

Page 1

Technical Documentation
Isolette® C2000/C2000e
Infant Incubator
WARNING!
Each servicing and/or testing of the device
requires full understanding of this Technical Documentation. Carefully read the Instructions for Use prior to any use of the
device.
Revision 1.1
6016.036
9036214
Because you care
Page 2

Page 3

Contents
General
1 Symbols and Definitions 3
2 Notes 3
Function Description
1 Controller Assembly 7
2 Variable Height Adjustable Pedestal/Stand Assembly 8
3 Hood/Shell Assembly 9
4 Theory of Operation 9
4.1 Electrical System .................................................................................................................... 9
4.1.1 Sensor Module ......................................................................................................... 9
4.1.2 Controller ................................................................................................................ 13
4.1.3 Impeller Movement Detector (IMD) P.C. Board ...................................................... 14
4.1.4 Fan Motor ............................................................................................................... 14
4.1.5 Heater Power ......................................................................................................... 14
4.1.6 Humidity Heater Power .......................................................................................... 15
4.2 Air System ............................................................................................................................ 18
4.2.1 Overall Functional Description ............................................................................... 18
4.2.2 Air Mode ................................................................................................................. 19
4.2.3 Skin Mode .............................................................................................................. 19
4.2.4 Oxygen Control ...................................................................................................... 20
Copyright reserved.
K6016036IECIVZ.fm 21.05.07
4.2.5 Humidity Control Valve ........................................................................................... 20
4.3 Hardware .............................................................................................................................. 20
4.3.1 Weighing Mode ....................................................................................................... 20
4.3.2 Trend Displays ........................................................................................................ 20
4.3.3 Interface Connections ............................................................................................ 21
I
Page 4

Contents
4.3.4 RS-232 Serial Port Protocol ....................................................................................21
Maintenance Procedures
1 Air filter 27
1.1 Safety precautions ................................................................................................................27
1.2 Replacing the air filter ...........................................................................................................28
1 Oxygen sensors 31
1.1 Notes/Safety instructions ......................................................................................................31
1.2 Replacing the oxygen sensors .............................................................................................32
1.2.1 Service Equipment Required ..................................................................................32
1.2.2 Procedure ...............................................................................................................32
1.3 Calibrating the oxygen sensors ............................................................................................40
1.3.1 Safety instructions for calibrating the oxygen sensors ............................................40
1.3.2 General ...................................................................................................................40
1.3.3 21 vol.%O2 calibration ............................................................................................41
1.3.4 100 vol.%O2 calibration ..........................................................................................43
Block diagrams
1 Shell Assembly Cable Routing (1) 49
2 Scale Assembly Cable Routing (2) 50
Annex
Parts catalog
Test List
II
Copyright reserved.
K6016036IECIVZ.fm 21.05.07
Page 5

General
1
Page 6

2
Page 7
Isolette® C2000/C2000e General
1 Symbols and Defini-
tions
WARNING
A WARNING statement provides important information about a potentially hazardous situation which, if not avoided, could result in death
or serious injury.
CAUTION
A CAUTION statement provides important information about a potentially
hazardous situation which, if not avoided, may result in minor or moderate
injury to the user or patient or in damage to the equipment or other property.
NOTE
A NOTE provides additional information intended to avoid inconvenience
during operation or servicing of the equipment.
Definitions according to German standard DIN 31051:
Inspection = examination of actual condition
Maintenance = measures to maintain specified condition
Repair = measures to restore specified condition
Servicing = inspection, maintenance, and repair
2Notes
This Technical Documentation conforms to the IEC 60601-1 standard.
Read each step in every procedure thoroughly before beginning any test.
Always use the proper tools and specified test equipment. If you deviate from
the instructions and/or recommendations in this Technical Documentation,
the equipment may operate improperly or unsafely, or the equipment could
be damaged.
Dräger recommends that only Dräger provided parts be used for maintenance. Otherwise the correct functioning of the device may be compromised.
The maintenance procedures described in this Technical Documentation may
be performed by trained service personnel only. These maintenance procedures do not replace inspections and servicing by the manufacturer.
This Technical Documentation is for the purpose of information only. Product
descriptions found in this Technical Documentation are in no way a substitute
for reading and studying the Instructions for Use.
NOTE
Unless otherwise stated, reference is made to laws, regulations or standards (as amended) applicable in the Federal Republic of Germany for
equipment used or serviced in Germany. Users or technicians in all other
countries must verify compliance with local laws or applicable international
standards.
Copyright reserved.
4.0_Printed on_21.05.07_K_General.fm
6016.036
3
Page 8

General Isolette® C2000/C2000e
Copyright reserved.
4.0_Printed on_21.05.07_K_General.fm
4
6016.036
Page 9

Function Description
5
Page 10

6
Page 11
Isolette® C2000/C2000e Theory of Operation
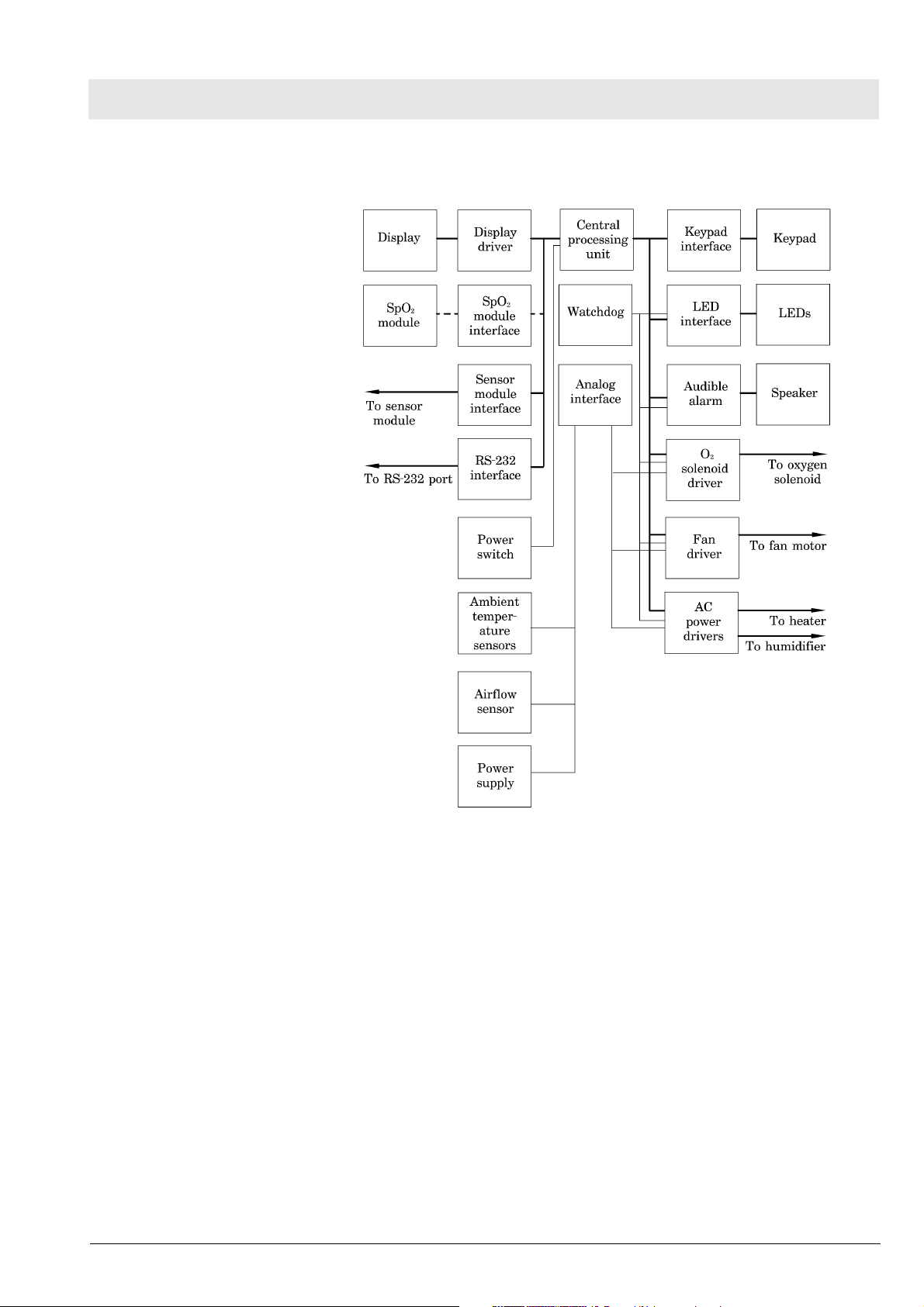
1 Controller Assembly
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
Figure 1 Controller Assembly Block Diagram
7
Page 12
Theory of Operation Isolette® C2000/C2000e
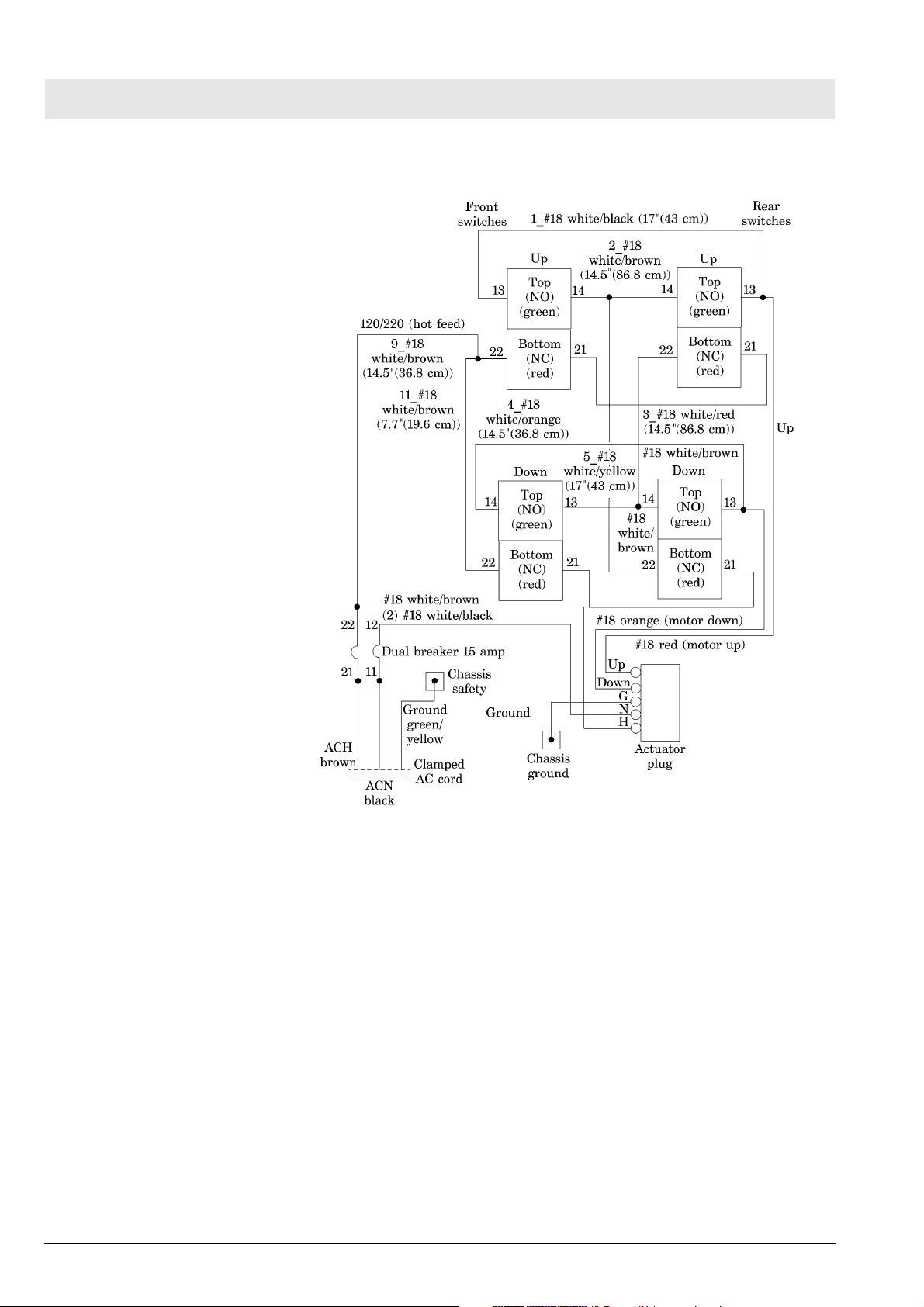
2 Variable Height
Adjustable Pedestal/Stand Assembly
Figure 2 Variable Height Adjustable Pedestal/Stand Assembly Wiring Dia-
gram
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
8
6016.036
Page 13
Isolette® C2000/C2000e Theory of Operation
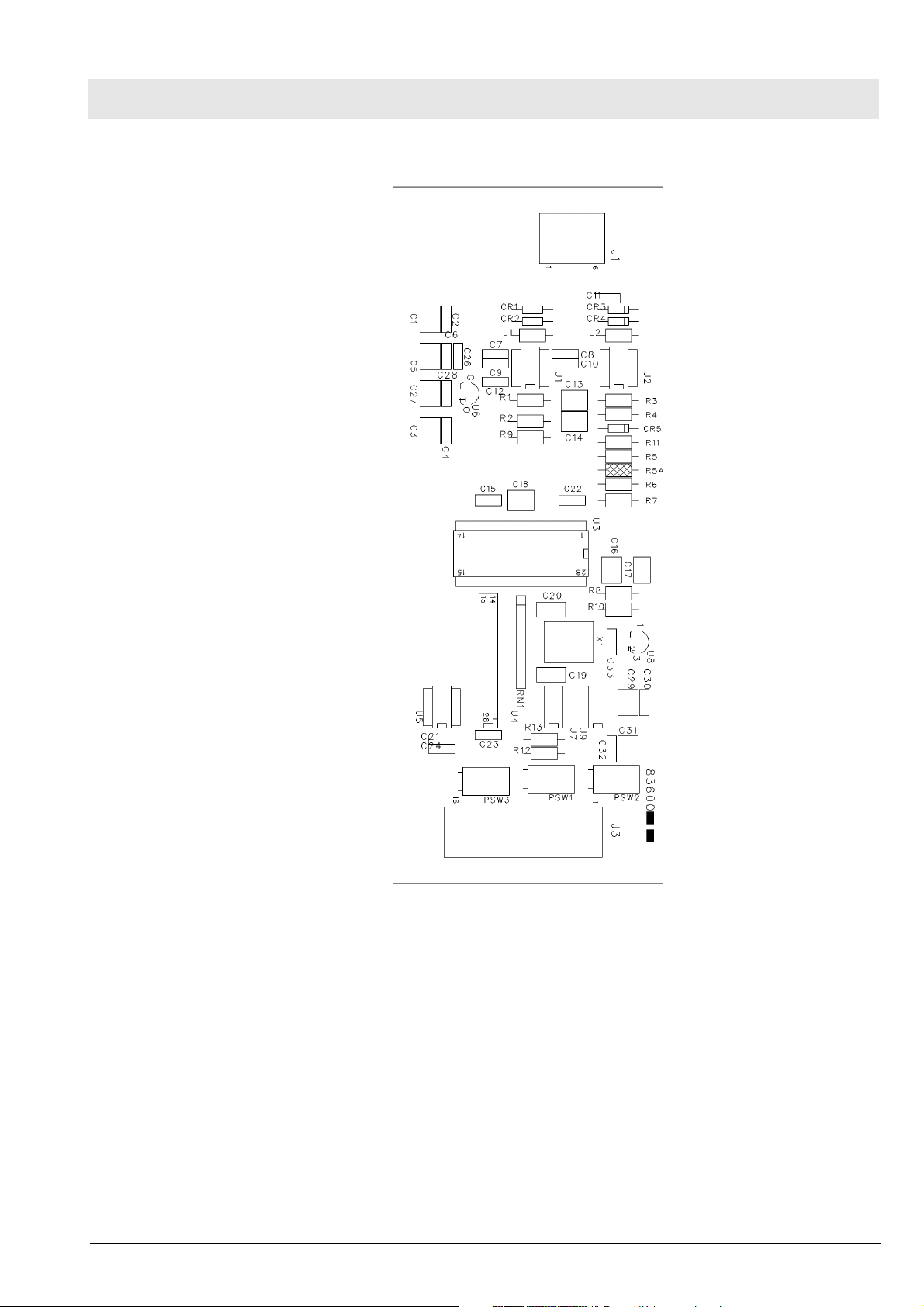
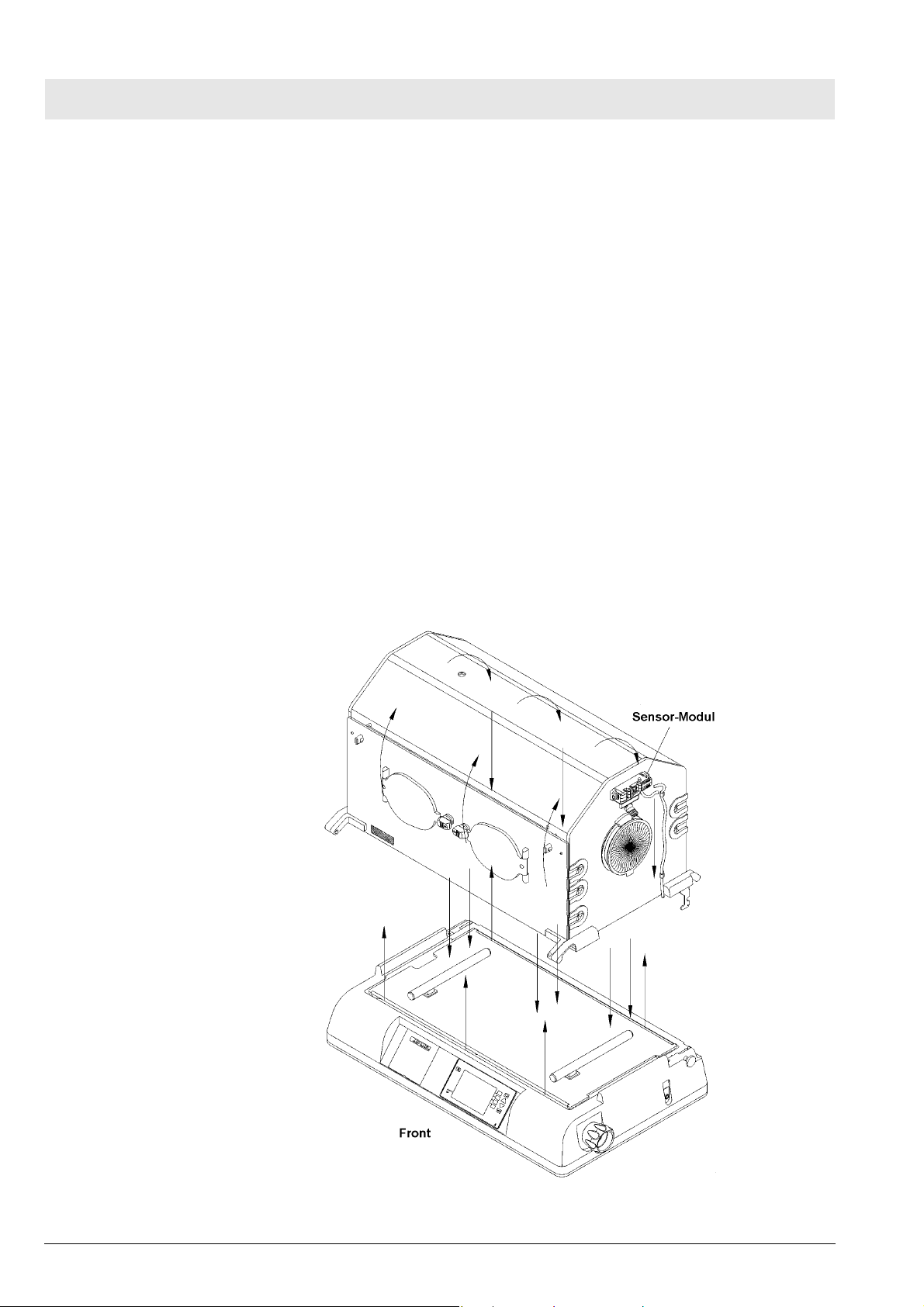
3 Hood/Shell Assem-
bly
Figure 3 Scale P.C. Board Layout
4 Theory of Operation
4.1 Electrical System
4.1.1 Sensor Module The sensor module P.C. board provides the interface for the patient and incu-
bator requirements that the infant incubator must support. The sensor module
assembly reads and processes the following parameters:
• Temperature
• Oxygen
• Humidity
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
• Weight information, collected from external sensors and cables
9
Page 14

Theory of Operation Isolette® C2000/C2000e
This information is periodically updated and transmitted to the main controller
upon request.
The sensor module P.C. board does not require manual calibration. To provide safe monitoring and control, both the temperature information and oxygen information have redundant circuitry to prevent single-fault failures.
All signals are transmitted through serial data communication.
The sensor module connects to a sensor P.C. board that has the following
parameters required for the system:
• Air temperature
• Oxygen
• Humidity
• Fan operation
Power Supply
The power to the sensor module P.C. board is provided through connector
J4, providing ±12 V AC for the system. U21, U19, and U15 regulate the volt-
ages by providing +5 V, digital +5 V and analog -5 V, respectively. U20 provides a precision +5 V source for analog signal conversions.
Sensor Position Detection
Hall effect sensors sense the magnets in the slide mechanism. The sensors,
U9 and U2, determine the calibration position. The sensors, U16 and U22,
determine the hood’s position during normal operation. The output is normally
high. These devices provide a low output if a significant south pole magnetic
field is applied to their surface.
Remote Light Alarm Indicator
DS1 provides an alarm indication with a high field of view. A positive signal,
RMLITE, at the gate of transistor Q3 illuminates DS1.
Scale Interface
The connector J3 provides the interface and power for the scale module. The
scale module supports serial data communication. The signal SCCLK is used
for scale communication only and is normally high when the scale is disconnected. The signal CDATA is bi-directional and is normally in the low state
when the scale is not connected.
Fan Control/Feedback Circuit
To drive the DC fan on the sensor board, the signal FANON pulses Q1 on its
gate at a 50% duty cycle at approximately 48 Hz to maintain proper speed
and to increase fan life. Every 4 seconds, the microcontroller asserts FANON
for 42 milliseconds, and the fan pulse detection begins.
10
U1A handles the pulse detection and, through the resistors R3 and R7, samples the current spikes from the fan produced across R1. The amplifier operates as a differentiator, providing high gain for the current spikes. D1 and C16
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 15

Isolette® C2000/C2000e Theory of Operation
then rectify and filter this signal and then feed it to the Analog/Digital (A/D)
converter as signal FANPUL. This provides a semi-DC level as a function of
the fan rotation.
Temperature Measurement
The temperature data acquisition circuit starts with the analog multiplexers,
U6 and U5, each allowing an 8-to-1 signal switching. The microcontroller
selects the multiplexer channel by the signals MSEL0, MSEL1, and MSEL2.
Each multiplexer output can be inhibited by either signal TM1SEL or
TM2SEL, depending on the multiplexer; only one multiplexer is active at a
time. With each multiplexer output into the amplification under control, this
data acquisition is viewed as a 16-to-1 analog temperature selector. The
microcontroller selects a new temperature channel every 21 milliseconds.
The resistor R14 provides the constant voltage drive required for each thermistor as it is selected from the appropriate multiplexer. This voltage is amplified by a factor of 2.1083, and is sent to the A/D converter as signal TCOM.
To provide automatic calibration of the circuit and eliminate temperature and
aging drifts, R44 and R45 introduce precise calibration values into each multiplexer. These values are read through the multiplexers and are used in software processing to eliminate the gain and offset errors of each
multiplexer/amplifier combination. These values equate to 120.87 °F
(49.37 °C) and 72.72 °F (22.62 °C), which allow for precise circuit calibration.
Resistor R43 is an additional check to the circuit, which provides a resistance
simulating 98.57 °F (36.98 °C).
The sensor module supports the following three air temperature sensors on
the sensor board:
•AIRTE
•AIRTC
•AIRTM
These signals interface through J2-6 to J2-8. The thermistors then route to
temperature multiplexers U5 and U6, which provide analog signal processing
into the A/D converter.
The skin temperature probes contain dual thermistors. The sensor module
supports two probes that plug into connectors J6 and J7. The two thermistors
connect to SKNT1M and SKNT1C or SKNT2M and SKNT2C, with a common
connector at AGND. Both probes have high frequency filtering by inductor
networks LN1 and LN2. In addition, each skin probe has a resistor that is
input to the multiplexers. The microcontroller uses these signals, SKNT1D
and SKNT2D, to determine if the probes are installed.
Humidity Measurement
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
Humidity measurement originates with the humidity sensor on the sensor
P.C. board, connected to J2-5 and J2-14 (AGND and HS2, respectively). The
sensor is a capacitive-type that changes capacitance as a function of humidity; the net range of capacitances is from approximately 160 pF to 200 pF.
The sensor connects to the amplifier U7A/U8A, which is set up as a multivibrator. The sensor capacitance charges up through R20 and R21 to a
threshold voltage established by R30 and R26.
11
Page 16

Theory of Operation Isolette® C2000/C2000e
When the capacitor voltage reaches the threshold, the capacitor U7A/U8A
goes high to 2.5 V as controlled by R19 and R28, and turns on Q2. This discharges the humidity sensor through R20 until it reaches the lower threshold
established by R24, R26, and R30. The capacitor voltage goes from approximately 0.2 V to 0.7 V. At this point, the comparators output goes low, releasing the drive to Q2 and allowing the humidity to start charging again. This
produces a frequency output as a function of capacitance, such as humidity.
The output signal, which is only 2.5 V peak, is then input into U7B/U8B to
condition the 5 V signal. Hysteresis is provided through the use of R23, R29,
and R32 to ensure stable frequency switching. The output signal, JUMPUL, is
then sent to the microcontroller for processing. A typical frequency would be
around 37 KHz.
Microcontroller
The microcontroller is a Priority-Interrupt Controller (PIC) 16C73, used for
signal-processing and for control of all signals on the sensor module. The
device has three external ports, configurable as inputs and outputs. The
microcontroller operates from a precise time-base of crystal Y1, operating at
4 MHz. The instruction cycle time of the PIC is ¼ of that, namely at 1 MHz or
1 microsecond.
To ensure a clean power-up, U10 provides a fixed power-up reset to the
microcontroller. This integrated circuit also generates a rest in the event of a
brownout condition when the D+5 falls below a predetermined threshold.
If the main controller determines that the sensor module requires reset intervention, the reset line of the microcontroller, SMRES, is available to the main
controller.
The PIC device operates with an internal watchdog timer device that asserts
SMRES if the program execution operates outside normal conditions.
Expansion Devices
The digital multiplexer, U3, allows additional digital signals for processor control. It is a dual, 4-to-1 multiplexer that allows the microcontroller to use two
ports for 8-bits of information. The signals, DVSEL0 and DVSEL1, control
U18.
The buffered line-drivers, U13A/B and U14A, are used for signals that are
going off-board, namely SMDATA, SCDATA, and SCCLK. The SMDATA line
is used as a bi-directional line that can change from input or output “on-thefly” for data communication to the main controller. The SCDATA is similar,
with connection to the scale at connector J3. SCCLK is the buffered clock line
used for scale communications.
12
Buffer U14B provides an inversion for TM1SEL, producing TM2SEL to alternately enable and disable the temperature multiplexers.
Analog/Digital (A/D) Conversions
The A/D converter, U11, is an eight-channel, 12-bit, serial, interface device.
Control for the channels is software-configurable by the serial communication
line SSPCLK, ADCDIN, and COMOUT. The signal, ACENI, enables the A/D
converter for signal processing and is asserted twice every 21 milliseconds;
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 17

Isolette® C2000/C2000e Theory of Operation
the A/D converter is read twice. In addition, the ADCIN and COMOUT are
driven at 21 millisecond intervals. The SSPCLK is shared with the EEPROM
on the sensor board and scale clock; therefore, the timing is not periodic.
All temperature information appears as a multiplexed signal on Channel 0,
and oxygen information appears as a multiplexed signal on Channel 2. Channel 4 enables the A/D converter to read its maximum input, and Channel 5
enables the A/D converter to read its minimum input to determine proper A/D
functioning.
The analog representation of fan pulses apply to Channel 6.
4.1.2 Controller The controller accepts input voltages between the range of 90 V AC and
264 V AC through a universal input switching power supply. Voltages above
the safe operating range are clamped using a transorb diode.
The controller accepts input frequencies between the range of 48 Hz to 62 Hz
through a universal input switching power supply.
The stand supplies the input power and protective ground to the controller
and incorporates a 15 A circuit breaker and electromagnetic interference
(EMI) filtering components.
The controller provides AC power to the heater and the humidifier. These outputs are fused in the controller to protect the controller in the event of a short
circuit or electrical overload.
• Maximum heater voltage—264 V AC
• Maximum heater current—4.8 A
• Maximum humidifier voltage—264 V AC
• Maximum heater current—1.2 A
• Heater/humidifier fuse rating—6.3 A
The controller provides DC power to the following:
•The fan
• The sensor module
• The scale
• The SPO2 module, if available
• The airflow sensors
• The door switches
These outputs are current-limited in the controller to protect the controller and
the powered device if a circuit shorts or electrically overloads. These outputs
are regulated to ensure the output voltage is within the voltage specification
for the powered device. The microprocessor feeds and monitors the outputs
1 and 2 into the A/D converter.
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
13
Page 18

Theory of Operation Isolette® C2000/C2000e
4.1.3 Impeller Movement
Detector (IMD) P.C.
Board
The Impeller Movement Detector (IMD) P.C. board is positioned so that magnets pressed into the bottom of the impeller pass directly over a Hall effect
sensor mounted to the IMD P.C. board. The IMD circuit monitors the Hall
effect sensor’s pulse train, produced by the magnets when the impeller
rotates. The speed of the impeller is measured and compared with the predetermined maximum and minimum acceptance limits. If the impeller’s rotational speed is too fast or too slow, an impeller error signal generates. The
IMD circuit also detects if one, two, or all three magnets are missing or if an
old impeller without magnets is used. These errors produce the same error
signal to the controller as for low or high impeller speeds.
The controller’s +12 V supplies the power for the IMD circuit through a 301 Ω
resistor. This resistor and the load of the IMD circuit form a voltage divider
that sets the LONG signal voltage that remains constant. U1, a voltage regulator, supplies +5 V DC to the Hall effect sensor (U3) and the microcontroller
(U2). As the magnets pass above the Hall effect sensor, its open-drain output, U3-2, goes low, detecting the magnets’ field. When the magnets’ field is
removed, the oscillator is used as a reference. When an error condition is
detected, U2-2, the microcontroller’s output, drives low, which accomplishes
the following:
• Turns off Q1.
• Releases a portion of the load on the short signal, allowing it to rise above
the LONG signal voltage.
R2, the switch portion of the SHORT signal load, and R4, the unswitch position of the SHORT signal load, adjust to provide an approximate 1V swing
between the error and non-error outputs. The capacitors, C1 and C2, filter the
system’s supply.
The IMD P.C. board supports in-circuit programming (ICP) of the microcontroller. Programming is done after the unprogrammed microcontroller is populated with all the other components by connecting a programmer to the pads
labeled VPP, +5 V, CLK, DTA, and GND.
4.1.4 Fan Motor The controller sets the fan motor speed if the watchdog is not tripped. The
microprocessor supplies a pulse-width modulation (PWM) signal to an optocoupler for isolation. The output connects to an integrator circuit that converts
the PWM signal to an analog signal for the motor controller. The motor incorporates the Hall effect sensors for monitoring and control. One of the Hall
effect sensor outputs is fed to the microprocessor for measuring the motor
speed. If the watchdog timer trips, the fan motor speed is maintained at
1500 rpm ± 450 rpm.
The controller provides an alarm to indicate a failure of the fan to rotate.
When this occurs, the heater and humidifier disable, and an audible alarm
with a visual indication activates.
4.1.5 Heater Power The controller monitors the heater power. A current transformer is in series
with the power to the heater and the humidifier. The output of the current
transformer connects to the A/D converter.
14
The system enables control of the incubator’s heater. The microprocessor
controls a solid state relay that controls the power to the heater. The microprocessor and the watchdog circuit control the safety relay, K3. The release
of the safety relay removes power from the heater regardless of the functionality of the heater triac.
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 19

Isolette® C2000/C2000e Theory of Operation
4.1.6 Humidity Heater Power The controller monitors the humidity heater power. A current transformer is in
series with the power to the heater and humidifier. The output of the current
transformer connects to the A/D converter.
The system enables control of the humidity heater. The microprocessor controls a solid state relay that controls the power to the humidity heater. The
microprocessor and the watchdog circuit control the safety relay, K3. The
release of the safety relay removes power from the humidifier heater regardless of the functionality of the humidity heater triac.
Oxygen Control
The system enables control of the oxygen pneumatics. The microprocessor
provides a PWM signal to the solenoid’s metal oxide semiconductor fieldeffect transistor (MOSFET).
The voltage to the oxygen solenoid is monitored and fed into the A/D converter. This circuit monitors the 12 V power supply and thermal fuse.
Light-Emitting Diodes (LEDs)
The microprocessor drives each light-emitting diode (LED). The hardware
watchdog timer circuit drives the alarm/system fail indicator. The power fail
detection circuitry drives the Power Fail indicator.
Audio Alarms
The audible alarm circuit incorporates an oscillator circuit to generate the
three alarm frequencies used:
•600 Hz
• 1500 Hz
• 2500 Hz
The microprocessor, the watchdog circuit, and the power failure detection circuitry drive the audible alarm circuit.
The audio volume is capable of three discrete sound levels. An analog
switch, incorporated in the audible alarm amplifier circuit, selects a 57 dB,
62 dB, or 65 dB output, as measured by International Electrotechnical Commission (IEC) 601-19-2:102.3. The microprocessor, the watchdog circuit, and
the power failure detection circuit control the analog switch.
Power Fail
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
The controller provides an audio output for power fail conditions. The alarm
oscillator is set for 600 Hz at 65 dB output, as measured by IEC 601-192:102.3. A timer circuit generates the cadence tone during power failures.
When a Power Failure alarm is activated, the following occurs:
•The Power Fail indicator on the front panel illuminates.
• An alarm sounds.
A high energy storage capacitor powers the power failure detection circuitry
and supplies power to the audible alarm and indicator for a minimum of 10
minutes. This capacitor charges while the unit is operating. When power is
15
Page 20

Theory of Operation Isolette® C2000/C2000e
lost to the controller and the Power switch remains in the On position, the
storage capacitor supplies power to the power failure circuitry. The power failure circuitry incorporates a timer circuit that periodically enables the audible
alarm and Power Fail indicator at a cadence of 520 milliseconds off and 98
milliseconds on until one of the following occurs:
•The Power switch is turned off.
• The power is restored.
• The storage capacitor is depleted.
The Power Failure alarm silence is hardware-controlled. Pressing the Alarm
Silence key during power failure silences the alarm for the duration of the
power failure. The Power Fail indicator flashes until one of the following
occurs:
• The storage capacitor is depleted.
•The Power switch is turned off.
• The power is restored.
The System Failure alarm is unaffected by the Alarm Silence key.
Interfacing
An interface port enables an RS-232 serial communication link. The serial
port is fully isolated from the remaining controller circuitry. The power to the
serial port interface circuitry derives from an isolated winding on the power
supply transformer. The RS-232 interface connector is a female DB-9,
mounted on the rear of the controller. An RS-232 transceiver converts the
RS-232 to logic voltage levels and vice versa. Optocouplers provide the isolation barrier and interface the RS-232 transceiver to the PC16550 UART. The
UART interfaces the serial port to the microprocessor bus. All lines connected to the RS-232 connector are filtered to block EMI. The RS-232 transceiver incorporates electrostatic discharge (ESD) protection.
An interface enables communication between the controller module and the
sensor module. The sensor module interface connector is a female DB-9,
mounted on the rear of the controller and comprised of a bi-directional data
line, a clock output line, and a reset output line. The data lines are fully isolated and optocoupled to the microprocessor. The controller provides isolated
power to the sensor module.
Door Switches
The controller connects to the two door switches that are wired in parallel.
The controller performs the following:
16
• Provides no more than 5 milliamperes (mA) of current to the switches
• Provides less than 6 V of power to the switches
• Monitors the return current to determine if either door is open
The switches are open when the door is closed. The input is protected with
transorb diodes and is filtered to block EMI and prevent ESD damage to the
controller.
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 21

Isolette® C2000/C2000e Theory of Operation
Cooling Fan
The cooling fan provides a continuous flow of air through the controller to
remove heat generated by the various components inside the controller
enclosure. The cooling fan operates whenever power is applied to the controller. The cooling fan is equipped with a tachometer output signal that is
supplied to the microprocessor.
Ambient Temperature Sensors
The temperature sensors, located in the airflow of the cooling fan, are NTC
thermistors. The output signals of the redundant sensors feed into the A/D
converter.
Watchdogs
The first watchdog timer is internal to the microprocessor. If the software
does not update the watchdog timer within the required time frame, the internal watchdog resets the microprocessor and all peripherals connected to the
external reset line.
The second watchdog timer circuit attaches to the microprocessor bus. The
microprocessor continuously writes the following data to the watchdog timer:
• Data 55 hex (01010101 binary) to watchdog register #1.
• Data AA hex (10101010 binary) to watchdog register #2.
The watchdog timer trips in 1 second ±0.4 second unless the above
sequence is completed. Once the watchdog timer trips, the following occurs:
• The safety relay turns off, removing power from the heater and the
humidifier.
• The fan control reverts to closed loop control, maintaining a constant fan
speed regardless of the door’s position.
• The oxygen solenoid control from the microprocessor is overridden, and
the oxygen solenoid turns off so that no oxygen enters the hood.
• A constant alarm sounds for a minimum of 500 milliseconds.
• The system failure indicator illuminates.
The microprocessor resets the watchdog timer after a watchdog trip by sending the above data sequence.
Factory Defaults
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
Factory defaults are stored in program memory, flash EEPROM. System
parameters are configured and stored in the real time clock (RTC) module or
serial EEPROM. The RTC memory and random access memory (RAM) are
protected against corruption during power failures and are battery-backed for
a period of time.
The program is stored in reprogrammable memory and may be reprogrammed through a cable connected to the serial port of a computer. The
program memory is stored in a flash EEPROM. The RS-232 serial port operates at speeds of 115,200 baud to expedite the speed of the program download.
17
Page 22
Theory of Operation Isolette® C2000/C2000e
Power Supply
The power supply is so designed that 1 second after disconnection of the
plug, the voltage between the supply pins of the plug and between either supply pin and the enclosure does not exceed 60 V by using a bleeder resistor
across the mains filter capacitor, if necessary.
4.2 Air System
4.2.1 Overall Functional
Description
The controller displays the air temperature and the skin temperature on an
electroluminescent display. Optional displays of the humidity and oxygen
concentration levels within the hood environment and the infant’s weight are
available. In addition, Trend displays of 2, 4, 8, 12, and 24 hours of all parameters (except weight, which is presented in days) are user-selectable.
To indicate which mode of operation, Air Mode or Skin Mode, is in control, the
set temperature of the controlling parameter remains on adjacent to the
actual displayed temperature. In addition, the rotating wheel in the Air or
Skin softkey designator rotates.
The forced air circulation system controls the temperature, humidity, and oxygen concentration (see Figure 4). The motor-driven impeller in the shell
draws a controlled amount of approximately 7 liters per minute (lpm) of room
air through the air intake filter.
18
Figure 4 Air/Oxygen Circulation System
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 23

Isolette® C2000/C2000e Theory of Operation
The impeller also provides the internal circulation at a much greater flow than
that of the fresh gas inflow. The total flow of fresh and circulated air is
directed past the airflow sensor and around the heater. The air enters the
infant compartment up through the slots at the front and rear of the main deck
and then passes between the front and rear inner walls. The air circulates
past the sensor module, which contains the temperature sensing probe that
encapsulates the air temperature control thermistor and a high air temperature alarm thermistor. After circulating within the infant compartment, the air
then re-circulates down through a slot in the right end of the main deck, and
back to the impeller. When the access panel of the hood is open, the air continues to flow upward past the opening, Impeller ramps up to 2200 RPM to
creating a warm air curtain to minimize the drop in air temperature in the incubator. The temperature is regulated using either the incubator’s air or the
infant’s skin temperature as the controlling parameter; the desired mode is
selected by the front panel keys.
In either mode of operation, the heater output is proportional to the amount of
heat required to maintain the desired temperature.
4.2.2 Air Mode In Air Mode, the air temperature is maintained from 68 °F to 99 °F (20 °C to
37 °C) (99 °F to 102 °F (37 °C to 39 °C) in Temperature Override Mode), as
selected by the Air Set Temperature Up and Down arrow keys on the front
panel. A probe located in the sensor module monitors the incubator’s air temperature and compares it with the air’s set temperature setting. The probe
supplies this information to the heater control circuitry, which regulates the
heater output to maintain the air temperature setting. The actual air temperature appears on the Air Temperature display. A second sensor within the air
temperature probe serves as a backup to limit the maximum incubator temperature. If the high temperature limit activates, the heater shuts off.
In Air Mode, the infant’s temperature is a function of the air temperature and
the infant’s ability to establish and maintain its own temperature. A small
infant, or one with underdeveloped homeostatic control, may not be able to
maintain a stable temperature at the desired level.
In Air Mode, there is a 15-minute setpoint retention. When you first power the
unit on, the air setpoint temperature is 95 °F (35 °C); for example, if you
change the air setpoint temperature to 95.9 °F (35.5 °C), and a power failure
occurs, the air set temperature comes up to 95.9 °F (35.5 °C) if the unit turns
on again before 15 minutes elapse.
4.2.3 Skin Mode In Skin Mode, the infant’s temperature is selected from 93 °F to 99 °F (34°C
to 37 °C) (99 °F to 100 °F (37 °C to 38 °C) in Temperature Override Mode) by
the Skin Set Temperature Up and Down arrow keys on the front panel. A
temperature sensing probe attaches directly to the infant’s skin. The probe
supplies information to the heater control circuitry, which proportions the heater output to maintain the skin set temperature.
The air temperature still appears in Skin Mode, but as information only. If Air
Mode is selected while the skin probe remains connected, the Skin Tempe-
rature display continues to display actual skin temperature, but it does not
control.
The sensor module accepts two skin probes. However, when the second skin
probe connects to the sensor module in Skin Mode, an alarm sounds, and the
message Remove Skin 2 Probe appears. To connect the second skin probe,
first select Air Mode. The controller then displays the two temperatures.
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
19
Page 24
Theory of Operation Isolette® C2000/C2000e
If Skin Probe 1 disconnects from its receptacle during Skin Mode, the Skin
Temperature display goes blank, an alarm sounds, and the heater turns off.
4.2.4 Oxygen Control An oxygen sensor assembly mounted inside the sensor module adjusts the
flow of oxygen into the hood and controls the oxygen concentration level
within the incubator’s hood environment.
A valve regulates the flow into the incubator and periodically interrupts the
flow of oxygen into the incubator.
The sensor module houses two independent oxygen fuel cells that monitor
and control the oxygen concentration levels inside the incubator.
If the sensor module is outside of the hood environment during Oxygen
Mode, audible and visual alarms are enabled, and the flow of oxygen is interrupted.
In Oxygen Mode, the user sets the oxygen level control point from 21% to
65%. The high and low alarm limits automatically set to ±3% from the control
point. If the oxygen concentration level rises above or falls below the selected
setpoint limits, an audible and visual alarm occurs.
4.2.5 Humidity Control Valve The built-in humidifier provides humidification of the incubator from 30% to
95% RH in 1% increments. The humidifier reservoir permits visual inspection
of the water level.
If the water level in the chamber is depleted, an audible and visual Low
Humidity alarm occurs, indicating a need to replenish the water supply.
4.3 Hardware
4.3.1 Weighing Mode Two load cells in a platform under the mattress perform the actual weighing
function. These cells provide a voltage that is proportional to the load on it.
The controller processes the voltage and displays it in either kilograms or
pounds/ounces on the Weight display.
The weighing routine is initiated by placing the infant on the mattress. If the
infant is already on the mattress, lift the infant off the mattress; when the system zeros, return the infant to the mattress to obtain the weight.
The Weigh key enables repeated weighing of the infant after the weighing
routine is initiated as described above.
4.3.2 Trend Displays Four standard parameters are presented on Trend displays:
• Air temperature
20
• Skin temperature #1
• Skin temperature #2
• Heater power
Additional Trend displays are available when the unit is equipped with any of
the following options:
• Oxygen
• Weight
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 25
Isolette® C2000/C2000e Theory of Operation
• Humidity
The Trend time is user-selectable in intervals of 2, 4, 8, 12, and 24 hours for
all parameters, except for weight, which provides a trend of 7 days.
4.3.3 Interface Connections A serial interface port is provided as a data terminal device and an RS-232
output.
The following parameters are available:
• Air and skin setpoint temperatures
• Current air and skin temperatures
• Oxygen setpoint
• Oxygen level
• Humidity setpoint
• Humidity level
• Infant weight
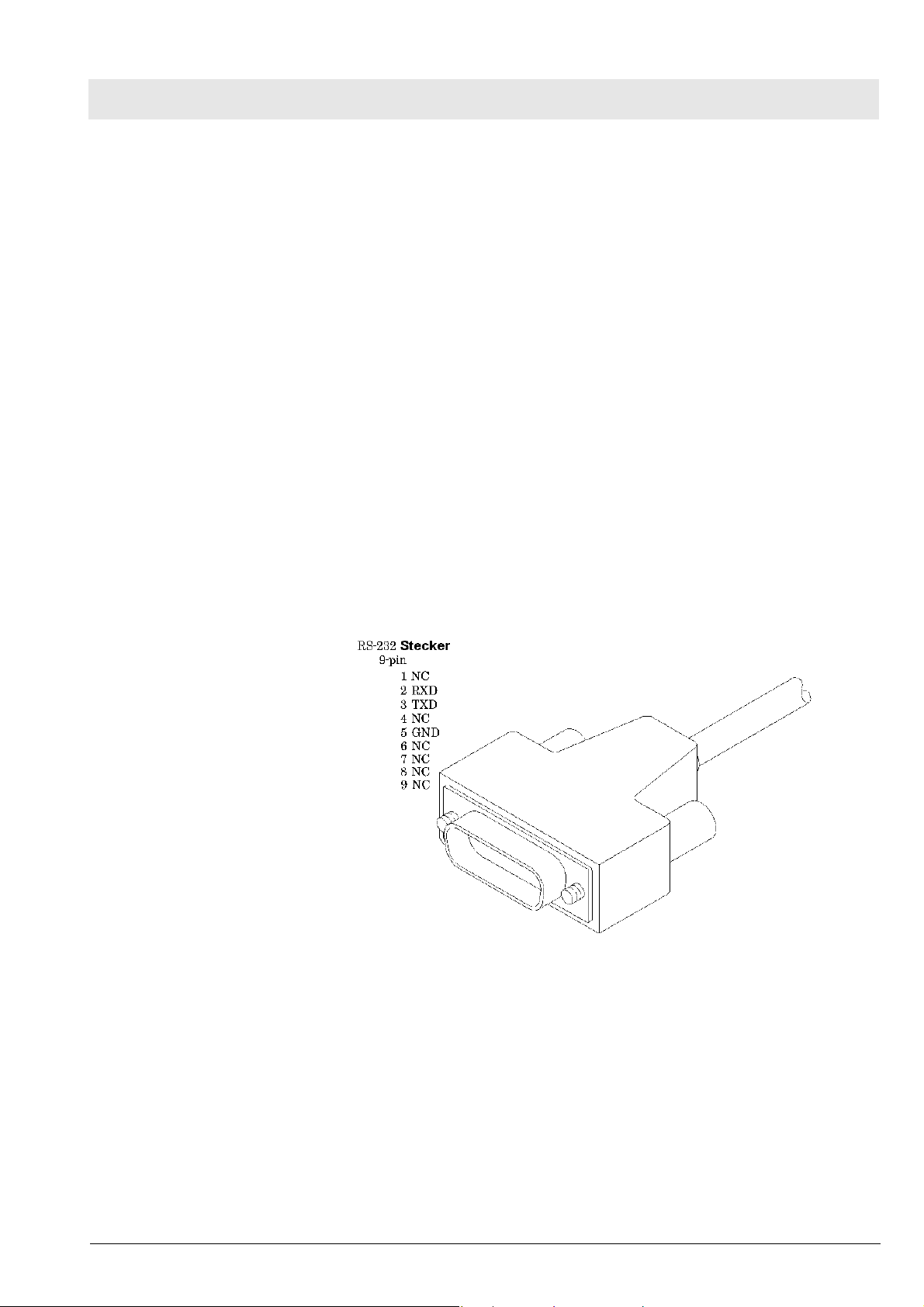
4.3.4 RS-232 Serial Port Protocol
The RS-232 serial port connector is next to the AC power connector on the
front of the incubator. The serial port is configured for 2400 baud, 8 data, 1
stop, no parity, and is output only (see Figure 5).
Figure 5 RS-232 Connector Pin Outs
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
During normal operation, a data packet transmits every 5 seconds. Each data
packet is entirely in American Standard Code Information Interchange
(ASCII) and is readable when displayed on any standard RS-232 terminal
device. A data packet consists of one 82-character line of text that is composed of a prefix, a data portion, a suffix, a checksum, and a carriage
return/line feed (CR/LF) pair.
The prefix identifies the data line. It consists of an opening bracket and an ID
character that are unique to the data line. The format of the data portion
depends on the specific data line. Any character positions within the data por-
21
Page 26
Theory of Operation Isolette® C2000/C2000e
tion that are undefined transmit as spaces to enhance the readability of the
output. The suffix property limits the data portion and consists of a closing
bracket.
The checksum is two ASCII hexadecimal digits and represents an 8-bit acclamation of the ASCII characters from the prefix to the suffix, inclusive.
All monitored parameters, including temperature, oxygen, humidity, and
weight, transmit at the 5-second interval. Asynchronous events, such as
alarms or mode changes, transmit as they occur.
Example of the data string:
000000000 1111111111 22222222 2 2 3 33333333 3 4 4 4 44444445 5 5 5 55555566
6
1234567890123456789012345678901234567890123456789012345678901
23
[ ISOLETTE 000000000000 361A 385 387 360 220 050 76 75 21 21 1245
]8D
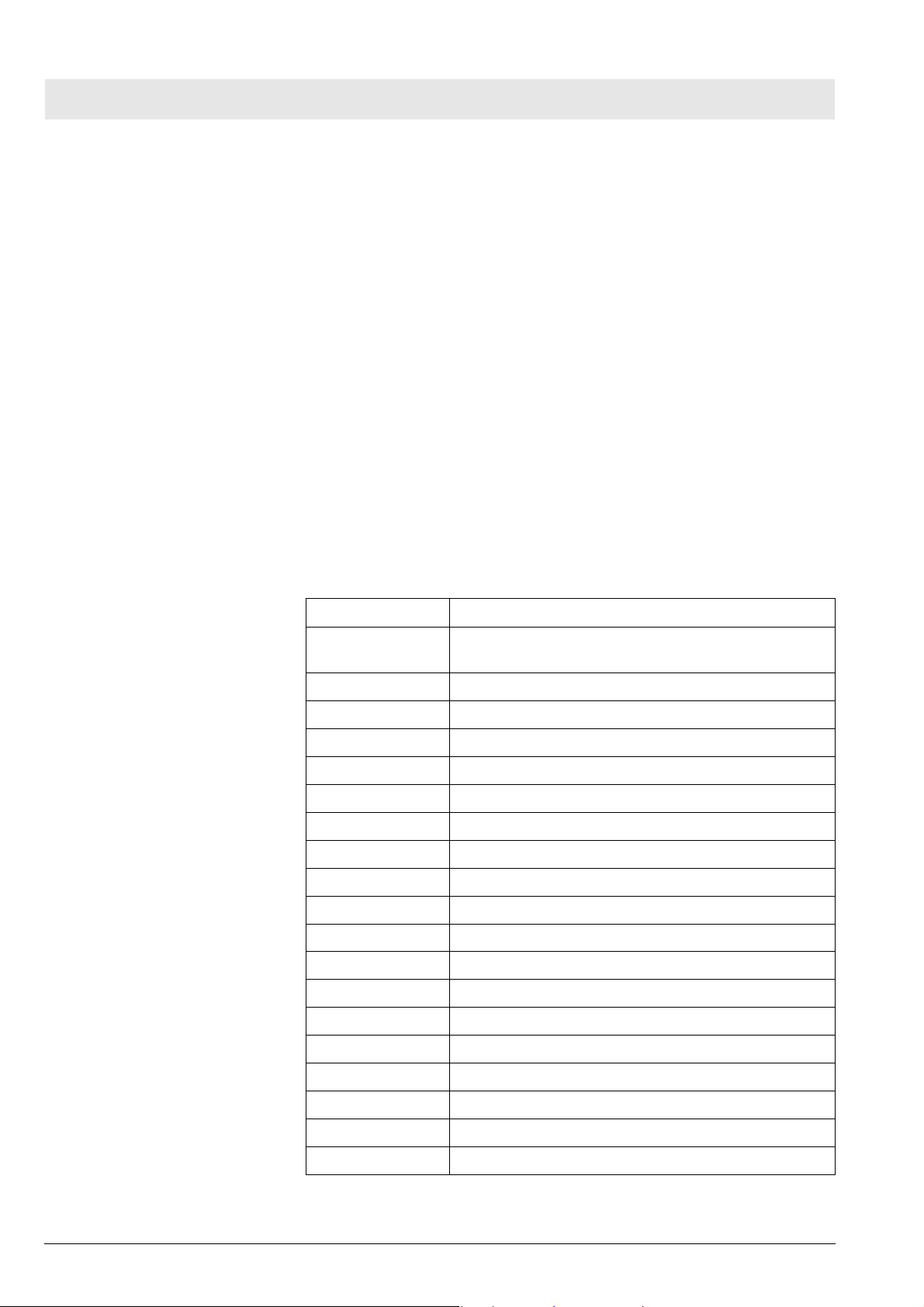
Table 1 RS-232 Serial Port Protoco
Columns Description
1 and 2 Prefix: 2 characters, ‘[‘ followed by the ID character
(see Ta b l e 2 )
4 through 11 Product ID: 8 characters
13 and 14 Mode bit flags: 2 hexadecimal digits (see Tab l e 3 )
15 through 24 Alarm bit flags: 10 hexadecimal digits (see Tab l e 4 )
26 through 28 Setpoint temperature: 3 digits, 1 decimal, Celsius
29 Air/Skin Mode: 1 character “A or B”
31 through 33 Skin temperature 1: 3 digits, 1 decimal, Celsius
35 through 37 Skin temperature 2: 3 digits, 1 decimal, Celsius
39 through 41 Air temperature: 3 digits, 1 decimal, Celsius
43 through 45 Ambient temperature: 3 digits, 1 decimal, Celsius
47 through 49 Heater power: 3 digits, range 0 to 250
51 and 52 Humidity: 2 digits, 0 decimal
54 and 55 Setpoint humidity: 2 digits
57 and 58 Oxygen: 2 digits, 0 decimal
22
60 and 61 Setpoint oxygen: 2 digits
63 through 66 Weight: 4 digits, 3 decimals, kilograms
78 Suffix: 1 character, ‘[ ‘
79 and 80 Checksum: 2 hexadecimal digits
81 and 81 CR/LF: 2 control characters
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 27
Isolette® C2000/C2000e Theory of Operation
Table 2 ID Characte
Character Description
<space> Normal mode
1 Special/Test Mode is in effect (data may be
invalid)
Table 3 Mode Bit Flags
Bit Description
01 Humidity on
02 Oxygen on
04 Baby Mode configuration
08 0.5 °C baby alarm limit
10 Reserved
20 Reserved
40 Reserved
80 Reserved
For example: If “Humidity on” and “Baby Mode configuration” are selected,
the character is 05.
Table 4 A l a r m B i t Flag s
Bit Description
0000000001 Low control temperature
0000000002 High control temperature
0000000004 Low oxygen
0000000008 High oxygen
0000000010 High temperature cut-out
0000000020 Skin 1—probe failure
0000000040 Skin probe—disconnect
0000000080 Oxygen calibration required
0000000100 Sensor out of position
0000000200 Water level low
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
6016.036
0000000400 Procedural Silence
0000000800 Motor failed
0000001000 Low air flow
0000002000 Heater failed
0000004000 EEPROM failed
0000008000 Sensor module failure
0000010000 Controller failure 1
23
Page 28
Theory of Operation Isolette® C2000/C2000e
Bit Description
0000020000 Controller failure 2
0000040000 Controller failure 3
0000080000 Controller failure 4
0000100000 Air probe failed
0000200000 Oxygen cell different
0000400000 Scale disconnect
0000800000 Too much weight
0001000000 Scale failed
For example: If the air temperature and oxygen are low and Procedural
Silence is initiated, such as when an access door is open, the 10 character
value equals 000000405.
Certain fields, such as air temperature, have an implied decimal point. The
decimal point does not physically appear in the data stream.
24
6016.036
Copyright reserved.
2.0_Printed on_21.05.07_F6016036_Theory_of_Operation.fm
Page 29

Maintenance Procedures
25
Page 30

26
Page 31

Isolette® C2000/C2000e Maintenance Procedures
1 Air filter
Figure 1 Air filter with imprint
1.1 Safety precautions
CAUTION
If the air filter (Figure 1/1) is dirty, do not clean it, but replace it with a new
one.
CAUTION
A dirty air filter (Figure 1/1) may impair the performance of the machine or
lead to the formation of carbon dioxide (CO2). The air filter must be serviced on a regular basis, in accordance with local regulations. It may be
necessary to change the filter frequently, especially if the machine is used
in an environment subject to unusually high dust levels. Failure to comply
with this instruction may result in injury to the infant or damage to the
machine!
NOTE
If the imprint on the air filter (Figure 1/1) is no longer legible, or the air filter
is dirty or damaged, replace the air filter.
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_Luftfilter_O2.fm
6016.036
27
Page 32

Maintenance Procedures Isolette® C2000/C2000e
1.2 Replacing the air filter
1. Check that there is no patient inside the Isolette.
2. If there is no patient inside the Isolette® C2000/C2000e, switch it off.
3. Slacken the screws (Figure 2/1) on the underside (rear) of the Isolette®
as far as possible.
Figure 2 Underside (rear) of Isolette® C2000/C2000e; screws
NOTE
Used air filters can be disposed of as normal waste.
4. Take the used air filter (Figure 3/1) out of the mounting and dispose of it
in the normal waste.
Figure 3 Mounting with air filter
28
5. Insert the new air filter in the mounting so that the imprint reading “This
side out” points downwards; see Figure 3. Note: When the air filter is fitted in the correct position the imprint is not legible!
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_Luftfilter_O2.fm
Page 33

Isolette® C2000/C2000e Maintenance Procedures
6. Fix the mounting to the Isolette by the screws (Figure 4/1).
Figure 4 Underside (rear) of Isolette® C2000/C2000e; screws
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_Luftfilter_O2.fm
6016.036
29
Page 34

Maintenance Procedures Isolette® C2000/C2000e
30
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_Luftfilter_O2.fm
Page 35

Isolette® C2000/C2000e Maintenance Procedures
1 Oxygen sensors
1.1 Notes/Safety
instructions
CAUTION
Preventive maintenance or repairs to the C2000 and C2000e models of the
Isolette® infant incubator may only be carried out by properly, trained personnel. If preventive maintenance is carried out by untrained personnel it
may result in personal injury or damage to property.
CAUTION
The oxygen sensor is a sealed unit which uses potassium hydroxide as an
electrolyte. If a leak occurs in the sensor it must be disposed of immediately. If electrolyte comes into contact with skin or clothing, the affected
area must be rinsed with copious amounts of water. If electrolyte gets into
the eyes, rinse them immediately for at least 15 minutes, keeping the eyes
open as you do so. Also consult a doctor. Failure to comply with this
instruction may result in personal injury or damage to the machine.
CAUTION
Only oxygen cells recommended by Dräger Medical have been tested with
the device and therefore we recommend only these cells be used otherwise the correct functioning of the device may be compromised.
CAUTION
Check the gas/oxygen service components at regular intervals for signs of
corrosion or damage. Failure to comply with this instruction may result in
personal injury or damage to the machine.
CAUTION
Check the oxygen cells regularly for loss of quality or leaks, and replace
them as necessary. Failure to comply with this instruction may result in personal injury or damage to the machine.
NOTE
In order to obtain a precise oxygen measurement, an oxygen calibration
should be carried out at least once a day!
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
31
Page 36

Maintenance Procedures Isolette® C2000/C2000e
1.2 Replacing the oxygen sensors
1.2.1 Service Equipment
Required
1.2.2 Procedure 1. Check that there is no patient inside the machine.
– Crosshead screwdriver
2. If there is no patient inside the Isolette® C2000/C2000e, switch it off.
3. Unplug the connector (Figure 1/1) of the sensor module from the jack.
Figure 1 Right side view of Isolette® C2000/C2000e; sensor module con-
nector
4. Remove the sensor module cable from the cable guides (Figure 2/1).
32
Figure 2 Side view of Isolette® C2000/C2000e; cable guides
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 37

Isolette® C2000/C2000e Maintenance Procedures
5. Turn the locking buttons (Figure 3/1) to the “OPEN” position.
Figure 3 Isolette® C2000/C2000e; locking buttons
6. Open the front door and lower it.
7. Unplug the connector (Figure 4/1) of the main thermometer (option) from
the sensor module.
8. Unplug the connector (Figure 4/2) of the weighing scale (option) from the
sensor module.
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
Figure 4 Sensor module; connector (main thermometer and weighing
scale)
9. Withdraw the sensor module all the way out of the covering.
33
Page 38

Maintenance Procedures Isolette® C2000/C2000e
10. Hold the two locking tabs (Figure 5/1) of the sensor module apart and at
the same time withdraw the sensor module all the way out of the covering.
Figure 5 Rear view of sensor module; locking tabs
11. Remove the screws (Figure 6/1).
Figure 6 Sensor module; screws
34
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 39

Isolette® C2000/C2000e Maintenance Procedures
12. Carefully detach the backing plate (Figure 7/1) (Note: There are wires
connecting the backing plate to the sensor module!).
Figure 7 Sensor module; backing plate
13. Unplug the jacks (Figure 8/1) from the connectors of the oxygen sensors.
Figure 8 Sensor module; jacks
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
35
Page 40

Maintenance Procedures Isolette® C2000/C2000e
14. Unscrew the oxygen sensors (Figure 9/1) anti-clockwise out of the backing plate (Figure 9/2).
Figure 9 Backing plate with oxygen sensors
NOTE
Used oxygen sensors are special waste. Used oxygen sensors must be
disposed of in accordance with local waste disposal regulations.
15. Dispose of used oxygen sensors in accordance with local waste disposal
regulations.
16. Screw new oxygen sensors (Figure 9/1) clockwise into the backing plate
(Figure 9/2) until a resistance is noticeable (Note: The sealing rings of the
oxygen sensors press against the backing plate!).
NOTE
The jacks on the ends of the oxygen sensor cables are not coded, and can
be attached to any of the oxygen sensors when reconnecting!
36
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 41

Isolette® C2000/C2000e Maintenance Procedures
17. Fit the jacks (Figure 10/1) firmly onto the connectors of the new oxygen
sensors.
Figure 10 Sensor module; jacks
18. Insert the backing plate (Figure 11/1) with the oxygen sensors into the
sensor module.
Figure 11 Sensor module; backing plate
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
37
Page 42

Maintenance Procedures Isolette® C2000/C2000e
19. Fix the backing plate to the sensor module by the screws (Figure 12/1).
Figure 12 Sensor module; screws
20. Insert the sensor module fully into the covering, ensuring correct positioning.
21. Plug the connector (Figure 13/1) of the main thermometer (option) into
the sensor module jack.
22. Plug the connector (Figure 13/2) of the weighing scale (option) into the
sensor module jack.
38
Figure 13 Sensor module; connector (main thermometer and weighing
scale)
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 43

Isolette® C2000/C2000e Maintenance Procedures
23. Close the front door and turn the locking buttons (Figure 14/1) to the
“CLOSED” position.
Figure 14 Isolette® C2000/C2000e; locking buttons
24. Insert the sensor module cable into the cable guides (Figure 15/1).
Figure 15 Side view of Isolette® C2000/C2000e; cable guides
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
39
Page 44

Maintenance Procedures Isolette® C2000/C2000e
25. Plug the connector (Figure 16/1) of the sensor module into the jack.
Figure 16 Zoomed view of Isolette® C2000/C2000e; sensor module con-
nector
26. Connect the Isolette® C2000/C2000e to the mains power supply.
27. Calibrate the oxygen sensors; see 1.3 Calibrating the oxygen sensors.
1.3 Calibrating the oxygen sensors
1.3.1 Safety instructions for
calibrating the oxygen
sensors
1.3.2 General After replacing oxygen sensors, however, be sure to calibrate the oxygen
Checking the calibration
setting and accessories
CAUTION
Display of false oxygen measurements due to non-compliance with the
calibration settings, with and without accessories, in oxygen sensor calibration. If the “100% oxygen calibration fitting” (Figure 18/1) is attached to the
sensor module, in conjunction with a “21%” calibration setting, false measurements will result. If the 100% oxygen calibration fitting is attached to
the sensor module, the calibration setting must be “100%”!
sensors at least once a day.
In order to calibrate the oxygen sensors, the calibration setting for oxygen
and for any accessories connected to the Isolette® C2000/C2000e must be
checked as follows:
1. Connect the Isolette® C2000/C2000e to the mains power supply.
2. Press and hold down the “alarm suppression” key and at the same time
switch on the Isolette® C2000/C2000e.
40
The Isolette® C2000/C2000e starts up in configuration mode.
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 45

Isolette® C2000/C2000e Maintenance Procedures
3. Check the oxygen calibration setting. Note: In Figure 17 the calibration
setting is “21%”.
Figure 17 Zoomed view of control panel; oxygen setting
If the oxygen calibration setting is “21%”, the 100% oxygen calibration fitting
(Figure 18/1) must not be attached to the sensor module! Calibration with
21 Vol.%O2, see 1.3.3 21 vol.%O2 calibration.
If the oxygen calibration setting is “100%”,the 100% oxygen calibration fit-
ting (Figure 18/1) must be attached to the sensor module! Calibration with
100 vol.%O2, see 1.3.4 100 vol.%O2 calibration.
Figure 18 Sensor module with 100% oxygen calibration fitting
1.3.3 21 vol.%O2 calibration 1. Connect the Isolette® C2000/C2000e to the mains power supply.
2. Press and hold down the “alarm suppression” key and at the same time
switch on the Isolette® C2000/C2000e.
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
The Isolette® C2000/C2000e starts up in configuration mode.
41
Page 46

Maintenance Procedures Isolette® C2000/C2000e
3. Check that the oxygen calibration setting is “21%” - see Figure 19/1 - and
that the 100% oxygen calibration fitting is not attached to the sensor
module.
Figure 19 Zoomed view of control panel; oxygen setting
4. Switch off the Isolette® C2000/C2000e.
5. Switch on the Isolette® C2000/C2000e.
6. On the control panel touch the “Sauerst.” (English=Oxygen; French=Oxygene; Spanish=Oxigeno) softkey (Figure 20/1).
42
Figure 20 Zoomed view of control panel; Sauerst. softkey
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 47

Isolette® C2000/C2000e Maintenance Procedures
7. On the control panel touch the Kal. (English=Cal.; French=Calib; Spanish=Cal,) softkey (Figure 21/1).
Figure 21 Zoomed view of control panel; Kal. softkey
8. If the display shows Modul aus (English=Slide Out Sens; French=Enlever
module; Spanish=Deslize M.S.), slide the sensor module fully out of the
covering.
The display shows a sand timer visually indicating the progress of the calibration, together with the message 21% Kal. (English=21% Cal; French=21%
Cal.; Spanish=Cal. 21%). If the calibration has completed successfully, the
display shows Kalibration OK (English=Cal Pass; French=Cal. acceptee;
Spanish=Cal. aceptada).
1.3.4 100 vol.%O2 calibration 1. Connect the Isolette® C2000/C2000e to the mains power supply.
2. Press and hold down the “alarm suppression” key and at the same time
switch on the Isolette® C2000/C2000e.
The Isolette® C2000/C2000e starts up in configuration mode.
3. Check that the oxygen calibration setting is “100%” - see Figure 22/1 and that the 100% oxygen calibration fitting is attached to the sensor
module.
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
43
Page 48

Maintenance Procedures Isolette® C2000/C2000e
Figure 22 Zoomed view of control panel; oxygen setting
4. Switch off the Isolette® C2000/C2000e.
5. Switch on the Isolette® C2000/C2000e.
6. Connect the oxygen tube to a medical oxygen cylinder.
7. Connect the oxygen tube to the port on the “100% oxygen fitting”.
8. Set a flow rate of 3 L/min to 5 L/min on the oxygen cylinder.
9. Open the oxygen feed on the oxygen cylinder.
10. On the display touch the “Sauerst.” (English=Oxygen; French=Oxygene;
Spanish=Oxigeno) (Figure 23/1) softkey.
44
Figure 23 Zoomed view of control panel; Sauerst. softkey
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 49

Isolette® C2000/C2000e Maintenance Procedures
11. Touch the Kal. (English=Cal.; French=Calib; Spanish=Cal,) (Figure 24/1)
softkey.
Figure 24 Zoomed view of control panel; Kal. softkey
12. If the display shows Modul aus (English=Slide Out Sens; French=Enlever
module; Spanish=Deslize M.S.), slide the sensor module fully out of the
covering.
The display shows a sand timer visually indicating the progress of the calibration, together with the message 100% Kal. (English=100% Cal;
French=100% Cal.; Spanish=Cal. 100%). If the calibration has completed
successfully, the display shows Kalibration OK (English=Cal Pass;
French=Cal. acceptee; Spanish=Cal. aceptada).
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
6016.036
45
Page 50

Maintenance Procedures Isolette® C2000/C2000e
46
6016.036
Copyright reserved.
1.1_Printed on_21.05.07_W6016036_O2_sensors.fm
Page 51

Block diagrams
47
Page 52

48
Page 53

Isolette® C2000/C2000e Block diagrams
1 Shell Assembly
Cable Routing (1)
Copyright reserved.
1.0_Printed on_21.05.07_S6016036_Block_diagrams.fm
6016.036
Figure 1 Shell assembly cable routing
Table 1 Legend to Figure 1
Number Description
1 Single-pole double-throw (SPDT), normally closed (NC),
magnetic reed switch
2 Single-pole double-throw (SPDT), normally closed (NC),
magnetic reed switch
3 Sensor modul-to-controller cable assembly
4 AC wiring harness assembly
5 AC harness-to-controller cable assembly
49
Page 54

Block diagrams Isolette® C2000/C2000e
2 Scale Assembly
Cable Routing (2)
50
Figure 2 Scale assembly cable routing
Table 2 Legend to Figure 2
Number Description
1 Scale cable assembly
2 Retaining clamp
3 Load beam
4 Scale subframe
5 Load beam
6 Cradle measuring cell
7 Conductive copper tape
6016.036
Copyright reserved.
1.0_Printed on_21.05.07_S6016036_Block_diagrams.fm
Page 55

Annex
Parts catalog
Test List
Page 56

Page 57

Parts catalog
Isolette® C2000/C2000e
Revision: 2007-03-22 06:55:13
6016.036
Because you care
Page 58

Page 59

Products concerned
Parts catalog
Item
Part No. Description Qty.
No.
MU20500 C2000 ISOLETTE 1.000 St
MU20501 C2000e ISOLETTE
1.000 St
Qty.u
nit
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 60

Maintenance parts/Service kits
Parts catalog
Item
Part No. Description Qty.
No.
1 MU12504 FILTER,REPL,ISOLETTE,BOX/ 4 1.000 St
2 MU13223 CELL,OXYGEN
3 MU13435 REPL KIT,SEALS AND SPRING
4 MU03664 VALVE,SOLENOID,12VDC,70PSI,O2
9 MU16051 BATTERY,3PK,MKD,RECHG,12V,7A
10 MU12681 LATCH,HEAT SHIELD
11 MU01958 FILTER DISC
1.000 St
1.000
1.000 St ohne Abbildung/item not shown;
1.000 St ohne Abbildung/item not shown;
2.000
3.000 St ohne Abbildung/item not shown;
Qty.u
Remark
nit
St ohne Abbildung/item not shown;
St ohne Abbildung/item not shown;
6016.036
Revision: 2007-03-22 06:55:13
Page 61

Accessories/Consumables
A
Parts catalog
Item
Part No. Description Qty.
No.
19 MU12533 PROBE 5,SKIN TEMP,REUSABLE 1.000 St
22 MU12249 MATTRESS,FOAM,C2000
23 MU12520
25 MU13223 CELL,OXYGEN
26 MU12504 FILTER,REPL,ISOLETTE,BOX/ 4
27 MU12525 PROBE 4,SKNTMP,DSP,ISO,BX/10
28 MU12551 PROBE 5,LG,SKIN TMP,YSI,BOX/10
29 MU03876 IRIS PORT SLEEVE,BOX/100
DPTR,PROBE 4,SKIN TEMP,REUSE
1.000 St
1.000
1.000 St
1.000 St
1.000
1.000 St
1.000 St
Qty.u
nit
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 62

Accessories/Consumables
A
A
Parts catalog
Item
Part No. Description Qty.
No.
30 MU12683
31 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
32 MU06562 NEAT-CLIPS,0.38 DIA,BOX/100
33 MU06563 NEAT-CLIPS,1.00 DIA,BOX/50
34 MU06570
35 MU06941 CRITTER COVERS,BOX/600
36 MU06942 CRITTER COVERS,BOX/100
37 MU06947 COVER,PROBE,CAREFORME,Box/25
38 MU06943 COVER,PROBE,CAREFORME,Box/100
39 MU06945 COVER,PROBE,CAREFORME,Box/500
40 MU06948 COVER,PROBE,CAREFORME,Box/25
41 MU06944 COVER,PROBE,CAREFORME,Box/100
42 MU06946 COVER,PROBE,CAREFORME,Box/500
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St
CS PORT CUFFS,OV,REPL,BOX/100 1.000 St
1.000 St
1.000
1.000 St
1.000
1.000 St
1.000 St
1.000 St
1.000
1.000 St
1.000 St
1.000
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 63

Accessories/Consumables
Parts catalog
Item
Part No. Description Qty.
No.
44 MU06566 SLEEVE,IRIS PORT,DISPOS,SOFT 1.000 St
45 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
46 MU10832 KLEENASEPTIC B,TRIGSPR,24OZ,12
47 MU13161 COVER,HUMIDITY RESERVOIR
48 MU13162 RESERVOIR,HUMIDITY
49 MU13202 RESERVOIR ASSY,HUMIDITY
1.000 St
1.000
1.000 St
1.000 St
1.000
Qty.u
nit
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 64

Basic Unit
A
Parts catalog
Item
Part No. Description Qty.
No.
MQ50227 Incubator Hood and Shell Assy 1.000 St kein Lieferteil/not available;
MQ50231 Mattress Tray (Overview)
MQ50234
MQ50235 Base Column Assies (Overview)
MQ50239 Fixed Height Stand (C2000)
MQ50240 Fixed Height Stand (C2000e)
MQ50241 VHA Stand (C2000)
MQ50242 VHA Stand (C2000e)
MQ50243 Uninterruptible Power Supply
MQ50244 Battery Pack/UPS
MQ50245 Base Cover+Support C2000e
MQ50246 Rail System for C2000e
ccess Panel front+rear door
1.000 St kein Lieferteil/not available;
1.000
1.000 St kein Lieferteil/not available;
1.000 St kein Lieferteil/not available;
1.000
1.000 St kein Lieferteil/not available;
1.000 St kein Lieferteil/not available;
1.000 St kein Lieferteil/not available;
1.000
1.000 St kein Lieferteil/not available;
1.000 St kein Lieferteil/not available;
Qty.u
Remark
nit
St kein Lieferteil/not available;
St kein Lieferteil/not available;
St kein Lieferteil/not available;
6016.036
Revision: 2007-03-22 06:55:13
Page 65

Incubator Hood and Shell Assy
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU12660 HOOD ASSY,HI,DUAL ACS,IPL&R 1.000 St
2 MU13437 REPL KIT,FR ACS,IP L&R,PAWL
3 MU13438 REPL KIT,DUAL ACS,IPL ADR,PAWL
4 MU12664 HOOD ASSY HI DUAL ACS ADL&R
5 MU12666 HOOD ASSY,HI,FR ACS,2AD ADL&R
9 MU12252 TRAY,X-RAY
10 MU12726
11 MU12732 REPL ACCESS PANEL ASSY,HI,FRNT
12 MU15729 SCR,SHLDR,.25D.38L 10-24SS NLK
13 MU12301 SENSOR MODULE ASSEMBLY
14 MU12734 REPL ACCESS PANEL ASSY,HI,REAR
15 MU12249 MATTRESS,FOAM,C2000
16 MU12250 TRAY,MATTRESS
17 MU16972 CONTROLLER ASSEMBLY
CCESS PANEL ASSY HIGH REAR 1.000 St
1.000 St
1.000
1.000 St
1.000 St
1.000
1.000 St
2.000 St
1.000
1.000 St
1.000 St
1.000
1.000 St C2000
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 66

Incubator Hood and Shell Assy
Parts catalog
Item
Part No. Description Qty.
No.
17 MU16974 CONTROLLER ASSEMBLY C2000e 1.000 St C2000e
19 MU12510 HEATER ASSEMBLY,120V
20 MU12514 HEATER ASSEMBLY,240V
21 MU12517 HEATER ASSEMBLY,100V
22 MU12500 RADIATOR,HEATER,MACHINING
23 MU05562 COVER,SCREW,LT GREY,1/4-20 PN
24 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
25 MU13018 LABEL,HOT SURFACE SYMBOL
26 MU12998 OVERLAY,HUMIDITY PANEL
27 MU15547 WSHR,FL,.20ID .50OD .04T BR NI
28 MU15420 NUT,WING,6-32,SS
30 MU13027 LABEL,OXY CONC & WARNINGS,ENG
33 MU13030 LABEL,OXY CONC & WARNINGS,GER
40 MU13041 LABEL,OXY CONC & WARNINGS,FIN
1.000 St
1.000
1.000 St
1.000 St
2.000
3.000 St
2.000 St
1.000 St
2.000
2.000 St
1.000 St
1.000
1.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 67

Incubator Hood and Shell Assy
Parts catalog
Item
Part No. Description Qty.
No.
5 MU12301 SENSOR MODULE ASSEMBLY 1.000 St
6 MU13027 LABEL,OXY CONC & WARNINGS,ENG
16 MU13041 LABEL,OXY CONC & WARNINGS,FIN
23 MU12998 OVERLAY,HUMIDITY PANEL
24 MU12500 RADIATOR,HEATER,MACHINING
25 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
26 MU12510 HEATER ASSEMBLY,120V
27 MU12514 HEATER ASSEMBLY,240V
28 MU12517 HEATER ASSEMBLY,100V
30 MU15547 WSHR,FL,.20ID .50OD .04T BR NI
31 MU15420 NUT,WING,6-32,SS
32 MU16972 CONTROLLER ASSEMBLY
33 MU16974 CONTROLLER ASSEMBLY C2000e
36 MU05562 COVER,SCREW,LT GREY,1/4-20 PN
1.000 St
1.000
1.000 St
1.000 St
3.000
1.000 St
1.000 St
1.000 St
2.000
1.000 St
1.000 St C2000
1.000
2.000 St
Qty.u
Remark
nit
St
St
St
St C2000e
6016.036
Revision: 2007-03-22 06:55:13
Page 68

Incubator Hood and Shell Assy
Parts catalog
Item
Part No. Description Qty.
No.
37 MU12267 BEARING,.251ID .29OD .41FLG NY 2.000 St
38 MU15580 WSHR,FL,.257ID .38OD .02T NYL
39 MU15729 SCR,SHLDR,.25D.38L 10-24SS NLK
45 MU12488 WIRING HARNESS ASSEMBLY,AC
2.000 St
2.000
1.000 St
Qty.u
nit
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 69

Hood Assy,HI,Dual Acs,ip l+r
Parts catalog
Item
Part No. Description Qty.
No.
1 MU13436 REPL KIT,DUAL ACS,IP L&R,PAWL 1.000 St
2 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
3 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
4 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
5 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
6 MU12609 GROMMET,ACCESS
7 MU06573 RING ASSY,IRIS PORT,LG FLANGE
8 MU06545 RING,RETAINING,IRIS PORT,CLEAR
9 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
9 MU01962 SLEEVE,IRIS PORT,REUSABLE
10 MU07188 STANDOFF,6-32ID .38OD .44L ACT
11 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
12 MU15141 SCR,6-32X9/16 TR PH SS
13 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
1.000 St
1.000
1.000 St
1.000 St
10.000
2.000 St
2.000 St
2.000 St wahlweise/optional;
2.000
2.000 St
2.000 St
2.000
2.000 St
Qty.u
Remark
nit
St
St
St wahlweise/optional;
St
6016.036
Revision: 2007-03-22 06:55:13
Page 70

Hood Assy,HI,Dual Acs,ip l+r
Parts catalog
Item
Part No. Description Qty.
No.
14 MU15254 SCR,10-32X3/4 TR PH SS,NY STP 8.000 St
15 MU12626 SLIDE ASSY,SENSOR MODULE
16 MU15417 NUT,HEX,6-32 SS
17 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
18 MU15421 NUT,ACORN,6-32 AL
19 MU12607 PLATE,BACKUP,HINGE,LF & RR
20 MU12608 PLATE,BACKUP,HINGE,LR & RF
21 MU05563 BASE,SCREW,1/4-20 PN
22 MU12716 SPACER,6-32ID .31OD .38L ACTL
23 MU15129 SCR,6-32X7/16,FL PH SS
24 MU12667 PLATE,COVER,SLIDE FIXTURE
25 MU12669 WASHER,CRV SPR MOD-SLIDE LOCK
26 MU12670 SLIDE LOCK,SENSOR MODULE
2.000 St
4.000
4.000 St
2.000 St
2.000
2.000 St
2.000 St
4.000 St
4.000
1.000 St
1.000 St
1.000
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 71

Hood Assy,HI,Dual Acs,1door+ip
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU13438 REPL KIT,DUAL ACS,IPL ADR,PAWL 1.000 St
2 MU12604 KEEPER,ACCESS PANEL LATCH
3 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
4 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
5 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
6 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
7 MU12609 GROMMET,ACCESS
8 MU06573 RING ASSY,IRIS PORT,LG FLANGE
9 MU06545 RING,RETAINING,IRIS PORT,CLEAR
10 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
10 MU01962 SLEEVE,IRIS PORT,REUSABLE
11 MU12677 DOOR,ACCESS
12 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
13 MU12683
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St wahlweise/optional;
4.000 St
1.000
1.000 St
1.000 St
1.000
10.000 St
1.000 St
1.000 St
1.000
1.000 St wahlweise/optional;
1.000 St
2.000
Qty.u
Remark
nit
St
St
St wahlweise/optional;
St
6016.036
Revision: 2007-03-22 06:55:13
Page 72

Hood Assy,HI,Dual Acs,1door+ip
Parts catalog
Item
Part No. Description Qty.
No.
13 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10 1.000 St wahlweise/optional;
14 MU12679 GASKET,ACCESS DOOR
15 MU08163 PIVOT,HINGE,ACCESS DOOR
16 MU08164 SPRING,TRSN,.27OD .030W .365LG
17 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
18 MU13393 REPL KIT,ACCESS DOOR LATCH
19 MU12687 LATCH MOUNT,ACCESS DOOR
21 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
22 MU12626 SLIDE ASSY,SENSOR MODULE
23 MU12622 PLATE,COVER,NO CAL. FIXT.
24 MU15417 NUT,HEX,6-32 SS
25 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
26 MU15421 NUT,ACORN,6-32 AL
27 MU15141 SCR,6-32X9/16 TR PH SS
1.000 St
2.000
1.000 St
16.000 St
1.000
1.000 St
8.000 St
2.000 St
1.000
4.000 St
4.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 73

Hood Assy,HI,Dual Acs,1door+ip
Parts catalog
Item
Part No. Description Qty.
No.
28 MU07188 STANDOFF,6-32ID .38OD .44L ACT 2.000 St
29 MU12607 PLATE,BACKUP,HINGE,LF & RR
30 MU12608 PLATE,BACKUP,HINGE,LR & RF
31 MU05563 BASE,SCREW,1/4-20 PN
2.000 St
2.000
2.000 St
Qty.u
nit
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 74

Hood Assy,HI,Dual Acs,ip l,d r
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU13438 REPL KIT,DUAL ACS,IPL ADR,PAWL 1.000 St
2 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
3 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
4 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
5 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
6 MU12609 GROMMET,ACCESS
7 MU06573 RING ASSY,IRIS PORT,LG FLANGE
8 MU06545 RING,RETAINING,IRIS PORT,CLEAR
9 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
9 MU01962 SLEEVE,IRIS PORT,REUSABLE
10 MU12677 DOOR,ACCESS
11 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
12 MU12683
12 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
CS DOOR CUFF,DISP,REPL,BX/100
1.000 St
1.000
1.000 St
1.000 St
10.000
1.000 St
1.000 St
1.000 St wahlweise/optional;
1.000
1.000 St
2.000 St
1.000
1.000 St wahlweise/optional;
Qty.u
Remark
nit
St
St
St wahlweise/optional;
St wahlweise/optional;
6016.036
Revision: 2007-03-22 06:55:13
Page 75

Hood Assy,HI,Dual Acs,ip l,d r
Parts catalog
Item
Part No. Description Qty.
No.
13 MU12679 GASKET,ACCESS DOOR 1.000 St
14 MU08163 PIVOT,HINGE,ACCESS DOOR
15 MU08164 SPRING,TRSN,.27OD .030W .365LG
16 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
17 MU13393 REPL KIT,ACCESS DOOR LATCH
18 MU12687 LATCH MOUNT,ACCESS DOOR
20 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
21 MU15525 WSHR,FL,.150ID .31OD .06T NYL
22 MU12626 SLIDE ASSY,SENSOR MODULE
23 MU15417 NUT,HEX,6-32 SS
24 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
25 MU15421 NUT,ACORN,6-32 AL
26 MU15141 SCR,6-32X9/16 TR PH SS
27 MU07188 STANDOFF,6-32ID .38OD .44L ACT
2.000 St
1.000
16.000 St
1.000 St
1.000
8.000 St
2.000 St
2.000 St
4.000
4.000 St
2.000 St
2.000
1.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 76

Hood Assy,HI,Dual Acs,ip l,d r
Parts catalog
Item
Part No. Description Qty.
No.
28 MU12607 PLATE,BACKUP,HINGE,LF & RR 2.000 St
29 MU12608 PLATE,BACKUP,HINGE,LR & RF
30 MU05563 BASE,SCREW,1/4-20 PN
31 MU12716 SPACER,6-32ID .31OD .38L ACTL
32 MU15129 SCR,6-32X7/16,FL PH SS
33 MU12667 PLATE,COVER,SLIDE FIXTURE
34 MU12669 WASHER,CRV SPR MOD-SLIDE LOCK
35 MU12670 SLIDE LOCK,SENSOR MODULE
2.000 St
2.000
4.000 St
4.000 St
1.000
1.000 St
1.000 St
Qty.u
nit
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 77

Hood Assy,HI,Dual Acs,door l+r
A
Parts catalog
Item
Part No. Description Qty.
No.
2 MU12604 KEEPER,ACCESS PANEL LATCH 4.000 St
3 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
4 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
5 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
6 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
7 MU12609 GROMMET,ACCESS
8 MU07188 STANDOFF,6-32ID .38OD .44L ACT
9 MU12677 DOOR,ACCESS
10 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
11 MU12683
11 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
12 MU12679 GASKET,ACCESS DOOR
13 MU08163 PIVOT,HINGE,ACCESS DOOR
14 MU08164 SPRING,TRSN,.27OD .030W .365LG
CS DOOR CUFF,DISP,REPL,BX/100
1.000 St
1.000
1.000 St
1.000 St
10.000
2.000 St
2.000 St
2.000 St
1.000
1.000 St wahlweise/optional;
2.000 St
4.000
2.000 St
Qty.u
Remark
nit
St
St
St wahlweise/optional;
St
6016.036
Revision: 2007-03-22 06:55:13
Page 78

Hood Assy,HI,Dual Acs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
15 MU15142 SCR,6-32X9/16 TR PH SS NYLOK 20.000 St
16 MU13393 REPL KIT,ACCESS DOOR LATCH
17 MU12687 LATCH MOUNT,ACCESS DOOR
18 MU15141 SCR,6-32X9/16 TR PH SS
19 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
21 MU12626 SLIDE ASSY,SENSOR MODULE
22 MU12622 PLATE,COVER,NO CAL. FIXT.
23 MU15417 NUT,HEX,6-32 SS
24 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
25 MU15421 NUT,ACORN,6-32 AL
26 MU12607 PLATE,BACKUP,HINGE,LF & RR
27 MU12608 PLATE,BACKUP,HINGE,LR & RF
28 MU05563 BASE,SCREW,1/4-20 PN
2.000 St
2.000
2.000 St
8.000 St
2.000
1.000 St
4.000 St
4.000 St
2.000
2.000 St
2.000 St
2.000
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 79

Hood Assy,HI,Dual Acs,AD l+r
A
Parts catalog
Item
Part No. Description Qty.
No.
2 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR 1.000 St
3 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
4 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
5 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
6 MU12609 GROMMET,ACCESS
7 MU07188 STANDOFF,6-32ID .38OD .44L ACT
8 MU12677 DOOR,ACCESS
9 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
10 MU12683
10 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
11 MU12679 GASKET,ACCESS DOOR
12 MU08163 PIVOT,HINGE,ACCESS DOOR
13 MU08164 SPRING,TRSN,.27OD .030W .365LG
14 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St wahlweise/optional;
1.000 St
1.000
1.000 St
10.000 St
2.000
2.000 St
2.000 St
1.000
2.000 St
4.000 St
2.000
20.000 St
Qty.u
Remark
nit
St
St
St wahlweise/optional;
St
6016.036
Revision: 2007-03-22 06:55:13
Page 80

Hood Assy,HI,Dual Acs,AD l+r
Parts catalog
Item
Part No. Description Qty.
No.
15 MU13393 REPL KIT,ACCESS DOOR LATCH 2.000 St
16 MU12687 LATCH MOUNT,ACCESS DOOR
17 MU15141 SCR,6-32X9/16 TR PH SS
18 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
20 MU15525 WSHR,FL,.150ID .31OD .06T NYL
21 MU12626 SLIDE ASSY,SENSOR MODULE
22 MU15417 NUT,HEX,6-32 SS
23 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
24 MU15421 NUT,ACORN,6-32 AL
25 MU12607 PLATE,BACKUP,HINGE,LF & RR
26 MU12608 PLATE,BACKUP,HINGE,LR & RF
27 MU05563 BASE,SCREW,1/4-20 PN
28 MU12716 SPACER,6-32ID .31OD .38L ACTL
29 MU15129 SCR,6-32X7/16,FL PH SS
2.000 St
2.000
8.000 St
4.000 St
2.000
4.000 St
4.000 St
2.000 St
2.000
2.000 St
2.000 St
4.000
4.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 81

Hood Assy,HI,Dual Acs,AD l+r
Parts catalog
Item
Part No. Description Qty.
No.
30 MU12667 PLATE,COVER,SLIDE FIXTURE 1.000 St
31 MU12669 WASHER,CRV SPR MOD-SLIDE LOCK
32 MU12670 SLIDE LOCK,SENSOR MODULE
1.000 St
1.000
Qty.u
nit
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 82

Hood Assy,HI,FrontAcs,2d,ipl+r
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU13437 REPL KIT,FR ACS,IP L&R,PAWL 1.000 St
2 MU12604 KEEPER,ACCESS PANEL LATCH
3 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
4 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
5 MU13452 REPL KIT,L.REAR HINGE/BRACKET
6 MU13451 REPL KIT,R.REAR HINGE/BRKT,LKG
7 MU12677 DOOR,ACCESS
8 MU12683
8 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
9 MU12679 GASKET,ACCESS DOOR
10 MU08163 PIVOT,HINGE,ACCESS DOOR
11 MU08164 SPRING,TRSN,.27OD .030W .365LG
12 MU13393 REPL KIT,ACCESS DOOR LATCH
13 MU12687 LATCH MOUNT,ACCESS DOOR
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St wahlweise/optional;
2.000 St
1.000
1.000 St
1.000 St
1.000
2.000 St
1.000 St wahlweise/optional;
2.000
4.000 St
2.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 83

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
14 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID 2.000 St
15 MU12609 GROMMET,ACCESS
16 MU06573 RING ASSY,IRIS PORT,LG FLANGE
17 MU06545 RING,RETAINING,IRIS PORT,CLEAR
18 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
18 MU01962 SLEEVE,IRIS PORT,REUSABLE
19 MU12256 HEAT SHIELD,ACCESS PANEL,HIGH
20 MU15401 SCR,SLFTPG,8X3/8 PN PH SZ,48-2
21 MU15127 SCR,6-32X3/8 TR PH SS NYLOK
22 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
23 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
24 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
25 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
26 MU12681 LATCH,HEAT SHIELD
6.000 St
2.000
2.000 St
1.000 St wahlweise/optional;
1.000
1.000 St
4.000 St
2.000 St
8.000
6.000 St
4.000 St
8.000
2.000 St
Qty.u
Remark
nit
St
St wahlweise/optional;
St
St
6016.036
Revision: 2007-03-22 06:55:13
Page 84

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
27 MU12682 HINGE,HEAT SHIELD 2.000 St
28 MU15421 NUT,ACORN,6-32 AL
29 MU12626 SLIDE ASSY,SENSOR MODULE
30 MU12622 PLATE,COVER,NO CAL. FIXT.
31 MU07188 STANDOFF,6-32ID .38OD .44L ACT
32 MU15141 SCR,6-32X9/16 TR PH SS
33 MU15417 NUT,HEX,6-32 SS
34 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
35 MU05563 BASE,SCREW,1/4-20 PN
36 MU12479 PLATE,HINGE & MAGNET
37 MU12697 MAGNET,.25SQ 1.00LG ALNICO
38 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
39 MU12607 PLATE,BACKUP,HINGE,LF & RR
40 MU12608 PLATE,BACKUP,HINGE,LR & RF
2.000 St
2.000
1.000 St
1.000 St
1.000
4.000 St
4.000 St
2.000 St
2.000
1.000 St
1.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 85

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
41 MU12685 BRACKET,HEAT SHIELD,REAR 1.000 St
Qty.u
nit
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 86

Hood Assy,HI,FrontAcs,2d,ipl+r
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU12647 HOOD HI FR ACS 2AD RR IP L&R 1.000 St
2 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
3 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
4 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
5 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
6 MU12677 DOOR,ACCESS
7 MU12683
7 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
8 MU12679 GASKET,ACCESS DOOR
9 MU08163 PIVOT,HINGE,ACCESS DOOR
10 MU08164 SPRING,TRSN,.27OD .030W .365LG
11 MU13393 REPL KIT,ACCESS DOOR LATCH
12 MU12687 LATCH MOUNT,ACCESS DOOR
13 MU12609 GROMMET,ACCESS
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St wahlweise/optional;
1.000 St
1.000
1.000 St
1.000 St
2.000
1.000 St wahlweise/optional;
2.000 St
4.000
2.000 St
2.000 St
2.000
6.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 87

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
14 MU06573 RING ASSY,IRIS PORT,LG FLANGE 2.000 St
15 MU06545 RING,RETAINING,IRIS PORT,CLEAR
16 MU06571 IRIS PORT CUFFS,DISP,SOFT,100
16 MU01962 SLEEVE,IRIS PORT,REUSABLE
17 MU12258 REPL HEAT SHIELD,ACS PNL,PAWL
18 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
19 MU15401 SCR,SLFTPG,8X3/8 PN PH SZ,48-2
20 MU15127 SCR,6-32X3/8 TR PH SS NYLOK
21 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
22 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
23 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
24 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
25 MU12681 LATCH,HEAT SHIELD
26 MU12682 HINGE,HEAT SHIELD
2.000 St
1.000
1.000 St wahlweise/optional;
1.000 St
2.000
4.000 St
2.000 St
8.000 St
8.000
4.000 St
8.000 St
2.000
2.000 St
Qty.u
Remark
nit
St wahlweise/optional;
St
St
St
6016.036
Revision: 2007-03-22 06:55:13
Page 88

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
27 MU15421 NUT,ACORN,6-32 AL 2.000 St
28 MU12626 SLIDE ASSY,SENSOR MODULE
29 MU07188 STANDOFF,6-32ID .38OD .44L ACT
30 MU15141 SCR,6-32X9/16 TR PH SS
31 MU15417 NUT,HEX,6-32 SS
32 MU12699 HINGE,ACCESS PANEL,RIGHT REAR
33 MU12698 HINGE,ACCESS PANEL,LEFT REAR
34 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
35 MU12697 MAGNET,.25SQ 1.00LG ALNICO
36 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
37 MU12607 PLATE,BACKUP,HINGE,LF & RR
38 MU12608 PLATE,BACKUP,HINGE,LR & RF
39 MU12685 BRACKET,HEAT SHIELD,REAR
40 MU05563 BASE,SCREW,1/4-20 PN
2.000 St
1.000
1.000 St
4.000 St
1.000
1.000 St
4.000 St
1.000 St
1.000
2.000 St
2.000 St
1.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 89

Hood Assy,HI,FrontAcs,2d,ipl+r
Parts catalog
Item
Part No. Description Qty.
No.
41 MU12716 SPACER,6-32ID .31OD .38L ACTL 2.000 St
42 MU15129 SCR,6-32X7/16,FL PH SS
43 MU12667 PLATE,COVER,SLIDE FIXTURE
44 MU12669 WASHER,CRV SPR MOD-SLIDE LOCK
45 MU12670 SLIDE LOCK,SENSOR MODULE
2.000 St
1.000
1.000 St
1.000 St
Qty.u
nit
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 90
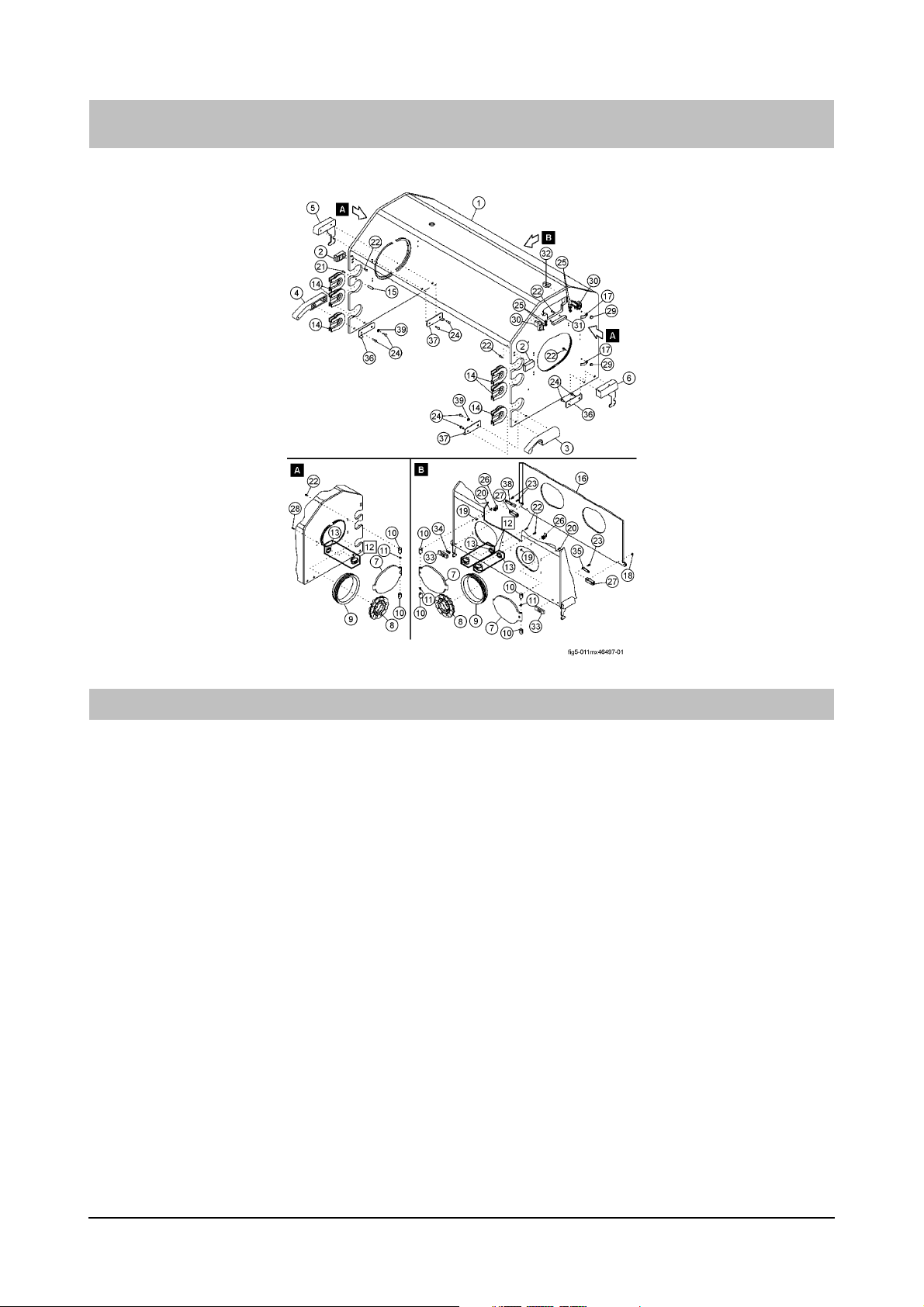
Hood Assy,HI,FrontAcs,door l+r
A
Parts catalog
Item
Part No. Description Qty.
No.
2 MU12604 KEEPER,ACCESS PANEL LATCH 2.000 St
3 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR
4 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
5 MU13452 REPL KIT,L.REAR HINGE/BRACKET
6 MU13451 REPL KIT,R.REAR HINGE/BRKT,LKG
7 MU12677 DOOR,ACCESS
8 MU12683
8 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
9 MU12679 GASKET,ACCESS DOOR
10 MU08163 PIVOT,HINGE,ACCESS DOOR
11 MU08164 SPRING,TRSN,.27OD .030W .365LG
12 MU13393 REPL KIT,ACCESS DOOR LATCH
13 MU12687 LATCH MOUNT,ACCESS DOOR
14 MU12609 GROMMET,ACCESS
CS DOOR CUFF,DISP,REPL,BX/100 1.000 St wahlweise/optional;
1.000 St
1.000
1.000 St
1.000 St
4.000
1.000 St wahlweise/optional;
2.000 St
4.000
2.000 St
2.000 St
2.000
6.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 91

Hood Assy,HI,FrontAcs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
15 MU07188 STANDOFF,6-32ID .38OD .44L ACT 2.000 St
16 MU12256 HEAT SHIELD,ACCESS PANEL,HIGH
17 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
19 MU15401 SCR,SLFTPG,8X3/8 PN PH SZ,48-2
20 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
21 MU15141 SCR,6-32X9/16 TR PH SS
22 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
23 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
24 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
25 MU15417 NUT,HEX,6-32 SS
26 MU12681 LATCH,HEAT SHIELD
27 MU12682 HINGE,HEAT SHIELD
29 MU15421 NUT,ACORN,6-32 AL
30 MU12626 SLIDE ASSY,SENSOR MODULE
1.000 St
2.000
2.000 St
1.800 St
1.000
16.000 St
4.000 St
8.000 St
4.000
2.000 St
2.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 92

Hood Assy,HI,FrontAcs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
31 MU12622 PLATE,COVER,NO CAL. FIXT. 1.000 St
32 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
33 MU12479 PLATE,HINGE & MAGNET
34 MU12697 MAGNET,.25SQ 1.00LG ALNICO
35 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
36 MU12607 PLATE,BACKUP,HINGE,LF & RR
37 MU12608 PLATE,BACKUP,HINGE,LR & RF
38 MU12685 BRACKET,HEAT SHIELD,REAR
39 MU05563 BASE,SCREW,1/4-20 PN
4.000 St
2.000
1.000 St
1.000 St
2.000
2.000 St
1.000 St
2.000 St
Qty.u
nit
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 93

Hood Assy,HI,FrontAcs,door l+r
A
Parts catalog
Item
Part No. Description Qty.
No.
2 MU12600 HINGE,HOOD/ACCESS PNL,RIGHT FR 1.000 St
3 MU12601 HINGE,HOOD/ACCESS PNL,LEFT FR
4 MU12602 HINGE,HOOD/ACS PNL,LEFT REAR
5 MU12603 HINGE,HOOD/ACS PNL,RIGHT REAR
6 MU12677 DOOR,ACCESS
7 MU12683
7 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
8 MU12679 GASKET,ACCESS DOOR
9 MU08163 PIVOT,HINGE,ACCESS DOOR
10 MU08164 SPRING,TRSN,.27OD .030W .365LG
11 MU13393 REPL KIT,ACCESS DOOR LATCH
12 MU12687 LATCH MOUNT,ACCESS DOOR
13 MU12609 GROMMET,ACCESS
14 MU07188 STANDOFF,6-32ID .38OD .44L ACT
CS DOOR CUFF,DISP,REPL,BX/100
1.000 St
1.000
1.000 St
4.000 St
1.000
1.000 St wahlweise/optional;
2.000 St
4.000 St
2.000
2.000 St
2.000 St
6.000
2.000 St
Qty.u
Remark
nit
St
St wahlweise/optional;
St
St
6016.036
Revision: 2007-03-22 06:55:13
Page 94
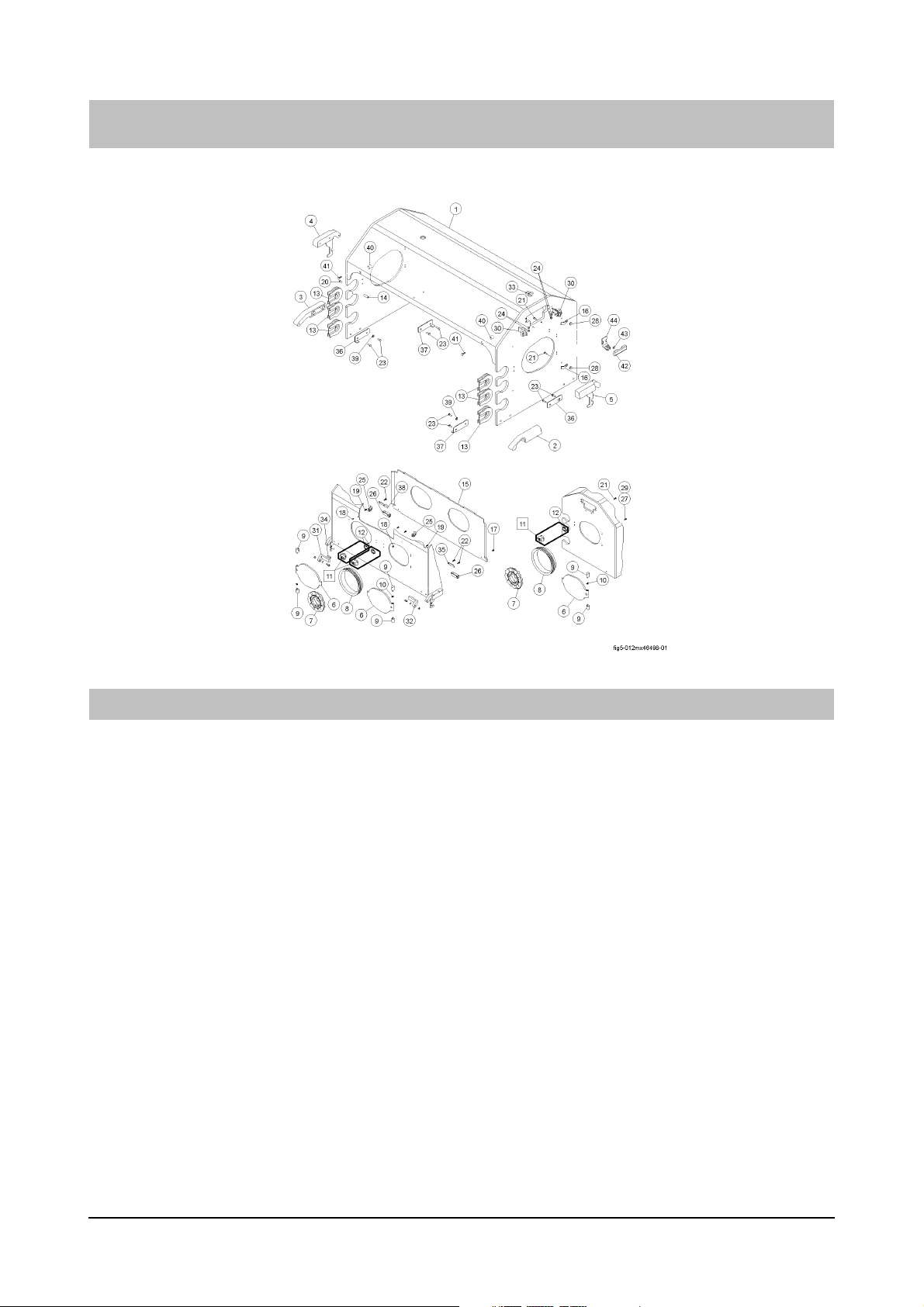
Hood Assy,HI,FrontAcs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
15 MU12258 REPL HEAT SHIELD,ACS PNL,PAWL 1.000 St
16 MU11061 CLAMP,CABLE,SPR TY,NYL .38ID
17 MU15401 SCR,SLFTPG,8X3/8 PN PH SZ,48-2
18 MU15127 SCR,6-32X3/8 TR PH SS NYLOK
19 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
20 MU15141 SCR,6-32X9/16 TR PH SS
21 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
22 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
23 MU15254 SCR,10-32X3/4 TR PH SS,NY STP
24 MU15417 NUT,HEX,6-32 SS
25 MU12681 LATCH,HEAT SHIELD
26 MU12682 HINGE,HEAT SHIELD
28 MU15421 NUT,ACORN,6-32 AL
29 MU15525 WSHR,FL,.150ID .31OD .06T NYL
2.000 St
4.000
2.000 St
8.000 St
1.000
16.000 St
4.000 St
8.000 St
4.000
2.000 St
2.000 St
2.000
4.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 95

Hood Assy,HI,FrontAcs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
30 MU12626 SLIDE ASSY,SENSOR MODULE 2.000 St
31 MU12699 HINGE,ACCESS PANEL,RIGHT REAR
32 MU12698 HINGE,ACCESS PANEL,LEFT REAR
33 MU15147 SCR,6-32X5/8 PN PH SS NYLOK
34 MU12697 MAGNET,.25SQ 1.00LG ALNICO
35 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
36 MU12607 PLATE,BACKUP,HINGE,LF & RR
37 MU12608 PLATE,BACKUP,HINGE,LR & RF
38 MU12685 BRACKET,HEAT SHIELD,REAR
39 MU05563 BASE,SCREW,1/4-20 PN
40 MU12716 SPACER,6-32ID .31OD .38L ACTL
41 MU15129 SCR,6-32X7/16,FL PH SS
42 MU12667 PLATE,COVER,SLIDE FIXTURE
43 MU12669 WASHER,CRV SPR MOD-SLIDE LOCK
1.000 St
1.000
4.000 St
1.000 St
1.000
2.000 St
2.000 St
1.000 St
2.000
2.000 St
2.000 St
1.000
1.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 96

Hood Assy,HI,FrontAcs,door l+r
Parts catalog
Item
Part No. Description Qty.
No.
44 MU12670 SLIDE LOCK,SENSOR MODULE 1.000 St
Qty.u
nit
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 97

Access Panel Assy High, Front
A
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU12673
2 MU12677 DOOR,ACCESS
3 MU12683
3 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
4 MU12679 GASKET,ACCESS DOOR
5 MU08163 PIVOT,HINGE,ACCESS DOOR
6 MU08164 SPRING,TRSN,.27OD .030W .365LG
7 MU13393 REPL KIT,ACCESS DOOR LATCH
8 MU12687 LATCH MOUNT,ACCESS DOOR
9 MU12691 LOWER BODY,ACCESS PANEL LATCH
10 MU12690 UPPER BODY,ACCESS PANEL LATCH
11 MU13392 REPL KIT,ACCESS PANEL LATCH
12 MU12693 SPRING,CPRS,.18OD .014W 1.50LG
13 MU12697 MAGNET,.25SQ 1.00LG ALNICO
CCESS PANEL,HIGH 1.000 St
CS DOOR CUFF,DISP,REPL,BX/100
Qty.u
Remark
nit
2.000 St
1.000
1.000 St wahlweise/optional;
2.000 St
4.000
2.000 St
2.000 St
2.000 St
2.000
2.000 St
2.000 St
2.000
1.000 St
St wahlweise/optional;
St
St
St
6016.036
Revision: 2007-03-22 06:55:13
Page 98

Access Panel Assy High, Front
Parts catalog
Item
Part No. Description Qty.
No.
14 MU12694 HINGE,ACCESS PANEL,RIGHT FRONT 1.000 St
15 MU12695 HINGE,ACCESS PANEL,LEFT FRONT
16 MU12681 LATCH,HEAT SHIELD
17 MU12682 HINGE,HEAT SHIELD
18 MU12256 HEAT SHIELD,ACCESS PANEL,HIGH
19 MU15127 SCR,6-32X3/8 TR PH SS NYLOK
20 MU15393 SCR,SLFTPG,
21 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
22 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
23 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
24 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
25 MU12684 BRACKET,HEAT SHIELD,FRONT
26 MU12717 SPACER,6-32ID .31OD .50L ACTL
27 MU15130 SCR,6-32X7/16 TR PH SS
1.000 St
2.000
2.000 St
1.000 St
2.000
4.000 St
12.000 St
4.000 St
4.000
1.000 St
1.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
Page 99

Repl Access Panel Assy,HI,Frnt
A
A
Parts catalog
Item
Part No. Description Qty.
No.
1 MU12673
2 MU12677 DOOR,ACCESS
3 MU12683
3 MU12702 CUFF,ACS DOOR,REUSE,ISO,BOX/10
4 MU12679 GASKET,ACCESS DOOR
5 MU08163 PIVOT,HINGE,ACCESS DOOR
6 MU08164 SPRING,TRSN,.27OD .030W .365LG
7 MU13393 REPL KIT,ACCESS DOOR LATCH
8 MU12687 LATCH MOUNT,ACCESS DOOR
9 MU12697 MAGNET,.25SQ 1.00LG ALNICO
10 MU12694 HINGE,ACCESS PANEL,RIGHT FRONT
11 MU12695 HINGE,ACCESS PANEL,LEFT FRONT
12 MU12681 LATCH,HEAT SHIELD
13 MU12682 HINGE,HEAT SHIELD
CCESS PANEL,HIGH 1.000 St
CS DOOR CUFF,DISP,REPL,BX/100
Qty.u
Remark
nit
2.000 St
1.000
1.000 St wahlweise/optional;
2.000 St
4.000
2.000 St
2.000 St
2.000 St
1.000
1.000 St
1.000 St
2.000
2.000 St
St wahlweise/optional;
St
St
St
6016.036
Revision: 2007-03-22 06:55:13
Page 100

Repl Access Panel Assy,HI,Frnt
Parts catalog
Item
Part No. Description Qty.
No.
14 MU12256 HEAT SHIELD,ACCESS PANEL,HIGH 1.000 St
15 MU15127 SCR,6-32X3/8 TR PH SS NYLOK
16 MU15401 SCR,SLFTPG,8X3/8 PN PH SZ,48-2
17 MU15131 SCR,6-32X7/16 TR PH SS NYLOK
18 MU15142 SCR,6-32X9/16 TR PH SS NYLOK
19 MU15248 SCR,10-32X5/8 TR PH SS NYLOK
20 MU12676 PLATE,BACKUP,HINGE,HEAT SHIELD
21 MU12684 BRACKET,HEAT SHIELD,FRONT
22 MU12717 SPACER,6-32ID .31OD .50L ACTL
23 MU15130 SCR,6-32X7/16 TR PH SS
24 MU08534 KNOB & LATCH REPL KIT,ACS PNL
2.000 St
4.000
8.000 St
4.000 St
4.000
1.000 St
1.000 St
2.000 St
2.000
2.000 St
Qty.u
nit
St
St
St
Remark
6016.036
Revision: 2007-03-22 06:55:13
 Loading...
Loading...