

Kawasaki 80C152, 80C51, KS152JB User Manual

KS152JB Universal Communications Controller
Technical Specifications
1.0 INTRODUCTION
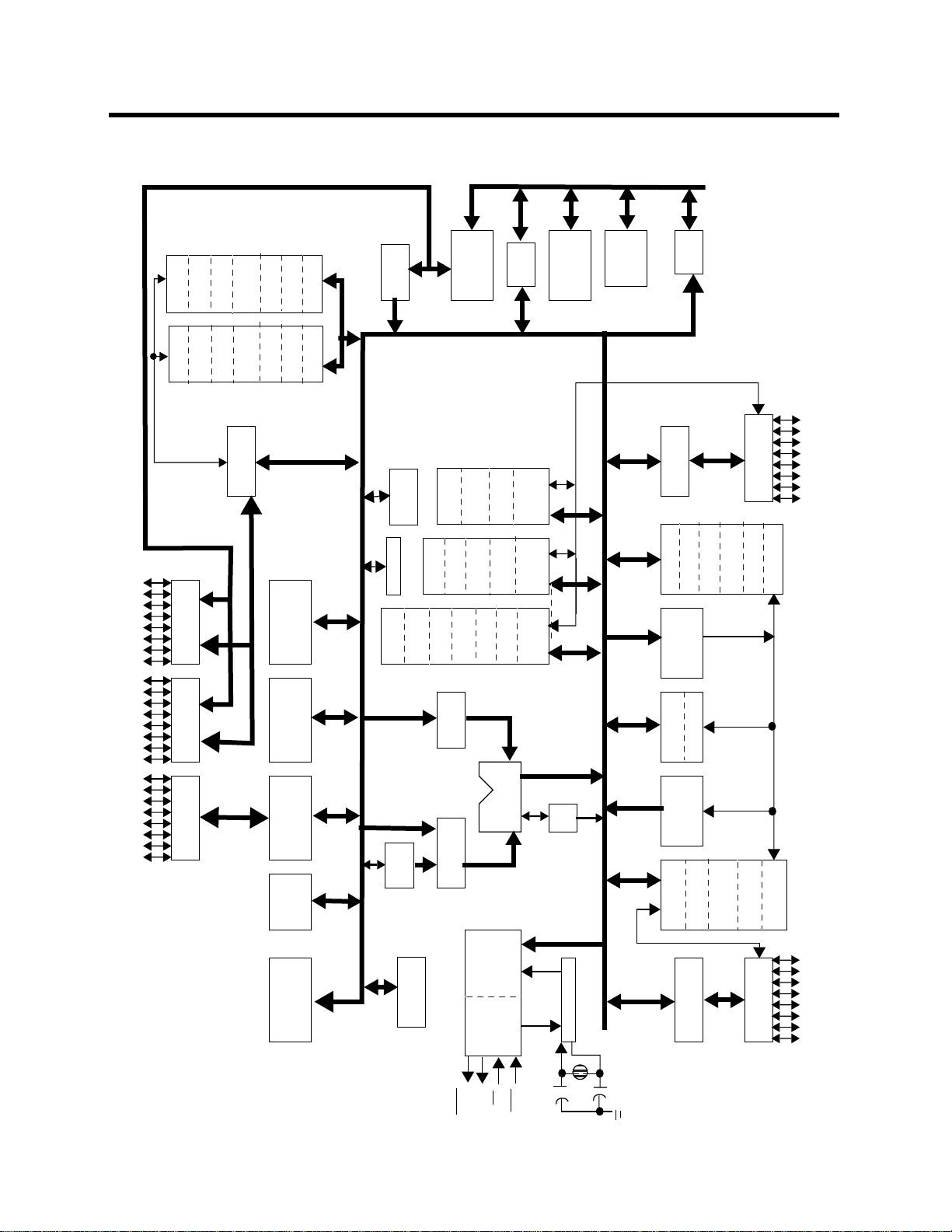
The 80C152 Universal Communications Controller is an 8-bit microcontroller designed for the
intelligent management of peripheral systems or components. The 80C152 is a derivative of the
80C51 and retains the same functionality. These enhancements include: a high speed multi-protocol serial communication interface, two channels for DMA transfers, HOLD/HLD A b us control, a
fifth I/O port, expanded data memory, and expanded program memory.
In addition to a standard UART, referred to here as Local Serial Channel (LSC), the 80C152 has
an on-board multi-protocol communication controller called the Global Serial Channel (GSC).
The GSC interface supports SDLC, CSMA/CD, user definable protocols, and a subset of HDLC
protocols. The GSC capabilities include: address recognition, collision resolution, CRC generation, flag generation, automatic retransmission, and a hardware based acknowledge feature. This
high speed serial channel is capable of implementing the Data Link Layer and the Physical Link
Layer as shown in the OSI open systems communication model. This model can be found in the
document “Reference Model for Open Systems Interconnection Architecture”, ISO/TC97/SC16
N309.
The DMA circuitry consists of two 8-bit DMA channels with 16-bit addressability. The control
signals; Read (RD), Write (WR), hold and hold acknowledge (HOLD/HLDA) are used to access
external memory. The DMA channels are capable of addressing up to 64K bytes (16 bits). The
destination or source address can be automatically incremented. The lower 8 bits of the address
can be automatically incremented. The lower 8 bits of the address are multiplexed on the data bus
Port 0 and the upper eight bits of address will be on Port 2. Data is transmitted over an 8-bit
address/data bus. Up to 64k bytes of data may be transmitted for each DMA activation.
The new I/O port (P4) function the same as Ports 1-3 found on the 80C51.
Internal memory has been doubled in the 80C152. Data memory has been expanded to 256 bytes,
and internal program memory has been expanded to 8 bytes.
There are also some specific differences between the 80C152 and the 80C51. The first difference
is that RESET is active low in the 80C152 and active high in the 80C51H. The second difference
is that GF0 and GF1, general purpose flags in PCON, have been renamed GFIEN and XRCLK.
GFIEN enables idle flags to be generated in SDLC mode, and XRCLK enables the receiver to be
externally clocked. All of the previously unused bits are now being used and interrupt vectors
have been added to support the new enhancements.
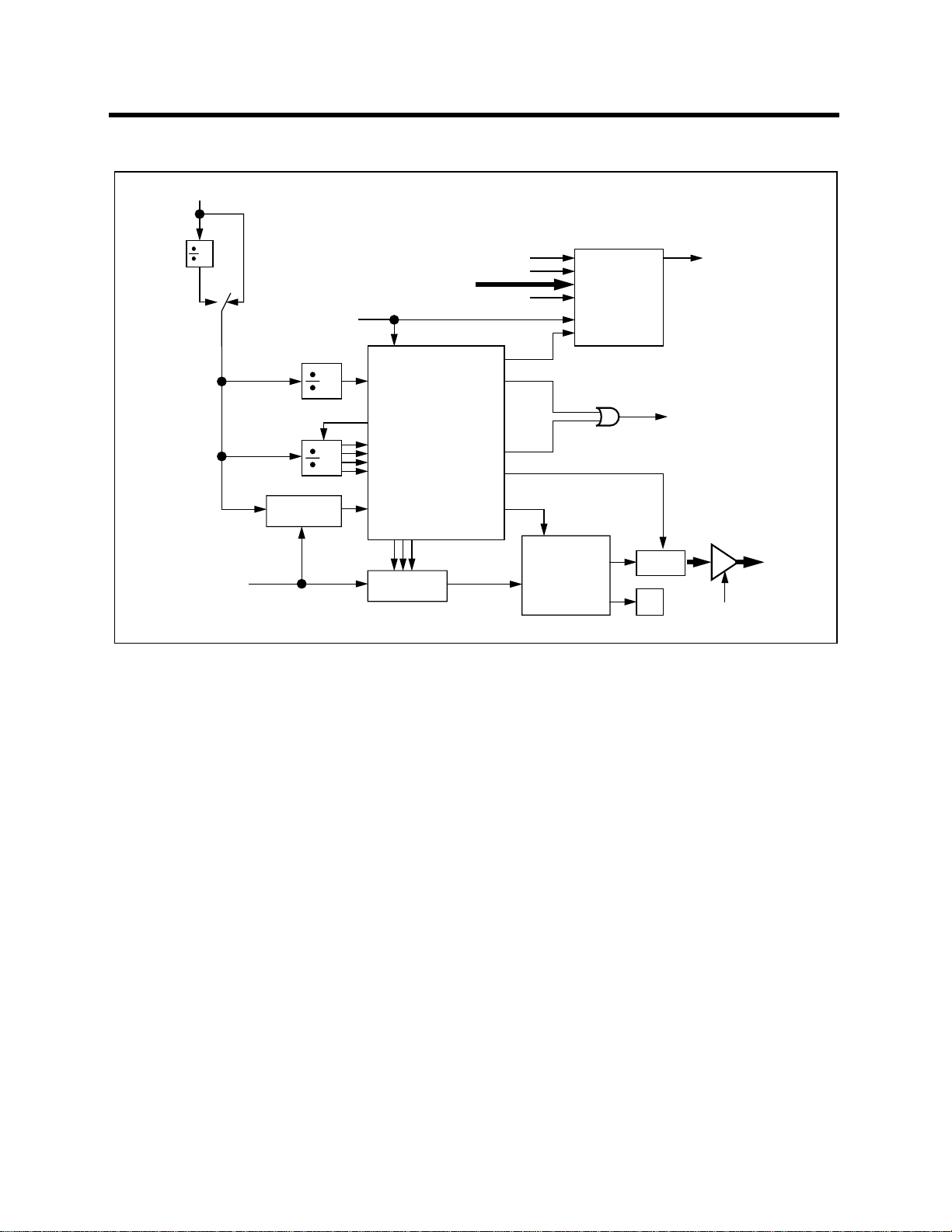
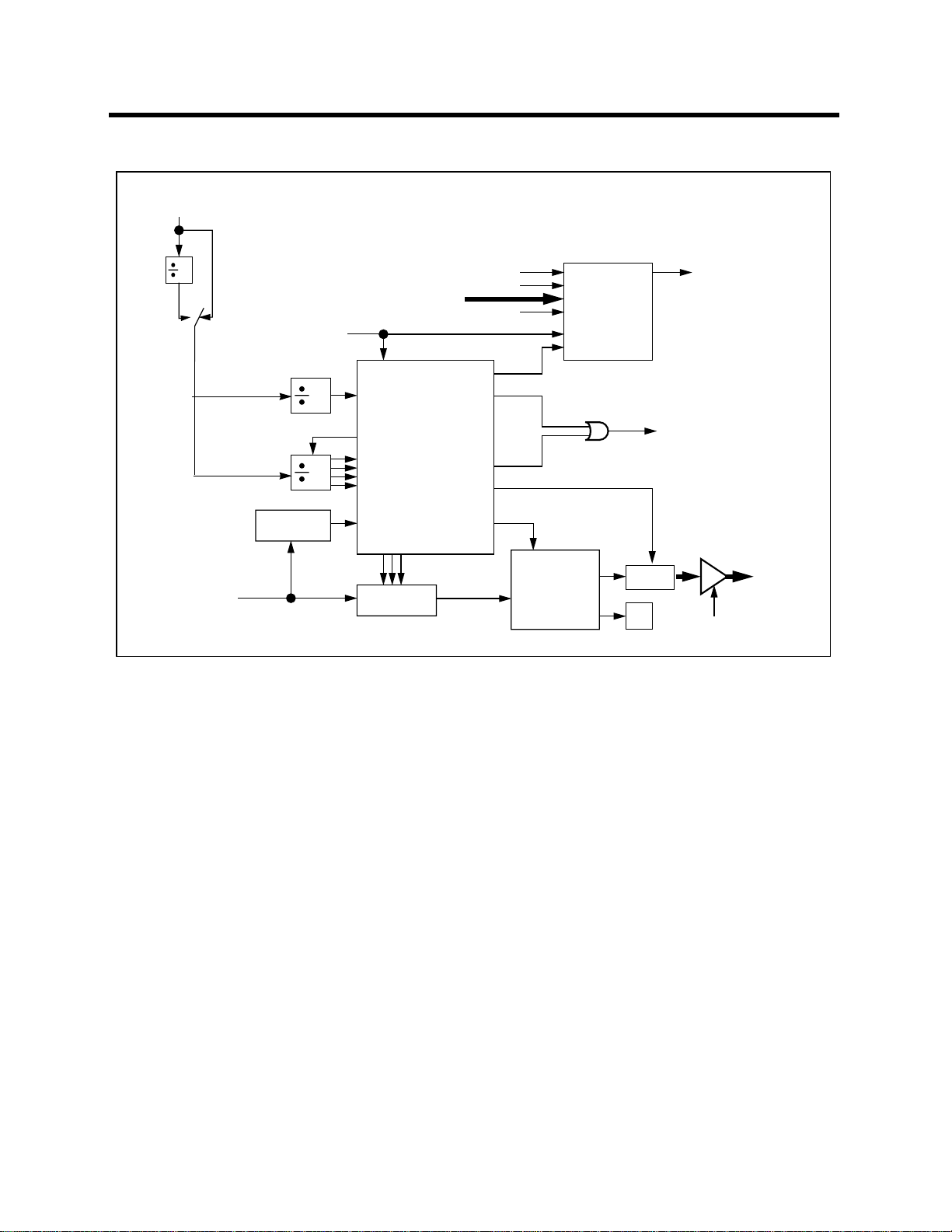
Throughout the rest of this manual the 80C152 will be referred to generically as the “C152”. The
C152 is based on the 80C51 architecture and utilizes the same 80C51 instruction set. There have
been no new instructions added. All the new features and peripherals are supported by an extension of the Special Function Registers (SFRs). A brief information on cpu functions as: the
instruction set, port operation, timer/counters, etc., is included in this document.
Kawasaki LSI USA, Inc. Page 1 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
DCON0 DCON1
PORT 2
DIRVERS
SARL1
SARL0
SARH0
SARH1
DARL0
DMA
CONTROL
DARL1
DARH1
DARH0
PORT 2
BCRL1
BCRL0
LATCH
BCRH1
BCRH0
ROM
8K X 8
STACK
PCON
TCON
POINTER
IPN1
TMOD
TL0
PROGRAM
SBUF(RX)
IEN1
TH0
ADDRESS
SBUF(TX)
SCON
IP
IE
TL1
TH1
BUFFER
LOCAL
SERIAL
PORT
INTERRUPT
CONTROL
TIMER
CONTROL
PC
INCREMEN-
TER
PROGRAM
COUNTER
DPTR
PORT 3
LATCH
PRBS
SLOTTM
FIFO
TRANSMIT
PORT 3
DRIVERS
IFS
TSTAT
MYSLOT
P3.0 - P3.7
TCDCNT
PORT 0
PORT 0
DRIVERS
P4.0 - P4.7 P0.0 - P0.7 P2.0 - P2.7
PORT 4
DRIVERS
LATCH
PORT 4
LATCH
RAM
256 X 8
RAM
ADDRESS
REGISTER
ACC
B
REGISTER
TMP 1
TMP 2
PSEN
INSTRUCT-
ION
REGISTER
TIMING
AND
ALE
CONTROL
EA
ALU
RST
XTAL1
PSW
OSCILLATOR
XTAL2
RSTAT
AMSKO-1
RECEIVE
FIFO
GSC
CONTROL
PORT1
LATCH
CRC
GMOD
GENERATOR
ADRO-3
PORT1
DRIVERS
BAUD
P1.0 - P1.7
Kawasaki LSI USA, Inc. Page 2 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
2.1 Pin Description
Table 1: PIN DESCRIPTION
Name Description
Port 0 Port 0 is an 8-bit open drain bi-directional I/O Port. As an output port each pin can
sink 8 LS TTL inputs. Port 0 pins that have 1s written to them float, and in that
state can be used as high-impedance inputs.
external program memory if EBEN is pulled low. During accesses to external
Data Memory, Port 0 always emits the low-order address byte and serves as the
multiplexed data bus. In these applications it uses strong internal pullups when
emitting 1s.
Port 0 also outputs the code bytes during program verification. External pullups
are required during program verification.
Port 1 Port 1 is an 8 -bit bidirectional I/O port with internal pullups. Port 1 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 1 pins that are externally being pulled low will
source current (I
Port 1 also serves the functions of various special features of the 8XC152, as listed
below:
, on the data sheet) because of the internal pullups.
IL
Pin Name Alternate Function
P1.0 GRXD GSC data input pin
P1.1 GTXD GSC data output pin
P1.2 DEN
P1.3
P1.4
P1.5 HLD DMA hold input/output
P1.6 HLDA DMA hold acknowledge input/output
Port 2 Port 2 is an 8-bit bi-directional I/O port with internal pullups. Port 2 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 2 pins that are externally being pulled low will
source current (I
the high-order address byte during fetches from external program memory if
EBEN is pulled low. During accesses to external Data Memory that use 16-bit
addresses (MOVX @ DPTR and DMA operations), Port 2 emits the high-order
address byte. In these applications it uses strong internal pullups when emitting
1s. During accesses to external Data Memory that use 8-bit addresses (MOVX @
Ri), Port2 emits the contents of the P2 Special Function Register. Port 2 also
receives the high-order address bits during program verification.
GSC enable signal for an external driver
TXC GSC input pin for external transmit clock
RXC GSC input pin for external receive clock
, on the data sheet) because of the internal pullups. port 2 emits
IL
Kawasaki LSI USA, Inc. Page 3 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Table 1: PIN DESCRIPTION
Port 3 Port 3 is an 8-bit bi-directional I/O port with internal pullups. Port 3 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 3 pins that are externally being pulled low will
source current (I
functions of various special features of the MCS-51 Family, as listed below:
Pin Name Alternate Function
P3.0 RXD Serial input line
P3.1 TXD Serial output line
P3.2
P3.3
P3.4 T0 Timer 0 external input
P3.5 T1 Timer 1 external input
P3.6
P3.7
INT0 External interrupt 0
INT1 External interrupt 1
WR External Data Memory Write strobe
RD External Data Memory Read strobe
on the data sheet) because of the pullups. Port 3 also serves the
IL,
Port 4 Port 4 is an 8-bit bi-directional I/O port with internal pullups. Port 4 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 4 pins that are externally being pulled low will
source current (I
Port 4 also receives the low-order address bytes during program verification.
Port 5 Port 5 is an 8-bit bi-directional I/O port with internal pullups. Port 5 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 5 pins that are externally being pulled low will
source current (I
Port 5 is also the multiplexed low-order address and data bus during accesses to
external program memory if EBEN is puled high. In this application it uses strong
pullups when emitting 1s.
Port 6 Port 6 is an 8-bit bi-directional I/O port with internal pullups. Port 6 pins that have
1s written to them are pulled high by the internal pullups, and in that state can be
used as inputs. As inputs, Port 6 pins that are externally pulled low will source
current (I
high-order address byte during fetches from external Program Memory if EBEN
is pulled high. In this application it uses strong pullups when emitting 1s.
XTAL1 Input to the inv erting oscillator amplifier and input to the internal clock generating
circuits.
, on the data sheet) because of the internal pullups. Port 6 emits the
LL
on the data sheet) because of the internal pullups. In addition,
IL,
, on the data sheet) because of the internal pullups.
IL
XTAL2 Output from the oscillator amplifier.
RST Reset input. A logic low on this pin for three machine cycles while the oscillator is
running resets the device. An internal pullup resistor permits a power on reset to
be generated using only an external capacitor to V
nizes the reset after three machine cycles, data may continue to be transmitted for
up to 4 machine cycles after Reset is first applied.
Kawasaki LSI USA, Inc. Page 4 of 120 Ver. 0.9 KS152JB2
. Although the GSC recog-
SS
KS152JB Universal Communications Controller
Technical Specifications
Table 1: PIN DESCRIPTION
ALE Address Latch Enable output signal for latching the low byte of the address during
accesses to external memory.
In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however,
that one ALE pulse is skipped during each access to external Data Memory. While
in Reset, ALE remains at a constant high level.
PSEN Program Store Enable is the Read strobe to External Program Memory. When the
8XC152 is executing from external program memory,
the device is executing code from External Program Memory,
twice each machine cycle, except that two
each access to External Data Memory. While in Reset,
stant high level.
EA External Access enable. EA must be externally pulled low in order to enable the
8XC152 to fetch code from External Program Memory locations 0000H to
0FFFH.
EA must be connected to VCC for internal program execution.
PSEN activations are skipped during
PSEN is active (lo w). When
PSEN is activated
PSEN remains at a con-
EBEN E-Bus Enable input that designates whether program memory fetches take place
via Ports 0 and 2 or ports 5 and 6. Table 2.1 shows how the ports are used in conjunction with EBEN.
EPSEN E-bus program Store Enable is the Read strobe to external program memory when
EBEN is high. Table 2.1 shows when
on the status of EBEN and
EA.
EPSEN is used relative to PSEN depending
Kawasaki LSI USA, Inc. Page 5 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
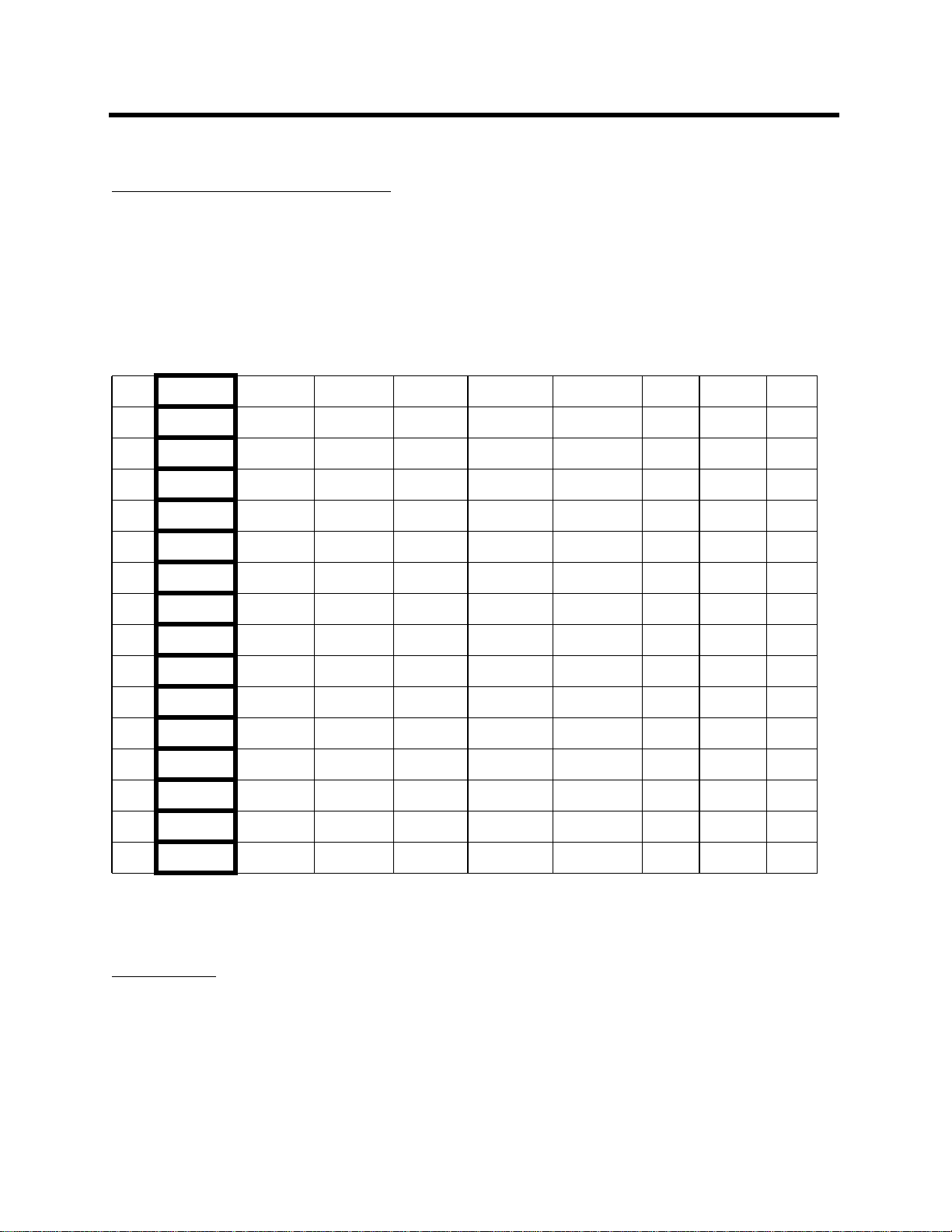
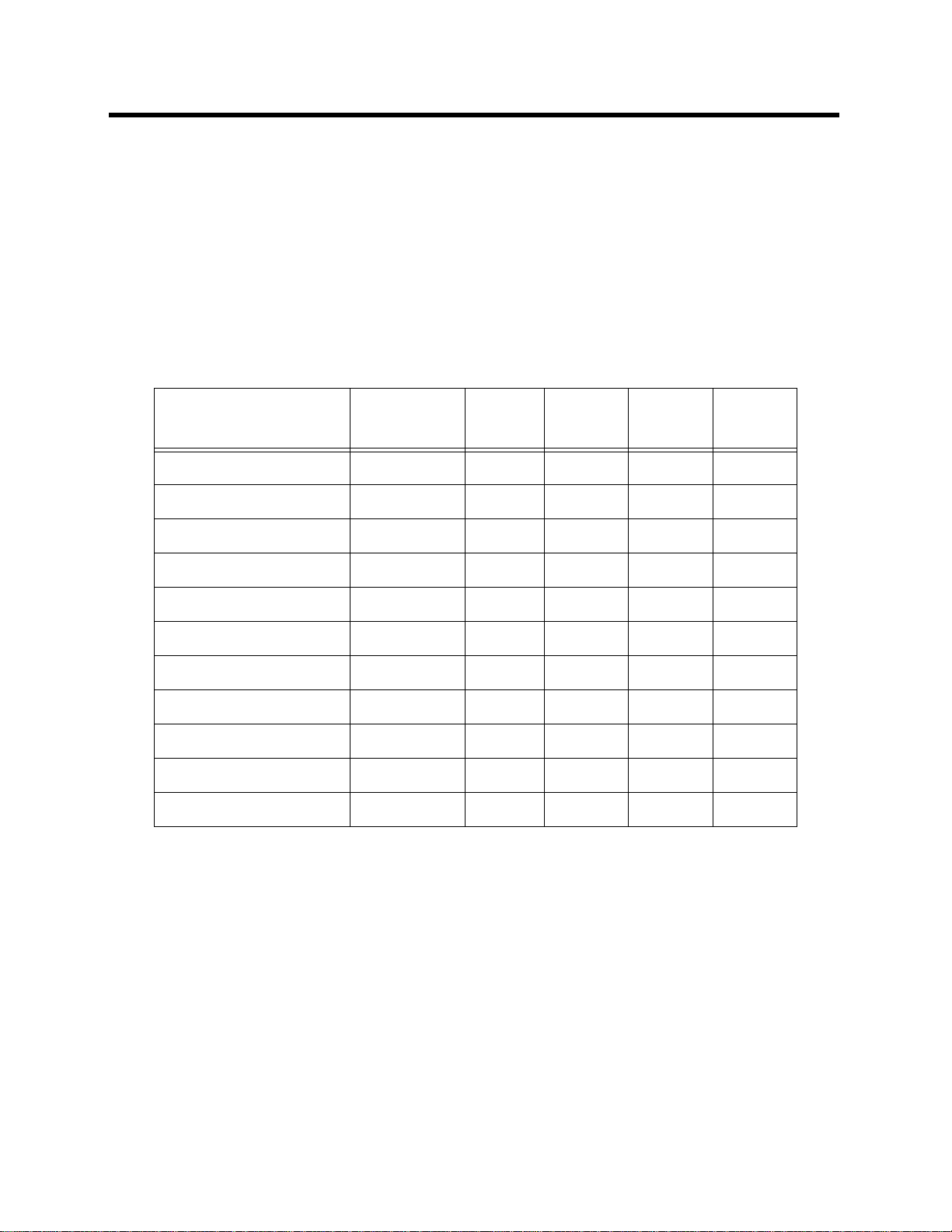
2.2 Special function Registers
The following table lists the SFR’s present in 80152. Note that not all the addresses are occupied
by SFR’s. The unoccupied addresses are not implemented and should not be used by the customer. Read access from these unoccupied locations will return unpredictable data, while write
accesses will have no effect on the chip
Table 2: SFR map for the cpu
F8 IPN1 FF
F0 B BCRL1 BCRH1 RFIFO MYSLOT F7
E8 RSTAT EF
E0 ACC BCRL0 BCRH0 PBRS AMSK1 E7
D8 TSTAT DF
D0 PSW DARL1 DARH1 TCDCNT AMSK0 D7
C8 IEN1 CF
C0 P4 DARL0 DARH0 BKOFF ADR3 C7
B8 IP BF
B0 P3 SARL1 SARH1 SLOTTM ADR2 B7
A8 IE AF
A0 P2 P6 SARL0 SARH0 IFS ADR1 A7
98 SCON SBUF 9F
90 P1 P5 DCON0 DCON1 BAUD ADR0 97
88 TCON TMOD TL0 TL1 TH0 TH1 8F
80 P0 SP DPL DPH GMOD TFIFO PCON 87
Note: SFR’s in marked column are bit addressable.
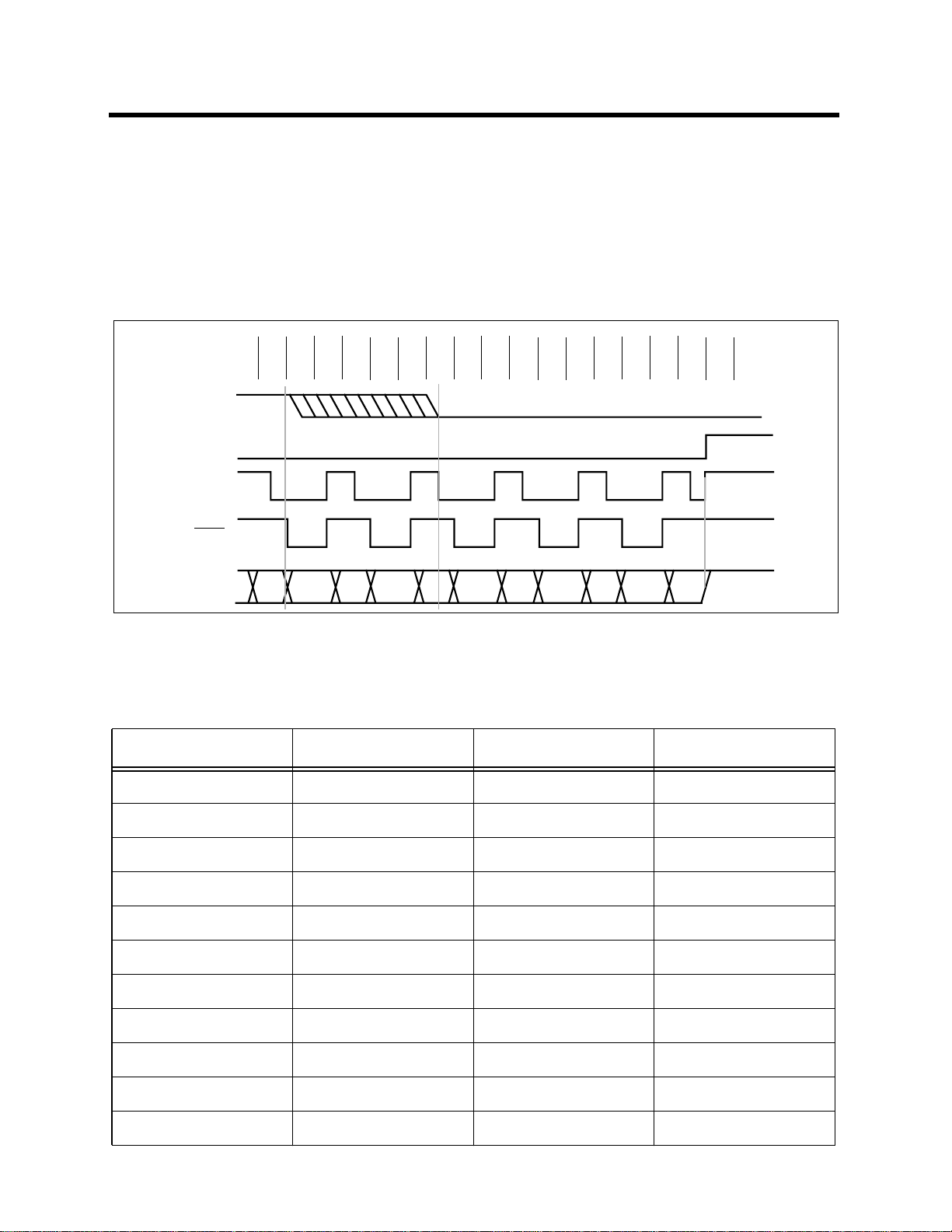
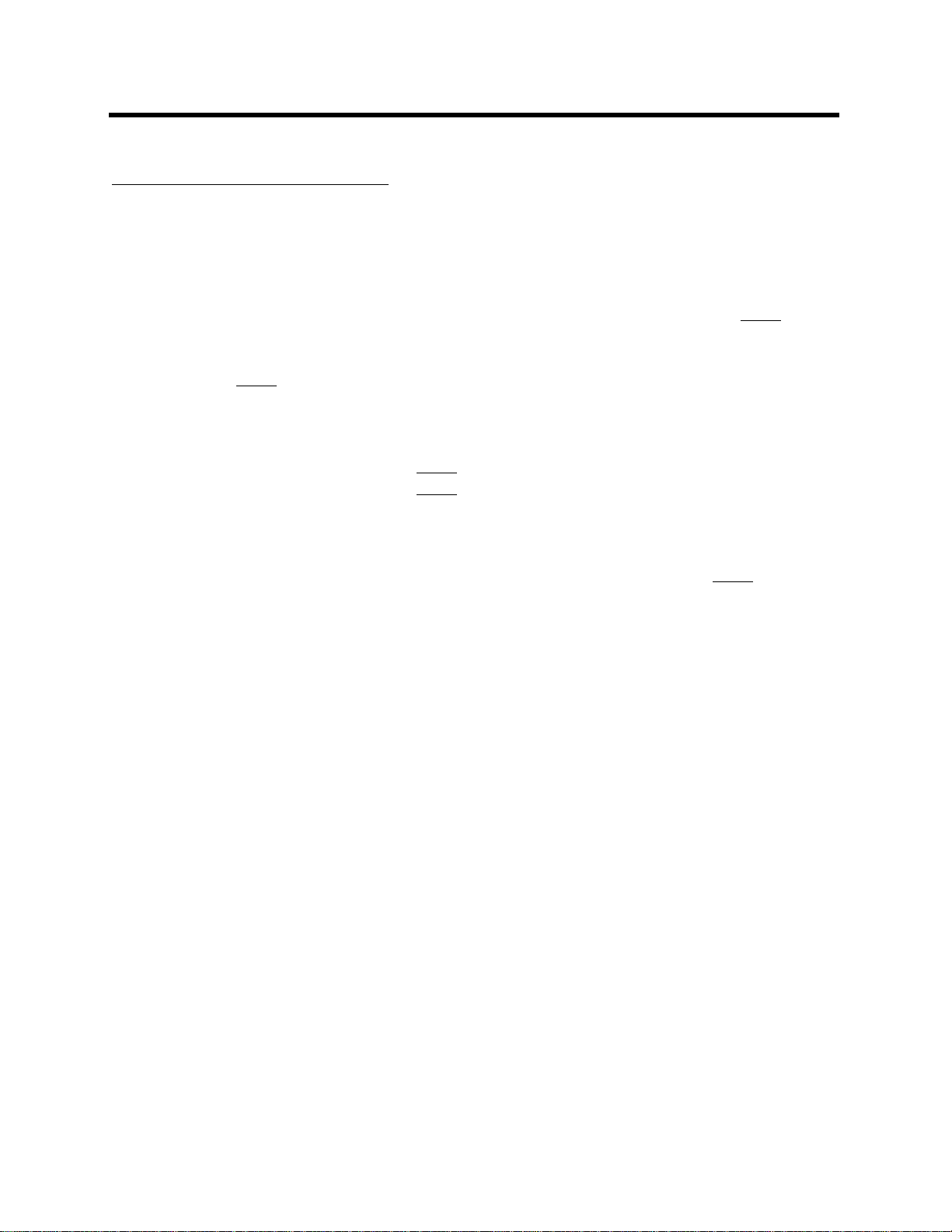
2.3 RESET
The RST pin is the input to a Schmitt Trigger whose output is used to generate the internal system
reset. In order to obtain a reset, the RST pin must be held low for at least four machine cycles,
while the oscillator is running. The CPU internal reset timings are shown in the Figure.
The external reset input RST is sampled on S5P2 in every machine cycle. If the sampled value is
high, then the processor responds with an internal reset signal at S3P1, two machine cycles after
the RST being sampled low. This means that there is an internal delay of 19 to 31 clock periods
Kawasaki LSI USA, Inc. Page 6 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
between the RST pin being pulled low and the internal reset being generated. During this time the
CPU continues its normal operations.
The internal reset signal clears the SFRs except the port SFRs which have FFh written into them
and the Stack Pointer which has 07h written to it. The SBUF is however in an indeterminate state.
The Program Counter is reset to 0000h. The internal RAM is not affected by the reset and their
contents remain unchanged. On power up, their contents is indeterminate.
RST
internal reset
ALE
PSEN
P0
S5 S6
S1 S2
ADDRINSTADDR
S3 S4
S5 S6
S1 S2
S3 S4
S5 S6
S1 S2
ADDRINSTADDRINSTADDRINSTADDRINST
S3 S4
Reset Timing
Table 3: Reset Values of the SFRs
SFR Name Reset Value SFR Name Reset Value
PC 0000H BRCL0-1 INDETERMINATE
ACC 00H BCRH0-1 INDETERMINATE
B 00H TL0 00H
PSW 00H TH0 00H
SP 07H TL1 00H
DPTR 0000H TH1 00H
P0-6 FFH ADR0-3 00H
RFIFO INDETERMINATE AMSK0-1 00H
RSTAT 00H BAUD 00H
SARH0-1 INDETERMINATE BKOFF INDETERMINATE
SARH0-1 INDETERMINATE SLOTTM 00H
Kawasaki LSI USA, Inc. Page 7 of 120 Ver. 0.9 KS152JB2

KS152JB Universal Communications Controller
Technical Specifications
Table 3: Reset Values of the SFRs
SFR Name Reset Value SFR Name Reset Value
IP XXX00000B SCON 00H
IE 0XX00000B SBUF INDETERMINATE
TMOD 00H PCON 0XXX0000B
TCON 00H DARL0-1 INDETERMINATE
DCON0-1 00H DARh0-1 INDETERMINATE
GMOD X0000000B IFS 00H
IEN1 XX000000B MYSLOT 00H
IPN1 XX000000B PRBS 00H
TCDCNT INDETERMINATE TCON 00H
TFIFO INDETERMINATE TSTAT XX000100B
2.4 PORT STRUCTURES AND OPERATION
The ports are all bidirectional. Each port consists of two sections, the port SFR and the I/O pad.
The Ports 0 and 2 are involved in accesses to external memory. In this case, Port 0 outputs the
lower byte of the external memory address while port 2 outputs the higher byte of the external
address. The Port 0 bus is also used as a data bus for the data byte that is read or is to be written.
Therefore Port 0 is actually a time-multiplexed address/data bus. A point to note is that Port 2 outputs the upper 8 bits of the address only if the address is 16 bits wide, else it continues to emit the
Port 2 SFR contents.
In order that the alternate functions on the port pin are activated correctly, the corresponding bit
latch must be held at value 1. If this is not done then the corresponding port pin is stuck at 0, and
external or internal inputs will have no effect on the pin value.
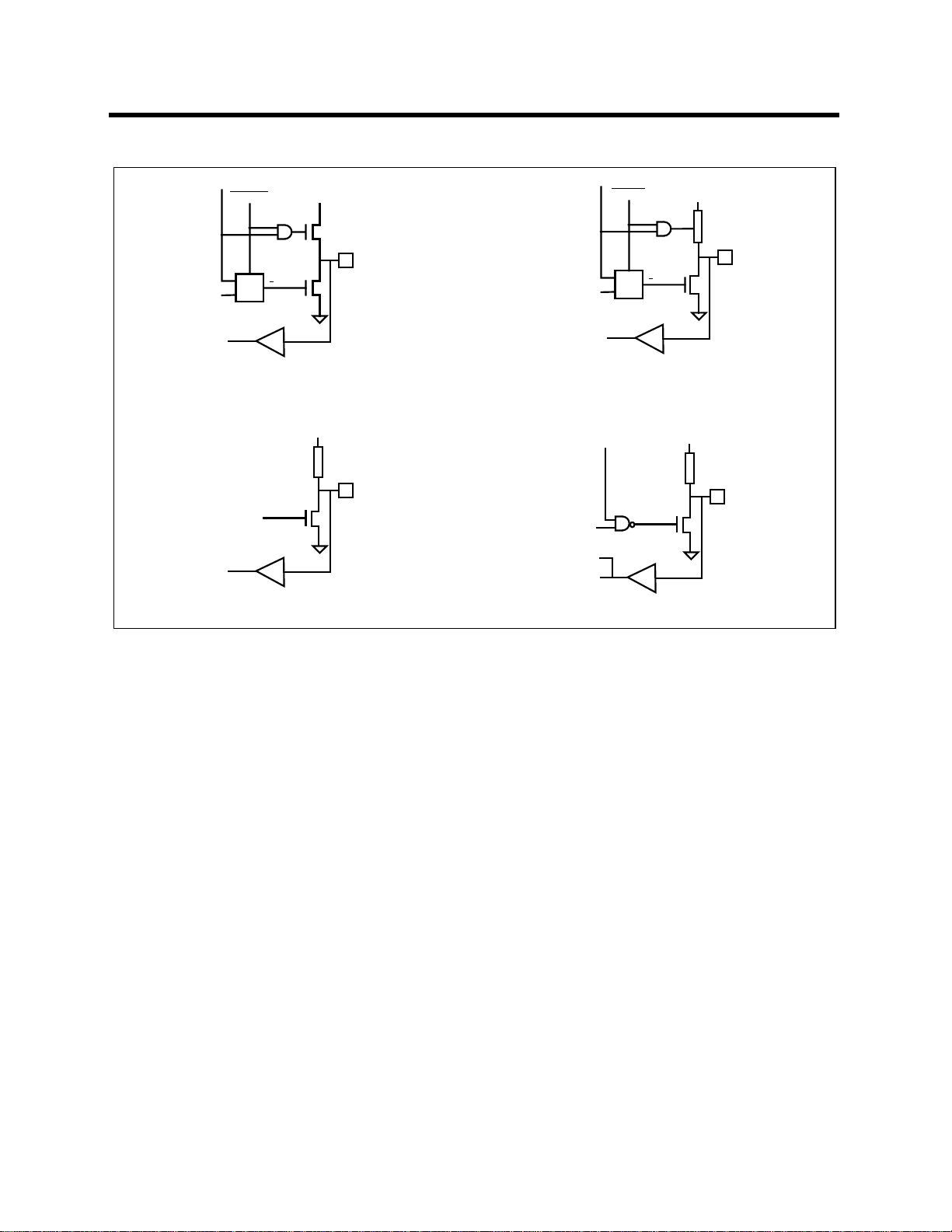
I/O CONFIGURATIONS
Each individual port has different I/O pads to accommodate the different functions of each individual port. The figure below shows a simplified diagram of the I/O pads for each port.
Kawasaki LSI USA, Inc. Page 8 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
ADDR/DATA
IDNAMX
1
Q
MUX
PORT0OP
PORT0IP
0
1. Port 0 I/O Pad
PORT1OP
PORT1IP
2. Port 1 I/O Pad
VCC
VCC
Weak Internal
Pullup
P0.X
P1.X
ADDRESS
IDNAHI
Pin
PORT2OP
PORT2IP
1
MUX
0
VCC
Internal
Pullup
P2.X
Pin
Q
3. Port 2 I/O Pad
Alternate Output
Function
Pin
PORT3OP
Alternate Output
Function
PORT3IP
VCC
Weak Internal
Pullup
P3.X
Pin
4. Port 3,4,5 &6 I/O Pad
Port bit I/O Pads
As shown in Figure above, Ports 0 and 2 can emit either their respective SFR contents or the
ADDR/DATA and ADDRESS bus, depending upon the control lines IDNAMX and IDNAHI.
During external memory accesses, the P2 SFR remains unchanged, but the P0 SFR is preset to
FFh.
Ports 1, 2, 4, 5 and 6 have internal pullups, while Port 0 has an open drain output.
Every single I/O line can be individually configured as an input or output. However Ports 0 and 2
cannot be used as I/O ports since they are used as the ADDRESS/ DATA bus. To use any port pin
as an input, the corresponding bit latch must contain a 1. This turns off the active pulldown FET.
Then, for Ports 1, 2 and 3, the pin is pulled high by the internal pullup. The Internal pullup is a
weak pullup and so the pin can be pulled low by a strong external source.
Port 0, however has no internal pullups. The active pullup FET is used only when the port pin is
emitting a 1 during external memory accesses, else the pullup is off. Hence, when the port is used
as an I/O pin; IDNAMX is 1; the pullup FET is always off. Writing a 1 to the bit latch will turn off
the active pulldown FET and as a result the port pin will float.
As port 1, 2 and 3 have internal pullups, they will go high when configured as inputs and will
source current. Hence they are also known as “quasi-bidirectional” ports. Port 0 on the other hand
“floats” when configured as an input and hence is called a “true bidirectional” port.
Kawasaki LSI USA, Inc. Page 9 of 120 Ver. 0.9 KS152JB2

KS152JB Universal Communications Controller
Technical Specifications
Writing to a Port
During the execution of an instruction that changes the value of a port SFR, the new value arrives
at the port latch during S6P2. However, the port latch contents do not appear on the port pins till
the next P1 phase. Therefore the new port data will appear on the port pins at S1P1 of the next
machine cycle.
Read-Modify-Write Feature
Each port is split into its SFR and its corresponding I/O pad. Therefore there are two options
available for a port read access. Either the SFR latch contents can be read or the input from the I/
O pads can be read. The instructions that read the latch, modify the value and write it back to the
latch are called “read-modify-write” instruction. In such instructions the latch and not the pin is
read. The instruction of this category are listed as follows
ANL logical AND
ORL logical OR
XRL logical XOR
JBC jump if bit = 1 and then clear bit
CPL complement bit
INC increment
DEC decrement
DJNZ decrement and jump if not zero
MOV PX.Y, C move carry bit to bit Y of Port X
CLR PX.Y clear bit Y of port X
SETB PX.Y set bit Y of X
2.5 Ports 4,5 and 6
Ports 4,5 and 6 operation is identical to Ports 1-3 on the 80C51. Ports 5 and 6 exist only on the
“JB” and “JD” version of the C152 and can either function as standard I/O ports or can be configured so that program memory fetches are performed with these two ports. To configure ports 5
and 6 as standard I/O ports, EBEN is tied to a logic low. When in this configuration, ports 5 and 6
operation is identical to that of port 4 except they are not bit addressable. To configure ports 5 and
6 to fetch program memory, EBEN is tied to a logic high. When using ports 5 and 6 to fetch the
program memory, the signal EPSEN is used to enable the external memory device instead of
PSEN. Regardless of which ports are used to fetch program memory, all data memory fetches
occur over ports 0 and 2. The 80C152JB and 80C152JD are available as ROMless devices only.
ALE is still used to latch the address in all configurations. Table 2.1 summarizes the control signals and how the ports may be used.
Kawasaki LSI USA, Inc. Page 10 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Table 4:
EBEN
0 0 P0, P2 Active Inactive Addresses 0 - 0FFFFH
0 1 N/A N/A N/A Invalid Combination
1 0 P5, P6 Inactive Addresses 0 - 0FFFFH
1 1 P5, P6
EA Program
Fetch via
P0, P2
PSEN EPSEN Comments
Inactive
Active
Active
Inactive
Addresses 0 - 1FFFH
Addresses 0 - 2000H
2.6 ACCESSING EXTERNAL MEMORY
External Memory is accessed if either of the following two conditions is met
1) The signal
2) Whenever the program counter (PC) contains an address greater than 0FFFh.
Accesses to external memory are of two type: External Program Memory accesses and External
Data Memory accesses. External Program Memory is accessed using the
strobe. External Data Memory is accessed using the
EA is low
PSEN signal as the read
RD or WR pins to strobe the memory.
Fetches from the external Program Memory always use a 16 bit address, while External Data
Memory accesses can have addresses of 8 bit or 16 bit. Whenever a 16 bit address is used, Port 2
is used to emit the higher byte of the address. The point to note is that during external accesses,
port 2 uses strong pullups while emitting 1s. During the time Port 2 does not emit the higher
address byte, it continuously outputs the Port 2 SFR contents, which are not modified by the hardware (unless of course the user writes to the Port 2 SFR). If an 8 bit address is being used, then the
Port 2 SFR contents will be outputed on the port pins throughout the external memory cycle.
The lower byte of the address is always multiplexed with the data byte on Port 0. The ADDR/
DATA bus can drive both the active pullup and pulldown FETs. Thus for external memory
accesses, the port 0 pins are not open-drain outputs and do not need any external pullups. The falling edge of the ALE signal can be used to store the address on Ports 0 and 2 in an external address
latch. During a write cycle, the data to be written to the external Data Memory is present on Port 0
pins and remains there until after
pins is read just before the deactivation of the
During accesses to external memory, the CPU presets the Port 0 SFR to FFh in order to float the
Port 0 pins. Therefore any data that was present in the SFR latch will be lost. If the user, writes
any data other than FFh to Port 0 during an external memory cycle, then the incoming code byte
will be corrupted. Therefore, DO NOT WRITE TO Port 0 if external memory is used.
WR is deactivated. In case of a read access, the data on Port 0
RD signal.
Kawasaki LSI USA, Inc. Page 11 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
During External Memory Accesses, both Ports 0 and 2 are used for Address/ Data transfer and
therefore cannot be used for general I/O purposes. During external program fetches, Port 2 uses
strong pullups to emit 1s.
2.7 TIMER/COUNTERS
This has two 16-bit Timer/Counters, TM0 andTM1. Each of these Timer/Counters has two 8 bit
registers which form the 16 bit counting register. For T imer/Counter TM0 the y are TH0, the upper
8 bits register and TL0, the lower 8 bit register. Similarly Timer/Counter TM1 has two 8 bit registers, TH1 and TL1 and Timer/Counter
When configured as a “Timer”, the register is incremented once every machine cycle. Since a
machine cycle consists of 12 clock periods, the timer clock can be thought of as 1/12 of the master
clock. In the “Counter” mode, the register is incremented on the falling edge of the external input
pin, T0 in case of TM0, T1 for TM1. The T0, T1 inputs are sampled in every machine cycle at
S5P2. If the sampled value is high in one machine cycle and low in the next, then a valid high to
low transition on the pin is recognized and the count register is incremented. Since it takes two
machine cycles to recognize a negative transition on the pin, the maximum rate at which counting
will take place is 1/24 of the master clock frequency. In either the “Timer” or “Counter” mode, the
count register will be updated in S3P1. Therefore, in the “Timer” mode, the recognized negative
transition on pin T0 and T1 can cause the count register value to be updated only in the machine
cycle following the one in which the negative edge was detected.
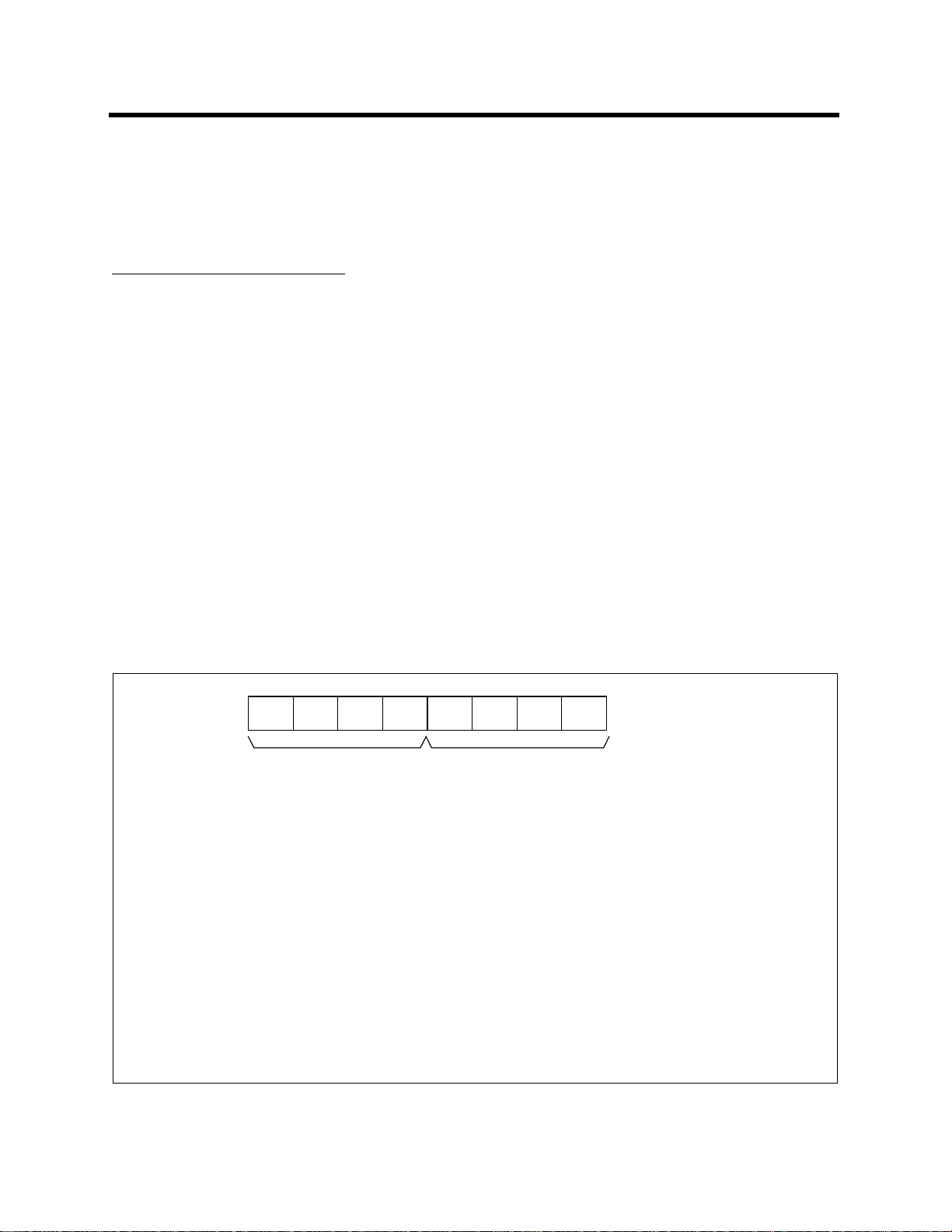
76543210
GATE C/T M1 M0 GATE C/T M1 M0
Timer 1 Timer 0
GATE This bit controls the gating operations. When this bit is set, the Timer/Counter “x”
C/T This bit selects the Timer or Counter mode of operation. If this bit is set then the
is enabled only while “INTx” pin is high and “TRx” bit is set high. If this bit is
cleared, then Timer/Counter “x” is enabled only if “TRx” is set.
Counter mode is selected, else the Timer mode is selected.
M1 and M0 selects the operating mode for the Timer/CounterM1, M0
M1 M0
0 0 “THx” acts as a 8 bit Timer/Counter, with “TLx” as the 5 bit prescaler.
0 1 “THx” and “TLx” are cascaded to form a single 16 bit Timer/Counter.
1 0 This is the Auto Reload mode.
11
Timer 0: TL0 is an 8 bit Timer/Counter controlled by the Timer 0
control bits. TH0 is a 8 bit timer controlled by the Timer 1 control bits.
Timer 1: Timer/Counter is stopped.
Operating Mode
TMOD: Timer/Counter Mode Control Register
Kawasaki LSI USA, Inc. Page 12 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
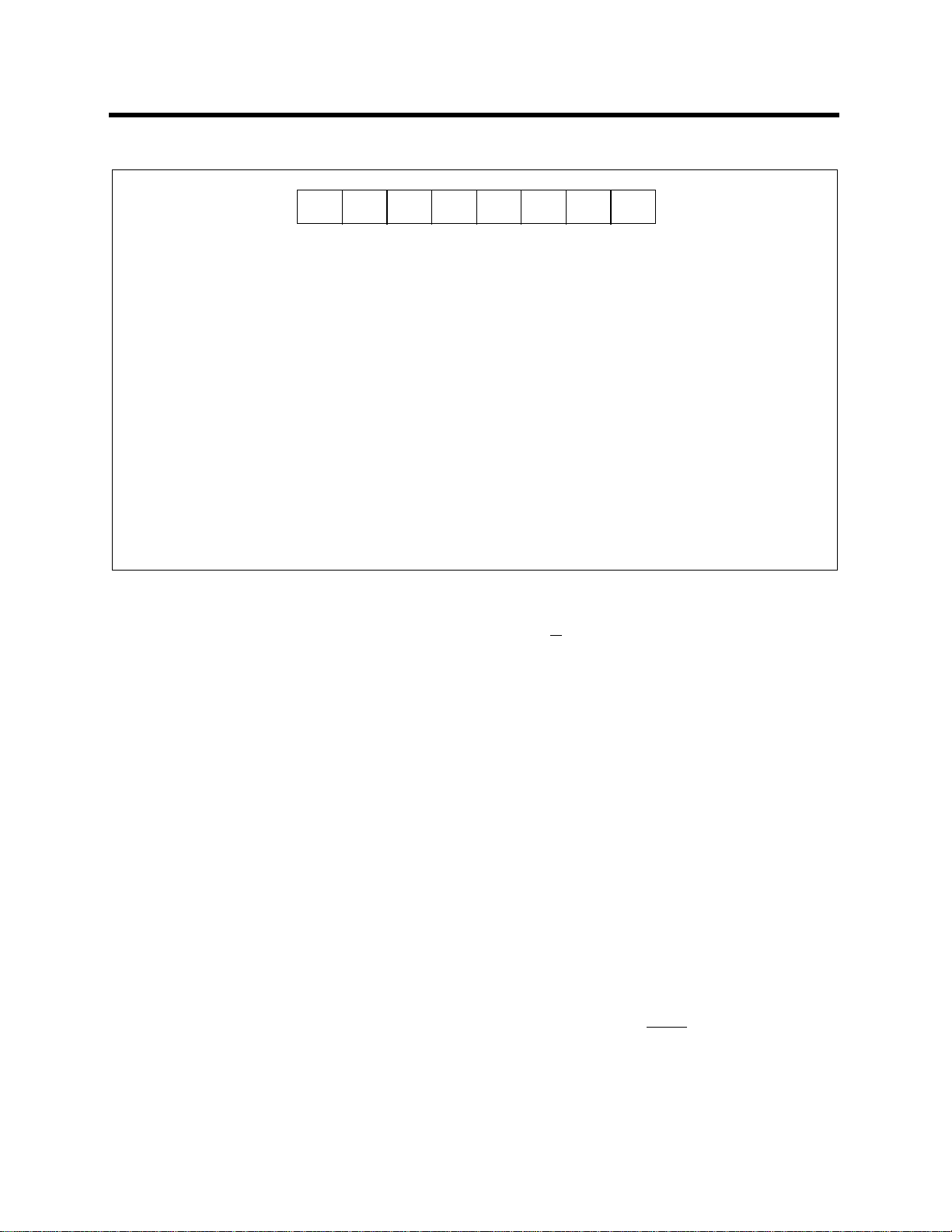
76543210
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
TF1 Timer 1 overflow flag. Set by hardware on Timer/Counter overflow. Cleared by
TF0
TR0
IE1
IT1
IE0
IT0
hardware when processor vectors to timer 1 interrupt routine.
Timer 1 Run control bit. Set/Cleared by software to turn Timer/Counter on/off.TR1
Timer 0 overflow flag. Set by hardware on Timer/Counter overflow. Cleared by
hardware when processor vectors to timer 0 interrupt routine.
Timer 0 Run control bit. Set/Cleared by software to turn Timer/Counter on/off.
Interrupt 1 Edge flag. Set by hardware when external interrupt edge is detected.
Cleared when interrupt is processed.
Interrupt 1 Type control bit. Set/ Cleared by software to specify falling edge/low
level triggered external interrupt.
Interrupt 0 Edge flag. Set by hardware when external interrupt edge id detected.
Cleared when interrupt is processed.
Interrupt 0 Type control bit. Set/Cleared by software to specify falling edge /low
level triggered external interrupt.
TCON: Timer/Counter Control Register.
The “Timer” or “Counter” function is selected by the “C/T” bit in the TMOD Special Function
Register. Each Timer/Counter has one selection bit for its own; bit 2 of TMOD selects the function for Timer/Counter 0 and bit 6 of TMOD selects the function for Timer/Counter 1. In addition
each Timer/Counter can be set to operate in any one of four possible modes. The mode selection
is done by bits M0 and M1 in the TMOD SFR. Modes 0, 1 and 2 are identical for both the Timer/
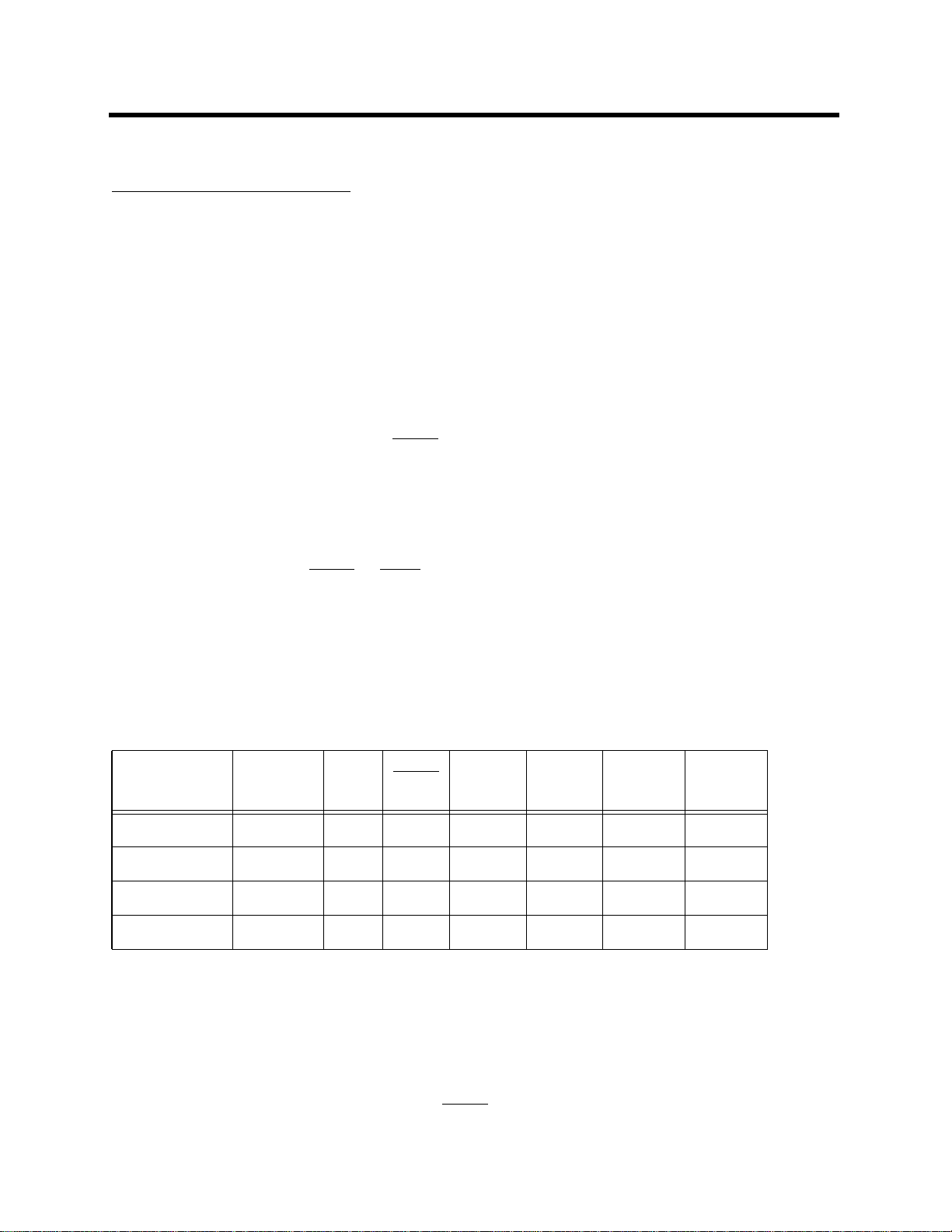
Counters, but Mode 3 is different. The four modes of operation are described below.
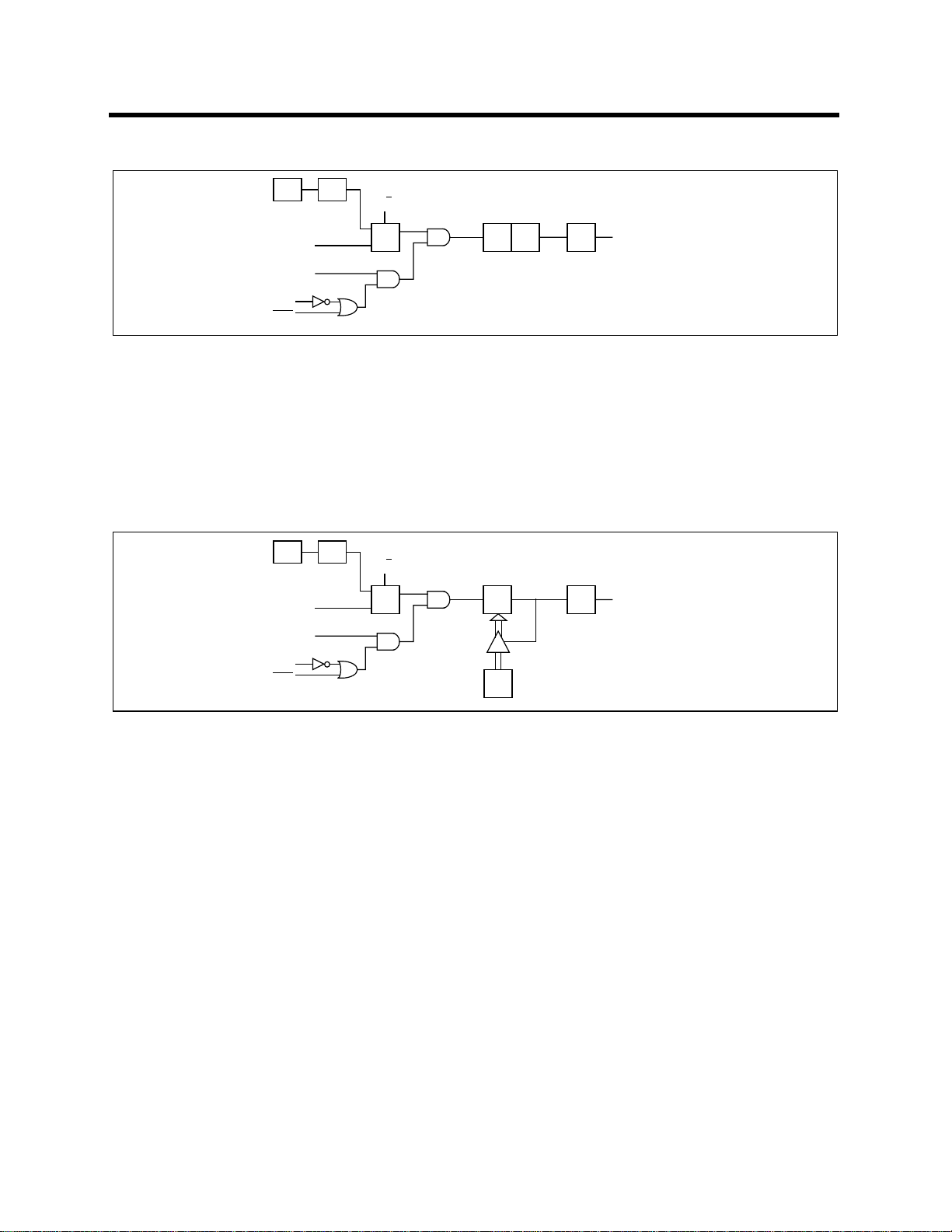
MODE 0
In Mode 0, the timer/counters act as a 8 bit counter with a 5 bit, divide by 32 prescaler. In this
mode we have a 13 bit timer/counter. The 13 bit counter consists of 8 bits of THx and 5 lower bits
of TLx. The upper 3 bits of TLx are ignored.
The negative edge of the clock increments the count in the TLx register. When the fifth bit in TLx
moves from 1 to 0, then the count in the THx register is incremented. When the count in THx
moves from FFh to 00h, then the overflow flag TFx in TCON SFR is set.
The counted input is enabled only if TRx is set and either GATE = 0 or
Kawasaki LSI USA, Inc. Page 13 of 120 Ver. 0.9 KS152JB2
INTx = 1.
KS152JB Universal Communications Controller
Technical Specifications
GATE
INTx
S3P1OSC
Tx pin
TRx
pin
C/T
I0
Q
I1
TLX
5 bits
THx
8 bits
TFx
INTERRUPT
Timer/Counter in Mode 0
MODE 1
Mode 1 is similar to Mode 0 except that the counting register form a 16 bit counter, rather than a
13 bit counter. This means that all the bits of THx and TLx are used.
.
GATE
INTx
S3P1OSC
Tx pin
TRx
pin
C/T
I0
Q
I1
TLX
8 bits
THx
8 bits
Reload
TFx
INTERRUPT
Timer/Counter in Mode 2
MODE 2
In Mode 2, the timer/counter is in the Auto Reload Mode. In this mode, TLx acts as a 8 bit count
register, while THx holds the reload value. When the TLx register overflows from FFh to 00h, the
TFx bit in TCON is set and TLx is reloaded with the contents of THx and the counting process
continues from here. The reload operation leaves the contents of the THx register unchanged
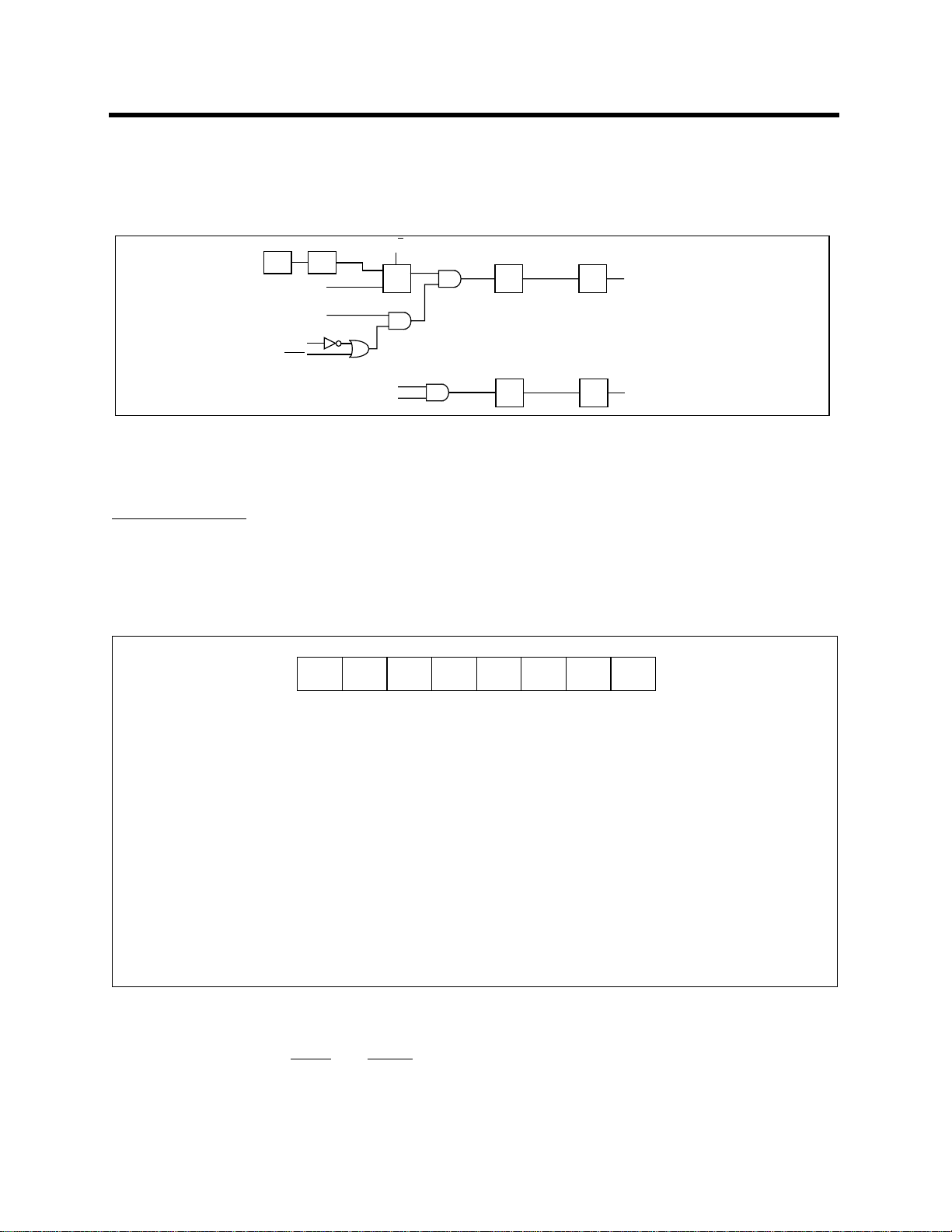
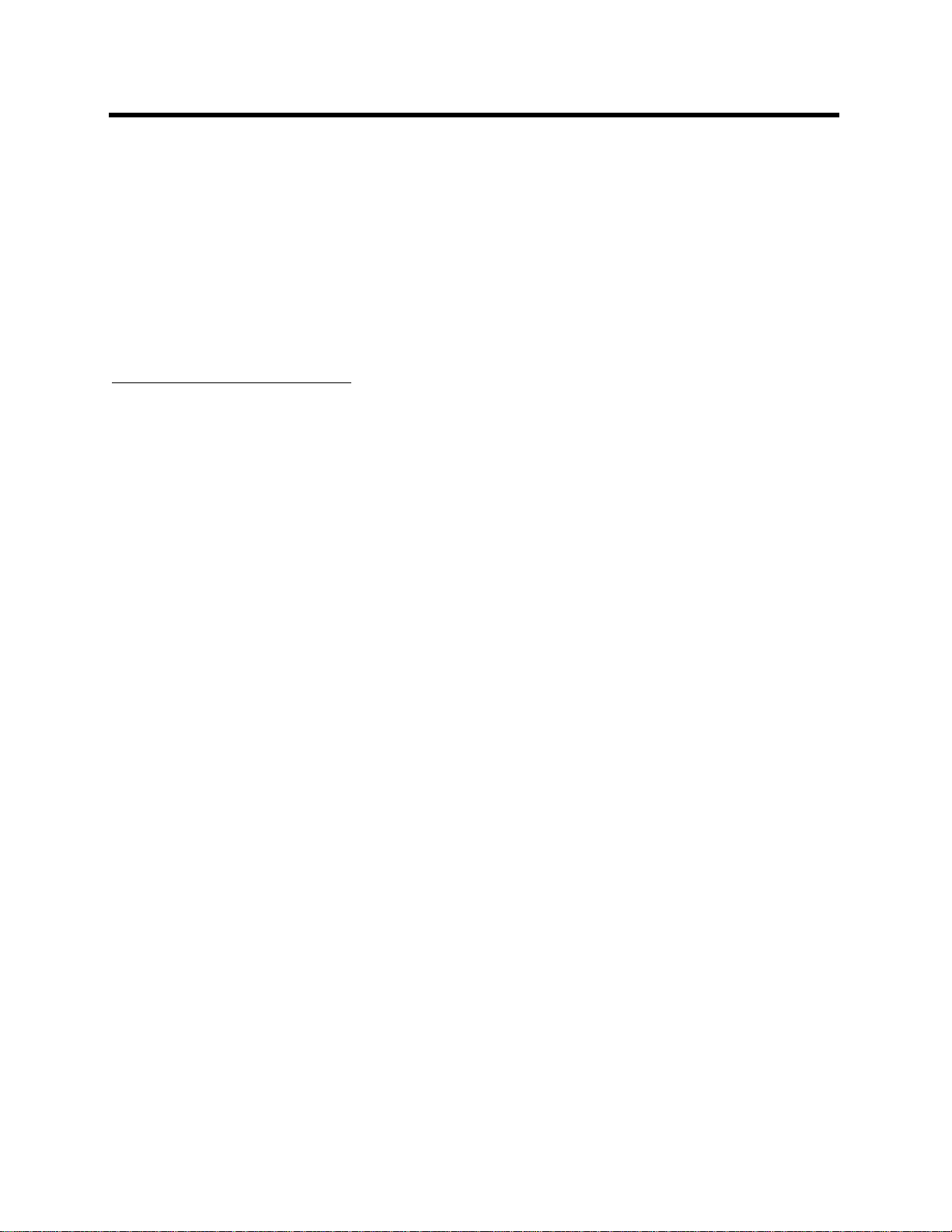
MODE 3
Mode 3 has different operating methods for the two timer/counters. For timer/counter TM1, mode
3 simply freezes the counter. This is the same as setting TR1 to 0.
Timer/Counter TM0 ho wever configures TL0 and TH0 as two separate 8 bit count registers in this
mode. The logic for this mode is shown in the figure. TL0 uses the Timer/Counter TM0 control
bits C/T, GATE, TR0, INT0 and TF0. TH0 is forced as a machine cycle counter and takes over the
use of TR1 and TF1 from Timer/Counter TM1.
Kawasaki LSI USA, Inc. Page 14 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Mode 3 is used in cases where an extra 8 bit timer is needed. W ith T imer 0 in Mode 3, Timer 1 can
be turned on and off by switching it out of and into its own Mode 3. It can also be used as a baud
rate generator for the serial port.
C/T
GATE
INT0
pin
S3P1OSC
T0 pin
TR0
S3P1
TR1
I0
Q
I1
TL0
5 bits
TH0
8 bits
Timer/Counter 0 in Mode 3
TF0
TF1
INTERRUPT
INTERRUPT
2.8 Interrupts
The cpu has a provision for 11 different interrupt sources. These are the two external interrupts,
the three timer interrupts, the local serial port interrupt, dma interrupt and global serial port interrupts.
76543210
EA -- -- ES ET1 EX1 ET0 EX0
EA Global Disable bit. If this bit is cleared it disables all the interrupts at once.
ES
ET1
EX1
ET0
EX0
If EA is 1 then interrupts can be individually enabled/disabled by setting or
clearing its own enable bit.
reserved.--
Local Serial port interrupt enable.
Timer 1 interrupt enable.
External interrupt 1 enable.
Timer 0 interrupt enable.
External interrupt 0 enable
IE: Interrupt Enable Register.
The External Interrupts
INT0 and INT1 can be either edge triggered or level triggered, depending
on bits IT0 and IT1. The bits IE0 and IE1 in the TCON register are the flags which are checked to
generate the interrupt. When an interrupt is generated by these external interrupt inputs, they will
be cleared on entering the Interrupt Service routine, only if the interrupt type is edge triggered. In
Kawasaki LSI USA, Inc. Page 15 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
case of level triggered interrupt, the IE0 and IE1 flags are not cleared and will have to be cleared
by the software. This is because in the level activated mode, it is the external requesting source
that controls the interrupt flag bit rather than the on-chip hardware.
The Timer 0 and 1 Interrupts are generated by the TF0 and TF1 flags. These flags are set by the
overflow in the Timer 0 and Timer 1. The TF0 and TF1 flags are automatically cleared by the
hardware when the timer interrupt is serviced.
The Timer 0 and 1 flags are set in S5P2 of the machine cycle in which the overflow occurs. The
values are polled in the next cycle.
The Local Serial block can generated interrupts on reception or transmission. There is however
only one interrupt source from the Local Serial block, which is obtained by oring the RI and TI
bits in the SCON SFR. These bits are not automatically cleared by the hardware and the user will
have to clear these bits using software.
All the bits that generate interrupts can be set or reset by hardware and thereby software initiated
interrupts can be generated. Each of the individual interrupts can be enabled or disabled by setting
or clearing a bit in the IE SFR. IE also has a global enable/disable bit EA, which can be cleared to
disable all the interrupts at once.
Priority Level Structure
There are two priority levels for the interrupts. Each interrupt source can be individually set to
either one of the two levels. Naturally, a higher priority interrupt cannot be interrupted by a lower
priority interrupt. However there exists a predefined hierarchy amongst the interrupts themselves.
This hierarchy comes into play when the interrupt controller has to resolve simultaneous requests
having the same priority level. This hierarchy is defined as shown below, the interrupts are numbered starting from the highest priority to the lowest.
76543210
-- -- -- PS PT1 PX1 PT0 PX0
reserved.-PS
PT1
PX1
PT0
PX0
Local Serial port interrupt priority bit.
Timer 1 interrupt priority bit.
External interrupt 1 priority bit.
Timer 0 interrupt priority bit.
External interrupt 0 priority bit
IE: Interrupt Enable Register.
Kawasaki LSI USA, Inc. Page 16 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
01234567
EDMA1 EGSTV EDMA0 EGSRE EGSRVEGSTE
IEN1 (Additional interrupt enable register) (0C8H)
Interrupt enable register for DMA and GSC interrupts. A 1 in any bit position enables that interrupt.
IEN1.0 (EGSRV) - Enables the GSC valid receive interrupt.
IEN1.1 (EGSRE) - Enables the GSC receive error interrupt.
IEN1.2 (EDMA0) - Enables the DMA done interrupt for channel 0.
IEN1.3 (EGSTV) - Enables the GSC valid transmit interrupt.
IEN1.4 (EDMA1) - Enables the DMA done interrupt for Channel1.
IEN1.5 (EGSTE) - Enables the GSC transmit error interrupt.
01234567
PDMA1 PGSTV PDMA0 PGSRE PGSRVPGSTE
IPN1 (Additional interrupt priority register) (0F8H)
Allows the user software two levels of prioritization to be assigned to each of the interrupts in
IEN1. A 1 assigns the corresponding interrupt in IEN1 a higher interrupt than an interrupt with a
corresponding 0.
IPN1.0 (PGSRV) - Assigns the priority of GSC receive valid interrupt.
IPN1.1 (PGSRE) - Assigns the priority of GSC error receive interrupt.
IPN1.2 (PDMA0) - Assigns the priority of DMA done interrupt for Channel 0.
IPN1.3 (PGSTV) - Assigns the priority of GSC transmit valid interrupt.
IPN1.4 (PDMA1) - Assigns the priority of DMA done interrupt for Channel 1.
IPN1.5 (PGSTE) - Assigns the priority of GSC transmit error interrupt.
Kawasaki LSI USA, Inc. Page 17 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
The interrupt flags are sampled in S5P2 of every machine cycle. In the next machine cycle, the
sampled interrupts are polled and their priority is resolved. If certain conditions are met then the
hardware will execute an internally generated LCALL instruction which will v ector the process to
the appropriate interrupt vector address. The conditions for generating the LCALL are
1. An interrupt of equal or higher priority is not currently being serviced.
2. The current polling cycle is the last machine cycle of the instruction currently being executed.
3. The current instruction does not involve a write to IP or IE registers and is not a RETI.
If any of these conditions are not met, then the LCALL will not be generated. The polling cycle is
repeated every machine cycle, with the interrupts sampled at S5P2 in the previous machine cycle.
If an interrupt flag is active in one cycle but not responded to, and is not active when the above
conditions are met, the denied interrupt will not be serviced. This means that active interrupts are
not remembered, every polling cycle is new.
The processor responds to a valid interrupts by ex ecuting an LCALL instruction to the appropriate
service routine. This may or may not clear the flag which caused the interrupt. In case of Timer
interrupts, the TF0 or TF1 flags, are cleared by hardware whenever the processor vectors to the
appropriate timer service routine. In case of External interrupt, I
cleared only if they are edge triggered. In case of Local Serial interrupts, the flags are not cleared
by hardware. The hardware LCALL behaves exactly like the software LCALL instruction. This
instruction saves the Program Counter contents onto the Stack, b ut does not sa v e the Program Status Word PSW. The PC is reloaded with the vector address of that interrupt which caused the
LCALL. These vector address for the different sources are as follows
Table 5:
Priority
sequence
1 IP.0 PX0 IE.0 EX0 03H
2 IPN1.0 PGSRV IEN1.0 EGSRV 2BH
3 IP.1 PT0 IE.1 ET0 0BH
Priority
address
Priority
name
Interrupt
Symbolic
name
NT0 and INT1, the flags are
Interrupt
Symbolic
Name
Vector
Address
4 IPN1.1 PGSRE IEN1.1 EGSRE 33H
5 IPN1.2 PDMA0 IEN1.2 EDMA0 3BH
6 IP.2 PX1 IE.2 EX1 13H
7 IPN1.3 PGSTV IEN1.3 EGSTV 43H
Kawasaki LSI USA, Inc. Page 18 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Table 5:
Priority
sequence
8 IPN1.4 PDMA1 IEN1.4 EDMA1 53H
9 IP.3 PT1 1E.3 ET1 1BH
10 IPN1.5 PGSTE IEN1.5 EGSTE 4BH
11 IP.4 PS IE.4 ES 23H
Execution continues from the vectored address till an RETI instruction is executed. On execution
of the RETI instruction the processor pops the Stack and loads the PC with the contents at the top
of the stack. The user must take care that the status of the stack is restored to what is was after the
hardware LCALL, if the execution is to return to the interrupted program. The processor does not
notice anything if the stack contents are modified and will proceed with execution from the
address put back into PC. Note that a RET instruction would do exactly the same process as a
RETI instruction, but it would not inform the Interrupt Controller, that the interrupt service routine is completed, an would leave the controller still thinking that the service routine is under
progress.
Priority
address
Priority
name
Interrupt
Symbolic
name
Interrupt
Symbolic
Name
Vector
Address
External Interrupts
There are two external interrupt sources in this processor , INT0 and INT1. These interrupts can be
programmed to be edge triggered or level activated, by setting bits IT0 and IT1 in TCON SFR. In
the edge triggered mode, the INTx inputs are sampled at S5P2 in every machine c ycle. If the sample is high in one cycle and low in the next, then a high to low transition is detected and the interrupts request flag IEx in TCON is set. The flag bit the requests the interrupt.Since the external
interrupts are sampled every machine cycle, they have to be held high or low for at least on complete machine cycle. The IEx flag is automatically cleared when the service routine is called.
If the level activated mode is selected, then the requesting source has to hold the pin low till the
interrupt is serviced. The IEx flag will not be cleared by the hardware on entering the service routine. If the interrupt continues to be held low even after the service routine is completed, then the
processor may acknowledge another interrupt request from the same source.
Response Time
The response time for each interrupt source depends on several factors like nature of the interrupt
and the instruction under progress. In the case of external interrupt INT0 and INT1, they are sampled at S5P2 of every machine cycle and then their corresponding interrupt flags IE0 and IE1 will
be set or reset. Similarly, the Local Serial port flags RI and TI are set in S5P2. The Timer 0 and 1
overflow flags are set during S3 of the machine cycle in which overflow has occurred. These flag
Kawasaki LSI USA, Inc. Page 19 of 120 Ver. 0.9 KS152JB2

KS152JB Universal Communications Controller
Technical Specifications
values are polled only in the next machine cycle. If a request is active and all three conditions are
met, then the hardware generated LCALL is executed. This call itself takes tw o machine cycles to
be completed. Thus there is a minimum time of three machine cycles between the interrupt flag
being set and the interrupt service routine being executed.
A longer response time should be anticipated if any of the three conditions are not met. If a higher
or equal priority is being serviced, then the interrupt latency time obviously depends on the nature
of the service routine currently being executed. If the polling cycle is not the last machine c ycle of
the instruction being executed, then an additional delay is introduced. This is maximum in the
case of MUL and DIV instructions which are four machine cycles long. In case of a RETI or a
write to IP or IE registers the delay can be at most 5 machine cycles. This is because at most one
cycle is needed to complete the current instruction and at most 4 machine cycles to execute the
next instruction, which may be a MUL or DIV instruction.
Thus in a single-interrupt system the interrupt response time will always be more than 3 machine
cycles and not more than 8 machine cycles.
Kawasaki LSI USA, Inc. Page 20 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
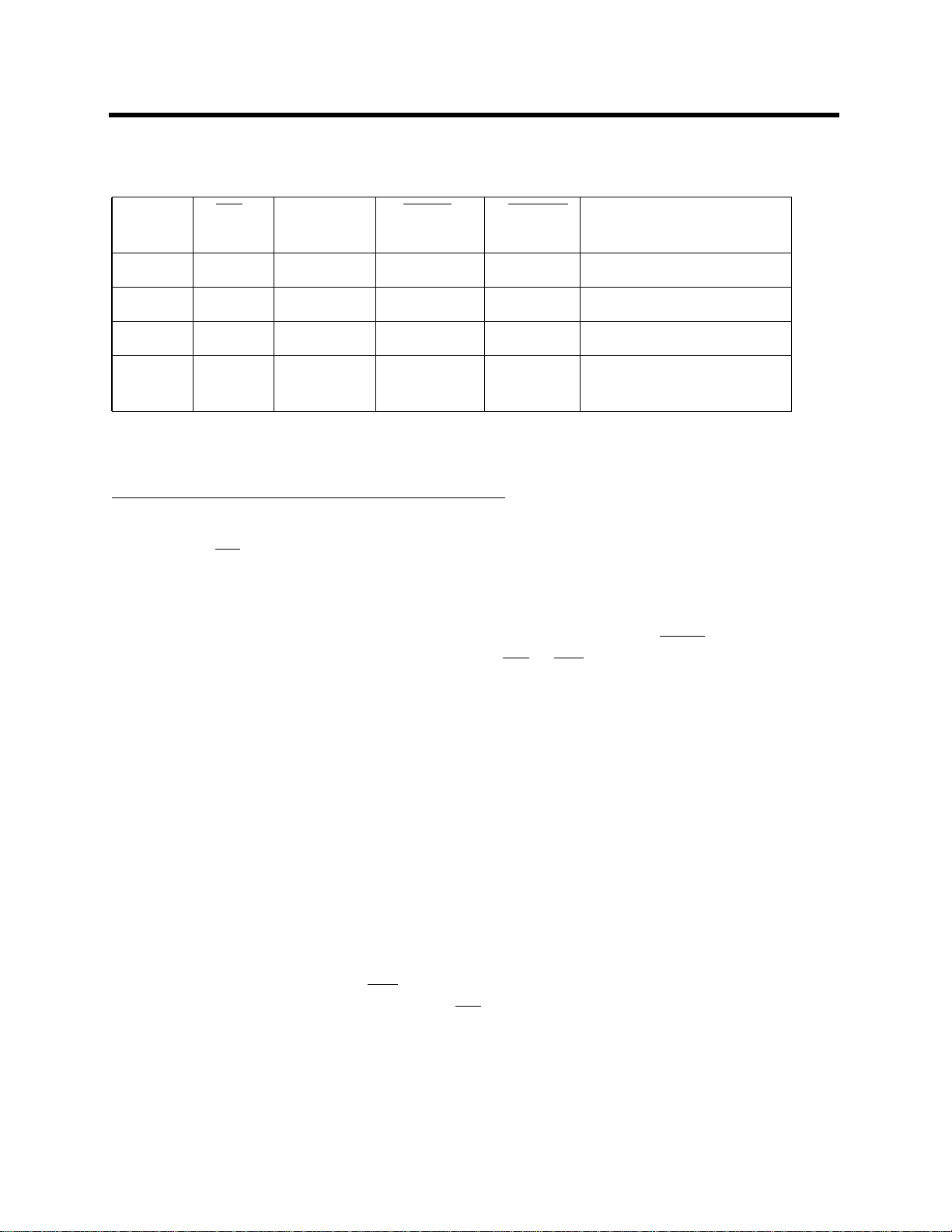
2.9 Power Down and Idle
The processor has two Power Reduction modes, Idle and Power Down. Backup power is supplied
through the VCC pin in these operations. The processor can be put into the Idle or the Power
down mode by setting bits 0 or bit 1 respectively in the PCON SFR.
Any instruction sets the PD bit in PCON SFR, causes that instruction to be the last instruction
executed by the processor before going into the Po wer Do wn mode. In the Po wer Do wn mode, the
clock to the CPU and the peripheral blocks like Interrupt Controller, Serial Port, dma and Timer/
Counters is stopped. This causes the complete processor to stop its current activities. The status of
all the registers in the CPU, the ALU, the Program Counter, the Stack Pointer, the Program status
Word and the Accumulator are held at their current states. The port pins hold the value they had at
the time Idle was activated. ALE and
There are two ways to exit from the Power Down mode. One is a hardware reset. reset and the
other an external interrupt. The hardware reset redefines all the SFRs but the on-chip RAM is
unaffected.
PSEN are both held at logic low levels.
With an external interrupt, INT0 or INT1 must be enabled and configures as level triggered interrupts before entering the power down mode. Holding the pin low ends the power down mode condition and bringing the pin high completes the exit. After the interrupt service routine is executed
the program will return to the next instruction following the one that put the device into Power
Down Mode.
Table 6: Status of the External Pins during Idle and Power Down
Mode
Idle Internal 1 1 Data Data Data Data
Idle External 1 1 Float Data Address Data
Power Down Internal 0 0 Data Data Data Data
Power Down External 0 0 Float Data Data Data
Any instruction which sets the IDL bit in PCON SFR, causes that instruction to be the last instruction executed by the processor before going into the idle mode. In the Idle mode, the clock to the
CPU is shut off while the peripheral blocks like Interrupt Controller, Serial Ports, dma and Timer/
Counters continue to receive the clock. This causes the CPU to stop its current activities. The status of all the registers in the CPU, the ALU, the Program Counter, the Stack Pointer, the Program
status Word and the Accumulator are held at their current states. The port pins hold the value they
had at the time Idle was activated. ALE and
Program
Memory
ALE
PSEN Port 0 Port 1 Port 2 Port 3,4.
PSEN are both held at logic high levels.
Kawasaki LSI USA, Inc. Page 21 of 120 Ver. 0.9 KS152JB2

KS152JB Universal Communications Controller
Technical Specifications
76543210
SMOD -- -- -- -- -- PD IDL
SMOD Double Baud Rate bit. When cleared, the baud rate is halved, by dividing the
-- Described later.
PD Power Down bit. Setting this bit activates this mode.
IDL Idle Mode bit. Setting this bit activates this mode.
serial clock by 2.
PCON: Power Control Register.
There are two ways to terminate the Idle mode. One way is to reset the processor and the other is
by activation of any enabled interrupt. On receiving an interrupt, the processor will vector to the
interrupt service routine and will start execution from here. After completion of the service routine, following the execution of RETI, the execution will continue from the instruction following
the one which put the processor into the Idle mode.
The signal at the RST pin is used to clear the IDL bit. The RST pin has to be held low for at least
24 clock periods to generate an internal reset. The clearing of IDL bit is done synchronously, so
that the CPU will restart from the same state phase condition that it went into Idle. This ensures
smooth transition from Idle mode to normal operation. Now the reset logic takes 19 clock periods
to activate the internal reset from the time where RST was sampled low. For this time the processor will continue operations carrying on from the next instruction which put the processor in the
Idle mode. On-chip hardware prevents an y writes to RAM during this period. b ut accesses to ports
is not inhibited. To prevent une xpected outputs at the port pins, the instruction after the one which
causes the Idle mode should not be an assess to the ports or External RAM.
The GSC continues to operate in Idle as long as the interrupts are enabled. The interrupts need to
be enabled, so that the CPU can service the FIFO’s. In order to properly terminate a reception or
transmission the C152 must not be in idle when the EOF is transmitted or received. After servicing the GSC, user software will need to again in voke the Idle command as the CPU does not automatically re-enter the Idle mode after servicing the interrupts.
The GSC does not operate while in Power Down so the steps required prior to entering Power
Down become more complicated. The sequence when entering Power Down and the status of the
I/O is of major importance in preventing damage to the C152 or other components in the system.
since the only way to exit Power Do wn is with a Reset, se v eral problems that merit careful consideration are cases where the Power Down occurs during the middle of a transmission, and the possibility that other stations are not or cannot enter this same mode. The state of the GSC I/O pins
becomes critical and the GSC status will need to be saved before power down is entered. There
will also need to be some method of identifying to the CPU that the following Reset is probably
not a cold start and that other stations on the link may have already been initialized.
Kawasaki LSI USA, Inc. Page 22 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
The DMA circuitry stops operation in both Idle and power Down modes. Since operation is
stopped in both modes, the process should be similar in each case. Specific steps that need to be
taken include: notification to other devices that DMA operation is about to cease for a particular
station or network, proper withdrawal from DMA operation, and saving the status of the DMA
channels. Again, the status of the I/O pins during Power Down needs careful consideration to
avoid damage to the C152 or other components.
Port 4 returns to its input state, which is high level using weak pullup devices.
2.10 Local Serial Channel
Local Serial port is a full duplex port. This means that it can simultaneously transmit and receive
data. In addition, the receive register is double buffered. This allows reception of the second data
byte before the first byte is read from the receive register. The transmit register and the receive
buffer are both addressed as SB UF Special Function Re gister. Howe v er an y write to SB UF will be
to the transmit register, while a read from SBUF will be from the receive buffer register.
The serial port can operate in four different modes.
MODE 0
This mode provides the synchronous communication with external de vices. In mode 0, serial data
is transmitted and received on the RXD line. TXD is used to transmit the shift clock. This mode is
therefore a half duplex mode of serial communication. 8 bits are transmitted or received per
frame. The LSB is transmitted/received first. The baud rate is fixed at 1/12 of the oscillator frequency.
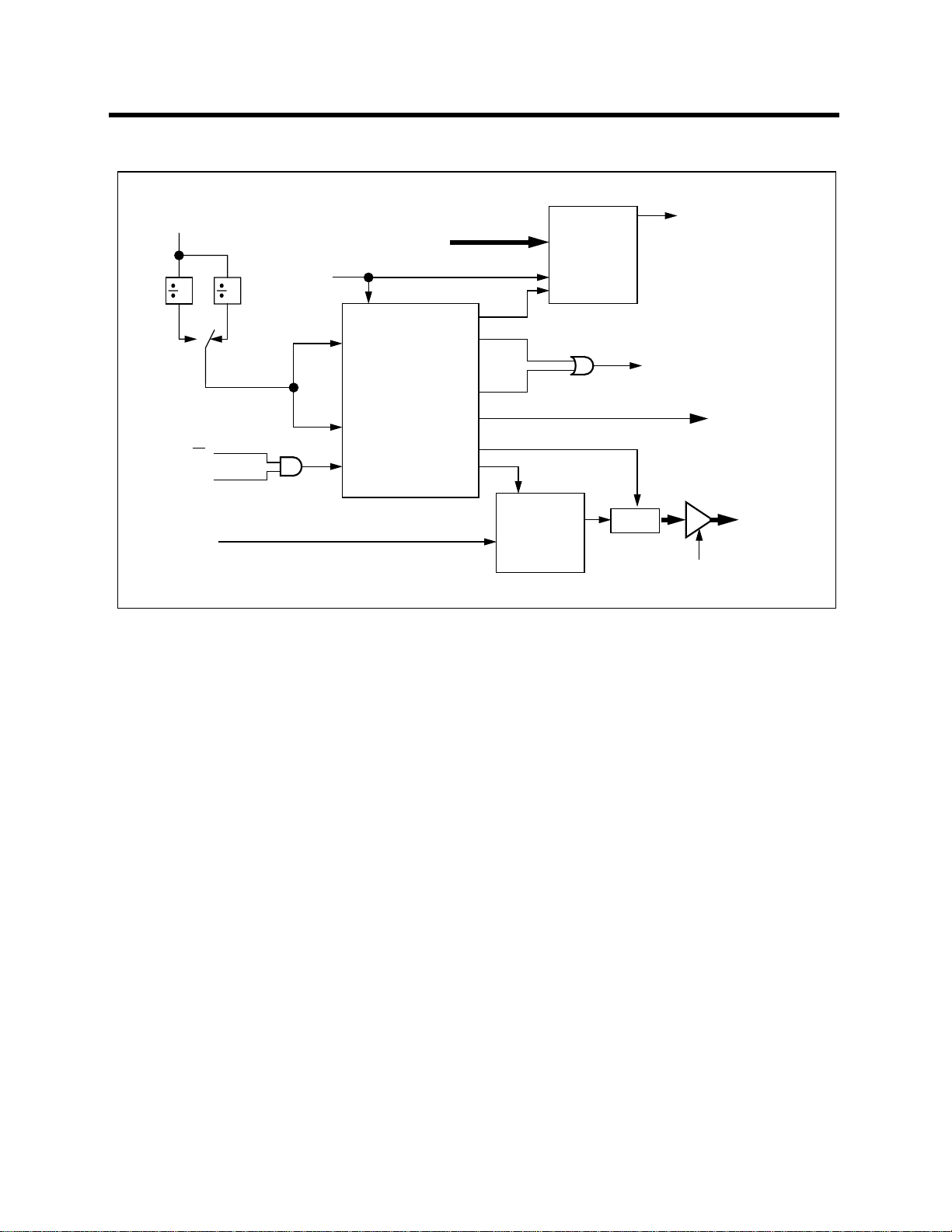
Mode 0 is used to transmit data synchronously, in a half duplex format. The functional block diagram is shown below. Data enters and leaves the Serial port on the RxD line. The Txd line is used
to output the shift clock. The shift clock is used to shift data into and out of the TBO and the
device at the other end of the line.
Any instruction that causes a write to SBUF will start the transmission. The shift clock will get
activated and data will be shifted out on RxD pin til all 8 bits are transmitted. The clock on TxD
then remains low for 6 clock periods and then goes high again. This ensures that at the receiving
end the data on RxD line can be clocked in either on the rising edge of the shift clock on TxD or
latched when the TxD clock is low. The TI flag is set high in S1 following the end of transmission
of the last bit.
The Serial port will receive data when REN is 1 and RI is zero. The shift clock (TxD) will be acti
vated and the serial port will latch data sampled at S5P2 at the rising edge of shift clock. The
external device should therefore present data on the falling edge on the shift clock. This process
continues till all the 8 bits have been received. The RI flag is set in S1 following the last rising
edge of the shift clock on TxD. This will stop reception, till the RI is cleared by software.
Kawasaki LSI USA, Inc. Page 23 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Transmit Shift Register
CLOCK
12 4
01
RI
REN
P3.0 Alternate
Input function
RxD
SM2
Write to
SBUF
TX START
TX CLOCK
SERIAL
CONTROLLER
RX CLOCK
RX
START
Internal
Data Bus
TX SHIFT
CLOCK
RX SHIFT
TI
RI
SHIFT
LOAD
SBUF
Receive Shift Register
CLOCK
SIN
PARIN
LOAD
CLOCK
PAROUT
SOUT
SBUF
RxD
P3.0 Alternate
Output function
Serial Interrupt
TxD
P3.1 Alternate
Output function
Read
SBUF
Internal
Data Bus
Local Serial Port Mode 0
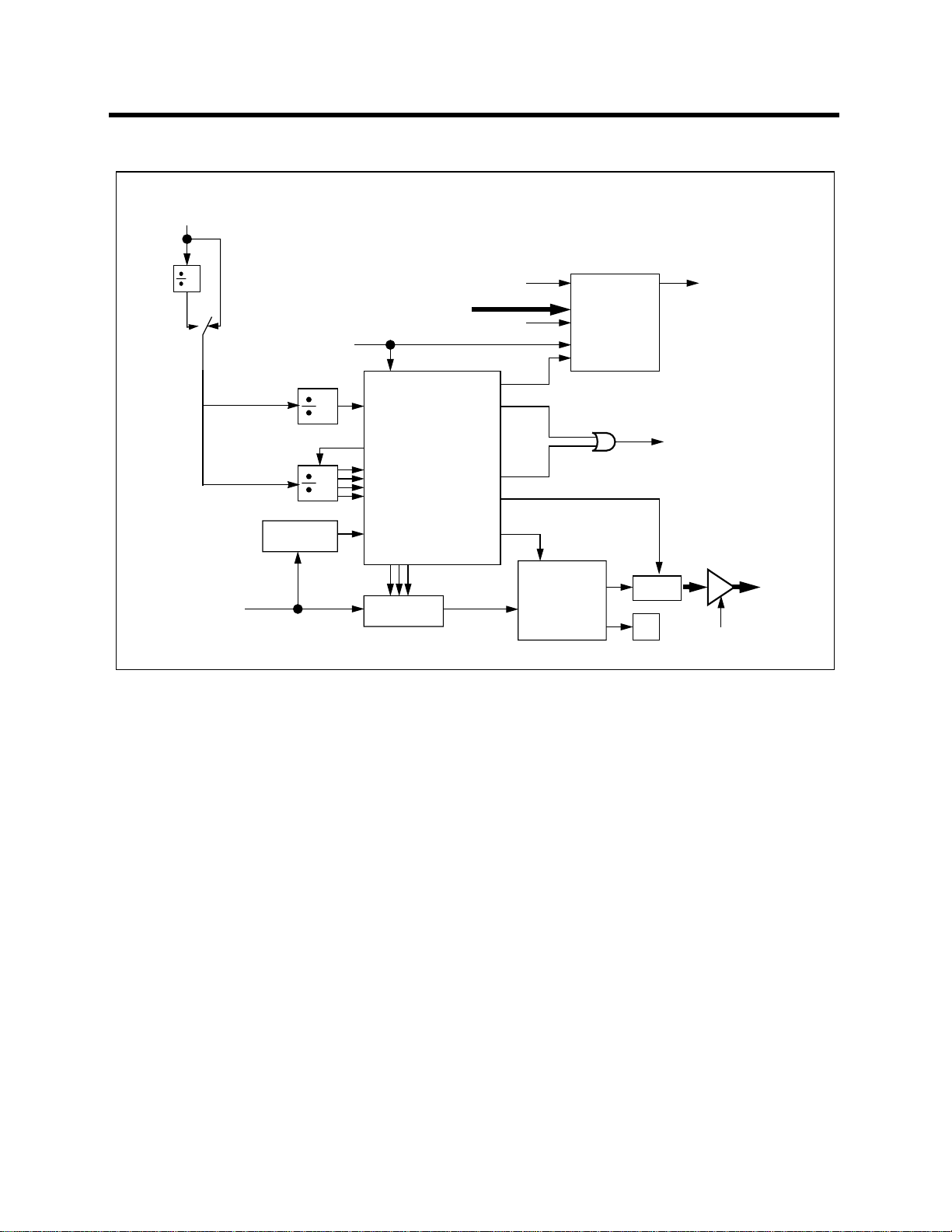
MODE 1
In Mode 1, the full duplex mode is used. Serial communication frames are made up of 10 bits
transmitted on TXD and received on RXD. The 10 bits consist of a start bit (0), 8 data bits (LSB
first), and a stop bit (1). On receive, the stop bit goes into RB8 in the SFR SCON. The baud rate in
this mode is variable.In this mode 10 bits are transmitted (on TxD) or received (on RxD). The
frame consists of a start bit (0), 8 data bits (LSB first), and a stop bit (1). On reception, the stop bit
is placed into RB8. Tthe baud rate is determined by the Timer 1 or timer 2 o verflow rate, and so it
can be controlled by the user.
The figure below gives the simplified functional block for Mode 1.
Transmission begins with a write to SB UF. The serial data is brought out on to TxD pin following
the first roll-over of divide by 16 counter. The next bit is placed on TxD pin following the next
rollover of the divide by 16 counter. Thus the transmission is synchronized to the divide by 16
counter and not directly to the write to SBUF signal. After all 8 bits of data are transmitted, the
stop bit is transmitted. The TI flag is set in the S1 state after the stop bit has been put out on TxD
pin. This will be at the 10th rollover of the divide by 16 counter after a write to SBUF.
Kawasaki LSI USA, Inc. Page 24 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Timer 1
Overflow
Transmit Shift Register
SMOD
2
01
Write to
SBUF
16
TX START
TX CLOCK
Internal
Data Bus
TX SHIFT
1
0
TI
STOP
PARIN
START
LOAD
CLOCK
SOUT
TxD
RxD
16
1-TO-0
DETECTOR
SERIAL
CONTROLLER
RX CLOCK
RX
START
BIT
DETECTOR
RI
LOAD
SBUF
RX SHIFT
CLOCK
PAROUT
SIN
D8
Receive Shift Register
SBUF
RB8
Serial Interrupt
Internal
Data Bus
Read
SBUF
Serial Port Mode 1
Reception is enabled only if REN is high. The serial port actually starts the receiving of serial
data, with the detection of a falling edge on the RxD pin. The 1-to-0 detector continuously monitors the RxD line sampling it at the rate of 16 times the selected baud rate. When a falling edge is
detected, the divide by 16 counter is immediately reset. This helps to align the bit boundaries with
the rollovers of the divide by 16 counter.
The 16 states of the counter effectively divide the bit time into 16 slices. The bit detection is done
on a best of three basis. The bit detector samples the RxD pin, at the 8th, 9th and 10th counter
states. By using a majority 2 of 3 voting system, the bit value is selected. This is done to improve
the noise rejection feature of the serial port. If the first bit detected after the falling edge of RxD
pin, is not 0, then it indicates an invalid start bit, and the reception is immediately aborted. the
serial port again looks for a falling edge in the RxD line. If a valid start bit is detected, then the
rest of the bits are also detected and shifted into the SBUF.
After shifting in 8 data bits, there is one more shift to do, after which the SBUF and RB8 are
loaded and RI is set. However certain conditions must be met before, The loading and setting of
RI can be done.
1. RI must be 0 and
2. Either SM2 = 0, or the received stop bit = 1.
Kawasaki LSI USA, Inc. Page 25 of 120 Ver. 0.9 KS152JB2

KS152JB Universal Communications Controller
Technical Specifications
If these conditions are met, then the stop bit goes to RB8, the 8 data bits go into SBUF and RI is
set. Else the received frame may be lost. After the middle of the stop bit, the receiver goes back to
looking for a 1-to-0 transition on the RxD pin.
MODE 2
In this mode, 11 bits are transmitted on TXD and received on RXD. The 11 bits consist of a start
bit (0), 8 data bits (LSB first), a programmable 9th data bit (TB8 in SCON) and a stop bit (1). The
9th bit can be assigned 1 or 0 by writing to bit 3 of SCON. On transmission, this bit will be
inserted into the data stream. On reception the received 9th bit goes into RB8 in SCON. The stop
bit is ignored. The baud rate is programmable to 1/32 or 1/64 of the oscillator frequency.
Transmission begins with a write to SB UF. The serial data is brought out on to TxD pin following
the first roll-over of divide by 16 counter. The next bit is placed on TxD pin following the next
rollover of the divide by 16 counter. Thus the transmission is synchronized to the divide by 16
counter and not directly to the write to SBUF signal. After all 8 bits of data are transmitted, the
stop bit is transmitted. The TI flag is set in the S1 state after the stop bit has been put out on TxD
pin. This will be at the 11th rollover of the divide by 16 counter after a write to SBUF.
Reception is enabled only if REN is high. The local serial port actually starts the receiving of local
serial data, with the detection of a falling edge on the RxD pin. The 1-to-0 detector continuously
monitors the RxD line sampling it at the rate of 16 times the selected baud rate. When a falling
edge is detected, the divide by 16 counter is immediately reset. This helps to align the bit boundaries with the rollovers of the divide by 16 counter.
The 16 states of the counter effectively divide the bit time into 16 slices. The bit detection is done
on a best of three basis. The bit detector samples the RxD pin, at the 8th, 9th and 10th counter
states. By using a majority 2 of 3 voting system, the bit value is selected. This is done to improve
the noise rejection feature of the local serial port. If the first bit detected after the falling edge of
RxD pin, is not 0, then it indicates an invalid start bit, and the reception is immediately aborted.
the local serial port again looks for a falling edge in the RxD line. If a valid start bit is detected,
then the rest of the bits are also detected and shifted into the SBUF.
After shifting in 8 data bits, there is one more shift to do, after which the SBUF and RB8 are
loaded and RI is set. However certain conditions must be met before, The loading and setting of
RI can be done.
1. RI must be 0 and
2. Either SM2 = 0, or the received stop bit = 1.
If these conditions are met, then the stop bit goes to RB8, the 8 data bits go into SBUF and RI is
set. Else the received frame may be lost. After the middle of the stop bit, the receiver goes back to
looking for a 1-to-0 transition on the RxD pin.
Kawasaki LSI USA, Inc. Page 26 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Clock / 2
Transmit Shift Register
2
SMOD
01
Write to
SBUF
16
TX START
TX CLOCK
Internal
Data Bus
TX SHIFT
1
TB8
0
TI
STOP
D8
PARIN
START
LOAD
CLOCK
SOUT
TxD
RxD
16
1-TO-0
DETECTOR
SERIAL
CONTROLLER
RX CLOCK
RX
START
BIT
DETECTOR
RI
LOAD
SBUF
RX SHIFT
CLOCK
PAROUT
SIN
D8
Receive Shift Register
SBUF
RB8
Serial Interrupt
Internal
Data Bus
Read
SBUF
Local Serial Port Mode 2
MODE 3
This mode is similar to Mode 2 in all respects, except that the baud rate is programmable.
In all four modes, transmission is started by any instruction that uses SBUF as a destination register. Reception is initiated in Mode 0 by the condition RI = 0 and REN = 1. Reception is initiated in
the other modes by the incoming start bit if REN = 1.
Kawasaki LSI USA, Inc. Page 27 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
Timer 1
Overflow
Transmit Shift Register
SMOD
2
01
Write to
SBUF
16
TX START
TX CLOCK
Internal
Data Bus
TX SHIFT
1
TB8
0
TI
STOP
D8
P ARIN
ST ART
LOAD
CLOCK
SOUT
TxD
RxD
16
1-TO-0
DETECTOR
SERIAL
CONTROLLER
RX CLOCK
RX
START
BIT
DETECTOR
RI
LOAD
SBUF
RX SHIFT
CLOCK
PAROUT
SIN
D8
Receive Shift Register
SBUF
RB8
Serial Interrupt
Internal
Data Bus
Read
SBUF
Local Serial Port Mode 3
Baud Rates
In Mode 0 the baud rate is fixed at 1/12 of the oscillator frequency.
In Mode 2 the baud rate depends on the value of bit SMOD in PCON SFR. If SMOD is 0 then the
baud rate is 1/64 of the oscillator frequency. If the bit is set to 1, then the baud rate is 1/32 of the
oscillator frequency.
Mode 2 Baud Rate = 2
( SMOD - 6 )
X Oscillator Frequency
The baud rates in Mode 1 and 3 are determined by the overflow rates of Timer 1.
Using Timer 1 to generate baud rates.
When Timer 1 is used as a baud rate generator, the baud rates in Modes 1 and 3 are determined by
the Timer 1 overflow rate and the value of SMOD.
Modes 1 and 3 baud rate = 2
( SMOD - 5 )
X Timer 1 overflow rate
The Timer 1 interrupt should be disabled in this mode. The timer itself can be configured as either
“timer” or “counter”, in any of its 3 operating modes. Commonly, Timer 1 is configured as a timer
Kawasaki LSI USA, Inc. Page 28 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
in auto-reload mode. In such a case the baud rate is given by
Mode 1,3 baud rate = 2
It is also possible to achieve very lo w baud rates by putting Timer 1 in Mode1 as a 16 bit timer and
enabling its interrupt. The Timer interrupt is used to reload the Timer 1 with a 16 bit value using
software methods. A list of commonly used baud rates and how they can be achieved is shown in
table 4
Baud Rate fosc SMOD C/T Mode
Mode 0 Max 1 MHZ 12 MHZ X X X X
Mode 2 Max 375K 12 MHZ 1 X X X
Modes 1,3 62.5K 12 MHZ 1 0 2 FFh
19.2 K 11.059 MHZ 1 0 2 FDh
9.6 K 11.059 MHZ 0 0 2 FDh
4.8 K 11.059 MHZ 0 0 2 FAh
(SMOD - 5)
Table 7: Timer 1 generated commonly used Baud rates
X Oscillator Frequency / (12 x [256 - TH1])
Reload
Value
2.4 K 11.059 MHZ 0 0 2 F4h
1.2 K 11.059 MHZ 0 0 2 E8h
137.5 11.059 MHZ 0 0 2 1Dh
110 6 MHZ 0 0 2 72h
110 12 MHZ 0 0 2 FEEBh
Kawasaki LSI USA, Inc. Page 29 of 120 Ver. 0.9 KS152JB2
KS152JB Universal Communications Controller
Technical Specifications
2.11 SINGLE-STEP OPERATION
The processor does not have any pin which can directly force it to operate in the single-step mode.
However the user can use the interrupt structure to obtain single-step operation. The user will be
aware that the processor executes one more instruction after a RETI instruction and only then
does it respond to an interrupt request. Thus once an interrupt routine has begun, it cannot enter
another routine unless one instruction of the interrupted program has been executed. The external
interrupts can be used to good effect to achieve this. One of the interrupts, say
grammed to be level activated interrupt. Now when the processor detects a low on this pin, it will
vector to the interrupt service routine. The interrupt service routine will have a simple loop which
will wait till the
program and execute at least one instruction. If the INT0 pin is held low, then another interrupt
request is generated and the interrupt service routine is again executed.
INT0 pin is pulsed, high to low. The processor will now return to the interrupted
INT0 is pro-
JNB P3.2, $ ; wait here till
JB P3.2, $ ; wait here till
RETI ; return to the interrupted program and execute at least one more
; instruction
In this way a single instruction of the main program will be executed every time
INT0 goes high
INT0 goes low
INT0 is pulsed.
Kawasaki LSI USA, Inc. Page 30 of 120 Ver. 0.9 KS152JB2
 Loading...
Loading...