

Page 1

Gold DC Bell
Digital Servo Drive
Installation Guide
EtherCAT and CAN
July 2014 (Ver. 1.200) www.elmomc.com
Page 2
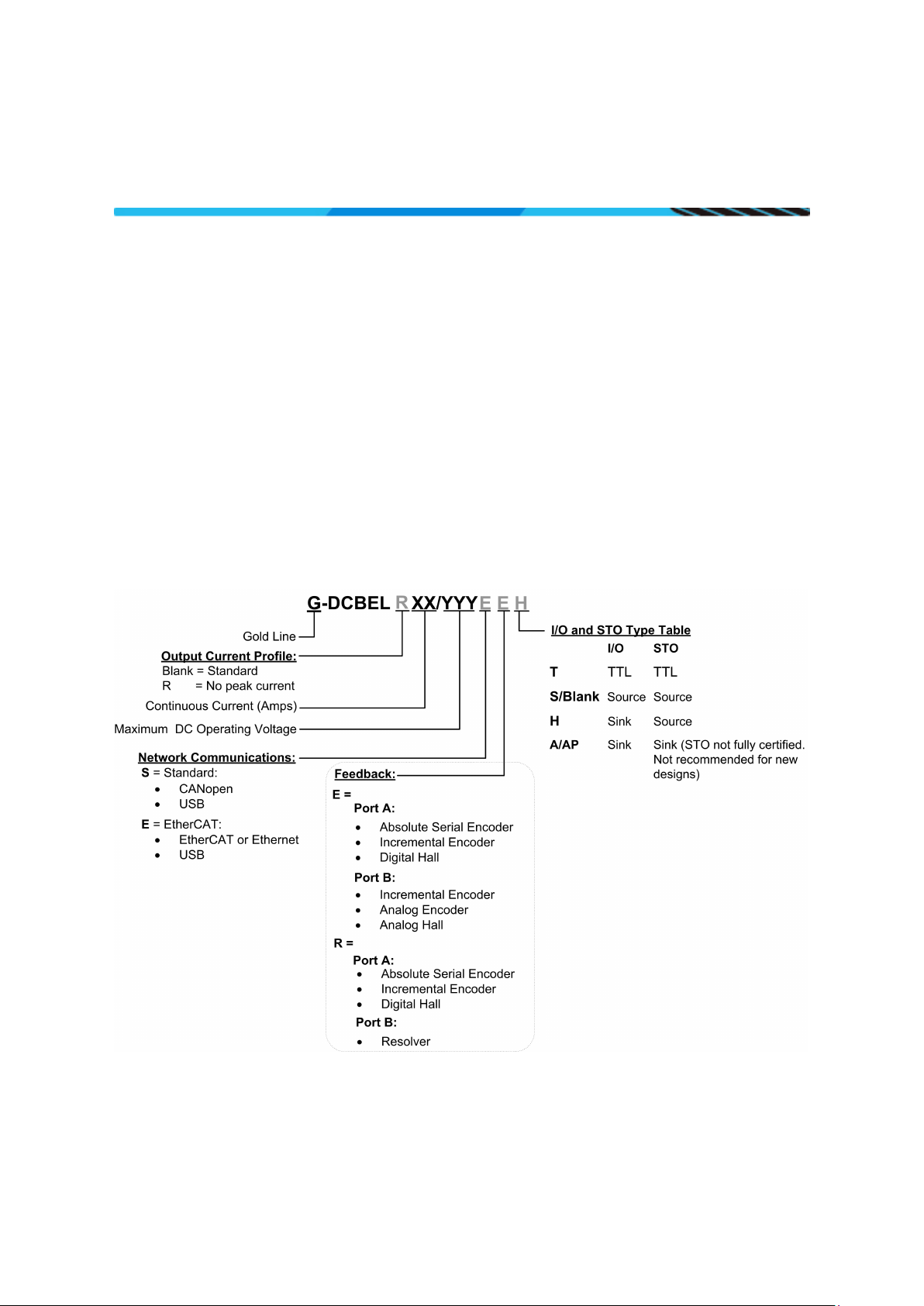
Table of Contents
Notice
This guide is delivered subject to the following conditions and restrictions:
• This guide contains proprietary information belonging to Elmo Motion Control Ltd. Such
information is supplied solely for the purpose of assisting users of the Gold DC Bell servo drive
in its installation.
• The text and graphics included in this manual are for the purpose of illustration and reference
only. The specifications on which they are based are subject to change without notice.
• Information in this document is subject to change without notice.
Document no. MAN-G-DCBELIG-EC (Ver. 1.200)
Copyright 2014
Elmo Motion Control Ltd.
All rights reserved.
Catalog Number
||Warnings|www.elmomc.com
Page 3
Cable Kit
Catalog number: CBL-GDCWHIKIT02 (can be ordered separately)
For further details, see the documentation for this cable kit (MAN-G-DCWHI-CBLKIT.pdf).
Revision History
Version Date Details
Ver. 1.200 Aug 2014 Initial release in new format
Page 4

Table of Contents
Table of Contents
MAN-G-DCBEL IG-EC (Ver. 1.200)
Chapter 1: This Installation Guide ..................................................................................... 6
Chapter 2: Safety Information .......................................................................................... 6
2.1. Warnings ........................................................................................................................ 7
2.2. Cautions .......................................................................................................................... 7
2.3. CE Marking Conformance ............................................................................................... 7
2.4. Warranty Information .................................................................................................... 7
Chapter 3: Product Description ......................................................................................... 8
3.1.1. Accessories ...................................................................................................... 8
Chapter 4: Technical Information ...................................................................................... 9
4.1. Physical Specifications .................................................................................................... 9
4.2. Technical Data ................................................................................................................ 9
4.2.1. Auxiliary Supply ............................................................................................. 10
4.2.2. Product Features ........................................................................................... 11
4
Chapter 5: Installation .................................................................................................... 12
5.1. Unpacking the Drive Components ............................................................................... 12
5.2. Connector Types ........................................................................................................... 13
5.3. Mounting the Gold DC Bell ........................................................................................... 16
5.4. The Gold DC Bell Connection Diagram ......................................................................... 17
Chapter 6: Wiring ........................................................................................................... 19
6.1. Basic Recommendations .............................................................................................. 20
6.1.1. General .......................................................................................................... 20
6.1.2. Feedback Cable Port A and Port B Connector ............................................... 21
6.1.3. Feedback Cable Port C Connector ................................................................. 22
6.1.4. IO Cable Connector ....................................................................................... 22
6.1.5. STO (Port C) Cable Connector........................................................................ 23
6.2. Motor Power Connector Pinouts ................................................................................. 24
6.3. Main and Auxiliary Power ............................................................................................ 26
6.3.1. Description .................................................................................................... 26
6.3.2. Main Power ................................................................................................... 27
6.3.3. Auxiliary Power Supply (Optional) ................................................................. 28
6.3.3.1. Power Rating 200 V ...................................................................... 29
6.3.3.2. Power Rating 100 V ...................................................................... 30
6.4. Drive Status Indicator ................................................................................................... 31
6.5. STO (Safe Torque Off) ................................................................................................... 32
6.5.1. Source Mode – PLC Voltage Level ................................................................. 33
6.5.2. TTL Mode – TTL Voltage Level ....................................................................... 33
6.5.3. Sink Mode – PLC Voltage Level...................................................................... 34
6.6. Port A
............................................................................................................................ 35
||Warnings|www.elmomc.com
Page 5

6.6.1. Incremental Encoder ..................................................................................... 36
6.6.2. Halls Sensor ................................................................................................... 36
6.6.3. Absolute Serial Encoder ................................................................................ 37
6.6.3.1. Hiperface ...................................................................................... 38
6.7. Port B ............................................................................................................................ 39
6.7.1. Incremental Encoder ..................................................................................... 40
6.7.2. Interpolated Analog Encoder ........................................................................ 41
6.7.3. Resolver ......................................................................................................... 42
6.8. Port C, Digital I/Os, and Analog Inputs ......................................................................... 43
6.8.1. Port C – Emulated Encoder Output ............................................................... 45
6.8.2. Analog Input .................................................................................................. 46
6.8.3. Digital Input and Output TTL Mode ............................................................... 47
6.8.4. Digital Input and Output PLC Source Mode .................................................. 49
6.8.5. Digital Input and Output Sink Mode.............................................................. 51
6.9. USB 2.0 ......................................................................................................................... 53
6.10. EtherCAT Communication Version ............................................................................... 54
6.10.1. EtherCAT IN/Ethernet Pin Assignments ........................................................ 54
6.10.2. EtherCAT OUT ................................................................................................ 55
6.10.3. therCAT Wiring .............................................................................................. 55
6.10.4. EtherCAT Status Indicator ............................................................................. 56
6.11. CAN Communication Version ....................................................................................... 57
6.11.1. CAN Wiring .................................................................................................... 58
6.12. Powering Up ................................................................................................................. 59
6.13. Initializing the System .................................................................................................. 59
5
Chapter 7: Dimensions ................................................................................................... 60
Page 6
Gold DC Bell Installation Guide
Table of Contents
Chapter 1: This Installation Guide
Chapter 2: Safety Information
Warning:
Caution:
Important:
MAN-G-DCBELIG-EC (Ver. 1.200)
This installation Guide details the technical data, pinouts, and power connectivity of the Gold DC
Bell. For a comprehensive detailed description of the functions refer to the
MAN-G-Panel Mounted Drives Hardware manual which describes Panel Mounted products.
In order to achieve the optimum, safe operation of the Gold DC Bell, it is imperative that you
implement the safety procedures included in this installation guide. This information is provided to
protect you and to keep your work area safe when operating the Gold DC Bell and accompanying
equipment.
Please read this chapter carefully before you begin the installation process.
Before you start, ensure that all system components are connected to earth ground. Electrical
safety is provided through a low-resistance earth connection.
6
Only qualified personnel may install, adjust, maintain and repair the servo drive. A qualified person
has the knowledge and authorization to perform tasks such as transporting, assembling, installing,
commissioning and operating motors.
The Gold DC Bell contains electrostatic-sensitive components that can be damaged if handled
incorrectly. To prevent any electrostatic damage, avoid contact with highly insulating materials,
such as plastic film and synthetic fabrics. Place the product on a conductive surface and ground
yourself in order to discharge any possible static electricity build-up.
To avoid any potential hazards that may cause severe personal injury or damage to the product
during operation, keep all covers and cabinet doors shut.
The following safety symbols are used in this and all Elmo Motion Control manuals:
This information is needed to avoid a safety hazard, which might cause bodily injury
or death as a result of incorrect operation.
This information is necessary to prevent bodily injury, damage to the product or to
other equipment.
Identifies information that is critical for successful application and understanding of
the product.
||Warnings|www.elmomc.com
Page 7
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
2.1. Warnings
• To avoid electric arcing and hazards to personnel and electrical contacts, never
connect/disconnect the servo drive while the power source is on.
• Power cables can carry a high voltage, even when the motor is not in motion. Disconnect
the Gold DC Bell from all voltage sources before servicing.
• The high voltage products within the Gold Line range contain grounding conduits for electric
current protection. Any disruption to these conduits may cause the instrument to become
hot (live) and dangerous.
• After shutting off the power and removing the power source from your equipment, wait at
least 1 minute before touching or disconnecting parts of the equipment that are normally
loaded with electrical charges (such as capacitors or contacts). Measuring the electrical
contact points with a meter, before touching the equipment, is recommended.
2.2. Cautions
• The maximum DC power supply connected to the instrument must comply with the
parameters outlined in this guide.
7
• When connecting the Gold DC Bell to an approved isolated auxiliary power supply, connect
it through a line that is separated from hazardous live voltages using reinforced or double
insulation in accordance with approved safety standards.
• Before switching on the Gold DC Bell, verify that all safety precautions have been observed
and that the installation procedures in this manual have been followed.
• Make sure that the Safe Torque Off is operational
2.3. CE Marking Conformance
The Gold DC Bell is intended for incorporation in a machine or end product. The actual end product
must comply with all safety aspects of the relevant requirements of the European Safety of
Machinery Directive 2006/42/EC as amended, and with those of the most recent versions of
standards EN 60204-1 and
Concerning electrical equipment designed for use within certain voltage limits, the Gold DC Bell
meets the provisions outlined in 2006/95/EC. The party responsible for ensuring that the
equipment meets the limits required by EMC regulations is the manufacturer of the end product.
EN ISO 12100 at the least, and in accordance with 2006/95/EC.
2.4. Warranty Information
The products covered in this manual are warranted to be free of defects in material and
workmanship and conform to the specifications stated either within this document or in the
product catalog description. All Elmo drives are warranted for a period of 12 months from the time
of installation, or 18 months from time of shipment, whichever comes first. No other warranties,
expressed or implied — and including a warranty of merchantability and fitness for a particular
purpose — extend beyond this warranty.
||Warnings|www.elmomc.com
Page 8

Gold DC Bell Installation Guide
Table of Contents
Chapter 3: Product Description
MAN-G-DCBELIG-EC (Ver. 1.200)
The Gold DC Bell is an advanced high power density servo drive delivering up to 1.2 kW of
continuous power or 2.4 kW of peak power in a 230.075 cc (14.04 in³) package (115 x 75 x 26.4 mm
or 4.5" x 3.0" x 1.04").
This advanced, high power density servo drive provides top performance, advanced networking and
built-in safety, as well as a fully featured motion controller and local intelligence. The Gold DC Bell is
powered by a single 12 V – 195 V isolated DC power source (not included) and a “smart” controlsupply algorithm enables the drive to operate up to 95V with only one power supply with no need
for an auxiliary power supply for the logic.
The Gold DC Bell can operate as a stand-alone device or as part of a multi-axis system in a
distributed configuration on a real-time network.
The Gold DC Bell drive is easily set up and tuned using Elmo Application Studio (EAS) software tools.
As part of the Gold product line, it is fully programmable with the Elmo motion control language.
For more about software tools, refer to the Elmo Application Studio Software Manual.
The Gold DC Bell is available in a variety of options. There are multiple power rating options, two
different communications options, a variety of feedback selections and I/O configuration
possibilities.
8
3.1.1. Accessories
Cable Kit, catalog number: CBL-GDCWHIKIT02 (can be ordered separately)
For further details, see the documentation for this cable kit (MAN-G-DCWHI-CBLKIT.pdf).
||Warranty Information|www.elmomc.com
Page 9
Gold DC Bell Installation Guide
Table of Contents
Chapter 4: Technical Information
MAN-G-DCBELIG-EC (Ver. 1.200)
4.1. Physical Specifications
Feature Units All Types
Weight g (oz) 267 g (9.42 oz)
9
Dimensions mm (in)
115 x 75 x 26.4 mm (4.5" x 3.0" x 1.04")
Mounting method Wall Mount / Book Shelf
4.2. Technical Data
Feature Units 1/100 2.5/100 5/100 10/100 15/100
Minimum supply voltage VDC 12
Nominal supply voltage VDC 85
Maximum supply voltage VDC 95
Maximum continuous power output W 80 200 400 800 1200
Efficiency at rated power (at nominal
conditions)
Maximum output voltage > 95% of DC bus voltage at f = 22 kHz
Auxiliary power supply VDC 12–95 VDC
Amplitude sinusoidal/DC continuous
current
Sinusoidal continuous RMS current limit (Ic) A 0.7 1.8 3.5 7 10.6
% > 99
(up to 6 VA inc. 5 V/2 x 200 mA for encoder)
A 1.0 2.5 5 10 15
Peak current limit A 2 x Ic
Table 1: Power Ratings
Note on current ratings: The current ratings of the Gold DC Bell are given in units of DC
amperes (ratings that are used for trapezoidal commutation or DC motors). The RMS
(sinusoidal commutation) value is the DC value divided by 1.41.
||Physical Specifications|www.elmomc.com
Page 10
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
Elmo offers a 200 VDC maximum output rating selection of Gold DC Bell, according to the
following technical data:
Feature Units 3/200 6/200 9/200
Minimum supply voltage VDC 12
Nominal supply voltage VDC 170
Maximum supply voltage VDC 195
Maximum continuous power output W 480 960 1450
10
Efficiency at rated power (at
% > 99
nominal conditions)
Maximum output voltage > 95% of DC bus voltage at f = 22 kHz
Auxiliary power supply VDC 12 to 95 VDC
(up to 6 VA inc. 5 V/2 x 200 mA for
encoder)
Amplitude sinusoidal/DC
A 3 6 9
continuous current
Sinusoidal continuous RMS current
A 2.1 4.2 6.3
limit (Ic)
Peak current limit A 2 x Ic
4.2.1. Auxiliary Supply
Feature Details
Auxiliary power supply Isolated DC source only
Auxiliary supply input voltage 12 V to 95 V
Auxiliary supply input power ≤ 4 VA without external loading
≤ 6 VA with full external loading
||Technical Data|www.elmomc.com
Page 11
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
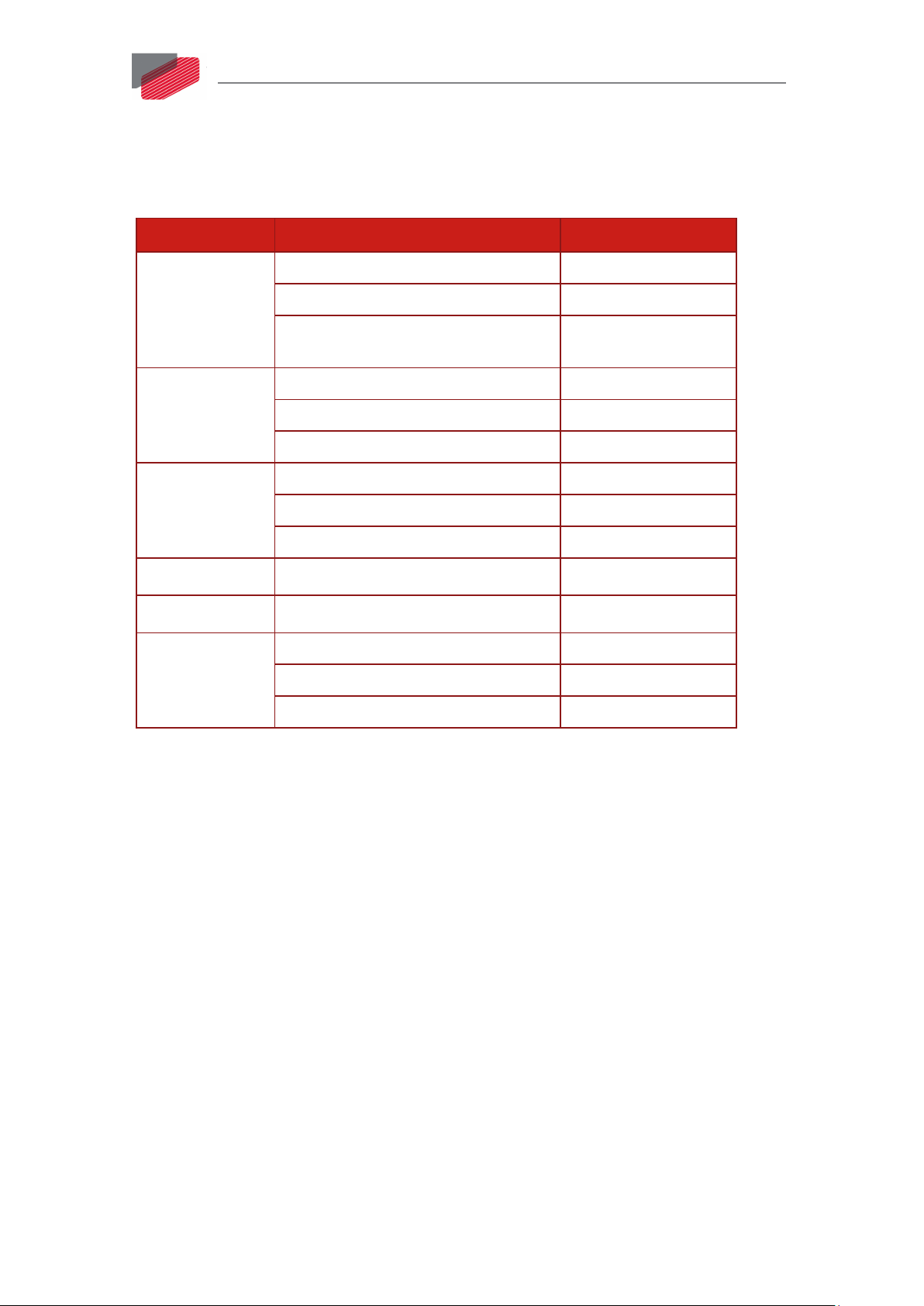
4.2.2. Product Features
Main Feature Details Presence and No.
11
STO
Digital Input
Option
Digital Output
Option
Analog Input
Feedback
Communication
Option
TTL, or √
PLC Source, or √
PLC Sink (is not fully certified, and not
√
recommended for new designs)
TTL, or 6
PLC Source, or 6
PLC Sink 6
TTL, or 4
PLC Source, or 4
PLC Sink 4
Differential ±10V 1
Standard Port A, B, & C √
USB √
EtherCAT option √
CAN option √
||Technical Data|www.elmomc.com
Page 12

Gold DC Bell Installation Guide
Table of Contents
Chapter 5: Installation
MAN-G-DCBELIG-EC (Ver. 1.200)
The Gold DC Bell must be installed in a suitable environment and properly connected to its voltage
supplies and the motor.
5.1. Unpacking the Drive Components
Before you begin working with the Gold DC Bell, verify that you have all of its components, as
follows:
• The Gold DC Bell servo drive
• The Elmo Application Studio software and software manual
The Gold DC Bell is shipped in a cardboard box with Styrofoam protection.
To unpack the Gold DC Bell:
1. Carefully remove the servo drive from the box and the Styrofoam.
2. Check the drive to ensure that there is no visible damage to the instrument. If any damage
12
has occurred, report it immediately to the carrier that delivered your drive.
3. To ensure that the Gold DC Bell you have unpacked is the appropriate type for your
requirements, locate the part number sticker on the side of the Gold DC Bell. It looks like
this:
4. Verify that the Gold DC Bell type is the one that you ordered, and ensure that the voltage
meets your specific requirements.
The part number at the top provides the type designation. Refer to the appropriate part
number in the section Catalog Number at the beginning of the installation guide.
||Unpacking the Drive Components|www.elmomc.com
Page 13
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
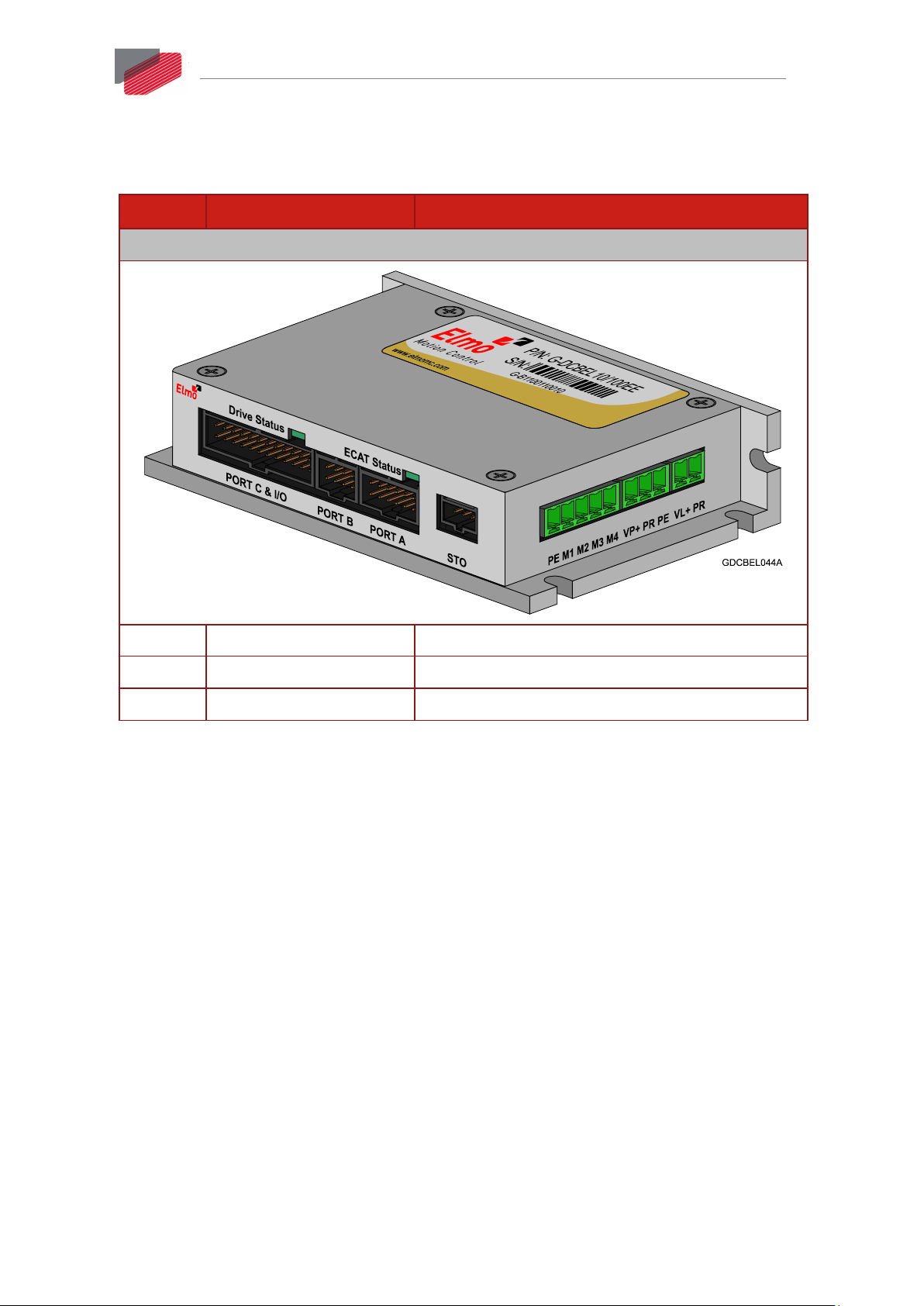
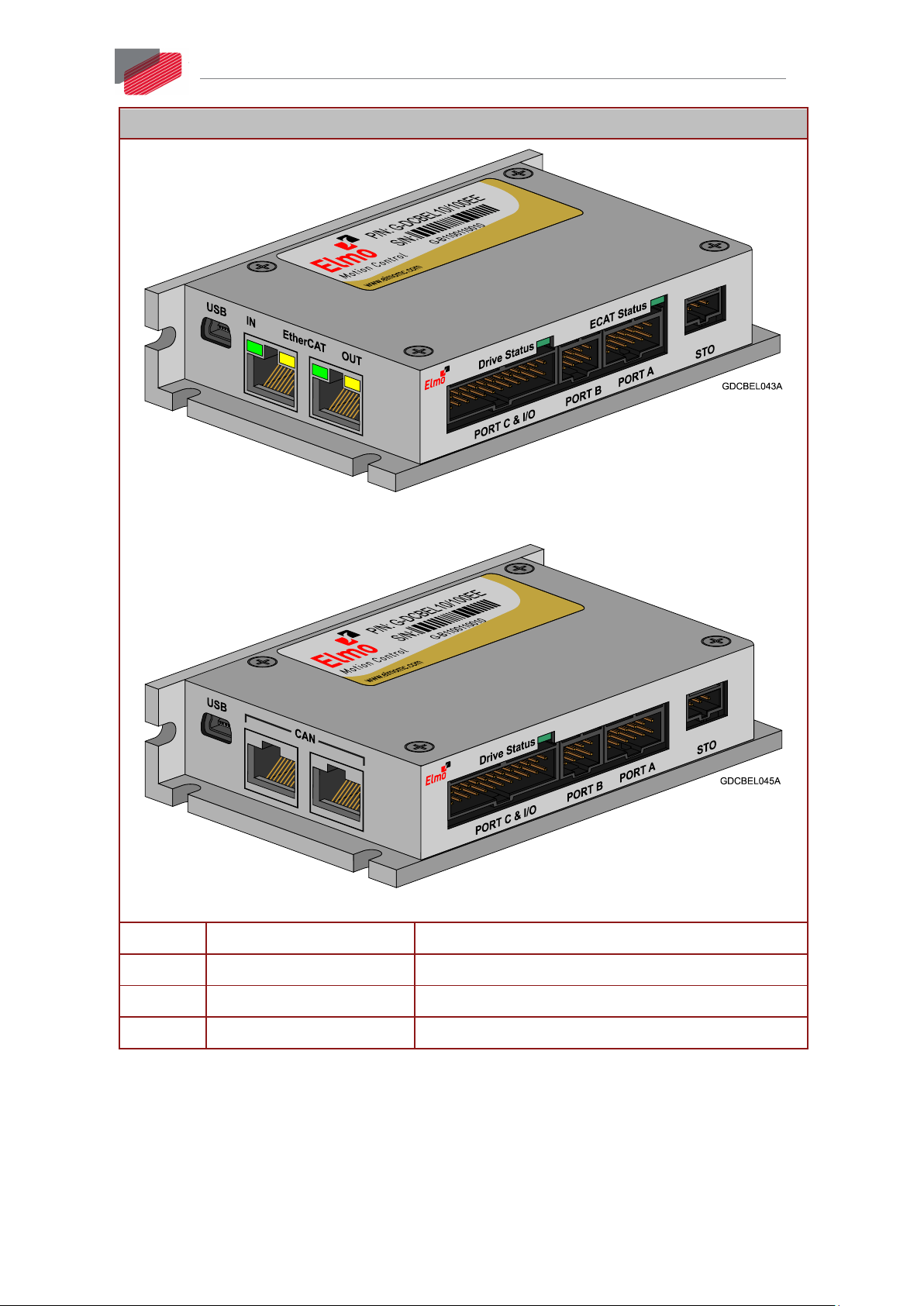
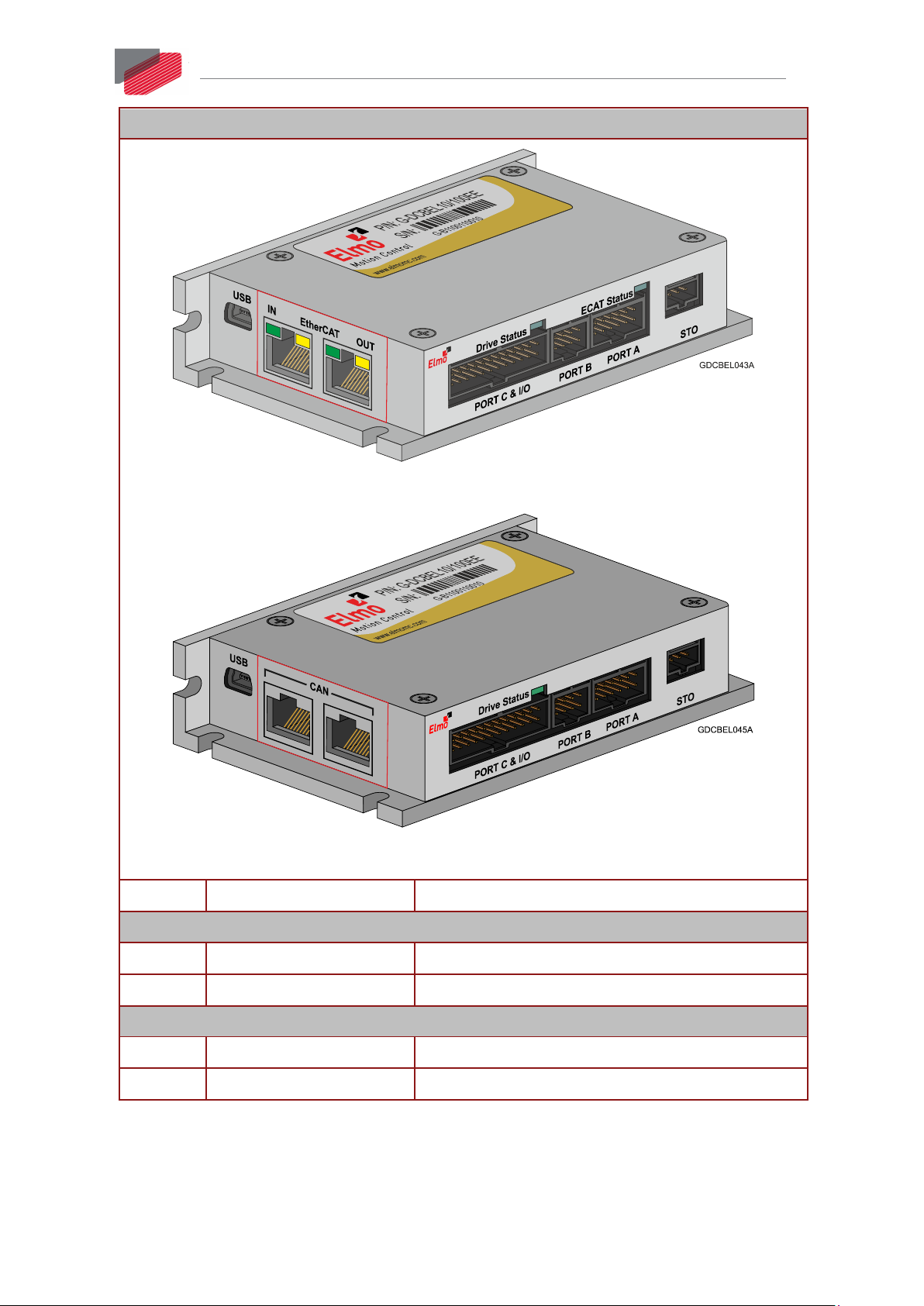
5.2. Connector Types
The Gold DC Bell has ten connectors.
No. Pins Type Function
Bottom Connectors
13
5 Phoenix 3.81 mm Pitch Motor phases+PE
3 Phoenix 3.81 mm Pitch Main Power
2 Phoenix 3.81 mm Pitch Auxiliary supply input
||Connector Types|www.elmomc.com
Page 14
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
Front Connectors
14
Front Connectors - EtherCAT
Front Connectors - CAN
3 2.54 mm Pitch Molex STO
24 2.54 mm Pitch Molex Feedback port C and I/O
8 2.54 mm Pitch Molex Feedback port B
12 2.54 mm Pitch Molex Feedback port A
||Connector Types|www.elmomc.com
Page 15
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
Top Connectors
15
Top Connectors - EtherCAT
Top Connectors - CAN
5 USB Device Mini-B USB
EtherCAT Version
8 RJ-45 EtherCAT In
8 RJ-45 EtherCAT Out
CAN Version
8 RJ-45 CAN
8 RJ-45 CAN
Table 2: Connector Types
The pinouts in Chapter 6: Wiring describe the function of each pin in the Gold DC Bell connectors
that are listed in Table 2.
||Connector Types|www.elmomc.com
Page 16
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
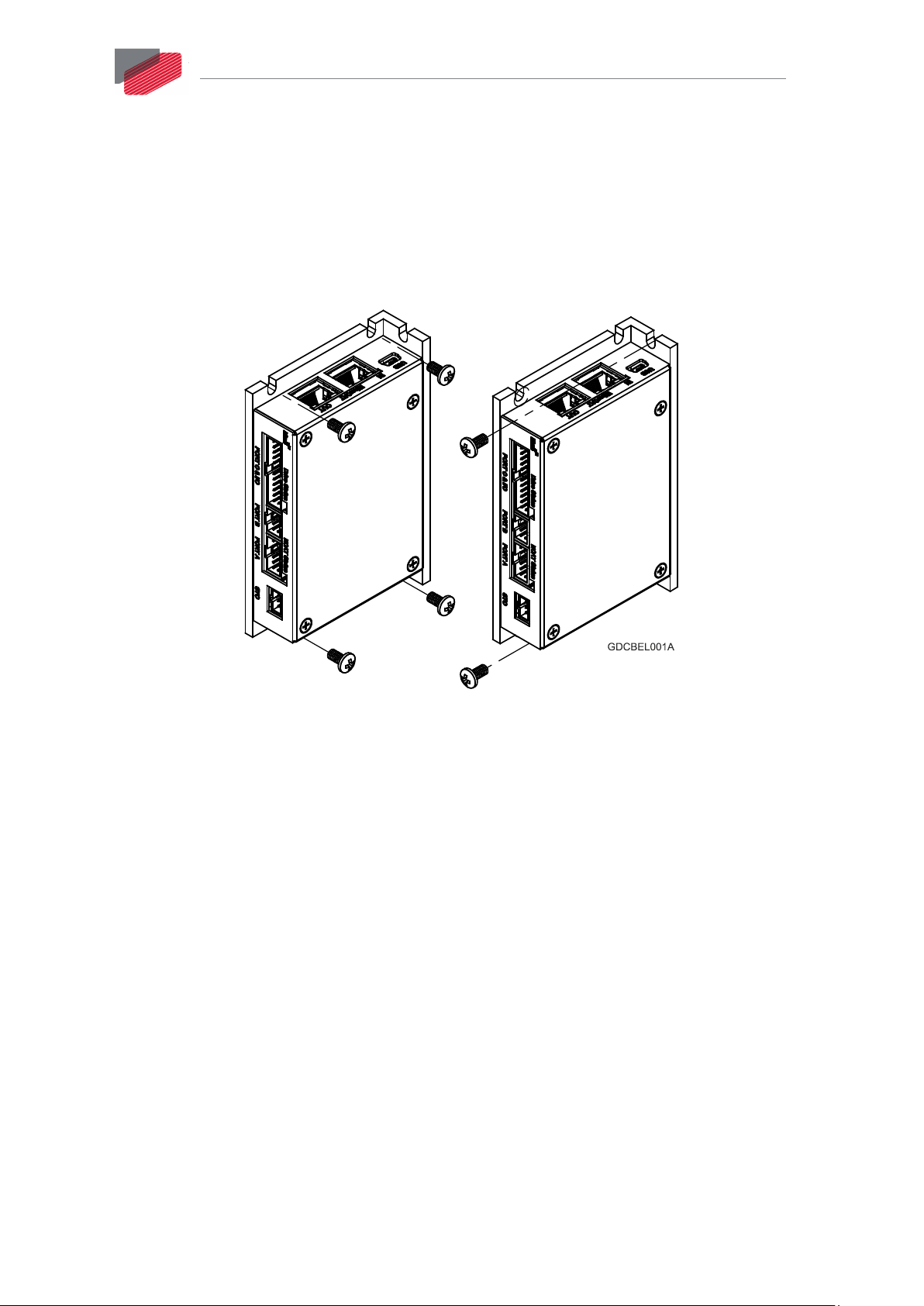
5.3. Mounting the Gold DC Bell
The Gold DC Bell has been designed for two standard mounting options:
• Wall Mount along the back (can also be mounted horizontally on a metal surface)
• Book Shelf along the side
M4 round head screws, one through each opening in the heat sink, are used to mount the Gold DC
Bell (see the diagram below).
16
Figure 1: Mounting the Gold DC Bell
||Mounting the Gold DC Bell|www.elmomc.com
Page 17
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
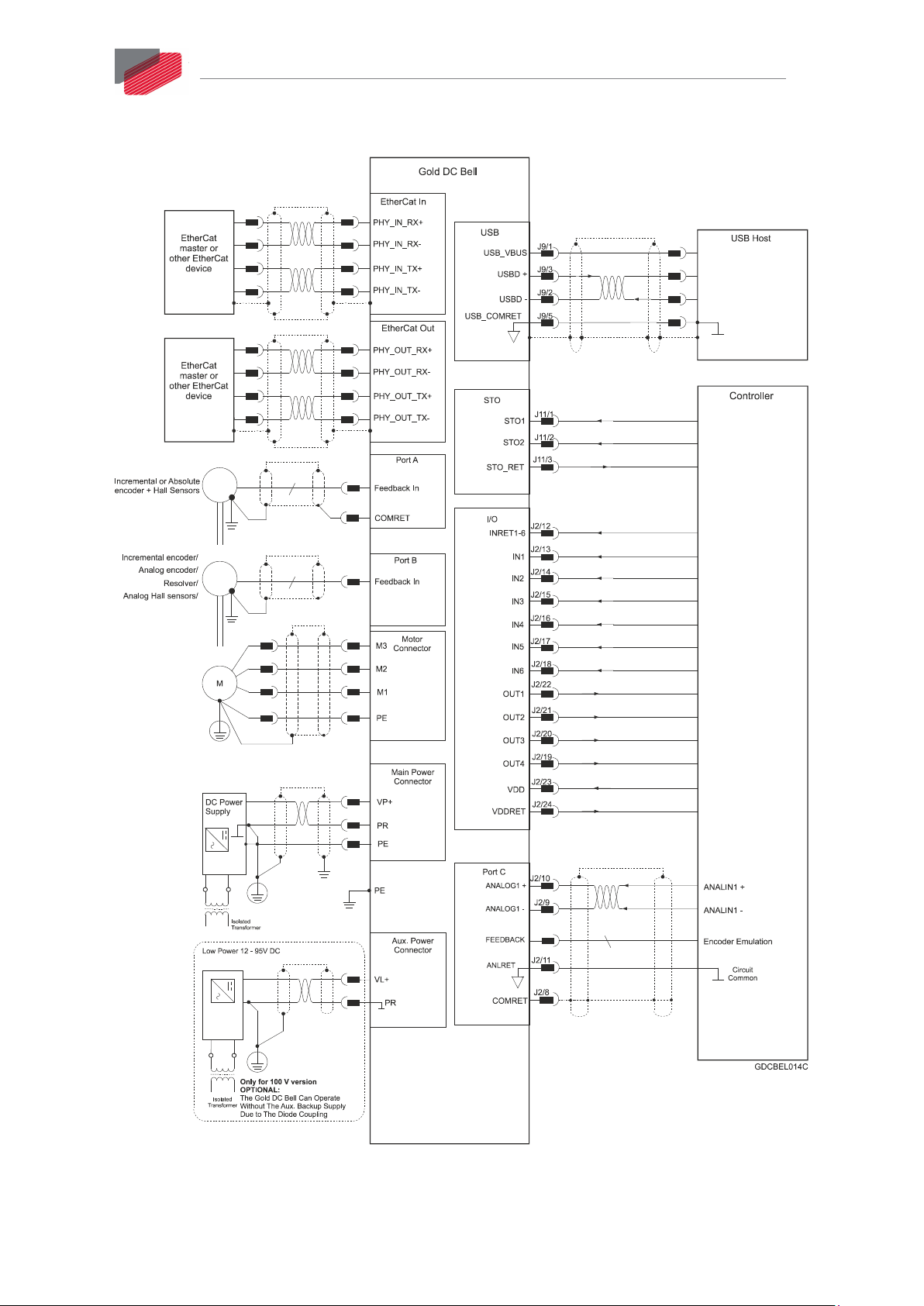
5.4. The Gold DC Bell Connection Diagram
17
Figure 2: The Gold DC Bell Connection Diagram - EtherCAT
||The Gold DC Bell Connection Diagram|www.elmomc.com
Page 18
Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
18
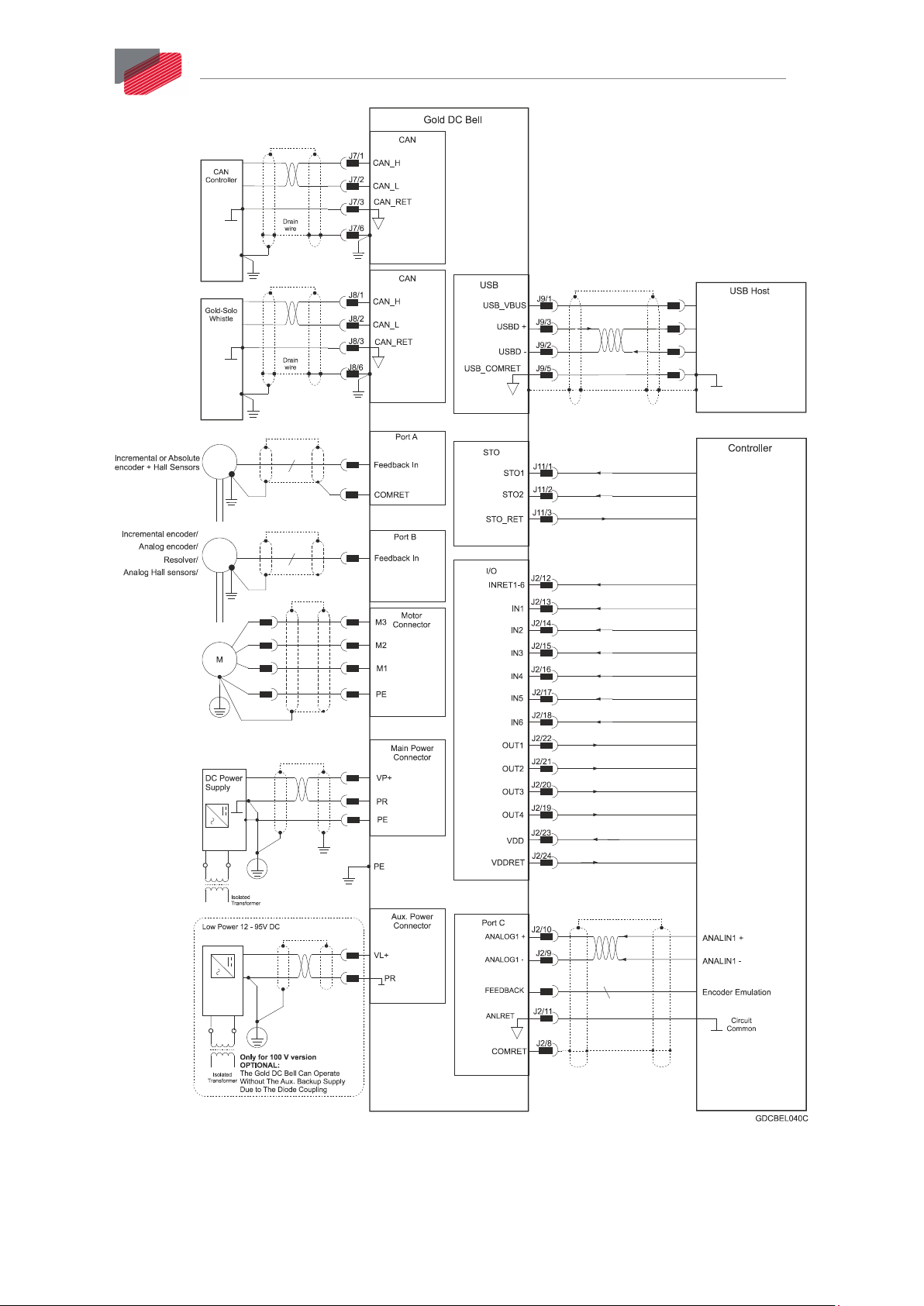
Figure 3: The Gold DC Bell Connection Diagram – CAN
||The Gold DC Bell Connection Diagram|www.elmomc.com
Page 19
Gold DC Bell Installation Guide
Table of Contents
Chapter 6: Wiring
MAN-G-DCBELIG-EC (Ver. 1.200)
Once the product is mounted, you are ready to wire the device. Proper wiring, grounding and
shielding are essential for ensuring safe, immune and optimal servo performance of the drive.
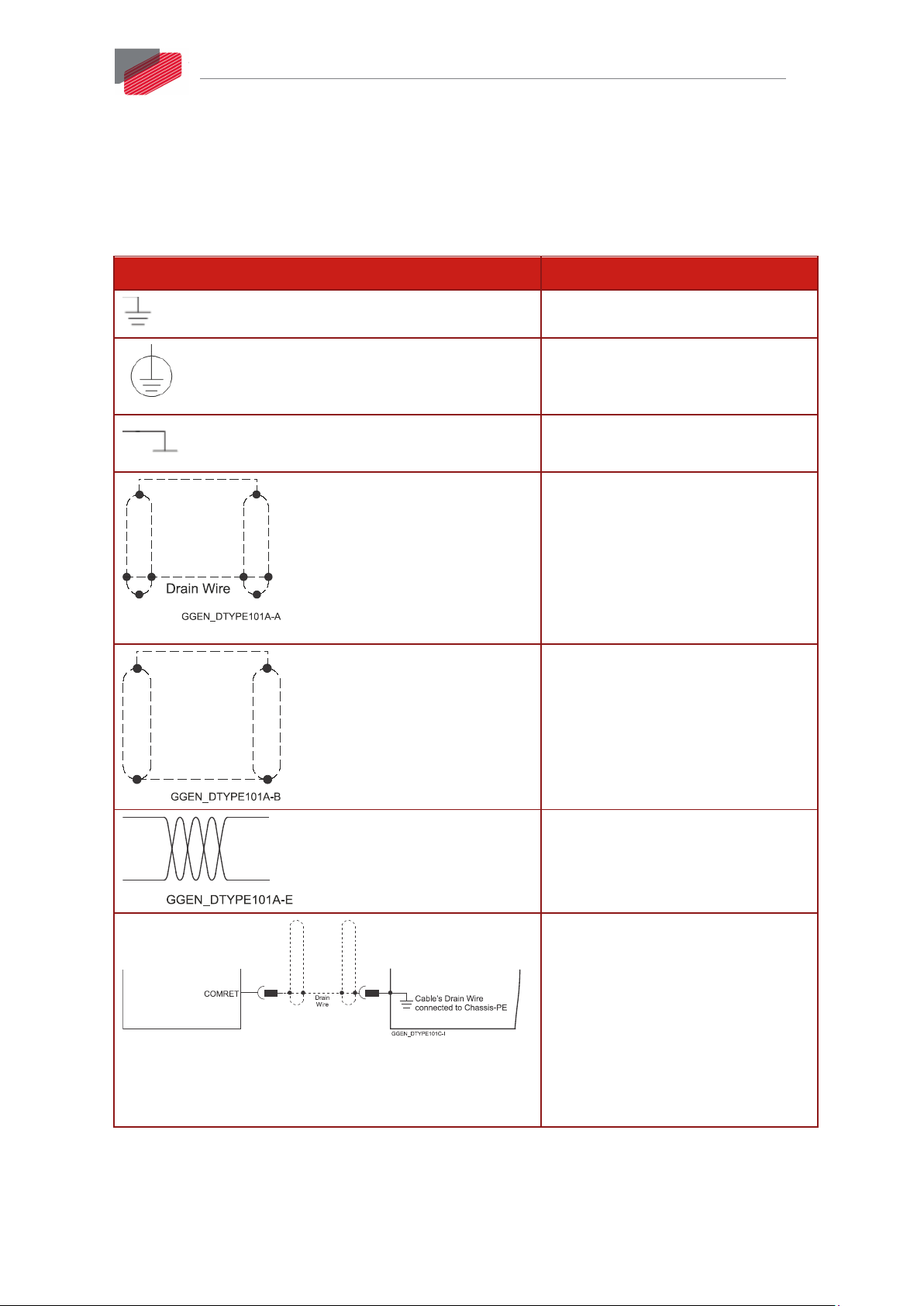
The following table legend describes the wiring symbols detailed in all installation guides.
Wiring Symbol Description
Earth connection (PE)
Protective Earth Connection
Common at the Controller
Shielded cable with drain wire.
The drain wire is a non-insulated
wire that is in direct contact with the
braid (shielding).
19
Shielded cable with drain wire
significantly simplifies the wiring and
earthing.
Shielded cable braid only, without
drain wire.
Twisted-pair wires
Encoder Earthing.
The cable`s shield is connected to the
chassis (PE) in the connector.
Earthing the Encoder and connecting
the Earth (PE) to the drive COMRET is
mandatory to insure reliable
operation, high noise immunity and
rejection of voltage common mode
interferences.
||The Gold DC Bell Connection Diagram|www.elmomc.com
Page 20

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.1. Basic Recommendations
6.1.1. General
1. Use shielded cables. For best results, the cable should have an aluminum foil shield covered
by copper braid, and should contain a drain wire.
Use 24, 26 or 28 AWG twisted-pair shielded with drain wire cables.
2. Keep the cable as short as possible.
Do not mount the power cables of the motor and power bus in the proximity of the control
and feedback cables.
3. Ensure that in normal operating conditions, the “earth connection” wires and shield of the
control cables carry no current. The only time these conductors carry current is under
abnormal conditions, when electrical equipment has become a potential shock or fire
hazard while conducting external EMI interferences directly to ground, in order to prevent
them from affecting the drive. Failing to meet this requirement might result in
drive/controller/host failure.
4. After completing the wiring, carefully inspect all wires to ensure tightness, good solder of
joints and general safety.
20
Figure 4: Feedback and Molex Control Cable Assemblies
Note: Please pay attention to the location of PIN 1 in the above connector diagram.
It should be noted that in all Elmo manuals the pinouts are shown differently to Molex’s technical
sheets. Molex shows pin 1 at the bottom-left when looking at the face of the cable-side connector,
tab down (Figure 5).
Figure 5: Molex vs Elmo Technical Diagram Examples Showing Pinout Numbers
However, Elmo specifies pin 1 as the bottom-left of drive-side connector. The result is that Elmo’s
pin designations are mirrored relative to the pinouts as labeled by Molex.
Where there is only one COMRET pin (Common Return) in the connector, which MUST be
connected to the DRAIN WIRE and also to COMRET signal of the cable, it is necessary to connect the
drain wire and COMRET signal to the same pin.
||Basic Recommendations|www.elmomc.com
Page 21

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.1.2. Feedback Cable Port A and Port B Connector
1. On the motor side connections, ground the shield to the motor chassis.
2. At least One COMRET (Common Return) must be connected to the PE.
Implement the following steps to connect the COMRET to the PE:
a. At the drive, connect the feedback drain wire to one of the COMRET terminals in the
Molex feedback connector (Figure 5.
b. At the motor, connect the feedback cable drain wire to the GND motor chassis
terminal of the feedback connector (Figure 6).
The drawing displays two earth connections.
21
Figure 6: Feedback Port A and B Cable Assemblies
||Basic Recommendations|www.elmomc.com
Page 22

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.1.3. Feedback Cable Port C Connector
1. At the controller side connections, follow the controller manufacturer’s recommendations
concerning the shield.
2. The connection of the Drain wire to the Port C is not mandatory.
22
Figure 7: Feedback Port C Cable Assemblies
6.1.4. IO Cable Connector
It is recommended to use shielded cable, but is not mandatory.
Figure 8: Feedback IO Cable Assemblies
||Basic Recommendations|www.elmomc.com
Page 23

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.1.5. STO (Port C) Cable Connector
It is recommended to use shielded cable, but is not mandatory.
Figure 9: STO Cable Assemblies
23
||Basic Recommendations|www.elmomc.com
Page 24

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
24
6.2. Motor Power Connector Pinouts(J14)
See Chapter 8 in the in the MAN-G-Panel Mounted Drives Hardware manual for full details.
Pin(J14) Signal Function Cable
Brushless Motor Brushed DC Motor Stepper Motor
1 PE Protective Earth Motor Motor Motor
2 M1 Motor phase Motor N/C Motor
3 M2 Motor phase Motor Motor Motor
4 M3 Motor phase Motor Motor Motor
5 M4 Motor phase N/C N/C Motor
5-Pin Phoenix 3.81 mm Pitch
Table 3: Connectors for Motor
5-Pin Phoenix Plug-in
Connector
Figure 10: Brushless Motor Power Connection Diagram
||Motor Power Connector Pinouts(J14)|www.elmomc.com
Page 25

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
Figure 11: DC Brushed Motor Power Connection Diagram
25
Figure 12: Stepper Motor Power Connection Diagram
||Motor Power Connector Pinouts(J14)|www.elmomc.com
Page 26

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.3. Main and Auxiliary Power
The Gold DC Bell receives power from main and auxiliary supplies and delivers power to the motor.
6.3.1. Description
This section describes the Main and Auxiliary Power for power ratings 200V and 100V, and provides
details for the optional Backup (Auxiliary) Supply.
• The Gold DC Bell Power rating is 12 to 195 VDC
• There are Two power ratings for Gold DC Bell; 100V and 200V:
For power rating 200V
Two power isolated DC power sources are required, main power 12 - 195V and Auxiliary
Power 12-95V for the logic.
For power rating of 100V
Single DC Power Supply - Power to the Gold DC Bell is provided by a 12–95 VDC single
isolated DC power source (not included with the Gold DC Bell). A “smart” control-supply
algorithm enables the Gold DC Bell to operate with only one power supply with no need for
an auxiliary power supply for the logic.
Optional Backup (Auxiliary) Supply
If backup functionality is required in case of power loss, e.g., to keep the original position, a
12–95 VDC external isolated supply should be connected (via the Gold DC Bell’s VL+
terminal). This is more flexible than the requirement for 24 VDC supply.
If backup is not needed, a single power supply is used for both the power and logic circuits.
There are two voltage ratings of the Gold DC Bell, therefore the correct power supply must
be used, according to the maximum operating voltage of the Gold DC Bell. Refer to section
4.2 Technical Data.
26
||Main and Auxiliary Power|www.elmomc.com
Page 27

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.3.2. Main Power (J13)
Pin(J13) Signal Function Cable
3 VP+ Positive Power input DC Power
2 PR Power return DC Power
1 PE Protective earth DC Power
27
3-Pin Phoenix Plug-in
Connector
3-Pin Phoenix 3.81 mm Pitch
Table 4: Connectors for Main Power
Connect the DC power cable to the VP+ and PR terminals on the Main Power Connector.
To connect the DC power supply:
1. The source of the 12 to 195 VDC power supply must be isolated.
2. For best immunity, it is highly recommended to use twisted and shielded cables for the DC
power supply. A 3-wire shielded cable should be used. The gauge is determined by the
actual current consumption of the motor.
3. Connect the cable shield to the closest ground connection near the power supply.
4. Connect the PE to the closest ground connection near the power supply.
5. Connect the PR to the closest ground connection near the power supply.
6. Before applying power, first verify the polarity of the connection.
||Main and Auxiliary Power|www.elmomc.com
Page 28

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.3.3. Auxiliary Power Supply(J12)
Pin(J12) Signal Function Cable
1 VL+ Auxiliary Supply Input DC Power
2 PR Auxiliary Supply Return DC Power
28
2-Pin Phoenix Plug-in
Connector
2-Pin Phoenix 3.81 mm Pitch
Table 5: Aux. Power Connector – Pin Assignments
Caution: Power from the Gold DC Bell to the motor must come from the Main
Supply and not from the Auxiliary Supply.
The backup functionality can be used for storing control parameters in case of power-outs,
providing maximum flexibility and backup capability when needed.
Connect the VL+ and PR terminal to the Auxiliary Connector.
To connect the auxiliary supply:
1. The source of the Auxiliary Supply must be isolated.
2. For safety reasons, connect the return (common) of the auxiliary supply source to the
closest ground near the auxiliary supply source
3. Connect the cable shield to the closest ground near the auxiliary supply source
4. Before applying power, first verify the polarity of the connection.
||Main and Auxiliary Power|www.elmomc.com
Page 29

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.3.3.1. Power Rating 200 V
For Power Rating 200 V, two power isolated DC power sources are required, main power 12 - 195V
and auxiliary Power 12-95V for the logic.
29
Figure 13: 200 VDC Power Source Connection Diagram
||Main and Auxiliary Power|www.elmomc.com
Page 30

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.3.3.2. Power Rating 100 V
6.3.3.2.a Single Power Supply
For power rating 100 V , a single Power Supply is required which contains a “smart” control-supply
algorithm, enabling the Gold DC Bell to operate with only one power supply with no need for an
auxiliary power supply for the logic.
Figure 14: Main Power Supply Connection Diagram (no Auxiliary Supply)
30
6.3.3.2.b Optional Backup Supply
Figure 15: Auxiliary Power Supply Connections Diagram
||Main and Auxiliary Power|www.elmomc.com
Page 31

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.4. Drive Status Indicator
Figure 16 shows the position of the red/green dual LED, which is used for immediate indication of
the Initiation and Working states. For details refer to Chapter 7 Drive Status Indicator, in the
MAN-G-Panel Mounted Drives Hardware manual.
31
Figure 16: Drive Status Indicator - EtherCAT
Figure 17: Drive Status Indicator - CAN
The red/green dual LED is used for immediate indication of the following states:
• Initiation state: In this state the LED indicates whether the drive is in the boot state
(blinking red) or in the operational state (steady red).
• Working state: In this state the LED indicates whether the drive is in an amplifier failure
state (red) or is ready to enable the motor (green).
||Drive Status Indicator|www.elmomc.com
Page 32

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.5. STO (Safe Torque Off)(J11)
See Chapter 9 in the in the MAN-G-Panel Mounted Drives Hardware manual for full details.
Pin(J11) Signal Function
1 STO1 STO1 input (default 24 V)
2 STO2 STO2 input (default 24 V)
3 STO_RET STO signal return
3-Pin Molex Plug
32
3-Pin 2.54 mm Pitch Molex
Table 6: STO Input – Pin Assignments
This cable is included in the
cable kit described in
Section 3.1.1.
||STO (Safe Torque Off)(J11)|www.elmomc.com
Page 33

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.5.1. Source Mode – PLC Voltage Level
Refer to the diagrams below for the PLC Source option connection.
Figure 18: STO Molex Type Input Connection – PLC Source Option
33
6.5.2. TTL Mode – TTL Voltage Level
Refer to the diagrams below for TTL option connection.
Figure 19: STO Input Connection – TTL Option
||STO (Safe Torque Off)(J11)|www.elmomc.com
Page 34

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.5.3. Sink Mode – PLC Voltage Level
Refer to the diagrams below for the PLC Sink option connections which is not fully certified for STO.
This option is not recommended for new designs.
34
Figure 20: STO Input Connection – Sink Option
||STO (Safe Torque Off)(J11)|www.elmomc.com
Page 35

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.6. Port A(J1)
See Section 10.3 in the in the MAN-G-Panel Mounted Drives Hardware manual for full details.
Incremental Encoder Absolute Serial Encoder
Pin(J1) Signal Function Signal Function
1 +5V Encoder +5V supply +5V Encoder +5V supply
2 COMRET Common Return COMRET Common Return
3 PortA_ENC_A+ Channel A + ABS_CLK+ Absolute encoder clock+
4 PortA_ENC_A- Channel A - ABS_CLK- Absolute encoder clock-
5 PortA_ENC_B+ Channel B+ ABS_DATA+ Absolute encoder data+
6 PortA_ENC_B- Channel B - ABS_DATA- Absolute encoder data -
7 PortA_ENC_INDEX+ Index+ Reserved Reserved
8 PortA_ENC_INDEX- Index - Reserved Reserved
35
9 HA Hall sensor A HA Hall sensor A
10 HB Hall sensor B HB Hall sensor B
11 HC Hall sensor C HC Hall sensor C
12
COMRET Common Return COMRET Common Return
Pin Positions Cable Connector
12-Pin Molex Plug
This cable is included in the
cable kit described in
Section 3.1.1.
12-Pin 2.54 mm Pitch Molex
Table 7: Port A Pin Assignments
||Port A(J1)|www.elmomc.com
Page 36

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.6.1. Incremental Encoder
36
Figure 21: Port A Molex Type Incremental Encoder Input – Recommended Connection Diagram
6.6.2. Halls Sensor
Figure 22: Molex Type Hall Sensors Connection Diagram
||Port A(J1)|www.elmomc.com
Page 37

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.6.3. Absolute Serial Encoder
The following figures describe the connections at Port A for the Absolute Serial type encoders.
37
Figure 23: Absolute Serial Encoder – Recommended Connection Diagram for EnDAT, Biss, SSI
Figure 24: Absolute Serial Encoder – Recommended Connection Diagram for Sensors
Supporting Data Line Only (NRZ types, e.g., Panasonic / Mitutoyo / Sanyo Danki / Tamagawa)
||Port A(J1)|www.elmomc.com
Page 38

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.6.3.1. Hiperface
The following figure describes the connection diagram.
38
Figure 25: Absolute Serial Encoder – Recommended Molex Type Connection Diagram for
Stegmann Hiperface
||Port A(J1)|www.elmomc.com
Page 39

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.7. Port B(J3)
See Section 10.4 in the in the MAN-G-Panel Mounted Drives Hardware manual for full details.
39
Incremental or
Resolver
Interpolated Analog Encoder
G-DCBELXXX/YYYYEXX G-DCBELXXX/YYYYRXX
Pin(J3) Signal Function Signal Function
1 +5 V Encoder +5 V supply NC
2 COMRET Common Return COMRET Common Return
3 PortB_ENC_A+/SIN+ Channel A+/Sine+ SIN+ Sine+
4 PortB_ENC_A-/SIN- Channel A -/Sine- SIN- Sine-
5 PortB_ENC_B+/COS+ Channel B+/ Cosine+ COS+ Cosine+
6 PortB_ENC_B-/COS- Channel B-/Cosine- COS- Cosine-
7 PortB_ENC_INDEX+/
Analog_Index+
8 PortB_ENC_INDEX-/
Analog_Index-
Channel_Index+/
Analog_Index+
Channel_Index- /
Analog_Index-
RESOLVER_OUT+ Vref f=1/TS, 50 mA
Max.
RESOLVER_OUT- Vref complement
f= 1/TS, 50 mA
Maximum
Pin Positions Cable Connector
8-Pin Molex Plug
his cable is included in the
cable kit described in Section
3.1.1.
8-Pin 2.54 mm Pitch Molex
Table 8: Port B Pin Assignments
||Port B(J3)|www.elmomc.com
Page 40

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.7.1. Incremental Encoder
The following figure describes the connections at Port B for the Incremental encoder.
40
Figure 26: Port B Incremental Encoder Input – Recommended Connection Diagram
||Port B(J3)|www.elmomc.com
Page 41

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.7.2. Interpolated Analog Encoder
The following figure describes the connections at Port B for the Interpolated Analog encoder.
41
Figure 27: Port B - Interpolated Analog Encoder Molex Type Connection Diagram
||Port B(J3)|www.elmomc.com
Page 42

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.7.3. Resolver
42
Figure 28: Port B – Resolver Molex Type Connection Diagram
||Port B(J3)|www.elmomc.com
Page 43

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8. Port C, Digital I/Os, and Analog Inputs(J2)
The Port C connector includes the following functions:
• Port C: Refer to Sections 10.5 in the in the MAN-G-Panel Mounted Drives Hardware manual
for full details
• I/O: Refer to Chapter 11 in the in the MAN-G-Panel Mounted Drives Hardware manual for full
details.
• Analog input: See Section 11.2 in the in the MAN-G-Panel Mounted Drives Hardware manual
for full details.
Pin(J2) Signal Function
1 PortC_ENCO_A+ Buffered Channel A output
2 PortC_ENCO_A- Buffered Channel A complement output
3 PortC_ENCO_B+ Buffered Channel B output
4 PortC_ENCO_B- Buffered Channel B complement output
5 PortC_ENCO_Index+ Buffered INDEX output
43
6 PortC_ENCO_Index- Buffered INDEX complement output
7 COMRET Common return
8
COMRET Common return
9 ANALOG1- Analog input complement
10 ANALOG1+ Analog input
11 ANARET Analog return
12 INRET1_6 Programmable input 1 – 6 return
13 IN1 Programmable input 1
14 IN2 Programmable input 2
15 IN3 Programmable input 3
16 IN4 Programmable input 4
17 IN5 Programmable input 5
18 IN6 Programmable input 6
19 OUT4 Programmable output 4
20 OUT3 Programmable output 3
21 OUT2 Programmable output 2
22 OUT1 Programmable output 1
23 VDD VDD supply (5 V up to 30 V)
24 VDDRET VDD supply return
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 44

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
Pin Positions Cable Connector
24-Pin Molex Plug
This cable is included in the
cable kit described in Section
3.1.1.
44
24-Pin 2.54 mm Pitch Molex
Table 9: Port C Feedback Out and I/O
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 45

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8.1. Port C – Emulated Encoder Output
The following figure describes the connections at Port C for the Emulated Encoder Differential.
45
Figure 29: Emulated Encoder Differential Output – Recommended Connection Diagram
Note that the user is required to connect a 120 Ω termination at the end of each differential line.
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 46

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8.2. Analog Input
The following circuit describes the internal interface of the Analog input.
46
Figure 30: Differential Analog Input
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 47

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8.3. Digital Input and Output TTL Mode
The following figure describes the connections at the I/O Port for the Digital Input and Output TTL
Mode.
47
Figure 31: Digital Input TTL Mode Connection Diagram
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 48

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
48
Figure 32: Digital Output Connection Diagram – TTL Option
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 49

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8.4. Digital Input and Output PLC Source Mode
The following figure describes the connections at the I/O Port for the Digital Input and Output PLC
Mode.
49
Figure 33: Digital Input Connection Diagram – Source PLC Option
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 50

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
50
Figure 34: Digital Output Connection Diagram – Source PLC Option
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 51

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.8.5. Digital Input and Output Sink Mode
The following figure describes the connections at the I/O Port for the Digital Input and Output Sink
Mode.
51
Figure 35: Digital Input Sink Mode – PLC voltage level Molex Type Connection Diagram
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 52

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
52
Figure 36: Digital Output as Sink Configuration Molex Type Connection Diagram
||Port C, Digital I/Os, and Analog Inputs(J2)|www.elmomc.com
Page 53

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.9. USB 2.0(J9)
The USB Network consists of Host controller and multiple devices. The Gold DC Bell is a USB Device.
See Section 12.1 in the in the MAN-G-Panel Mounted Drives Hardware manual for full details.
Pin(J9) Signal Function
1 USB VBUS USB VBUS 5 V
2 USBD- USB _N line
3 USBD+ USB _P line
5 USB COMRET USB communication return
Pin Positions Cable Connector
53
USB Device Mini-B
Table 10: USB 2.0 Pin Assignments
USB Device Mini-B Plug
Figure 37: USB Network Diagram
||USB 2.0(J9)|www.elmomc.com
Page 54

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.10. EtherCAT Communication Version
Fieldbus communications are industrial network protocols for real-time distributed control that
allows connection of servo drives. The Gold DC Bell supports the following EtherCAT fieldbus type
industrial network protocol:
Fieldbus Type Product Number
EtherCAT G-DCBELXX/YYYEXX
6.10.1. EtherCAT IN/Ethernet Pin Assignments(J7)
Refer to section 12.2 in the MAN-G-Panel Mounted Drives Hardware manual for more details.
Pin(J7) Signal Function
1 EtherCAT_IN_TX+/Ethernet_TX+ EtherCAT in/Ethernet transmit +
2 EtherCAT_IN_TX-/Ethernet_TX- EtherCAT in/Ethernet transmit -
3 EtherCAT_IN_RX+/Ethernet_RX+ EtherCAT in/Ethernet receive +
54
4, 5 N/A
6 EtherCAT_IN_RX-/Ethernet_RX- EtherCAT in/Ethernet receive -
7, 8 N/A
Pin Positions Cable Connector
Standard Ethernet CAT5 Cable
8-Pin RJ-45
Table 11: EtherCAT In Pin Assignments
||EtherCAT Communication Version|www.elmomc.com
Page 55

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.10.2. EtherCAT OUT(J8)
See Section 12.2 in the MAN-G-Panel Mounted Drives Hardware manual for the electrical diagram.
Pin(J8) Signal Function
1 EtherCAT_OUT_TX+ EtherCAT in transmit +
2 EtherCAT_OUT_TX- EtherCAT in transmit -
3 EtherCAT_OUT_RX+ EtherCAT in receive +
4, 5 N/A
6 EtherCAT_OUT_RX- EtherCAT in receive -
7, 8 N/A
Pin Positions Cable Connector
55
Standard Ethernet CAT5 Cable
8-Pin RJ-45
Table 12: EtherCAT Out Pin Assignments
6.10.3. therCAT Wiring
Figure 37 describes the wiring diagram for the EtherCAT connections.
Figure 38: EtherCAT RJ-45 Connections
||EtherCAT Communication Version|www.elmomc.com
Page 56

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.10.4. EtherCAT Status Indicator
Figure 39: EtherCAT Status LED
56
The EtherCAT status indicator is a red/green dual LED. It combines run indication (when it is green)
and error indication (when it is red) of the EtherCAT device. For further details, see the EtherCAT
Manual.
Note: There is no Gold DC Bell ECAT Status indicator equivalent in the CAN version, refer to the
figure below.
Figure 40: Gold DC Bell Status Indicator - CAN
||EtherCAT Communication Version|www.elmomc.com
Page 57

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.11. CAN Communication Version
Fieldbus communications are industrial network protocols for real-time distributed control that
allows connection of servo drives. The Gold DC Bell supports the following CAN fieldbus type
industrial network protocol:
Fieldbus Type Product Number
CAN G-DCBEL XX/YYYSXX
See Section 12.4 in the MAN-G-Panel Mounted Drives Hardware manual for the electrical diagram.
Pin (J7/J8) Signal Function
1 CAN_H CAN_H bus line (dominant high)
2 CAN_L CAN_L bus line (dominant low)
3 COMRET (CAN_RET) CAN Return
4, 5 N/A —
6 CAN_SHLD Shield, connected to the RJ plug cover
57
7 CAN_RET CAN Return
8 N/A —
Pin Positions Cable Connector
Standard CAT5e Ethernet
Cable
Table 13: CAN In/Out Connectors Pin Assignments
||CAN Communication Version|www.elmomc.com
Page 58

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.11.1. CAN Wiring
58
Caution
When installing the CAN
communications, ensure that each
servo drive is allocated a unique ID.
Otherwise, the CAN network may
hang.
Figure 41: Gold DC Bell Connection Diagram – CAN
||CAN Communication Version|www.elmomc.com
Page 59

Gold DC Bell Installation Guide
Table of Contents
MAN-G-DCBELIG-EC (Ver. 1.200)
6.12. Powering Up
After the Gold DC Bell is connected to its device, it is ready to be powered up.
Caution:
Before applying power, ensure that the DC supply is within the specified range
and that the proper plus-minus connections are in order.
6.13. Initializing the System
After the Gold DC Bell has been connected and mounted, the system must be set up and initialized.
This is accomplished using the EASII, Elmo’s Windows-based software application. Install the
application and then perform setup and initialization according to the directions in the EASII User
Manual.
59
||Powering Up|www.elmomc.com
Page 60

Gold DC Bell Installation Guide
Table of Contents
Chapter 7: Dimensions
MAN-G-DCBELIG-EC (Ver. 1.200)
This chapter provides detailed technical information regarding the Gold DC Bell.
60
||www.elmomc.com
Page 61

Table of Contents
61
||www.elmomc.com
 Loading...
Loading...