

Page 1
GHP™ Reactor
Mechanical
Installation Instructions
Important Safety Information
WARNING
See the Important Safety and Product Information guide in the
product box for product warnings and other important
information.
You are responsible for the safe and prudent operation of your
vessel. The autopilot is a tool that enhances your capability to
operate your boat. It does not relieve you of the responsibility of
safely operating your boat. Avoid navigational hazards and
never leave the helm unattended.
Always be prepared to promptly regain manual control of your
boat.
Learn to operate the autopilot on calm and hazard-free open
water.
Use caution when operating the autopilot near hazards in the
water, such as docks, pilings, and other boats.
CAUTION
When in use, beware of hot motor and solenoid components
and the risk of entrapment from moving parts.
Failure to install and maintain this equipment in accordance with
these instructions could result in damage or injury.
NOTICE
To avoid damage to your boat, the autopilot system should be
installed by a qualified marine installer. Specific knowledge of
hydraulic steering componentry and marine electrical systems is
required for proper installation.
Installation Preparation
The autopilot system consists of multiple components. You
should familiarize yourself with all of the component mounting
and connection considerations before beginning installation. You
must know how the components operate together in order to
correctly plan the installation on your boat.
You can consult the layout diagrams (Power and Data Layout)
to help understand the mounting and connection considerations.
You should lay out all of the components on the boat as you
plan the installation to make sure your cables will reach each
component. If needed, extension cables (sold separately) for
various components are available from your Garmin® dealer or
from www.garmin.com.
You should record the serial number of each component for
registration and warranty purposes.
Tools Needed
• Safety glasses
• Drill and drill bits
• 90 mm (3.5 in.) hole saw or a rotary cutting tool
• Wire cutters/strippers
• Phillips and flat screwdrivers
• Cable ties
• Waterproof wire connectors (wire nuts) or heat-shrink tubing
and a heat gun
• Marine sealant
• Portable or handheld compass (to test for magnetic
interference)
• Anti-seize lubricant (optional)
NOTE: Mounting screws are provided for the main components
of the autopilot system. If the provided screws are not
appropriate for the mounting surface, you must provide the
correct types of screws.
Mounting and Connection Considerations
The autopilot components connect to each other and to power
using the included cables. Ensure that the correct cables reach
each component and that each component is in an acceptable
location before mounting or wiring any components.
Helm Control Mounting Considerations
NOTICE
This device should be mounted in a location that is not exposed
to extreme temperatures or conditions. The temperature range
for this device is listed in the product specifications. Extended
exposure to temperatures exceeding the specified temperature
range, in storage or operating conditions, may cause device
failure. Extreme-temperature-induced damage and related
consequences are not covered by the warranty.
The mounting surface must be flat to avoid damaging the device
when it is mounted.
Using the included hardware and template, you can flush mount
the device in the dashboard. If you want to mount the device
using an alternative method where it appears flat with the front
of the dashboard, you must purchase a flat-mount kit
(professional installation recommended) from your Garmin
dealer.
When selecting a mounting location, observe these
considerations.
• The mounting location should be at or below eye level to
provide optimal viewing as you operate your vessel.
• The mounting location should allow easy access to the keys
on the device.
• The mounting surface must be strong enough to support the
weight of the device and protect it from excessive vibration or
shock.
• To avoid interference with a magnetic compass, the device
should not be installed closer to a compass than the
compass-safe distance value listed in the product
specifications.
• The area behind the mounting surface must allow room for
the routing and connection of the cables.
Helm Control Connection Considerations
• The helm control must connect to the NMEA 2000® network.
• Optional NMEA® 0183 devices, such as wind sensors, waterspeed sensors, or GPS devices can be connected to the
helm control using a data cable (NMEA 0183 Connection
Considerations).
December 2014
Printed in Taiwan 190-01769-02_0A
Page 2
CCU Mounting and Connection Considerations
FEEDBACK
CCU
POWER
DRIVE
• The CCU is the primary sensor of the GHP Reactor
Mechanical autopilot system. For best performance, observe
these considerations when selecting a mounting location.
◦ A handheld compass should be used to test for magnetic
interference in the area where the CCU is to be mounted.
If the needle on a handheld compass moves when you
hold it where you want to mount the CCU, magnetic
interference is present. Choose another location and test
again.
◦ The CCU should be mounted on a rigid surface for best
performance.
◦ Though the CCU can be installed in any orientation on
your boat, you can avoid the step of defining north in the
setup procedure by meeting all of the following
considerations when selecting a mounting location
(optional).
◦ The connectors on the CCU must point towards the
bow.
◦ The base of the CCU must be square with the roll and
pitch axis of the boat.
◦ The CCU must be located near the center of rotation of
the boat, slightly towards the front if necessary.
• The CCU cable connects the CCU to the ECU and is 5 m
(16 ft.) long.
◦ If the CCU cannot be mounted within 5 m (16 ft.) of the
ECU, replacement and extension cables are available
from your local Garmin dealer or at www.garmin.com.
◦ This cable must not be cut.
Finding the Best Mounting Location
Create a list of all suitable mounting locations for the CCU
1
where no iron, magnets, or high-current wires are located
within 60 cm (2 ft.).
A large magnet, such as a subwoofer-speaker magnet should
be no closer than 1.5 m (5 ft.) to these locations.
Locate the center of rotation of the boat, and measure the
2
distance between the center of rotation and each of the
suitable mounting locations you listed in step 1.
Select the location closest to the center of rotation.
3
If more than one location is approximately the same distance
from the center of rotation, you should select the location that
best meets these considerations.
• The best location is closest to the centerline of the boat.
• The best location is lower in the boat.
• The best location is slightly forward in the boat.
ECU Mounting and Connection Considerations
• The ECU can be mounted on a flat surface, facing any
direction.
• Mounting screws are included with the ECU, but you may
need to provide different screws if the supplied screws are
not suitable for the mounting surface.
• The ECU must be located within 0.5 m (19 in.) of the drive
unit.
◦ The cables connecting the ECU to the drive unit cannot be
extended.
• The ECU must be mounted in a location where it will not be
submerged or exposed to wash down.
• The ECU power cable connects to the boat battery, and it
can be extended if needed (Power Cable Extensions).
Drive Unit Mounting and Wiring Considerations
• If a compatible drive unit is not already installed on your boat,
the drive unit is sold separately, and must be installed by an
experienced professional in order to correctly steer your boat.
• The drive unit must be installed before the ECU is
permanently mounted.
• The cables connected to the drive unit cannot be extended.
• If you are connecting to an existing drive unit (not sold by
Garmin), a drive unit power cable (sold separately) must be
used to adapt your drive unit for use with the autopilot system
(Connecting to an Existing Drive Unit).
◦ The drive unit power cable cannot be extended.
• If you are connecting to a solenoid drive unit, a solenoid
power cable (sold separately) must be used to adapt your
solenoid drive unit for use with the autopilot system
(Connecting to a Solenoid Drive Unit).
◦ The solenoid power cable cannot be extended.
• If you are connecting to a drive unit not sold by Garmin, you
must also install a rudder feedback sensor, such as the
Garmin GRF™ 10, or connect to an existing rudder-feedback
sensor using a rudder feedback cable (sold separately).
NOTE: The GHP Reactor Mechanical autopilot is compatible
with a typical three-terminal, potentiometer-type rudder
feedback sensor only. The system does not work with a
frequency-based rudder feedback sensor.
Alarm Mounting and Connection Considerations
• The alarm should be mounted near the primary helm station.
• The alarm can be mounted under the dashboard.
• If needed, the alarm wires can be extended with 28 AWG
(0.08 mm2) wire.
NMEA 2000 Connection Considerations
• The CCU and the helm control must connect to a NMEA
2000 network.
• If your boat does not already have a NMEA 2000 network,
one can be built using the included NMEA 2000 cables and
connectors (Building a Basic NMEA 2000 Network for the
Autopilot System).
• To use the advanced features of the autopilot, optional
NMEA 2000 devices, such as a wind sensor, a water-speed
sensor, or a GPS device, can be connected to the NMEA
2000 network.
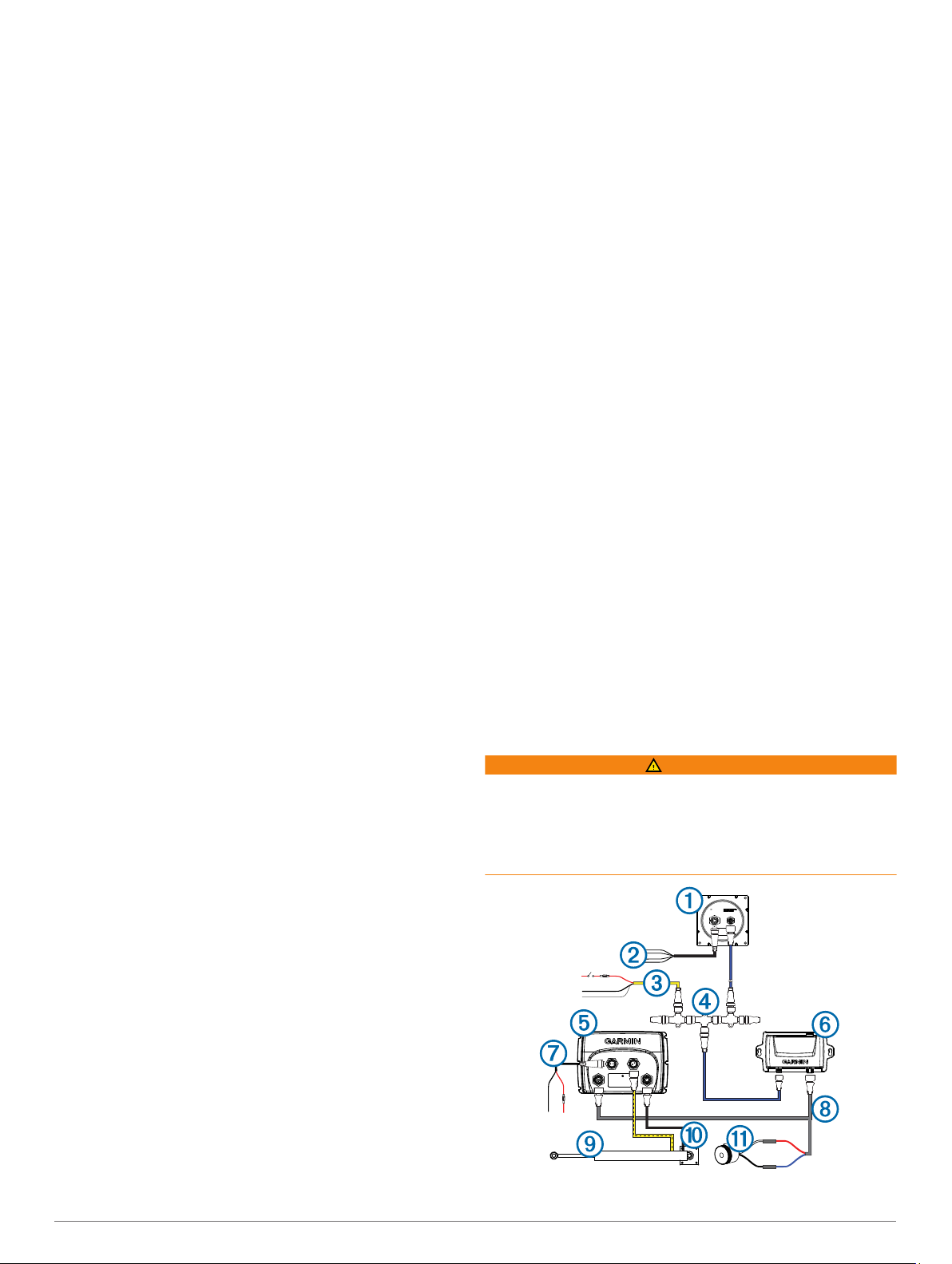
Power and Data Layout
WARNING
When connecting the power cable, do not remove the in-line
fuse holder. To prevent the possibility of injury or product
damage caused by fire or overheating, the appropriate fuse
must be in place as indicated in the product specifications. In
addition, connecting the power cable without the appropriate
fuse in place will void the product warranty.
2
Page 3
Item Description Important Considerations
Helm control
À
Helm control
Á
data cable
NMEA 2000
Â
power cable
NMEA 2000
Ã
network
ECU
Ä
CCU The CCU can be mounted in a non-submerged
Å
ECU power
Æ
cable
CCU cable To extend this cable to reach the ECU,
Ç
Drive unit This diagram shows only the electrical
È
Drive unit
É
power and
feedback
cables
Alarm The alarm provides audible alerts from the
This cable should be installed only if you are
connecting the autopilot to optional NMEA 0183
devices, such as a wind sensor, a water-speed
sensor, or a GPS device (NMEA 0183
Connection Considerations).
This cable should be installed only if you are
building a NMEA 2000 network. Do not install
this cable if there is an existing NMEA 2000
network on your boat.
The NMEA 2000 power cable must be connected
to a 9 to 16 Vdc power source.
The helm control and the CCU must be
connected to a NMEA 2000 network using the
included T-connectors (NMEA 2000 Connection
Considerations).
If there is not an existing NMEA 2000 network on
your boat, you can build one using the supplied
cables and connectors (Building a Basic NMEA
2000 Network for the Autopilot System).
location near the center of the boat, in any
orientation (CCU Mounting and Connection
Considerations).
The CCU must be located away from sources of
magnetic interference.
The ECU must be connected to a 12 to 24 Vdc
power source. To extend this cable, use the
correct wire gauge (Power Cable Extensions).
extensions (sold separately) may be necessary
(CCU Mounting and Connection Considerations).
This cable connects to the alarm.
connections for the drive unit (sold separately).
Detailed installation instructions are included with
the drive unit.
If you purchased a drive unit from Garmin, it will
come with the power and feedback cables
needed.
The drive unit power cable cannot be cut or
extended. If you are using the autopilot with a
drive unit not sold by Garmin, a drive unit power
cable (sold separately) must be used
(Connecting to an Existing Drive Unit).
If you are using the autopilot with a solenoid
drive unit, a solenoid power cable (sold
separately), must be used (Connecting to a
Solenoid Drive Unit).
If you are using the autopilot with a drive unit not
sold by Garmin or a solenoid drive unit, you must
also install a Garmin rudder feedback sensor
(recommended), or connect to an existing rudder
feedback sensor using a rudder feedback cable
(sold separately) (Drive Unit Installation).
autopilot system, and should be installed near
the helm control (Installing the Alarm).
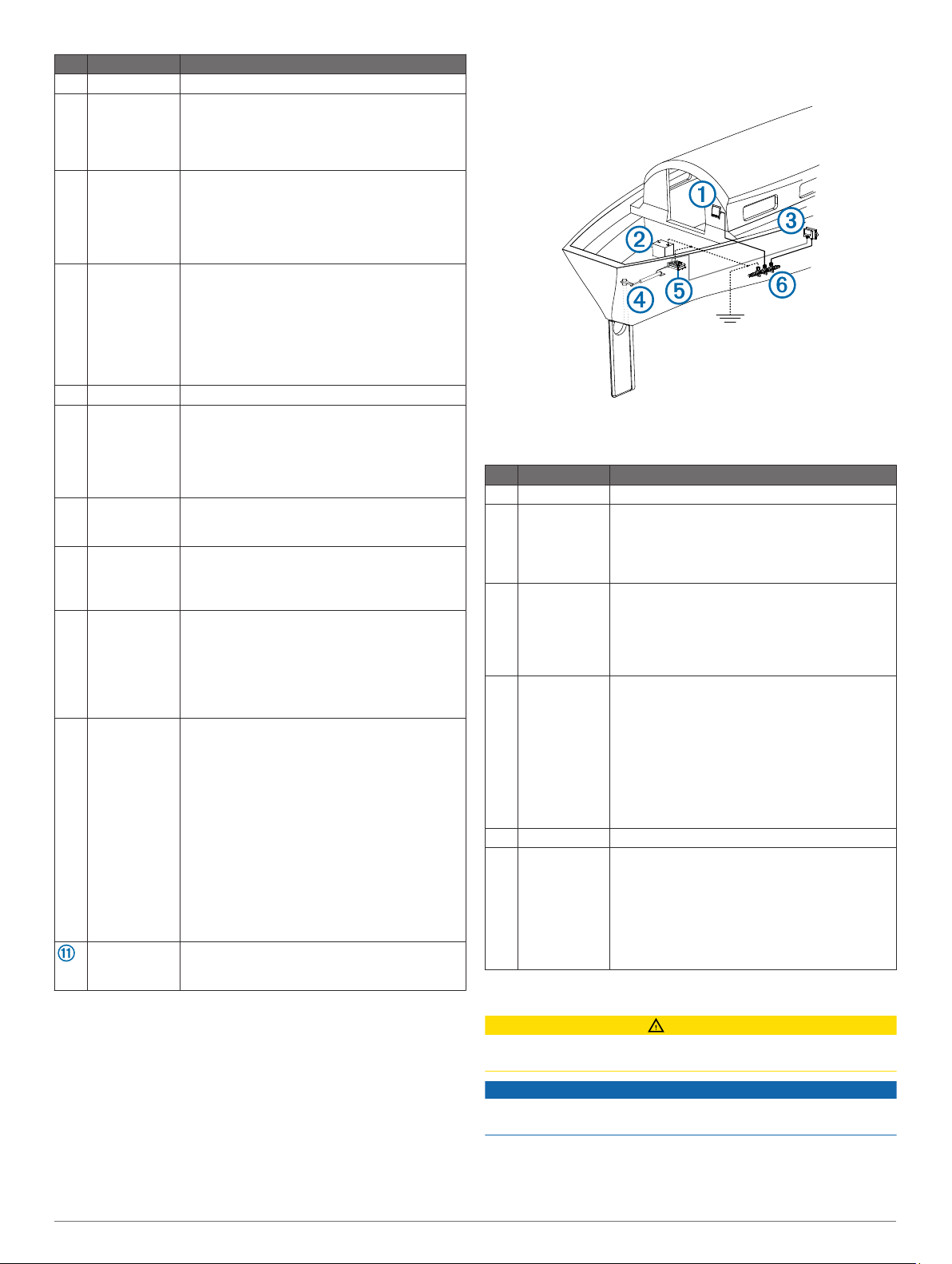
Component Layout
Single-Helm Layout
NOTE: This diagram is for planning purposes only. If needed,
specific connection diagrams are included in the detailed
installation instructions for each component.
Item Description Important Considerations
Helm control
À
12 to 24 Vdc
Á
battery
CCU The CCU can be mounted in a non-submerged
Â
Drive unit The drive unit power cable cannot be cut or
Ã
ECU
Ä
NMEA 2000
Å
network
The ECU must be connected to a 12 to 24 Vdc
power source. To extend this cable, use the
correct wire gauge (Power Cable Extensions).
The NMEA 2000 power cable must be connected
to a 9 to 16 Vdc power source.
location near the center of the boat, in any
orientation (CCU Mounting and Connection
Considerations).
The CCU must be located away from sources of
magnetic interference.
extended.
If you are using the autopilot with a drive unit not
sold by Garmin, a drive unit power cable (sold
separately) must be used (Connecting to an
Existing Drive Unit).
If you are using the autopilot with a solenoid
drive unit, a solenoid power cable (sold
separately), must be used (Connecting to a
Solenoid Drive Unit).
The helm control and the CCU must be
connected to a NMEA 2000 network using the
included T-connectors (NMEA 2000 Connection
Considerations).
If there is not an existing NMEA 2000 network on
your boat, you can build one using the supplied
cables and connectors (Building a Basic NMEA
2000 Network for the Autopilot System).
Installation Procedures
CAUTION
Always wear safety goggles, ear protection, and a dust mask
when drilling, cutting, or sanding.
NOTICE
When drilling or cutting, always check what is on the opposite
side of the surface.
After you have planned the autopilot installation on your boat
and satisfied all of the mounting and wiring considerations for
your particular installation, you can begin mounting and
connecting the components.
3
Page 4
Helm Control Installation
You must Install the helm control by flush-mounting it in the
dashboard near the helm and connecting it to a NMEA 2000
network.
To use advanced features of the autopilot, optional NMEA 2000compatible or NMEA 0183-compatible devices, such as a wind
sensor, water-speed sensor, or GPS device, can be connected
to the NMEA 2000 network or connected to the helm control
through NMEA 0183.
Mounting the Helm Control
NOTICE
If you are mounting the device in fiberglass, when drilling the
four pilot holes, it is recommended to use a countersink bit to
drill a clearance counterbore through only the top gel-coat layer.
This will help to avoid any cracking in the gel-coat layer when
the screws are tightened.
Stainless-steel screws may bind when screwed into fiberglass
and overtightened. Garmin recommends applying an anti-seize
lubricant to the screws before installing them.
Before you can mount the helm control, you must select a
mounting location (Helm Control Mounting Considerations).
Trim the flush-mount template and ensure it fits in the
1
selected mounting location.
The flush-mount template is included in the helm control
product box.
Secure the template to the selected mounting location.
2
If you plan to cut the hole with a rotary cutting tool instead of
3
a 90 mm (3.5 in.) hole saw, use a 10 mm (3/8 in.) drill bit to
drill a pilot hole as indicated on the template to begin cutting
the mounting surface.
Using the hole saw or rotary cutting tool, cut the mounting
4
surface along the inside of the dashed line indicated on the
template.
If necessary, use a file and sandpaper to refine the size of
5
the hole.
Place the helm control into the cutout to confirm that the four
6
mounting holes on the template are in the correct locations.
If the mounting holes are not correct, mark the correct
7
locations of the four mounting holes.
Remove the helm control from the cutout.
8
Drill the four 2.8 mm (7/64 in.) pilot holes.
9
If you are mounting the helm control in fiberglass, you should
use a countersink bit as advised in the notice.
Remove the remainder of the template.
10
Place the included gasket on the back of the device.
11
You can apply marine sealant around the gasket to prevent
leakage behind the dashboard (optional).
Place the helm control into the cutout.
12
Securely fasten the helm control to the mounting surface
13
using the supplied screws.
If you are mounting the helm control in fiberglass, you should
use an anti-seize lubricant as advised in the notice.
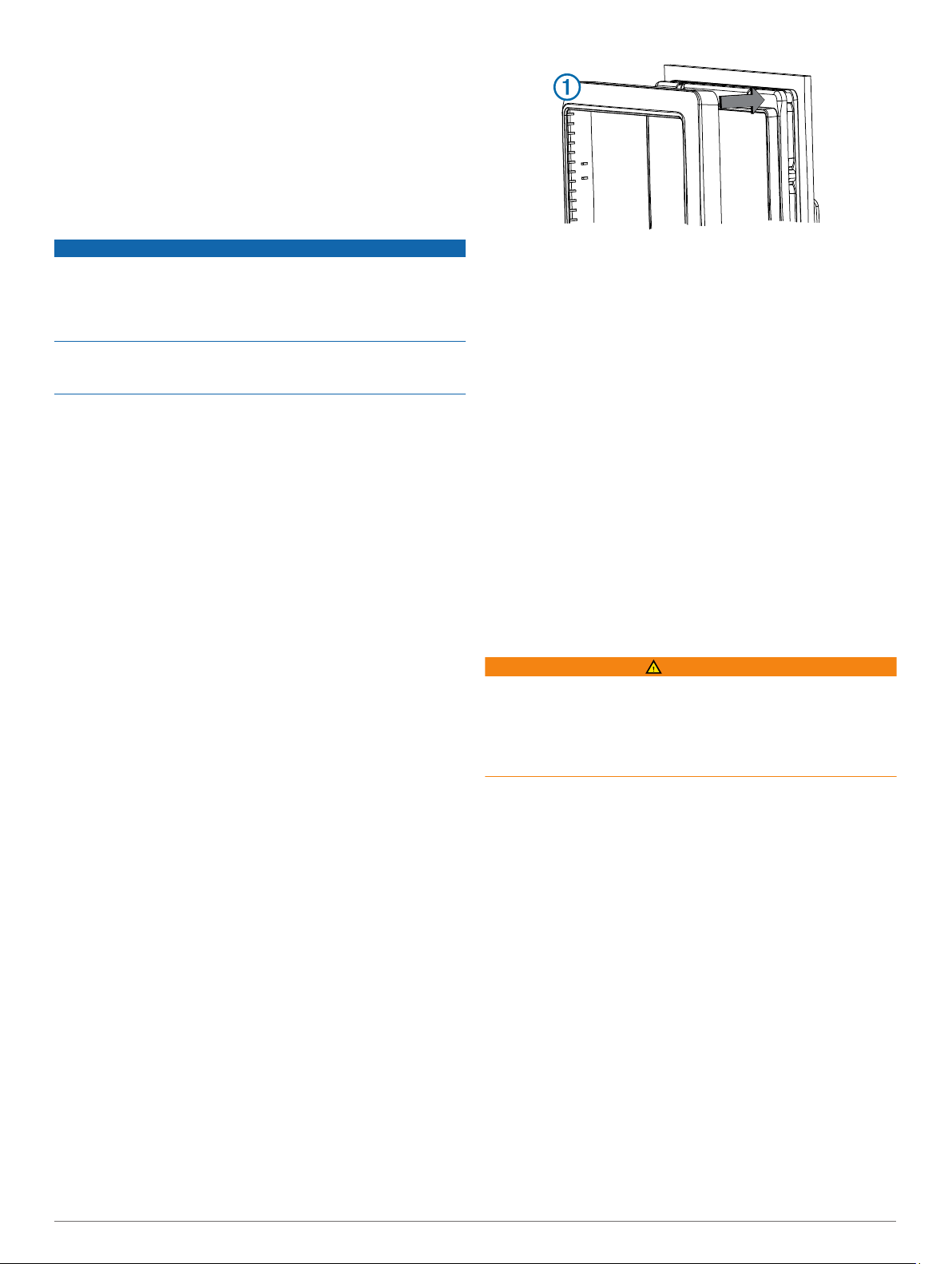
Snap the decorative bezel À into place.
14
Mounting the CCU
Determine the mounting location.
1
Using the CCU as a template, mark the two pilot hole
2
locations on the mounting surface.
Using a 3 mm (1/8 in.) bit, drill the pilot holes.
3
Use the included screws to attach the CCU to the mounting
4
surface.
ECU Installation
Mounting the ECU
Before you can mount the ECU, you must select a location and
determine the correct mounting hardware (ECU Mounting and
Connection Considerations
Hold the ECU in the intended mounting location and mark the
1
locations of the mounting holes on the mounting surface,
using the ECU as a template.
Using a drill bit appropriate for the mounting surface and
2
selected mounting hardware, drill the four holes through the
mounting surface.
Secure the ECU to the mounting surface using the selected
3
mounting hardware.
Connecting the ECU to Power
When connecting the power cable, do not remove the in-line
fuse holder. To prevent the possibility of injury or product
damage caused by fire or overheating, the appropriate fuse
must be in place as indicated in the product specifications. In
addition, connecting the power cable without the appropriate
fuse in place will void the product warranty.
You should connect the ECU power cable directly to the boat
battery, if possible. Although it is not recommended, if you
connect the power cable to a terminal block or other source, you
must connect it through a 40 A fuse.
If you plan to route the ECU power through a breaker or a switch
near the helm, you should consider using an appropriately sized
relay and control wire instead of extending the ECU power
cable.
Route the connector-terminated end of the ECU power cable
1
to the ECU, but do not connect it to the ECU.
Route the bare-wire end of the ECU power cable to the boat
2
battery.
If the wire is not long enough, it can be extended (Power
Cable Extensions).
Connect the black wire (-) to the negative (-) terminal of the
3
battery, and connect the red wire (+) to the positive (+)
terminal of the battery.
After you install all of the other autopilot components,
4
connect the power cable to the ECU.
Power Cable Extensions
If necessary, the power cable can be extended using the
appropriate wire gauge for the length of the extension.
).
WARNING
4
Page 5
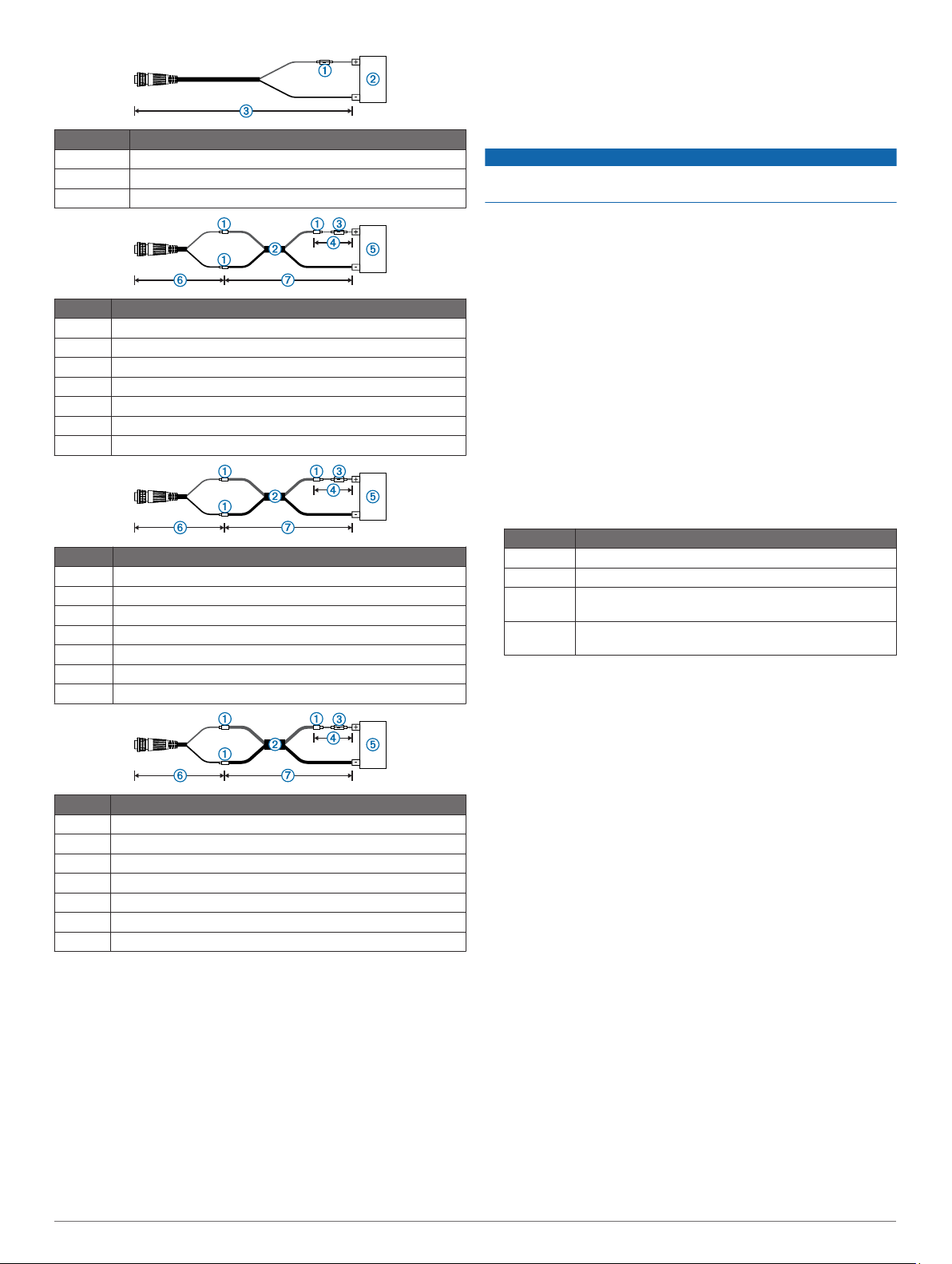
Item Description
À
Á
Â
Item Description
À
Á
Â
Ã
Ä
Å
Æ
Item Description
À
Á
Â
Ã
Ä
Å
Æ
Item Description
À
Á
Â
Ã
Ä
Å
Æ
Fuse
Battery
9 ft. (2.7 m) no extension
Splice
10 AWG (5.26 mm²) extension wire
Fuse
8 in. (20.3 cm)
Battery
8 in. (20.3 cm)
Up to 15 ft. (4.6 m)
Splice
8 AWG (8.36 mm²) extension wire
Fuse
8 in. (20.3 cm)
Battery
8 in. (20.3 cm)
Up to 23 ft. (7 m)
Splice
6 AWG ( 13.29 mm²) extension wire
Fuse
8 in. (20.3 cm)
Battery
8 in. (20.3 cm)
Up to 36 ft. (11 m)
Drive Unit Installation
The drive unit (sold separately) must be connected to your
rudder control so the GHP Reactor Mechanical autopilot can
steer your boat. When you purchase a drive unit sold by Garmin,
it will include the correct cables, connectors, and instructions.
If a drive unit is installed on your boat already, you can use a
drive unit power cable (sold separately) to adapt your drive unit
for use with the autopilot system.
If you connect the autopilot system to a drive unit not sold by
Garmin, you must also provide rudder-feedback information by
installing and connecting a Garmin rudder-feedback sensor
(recommended) or by connecting to an existing rudder-feedback
sensor on your boat using a rudder feedback cable (sold
separately).
Installing a Garmin Drive Unit
Follow the installation instructions provided with your Garmin
drive unit to mount it and connect it to your rudder control and
autopilot system.
Corrosion Blocker
NOTICE
To ensure long life of all parts, apply corrosion blocker to the
drive unit at least twice yearly.
A marine-rated corrosion blocker should be applied to the drive
unit after all connections are made.
Connecting to an Existing Drive Unit
You must install a drive unit power cable to use a drive unit not
sold by Garmin with the GHP Reactor Mechanical autopilot. This
cable is sold separately.
These instructions do not apply to a solenoid-type drive unit
(Connecting to a Solenoid Drive Unit).
If necessary, use the installation instructions provided with
1
the drive unit to install it on your boat.
If your drive unit has cables connected, disconnect the
2
cables.
Consult the documentation provided by the manufacturer of
3
your drive unit to identify the connections on your drive unit.
Connect the drive unit power cable (not included) to your
4
drive unit, based on the wire colors and functions in the table.
The drive unit power cable cannot be extended.
Wire Color Function
Red Drive unit positive (+)
Black Drive unit negative (-)
Blue Clutch power (cut and tape this wire if your drive unit
White Clutch ground (cut and tape this wire if your drive unit
Connect the drive unit power cable to the ECU.
5
has no clutch)
has no clutch)
Connecting to a Solenoid Drive Unit
You must install the solenoid power cable to use a solenoid
drive unit with the GHP Reactor Mechanical autopilot system.
This cable is sold separately.
These instructions apply only to solenoid-type drive units.
If necessary, use the installation instructions provided with
1
the solenoid drive unit to install it on your boat.
If your solenoid drive unit has cables connected, disconnect
2
the cables.
Consult the documentation provided by the manufacturer of
3
your solenoid drive unit to identify the connections on your
drive unit.
Connect the solenoid power cable (not included) to your
4
solenoid drive unit, based on the diagram and tables.
The solenoid power cable is 0.8 m (2.6 ft.) long, and cannot
be extended.
5
Page 6

+ ‐ + ‐ + ‐
Item Description Notes
Solenoid power cable Sold separately.
Ê
Starboard solenoid
Ë
Port solenoid
Ì
Bypass solenoid May not be present in all systems.
Í
Auxiliary steering system May not be present in all systems.
Î
Wire Color Description
Red Connect to starboard solenoid positive (+).
À
White/red Connect to starboard common (-).
Á
Black Connect to port solenoid positive (+).
Â
White/black Connect to port common (-).
Ã
Blue Connect to bypass solenoid positive (+).
Ä
White/blue Connect to bypass solenoid common (-).
Å
N/A Auxiliary steering starboard positive (+) (if
Æ
N/A Auxiliary steering port positive (+) (if present).
Ç
N/A Auxiliary steering bypass positive (+) (if present).
È
N/A Auxiliary steering common (-) (if present).
É
Connect the solenoid power cable to the ECU.
5
Cut and tape this wire if no bypass solenoid is
present.
Cut and tape this wire if no bypass solenoid is
present.
present).
Installing a Garmin Rudder Feedback Sensor
If you installed a drive unit provided by Garmin, rudder feedback
data is provided by the drive unit, and a separate rudder
feedback sensor is not required. If you are connecting the
autopilot to a drive unit not sold by Garmin, you must also install
a rudder feedback sensor, such as the GRF 10 (sold
separately).
Follow the installation instructions provided with your GRF
rudder feedback sensor to connect it to your rudder control
and autopilot system.
Connecting to an Existing Rudder Feedback Sensor
If you connected the autopilot to a drive unit not sold by Garmin,
and you plan to connect to a rudder feedback sensor not sold by
Garmin, you must use a rudder feedback cable to connect your
sensor to the GHP Reactor Mechanical autopilot. This cable is
sold separately.
NOTE: The GHP Reactor Mechanical autopilot is compatible
with a typical three-terminal, potentiometer-type rudder feedback
sensor only. The system does not work with a frequency-based
rudder feedback sensor.
If necessary, use the installation instructions provided with
1
the rudder feedback sensor to install it on your boat.
If your rudder feedback sensor has cables connected,
2
disconnect the cables.
6
Consult the documentation provided by the manufacturer of
3
your rudder feedback sensor to identify the connections on
your rudder feedback sensor.
Connect the rudder feedback cable (not included) to your
4
drive unit, based on the wire colors and functions in the table.
If necessary, the cable can be extended using 22 AWG
(0.33 mm2) wire.
Wire Color Function
Red Rudder feedback positive (+)
Black Rudder feedback negative (-)
Yellow Rudder feedback wiper
Connect the rudder feedback cable to the ECU.
5
Connecting the CCU
Route the connector end of the CCU cable to the ECU and
1
make the connection.
Route the red and blue wires from the bare-wire portion of
2
the CCU cable to the location where you plan to install the
alarm (Installing the Alarm).
If the cable is not long enough, extend the appropriate wires
with 0.08 mm2 (28 AWG) wire.
Route the brown and black wires from the bare-wire portion
3
of the CCU cable to the location where you plan to install the
Shadow Drive™ () (optional).
If the cable is not long enough, extend the appropriate wires
with 0.08 mm2 (28 AWG) wire.
If you do not plan to install the Shadow Drive, cut and tape
the brown and black wires.
Installing the Alarm
Before you can mount the alarm, you must select a mounting
location (Alarm Mounting and Connection Considerations).
Route the alarm cable to the bare-wire end of the CCU cable.
1
If the cable is not long enough, extend the appropriate wires
with 28 AWG (0.08 mm2) wire.
Connect the cables, based on this table.
2
Alarm Wire Color CCU Cable Wire Color
White (+) Red (+)
Black (-) Blue (-)
Solder and cover all bare-wire connections.
3
Secure the alarm with cable ties or other appropriate
4
mounting hardware (not included).
NMEA 2000 and the Autopilot Components
NOTICE
If you have an existing NMEA 2000 network on your boat, it
should already be connected to power. Do not connect the
NMEA 2000 power cable to an existing NMEA 2000 network,
because only one power source should be connected to a
NMEA 2000 network.
You can connect the helm control and the CCU through an
existing NMEA 2000 network. If you do not have an existing
NMEA 2000 network on your boat, all the parts needed to build
one are supplied in the autopilot package (Building a Basic
NMEA 2000 Network for the Autopilot System).
To use advanced features of the autopilot, optional NMEA 2000
devices, such as a GPS device, can be connected to the NMEA
2000 network.
If you are unfamiliar with NMEA 2000, you should read the
“NMEA 2000 Network Fundamentals” chapter of the Technical
Reference for NMEA 2000 Products. To download this
document, select Manuals on the product page for your device
at www.garmin.com.
Page 7

Building a Basic NMEA 2000 Network for the Autopilot System
NOTICE
If you are installing a NMEA 2000 power cable, you must
connect it to the boat ignition switch or through another in-line
switch. NMEA 2000 devices will drain your battery if the NMEA
2000 power cable is connected to the battery directly.
Connect the three T-connectors À together side-by-side.
1
Connect the included NMEA 2000 power cable Á to a 9 to
2
12 Vdc power source  through a switch Ã.
Connect the power cable to the ignition switch of the boat if
possible, or route it through an inline switch (not included).
NOTE: The braided drain wire (bare) on the NMEA 2000
power cable must be connected to the same ground as the
black wire on the NMEA 2000 power cable.
Connect the NMEA 2000 power cable to one of the T-
3
connectors.
Connect one of the included NMEA 2000 drop cables Ä to
4
one of the T-connectors and to the helm control Å.
Connect the other included NMEA 2000 drop cable to the
5
other T-connector and to the CCU Æ.
Connect the male and female terminators Ç to each end of
6
the combined T-connectors.
Connecting the Autopilot Components to an Existing NMEA 2000 Network
Determine where to connect the helm control À and the CCU
1
to your existing NMEA 2000 backbone Â.
Á
If necessary, connect a NMEA 2000 backbone extension
3
cable (not included) to the side of the disconnected Tconnector to extend the NMEA 2000 network backbone.
Add an included T‑connector for the helm control to the
4
NMEA 2000 backbone by connecting it to the side of the
disconnected T‑connector or backbone extension cable.
Route the included drop cable Ä to the helm control and to
5
the bottom of the T-connector added in step 4.
If the included drop cable is not long enough, you can use a
drop cable up to 6 m (20 ft.) long (not included).
Connect the drop cable to the helm control and the T-
6
connector.
Repeat steps 2 through 6 for the CCU.
7
Connecting Optional Devices to the Autopilot System
You can use advanced features of the autopilot system by
connecting optional NMEA 2000-compatible devices, such as a
wind sensor, a water-speed sensor, or a GPS device to the
NMEA 2000 network.
You can connect optional devices that are not NMEA 2000
compatible to the helm control through NMEA 0183 (NMEA
0183 Connection Considerations).
Add an additional T-connector (not included) to the NMEA
1
2000 network.
Connect the device to the T-connector by following the
2
instructions provided with the device.
Configuring the Autopilot
The autopilot must be configured and tuned to your boat
dynamics. The Dockside Wizard and the Sea Trial Wizard on
the helm control are used to configure the autopilot. These
wizards walk you through the necessary configuration steps.
The Dockside Wizard
NOTICE
If you perform the Dockside Wizardwhile your boat is out of the
water, provide rudder-movement clearance to avoid damage to
the rudder or other objects.
You can complete the Dockside Wizard while the boat is in or
out of the water.
If the boat is in the water, it must be stationary while you
complete the wizard.
Performing the Dockside Wizard
NOTICE
If you have a boat with a power assist steering system, turn on
the power assist before performing the Dockside Wizard to
avoid damaging the steering system.
In the location where you want to connect the helm control,
2
disconnect one side of a NMEA 2000 T-connector à from the
network.
Turn on the autopilot.
1
The first time you turn on the autopilot, you are prompted to
complete a short setup sequence.
If the Dockside Wizard does not start automatically after the
2
setup sequence, select Menu > Setup > Dealer Autopilot
Configuration > Wizards > Dockside Wizard.
Select the vessel type.
3
Select the drive unit class (Selecting the Drive Unit Class).
4
If you have a drive unit not sold by Garmin, select the drive-
5
unit voltage and the drive-unit-clutch voltage (Selecting the
Drive-Unit Voltage and Drive-Unit-Clutch Voltage).
If you have a solenoid drive unit, select the solenoid voltage
6
and the solenoid bypass-valve voltage (Selecting the
Solenoid Voltage and Solenoid Bypass-Valve Voltage).
If necessary, enable the Shadow Drive (Enabling the Shadow
7
Drive).
7
Page 8

Calibrate the rudder sensor (Calibrating the Rudder).
8
If you have a drive unit not sold by Garmin, tune the drive unit
9
(Tuning an Existing Drive Unit). Test the steering direction (Testing the Steering Direction).
10
If necessary, select the speed source (Selecting the Speed
11
Source).
If necessary, verify the tachometer (Verifying the
12
Tachometer).
Review the results of the Dockside Wizard (Reviewing the
13
Results of the Dockside Wizard).
Selecting the Drive Unit Class
On the helm control, select an option:
• If you installed a Garmin Class A drive unit, select Class
A.
• If you installed a Garmin Class B drive unit, select Class
B.
• If you connected the autopilot to an existing solenoid drive
unit, select Solenoid.
• If you connected the autopilot to an existing drive unit not
sold by Garmin, select Other.
Selecting the Drive-Unit Voltage and Drive-Unit-Clutch Voltage
NOTICE
Providing an incorrect drive-unit-voltage value or drive-unitclutch-voltage value for your drive unit can damage your drive
unit.
These settings apply only to drive units not sold by Garmin.
Consult the manufacturer of your drive unit to determine the
1
drive-unit voltage and drive-unit clutch voltage.
On the helm control, select the voltage approved for your
2
drive unit.
Select the voltage approved for your drive-unit clutch.
3
Selecting the Solenoid Voltage and Solenoid Bypass-Valve Voltage
NOTICE
Providing an incorrect solenoid-voltage value or solenoidbypass-valve-voltage value for your drive unit can damage your
drive unit.
These settings apply only to solenoid-type drive units.
Consult the manufacturer of your solenoid drive unit to
1
determine the solenoid voltage and the solenoid bypassvalve voltage.
On the helm control, select the voltage approved for your
2
solenoid drive unit.
Select the bypass-valve voltage approved for your solenoid
3
drive unit.
Calibrating the Rudder
NOTE: If an error appears during these steps, the rudder
feedback sensor may have reached its limit. If this happens, the
rudder feedback sensor may not have been installed correctly. If
the problem persists, you can continue with calibration by
moving the rudder to the farthest position that does not report an
error.
Position the rudder so that the boat would steer fully
1
starboard and select OK.
After the starboard calibration is complete, position the
2
rudder so that the boat would steer fully port, and select OK.
After the port calibration is complete, center the rudder
3
position, let go, and select Begin.
The autopilot takes control of the rudder.
Without touching the rudder or helm control, allow the
4
autopilot to calibrate the rudder.
Select an option:
5
• If the calibration did not complete successfully, repeat
steps 1 through 4.
• If the calibration completed successfully, select OK.
Enabling the Shadow Drive
If you installed the autopilot on a boat with a hydraulic steering
system, you can install a Garmin Shadow Drive valve (sold
separately).
On the helm control, select an option:
• Select No if you did not install a Shadow Drive valve.
• Select Yes if you installed a Shadow Drive valve.
Tuning an Existing Drive Unit
NOTE: This process does not apply to solenoid drive units.
If you connected the autopilot to a drive unit not sold by Garmin,
you must tune the drive unit for use with the autopilot system.
Center the rudder position and let go of the helm.
1
On the helm control, select Continue.
2
The autopilot takes control of the rudder as it tunes the drive
unit. A message appears on the helm control when the tuning
is complete.
After the tuning is complete, select an option:
3
• If the tuning completes successfully, select Done.
• If the tuning is not successful, repeat steps 1 through 3.
NOTE: If needed, you can refine the tuning later, using the
advanced settings (Performing Advanced Tuning Procedures
for an Existing Drive Unit).
Testing the Steering Direction
Test the steering direction.
1
When you select , the rudder must turn so that the boat
steers to the left, and when you select , the rudder must
turn so that the boat steers to the right.
Select Continue.
2
Select an option:
3
• If the steering test turns the boat in the correct direction,
select Yes.
• If the steering test turns the boat in the opposite direction,
select No.
If you selected No in step 3, repeat steps 1–2.
4
Selecting the Speed Source
NOTE: This procedure applies only to power planing hull and
power displacement hull vessels. It does not appear when
configuring the autopilot for a sailboat.
Select an option:
• If you connected a NMEA 2000 compatible engine (or
engines) to the NMEA 2000 network, select Tach - N2K
or Proprietary.
• If NMEA 2000 tachometer data source is not available or
unusable, select GPS as a speed source.
• If you did not connect a NMEA 2000 tachometer or GPS
device as a speed source, select None.
NOTE: If the autopilot does not perform well using None
as the speed source, Garmin recommends connecting a
tachometer through the NMEA 2000 network or using a
GPS device as the speed source.
Verifying the Tachometer
This procedure applies only to power planing hull and power
displacement hull vessels. It does not appear when configuring
the autopilot for a sailboat.
This procedure does not appear when GPS or None is selected
as the speed source.
8
Page 9

With the engine (or engines) running, compare the RPM
readings on the helm control with the tachometer (or
tachometers) on the dashboard of your boat.
If the RPM numbers do not align, there may be a problem
with the NMEA 2000 speed source or connection.
Reviewing the Results of the Dockside Wizard
The helm control displays the values you chose when you ran
the Dockside Wizard.
Examine the results of the Dockside Wizard.
1
Select any incorrect value, and select Select.
2
Correct the value.
3
Repeat steps 2–3 for all incorrect values.
4
When you are finished reviewing the values, select Done.
5
The Sea Trial Wizard
The Sea Trial Wizard configures the fundamental sensors on the
autopilot, and it is extremely important to complete the wizard in
conditions appropriate for your boat.
Important Sea Trial Wizard Considerations
The Sea Trial Wizard must be completed in calm water.
Because the nature of calm water is relative to the size and
shape of the boat, before you begin the Sea Trial Wizard, the
boat must be in an appropriate location:
• The boat must not rock while sitting still or moving very
slowly.
• The boat must not be significantly affected by the wind.
While completing the Sea Trial Wizard, observe these
considerations:
• Weight on the boat must remain balanced. While completing
any of the steps in the Sea Trial Wizard, do not move around
on the boat.
• On sailboats, the sails must be lowered.
• On sailboats, the motor must remain in a position that drives
the boat in a straight direction.
Performing the Sea Trial Wizard
Drive your boat to an open area of calm water.
1
Select Menu > Setup > Dealer Autopilot Configuration >
2
Wizards > Sea Trial Wizard.
If necessary, configure the planing RPM.
3
This step applies only to planing-hull power boats with the
speed source set to Tach - N2K or Proprietary.
If necessary, configure the planing speed.
4
This step applies only to planing-hull power boats with the
speed source set to GPS.
If necessary, configure the high RPM limit.
5
This step applies only to power boats with the speed source
set to Tach - N2K or Proprietary or GPS.
If necessary, configure the maximum speed.
6
This step applies only to power boats with the speed source
set to GPS.
Calibrate the compass (Calibrating the Compass).
7
Perform the Autotune procedure (Performing the Autotune
8
Procedure).
Set north (Setting North) if GPS-heading information is
9
available, or set the fine heading adjustment (Setting the Fine
Heading Adjustment) if GPS-heading information is not
available.
Calibrating the Compass
Select an option:
1
• If you are performing this procedure as part of the Sea
Trial Wizard, select Begin, and continue to drive in a
straight line.
• If you are performing this procedure outside of the Sea
Trial Wizard, from the heading screen, select Menu >
Setup > Dealer Autopilot Configuration > Automated
Setup > Calibrate Compass > Begin.
Follow the directions on the helm control until calibration is
2
complete, taking care to keep the boat as steady and flat as
possible.
The boat should not list during calibration.
Select an option:
3
• If the calibration completes successfully, select Done.
• If the calibration is not successful, select Retry and repeat
steps 1 through 3.
When the calibration is complete, calibration values are
displayed. You can use these values to determine the quality of
the calibration procedure.
Compass-Calibration Values
After the compass calibration process is complete, you can
review the results provided on the helm control to determine the
successfulness of the calibration.
• Indicates the level of distortion of the Earth's magnetic
field at the mounting location.
• A value of 100 indicates the device experiences no
magnetic interference at the mounting location.
• If this value is low, you might need to move the CCU and
calibrate the compass again.
• A value of 100 is ideal, but it is not necessary for the
autopilot to function correctly. If the CCU is mounted in an
optimal location on your boat, you should continue
configuring the autopilot and evaluate the performance
again later.
Spin Quality: Represents the level of the boat during the
compass-calibration process.
• A value of 100 indicates the boat remained perfectly level
during compass calibration.
• If this value is low, you might need to calibrate the
compass again.
Performing the Autotune Procedure
Before you can begin this procedure, you must have a large
stretch of open water available.
Adjust the throttle so the boat travels at a typical cruising
1
speed that provides responsive steering.
Select an option:
2
• If you are performing this procedure as part of the Sea
Trial Wizard, select Begin, and continue to drive in a
straight line.
• If you are performing this procedure outside of the Sea
Trial Wizard, from the heading screen, select Menu >
Setup > Dealer Autopilot Configuration > Automated
Setup > Autotune > Begin.
The boat performs various zigzag motions while the Autotune
is in progress.
NOTE: During the Autotune procedure, the number of zigzag
cycles remaining counts down on the helm control. You can
stop the procedure at any time, but allowing the procedure to
complete on its own gives the best results .
After the procedure is finished, follow the on-screen
3
instructions.
Select an option:
4
• If the Autotune procedure is not successful, but you have
not reached maximum cruising speed, increase the speed
and repeat steps 1 through 3 until the Autotune
procedure completes successfully.
• If the Autotune procedure is not sucessful, and you have
reached maximum cruising speed, reduce your speed to
9
Page 10

the initial Autotune speed and select Alternate Autotune
to begin an alternate procedure.
When the Autotune procedure is complete, gain values are
displayed. You can use these values to determine the quality of
the Autotune procedure.
Autotune Gain Values
After the autotune procedure is complete, you can review the
gain values provided on the helm control. You can record these
numbers for reference if you want to run the autotune procedure
at a later time or if you want to manually adjust the gain settings
(not recommended) (Adjusting the Autopilot Gain Settings).
Gain: Sets how tightly the autopilot holds the heading and how
aggressively it makes turns.
Counter Gain: Sets how aggressively the autopilot adjusts any
over-steering after making a turn.
Setting North
Before you can begin this procedure, you must have a large
stretch of open water available.
NOTE: If you followed the guidelines when mounting the CCU,
this procedure may not be necessary (CCU Mounting and
Connection Considerations).
This procedure appears if the autopilot is connected to an
optional GPS device (Connecting Optional Devices to the
Autopilot System), and the device has acquired a GPS position.
During this procedure, the autopilot uses the GPS heading
information to calibrate north on the autopilot system.
If you do not have a GPS device connected, you are prompted
to set the fine heading adjustment instead (Setting the Fine
Heading Adjustment).
Drive your boat at cruising speed in a straight line.
1
Select an option:
2
• If you are performing this procedure as part of the Sea
Trial Wizard, select Begin, and continue to drive in a
straight line.
• If you are performing this procedure outside of the Sea
Trial Wizard, from the heading screen, select Menu >
Setup > Dealer Autopilot Configuration > Automated
Setup > Set North > Begin.
Continue to drive the boat at cruising speed in a straight line
3
and follow the on-screen instructions.
Select an option:
4
• If the calibration completes successfully, select Done.
• If the calibration is not successful, repeat steps 1 through
3.
Setting the Fine Heading Adjustment
This procedure appears only if you do not have an optional GPS
device connected to the autopilot (Connecting Optional Devices
to the Autopilot System). If the autopilot is connected to a GPS
device that has acquired a GPS position, you are prompted to
set north instead (Setting North).
Using a handheld compass, identify north.
1
Select an option:
2
• If you are performing this procedure as part of the Sea
Trial Wizard, adjust the fine heading setting until it
matches north on the magnetic compass.
• If you are performing this calibration outside of the Sea
Trial Wizard, from the heading screen, select Menu >
Setup > Dealer Autopilot Configuration > Automated
Setup > Fine Heading Adjustment, and adjust the fine
heading setting until it matches north on the magnetic
compass.
After the fine heading setting matches north on the magnetic
3
compass, select Done.
Testing and Adjusting the Configuration
NOTICE
Test the autopilot at a slow speed. After the autopilot has been
tested and adjusted at a slow speed, test it at a higher speed to
simulate normal operating conditions.
Drive the boat in one direction with the autopilot engaged
1
(heading hold).
The boat may oscillate slightly, but it should not oscillate
significantly.
Turn the boat in one direction using the autopilot and observe
2
the behavior.
The boat should turn smoothly, not too quickly or too slowly.
When you turn the boat using the autopilot, the boat should
approach and settle on the desired heading with minimal
overshoot and oscillation.
Select an option:
3
• If the boat turns too quickly or too sluggishly, adjust the
autopilot acceleration limiter (Adjusting the Acceleration
Limiter Settings).
• If the heading hold oscillates significantly or the boat does
not correct when turning, adjust the autopilot gain
(Adjusting the Autopilot Gain Settings).
• If the boat turns smoothly, the heading hold oscillates only
slightly or not at all, and the boat adjusts the heading
correctly, the configuration is correct, and no further
adjustments are necessary.
Adjusting the Acceleration Limiter Settings
Enable Dealer Mode (Enabling Dealer Configuration).
1
Select Menu > Setup > Dealer Autopilot Configuration >
2
Autopilot Tuning > Acceleration Limiter.
Select an option:
3
• Increase the setting if the autopilot turns too quickly.
• Decrease the setting if the autopilot turns too slowly.
When you manually adjust the acceleration limiter, make
relatively small adjustments. Test the change before making
additional adjustments.
Test the autopilot configuration.
4
Repeat steps 3–4 until the autopilot performance is
5
satisfactory.
Adjusting the Autopilot Gain Settings
Enable Dealer Mode (Enabling Dealer Configuration).
1
Select Menu > Setup > Dealer Autopilot Configuration >
2
Autopilot Tuning > Rudder Gains.
Select an option based on the type of boat:
3
• If you have a sailboat, a displacement-hull powerboat, or a
powerboat with the speed source set to None, select Gain
and adjust how tightly the rudder holds the heading and
makes turns.
If you set this value too high, the autopilot may be
overactive and attempt to constantly adjust the heading at
the slightest deviation. An overactive autopilot can drain
the battery at a faster-than-normal rate.
• If you have a sailboat, a displacement-hull powerboat, or a
powerboat with the speed source set to None, select
Counter Gain and adjust how tightly the rudder corrects
the turn overshoot.
If you set this value too low, the autopilot can overshoot
the turn again when it attempts to counter the original turn.
• If you have a planing-hull powerboat with the speed
source set to Tach - N2K or Proprietary or GPS, select
Low Speed or High Speed and adjust how tightly the
rudder holds the heading and makes turns at low speed or
high speed.
10
Page 11

If you set this value too high, the autopilot may be
overactive and attempt to constantly adjust the heading at
the slightest deviation. An overactive autopilot can drain
the battery at a faster-than-normal rate.
• If you have a planing-hull powerboat with the speed
source set to Tach - N2K or Proprietary or GPS, select
Low Speed Counter or High Speed Counter to adjust
how tightly the rudder corrects the turn overshoot.
If you set this value too low, the autopilot can overshoot
the turn again when it attempts to counter the original turn.
Test the autopilot configuration, and repeat steps 2 and 3
4
until the autopilot performance is satisfactory.
Advanced Configuration
Advanced configuration options are not available on the helm
control under normal conditions. To access the advanced
configuration settings of the autopilot, you must first enable
Dealer Mode (Enabling Dealer Configuration).
Enabling Dealer Configuration
From the heading screen, select Menu > Setup > System >
1
System Information.
Hold the center key for 5 seconds.
2
Dealer Mode appears.
Select Back > Back.
3
If the option for Dealer Autopilot Configuration is available on the
Setup screen, the procedure was successful.
Advanced Configuration Settings
You can run the autotune process, calibrate the compass, and
define north on the autopilot without running the wizards. You
can also define each setting individually, without running the
configuration processes.
Running the Automated Configuration Processes Manually
Enable Dealer Mode (Enabling Dealer Configuration).
1
From the heading screen, select Menu > Setup > Dealer
2
Autopilot Configuration > Automated Setup.
Select Calibrate Compass, Set North, or Autotune.
3
Follow the on-screen instructions.
4
Defining Individual Configuration Settings Manually
Configuring certain configuration settings may require you to
modify other settings. Review the "Detailed Configuration
Settings" section (Detailed Configuration Settings) prior to
modifying any settings.
Enable Dealer Mode (Enabling Dealer Configuration).
1
From the heading screen, select Menu > Setup > Dealer
2
Autopilot Configuration.
Select a setting category.
3
Select a setting to configure.
4
Descriptions of each setting are available in the appendix
(Detailed Configuration Settings).
Configure the value of the setting.
5
Manually Adjusting the Settings for an Existing Unit
NOTICE
Providing an incorrect Drive Unit Voltage, Clutch Voltage, or
Drive Unit Max Current value for your existing drive unit can
damage your drive unit.
Select an option:
4
• Select Generic Tune to re-run the tuning procedure you
completed during the Dockside Wizard (Tuning an
Existing Drive Unit).
• Select Drive Unit Voltage to adjust the drive-unit voltage
according to the specifications provided by your drive-unit
manufacturer.
• Select Clutch Voltage to adjust the clutch voltage
according to the specifications provided by your drive-unit
manufacturer.
• Select Drive Unit Max Current to set the drive-unit-rated
current value according to the specifications provided by
your drive-unit manufacturer.
• Select Advanced Tuning to perform high-level drive unit
adjustments (Performing Advanced Tuning Procedures for
an Existing Drive Unit).
• Select Restore Defaults to reset the existing-drive-unit
settings to the default values.
After you reset the drive-unit settings to the default values,
you must perform the Generic Tune procedure (Tuning
an Existing Drive Unit).
If you adjust any of these values or run any of these tuning
procedures, you must perform the autotune procedure again.
Performing Advanced Tuning Procedures for an Existing Drive Unit
NOTICE
You should perform these procedures only if you completely
understand the concepts of drive-unit speed and error tolerance
as defined below. Incorrectly setting these values can damage
your drive unit, drain your battery at a faster-than-normal rate, or
result in poor autopilot performance.
For almost every installation of a drive unit not sold by Garmin,
the generic tuning procedure performed during the Dockside
Wizard is sufficient to calibrate the drive unit for use with the
autopilot system. Use these advanced-tuning procedures only
when you need to make slight adjustments to the performance
of the drive unit.
Tuning the Speed on an Existing Drive Unit
This setting does not apply to solenoid drive units.
The speed of the drive unit determines how quickly it reacts to
commands from the autopilot.
If you set the speed value too low, the drive unit appears slow
and takes a long time to respond to commands from the
autopilot.
If you set the speed value too high, the drive unit reacts too
quickly and can force the rudder to the stops at a high rate of
speed. This could damage the drive unit or rudder stops and
drain your battery at a faster-than-normal speed.
From the heading screen, select Menu > Setup > Dealer
1
Autopilot Configuration > Steering System Setup > Drive
Unit Class > Other > Advanced Tuning > Tune Speed.
Center the rudder position, let go of the rudder control, and
2
select Begin.
A graph appears. The red line À represents the intended
position of the rudder. The blue line Á represents the actual
position of the rudder.
Enable dealer configuration (Enabling Dealer Configuration).
1
From the Heading screen, select Menu > Setup > Dealer
2
Autopilot Configuration > Steering System Setup > Drive
Unit Class.
Select Other or Solenoid, according to the setting chosen in
3
the Dockside Wizard.
11
Page 12

Select Tune, and observe the graph.
3
• The intended rudder position (indicated by the red line)
moves from +5° to -5° each time you select Tune, and the
drive unit steers the rudder accordingly (indicated by the
blue line).
• If the drive-unit-speed value is set too low, it responds
slowly. After you select Tune, the blue line draws a large
slope  to the red line.
• If the drive-unit-speed value is set too high, it reacts
immediately and might force the rudder to the stops
quickly. After you select Tune, the blue line draws a hard
straight line that hits the red line without a slope Ã.
harder and may drain your battery at a faster-than-normal
speed.
If you set the error tolerance too high, the drive unit will not react
until your course is off a significant distance. This causes a less
reliable heading hold, and can result in unnecessarily large
course corrections.
From the heading screen, select Menu > Setup > Dealer
1
Autopilot Configuration > Steering System Setup > Drive
Unit Class.
Select Other or Solenoid, according to your selection in the
2
Dockside Wizard.
Select Advanced Tuning > Tune Error Tolerance.
3
Center the rudder position, let go of the rudder control, and
4
select Begin.
Select Tune.
5
The rudder position moves from +5° to -5° each time you
select Tune, and the drive unit steers the rudder accordingly.
After the drive unit stops, observe the Rudder Error and
6
Power Usage fields for 30 seconds.
• If the Power Usage field fluctuates, then your error
tolerance is set too low.
• If the Power Usage field stays at 0%, but the Rudder Error
field shows and unacceptable degree of error (1% or
more), then your error tolerance is set too high.
• An ideal error-tolerance configuration holds the rudder at
an acceptable degree of error (.5% or so) without
unnecessarily adjusting the drive unit and wasting power
(0% for 30 seconds or more).
If necessary, select Adjust and select an option:
7
• If the drive-unit error-tolerance is set too low, increase the
value and repeat steps 3 through 6.
• If the drive-unit error-tolerance is set too high, decrease
the value and repeat steps 3 through 6.
After the drive-unit error-tolerance is tuned correctly, select
8
Back.
• If the drive unit speed is configured correctly, it reacts
quickly and eases into the stop. After you select Tune, the
blue line draws a straight line with a small slope Ä as it
approaches the red line.
If necessary, select Adjust.
4
Select an option:
5
• If the drive-unit-speed value is set too low, increase the
value and repeat step 3.
• If the drive-unit-speed value is set too high, decrease the
value and repeat step 3.
After the drive-unit speed is tuned correctly, select Done.
6
Tuning the Error Tolerance on an Existing Drive Unit
The error tolerance of the drive unit determines how much error
the autopilot allows before adjusting the drive unit.
If you set the error tolerance too low, the drive unit will react to
the slightest course deviation. This causes the drive to work
Appendix
NMEA 0183 Connection Diagrams
These wiring diagrams are examples of different situations you
may encounter when connecting your NMEA 0183 device to the
helm control.
NMEA 0183 Connection Considerations
• The installation instructions provided with your NMEA 0183
compatible device should contain the information you need to
identify the transmitting (Tx) and receiving (Rx) A (+) and B
(-) wires.
• When connecting NMEA 0183 devices with two transmitting
and two receiving wires, it is not necessary for the NMEA
2000 bus and the NMEA 0183 device to connect to a
common ground.
• When connecting a NMEA 0183 device with only one
transmitting (Tx) wire or with only one receiving (Rx) wire, the
NMEA 2000 bus and the NMEA 0183 device must be
connected to a common ground.
12
Page 13

Two-Way NMEA 0183 Communication
NMEA 2000 network (provides power to the helm control)
À
12 Vdc power source
Á
Helm control
Â
NMEA 0183-compatible device
Ã
Wire Helm Control Wire Color —
Function
N/A Power
Ê
N/A NMEA 0183 ground
Ë
Blue — Tx/A (+) Rx/A (+)
Ì
White — Tx/B (-) Rx/B (-)
Í
Brown — Rx/A (+) Tx/A (+)
Î
Green — Rx/B (-) Tx/B (-)
Ï
NMEA 0183-Compatible
Device Wire Function
NOTE: When connecting a NMEA 0183 device with two
transmitting and two receiving lines, it is not necessary for the
NMEA 2000 bus and the NMEA 0183 device to connect to a
common ground.
Only One Receiving Wire
If your NMEA 0183-compatible device has only one receiving
wire (Rx), it must be connected to the blue wire (Tx/A) from the
helm control, and the white wire (Tx/B) from the helm control
must remain unconnected.
NMEA 2000network (provides power to the helm control)
À
12 Vdc power source
Á
Helm control
Â
NMEA 0183-compatible device
Ã
Wire Helm Control Wire Color —
Function
N/A Power
Ê
N/A NMEA 0183 ground
Ë
Blue — Tx/A (+) Rx
Ì
White — unconnected N/A
Í
Brown — Rx/A (+) Tx/A (+)
Î
Green — Rx/B (-) Tx/B (-)
Ï
NMEA 0183-Compatible
Device Wire Function
NOTE: When connecting a NMEA 0183 device with only one
receiving (Rx) line, the NMEA 2000 bus and the NMEA 0183
device must be connected to a common ground.
Only One Transmitting Wire
If your NMEA 0183-compatible device has only one transmitting
wire (Tx), it must be connected to the brown wire (Rx/A) from the
helm control, and the green wire (Rx/B) from the helm control
must be connected to NMEA 0183 ground.
NMEA 2000 network (provides power to the helm control)
À
12 Vdc power source
Á
Helm control
Â
NMEA 0183-compatible device
Ã
Wire Helm Control Wire Color —
Function
N/A Power
Ê
Green — Rx/B (-) (connect to
Ë
NMEA 0183 ground)
Blue — Tx/A (+) Rx/A (+)
Ì
White — Tx/B (-) Rx/B (-)
Í
Brown — Rx/A (+) Tx/A (+)
Î
NMEA 0183-Compatible
Device Wire Function
NMEA 0183 ground
NOTE: When connecting a NMEA 0183 device with only one
transmitting (Tx) line, the NMEA 2000 bus and the NMEA 0183
device must be connected to a common ground.
Specifications
CCU
Specification Measurement
Dimensions (L × W × H) 170 × 90 × 50 mm (6.7 × 3.5 × 2 in.)
Weight 200 g (7 oz.)
Temperature range From -15° to 70°C (from 5° to 158°F)
Material Fully gasketed, high-impact plastic
Water resistance IEC 60529 IPX7*
CCU cable length 5 m (16 ft.)
NMEA 2000 input voltage 9 to 16 Vdc
NMEA 2000 LEN 4 (200 mA)
*The device withstands incidental exposure to water of up to 1 m for up
to 30 min. For more information, go to www.garmin.com/waterrating.
ECU
Specification Measurement
Dimensions (W × H × D) 168 × 117 × 51 mm (6.6 × 4.6 × 2 in.)
Weight 680 g (24 oz.)
Temperature range From -15° to 60°C (from 5° to 140°F)
Material Fully gasketed, high-impact aluminum
Water resistance IEC 60529 IPX7*
Power cable length 2.7 m (9 ft.)
Input voltage From 11.5 to 30 Vdc
Fuse 40 A, blade-type
Main power usage 1 A (not including the drive unit)
*The device withstands incidental exposure to water of up to 1 m for up
to 30 min. For more information, go to www.garmin.com/waterrating.
alloy
13
Page 14

Helm Control
Specification Measurement
Dimensions without sun cover (H
× W × D)
Dimensions with sun cover (H ×
W × D)
Weight without sun cover 247 g (8.71 oz.)
Weight with sun cover 283 g (9.98 oz.)
Temperature range From -15° to 70°C (from 5° to 158°F)
Compass-safe distance 209 mm (8.25 in.)
Material Case: fully-gasketed polycarbonate
Water resistance IEC 60529 IPX7*
Power usage 2.5 W max
Unit max. voltage 32 Vdc
NMEA 2000 input voltage 9 to 16 Vdc
NMEA 2000 (LEN) 6 (300 mA at 9 Vdc)
*The device withstands incidental exposure to water of up to 1 m for up
to 30 min. For more information, go to www.garmin.com/waterrating.
110 x 115 x 30 mm (4.33 x 4.53 x
1.18 in.)
115 x 120 x 35.5 mm (4.53 x 4.72 x
1.40 in.)
Lens: glass with an anti-glare
treatment
Alarm
Specification Measurement
Dimensions (L×diameter)29/32 × 1 in. (23 × 25 mm)
Weight 2.4 oz. (68 g)
Temperature range From 5°F to 140°F (from -15°C to 60°C)
Cable length 10 ft. (3.0 m)
NMEA 2000 PGN Information
CCU
Type PGN Description
Transmit and
receive
Transmit only 127245 Rudder data
Transmit only 127250 Vessel heading
Receive only 127245 Rudder data
Receive only 127258 Magnetic variation
Helm Control
Type PGN Description
Transmit and
receive
059392 ISO acknowledgment
059904 ISO request
060928 ISO address claim
126208 NMEA: Command/Request/Acknowledge
group function
126464 Transmit/Receive PGN list group function
126996 Product information
127257 Transmit/Receive attitude data
127251 Transmit/Receive rate of turn
127488 Engine parameters: Rapid update
128259 Water speed
129025 Position: Rapid update
129026 COG & SOG: Rapid update
129283 Cross track error
129284 Navigation data
130306 Wind data
059392 ISO Acknowledgment
059904 ISO Request
060928 ISO Address Claim
126208 NMEA - Command/Request/Acknowledge
Group Function
Type PGN Description
126464 Transmit/Receive PGN List Group Function
126996 Product Information
Transmit only 128259 Water Speed
129025 Position - Rapid Update
129026 COG & SOG - Rapid Update
129283 Cross Track Error
129284 Navigation Data
129540 GNSS Satellites in View
130306 Wind Data
Receive only 127245 Rudder Data
127250 Vessel Heading
127488 Engine Parameters - Rapid Update
128259 Water Speed
129025 Position - Rapid Update
129029 GNSS Position Data
129283 Cross-Track Error
129284 Navigation Data
129285 Navigation - Route/WP information
130306 Wind Data
130576 Small Craft Status
NMEA 0183 Information
When connected to optional NMEA 0183-compatible devices,
the autopilot uses the following NMEA 0183 sentences.
Type Sentence
Transmit hdg
Receive wpl
gga
grme
gsa
gsv
rmc
bod
bwc
dtm
gll
rmb
vhw
mwv
xte
Error and Warning Messages
Error Message Cause Autopilot Action
ECU Voltage is Low The pump supply voltage
Autopilot is not
receiving navigation
data. Autopilot
placed in Heading
Hold.
Connection with
Autopilot Lost
has fallen below 10 Vdc
for longer than 6 seconds.
The autopilot is no longer
receiving valid navigation
data while performing a
Route To maneuver.
This message also
appears if navigation is
stopped on a chartplotter
before the autopilot is
disengaged.
The helm control has lost
connection with the CCU.
• Alarm sounds for
5 seconds
• Continues in
normal operation
• Alarm sounds for
5 seconds
• Autopilot
transitions to
heading hold
N/A
14
Page 15

Error Message Cause Autopilot Action
Lost Wind Data
(sailboat only)
Low GHC™ Supply
Voltage
Error: ECU High
Voltage
Error: ECU Voltage
has Dropped Rapidly
Error: ECU High
Temperature
Error: Lost
Communication
Between ECU and
CCU (when the
autopilot is engaged)
The autopilot is no longer
receiving valid wind data.
The supply voltage level
has fallen below the value
specified in the low voltage
alarm menu.
The pump supply voltage
has risen above 33.5 Vdc.
The ECU voltage has
dropped quickly below
7.0 Vdc.
The ECU temperature has
risen above 100°C
(212°F ).
Communication between
the CCU and the pump
has timed out.
• Alarm sounds for
5 seconds
• Autopilot
transitions to
heading hold
N/A
• Alarm sounds for
5 seconds
• The ECU shuts
down
• Alarm sounds for
5 seconds
• The error is
cleared when the
ECU voltage
rises above
7.3 Vdc.
• Alarm sounds for
5 seconds
• The ECU shuts
down
• The helm control
beeps, and
autopilot
transitions to
standby.
Detailed Configuration Settings
Although all of the configuration is typically completed
automatically through wizards, you can manually adjust any
setting to fine-tune the autopilot.
Advanced configuration settings are available only when using
Dealer Mode (Enabling Dealer Configuration). User-specific
settings are available during normal operation of the autopilot.
See the configuration section of the owner's manual provided
with the autopilot for more information.
NOTE: Depending upon the configuration of the autopilot,
certain settings may not appear.
NOTE: On a powerboat, each time you change to the Speed
Source setting, you must review the Verify Tachometer, Low
RPM Limit, High RPM Limit, Planing RPM, Planing Speed, or
Max. Speed settings, where applicable, before performing the
autotune procedure (Performing the Autotune Procedure).
Autopilot Tuning Settings
To open the general autopilot tuning settings, select Menu >
Setup > Dealer Autopilot Configuration.
Acceleration Limiter: Allows you to limit the speed of autopilot-
controlled turns. You can increase the percentage to limit the
turn rate, and decrease the percentage to allow higher turn
rates.
Speed Source Settings
NOTE: Speed source settings are available only for power
boats.
To open the speed source settings, select Menu > Setup >
Dealer Autopilot Configuration > Speed Source Setup.
Speed Source: Allows you to select the speed source.
Verify Tachometer: Allows you to compare the RPM readings
on the helm control with the tachometers on the dashboard of
your boat.
Planing RPM: Allows you to adjust the RPM reading on the
helm control at the point when your boat transitions from
displacement to planing speed. If the value does not match
the value on the helm control, you can adjust the value.
Planing Speed: Allows you to adjust the planing speed of your
boat. If the value does not match the value on the helm
control, you can adjust the value.
Low RPM Limit: Allows you to adjust the lowest RPM point of
your boat. If the value does not match the value on the helm
control, you can adjust the value.
High RPM Limit: Allows you to adjust the highest RPM point of
your boat. If the value does not match the value on the helm
control, you can adjust the value.
Max. Speed: Allows you to adjust the maximum speed of your
boat. If the value does not match the value on the helm
control, you can adjust the value.
Rudder Gain Settings
NOTE: If you set these values too high or too low, the autopilot
may become overactive, attempting to constantly adjust the
heading at the slightest deviation. An overactive autopilot can
cause excess wear on the pump, and drain the battery at a
faster-than-normal rate.
To open the rudder gain settings, select Menu > Setup > Dealer
Autopilot Configuration > Rudder Gains.
NOTE: These settings apply only to sailboats, displacement-hull
powerboats, and powerboats with the speed source set to None.
Gain: Allows you to adjust how tightly the rudder holds a
heading and makes turns.
Counter Gain: Allows you to adjust how tightly the rudder
corrects turn overshoot. If you set this value too low, the
autopilot can overshoot a turn when attempting to counter the
original turn.
NOTE: These settings apply only to planing-hull powerboats
with the speed source set to Tach - N2K or Proprietary or GPS.
Allows you to set the rudder gain for low speeds. This setting
applies to the vessel when operating below planing speed.
Low Speed Counter: Allows you to set the rudder gain counter-
correction for low speeds. This setting applies to the vessel
when operating below planing speed.
High Speed: Allows you to set the rudder gain for high speeds.
This setting applies to the vessel when operating above
planing speed.
High Speed Counter: Allows you to set the rudder gain counter-
correction for high speeds. This setting applies to the vessel
when operating above planing speed.
Steering System Settings
To open the steering system settings, select Menu > Setup >
Dealer Autopilot Configuration > Steering System Setup.
Verify Steering Dir.: Allows you to set the direction the rudder
must move to turn the vessel to port and to starboard. You
can test and reverse the steering direction if necessary.
Rudder Sensor Settings
NOTE: Rudder sensor settings apply only when a rudder sensor
is connected to the autopilot system.
To open the rudder sensor settings, select Menu > Setup >
Dealer Autopilot Configuration > Steering System Setup >
Rudder Sensor Setup.
Max. Port Angle: Allows you to enter the angle at which your
rudder turns furthest port.
Max. Starboard Angle: Allows you to enter the angle at which
your rudder turns furthest starboard.
Calibrate Rudder Sensor: Initiates a procedure that establishes
the maximum range of movement of the rudder and
calibrates the rudder-position sensor. If an error appears
during the calibration, the rudder-position sensor has likely
reached its limit. The sensor might not be correctly installed.
If the problem persists, you can bypass this error by moving
15
Page 16

the rudder to the farthest position that does not report an
error.
Calibrate Rudder Center: Initiates a procedure that establishes
the center position of the rudder. You can use this calibration
if the on-screen rudder position indicator does not match the
true rudder center on your boat.
Registering Your Device
Help us better support you by completing our online registration
today.
• Go to http://my.garmin.com.
• Keep the original sales receipt, or a photocopy, in a safe
place.
Contacting Garmin Product Support
• Go to www.garmin.com/support and click Contact Support
for in-country support information.
• In the USA, call (913) 397.8200 or (800) 800.1020.
• In the UK, call 0808 2380000.
• In Europe, call +44 (0) 870.8501241.
Garmin® and the Garmin logo are trademarks of Garmin Ltd. or its subsidiaries, registered in the USA and other countries. GHP™, GHC™, Reactor™, and Shadow Drive™ are trademarks of Garmin Ltd. or its
subsidiaries. These trademarks may not be used without the express permission of Garmin.
NMEA®, NMEA 2000®, and the NMEA 2000 logo are trademarks of the National Marine Electronics Association.
© 2014 Garmin Ltd. or its subsidiaries www.garmin.com/support
 Loading...
Loading...