

Page 1
Intel® It anium® 2 Processor
Intel® Itanium® 2 Processor 1.66 GHz with 9 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.66 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.6 GHz with 9 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.6 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.5 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.5 GHz with 4 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.4 GHz with 4 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.3 GHz with 3 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.0 GHz with 3 MB L3 Cache
®
Intel
Itanium® 2 Processor 900 MHz with 1.5 MB L3 Cache
Datasheet
February 2006
Document Number: 250945-005
Page 2

INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY
ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PRO PERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN
INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEV ER, AND INTEL DISCLAIMS
ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES
RELATING T O FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY P ATENT, COPYRIGHT OR OTHER
INTELLECTUAL PROPERTY RIGHT. Intel products are not intended for use in medical, life saving, life sustaining applications.
Intel may make changes to specifications and product descriptions at any time, without notice.
Designers must not rely on the absence or characteristics of any features or instructions marked “reserved” or “un defined.” Intel reserves these for
future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them
®
The Intel
specifications. Current characterized errata are available on request.
Contact your local Intel sales office or your distributor to obtain the latest specifications and before placing your product o rder.
Copies of documents which have an order number and are referenced in this document, or other Inte l literature, may be obta ined by calling1-800-5 48-
4725, or by visiting Intel's website at http://www.intel.com.
Intel and Itanium are trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other countries.
Copyright © 2002-2006, Intel Corporation
*Other names and brands may be claimed as the property of others.
I2C is a two-wire communication bus /protocol developed by Phillips. SMBus is a subset of the I2C bus/protocol developed by Intel. Implementation of
the I2C bus/protocol or the SMBus bus/protocol may require licenses from various entities, including Phillips Electronics, N.V. and North American
Phillips Corporation.
Itanium® 2 processor may contain design defects or errors known as errata which may cause the product to deviate from published
2 Datasheet
Page 3
Contents
1 Introduction.......................................................................................................................11
1.1 Overview .............................................................................................................11
1.2 Processor Abstraction Layer............................................................................ ...11
1.3 Mixing Processors of Different Frequencies and Cache Sizes ...........................12
1.4 Terminology.........................................................................................................12
1.5 State of Data .......................................................................................................12
1.6 Reference Documents.........................................................................................13
2 Electrical Specifications....................................................................................................15
2.1 Itanium
2.1.1 System Bus Power Pins.........................................................................15
2.1.2 System Bus No Connect. ... .... ... ... ... .... ... ... ... ..........................................15
2.2 System Bus Signals ............................................................................................15
2.2.1 Signal Groups.................. ... .... ... ... ... .... ... ... .............................................15
2.2.2 Signal Descriptions............. .... ... ... ... .... ... ................................................16
2.3 Package Specifications.......................................................................................17
2.4 Signal Specifications.... ... ... .... ... ..........................................................................18
2.4.1 Maximum Ratings................... ... ... ... .... ... ... ... ... .... ... ................................22
2.5 System Bus Signal Quality Specifications and Measurement Guidelines...........23
2.5.1 Overshoot/Undershoot Magnitude .........................................................23
2.5.2 Overshoot/Undershoot Pulse Duration......... ... .... ... ... ... .... ... ... ... ... ..........24
2.5.3 Activity Factor.........................................................................................24
2.5.4 Reading Overshoot/Undershoot Specification Tables............................25
2.5.5 Determining if a System Meets the Overshoot/Undershoot
2.5.6 Wired-OR Signals...................................................................................28
2.6 Power Pod Connector Signals ............................................................................30
2.7 Itanium
2.8 Recommended Connections for Unused Pins ....................................................35
®
2 Processor System Bus......................................................................15
Specifications.........................................................................................25
®
2 Processor System Bus Clock and Processor Clocking .....................32
3 Pinout Specifications........................................................................................................37
4 Mechanical Specifications................................................................................................69
4.1 Mechanical Dimensions ......................................................................................69
4.2 Package Marking.................................................................................................72
4.2.1 Processor Top-Side Marking........................... .... ... ... ... .... ... ... ... ... .... ... ...72
4.2.2 Processor Bottom-Side Marking.............................................................72
5 Thermal Specifications........ .......................................... ... ... .......................................... ...75
5.1 Thermal Features............................................. ... ... .......................................... ...75
5.1.1 Thermal Alert............................. ... ..........................................................75
5.1.2 Enhanced Thermal Management...........................................................76
5.1.3 Thermal Trip................................. ... .... ... ... ... ... .... ...................................76
5.2 Case Temperature .............................................. ... ... ..........................................76
6 System Management Feature Specifications...................................................................79
6.1 System Management Bus...................................................................................79
6.1.1 System Management Bus Interface .......................................................79
6.1.2 System Management Interface Signals..................................................79
Datasheet 3
Page 4

6.1.3 SMBus Device Addressing.....................................................................81
6.2 Processor Information ROM................................................................................82
6.3 Scratch EEPROM ...............................................................................................85
6.4 Processor Information ROM and Scratch EEPROM Supported
SMBus Transactions...........................................................................................85
6.5 Thermal Sensing Device.....................................................................................86
6.6 Thermal Sensing Device Supported SMBus Transactions .................................87
6.7 Thermal Sensing Device Registers.....................................................................88
6.7.1 Thermal Reference Registers ................................................................88
6.7.2 Thermal Limit Registers .........................................................................89
6.7.3 Status Register... ... ... .... ..........................................................................89
6.7.4 Configuration Register ...........................................................................89
6.7.5 Conversion Rate Register......................................................................90
A Signals Reference........................ ... ... .... ... ... ... .... .............................................................91
A.1 Alphabetical Signals Reference ..........................................................................91
A.1.1 A[49:3]# (I/O)..........................................................................................91
A.1.2 A20M# (I) ...............................................................................................91
A.1.3 ADS# (I/O)................................. ... ... ... .... ... ...................................... .... ...91
A.1.4 AP[1:0]# (I/O) ............................................... ... ... .... ... ... ... .... ...................91
A.1.5 ASZ[1:0]# (I/O).......................................................................................91
A.1.6 ATTR[3:0]# (I/O).....................................................................................92
A.1.7 BCLKp/BCLKn (I)...................................................................................92
A.1.8 BE[7:0]# (I/O) ............................................... ... ... .... ... ... ... .... ...................92
A.1.9 BERR# (I/O)...........................................................................................93
A.1.10 BINIT# (I/O)............................................................................................94
A.1.11 BNR# (I/O) ...................... ... ... .... ... ... ....................................... ... ... ... .... ...94
A.1.12 BPM[5:0]# (I/O) ......................................................................................94
A.1.13 BPRI# (I) ................................................................................................94
A.1.14 BR[0]# (I/O) and BR[3:1]# (I)..................................................................94
A.1.15 BREQ[3:0]# (I/O)....................................................................................95
A.1.16 CCL# (I/O)..............................................................................................96
A.1.17 CPUPRES# (O)......................................................................................96
A.1.18 D[127:0]# (I/O) .......................................................................................96
A.1.19 D/C# (I/O)...............................................................................................96
A.1.20 DBSY# (I/O) ................................................. ... ... .... ... .............................96
A.1.21 DBSY_C1# (O).......................................................................................96
A.1.22 DBSY_C2# (O).......................................................................................97
A.1.23 DEFER# (I)................................... ... ... ....................................... ... ... .... ...97
A.1.24 DEN# (I/O) ...................... ... ... .... ... ....................................... ... ... ... ... .......97
A.1.25 DEP[15:0]# (I/O).....................................................................................97
A.1.26 DHIT# (I) ......................... ... ... .... ... ... ....................................... ... ... ... .... ...97
A.1.27 DPS# (I/O).................................... ... ... ....................................... ... ... .... ...98
A.1.28 DRDY# (I/O)...........................................................................................98
A.1.29 DRDY_C1# (O) ......................................................... .............................98
A.1.30 DRDY_C2# (O) ......................................................... .............................98
A.1.31 DSZ[1:0]# (I/O).......................................................................................98
A.1.32 EXF[4:0]# (I/O).......................................................................................98
A.1.33 FCL# (I/O) ..............................................................................................99
A.1.34 FERR# (O) ...................................................... ... .... ... ... ... .... ...................99
A.1.35 GSEQ# (I) ....................... ... ... .... ... ... ... .... ... ...................................... .... ...99
A.1.36 HIT# (I/O) and HITM# (I/O) ....................................................................99
4 Datasheet
Page 5

A.1.37 ID[9:0]# (I) ..............................................................................................99
A.1.38 IDS# (I)...................................................................................................99
A.1.39 IGNNE# (I)............................................................................................100
A.1.40 INIT# (I)................................................................................................100
A.1.41 INT (I)...................................................................................................100
A.1.42 IP[1:0]# (I).............................................................................................100
A.1.43 LEN[2:0]# (I/O) .................................................................... ... ..............100
A.1.44 LINT[1:0] (I) ..........................................................................................101
A.1.45 LOCK# (I/O) .........................................................................................101
A.1.46 NMI (I) ..................................................................................................101
A.1.47 OWN# (I/O) ............................................ ... ... ... .... ... ... ...........................101
A.1.48 PMI# (I)...................... ... ... ... .... ... ....................................... ... ... ... ... .... ... .101
A.1.49 PWRGOOD (I)................. ... .... ... ... ... .....................................................101
A.1.50 REQ[5:0]# (I/O) ...................................... ... ... ....................................... .101
A.1.51 RESET# (I)...........................................................................................102
A.1.52 RP# (I/O)..............................................................................................102
A.1.53 RS[2:0]# (I)...........................................................................................103
A.1.54 RSP# (I)................................................................................................103
A.1.55 SBSY# (I/O)..........................................................................................103
A.1.56 SBSY_C1# (O)................... ..................................................................103
A.1.57 SBSY_C2# (O)................... ..................................................................103
A.1.58 SPLCK# (I/O) ......................................... ... ... ... .... ... ..............................103
A.1.59 STBn[7:0]# and STBp[7:0]# (I/O).........................................................104
A.1.60 TCK (I)..................................................................................................104
A.1.61 TDI (I)...................................................................................................104
A.1.62 TDO (O)..................... ...................................... .... ... ... ... .... ... ... ..............104
A.1.63 THRMTRIP# (O)...................................................................................104
A.1.64 THRMALERT# (O)...............................................................................105
A.1.65 TMS (I) ................................................... ... ... ... .... ... ... ...........................105
A.1.66 TND# (I/O)............................................................................................105
A.1.67 TRDY# (I).............................................................................................105
A.1.68 TRST# (I)..............................................................................................105
A.1.69 WSNP# (I/O) ........................................................................................105
A.2 Signal Summaries........ ... ... .... ... ... ... .... .......................................... ... ... ... ...........105
Figures
2-1 Generic Clock Waveform ....................................................................................22
2-2 SMSC Clock Waveform.......................................................................................22
2-3 System Bus Signal Waveform Exhibiting Overshoot/Undershoot.......................24
2-4 Itanium
2-5 Processor Full, Normal and Low Power Mode with Timings...............................32
2-6 System Bus Reset and Configuration Timings for Cold Reset............................34
2-7 System Bus Reset and Configuration Timings for Warm Reset..........................35
3-1 Itanium
4-1 Itanium
4-2 Itanium
4-3 Itanium
4-4 Processor Top-Side Marking on IHS...................................................................72
4-5 Processor Bottom-Side Marking Placement on Interposer .................................73
5-1 Itanium
Datasheet 5
®
2 Processor Power Tab Physical Layout..............................................30
®
2 Processor Pinout...............................................................................37
®
2 Processor Package ...........................................................................69
®
2 Processor Package ...........................................................................70
®
2 Processor Package Power Tab.........................................................71
®
2 Processor Thermal Features.............................................................75
Page 6

Tables
5-2 Itanium® 2 Processor Package Thermocouple Location.....................................77
6-1 Logical Schematic of SMBus Circuitry ................................................................80
2-1 Itanium® 2 Processor System Bus Signal Groups..............................................16
2-2 Itanium
2-3 Itanium
®
2 Processor Package Specifications....................................................17
®
2 Processor Power Supply Specifications............................................18
2-4 AGTL+ Signals DC Specifications.......................................................................18
2-5 Power Good Signal DC Specifications......................... ... .... ... ... ... .... ... ... ... ... .... ...19
2-6 System Bus Clock Differential HSTL DC Specifications .....................................19
2-7 TAP Connection DC Specifications.....................................................................19
2-8 SMBus DC Specifications ...................................................................................20
2-9 LVTTL Signal DC Specific at ions .................................................................. .... ...20
2-10 System Bus Clock Differential HSTL AC Specifications .....................................20
2-11 SMBus AC Specifications ...................................................................................21
2-12 Itanium
®
2 Processor Absolute Maximum Ratings .............................................22
2-13 Source Synchronous AGTL+ Signal Group and Wired-OR Signal Group
Absolute Overshoot/Undershoot Tolerance........................................................26
2-14 Itanium
®
2 Processors (900 MHz, 1.0 GHz, 1.3 GHz, 1.4 GHz, 1.5 GHz/6 MB)
Source Synchronous AGTL+ Signal Group Time Dependent
Overshoot/Undershoot Tolerance for 400 MHz System Bus ..............................26
2-15 Itanium
®
2 Processors (1.5 GHz/4 MB, 1.6 GHz) Source
Synchronous AGTL+ Signal Group Time-Dependent
Overshoot/Undershoot Tolerance for 400 MHz System Bus ..............................27
2-16 Itanium
®
2 (9 MB) Processors Source Synchronous AGTL+
Signal Group Time-Dependent Over sho o t/Undershoot Tolerance
for 533 MHz System Bus ....................................................................................27
2-17 Itanium
®
2 Processors (1.66 GHz) Source Synchronous AGTL+
Signal Group Time-Dependent Over sho o t/Undershoot Tolerance
for 667 MHz System Bus ....................................................................................28
2-18 Itanium
®
2 Processors (900 MHz, 1.0 GHz, 1.3 GHz, 1.4 GHz,
1.5 GHz/6 MB) Wired-OR Signal Group
(BINIT#, HIT#, HITM#, BNR#, TND#, BERR#)
Overshoot/Undershoot Tolerance for 400 MHz System Bus ..............................28
2-19 Itanium
®
2 Processors (1.5 GHz/4 MB, 1.6 GHz) Wired-OR Signal
Group (BINIT#, HIT#, HITM#, BNR#, TND#, BERR#)
Overshoot/Undershoot Tolerance for 400 MHz System Bus ..............................29
2-20 Itanium
®
2 (9 MB) Processors Wired-OR Signal Group
(BINIT#, HIT#, HITM#, BNR#, TND#, BERR#) Overshoot/Undershoot
Tolerance for 533 MHz System Bus ...................................................................29
2-21 Itanium
®
2 (1.66 GHz) Processors Wired-OR Signal Group
(BINIT#, HIT#, HITM#, BNR#, TND#, BERR#) Overshoot/Undershoot
Tolerance for 667 MHz System Bus ...................................................................29
2-22 Itanium
®
2 Processor Power Pod Connector Signals.........................................30
2-23 Processor Core Voltage Identification Code .......................................................31
2-24 Processor Power States......................................................................................32
2-25 Itanium
®
2 Processor System Bus Ratios...........................................................33
2-26 Connection for Unused Pins ...............................................................................35
3-1 Pin/Signal Information Sorted by Pin Name........................................................38
3-2 Pin/Signal Information Sorted by Pin Location....................................................53
5-1 Case Temperature Specification.........................................................................76
6-1 System Management Interface Signal Descriptions ...........................................79
6 Datasheet
Page 7
6-2 Thermal Sensing Device SMBus Addressing on the Itanium® 2 Processor .......81
6-3 EEPROM SMBus Addressing on the Itanium
®
2 Processor......................... ... ...82
6-4 Processor Information ROM Format ...................................................................82
6-5 Current Address Read SMBus Packet................................................................86
6-6 Random Address Read SMBus Packet ..............................................................86
6-7 Byte Write SMBus Packet ...................................................................................86
6-8 Write Byte SMBus Packet...................................................................................87
6-9 Read Byte SMBus Packet...................................................................................87
6-10 Send Byte SMBus Packet ...................................................................................87
6-11 Receive Byte SMBus Packet...............................................................................87
6-12 ARA SMBus Packet ............................................................................................87
6-13 Command Byte Bit Assignment...........................................................................88
6-14 Thermal Sensing Device Status Register............................................................89
6-15 Thermal Sensing Device Configuration Register ................................................89
6-16 Thermal Sensing Device Conversion Rate Register...........................................90
A-1 Address Space Size............................................................................................92
A-2 Effective Memory Type Signal Encoding................................................ ... .... ... ...92
A-3 Special Transaction Encoding on Byte Enables..................................................93
A-5 BR0# (I/O), BR1#, BR2#, BR3# Signals for 2P Rotating Interconnect................95
A-4 BR0# (I/O), BR1#, BR2#, BR3# Signals for 4P Rotating Interconnect................95
A-6 BR[3:0]# Signals and Agent IDs............................. .......................................... ...95
A-7 DID[9:0]# Encoding.............................................................................................97
A-8 Extended Function Signals........................................................ .... ... ... ... ... .... ... ...99
A-9 Length of Data Transfers...................................................................................100
A-10 Transaction Types Defined by REQa#/REQb# Signals ....................................102
A-11 STBp[7:0]# and STBn[7:0]# Associations .........................................................104
A-12 Output Signals...................................................................................................105
A-13 Input Signals......................................................................................................106
A-14 Input/Output Signals (Single Driver)..................................................................107
A-15 Input/Output Signals (Multiple Driver) ...............................................................107
Datasheet 7
Page 8
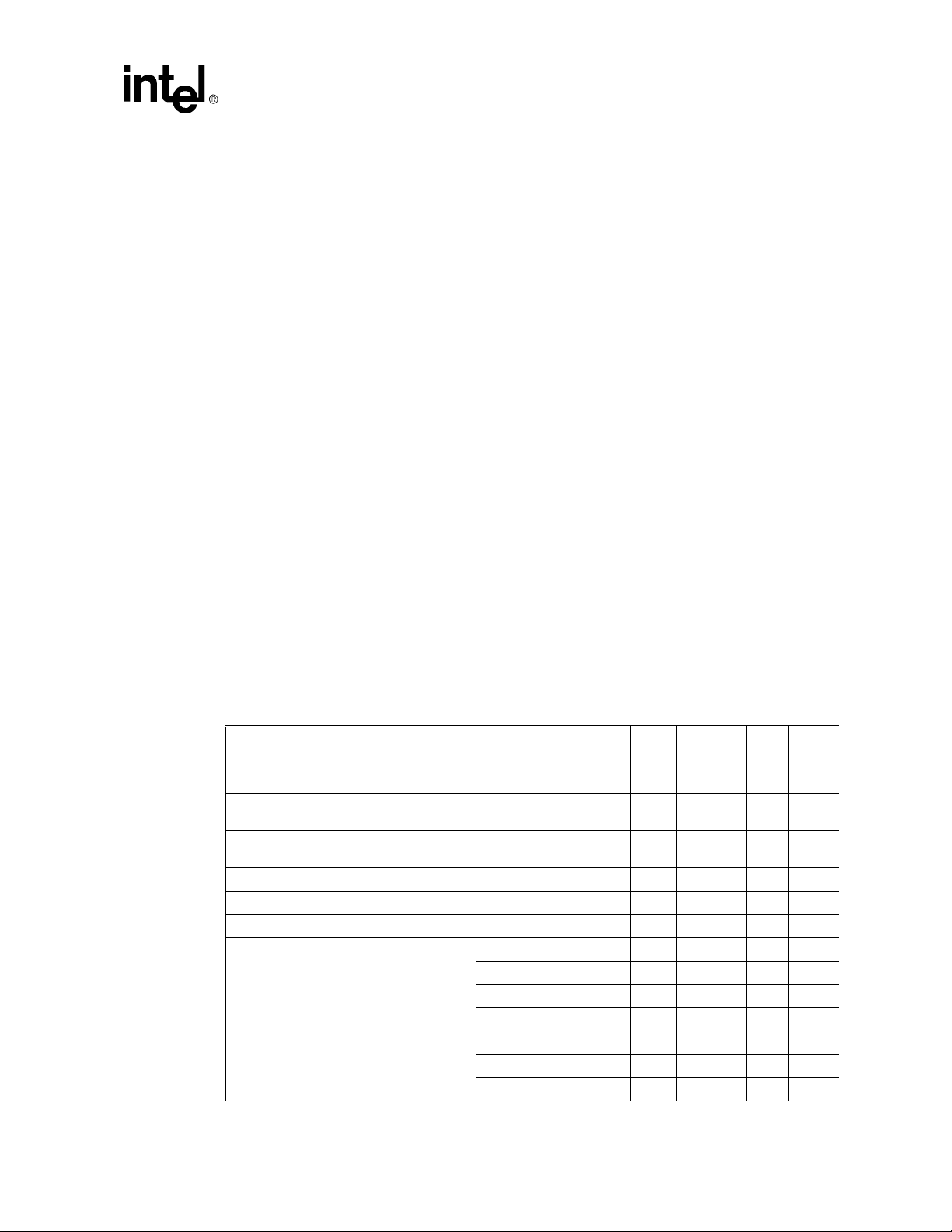
Revision History
Revision No. Description Date
-001 Initial release of this document. July 2002
-002 Updated content to include information pertaining to Itanium
(1.5 GHz, 6 MB), Itanium
processor (1.3 GHz, 3 MB).
-003 Updated content to include information pertaining to Itanium
processor (1.5 GHz, 4 MB) and Itanium
9MB).
-004 Updated content to include information pertaining to Itanium
processor (1.66 GHz, 6 MB and 9 MB).
-005 Updated content to include information pertaining to Itanium
processor (533 MHz system bus speed).
2 processor (1.4 GHz, 4 MB) and Itanium 2
2 processor (1.6 GHz, 6 MB and
2 processor
®
2
®
2
®
2
June 2003
November 2004
July 2005
February 2006
8 Datasheet
Page 9
Intel® Itanium® 2 Processor
Intel® Itanium® 2 Processor 1.66 GHz with 9 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.66 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.6 GHz with 9 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.6 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.5 GHz with 6 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.5 GHz with 4 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.4 GHz with 4 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.3 GHz with 3 MB L3 Cache
®
Intel
Itanium® 2 Processor 1.0 GHz with 3 MB L3 Cache
Intel® Itanium® 2 Processor 900 MHz with 1.5 MB L3 Cache
Product Features
■ Wide, parallel hardware based on In tel
architecture for high performance:
— Integrated on-die cache of up to 9 MB; cache
hints for L1, L2, and L3 caches for reduced
memory latency.
— 128 general and 128 floating-point registers
supporting register rotation.
— Register stack engine for effective management
of processor resources.
— Support for predication and speculation.
■ Extensive RAS features for business-critical
applications:
— Full SMBus compatibility.
— Enhanced machine check architecture with
extensive ECC and parity protection.
— Enhanced thermal management.
— Built-in processor information ROM (PIROM).
— Built-in programmable EEPROM.
®
Itanium®
■ High bandwidth system bus for multiprocessor
scalability:
— Up to 10.6 GB/s bandwidth.
— 128-bit wide data bus.
— 50-bits of physical memory addressing and 64-
bits of virtual addressing.
— Up to four processors on the same system bus at
400 MHz data bus frequency.
— Up to two processors on the same system bus at
533 MHz or 667 MHz data bus frequency.
— Expandable to systems with multiple system
buses.
■ Features to support flexible platform environments:
— Support for IA-32 application binaries.
— Bi-endian support.
— Processor abstraction layer eliminates processor
dependencies.
The Intel® Itanium® 2 processor is designed to address the needs of high-performance servers and workstations.
The Itanium architecture goes beyond RISC and CISC approaches by employing Explicitly Parallel Instruction
Computing (EPIC), which pairs extensive processing resources with intelligent compilers that enable parallel
execution explicit to the processor. The processor’s large internal resources combine with predication and
speculation to enable optimization for high performance applications running on multiple operating systems,
including versions of Microsoft Windows*, HP-UX* and Linux*. The Itanium 2 processor is designed to support
very large scale systems, including those employing thousands of processors, to provide the processing power and
performance head room for the most demanding enterprise and technical computing applications. SMBus
compatibility and comprehensive reliability, availability and serviceability (RAS) features make the Itanium 2
processor ideal for applications requiring high up-time. For high performance servers and workstations, the
Itanium 2 processor offers outstanding performance and reliability for today’s applications and the scalability to
address the growing e-business needs of tomorrow.
Datasheet 9
Page 10

10 Datasheet
Page 11
1 Introduction
1.1 Overview
The Itanium 2 processor employs Explicitly Parallel Instruction Computing (EPIC) design
concepts for a tighter coupling between hardware and software. In this design style, the interface
between hardware and software is designed to enable the software to exploit all available compiletime information, and efficiently deliver this information to the hardware. It addresses several
fundamental performance bottlenecks in modern computers, such as memory latency, memory
address disambiguation, and control flow dependencies. The EPIC constructs provide powerful
architectural semantics, and enable the software to make global optimizations across a large
scheduling scope, thereby exposing available Instruction Level Parallelism (ILP) to the hardware.
The hardware takes advantage of this enhanced ILP, and provid e s abundant execution resources.
Additionally, it focuses on dynamic run-time optimizations to enable the compiled code schedule
to flow at high throughput. This strategy increases the synergy between hardware and software, and
leads to greater overall performance.
The Itanium 2 processor provides a 6-wide and 8-stage deep pipeline, running at up to 1.66 GHz.
This provides a combination of abundant resources to ex ploit ILP as well as increased frequency
for minimizing the latency of each instruction. The resources consist of six integer units, six
multimedia units, two load and two store units, three branch units, two extended-precision floating
point units, and one additional single-precision floating point unit. The hardware employs dynamic
prefetch, branch prediction, a register scoreboard, and non-blocking caches to optimize for
compile-time non-determinism. Three levels of on-die cache minimize overall memory latency.
This includes up to a 9 MB L3 cache, accessed at core speed, providing up to 84.8 Gb/sec of data
bandwidth. The system bus is designed to support up to four processors (on a single system bus),
and can be used as an effective building block for very large systems. The balanced core and
memory subsystem provide high performance for a wide range of applications ranging from
commercial workloads to high performance technical computing.
The Itanium 2 processor supports a range of computing needs and configurations from a 2-way to
large SMP servers. This document provides the electrical, mechanical and thermal specifications
for the Itanium 2 processor for use while using systems with Itanium 2 processors.
1.2 Processor Abstraction Layer
The Itanium 2 processor requires implementation-specific Processor Abstraction Layer (PAL)
firmware. P AL firmware supports processor initialization, error recovery , and other functionality . It
provides a consistent interface to system firmware and operating systems across processor
hardware implementations. The Intel
Volume 2: System Architecture, describes PAL. Platforms must provide access to the firmware
address space and PAL at reset to allow Itanium 2 processors to initialize.
The System Abstraction Layer (SAL) firmware contains platform-specific firmware to initialize
the platform, boot to an operating system, and provide runtime functionality. Further information
about SAL is available in the Intel
Specification.
Datasheet 11
®
Itanium® Architecture Software Developer’s Manual,
®
Itanium® Processor Family System Abstraction Layer
Page 12
Introduction
1.3 Mixing Processors of Different Frequencies and Cache Sizes
All Itanium 2 processors on the same system bus are required to have the same cache size (9 MB,
6 MB, 4 MB, 3 MB or 1.5 MB) and identical core frequency. Mixing components of different core
frequencies and cache sizes is not supported and has not been validated by Intel. Operating system
support for multiprocessing with mixed components should also be considered.
While Intel has done nothing to specifically prevent processors within a multiprocessor
environment from operating at differing frequencies and differing cache sizes, there may be
uncharacterized errata that exist in such configurations. Customers would be fully responsible for
validation of system configurations with mixed components other than the supported
configurations described above.
1.4 Terminology
In this document, a ‘#’ symbol after a signal name refers to an active low signal. This means that a
signal is in the active state (based on the name of the signal) when driven to a low level. For
example, when RESET# is low, a processor reset has been requested. When NMI is high, a nonmaskable interrupt has occurred. In the case of lines where the name does not imply an active state
but describes part of a binary sequence (such as address or data), the ‘#’ symbol implies that the
signal is inverted. For example, D[3:0] = ‘HLHL’ refers to a hex ‘A’, and D [3:0] # = ‘LHLH’ also
refers to a hex ‘A’ (H = High logic level, L = Low lo gic level).
The term “system bus” refers to the interface between the processor, system core logic and other
bus agents. The system bus is a multiprocessing interface to processors, memory and I/O.
A signal name has all capitalized letters, for example, VCTERM.
A symbol referring to a voltage level, current level, or a time value carries a plain subscript, e.g.,
V
, or a capitalized abbreviated subscript, for example, TCO.
CC,core
1.5 State of Data
The data contained in this document is subject to change. It is the best information that Intel is able
to provide at the publication date of this document.
12 Datasheet
Page 13
1.6 Reference Documents
The reader of this specification should also be familiar with material and concepts presented in the
following documents:
Title Document Number
®
Intel
Itanium® 2 Processor Specification Update 251141
®
Itanium® Architecture Software Developer’s Manual, Volume 1:
Intel
Application Architecture
®
Intel
Itanium® Architecture Software Developer’s Manual, Volume 2: System
Architecture
®
Intel
Itanium® Architecture Software Developer’s Manual,
Volume 3: Instruction Set Reference
®
Intel
Itanium® 2 Processor Reference Manual for Software Development and
Optimization
®
Intel
Itanium® Processor Family System Abstraction Layer Specification 245359
ITP700 Debug Port Design Guide 249679
System Management Bus Specification http://www.smbus.org/specs
Introduction
245317
245318
245319
251110
Note: Contact your Intel representative or check http://developer.intel.com for the latest revision of the
reference documents.
Datasheet 13
Page 14

Introduction
14 Datasheet
Page 15
2 Electrical Specifications
This chapter describes the electrical specifications of the Itanium 2 processor.
2.1 Itanium® 2 Processor System Bus
Most Itanium 2 processor signals use the Itanium processor’s assisted gunning transceiver logic
(AGTL+) signaling technology. The termination voltage, V
and is the system bus high reference voltage. The buffers that drive most of the system bus signals
on the Itanium 2 processor are actively driven to V
improve rise times and reduce noise. These signals should still be considered open-drain and
require termination to V
is terminated to V
which case the termination is provided by external resistors connected to V
CTERM
, which provides the high level. The Itanium 2 processor system bus
CTERM
at each end of the bus. There is also support of off-die termination in
during a low-to-high transition to
CTERM
, is generated on the baseboard
CTERM
CTERM
.
AGTL+ inputs use differential receivers which require a reference signal (V
the receivers to determine if a signal is a logical 0 or a logical 1. The Itanium 2 processor generates
V
on-die, thereby eliminating the need for an off-chip reference voltage source.
REF
2.1.1 System Bus Power Pins
VCTERM (1.2 V) input pins on the Itanium 2 processor provide power to the driver buffers and
on-die termination. The GND pins, in addition to the GND
provide ground to the processor. Power for the processor core is provided through the power tab
connector by V
management bus (SMBus). The V
from each other.
. The 3.3 V pin is included on the processor to provide power to the system
CC,PS
CTERM
2.1.2 System Bus No Connect
All pins designated as “N/C” or “No Connect” must remain unconnected.
2.2 System Bus Signals
2.2.1 Signal Groups
Table 2-1 contains Itanium 2 processor system bus signals that have been combined into groups by
buffer type and whether they are inputs, outputs or bidirectional with respect to the processor.
). V
REF
input at the power tab connector,
, 3.3 V, and GND pins must remain electrically separated
is used by
REF
Datasheet 15
Page 16
Electrical Specifications
..
Table 2-1. Itanium
AGTL+ Input Signals BPRI#, BR[3:1]#, DEFER#, GSEQ#, ID[9:0]#, IDS#, RESET#
AGTL+ I/O Signals A[49:3]#, ADS#, AP[1:0]#, BERR#, BINIT#, BNR#, BPM[5:0]#1, BR0#,
AGTL+ Output Signals FERR#, THRMTRIP#, DBSY[1:0]#, DRDY[1:0]#, SBSY[1:0]#
Special AGTL+ Asynchronous
Interrupt Input Signals
Power Good Signal
HSTL Clock Signals BCLKn, BCLKp
TAP Input Signals
TAP Output Signals
System Management Signals
Power Signals GND, VCTERM
LVTTL Power Pod Signals
Other TERMA, TERMB, TUNER1, TUNER2, VCCMON, VSSMON
NOTES:
1. Signals will not be terminated on-die even when on-die termination (ODT) is enabled. See Intel® Itanium® 2 Processor
®
Group Name Signals
Hardware Developer’s Manual for further details.
2 Processor System Bus Signal Groups
RSP#, TRDY#
D[127:0]#, DBSY#, DEP[15:0]#, DRDY#, HIT#, HITM#, LOCK#, REQ[5:0]#,
RP#, SBSY#, STBN[7:0]#, STBP[7:0]#, TND#
A20M#, IGNNE#, INIT#, LINT[1,0], PMI#
1
1
1
PWRGOOD
TCK, TDI, TMS, TRST#
TDO
1
3.3V, SMA[2:0], SMSC, SMSD, SMWP, THRMALERT#
1
CPUPRES#, OUTEN, PPODGD#
1
, RS[2:0]#,
All system bus outputs should be treated as open drain signals and require a high level source
provided by the V
CTERM
supply.
AGTL+ inputs have differential input buffers which use V
signals require termination to V
AGTL+ input group as well as the AGTL+ I/O group when receiving. Similarly, “AGTL+ Output
Signals” refers to the AGTL+ output group as well as the AGTL+ I/O group when driving.
The Power Good (PWRGOOD) signal and Test Access Port (TAP) connection input signals use a
non-differential receiver with levels that are similar to AGTL+. No reference voltage is required for
these signals. The TAP Connection Output signals are AGTL+ output signals.
The Itanium 2 processor system bus requires termination on both ends of the bus. The Itanium 2
processor system bus supports both on-die and off-die termination controlled by two pins, TERMA
and TERMB. Please see the TERMA and TERMB pin description in Section 2.2.2.
The HSTL clock signals are the differential clock inputs for the Itanium 2 processor. The SMBus
signals and LVTTL power pod signals are driven using the 3.3 V CMOS logic levels listed in
Table 2-8 and Table 2-9, respectively.
2.2.2 Signal Descriptions
Appendix A, “Signals Reference”contains functional descriptions of all system bus signals and
L VTTL power pod signals. Further descriptions of the system management signals are contained in
Chapter 6. The signals listed under the “Power” and “Other” group are described here:
as a reference level. AGTL+ output
. In this document, “AGTL+ Input Signals” refers to the
CTERM
REF
16 Datasheet
Page 17
Electrical Specifications
V
CTERM
System bus termination voltage.
GND System ground.
N/C No connection can be made to these pins.
TERMA, TERMB The Itanium 2 processor uses two pins to control the on-die termination
function, TERMA and TERMB. Both of these termination pins must be
pulled to VCTERM in order to terminate the system bus using the on-die
termination resistors. Both of these termination pins must be pulled to
GND in order to use off-die termination.
TUNER1, TUNER2 TUNER1 is used to control the slew rate of the system bus I/O buffers.
The nominal value for the TUNER1 resistor is 150 ohms. A lower
resistance will cause a faster slew rate. TUNER2 is used to control the
termination resistance for the system bus I/O buffers. The nominal value
for the TUNER2 resistor is 150 ohms. A lower resistance will cause a
lower on-die termination resistance. On-die termination mode will only
be selected if the TERMA and TERMB pins are terminated as indicated
above.
VCCMON, VSSMON These pins provide a remote sense connection from the processor to the
power pod. No connections that constitute a current load can be made to
these pins.
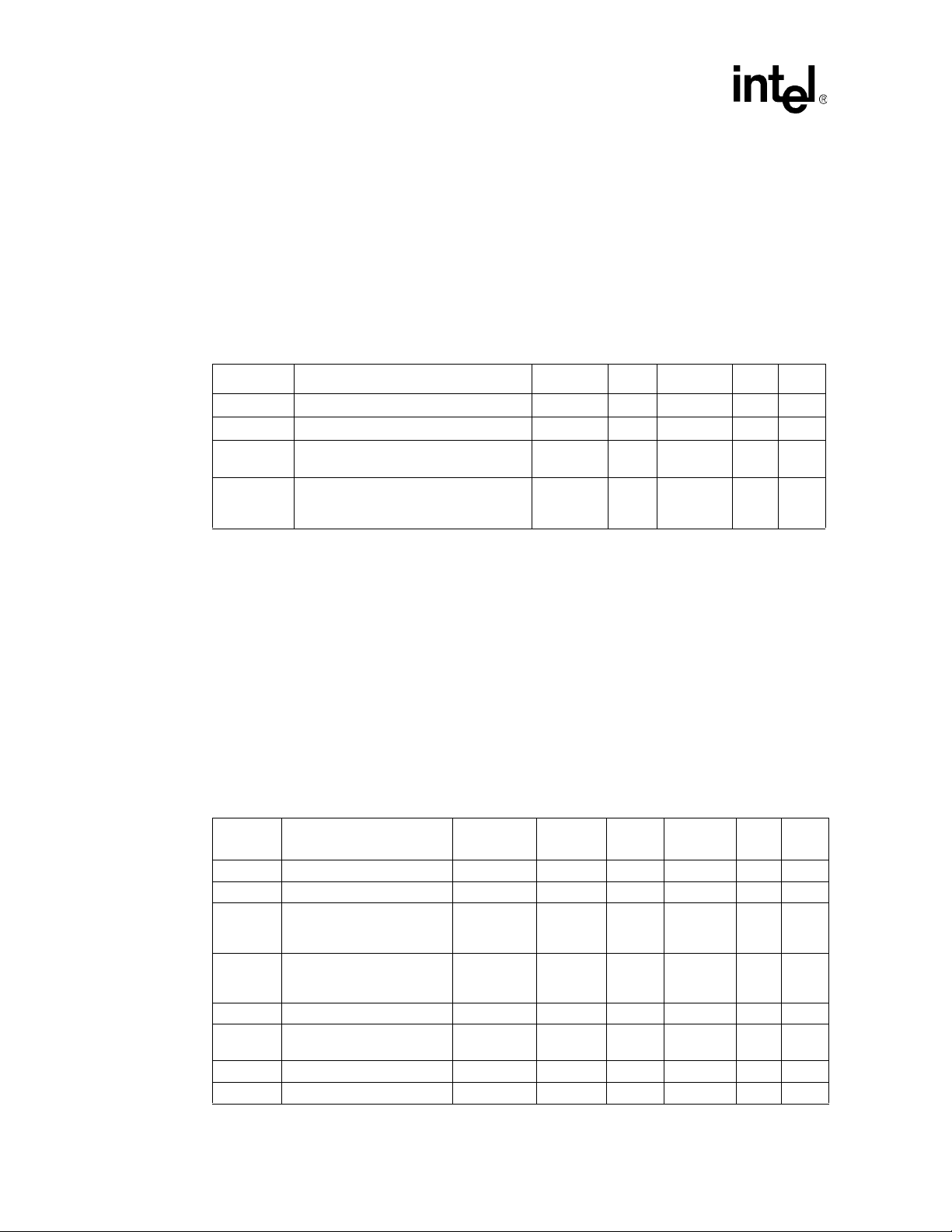
2.3 Package Specifications
Table 2-2 through Table 2-9 list the DC voltage, current and power specifications for the Itanium 2
processor. The voltage and current specifications are defined at the Itanium 2 processor pins.
Operational specifications listed in Table 2-2 through Table 2-9 are only valid while meeting
specifications for case temperature, clock frequency, and input voltages.
Table 2-2. Itanium
Symbol Parameter
V
CTERM
R
TERM
V
TAP
I
CTERM
PWR
MAX
PWR
TDE
PWR
TDP
®
2 Processor Package Specifications
Core
Frequency
Termination Voltage All 1.2 –1.5% 1.2 1.2 +1.5% V
Recommended Termination
Resistance
Test Access Port Voltage
(VCC
Termination Voltage Current All 7.2 A
Maximum Processor Power All 130 W
Thermal Design Envelope All 130 W
Thermal Design Power 900 MHz 90 W
TAP
)
All 45 W
All 1.2 –1.5% 1.2 1.5 V
1.0 GHz 100 W
1.3 GHz 97 W
1.4 GHz 91 W
1.5 GHz 107 W
1.6 GHz 122 W
1.66 GHz 122 W
Minimum Typ Maximum Unit Notes
1
2
3
4
5
6
6
6
6
6
6
6
Datasheet 17
Page 18
Electrical Specifications
NOTES:
1. This is the tolerance requirement, across a 200 MHz bandwidth, at the processor pins. The requirement at the processor pins
accounts for voltage drops (and impedance discontinuities) at the processor pins and to the processor core. In addition to the
±1.5% DC tolerance, there is a ±3.5% AC tolerance for a total of ±5% tolerance.
2. The Itanium
die and off-die termination which is selected by the TERMA and TERMB pins. Termination tolerance is ±15% for on-die
termination measured at V
3. Maximum termination voltage current on one terminating agent.
4. For all core frequencies and cache sizes.
5. Maximum thermal design envelope is provided for the design of thermal/chassis solutions.
6. Maximum thermal design power is an estimate of the power dissipation for the Itanium 2 processor offering while executing a
worst-case application mix under nominal V
®
2 processor system bus is terminated at each end of the system bus. The Itanium 2 processor supports both on -
and ±1% for off-die termination.
OL
and worst-case temperature.
CC,PS
Table 2-3. Itanium® 2 Processor Power Supply Specificat ions
Symbol Parameter Minimum Typ Maximum Unit Notes
V
CC,PS
I
CC,PS
PS
slew_rate
PS
TT
NOTES:
1. The power pod DC set point accuracy is ±1.5%. Included for reference only, under worst case switching activit y, the power pod
tolerance is ±7%.
2. The V
3. The maximum current (I
defined to be based on worst-case V
VCC from the Power Supply VID –1.5% VID VID +1.5% V
Current Required from Power Supply 100 A
Power Supply Slew Rate at the
Processor Power Pod Connector
Power Supply Slew Rate for the
Termination Voltage at the Processor
Pins
for the processor is defined by the VID bits specified in Table 2-23.
CC,PS
) specification is intended for system power supply design. The maximum current values are
CC,PS
, temperature and application mix.
CC,PS
1, 2
3
100 A/µs
0.05 A/ns
2.4 Signal Specifications
This section describes the DC specifications of the system bus signals. The processor signal’s DC
specifications are defined at the Itanium 2 processor pins. Table 2-4 through Table 2-9 describe the
DC specifications for the AGTL+, PWRGOOD, HSTL clock, TAP port, system management, and
LVTTL signals. Please refer to the ITP700 Debug Port Design Guide for the TAP connection
signals DC specifications at the debug port.
Table 2-4. AGTL+ Signals DC Specifications (Sheet 1 of 2)
Symbol Parameter
V
IL
V
IH
V
IL
V
IH
Input Low Voltage All 0.625 V
Input High Voltage All 0.875 V
Input Low Voltage
(1.6x GHz, I.5 GHz/4 MB
®
Itanium
2 Processors)
Input High Voltage
(1.6x GHz, I.5 GHz/4 MB
Itanium 2 Processors)
V
OL
V
OH
I
OL
I
OL
Output Low Voltage All 0.3 0.4 V
Output High Voltage All V
Output Low Current @ 0.3V All 34 mA
Output Low Current @ 0.3V All 17 mA
Core
Frequency
All 0.65 V
All 0.85 V
Minimum Typ Maximum Unit Notes
1
1
1
1
2
,
CTERM
minimum
V
CTERMVCTERM
maximum
,
V
3
4
18 Datasheet
Page 19
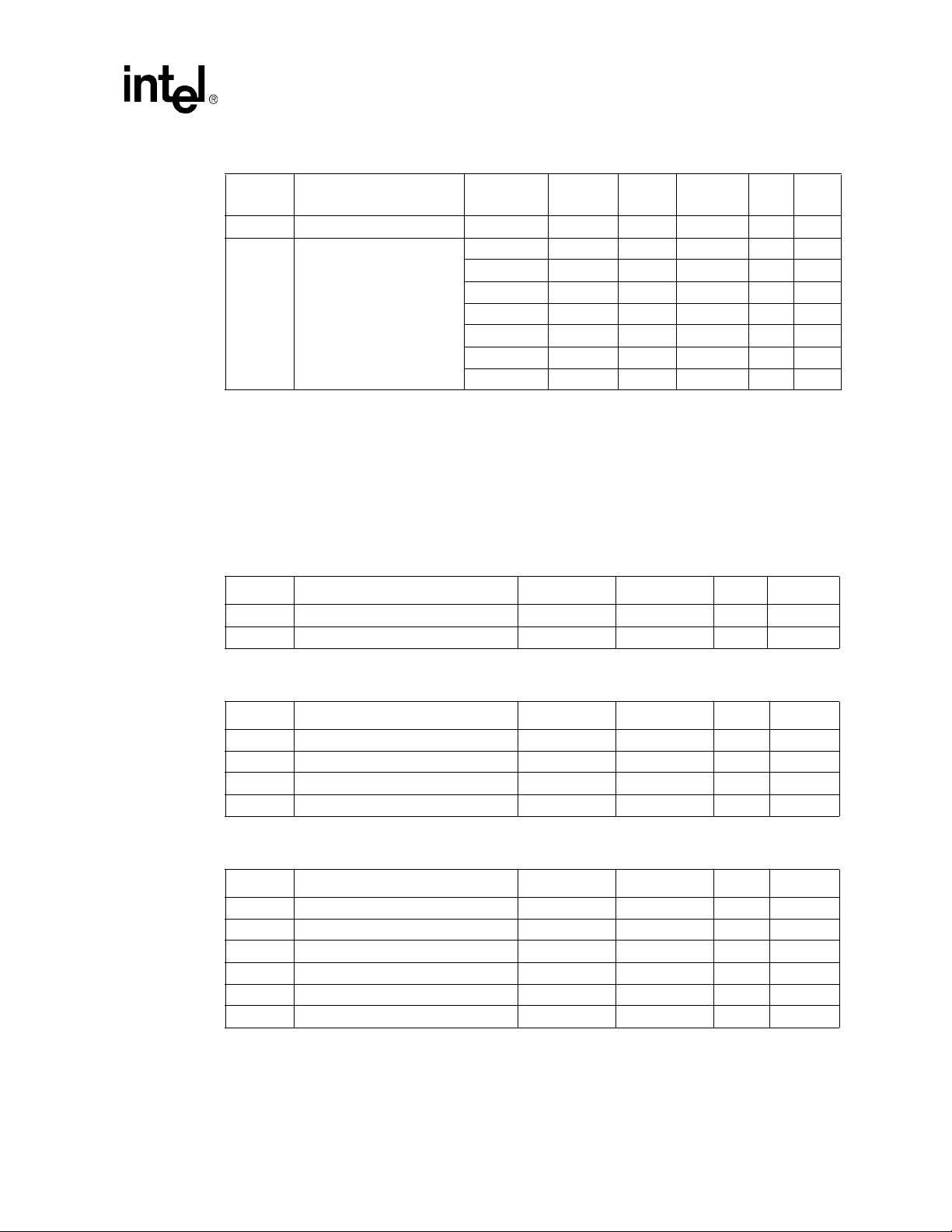
Table 2-4. AGTL+ Signals DC Specifications (Sheet 2 of 2)
Electrical Specifications
Symbol Parameter
I
L
C
AGTL+
Leakage Current All ±100 µA
AGTL+ Pad Capacitance 900 MHz 3 pF
Core
Frequency
1.0 GHz 3 pF
1.3 GHz 1.5 pF
1.4 GHz 1.5 pF
1.5 GHz 1.5 pF
1.6 GHz 1.5 pF
1.66 GHz 1.5 pF
NOTES:
1. The typical transition point between VIL and VIH assuming 125 mV V
±100 mV respectively, for a system bus agent using on-board termination. V
V
REF
mV respectively, f or a system bus agent using on-die termination.
2. Parameter measured into a 22.5 ohm resistor to 1.2V. Minimum V
3. Calculated using off-die termination through two 45 ohm ±1% resistors in parallel.
4. Calculated using on-die termination to a 45 ±15% resistor measured at V
5. At 1.2V ±1.5%. V
6. Total of I/O buffer with ESD structure and processor parasitics if applicable. Capacitance values guaran teed by design for all
AGTL+ buffers.
, minimum ≤ Vpin ≤ V
CTERM
CTERM
, maximum.
Table 2-5. Power Good Signal DC Specifications
Symbol Parameter Minimum Maximum Unit Notes
V
IL
V
IH
Input Low Voltage 0.440 V
Input High Voltage 0.875 V
Minimum Typ Maximum Unit Notes
5
6
6
6
6
6
6
6
uncertainty for ODT. V
REF
and IOL are guaranteed by design/characterization.
OL
.
OL
REF_high
and V
REF_high
REF_low
and V
REF_low
levels are V
levels are
±125
REF
Table 2-6. System Bus Clock Differential HSTL DC Specifications
Symbol Parameter Minimum Maximum Unit Notes
V
IH
V
IL
V
X
C
CLK
Input High Voltage 0.78 1.3 V
Input Low Voltage –0.3 0.5 V
Input Crossover Voltage 0.55 0.85 V
Input (Pad) Capacitance 1.75 pF
Table 2-7. TAP Connection DC Specifications
Symbol Parameter Minimum Maximum Unit Notes
V
IL
V
IH
V
OL
V
OH
I
OL
I
IC
NOTES:
1. There is a 100 mV hysteresis on TCK.
2. VIH, MAX = 1.5V + 5%, VOH, MAX = 1.2V +5%.
3. There is no internal pull-up. An external pull-up is always assumed. Max voltage tolerated at TDO is 1.5V.
4. Per input pin.
Input Low Voltage –0.3 0.5 V
Input High Voltage 1.1 1.57 V
Output Low Voltage 0.3 V
Output High Voltage 1.2 V
Output Low Current 20 mA
Input Current 690 uA
1
1, 2
2, 3
4
Datasheet 19
Page 20
Electrical Specifications
Table 2-8. SMBus DC Specifications
Symbol Parameter Minimum Typ Maximum Unit Notes
3.3V V
V
IL
V
IH
V
OL
I
3.3V
I
OL
I
OL2
I
LI
I
LO
NOTES:
1. The value specified for I
2. The value specified for I
for the System Management
CC
Components
Input Low Voltage –0.3 0.3*3.3V V
Input High Voltage 2.31 3.47 V Max =
Output Low Voltage 0.4 V
3.3V Supply Current 5.0 30.0 mA
Output Low Current 3 mA
Output Low Current 6 mA
Input Leakage Current 10 µA
Output Leakage Current 10 µA
3.14 3.3 3.47 V 3.3V ±5%
applies to all signals except for THRMALERT#.
OL
applies only to THRMALERT# which is an open drain signal.
OL2
3.3 +5%
Min +
0.7*3.3V
1
2
Table 2-9. LVTTL Signal DC Specifications
Symbol Parameter Minimum Maximum Unit Notes
V
IL
V
IH
V
OL
V
OH
Input Low Voltage 0.8 V
Input High Voltage 2.0 3.63 V
Output Low Voltage 0.4 V
Output High Voltage 2.4 V
Table 2-10 through Table 2-11 list the AC specifications for the Itanium 2 processor’s clock and
SMBus (timing diagrams begin with Figure 2-1). The Itanium 2 processor uses a differential HSTL
clocking scheme with a frequency of 200, 266 or 333 MHz. The SMBus is a subset of the I2C*
interface which supports operation of up to 100 kHz.
Table 2-10. System Bus Clock Differential HSTL AC Specifications (Sheet 1 of 2)
System
Symbol Parameter
BCLKp Period 200 5.0 ns Figure 2-1
T
period
T
skew
f
BCLK
T
jitter
T
high
T
low
T
period
T
skew
f
BCLK
T
jitter
T
high
System Clock Skew 200 100 ps
BCLKp Frequency 200 200 200 MHz Figure 2-1
BCLKp Input Jitter 200 100 ps Figure 2-1
BCLKp High Time 200 2.25 2.5 2.75 ns Figure 2-1
BCLKp Low Time 200 2.25 2.5 2.75 ns Figure 2-1
BCLKp Period 266 3.75 ns Figure 2-1
System Clock Skew 266 60 ps
BCLKp Frequency 266 266 266 MHz Figure 2-1
BCLKp Input Jitter 266 50 ps Figure 2-1
BCLKp High Time 266 1.69 1.88 2.06 ns Figure 2-1
Bus
Clock
(MHz)
Minimum Typ Maximum Unit Figure Notes
1
2
3
4
4
5
2
3
4
20 Datasheet
Page 21
Electrical Specifications
Table 2-10. System Bus Clock Differential HSTL AC Specifications (Sheet 2 of 2)
System
Symbol Parameter
T
low
T
period
T
skew
f
BCLK
T
jitter
T
high
T
low
T
rise
T
fall
V
PP
BCLKp Low Time 266 1.69 1.88 2.06 ns Figure 2-1
BCLKp Period 333 3.0 ns Figure 2-1
System Clock Skew 333 60 ps
BCLKp Frequency 333 333 333 MHz Figure 2-1
BCLKp Input Jitter 333 50 ps Figure 2-1
BCLKp High Time 333 1.35 1.5 1.65 ns Figure 2-1
BCLKp Low Time 333 1.35 1.5 1.65 ns Figure 2-1
BCLKp Rise Time All 333 500 667 ps Figure 2-1 20–80%
BCLKp Fall Time All 333 500 667 ps Figure 2-1 20–80%
Minimum Input Swing All 600 mV Figure 2-1
NOTES:
1. The system clock skew is ±100 ps.
2. Measured on cross point of rising edge of BCLKp and falling edge of BCLKn. Long term jitter is defined as peak-to-peak variation measured by
accumulating a large number of clock cycles and recording peak-to-peak jitter.
3. Cycle-to-cycle jitter is defined as peak-to-peak variation measured over 10000 cycles peak-to-peak jitter.
4. Measured on cross point of rising edge of BCLKp and falling edge of BCLKn.
5. The system clock skew is ±60 ps.
is defined as the minimum input differential voltage which will cause no increase in the clock receiver timing.
6. V
PPmin
Bus
Clock
(MHz)
Minimum Typ Maximum Unit Figure Notes
4
3
4
4
6
Table 2-11. SMBus AC Specifications
Symbol Parameter Minimum Maximum Unit Notes
f
SMSC
T
SMSC
t
high
t
low
t
rise
t
fall
t
VALID
t
SU
t
HLD
t
FREE
NOTES:
1. Please refer to Figure 2-2 for the Standard Microsystems Corporation (SMSC)* clock waveform.
2. Bus Free Time is the minimum time allowed between request cycles.
SMSC Clock Frequency 100 kHz
SMSC Clock Period 10 µs
SMSC Clock High Time 4.0 µs
SMSC Clock Low Time 4.7 µs
SMSC Clock Rise Time 1.0 µs
SMSC Clock Fall Time 0.3 µs
SMBus Output Valid Delay 1.0 µs
SMBus Input Setup Time 250 ns
SMBus Input Hold Time 0 ns
Bus Free Time 4.7 µs
1
1
1
1
2
Datasheet 21
Page 22
Electrical Specifications
Figure 2-1. Generic Clock Waveform
T
rise
V
80%
pp
20%
T
Rise Time
=
rise
T
Fall Time
=
fall
T
High Time
=
high
T
Low Time
=
low
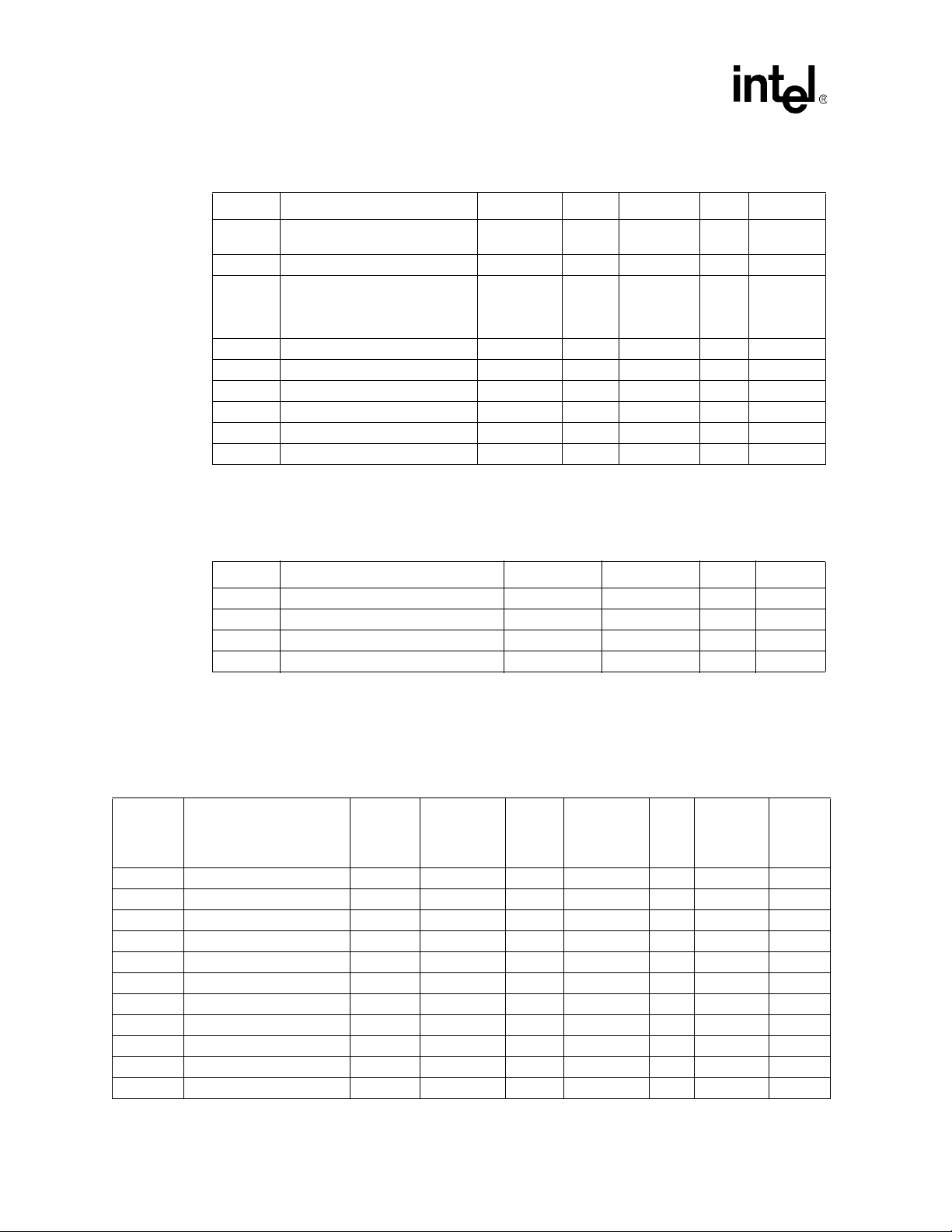
Figure 2-2. SMSC Clock Waveform
T
rise
75% V
SMSC
25% V
cc
cc
T
high
T
T
T
V
high
T
period
period
jitter
pp
fall
T
low
T
fall
BCLKN
BCLKP
=
=T
Period
Long Term Peak-to-Peak Jitter
=
Peak-to-Peak Swing
=
90% V
cc
T
low
T
jitter
000615
V (3.3V)
cc
T
T
rise
fall
=
Rise Time
Fall Time
=
T
T
high
low
=
High Time
Low Time
=
2.4.1 Maximum Ratings
Table 2-12 contains the Itanium 2 processor stress ratings. Functional operation at the absolute
maximum and minimum is neither implied nor guaranteed. The processor should not receive a
clock while subjected to these conditions. Functional operating conditions are given in the DC
tables. Extended exposure to the maximum ratings may affect device reliability. Furthermore,
although the processor contains protective circuitry to resist damage from static electric discharge,
one should always take precautions to avoid static voltages or electric fields.
Table 2-12. Itanium® 2 Processor Absolute Maximum Ratings (Sheet 1 of 2)
Symbol Parameter Minimum Maximum Unit Notes
T
storage
T
shipping
V
CC,Processor
3.3V Any 3.3V Supply Voltage with Respect to
Processor Storage Temperature –10 45 °C
Processor Shipping Temperature –45 75 °C
Any V
to GND
CC,Processor
Voltage with Respect
–0.1 2.1 V
–0.3 5.5 V
GND
000618
1
2
3
4
22 Datasheet
Page 23
Electrical Specifications
Table 2-12. Itanium® 2 Processor Absolute Maximum Ratings (Sheet 2 of 2)
Symbol Parameter Minimum Maximum Unit Notes
V
in, SMBus
V
in, AGTL+
V
CTERM
V
in,TAP
NOTES:
1. Storage temperature is temperature in which the processor can be stored for up to one year.
2. Shipping temperature is temperature in which the processor can be shipped for up to 24 hours.
3. See Table 2-4 through Table 2-9 inclusive for operating voltages.
4. Parameters are from third party vendor specifications.
5. Maximum instantaneous voltage at receiver buffer input.
6. Specification includes V
respect to GND.
SMBus Buffer DC Input Voltage with
Respect to GND
AGTL+ Buffer DC Input Voltage with
Respect to GND
Any V
GND
TAP Buffer DC Input Voltage with
Respect to GND.
in,AGTL+
Voltage with Respect to
CTERM
and V
in,AGTL+ ASYNCHRONOUS
–0.1 6.0 V
–0.1 1.9 V
–0.1 1.9 V
–0.1 2.1 V
(AGTL+ asynchronous buffer DC input voltage with
2.5 System Bus Signal Quality Specifications and Measurement Guidelines
4
5, 6
3
5
Overshoot (or undershoot) is the absolute value of the maximum voltage above the nominal
V
limit transitions beyond V
voltage (or below GND), as shown in Table 2-3. The overshoot/undershoot specifications
CTERM
or GND due to the fast signal edge rates. The processor can be
CTERM
permanently damaged by repeated overshoot or undershoot events on any input, output, or I/O
buffer if the charge is large enough (that is, if the overshoot/undershoot is great enough).
Determining the impact of an overshoot/undershoot condition requires knowledge of the
magnitude, the pulse duration, and the activity factor (AF).
2.5.1 Overshoot/Undershoot Magnitude
Magnitude describes the maximum potential difference between a signal and its voltage reference
level. For the Itanium 2 processor, both are referenced to GND as shown in Figure 2-3. It is
important to note that overshoot and undershoot conditions are separate and their impact must be
determined independently. Overshoot/undershoot magnitude levels must observe the absolute
maximum specifications listed in Table 2-13 through Table 2-21. These specifications must not be
violated at any time regardless of bus activity or system state. Within these specifications are
threshold levels that define different allowed pulse duration. Provided that the magnitude of the
overshoot/undershoot is within the absolute maximum specifications (1.8 V for overshoot and
–0.60 V for undershoot), the pulse magnitude, duration and activity factor must all be used to
determine if the overshoot/undershoot pulse is within specifications.
Datasheet 23
Page 24
Electrical Specifications
p
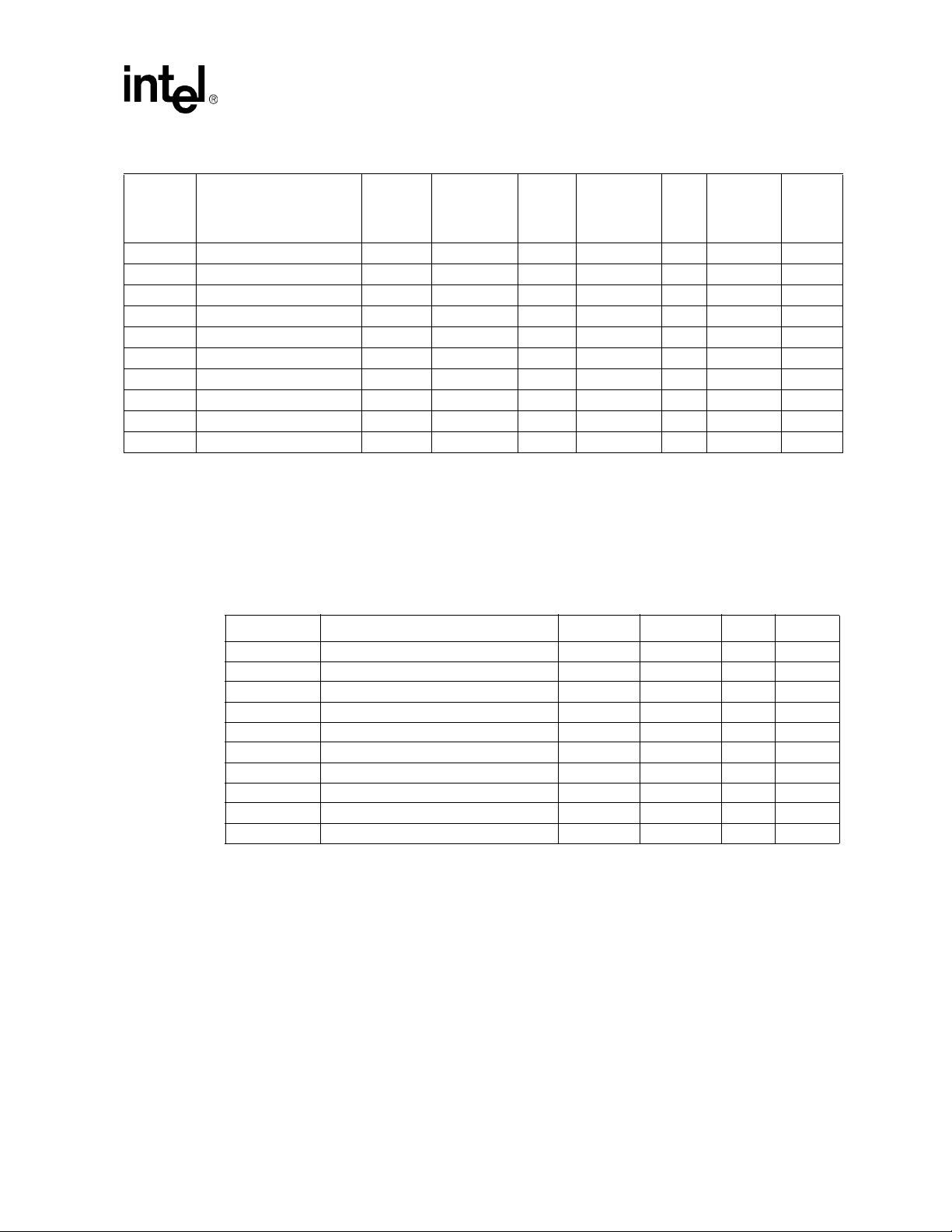
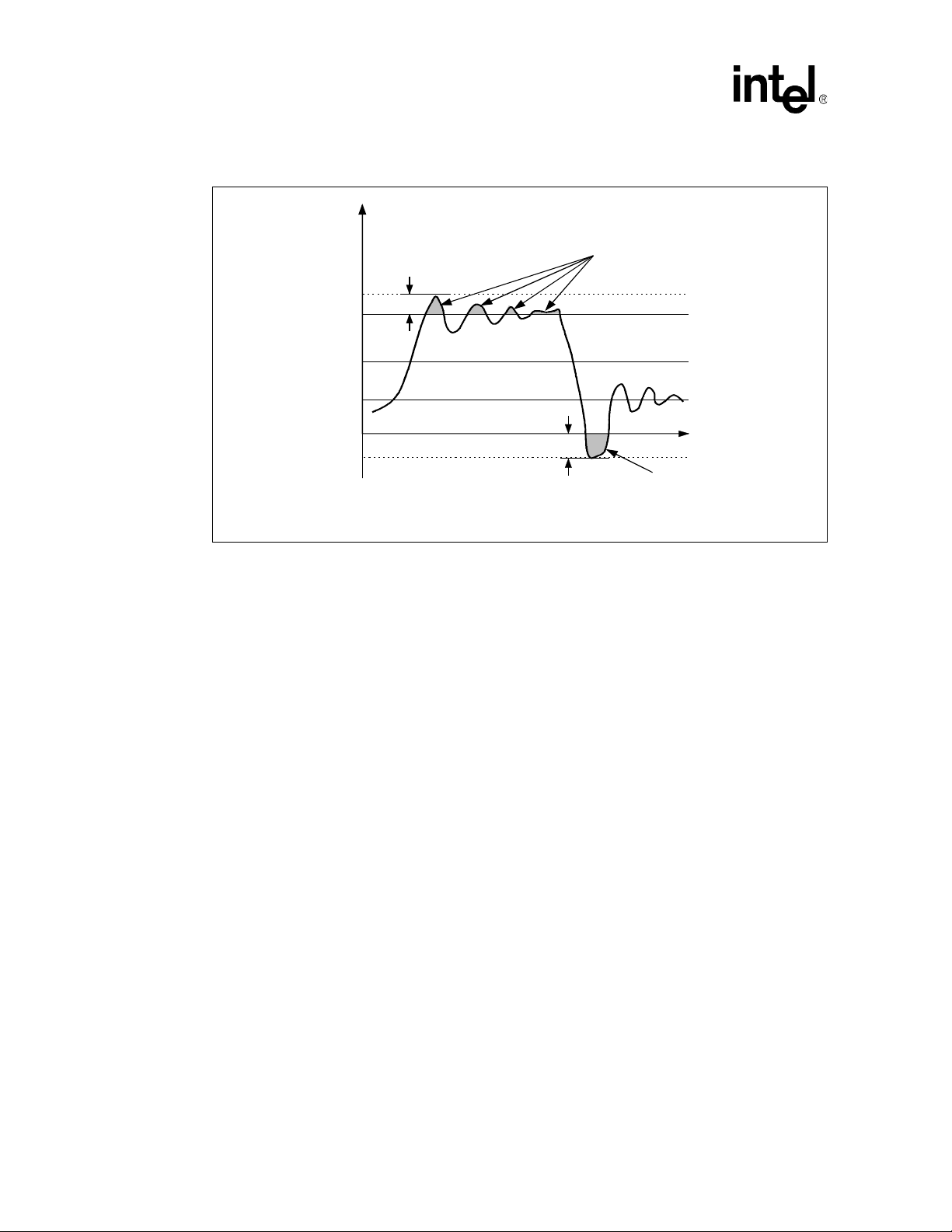
Figure 2-3. System Bus Signal Waveform Exhibiting Overshoot/Undershoot
Maximum
Absolute
Overshoot
V
MAX
V
CTERM
V
REF
V
OL
GND
V
MIN
Maximum
Absolute
Undershoot
2.5.2 Overshoot/Undershoot Pulse Duration
Pulse duration describes the total time an overshoot/undershoot event exceeds the
overshoot/undershoot reference voltage (V
oscillations above the reference voltage. Multiple overshoot/undershoot pulses within a single
overshoot/undershoot event may need to be measured to determine the total pulse duration.
/GND). The total time could encompass several
CTERM
Time-dependent
Overshoot
Time-de
Undershoot
endent
000588
Note: Oscillations below the reference voltage cannot be subtracted from the total overshoot/undershoot
pulse duration.
2.5.3 Activity Factor
Activity factor (AF) describes the frequency of overshoot (or undershoot) occurrence relative to a
clock. Since the highest frequency of assertion of any common clock signal is every other clock, an
AF = 1 indicates that the specific overshoot (or undershoot) waveform occurs every other clock
cycle. Thus, an AF = 0.01 indicates that the specific overshoot (or undershoot) waveform occurs
one time in every 200 clock cycles. For source synchronous signals (data, and associated strobes),
the activity factor is in reference to the strobe edge. The highest frequency of assertion of any
source synchronous signal is every active edge of its associated strobe. So, an AF = 1 indicates that
the specific overshoot (or undershoot) waveform occurs every other strobe cycle. The
specifications provided in Table 2-14 through Table 2-21 show the maximum pulse duration
allowed for a given overshoot/undershoot magnitude at a specific activity factor. Each table entry is
independent of all others, meaning that the pulse duration reflects the existence of
overshoot/undershoot events of that magnitude ONLY. A platform with an overshoot/undershoot
that just meets the pulse duration for a specific magnitude where the AF <1, means that there can
be no other overshoot/undershoot events, even of lesser magnitude (if AF = 1, then the event
occurs at all times and no other events can occur).
24 Datasheet
Page 25

Electrical Specifications
Note: AF for the common clock AGTL+ signals is referenced to BCLKn, and BCLKp frequency.
The wired-OR Signals (BINIT#, HIT#, HITM#, BNR#, TND#, BERR#) are common clock
AGTL+ signals.
Note: AF for source synchronous (2x) signals is referenced to STBP#[7:0], and STBN#[7:0].
2.5.4 Reading Overshoot/Undershoot Specification Tables
The overshoot/undershoot specification for the processor is not a simple single value. Instead,
many factors are needed in order to correctly interpret the overshoot/undershoot specification. In
addition to the magnitude of the overshoot, the following parameters must also be known: the
width of the overshoot and the AF. To determine the allowed overshoot for a particular overshoot
event, the following must be done:
1. Determine the signal group that the particular signal falls into. For AGTL+ signals operating
in the 2x source synchronous domain, use Table 2-14 through Table 2-17. If the signal is a
wired-OR AGTL+ signal operating in the common clock domain, use Table 2-18 through
Table 2-21.
2. Determine the magnitude of the overshoot, or the undershoot (relative to GND).
3. Determine the activity factor (how often does this overshoot occur?).
4. Next, from the appropriate specification table, determine the maximum pulse duration (in
nanoseconds) allowed. The pulse duration shown in the table are referring to the period where
either the maximum overshoot (for high phase) and undershoot (for low phase) occurred.
5. Compare the specified maximum pulse duration to the signal being measured. If the pulse
duration measured is less than the pulse duration shown in the table, then the signal meets the
specifications.
6. Undershoot events must be analyzed separat e ly from oversho ot events as they are
mutually exclusive.
NOTES: The following notes also apply when reading the Overshoot/Undershoot tables.
1. Absolute Maximum Overshoot magnitude must never be exceeded.
2. Absolute Maximum Overshoot magnitude is measured referenced to GND. Pulse Duration of overshoot is
measured relative to VCTERM.
3. Absolute Maximum Undershoot magnitude and Pulse Duration of undershoot is measured relative to
VCTERM.
4. Ringback below VCTERM cannot be subtracted from overshoots/undershoots.
5. Lesser undershoot does not allocate overshoot with longer duration or greater magnitude.
6. OEM’s are strongly encouraged to follow Intel layout guidelines.
7. All values specified by design characterization.
2.5.5 Determining if a System Meets the Overshoot/Undershoot Specifications
The overshoot/undershoot specifications listed in Table 2-13 through Table 2-21 specify the
allowable overshoot/undershoot for a single overshoot/undershoot event. However, most systems
will have multiple overshoot and/or undershoot events that each have their own set of parameters
(duration, AF and magnitude). While each overshoot on its own may meet the overshoot
specification, the total impact of all overshoot events may cause the system to fail. A guideline to
ensure a system passes the overshoot and undershoot specifications is shown below:
1. Ensure no signal ever exceeds V
2. If only one overshoot/undershoot event magnitude occurs, ensure it meets the specifications
listed in Table 2-13 through Table 2-21.
Datasheet 25
CTERM
or GND.
Page 26
Electrical Specifications
3. If multiple overshoots and/or multiple undershoots occur, measure the worst-case pulse
duration for each magnitude and compare the results against the AF = 1 specifications. If all of
these worst-case overshoot or undershoot events meet the specifications (measured time <
specifications) in the table (where AF = 1), then the system passes.
Table 2-13. Source Synchronous AGTL+ Signal Group and Wired-OR Signal Group Absolute
Overshoot/Undershoot Tolerance
Parameter Description Specification Units
V
CTERM
V
MAX
V
MIN
Overshoot Time dependent overshoot amount above V
Undershoot Time dependent undershoot amount below GND.
NOTES:
1. These parameters cannot be specified in absolute terms.
NOTES: The following notes apply to Table 2-14 through Table 2-21:
1. Absolute Maximum Overshoot magnitude of 1.8V must never be exceeded.
2. Absolute Maximum Overshoot is measured referenced to GND. Pulse duration of overshoot is measured
relative to V
3. Absolute Maximum Undershoot and Pulse Duration of undershoot is measured relative to V
4. Ringback below V
5. Lesser undershoot does not allocate overshoot with longer duration or greater magnitude.
6. All values specified by design characterization.
I/O power supply voltage (nominal). 1.20 V
Maximum absolute voltage for system bus signals at the input
of the receiver buffers.
Minimum absolute voltage for system bus signals at the input of
the receiver buffers.
CTERM .
.
CTERM
cannot be subtracted from overshoots/undershoots.
CTERM
1.80 V
–0.60 V
1
1
CTERM
.
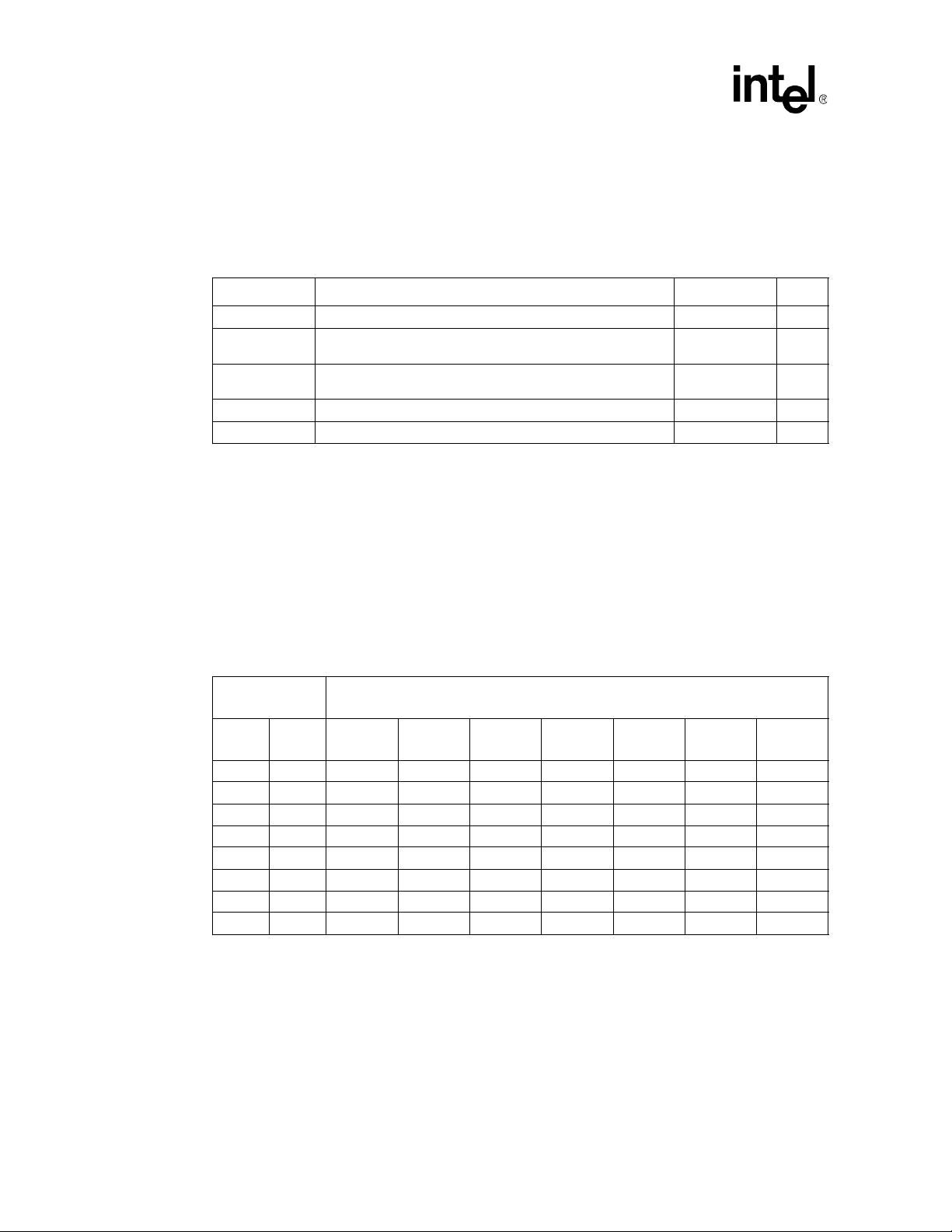
Table 2-14. Itanium® 2 Processors (900 MHz, 1.0 GHz, 1.3GHz, 1.4GHz, 1.5GHz/6MB) Source
Synchronous AGTL+ Signal Group Time Dependent Overshoot/Undershoot
Tolerance for 400 MHz System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.0206 0.0276 0.0413 0.0827 0.2067 0.4139 2.0680
1.65 –0.45 0.1851 0.2470 0.3702 0.7392 1.8500 2.5 2.5
1.55 –0.35 1.6100 2.1451 2.5 2.5 2.5 2.5 2.5
1.45 –0.25 2.5 2.5 2.5 2.5 2.5 2.5 2.5
NOTES:
1. Activity factor = 1 means signal toggles every 5 ns.
Under-
shoot
1.8 –0.6 0.0083 0.0089 0.0137 0.02750 0.0688 0.1376 0.6863
1.7 –0.5 0.0621 0.0828 0.1239 0.2480 0.6207 1.2420 2.5
1.6 –0.4 0.5477 0.7296 1.0972 2.1915 2.5 2.5 2.5
1.5 –0.3 2.5 2.5 2.5 2.5 2.5 2.5 2.5
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
26 Datasheet
Page 27
Electrical Specifications
Table 2-15. Itanium® 2 Processors (1.5 GHz/4 MB, 1.6 GHz) Source Synchronous AGTL+
Signal Group Time-Dependent Overshoot/Undershoot Tolerance for 400 MHz
System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.0216 0.0287 0.0430 0.0861 0.2157 0.4313 2.1552
1.65 –0.45 0.1925 0.2572 0.3858 0.7700 1.9264 2.5 2.5
1.55 –0.35 1.1.676 2.2351 2.5 2.5 2.5 2.5 2.5
1.45 –0.25 2.5 2.5 2.5 2.5 2.5 2.5 2.5
NOTES:
1. Activity Factor = 1 means signal toggles every 5 ns.
Under-
shoot
1.8 –0.6 0.0083 0.0090 0.0143 0.0287 0.0717 0.1431 0.7169
1.7 –0.5 0.0646 0.0861 0.1291 0.2584 0.6457 1.2914 2.5
1.6 –0.4 0.5713 0.7625 1.1408 2.2831 2.5 2.5 2.5
1.5 –0.3 2.5 2.5 2.5 2.5 2.5 2.5 2.5
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
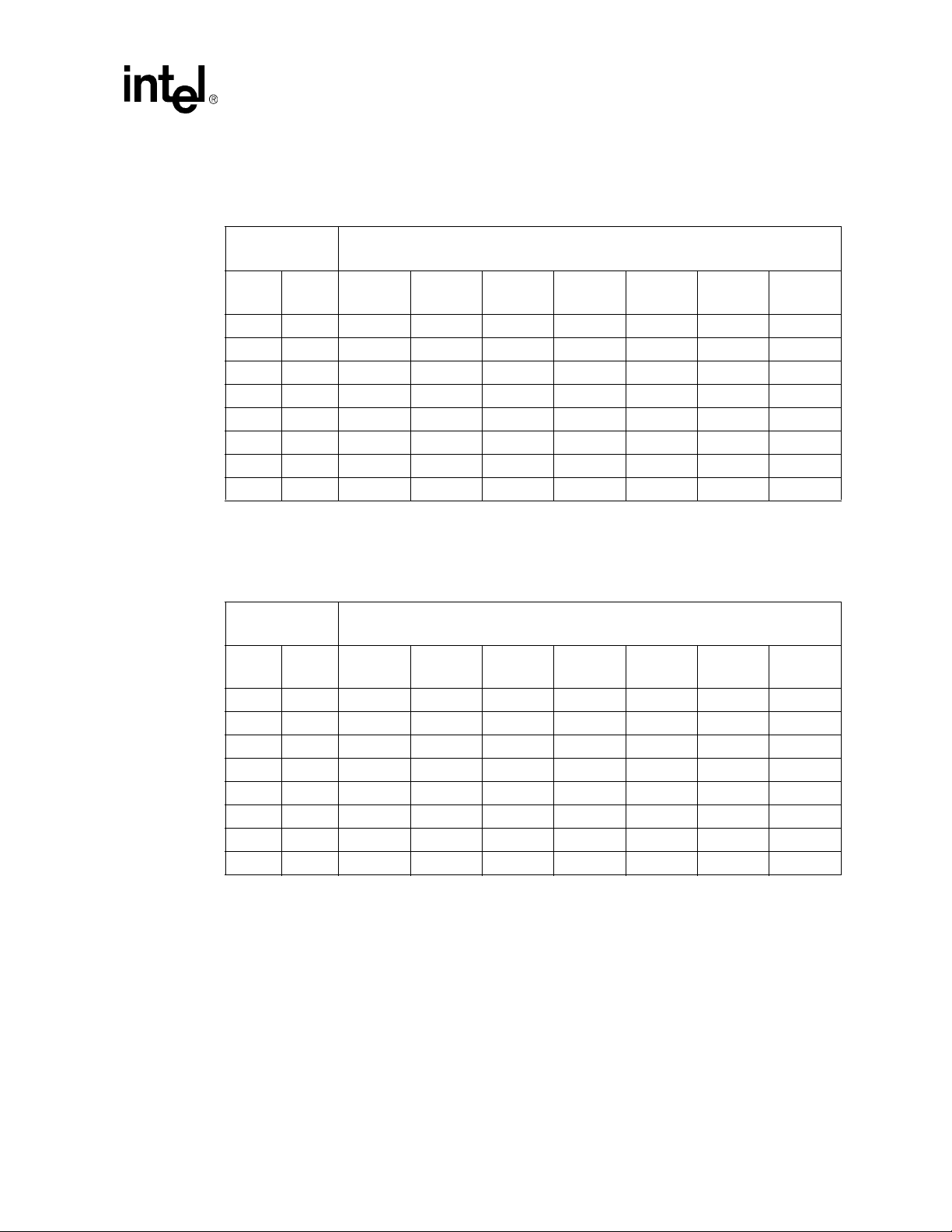
Table 2-16. Itanium® 2 (9 MB) Processors Source Synchronous AGTL+ Signal Group Time-
Dependent Overshoot/Undershoot Tolerance for 533 MHz System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.0161 0.0215 0.0323 0.0647 0.1619 0.3230 1.6161
1.65 –0.45 0.1444 0.1924 0.2894 0.5776 1.4465 1.875 1.875
1.55 –0.35 1.2573 1.6763 1.875 1.875 1.875 1.875 1.875
1.45 –0.25 1.875 1.875 1.875 1.875 1.875 1.875 1.875
NOTES:
1. Activity Factor = 1 means signal toggles every 3.75 ns.
Under-
shoot
1.8 –0.6 0.0032 0.0035 0.0107 0.0214 0.0538 0.1074 0.5371
1.7 –0.5 0.0494 0.0646 0.0969 0.1937 0.4853 0.9692 1.875
1.6 –0.4 0.4279 0.5705 0.8561 1.7130 1.875 1.875 1.875
1.5 –0.3 1.875 1.875 1.875 1.875 1.875 1.875 1.875
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
Datasheet 27
Page 28
Electrical Specifications
Table 2-17. Itanium
®
2 Processors (1.66 GHz) Source Synchronous AGTL+ Signal Group
Time-Dependent Overshoot/Undershoot Tolerance for 667 MHz System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.0129 0.0172 0.0258 0.0517 0.1292 0.2585 1.2953
1.65 –0.45 0.1158 0.1544 0.2311 0.4629 1.1564 1.5 1.5
1.55 –0.35 1.0065 1.3411 1.5 1.5 1.5 1.5 1.5
1.45 –0.25 1.5 1.5 1.5 1.5 1.5 1.5 1.5
NOTES:
1. Activity Factor = 1 means signal toggles every 3 ns.
Under-
shoot
1.8 –0.6 0.0050 0.0054 0.0086 0.0172 0.0423 0.0858 0.4297
1.7 –0.5 0.0387 0.0516 0.0775 0.1553 0.3882 0.7748 1.5
1.6 –0.4 0.3429 0.4562 0.6845 1.3728 1.5 1.5 1.5
1.5 –0.3 1.5 1.5 1.5 1.5 1.5 1.5 1.5
AF = 1
1
2.5.6 Wired-OR Signals
System bus signals must meet certain overshoot and undershoot requirements. The maximum
absolute overshoot voltage is 1.8V and the minimum absolute undershoot voltage is
–0.6V. The system bus wired-OR signals (BINIT#, HIT#, HITM#, BNR#, TND#, BERR#) hav e
the same absolute overshoot and undershoot specification as the Source Synchronous AGTL+
Signals, but they have different time dependent overshoot/undershoot requirements. Please refer to
Table 2-18 through Table 2-21 for the wired-O R time dependant overshoot/undershoot limits.
Pulse Duration (ns)
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Table 2-18. Itanium® 2 Processors (900 MHz, 1.0 GHz, 1.3 GHz, 1.4 GHz, 1.5 GHz/6 MB) Wired-
OR Signal Group (BINIT#, HIT#, HITM#, BNR#, TND#, BERR#)
1
Overshoot/Undershoot Tolerance for 400 MHz System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.1485 0.1977 0.2966 0.5933 1.4834 2.9659 5
1.65 –0.45 1.3290 1.7670 2.6529 5 5 5 5
1.55–0.355555555
NOTES:
1. Wired-OR signals operate at 200 MHz.
2. Activity factor = 1 means signal toggles every 10ns.
Under-
shoot
1.8 –0.6 0.0493 0.06576 0.0985 0.1968 0.4923 0.9852 4.9228
1.7 –0.5 0.4444 0.5932 0.8898 1.7798 4.4448 5 5
1.6 –0.4 3.9270 555555
1.5–0.35555555
AF = 1
2
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
28 Datasheet
Page 29
Electrical Specifications
Table 2-19. Itanium® 2 Processors (1.5 GHz/4 MB, 1.6 GHz) Wired-OR Signal Group (BINIT#,
HIT#, HITM#, BNR#, TND#, BERR#) Overshoot/Undershoot Tolerance for 400 MHz
System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.1547 0.2059 0.3088 0.6192 1.5458 3.0902 5
1.65 –0.45 1.3836 1.8410 2.7641 5555
1.55–0.355555555
NOTES:
1. Activity Factor = 1 means signal toggles every 10 ns.
Under-
shoot
1.8 –0.6 0.0513 0.0685 0.1026 0.2054 0.5129 1.0258 5
1.7 –0.5 0.4640 0.6191 0.9265 1.8536 4.6313 5 5
1.6–0.44.0947555555
1.5–0.35555555
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
Table 2-20. Itanium® 2 (9 MB) Processors Wired-OR Signal Group (BINIT#, HIT#, HITM #, BNR#,
TND#, BERR#) Overshoot/Undershoot Tolerance for 533 MHz System Bus
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.1161 0.1548 0.2317 0.4641 1.1593 2.3177 3.75
1.65 –0.45 1.0365 1.3801 2.0731 3.75 3.75 3.75 3.75
1.55 -0.35 3.75 3.75 3.75 3.75 3.75 3.75 3.75
NOTES:
1. Activity Factor = 1 means signal toggles every 7.5 ns.
Under-
shoot
1.8 –0.6 0.0385 0.0513 0.0770 0.1541 0.3853 0.7690 3.75
1.7 –0.5 0.3473 0.4643 0.6945 1.3895 3.4738 3.75 3.75
1.6 –0.4 3.0710 3.75 3.75 3.75 3.75 3.75 3.75
1.5 –0.3 3.75 3.75 3.75 3.75 3.75 3.75 3.75
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Pulse Duration (ns)
Table 2-21. Itanium® 2 (1.66 GHz) Processors Wired-OR Signal Group (BINIT#, HIT#, HITM#,
BNR#, TND#, BERR#) Overshoot/Undershoot Tolerance for 667 MHz System Bus
(Sheet 1 of 2)
Absolute
Maximum (V)
Overshoot
1.75 –0.55 0.0928 0.1237 0.1855 0.3706 0.9291 1.8546 3
1.65 –0.45 0.8288 1.1056 1.6585 3333
Under-
shoot
1.8 –0.6 0.0308 0.0411 0.0615 0.1231 0.3079 0.6167 3
1.7 –0.5 0.2780 0.3714 0.5568 1.1136 2.7783 3 3
AF = 1
1
AF = 0.75 AF = 0.5 AF = 0.25 AF = 0.1 AF = 0.05 AF = 0.01
Datasheet 29
Pulse Duration (ns)
Page 30
Electrical Specifications
Table 2-21. Itanium® 2 (1.66 GHz) Processors Wired-OR Signal Group (BINIT#, HIT#, HITM#,
BNR#, TND#, BERR#) Overshoot/Undershoot Tolerance for 667 MHz System Bus
(Sheet 2 of 2)
Absolute
Maximum (V)
1.6 –0.4 2.4567 333333
1.55–0.353333333
1.5–0.33333333
NOTES:
1. Activity Factor = 1 means signal toggles every 6 ns.
Pulse Duration (ns)
2.6 Power Pod Connector Signals
Power delivery for the Itanium 2 processor is from a DC-DC converter called the “power pod”. The
power pod consists of a DC-DC converter and a semi-flexible connector which delivers the voltage
to the processor.
Table 2-22 lists all of the signals which are part of the It anium 2 processor power pod connector.
Table 2-22. Itanium® 2 Processor Power Pod Connector Signals
Group Name Signals
Power Pod Connector OUTEN, CPUPRES#, PPODGD#, VCC, VCCMON, GND, VSSMON, VID[4:0]
Warning: If the power supply canno t su pply the voltages requested by the components in the Itanium 2
processor, then it must disable itself.
Figure 2-4 shows the top and bottom views of the power tab connector. The processor ground,
V
SS,Processor
, connection is provided on the power tab connector as well.
Figure 2-4. Itanium® 2 Processor Power Tab Physical Layout
Reserved
OUTEN
VSSMON
VCCMON
PPODGD#
GND / VSS
CPUPRES#
Processor
Reserved
VID[4]
VID[3]
VID[2]
VID[1]
VID[0]
To Power Pod
Top View of Processor Bottom View of Processor
To Power Pod
Processor
VCC
Pins
000983a
30 Datasheet
Page 31

Electrical Specifications
The power pod provides a selectable output voltage controlled via multiple binary weighted
Voltage Identification (VID) inputs. The VID value (high = 1; low = 0) is defi ned in Table 2-23.
VID pads shall be considered as LVTTL inputs to the power pod, having resistive pull-ups (5 kΩ)
included inside the power pod to the internal 3.3 V power supply. The VID pads on the power
connector tab will be pulled low with 10 Ω resisto rs that are in ternal to the processor. The 10 Ω
resistive pulldowns are controlled by Intel and will not be externally adjustable.
Table 2-23. Processor Core Voltage Identification Code
Processor Pins: 0 = Connected to GND; 1 = Open
VID4 VID3 VID2 VID1 VID0
1 1 1 1 1 Output Off
11 1 1 00.95
1 1 1 0 1 0.975
11 1 0 01.0
1 1 0 1 1 1.025
11 0 1 01.05
1 1 0 0 1 1.075
11 0 0 01.1
1 0 1 1 1 1.125
10 1 1 01.15
1 0 1 0 1 1.175
10 1 0 01.2
1 0 0 1 1 1.225
1 0 0 1 0 1.250
1 0 0 0 1 1.275
10 0 0 01.3
0 1 1 1 1 1.325
01 1 1 01.35
0 1 1 0 1 1.375
01 1 0 01.4
0 1 0 1 1 1.425
01 0 1 01.45
0 1 0 0 1 1.475
01 0 0 01.5
0 0 1 1 1 1.525
00 1 1 01.55
0 0 1 0 1 1.575
00 1 0 01.6
0 0 0 1 1 1.625
00 0 1 01.65
0 0 0 0 1 1.675
00 0 0 01.7
NOTES:
1. Nominal settings require regulation to ±7% at V
pins at the power tab under all conditions.
CC,PS
1
V
(VDC)
CC
The processor has several power levels as shown in Table 2-24 and in Figure 2-5. Full power to the
processor is defined in Table 2-2.
Datasheet 31
Page 32

Electrical Specifications
Table 2-24. Processor Power States
State Transition Ramp Rate Comment
Zero to 1st Power State (A) 10 μs Off state to initial power on.
1st Power State to 2nd Power State (B) 10μs 1st power state is defined as the system
2nd Power State to 3rd Power State (C) 10 μs 2nd power state is defined as 75% of full
3rd Power State to 2nd Power State (D) 10 μs 3rd power state is defined as 40% of full
2nd Power State to 1st Power State (E) 10μs Typical fast power down to initial power on.
Normal Operating Range (F) 100 A/μs max Defined as 75% to 100% of full power.
Thermal Trip (G) 1ns ±250 ps or one
processor core cycle.
minimum operating load. Fastest power up
sequence.
power.
power.
Processor over temperature condition
emergency shutdown.
Figure 2-5. Processor Full, Normal and Low Power Mode with Timings
Current Level Current Level
100A 100A
B
D
75A
FF
40A 40A
5A
0A
C
A
E
75A
5A
0A
G
2.7 Itanium® 2 Processor System Bus Clock and Processor Clocking
The BCLKn and BCLKp inputs control the operating frequency of the Itanium 2 processor system
bus interface. All Itanium 2 processor system bus timing parameters are specified with respect to
the falling edge of BCLKn and rising edge of BCLKp. The Itanium 2 processor core to bus ratio
must be configured during system reset by using the A[21:17]# pins (see Table 2-25). The value on
these pins during the system reset sequence determines the multiplier that the PLL will use for the
internal core clock. Because the A[21:17]# signals pins have different uses after a system reset is
complete, these signals must be multiplexed for configuration during reset and for normal use after
reset. See the Intel
information on Itanium 2 processor system bus clock and processor clocking.
®
Itanium® 2 Processor Hardware Developer’s Manual for complete
000672b
32 Datasheet
Page 33

Electrical Specifications
Listed in Table 2-25 are the system bus rat ios defi ned for the Itanium 2 processor. The Itanium 2
processor supports bus ratios of 2/9, 2/10, 2/13, 2/14, 2/15 and 2/16. Table 2-25 lists the system bus
ratios defined for the Itanium 2 processor. Each particular implementation of the Itanium 2
processor only supports a small subset of the ratios listed in Table 2-25. The supported ratios are
defined below:
• The Itanium 2 processor 900 MHz with 1.5 MB L3 cache supports a bus ratio of 2/9.
• The Itanium 2 processor 1.0 GHz with 3 MB L3 cache supports a bus ratio of 2/10.
• The Itanium 2 processor 1.30 GHz with 3 MB L3 cache supports a bus ratio of 2/13.
• The Itanium 2 processor 1.40 GHz with 4 MB L3 cache supports a bus ratio of 2/14.
• The Itanium 2 processor 1.50 GHz with 6 MB L3 cache supports a bus ratio of 2/15.
• All other Itanium 2 processors will be locked at the correct supported ratios.
Table 2-25. Itanium
Core Frequency
900 MHz 2/9 1(L) 0(H) 1(L) 1(L) 0(H)
1.0 GHz 2/10 1(L) 0(H) 1(L) 0(H) 1(L)
1.3 GHz 2/13 1(L) 0(H) 0(H) 1(L) 0(H)
1.4 GHz 2/14 1(L) 0(H) 0(H) 0(H) 1(L)
1.5 GHz 2/15 1(L) 0(H) 0(H) 0(H) 0(H)
NOTES:
1. Reserved bus ratio encodings should never be driven on the bus during reset, otherwise it may cause damage to the
processor.
The Itanium 2 processor bus to core ratio is configured during system reset by using the A[21:17]#
signal pins. These bus ratio configuration pins are required to be stable and valid during the
duration of the reset sequence as defined below.
Cold Reset Sequence:
• The bus ratio configuration pins (A[21:17]#) must be asserted the entire time RESET# is
asserted.
• RESET# must be asserted before PWRGOOD is asserted.
• The duration from the assertion of PWRGOOD to the deassertion of RESET# must be 1
millisecond minimum.
• After RESET# is deasserted, all the configuration, including the bus ratio configuration pins
A[21:17]#, must remain valid for 2 BCLKs (minimum) to 3 BCLKs (maximum).
• BCLK is shown as a time reference to the BCLK period. It is not a requirement that this is
BCLKn or BCLKp signal.
• Configuration signals other than A[21:17]# must be asserted 4 BCLKs prior to the deasserted
edge of RESET# and must remain valid for 2 BCLKs (minimum) to 3 BCLKs (maxi mu m)
after the deasserted edge of RESET#.
®
2 Processor System Bus Ratios
Ratio of Bus Frequency
to Processor Frequency
Reserved
1
A21# A20# A19# A18# A17#
All other possible encodings
Figure 2-6 outlines the timing relationship between the bus ratio configuration pins, RESET# and
PWRGOOD for cold reset.
Datasheet 33
Page 34

Electrical Specifications
Figure 2-6. System Bus Reset and Configuration Timings for Cold Reset
t
-2t-1t0
T
E
BCLK
PWRGOOD
RESET#
Bus Ratio
(A[21:17]#)
Additional
Configuration
Signals
t
-4t-3
T
C
TA= 1.15 ns minimum; (set up time to BCLK for deassertion edge of RESET#)
T
= 1 ms minimum for cold reset
B
TC= Bus ratio signals must be asserted no later than RESET#
T
= 2 BCLKs minimum, 3 BCLKs maximum
D
= 4 BCLKs minimum
T
E
T
= 2 BCLKs minimum, 3 BCLKs maximum
F
T
B
t
t2t
1
T
A
T
D
T
F
3
000859b
Warm Reset Sequence:
• PWRGOOD remains high throughout the entire sequence as power is already available and
stable to the processor.
• The bus ratio configuration pins (A[21:17]#) must be asserted the entire time RESET# is
asserted.
• The duration from the assertion of RESET# to the deassertion of RESET# must be 1
millisecond minimum.
• After RESET# is deasserted, the configuration pins must remain valid for two BCLKs
(minimum) to three BCLKs (maximum).
• BCLK is shown as a time reference to the BCLK period. It is not a requirement that this is
BCLKn or BCLKp signal.
• Configuration signals other than A[21:17]# must be asserted four BCLKs prior to the
deasserted edge of RESET# and must remain valid for two BCLKs (minimum) to three
BCLKs (maximum) after the deasserted edge of RESET#.
Figure 2-7 outlines the timing relationship between the bus ratio configuration pins, RESET# and
PWRGOOD for warm reset.
34 Datasheet
Page 35

Electrical Specifications
Figure 2-7. System Bus Reset and Configuration Timings for Warm Reset
BCLK
PWRGOOD
RESET#
Bus Ratio
(A[21:17]#)
Additional
Configuration
Signals
T
t
A
1t2
T
D
T
F
t-4t
T
C
T
B
t
-3
-2t-1t0
T
E
t
TA= 1.15 ns minimum; (set up time to BCLK for deassertion edge of RESET#)
T
= 1 ms minimum for warm reset
B
TC= Bus ratio signals must be asserted no later than RESET#
T
= 2 BCLKs minimum, 3 BCLKs maximum
D
= 4 BCLKs minimum
T
E
T
= 2 BCLKs minimum, 3 BCLKs maximum
F
2.8 Recommended Connections for Unused Pins
3
000777b
Pins that are unused in an application environment (as opposed to testing environment) should be
connected to the states listed in Table 2-26. Pins that must be used in an application are stated as
such and do not have a recommended state for unused connection.
Table 2-26. Connection for Unused Pins (Sheet 1 of 2)
Pins/Pin Groups
AGTL+ pins H
HSTL Clock Signals Must be used
All Power Signals Must be used
PWRGOOD Must be used
TUNER[2:1] Must be used
TAP Signals
TCK L
TRST# L
TDI H
TDO H
TMS H
Recommended
Connections
Notes
1, 2
1, 3
1, 3
1, 3
1, 3
1, 3
Datasheet 35
Page 36

Electrical Specifications
Table 2-26. Connection for Unused Pins (Sheet 2 of 2)
Pins/Pin Groups
Recommended
Connections
Notes
System Management Signals
3.3V GND
SMA[2:0] N/C
SMSC N/C
SMSD N/C
SMWP N/C
THRMALERT# H
LVTTL Power Pod Signals
OUTEN Must be used
PPODGD# Must be used
CPUPRES# Must be used
Reserved Pins
N/C N/C
NOTES:
1. L = GND, H = V
2. AGTL+ output signals SBSY[0:1]#, DBSY[0:1]#, and DRDY[0,1]# may be left as N/C if not used on platform.
3. Should be properly terminated through a resistor.
4. THRMALERT# should be pulled up to 3.3V through a resistor.
CTERM
.
1, 4
36 Datasheet
Page 37

3 Pinout Specifications
0
2
3
4
5
6
7
8
9
0
2
3
4
5
This chapter describes the Itanium 2 processor signals and pinout.
Note: The pins labeled “N/C” must remain unconnected. The Itanium 2 processor uses a JEDEC standard
pin naming convention.
In this chapter, pin names are the actual names given to each physical pin of the processor.
System bus signal names are the names associated with the functions of those pins. For those pins
associated with multiple functions, their pin names and system bus signal names are not
necessarily identical.
Figure 3-1 shows the Itanium 2 processor pin location diagram from the top view.
Figure 3-1. Itanium
®
2 Processor Pinout
AH AG AF AE AD AC AB AA Y W V U T R P N M L K J H G F E D C B A
1
GND
2
GND
TERMA
3
TUNER[2] GND GND GND GND A05# D25# GND D23# GND D17# GND D13# GND D14# GND D01# GND NC GND GND
TUNER[1]
4
5
6
7
8
9
10
11
12
13
BCLKN
14
15
GOOD
16
17
18
19
20
21
22
23
A20M#
24
25
FERR#
OUTEN
GND
NC
NC
GND
RSP# ID 8 # ID9# A08# A03# VC
GND
TDO
TDI
GND
INIT # RS1#
GND
TMS
TCK
GND
REQ1# REQ2#
GND
NC
NC
REQ4#
GND
BCLKP
TRDY#
GND
PWR
PROC
PRES#
BREQ0# BREQ 1#NCNC A36# A38# DEP11# VC
GND
GND
NC
NC
BREQ3#NCNC BREQ2# A35# A29# VC
GND
NC
NC
PPOD
GND
NC
NC
GND
LINT0
GND
IGNNE#
LINT1 GND BPM4# GND BPM5# GND A43# A40# GND D123# VC
GND
TH_TRIP#
AH AG AF AE AD AC AB AA Y W V U T R P N M L K J H G F E D C B A
GND GND GND
GND
GND ID0# GND ID1# GND A07#
ID3#
TERMB
REQ0#
REQ3# GND DRDY# GND A23# GND GND NC GND D60# GND STBN3# GND D56# GND DEP5# GND D41# GND STBP2# GND D33# GND VCCMON
GND
SBSY#
GND
LOCK#
GND
GND
GD#
TRST#
BPM2# GND BPM3# GND AP1# GND GND A42# GND D126# GND STBN7# GND D116# GND DEP13# GND D108# GND STBP6# GND D97# GND GND
ID2 #
ID4 # ID5# A13#
ID7 # A11# GND GND GND GND D19# GND DEP1# GND D08# GND STBP0# GND D02# GND GND
GND
GND
ID6#
IDS # GND DRDY0# GND GND A09# GND D31# GND D22# GND GND DEP0# GND GND D10# GND D00# GND THRM
RS0#
GND
RS2# A17# A15# DEP6# VC
DBSY#
GND GND
REQ5#
GND GND GND GND GND GND GND D52# D47# D43# D39# GND NC GND GND
GSEQ# DEFER# A34# A31# VC
GND TND# GND BINIT# GND GND A28# GND D92# GND D91# GND D81# GND D78# GND D71# GND D67# GND NC GND SMA2
GND GND GND GND GND GND GND D88# DEP9# D72# STBP4# GND D73# GND SMA1
BPRI# GND SBSY1# GND GND GND GND D85# GND D82# GND DEP8# GND D79# GND D74# GND D70# GND GND
RESET#NCADS# GND A39# A45# GND DEP14# VC
GND GND GND GND GND D112# DEP12# D101# D96# GND D99# GND SMWP
BPM0# BERR# A49# A47# VC
GND
PMI# BPM1# AP0# GND VC
DSBY0#
HIT# A24# A20# VC
HITM# A25# A19# D62# VC
RP#
SBSY0#
A33#
DRDY1#
GND
GND
GND
A04# VC
A06#
A10#
A12#
GND
A14#
GND GND
A21#
A26#
A22#
A37#
A32#
A30#
GND
A44#
A46#
A41#
GND
VC
GND GND VC
GND
TERM
D30# GND D27# VC
TERM
GND
GND DEP3# VC
TERM
D29#
NC
DEP2# D26# VC
TERM
TERM
D63#
GND GND GND D53# DEP4# D38#
A18#
DEP7#
TERM
TERM
D59#
A16#
D94#
TERM
TERM
D89#
BNR#
DEP10#
TERM
A27# GND D90#DBSY1#
TERM
D124#
A48#
DEP15#
TERM
TERM
GND
D121# D119# GND D113# GND D110# GND D107# GND D100# GND NC GND VC
TERM
D20# GND NC VC
TERM
D24# GND STBP1# VC
STBN1#
D28#
TERM
D54# D48# VC
D58#
D61# VC
STBP3# D50# VC
TERM
D57# D51# VC
D55#
D87# VC
D84# NC VC
TERM
D93# STBP5# VC
STBN5#
D95# VC
D86# D80# VC
TERM
D122# GND D118# VC
GND
D127#
D125# VC
STBP7# D114# VC
TERM
D120# GND D115# VC
GND
TERM
TERM
D16# GND D12# VC
TERM
D18# VC
TERM
D21#
D49# GND D42# VC
TERM
GND
TERM
NC GND D46# VC
TERM
GND
TERM
D83# GND D76# VC
TERM
GND
TERM
D117# GND D111# VC
TERM
GND
TERM
NC GND D109# VC
TERM
GND VC
TERM
D11# GND D07# VC
TERM
D09#
D15#
TERM
GND
D32# STBN2# VC
TERM
GND
D75# D68# VC
TERM
GND
D77# D69# VC
TERM
GND
D105# STBN6# VC
TERM
GND GND VC
TERM
STBN0# GND D03# VC
D06# VC
TERM
D45# GND D37# VC
D40# GND D35# GND VSSMON
GND
TERM
D44# GND D36# VC
GND
TERM
STBN4# GND D66# VC
GND
TERM
D106# GND D102# VC
GND
TERM
D103# GND D104# VC
D04# GND 3.3V VC
D05# GND NC VC
D34# GND GND VCTERM
D65# GND NC VC
D64# GND SMA0 VC
D98# GND SMSD
TERM
TERM
TERM
TERM
TERM
TERM
TERM
NC NC
NC GND
NC GND
NC GND
SMSC GND
GND
TERM
TERM
ALERT#
TERM
TERM
VC
TERM
TERM
1
2
3
4
5
6
7
8
9
1
11
1
1
1
1
1
1
1
1
2
21
2
2
2
2
Power Pod
000638b
Datasheet 37
Page 38

Pinout Specifications
Table 3-1 provides the Itanium 2 processor pin list in alphabetical order.
Table 3-2 provides the Itanium 2 processor pin list by pin location.
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 1 of 15)
Pin Name
3.3V B02 IN SMBus supply voltage
A003# AA03#/EXF0# V06 IN/OUT
A004# AA04#/EXF1# V02 IN/OUT
A005# AA05#/EXF2# U03 IN/OUT
A006# AA06#/EXF3# W03 IN/OUT
A007# AA07#/EXF4# Y02 IN/OUT
A008# AA08#/BE0# Y06 IN/OUT
A009# AA09#/BE1# U07 IN/OUT
A010# AA10#/BE2# V04 IN/OUT
A011# AA11#/BE3# AA05 IN/OUT
A012# AA12#/BE4# W05 IN/OUT
A013# AA13#/BE5# Y04 IN/OUT
A014# AA14#/BE6# W07 IN/OUT
A015# AA15#/BE7# V08 IN/OUT
A016# AA16#/DID0# U13 IN/OUT
A017# AA17#/DID1# Y08 IN/OUT
A018# AA18#/DID2# U09 IN/OUT
A019# AA19#/DID3# V12 IN/OUT
A020# AA20#/DID4# V10 IN/OUT
A021# AA21#/DID5# W09 IN/OUT
A022# AA22#/DID6# W13 IN/OUT
A023# AA23#/DID7# AA11 IN/OUT
A024# AA24#/DID8# Y10 IN/OUT
A025# AA25#/DID9# Y12 IN/OUT
A026# AA26#/AB26# W11 IN/OUT
A027# AA27#/xTPRValue0# U19 IN/OUT
A028# AA28#/xTPRValue1# U15 IN/OUT
A029# AA29#/xTPRValue2# V18 IN/OUT
A030# AA30#/xTPRValue3# W19 IN/OUT
A031# AA31#/xTPRDisable# V14 IN/OUT
A032# AA32#/ATTR0# W17 IN/OUT
A033# AA33#/ATTR1# AA17 IN/OUT
A034# AA34#/ATTR2# Y14 IN/OUT
A035# AA35#/ATTR3# Y18 IN/OUT
A036# AA36#/AB36# Y16 IN/OUT
A037# AA37#/AB37# W15 IN/OUT
A038# AA38#/AB38# V16 IN/OUT
A039# AA39#/AB39# Y20 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
38 Datasheet
Page 39

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 2 of 15)
Pinout Specifications
Pin Name
A040# AA40#/AB40# V24 IN/OUT
A041# AA41#/AB41# W25 IN/OUT
A042# AA42#/AB42# U23 IN/OUT
A043# AA43#/AB43# Y24 IN/OUT
A044# AA44#/AB44# W21 IN/OUT
A045# AA45#/AB45# V20 IN/OUT
A046# AA46#/AB46# W23 IN/OUT
A047# AA47#/AB47# V22 IN/OUT
A048# AA48#/AB48# U21 IN/OUT
A049# AA49#/AB49# Y22 IN/OUT
A20M# A20M# AH23 IN
ADS# ADS# AB20 IN/OUT
AP0# AP0# AA25 IN/OUT
AP1# AP1# AA23 IN/OUT
BCLKn BCLKN AH13 IN
BCLKp BCLK AG13 IN
BERR# BERR# AB22 IN/OUT
BINIT# BINIT# AA15 IN/OUT
BNR# BNR# U17 IN/OUT
BPM0# BPM0# AD22 IN/OUT
BPM1# BPM1# AC25 IN/OUT
BPM2# BPM2# AE23 IN/OUT
BPM3# BPM3# AC23 IN/OUT
BPM4# BPM4# AD24 IN/OUT
BPM5# BPM5# AB24 IN/OUT
BPRI# BPRI# AE19 IN
BR0# BREQ0# AF16 IN/OUT
BR1# BREQ1# AD16 IN
BR2# BREQ2# AB18 IN
BR3# BREQ3# AF18 IN
CPUPRES# CPUPRES# AG15 OUT Power pod signal
D000# D00# C07 IN/OUT
D001# D01# E03 IN/OUT
D002# D02# C05 IN/OUT
D003# D03# D04 IN/OUT
D004# D04# D02 IN/OUT
D005# D05# D06 IN/OUT
D006# D06# F06 IN/OUT
D007# D07# F02 IN/OUT
D008# D08# G05 IN/OUT
D009# D09# H06 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 39
Page 40

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 3 of 15)
Pin Name
D010# D10# E07 IN/OUT
D011# D11# H02 IN/OUT
D012# D12# H04 IN/OUT
D013# D13# J03 IN/OUT
D014# D14# G03 IN/OUT
D015# D15# G07 IN/OUT
D016# D16# K04 IN/OUT
D017# D17# L03 IN/OUT
D018# D18# K06 IN/OUT
D019# D19# L05 IN/OUT
D020# D20# M02 IN/OUT
D021# D21# L07 IN/OUT
D022# D22# N07 IN/OUT
D023# D23# N03 IN/OUT
D024# D24# P04 IN/OUT
D025# D25# R03 IN/OUT
D026# D26# P06 IN/OUT
D027# D27# P02 IN/OUT
D028# D28# M06 IN/OUT
D029# D29# R05 IN/OUT
D030# D30# T02 IN/OUT
D031# D31# R07 IN/OUT
D032# D32# H10 IN/OUT
D033# D33# C11 IN/OUT
D034# D34# D10 IN/OUT
D035# D35# C09 IN/OUT
D036# D36# D12 IN/OUT
D037# D37# D08 IN/OUT
D038# D38# G09 IN/OUT
D039# D39# E13 IN/OUT
D040# D40# E09 IN/OUT
D041# D41# G11 IN/OUT
D042# D42# H08 IN/OUT
D043# D43# G13 IN/OUT
D044# D44# F12 IN/OUT
D045# D45# F08 IN/OUT
D046# D46# H12 IN/OUT
D047# D47# J13 IN/OUT
D048# D48# M08 IN/OUT
D049# D49# K08 IN/OUT
D050# D50# K10 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
40 Datasheet
Page 41

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 4 of 15)
Pinout Specifications
Pin Name
D051# D51# M12 IN/OUT
D052# D52# L13 IN/OUT
D053# D53# L09 IN/OUT
D054# D54# P08 IN/OUT
D055# D55# N13 IN/OUT
D056# D56# L11 IN/OUT
D057# D57# P12 IN/OUT
D058# D58# N09 IN/OUT
D059# D59# R13 IN/OUT
D060# D60# R11 IN/OUT
D061# D61# P10 IN/OUT
D062# D62# T12 IN/OUT
D063# D63# R09 IN/OUT
D064# D64# D18 IN/OUT
D065# D65# D14 IN/OUT
D066# D66# D16 IN/OUT
D067# D67# E15 IN/OUT
D068# D68# F14 IN/OUT
D069# D69# F18 IN/OUT
D070# D70# C19 IN/OUT
D071# D71# G15 IN/OUT
D072# D72# G17 IN/OUT
D073# D73# C17 IN/OUT
D074# D74# E19 IN/OUT
D075# D75# H14 IN/OUT
D076# D76# H16 IN/OUT
D077# D77# H18 IN/OUT
D078# D78# J15 IN/OUT
D079# D79# G19 IN/OUT
D080# D80# K18 IN/OUT
D081# D81# L15 IN/OUT
D082# D82# L19 IN/OUT
D083# D83# K16 IN/OUT
D084# D84# M14 IN/OUT
D085# D85# N19 IN/OUT
D086# D86# M18 IN/OUT
D087# D87# P14 IN/OUT
D088# D88# L17 IN/OUT
D089# D89# R17 IN/OUT
D090# D90# R19 IN/OUT
D091# D91# N15 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 41
Page 42

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 5 of 15)
Pin Name
D092# D92# R15 IN/OUT
D093# D93# P16 IN/OUT
D094# D94# T14 IN/OUT
D095# D95# P18 IN/OUT
D096# D96# E21 IN/OUT
D097# D97# C23 IN/OUT
D098# D98# D22 IN/OUT
D099# D99# C21 IN/OUT
D100# D100# E25 IN/OUT
D101# D101# G21 IN/OUT
D102# D102# D20 IN/OUT
D103# D103# F24 IN/OUT
D104# D104# D24 IN/OUT
D105# D105# H22 IN/OUT
D106# D106# F20 IN/OUT
D107# D107# G25 IN/OUT
D108# D108# G23 IN/OUT
D109# D109# H24 IN/OUT
D110# D110# J25 IN/OUT
D111# D111# H20 IN/OUT
D112# D112# L21 IN/OUT
D113# D113# L25 IN/OUT
D114# D114# K22 IN/OUT
D115# D115# M24 IN/OUT
D116# D116# L23 IN/OUT
D117# D117# K20 IN/OUT
D118# D118# M20 IN/OUT
D119# D119# N25 IN/OUT
D120# D120# P24 IN/OUT
D121# D121# R25 IN/OUT
D122# D122# P20 IN/OUT
D123# D123# T24 IN/OUT
D124# D124# R21 IN/OUT
D125# D125# P22 IN/OUT
D126# D126# R23 IN/OUT
D127# D127# N21 IN/OUT
DBSY# DBSY# AC09 IN/OUT
DBSY0# DBSY_C1# AA09 OUT
DBSY1# DBSY_C2# AA19 OUT
DEFER# DEFER# AB14 IN
DEP00# DEP0# J07 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
42 Datasheet
Page 43

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 6 of 15)
Pinout Specifications
Pin Name
DEP01# DEP1# J05 IN/OUT
DEP02# DEP2# T06 IN/OUT
DEP03# DEP3# T04 IN/OUT
DEP04# DEP4# J09 IN/OUT
DEP05# DEP5# J11 IN/OUT
DEP06# DEP6# T08 IN/OUT
DEP07# DEP7# T10 IN/OUT
DEP08# DEP8# J19 IN/OUT
DEP09# DEP9# J17 IN/OUT
DEP10# DEP10# T18 IN/OUT
DEP11# DEP11# T16 IN/OUT
DEP12# DEP12# J21 IN/OUT
DEP13# DEP13# J23 IN/OUT
DEP14# DEP14# T20 IN/OUT
DEP15# DEP15# T22 IN/OUT
DRDY# DRDY# AC11 IN/OUT
DRDY0# DRDY_C1# AA07 OUT
DRDY1# DRDY_C2# AA21 OUT
FERR# FERR# AH25 OUT
GND GND A01 IN
GND GND A03 IN
GND GND A05 IN
GND GND A08 IN
GND GND A13 IN
GND GND A16 IN
GND GND A19 IN
GND GND A20 IN
GND GND A23 IN
GND GND A24 IN
GND GND AA02 IN
GND GND AA20 IN
GND GND AA24 IN
GND GND AB01 IN
GND GND AB03 IN
GND GND AB05 IN
GND GND AB07 IN
GND GND AB09 IN
GND GND AB11 IN
GND GND AB13 IN
GND GND AB15 IN
GND GND AB17 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 43
Page 44

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 7 of 15)
Pin Name
GND GND AB19 IN
GND GND AB21 IN
GND GND AB23 IN
GND GND AB25 IN
GND GND AC02 IN
GND GND AC24 IN
GND GND AD01 IN
GND GND AD03 IN
GND GND AD05 IN
GND GND AD07 IN
GND GND AD09 IN
GND GND AD11 IN
GND GND AD13 IN
GND GND AD15 IN
GND GND AD17 IN
GND GND AD19 IN
GND GND AD21 IN
GND GND AD23 IN
GND GND AD25 IN
GND GND AE02 IN
GND GND AE24 IN
GND GND AF01 IN
GND GND AF05 IN
GND GND AF07 IN
GND GND AF09 IN
GND GND AF11 IN
GND GND AF13 IN
GND GND AF15 IN
GND GND AF17 IN
GND GND AF19 IN
GND GND AF21 IN
GND GND AG02 IN
GND GND AG04 IN
GND GND AG06 IN
GND GND AG08 IN
GND GND AG10 IN
GND GND AG12 IN
GND GND AG14 IN
GND GND AG16 IN
GND GND AG18 IN
GND GND AG20 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
44 Datasheet
Page 45

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 8 of 15)
Pinout Specifications
Pin Name
GND GND AG22 IN
GND GND AG24 IN
GND GND AH01 IN
GND GND B03 IN
GND GND B05 IN
GND GND B07 IN
GND GND B09 IN
GND GND B10 IN
GND GND B11 IN
GND GND B13 IN
GND GND B15 IN
GND GND B17 IN
GND GND B19 IN
GND GND B21 IN
GND GND B23 IN
GND GND B25 IN
GND GND C02 IN
GND GND C06 IN
GND GND C10 IN
GND GND C14 IN
GND GND C18 IN
GND GND C22 IN
GND GND D01 IN
GND GND D03 IN
GND GND D05 IN
GND GND D07 IN
GND GND D09 IN
GND GND D11 IN
GND GND D13 IN
GND GND D15 IN
GND GND D17 IN
GND GND D19 IN
GND GND D21 IN
GND GND D23 IN
GND GND D25 IN
GND GND E04 IN
GND GND E08 IN
GND GND E12 IN
GND GND E16 IN
GND GND E20 IN
GND GND E24 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 45
Page 46

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 9 of 15)
Pin Name
GND GND F01 IN
GND GND F03 IN
GND GND F05 IN
GND GND F07 IN
GND GND F09 IN
GND GND F11 IN
GND GND F13 IN
GND GND F15 IN
GND GND F17 IN
GND GND F19 IN
GND GND F21 IN
GND GND F23 IN
GND GND F25 IN
GND GND G02 IN
GND GND H03 IN
GND GND H05 IN
GND GND H07 IN
GND GND H09 IN
GND GND H11 IN
GND GND H13 IN
GND GND H15 IN
GND GND H17 IN
GND GND H19 IN
GND GND H21 IN
GND GND H23 IN
GND GND H25 IN
GND GND J01 IN
GND GND J04 IN
GND GND J08 IN
GND GND J12 IN
GND GND J16 IN
GND GND J20 IN
GND GND J24 IN
GND GND K03 IN
GND GND K05 IN
GND GND K07 IN
GND GND K09 IN
GND GND K11 IN
GND GND K13 IN
GND GND K15 IN
GND GND K17 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
46 Datasheet
Page 47

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 10 of 15)
Pinout Specifications
Pin Name
GND GND K19 IN
GND GND K21 IN
GND GND K23 IN
GND GND K25 IN
GND GND L02 IN
GND GND M01 IN
GND GND M03 IN
GND GND M05 IN
GND GND M07 IN
GND GND M09 IN
GND GND M11 IN
GND GND M13 IN
GND GND M15 IN
GND GND M17 IN
GND GND M19 IN
GND GND M21 IN
GND GND M23 IN
GND GND M25 IN
GND GND N04 IN
GND GND N20 IN
GND GND N24 IN
GND GND P01 IN
GND GND P03 IN
GND GND P05 IN
GND GND P07 IN
GND GND P09 IN
GND GND P11 IN
GND GND P13 IN
GND GND P15 IN
GND GND P17 IN
GND GND P19 IN
GND GND P21 IN
GND GND P23 IN
GND GND P25 IN
GND GND R02 IN
GND GND T01 IN
GND GND T03 IN
GND GND T05 IN
GND GND T07 IN
GND GND T09 IN
GND GND T11 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 47
Page 48

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 11 of 15)
Pin Name
GND GND T13 IN
GND GND T15 IN
GND GND T17 IN
GND GND T19 IN
GND GND T21 IN
GND GND T23 IN
GND GND T25 IN
GND GND U04 IN
GND GND U20 IN
GND GND U24 IN
GND GND V01 IN
GND GND V03 IN
GND GND V05 IN
GND GND V07 IN
GND GND V09 IN
GND GND V11 IN
GND GND V13 IN
GND GND V15 IN
GND GND V17 IN
GND GND V19 IN
GND GND V21 IN
GND GND V23 IN
GND GND V25 IN
GND GND W02 IN
GND GND Y01 IN
GND GND Y03 IN
GND GND Y05 IN
GND GND Y07 IN
GND GND Y09 IN
GND GND Y11 IN
GND GND Y13 IN
GND GND Y15 IN
GND GND Y17 IN
GND GND Y19 IN
GND GND Y21 IN
GND GND Y23 IN
GND GND Y25 IN
GSEQ# GSEQ# AD14 IN
HIT# HIT# AB10 IN/OUT
HITM# HITM# AB12 IN/OUT
ID0# IDA0#/IP0# AD02 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
48 Datasheet
Page 49

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 12 of 15)
Pinout Specifications
Pin Name
ID1# IDA1#/IP1# AB02 IN
ID2# IDA2#/DHIT# AC03 IN
ID3# IDA3#/IDB3# AA03 IN
ID4# IDA4#/IDB4# AD04 IN
ID5# IDA5#/IDB5# AB04 IN
ID6# IDA6#/IDB6# AE05 IN
ID7# IDA7#/IDB7# AC05 IN
ID8# IDA8#/IDB8# AD06 IN
ID9# IDA9#/IDB9# AB06 IN
IDS# IDS# AC07 IN
IGNNE# IGNNE# AG23 IN
INIT# INIT# AF08 IN
LINT0 INT AF22 IN
LINT1 NMI AF24 IN
LOCK# LOCK# AE15 IN/OUT
N/C A04
N/C AB16
N/C AC17
N/C AC21
N/C AD18
N/C AE17
N/C AG05
N/C AG11
N/C AG17
N/C AG19
N/C AG21
N/C AH05
N/C AH11
N/C AH17
N/C AH19
N/C AH21
N/C B04
N/C B06
N/C B08
N/C B14
N/C B16
N/C B20
N/C C03
N/C C13
N/C C15
N/C C25
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 49
Page 50

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 13 of 15)
Pin Name
N/C K02
N/C K12
N/C K14
N/C K24
N/C U05
N/C U11
OUTEN OUTEN AF04 IN Power pod signal
PMI# PMI# AE25 IN
PPODGD# PPODGD# AF20 OUT Power pod signal
PWRGOOD PWRGOOD AH15 IN
REQ0# REQA0#/LEN0# AE09 IN/OUT
REQ1# WSNP#, D/C#/LEN1# AF10 IN/OUT
REQ2# REQA2#/ REQB2# AD10 IN/OUT
REQ3# ASZ0#/DSZ0# AE11 IN/OUT
REQ4# ASZ1#/DSZ1# AF12 IN/OUT
REQ5# REQ5# AD12 IN/OUT
RESET# RESET# AD20 IN
RP# RP# AC13 IN/OUT
RS0# RS0# AE07 IN
RS1# RS1# AD08 IN
RS2# RS2# AB08 IN
RSP# RSP# AF06 IN
SBSY# SBSY# AE13 IN/OUT
SBSY0# SBSY_C1# AA13 OUT
SBSY1# SBSY_C2# AC19 OUT
SMA0 SMA0 B18 IN SMBus signal
SMA1 SMA1 A17 IN SMBus signal
SMA2 SMA2 A15 IN SMBus signal
SMSC SMSC B24 IN SMBus signal
SMSD SMSD B22 IN/OUT SMBus signal
SMWP SMWP A21 IN SMBus signal
STBN0# STBN0# F04 IN/OUT
STBN1# STBN1# N05 IN/OUT
STBN2# STBN2# F10 IN/OUT
STBN3# STBN3# N11 IN/OUT
STBN4# STBN4# F16 IN/OUT
STBN5# STBN5# N17 IN/OUT
STBN6# STBN6# F22 IN/OUT
STBN7# STBN7# N23 IN/OuT
STBP0# STBP0# E05 IN/OUT
STBP1# STBP1# M04 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
50 Datasheet
Page 51

Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 14 of 15)
Pinout Specifications
Pin Name
STBP2# STBP2# E11 IN/OUT
STBP3# STBP3# M10 IN/OUT
STBP4# STBP4# E17 IN/OUT
STBP5# STBP5# M16 IN/OUT
STBP6# STBP6# E23 IN/OUT
STBP7# STBP7# M22 IN/OUT
TCK TCK AG09 IN JTAG
TDI TDI AG07 IN JTAG
TDO TDO AH07 OUT JTAG
TERMA FSBT1 AF02 IN
TERMB FSBT2 AE03 IN
THRMTRIP# THRMTRIP# AG25 OUT
THRMALERT# THRMALERT# A07 OUT
TMS TMS AH09 IN JTAG
TND# TND# AC15 IN/OUT
TRDY# TRDY# AF14 IN
TRST# TRST# AE21 IN JTAG
TUNER[1] TUNER[1] AH03
TUNER[2] TUNER[2] AG03
VCCMON VCCMON A11 OUT Power pod signal
VCTERM VCTERM A02 IN
VCTERM VCTERM A06 IN
VCTERM VCTERM A10 IN
VCTERM VCTERM A14 IN
VCTERM VCTERM A18 IN
VCTERM VCTERM A22 IN
VCTERM VCTERM A25 IN
VCTERM VCTERM C01 IN
VCTERM VCTERM C04 IN
VCTERM VCTERM C08 IN
VCTERM VCTERM C12 IN
VCTERM VCTERM C16 IN
VCTERM VCTERM C20 IN
VCTERM VCTERM C24 IN
VCTERM VCTERM E02 IN
VCTERM VCTERM E06 IN
VCTERM VCTERM E10 IN
VCTERM VCTERM E14 IN
VCTERM VCTERM E18 IN
VCTERM VCTERM E22 IN
VCTERM VCTERM G01 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 51
Page 52

Pinout Specifications
Table 3-1. Pin/Signal Information Sorted by Pin Name (Sheet 15 of 15)
Pin Name
VCTERM VCTERM G04 IN
VCTERM VCTERM G08 IN
VCTERM VCTERM G12 IN
VCTERM VCTERM G16 IN
VCTERM VCTERM G20 IN
VCTERM VCTERM G24 IN
VCTERM VCTERM J02 IN
VCTERM VCTERM J06 IN
VCTERM VCTERM J10 IN
VCTERM VCTERM J14 IN
VCTERM VCTERM J18 IN
VCTERM VCTERM J22 IN
VCTERM VCTERM L01 IN
VCTERM VCTERM L04 IN
VCTERM VCTERM L08 IN
VCTERM VCTERM L12 IN
VCTERM VCTERM L16 IN
VCTERM VCTERM L20 IN
VCTERM VCTERM L24 IN
VCTERM VCTERM N02 IN
VCTERM VCTERM N06 IN
VCTERM VCTERM N10 IN
VCTERM VCTERM N14 IN
VCTERM VCTERM N18 IN
VCTERM VCTERM N22 IN
VCTERM VCTERM R01 IN
VCTERM VCTERM R04 IN
VCTERM VCTERM R08 IN
VCTERM VCTERM R12 IN
VCTERM VCTERM R16 IN
VCTERM VCTERM R20 IN
VCTERM VCTERM R24 IN
VCTERM VCTERM U02 IN
VCTERM VCTERM U06 IN
VCTERM VCTERM U10 IN
VCTERM VCTERM U14 IN
VCTERM VCTERM U18 IN
VCTERM VCTERM U22 IN
VCTERM VCTERM U25 IN
VSSMON VSSMON A09 OUT Power pod signal
System Bus
Signal Name
Pin
Location
Input/Output Notes
52 Datasheet
Page 53

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 1 of 15)
Pinout Specifications
Pin Name
GND GND A01 IN
VCTERM VCTERM A02 IN
GND GND A03 IN
N/C A04
GND GND A05 IN
VCTERM VCTERM A06 IN
THRMALERT# THRMALERT# A07 OUT
GND GND A08 IN
VSSMON VSSMON A09 OUT Power pod signal
VCTERM VCTERM A10 IN
VCCMON VCCMON A11 OUT Power pod signal
GND GND A13 IN
VCTERM VCTERM A14 IN
SMA2 SMA2 A15 IN SMBus signal
GND GND A16 IN
SMA1 SMA1 A17 IN SMBus signal
VCTERM VCTERM A18 IN
GND GND A19 IN
GND GND A20 IN
SMWP SMWP A21 IN SMBus signal
VCTERM VCTERM A22 IN
GND GND A23 IN
GND GND A24 IN
VCTERM VCTERM A25 IN
3.3V B02 IN SMBus supply voltage
GND GND B03 IN
N/C B04
GND GND B05 IN
N/C B06
GND GND B07 IN
RSVD RSVD B08
GND GND B09 IN
GND GND B10 IN
GND GND B11 IN
GND GND B13 IN
N/C B14
GND GND B15 IN
N/C B16
GND GND B17 IN
SMA0 SMA0 B18 IN SMBus signal
GND GND B19 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 53
Page 54

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 2 of 15)
Pin Name
N/C B20
GND GND B21 IN
SMSD SMSD B22 IN/OUT SMBus signal
GND GND B23 IN
SMSC SMSC B24 IN SMBus signal
GND GND B25 IN
VCTERM VCTERM C01 IN
GND GND C02 IN
N/C C03
VCTERM VCTERM C04 IN
D002# D02# C05 IN/OUT
GND GND C06 IN
D000# D00# C07 IN/OUT
VCTERM VCTERM C08 IN
D035# D35# C09 IN/OUT
GND GND C10 IN
D033# D33# C11 IN/OUT
VCTERM VCTERM C12 IN
N/C C13
GND GND C14 IN
N/C C15
VCTERM VCTERM C16 IN
D073# D73# C17 IN/OUT
GND GND C18 IN
D070# D70# C19 IN/OUT
VCTERM VCTERM C20 IN
D099# D99# C21 IN/OUT
GND GND C22 IN
D097# D97# C23 IN/OUT
VCTERM VCTERM C24 IN
N/C C25
GND GND D01 IN
D004# D04# D02 IN/OUT
GND GND D03 IN
D003# D03# D04 IN/OUT
GND GND D05 IN
D005# D05# D06 IN/OUT
GND GND D07 IN
D037# D37# D08 IN/OUT
GND GND D09 IN
D034# D34# D10 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
54 Datasheet
Page 55

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 3 of 15)
Pinout Specifications
Pin Name
GND GND D11 IN
D036# D36# D12 IN/OUT
GND GND D13 IN
D065# D65# D14 IN/OUT
GND GND D15 IN
D066# D66# D16 IN/OUT
GND GND D17 IN
D064# D64# D18 IN/OUT
GND GND D19 IN
D102# D102# D20 IN/OUT
GND GND D21 IN
D098# D98# D22 IN/OUT
GND GND D23 IN
D104# D104# D24 IN/OUT
GND GND D25 IN
VCTERM VCTERM E02 IN
D001# D01# E03 IN/OUT
GND GND E04 IN
STBP0# STBP0# E05 IN/OUT
VCTERM VCTERM E06 IN
D010# D10# E07 IN/OUT
GND GND E08 IN
D040# D40# E09 IN/OUT
VCTERM VCTERM E10 IN
STBP2# STBP2# E11 IN/OUT
GND GND E12 IN
D039# D39# E13 IN/OUT
VCTERM VCTERM E14 IN
D067# D67# E15 IN/OUT
GND GND E16 IN
STBP4# STBP4# E17 IN/OUT
VCTERM VCTERM E18 IN
D074# D74# E19 IN/OUT
GND GND E20 IN
D096# D96# E21 IN/OUT
VCTERM VCTERM E22 IN
STBP6# STBP6# E23 IN/OUT
GND GND E24 IN
D100# D100# E25 IN/OUT
GND GND F01 IN
D007# D07# F02 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 55
Page 56

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 4 of 15)
Pin Name
GND GND F03 IN
STBN0# STBN0# F04 IN/OUT
GND GND F05 IN
D006# D06# F06 IN/OUT
GND GND F07 IN
D045# D45# F08 IN/OUT
GND GND F09 IN
STBN2# STBN2# F10 IN/OUT
GND GND F11 IN
D044# D44# F12 IN/OUT
GND GND F13 IN
D068# D68# F14 IN/OUT
GND GND F15 IN
STBN4# STBN4# F16 IN/OUT
GND GND F17 IN
D069# D69# F18 IN/OUT
GND GND F19 IN
D106# D106# F20 IN/OUT
GND GND F21 IN
STBN6# STBN6# F22 IN/OUT
GND GND F23 IN
D103# D103# F24 IN/OUT
GND GND F25 IN
VCTERM VCTERM G01 IN
GND GND G02 IN
D014# D14# G03 IN/OUT
VCTERM VCTERM G04 IN
D008# D08# G05 IN/OUT
D015# D15# G07 IN/OUT
VCTERM VCTERM G08 IN
D038# D38# G09 IN/OUT
D041# D41# G11 IN/OUT
VCTERM VCTERM G12 IN
D043# D43# G13 IN/OUT
D071# D71# G15 IN/OUT
VCTERM VCTERM G16 IN
D072# D72# G17 IN/OUT
D079# D79# G19 IN/OUT
VCTERM VCTERM G20 IN
D101# D101# G21 IN/OUT
D108# D108# G23 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
56 Datasheet
Page 57

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 5 of 15)
Pinout Specifications
Pin Name
VCTERM VCTERM G24 IN
D107# D107# G25 IN/OUT
D011# D11# H02 IN/OUT
GND GND H03 IN
D012# D12# H04 IN/OUT
GND GND H05 IN
D009# D09# H06 IN/OUT
GND GND H07 IN
D042# D42# H08 IN/OUT
GND GND H09 IN
D032# D32# H10 IN/OUT
GND GND H11 IN
D046# D46# H12 IN/OUT
GND GND H13 IN
D075# D75# H14 IN/OUT
GND GND H15 IN
D076# D76# H16 IN/OUT
GND GND H17 IN
D077# D77# H18 IN/OUT
GND GND H19 IN
D111# D111# H20 IN/OUT
GND GND H21 IN
D105# D105# H22 IN/OUT
GND GND H23 IN
D109# D109# H24 IN/OUT
GND GND H25 IN
GND GND J01 IN
VCTERM VCTERM J02 IN
D013# D13# J03 IN/OUT
GND GND J04 IN
DEP01# DEP1# J05 IN/OUT
VCTERM VCTERM J06 IN
DEP00# DEP0# J07 IN/OUT
GND GND J08 IN
DEP04# DEP4# J09 IN/OUT
VCTERM VCTERM J10 IN
DEP05# DEP5# J11 IN/OUT
GND GND J12 IN
D047# D47# J13 IN/OUT
VCTERM VCTERM J14 IN
D078# D78# J15 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 57
Page 58

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 6 of 15)
Pin Name
GND GND J16 IN
DEP09# DEP9# J17 IN/OUT
VCTERM VCTERM J18 IN
DEP08# DEP8# J19 IN/OUT
GND GND J20 IN
DEP12# DEP12# J21 IN/OUT
VCTERM VCTERM J22 IN
DEP13# DEP13# J23 IN/OUT
GND GND J24 IN
D110# D110# J25 IN/OUT
N/C K02
GND GND K03 IN
D016# D16# K04 IN/OUT
GND GND K05 IN
D018# D18# K06 IN/OUT
GND GND K07 IN
D049# D49# K08 IN/OUT
GND GND K09 IN
D050# D50# K10 IN/OUT
GND GND K11 IN
N/C K12
GND GND K13 IN
N/C K14
GND GND K15 IN
D083# D83# K16 IN/OUT
GND GND K17 IN
D080# D80# K18 IN/OUT
GND GND K19 IN
D117# D117# K20 IN/OUT
GND GND K21 IN
D114# D114# K22 IN/OUT
GND GND K23 IN
N/C K24
GND GND K25 IN
VCTERM VCTERM L01 IN
GND GND L02 IN
D017# D17# L03 IN/OUT
VCTERM VCTERM L04 IN
D019# D19# L05 IN/OUT
D021# D21# L07 IN/OUT
VCTERM VCTERM L08 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
58 Datasheet
Page 59

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 7 of 15)
Pinout Specifications
Pin Name
D053# D53# L09 IN/OUT
D056# D56# L11 IN/OUT
VCTERM VCTERM L12 IN
D052# D52# L13 IN/OUT
D081# D81# L15 IN/OUT
VCTERM VCTERM L16 IN
D088# D88# L17 IN/OUT
D082# D82# L19 IN/OUT
VCTERM VCTERM L20 IN
D112# D112# L21 IN/OUT
D116# D116# L23 IN/OUT
VCTERM VCTERM L24 IN
D113# D113# L25 IN/OUT
GND GND M01 IN
D020# D20# M02 IN/OUT
GND GND M03 IN
STBP1# STBP1# M04 IN/OUT
GND GND M05 IN
D028# D28# M06 IN/OUT
GND GND M07 IN
D048# D48# M08 IN/OUT
GND GND M09 IN
STBP3# STBP3# M10 IN/OUT
GND GND M11 IN
D051# D51# M12 IN/OUT
GND GND M13 IN
D084# D84# M14 IN/OUT
GND GND M15 IN
STBP5# STBP5# M16 IN/OUT
GND GND M17 IN
D086# D86# M18 IN/OUT
GND GND M19 IN
D118# D118# M20 IN/OUT
GND GND M21 IN
STBP7# STBP7# M22 IN/OUT
GND GND M23 IN
D115# D115# M24 IN/OUT
GND GND M25 IN
VCTERM VCTERM N02 IN
D023# D23# N03 IN/OUT
GND GND N04 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 59
Page 60

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 8 of 15)
Pin Name
STBN1# STBN1# N05 IN/OUT
VCTERM VCTERM N06 IN
D022# D22# N07 IN/OUT
D058# D58# N09 IN/OUT
VCTERM VCTERM N10 IN
STBN3# STBN3# N11 IN/OUT
D055# D55# N13 IN/OUT
VCTERM VCTERM N14 IN
D091# D91# N15 IN/OUT
STBN5# STBN5# N17 IN/OUT
VCTERM VCTERM N18 IN
D085# D85# N19 IN/OUT
GND GND N20 IN
D127# D127# N21 IN/OUT
VCTERM VCTERM N22 IN
STBN7# STBN7# N23 IN/OuT
GND GND N24 IN
D119# D119# N25 IN/OUT
GND GND P01 IN
D027# D27# P02 IN/OUT
GND GND P03 IN
D024# D24# P04 IN/OUT
GND GND P05 IN
D026# D26# P06 IN/OUT
GND GND P07 IN
D054# D54# P08 IN/OUT
GND GND P09 IN
D061# D61# P10 IN/OUT
GND GND P11 IN
D057# D57# P12 IN/OUT
GND GND P13 IN
D087# D87# P14 IN/OUT
GND GND P15 IN
D093# D93# P16 IN/OUT
GND GND P17 IN
D095# D95# P18 IN/OUT
GND GND P19 IN
D122# D122# P20 IN/OUT
GND GND P21 IN
D125# D125# P22 IN/OUT
GND GND P23 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
60 Datasheet
Page 61

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 9 of 15)
Pinout Specifications
Pin Name
D120# D120# P24 IN/OUT
GND GND P25 IN
VCTERM VCTERM R01 IN
GND GND R02 IN
D025# D25# R03 IN/OUT
VCTERM VCTERM R04 IN
D029# D29# R05 IN/OUT
D031# D31# R07 IN/OUT
VCTERM VCTERM R08 IN
D063# D63# R09 IN/OUT
D060# D60# R11 IN/OUT
VCTERM VCTERM R12 IN
D059# D59# R13 IN/OUT
D092# D92# R15 IN/OUT
VCTERM VCTERM R16 IN
D089# D89# R17 IN/OUT
D090# D90# R19 IN/OUT
VCTERM VCTERM R20 IN
D124# D124# R21 IN/OUT
D126# D126# R23 IN/OUT
VCTERM VCTERM R24 IN
D121# D121# R25 IN/OUT
GND GND T01 IN
D030# D30# T02 IN/OUT
GND GND T03 IN
DEP03# DEP3# T04 IN/OUT
GND GND T05 IN
DEP02# DEP2# T06 IN/OUT
GND GND T07 IN
DEP06# DEP6# T08 IN/OUT
GND GND T09 IN
DEP07# DEP7# T10 IN/OUT
GND GND T11 IN
D062# D62# T12 IN/OUT
GND GND T13 IN
D094# D94# T14 IN/OUT
GND GND T15 IN
DEP11# DEP11# T16 IN/OUT
GND GND T17 IN
DEP10# DEP10# T18 IN/OUT
GND GND T19 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 61
Page 62

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 10 of 15)
Pin Name
DEP14# DEP14# T20 IN/OUT
GND GND T21 IN
DEP15# DEP15# T22 IN/OUT
GND GND T23 IN
D123# D123# T24 IN/OUT
GND GND T25 IN
VCTERM VCTERM U02 IN
A005# AA05#/EXF2# U03 IN/OUT
GND GND U04 IN
N/C U05
VCTERM VCTERM U06 IN
A009# AA09#/BE1# U07 IN/OUT
A018# AA18#/DID2# U09 IN/OUT
VCTERM VCTERM U10 IN
N/C U11
A016# AA16#/DID0# U13 IN/OUT
VCTERM VCTERM U14 IN
A028# AA28#/xTPRValue1# U15 IN/OUT
BNR# BNR# U17 IN/OUT
VCTERM VCTERM U18 IN
A027# AA27#/xTPRValue0# U19 IN/OUT
GND GND U20 IN
A048# AA48#/AB48# U21 IN/OUT
VCTERM VCTERM U22 IN
A042# AA42#/AB42# U23 IN/OUT
GND GND U24 IN
VCTERM VCTERM U25 IN
GND GND V01 IN
A004# AA04#/EXF1# V02 IN/OUT
GND GND V03 IN
A010# AA10#/BE2# V04 IN/OUT
GND GND V05 IN
A003# AA03#/EXF0# V06 IN/OUT
GND GND V07 IN
A015# AA15#/BE7# V08 IN/OUT
GND GND V09 IN
A020# AA20#/DID4# V10 IN/OUT
GND GND V11 IN
A019# AA19#/DID3# V12 IN/OUT
GND GND V13 IN
A031# AA31#/xTPRDisable# V14 IN/OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
62 Datasheet
Page 63

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 11 of 15)
Pinout Specifications
Pin Name
GND GND V15 IN
A038# AA38#/AB38# V16 IN/OUT
GND GND V17 IN
A029# AA29#/xTPRValue2# V18 IN/OUT
GND GND V19 IN
A045# AA45#/AB45# V20 IN/OUT
GND GND V21 IN
A047# AA47#/AB47# V22 IN/OUT
GND GND V23 IN
A040# AA40#/AB40# V24 IN/OUT
GND GND V25 IN
GND GND W02 IN
A006# AA06#/EXF3# W03 IN/OUT
A012# AA12#/BE4# W05 IN/OUT
A014# AA14#/BE6# W07 IN/OUT
A021# AA21#/DID5# W09 IN/OUT
A026# AA26#/AB26# W11 IN/OUT
A022# AA22#/DID6# W13 IN/OUT
A037# AA37#/AB37# W15 IN/OUT
A032# AA32#/ATTR0# W17 IN/OUT
A030# AA30#/xTPRValue3# W19 IN/OUT
A044# AA44#/AB44# W21 IN/OUT
A046# AA46#/AB46# W23 IN/OUT
A041# AA41#/AB41# W25 IN/OUT
GND GND Y01 IN
A007# AA07#/EXF4# Y02 IN/OUT
GND GND Y03 IN
A013# AA13#/BE5# Y04 IN/OUT
GND GND Y05 IN
A008# AA08#/BE0# Y06 IN/OUT
GND GND Y07 IN
A017# AA17#/DID1# Y08 IN/OUT
GND GND Y09 IN
A024# AA24#/DID8# Y10 IN/OUT
GND GND Y11 IN
A025# AA25#/DID9# Y12 IN/OUT
GND GND Y13 IN
A034# AA34#/ATTR2# Y14 IN/OUT
GND GND Y15 IN
A036# AA36#/AB36# Y16 IN/OUT
GND GND Y17 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 63
Page 64

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 12 of 15)
Pin Name
A035# AA35#/ATTR3# Y18 IN/OUT
GND GND Y19 IN
A039# AA39#/AB39# Y20 IN/OUT
GND GND Y21 IN
A049# AA49#/AB49# Y22 IN/OUT
GND GND Y23 IN
A043# AA43#/AB43# Y24 IN/OUT
GND GND Y25 IN
GND GND AA02 IN
ID3# IDA3#/IDB3# AA03 IN
A011# AA11#/BE3# AA05 IN/OUT
DRDY0# DRDY_C1# AA07 OUT
DBSY0# DBSY_C1# AA09 OUT
A023# AA23#/DID7# AA11 IN/OUT
SBSY0# SBSY_C1# AA13 OUT
BINIT# BINIT# AA15 IN/OUT
A033# AA33#/ATTR1# AA17 IN/OUT
DBSY1# DBSY_C2# AA19 OUT
GND GND AA20 IN
DRDY1# DRDY_C2# AA21 OUT
AP1# AP1# AA23 IN/OUT
GND GND AA24 IN
AP0# AP0# AA25 IN/OUT
GND GND AB01 IN
ID1# IDA1#/IP1# AB02 IN
GND GND AB03 IN
ID5# IDA5#/IDB5# AB04 IN
GND GND AB05 IN
ID9# IDA9#/IDB9# AB06 IN
GND GND AB07 IN
RS2# RS2# AB08 IN
GND GND AB09 IN
HIT# HIT# AB10 IN/OUT
GND GND AB11 IN
HITM# HITM# AB12 IN/OUT
GND GND AB13 IN
DEFER# DEFER# AB14 IN
GND GND AB15 IN
N/C AB16
GND GND AB17 IN
BR2# BREQ2# AB18 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
64 Datasheet
Page 65

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 13 of 15)
Pinout Specifications
Pin Name
GND GND AB19 IN
ADS# ADS# AB20 IN/OUT
GND GND AB21 IN
BERR# BERR# AB22 IN/OUT
GND GND AB23 IN
BPM5# BPM5# AB24 IN/OUT
GND GND AB25 IN
GND GND AC02 IN
ID2# IDA2#/DHIT# AC03 IN
ID7# IDA7#/IDB7# AC05 IN
IDS# IDS# AC07 IN
DBSY# DBSY# AC09 IN/OUT
DRDY# DRDY# AC11 IN/OUT
RP# RP# AC13 IN/OUT
TND# TND# AC15 IN/OUT
N/C AC17
SBSY1# SBSY_C2# AC19 OUT
N/C# AC21
BPM3# BPM3# AC23 IN/OUT
GND GND AC24 IN
BPM1# BPM1# AC25 IN/OUT
GND GND AD01 IN
ID0# IDA0#/IP0# AD02 IN
GND GND AD03 IN
ID4# IDA4#/IDB4# AD04 IN
GND GND AD05 IN
ID8# IDA8#/IDB8# AD06 IN
GND GND AD07 IN
RS1# RS1# AD08 IN
GND GND AD09 IN
REQ2# REQA2#/ REQB2# AD10 IN/OUT
GND GND AD11 IN
REQ5# REQ5# AD12 IN/OUT
GND GND AD13 IN
GSEQ# GSEQ# AD14 IN
GND GND AD15 IN
BR1# BREQ1# AD16 IN
GND GND AD17 IN
N/C AD18
GND GND AD19 IN
RESET# RESET# AD20 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 65
Page 66

Pinout Specifications
Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 14 of 15)
Pin Name
GND GND AD21 IN
BPM0# BPM0# AD22 IN/OUT
GND GND AD23 IN
BPM4# BPM4# AD24 IN/OUT
GND GND AD25 IN
GND GND AE02 IN
TERMB FSBT2 AE03
ID6# IDA6#/IDB6# AE05 IN
RS0# RS0# AE07 IN
REQ0# REQA0#/LEN0# AE09 IN/OUT
REQ3# ASZ0#/DSZ0# AE11 IN/OUT
SBSY# SBSY# AE13 IN/OUT
LOCK# LOCK# AE15 IN/OUT
N/C AE17
BPRI# BPRI# AE19 IN
TRST# TRST# AE21 IN
BPM2# BPM2# AE23 IN/OUT
GND GND AE24 IN
PMI# PMI# AE25 IN
GND GND AF01 IN
TERM FSBT AF02 IN
OUTEN OUTEN AF04 IN Power pod signal
GND GND AF05 IN
RSP# RSP# AF06 IN
GND GND AF07 IN
INIT# INIT# AF08 IN
GND GND AF09 IN
REQ1# WSNP#, D/C#/LEN1# AF10 IN/OUT
GND GND AF11 IN
REQ4# ASZ1#/DSZ1# AF12 IN/OUT
GND GND AF13 IN
TRDY# TRDY# AF14 IN
GND GND AF15 IN
BR0# BREQ0# AF16 IN/OUT
GND GND AF17 IN
BR3# BREQ3# AF18 IN
GND GND AF19 IN
PPODGD# PPODGD# AF20 OUT Power pod signal
GND GND AF21 IN
LINT0 INT AF22 IN
LINT1 NMI AF24 IN
System Bus
Signal Name
Pin
Location
Input/Output Notes
66 Datasheet
Page 67

Table 3-2. Pin/Signal Information Sorted by Pin Location (Sheet 15 of 15)
Pinout Specifications
Pin Name
GND GND AG02 IN
TUNER[2] AG03
GND GND AG04 IN
N/C AG05
GND GND AG06 IN
TDI TDI AG07 IN JTAG
GND GND AG08 IN
TCK TCK AG09 IN JTAG
GND GND AG10 IN
N/C AG11
GND GND AG12 IN
BCLKp CLK AG13 IN
GND GND AG14 IN
CPUPRES# CPUPRES# AG15 OUT Power pod signal
GND GND AG16 IN
N/C AG17
GND GND AG18 IN
N/C AG19
GND GND AG20 IN
N/C AG21
GND GND AG22 IN
IGNNE# IGNNE# AG23 IN
GND GND AG24 IN
THRMTRIP# THRMTRIP# AG25 OUT Thermal trip
GND GND AH01 IN
TUNER[1] AH03
N/C AH05
TDO TDO AH07 OUT JTAG
TMS TMS AH09 IN JTAG
N/C AH11
BCLKn BCLKN AH13 IN
PWRGOOD PWRGOOD AH15 IN
N/C AH17
N/C AH19
N/C AH21
A20M# A20M# AH23 IN
FERR# FERR# AH25 OUT
System Bus
Signal Name
Pin
Location
Input/Output Notes
Datasheet 67
Page 68

Pinout Specifications
68 Datasheet
Page 69

4 Mechanical Specifications
This chapter provides the mechanical specifications of the Itanium 2 processor .
4.1 Mechanical Dimensions
The Itanium 2 processor package is comprised of an interposer, a processor package substrate, and
an integrated heat spreader (IHS), as illustrated in Figure 4-1. The interposer interfaces with the
socket and the power pod and contains 611 pins which are positioned in a 25 x 28 grid. The IHS,
which is mounted on the top surface of the processor package substrate, efficiently transfers the
heat generated by the die to its surface.
Figure 4-1. Itanium
®
2 Processor Package
Processor
Package
Substrate
(OLGA)
IHS
Interposer
001160e
Figure 4-2 contains mechanical drawings and dimensions for the Itanium 2 processor package.
Figure 4-3 contains mechanical drawing for the power tab. All dimensions are measured in mm
and are not to scale.
Datasheet 69
Page 70

Mechanical Specifications
Figure 4-2. Itanium® 2 Processor Package
48.26
42.50
38.50
90.00
42.50
38.50
Top View
IHS Height (See Note)
Substrate Height (See Note)
1.43
0.00
2.03
28 x 1.27 Pitch
Ø
All dimensions are measured in mm. Not to scale.
NOTE:
Processor
900 MHz (1.5 MB) 5.575 3.397 mm
1.0 GHz (3 MB) 5.575 3.397 mm
1.3 GHz (3 MB) 5.825 3.447 mm
1.4 GHz (4 MB) 5.825 3.447 mm
1.5 GHz (4 MB/6 MB) 5.825 3.447 mm
1.6 GHz (6 MB/9 MB) 5.825 3.447 mm
1.66 GHz (6 MB/9 MB) 5.825 3.447 mm
IHS
Height
Side View
34.29
Bottom View
Substrate
Height
Integrated Heat Spreader
Processor Package Substrate
Interposer
Pins
25 x 1.27 Pitch
30.48611 x 0.305 Pins
000655g
Units
70 Datasheet
Page 71

Figure 4-3. Itanium® 2 Processor Package Power Tab
C
L
2.48
12x 2.92
Mechanical Specifications
2x R1.20
2x 25.85
46.96
12x 0.86
2x 16.10
10x 1.15
2.98
46.96
12x 38.76
90.00
Top View
C
L
2x 9.10 2x 12.91
45.0042.46
24.13
46.74 48.26
46.00
C
L
42.21
Bottom View
All dimensions are measured in mm. Not to scale.
4x R1.00
001159a
Datasheet 71
Page 72

Mechanical Specifications
4.2 Package Marking
The following section details the processor top-side and bottom-side markings for the Itanium 2
processor and is provided as an identification aid. The processor top-side mark for the product is a
laser marking on the IHS.
4.2.1 Processor Top-Side Marking
Figure 4-4 shows an example of the laser marking on the IHS. The processor top-side mark
provides the following information:
• INTEL CONFIDENTIAL
• Legal Mark
• Assembly Process Order (APO) number
• Serial Number
Figure 4-4. Processor Top-Side Marking on IHS
INTEL CONFIDENTIAL
i M C 'YY
APO NUMBER
SERIAL NUMBER
4.2.2 Processor Bottom-Side Marking
The processor bottom-side mark for the product is a laser marking on the pin side of the interposer.
Figure 4-5 shows the placement of the laser marking on the pin side of interposer. The processor
bottom-side mark provides the following information:
• Product ID
• Finish Process Order (FPO)
• Serial Number
• S-Spec
• Country of origin
• 2D Matrix Mark (on Itanium
Itanium 2 (9 MB) class of processors and Montecito class of processors only. Not included on
the Itanium 2 [900 MHz, 1.0 GHz] processor).
2 processor [1.30 GHz, 1.40 GHz, 1.50 GHz, 1.60 GHz],
001088b
72 Datasheet
Page 73

Mechanical Specifications
Figure 4-5. Processor Bottom-Side Marking Placement on Interposer
Laser Mark including
2D Matrix Mark
AH25
AH1 A1
A25
Pin 1
Indicator
001267b
NOTE: 2D Matrix Mark only present on Itanium 2 processor (6 MB), Itanium 2 processor (4 MB) and Itanium 2
processor (1.3 GHz, 3 MB).
Datasheet 73
Page 74

Mechanical Specifications
74 Datasheet
Page 75

5 Thermal Specifications
This chapter provides a description of the thermal features relating to the Itanium 2 processor.
5.1 Thermal Features
The Itanium 2 processor has an internal thermal circuit which senses when a certain temperature is
reached on the processor core. This circuit is used for controlling various thermal states. In
addition, an on-chip thermal diode is available for use by the thermal sensing device on the
Itanium 2 processor . Figure 5-1 shows the relationship between temperature, time, and the thermal
alert, enhanced thermal management (ETM), and thermal trip points.
Note: Figure 5-1 is not intended to show a linear relationship in time or temperature as a processor's
thermal state advances from one state to the next state when the cooling solution fails to control the
processor temperature, as this is affected by many factors such as cooling solution performance
degradation and processor workload variations.
Figure 5-1. Itanium
®
2 Processor Thermal Features
Temperature
5.1.1 Thermal Alert
THRMALERT# is a programmable thermal alert signal which is part of the Itanium 2 processor
system management feature. THRMALERT# is asserted when the measured temperature from the
processor thermal diode equals or exceeds the temperature threshold data programmed in the high
temp (THIGH) or low temp (TLOW) registers on the sensor. Intel recommends using the upper
temperature reference byte listed in the Processor Information ROM when programming the
THIGH register (see Chapter 6 for more details). This signal can be used by the platform to
implement thermal regulation features such as generating an external interrupt to tell the operating
system that the processor core die temperature is increasing.
Thermal Alert
Time
ETM
Thermal Trip
000653b
Datasheet 75
Page 76

Thermal Specifications
5.1.2 Enhanced Thermal Management
ETM is a new feature that has been added to the Itanium 2 processor. ETM uses a thermal sensing
device on the die to monitor a thermal entry point, indicating dangerous operation exceeding the
thermal specification. Once the thermal sensing device observes the temperature rise above the
thermal entry point, the processor will enter a low power mode of execution and notify the system
by sending a Correctable Machine Check Interrupt (CMCI). The Itanium 2 processor will rema in in
this low power mode until the temperature decreases below the thermal entry point and remains for
approximately one second, at which point the it will send an another CMCI and resume normal
operation. If the temperature cannot be reduced and continues to rise to critical levels, the
processor will assert the THRMTRIP# signal. The ETM feature may be disabled through the PAL.
5.1.3 Thermal Trip
The Itanium 2 processor protects itself from catastrophic overheating by use of an internal thermal
sensor. The sensor trip point is set well above the normal operating temperature to ensure that there
are no false trips. The Itanium 2 processor will stop all execution when the junction temperature
exceeds a safe operating level.
Warning: Data will be lost if the Itanium 2 processor goes into thermal trip (signaled to the system by the
THRMTRIP# pin).
Once thermal trip is activated, the Itanium 2 processor remains stopped until RESET# is asserted.
The processor case temperature must drop below the specified maximum before issuing a reset to
the processor. Please see Section 5.2 for details on case temperature.
5.2 Case Temperature
See Table 5-1 for the case temperature specifications for the Itanium 2 processor. The case
temperature is defined as the temperature measured at the center of the top surface of the IHS.
Warning: Data may be lost if the case temperature exceeds the specified maximum.
Table 5-1. Case Temperature Specification
Symbol Parameter
Tcase Case Temperature 900 MHz 5 85 °C
Core
Frequency
1.0 GHz 5 85 °C
1.3 GHz 5 83 °C
1.4 GHz 5 83 °C
1.5 GHz 5 83 °C
1.6 GHz 5 83 °C
1.66 GHz 5 83 °C
Minimum Maximum Unit Notes
Figure 5-2 contains dimensions for the thermocouple location on the Itanium 2 processor package.
This is the recommended location for placement of a thermocouple for case temperature
measurement.
76 Datasheet
Page 77

Figure 5-2. Itanium® 2 Processor Package Thermocouple Location
2
4.13
Thermal Specifications
45.00
All dimensions are measured in mm. Not to scale.
Thermocouple Location
001103a
Datasheet 77
Page 78

Thermal Specifications
78 Datasheet
Page 79

6 System Management Feature
Specifications
The Itanium 2 processor includes a system management bus (SMBus) interface. This chapter
describes the features of the SMBus and SMBus components.
6.1 System Management Bus
6.1.1 System Management Bus Interface
The Itanium 2 processor includes an Itanium processor family SMBus interface which allows
access to several processor features. The system management components on the processor include
two memory components (EEPROMs) and a thermal sensing device (digital thermometer). The
processor information EEPROM (PIROM) is programmed by Intel with manufacturing and feature
information specific to the Itanium 2 processor. This information is permanently write-protected.
Section 6.2 provides detail on the PIROM. The other EEPROM is a scratch EEPROM that is
available for other data at the system vendor’s discretion. The thermal sensor can be used in
conjunction with the information in the PIROM and/or the Scratch EEPROM for system thermal
monitoring and management. The thermal sensing device on the processor provides an accurate
means of acquiring an indicator of the junction temperature of the processor core die. The thermal
sensing device is connected to the anode and cathode of the Itanium 2 processor on-die thermal
diode. SMBus implementation on the Itanium 2 processor uses the clock and data signals as
defined by SMBus specifications.
6.1.2 System Management Interface Signals
Table 6-1 lists the system management interface signals and their descriptions. These signals are
used by the system to access the system management components via the SMBus.
Table 6-1. System Management Interface Signal Descriptions
Signal Name Pin Count Description
3.3V 1 Voltage supply for EEPROMs and thermal sensor.
SMA[2:0] 3 Address select passed through from socket.
SMSC 1 System management bus clock.
SMSD 1 System management serial address/data bus.
SMWP 1 Scratch EEPROM write protect.
THRMALERT# 1 Temperature alert from the thermal sensor.
Figure 6-1 shows the logical schematics of SMBus circuitry on the Itanium 2 processor and shows
how the various system management components are connected to the SMBus. The reference to
the System Board at the lower left corner of Figure 6-1 shows how SMBus address configuration
for multiple Itanium 2 processors can be realized with resistor stuffing options.
Datasheet 79
Page 80

System Management Feature Specifications
Figure 6-1. Logical Schematic of SMBus Circuitry
3.3V
10K
A0
A1
A2
V
CC
Processor
Information
ROM
SC
SD
10K 10K
VCC
A0
A1
®
Intel
Itanium® 2 Processor
STBY
Thermal
Sensing
Device
SC
SD
Core
THERMDA
THERMDC
10K
10K
SMA0
System Board
SMA1
10K
V
A0
A1
A2
SMA23.3V
3.3V
CC
Scratch
EEPROM
Stuffing
Options
SC
SD
WP
SMWP
SMSD
SMSC THRMALE RT#
ALERT
3.3V
10K
System Board
NOTE:
1. Actual implement ation may vary.
2. For use in general unde rstanding of the architecture.
000668b
80 Datasheet
Page 81

6.1.3 SMBus Device Addressing
Of the addresses broadcast across the SMBus, the memory components claim those of the form
“1010XXYZb”. The “XX” and “Y” bits are used to enable the devices on the processor at adjacent
addresses. The Y bit is hard-wired on the processor to GND (‘0’) for the Scratch EEPROM and
pulled to 3.3V (‘1’) for the processor information ROM. The “XX” bits are defined by the
processor socket via the SMA0 and SMA1 pins on the Itanium 2 processor connector. These
address pins have a weak pull-down (10 kΩ) to ensure that the memory components are in a known
state in systems which do not support the SMBus, or only support a partial implementation. The
“Z” bit is the read/write bit for the serial bus transaction.
The thermal sensing device internally decodes 1 of 3 upper address patterns from the bus of the
form “0011XXXZb”, “1001XXXZb” or “0101XXXZb”. The device’s addressing, as implemented,
uses SMA2 and SMA1 and includes a Hi-Z state for the SMA2 address pin. Therefore, the thermal
sensing device supports six unique resulting addresses. To set the Hi-Z state for SMA2, the pin
must be left floating. The system should drive SMA1 and SMA0, and will be pulled low (if not
driven) by the 10 kΩ pull-down resistor on the processor substrate. Attempting to drive either of
these signals to a Hi-Z state would cause ambiguity in the memory device address decode, possibly
resulting in the devices not responding, thus timing out or hanging the SMBus. As before, the “Z”
bit is the read/write bit for the serial bus transaction.
Figure 6-1 shows a logical diagram of the pin connections. Table 6-2 and Table 6-3 describe the
address pin connections and how they affect the addressing of the devices.
System Management Feature Specifications
Note: Addresses of the form “0000XXXXb” are Reserved and should not be generated by an SMBus
master. Also, system management software must be aware of the processor se lect in the address for
the thermal sensing device.
Table 6-2. Thermal Sensing Device SMBus Addressing on the Itanium
Processor Select 8-Bit Address Word on Serial Bus
Address (Hex) Upper Address
3Xh 0011 0 0 0011000Xb
0011 0 1 0011010Xb
5Xh 0101 Z
0101 Z
9Xh 1001 1 0 1001100Xb
1001 1 1 1001110Xb
NOTES:
1. Upper address bits are decoded in conjunction with the select pins.
2. A tri-state or “Z” state on this pin is achieved by leaving this pin unconnected.
1
SMA2 SMA1 b[7:0]
2
b
0 0101001Xb
1 0101011Xb
®
2 Processor
Datasheet 81
Page 82

System Management Feature Specifications
Table 6-3. EEPROM SMBus Addressing on the Itanium
Upper
Address
(Hex)
A0h/A1h 1010 0 0 0 X Scratch EEPROM 1
A2h/A3h 1010 0 0 1 X Processor Information ROM 1
A4h/A5h 1010 0 1 0 X Scratch EEPROM 2
A6h/A7h 1010 0 1 1 X Processor Information ROM 2
A8h/A9h 1010 1 0 0 X Scratch EEPROM 3
AAh/ABh 1010 1 0 1 X Processor Information ROM 3
ACh/ADh 1010 1 1 0 X Scratch EEPROM 4
AEh/AFh 1010 1 1 1 X Processor Information ROM 4
NOTES:
1. Though this addressing scheme is targeted for up to four-way MP systems, more processors can be supported by using a
multiplexed (or separate) SMBus implementation.
Address
Bits 7–4
Processor Select
1
(SMA1)
Bit 3
(SMA0)
Bit 2
Memory
Device
Select
Bit 1 Bit 0
6.2 Processor Information ROM
An electrically programmed read-only memory (ROM) provides information about the Itanium 2
processor. The checksum bits for each category provide error correction and serve as a mechanism
to check whether data is corrupted or not. This information is permanently write-protected.
Table 6-4 shows the data fields and formats provided in the memory.
®
2 Processor
Read/
Write
Device Addressed
Note: The data, in byte format, is written and read serially with the most significant bit first.
Table 6-4. Processor Information ROM Format (Sheet 1 of 4)
Offset/
Section
Header
00h 8 Data Format Revision Two 4-bit hex digits Start with 00h
01h 16 EEPROM Size Size in bytes (MSB first) Use a decimal to hex
03h 8 Processor Data Address Byte pointer, 00h if not present 0Eh
04h 8 Processor Core Address Byte pointer, 00h if not present 17h
05h 8 Processor Cache Address Byte pointer, 00h if not present 28h
06h 8 Processor Data Address Byte pointer, 00h if not present 37h
07h 8 Part Number Data Address Byte pointer, 00h if not present 3Eh
08h 8 Thermal Reference Data
# of
Bits
Function Notes Examples
Byte pointer, 00h if not present 63h
Address
transfer; 128 bytes =
0080h:
• 02h[7:4] = 0000
• 02h[3:0] = 0000
• 01h[7:4] = 1000
• 01h[3:0] = 0000
82 Datasheet
Page 83

System Management Feature Specifications
Table 6-4. Processor Information ROM Format (Sheet 2 of 4)
Offset/
Section
# of
Bits
Function Notes Examples
09h 8 Feature Data Address Byte pointer, 00h if not present 67h
0Ah 8 Other Data Address Byte pointer, 00h if not present 7Ah
0Bh 16 Reserved Reserved for future use 0000h
0Dh 8 Checksum 1 byte checksum Add up by byte and
take 2’s complement.
Processor
0Eh 48 S-spec Number Six 8-bit ASCII characters S-spec number of S123
would be:
• 13h = 00h
• 12h = 00h
• 11h = “3”
• 10h = “2”
•0Fh = “1”
•0Eh = “S”
14h 2 Sample/Production 00b = Sample only (MSB First) 00000001b =
Production
15h 8 Reserved Reserved for future use 00h
16h 8 Checksum 1 byte checksum Add up by byte and
take 2’s complement.
Core
17h 8 Architecture Revision From CPUID
1
Taken from
CPUID[3].archrev.
18h 8 Processor Core Family From CPUID Taken from
CPUID[3].family.
19h 8 Processor Core Model From CPUID Taken from
CPUID[3].model.
1Ah 8 Processor Core Stepping From CPUID Taken from
CPUID[3].revision.
1Bh 24 Reserved Reserved for future use 000000h
1Eh 16 Maximum Core Frequency Four 4-bit hex digits (in MHz) 1 GHz = 1000h
20h 12 Maximum System Bus
Three 4-bit hex digits (in MHz) 200 MHz = 200h
2
1
Frequency
22h 16 Core Voltage ID Voltage in four 4-bit hex digits
1500 mV = 1500h
1
(in mV)
24h 8 Core Voltage Tolerance,
High
25h 8 Core Voltage Tolerance,
Low
Edge finger tolerance in mV, +
two 4-bit hex digits
Edge finger tolerance in mV, –
two 4-bit hex digits
1.5% = 22 mV = 22h
1.5% = 22 mV = 22h
1
1
26h 8 Reserved Reserved for future use 00h
27h 8 Checksum 1 byte checksum Add up by byte and
take 2’s complement.
Cache
28h 32 Reserved Reserved for future use 00000000h
2Ch 16 Cache Size Four 4-bit hex digits (in Kbytes) 3072 Kbytes = 3072h
2Eh 64 Reserved Reserved for future use x0h
36h 8 Checksum 1 byte checksum
1
Datasheet 83
Page 84

System Management Feature Specifications
Table 6-4. Processor Information ROM Format (Sheet 3 of 4)
Offset/
Section
Package
37h 32 Package Revision Four 8-bit ASCII characters Itanium® 2 Package =
3Bh 2 Substrate Revision
3Ch 8 Reserved Reserved for future use 00h
3Dh 8 Checksum 1 byte checksum Add up by byte and
Part Numbers
3Eh 56 Processor Part Number Seven 8-bit ASCII characters Itanium 2 (900 MHz,
45h 64 Processor Electronic
4Dh 168 Reserved Reserved for future use x0h
62h 8 Checksum 1 byte checksum Add up by byte and
Thermal Reference
63h 8 Upper Temp Reference
64h 8 Thermal Calibration Offset
65h 8 Reserved Reserved for future use 00h
66h 8 Checksum 1 byte checksum Add up by byte and
Features
67h 32 IA-32 Processor Core
6Bh 64 Reserved Reserved (Processor core
# of
Bits
Function Notes Examples
Software ID
Signature
Byte
Byte Present
Feature Flags
INT2b, (1.50 GHz 4MB
and above) = INT3b:
• 37h = I
• 38h = N
• 39h = T
• 3Ah = 2 or 3
2-bit revision number 00
take 2’s complement
1.0 GHz) = 80542KC.
Itanium 2 processor
(1.30 GHz -1.66 GHz) =
80543KC:
•3Eh = “8”
•3Fh = “0”
• 40h = “5”
• 41h = “4”
• 42h = “2” or “3”
• 43h = “K”
• 44h = “C”
64-bit identification number May have padded
Hex value of thermal upper temp
limit
Number of degrees in error (±) Default = 0
From 32 bit CPUID 4387FBFFh
feature flags implemented in the
®
Itanium
processor family)
zeros
take 2’s complement
Default = 113 for 1.66
GHz through 1.5
GHz/4MB. Default =
105 for all others.
take 2’s complement.
0000 0000 6380 811Bh
84 Datasheet
Page 85

System Management Feature Specifications
Table 6-4. Processor Information ROM Format (Sheet 4 of 4)
Offset/
Section
73h 32 Processor Feature Flags All other are reserved:
77h 4 Number of Devices in TAP
78h 4 Reserved Reserved for future use 0h
79h 8 Checksum 1 byte checksum Add up by byte and
Other
7Ah 16 Reserved Reserved for future use 0000h
NOTES:
1. Refer to the Intel
2. The translation is using BCD.
# of
Bits
Chain
®
Itanium® Architecture Software Developer’s Manual for details on CPUID registers.
Function Notes Examples
6.3 Scratch EEPROM
Also available on the SMBus interface on the processor is an EEPROM which may be used for
other data at the system vendor’s discretion (Intel will not be using the scratch EEPROM). The data
in this EEPROM, once programmed, can be write-protected by asserting the active-high SMWP
signal. This signal has a weak pull-down (10 kΩ) to allow the EEPROM to be programmed in
systems with no implementation of this signal.
[4] =Upper temp reference byte
[3] =Thermal calibration offset
byte present
[2] =SCRATCH EEPROM
present
[1] =Core VID present
One 4-bit hex digit
1 indicates EEPROM
data for specified field
is valid.
take 2’s complement.
6.4 Processor Information ROM and Scratch EEPROM Supported SMBus Transactions
The processor information ROM and scratch EEPROM responds to three of the SMBus packet
types: current address read, random address read, and sequential read.
Table 6-5 shows the format of the current address read SMBus packet. The internal address counter
keeps track of the address accessed during the last read or write operation, incremented by one.
Address “roll over” during reads is from the last byte of the last eight byte page to the first byte of
the first page. “Roll over” during writes is from the last byte of the current eight byte page to the
first byte of the same page.
Table 6-6 shows the form at of the random read SMBus packet. The write with no data loads the
address desired to be read. Sequential reads may begin with a current address read or a random
address read. After the SMBus host controller receives the data word, it responds with an
acknowledge. This will continue until the SMBus host controller responds with a negative
acknowledge and a stop.
Table 6-7 shows the format of the byte write SMBus packet. The page write operates the same way
as the byte write except that the SMBus host controller does not send a stop after the first data byte
and acknowledge. The Scratch EEPROM internally increments its address. The SMBus host
Datasheet 85
Page 86

System Management Feature Specifications
controller continues to transmit data bytes until it terminates the sequence with a stop. All data
bytes will result in an acknowledge from the Scratch EEPROM. If more than eight bytes are
written, the internal address will “roll over” and the previous data will be overwritten.
In Table 6-5 through Table 6-7, ‘S’ represents the SMBus start bit, ‘P’ represents a stop bit, ‘R’
represents a read, ‘W’ represents a write bit, ‘A’ represents an acknowledge, and ‘///’ represents a
negative acknowledge. The shaded bits are transmitted by the processor information ROM or
Scratch EEPROM and the bits that are not shaded are transmitted by the SMBus host controller. In
the tables the data addresses indicate eight bits. The SMBus host controller should transmit eight
bits, but as there are only 128 addresses, the most significant bit is a don’t care.
Table 6-5. Current Address Read SMBus Packet
Device
S
Address
17 bits11 8 bits 1 1
R A Data /// P
Table 6-6. Random Address Read SMBus Packet
Device
S
Address
17 bits118 bits1 1 7 bits 1 1 8 bits 1 1
W A
Data
Address
AS
Table 6-7. Byte Write SMBus Packet
Device
S
Address
17 bits018 bits 18 bits11
W A
Data
Address
ADataAP
6.5 Thermal Sensing Device
The Itanium 2 processor’s thermal sensing device provides a means of acquiring thermal data from
the processor. The accuracy of the thermal reading is expected to be better than ±3 °C. The thermal
sensing device is composed of control logic, SMBus interface logic, a precision analog to digital
converter, and a precision current source. The thermal sensing device drives a small current
through a thermal diode located on the processor core and measures the voltage generated across
the thermal diode by the current. With this information, the thermal sensing device computes a byte
of temperature data. Software running on the processor or on a micro-controller can use the
temperature data from the thermal sensing device to thermally manage the system.
The thermal sensing device provides a register with a data byte (seven bits plus sign) which
contains a value corresponding to the sampled output of the thermal diode in the It aniu m 2
processor core. The value of the byte read from the thermal sensor gives an accurate reading of
processor core temperature at the time of the reading. This data can be used in conjunction with the
upper temperature reference byte (provided in the processor information ROM) for thermal
management purposes. The temperature data from the thermal sensor can be read out digitally
using an SMBus read command (see Section 6.6). The thermal sensor detects when SMBus power
is applied to the processor, and resets itself at power up.
Device
Address
R A Data /// P
The thermal sensing device also contains alarm registers to store thermal reference threshold data.
These values can be individually programmed on the thermal sensor. If the measured temperature
equals or exceeds the alarm threshold value, the appropriate bit is set in the thermal sensing device
status register, which is also brought out to the Itanium 2 processor system bus via the
86 Datasheet
Page 87

System Management Feature Specifications
THRMALERT# signal (see Section 6.1.1 for more details). At power up, the appropriate alarm
register values need to be programmed into the thermal sensing device via the SMBus. It is
recommended that the upper thermal reference threshold byte (provided in the processor
information ROM) be used for setting the upper threshold value in the alarm register.
When polling the thermal sensing device on the processor to read the processor temperatures, it is
recommended that the polling frequency be every 0.5 to 1 second.
6.6 Thermal Sensing Device Supported SMBus Transactions
The thermal sensing device responds to five of the SMBus packet types: write byte, read byte, send
byte, receive byte, and alert response address (ARA). The send byte packet is used for sending oneshot commands only. The receive byte packet accesses the register commanded by the last read
byte packet. If a receive byte packet was preceded by a write byte or send byte packet more
recently than a read byte packet, then the behavior is undefined. Table 6-8 through Table 6-12
diagram the five packet types. In these tables, ‘S’ represents the SMBus start bit, ‘P’ represents a
stop bit, ‘Ack’ represents an acknowledge, and ‘///’ represents a negative acknowledge. The shaded
bits are transmitted by the thermal sensor and the unshaded bits are transmitted by the SMBus host
controller. Table 6-13 shows the encoding of the command byte.
Table 6-8. Write Byte SMBus Packet
S Address Write Ack Command Ack Data Ack P
17 bits 1 18 bits18 bits11
Table 6-9. Read Byte SMBus Packet
S Address Write Ack Command Ack S Address Read Ack Data /// P
17 bits 1 18 bits1 1 7 bits 1 1 8 bits 1 1
Table 6-10. Send Byte SMBus Packet
S Address Write Ack Command Ack P
17 bits 1 18 bits1
Table 6-11. Receive Byte SMBus Packet
S Address Read Ack Data /// P
17 bits 1 1 8 bits 1 1
Table 6-12. ARA SMBus Packet
S ARA Read Ack Address /// P
1 0001 100 1 1 1001 1011 1 1
Datasheet 87
Page 88

System Management Feature Specifications
Table 6-13. Command Byte Bit Assignment
Register Command Reset State Function
RESERVED 00h N/A Reserved for future use.
RRT 01h N/A Read processor core thermal data.
RS 02h N/A Read status byte (flags, busy signal).
RC 03h 0000 0000 Read configuration byte.
RCR 04h 0000 0010 Read conversion rate byte.
RESERVED 05h 0111 1111 Reserved for future use.
RESERVED 06h 1100 1001 Reserved for future use.
RRHL 07h 0111 1111 Read processor core thermal diode T
RRLL 08h 1100 1001 Read processor core thermal diode T
WC 09h N/A Write configuration byte.
WCR 0Ah N/A Write conversion rate byte.
RESERVED 0Bh N/A Reserved for future use.
RESERVED 0Ch N/A Reserved for future use.
WRHL 0Dh N/A Write processor core thermal diode T
WRLL 0Eh N/A Write processor core thermal diode T
OSHT 0Fh N/A One shot command (use send byte packet).
RESERVED 10h – FFh N/A Reserved for future use.
HIGH
LOW
HIGH
LOW
limit.
limit.
limit.
limit.
All of the commands are for reading or writing registers in the thermal sensor except the one-shot
command (OSHT). The one-shot command forces the immediate start of a new voltage-totemperature conversion cycle. If a conversion is in progress when the one-shot command is
received, then the command is ignored. If the thermal sensing device is in standby mode when the
one-shot command is received, a conversion is performed and the sensor returns to standby mode.
If the thermal sensor is in auto-convert mode and is between conversions, then the conversion rate
timer resets, and the next automatic conversion takes place after a full delay elapses. Please refer to
Section 6.7.4 for further detail on standby and auto-convert modes.
The default command after reset is the reserved value (00h). After reset, receive byte packets will
return invalid data until another command is sent to the thermal sensing device.
6.7 Thermal Sensing Device Registers
The system management software can configure and control the thermal sensor by writing to and
interacting with different registers in the thermal sensor. These registers include a thermal
reference register, two thermal limit registers, a status register, a configuration register, a
conversion rate register, and other reserved registers. The following subsections describe the
registers in detail.
6.7.1 Thermal Reference Registers
The processor core and thermal sensing device internal thermal reference registers contain the
thermal reference value of the thermal sensing device and the processor core thermal diodes. This
value ranges from +127 to –128 decimal and is expressed as a two’s complement, eight-bit number.
These registers are saturating, that is, values above 127 are represented at 127 decimal, and values
below –128 are represented as –128 decimal.
88 Datasheet
Page 89

6.7.2 Thermal Limit Registers
The thermal sensing device has two thermal limit registers; they define high and low limits for the
processor core thermal diode. The encoding for these registers is the same as for the thermal
reference registers. If the diode thermal value equals or exceeds one of its limits, then its alarm bit
in the status register is triggered. This indication is also brought out to the Itanium 2 processor
system bus via the THRMALERT# signal.
6.7.3 Status Register
The status register shown in Table 6-14 indicates which (if any) of the thermal value thresholds
have been exceeded. It also indicates if a conversion is in progress or if an open circuit has been
detected in the processor core thermal diode connection. Once set, alarm bits stay set until they are
cleared by a status register read. A successful read to the status register will clear any alarm bits
that may have been set, unless the alarm condition persists. Note that the THRMALERT# interrupt
signal is latched and is not automatically cleared when the status flag bit is cleared. The latch is
cleared by sending the Alert Response Address (0001100) on the SMBus.
Table 6-14. Thermal Sensing Device Status Register
Bit Name Function
7 (MSB) BUSY A one indicates that the device’s analog to digital converter is busy converting.
6 RESERVED Reserved for future use.
5 RESERVED Reserved for future use.
4 RHIGH A one indicates that the processor core thermal diode high temperature alarm has
been activated.
3 RLOW A one indicates that the processor core thermal diode low temperature alarm has
been activated.
2 OPEN A one indicates an open fault in the connection to the processor core diode.
1 RESERVED Reserved for future use.
0 (LSB) RESERVED Reserved for future use.
System Management Feature Specifications
6.7.4 Configuration Register
The configuration register controls the operating mode (standby vs. auto-convert) of th e thermal
sensing device. Table 6-15 shows the format of the configuration register. If the RUN/STOP bit is
set (high) then the thermal sensing device immediately stops converting and enters standby mod e .
The thermal sensing device will still perform analog-to-digital conversions in standby mode when
it receives a one-shot command. If the RUN/STOP bit is clear (low) then the thermal sensor enters
auto-conversion mode. The thermal sensing device starts operating in free running mode, autoconverting at 0.25 Hz after power-up.
Table 6-15. Thermal Sensing Device Configuration Register
Bit Name
7 (MSB) RESERVED 0 Reserved for future use.
6 RUN/STOP 0 Standby mode control bit. If high, the device immediately stops
5–0 RESERVED 0 Reserved for future use.
Datasheet 89
Reset
State
Function
converting, and enters standby mode. If low, the device converts in either
one-shot or timer mode.
Page 90

System Management Feature Specifications
6.7.5 Conversion Rate Register
The contents of the conversion rate register determine the nominal rate at which analog-to-digital
conversions happen when the thermal sensing device is in auto-convert mode. Table 6-16 shows
the mapping between conversion rate register values and the conversion rate. As indicated in
Table 6-16, the conversi on rate register is set to its default state of 02h (0.25 Hz nominally) when
the thermal sensing device is powered-up. There is a ±25% error tolerance between the conversion
rate indicated in the conversion rate register and the actual conversion rate.
Table 6-16. Thermal Sensing Device Conversion Rate Register
Register Contents Conversion Rate (Hz)
00h 0.0625
01h 0.125
02h 0.25
03h 0.5
04h 1
05h 2
06h 4
07h 8
08h to FFh Reserved for future use
90 Datasheet
Page 91

A Signals Reference
This appendix provides an alphabetical listing of all Itanium 2 processor system bus signals. The
tables at the end of this appendix summarize the signals by direction: output, input, and I/O.
For a complete pinout listing including processor specific pins, please refer to Chapter 3, “Pinout
Specifications.”
A.1 Alphabetical Signals Reference
A.1.1 A[49:3]# (I/O)
The Address (A[49:3]#) signals, with byte enables, define a 2
space. When ADS# is active, these pins transmit the address of a transaction. These pins are also
used to transmit other transaction related information such as transaction identifiers and external
functions in the cycle following ADS# assertion. These signals must connect the appropriate pins
of all agents on the Itanium 2 processor system bus. The A[49:27]# signals are parity-protected by
the AP1# parity signal, and the A[26:3]# signals are parity-protected by the AP0# parity signal.
On the active-to-inactive transition of RESET#, the processors sample the A[49:3]# pins to
determine their power-on configuration.
A.1.2 A20M# (I)
A20M# is ignored in the Itanium 2 processor system environment.
A.1.3 ADS# (I/O)
The Address Strobe (ADS#) signal is asserted to indicate the validity of the transaction address on
the A[49:3]#, REQ[5:0]#, AP[1:0]# and RP#pins. All bus agents observe the ADS# activation to
begin parity checking, protocol checking, address decode, internal snoop, or deferred reply ID
match operations associated with the new transaction.
A.1.4 AP[1:0]# (I/O)
The Address Parity (AP[1:0]#) signals can be driven by the request init iator along with ADS# and
A[49:3]#. AP[1]# covers A[49:27]#, and AP[0]# covers A[26:3]#. A correct parity signal is high if
an even number of covered signals are low and low if an odd number of covered signals are low.
This allows parity to be high when all the covered signals are high.
50
Byte physical memory address
A.1.5 ASZ[1:0]# (I/O)
The ASZ[1:0]# signals are the memory address-space size signals. They are driven by the request
initiator during the first Request Phase clock on the REQa[4:3]# pins. The ASZ[1:0]# signals are
valid only when REQa[2:1]# signals equal 01B, 10B, or 11B, indicating a memory access
transaction. The ASZ[1:0]# decode is defined in Table A-1.
Datasheet 91
Page 92

Signals Reference
Table A-1. Address Space Size
ASZ[1:0]#
00 Reserved Reserved
0 1 36-bit 0 to (64 GByte - 1)
1 0 50-bit 64 GByte to
11 Reserved Reserved
Memory Address
Space
Any memory access transaction addressing a memory region that is less than 64 GB (that is,
Aa[49:36]# are all zeroes) must set ASZ[1:0]# to 01. Any memory access transaction addressing a
memory region that is equal to or greater than 64 GB (that is, Aa[49:36]# are not all zeroes) must
set ASZ[1:0]# to 10. All observing bus agents that support the 64 GByte (36-bit) address space
must respond to the transaction when ASZ[1:0]# equals 01. All observing bus agents that support
larger than the 64 GByte (36-bit) address space must respond to the transaction when ASZ[1:0]#
equals 01 or 10.
A.1.6 ATTR[3:0]# (I/O)
The ATTR[3:0]# signals are the attribute signals. They are driven by the request initiator during the
second clock of the Request Phase on the Ab[35:32]# pins. The ATTR[3:0]# signals are valid for
all transactions. The ATTR[3]# signal is reserved. The ATTR[2:0]# are driven based on the
memory type. Please refer to Table A-2.
Table A-2. Effective Memory Type Signal Encoding
Memory Access
Range
(1 Pbyte –1)
ATTR[2:0]# Description
000 Uncacheable
100 Write Coalescing
101 Write-Through
110 Write-Protect
111 Writeback
A.1.7 BCLKp/BCLKn (I)
The BCLKp and BCLKn differential clock signals determine the bus frequency. All agents drive
their outputs and latch their inputs on the differential crossing of BCLKp and BCLKn on the
signals that are using the common clock latched protocol.
BCLKp and BCLKn indirectly determine the internal clock frequency of the Itanium 2 processor.
Each Itanium 2 processor derives its internal clock by multiplying the BCLKp and BCLKn
frequency by a ratio that is defined and allowed by the power-on configuration.
A.1.8 BE[7:0]# (I/O)
The BE[7:0]# signals are the byte-enable signals for partial transactions. They are driven by the
request initiator during the second Request Phase clock on the Ab[15:8]# pins.
92 Datasheet
Page 93

For memory or I/O transactions, the byte-enable signals indicate that valid data is requested or
being transferred on the corresponding byte on the 128-bit data bus. BE[0]# indicates that the least
significant byte is valid, and BE[7]# indicates that the most significant byte is valid. Since
BE[7:0]# specifies the validity of only 8 bytes on the 16 byte wide bus, A[3]# is used to determine
which half of the data bus is validated by BE[7:0]#.
For special transactions ((REQa[5:0]# = 001000B) and (REQb[1:0]# = 01B)), the BE[7:0]# signals
carry special cycle encodings as defined in Table A-3. All other encodings are reserved.
Table A-3. Special Transaction Encoding on Byte Enables
Special Transaction Byte Enables[7:0]#
NOP 0000 0000
Shutdown 0000 0001
Flush (INVD) 0000 0010
Halt 0000 0011
Sync (WBINVD) 0000 0100
Reserved 0000 0101
StopGrant Acknowledge 0000 0110
Reserved 0000 0111
xTPR Update 0000 1000
Signals Reference
For Deferred Reply transactions, BE[7:0]# signals are reserved. The Defer Phase transfer length is
always the same length as that specified in the Request Phase except the Bus Invalidate Line (BIL)
transaction.
A BIL transaction may return one cache line (128 bytes).
A.1.9 BERR# (I/O)
The Bus Error (BERR#) signal can be asserted to indicate a recoverable error with global MCA.
BERR# assertion conditions are configurable at the system level. Configuration options enable
BERR# to be driven as follows:
• Asserted by the requesting agent of a bus transaction after it observes an internal error.
• Asserted by any bus agent when it observes an error in a bus transaction.
When the bus agent samples an asserted BERR# signal and BERR# sampling is enabled, the
processor enters a Machine Check Handler.
BERR# is a wired-OR signal to allow multiple bus agents to drive it at the same time.
Datasheet 93
Page 94

Signals Reference
A.1.10 BINIT# (I/O)
If enabled by configuration, the Bus Initialization (BINIT#) signal is asserted to signal any bus
condition that prevents reliable future operation.
If BINIT# observation is enabled during power-on configuration, and BINIT# is sampled asserted,
all bus state machines are reset. All agents reset their rotating IDs for bus arbitration to the same
state as that after reset, and internal count information is lost. The L2 and L3 caches are not
affected.
If BINIT# observation is disabled during power-on configuration, BINIT# is ignored by all bus
agents with the exception of the priority agent. The priority agent must handle the error in a manner
that is appropriate to the system architecture.
BINIT# is a wired-OR signal.
A.1.11 BNR# (I/O)
The Block Next Request (BNR#) signal is used to assert a bus stall by any bus agent that is unable
to accept new bus transactions to avoid an internal transaction queue overflow. During a bus stall,
the current bus owner cannot issue any new transactions.
Since multiple agents might need to request a bus stall at the same time, BNR# is a wired-OR
signal. In order to avoid wired-OR gli tches associated with simultaneous edge transitions driven by
multiple drivers, BNR# is asserted and sampled on specific clock edges.
A.1.12 BPM[5:0]# (I/O)
The BPM[5:0]# signals are system support signals used for inserting breakpoints and for
performance monitoring. They can be configured as outputs from the processor that indicate
programmable counters used for monitoring performance, or inputs from the processor to indicate
the status of breakpoints.
A.1.13 BPRI# (I)
The Bus Priority-agent Request (BPRI#) signal is used by the priority agent to arbitrate for
ownership of the system bus. Observing BPRI# asserted causes all other agents to stop issuing new
requests, unless such requests are part of an ongoing locked operation.The priority agent keeps
BPRI# asserted until all of its requests are completed, then releases the bus by deasserting BPRI#.
A.1.14 BR[0]# (I/O) and BR[3:1]# (I)
BR[3:0]# are the physical bus request pins that drive the BREQ[3:0]# signals in the system. The
BREQ[3:0]# signals are interconnected in a rotating manner to individual processor pins.
Table A-4 and Table A-4 give the rotating interconnection between the processor and bus signals
for both the 4P and 2P system bus topologies.
94 Datasheet
Page 95

Signals Reference
Table A-4. BR0# (I/O), BR1#, BR2#, BR3# Signals for 4P Rotating Interconnect
Bus Signal Agent 0 Pins Agent 1 Pins Agent 2 Pins Agent 3 Pins
BREQ[0]# BR[0]# BR[3]# BR[2]# BR[1]#
BREQ[1]# BR[1]# BR[0]# BR[3]# BR[2]#
BREQ[2]# BR[2]# BR[1]# BR[0]# BR[3]#
BREQ[3]# BR[3]# BR[2]# BR[1]# BR[0]#
Table A-5. BR0# (I/O), BR1#, BR2#, BR3# Signals for 2P Rotating Interconnect
Bus Signal Agent 0 Pins Agent 3 Pins
BREQ[0]# BR[0]# BR[1]#
BREQ[1]# BR[1]# BR[0]#
BREQ[2]# Not Used Not Used
BREQ[3]# Not Used Not Used
During power-on configuration, the priority agent must assert the BR[0]# bus signal. All
symmetric agents sample their BR[3:0]# pins on asserted-to-deasserted transition of RESET#. The
pin on which the agent samples an asserted level determines its agent ID. All agents then configure
their pins to match the appropriate bus signal protocol as shown in Table A-6.
Table A-6. BR[3:0]# Signals and Agent IDs
Pin Sampled
Asserted on
RESET#
BR[0]# 0 0
BR[3]# 1 2
BR[2]# 2 4
BR[1]# 3 6
Arbitration ID Agent ID Reported
A.1.15 BREQ[3:0]# (I/O)
The BREQ[3:0]# signals are the symmetric agent arbitration bus signals (called bus request). A
symmetric agent n arbitrates for the bus by asserting its BREQn# signal. Agent n drives BREQn#
as an output and receives the remaining BREQ[3:0]# signals as inputs.
The symmetric agents support distributed arbitration based on a round-robin mechanism. The
rotating ID is an internal state used by all symmetric agents to track the agent with the lowest
priority at the next arbitration event. At power-on, the rotating ID is initialized to three, allowing
agent 0 to be the highest priority symmetric agent. After a new arbitration event, the rotating ID of
all symmetric agents is updated to the agent ID of the symmetric owner. This update gives the new
symmetric owner lowest priority in the next arbitration event.
A new arbitration event occurs either when a symmetric agent asserts its BREQn# on an Idle bus
(all BREQ[3:0]# previously deasserted), or the current symmetric owner deasserts BREQn# to
release the bus ownership to a new bus owner n. On a new arbitration event, all symmetric agents
simultaneously determine the new symmetric owner using BREQ[3 :0]# and the rotating ID. The
symmetric owner can park on the bus (hold the bus) provided that no other symmetric agent is
requesting its use. The symmetric owner parks by keeping its BREQn# signal asserted. On
Datasheet 95
Page 96

Signals Reference
sampling BREQn# asserted by another symmetric agent, the symmetric owner deasserts BREQn#
as soon as possible to release the bus. A symmetric owner stops issuing new requests that are not
part of an existing locked operation on observing BPRI# asserted.
A symmetric agent can deassert BREQn# before it becomes a symmetric owner. A symmetric
agent can reassert BREQn# after keeping it deasserted for one clock.
A.1.16 CCL# (I/O)
CCL# is the Cache Cleanse signal. It is driven on the second clock of the Request Phase on the
EXF[2]#/Ab[5]# pin. CCL# is asserted for Memory Write transaction to indicate that a modified
line in a processor may be written to memory without being invalidated in its caches.
A.1.17 CPUPRES# (O)
CPUPRES# can be used to detect the presence of a Itanium 2 processor in a socket. A ground
indicates that a Itanium 2 processor is installed, while an open indicates that a Itanium 2 processor
is not installed.
A.1.18 D[127:0]# (I/O)
The Data (D[127:0]#) signals provide a 128-bit data path between various system bus agents.
Partial transfers require one data transfer clock with valid data on the byte(s) indicated by asserted
byte enables BE[7:0]# and A[3]#. Data signals that are not valid for a particular transfer must still
have correct ECC (if data bus error checking is enabled). The data driver asserts DRDY# to
indicate a valid data transfer.
A.1.19 D/C# (I/O)
The Data/Code (D/C#) signal is used to indicate data (1) or code (0) on REQa[1]#, only during
Memory Read transactions.
A.1.20 DBSY# (I/O)
The Data Bus Busy (DBSY#) signal is asserted by the agent that is responsible for driving data on
the system bus to indicate that the data bus is in use. The data bus is released after DBSY# is
deasserted.
DBSY# is replicated three times to enable partitioning of the data paths in the system agents. This
copy of the Data Bus Busy signal (DBSY#) is an input as well as an output.
A.1.21 DBSY_C1# (O)
DBSY# is a copy of the Data Bus Busy signal. This copy of the Data Bus Busy signal
(DBSY_C1#) is an output only.
96 Datasheet
Page 97

A.1.22 DBSY_C2# (O)
DBSY# is a copy of the Data Bus Busy signal. This copy of the Data Bus Busy signal
(DBSY_C2#) is an output only.
A.1.23 DEFER# (I)
The DEFER# signal is asserted by an agent to indicate that the transaction cannot be guaranteed inorder completion. Assertion of DEFER# is normally the responsibility of the priority agent.
A.1.24 DEN# (I/O)
The Defer Enable (DEN#) signal is driven on the bus on the second clock of the Request Phase on
the Ab[4]# pin. DEN# is asserted to indicate that the transaction can be deferred by the responding
agent.
A.1.25 DEP[15:0]# (I/O)
The Data Bus ECC Protection (DEP[15:0]#) signals provide optional ECC protection for Data Bus
(D[127:0]#). They are driven by the agent responsible for driving D[127:0]#. During power-on
configuration, bus agents can be enabled for either ECC checking or no checking.
Signals Reference
The ECC error correcting code can detect and correct single-bit errors and detect double-bit or
nibble errors.
A.1.26 DHIT# (I)
The Deferred Hit (DHIT#) signal is driven during the Deferred Phase by the deferring agent. For
read transactions on the bus DHIT# returns the final cache status that would have been indicated on
HIT# for a transaction which was not deferred. DID[9:0]# (I/O)
DID[9:0]# are Deferred Identifier signals. The requesting agent transfers these signals by using
A[25:16]#. They are transferred on Ab[25:16]# during the second clock of the Request Phase on all
transactions, but Ab[20:16]# is only defined for deferrable transactions (DEN# asserted).
DID[9:0]# is also transferred on Aa[25:16]# during the first clock of the Request Phase for
Deferred Reply transactions.
The Deferred Identifier defines the token supplied by the requesting agent. DID[9]# and DID[8:5]#
carry the agent identifiers of the requesting agents (always valid) and DID[4:0]# carry a transaction
identifier associated with the request (valid only with DEN# asserted). This configuration limits the
bus specification to 32 logical bus agents with each one of the bus agents capable of making up to
32 requests. Table A-7 shows the DID encodings.
Table A-7. DID[9:0]# Encoding
DID[9]# DID[8:5]# DID[4:0]#
Agent Type Agent ID[3:0] Transaction ID[4:0]
DID[9]# indicates the agent type. Symmetric agents use 0. Priority agents use 1. DID[8:5]#
indicates the agent ID. Symmetric agents use their arbitration ID. DID[4:0]# indicates the
transaction ID for an agent. The transaction ID must be unique for all deferrable transactions issued
by an agent which have not reported their snoop results.
Datasheet 97
Page 98

Signals Reference
The Deferred Reply agent transmits the DID[9:0]# (Ab[25:16]#) signals received during the
original transaction on the Aa[25:16]# signals during the Deferred Reply transaction. This process
enables the original requesting agent to make an identifier match with the original request that is
awaiting completion.
A.1.27 DPS# (I/O)
The Deferred Phase Enable (DPS#) signal is driven to the bus on the second clock of the Request
Phase on the Ab[3]# pin. DPS# is asserted if a requesting agent supports transaction completion
using the Deferred Phase. A requesting agent that supports the Deferred Phase will always assert
DPS#. A requesting agent that does not support the Deferred Phase will always deassert DPS#.
A.1.28 DRDY# (I/O)
The Data Ready (DRDY#) signal is asserted by the data driver on each data transfer, indicating
valid data on the data bus. In a multi-cycle data transfer, DRDY# can be deasserted to insert
idle clocks.
DRDY# is replicated three times to enable partitioning of data paths in the system agents. This
copy of the Data Ready signal (DRDY#) is an input as well as an output.
A.1.29 DRDY_C1# (O)
DRDY# is a copy of the Data Ready signal. This copy of the Data Phase data-ready signal
(DRDY_C1#) is an output only.
A.1.30 DRDY_C2# (O)
DRDY# is a copy of the Data Ready signal. This copy of the Data Phase data-ready signal
(DRDY_C2#) is an output only.
A.1.31 DSZ[1:0]# (I/O)
The Data Size (DSZ[1:0]#) signals are transferred on REQb[4:3]# signals in the second clock of
the Request Phase by the requesting agent. The DSZ[1:0]# signals define the data transfer
capability of the requesting agent. For the Itanium 2 processor, DSZ# = 01, always.
A.1.32 EXF[4:0]# (I/O)
The Extended Function (EXF[4:0]#) signals are transferred on the A[7:3]# pins by the requesting
agent during the second clock of the Request Phase. The signals specify any special functional
requirement associated with the transaction based on the requestor mode or capability. The signals
are defined in Table A-8.
98 Datasheet
Page 99

Table A-8. Extended Function Signals
Signals Reference
Extended Function
Signal
EXF[4]# Reserved Reserved
EXF[3]# SPLCK#/FCL# Split Lock / Flush Cache Line
EXF[2]# OWN#/CCL# Memory Update Not Needed / Cache Cleanse
EXF[1]# DEN# Defer Enable
EXF[0]# DPS# Deferred Phase Supported
A.1.33 FCL# (I/O)
The Flush Cache Line (FCL#) signal is driven to the bus on the second clock of the Request Phase
on the A[6]# pin. FCL# is asserted to indicate that the memory transaction is initiated by the global
Flush Cache (FC) instruction.
A.1.34 FERR# (O)
The FERR# signal may be asserted to indicate a processor detected error when IERR mode is
enabled. If IERR mode is disabled, the FERR# signal will not be asserted in the Itanium 2
processor system environment.
A.1.35 GSEQ# (I)
Signal Name Alias Function
Assertion of the Guaranteed Sequentiality (GSEQ#) signal indicates that the platform guarantees
completion of the transaction without a retry while maintaining sequentiality.
A.1.36 HIT# (I/O) and HITM# (I/O)
The Snoop Hit (HIT#) and Hit Modified (HITM#) signals convey transaction snoop operation
results. Any bus agent can assert both HIT# and HITM# together to indicate that it requires a snoop
stall. The stall can be continued by reasserting HIT# and HITM# together.
A.1.37 ID[9:0]# (I)
The Transaction ID (ID[9:0]#) signals are driven by the deferring agent. The signals in the two
clocks are referenced IDa[9:0]# and IDb[9:0]#. During both clocks, ID[9:0]# signals are protected
by the IP0# parity signal for the first clock, and by the IP[1]# parity signal on the second clock.
IDa[9:0]# returns the ID of the deferred transaction which was sent on Ab[25:16]# (DID[9:0]#).
A.1.38 IDS# (I)
The ID Strobe (IDS#) signal is asserted to indicate the validity of ID[9:0]# in that clock and the
validity of DHIT# and IP[1:0]# in the next clock.
Datasheet 99
Page 100

Signals Reference
A.1.39 IGNNE# (I)
IGNNE# is ignored in the Itanium 2 processor system environment.
A.1.40 INIT# (I)
The Initialization (INIT#) signal triggers an unmasked interrupt to the processor. INIT# is usually
used to break into hanging or idle processor states. Semantics required for platform compatibility
are supplied in the PAL firmware interrupt service routine.
A.1.41 INT (I)
INT is the 8259-compatible Interrupt Request signal which indicates that an external interrupt has
been generated. The interrupt is maskable. The processor vectors to the interrupt handler after the
current instruction execution has been completed. An interrupt acknowledge transaction is
generated by the processor to obtain the interrupt vector from the interrupt controller.
The LINT[0] pin can be software configured to be used either as the INT signal or another local
interrupt.
A.1.42 IP[1:0]# (I)
The ID Parity (IP[1:0]#) signals are driven on the second clock of the Deferred Phase by the
deferring agent. IP0# protects the IDa[9:0]# and IDS# signals for the first clock, and IP[1]#
protects the IDb[9:2, 0]# and IDS# signals on the second clock.
A.1.43 LEN[2:0]# (I/O)
The Data Length (LEN[2:0]#) signals are transmitted using REQb[2:0]# signals by the requesting
agent in the second clock of Request Phase. LEN[2:0]# defines the length of the data transfer
requested by the requesting agent as shown in Table A-9. The LEN[2:0]#, HITM#, and RS[2:0]#
signals together define the length of the actual data transfer.
Table A-9. Length of Data Transfers
LEN[2:0]# Length
000 0 – 8 bytes
001 16 bytes
010 32 bytes
011 64 bytes
100 128 bytes
101 Reserved
110 Reserved
111 Reserved
100 Datasheet
 Loading...
Loading...