

Page 1
Freescale Semiconductor
Document Number: MCF5235EC
Hardware Specification
MCF523x Integrated
Microprocessor
Hardware Specification
by: Microcontroller Division
Rev. 2, 08/2006
The MCF523x is a family of highly-integrated 32-bit
microcontrollers based on the V2 ColdFire
microarchitecture. Featuring a 16 or 32 channel eTPU,
64 Kbytes of internal SRAM, a 2-bank SDRAM
controller, four 32-bit timers with dedicated DMA, a 4
channel DMA controller, up to 2 CAN modules, 3
UARTs and a queued SPI, the MCF523x family has been
designed for general purpose industrial control
applications. It is also a high-performance upgrade for
users of the MC68332. This document provides an
overview of the MCF523x microcontroller family, as
well as detailed descriptions of the mechanical and
electrical characteristics of the devices.
The MCF523x family is based on the Version 2 ColdFire
reduced instruction set computing (RISC)
microarchitecture operating at a core frequency of up to
150 MHz and bus frequency up to 75 MHz.
Contents
1 MCF523x Family Configurations . . . . . . . . . . . . . . . . . . . 2
2 Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4 Signal Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
5 Design Recommendations . . . . . . . . . . . . . . . . . . . . . . . 9
6 Mechanicals/Pinouts and Part Numbers . . . . . . . . . . . . 14
7 Preliminary Electrical Characteristics . . . . . . . . . . . . . . 23
8 Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
9 Document Revision History . . . . . . . . . . . . . . . . . . . . . . 44
© Freescale Semiconductor, Inc., 2006. All rights reserved.
Page 2
MCF523x Family Configurations
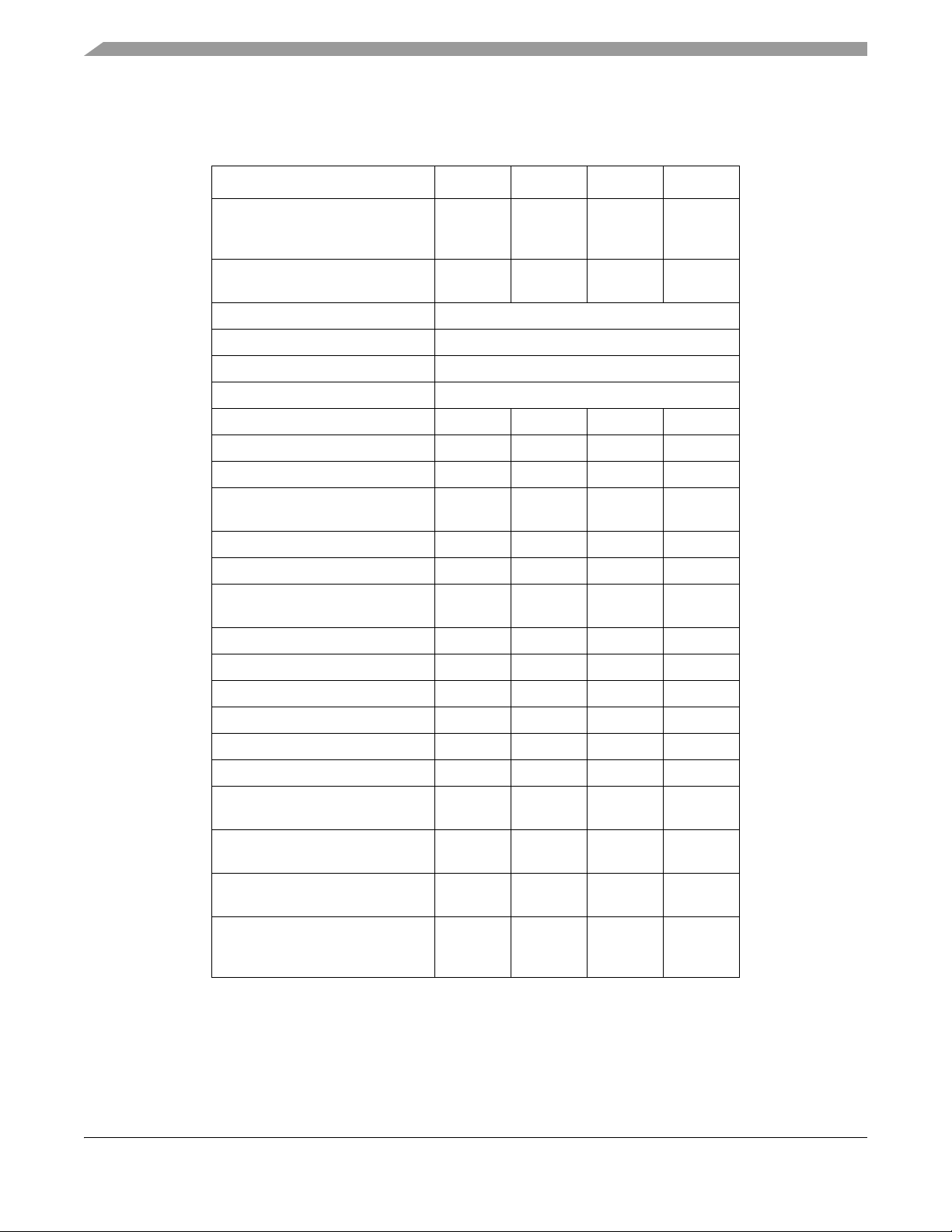
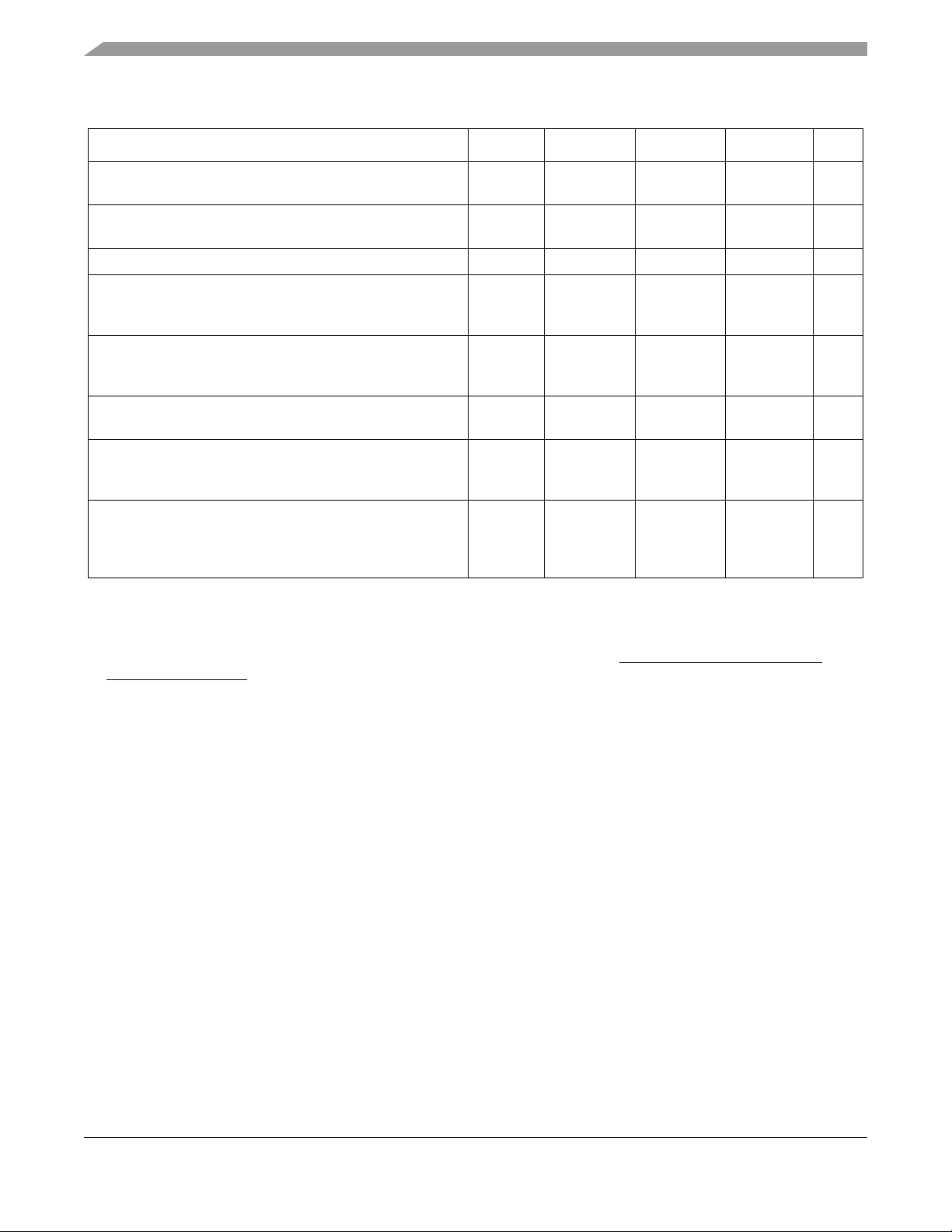
1 MCF523x Family Configurations
Table 1. MCF523x Family Configurations
Module MCF5232 MCF5233 MCF5234 MCF5235
ColdFire V2 Core with EMAC
(Enhanced Multiply-Accumulate
Unit)
Enhanced Time Processor Unit
with memory (eTPU)
System Clock up to 150 MHz
Performance (Dhrystone/2.1 MIPS) up to 144
Instruction/Data Cache 8 Kbytes
Static RAM (SRAM) 64 Kbytes
Interrupt Controllers (INTC) 2 2 2 2
Edge Port Module (EPORT) x x x x
External Interface Module (EIM) x x x x
4-channel Direct-Memory Access
(DMA)
SDRAM Controller x x x x
Fast Ethernet Controller (FEC) — — x x
Cryptography - Security module for
data packets processing
Watchdog Timer (WDT) x x x x
xxxx
16-ch
6K
xxxx
——— x
32-ch
6K
16-ch
6K
32-ch
6K
Four Periodic Interrupt Timers (PIT) x x x x
32-bit DMA Timers 4 4 4 4
QSPI xxxx
UART(s) 3333
2
Cxxxx
I
FlexCAN 2.0B - Controller-Area
Network communication module
General Purpose I/O Module
(GPIO)
JTAG - IEEE 1149.1 Test Access
Por t
Package 160 QFP
1212
xxxx
xxxx
196
MAPBGA
256
MAPBGA
256
MAPBGA
256
MAPBGA
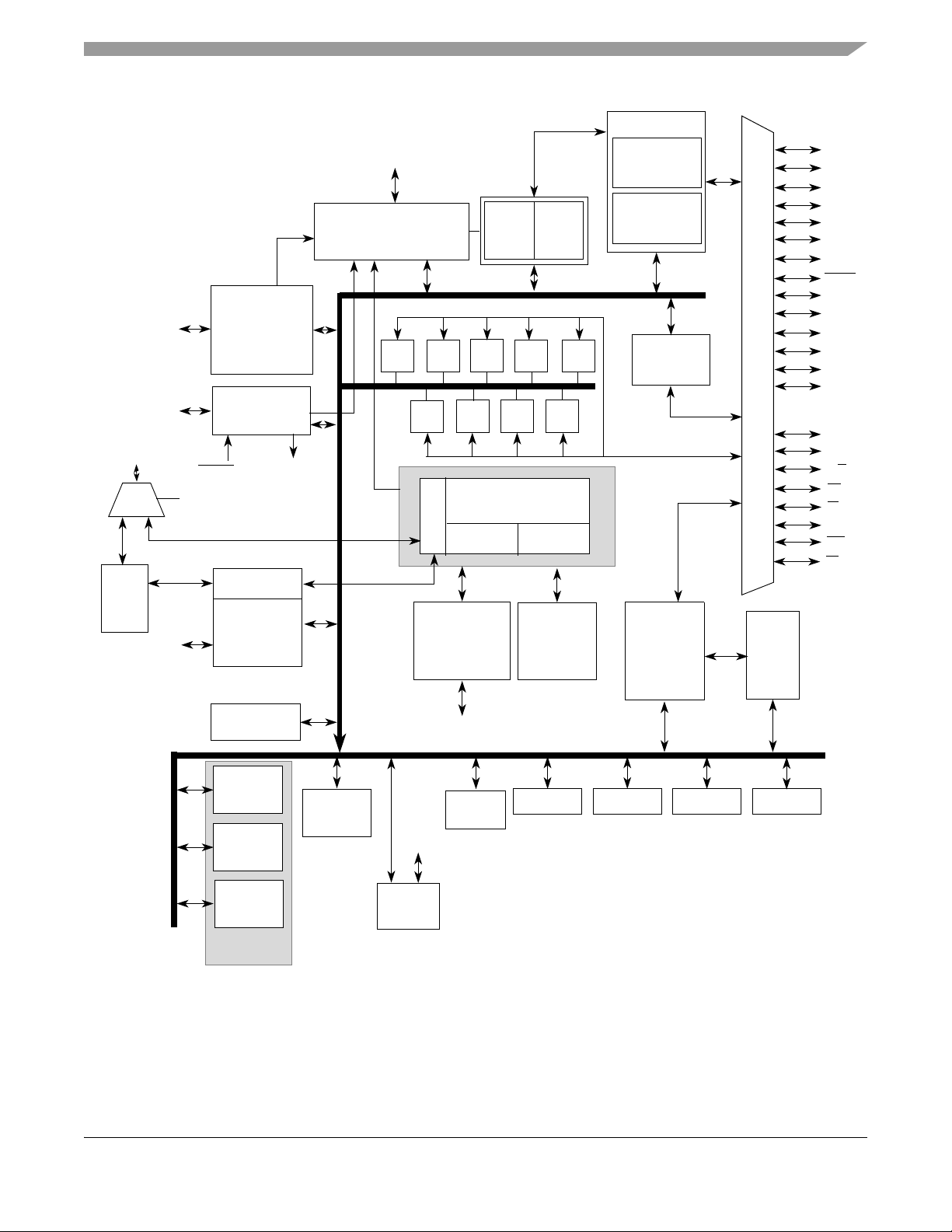
2 Block Diagram
The superset device in the MCF523x family comes in a 256 mold array process ball grid array (MAPBGA)
package. Figure shows a top-level block diagram of the MCF5235, the superset device.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor2
Page 3
(To/From PADI)
(To/From PADI)
(To/From
PAD I)
MUX
JTAG
TAP
(To/From PADI)
DREQ[2:0]
JTAG_EN
FAST
ETHERNET
CONTROLLER
(FEC)
4 CH DMA
DACK[2:0]
NEXUS
eTPU
(To/From SRAM backdoor)
Arbiter
UART
UART
0
1
DTIM
DTIM
0
V2 ColdFire CPU
BDM
64 Kbytes
SRAM
(8Kx16)x4
UART
1
DIV
INTC0
2
DTIM
2
INTC1
2
C
I
DTIM
EMAC
8 Kbytes
CACHE
(1Kx32)x2
QSPI
3
EIM
CHIP
SELECTS
EBI
SDRAMC
PORTS
(GPIO)
Features
SDRAMC
QSPI
I2C_SDA
I2C_SCL
UnTXD
UnRXD
DTnOUT
DTnIN
FEC
CANTX
PADI – Pin Muxing
CIM
UnRTS
nCTS
U
CANRX
eTPU
D[31:0]
A[23:0]
R/
W
CS[3:0]
TA
TSIZ[1:0]
TEA
BS[3:0]
Watchdog
Timer
SKHA
FlexCAN
(x2)
RNGA
MDHA
(To/From Arbiter backdoor)
PLL
CLKGEN
(To/From INTC)
Edge
Port
PIT0
PIT1 PIT2 PIT3
Cryptography
MCF5235 Block Diagram
Modules
3Features
For a detailed feature list see the MCF5235 Reference Manual (MCF5235RM).
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 3
Page 4
Signal Descriptions
4 Signal Descriptions
This section describes signals that connect off chip, including a table of signal properties. For a more
detailed discussion of the MCF523x signals, consult the MCF5235 Reference Manual (MCF5235RM).
4.1 Signal Properties
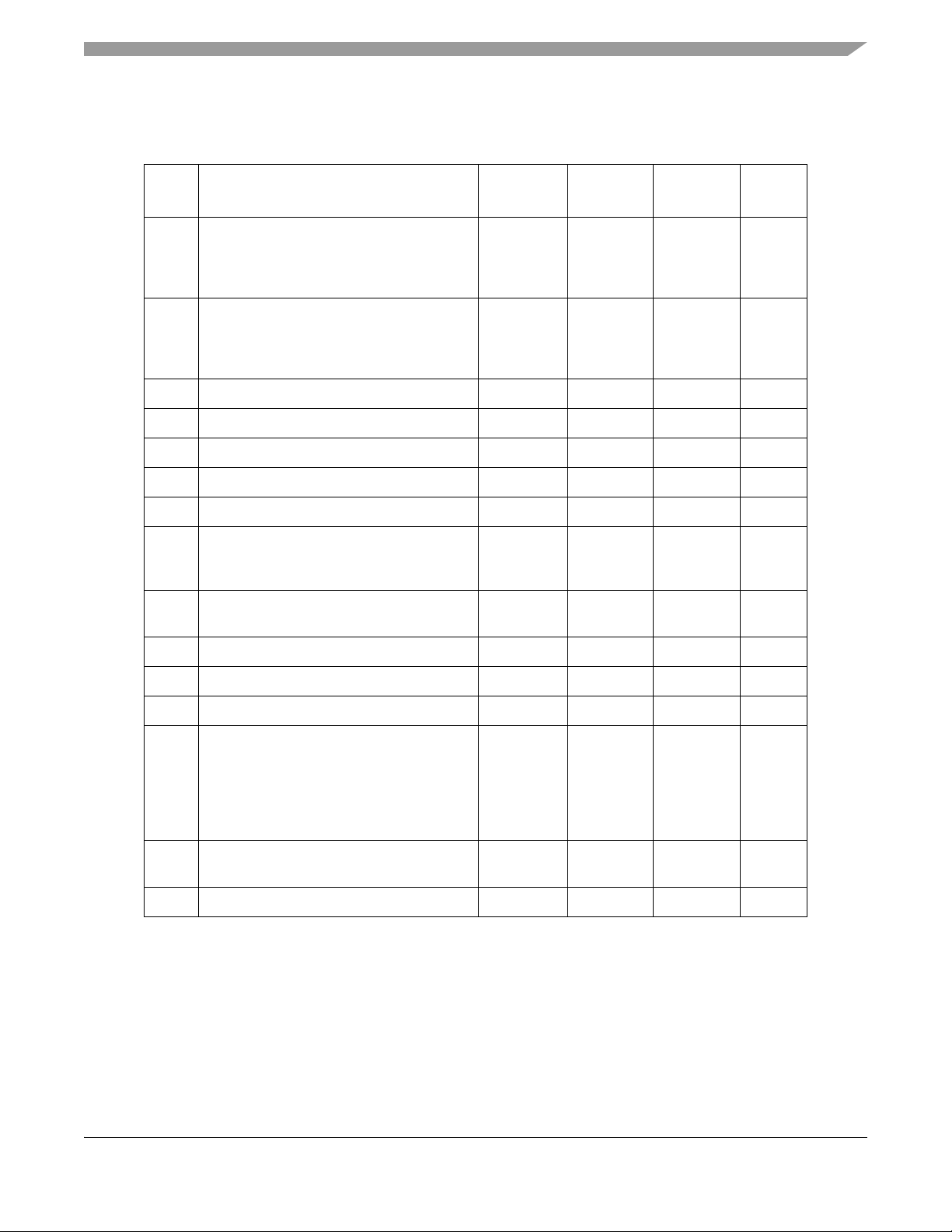
Table 2 lists all of the signals grouped by function. The “Dir” column is the direction for the primary
function of the pin. Refer to Section 6, “Mechanicals/Pinouts and Part Numbers,” for package diagrams.
NOTE
In this table and throughout this document a single signal within a group is
designated without square brackets (i.e., A24), while designations for
multiple signals within a group use brackets (i.e., A[23:21]) and is meant to
include all signals within the two bracketed numbers when these numbers
are separated by a colon.
NOTE
The primary functionality of a pin is not necessarily its default functionality.
Pins that are muxed with GPIO will default to their GPIO functionality.
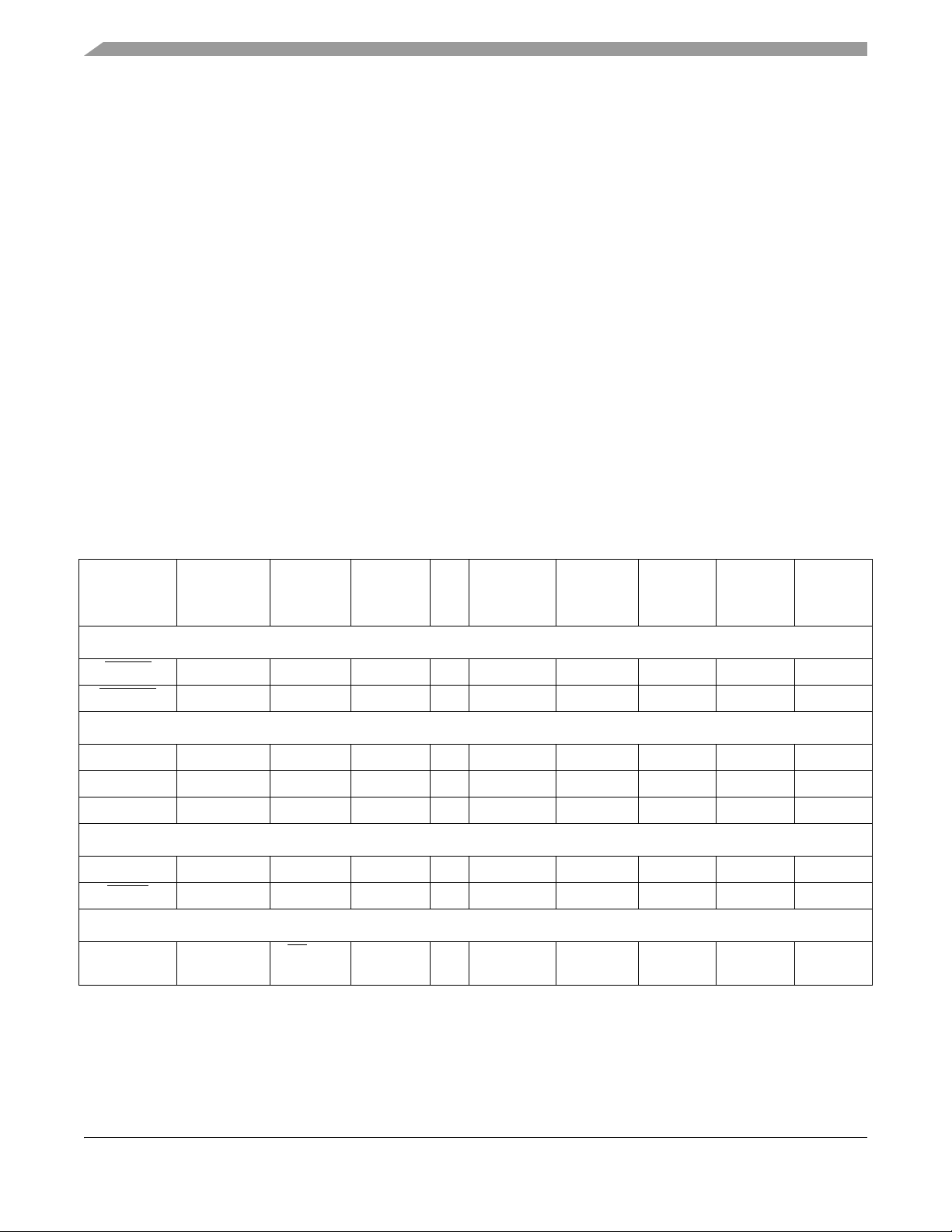
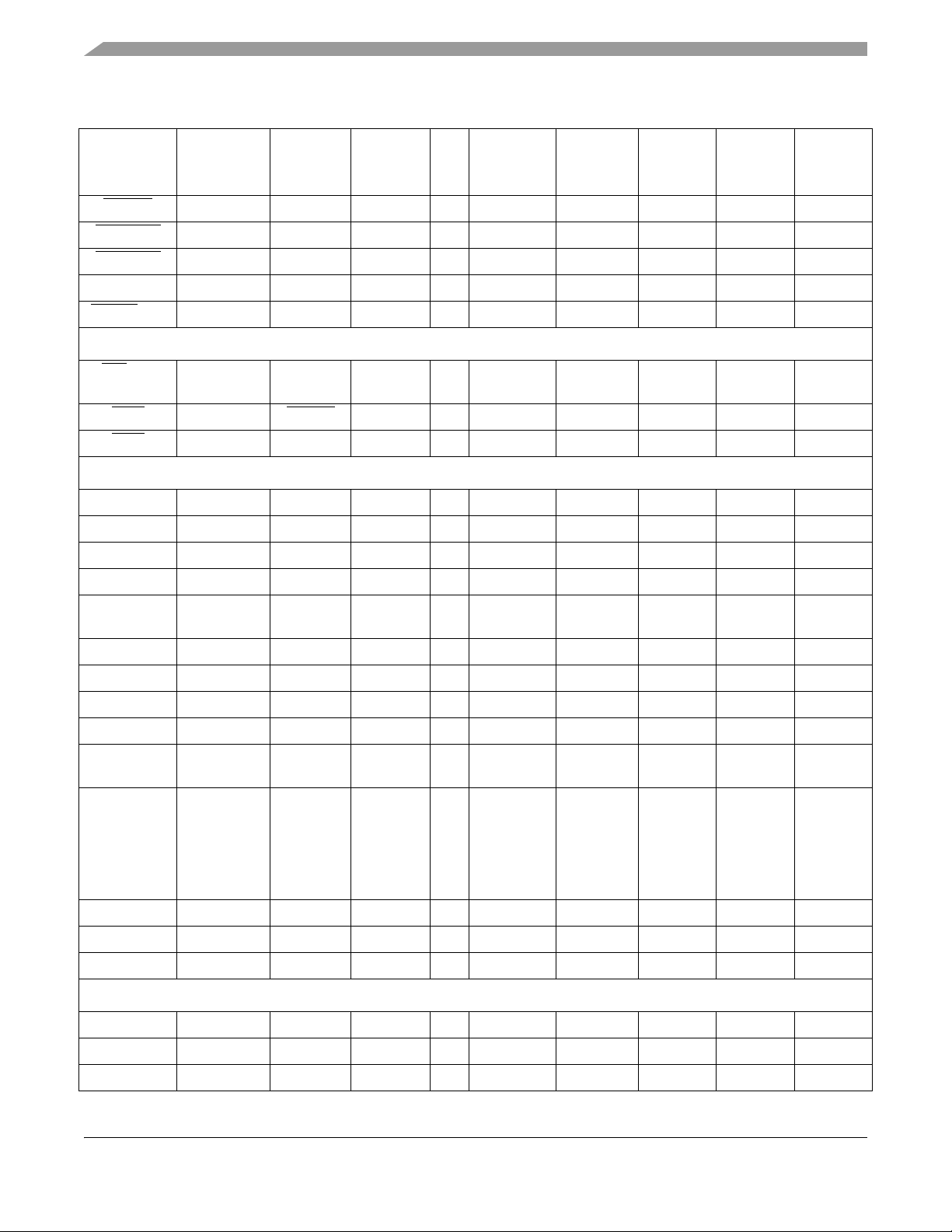
Table 2. MCF523x Signal Information and Muxing
MCF5232
Signal Name GPIO Alternate 1 Alternate 2 Dir.
RESET — — — I 83 N13 T15 T15 T15
RSTOUT — — — O 82 P13 T14 T14 T14
EXTAL — — — I 86 M14 P16 P16 P16
XTAL — — — O 85 N14 R16 R16 R16
CLKOUT — — — O 89 K14 M16 M16 M16
CLKMOD[1:0] — — — I 19,20 G5, H5 J3, J2 J3, J2 J3, J2
RCON — — — I 79 K10 P13 P13 P13
External Memory Interface and Ports
A[23:21] PADDR[7:5] CS
[6:4] — O 126, 125,
1
160
QFP
Reset
Clock
Mode Selection
124
MCF5232
196
MAPBGA
B11, C11,
D11
MCF5233
256
MAPBGA
B14, C14,
A15
MCF5234
256
MAPBGA
B14, C14,
A15
MCF5235
256
MAPBGA
B14, C14,
A15
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor4
Page 5
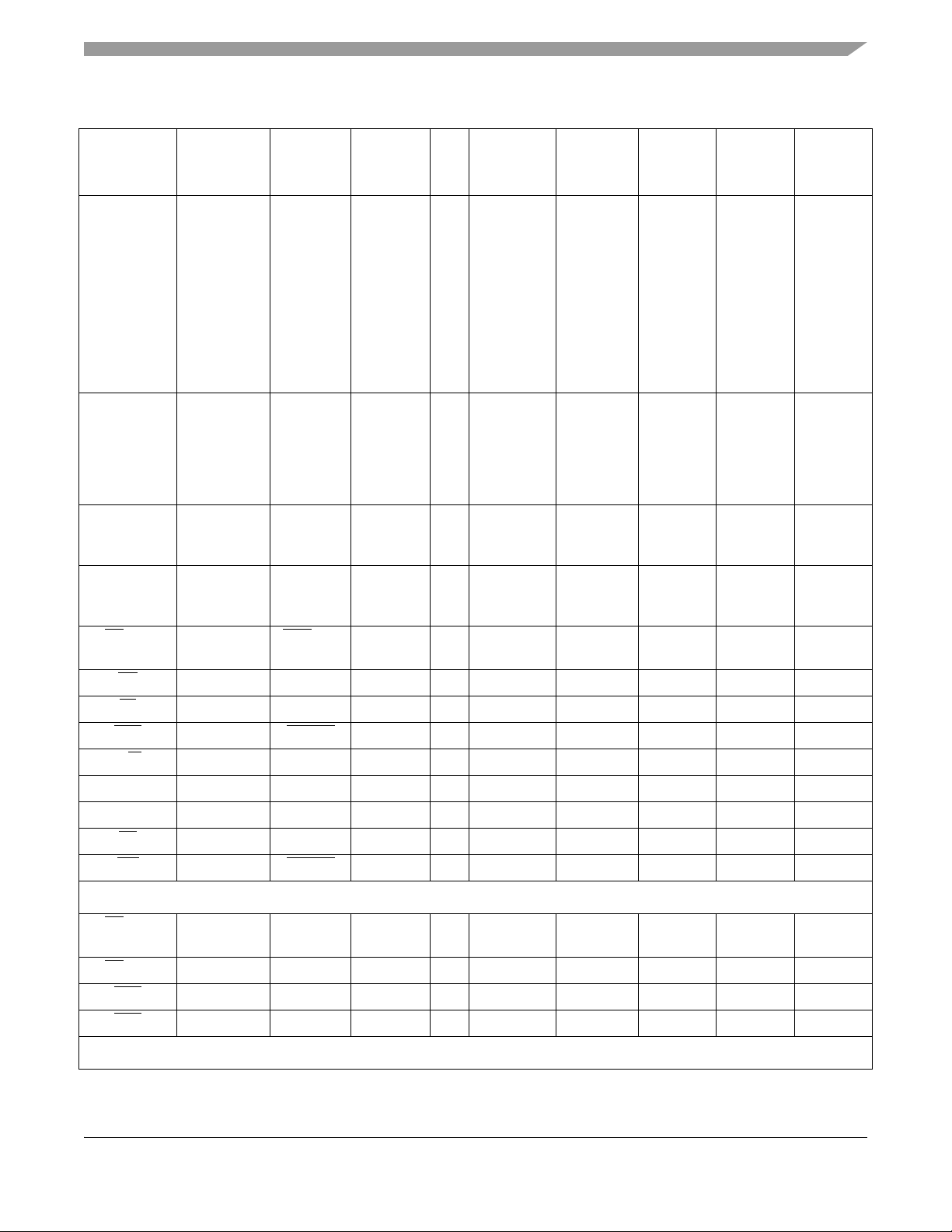
Table 2. MCF523x Signal Information and Muxing (continued)
Signal Descriptions
MCF5232
Signal Name GPIO Alternate 1 Alternate 2 Dir.
1
A[20:0] — — — O 123:115,
112:106,
160
QFP
102:98
MCF5232
MAPBGA
A12, B12,
C12, A13,
B13, B14,
C13, C14,
D12, D13,
D14, E11,
E12, E13,
E14, F12,
F13, F14,
G11, G12,
G13
D[31:16] — — — O 21:24, 26:30,
33:39
G1, G2, H1,
H2, H3, H4,
J1, J2, J3,
J4, K1, K2,
K3, K4, L1,
D[15:8] PDATAH[7:0] — — O 42:49, M1, N1, M2,
N2, P2, L3,
M3, N3,
D[7:0] PDATAL[7:0] — — O 50:52, 56:60 P3, M4, N4,
P4, L5, M5,
N5, P5
196
L2
MCF5233
256
MAPBGA
B15, B16,
C15, C16,
D16, D15,
D14, E16,
E15, E14,
E13, F15,
F14, F13,
G15, G14,
G13, H16,
H15, H14,
H13
K4, K3, K2,
K1, L4, L3,
L2, L1, M3,
M2, M1,
N2, N1, P2,
P1, R1
R2, T2, N3,
P3, R3, T3,
N4, P4,
R4, T4, P5,
R5, N6, P6,
R6, N7
MCF5234
256
MAPBGA
B15, B16,
C15, C16,
D16, D15,
D14, E16,
E15, E14,
E13, F15,
F14, F13,
G15, G14,
G13, H16,
H15, H14,
H13
K4, K3, K2,
K1, L4, L3,
L2, L1, M3,
M2, M1,
N2, N1, P2,
P1, R1
R2, T2, N3,
P3, R3, T3,
N4, P4,
R4, T4, P5,
R5, N6, P6,
R6, N7
MCF5235
256
MAPBGA
B15, B16,
C15, C16,
D16, D15,
D14, E16,
E15, E14,
E13, F15,
F14, F13,
G15, G14,
G13, H16,
H15, H14,
H13
K4, K3, K2,
K1, L4, L3,
L2, L1, M3,
M2, M1,
N2, N1, P2,
P1, R1
R2, T2, N3,
P3, R3, T3,
N4, P4,
R4, T4, P5,
R5, N6, P6,
R6, N7
BS
[3:0] PBS[7:4] CAS[3:0] — O 143:140 B6, C6, D7, C7C9, B9, A9,
A10
OE
PBUSCTL7 — — O 63 N6 T7 T7 T7
C9, B9, A9,
A10
C9, B9, A9,
A10
TA PBUSCTL6 — — I 97 H11 K14 K14 K14
TEA
R/W
PBUSCTL5 DREQ1 —I — J14 K13 K13 K13
PBUSCTL4 — — O 96 J13 L16 L16 L16
TSIZ1 PBUSCTL3 DACK1 — O —P6N8N8N8
TSIZ0 PBUSCTL2 DACK0 — O —P7P8P8P8
TS PBUSCTL1 DACK2 — O — H13 K16 K16 K16
TIP PBUSCTL0 DREQ0 — O — H12 K15 K15 K15
Chip Selects
CS
[7:4] PCS[7:4] — — O —B9, A10,
C10, A11
CS
[3:2] PCS[3:2] SD_CS[1:0] — O 134,133 A9, C9 B12, D12 B12, D12 B12, D12
CS1
CS0
PCS1 — — O 130 B10 B13 B13 B13
— — — O 129 D10 D13 D13 D13
C12, A13,
C13, A14
C12, A13,
C13, A14
C12, A13,
C13, A14
SDRAM Controller
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 5
Page 6
Signal Descriptions
Table 2. MCF523x Signal Information and Muxing (continued)
Signal Name GPIO Alternate 1 Alternate 2 Dir.
SD_WE
SD_SCAS
SD_SRAS
PSDRAM5 — — O 93 K13 L13 L13 L13
PSDRAM4 — — O 92 K12 M15 M15 M15
PSDRAM3 — — O 91 K11 M14 M14 M14
1
MCF5232
160
QFP
MCF5232
196
MAPBGA
MCF5233
256
MAPBGA
MCF5234
256
MAPBGA
MCF5235
256
MAPBGA
SD_CKE PSDRAM2 — — O — E8 C10 C10 C10
SD_CS
[1:0] PSDRAM[1:0] — — O — L12, L13 N15, M13 N15, M13 N15, M13
External Interrupts Port
IRQ[7:3] PIRQ[7:3] — — I IRQ7=64
IRQ4=65
N7, M7, L7,
P8, N8
R8, T8, N9,
P9, R9
R8, T8, N9,
P9, R9
R8, T8, N9,
P9, R9
IRQ2 PIRQ2 DREQ2 — I —M8T9T9T9
IRQ1 PIRQ1 — — I 66 L8 N10 N10 N10
eTPU
TPUCH31 — ECOL — — —F3—F3
TPUCH30 — ECRS — — —F4—F4
TPUCH29 — ERXCLK — — —E3—E3
TPUCH28 — ERXDV — — —E4—E4
TPUCH[27:24] — ERXD[3:0] — — — D3, D4, C3,
C4
— D3, D4, C3,
C4
TPUCH23 — ERXER — — —D5—D5
TPUCH22 — ETXCLK — — —C5—C5
TPUCH21 — ETXEN — — —D6—D6
TPUCH20 — ETXER — — —C6—C6
TPUCH[19:16] — ETXD[3:0] — — — B6,B5, A5,
B7
TPUCH[15:0] — — — 11, 10, 7:2,
159:154,
152, 151
E2, E1, D1
D2, D3, C1,
C2, B1, B2,
A2, C3, B3,
A3, A4, C4,
BR
F2, E1, E2,
D1, D2, C1,
C2, B1, B2,
A2, B3, A3,
B4, A4, A6,
A7
— B6,B5, A5,
F2, E1, E2,
D1, D2, C1,
C2, B1, B2,
A2, B3, A3,
B4, A4, A6,
F2, E1, E2,
D1, D2, C1,
C2, B1, B2,
A2, B3, A3,
B4, A4, A6,
A7
B7
A7
TCRCLK PETPU2 — — 12 E3 F1 F1 F1
UTPUODIS PETPU1 — — — H10 J13 J13 J13
LTPUODIS PETPU0 — — — G10 J14 J14 J14
FEC
EMDIO PFECI2C2 I2C_SDA U2RXD I/O — — —C7C7
EMDC PFECI2C3 I2C_SCL U2TXD O — — —D7D7
ECOL — — — I — — —F3F3
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor6
Page 7
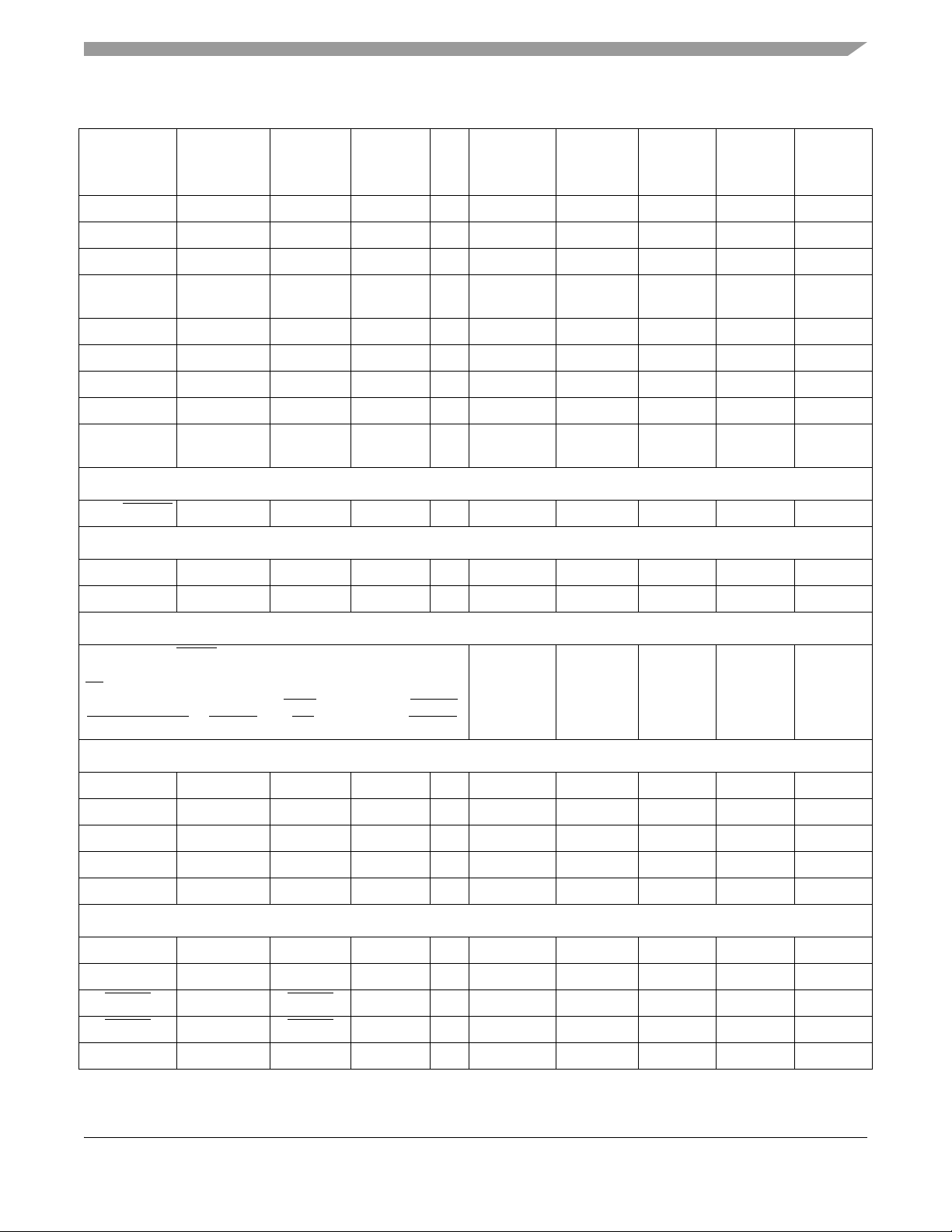
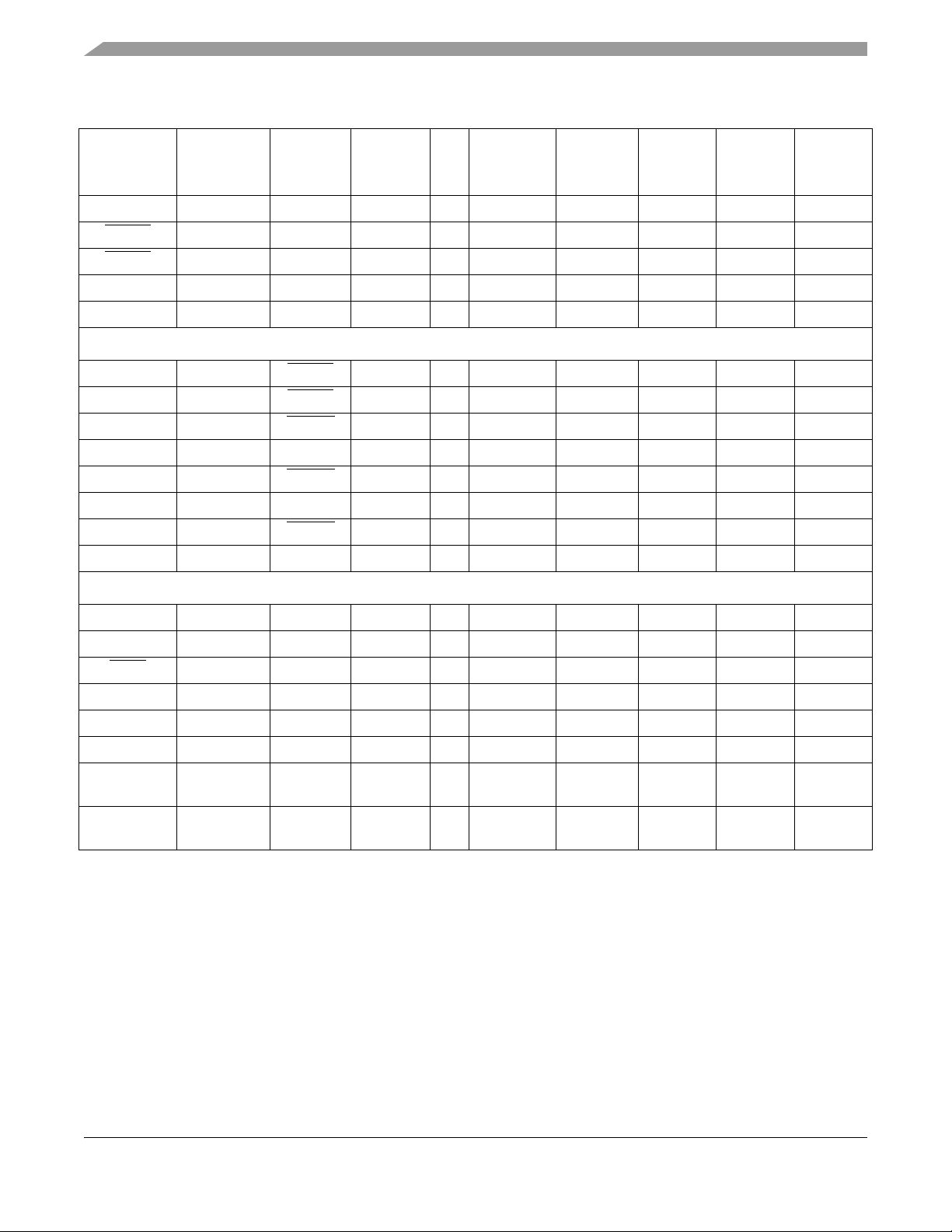
Table 2. MCF523x Signal Information and Muxing (continued)
Signal Descriptions
Signal Name GPIO Alternate 1 Alternate 2 Dir.
1
MCF5232
160
QFP
MCF5232
196
MAPBGA
MCF5233
256
MAPBGA
MCF5234
256
MAPBGA
MCF5235
256
MAPBGA
ECRS — — — I — — —F4F4
ERXCLK — — — I — — —E3E3
ERXDV — — — I — — —E4E4
ERXD[3:0] — — — I — — —D3, D4, C3, C4D3, D4, C3,
C4
ERXER — — — I — — —D5D5
ETXCLK — — — I — — —C5C5
ETXEN — — — O — — —D6D6
ETXER — — — O — — —C6C6
ETXD[3:0] — — — O — — — B6, B5, A5, B7B6, B5, A5,
B7
Feature Control
eTPU/EthENB — — — I ————M4
I2C
I2C_SDA PFECI2C1 CAN0RX — I/O — J12 L15 L15 L15
I2C_SCL PFECI2C0 CAN0TX — I/O — J11 L14 L14 L14
DMA
DACK[2:0] and DREQ[2:0] do not have a dedicated bond pads.
— — — — —
Please refer to the following pins for muxing:
TS and DT2OUT for DACK2, TSIZ1and DT1OUT for DACK1,
TSIZ0 and DT0OUT for DACK0, IRQ2
and DT2IN for DREQ2,
TEA and DT1IN for DREQ1, and TIP and DT0IN for DREQ0.
QSPI
QSPI_CS1 PQSPI4 SD_CKE — O 139 B7 B10 B10 B10
QSPI_CS0 PQSPI3 — — O 147 A6 D9 D9 D9
QSPI_CLK PQSPI2 I2C_SCL — O 148 C5 B8 B8 B8
QSPI_DIN PQSPI1 I2C_SDA — I 149 B5 C8 C8 C8
QSPI_DOUT PQSPI0 — — O 150 A5 D8 D8 D8
UARTs
U2TXD PUARTH1 CAN1TX — O —A8D11D11D11
U2RXD PUARTH0 CAN1RX — I —A7D10D10D10
U1CTS PUARTL7 U2CTS — I —B8C11C11C11
U1RTS PUARTL6 U2RTS — O —C8B11B11B11
U1TXD PUARTL5 CAN0TX — O 135 D9 A12 A12 A12
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 7
Page 8
Signal Descriptions
Table 2. MCF523x Signal Information and Muxing (continued)
Signal Name GPIO Alternate 1 Alternate 2 Dir.
1
MCF5232
160
QFP
MCF5232
196
MAPBGA
MCF5233
256
MAPBGA
MCF5234
256
MAPBGA
MCF5235
256
MAPBGA
U1RXD PUARTL4 CAN0RX — I 136 D8 A11 A11 A11
U0CTS PUARTL3 — — I — F3 G1G1G1
U0RTS PUARTL2 — — O —G3H3H3H3
U0TXD PUARTL1 — — O 14 F1 H2 H2 H2
U0RXD PUARTL0 — — I 13 F2 G2 G2 G2
DMA Timers
DT3IN PTIMER7 U2CTS QSPI_CS2 I — H14 J15 J15 J15
DT3OUT PTIMER6 U2RTS QSPI_CS3 O — G14 J16 J16 J16
DT2IN PTIMER5 DREQ2 DT2OUT I —M9P10P10P10
DT2OUT PTIMER4 DACK2 — O —L9R10R10R10
DT1IN PTIMER3 DREQ1 DT1OUT I —L6P7P7P7
DT1OUT PTIMER2 DACK1 — O —M6R7R7R7
DT0IN PTIMER1 DREQ0 — I — E4 G4G4G4
DT0OUT PTIMER0 DACK0 — O — F4 G3G3G3
BDM/JTAG
2
DSCLK — TRST — I 70 N9 N11 N11 N11
PSTCLK — TCLK — O 68 P9 T10 T10 T10
BKPT — TMS — I 71 P10 P11 P11 P11
DSI — TDI — I 73 M10 T11 T11 T11
DSO — TDO — O 72 N10 R11 R11 R11
JTAG_EN — — — I 78 K9 N13 N13 N13
DDATA[3:0] — — — O —M12, N12,
P12, L11
PST[3:0] — — — O 77:74 M11, N11,
P11, L10
N14, P14,
T13, R13
T12, R12,
P12, N12
N14, P14,
T13, R13
T12, R12,
P12, N12
N14, P14,
T13, R13
T12, R12,
P12, N12
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor8
Page 9
Table 2. MCF523x Signal Information and Muxing (continued)
Design Recommendations
MCF5232
Signal Name GPIO Alternate 1 Alternate 2 Dir.
TEST — — — I 18 F5 J4 J4 J4
PLL_TEST — — — I —R14R14R14
VDDPLL — — — I 87 M13 P15
VSSPLL — — — I 84 L14 R15
OVDD — — — I 1, 9, 17, 32,
VSS — — — I 8, 16, 25, 31,
1
160
QFP
Test
Power Supplies
41, 55, 62,
69, 81, 90,
95, 105, 114,
128, 132,
138, 146
40, 54, 61,
67, 80, 88,
94, 104, 113,
127, 131,
137, 145,
153, 160
MCF5232
196
MAPBGA
E5, E7,
E10, F7, F9,
G6, G8, H7,
H8, H9, J6,
J8, J10, K5,
K6, K8
A1, A14,
E6, E9, F6,
F8, F10,
G7, G9, H6,
J5, J7, J9,
K7, P1, P14
MCF5233
256
MAPBGA
E6:11, F5, F7:10, F12, G5, G6, G11,
G12, H5, H6, H11, H12, J5, J6, J11,
J12, K5, K6, K11, K12, L5, L7:10,
A1, A16, E5, E12, F6, F11, F16,
G7:10, H7: 10, J1, J7:10, K7:10, L6,
L11, M5, M12, N16, T1, T6, T16
MCF5234
256
MAPBGA
L12, M6:M11
MCF5235
256
MAPBGA
VDD — — — I 15, 53, 103,
144
1
Refers to pin’s primary function. All pins which are configurable for GPIO have a pullup enabled in GPIO mode with the exception
of PBUSCTL[7], PBUSCTL[4:0], PADDR, PBS, PSDRAM.
2
If JTAG_EN is asserted, these pins default to Alternate 1 (JTAG) functionality. The GPIO module is not responsible for assigning
these pins.
D6, F11,
G4, L4
A8, G16, H1, T5
5 Design Recommendations
5.1 Layout
• Use a 4-layer printed circuit board with the VDD and GND pins connected directly to the power
and ground planes for the MCF523x.
• See application note AN1259, System Design and Layout Techniques for Noise Reduction in
Processor-Based Systems.
• Match the PC layout trace width and routing to match trace length to operating frequency and board
impedance. Add termination (series or therein) to the traces to dampen reflections. Increase the
PCB impedance (if possible) keeping the trace lengths balanced and short. Then do cross-talk
analysis to separate traces with significant parallelism or are otherwise "noisy". Use 6 mils trace
and separation. Clocks get extra separation and more precise balancing.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 9
Page 10
Design Recommendations
5.2 Power Supply
•33µF, 0.1 µF, and 0.01 µF across each power supply
5.2.1 Supply Voltage Sequencing and Separation Cautions
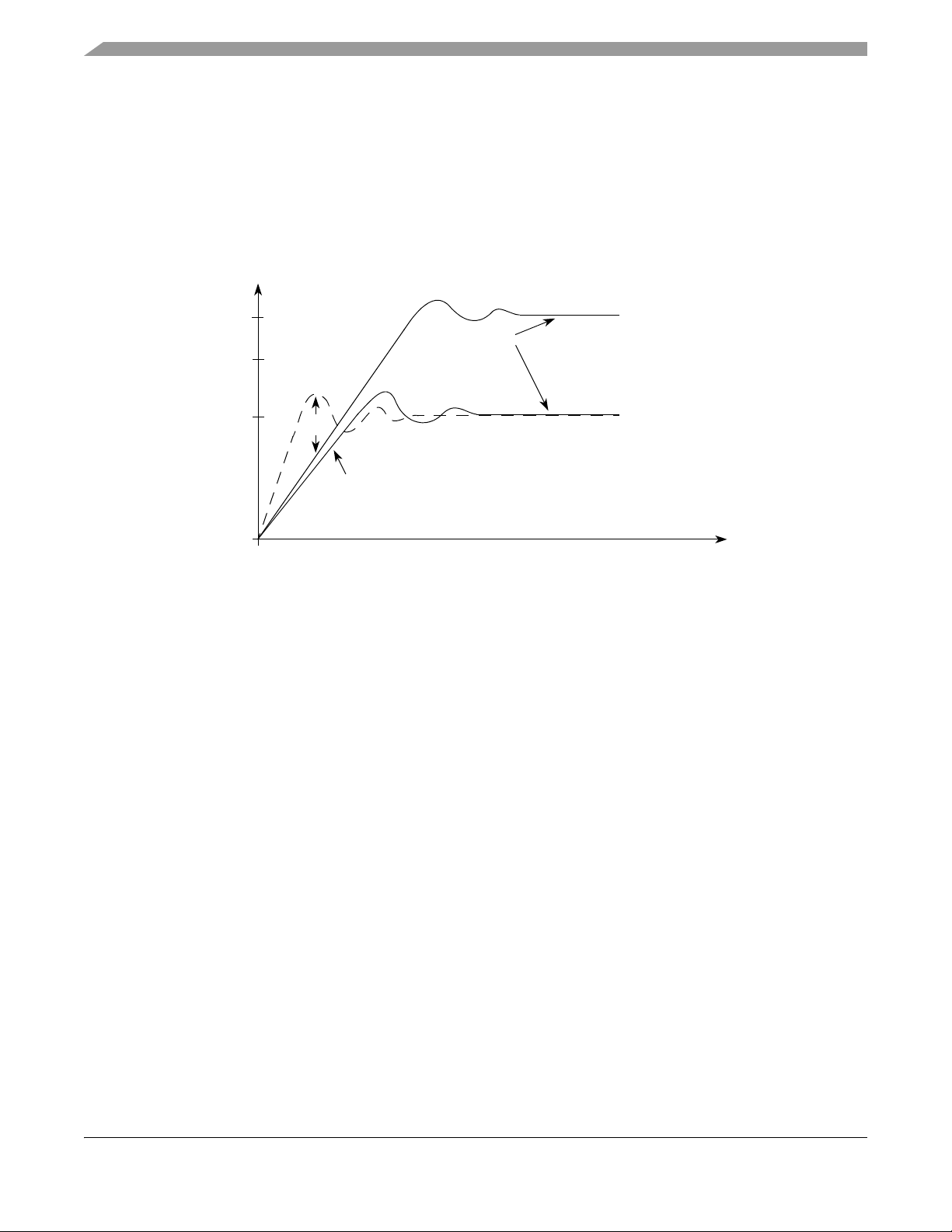
Figure 1 shows situations in sequencing the I/O VDD (OVDD), PLL VDD (PLLVDD), and Core VDD (VDD).
OVDD is specified relative to VDD.
OV
3.3V
Supplies Stable
2.5V
DD
1.5V
DC Power Supply Voltage
0
Notes:
1.
2.
3.
4.
Figure 1. Supply Voltage Sequencing and Separation Cautions
1
2
VDD should not exceed OVDD or PLLVDD by more than 0.4 V
at any time, including power-up.
Recommended that VDD/PLLVDD should track OVDD up to
0.9 V, then separate for completion of ramps.
Input voltage must not be greater than the supply voltage (OVDD,
VDD, or PLLVDD) by more than 0.5 V at any time, including during power-up.
Use 1 ms or slower rise time for all supplies.
VDD, PLLV
DD
Time
5.2.1.1 Power Up Sequence
If OVDD are powered up with VDD at 0 V, then the sense circuits in the I/O pads will cause all pad output
drivers connected to the OV
powers up before V
must powered up. VDD should not lead the OVDD or PLLVDD by more than 0.4 V
DD
during power ramp-up, or there will be high current in the internal ESD protection diodes. The rise times
on the power supplies should be slower than 1 µs to avoid turning on the internal ESD protection clamp
diodes.
to be in a high impedance state. There is no limit on how long after OVDD
DD
The recommended power up sequence is as follows:
1. Use 1 µs or slower rise time for all supplies.
2. V
/PLLVDD and OVDD should track up to 0.9 V, then separate for the completion of ramps with
DD
OV
going to the higher external voltages. One way to accomplish this is to use a low drop-out
DD
voltage regulator.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor10
Page 11

Design Recommendations
5.2.1.2 Power Down Sequence
If VDD/PLLVDD are powered down first, then sense circuits in the I/O pads will cause all output drivers to
be in a high impedance state. There is no limit on how long after VDD and PLLVDD power down before
OV
power down or there will be undesired high current in the ESD protection diodes. There are no
requirements for the fall times of the power supplies.
The recommended power down sequence is as follows:
must power down. VDD should not lag OVDD or PLLVDD going low by more than 0.4 V during
DD
1. Drop V
/PLLVDD to 0 V.
DD
2. Drop OVDD supplies.
5.3 Decoupling
• Place the decoupling caps as close to the pins as possible, but they can be outside the footprint of
the package.
• 0.1 µF and 0.01 µF at each supply input
5.4 Buffering
• Use bus buffers on all data/address lines for all off-board accesses and for all on-board accesses
when excessive loading is expected. See Section 7, “Preliminary Electrical Characteristics.”
5.5 Pull-up Recommendations
• Use external pull-up resistors on unused inputs. See pin table.
5.6 Clocking Recommendations
• Use a multi-layer board with a separate ground plane.
• Place the crystal and all other associated components as close to the EXTAL and XTAL (oscillator
pins) as possible.
• Do not run a high frequency trace around crystal circuit.
• Ensure that the ground for the bypass capacitors is connected to a solid ground trace.
• Tie the ground trace to the ground pin nearest EXTAL and XTAL. This prevents large loop currents
in the vicinity of the crystal.
• Tie the ground pin to the most solid ground in the system.
• Do not connect the trace that connects the oscillator and the ground plane to any other circuit
element. This tends to make the oscillator unstable.
• Tie XTAL to ground when an external oscillator is clocking the device.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 11
Page 12
Design Recommendations
5.7 Interface Recommendations
5.7.1 SDRAM Controller
5.7.1.1 SDRAM Controller Signals in Synchronous Mode
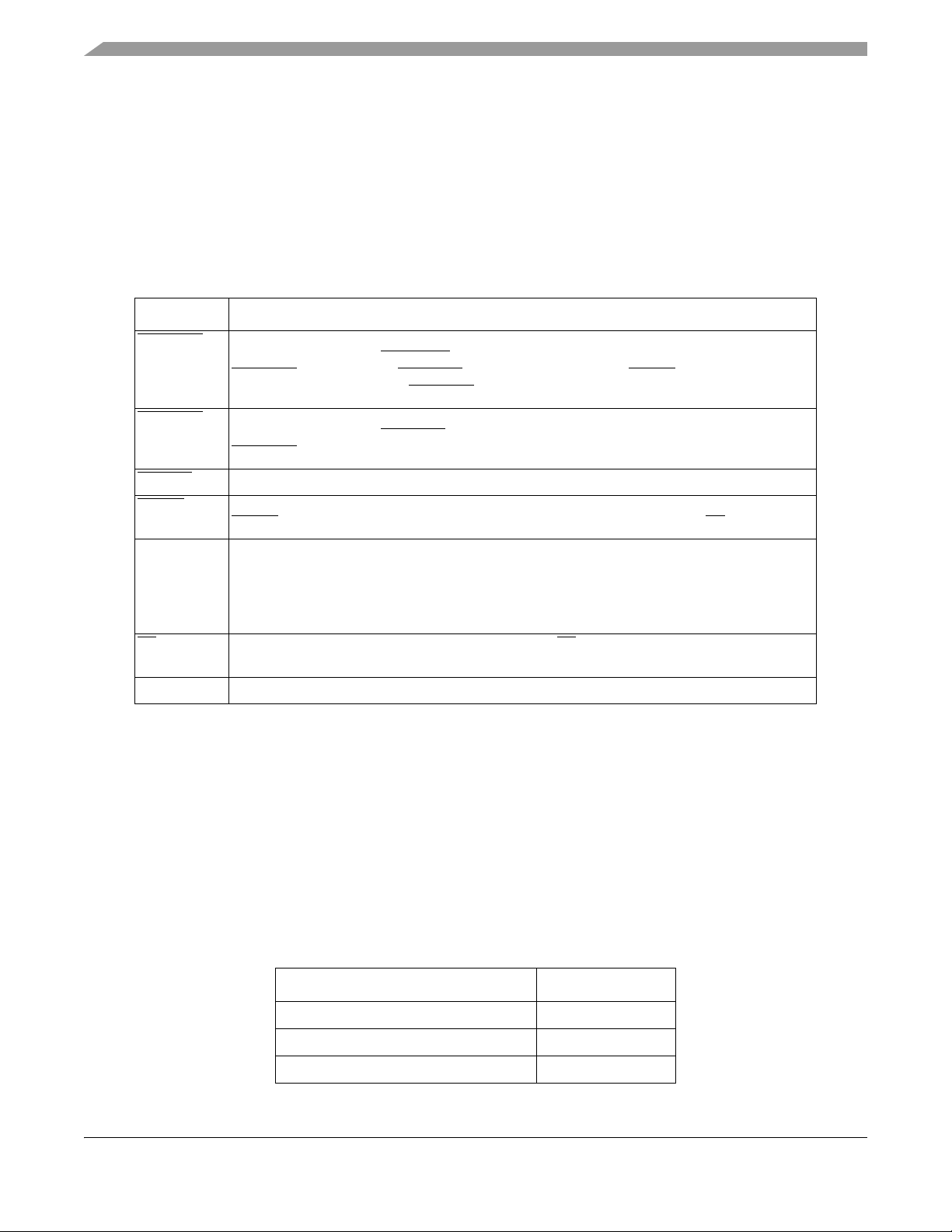
Table 3 shows the behavior of SDRAM signals in synchronous mode.
Table 3. Synchronous DRAM Signal Connections
Signal Description
SD_SRAS
SD_SCAS
DRAMW
SD_CS
SD_CKE Synchronous DRAM clock enable. Connected directly to the CKE (clock enable) signal of
BS
CLKOUT Bus clock output. Connects to the CLK input of SDRAMs.
Synchronous row address strobe. Indicates a valid SDRAM row address is present and can be
latched by the SDRAM. SD_SRAS should be connected to the corresponding SDRAM
SD_SRAS
be interfaced to the SDRAM SD_SRAS signals.
Synchronous column address strobe. Indicates a valid column address is present and can be
latched by the SDRAM. SD_SCAS
SD_SCAS on the SDRAM.
DRAM read/write. Asserted for write operations and negated for read operations.
[1:0] Row address strobe. Select each memory block of SDRAMs connected to the MCF523x. One
SD_CS signal selects one SDRAM block and connects to the corresponding CS signals.
SDRAMs. Enables and disables the clock internal to SDRAM. When CKE is low, memory can
enter a power-down mode where operations are suspended or they can enter self-refresh mode.
SD_CKE functionality is controlled by DCR[COC]. For designs using external multiplexing,
setting COC allows SD_CKE to provide command-bit functionality.
[3:0] Column address strobe. For synchronous operation, BS[3:0] function as byte enables to the
SDRAMs. They connect to the DQM signals (or mask qualifiers) of the SDRAMs.
. Do not confuse SD_SRAS with the DRAM controller’s SD_CS[1:0], which should not
should be connected to the corresponding signal labeled
5.7.1.2 Address Multiplexing
See the SDRAM controller module chapter in the MCF5235 Reference Manual for details on address
multiplexing.
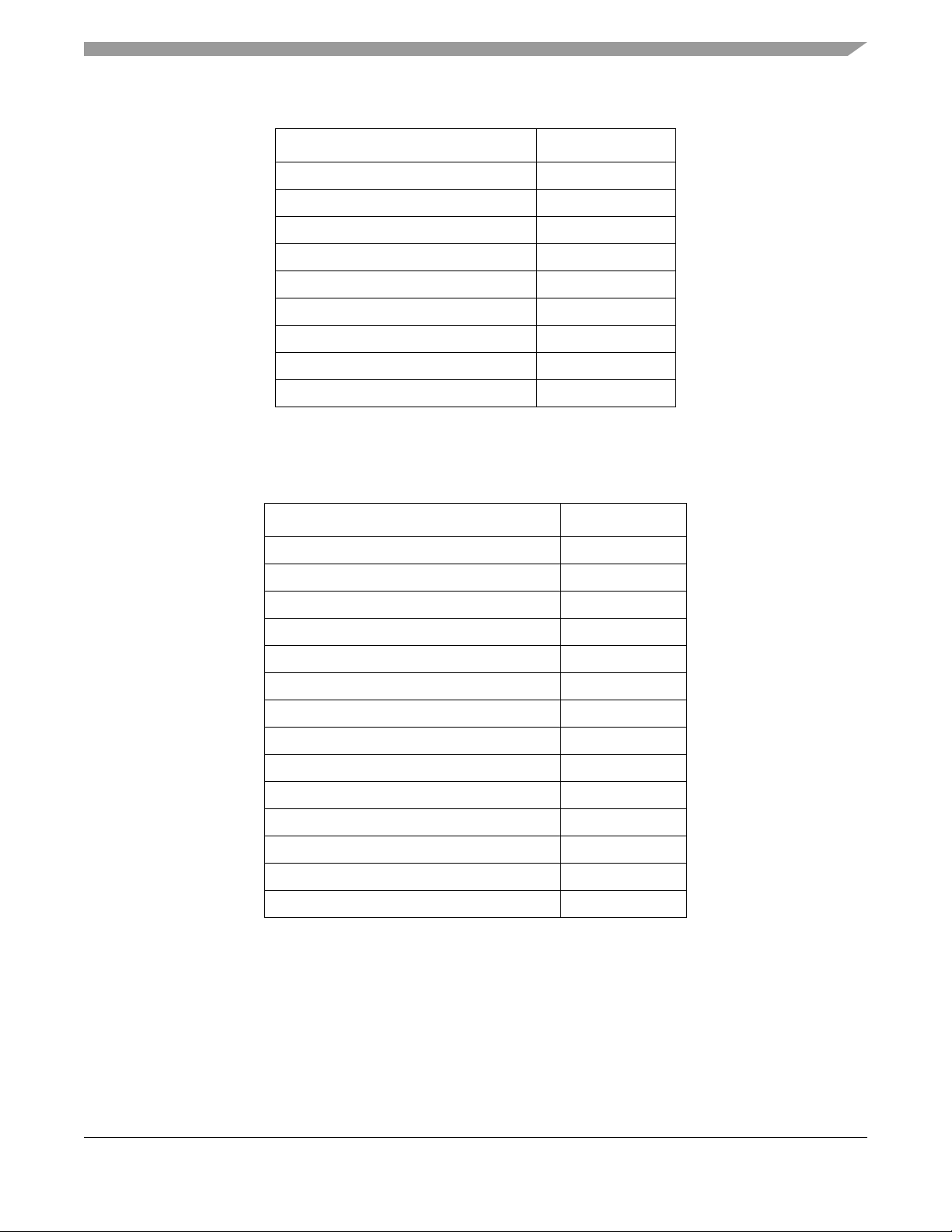
5.7.2 Ethernet PHY Transceiver Connection
The FEC supports both an MII interface for 10/100 Mbps Ethernet and a seven-wire serial interface for 10
Mbps Ethernet. The interface mode is selected by R_CNTRL[MII_MODE]. In MII mode, the 802.3
standard defines and the FEC module supports 18 signals. These are shown in Table 4.
Table 4. MII Mode
Signal Description MCF523x Pin
Transmit clock ETXCLK
Transmit enable ETXEN
Transmit data ETXD[3:0]
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor12
Page 13
Design Recommendations
Table 4. MII Mode (continued)
Signal Description MCF523x Pin
Transmit error ETXER
Collision ECOL
Carrier sense ECRS
Receive clock ERXCLK
Receive enable ERXDV
Receive data ERXD[3:0]
Receive error ERXER
Management channel clock EMDC
Management channel serial data EMDIO
The serial mode interface operates in what is generally referred to as AMD mode. The MCF523x
configuration for seven-wire serial mode connections to the external transceiver are shown in Table 5.
Table 5. Seven-Wire Mode Configuration
Signal Description MCF523x Pin
Transmit clock ETXCLK
Transmit enable ETXEN
Transmit data ETXD[0]
Collision ECOL
Receive clock ERXCLK
Receive enable ERXDV
Receive data ERXD[0]
Unused, configure as PB14 ERXER
Unused input, tie to ground ECRS
Unused, configure as PB[13:11] ERXD[3:1]
Unused output, ignore ETXER
Unused, configure as PB[10:8] ETXD[3:1]
Unused, configure as PB15 EMDC
Input after reset, connect to ground EMDIO
Refer to the M523xEVB evaluation board user’s manual for an example of how to connect an external
PHY. Schematics for this board are accessible at the MCF5235 site by navigating to:
http://www.freescale.com/coldfire.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 13
Page 14

Mechanicals/Pinouts and Part Numbers
5.7.3 FlexCAN
The FlexCAN module interface to the CAN bus is composed of 2 pins: CANTX and CANRX, which are
the serial transmitted data and the serial received data. The use of an external CAN transceiver to interface
to the CAN bus is generally required. The transceiver is capable of driving the large current needed for the
CAN bus and has current protection, against a defective CAN bus or defective stations.
5.7.4 BDM
Use the BDM interface as shown in the M523xEVB evaluation board user’s manual. The schematics for
this board are accessible at the Freescale website at: http://www.freescale.com/coldfire.
6 Mechanicals/Pinouts and Part Numbers
This section contains drawings showing the pinout and the packaging and mechanical characteristics of
the MCF523x devices. See Table 2 for a list the signal names and pin locations for each device.
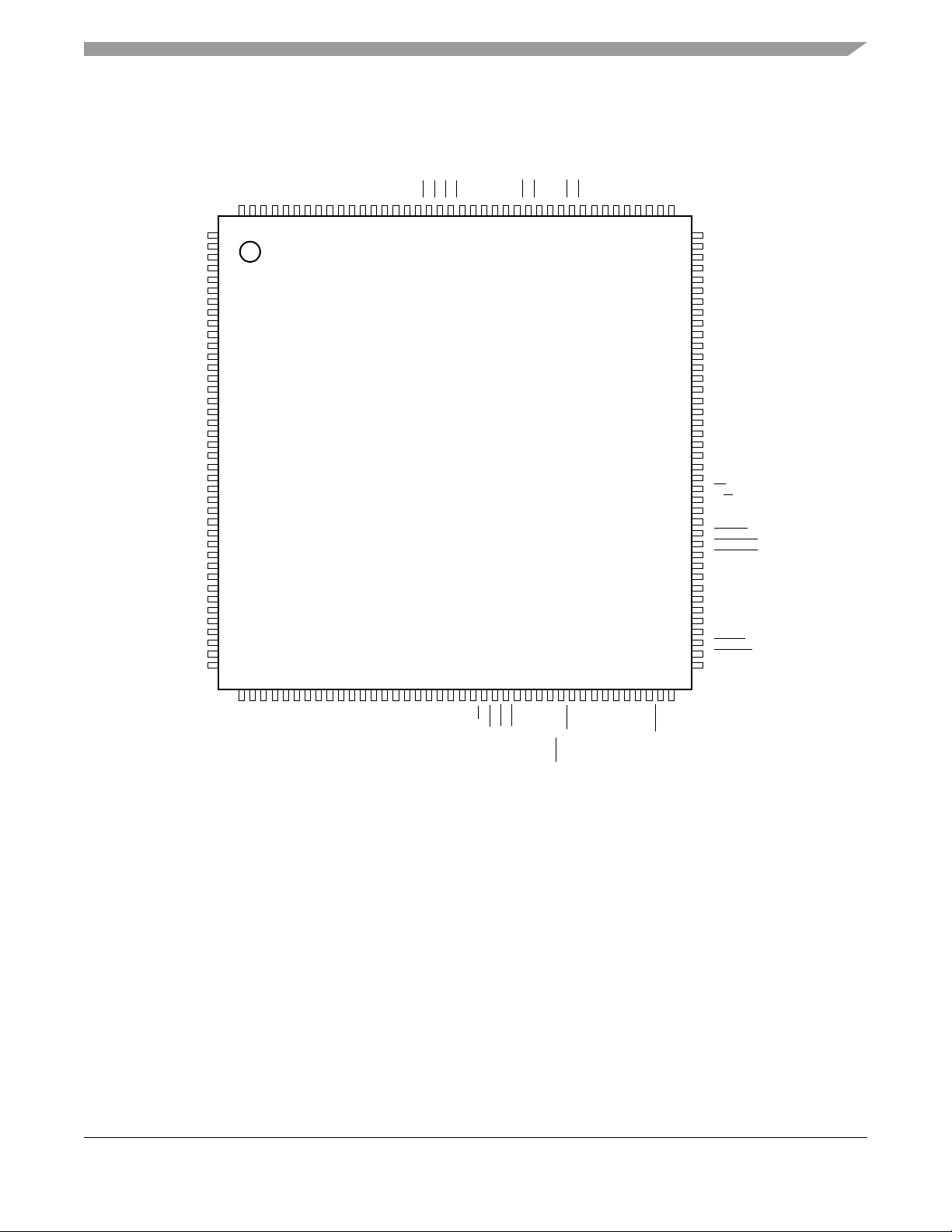
6.1 Pinout—196 MAPBGA
The following figure shows a pinout of the MCF5232CVMxxx package.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor14
Page 15
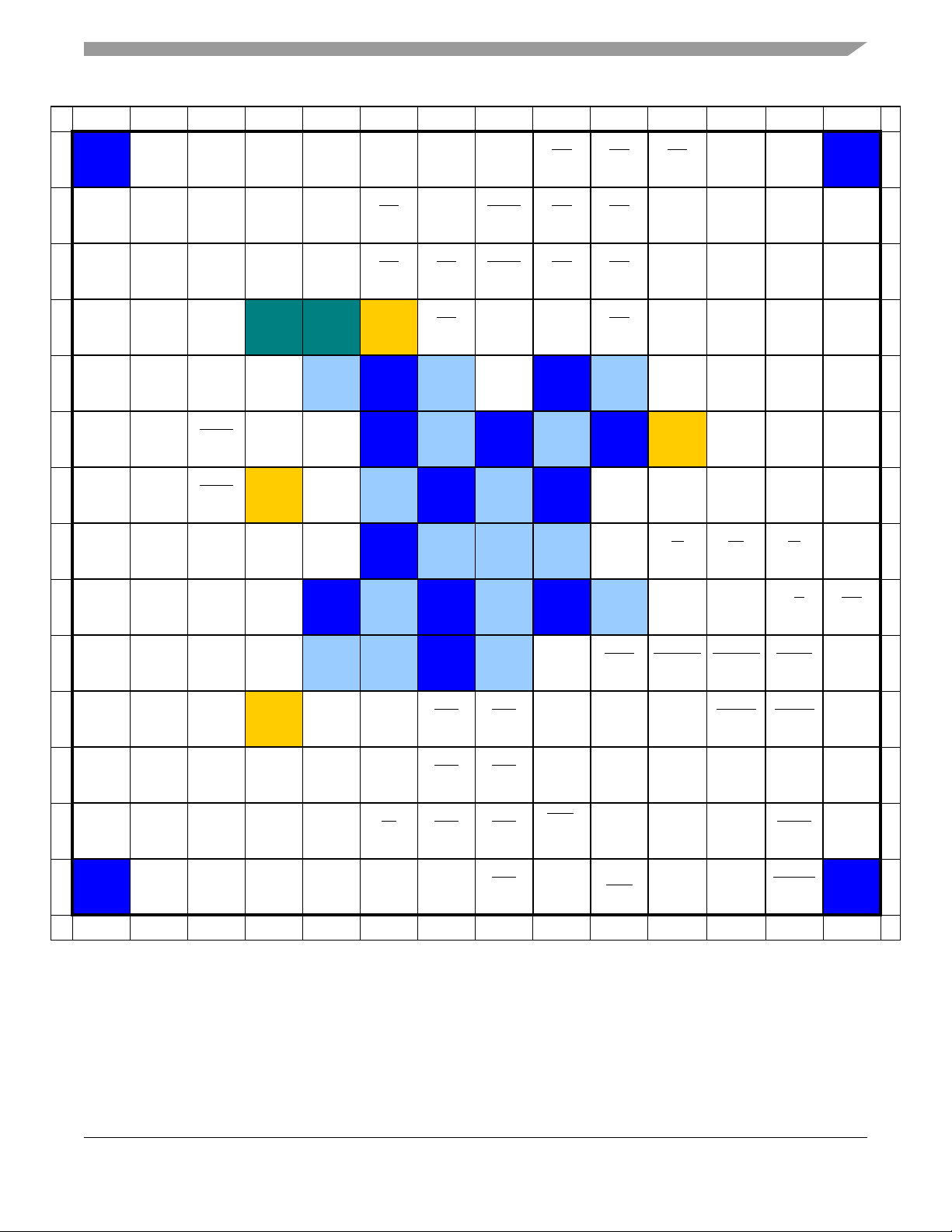
Mechanicals/Pinouts and Part Numbers
1234567891011121314
A
VSS TPUCH6 TPUCH3 TPUCH2
B TPUCH8 TPUCH7 TPUCH4 TPUCH0
C TPUCH10 TPUCH9 TPUCH5 TPUCH1 QSPI_CLK BS2
D TPUCH13 TPUCH12 TPUCH11
E TPUCH14 TPUCH15 TCRCLK DT0IN
F U0TXD U0RXD U0CTS
G D31 D30 U0RTS
H D29 D28 D27 D26 CLKMOD0
NC NC VDD BS1
DT0OUT TEST VSS OVDD VSS OVDD VSS VDD A5 A4 A3 F
VDD C LKMOD1 OVDD VSS OVDD VSS
QSPI_
DOUT
QSPI_
OVDD VSS OVDD SD_CKE VSS OVDD A9 A8 A7 A6 E
QSPI_CS0 U2RXD U2TXD CS3
DIN
BS3
VSS OVDD OVDD OVDD
CS6 CS4 A20 A17 VSS A
QSPI_CS1 U1CTS CS7 CS1 A23 A19 A16 A15 B
BS0 U1RTS CS2 CS5 A22 A18 A14 A13 C
U1RXD/
CAN0RX
U1TXD/
CAN0TX
CS0
LTP U
ODIS
UTPU
ODIS
A21 A12 A11 A10 D
A2 A1 A0 DT3OUT G
TA
TIP TS DT3IN H
J D25 D24 D23 D22
K D21 D20 D19 D18
L D17 D16 D10
M D15 D13 D9 D6 D2 DT1OUT IRQ6
N D14 D12 D8 D5 D1 OE
VSS D11 D7 D4 D0 TSIZ1 TSIZ0 IRQ4
P
1234567891011121314
VDD D3 DT1IN IRQ5 IRQ1 DT2OUT PST0 DDATA0 SD_CS1 SD_CS0 VSSPLL L
VSS OVDD VSS OVDD VSS OVDD I2C_SCL I2C_SDA R/W TEA J
OVDD OVDD VSS OVDD JTAG_EN RCON SD_SRAS SD_SCAS SD_WE CLKOUT K
IRQ2 DT2IN TDI/DSI PST3 DDATA3 VDDPLL EXTAL M
IRQ7 IRQ3
TRST/
DSCLK
TCLK/
PSTCLK
TDO/DSO PST2 DDATA2 RESET
TMS/
BKPT
PST1 DDATA1 RSTOUT VSS P
Figure 2. MCF5232CVMxxx Pinout (196 MAPBGA)
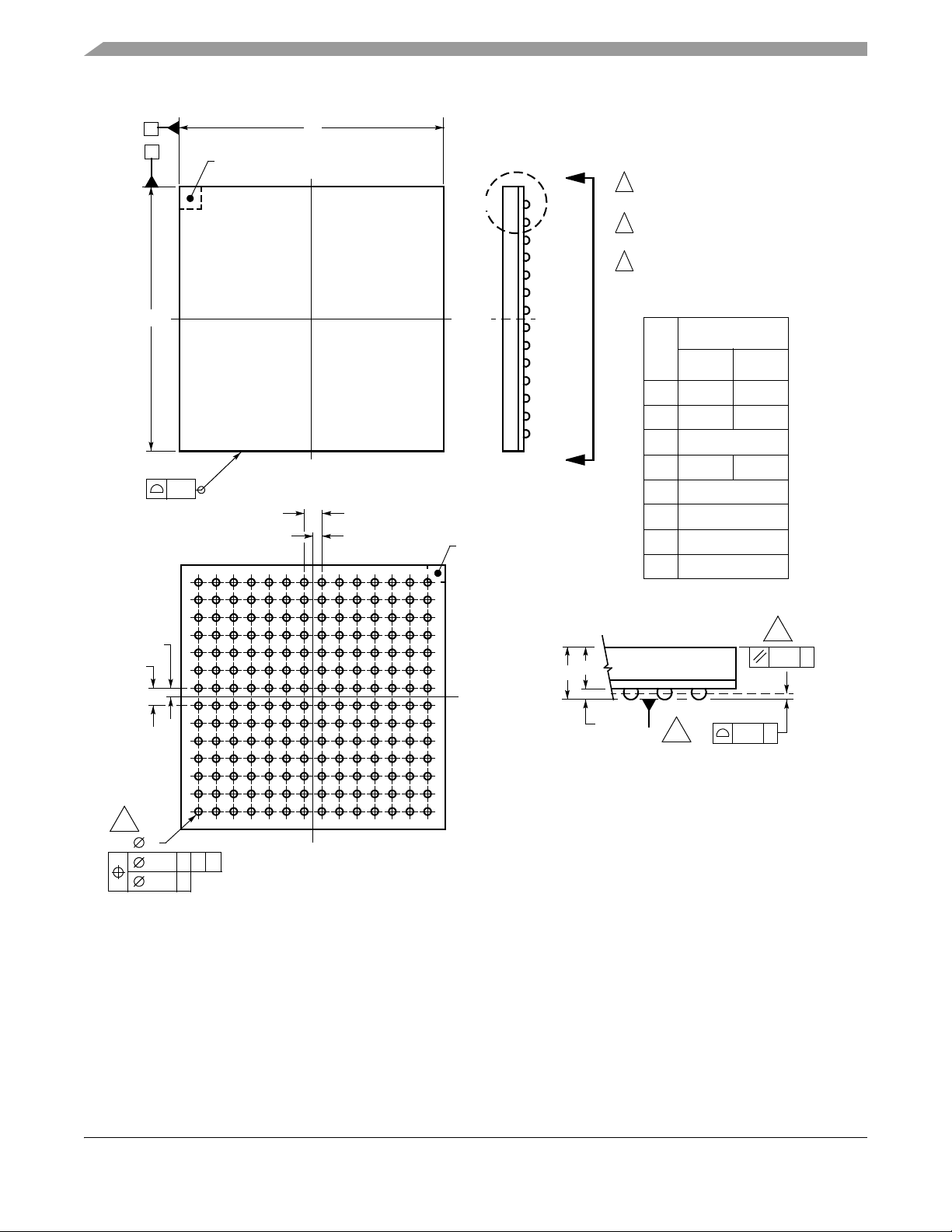
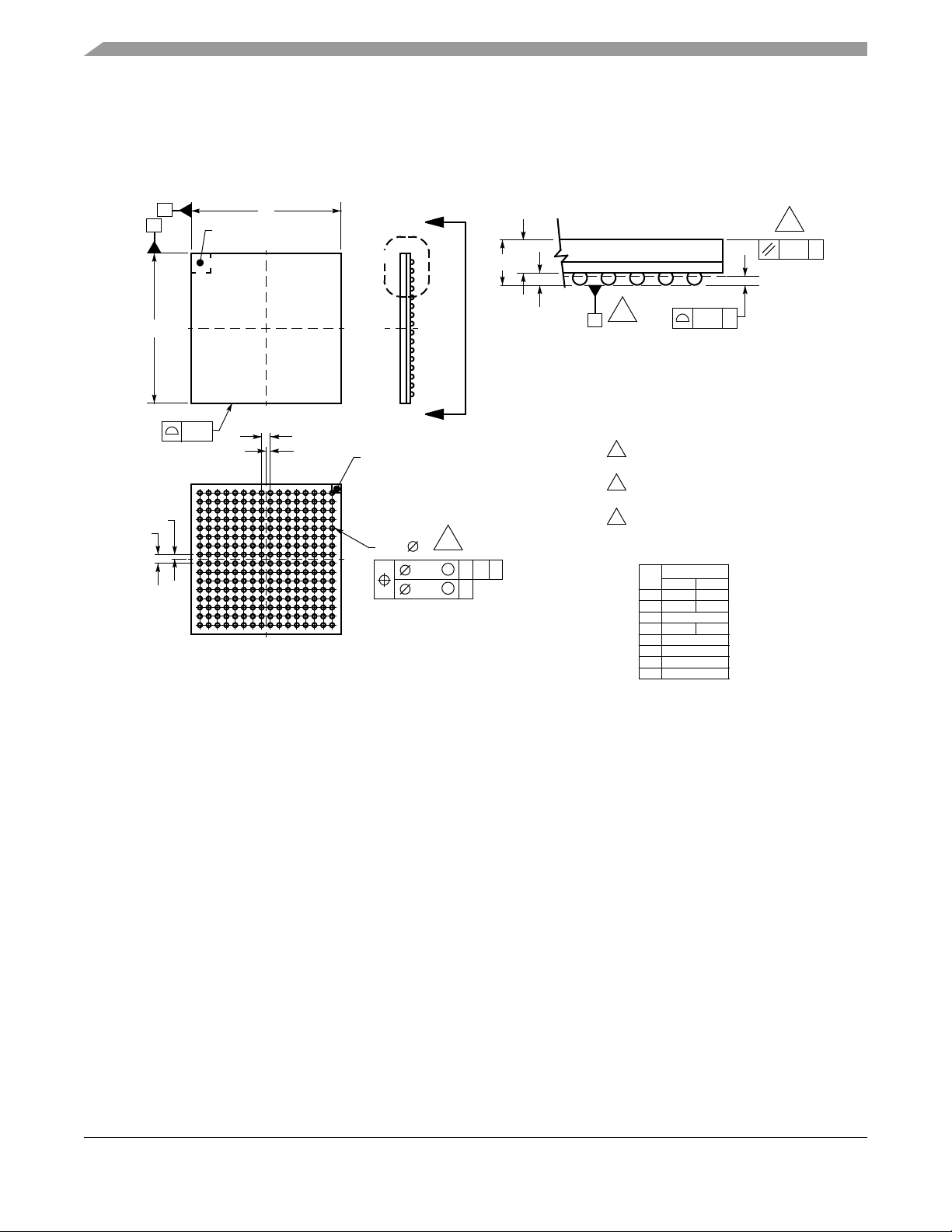
6.2 Package Dimensions—196 MAPBGA
Figure 3 shows MCF5232CVMxxx package dimensions.
XTAL N
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 15
Page 16
Mechanicals/Pinouts and Part Numbers
X
Y
Laser mark for pin 1
identification in
this area
D
M
K
NOTES:
1. Dimensions are in millimeters.
2. Interpret dimensions and tolerances
per ASME Y14.5M, 1994.
3. Dimension b is measured at the
maximum solder ball diameter,
parallel to datum plane Z.
4. Datum Z (seating plane) is defined
by the spherical crowns of the solder
balls.
5. Parallelism measurement shall
exclude any effect of mark on top
surface of package.
E
Millimeters
DIM
Min Max
1.25 1.60
A
0.27 0.47
A1
A2
M
TOL
e13X
S
14 13 12 11 5 4 3 2
S
e13X
3
Metalized mark for
pin 1 identification
1610 9
in this area
A
B
C
D
E
F
G
H
J
K
L
M
N
P
A2
A
A1
b
D
E
e
S
Z
Detail K
Rotated 90° Clockwise
1.16 REF
0.45 0.55
15.00 BSC
15.00 BSC
1.00 BSC
0.50 BSC
4
5
0.20 Z
0.10 Z
196X
b196X
X0.15 YZ
View M-M
0.08 Z
Figure 3. 196 MAPBGA Package Dimensions (Case No. 1128A-01)
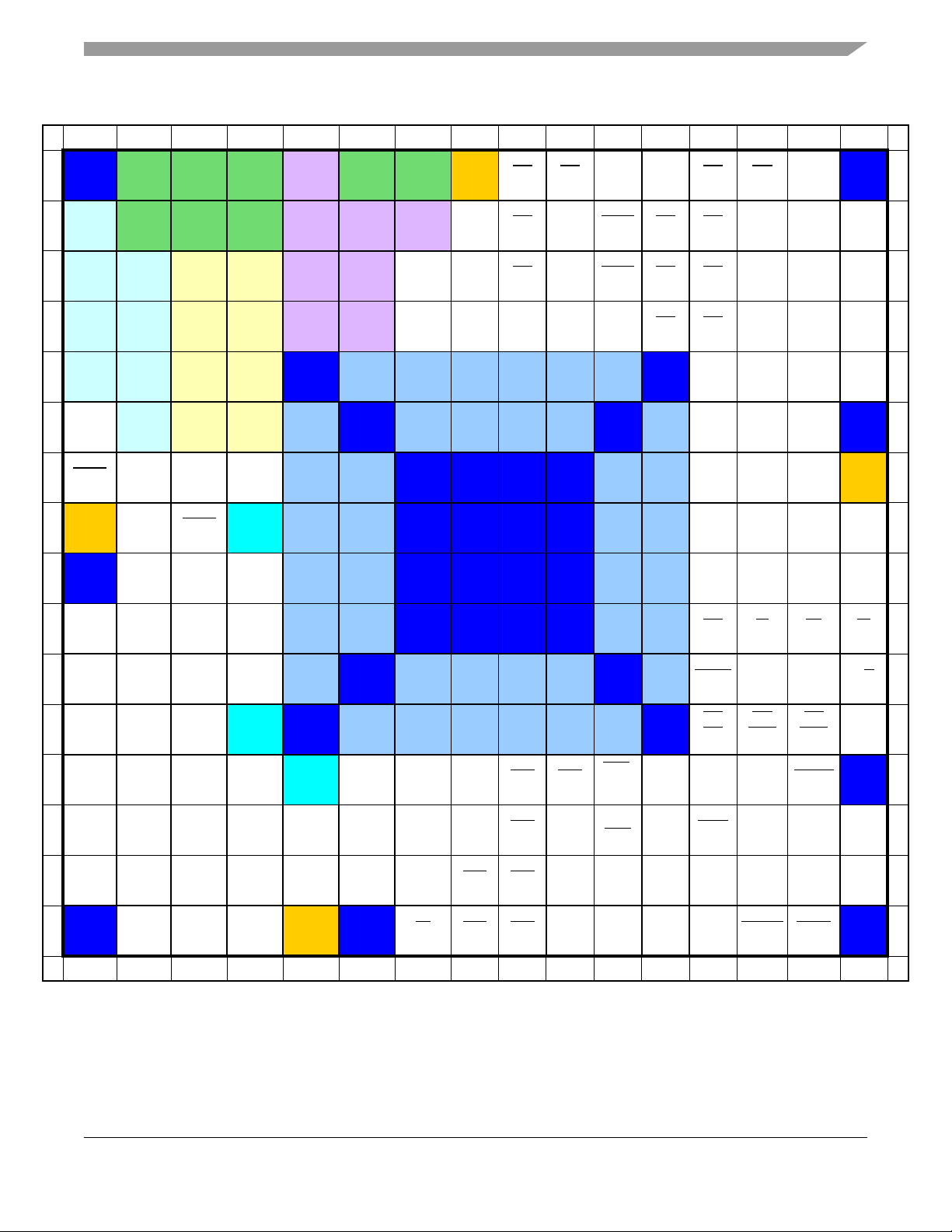
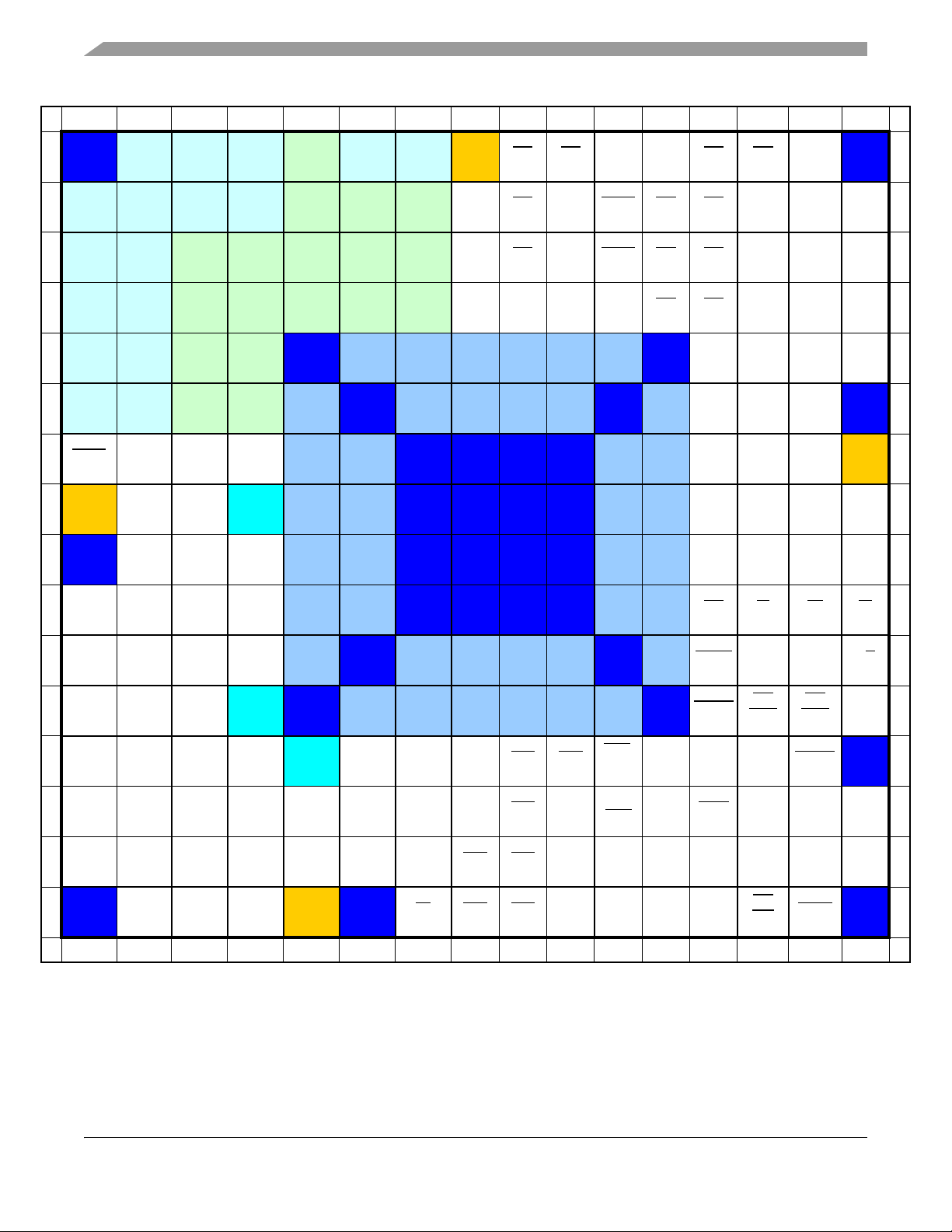
6.2.1 Pinout—256 MAPBGA
Figure 4 through Figure 6 show pinouts of the MCF5233CVMxxx, MCF5234CVMxxx, and
MCF5235CVMxxx packages.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor16
Page 17
Mechanicals/Pinouts and Part Numbers
1 2 3 4 5 6 7 8 9 1011121314 15 16
A
VSS TPUCH6 TPUCH4 TPUCH2 TPUCH17 TPUCH1 TPUCH0 VDD BS1 BS0
U1RXD/
CAN0RX
U1TXD/
CAN0TX
CS6
CS4 A21 VSS A
B
TPUCH8 TPUCH7 TPUCH5 TPUCH3 TPUCH18 TPUCH19 TPUCH16
C
TPUCH10 TPUCH9 TPUCH25 TPUCH24 TPUCH22 TPUCH20
D
TPUCH12 TPUCH11 TPUCH27 TPUCH26 TPUCH23 TPUCH21
E
TPUCH14 TPUCH13 TPUCH29 TPUCH28 VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS A10 A11 A12 A13 E
F
TCRCLK TPUCH15 TPUCH31 TPUCH30 OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD A7 A8 A9 VSS F
G
U0CTS
H
VDD U0TXD U0RTS NC OVDD OVDD VSS VSS VSS VSS OVDD OVDD A0 A1 A2 A3 H
J
VSS
K
D28 D29 D30 D31
U0RXD DT0OUT DT0IN OVDD OVDD VSS VSS VSS VSS OVDD OVDD A4 A5 A6 VDD G
CLK
MOD0
CLK
MOD1
TEST
OVDD OVDD VSS VSS VSS VSS OVDD OVDD
OVDD OVDD VSS VSS VSS VSS OVDD OVDD TEA TA TIP TS K
I2C_SDA/
U2RXD
I2C_SCL/
U2TXD
QSPI_
CLK
QSPI_
DIN
QSPI_
DOUT
QSPI_
BS2
BS3
SD_CKE U1CTS CS7 CS5 A22 A18 A17 C
QSPI_
U2RXD/
CS0
CAN1RX
CS1
U1RTS
U2TXD/
CAN1TX
CS3 CS1 A23 A20 A19 B
CS2
CS0 A14 A15 A16 D
UTPU
ODIS
LTP U
ODIS
DT3IN DT3OUT J
L
D24 D25 D26 D27
M
D21 D22 D23
N
D19 D20 D13 D9
P
D17 D18 D12 D8 D5 D2 DT1IN TSIZ0 IRQ4
R
D16 D15 D11 D7 D4 D1 DT1OUT IRQ7
T
VSS D14 D10 D6 VDD VSS OE IRQ6 IRQ2
1 2 3 4 5 6 7 8 9 1011121314 15 16
NC VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS
OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD SD_WE
NC D3 D0 TSIZ1 IRQ5 IRQ1
DT2IN
IRQ3 DT2OUT
TCLK/
PSTCLK
TRST/
DSCLK
TMS/
BKPT
TDO/
TDI/DSI PST3 DDATA1 RSTOUT
PST0
PST1 RCON DDATA2 VDDPLL EXTAL P
PST2 DDATA0
DSO
SD_
CS0
JTAG_
EN
I2C_SCL/
CAN0TX
DDATA3 SD_CS1
I2C_SDA/
CAN0RX
SD_
SRAS
PLL_
VSSPLL XTAL R
TEST
RESET VSS T
SD_
SCAS
Figure 4. MCF5233CVMxxx Pinout (256 MAPBGA)
R/W
CLKOUT M
VSS N
L
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 17
Page 18
Mechanicals/Pinouts and Part Numbers
1 2 3 4 5 6 7 8 9 10111213 14 15 16
VSS TPUCH6 TPUCH4 TPUCH2 ETXD1 TPUCH1 TPUCH0 VDD BS1 BS0
A
TPUCH8 TPUCH7 TPUCH5 TPUCH3 ETXD2 ETXD3 ETXD0
B
TPUCH10 TPUCH9 ERXD1 ERXD0 ETXCLK ETXER EMDIO
C
TPUCH12 TPUCH11 ERXD3 ERXD2 ERXER ETXEN EMDC
D
TPUCH14 TPUCH13 ERXCLK ERXDV VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS A10 A11 A12 A13 E
E
TCRCLK TPUCH15 ECOL ECRS OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD A7 A8 A9 VSS F
F
G U0CTS
VDD U0TXD U0RTS NC OVDD OVDD VSS VSS VSS VSS OVDD OVDD A0 A1 A2 A3 H
H
VSS
J
U0RXD DT0OUT DT0IN OVDD OVDD VSS VSS VSS VSS OVDD OVDD A4 A5 A6 VDD G
CLK
MOD0
CLK
MOD1
TEST
OVDD OVDD VSS VSS VSS VSS OVDD OVDD
QSPI_
CLK
QSPI_
DIN
QSPI_
DOUT
BS2
BS3
SD_CKE U1CTS CS7 CS5 A22 A18 A17 C
QSPI_
CS0
U1RXD/
CAN0RX
QSPI_
CS1
U2RXD U2TXD CS2
U1RTS
U1TXD/
CAN0TX
CS3 CS1 A23 A20 A19 B
CS6
CS0 A14 A15 A16 D
UTPU
ODIS
CS4 A21 VSS A
LTP U
ODIS
DT3IN DT3OUT J
K D28 D29 D30 D31
L D24 D25 D26 D27
M D21 D22 D23
N D19 D20 D13 D9
P D17 D18 D12 D8 D5 D2 DT1IN TSIZ0 IRQ4
R D16 D15 D11 D7 D4 D1 DT1OUT IRQ7
T
VSS D14 D10 D6 VDD VSS OE IRQ6 IRQ2
1 2 3 4 5 6 7 8 9 10111213 14 15 16
NC VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS SD_CS0
OVDD OVDD VSS VSS VSS VSS OVDD OVDD TEA TA TIP TS K
OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD SD_WE
NC D3 D0 TSIZ1 IRQ5 IRQ1
DT2IN
IRQ3 DT2OUT
TCLK/
PSTCLK
TRST/
DSCLK
TMS/
BKPT
TDO/
DSO
TDI/DSI PST3 DDATA1
JTAG_
PST0
PST1 RCON DDATA2 VDDPLL EXTAL P
PST2 DDATA0
EN
I2C_SCL/
CAN0TX
DDATA3 SD_CS1
SD_
SRAS
PLL_
TEST
RST
OUT
I2C_SDA/
CAN0RX
SD_
SCAS
VSSPLL XTAL R
RESET VSS T
Figure 5. MCF5234CVMxxx Pinout (256 MAPBGA)
R/W
CLKOUT M
VSS N
L
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor18
Page 19

Mechanicals/Pinouts and Part Numbers
12345678910111213141516
TEST
TPUCH17/
ETXD1
TPUCH18/
ETXD2
TPUCH22/
ETXCLK
TPUCH23/
ERXER
OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD A7 A8 A9 VSS F
OVDD OVDD VSS VSS VSS VSS OVDD OVDD
TPUCH1 TPUCH0 VDD BS1 BS0
TPUCH19/
ETXD3
TPUCH20/
ETXER
TPUCH21/
ETXEN
VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS A10 A11 A12 A13 E
TPUCH16/
ETXD0
I2C_SDA/
U2RXD/
EMDIO
I2C_SCL/
U2TXD/
EMDC
QSPI_
CLK
QSPI_
DIN
QSPI_
DOUT
BS2
BS3
SD_CKE U1CTS CS7 CS5 A22 A18 A17 C
QSPI_
U2RXD/
CS0
CAN1RX
VSS TPUCH6 TPUCH4 TPUCH2
A
TPUCH8 TPUCH7 TPUCH5 TPUCH3
B
C
TPUCH10 TPUCH9
TPUCH12 TPUCH11
D
E
TPUCH14 TPUCH13
TCRCLK TPUCH15
F
G U0CTS
VDD U0TXD U0RTS NC OVDD OVDD VSS VSS VSS VSS OVDD OVDD A0 A1 A2 A3 H
H
J
U0RXD DT0OUT DT0IN OVDD OVDD VSS VSS VSS VSS OVDD OVDD A4 A5 A6 VDD G
VSS
TPUCH25/
ERXD1
TPUCH27/
ERXD3
TPUCH29/
ERXCLK
TPUCH31/
CLK
MOD0
ECOL
CLK
MOD1
TPUCH24/
ERXD0
TPUCH26/
ERXD2
TPUCH2/
ERXDV
TPUCH30/
ECRS
QSPI_
CS1
U1RXD/
CAN0RX
U1RTS
U2TXD/
CAN1TX
U1TXD/
CAN0TX
CS3 CS1 A23 A20 A19 B
CS2
CS6
CS0 A14 A15 A16 D
UTPU
ODIS
CS4 A21 VSS A
LTP U
ODIS
DT3IN DT3OUT J
K D28 D29 D30 D31
L D24 D25 D26 D27
M D21 D22 D23
N D19 D20 D13 D9
P D17 D18 D12 D8 D5 D2 DT1IN TSIZ0 IRQ4
R D16 D15 D11 D7 D4 D1 DT1OUT IRQ7
T
VSS D14 D10 D6 VDD VSS OE IRQ6 IRQ2
12345678910111213141516
eTPU/
EthENB
OVDD OVDD VSS VSS VSS VSS OVDD OVDD TEA TA TIP TS K
OVDD VSS OVDD OVDD OVDD OVDD VSS OVDD SD_WE
VSS OVDD OVDD OVDD OVDD OVDD OVDD VSS SD_CS0
NC D3 D0 TSIZ1 IRQ5 IRQ1
DT2IN
IRQ3 DT2OUT
TCLK/
PSTCLK
TRST/
DSCLK
TMS/
BKPT
TDO/
DSO
TDI/DSI PST3 DDATA1 RSTOUT
JTAG_
PST0
PST1 RCON DDATA2 VDDPLL EXTAL P
PST2 DDATA0
EN
I2C_SCL/
CAN0TX
DDATA3 SD_CS1
I2C_SDA/
CAN0RX
SD_
SRAS
PLL_
VSSPLL XTAL R
TEST
RESET VSS T
SD_
SCAS
Figure 6. MCF5235CVMxxx Pinout (256 MAPBGA)
R/W
CLKOUT M
VSS N
L
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 19
Page 20
Mechanicals/Pinouts and Part Numbers
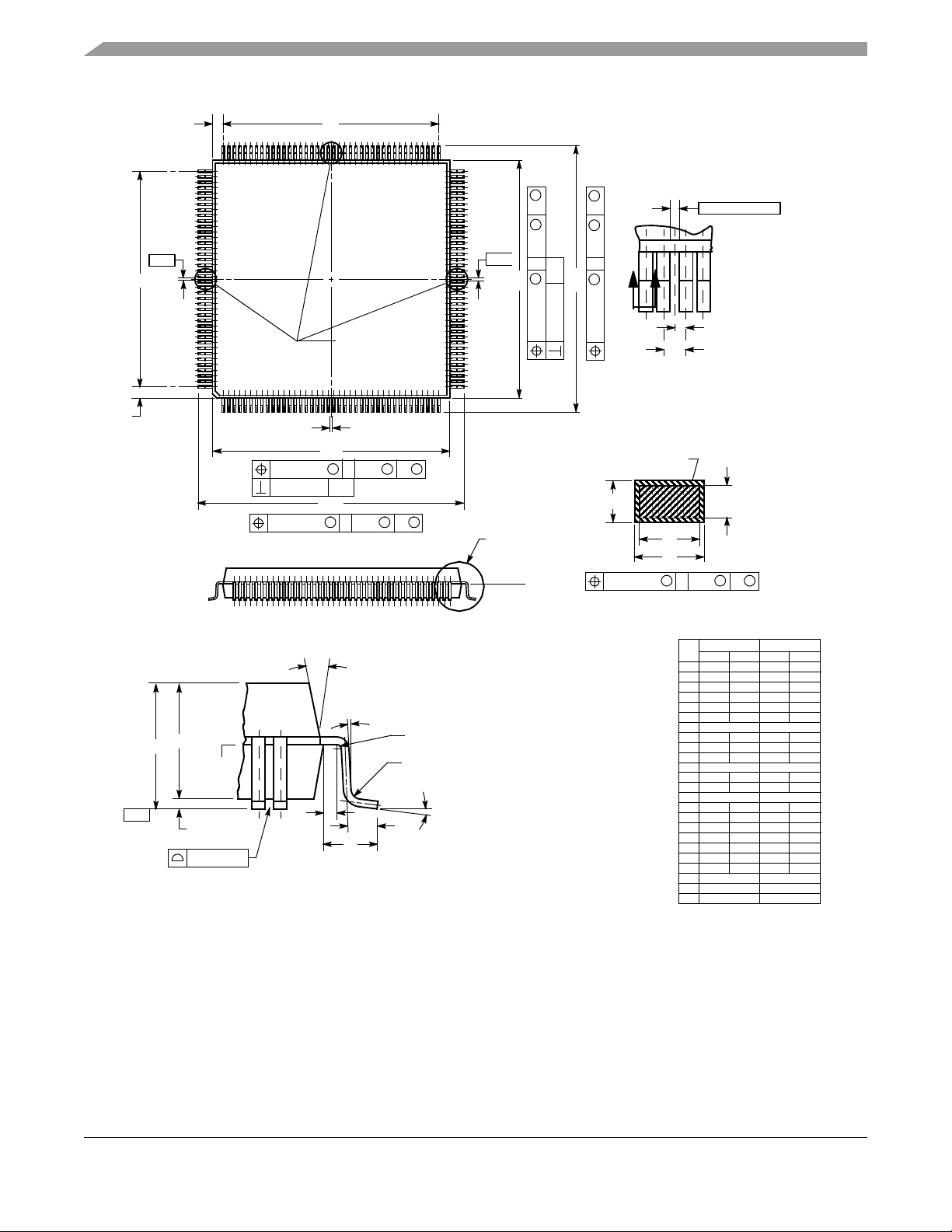
6.2.2 Package Dimensions—256 MAPBGA
Figure 7 shows MCF5235CVMxxx, MCF5234CVMxxx, and MCF5233CVMxx package dimensions.
X
Y
D
LASER MARK FOR PIN A1
IDENTIFICATION IN
THIS AREA
M
K
A2
A
5
Z0.30
A1
4
E
M
0.20
S
e15X
e15X
S
METALIZED MARK FOR
PIN A1 IDENTIFICATION
IN THIS AREA
123456710111213141516
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
3
b256X
M
0.25 YZ
M
0.10XZ
Z
ROTATED 90 CLOCKWISE
NOTES:
1. DIMENSIONS ARE IN MILLIMETERS.
2. INTE RPRET DIMENSIONS AND
3. DIMENSION b IS MEASURED AT THE
4. DATUM Z (SEATING PLANE) IS DEFINED BY
5. PAR ALLELISM MEASUREMENT SHALL
VIEW M-M
256X
Z
0.15
DETAIL K
°
TOLERANCES PER ASME Y14.5M, 1994.
MAXIMUM SOLDER BALL DIAMETER,
PARALLEL TO DATUM PLANE Z.
THE SPHERICAL CROWNS OF THE SOLDER
BALLS.
EXCLUDE ANY EFFECT OF MARK ON TOP
SURFACE OF PACKAGE.
MILLIMETERS
DIM MIN MAX
A 1.25 1.60
A1
0.27 0.47
1.16 REF
A2
0.40 0.60
b
17.00 BSC
D
17.00 BSC
E
e 1.00 BSC
0.50 BSC
S
Figure 7. 256 MAPBGA Package Outline
6.3 Pinout—160 QFP
Figure 8 shows a pinout of the MCF5232CABxxx package.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor20
Page 21
OVDD
TPUCH8
TPUCH9
TPUCH10
TPUCH11
TPUCH12
TPUCH13
VSS
OVDD
TPUCH14
TPUCH15
TCRCLK
U0RXD
U0TXD
VDD
VSS
OVDD
TEST
CLKMOD1
CLKMOD0
D31
D30
D29
D28
VSS
D27
D26
D25
D24
D23
VSS
OVDD
D22
D21
D20
D19
D18
D17
D16
VSS
Mechanicals/Pinouts and Part Numbers
VSS
TPUCH7
TPUCH6
TPUCH5
TPUCH4
TPUCH3
TPUCH2
VSS
TPUCH1
TPUCH0
QSPI_DOUT
QSPI_DIN
QSPI_CLK
QSPI_CS0
OVDD
VSS\OVSS
VDD
BS3
BS2
BS1
BS0
SD_CKE\QSPI_CS1
OVDD
VSS
U1RXD\CAN0RX
U1TXD\CAN0TX
CS3
CS2
OVDD
VSS
CS1
CS0
OVDD
VSS
A23
160
159
158
157
156
155
154
153
152
151
150
149
148
147
146
145
144
143
142
141
140
139
138
137
136
135
134
133
132
131
130
129
128
127
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
414243444546474849505152535455565758596061626364656667686970717273747576777879
MCF5232
126
A22
A21
A20
A19
A18
125
124
123
122
121
120
A17
119
A16
118
A15
117
A14
116
A13
115
A12
114
OVDD
113
VSS
112
A11
111
A10
110
A9
109
A8
108
A7
107
A6
106
A5
105
OVDD
104
VSS/OVSS
103
VDD
102
A4
101
A3
100
A2
99
A1
98
A0
97
TA
96
R/W
95
OVDD
94
VSS
93
SD_WE
92
SD_SCAS
91
SD_SRAS
90
OVDD
89
CLKOUT
88
VSS
87
VDDPLL
86
EXTAL
85
XTAL
84
VSSPLL
83
RESET
82
RSTOUT/PLL_TEST
81
OVDD
80
D15
OVDD
D9D8D7D6D5
D11
D14
D13
D12
D10
VDD
D4D3D2D1D0
OVDD
VSS\OVSS
VSS
OE
OVDD
IRQ7
IRQ4
IRQ1
VSS
OVDD
TCLK\PSTCLK
TMS\BKPT
TRST\DSCLK
TDO/DSO
PST0
PST1
TDI/DSI
VSS
PST2
PST3
RCON
JTAG_EN
Figure 8. MCF5232CABxxx Pinout (160 QFP)
6.4 Package Dimensions—160 QFP
Figure 9 shows MCF5232CAB80 package dimensions.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 21
Page 22
Mechanicals/Pinouts and Part Numbers
LY
Z
–C–
A-B
V
0.20 (0.008)
S
D
S
A-B
H
M
0.20 (0.008)
–A–, –B–, –D–
B
B
P
G
S
D
S
–A–
–B–
L
DETAIL A
A-B
H
M
B
0.20 (0.008)
DETAIL A
A
0.20 (0.008) A-B DCM
0.20 (0.008)
A-B
S
S
0.20 (0.008)
M
S
A-B DC
S
N
S
DETAIL C
BASE
METAL
F
J
D
–H–
0.13 (0.005)
M
A-B DC
S
S
SECTION B–B
MILLIMETERS
×
M
TOP &
BOTTOM
×
U
E
C
–H–
W
H
0.110 (0.004)
K
X
DETAIL C
NOTES
1. DIMENSIONING AND TOLERINCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER
T
3. DATUM PLAN -H- IS LOCATED AT BOTTOM OF
R
Q
LEAD AND IS COINCIDENT WITH THE LEAD WHERE
THE LEAD EXITS THE PLASTIC BODY AT THE
BOTTOM OF THE PARTING LINE.
×
4. DATUMS -A-, -B-, AND -D- TO BE DETERMINED AT
DATUM PLANE -H-.
5. DIMENSIONS S AND V TO BE DETERMINED AT
SEATING PLANE -C-.
6. DIMENSIONS A AND B DO NOT INCLUDE MOLD
PROTRUSION. ALLOWABLE PROTRUSION IS 0.25
(0.010) PER SIDE. DIMENSIONS A AND B DO
INCLUDE MOLD MISMATCH AND ARE DETERMINED
AT DATUM PLANE -H-.
7. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR PROTRUSION
SHALL BE 0.08 (0.003) TOTAL IN EXCESS OF THE D
DIMENSION AT MAXIMUM MATERIAL CONDITION.
DAMBAR CANNOT BE LOCATED ON THE LOWER
RADIUS OR THE FOOT.
DIM MIN MAX MIN MAX
A
27.90 28.10 1.098 1.106
27.90 28.10 1.098 1.106
B
3.35 3.85
3.35 3.85 0.132 1.106
C
D
E
F
0.65 BSC 0.026 REF
G
H
J
K
25.35 BSC 0.998 REF
L
°16°5°16°
M
5
N
0.325 BSC 0.013 REF
P
°7°
Q
0
R
S
31.00 31.40 1.220 1.236
T
°
U
0
V
31.00 31.40 1.220 1.236
W
1.60 REF 0.063 REF
X
Y
1.33 REF 0.052 REF
1.33 REF 0.052 REF
Z
INCHES
0.009 0.0150.22 0.38
0.126 0.1383.20 3.50
0.009 0.0130.22 0.33
0.010 0.0140.25 0.35
0.004 0.0090.11 0.23
0.028 0.0350.70 0.90
0.004 0.0070.11 0.19
0°7
0.005 0.0120.13 0.30
0.005 —0.13 —
—0°—
0.016 —0.4 —
°
Case 864A-03
Figure 9. 160 QFP Package Dimensions
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor22
Page 23

6.5 Ordering Information
Table 6. Orderable Part Numbers
Preliminary Electrical Characteristics
Freescale Part
Number
MCF5232CAB80 MCF5232 RISC Microprocessor, 160 QFP 80MHz –40
MCF5232CVM100 MCF5232 RISC Microprocessor, 196 MAPBGA 100MHz –40
MCF5232CVM150 MCF5232 RISC Microprocessor, 196 MAPBGA 150MHz –40
MCF5233CVM100 MCF5233 RISC Microprocessor, 256 MAPBGA 100MHz –40
MCF5233CVM150 MCF5233 RISC Microprocessor, 256 MAPBGA 150MHz –40
MCF5234CVM100 MCF5234 RISC Microprocessor, 256 MAPBGA 100MHz –40
MCF5234CVM150 MCF5234 RISC Microprocessor, 256 MAPBGA 150MHz –40
MCF5235CVM100 MCF5235 RISC Microprocessor, 256 MAPBGA 100MHz –40
MCF5235CVM150 MCF5235 RISC Microprocessor, 256 MAPBGA 150MHz –40
Description Speed Temperature
° to +85° C
° to +85° C
° to +85° C
° to +85° C
° to +85° C
° to +85° C
° to +85° C
° to +85° C
° to +85° C
7 Preliminary Electrical Characteristics
This chapter contains electrical specification tables and reference timing diagrams for the MCF5235
microcontroller unit. This section contains detailed information on power considerations, DC/AC
electrical characteristics, and AC timing specifications of MCF5235.
The electrical specifications are preliminary and are from previous designs or design simulations. These
specifications may not be fully tested or guaranteed at this early stage of the product life cycle, however
for production silicon these specifications will be met. Finalized specifications will be published after
complete characterization and device qualifications have been completed.
NOTE
The parameters specified in this processor document supersede any values
found in the module specifications.
7.1 Maximum Ratings
Table 7. Absolute Maximum Ratings
Rating Symbol Value Unit
Core Supply Voltage V
Pad Supply Voltage OV
Clock Synthesizer Supply Voltage V
Digital Input Voltage
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 23
3
DD
DD
DDPLL
V
IN
1, 2
– 0.5 to +2.0 V
– 0.3 to +4.0 V
– 0.3 to +4.0 V
– 0.3 to + 4.0 V
Page 24

Preliminary Electrical Characteristics
Table 7. Absolute Maximum Ratings
1, 2
(continued)
Rating Symbol Value Unit
Instantaneous Maximum Current
Single pin limit (applies to all pins)
3,4,5
Operating Temperature Range (Packaged) T
I
D
A
25 mA
– 40 to 85 °C
(TL - TH)
Storage Temperature Range T
1
Functional operating conditions are given in DC Electrical Specifications. Absolute Maximum
stg
– 65 to 150 °C
Ratings are stress ratings only, and functional operation at the maxima is not guaranteed.
Continued operation at these levels may affect device reliability or cause permanent damage
to the device.
2
This device contains circuitry protecting against damage due to high static voltage or
electrical fields; however, it is advised that normal precautions be taken to avoid application of
any voltages higher than maximum-rated voltages to this high-impedance circuit. Reliability of
operation is enhanced if unused inputs are tied to an appropriate logic voltage level (e.g.,
either V
3
Input must be current limited to the value specified. To determine the value of the required
or OVDD).
SS
current-limiting resistor, calculate resistance values for positive and negative clamp voltages,
then use the larger of the two values.
4
All functional non-supply pins are internally clamped to VSS and OVDD.
5
Power supply must maintain regulation within operating OVDD range during instantaneous
and operating maximum current conditions. If positive injection current (V
than IDD, the injection current may flow out of OV
and could result in external power supply
DD
> OVDD) is greater
in
going out of regulation. Insure external OVDD load will shunt current greater than maximum
injection current. This will be the greatest risk when the processor is not consuming power
(ex; no clock).Power supply must maintain regulation within operating OV
range during
DD
instantaneous and operating maximum current conditions.
7.2 Thermal Characteristics
The below table lists thermal resistance values.
Characteristic Symbol
Junction to ambient, natural convection Four layer board (2s2p) θ
Junction to ambient (@200 ft/min) Four layer board (2s2p) θ
Junction to board θ
Junction to case θ
Junction to top of package Ψ
Maximum operating junction temperature T
1
θ
and Ψjt parameters are simulated in conformance with EIA/JESD Standard 51-2 for natural convection. Freescale
JMA
recommends the use of θ
and power dissipation specifications in the system design to prevent device junction
JmA
temperatures from exceeding the rated specification. System designers should be aware that device junction
temperatures can be significantly influenced by board layout and surrounding devices. Conformance to the device
junction temperature specification can be verified by physical measurement in the customer’s system using the Ψ
parameter, the device power dissipation, and the method described in EIA/JESD Standard 51-2.
2
Per JEDEC JESD51-6 with the board horizontal.
Table 8. Thermal Characteristics
JMA
JMA
JB
JC
jt
j
256
MAPBGA
1,2
26
1,2
23
3
15
4
10
1,5
2
196
MAPBGA
1,2
32
1,2
29
3
20
4
10
1,5
2
102 104 105
160
QFP
1,2
40
1,2
36
3
25
4
10
1,5
2
6o
°C / W
°C / W
°C / W
°C / W
°C / W
jt
Unit
C
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor24
Page 25
Preliminary Electrical Characteristics
3
Thermal resistance between the die and the printed circuit board in conformance with JEDEC JESD51-8. Board
temperature is measured on the top surface of the board near the package.
4
Thermal resistance between the die and the case top surface as measured by the cold plate method (MIL SPEC-883
Method 1012.1).
5
Thermal characterization parameter indicating the temperature difference between package top and the junction
temperature per JEDEC JESD51-2. When Greek letters are not available, the thermal characterization parameter is
written in conformance with Psi-JT.
6
At 100MHz.
The average chip-junction temperature (TJ) in °C can be obtained from:
JTAPDΘJMA
×()+=
(1)
Where:
TA= Ambient Temperature, °C
Θ
= Package Thermal Resistance, Junction-to-Ambient, °C/W
JMA
PD= P
P
INT
P
I/O
For most applications P
and TJ (if P
+ P
INT
I/O
= IDD × VDD, Watts - Chip Internal Power
= Power Dissipation on Input and Output Pins — User Determined
I/O
is neglected) is:
I/O
< P
and can be ignored. An approximate relationship between PD
INT
PDKTJ273° C+()÷=
(2)
Solving equations 1 and 2 for K gives:
2
K = PD × (TA + 273 °C) + Θ
JMA
× P
(3)
D
where K is a constant pertaining to the particular part. K can be determined from equation (3)
by measuring PD (at equilibrium) for a known TA. Using this value of K, the values of PD and
TJ can be obtained by solving equations (1) and (2) iteratively for any value of TA.
7.3 DC Electrical Specifications
Characteristic Symbol Min Typical Max Unit
Core Supply Voltage V
Pad Supply Voltage OV
Input High Voltage V
Input Low Voltage V
Input Hysteresis V
Input Leakage Current
V
= VDD or VSS, Input-only pins
in
High Impedance (Off-State) Leakage Current
= VDD or VSS, All input/output and output pins
V
in
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 25
Table 9. DC Electrical Specifications
DD
DD
0.7 × OV
0.06 × OV
HYS
I
in
I
OZ
IH
IL
1
1.4 — 1.6 V
3—3.6V
DD
V
– 0.3 — 0.35 × OV
SS
DD
–1.0 — 1.0 µA
–1.0 — 1.0 µA
—3.65V
V
DD
——mV
Page 26
Preliminary Electrical Characteristics
Table 9. DC Electrical Specifications1 (continued)
Characteristic Symbol Min Typical Max Unit
Output High Voltage (All input/output and all output pins)
= –5.0 mA
I
OH
Output Low Voltage (All input/output and all output pins)
I
= 5.0mA
OL
Weak Internal Pull Up Device Current, tested at V
Input Capacitance
3
Max.
IL
2
All input-only pins
All input/output (three-state) pins
Load Capacitance
4
Low drive strength
High drive strength
Core Operating Supply Current
5
Master Mode
Pad Operating Supply Current
Master Mode
Low Power Modes
DC Injection Current
V
NEGCLAMP
3, 6, 7, 8
=VSS– 0.3 V, V
POSCLAMP
= VDD + 0.3
Single Pin Limit
Total processor Limit, Includes sum of all stressed pins
1
Refer to Table 10 for additional PLL specifications.
2
Refer to the MCF5235 signals section for pins having weak internal pull-up devices.
3
This parameter is characterized before qualification rather than 100% tested.
4
pF load ratings are based on DC loading and are provided as an indication of driver strength. High speed interfaces require
V
V
I
APU
C
I
OI
C
DD
I
OH
OL
DD
IC
OV
- 0.5 — — V
DD
——0.5V
–10 — – 130 µA
in
—
—
L
—
—
—
7
7
25
50
— 135 150 mA
—
—
–1.0
–10
100
TBD
—
—
1.0
10
transmission line analysis to determine proper drive strength and termination. See High Speed Signal Propagation:
Advanced Black Magic by Howard W. Johnson for design guidelines.
5
Current measured at maximum system clock frequency, all modules active, and default drive strength with matching load.
6
All functional non-supply pins are internally clamped to VSS and their respective VDD.
7
Input must be current limited to the value specified. To determine the value of the required current-limiting resistor, calculate
resistance values for positive and negative clamp voltages, then use the larger of the two values.
8
Power supply must maintain regulation within operating VDD range during instantaneous and operating maximum current
conditions. If positive injection current (V
> VDD) is greater than IDD, the injection current may flow out of V
in
and could
DD
result in external power supply going out of regulation. Insure external VDD load will shunt current greater than maximum
injection current. This will be the greatest risk when the processor is not consuming power. Examples are: if no system
clock is present, or if clock rate is very low which would reduce overall power consumption. Also, at power-up, system clock
is not present during the power-up sequence until the PLL has attained lock.
pF
pF
pF
mA
µA
mA
mA
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor26
Page 27
Preliminary Electrical Characteristics
7.4 Oscillator and PLLMRFM Electrical Characteristics
Table 10. HiP7 PLLMRFM Electrical Specifications
1
Num Characteristic Symbol
1 PLL Reference Frequency Range
Crystal reference
External reference
1:1 mode (NOTE: f
2 Core frequency
CLKOUT Frequency
External reference
sys/2
2
= 2 × f
ref_1:1
)
f
ref_crystal
f
ref_ext
f
ref_1:1
f
sys
f
sys/2
On-Chip PLL Frequency
5
5, 6,8
5
3, 5
4, 5
9
f
LOR
f
SCM
—10ms
t
cst
t
lpll
t
lplk
t
skew
tdc 40 60 %
3 Loss of Reference Frequency
4 Self Clocked Mode Frequency
5 Crystal Start-up Time
5, 6
6 XTAL Load Capacitance
7 PLL Lock Time
5, 7,13
8 Power-up To Lock Time
With Crystal Reference (includes 5 time)
Without Crystal Reference
9 1:1 Mode Clock Skew (between CLKOUT
and EXTAL)
10
10 Duty Cycle of reference
Min.
Val ue
Max.
Val ue
Unit
MHz
8
8
24
0
f
ref
÷ 32
25
25
75
150
75
75
MHz
MHz
MHz
100 1000 kHz
10.25 15.25 MHz
530pF
—750µs
—
—
11
750
ms
µs
–1 1 ns
11 Frequency un-LOCK Range f
12 Frequency LOCK Range f
13 CLKOUT Period Jitter,
Measured at f
sys/2
5, 6, 8,11, 12
Max
Peak-to-peak Jitter (Clock edge to clock
–3.8 4.1 % f
UL
–1.7 2.0 % f
LCK
C
jitter
—
—
5.0
.01
% f
edge)
Long Term Jitter (Averaged over 2 ms
interval)
14 Frequency Modulation Range Limit
(f
Max must not be exceeded)
sys/2
15 ICO Frequency. f
1
All values given are initial design targets and subject to change.
2
All internal registers retain data at 0 Hz.
3
“Loss of Reference Frequency” is the reference frequency detected internally, which transitions the PLL
into self clocked mode.
4
Self clocked mode frequency is the frequency that the PLL operates at when the reference frequency falls
below f
5
This parameter is guaranteed by characterization before qualification rather than 100% tested.
6
Proper PC board layout procedures must be followed to achieve specifications.
with default MFD/RFD settings.
LOR
ico
= f
ref
× 2 × (MFD+2)
13,14
15
C
0.8 2.2 %f
mod
f
48 150 MHz
ico
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
sys/2
sys/2
sys/2
sys/2
Freescale Semiconductor 27
Page 28

Preliminary Electrical Characteristics
7
This specification applies to the period required for the PLL to relock after changing the MFD frequency
control bits in the synthesizer control register (SYNCR).
8
Assuming a reference is available at power up, lock time is measured from the time VDD and V
valid to RSTOUT
crystal start up time must be added to the PLL lock time to determine the total start-up time.
9
t
= (64 * 4 * 5 + 5 × τ) × T
lpll
τ = 1.57x10
10
PLL is operating in 1:1 PLL mode.
11
Jitter is the average deviation from the programmed frequency measured over the specified interval at
maximum f
stable external clock signal. Noise injected into the PLL circuitry via V
crystal oscillator frequency increase the Cjitter percentage for a given interval.
12
Values are with frequency modulation disabled. If frequency modulation is enabled, jitter is the sum of
Cjitter+Cmod.
13
Modulation percentage applies over an interval of 10µs, or equivalently the modulation rate is 100KHz.
14
Modulation rate selected must not result in f
Modulation range determined by hardware design.
15
f
= f
sys/2
ico
negating. If the crystal oscillator is being used as the reference for the PLL, then the
, where T
-6
× 2(MFD + 2).
. Measurements are made with the device powered by filtered supplies and clocked by a
sys/2
RFD
/ (2 * 2
ref
)
ref
= 1/F
sys/2
ref_crystal
= 1/F
value greater than the f
ref_ext
= 1/F
DDSYN
7.5 External Interface Timing Characteristics
Table 11 lists processor bus input timings.
NOTE
All processor bus timings are synchronous; that is, input setup/hold and
output delay with respect to the rising edge of a reference clock. The
reference clock is the CLKOUT output.
, and
ref_1:1
and V
maximum specified value.
sys/2
and variation in
SSSYN
DDSYN
are
All other timing relationships can be derived from these values.
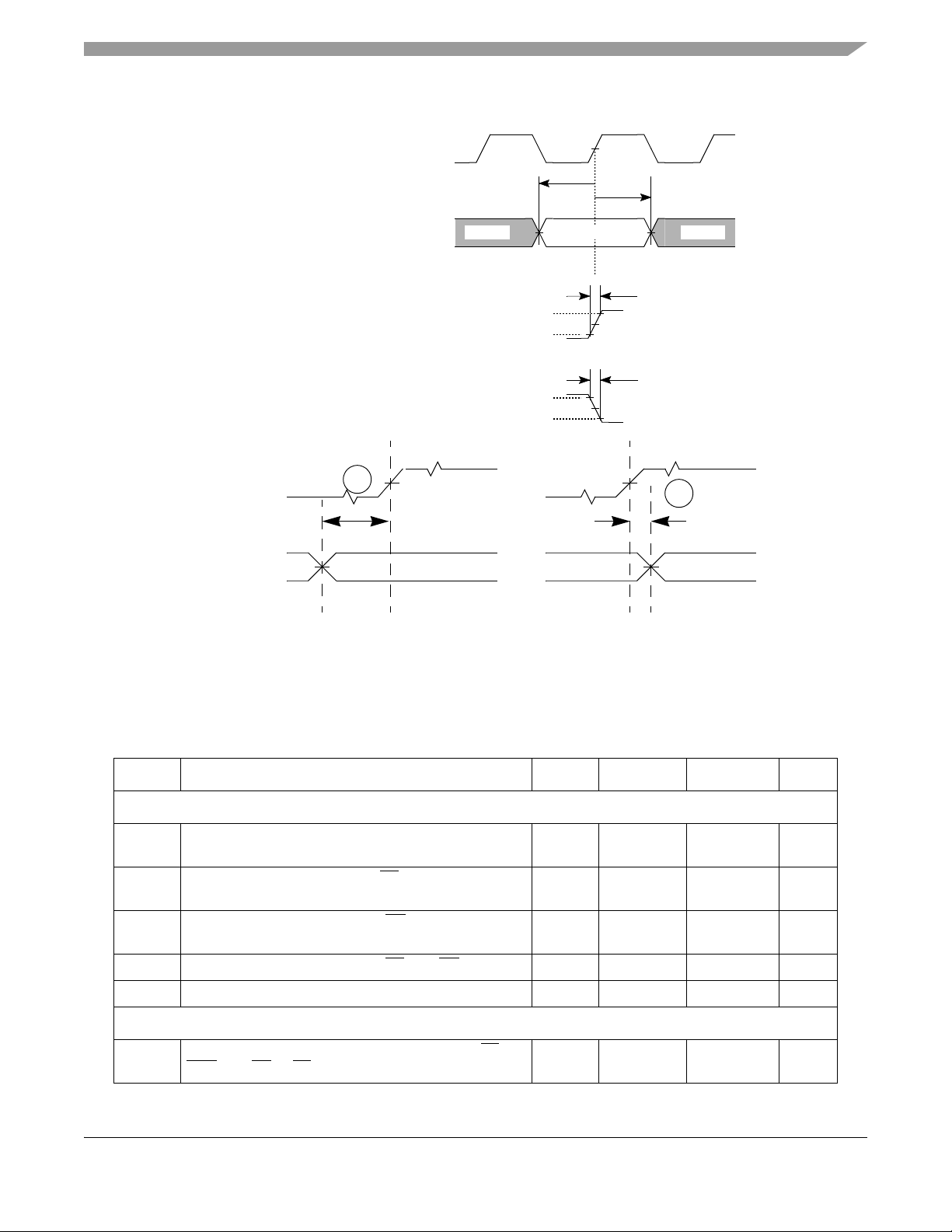
Table 11. Processor Bus Input Timing Specifications
Name Characteristic
1
freq System bus frequency f
B0 CLKOUT period t
Control Inputs
B1a Control input valid to CLKOUT high
B1b BKPT
B2a
B2b
valid to CLKOUT high
CLKOUT high to control inputs invalid
CLKOUT high to asynchronous control input BKPT invalid
2
3
2
3
Data Inputs
B4
Data input (D[31:0]) valid to CLKOUT high t
B5
CLKOUT high to data input (D[31:0]) invalid t
1
Timing specifications are tested using full drive strength pad configurations in a 50ohm transmission line
environment..
2
TEA and TA pins are being referred to as control inputs.
3
Refer to figure A-19.
Symbol Min Max Unit
sys/2
cyc
t
CVCH
t
BKVCH
t
CHCII
t
BKNCH
DIVCH
CHDII
50 75 MHz
—1/75ns
9—ns
9—ns
0—ns
0—ns
4—ns
0—ns
Timings listed in Table 11 are shown in Figure 10 & Figure A-3.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor28
Page 29
* The timings are also valid for inputs sampled on the negative clock edge.
Preliminary Electrical Characteristics
CLKOUT
Inputs
CLKOUT(75MHz)
Input Setup And Hold
Input Rise Time
Input Fall Time
B4
1.5V
T
SETUP
Invalid Invalid
Vh = V
IH
Vl = V
IL
Vh = V
IH
Vl = V
IL
T
HOLD
1.5V1.5V Valid
trise
tfall
B5
Figure 10. General Input Timing Requirements
7.6 Processor Bus Output Timing Specifications
Table 12 lists processor bus output timings.
Table 12. External Bus Output Timing Specifications
Name Characteristic Symbol Min Max Unit
Control Outputs
B6a CLKOUT high to chip selects valid
B6b CLKOUT high to byte enables (BS
B6c CLKOUT high to output enable (OE
B7 CLKOUT high to control output (BS
B7a CLKOUT high to chip selects invalid t
B8 CLKOUT high to address (A[23:0]) and control (TS
TSIZ[1:0], TIP, R/W) valid
1
[3:0]) valid
) valid
2
3
[3:0], OE) invalid t
t
CHCV
t
CHBV
t
CHOV
CHCOI
CHCI
Address and Attribute Outputs
,
t
CHAV
—0.5t
—0.5t
—0.5t
0.5t
0.5t
+1.5 — ns
CYC
+1.5 — ns
CYC
—9ns
+5 ns
CYC
+5 ns
CYC
+5 ns
CYC
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 29
Page 30

Preliminary Electrical Characteristics
Table 12. External Bus Output Timing Specifications (continued)
Name Characteristic Symbol Min Max Unit
B9 CLKOUT high to address (A[23:0]) and control (TS,
[1:0], TIP, R/W) invalid
TSIZ
t
CHAI
1.5 — ns
Data Outputs
B11 CLKOUT high to data output (D[31:0]) valid t
B12 CLKOUT high to data output (D[31:0]) invalid t
B13 CLKOUT high to data output (D[31:0]) high impedance t
1
CS transitions after the falling edge of CLKOUT.
2
BS transitions after the falling edge of CLKOUT.
3
OE transitions after the falling edge of CLKOUT.
CHDOV
CHDOI
CHDOZ
—9ns
1.5 — ns
—9ns
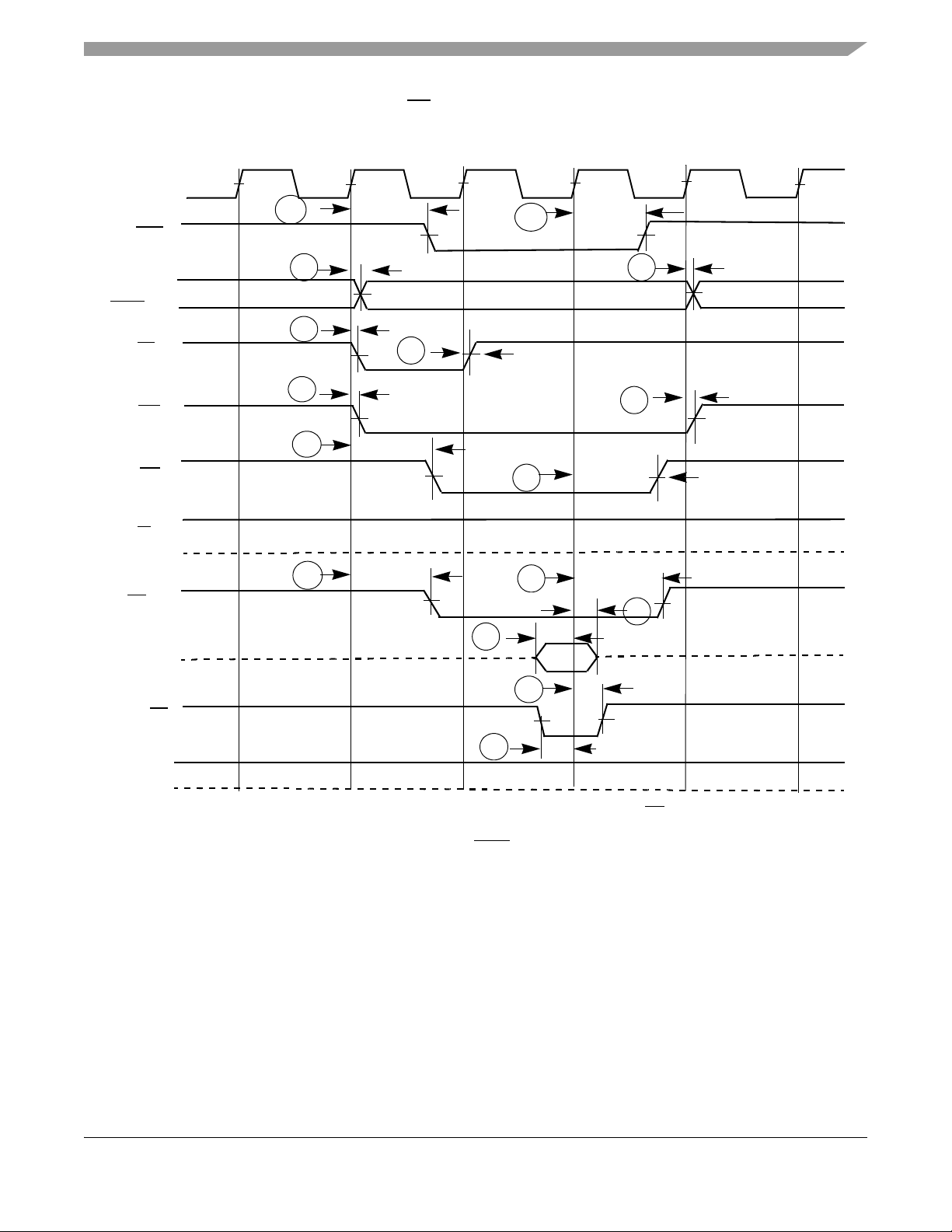
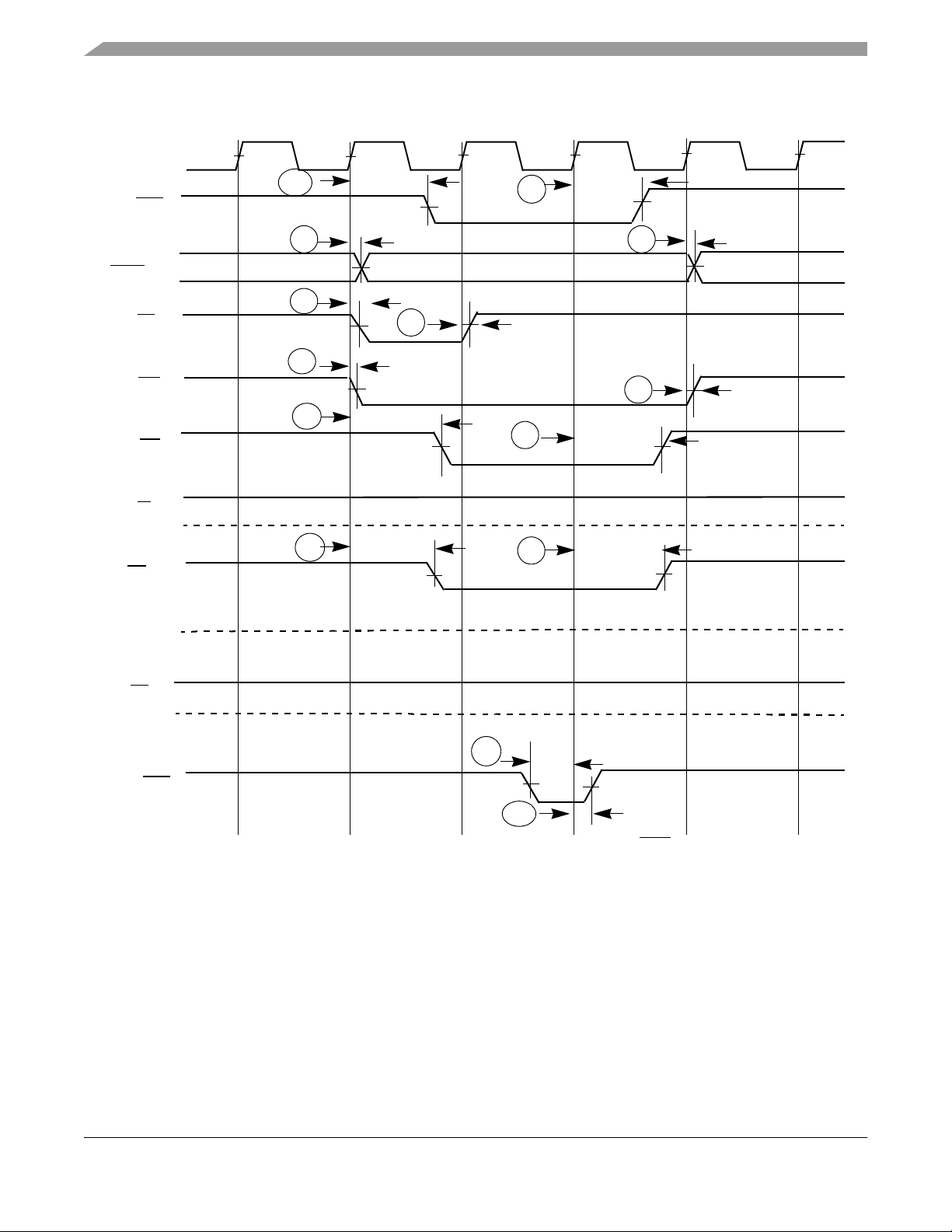
Read/write bus timings listed in Table 12 are shown in Figure 11, Figure 12, and Figure 13.
CLKOUT
CSn
A[23:0]
TSIZ[1:0]
TS
TIP
S0
B6a
B8
B8
B9
B8
S2 S3S1 S4 S5 S0 S1 S2 S3 S4 S5
B7a
B7a
B6a
B8
B9
B8
B9
B9
R/W
BS[3:0]
D[31:0]
TA
TEA
OE
(H)
(H)
(H)
B6c
B0
B7
B8
B6b
B6b
B7
B7
B4
B11
B5
Figure 11. Read/Write (Internally Terminated) SRAM Bus Timing
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
B9
B12
B13
Freescale Semiconductor30
Page 31
Preliminary Electrical Characteristics
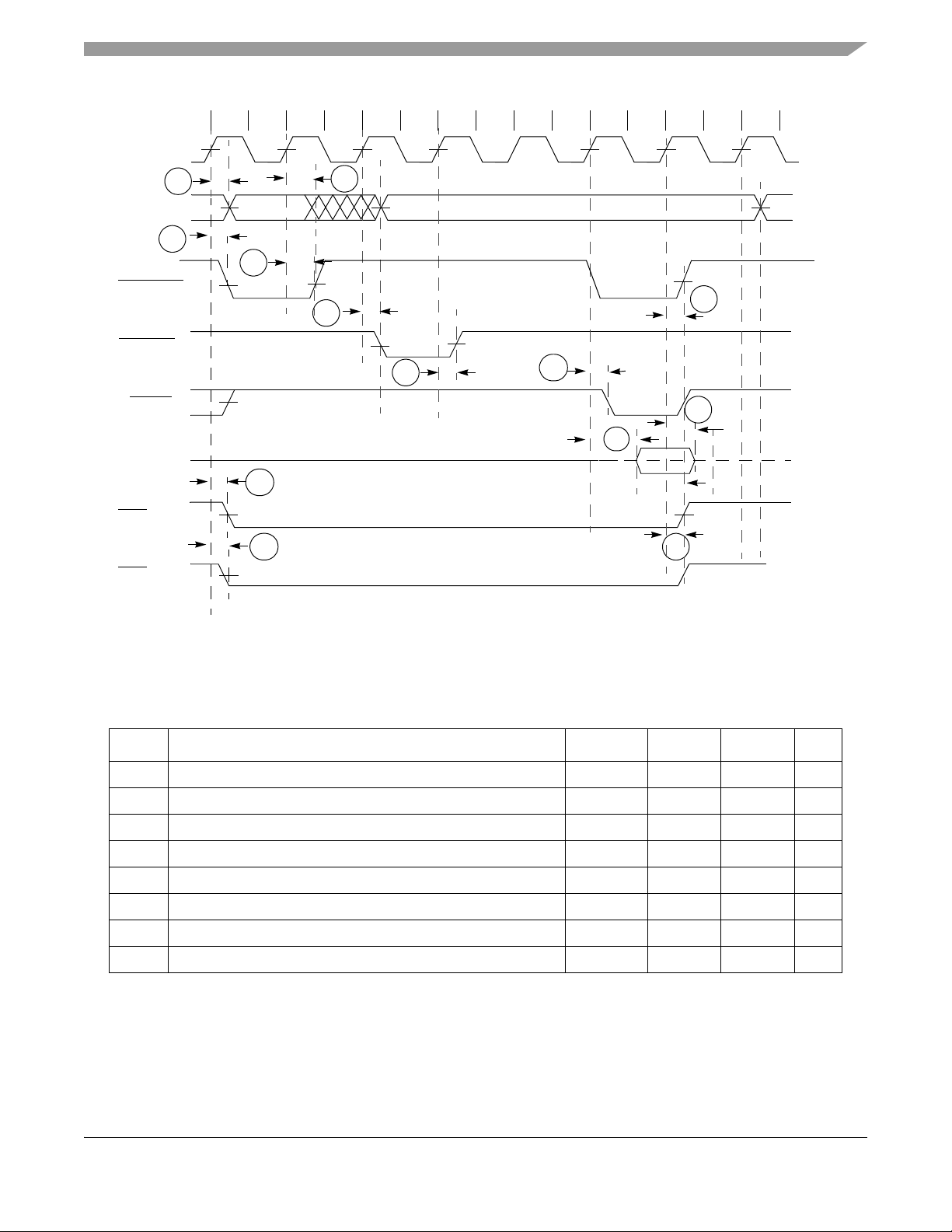
Figure 12 shows a bus cycle terminated by TA showing timings listed in Ta b l e 1 2 .
S0 S2 S3S1 S4 S5 S0 S1
CLKOUT
CS
A[23:0]
TSIZ[1:0]
TS
TIP
OE
R/W
BS[3:0]
D[31:0]
n
(H)
B6a
B8
B8
B8
B6c
B6b
B7a
B9
B9
B9
B7
B7
B5
B4
B2a
TA
B1a
TEA
(H)
Figure 12. SRAM Read Bus Cycle Terminated by TA
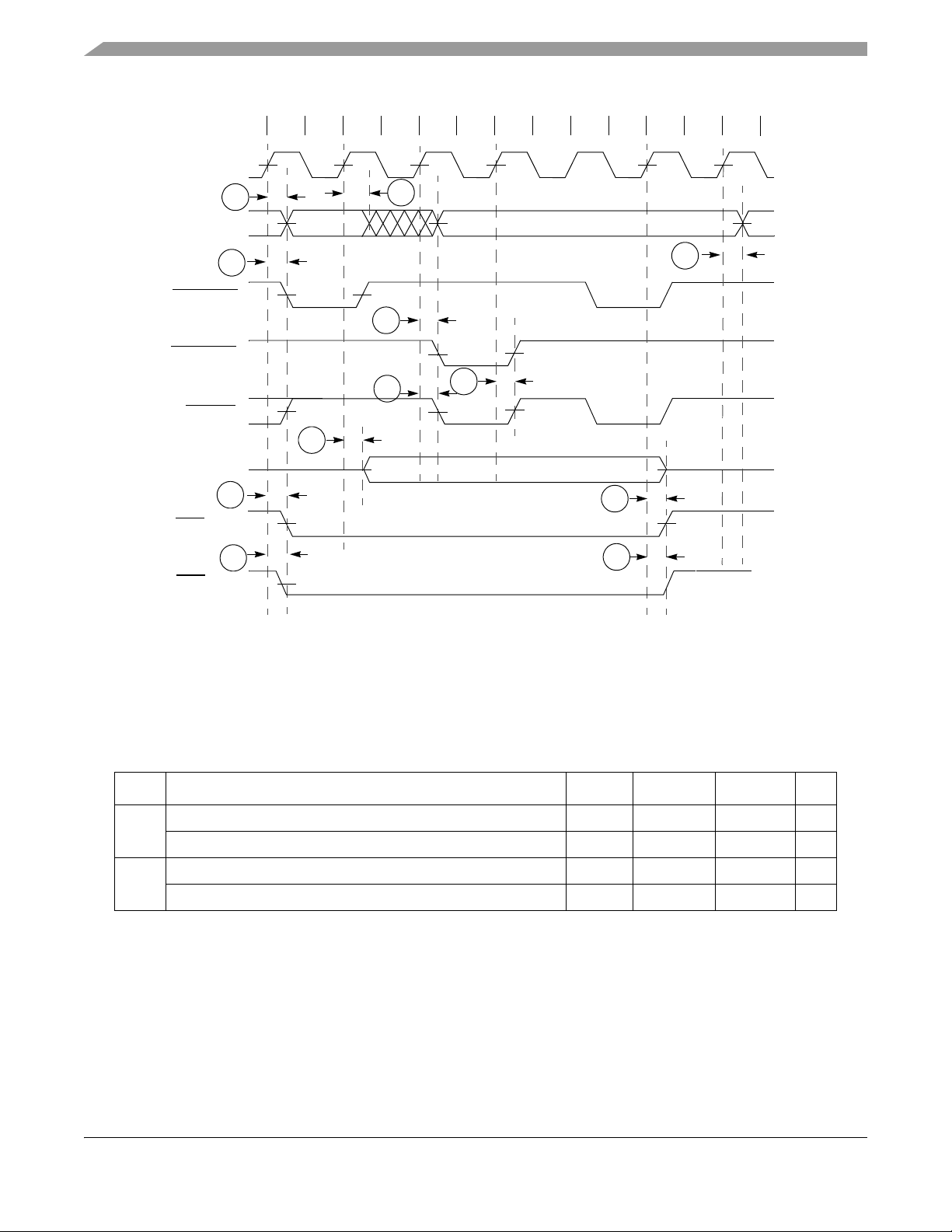
Figure 13 shows an SRAM bus cycle terminated by TEA showing timings listed in Table 12.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 31
Page 32
Preliminary Electrical Characteristics
CLKOUT
CS
A[23:0]
TSIZ[1:0]
TS
TIP
OE
R/W
BS[3:0]
n
(H)
B6a
B8
B8
B8
B6c
B6b
S0
B9
S1
S2
B7a
B7
B7
S3
S4
S5 S0 S1
B9
B9
D[31:0]
TA
(H)
TEA
Figure 13. SRAM Read Bus Cycle Terminated by TEA
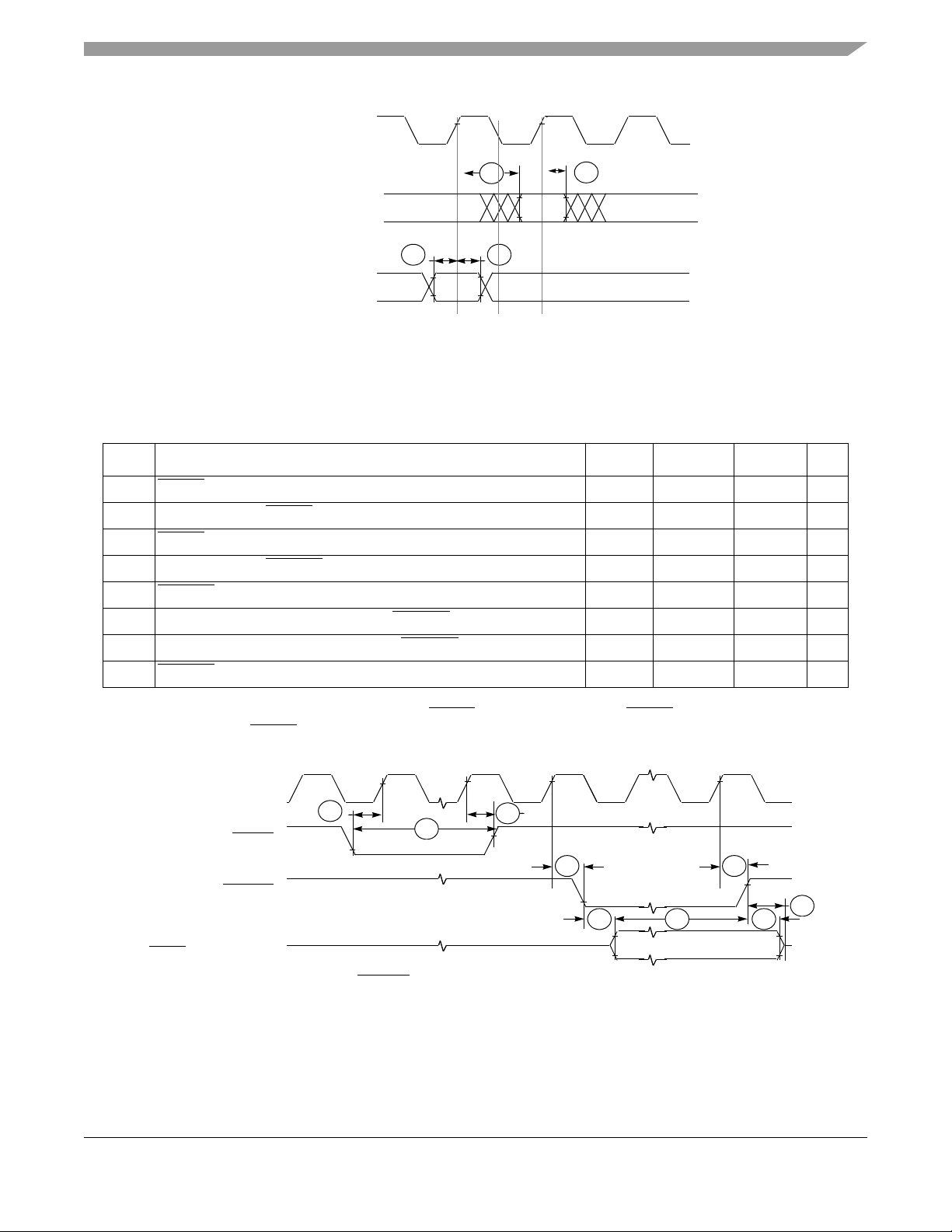
Figure 14 shows an SDRAM read cycle.
B1a
B2a
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor32
Page 33
SD_CKE
Preliminary Electrical Characteristics
0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
A[23:0]
D2
SD_SRAS
SD_CAS
SDWE
D[31:0]
RAS[1:0]
CAS[3:0]
1
DACR[CASL] = 2
D1
D3
Row
D4
D2
1
D4
D2
D2
ACTV NOP PALLNOP
READ
NOP
Column
D4
D2
D6
D5
D4
Figure 14. SDRAM Read Cycle
Table 13. SDRAM Timing
NUM Characteristic Symbol Min Max Unit
D1 CLKOUT high to SDRAM address valid t
D2 CLKOUT high to SDRAM control valid t
D3 CLKOUT high to SDRAM address invalid t
D4 CLKOUT high to SDRAM control invalid t
D5 SDRAM data valid to CLKOUT high t
D6 CLKOUT high to SDRAM data invalid t
1
D7
CLKOUT high to SDRAM data valid t
2
CLKOUT high to SDRAM data invalid t
D8
1
D7 and D8 are for write cycles only.
CHDAV
CHDCV
CHDAI
CHDCI
DDVCH
CHDDI
CHDDVW
CHDDIW
—9ns
—9ns
1.5 — ns
1.5 — ns
4—ns
1.5 — ns
—9ns
1.5 — ns
Figure 15 shows an SDRAM write cycle.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 33
Page 34
Preliminary Electrical Characteristics
0 1 2 3 4 5 6 7 8 9 10 11 12
SD_CKE
A[23:0]
SD_SRAS
SD_SCAS
SD_WE
D[31:0]
RAS[1:0]
CAS[3:0]
D1
D2
1
D2
D2
ACTV PALLNOP
1
DACR[CASL] = 2
D7
Row
D2
D2
D3
D4
WRITE
Column
D4
D8
D4
NOP
Figure 15. SDRAM Write Cycle
7.7 General Purpose I/O Timing
Table 14. GPIO Timing1
NUM Characteristic Symbol Min Max Unit
G1G2CLKOUT High to GPIO Output Valid t
CLKOUT High to GPIO Output Invalid t
G3G4GPIO Input Valid to CLKOUT High t
CLKOUT High to GPIO Input Invalid t
1
GPIO pins include: INT, ETPU, UART, FlexCAN and Timer pins.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
CHPOV
CHPOI
PVCH
CHPI
—10ns
1.5 — ns
9—ns
1.5 — ns
Freescale Semiconductor34
Page 35
CLKOUT
Preliminary Electrical Characteristics
G1
GPIO Outputs
G4G3
GPIO Inputs
G2
Figure 16. GPIO Timing
7.8 Reset and Configuration Override Timing
Table 15. Reset and Configuration Override Timing
(V
= 2.7 to 3.6 V, V
DD
NUM Characteristic Symbol Min Max Unit
R1 RESET Input valid to CLKOUT High t
R2 CLKOUT High to RESET
R3 RESET
Input valid Time
Input invalid t
2
R4 CLKOUT High to RSTOUT Valid t
R5 RSTOUT
valid to Config. Overrides valid t
R6 Configuration Override Setup Time to RSTOUT
R7 Configuration Override Hold Time after RSTOUT invalid t
R8 RSTOUT
1
All AC timing is shown with respect to 50% VDD levels unless otherwise noted.
2
During low power STOP, the synchronizers for the RESET input are bypassed and RESET is asserted asynchronously
invalid to Configuration Override High Impedance t
to the system. Thus, RESET must be held a minimum of 100 ns.
SS
= 0 V, T
= T
L
A
invalid t
to TH)
RVCH
CHRI
t
RIVT
CHROV
ROVCV
COS
COH
ROICZ
1
9—ns
1.5 — ns
5—t
—10ns
0—ns
20 — t
0—ns
—1t
CYC
CYC
CYC
CLKOUT
RESET
RSTOUT
Configuration Overrides*:
(RCON, Override pins])
R1
R3
R2
R4
R4
R8
R7R6R5
Figure 17. RESET and Configuration Override Timing
Refer to the chip configuration module (CCM) chapter in the device’s reference manual for more
information.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 35
Page 36

Preliminary Electrical Characteristics
7.9 I2C Input/Output Timing Specifications
Table 16 lists specifications for the I2C input timing parameters shown in Figure 18.
Table 16. I2C Input Timing Specifications between I2C_SCL and I2C_SDA
Num Characteristic Min Max Units
I1 Start condition hold time 2 — t
I2 Clock low period 8 — t
I3 I2C_SCL/I2C_SDA rise time (VIL= 0.5 V to VIH= 2.4 V) — 1 ms
I4 Data hold time 0 — ns
I5 I2C_SCL/I2C_SDA fall time (VIH= 2.4 V to VIL= 0.5 V) — 1 ms
I6 Clock high time 4 — t
I7 Data setup time 0 — ns
I8 Start condition setup time (for repeated start condition only) 2 — t
I9 Stop condition setup time 2 — t
Table 17 lists specifications for the I2C output timing parameters shown in Figure 18.
1
2
3
Tabl e 17. I2C Output Timing Specifications between I2C_SCL and I2C_SDA
Num Characteristic Min Max Units
1
I1
I2 1Clock low period 10 — t
I3
I4
I5
I6
I7 1Data setup time 2 — t
I8 1Start condition setup time (for repeated start condition only) 20 — t
I9 1Stop condition setup time 10 — t
Note: Output numbers depend on the value programmed into the IFDR; an IFDR programmed with
the maximum frequency (IFDR = 0x20) results in minimum output timings as shown in Ta b l e 1 7 . The
I
I2C_SCL low period. The actual position is affected by the prescale and division values programmed
into the IFDR; however, the numbers given in Ta bl e 1 7 are minimum values.
Because I2C_SCL and I2C_SDA are open-collector-type outputs, which the processor can only
actively drive low, the time I2C_SCL or I2C_SDA take to reach a high level depends on external
signal capacitance and pull-up resistor values.
Specified at a nominal 50-pF load.
Start condition hold time 6 — t
2
I2C_SCL/I2C_SDA rise time (V
1
Data hold time 7 — t
3
I2C_SCL/I2C_SDA fall time (V
1
Clock high time 10 — t
2
C interface is designed to scale the actual data transition time to move it to the middle of the
= 0.5 V to VIH= 2.4 V) — — µs
IL
= 2.4 V to VIL= 0.5 V) — 3 ns
IH
cyc
cyc
cyc
cyc
cyc
cyc
cyc
cyc
cyc
cyc
cyc
cyc
Figure 18 shows timing for the values in Table 16 and Table 17.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor36
Page 37

Preliminary Electrical Characteristics
I2C_SCL
I2C_SDA
I2 I6
I1 I4
I7
I8 I9
I5
I3
Figure 18. I2C Input/Output Timings
7.10 Fast Ethernet AC Timing Specifications
MII signals use TTL signal levels compatible with devices operating at either 5.0 V or 3.3 V.
7.10.1 MII Receive Signal Timing (ERXD[3:0], ERXDV, ERXER, and ERXCLK)
The receiver functions correctly up to a ERXCLK maximum frequency of 25 MHz +1%. The processor
clock frequency must exceed twice the ERXCLK frequency.
Table 18 lists MII receive channel timings.
Table 18. MII Receive Signal Timing
Num Characteristic Min Max Unit
M1 ERXD[3:0], ERXDV, ERXER to ERXCLK setup 5 — ns
M2 ERXCLK to ERXD[3:0], ERXDV, ERXER hold 5 — ns
M3 ERXCLK pulse width high 35% 65% ERXCLK period
M4 ERXCLK pulse width low 35% 65% ERXCLK period
Figure 19 shows MII receive signal timings listed in Table 18.
M3
ERXCLK (input)
ERXD[3:0] (inputs)
ERXDV
ERXER
M1 M2
Figure 19. MII Receive Signal Timing Diagram
M4
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 37
Page 38

Preliminary Electrical Characteristics
7.10.2 MII Transmit Signal Timing (ETXD[3:0], ETXEN, ETXER, ETXCLK)
Table 19 lists MII transmit channel timings.
The transmitter functions correctly up to a ETXCLK maximum frequency of 25 MHz +1%. The processor
clock frequency must exceed twice the ETXCLK frequency.
Table 19. MII Transmit Signal Timing
Num Characteristic Min Max Unit
M5 ETXCLK to ETXD[3:0], ETXEN, ETXER invalid 5 — ns
M6 ETXCLK to ETXD[3:0], ETXEN, ETXER valid — 25 ns
M7 ETXCLK pulse width high 35% 65% ETXCLK period
M8 ETXCLK pulse width low 35% 65% ETXCLK period
Figure 20 shows MII transmit signal timings listed in Table 19.
M7
ETXCLK (input)
M5
ETXD[3:0] (outputs)
ETXEN
ETXER
M6
M8
Figure 20. MII Transmit Signal Timing Diagram
7.10.3 MII Async Inputs Signal Timing (ECRS and ECOL)
Table 20 lists MII asynchronous inputs signal timing.
Table 20. MII Async Inputs Signal Timing
Num Characteristic Min Max Unit
M9 ECRS, ECOL minimum pulse width 1.5 — ETXCLK period
Figure 21 shows MII asynchronous input timings listed in Table 20.
ECRS, ECOL
M9
Figure 21. MII Async Inputs Timing Diagram
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor38
Page 39
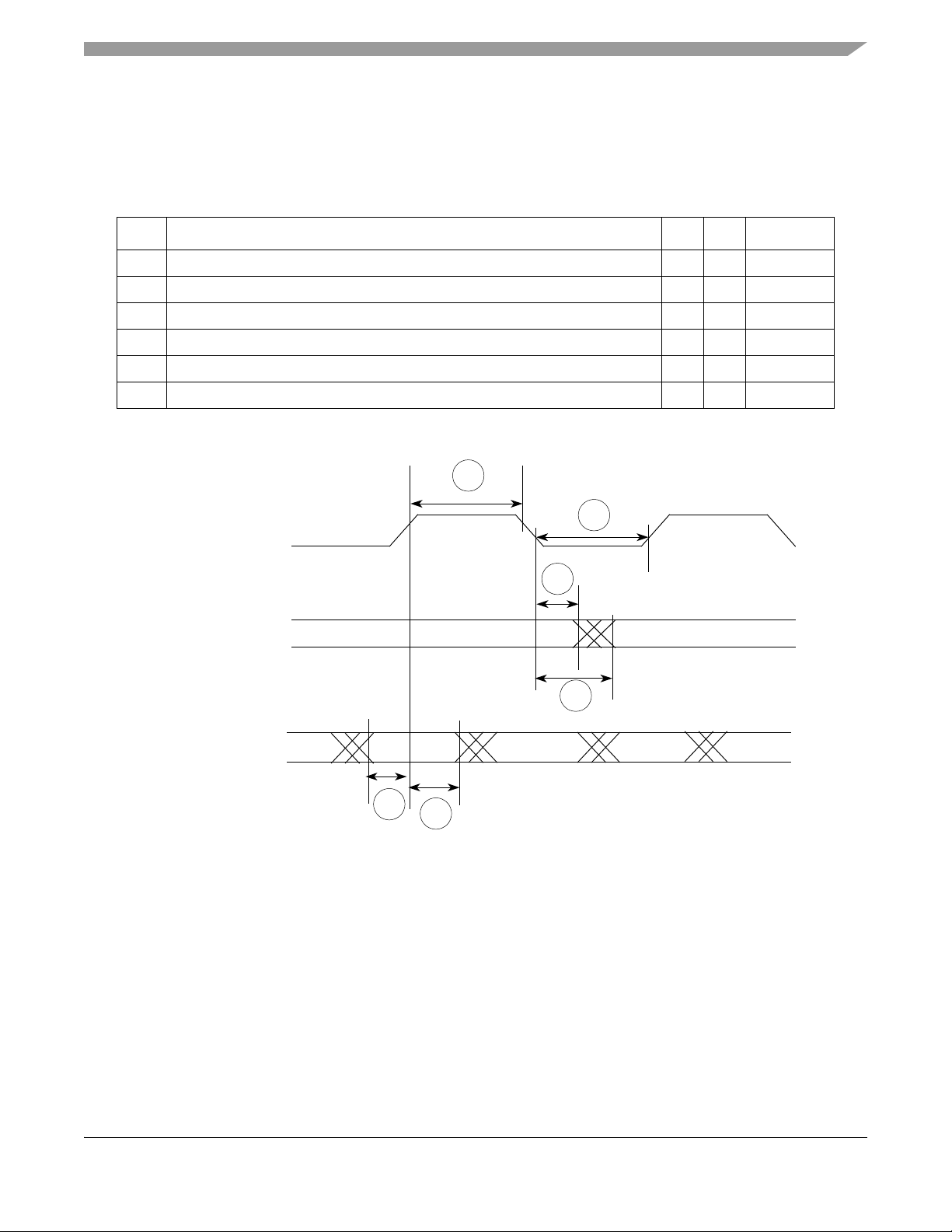
Preliminary Electrical Characteristics
7.10.4 MII Serial Management Channel Timing (EMDIO and EMDC)
Table 21 lists MII serial management channel timings. The FEC functions correctly with a maximum
MDC frequency of 2.5 MHz.
Table 21. MII Serial Management Channel Timing
Num Characteristic Min Max Unit
M10 EMDC falling edge to EMDIO output invalid (minimum propagation delay) 0 — ns
M11 EMDC falling edge to EMDIO output valid (max prop delay) — 25 ns
M12 EMDIO (input) to EMDC rising edge setup 10 — ns
M13 EMDIO (input) to EMDC rising edge hold 0 — ns
M14 EMDC pulse width high 40% 60% MDC period
M15 EMDC pulse width low 40% 60% MDC period
Figure 22 shows MII serial management channel timings listed in Table 21.
M14
EMDC (output)
EMDIO (output)
EMDIO (input)
M12
M13
M15
M10
M11
Figure 22. MII Serial Management Channel Timing Diagram
7.11 32-Bit Timer Module AC Timing Specifications
Table 22 lists timer module AC timings.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 39
Page 40

Preliminary Electrical Characteristics
Table 22. Timer Module AC Timing Specifications
Name Characteristic
0–66 MHz
Unit
Min Max
T1 DT0IN / DT1IN / DT2IN / DT3IN cycle time 3 — t
T2 DT0IN / DT1IN / DT2IN / DT3IN pulse width 1 — t
7.12 QSPI Electrical Specifications
Table 23 lists QSPI timings.
Table 23. QSPI Modules AC Timing Specifications
Name Characteristic Min Max Unit
QS1 QSPI_CS[1:0] to QSPI_CLK 1 510 tcyc
QS2 QSPI_CLK high to QSPI_DOUT valid. — 10 ns
QS3 QSPI_CLK high to QSPI_DOUT invalid. (Output hold) 2 — ns
QS4 QSPI_DIN to QSPI_CLK (Input setup) 9 — ns
QS5 QSPI_DIN to QSPI_CLK (Input hold) 9 — ns
The values in Table 23 correspond to Figure 23.
QS1
QSPI_CS[1:0]
CYC
CYC
QSPI_CLK
QSPI_DOUT
QSPI_DIN
QS2
QS3
QS4
Figure 23. QSPI Timing
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
QS5
Freescale Semiconductor40
Page 41
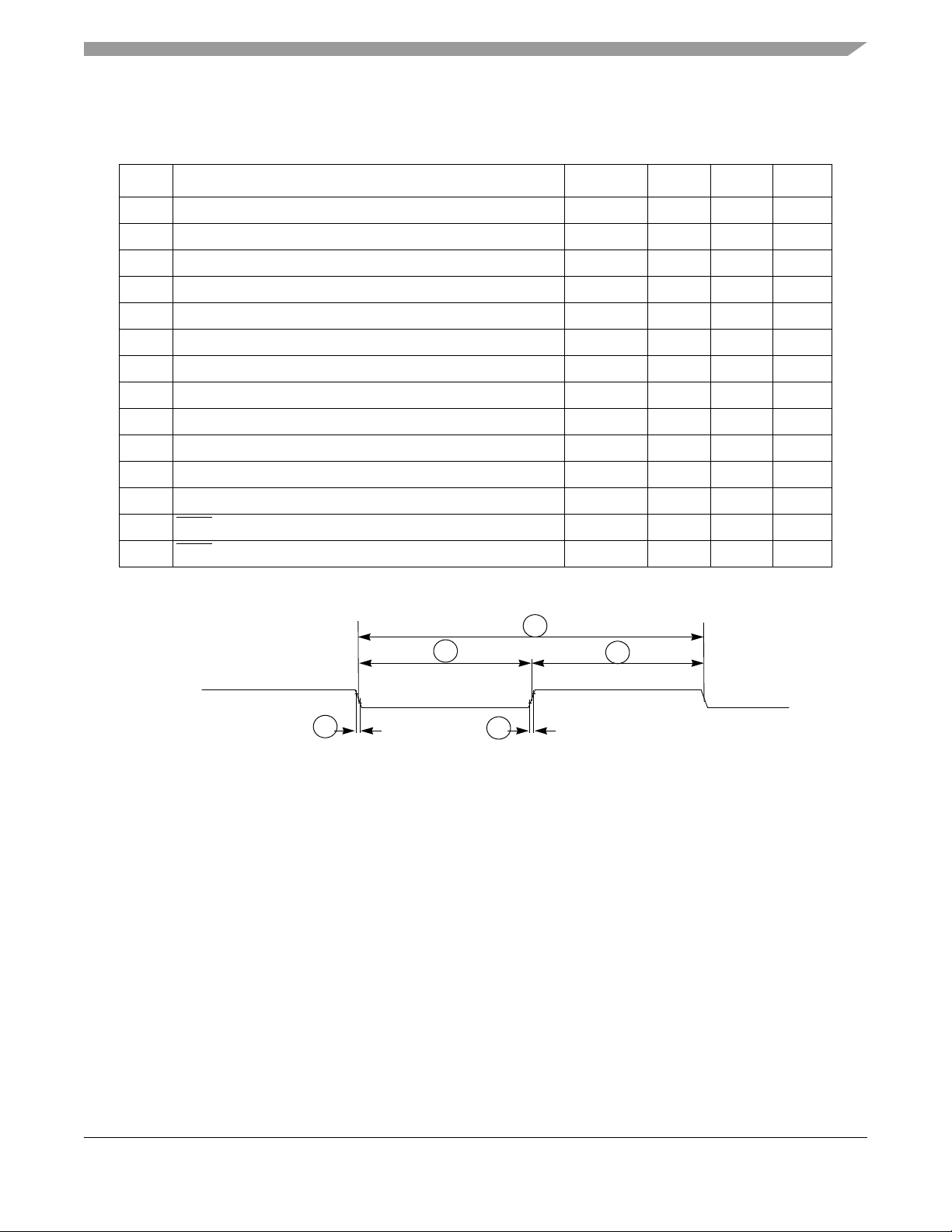
7.13 JTAG and Boundary Scan Timing
Table 24. JTAG and Boundary Scan Timing
Preliminary Electrical Characteristics
Num Characteristics
1
J1 TCLK Frequency of Operation f
J2 TCLK Cycle Period t
J3 TCLK Clock Pulse Width t
J4 TCLK Rise and Fall Times t
J5 Boundary Scan Input Data Setup Time to TCLK Rise t
J6 Boundary Scan Input Data Hold Time after TCLK Rise t
J7 TCLK Low to Boundary Scan Output Data Valid t
J8 TCLK Low to Boundary Scan Output High Z t
J9 TMS, TDI Input Data Setup Time to TCLK Rise t
J10 TMS, TDI Input Data Hold Time after TCLK Rise t
J11 TCLK Low to TDO Data Valid t
J12 TCLK Low to TDO High Z t
J13 TRST
J14 TRST
1
JTAG_EN is expected to be a static signal. Hence, specific timing is not associated with it.
Assert Time t
Setup Time (Negation) to TCLK High t
Symbol Min Max Unit
JCYC
JCYC
JCW
JCRF
BSDST
BSDHT
BSDV
BSDZ
TAPBST
TAPBHT
TDODV
TDODZ
TRSTAT
TRSTST
DC 1/4 f
4—t
sys/2
CYC
26 — ns
03ns
4—ns
26 — ns
033ns
033ns
4—ns
10 — ns
026ns
08ns
100 — ns
10 — ns
TCLK
(input)
J2
J3 J3
V
IH
V
J4 J4
IL
Figure 24. Test Clock Input Timing
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 41
Page 42

Preliminary Electrical Characteristics
TCLK
Data Inputs
Data Outputs
Data Outputs
Data Outputs
TCLK
TDI
TMS
V
IL
J5 J6
Input Data Valid
J7
J8
J7
V
IH
Output Data Valid
Output Data Valid
Figure 25. Boundary Scan (JTAG) Timing
V
IL
J9 J10
Input Data Valid
J11
V
IH
TDO
J12
Output Data Valid
TDO
J11
TDO
Output Data Valid
Figure 26. Test Access Port Timing
TCLK
J14
TRST
J13
Figure 27. TRST
Timing
7.14 Debug AC Timing Specifications
Table 25 lists specifications for the debug AC timing parameters shown in Figure 29.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor42
Page 43
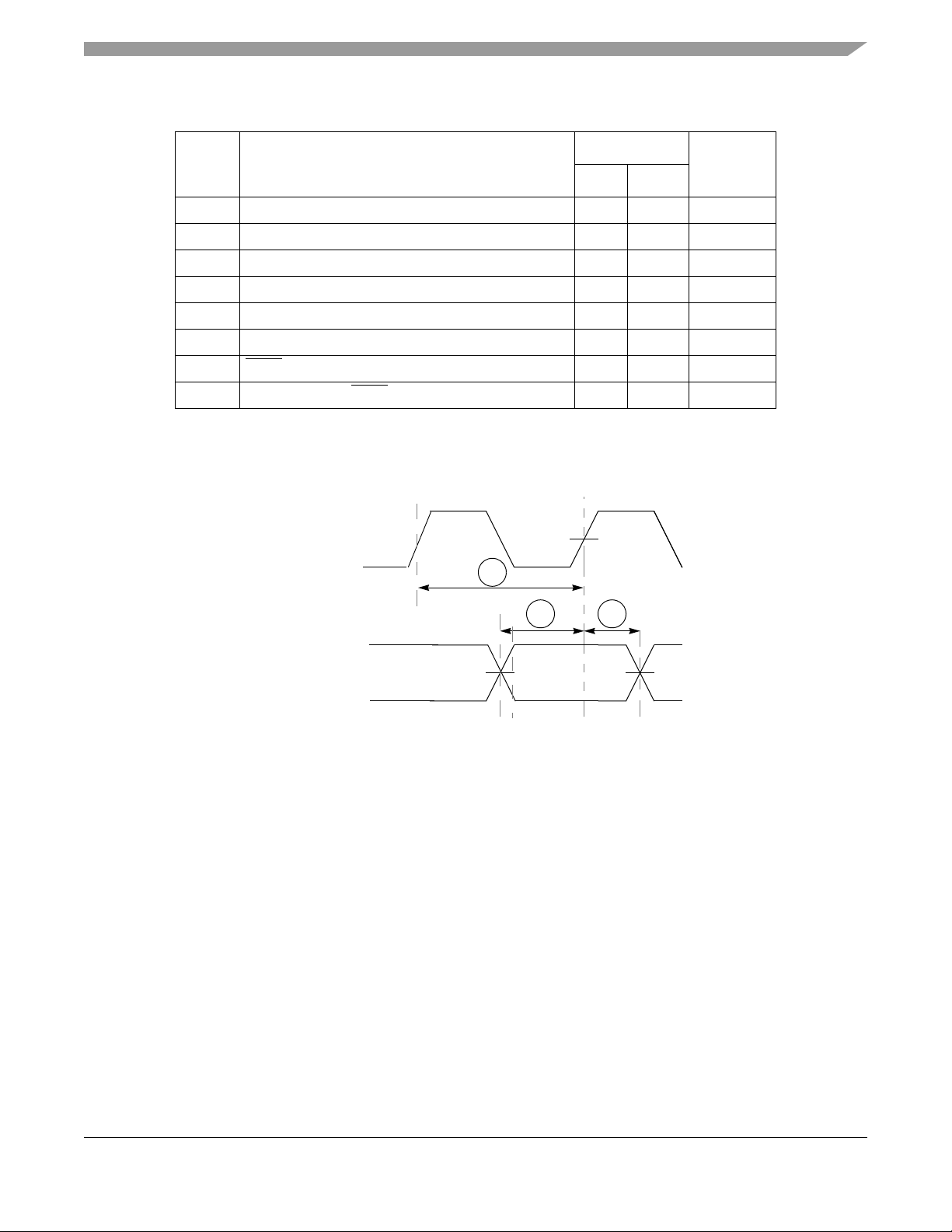
Table 25. Debug AC Timing Specification
Num Characteristic
Preliminary Electrical Characteristics
150 MHz
Units
Min Max
DE0 PSTCLK cycle time — 0.5 t
DE1 PST valid to PSTCLK high 4 — ns
DE2 PSTCLK high to PST invalid 1.5 — ns
DE3 DSCLK cycle time 5 — t
DE4 DSI valid to DSCLK high 1 — t
1
DE5
DSCLK high to DSO invalid 4 — t
DE6 BKPT input data setup time to CLKOUT rise 4 — ns
DE7 CLKOUT high to BKPT
1
DSCLK and DSI are synchronized internally. D4 is measured from the synchronized DSCLK
high Z 0 10 ns
input relative to the rising edge of CLKOUT.
Figure 28 shows real-time trace timing for the values in Table 25.
PSTCLK
DE0
cyc
cyc
cyc
cyc
DE2DE1
PST[3:0]
DDATA[3:0]
Figure 28. Real-Time Trace AC Timing
Figure 29 shows BDM serial port AC timing for the values in Table 25.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 43
Page 44

Documentation
CLKOUT
BKPT
DSCLK
DE6
DE7
DE5
DE3
DSI
DSO
Current Next
DE4
Past Current
Figure 29. BDM Serial Port AC Timing
8 Documentation
Documentation regarding the MCF523x and their development support tools is available from a local
Freescale distributor, a Freescale semiconductor sales office, the Freescale Literature Distribution Center,
or through the Freescale web address at http://www.freescale.com/coldfire.
9 Document Revision History
The below table provides a revision history for this document.
Table 26. Document Revision History
Rev. No. Substantive Change(s)
0 Preliminary release.
1 • Updated Signal List table
1.1 • Removed duplicate information in the module description sections. The information is all in the
Signals Description Table.
1.2 • Corrected Figure 8 pin 81. VDD instead of VSS
• Changed instances of Motorola to Freescale
1.3 • Removed detailed signal description section. This information can be found in the
MCF5235RM Chapter 2.
• Removed detailed feature list. This information can be found in the MCF5235RM Chapter 1.
• Corrected Figure 2 pin F10. VSS instead of VDD. Change made in Ta b le 2 as well.
• Corrected Figure 8 pin 81. OVDD instead of VDD. Change made in Ta bl e 2 as well.
• Cleaned up many inconsistencies within the pinout figure signal names
• Corrected document IDs in Documentation Table
1.4 • Added values for ‘Maximum operating junction temperature’ in Ta b le 8 .
• Added typical values for ‘Core operating supply current (master mode)’ in Ta b le 9 .
• Added typical values for ‘Pad operating supply current (master mode)’ in Ta bl e 9 .
• Removed unnecessary PLL specifications, #6-9, in Ta bl e 1 0 .
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor44
Page 45

Document Revision History
Table 26. Document Revision History (continued)
Rev. No. Substantive Change(s)
1.5 • Removed Overview, Features, Modes of Operation, and Address Multiplexing sections. This
information can be found in the MCF5235 Reference Manual.
• Removed list of documentation table in Section 8, “Documentation.”. An up-to-date list is
always available on our web site.
1.6 • Ta bl e 9 : Changed core supply voltage (V
1.7 • Ta bl e 1 0: Changed max f
frequency from “75 MHz” to “150 MHz”.
ICO
) from 1.35-1.65 to 1.4-1.6.
DD
1.8 • Added Section 5.2.1, “Supply Voltage Sequencing and Separation Cautions.”
• Updated 196MAPBGA package dimensions, Figure 3.
2 •Ta b le 2 : Changed SD_CKE pin location from 139 to “—” for the 160QFP device. Changed
QSPI_CS1 pin location from “—” to 139 for the 160QFP device.
• Figure 8: Changed pin 139 label from “SD_CKE/QSPI_CS1” to “QSPI_CS1/SD_CKE”.
• Removed second sentence from Section 7.10.1, “MII Receive Signal Timing (ERXD[3:0],
ERXDV, ERXER, and ERXCLK),” and Section 7.10.2, “MII Transmit Signal Timing (ETXD[3:0],
ETXEN, ETXER, ETXCLK),” regarding no minimum frequency requirement for TXCLK.
• Removed third and fourth paragraphs from Section 7.10.2, “MII Transmit Signal Timing
(ETXD[3:0], ETXEN, ETXER, ETXCLK),” as this feature is not supported on this device.
MCF523x Integrated Microprocessor Hardware Specification, Rev. 2
Freescale Semiconductor 45
Page 46

How to Reach Us:
Home Page:
www.freescale.com
E-mail:
support@freescale.com
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, CH370
1300 N. Alma School Road
Chandler, Arizona 85224
+1-800-521-6274 or +1-480-768-2130
support@freescale.com
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
support@freescale.com
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductor products. There are no express or
implied copyright licenses granted hereunder to design or fabricate any integrated
circuits or integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to
any products herein. Freescale Semiconductor makes no warranty, representation or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application or use of any
product or circuit, and specifically disclaims any and all liability, including without
limitation consequential or incidental damages. “Typical” parameters that may be
provided in Freescale Semiconductor data sheets and/or specifications can and do vary
in different applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer application by
customer’s technical experts. Freescale Semiconductor does not convey any license
under its patent rights nor the rights of others. Freescale Semiconductor products are
not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support or sustain life,
or for any other application in which the failure of the Freescale Semiconductor product
could create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended or
unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and
its officers, employees, subsidiaries, affiliates, and distributors harmless against all
claims, costs, damages, and expenses, and reasonable attorney fees arising out of,
directly or indirectly, any claim of personal injury or death associated with such
unintended or unauthorized use, even if such claim alleges that Freescale
Semiconductor was negligent regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
All other product or service names are the property of their respective owners.
© Freescale Semiconductor, Inc. 2006. All rights reserved.
RoHS-compliant and/or Pb-free versions of Freescale products have the functionality
and electrical characteristics as their non-RoHS-compliant and/or non-Pb-free
counterparts. For further information, see http://www.freescale.com or contact your
Freescale sales representative.
For information on Freescale’s Environmental Products program, go to
http://www.freescale.com/epp.
Document Number: MCF5235EC
Rev. 2
08/2006
 Loading...
Loading...