

Page 1

Instruction Manual
D103785X012
DVC6000 HW2 Digital Valve Controller
June 2017
Fisher™ FIELDVUE™ DVC6000 HW2 Digital Valve
Controller
This manual applies to
Instrument Level HC, AD, PD, ODV
Device Type 130b
Device Revision 1 & 2
Hardware Revision 2
Firmware Revision 6
DD Revision 4 & 5
Contents
Section 1 Introduction 3.................
Scope of Manual 3..............................
Conventions Used in this Manual 3................
Description 3..................................
Specifications 4................................
Related Documents 7...........................
Educational Services 8...........................
Section 2 Wiring Practices 9..............
Control System Requirements 9..................
HART Filter 9.................................
Voltage Available 9............................
Compliance Voltage 11........................
Auxiliary Terminal Wiring Length Guidelines 12....
Maximum Cable Capacitance 12.................
Installation in Conjunction with a Rosemountt
333 HART Tri‐Loopt HART‐to‐Analog
Signal Converter 17.........................
Section 3 Configuration 19...............
Guided Setup 19...............................
Manual Setup 19...............................
Mode and Protection 20........................
Instrument Mode 20.......................
Write Protection 20........................
Instrument 20................................
Identification 20...........................
Serial Numbers 21.........................
Units 21..................................
Terminal Box 21...........................
Input Range 21............................
Spec Sheet 22.............................
Edit Instrument Time 22....................
Travel/Pressure Control 22......................
Travel/Pressure Select 22...................
Cutoffs and Limits 23.......................
End Point Pressure Control 23................
Pressure Control 24........................
Pressure Fallback 24........................
Control Mode 25..........................
Characterization 25........................
Dynamic Response 27......................
Tuning 28....................................
Travel Tuning 28...........................
Pressure Tuning 31........................
Travel/Pressure Integral Settings 31..........
Valve and Actuator 32..........................
Partial Stroke Test 34..........................
Outputs 37...................................
Output Terminal Configuration 37............
Switch Configuration 37....................
HART Variable Assignments 38..............
Transmitter Output 38.....................
Burst Mode 38............................
Alert Setup 39.................................
Change to HART 5 / HART 7 40....................
www.Fisher.com
Page 2

DVC6000 HW2 Digital Valve Controller
June 2017
Instruction Manual
D103785X012
Contents (continued)
Section 4 Calibration 41.................
Calibration Overview 41.........................
Travel Calibration 42...........................
Auto Calibration 42........................
Manual Calibration 44......................
Pushbutton Calibration 45..................
Sensor Calibration 46..........................
Pressure Sensors 46........................
Travel Sensor 47...........................
Analog Input Calibration 51.................
Relay Adjustment 52...........................
Double‐Acting Relay 52.....................
Single‐Acting Relays 53.....................
PST Calibration 54.............................
Section 5 Device Information,
Diagnostics, and Alerts 55...............
Overview 55...................................
Status & Primary Purpose Variables 55............
Device Information 55.........................
Service Tools 56................................
Device Status 56..............................
Alert Record 56...............................
Electronics 56.............................
Pressure 57...............................
Travel 58.................................
Travel History 59..........................
Alert Record 59............................
Status 60.................................
Diagnostics 60................................
Stroke Valve 60............................
Partial Stroke Test (ODV only) 60.............
Variables 61...................................
Section 6 Maintenance and
Troubleshooting 63.....................
Module Base Maintenance 64.....................
Tools Required 64.............................
Removing the Module Base 64..................
Replacing the Module Base 66...................
Submodule Maintenance 67......................
I/P Converter 67...............................
Printed Wiring Board (PWB) Assembly 69..........
Pneumatic Relay 71............................
Gauges, Pipe Plugs or Tire Valves 72..............
Terminal Box 72................................
Removing the Terminal Box 72..................
Replacing the Terminal Box 73...................
Travel Sensor 73................................
Disassembly 74...............................
DVC6015 Remote Feedback Unit 74..........
DVC6025 Remote Feedback Unit 75..........
DVC6035 Remote Feedback Unit 75..........
Assembly 75..................................
DVC6015 Feedback Unit 75.................
DVC6025 Feedback Unit 76.................
DVC6035 Feedback Unit 78.................
Troubleshooting 80.............................
Checking Voltage Available 80....................
DVC6000 HW2 Technical Support Checklist 83......
Section 7 Parts 85......................
Parts Ordering 85...............................
Parts Kits 85...................................
Parts List 86...................................
DVC6005 Base Unit 86.........................
Pressure Gauges, Pipe Plugs, or Tire
Valve Assemblies 88.........................
Remote Travel Sensor Parts 86..................
HART Filters 88...............................
Appendix A Principle of Operation 95......
HART Communication 95........................
DVC6200 Digital Valve Controller 95...............
Appendix B Field Communicator
Menu Tree 99........................
Glossary 107...........................
Index 113.............................
2
Page 3

Instruction Manual
D103785X012
Introduction
June 2017
Section 1 Introduction
Installation, Pneumatic and Electrical Connections, and Initial
Configuration
Refer to the DVC6005 Series Remote Mount quick start guide (D103784X012) for DVC6000 HW2 installation,
connection and initial configuration information. If a copy of this quick start guide is needed contact your Emerson
sales office or Local Business Partner, or visit our website at Fisher.com
Scope of Manual
This instruction manual is a supplement to the DVC6005 Series Remote Mount quick start guide (D103784X012) that
ships with every instrument. This instruction manual includes product specifications, reference materials, custom
setup information, maintenance procedures, and replacement part details.
.
This instruction manual describes using the 475 Field
also use Fisher ValveLink software or ValveLink Mobile software to setup, calibrate, and diagnose the valve and
instrument. For information on using ValveLink software with the instrument refer to ValveLink software help or
documentation.
Do not install, operate, or maintain a DVC6000 HW2 digital valve controller without being fully trained and qualified in
valve, actuator, and accessory installation, operation, and maintenance. To avoid personal injury or property damage,
it is important to carefully read, understand, and follow all of the contents of this manual, including all safety cautions
and warnings. If you have any questions about these instructions, contact your Emerson sales office or Local Business
Partner before proceeding.
Communicator to set up and calibrate the instrument. You can
Conventions Used in this Manual
Navigation paths and fast‐key sequences are included for procedures and parameters that can be accessed using the
Field Communicator.
For example, to access Device Setup:
Field Communicator Configure > Guided Setup > Device Setup (2‐1‐1)
Refer to Appendix B for Field Communicator menu trees.
Description
DVC6000 HW2 digital valve controllers (figures 1‐1) are communicating, microprocessor‐based current‐to‐pneumatic
instruments. In addition to the normal function of converting an input current signal to a pneumatic output pressure,
the DVC6000 HW2 digital valve controller, using the HARTr communications protocol, gives easy access to
information critical to process operation. You can gain information from the principal component of the process, the
control valve itself, using the Field Communicator at the valve, or at a field junction box, or by using a personal
computer or operator's console within the control room.
3
Page 4
Introduction
June 2017
Instruction Manual
D103785X012
Using a personal computer and ValveLink software or
AMS Suite: Intelligent Device Manager, or a Field
Communicator, you can perform several operations with
Figure 1‐1. DVC6000 HW2 Digital Valve Controller
Mounted on Rotary Control Valve/Actuator
the DVC6000 HW2 digital valve controller. You can
obtain general information concerning software revision
level, messages, tag, descriptor, and date.
Diagnostic information is available to aid you when
troubleshooting. Input and output configuration
parameters can be set, and the digital valve controller can
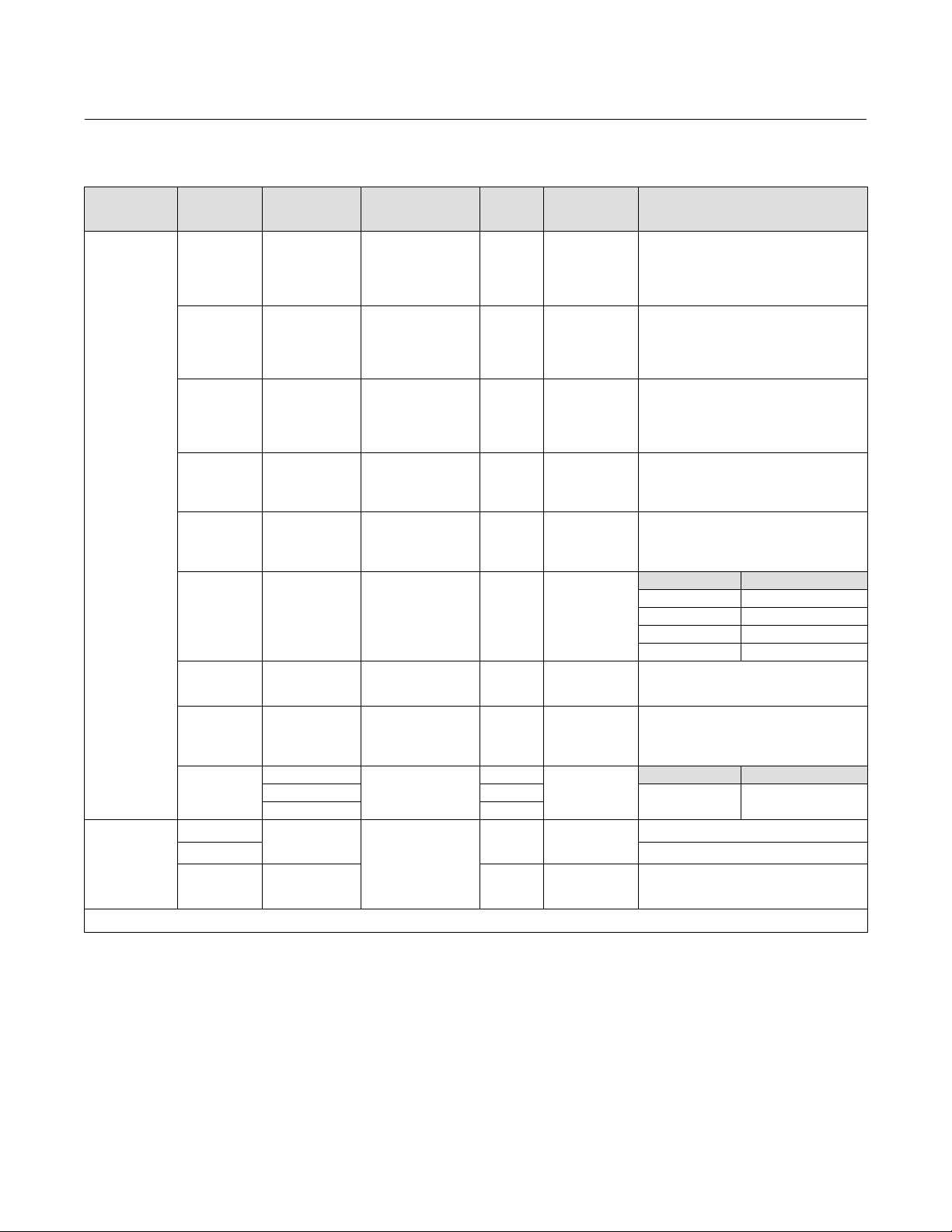
be calibrated. Refer to table 1‐1 for details on the
capabilities of each diagnostic tier.
Using the HART protocol, information from the field can
be integrated into control systems or be received on a
single loop basis.
The DVC6000 HW2 digital valve controller is designed to
directly replace standard pneumatic and electro‐
pneumatic valve mounted positioners.
W8373
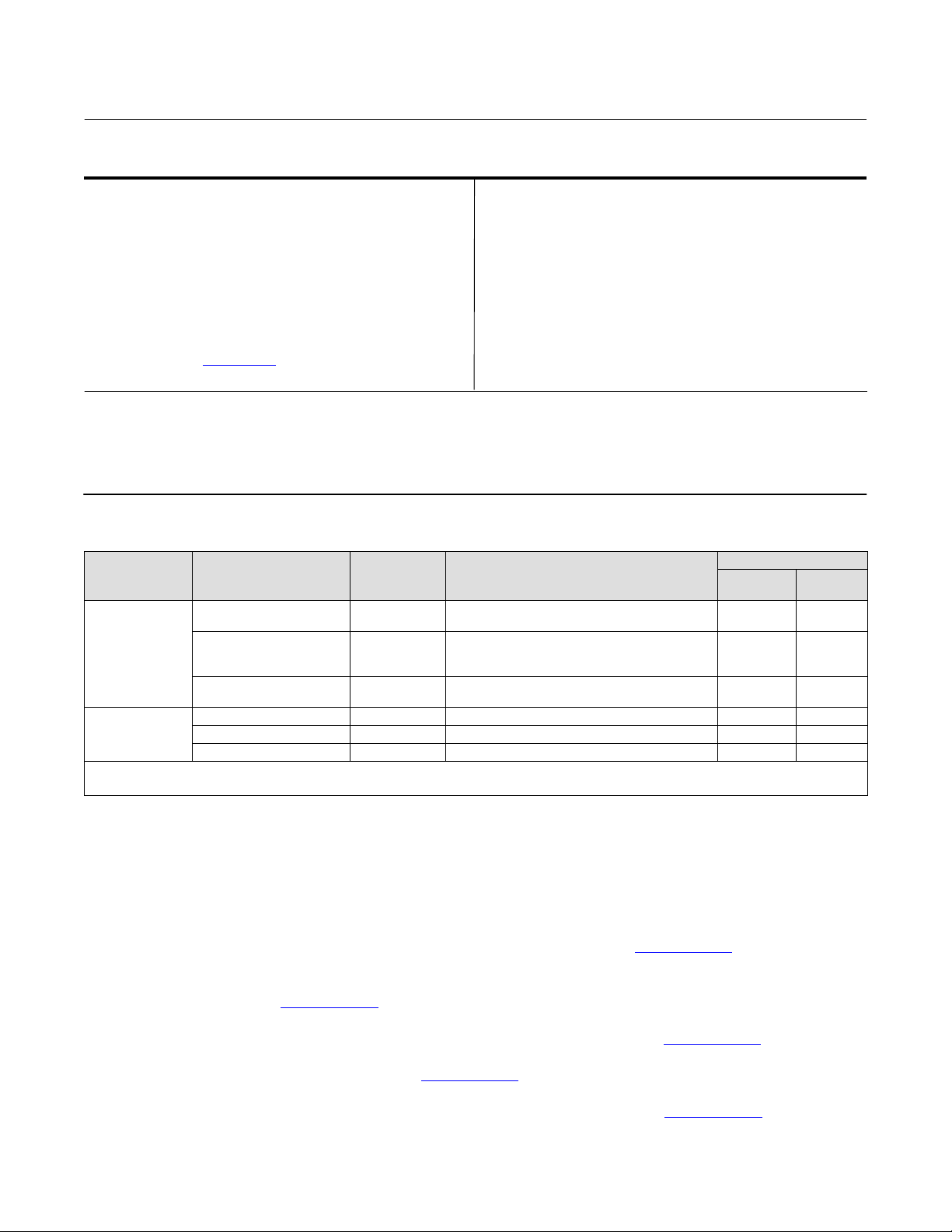
Table 1‐1. Instrument Level Capabilities
CAPABILITY
Auto Calibration X X X X
Custom Characterization X X X X
Burst Communication X X X X
Alerts X X X X
Step Response, Drive Signal Test & Dynamic Error Band X X X
Advanced Diagnostics (Valve Signature) X X X
Performance Tuner X X X
Travel Control ‐ Pressure Fallback X X X
Supply Pressure Sensor X X X
Performance Diagnostics X X
Solenoid Valve Testing X X
Lead/Lag Set Point Filter
1. Refer to brochure part # D351146X012 for information on Fisher optimized digital valves for compressor antisurge applications.
2. HC = HART Communicating ; AD = Advanced Diagnostics ; PD = Performance Diagnostics ; ODV = Optimized Digital Valve.
(1)
HC AD PD ODV
DIAGNOSTIC LEVEL
(2)
X
Specifications
WARNING
Refer to table 1‐2 for specifications. Incorrect configuration of a positioning instrument could result in the malfunction of
the product, property damage or personal injury.
Specifications for DVC6000 HW2 digital valve controllers are shown in table 1‐2. Specifications for the Field
Communicator can be found in the product manual
4
for the Field Communicator.
Page 5
Instruction Manual
D103785X012
Table 1‐2. Specifications
Introduction
June 2017
Available Mounting
DVC6000 HW2 digital valve controllers can be
mounted on Fisher and other manufacturers rotary
and sliding‐stem actuators
(1)
DVC6005 HW2: Base unit for 2 inch pipestand or wall
mounting
J DVC6015: Remotely mounted feedback unit for
sliding‐stem applications
J DVC6025: Remotely mounted feedback unit for
rotary or long‐stroke sliding‐stem applications or
J DVC6035: Remotely mounted feedback unit for
quarter‐turn rotary applications
Mounting kit required for mounting feedback unit on
actuator
Mounting the instrument vertically, with the vent at
the bottom of the assembly, or horizontally, with the
vent pointing down, is recommended to allow
drainage of moisture that may be introduced via the
instrument air supply.
Communication Protocol
J HART 5 or J HART 7
Input Signal
Point-to-Point
Analog Input Signal: 4-20 mA DC, nominal; split
ranging available
Minimum Voltage Available at Instrument Terminals
must be 9.5 VDC for analog control, 10 VDC for HART
communication
Minimum Control Current: 4.0 mA
Minimum Current w/o Microprocessor Restart: 3.5 mA
Maximum Voltage: 30 VDC
Overcurrent protected
Reverse Polarity protected
Multi-drop
Instrument Power: 11 to 30 VDC at 10 mA
Reverse Polarity protected
Supply Pressure
(2)
Minimum Recommended: 0.3 bar (5 psig) higher
than maximum actuator requirements
Maximum: 10.0 bar (145 psig) or maximum pressure
rating of the actuator, whichever is lower
Medium: Air or Natural Gas
Supply medium must be clean, dry and non-corrosive
-continued-
Per ISA Standard 7.0.01: A maximum 40 micrometer
particle size in the air system is acceptable. Further
filtration down to 5 micrometer particle size is
recommended. Lubricant content is not to exceed 1
ppm weight (w/w) or volume (v/v) basis.
Condensation in the air supply should be minimized.
Per ISO 8573-1:
Maximum particle density size: Class 7
Oil content: Class 3
Pressure Dew Point: Class 3 or at least 10_C less than
the lowest ambient temperature expected
Output Signal
Pneumatic signal as required by the actuator, up to
full supply pressure.
Minimum Span: 0.4 bar (6 psig)
Maximum Span: 9.5 bar (140 psig)
Action:
Steady‐State Air Consumption
J Double, J Single Direct or J Reverse
(3)(4)
Standard Relay
At 1.4 bar (20 psig) supply pressure:
Less than 0.38 normal m
At 5.5 bar (80 psig) supply pressure:
Less than 1.3 normal m
3
/hr (14 scfh)
3
/hr (49 scfh)
Low Bleed Relay
At 1.4 bar (20 psig) supply pressure:
Average value 0.056 normal m
At 5.5 bar (80 psig) supply pressure:
Average value 0.184 normal m
Maximum Output Capacity
At 1.4 bar (20 psig) supply pressure:
10.0 normal m
3
/hr (375 scfh)
3
/hr (2.1 scfh)
3
/hr (6.9 scfh)
(3)(4)
At 5.5 bar (80 psig) supply pressure:
29.5 normal m
Operating Ambient Temperature Limits
3
/hr (1100 scfh)
(2)(5)
-40 to 85_C (-40 to 185_F) for base unit
-52 to 85_C (-62 to 185_F) for base unit utilizing the
Extreme Temperature option (fluorosilicone
elastomers)
-52 to 125_C (-62 to 257_F) for remote‐mount
feedback unit
Independent Linearity
(6)
Typical Value: ±0.50% of output span
5
Page 6
Introduction
June 2017
Table 1‐2. Specifications (continued)
Instruction Manual
D103785X012
Electromagnetic Compatibility
Meets EN 61326-1:2013
Immunity—Industrial locations per Table 2 of
the EN 61326-1 standard. Performance is
shown in table 1‐3 below.
Emissions—Class A
ISM equipment rating: Group 1, Class A
Lightning and Surge Protection—The degree of
immunity to lightning is specified as Surge immunity
in table 1‐3. For additional surge protection
commercially available transient protection devices
can be used.
Vibration Testing Method
Tested per ANSI/ISA-S75.13.01 Section 5.3.5. A
resonant frequency search is performed on all three
axes. The instrument is subjected to the ISA specified
1/2 hour endurance test at each major resonance.
Input Impedance
An equivalent impedance of 500 ohms may be used.
This value corresponds to 10V @ 20 mA.
Humidity Testing Method
Tested per IEC 61514‐2
Electrical Classification
Hazardous Area Approvals
CSA— Intrinsically Safe, Explosion‐proof,
Division 2, Dust Ignition-proof
FM— Intrinsically Safe, Explosion‐proof,
Dust Ignition-proof, Non-Incendive
ATEX— Intrinsically Safe, Flameproof, Type n
IECEx— Intrinsically Safe, Flameproof, Type n
Electrical Housing
CSA— Type 4X, IP66
FM— Type 4X, IP66
ATEX— IP66
IECEx— IP66
Other Classifications/Certifications
CUTR—Customs Union Technical Regulations
(Russia, Kazakhstan, Belarus, and Armenia)
INMETRO— National Institute of Metrology, Quality,
and Technology (Brazil)
-continued-
PESO CCOE— Petroleum and Explosives Safety
Organisation - Chief Controller of Explosives (India)
Contact your Emerson sales office
or Local Business
Partner for classification/certification specific
information.
Connections
Supply Pressure: 1/4 NPT internal and integral pad for
mounting 67CFR regulator
Output Pressure: 1/4 NPT internal
Tubing: 3/8‐inch recommended
Vent: 3/8 NPT internal
Electrical: 1/2 NPT internal or M20
(7)
Actuator Compatibility
Stem Travel (Sliding‐Stem Linear)
Linear Actuators with rated travel between 6.35 mm
(0.25 inch) and 606 mm (23.375 inches)
Shaft Rotation (Quarter‐Turn Rotary)
Rotary Actuators with rated travel between 50
degrees and 180 degrees
Mounting
Weight
DVC6005 HW2 Base Unit: 4.1 kg (9 lbs)
DVC6015 Remote Feedback Unit: 1.3 kg (2.9 lbs)
DVC6025 Remote Feedback Unit: 1.4 kg (3.1 lbs)
DVC6035 Remote Feedback Unit: 0.9 kg (2.0 lbs)
Construction Materials
Housing, module base and terminal box:
A03600 low copper aluminum alloy
Cover: Thermoplastic polyester
Elastomers: Nitrile (standard)
Fluorosilicone (extreme temperature)
Options
J Supply and output pressure gauges or
J Tire valves J Integral mounted filter regulator
J Low‐Bleed Relay J Extreme Temperature
J Integral 4‐20 mA Position Transmitter
(8)
:
4‐20 mA output, isolated
Supply Voltage: 8‐30 VDC
Reference Accuracy: 1% of travel span
(Options continued on next page)
6
Page 7
Instruction Manual
D103785X012
Table 1‐2. Specifications (continued)
Introduction
June 2017
Options (continued)
J Integral Switch
(8)
:
One isolated switch, configurable throughout the
calibrated travel range or actuated from a device alert
Off State: 0 mA (nominal)
On State: up to 1 A
Supply Voltage: 30 VDC maximum
Reference Accuracy: 2% of travel span
Contact your Emerson sales office, Local Business
Partner, or go to Fisher.com
for additional
information
NOTE: Specialized instrument terms are defined in ANSI/ISA Standard 51.1 - Process Instrument Terminology.
1. 4‐conductor shielded cable, 18 to 22 AWG minimum wire size, in rigid or flexible metal conduit, is required for connection between base unit and feedback unit. Pneumatic tubing between base
unit output connection and actuator has been tested to 91 meters (300 feet). At 15 meters (50 feet) there was no performance degradation. At 91 meters there was minimal pneumatic lag.
2. The pressure/temperature limits in this document and any other applicable code or standard should not be exceeded.
3. Normal m
4. Values at 1.4 bar (20 psig) based on a single-acting direct relay; values at 5.5 bar (80 psig) based on double-acting relay.
5. Temperature limits vary based on hazardous area approval.
6. Not applicable for travels less than 19 mm (0.75 inch) or for shaft rotation less than 60 degrees. Also not applicable for digital valve controllers in long‐stroke applications.
7. M20 electrical connection only available with ATEX approvals
8. The electronic output is available with either the position transmitter or the switch.
3
/hour - Normal cubic meters per hour at 0_C and 1.01325 bar, absolute. Scfh - Standard cubic feet per hour at 60_F and 14.7 psia.
Declaration of SEP
Fisher Controls International LLC declares this
product to be in compliance with Article 4 paragraph
3 of the PED Directive 2014/68/EU. It was designed
and manufactured in accordance with Sound
Engineering Practice (SEP) and cannot bear the CE
marking related to PED compliance.
However, the product may bear the CE marking to
indicate compliance with other applicable European
Community Directives.
Table 1‐3. EMC Summary Results—Immunity
Performance Criteria
Port Phenomenon Basic Standard Test Level
Electrostatic discharge (ESD) IEC 61000‐4‐2
Enclosure
I/O signal/control
Performance criteria: +/- 1% effect.
1. A = No degradation during testing. B = Temporary degradation during testing, but is self‐recovering.
2. Excluding auxiliary switch function, which meets Performance Criteria B.
Radiated EM field IEC 61000‐4‐3
Rated power frequency
magnetic field
Burst IEC 61000‐4‐4 1 kV A A
Surge IEC 61000‐4‐5 1 kV B B
Conducted RF IEC 61000‐4‐6 150 kHz to 80 MHz at 3 Vrms A A
IEC 61000‐4‐8 30 A/m at 50/60Hz A
4 kV contact
8 kV air
80 to 1000 MHz @ 10V/m with 1 kHz AM at 80%
1400 to 2000 MHz @ 3V/m with 1 kHz AM at 80%
2000 to 2700 MHz @ 1V/m with 1 kHz AM at 80%
Point-to-
Point Mode
(2)
A
A A
(2)
Multi-drop
Mode
A
A
(1)
Related Documents
This section lists other documents containing information related to the DVC6000 HW2 digital valve controller. These
documents include:
D Bulletin 62.1:DVC6000 HW2 - FIELDVUE DVC6000 HW2 Digital Valve Controller (D103786X012
D Bulletin 62.1:DVC6005 - FIELDVUE DVC6005 Series Digital Valve Controller and DVC6015, DVC6025, and DVC6035
Feedback Unit Dimension (D103308X012
)
D FIELDVUE DVC6005 Series Remote Mount Digital Valve Controller Quick Start Guide (D103784X012
D FIELDVUE Digital Valve Controller Split Ranging (D103262X012
)
D Using FIELDVUE Instruments with the Smart HART Loop Interface and Monitor (HIM) (D103263X012
)
)
)
7
Page 8
Introduction
June 2017
D Using FIELDVUE Instruments with the Smart Wireless THUM Adapter and a HART Interface Module (HIM)
(D103469X012
)
Instruction Manual
D103785X012
D Audio Monitor for HART Communications (D103265X012
D HART Field Device Specification - FIELDVUE DVC6000 HW2 Digital Valve Controller (D103782X012
D Using the HART Tri‐Loop HART‐to‐Analog Signal Converter with FIELDVUE Digital Valve Controllers (D103267X012
D Lock‐in‐Last Strategy (D103261X012
D Fisher HF340 Filter Instruction Manual (D102796X012
D 475 Field Communicator User's Manual
D ValveLink Software Help or Documentation
All documents are available from your Emerson sales office or Local Business Partner, or at Fisher.com.
)
)
)
)
Educational Services
For information on available courses for the DVC6000 HW2 digital valve controller, as well as a variety of other
products, contact:
Emerson Automation Solutions
Educational Services - Registration
Phone: + 1-641‐754‐3771 or +1-800‐338‐8158
Email: education@emerson.com
emerson.com/fishervalvetraining
)
8
Page 9

Instruction Manual
D103785X012
Wiring Practices
June 2017
Section 2 Wiring Practices22
Control System Requirements
There are several parameters that should be checked to ensure the control system is compatible with the
DVC6000 HW2 digital valve controller.
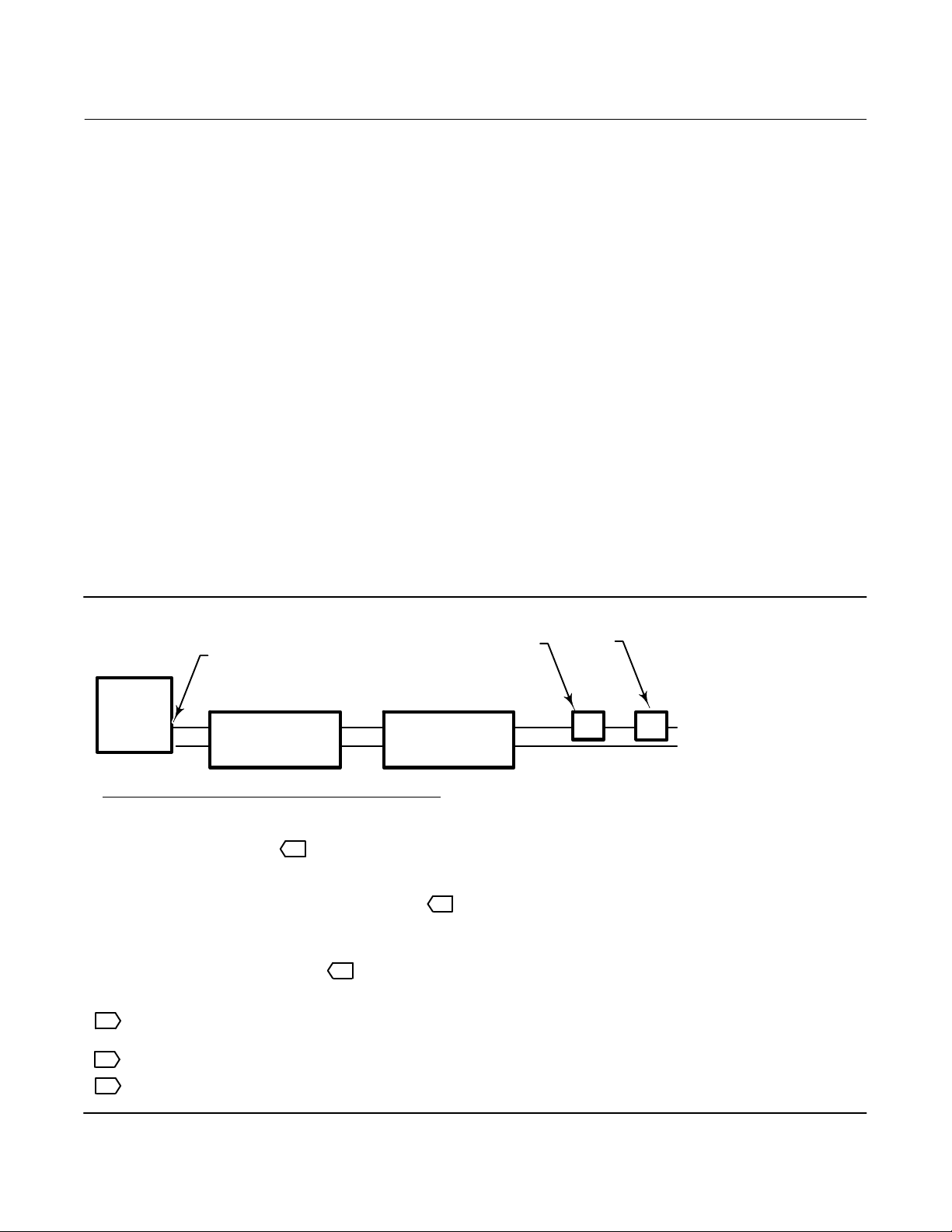
HART Filter
Depending on the control system you are using, a HART filter may be needed to allow HART communication. The
HART filter is a passive device that is inserted in field wiring from the HART loop. The filter is normally installed near the
field wiring terminals of the control system I/O (see figure 2‐1). Its purpose is to effectively isolate the control system
output from modulated HART communication signals and raise the impedance of the control system to allow HART
communication. For more information on the description and use of the HART filter, refer to the appropriate HART
filter instruction manual.
To determine if your system requires a filter contact your Emerson sales office
Note
A HART filter is typically NOT required for any of the Emerson Automation Solutions control systems, including PROVOXt, RS3t,
and DeltaVt systems.
or Local Business Partner.
Figure 2‐1. HART Filter Application
NON‐HART BASED DCS
I/O I/O
HART
FILTER
4‐20 mA + HART
DIGITAL VALVE
CONTROLLER
Tx Tx
VALVE
A6188‐1
Voltage Available
The voltage available at the DVC6000 HW2 digital valve controller must be at least 10 VDC. The voltage available at
the instrument is not the actual voltage measured at the instrument when the instrument is connected. The voltage
measured at the instrument is limited by the instrument and is typically less than the voltage available.
9
Page 10
Wiring Practices
June 2017
Instruction Manual
D103785X012
As shown in figure 2‐2, the voltage available at the instrument depends upon:
D the control system compliance voltage
D if a filter, wireless THUM adapter, or intrinsic safety barrier is used, and
D the wire type and length.
The control system compliance voltage is the maximum voltage at the control system output terminals at which the
control system can produce maximum loop current.
The voltage available at the instrument may be calculated from the following equation:
Voltage Available = [Control System Compliance Voltage (at maximum current)] - [filter voltage drop (if a HART filter is
used)] - [total cable resistance maximum current] - [barrier resistance x maximum current].
The calculated voltage available should be greater than or equal to 10 volts DC.
Table 2‐1 lists the resistance of some typical cables.
The following example shows how to calculate the voltage available for a Honeywellt TDC2000 control system with a
HF340 HART filter, and 1000 feet of Beldent 9501 cable:
Voltage available = [18.5 volts (at 21.05 mA)] - [2.3 volts] - [48 ohms 0.02105 amps]
Voltage available = [18.5] - [2.3] - [1.01]
Voltage available = 15.19 volts
Figure 2‐2. Determining Voltage Available at the Instrument
TOTAL LOOP
COMPLIANCE VOLTAGE
CONTROL
SYSTEM
+
-
Calculate Voltage Available at the Instrument as follows:
Control system compliance voltage
– Filter voltage drop (if used) 1
– Intrinsic safety barrier resistance (if used) x maximum loop current – 2.55 volts (121 ohms x 0.02105 amps)
– Smart Wireless THUM adapter voltage drop (if used) 2
– Total loop cable resistance x maximum loop current – 1.01 volts (48 ohms x 0.02105 amps for
= Voltage available at the instrument 3
NOTES:
1 Obtain filter voltage drop. The measured drop will be different than this value. The measured filter voltage drop
depends upon control system output voltage, the intrinsic safety barrier (if used), and the instrument. See note 3.
2 The voltage drop of the THUM adapter is linear from 2.25 volts at 3.5 mA to 1.2 volts at 25 mA.
HART FILTER
(if used)
CABLE RESISTANCE
INTRINSIC SAFETY
BARRIER
(if used)
THUM ADAPTER
(IF USED)
R
Example Calculation
18.5 volts (at 21.05 mA)
– 2.3 volts (for HF300 filter)
1000 feet of Belden 9501 cable)
= 15.19 volts, available—if safety barrier (2.55 volts)
is not used
VOLTAGE
AVAILABLE AT THE
+
INSTRUMENT
-
3 The voltage available at the instrument is not the voltage measured at the instrument terminals. Once the
instrument is connected, the instrument limits the measured voltage to approximately 8.0 to 9.5 volts.
10
Page 11
Instruction Manual
D103785X012
Wiring Practices
June 2017
Table 2‐1. Cable Characteristics
pF/Ft
(1)
Capacitance
Cable Type
BS5308/1, 0.5 sq mm 61.0 200 0.022 0.074
BS5308/1, 1.0 sq mm 61.0 200 0.012 0.037
BS5308/1, 1.5 sq mm 61.0 200 0.008 0.025
BS5308/2, 0.5 sq mm 121.9 400 0.022 0.074
BS5308/2, 0.75 sq mm 121.9 400 0.016 0.053
BS5308/2, 1.5 sq mm 121.9 400 0.008 0.025
BELDEN 8303, 22 awg 63.0 206.7 0.030 0.098
BELDEN 8441, 22 awg 83.2 273 0.030 0.098
BELDEN 8767, 22 awg 76.8 252 0.030 0.098
BELDEN 8777, 22 awg 54.9 180 0.030 0.098
BELDEN 9501, 24 awg 50.0 164 0.048 0.157
BELDEN 9680, 24 awg 27.5 90.2 0.048 0.157
BELDEN 9729, 24 awg 22.1 72.5 0.048 0.157
BELDEN 9773, 18 awg 54.9 180 0.012 0.042
BELDEN 9829, 24 awg 27.1 88.9 0.048 0.157
BELDEN 9873, 20 awg 54.9 180 0.020 0.069
1. The capacitance values represent capacitance from one conductor to all other conductors and shield. This is the appropriate value to use in the cable length calculations.
2. The resistance values include both wires of the twisted pair.
Capacitance
pF/m
(1)
Resistance
Ohms/ft
(2)
Resistance
(2)
Ohms/m
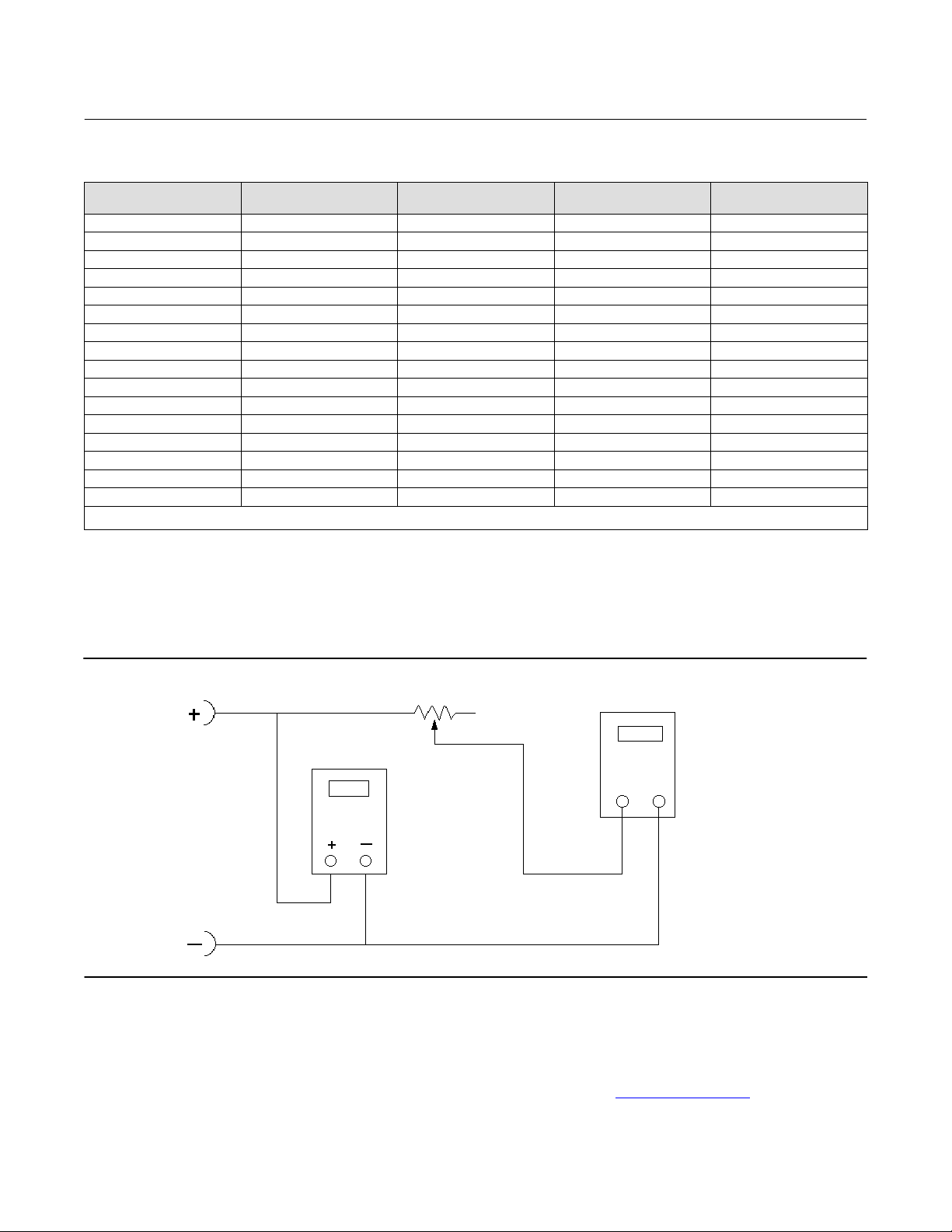
Compliance Voltage
If the compliance voltage of the control system is not known, perform the following compliance voltage test.
1. Disconnect the field wiring from the control system and connect equipment as shown in figure 2‐3 to the control
system terminals.
Figure 2‐3. Voltage Test Schematic
kW POTENTIOMETER
1
VOLTMETER
CIRCUIT
UNDER
TEST
A6192‐1
MILLIAMMETER
2. Set the control system to provide maximum output current.
3. Increase the resistance of the 1 kW potentiometer, shown in figure 2‐3, until the current observed on the
milliammeter begins to drop quickly.
4. Record the voltage shown on the voltmeter. This is the control system compliance voltage.
For specific parameter information relating to your control system, contact your Emerson sales office
or Local Business
Partner.
11
Page 12

Wiring Practices
June 2017
Instruction Manual
D103785X012
Auxiliary Terminal Wiring Length Guidelines
The Auxiliary Input Terminals of a DVC6000 HW2 with instrument level ODV can be used with a locally‐mounted
switch for initiating a partial stroke test. Some applications require that the switch be installed remotely from the
DVC6000 HW2.
The length for wiring connected to the Auxiliary Input Terminals is limited by capacitance. For proper operation of the
Auxiliary Input Terminals capacitance should not exceed 100,000 pF. As with all control signal wiring, good wiring
practices should be observed to minimize adverse effect of electrical noise on the Aux Switch function.
Example Calculation: Capacitance per foot or per meter is required to calculate the length of wire that may be
connected to the Aux switch input. The wire should not exceed the capacitance limit of 100,000 pF. Typically the wire
manufacturer supplies a data sheet which provides all of the electrical properties of the wire. The pertinent parameter
is the highest possible capacitance. If shielded wire is used, the appropriate number is the “Conductor to Other
Conductor & Shield” value.
Example — 18AWG Unshielded Audio, Control and Instrumentation Cable
Manufacturer's specifications include:
Nom. Capacitance Conductor to Conductor @ 1 KHz: 26 pF/ft
Nom. Conductor DC Resistance @ 20 Deg. C: 5.96 Ohms/1000 ft
Max. Operating Voltage - UL 200 V RMS (PLTC, CMG),150 V RMS (ITC)
Allowable Length with this cable = 100,000pF /(26pF/ft) = 3846 ft
Example — 18AWG Shielded Audio, Control and Instrumentation Cable
Manufacturer's specifications include:
Nom. Characteristic Impedance: 29 Ohms
Nom. Inductance: .15 μH/ft
Nom. Capacitance Conductor to Conductor @ 1 KHz: 51 pF/ft
Nom. Cap. Cond. to other Cond. & Shield @ 1 Khz: 97 pF/ft
Allowable Length with this cable = 100,000pF /(97pF/ft) = 1030 ft
The AUX switch input passes less than 1 mA through the switch contacts, and uses less than 5 V, therefore, neither the
resistance nor the voltage rating of the cable are critical. Ensure that switch contact corrosion is prevented. It is
generally advisable that the switch have gold‐plated or sealed contacts.
Maximum Cable Capacitance
The maximum cable length for HART communication is limited by the characteristic capacitance of the cable.
Maximum length due to capacitance can be calculated using the following formulas:
Length(ft) = [160,000 - Cmaster(pF)] [Ccable(pF/ft)]
Length(m) = [160,000 - Cmaster(pF)] [Ccable(pF/m)]
where:
160,000 = a constant derived for FIELDVUE instruments to ensure that the HART network RC time constant will be no
greater than 65 μs (per the HART specification).
Cmaster = the capacitance of the control system or HART filter
12
Page 13
Instruction Manual
D103785X012
Wiring Practices
June 2017
Ccable = the capacitance of the cable used (see table 2‐1)
t
The following example shows how to calculate the cable length for a Foxboro
I/A control system (1988) with a C
master
of 50, 000 pF and a Belden 9501 cable with characteristic capacitance of 50pF/ft.
Length(ft) = [160,000 - 50,000pF] [50pF/ft]
Length = 2200 ft.
The HART communication cable length is limited by the cable characteristic capacitance. To increase cable length,
select a wire with lower capacitance per foot. Contact your Emerson sales office
for specific information relating to
your control system.
Remote Travel Sensor Connections
The DVC6005 HW2 base unit is designed to receive travel information via a remote sensor. The remote can be any of
the following:
D Emerson Automation Solutions supplied DVC6015, DVC6025 or DVC6035 remote feedback unit; refer to the
DVC6005 Series Remote Mount Digital Valve Controller quick start guide (D103784X012
product,
) that ships with the
D An under‐traveled 10 kOhm potentiometer used in conjunction with onboard 30 kOhm resistor, or
D A potentiometer used in conjunction with two fixed resistors (potentiometer travel is the same as actuator travel).
WARNING
Personal injury or property damage, caused by wiring failure, can result if the feedback wiring connecting the base unit
with the remote feedback unit shares a conduit with any other power or signal wiring.
Do not place feedback wiring in the same conduit as other power or signal wiring.
Note
3‐conductor shielded cable, 22 AWG minimum wire size, is required for connection between base unit and feedback unit.
Pneumatic tubing between base unit output connection and actuator has been tested to 91 meters (300 feet). At 15 meters (50
feet) there was no performance degradation. At 91 meters there was minimal pneumatic lag.
Using an External 10 kOhm External Potentiometer as a Remote Travel Sensor
Note
Potentiometer travel must be between 1.3 and 1.6 times greater than the actuator travel. For example: if an actuator has a travel
of 9 inches, then a linear potentiometer must be selected with a rated travel between 11.7 and 14.4 inches. The resistive element
must be tapered from 0 kOhm to 10 kOhm over rated travel of the potentiometer. The actuator will only use 63 to 76 % of the
potentiometer rated travel.
13
Page 14
Wiring Practices
June 2017
Note
The digital valve controller must be configured using the SStem/Roller selection on the menu of the appropriate setup device.
Instruction Manual
D103785X012
The DVC6005 HW2 base unit was designed to work with a 40 kOhm potentiometer for travel feedback. However,
there are linear potentiometers that are readily available with a rated resistance of 10 kOhm. Therefore, the feedback
connections terminal box of the DVC6005 HW2 contains an additional 30 kOhm fixed resistor that may be added to
the circuit. This brings the total resistance up to the required 40 kOhm.
1. Mount the external 10 kOhm potentiometer to the actuator such that the mid‐travel position of the potentiometer
(5 kOhm) corresponds to the mid‐travel position of the actuator. This will leave an equal amount of unused resistive
element on both ends of the travel, which is required by the digital valve controller to function properly.
2. On the base unit, remove the feedback connections terminal box cap.
3. If necessary, install conduit between the potentiometer and the base unit following applicable local and national
electrical codes. Route the 3‐conductor shielded cable between the two units (refer to figure 2‐4).
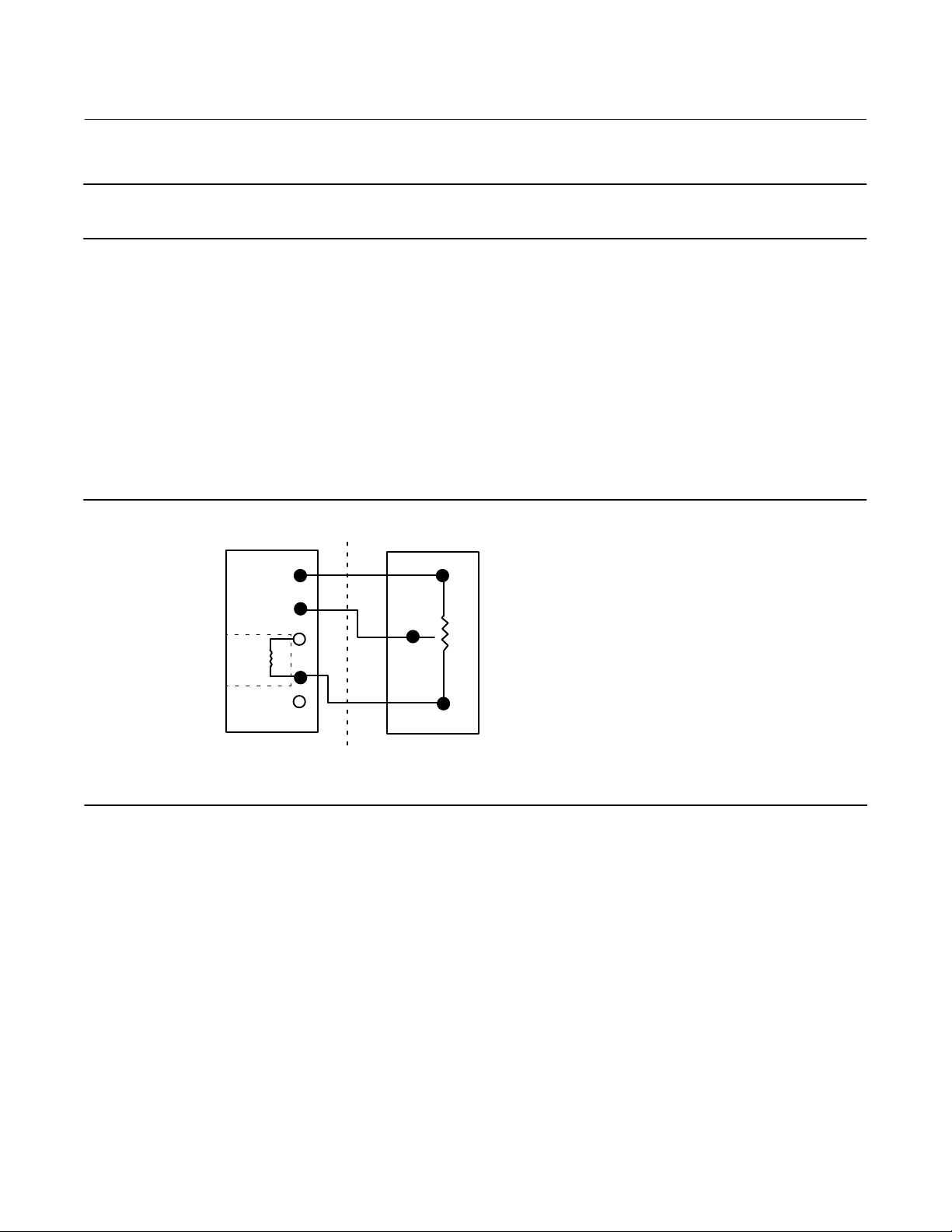
Figure 2‐4. Terminal Details for Connecting a FIELDVUE DVC6005 HW2 Base Unit and a 10k Ohm External
Potentiometer
3
2
INTERNAL
(30k W)
BASE UNIT TERMINATION BOX
(DVC6005 HW2)
1
30k
3RD PARTY FEEDBACK ELEMENT
(WITH 10k W POTENTIOMETER)
"
10k W
4. Connect one wire of the 3‐conductor shielded cable between the terminal labeled “30kW” on the base unit and one
end lead of the potentiometer.
5. Connect the second wire of the 3‐conductor shielded cable between the middle lead (wiper) of the 10 kOhm
potentiometer to Terminal 2 on the base unit.
6. Connect the third wire of the 3‐conductor shielded cable between Terminal 3 on the base unit and the other
end‐lead of the 10 kOhm potentiometer.
7. Connect the cable shield or drain wire to the ground screw in the feedback connections terminal box of the base
unit. Do not connect the shield or drain wire to the external potentiometer.
8. Replace and tighten the base unit cover.
14
Page 15
Instruction Manual
D103785X012
Wiring Practices
June 2017
Using a Potentiometer with Two Fixed Resistors as a Remote Travel Sensor
Perform the following procedure if a potentiometer is used with the same, or slightly longer travel than the actuator's
travel.
Note
The potentiometer must be capable of resistance close to 0 Ohms.
CAUTION
To prevent damage to the potentiometer, ensure that it is free to travel the entire length of the actuator's travel.
Note
The digital valve controller must be configured using the SStem/Roller selection on the menu of the appropriate setup device.
This procedure uses three resistors connected in series, two fixed resistors and one potentiometer. Three conditions
must be met for the resistor combination to correctly operate the digital valve controller:
D The maximum resistance of the potentiometer [Rpot(max)] must be between 3.9 kOhm and 10 kOhm.
D The resistance of R
D The resistance of R
is 4.25 times greater than Rpot(max).
1
is 4 times less than Rpot(max).
2
WARNING
To avoid personal injury or property damage from an uncontrolled process ensure that the R1 resistor is properly insulated
before installing it in the terminal box.
1. On the base unit, remove the feedback connections terminal box cap.
2. If necessary, install conduit between the two‐resistor series and the base unit following applicable local and national
electrical codes. Route the 3‐conductor shielded cable between the two units (refer to figure 2‐5).
15
Page 16
Wiring Practices
June 2017
Instruction Manual
D103785X012
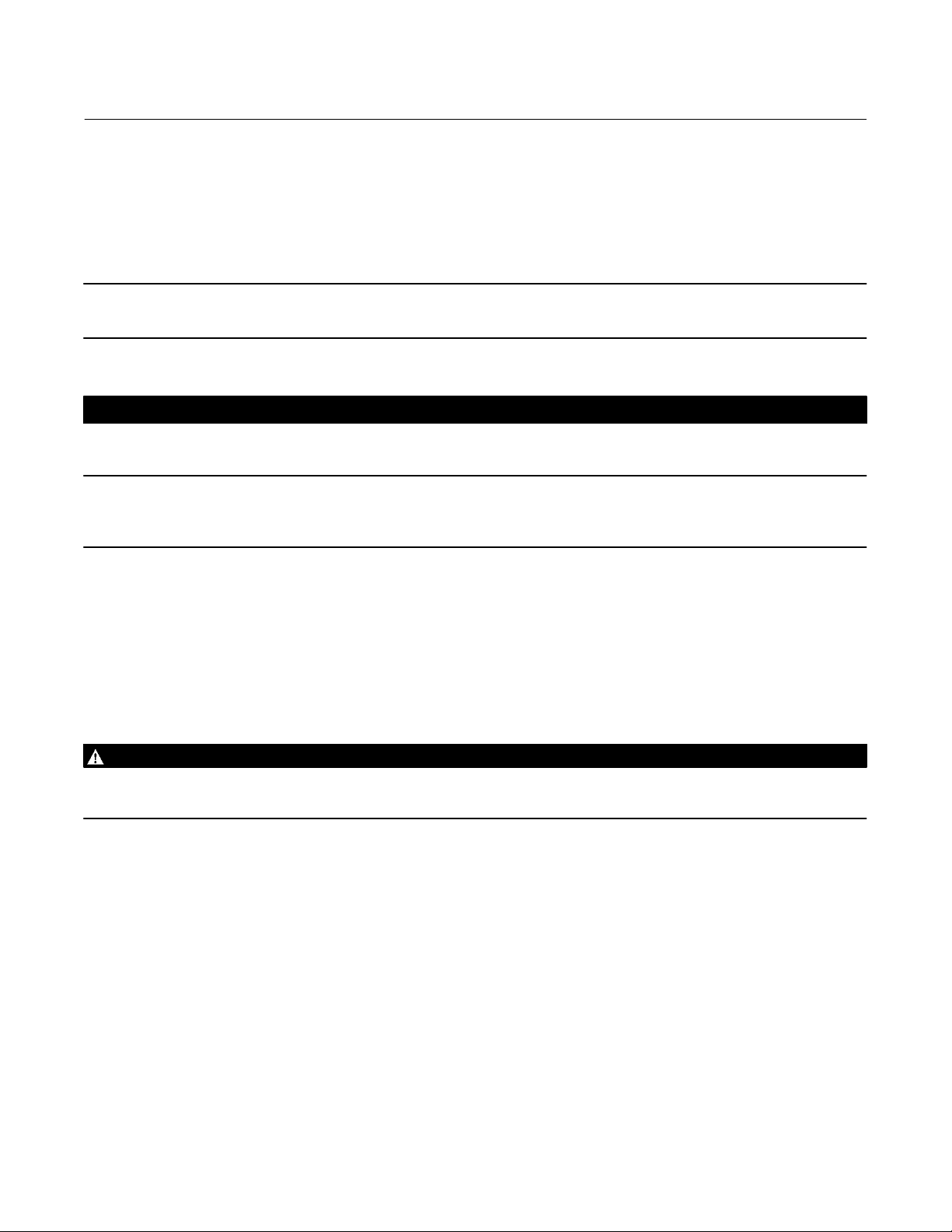
Figure 2‐5. Terminal Details for Connecting a FIELDVUE DVC6005 HW2 Base Unit and a Three‐Resistor Series
3
2
1
30kW
(R1)
BASE UNIT TERMINATION BOX
(DVC6005 HW2)
THREE‐RESISTOR SERIES
(R
)
2
"
(R
)
pot
3. Install the fixed resistor (R1) across the unlabeled bottom Terminal and Terminal #1. The bottom terminal does not
have a screw. The screw on the 30 kOhm terminal can be used. R1 must be properly insulated when installed in the
terminal box to prevent personal injury or property damage.
4. Connect one wire of the 3‐conductor shielded cable between the unlabeled bottom Terminal on the base unit and
an end‐lead of the external potentiometer (R
pot
).
5. Connect the second wire of the 3‐conductor shielded cable between the middle lead (wiper) of the external
potentiometer (R
6. Connect the third wire of the 3‐conductor shielded cable between between a lead on fixed resistor (R
) and Terminal 2 on the base unit.
pot
) and
2
terminal #3 of the base unit.
7. Connect the available end‐lead on the potentiometer (R
) with the available lead on fixed resistor (R2).
pot
8. Connect the cable shield or drain wire to the ground screw in the feedback connections terminal box of the base
unit. Do not connect the shield or drain wire to the two‐resistor series.
9. Replace and tighten the base unit cover.
Example: Using a linear potentiometer rated at 400 Ohms/inch on an actuator with 16” of travel.
16
D R
D R
D R
pot(max)
1
2
is 400 Ohms/in x 16” = 6.4 kOhm
= 6.4 kOhm x 4.25 = 27.2 kOhm
= 6.4 kOhm / 4 = 1.6 kOhm
Page 17
Instruction Manual
D103785X012
Wiring Practices
June 2017
Installation in Conjunction with a Rosemount 333 HART Tri‐Loop
HART‐to‐Analog Signal Converter
Use the DVC6000 HW2 digital valve controller in operation with a Rosemount 333 HART Tri‐Loop HART‐to‐Analog
Signal Converter to acquire an independent 4‐20 mA analog output signal for the analog input, travel target, pressure,
or travel. The HART Tri‐Loop accepts any three of these digital signals and converts them into three separate 4‐20 mA
analog channels.
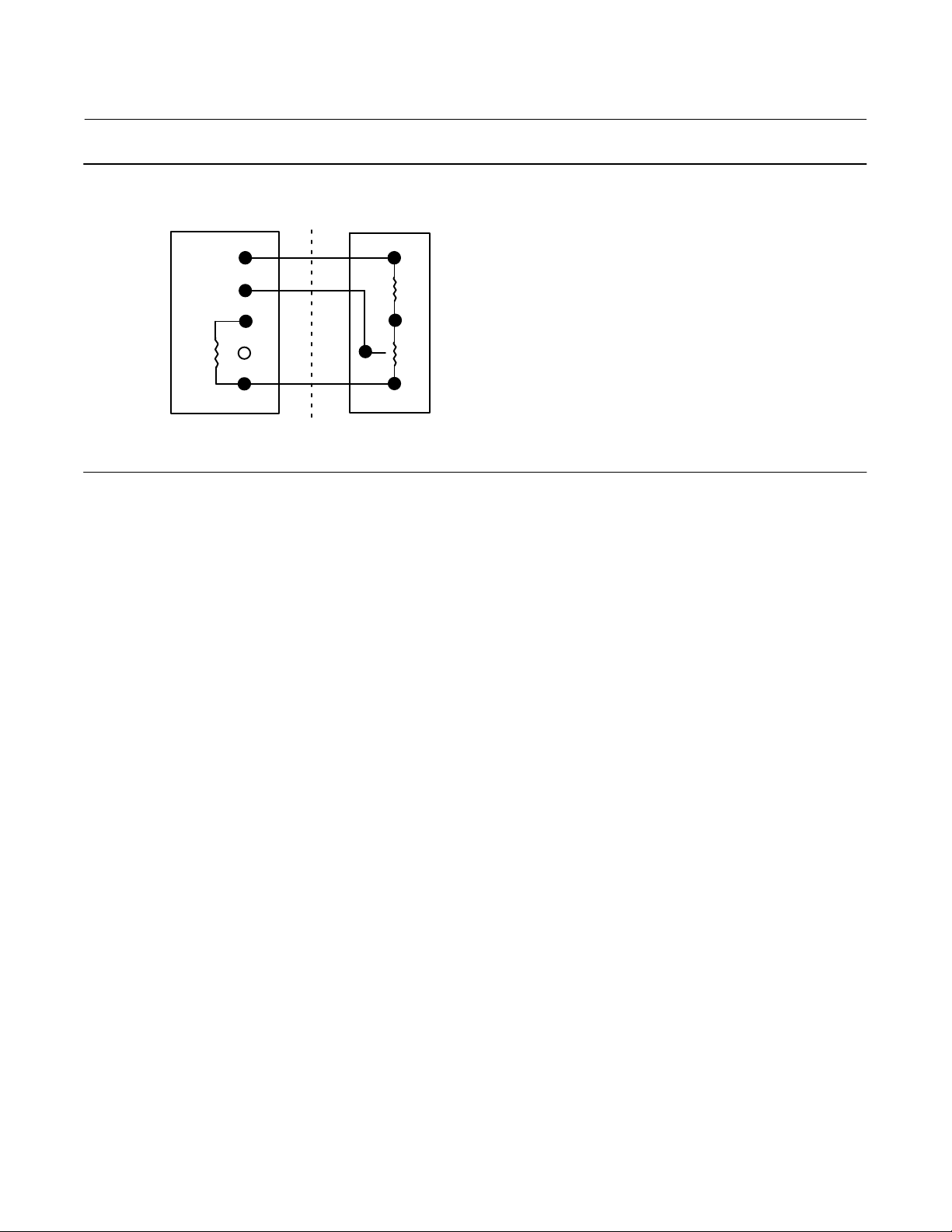
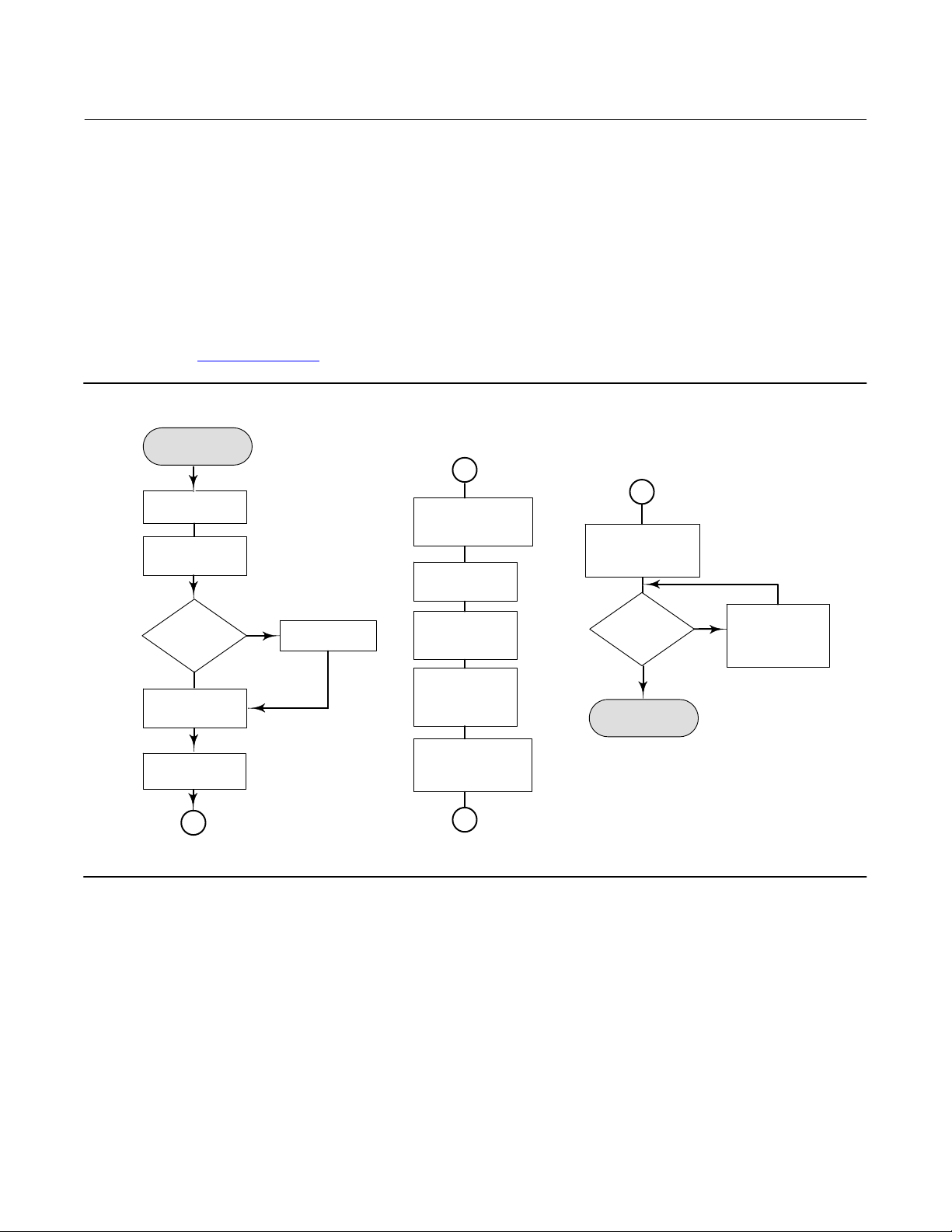
Refer to figure 2‐6 for basic installation information. Refer to the 333 HART Tri‐Loop HART‐to‐Analog Signal Converter
Product Manual (00809-0100-4754
Figure 2‐6. HART Tri‐Loop Installation Flowchart
START HERE
) for complete installation information.
Unpack the
HART Tri‐Loop
Review the HART
Tri‐Loop Product
Manual
Digital valve
Set the digital
valve controller
Burst Option
Set the digital
valve controller
Burst Mode
E0365
controller
Installed?
Yes
No
Install the digital
valve controller.
Install the HART Tri‐
Loop. See HART Tri‐
Loop product manual
Mount the HART
Tri‐Loop to the
DIN rail.
Wire the digital
valve controller to
the HART Tri‐Loop.
Install Channel 1
wires from HART
Tri‐Loop to the
control room.
(Optional) Install
Channel 2 and 3 wires
from HART Tri‐Loop to
the control room.
Configure the HART
Tri‐Loop to receive
digital valve controller
burst commands
Pass system
test?
Yes
DONE
No
Check
troubleshooting
procedures in
HART Tri‐Loop
product manual.
17
Page 18
Wiring Practices
June 2017
Instruction Manual
D103785X012
Commissioning the Digital Valve Controller for use with the HART
Tri‐Loop Signal Converter
To prepare the digital valve controller for use with a 333 HART Tri‐Loop, you must configure the digital valve controller
to burst mode, and select Burst Command 3. In burst mode, the digital valve controller provides digital information to
the HART Tri‐Loop HART‐to‐Analog Signal Converter. The HART Tri‐Loop converts the digital information to a 4 to 20
mA analog signal. Each burst message contains the latest value of the primary (analog input), secondary (travel
target), tertiary (configured output pressure), and quaternary (travel) variables.
To commission a DVC6000 HW2 for use with a HART Tri‐Loop, perform the following procedures.
Note
The DVC6000 HW2 must be in HART 5 compatibility mode to use burst communications.
Enable Burst Operation
With I/O Package
Field Communicator
Configure > Manual Setup > Outputs > Burst Mode (2‐2‐6‐5) HC, AD, PD or (2-2-7-5) ODV
Without I/O Package
Configure > Manual Setup > Outputs > Burst Mode (2‐2‐6‐2) HC, AD, PD or (2-2-7-2) ODV
Select Burst Enable and follow the prompts to enable burst mode. Then select Burst Command and follow the prompts
to configure Loop Current/PV/SV/TV/QV.
Select the HART Variable Assignments
With I/O Package
Field Communicator
Configure the HART Variable Assignments. The Primary Variable (PV) is always Analog Input. The Secondary Variable
(SV), Tertiary Variable (TV) and Quaternary Variable (QV) can be configured to any of the following variables.
D Setpoint
D Travel (see note below)
D Pressure A
D Pressure B
D Pressure AB
D Supply Pressure
D Drive Signal
D Analog Input
Note
If the instrument is configured to operate in pressure control mode, or detects an invalid travel sensor reading, the Travel variable
will report pressure in percent of bench set range.
Configure > Manual Setup > Outputs > HART Variable Assignments (2-2-6-4) HC, AD, PD or (2-2-7-4) ODV
Without I/O Package
Configure > Manual Setup > Outputs > HART Variable Assignments (2-2-6-1) HC, AD, PD or (2-2-7-1) ODV
18
Page 19

Instruction Manual
D103785X012
Configuration
June 2017
Section 3 Configuration
Guided Setup
Field Communicator Configure > Guided Setup (2‐1)
The following procedures will guide you through the instrument setup process.
D Device Setup—This procedure is used to configure actuator and valve information, calibrate the valve assembly, and
assign the tuning set for the valve assembly.
D Performance Tuner (instrument level AD, PD, ODV)—This procedure executes a simple step response test and then
calculates a recommended set of gain values based on the response of the control valve. See page 30 for additional
information.
D Stabilize Optimize (instrument level HC)—This procedure permits you to adjust valve response by changing the
digital valve controller tuning. See page 30 for additional information.
Manual Setup33
Manual Setup allows you to configure the digital valve controller to your application. Table 3‐1 lists the default settings
for a standard factory configuration. You can adjust actuator response, set the various modes, alerts, ranges, travel
cutoffs and limits. You can also restart the instrument and set the protection.
Table 3‐1. Default Detailed Setup Parameters
Setup Parameter Default Setting
Control Mode Analog
Restart Control Mode Resume Last
Analog In Range Low 4 mA
Analog In Range High 20 mA
Instrument
Configuration
Dynamic Response and
Tuning
Analog Input Units mA
Local AutoCal Button Disabled
Polling Address 0
Burst Mode Enable No
Burst Command 3
Cmd 3 (Trending) Pressure A-B
Input Characterization Linear
Travel Limit High 125%
Travel Limit Low -25%
Travel/Pressure Cutoff High 99.46%
Travel/Pressure Cutoff Low 0.50%
Set Point Rate Open 0%/sec
Set Point Rate Close 0%/sec
Set Point Filter Time (Lag Time) 0 sec
Integrator Enable Yes
Integral Gain 9.4 repeats/minute
Integral Deadzone 0.26%
-continued on next page-
(1)
19
Page 20

Configuration
June 2017
Instruction Manual
D103785X012
Table 3‐1. Default Detailed Setup Parameters (continued)
Setup Parameter Default Setting
Travel Deviation Alert Enable Yes
Travel Deviation Alert Point 5%
Travel Deviation Time 9.99 sec
Deviation & Other Alerts
1. The settings listed are for standard factory configuration. DVC6000 HW2 instruments can also be ordered with custom configuration
settings. Refer to the order requisition for custom settings (if specified) .
2. Adjust to bar, kPa, or Kg/cm
Pressure Deviation Alert Enable Yes
Pressure Deviation Alert Point 5 psi
Pressure Deviation Alert Time 5.0 sec
Drive Signal Alert Enable Yes
Supply Pressure Alert Enable Yes
2
if necessary
(1)
(2)
Mode and Protection
Field Communicator Configure > Manual Setup > Mode and Protection (2‐2‐1)
Instrument Mode
There are two instrument modes for the DVC6000 HW2; In Service or Out of Service. In Service is the normal operating
mode such that the instrument follows the 420 mA control signal. Out of Service is required in some cases to modify
configuration parameters or to run diagnostics.
Note
Some changes that require the instrument to be taken Out Of Service will not take effect until the instrument is placed back In
Service or the instrument is restarted.
Write Protection
There are two Write Protection modes for the DVC6000 HW2: Not Protected or Protected. Protected prevents
configuration and calibration changes to the instrument. The default setting is Not Protected. Write Protection can be
changed to Protected remotely. However, to change Write Protection to Not Protected, you must have physical access
to the instrument. The procedure will require you to press a button ( ) on the terminal box as a security measure.
Instrument
Field Communicator Configure > Manual Setup > Instrument (2‐2‐2)
Follow the prompts on the Field Communicator display to configure the following Instrument parameters:
Identification
D HART Tag—A tag name up to 8 characters is available for the instrument. The HART tag is the easiest way to
distinguish between instruments in a multi‐instrument environment. Use the HART tag to label instruments
electronically according to the requirements of your application. The tag you assign is automatically displayed
when the Field Communicator establishes contact with the digital valve controller at power‐up.
D HART Long Tag (HART Universal Revision 7 only)—A tag name up to 32 characters is available for the instrument.
20
Page 21
Instruction Manual
D103785X012
D Description—Enter a description for the application with up to 16 characters. The description provides a longer
user‐defined electronic label to assist with more specific instrument identification than is available with the HART
tag.
D Message—Enter any message with up to 32 characters. Message provides the most specific user‐defined means for
identifying individual instruments in multi‐instrument environments.
D Polling Address—If the digital valve controller is used in point‐to‐point operation, the Polling Address is 0. When
several devices are connected in the same loop, such as for split ranging, each device must be assigned a unique
polling address. The Polling Address is set to a value between 0 and 63 for HART 7 and 0 and 15 for HART 5. To
change the polling address the instrument must be Out Of Service.
For the Field Communicator to be able to communicate with a device whose polling address is not 0, it must be
configured to automatically search for all or specific connected devices.
Configuration
June 2017
Serial Numbers
D Instrument Serial Number—Enter the serial number on the instrument nameplate, up to 12 characters.
D Valve Serial Number—Enter the serial number for the valve in the application, up to 12 characters.
Units
D Pressure Units—Defines the output and supply pressure units in either psi, bar, kPa, or kg/cm2.
D Temperature Units—Degrees Fahrenheit or Celsius. The temperature measured is from a sensor mounted on the
digital valve controller's printed wiring board.
D Analog Input Units—Permits defining the Analog Input Units in mA or percent of 4-20 mA range.
Terminal Box
D Calibration (CAL) Button—This button is near the wiring terminals in the terminal box and provides a quick means to
autocalibrate the instrument. The button must be pressed for 3 to 10 seconds. Autocalibration will move the valve
through the full range of travel whether the Instrument Mode is In Service or Out of Service. However, if the Write
Protection is Protected, this button will not be active. To abort, press the button again for 1 second. The calibration
button is disabled by default.
D Auxiliary Terminal Action—These wire terminals can be configured to initiate a partial stroke test upon detection of
a short across the (+) and (-) terminals. The terminals must be shorted for 3 to 10 seconds.
Note
Auxiliary Terminal Action is only available for instrument level ODV.
Analog Input Range
D Input Range Hi—Permits setting the Input Range High value. Input Range High should correspond to Travel Range
High, if the Zero Power Condition is configured as closed. If the Zero Power Condition is configured as open, Input
Range High corresponds to Travel Range Low. See figure 3‐1.
21
Page 22

Configuration
June 2017
Instruction Manual
D103785X012
D Input Range Lo—Permits setting the Input Range Low value. Input Range Low should correspond to Travel Range
Low, if the Zero Power Condition is configured as closed. If the Zero Power Condition is configured as open, Input
Range Low corresponds to Travel Range High. See figure 3‐1.
Figure 3‐1. Calibrated Travel to Analog Input Relationship
TRAVEL
RANGE
HIGH
CALIBRATED TRAVEL, %
TRAVEL
RANGE
LOW
ZPC = OPEN
ZPC = CLOSED
THE SHAPE OF THESE LINES
DEPENDS ON THE INPUT
CHARACTERISTICS LINEAR
CHARACTERISTIC SHOWN
ANALOG INPUT
INPUT RANGE
NOTE:
ZPC = ZERO POWER CONDITION
A6531‐1
LOW
mA OR % OF 4‐20 mA
INPUT RANGE
HIGH
Spec Sheet
The Spec Sheet provides a means to store the entire control valve specifications on board the DVC6000 HW2.
Edit Instrument Time
Permits setting the instrument clock. When alerts are stored in the alert record, the record includes the time and date.
The instrument clock uses a 24‐hour format.
Travel/Pressure Control
Field Communicator Configure > Manual Setup > Travel/Pressure Control (2‐2-3)
Travel/Pressure Select
This defines the operating mode of the instrument as well as the behavior of the instrument should the travel sensor
fail. There are four choices:
D Travel Control—The instrument is controlling to a target travel. Fallback is not enabled.
D Pressure Control—The instrument is controlling to a target pressure. Fallback is not enabled.
D Fallback-Sensor Failure—The instrument will fallback to pressure control if a travel sensor failure is detected.
22
Page 23

Instruction Manual
D103785X012
Configuration
June 2017
D Fallback-Sensor/Tvl Deviation—The instrument will fallback to pressure control if a travel sensor failure is detected,
or if the Tvl Dev Press Fallback setting is exceeded for more than the Tvl Dev Press Fallback Time.
Note
Travel / Pressure Select must be set to Travel for double‐acting actuators
Cutoffs and Limits
D Hi Limit/Cutoff Select—When the Hi Cutoff/Limit Select is configured for Cutoff, the Travel Target is set to 123%
when the Travel exceeds the Hi Cutoff Point. When the Hi Cutoff/Limit Select is configured for Limit, the Travel
Target will not exceed the Hi Limit Point.
D Hi Limit/Cutoff Point—This is the point within the calibrated travel range above which the Limit or Cutoff is in effect.
When using cutoffs, a Cutoff Hi of 99.5% is recommended to ensure valve goes fully open. The Hi Cutoff/Limit is
deactivated by setting it to 125%.
D Lo Limit/Cutoff Select—When the Lo Cutoff/Limit Select is configured for Cutoff, the Travel Target is set to 23%
when the Travel is below the Lo Cutoff Point. When the Hi Cutoff/Limit Select is configured for Limit, the Travel
Target will not fall below the Lo Limit Point.
D Lo Limit/Cutoff Point—This is the point within the calibrated travel range below which the Limit or Cutoff is in effect.
When using cutoffs, a Cutoff Lo of 0.5% is recommended to help ensure maximum shutoff seat loading. The Lo
Limit/Cutoff is deactivated by setting it to 25%.
End Point Pressure Control (EPPC)
Note
End Point Pressure Control is available for instrument level ODV.
D EPPC Enable—Select Yes or No. End Point Pressure Control allows the digital valve controller to pull back from
saturation of the pneumatic output after reaching the travel extreme. Rather than having the instrument provide
full supply pressure (saturation) continuously at the travel extreme, the digital valve controller switches to an End
Point Pressure Control where the output pressure (pressure controller set point) to the actuator is maintained at a
certain value. This value is configured through the Upper Operating Pressure feature. Because the digital valve
controller is constantly in control and not allowed to reach a dormant or saturated state, it is constantly testing its
own pneumatic system. If there is an output pressure deviation, for example, the instrument will issue an alert. To
ensure there is an alert when an output pressure deviation occurs, setup the alert as described under Pressure
Deviation Alert.
23
Page 24

Configuration
June 2017
Instruction Manual
D103785X012
D EPPC Set Point—Used in conjunction with End Point Pressure Control, End Point Pressure Control Set Point allows
you to select a pressure to be delivered by the instrument at the travel extreme. For a fail‐closed valve, this pressure
must be sufficient to maintain the fully open position. For a fail‐open valve, this pressure (which is automatically set
to supply pressure) must be sufficient to fully close the valve and maintain its rated shutoff classification. For
double‐acting spring return actuators, this is the differential pressure required to either maintain the fully open or
fully closed position, depending on the valve and actuator configuration. For a double‐acting actuator without
springs with a fail‐close valve, this is 95% of the supply pressure. If the valve is fail‐open, the upper operating
pressure for all actuators is set to the supply pressure.
D EPPC Saturation Time—End Point Pressure Control Saturation Time is the time the digital valve controller stays in
hard cutoff before switching to pressure control. Default is 45 seconds.
Pressure Control
D Pressure Range High—The high end of output pressure range. Enter the pressure that corresponds with 100% valve
travel when Zero Power Condition is closed, or 0% valve travel when Zero Power Condition is open. This pressure
must be greater than the Pressure Range Lo.
D Pressure Range Lo—The low end of the output pressure range. Enter the pressure that corresponds to 0% valve
travel when Zero Power Condition is closed, or 100% valve travel when Zero Power Condition is open. This pressure
must be less than the Pressure Range Hi.
Pressure Fallback
Note
Pressure Fallback is available for instrument level AD, PD, ODV.
D Tvl Dev Press Fallback—When the difference between the travel target and the actual travel exceeds this value for
more than the Tvl Dev Press Fallback Time, the instrument will disregard the travel feedback and control based on
output pressure.
D Tvl Dev Press Fallback Time—The time, in seconds, that the travel target and the actual travel must be exceeded
before the instrument falls back into pressure control.
D Fallback Recovery—If the instrument has fallen into pressure control and the feedback problem is resolved, recovery
to travel control can occur automatically or with manual intervention. To return to travel control when Manual
Recovery is selected, change the Fallback Recovery to Auto Recovery, and then back to Manual Recovery (if
desired).
24
Page 25

Instruction Manual
D103785X012
Configuration
June 2017
Control Mode
D Control Mode—Displays the current control mode of the instrument. This will show Analog if the instrument is in
PointtoPoint mode and is using a 420 mA signal for its power and set point. This will show Digital if the
instrument is in Multidrop mode and is using 24 VDC for power and a digital set point for control.
Note
Another mode, Test, may be displayed. Normally the instrument should not be in the Test mode. The digital valve controller
automatically switches to this mode whenever it needs to stroke the valve during calibration or stroke valve, for example.
However, if you abort from a procedure where the instrument is in the test mode, it may remain in this mode. To take the
instrument out of the Test mode, select Change Control Mode and enter Analog or Digital.
D Change Control Mode—Allows you to configure the control mode to Analog or Digital.
D Restart Control Mode—Defines the Control Mode of the instrument after a restart (e.g. power cycle). Available
choices are Resume Last, Analog and Digital.
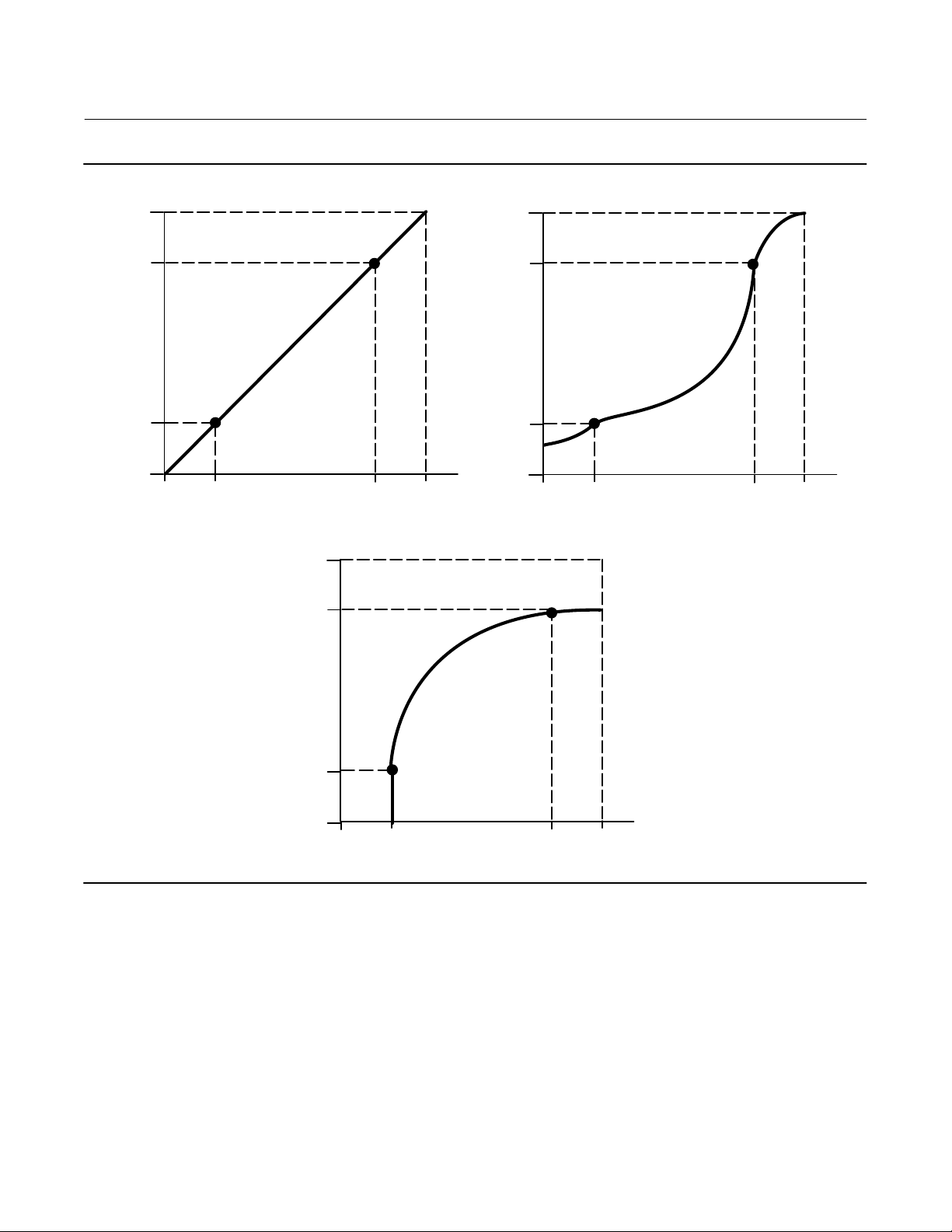
Characterization
D Input Characterization
Input Characterization defines the relationship between the travel target and ranged set point. Ranged set point is the
input to the characterization function. If the zero power condition equals closed, then a set point of 0% corresponds to
a ranged input of 0%. If the zero power condition equals open, a set point of 0% corresponds to a ranged input of 100%.
Travel target is the output from the characterization function.
To select an input characterization, select Input Characterization from the Characterization menu. You can select from
the three fixed input characteristics shown in figure 3‐2 or you can select a custom characteristic. Figure 3‐2 shows the
relationship between the travel target and ranged set point for the fixed input characteristics, assuming the Zero
Power Condition is configured as closed.
You can specify 21 points on a custom characteristic curve. Each point defines a travel target, in % of ranged travel, for
a corresponding set point, in % of ranged set point. Set point values range from -6.25% to 106.25%. Before
modification, the custom characteristic is linear.
D Custom Characterization
To define a custom input character, select Custom Characterization from the Characterization menu. Select the point
you wish to define (1 to 21), then enter the desired set point value. Press Enter then enter the desired travel target for
the corresponding set point. When finished, select point 0 to return to the Characterization menu.
With input characterization you can modify the overall characteristic of the valve and instrument combination.
Selecting an equal percentage, quick opening, or custom (other than the default of linear) input characteristic
modifies the overall valve and instrument characteristic. However, if you select the linear input characteristic, the
overall valve and instrument characteristic is the characteristic of the valve, which is determined by the valve trim
(i.e., the plug or cage).
25
Page 26
Configuration
June 2017
Instruction Manual
D103785X012
Figure 3‐2. Travel Target Versus Ranged Set Point, for Various Input Characteristics (Zero Power Condition = Closed)
125
100
Travel Target, %
0
-25
-25 0 125100
Ranged Set Point, %
Input Characteristic = Linear
125
100
125
100
Travel Target, %
0
-25
-25 0 125100
Ranged Set Point, %
Input Characteristic = Equal Percentage
26
A6535‐1
Travel Target, %
0
-25
-25 0 125100
Ranged Set Point, %
Input Characteristic = Quick Opening
Page 27
Instruction Manual
D103785X012
Configuration
June 2017
Dynamic Response
D SP Rate Open—Maximum rate (% of valve travel per second) at which the digital valve controller will move to the
open position regardless of the rate of input current change. A value of 0 will deactivate this feature and allow the
valve to stroke open as fast as possible.
D SP Rate Close—Maximum rate (% of valve travel per second) at which the digital valve controller will move to the
close position regardless of the rate of input current change. A value of 0 will deactivate this feature and allow the
valve to stroke close as fast as possible.
D Set Point Filter Time (Lag Time)—The Set Point Filter Time (Lag Time) slows the response of the digital valve
controller. A value ranging from 0.2 to 10.0 can be used for noisy or fast processes to improve closed loop process
control. Entering a value of 0.0 will deactivate the lag filter.
Note
Set Point Filter Time (Lag Time) is available for instrument level HC, AD, and PD.
D Lead/Lag Set Point Filter—ODV devices have access to a lead‐lag set point filter that can be used to improve a valve's
dynamic response. The lead‐lag filter is part of the set point processing routine that reshapes the input signal before
it becomes travel set point. Lead‐lag filters are characterized by lead and lag time constants.
Note
Lead/Lag is only available for instrument level ODV.
When the valve is in its active control region (off the seat), the lead‐lag filter improves small amplitude response by
momentarily overdriving the travel set point. This is useful when the actuator is large and equipped with accessories.
As a result, any volume boosters that are present will be activated. The longer the lag time, the more pronounced the
overdrive. Since the lead‐lag input filter is used to enhance the dynamic response of a control valve, filter parameters
should be set after the tuning parameters have been established.
When the valve is at its seat, the lead‐lag filter also has a boost function that sets the initial conditions of the filter
artificially low so that small amplitude signal changes appear to be large signal changes to the filter. The boost
function introduces a large spike that momentarily overdrives the instrument and activates any external volume
boosters that may be present. The lead‐lag boost function is normally disabled except for those cases where the valve
must respond to small command signals off the seat. By setting the lead/lag ratio in the opening and closing directions
to 1.0, the boost function can be enabled without introducing lead‐lag dynamics in the active control region. See table
3‐2 for typical lead‐lag filter settings.
Table 3‐2. Typical Lead/Lag Filter Settings for Instrument Level ODV
Parameter Description Typical Value
Lag Time First order time constant. A value of 0.0 will disable the lead‐lag filter. 0.2 sec
Opening Lead/Lag Ratio Initial response to the filter in the opening direction. 2.0
Closing Lead/Lag Ratio Initial response to the filter in the closing direction. 2.0
Lead‐Lag Boost Initial conditions of the lead‐lag filter when the lower travel cutoff is active. Off
27
Page 28

Configuration
June 2017
Instruction Manual
D103785X012
Tuning
Field Communicator Configure > Manual Setup > Tuning (2‐2-4)
Travel Tuning
WARNING
Changes to the tuning set may cause the valve/actuator assembly to stroke. To avoid personal injury and property damage
caused by moving parts, keep hands, tools, and other objects away from the valve/actuator assembly.
D Travel Tuning Set
There are eleven tuning sets to choose from. Each tuning set provides a preselected value for the digital valve
controller gain settings. Tuning set C provides the slowest response and M provides the fastest response.
Table 3‐3 lists the proportional gain, velocity gain and minor loop feedback gain values for preselected tuning sets.
Table 3‐3. Gain Values for Preselected Travel Tuning Sets
Tuning Set Proportional Gain Velocity Gain Minor Loop Feedback Gain
C
D
E
F
G
H
I
J
K
L
M
X (Expert) User Adjusted User Adjusted User Adjusted
4.4
4.8
5.5
6.2
7.2
8.4
9.7
11.3
13.1
15.5
18.0
3.0
3.0
3.0
3.1
3.6
4.2
4.85
5.65
6.0
6.0
6.0
35
35
35
35
34
31
27
23
18
12
12
In addition, you can specify Expert tuning and individually set the proportional gain, velocity gain, and minor loop
feedback gain. Individually setting or changing any tuning parameter or running the Performance Tuner or Stabilize
Optimize routine will automatically change the tuning set to X (expert).
Note
Use Expert tuning only if standard tuning has not achieved the desired results.
Stabilize/Optimize or Performance Tuner may be used to achieve the desired results more rapidly than manual Expert tuning.
Table 3‐4 provides tuning set selection guidelines for Fisher and Baumann actuators. These tuning sets are only
recommended starting points. After you finish setting up and calibrating the instrument, you may have to select either
a higher or lower tuning set to get the desired response. You can use the Performance Tuner to optimize tuning.
28
Page 29
Instruction Manual
D103785X012
Table 3‐4. Actuator Information for Initial Setup
Actuator
Manufacturer
Fisher
Baumann
1. X = Expert Tuning. Proportional Gain = 4.2; Velocity Gain = 3.0; Minor Loop Feedback Gain = 18.0
2. Values shown are for Relay A and C. Reverse for Relay B.
Actuator
Model
585C & 585CR
657
667
1051 & 1052
1061
1066SR
2052
3024C
GX
Air to Extend
Air to Retract Counterclockwise
Rotary
Actuator Size Actuator Style
25
50
60
68, 80
100, 130
30
34, 40
45, 50
46, 60, 70, 76, &
80‐100
30
34, 40
45, 50
46, 60, 70, 76, &
80‐100
20, 30
33
40
60, 70
30
40
60
68, 80, 100, 130
20
27, 75
1
2
3
30, 30E
34, 34E, 40, 40E
45, 45E
225
750 K
1200 M
16
32
54
10
25
54
Piston Dbl with or
w/out Spring. See
actuator instruction
manual and
nameplate.
Spring & Diaphragm
Spring & Diaphragm
Spring & Diaphragm
Piston Dbl w/o Spring
Piston Sgl w/Spring
Spring & Diaphragm
Spring & Diaphragm
Spring & Diaphragm
Spring & Diaphragm
Starting
Tuning
Set
E
I
J
L
M
H
K
L
M
H
K
L
M
H
I
K
M
J
K
L
M
G
L
H
J
M
E
H
K
(1)
X
C
E
H
E
H
J
Configuration
Feedback
Connection
SStem-Standard
for travels up to
4 inches.
SStem-Roller for
longer travels
SStem-Standard Clockwise
SStem-Standard Counterclockwise
Rotary Clockwise
Rotary
Rotary
Rotary Clockwise
SStem-Standard
SStem-Standard
SStem-Standard
Rotary Specify
Counterclockwise Clockwise
Travel Sensor Motion
Relay A or C
Depends upon pneumatic connections.
See description for Travel Sensor Motion
Depends upon pneumatic connections.
See description for Travel Sensor Motion
Mounting Style Travel Sensor Motion
A Clockwise
B Counterclockwise
C Clockwise
D Counterclockwise
For Po operating mode (air opens):
Counterclockwise
For P
operating mode (air closes):
s
Clockwise
Air to Open Air to Close
Clockwise
(1)
June 2017
D Proportional Gain—The proportional gain for the travel control tuning set. Changing this parameter will also change
the tuning set to Expert.
D Velocity Gain—The velocity gain for the travel control tuning set. Changing this parameter will also change the
tuning set to Expert.
D MLFB Gain—The minor loop feedback gain for the travel control tuning set. Changing this parameter will also
change the tuning set to Expert.
29
Page 30
Configuration
June 2017
Instruction Manual
D103785X012
D Integral Enable—Yes or No. Enable the integral setting to improve static performance by correcting for error that
exists between the travel target and actual travel. Travel Integral Control is enabled by default.
D Integral Gain—Travel Integral Gain is the ratio of the change in output to the change in input, based on the control
action in which the output is proportional to the time integral of the input.
D Performance Tuner
WARNING
During performance tuning the valve may move, causing process fluid or pressure to be released. To avoid personal injury
and property damage caused by the release of process fluid or pressure, isolate the valve from the process and equalize
pressure on both sides of the valve or bleed off the process fluid.
Note
The Performance Tuner is available for instrument level AD, PD, and ODV and can only be run while in Travel control mode.
The Performance Tuner is used to determine digital valve controller tuning. It can be used with digital valve controllers
mounted on most sliding‐stem and rotary actuators, including Fisher and other manufacturers' products. Moreover,
because the performance tuner can detect internal instabilities before they become apparent in the travel response, it
can generally optimize tuning more effectively than manual tuning. Typically, the performance tuner takes 3 to 5
minutes to tune an instrument, although tuning instruments mounted on larger actuators may take longer.
D Stabilize/Optimize
WARNING
During Stabilize/Optimize the valve may move, causing process fluid or pressure to be released. To avoid personal injury
and property damage caused by the release of process fluid or pressure, isolate the valve from the process and equalize
pressure on both sides of the valve or bleed off the process fluid.
Stabilize/Optimize permits you to adjust valve response by changing the digital valve controller tuning. During this
routine the instrument must be out of service, however, the instrument will respond to setpoint changes.
If the valve is unstable, select Decrease Response to stabilize valve operation. This selects the next lower tuning set
(e.g., F to E). If the valve response is sluggish, select Increase Response to make the valve more responsive. This selects
the next higher tuning set (e.g., F to G).
If after selecting Decrease Response or Increase Response the valve travel overshoot is excessive, select Decrease
Damping to select a damping value that allows more overshoot. Select Increase Damping to select a damping value that
will decrease the overshoot. When finished, select done.
30
Page 31

Instruction Manual
D103785X012
Configuration
June 2017
Pressure Tuning
D Pressure Tuning Set
There are twelve Pressure Tuning Sets to choose from. Each tuning set provides a preselected value for the digital valve
controller gain settings. Tuning set C provides the slowest response and M provides the fastest response. Tuning set B
is appropriate for controlling a pneumatic positioner. Table 3‐5 lists the proportional gain, pressure integrator gain and
minor loop feedback gain values for preselected tuning sets.
Table 3‐5. Gain Values for Preselected Pressure Tuning Sets
Tuning Set Proportional Gain Integrator Gain Minor Loop Feedback Gain
B
C
D
E
F
G
H
I
J
K
L
M
X (Expert) User Adjusted User Adjusted User Adjusted
0.5
2.2
2.4
2.8
3.1
3.6
4.2
4.8
5.6
6.6
7.8
9.0
0.3
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
35
35
35
35
35
34
31
27
23
18
12
12
In addition, you can specify Expert tuning and individually set the pressure proportional gain, pressure integrator gain,
and pressure minor loop feedback gain. Individually setting or changing any tuning parameter will automatically
change the tuning set to X (expert).
Note
Use Expert tuning only if standard tuning has not achieved the desired results.
Stabilize/Optimize or Performance Tuner may be used to achieve the desired results more rapidly than Expert tuning.
D Proportional Gain—The proportional gain for the pressure control tuning set. Changing this parameter will also
change the tuning set to Expert.
D MLFB Gain—The minor loop feedback gain for the pressure control tuning set. Changing this parameter will also
change the tuning set to Expert.
D Integral Enable—Yes or No. Enable the pressure integral setting to improve static performance by correcting for
error that exists between the pressure target and actual pressure. Pressure Integral Control is disabled by default.
D Integral Gain—Pressure Integral Gain (also called reset) is the gain factor applied to the time integral of the error
signal between desired and actual pressure. Changing this parameter will also change the tuning set to Expert.
Travel/Pressure Integral Settings
D Integral Dead Zone—A window around the Primary Setpoint in which integral action is disabled. This feature is used
to eliminate friction induced limit cycles around the Primary Setpoint when the integrator is active. The Dead Zone
is configurable from 0% to 2%, corresponding to a symmetric window from 0% to +/-2% around the Primary
Setpoint. Default value is 0.25%.
31
Page 32

Configuration
June 2017
Instruction Manual
D103785X012
D Integrator Limit—The Integrator Limit provides an upper limit to the integrator output. The high limit is configurable
from 0 to 100% of the I/P drive signal.
Valve and Actuator
Field Communicator Configure > Manual Setup > Valve and Actuator (2‐2‐5)
Valve Style—Enter the valve style, rotary or sliding‐stem
Actuator Style—Enter the actuator style, spring and diaphragm, piston double‐acting without spring, piston
single‐acting with spring, or piston double‐acting with spring.
View/Edit Feedback Connection—Select Rotary All, SStem - Roller or SStem - Standard. For rotary valves, enter Rotary All, SStem - Roller. For sliding-stem valves, if the feedback linkage consists of a connector arm, adjustment arm, and
feedback arm (similar to figure 3‐3), enter SStem - Standard. If the feedback linkage consists of a roller that follows a
cam (similar to figure 3‐4), enter Rotary All, SStem - Roller.
Figure 3‐3. Feedback Connection for Typical
Sliding-Stem Actuator (Up to 4 inch Travel)
ACTUATOR
STEM
TRAVEL SENSOR SHAFT
FEEDBACK
ARM
ADJUSTMENT
ARM
CONNECTOR
ARM
Figure 3‐4. Feedback Connection for Typical
Long-Stroke Sliding-Stem Actuator (4 to 24 Inches
Travel)
ROLLER
STEM
CONNECTOR
X0914
CAM
Relay Type—There are three categories of relays that result in combinations from which to select.
Relay Type: The relay type is printed on the label affixed to the relay body.
A = double‐acting or single‐acting
B = single‐acting, reverse
C= single‐acting, direct
Special App: This is used in single‐acting applications where the “unused” output port is configured to read the
pressure downstream of a solenoid valve.
Lo Bleed: The label affixed to the relay body indicates whether it is a low bleed version.
32
Page 33

Instruction Manual
D103785X012
Configuration
June 2017
Zero Power Condition—The position of the valve (open or closed) when the electrical power to the instrument is
removed. Zero Power Condition (ZPC) is determined by relay type, as shown in figure 3‐5.
Figure 3‐5. Zero Power Condition
A
Single‐Acting Direct (Relay A or C)
Double‐Acting (Relay A)
Single‐Acting Reverse (Relay B)
Relay Type
Loss of Electrical Power
Port A pressure to zero.
Port A pressure to zero.
Port B pressure to full supply.
Port B pressure to full supply.
B
X0797
Travel Sensor Motion
WARNING
If you answer YES to the prompt for permission to move the valve when determining travel sensor motion, the instrument
will move the valve through a significant portion of its travel range. To avoid personal injury and property damage caused
by the release of process fluid or pressure, isolate the valve from the process and equalize pressure on both sides of the
valve or bleed off the process fluid.
Travel Sensor Motion—Select Clockwise, or Counterclockwise. Travel Sensor Motion establishes the proper travel
sensor rotation. Determine the rotation by viewing the end of the travel sensor shaft from the perspective of the
actuator.
D For instruments with Relay A and C: If increasing air pressure at output A causes the shaft to turn clockwise, enter
Clockwise. If it causes the shaft to turn counterclockwise, enter Counterclockwise.
D For instruments with Relay B: If increasing air pressure at output B causes the shaft to turn counterclockwise, enter
Clockwise. If it causes the shaft to turn clockwise, enter Counterclockwise.
Maximum Supply Pressure
Enter the maximum supply pressure that is required to fully stroke the valve.
33
Page 34

Configuration
June 2017
Instruction Manual
D103785X012
Partial Stroke Test (PST) (Instrument Level ODV only)
Field Communicator Configure > Manual Setup > Partial Stroke (2-2-6)
Note
Partial Stroke is only available for instrument level ODV.
Partial Stroke Test (PST)
D PST Pressure Limit— This defines the actuator pressure at which a partial stroke test will abort. This prevents the
DVC6000 HW2 from exhausting (or building) excessive pressure to the actuator in an attempt to move a stuck
valve. During Device Setup or Auto Travel Calibration, the Partial Stroke Pressure Limit will be set automatically as
follows:
Single Acting Actuators - For those actuators that exhaust pressure from the partial test start point, the Pressure
Limit will be a minimum value. For those actuators that build pressure from the partial test start point, the Pressure
Limit will be a maximum value.
Double Acting Actuators - The Pressure Limit will be set to a negative value for actuators where the partial stroke
start point is opposite of the Zero Power Condition (e.g., Partial Stroke Start Point = Open and Zero Power
Condition = Closed) and to a positive valve for actuators where the partial stroke start point is the same as the Zero
Power Condition.
The pressure signal used to determine this parameter depends on relay type and is summarized below.
Relay Type Pressure Signal
A or C Port A - Port B
B Port B - Port A
B Special App. Port B
C Special App. Port A
To manually set the partial stroke pressure limit, you must examine current partial stroke test results using ValveLink
software. The following steps will guide you through the process:
1. Connect the DVC6000 HW2 to a system running ValveLink software.
2. Disable the following parameters:
D Travel Deviation Alert - set to 125%.
D End Point Pressure Control - disable
D Partial Stroke Pressure Limit - disable by setting the appropriate value shown in table 3‐6.
34
Page 35

Instruction Manual
Configuration
D103785X012
Table 3‐6. Values for Disabling Partial Stroke Pressure Limit
Actuator Type Relay Type Zero Power Condition Partial Stroke Start Point Partial Stroke Pressure Limit (Disabled)
Closed
A or C
Open
Single Acting
Closed
B
Open
Open 0.0
Closed Psupply
Open Psupply
Closed 0.0
Open Psupply
Closed 0.0
Open 0.0
Closed Psupply
June 2017
Closed
Double Acting A
Open
Open -Psupply
Closed Psupply
Open Psupply
Closed -Psupply
3. Run a partial stroke test.
4. Select the Press/Time radio button on the partial stroke graph (refer to the example in figure 3‐6, bottom plot). If
the actuator pressure starts high and moves low, find the minimum actuator pressure (Pmin). If the actuator
pressure starts low and moves high, find the maximum actuator pressure (Pmax). Doubleacting actuators will
display differential pressure. Use table 3‐7 to estimate the partial stroke pressure limit.
Table 3‐7. Estimates for Partial Stroke Pressure Limits
Actuator Style Relay Type Zero Power Condition PST Starting Point Partial Stroke Pressure Limit
Open Pmin - 0.25 * (Bench Set High - Bench Set Low)
Closed Pmax + 0.25 * (Bench Set High - Bench Set Low)
Open Pmax + 0.25 * (Bench Set High - Bench Set Low)
Closed Pmin - 0.25 * (Bench Set High - Bench Set Low)
Open Pmax + 0.25 * (Bench Set High - Bench Set Low)
Closed Pmin - 0.25 * (Bench Set High - Bench Set Low)
Open Pmin - 0.25 * (Bench Set High - Bench Set Low)
Closed Pmax + 0.25 * (Bench Set High - Bench Set Low)
Open 0.5 * Pmin
Closed Pmax + 0.5 * (Psupply - Pmax)
Open Pmax + 0.5 * (Psupply - Pmax)
Closed 0.5 * Pmin
Open Pmax + 0.5 * (Psupply - Pmax)
Closed 0.5 * Pmin
Open 0.5 * Pmin
Closed Pmax + 0.5 * (Psupply - Pmax)
Spring and
Diaphragm
Single Acting Piston
Closed
A or C
Open
Closed
B
Open
Closed
A or C
Open
Closed
B
Open
(1)
Closed
Double Acting Piston A
Open
Open Pmin - 0.5 * (Psupply + Pmin)
Closed Pmax + 0.5 * (Psupply - Pmax)
Open Pmax + 0.5 * (Psupply - Pmax)
Closed Pmin - 0.5 * (Psupply + Pmin)
5. Enable the parameters that were previously disabled:
D Travel Deviation Alert - set to 1.5 x the maximum travel deviation between travel set point and travel.
D End Point Pressure Control - enable
D Partial Stroke Pressure Limit - calculate the value using table 3‐7.
35
Page 36

Configuration
June 2017
Instruction Manual
D103785X012
PST Enable—Yes or No. This enables or disables the Partial Stroke Test.
PST Start Point—Valve Open or Valve Closed. This defines the travel stop that the valve needs to be at before a partial
stroke test can be initiated. This also defines the travel stop for end point pressure control. Setting this value to Not
Configured will disable partial stroke tests and end point pressure control.
PST Variables—Follow the prompts on the Field Communicator display to enter or view information for following PST
Variables:
D Max Travel Movement— The percentage of total span that the valve moves away from its normal operating state
towards its tripped state during the test. The default value is 10%.
D Test Speed—The rate at which the valve will move during the test. The default value is 0.25%/second.
D Pause Time—The pause time between the up and down strokes of the test. The default value is 5 seconds.
Figure 3‐6. Example Time Series Plots of Travel Set Point, Travel, Error, and Actuator Pressure
TEST START POINT
ACTUAL TRACE FROM TEST (TYPICAL)
TEST SPEED
(%/SEC)
TVL SET POINT, TRAVEL (%)
TRAVEL DEVIATION ALERT POINT
ERROR (%)PRESSURE (%)
ACTUAL TRACE FROM TEST (TYPICAL)
MAXIMUM DEVIATION
MINIMUM PRESSURE
(Pmin)
TEST PAUSE
TIME (SEC)
TIME (SEC)
TIME (SEC)
ACTUAL TRACE FROM TEST (TYPICAL)
PARTIAL STROKE PRESSURE LIMIT
MAX. TRAVEL
PERCENT (%)
36
TIME (SEC)
Page 37

Instruction Manual
D103785X012
Configuration
June 2017
Outputs
Field Communicator Configure > Manual Setup > Outputs (2-2-6) HC, AD, PD or (2-2-7) ODV
Note
These menu items are only available on units that have the optional 420 mA position transmitter or switch hardware installed.
Output Terminal Configuration
D Output Terminal Enable—If using the optional output terminal for a Position Transmitter or Switch output, this must
be Enabled.
D Function—The output terminals can be configured as one of the following:
Transmitter - 420 mA output that represents 0100% of the calibrated valve travel.
Limit Switch - Discrete switch (1 A max) that trips at a configurable point within 0100% of calibrated valve travel.
Alert Switch - Discrete switch (1 A max) that trips based on a configurable device alert.
D Fail Signal—Should the output circuit fail to operate properly, the output will attempt to drive to a known state.
Depending on the nature of the failure, the circuit may or may not be able to achieve this fail state. When
configured as a transmitter, the output can be configured to fail low (< 3.6 mA). The output can be configured to fail
high (> 22.5 mA) when the positioner is powered. When configured as a switch, the output can be configured to
drive Closed or Open.
Note
On loss of positioner power, the switch circuit will always go to the open state.
Switch Configuration
D Limit Switch Trip Point—When the function is configured as a Limit Switch, the Limit Switch Trip Point defines the
threshold for the limit switch in percent of calibrated travel.
D Alert Switch Source—When the function is configured as an Alert Switch, the Alert Switch Source determines which
alert will activate the switch. The alert choices are: Travel Deviation or Pressure Fallback.
D Switch Closed—Configures the action of the switch. The choices are: Below Trip Point / Alert Not Active or Above
Trip Point / Alert Active.
37
Page 38

Configuration
June 2017
Instruction Manual
D103785X012
HART Variable Assignments
Instrument variables can be reported via four different HART variable assignments. The Primary Variable is always
configured as Analog Input. However, the remaining three variables have additional options as listed below.
Primary Variable (PV) Analog Input
Secondary Variable (SV) Travel, Travel Setpoint, Pressure A, Pressure B, Pressure AB, Supply Pressure,
Drive Signal, or Analog Input; default value is Travel Setpoint
Tertiary Variable (TV) Travel, Travel Setpoint, Pressure A, Pressure B, Pressure AB, Supply Pressure,
Drive Signal, or Analog Input; default value is Pressure A.
Quaternary Variable (QV) Travel, Travel Setpoint, Pressure A, Pressure B, Pressure AB, Supply Pressure,
Drive Signal, or Analog Input; default value is Travel.
Transmitter Output
This configures the relationship between the valve travel and the position transmitter output signal. There are two
choices; 4mA = Valve Closed or 4mA = Valve Open.
Burst Mode
Burst mode provides continuous communication from the digital valve controller. Burst mode applies only to the
transmission of burst mode data (HART Variable Assignments) and does not affect the way other data is accessed.
Burst mode is only available in devices configured as HART Universal Revision 5.
D Burst Enable—Turns on or off the burst mode.
D Burst Command—Defines which HART command is configured for burst reporting. There are three options to
choose from. When using a TriLoop, select the third option.
- Analog Input (Command 1)
- Loop Current / Travel (Command 2)
- Loop Current / PV / SV / TV / QV (Command 3)
Note
Access to information in the instrument is normally obtained through the poll/response of HART communication. The Field
Communicator or the control system may request any of the information that is normally available, even while the instrument is in
burst mode. Between each burst mode transmission sent by the instrument, a short pause allows the Field Communicator or
control system to initiate a request. The instrument receives the request, processes the response message, and then continues
“bursting” the burst mode data.
Burst mode will be disabled by ValveLink software during diagnostics tests such as Valve Signature.
Note
If the instrument is configured to operate in pressure control mode, or detects an invalid travel sensor reading, the Travel variable
will report pressure in percent of bench set range.
38
Page 39

Instruction Manual
D103785X012
Configuration
June 2017
Alert Setup
Field Communicator Configure > Alert Setup (2‐3)
An alert is a notification that the instrument has detected a problem. A shutdown is an action that the instrument
takes to drive the air output to the Zero Power Condition as per figure 3‐5. Some alerts can be configured to shutdown
the instrument. Refer to table 3‐8 for default alert and shutdown settings.
Alerts may be enabled or disabled with the instrument In Service, Out of Service, Protected, or Not Protected.
However, the instrument must be Not Protected to enable or disable a shutdown. Alerts are not processed when a
diagnostic is in progress.
If shutdown is enabled, and the alert is active, the instrument will latch in the shutdown state until power to the
instrument is cycled and the alert has cleared. While in the shutdown condition, HART communication will continue if
the instrument remains powered.
For a detailed explanation of the alerts and the recommended actions, refer to Section 5.
Table 3‐8. Default Alert and Shutdown Settings
ALERT DEFAULT ALERT SETTING DEFAULT SHUTDOWN SETTING
Travel Sensor Failure Enabled Disabled
Temperature Sensor Failure Enabled Disabled
Minor Loop Sensor Failure Enabled Disabled
Pressure Sensor Failure Enabled Disabled
Drive Current Failure Enabled Disabled
Critical NVM Failure Enabled Disabled
Non-Critical NVM Failure Enabled Disabled
Flash Integrity Failure Enabled Disabled
Reference Voltage Failure Enabled Disabled
Drive Signal Out of Range Enabled Not Available
Supply Pressure Low
Travel Deviation Enabled Not Available
Pressure Fallback Active
High Travel Disabled Not Available
Low Travel Disabled Not Available
High-High Travel Disabled Not Available
Low-Low Travel Disabled Not Available
Travel Limit/Cutoff High Disabled Not Available
Travel Limit/Cutoff Low Disabled Not Available
Integrator Saturated High Disabled Not Available
Integrator Saturated Low Disabled Not Available
Cycle Count High Disabled Not Available
Travel Accumulator High Disabled Not Available
Output Circuit Communication Failure Disabled Not Available
Alert Record Not Empty Disabled Not Available
Alert Record Full Disabled Not Available
Instrument Time is Approximate Disabled Not Available
1. Instrument level AD, PD, or ODV only.
(1)
(1)
Enabled Not Available
Enabled Not Available
39
Page 40

Configuration
June 2017
Instruction Manual
D103785X012
Change to HART 5 / Change to HART 7
Field Communicator Service Tool > Maintenance > Change to HART 5 / Change to HART 7 (3-5-3) HC or (3-5-4) AD, PD or (3-5-5) ODV
Note
This procedure must never be done while the valve is in service and controlling the process. Depending on the control system or
asset management system attached, complete system reset may be required to reestablish HART communication. Consult the
system documentation for further information.
This procedure changes the instrument from HART Universal Revision 5 to HART Universal Revision 7 (or vice versa).
Before proceeding, verify that your systems are prepared to support HART Universal Revision 7 devices. Follow the
prompts on the Field Communicator display.
40
Page 41

Instruction Manual
D103785X012
Calibration
June 2017
Section 4 Calibration 44
Calibration Overview
When a DVC6000 HW2 digital valve controller is ordered as part of a control valve assembly, the factory mounts the
remote feedback unit on the actuator and connects the necessary tubing, then sets up and calibrates the controller.
For digital valve controllers that are ordered separately, recalibration of the analog input or pressure sensors generally
is unnecessary. However, after mounting on an actuator, perform the initial setup then calibrate travel by selecting
Configure > Calibration > Travel Calibration > Auto Calibration. For more detailed calibration information, refer to the
following calibration procedures.
Field Communicator Configure > Calibration (2-4)
Auto Travel Calibration - see page 42
Manual Travel Calibration - see page 44
Pushbutton Calibration - see page 45
Pressure Sensor Calibration - see page 46
Travel Sensor Calibration - see page 47
Analog Input Calibration - see page 51
Relay Adjustment - see page 52
PST Calibration (ODV Instrument Level only) - see page 54
Note
The Instrument Mode must be Out Of Service and the Protection set to None before the instrument can be calibrated.
If you are operating in burst mode, we recommend that you disable burst before continuing with calibration. Once calibration is
complete, burst mode may then be turned back on.
WARNING
During calibration the valve will move full stroke. To avoid personal injury and property damage caused by the release of
pressure or process fluid, isolate the valve from the process and equalize pressure on both sides of the valve or bleed off the
process fluid.
41
Page 42

Calibration
June 2017
Instruction Manual
D103785X012
Travel Calibration
If a double‐acting relay is used, you will be prompted to run the relay adjustment when auto or manual calibration is
selected. Select Yes to adjust the relay, select No to proceed with calibration. For additional information, refer to Relay
Adjustment on page 52.
Auto Calibration
User interaction is only required with Auto Calibrate Travel when the feedback connection is SStem ‐ Standard (Sliding
Stem ‐ Standard). A feedback connection of Rotary ‐ All, SStem ‐ Roller (Sliding Stem ‐ Roller) requires no user
interaction and you can start with step 6.
For a SStem ‐ Standard feedback connection, interaction provides a more accurate crossover adjustment. Setting
crossover establishes the zero degree point for the geometric correction used to translate the rotary motion observed
by the travel sensor into the linear motion of the sliding‐stem valve.
1. Select the method of crossover adjustment: manual, last value, or default. Manual is the recommended choice. If
you select Manual, the Field Communicator will prompt you to adjust the crossover in step 3.
If you select Last Value, the crossover setting currently stored in the instrument is used and there are no further user
interactions with the auto‐calibration routine (go to step 6). Use this selection if you cannot use manual, such as
when you cannot see the valve.
If you select Default, an approximate value for the crossover is written to the instrument and there are no further
user interactions with the auto‐calibration routine (go to step 6). Use this selection only as a last resort. Default
assumes a midrange position on the travel sensor as the crossover point, however, this may not be an appropriate
value to use for crossover because of variations in mounting and travel sensor calibration.
2. The instrument seeks the high and low drive points and the minor loop feedback (MLFB) and output bias. No user
interaction is required in this step. For a description of these actions see step 6.
3. If you select Manual in step 1, you are asked to select an adjustment source, either analog or digital. If you use a
current source to adjust the crossover, select Analog and go to step 4. If you wish to adjust the current source
digitally, select Digital and go to step 5.
4. If you selected Analog as the crossover adjustment source, the Field Communicator prompts you to adjust the
current source until the feedback arm is 90° to the actuator stem, as shown in figure 4‐1. After you have made the
adjustment, press OK and go to step 6.
5. If you selected Digital as the crossover adjustment source, the Field Communicator displays a menu to allow you to
adjust the crossover.
Select the direction and size of change required to set the feedback arm so it is 90° to the actuator stem, as shown
in figure 4‐1. Selecting large, medium, and small adjustments to the crossover causes changes of approximately
10.0°, 1.0°, and 0.1°, respectively, to the rotation of the feedback arm.
If another adjustment is required, repeat step 5. Otherwise, select Done and go to step 6.
6. The remainder of the auto calibration procedure is automatic. It is completed when the Calibration menu appears.
During calibration, the instrument seeks the high and low end points and the minor loop feedback (MLFB) and
output bias. By searching for the end points, the instrument establishes the limits of physical travel, i.e. the actual
travel 0 and 100% positions. This also determines how far the relay beam swings to calibrate the sensitivity of the
MLFB sensor.
42
Page 43

Instruction Manual
D103785X012
Figure 4‐1. Crossover Point
90_
Calibration
June 2017
ACTUATOR
STEM
FEEDBACK
ARM
A6536-3
7. Place the instrument In Service and verify that the travel properly tracks the current source.
If the unit does not calibrate, refer to table 4‐1 for error messages and possible remedies.
Table 4‐1. Auto Calibrate Travel Error Messages
Error Message Possible Problem and Remedy
Power failure occurred during Auto Calib
Auto Calib did not complete within the time limit.
Insufficient travel
Drive signal exceed low limit; check supply
pressure
Drive signal exceed high limit; check supply
pressure
The analog input signal to the instrument must be greater than 3.8 mA. Adjust the current output
from the control system or the current source to provide at least 4.0 mA.
The problem may be one or the other of the following:
1. The tuning set selected is too low and the valve does not reach an end point in the allotted time.
Select Manual Setup > Tuning > Travel Tuning > Stabilize/Optimize then Increase Response (selects next
higher tuning set).
2. The tuning set selected is too high, valve operation is unstable and does not stay at an end point
for the allotted time. Select Manual Setup > Tuning > Travel Tuning > Stabilize/Optimize then Decrease
Response (selects next lower tuning set).
Prior to receiving this message, did the instrument output go from zero to full supply? If not, verify
instrument supply pressure by referring to the specifications in the appropriate actuator instruction
manual. If supply pressure is correct, check instrument pneumatic components (I/P converter and
relay).
If the instrument output did go from zero to full supply prior to receiving this message, then verify
proper mounting by referring to the appropriate mounting procedure in the Installation section.
Verify travel sensor adjustment by performing the appropriate Travel Sensor Adjust procedure in the
Calibration section. Making the crossover adjustment with the valve positioned at either end of its
travel will also cause this message to appear.
1. Check supply pressure (reverse‐acting relay)
2. Friction is too high.
1. Check supply pressure (direct‐acting relay)
2. Friction is too high
43
Page 44

Calibration
June 2017
Instruction Manual
D103785X012
Manual Calibration
Two procedures are available to manually calibrate travel:
D Analog Adjust— This procedure is used when you can manually change the 4-20 mA current source to move the
valve.
D Digital Adjust— This procedure is used when the 4-20 mA current source cannot be manually changed.
Analog Calibration Adjust
Connect a variable current source to the instrument LOOP + and LOOP - terminals. The current source should be
capable of generating 4 to 20 mA.
Follow the prompts on the Field Communicator display to calibrate the instrument's travel in percent.
Note
0% Travel = Valve Closed
100% Travel = Valve Open
1. Adjust the input current until the valve is near mid‐travel. Press OK.
Note
In steps 2 through 7 the accuracy of the current source adjustment affects the position accuracy.
2. Adjust the current source until the valve is at 0% travel, then press OK.
3. Adjust the current source until the valve is at 100% travel, then press OK.
4. Adjust the current source until the valve is at 0% travel, then press OK.
5. Adjust the current source until the valve is at 100% travel, then press OK.
6. Adjust the current source until the valve is at 5% travel, then press OK.
7. Adjust the current source until the valve is at 95% travel, then press OK.
8. Place the instrument In Service and verify that the travel properly tracks the current source.
Digital Calibration Adjust
Connect a variable current source to the instrument LOOP + and LOOP - terminals. The current source should be set
between 4 and 20 mA.
Follow the prompts on the Field Communicator display to calibrate the instrument's travel in percent.
1. Adjust the input current until the valve is near mid‐travel. Press OK.
Note
0% Travel = Valve Closed
100% Travel = Valve Open
44
Page 45

Instruction Manual
D103785X012
2. From the adjustment menu, select the direction and size of change required to set the travel at 0%.
Selecting large, medium, and small adjustments causes changes of approximately 10.0%, 1.0%, and 0.1%,
respectively. If another adjustment is required, repeat step 2. Otherwise, select Done and go to step 3.
3. From the adjustment menu, select the direction and size of change required to set the travel to 100%.
If another adjustment is required, repeat step 3. Otherwise, select Done and go to step 4.
4. From the adjustment menu, select the direction and size of change required to set the travel at 0%.
If another adjustment is required, repeat step 4. Otherwise, select Done and go to step 5.
5. From the adjustment menu, select the direction and size of change required to set the travel to 100%.
If another adjustment is required, repeat step 5. Otherwise, select Done and go to step 6.
6. From the adjustment menu, select the direction and size of change required to set the travel to 5%.
If another adjustment is required, repeat step 6. Otherwise, select Done and go to step 7.
7. From the adjustment menu, select the direction and size of change required to set the travel to 95%.
If another adjustment is required, repeat step 7. Otherwise, select Done and go to step 8.
8. Place the instrument In Service and verify that the travel properly tracks the current source.
Calibration
June 2017
Pushbutton Calibration
A pushbutton near the wiring terminals in the terminal box provides a quick means to autocalibrate the instrument.
The button must be pressed for 3 to 10 seconds. Autocalibration will move the valve through the full range of travel
whether the Instrument Mode is In Service or Out of Service. However, if the Write Protection is Protected, this button
will not be active. To abort, press the button again for 1 second. The calibration button is disabled by default. To
enable it, go to Manual Setup > Instrument > Calibration Button.
Note
Pressure range (used for Pressure Fallback) is not recalibrated during this procedure.
This calibration procedure is recommended whenever the I/P converter or pneumatic relay is replaced. Do not use the
pushbutton calibration for initial calibration when mounting the instrument on an actuator, or if the printed wiring
board assembly was replaced.
If you suspect calibration has changed due to drift, first perform a Valve Signature diagnostic test using ValveLink
software to capture the asfound data for future root cause analysis.
45
Page 46

Calibration
June 2017
Instruction Manual
D103785X012
Sensor Calibration
Pressure Sensors
Note
The pressure sensor is calibrated at the factory and should not require calibration.
Output Pressure Sensor
To calibrate the output pressure sensor, connect an external reference gauge to the output being calibrated. The
gauge should be capable of measuring maximum instrument supply pressure. Depending upon the sensor you wish to
calibrate, select either Output A Sensor or Output B Sensor. Follow the prompts on the Field Communicator display to
calibrate the instrument's output pressure sensor.
1. Adjust the supply pressure regulator to the maximum instrument supply pressure. Press OK.
2. The instrument reduces the output pressure to 0. The following message appears.
Use the Increase and Decrease
selections until the displayed
pressure matches the output x
pressure.
Press OK when you have read the message.
3. The value of the output pressure appears on the display. Press OK to display the adjustment menu.
4. From the adjustment menu, select the direction and size of adjustment to the displayed value.
Selecting large, medium, and small adjustments causes changes of approximately 3.0 psi/0.207 bar/20.7 kPa, 0.30
psi/0.0207 bar/2.07 kPa, and 0.03 psi/0.00207 bar/0.207 kPa, respectively.
If the displayed value does not match the output pressure, press OK, then repeat this step (step 4) to further adjust
the displayed value. When the displayed value matches the output pressure, select Done and go to step 5.
5. The instrument sets the output pressure to full supply. The following message appears.
Use the Increase and Decrease
selections until the displayed
pressure matches the output x
pressure.
Press OK when you have read the message.
6. The value of the output pressure appears on the display. Press OK to display the adjustment menu.
7. From the adjustment menu, select the direction and size of adjustment to the displayed value. If the displayed value
does not match the output pressure, press OK, then repeat this step (step 7) to further adjust the displayed value.
When the displayed value matches the output pressure, select Done and go to step 8.
8. Place the instrument In Service and verify that the displayed pressure matches the measured output pressure.
46
Page 47

Instruction Manual
D103785X012
Calibration
June 2017
Supply Pressure Sensor
Note
Supply Pressure Sensor Calibration is not available for instrument level HC.
To calibrate the supply pressure sensor, connect an external reference gauge to the output side of the supply
regulator. The gauge should be capable of measuring maximum instrument supply pressure. Follow the prompts on
the Field Communicator display to calibrate the instrument's supply pressure sensor.
1. Select a) Zero Only, or b) Zero and Span (gauge required).
a. If Zero Only calibration is selected, adjust the supply pressure regulator to remove supply pressure from the
instrument. Press OK. Once calibration is complete, go to step 5.
b. If Zero and Span calibration is selected, adjust the supply pressure regulator to remove supply pressure from the
instrument. Press OK. Adjust the supply regulator to the maximum instrument supply pressure. Press OK.
Proceed with step 2.
2. The following message appears:
Use the Increase and Decrease
selections until the displayed
pressure matches the supply
pressure.
Press OK when you have read this message.
3. The value of the pressure appears on the display.
4. From the adjustment menu, select the direction and size of adjustment to the displayed value.
Selecting large, medium, and small adjustments causes changes of approximately 3.0 psi/0.207 bar/20.7 kPa, 0.30
psi/0.0207 bar/2.07 kPa, and 0.03 psi/0.00207 bar/0.207 kPa, respectively.
Adjust the displayed value until it matches the supply pressure, select Done and go to step 5.
5. Place the instrument In Service and verify that the displayed pressure matches the measured supply pressure.
Travel Sensor
The travel sensor is normally adjusted at the factory and should not require adjustment. However, if the travel sensor
has been replaced, adjust the travel sensor by performing the appropriate procedure. See the Maintenance section for
travel sensor assembly replacement procedures.
DVC6015 and DVC6035 Remote Feedback Units
WARNING
Failure to remove air pressure may cause personal injury or property damage from bursting parts.
1. Remove supply air and remove the instrument from the actuator.
47
Page 48

Calibration
June 2017
Instruction Manual
D103785X012
2. As shown in figure 4‐2, align the feedback arm (key 79) with the housing by inserting the alignment pin (key 46)
through the hole marked “A” on the feedback arm. Fully engage the alignment pin into the tapped hole in the
housing.
Note
The alignment pin (key 46) is stored inside the remote feedback unit housing.
Figure 4‐2. FIELDVUE DVC6015 Remote Feedback Unit Showing Feedback Arm in Position for Travel Sensor
Adjustment
ALIGNMENT PIN
FEEDBACK ARM
(KEY 79)
(KEY 46)
B
TRAVEL
SENSOR
SHAFT
X0918
3. Loosen the screw that secures the feedback arm to the travel sensor shaft. Position the feedback arm so that the
surface of the feedback arm is flush with the end of the travel sensor shaft.
4. Connect a current source to the instrument LOOP - and LOOP + terminals. Set the current source to any value
between 4 and 20 mA. Connect the Field Communicator to the TALK terminals.
5. Before beginning the travel sensor adjustment, set the instrument mode to Out Of Service and the protection to
None.
6. From the Calibrate menu select Sensor Calibration, Travel Sensor. Follow the prompts on the Field Communicator
display to adjust the travel sensor counts to the value listed in table 4‐2.
Table 4‐2. Travel Sensor Counts
Remote Feedback Unit Travel Sensor Counts
DVC6015 700 ±200
DVC6025 2100 ±200
DVC6035
Counterclockwise shaft rotation
DVC6035
Clockwise shaft rotation
1. Refer to figure 4‐3 to determine the desired starting position for the DVC6035 based on potentiometer shaft; counterclockwise or clockwise.
(1)
(1)
600 ±200
3400 ±200
48
Page 49

Instruction Manual
D103785X012
Figure 4‐3. Travel Indicator Assembly Starting Position; Counterclockwise or Clockwise
DVC6035 FEEDBACK
DVC6035 FEEDBACK
ARM MOVEMENT
ACTUATOR SHAFT MOVEMENT ACTUATOR SHAFT MOVEMENT
STARTING POSITION OF THE TRAVEL INDICATOR ASSEMBLY IF
INCREASING PRESSURE FROM OUTPUT A DRIVES THE INDICATOR
CLOCKWISE. THE POTENTIOMETER SHAFT WILL ROTATE
COUNTERCLOCKWISE AS VIEWED FROM THE BACK OF THE
INSTRUMENT.
ARM MOVEMENT
STARTING POSITION OF THE TRAVEL INDICATOR ASSEMBLY
IF INCREASING PRESSURE FROM OUTPUT A DRIVES THE
INDICATOR COUNTERCLOCKWISE. THE POTENTIOMETER
SHAFT WILL ROTATE CLOCKWISE AS VIEWED FROM THE
BACK OF THE INSTRUMENT.
Calibration
June 2017
Note
In the next step, be sure the feedback arm surface remains flush with the end of the travel sensor shaft.
7. While observing the travel sensor counts, tighten the screw that secures the feedback arm to the travel sensor
shaft. Be sure the travel sensor counts remain within the tolerances listed in table 4‐2. Paint the screw to discourage
tampering with the connection.
8. Disconnect the Field Communicator and current source from the instrument.
9. Remove the alignment pin and store it in the instrument housing.
10. Install the remote feedback unit on the actuator.
DVC6025 Remote Feedback Unit
WARNING
Failure to remove air pressure may cause personal injury or property damage from bursting parts.
1. Remove supply air and remove the instrument from the actuator.
2. See figure 4‐4 for parts identification. Disconnect the bias spring (key 82) from the feedback arm assembly (key 84)
and the arm assembly (key 91). Remove the mounting bracket (key 74) from the back of the feedback unit. Hold
the arm assembly (key 91) so that the arm assembly points toward the terminal box and the arm is parallel to the
back of the housing, as shown in figure 4‐5.
49
Page 50

Calibration
June 2017
Instruction Manual
Figure 4‐4. FIELDVUE DVC6025 Digital Valve Controller Mounted on Fisher 2052, Size 33 Actuator
CAP SCREW, HEX SOCKET
MOUNTING
ADAPTER
(KEY 117)
(KEY 116)
MOUNTING BRACKET
(KEY 74)
BIAS SPRING
(KEY 82)
FEEDBACK ARM ASSEMBLY
(KEY 84)
D103785X012
ARM ASSEMBLY
FEEDBACK ARM
TORSION SPRING
(KEY 93)
X0919
(KEY 91)
3. Loosen the screw that secures the arm assembly to the travel sensor shaft. Position the arm assembly so that the
outer surface is flush with the end of the travel sensor shaft.
4. Connect a current source to the instrument LOOP - and LOOP + terminals. Set the current source to any value
between 4 and 20 mA. Connect the Field Communicator to the TALK terminals.
5. Before beginning the travel sensor adjustment, set the instrument mode to Out Of Service and the protection to
None.
6. From the Calibrate menu, select Sensor Calibration, Travel Sensor. Follow the prompts on the Field Communicator
display to adjust the travel sensor counts to the value listed in table 4‐2.
50
Page 51

Instruction Manual
D103785X012
Note
In the next step, be sure the arm assembly outer surface remains flush with the end of the travel sensor shaft.
Calibration
June 2017
7. While observing the travel sensor counts, tighten the screw that secures the arm assembly to the travel sensor
shaft. Be sure the travel sensor counts remain within the tolerances listed in table 4‐2. Paint the screw to discourage
tampering with the connection.
8. Disconnect the Field Communicator and current source from the instrument.
9. Apply lubricant (key 63) to the pin portion of the arm assembly (key 91).
10. Replace the mounting bracket on the back of the instrument and reconnect the bias spring between the feedback
arm assembly and the arm assembly on the travel sensor shaft.
11. Install the remote feedback unit on the actuator.
Figure 4‐5. FIELDVUE DVC6025 Travel Sensor Arm/Housing Back Plane Alignment
BACK EDGE OF ARM
PARALLEL W/BACK
OF HOUSING
ARM ASSEMBLY
ARM ASSEMBLY PIN
TRAVEL
SENSOR SHAFT
A7025
BACK OF HOUSING
Analog Input Calibration
To calibrate the analog input sensor, connect a variable current source to the instrument LOOP+ and LOOP- terminals.
The current source should be capable of generating an output of 4 to 20 mA. Follow the prompts on the Field
Communicator display to calibrate the analog input sensor.
1. Set the current source to the target value shown on the display. The target value is the Input Range Low value. Press
OK.
2. The following message appears:
Use the Increase and Decrease
selections until the displayed
current matches the target.
Press OK when you have read this message.
51
Page 52

Calibration
June 2017
3. The value of the Analog Input appears on the display. Press OK to display the adjustment menu.
4. From the adjustment menu, select the direction and size of adjustment to the displayed value.
Selecting large, medium, and small adjustments causes changes of approximately 0.4 mA, 0.04 mA, and 0.004 mA,
respectively.
If the displayed value does not match the current source, press OK, then repeat this step (step 4) to further adjust
the displayed value. When the displayed value matches the current source, select Done and go to step 5.
5. Set the current source to the target value shown on the display. The target value is the Input Range High value.
Press OK.
6. The following message appears:
Use the Increase and Decrease
selections until the displayed
current matches the target.
Press OK when you have read this message.
7. The value of the Analog Input appears on the display. Press OK to display the adjustment menu.
8. From the adjustment menu, select the direction and size of adjustment to the displayed value. If the displayed value
does not match the current source, press OK, then repeat this step (step 8) to further adjust the displayed value.
When the displayed value matches the current source, select Done and go to step 9.
9. Place the instrument In Service and verify that the analog input displayed matches the current source.
Instruction Manual
D103785X012
Relay Adjustment
Before beginning travel calibration, check the relay adjustment. Replace the instrument cover when finished.
Note
Relay B and C are not user‐adjustable.
Double‐Acting Relay
The double‐acting relay is designated by “Relay A” on a label affixed to the relay itself. For double‐acting actuators, the
valve must be near mid‐travel to properly adjust the relay. The Field Communicator will automatically position the
valve when Relay Adjust is selected.
CAUTION
Care should be taken during relay adjustment as the adjustment disc may disengage if rotated too far.
Rotate the adjustment disc, shown in figure 4‐6, until the output pressure displayed on the Field Communicator is
between 50 and 70% of supply pressure. This adjustment is very sensitive. Be sure to allow the pressure reading to
stabilize before making another adjustment (stabilization may take up to 30 seconds or more for large actuators).
52
Page 53

Instruction Manual
D103785X012
Calibration
June 2017
If the low bleed relay option has been ordered stabilization may take approximately two minutes longer than the
standard relay.
Relay A may also be adjusted for use in single‐acting‐ direct applications. Rotate the adjustment disc as shown in figure
4‐6 for single‐acting direct operation.
Figure 4‐6. Relay A Adjustment (Shroud Removed for Clarity)
FOR SINGLE‐ACTING DIRECT
RELAYS: ROTATE ADJUSTMENT
DISC IN THIS DIRECTION UNTIL IT
CONTACTS THE BEAM
FOR DOUBLE‐ACTING RELAYS:
ROTATE ADJUSTMENT DISC IN
THIS DIRECTION TO DECREASE
OUTPUT PRESSURE
ADJUSTMENT DISC
W9034
FOR DOUBLE‐ACTING RELAYS:
ROTATE ADJUSTMENT DISC IN
THIS DIRECTION TO INCREASE
OUTPUT PRESSURE
Single‐Acting Relays
WARNING
For Instrument Level ODV only:
If the unused port is monitoring pressure, ensure that the pressure source conforms to ISA Standard 7.0.01 and does not
exceed the pressure supplied to the instrument.
Failure to do so could result in personal injury or property damage caused by loss of process control.
Single‐Acting Direct Relay
The single‐acting direct relay is designated by “Relay C” on a label affixed to the relay itself. Relay C requires no
adjustment.
Single‐Acting Reverse Relay
The single‐acting reverse relay is designated by “Relay B” on a label affixed to the relay itself. Relay B is calibrated at the
factory and requires no further adjustment.
53
Page 54

Calibration
June 2017
Instruction Manual
D103785X012
PST Calibration (ODV Instrument Level only)
This procedure permits you to run the Partial Stroke Calibration, which enables the Partial Stroke Test. It establishes
values for Partial Stroke Pressure Limit, Pressure Set Point and Pressure Saturation Time for End Point Pressure Control,
Travel Deviation Alert Point and Travel Deviation Time. The Partial Stroke Calibration also sets default values for max
travel movement, test speed, and test pause time.
Note
You must take the instrument out of service before running Partial Stroke Calibration.
Ensure that the instrument is put back in service after the completing the calibration procedure.
54
Page 55

Instruction Manual
D103785X012
Device Information, Diagnostics, and Alerts
June 2017
Section 5 Device Information, Diagnostics, and Alerts55
Overview
Field Communicator Overview (1)
Status & Primary Purpose Variables
The overview section provides basic information about the current state of the instrument and gives you access to the
current values of:
D Alert Status
D Communication Status
D Instrument Mode (In/Out of Service)
D Analog Input
D Setpoint
D Travel
D Supply Pressure (not available in Instrument Level HC)
D Actuator Pressure(s)
D Travel/Pressure Control Configuration
Device Information
Device Information provides details about the instrument construction including:
D Tag Name
D Instrument Model Number
D Instrument Level (see table 5‐1)
D Device ID (unique number used to prevent the instrument from accepting commands intended for other
instruments)
D Serial Numbers
D Firmware, DD, and Hardware Revisions
D HART Universal Revision
D Write Protection (provides a procedure to enable/disable)
Table 5‐1. Functions Available for Instrument Level
Instrument Level Functions Available
HART Communicating: Communicates with the Field Communicator and ValveLink software. In addition,
HC
AD
PD
ODV Optimized Digital Valve: Includes all functions listed above plus partial stroke test and lead/lag set point filter
HC provides: travel cutoffs and limits, minimum opening and closing times, input characterization (linear, equal
percentage, quick opening, and custom), trending with ValveLink Solo, and the following alerts: travel deviation;
travel alert high, low, high high, and low low; drive signal; cycle counter; and travel accumulation.
Advanced Diagnostics: Includes all functions listed above plus (with ValveLink software) all offline diagnostic tests
(dynamic error band, drive signal, step response, and valve signature) plus online trending
Performance Diagnostics: Includes all functions listed above plus all Performance Diagnostics online/in‐service
valve testing (valve friction, electronics, and mechanical condition)
55
Page 56

Device Information, Diagnostics, and Alerts
June 2017
Instruction Manual
D103785X012
Service Tools
Field Communicator Service Tools (3)
Device Status
Instrument alerts, when enabled, detect many operational and performance issues that may be of interest. If there are
no alerts currently active, this display will be empty.
Alert Record
The DVC6000 HW2 will store 20 alerts. Once the alert record is full, no additional alerts will be stored until the record is
cleared.
Below is a list of the alerts that can be detected by the instrument. To enable or disable the alerts, navigate to
Configure > Alert Setup.
D Offline/Failed Alert—This alert is active if a shutdown alert has put the device in a failed state and is therefore not
controlling the input. Press Enter to view the alert(s) that caused the shutdown.
Electronics
D Drive Current Failure—This alert is active when the drive current to the I/P converter is not flowing as expected. If
this alert occurs, check the connection between the I/P converter and the printed wiring board assembly. Try
removing the I/P converter and reinstalling it. If the alert does not clear, replace the I/P converter or the printed
wiring board assembly.
D Drive Signal Alert—This alert monitors the drive signal and calibrated travel. If one of the following conditions exists
for more than 20 seconds, the alert is set.
For the case where Zero Power Condition is defined as closed:
Drive Signal < 10% and Calibrated Travel > 3%
Drive Signal > 90% and Calibrated Travel < 97%
For the case where Zero Power Condition is defined as open:
Drive Signal < 10% and Calibrated Travel < 97%
Drive Signal > 90% and Calibrated Travel > 3%
D NonCritical NVM Alert—This alert is active if there is a failure associated with NVM (nonvolatile memory) that is not
critical for instrument operation. If this alert is active, restart the instrument. If the alert persists, replace the printed
wiring board assembly.
D Critical NVM Alert—This alert is active if there is a failure associated with NVM that is critical for instrument
operation. If this alert is active, restart the instrument. If the alert persists, replace the printed wiring board
assembly.
D Flash Integrity Failure—This alert is active if there is a failure associated with flash ROM (read only memory). If this
alert is active, restart the instrument. If the alert persists, replace the printed wiring board assembly.
D Reference Voltage Failure—This alert is active if there is a failure associated with the internal voltage reference. If
this alert is active, replace the printed wiring board assembly.
56
Page 57

Instruction Manual
D103785X012
Device Information, Diagnostics, and Alerts
June 2017
D Variable Out of Range—This alert is active if one or more of the measured analog sensor readings (loop current,
pressure, temperature, or travel) is saturated or reading out of its configured range. The condition may be due to
improper configuration or physical setup and not be due to a sensor malfunction.
D Field Device Malfunction—This alert is active if the pressure, position, or temperature sensors are providing invalid
readings.
D Internal Sensor Out of Limits—This alert is active if there is a problem with either the pressure sensor or the printed
wiring board assembly.
D Travel Sensor Alert—This alert is active if the sensed travel is outside the range of 25.0 to 125.0% of calibrated
travel. If this alert is active, check the instrument mounting. Also, check that the electrical connection from the
travel sensor is properly plugged into the printed wiring board assembly. After restarting the instrument, if the alert
persists, troubleshoot the printed wiring board assembly or travel sensor.
D Temperature Sensor Alert—This alert is active when the instrument temperature sensor fails, or the sensor reading
is outside of the range of 60 to 100°C (76 to 212°F). The temperature reading is used internally for temperature
compensation of inputs. If this alert is active, restart the instrument. If the alert persists, replace the printed wiring
board assembly.
D Pressure Sensor Alert—This alert is active if any of the 3 pressure sensor readings are outside the range of 24.0 to
125.0% of the calibrated pressure for more than 60 seconds. If this alert is active, check the instrument supply
pressure, ensure the printed wiring board assembly is properly mounted onto the module base assembly, and
ensure the pressure sensor Orings are properly installed. If the alert persists after restarting the instrument, replace
the printed wiring board assembly.
D Minor Loop Sensor Alert—This alert is active if the pneumatic relay position reading is outside the valid range. If the
alert persists, replace the printed wiring board.
D Loop Current Validation Alert—This alert is active if the loop current is significantly out of range, or if there is a
problem with the analog circuit electronics. If this alert is active, restart the instrument with the loop current
verified to be in the 420 mA range. If the alert persists, replace the printed wiring board.
Note
If the control system is known to output current 24 mA or above, Shutdown on Loop Current Validation should not be enabled.
D Output Circuit Communication Failure—This alert is active if the output circuit is not responding. If configured as a
position transmitter output, first make sure the transmitter circuit is powered. If the alert persists, make sure the
DIP switch on the main electronics matches the configuration of the OUT terminals. If the alert is still active, replace
the main electronics.
D Instrument Time is Approximate Alert—This alert is active if the instrument has been powered down since the last
time the instrument clock was set. To clear the alert, reset the instrument time.
Pressure
D Supply Pressure Alert—This alert is active if the supply pressure falls below the supply pressure alert point.
Note
The Supply Pressure Lo alert is available for instrument level AD, PD, and ODV.
57
Page 58

Device Information, Diagnostics, and Alerts
June 2017
Instruction Manual
D103785X012
Travel
Note
The Travel Alert Deadband applies to the Travel Deviation Alert as well as the Travel Alert Hi, Lo, Hi Hi, and Lo Lo.
D Travel Deviation Alert—If the difference between the Travel Target and the Travel exceeds the Travel Deviation Alert
Point for more than the Travel Deviation Time, the Travel Deviation Alert is active. It remains active until the
difference between the travel target and the Travel is less than the Travel Deviation Alert Point minus the Travel
Alert Deadband.
D Travel Alert Hi—This alert is active when the Travel exceeds the Travel Alert Hi Point. Once the alert is active, the
alert will clear when the Travel falls below the Travel Alert Hi Point minus the Travel Alert Deadband. See figure 5‐1.
Figure 5‐1. Travel Alert Deadband
ALERT IS SET
TRAVEL ALERT
HIGH POINT
TRAVEL ALERT
DEADBAND
ALERT IS CLEARED
A6532
D Travel Alert Hi Hi—This alert is active when the Travel exceeds the Travel Alert Hi Hi Point. Once the alert is active,
the alert will clear when the Travel falls below the Travel Alert Hi Hi Point minus the Travel Alert Deadband.
D Travel Alert Lo—This alert is active when the Travel is below the Travel Alert Lo Point. Once the alert is active, the
alert will clear when the Travel exceeds the Travel Alert Lo Point plus the Travel Alert Deadband.
D Travel Alert Lo Lo—This alert is active when the Travel is below the Travel Alert Lo Lo Point. Once the alert is active,
the alert will clear when the Travel exceeds the Travel Alert Lo Lo Point plus the Travel Alert Deadband.
D Travel Limit/Cutoff Hi Alert—This alert is active when the Travel exceeds the Hi Limit/Cutoff Point.
D Travel Limit/Cutoff Lo Alert—This alert is active when the Travel falls below the Lo Limit/Cutoff Point.
D Integrator Saturated High Alert—This alert is active if the instrument integrator is saturated at the high extreme.
D Integrator Saturated Low Alert—This alert is active if the instrument integrator is saturated at the low extreme.
D Pressure Fallback Active Alert—This alert is active when the instrument has detected a problem with the travel
feedback and is now controlling the output like an I/P transducer.
58
Page 59

Instruction Manual
D103785X012
Device Information, Diagnostics, and Alerts
June 2017
Travel History
D Cycle Count High Alert—This alert is active if the Cycle Counter exceeds the Cycle Count Alert Point. The Cycle Count
records the number of times the travel changes direction when it is outside of the deadband. To clear the alert, set
the Cycle Counter to a value less than the alert point.
D Travel Accumulator High Alert—This alert is active if the Travel Accumulator exceeds the Travel Accumulator Alert
Point. The Travel Accumulator totalizes the travel of the valve when the deadband is exceeded. To clear the alert,
set the Travel Accumulator to a value less than the alert point.
Note
The Cycle Count / Travel Accumulator Deadband applies to both the Cycle Count High Alert and the Travel Accumulator High
Alert.
The deadband is the percent (%) of ranged travel around a travel reference point. The travel reference point gets
reestablished to the point of travel reversal that occurs outside of the deadband. The deadband must be exceeded
before a change in travel direction will be counted as a cycle and the accumulated travel (up to the point of travel
reversal) is added to the total accumulation. See figure 5‐2.
Figure 5‐2. Cycle Counter and Travel Accumulator Deadband Example (set at 10%)
DEADBAND EXCEEDED, NEW
REFERENCE POINT ESTABLISHED
DEADBAND
REFERENCE POINT
VALVE POSITION
TIME
E1473
DEADBAND (+/- 5%)
DEADBAND
DARK SEGMENTS REPRESENT THE AMOUNT OF TRAVEL
THAT WILL BE ADDED TO THE TRAVEL ACCUMULATOR
CYCLE COUNTER INCREMENTS
Alert Record
D Alert Record Not Empty Alert—This alert is active when there are 1 or more alerts stored in the alert record.
D Alert Record Full Alert—This alert is active when the alert record is full. Additional alerts that are detected will not be
saved to the alert record until the alert record is cleared.
59
Page 60

Device Information, Diagnostics, and Alerts
June 2017
Instruction Manual
D103785X012
Status
D Calibration in Progress Alert—This alert is active when calibration is in progress.
D AutoCal in Progress Alert—This alert is active when auto calibration is in progress.
D Diagnostic in Progress Alert—This alert is active when a diagnostic test is in progress.
D Diagnostic Data Available Alert—This alert is active when diagnostic data has been collected and is being stored in
the instrument.
D Pressure Control Active Alert—This alert is active when the instrument is controlling like an I/P transducer (Pressure
Control instead of Travel Control).
Diagnostics
Stroke Valve
Follow the prompts on the Field Communicator display to select from the following:
D Done—Select this if you are done. All ramping is stopped when DONE is selected.
D Ramp Open—ramps the travel toward open at the rate of 1.0% per second of the ranged travel.
D Ramp Closed—ramps the travel toward closed at the rate of 1.0% per second of the ranged travel.
D Ramp to Target—ramps the travel to the specified target at the rate of 1.0% per second of the ranged travel.
D Step to Target—steps the travel to the specified target.
Partial Stroke Test
Note
Partial Stroke Test is only available for instrument level ODV.
The Partial Stroke Test allows DVC6000 HW2 digital valve controllers with instrument level ODV to perform a Valve
Signature type of test while the instrument is in service and operational. In some applications, it is important to be able
to exercise and test the valve to verify that it will operate when commanded. This feature allows the user to partially
stroke the valve while continually monitoring the input signal. If a demand arises, the test is aborted and the valve
moves to its commanded position. The partial stroke valve travel is configurable between 1 and 30% maximum travel,
in 0.1% increments. Data from the last partial stroke test is stored in the instrument memory for retrieval by ValveLink
software.
The Partial Stroke Test allows you to perform a partial, 10%, stroke test (standard) or a custom stroke test. With the
custom stroke test, the stroke may be extended up to 30%. Be sure to check plant guidelines before performing a
custom stroke test. The purpose of this test is to ensure that the valve assembly moves upon demand.
A partial stroke test can be initiated when the valve is operating at either 4 or 20 mA (point‐to‐point mode). In
applications where a spurious trip is to be minimized, 4 mA is the normal operating position.
60
Page 61

Instruction Manual
D103785X012
Device Information, Diagnostics, and Alerts
June 2017
When enabled, a partial stroke test may be initiated by the device (as a scheduled, auto partial stroke test), a remote
pushbutton located in the field or at the valve, a Field Communicator, or ValveLink software.
D Automatic (Scheduled)
The Auto Partial Stroke Test allows the partial stroke test to be scheduled by the DVC6000 HW2. The test is scheduled
in number of hours between tests. Any power cycle will reset the test clock timer.
D Local Pushbutton
A partial stroke test command may be sent to the digital valve controller using a set of contacts wired to the auxiliary
+/- terminals. To perform a test, the contacts must be closed for 3 to 5 seconds and then opened. To abort the test,
close the contacts for 1 second. The last set of diagnostic data is stored in the instrument memory for later retrieval via
ValveLink software.
D Field Communicator
1. Connect the Field Communicator to the LOOP terminals on the DVC6005 HW2 base unit.
2. Turn on the Field Communicator.
3. From the Online menu, select Service Tools > Diagnostics > Partial Stroke Test.
4. Select either Standard (10%) or Custom. With the Custom Stroke Test, the stroke may be entered up to 30% with
configurable stroking speed and pause time.
5. The currently configured Stroke, Stroking Speed, and Pause Time is displayed. Choose “Yes” to run the test using
these values. Choose “No” to modify the values. The default value for Stroke Speed is 0.25%/second.
6. The valve begins to move and the actual travel reported by the digital valve controller is displayed on the Field
Communicator.
7. Once the valve has reached the endpoint, check that the valve has reached the desired set point. The valve should
return to its original position.
For information on configuring the Partial Stroke Test, see Partial Stroke Variables in the Detailed Setup section.
Variables
Field Communicator Service Tools > Variables (3-4)
The Variables section provides current values of the instrument variables. Below is a list of the variables available for
viewing:
D Write Protection (also provides a procedure to enable/disable)
D Instrument Mode (also provides a procedure to place in/out of service)
D Analog Input
D Setpoint
D Travel
D Drive Signal
D Input Characterization (also provides a procedure to modify)
D Cycle Counter
D Travel Accumulator
D Supply Pressure (not available in Instrument Level HC)
61
Page 62

Device Information, Diagnostics, and Alerts
June 2017
D Actuator Pressure(s)
D Travel/Pressure Control Configuration (also provides a procedure to modify)
D Control Mode (also provides a procedure to modify)
D Instrument Temperature
D Travel Counts (this is the raw travel sensor reading used for advanced adjustments)
D Maximum Recorded Temperature
D Minimum Recorded Temperature
D Number of Power Ups
D Days Powered Up
Instruction Manual
D103785X012
62
Page 63

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
Section 6 Maintenance and Troubleshooting66
The DVC6000 HW2 digital valve controller enclosure is rated Type 4X and IP66, therefore periodic cleaning of internal
components is not required. If the DVC6000 HW2 is installed in an area where the exterior surfaces tend to get heavily
coated or layered with industrial or atmospheric contaminants, it is recommended that the vent (key 52) be
periodically removed and inspected to ensure there is no partial or full obstruction. If the vent appears to be partially or
fully obstructed, it must be cleaned or replaced. Lightly brush the exterior of the vent to remove contaminants and run
a mild water/detergent solution through the vent to ensure it is free of any obstruction. Allow the vent to dry before
reinstalling.
WARNING
Personal injury or property damage can occur from cover failure due to overpressure. Ensure that the housing vent
opening is open and free of debris to prevent pressure buildup under the cover.
WARNING
To avoid static discharge from the plastic cover when flammable gases or dust are present, do not rub or clean the cover
with solvents. To do so could result in a spark that may cause the flammable gases or dust to explode, resulting in personal
injury or property damage. Clean with a mild detergent and water only.
WARNING
Avoid personal injury or property damage from sudden release of process pressure or bursting of parts. Before performing
any maintenance procedures on the DVC6000 HW2 digital valve controller:
D Always wear protective clothing, gloves, and eyewear.
D Do not remove the actuator from the valve while the valve is still pressurized.
D Use bypass valves or completely shut off the process to isolate the valve from process pressure. Relieve process pressure
from both sides of the valve.
D Use lock‐out procedures to be sure that the above measures stay in effect while you work on the equipment.
D Check with your process or safety engineer for any additional measures that must be taken to protect against process
media.
D Vent the pneumatic actuator loading pressure and relieve any actuator spring precompression so the actuator is not
applying force to the valve stem; this will allow for the safe removal of the stem connector.
D Disconnect any operating lines providing air pressure, electric power, or a control signal to the actuator. Be sure the
actuator cannot suddenly open or close the valve.
When using natural gas as the supply medium, or for explosion proof applications, the following warnings also apply:
D Remove electrical power before removing the housing cap. Personal injury or property damage from fire or explosion
may result if power is not disconnected before removing the cap.
D Remove electrical power before disconnecting any of the pneumatic connections.
D When disconnecting any of the pneumatic connections or any pressure retaining part, natural gas will seep from the
unit and any connected equipment into the surrounding atmosphere. Personal injury or property damage may result
from fire or explosion if natural gas is used as the supply medium and appropriate preventive measures are not taken.
Preventive measures may include, but are not limited to, one or more of the following: Remote venting of the unit,
re‐evaluating the hazardous area classification, ensuring adequate ventilation, and the removal of any ignition sources.
D Ensure that all caps and covers are correctly installed before putting this unit back into service. Failure to do so could
result in personal injury or property damage from fire or explosion.
63
Page 64

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
CAUTION
When replacing components, use only components specified by the factory. Always use proper component replacement
techniques, as presented in this manual. Improper techniques or component selection may invalidate the approvals and
the product specifications, as indicated in table 1‐2. It may also impair operations and the intended function of the device.
Note
If the feedback arm (key 79) or feedback arm assembly (key 84) is removed from the digital valve controller, the travel sensor must
be recalibrated.
Because of the diagnostic capability of the DVC6000 HW2, predictive maintenance is available through the use of
ValveLink software. Using the digital valve controller, valve and instrument maintenance can be enhanced, thus
avoiding unnecessary maintenance. For information on using the ValveLink software, refer to the ValveLink software
online help.
Module Base Maintenance
The digital valve controller contains a module base consisting of the I/P converter, printed wiring board assembly, and
pneumatic relay. The module base may be easily replaced in the field without disconnecting field wiring or tubing.
Tools Required
Table 6‐1 lists the tools required for maintaining the DVC6000 HW2 digital valve controller.
Table 6‐1. Tools Required
Tool Size Component
Phillips Screwdriver
Hex key
Hex key
Hex key
Hex key
Hex key
Open‐end wrench
Hex key
Open‐end wrench
Hex key
5 mm
1.5 mm
2.5 mm
5 mm
6 mm
1/2‐inch
9/64‐inch
7/16‐inch
3/16‐inch
Relay, printed wiring board assembly, and cover screws
Terminal box screw
Terminal box cover screw
I/P converter screws
Travel sensor screws
Module base screws
Connector Arm screw (DVC6015)
Feedback arm screw
DVC6015 mounting bolts
DVC6025 mounting bolts
Removing the Module Base
To remove the DVC6005 HW2 module base, perform the following steps. Refer to figure 7‐2 for key number locations.
WARNING
To avoid personal injury or equipment damage from bursting of parts, turn off the supply pressure to the digital valve
controller and bleed off any excess supply pressure before attempting to remove the module base assembly from the
housing.
64
Page 65

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
1. For sliding‐stem applications only, a protective shield for the feedback linkage is attached to the side of the module
base assembly as shown in figure 6‐1. Remove this shield and keep for reuse on the replacement module. The
replacement module will not have this protective shield.
Figure 6‐1. Protective Shield for Feedback Linkage
SHIELD
X0908
FEEDBACK ARM EXTENSION,
BIAS SPRING
2. Unscrew the four captive screws in the cover (key 43) and remove the cover from the module base (key 2).
3. Using a 6 mm hex socket wrench, loosen the three‐socket head screws (key 38). These screws are captive in the
module base by retaining rings (key 154).
Note
The module base is linked to the housing by two cable assemblies. Disconnect these cable assemblies after you pull the module
base out of the housing.
4. Pull the module base straight out of the housing (key 1). Once clear of the housing, swing the module base to the
side of the housing to gain access to the cable assemblies.
5. The base unit has two cable assemblies, shown in figure 6‐2, which connect the module base, via the printed wiring
board assembly, to the travel sensor and the terminal box. Disconnect these cable assemblies from the printed
wiring board assembly on the back of the module base.
CAUTION
To avoid affecting performance of the instrument, take care not to damage the module base seal or guide surface. Do not
bump or damage the bare connector pins on the PWB assembly. Damaging either the module base or guide surface may
result in material damage, which could compromise the instruments ability to maintain a pressure seal.
65
Page 66

Maintenance and Troubleshooting
June 2017
Figure 6‐2. Printed Wiring Board Cable Connections
Instruction Manual
D103785X012
TERMINAL BOX
REMOTE
TERMINAL BOX
X0921
HOUSING
CABLE TO
TERMINAL BOX
CABLE TO REMOTE
TERMINAL BOX
MODULE BASE
ASSEMBLY
PRINTED WIRING
BOARD ASSEMBLY
Replacing the Module Base
To replace the DVC6005 HW2 module base perform the following steps. Refer to figure 7‐2 for key number locations.
Note
To avoid affecting performance of the instrument, inspect the guide surface on the module and the corresponding seating area in
the housing before installing the module base assembly. These surfaces must be free of dust, dirt, scratches, and contamination.
Ensure the module base seal is in good condition. Do not reuse a damaged or worn seal.
1. Ensure the module base seal (key 237) is properly installed in the housing (key 1). Ensure the O‐ring (key 12) is in
place on the module base assembly.
2. Connect the terminal box connector to the PWB assembly (key 50). Orientation of the connector is required.
3. Connect the travel sensor connector to the PWB assembly. Orientation of the connector is required.
4. Insert the module base (key 2) into the housing (key 1).
5. Install three socket head screws (key 38) in the module base into the housing. If not already installed, press three
retaining rings (key 154) into the module base. Evenly tighten the screws in a crisscross pattern to a final torque of
16 NSm (138 lbfSin).
66
Page 67

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
WARNING
Personal injury, property damage, or disruption of process control can result if the cable assemblies/wiring are damaged
when attaching the cover to the module base assembly.
Ensure that the cable assemblies/ wiring are positioned in the cavity of the module base so they do not get compressed or
damaged when attaching the cover to the module base assembly in step 6.
6. Attach the cover (key 43) to the module base assembly.
7. For sliding‐stem applications only, install the protective shield onto the side of the replacement module base
assembly (refer to figure 6‐1).
Submodule Maintenance
The base unit's module base contains the following submodules: I/P converter, PWB assembly, and pneumatic relay. If
problems occur, these submodules may be removed from the module base and replaced with new submodules. After
replacing a submodule, the module base may be put back into service.
CAUTION
Exercise care when performing maintenance on the module base. Reinstall the cover to protect the I/P converter and
gauges when servicing other submodules.
In order to maintain accuracy specifications, do not strike or drop the I/P converter during submodule maintenance.
I/P Converter
Refer to figure 7‐2 for key number locations. The I/P converter (key 41) is located on the front of the module base.
Note
After I/P converter submodule replacement, calibrate the digital valve controller to maintain accuracy specifications.
Replacing the I/P Filter
A screen in the supply port beneath the I/P converter serves as a secondary filter for the supply medium. To replace this
filter, perform the following procedure:
1. Remove the I/P converter (key 41) and shroud (key 169) as described in the Removing the I/P Converter procedure.
2. Remove the screen (key 231) from the supply port.
67
Page 68

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
3. Install a new screen in the supply port as shown in figure 6‐3.
4. Inspect the O‐ring (key 39) in the I/P output port; if necessary, replace it.
5. Reinstall the I/P converter (key 41) and shroud (key 169) as described in the Replacing the I/P Converter procedure.
Figure 6‐3. I/P Filter Location
O‐RING LOCATED
IN I/P CONVERTER
OUTPUT PORT
W8072
SCREEN (FILTER) LOCATED IN I/P
CONVERTER SUPPLY PORT
Removing the I/P Converter
1. Remove the front cover (key 43), if not already removed.
2. Refer to figure 6‐4. Using a 2.5 mm hex socket wrench, remove the four socket‐head screws (key 23) that attach the
shroud (key 169) and I/P converter (key 41) to the module base (key 2).
3. Remove the shroud (key 169); then pull the I/P converter (key 41) straight out of the module base (key 2). Be
careful not to damage the two electrical leads that come out of the base of the I/P converter.
4. Ensure that the O‐ring (key 39) and screen (key 231) stay in the module base and do not come out with the I/P
converter (key 41).
Replacing the I/P Converter
1. Refer to figure 6‐3. Inspect the condition of the O‐ring (key 39) and screen (key 231) in the module base (key 2).
Replace them, if necessary. Apply silicone lubricant to the O‐rings.
2. Ensure the two boots (key 210) shown in figure 6‐4 are properly installed on the electrical leads.
3. Install the I/P converter (key 41) straight into the module base (key 2), taking care that the two electrical leads feed
into the guides in the module base. These guides route the leads to the printed wiring board assembly submodule.
4. Install the shroud (key 169) over the I/P converter (key 41).
5. Install the four socket‐head screws (key 23) and evenly tighten them in a crisscross pattern to a final torque of
1.6 NSm (14 lbfSin).
6. After replacing the I/P converter, calibrate travel or perform touch‐up calibration to maintain accuracy
specifications.
68
Page 69

Instruction Manual
D103785X012
Figure 6‐4. I/P Converter
Maintenance and Troubleshooting
June 2017
SHROUD
(KEY 169)
I/P CONVERTER
(KEY 41)
W9328
BOOTS
(KEY 210)
SOCKET‐HEAD
SCREWS (4)
(KEY 23)
PWB (Printed Wiring Board) Assembly
Refer to figure 7‐2 for key number locations. The PWB assembly (key 50) is located on the back of the module base
assembly (key 2).
Note
If the PWB assembly submodule is replaced, calibrate and configure the digital valve controller to maintain accuracy specifications.
Removing the Printed Wiring Board Assembly
1. Separate the module base from the housing by performing the Removing the Module Base procedure.
2. Remove three screws (key 33).
3. Lift the PWB assembly (key 50) straight out of the module base (key 2).
4. Ensure that the O‐rings (key 40) remain in the pressure sensor bosses on the module base assembly (key 2) after the
PWB assembly (key 50) has been removed.
Replacing the PWB Assembly and Setting the DIP Switch
1. Apply silicone lubricant to the pressure sensor O‐rings (key 40) and install them on the pressure sensor bosses in the
module base assembly.
2. Properly orient the PWB assembly (key 50) as you install it into the module base. The two electrical leads from the
I/P converter (key 41) must guide into their receptacles in the PWB assembly and the pressure sensor bosses on the
module base must fit into their receptacles in the PWB assembly.
3. Push the PWB assembly (key 50) into its cavity in the module base.
4. Install and tighten three screws (key 33) to a torque of 1 NSm (10.1 lbfSin).
69
Page 70

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
5. Set the DIP switch on the PWB assembly according to table 6‐2. On units that have the optional 4-20 mA position
transmitter or switch hardware installed, set the Transmitter or Switch option according to table 6‐3.
Table 6‐2. DIP Switch Configuration
(1)
Switch Label Operational Mode DIP Switch Position
PT-PT 420 mA PointtoPoint Loop LEFT
Multi 24 VDC MultiDrop Loop RIGHT
1. Refer to figure 6‐5 for switch location.
Table 6‐3. Output Switch Configuration
(1)
Switch Label/Function DIP Switch Position
Transmitter LEFT
Switch RIGHT
1. Refer to figure 6‐5 for switch location.
Figure 6‐5. Printed Wiring Board (PWB) Connections and Settings
TRAVEL SENSOR
CONNECTOR
TRAVEL SENSOR
CONNECTOR
TRANSMITTER/SWITCH
SELECTION
TERMINAL BOX
CONNECTOR
OPERATIONAL
MODE SELECTION
X0463
TERMINAL BOX
CONNECTOR
OPERATIONAL
MODE SELECTION
X0432
Note
For the digital valve controller to operate with a 4 to 20 mA control signal, be sure the DIP switch is in the point‐to‐point loop
position.
6. Reassemble the module base to the housing by performing the Replacing the Module Base procedure.
7. Setup and calibrate the DVC6005 HW2 base unit.
70
Page 71

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
Pneumatic Relay
Refer to figure 7‐2 for key number locations. The pneumatic relay (key 24) is located on the front of the module base.
Note
After relay submodule replacement, calibrate the digital valve controller to maintain accuracy specifications.
Removing the Pneumatic Relay
1. Loosen the four screws that attach the relay (key 24) to the module base. These screws are captive in the relay.
2. Remove the relay.
Replacing the Pneumatic Relay
1. Visually inspect the holes in the module base to ensure they are clean and free of obstructions. If cleaning is
necessary, do not enlarge the holes.
2. Apply silicone lubricant to the relay seal and position it in the grooves on the bottom of the relay as shown in
figure 6‐6. Press small seal retaining tabs into retaining slots to hold relay seal in place.
3. Position the relay (with shroud) on the module base. Tighten the four screws, in a crisscross pattern, to a final
torque of 2 NSm (20.7 lbfSin).
4. Using the Field Communicator, verify that the value for the parameter Relay matches the relay type installed.
5. After replacing the relay and verifying the relay type, calibrate travel or perform touch‐up calibration to maintain
accuracy specifications
Figure 6‐6. Pneumatic Relay Assembly
W8074
RELAY SEAL
71
Page 72

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
Gauges, Pipe Plugs, or Tire Valves
Depending on the options ordered, the DVC6000 HW2 will be equipped with either gauges (key 47), pipe plugs (key
66), or tire valves (key 67). Single‐acting direct instruments will also have a screen (key 236, figure 7‐3). These are
located on the top of the module base next to the relay.
Perform the following procedure to replace the gauges, tire valves, or pipe plugs. Refer to figure 7‐2 for key number
locations.
1. Remove the front cover (key 43).
2. Remove the gauge, pipe plug, or tire valve as follows:
For gauges (key 47), the flats are on the gauge case. Use a wrench on the flats of the gauge to remove the gauge from
the module base. For double‐acting instruments, to remove the supply gauge remove one of the output gauges.
For pipe plugs (key 66) and tire valves (key 67), use a wrench to remove these from the module base.
3. Apply pipe thread sealant (key 64) to the threads of the replacement gauges, pipe plugs, or tire valves.
4. Using a wrench, screw the gauges, pipe plugs, or tire valves into the module base.
Terminal Box
WARNING
Refer to the Maintenance WARNING at the beginning of this section.
Refer to figure 7‐2 for key number locations.
The terminal box is located on the housing and contains the terminal strip assembly for field wiring connections.
Removing the Terminal Box
WARNING
To avoid personal injury or property damage caused by fire or explosion, remove power to the instrument before removing
the terminal box cover in an area which contains a potentially explosive atmosphere or has been classified as hazardous.
1. Loosen the set screw (key 58) in the cap (key 4) so that the cap can be unscrewed from the terminal box.
2. After removing the cap (key 4), note the location of field wiring connections and disconnect the field wiring from
the terminal box.
3. Separate the module base from the housing by performing the Removing the Module Base procedure.
4. Remove the screw (key 72). Pull the terminal box assembly straight out of the housing.
5. Remove two wire retainers (key 44), internal and external to the terminal box.
72
Page 73

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
Replacing the Terminal Box
Note
Inspect all O‐rings for wear and replace as necessary.
1. Install two wire retainers (key 44), internal and external to the terminal box.
2. Apply silicone lubricant to the O‐ring (key 34) and install the O‐ring over the stem of the terminal box.
3. Insert the terminal box assembly stem into the housing until it bottoms out. Position the terminal box assembly so
that the hole for the screw (key 72) in the terminal box aligns with the threaded hole in the housing. Install the
screw (key 72).
4. Connect the terminal box connector to the PWB assembly (key 50). Orientation of the connector is required.
5. Reassemble the module base to the housing by performing the Replacing the Module Base procedure.
6. Reconnect the field wiring as noted in step 2 in the Removing the Terminal Box procedure.
7. Apply silicone lubricant to the O‐ring (key 36) and install the O‐ring over the 2‐5/8 inch threads of the terminal box.
Use of a tool is recommended to prevent cutting the O‐ring while installing it over the threads.
8. Apply lubricant (key 63) to the 2‐5/8 inch threads on the terminal box to prevent seizing or galling when the cap is
installed.
9. Screw the cap (key 4) onto the terminal box.
10. Install a set screw (key 58) into the cap (key 4). Loosen the cap (not more than 1 turn) to align the set screw over
one of the recesses in the terminal box. Tighten the set screw (key 58).
11. Apply sealant (key 64) to the conduit entrance plug (key 62) and install it into the unused conduit entry of the
terminal box.
Travel Sensor
WARNING
Refer to the Maintenance WARNING at the beginning of this section.
Replacing the travel sensor requires removing the remote feedback unit from the actuator.
WARNING
To avoid personal injury or property damage caused by fire or explosion, remove power to the instrument before removing
the travel sensor assembly in an area which contains a potentially explosive atmosphere or has been classified as
hazardous.
73
Page 74

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
Disassembly
Note
If the feedback arm (key 79) or feedback arm assembly (key 84) is removed from the digital valve controller, the travel sensor
assembly [i.e. potentiometer/bushing assembly (key 223)] must be recalibrated.
DVC6015 Remote Feedback Unit
Refer to figure 7‐4 for key number locations.
1. Remove piping and fittings from the instrument.
2. Disconnect the adjustment arm from the connector arm and the feedback arm, see figure 6‐7.
3. Remove the instrument from the actuator.
4. Loosen the screw (key 80) that secures the feedback arm (key 79) to the travel sensor shaft.
5. Remove the feedback arm (key 79) from the travel sensor shaft.
6. Disconnect the three travel sensor assembly wires from the terminals.
7. Remove the screw (key 72) that fastens the travel sensor assembly to the housing.
8. Pull the travel sensor assembly (key 223) straight out of the housing.
Figure 6‐7. FIELDVUE DVC6015 Adjustment Arm
FEEDBACK ARM (KEY 79)
ADJUSTMENT ARM
CONNECTOR ARM
74
X0910
Page 75

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
DVC6025 Remote Feedback Unit
Refer to figure 7‐5 for key number locations.
1. Remove piping and fittings from the instrument.
2. Remove the instrument from the actuator.
3. Disconnect the bias spring (key 82) from the feedback arm assembly (key 84) and the arm assembly (key 91).
Remove the mounting bracket (key 74) from the back of the digital controller. If the torsion spring (key 93) needs to
be replaced, ensure that the shaft on which it is installed is smooth and free of rough spots. Replace the entire
feedback arm assembly if necessary.
4. Loosen the screw (key 80) that secures the arm assembly to the travel sensor assembly shaft.
5. Remove the arm assembly (key 91) from the travel sensor assembly shaft.
6. Disconnect the three travel assembly wires from the terminals.
7. Remove the screw (key 72) that fastens the travel sensor assembly to the housing.
8. Pull the travel sensor assembly (key 223) straight out of the housing.
DVC6035 Remote Feedback Unit
Refer to figure 7‐6 for key number locations.
1. Remove piping and fittings from the instrument.
2. Remove the instrument from the actuator. Loosen the screw (key 80) that secures the feedback arm (key 79) to the
travel sensor shaft. Remove the feedback arm from the travel sensor assembly shaft.
3. Disconnect the three travel sensor assembly wires from the terminals.
4. From within the housing, unscrew the travel sensor assembly (key 223) from the housing.
Assembly
Note
If the feedback arm (key 79) or feedback arm assembly (key 84) is removed from the digital valve controller, the travel sensor
assembly must be recalibrated.
DVC6015 Remote Feedback Unit
Refer to figure 7‐4 for key number locations.
1. Insert the travel sensor assembly (key 223) into the housing (key 1). Secure the assembly with screw (key 72).
2. Connect the travel sensor assembly wires to the terminals as follows:
red terminal 1
white terminal 2
black terminal 3
3. Loosely assemble the bias spring (key 78), screw (key 80), plain washer (key 163), and nut (key 81) to the feedback
arm (key 79), if not already installed.
4. Attach the feedback arm (key 79) to the travel sensor assembly shaft.
75
Page 76

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
5. Using a Field Communicator, perform the appropriate Travel Sensor Adjust procedure in the Calibration section.
Install the remote feedback unit on the actuator when the travel sensor adjustment is complete.
Note
If a Field Communicator is not available, perform the Travel Sensor Adjustment with Multimeter procedure below.
Travel Sensor Adjustment with a Multimeter (DVC6015)
1. Align the feedback arm (key 79) to the housing (key 1) by inserting the alignment pin (key 46) through the hole
marked “A” on the feedback arm. Fully engage the alignment pin into the tapped hole in the side of the housing.
Position the feedback arm so that the surface is flush with the end of the travel sensor shaft.
2. Connect a multimeter set to a resistance range of 50,000 ohms. Measure the resistance between terminals 1 and 3
of the remote feedback unit. Refer to figure 6‐8 for terminal location. The resistance should be between 40,000 and
50,000 ohms.
3. Multiply the result in step 2 by 0.046 to get a calculated resistance. The calculated resistance should be in the range
of 1840 to 2300 ohms.
4. Re‐range the multimeter to a resistance of 3000 ohms between terminals 2 and 3 of the remote feedback unit.
Refer to figure 6‐8 for terminal location.
5. Adjust the travel sensor shaft to obtain the calculated resistance determined in step 3, $100 ohms.
Note
In the next step, be sure the feedback arm surface remains flush with the end of the travel sensor shaft.
6. While observing the resistance, tighten the screw (key 80) to secure the feedback arm to the travel sensor shaft. Be
sure the resistance reading remains at the calculated resistance determined in step 3, $100 ohms. Paint the screw
to discourage tampering with the connection.
7. Disconnect the multimeter from the travel sensor connector.
8. Travel sensor adjustment is complete. Install the remote feedback unit on the actuator.
DVC6025 Feedback Unit
Refer to figure 7‐5 for DVC6025 key number locations.
1. Insert the travel sensor assembly (key 223) into the housing. Secure the assembly with screw (key 72).
2. Connect the travel sensor assembly wires to the terminals as follows:
red terminal 1
white terminal 2
black terminal 3
3. Loosely assemble the screw (key 80), plain washer (key 163), and nut (key 81) to the arm assembly (key 91), if not
already installed.
4. Attach the arm assembly (key 91) to the travel sensor assembly (key 223) shaft.
76
Page 77

Instruction Manual
D103785X012
Figure 6‐8. Remote Feedback Terminals; Potentiometer Resistance Measurement
TERMINAL 2
TERMINAL 3
TERMINAL 1
Maintenance and Troubleshooting
June 2017
5. Using a Field Communicator, perform the appropriate Travel Sensor Adjust procedure in the Calibration section.
Install the remote feedback unit on the actuator when travel sensor adjustment is complete.
Note
If a Field Communicator is not available, perform the Travel Sensor Adjustment with Multimeter procedure below.
Travel Sensor Adjustment with a Multimeter (DVC6025)
1. Connect a multimeter set to a resistance range of 50,000 ohms. Measure the resistance between terminals 1 and 3
of the remote feedback unit. Refer to figure 6‐8 for terminal location. The resistance should be between 40,000 and
50,000 ohms.
2. Multiply the result in step 1 by 0.142 to get a calculated resistance. The calculated resistance should be in the range
of 5680 to 7100 ohms.
3. Re‐range the multimeter to a resistance of 7000 ohms between terminals 2 and 3 of the remote feedback unit.
Refer to figure 6‐8 for terminal location.
4. Hold the arm assembly (key 91) in a fixed position so that the arm is parallel to the housing back plane and pointing
toward the terminal box. Position the arm assembly so that the outer surface is flush with the end of the travel
sensor shaft.
5. Adjust the travel sensor shaft to obtain the calculated resistance determined in step 2, $100 ohms.
Note
In the next step, be sure the arm assembly outer surface remains flush with the end of the travel sensor shaft.
77
Page 78

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
6. While observing the resistance, tighten the screw (key 80) to secure the feedback arm to the travel sensor shaft. Be
sure the resistance reading remains at the calculated resistance determined in step 2, $100 ohms. Paint the screw
to discourage tampering with the connection.
7. Disconnect the multimeter from the travel sensor connector.
8. Apply anti‐seize (key 64) to the pin portion of the arm assembly (key 91).
9. Position the mounting bracket over the back of the digital valve controller. Push the feedback arm assembly
(key 84) toward the housing and engage the pin of the arm assembly into the slot in the feedback arm.
10. Install the mounting bracket (key 74).
11. Install the bias spring (key 82) as shown in figure 6‐9.
12. Travel sensor adjustment is complete. Install the remote feedback unit on the actuator.
Figure 6‐9. FIELDVUE DVC6025 digital Valve Controller, Bias Spring (key 82) Installation
BIAS SPRING
(KEY 82)
FEEDBACK ARM
ASSEMBLY
(KEY 84)
ARM ASSEMBLY
(KEY 91)
NOTE:
INSTALL BIAS SPRING WITH SMALLER DIAMETER HOOK CONNECTED TO ARM ASSEMBLY (KEY 91)
AND WITH BOTH HOOK OPENINGS TOWARD CENTER OF BRACKET.
DVC6035 Remote Feedback Unit
Refer to figure 7‐6 for DVC6035 key number locations.
1. Apply lubricant (key 63) to the travel sensor assembly threads.
2. Screw the travel sensor assembly (key 223) into the housing until it is tight.
3. Connect the travel sensor wires to the terminals as follows:
red terminal 1
white terminal 2
black terminal 3
78
Page 79

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
4. Loosely assemble the bias spring (key 78), screw (key 80), plain washer (key 163), and nut (key 81) to the feedback
arm (key 79), if not already installed.
5. Attach the feedback arm (key 79) to the travel sensor shaft.
6. Using a Field Communicator, perform the appropriate Travel Sensor Adjust procedure in the Calibration section.
Install the remote feedback unit on the actuator when travel sensor adjustment is complete.
Note
If a Field Communicator is not available, perform the Travel Sensor Adjustment with a Multimeter procedure below.
Travel Sensor Adjustment with a Multimeter (DVC6035)
1. Align the feedback arm (key 79) to the housing (key 1) by inserting the alignment pin (key 46) through the hole
marked “A” on the feedback arm. Fully engage the alignment pin into the tapped hole in the housing. Position the
feedback arm so that the outer surface is flush with the end of the travel sensor shaft.
2. Connect a multimeter set to a resistance range of 50,000 ohms. Measure the resistance between terminals 1 and 3
of the remote feedback unit. Refer to figure 6‐8 for terminal location. The resistance should be between 40,000 and
50,000 ohms.
3. Multiply the result in step 2 by 0.042 to get a calculated resistance. The calculated resistance should be in the range
of 1680 to 2100 ohms.
4. Re‐range the multimeter to a resistance of 3000 ohms between terminals 2 and 3 of the remote feedback unit.
Refer to figure 6‐8 for terminal location.
5. Adjust the travel sensor shaft to obtain the calculated resistance determined in step 3, $100 ohms.
Note
In the next step, be sure the feedback arm outer surface remains flush with the end of the travel sensor shaft.
6. While observing the resistance, tighten the screw (key 80) to secure the feedback arm to the travel sensor shaft. Be
sure the resistance reading remains at the calculated resistance determined in step 3, $100 ohms. Paint the screw
to discourage tampering with the connection.
7. Disconnect the multimeter from the travel sensor connector.
8. Travel sensor adjustment is complete. Install the remote feedback unit on the actuator as described in the
Installation section.
79
Page 80

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
Troubleshooting
If communication or output difficulties are experienced with the instrument, refer to the troubleshooting chart in
table 6‐4. Also see the DVC6000 HW2 Troubleshooting Checklist on page 83.
Checking Voltage Available
WARNING
Personal injury or property damage caused by fire or explosion may occur if this test is attempted in an area which contains
a potentially explosive atmosphere or has been classified as hazardous.
To check the Voltage Available at the instrument, perform the following:
1. Connect the equipment in figure 2‐3 to the field wiring in place of the FIELDVUE instrument.
2. Set the control system to provide maximum output current.
3. Set the resistance of the 1 kilohm potentiometer shown in figure 2‐3 to zero.
4. Record the current shown on the milliammeter.
5. Adjust the resistance of the 1 kilohm potentiometer until the voltage read on the voltmeter is 10.0 volts.
6. Record the current shown on the milliammeter.
7. If the current recorded in step 6 is the same as that recorded in step 4 (± 0.08 mA), the voltage available is
adequate.
8. If the voltage available is inadequate, refer to Section 2, Wiring Practices.
Restart Processor
This is a “soft” reset of the device. This procedure can only be performed while the instrument is out of service. A soft
reset will immediately put into effect changes that have been sent to the instrument. Also, if the device is configured
to shutdown on an alert, the soft reset will clear the shutdown.
80
Page 81

Instruction Manual
D103785X012
Table 6‐4. Instrument Troubleshooting
Symptom Possible Cause Action
1. Analog input reading at
instrument does not match
actual current provided.
2. Instrument will not
communicate.
3. Instrument will not
calibrate, has sluggish
performance or oscillates.
1a. Control mode not Analog. 1a. Check the control mode using the Field Communicator. If in
1b. Low control system compliance voltage. 1b. Check system compliance voltage (see Wiring Practices in
1c. Instrument shutdown due to self test failure. 1c. Check instrument status using the Field Communicator (see
1d. Analog input sensor not calibrated. 1d. Calibrate the analog input sensor (see Analog Input
1e. Current leakage. 1e. Excessive moisture in the terminal box can cause current
2a. Insufficient Voltage Available. 2a. Calculate Voltage Available (see Wiring Practices in the
2b. Controller output Impedance too low. 2b. Install a HART filter after reviewing Control System
2c. Cable capacitance too high. 2c. Review maximum cable capacitance limits (see Wiring
2d. HART filter improperly adjusted. 2d. Check filter adjustment (see the appropriate HART filter
2e. Improper field wiring. 2e. Check polarity of wiring and integrity of connections. Make
2f. Controller output providing less than 4 mA to loop. 2f. Check control system minimum output setting, which should
2g. Disconnected loop wiring cable at PWB. 2g. Verify connectors are plugged in correctly.
2h. PWB DIP switch not set properly. 2h. Check for incorrect setting or broken DIP switch on the back
2j. PWB failure. 2j. Use a 4-20 mA current source to apply power to the
2k. Polling address incorrect. 2k. Use the Field Communicator to set the polling address (refer
2l. Defective terminal box. 2l. Check continuity from each screw terminal to the
2m. Defective Field Communicator or ValveLink
modem cable.
2n. ValveLink modem defective or not compatible
with PC.
2p. ValveLink hardlock defective or not programmed. 2p. Replace if defective or return to factory for programming.
3a. Travel sensor seized, will not turn. 3a. Rotate feedback arm to ensure it moves freely. If not, replace
3b. Broken travel sensor wire(s). 3b. Inspect wires for broken solder joint at potentiometer or
3c. Travel sensor misadjusted. 3c. Perform Travel Sensor Adjust procedure in the Calibration
3d. Open travel sensor. 3d. Check for continuity in electrical travel range. If necessary,
3e. Cables not plugged into PWB correctly. 3e. Inspect connections and correct.
3f. Feedback arm loose on potentiometer. 3f. Perform Travel Sensor Adjust procedure in the Calibration
Maintenance and Troubleshooting
June 2017
the Digital or Test mode, the instrument receives its set point as
a digital signal. Control is not based on input current. Change
Control Mode to Analog.
the Installation section.
Viewing Instrument Status in the Viewing Device Information
section).
Calibration in the Calibration section).
leakage. Typically the current will vary randomly if this is the
case. Allow the inside of the terminal box to dry, then retest.
Installation section). Voltage Available should be greater than or
equal to 10 VDC.
Compliance Voltage requirements (see Wiring Practices in the
Installation section).
Practices in the Installation section).
instruction manual).
sure cable shield is grounded only at the control system.
not be less than 3.8 mA.
of the PWB. Reset switch or replace PWB, if switch is broken. See
table 6‐2 for switch setting information
instrument. Terminal voltage across the LOOP+ and LOOPterminals should be 8 to 9.5 VDC. If the terminal voltage is not 8
to 9.5 VDC, replace the PWB.
to the Detailed Setup section). From the Utility menu, select
Configure Communicator and Polling. Select Always Poll. Set the
instrument polling address to 0.
corresponding PWB connector pin. If necessary, replace the
terminal box assembly.
2m. If necessary, repair or replace cable.
2n. Replace ValveLink modem.
the travel sensor (pot/bushing) assembly.
broken wire. Replace travel sensor (pot/bushing) assembly.
section.
replace pot/bushing assembly.
section.
81
Page 82

Maintenance and Troubleshooting
June 2017
Table 6‐4. Instrument Troubleshooting
3. Instrument will not
calibrate, has sluggish
performance or oscillates.
4. ValveLink diagnostic tests
provide erroneous results.
5. Field Communicator does
not turn on.
3g. Feedback arm bent/damaged or bias spring
missing/damaged.
3h. Configuration errors. 3h. Verify configuration:
3j. Restricted pneumatic passages in I/P converter. 3j. Check screen in I/P converter supply port of the module base.
3k. O‐ring(s) between I/P converter ass'y missing or hard
and flattened losing seal.
3l. I/P converter ass'y damaged/corroded/clogged. 3l. Check for bent flapper, open coil (continuity), contamination,
3m. I/P converter ass'y out of spec. 3m. I/P converter assembly nozzle may have been adjusted.
3n. Defective module base seal. 3n. Check module base seal for condition and position. If
3p. Defective relay. 3p. Depress relay beam at adjustment location in shroud, look
3q. Defective 67CFR regulator, supply pressure gauge
jumps around.
4a. Bent or defective pressure sensor. 4a. Replace PWB.
4b. Pressure sensor O‐ring missing. 4b. Replace O‐ring.
5a. Battery pack not charged. 5a. Charge battery pack.
Instruction Manual
D103785X012
ActionPossible CauseSymptom
3g. Replace feedback arm and bias spring.
If necessary, set protection to None.
If Out of Service, place In Service.
Check:
Travel Sensor Motion
Tuning set
Zero control signal
Feedback Connection
Control mode (should be Analog)
Restart control mode (should be Analog)
Replace if necessary. If passages in I/P converter restricted,
replace I/P converter.
3k. Replace O‐ring(s).
staining, or dirty air supply. Coil resistance should be between
1680 ‐ 1860 ohms. Replace I/P assembly if damaged, corroded,
clogged, or open coil.
Verify drive signal (55 to 80% for double‐acting; 60 to 85% for
single‐acting) with the valve off the stops. Replace I/P converter
ass'y if drive signal is continuously high or low.
necessary, replace seal.
for increase in output pressure. Remove relay, inspect relay seal.
Replace relay seal or relay if I/P converter ass'y good and air
passages not blocked. Check relay adjustment.
3q. Replace 67CFR regulator.
Note: Battery pack can be charged while attached to the Field
communicator or separately. The Field Communicator is fully
operable while the battery pack is charging. Do not attempt to
charge the battery pack in a hazardous area.
82
Page 83

Instruction Manual
D103785X012
Maintenance and Troubleshooting
June 2017
DVC6000 HW2 Troubleshooting Checklist
1. Instrument serial number as read from nameplate ________________________________________________
2. Is the digital valve controller responding to the control signal? Yes _________ No _________
If not, describe ___________________________________________________________________________
3. Measure the voltage across the “Loop -” and Loop +” terminal box screws when the commanded current is 4.0 mA
and 20.0 mA: __________V @ 4.0 mA __________V @ 20.0 mA.
(These values should be around 8.6 V @ 4.0 mA and 8.8 V @ 20 mA.)
4. Is it possible to communicate via HART to the digital valve controller? Yes _________ No _________
5. What is the Diagnostic Tier of the digital valve controller? AC ____ HC ____ AD ____ PD ____ ODV____
6. What is the firmware version of the digital valve controller? ______________
7. What is the hardware version of the digital valve controller? ______________
8. Is the digital valve controller's Instrument Mode “In Service”? Yes _________ No _________
9. Is the digital valve controller's Control Mode set to “Analog”? Yes _________ No _________
10. Is it on Travel or Pressure control?
11. What are the following parameter readings?
Input Signal _________ Drive Signal _________%
Supply Pressure _________ Pressure A _________ Pressure B _________
Travel Target _________% Travel _________%
12. What are the following alert readings?
Fail alerts _______________________________________________________________________________
Valve alerts _____________________________________________________________________________
Operational status ________________________________________________________________________
Alert event record entries __________________________________________________________________
13. Export ValveLink data (if available) for the device (Status Monitor, Detailed Setup, etc.).
Mounting
1. Which DVC6000 HW2 do you have? DVC6005 HW2 w/ DVC6015 ____ DVC6025 ____ DVC6035 ____
2. What Make, Brand, Style, Size, etc. actuator is the DVC6000 HW2 mounted on? ________________________
3. What is the full travel of the valve? ____________________________________________________________
4. What is the Mounting Kit part number? _________________________________________________________
5. If mounting kits are made by LBP/Customer, please provide pictures of installation.
6. Is the Mounting kit installed per the instructions? Yes _________ No _________
7. What is the safe position of the valve? Fail closed _________ Fail open _________
83
Page 84

Maintenance and Troubleshooting
June 2017
Instruction Manual
D103785X012
84
Page 85

Instruction Manual
D103785X012
Parts
June 2017
Section 7 Parts77
Parts Ordering
Whenever corresponding with your Emerson sales office or Local Business Partner about this equipment, always
mention the controller serial number.
WARNING
Use only genuine Fisher replacement parts. Components that are not supplied by Emerson Automation Solutions should
not, under any circumstances, be used in any Fisher instrument. Use of components not supplied by Emerson Automation
Solutions may void your warranty, might adversely affect the performance of the instrument, and could cause personal
injury and property damage.
Parts Kits
Kit Description Part Number
1* Elastomer Spare Parts Kit (kit contains parts to
service one digital valve controller)
Standard 19B5402X012
Extreme Temperature option
(fluorosilicone elastomers) 19B5402X022
2* Small Hardware Spare Parts Kit (kit contains parts
to service one digital valve controller) 19B5403X012
3 Conversion Kit, DVC6015 to DVC6025 19B5405X012
4 Conversion Kit, DVC6025 to DVC6015 14B5072X112
5 Alignment Pin Kit
[kit contains 15 alignment pins (key 46)] 14B5072X092
6* Seal Screen Kit
[kit contains 25 seal screens (key 231)
and 25 O-rings (key 39)]
Standard and Extreme Temperature option 14B5072X182
(fluorosilicone elastomers)
Kit Description Part Number
Note
The following terminal boxes are only compatible with PWB Assembly
electronics hardware revision 2 (HW2) (key 50), as shown in figure 7‐1.
Use only with replace in-kind.
7 Terminal Box Kit
Without I/O Package
Standard Temperature (nitrile elastomers) 19B5401X142
Extreme Temperature (fluorosilicone elastomers 19B5401X152
Without I/O Package, Natural Gas Approved
Standard Temperature (nitrile elastomers) 19B5401X162
Extreme Temperature (fluorosilicone elastomers 19B5401X172
With I/O Package
Standard Temperature (nitrile elastomers) 19B5401X182
Extreme Temperature (fluorosilicone elastomers) 19B5401X192
*Recommended spare
85
Page 86

Parts
June 2017
Instruction Manual
D103785X012
Kit Description Part Number
8* I/P Converter Kit
Standard 38B6041X152
For Extreme Temperature option
(fluorosilicone elastomers) 38B6041X132
9 Adjustment Arm Kit
(includes washer, nut and adjustment arm) 14B5072X132
10* Spare Module Base Assembly Kit
[kit contains module base (key 2); drive screws, qty. 2,
(key 11); shield/label (key 19); hex socket cap screw, qty. 3,
(key 38); self tapping screw, qty. 2 (key 49); pipe plug, qty. 3
(key 61); retaining ring, qty. 3 (key 154); screen (key 236);
and flame arrestors, qty. 3 (key 243)]
11* Spare Shroud Kit GE29183X012
12 Remote Travel Sensor Assembly
Note
Contact your Emerson sales office
Travel Sensor Assembly ordering information.
or Local Business Partner for Remote
GE18654X012
Kit Description Part Number
DVC6005 HW2 Base Unit
(see figure 7‐2)
Housing
1 Housing
11 Drive Screw (2 req'd)
20 Shield
52 Vent, plastic
74 Mounting Bracket
248 Screw, hex head
249 Screw, hex head
250 Spacer
267 Standoff
271 Screen
Common Parts
16* O-ring
29 Warning label, for use only with LCIE hazardous area
classifications
33 Mach Screw, pan hd, SST
38 Cap Screw, hex socket, SST
43* Cover Assembly (includes cover screws)
Standard 38B9580X022
Extreme temperature option
(fluorosilicone elastomers) 38B9580X032
(16)
(4 req'd)
(16)
(1)
(3 req'd)
(2)
(16)
(16)
(2 req'd)
(16)
(4 req'd)
(4 req'd)
(2)
(3 req'd)
(2,10)
(3 req'd)
13 Remote Terminal Box Kit GE00418X012
14 Feedback Unit
DVC6015 49B7986X012
DVC6025 long arm 49B7987X012
DVC6025 Short Arm 49B7987X022
DVC6035 49B7988X012
DVC6035 (for GX actuator) 49B7988X022
15 Feedback Unit Termination Strip Kit GE00419X012
16 Pipestand/Wall Mounting Kit GE00420X012
Parts List
Note
Contact your Emerson sales office or Local Business Partner for Part
Ordering information.
Note
Parts with footnote numbers shown are available in parts kits; see
footnote information at the bottom of the page.
48 Nameplate
49 Screw, self tapping (2 req'd)
63 Lithium grease (not furnished with the instrument)
64 Pipe thread sealant (not furnished with the instrument)
65 Lubricant, silicone sealant (not furnished with the instrument)
154 Retaining Ring
237 Module Base Seal
(2)
(3 req'd)
(1)
(10)
Module Base
2 Module Base
11 Drive Screw
12 O-ring
19 Shield Assembly
61 Pipe Plug, hex socket
236 Screen, for single-acting direct units only
243 Flame Arrestor Assembly
(10)
(10)
(2 req'd)
(1)
(10)
(10)
(3 req'd)
(10)
(3 req'd)
(10)
I/P Converter Assembly
(2,11)
23 Cap Screw, hex socket, SST
39* O-ring
41 I/P Converter
169 Shroud
210* Boot, nitrile
231* Seal Screen
*Recommended spare
1. Available in the Elastomer Spare Parts Kit
2. Available in the Small Hardware Spare Parts Kit
6. Available in the Seal Screen Kit
8. Available in the I/P Converter Kit
10. Available in the Spare Module Base Assembly Kit
11. Available in the Spare Shroud Kit
16. Available in the Pipestand/Wall Mounting Kit
(1,8)
(8)
(8, 11)
(1,8)
(2 req'd) (also see figure 6‐4)
(1,6,8)
(4 req'd)
86
Page 87

Instruction Manual
D103785X012
Parts
June 2017
Key Description Part Number
Relay
24* Relay Assembly, (includes shroud, relay seal, mounting screws)
Standard
Single-acting direct (relay C) 38B5786X132
Double-acting (relay A) 38B5786X052
Single-acting reverse (relay B) 38B5786X092
Low Bleed
Single-acting direct (relay C) 38B5786X152
Double-acting (relay A) 38B5786X072
Single-acting reverse (relay B) 38B5786X112
Extreme Temperature option (fluorosilicone elastomers)
Standard Bleed
Single-acting direct (relay C) 38B5786X142
Double-acting (relay A) 38B5786X032
Single-acting reverse (relay B) 38B5786X102
Low Bleed
Single-acting direct (relay C) 38B5786X162
Double-acting (relay A) 38B5786X082
Single-acting reverse (relay B) 38B5786X122
Terminal Box
4 Terminal Box Cap
34* O-ring
36* O-ring
(1,7,13)
(1,7,13)
44 Wire Retainer, pl stl
58 Set Screw, hex socket, SST
72 Cap Screw, hex socket, SST
164 Terminal Box Assembly
(13)
(2)
(6 req'd) (not shown)
(2,13)
(2,13)
(7)
Figure 7‐1. Terminal Box
WITHOUT I/O PACKAGE
Key Description
WITH I/O PACKAGE
PWB Assembly
50* PWB Assembly for DVC6005 HW2
Note
The following PWB Assemblies are only compatible with the terminal
boxes shown in figure 7‐1.
Feedback Connections Terminal Box
4 Terminal Box Cap
34* O-ring
36* O-ring
(1,7,13)
(1,7,13)
44 Wire Retainer, pl stl
58 Set Screw, hex socket, SST
62 Pipe Plug, hex hd, SST
72 Cap Screw, hex socket, SST
262 Adapter
263* O-ring
(13)
(13)
Standard
Extreme temperature option, (fluorosilicone)
264 Terminal Box Assembly, remote
*Recommended spare
1. Available in the Elastomer Spare Parts Kit
2. Available in the Small Hardware Spare Parts Kit
7. Available in the Terminal Box Kit
13. Available in the Remote Terminal Box Kit
(13)
(2,14)
(5 req'd) (not shown)
(2,13)
(13)
(2,13)
(3 req'd)
(13)
Hardware Revision 2 (HW2), without I/O Package
For instrument level HC
For instrument level AD
For instrument level PD
For instrument level ODV
Hardware Revision 2 (HW2), with I/O Package
For instrument level HC
For instrument level AD
For instrument level PD
For instrument level ODV
87
Page 88

Parts
June 2017
Instruction Manual
D103785X012
Key Description Part Number
Pressure Gauges, Pipe Plugs, or
Tire Valve Assemblies
(see figure 7‐3)
47* Pressure Gauge, nickel-plated brass case, brass connection
Double-acting (3 req'd); Single-acting (2 req'd)
PSI/MPA Gauge Scale
To 60 PSI, 0.4 MPa 18B7713X042
To 160 PSI, 1.1 MPa 18B7713X022
PSI/bar Gauge Scale
To 60 PSI, 4 bar 18B7713X032
To 160 PSI, 11 bar 18B7713X012
PSI/KG/CM
To 60 PSI, 4 KG/CM
To 160 PSI, 11 KG/CM
66 Pipe Plug, hex hd
For double-acting and single acting direct w/gauges
(none req'd)
For single-acting reverse w/gauges (1 req'd)
For all units w/o gauges (3 req'd)
67 Tire Valve Assembly (3 req'd)
Not for mounting on 1250 and 1250R actuators.
2
Gauge Scale
2
2
18B7713X072
18B7713X082
Key Description Part Number
(14,15)
(14)
(14)
(14)
, DVC6015 only
(2,14)
(14)
(14)
(DVC6015 only)
(14,15)
(14)
(14)
(14)
(2 req'd) (DVC6015 only)
107 Mounting Bracket
Not for mounting on 1250 and 1250R actuators.
Mounting parts for 1250 and 1250R actuators are
included in the mounting kit for these actuators.
- - - Feedback Linkage Shield
Up to 50.4 mm (2 inch) travel
All sliding-stem actuators except 585C size 60
50.4 mm (2 inch) to 104mm (4 inch) travel
All sliding-stem actuators except 585C size 60
585C size 60, 19 mm (0.75 inch) to
104 mm (4 inch) travel
131 Retainer Wire
163 Plain Washer, SST
223* Potentiometer/Bushing Assembly (Travel Sensor Assembly)
DVC6015 and DVC6025
DVC6035
251 Feedback housing
252 Assembly Plate Shield
253 Terminal bracket
254 Terminal Strip
255 Terminal Cap
256 O-ring, fluorosilicone
257 Machine Screw, pan head
258 Label, cover
260 Hex Nut, SST (2 req'd)
261 Nameplate
265 Plug
(14)
(DVC6015 and DVC6035 only)
DVC6025 (see figure 7‐5)
Remote Feedback Units
Common Parts
DVC6015, DVC6025, and DVC6035
(see figures 7‐4, 7‐5, and 7‐6)
23 Cap Screw, hex socket
44 Wire Retainer, pl stl
46 Alignment Pin
for DVC6015 and DVC6035
49 Screw, self tapping (2 req'd)
58 Set Screw, hex socket
62 Pipe Plug, hex hd, SST
64 Anti-seize compound (not furnished with the instrument)
65 Lubricant, silicone sealant (not furnished with the instrument)
72 Cap Screw, hex socket
for DVC6015, and DVC6025
78 Bias Spring, SST
for DVC6015 and DVC6035
79 Feedback Arm
for DVC6015 and DVC6035
80 Cap Screw, hex socket, SST
81 Square Nut, SST
104 Cap Screw, hex hd
Not for mounting on 1250 and 1250R actuators.
Mounting parts for 1250 and 1250R actuators are
included in the mounting kit for these actuators.
(14,15)
(2 req'd)
(14,15)
(5,14)
(2,14)
(2,14)
(9 req'd)
(14)
(14)
(2,14)
(2 req'd)
(2,14)
(14)
(4 req'd), DVC6015 only
74 Mounting Bracket
82 Bias Spring, SST
83 Bearing Flange, PTFE-based (2 req'd)
84 Feedback Arm Assembly, SST
85 E-ring, pl stl (2 req'd)
86 Plain Washer, pl stl (2 req'd)
87 Follower Post, SST
88 Roller, SST/PTFE
89 Spring Lock Washer, pl stl
90 Hex Nut, pl stl
91 Arm Assembly, SST
92 Cap Screw, hex socket (4 req'd)
93 Torsion Spring, Feedback Arm
HART Filters
HF340, DIN rail mount 39B5411X022
HF341, DIN rail Mount, pass through (no filter) 39B5412X012
*Recommended spare
2. Available in the Small Hardware Spare Parts Kit
5. Available in Alignment Pin Kit
14. Available in Feedback Unit Kit
15. Available in Feedback Unit Termination Strip Kit
88
Page 89

Instruction Manual
D103785X012
Figure 7‐2. FIELDVUE DVC6005 HW2 Base Unit Assembly
Parts
June 2017
SECTION B-B
APPLY LUB, SEALANT
NOTES:
1. APPLY LUBRICANT KEY 65 TO ALL O-RINGS UNLESS OTHERWISE SPECIFIED
49B3261-C SHT 1 & 2
SECTION A-A
SECTION C-C
89
Page 90

Parts
June 2017
Figure 7‐2. FIELDVUE DVC6005 HW2 Base Unit Assembly (continued)
1
Instruction Manual
D103785X012
E
E
SECTION E-E
OUTPUT A
OUTPUT A
OUTPUT B
SUPPLY
WALL MOUNTING
APPLY LUB, SEALANT
NOTES:
1 SEE FIGURE 7‐3 FOR GAUGE CONFIGURATIONS
2. APPLY LUBRICANT KEY 65 TO ALL O-RINGS UNLESS OTHERWISE SPECIFIED
49B3261-C SHT 2 & 3
90
OUTPUT B
SUPPLY
PIPESTAND MOUNTING
Page 91

Instruction Manual
D103785X012
Figure 7‐3. Typical FIELDVUE DVC6005 HW2 Digital Valve Controller Gauge Configuration
1
Parts
June 2017
2
DOUBLE-ACTING
APPLY LUB, SEALANT
NOTE:
1 FOR SINGLE-ACTING DIRECT, OUTPUT B IS PLUGGED.
2 FOR SINGLE-ACTING REVERSE, OUTPUT A IS PLUGGED.
49B3261-C SHT 2
SINGLE-ACTING DIRECT SINGLE-ACTING REVERSE
91
Page 92

Parts
June 2017
Figure 7‐4. FIELDVUE DVC6015 Remote Feedback Unit Assembly
Instruction Manual
D103785X012
SECTION C-C
SECTION B-B
APPLY LUB, SEALANT
NOTE:
1. APPLY LUBRICANT KEY 65 TO ALL O-RINGS UNLESS OTHERWISE SPECIFIED
49B7986-A
SECTION A-A
SECTION D-D
92
Page 93

Instruction Manual
D103785X012
Figure 7‐5. FIELDVUE DVC6025 Remote Feedback Unit Assembly
SECTION B-B
Parts
June 2017
APPLY LUB, SEALANT, THREAD LOCK
NOTE:
1. APPLY LUBRICANT KEY 65 TO ALL O-RINGS UNLESS OTHERWISE SPECIFIED
49B7987-A
SECTION A-A
93
Page 94

Parts
June 2017
Figure 7‐6. FIELDVUE DVC6035 Remote Feedback Unit Assembly
Instruction Manual
D103785X012
SECTION C-C
SECTION B-B
APPLY LUB, SEALANT, THREAD LOCK
NOTE:
1. APPLY LUBRICANT KEY 65 TO ALL O-RINGS UNLESS OTHERWISE SPECIFIED
49B7988-A
SECTION A-A
94
Page 95

Instruction Manual
D103785X012
Principle of Operation
June 2017
Appendix A Principle of OperationAA−A
HART Communication
The HART (Highway Addressable Remote Transducer) protocol gives field devices the capability of communicating
instrument and process data digitally. This digital communication occurs over the same two‐wire loop that provides
the 4‐20 mA process control signal, without disrupting the process signal. In this way, the analog process signal, with
its faster update rate, can be used for control. At the same time, the HART protocol allows access to digital diagnostic,
maintenance, and additional process data. The protocol provides total system integration via a host device.
The HART protocol uses frequency shift keying (FSK). Two individual frequencies of 1200 and 2200 Hz are
superimposed over the 4‐20 mA current signal. These frequencies represent the digits 1 and 0 (see figure A‐1). By
superimposing a frequency signal over the 4-20 mA current, digital communication is attained. The average value of
the HART signal is zero, therefore no DC value is added to the 4‐20 mA signal. Thus, true simultaneous communication
is achieved without interrupting the process signal.
Figure A‐1. HART Frequency Shift Keying Technique
+0.5V
A6174
0
-0.5V
1200 Hz
“1”
AVERAGE CURRENT CHANGE DURING COMMUNICATION = 0
2200 Hz
“0”
ANALOG
SIGNAL
The HART protocol allows the capability of multidropping, i.e., networking several devices to a single communications
line. This process is well suited for monitoring remote applications such as pipelines, custody transfer sites, and tank
farms. See table 6‐2 for instructions on changing the printed wiring board DIP switch configuration to multidrop.
DVC6000 HW2 Digital Valve Controller
The DVC6000 HW2 digital valve controller housing contains the travel sensor, terminal box, pneumatic input and
output connections and a module base that may be easily replaced in the field without disconnecting field wiring or
tubing. The module base contains the following submodules: I/P converter, printed wiring board (pwb) assembly, and
pneumatic relay. The relay position is detected by sensing the magnet on the relay beam via a detector on the printed
wiring board. This sensor is used for the minor loop feedback (MLFB) reading. The module base can be rebuilt by
replacing the submodules. See figures A‐3.
95
Page 96

Principle of Operation
June 2017
Instruction Manual
Figure A‐2. Typical FIELDVUE Instrument to Personal Computer Connections for ValveLink Software
CONTROL SYSTEM
HART MODEM
FIELD TERM.
D103785X012
E1568
DVC6000 HW2 digital valve controllers are loop‐powered instruments that provide a control valve position
proportional to an input signal from the control room. The following describes a double‐acting digital valve controller
mounted on a piston actuator.
The input signal is routed into the terminal box through a single twisted pair of wires and then to the printed wiring
board assembly submodule where it is read by the microprocessor, processed by a digital algorithm, and converted
into an analog I/P drive signal.
As the input signal increases, the drive signal to the I/P converter increases, increasing the I/P output pressure. The I/P
output pressure is routed to the pneumatic relay submodule. The relay is also connected to supply pressure and
amplifies the small pneumatic signal from the I/P converter. The relay accepts the amplified pneumatic signal and
provides two output pressures. With increasing input (4 to 20 mA signal), the output A pressure always increases and
the output B pressure decreases. The output A pressure is used for double‐acting and single‐acting direct applications.
The output B pressure is used for double‐acting and single‐acting reverse applications. As shown in figure A‐3 the
increased output A pressure causes the actuator stem to move downward. Stem position is sensed through the
feedback linkage by the travel sensor which is electrically connected to the printed wiring board assembly submodule.
The stem continues to move downward until the correct stem position is attained. At this point the printed wiring
board assembly stabilizes the I/P drive signal. This positions the flapper to prevent any further increase in nozzle
pressure.
As the input signal decreases, the drive signal to the I/P converter submodule decreases, decreasing the I/P output
pressure. The pneumatic relay decreases the output A pressure and increases the output B pressure. The stem moves
upward until the correct position is attained. At this point the printed wiring board assembly stabilizes the I/P drive
signal. This positions the flapper to prevent any further decrease in nozzle pressure.
96
Page 97

Instruction Manual
D103785X012
Figure A‐3. FIELDVUE DVC6000 HW2 Digital Valve Controller Block Diagram
4-20 mA
+
HART
FEEDBACK CONNECTION
TERMINAL BOX
AUXILIARY
TERMINALS
TERMINAL BOX
PRINTED
WIRING BOARD
DRIVE
SIGNAL
Principle of Operation
June 2017
INPUT SIGNAL
REMOTE
FEEDBACK
UNIT
OUTPUT A
E1569
VENT
I/P
CONVERTER
PNEUMATIC
RELAY
VALVE TRAVEL FEEDBACK
SUPPLY PRESSURE
OUTPUT B
VALVE AND
ACTUATOR
97
Page 98

Principle of Operation
June 2017
Instruction Manual
D103785X012
98
Page 99

Instruction Manual
D103785X012
Field Communicator Menu Trees
June 2017
Appendix B Field Communicator Menu TreesB
This section contains the Field Communicator menu trees for instrument level HC, AD, PD, and ODV. It also contains
an alphabetized function/variable list to help locate the function/variable on the appropriate menu tree. All Fast Key
Sequences referenced in the menu trees assume the Online menu (see figure B‐2) as the starting point.
Instrument Level HC, AD, PD, and ODV
Function/Variable
Actual Travel B‐6
Actuator Manufacturer B‐6
Actuator Model B‐6
Actuator Selection B‐6
Actuator Size B‐6
Actuator Style B‐8
Air B‐6
Alert Record Full Enable B‐9
Alert Record Not Empty Enable B‐9
Alert Switch Source B‐8
Analog Input B‐3, B‐11
Analog Input (Calibration) B‐10
Analog Input Units B‐6
Area Units B‐6
Auto Calibration B‐10
Auxiliary Terminal Action B‐6
Auxiliary Terminal Action, Edit B‐6
Breakout Torque B‐6
Burst Mode B‐8
Calibration Button B‐6
Calibration Record B‐10
Calibration Time B‐10
Calibration Type B‐10
Calibrator B‐10
Change Control Mode B‐7, B‐11
Change Instrument Mode B‐1, B‐6
Change to HART 5 B‐11
Change to HART 7 B‐11
Change Write Protection B‐1, B‐3, B‐6
Clear Records B‐9, B‐11
Control Mode B‐7, B‐11
Critical NVM Failure Shutdown B‐9
Custom Characterization B‐7, B‐11
Cycle Count Alert Enable B‐9
Cycle Count Alert Point B‐9
Cycle Counter B‐11
Cycle Count/Travel Accum Deadband B‐9
Days Powered Up B‐11
DD Information B‐3
Description B‐3, B‐6
Device ID B‐3
Device Revision B‐3
Device Setup B‐5
Device Status B‐3, B‐11
Drive Current Failure Shutdown B‐9
Drive Signal B‐11
See Figure
Function/Variable
Drive Signal Alert Enable B‐9
Dynamic Torque B‐6
Edit Cycle Counts B‐9
Edit Instrument Time B‐6, B‐9
Edit Travel Accumulator B‐9
Effective Area (Acutator) B‐6
End Point Pressure Control (EPPC) B‐7
EPPC Deviation (Alert Setup) B‐9
Fail Signal B‐8
Fallback Recovery B‐7, B‐9, B‐11
Feedback Connection B‐8
Firmware Revision B‐3
Flash Integrity Failure Shutdown B‐9
Flow Direction B‐6
Flow Tends to B‐6
Function B‐8
Hardware Revision (Device) B‐3
HART Long Tag B‐3, B‐6
HART Tag B‐3, B‐6
HART Universal Revision B‐3
Hi Limit/Cutoff Point B‐7, B‐9
Hi Limit/Cutoff Select B‐7, B‐9
HART Variable Assignments B‐8
Inlet Pressure B‐6
Input Characterization B‐7, B‐11
Input Range Hi B‐6
Input Range Lo B‐6
Instrument Alert Record B‐9
Instrument Level B‐3
Instrument Mode B‐1, B‐6
Instrument Serial Number B‐3, B‐6
Instrument Time is Approximate Enable B‐9
Integral Enable B‐8
Integral Gain B‐8
Integrator Saturated High Enable B‐9
Integrator Saturated Lo Enable B‐9
Integrator Limit B‐8
Intgegral Dead Zone B‐8
Last AutoCal Status B‐10
Leak Class (Trim) B‐6
Length Units B‐6
Lever Arm Length B‐6
Lever Style B‐6
Limit Switch Trip Point B‐8
Limit Switch Valve Close B‐6
Limit Switch Valve Open B‐6
See Figure
99
Page 100

Field Communicator Menu Trees
June 2017
Instruction Manual
D103785X012
Function/Variable See Figure
Lo Limit/Cutoff Point B‐7, B‐9
Lo Limit/Cutoff Select B‐7, B‐9
Manual Calibration B‐10
Manufacturer (Device) B‐3
Maximum Recorded Temperature B‐11
Maximum Supply Pressure B‐8
Message B‐3, B‐6
Mininum Recorded Temperature B‐11
Minor Loop Sensor Failure Shutdown B‐9
MLFB Gain B‐8
Model (Device) B‐3
Non-Critical NVM Failure Shutdown B‐9
Number of Power Ups B‐11
Outlet Pressure B‐6
Output Circuit Comm Failure Enable B‐9
Output Terminal Enable B‐8
Packing Type B‐6
Partial Stroke Test B‐11
Partial Stroke Test (PST) B‐8
Performance Tuner B‐5, B‐8, B‐11
Polling Address B‐6
Port Diameter (Trim) B‐6
Port Type (Trim) B‐6
Position Transmitter B‐6
Pressure A B‐3, B‐11
Pressure A-B B‐3, B‐11
Pressure B B‐3, B‐11
Pressure Fallback Active Enable B‐9
Pressure Range Hi B‐7
Pressure Range Lo B‐7
Pressure Sensor Failure Shutdown B‐9
Pressure Sensors (Calibration) B‐10
Pressure Tuning Set B‐8
Pressure Units B‐6
Proportional Gain B‐8
PST Enable B‐8
PST Calibration B‐10
PST Pressure Limit B‐8
PST Start Point B‐8
PST Variables B‐8
Push Down To (Trim) B‐6
PWB Serial Number B‐3
Quick Release B‐6
Rated Travel B‐6
Relay Adjust B‐10
Relay Type B‐8
Reference Voltage Failure Shutdown B‐9
Reset Valve Stuck Alert B‐11
Restart Control Mode B‐11
Restart Processor B‐11
Seat Type (Trim) B‐6
Setpoint B‐3, B‐11
Shutdown on Alert B‐9
Solenoid Valve B‐6
SP Rate Close B‐7
Function/Variable See Figure
SP Rate Open B‐7
Spring Rate B‐6
Spring Rate Units B‐6
Stabilize/Optimize B‐5, B‐8, B‐11
Stem Diameter B‐6
Stroke Valve B‐11
Supply Pressure B‐3, B‐11
Supply Pressure Lo Alert B‐9
Switch Closed B‐8
Temperature B‐11
Temperature Units B‐6
Temp Sensor Failure Shutdown B‐9
Torque Units B‐6
Transmitter Output B‐8
Travel B‐3, B‐11
Travel Accumulator B‐11
Travel Accumulator Alert Enable B‐9
Travel Accumulator Alert Point B‐9
Travel Alert Deadband B‐9
Tavel Alert Hi Enable B‐9
Travel Alert Hi Hi Enable B‐9
Travel Alert Hi Hi Point B‐9
Travel Alert Hi Point B‐9
Travel Alert Lo Enable B‐9
Travel Alert Lo Lo Enable B‐9
Travel Alert Lo Lo Point B‐9
Travel Alert Lo Point B‐9
Travel Counts B‐11
Travel Deviation (Alert Setup) B‐9
Travel Deviation Pressure Fallback B‐7
Travel Deviation Pressure Fallback Time B‐7
Travel Limit/Cutoff High Enable B‐9
Travel Limit/Cutoff Lo Enable B‐9
Travel/Pressure Select (Alert Setup) B‐9
Travel Sensor Adjust B‐10
Travel Sensor Failure Shutdown B‐9
Travel Sensor Motion B‐8
Travel Tuning Set B‐8
Travel Units B‐6
Travel/Pressure Select B‐7, B‐11
Unbalanced Area (Trim) B‐6
Valve Class B‐6
Valve Manufacturer B‐6
Valve Model B‐6
Valve Serial Number B‐3, B‐6
Valve Size B‐6
Valve Style B‐8
Velocity Gain B‐8
View Alert Records B‐11
View Edit Lag Time B‐7
View Edit Lead/Lag B‐7
Volume Booster B‐6
Write Protection B‐1, B‐3, B‐6
Zero Power Condition B‐8
100
 Loading...
Loading...