

Page 1
Thank you for buying a GY240 AVCS gyro.
Before using your new gyro, please read this manual thoroughly and use
the gyro properly and safely. After reading this manual, store it in a safe
place.
•No part of this manual may be reproduced in any form without prior permission.
•The contents of this manual are subject to change without prior notice.
•This manual has been carefully written. Please write to Futaba if you feel that any corrections or clarifications should be made.
FOREWORD1
The GY240 is a high performance, small, and light weight
AVCS (Angular Vector Control System) gyro developed
for model helicopters.
Because the sensor section and control circuit are integrated, mounting is easy.
1M23N07402
helicopter to drift. When the tail drifts, the gyro generates a
control signal that stops the drift. When the tail stops
drifting, the control signal from the gyro becomes zero. If
the cross-wind continues to cause the tail to drift in this
state, the "stop" operation is repeated until the tail faces
downwind. This is called the "weathervane" effect.
2
FEATURES
Adoption of AVCS
Since rudder trim changes caused by changes in tail
reaction torque changes due to wind and other meteorological changes and main rotor rotation variations are automatically cancelled, tail (rudder) operation is easy, making it
perfect for beginners.
SMM gyro sensor
Use of a new extremely small drift SMM (Silicon Micro
Machine) gyro sensor virtually eliminates rudder trim
changes during flight.
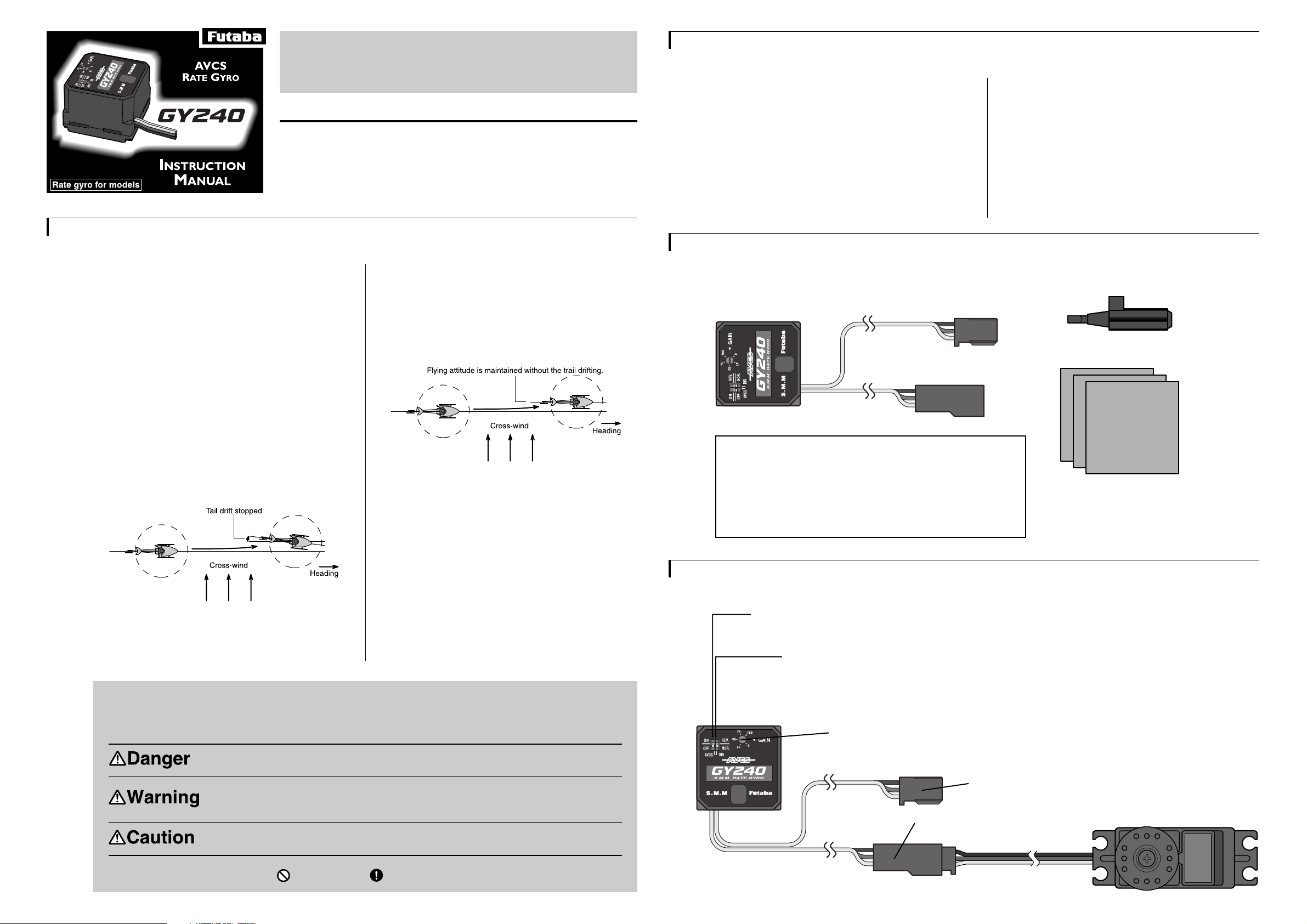
SET CONTENTS3
The GY240 comes with the following accessories:
GY240
High-speed, high-precision control
High-speed, high-precision control realized by digital
advanced control by microcomputer.
Small, light weight, integrated type
Small size (27 x 27 x 20mm) and light weight (25g) are
realized through high precision mounting technology.
Conductive resin case
Conductive resin case improves anti-EMI (static electricity,
radiowave interference) characteristic.
Mini screwdriver (for adjustments)
AVCS Gyro
Conventional gyros send control signals to the rudder servo
only when the tail of the helicopter moves. When the tail
stops moving, the control signal from the gyro becomes
zero. Conversely, the AVCS gyro continues to send control
signals to the servo even when the tail of the helicopter
stops moving.
The following sequentially describes the conventional gyro
and the AVCS gyro.
Operation of Conventional Gyro
Basic operation is described by considering the case when
the helicopter is hovering under cross-wind conditions.
With a conventional gyro, when the helicopter encounters a
cross-wind, the force of the cross-wind causes the tail of the
Operation of AVCS Gyro
Conversely, with an AVCS gyro, when the helicopter
encounters a cross-wind and the tail drifts, a control signal
from the gyro stops the drift. At the same time, the gyro
computes the drift angle and constantly outputs a control
signal that resists the cross-wind. Therefore, drifting of the
tail can be stopped even if the cross-wind continues to
effect the helicopter. In other words, the gyro itself automatically corrects (auto trim) changes in helicopter tail trim
by cross-wind.
Considering operation of an AVCS gyro, when the tail of
the helicopter rotates, the servo also rotates in accordance
with the angle of rotation of the tail. When the tail stops
rotating, the servo judges that it has stopped in that position. This is the auto trim function.
Special Markings
Pay special attention to the safety at the parts of this manual that are indicated by the following marks.
Mark Meaning
Procedures which may lead to a dangerous condition and cause death or serious injury to the
user if not carried out properly.
Procedures which may lead to a dangerous condition or cause death or serious injury to the
user if not carried out properly, or procedures where the probability of superficial injury or
physical damage is high.
Procedures where the possibility of serious injury to the user is small, but there is a danger of
injury, or physical damage, if not carried out properly.
Double-sided tape (3 sheets)
Ratings
(Integrated sensor type AVCS rate gyro)
•Control system: Digital advanced PI (Proportional Integration) control
•Gyro sensor: SMM (Silicon Micro Machine) system vibration gyro
•Operating voltage: +4 to +6VDC
•Operating temperature range: -10˚C to +45˚C
•Dimensions: 27 x 27 x 20mm
•Weight: 25g (including connector)
•Functions: Sensitivity trimmer, gyro operating direction adjustment switch,
AVCS on/off switch
4FUNCTIONS AND CONNECTIONS
AVCS on/off switch (AVCS)
Turns the AVCS function on and off. In the "off" position, the GY240
operates as a conventional gyro.
Gyro direction switch (DIR)
Switches the gyro control direction. Must be switched according to the main
rotor rotating direction and rudder linkage direction.
(If you try to fly a helicopter with a clockwise rotation rotor with the gyro in
the reverse direction, the nose will swing to the left.)
Gyro sensitivity trimmer (GAIN)
Gyro sensitivity setting trimmer. Set to the maximum value at which the tail
does not hunt (minute vibration).
Rudder input connector
Connects to the receiver rudder channel (ch4) output connector.
Rudder servo connector
Connects the rudder servo.
Rudder servo
Symbol: ; Prohibited ; Mandatory
Page 2
5USE
Switch and Trimmer Operation
To make the GY240 small and lightweight, a small
switch and trimmer are also used. Be careful when
operating the switch and trimmer. Always operate the
switch and trimmer with the mini screwdriver supplied.
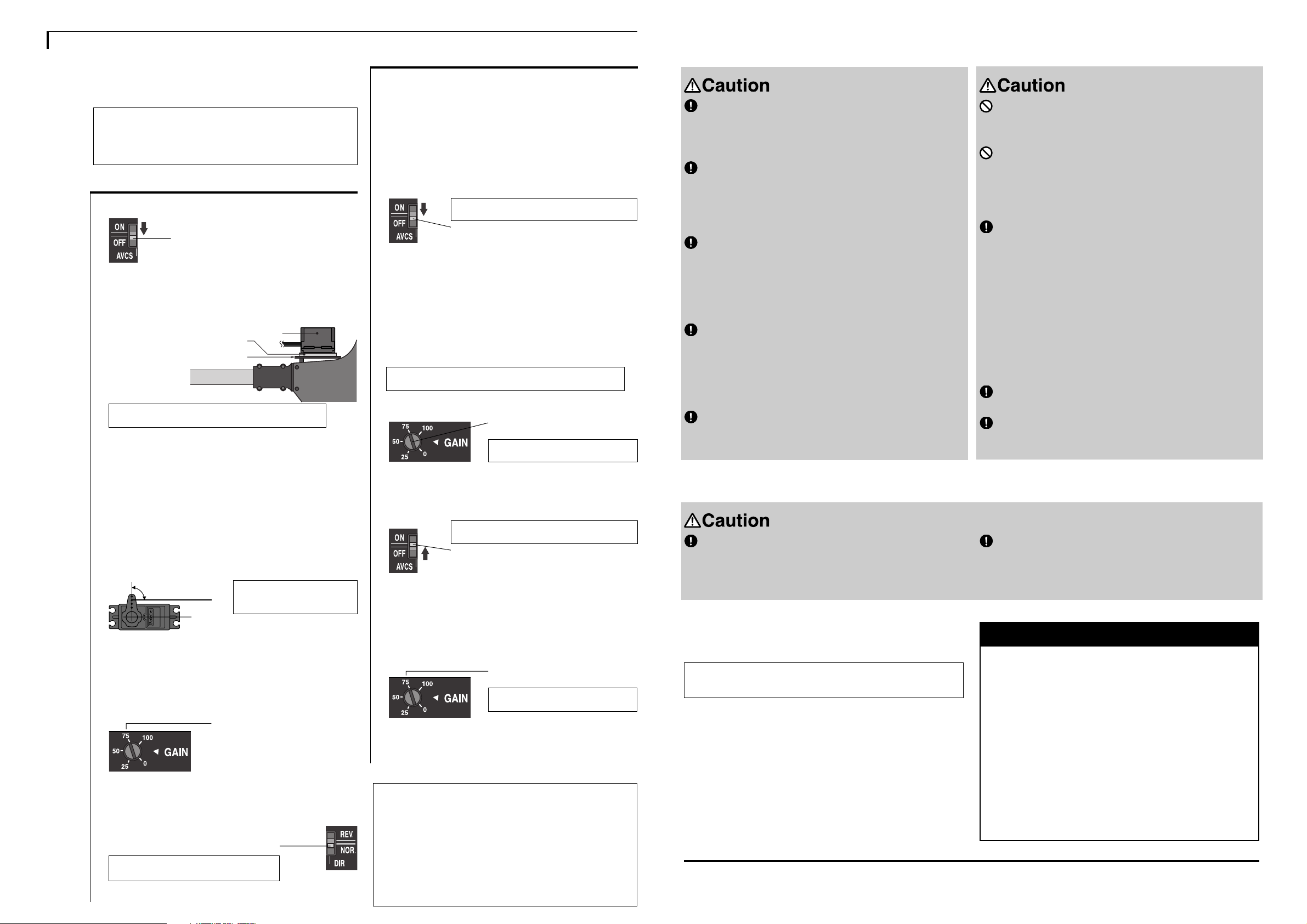
Mounting to Fuselage
1 Set the AVCS on/off switch to "off".
2 Install the GY240 body to the helicopter gyro bed using
the double-sided sponge tape supplied with the GY240. At
this time, check that the bottom of the gyro body is perpendicular to the main rotor shaft (parallel to the tail pipe).
When used with a motor helicopter, install the GY240
at least 10cm away from the drive motor.
3 Connect the GY240 rudder servo connector to the rudder
servo.
4 Connect the GY240 rudder input connector to the
receiver rudder channel (ch4) connector.
5 Install the rudder servo and tail control wire linkage and
servo horn in accordance with the helicopter instruction
manual. For the gyro to display top performance, it must be
linked at a position at which the servo horn and control wire
are perpendicular at the rudder neutral position.
6 Try moving the rudder stick to the left and right, and
check the direction of operation of the rudder servo. If the
rudder servo moves in the opposite direction, use the
transmitter reverse function to reverse it.
7 Set the gyro sensitivity trimmer to the approximately
75% position.
8 If the rudder servo moves to the left when the nose of the
helicopter turned to the right, the gyro direction is correct.
If the servo moves in the opposite direction, switch the gyro
direction switch.
If the rudder servo moves in the opposite
direction, switch the switch.
Since this switch is close to the adjacent
switches, switch it carefully.
* If you try to fly the helicopter while the gyro operation
direction is wrong, the nose will swing to the right or left.
This section describes how to use the
GY240. Mount and adjust the GY240
as described below.
Push the white protruding part of the
switch in the arrow (down) direction.
Double-sided sponge tape
Gyro bed
Perpendicular
Control wire
First, turn the trimmer fully clockwise. At this time, the position at
which the trimmer cuts in is the
100% position. Set the cut-in position to the 75% position.
GY240
Set the length of the servo
horn based on the model
manufacturer's instructions.
Flying Adjustment
In the AVCS mode, the gyro automatically sets the rudder
neutral position. Therefore, it is impossible to judge if the
mechanical rudder neutral position changed. Consequently,
during initial flight and when correcting the linkage, turn
off the AVCS function and adjust the mechanical rudder
neutral position.
(Rudder neutral adjustment)
1 First, to adjust the rudder neutral trim, start with the
AVCS on/off switch in the "off" position.
Since this switch is close to the adjacent
switches, switch it carefully.
Push the white protruding part of the switch in
the arrow (down) direction.
2 Set transmitter revolution mixing (pitch to rudder) to 0%
or "off".
3 Next, turn on the transmitter power, then turn on the gyro
power (shared with the receiver, etc.). Since the GY240
initializes the data when the power is turned on, never move
the helicopter for about three seconds.
4 Lift off and hover, then adjust the rudder neutral position
with the transmitter trim lever.
For large deviation, use the fuselage linkage to adjust
the rudder neutral position.
5 Adjust the gyro sensitivity to just before the helicopter
tail starts to hunt.
(AVCS Adjustment)
6 Turn off the gyro power and turn on the AVCS on/off
switch.
Since this switch is close to adjacent
switches, switch it carefully.
Push the white protruding part of the switch in
the arrow (up) direction.
7 In the transmitter power on state, turn on the gyro power.
At this time, hold the transmitter rudder stick in the neutral
position and do not move the helicopter for approximately
three seconds.
8 Hover the helicopter and adjust the gyro sensitivity to
just before the helicopter begins to hunt.
9 Adjust the rudder effect with the transmitter rudder
adjustment functions (ATV, AFR, D/R, etc.).
Rudder Neutral Adjustment
In the AVCS mode, the servo does not return to the neutral
position even when the rudder stick is returned to the neutral position. When you want to check the servo neutral
position during linkage neutral check, etc., set the AVCS
switch to the "off" position, or move the rudder stick at
least three times larger to the left and right in one second
intervals and immediately return the stick to the neutral
position. This operation resets the AVCS function and
outputs the neutral signal to the servo.
When hunting occurs, set to a lower
value.
Adjust the sensitivity gradually
while checking for hunting.
For more information, see <OnePoint Advice>.
When hunting occurs, set to a lower
value.
Adjust the sensitivity gradually
while checking for hunting.
For more information, see <OnePoint Advice>.
Setting Precautions
Always use the attached sensor tape to mount the gyro
sensor.
Always reinstall the sensor tape if it has started to separate
or tear.
When mounting the GY240, leave a small margin so
that the gyro connection cable is not stretched tight.
If the cable is stretched tight, the gyro will not display top
performance. If the gyro is dislodged, the gyro may malfunction and is very dangerous.
When used with a motor helicopter, mount the GY240
as far away as possible (at least 10cm) from the drive
motor.
The drive motor generates strong electromagnetic noise.
This noise may interfere with the gyro sensor and cause
erroneous operation.
Mount the GY240 so that metal and other conductive
parts do not touch the case of the GY240.
The GY240 uses a conductive resin case to reduce static
electricity and electromagnetic interference. Since the
surface of the case is conductive, it may cause a short
circuit.
Insert the connectors fully and firmly.
If vibration, etc. causes a connector to work loose during
flight, the heli may crash.
Fuselage Maintenance Precautions
Always perform proper maintenance for ultimate
performance.
The rigidity of the fuselage tail has a large effect on gyro
performance.
<One-Point Advice>
The gyro sensitivity also changes with the length of the servo
horn.
If the sensitivity is too low, lengthen the servo horn. Conversely, when hunting does not stop, shorten the servo horn.
<Other Precautions>
• To improve the tail control characteristic, a delay function is
added to the rudder control signal from the transmitter. When
this signal is passed through the gyro, movement of the servo
is slower than the transmitter rudder operation. This is
normal.
• When the fuselage is static, the servo may move a little. This
is normal and occurs because the gyro sensitivity is set to a
high value.
Makuhari Techno Garden Bldg., B6F 1-3 Nakase, Mihama-ku, Chiba 261-8555, Japan
FUTABA CORPORATION
Phone: (043) 296-5118 Facsimile: (043) 296-5124
Operating Precautions
Do not move the helicopter and the transmitter rudder
stick from the neutral position during about 3 seconds
(during initialization) when turning on the gyro power.
Never use the transmitter rudder trim in the AVCS
mode.
When the power is turned on, the GY240 judges that the
rudder stick is in the neutral position. Operating the rudder
trim during flight will change the neutral position.
Avoid sudden temperature changes.
Sudden temperature changes will cause the neutral position
to change. For example, in the winter, do not fly immediately after removing the model from inside a heated car and
in the summer, do not fly immediately after removing the
model from inside an air conditioned car. Allow the model
to stand for about 10 minutes and turn on the power after
the temperature inside the gyro has stabilized. Also, if the
gyro is exposed to direct sunlight or is mounted near the
engine, the temperature may change suddenly. Take
suitable measures so that the gyro is not exposed to direct
sunlight, etc.
When using the GY240 in the AVCS mode, set revolution mixing to OFF (or 0%).
Check the remaining receiver and gyro/servo nicd
battery operating time during the adjustment stage and
decide how many flights are remaining.
Make the fuselage vibration as small as possible.
Fuselage vibration has an adverse affect on gyro operation.
Repair Service
Before requesting repair, read this instruction manual again
and recheck your system. Should the problem continue, request repair service as follows:
Describe the problem in as much detail as possible and send it
with a detailed packing list together with the parts that require
service.
• Symptom (Including when the problem occurred)
• System(Transmitter, Receiver, Servo's and model numbers)
• Model (Model name)
• Model Numbers and Quantity
• Your Name, Address, and Telephone Number.
If you have any questions regarding this product, please consult your local hobby dealer or contact the Futaba Service
Center.
©FUTABA CORPORATION 2000, 4
 Loading...
Loading...