

Page 1
rr
iSBC 86/12
SINGLE BOARD COMPUTER
HARDWARE
REFERENCE MANUAL
Manual Order Number: 9800645A
I
Intel Corporation, 3065 Bowers
Copyright © 197E:
Av.~nue,
Intel
Corporation
Santa Clara, California 95051
.
L
Page 2

The infonnation in this manual
kind with regard to this manual, including, but not limited to, the implied warranties
is
subject to change without notice. Intel Corporation makes
no
warranty
of
merchantability and
of
any
fitness for a particular purpose. Intel Corporation assumes no responsibility for any errors that may appear in this
manual. Intel Corporation makes no commitment to update nor to keep current the infonnation contained
in this manual.
No
part
of
of
this manual may be copied or reproduced
Intel Corporation. The following are trademarks
in
any fonn
or
of
by any means without the prior written consent
Intel Corporation and may be used only
to
describe
Intel products:
ICE·
30
ICE·gO
INSITE
INTEL
INTEU.EC
iSBC
LIBRARY
MANAGER
MCS
MEGACHASSIS
MICROMAP
MULTIBUS
PROMPT
UPI
RMX
ii
Printed in
U.S,A./B66/0778(TL
7.SK
Page 3

PREFACE
This manual provides general information, installation, programming information,
principles of operation, and service information for the Intel iSBC 86/12 Single Board
Computer. Additional information
is
available in the following documents:
• 8086 Assembly Language Reference
• Intel MCS-85 User's Manual, Order No. 98-366
• Intel 8255A Programmable Peripheral 1 nterface , Application Note AP-15
• Intel 8251 Universal Synchronous/Asynchronous Receiver/Transmitter, Application
AP-16
Note
• Intel MULTIBUS Interfacing, Application Note AP-28
• Intel 8259 Programmable Interrupt
Ma~ual,
Cm~troller,
Order No. 9800640
Application Note AP-31
iii
Page 4
CHAPTER 1
GENERAL INFORMATION
Introduction
Description
System Software Development
Equipment
Equipment Required
Specifications
....................................
.....................................
.....................
Supplied . . . . . . . . . . . . . . . . . . . . . . . . . . . .
..............................
...................................
CHAPTER 2
PREPARATION
Introduction
Unpacking and Inspection
Installation Considerations . . . . . . . . . . . . . . . . . . . . . . .
User-Furnished Components
Power Requirement
Cooling Requirement
Physical Dimensions
Component Installation. . . . . . . . . . . . . . . . . . . . . . . . . .
ROM/EPROM Chips
Line Drivers and
Jumper/Switch Configuration
RAM Addresses (Multibus Access)
Priority Interrupts
Serial I/O Port Configuration. . . . . . . . . . . . . . . . . . .
Parallel I/O Port Configuration
Multibus Configuration
Signal Characteristics
Serial Priority Resolution
Parallel Priority Resolution
Power Fail/Memory Protect Configuration
Parallel I/O Cabling
Serial I/O Cabling
Board Installation
.....................................
FOR USE
.........................
.....................
............................
...........................
............................
...........................
I/O Terminators
...
. . . . . . . . . . . . . . . . . . . . . . . . .
...........................
..........................
.......................
.............................
...............................
...............................
.................
.......................
................
...................
.....................
...........
CHAPTER 3
PROGRAMMING INFORMATION
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Failsafe Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Addressing
CPU Access
Multibus Access
I/O Addressing
System Initialization
8251A
USART Programming
Mode Instruction Fonnat
Sync CharaCters
Command Instruction Fonnat
........................................
Reset
Addressing
Initialization
Operation
.....................................
Data
Input/Output . . . . . . . . . . . . . . . . . . . . . . . . . .
Status Read
..............................
..................................
................................
..................................
..............................
......................
........................
...............................
....................
....................................
..................................
.................................
PAGE
,
1-1
I-I
1-3
..
1-3
1-3
1-3
2-1
2-1
..
2-1
2-1
2-1
2-1
2-1
..
2-1
2-1
2-4
2-4
2-4
..
2-6
..
2-9
2-9
2-9
2-13
2-13
2-13
2-13
2-23
2-23
2-23
..
3-1
..
3-1
3-1
3-1
3-2
3-3
3-3
3-4
3-4
3-5
3-5 .
3-5
3-5
3-6
3-7
..
3-7
3-7
CONTENTS]
8253 PIT Programming
Mode Control Word and Count
Addressing
Initialization
Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Counter Read
Clock Frequency/Divide Ratio Selection
Rate Generator/Interval
Interrupt Timer
8255;\
Control Word Fonnat
Addressing
Iniitialization
Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read
Write
8259A
Interrupt
Nested Mode
Fully Nested Mode
Automatic Rotating Mode
Specific Rotating Mode
Special Mask Mode
Poll Mode
Status Read
Initialization Command Words
Operation Command Words. . . . . . . . . . . . . . . . . . .
Addressing
Initialization
Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hardware Interrupts
Non-Maskable Interrupt (NMI)
Maskable Interrupt (lNTR)
Master
Slave PIC Byte Identifier
..................................
.................................
ppl
Programming . . . . . . . . . . . . . . . . . . . . . . .
..................................
.................................
Operation
Operation
PIC-Programming
Priority Modes. . . . . . . . . . . . . . . . . . . . . .
.................................
..................................
..................................
.................................
PIC Byte Identifier
CHAPTER 4
PRINCIPLES
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Functional Description
Clock Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Central
Processor Unit . . . . . . . . . . . . . . . . . . . . . . . .
Interval Timer
Serial I/O
Parallel I/O
Interrupt Controller
ROM/EPROM Configuration
RAM Configuration
Bus Structure
Multibus Interface
.....................................
.................
...........................
...................
..............................
Timer.
.............................
..........................
.............................
............................
.........................
...............................
..........................
.........................
.............................
. . . . . . . . . . . . . .
....................
......................
..................
..................
.....................
....................
....................•
OF OPERATION
............................
.................................
. . . . . . . . . . . . . . . .
.............•...............
.....................
............................
.................................
.............................
.........
PAGE
3-8
3-8
3 -12
3 -12
..
3-1"3
3-13
3-13
..
3 -14
3-14
..
3 -14
3-15
3-15
3-16
..
3 -16
3-16
3-16
3-17
..
3 -17
3-17
3-17
3 -17
3-17
3-18
3-18
3-18
3 -18
..
3 -19
3 -19
3 -19
..
3 -19
3-25
3-25
3-25
3-25
3-25
..
4-1
4-1
..
..
..
, 4-3
4-1
4-1
4-1
4-1
4-1
4-2
4-2
4-2
4-2
iv
I,
Page 5
CONTENTS (Continued)
Circuit Analysis
Initialization
Clock Circuits
Central Processor Unit
Basic Timing
Bus Timing
Address Bus
Data Bus
Bus Time Out
Internal Control Signals
Dual Port Control Logic
Multibus Access Timing
CPU Access Timing
Multibus Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/O Operation
On-Board I/O Operation
System I/O
ROM/EPROM Operation . . . . . . . . . . . . . . . . . . . . . . .
.................................
.................................
.................................
..........................
................................
.................................
..................................
.....................................
...............................
.........................
...........................
........................
............................
..................................
.......................
Operation.
. . . . . . . . . . . . . . . . . . . . . . .
PAGE
"
..
4-11
4-11
4-11
..
4-12
..
4-12
4-3
4-4
4-4
4-4
4-4
4-4
4-6
4-6
4-6
4-8
4-8
4-8
4-8
RA\1 Operation
RA\1 Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12
RA\1 Chips
On-Board Read/Write Operation
Bus Read/Write Operation
Byte Operation
Interrupt
Operation.
NBVlnterrupt
B V Interrupt
................................
..................................
.................
......................
.............................
. . . . . . . . . . . . . . . . . . . . . . . .
................................
...............................
" 4-13
.. " 4-14
"
CHAPTER 5
SERVICE INFORMATION
Introduction
Replaceable
Service Diagrams
Service and Repair Assistance. . . . . . . . . . . . . . . . . .
.....................................
Parts
.............................
............................
APPENDIX A
TELETYPEWRITER MODIFICATIONS
PAGE
4-12
4-13
4-13
4-13
4-14
4-14
5-1
5-1
5-1
5-1
v
Page 6
I
TABLES
TABLE
1·1
2·1
2~2
2·3
2·4
2·5
2·6
2·7
2·8
2·9
2·10
2·11
2·12
2·13
2·14
2·15
2·16
2·17
3·}
3·2
3·3
3·4
3·5
TITLE
Specifications
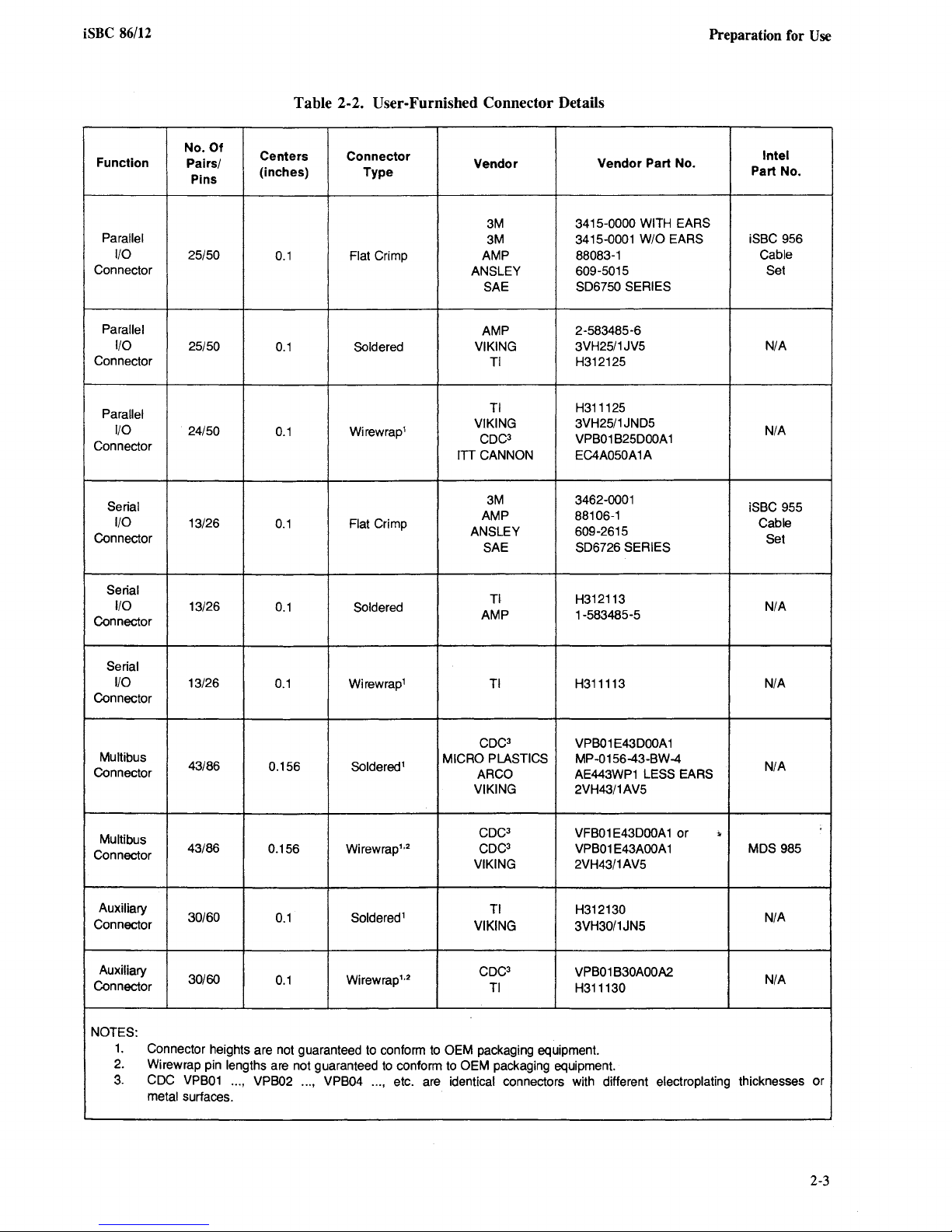
User-Furnished- and Installed Components
Furnished Connector Details
User·
Line Driver and
Jumper and Switch Selectable Options
Priority Interrupt Jumper Matrix
Serial
I/O Connector J2 Pin Assignments
Configuration Jumpers
Parallel
Multibus Connector
Multibus Signal Functions
iSBC 86/12 DC Characteristics
iSBC 86/12 AC Characteristics
(Master Mode)
iSBC 86/12 AC Characteristics
(Slave Mode)
Auxiliary Connector P2 Pin Assignments
Auxiliary Signal (Connector P2)
DC Characteristics
Parallel
Pin Assignments
Parallel
DC Characteristics
Connector J2 Vs RS232C Pin
Correspondence
On -Board Memory Addresses
(CPU Access)
I/O Address Assignments
Typical
Instruction Subroutine
Typical USART Data, Character Read
Subroutine
Typical
Subroutine
...........................
...........
I/O Terminator Locations . .
............
....... : ..........
I/O Port Configuration Jumpers
PJ.
Pin Assignments
................
............
.......................
........ : ...............
.............
I/O Connector
I/O Signal (Connector 11)
USART Mode
............................
USART Data Character Write
............................
11
......................
....................
.......................
.........................
..................
or
Command
..................
.......
'
.......
Vs
.....
....
....
PAGE
....
..
1-4
2-2
2-3
2-4
2-5
2-8
2-9
2-10
2-14
2-15
2-16
2-18
2-18
2-22
2-22
2-23
2-24
2-24
3-2
3-3
3 -7
3-8
3-8
TABLE
3-6
3-7
3-8
3-9
3-10
3-11
3-12
3-13
3-14
3-15
3-16
3-17
3-18
3-19
3-20
3-21
3-22
3-23
3·24
3-25
5-1
5-2
TITLE
Typical
PIT Counter Operation
Typical PIT Control Word Subroutine
Typical PIT Count Value Load
Typical PIT Counter Read Subroutine
PIT Count Value
PIT Rate Generator Frequencies and
PIT Time Intervals
Typical PPI Initialization Subroutine. . . . . .
Typical PPI Port Read Subroutine
Typical PPI Port Write Subroutine
Typical PIC Initialization Subroutine
Typical Master PIC Initialization Subroutine
Typical Slave PIC Initialization Subroutine
PIC Operation Procedures
Typical PIC Interrupt Request
Typical PIC In-Service Register
Typical PIC Set Mask Register Subroutine
Typical PIC Mask Register Read
Typical PIC End-of-Interrupt Command
Replaceable Parts
List
US
ART Status Read Subroutine
Vs
Gate Inputs
Subroutine
Each Baud Rate
Timer Intervals . . . . . . . . . . . . . .
(NBV Mode)
(BV Mode)
(BV Mode)
Register Read Subroutine
Read Subroutine
Subroutine
Subroutine
of
...........................
Vs
Rate Multiplier for
......................
Vs
Timer Counts
.........................
..........................
..........................
...........................
...........................
........................
Manufacturers' Codes
................
......................
...............
..............
......
......
......
..
. . . . .
.......
..........
.........
.....
PAGE
..
..
...
3-9
3·12
3-12
3·12
3-13
3-14
3 -15
3-15
3-16
3-16
3-16
3-21
3-21
3-22
3-22
3-24
3-24
3-24
3-24
3-25
5-1
5·3
vi
Ij'
Page 7
ILLUSTRATIONS
FIGURE
I-I
2-1
2-2
2-3
2-4
2-5
2-6
3-1
3-2
3-3
3-4
3-5
3-6
3-7
3-8
3-9
3-10
TITLE
iSBC 86/12 Single Board Computer
Dual Port RAM Address Configuration
(Multibus Access)
Simplified Master/Slave
Interconnect Example
Bus Exchange Timing (Master Mode)
Bus Exchange Timing (Slave Mode)
Serial
Priority Resolution Scheme
Parallel Priority Resolution Scheme
Dual Port RAM Addressing
(Multibus Access)
USART Synchronous
Word Format
USART Synchronous
...............................
Format
US
ART Asynchronous Mode Instruction
Word Format
USART
USART
Word Format
Typical USART Initialization and
USART Status
PIT Mode Control Word Format
PIT Programming Sequence Examples
Asynchronous Mode Transmission
Format
...............................
Command Instruction
I/O Data Sequence
......................
PIC
...................
......................
Mode Instruction
..........................
Mode Transmission
..........................
............................
.....................
Read Format
.........
........
..........
........
...............
...........
......
......
PAGE
I-I
2-7
2-8
2-19
2-20
2-21
2-21
3-2
3-4
3-4
3-5
3-5
3-6
3-6
3-9
3-10
3-11
FIGURE
3-11
3-12
3-13
3-14
3-15
4-1
4-2
4-3
4-4
4-5
4-6
4-7
4-8
5-1
5-2
5-3
5-4
TITLE
PIT Counter Register Latch Control
Word Format
PPI Control Word Format
PPI Port C Bit Set/Reset Control
Word Format.
PIC Initialization Command
Word Formats
PIC Operation Control Word Formats
iSBC 86/12 Input/Output and Interrupt
Simplified
86/12 ROM/EPROM and Dual Port RAM
iSBC
Simplified Logic Diagram "
Internal Bus Structure
CPU
Read Timing
CPU
Write Timing
CPU Interrupt Acknowledge
Cycle Timing
Dual Port Control Multibus Access
Timing With
Dual Port Control CPU Access Timing
With Multibus Lockout
iSBC
86/12
86/12 Schematic Diagram
iSBC
iSBC 604 Schematic
iSBC
614 Schematic Diagram
.....................
...................
...................
Logic
Diagram.
...................
...........
.......................
.........................
CPU Lockout
PaJ1s
Location Diagram
Diagram
...............
. . . . . . . . . 4-15
............
,
...........
..
. . . . . . . . . .
................
.........
............
.............
.............
...
PAGE
.
3-13
.
3-15
.
3-17
3-18
.
.
3-20
4-17
" 4-3
4-5
4-6
4-7
..
4-9
4-10
5-6
5-7
5-29
5-31
vii/viii
Page 8

Page 9
CHAPTER 1
1-1. INTRODUCTION
The iSBC 86/12 Single Board Computer, which
member
products,
printed-circuit assembly. The
16-bit central processing unit (CPU), 32K bytes
dynamic RAM, a serial communications interface, three
programmable parallel
priority interrupt control, Multibus control logic, and bus
expansion drivers for interface with other
compatible expansion boards. Also included
control logic to allow the
RAM device to other Multibus masters
Provision is made for user installation
of
of
Intel's complete line
is
a complete computer system on a single
read only memory.
of
iSBC 80/86 computer
iSBC 86/12 includes a
I/O ports, programmable timers,
is
iSBC 86/12 to act
in
the system.
of
up to 16K bytes
is
Multibus-
dual port
as
a slave
of
1-2. DESCRIPTION
The iSBC 86/12 Single Board Computer (figure 1-1)
controlled by an Intel 8086
The
8086 CPU includes four 16-bit general purpose regis-
ters that may also be addressed as eight 8-bit registers. In
16-
B it Microprocessor (CPU) .
is
GENERAL
addition, the CPU contains two 16-bit pointer registers
and two 16-bit index registers. Four 16-bit segment
ters allow extended addressing to a full megabyte
a
memory. The CPU instruction set supports a wide range
of
addressing modes and data transfer operations, signed
and unsigned 8-bit and 16-bit arithmetic including
hardware mUltiply and divide, and logical and string
ations. The CPU architecture features dynamic code relocation, reentrant code, and instruction lookahead.
iSBC 86/12 has an internal bus for all on-board
The
memory and
(Multibus) for all external memory and
Hence, local (on-board) operations do not involve the
Multibus,
processing when several bus masters (e.
and other single board computers) are used in a
ter scheme.
Dual port control logic
dynamic RAM with the Multibus so that the
can function
the Multibus. The CPU has priority when accessing onboard RAM. After the CPU completes its read
I/O operations and accesses the system bus
making the Multibus available for true parallel
as
a slave RAM device when not in control
INFORMATION
I/O operations.
g.,
D MA devices
is
included to interface the
regis-
of
oper-
multimas-
iSBC 86/12
of
or
write
(MULTIBUS)
645-1
f4'igure
(AUXIUARy)
1-1. iSBC 86/12 Single Board Computer
1-1
Page 10
General Information
iSBC 86/12
operation, the controlling bus master is allowed
RAM and complete its operation. Where both the
and the controlling bus master have the need to write or
read several bytes
their operations ary interleaved. For CPU access, the
on-board RAM addresses are assigned from the bottom up
of
the I-megabyte address space;
The slave RAM address decode logic includes jumpers
and switchers to allow partitioning the on-based RAM
into any 128K segment
space.
The slave RAM can be configured to allow either 8K, 16K
or
24K,
RAM can be configured to allow other bus masters to
access a segment
another segment strictly for on-board use. The addressing
scheme accommodates both 16-bit and 20-bitaddressing.
Four IC sockets are included
bytes
jumpers allow read only memory to be installed in 2K,
4K,
The
lines implemented by means
grammable
software
tion
The
peripheral requirements and, in order to take full advantage
sockets are provided for interchangeable
and terminators. Hence, the flexibility
interface
the appropriate combination
terminators'to
and drive/termination characteristics for each application.
The 24-programmable
are brought
with flat, woven,
32K access by another bus master. Thus, the
of
user-installed read only memory. Configuration
or
8K increments.
iSBC 86/12 includes 24 programmable parallel I/O
is
used to configure the I/O lines in any combina-
of
unidirectional input/output and bidirectional ports.
I/O interface may be customized to meet specific
of
the large number
is
or
words to
of
of
the on-board RAM and still reserve
Peripheral Interface (PPI). The system
of
further enhanced by the capability
provide the required sink current, polarity,
I/O ,lines and signal ground lines
out to a 50-pin edge connector
or
round cable.
or
from on-board RAM,
i.e.,
the 1-megabyte system address
to
accommodate up to 16K
of
an Intel 8255A Pro-
possible I/O configurations, IC
of
of
optional line drivers and
to
access
CPU
0OOOO-07FFFH·
I/O line drivers
the parallel I/O
of
selecting
(11)
that mates
In the asynchronous mode the following are programmable:
a.
Character length,
b.
Baud rate factor (clock divide ratios
c.
Stop bits, and
Parity.
d.
In both the synchronous and asychronous modes, the
serial
I/O port features halffered transmit and receive capability. In addition,
error detection circuits can check for parity, overrun, and
framing errors. The
rates are supplied by a programmable baud rate/time
generator. These clocks may optionally be supplied from
an external source. The RS232C command lines, serial
data lines, and signal ground lines are brought out to a
50-pin edge connector
cable.
Three independent, fully programmable 16-bit interval
timer/event counters are provided by an Intel 8253 Programmable Interval Timer
of
operating in either BCD
counters are available
accurate time intervals under software control. Routing
for the outputs and gate /trigger inputs
counters may
rammable Interrupt Controller
of
puts
associated with the 8255A
the two counters may
from the 8255A
programmable baud rate generator for the serial
In utilizing the
configures, via software, each counter independently to
meet system requirements. Whenever a given time delay
is
or count
select the desired function. The contents
may
simple operations
special commands are
each counter·can
needed, software commands to the 8253 PIT
be
read at any time during system operation with
USART transmit and receive clock
be
independently routed to the 8259A Prog-
PPI. The third counter is used as a
iSBC 86/12, the systems designer simply
for event counting applications, and
be
read
or
full-duplex, double buf-
(12)
that mates with flat
(PIT). Each counter is capable
or
binary modes; two
to
the systems designer to generate
(PIC). The gate/trigger in-
be
routed to I/O terminators
PPI
or
included ~ that the contents
"on
the
of
1, 16,
or
64),
USART
or
round
of
these
of
two
of
these
as input connections
I/O
port.
of
each counter
fly".
of
The RS232C compatible serial I/O port is controlled arid
interfaced by an Intel 8251A
Syncronous/Asynchrortous
The
USART
in most synchronous
mission formats
In the synchronous mode the following are programma- .
ble:
a. Character length,
Sync character (or chlU1lcters), and
b.
c.
Parity.
1-2
is
individually programmable for operation
(including· iBM Bi-Sync).
ReceiverlTransmitter) chip.
or
asynchronous serial data trans-
US
ART (Universal
..
The iSBC 86/
~ruid
non-bus vectored (NBY) interrupts. An on-board
In.tel 8259A Programmable Interrupt Controller (PIC)
handles up to eight NBV interrupts. By using external
PIC's slaved. to the on-board PIC (master), the interrupt
structure can
ityof
PIC, which can
The
sensitive
signal condition as an interrupt request. After resolving
the interrupt priority, the
request to the
programmable under software control. The program-
mable interrupt priority modes are:
12
provides vectoring for bus vectored (B V)
be
expanded to handle and resolve the prior-
upto
64 BV sources.
be
programmed to respond to edge-
or
level-sensitive inputs, treats each true input
PIC issues a single interrupt
·CPU. Interrupt priorities are independently
Page 11
iSBC
86/12
a.
Fully Nested Priority. Each interrupt request has a
0
is
fixed priority: input
b.
Auto-Rotating Priority. Each interrupt request has
highest, input 7
is
lowest.
equal priority. Each level, after receiving service,
becomes the lowest priority level until the next interrupt occurs.
c. Specific priority. Software assigns lowest priority.
Priority
of
all other levels
is
in
numerical sequence
based on lowest priority.
CPU includes a non-maskable interrupt (NMI) and a
The
is
maskable interrupt (lNTR). The NMI interrupt
to be used for catastrophic events such
that require immediate action
is
interrrupt
driven by the 8259A PIC which, on demand,
provides an 8-bit identifier
C~U
multiplies the 8-bit identifier
of
of
the interrupting source. The
as
the CPU. The INTR
by
four to derive a
intended
power outages
pomter to the service routine for the interrupting device.
18
Interrupt requests may originate from
the necessity
of
external hardware. Two jumper-
sources without
selectable interrupt requests can be automatically gener-
by
ated
when a byte
~086
tIOn
output buffer
requests can be automatically generated
when a character
CPU
character
data buffer
request can be generated by two
the Programmable Peripheral Interface (PPI)
of
information
CPU (i.e., input buffer is full) or a byte
is
ready to be transferred to the
of
informa-
has been transferred to a peripheral device (i.e.,
is
empty). Two jumper-selectable interrupt
by
the
US
ART
is
ready to be transferred
(i.e., receive channel buffer
is
ready to be transmitted (i.e., transmit channel
is
empty.) A jumper-selectable interrupt
is
of
to
the 8086
full)
or
when a
the programmable
counters and eight additional interrupt request lines are
ava.ilable to the user for direct interfaces to user-designated
penpheral devices via the Multibus.
One interrupt request
line may be jumper routed directly from a peripheral via
th~
~arallel
VO
driverlterminator section and one power
fall mterrupt may be input via auxiliary connector P2.
Th~
iSBC 86/12 includes the resources for supporting a
~anety
tIOns
benefits
of
OEM system requirements. For those applica-
requiring additional processing capacity and the
of
multiprocessing (Le., several
CPU's
and/or
controllers logically sharing systems tasks with communication over the Multibus), the
iSBC 86/12 provides
full bus arbitration control logic . This control logic allows
up to three bus masters (e.g., combination
DMA controller, diskette controller, etc.)
Multibus
in
serial (daisy-chain) fashion
of
iSBC 86/12
to
or
up to
share the
16
bus
masters to share the Multibus using an external parallel
priority resolving network.
General
lers
to
share resources on the same bus,. and transfers via
~he
bus proceed asynchronously. Thus, the transfer speed
IS
dependent on transmitting and receiving devices only.
Information
This design prevents slower master modules from being
handicapped in their attempts
gain control
of
the bus,
to
but does not restrict the speed at which faster modules can
transfer data via the same bus. The most obvious applica-
of
tions for the master-slave capabilities
the bus are multiprocessor configurations, high-speed direct memory
access (DMA) operations, and high-speed peripheral
by
no
control, but are
means limited to these three.
1-3. SYSTEM SOFTWARE
DEVELOPMENT
The development cycle
may be significantly reduced using an Intel Intellec Mic-
rocomputer Development
and system monitor greatly simplify the design, develop-
~ent,
and
deb~g
dIskette operatmg system provides a relocating loader and
linkage editor, and a library manager.
Intel's high level programming language,
available
ment
program
the need
PUM
as
a resident Intellec Microcomputer Develop-
System option.
in
a natural, algorithmic language and eliminates
to
manage register usage
86 programs can be written in a much shorter time
than assembly language programs for a given application.
of
iSBC 86/12 based products
System. The resident text editor
of
iSBC system software.
PUM
86 provides the capability to
or
An
optional
PUM86,
is
also
allocate memory.
1-4. EQUIPMENT SUPPLIED
The following are supplied with the iSBC 86/12 Single
Board Computer:
a.
Schematic diagram, dwg no. 2002259
b. Assembly drawing, dwg no. 1001801
1-5. EQUIPMENT REQUIRED
Because the iSBC 86/12 is designed to satisfy a variety
applications, the user must purchase and install only those
components required to satisfy his particular needs. A list
of
components required to configure all the intended ap-
plications
of
the iSBC86/12
is
provided in table 2-1.
of
T~e
Multibus arbitration logic operates synchronously
WIth
the bus clock, which
86/12
or
can be optionally generated
master. Data, however,
is
derived either from the iSBC
is
transferred via a handshake
between the controlling master and the addressed slave
module. This arrangement allows different speed control-
by
some other bus
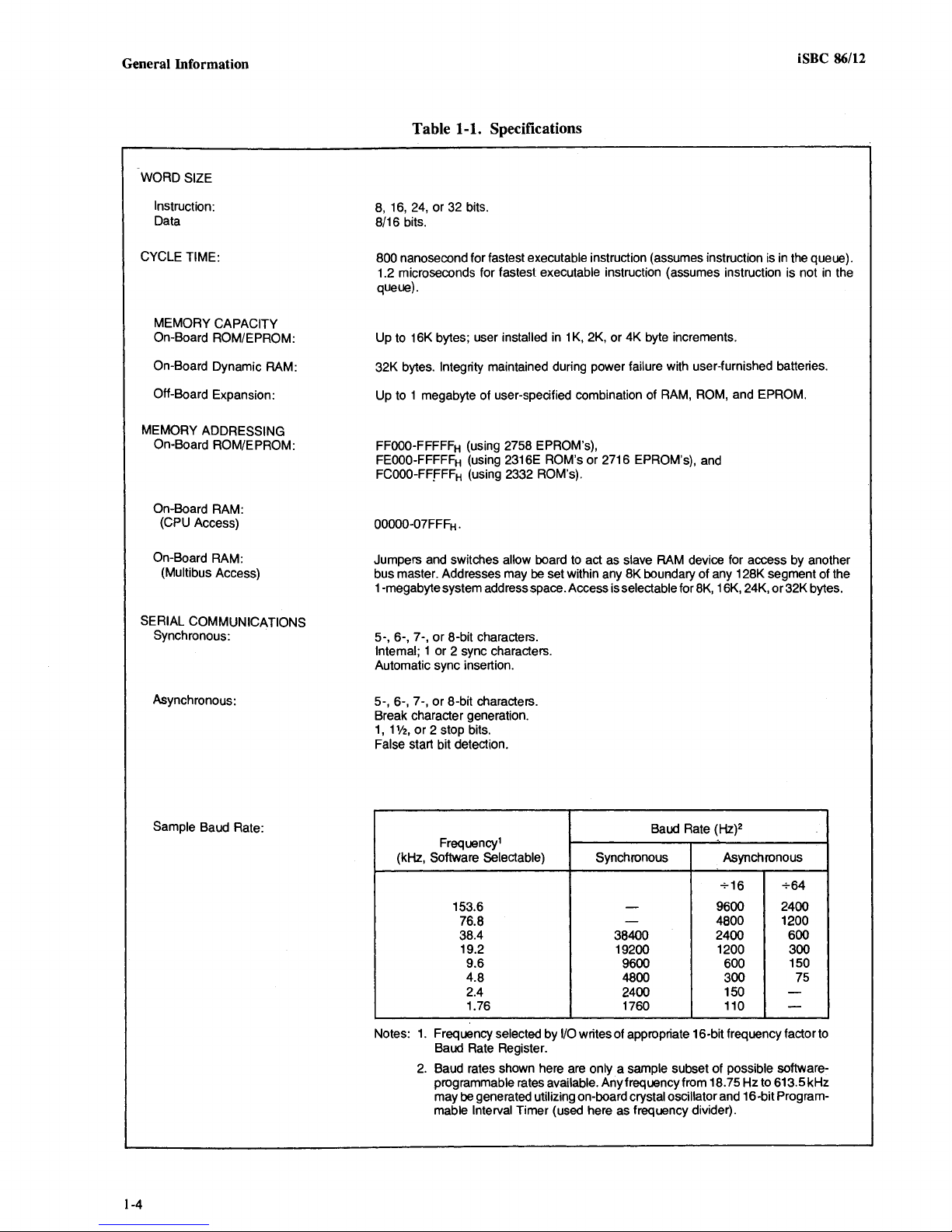
1-6. SPECIFICATIONS
Specifications
are listed
of
the iSBC 86/12 Single Board Computer
in
table 1-1.
1-3
Page 12
General Information
WORD SIZE
iSBC 86/12
Table 1-1. Specifications
Instruction:
Data
CYCLE TIME:
MEMORY CAPACITY
On-Board ROM/EPROM:
On-Board Dynamic RAM:
Off-Board Expansion:
MEMORY
On-Board ROM/EPROM:
On-Board RAM:
On-Board RAM:
SERIAL COMMUNICATIONS
Synchronous:
ADDRESSING
(CPU Access)
(Multi bus Access)
8,
16,
24,
or
8/16 bits.
800 nanosecond for fastest executable instruction (assumes instruction is
1.2 microseconds for fastest executable instruction (assumes instruction is not
queue).
Up to 16K bytes; user installed in 1
32K bytes. Integrity maintained during power failure with user-furnished batteries.
Up to 1 megabyte of user-specified combination of RAM,
FFOOO-FFFFFH
FEOOO-FFFFFH
FCOOO-FFfFFH (using 2332 ROM's).
00000-07FFFH .
Jumpers and switches allow board to act as slave RAM device for access by another
bus master. Addresses may
1-megabyte system address space. Access is selectable for
5-, 6-, 7-,
Intemal; 1
Automatic sync insertion.
32 bits.
(using 2758 EPROM's),
(using 2316E ROM's
or
8-bit characters.
or
2 sync characters.
in
the queue).
K,
2K,
or
4K byte increments.
ROM, and EPROM.
or
2716 EPROM's), and
be
set within any 8K boundary of any 128K segment of the
8K,
16K, 24K,
or32K
in
bytes.
the
Asynchronous:
Sample Baud Rate:
5-, 6-, 7-,
Break character generation.
1, 1 Y2,
False start bit detection.
Notes:
or
8-bit characters.
or
2 stop bits.
Frequency'
(kHz, Software Selectable)
153.6
76.8
38.4
19.2
9.6
4.8
2.4
1.76
1.
Frequency selected by I/O writes of appropriate 16-bit freq uency factor to
Baud Rate Register.
2.
Baud rates shown here are only a sample subset of possible softwareprogrammable rates available. Any frequency from 18.75 Hz to 613.5 kHz
may
be generated utilizing on-board crystal oscillator and 16-bit Program-
mable Interval T'imer (used here as frequency divider).
Baud Rate (Hz)2
Synchronous Asynchronous
+16
-
-
38400 2400
19200
9600
4800 300
2400
1760 110
9600 2400
4800 1200
1200
600 150
150
+64
600
300
-
-
75
1-4
Page 13

JSBC
86/12
General Information
Table 1-1. Specifications (Continued)
INTERVAl
GENERATOR
Input Frequency (selectable):
Output Frequencies:
SYSTEM CLOCK (8086 CPU):
I/O ADDRESSING:
INTERFACE COMPATIBILITY
Serial I/O:
TIMER AND BAUD RATE
2.46 MHz
1.23 MHz
153.6 kHz
5.0 MHz ±0.1%.
All communication to Parallel I/O and Serial I/O Ports, Timer, and InterruptControlier
is via read and write commands from on-board
EIA Standard RS232C signals provided and supported:
±0.1% (0.41
±0.1% (0.82
±0.1% (6.5
Function
Real-Time
Interrupt
Interval
Rate
Generator 2.342
(Frequency)
Clear to Send Receive Data
Data Set Ready Secondary Receive Data*
Data Terminal Ready Secondary
Request to Send Transmit Clock*
Receive Clock Transmit Data
jLsec
jLsec
jLsec
Min.
1.63
period nominal),
period nominal), and
period nominal).
Single Timer
Max.
jLsec
Hz
427.1 msec
613.5 kHz
*Can support only one.
(Two Timers Cascaded)
Min. Max.
3.26
0.000036 Hz
8086 CPU. Refer to table 3-2.
CTS*
Dual Timers
jLsec
466.5
minutes
306.8 kHz
Parallel I/O:
INTERRUPTS:
COMPATIBLE CONNECTORS/CABLES:
ENVIRONMENTAL REQUIREMENTS
Operating Temperature:
Relative Humidity:
PHYSICAl
Width:
Height:
Thickness:
Weight:
CHARACTERISTICS
24 programmable lines (8 lines per port); one port indudes bidirectional bus driver.
IC sockets included for user installation of line drivers and/or I/O terminators as
required for interface ports. Refer to table 2-1.
8086 CPU includes non-maskable interrupt (NMI) and maskable interrupt (INTR).
NMI
interrupt is provided for catastrophic event such as power failure; NMI vector
address is
8-bit identifier of interrupting device to
vector address. Jumpers select interrupts from 18 sources without necessity of
external hardware.
level-sensitive inputs.
Refer to table 2-2 for compatible connector details. Refer to paragraphs 2-21 and
2-22 for recommended types and lengths of
To
30.48 cm (12.00 inches).
17.15 em (6.75 inches).
1.78 cm
539 gm (19 ounces).
00008. INTR interrupt is driven by on-board 8259A PIC, which provides
CPU. CPU multiplies identifier by four to derive
PIC may be programmed to accommodate edge-sensitive
I/O cables.
90% without condensation.
(0.7 inch).
or
1-5
Page 14
General
Information
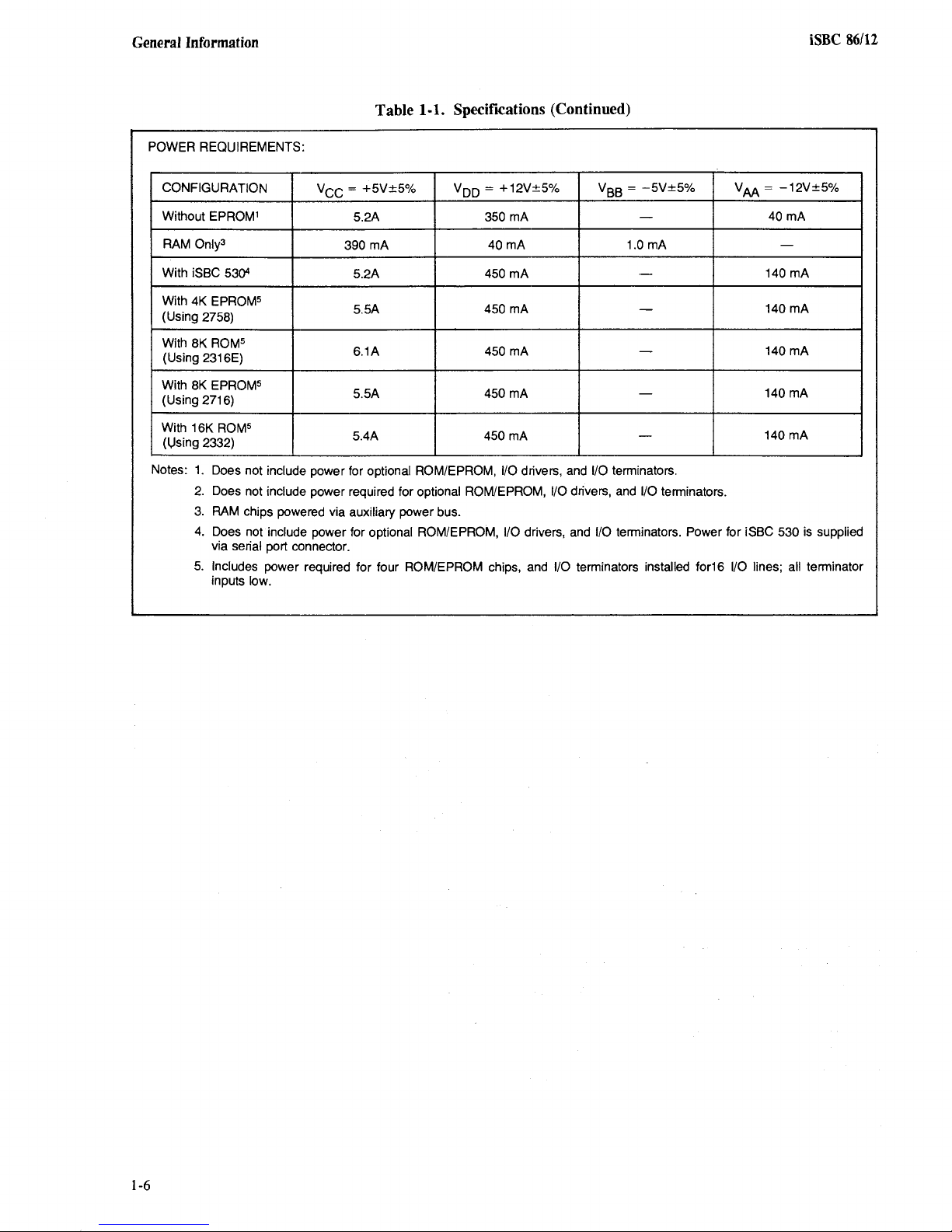
POWER REQUIREMENTS:
CONFIGURATION
VCC
Table 1-1. Specifications (Continued)
=
+5V±5%
VOO = +12V±5%
VBB =
-5V±5%
V
AA
=
-12V±5%
iSBC
86/12
Without EPROM'
RAM
Only3
With iSBC
With 4K EPROMs
(Using 2758)
With 8K
(Using 2316E)
With 8K EPROMs
(Using 2716)
With 16K
(Using 2332)
Notes:
53()4
ROMS
ROMS
1.
Does not include power for optional ROM/EPROM,
2.
Does not include power required for optional ROM/EPROM,
3.
RAM chips powered via auxiliary power bus.
4. Does not include power for
via serial port connector.
5.
Includes power required for four ROM/EPROM chips, and
low.
inputs
5.2A
rnA 40 rnA
390
5.2A
5.5A
6.1A 450 rnA
5.5A
5.4A 450 rnA
optional ROM/EPROM,
350 rnA
450 rnA
450 rnA
450 rnA
110
drivers, and
110
drivers, and
-
1.0 rnA -
-
-
-
-
-
110
terminators.
1/0
drivers, and
110
terminators installed for16
110
terminators.
110
terminators. Power for iSBC 530
40 rnA
140 rnA
140 rnA
140 rnA
140 rnA
140 rnA
is
110
lines; all terminator
supplied
1-6
Page 15
CHAPTER 2
PREPARATION FOR USE
2-1. INTRODUCTION
This chapter provides instructions for the iSBC 86/12
Single Board Computer in the user-defined environment.
of
It is advisable that the contents
fully understood before beginning the configuration and
installation procedures provided in this chapter.
Chapters 1 and 3 be
2-2. UNPACKING AND INSPECTION
Inspect the shipping carton immediately upon receipt for
of
evidence
carton is severely damaged
the carrier's agent be present when the carton
If
the carrier's agent is not present when the carton
opened and the contents
keep the carton and packing material for the agent's
inspection.
For
repairs to a product damaged in shipment, contact
the Intel Technical
to obtain a Return Authorization Number and further
instructions. A purchase order will be required to complete the repair. A copy
submitted to the carrier with your claim.
mishandling during transit. If the shipping
or
waterstained, request that
is
opened.
is
of
the carton are damaged,
Support Center (see paragraph 5-3)
of
the purchase order should be
2-5. POWER REQUIREMENT
The iSBC 86/12 requires
power. The
dual port RAM, can be supplied by the system
supply, an auxiliary battery,
regulator. (The
-12V
-5V
-5V
supply.)
+5V,
-5V,
+ 12V, and
power, which is required only for the
or
by the on-board
regulator operates from the system
-12V
-5V
-5V
2-6. COOLING REQUIREMENT
The iSBC 86/12 dissipates 451 gram-calories/minute
of
(1.83 Btu/minute) and adequate circulation
provided to prevent a temperature rise above 55°C
(131°F). The
tem include fans to provide adequate intake and exhaust
ventilating air.
System 80 enclosures and the Intellec Sys-
air must be
of
2-7. PHYSICAL DIMENSIONS
Physical dimensions
a. Width:
b.
Height:
c. Thickness:
of
the iSBC 86/12 are as follows:
30.48 cm (12.00 inches).
17.15 cm (6.75 inches).
cm
1.78
(0.70 inch).
It is suggested that salvageable shipping cartons and packing material be saved for future use
duct must be reshipped.
in
the event the pro-
2-3. INSTALLATION CONSIDERATIONS
The iSBC 86/12 is designed for use in one
ing configurations:
a. Standalone
b. Bus master in a single bus master system.
c. Bus master in a multiple bus master system.
Important criteria for installing and interfacing the
iSBC 86/12 in these configurations are presented in
following paragraphs.
(single~board)
system.
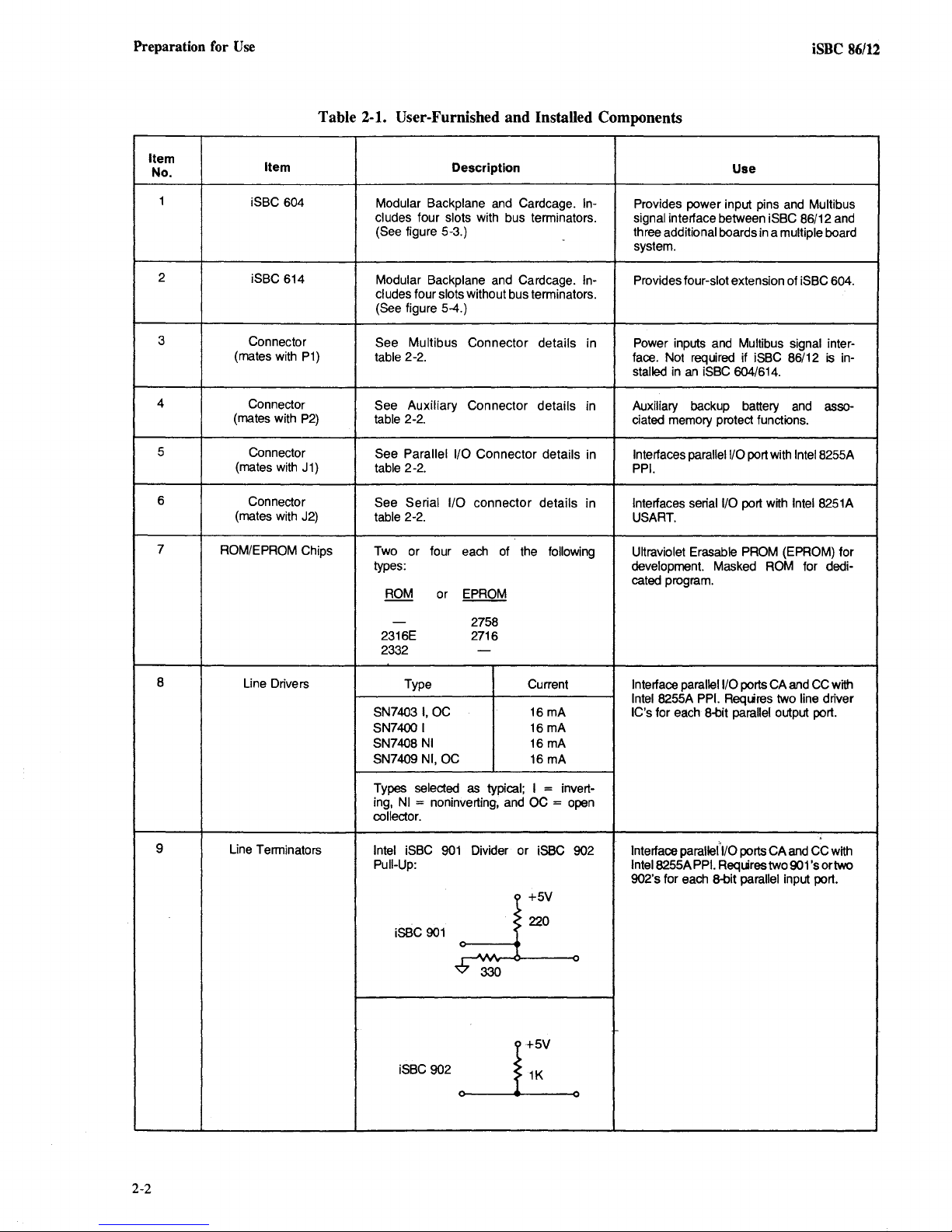
2-4. USER-FURNISHED COMPONENTS
The user-furnished components required to configure the
iSBC86/12
2-1. Various types and vendors
in table 2-1 are listed in table 2-2.
fied
for a particular application are listed in table
of
the connectors speci-
ofthe
follow-
2-8. COMPONENT INSTALLATION
Instructions for installing optional ROM/EPROM and
parallel
given in following paragraphs. When installing these chip
components, be sure to orient pin 1
to the white dot located near pin 1
IC socket. The grid zone location
location diagram) is specified for each component chip to
be installed.
2-9. ROM/EPROM CHIPS
IC sockets A28, A29, A46, and A47 (figure 5-1 zone C3)
accommodate 24-pin
CPU jumps to location
ROM/EPROM address space resides in the topmost portion
from the top down. IC sockets A29 and A47 accommodate the top
must always be loaded; IC sockets A28 and A46 accommodate the
stalled in A29 and A47.
I/O port line drivers and/or line terminators are
of
the chip adjacent
of
the associated
on figure 5-1 (pltrts
ROM/EPROM chips. Because the
FFFFO
on a power up
of
the I-megabyte address space and must be loaded
of
the ROM/EPROM address space and
ROM/EPROM space directly below that in-
or
reset, the
2-1
Page 16
Preparation for
Use
Table 2-1. User-Furnished and Installed Components
iSBC
86112
Item
No.
1
2
3
4
5
6
7
Item
iSBC
604
iSBC
614
Connector
(mates
with
Connector
(mates
with
Connector
(mates
with
Connector
(mates
with
ROM/EPROM
P1)
P2)
J1)
J2)
Chips
Description
Modular
cludes four
(See
Modular
cludes four slots without
(See
See
table
See Auxiliary
table
See
table
See
table
Two
types:
Backplane
slots
figure
5-3.)
Backplane
figure
5-4.)
Multibus Connector
2-2.
2-2.
Parallel I/O Connector details
2-2.
Serial
2-2.
or
four
ROM
or
and
with
bus
and
bus
Connector details
I/O connector details in
each
of
EPROM
Cardcage.
terminators.
-
Cardcage.
terminators.
details in
the
following
In-
In-
in
in
Provides
signal
three
system.
Provides
Power
face.
stalled
Auxiliary
ciated
Interfaces
PPI.
Interfaces
USART.
Ultraviolet
development.
cated
power input
interface
additional boards
four-slot extension of
inputs
Not
required
in
an
backup
memory
parallel
serial
Erasable
program.
between
and
iSBC
protect
I/O
Masked
Use
pins
in
Multibus
if
iSBC
6041614.
battery
functions.
I/O
port
port
PROM
and
iSBC
86/12
a multiple
iSBC
signal
86/12
and
with
Intel8255A
with
Intel
(EPROM)
ROM
for
Multibus
and
board
604.
inter-
is
in-
asso-
8251A
for
dedi-
-
2316E
2332
8
9
Une
Une
Terminators
Drivers
Type
SN7403I,OC
SN7400
SN7408
SN7409
Types
ing,
collector.
Intel
Pull-Up:
I
NI
NI,
selected
NI = noninverting,
iSBC
iSBC
iSBC
901
902
OC
901
.&
0
2758
2716
-
as
typical;
Divider
A
330
Current
16mA
16mA
16mA
16mA
I =
and
invert-
OC = open
or
iSBC
+5V
220
r:v
902
0
Interface
Intel
IC's
Interface
Intel8255A
902'sfor
parallel
8255A
for
each
parallel"VO
each
I/O
ports
PPI.
8-bit
PPI.
Requires
8-bit
CA
Requres two line driver
parallel
output
ports
CA
two 901's ortwo
parallel
and
and
input
CC
port.
CC
port.
with
with
2-2
Page 17
iSBC
Function
86/12
No.
Pairs/
Pins
Of
Table 2-2. User-Furnished Connector Details
Centers
(inches)
Connector
Type
Vendor
Vendor
Part
Preparation for
No.
Intel
Part
Use
No.
Parallel
I/O
Connector
Parallel
I/O
Connector
Parallel
I/O
Connector
Serial
110
Connector
Serial
110
Connector
Serial
110
Connector
25/50
25/50
. 24/50
13/26
13/26
13/26
0.1
0.1
0.1
0.1
0.1
0.1
3M
3M
Flat Crimp AMP
ANSLEY
SAE S06750 SERIES
AMP 2-583485-6
Soldered
Wirewrap'
Flat Crimp
Soldered
Wi
rew
rap'
VIKING
TI H312125
TI
VIKING
COO
ITICANNON
3M
AMP
ANSLEY
SAE S06726 SERIES
TI H312113
AMP
TI
3415-0000 WITH EARS
3415-0001 W/O EARS iSBC 956
88083-1
609-5015 Set
3VH25/1JV5
H311125
3VH25/1JN05
VPB01 B25000A 1
EC4A050A1A
3462-0001
88106-1
609-2615
1-583485-5
H311113
Cable
N/A
N/A
iSBC
Cable
Set
N/A
N/A
955
Multibus
Connector
Multibus
Connector
Auxiliary
Connector
Auxiliary
Connector
NOTES:
1.
2.
3.
COC3
43/86
43/86
30/60
30/60
Connector heights are not guaranteed to conform to OEM packaging equipment.
Wirewrap pin lengths are not guaranteed to conform to
COC VPB01 .... VPB02 .... VPB04 .... etc. are identical connectors with different electroplating thicknesses
metal surfaces.
0.156
0.156
0.1
0.1
Soldered'
Wirewrap1.2
Soldered'
Wirewrap1.2
MICRO PLASTICS
ARCO AE443WP1 LESS EARS
VIKING 2VH43/1AV5
COO
COC3
VIKING 2VH43/1AV5
TI
VIKING
COO
TI
OEM packaging equipment.
VPB01 E43000A 1
MP-0156-43-BW-4
VFB01 E43000A 1 or
VPB01E43AooA1 MOS 985
H312130
3VH30/1JN5
VPB01
B30AOOA2
H311130
:,
N/A
N/A
N/A
or
2-3
Page 18
Preparation for
Use
iSBC 86/12
The low-order byte (bits 0-7)
installed
(bits 8-15) must
in
sockets A29 and A28; the high-order byte
be
installed
Assuming that 2K bytes
of
ROM/EPROM must
in
sockets A47 and A46.
of
EPROM are to
be
installed
be
using two Intel 2758 chips, the chip containing the
low-order byte must
the chip containing the high-order byte must
in
IC
socket A47.
ROM/EPROM address space
ditional Intel 2758 chips may
sockets
A28
FFOOO-FF7FF.
be
installed
In
this configuration, the usable
in
IC
socket A29 and
be
is
FF800-FFFFF. Two
be
installed later
installed
ad-
in
IC
and A46 and occupy the address space
(Even addresses read the low-order bytes
and odd addresses read the high-order bytes.)
The default (factory connected) jumpers and switch
are configured for
2K
by
8-bit ROM/EPROM chips
S 1
(e.g., two or four Intel 2716's). If different type chips
are installed, reconfigure the jumpers and switch
S 1
as
listed in table 2-4.
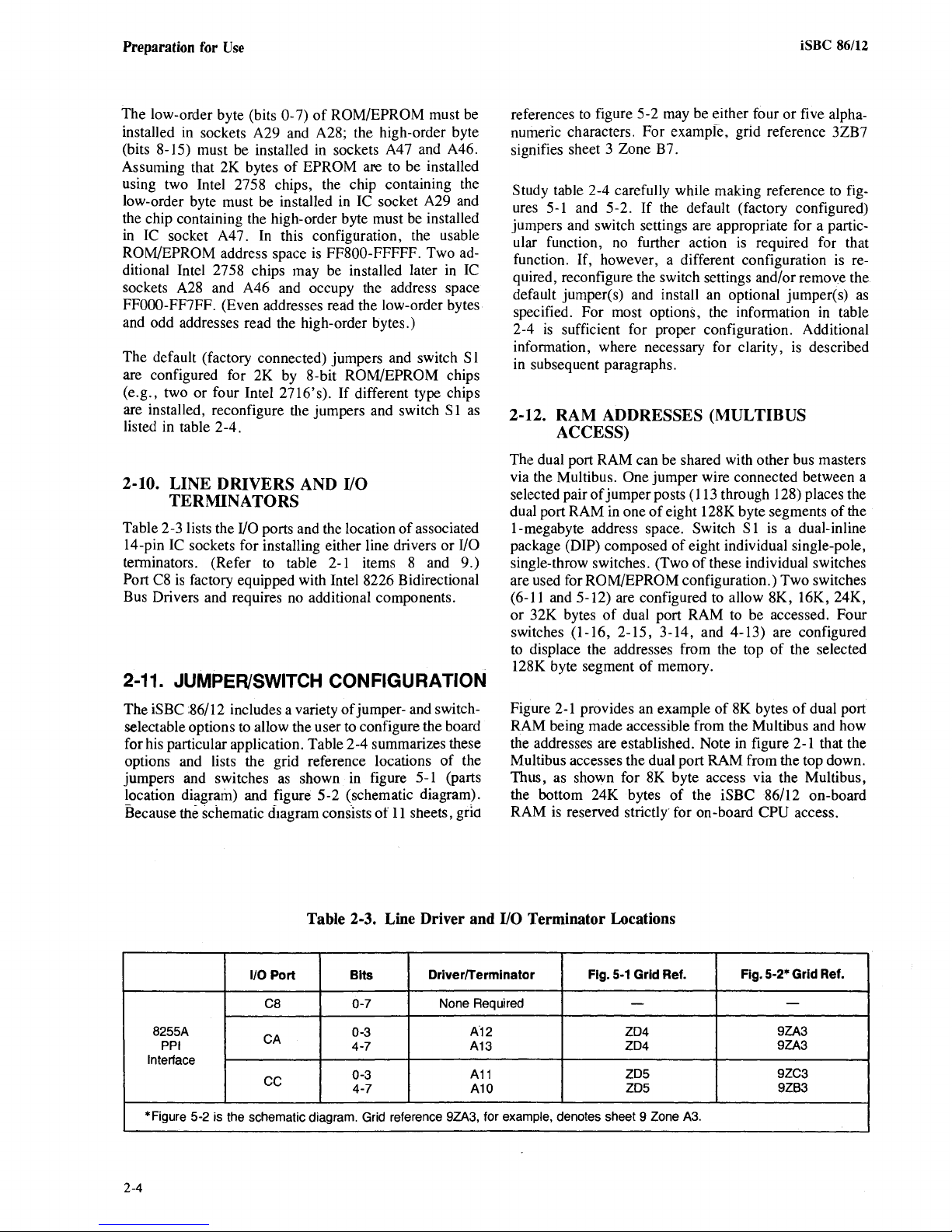
2-10. LINE DRIVERS
AND
I/O
TERMINATORS
Table 2-3 lists the I/O ports and the location
14-pin
IC
sockets for instaHing either line drivers or I/O
tenninators. (Refer
Port
C8
is
factory equipped with Intel 8226 Bidirectional
Bus Drivers and requires
to
table 2-1 items 8 and 9.)
no
additional components.
of
associated
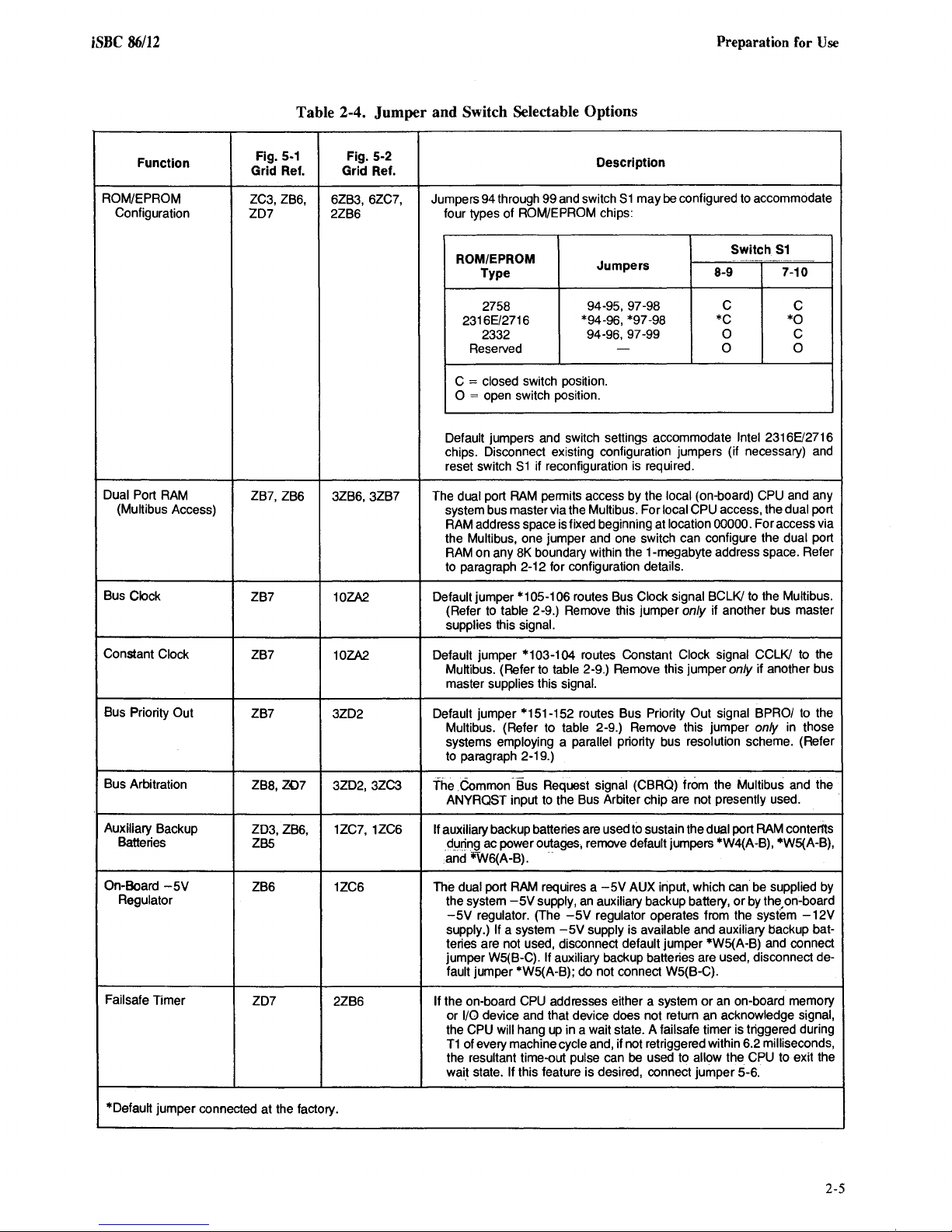
2-11. JUMPER/SWITCH CONFIGURATION
The iSBC
selectable options to allow the user
for his particular application. Table 2-4 summarizes these
options and lists the grid reference locations
jumpers and switches
location diagram) and figure 5-2 (schematic diagram).
Because
:86/12
includes a variety
as
of
jumper- and switch-
to
configure the board
shown in figure 5-1 (parts
the schematic dIagram consists
of
11
of
the
sheets, gria
references
to
figure 5-2
may
be
either four or five alphanumeric characters. For exampfe, grid reference 3ZB7
signifies sheet 3 Zone B7.
Study table 2-4 carefully while making reference
ures
5-1
and 5-2.
If
the default (factory configured)
to
fig-
jumpers and switch settings are appropriate for a partic-
ular function,
function. If, however, a different configuration
no
further action
is
required for that
is
required, reconfigure the switch settings and/or remove the
default jumper(s) and install an optional jumper(s)
specified. For most options, the infonnation
2-4
is
sufficient for proper configuration. Additional
information, where necessary for clarity,
in
subsequent paragraphs.
in
is
described
table
2-12. RAM ADDRESSES (MULTIBUS
ACCESS)
The dual port RAM can
via the Multibus.
selected pair
dual port RAM
of
jumper posts (113 through 128) places the
in
I-megabyte address space.
package (DIP) composed
single-throw switches. (Two
are used for
ROM/EPROM configuration.) Two switches
(6-11 and 5-12) are configured
or 32K bytes
of
switches (1-16, 2-15, 3-14, and 4-13) are configured
to
displace the addresses from the top
128K byte segment
Figure
2-1
provides an example
RAM being made accessible from the Multibus and how
the addresses are established. Note in figure 2-1 that the
Multibus accesses the dual port RAM from the top down.
Thus, as shown for
the bottom
RAM
24Kbytes
is
reserved strictly for on-board CPU access.
be
shared with other bus masters
One jumper wire connected between a
one
of
eight 128K byte segments
Switch S 1
of
eight individual single-pole,
of
these individual switches
to
allow 8K, 16K, 24K,
dual port RAM to
of
memory.
of
8K
byte access via the Multibus,
of
the iSBC 86/12 on-board
is
be
accessed. Four
of
8K
bytes
of
the
a dual-inline
the selected
of
dual port
as
Table 2-3. Line Driver and
1/0
Port
C8 0-7
8255A
PPI
Interface
*Figure 5-2 is the schematic diagram. Grid reference 9ZA3, for example, denotes sheet 9 lone A3.
2-4
CA
CC
Bits
0-3
4-7
0-3
4-7
I/O
Terminator Locations
DriverlTermlnator
None Required -
A12
A13
A11
A10
Fig.
5-1
Grid Ref.
lO4
lO4
lO5
lO5
Fig. 5-2* Grid Ref.
-
9ZA3
9ZA3
9lC3
9lB3
Page 19
i8BC
86/12
Preparation for
Use
Function
ROM/EPROM
Configuration
Table 2-4.
Fig. 5-1 Fig. 5-2
Grid
Ref.
ZC3, ZB6,
ZD7
Jumper
Grid
Ref.
6ZB3,6ZC7,
2ZB6
and Switch Selectable Options
Description
Jumpers 94 through 99 and switch
four types of
ROM/EPROM
2316E/2716
Reserved
= closed switch position.
C
ROM/EPROM chips:
Type
2758
2332
S1
Jumpers
94-95, 97 -98
*94-96, *97-98
94-96, 97-99
-
may be configured to accommodate
Switch
S1
--
--
8-9
C C
*C
0 C
0 0
7-10
*0
o = open switch position.
Default jumpers and switch settings accommodate Intel 2316E/2716
chips. Disconnect existing configuration jumpers (if necessary) and
reset switch
Dual Port RAM
(Multibus Access) system bus master via the Multibus. For local CPU access, the dual port
ZB7, ZB6
3ZB6,3ZB7
The dual port RAM permits access by the local (on-board) CPU and any
RAM address space is fixed beginning at
the
Multibus, one jumper and one switch can configure the dual port
RAM on any 8K boundary within the 1-megabyte address space. Refer
to paragraph 2-12 for configuration
S1
if reconfiguration is required.
details.
location 00000. For access via
Bus Clock
Constant Clock
Bus Priority Out
Bus Arbitration
Auxiliary Backup
Batteries
On-Board
Failsafe Timer
-5V
Regulator
ZB7
ZB7
ZB7
ZBB,
Zf)7
ZBB, 1ZC7,1ZCB
ZD3,
ZB5
ZB6
ZD7
10ZA2
10ZA2
3ZD2
3ZD2,3ZC3
1ZCB
2ZB6
Default
jumper *105-106 routes Bus Clock signal BCLKI to the Multibus.
(Refer to table 2-9.) Remove this jumper only if another bus master
supplies this signal.
jumper *103-104 routes Constant Clock signal CCLKI to the
Default
Multibus. (Refer to table 2-9.) Remove this jumper only if another bus
master
supplies this signal.
Default jumper *151-152 routes Bus Priority
Multibus. (Refer to table 2-9.) Remove this jumper only in those
systems
to paragraph 2-19.)
The Common . Bus Request signal (CBRO)
ANYROST input to the Bus Arbiter chip are not presently used.
If auxiliary backup batteries are used to sustain the dual port RAM
du~ng
and *W6(A-B).
The dual port RAM requires a
the system
-5V
supply.) If a system
teries are not used, disconnect
jumper W5(B-C).
fault jumper *W5(A-B); do not connect W5(B-C).
If the on-board CPU addresses either a system
or
the CPU will hang up in a wait state. A failsafe timer is triggered during
T1
the
wait state.
employing a parallel priority bus resolution scheme. (Refer
ac power outages, remove default jumpers *W4(A-B), *W5(A-B),
regulator. (The
I/O device and that device does not return an acknowledge Signal,
of every machine cycle and, if not retriggered within 6.2 milliseconds,
resultant time-out pulse can be used to allow the CPU to exit the
..
-5V
-5V
supply, an auxiliary backup battery,
-5V
-5V
If auxiliary backup batteries are used, disconnect de-
If this feature is desired, connect jumper 5-6.
AUX input, which can be supplied by
regulator operates from the system
supply is available and auxiliary backup bat-
default jumper *W5(A-B) and connect
Out
signal BPRO/ to the
trom
the Multibus and the
or
by the,on-board
or
an on-board memory
conter1'ts
-12V
*Default jumper connected
at
the factory.
2-5
Page 20
Preparation for
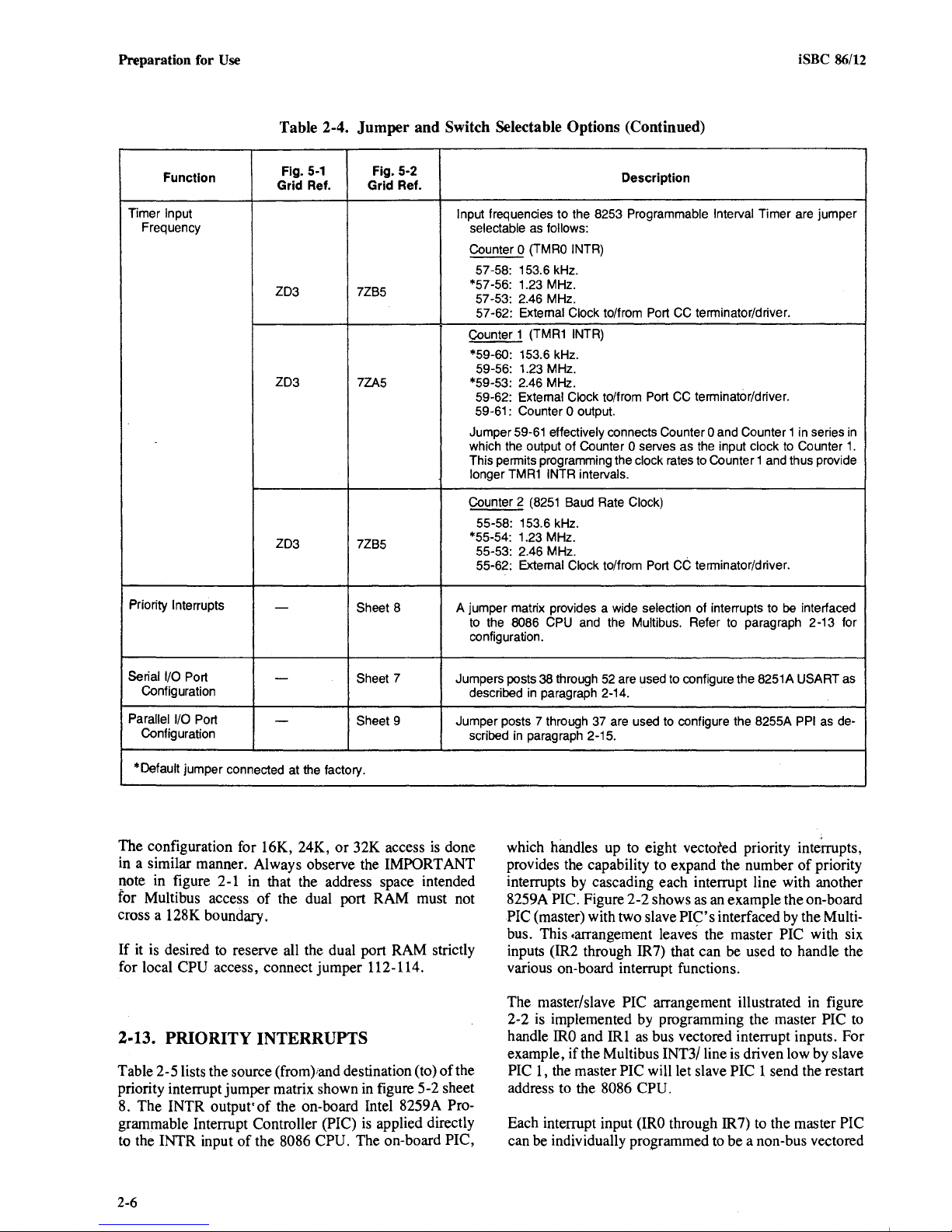
Function
Timer
Input
Frequency
Use
Table 2-4. Jumper and Switch Selectable Options (Continued)
Fig.
5-1
Grid
Ref.
ZD3 7ZB5
ZD3
Fig. 5-2
Grid
7ZA5
Ref.
Description
Input
frequencies to the 8253 Programmable Interval Timer are jumper
selectable as follows:
Counter 0
57-58: 153.6 kHz.
*57-56: 1.23 MHz.
57 -53: 2.46 MHz.
57-62:
Counter 1
*59-60: 153.6 kHz.
59-56: 1.23 MHz.
*59-53: 2.46 MHz.
59-62:
59-61: Counter
Jumper 59-61
which.the output
This permits programming the clock rates to Counter 1 and thus provide
longer
(TMRO
INTR)
Extemal Clock to/from Port CC terminator/driver.
(TMR1
INTR)
External Clock to/from Port CC terminator/driver.
TMR1
0 output.
effectively connects Counter 0 and Counter 1 in series
of
Counter 0 serves as the input clock to Counter
INTR intervals.
iSBC 86/12
in
1.
ZD3
Interrupts
Priority
Serial I/O Port
Configuration
Parallel I/O Port
Configuration
*Default jumper connected at the factory.
-
- Sheet 7
- Sheet 9
The configuration for 16K, 24K,
7ZB5
Sheet 8
or
32K access
A jumper matrix provides a wide
Jumpers posts 38 through 52 are used to configure the 8251A
Jumper posts 7 through 37 are used to configure the 8255A
is
done
in a similar manner. Always observe the IMPORTANT
note in figure 2-1 in that the address space intended
of
for Multibus access
cross a 128K
If
it
is
for local
boundary.
desired
to
CPU access, connect jumper 112-114.
the dual port RAM must not
reserve all the dual port RAM strictly
Counter 2
55-58: 153.6 kHz.
*55-54: 1.23 MHz.
55-53: 2.46 MHz.
55-62:
to the 8086
configuration.
described
scribed
(8251
Baud Rate Clock)
External Clock to/from Port CC terminator/driver.
CPU and the Multibus. Refer to paragraph 2-13 for
in
paragraph 2-14.
in
paragraph 2-15.
selection of interrupts to be interfaced
which himdles up to eight vectored priority interrupts,
provides the capability to expand the number
interrupts by cascading each interrupt line with another
as
8259A PIC. Figure 2-2 shows
an example the
PIC (master) with two slave PIC's interfaced by the Multi-
bus. This .arrangement leaves the master PIC with six
inputs (IR2 through IR 7) that can be used to handle the
various on-board interrupt functions.
USART as
PPI as de-
of
priority
on~board
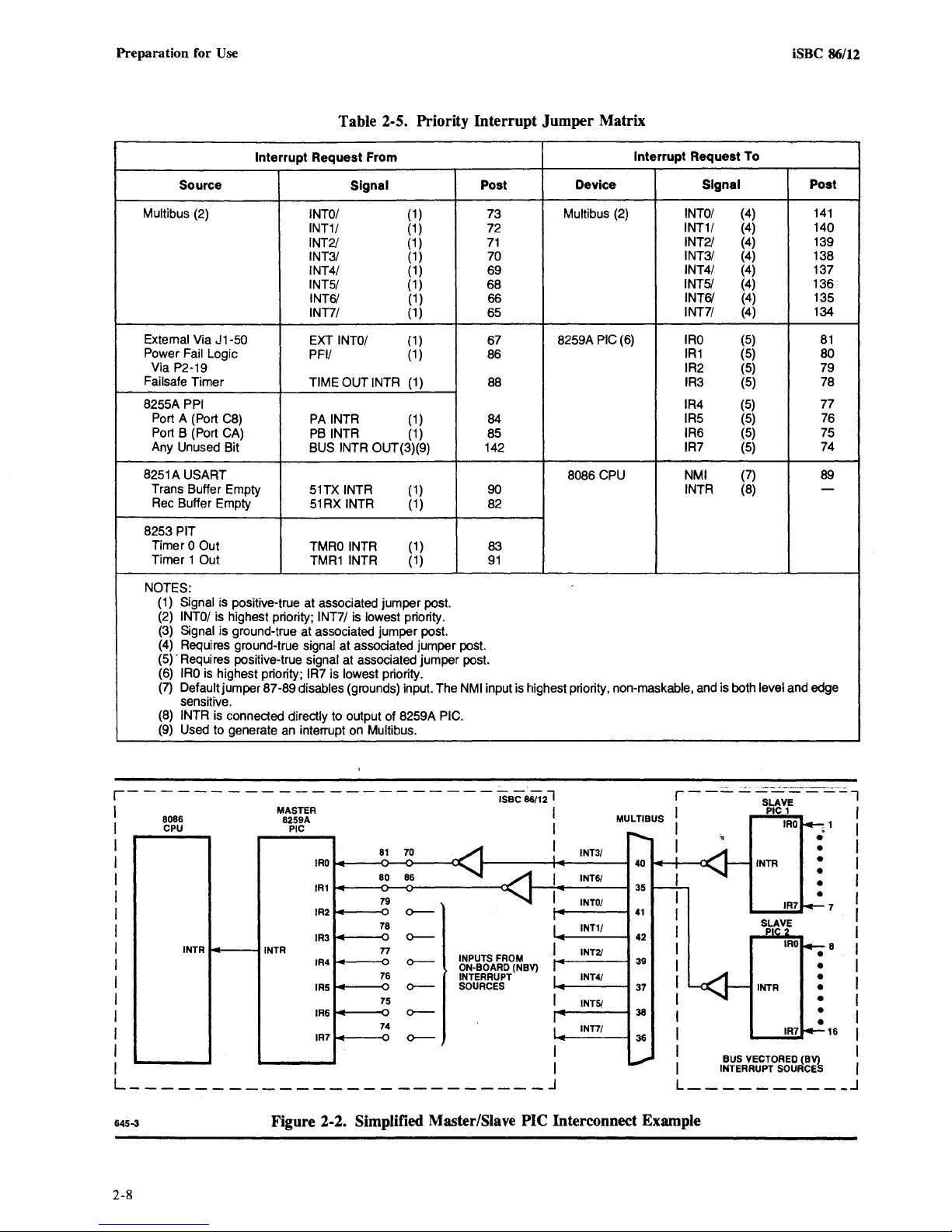
2-13. PRIORITY INTERRUPTS
Table 2-5 lists the source (from)iand destination (to)
priority interrupt jumper matrix shown
8. The INTR
output'of
grammable Interrupt Controller (PIC) is applied directly
to the INTR input
2-6
the on-board Intel 8259A Pro-
of
the 8086 CPU. The on-board PIC,
in
figure 5 -2 sheet
of
the
The master/slave PIC arrangement illustrated in figure
2-2
is
implemented by programming the master PIC
handle
IRO
and IRI
example,
PIC
if
the Multibus INT3/line
1,
the master PIC will let slave PIC 1 send the restart
address to the 8086
Each interrupt input
can
be
individually programmed
as
bus vectored interrupt inputs. For
is
driven low by slave
CPU.
(IRO
through IR7) to the master PIC
to
be a non-bus vectored
to
Page 21

iSBC 86/12
Preparation
for
Use
SYSTEM
128K BYTE
SEGMENT
NO ACCESS
EOOOO-FFFFF
®
JUMPER
112·114
113-114
EXPLANATION
® SELECTS X PARAMETER (128K BYTE SEGMENT)
® SELECTS Z PARAMETER (MEMORY AVAILABLE
©
SEL.ECTS
Y PARAMETER (LOCATION WITHIN 128K SEGMENT)
ADDRESS (UPPER) ~ X+Y
ADDRESS(LOWER)~
IN THE EXAMPLE SHOWN IN THE SHADED PATH, X ~ COOOO,
Z ~ 8K (01I'FF). THUS,
IMPORTA~IT
THE
SElI,CTED
BOUNDARY. THAT IS,
ABSOLUTIE VALUE
X+Y-Z
COOOO ~ X
+OBFFF ~ Y
CBFFF
~
-01FFF ~ Z (8K)
"""CAoOo
MEMORY SPACE CANNOT EXTEND ACROSS A 128K BYTE
OF
ADDRESS (UPPER)
~
ADDRESS (LOWER)
X+Y-Z
MUST BE EQUAL TO OR GREATER THAN THE
X.
TO
BUS)
Y ~ OBFFF, AND
645·2
FFFFF
00000
....
"'1-------1
C
0
0 C
0
0 C
0
0 0
0
0 0
SYSTEM
MEMORY
01FFF
03FFF
0
0
0
C
C
C
C·
0
0
C
0
C
0
0
0
OFFFF
C
11FFF
0
13FFF
C
15FFF
0
17FFF
C
19FFF
0
1BFFF
C
1DFFF
0
1FFFF
-..-
Y PARAMETER
Figure 2-1. Dual Port RAM Address Configuration (Multibus Access)
86/12
8K
8K
8K
8K
07FFF
06000
04000
02000
00000
2-7
Page 22
Preparation for
Use
Table 2-5. Priority Interrupt Jumper Matrix
iSBC
86/12
Interrupt Request From
Source Signal Post
Multibus
Extemal
Power
Failsafe Timer
8255A
8251A
8253
NOTES:
(2)
Via
J1-50
Fail
Via
Port
Port B (Port CAl
Any
Trans Buffer Empty
Ree
Timer 0 Out
Timer 1 Out
(1)
(2)
(3)
(4)
(5)
(6)
(7) Default jumper
(8)
(9)
Logie
P2-19
PPI
A (Port
C8)
Unused
Buffer
PIT
'Requires positive-true signal at associated jumper
Bit
USART
Empty
Signal
is positive-true
INTO/
is
Signal
Requires
IRO
sensitive.
INTR
Used
highest priority;
is
ground-true at associated jumper
ground-true
is highest priority;
is connected directly to output of
to
generate
87
INTO/
INT1/
INT2I
INT3/
INT4/
INT5/
INT6I
INT7/
EXT
PFI/
TIME
PAINTR
PBINTR
BUS
51TX
51RX
TMRO
TMR11NTR
at
associated jumper
INT7/
Signal
IR7
-89
an
is lowest priority.
disables
interrupt
INTO/
OUT
INTR
INTR
OUT
INTR
INTR
INTR
is
lowest
at associated jumper
(grounds)
on
8259A
Multibus.
(1)
(1
)
(1
)
(1
)
(1
)
(1
)
(1
)
(1
)
(1
)
(1
)
(1)
(1
)
(1)
(3)(9)
(1)
(1
)
(1
)
(1)
post.
priority.
post.
input.
The
PIC.
post.
post.
NMI
73
72
71
70
69
68
66
65
67
86
88
84
85
142
90
82
83
91
input
is highest priority,
Device
Multibus
8259A
8086
.'
Interrupt Request
(2)
PIC
(6)
CPU
non-maskable,
To
Signal Post
and
is
(4)
(4)
(4)
(4)
(4)
(4)
(4)
(4)
(5)
(5)
(5)
(5)
(5)
(5)
(5)
(5)
(7)
(8)
both
level
and
INTO/
INT1/
INT2I
INT3I
INT4/
INT5/
INT6I
INT7/
IRO
IR1
IR2
IR3
IR4
IR5
IR6
IR7
NMI
INTR
141
140
139
138
137
136
135
134
81
80
79
78
n
76
75
74
89
-
edge
r-
-----
-
--
---
I 8086 MASTER I
I
cpu
8~~~A
I
I
I
I
I
I
INTR
I
I+---IINTR
I
I
I
I
I
IRO
IR1
IR214---o
IR3
IR414---o
IR514---o
IR614---o
IR7
I
I I
L
_________________________
645-3
2-8
Figure 2-2. Simplified Master/Slave PIC Interconnect Example
-----
-----iSBCa6i121
81
70 I
1+--<>---0----<,
80
k---c~o_----_<:C
.....
--o
.....
--o
79
78
77
76
75
74
86
0-
0-
0-
0--
0-
0-
INPUTS FROM
ON-BOARD
INTERRUPT
SOURCES
(NBV)
r---
I
MULTIBUS
INT3I
INT6I
INTO!
INT11
1NT2I
INT4/
INTS/
INT71
J
I PIC 1
I
I :
I
I
41
I
I
42
I
39
I
I
37
I
38
I
I
36
I BUS VECTORED (BV)
I INTERRUPT SOUFICES
L
__________
-SLAve-
IRO
INTR
1o-...,.;,IR:.:;7,,---- 7
SLAVE
-
--1
,,1
•
•
•
•
J
Page 23
iSBC
86/12
(NB
V)
interrupt (the master PIC generates the restart
address) or bus vectored (B
V)
interrupt (the slave PIC
generates the restart address). Thus, the master PIC can
handle eight on-board
(an interrupt line that
to
64 interrupts with the implemention
or
single Multibus interrupt lines
is
not driven by a slave PIC) or up
of
slave PIC's.
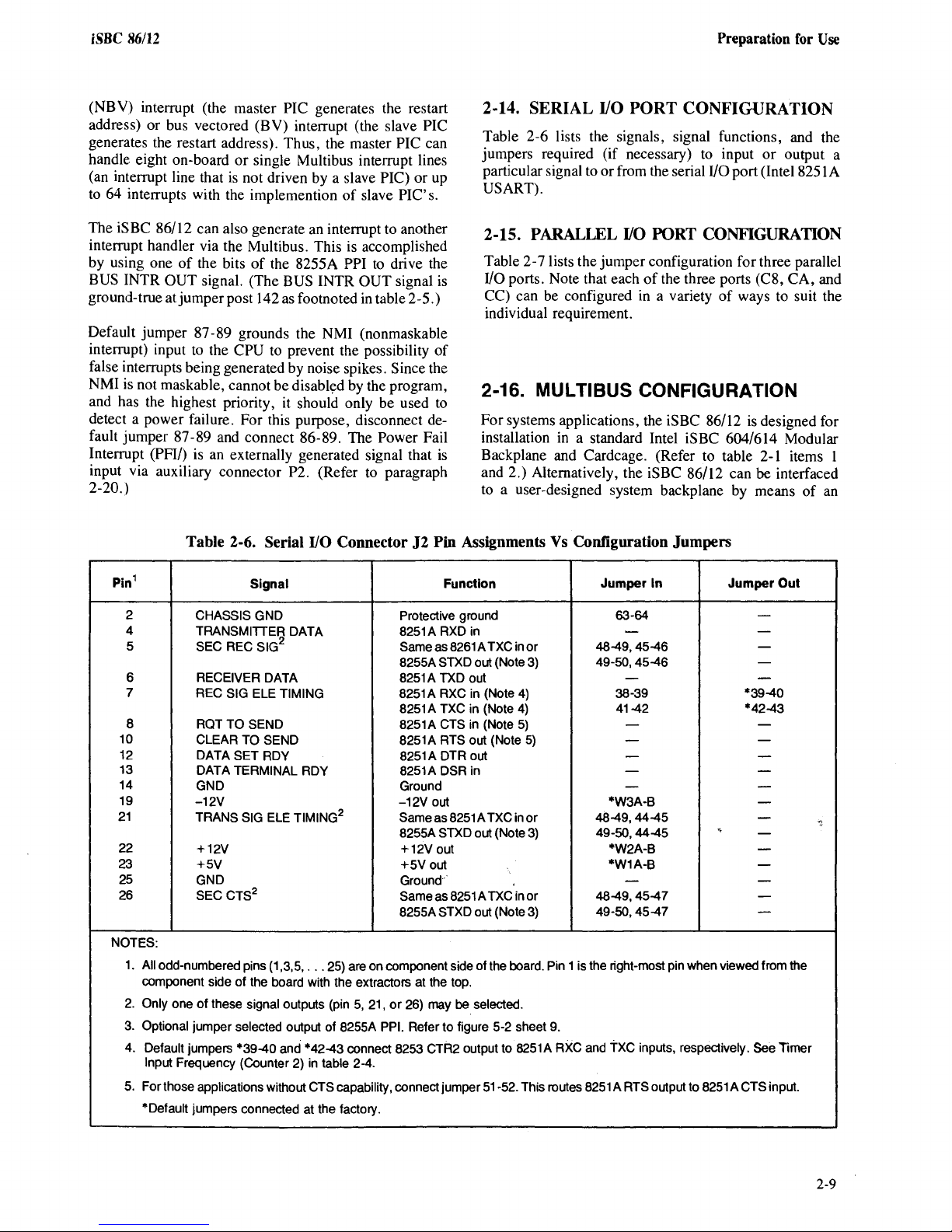
2-14. SERIAL
Preparation
110
PORT CONFIGURATION
for
Use
Table 2-6 lists the signals, signal functions, and the
jumpers required (if necessary) to input
particular signal to or from the serial
VO
or
output a
port (Intel 8251 A
USART).
The iSBC 86/12 can also generate an interrupt to another
interrupt handler via the Multibus. This
by using one
of
the bits
of
the 8255A PPI to drive the
BUS INTR OUT signal. (The BUS INTR OUT signal
ground-true at jumper post 142 as footnoted
is
accomplished
in
table 2-5.)
is
Default jumper 87-89 grounds the NMI (nonmaskable
intemlpt) input to the
CPU to prevent the possibility
of
false interrupts being generated by noise spikes. Since the
NMI is not maskable, cannot be disablyd
and has the highest priority,
it
should only be used to
by
the program,
detect a power failure. For this purpose, disconnect default jumper 87-89 and connect 86-89. The Power Fail
Interrupt (PFI/) is an externally generated signal that
is
input via auxiliary connector P2. (Refer to paragraph
2-20.)
Pin
21
:23
:26
'10
12
'13
14
'19
22
25
Table 2-6. Serial I/O Connector
1
2
4
5
6
7
8
CHASSIS GND
TRANSMITIER
SEC REC SIG
RECEIVER DATA 8251A TXD out
REC
RaTTO
CLEAR TO SEND
DATASET
DATA TERMINAL ROY 8251A DSR in
GND
-12V
TRANS SIG ELE TIMING
+12V
+5V
GND
SEC CTS
Signal
DATA 8251A RXD in
2
SIG ELE TIMING
SEND
ROY 8251A DTR out
2
2
J2
Pin Assignments
Protective ground
Same as
8255A STXD out (Note 3)
8251A RXC in (Note 4)
8251A TXC in (Note 4)
8251A CTS in (Note
8251A RTS out (Note
Ground
-12Vout
Same as 8251ATXC
8255A STXD out (Note
+12Vout
+5Vout
Ground
Same as
8255A STXD out (Note 3)
2-l5.
PARALLEL
110
PORT CONFIGURATION
Table 2- 7 lists the jumper configuration for three parallel
VO
ports. Note that each
CC) can be configured
of
the three ports (C8,
in
a variety
of
ways to suit the
individual requirement.
2-16. MULTIBUS CONFIGURATION
For
systems applications, the iSBC 86/12 is designed for
installation
in
a standard Intel iSBC 604/614 Modular
Backplane and Cardcage. (Refer to table 2-1 items 1
and 2.) Alternatively, the iSBC 86/12 can
to
3i
user-designed system backplane by means
Vs
Configuration Jumpers
Function
Jumper
In Jumper Out
63-64
-
8261
8251
A TXC in
A TXC in
or
5)
5)
inor
3)
or
48-49, 45-46
49-50,
45-46
-
38-39
41-42
-
-
-
-
-
*W3A-8
48-49, 44-45
49-50, 44-45
*W2A-8
*W1A-8
-
48-49,45-47
49-50,45-47
*39-40
*42-43
.
CA,
be
interfaced
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
of
and
an
NOTES:
1.
All odd-numbered pins (1,3,5,
component side
2.
Only one
3. Optional jumper selected output
Default jumpers
4.
Input Frequency (Counter 2)
5. For those
*Default jumpers connected at the factory.
of
the board with the extractors at the top.
of
these signal outputs (pin
*39-40
applications without CTS capability, connect jumper 51··52. This routes
and
...
*42-43
in
25) are on component side of the board. Pin 1 is the right-most pin when viewed from the
5,
21,
or
26) may
of
8255A PPI. Refer to figure 5-2 sheet 9.
connect 8253 CTR2 output to 8251A RXC and txc inputs, respectively. See
table 2-4.
be,
sele<.1ed.
8251
A RTS output to
8251 A CTS
Timer
input.
2-9
Page 24
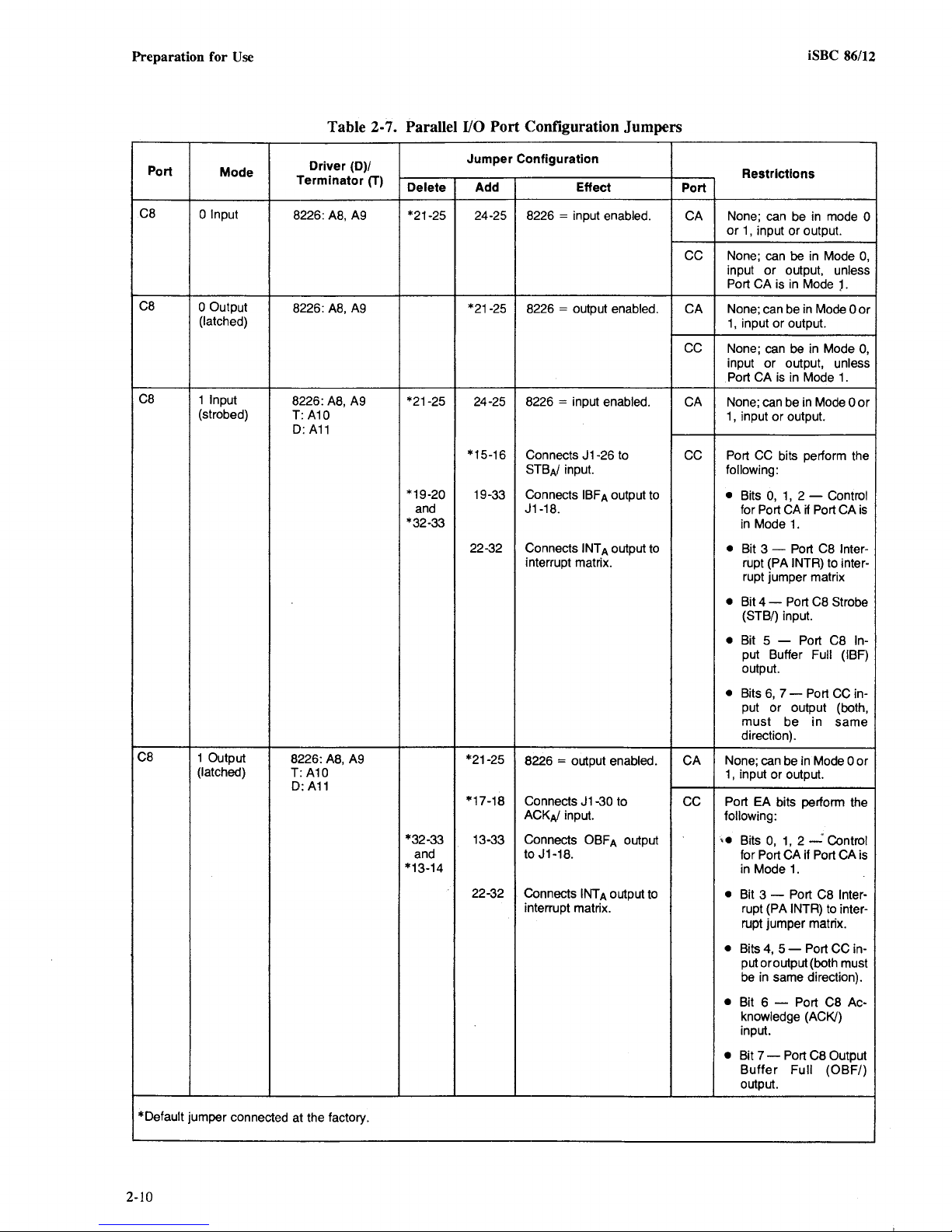
Preparation for
Use
Table 2-7. Parallel I/O Port Configuration Jumpers
iSBC
86/12
CB
CB
CB
CB
Port
Mode
o Input
o Output
(latched)
1 Input
(strobed)
1 Output
(latched)
Driver
Terminator
(D)/
B226:AB,A9
B226:AB,A9
B226:AB,A9
T:A10
0:
A11
B226:AB,A9
T:A10
0:
A11
(T)
Delete
*21-25
*21-25 24-25
*19-20 19-33
and
*32-33
*32-33 13-33
and
*13-14
Jumper
*21-25
*15-16 Connects J1-26 to
Add
24-25
Configuration
Effect
B226
= input enabled.
B226
= output enabled.
B226
= input enabled.
STBAI
input. following:
Connects IBF A output to
J1-1B.
22-32
*21-25
*17-1B
22-32
Connects
interrupt matrix.
B226
Connects J1-30 to
ACKAI input.
Connects OBF A output
to
Connects
interrupt matrix.
INT A output to
= output enabled.
J1-1B.
INT A output to
Port
CA
CC
CA None; can be
CC
CA None; can be
CC
CA
CC
Restrictions
None; can be in mode 0
or
1,
input or output.
None; can be in Mode 0,
input or output, unless
Port CA is
1,
input or output.
None; can be in Mode
input or output,
.Port CA is
1,
input or output.
Port CC bits perform the
• Bits 0,
• Bit 3 - Port
• Bit 4 - Port
• Bit 5 - Port
• Bits
None; can be
1, input
Port EA bits perform the
following:
".
• Bit 3 - Port
1,
for Port CA if Port CA
in Mode
rupt (PA INTR) to interrupt jumper matrix
(STBI)
input.
put Buffer Full (IBF)
output.
6,
7 - Port CC in-
or
put
must
direction).
or
Bits 0,
1, 2 --
for Port CA if Port CA is
in Mode
rupt (PA
rupt jumper matrix.
in
Mode
1.
in
Mode 0
unless
in
Mode
1.
in
Mode 0
2 - Control
1.
CB
Inter-
CB
Strobe
CB
output
(both,
in
be
output.
same
in
Mode 0
Control
1.
CB
INTR) to inter-
Inter-
or
0,
or
is
In-
or
*Default jumper connected at the factory.
2-10
• Bits 4, 5 - Port CC input or output (both must
be
in
same direction).
• Bit 6 - Port
knowledge
input.
• Bit 7 - Port
Buffer
output.
(ACKJ)
Full
CB
CB
(OBF/)
Ac-
Output
II
Page 25
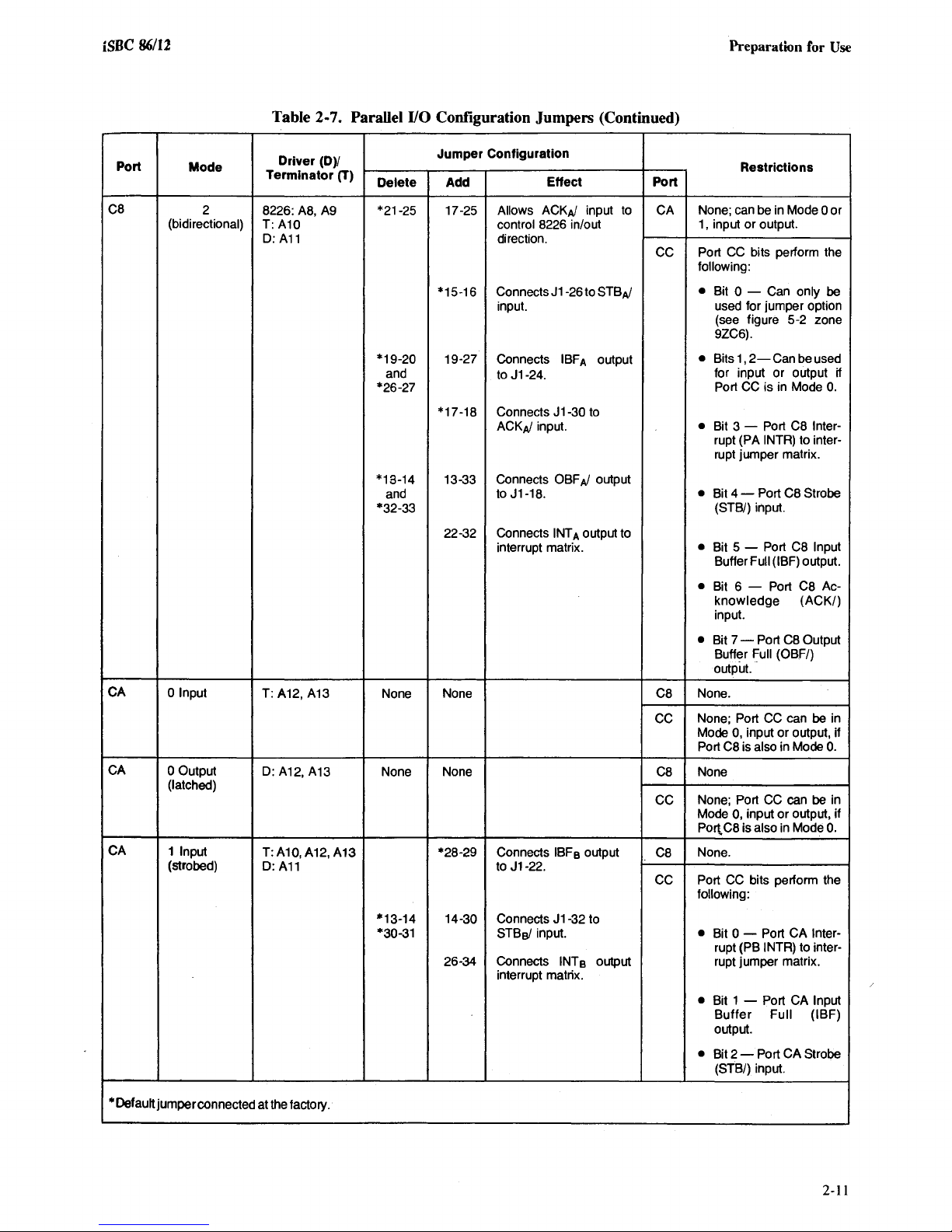
iSBC
86/12
Table 2-7. Parallel I/O Configuration Jumpers (Continued)
Preparation for
Use
Port
CB
Mode
2
(bidirectional)
Driver
Terminator
B226:AB,A9
T:A10
D:
(D)I
A11
Jumper
(T)
Delete Add
*21-25
*19-20
and
*26-27
*13-14 13-33 Connects
and
*32-33
17-25
*15-16 Connects J1-26 to STBtJ
19-27
*17-1B
22-32
Configuration
Effect
Allows ACKtJ input
control B226 inlout
direction.
input.
Connects
to J1-24.
Connects J1-30 to
ACKtJ input.
to J1-1B.
Connects
interrupt matrix.
IBFA
OBF
tJ
INT A output to
Port
to CA None; can be in Mode 0 or
CC Port
output • Bits
output
Restrictions
1,
input or output.
CC
following:
•
• Bit 3 - Port
• Bit 4 - Port
bits perform the
Bit 0 - Can only be
used for jumper option
(see figure 5-2 zone
9ZC6).
1,2-
for input or output if
Port CC is in Mode
rupt (PA INTR) to interrupt jumper matrix.
Can be used
(STB/) input.
• Bit 5 - Port
Buffer Full (IBF) output.
• Bit 6 - Port
knowledge
input.
CB
CB
CB
CB
(ACKI)
O.
Inter-
Strobe
Input
Ac-
CA-
CA-
CA
o Input
o Output
(latched)
1 Input
(strobed)
T: A12, A13
D: A12, A13 None None
T:A10,A12,A13
A11
D:
None None
*2B-29 Connects IBFe output
"'13-14 14-30 Connects J1-32 to
*30-31 STBei input.
26-34
to J1-22.
Connects
interrupt matrix.
INTe
• Bit 7 - Port
Buffer
output.
None.
CB
None; Port
CC
Mode
0,
Port
CB
CB
None
CC
None; Port CC can be
Mode 0, input or output, if
Port
CB
None.
CB
Port CC
CC
following:
• Bit 0 - Port CA Inter-
output rupt jumper matrix.
rupt (PB INTR) to inter-
• Bit 1 - Port CA Input
Buffer
output.
• Bit 2 - Port CA Strobe
(STB/)
CB
Full (OBF/)
input or output, if
is also in Mode
is also in Mode
bits perform the
input.
Output
CC
can be
Full (IBF)
in
O.
in
O.
'"
Default jumper connected at the factory.
2-11
Page 26

Preparation for
Use
iSBC 86/12
Table 2-7. Parallel I/O Port Configuration Jumpers (Continued)
Port
CA
Mode
1 Output
(latched)
Driver
Terminator
T:A10
D: A11, A12, A13
(D)
(T)
Delete
*13-14
and
*30-31
*26-27
Jumper
*28-29
Configuration
Add
Connects
output J 1 -22.
14-30 Connects J1-32 to
ACKBI input.
26-34 Connects
interrupt matrix.
Effect
OBFe! output C8
INT B output
Port
CC
to
Restrictions
• Bit 3 - If Port C8 is
Mode 0, bit 3 can be input
or
output. Other-
wise, bit 3 is reserved.
• Bits 4, 5 ~ Depends on
Port
C8
mode.
• Bits 6, 7
None.
Port CC bits perform the
• Bit 0 - Port CA inter-
• Bit 1 - Port
• Bit 2 - Port
-Input
put (both must be
same direction).
following:
rupt (PB
rupt jumper matrix.
put Buffer
output.
knowledge
input.
INTR) to inter-
Full (OBF!)
or out-
CA
Out-
CA
(ACK/)
in
,
in
Ac-
CC o Input
(upper)
CC o Input
(lower)
CA
(upper)
CA
(lower)
o Outpl:lt
(latched)
o Output
(latched)
T:A10
T:
A11
D:A10
D:
A11
None
None *26-27
None
*15-16 Connects bit 4 to J1-26.
*19-20
*17-18
*13-14 Connects bit 7 to J1-32.
*28-29
*30-31
*32-33
Same' as for Port CC (upper) mode
o Input.
None
Same as for Port CC (lower) Mode CC Same as for Port CC
o Input.
bit 5 to
Connects
Connects bit 6 to J1-30.
Connects bit
Connects bit 1 to J1-22.
Connects bit 2 to
Connects bit 3 to J1-18.
J1--28.
0 to J1-24.
J1-20. available.
• Bit 3 - If Port
Mode 0, bit 3 can be input or output. Otherwise, bit 3 is
•
Bits4,5-lnputoroutput (both must be in
same direction).
• Bit
6,
7 - Depends on
C8
Port
Port
C8
C8
()
av~ilable.
CA Port
must be in Mode
for all four bits to be
CA
must be in Mode
o for all four bits to be
available.
Port
C8
C8
must be in Mode
o for all four bits
CA Port
CA
must be in Mode
o for all four bits to be
available.
C8 Same
as
(upper) Mode 0 Input.
(lower) Mode 0 Input.
C8
~served.
mode.
to
for
Port CC
"'!:;'
is
in
be
*Default jumper connected at the factory.
2-12
Page 27

iSBC 86/12
Preparation for
Use
86-pin connector. (Refer to table 2-1 item 3.) Multibus
of
signal characteristics and methods
serial
or
parallel priority resolution scheme for resolving
bus contention in a multiple bus master system are described in following paragraphs.
Always turn
fore installing
the backplane. Failure
caution can cause damage to the board.
off
the system power supply be-
or
removing any board from
to
implementing a
observe this pre-
2-17. SIGNAL CHARACTERISTICS
As shown
86/12 to the Multibus. Connector
listed in table 2-8 and descriptions
are provided in table 2-9.
The dc characteristics
signals are provided in table 2-10. The ac characteristics
mode and slave mode are provided in tables 2-11 and
2-12, respectively. Bus exchange timing diagrams are
provided in figures 2-3 and 2-4.
in
figure 1-1, connector
of
the iSBC 86/12 bus interface
of
the iSBC 86/12 when operating in the master
PI
interfaces the iSBC
PI
pin assignments are
of
the signal functions
2-19. PARALLEL PRIORITY RESOLUTION
A parallel priority resolution scheme allows up
masters to acquire and control the Multibus. Figure
illustrates one method
resolving bus contention in a system containing eight bus
masters installed
highest and two lowest priority bus masters are shown installed
in
the iSBC 604.
In the scheme shown in figure 2-6, the priority encoder
is
a 74148 and the priority decoder is an Intel 8205.
Input connections to the priority encoder determine the
bus priority, with input 7 having the highest priority
and input
master has the highest priority and the J5 bus master
has the lowest priority.
IMPORT ANT:
the
On the iSBC 86/12 disable the BPRO/ output signal by
removing jumper 151-152.
removed on the other bus masters, either clip the IC pin
that supplies the BPRO/ output signal to the Multibus
or
cut the signal trace.
0 having the lowest priority. Here, the
BPRO/ output must be disabled on all bus masters.
of
implementing such a scheme for
in
an iSBC 604/614. Notice that the two
In
a parallel priority resolution scheme,
If
a similar jumper cannot be
to
16
J3
bus
2-6
bus
2-20. POWER FAIUMEMORY PROTECT
CONFIGURATION
2-18. SERIAL PRIORITY RESOLUTION
In a multiple bus master system, bus contention can be
resolved in an iSBC 604 Modular Backplane and Card-
cage by implementing a serial priority resolution scheme
in
as shown
the BPRO/ signal path, this scheme is limited to a maximum
trolling the Multibus. In the configuration shown in figure
2-5, the bus master installed in slot J2 has the highest
priority and is able to acquire control
any time because its
(tied to ground) through jumpers
plane. (See figure 5-3.)
If
the bus master in slot 12 desires control
figure 2-5. Due to the propagation delay
of
three bus masters capable
BPRN/ input
of
acquiring and con-
is
Band
of
the Multibus at
always enabled
N on the back-
of
the Multibus',
it drives its BPRO/ output high and inhibits the BPRN/
input to all lower-priority bus masters. When finished
using the Multibus, the J2 bus master pulls its
output low and gives the
take control
desire to control the Multibus at this time,
BPRO/ output low and gives the lowest priority bus
master in slot J4 the opportunity to assume control
Multibus.
The serial priority scheme can be implemented
designed system bus
signals are wired as shown in figure 5-3.
of
the Multibus.
J3
bus master the opportunity to
If
the
J3
bus master does not
if
the chaining
of
BPRO/ and BPRN/
it pulls its
BPRO/
of
in
a user-
of
the
A mating connector must be installed in the iSBC
604/604 Modular Cardcage and Backplane to accom-
modate auxiliary
Table 2-2 lists some 60-pin connectors that can
for this purpose; flat crimp, solder, and wirewrap connector types are listed. Table 2-13 correlates the signals
and pin numbers on the connector.
Procure the appropriate mating connector for P2 and
secure it
a. Position holes in P2 mating connector over mounting
b. From top
c. Install a flat washer, lock washer, and star-type nut
When the mating connector for P2 is in place, wire the
power fail signals to the appropriate pins
as listed in table 2-13. The dc characteristics
signals interfaced via P2 are given in table 2-14. In a
typical system, these signals would be wired as follows:
a. Connect auxiliary signal common and returns for
in
holes that are in line with corresponding
connector.
head screws down through connector and mounting
holes.
on each screw; then tighten the nuts.
~onnector
place as follows:
of
connector, insert two 0.5-inch
P2. (Refer to figure 1-1.)
be
PI
mating
#4-40
of
the connector
of
used
pan
the
+ 5 V, - 5 V, and + 12 V backup batteries to P2 pins
1,2,21,
and 22.
2-13
Page 28

Preparation for
Use
iSBC 86/12
Table 2·8. MuItibus Connectol·
Pin*
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
*AII odd-numbered pins
component side of the board with the extractors
Signal
GND
GND 45 ADRC/
+5V
+5V
+5V
+5V
+12V
+12V
-5V
-5V
GND
GND
BClK/
INIT/
BPRN/
BPRO/
BUSY/
BREa/
MRDC/
MWTC/ Memory Write Command
10RC/
10WC/
XACK/
INH1/
BHEN/
ADR10/
CBRa/
ADR11/
CCLK/
ADR12/
INTN
ADR13/
INT6/
INT7/
INT4/
INT5/
INT2/
INT3/
INTO/
INT1/
ADRE/
} Ground
} Ground
Bus Clock 56 ADR3/
System
Bus Priority
Bus Priority Out
Bus Busy
Bus Request
Memory Read Command
I/O
I/O
Transfer Acknowledge
Inhibit
Byte High Enable
Address bus bit 10
Common Bus Request
Address bus bit
Constant Clock 74
Address bus bit 12 75 GND
Interrupt Acknowledge
Address bus bit 13
Interrupt request on level 6 78
Interrupt request on level 7
Interrupt request on level 4
Interrupt request on level 5
Interrupt
Interrupt request on level 3
Interrupt request on level 0
Interrupt request on level 1
\
(1,3,,5
...
Function
Power input
Initialize
In
Read Command 64 DATB/
Write Command 65 DAT8I
RAM
request on level 2
85) are on component side of the board. Pin 1 is the left-most pin when viewed from the
PI
Pin Assignments
Pin*
44
46
47 ADRA/
48 ADRB/
49
50
51
52 ADR7/
53 ADR4/
54 ADR5/
505
Eo7
58 ADR1/
5,9
60
61
62
63
66
67 DAT6/
68
69 DAT4/
70 DAT5/
71
7:2
11
73
715
Tl
7!}
80
8'1
82
83
84
85 GND
86 GND
at
the top. All unassigned pins are reserved.
Signal
ADRF/
ADRD/
ADR8I
ADR9/
ADR6/
ADR2/
ADRO/
DATE!
DATF/
DATC/
DATD/
DATN
DAT9/
DAT7/
DAT2/
DAT3/
DATO/
DAT1/
GND
+12V
-12V
+5V
+5V
+5V
+5V
>'
Address bus
Data bus
} Ground
Power input
J
Ground
}
Function
2-14
Page 29

iSBC
86/12
Table 2-9. Multibus Signal Functions
Preparation for
Use
Signal
ADRO/ADRFI
ADR10/-ADR131
BClK/
BHENI
BPRNI
BPROI
BREQI
BUSYI
CBROI
Address.
Bus Clock.
Byte High Enable.
For
memory
on
the
address
by
the
cycle.
duty
These
access,
Multibus;
bit.
Used
iSBC
86/12, BClK/
20
lines
i.e.,
to
synchronize
When
Multibus.
Bus Priority
use
Bus Priority Out.
to
Bus Request.
master
with
Bus Busy.
control of
Common Bus Request.
presently
raises
of the
the
BClK/.
In.
bus.
BPRN!
requires
Indicates
the
have
the
CBROI
Indicates
BPRNI
In
serial
input
In
parallel priority
control of
that
bus.
BUSYI
control.
signal.
transmit
ADROI
ADROI
to
is
(daisy
of the
the
Indicates
As
Functional Description
the
address
(when
active
the
low,
chain)
master
active
low
bus
of
enables
bus
priority
with
for
contention
master
with
is
has a period
active
a particular
synchronized
bus
resolution
the
bus
for
one
bus
is
in
that a
as
control
use
bus
is
synchronized
soon
of
the
memory
low)
enables
all
even
108.5
nanoseconds
the
that
BCLK!.
resolution
the
next
schemes,
or
more
and
prevents
with BClK/.
master
of the
bus
location or
the
addresses.
logic
on
all
odd
byte
no
higher priority
schemes,
lower
bus
BREOI
data transfers.
all
other
wishes
control of the
is
obtained,
VO
port
to
be
even
byte
ADR131
bus
masters.
(9.22
MHz)
bank
(DAT8I-DATF/)
BPROI
bank
is
the
with a 35-65 percent
bus
master
must
accessed.
(DATO/-DAT7/)
most
significant
When
generated
onto
is
requesting
be
connected
priority.
indicates that a particular
BREOI
is
synchronized
bus
the
requesting
masters
bus
from
but
bus
does not
controller
the
bus
gaining
CCLK!
DATO/-DATFI
INH11
INITI
INTN
INTOl·INT7/
IORCI
IOWCI
MRDCI
MWTC/
Constant Clock.
When
generated
with a 35-65 percent duty
Data.
These
memory
DATO/-DAT71
Inhibit RAM.
overlayed
CPU
access of
Initialize.
Inte"upt
Interrupt Request.
Acknowledge. This
handler.
110
Read Command. Indicates that the
and
that
110
Write Command. Indicates that
and
that
Memory Read Command. Indicates that the
address
data
lines.
Memory Write Command.
address
Provides a clock
by
16
bidirectional data
location
or
is
the
For
system
by
ROM/PROM
its
Resets
the
These
INTO
has
the
output of that port
the
contents
lines
and
lines
and
that the
signal
the
iSBC86112,
of ronstant
CClK/
cycle.
lines
VO
even
dual
entire
port
port.
byte
applications,
or
memory
RAM.
system
signal
CATF/
and
DAT8I·DATFI
to a known
is
issued'
transmit
is
allows
mappecll/O
eight lines transmit Interrupt
the highest priority.
address
is
to
be
the
Multibus
that
on
address
data lines
of that location
the
the
that
on
the
the
Indicates
contents
contents
read
Multibus data
frequency
has a period
and
for
use
of 108.5 nanoseconds
receive
data
to
by
and
other
from
system
the
modules.
(9.22
MHz)
addressed
the most-significant bit. For data byte operations,
is
the
odd
byte.
iSBC
86112
dual
port
RAM
internal
in
response
of
an
(placed)
of
an
are
address
address
devices.
state.
to
Requests
VO
port
onto
VO
port
to
be
of a
memory
are
to
of a
memory
lines
This
addresses
signal
has
no
an
interrupt
is
on
the
Multibus data lines.
is
on
accepted
be
read
are
to
request.
to
the
ap}>ropriate
the Multibus address lines
the Multibus
by
the addressed
location
is
(placed)
location
on
on
is
on
be written into that location.
to
be
effect of local
interrupt"
address
tines
port.
the
Multibus
the Multibus
the Multibus
XACK/
Transfer Acknowledge. Indicates that
read
data
or
write
lines.
operation.
That
is,
the
data
address
has
been
memory
placed
location
onto
or
has
completed
accepted
the specified
from
the
Multibus
2·15
Page 30

Preparation
for
Use
iSBC
86/12
Signals
AACK/, XACK/
ADRO/-ADRF/
ADR10/-ADR13/
BCLK/
Table 2-10. iSBC 86/12
Symbol
VOL
VOH
VIL
VIH
IlL
IIH
*CL
VOL
VOH
VIL
VIH
IlL
IIH
ILH
ILL
*CL
VOL
VOH
VIL
VIH
IlL
IIH
*CL
Output Low Voltage
Output High Voltage
Input
Input High Voltage
Input Current
Input Current at High V
Capacitive Load
Output Low Voltage
Output High Voltage
Input Low Voltage 0.8
Input High Voltage
Input Current
Input Current
Output Leakage High
Output Leakage Low
Capacitive
Output Low Voltage
Output High Voltage
Input
Input High Voltage 2.0 V
Input Current
Input c.urrent
Capacitive
DC
Characteristics
Parameter
Description
Low Voltage
at Low V
at
Low V
at
High V
Load 18
Low Voltage 0.8
at Low V
at
High V
Load 15 pF
Test
Conditions
IOL=
16 rnA
IOH = -3
VIN = O.4V
VIN
IOL
IOH = 3mA
VIN
VIN
Vo = 5.25V
Vo =
IOL
IOH
VIN
VIN
rnA
= 2.4V
= 32 rnA
= 0.45V
= 5.25V
0.45V
= 59.5
rnA
=
-3
rnA
= 0.45V
= 5.25V 40
Min.
2.0
2.0
2.4
2.0
2.7 V
.Max.
.04 V
0.8
-2.2
-1.4
15 pF
0.55
-0.25
50
-0.25
-0.25
0.5 V
-0.5
Units
V
V
V
rnA
rnA'
V
V
V
V
rnA
/LA
rnA
rnA
pF
V
rnA
/LA
BHEN/
BPRN/
BPRO/
BREQJ
BUSY/,
CBRQJ,
INTROUT/
(OPEN
COllECTOR)
*Capacitive load values are approximations.
VOL
VOH
VIL
VIH
IlL
IIH
*C
VIL
VIH
IlL
IIH
*CL
VOL
VOH
.*CL
VOL
VOH
*CL
VOL
*CL
L
Output Low Voltage
Output High Voltage
Input
Low Voltage
Input High Voltage
at
Input Current
Input Current at High V
Capacitive
Low Voltage
Input
Input High Voltage 2.0 V
Input Current
Input Current at High V
Capacitive
Output Low Voltage
Output High Voltage
Capacitive
Output Low Voltage
Output High Voltage
Capacitive
Output Low Voltage
Capacitive
Low V
Load 15 pF
at
Low V
Load
Load
Load
load
IOL
= 16 rnA
IOH = -2.0
VIN
VIN
VIN
VIN
IOL
IOH = -0.4
IOL
IOH = -0.4
IOL
rnA
= 0.4V
= 2.4V
= 0.4V
= 5.25V
= 3.2 rnA
rnA
=;<
20 rnA 0.45 V
rnA
= 20 rnA 0.4 V
2.4 V
2.0
2.4
2.4 V
0.4
0.8
1.6
40
0.8
-0.5
50
18
0.45 V
15
10
20
rnA
/LA
rnA
/LA
pF
pF
pF
pF
V
V
V
V
V
2-16
,
I.
Page 31

iSBC
86/12
Preparation for
Use
Signals
CCLKI
DATOI-DATFI
INH11
INITI
(SYSTEM RESET)
Table 2-10. iSBC 86/12
Symbol
VOL
VOH
*C
L
VOL
VO
H
V
IL
V
IH
IlL
ILH
*C
L
V
IL
V
IH
IlL
IIH
*CL
VOL
VO
H
V
IL
V
IH
IlL
IIH
*CL
Parameter
Description
Output Low Voltage
Output High Voltage
Capacitive Load
Output Low Voltage
High Voltage
Output
Input Low Voltage
Input High Voltage
Input Current at Low V
Output Leakage High Vo = 5.25V 100
Capacitive Load
Input Low Voltage 0.8
Input High Voltage 2.0
Input Current at Low
Input Current at High
Capacitive Load
Output Low Voltage
Output
High Voltage OPEN
Input Low \Ioltage
Input High Voltage
Current at Low V
Input
Input Current at High V
Capacitive Load 15
DC
Characteristics (Continued)
Test
Conditions
IOL
= 60 rnA
10H = -3
10L
10H = -5
VIN
VIN
VIN
10L
COLLECTOR
VIN
VIN = 2AV
rnA
= 32 rnA
rnA
= OA5V
= 0.5V
= 2.7V
= 44 rnA
= OAV
Min.
2.7
2A
2.0
2.0
Max.
0.5
15
OA5
0.80
-0.20
18
-2.0
50
OA
0.8
-4.2
-1A
18
Units
V
V
pF
V
V
V
V
rnA
J.lA
pF
V
V
rnA
J.lA
pF
V
V
V
rnA
mA
pF
*C
*C
*C
V
IL
V
IH
IlL
IIH
L
VOL
VO
ILH
ILL
L
VOL
VOL
V
IL
V
IH
IlL
IIH
L
H
INTOi-lNT7
IORC/. IOWCI
INTN.
MRDC/.
MWTCI
*Capacitive load values are approximations.
Input Low Voltage
Input High Voltage
Current at Low V
Input
Input Current at High V
Capacitive Load
Output Low Voltage
Output
High Voltage
Output Leakage High Vo = 5.25V
Output Leakage Low
Capacitive Load
Output Low Voltage
Output High Voltage
Input Low Voltage
Input High Voltage 2.0
Input
Current at Low V
Input Current at High V
Capacitive Load
VIN
= OAV
VIN = 2AV
IOL
= 32 mA
10H = -5
Vo = OA5V
10L
10H = -5
VIN
VIN
rnA
= 30 rnA
rnA
= OA5V
= 5.25
2.0
2A
2A
0.8
-1.6
40
18
OA5
100
-100
15
OA5
0.95
-2.0
1000
25
V
V
rnA
J.lA
pF
V
V
J.lA
J.lA
pF
V
V
V
V
rnA
J.lA
pF
2-17
Page 32

Preparation
for
Use
iSBC
86/12
Parameter
tAS
tAH
tos
tOHw
tcy
tcMOR
tcMOW
tcSWR
tcSRR
tcsww
tCSRW
tXACK1
tSAM
lACKRo
lACKWT
tOHR
tOXL
tXKH
to
XL
tews
tes
toey
tNOO
toeo
toeo 40
tecy
tew
tlNIT
Minimum
(ns) (ns)
-115
3000
Table 2-11. iSBC 86/12 AC Characteristics (Master Mode)
Maximum
50
50
50
50
198
202
430
430
380
380
580 Write-to-write
580 Write-to-read
-55
202 210
115
205
0
0
0
35
00
23
55
30
35
108
35
109
74
Address
Address
Data
setup
Data
hold
CPU
cycle
Read
Write
Read
-to-write
Read-to-read
Command
Time
AACK
AACK
Read
Read
XACK
AACK
Bus
clock
BPRN
BCLK
BPRN
BCLK/
BCLK/
Bus
clock
Bus
clock
Initialization
Description
setup
hold
to
time
time
command
command
to
between
to
valid
or write
data
hold
data
setup
hold
time
to
XACK
low
to
BCLK
to
BUSY
to
BPRO
to
bus
to
bus
period
low
width
---- -
----"
time
to
time
from
write
CMD
from
write
width
width
command
command
command
command
XACK
sample
XACK
samples
read
data
command
time
to
XACK
tum
off
or
high
intervals
setup
delay
delay
request
priority out
(BCLK)
or
high
interval
---
command
command
CMD
separation
separation
separation
separation
point
inactive
delay
time
No
wait
states
With 1 wait
In
override
In
override
In
override
In
override
In
override
In
override
When
AACK
When
AACK
Supplied
From
From
After
iSBC
iSBC
all
voltages
by
Remarks
state
mode
mode
mode
mode
mode
mode
is
used
is
used
system
86/12
when
86/12
when
have
terminated
terminated
stabilized
Parameter
tAS
tos
toeD
tACK
tCMo
tAH
tOHw
tOHR
t)I<H
tACC
tlH
tlPW
tCY
tRO
tOXL
tcs
tiS
NOTES:
1.
No
refresh, dual port
2.
Maximum = tRO + toeD + tACK,
3.
Maximum
Minimum
(ns)
50
-200 Write data
720
0
0
0
0
50
100
30
200
access =
tACC + toeD + tRO.
Table 2-12. iSBC 86/12
Maximum
(ns)
Address
RAM
not
980
720
65
640
920
555
50
busy.
On-board
Command
Command
Address
Write
Read
Acknowledge
Read
Inhibit
Inhibit
Cycle
Refresh
Read
Command
. Inhibit
AC
Characteristics (Slave Mode)
Description
setup
to
command
setup
to
command
memory
hold
data
data
to data
hold
pulse
time
delay
data
setup
cycle
to
XACK
width
time
hold
time
hold
time
hold
time
valid
time
width
of
board
time
setup
to
separation
time
delay
XACK
From
address
Note
1
No
refresh
Notes 1 and
Note
1
Acknowledge
Note
3
Blocks
AACK
Remarks
to
command
2
turnoff delay
if
tiS > tiS
min.
2-18
Page 33

iSBC86/12
Preparation for
Use
BCLKJ
BREal
BPRNI
BUSYI
BPROI
ADDRESS
WRITE DATA
BCY
t
---.\
=.7
,.,'os~"
~
tBW--1
~
_________________
tDBO
__
tOBY
H
STABLE_DATA
~tBW
I 1
---,--JX
~''"''""W
L
___
T
_
611-4
WRITE COMMANDI
WRT AACKI
READ
READ DATA
READ XACKI
READAACKJ
---~.
Figure 2-3. Bus Exchange Timing (Master Mode)
\~4'----------~MDW----------~.~/
\
TACKWT~
---,\
~---------tCMDR--------~~
STABLE DATA
'OX,~
I
~
~
I
A--
--I-l--t
XKH
b~"
I
tACKRD
=1
~
I
2-19
Page 34

Preparation
for
Use
ADDRESS
MWTCI
XACK/
DATA
iSBC
86/12
~-----------------ICMD----------------~
~-----------IACK------------"'"
----t
lAS
~I-+------------~--~~
STABLE ADDRESS
IDS
--------~)<:r----------------------S-T-A-BL-E-D-A-T-A----------------------
I
ADDRESS
MRDCI
XACK/
DATA
lAS
liS
DUAL
PORT
RAM
STABLE ADDRESS
lACK
IACC
WRITE
IAH
INHll
611·5
2·20
I·
IIPW
DUAL
PORT
RAM
READ
Figure 2-4. Bus Exchange Timing (Slave Mode)
~I
'
Page 35

iSBC
86/12
Preparation for Use
484-2
~
PRIORITY
BPRNI
(NOTE)
NO.2
J2
~
B
N
-=
BREal
HIGHEST
PRIORITY
MASTER
BPRNI
o1L
LOWEST
PRIORITY
MASTER
BPRNI
J3
BPROI
~
'--
~
E
Ll
BPRNI
J2
BPROI
~
~
'--
C
Ml
-=
Figure 2-5. Serial Priority Resolution Scheme
~
NO.1
PRIORITY
(HIGHEST)
BPRNI
(NOTE)
J3
BREal
.Jio BPRNI
o-!!-
NO.7 PRIORITY
PRIORITY (LOWEST)
J4 J5
(NOTE) (NOTE)
BREal
01!-
J4
BPROI
~
BPROIAN
NOTUSED
MASTERS.
~
H
Kl
-=
NO.8
BPRNI
BREal
D BPRNI
BYNON-
iSBC604
BACKPLANE
(BOTTOM)
01!-
PINS
1-
I
-
B
- - -
f-
- - - - - - - - - - - - f--
A(
C D E F H G (BOTTOM)
L------r--f-------------I-I--------
BREal
INPUTS I
i:i~~CM6~~TERS
NOT
E:
REFER
TO
TEXT
484-1
DISABLING OF BPROI OUTPUT.
REGARDING
THE
Figure 2-6. Parallel Priority Resolution Scheme
BUS
PR10RITY
RESOLVER
-<
-<
7
6
4
3
2
0
P P
R R
I I
0
R
I I
T T
Y Y
E D
N E
C C
0 0
D D
E E
R R
L-..c
:
C'
l-<
r-<: 1
7106
0
R
41e>--
~~~~GTS
'~}
31e>--
TO
MASTERS
IN
iSBC
21>1
0
614
f--
- - - - -
-1ISBC604
BACKPLANE
I
2-21
Page 36

Preparation for
Use
iSBC 86/12
Table 2-13. Auxiliary Connector
Pin*
1
2
3
4
7
8
11
12
19
20
21
22
32
38
*AII odd-numbered pins (1,3,5
the component side of the board with the extractors at the top.
Signal
GND
GND
+5V
AUX
+5VAUX
-5VAUX
-5V
AUX
+12V
AUX
+12V
AUX
PFI!
MEM PROT/
GND
GND
ALE
AUX RESET/
...
} Auxiliary common
}
Au,;';.",
Power Fai/lnterrupt. This externally generated signal, which is input
to the priority interrupt jumper matrix,
to the 8086
Memory Protect. This externally generated
to the
}
Auxi,liary common.
Address Latch Enable. The
of every CPU/ machine cycle. This signal may be used as
auxiliary address latch.
Reset. The externally generated signal initiates a power-up
sequence; i.e.,
system to a known
59)
are on component side of the board.
P2
Pin Assignments
Definition
"ok""
batte<y
'''''''''
CPU NMI input.
dual port RAM during backup battery operation.
iSBC 86/12 activates ALE during
initializes the iSBC 86/12 and resets the entire
internal state.
Pin
1 is the left-most pin when viewed from
should normally be connected
signal prevents access
T1
an
Table 2-14. Auxiliary Signal (Connector
Signals
ALE
PFI
PROT/
MEM
RESET/
*Capacitance load yalues are approximations.
2-22
Symbol
VOL
VOH
*CL
'VIL
VIH
IlL
IIH
*CL
VIL
VIH
IlL
IIH
*CL
VIL
VIH
IlL
IIH
*CL
P2)
DC
Characte~tics
Parameter
Description
Output Low Voltage
Output High Voltage
Capacitive
Input
Input High Voltage
Input Current
Input Current at High V
Capacitive
Input
Input High Voltage 2.0 V
Input Current
Input Current at High V
Capacitive
Input
Input High Voltage
Input Current
Input Current at High V
Capacitive
Load
Low Voltage
at Low V
Load 20
Low Voltage
at Low V
Load. 15 pF
Low Voltage
at Low V
Load
Test
Conditions
IOL=8mA
IOH = -1.0
VIN = O.4V
VIN
VIN
VIN
VIN
VIN
rnA
= 2.4V
= 0.45V
= 5.25V
= 0.45V
= 5.25V 10
Min. Max. Units
2.4
2.4
2.6
0.45
'.
-0.4
0.80
--6.0
250
-0.25
,V
i-V
20
0.8 V
20
0.8
10
pF
rnA
pF
rnA
p,A
rnA
p,A
p,F
V
p,
V
V
V
Page 37

iSBC
86/12
Preparation for
Use
b.
Connect
-5V
battery input to
W4,
+5V
battery input to P2 pins 3 and
battery input to P2 pins 7 and 8, and + 12V
P2 pins
11
and 12. Remove jumpers
W5, and W6.
4,
c. Connect MEM PROTI input to P2 pin 20.
d. Connect PFII input to P2 pin 19; this signal is inverted
To
and applied to the priority jumper matrix.
the
PFII input the highest priority (8086 NMI input),
assign
remove jumper 87-89 and connect jumper 86-89.
e.
Connect RESETI input to P2 pin 38. This signal is
usually supplied by a momentary-closure switch
mounted
on
the system enclosure.
f. Connect ALE output signal to P2 pin 32.
2-21. PARALLEL
Parallel I/O ports C8,
Intel 8255 Programmable Peripheral Interface
I/O
CABLING
CA,
and CC, controlled by the
(PPI), are
interfaced via edge connector J 1. (Refer to figure 1-1.)
Pin assignments for connector
dc characteristics
table 2-16. Table
of
the parallel I/O signals are given in
2-2
lists some 50-pin edge connectors
that can be used for interface to
J1
are listed in table 2-15;
J1
and J2; flat crimp,
solder, and wirewrap connector types are listed.
The transmission path from the I/O source to the iSBC
86/12 should be limited to 3 meters (10 feet) maximum.
The
following bulk cable types (
or
equivalent) are recom-
mended for interfacing with the parallel I/O ports:
a. Cable, flat, 50-conductor, 3M 3306-50.
b. Cable, flat, 50-conductor (with ground plane), 3M
3380-50.
c.
Cable, woven, 25-pair,
An Intel iSBC 956 Cable Set, consisting
assemblies, is recommended for parallel
Both cable assemblies consist
with a 50-pin
PC
connector at one end. When attaching
3M
3321-25.
of
I/O. interfacing.
of
a 50-conductor flat cable
two cable
the cable to J 1, be sure that the connector is oriented
properly with respect to pin 1
(Refer
to
the footnote in table 2-15.)
2-22. SERIAL
I/O
on
the edge connector.
CABLING
Table 2-15. Parallel I/O Connector
J1
Pin
Assignments
Pln* Function
1 Ground
3 4 Port CA bit 6
5
7
9 10
11
13
15 Ground 16
17 Ground 18 Port
19
21
23 24 Port
25 26
27
29
31
33
35
37
39
41
43 44
45 46 Port C8 bit 1
47
49 Ground 50
*AII Odd-numbered pins (1,3,5,
side of the board. Pin 1 is the right-most pin when viewed
from the component side of the board with the extractors
at the top.
For
OEM
Ground 32 Port CC bit 7
Ground
Ground
applications where cables will be made
Pin*
2 Port CA bit 7
6 Port CA bit 5
8 Port CA bit 4
12
14
20 Port
22 Port CC bit 1
28
30
34
36
38
40 Port C8 bit 4
42
48
...
iSBC 86/12, it is important to note that the mating connector for J2 has 26 pins whereas the RS232C connector
has 25 pins. Consequently, when connecting the 26-pin
mating connector to 25-conductor flat cable, be sure that
the cable makes contact with pins 1 and 2
(!onnector and not with pin 26. Table 2-17 provides pin
correspondence between connector
connector. When attaching the cable to
the PC connector is oriented properly with respect to pin 1
on the edge connector.·(Refer to the footnote in table
Function
Port CA bit 3
Port CA bit 2
Port CA bit 1
Port CA bit 0
CC
bit 3
CC
bit 2
CC
bit 0
CC
Port
Port
Port CC bit 6
Port
Port C8 bit 6
Port C8 bit 5
Port C8 bit 3
Port C8 bit 2
Port C8 bit 0
EXT
49) are on component
bit 4
CC
bit 5
C8 bit 7
INTRO/
for
of
the mating
J2 and an RS232C
J2, be sure that
2-6.)
the
Pin assignments and signal definitions for RS232C serial
I/O interface are listed in table 2-6. An Intel iSBC 955
Cable Set is recommended for RS232C interfacing.
cable assembly consists
of
a 25-conductor flat cable with
a 26-pin PC connector at one end and an RS232C interface connector at the other end. The second cable assembly includes an RS232C connector at one end and has
spade lugs at the other end; the spade lugs are used to
interface to a teletypewriter. (See Appendix A for ASR33
TTY interface instructions.)
One
2-23. BOARD INSTALLATION
Always turn
supply before installing
iSBC 86/12 board and before installing
off
the computer system power
or
removing the
or
2-23
ii_
Page 38

Preparation
for
Use
Table
2-16. Parallel I/O Signal (Connector J1) DC Characteristics
iSBC 86/12
Signals
Port C8
Bidirectional
Drivers
8255A
Driver/Receiver
INTRO/
EXT
*Capacitive
load values are approximations.
Symbol
VOL
VOH
VIL
VIH
IlL
*CL
VOL
VOH
V
IL
VIH
IlL
IIH
*CL
VIL
VIH
IlL
IIH
*CL
Parameter
Description
Output Low Voltage
Output High Voltage
Input
Low Voltage
Input High Voltage
Input
Current at Low V
Capacitive Load
Output Low Voltage
Output High Voltage
Input Low Voltage
Input High Voltage
Input
Current at Low V
Input Current at High V
Capacitive Load
Low Voltage
Input
Input High Voltage
Input
Current at Low V
Input Current at High V
Capacitive Load
Test
Conditions
10L
= 20
mA
10H = -12
VIN
= 0.45V
10L
= 1.7 mA
IOH = -200
VIN
= 0.45
VIN
= 5.0
VIN
= 0.4V
VIN
= 2.4V
mA
p.A
Min.
2.4
2.0
2.4
2.0
2.0
Max.
0.45 V
0.95
-5.25
18
0.45 V
0.8 V
10
10
18 pF
0.8
-1.0
-0.8
30
Units
V
V
V
mA
pF-
V
V
p.A
p.A
V
V
mA
mA
pF
removing device interface cables. Failure to take
these precautions can result in damage to the
board.
Table 2-17.
PC
Conn.
J3
1
2
3
4
5
6
7
8
9 18
10
11
12
13
Connector
Pin
RS232C .
Conn.
14 14
1 15
15
2 17 22
16
3
17
4
5
19
6 25
20
J2
Vs
RS232C
Correspondence
PC
Conn.
J3
16
18
19
20
21
22
23
24
26
RS232C
Conn.
N/C
21
23
10
24
11
25
12
13
NOTE
Inspect the modular backplane and cardcage and
ensure that pull-up regis tors have been included
for pins 27, 28, 30, 32, 33, and 34.
Eariier
backplanes did not include pull-ups on these
pins.
7
In an
8
9
"
iSBC 80 Single Board Computer based system,
install the
for a dedicated function. In an
iSBC 86/12 in any slotthat has not
Intellec System, install the
iSBC 86/12 in any odd-numbered slot except
another module in the Intellec System
beeq.
slqtl.
is
to supply the
BCLK/ and CCLK/ signals, disconnect 105-106
wired
If
and.
103-104 jumpers on the iSBC 86/12. Make sure that
auxiliary connector
P2 (if used) mates with the userinstalled mating connector. Attach the appropriate cable
assemblies to connectors
11
and 12.
2-24
Page 39

CHAPTER 3
PROGRAMMING INFORMATION
3-1. INTRODUCTION
This chapter lists the dual port RAM, ROM/EPRON, and
I/O address assignments, describes the effects
hardware initialization (power-up and reset), and provides programming information for the following programmable chips:
a.
Intel
825lA
USART (Universal Synchronous/Asyn-
chronous Receiver/Transmitter) that controls the
serial
I/O port.
b.
Intel 8253 PIT (Programmable Interval Timer) that
controls various frequency and timing functions.
c. Intel 8255A
face) that controls the three parallel
d. Intel 8259A
troller) that can handle up
intenupts for the on-board microprocessor.
This
chapter also discusses the Intel 8086 Micropro:::essor
(CPU) intenupt
programming with Intel's assembly language is gi
the 8086 Assembly Language Reference Manual, Manual
Order No.
PPI (Programmable Peripheral Inter-
I/O ports.
PIC (Programmable Intenupt Con-
to
64 vectored priority
capability. A complete descripLon of
9800640.
of
ven
3-2. FAILSAFE TIMEB
The 8086 CPU expects
turned from the addressed
sponse to each Read
includes a Failsafe Timer that
every machine cycle. If the Failsafe Timer
hardwire jumper as described
acknowledge signal
milliseconds after the command
Timer will time out and allow the
state. As described in
the Failsafe Timer output (TIME
used to
If the Failsafe Timer
and an acknowledge signal is not returned for any reason,
the CPU will hang up in a wait state. In this situation, the
only way to free the
described
intenupt the CPU.
in
paragraph 3 -7 .
3-3" MEMORY ADDRESSING
The iSBC 86/12 includes 32K bytes
access memory (RAM) and four
an
acknowledge signal to
I/O
or
memory device
or
W rite Command. The iSBC g6/
is
triggered during
is
enabled
in
table 2-4, and no
is
received within approximately 6
is
issued, the Failsafe
CPU to exit the wait
Chapter 2, provision
OUT/) can optionally be
is
not enabled by hardwire jumper
CPU
is
to initialize the
IC sockets to accom-
is
made
sys!:em
of
dynamic random
be
in
Tl
so
rere-
12
of
by
that
as
mod ate
memory
dual port RAM access anangement
RAM can be accessed
a
processor
Multibus. The
CPU.
The dual port RAM can be accessed by another bus master
that
noted that, even though another bus master may be con·
tinually accessing the dual port RAM, this does not prevent the
When this situation occurs, memory accesses
and controlling bus master are interleaved. Such inter-
leaved access will,
both for the
Dual-port RAM access by another bus master does not
interfere with the CPU while it
ROM/EPROM and I/O devices.
in
up
to
16K bytes
(ROM
or
EPROM). The iSBC 86/12 features a
(CPU) or by another bus master via the
ROM/EPROM can be accessed only
cunently has control
CPU from also accessing the dual port RAM.
of
CPU and for the controlling bus master.
of
user-installed read-only
in
which the on-board
by
the on-board 8086 micro-
of
the Multibus. It should
course, impose a longer wait state
is
accessing the on-board
3-4. CPU ACCESS
Addresses for CPU access
board RAM are provided
ROM/EPROM addresses are assigned from the top down
of
the I-megabyte address space with the bottom address
being determined by the user
tion. The on-board RAM addresses are assigned from the
bottom up
When the
ROM,
automatically generated and imposes one wait state for
each
memory via the Multibus, the CPU must first gain control
of
the Multibus and, after the Memory Read
Write
Acknowledge
memory device. The Failsafe Timer, if enabled, will
prevent a
equipment failure
It should be noted in table 3-1 that
ure
an illegal address
Write
edge signal
and the
ever,
of
the 1-megabyte address space.
CPU
is
addressing on-board memory (RAM,
or
EPROM), an internal acknowledge signal
CPU operation. When the CPU
Command
CPU hang-up in the event
ROM/EPROM such
Command
CPU wilI continue executing the program. How-
in
this case, enoneous data will be returned.
(XACK!)
is
to
is
generated
is
or
used
ROM/EPROM, an internal acknowl-
of
ROM/EPROM and on-
in
table 3-1. Note that the
ROM/EPROM configura-
is
addressing system
given, must wait for a Transfer
to be received from the addressed
of
a memory device
a bus failure.
it
is
possible to config-
as
to
create illegal addresses.
in
conjunction with a Memory
as
though the address was legal
by
the CPU
or
Memory
by
the
be
is
If
3-\
Page 40

Programming Information
Table 3-1. On-Board Memory Addresses (CPU Access)
iSBC
86112
Type
EPROM
ROM
RAM
Configuration
Two
2758
Four 2758 chips
Two
Four 2716 chips
Two
Four
Two
Four
Sixteen 2117 chips
chips
2716 chips
2316E chips
2316E
chips
2332 chips
2332
chips
3-5. MUL TIBUS ACCESS
As described in paragraph 2-12, the iSBC 86/12 can be
configur~
32K bytes
8-bit and 16-bit masters to reside in the same system and,
to accomplish this, the memory
data banks to form one 16-bit word. The banks are
organized such that all even bytes are in one bank
(DATO-DAT7) and
bank (DAT8-DATF).
The Byte High Enable (BHEN/) signal controls the odd
data byte and, when active, enables the high
(DAT8/-DATF/) onto the Multibus. Address bit
controls the even data byte and, when active. enables the
low byte (DATO/-DAT7/) onto the Multibus. For
. maximum efficiency. 16-bit word operations must occur
on an even byte boundary with BHEN/ active. Address bit
ADRO/
addressing requires two operations to form a 16-bit word.
to
permit Multibus access
of
on-board RAM. The Multibus allows both
alL
odd bytes are in the other
of
8K, 16K, 24K,
is
divided into two 8-bit
or
byte
ADRO/
is active for all even byte addresses. Odd byte
Legal Addresses
FF800-FFFFF
FFOOO-FFFFF
FFOOO-FFFFF
FEOOO-FFFFF
FFOOO-FFFFF
FEOOO-FFFFF
FEOOO-FFFFF
FCOOO-FFFFF
0OOO-07FFF
REF
A
B
MEMORY
DATA
PATHS
Illegal Addresses
FFOOO-FF7FF
-
FEOOO-FEFFF
-
FEOOO-FEFFF
-
FCOOO-FDFFF
-
-
BHENI
DATO/-DAT7/
DAT8/·DATF/
ADRo/
o
USED
:u"s
MASTERS
8-B1T.
16-BIT.
OR
MIXED
8-B1T
Byte operations can occur in two ways. The even byte can
be
accessed by controlling ADRO/. which places the data
on the DATO/-DAT7/lines. (See figure 3-1A.) To access
the odd data bank. which normally is
OAT8/-DATFI lines, a new data path
thactive .slate
buner
of
ADROi
that
places the odd data barik on DATO/-DAT7/.
and BHENI enable a
(See figure 3-1B.) This permits an
access both bytes
of
a data word by controlling only
ADRO/.
Figure 3
16-bit word by a single address on an even byte boundary.
Figure 3-1A illustrates how a 16-bit bus master may
selectively address an even (low) data byte.
3-2
-1
C illustrates how a 16-bit bus master obtains a
8-Ott
placed
is
bus
jID
the
defined. The
Sloll1Ip
~te
master
to
--
c
Figure 3-1. Dual Port RAM Addressing
645-4 (Multibus Access)
o
16-BIT
Page 41

iSBC
86/12
Programming Information
3,-6.
I/O ADDRESSING
The CPU communicates with the one board programmable
chips through a sequence
Commands. As shown in table
recogll1izes four separate hexadecimal
are used to control
VO
(The
address decoder operates
the:
of
VO
Read and
3-2,
each
VO
VO
of
these chips
addresses
Write
that
various programmable functions.
on
the lower eight bits
and all addresses must be on an even byte boundary.)
Where two hexadecimal addresses are listed for a single
function, either address may be used. For example, an
Read Command to
of
the 8251A USART.
OOODA
or
OOODE
will read the status
VO
Table 3-2. I/O Address Assignments
I/O
Address*
OOOCO
or
000C4
000C2
or
000C6
Chip
Select
8259A
PIC
3-7. SYSTEM INITIALIZATION
When power
signal
following:
a.
The 8086 CPU internal registers are set as follows:
PSW 0000
IP 0000
OS 0000
ES 0000
Code
This effectively causes a long
is
initially applied to the system, a reset
is
automatically generated that performs the
Relocation Register =
Function
Write: ICW1, OCW2, and OCW3
Read:
Status and Poll
Write: ICW2, ICW3, ICW4, OCW1 (Mask)
Read:
OCW1
(Mask)
FFFF
JMP
to FFFFO.
000C8
OOOCA
OOOCC
OOOCE
OOODO
000D2
000D4
000D6
000D8
or
OOODC
OOODA
or
OOODE
8255A
PPI
8253
PIT
8251A
USART
Write: Port A (J1)
Read: Port A (J1)
Write: Port B
Read: Port B (J1)
Write: Port C (J1)
Read: Port
Write: Control
Read: None
Write: Counter 0 (Load Count 7
Read: Counter 0
Write: Counter 1 (Load Count 7
Read:
Write: Counter 2 (Load Count 7
Read: Counter 2
Write: Control
Read: None
Write: Data (J2)
Read: Data (J2)
Write: Mode or Command
Read: Status
(.11)
C Status
Counter 1
N)
N)
N)
*Odd addresses
(i.e,.,
000C1, 000C3,
.....
OOOD!))
are illegal.
3-3
Page 42

Programming
b.
The
mode, waiting for a set
Information
825lA
US
ART serial
VO
port
is
set
of
Command Words
to
the'
'idle"
to
pro-
gram the desired function.
c. The 8255A
PPI parallel
VO
ports are set
to
the input
mode.
The 8253
PIT and the 8259 PIC are not affected by the
power-up sequence.
The reset signal
the remainder
is
also gated onto the Multibus
of
the system components
to
initialize
to
a known
internal state.
The reset signal can also be generated by an auxiliary
RESET switch.
produces the same effect
Pressing and releasing the RESET switch
as
the power-up reset described
above.
I
scs
I ESD I
EP
I PFN I
L21
L,
I 0 I 0 J
I
CHARACTER LENGTH
1
0
0 0 1
5 6
BITS
BITS
PARITY ENABLE
11
c
ENABLE
DISABLEI
PARITY
EVEN
ODD
I
(0 -
EVEN
1 -
0
iSBC 86/12
0
7
BITS
GENERA
1
1
8
BITS
nON/CHE
CK
3-8.
8251
A USART PROGRAMMING
The USART converts parallel output data into virtually
any serial output data fonnat (including IBM Bi-Sync) for
US
half- or full-duplex operation. The
ART also converts
serial input data into parallel data fonnat.
Prior
to
starting transmitting
US
ART must be loaded with a set
or
receiving data, the
of
control words. These
control words, which define the complete functional op-
of
eration
the USART, must immediately follow a reset
(internal or exterrtal). The control words are either a Mode
instruction or a Command instruction.
3·9. MODE INSTRUCTION FORMAT
The Mode instruction word defines
of
teristics
the USART and must follow a reset operation.
Once the Mode instruction word has been written into the
USART, sync characters
be
inserted. The Mode instruction word defines the
or
command instructions may
following:
a. For Sync Mode:
(I)
Character length
(2)
Parity enable
(3) Even/odd parity generation and check
(4)
External
sync
detect
86/IX)
(5) Single
or
double character sync
b. For Async Mode:
(1) Baud rate factor
(Xl,
(2) Character length
Parity enabie
(3)
(4) Even/odd parity generation and check
of
(5) Number
stop bits
the
general charac-
(not
supported
X16, or X64)
by
NOTE-
IN
EXTERNAL
SYNC
WILL
SYNC
AFFECT
MODE,
PROGRAMMING
ONl Y THE
EXTERNAL
1 ~ SYNDET
0
~NGLECHARACTERSYNC
1
o
Tx
$Y"JOET IS
SINGLE
SYNC
DOUBLE
DOUBLE
SYNC
IS
SYNC
Figure 3·2. USART Synchronous Mode
Instruction Word Format
CPU
BYTES
158
CHARACTFRS
SERIAL
2
-'-
DATA
BYTES
DATA
BITS/CHARI
----,
1-1
--_
DATA
OUTPUT
DATA
___
INPUT
DA
T A
158
BITS/CHARI
1-,
----,
CHARACTERS
-;1 ,..,
___
....
IhDI
CH:R~ACTERS
---I.
_---
IR,DI
CHAR~
....
....I
RECEIVE
'--
FORMAT
SYNC
CHAR
__
,...---__<11-1
'-------II
ASSEMBLED
1
CHAR
-L
___
r-----;,
'--
DATA
SYNC
SERIAL
CPU
___
DETECT
AN
INPUT
AN
OUTPUT
CHARACTER
CHARACTER
CHARACTER
C-TE-R-S
_---.oJ
.....
Instruction word and data transmission fonnats for syncnronous and asynchronous modes are shown in figures
3-2 through 3-5.
3-4
Figure 3-3. USART Synchronous Mode
Transmission Format
Page 43

iSBC
86112
Programming Information
'--
'-------\
'---------
_______
.;,
~IAREI~~:LNtBLoE"
~
~VEE~~~RIT~
INVALIO
IONL Y EFFECTS Tx;
REQUIRES MORE THAN ONE
STOP
CHARACTER
NUMBER
BITI
LENGTH
,,;,
.;,
DISABLE
~~~~RATION/CHECK
OF STOP
BITS
"11
BiT
BITS BITS
Rx
Figure 3-4. USART Asynchronous Mode
Instruction Word Format
,,;,
2
NEVER
TRANSMITTER
RECEIVER
INPUT
RxD
TR ANSMISSION
L-_~
RECEIVE
FORMAT
STArn
'-----'-----/
·NOTE
OUTPUT
BIT
START
L-
__
FORMAT
ASSEMBLED
___
IF
BITS
CHARACTER
0001
DO
D1 - -
! f \
BIT
.---------11
DATA
-'-
__
,...;
---..--'
PROGRAMMED
CHARACTER
LENGTH
CPU
BYTE
(~18
DATA
C'~~RACTER
SERIAL
~'---~---'--~[J
(lATA
CHARACTER
~~,
____
SE~IAL
DATA INPUT !AxD)
DATA
CHARACT£R
f-----'------'--i
CPU
BYTE
15 B BITS/CHARI·
DATA
CHARACTER
L------f,
LENGTH
THE
UNUSED
BITS
GENERATED
Ox
BY
8251A
DOES
NOT
ON
___
THE
DATA
IhDI
~
AS 5 6 OR 7
TO
"lERC),"
APPEAR
BUS
__
--Ox
~-r----'-~---I
BITS
r----'L-----'
BITS/CHAR)
DATA
OUTPUT
-i
~,
---..,
1-1
---~
IS
DEFINED
ARE SET
ST6;I
BrrS
L
fL
STOP
BITS
STOP
BITS
~
sl~oD
BITS
J-I0.
SYNC CHARACTERS
Sync characters are written to the USART in the synchronous mode only. The USART can be programmed to
either one
characters is at the option
~I-ll.
The Command instruction word shown in figure
trols the operation
or
two sync characters; the format
of
the programmer.
of
the sync
COMMAND INSTRUCTION FORMAT
3-6
con-
of
the addressed USAR T. A Command
instruction must follow the mode and/or sync words.
Once the Command instruction is written, data can be
transmitted
lit
is not necessary for a Command instruction to precede
or
received by the USART.
all data transactions; only those transmissions that require
a change in the Command instruction. An example
change in the enable transmit
or
enable receive bus.
is
Command instructions can be written to the USART at
any time after one
or
more data operations.
After initialization, always read the chip status and check
1;:>r
the TXRDY bit prior to writing either data
or
com-
mand words to the USART. This e:nsures that any prior
iJilput
is not overwritten and lost. Note that issuing a
Figure 3-5. USART Asynchronous Mode
Transmission
Command instruction with bit 6 (lR) set will return the
USART to the Mode instruction format.
Format
3-12. RESET
To change the Mode instruction word, the USART must
receive a Reset command. The next word written to the
USART after a Reset command
is
assumed to be a Mode
instruction. Similarly, for sync mode, the next word after
a Mode instruction
is
assumed to be one
or
characters. All control words written into the USART
after the Mode instruction (and/or the sync character) are
a
assumed to be Command instructions.
3-13. ADDRESSING
The USART chip uses address
and write I/O data; address
write mode and command words and read the USART
status. (Refer to table 3-2.)
OOOD8
OOODA
or
or
OOODE
OOOJDC
more sync
to read
is
used to
3-5
Page 44

Programming Information
iSBC 86/12
o 0
,
I EH I
6
IR I RTS I
03 O2 0,
4
ER I SBRKI
RxE I OTR I
hEN
-
DO
L
TRANSMIT
1
'"
enable
o
'"
disable
DATA
TERMINAL
READY
"high"
will
output
RECEIVE
1 =
o
force
to
zerO
ENABLE
enable
co
dIsable
SEND
BREAK
CHARACTER
1
::
forces
lllO
o
'"
normal
operation
ERROR RESET
1
'"
reset
error
PE.
OE.
FE
REQUEST
TO
"high"
will
force
output
to
lero
INTERNAL
"high:'
returns
Mode
Instruction
ENABLE
-
OTR
"low
flags
SEND
RESET
82S1A
Format
RTS
ADDRESS
OOODA
OOODA
OOODA
OOODA
00008
OOODA
00008
.'
OOODA
*The second sync character
programmed USART to
Both sync characters
RESET
MODE
INSTRUCTION
SYNC
SYNC
COMMAND
COMMAND
"
COMMAND
CHARACTER
CHARACTER
DATA
DATA
1
2
INSTRUCTION
110
INSTRUCTION
1/0
INSTRUCTION
is
skipped
SYNC
MODE
}
ONLY'
if
Mode instruction has
single character internal sync mode.
are
skipped if Mode instruction has
programmed USART to async mode.
Figure 3·7. Typical USART Initialization
645·5 and Data I/O Sequence
to
ENTER
1
Characters
Note:
Error
Reset
must
be
Enter
Hunt
are
programmed.
performed
whenever
Figure 3-6. USART Command
Instruction Word Format
3-14. INITIALIZATION
A typical USART initialization and
presented in figure 3 -7. The USAR T chip
four steps:
US
ART
to
a. Reset
Mode instruction fonnat.
b. Write Mode instruction word.
word
is
to specify synchronous
operation.
If
synchronous mode
c.
sync characters
as
required.
is
d. Write Command instruction word.
VO
One function
selected, write one or two
HUNT
'"
• (HAS NO EFFECT
MODE'
enable search for Sync
IN ASYNC MODE)
RxEnable
data sequence
is
initialized in
of
mode'
or
asynchronous
and
is
To avoid spurious interrupts during
US
disable the
ART interrupt. This can be done by either
US
ART initialization,
masking the appropriate interrupt request input at the
or
by
8259A PIC
by
rupts
executing a DI instruction.
First, reset the
struction tolocation
instruction must have bit 6 set (IR
disabling the 8086 microprocessodnter-
USART chip by writing a Command in-
OOODA
(or
OOODE).
The Command
= 1); all other bits are
immaterial.
NOTE
This reset procedure should be used only if the
USART has been completely initialized,
or
the
initialization procedure has reached the point
that the
word. For example, if the reset command
USART
is
ready to receive a Command
is
written when the initialization sequence calls
for a sync character, then subsequent programming will be in error.
to
Next write a Mode instruction word
the USART. (See
figures 3-2 through 3-5.) A typical subroutine for writing
is
both Mode and Command instructions
given in table
3-3.
US
ART
is
If the
programmed for the synchronous mode,
write one or two sync characters depending on the transmission fonnat.
3-6
Page 45

iSBC
86/12
Table
3-3. Typical
;CMD2 OUTPUTS CONTROL WORD TO USART.
;USES-A, STAT2; DESTROYS-NOTHING.
USART
Mode
or
Command
Instruction
Programming Information
Subroutine
PUBL.IC
EXTRN
CMD2:
LP:
511NT:
LAHF
PUSH
CALL.
AND
JZ
POP
SAHF
OUT
RET
END
Finally, write a Command instruction word
USART. Refer to figure
3-6
and table 3-3.
CMD2
STAT2
AX
STAT2
AL,1
L.P
AX
ODAH
to
the
IMPORTANT: During initialization, the 8251A USART
requires a minimum recovery time
(16 clock cycles) between back-to-back writes
of
3.2 microseconds
in
order to
set up its internal registers. This recovery time can be
satisfied by the CPU performing two byte reads and a
NOP between the back-to-back writes
USART
OUT
SAHF
NOP
OUT
as
follows:
ODAH
ODAH
;FIRST USART WRITE
;TWO-BYTE
;ADDED WAIT
;SECOND USART WRITE
RIEAD
tOo
the 8251A
This precaution applies only to the USART initialization
and does not apply otherwise.
3-15. OPERATION
Normal operating procedures use data I/O read and write,
status read, and Command instruction write operations.
Programming and addressing procedures for the above are
summarized in following paragraphs.
NOTE
After the USART has been initialized, always
check the status
writing data
the
USART. The TXRDY bit
prevent overwriting and subsequent loss
command
inactive until initialization has been completed;
do not check
word, which concludes the initialization
dure, has been written.
of
the TXRDY bit prior to
or
writing a new command word to
must
be true to
or
data words. The TXRDY bit
TXRDY until after the command
of
is
proce-
;CHECK TXRDY
;TXRDY MUST
;ENTER HERE
Prior
to
any operating change, a new command word must
be
written with command bits changed as appropriate.
(Refer
to
figure 3-6 and table 3-3.)
3-16. DATA
BE
TRUE
FOR INITIALIZATION
INPUT/OUTPUT.
For
data receive or
transmit operations, perfonn a read or write, respectively,
to the
USART. Table 3-4 and 3-5 provide examples
of
typical character read and write subroutines.
During normal transmit operation, the USART generates
a Transmit Ready (TXRDY) signal that indicates that the
USART
sion.
character into the
Similarly, during normal receive operation, the
is
ready to accept a data character for transmis-
TXRDY
is
automatically reset when the CPU loads a
US
ART.
USART
generates a Receive Ready (RXRDY) signal that indicates
that a character has been received and
CPU. RXRDY
the
is
read by the CPU.
is
automatically reset when a character
The TXRDY and RXRDY outputs
is
ready for input to
of
the USART are
available at the priority interrupt jumper matrix. If, for
instance,
TXRDY and RXRDY are input
to
the 8259A
PIC, the PIC resolves the priority and interrupts the CPU.
TXRDY and RXRDY are also available
in
the status
word. (Refer to paragraph 3-16.)
3-17.
STATUS
of
status
a serial I/O port
to the upper address
chip. The format
A typical status read subroutine
READ" The CPU can determine the
by
issuing an I/O Read Command
(OOODA
of
the status word
or
OOODE)
is
is
shown
given
of
the USART
in
figure 3-8.
in
table 3-6.
3-7
Page 46

Programming Information iSBC 86/12
Table 3-4. Typical USART Data Character Read Subroutine
;RX1
READS DATA CHARACTER FROM USART.
;USES-STATO; DESTROYS-A,FLAGS.
RX1,RXA1
STATO
STATO
AL,2
RX1
ODCH
RX1
:
RXA1:
PUBLIC
EXTRN
CALL
AND
JZ
IN
RET
END
Table 3-5. Typical USART Data Character Write Subroutine
;TX1
WRITES DATA CHARACTER FROM REG A TO US ART.
;USES-STATO; DESTROYS-FLAGS.
TX1
:
TX11 :
TXA1:
PUBLIC
EXTRN
PUSH
CALL
AND
JZ
POP
OUT
RET
TX1,TXA1
STATO
AX
STATO
AL,1
TX11
AX
OD8H
;CHECK FOR RXRDY TRUE
;ENTER HERE
;CHECK FOR TXRDY TRUE
;ENTER HERE
IF RXRDY IS TRUE
IF TXRDY IS TRUE
END
3-18. 8253 PIT PROGRAMMING
A 22.1184-MHz crystal oscillator supplies the basic clock
frequency for the programmable chips. This clock fre-
is
quency
divided by 9, 18, and 144
jumper-selectable clocks: 2.46 MHz, 1.23 MHz, and
153.6 kHz. These clocks are available for input to Counter
0,
Counter
1,
and Counter 2
of
the 8253 PIT. The default
(factory connected) and optional jumpers for selecting the
to
clock inputs
the three counters are listed in table 2-4.
Default jumpers connect the output
TXC and RXC inputs
included so that Counters
interrupts to the 8259A
of
the 8251A
0 and 1 can provide real-time
PIC.
Before programming the 8253 PIT, ascertain the input
clock frequency and the output function
three counters. These factors are determined and estab-
by
lished
the user during the installation.
to
produce three
of
Counter 2
US
ART. Jumpers are
of
each
to
of
the
the
3-19. MODE CONTROL WORD AND COUNT
All three counters must be initializc:d prior to their'use.
of
The initialization for each counter consists
a.'
A mode control word (figure 3-9) is written to the
control register for each individual counter.
b.
A down-count number
the down-count number
as
determined by mode control word.
is
loaded into each counter;
is
in one
The mode control word (figure 3-9) does the following:
a. Selects counter to be loaded.
b. Selects counter operating mode.
c. Selects one
of
the following four counter read/load
functions:
(1) Counter latch (for stable read operation)
(2) Read
or
load most-significant byte only.
two steps:
or
two 8-bit bytes
3-8
Page 47

iSBC
86/12
DSR
I
SYNDET
I
When
set
"""m,,
cates
that
achieved
FE I DE
FRAMING
FE
flag
detected
is
reset
tion.
FE
8251.
for
internal
character
and
8251
OVERRUN
The
not
one
the
OE
8251;
character
--
ERROR
is
set
when a valid
at
end
by
ER
does
sync
sync
is
fIlady
PE
I
ERROR
OE
fla!l
is
set
read a character
becomes
available.
ER
bit
of
the
does
not
inhibit
howllver,
the
is
lost.
(ASYNC
ONLY)
stop
of
every
character.
bit
of
Command
not
inhillit
operaton
detect,
indio
a
has
bel,n
for
data.
TXE
I
when
the
before
It
Command
operation
previously
bit
is
not
It
instruc-
of
I
CPU
the
is
reset
instruction.
of
overrun
is
next
DO
RSRDY I TXRDY
I
does
by
the
~
I
'---
~
TRANSMITIER
RECEIVER
TRANSMIITER
PARITY
PE
detected.
operation
Indicates
data
character
Indicates
acter
on
to
transfer
Indicates
verter
ERROR
flag
mand
instruction.
USART
READY
USART
its
it
that
in
transmitter
is
set
It
is
of
Programming Information
READY
is
ready
to
accept
and
serial
bit
not
is
error
of
ready
con·
is
Com-
inhibit
a
or
command.
has
received a char-
selrial
input
t~1
the
CPU.
EMPTY
parallel
is
when a parity
reset
by
PE
does
8251.
to
empty.
ER
DSR
is
general
purpose.
"''' m ""'"'
used
to
test
Set
modem
Ready.
Data
Nonnally
conditions
~
such
as
Figure 3-8. USART Status Read Format
---------------------------
(3) Read
(4) Read or load least-significant byte first, then
d.
Sets counter for either binary or BCD count.
The mode control word and the count register bytes for
any given counter must be entered
sequence:
a..
Mode control word.
b,
Least-significant count register byte.
_.
Most-significant count register byte,
or
load least-significant byte only,
most-significant byte.
;STATO READS STATUS FFlOM USART.
;DESTROYS-A.
in
the following
Tabh!
3-6. Typical USART Status Read Subroutine
As
long
as
the above procedure
counter, the chip can
be
programmed
is
followed for each
in
any convenient
sequence, For example, mode control words can be
loaded first into each
by the least-significant byte, etc. Figure
of
three counters per chip, followed
3-10 shows the
two programming sequences described above.
Since
all
counters
value loaded
in
the PIT chip are downcounters, the
in
the count registers
is
decremented, Loading all zeroes into a count register results in a maximum
countof2
16
for binary numbers
of
104 for BCD numbers.
PUBLIC
STATO:
IN
RET
END
STATO
ODEH
;GET STATUS
3-9
Page 48

Programming Iuf'onnation
iSBC
86/12
I
"
"
~
(BI NARY/BCD)
o Binary Counter (16-bits)
M2
0 0
0 0
X 1
X
RL1
a
0
Binary Coded
(4 Decades)
M1
MO
(MODE)
a Mode a
1 Mode 1
Mode 2
0
1
1 Mode 3
0
0
RLO
Mode 4
a
Mode 5
(READ/LOAD)
0 Counter Latching operation (refer
to paragraph 3-29).
0 Read/Load most significant byte only.
1
1 Read/Load least significant byte first.
Read/Load
then most significant byte.
Decimal (BCD) Counter
~
Use Mode 3 for
Baud Rate Generator
least significant byte only.
SC1
0
0
611-7
Figure 3-9. PIT
Mode
When a selected count register is to be loaded, it mUst be
loaded with the number
control word.
One
on the appropriate down count. These two bytes can
of
bytes programmed in the mode
or
two bytes can be loaded, depending
be
programmed at any time following the mode control
of
bytes
is
word, as long as the correct number
loaded in
order.
The count mode selected in the control word controls the
counter output. As shown in figure 3-9, the PIT chip can
of
operate in any
a. Mode
Counters 1 and 2 can
such
as
six modes: .
0:
Interrupt on terminal count. In this mode,
be used for auxiliary functions,
generating real-time interrupt intervals. After
SCO
a Select Counter a
1
1
1
a Select Counter 2
1
Control Word Fonnat
the count value is loaded into the count register, the
counter output goes low and remains low until the
terminal count is reached. The output then goes high
until either the count register
register
b.
Mode
1:
of
output
the count following the rising edge
from Port CC (assuming Port CC jumpers are so
configured). The output will go high on the terminal
If
count.
is
low, it will not affect the duration
shot pulse until the succeeding trigger. The current
count can be read at any time without affecting the
(SELECT COUNTER)
Select Counter 1
Illegal
or
the mode control
is
reloaded.
Programmable one-shot. In this mode, the
Counter 1 and/or Counter 2 will go low on
of
the GATE input
a new count value
is
loaded while the output
of
the one-
3-10
Page 49

isnc
86/12
Programming Information
PROGRAMMING
Step
1
2
3
LSB
MSB
FORMAT
Mode ( ;ontrol Word
Cc
Count F
Count F
legister Byte
lunter n
Cc
~egister
(~(
)unter n
,unter n
Byte
ALTERNATE
Step
1
2
3
4 LSB
5 MSB
6
7 MSB
8 LSB
9
PROGRAMMING
Mode
Mode
Mode
Counter Register Byte
Count Register Byte
LSB
MSB
Count Register Byte
Count Register Byte
Count Register Byte
Count Register Byte
FORMAT
Control Word
Counter
Counter 1
Counter 2
Counter 1
Counter 1
Counter 2
Counter 2
Counter
Counter
0
Control Word
Control Word
0
0
450-18
one-shot pulse. The one-shot
Figure 3-10.
is
retriggerable, hence
PIT
the output will remain low for the full count after any
rising edge
c. Mode
of
the gate input.
2:
Rate generator. In this mode, the output
Counter 1 and/or Counter 2 will be low for one period
of
the clock input. The period from one output pulse
to the next equals the number
count register.
If
the count register
of
input counts
is
reloaded be-
tween output pulses, the present period will not be
affected but the subsequent period will reflect the new
value. The gate input, when low, will force the output
high. When the gate input goes high, the counter will
start from the initial count. Thus, the gate input can be
used to synchronize the counter. When Mode 2
the output will remain high until after the counter
register is loaded; thus, the count can be synchronized
by software.
d. Mode
3:
Square wave generator
..
Mode 3, which
the primary operating mode for Counter 2,
generating Baud rate clock signals.
In
this mode, the
counter output remains high until one-half
count value
in
the count register has been decremented (for even numbers). The output then goes
low for the other half
count register is odd, the counter output
(N + 1 )/2 counts, and low for
of
the count. If the value
(N
- 1 )/2 counts.
is
Programming Sequence Examples
e. Mode
4:
Software triggered strobe. After this mode
set, the output will be high. When the count
the counter begins counting. On terminal count, the
of
output will go low for one input clock period and then
go high again. If the count register
tween output pulses, the present count will not be
in
the
affected, but the subsequent period will reflect the
new value. The count will be inhibited while the gate
input
is
low. Reloading the count register will restart
the counting for the new value.
f.
Mode
5:
Hardware triggered strobe. Counter 0 and/or
Counter 1 will start counting on the rising edge
gate input and the output will go low for one clock
is
set,
period
counter
when.
is
retriggerable. The output will not go low
until the full count after the rising edge
input.
is
is
used for
of
the
Table 3-7 provides a summary
versus the gate inputs. The gate inputs
in
the
high for
are tied high
by
default jumpers; these gates may optionally be controlled
is
not optionally controlled.
the terminal count
of
by
Port
Cc.
The gate input to Counter 2
is
is
loaded,
is
reloaded be-
of
the
is
reached. The
of
the gate
the counter operation
to
Counters 0 and 1
3-11
Page 50

Programming Information
iSBC
86/12
Table 3-7.
Modes
~
Status
0
1
2
3
4
5
PIT
Counter Operation
Low
Or Going
Low
Disables
counting
- 1 )
1)
Disables
counting
2)
Sets output
immediately
high
1 )
Disables
counting
2)
Sets output
immediately
high
Disables
counting
-
Rising
-
Initiates
counting
2)
Resets output
after next clock
Initiates
counting
Initiates
counting
-
Initiates
counting
Vs
Gate Inputs
High
Enables
counting
-
Enables
counting
Enables
counting
Enables
counting
-
3-20. ADDRESSING
As
listed
in
Addresses
used
in
loading and reading the count
2.
Address
word
to
table 3-2, the PIT uses four
00000,
00006
00002,
is
and
00004,
used in writing the mode control
the desired counter.
I/O
addresses.
respectively, are
in
Counters 0, I, and
3-21. INITIALIZATION
To initialize the PIT chip, perform the following:
a. Write mode control word for Counter
Note that all mode control words are written
00006,
counter
since mode control word must specify which
is
being programmed. (Refer
Table 3-8 provides a sample subroutine for writing
mode control words
b.
Assuming mode control word has selected a 2-byte
load, load least-significant byte
Oat 00000. (Count value
to
all three counters.
of
to
be
loaded
paragraphs 3-23 through 3-25.) Table 3-9 provides a
sample subroutine for loading 2-byte count value.
of
c. Load most-significant byte
count into Counter 0
00000.
0 to 00006.
to
figure 3-9.)
count into Counter
is
described
to
in
at
;INTIMR
;COUNTERS 0
;COUNTER
;ALL THREE
;DESTROYS-A.
INTIMR:
INITIALIZES COUNTERS 0,1,2.
2
COlJWTERS ARE SET UP FOR 1S-BIT OPERATION.
PUBLIC
MOV
OUT
MOV
OUT
MOV
OUT
RET
END
Table 3-8. Typical PIT Control Word Subroutine
AND 1 ARE INITIALIZED
IS
INITIALIZED AS BAUD RATE GENERATOR.
INTIMR
AL,30H
ODSH
AL,70H
ODSH
AL,B6H
OD6H
AS
INTERRUPT TIMERS.
;MODE CONTROL WORD FOR COUNTER 0
;MODE CONTROL WORD FOR COUNTER
;MODE CONTROL WORD FOR COUNTER 2
Table 3-9. Typical PIT Count Value Load Subroutine
;LOADO
;USES-D,E;
LOADO: MOV AL,EL ;GET LSB
LOADS COUNTER 0 FROM D&E. D IS MSB, E IS LSB.
DESTROYS-A.
PUBLIC
OUT
MOV AL,DL ;GET MSB
OUT
RET
LOADO
OOOH
ODOH
1
3-12
END
Page 51

iSBC 86/12
NOTE
Be
sure to enter the down count
bytes if the counter was programmed for a
two-byte entry
Similarly, enter the downcount value in
BCD if the counter was so programmed.
d. Repeat steps b, c, and d for Counters 1 and 2.
in
the mode control word.
in
two
3-22. OPERATION
The following paragraphs describe operating procedures
for a counter read, clock frequency divide/ratio selection,
and interrupt timer counter selection.
3-23.
COUNTER
can be used to read the contents
The first method involves a simple read
counter. The only requirement with this method
order to ensure stable count reading, the desired counter
must be
Counter 0 and Counter I can be read using this method
because the gate input to Counter 2
inhibited by controlling its gate input. Only
READ.
There are two methods that
of
a particular counter.
of
the desired
is
that,
in
is
not controllable.
Programming Information
a.
Write counter register latch control word (figure
3-11) to
counter and selects counter latching operation.
b.
Perform a read operation
table 3-2 for counter addresses.
3-24.
SELECTION.
timer input frequencies to Counters
input frequencies are divided
TMRO lNTR OUT (Counter! 0), TMR 1 INTR OUT
(Counter 1), and the
00006.
Be sure
whichever was specified
tion mode control word. For two bytes,
read
in
CLOCK
Control word specifies desired
of
desired counter; refer to
NOTE
to
read one
thc order specified.
FREQUENCY
Table 2-4 lists the default and optional
8251
A Baud Rate Clock (Counter 2).
or
two bytes,
in
the initializa-
IDIVIDE
0 through 3. The timer
by
the counters to generate
RATIO
The second method allows the counter to be read
the-
fly."
The recommended procedure
control word to latch the contents
ens,ures that the count reading
of
latched value
If
a counter
mandatory to complete the read procedure; that
is, if two bytes were programmed to the counter,
then two bytes
operations are performed with that counter.
To read the count
follows (a typical counter read subroutine
3-10):
the count can then be read.
NOTE
is
read during the down count, it
must be read before any other
of
a particular counter, proceed
of
is
accurate and stable. The
Table 3-10. Typical
;READ1 READS COUNTER 1 ON-THE-FLY INTO D&E. MSB
;DESTROYS-A.D.E.
PUBLIC
is
to use a mode
the count register; this
is
given in table
PIT
READ1
"on-
is
as
Counter
c1
G,
1
sca
I a I a I x I x I x
L'---.---'i'
L L Don't Cam
Selects Counter Latching
Operation
L--
__
Specifies Counter
Figure 3-11. PIT Counter Register
450-1911 Latch Control
Read Subroutine
IN
D,
LSB
IN
E.
to
be Latched
Word
I
Format
READ1:
MOV
OUT
IN
MOV
IN
MOV
RET
END
AL,40H
OD6H
OD2H
E.A
OD2H
D.A
;MODE WORD FOR LATCHING COUNTER 1 VALUE
;LSB OF COUNTER
;MSB OF COUNTER
3-13
Page 52

Programming Information
iSBC
86/13')
Each counter must be programmed with a down-count
number,
or
count value N. When count value N
is
loaded
into a counter, it becomes the clock divisor. To derive
N for either synchronous or asynchronous RS232C
in
operation, use the procedures described
following
paragraphs.
3
-25.
Synchronous Mode. In the synchronous mode, the
TXC and/or RXC rates equal the Baud rate. Therefore,
is
the count value
N = C/B
N
B
is
is
where
Cis
Thus, for a
determined by:
the count value,
the desired Baud rate, and
1.23 MHz, the input clock frequency.
4800 Baud rate, the required count value
(N)
is:
N=
1.23 X
4800
If the binary equivalent
into Counter 2, then the output frequency
is
which
the desired clock rate for synchronous mode
6
10
= 256.
~
of
count value N = 256
is
is
4800 Hz,
loaded
operation.
3-26. Asynchronous Mode. In the asynchronous mode,
the TXC and/or RXC rates equal the Baud rate times
of
one
the following multipliers:
Therefore, the count value
is
XI,
X16,
determined by:
or
X64.
N = C/BM
N is the copnt value,
where
B
is
the desired Baud rate,
M is the Baud rate multiplier
C
is
1.23 MHz, the input clock frequency.
Thus, for a
4800 Baud rate, the required count value (N)
(1, 16,
or
64), and
is:
N=
If
the binary equivalent
1.23 X 10
4800 x
into Counter 2, then the output frequency
Hz, which
is
the desired clock rate for asynchronous mode
operation. Count values
each Baud rate are listed in
6
=
16
of
(N) versus rate multiplier (M) for
16
='
count value N =
16
is
4800 x
is
loaded
table3-IL
Table 3·11.
Baud Rate:
·Count
Count Values (N) for 2.46 MHz clock. Count Values (N)
and Rate Multipliers
3·27.
PIT
Count
Value Vs
Each
Baud
Rate
·Count Value (N) For
(B)
75
110
150
300 4096
600 2048
1200 1024 64
2400 512 32 8
4800 256 16 4
9600 128 8 2
19200 64 4
38400
76800 16
Values
RATE
M = 1 M = 16
16384
11171
8192 512
32 2
(N)assume
(M)
are
GENERATOR/INTERVAL
Rate
1024
698
256 64
128
clock is 1.23 MHz. Double
in
decimal.
Table 3-12 shows the maximum and minimum rate
generator frequencies and timer intervals for Counters
and I when these counters, respectively, have 1.23-MHz
and 153.6-kHz clock inputs. The table also provides the
maximum and minimum generator frequencies and time
intervals that may be obtained by connecting Counters
and I in series.
3·28.
INTERRUPT
TIMER.
To program an il!terval
timer for an interruption terminal count, program the
appropriate timer for the correct operating mode (Mode
in the control word. Then load the count value (N), which
is
derived by
N
=TC
where
N
is
the count value for Counter 2,
T is the desired interrupt time interval in seconds,
and
is
the internal clock frequency (Hz).
C
Table
3-13
shows the count value (N) required for several
time intervals (T) that can be generated for Counters
16
and I.
3-29. 8255A PPI PROGRAMMING
Multiplier
M=64
256
175
128
32
16
TIMER.
for
0
0
0)
0
NOTE
During initialization, be sure to load the count
value
(N)
into the appropriate counter and the
Baud rate multiplier (M) into the 8251A
USART.
3-14
The three parallel
I/O
ports interfaced to connector
J1
are
controlled by an Intel 8255A Programmable Peripheral
Interface. Port A includes bidirectional data buffers and
of
Ports B and C include IC sockets for installation
input terminators
or
output drivers depending on the
either
user's application.
Page 53

iSBC
86/12
Programming Information
Table 3-12. PIT Rate Generator Frequendes and Timer Intervals
Single
Minimum Maximum
RatE!
Generator (frequency)
Real-Time Interrupt (interval)
NOTES:
1.
Assuming a 1.23-MHz clock input.
2.
Assuming a 153.6-kHz clock input.
3.
Assuming Counter 0 has 1.23-MHz clock input.
Table 3-13. PIT Time Intervals
T
10
/-Lsec
100
I-Lsec
1 msec
10 msec
50 msec
*Count Values
MHz.
Count Values (N) are
18.75 Hz 614.4 kHz
1.63/-Lsec
Vs
(N) assume clock is 1.23
in
Timer'
(Counter 0)
53.3 msec
Timer Counts
N*
12
123
1229
12288
61440
decimal.
Single Timer2 (Counter 1) Dual Timer3
Minimum
2.344 Hz
13/-Lsec
I
D71
Maximum
76.8 kHz
426.67 msec 3.26/-Lsec
D,;
D5 I D41 D31
CONTROL
WORD
Minimum Maximum
0.00029
D] 1 D, 1 Do
Hz
I
1-.-1
'---
(O
and 1 in Serie's)
307.2 kHz
58.25 minutes
GROUP B
/
PORT C
(LOWER)
1 =
INPUT
0=
OUTPUT
\
Default jumpers set the Port A bidirectional data buffers to
the input mode. Optional jumpers allow the bidirectional
or
allow
data buffers to be set to the output mode
of
the eight
tional data buffers to the input
POIt
C bits to selective set the Port A bidirec-
or
output mode.
anyone
Table 2-11 lists the various operating modes for the three
PPI parallel I/O ports. Note that Port A (C8) can be
operated in Modes
can be operated in Mode °
Port B (CA) and Port e
or
1.
(eq
0, 1,
or
2;
3-30. CONTROL WORD FORMAT
The:
control word format shown
initialize the PPI to define
in
figure 3-12
tl}e
operating mode
is
used to
of
the three
ports. Note that the ports are separated into two groups.
Group A (control word bits 3 through
operating mode for
Port C
(cq.
defines the operating mode for
four bits
of
Port C
Port A (C8) and the upper four bits
Group B (control word bits 0 through 2)
Port B (CA) and the lower
(cq.
Bit 7
of
the control word controls
6)
defines the
of
the mode set nag.
3-31. ADDRESSING
/
.
PORT B
INPUT
1 =
0=
OUTPUT
MODE
SELECTION
0=
MODE
0
1 =
MODE
1
GROUP A
PORT C (UPPER)
1 =
INPUT
0=
OUTPUT
PORT A
1
=
INPUT
0=
OUTPUT
MODE
SELECTION
00 = MODE
01 = MODE
lX=MODE2
MODE
1 =
SET
ACTIVE
0
1
FLAG
\
The PPI uses four consecutive even addresses
through
Port C
OOOCE)
(cq,
for data transfer, obtaining the status
and for port control. (Refer to table 3-2.)
(OOOC8
of
Figure 3-12. PPI Control Word Format
3-15
Page 54

Programming Information
iSBC 86/12
3-32. INITIALIZATION
To initialize the PPI, write a control word
to
figure 3-12 and table 3-14 and assume that the control
word
is
92 (hexadecimal). This initializes the PPI
follows:
a.
Mode Set Flag active
b.
Port A (C8) set to Mode 0 Input
c.
Port C (CC) upper set
d. Port B (CA) set
Port C (CC) lower set to Mode 0 Output
e.
to
Mode 0 Output
to
Mode 0 Input
Table 3-14. Typical PPI Initialization Subroutine
;INTPAR INITIALIZES PARALLEL PORTS.
;DESTROYS-A.
PUBLIC
INTPAR:
MOV
OUT
RET
to
OOOCE.
INTPAR
A,92H
OCEH
Refer
as
3-33. OPERATION
After the PPI has been initialized, the operation
performing a read or a write
3-34. READ
Port A
for
3-35.
routine for
figure 3-13, any
cleared
;MODE WORD TO PPI PORT A&B IN,C OUT
OPERATION.
is
given
in
WRITE
by
OPERATION.
Port C
is
given
of
the Port C bits can be selectively set or
writing a control word to
to
A typical read subroutine
table 3 -15.
in
table 3-16.
the appropriate port.
A typical write sub-
As
OOOCE.
is
simply
shown in
END
Table 3·15. Typical PPI
;AREAD READS A BYTE FROM PORT.A INTO REG
;DESTROYS-A.
AREAD
AREAD:
IN
RET
END
Table 3·16. Typical PPI
;COUT OUTPUTS A BYTE FROM REG A TO PORT
;USES-A; DESTROYS-NOTHING.
PUBLIC COUT
OC8H
Port
Read
Port
Write Subroutine
Subroutine'
A.
;GET BYTE
C.
COUT;
3-16
OUT
RET
END
OCCH
;OUTPUT BYTE
Page 55

iSBC 86/12
Programming Information
CONTROL
WORD
7
I 0
\ 06 \
Os
I 04 I 03 I O2 I
I
I
x
I
x
I
DON'T
CARE
Figure 3-13.
I
x
I
0, I DO
PPI
Port
Control
I
BIT
L
---
C Bit Set/Reset
Word
SET/RESET
1 = SET
0=
RESET
BIT
SELECT
o 1 2 3 4 5 6 7
o 1 o 1 o 1 o 1
11
o 0
00
00
BIT
SET/RESET
= o
ACTIVE
Format
00
11 11
11
FLAG
Bol
B,I
B21
3-36. 8259A PIC PROGRAMMING
The on-board master 8259A PIC handles up
vectored priority interrupts and has the capability
panding the number priority interrupts by cascading one
or more
of
its interrupt input lines with slave 8259A
PIC's. (Refer to paragraph 2-13.)
to
eight
of
ex-
CPU. Lower priority interrupts are inhibited; higher priority interrupts will
be
acknowledged if the CPU has enabled its own interrupt
input through software. The
command from the
be
CPU
able
to
generate
an
interrupt that will
End-Of.·Interrupt (EO!)
is
required to reset the PIC for the
next interrupt.
is
3-39. FULLY NESTED MODE. This mode
only when one or more
in
which case the priority
PIC's are slaved to the master PIC,
is
conserved within the slave
used
PIC's.
The operation
nested mode except
a.
When
that particular
PIC priority logic. That is, further interrupts
priority within this slave
in
the fully nested mode IS the same
as
follows:
an
interrupt from a slave PIC
PIC
is
not locked out from the master
PIC will be recognized and
as
is
being serviced,
of
higher
the
the master PIC will initiate an interrupt to the CPU.
b.
When exiting the interrupt service routine, the software must check
pending from the same slave PIC. This
sending
slave
an
PIC and then reading its In-Service (IS)
register. If the
command
is
not clear (interrupt pending),
should
be
to
determine
if
another interrupt
End-of-Interrupt (EO!) command
IS
is
sent
register
to
is
clear (empty), an EOI
the master PIC. If the
no
EO! command
sent to the master PIC.
is
done by
IS
register
to
the
is
of
The basic functions
priority
request to the
of
interrupt requests, (2) issue a single interrupt
CPU based on that priority, and (3) send the
the PIC are to (1) resolve the
CPU a vectored restart address for servicing the interrupting device.
3-37. INTERRUPT PRIORITY MODES
The PIC can be programmed
following modes:
a.
Nested Mode
b.
Fully Nested Mode
•
c. Automatic Rotating Mode
d.
Specific Rotating Mode
e. Special Mask
f.
Poll Mode
3-38.
NESTED
Mode
MODE.
signals are assigned a priority from
operates in this mode unless specifically programmed
otherwise. Interrupt
IRO
has the lowest priority. When an interrupt
ledged, the highest priority request
to
operate
In
this mode, the PIC input
0 through
in
one
7.
The PIC
of
has the highest priority and
is
acknow-
is
available
to
the
IR
the
3-40. AUTOMATIC ROTATING
mode the interrupt priority
given input
priority. Thus,
is
serviced, that interrupt assumes the lowest
if
there are a number
rotates. Once an interrupt on a
MODE.
of
interrupts, the priority will rotate among the interrupts in
numerical order. For example, if interrupts IR4 and IR6
request service simultaneously, IR4
will receive the highest priority. After service, the priority level rotates so that
IR4
has the lowest priority and IR5 assumes the highest
In
priority.
the worst case, seven other interrupts are
serviced before IR4 again has the highest priority,
course, if IR4
The priority shifts when the
is
the only request, it is serviced promptly.
PIC receives an End-of-
Interrupt (EO!) command.
3-41.
SPECIFIC
ROTATING
MODE.
In this mode,
the software can change interrupt priority by specifying
the bottom priority, which automatically sets the highest
priority. For example, if
ity, IR6 assumes the highest priority.
mode, the priority can be rotated
Rotate at EO! (SEO!) command
mand contains the BCD code
viced; that interrupt
7
is
IR5
reset
is
assig!1ed
of
as
the bottom prior-
In
specific rotating
by
writing a Specific
to
the PIC. This com-
the interrupt being ser-
the bottom priority.
addition, the bottom priority interrupt can be fixed at any
time
by
writing a command word to the appropriate PIC.
In
this
simultaneous
Of
In
3-17
Page 56

Programming Information
iSBC 86/I!
3-42.
SPECIAL
MASK
MODE.
One or more
of
the
eight interrupt request inputs can be individually masked
during the PIC initialization
an interrupt is masked while it
or
at any subsequent time.
is
being serviced, lower
If
priority interrupts are inhibited. There are two ways to
enable the lower priority interrupts:
a. Write an End-of-Interrupt (EOI) command.
b. Set the Special Mask Mode.
The Special Mask Mode is useful when one
interrupts are masked.
while it
is
being serviced, the lower priority interrupts are
If
for any reason an input
or
is
masked
more
disabled. However, it is possible to enable the lower
priority interrupt with the Special Mask Mode. In this
mode, the lower priority lines are enabled until the Special
Mask Mode
3-43.
Intenitpt Enable flip-flop
a software subroutine
In the Poll Mode, the addressed PIC treats an
Command
flip-flop
the priority level. This mode
is
reset. Higher priorities are not affected.
POLL
MODE.
as
an interrupt acknowledge, sets its In -Service
if
there is a pending interrupt request, and reads
In this mode the CPU internal
is
clear (interrupts disabled) and
is
used to initiate a Poll command.
is
useful
if
there
is
I/O Read
a common
service routine for several devices.
. c. Bits 2, 5, 6, and 7 are don't care and are normally
0'
coded as
s.
d. Bit 3 establishes whether the interrupts are requested
by
a positive-true level intput
or
requested by a lowto-high transition input. This applies to all input requests handled
3
= 1, a low-to-high transition
an interrupt on any
by
the PIC.
In
is
of
the eight levels handled
other words, if bit
required to request
by
the
PIC.
The second Initialization Command Word (ICW2), which
is
also required in all modes
of
operation, consists
of
the
following:
OOH
no
in
in-
a. For programming the master PIC, write
ICW2. Although
formation,
either ICW3
in
this case ICW2 conveys
it
is
required to prepare the master PIC for
or
ICW4 (or both) to follow.
1 = SINGLE
o = NOT SINGLE
3-44. STATUS READ
07
D6
Interrupt request inputs is handled by the following two
internal PIC registers:
I 0 I 0 1
a. Interrupt Request Register (IRR), which stores all
interrupt levels that are requesting service.
b. In-Service Register (ISR), which stores all interrupt
levels that are being serviced.
Either register can be read by writing a suitable command
word and then performing a read operation.
3-45. INITIALIZATION COMMAND WORDS
The on-board master PIC and each slave PIC requires a
separate initialization sequence to work in a particular
mode. The initialization sequence, depending on the
hardware configuration, requires either three
Initialization Command Words (ICW's) shown in figure
3-14.
The first initialization Command Word (lCW1), which
is
required in all modes
of
operation, consists
following:
a. Bits
0 and 4 are both
l'
s and identify the word
ICWI for an 8086 CPU operation.
b. Bit 1 denotes whether
or
not the PIC
multiple PIC configuration. In other words, code bit 645-6 Figure 3-14.
1 = 1
if
no slave PIC(s)
is
interfaced to the master
PIC via the Multibus.
or
four
of
of
is
employed in a
the
the
is
05 04 03 02
10
'--'----'-----L_'---'----'-----L_~
10
21
1 1100 I 0 I 0 I 0 I
ICW4
PIC
Word
01
DO
Initialization
Formats
SLAVE 10
0
1 2
0 1 0 1
0 0 1 1
0 0 0 0
,. =
IR
INPUT IS SLAVE
0=
IR
INPUT IS NOT SLAVE
1 = AUTO END-OF.fNTERRUPT
o = NOT AUTO EOI
4
3
0 1 o 1
0
1 1 1 1
5'
6
1
0
Command
7
1
3-18
Page 57

iSBC 86/12
Programming
Information
b.
For
programming
slave identification (10) number.
unless there are eight
master
by the slave
The
only
are used;
board master PIC.
IRO-IR7 bits
PIC is
3 =
The
required for all modes
following:
a. Bits
b. Bit
c. Bit 2 specifies
ct..
In
summary,
the master and
PIC.
acknow
third Initialization Control
if
fourth Initialization Control
ICW4
configured for buffered operation.
Code
executed (hardware).
mand
from the service routine.
a slave
the
Bit 4
(Refer
ledge.)
bit I = 0 in
i.e.,
one
of
connected
l.
0 and 3 are both
for
I programs the
bit 1 = 1
is
to be generated by software before returning
PIC.
master
programs
to paragraphs
three
a slave PIC,
PIC
(These
10 bits are retained and returned
PIC
in
response to a
lCWI,
the master PIC.
to the master PIC IR3 input,
an 8086
if
For
PIC.
or
each
specifying that multiple
or
more
The
SO-S7
of
I'
CPU
End-of-Interrupt
if
an
Code
ICW4
is
example,
the nested
3-38
four
ICW'
slave PIC. Specifically:
code
bits
3-5
with a
Do
not use 000
s slaved to the on-board
CPU
interrupt
Word
(lCW3)
PIC's
are slaved to the
bits correspond to the
For
example,
Word
operation, consists
s to identify that the word
and that the hardware is
EOI
is to
bit I = 0
addressed to a master PIC
code bit 2 = 1
or
fully nested mode.
and
3-39.)
s are required to initialize
is
required
PIC's
if a slave
code
(ICW4),
be
which is
of
(EOI) function.
automatically
if
an
EOI
in
ICW 4 for
com-
on-
bit
the
3-47. ADDRESSING
The
master PIC uses addresses
initialization and operation
dresses
bytes. Addresses for the specific functions are provided in
table 3-2.
Slave
and their addresses are determined by the hardware
designer.
000C4
PIC's,
or
000C6
if
employed,
OOOCO
or
command
to read status, poll, and mask
are accessed via the Multibus
words and ad-
3-48. INITIALIZATION
To
initialize the
follows (table
subroutine for a
mode; tables 3 -18 and 3 -19 are typical master
slave
is
PIC initialization subroutines for the bus vectored
mode):
a. Disable system interrupts by executing a
Interrupt Flag) instruction.
b. Initialize master
ing sequence:
(1) Write
(2)
or
c. Initialize each slave PIC by writing
d. Enable system interrupts by execlJting an STI (Set
If
000C2.
and write
following sequence:
Interrupt Flag) instruction.
PIC's
3-17
provides a typical
PIC operated in the
PIC by writing
ICWI
to
slave
PIC's
are used, write
If
no slave
ICW4
(master and slaves), proceed as
PIC
non-bus
ICW'
OOOCO
PIC's
only to
ICWI,
and
ICW2
are used,
000C2.
ICW2,
ICW3
and
000C2
to write
initialization
vectored
PIC and
CLI
(Clear
s in the follow-
to
000C2.
and
ICW4
omit
ICW3
ICW's
in the
ICW4.
to
•
Master
•
Master
•
Each
PIC ICWI
ICW2
ICW4
PIC - With Slave(s)
ICWI
ICW2
ICW3
ICW4
Slave
ICW!
ICW2
ICW4
No
PIC
Slaves
3-46. OPERATION COMMAND WORDS
After
being initialized, the
programmed
Operation
figure
Command
3-15
and discussed in paragraph
at any
time
master
and slave
for various operating modes.
Word
(OCW)
fornlats are
PIC's
3-49.
shown
can
be
The
in
NOTE
Each
PIC independently operates in the
nested mode (paragraph
ization and before an
Word
(OCW)
programs it otherwise.
3-38)
after initial-
Operation Control
3-49. OPERATION
After initialization, the master PIC and slave
independently be
tion
Command
operations:
a. Auto-rotating priority.
Specific rotating priority.
b.
c.
Status read
d. Status read
e. Interrupt mask bits are set, reset,
f.
Special mask mode set
programmed
Word
of
Interrupt
of
In-Service Register (ISR).
at any time by an Opera-
(OCW)
or
for the following
Request
Register (IRR).
reset.
or
read.
PIC's
can
3-\9
Page 58

Programming Information
0
7
I R I
SEOI I EOI
1\
OCW2
Os
D.
I
o I 0 I LZ I
03 DZ 0,
iSBC
86/1t
0"
L,
I
Lo
I
BCD
LEVEL
TO
BE
OR
PUT
INTO
0 1 2 3
0 1 0
0
0
1 1
0 0 0 0 1 1 1 1
LOWEST
4
1 0 1
O'
RESET
PRIORITY
6 7
5
0 1
0 1
1
I -
DOLT
CARE
IESMMI
SMM
I 0 I 1 I
OCW3
P I
ERIS I RIS
I
I
NON·SPECIFIC
1 -
RESET
BITOF
0-
NO
SPECIFIC
1 •
O-NOACTION
0 1 0 1
0
ACTION
Lz.
L,.
ROTATE
1O·
READ
1
I
NO
ACTION
POLLING
A
HIGH
TO
READ
EST
LEVEL
END
THE
HIGHEST
ISR
END
OF
Lo
BITS
ROTATE
NOT
ROTATE
IN-SERVICE
0
ENABLES
THE
REOUESTING
OF
INTERRUPT
PRIORITY
INTERRUPT
ARE
PRIORITY
READ
IRREG
ON
RDPULSE
THE
BCD
CODE
USED
REGISTER
1
NEXT
NEXT
OF
INTERRUPT.
1
READ
IS
REG
ON
NEXT
RDPULSE
AD
PULSE
THE
HIGH·
3-20
SPECIAL
MASK
MOOE
NO
1
1
ACTION
1
0
0 1
1
RESET
SPECIAL
SPECIAL
MASK MASK
0
0
Figure 3-15. PIC Operation Control Word Formats
1
SET
Page 59

iSBC 86/12
Programming Information
Table 3-17. Typical PIC Initializatiion Subroutine (NBV Mode)
;INT59 INITIALIZES THE PIC. A 64-BYTE ADDRESS BLOCK BEGINNING WITH
;OOOOOH
;PIC
;PIC
;USES-SETI,
IS
SET UP FOR INTERRUPT SERVICE HOUTINES.
MASK
IS
IS
SET, DISABLING ALL PIC INTERRUPTS.
IN
FULLY NESTED MODE, NON-AUTO EOI.
SMASK; DESTROYS-A.
PUBLIC INT59
EXTRN SETI,
SMASK
INT59:
CALL
MOV
OUT
MOV
OUT
MOV
OUT
MOV
CALL SMASK
RET
END
SETI
AL,13H
OCOH
AL,OOH
OC6H
AL,1DH
OC2H
AL,OFFH
;ICW1 TO PIC
;ICW2 TO PIC
;ICW4 TO PIC
Table 3-18. Typical Master PIC Initialization Subroutine (BV Mode)
;INTMA INITIALIZES MASTER PIC WITH A SINGE SLAVE ATTACHED
;IN THE 0 LEVEL INTERRUPT.
;PIC MASK
;PIC
;USES-SETI, SMASK
INTMA: CALL SETI
IS
SET
WITH
IS
FULLY NESTED, NON-AUTO EOI.
PUBLIC
EXTRN
MOV
OUT
MOV
OUT
MOV AL,01H
OUT
MOV AL,1DH
OUT
MOV
CALL SMASK
RET
ALL PIC
INTMA
SETI,
AL,11H
OCOH
AL,OOH
OC2H
OC2H
OC2H
AL,OFFH
INTEI~RUPTS
SMASK
DISABLED.
;ICW1
;ICW2
;ICW3
;ICW4
Table 3 -20 lists details
of
the above operations. Note that
an End-Of-Interrupt (EOI) or a Special End-Of-Interrupt
(SEOI) command
is
required at the end
service routine to reset the ISR. The
in
the fully nested and auto-rotating priority modes and
the SEOI command, which specifies
used in the specific rotating priority mode. Tables 3-21
through 3-25 provide typical subroutines for the
following:
END
of
each interrupt
EOI command
Ithe
bit
to
be reset,
is
used
is
a.
Read IRR (table 3-21).
b.
Read ISR (table 3-22).
c.
Set mask register (table 3-23).
d. Read mask register (table 3-24).
e.
Issue EOI command table (3-25).
3-21
Page 60

Programming Information
iSBC
86/12
Operation
Table 3-19. Typical Slave PIC Initialization Subroutine
;INTSL
INITIALIZES A SLAVE
;BEGINNING
;PIC
IS
FULLY
;USES-SETI,
INTSL:
WITH
0200H.
NESTED,
DESTROYS-A.
PUBLIC
EXTRN
CALL
MOV
OUT
MOV
OUT
MOV
OUT
RET
END
PIC
LOCATED
NON-AUTO
INTSL
SET
I
SETI
AL,11H
OCOH
AL,08H
OC2H
AL,19H
OC2H
EOI.
AT
ADDRESS
;ICW1
;ICW2
;ICW4
Table 3-20. PIC Operation Procedures
Procedure
BLOCK
(BV
Mode)
Auto-Rotating
Spedfic
Priority
Priority
Mode
Rotating
Mode
To
set:
In
OCW2,
write a
Terminate interrupt
In
OCW2,
To
set:
In
OCW2,
OOOCO:
To terminate interrupt
In
OCW2,
To
rotate
priority without
In
OCW2,
write
write a
write
write
and
EOI
an
,a
Rotate
Priority
rotate
command
Rotate
Priority
I
BCD
and
rotate
SEQI
command
I
BCD
EOI:
command
at
EOI
command
priority:
(20H)
to
OOOCO.
at
SEOI
D7
D6 I D5 I D4
I
1 1 1 0 0
I
of
IR
line to
be
priority:
in
the
following format to
D7 I D6 1 D5 1 D4 1 D3
0 1 1
I
of
ISR
flip-flop
word
in
the
following
command
reset
and/or
0 0
to
be
format
(AOH)
in
D3
I
reset.
to
OOOCO.
the following format to
I
D2 I D1 I DO
L2
L1
I
D1
L1
I
LO
DO
1
LO
~
put
into lowest priority.
OOOCO.
1
D21
L2
--.,...-.
to
OOOGO:
I
I
3-22
D7
I
BCD
1
D6 1 D5
1
1
I
of
bottom
D4
1
1
0 0 0
priority
IR
line.
D3
1
--.,...-.
D21
L2
D1
L1
I
I
DO
LO
I
Page 61

iSBC 86/12
Table
;J-20.
PIC Operation Procedures (Continued)
Programming Information
Operation
Interrupt Request
Register
Status
In-Service
Register (ISR)
Status
(IRR)
Procedure
The IRR stores a
an interrupt. To read the
(1) Write
(2) Read
The ISR stores a
The
ISR is updated when an EOI command is issued. To read the ISR (refer
to footnote):
(1) Write
(2) Read
Be sure to reset ISR bit at end-of-interrupt when
Auto-Rotating (both types)
"1"
in the associated bit for each IR input line that is requesting
IRR (refer to footnote):
OAH
to
OOOCO.
OOOCO.
Status is as follows:
~7
IR Line: 7 6
"1"
in the associated bit for priority inputs that are being serviced.
OBH
to
OOOCO.
DOOCO.
Status is as follows:
E·"-I
IR Line:
7 6 5 4 3
and Special Mask. To reset ISR in OCW2, write:
06
I
-06-'"1-
04 1 03 1 02 1 01
05
1
1
5 4 3
-'--1
-04---'1-0-3 -'--1
0-5
2 1
-02---'1--0-1 -'--1
2 o
in
the following modes:
1
00
0
-00--'1
1
Interrupt
Special Mask
NOTE:
Mask
Register
Mode
If previous operation
~I
To set mask bits in
OCW1, writl3 the following mask byte to 000C2:
~
IR Bit Mask: M7 M6 M5 M4 M3 M2
1 = Mask Set, o = Mask Reset
To read mask bits, read
The Special Mask Mode enables desired bits that have been previously masked;
lower priority bits are also enabled.
To set, write 68H to
To
reset, write 48H to
was
addressed to same register, it is not necessary to rewrite the OCW.
000C2.
DOOCO.
OOOCO.
06 I 05
1 1
0
I
BCO identifies bit to be reset.
1061051
I
04
03
I
0
0
04 1 03
I
02
I 01 I
L2
L1
--...-.-
-.l
1 021
01
M1
I
00
LO
00
MO
I
I
3-23
Page 62

Programming Information
Table 3-21. Typical PIC Interrupt Request Register Read Subroutine
;RRO
;USES-SETI;
READS
PIC
INTERRUPT
DESTROYS-A.
REQUEST
REG.
iSBC
86/12
RRO:
PUBLIC
EXTRN
CALL
MOV
OUT
IN
RET
END
RRO
SETI
SET
I
AL,OAH
OCOH
OCOH
;OCW3
RR
INSTRUCTION
Table 3-22. Typical PIC In-Service Register Read Subroutine
;RISO
READS
;USES-SETI;
RISO:
PIC
IN-SERVICE
DESTROYS-A.
PUBLIC
EXTRN
CALL
MOV
OUT
IN
RET
END
REGISTER.
RISO
SETI
SETI
AL,OSH
OC4H
OC4H
;OCW3
RIS
INSTRUCTION
TO
TO
PIC
PIC
Table 3-23. Typical PIC Set Mask Register Subroutine
;SMASK
;A
;USES-A,SETI;
SMASK:
STORES A REG
ONE
MASKS
INTO
OUT
AN
DESTROYS-NOTHING.
PUBLIC
EXTRN
CALL
OUT
RET
END
PIC
INTERRUPT, A ZERO
SMASK
SETI
SETI
OC2H
MASK
REG.
ENABLES
IT.
Table 3-24. Typical PIC Mask Register Read Subroutine
;RMASK
;USES-SETI;
RMASK:
READS
PIC
DESTROYS-A.
PUBLIC
EXTRN
CALL
IN
RET
END
MASK
SETI
OC2H
REG
RMASK
.
SETI
INTO A REG.
3-24
Page 63

iSBC
86/12
Table
3-25.
Typical
PIC
End-of-][nterrupt
Command
Programming Information
Subroutine
EOI ISSUES END-OF-INTERRUPT TO
;USES-SETI; DESTROYS-A.
PUBLIC EOI
EOI:
EXTRN
CALL SETI
MOV
OUT
F~ET
END
SETI
A,20H
OCOH
3-50. HARDWARE INTERRUPTS
The
8086 CPU includes two hardware interrupts inputs,
NMI and INTR,
able, respectively.
3-51. NON-MASKABLE
The NMI input has the higher priority
inputs. A low-to-high transition on the NMI input will be
serviced at the end
whole moves
sponse to NMI
shift instruction.
When
the NMI input goes active, the
following:
classified as
of
the current instruction
of
a block-type instruction. Worst-case re-
is
during a multiply, divide,
non·maskable
lNTERRUPT
of
the two interrupt
or
or
CPU
performs the
and mask-
(NMI)
between
variable
PIC.
;NON-SPECIFIC
When
INTR goes active, the CPU pertorms the following
(assuming the Interrupt Flat
a. Issues two acknowledge signals; upon receipt
EOI
is
set):
of
the
second acknowledge signal, the interrupting device
(master
or
slave PIC) will respond with a one-byte
interrupt identifier.
b. Pushes the Flag registers onto
th.e
stack (same as a
PUSHF instruction).
c. Clears the Interrupt Flag, thereby disabling further
maskable interrupts.
d. Multiplies by four (4) the binary value (X) contained
in the one-byte identifier from the interrupting
device.
e. Transfers control with an indirect call through
Upon completion
of
the service routine, the
CPU
4X.
automat-
ically restores its flags and returns to the main program.
a. Pushes the Flag registers onto the stack (same
PUSHF
instruction).
b. If not already clear, clears the Interrupt Flag (same as
a
CLI instruction); this disables maskable interrupt.
c. Transfers control with an indirect call through
The
NMI input
is
intended only for catastrophic
handling such as a system power failure. Upon completion
of
the service routine, the
CPU
the flags and returns to the main program.
3-52. MASKABLE
The
INTR input has the lower priority
INTERRUPT
inputs. A high level on the INTR input will be serviced at
the
end
of
the current instruction
or
move for a block -type instruction.
as
00008.
error
automatically restores
(INTR)
of
the two interrupt
at the
end
of
a whole
a
3-53.
MASTER
PIC
BYTE
IDENTIFIER.
ter (ol1-board) PIC responds to the second acknowledge
signal from the
nOIll-slaved device;
to one
of
eight IR inputs numbered
idel1tified by a 3-bit binary number.
request occurs on IRS, the master
second acknowledge signal from the
the byte 00000
CPU
only
if
the interrupt request
i.e.,
a device that liS connected directly
the master PIC IR inuts.
IRO
through IR 7, which are
1012 (OSH).
The
CPU
The
master PIC has
Thus,
if
PIC responds to the
CPU
mUltiplies this value
by four and transfers control with an indirect call through
000
101002 (l4H)'
3-54"
SLAVE
PIC
is
initialized with a
These
three bits will form a part
transferred to the
PIC
BYTE
CPU
IDENTIFIER.
3-bit
identifier
in
response to the second
(ID)
of
the byte identifier
acknowledge signal.
The
mas-
is
from a
an interrupt
by outputting
Each
slave
in ICW2.
3-25
Page 64

Programming
Information
iSBC
861l~
The slave PIC requests an interrupt by driving the associated master
drives the
first
of
two acknowledge signals. In response to the first
PIC IR line. The master PIC,
CPU INTR input high and the CPU outputs the
acknowledge signal, the master
code to slaved
priate slave
signal from the
PIC's; this 3 -bit code allows the appro-
PIC to respond to the second acknowledge
CPU.
PIC outputs a 3-bit binary
in
tum,
Assume that the slave PIC has the ID code
.
in
ICW2, and that the device requesting service is driving
the
IR2 line (010). Thus,
in
response to the
acknowledge signal, the slave PIC outputs
(3AW.
fers control with
(E8
The CPU multiplies this value by four and trans-
an
indirect call through
)·
H
1112
assigned
OOIIIOIO~
1ll0lOOO2
secon<l
3-26
Page 65

C
4-1. INTRODUCTION
---
CHAPTER 4
PRINCIPLES OF OPERATION
4-4.
CENTRAL
PROCESSOR UNIT
This chapter provides a functional description and a
of
circuit analysis
puter. Figures 4-1 and
chapter, are simplified foldout logic diagrams that
illustrate the functional interface between the
microprocessor (CPU) and the on-board facilities and
between the
Multibus. Also shown
Control Logic that allows the iSBC 86/12 to function
master/slave relationship with the Multibus
aHother bus master to access the on-board dual port RAM.
the iSBC 86/12 Single Board Com-
4-2,
located
CPU and the system facilities via the
in
figure 4-2
at
the end
is
the Dual Port
to
of
8086
allow
this
in
4-2. FUNCTIONAL DESCRIPTION
A brief description
comprising the
graphs. A operational circuit analysis
with paragraph 4-13.
4-3.
CLOCK
The clock circuit composed
stabilized by a 22.1184-MHz crystal. This circuit provides nominal IS3.7-kHz, 1.23-MHz , and
optional clock frequencies to the 82S3 Programmable
Interval Timer (PIT);
8251A Universal Synchronous/Asynchronous Receiver/
Transmitter
to
the Dual Port Control Logic and RAM Controller.
The clock circuit composed
by an 18.432-MHz crystal. This circuit divides the
crystal frequency by two to provide the nominal
9.22-MHz
(CCLK/) signals to the Multibus. (The BCLK/ signal
is also used by the Bus Arbiter Assembly.) Removeable jumpers are provided to allow this clock circuit to
be disabled
CCLK/
Clock A38
a nominal S-MHz clock to
A81, the Bus Arbiter Assembly, and Bus Command
Decoder A83. Clock A38 also provides a reset signal on
power-up and when commanded to do so by an optional
signal supplied via auxiliary connector
signal initializes the system
components to a known internal state.
(USART); and a 22.12-1\1Hz clock frequency
Bus Clock (BCLK/) and Constant Clock
if
to
the Multibus.
is
stabilized by a
of
the functional blocks
iSBC 86/12
is
given in following para-
is
given beginning
of
logic
CIRCUITS
of
A16,
Al7,
and
Al8
2.46-MHz
2.46-MHz
some other source supplies BCLK/ and
Baud rate clock
of
A80 and A63
IS-MHz
CPU A39, Status Decoder
as
crystal and provides
P2. The RESET
well
as
certain iSBC 86/12
is
stabilized
to
the
The 8086 Microprocessor (CPU A39),
of the single board computer, pcrforn1s the system pro-
cessing functions and generates the address and control
signals required to access memory and
trol signals
decoded
signals required to control the board. The
AD1S pins are used
data and the lower l6-bits
a
part
of
(ADO-ADIS) and the upper 4-bits
strobed into Address Latch
Latch Enable (ALE) signal. (The ALE signal
by
decoding
puts form the
ABOmachine cycle, the
to form the 16-bit data bus
4-5. INTERVAL
The 8253 PIT provides three independently controlled
counters that derive their optional basic timing inputs
from
is
Counter 2 provides timing for the serial
(82SIA
USART, can provide programmable Baud rates from 110
to 9600. Counter 0 can be used in one
clock generator it can be buffered to provide an external
user-defined clock
CPU interrupt. Counter 1, which
timer and can also generate an interrupt.,. has a range
microseconds to
needed., Counters
single timer with a maximum delay
SO,
S I, and S2 are driven by the CPU and
by
Status Decoder
to
a machine cycle, for example, the lower 16-bits
SO,
SI,
20-bit address bus ABO-ABI3;
ABF and
AB
I 0-
ADO-ADIS pins
A81
multiplex the Hi-bit input/output
of
the address. During the first
A40/41/S7 by the Address
and S2.) The Address Latch out-
AB
13. During the remainder
ADO-ADF.
TIMER
the clock circuit composed
USART). This counter,
or
(2) as an interval timer to generate a
8S3.3 milliseconds.
0 and 1 can be cascaded to provide a
INhich
I/O devices. Con-
to develop the various
(ADl6-ADl9)
of
the CPU are used
of
AI6/17/18.
in
conjunction with the
of
two ways:
is
the system interval
If
longer times are
of
over
4-6. SERIAL 110
The 8251A USART provides RS232C compatibility and
is
configured
chronous mode, character size, parity bits, stop bits, and
Baud rates are all programmable. Data, clocks and control
lines
to
as
a data terminal. Synchronous
and from connector
12
are buffered.
4-7. PARALLEL 110
The 825SA Programmable Peripheral Interface provides
24 programmable
so that, depending on the application,
I/O
lines. Two IC sockets are provided
TTL
is
the heart
CPU
is
I/O
SO
hours.
or
drivers
ADO-
are
derived
i.e.,
of
the
port
(I)
as
of
1.6
ansyn-
or
I/O
a
4-1
Page 66

Principles
of
Operation
iSBC 86/12
tenninators
connector J
of
eight lines each; these ports can be programmed
simple I/O ports, strobed
or
one port can be programmed
with control lines. The iSBC 86/12 includes various
optional functions controlled
such
lines, bus override, strobed I/O port interrupts, and one
MuItibus interrupt.
may
be installed
1.
The 24 lines are grouped into three ports
as
an
RS232C interface line, timer gate control
to
complete the interface
VO
ports with handshaking,
as
a bidirectional port
by
the parallel I/O lines
to
to
be
4-8. INTERRUPT CONTROLLER
The 8259A Programmable Interrupt Controller (PIC)
handles
8259A
of
another 8259A
programming the master
that
PIC (the one interfaced to the master PIC via the
Multibus).
PIC, it will allow the slave PIC
vector address
master
bus vectored (NBV) interrupt line (master
the restart address) or a bus vectored (BV) interrupt
(cascaded to a slave
dress). The
single Multibus interrupt lines (an interrupt line which
does not have a slave
aid
rupts to 64. All 64 interrupts must be processed through
the slave
iSBC 86/12.
There are nine jumper-selectable interrupt sources: serial
I/O
ternal viaJ1
The eight Multibus interrupt lines
be connected to the master
interrupt levels. The user
interrupt levels by hardware jumpers. The iSBC 86/12
can also generate one Multibus interrupt that
by
up
to
eight vectored priority interrupts. The
PIC provides the capability
priority interrupts
an
interrupt line (e.g., IR3)
If
PIC can be individually programmed
iSBC
of
eight slave PIC's, expand the number
PIC's
port
(2),parallel
(1), power fail (1), and MuItibus time out (1).
an 8255A PPI output bit.
by
cascading each interrupt line with
PIC. (Refer to figure 2-2.) This
PIC (the one on the iSBC 86/12)
an IR3 interrupt
to
the CPU. Each interrupt line into the
PIC which generates the restart ad-
86/12 can handle eight on-board or
PIC connected
and must therefore be external to the
VO
interface (2), timers (2), ex-
cap map interrupt sources into
PIC
is
is
to
to
sensed
expand the number
is
done by
connected
to
to
(INTO/-INT7/) can
provide 8
to
a slave
by
the master
send the restart
to
be a non-
PIC generates
it) or, with the
of
inter-
to
64 bus
is
controlled
4-10. RAM CONFIGURATION
The iSBC 86/12 includes 32K bytes
composed
8202 RAM Controller.
The Dual
Multibus
RAM device when not acting
port
faulting control
time a bus master generates a memory request to the
dual port RAM via the Multibus, the RAM must be
taken away from the
When the slave request
RAM returns
The dual port consists
and decoder; bidirectional address and data bus (Multibus)
drivers; slave RAM address decoder/translator; control
logic; and the RAM and RAM controller.
The
bus
On-board RAM addresses (as seen by the CPU) are
(assigned from the bottom up)
The address bus drivers and data bus drivers separate the
dual port bus from the Multibus. The slave RAM address
decoder
to
provide independent Multibus address selection ,that
can be located throughout the I-megabyte address space.
The slave RAM address
address and memory size. The base address can be on
any
space cannot extend across a I28K boundary. The
memory size specifies the amount
accessible by the Multibus and
increments. This provides the capability
tions
and frees
address
an
(Refer
of
sixteen 2117 Dynamic RAM chips and
Port Control Logic interfaces the RAM with the
so
that the iSBC 86/12 can perfonn
is
designed
CPU address and data buffers separate the on-board
(I/O and ROM/EPROM) from the dual port bus.
is
8K
of
is
on-board RAM address (as seen
to
to
maximize the CPU throughput by de-
to
the CPU when not in demand. Each
CPU (when the CPU
is
completed, the control
to
the CPU.
of
CPU address and data buffers
separate from the CPU RAM address decoder
is
selected by specifying the base
boundary with the exception that the memory
the dual port RAM for
up
the address space. Regardless
selected, the slave RAM address
figure 2-1.)
of
read/write memory
as
as
a bus master. This dual
is
not using it).
00000-07FFF.
of
Dual Port RAM
is
switch selectable in 8K
to
reserve. sec-
u\e
only by
the'CPU
of
what base
is
mapped into
by
the CPU).
an
a slave
of
the
4-9.
ROM/EPROM
IC sockets A28, A29, A46, and A47 are provided for
user installation
provided to accommodate either 2K, 4K,
The
ROM/EPROM address space
the I-megabyte memory space because the 8086 CPU
branches to
the different
(using 2K chips),
(using
8K
4-2
of
FFFFO
ROM/EPROM configurations are
chips).
CONFIGURATION
ROM
or
EPROM chips; jumpers are
after a reset. Starting addresses for
FEOOO
(using 4K chips), and
or
8K
is
located at the top
chips.
of
FFOOO
FCOOO
4-11.
BUS
STRUCTURE
The iSBC 86/12 architecture
bus hierarchy: the on-board bus, the dual port bus, and
the Multibus. (Refer
municate only within itself and
bus can operate independently
fonnance
bus it must go to perfonn
the
of
the iSBC 86/12
bus
to
the on-board bus, the better the perfonnance.
is
organized around a three-
to
figure 4-3.) Each bus can com-
an
adjacent bus, and each
of
each other. The per-
is
directly related to which
an
operation; that is, the closer
Page 67

iSBC
86/12
Principles of Operation
is
RAM perfonnance
designed to equal that
activity (if the dual port bus is not busv when the
board bus requests it). The dual port
returns
This level
bus activity
Ito
State I when the CPU completes its operation.
of
bus activity operates independently
(if
the Multibus does not need the dual
of
b~s
control logic
on-board
on-
of
Multi-
port bus).
When
the Multibus requests the dual port bus, the control
logic goes from State
in about
to
independent
150 nanoseconds and, upon completion, returns
State
:I.
The Multibus use
of
the on-board activity.
I to 3 (it will wait if busy)
of
the dual port bus
is
When the on-board bus needs the Multibus, it must go
through the dual port bus to the Multibus.
bus uses the dual port bus only
to
communicate with the
Multibus and leaves the dual port bus in State
at this level requires a minimum
200-nanosecond over-
The
I.
on-board
Activity
head for Multibus exchange.
645-9
The
requires
(Exception: a
However,
"h~des"
The
the on-board bus, which connects the
I/O devices,
Ac:tivity
buses, thus permitting independent execution
Figure
4-3_
Internal
iSBC 86/12 operates at a
one
wait state for all on-board system accesses.
RAM
write requilres two wait states.)
the pipeline effect
of
these wait states.
core
of
the iSBC 86/12 series bus architecture is
ROM/EPROM,
on
this bus does not require control
and the dual port RAM bus.
nus
Structure
5-MHz
the 8086
CPU
CPU
cycle and
CPU
effectively
to all on-board
of
the outer
of
on-board
activities. Activities at this \evel re:quirc no bus overhead
and operate at
The
next bus in the hierarchy is the dual port bus. This
maximum
bus controls the dynamic
the
on-board
be
in
a.
State 1 - On-board bus
one
bus
and
of
three states:
board perfonnance.
RAM
and communicates with
the Multibus
..
is
conltrolling it but not
The
dual port bus can
using it (not busy).
b_
State 2 - On-board bus is controlling it and using
it (busy).
c_
State 3 - Multibus is controlling it and using it
(busy).
State 1 is the idle state
in control
the
of
the on-board bus to minimize delays when
CPU
needs it. When the
dual port bus to access
logic will go from
of
the dual port bus and is left
on-board
RA\1,
the dual port bus control
State I to State
bus requires the
2.
(If
the dual port
bus is busy, it will wait until it is not busy). Activity
at this level requires a minimum
of
bus overhead and the
4-12. \1ULTIBUS
The
iSBC 86/12
supports both 8-bit and 16-bit
interface includes the Bus Arbiter
Command
data bus drivers, and interrupt drivers and receivers.
Bus Arbiter allows the iSBC 86/12 to operate
masters in the system in which the
Decoder A83, bidirectional address bus and
INTERFACE
is
completely Multibus compatible and
operations.
8086
The
Multibus
i
....
ssembly, Bus
as
CPU
can request
The
a bus
the Multibus when a bus resource is needed.
The Bus Arbiter Assembly mounts on the
is electrically interfaced
to the board via connector
iSBC 86/12 and
J\
2.
4-13. CIRCUIT ANALYSIS
The
schematic diagram for the iSBC 86/12
figure 5-2.
each
traverse from
The
schematic diagram consists
of
which includes grid coordinlftes. Signals that
one
sheet to another are assigned grid
coordinates at both the signal source and signal
tination.
a signal source (or signal destination
For
example,
the grid coordinates 2ZB I locate
as
on sheet 2 Zone B 1 .
Both active-high and active-low signals are used. A signal
mnemonic that ends with a virgule
that the signal
is
active low
signal mnemonic without a virgule
. that the signal
Figures 4-1 and
simplified logic diagrams
is
active high
4-2
at the end
of
(e.g.,
(~0.4
V). Conversely, a
(e.g.,
C?2.0V).
of
the input/output, interrupt,
and memory sections. These diagrams will be helpful
understanding both the addressing scheme and the internal bus structure
of
the board.
is
given in
of
II
sheets,
des-
the
cas~
may be)
DAT7/) denotes
ALE) denotes
this chapter are
in
4-3
Page 68

Principles
of
Operation
iSBC
86/12;
4-14. INITIALIZATION
When power is applied
of
contents
the 8086 CPU program counter, program
status word, interrupt enable flip- flop, etc., are subject to
random factors
and cannot be predicted. For this
reason, a power-up sequence
Bus Arbiter, and
When power
VO
is
initially applied to the iSBC 86/IX,
capacitor C26 (2ZD6) begins to charge through resistor
R9. The charge developed across C26
Schmitt trigger, which is internal to Clock Generator A38.
The
Schmitt trigger converts the slow transition appearing
at pin
12
into a clean, fast-rising synchronized RESET
signal at pin 11. The RESET signal
to develop
matically sets the
RESET/ and INIT/. The RESET/ signal auto-
8086 CPU program counter to FFFFO
and clears the interrupt enable flip-flop; resets the
VO
ports
parallel
I/O port to the
to
"idle"
(outputs are tristated). The INIT/ signal
over the Multibus to set the entire system to a known
internal state.
The initialization described above can be performed at
any time by inputting a
connector
P2.
in
a start-up sequence, the
is
used to set the CPU,
ports to a known internal state.
is
sensed by a
is
inverted
by
A48-6
the input mode; resets the serial
mode; and resets the Bus Arbiter
is
transmitted
RESET/ signal via auxiliary
4-16. CENTRAL PROCESSOR UNIT
The 8086 CPU uses the 5-MHz clock input to develop
the timing requirements for various time-dependent functions described
4-17. BASIC
of
at
least four clock (CLK) cycles referred to
T2, T3 and T4. The address
during
Tl
T3 and T4; T2
direction
that a
"not
device,
"wait"
T4. Each inserted TW state
a CLK cycle. Periods can occur between CPU-driven bus
cycles; these periods are referred to as
(TI) or inactive CLK cycles. The processor uses
states for internal housekeeping.
4-18. BUS
SO,
S 1, and S2 during T I
status signals are used
Arbiter Assembly, and Bus Command Decoder A83 to
identify the following types
S2
in
following paragraphs.
TIMING.
Each CPU bus cycle consists
as T 1,
is
emitted from the CPU
and data transfer occurs on the bus during
is
used primarily for changing the
of
the bus during read operations. In the event
ready" indication
is
given
by
the addressed
states (TW) are inserted between T3 and
is
of
the same duration
.•
idle" states
TIMING.
S1
The CPU generates status signals
of
every machine cycle. These
by
Status Decoder A81, Bus
of
machine cycles.
CPU
SO
Machine Cycle
as
TI
4-15. CLOCK CIRCUITS
The 5-MHz CLK
(2ZC6)
in
the time base for CPU A39, Status Decoder
Arbiter Assembly and Bus Command Decoder A83.
The time base for Bus Clock BCLK! and Constant Clock
CCLK!
is
and crystal
divided by A63 and driven onto the Multibus through
jumpers 105-106 and 103-104. The BCLK! signal
used as a clock input to the Bus Arbiter Assembly.
The time base for the remaining functions on the board
provided
by
The nominal
the
OSC output
Dual
Port Control Logic and to RAM Controller A70.
Clock Generator A
by nine to develop a 2.46-MHz clock at its
output. The 2.46-MHz clock
clock input
AI8
to provide a selectable clock for the 8253 PIT.
Divider A16 also divides the 2.46-MHz clock by two
and by nine, respectively, to produce 1.23-MHz and
153.6-kHz selectable clocks for the 8253
is
developed by Clock Generator A38
conjunction with crystal Y2. This clock
A8I,
the Bus
provided by Clock Generator A80
Y3.
The 18.432-MHz crystal frequency
(1
OZA5)
is
clock Generator A
22.I2-MHz
of
AI7
17
also divides the crystal frequency
17
(7ZA
7)
and crystal Y
crystal frequency appearing at
is
buffered and supplied to the
<l>2TTL
is
applied directly to the
of
the
825lA
USART and applied through
PIT.
is
also
0 0
0
0 1
0 1
1
1 0
1
1 1
0
0 0 Code Access
1
A read cycle begins
Address Latch Enable (ALE) signal and the emission
is
the address. (Refer to figure
0
1
0
'1
1 Memory Read
0
1
in
Interrupt Acknowledge
1/0
Read
1/0
Write
Halt
Memory Write
Passive
T I with the assertion
4-4.~
The trailing edge
ALE signal latches. the address into Address Latch
A40/41/57 (2ZB2). (The BHEN/ signal and address bit
ADO
address the low byte, high byte,
or
both bytes.) The
Data Transmit/Receive (DT/R) signal, which
at the end
is
and data bus drivers for a
1.
Memory Read Command (MRDC/)
of T 1,
is used
to
set up the various data buffer:
CPU read operation. The
or
I/O Read Command (IORC/) is asserted from the beginning
beginning
lines
the Data Enable (DEN) signal
signal enables the data buffers.) The
state
READY input
ofT4.
At the beginning
of
the local bus are switched to the
ofT3,
is
asserted. (The DEN
CPU examines the
of
its READY input during the last half
is
high (signifying that the addressed
the ADO-ADI5
"data"
device has placed data on the data lines), the
proceeds into T4; if its READY input
is
enters a wait (TW) state and stays there until READY
of
the
of
of
is
asserted
of
T2 to the
mode and
of
T3. If its
CPU
low, the CPU
4-4
Page 69

iSBC
86/12
Principles
of
Operation
5-MHZ CLK
S2/, S1/,
SOl
BHEN/, AD16-AD19
,
,"
ALE
ADO-AD15
.".
DT/R
,
..
,.
MRDC/'
IORCI
\
~
11
1\
\
VALID
STATUS
ADDRESS
12
n
,
J
T3
1\
DATA
14
f\
~-
I--
-
\
'-
--
I FLOAT
IN
FLOAT
."*
DEN
NOTE: INTAI, AMWC/, MWTC/, AIOWC/, IOWCI ~ VOH
OR
"DENOTES CPU INPUT
**DENOTES STATUS DECODER
645-10
goes high. The external effect
is
to preserve the exact state
for an integral number
the machine cycle. This
in
effect, increases the allowable access time for memory
or
I/O devices, By inserting TW states, the CPU can
accommodate slower memory or slower
CPU accepts the data and terminates the command
OUTPUT
AS1
OUTPUT SIGNAL
Figure 4-4. CPU Read Timing
of
using the READY input
of
the CPU at the end
of
clock periods before finishing
• stretching'
of
the system timing,
I/O devices. The
of
in
T3
T4;
the DEN signal then goes false and the data buffers are
tristated.
A write cycle begins
signal and the emission
4-5.) The trailing edge
address latch as described for a write cycle. The
in
T I with the assertion
of
the address. (Refer to figure
of
ALE latches
the
address into the
of
the ALE
DT/R
signal remains high throughout the entire read cycle to set
up
the data buffers and data bus buffers for a CPU
write operation. Status Decoder
of
write strobe signals: advanced (AMWT/ and
and normal (MWTC/ and 10WC/).
4-5, the advanced memory and
A8l
provides two types
AIOWq
As
shown
in
figure
I/O write strobes are
issued one clock cycle earlier than the normal memory
VO
and
advanced
write strobes. (The iSBC 86/12 doesn't use
VO
write strobe AIOWC/.) At the beginning
T2, the advance write and DEN signals are asserted and
the ADO-ADI5 lines
of
the local bus are switched to the
"data" mode. (The DEN signal enables the data buffers.)
..
The
CPU then places the data on the ADO-ADI5 lines
at
and,
the beginning
issued. The CPU examines the state
during the last half
of
T3, the normal write strobe
of
its READY input
of
T3. When READY goes high
(signifying that the addressed device has accepted the
data), the
CPU enters T4 and terminates the write strobe.
DEN then goes false and the data buffers are tristated.
The
CPU interrupt acknowledge
shown
in
figure 4-6. Two back-to-back INTA cycles are
(I
NT
A)
cycle timing
required for each interrupt initiated by the 8259A
by
a slave 8259A PIC cascaded to the master PIC. The
cycle
is
INT A
is
that
an
10RC/ signal and the address bus
similar to a read cycle. The basic difference
INT N signal
is
asserted instead
is
of
an MRDC/ or
floated. In the second
PIC
of
is
is
or
4-5
Page 70

Principles
of
Operation
iSBC86.
5-MHZ
ClK
* 52/. 51/.
** ALE
••
••
501
BHEN/. AD16-AD19
•
* ADO-AD15
DEN
AMWTI + AlOWCI
\
~
~
'i
T1
n
VALID
ADDRESS
STATUS
T2 T3 T4
n
n
DATA OUT
n
~
I FLOAT
I,
~
~--
--
FLOAT
(NOTE 2)
...
~
••
MWTCI + IOWCI
NOTES: _
1. INTAI. IORC/. MRDC/. DTIR = VOH.
2.
FLOATS ONLY IF ENTERING A
'DENOTES
"DENOTES
641H1
INT A cycle, a byte
PIC)
which identifies the interrupting source,
four by the
vector look-up table.
4-19. ADDRESS
The address bus
and4-2.
CPU A39 during the first clock cycle
or
I/O instruction. The 'trailing edge
Enable (ALE) signal, output by
ing T
41/57. The latched address
a. AB3-ABF to
(6ZA7).
b. ABB-AB13
A18/68 (6ZB6).
CPU INPUT OR OUTPUT
STATUS DECODER
of
infonnation (supplied
is
read from
"dat~"
CPU and used
BUS
is
shown in weighted lines in figures 4-1
The 20-bit address (ADO-ADI9)
1,
strobes and latches the address into Latch A40/
I/O Address Decoder A54/55/56
to
PROM Address Decode Logic
"HOLD"
CONDITION.
A81
OUTPUT
lines ADO-AD7. This byte,
as
a pointer into an interrupt
(T
of
Status Decoder
is
distributed as follows:
Figure 4-5. CPU Write Timing
by
the 8259A
is
multiplied by
c. ABI-ABC
d. AB13 to on-board RAM address recognition gate
A53-6 (6ZD6).
4-20. DATA
At the beginning
pins become the source
ADF. Data can be sourced to
is
output
by
a. Data Buffer A44/45 (4ZD4).
I)
of
the memory
the Address Latch
A81
dur-
b. Data Buffer A60/61 (4ZD5).
4-21.
Bus Time Out one-shot
signal. If jumper 5-6
BUS
leading edge
hung
lJP
nanoseconds,
to
PROM A28/29/46/47 (6ZC3).
BUS
of
clock cycle T2, the CPU
or
destination
or
input from the following:
of
data bus
ADO"
TIME OUT
A5
(lOZA6)
of
the ALE signal.
in a wait state for approximately 6.2
A5
times out and asserts the TIMEOUT/
is
installed, the TIMEOUT/ signal
is
triggered by the
If
the CPU halts,
(±
AD
ADO-
or
15%)
15
is
4-6
Page 71

iSBC
86/12
Principles
of
Operation
5-MHZ CLK
S2/, S1/,
SOl
BHEN/, AD16-AD19
*"
ALE
"
AD8-AD15
'\
--;
\
U
-
FLOAT
(NOTE
T1
CASCADE ADDRESS
2)
n
VALID
A8-A10
STATUS
T2
n
FLOAT
T3
n
T4
n
J FLDAT
FLOAT
(NOTE
10-
1--
\
\
\
-
2)
FLOAT (NOTE
" ADO-AD7
** MCE
-
IJ
\
*'"
DT/A
*'
INTAI
*'
DEN
NOTES:
1. MRDC/, IORCI, AMWC/, MWTC/, AIOWCI, IOWCI = VOH; BHENI =
2.
THE TWO INTA CYCLES
IS FLOATING WHEN THE SECOND INTA CYCLE IS ENTERED.
'DENOTES CPU INPUT OR OUTPUT
**DENOTES STATUS DECODER
RUN
BACK-TO-BACK. THUS, THE LOCAL BUS
A81
OUTPUT
2)
Vol.
POINTER
FLOAT
645-12 Fligure 4-6. CPU
Interrupt
Acknowledge Cycle Timing
4-7
Page 72

Principles
of
Operation
iSBC 86'1i_
drives the CPU READY line high through A7-12
and A38-5 to allow the
TIMEOUT/ signal
signal to the interrupt
CPU to exit the wait state. The
is
also routed as a TIMEOUT INTR
jumper
matrix
(8ZDl).
4-22. INTERNAL CONTROL SIGNALS
Status Decoder A81 (3ZB3) receives the
signal from Clock Generator A38 and status signals
from
CPU
A39. The
CLK
signal establishes when the
command signals are generated as a result
SO-S2. The following signals are output from Status Decoder A81:
Signal
ALE Address Latch Enable. Strobes address into Ad-
AIOWCI
AMWCI
DEN
DT/R
IORCI
10WCI
INTA/
MCE
MRDCI
W"VTCI
dress Latch
Advanced I/O
is issued earlier than
avoid imposing a CPU wait state.
Advanced Memory
Write Command that is issued earlier than
MWTCI in an attempt to avoid imposing a CPU
wait state.
Data Enable. Enables Data Buffers A44 and
A60/61.
Data Transmit/Receive. Establishes direction of
data transfer through Data Buffers
A60/61 and Data Bus Buffers A69/89/90.
I/O Read Command to on-board PPI, USART,
PIT,
and PIC.
I/O Write Command to on-board PPI, USART,
PIT,
and PIC.
Interrupt Acknowledge. Provides on-board con-
trol during INTA cycle.
Master Cascade Enable. Enable cascade ad-
dress from master 8259A
slave PIC address can be latched.
that
Memory Read Command.
Memory
Write
Definition
A40/41/57.
Write.
An I/O Write Command that
10WCI
Write
Command. A Memory
Command.
5-MHz
CLK
SO-S2
of
decoding
in
an
attempt to
A44/45 and
PIC onto local bus so
4-23. DUAL PORT CONTROL LOGIC
The Dual Port Control Logic (figure
the dual port RAM facilities to be shared by the on-board
CPU
or
by
another bus master via the Multibus. When not
acting as a bus master
RAM,
the iSBC 86/12
or
when not accessing the dual port
can
act as a
in a multiple bus master system. When accessing the dual
port
RAM,
the on-board
CPU
tempt to access the dual port RAM via the Multibus. In
this situation, the bus access
is
completed its particular read
bus access is
enters the
will be held
4-7
and
in
progress, the Dual Port Control Logic
"slave"
4-8
mode
aodany
off
until the slave mode
are timing diagrams for the Dual Port Control
Logic.
5-2
sheet 11) allQws
"slave"
RAM device
has priority over any at-
held
off
until the
or
write operation. When a
CPU
subsequent CPU request
is
terminated. Figures
has.
4-24. MULTIBUS ACCESS TIMING. Figure
lustrates the Dual Port Control Logic timing
RAM access via the Multibus. (P-periods
PO
4-7
for
dual port
through
it
Pl1
are used only for descriptive purposes and have no relationship to the
BD RAM
A49-7 goes low on the next rising edge
of
PO
end
22.12-MHz
CMD
signal goes high, A49-10 goes high and
(assuming that
clock signal.) When the OFF
of
the clock at the
ON
BD RAM RQT/ and RAM
XACK! are both high).
At the end
A50-6 asserts the
of
PI,
A50-5 goes high and
SLA
VE MODE/ signal.
A50-6
The
goes low;
outputs
A50-6 and A49- 7 are ANDed to hold A50-5 in the preset
of
(high) state. At the end
asserts the
or
DP
WRT/
SLA VE
CMD
to RAM Controller A 70 (lOZB6); SLA VE
P2, A49-14 goes low and
EN/ signal, which gates
DP
RD/
CMD EN/ also gates the subsequently generated RAM
CPU
XACK! to the
READY input. (RAM XACK!
generated by the RAM Controller when data has been read
or
from
written into RAM.)
The RAM Controller asserts RAM XACK! during P13
of
and A49-10 goes low on the next rising edge
The bus master then terminates the
signal and the
OFF
BD
CMD
signal.
DP
The
RD/
the clock.
or
DP
WRT/
RAM controller
next terminates RAM XACK! and then A49- 7 goes high
on the next rising edge
of
the clock. At the end
of
P16,
A50-5 goes low and A50-6 goes high (terminating the
SLA VE MODE/ signal).
high and terminates the
At
SLA
the end
VE
CMD
ofPl7,
EN/
A49-14 goes
signal.
The foregoing discussion pertains only to the operation
the Dual Port Control Logic for Multibus access
dual port RAM. The actual addressing and transfer
are discussed in paragraph
4-25. CPU ACCESS TIMING. Figure
4-35.
4-8
of
the
of
data
illustrates
the Dual Port Control Logic timing for dual port. RAM
access by the on-board
P13 are used only for descriptive
relationship to the 22.12-MHz clock signal.)
demonstrate that the CPU has priority in the access
dual port RAM, figure
8086 CPU. (P- periods
~urposes
4-8
shows the
OFF
PO
~rough
and
hJve
of
BD
RAM
no
To
the
CMD signal active when the CPU access is initiated by the
ON
BO
RAM RQT/ signal. The timing has progressed
through
PO,
during which time A49-10 has been clocked
·high and A49-7 has been clocked low.
Rip-Rop
asserts the ALE! signal at the beginning
instruction cycle. When the
asserted, the
is now low, A49-10 goes low on the next rising edge
clock. Flip-flop
clocked high and therefore keeps the
signal asserted;
SLA
A50-9
is
preset (high) when the Status Decoder
EXT
ALE/ signal goes low
A50-5
A50-6 remains high and suppresses the
VE MODE/ signal.
of
T1 in the
ON
BD RAM RQT/ signal
and,
since
is
thus prevented from being
DP
ON
BD
CPU
A51-6
of
the
ADR/
of
is
of
is
4-8
Page 73

iSBC
86/12
Principles of Operation
DUAL PORT
22.12 MHZ
ON
OFF BD RAM CMD
FF A49-10 a
FF
FF
ClK
ClK
BD RAM RaTI
ASO-S
a
ASO-6
a o
P-PERIODS
o
o
o
o
PO
P1
P2
P3
P4
P13
I P14 I
P1S
P16 I P17
FF A49-14 a
FF A49-7 a o
SLAVE CMD
DP
RAMXACKI
8086 CPU CONTROL 0
645-13
RDI
OR
DP
ENI
WRTI
o
o
o
o
CPU CONTROL
Figure 4-7. Dual
L-
____________________
Port
With CPU Lockout
~M~U~lT~IB~U~S~C~O~N_T_R_O_l
______________________
Control Multibus Access Timing
~~
4-9
Page 74

Principles of Operation
iSBC 861,.
-.
DUAL PORT
22.12 MHZ
ON
OFF
FF
FF A49-10 a
FF
FF
ClK
P-PERIOOS
ClK
BO
RAM ROT! o
BO
RAM CMD o
ASO-9 a
ASO-S a 0
ASO-6 Q 0
PO
P1
P2
P12
P13
PO
P1
P2
P3
P4
~--------~(~'------~
o
o
DP
ON
BD CMD EN!
FF
A49-14 Q 0
FF A49-7 a 0
ON BD CMD EN! 0
SLAVE
CMD EN! 0
DP RD! OR DP WRT! 0
ADV MEM RD!
RAM
a086 CPU CONTROL
"FOR REMAINDER OF
MUlTIBUS
SEE
WITH
OR
MEM WRT! 0
XACK/
ACCESS TIMING,
FIG. 4-7 BEGINNING
P3.
o
o
l·~
CPU
CONTROL
L-
________________________
MUlTIBUS
CONTROL
~?
*
645;-14
Figure 4-8. Dual Port Control CPU Access Timing With Multibus Lockout
4-10
Page 75

iSBC
86/12
Principles of Operation
The ON BD
as the
The
ADV
Status Decoder is ORed with the
signal to prevent A50-5 and A50-6 from changing states
when ALE/ goes false at the end
(A49-10
the clock after ALE/ goes false.)
The subsequently generated
gated by the asserted
mitted to RAM Controller A
or
write is completed, the RAM Controller asserts RAM
XACK!
ofP13,
RAM
MEM
then terminated and A49-10 goes high at the end
the end
goes high and A50-6 goes low.
The
foregoing discussion pertains only to the operation
the Dual Port Control Logic for CPU access
RAM. The actual addressing and transfer
discussed in paragraph 4-34.
CMD
EN/ signal
ON
BD RAM RQT/ signal since A49-14
MEM RD/
is
allowed to go high on the next rising edge
ON
and A49-1O goes low at the end
the CPU terminates the instruction and the ON BD
RQT/,
DP
RD/
WRT/
signals go false.
of
PI
, the SLA VE MODE/
is
asserted at the same time
or
MEM WRT/ signal from the
ON
BD RAM RQT/
of
Tl
in the instruction.
DP RD/
BD
70 (lOZB6). When the read
or
DP
WRT/, and
or
DP WRT/ signal,
CMD
EN/ signal,
ofPl2.
ADV
The
RAM
XACK!
is
entered when A50-5
of
of
is
high.
is
trans-
At the end
MEM/ or
signal
of
PO.
on-board
data are
of
At
of
With AEN2/ enabled, the Clock Generator
recognize the ensuing acknowledge signal (AACK!
XACK!) transmitted by the addressed system device.
ensure adequate setup for the address and data, counter A4
(2ZB5)
asserted. When ALE/ goes false, A4-3
the 5-MHz
driven through gate A2-11
Decoder.
The false
Command Decoder, which decodes
appropriate command low on the Multibus when T21/
occurs. The Bus Command Decoder also drives
DEN high
Bus Driver
"receive"
is
output
After the command
addressed device driving the Multibus XACK! line low),
the
Arbiter and Bus Command Decoder, respectively, terminate
relinquishes control
high and
is
held in the clear state as long as ALE/
is
clocked low by
clo~k
to generate T21/. This signal (T21/)
to
enable the Bus Command
ON BD ADR/ signal also enables the Bus
SO-S2 and drives the
to
enable Data Bus Driver A69/89.
is
switched
mode depending on the state
of
Status Decoder A81.
CPU terminates the appropriate command. The Bus
BUS ADEN/ and BUS DEN; the Bus Arbiter also
BPRO/ low and then raising BUSY/.
to
the appropriate
is
acknowledged (signified by the
of
the Multibus by driving BREQ/
is
prepared to
BUS
The
Data
"transmit"
of
the DT/R
or
To
is
is
or
4-26. MULTIBUS INTERFACE
The
Multibus interface consists
Assembly (3ZD3), Bus Command Decoder A83 (3ZC3),
bidirectional Address Bus Driver A87/88 (5ZC3), bidirectional Data Bus Driver A69/89/90 (4ZB3), and the
Slave RAM Decode Logic (figure
The
falling edge
ence for the Bus Arbiter, which allows the
assume the role
signal is false (high) and the
either a read
BREQ/ low and BRPO/ high. The BREQ/ output from
each bus master in the system is used by the Multibus
when the bus priority is resolved by a parallel priority
scheme as described in paragraph 2-19. The
put is used by the Multibus when the bus priority
resolved by a serial priority scheme as described
paragraph 2-18.
The
iSBC 86/12 gains control
BPRN/ input to the Bus Arbiter
falling edge
BUS ADEN/ low. The BUSY/ output indicates that the
bus is in use and that the current bus master in control will
not relinquish control until it raises its BUSY/ signal.
The
BUS ADEN/ output, which can be thought
"master
input
Driver (sheet 5), and the input
bus
of
Clock Generator A38 (2ZC6), the Bus Address
of
BCLK! provides the bus timing refer-
of
a bus master. When the
or
write operation, the Bus Arbiter drives
of
BCLK!, the Bus Arbiter drives BUSY/ and
control"
signal, is applied to the AEN2/
of
the Bus Arbiter
5-2
sheet 3).
iSBC 86/1X to
ON
BD ADR/
SO-S2 status signals indicate
BPRO/ out-
of
the Multibus when the
is
driven low.
of
gate A2-11 (3ZC4).
On
the next
of
as a
It
should be noted that, after gaining control
tibus, the
to prevent losing control at a critical time. (For instance, it
may be desired to execute several consecutive commands
without having to contend for the bus after each command
is
driving the Bus Arbiter
ways:
a.
b.
During an interrupt from the 8259A PIC, the LOCK input
is
signals issued by Status Decoder A81. (Refer to
paragraphs 4-37 through
is
4~27.
in
The following paragraphs describe on-board and system
VO
specific read and write commands to on -board
are described in Chapter 3.
4-28.
.
AB3-ABF are applied to the
posed
developed by flip-flop A63-5 (2ZA2) when the ALE
signal latches the
ADR
AACK! when AB8-ABF are false, AB6-AB7 are true,
iSBC 86/12 can invoke a
executed.)
By executing a software LOCK XCNG command.
By
automatically driven low by the first
The
"'bus
lock"
LOCK input low
clearing an option bit via
4-39.)
"bus
lock"
condition is invoked by
VO
Port
I/O OPERATION
operations. The actual functions performed by
ON-BOARD
of
A54/55/56 (6ZA 7). The
is
true, the
I/O
OPERATION.
VO
Address Decoder ,com-
ADV
I/O ADR signal is
CPU inverted S2 signal. When
VO
Address Decoder develops 10
of
the Mul-
condition
in
one
of
Cc.
of
two INT
VO
devices
Address bits
ADV
two
AI
I/O
4-11
Page 76

Principles
of
Uperation
iSBC
86/12
and AB5 is either true
AACK!
signal
or
false.
The
I/O
enables decoder A54, which then decodes AB3-AB4.
(The
I/O AACK signal also drives the CPU READY input
high.) Assuming AB8-ABF are false, AB3-AB7 are
de-
coded to generate the following chip select signals:
are
10
Chip Select
Signal
8259CSI
8255CSI
8253CSI
8251CSI
invalid.)
EN/ and
of
ON
BD
Status De-
of
data
Bits
7 6
543
1
000
1
1 1 0 0 1
1
101
1 1 0 1 1 08,
*Odd address
The
10
0
AACK!
respectively, to develop
ADR/.
(4ZD4) and
PROM
ON
Bus Command Decoder. The
Addresses*
CO,C2
C8,
CA,
CC,
02, 04,
~C,
C3,
....
CE
06
DE
~O)
(Le.,
signal
~O,
OA,
C1,
is
driven through A32-8 and A6-8,
PROM
10
EN/ enables Data Buffer A44/45
BD
ADR/ inhibits the Bus Arbiter and
DT/R output
coder A81 is inverted to select the proper direction
transfer through the Data Buffer.
Mter
the proper I/O device is enabled, the specific function for the device is selected by address bits ABO-AB1
and the
10RC/
or
10WC/
output
of
Status Decoder A81.
4-29. SYSTEM I/O OPERATION. Address bits
. AB3-ABF are decoded by the I/O Address Decoder as
described in paragraph 4-27.
on-board
I/O device, the
(high) and enables the Bus Arbiter Assembly and Bus
Command Decoder A53. (Refer to figure
The
Bus Arbiter and Bus Command Decoder, which are
clocked by the
signals
5-MHz
SO-S2, then acquire control
described in paragraph 4-26.
If
the address is not for an
ON
BD ADR/ signal is false
5-2
sheet
3.)
clock to latch in and decode status
of
the Multibus as
IC sockets A29 and A47 accommodate the top
of
ROM!
EPROM; IC sockets A28 and A46 accommodate the
ROM/EPROM space directly below that installed in A29
and A47. The low-order bytes (bits DBO-DB7) are
installed in A29 and A28; the high-order bytes (bits
DB8-DBF) are installed in A47 and A46.
ADV
10
ADR
is
When
false, a custom
(6ZB6) decodes address bits ABB-AB 12.
within the limit specified above, the
pins will be low and the
depend
half
on
whether the address is in the upper half
of
the address block. For instance,
chips are installed and the address
FF7FF, the
tively;
and
02
and
01
if
the address is in the range FF800-FFFFF, the
01
pins will both
are compared with address bit AB
PROM
AACK!
signal
02
and
01
is
pins will be high and low, respec-
be
high.
The
04
13.·
is
asserted;
if
AB13
ROM
If
the address
04
and
03
output pins will
or
if
2758 EPROM
in the range
and
03
output pins
If
AB
13
is
high, the
is
low, the ON
(A68)
output
lower
FFOOO-
02
BD RAM RQT/ signal is asserted.
When ALE goes false, Decoder A18 (6ZC4) is enabled
and decodes the inputs presented by the
of
A68.
If
02/01
A28 and A46;
= 10, PCS2! is asserted and enables
if
02
and
01
= 11, PS3/ is asserted and
enables A29 and A47. Each chip
02
and
01
of
the selected pair
output
of
chips are individually addressed by AB1-ABA. Thus,
when the associated enable signal
asserted, the contents
ABA are transferred to the
of
the address specified by AB1-
CPU via Data Buffer A44/45 .
(PCS2/
or
PCS3/) is
4-31. RAM OPERATION
As described in paragraph
logic allows the on-board RAM facilities to be shared by
the
8086 CPU and another bus master via the Multibus.
The following paragrapbs describe the
RAM chip arrays, and the overall operation
RAM is addressed for read/write ooeration.
4-22,
the Dual
RAM
Port
Control
Controller,
of
how the
is
4-30. ROM/EPROM OPERATION
The
four ROM/EPROM chips are installed by the user in
IC sockets A28/29/46/47. (Refer to figure
The
ROM/EPROM addresses are assigned from the top
down in the I-megabyte address space; the bottom
dress is determined by the user configuration
follows:
ROM
-
2316E
2332
Jumper posts
edy
configured to accommodate the type
EPROM
4-12
installed. (Refer to table
EPROM
2758
2716
-
94
through 99 and switch S 1 must
5-2
Address
FFOOO-FFFFF
FEOOO-FFFFF
FCOOO-FFFFF
2-4.)
sheet
of
chips as
Block
be
of
6.)
ad-
prop-
ROM/
4-32. RAM CONTROLLER. All address
RAM
inputs to the on-board
is supplied by
and
RAM
control'
Controller A70 (IOZB6). The RAM Controller automatically
provides a 64-cycle RAS/CAS refresh timing cycle to the
dynamic RAM composed
of
RAM chips A 72- 79 and
A92-99.
The RAM Controller, when enabled by a low input to its
PeS/
pin, multiplexes the address to the
Low-order address bits
AO-A6 are presented at the RAM
address lines and RAS/ is driven low at the beginning
RAM
chiRs.
of
the first memory clock cycle. High-order address bits
A 7 -A13 are presented at the RAM address lines and
CASt
is driven low during the second memory clock cycle. The
WE/
RAM Controller drives its
whether the
operation, the WT/ input
CPU instruction is a read
is
output pin according to
or
write.
low to the
RAM
For
a write
Controller, in
Page 77

iSBC 86/12
Principles of Operation
which case the WEI output
operation, the WR/ input
is
driven low. For a write
is
low and the WEI output
remains high. When the memory cycle (read or write)
starts, the RAM Controller drives its SACK/ output low;
when the memory cycle
is
complete, it drives its XACK!
output low. The SACK/ and XACK!· go high when the
RD/ or WR/ input goes high.
RAM
4-33.
CHIPS.
A72-A79 and odd bytes
The WE/ input pin to A72-A79
Even bytes
of
data are stored
is
of
data are stored
in
controlled
A92-A99.
by
ANDing
in
the RAM Controller WEI output and memory address bit
AMO.
The WEI input pin to A92-A99
ANDing the RAM Controller WEI output,
is
controlled
AMO,
by
and
MBHEN/ (Memory Byte High Enable).
ON BOARD
4-34.
When the
04
output
are both low, the output
READ/WRITE
of
A68 (6ZB6) and address bit
of
AS3-6 goes low and asserts the
OPERATION.
AB
13
ON BD RAM RQT/ signal. When ON BD RAM RQT/
goes low,
BD CMD EN/
DPRD/ or
4-8.) The RAM Controller then multiplexes the address
AS2-3
(llZA3)
to
generate RAMCS via AS2-11 and to gate
DRWr/
to
is
enabled and generates ON
the RAM Controller. (See Figure
to
RAM and, depending on which input command it true
(DPRD/ or DPWT/), drives its WEI output high or low.
is
(The WE/ output
for a read.) The
by
the RAM Controller
The
CPU completes the read
XACK!
During the
is
asserted.
CPU access
driven low for a write; it remains high
SACK! and XACK! signals are generated
as
described in paragraph 4-33.
or
write operation when
of
on-board RAM, the Address
Bus Drivers and Data Bus Drivers are disabled and the
Address Buffer and Data Buffer are enabled.
A49-10 goes low, develops the RAMCS. and SLAVE
CMD EN/ signals. RAMCS enables RAM Controller A 70
and SLA
VE
CMD EN/ gates DPRD/ or DPWT/
to
the
RAM Controller. The RAM Controller then multiplexes
the address to RAM and, depending on which input
mand
is
true (DPRD/ or DPWT/), drives its WEI output
is
high or low. (The WEI output
driven low for a write; it
com-
remains high for a read.) The SACK! and XACK! signals
are generated
by
the RAM Controller
as
described
in
paragraph 4-34. The CPU completes the read or write
operation when
XACK!
During the Multibus access
SLA
VE
MODE/ signal enables the Address Bus Drivers
(A86/87/88); the
ON BD ADR/ signal
is
asserted.
of
on-board RAM, the
is
false and enables
the Data Bus Drivers (A69/89).
BYTE
4-36.
the on-board RAM
all even byte data
odd byte data
to
figure 3
operation
OPERATION.
is
organized
is
in
one bank (DATO/-DAT7/) and all
is
in
the other bank (DAT8/-DATF/). Refer
-1
which shows the data path for Multibus
by
8-bit and 16-bit bus masters.
For Multibus operation,
as
two 8-bit data banks;
The Byte High Enable (BHEN/) signal. when asserted.
(odet)
access the high
access the low
byte; address bit ADRO/, when low,
(~ven
l
h.¥te.
All
word operations must
occur on an even byte address boundary with BHEN/
in
one
of
asserted. Byte operations can occur
a.
The even bank can be accessed by controlling
ADRO/,
lines. (Refer
b. To access the odd bank, which
which places the data on the DATO/-DAT7/
to
figure 3-1A.)
is
normally placed on
two ways:
DAT8/-DATF/, the data path shown in figure 3-1B
is
implemented. This requires that BHEN/ be false
and
ADRO/
to
be low.
BUS
4-35.
another bus master has control
READ/WRITE
OPERATION.
of
the Multibus, that bus
master can address the iSBC 86/12
device. The bus master first places the address on the
Multibus and then asserts MRDC/ or MWTC/. Address
bits ADRD/-ADRlO/ and switch
SI
dress to a special ROM (A67) (3ZB6); address bits
ADRD/-ADRI3/ are decoded
tings
of
S I represent the base address and memory bus
size; the
01-03
which are multiplexed
outputs
by
by
A66. The switch set-
of
A67 are ATRD/-ATRF/,
A86 (SZC4) into memory address bits AMC-AMF when the SLA
subsequently activated
The
04
output
of
128K byte matches) to develop the
RQT signal, which
Logic.
If
no
CPU access
by
the Dual Port Control Logic.
A67
is
driven through A23-4 (when the
OFF BD RAM ADR
is
applied to the Dual Port Control
is
in
progress, the Dual Port
Control Logic then enters the slave mode and, when
When
as
a slave RAM
present a lO-bit ad-
VB
MODE/ signal
These operations permit the access
by
16-bit data word
ADRO/
of
therefore specifies a unique byte and is
a 16-bir word operatIon.
controlling
Shown below are the states
of
AD~/.
of
BHEN/ and
both bytes
8-bit and 16-bit operations and the effects on transceiver
control and memory block chip select.
is
Bus Control
Lines Chip
BHENI
ADROI
1 1
1
0 1
0 0
Data Bus Driver
A69
On
Off
0
On On
Off Off
Select
A89
A90 A72-A79
On
Off
Off
On
Off
On
Memory
Yes
No
Yes
No
of
the
In other words,
nota
part
Chip
ADRO/
Select
for
Block
A92-A99
No
Yes
Yes
Yes
4-13
Page 78

Principles
of
Operation
iSBC8~
4-37. INTERRUPT OPERATION
The 82S9A PIC can support both bus vectored (BV) and
non-bus vectored (NBV) interrupts. For both BV and
NBV interrupts, the on-board
the master PIC. (Refer to paragraph 2-13;) The master
PIC drives the CPU INTR input high to initiate an interrupt request and the CPU then enters the intel11lpt timing
in
cycle
NB
which two INTA cycles occur back-to-back. The
V and B V interrupts are described in following
paragraphs.
NBV
4-38.
rupt
is
INTERRUPT.
initiated by an on-board function driving the
line high to the on-board PIC; if no higher interrupt
progress, the PIC then drives the CPU INTR input high.
Assuming that the NMI interrupt
CPU interrupt enable flip-flop
the current operation and proceeds with the first
back-to-back INTA cycles. (Refer to figure
nals activated during the first and subsequent INT A
cycle.)
The Bus Arbiter acquires control
MCE signal drives the
tibus control until the second INT A cycle is complete. The
Bus Command Decoder drives the INTAI signal low.
receipt
of
the first INT
the internal state
INTN
signal also sets flip-flop A63-S (8ZA2), which
generates the 1st
of
its priority resolution logic. The first
ACK!
input high.
CPU then proceeds with the second INT A cycle. On
The
receipt
of
the second INT
an 8-bit identifier for IRS on the data bus, and drives its
DEN/ output low. The resultant
signal enables Data Buffer A44 and drives the
READY input high. (The second
PIC (A24) (8ZB6) serves
as
Assume that a NBV inter-
IRS
is
is
inactive and that the
is
set, the CPU suspends
of
two
4-6
for sig-
of
the Multibus and the
LOCK! signal low to ensure Mul-
On
AI
signal, the master PIC freezes
signal to drive the CPU READY
AI
signal, the master PIC places
LOCAL INTA DEN/
CPU
INTN
signaI' clears
in
flip-flop A63-S.) The CPU then inputs the 8-bit
identifi~
and terminates the interrupt timing cycle.
The
CPU multiplies the 8-bit identifier by four to derivq,
the restart address
service routine
of
the interrupting device. After the·
is
completed, the CPU automatically re
sets all its affected flags and returns to the main program.
BV
4-39.
INTERRUPT.
cerned, BV interrupts are handled exactly the same
As
far as the CPU
is
con-
as
NBV interrupts. Assume that the IR6 line to the master
PIC
is
driven by a slave PIC on the Multibus. When IR6
goes high, the master
as previously described.
PIC drives the CPU INTR input high
On receipt
of
the first
INTN
signal, the master PIC generates BUS INTA DEN/ via its
DEN/ output and places the interrupt address code for IR6
CO-C2
on its
output
pins; since QMCE/
of
the Status Decoder, the CO-C2
is
enabled
by
the MCE
is
transferred to
the Address Latch via address lines AD8-ADA. (These
bits are latched when the ALE signal goes false.) The
BUS
INTA DEN/ signal enables the Data Bus Driver in preparation to receive the 8-bit identifier from the slave PIC.
(The interrupt address code
lines
ADR8/-ADRN.)
is
now on Mu\tibus address
The first INT N signal sets flip-flop A63-S to drive the
CPU READY input high. The CPU then proceeds with the
second INT A cycle. When the second INT A/ signal
driven onto the Multibus and the slave PIC recognizes its
address,
-DAT7/ lines and drives the Multibus
(The second INT
A63-S.) The
it
outputs an 8-bit identifier onto the
XACK!
N also toggles and clears flip-flop
CPU then inputs the 8-bit identifier and
DATO/
line low.
terminates the interrupt timing cycle.
The
CPU multiplies the 8-bit identifier by four to derive
of
the restart address
service routine is completed, the
the interrupting device. After the
CPU automatically re-
sets all its affected flags and returns to the main program.
..
is
4-14
Page 79

APPENDIX
A
TELETYPEWRITER
A-1.
INTRODUCTION
This appendix provides information required to
modify a Model
certain Intel
A-2. INTERNAL
ASR-33 Teletypewriter for use with
iSBC
80
computer systems.
MODIFICATIONS
''4hW!Uf
Hazardous voltages are exposed when the
top cover
To prevent accidental shock, disconnect the
teleprinter power cord before proceeding
beyond this point.
Remove the top cover and modify the teletypewriter
as follows:
of
the teletypewriter
is
removed.
MODIFICATIONS
substituted
card has been assembled, mount
shown
using two self-tapping screws. Connect the relay circuit to the distributor trip magnet and mode switch
follows:
a. Refer to figure A-4 and connect a wire (Wire
from relay circuit card to terminal L2 on mode
switch. (See figure A-6.)
b. Disconnect brown wire shown in figure A-7 from
plastic connector. Connect this brown wire to terminal
to be extended.)
c.
Refer to figure A-4 and connect a wire (Wire
from relay circuit board to terminal
switch.
'for the thyractor.) After the relay circuit
it
in position as
in
figure A-5. Secure the card to the base plate
L2
on mode switch. (Brown wire will have
Ll
on
as
'A')
'B')
mode
a. Remove blue lead from
source register; reconnect this lead to
tap. (Refer
b.
On
terminal block, change two wires as follows to
(:reate an internal full-duplex loop (refer to figures
A-I and A-3):
1.
Remove brown/yellow lead from terminal
reconnect this
Remove
2.
reconnect
On
c.
terminal
changes the receiver current level' from 60 rnA
20 rnA.
A relay circuit card must be fabricated and connected
to the paper tape reader driver circuit. The relay cir-
cuit card to be fabricated requires a relay, a diode, a
thyractor·, a small 'vector'
components, and suitable hardware for mounting the
assembled relay card.
circuit diagram
A
in
figure A-4; this diagram also includes the part
numbers
that a 470-ohm resistor and a 0.1
to
figures A-I and A-2.)
lead
white/blue lead from terminal 4;
this lead to terminal 5.
terminal block, remove violet lead from
8;
reconnect this lead
of
of
the relay, diode, and thyractor. (Note
750-ohm tap on current
to terminal 5.
to
terminal 9. This
board
the relay circuit card
for mounting the
I1F
capacitor may be
1450-ohm
to
is
included
3;
A-3. EXTERNAL
Connect a two-wire receive loop, a two-wire send
loop, and a two-wire tape reader control loop to the
external device as shown in figure A-4. The extetnal
connector pin numbers shown in figure A-4 are for
interface with an
CONNECTIONS
RS232C device.
A-4. iSBC 530 TTY ADAPTER
The iSBC 530, which converts RS232Csignai l£vels
to an optically isolatt:d
provides signal translation for· transmitted
received data, and a paper tape reader relay. The
iSBC 530 interfaces
to
system
The
98
rnA.
80
diagram
The following auxiliary power connector (or
equivalent) must be procured by the user:
a teletypewriter as shown in figure A-8.
iSBC 530 requires +12V
An
auxiliary supply must be used if the iSBC
system does
of
Connector, Molex
Pins,
Polarizing
not
the iSBC 530
Molex 08-50-0106
20mA
an
supply this power. A schematic
Key, Molex 15-04-0219
curreut100p interface,
Intel iSBC
at
98
is
supplied with the unit.
09-50-7071
mA
80
computer
and
-12V
data,
at
A-I
Page 80

Teletypewriter
Modifications
MODE
SWITCH
MOUNT
CIRCUIT
CARD
CAPACITOR
CURRENT
SOURCE
RESISTOR
POWER
SUPPLY
TERMINAL
BLOCK
KEYBOARD
PRINTER
DISTRIBUTOR
TRIP
MAGNET
ASSEMBLY
FloCARD
lQJ
TELETYPE
TOP
VIEW
UNIT
GOTOV
MODEL
33TC
TAPE
READER
TAPE
PUNCH
Figure A-2.
Current
Figure
A-I.
Teletype
Component
Layout
Source Resistor Figure A-3.
Terminal
Block
A-2
Page 81

TERMINAL
BLOCK 151411
Teletypewriter Modifications
"
..
25·PIN
EXTERNAL
CONNECTOR
RECEIVE
SEND 3
9
8
7
6
5
4
r-r-----i-~;.~l=f-=-
2
VIO
VEL
--
-
----
BLK/GRN
WHT/BRN
RED/GRN
WHT/VEL
WHT/BLK
WHT/BLU
BRN/VEl
GRN
RED
-~https://manualmachine.com/R~;--
BLK
BLK
WHT
WHT
TAPE
READER
CONTROL
20MA
60MA
- -
------'"
FULL
DUPLEX
-
--
--
CONNECTOR r-t...._,
L...r
0.11#lF
~
..,.
--
117VAC
DISTRIBUTOR
I
MAGNET
L..-·U----'lIVv----l
4700
TRIP
117
VAC
COMMON
*ALTERNATE
.-Jr--1-47-0-Q-y"~W
L
TO.1200V
CONTACT
CIRCUIT
PROTECTION
I
IJR.1006
I OPEN
lW-~~Il!LC~
Figure A-4. Teletypewriter Modifications
~2VDC;600Q
~~RMAL
COIL
CONTACTS
_
WIRE'B'
,S
Figure
A-S.
Relay Circuit
Figure A-6.
Mode
Switch
A-3
Page 82

Teletypewriter
Modifications
FROM
SERIAL
PORT
IN/OUT
CINCH OB-25S
Figure A-7.
P3 TTY
Figure A-S.
Distributor
J1
iSBC 530
ADAPTER
J2
TTY
Adapter
Trip
Cabling
Magnet
TO
TERMINAL
(SEE
FIGURES
CINCH OB-25P
A-3
BLOCK
AND
A-4)
A-4
Page 83

CHAPTER 5
SERVICE INFORMATION
5-1. INTRODUCTION
This chapter provides a list
diagrams, and service and repair assistance instructions
for the iSBC 86/12 Single Board Computer.
of
replaceable parts, service
5-2. REPLACEABLE PARTS
Table 5-1 provides
86/12. Table 5-2 identifies and locates the manufacturers
specified in the MFR
parts that are available on the open market are listed in the
MFR
CODE column
made to procure these parts from a local (commercial)
distributor.
alist
of
replaceable parts for the iSBC
CODE column in
as
"COML";
table5-I.
Intel
every effort should be
5-3. SERVICE DIAGRAMS
The iSBC 86/12 parts location diagram and schematic
diagram are provided in figures 5-1 and 5-2, respectively.
On the schematic diagram, a signal mnemonic that ends
with a slash (e.g.,
signal mnemonic without a slash (e.g., INTR)
10WC/)
is
active low. Conversely, a
is
active
high.
5-4. SERVICE AND REPAIR
ASSISTANCE
United States customers can obtain service and repair
assistance from Intel by contacting the MCD Technical
Support Center in Santa Clara, California, at one
following numbers:
of
the
Telephone:
From Alaska or Hawaii call -
(408)
987-8080
From locations within California call toll free -
(800) 672-3507
From all other
U.S. locations call toll
free-
(800) 538-8014
TWX: 910-338-0026
TELEX:.
34-6372
Always contact the MCD Technical Support Center before returning a product to Intel for service
will be given a
"Repair
Authorization Number", ship-
or
repair. You
ping instructions, and other important information which
will help Intel provide you with fast, efficient service. If
the product
during shipment from Intel,
warranty, a purchase order
MCD
In preparing the product for shipment to the MCD
is
being returned because
is
of
damage sustained
or
if the product is out
necessary in order for the
Tlechnical Support Center to initiate the repair.
Techni-
of
cal Support Center, use the original factory packaging
material,
if
available.
If
the original packaging
is
not
available, wrap the product in a cushioning material such
as
Air Cap TH-240 (or equivalent) manufactured by the
Sealed Air Corporation, Hawthorne, N.J. , and enclose in
a heavy-duty corrugated shipping carton. Seal the carton
securely, mark
it
"FRAGILE"
to ensure careful handling, and ship it to the address specified by MCD Technical Support Center personnel.
NOTE
Customers outside
tact their sales source (Intel Sales Office
thorized Intel Distributor) for directions on obtaining service
of
the United States should con-
or
repair assistance.
or
Au-
Reference Designation
A1,37,62
A2,21 ,53
A3,7
M,49
A5
A6,51
A8,9
A14
A15
A16
A17,80
A18,54
A19,32
A20,34
A22,59
A23
A24
IC, 74125, Quad Bus Buffer (3-state) SN74125
IC, 74S32, Quad 2-lnput Positive-OR.
IC, 74S10, Triple 3-lnput Positive-NAND Gate
IC, 74S175, Hex Quad D-Type Flip-Flop
IC, 9602, Dual One-Shot Multivibrator
IC, 74S11, Triple 3-lnput Positive-AND Gate
IC, Intel 8226, 4-Bit Bidirectional Bus Driver 8226
IC, 75189, Quad Une Receivers SN75189
IC, 75188, Quad Une Drivers SN75188
IC, 74163, Sync 4-Bit Counter . SN74163
IC, Intel 8224, Clock Generator and Driver 8224
IC, 74S139, Decoder/Multiplexer SN74S139
IC, 74S08, Quad 2-lnput Positive-AND Gate
IC,
74S04, Hex Inverters
IC, 7432, Quad 2-lnput Positive-OR Gate SN7432
IC, 74S02, Quad 2-lnput Positive-NOR Gate
IC, Intel 8259A, Programmable Interrupt Controller 8259A COML
Table 5-1. Replaceable Parts
Description Mfr. Part No.
Gate
SN74S32
SN74S1 0
SN74S175
9602PC
SN74S11
SN74S08
SN74S04
SN74S02
Mfr.
Code
TI
TI
TI
TI
FAIR
TI 2
COML
TI 1
TI 1
TI 1
COML
TI
TI
TI 2
TI
TI
Qty.
3
3
2
2
1
2
2
2
2
2
1
1
5-1
Page 84

Service
Information
Table 5-1. Replaceable Parts (Continued)
iSBC
86/12
Reference
A25
A26
A27
A30, 57
A31,33,43,52
A35,84,85
A36
A38
A39
A40,41,71,91
A42,44,45,58,60,61
A48
A50,63
A55
A56
A64
A65
A66
A67
A68
A69,87-90
A70
A 72-79,92-99
A81,83
A86
CR1,2
C1
,2,4-11 ,13,15-19,
21-25,28-51,65-75,
91
C3
C12,27,64
C20,98
C26
C52,54,55,57,58,60,61
63,76,78,79,81,82,84,
85,87,92
C53,56,59,62,77,80,
83,86
C88-90,93-97 Cap., tant.
Designation
IC, Intel 8255A, Programmable Peripheral Interface
IC,
Intel 8253, Programmable Interval Timer
IC, Intel 8251A, Programmable Comm. Interface
IC,
74LS75, 4-Bit Bistable Latch
IC,
74S00, Quad 2-lnput Positive-NAND Gate
IC,
74LS04,
IC,
7400, Quad 2-lnput Positive-NAND Gate
IC, Intel 8284, 18-Pin Clock Generator
IC,
Intel 8086, 16-Bit Microprocessor
IC,
74S373, Octal D-Type Latches
IC,
Intel 8286, 8-Bit Non-Inverting Transceiver
IC,
7438, Quad 2-lnpu1 Positive-NAND Gate
IC,
74S74
IC, 74S30, 8-lnput Positive-NAND Gate
IC,
7425, Dual4-lnput Positive-NOR Gate w/Strobe
IC,
74S140, Dual 4-lnput Positive-NAND Gate
IC,
8097, 3-State Hex Buffers
IC,
Intel 8205, 1 -of-8 Decoder
IC,
PROM, Address Decoder
IC,
PROM, Address Decoder
IC,
Intel
IC,
Intel 8202, Dynamic
IC,
Intel 2117-4, Dynamic
IC,
Intel 8288, Bus Controller for 8086
IC,
74S240, Octal Buffer/Line Driver/Line Receiver
Oiode,1N9148
Cap., mono,
Cap., mono,
Cap., mica, 1
Cap., mono,
Cap., tant.
Cap., mono,
Cap., mono,
Description
Hex
Inverters
..
Dual D-type Edge-Triggered Flip Flop
8287,8-Bit
10JLF,
22JLF,
Inverting Transceiver
RAM
C;ontroller 8202
RAM
0.1JLF,
+80
-20°0, 50V
1.0JLF,
±1000, 50V OBO
OpF,
±5~,0,
0.001JLF,
0.33JLF,
0.01JLF,
500V OBO
+20~'0,
±10O,o,
+80
+X()
±100,0,
50V
20V
-20~0,
50V OBO
-20°'°, 50V OBO COML
15V
Mfr.
Part
8255A
8253
8251A
SN74LS75
SN74S00
SN74LS04
SN7400
8284L
8086
SN74S373
8286
SN7438
SN74S74
SN74S30
SN7425
SN74S140
DM8097
8205
INTEL
INTEL
8287
2117-4
8288
SN74S240
OBO
OBO
OBO
OBO
OBO
No.
Mfr.
Code
COML 1
COML
COML 1
TI
TI
TI
TI
COML
COML
TI
COML 6
aty.
TI
TI
TI
TI
TI
NAT
COML
9100134
9100129
COML
COML
COML
COML 2
TI
COML
COML
COML
COML
COML
COML
COML
COML
16
57
17
1
2
4
3
1
1
1
4
1
2
1
1
1
1
1
1
1
5
1
1
2
1
3
2
1
8
8
J12
- *IC, Bus Controller
-
- *Resistor, fxd, comp, 270 ohm,
-
-
-
RP1
RP2
RP3
RP4
R1,
11,16,17 Res., fxd, comp, 10K,
R2,22
R3-5,13,20
R7,8,1
0,
14, 18, 19,21,23 Res., fxd, comp, 1
R9
R12
R15
S1
VR1
5-2
Assembly, Bus Arbiter 1001794 INTEL 1
*IC, 74S00, Quad 2-lnpu1 Positive-NAND Gate SN74S00
*Resistor, fxd, comp, 2.2K,
*Capacitor, mono',
*Capacitor, mono, 220pF, ±5°'0, 500V
Res" pack, 8-pin, 1
Res., pack, 14-pin, 1K:
Res" pack, 16-pin; 10K,
Res"
pack, '6-pin, 2.2K,
Res., fxd, comp,
Res"
fxd, comp,
Res., fxd, comp,
Res" fxd, comp, 330 ohm, '±5%, %W
Res., fxd, comp,
Switch, 8-position, DIP 206-8
Voltage regulator
0.1JLF,
K,
±5'\0,
±5%,
20K,
±5%,
5.1
K,
±5%,
K,
5%,
100K,
5%,
210 ohm,
+80
±2%,
±5%,
±5%,
Y4W
±5%,
±50/0,
±5%,
-20°'0, 50V
2W.
PP
1.~W
2W PP
1W
%W
%W
%W
%W
%W
%W OBO COML
%W
PP
PP
OBO
OBO COML
OBO COML
OBO
OBO
OBO
aBO
OBO
OBO
OBO
OBO
OBO COML
OBO
OBO COML
MC79L05AC MOT
INTEL
TI
COML
COML
COML
COML
COML
COML
COML
COML
COML
COML
CTS
1
1
1
1
1
1
1
1
1
4
2
5
8
1
1
1
1
1
Page 85

iSBC
86/12
Table 5-1. Replaceable Parts (Continued)
Service
Information
Reference
XA8,9
XA10·13
XA27
XA28,29,46,47
XA39,70
XA67,68
XA71,91
Y1
Y2
Y3
MFR. CODE
AMP
AUG
Designation
Socket, 16-pin, DIP
Socket,
Socket, 28-pin, DIP C-93·28-02
Socket, 24-pin, DIP
Crystal, 22.1184·MHz, fundamental
Crystal, 15-MHz, fundamental
Crystal, 18.432·MHz, fundamental
Extractor,
14-pin, DIP
Socket, 40-pin,
Socket, 18-pin,
Socket, 20-pin, DIP
Cardt
Post, Wire Wrap
Plug, Shorting, 2-position
Description
DIP
DIP
Table 5-2. List of Manufacturers' Codes
MANUFACTURER ADDRESS MFR. CODE
AMP, Inc.
Augat,
Inc.
Harrisburg, PA
Attleboro, MA SCA
NAT
Mfr. Part No.
C·93-16-02
C-93-14-02
C-93-24·02
540-A37D
C-93·18-02
C-93-20-02
OBD
OBD CTS
OBD CTS
S-203 SCA
89531-6
530153-1
MANUFACTURER
National Santa Clara, CA
Semiconductor
Scanbe, Inc.
Mfr.
Code
TI
TI
TI
TI
AUG
TI
TI
CTS
AMP
AMP
ADDRESS
EI
Qty.
2
4
1
4
2
2
2
1
1
1
2
126
1
Monte, CA
CTS
FAIR
MOT
CTS
Corp.
Fairchild
Semiconductor
Motorola
Semiconductor
TX
Elkhart,
Mt. View, CA OBD Order by Description; available from any
Phoenix, AZ
IN
TI Texas Instruments
commercial (COML)
Dallas,
source.
5-3/5-4
Page 86

 Loading...
Loading...