

Page 1
UAIS TRANSPONDER
FA-100
Page 2
C
All rights reserved.
PUB. No. OME-44170
( YOSH)
FIRST EDITION : SEP. 2002
9-52, Ashihara- cho,
Nishinomiya, Japan
Telephone: 0798-65-2111
Telefax: 0798-65-4200
Printed in Japan
Your Local Agent/Dealer
C1 : JAN. 23, 2003
FA- 100
Page 3
SAFETY INSTRUCTIONS
WARNING
ELECTRICAL SHOCK HAZARD
Do not open the equipment.
Only qualified personnel
should work inside the
equipment.
Immediately turn off the power at the
switchboard if water leaks into the
equipment or something is dropped in
the equipment.
WARNING LABEL
A warning label is attached to the AC-DC
power supply. Do not remove the label.
If the label is missing or damaged, contact
a FURUNO agent or dealer about
replacement.
WARNING
To avoid electrical shock, do not
remove cover. No user-serviceable
parts inside.
Name: Warning Label (1)
Type: 86-003-1011-1
Code No.: 100-236-231
Continued use of the equipment can cause
fire or electrical shock. Contact a FURUNO
agent for service.
Do not disassemble or modify the
equipment.
Fire, electrical shock or serious injury can
result.
Do not place liquid-filled containers on
the top of the equipment.
Fire or electrical shock can result if a liquid
spills into the equipment.
Immediately turn off the power at the
switchboard if the equipment is emitting
smoke or fire.
Continued use of the equipment can cause
fire or electrical shock. Contact a FURUNO
agent for service.
Make sure no rain or water splash leaks
into the equipment.
Fire or electrical shock can result if water
leaks in the equipment.
Do not operate the equipment with wet
hands.
Electrical shock can result.
i
Page 4

TABLE OF CONTENTS
FOREWORD ...........................................iii
SYSTEM CONFIGURATION ...................v
PROGRAM NUMBER .............................vi
SYSTEM OVERVIEW ............................vii
SPECIFICATIONS..............................SP-1
1 OPERATION .........................................1
1.1 Description of Controls......................... 1
1.2 Turning On and Off............................... 2
1.3 Adjusting Display Brilliance and
Contrast................................................ 3
1.4 Menu Overview.................................... 4
1.4.1 Menu operating procedure ........ 4
1.4.2 Remarks on menu operation ..... 5
1.5 Setting Up for a Voyage ....................... 7
1.6 Setting CPA/TCPA................................ 10
1.7 Plotter Display.................................... 11
1.8 Target Data Display............................ 12
1.8.1 Normal target data................... 12
1.8.2 Finding dangerous ship’s data . 14
1.9 Own Ship’s Information ...................... 15
1.9.1 Own static data ....................... 15
1.9.2 Own dynamic data................... 17
1.10 Messages .......................................... 18
1.10.1 Sending a message................. 18
1.10.2 Receiving messages ............... 20
1.10.3 Message logs.......................... 21
1.11 Regional Operating Channels............. 22
1.11.1 Viewing channels, Tx power .... 22
1.11.2 Displaying, editing regional
operating area status ............... 23
1.12 Enabling/Disabling the Buzzer............ 25
1.13 Long Range Mode ............................. 26
2 MAINTENANCE,
TROUBLESHOOTING....................... 27
2.1 Maintenance ...................................... 27
2.2 Resetting the Breaker......................... 28
2.3 Replacement of Battery...................... 28
2.4 Troubleshooting ................................. 29
2.5 Diagnostics ........................................ 30
2.5.1 Displaying program number..... 30
2.5.2 Memory test ............................ 31
2.5.3 Keyboard test.......................... 31
2.5.4 LCD test.................................. 32
2.5.5 On/off history........................... 32
2.5.6 GPS test ................................. 33
2.6 Alarm Status ......................................34
2.7 Error Messages.................................. 35
2.8 GPS Monitor ...................................... 36
2.9 Displaying Sensor Status.................... 37
2.10 Restoring Default Settings.................. 38
APPENDIX .........................................AP-1
Menu Tree ............................................. AP-1
Parts List................................................ AP-3
Parts Location........................................ AP-4
Digital Interface (IEC 61162-2) ............... AP-7
VHF Frequency List ............................. AP-26
INDEX.................................................. IN-1
Declaration of Conformity
ii
Page 5

FOREWORD
A Word to the Owner of the FA-100
FURUNO Electric Company thanks you for purchasing the FA-100 UAIS Transponder. We
are confident you will discover why the FURUNO name has become synonymous with
quality and reliability.
For over 50 years FURUNO Electric Company has enjoyed an enviable reputation for
quality and reliability throughout the world. This dedication to excellence is furthered by
our extensive global network of agents and dealers.
Your equipment is designed and constructed to meet the rigorous demands of the marine
environment. However, no machine can perform its intended function unless properly
operated and maintained. Please carefully read and follow the operation and maintenance
procedures set forth in this manual.
We would appreciate feedback from you, the end-user, about whether we are achieving
our purposes.
Thank you for considering and purchasing FURUNO.
Note: The example screens shown in this manual may not match the screens you see on
your display. The screen you see depends on your system configurat ion and equipment
settings.
Features
The FA-100 is a universal shipborne AIS (Automatic Identification System) capable of
exchanging navigation and ship data between own ship and other ships or coastal stations.
It complies with IMO MSC.74(69) Annex 3, A.694, ITU-R M.1371-1 and DSC ITU-R M.825.
It also complies with IEC 61993-2 (Type testing standard), IEC 60945 (EMC and
environmental conditions).
The FA-100 consists of VHF/GPS antennas, a transponder unit and several associated
units. The transponder contains a VHF transmitter, two TDMA receivers on two parallel
VHF channels, a DSC channel 70 receiver, interface, communication processor, LCD
display, and internal GPS receiver. The internal GPS is a 12-channel all-in-view receiver
with a differential capability, and provides UTC reference for system synchronization to
eliminate clash among multiple users. It also gives position, COG and SOG when the
external GPS fails.
The LCD panel displays all required information about static data, dynamic data,
voyage-related data and short safety-related messages. The information and messages
are automatically updated according to the ITU-R M.1371-1, e.g., static information every
6 min and on request, dynamic information every 10 s on ship faster than 3 kt and 3.3 s
when changing course at 0-14 kt, etc.
iii
Page 6

The main features are
• Safety of navigation by automatically exchanging navigational data between ships and
between ship and coast.
• Static data:
- MMSI (Maritime Mobile Service Identity)
- IMO number (where available)
- Call sign & name
- Length and beam
- Type of ship
- Location of position-fixing antenna on the ship
• Dynamic data:
- Ship’s position with accuracy indication and integrity status
- UTC
- Course over ground (COG)
- Speed over ground (SOG)
- Heading
- Navigation status (manual input)
- Rate of turn (where available)
• Voyage-related data
- Ship’s draught
- Hazardous cargo (type)
- Destination and ETA (at master’s discretion)
• Short safety-related messages, Free messages
• LCD panel satisfying the IMO minimum requirements plus simple plotting modes
• Interfaces for radar, ECDIS, PC, LAN for future networking expansion
• GPS/VHF combined antenna for easy installation available
• CPA/TCPA alarm
• Built-in GPS receiver for UTC synchronization and backup position fixing
iv
Page 7
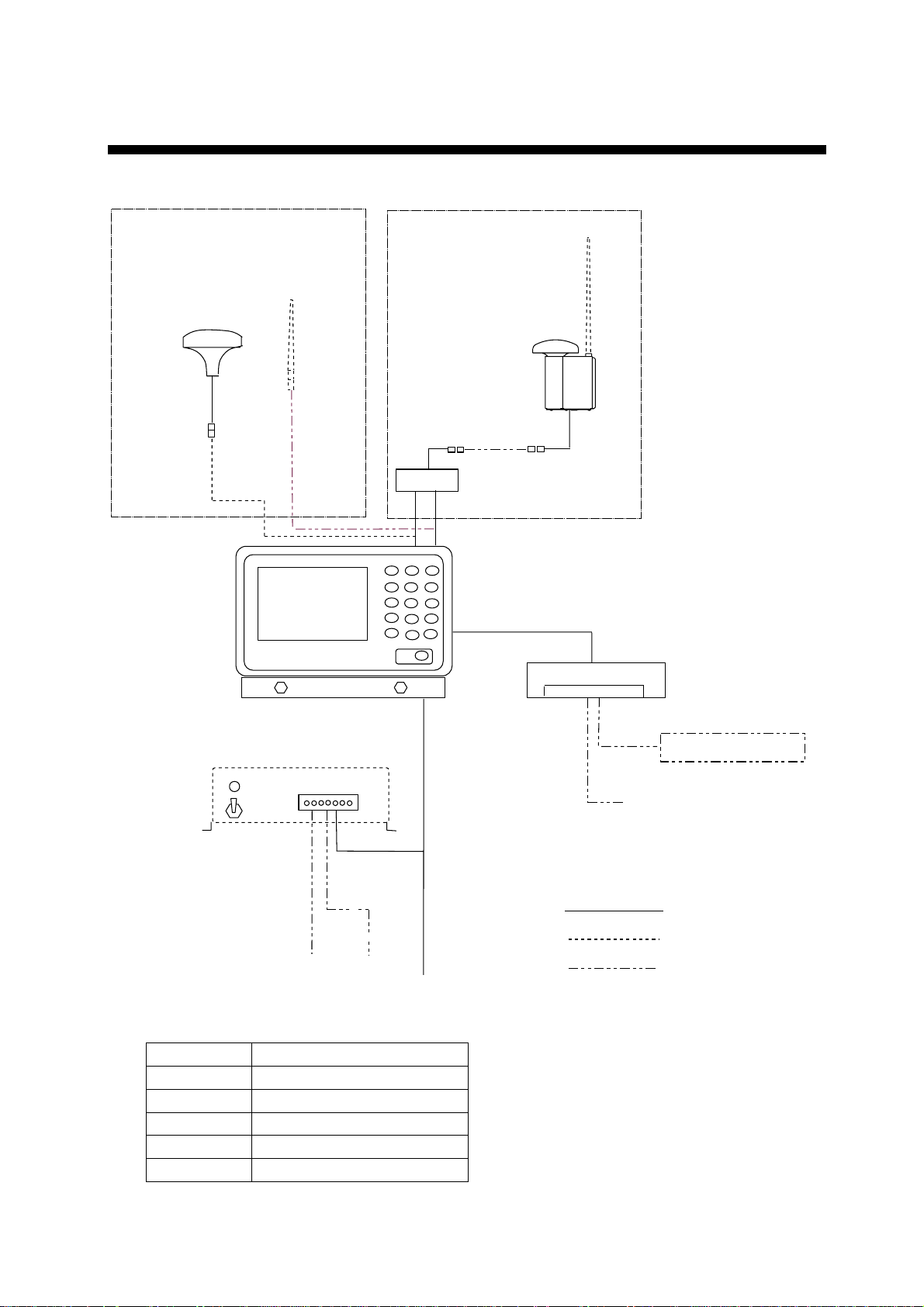
SYSTEM CONFIGURATION
Either
GPS/VHF
VHF Antenna
GPS Antenna
GSC-001
Combined Antenna
GVA-100
Distributor Unit
DB-1
Power Supply
PR-240-CE
Ship’s Mains
100/110/115/200/
220/230 VAC
φ, 50/60Hz
1
24 VDC
Transponder Unit
FA-100
Junction Box CB-100
GPS Navigator *
Other external equipment
: Standard
: Option
: Local supply
12-24 VDC
*: External GPS navigator is required.
GSC-001 Exposed to weather
GVA-100 Exposed to weather
FA-100 Protected from weather
CB-100 Protected from weather
PR-240 Protected from weather
DB-1 Protected from weather
v
Page 8
PROGRAM NUMBER
PCB Version No. Date Reason for Modification
MAIN 245-0001-002 Nov/2002
SUB 245-0002-002 Nov/2002
H8S1 245-0003-001 Sep/2002
H8S2 245-0004-001 Sep/2002
H8S3 245-0005-001 Sep/2002
vi
Page 9
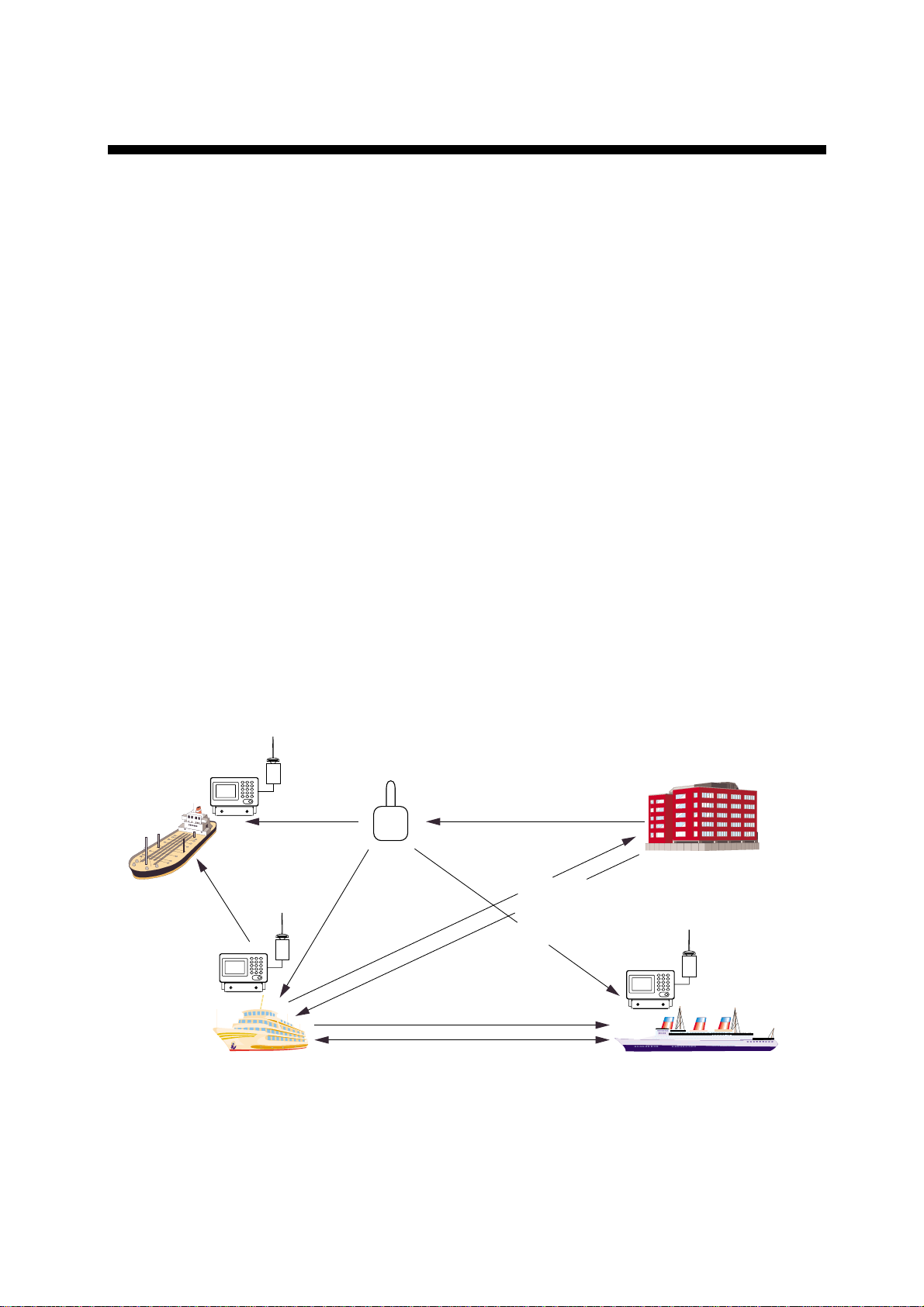
SYSTEM OVERVIEW
System overview
The Automatic Identification System (AIS) was originally developed to aid the Vessel
Traffic Services (VTS) by use of a VHF transponder working on Digital Selective Call
(DSC) at VHF CH70, and is still in use along the UK coastal areas and others. Some time
later the IMO developed a Universal AIS using the new sophisticated technology called
Self-Organized Time Division Multiple Access (SOTDMA) based on a VHF Data Link
(VDL).
The system operates in three modes – autonomous (continuous operation in all areas),
assigned (data transmission interval remotely controlled by authority in traffic monitoring
service) and polled (in response to interrogation from a ship or authority). It is
synchronized with GPS time to avoid conflict among multiple users (IMO minimum 2000
reports per minute and IEC requires 4500 reports on two channels). The VHF channels
87B and 88B are commonly used and in addition there are local AIS frequencies.
Shipborne AIS transponders exchange various data as specified by the IMO and ITU on
either frequency automatically set up by the frequency management telecommand
received by the DSC receiver on ship. VHF transmit power is also set up for 12.5 W or
2 W automatically.
AIS-fitted AtoN broadcasts its
identification, type of operation,
location, displacement, etc. at
3 min intervals or at a reporting
rate designated by the
Administration authorities.
Aids to
Navigation
(AtoN)
Static and Dynamic information incl.
MMSI, Name, POSN, HDG, COG, SOG
Interrogation and Response
Own ship
All ships broadcast Static and Dynamic information (autonomous and
continuous mode). If OS wants to know information about ship 1, OS shall
send an interrogation in polling mode; then ship 1 will transmit her
response on the same VHF channel without operator intervention.
VTS Center transmits TDMA CH
management message including
code, type, position, etc. of buoys
every 3 min, and the AtoN broadcasts
these messages for ships.
VTS center
The VTS center transmits a command on
frequency assignment, slots, report rate,
VHF output power, channel spacing, etc.
(Assigned mode)
Transponder
Ship 1
AIS system
vii
Page 10

Not all ships carry AIS
The Officer of the Watch (OOW) should always be aware that other ships, and in particular
leisure craft, fishing boats and warships, and some coastal shore stations including Vessel
Traffic Service centers might not be fitted with AIS.
The OOW should also be aware that AIS fitted on other ships as a mandatory carriage
requirement might be switched off by professional judgment of the master. Thus, users are
therefore cautioned to always bear in mind that information provided by AIS may not be
giving a complete or correct “picture” of shipping traffic in their vicinity.
Use of AIS in collision avoidance
As an anti-collision aid the AIS has the following advantages over radar:
• Information provided in near real-time
• Capable of instant presentation of target course alterations
• Not subject to target swap
• Not subject to target loss in clutter
• Not subject to target loss due to fast maneuvers
• Able to detect ships within VHF/FM coverage, including in some circumstances, around
bends and behind islands.
When using the AIS for anti-collision purposes it is important to remember that the AIS is
an additional source of navigation information. It does not replace other navigational
systems. Once again, remember that the AIS may not be giving a complete or correct
“picture” of shipping traffic in their vicinity.
The use of the AIS does not negate the responsibility of the OOW to comply with all
collision regulation requirements, especially the maintaining of a proper look-out. The
prudent navigator uses all aids available to navigate the ship.
Erroneous information
Erroneous information implies a risk to other ships as well as your own. Poorly configured
or calibrated sensors might lead to incorrect information being transmitted. It is the user’s
responsibility to ensure that all information entered into the system is correct and up to
date.
viii
Page 11

SPECIFICATIONS OF THE U-AIS TRANSPONDER FA-100
The AIS shall improve the safety of navigation by assisting in the efficient navigation of ship’s,
protection of the environment, and operation of Vessel Traffic Services (VTS), by the functions of
collision avoidance, ships’ and cargo’s information obtaining, and traffic management.
1 GENERAL
1.1 Display Monochrome STN-LCD, 60 (H) x 95 (W) mm, 120 x 64 dots
1.2 TX/RX Frequency 156.025 MHz to 162.025 MHz
1.3 Output Power 2 W/ 12.5 W or 0W exchangeable
1.4 Impedance 50 ohms
1.5 DSC Receiver CH70 fixed, 156.525 MHz, G2B, 1200 bps
1.6 Band Width 25 kHz/ 12.5 kHz
2 TRANSPONDER UNIT
2.1 CPU SH7709A, 76.0 MHz
2.2 ROM Flash ROM 1 MW
2.3 Menu Target data/ Plotter/ Own data/ Set MSG/ Init Settings/
System Settings/ Diagnostics
3 GPS RECEIVER
3.1 Receiving Channels 12 channels parallel, 12 satellites tracking
3.2 Rx Frequency/ Rx Code 1575.42 MHz, C/A code
3.3 Position Fixing System All in view, 8-state Kalman filter
3.4 Position Accuracy Approx. 10 m, 95% of the time, (HDOP 4)
DGPS: approx. less than 5 m, 95% of the time
3.5 Tracking Velocity 900 kts
3.6 Position-fixing Time Warm start: 12 seconds, Cold start: 90 seconds
3.7 Position Update Interval 1 second
3.8 DGPS Data Receiving RTCM SC-104 Ver 2.1 formatted
4 INTERFACES
4.1 Sensor 1/ 2/ 3 IEC 61162-1(2000-07)/61162-2(1998-09)
Input: DTM, GNS, GLL, GGA, RMC, VBW, VTG, OSD, HDT, GBS,
ROT (GN>GP>GL>LC)
4.2 PC I/O, EXTRA1, LR or ECDIS/RADAR
IEC 61162-1(2000-07)/61162-2(1998-09)
Input: VSD, SSD, ABM, BBM, ACA, ACK, AIR, DTM, GBS, GGA, GLL,
GNS, HDT, LRF, LRI, OSD, RMC, ROT, VBW, VTG
Output: VDM, VDO, ABK, ACA, ALR, TXT, LR1, LR2, LR3, LRF, LRI
4.3 Alarm Contact Closure
4.4 LAN (10base-T) IEC61162-4
SP-1 E4417S01G
Page 12

4.5 AD-10 AD-10 format
5 POWER SUPPLY
5.1 Transponder Unit 12-24 VDC: 7-3.5 A
5.2 AC/DC Power Supply Unit (PR-240, option) 100-115/200-230 VAC, 1 phase, 50/60 Hz
6 ENVIRONMENTAL CONDITION
6.1 Ambient Temperature
GPS Antenna Unit: -25°C to +70°C
Other units: -15°C to +55°C
6.2 Relative Humidity 95% at 40°C
6.3 Waterproof (IEC 61529)
Antenna Unit: IPX6
Other units: IPX0
6.4 Vibration IEC 60945 ed.3
7 COATING COLOR
7.1 GPS Antenna Unit: N9.5
7.2 Other units: 2.5GY5/1.5
SP-2 E4417S01G
Page 13
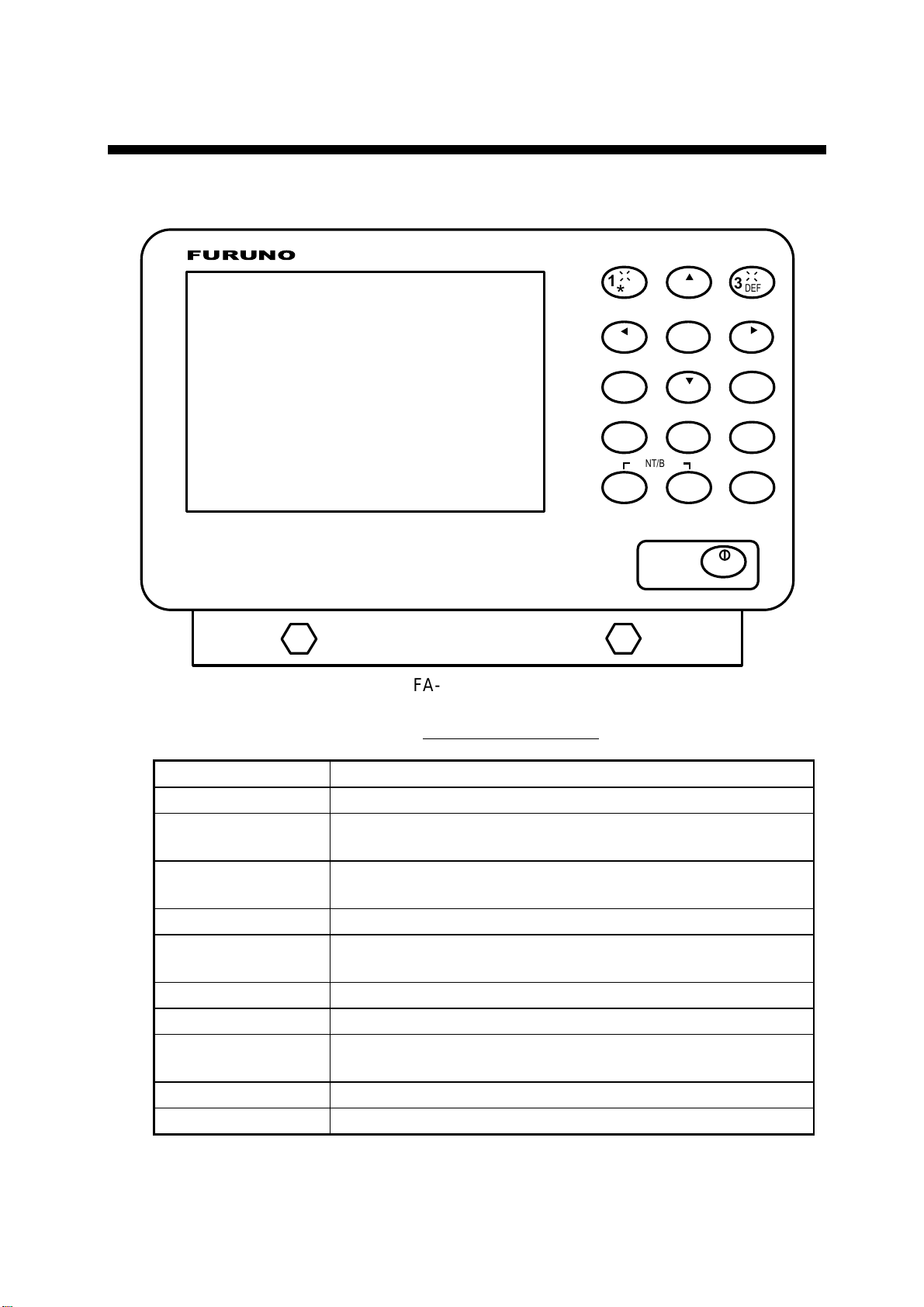
1 OPERATION
1.1 Description of Controls
FURUNO
F A-100 Transponder unit
a
a
a
1
*
4
GHI
7
PQRS
NEXT
CLR
ALM
a
2
ABC
5
8
TUV
0
CONT/BRILL
SFT
+/-
JKL
_,.
3
6
9
MENU
POWER
a
a
DEF
MNO
WXYZ
ENT
a
a
Description of controls
Control Description
0 - 9 Alphanumeric, symbol input keys
2(▲) and 8(▼) Adjust display brilliance and keyboard backlighting; scroll
display.
4(◄) and 6(►) Shift the cursor left and right (pressed with [SFT/ +/-]),
respectively; adjust contrast.
CLR/ALM Clears an entry; silences the audio alarm.
SFT/ +/- Selects numeric or alphabet entry mode alternately; selects
options on menus.
CLR/ALM + SFT/ +/- Change the contrast and brilliance.
ENT Concludes an entry.
NEXT Chooses next line. Press together with [SFT/ +/-] to shift
cursor in reverse direction.
MENU Displays menu. Also used to perform “escape”.
POWER Turns the power on and off.
1
Page 14
1 OPERATION
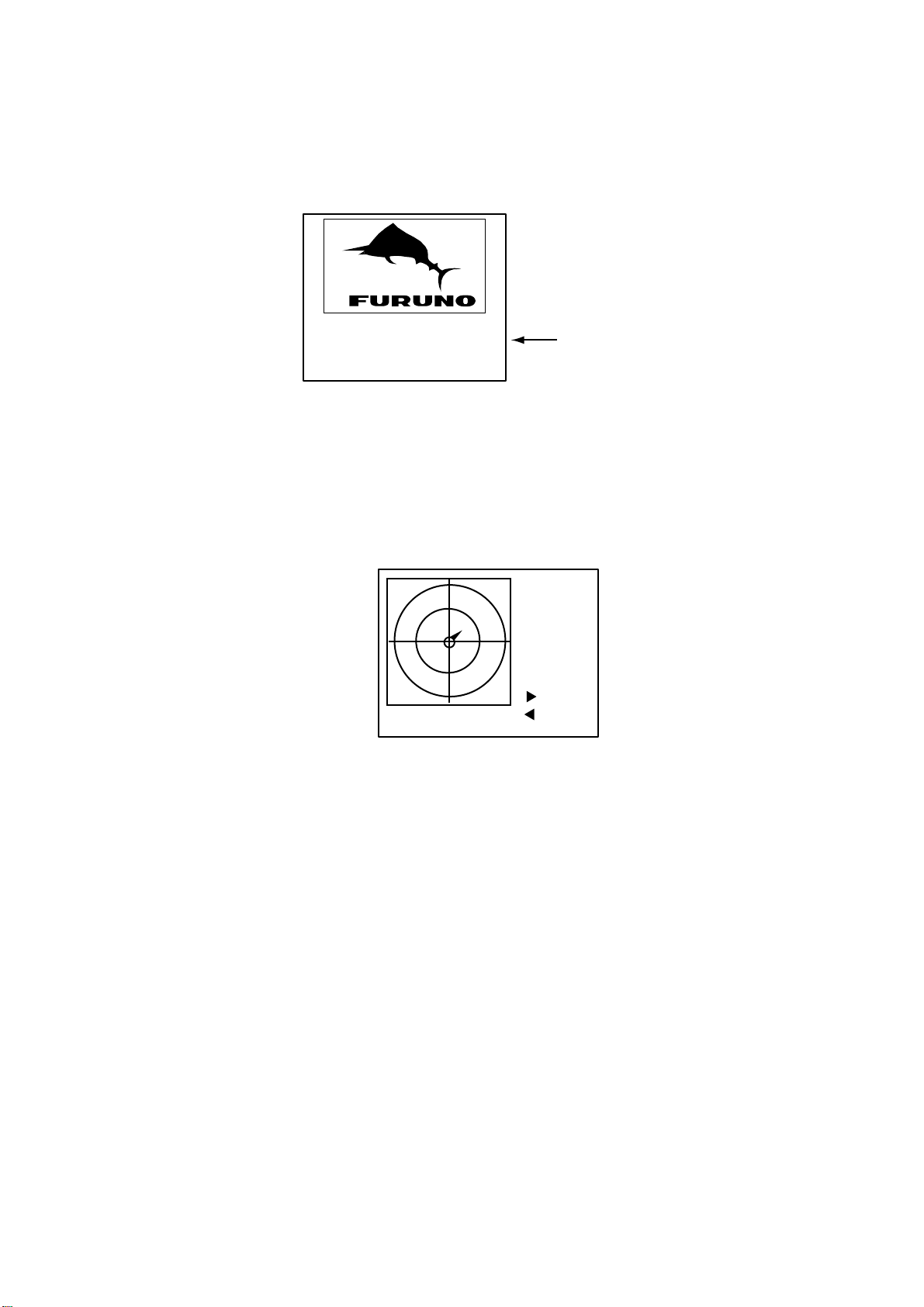
1.2 Turning On and Off
Press the [POWER] key to turn the equipment on and off. The startup screen
appears. Showing FURUNO logo along with the date and time of last
power-off.
SHUT DOWN
26/AUG/2002
05:46:52
Date and time of
last power-off.
Startup screen
After the FURUNO logo disappears, the screen displays “NOW
STARTING…CHECKING MEMORY. At this time the BIIT (built-in integrity test
facility) checks the major circuits including RAM, ROM, interface, etc. The
plotter display appears, showing the message “NOW SORTING.” This means
the equipment is sorting targets by distance, from closest to furthest. This takes
several seconds to complete.
[- - - - - -]
SOG:
- - -.- kt
COG:
- - -.- deg
INTRD: 0
[ ]: FWD
n
RNG: 1.50
"Please Wait!" is shown when
no data is being received.
[ ]: BACK
m
PLOTTER display
The FA-100 should be powered while underway or at anchor. The master may
switch off the AIS if he believes that the continual operation of the AIS might
compromise the safety or security of his ship. The AIS should be restarted
once the source of danger has disappeared.
The equipment transmits own ship static data within two minutes of start-up
and it is transmitted at six-minute intervals. Static data includes MMSI number,
IMO number, call sign, ship name, ship length and width, ship type and GPS
antenna position.
In addition to static data, ship’s dynamic data is also transmitted. This data
includes position with accuracy, SOG, COG, rate of turn, heading, etc. Dynamic
data is transmitted ever 2 s to 3 min depending on ship’s speed and course
change, voyage-related data, such as ship draft, hazardous cargo, destination
and estimated time of arrival, are transmitted at six-minute intervals.
2
Page 15
1 OPERATION
The FA-100 starts receiving data from AIS-equipped ships as soon as it is
turned on, and the ships’ location on the plotter display is shown with the AIS
symbol. (To learn more about the plotter display, see paragraph 1.7.) With
connection of a radar or ECDIS, the AIS target symbols may be overlaid on the
radar or ECDIS.
Note 1: If no navigation sensor is installed or a sensor such as a gyrocompass
has failed, the AIS automatically transmits “not available” data.
Note 2:
The reporting intervals are as follows
Ship’s navigation status and reporting interval
Ship’s navigation status Reporting interval
Moored 3 min
0-14 kt speed 10 s
0-14 kt speed with course change 3+1/3 s
14-23 kt speed 6 s
14-23 kt speed with course change 2 s
Speed higher than 23 kt 2 s
Speed higher than 23 kt with course change 2 s
1.3 Adjusting Display Brilliance and Contrast
1. Press the [CLR/ALM]+[SFT/ +/-] keys together to show the dialog box
below.
BRILLIANCE
q p
CONTRAST
tu
ESC: [ENT]
Dialog box for adjustment of brilliance and cont rast
2. Use the [▲] or [▼] key to adjust brilliance; [◄] or [►] key to adjust contrast.
3. Press the [ENT] key to close the dialog box.
Note: If you turn off the equipment with minimum contrast, the startup screen is
displayed in high contrast at the next power-on. However, the plotter
display, which appears after the startup screen, will be shown in
minimum contrast. Therefore, adjust the contrast as described above.
3
Page 16
1 OPERATION
1.4 Menu Overview
You can choose the functionality of the equipment through the menu. If you get
lost in operation, press the [MENU] key until you return to the main menu. The
complete menu tree is provided in the Appendix.
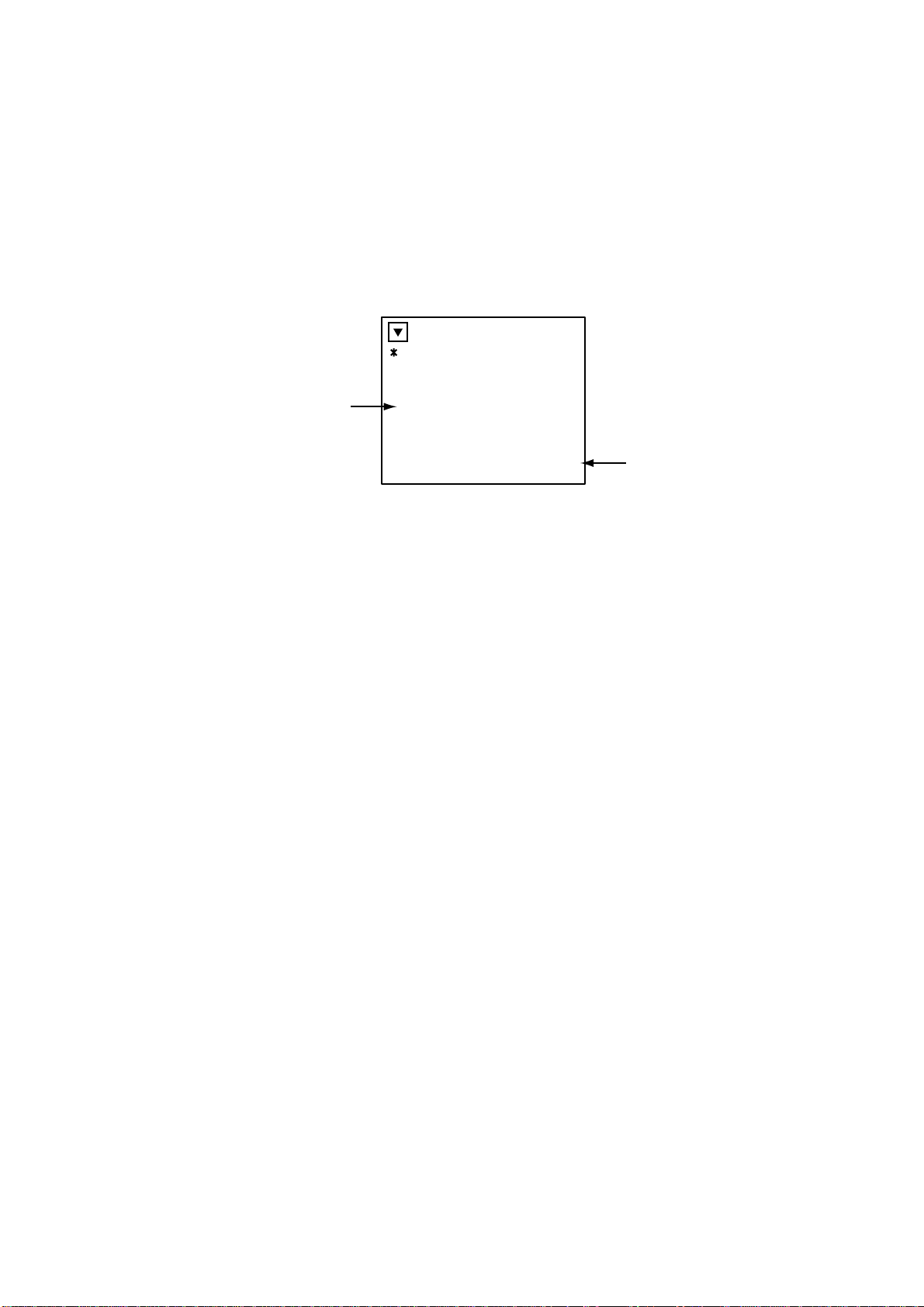
1.4.1 Menu operating procedure
1. Press the [MENU] key to display the main menu.
Asterisk marks
current selection.
2. Press appropriate numeric key to choose a wanted sub-menu. For example,
press the [6] key to choose the SYSTEM SETTINGS sub-menu. (You may
also choose a sub-menu by pressing the [NEXT] key to choose it and then
pressing the [ENT] key.)
[MENU]
1 TARGET DATA
2 PLOTTER
3 OWN DATA
4 SET MSG
5 INIT SETTINGS
6 SYSTEM SETTINGS
7 DIAGNOSTICS
Main menu
[SYSTEM SETTINGS]
1 SET I/O PORT
2 SET CHANNEL
3 SET LR MODE
4 SET OTHER I/O
5 SET BUZZER
SYSTEM SETTINGS sub-menu
3. Press appropriate numeric key to choose sub-menu desired. For example,
press the [5] key to show the SET BUZZER sub-menu.
[SET BUZZER]
ALARM : OFF
CPA/TCPA: OFF
MSG ALM: OFF
+
-
+
-
+
-
"+/-" means to use the
[SFT/ +/-] key to choose
desired option.
SET BUZZER sub-menu
4
4. Choose item with the [NEXT] key. The asterisk shows current selection.
5. Depending on the sub-menu shown, use the alphanumeric keys to enter
data, or use the [SFT/ +/-], [▲], [▼], [◄] or [►] key to choose data.
6. Press the [ENT] key to register data.
7. Press the [MENU] key several times to return to the main menu.
Page 17
1.4.2 Remar ks on menu operati on
Confirming entry
If, after you have changed data, you pressed the [MENU] key without pressing
the [ENT] key, the message shown below appears. If you want to cancel the
data, press the [ENT] key. If you wish to save, use the [▼] key to choose NO,
press the [ENT] key and then press the [ENT] key again.
CANCEL?
YES
NO +/-
“Are you sure” confirmation dialog
Choosing data input mode
To enter a specific numeric, alphabet or symbol, choose the appropriate data
input mode, numeric or alphabet. The active data input mode is shown at the
bottom left-hand corner of the screen. Use the [SFT/ +/-] key to select desired
mode. To enter a numeric, simply press appropriate numeric key. For alphabet
or symbol, press appropriate key until desired character or symbol appears.
1 OPERATION
Data Input Mode
123: Numeric
ABC: Alphabet
Use the [SFT/ +/-] key
to switch modes.
SET MSG screen
[SET MSG]
123 0/150
5
Page 18
1 OPERATION
Shifting the cursor
To shift the cursor backward or forward, press [SFT/ +/-] + [◄] together to shift
it backward; [SFT/ +/-] + [►] together to shift it forward. This is convenient for
creating a space or using the same key consecutively.
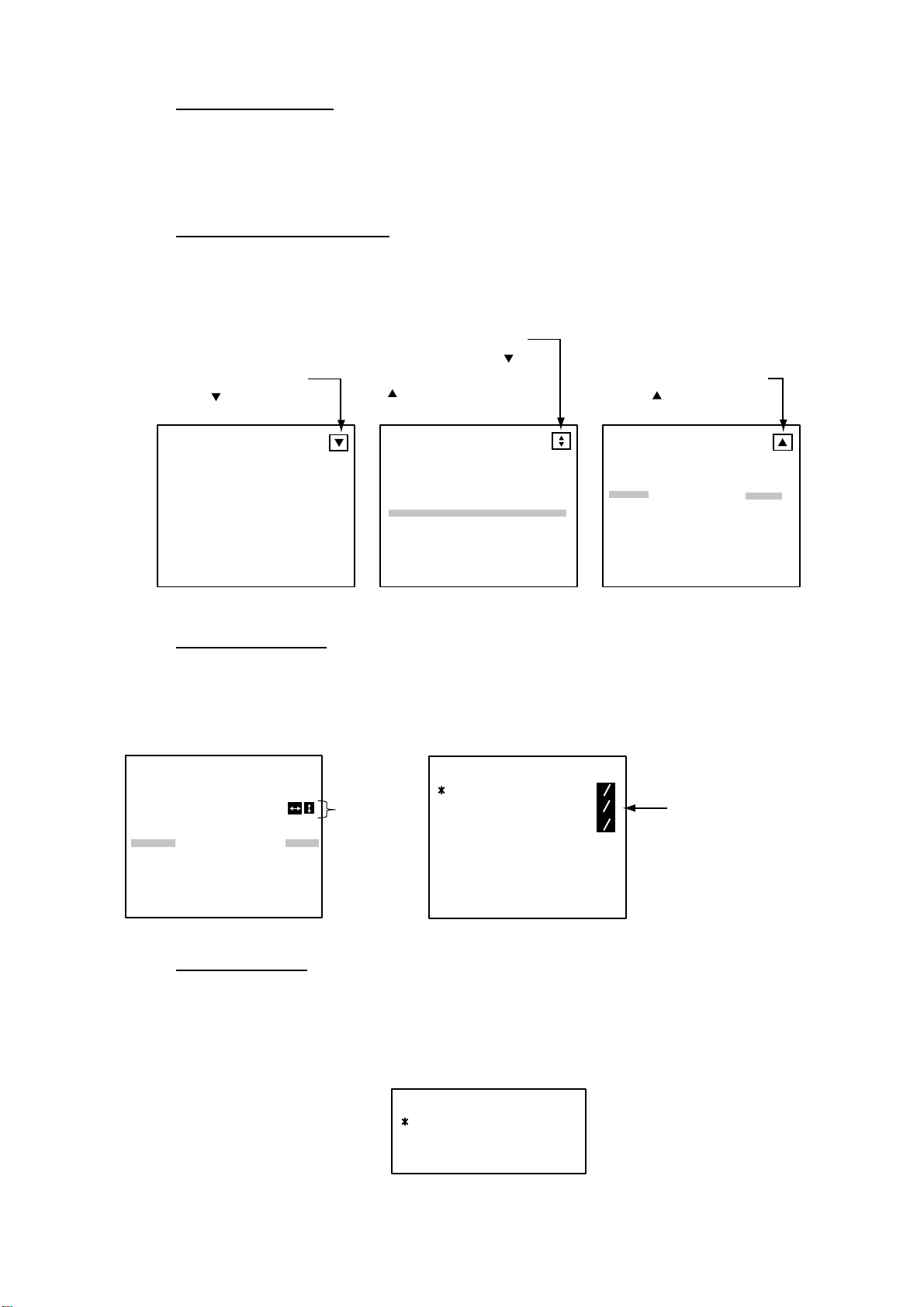
Multiple page sub-menus
Some sub-menus have more than one page. In this case, an arrow(s) appears
at the top of the display to show which arrow key(s) to press to change the
page.
Page 1 of sub-menu.
Press [ ] to go to
next page.
Intermediate page in
sub-menu. Press [ ]
to go to next page;
[ ] to go to previous
page.
Last page of sub-menu.
Press [ ] to go to
previous page.
[OWN STATIC DATA1]
NAME : SHIP
C. SIGN: CAL0001
MMSI : 123456789
IMO# : 623498071
[OWN STATIC DATA2]
DESTINATION:
TOKYO
DATE : 12/FEB
TIME : 10:25
[OWN STATIC DATA5]
CREW : 12
TYPE : 36 CLASS : A
TYPE NAME
SAILING
OWN STATIC DATA displays 1, 2 and 5
Choosing options
Menu options may be chosen with the [▲], [▼], [◄] or [►] key or [SFT/ +/-]
key depending on the sub-menu. In the examples below, you may choose NAV
STATUS option with the [▲], [▼], [◄] or [►] key and ALARM option with the
[SFT/ +/-] key.
[SET STATUS]
NAV STATUS: 00
STATUS NAME
UNDER WAY USING
ENGINE (DEFAULT)
Use these
arrow keys
to choose
an option.
[SET BUZZER]
ALARM : OFF
CPA/TCPA: OFF
MSG ALM: OFF
+
-
+
-
-
+
-
Use the
[SFT/ +/-] key
to choose
an option.
6
SET STATUS sub-menu
Saving settings
When the [MENU] key is pressed after changing an option (to register setting),
you are asked if you want to save the setting. To save the setting, press the
[ENT] key. To retain the previous setting, select NO and press the [ENT] key.
To escape, choose [CANCEL] and press the [ENT] key.
SAVE?
YES
NO
CANCEL +/-
Save confirmation dialog
Page 19
1.5 Setting Up for a Voyage
There are five items on the INIT SETTINGS menu (Menu #5) you will need to
enter at the start of a voyage: draught, destination, navigation status, ship type
and number of crew.
1. Press the [MENU] key to open the main menu.
2. Press the [5] key to open the INIT SETTINGS menu.
[INIT SETTINGS]
1 SET SHIP DATA
2 SET DESTINATION
3 SET NAV STATUS
4 SET TYPE&CREW
5 SET CPA/TCPA
6 SET ANTENNA POS
INIT SETTING sub-menu
3. Press the [1] key to choose SET SHIP DATA. The ship’s name and call sign
have been entered at installation. Confirm that they are correct.
1 OPERATION
[SET SHIP DATA]
NAME : FURUNO
C. SIGN : 6LCZ43B
DRUGHT : 12.3 m
DTE :
123
KEY & DISP
+
-
SET SHIP DATA sub-menu
4. Press the [NEXT] key to choose DRUGHT (draught).
5. Use the numeric keys to enter ship’s current draught for the voyage. (Be
sure to amend it if it changes during the voyage.)
Note: DTE should not be changed from "KEY & DISP."
6. Press the [ENT] key to register data and return to the INIT SETTINGS
menu.
7. Press the [2] key to choose SET DESTINATION.
[SET DESTINATION]
DATE: 00/00 (DD/MM)
TIME: 00:00
DESTINATION:
Dialog box for entry of destination
8. DATE is selected; enter estimated day and month of arrival at destination
and then press the [NEXT] key to choose TIME.
9. Enter estimated time of arrival at destination and then press the [NEXT] key
to choose DESTINATION.
7
Page 20
1 OPERATION
10. Enter name of destination and then press the [ENT] key to register data and
Note: Be sure to change destination information when it changes.
11. Press the [3] key to choose SET NAV STATUS.
12. Use the [▲], [▼], [◄] or [►] key to choose appropriate navigation status
return to the INIT SETTINGS menu.
[SET STATUS]
NAV STATUS: 00
STATUS NAME
UNDER WAY USING
ENGINE (DEFAULT)
SET STATUS sub-menu
referring to the list below.
[▲], [▼]: Increment, decrement selection number by 1.
[◄], [►]: Increment, decrement selection number by 10.
00: Underway using engine (default)
01: At anchor
02: Not under command
03: Restricted maneuverability
04: Constrained by draught
05: Moored
06: Aground
07: Engaged in fishing
08: Underway by sailing
09: Reserved for high speed craft (HSC)
10: Reserved for wing in ground (WIG, for example, hydrofoil)
11-15: Reserved for future use
13. Press the [ENT] key to register data and return to the INIT SETTINGS
menu.
14. Press the [4] key to choose SET TYPE&CREW.
[SET TYPE&CREW]
CREW : 0012
TYPE CLASS : A
TYPE NO. : 0
TYPE NAME
+
-
Do not change from A.
(A = IMO type)
8
SET TYPE&CREW sub-menu
15. CREW is selected; enter number of crew with the numeric keys.
Page 21
1 OPERATION
16. Press the [NEXT] key to choose TYPE NO.
Note: TYPE NO. is entered at installation. However, if the ship carries
hazardous cargo, dangerous goods, harmful substances or marine
pollutants it should be entered.
17. Use [▲], [▼], [◄], [►] to choose appropriate type number.
[▲], [▼]: Increment, decrement selection number by 1.
[◄], [►]: Increment, decrement selection number by 10.
10 FUTURE USE ALL SHIPS OF THIS TYPE 60 PASSENGER SHIPS ALL SHIPS OF THIS TYPE
11 FUTURE USE CARRYING DG, HS, OR, MP(A) 61 PASSENGER SHIPS CARRYING DG, HS, OR, MP(A)
12 FUTURE USE CARRYING DG, HS, OR, MP(B) 62 PASSENGER SHIPS CARRYING DG, HS, OR, MP(B)
13 FUTURE USE CARRYING DG, HS, OR MP(C) 63 PASSENGER SHIPS CARRYING DG, HS, OR MP(C)
14 FUTURE USE CARRYING DG, HS, OR, MP(D) 64 PASSENGER SHIPS CARRYING DG, HS, OR, MP(D)
15 FUTURE USE FUTURE USE 65 PASSENGER SHIPS FUTURE USE
16 FUTURE USE FUTURE USE 66 PASSENGER SHIPS FUTURE USE
17 FUTURE USE FUTURE USE 67 PASSENGER SHIPS FUTURE USE
18 FUTURE USE FUTURE USE 68 PASSENGER SHIPS FUTURE USE
19 FUTURE USE NONE 69 PASSENGER SHIPS NONE
20 WIG
21 WIG CARRYING DG, HS, OR, MP(A) 71 CARGO SHIP CARRYING DG, HS, OR, MP(A)
22 WIG CARRYING DG, HS, OR, MP(B) 72 CARGO SHIP CARRYING DG, HS, OR, MP(B)
23 WIG CARRYING DG, HS, OR MP(C) 73 CARGO SHIP CARRYING DG, HS, OR MP(C)
24 WIG CARRYING DG, HS, OR, MP(D) 74 CARGO SHIP CARRYING DG, HS, OR, MP(D)
25 WIG FUTURE USE 75 CARGO SHIP FUTURE USE
26 WIG FUTURE USE 76 CARGO SHIP FUTURE USE
27 WIG FUTURE USE 77 CARGO SHIP FUTURE USE
28 WIG FUTURE USE 78 CARGO SHIP FUTURE USE
29 WIG NONE 79 CARGO SHIP NONE
30 FISHING 80 TANKER
31 TOWING 81 TANKER CARRYING DG, HS, OR, MP(A)
LENGTH OF THE TOW EXCEEDS 200M OR BREADTH EXCEEDS 25M
32
33 ENGAGED IN DREDGING OR UNDERWATER OPERATIONS 83 TANKER CARRYING DG, HS, OR MP(C)
34 ENGAGED IN DIVING OPEARATIONS 84 TANKER CARRYING DG, HS, OR, MP(D)
35 ENGAGED IN MILITARY OPEARATIONS 85 TANKER FUTURE USE
36 SAILING 86 TANKER FUTURE USE
37 PLEAURE CRAFT 87 TANKER FUTURE USE
38 FUTURE USE 88 TANKER FUTURE USE
39 FUTURE USE 89 TANKER NONE
40 HSC
41 HSC CARRYING DG, HS, OR, MP(A) 91 OTHER TYPE OF SHI CARRYING DG, HS, OR, MP(A)
42 HSC CARRYING DG, HS, OR, MP(B) 92 OTHER TYPE OF SHI CARRYING DG, HS, OR, MP(B)
43 HSC CARRYING DG, HS, OR MP(C) 93 OTHER TYPE OF SHI CARRYING DG, HS, OR MP(C)
44 HSC CARRYING DG, HS, OR, MP(D) 94 OTHER TYPE OF SHICARRYING DG, HS, OR, MP(D)
45 HSC FUTURE USE 95 OTHER TYPE OF SHI FUTURE USE
46 HSC FUTURE USE 96 OTHER TYPE OF SHI FUTURE USE
47 HSC FUTURE USE 97 OTHER TYPE OF SHI FUTURE USE
48 HSC FUTURE USE 98 OTHER TYPE OF SHI FUTURE USE
49 HSC NONE 99 OTHER TYPE OF SHI NONE
50 PILOT
51 SEACH AND RESCURE VESSELS
52 TUGS
53 PORT TENDERS
VESSELS WITH ANTI-POLUUTION FACILITIES OR EQUIPMENT
54
55 LAW ENFOREMENT VESSELS
56 SPARE-FOR ASSIGNMENTS TO LOCAL VESSELS
57 SPARE-FOR ASSIGNMENTS TO LOCAL VESSELS
58 MEDICAL TRANSPORTS
59 SHIPS ACCORDING TO RESOLUTION NO 18
ALL SHIPS OF THIS TYPE 70 CARGO SHIP ALL SHIPS OF THIS TYPE
ALL SHIPS OF THIS TYPE
82 TANKER CARRYING DG, HS, OR, MP(B)
ALL SHIPS OF THIS TYPE 90 OTHER TYPE OF SHI ALL SHIPS OF THIS TYPE
WIG: Wing in ground
HSC: HIgh speed craft
DG: Dangerous goods
HS: Harmful substances
MP: Marine pollutants
0-9: Undefined
18.Press the [ENT] key to register settings and return to the INIT SETTINGS
menu.
19. Press the [MENU] key. You are asked if you are sure to save settings.
9
Page 22
1 OPERATION
20. Press the [ENT] key to save settings.
1.6 Setting CPA/TCPA
Set the CPA (Closest Point of Approach and TCPA (Time to Closest Point of
Approach) of AIS targets for which you want to be alerted to targets close to
own ship. When a ship whose CPA and TCPA are lower than set here the audio
alarm sounds (if active). (The audio alarm may be activated or deactivated
through the menu. See paragraph 1.12.)
1. Press the [MENU] key to open the main menu.
2. Press the [5] key to open the INIT SETTINGS menu.
3. Press the [5] key to choose SET CPA/TCPA.
SAVE ?
YES
NO
CANCEL
[SET CPA/TCPA]
CPA: 0.90 nm
TCPA: 01 min
ACTV: DSBL
+
-
Dialog box for entry of CPA/TCPA
4. Enter desired CPA (setting range: 0-6.00 nm) with the numeric keys and
then press the [NEXT] key to choose TCPA.
5. Enter desired TCPA (setting range: 0-60 min) with the numeric keys and
then press the [NEXT] key to chose ACTV.
6. Press the [SFT/ +/-] key to choose ENBL to activate the CPA/TCPA alarm;
DSBL to disable it.
7. Press the [ENT] key to return to the INIT SETTINGS menu.
8. Press the [MENU] key. You are asked if you are sure to save settings.
SAVE ?
YES
NO
CANCEL
10
SAVE confirmation screen
9. Press the [ENT] key to save settings.
If, when ACTV is set to ENBL, a target whose CPA and TCPA are lower than
set here is detected, the message WNG COLLISION appears and the audio
alarm sounds (if active). Press the [CLR/ALM] key to erase the message and
silence the alarm.
Page 23
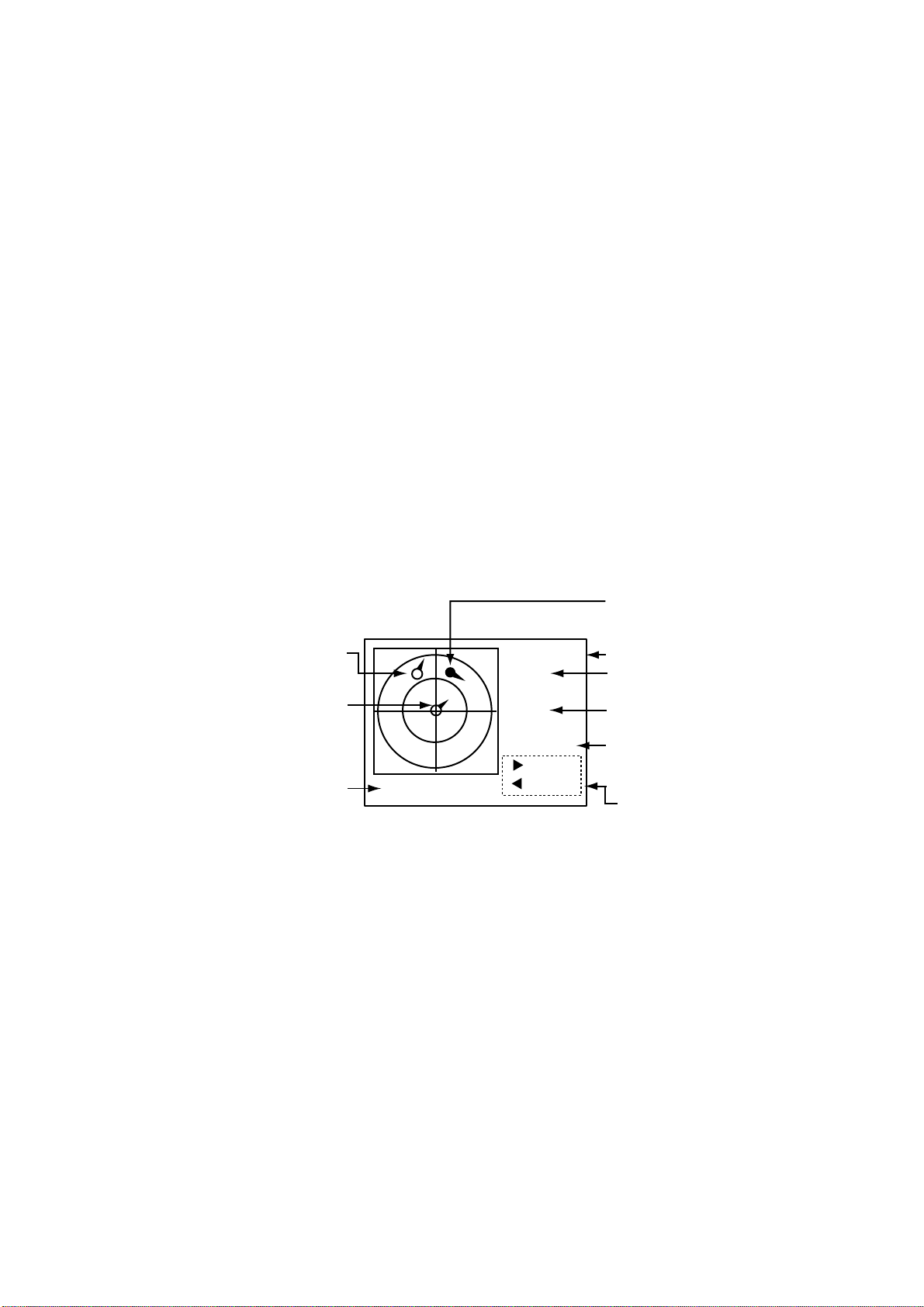
1.7 Plotter Display
The plotter display automatically appears at each power on. You may also
display it as below. AIS targets are displayed automatically.
A target (target marker is hollow) indicates the presence of a vessel equipped
with AIS in a certain location and course. If you desire to know more about a
vessel’s data, select as in step 4 below.
1. Press the [MENU] key to open the menu.
2. Press the [2] key to show the PLOTTER display.
3. Use the [1] or [3] key to choose the range: [1] key to lower it; [3] key to raise
it. The available ranges are (in nm) 0.125, 0.25, 0.5, 0.75, 1.5, 3, 6, 12, and
24.
4. To find a target’s data, do the following:
a) Use the [◄] or [►] key to fill a wanted target marker in black; namely,
activate the target.
b) Press the [SFT/ +/-] key to display SOG/COG and CPA/TCPA alternately.
c) Press the [ENT] key to display other data. Use the [▼] or [▲] key to scroll
the data. The data is the same as that shown on the TARGET DATA
sub-menu. For details, see paragraph 1.8.
1 OPERATION
Selected target
(circle filled in black)
Target
(hollow circle)
Own ship marker
Display range
[FURUNO]
SOG:
10.2 kt
COG:
135.0 deg
INTRD: 0
[ ]: FWD
n
RNG: 1.50
* = Use [SFT +/-] key to
show CPA/TCPA.
[ ]: BACK
m
Target name
Speed over ground*
Course over ground*
Number of targets
within the guard zone
(CPA setting)
Use keys shown to select
target to display its data.
Plotter display
Note 1: If no signal is received from an AIS target for one minute and thirty
seconds it is declared a lost target. Three minutes later it is erased
from the screen.
Note 2: When a target’s CPA and TCPA are lower than set in paragraph 1.6,
the target flashes and the audio alarm sounds (if active). Press the
[CLR/ALM] key to stop the flashing and silence the audio alarm. Take
suitable measures to avoid collision.
11
Page 24
1 OPERATION
1.8 Target Data Display
If you desire detailed information about a target, do the f ollowing:
1.8.1 Normal target data
1. Press the [MENU] key to open the menu.
2. Press the [1] key to choose TARGET DATA. (To show the DANGEROUS
SHIPS display at this time, press the [SFT / +/-] key. For further details
about the DANGEROUS SHIPS display see paragraph 1.8.2.)
Targets listed in
order of range from
own ship
Target’s name, and
range and bearing
from own ship to target
NAME RNG( ) BRG(°)
FURUNO 2.9 276.1
VOYAGE 3.1 292.9
QUEST 4.3 279.5
SEADOG 15.6 82.0
INTREP 21.1 123.1
GLOBER 28.8 246.3
DTLS: [ENT] 1/ 6
n
m
Target no. selected,
no. of targets
Target list
3. Use the [▼] or [▲] key to choose the target whose data you wish to view,
and then press [ENT] key.
4. Use the [▼] or [▲] key to scroll the display.
5. Press the [MENU] key twice to return to the main menu.
See the illustration on the next page for target data display examples.
12
Page 25

1 OPERATION
[DETAILS DATA]
MMSI : 431099806
NAME: FURUNO
C. SIGN: ZL6DEF1
IMO# : 109873421
CPA : 0.02 nm
TCPA : 0’17"
[]
[DETAILS DATA]
MMSI: 431099806
LAT : 34
LON : 134
COG : 270.0 deg
SOG : 20.0 kt
RNG : 25.1 nm
BRG : 278.0 deg
[DETAILS DATA]
MMSI: 431099806
°
03.5442’N
°
30.3883’E
[] []
DNG
[]
MMSI no.
Name
Call sign
IMO no.
CPA
TCPA
MMSI no.
Latitude
Longitude
Course over ground
Speed over ground
Range
Bearing
MMSI no.
"DNG" (DANGER) appears
when a target’s CPA and TCPA
are lower than the CPA/TCPA
setting.
"LOST" appears when signal
from a target is lost. Three
minutes after the loss the
target’s data is erased.
A
A: 10 m
B: 20 m
B
CD
[] []
[DETAILS DATA]
MMSI : 431099806
TYPE NO : 255
TYPE NAME
FUTURE USE
[] []
[DETAILS DATA]
MMSI : 431099806
NAV STATUS NO : 00
NAV STATUS
UNDER WAY USING
ENGINE (DEFAULT)
C: 5 m
D: 5 m
Distance from bow to GPS antenna position
Distance from stern to GPS antenna position
Distance from port to GPS antenna position
Distance from starboard to GPS antenna position
MMSI no.
Type no.
Type description
MMSI no.
Navigation status no.
Navigation status description
Target data displays
13
Page 26

1 OPERATION
1.8.2 Fi ndi ng dangerous ship’s data
You can easily find dangerous ships whose CPA and TCPA are lower than the
preset CPA and TCPA values set on the INIT SETTINGS menu.
1. Press the [MENU] key to open the menu.
2. Press the [1] key to choose TARGET DATA.
3. Press the [SFT/ +/-] key to show the DANGEROUS SHIPS display.
Target’s name, and
CPA and TCPA
[DANGEROUS SHIPS]
NAME CPA( ) TCPA
BOUNTY 0.2 2:00
SEADOG 1.0 2:30
DTLS: [ENT] 1/ 2
n
m
Target no. selected,
no. of dangerous targets
Dangerous ships display
4. To find a dangerous target’s details, choose it using the [▲] or [▼] key and
then press the [ENT] key. The data format is the same as that shown on the
previous page.
5. Press the [MENU] key several times to return to the main menu.
Note: The message “LOST” appears at the top of the DANGEROUS SHIPS
display when no AIS signal is received from the selected target.
14
Page 27

1.9 Own Ship’s Information
The OWN DATA menu (Menu #3) shows your ship's information and status (set
on the INIT SETTING menu) and navigation data.
1.9.1 Own static data
The OWN STATIC DATA display shows your ship’s static data, which includes
MMSI, call sign and name, IMO number, length and beam, type of ship and
location of position fixing antenna. This data should be checked once per
voyage or once per month whichever is shorter. Data may be changed only on
the authority of the master.
1. Press the [MENU] key to show the menu.
2. Press the [3] key to open the OWN DATA sub-menu.
[OWN DATA]
1 OWN STATIC DATA
2 OWN DYNAMIC DATA
3 ALARM STATUS
4 SENSOR STATUS
5 INTERNAL GPS
1 OPERATION
.
OWN DATA sub-menu
3. Press the [1] key to choose OWN STATIC DATA.
4. Use the [▼] or [▲] key to view other pages.
5. Press the [MENU] key twice to return to the main menu.
See the illustration on the next page for own static data examples.
15
Page 28

1 OPERATION
[OWN STATIC DATA1]
NAME : XXXX
Name
C. SIGN: CAL0001
MMSI : 123456789
IMO : 623498071
[]
[OWN STATIC DATA2]
DESTINATION:
TOKYO
DATE : 12/DEC
TIME : 10:25
[] []
[OWN STATIC DATA3]
DTE : DEFAULT
DRAUGHT: 12.1 m
NAV STATUS: 00
STATUS NAME
UNDER WAY USING
ENGINE (DEFAULT)
[]
Call sign
MMSI no.
IMO no.
Destination
Estimated date of arrival
Estimated time of arrival
Data terminal equipment status
Draught
Navigation status no.
Navigation status description
[] []
[OWN STATIC DATA4]
CPA : 1.50 nm
TCPA : 10 min
ANT POS INT. EXT.
LENGTH A : 75 m 77 m
LENGTH B : 20 m 18 m
LENGTH C : 15 m 18 m
LENGTH D : 15 m 12 m
[] []
[OWN STATIC DATA5]
CREW : 12
TYPE : 36 CLASS : A
TYPE NAME
SAILING
OWN STATIC DATA displays
CPA (preset value)
TCPA (preset value)
IN: Internal GPS, OUT: External GPS
Distance from bow to GPS antenna position
Distance from stern to GPS antenna position
Distance from port to GPS antenna position
Distance from starboard to GPS antenna position
Number of crew
Ship type, class
Ship type description
16
Page 29

1.9.2 Own dynamic data
The OWN DYNAMIC DATA display shows your ship’s dynamic data, which
includes time, date, ship’s position, course over ground (COG), speed over
ground (SOG), rate of turn (ROT ), and heading.
The OOW should periodically check position, speed over ground and sensor
information.
1. Press the [MENU] key to open the menu.
2. Press the [3] key to choose OWN DATA.
3. Press the [2] key to choose OWN DYNAMIC DATA.
1 OPERATION
Date, time
Latitude
Longitude
Speed over ground
Course over ground
Rate of turn
Heading
4. Press the [ MENU] key to close the display.
[OWN DYNAMIC DATA]
01/JAN/2002 13:24:55
LAT : 34
LON : 135
SOG : 8.1 kt
COG : 118.5 deg
ROT* : R10.3 deg/min
HDG : 120.7 deg
°
45.2132’ N
°
21.2345’ E
OWN DYNAMIC DATA display
Flashing when transmitting
* = If no ROT device is connected and HDG
sentence is input from a gyrocompass, etc.,
the following is displayed:
Rate of turn less than 10
Rate of turn 10
Rate of turn 10
°
/min. rightward or higher: R>10
°
/min. leftward or higher: L>10
°
/min.: 0.0
17
Page 30

1 OPERATION
1.10 Messages
You may send and receive messages via the VHF link, to a specified
destination (MMSI) or all ships in the area. Messages can be sent to warn of
safety of navigation, for example, an iceberg sighted. Routine messages are
also permitted.
Short safety related messages are only an additional means to broadcast
safety information. They do not remove the requirements of the GMDSS.
When a message is received, the equipment beeps and the indication
“MESSAGE” appears. The contents of the message may be viewed on the
receive message log.
1.10.1 Sending a message
1. Press the [MENU] key to open the main menu.
2. Press the [4] key to open the SET MSG sub-menu.
[SET MSG]
1 CREATE MSG
2 XMIT MSG(S)
3 RCVD MSG(S)
SET MSG sub-menu
3. Press the [1] key to open the CREATE MSG sub-menu.
[CREATE MSG]
1 SET MSG TYPE
2 SET MSG
3 SEND MSG
CREATE MSG sub-menu
4. Press the [1] key to choose SET MSG TYPE.
18
[SET MSG TYPE]
+
-
+
-
+
-
ADDRESS TYPE:
BROAD-CAST
MMSI: 000000000
MSG TYPE: NORMAL
CHANNEL#: A OR B
MMS
SET MSG TYPE sub-menu
Page 31

1 OPERATION
5. ADDRESS TYPE is selected; use the [SFT/ +/-] key to choose address
type: ADDRESS-CAST for a specific ship, or BROAD-CAST for all ships.
For BROAD-CAST go to step 7.
6. For ADDRESS-CAST, press the [NEXT] key to choose “MMSI,” and then
enter the MMSI of the receiving ship.
7. Press the [NEXT] key to choose MSG TYPE.
8. Use the [SFT/ +/-] key to choose message type: NORMAL (message other
than safety) or SAFETY (important navigational or meteorological warning).
9. Press the [NEXT] key to choose CHANNEL#.
10. Use the [SFT/ +/-] key to choose which channel to transmit your message
over; CH-A, CH-B, BOTH (CH-A and CH-B), or “A OR B” (either channel).
11. Press the [ENT] key to register settings and return to the CREATE MSG
sub-menu.
12. Press the [2] key to choose SET MSG.
[SET MSG]
Data Input Mode
123: Numeric
ABC: Alphabet
Use the [SFT/ +/-] key
to switch modes.
123 0/150
Number of
characters used
SET MSG screen
13. Key in your message, using up to 150 alphanumeric characters. Use the
[SFT/ +/-] key to switch between numeric and alphabet input. If you enter a
wrong character, use the [CLR/ALM] key to erase it.
14. Press the [ENT] key to save the message and return to the CREATE MSG
sub-menu.
15. Press the [3] key (SEND MSG) to send your message.
The screen displays “NOW SENDING” during transmission and “SEND
COMPLETED!” when transmission has been completed. (MMSI no. is shown
along with “SEND COMPLETED” if the message was transmitted to a specific
ship.) If the message could not be sent, “SEND FAILED” appears. And if you
did not receive acknowledgement of a message, despite successful
transmission, “UNSUCCESSFUL” appears.
19
Page 32

1 OPERATION
1.10.2 Receiving messages
When a message is received the window below appears on the display. To
view the contents of the message do the following:
MESSAGE !
ESC : [ENT]
1. Press the [ENT] key to erase the “message received” window.
2. Press the [MENU] key to show the main menu.
3. Press the [4] key to choose SET MSG.
4. Press the [3] key to choose RCVD MSG(S).
Date and time message received
Message received
[RCVD MSG(S)]
10/APR 05:09
FROM: 431099806
27/MAR 22:00
FROM: 431099806
01/JAN 09:54
FROM: 431099806
NEW!
S
Unread message
Sender of message
(10 digits)
Safety-related
message
Sample received message
5. Press the [NEXT] key to choose message marked with “NEW” and press
the [ENT] key to view the contents of the message.
20
Page 33

1.10.3 Message logs
The FA-100 automatically saves five each of transmitted and received
messages to their respective message logs. When a log becomes full, the
oldest message in the log is automatically deleted to make room for the latest.
To display a message log, do the following:
1. Press the [MENU] key to open the menu.
2. Press the [4] key to choose SET MSG.
3. Press the [2] key to display the XMIT message log, or the [3] key to display
the RCVD message log.
Date, time message transmitted
1 OPERATION
Date, time message received
MMSI
delivered
to
[XMIT MSG(S)]
31/NOV 13:25 *
TO: 431099111
26/OCT 03:43 *
TO: 431099111
19/SEP 18:00
TO: 431099111
XMIT MSG log
NEW!
NEW!
[RCVD MSG(S)]
10/APR 05:09
FROM: 431099806
27/MAR 22:00
FROM: 431099806
01/JAN 09:54
FROM: 431099806
RCVD MSG log
NEW!
*
Sender’s MMSI
* = NEW: Unread message
XMIT and RCVD message logs
4. To view a message, choose it with the [▼] or [▲] key and then press the
[ENT] key.
5. Press the [MENU] key twice to close the log and return to the main menu.
21
Page 34

1 OPERATION
1.11 Regional Operating Channels
AIS operates primarily on two dedicated VHF channels, CH 2087 and CH2088.
Where these channels are not available regionally, the AIS is capable of being
automatically switching to designated alternate channels by means of a
message from a shore facility. Where no shore based AIS or GMDSS sea area
A1 station is in place, the AIS should be switched manually as in paragraph
1.11.2.
A regional operating area is set with the procedure below. The most recent
eight areas are memorized.
• Automatic setting of VHF DSC (channel 70) from shore-based AIS
• Automatic setting by AIS message from shore-based AIS
• Setting by shipboard system such as ECDIS
• Manual setting
The default area is as follows:
• Tx power: 12.5 W
• Channel no. 2087, 2088
• Frequency bandwidth: 25 kHz
• Tx/Rx mode: Tx/Rx
1.11.1 Viewing channels, Tx power
Do the following to view current channels.
1. Press the [MENU] key to open the menu.
2. Press the [6] key to open the SYSTEM SETTINGS sub-menu.
3. Press the [2] key to choose SET CHANNEL.
[SET CHANNEL]
1 VIEW CHANNEL
2 CHANNEL EDIT
22
SET CHANNEL menu
Page 35

4. Press the [1] key to show the VIEW CHANNEL display.
1 OPERATION
Power
Channel
[VIEW CHANNEL]
POWER : 12.5W
CHANNEL NO.
CH-A: 2087
CH-B: 2088
VIEW CHANNEL display
5. Press the [MENU] key to close the display.
1.11.2 Displaying, editing regional operating area status
You may display the status of regional operating areas currently memorized in
the equipment. Nine of any combination of AIS message from shore-based AIS,
DSC message, manual settings and commands from ECDIS or a PC may be
registered and one will be a default value.
About registering areas
• AIS and DSC messages registered within last two hours cannot be edited.
• An item labeled DEFAULT cannot be registered. (“DEFAULT” are data used
for international waters not controlled by shore-based AIS.)
• If two areas overlap one another the oldest data is deleted.
• Data older than five weeks is deleted.
• Area data is deleted when it is more than 500 miles from the area for which it
was registered.
1. Press the [MENU] key to open the menu.
2. Press the [6] key to open the SYSTEM SETTINGS sub-menu.
3. Press the [2] key to choose SET CHANNEL.
4. Press the [2] key to open the CHANNEL EDIT sub-menu.
[CHANNEL EDIT]
SELECT NO. 1
TIME:
- -/- - - - -: - -
FROM
MMSI: DEFAULT
TYPE: DEFAULT
EDIT : [ENT]
CHANNEL EDIT sub-menu, page 1
SELECT NO.: File number, 1-9. In order of distance from own ship,
from closest to furthest.
TIME: Data and time equipment controlled by external source.
MMSI: MMSI displayed for control by DSC or shore-based AIS.
Dashes or “EMPTY” (no data) otherwise.
23
Page 36

1 OPERATION
TYPE: How channel is controlled:
Note: MMSI and TYPE must be set to other DEFAULT to edit.
5. Use the [▲] or [▼] key to choose file number from SELECT NO.
6. Press the [ENT] key to show details.
7. POWER is selected; press the [SFT/ +/-] key to choose power: 12.5 W or 2
W.
8. Press the [NEXT] key to choose CH NO.
9. Key in channel number for channel A and B with the numeric keys.
10. Press the [NEXT] key to choose MODE.
11. Press the [SFT/ +/-] key to assign mode for channel A and B. Each time the
key is pressed the selection changes in the sequence of TX/RX, TX/RX;
TX/RX, RX; RX, TX/RX; RX, RX; RX, UNUSED; UNUSED, RX.
12. Press the [NEXT] key to choose ZONE. In this zone, the #1 channel in
selected area and the #1 channel in the adjacent zone are used for
communications.
13. Key in the zone distance. The setting range is 0 to 8 (nm), and the default
setting is 5 nm.
14. Press the [NEXT] key to go to the next page.
AIS, AIS message; PI, ECDIS or PC; DSC, DSC, MANUAL,
manual control
[CHANNEL EDIT]
FROM MMSI:
POWER : 12.5W
CH NO.CH-A: 2087
CH-B: 2088
MODE CH-A: TX/RX
CH-B: TX/RX
ZONE: 5nm
_ _ _ _ _ _ _ _ _
+
-
+
-
CHANNEL EDIT sub-menu, page 2
24
[CHANNEL EDIT]
CH-AREA
RIGHT-TOP
LAT: 00
LON: 000
LEFT-BOTTOM
LAT: 00
LON: 000
°
00.0’N
°
00.0’E
°
00.0’N
°
00.0’E
+
-
+
-
+
-
+
-
CHANNEL EDIT sub-menu, page 3
15. Key in the latitude and longitude for the right-top position (nort heast point)
of the AIS operating area. Use the [SF T/ +/-] key to switch coordinate, if
necessary.
16. Press the [NEXT] key to choose LEFT-BOTTOM.
17. Key in the latitude and longitude for the left -bottom position (southwest
position) of the AIS operating area. Use the [S FT/ +/-] key to switch
coordinate, if necessary.
Note: The available range is 20-200 nm. If the area contains overlapping
data the older data will be erased.
Page 37

20-200nm
1 OPERATION
RIGHT-TOP
20-200nm
LEFT-BOTTOM
ZONE
1-8nm
Description of RIGHT-TOP, LEFT-BOTTOM, ZONE
Note: To check or edit settings on previous page, press the [NEXT] key
while pressing the [SFT +/-] key.
18. Press the [ENT] key.
19. YES is selected; press the [ENT] key to register settings. (If the password
entry screen is displayed, MMSI is set to DEFAULT. This cannot be
changed.)
20. Press the [MENU] key several times to close the menu.
Note: If you enter invalid data an appropriate error message appears. Press
the [ENT] key and then reenter data.
1.12 Enabling/Disabling the Buzzer
The buzzer that sounds against CPA or TCPA violation, message reception and
system trouble may be enabled or disabled as below. Note that this buzzer is
not related to a radar or ECDIS alarm.
1. Press the [MENU] key to open the menu.
2. Press the [6] key to open the SYSTEM SETTINGS menu.
3. Press the [5] key to choose SET BUZZER.
[SET BUZZER]
ALARM : ON
CPA/TCPA : ON
MSG ALM : ON
+
-
+
-
+
-
SET BUZZER menu
4. ALARM is selected; press the [SFT/ +/-] key to choose ON or OFF as
appropriate. This alarm is given to system trouble.
5. Press the [NEXT] key to choose CPA/TCPA or MSG ALM, and then press
the [SFT/ +/-] key to choose ON or OFF as appropriate.
6. Press the [ENT] key to register settings.
7. Press the [MENU] key several times to close the menu.
25
Page 38

1 OPERATION
1.13 Long Range Mode
The long range mode sets how to reply to a request for own ship data from a
distant station, for example, Inmarsat C station. You may reply automatically or
manually.
1. Press the [MENU] key to open the menu.
2. Press the [6] key to open the SYSTEM SETTINGS menu.
3. Press the [3] key to choose SET LR MODE.
[SET LR MODE]
LR MODE : AUTO
SET LR MODE menu
+
-
4. Press the [SFT/ +/-] key to choose AUTO or MANUAL as appropriate.
AUTO for automatic replay, MANUAL for manual reply.
5. Press the [ENT] key to register setting.
6. Press the [MENU] key several times to close the menu.
Manual reply
For manual reply, the message below appears when a request for own ship
data arrives from a distant station. Press the [ENT] key to send the data, or
choose NO and press the [ENT] key to send no data.
[RECEIVE LR]
RESPONSE?
YES
NO +/-
Automatic reply
For automatic reply, the message below appears when a request for own ship
data arrives from a distant station and its data is automatically transmitted.
Press the [ENT] key to erase the message.
26
[RECEIVE LR]
LR RECEIVED
ESC : [ENT]+/-
Page 39

2 MAINTENANCE,
TROUBLESHOOTING
WARNING
ELECTRICAL SHOCK HAZARD
Do not open the equipment.
Only qualified personnel
should work inside the
equipment.
2.1 Maintenance
Regular maintenance is necessary to maintain performance. A monthly
maintenance program should be established and should at least include the
items in the table below.
Maintenance items
Item Check point
Connectors
Cabling Check cabling for damage. Replace if damaged.
Ground terminal Check the ground terminal for rust. Clean if necessary.
Ground wire Confirm that the ground wire is firmly fastened.
Transponder unit
cleaning
Check that all connectors on the rear panel of the transponder
unit are firmly connected.
Dirt and dust should be removed from the transponder unit
with a soft, dry cloth. Wipe the LCD carefully to prevent
scratching, using tissue paper and an LCD cleaner. To remove
dirt or salt deposits, use an LCD cleaner, wiping slowly with
tissue paper so as to dissolve the dirt or salt. Change paper
frequently so the salt or dirt will not scratch the LCD. Do not
use solvents such as thinner, acetone or benzene for cleaning;
they can remove paint and marks and deform the equipment.
27
Page 40

2 MAINTENANCE, TROUBLESHOOTING
2.2 Resetting the Breaker
The BREAKER button on the rear panel pops out when internal fault or
overcurrent is detected. Find the cause before pushing in the breaker to restore
normal operation.
POWER
12-24 VDC
Breaker
BREAKER
(PUSH-ON)
to JUNCTION BOX
FA-100 T r ansponder unit, rear view
2.3 Replacement of Battery
The lithium battery on the MPB Board (24P0015) stores data while the power is
turned off, and its life is about five years. When the voltage of the battery goes
below a certain level, the message BACKUP ERROR appears when turning on
the power. When this occurs, contact a FURUNO agent or dealer to request
replacement of the battery, at your earliest convenience.
The battery stores own ship’s static data and setting data, except MMSI no.,
IMO no., ship name, call sign, internal GPS antenna position, external GPS
antenna position, type of ship, baud rate of each interface port, L/R mode,
status of L/R port, AD-10 setting, and LAN port setting (These are stored in the
involatile memory). After the battery has been replaced, reenter necessary
data.
GPS ANT VHF ANT
AUX-1 AUX-2
LAN
EXTRA I/O
AD-10 IN
28
Battery Type Code No.
CR2/3-8LF1ST1SN 000-145-543
Page 41

2.4 Troubleshooting
The troubleshooting table below provides common symptoms of trouble and
the means to rectify them. If you cannot restore normal operation, do not
attempt to check inside the equipment. Refer any repair work to a qualified
technician.
2 MAINTENANCE, TROUBLESHOOTING
Troubleshooting
Symptom Remedy
Power
Cannot turn on the power. • Check that the power connector is firmly fastened.
• Check if the breaker (red button) on the rear panel
of the transponder unit has popped out. Find out
the cause before pushing in the breaker to restore
normal operation.
• Check the power supply.
Transmitting, receiving messages
Cannot transmit or
receive.
Can transmit but message
is sent to wrong party.
Position data
No position data • Check the GPS antenna for damage.
• Check that the VHF antenna cable is firmly
fastened.
• Check the VHF antenna.
• For TX message, try different TX channel
(operating sequence: [MENU], [4], [1], [1]).
• On the SET MSG TYPE sub-menu, check that
ADDRESS TYPE is selected to ADDRESS-CAST
and MMSI is correct, before sending a message.
(operating sequence: [MENU], [4], [1], [1])
• Check the GPS antenna cable and its connectors.
29
Page 42

2 MAINTENANCE, TROUBLESHOOTING
2.5 Diagnostics
The FA-100 provides diagnostic tests to check program no., memory, keyboard,
LCD and built-in GPS receiver.
2.5.1 Di spl aying program number
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
For service technician.
Not accessible by user.
DIAGNOSTICS sub-menu
3. Press the [1] key to choose PROGRAM NO.
[DIAGNOSTICS]
1 PROGRAM NO.
2 MEMORY TEST
3 KEY TEST
4 LCD TEST
5 ON/OFF HISTORY
6 GPS TEST
7 FOR SERVICE
[PROGRAM NO.]
MAIN: 245-0001-0**
SUB : 245-0002-0**
H8S1: 245-0003-0**
H8S2: 245-0004-0**
H8S3: 245-0005-0**
** = Program version no.
PROGRAM NO. display
4. Press the [MENU] key to return to the DIAGNOSTICS sub-menu.
30
Page 43

2.5.2 Memory test
The memory can be checked for proper operation as follows:
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
3. Press the [2] key to choose MEMORY TEST to test the memory. The
results are shown as OK or NG (No Good). For any NG, contact your dealer
for advice.
2 MAINTENANCE, TROUBLESHOOTING
[MEMORY TEST]
ROM RAM
MAIN : OK OK
SUB : OK OK
H8S1 : OK OK
H8S2 : OK OK
H8S3 : OK OK
MEMORY TEST display
4. Press the [MENU] key to return to the DIAGNOSTICS sub-menu.
2.5.3 Keyboard test
The keyboard can be checked for proper operation as follows:
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
3. Press the [3] key to choose KEY TEST.
4. Press each key (except the [POWER] key) one by one. A key’s on-screen
location fills in black while the key is pressed, if the key is functioning
properly.
5. To escape from the keyboard test, press the [MENU] key three times.
[KEY TEST]
1
4
7
NXT
CLR
ESC : [MENU]x3
2
5
8
0
SFT
KEY TEST display
3
6
9
MEN
ENT
31
Page 44

2 MAINTENANCE, TROUBLESHOOTING
2.5.4 LCD test
The LCD can be checked for proper display as follows:
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
3. Press the [4] key to choose LCD TEST. The screen color automatically
changes from yellowish-green to black alternately if the LCD is normal.
[LCD TEST]
Yellowish-green Black
4. Press the [MENU] key to return to the DIAGNOSTICS sub-menu.
2.5.5 On/off history
The ON/OFF HISTORY log shows the date and time of the latest 30 power-ons
and power-offs. In special cases, on and off times of 0 W transmission may
also be shown. However, if the interval between power-on and power-off is
within 15 minutes it is not shown.
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
3. Press the [5] key to choose ON/OFF HISTORY.
[LCD TEST]
LCD TEST display
[ON/OFF HISTORY]
PWR-ON 17/MAY/2002
05:35:54
PWR-OFF 17/MAY/2002
04:56:57
PWR-ON 17/MAY/2002
04:06:34
Power turned on 17 May 2002
at 05:35:54
ON/OFF HISTORY log
4. Use the [▼] or [▲] key to scroll the log.
5. Press the [MENU] key to return to the DIAGNOSTICS sub-menu.
32
Page 45

2.5.6 GPS test
The GPS test checks the built-in GPS receiver for proper operation.
1. Press the [MENU] key to open the main menu.
2. Press the [7] key to open the DIAGNOSTICS sub-menu.
3. Press the [6] key to choose GPS TEST.
4. Press the [ENT] key to start the test. “NOW TESTING…” is displayed during
the testing and the results are displayed as shown in the illustration below.
SELF TEST1 shows OK for normal operation; NG (No Good) for abnormal
operation. SELF TEST shows “0” for normal operation; other numeric for
abnormal operation.
2 MAINTENANCE, TROUBLESHOOTING
[GPS TEST]
START OF TEST
PUSH [ENT]
GPS TEST display
[GPS TEST]
PROGRAM No. : 4850218
PROGRAM Ver. : 0**
SELF TEST1 : OK
SELF TEST2 : 0
ERROR CONTENTS
** = Program Version No.
GPS test results
5. Press the [MENU] key to return to the DIAGNOSTICS sub-menu.
33
Page 46

2 MAINTENANCE, TROUBLESHOOTING
2.6 Alarm Status
The alarm status log shows the date and time alarms were violated.
1. Press the [ MENU] key to open t he main menu.
2. Press the [ 3] key to choose O WN DATA.
3. Press the [3] key to choose ALARM STATUS.
Alarm name,
date and time
of alarm
ALARM STATUS display
4. Use the [▼] or [▲] key to scroll the log.
5. Press the [MENU] key to close the log.
Alarm statuses and their meanings
[ALARM STATUS]
EPFS 7/MAR 4:32:16
L/L 7/MAR 4:02:01
SOG 7/MAR 2:34:54
COG 6/MAR 7:09:32
HDG 3/MAR 8:00:21
ROT 19/FEB 9:05:22
Alarm Status
Indication
TX Tx malfunction TX malfunction
ANT Antenna VSWR
exceed limit
CH1 Rx channel 1
malfunction
CH2 Rx channel 2
malfunction
CH70 Rx channel 70
malfunction
EPFS External EPFS lost No dat a from external navigator.
L/L No sensor
positioning in use
SOG No valid SOG
information
COG No valid COG
information
HDG Heading lost/invalid Invalid/nonexistent HDG data
ROT No valid ROT
information
Alarm
Message
Meaning
Antenna VSWR t rouble. Continued
operation possible.
TDMA RX1 Board trouble. TX stopped
on corresponding TX channel.
TDMA RX2 Board trouble. TX stopped
on corresponding TX channel.
DSC RX Board trouble, transmission
stopped on CH70.
Continued operation possible.
No L/L data
Invalid SOG data
Invalid COG data
Invalid ROT data
34
Page 47

2.7 Error Messages
The F A-100 displays the following error messages to alert you to invalid data,
etc..
2 MAINTENANCE, TROUBLESHOOTING
Error messages
Message Meaning
BATTERY ERROR! Voltage of backup battery is getting low.
BACKUP ERROR
ENTER MMSI Your MMSI was not found when turning on the power.
NO SEL. RENEW AGAIN
CAN’T DISPLAY OVER LAT85° Own ship’s latitude is higher than 85°.
CAN’T DISPLAY INVALID DATA Invalid own ship position.
NO MMSI
SYNCHRONISM CAN’T TAKEN
NO MESSAGE!
SEND FAILED! Transmission failed.
UNSUCCESSFUL!
NO MESSAGE No TX or RX message.
OUT OF RANGE!: DRAUGHT:0-25.5 Invalid draught entered in SET SHIP DATA.
OUT OF RANGE!: YEAR Invalid year entered in SET DESTINATION.
OUT OF RANGE!: MONTH:1-12 Invalid month entered in SET DESTINATION.
OUT OF RANGE!: DAY:1-29/30/31 Invalid day entered in SET DESTINATION.
OUT OF RANGE!: HOUR:0-23 Invalid hour entered in SET DESTINATION.
ROM contents erased because voltage of backup
battery is too low.
No data found for target selected (target data,
dangerous ship).
MMSI not entered when SEND MSG is set for
ADDRESS-CAST.
Slot synchronization not yet performed when you
attempted to send a message.
No TX message when you attempted to send a
message.
Message sent did not reach specified station. (Not
receiving ACK.)
OUT OF RANGE!: MINUTE:0-59 Invalid minute entered in SET DESTINATION.
OUT OF RANGE!: CREW:0-8191 Invalid crew no. entered in SET CREW&TYPE.
OUT OF RANGE!: CPA:0-6.00 Invalid CPA range entered.
OUT OF RANGE!: TCPA:0-60 Invalid TCPA entered.
OUT OF RANGE!: CH-A:IT
DOESN’T EXIST
OUT OF RANGE!: CH-A:IT
DOESN’T EXIST
OUT OF RANGE!: ZONE:1-8
ERROR REGIST Duplicate data in overlapping sea areas.
OUT OF RANGE!: ROT CYCLE:1-10 Invalid ROT entered in SET I/O menu.
Invalid CH-NO. A entered on the CHANNEL EDIT
sub-menu.
Invalid CH-NO. A entered on the CHANNEL EDIT
sub-menu.
Invalid ZONE entered on the CHANNEL EDIT
sub-menu.
35
Page 48

2 MAINTENANCE, TROUBLESHOOTING
Note: Detection of RX Malfunction
1) Detection of TDMA RX malfunction
Frequency error
PLL chip on receiver board generates lock or unlock signal for synthesizer.
MPU watches and sets status flag which reflects data of ALR sentence.
ID 003 for RX1, ID 004 for RX2
2) Detection of DSC RX malfunction
General error
DSC Error (ID: 005) will happen in case of DSC MPU could not receive
form at specifier of the data f r om DSC amplifier unless RSSI exists more
than four seconds.
2.8 GPS Monitor
The GPS monitor display shows information about the built-in GPS receiver,
including position, speed over ground, course over ground, date, time, mode
and status.
1. Press the [ MENU] key to open t he menu.
2. Press the [ 3] key to choose O WN DATA.
3. Press the [ 5] key to choose INTERNAL GPS.
[INTERNAL GPS]
Latitude position
Longitude position
Speed over ground
Course over ground
Date
Time
Mode
A: GPS
D: Differential
N: No Fix
LAT : 34
LON : 135
SOG : 10.9 kt
COG : 98.9 deg
UTC : 6/MAR/2002
6:29:02
MODE: A STS: 3D
°
44.4639’N
°
21.2395’E
STS (Status)
2D GPS position fix
2D:
3D: 3D GPS position fix
D2D: 2D DGPS position fix
D3D: 3D DGPS position fix
DOP: HDOP larger than 4 in 2D fix,
or PDOP larger than 6 in 3D fix
NO FIX: No position fix
Internal GPS monitor
4. Press the [MENU] key to close the display.
36
Page 49

2 MAINTENANCE, TROUBLESHOOTING
2.9 Displaying Sensor Status
The SENSOR STATUS display monitors sensor status.
1. Press the [MENU] key.
2. Press the [3] key to choose OWN DATA.
3. Press the [4] key to choose SENSOR STATUS.
[SENSOR STATUS]
UTC CLOCK LOST
Sensor status display
4. Press the [MENU] key to close the menu.
37
Page 50

2 MAINTENANCE, TROUBLESHOOTING
2.10 Restoring Default Settings
You may clear all settings to start afresh with default settings. When this is
done, the default options for all items in the INIT SETTING and SYSTEM
SETTINGS sub-menus are restored. GPS data is also cleared; however, MMSI
and IMO numbers are not cleared.
1. Turn on the power while pressing and holding down the [CLR/ALM] key.
Hold down the [CLR/ALM] key until the “SHUT DOWN” screen below
appears.
SHUT DOWN
18/MAR/2002
12:12:11
Shut down screen
2. The equipment then starts restoring default settings, showing “COMPLETE”
when finished.
NOW STARTING . . .
CHECKING MENORY
COMPLETE
Screen after memory has been cleared
3. Press the [CLR/ALM] key. The plotter display appears.
4. Set items in INIT SETTINGS and SYSTEM SETTINGS, referring to Chapter
1.
38
Page 51

A
APPENDIX
Menu Tree
Default settings in bold italics.
[MENU] key
1 TARGET DATA
2 PLOTTER
3 OWN DATA
1 OWN STATIC DATA
OWN STATIC DATA 1 (Name, call sign, MMSI, IMO no.)
OWN STATIC DATA 2 (Destination, estimated date and time of arrival)
OWN STATIC DATA 3 (DTE, nav status)
OWN STATIC DATA 4 (CPA, TCPA, GPS antenna position)
OWN STATIC DATA 5 (Crew, type, class)
2 OWN DYNAMIC DATA (Own ship latitude, longitude, SOG, COG, ROT, HDG)
3 ALARM STATUS (Displays alarm log.)
4 SENSOR STATUS
5 INTERNAL GPS (Shows position, SOG, COG, time, date, mode, reveiver status.)
4 SET MSG
1 CREATE MSG
1 SET MSG TYPE
ADDRESS TYPE (ADDRESS-CAST, BROADCAST)
MMSI
MSG TYPE (NORMAL, SAFETY)
CHANNEL (CH-A, CH-B, A OR B)
2 SET MSG
3 SEND MSG
2 XMIT MSG(S)
3 RCVD MSG(S)
5 INIT SETTINGS
1 SET SHIP DATA (NAME, CALL SIGN, DRAUGHT, DTE)
2 SET DESTINATION (DATE, TIME, DESTINATION)
3 SET NAV STATUS
4 SET TYPE&CREW
CREW (0-8191, 0)
TYPE CLASS (A, B)
TYPE NO. (Set ship type. See page 8.)
5 SET CPA/TCPA
CPA (0-6.00 nm)
TCPA (0-60 min)
ACTV (ENBL, DSBL)
6 SET ANTENNA POS
1 INTERNAL ANT POS
A (0-511 m, 0)
B (0-511 m, 0)
C (0-63 m, 0)
D (0-63 m, 0)
2 EXTERNAL ANT POS (Same items as 1 INTERNAL ANT POS.)
(Continued on next page.)
P-1
Page 52

APPENDIX
A
6 SYSTEM SETTINGS
1 SET I/O PORT
1 I/O SPEED (PCI/O, SNSR1, SNSR2, SNSR3, L/R, BCON,
EXTRA1 I/O, XTRA I/O. Setting: 38.4k, 4800)
2 I/O FUNCTION (EXT DISP, LR)
3 I/O PRIORITY
1 L/L, COG, SOG (SN1, 1; SN2, 2: SN3, 3; EX1, 4; LR, 5; PC, 6, LAN, 7)
2 HDG (Same as 1 above)
3 ROT (Same as 1 above)
4 AIS
RESPONSE (PC, LAN, NONE, EX1, LR)
EX1 (ENBL, DSBL)
LR (ENBL, DSBL)
PC (ENBL, DSBL)
LAN (ENBL, DSBL)
4 SET LAN (IP ADRS) (IP ADDRESS 000-000-000-000, SUB)
NET MASK 000-000-000-000, PORT No. 10000)
2 SET CHANNEL
1 VIEW CHANNEL
POWER (0, 2, 12.5 W
CHANNEL NO. (CH-A, 2087, CH-B, 2088
2 CHANNEL EDIT
SELECT (1-9)
TIME
MMSI
TYPE
POWER (
CH-NO.
MODE
ZONE: 0 nm (1-8)
CH AREA RIGHT-TOP ( LAT, LON)
3 SET L/R MODE (AUTO , MANUAL)
4 SET OTHER I/O
AD-10 (ENBL, DSBL
ROT (1-10 s, 1.)
5 SET BUZZER
ALARM (ON, OFF)
CPA/TCPA (ON, OFF)
MSG ALM (ON, OFF)
12.5W, 2 W)
CH-A (0000)
CH-B (0000)
CH-A (TX/RX, RX UNUSED)
CH-B (TX/RX, RX UNUSED)
LEFT-BOTTOM (LAT, LON)
)
)
)
7 DIAGNOSTICS
1 PROGRAM NO.
2 MEMORY STATUS
3 KEY TEST
4 LCD TEST
5 ON/OFF HISTORY
6 GPS TEST
7 FOR SERVICE
AP-2
Page 53

APPENDIX
A
Parts List
This equipment contains complex modules in which fault diagnosis and repair down to
component level are not practical (IMO A.694(17)/8.3.1. Only some discrete components
are used. FURUNO Electric Co., Ltd. believes identifying these components is of no value
for shipboard maintenance; therefore, they are not listed in the manual. Major modules
can be located on the parts location photo on page AP-4.
F U R U N O
Model FA-100
Unit
TRANSPONDER UNIT
ELECTRICAL PARTS LIST
2002-June Blk.No.
SYMBOL TYPE CODE No. REMARKS SHIPPABLE
ASSEMBLY
PRINTED CIRCUIT BOARD
24P0026, LKY2 005-950-780 X
24P0025, OCN2 005-950-790 X
24P0024, MOT2 005-950-800 X
24P0015, MPB 005-950-880 X
ASSEMBLY
RX1 005-952-240 24P0010A X
RX2 005-952-250 24P0010B X
EXCT 005-952-260 24P0012 X
DSC 005-952-270 24P0013 X
PA 005-952-280 24P0014 X
PWX 005-952-290 24P0016 X
FRONT PANEL ASSEMBLY
FA-100 005-952-310 X
FILTER ASSEMBLY
FA-100 005-952-230 X
BREAKER
BK1 TBC5101-01-1211 000-119-400
GPS ASSEMBLY
GN-7N5A-N 005-952-860
P-3
Page 54

APPENDIX
Parts Location
MOT2
Board
(behind)
PWX Assy.
MPB Board
(see photo
below)
Assy.
EXCT
Assy.
PA
RX1 Assy.
RX2 Assy.
DSC Assy.
Transponder unit, f r ont view, front panel removed
MPB
Board
24P0015
Transponder unit, right side view, cover removed
AP-4
Page 55

A
GPS Receiver
GN-79N5A-N
APPENDIX
Transponder unit, top view, cover removed
Front panel of transponder unit
LKYZ
Board
24P0026
P-5
Page 56

APPENDIX
Filter Assy.
POWER
12-24 VDC
BREAKER
(PUSH-ON)
FA-100, front view
GPS ANT VHF ANT
AUX-1 AUX-2
LAN
to JUNCTION BOX
FA-100, rear view
AD-10 IN
EXTRA I/O
OCN Board
(behind plate)
AP-6
Page 57

APPENDIX
A
Digital Interface
(IEC 61162-1 Edition 2 (2000-07)/ IEC 61162-2(1998-09))
Sentence data
Input sentences
ABM, ACA, ACK, AIR, BBM, DTM, GBS, GGA, GLL, GNS, HDT, LRF, LRI, OSD, RMC,
ROT, SSD, VBW, VSD, VTG
Output sentences
ABK, ACA, ALR, LRF, LR1, LR2, LR3, TXT, VDM, VDO
Transmission interval
ABK: With each event
ACA: At RX
ALR: 30 s during alarm, 2 min normally no alarm
LRF, LR1, LR2, LR3: At RX
TXT: Each update
VDM: At RX
VDO: 1 s
Load requirements as listener
Isolation: Provided
Input Impedance: 190 ohms (940 ohms without jumper plug)
Max. Voltage: ±14 V to GNDiso
Threshold: ±0.2 V (A-B)
Data transmission
Data is transmitted in serial asynchronous form in accordance with the standard
referenced in 2.1 of IEC 61162-1/2. The first bit is a start bit and is followed by data bits,
least-significant-bit as illustrated below.
The following parameters are used:
Baud rate: 38.4 Kbps /4800 bps
Data bits: 8 (D7 = 0), parity none
Stop bits: 1
D0D1D2D3D4D5D6D7
Start
bit
Databits
Stop
bit
P-7
Page 58

APPENDIX
Serial interface I/O circuit
1. Input/Output Port SENSOR1, 2, 3, L/R, PC IO (PI), EXTRA1
(Transmission rate is selectable between 4800 bps and 38.4 Kbps.)
Input((((RD - A, B))))
Output (TD - A, B)
lsolated IO device
LTC1535
lsolated IO device
LTC1535
Logical High: A-B>+0.2V logical Low: A-B<-0.2V
240 ohms can be neglected by jumper plug.
470 ohm x2
o
i
470ohm x2
RD-A
240 ohm
RD-B
GND isolated
TD-A
TD-B
GND isolated
Logical High: A-B>+4.0V at i
i
o is normally limited less than 100 mA on this device.
This means load resister equal to more than 50 ohms.
o=100 mA logical Low: A-B>-4.0V at io=100 mA
2. Input/Output Port BEACON, EXTRA (maker’s option)
These two ports are simply used Opt-coupler to isolate I/F only on RD terminal.
TD is not isolated and needed isolation by receiver’s responsibility.
RS422A device
SN75C1168
Input current is about 17 mA in case of A-B=+5V.
logical high: A-B< about +2V logical Low: A-B> about +2V
220 ohm
RD-A
RD-B
RS422A device
i
o
SN75C1168
TD-A
AP-8
TD-B
470 ohm x2
GND not isolated
logical High: A-B>+0.2V logical Low: A-B<-0.2V
i
o
is normally limited less than 100 mA.
This means that load resister must be more than 50 ohms.
Page 59

APPENDIX
A
Sentence description
Input
ABM - Addressed binary and safety related message
This sentence provides an external application with a means to exchange data using an
AIS.
!--ABM,x,x,x,xxxxxxxxx,x,xx,s--s,x*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--- 9
| | | | | | | +----- 8
| | | | | | +-------- 7
| | | | | +------------ 6
| | | | +--------------- 5
| | | +--------------------- 4
| | + --------------------------- 3
| +----------------------------- 2
+------------------------------- 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Message sequence identifier, 0 to 3
4. The MMSI of destination AIS unit for the ITU-R M.1371 message 6 or 12
5. AIS channel for broadcast of the radio message
6. VDL message number(6 or 12), see ITU-R M.1371
7. Encapsulated data
8. Number of fill-bits, 0 to 5
9. Checksum
P-9
Page 60

APPENDIX
ACA - AIS regional channel assignment message
This sentence is used to both enter and obtain channel management information.
$--ACA,x,IIII.I, a,yyyyy.yy,a,IIII.II,a,yyyyy.yy,a,x,xxxx,x,xxxx,x,x,x,a,x,hhmmss.ss*hh<CR><LF>
14
13
12
11
10
9
8
7
6
5
15
4
3
2
1
1. Sequence number, 0 to 9
2. Region Northeast corner latitude - N/S
3. Region Northeast corner longitude - E/W
4. Region Southwest corner latitude - N/S
5. Region Southwest corner longitude - E/W
6. Transition Zone Size
7. Channel A
8. Channel A bandwidth
9. Channel B
10. Channel B bandwidth
11. Tx/Rx mode control
12. Power level control
13. Information source
14. In-use flag
15. Time of in-used change
ACK- Ackno wledge alarm
$--ACK,xxx*hh<CR><LF>
| +--------------------- 2
+------------------------ 1
1. Local alarm number(identifier)
2. Checksum
AP-10
Page 61

APPENDIX
A
AIR - AIS interrogation request
This sentence provides an external application with the means to initiate a request for
specific ITU-R M.1371 message from distant mobile or base AIS stations.
$--AIR,xxxxxxxxx,x.x,x,x.x,x,xxxxxxxxx,x.x,x*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--- 9
| | | | | | | +----- 8
| | | | | | +-------- 7
| | | | | +--------------- 6
| | | | +--------------------- 5
| | | +------------------------ 4
| | +--------------------------- 3
| +------------------------------ 2
+------------------------------------- 1
1. MMSI of interrogated satation 1
2. ITU-R M.1371 message requested from station 1
3. Message 5 data set indicator
4. Number of second message requested from station 1
5. Message 5 data set indicator
6. MMSI of interrogated station 2
7. Number of message requested from station 2
8. Message 5 data set indicator
9. Checksum
BBM - UAIS broadcast binary message
This sentence provides an external application with a means to broadcast data, as defined
by the application only – not the AIS.
!--BBM,x,x,x,x,xx,s--s,x*hh<CR><LF>
| | | | | | | |
| | | | | | | +--- 8
| | | | | | +------ 7
| | | | | +--------- 6
| | | | +------------- 5
| | | +---------------- 4
| | +------------------ 3
| +-------------------- 2
+---------------------- 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential Message identifier, 0 to 9
4. AIS channel for broadcast of the radio message
5. VDL message number(8,14,19 or 21), see ITU-R M.1371
6. Binary data
7. Number of fill-bits, 0 to 5
8. Checksum
P-11
Page 62

APPENDIX
DTM - Datum reference
Local geodetic datum to which a position location is referenced.
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--- 7
| | | | | | | +------ 6
| | | | | | +---------- 5
| | | | +---+------------- 4
| | +---+------------------- 3
| +------------------------- 2
+---------------------------- 1
1. Local datum W84 - WGS84
W72 - WGS72
S85 - SGS85
P90 - PE90
999 - User defined
IHO datum code
2. Local datum subdivision code
3. Lat offset, min, N/S
4. Lon offset, min, E/W
5. Altitude offset, m (Not used.)
6. Reference dattum W84 - WGS84
W72 - WGS72
S85 - SGS85
P90 - PE90
7. Checksum
AP-12
Page 63

APPENDIX
A
GBS - GNSS satellite fault detection
This message is used to support receiver autonomous integrity monitoring (RAIM). Given
that a GPS receiver is tracking enough satellites to perform integrity checks of the
positioning quality of the position solution, a message is needed to report the output of this
process to other systems to advise the system user. With the RAIM in the GPS receiver,
the receiver can isolate faults to individual satellites and not use them in its position and
velocity calculations. Also, the GPS receiver can still track the satellite and easily judge
when it is back within tolerance.
This message shall be used for reporting this RAIM information. To perform these integrity
functions, six channels of satellite tracking are a minimum while all-in-view tracking is
most desirable.
$--GBS,hhmmss.ss,x.x,x.x,x.x,xx,x.x,x.x,x.x*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--------- 9
| | | | | | | +------------ 8
| | | | | | +---------------- 7
| | | | | +-------------------- 6
| | | | +----------------------- 5
| | | +--------------------------- 4
| | +------------------------------- 3
| +----------------------------------- 2
+------------------------------------------- 1
1. UTC time of the GGA or GNS fix addociated with this sentence
2. Expected error in latitude
3. Expected error in longitude
4. Expected error in altitude
5. ID number of most likely failed satellite
6. Probability of missed detection for most likely failed satellite
7. Estimate of bias on most likely failed satellite
8. Standard deviation of bias estimate
9. Checksum
P-13
Page 64

APPENDIX
GGA - Global positioning system (GPS) fix data
Time, position and fix related data for a GPS receiver.
$--GGA,hhmmss.ss,llll.lll,a,yyyyy.yyy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh<CR><LF>
| | | | | | | | | | | | | | |
| | | | | | | | | | | | | | +-- 11
| | | | | | | | | | | | | +---- 10
| | | | | | | | | | | | +--------- 9
| | | | | | | | | | +---+------------ 8
| | | | | | | | +---+------------------ 7
| | | | | | | +------------------------- 6
| | | | | | +---------------------------- 5
| | | | | +------------------------------- 4
| | | +----+--------------------------------- 3
| +---+--------------------------------------------- 2
+------------------------------------------------------------- 1
1. UTC of position (Not used.)
2. Latitude, N/S
3. Longitude, E/W
4. GPS quality indicator
5. Number of satllite in use,00-12, may be different from the number in view (Not used.)
6. Horizontal dilution of precision (Not used.)
7. Antenna altitude above/below mean sealevel, m (Not used.)
8. Geoidal separation, m (Not used.)
9. Age of differential GPS data (Not used.)
10. Differential reference station ID, 0000-1023 (Not used.)
11. Checksum
AP-14
Page 65

A
GLL - Geographic position - latitude/longitude
Latitude and longitude of present vessel position, time of position fix and status.
$--GLL,llll.lll,a,yyyyy.yyy,a,hhmmss.ss,A,a*hh<CR><LF>
| | | | | | | |
| | | | | | | +------- 6
| | | | | | +--------- 5
| | | | | +----------- 4
| | | | +---------------- 3
| | +------+----------------------- 2
+---+----------------------------------- 1
1. Latitude, N/S
2. Longitude, E/W
3. UTC of position (Not used.)
4. Status: A=data valid, V=data invalid
5. Mode indicator(see note)
6. Checksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
APPENDIX
The Mode indicator field supplements the Status field. The Status field shall be
set to V=invalid for all values of Operating Mode except for A=Autonomous and
D=Differential. The positioning system Mode indicator and Status field shall not
be null fields.
P-15
Page 66

APPENDIX
GNS - GNSS fixed data
$--GNS,hhmmss.ss,llll.lll,a,yyyyy.yyy,a,c--c,xx,x.x,x.x,x.x,x.x,x.x*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 11
| | | | | | | | | | | +------ 10
| | | | | | | | | | +---------- 9
| | | | | | | | | +-------------- 8
| | | | | | | | +------------------ 7
| | | | | | | +---------------------- 6
| | | | | | +------------------------- 5
| | | | | +------------------------------ 4
| | | +-------+--------------------------------- 3
| +---+--------------------------------------------- 2
+------------------------------------------------------------- 1
1. UTC of position (Not used.)
2. Latitude, N/S
3. Longitude, E/W
4. Mode indicator
5. Total number of satllite in use,00-99 (Not used.)
6. HDOP (Not used.)
7. Antenna altitude, metres, re:mean-sea-level(geoid) (Not used.)
8. Geoidal separation (Not used.)
9. Age of differential data (Not used.)
10. Differential reference station ID (Not used.)
11. Checksum
HDT - Heading - true
Actual vessel heading in degrees true produced by any device or system producing true
bearing.
$--HDT,x.x,T*hh<CR><LF>
| | |
| | +--------- 2
+----+----------- 1
1. Heading, degrees true
2. Checksum
AP-16
Page 67

APPENDIX
A
LRF – Long-range function
This sentence is used in both long-range interrogation and long-range interrogation replies.
The LRF-sentence is the second sentence of the long-range range interrogation request
pair, LRI and LRF.
$--LRF,x,xxxxxxxxx,c--c,c--c*hh<CR><LF>
| | | | |
| | | | +--- 5
| | | +------ 4
| | +----------- 3
| +------------------- 2
+------------------------- 1
1. Sequence number, 0 to 9
2. MMSI of requestor
3. Name of requestor, 1 to 20 characters
4. Function, 1 to 26 characters
5. Checksum
LRI – Long-range interrogation
The LRI-sentence contains the information that the AIS needs in order to determine if the
reply sentences need to be constructed.
$--LRI,x,a,xxxxxxxxx,xxxxxxxxx,llll.ll,a,yyyyy.yy,a,llll.ll,a,yyyyy.yy,a*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 9
| | | | | | | | | | +---+----- 8
| | | | | | | | +--+---------------- 7
| | | | | | +---+-------------------------- 6
| | | | +--+------------------------------------- 5
| | | +--------------------------------------------------- 4
| | +------------------------------------------------------------- 3
| +------------------------------------------------------------------- 2
+--------------------------------------------------------------------- 1
1. Sequence number, 0 to 9
2. Control Flag
3. MMSI of requestor
4. MMSI of destination
5. Latitude - N/S(north-east coordinate)
6. Longitude - E/W(north-east coordinate)
7. Latitude - N/S(south-west coordinate)
8. Longitude - E/W(south-west coordinate)
9. Checksum
P-17
Page 68

APPENDIX
OSD - Own ship data
Heading. course, speed, set and drift summary. Useful for, but not limited to radar/ARPA
application.
$--OSD,x.x,A,x.x,a,x.x,a,x.x,x.x,a*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +--------- 10
| | | | | | | | +----------- 9
| | | | | | | +-------------- 8
| | | | | | +------------------ 7
| | | | | +--------------------- 6
| | | | +------------------------ 5
| | | +--------------------------- 4
| | +------------------------------ 3
| +--------------------------------- 2
+------------------------------------ 1
1. Heading, degrees true
2. Heading status: A=data valid, V=data invalid
3. Vessel course, degrees true
4. Course reference, B/M/W/R/P(see note)
5. Vessel soeed
6. Speed refereence, B/M/W/R/P(see note)
7. Vessel set, degrees true---Manually entered (Not used.)
8. Vessel drift(speed) ---Manually entered (Not used.)
9. Speed units, K(km/h) / N(Knots) / S(statute miles/h)
10. Checksum
NOTES - Reference systems(speed/course):
B = bottom tracking log
M = manually entered
W = water referenced
R = radar tracking(of fixed target)
P = positioning system ground reference
AP-18
Page 69

APPENDIX
A
RMC - Recommended minimum specific GPS/TRANSIT data
Time, date, position, course and speed data provided by a GPS or TRANSIT navigation
receiver. Checksum is mandatory in this sentence. This sentence is transmitted at
intervals not exceeding 2 s and is always accompanied by RMB when a destination
waypoint is active. RMC and RMB are the recommended minimum data to be provided by
a GPS or TRANSIT receiver. All data fields must be provided, null fields used only when
data is temporarily unavailable.
$--RMC,hhmmss.ss,A,llll.lll,a,yyyyy.yyy,a,x.x,x.x,xxxxxx,x.x,a,a*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 10
| | | | | | | | | | | +----- 9
| | | | | | | | | +--+------- 8
| | | | | | | | +--------------- 7
| | | | | | | +--------------------- 6
| | | | | | +------------------------- 5
| | | | +---+---------------------------- 4
| | +---+---------------------------------------- 3
| +--------------------------------------------------- 2
+---------------------------------------------------------- 1
1. UTC of position fix (Not used.)
2. Status: A=data valid, V=navigation receiver warning
3. Latitude, N/S
4. Longitude, E/W
5. Speed over ground, knots
6. Course over ground, degrees true
7. Date: dd/mm/yy (Not used.)
8. Magnetic variation, degrees E/W (Not used.)
9. Mode indicator(see note)
10. Checksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
The Mode indicator field supplements the Status field. The Status field
shall be set to V=invalid for all values of Operating Mode except for
A=Autonomous and D=Differential. The positioning system Mode indicator
and Status field shall not be null fields.
ROT - Rate of turn
Rate of turn and direction of turn.
$--ROT,x.x,A*hh<CR><LF>
| | |
| | +--- 3
| +----- 2
+-------- 1
1. Rate of turn, deg/min, "-"=bow turns to port
2. Status: A=data valid, V=data invalid
3. Checksum
P-19
Page 70

APPENDIX
SSD - UAIS ship static data
This sentence is used to enter static parameters into a shipboard AIS. The parameters in
this sentence support a number of ITU-R M.1371 messages.
$--SSD,c--c,c--c,xxx,xxx,xx,xx,c*hh<CR><LF>
| | | | | | | |
| | | | | | | +--- 8
| | | | | | +----- 7
| | | | | +------- 6
| | | | +---------- 5
| | | +-------------- 4
| | +------------------ 3
| +---------------------- 2
+--------------------------- 1
1. Ship’s Call Sign, 1 to 7 characters
2. Ship’S Name, 1 to 20 characters
3. Pos. ref. point distance, "A," from bow, 0 to 511 Meters
4. Pos. ref. point distance, "B," from stern, 0 to 511 Meters
5. Pos. ref. point distance, "C," from port beam, 0 to 63 Meters
6. Pos. ref. point distance, "D," from starboard beam, 0 to 63 Meters
7. DTE indicator flag
8. Checksum
VBW - Dual ground/water speed
$--VBW,x.x,x.x,A,x.x,x.x,A,x.x,A,x.x,A*hh<CR><LF>
| | | | | | | | | | |
| | | | | | | | | | +--- 11
| | | | | | | | | +----- 10
| | | | | | | | +-------- 9
| | | | | | | +----------- 8
| | | | | | +-------------- 7
| | | | | +----------------- 6
| | | | +-------------------- 5
| | | +------------------------ 4
| | +--------------------------- 3
| +------------------------------ 2
+---------------------------------- 1
1. Longitudial water speed, knots
2. Transverse water speed, knots
3. Status: water speed, A=data valid V=data invalid
4. Longitudial ground speed, knots
5. Transverse ground speed, knots
6. Status: ground speed, A=data valid V=data invalid
7. Stern transverse water speed, knots
8. Status: stern water speed, A=data valid V=data invalid
9. Stern transverse ground speed, knots
10. Status: stern ground speed, A=data valid V=data invalid
11. Checksum
AP-20
Page 71

A
VSD - UAIS voyage static data
$--VSD,x.x,x.x,x.x,c--c,hhmmss.ss,xx,xx,x.x,x.x*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +--- 10
| | | | | | | | +------ 9
| | | | | | | +---------- 8
| | | | | | +------------- 7
| | | | | +---------------- 6
| | | | +----------------------- 5
| | | +------------------------------ 4
| | +----------------------------------- 3
| +--------------------------------------- 2
+------------------------------------------- 1
1. Type of ship and cargo category, 0 to 255
2. Maximum present static draught, 0 to 25.5 Meters
3. Persons on-board, 0 to 8191
4. Destination, 1-20 characters
5. Estimated UTC of arrival at destination
6. Estimated day of arrival at destination, 00 to 31(UTC)
7. Estimated month of arrival at destination, 00 to 12(UTC)
8. Navigational status, 0 to 15
9. Regional application flags, 0 to 15
10. Checksum
APPENDIX
VTG - Course over ground and ground speed
The actual course and speed relative to the ground.
$--VTG,x.x,T,x.x,M,x.x,N,x.x,K,a*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +------- 6
| | | | | | | | +--------- 5
| | | | | | +---+----------- 4
| | | | +--+----------------- 3
| | +--+----------------------- 2
+-+----------------------------- 1
1. Course over ground, degrees true
2. Course over ground, degrees magnetic (Not used.)
3. Speed over ground, knots
4. Speed over ground, km/h
5. Mode indicator(see note)
6. CHecksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
The positioning system Mode indicator field shall not be a null field.
P-21
Page 72

APPENDIX
Output
ABK - UAIS addressed and binary broadcast acknowledgement
The ABK-sentence is generated when a transaction, initiated by reception of an ABM, AIR
or BBM sentence, is completed or terminated.
$--ABK,xxxxxxxxx,x,x.x,x,x*hh<CR><LF>
| | | | | |
| | | | | +--- 6
| | | | +----- 5
| | | +------- 4
| | +---------- 3
| +------------- 2
+------------------- 1
1. MMSI of the addressed AIS unit
2. AIS channel of reception
3. Message type
4. Message sequence number
5. Type of acknowledgement
6. Checksum
ACA- See “Input” section.
ALR –Set alarm state
$--ALR,hhmmss.ss,xxx,A,A,c--c*hh<CR><LF>
| | | | | |
| | | | | +------------- 6
| | | | +----------------- 5
| | | +-------------------- 4
| | +---------------------- 3
| +------------------------- 2
+--------------------------------- 1
1. Time of alarm condition change, UTC
2. Local alarm number(identifier)
3. Alarm condition(A=threshold exceeded, V=not exceeded)
4. Alarm’s acknowledge state, A=acknowledged V=unacknowledged
5. Alarm’s description text
6. Checksum
LRF – Long-range function
See input section.
AP-22
Page 73

APPENDIX
A
LR1 - Long-range reply with destination for function request “A”
The LRI sentence identifies the destination for the reply and contains the information
requested by the “A” function identification character.
$--LR1,x,xxxxxxxxx,xxxxxxxxx,c--c,c--c,xxxxxxxxx*hh<CR><LF>
| | | | | | |
| | | | | | +---- 7
| | | | | +---------- 6
| | | | +----------------- 5
| | | +---------------------- 4
| | +------------------------------ 3
| +---------------------------------------- 2
+---------------------------------------------- 1
1. Sequence Number
2. MMSI of responder
3. MMSI of requestor(reply destination)
4. Ship’s name, 1 to 20 characters
5. Call Sign, 1 to 7 characters
6. IMO Number, 9-digit number
7. Checksum
LR2 - Long-range reply for function requests “B, C, E, and F”
The LR2-sentence contains the information requested by the “B, C, E and F” function
identification characters.
$--LR2,x,xxxxxxxxx,xxxxxx,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x.x,T,x.x,N*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 9
| | | | | | | | | | +---+----- 8
| | | | | | | | +--+----------- 7
| | | | | | +----+----------------- 6
| | | | +----+---------------------------- 5
| | | +------------------------------------------ 4
| | +-------------------------------------------------- 3
| +----------------------------------------------------------- 2
+----------------------------------------------------------------- 1
1. Sequence Number
2. MMSI of responder
3. Date: ddmmyy
4. UTC of Position
5. Latitude - N/S
6. Longitude - E/W
7. Course over ground, degrees True
8. Speed over ground, Knots
9. Checksum
P-23
Page 74

APPENDIX
LR3- - Long-range reply for function requests “I, O, P, U and W”
The LR3-sentence contains the information requested by the “I, O, P, U and W” function
identification characters.
$--LR3,x,xxxxxxxxx,c--c,xxxxxx,hhmmss.ss,x.x,cc,x.x,x.x,cc,x.x*hh<CR><LF>
| | | | | | | | | | | |
| | | | | | | | | | | +---- 12
| | | | | | | | | | +------- 11
| | | | | | | | | +---------- 10
| | | | | | | | +-------------- 9
| | | | | | | +------------------ 8
| | | | | | +--------------------- 7
| | | | | +------------------------- 6
| | | | +-------------------------------- 5
| | | +---------------------------------------- 4
| | +---------------------------------------------- 3
| +------------------------------------------------------ 2
+------------------------------------------------------------ 1
1. Sequence Number
2. MMSI of responder
3. Voyage destination, 1 to 20 characters
4. ETA Date: ddmmyy
5. ETA Time
6. Draught
7. Ship/cargo(ITU-R M.1371, Table 18)
8. Ship length
9. Ship breadth
10. Ship type(ITUR-R M.1371, Table 18)
11. Persons, 0 to 8191
12. Checksum
TXT - Text transmission
$--TXT,xx,xx,xx,c--c*hh<CR><LF>
| | | | | |
| | | | | +--- 5
| | | +--+----- 4
| | +---------- 3
| +------------- 2
+---------------- 1
1. Total number of message, 01 to 99
2. Message number, 01 to 99
3. Text identifier
4. Text Message
5. Checksum
AP-24
Page 75

APPENDIX
A
VDM – VHF data-link message
This sentence is used to transfer the entire contents of a received AIS message packet, as
defined in ITU-R M.1371 and as received on the VHF Data Link (VDL), using the “6-bit”
field type.
!--VDM,x,x,x,x,s--s,x*hh<CR><LF>
| | | | | | |
| | | | | | +--- 7
| | | | | +----- 6
| | | | +-------- 5
| | | +------------ 4
| | +-------------- 3
| +---------------- 2
+------------------ 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential message identifier, 0 to 9
4. AIS channel Number
5. Encapsulated ITU-R M.1371 radio message
6. Number of fill-bits, 0 to 5
7. Checksum
VDO - UAIS VHF data-link own-vessel report
!--VDO,x,x,x,x,s--s,x*hh<CR><LF>
| | | | | | |
| | | | | | +--- 7
| | | | | +----- 6
| | | | +-------- 5
| | | +------------ 4
| | +-------------- 3
| +---------------- 2
+------------------ 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential message identifier, 0 to 9
4. AIS channel Number
5. Encapsulated ITU-R M.1371 radio message
6. Number of fill-bits, 0 to 5
7. Checksum
P-25
Page 76

APPENDIX
A
VHF channel list
Ch No. Frequency Ch No. Frequency Ch No. Frequency Ch No. Frequency
1001 156.05 208 156.4125 2002 160.7 2206 160.9125
1003 156.15 209 156.4625 2003 160.75 2207 160.9625
1005 156.25 210 156.5125 2004 160.8 2218 161.5125
6 156.3 211 156.5625 2005 160.85 2219 161.5625
1007 156.35 212 156.6125 6 156.3 2220 161.6125
1018 156.9 213 156.6625 2007 160.95 2221 161.6625
1019 156.95 214 156.7125 8 156.4 2222 161.7125
1020 157 215 156.7625 9 156.45 2223 161.7625
1021 157.05 216 156.8125 10 156.5 2224 161.8125
1022 157.1 217 156.8625 11 156.55 2225 161.8625
1023 157.15 1218 156.9125 12 156.6 2226 161.925
1024 157.2 1219 156.9625 13 156.65 2227 161.975
1025 157.25 1220 157.0125 14 156.7 2228 162.0125
1026 157.3 1221 157.0625 15 156.75 2260 160.6375
1027 157.35 1222 157.1125 16 156.8 2261 160.6875
1028 157.4 1223 157.1625 17 156.85 2262 160.7375
1061 156.075 1224 157.2125 2018 161.5 2263 160.7875
1063 156.175 1225 157.2625 2019 161.55 2264 160.8375
1064 156.225 1226 157.3125 2020 161.6 2265 160.8875
1065 156.275 1227 157.3625 2021 161.65 2266 160.9375
1066 156.325 1228 157.4125 2022 161.7 2278 161.5375
67 156.375 1260 156.0375 2023 161.75 2280 161.6375
68 156.425 1261 156.0875 2024 161.8 2281 161.6875
69 156.475 1262 156.1375 2025 161.85 2282 161.7375
70 156.525 1263 156.1875 2026 161.9125 2283 161.7875
71 156.575 1264 156.2375 2027 161.9625 2284 161.8375
72 156.625 1265 156.2875 2028 162 2285 161.8875
73 156.675 1266 156.3375 2060 160.625 2286 161.9375
74 156.725 267 156.3875 2061 160.675 2287 161.9625
75 156.775 268 156.4375 2062 160.725 2288 162.0125
76 156.825 269 156.4875 2063 160.775
77 156.875 270 156.5375 2064 160.825
1078 156.925 271 156.5875 2065 160.875
1079 156.975 272 156.6375 2066 160.925
1080 157.025 273 156.6875 2078 161.525
1081 157.075 274 156.7375 2079 161.575
1082 157.125 275 156.7875 2080 161.625
1083 157.175 276 156.8375 2081 161.675
1084 157.225 277 156.8875 2082 161.725
1085 157.275 1278 156.9375 2083 161.775
1086 157.325 1280 157.0375 2084 161.825
1087 157.375 1281 157.0875 2085 161.875
1088 157.425 1282 157.1375 2086 161.925
1201 156.0625 1283 157.1875 2087 161.975
1202 156.1125 1284 157.2375 2088 162.025
1203 156.1625 1285 157.2875 2201 160.6625
1204 156.2125 1286 157.3375 2202 160.7125
1205 156.2625 1287 157.3875 2203 160.7625
1206 156.3125 1288 157.4125 2204 160.8125
1207 156.3625 2001 160.65 2205 160.8625
Note:
AP-26
dd 1000 for one-digit, two-digit, and three-digit channel numbers.
Page 77

INDEX
A
Alarm status..................................................34
B
Battery replacement......................................28
Brilliance .........................................................3
Buzzer...........................................................25
C
Channels
setting .......................................................23
viewing......................................................22
Contrast ..........................................................3
Controls...........................................................1
CPA/TCPA range ............................................7
L
LCD test........................................................32
Long range mode.........................................26
M
Maintenance.................................................27
Memory clear................................................38
Memory test..................................................31
Menu tree .................................................AP-1
Messages
logs...........................................................21
sending.....................................................18
N
Navigation status............................................7
D
Dangerous targets........................................14
Destination......................................................7
Diagnostics
GPS test....................................................33
keyboard test............................................31
LCD test....................................................32
memory test..............................................31
on/off history .............................................32
program no................................................30
Digital interface........................................ AP-7
Draught ...........................................................7
Dynamic data................................................17
G
GPS monitor .................................................36
GPS test........................................................33
K
Keyboard test................................................31
O
On/off history................................................32
P
Parts location............................................AP-4
Plotter display...............................................11
POWER key ...................................................2
Program no...................................................30
Program number record................................ vi
S
Sensor status................................................37
Ship type and crew.........................................7
Static data.....................................................15
System configuration...................................... v
System overview ...........................................vii
T
Target data....................................................12
Troubleshooting............................................28
IN-1
Page 78

 Loading...
Loading...