating (temperature sensor evaluation)
been activated?
ƒ Is the controller correctly parameterised for the motor?
(^ Controller operating instructions)
ƒ Are the electrical connections o.k.?
ƒ Does the motor connection have the correct phase sequence?
ƒ Are rotating parts and surfaces which can become very hot protected against
accidental contact?
ƒ Is the contact of good electrical conductivity if a PE connection on the motor housing
is used?
7.2.1 Servo motor parameters
Motor
SDSGSLL
035−22
047−22
056−22
063−22
Mains voltage / AC current C86
210 V AC 1409
360V AC 1413
210 V AC 1410
360V AC 1414
210 V AC 1411
360V AC 1415
210 V AC 1412
360V AC 1416
Code for 9300 and 9400
34
l
BA 13.0011−EN 1.0
Page 35

7.3 Functional test
7.4 Functional test
ƒ Check all functions of the drive after commissioning:
ƒ Direction of rotation of the motor
– Direction of rotation in the disengaged state (see chapter "Electrical connection").
ƒ Torque behaviour and current consumption
ƒ Function of the feedback system
7.5 During operation
Commissioning and operation
Functional test
7
( Stop!
ƒ Fire hazard! Do not clean or spray motors with flammable detergents or
solvents.
ƒ Avoid overheating! Deposits on the drives impede the heat dissipation
required and have to be removed regularly.
} Danger!
During operation, motor surfaces may not be touched. According to the
operating status, the surface temperature for motors can be up to 150°C. For
the protection against burn injuries, provide protection against contact, if
necessary. Observe cooling−off times!
Perform regular inspections during operation. Check the drives approx. every 50 operating
hours. Pay particular attention to:
ƒ Unusual noises
ƒ Oil spots on drive end or leakages
ƒ Irregular running
ƒ Increased vibration
ƒ Loose fixing elements
BA 13.0011−EN 1.0
ƒ Condition of electrical cables
ƒ Speed variations
ƒ Impeded heat dissipation through:
– Deposits on the drive system
In case of irregularities or faults: ^ chapter 9.
l
35
Page 36

8
Maintenance/repair
Important notes
8 Maintenance/repair
8.1 Important notes
{ Danger!
Hazardous voltage on the power connections even when disconnected from
mains: residual voltage >60 V!
Before working on the power connections, always disconnect the drive
component from the mains and wait until the motor is at standstill.
Verify safe isolation from supply!
Shaft sealing rings and rolling−contact bearings have a limited service life.
8.2 Maintenance intervals
Inspections
ƒ If the machine is exposed to dirt, clean the air channels regularly.
ƒ Check the power supply cables on a regular basis.
Motor
ƒ Only the bearings and shaft sealing rings become worn.
– Check bearings for noise (after approx. 15,000 h at the latest).
ƒ In order to prevent overheating, remove dirt deposits on the drives regularly.
ƒ We recommend carrying out an inspection after the first 50 operating hours. In this
way, you can detect and correct any irregularities or faults at an early stage.
36
l
BA 13.0011−EN 1.0
Page 37

Maintenance/repair
Repair
Holding brake
The brakes need to be checked on a regular basis to ensure safe and trouble−free operation.
The necessary maintenance intervals primarily depend on the stress to which the brake is
subjected in an application. When a maintenance interval is being calculated, all causes of
wear must be taken into account (see notes "Wear on spring−applied brakes"). In the case
of brakes which are subjected to low levels of stress, e.g. holding brakes with emergency
stop function, regular inspections at a fixed time interval are recommended. In order to
reduce the amount of work involved in maintenance, perform the inspection at the same
time as other maintenance work carried out cyclically on the machine if possible.
If the brakes are not properly serviced, operating faults, production outages or damage to
machinery can occur. A maintenance concept adapted to the operating conditions and the
stresses to which the brakes are subjected must therefore be drawn up for every
application. For brakes, the maintenance intervals and servicing work listed in the
following table are necessary.
8
Maintenance interval for holding brake with
emergency stop
At least every 2 years
After 1 million cycles at the latest
Shorter intervals in the case of frequent emergency
stops!
8.3 Repair
ƒ It is recommended to have all repairs performed by Lenze Service.
Maintenance work
Inspection of the brake integrated in the motor:
l Check ventilation function and
activation/deactivation
BA 13.0011−EN 1.0
l
37
Page 38

Troubleshooting and fault elimination9
9 Troubleshooting and fault elimination
If faults occur during operation of the drive system:
ƒ First check the possible causes of malfunction according to the following table.
) Note!
Also observe the corresponding chapters in the operating instructions to the
other components of the drive system.
If the fault cannot be remedied using one of the listed measures, please contact the Lenze
Service.
} Danger!
ƒ Only work on the drive system when it is in a deenergised state!
ƒ Hot motor surfaces of up to 150 °C. Observe cooling times!
ƒ Remove loads acting on motors or secure loads acting on the drive!
38
l
BA 13.0011−EN 1.0
Page 39

Troubleshooting and fault elimination 9
Fault Cause Remedy
Motor does not start
Motor suddenly stops and
does not restart
Incorrect direction of
rotation of the motor, correct
display on the controller
Motor rotates slowly in one
direction and cannot be
influenced by the controller
Motor does not rotate,
gearbox output is not
running
Irregular running
Vibrations
Running noises
Surface
temperature > 150 °C
Voltage supply interrupted l Check error message at the controller
l Check electrical connection (chapter 6)
Controller inhibited l Check display at drive controller
l Check controller enable
Resolver cable is interrupted l Check error message at the controller
l Check resolver cable
Brake does not release
Drive blocks Check components for easy movement, remove foreign particles if
Overtemperature protector
switch is activated
Overload monitoring of the
inverter is activated
Reversed motor cable and
resolver cable
Polarity reversal of motor or
resolver cable
Defective wheel−hub
connection
Toothing worn out Repair by manufacturer
Insufficient shielding of
motor or resolver cable
Drive controller gain too
large
Insufficiently balanced
coupling elements or
machine
Poor alignment of the drive
train
Loose fixing screws Check and tighten screw connections
Foreign particles inside the
motor
Bearing damage Repair by manufacturer, if necessary
Overload of the drive Check load and, if necessary, reduce load by prolonging the
Heat dissipation impeded by
deposits
Check electrical connection
Check continuity of magnetic coil
necessary
l Let motor cool down
– Reduce the load by prolonging the acceleration times
l Check controller settings
l Reduce the load by prolonging the acceleration times
Exchange 2 phases of the motor cable
and
the +COS/−COS connections of the resolver
Exchange 2 phases of the motor cable
or
the +COS/−COS connections of the resolver
Check the connection, replace the keyway, if necessary, repair by
the manufacturer
Check shielding and grounding (chapter 6)
Adjust the gains of the controllers (see Drive controller operating
instructions)
Rebalance
Realign machine unit, check foundation if necessary
Repair by manufacturer, if necessary
acceleration times
Clean surface and cooling fins of the drives
BA 13.0011−EN 1.0
l
39
Page 40

F
(
Ê
ü
© 07/2010
Lenze Drives GmbH
Postfach 10 13 52
D−31763 Hameln
Germany
+49(0)5154/ 82−0
+49(0)5154/ 82−28 00
Lenze@Lenze.de
www.Lenze.com
Service Lenze Service GmbH
Breslauer Straße 3
D−32699 Extertal
Germany
(
Ê
008000/ 2446877 (24 h helpline)
+49(0)5154/ 82−13 96
Service@Lenze.de
BA 13.0011−EN § .CD( § § 1.0 § TD35
10987654321
Q
 Loading...
Loading...