

Distributed I/O
XFL521B, 522B,
523B, AND 524B MODULES
PRODUCT DATA
FEATURES
• LONMARK™ compliant
• 2-wire LONWORKS® bus interface between controller
and I/O
• No additional field terminals required
• Usable with Excel 500 controllers in conjunction with
standard internal I/O modules
• Automatic binding and commissioning to Excel 500
controllers when using CARE
• Connector module with sliding bus connector
(eliminating the need to wire together neighboring
modules)
• Fast connection due to spring clamp terminals
• Module exchange during operation
• Alarm in case of defective module
• Mechanical coding prevents mismatching of modules
• Power LED (L1, green) and L
(L2, red) on all electronics modules
• Status LEDs for outputs and digital inputs
• Optional manual override modules for analog and
digital output modules with feedback
• XILON for wiring test
ONWORKS service LED
GENERAL
The XFL521B, 522B, 523B, and 524B modules are LONMARK
compliant digital and analog I/O modules which can be
installed at strategic locations within a building. These
modules convert sensor readings and provide output signals
used for operating actuators via L
variables (SNVTs). Each Distributed I/O module plugs into a
base terminal block allowing communication with controllers
via the built-in Echelon
minal block provides spring clamp terminals for easy connection of field cables from the various sensors and actuators.
The modular system allows Distributed I/O modules to be
removed from the system without disturbing other modules.
The module with terminal block mounts easily onto a DIN rail.
When using CARE, the Distributed I/O modules can be
automatically bound and commissioned to the Excel 500
CPU (XC5010C, XC5210C, XCL5010) and XL50. When the
modules are used by other controllers, provided plug-ins
permit the modules to be commissioned by CARE 4.0 or by
any LNS network management tool.
® U.S. Registered Trademark
Copyright © 2002 Honeywell Inc. • All Rights Reserved EN0B-0090GE51 R0802
®
LONWORKS bus interface. The ter-
ONWORKS standard network
DESCRIPTION
These Distributed I/O modules use a Neuron® chip and an
FTT-10A free topology transceiver for communication on a
ONWORKS bus and comply with LONMARK Application Layer
L
Guidelines V3.2.
Table 1. Modules and accessories
Item Description
XFL521B Analog input module
XFL522B Analog output module
XFL523B Digital input module
XFL524B Digital output module
XSL511 LONWORKS connector module
XSL512 Manual terminal disconnect module
XSL513 Terminal block for XFL521x, 522x, 523x
XSL514 Terminal block for XFL524x
XFR522A Analog output manual override module
XFR524A Digital output manual override module
XAL-Code To prevent mismatching modules
XAL-Term Interface to the LONW ORKS bus
209541B LonWorks bus termination modules
XAL 2 Cover release tool
XAL 1 Swivel label (for manual override modules)
74-2145-2
DISTRIBUTED I/O
INTEROPERABILITY
The Distributed I/O modules are compliant to the LONMARK
Application Layer Interface Guidelines, version 3.2. The
modules contain a L
and setting the status of the various Sensor / Actuator Objects, as well as a L
an Actuator Object for each individual output.
Upon receiving an update to the NViRequest network variable, the NVoStatus network variable is updated. The definition of SNVT_obj_request includes an object ID field to allow
the Node Object to report status conditions for all objects on
a node.
All network variables have the NV names in their self-documentation strings. This allows a network management node
or tool to display meaningful information on a Distributed I/O
module even if it is installed by an EXCEL 500 controller and
not by the tool itself.
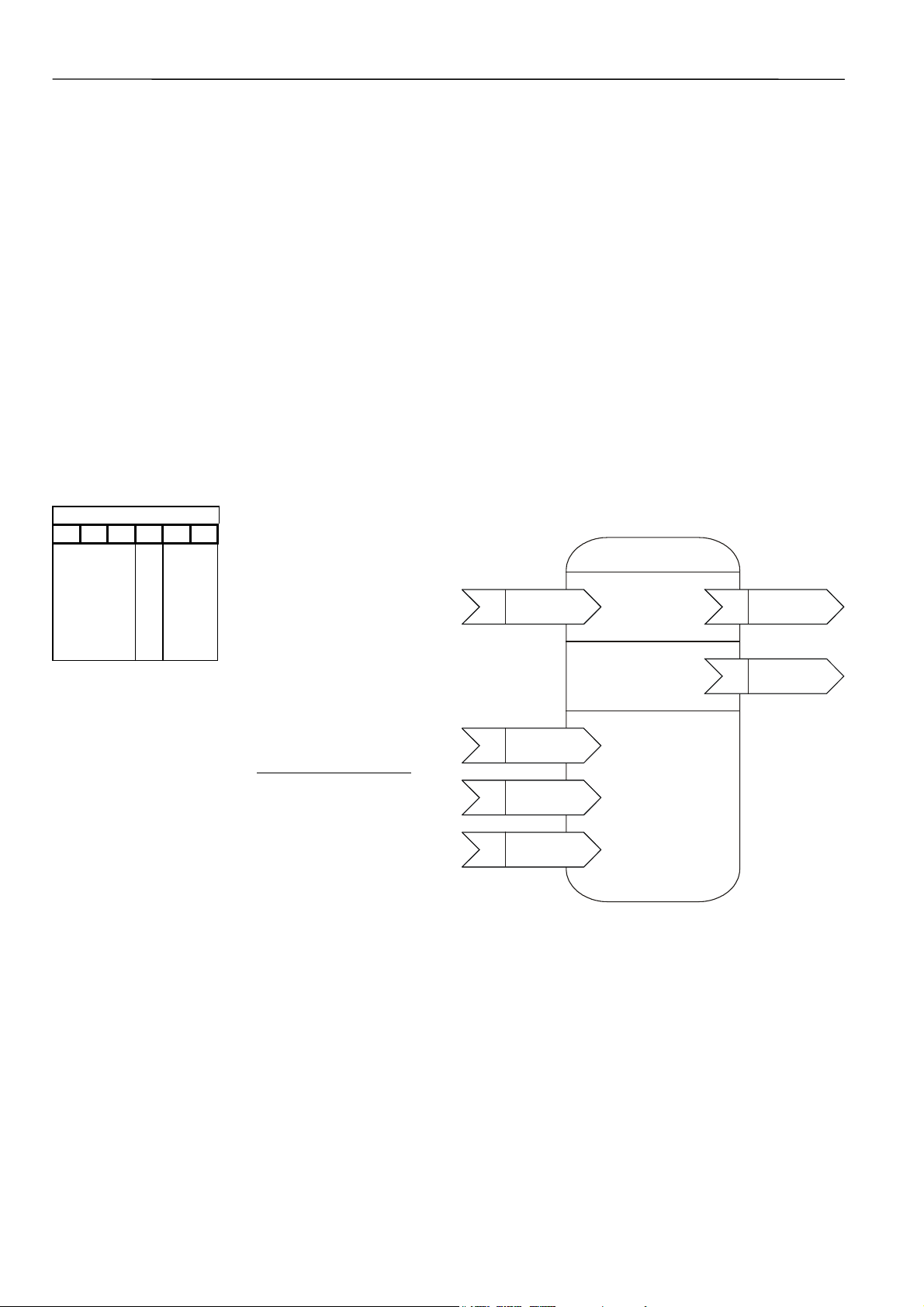
The Distributed I/O modules use the standard 6-byte location
string (see Table 2) in the Neuron® chip’s EEPROM to store
the module address (0...15 as set using the rotary HEX
switch in the case of applications prior to CARE 4.0) and the
module type.
Location String
Module type
ONMARK Node Object to allow monitoring
ONMARK Sensor Object for each input or
‘0’ Y Y
Module Type:
0 = XFL521B Analog Input
1 = XFL522B Analog Output
2 = XFL523B Digital Input
Set to '0'
3 = XFL524B Digital Output
Module
address
the Distributed I/O module to set its location string. If a
network management node commands this nci to
“CFG_EXTERNAL”, then the module will no longer modify its
Location String. This nci is stored in EEPROM and remains
there even in the event of a power failure.
LONMARK Sensor/Actuator Objects
All Actuator Objects (contained in the output modules) have
an output NV showing the actual state of the physical output
and whether it is in the automatic or manual override mode.
Note that the output modules have a manual override panel
which can be plugged on or off.
All Sensor Objects (contained in the input modules) have a
configuration property, MaxSendTime, defining the heartbeat
time, i.e. the interval in which output NVs belonging to the
physical inputs will be sent even if their values do not
change.
All Sensor Objects also have a configuration property,
MinSendTime, defining the minimum time which must elapse
before a changed value of an output NV belonging to a
physical input will be sent. This is to limit the network traffic
when sensor values change rapidly.
Node Object
Typ e #0
input
nv1
SNVT_obj_request
SNVT_obj_request
NV 1
nviRequest
nviRequest
Mandatory
Network
Var iabl es
input
nv2
SNVT_obj_ status
SNVT_obj_request
NV 1
nviRequest
nvoStatus
Table 2. Location string for storing module address
The node self-documentation string contains the module type
and revision in the optional part after the semicolon.
Example:
#pragma set_node_sd_string &3.2@0,3[6;XDO2_2_00
In this example, the module type is "XDO2" ("2" means that
the 3120E5 chip is used) and the revision is "2.00".
LONMARK Node Object
Setting the Node Object to “DISABLE” via nviRequest
suppresses updating of all output NVs and handling of input
NVs. Setting the Node Object to “ENABLE” via nviRequest
returns the module to normal operation.
The Node Object also contains the optional NV nciNetConfig
which is initialized to “CFG_LOCAL” by default. This allows
input
nc25
SNVT_config_src
SNVT_obj_request
NV 1
SCPTMaxSendTime
input
nc49
SNVT_time_sec
SNVT_obj_request
NV 1
SCPTMinSendTime
input
nc52
SNVT_time_sec
SNVT_obj_request
NV 1
nviRequest
nciNetConfig
nviRequest
nviRequest
Optional
Network
Var iabl es
Optional
Configuration
Properties
nvoFileDirectory
input
nv8
SNVT_address
SNVT_obj_request
NV 1
nviRequest
Fig. 1. Distributed I/O LONMARK Node Object profile
EN0B-0090GE51 R0802 2
Table 3. Node Object network variables
NV Name Type Range Description
nviRequest SNVT_obj_request
nvoStatus SNVT_obj_status
nciNetConfig SNVT_config_src
nvoFileDirectory SNVT_address
SCPTMinSendTime SNVT_time_sec
SCPTMaxSendTime SNVT_time_sec
RQ_NORMAL
RQ_DISABLE
RQ_ENABLE
RQ_UPDATE_STATUS
RQ_REPOPRT_MASK
RQ_SELF_TEST
CFG_LOCAL (default)
CFG_EXTERNAL
1.0 to 10.0 sec
(default = 1.0 sec)
1.0 to 6553.4 sec
(default = 60.0 sec)
Upon receiving an update to nviRequest, nvoStatus is
updated.
RQ_SELF_TEST is used only in the XFL522B analog
output module for outputs configured as a motor. In
this case, a synchronization is performed to set the
actuator in the 0% position.
Reports the status of the node upon request through
nviRequest.
This configuration variable is set to CFG_LOCAL at
the factory and whenever the rotary HEX switch is
reset. If it is set to CFG_EXTERNAL, a network
manager will assign a network address for the node. In
this case, the module will not modify its location string
as long as the rotary HEX switch is not reset.
Points to a file directory in the address space of the
Neuron® chip containing descriptors for the files in the
module. It is used to access the configuration properties stored in configuration parameter files
accessed by network management read/write
messages.
Defines the minimum period of time between output
variable transitions. This configuration property is
applicable only to output NVs of the input modules.
Defines the maximum time period of time before output NVs are automatically updated. It must be set to a
higher number than SCPTminSendTime. This configuration property is applicable only to output NVs of
the input modules.
DISTRIBUTED I/O
XFL52xB Module Response Times
The response time of Distributed I/O modules is defined as
the period of time between the updating of the physical signal
and the updating of the NV (or vice versa). The response
time varies somewhat due to certain factors and is also
dependent upon the module type (see also Table 4).
Table 4. Response time (RT)
Module
XFL521B 0.8 1.6
XFL522B 0.2 0.4 n.a.
XFL523B 0.3 0.5
XFL524B 0.2 0.4 not applicable
Typical RT
(sec)
Max. RT
(sec)
Min. time between
2 updates
SNVTMinSendTime
(default: 1 sec)
SNVTMinSendTime
(default: 1 sec)
XSL511 Connector Module Power Supply
NOTE: When connecting XFL52xB modules to the power
supply, the same side of the transformer must
always be connected to the same side of the
XSL511 (see also Fig. 6 on page 8)!
3 EN0B-0090GE51 R0802
DISTRIBUTED I/O
TECHNICAL DATA
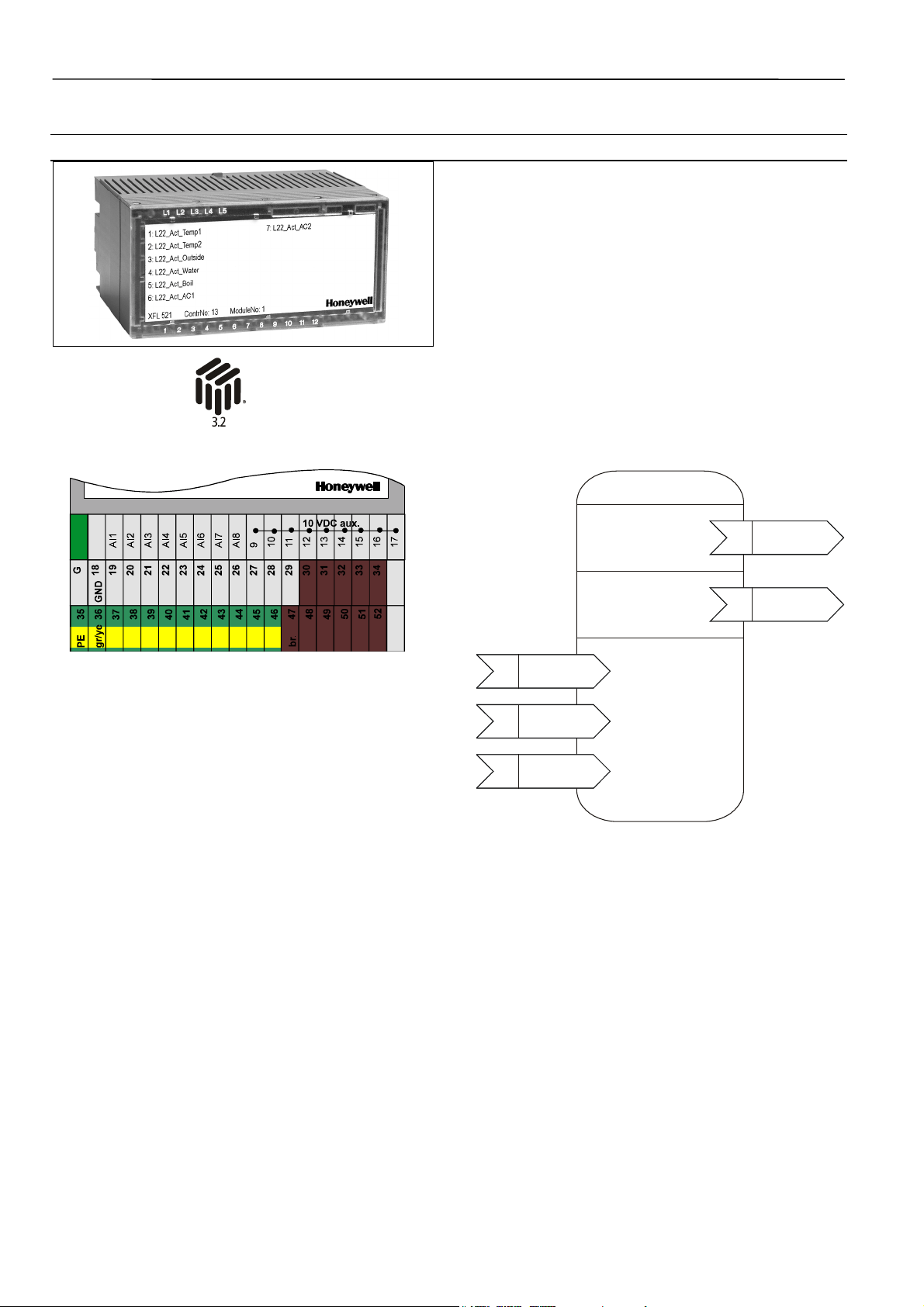
Analog Input Module XFL521B
• Eight inputs (AI1 – AI8)
0...10 Vdc (see EN1R-1047 for impedance information)
0...20 mA (via external 500-ohm resistor)
4...20 mA (via external 500-ohm resistor)
NTC 20K ohm (-50 °C to +150 °C)
PT1000 (-50 °C to +150 °C)
• Protected inputs up to 40 Vdc / 24 Vac
• 12-bit resolution
• ± 75 mV accuracy (0...10 V)
• 10 Vdc auxiliary voltage supply (9 – 17) , I
= 5 mA
max
• 1 sec polling time with CPU
• Green power LED (L1) and red LONWORKS status LED
(L2)
• Dimensions (WxLxH): 47x97x70 mm
Open Loop Sensor
Object Type #1
The analog input module has eight input channels which
can be used for connecting sensors or any device providing an analog output. The input values are read by the
CPU and can then be used for monitoring or as parameters for controlling other devices.
The unit plugs into the XSL513 Terminal Block and can be
inserted and removed without disturbing other units on the
bus. Terminals AI1 through AI8 are the analog inputs and
terminals 9 through 17 are wired together and provide an
auxiliary voltage of 10 Vdc. The module address is set
using the rotary HEX switch (in the case of applications
prior to CARE 4.0).
NOTE: In the case of applications prior to CARE 4.0,
when the input is configured as a slow DI, the
internal pull-up resistor is disabled.
nviRequest
input
UCPTSensorConfig
nc1
SNVT_obj_request
NV 1
nviRequest
input
nc2 UCPTSendOnDelta
SNVT_obj_request
NV 1
nviRequest
input
nc3 UCPTWireOffset
SNVT_obj_request
NV 1
Mandatory
Network
Vari able s
Optional
Network
Vari able s
Optional
Configuration
Properties
input
nv1
SNVT_obj_request
NV 1
input
nv1
SNVT_obj_request
NV 1
nviRequest
nvoAiValue
SNVT_volt_f
nviRequest
nvoAiTemp
SNVT_temp_p
Fig. 2. LONMARK Object for each analog input
For each Sensor Object, the XFL521B Analog Input
Module provides an additional output NV, SNVT_temp_p,
which communicates the temperature in °C. This allows
this module to be used as a true temperature sensor in an
ONMARK integration. If the Sensor Object is con-
open L
figured as 0 to 10V, this NV will be invalid (0x7FFF).
EN0B-0090GE51 R0802 4
Table 5. LONMARK Object NVs for the XFL521B
NV Name Type Range Description
The value of the input channel connected to a
nvoAiValue SNVT_volt_f
nvoAiTemp SNVT_temp_p
UCPTSensorConfig
UPCTSendOnDelta SNVT_count 0 to 4095 (default = 2)
UCPTWireOffset SNVT_res 0 to 6553.5 ohm (default = 0)
0x000 (0.00 mV) to
0x461C4000 (10 V)
0xEC78 (-50 °C) to
0x3A98 (150 °C)
Invalid = 0x7FFF
0 = not used,
9 = 0 to 10V with pull-up resistor
4 = NTC20
5 = PT1000
10 = 0 to 10V without pull-up
resistor (default = 8)
0...10 V signal after it has been filtered. Voltage
is transmitted in mV. When configured for a
temperature sensor, the channel transmits the
measured resistance.
The value of the input connected to either an
NTC20k or PT1000 sensor with a resolution of
0.1 °C. If the sensor channel is configured as a
voltage input, the temperature value is invalid
(0x7FFF).
Specifies the type of sensor for a particular
input channel.
Specifies the difference in the raw value
measured by the A/D converter is required
before the value of the sensor is transmitted.
Specifies a resistance value to add to the
resistance measured for a temperature sensor.
DISTRIBUTED I/O
5 EN0B-0090GE51 R0802
DISTRIBUTED I/O
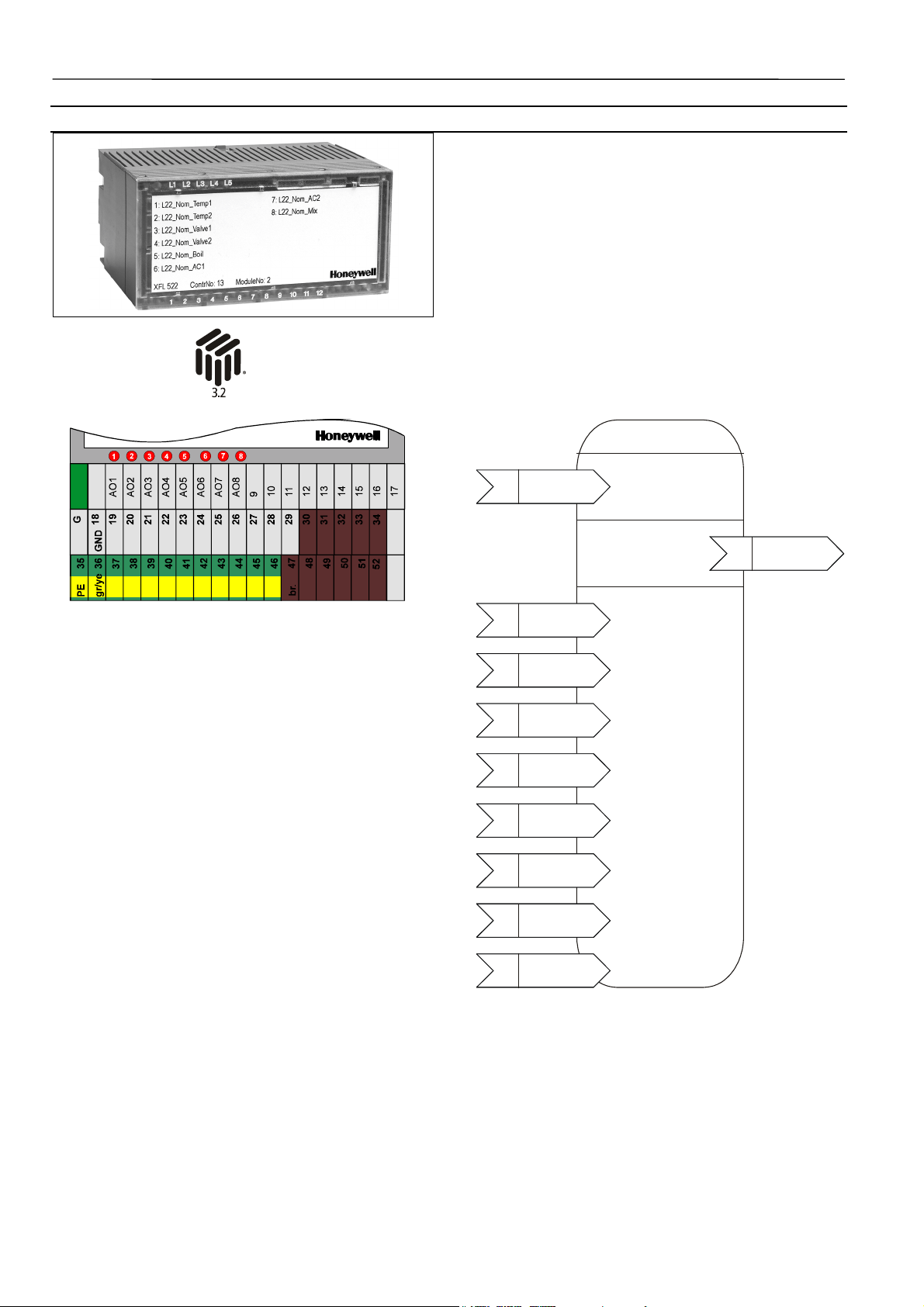
Analog Output Module XFL522B
• Eight outputs (AO1 – AO8), short-circuit proof
• Signal levels 0...10 Vdc
= 11 Vdc, I
U
max
= +1 mA, -1 mA
max
• Protected outputs up to 40 Vdc / 24 Vac
• 8-bit resolution
• Zero point < 200 mV
• Accuracy ± 150 mV deviation from output voltage
• One red LED per channel (light intensity proportional to
output voltage)
• Green power LED (L1) and red L
ONWORKS status LED
(L2)
• Control updating every 1 sec with CPU
• Dimensions (WxLxH): 47x97x70 mm
Open Loop Actuator
Object Type #3
This analog output module has eight output channels
which can be connected to actuators or other suitable
analog devices.
The unit plugs into the XSL513 Terminal Block and can be
inserted and removed without disturbing other units on the
bus. Terminals AO1 through AO8 are the analog outputs.
Terminals 9 through 17 are connected to ground. Eight red
LEDs are located on top of the module. The brightness of
each LED is proportional to the output level of the corresponding channel. The module address is set using the
rotary HEX switch (in the case of applications prior to
CARE 4.0).
input
nv1
SNVT_obj_request
NV 1
input
UCPTSensorConfig
nc1
SNVT_obj_request
NV 1
input
UCPTdriveTimeClose
nc2
SNVT_obj_request
NV 1
input
UCPTdriveTimeOpen
nc3
SNVT_obj_request
NV 1
input
nc4
SNVT_obj_request
NV 1
input
UCPTsyncMax
nc5
SNVT_obj_request
NV 1
input
UCPTsyncCharge
nc6
SNVT_obj_request
NV 1
input
UCPTminDel taLevel
nc88
SNVT_obj_request
NV 1
nviRequest
nviValue
SNVT_switch
nviRequest
nviRequest
nviRequest
nviRequest
UCPTsyncMin
nviRequest
nviRequest
nviRequest
Mandatory
Network
Vari able s
Optional
Network
Vari able s
Optional
Configuration
Properties
input
nv3
SNVT_obj_request
NV 1
nviRequest
nvoFeedback
SNVT_switch
EN0B-0090GE51 R0802 6
nviRequest
input
UCPTdelayTime
nc96
SNVT_obj_request
NV 1
Fig. 3. LONMARK Object for each analog output

DISTRIBUTED I/O
Table 6. LONMARK Object NVs for the XFL522B
NV Name Type Range Description
nviValue SNVT_switch Receives the value for the output channel.
Transmits the feedback value of the actuator output. If
the manual override switch is set to 0, or if the manual
override module is not plugged in, the feedback output
reflects the value of nviValue. As soon as the manual
override switch is set at the 20% threshold, the
Actuator Objects adopts this manual value. In this
case, the value of nvoFeedback will be 0xFF (invalid)
and the value field will contain the actuator position.
nvoFeedback SNVT_switch
UCPTSensorConfig none
UCPTdriveTimeClose SNVT_time_sec
UCPTdriveTimeOpen SNVT_time_sec
SCPTdelayTime SNVT_time_sec
SCPTminDeltaLevel SNVT_lev_cont.
UCPTsyncMin SNVT_lev_cont
UCPTsyncMax SNVT_lev_cont
UCPTsyncCharge SNVT_lev_cont
0 = not used
6 = 0 to 10V (default)
7 = motor (floating)
10.0 to 1000 sec
(default = 90.0 sec)
10.0 to 1000 sec
(default = 90.0 sec)
0.0 to 10.0 sec
(default = 5.0 sec)
0 to10%
(default = 2%)
90 to 100%
(default = 98%)
0 to 127.5%
(default = 100%)
If the actuator is configured as a motor, the position
commanded with the manual override switch will be
reflected in the open/close commands for a floating
actuator.
If the manual override switch is in the automatic position, data is transmitted whenever nviValue is written.
If the manual override switch is in the manual position,
data is transmitted whenever the manual position is
changed.
Specifies the actuator output type for an output
channel.
Specifies a floating actuator’s runtime from 100% to
0%.
Specifies a floating actuator’s runtime from 0% to
100%.
Specifies the delay time before a floating actuator
changes its direction. This avoids mechanical
problems that could occur when the run direction
changes due to an update to nviValue while the
actuator is still moving.
Specifies the delta level for an update to nviValue to
be exceeded before a new position is calculated for
the floating motor model. This is applicable only if the
actuator is configured as a motor.
Specifies the lower synchronization threshold. If the
actuator is configured as a motor and the value
commanded through nviValue approaches 0%, the
actuator is synchronized to 0% as soon as nviValue
reaches the percentage specified by UCPTsyncMin.
Specifies the upper synchronization threshold. If the
actuator is configured as a motor and the value
commanded through nviValue approaches 100%, the
actuator is synchronized to 100% as soon as nviValue
reaches the percentage specified by UCPTsyncMax.
Specifies the additional runtime when an actuator performs a synchronization. This is to ensure that the
actuator reaches the end position even if the actuator
position is not what it should be due to inaccuracy.
For example, with UCPTsyncCharge at 100%, an
actuator with a theoretical current position of 20%
would be forced to run 120% of the runtime specified
by UCPTdriveTimeClose if it starts a synchronization
from this point of operation.
7 EN0B-0090GE51 R0802
DISTRIBUTED I/O
A
A
A
A
A
A
A
A
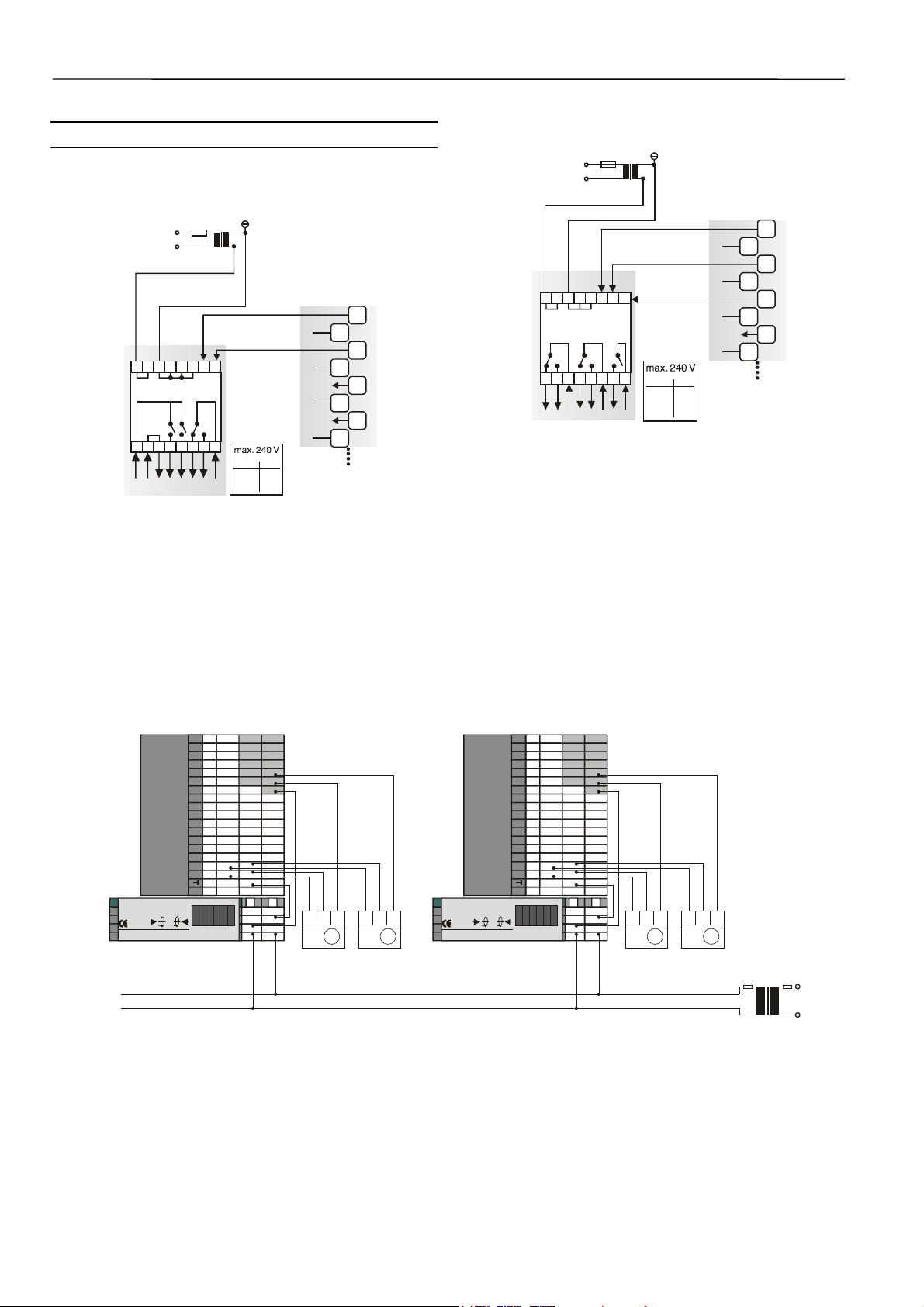
Relay Modules MCD 3 and MCE 3
The relay modules facilitate the control of peripheral devices
with high load via the analog outputs. Fig. 4 and Fig. 5
present connection examples for the relay modules MCD 3
and MCE 3, respectively.
FUSE
230 Vac / 120 Vac
00000001
O1
18
O2
11121314151617 18
MCD 3
K1
1223K345
LN
678
0.2 A
K 1
K 2
3 A
K 3
Fig. 4. Analog outputs, connection of relay MCD 3
MCD 3
Relay terminal 17 controls the changeover contact K3. Relay
terminal 18 controls the ON contacts K1, K2. Ground can be
looped through terminals 2/3.
19
O3
20
O4
21
230 Vac / 120 Vac
FUSE
00000002
O1
18
O2
19
11 12 13 1415 16 17 18
MCE 3
K1 K2
123
K3
45678
0.2 A
2 A
K 1
K 2
K 3
O3
20
O4
21
Fig. 5. Analog outputs, connection of relay MCE 3
MCE 3
Relay terminal 16 controls the ON contact K3. Relay terminal
17 controls the changeover contact K2. Relay terminal 18
controls the changeover contact K1.
Power Supply
Several relay modules can be connected in series via the
bridged terminal pair:
24 Vac: Terminals 11/12 of the relay
24 Vac (-): Terminals 13 to 16 of the relay (MCD3)
24 Vac (-): Terminals 13 to 15 of the relay (MCE3)
Attention: Always connect the same side of the transformer to the same side of XSL511.
XFL522 + XSL513
Connector Module
XSL 511
Honeywell AG
XSL511
shield
LON
1
4
2
5
3
6
Made in German y
A1A1
34
52
33
51
32
50
31
49
30
48
47
28
27
23456
26
8
25
7
24
6
23
5
22
4
21
3
20
2
19 AO1
1
S
18
GND
PE
PE
~
24V
↑
0...10 V
Actuator
0
1
0
V
24
M
V
↑
24
M
0...10 V
2
Actuator
XFL522 + XSL513
Connector Module
XSL 511
Honeywell AG
XSL511
LON
shield
1
4
2
5
3
6
Made in Germany
AO8
AO7
AO6
AO5
AO4
AO3
AO2
LON
shield
1
23456
AO8
AO7
AO6
AO5
AO4
AO3
AO2
LON
shield
1
Fig. 6. XFL522B analog output module
A1A1
34
52
33
51
32
50
31
49
30
48
47
29 29
28
27
26
8
25
7
24
6
23
5
22
4
21
3
20
2
19 AO1
1
S
18
GND
PE
PE
~
24V
↑
0...10 V
Actuator
0
1
0
V
24
M
V
↑
24
M
0...10 V
2
Actuator
fuse dependent
24 Vac
upon your transformer
+/- 20%
fuse dependent
230 Vac
upon your transformer
120 Vac
EN0B-0090GE51 R0802 8
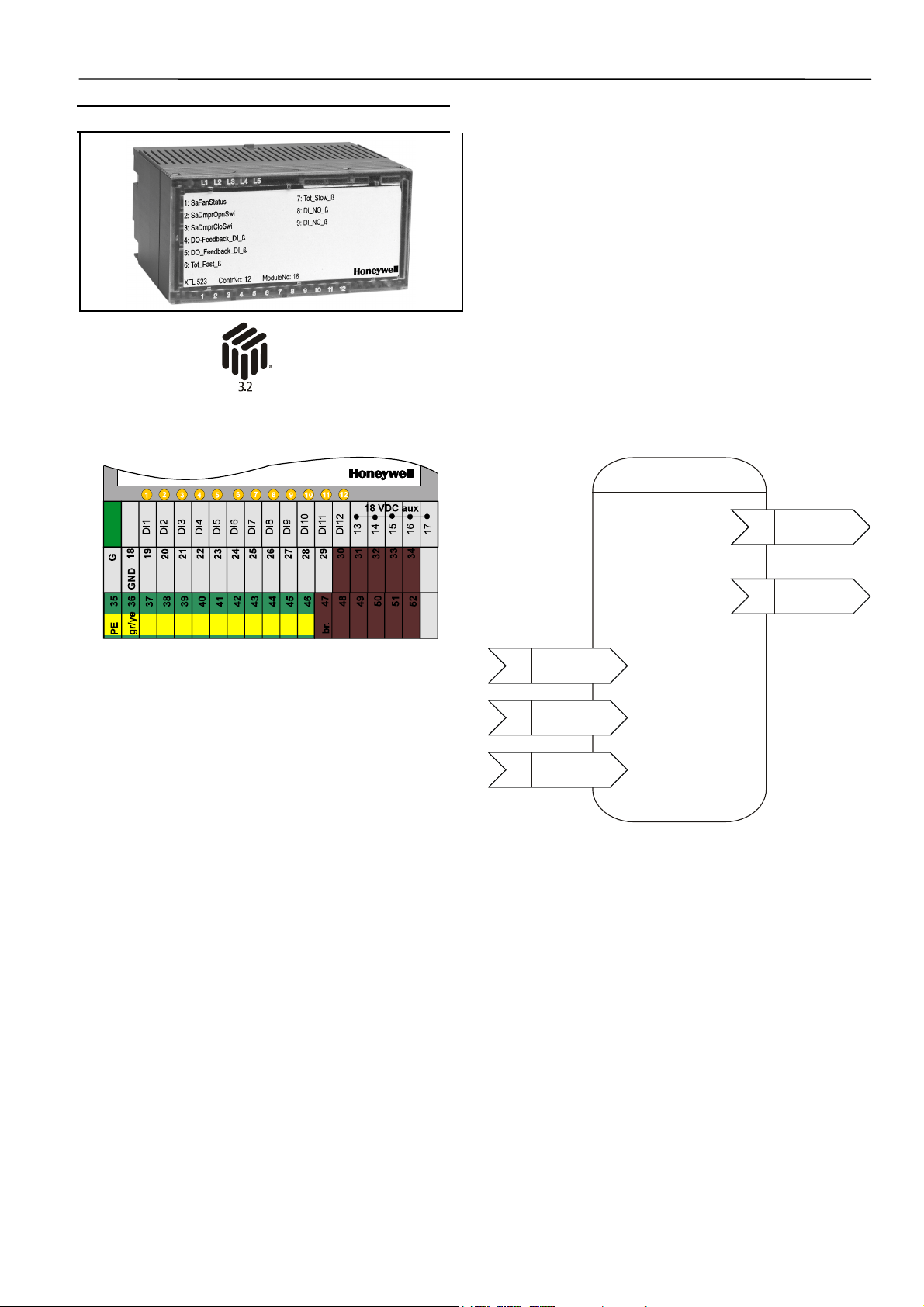
Digital Input Module XFL523B
DISTRIBUTED I/O
• Twelve inputs (DI1 – DI12)
• Ri = 10K ohm
• Max. 20 Hz input frequency
• ON/OFF state: OFF: Ui ≤ 2.5 Vdc; ON: Ui ≥ 5 Vdc
• Protected switching up to 40 Vdc / 24 Vac
• LED per channel, color selectable in two groups (SW1: DI
1 – 6; SW2 DI: 7 – 12); color combinations: see Table 7
• 18 Vdc auxiliary voltage supply (unregulated)
• 1 sec polling time with CPU
• Green power LED (L1) and red L
(L2)
• Dimensions (WxLxH): 47x97x70 mm
Open Loop Sensor
Object Type #1
ONWORKS status LED
The digital input module has twelve input channels which can
be used for connecting sensors or any device providing a
digital output. The input values are read by the CPU and can
then be used for monitoring or as parameters for controlling
other devices
The unit plugs into the XSL513 Terminal Block and can be
inserted and removed without disturbing other units on the
bus. Terminals DI1 through DI12 are the digital inputs and
terminals 13 through 17 are wired together and provide an
auxiliary voltage of 18 Vdc. The module address is set using
the rotary HEX switch (in the case of applications prior to
CARE 4.0).
Beginning with Excel 500 controller firmware version 2.04.00,
the online point attribute Normally Open / Normally Closed
(NO/NC) defines the relation between the physical state
(contact position) and its logical status. See Table 7.
nviRequest
input
UCPTSensorConfig
nc1
SNVT_obj_request
NV 1
nviRequest
input
nc2 UCPTSendOnDelta
SNVT_obj_request
NV 1
nviRequest
input
nc27 SCPTDirection
SNVT_obj_request
NV 1
Mandatory
Network
Var iabl es
Optional
Network
Var iabl es
Optional
Configuration
Properties
input
nv1
SNVT_obj_request
NV 1
nvoDiValueCnt
input
nv1
SNVT_obj_request
NV 1
nviRequest
nvoDiValue
SNVT_switch
nviRequest
SNVT_count
Fig. 7. LONMARK Object for each digital input
For each Sensor Object, the XFL523B Digital Input Module
provides an additional output NV, SNVT_switch. For an open
ONMARK integration, this offers a more convenient way of
L
accessing the sensor value compared to using the NV
SNVT_count. If the Sensor Object is configured as
“Totalizer”, this NV is invalid (state = 0xFF, value = 0).
9 EN0B-0090GE51 R0802

DISTRIBUTED I/O
Table 7. Relation between physical state and logical status as defined by the point attribute NO/NC for the XFL523B
Contact position NO/NC attribute Logical status Input voltage LED switch on LED switch off
open NO 0 ≤ 2.5 V off green
closed NO 1 ≥ 5 V yellow red
open NC 1 ≤ 2.5 V yellow red
closed NC 0 ≥ 5 V off green
Table 8. LONMARK Object NVs for the XFL523B
NV Name Type Range Description
nvoDiValue SNVT_switch
nvoDiValueCnt SNVT_count
UCPTSensorConfig
UCPTSendOnDelta SNVT_count 0 to 65535
SCPTDirection SNVT_state
binary: 0, 1
totalizer: 0 to 65534
(65534 initial value)
0 (not used)
1 = binary (default)
2 = totalizer
Transmits the state of the input channel every time
there is a state change or if SCPTMaxSendTime in
the Node Object has expired.
Transmits the state of the input channel every time
there is a state change or if SCPTMaxSendTime in
the Node Object is expired. If configured as a
totalizer, this NV transmits the number of transitions
from 0 to 1.
Specifies the setting for a sensor channel.
Specifies the difference in totalizer count required
before a transmission of the value output of the
Sensor Object takes place.
Used to define the relation between the logical status
of the input and the state of the LED. One bit corresponds to one input channel (bit 4 = input channel
12, bit 15 (MSB) = input channel 1). If a bit is clear,
the LED for the channel will be 0=green and 1=red. If
the bit is set, then 0=red and 1=green.
EN0B-0090GE51 R0802 10

Digital Output Module XFL524B
DISTRIBUTED I/O
• Six isolated change-over contacts
• Max. voltage U
• Max. current I
• LED per channel
OFF: LED off
ON: LED illuminated (yellow)
• Green power LED (L1) and red L
(L2)
• Cycle time 1 sec with CPU
• Dimensions (WxLxH): 47x97x70 mm
Table 9. Physical state and logical status as defined by
the point attribute NO/NC for the XFL524B
= 230 Vac per output
max
= 2 A per output
max
ONWORKS status LED
The digital output module has six isolated change-over contacts which can be connected to actuators or other switchable devices.
The unit plugs into the XSL514 Terminal Block and can be
inserted and removed without disturbing other units on the
bus. Terminals 1 through 18 are switched according to the
adjacent figure. Six LEDs are located on top of the module.
The module address is set using the rotary HEX switch (in
the case of applications prior to CARE 4.0).
Beginning with Excel 500 controller firmware version 2.04.00,
the online point attribute Normally Open / Normally Closed
(NO/NC) defines the relation between the physical state
(relay on/off) and its logical status. See Table 9.
NOTE: The relays can be used to switch signals with up to
230 Vac and 2 A. All outputs from a single module
must be of the same kind. It is not allowed to mix
high-voltage (e.g. 230 Vac) and low-voltage (e.g.
24 Vac) signals.
Relay on/off NO/NC
attribute
Logical
status
on NO 1 on
off NO 0 off
on NC 0 off
off NC 1 on
Open Loop Actuator
Object Type #3
input
nv1
SNVT_obj_request
NV 1
input
UCPTSensorConfig
nc1
SNVT_obj_request
NV 1
nviValue
nviRequest
SNVT_swi tch
nviRequest
Mandatory
Network
Vari abl es
Optional
Network
Vari abl es
User-Defined
Network
Vari abl es
Optional
Configuration
Properties
input
nv3
SNVT_obj_request
NV 1
1
input
nv1
SNVT_obj_request
NV 1
input
nv1
SNVT_obj_request
NV 1
LED
status
nviRequest
nvoFeedback
SNVT_switch
nviRequest
nvoDiagnose
SNVT_count
nviRequest
nvoManCnt
SNVT_count
1
This output NV appears only once for the node.
Fig. 8. LONMARK Object for each digital output
11 EN0B-0090GE51 R0802

DISTRIBUTED I/O
Table 10. LONMARK Object NVs for the XFL524B
NV Name Type Range Description
nviValue SNVT_switch Receives the value for the output channel.
Transmits the feedback value of the Actuator Object. If
the manual override switch is set to auto, or if the
manual override module is not plugged in, the
feedback output reflects the value of nviValue. As
soon as the manual override switch is set to either
manual position, the Actuator Object adopts this
nvoFeedback SNVT_switch
nvoManCnt SNVT_count 0 to 65535
nvoDiagnose SNVT_count 0 to 65535
UCPTSensorConfig
0 = not used
1 = binary (default)
manual value. In this case, the state of nvoFeedback
will be 0xFF (invalid) and the value field will contain
the actuator position.
If the manual override switch is in the automatic position, data is transmitted whenever nviValue is written.
If the manual override switch is in the manual position,
data is transmitted whenever the manual position is
changed.
Transmits the number of manual switching operations.
Each transition from the "auto/manual on/manual off"
state to any other state is counted by incrementing this
NV.
Counts the number of times the internal filter for
smoothing the signal from the manual override switch
board has been active.
Specifies whether an Actuator Object is processed or
not. If set to 0, the value is not updated.
EN0B-0090GE51 R0802 12

Terminal Block XSL513 for XFL521B/522B/523B
DISTRIBUTED I/O
• Mounts on a DIN rail (top-hat rail)
• Spring-clamp terminals
• Safety latch secures XFL module in its position
• Mechanical coding using coding pins; an optional package
with 20 coding combs is available (XAL-Code)
The XSL513 Terminal Block has three rows of terminals:
Top row: 18 signal terminals (gray); function
depending upon the electronics module used
(see the respective Distributed I/O module
descriptions).
Middle row: Twelve signal ground terminals (gray), con-
nected internally to electronics modules.
Five interconnected auxiliary terminals
(brown)
Bottom row: Twelve PE terminals (green/yellow),
connected together to the DIN rail. Six
interconnected auxiliary terminals (brown)
NOTE: Both rows of brown terminals are connected
internally but are not connected to the electronic
module.
Terminal Block XSL514 for XFL524B
• Mounts on a DIN rail (top-hat rail)
• Spring-clamp terminals
• Safety latch secures XFL module in its position
• Mechanical coding using coding pins; an optional package
with 20 coding combs is available (XAL-Code)
The XSL514 Terminal Block is intended for use only with the
XFL524B Digital Output module. It has three rows of
terminals.
Top row: 18 signal terminals (gray); function as
described for XFL524B.
Middle row: Eight interconnected auxiliary terminals
(brown), not connected to the module. Eight
interconnected auxiliary terminals (blue), not
connected to the module.
Bottom row: Seven PE terminals (green/yellow), connected
together to the DIN rail.
13 EN0B-0090GE51 R0802

DISTRIBUTED I/O
Manual Override Module XFR522A for XFL522B (Analog Output)
• Mounts on top of the XFL522B module
• Potentiometer settings
automatic or variable 0 – 100%
• XFL522B LEDs remain visible
• Dimensions (WxLxH): 47x97x20 mm
• Feedback signal including point name, status (manual,
auto), and point value provided to CPU
The XFR522A manual override module mounts directly on
top of the XFL522B. Eight potentiometers on top of the
module can be used to independently vary the output of each
channel from 0 to 100%. Each potentiometer also has an
automatic setting which causes the channel to operate
normally. The LEDs of the XFL522B are also visible.
The manual override module works even if the CPU
XC5010C or XCL5010 is not working.
Manual Override Module XFR524A for XFL524B (Digital Output)
• Mounts on top of the XFL524B module
• Switch settings:
automatic, off (0) and on (1)
• XFL524B LEDs remain visible
• Dimensions (WxLxH): 47x97x20 mm
• Feedback signal including point name, status (manual,
auto), and point value provided to CPU
The XFR524A manual override module mounts directly on
top of the XFL524B. Six switches on top of the module can
be used to independently switch each of the digital outputs
OFF (0) or ON (1). Each switch also has an automatic setting
which causes the channel to operate normally. The LEDs of
the XFL524B are also visible.
The manual override module works even if the CPU
XC5010C or XCL5010 is not working.
.
LONWORKS Connector Module XSL511
• LONWORKS network connection to connected modules
• 24 Vac voltage supply for distribution to connected
modules
• Electronic fuse for 24 Vac
• Connection to Distributed I/O modules via sliding bus
connector (L
Distributed I/O modules)
ONWORKS bus and voltage supply for
The XSL511 LONWORKS connector module provides ter-
minals for connecting to the L
terminals for the 24 Vac supply voltage for the other
modules. Termination is effected using the L
termination module (see also section "LonWorks Bus
Termination Modules" on page 23).
EN0B-0090GE51 R0802 14
ONWORKS bus wiring, as well as
ONWORKS bus
The terminal block is coded using the XAL-Code (see section
"Coding the Terminal Block").

Terminal Block Connection
NOTE: The terminal blocks are to be mounted on 1.5-inch
The L
Connector Module XSL511") can be used as an interface
between the L
The terminal blocks may be fitted alongside one another.
Depending upon the configuration, either one or two
termination modules are required for terminating a
ONWORKS bus with FTT devices on it. See also section
L
"LonWorks Bus Termination Modules" on page 23 for more
information on termination.
(35-mm) DIN rails (DIN/EN 50 022 35x15). The
mounting panel should have a minimum thickness of
0.08 inch (2 mm) to provide reference potential for
proper grounding and shielding. The maximum
distance between the fastening points of the rail
should be 5.9 inches (150 mm).
ONWORKS connector module (see section "LONWORKS
ONWORKS bus and the Distributed I/O modules.
DISTRIBUTED I/O
Table 12. Max. current ratings for other modules
Module
XFL521B
XFL522B
XFL523B
XFL524B
1
All inputs shorted to GND. 10 V loaded with 5 mA.
2
All outputs loaded with 1 mA. XFR522A mounted and set to
19.2 Vac 28.8 Vac 19.2 Vdc 28.8 Vdc
1
130 mA 90 mA 90 mA 65 mA
2
120 mA 90 mA 85 mA 60 mA
3
155 mA 105 mA 110 mA 75 mA
4
165 mA 115 mA 120 mA 80 mA
maximum output.
3
All inputs connected to 18 V. All LEDs (yellow) ON.
4
XFR524A mounted. All relays set to ON.
Maximum current rating at:
Mounting with the LonWorks Connector Module
IMPORTANT
When mounting the terminal blocks using the
XSL511 LonWorks Connector Module, the following
worst-case power consumption analysis must be
performed to determine the required transformer.
Select the worst-case maximum current rating for the
XSL511 based upon the maximum temperature of the
installation as stated in Table 11.
The electronic fuse RXE160 is applied in XSL511 with date
code 9916 and higher. Ratings are as follows:
Table 11. Max. current ratings for XSL511
Module/
fuse
XSL511/
RXE090
XSL511
RXE160
32°F
(0°C)
1.07 A 0.9 A 0.73 A 0.65 A 0.57 A 0.49 A
1.9 A 1.6 A 1.3 A 1.15 A 1.01 A 0.86 A
Calculate the worst-case current draw for the Distributed I/O
modules and the Excel 500-XCL5010 controller to be
connected to the transformer based on the input voltage
stated in Table 12:
Maximum Current Rating at:
68°F
(20°C)
104°F
(40°C)
122°F
(50°C)
140°F
(60°C)
(70°C)
158°F
Cos ϕ for all modules is approx. 0.75.
Terminal blocks XSL513 and XSL514 can be combined on
the rail in any order.
1. Mount the DIN rail at the desired location (vertically or
horizontally).
NOTE: It is recommended that when mounting vertically,
the XSL511 L
ONWORKS connector module be
mounted at the bottom to ensure a good connection
of the bus in case any slippage occurs on the DIN
rail.
rd
2. Install the 3
-party DIN rail end bracket onto the left end of
the rail.
3. Install the connector module onto the left end of the rail
next to the end bracket by first hooking the terminal end of
the module onto the rail and snapping it into place.
4. If necessary (e.g. in case of vibrations due to refrigerating
equipment, etc.), mount braces (see Fig. 11).
5. Install the first terminal block onto the rail.
NOTE: To avoid damage, ensure that the sliding bus con-
nector does not extend past the left edge of the
module.
15 EN0B-0090GE51 R0802

DISTRIBUTED I/O
b
b
6. Push the sliding bus connector to the left until it locks
onto the matching circuit board section on the adjacent
connector module (see Fig. 10).
7. If necessary (e.g. in case of vibrations due to
refrigerating equipment, etc.), mount braces (see Fig.
11).
8. Lock in all other modules and connect them using the
sliding bus connector. Slide each sliding bus connector
as far to the left as possible.
NOTE: The electronics module or the manual terminal dis-
connect module will not fit properly on the terminal
block if the sliding bus connector is not on the left
side.
9. Fit the end cover included with the XSL511 onto the last
module.
10. Install 3
rd
-party DIN rail end bracket close to end cover
of the last module.
rd
NOTE: It is recommended that you use solid standard 3
party DIN rail end brackets on both ends of the
terminal block to prevent any movement of the
terminal blocks. Terminal blocks must abut each
other to ensure proper contact at the sliding bus
connector.
11. Mount the type-C safety latches to provide extra
assurance that adjacent terminal blocks will not
become separated.
Fig. 9. Terminal blocks with LONWORKS connector
race
DIN rail
end bracket
Connector Module
XSL 511
type-C safety latch
24V
Fig. 10. Sliding bus connector connects adjacent modules
race
type-C safety latch
DIN rail
end bracket
EN0B-0090GE51 R0802 16

Mounting / Dismounting the Braces and Type-C Safety Latches
DISTRIBUTED I/O
1a.
4.
Fig. 11. Mounting braces (steps 1a and 1b) and mounting (2, 3, and 4) and dismounting type-C safety latches (steps 5
1b.
and 6)
2.
5.
3.
6.
Mounting Accessories
See also section "Accessories, Standards, Ratings, and
Literature" on page 29 for additional parts which may be
needed for mounting.
Manual Terminal Disconnect Module XSL512
• Mounts between terminal blocks and Distributed I/O
modules
• Manual terminal disconnect switches
• 18 disconnect switches
• Dimensions (WxLxH): 58x97x55 mm
• Safety latch secures XFL module in its position
The XSL512 Manual Terminal Disconnect module allows
each of the terminal block's input connections to be manually
disconnected from the plugged-in module. This is particularly
useful for troubleshooting and installation.
17 EN0B-0090GE51 R0802

DISTRIBUTED I/O
Coding the Terminal Block
The terminal block is coded using the XAL-Code, (package of
20 combs).
CAUTION
Mixing the modules can destroy them.
The terminal block is coded by inserting pins into designated
location holes on the terminal block in the base. This codes
the electronics modules to their respective terminal blocks.
1. Break off the coding pins on the coding comb such that
the comb is left with the coding combinations shown in
Fig. 12.
2. The comb side corresponding to the respective terminal
block is inserted into the location holes in the terminal
block and broken off (positions 1 to 9 are printed on the
circuit board of the terminal block for alignment).
Fig. 12. Coding comb patterns
These pins prevent mixing the module types during
commissioning or servicing.
Fig. 13. Inserting coding comb into terminal block
3. Next, the other side of the comb is inserted into the elec-
tronics module location holes and likewise broken off. If
one or more opposing location holes both contain pins,
then the module cannot be mounted onto the terminal
block. The module can be mounted only if the single
coding pin corresponds to the missing pin in the terminal
block.
Fig. 14. Inserting coding comb into I/O module
EN0B-0090GE51 R0802 18

Setting the Module Address
NOTE: The module address is set using the rotary HEX
switch (in the case of applications prior to CARE
4.0).
All modules will report the setting of the 16-position rotary
HEX switch as a 2-byte ASCII number in the lowest 2 bytes
of the Neuron® chip’s location string. Changing the rotary
HEX switch setting causes the module to reset its application
configuration (sensor selection, output selection, motor
runtime, etc.) and go unconfigured. Modules will run their
application in the unconfigured state so that another change
of the DIP switch will be recognized.
To remove the cover or a manual override module from the
Distributed I/O module, do the following:
1. Insert the cover release tool XAL2 into the corresponding
slots in the electronics module to release the locking tabs.
The tool should be inserted such that the marking is on
the right-hand side.
DISTRIBUTED I/O
Fig. 17. Rotary HEX switch location
3. The module address is set by turning the HEX switch to
the appropriate address code using a screwdriver.
CAUTION
Do not plug an XFL module without a cover or manual
override module into the terminal block.
Installing the I/O Modules
Fig. 15. Inserting opening tool
2. Lift off the cover as is depicted in Fig. 16.
Fig. 16. Lifting the cover off
IMPORTANT
Always use the XAL2 tool to remove the cover or a
manual override module from an output module. Lift
off manual override modules carefully to avoid
tearing the attached flat strip cable.
locking procedure locked latch
Fig. 18. Type-A safety latch
locking procedure locked latch
Fig. 19. Type-B safety latch
The electronic I/O modules can be installed either on top of
the terminal blocks or on top of the manual terminal disconnect modules.
1. Make sure the sliding bus connector on the terminal block
is on the left side.
2. Mount the module onto the terminal block (or the manual
terminal disconnect module if installed) and make sure the
spring clip snaps on the little hook on the module housing.
3. Lock the safety latch on the terminal block (type A) (and
the manual terminal disconnect module, if installed; for the
safety latch on the manual disconnect module (type B) it is
recommended that you use a screwdriver or similar for
locking) as is shown in the figure.
Installing the XFR522A and XFR524A Manual
Override Modules
The manual override modules are installed on top of their
respective output modules. The XFR522A and XFR524A are
connected to the output modules via flat strip cable; this
allows opening the housing and setting the rotary HEX switch
under power without disconnecting the manual override
module.
19 EN0B-0090GE51 R0802

DISTRIBUTED I/O
The manual override modules are installed as follows:
1. Switch off the power to the output module; or unlock the
safety latch and unplug the module from the terminal block
as described in section "Removing Modules and Terminal
Blocks".
2. Remove the standard cover of the module housing
(XFL522B/XFL524B) as is described in section
"Setting the Module Address".
3. Plug the manual override connector situated at the end of
the flat strip cable into the socket in the output module.
NOTE: By mechanical design, the plug can be inserted in
only one orientation, thus preventing wrong connection.
Fig. 20. Manual override connector socket location
1. Slightly push back the locking tabs with the XAL2 tool to
bring them behind the edge of the module housing.
Fig. 22. Snap override module into place
IMPORTANT
Avoid tearing on the flat strip cable if you need to
remove a manual override module. Always use a
cover release tool XAL2 to remove the manual
override module and disconnect the plug carefully
(see also section "Setting the Module Address").
3. Remount the module as is described in the previous
section.
Installing the Manual Terminal Disconnect
Module XSL512
Fig. 21. Pushing back locking tabs
2. Snap the override module onto the electronics module
housing such that the power, L
put LEDs in the electronics module are aligned with their
respective view windows on the manual override face
plate. Make sure that all tabs of the manual override
module are snapped into the slots of the output module.
EN0B-0090GE51 R0802 20
ONWORKS service, and out-
Fig. 23. Installing the manual terminal disconnect module
The manual terminal disconnect module is installed between
the terminal block and the electronics module. If the right
side of the XSL512 is accessible (no other modules are
mounted to the right), then the end cover provided with the
XSL512 must be used.
1. Remove the electronics module as described in section
"Removing Modules and Terminal Blocks".
2. Mount the XSL512 module onto the terminal block with the
switches on the terminal side of the terminal block as
depicted and lock the safety latch as described previously.
3. Mount the electronics module onto the top of the XSL512
and lock the safety latch as described in section "Installing
the I/O Modules".
The individual inputs to the electronics module can now be
connected and disconnected manually.

DISTRIBUTED I/O
Removing Modules and Terminal Blocks
The electronics modules and terminal blocks can be removed
by carrying out the following steps:
1. Unlock the safety latch(es) as is depicted in Fig. 24.
on terminal blocks on XSL512
Fig. 24. Unlocking the safety latches
2. Remove the electronics module from the terminal block (or
manual terminal disconnect module) by pushing a screwdriver between the electronics module and the spring clip
on the terminal block (or manual terminal disconnect
module).
module by pushing a screwdriver into one of the notches
of the sliding bus link and sliding it backwards into its
home position (terminal block) with small sideways movements.
Fig. 27. Removing the terminal block
9. Unlock and dismount the type-C safety latch.
NOTE: If braces have been mounted, the modules must be
slid apart before proceeding to the next step.
10. Lift the terminal block from the rail by inserting a screw-
driver tip into the two mounting feet - one after the other and lifting up the terminal block with small levering
movements.
Applying CARE Printout Labels
Fig. 25. Unlocking the module spring clip
3. Unlock the spring clip by lightly bending upwards with the
screwdriver.
4. Unplug the electronics module.
5. When installed, dismount the manual terminal disconnect
module as is described for the electronics module.
6. Disconnect the power to the connector module before
removing the terminal block.
Fig. 26. Releasing the sliding bus link
7. Now release the sliding bus link with a screwdriver and
push the sliding bus link to the right into its terminal block.
Make sure that it is drawn back completely!
NOTE: Do not dismount the terminal block until both sliding
bus links are drawn back completely.
8. The sliding bus link of the terminal block to the right (if one
exists) can be released without removing the electronics
Fig. 28. XAL1 swivel label holder
Normally, CARE labels can be used on electronics modules.
When using electronics modules with manual override units,
CARE labels cannot be applied to the face of the manual
override unit. In this case, the XAL1 swivel label holder is required (package of 10). The XAL1 swivel label holder is
mounted to the terminal block as shown in Fig. 28.
LONWORKS Network Interface
Distributed I/O modules contain an FTT-10A Free Topology
Twisted Pair Transceiver allowing communication with other
devices on a L
communicate at 78 Kbaud and provide transformer isolation
so that the bus wiring does not have a polarity; that is, it is
not important which of the two bus terminals are connected
to each wire of the twisted pair.
IMPORTANT
ONWORKS network. FTT-10A transceivers
ONWORKS transceiver can be affected by
The L
electromagnetic fields generated by frequency
converters. If possible, locate frequency converters
21 EN0B-0090GE51 R0802

DISTRIBUTED I/O
ed
in a different cabinet, or allow a minimum distance of
18 inches (50 cm) between frequency converters
and their respective cabling, and Distributed I/0
Modules.
FTT devices can be wired in daisy chain, star, loop or any
combination thereof as long as the maximum wire length requirements given below are met. The recommended configuration is a daisy chain with two bus terminations. This
layout allows for maximum bus length, and its simple structure presents the least number of possible problems, particularly when adding on to an existing bus.
NOTE: A doubly-terminated bus may have stubs of up to
10 ft (3 m) from the bus to each node.
device
termination
module
device
device
device
device
device
device
device
device
device
Table 13. Doubly-terminated bus specifications
Cable type Max. bus length
Belden 85102 8,900 ft (2,700m)
Belden 8471 8,900 ft (2,700m)
Level IV, 22 AWG 4,600 ft (1,400m)
JY (St) Y 2x2x0.8 3,000 ft (900m)
TIA568A Categ. 5 24AWG, twisted pair 3,000 ft (900m)
NOTE: The cable types listed above are as recommended
by Echelon® in their FTT-10A User Guide. The
cable recommended by Honeywell is the level IV, 22
AWG, solid core, non-shielded cable. Belden part
numbers are 9H2201504 (plenum) and 9D220150
(non-plenum).
device device
termination
module
device
device device
termination
module
Fig. 29. Doubly-terminated bus configuration
(recommended)
Free topology requires only one bus termination and allows a
variety of bus configurations (see Fig. 30):
device device
loop
device
device
termination
device
device
module
device
mix
Fig. 31. Free topology examples
The FTT specification includes two components that must be
met for proper system operation. The distance from each
transceiver to all other transceivers and to the termination
must not exceed the maximum node-to-node distance. If
multiple paths exist, the maximum total wire length is the total
amount of wire used.
Table 14. Free topology (singly-terminated)
specifications
Cable type
Maximum node-
to-node distance
Belden 85102 1,650 ft (500 m) 1,650 ft (500 m)
Belden 8471 1,300 ft (400 m) 1,650 ft (500 m)
Level IV, 22AWG 1,300 ft (400 m) 1,650 ft (500 m)
JY (St) Y 2x2x0.8 1,050 ft (320 m) 1,650 ft (500 m)
TIA568A Category 5
24AWG, twisted pair
825 ft (250 m) 1,500 ft (450 m)
Maximum total
wire length
termination
module
device
device device device
singly-terminated
device
termination
module
device device
star
Fig. 30. Possible bus configurations
EN0B-0090GE51 R0802 22
device
IMPORTANT
Do not use different wire types or gauges on the
same L
ONWORKS network segment. The step
change in line impedance characteristics would
cause unpredictable reflections on the bus.
Examples of allowed and not-allowed free topology layouts
for cable JY (St) Y 2x2x0.8 are shown in Fig. 32.

device
100 m
(328 ft.)
ALLOWED:
device
100 m
(328 ft.)
100 m (328 ft.)
100 m (328 ft.)
CPU
termination
module
device
node-to-node = 200 m (656 ft.)
total wire length = 400 m (1312 ft.)
device
100 m
(328 ft.)
termination
module
NOT ALLOWED:
node-to-node = 400 m (1312 ft.)
total wire length = 500 m (1640 ft.)
device
200 m
(656 ft.)
200 m
(656 ft.)
device
device
200 m
device
(656 ft.)
termination
module
100 m
(328 ft.)
device
device
NOT ALLOWED:
node-to-node = 200 m (656 ft.)
total wire length = 600 m (1968 ft.)
Fig. 32. Example of allowed/not-allowed free topology
layouts (max. node-to-node distance: 320 m, max. wire
length: 500 m)
100 m
(328 ft.)
device
removable screw-type
3-pole terminal block
DISTRIBUTED I/O
l
l
e
w
y
e
n
Ho
m
r
e
T
-
L
A
X
4
3
L
L
O
O
N
N
shield shield
plug-in
jumper
34
LON
Termi nat ion
FTT/LPT Bus
FTT/LPT Free
Park Position
5
1
06
NOTE: In the event that the limit on the total wire length is
exceeded, then FTT physical layer repeaters
(FTT 10A) can be added to interconnect segments
and increase the overall length by an amount equal
to the original specification for that cable type and
bus type for each repeater used. For example,
adding repeaters for a doubly-terminated bus using
JY (St) Y 2x2x0.8 cable increases the maximum
length 3000 ft (900m) for each repeater.
LONWORKS Bus Termination Modules
Depending upon the configuration, either one or two
termination modules are required for terminating a
ONWORKS bus with FTT devices on it. The following two
L
different L
purpose:
• 209541B L
• XAL-Term L
ONWORKS termination units are available for this
ONWORKS Bus Termination Module (see Fig.
33 and Fig. 34) and
ONWORKS connection and termination
module (see Fig. 35), which can be mounted on DIN rails
and in fuse boxes.
Fig. 35. XAL-Term
In the case of either a daisy chain or free-topology
ONWORKS bus layout, the maximum lengths described
L
above must be adhered to.
Fig. 33. Termination Module 209541B connections for
doubly-terminated FTT network
Fig. 34. Termination Module 209541B connections for a
singly-terminated FTT network
23 EN0B-0090GE51 R0802

DISTRIBUTED I/O
y
y
Commissioning Distributed I/O Modules
The following refers to the commissioning of Distributed I/O
modules in conjunction with Excel 500 controllers into which
controller firmware version 2.04.xx has been downloaded.
Previous to controller firmware version 2.04.xx, Distributed
I/O modules were used only on a local L
nected to a single Excel 500 controller. Concurrent with the
release of controller firmware version 2.04.xx is the release of
the XFL52xB Distributed I/O modules with updated firmware
and with a new Neuron chip which make them fully L
compliant. This means that multiple Excel 500 controllers,
each with its own Distributed I/O modules, as well as third-
ONMARK compliant devices, can coexist and inter-
party L
operate on the same L
ONWORKS bus. Furthermore, the
XFL52xB modules can be used as third-party devices with
ONMARK compliant products, independently of an
other L
Excel 500 controller.
ONWORKS bus con-
ONMARK
IMPORTANT:
Full L
controller with controller firmware version 2.04.xx (or
later), a 3120E5 Neuron chip, and Distributed I/O
modules XFL52xB.
An Excel 500 controller with controller firmware
version 2.04.xx (or later) and a 3120E5 Neuron chip
will commission earlier versions of Distributed I/O
modules (XFL52x, XFL52xA), but only in the local
mode (max 16 modules per CPU and no other
controllers on the L
Distributed I/O modules XFL52xB can be used with
older versions of Excel 500 that support Distributed
I/O, but only if the modules are switched into a
different mode. This is accomplished by pressing the
service pin while simultaneously turning the rotary
HEX switch. This mode can be cancelled by
ONMARK functionality requires an Excel 500
ONWORKS bus).
pressing the service pin for more than three
seconds.
Table 15. Controller compatibility (non-L
Controller type Controller firmware
ONMARK CPUs/application modules, date code older than week 44 in 2000)
Open
LONWORKS
functionalit
CPU autobinding1 with
XFL52x XFL52xB
CARE 4.0
LONWORKS
binding
LM4W
binding
2.00.xx – 2.03.xx not possible local local not possible not possible
2.04.xx not possible local local/shared not possible not possibleXC5010C, XCL5010
2.06.xx not possible local local/shared not possible not possible
XD50-FL, XD50-FCL 2.04.xx – 2.06.xx not possible not possible not possible not possible not possible
XD50-FL-xxxx-yy2,
XD50-FCL-xxxx-yy
1
See section "Operating Modes" on page 25 for definitions of the terms "local," "shared," "open," and "shared/open."
2
"xxxx-yy" stands for configurable applications, e.g. AH03-EN.
2
2.00.xx – 2.05.xx possible not possible not possible possible possible
2.06.xx possible not possible not possible possible possible
Table 16. Controller compatibility (LONMARK CPUs/application modules, date code younger than week 44 in 2000)
Controller type Controller firmware
Open
LONWORKS
functionalit
CPU autobinding1 with
XFL52x XFL52xB
CARE 4.0
LONWORKS
binding
2.00.xx – 2.03.xx not possible local local not possible not possible
XC5010C, XCL5210C,
XCL5010
2.04.xx in use not possible shared/open not possible possible
2.04.xx not in use local local/shared not possible possible
2.06.xx in use not possible not possible possible possible
2.06.xx not in use local local/shared not possible not possible
2.04.xx – 2.05.xx in use not possible open not possible possible
XD50-FL, XD50-FCL
2.04.xx – 2.05.xx not in use not possible not possible not possible not possible
2.06.xx in use not possible not possible possible possible
2.06.xx not in use not possible not possible not possible not possible
2.00.xx – 2.05.xx in use not possible not possible not possible possible
XD50-FL-xxxx-yy2,
XD50-FCL-xxxx-yy
1
See section "Operating Modes" on page 25 for definitions of the terms "local," "shared," "open," and "shared/open."
2
"xxxx-yy" stands for configurable applications.
2
2.00.xx – 2.05.xx not in use not possible not possible not possible not possible
2.06.xx in use not possible not possible possible possible
2.06.xx not in use not possible not possible not possible not possible
LM4W
binding
EN0B-0090GE51 R0802 24

DISTRIBUTED I/O
Table 17. Distributed I/O module compatibility
Distributed I/O
modules
V2.00.xx to V2.03.xx V2.04.xx V2.06.xx
One controller to which
XFL521, XFL522A,
XFL523, XFL524A
Distributed I/O modules are
assigned on a single L
bus; operating mode: local
One controller to which
Distributed I/O modules are
XFL521B,
XFL522B,
XFL523B,
XFL524B
assigned on a single L
bus (if you wish to enable this
backwards-compatible mode
the XFL52xB modules, press the
ONWORKS service pin while
L
turning the rotary HEX switch);
1
To cancel the backwards-compatible mode for XFL52xB modules (date code: 4400 or later), thus allowing full LONWORKS
operating mode: local
functionality, press and hold down the LONWORKS service pin for at least 3 seconds.
2
Excel 500 controller with Neuron 3120E5 chip required!
NOTE: The compatibility of XFR522A and XFR524A Manual Override modules is affected by neither the firmware version nor
the Neuron chip version.
LONWORKS Functionality, by XL500 controller firmware version
ONWORKS
ONWORKS
1
for
One controller to which Distributed I/O modules are
assigned on a single L
ONWORKS
bus; operating mode: local
ONWORKS functionality:
Full L
Multiple Distributed I/O modules
and multiple controllers
on a single L
ONWORKS bus;
2
possible
operating mode: open
One controller to which Distributed I/O modules are
assigned on a single L
bus; operating mode: local
Full LONWORKS functionality:
Multiple Distributed I/O modules
and multiple controllers
on a single L
operating mode: open
ONWORKS
2
ONWORKS bus;
possible
Operating Modes
The following refers to the operating modes of Excel 500
controllers into which controller firmware version 2.04.xx has
been downloaded.
It is important to remember the following definitions:
Local: The term "local" refers to an operating mode in which
a max. of 16 Distributed I/O modules are connected to a
single host Excel 500 controller via a L
which no other devices co-exist on that bus. In this mode, the
Distributed I/O modules are assigned to their host Excel 500
controller automatically, and autobinding is performed.
Shared: The term "shared" means that, aside from the host
Excel 500 controller and its Distributed I/O modules, other
devices (which may include other Excel 500 controllers with
their own Distributed I/O modules, Excel 50 or Excel 10 controllers, or 3
rd
-party devices) co-exist on the LONWORKS bus.
In the shared mode, autobinding may still be used for the
NVs of a maximum of 16 Distributed I/O modules assigned
(manually) exclusively to the host Excel 500 controller.
NOTE: It is recommended that you use CARE to assign the
Distributed I/O modules to the host Excel 500 controller (i.e. to enter the Distributed I/O modules'
Neuron IDs). The alternative is to assign them using
the MMI.
Open: The term "open" refers to an interoperable L
system in which CARE has been used to generate a
ONMARK-compliant network interface file capable of pro-
L
viding NVs which can be bound to other devices (which may
include other Excel 500 controllers with their own Distributed
I/O modules, Excel 50 or Excel 10 controllers, or third-party
devices). In the open operating mode, the NVs of the Distributed I/O modules exceeding 16 must be bound manually
using a L
ONWORKS network management tool (an LNS-based
tool capable of using Honeywell plug-ins is recommended).
Shared/Open: The shared and the open operating modes
can be in effect simultaneously. In this case, autobinding is
performed for the NVs of a maximum of 16 Distributed I/O
modules, while the data points of additional Distributed I/O
ONWORKS bus, and in
ONWORKS
modules must be mapped with shared NVs, and the NVs of
the additional Distributed I/O modules must be bound
manually (e.g. using an LNS-based tool).
Autobinding
The following refers to the autobinding of the NVs of
Distributed I/O modules to Excel 500 controllers into which
controller firmware version 2.04.xx has been downloaded.
When Distributed I/O modules are used exclusively by
Honeywell Excel 500 controllers, it is possible to automatically bind their NVs to the controller. This is referred to
as "autobinding." In autobinding, each controller on the bus
finds the Distributed I/O modules assigned to it and binds the
required NVs.
IMPORTANT:
Autobinding does not work across routers. Distributed I/O modules must be located within the
same router segment as the controller to which their
NVs are to be bound. However, autobinding is
possible across repeaters.
IMPORTANT:
The autobound NVs of a controller are not visible to
ONWORKS network management tool, and there is
a L
hence no danger that a careless user will attempt to
re-bind them. However, the NVs of the Distributed
I/O modules are visible to a L
management tool. Any attempt to re-bind the autobound NVs of Distributed I/O modules will corrupt
the autobindings. In such a case, the Excel 500 controller will restore the autobindings automatically, but
there will be numerous system and application
alarms as a result.
If, prior to autobinding, the Distributed I/O modules
have been accessed by a L
management tool, the modules will remain in the
“configured” mode. In this state, they cannot be
found by the controller during autobinding, and they
do not appear in the list of modules on the controller
ONWORKS network
ONWORKS network
25 EN0B-0090GE51 R0802

DISTRIBUTED I/O
MMI. Such modules must be decommissioned using
ONWORKS network management tool, or the
the L
ONWORKS service pin must be pressed for at least
L
three seconds.
If an Excel 500 controller in the shared/open mode is deleted
from the LonMaker project, all of its bindings will also be
deleted. In this case, the deleted Excel 500 controller will
restore all of the autobindings (if any) automatically after 3
minutes (provided no bindings are performed or changed in
LonMaker in the meantime), but there will be numerous
system and application alarms as a result.
Assignment
The following refers to the assignment of Distributed I/O
modules to Excel 500 controllers into which controller
firmware version 2.04.xx has been downloaded.
There are two methods of assigning Distributed I/O modules
to a particular Excel 500 controller. Regardless of which of
these two assignment methods is employed, assignment
requires that the modules' rotary HEX switches be set
according to the CARE terminal assignment.
Recommended Assignment Method
The Ideal approach is to know the Neuron IDs of the Distributed I/O modules when engineering the application using
CARE, thus enabling you to enter the Neuron ID during the
CARE terminal assignment. When this is done, every module
will be fully identified and assigned automatically by the Excel
500 controller after the application is downloaded.
Alternate Assignment Method
If the Neuron ID is not available when engineering the
application using CARE, it will be possible to correctly assign
the Distributed I/O modules to their controller(s) only after
having downloaded the application. In this case, assignment
is performed via the MMI as described in detail in the
XI581/XI582 User Guide, EN2B-0126.
IMPORTANT:
It is essential that Distributed I/O modules not be
assigned simultaneously via different MMIs. When
using the alternative assignment method, work on
only one MMI at a time so as to avoid competing
network accesses. Disregarding this will result in
contradictory and unreliable assignments. There will
be incomplete Distributed I/O module lists displayed,
and there is the danger that one controller will take
away an existent assignment from another
controller.
been made during the test mode, the assignments are
automatically saved in Flash memory. These assignments
can be reused for the application after the application has
been downloaded (the MMI's assignment dialog will offer the
option of keeping the existing assignment).
Controller Reset
IMPORTANT:
Resetting a controller will erase the Distributed I/O
module assignment. After a reset, one of the
following procedures must be performed.
• Restore the application (including the assignments) from
Flash (this is the simplest method).
• Restore the assignments during the "start-up" sequence
(this requires somewhat more effort because all of the
modules are searched on the LonWorks network
automatically).
• Download the application and re-assign the Distributed
I/O modules (this method requires the most effort
because it must be done manually).
Manual Binding
The following refers to the manual binding of the NVs of
Distributed I/O modules to Excel 500 controllers into which
controller firmware version 2.04.xx has been downloaded.
There are several cases in which it is necessary to manually
bind the NVs of the Distributed I/O modules to their
respective controller(s). This is done using a L
network management tool (e.g. LonMaker).
More than 16 Modules per Excel 500
Autobinding can be used to bind the NVs of a maximum of 16
Distributed I/O modules per controller, only. If the application
requires more than 16 Distributed I/O modules per controller,
you must use CARE to allocate those additional NVs
requiring mapping with the data points, and you will also have
to use a L
ONWORKS network management tool to bind the
NVs of the additional modules to the controller.
Double-Mapping a Data Point
It is possible to preserve the autobinding by mapping the
data point with a second NV. However, the second NV must
then be bound (using a L
tool) to another L
ONWORKS device. While this method
preserves autobinding, it does require one controller NV
more than if all binding is performed using a L
network management tool (e.g. LonMaker).
ONWORKS network management
ONWORKS
ONWORKS
Priority of Distributed I/O Module Assignments
Assignments made via an MMI always have priority over
assignments made using CARE. Thus, in the event of a conflict (e.g. when the Neuron ID entered using CARE differs
from the Neuron ID entered via the MMI), the assignment
carried out via the MMI will have priority.
Flashing of Distributed I/O Module Assignment
The Distributed I/O module assignment that was made in
CARE or via the controller MMI must be manually saved to
Flash memory. When Distributed I/O module assignment has
EN0B-0090GE51 R0802 26
Binding to Other Devices
If you wish to bind the NVs of Distributed I/O modules to
other devices (i.e. other than the host Excel 500 controller),
autobinding cannot be used. Instead, you will have to employ
ONWORKS network management tool (e.g. LonMaker) to
a L
(manually) bind all of the Distributed I/O modules' NVs.

DISTRIBUTED I/O
Troubleshooting (Controller Autobinding)
Wiring Check
NOTE: In the case of CARE 4.0, the controller cannot be
used to perform autobinding. However, you can use
XILON to perform the wiring test.
In the case of Excel 500 controllers with controller firmware
version 2.04.xx, Distributed I/O modules can be checked out
without even having an application loaded in the controller.
This is possible using a special test mode previously active
only for internal I/O modules. This test mode, accessible
through the “Data Point Wiring Check” option on the second
screen of the start-up sequence, allows manually setting
outputs and reading inputs to verify the I/O wiring. The
procedure is described in detail in the XI581/582 User Guide,
EN2B-0126.
Fig. 36. Distributed I/O module faceplate and LEDs
Each Distributed I/O module has a green Power ON LED (L1)
and a red LONWORKS service LED (L2) at the upper left of the
faceplate. The L
diagnosing the state of the Distributed I/O module (see
below).
Fig. 37. Distributed I/O module troubleshooting example
If you have more than one module connected to one XSL511,
you should check the modules to the left and to the right of
the defect module (status of green power LED L1 and red
ONWORKS status LED L2). A module is "working" in Table 18
L
if L1 is lit up green and if the L
working.
ONWORKS service LED (L2) is used for
ONWORKS communication is
Table 18. Troubleshooting of Distributed I/O modules
Modules to the left side
working
no no
yes no
yes yes
In case of problems, check if the behavior is changed if you:
1. Push the LONWORKS service button to reconfigure the
Distributed I/O module. The L
light as long as you push the L
The hardware is defective if this is not the case.
2. Switch the power ON / OFF.
Modules to the right
side working
ONWORKS service LED will
ONWORKS service button.
Service Pin Message and LED
A service pin message is sent when
• powering-up or resetting,
• transitioning to the configured/online state, or
• turning the DIP switch.
In the case of a power-up or reset, the service pin message
is delayed a random time between 1 and 5 seconds to avoid
an overload of a network management node receiving these
Possible causes
• Power OFF
• CPU not working
• Incorrect wiring
• Sliding bus connector on XSL511 not closed properly
• Defective hardware → contact your Honeywell dealer
• Sliding bus connector on the left side not closed properly
• Defective hardware → contact your Honeywell dealer
• Wrong L
• Defective hardware → contact your Honeywell dealer
3. Set the rotary HEX switch to an unused address for a few
Please contact Honeywell if the above actions do not solve
the problem.
messages when a large number of Distributed I/O modules
are powered up simultaneously.
The service LED indicates the status of the Neuron® chip.
Normally, the service LED will blink a few times during the
power-up/reset phase and then remain off. During normal
commissioning, the service LED will stay on briefly and then
flash briefly before remaining off. The time required for commissioning is variable, lasting from approximately 10 to 60
seconds, depending upon the amount of network information
ONWORKS address (HEX switch setting)
seconds and then select the correct address. This will
reset the Distributed I/O module.
27 EN0B-0090GE51 R0802

DISTRIBUTED I/O
S
E
being downloaded from the installation tool and the
installation tool itself. For additional information on service
LED behavior, see Table 19 and Fig. 38.
LONWORKS Service LED L2
This LED is used to diagnose the state of the Distributed I/O
module. In general:
• The module is applicationless if the LED illuminates con-
tinuously.*
• The module has an application but it is not configured if
the LED is blinking.
• The module is running normally if L2 is off.
*Pushing the L
commissioning of the module. While commissioning, LED L2
continuously illuminates red for less than 1 minute and then
returns to the normal state (L2 = OFF).
A more detailed diagnosis can be carried out by observing
the duration of the ON and OFF states of the service LED in
connection with power ON / OFF. Fig. 38 illustrates the
different service LED behaviors. These are the most common
behaviors, but others are possible since the state of the
service LED is under firmware control and can be affected
both by hardware and software anomalies.
ONWORKS service button will force a new
Table 19. Service LED behavior descriptions
IMPORTANT
In Table 19, the words ”configured”, “unconfigured”,
“application”, and “applicationless” refer only to the
communication layer running on the Neuron® chip and not to
the controller application.
1
2
3
4
D Behavior
5
6
ervice L
7
Power
applied
to node
see table
1 sec
2 sec 3 sec 4 sec 5 sec
* Does not scale with the Neuron chip.
see table
= ON = OFF
Continuous
Continuous
Continuous
Repeated
Repeated*
Continuous
Time
(at 10 MHz,
approx.)
Fig. 38. Service LED behavior
Behavior Context Likely explanation
1 Power-up of the node
2 Power-up of the node
Bad node hardware. For Distributed I/O modules, perform the tests shown in
the previous section.
Bad node hardware. For Distributed I/O modules, perform the tests shown in
the previous section.
The module is applicationless. May be caused by the Neuron chip firmware
3 Power-up / Reset of the node
when a mismatch occurs on application checksums. This behavior is normal if
the application was exported to come up applicationless.
4Anytime
5Anytime
First power-up, applicationless
firmware state exported
Possible corrupt EEPROM. For a Neuron 3150 Chip-based node, use a newly
programmed PROM, or EEBLANK and follow bring-up procedure.
The module is unconfigured. Connect the Distributed I/O module to the CPU.
The CPU will configure the Distributed I/O module.
The OFF duration is approximately 1 second. The service LED should then
turn ON and stay on indicating an applicationless state.
The OFF duration is 1-15 seconds (depending on the application size and
6
firmware state exported
First power-up, unconfigured
system clock). The service LED should then begin flashing as in behavior 5,
indicating an unconfigured state. Connect the Distributed I/O module to the
CPU. The CPU will configure the Distributed I/O module.
First power-up, configured
firmware state exported
The OFF duration is indefinite (1-15 seconds to load internal EEPROM; stays
OFF indicating configured state.) The module is configured and running
normally.
7 Anytime The module is configured and running normally.
EN0B-0090GE51 R0802 28

Accessories, Standards, Ratings, and Literature
Accessories
— XAL 1 Swivel Label Holder (required for Manual Override
Modules, package includes 10 XAL 1 swivel labels).
— XAL 2 Cover Release Tool (required for opening the
module housing e.g. to set the module address using the
rotary HEX switch; package includes 20 XAL 2 Cover
Release Tools).
— 209541B Termination Module (one or two required,
depending on L
"LonWorks Bus Termination Modules" on page 23).
— XAL-Term L
module (see Fig. 35 on page 23).
ONWORKS bus layout; see section
ONWORKS Connection and Termination
DISTRIBUTED I/O
Approvals and Standards
• CE and EN 50082-1
Environmental Ratings
• Operating temperature: 32° to 122°F (0° to 50°C)
• Shipping/storage temperature: -13° to 150°F (-25° to
65°C)
• Relative humidity (operation and storage): 5% to 90%,
non-condensing
Applicable Literature
• EN0B-091 Excel 100/500/600 System Overview
• EN1R-1047 Excel 500/600 Installation Instructions
• EN0B-270 Excel 50/500 LONWORKS Mechanisms
electronic module
(XFL521x, 522x,
523x, 524x)
4-1/8 inches (104.5 mm)
(38 mm)
1-1/2 inches
3-13/16 inches (97 mm)
top view
Fig. 39. Terminal block XSL513/514
3-1/2 inches (89 mm)
with electronic module
4-1/4 inches (108 mm)
with manual override module
side view
manual
override
module
(XFR522,
XFR524)
29 EN0B-0090GE51 R0802

DISTRIBUTED I/O
6-27/64 inches (163 mm)
with manual disconnect module and manual override module
5-43/64 inches (144 mm)
with manual disconnect module
electronic module
(XFL521x, 522x,
523x, 524x)
4-41/64 inches (118 mm)*
*The maximum length of 4-41/64 inches (118 mm)
manual
override
module
(XFR522,
XFR524)
is attained when the
XSL511 LON Connector is attached.
XSL511
Fig. 40. Outside dimensions of XSL513/514 terminal blocks and mounted modules (side view)
Fig. 41. Dimensions of XSL511 LONWORKS connector module in inches (mm)
Control Products Control Products Control Products
Honeywell Inc. Honeywell Limited-Honeywell Limitee Honeywell AG
Honeywell Plaza 155 Gordon Baker Road Böblinger Straβe 17 Manufacturing
P.O. Box 524 North York, Ontario D-71101 Schönaich location certified to
Minneapolis, MN 55408-0524 M2H 3N7 Germany
USA Canada http://europe.hbc.honeywell.com
EN0B-0090GE51 R0802 / 74-2145-2 printed in Germany Subject to change without notice
 Loading...
Loading...