

Page 1
Gold Trombone
Digital Servo Drive
Installation Guide
EtherCAT and CAN
July 2014 (Ver. 1.604)
www.elmomc.com
Page 2
Elmo Motion Control and the Elmo Motion Control logo are
EtherCAT Conformance Tested. EtherCAT® is a registered
Notice
This guide is delivered subject to the following conditions and restrictions:
• This guide contains proprietary information belonging to Elmo Motion Control Ltd. Such
information is supplied solely for the purpose of assisting users of the Gold Trombone
servo drive in its installation.
• The text and graphics included in this manual are for the purpose of illustration and
reference only. The specifications on which they are based are subject to change
without notice.
• Information in this document is subject to change without notice.
registered trademarks of Elmo Motion Control Ltd.
trademark and patented technology, licensed by Beckhoff
Automation GmbH, Germany.
Catalog Number
Document no. MAN-G-TROIG-EC (Ver. 1.604)
Copyright 2014
Elmo Motion Control Ltd.
All rights reserved.
Page 3
Revision History
Version Details
1.0 Initial release
1.1 Major updates to Chapter 3
1.2 Several updates throughout the manual
1.3 Sections 4.3 and 4.3.1: Auxiliary Supply Voltage range: 18 V to 30 V
1.4 Wide ranging changes throughout document to include new pinouts.
Removal of the RS-232 option.
Added update P/N details on Feedbacks Absolute - included as standard.
1.5 Change the overvoltage in 800 V mode
1.6 Neutral option removed. Change the overvoltage in 800 V mode, Pin layout,
UL recognition, and further optional versions added
1.601 General document updates
1.602 Organized how the Gold Trombone features are presented in the document.
1.603 Added a caution and recommendation on the type of cleaning solution to
use for the Elmo unit.
Updated the supply output (VDD) voltage range value of the Digital Output
Interface for PLC and TTL modes.
1.604 General format updates
Page 4

Elmo Worldwide
Head Office
Elmo Motion Control Ltd.
60 Amal St., P.O. Box 3078, Petach Tikva 49516
Israel
Tel: +972 (3) 929-2300 • Fax: +972 (3) 929-2322 • info-il@elmomc.com
North America
Elmo Motion Control Inc.
42 Technology Way, Nashua, NH 03060
USA
Tel: +1 (603) 821-9979 • Fax: +1 (603) 821-9943 • info-us@elmomc.com
Europe
Elmo Motion Control GmbH
Hermann-Schwer-Strasse 3, 78048 VS-Villingen
Germany
Tel: +49 (0) 7721-944 7120 • Fax: +49 (0) 7721-944 7130 • info-de@elmomc.com
China
Elmo Motion Control Technology (Shanghai) Co. Ltd.
Room 1414, Huawen Plaza, No. 999 Zhongshan West Road, Shanghai (200051)
China
Tel: +86-21-32516651 • Fax: +86-21-32516652 • info-asia@elmomc.com
Asia Pacific
Elmo Motion Control APAC Ltd.
B-601 Pangyo Innovalley, 621 Sampyeong-dong, Bundang-gu, Seongnam-si, Gyeonggi-do,
South Korea (463-400)
Tel: +82-31-698-2010 • Fax: +82-31-801-8078 • info-asia@elmomc.com
Page 5

MAN-G-TROIG -EC (Ver. 1.604)
Table of Contents
Gold Trombone Installation Guide (EtherCAT and CAN) Table of Contents
Chapter 1: Safety Information .......................................................................................... 8
1.1. Warnings ......................................................................................................................... 9
1.2. Cautions .......................................................................................................................... 9
1.3. Directives and Standards .............................................................................................. 10
1.4. CE Marking Conformance ............................................................................................. 10
1.5. Warranty Information .................................................................................................. 10
Chapter 2: Product Description ...................................................................................... 11
2.1. Drive Description .......................................................................................................... 11
2.2. Product Features .......................................................................................................... 12
2.2.1. Servo Control ................................................................................................. 12
2.2.2. Advanced Filters and Gain Scheduling........................................................... 13
2.2.3. Motion Control .............................................................................................. 13
2.2.4. Fully Programmable ....................................................................................... 13
2.2.5. Feedback Ports Options ................................................................................. 14
2.2.6. Feedback Sensor Specifications ..................................................................... 15
2.2.7. Communications ............................................................................................ 16
2.2.8. Safety ............................................................................................................. 16
2.2.9. Digital Outputs ............................................................................................... 16
2.2.10. Differential Outputs ....................................................................................... 17
2.2.11. Digital Inputs .................................................................................................. 17
2.2.12. Differential Inputs .......................................................................................... 17
2.2.13. Analog Input .................................................................................................. 17
2.2.14. Built-In Protection ......................................................................................... 18
2.2.15. Status Indication ............................................................................................ 18
2.2.16. Automatic Procedures ................................................................................... 18
2.3. System Architecture ..................................................................................................... 19
2.4. How to Use this Guide .................................................................................................. 20
5
Chapter 3: Technical Information ................................................................................... 21
3.1. Technical Data .............................................................................................................. 21
3.1.1. Auxiliary Supply ............................................................................................. 22
Chapter 4: Installation ................................................................................................... 23
4.1. Site Requirements ........................................................................................................ 23
4.2. Unpacking the Drive Components ................................................................................ 23
4.3. Connectors.................................................................................................................... 25
4.3.1. Connector Types ............................................................................................ 25
4.3.2. Pinouts ........................................................................................................... 26
4.3.2.1. Motor Power ................................................................................. 26
4.3.2.2. Main Power
................................................................................... 26
Page 6

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Table of Contents
4.3.2.3. Auxiliary Power Connector (J3)..................................................... 27
4.3.2.4. Connector J2 ................................................................................. 28
4.3.2.5. Connector J1 ................................................................................. 31
4.4. Mounting the Gold Trombone ..................................................................................... 33
4.5. Integrating the Gold Trombone on a PCB .................................................................... 34
4.5.1. Traces ............................................................................................................. 34
4.5.2. Grounds and Returns ..................................................................................... 35
4.6. Connection Diagrams ................................................................................................... 36
4.7. Main Power, Motor Power and Auxiliary Power .......................................................... 41
4.7.1. Motor Power.................................................................................................. 41
4.7.2. Main Power.................................................................................................... 42
4.7.2.1. Direct-to-Mains Power Source (Non-Isolated Rectifier) ............... 43
4.7.2.2. Battery Power Supply ................................................................... 47
4.7.3. +24 V Auxiliary Supply (J3) ............................................................................. 47
4.8. STO (Safe Torque Off) Inputs (J1) ................................................................................. 49
4.9. Feedback ....................................................................................................................... 51
4.9.1. Port A (J2, J1) ................................................................................................. 51
4.9.1.1. Incremental Encoder Connection Diagram .................................. 53
4.9.1.2. Absolute Serial Encoder Connection Diagram .............................. 54
4.9.1.3. Hall Sensor Connection Diagram .................................................. 55
4.9.2. Port B (J2, J1) ................................................................................................. 56
4.9.2.1. Incremental Encoder Connection Diagram .................................. 57
4.9.2.2. Interpolated Analog Encoder Connection Diagram ...................... 58
4.9.2.3. Resolver Connection Diagram ...................................................... 59
4.9.3. Port C – Emulated Encoder Output (J2) ......................................................... 59
4.10. User I/Os ....................................................................................................................... 61
4.10.1. Digital Inputs (J1) ........................................................................................... 61
4.10.2. Digital Outputs (J1) ........................................................................................ 64
4.10.3. Input (J2) ........................................................................................................ 67
4.11. Communications ........................................................................................................... 68
4.11.1. CAN Communication (J2) ............................................................................... 68
4.11.2. USB 2.0 Communication (J2) ......................................................................... 70
4.11.3. EtherCAT Communication (J2) ....................................................................... 71
4.11.4. Ethernet Communication (J2) ........................................................................ 73
4.11.5. EtherCAT/Ethernet Line Interface ................................................................. 75
4.12. Powering Up ................................................................................................................. 75
4.12.1. Initializing the System .................................................................................... 75
4.13. Heat Dissipation............................................................................................................ 76
4.13.1. Gold Trombone Thermal Data .......................................................................
4.13.2. Heat Dissipation Data .................................................................................... 76
4.13.3. How to Use the Charts ................................................................................... 77
6
76
Chapter 5: Technical Specifications ................................................................................ 78
5.1. Gold Trombone Dimensions ......................................................................................... 78
5.2. Environmental Conditions ............................................................................................ 79
Page 7

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Table of Contents
5.3. Control Specifications ................................................................................................... 79
5.3.1. Current Loop .................................................................................................. 79
5.3.2. Velocity Loop ................................................................................................. 80
5.3.3. Position Loop ................................................................................................. 80
5.4. Feedback ....................................................................................................................... 81
5.4.1. Feedback Supply Voltage ............................................................................... 81
5.4.2. Feedback Options .......................................................................................... 81
5.4.2.1. Incremental Encoder Input ........................................................... 81
5.4.2.2. Digital Halls ................................................................................... 82
5.4.2.3. Interpolated Analog (Sine/Cosine) Encoder ................................. 82
5.4.2.4. Resolver ........................................................................................ 83
5.4.2.5. Absolute Serial Encoder ................................................................ 83
5.4.3. Port C Feedback Output ................................................................................ 84
5.5. I/Os ............................................................................................................................... 85
5.5.1. Digital Input Interfaces – TTL Mode .............................................................. 85
5.5.2. Digital Input Interfaces – PLC Mode .............................................................. 86
5.5.3. Digital Output Interface – PLC Mode ............................................................. 87
5.5.4. Digital Output Interface – TTL Mode ............................................................. 88
5.5.5. Analog Input .................................................................................................. 88
5.6. Safe Torque Off (STO) ................................................................................................... 89
5.6.1. STO Input Interfaces – TTL Mode .................................................................. 89
5.6.2. STO Input Interfaces – PLC Mode .................................................................. 89
5.7. Communications ........................................................................................................... 90
5.8. Pulse-Width Modulation (PWM) .................................................................................. 90
5.9. Compliance with Standards .......................................................................................... 91
7
Page 8
MAN-G-TROIG -EC (Ver. 1.604)
Chapter 1: Safety Information
Warning:
Caution:
Gold Trombone Installation Guide (EtherCAT and CAN) Safety Information
In order to achieve the optimum, safe operation of the Gold Trombone servo drive, it is
imperative that you implement the safety procedures included in this installation guide. This
information is provided to protect you and to keep your work area safe when operating the
Gold Trombone and accompanying equipment.
Please read this chapter carefully before you begin the installation process.
Before you start, ensure that all system components are connected to earth ground. Electrical
safety is provided through a low-resistance earth connection.
Only qualified personnel may install, adjust, maintain and repair the servo drive. A qualified
person has the knowledge and authorization to perform tasks such as transporting, assembling,
installing, commissioning and operating motors.
The Gold Trombone servo drive contains electrostatic-sensitive components that can be
damaged if handled incorrectly. To prevent any electrostatic damage, avoid contact with highly
insulating materials, such as plastic film and synthetic fabrics. Place the product on a
conductive surface and ground yourself in order to discharge any possible static electricity
build-up.
8
To avoid any potential hazards that may cause severe personal injury or damage to the product
during operation, keep all covers and cabinet doors shut.
The following safety symbols are used in this manual:
This information is needed to avoid a safety hazard, which might cause bodily
injury.
This information is necessary for preventing damage to the product or to other
equipment.
www.elmomc.com
Page 9
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Safety Information
1.1. Warnings
• To avoid electric arcing and hazards to personnel and electrical contacts, never
connect/disconnect the servo drive while the power source is on.
• Power cables can carry a high voltage, even when the motor is not in motion. Disconnect
the Gold Trombone from all voltage sources before it is opened for servicing.
• The Gold Trombone servo drive contains grounding conduits for electric current protection.
Any disruption to these conduits may cause the instrument to become hot (live) and
dangerous.
• After shutting off the power and removing the power source from your equipment, wait at
least 1 minute before touching or disconnecting parts of the equipment that are normally
loaded with electrical charges (such as capacitors or contacts). Measuring the electrical
contact points with a meter, before touching the equipment, is recommended.
1.2. Cautions
9
• The Gold Trombone servo drive contains hot surfaces and electrically charged components
during operation.
• The maximum DC power supply connected to the instrument must comply with the
parameters outlined in this guide.
• When connecting the Gold Trombone to an approved isolated 18 to 30 VDC auxiliary power
supply, connect it through a line that is separated from hazardous live voltages using
reinforced or double insulation in accordance with approved safety standards.
• Before switching on the Gold Trombone, verify that all safety precautions have been
observed and that the installation procedures in this manual have been followed.
• Do not clean any of the Gold Trombone drive's soldering with solvent cleaning fluids of pH
greater than 7 (8 to 14). The solvent corrodes the plastic cover causing cracks and eventual
damage to the drive's PCBs.
Elmo recommends using the cleaning fluid Vigon-EFM which is pH Neutral (7).
For further technical information on this recommended cleaning fluid, select the link:
http://www.zestron.com/fileadmin/zestron.com-usa/daten/electronics/Product_TI1s/TI1VIGON_EFM-US.pdf
www.elmomc.com
Page 10
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Safety Information
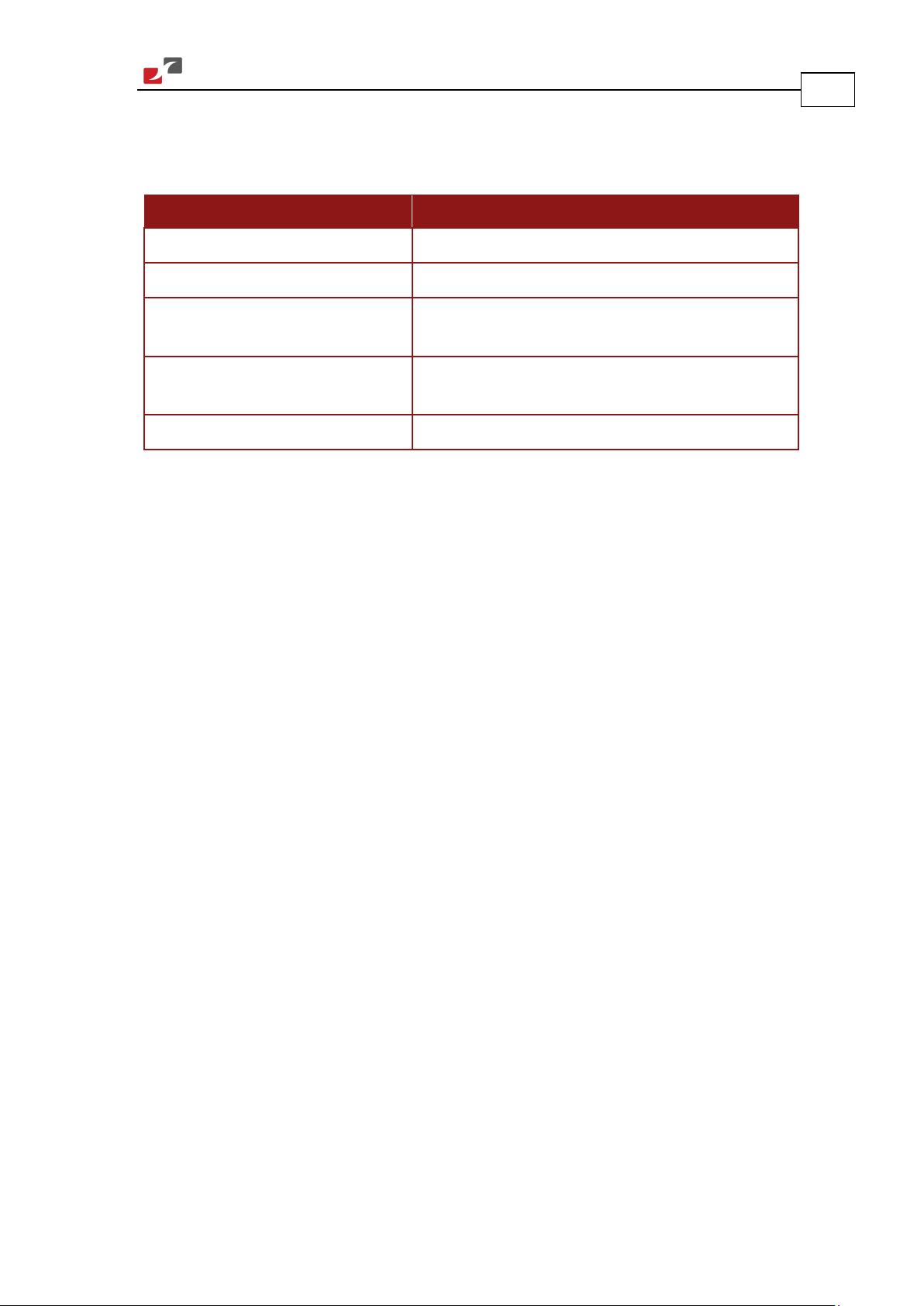
1.3. Directives and Standards
The Gold Trombone conforms to the following industry safety standards:
Safety Standard Item
Approved IEC/EN 61800-5-1, Safety Adjustable speed electrical power drive systems
Recognized UL 508C Power Conversion Equipment
In compliance with UL 840 Insulation Coordination Including Clearances and
Creepage Distances for Electrical Equipment
10
In compliance with UL 60950-1
(formerly UL 1950)
Safety of Information Technology Equipment
Including Electrical Business Equipment
In compliance with EN 60204-1 Low Voltage Directive 73/23/EEC
The Gold Trombone servo drive has been developed, produced, tested and documented in
accordance with the relevant standards. Elmo Motion Control is not responsible for any
deviation from the configuration and installation described in this documentation.
Furthermore, Elmo is not responsible for the performance of new measurements or ensuring
that regulatory requirements are met.
1.4. CE Marking Conformance
The Gold Trombone servo drive is intended for incorporation in a machine or end product. The
actual end product must comply with all safety aspects of the relevant requirements of the
European Safety of Machinery Directive 98/37/EC as amended, and with those of the most
recent versions of standards EN 60204-1 and EN 292-2 at the least.
According to Annex III of Article 13 of Council Directive 93/68/EEC, amending Council Directive
73/23/EEC concerning electrical equipment designed for use within certain voltage limits, the
Gold Trombone meets the provisions outlined in Council Directive 73/23/EEC. The party
responsible for ensuring that the equipment meets the limits required by EMC regulations is
the manufacturer of the end product.
1.5. Warranty Information
The products covered in this manual are warranted to be free of defects in material and
workmanship and conform to the specifications stated either within this document or in the
product catalog description. All Elmo drives are warranted for a period of 12 months from the
time of installation, or 18 months from time of shipment, whichever comes first. No other
warranties, expressed or implied — and including a warranty of merchantability and fitness for
a particular purpose — extend beyond this warranty.
www.elmomc.com
Page 11

MAN-G-TROIG -EC (Ver. 1.604)
Chapter 2: Product Description
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
This installation guide describes the Gold Trombone servo drive and the steps for its wiring,
installation and power-up. Following these guidelines ensures optimal performance of the drive
and the system to which it is connected.
2.1. Drive Description
The Gold Trombone series of digital servo drives are highly resilient and designed to deliver the
highest density of power and intelligence. The Gold Trombone delivers up to 10 kW of
continuous power or 16 kW of peak power in a compact package.
The digital drives are part of Elmo’s advanced Gold Line. They operate from a DC power source
in current, velocity, position and advanced position modes, in conjunction with a permanentmagnet synchronous brushless motor, DC brush motor, linear motor or voice coil. They are
designed for use with any type of sinusoidal and trapezoidal commutation, with vector control.
The Gold Trombone can operate as a stand-alone device or as part of a multi-axis system in a
distributed configuration on a real-time network.
11
The drives are easily set up and tuned using Elmo Application Studio software tools. This
Windows-based application enables users to quickly and simply configure the servo drive for
optimal use with their motor. The Gold Trombone, as part of the Gold Line, is fully
programmable with Elmo’s motion control language.
Power to the drives is provided by a DC power source (not included with the Gold Trombone).
Since the power stage is fully isolated from the control stage, the DC rectifier can be fed directly
from the mains, without the need for a bulky and expensive transformer.
If backup functionality is required to store control parameters in the event of a mains power
outage, then an S or T-model Gold Trombone should be used, with an external 24 VDC isolated
supply connected to it.
Note: The backup functionality can operate from an isolated voltage source within the
range of 18 to 30 VDC.
Whenever backup functionality is not required, Gold Trombone models that have 0 or 1 suffix
(only for 400V models) in the catalog number (see page 23) can be used, i.e., they do not have
a 24 V control supply. In these models, a smart control-supply algorithm enables the Gold
Trombone to operate with only the main power supply VP+ and VN-, with no need for a 24 VDC
auxiliary power supply for the logic.
The Gold Trombone is a PCB-mounted device which enables efficient and cost-effective
implementation. However, stand-alone integrated products (the Gold DC Trombone and Gold
Solo Trombone) are also available, using pluggable connections.
www.elmomc.com
Page 12

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2. Product Features
Note: The features described in this chapter relate to the range of Gold Trombone models.
Depending on the model you have purchased, not all features are available.
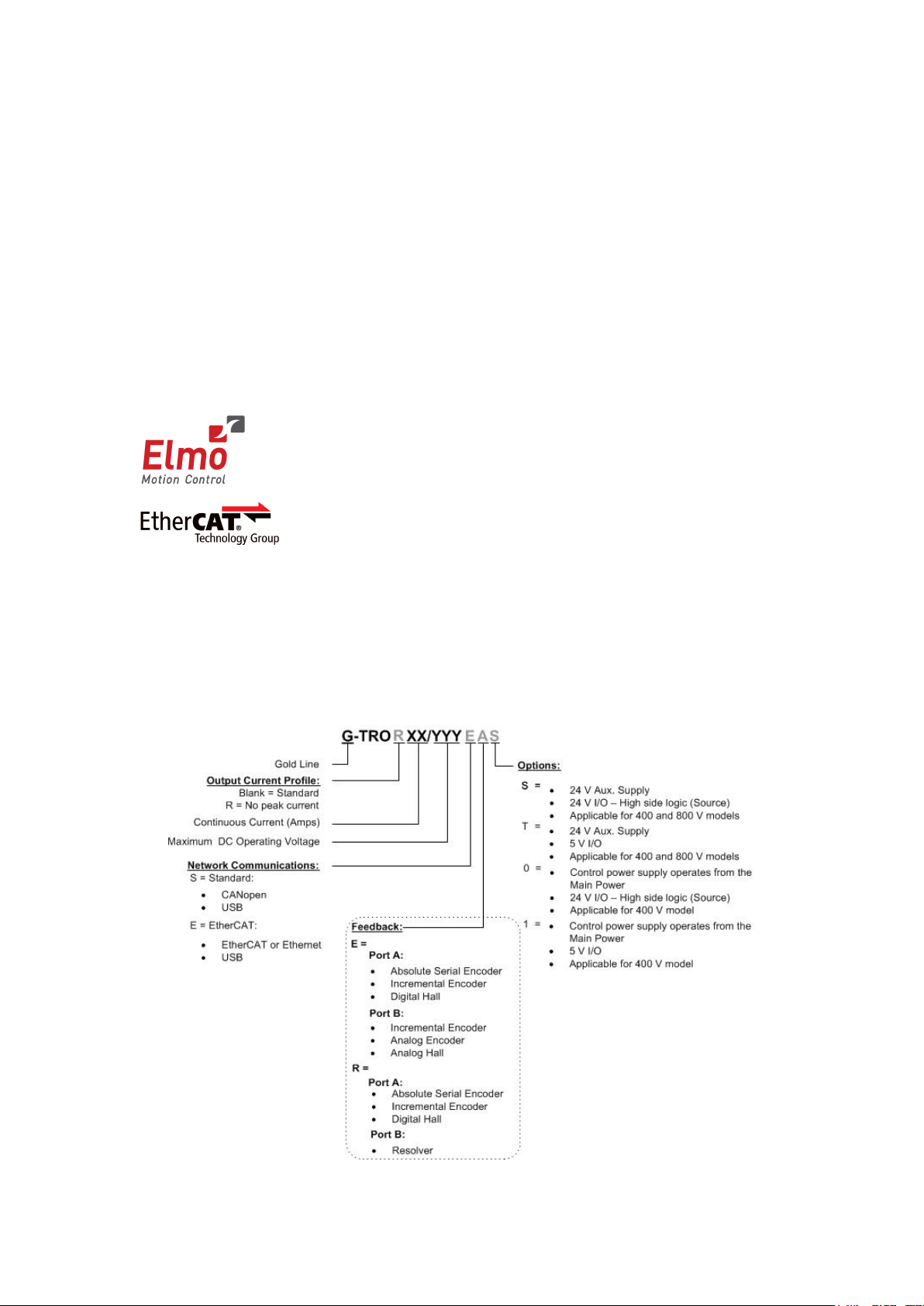
To see the features for your model, look at the product label on the Gold Trombone and use
the product catalog number schematic that appears at the beginning of this manual and on
page 24 to determine which specific features are available to you.
2.2.1. Servo Control
• Advanced and extremely fast vector control algorithm (current loop bandwidth: 4 kHz)
• Current/Torque sampling rate: up to 20 kHz (50 μs)
• Velocity sampling rate: up to 10 kHz (100 μs)
• Position sampling rate: up to 10 kHz (100 μs)
• Electrical commutation frequency: up to 4 kHz
• Current closed loop bandwidth exceeds 4 kHz
12
• Position/Velocity/Acceleration command range – full 32 bit
• Position over velocity, with full dual loop support
• Current gain scheduling to compensate for the motor’s non-linear characteristics
• Advanced filtering: Low pass, Notch, General Biquad
• Current loop gain scheduling to compensate for bus voltage variations
• Velocity gain scheduling for ultimate velocity loop performance
• Gains and filter scheduling vs. position for mechanical coupling optimization, speed and
position tracking errors
• High order filters gain scheduling vs. speed and position
• S-curve Profile Smoothing
• Cogging, BEMF and ωxL compensation
• Dual Loop Operation supported by Auto Tuning
• Fast, easy and efficient advanced Auto Tuning
• Incremental encoder frequency of up to 75 Megacounts/sec
• Motion profiler numeric range:
Position up to ±2 x 10
Velocity up to 2 x 10
Acceleration up to 2 x 10
9
counts
9
counts/sec
9
counts/sec2
www.elmomc.com
Page 13

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2.2. Advanced Filters and Gain Scheduling
• “On-the-Fly” gain scheduling of current and velocity
• Velocity and position with “1-2-2” PIP controllers
• Automatic commutation alignment
• Automatic motor phase sequencing
• Current gain scheduling to compensate for the motor’s non-linear characteristics
• Advanced filtering: Low pass, Notch, General Biquad
• Current loop gain scheduling to compensate for bus voltage variations
• Velocity gain scheduling for reliable velocity loop performance
• Gains & filter scheduling vs. position for mechanical coupling optimization, speed and
position tracking errors
• High order filters gain scheduling vs. speed and position
13
2.2.3. Motion Control
• Motion control programming environment
• Motion modes: PTP, PT, PVT, ECAM, Follower, Dual Loop, Current Follower, Fast event
capturing inputs
• Full DS-402 motion mode support in the CAN and CAN over EtherCAT (CoE) protocols,
including Cyclic Position/Velocity modes. Fast (hardware) event capturing inputs,
supporting < 1 μs latch latency
• Fast (hardware) Output Compare, with < 1 μs latency
• Output compare repetition rate:
• Fixed Gap: Unlimited
• Table based: 4 kHz
• Motion Commands: Analog current and velocity, Pulse-Width Modulation (PWM) current
and velocity, digital (software), Pulse and Direction
• Distributed Motion Control
• EAS (Elmo Application Studio) software: an efficient and user friendly auto tuner
2.2.4. Fully Programmable
• Third generation programming structure
• Event capturing interrupts
• Event triggered programming
www.elmomc.com
Page 14

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2.5. Feedback Ports Options
There are Port A and Port B feedback input ports that are flexible and configurable. Each port
can be programmed to serve as:
• Commutation feedback and/or
• Velocity feedback and/or
• Position feedback
Port A supports the following sensors, depending on the specific model:
• Incremental encoder
• Incremental encoder and digital Hall
• Absolute serial encoder
• Absolute serial encoder and digital Hall (for dual loop).
Port B supports the following sensors, depending on the specific model:
• Incremental encoder
14
• Analog encoder
• Analog Hall
• Resolver
Port C is a flexible and configurable feedback output port. It supports:
• Encoder emulation outputs of Port A or Port B or internal variables.
Analog input (± 10 V ptp) support:
• Velocity feedback (tachometer)
• Position feedback (potentiometer)
www.elmomc.com
Page 15

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2.6. Feedback Sensor Specifications
• Incremental Encoder – up to 75 Megacounts per second (18 MHz PPS(Pulses Per Second))
• Digital Halls:
Up to 4 kHz commutation frequency
5 V logic
Input voltage up to 15 VDC
• Incremental encoder with digital Halls for commutation – up to 75 Megacounts per second
for encoder
• Interpolated Analog (Sine/Cosine) Encoder:
Supports 1 V PTP Sin/Cos
Sin/Cos frequency: up to 500 kHz
Internal interpolation: up to ×8192
Automatic correction of amplitude mismatch, phase mismatch, signal offset
Emulated encoder output of the analog encoder
15
• Analog Hall Sensor:
One feedback electrical cycle = one electrical cycle of the motor
Supports 1 V PTP Sin/Cos
Sin/Cos Frequency: up to 500 kHz
Internal Interpolation: up to ×8192
Automatic correction of amplitude mismatch, phase mismatch, signal offset
• Resolver
14 bit resolution
Up to 512 revolutions per second (RPS)
Emulated encoder outputs of the resolver
• Auxiliary encoder inputs (ECAM, follower, etc.) single-ended, unbuffered
• Tachometer & Potentiometer
• Absolute serial encoders:
NRZ (Panasonic, Tamagawa, Mitutoyo, etc.)
EnDAT 2.2
BiSS/SSI
The Gold Trombone can provide power (5 V, 2x200 mA max) for encoders, resolver or Halls.
www.elmomc.com
Page 16

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2.7. Communications
• Fast and efficient EtherCAT and CAN networking
• EtherCAT Slave per part number:
CoE (CAN over EtherCAT)
EoE (Ethernet over EtherCAT)
FoE (File over EtherCAT) for firmware download
Supports Distributed Clock
EtherCAT cyclic modes supported down to a cycle time of 250 μs
• CAN (DS-301, DS-305, DS-402) per part number. Refer to the section 4.11 for further details
• Ethernet TCP/IP
UDP
Telnet
• USB 2.0
16
2.2.8. Safety
• Approved IEC /EN 61800-5-1, Safety
• Approved IEC/EN 61800-3, EMC
• IEC 61800-5-2, Safe Torque Off (STO) with two STO inputs PLC level which can be
configured to 5 V logic (available on request)
• UL 508C recognition
• UL 60950 compliance
• CE EMC compliance
2.2.9. Digital Outputs
• Four separate programmable high voltage digital outputs related to VDD and VDDRET:
TTL level: optically isolated sink and source
PLC: optically isolated source
Conforms to IEC 61131-2
Up to 30 VDC
High side logic (Source)
For S, 0 suffix, Digital Outputs 2,3,4 up to 250 mA
For T, 1 suffix, Digital Outputs 2,3,4 up to 7 mA
For S, 0 suffix, Digital Output 1 brake output: 500 mA
For T, 1 suffix, Digital Output 1: 7 mA
Short circuit protection
Thermal protection
Reverse polarity protection
• The four outputs can be configured to 5 V Logic (available on request)
www.elmomc.com
Page 17

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
• Optional functions:
Fast output compare (for one output only)
Brake control
Amplifier fault indication
General purpose
Servo enable indication
• PWM current command output for torque and velocity
2.2.10. Differential Outputs
• Three additional differential outputs can be configured through Port C:
EIA-422 differential output line transmitters
Response time < 1μs
Output current: ± 15 mA
2.2.11. Digital Inputs
• Six digital inputs – optically isolated, sharing a single common INRET
17
• Six separate programmable digital inputs, optically isolated, PLC compatible, can be
configured to TTL Level depending on the part number definition.
• All six inputs are fast capture data <5 μs
• Optional functions:
Fast event capture
Inhibit/Enable motion
Stop motion under control (hard stop)
Motion reverse and forward limit switches
Begin on input
Abort motion
Homing
General purpose
• Pulse and Direction inputs (single-ended)
2.2.12. Differential Inputs
• Six additional fast differential event capture inputs 5 V logic cab be configured through
Ports A and B:
Via Port A or B (three on each port, depending on model)
EIA-422 Differential input line receiver
Response time < 1 μs
2.2.13. Analog Input
• One analog input – up to 14-bit resolution
• One Analog Input: ±10 V
www.elmomc.com
Page 18

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.2.14. Built-In Protection
Built-in Protection & Diagnostics:
• Software error handling
• Abort (hard stops and soft stops)
• Extensive status reporting
• Protection against:
Shorts between motor power outputs
Shorts between motor power outputs and power input/return
Failure of internal power supplies
Over-heating
Over temperature
Motor current
2
i
t motor current
• STO
18
• Continuous temperature measurement. Temperature can be read on-the-fly; a warning can
be initiated x degrees before temperature disable is activated.
Over/under voltage
Loss of feedback
Following errors
Current limits
2.2.15. Status Indication
• 2 outputs for a bi-color LEDs
2.2.16. Automatic Procedures
• Commutation alignment
• Phase sequencing
• Current loop offset adjustment
• Current loop gain tuning
• Current gain scheduling
• Velocity loop offset adjustment
• Velocity gain tuning
• Velocity gain scheduling
• Position gain tuning
www.elmomc.com
Page 19
MAN-G-TROIG -EC (Ver. 1.604)
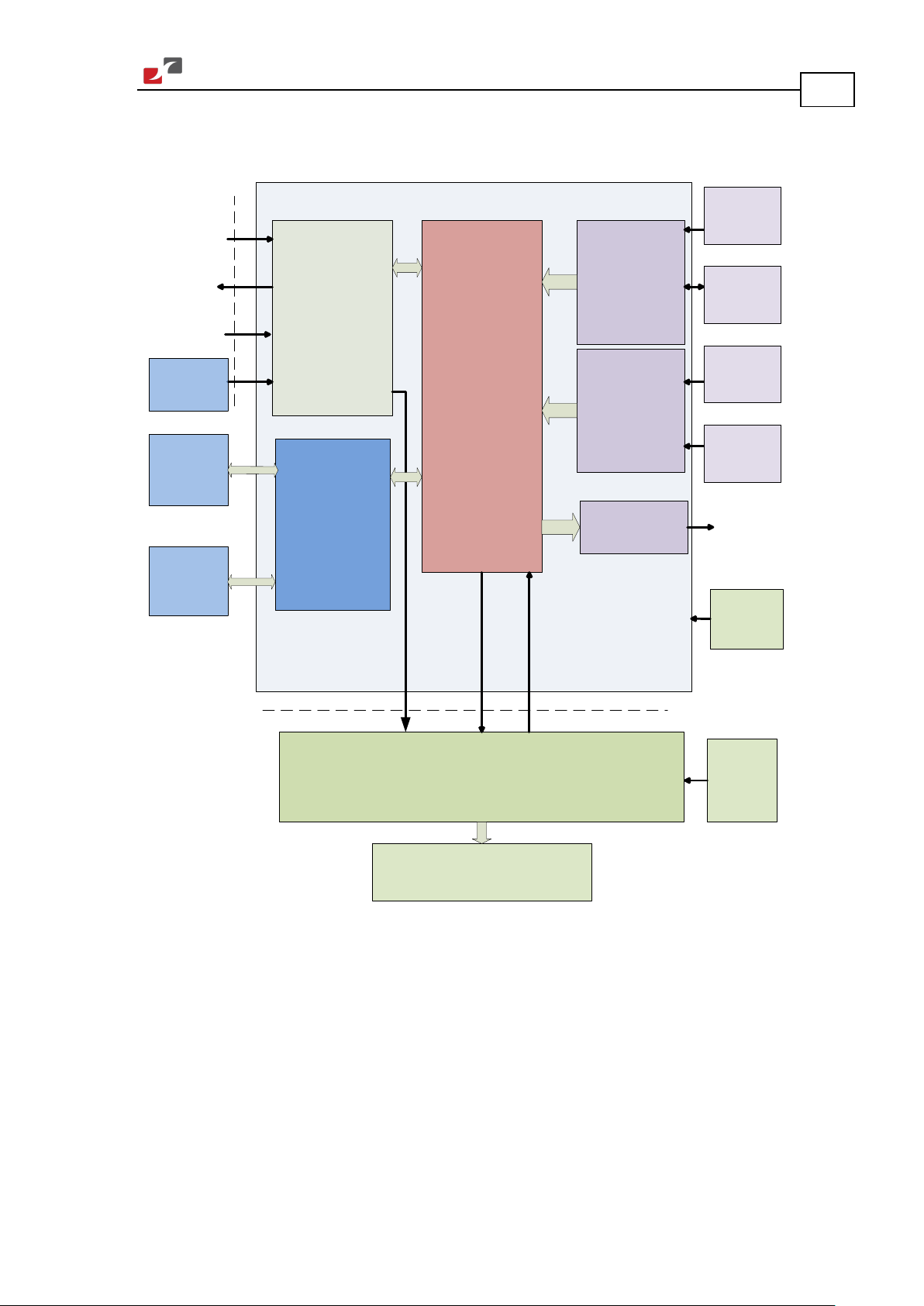
Isolated Power Stage
Feedback Port A
Feedback Port B
Feedback Out
Port C
Communication
User I/O Interface
Motion
Control
Logic
Incremental
Encoder, Hall
Sensors
(Options E, R)
Serial Encoder,
Hall Sensors
(Options E, R)
Incremental
Encoder
Or
Analog Encoder
(Option E)
Resolver
(Option R)
Encoder
Emulation,
PWM
Digital
Inputs
Digital
Outputs
Analog
Input
CANopen, USB,
(Network
Communication
Option S)
EtherCAT, USB,
(Network
Communication
Option E)
Main DC Power
Supply
Optional DC
Auxiliary Supply
for S and T
models
Motor
PWM
Current
Feedback,
VBus
Protection
Or
Or
Or
STO2
Isolation
Boundary
Isolation
Boundary
STO1,
STO2
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.3. System Architecture
19
Figure 1: Gold Trombone System Block Diagram
www.elmomc.com
Page 20

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Product Description
2.4. How to Use this Guide
In order to install and operate your Elmo Gold Trombone servo drive, you will use this manual
in conjunction with a set of Elmo documentation. Installation is your first step; after carefully
reading the safety instructions in the first chapter, the following chapters provide you with
installation instructions as follows:
• Chapter 3 - Installation, provides step-by-step instructions for unpacking, mounting,
connecting and powering up the Gold Trombone.
• Chapter 4 - Technical Specifications, lists all the drive ratings and specifications.
Upon completing the instructions in this guide, your Gold Trombone servo drive should be
successfully mounted and installed. From this stage, you need to consult higher-level Elmo
documentation in order to set up and fine-tune the system for optimal operation.
• The Gold Product Line Software Manual, which describes the comprehensive software used
with the Gold Trombone
• The Gold Product Line Command Reference Manual, which describes, in detail, each
software command used to manipulate the Gold Trombone motion controller
20
• The Elmo Application Studio Software Manual, which includes explanations of all the
software tools that are part of the Elmo Application Studio software environment
www.elmomc.com
Page 21
MAN-G-TROIG -EC (Ver. 1.604)
Chapter 3: Technical Information
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Information
21
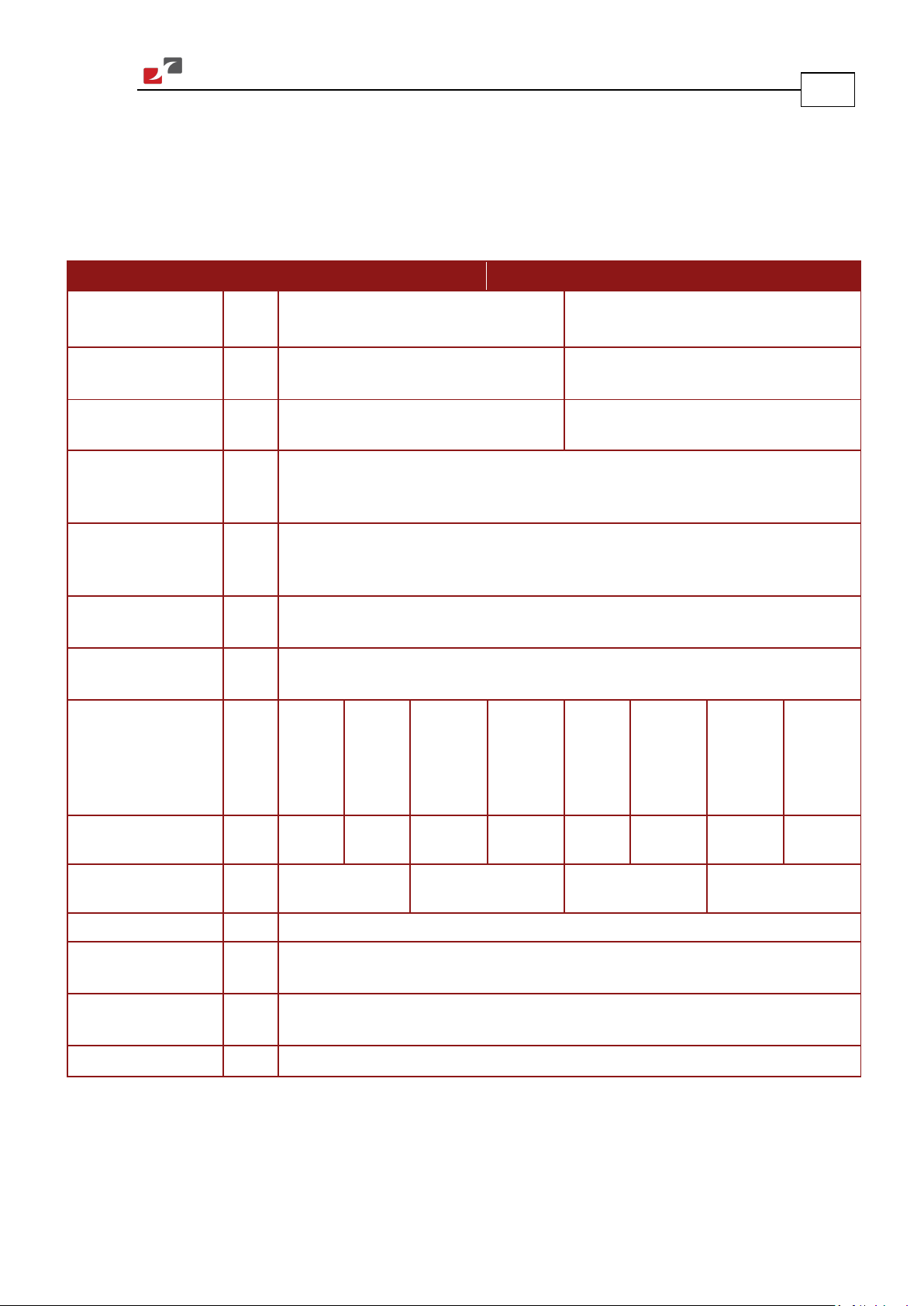
3.1. Technical Data
Feature Units 12/400 16/400 R17/400 R22/400 8/800 12/800 R11/800 R16/800
Minimum supply
voltage
Nominal supply
voltage
Maximum supply
voltage
Maximum continuous
power output
Efficiency at rated
power (at nominal
conditions)
Auxiliary supply
voltage option
Auxiliary power
supply
Continuous current
limit (Ic) Amplitude
sinusoidal/DC
trapezoidal
commutation
VDC
VDC 325 560 for 400 VAC
VDC 400 780
W Up to 10 kW of continuous qualitative power
% > 98
VDC 18 to 30 VDC (only in S or T type)
VA ≤5 VA without external loading
A 12 16 17 22 8 12 11 16
*For S or T type = 50
For 0 or 1 suffix type = 100
≤8 VA with full external loading
*For S or T type = 95
680 for 480 VAC
Sinusoidal continuous
RMS current limit (Ic)
Peak current limit A 2 x Ic No peak 2 x Ic No peak
Weight g (oz) 300 g (10.6 oz)
Dimensions mm
Digital in/Digital out/
Analog in
Mounting method PCB Mounted
A 8.5 11.3 12 15.5 5.7 8.5 7.8 11.3
111 x 76 x 34 (4.37" x 3" x 1.34")
(in)
6/4/1
*See page 23 for details on the part number. The S or T suffix appears in models where there is a
24 V control supply. If there is an 0 or 1 suffix, the control power supply operates from the main
power.
www.elmomc.com
Page 22
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Information
Note on current ratings: The current ratings of the Gold Trombone are given in units of DC
amperes (ratings that are used for trapezoidal commutation or DC motors). The RMS
(sinusoidal commutation) value is the DC value divided by 1.41.
3.1.1. Auxiliary Supply
Feature Details
Auxiliary power supply Isolated DC source only
Auxiliary supply input voltage 18 VDC to 30 VDC
Auxiliary supply input power < 4 VA (this includes the 5 V/200 mA load for the main
encoder only)
< 5.5 VA (this includes the 5 V/400 mA load on the main
encoder and feedback B)
22
www.elmomc.com
Page 23
MAN-G-TROIG -EC (Ver. 1.604)
Chapter 4: Installation
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
The Gold Trombone must be installed in a suitable environment and properly connected to its
voltage supplies and the motor.
4.1. Site Requirements
You can guarantee the safe operation of the Gold Trombone by ensuring that it is installed in
an appropriate environment.
Feature Value
23
Ambient operating temperature
Maximum non-condensing humidity 90%
Maximum altitude 2,000 m (6562 feet)
Operating area atmosphere No flammable gases or vapors permitted in area
Models for extended environmental conditions are available.
Caution: The Gold Trombone dissipates its heat by convection. The maximum
ambient operating temperature of 40 °C (104 °F) must not be exceeded.
0 °C to 40 °C (32 °F to 104 °F)
4.2. Unpacking the Drive Components
Before you begin working with the Gold Trombone, verify that you have all of its components,
as follows:
• The Gold Trombone servo drive
• The Elmo Application Studio (EAS) software and software manual
The Gold Trombone is shipped in a cardboard box with Styrofoam protection.
To unpack the Gold Trombone:
1. Carefully remove the servo drive from the box and the Styrofoam.
2. Check the drive to ensure that there is no visible damage to the instrument. If any damage
has occurred, report it immediately to the carrier that delivered your drive.
www.elmomc.com
Page 24
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
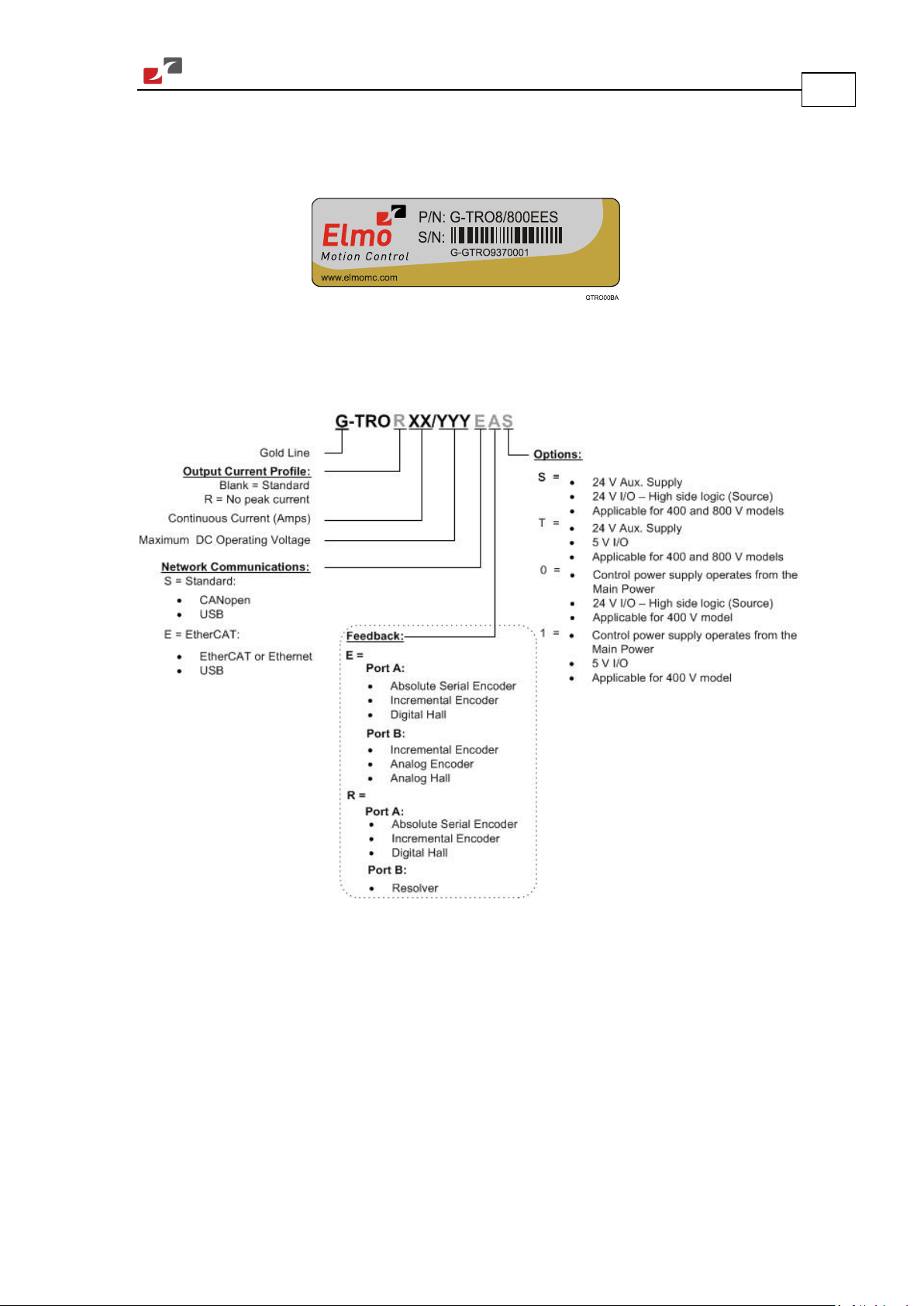
3. To ensure that the Gold Trombone you have unpacked is the appropriate type for your
requirements, locate the part number sticker on the side of the Gold Trombone. It looks
like this:
4. Verify that the Gold Trombone type is the one that you ordered, and ensure that the
voltage meets your specific requirements.
The part number at the top gives the type designation as follows:
24
www.elmomc.com
Page 25
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
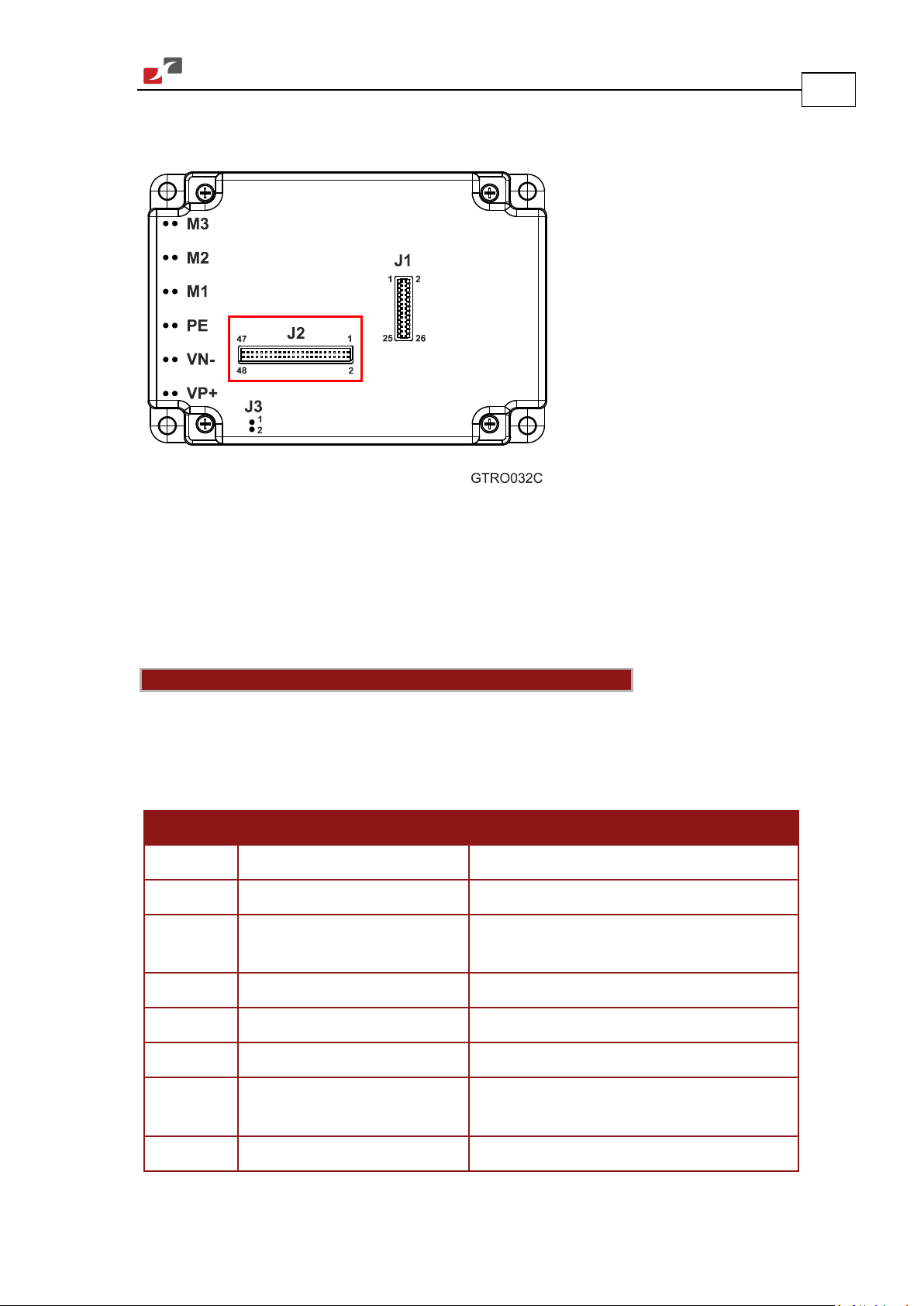
4.3. Connectors
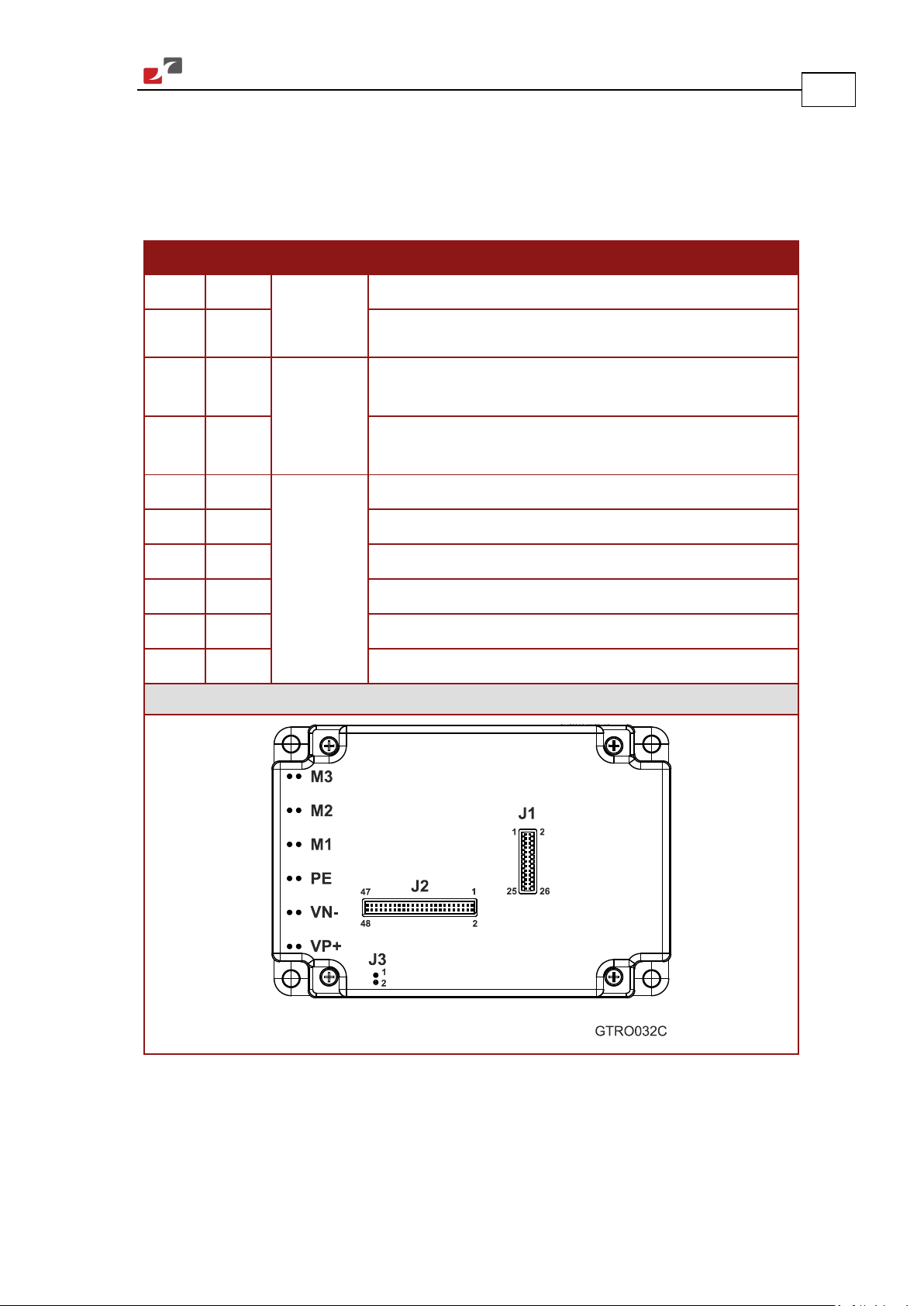
The Gold Trombone has 9 connectors.
4.3.1. Connector Types
Port Pins Type Function
25
J1 2x13 1.27 mm
J2 2x24 Communications
pitch 0.41
Analog Input, Feedback
mm sq
J3/1 1 2 mm pitch
0.51 mm sq
24 VDC Auxiliary power input positive (Only in Trombones
with the S or T suffix)
J3/2 1 24 VDC Auxiliary supply input return (Only in Trombones
with the S or T suffix)
VP+ 2 2.54 mm
VN- 2 Negative DC power input
pitch
Positive DC power input
0.64 mm sq
PE 2 Protective earth
M1 2 Motor power output 1
M2 2 Motor power output 2
M3 2 Motor power output 3
Connector Location
Table 1: Connector Types
www.elmomc.com
Page 26
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.3.2. Pinouts
The pinouts in this section describe the function of each pin in the Gold Trombone connectors
that are listed in Table 1.
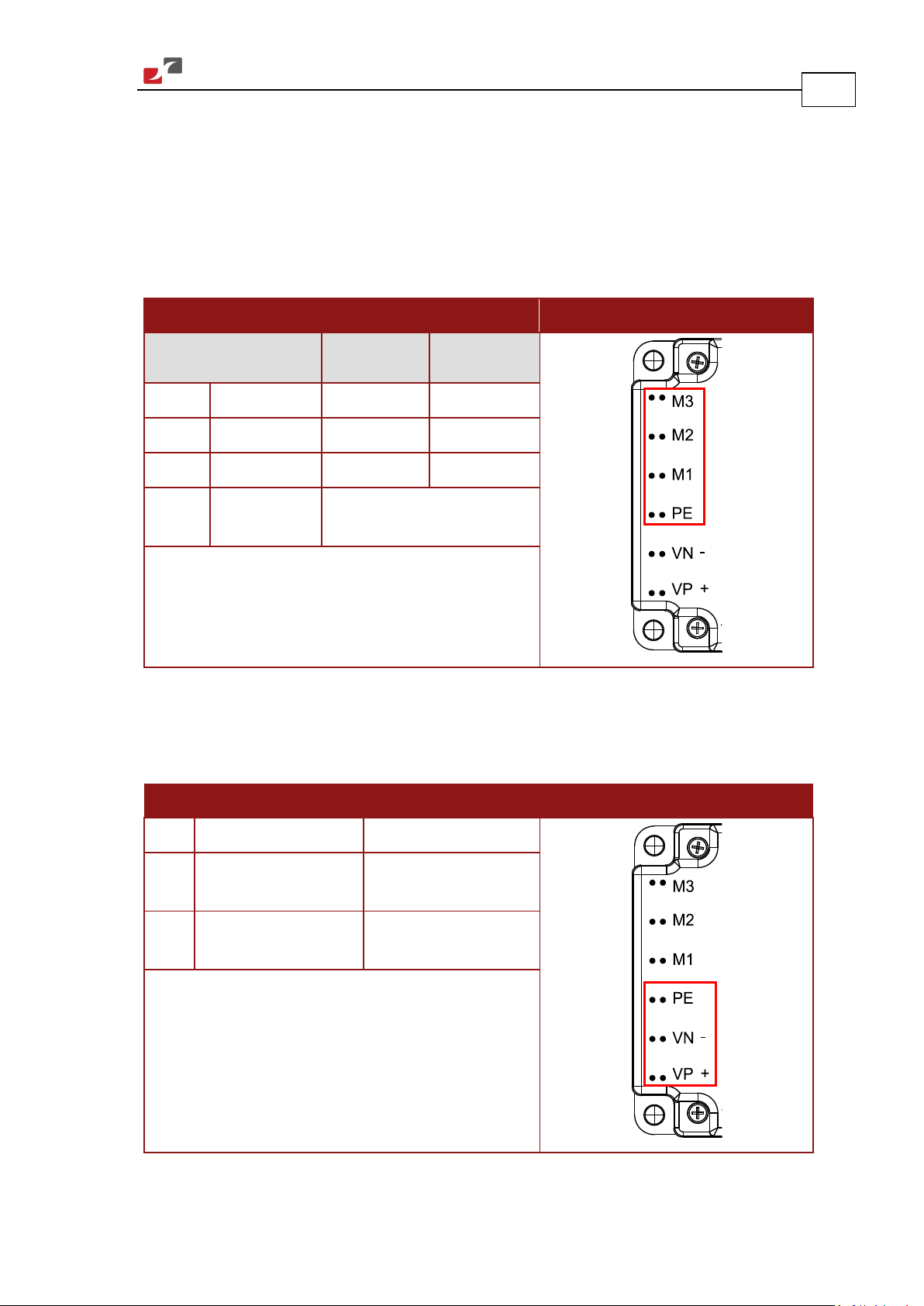
4.3.2.1. Motor Power
For full details about connecting motor power see Section 4.7.1.
Pin Function Cable Pin Positions
26
Brushless
Motor
Brushed DC
Motor
M3 Motor phase Motor Motor
M2 Motor phase Motor Motor
M1 Motor phase Motor N/C
PE Protective
Power and Motor
Earth
Connector Type: 2.54 mm pitch 0.64 mm sq
Table 2: Connector for Motor
4.3.2.2. Main Power
For full details about connecting main power see Section 4.7.2.
Pin Function Cable Pin Positions
PE Protective Earth Power and Motor
VN- DC Negative Power
Power
input
VP+ DC Positive Power
Power
input
Connector Type: 2.54 mm pitch 0.64 mm sq
Table 3: Connector for Main Power
www.elmomc.com
Page 27
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
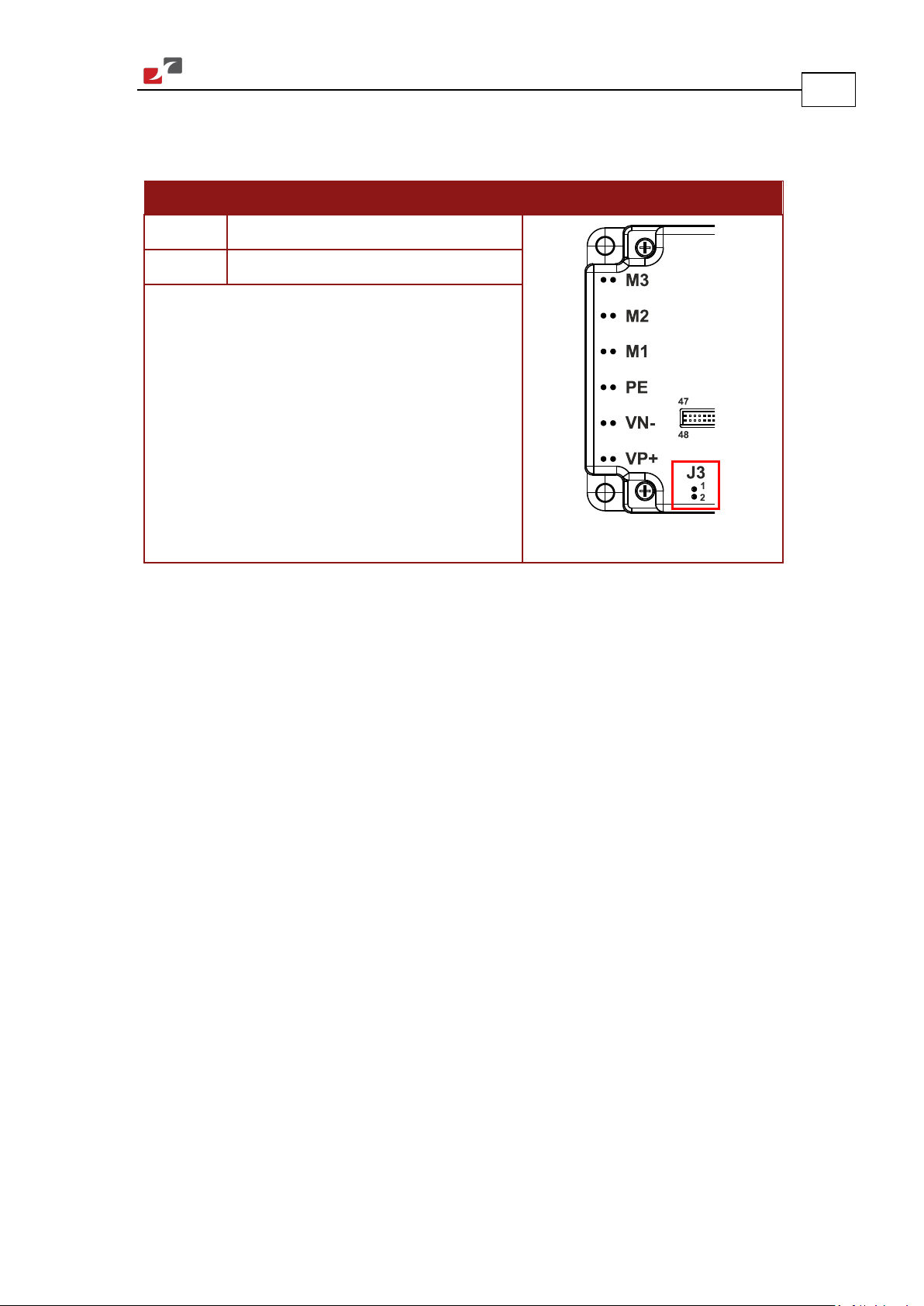
4.3.2.3. Auxiliary Power Connector (J3)
For full details about connecting auxiliary power, see Section 4.7.3.
Pin (J3) Function Pin Positions
1 +24 V Auxiliary Supply Input Positive
2 24 V RET Auxiliary Supply Input Return
Connector Type: 2 mm pitch 0.51 mm sq
27
Table 4: Auxiliary 24 VDC Backup Supply Pins and Polarity
www.elmomc.com
Page 28
MAN-G-TROIG -EC (Ver. 1.604)
Feedback, Analog input,
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.3.2.4. Connector J2
communications
Connector Type: 1.27 mm pitch
0.41 mm sq
For full details about connecting
feedback port A see Section
4.9.1.
For full details about connecting
feedback port B see Section
4.9.2.
For full details about connecting
feedback port C see Section
4.9.3.
28
Note regarding the EtherCAT and CAN communication options:
The J2 Connector exports all supported communication links. However, note that CAN and
EtherCAT are not available in the same version of the Gold Trombone and are thus not
operational simultaneously. See the part number diagram in Section 4.2 above for the
different Gold Trombone configurations.
Pin (J2) Signal Function
For full details about connecting
analog input see Section 4.10.3.
For full details about connecting
communication see
Section 4.11.
1 PortA_ENC_A+ /ABS_CLK+ Port A- channel A/ Absolute encoder clock+
2 PortC_ENCO_A- Port C- channel A complement output
3 PortA_ENC_A-/ABS_CLK- Port A- channel A complement / Absolute
encoder clock-
4 PortC_ENCO_A+ Port C- channel A output
5 PortA_ENC_B+/ABS_DATA+ Port A - channel B/ Absolute encoder Data+
6 PortC_ENCO_B- Port C - channel B complement output
7 PortA_ENC_B-/ABS_DATA- Port A - channel B complement / Absolute
encoder Data-
8 PortCENCO_B+ Port C - channel B output
www.elmomc.com
Page 29

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Pin (J2) Signal Function
9 PortA_ENC_INDEX+ Port A – index
10 PortC_ENCO_INDEX- Port C - index complement output
11 PortA_ENC_INDEX- Port A - index complement
12 PortC_ENCO_INDEX+ Port C - index output
13 PortB_ENC_A+/SIN+ Port B - channel A
14 HC Hall sensor C input
15 PortB_ENC_A-/SIN- Port B - channel A complement
16 HB Hall sensor B input
17 PortB_ENC_B+/COS+ Port B - channel B
18 HA Hall sensor A input
19 PortB_ENC_B-/COS- Port B - channel B complement
29
20 ANLRET Analog return
21 PortB_ENC_INDEX+/ANALOG_
Port B – index
I+
RESOLVER_OUT+ Vref complement
f= 1/TS, 50 mA Maximum
22 ANALOG1+ Analog input 2
23 PortB_ENC_INDEX-
Port B – index complement
/ANALOG_I-
RESOLVER_OUT- Vref complement
f= 1/TS, 50 mA Maximum
24 ANALOG1- Analog input 1 complement
25 SUPRET Supply return
26 +3.3V 3.3 V supply voltage for EtherCAT LEDs
27 PHY_IN_RX+ EtherCAT In receive
28 EtherCAT: PHY_OUT_RX+ EtherCAT Out receive
29 PHY_IN_RX- EtherCAT In receive complement
30 EtherCAT: PHY_OUT_RX- EtherCAT Out receive complement
31 PHY_IN_COMRET EtherCAT In Communication return
CAN: CAN_COMRET CAN Communication Return
32 EtherCAT: PHY_OUT_COMRET EtherCAT Out Communication
www.elmomc.com
Page 30

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Pin (J2) Signal Function
CAN: CAN_COMRET CAN Communication Return
33 PHY_IN_TX+ EtherCAT In transmit
34 EtherCAT: PHY_OUT_TX+ EtherCAT Out transmit complement
35 PHY_IN_TX- EtherCAT In transmit complement
36 EtherCAT: PHY_OUT_TX- EtherCAT Out transmit complement
37 PHY_IN_LINK_ACT EtherCAT In active LED
30
38 EtherCAT:
EtherCAT Out active LED
PHY_OUT_LINK_ACT
CAN: CAN_L CAN_L bus line (dominant low)
39 PHY_IN_SPEED EtherCAT In LED2
40 EtherCAT: PHY_OUT_SPEED EtherCAT Out LED2
CAN: CAN_H CAN_H bus line (dominant high)
41 USBD- USB data complement
42 USBD+ USB data
43 USB_COMRET USB_COMRET
44 USB_VBUS USB VBUS 5V
45 N/A N/A – Not in use, keep unconnected
46 COMRET Common return
47 N/A N/A – Not in use, keep unconnected
48 N/A N/A – Not in use, keep unconnected
Table 5: Connector J2 – Feedback and Analog Input
www.elmomc.com
Page 31

MAN-G-TROIG -EC (Ver. 1.604)
Digital Inputs, Digital Outputs, STO,
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.3.2.5. Connector J1
31
Amplifier and Communication LEDs, Encoder
Supply
Connector Type: 1.27 mm pitch 0.41 mm sq
For full details about connecting digital input
see Section 4.10.3.
For full details about connecting digital
output see Section 4.10.2.
Pin (J1) Signal Function
1 SUPRET Supply Return
2 +5VE Encoder +5V supply
3 N/A N/A
4 N/A N/A
5
6
7
8
9
10
11
12
INRET1_6 Programmable digital inputs 1–6 return
IN1 Programmable digital input 1
IN2 Programmable digital input 2
IN3 Programmable digital input 3
IN4 Programmable digital input 4
IN5 Programmable digital input 5
IN6 Programmable digital input 6
STO_RET Safety signal return
13
14
STO2 Safety 2 input (default 24 V)
STO1 Safety 1 input (default 24 V)
15 LED_ET_ERR Communication error LED output (Cathode)
16 LED_ET_RUN Communication OK LED output (Cathode)
www.elmomc.com
Page 32

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Pin (J1) Signal Function
32
17
18
19
LED2 Bi-color amplifier OK LED output (Cathode)
LED1 Bi-color amplifier error LED output (Cathode)
COMRET Common return
20 N/A N/A
21
22
23
24
OUT2 Programmable output 2
OUT1 Programmable output 1
OUT4 Programmable output 4
OUT3 Programmable output 3
25 VDDRET VDD Supply Return
26 VDD VDD Supply (5V up to 30V)
Table 6: Connector J1 – Communication
www.elmomc.com
Page 33

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.4. Mounting the Gold Trombone
The Gold Trombone is designed for mounting on a printed circuit board (PCB). It is connected
by 1.27 mm pitch 0.41 mm square pins and 2.54 mm pitch 0.64 mm square pins. When
integrating the Gold Trombone into a PCB, be sure to leave about 1 cm (0.4") outward from the
heatsink to enable free convection of the air around the Gold Trombone. We recommend that
the Gold Trombone be soldered directly to the board. Alternatively, though this is not
recommended, the Gold Trombone can be attached to socket connectors mounted on the PCB.
However, if the PCB is enclosed in a metal chassis, we recommend that the Gold Trombone be
screw-mounted to it as well to help with heat dissipation. The Gold Trombone has
screw-mount holes on each corner of the heatsink for this purpose.
33
Figure 2: Gold Trombone Footprint
www.elmomc.com
Page 34

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.5. Integrating the Gold Trombone on a PCB
The Gold Trombone is designed to be mounted on a PCB, either by soldering its pins directly to
the PCB or by using suitable socket connectors. In both cases the following rules apply:
4.5.1. Traces
1. The size of the traces on the PCB (thickness and width) is determined by the current
carrying capacity required by the application.
The rated continuous current limit (Ic) of the Gold Trombone is the current used for
sizing the motor traces (M1, M2, M3 and PE) and power traces (VP+, VN- and PE).
For control, feedbacks and I/O conductors the actual current is very small, but
“generous” thickness and width of the conductors will contribute to better
performance and lower interference.
2. The traces should be as short as possible to minimize EMI and to minimize the heat
generated by the conductors.
3. The spacing between the high voltage conductors (VP+, VN-, M1, M2, M3) must be at least:
34
400 V Drives 800 V Drives
Surface
layer
Non-coated 2.4 mm 4.2 mm
Coated 1.0 mm 2.4 mm
Internal layer 0.5 mm 1.0 mm
4. The spacing between the high voltage conductors (VP+, VN-, M1, M2, M3) and the logic
part of the drive must be at least:
400 V Drives 800 V Drives
Surface
layer
Non-coated 4.8 mm 8.4 mm
Coated 2.0 mm 3.8 mm
Internal layer 0.5 mm 1.0 mm
5. The spacing between any voltage conductors and the PE part of the drive, must be at least:
400 V Drives 800 V Drives
Surface
layer
Non-coated 2.4 mm 4.2 mm
Coated 1.0 mm 1.8 mm
Internal layer 0.5 mm 1.0 mm
Complying with the rules above will help satisfy UL safety standards, MIL-STD-275 and the IPCD-275 standard for non-coated conductors, operating at voltages lower than 800 VDC.
www.elmomc.com
Page 35

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.5.2. Grounds and Returns
The “Returns” of the Gold Trombone are structured internally in a star configuration. The
returns in each functional block are listed below:
Functional Block Return Pin
CAN Communications CAN_COMRET (J2/31, 32)
USB Communications USB_COMRET (J2/43)
PHY_IN communication return PHY_IN_COMRET (J2/31)
PHY OUT communication return PHY_OUT_COMRET (J2/32)
Analog input return ANLRET (J2/20)
Common return COMRET (J1/19, J2/46)
Supply return SUPRET (J1/1, J2/25)
Table 7: Grounds and Returns
35
The returns above are all shorted within the control section of the Gold Trombone in a
topology that results in optimum performance.
Caution: Follow these instructions to ensure safe and proper implementation.
Failure to meet any of the below-mentioned requirements can result in
drive/controller/host failure.
1. When wiring the traces of the above functions, on the Integration Board, the Returns of
each function must be wired separately to its designated terminal on the Gold Trombone.
DO NOT USE A COMMON GROUND PLANE. Shorting the commons on the Integration
Board may cause performance degradation (ground loops, etc).
2. Inputs: The 6 digital inputs are optically isolated from the other parts of the Gold
Trombone. All six inputs share one return line, INRET1_6. To retain isolation, the Input
Return pin and all other conductors on the input circuit, must be laid out separately.
3. Outputs: The 4 digital outputs are optically isolated from the other parts of the Gold
Trombone. Each output is related to VDDRET that is also optically isolated. To retain
isolation, all the output circuit conductors must be laid out separately.
4. Return Traces: The return traces should be as large as possible, but without shorting each
other, and with minimal cross-overs.
5. Main Power Supply and Motor Traces: The power traces must be kept as far away as
possible from the feedback, control and communication traces.
6. PE Terminal: The PE (Protective Earth) terminal is connected directly to the Gold
Trombone’s heat-sink. The heat-sink serves as an EMI common plane. The PE terminal
should be connected to the system's Protective Earth. Any other metallic parts (such as the
chassis) of the assembly should be connected to the Protective Earth as well.
www.elmomc.com
Page 36

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
7. Under normal operating conditions, the PE trace carries no current. The only time these
traces carry current is under abnormal conditions (such as when the device has become a
potential shock or fire hazard while conducting external EMI interferences directly to
ground). When connected properly the PE trace prevents these hazards from affecting the
drive.
4.6. Connection Diagrams
There are two connection diagrams for EtherCAT and two for CAN that show the two different
ways of connecting the power supply:
• 400 V and 800 V S or T -models (the catalog number has an S or T suffix) that feature
backup functionality and require an auxiliary 24 V backup supply. The drive will not be
operative without the external 24 VDC supply.
• 400 V model without backup functionality (0 or 1 suffix). The drive’s internal DC/DC
converter is fed from the VP+ and VN- of the internal drive’s bus line.
36
www.elmomc.com
Page 37

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
37
Figure 3: Gold Trombone Connection Diagram for EtherCAT – with Backup Functionality
(S or T Model Drive)
www.elmomc.com
Page 38

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
38
Figure 4: Gold Trombone Connection Diagram for EtherCAT – 400 V without Backup Functions
(0 or 1 Suffix)
www.elmomc.com
Page 39

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
39
Figure 5: Gold Trombone Connection Diagram for CAN – with Backup Functionality
(S or T Model Drive)
www.elmomc.com
Page 40

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
40
Figure 6: Gold Trombone Connection Diagram for CAN – 400 V without Backup Functions
(0 or 1 Suffix)
www.elmomc.com
Page 41

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.7. Main Power, Motor Power and Auxiliary Power
The Gold Trombone receives power from main and auxiliary supplies and delivers power to the
motor.
Note: There are multiple voltage ratings of the Gold Trombone (80 V to 780 V), so you must
use the correct power supply according to the maximum operating voltage of the Gold
Trombone. See Section Chapter 3: Technical Information
4.7.1. Motor Power
Pin Function Cable Pin Positions
Brushless Motor Brushed DC Motor
M3 Motor phase Motor Motor
M2 Motor phase Motor Motor
M1 Motor phase Motor N/C
41
PE Protective
Power and Motor
Earth
Table 8: Connector for Motor
Connect the M1, M2, M3 and PE pins on the Gold Trombone in the manner described in
Section 4.5 (Integrating the Gold Trombone on a PCB). The phase connection is arbitrary as
Elmo Application Studio (EAS) will establish the proper commutation automatically during
setup. When tuning a number of drives, you can copy the setup file to the other drives and thus
avoid tuning each drive separately. In this case the motor-phase order must be the same as on
the first drive.
Figure 7: Brushless Motor Power Connection Diagram
www.elmomc.com
Page 42

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Figure 8: DC Brushed Motor Power Connection Diagram
Notes:
• For best immunity, it is highly recommended to use a 4-wire shielded (not twisted) cable
for the motor connection. The gauge is determined by the actual current consumption of
the motor.
• Connect the cable shield to the closest ground connection at the motor end.
42
• Connect the cable shield to the closest PE terminal of the Gold Trombone.
• Ensure that the motor chassis is properly grounded.
4.7.2. Main Power
Pin Function Cable Pin Positions
PE Protective Earth Power and Motor
VN- DC Negative Power input Power
VP+ DC Positive Power input Power
Table 9: Connector for Main Power
The DC power for the Gold Trombone is delivered from a separated rectifying unit (supplied by
the user). Elmo recommends using the Tambourine rectifier specifically designed for use with
Elmo drives which offers a range of versatile options.
www.elmomc.com
Page 43

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
The following sections contain topology recommendations for implementing three-phase and
single-phase supply chains.
The power stage of the Gold Trombone is fully isolated from the other sections of the Gold
Trombone, such as the control-stage and the heat-sink. This isolation allows the user to
connect the common of the control section to the PE, a connection which significantly
contributes to proper functionality, safety and EMI immunity, leading to better performance of
the Gold Trombone.
In addition, this isolation simplifies the requirements of the DC power supply that is used to
power the DC bus of the Gold Trombone, by allowing it to operate with a non-isolated DC
power source (a direct-to-mains connection) which eliminates the need for a bulky and
expensive isolation transformer.
However, as well as operating from a non-isolated/direct-to-mains DC power supply, the Gold
Trombone can also operate from an isolated power supply or batteries.
When rectifying an AC voltage source, the AC voltage level must be limited to 270 VAC so as
not to exceed the maximum 390 VDC in the case of a 400 VDC drive, or 528 VAC so as not to
exceed the maximum 747 VDC in the case of an 800 VDC drive.
43
4.7.2.1. Direct-to-Mains Power Source (Non-Isolated Rectifier)
This section relates to the configuration of the power supply and drive, which are connected
directly to the mains.
To connect the non-isolated DC power supply:
1. For best immunity, it is highly recommended to use twisted cables for the DC power supply
cable. A 3-wire shielded cable should be used. The gauge is determined by the actual
current consumption of the motor.
2. Connect both ends of the cable shield to the closest PE connections.
3. Tie one end to the power supply’s PE terminal, and tie the other end either to the PE pins
of the module/PE terminal of the integration board, or attach it to one of the four
mounting screws of the drive’s heat-sink.
www.elmomc.com
Page 44

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.7.2.1.a Three-Phase Direct-to-Mains Connection Topology
Figure 9: Non-Isolated Three-Phase Connection Topology
44
Caution:
• Do not connect VN- to PE. In a direct-to-mains connection the VN- must
not be connected to the PE, as this will cause irreparable damage to the
system.
• Take care and note that in a direct-to-mains connection the Neutral point is
not the most negative voltage level. It is the mid-point level of the rectified
DC bus.
www.elmomc.com
Page 45

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.7.2.1.b Single-Phase Direct-to-Mains Connection Topology
Figure 10: Non-Isolated Single-Phase Connection Topology
45
The Power Supply is connected directly to the mains AC line.
Warning:
• Do not connect VN- to PE. In a direct-to-mains connection the VN- must
not be connected to the PE, as this will cause irreparable damage to the
system.
• Take care and note that in a direct-to-mains connection the Neutral point is
not the most negative voltage level. It is the mid-point level of the rectified
DC bus.
www.elmomc.com
Page 46

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.7.2.1.c Multiple Connections Topology
In a multi-axis application it is likely that a single power supply can feed several drives in
parallel. This topology is efficient and cost saving, by reducing the number of power supplies
and the amount of wiring. Most importantly it utilizes an energy sharing environment among
all the drives that share the same DC bus network.
The power supply is connected directly to the mains AC line, and it feeds more than one drive.
46
Figure 11: Non-Isolated Three-Phase Multiple Connection Topology
www.elmomc.com
Page 47

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.7.2.2. Battery Power Supply
Figure 12: Battery Connection Topology
Caution: When using batteries, it is recommended to connect the negative pole
to the PE.
When doing so, the charger of the battery
an isolation transformer.
47
must be isolated from the mains by
4.7.3. +24 V Auxiliary Supply (J3)
Pin (J3) Function Pin Positions
1 +24 V Auxiliary Supply Input Positive
2 24 V RET Auxiliary Supply Input Return
Table 10: Auxiliary 24 VDC Backup Supply Pins and Polarity
In drives that have an 0 or 1 suffix (only for 400V models), a smart control-supply algorithm
enables the Gold Trombone to operate with the main power supply only, with no need for an
auxiliary supply voltage to supply the drive’s logic section. However, it should be noted that in
such model there is no backup ability at all.
www.elmomc.com
Page 48

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
If backup functionality is required to store control parameters in the event of a mains power
outage, then an S or T-model Gold Trombone should be used, with an external 24 VDC isolated
supply connected to it.
Note that the S or T-model Gold Trombone always requires an external 24 VDC power supply,
regardless of whether or not backup functionality is required.
Connect the auxiliary 24 VDC power supply as described below.
To connect the 24 VDC backup supply:
1. Use a 24 AWG twisted pair shielded cable. The shield should have copper braid.
2. The source of the 24 VDC backup supply must be isolated with an isolation transformer.
3. For safety and EMI reasons, connect the return of the 24 VDC backup supply to the closest
ground (PE).
4. Connect the cable shield to the closest ground (PE) near the power source.
5. Before applying power, first verify that the polarity of the connection is correct.
48
Figure 13: Auxiliary 24 VDC Backup Supply Connection Diagram
www.elmomc.com
Page 49

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.8. STO (Safe Torque Off) Inputs (J1)
Activation of Safe Torque Off causes the drive to stop providing power that can cause rotation
(or motion in the case of a linear motor) to the motor.
This function may be used to prevent unexpected motor rotation (of brushless DC motors)
without disconnecting the drive from the power supply.
The motor is active only as long as 24 VDC (or 5 V for the TTL option) is provided to both STO1
and STO2. Whenever any input voltage is no longer present, power is not provided to the
motor and the motor shaft continues to rotate to an uncontrolled stop.
In circumstances where external influences (for example, falling of suspended loads) are
present, additional measures such as mechanical brakes are necessary to prevent any hazard.
This function corresponds to an uncontrolled stop in accordance with Stop Category 0 of IEC
60204-1.
Note: This function does not protect against electrical shock, and additional measures to
turn the power off are necessary.
49
The following table defines the behavior of the motor as a function of the state of the STO
inputs:
Signal – STO1 Signal – STO2 Function
Not Active Not Active Motor is disabled
Not Active Active Motor is disabled
Active Not Active Motor is disabled
Active Active Motor can be enabled
Table 11: Motor Behavior According to Safety Inputs
Note: In the Gold Trombone, STO1 also latches a software disable condition.
Pin (J1) Signal Function
14 STO1 Safety 1 input (default 24 V)
13 STO2 Safety 2 input (default 24 V)
12 STO_RET Safety signal return
Table 12: Safety Inputs Pin Assignments
See Figure 14 for the PLC option connection and Figure 15 for the TTL option connection.
www.elmomc.com
Page 50

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Figure 14: STO Input Connection – PLC Option for S or 0 Suffixes
50
Figure 15: Safety Input Connection – TTL Option for T or 1 Suffixes
www.elmomc.com
Page 51

MAN-G-TROIG -EC (Ver. 1.604)
Port A
Port B
Port C
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9. Feedback
Figure 16: Feedback Ports on J2
The Gold Trombone has two configurable motion sensor input ports, namely, Port A and Port B,
and the emulated buffered output Port C. Motion sensors from the motor being controlled and
from other sources can be connected to any of the available inputs on Port A or Port B.
Software configuration designates each input a role, e.g., the incremental encoder on Port B is
the controlled motor position feedback, the Hall sensors on Port A are commutation feedback,
and the incremental encoder on Port A is follower input.
51
For more information about sensors and their use refer to the Gold Line Software Manual.
4.9.1. Port A (J2, J1)
Port A supports the following sensor inputs:
• Digital Hall sensors
• Incremental encoder or absolute serial encoder, depending on the specific model
Differential PWM signal input can be connected to Port A in the models that support input
from an incremental encoder. The PWM signal can be connected to the applicable pair of
matching + and - encoder channels and is configurable by software.
Differential pulse and direction signal inputs can be connected to Port A in the models that
support input from an incremental encoder. The signals can be connected to the applicable pair
of matching + and - encoder channels and are configurable by software.
www.elmomc.com
Page 52

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Port A - Incremental Encoder Port A - Absolute Serial Encoder
Pin Signal Function Signal Function
52
J1/2 +5V Encoder +5V
+5V Encoder +5V supply
supply
J1/1 SUPRET Supply return SUPRET Supply return
J2/1 PortA_ENC_A+ Channel A+ ABS_CLK+ Abs encoder clock +
J2/3 PortA_ENC_A- Channel A- ABS_CLK- Abs encoder clock -
J2/5 PortA_ENC_B+ Channel B+ ABS_DATA+ Abs encoder data +
J2/7 PortA_ENC_B- Channel B- ABS_DATA- Abs encoder data -
J2/9 PortA_ENC_Index+ Index+ Reserved Reserved
J2/11 PortA_ENC_Index- Index- Reserved Reserved
J2/18 HA Hall sensor A HA Hall sensor A
J2/16 HB Hall sensor B HB Hall sensor B
J2/14 HC Hall sensor C HC Hall sensor C
Table 13: Port A Pin Assignments
www.elmomc.com
Page 53

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.1.1. Incremental Encoder Connection Diagram
53
Figure 17: Port A Incremental Encoder Input – Recommended Connection Diagram
www.elmomc.com
Page 54

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.1.2. Absolute Serial Encoder Connection Diagram
54
Figure 18: Absolute Serial Encoder – Recommended Connection Diagram for Sensors
Supporting Data/Clock (e.g., Biss/SSI/EnDAT/etc.)
www.elmomc.com
Page 55

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
55
Figure 19: Absolute Serial Encoder – Recommended Connection Diagram for Sensors
Supporting Data Line Only (NRZ types, e.g., Panasonic / Mitutoyo / etc.)
4.9.1.3. Hall Sensor Connection Diagram
Figure 20: Hall Sensors Connection Diagram
www.elmomc.com
Page 56

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.2. Port B (J2, J1)
Port B supports the following sensors:
• Incremental encoder, interpolated analog encoder or as analog Hall sensors
Or:
• Resolver (separate hardware option)
Differential PWM signal input can be connected to port B in the models that support input
from an incremental encoder. The PWM signal can be connected to the applicable pair of
matching + and – encoder channels and is configurable by software.
Differential pulse and direction signal inputs can be connected to port B in the models that
support input from an incremental encoder. The signals can be connected to the applicable pair
of matching + and – encoder channels and are configurable by software.
56
Port B - Incremental or
Port B - Resolver
Interpolated Analog Encoder
G-TROXXX/YYYYEXS G-TROXXX/YYYYRXS
Pin Signal Function Signal Function
J1/2 +5V Encoder +5V supply NC
J1/1 SUPRET Supply return SUPRET Supply return
J2/13 PortB_ENC_A+/SIN+ Channel A+ / Sine+ SIN+ Sine+
J2/15 PortB_ENC_A-/SIN- Channel A- / Sine- SIN- Sine-
J2/17 PortB_ENC_B+/COS+ Channel B+ / Cosine+ COS+ Cosine+
J2/19 PortB_ENC_B-/ COS- Channel B - / Cosine - COS- Cosine-
J2/21 PortB_ENC_INDEX+/
Analog_Index+
J2/23 PortB_ENC_INDEX-/
Analog_Index-
Index +/
Analog_Index+
Index -/
Analog_Index-
RESOLVER_OUT+ Vref f=1/TS,
50 mA max.
RESOLVER_OUT- Vref
complement
f= 1/TS, 50 mA
max.
Table 14: Port B Pin Assignments
www.elmomc.com
Page 57

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.2.1. Incremental Encoder Connection Diagram
57
Figure 21: Port B Incremental Encoder Input – Recommended Connection Diagram
www.elmomc.com
Page 58

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.2.2. Interpolated Analog Encoder Connection Diagram
58
Figure 22: Port B - Interpolated Analog Encoder Connection Diagram
www.elmomc.com
Page 59

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.9.2.3. Resolver Connection Diagram
59
Figure 23: Port B – Resolver Connection Diagram
4.9.3. Port C – Emulated Encoder Output (J2)
Port C provides emulated encoder output derived from port A or port B feedback inputs, or
from internal variables. The output options are:
• Port A/B daisy chain (1:1) for incremental encoder
• Encoder emulation: Emulate any input sensor, digital or analog, or use to emulate an
internal variable such as virtual profiler.
• PWM output: any pair of outputs that is used as an encoder channel (e.g., channel A+ and
channel A-) can be configured by software to become PWM output.
• Pulse & Direction output: The output pins that are assigned as channel A and channel B
when used as encoder out, can be configured by software to become pulse and direction
outputs respectively.
This port is used when:
• The Gold Trombone is used as a current amplifier to provide position data to the position
controller.
• The Gold Trombone is used in velocity mode, to provide position data to the position
controller.
• The Gold Trombone is used as a master in follower or ECAM mode.
www.elmomc.com
Page 60
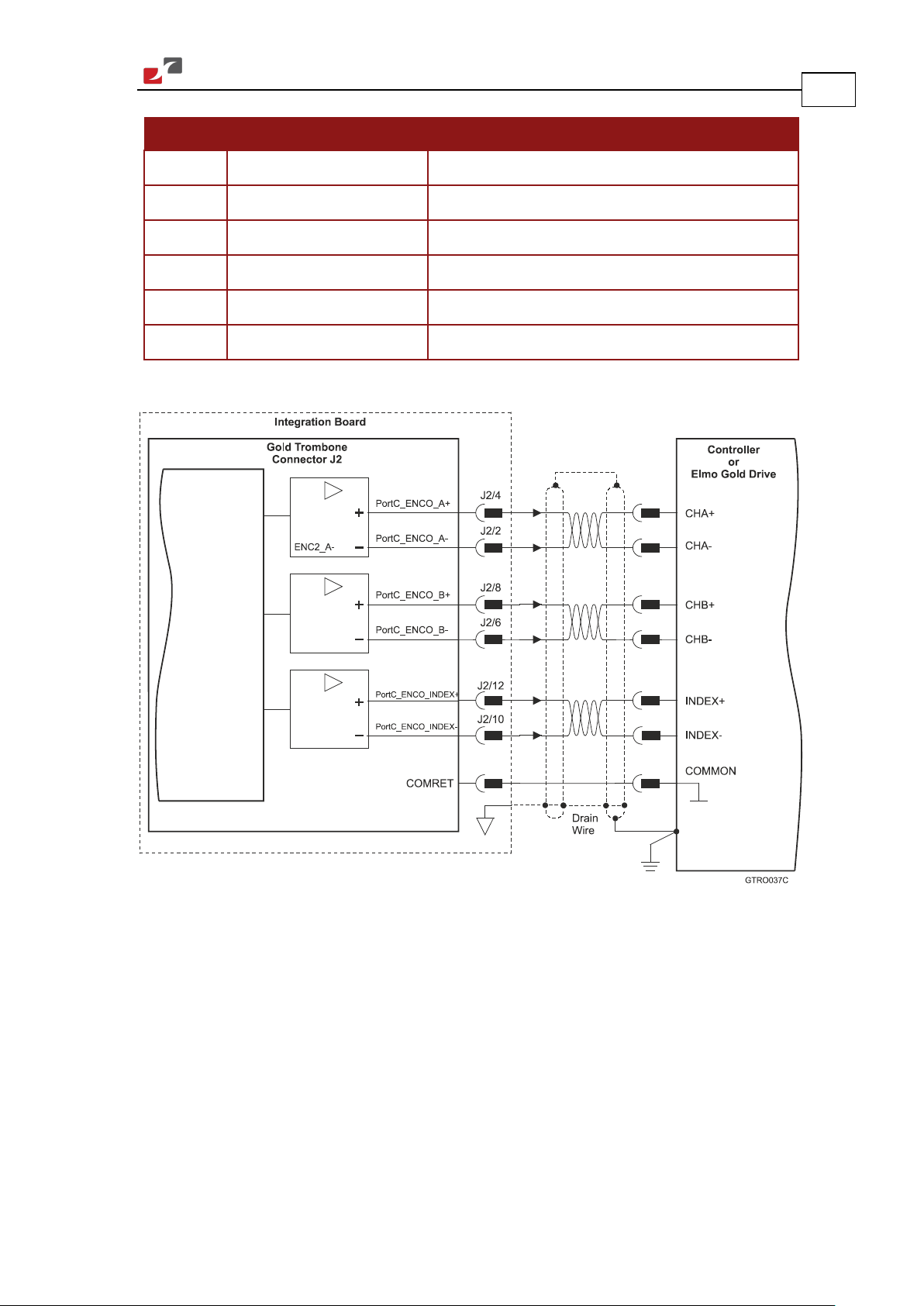
MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Pin (J2) Signal Function
4 PortC_ENCO_A+ Buffered Channel A+ output/Pulse+/PWM+
2 PortC_ENCO_A- Buffered Channel A- output / Pulse- / PWM-
8 PortC_ENCO_B+ Buffered Channel B+ output / Dir+
6 PortC_ENCO_B- Buffered Channel B- output / Dir-
12 PortC_ENCO_INDEX+ Buffered Channel INDEX+ output
10 PortC_ENCO_INDEX- Buffered Channel INDEX- output
Table 15: Port C Pin Assignment
60
Figure 24: Emulated Encoder Differential Output – Recommended Connection Diagram
www.elmomc.com
Page 61

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.10. User I/Os
The Gold Trombone has six programmable digital inputs (J1), four digital outputs (J1) and one
analog input (J2).
4.10.1. Digital Inputs (J1)
Each of the pins below can function as an independent input.
Pin (J1) Signal Function
6 IN1 High speed programmable input 1
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
7 IN2 High speed programmable input 2
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
8 IN3 High speed programmable input 3
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
61
9 IN4 High speed programmable input 4
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
10 IN5 High speed programmable input 5
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
11 IN6 High speed programmable input 6
(event capture, home, general purpose, RLS, FLS, INH, PWM & dir
input, pulse & dir input)
5 INRET1-6 Programmable inputs 1 - 6 return
Table 16: Digital Input Pin Assignments
See Figure 25 for the PLC option connection and Figure 26 for the TTL option connection.
www.elmomc.com
Page 62

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
62
Figure 25: Digital Input PLC Mode Connection Diagram for S or 0 Suffixes
www.elmomc.com
Page 63

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
63
Figure 26: Digital Input TTL Mode Connection Diagram for T or 1 Suffixes
www.elmomc.com
Page 64

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.10.2. Digital Outputs (J1)
The outputs conform to the PLC standard. TTL configuration is available upon request.
Pin (J1) Signal Function
High speed programmable digital output 1:
64
22 OUT1
• 500 mA for PLC models
• 7 mA for TTL models
Programmable digital output 2:
21 OUT2
• 250 mA for PLC models
• 7 mA for TTL models
Programmable digital output 3:
24 OUT3
• 250 mA for PLC models
• 7 mA for TTL models
Programmable digital output 4:
23 OUT4
• 250 mA for PLC models
• 7 mA for TTL models
26 VDD Supply for outputs 1 to 4
25 VDDRET Supply return for outputs 1 to 4
Table 17: Digital Output Pin Assignment
See Figure 27 for the PLC option connection and Figure 28 for the TTL option connection.
www.elmomc.com
Page 65

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
65
Figure 27: Digital Output Connection Diagram – PLC Option for S or 0 Suffixes
www.elmomc.com
Page 66

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
66
Figure 28: Digital Output Connection Diagram – TTL Option for T or 1 Suffixes
www.elmomc.com
Page 67

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.10.3. Input (J2)
An analog user input can be configured by software to be used as either tachometer velocity
sensor input or potentiometer position feedback.
Pin (J2) Signal Function
22 ANALOG1+ Analog input 1+
24 ANALOG1- Analog input 1-
20 ANLRET Analog ground
Table 18: Analog Input Pin Assignment
67
Figure 29: Analog Input with Single-Ended Source
www.elmomc.com
Page 68

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.11. Communications
The communication interface may differ according to the user’s hardware. The Gold Trombone
can communicate using the following options:
Standard EtherCAT
G-TROXXX/YYYSXX G-TROXXX/YYYEXX
CAN EtherCAT
USB 2.0 USB 2.0
Table 19: Gold Trombone Communication Options
For ease of setup and diagnostics of CAN communication, and CAN can be used simultaneously.
Note: When the EtherCAT is connected, and FoE in operation, the USB cable connection
must be disconnected.
68
4.11.1. CAN Communication (J2)
In order to benefit from CAN communication, the user must have an understanding of the basic
programming and timing issues of a CAN network.
To connect the CAN communication cable:
1. Connect the shield to the ground of the host (PC). Usually, this connection is soldered
internally inside the connector at the PC end. You can use the drain wire to facilitate
connection.
2. Ensure that the shield of the cable is connected to the shield of the connector used for
communications. The drain wire can be used to facilitate the connection.
3. Make sure to have a 120-Ohm resistor termination at each of the two ends of the network
cable.
4. The Gold Trombone’s CAN port is non-isolated.
Pin (J2) Signal Function
31, 32 CAN_COMRET CAN Communication Return
38 CAN_L CAN_L bus line (dominant low)
40 CAN_H CAN_H bus line (dominant high)
Table 20: CAN Pin Assignments
www.elmomc.com
Page 69

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
69
Figure 30: CAN Network Diagram
Caution: When installing CAN communication, ensure that each servo drive is
allocated a unique ID. Otherwise, the CAN network may “hang”.
www.elmomc.com
Page 70

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.11.2. USB 2.0 Communication (J2)
The USB network consists of a Host controller and multiple devices. The Gold Trombone is a
USB device.
To connect the USB communication cable:
1. Connect the shield to the ground of the host (PC). Usually, this connection is soldered
internally inside the connector at the PC end. You can use the drain wire to facilitate
connection.
2. Ensure that the shield of the cable is connected to the shield of the connector used for
communications. The drain wire can be used to facilitate the connection.
Pin (J2) Signal Function
44 USB VBUS USB VBUS 5 V
43 USB COMRET USB Communication return
41 USBD- USB _N line
70
42 USBD+ USB _P line
Table 21: USB 2.0 Pin Assignments
Figure 31: USB Network Diagram
www.elmomc.com
Page 71

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.11.3. EtherCAT Communication (J2)
To use EtherCAT and Ethernet communication with the Gold Trombone, it is required to use an
isolation transformer. The most common solution is to use RJ-45 connectors that include
transformer isolation.
This section describes how to connect the Gold Trombone’s EtherCAT interface using the above
mentioned connectors.
Notes for EtherCAT communication:
1. The EtherCAT IN port can be configured as an Ethernet port for TCP/IP – see the EtherCAT
Manual.
2. It is recommended to use CAT5e (or higher) cable. Category 5e cable is a high signal
integrity cable with four twisted pairs.
Pin (J2) Signal Function
26 3.3 V 3.3 V for EtherCAT LEDs
71
31, 32 PHY_IN_COMRET EtherCAT Communication Return
27 PHY_IN_RX+ EtherCAT IN RX+ Line
29 PHY_IN_RX- EtherCAT IN RX- Line
33 PHY_IN_TX+ EtherCAT IN TX+ Line
35 PHY_IN_TX- EtherCAT IN TX- Line
39 PHY_IN_SPEED Indicates EtherCAT Speed
37 PHY_IN_LINK_ACT Indicates EtherCAT LINK
31, 32 PHY_OUT COMRET EtherCAT Communication return
28 PHY_ OUT _RX+ EtherCAT OUT RX+ Line
30 PHY_ OUT _RX- EtherCAT OUT RX- Line
34 PHY_ OUT _TX+ EtherCAT OUT TX+ Line
36 PHY_ OUT _TX- EtherCAT OUT TX- Line
40 PHY_ OUT _SPEED Indicates EtherCAT Speed
38 PHY_ OUT_LINK_ACT Indicates EtherCAT LINK
Table 22: EtherCAT - Pin Assignments
www.elmomc.com
Page 72

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
72
Figure 32: EtherCAT Connection Schematic Diagram
www.elmomc.com
Page 73

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Note: The diagram above ignores line interface for simplicity.
When connecting several EtherCAT devices in a network, the EtherCAT master must always be
the first device in the network. The output of each device is connected to the input of the next
device. The output of the last device may remain disconnected. If redundancy is required, the
output of the last device should be connected to the input of the EtherCAT master.
Figure 33: EtherCAT Network with no Redundancy
73
Figure 34: EtherCAT Network with Redundancy
4.11.4. Ethernet Communication (J2)
To use EtherCAT and Ethernet communication with the Gold Trombone, it is required to use an
isolation transformer. The most common solution is to use RJ-45 connectors that include
transformer isolation.
This section describes how to connect the Gold Trombone Ethernet interface using the above
mentioned connectors.
For other available options, please see Section 0 4.11.5.
To initiate Ethernet communication:
1. The EtherCAT IN port can be configured as an Ethernet port for TCP/IP – see the EtherCAT
Manual.
2. It is recommended to use CAT5e (or higher) cable. Category 5e cable is a high signal
integrity cable with four twisted pairs.
www.elmomc.com
Page 74

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
Pin (J2) Signal Function
26 3.3 V 3.3 V for Ethernet LEDs
27 PHY_IN_RX+ Ethernet RX + Line
29 PHY_IN_RX- Ethernet RX – Line
31, 32 Ethernet COMRET Ethernet Communication return
33 PHY_IN_TX+ Ethernet TX + Line
35 PHY_IN_TX- Ethernet TX – Line
39 PHY_IN_SPEED Indicates Ethernet Speed
37 PHY_IN_LINK_ACT Indicates Ethernet LINK
Table 23: Ethernet - Pin Assignments
74
Figure 35: Ethernet Network Schematic Diagram
Note: The diagram above ignores line interface for simplicity.
www.elmomc.com
Page 75

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.11.5. EtherCAT/Ethernet Line Interface
Ethernet transceivers require either isolation transformers or capacitor coupling for proper
functioning. The Gold Trombone unit does not include such isolation, therefore you must take
this into consideration when designing the integration board.
In Sections 4.11.3 and 4.11.4, a schematic connection with a standard RJ-45 connector that
includes transformer isolation is described.
Other recommended connection options are:
• Gold Trombone to an RJ-45 connector without an integrated magnetic isolation (e.g., M12
connectors) – an isolation transformer is required.
• Connecting two EtherCAT ports on the same board can be done using capacitive coupling
or transformer coupling.
For more detailed explanations, including layout recommendations and component selection
guidelines contact Elmo’s technical support.
4.12. Powering Up
75
After the Gold Trombone is connected to its peripheral devices, it is ready to be powered up.
Caution: Before applying power, ensure that
1. The DC supply is within the specified range.
2. The proper plus-minus connections are in order.
3. The VN- is not connected to the PE nor to the Neutral, when working with a
non-isolated power supply.
4.12.1. Initializing the System
After the Gold Trombone has been connected and mounted, the system must be set up and
initialized. This is accomplished using the Elmo Application Studio, Elmo’s Windows-based
software application. Install the application and then perform setup and initialization according
to the directions in the Elmo Application Studio User’s Manual.
www.elmomc.com
Page 76

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
4.13. Heat Dissipation
The best way to dissipate heat from the Gold Trombone is to mount it so that its heatsink faces
up. For best results leave approximately 10 mm of space between the Gold Trombone‘s
heatsink and any other assembly.
4.13.1. Gold Trombone Thermal Data
• Heat dissipation capability (θ): approximately 5.5 °C/W
• Thermal time constant: approximately 600 seconds (thermal time constant means that the
Gold Trombone will reach 2/3 of its final temperature after 10 minutes)
• Shut-off temperature: 86 °C to 88 °C (measured on the heatsink)
4.13.2. Heat Dissipation Data
Heat Dissipation is shown graphically below:
76
Figure 36: Dissipation versus Current Graph for 560 and 680 VDC
www.elmomc.com
Page 77

MAN-G-TROIG -EC (Ver. 1.604)
DC Bus Voltage (VDC)
Rectified Voltage (VAC)
Gold Trombone Installation Guide (EtherCAT and CAN) Installation
77
Figure 37: Dissipation versus Current Graph for 330 VDC
4.13.3. How to Use the Charts
The power dissipation in the chart includes the losses of the rectifying bridge.
Regarding Figure 36 and Figure 37, the following should be noted:
560 3X400
680 3X480
330 3X230
The charts above are based upon theoretical worst-case conditions. Actual test results show
30% to 50% better power dissipation.
To determine if your application needs a heat sink:
1. Allow maximum heat sink temperature to be 80 °C or less (shunt down is 6 °C to 8 °C
higher).
2. Determine the ambient operating temperature of the Gold Trombone as ≤ 40 °C.
3. Calculate the allowable temperature increase according to the following example: For
an ambient temperature of 40 °C, ΔT = 80 to 40°C = 40°C
4. Use the chart to find the actual dissipation power of the drive. Follow the voltage curve
to the desired output current and then find the dissipated power.
www.elmomc.com
Page 78

MAN-G-TROIG -EC (Ver. 1.604)
Chapter 5: Technical Specifications
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
This chapter provides detailed technical information regarding the Gold Trombone. This
includes its dimensions, power ratings, the environmental conditions under which it can be
used, the standards to which it complies and other specifications.
5.1. Gold Trombone Dimensions
78
www.elmomc.com
Page 79

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.2. Environmental Conditions
Feature Details
Ambient operating temperature 0 °C to 40 °C (32 °F to 104 °F)
Storage temperature -20 °C to 85 °C (-4 °F to 185 °F)
Maximum Altitude 2,000 m (6562 feet)
Maximum non-condensing humidity 90%
Protection level IP64
5.3. Control Specifications
5.3.1. Current Loop
Feature Details
Controller type Vector, digital
79
Compensation for bus voltage variations “On-the-fly” automatic gain scheduling
Motor types
• AC brushless (sinusoidal)
• DC brushless (trapezoidal)
• DC brush
• Linear motors
• “Voice” coils
Current control
• Fully digital
• Sinusoidal with vector control
• Programmable PI control filter based on a
pair of PI controls of AC current signals and
constant power at high speed
Current loop bandwidth > 4 kHz closed loop
Current sampling time
Programmable 40 to 120 µsec
Current sampling rate Up to 20 kHz; default 20 kHz
www.elmomc.com
Page 80

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.3.2. Velocity Loop
Feature Details
Controller type PI + Four advanced filters + Two advanced gain
scheduling filters
80
Velocity control
• Fully digital
• Programmable PI and feed forward control
filters
• On-the-fly gain scheduling according to either
speed or position command or feedback.
• Automatic, quick, advanced or expert tuning
Velocity and position feedback options
• Incremental Encoder
• Digital Halls
• Interpolated Analog (sin/cos) Encoder
(optional)
• Resolver (optional)
• Absolute serial encoder
Note: With all feedback options, 1/T with
automatic mode switching is activated (gap,
frequency and derivative).
Velocity loop bandwidth < 500 Hz
Velocity sampling time
80 to 240 µsec (2x current loop sample time)
Velocity sampling rate Up to 10 kHz; default 10 kHz
Velocity command options Internally calculated by either jogging or step
Note: All software-calculated profiles support
on-the-fly changes.
5.3.3. Position Loop
Feature Details
Controller type “1-2-2” PIP + three advanced filters + one
advanced gain scheduling filter
Position command options
Position loop bandwidth < 200 Hz
Position sampling time
Position sampling rate Up to 10 kHz; default 10 kHz
• Software
• Pulse and Direction
80 to 240 µsec (2x current loop sample time)
www.elmomc.com
Page 81

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.4. Feedback
5.4.1. Feedback Supply Voltage
The Gold Trombone has two feedback ports (Main and Auxiliary). The Gold Trombone supplies
voltage only to the main feedback device and to the auxiliary feedback device if needed.
Feature Details
Encoder supply voltage 5 V ± 5% @ 2 x 200 mA (maximum)
5.4.2. Feedback Options
The Gold Trombone can receive and process feedback input from diverse types of devices.
5.4.2.1. Incremental Encoder Input
Feature Details
81
Encoder format
• A, B and Index
• Differential
• Quadrature
Interface RS-422
Input resistance
Differential: 120 Ω
Maximum incremental encoder frequency Maximum absolute: 75 Megacounts per
second (18 MHz on A/B)
Minimum quadrature input period (PIN) 53 nsec
Minimum quadrature input high/low period
26 nsec
(PHL)
Minimum quadrature phase period (PPH) 13 nsec
Maximum encoder input voltage range
Common mode: ± 7 V
Differential mode: ± 7 V
Figure 38: Main Feedback - Encoder Phase Diagram
www.elmomc.com
Page 82

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.4.2.2. Digital Halls
Feature Details
Hall inputs
• H
• Single ended inputs
• Built in hysteresis of 1 V for noise immunity
, HB, HC
A
82
Input voltage Nominal operating range: 0 V < V
Maximum absolute: -1 V < V
High level input voltage: V
Low level input voltage: V
InHigh
InLow
In_Hall
> 2.5 V
< 1 V
< 5 V
In_Hall
< 15 V
Input current Sink current (when input pulled to the common): 5
mA
Maximum frequency f
MAX
: 4 kHz
5.4.2.3. Interpolated Analog (Sine/Cosine) Encoder
Feature Details
Analog encoder format Sine and Cosine signals
Analog input signal level
Input resistance
Maximum analog signal frequency f
• Offset voltage: 2.2 V to 2.8 V
• Differential, 1 V peak to peak
Differential: 120 Ω
: 500 kHz
MAX
Interpolation multipliers Programmable: x4 to x8192
Maximum “counts” frequency 2 x 10
Automatic error correction
9
counts/sec
• Signal amplitudes mismatch
• Signal phase shift
• Signal offsets
Encoder outputs See Port C Encoder Outputs Specifications,
Section 5.4.3.
www.elmomc.com
Page 83

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.4.2.4. Resolver
Feature Details
83
Resolver format
• Sine/Cosine
• Differential
Input resistance
Differential 2.49 kΩ
Resolution Programmable: 10 to 15 bits
Maximum electrical frequency (RPS) 512 revolutions/sec
Resolver transfer ratio 0.5
Reference frequency 1/Ts (Ts = sample time in seconds)
Reference voltage Supplied by the Gold Trombone
Reference current up to ±50 mA
Encoder outputs See Port C Encoder Output Specifications,
Section 5.4.3.
5.4.2.5. Absolute Serial Encoder
Feature Details
Encoder format
• NRZ (Panasonic, Tamagawa, Mitutoyo, etc.)
• EnDAT 2.2
• BiSS/SSI
Interface
• RS-485
• Clock – Differential output line
• Data – Differential bidirectional line
Input Resistance
Differential 120 Ω
Transmission Rate Up to 2.5 MHz
www.elmomc.com
Page 84

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.4.3. Port C Feedback Output
Feature Details
84
Emulated output
• A, B, Index
• Differential
Interface RS-422
Output current capability Maximum output current: IOH (max) = 2 mA
Available as options
High level output voltage: V
Minimum output current: I
Low level output voltage: V
• Emulated encoder output of any sensor on
> 3.0 V
OH
= 2 mA
OL
< 0.4 V
OL
Port A or Port B
• Daisy chain Port A or Port B
• Emulated encoder output of internal
variables
• Emulated encoder outputs of the tachometer
• Emulated encoder outputs of the
potentiometer
Maximum frequency f
: 8 MHz pulses/output
MAX
Edge separation between A & B Programmable number of clocks to allow adequate
noise filtering at remote receiver of emulated
encoder signals (default 2 MHz)
Index (marker) Length of pulse is one quadrature (one quarter of
an encoder cycle) and synchronized to A&B
www.elmomc.com
Page 85

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.5. I/Os
The Gold Trombone has:
• 6 Digital Inputs
• 4 Digital Outputs
• 1 Analog Input
5.5.1. Digital Input Interfaces – TTL Mode
Feature Details
Suffix applicable T or 1
Type of input Optically isolated
Input current for all inputs Iin = 3.8 mA @ Vin = 5 V
High-level input voltage 2.4 V < Vin < 15 V, 5 V typical
Low-level input voltage 0 V < Vin < 0.8 V
85
Minimum pulse width
Execution time (all inputs):
the time from application of
voltage on input until execution is
complete
High-speed inputs – 1 to 6
minimum pulse width, in highspeed mode
Capture with differential input
Port A, Port B Index
>250 µsec for inputs 1-6, >3 msec for STO
0 < T < 250 µsec
T > 5 µsec if the input functionality is set to
latch/capture (index/strobe).
Notes:
• Home mode is high-speed mode and can be used
for fast capture and precise homing.
• Highest speed is achieved when turning on
optocouplers.
T > 0.1 µsec if the differential input functionality is set
to touch probe/capture (index/strobe).
Figure 39: Digital Input Schematic
www.elmomc.com
Page 86

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.5.2. Digital Input Interfaces – PLC Mode
Feature Details
Suffix applicable S or 0
Type of input Optically isolated
Input current for all inputs Iin = 2 mA @ Vin = 12 V
High-level input voltage 12 V < Vin < 30 V
Low-level input voltage 0 V < Vin < 7 V
86
Minimum pulse width
Execution time (all inputs):
the time from application of
voltage on input until execution is
complete
High-speed inputs – 1 to 6
minimum pulse width, in highspeed mode
Capture with differential input
Port A, Port B Index
>250 µsec
0 < T < 250 µsec
T > 5 µsec if the input functionality is set to
latch/capture (index/strobe).
Notes:
• Home mode is high-speed mode and can be used
for fast capture and precise homing.
• Highest speed is achieved when turning on
optocouplers.
T > 0.1 µsec if the differential input functionality is set
to touch probe/capture (index/strobe).
Figure 40: Digital Input Schematic
www.elmomc.com
Page 87

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.5.3. Digital Output Interface – PLC Mode
Feature Details
Suffix applicable S or 0
Type of output Optically isolated source
Supply output (VDD) 12 V to 30 V
87
Maximum output current
I
(max) (V
out
= Low)
out
VOL at maximum output voltage
(max) ≤ 500 mA for output 1
I
out
I
(max) ≤ 250 mA for outputs 2 to 4
out
V
(on) ≤ 0.3 V
out
(low level)
RL The external resistor RL must be selected to limit the
output current to no more than 500 mA (output 1) or
250 mA (outputs 2 to 4).
Executable time
0 < T < 250 µsec
Figure 41: Digital Output Schematic
www.elmomc.com
Page 88

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.5.4. Digital Output Interface – TTL Mode
Feature Details
Suffix applicable T or 1
88
Type of output
• Optically isolated
• Source/Sink
Supply output (VDD) 5 V to 15 V
Max. output current
I
(max) (V
out
= Low)
out
VOL at maximum output voltage
7 mA
V
(on) ≤ 0.4 V
out
(low level)
Executable time
0< T< 250 µsec
Figure 42: Digital Output Schematic
5.5.5. Analog Input
Feature Details
Maximum operating differential voltage ± 10 V
Maximum absolute differential input voltage ± 16 V
Differential input resistance 3.74 kΩ
Analog input command resolution 14-bit
www.elmomc.com
Page 89

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.6. Safe Torque Off (STO)
The Gold Trombone has two STO (Safe Torque Off) inputs.
5.6.1. STO Input Interfaces – TTL Mode
Feature Details
Suffix applicable T or 1
Type of input Optically isolated
Input current for all inputs Iin = 3.8 mA @ Vin = 5 V
High-level input voltage 2.4 V < Vin < 15 V, 5 V typical
Low-level input voltage 0 V < Vin < 0.8 V
Minimum pulse width >3 ms
89
Figure 43: STO Input Schematic
5.6.2. STO Input Interfaces – PLC Mode
Feature Details
Suffix applicable S or 0
Type of input Optically isolated
Input current for all inputs Iin = 2 mA @ Vin = 12 V
High-level input voltage 12 V < Vin < 30 V
Low-level input voltage 0 V < Vin < 7 V
Minimum pulse width >3 ms
Figure 44: STO Input Schematic
www.elmomc.com
Page 90

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.7. Communications
Specification Details
90
CAN
EtherCAT
Ethernet
CAN bus Signals:
• CAN_H, CAN_L, CAN_COMRET
• Maximum Baud Rate of 1 Mbit/sec.
Version:
• DS 301 v4.01
Layer Setting Service and Protocol Support:
• DS 305
Device Profile (drive and motion control):
• DS 402
• 100base-T
• Baud Rate: 100 Mbit/sec
• CAT5 Cable
• CoE, FoE, EoE
• 100base-T
• Baud Rate: 100 Mbit/sec
• CAT5 Cable
• UDP, Telnet
USB
• USB 2.0 Device mode
5.8. Pulse-Width Modulation (PWM)
Feature Details
PWM resolution 12-bit
PWM switching frequency on the load 1/Ts (factory default 20 kHz on the motor)
www.elmomc.com
Page 91

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
5.9. Compliance with Standards
Specification Details
Quality Assurance
ISO 9001:2008 Quality Management
Design
Approved IEC/EN 61800-5-1, Safety Printed wiring for electronic equipment
(clearance, creepage, spacing, conductors
sizing, etc.)
MIL-HDBK- 217F Reliability prediction of electronic equipment
(rating, de-rating, stress, etc.)
91
• UL 60950
• IPC-D-275
• IPC-SM-782
Printed wiring for electronic equipment
(clearance, creepage, spacing, conductors
sizing, etc.)
• IPC-CM-770
• UL 508C
• UL 840
In compliance with VDE0160-7 (IEC 68) Type testing
Safety
Recognized UL 508C Power Conversion Equipment
In compliance with UL 840 Insulation Coordination Including Clearances
and Creepage Distances for Electrical
Equipment
In compliance with UL 60950 Safety of Information Technology Equipment
Including Electrical Business Equipment
Approved IEC/EN 61800-5-1, Safety Adjustable speed electrical power drive
systems
In compliance with EN 60204-1 Low Voltage Directive 73/23/EEC
www.elmomc.com
Page 92

MAN-G-TROIG -EC (Ver. 1.604)
Gold Trombone Installation Guide (EtherCAT and CAN) Technical Specifications
Specification Details
EMC
Approved IEC/EN 61800-3, EMC Adjustable speed electrical power drive
systems
92
In compliance with EN 55011 Class A with
Electromagnetic compatibility (EMC)
EN 61000-6-2: Immunity for industrial
environment, according to:
IEC 61000-4-2 / criteria B
IEC 61000-4-3 / criteria A
IEC 61000-4-4 / criteria B
IEC 61000-4-5 / criteria B
IEC 61000-4-6 / criteria A
IEC 61000-4-8 / criteria A
IEC 61000-4-11 / criteria B/C
Workmanship
In compliance with IPC-A-610, level 3 Acceptability of electronic assemblies
PCB
In compliance with IPC-A-600, level 2 Acceptability of printed circuit boards
Packing
In compliance with EN 100015 Protection of electrostatic sensitive devices
Environmental
In compliance with 2002/96/EC Waste Electrical and Electronic Equipment
regulations (WEEE)
Note: Out-of-service Elmo drives should be
sent to the nearest Elmo sales office.
In compliance with 2002/95/EC
(effective July 2006)
Restrictions on Application of Hazardous
Substances in Electric and Electronic
Equipment (RoHS)
www.elmomc.com
 Loading...
Loading...