

Canon GC-201, GM-1000 User Manual

CANON Digital Galvano Scanner System
GM-1000 Series
GC-201
Users Manual
Rev. 1.20
Be sure to read this guide before using the product.
Keep this guide carefully for future use.
For Safe and Correct Use
To prevent injury to the user or damage to property, this guide gives information for the safe and correct
use of this product.
Before installation, operation, maintenance, or inspection, be sure to read this guide.
Markings
This guide uses the following markings:
Warning
This indicates the possibility of death or serious injury by a fire or electric shock.
Caution
This indicates the possibility of injury or damage to property.
Warning
・Do not use the product in an atmosphere of inflammable or explosive gas or vapor.
・Use the product at the specified voltage.
・Connect the power supply line correctly.
・Do not install, operate, maintain, or inspect the product with wet hands.
・Do not disassemble or alter this product.
・Do not drop or cause impact to the product.
Caution
・Before installation, operation, maintenance, or inspection, thoroughly check that the device is safe.
・When connecting a connector, check the pin numbers with the power off.
・When connecting oscilloscope probes to the test pins, be careful not to apply tension to them.
・Since this product is a precision device, use it under the specified environmental conditions.
・Do not store or transport this product in a place exposed to direct sunlight, moisture, dust, or temperature
of 60ºC or higher.
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
2

Contents
1. Product Outline ............................................................................................................................. 5
1.1. Features ............................................................................................................................................ 5
1.2. Configuration ..................................................................................................................................... 5
2.
Specifications ................................................................................................................................ 6
2.1. Galvano Motor (GM-1010, GM-1015, and GM-1020) ........................................................................ 6
2.2. Controller (GC-201) ........................................................................................................................... 7
2.3. Dimensions ....................................................................................................................................... 8
2.4. Power Supply .................................................................................................................................. 11
2.5. Connections .................................................................................................................................... 11
2.6. Connector and Pin Assignment ....................................................................................................... 13
2.7. Optional Cables ............................................................................................................................... 17
2.8. Control Specifications ...................................................................................................................... 19
2.8.1. Number of Encoder Pulses .................................................................................................... 21
2.8.2. RS-232C command input .................................................................................................. 22
2.8.3. High-speed serial communication .................................................................................... 26
2.8.3.1. Origin Offset ....................................................................................................................... 32
2.8.3.2. High-speed serial communication motor drive timing ......................................................... 33
2.8.4. Status (High-speed Serial Communication STS) .......................................................... 34
2.8.5. RS-232C Communication Command Input and High-Speed Communication
Switching .......................................................................................................................................... 37
2.9. Heat Radiation and Installation........................................................................................................ 38
3. Software .......................................................................................................................................... 39
3.1. Supported PC Environment ............................................................................................................. 39
3.2. Installation CD ................................................................................................................................. 39
3.3. Control Software Installation ........................................................................................................... 40
3.4. Software Start Up ............................................................................................................................ 43
3.5. Control Screen ................................................................................................................................ 45
4.
Operating Procedure ............................................................................................................... 47
4.1. Controller Start Up ........................................................................................................................... 47
4.2. Step Movement ............................................................................................................................... 49
4.2.1. Step Movement Responce Time Measurement ............................................................ 51
4.2.1.1. Measurement Data Display Zoom Method ......................................................................... 54
4.2.1.2. Reference Data Comparison Method ................................................................................. 56
4.3. Raster Scan .................................................................................................................................... 59
4.4. Position Command Input by High-speed Serial Communication ..................................................... 61
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
3

5. Monitor Output and Digital Input Functions ............................................................. 62
5.1. Connector Pin Assignment .............................................................................................................. 62
5.2. Analog Monitor Output Selecting ..................................................................................................... 66
5.3. Digital Input-Output Function ........................................................................................................... 69
6.
Other - Operation Setting ..................................................................................................... 70
6.1. Setting Controller Start Up Mode..................................................................................................... 70
6.2. Controller LED Display .................................................................................................................... 72
6.3. Operation that Synchronizes with External Trigger Signal input (Raster Scan) ............................... 74
7.
Tuning .............................................................................................................................................. 76
7.1. Tuning ............................................................................................................................................. 76
7.2. Frequency Characteristic (FFT) Measurement ................................................................................ 77
7.3. Easy Auto Tuning ............................................................................................................................ 81
7.4. X and Y Axis Matching ..................................................................................................................... 87
8.
Commands .................................................................................................................................... 95
8.1. List of Commands ........................................................................................................................... 95
8.2. Command Details ............................................................................................................................ 97
9.
Parameters .................................................................................................................................. 108
9.1. List of Parameters ......................................................................................................................... 108
9.2. Parameter Details .......................................................................................................................... 110
9.3. Modifying Parameters ................................................................................................................... 126
9.4. Writing Parameters into ROM ....................................................................................................... 127
9.5. Saving a Parameter File ................................................................................................................ 128
10.
Safety Functions .................................................................................................................... 129
10.1. Safety Functions .......................................................................................................................... 129
10.2. Errors .......................................................................................................................................... 130
11.
Appendix ..................................................................................................................................... 132
11.1. Firmware Update ......................................................................................................................... 132
11.1.1. Writing Procedure ................................................................................................................ 133
11.2. Parameter Changes from the Number of Encoder Divisions ....................................................... 137
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
4
1. Product Outline
1.1. Features
The Canon Digital Galvano Scanner System is fully digitally controlled with a high-precision
optical encoder on the galvano motor and a high-speed digital signal processor (DSP) on the
controller.
This system has the following features:
z High positioning precision
z Low temperature drift
z Fast and stable operation by a unique control system
z Easy tuning with parameter settings
1.2. Configuration
This system supports various applications by the combination of a galvano motor and a controller.
Galvano motor: Encoder-mounted galvano motor
GM-1010
GM-1015
GM-1020
Controller: Digital servo-controller
GC-201
IF board: IF board for high-speed serial communication
GC-422
GC-LVDS
Extension cable: Extension cable for galvano motor and controller connection
GM-EC10, 20, 30
GM-MC10, 20, 30
・・・・ Encoder extension cable (1, 2, 3 m)
・・・・ Motor extension cable (1, 2, 3 m)
・・・・ Beam diameter: φ8 to φ10 mm
・・・・ Beam diameter: φ10 to φ15 mm
・・・・ Beam diameter: φ15 to φ30 mm
・・・・ Controller for two-axis control
・・・・ IF board for 5V-TTL (RS-422)
・・・・ IF board for LVDS level
Controller
IF board
Motor extension
cable
Galvano motor
Encoder
extension cable
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
5

2. Specifications
2.1. Galvano Motor (GM-1010, GM-1015, and GM-1020)
Performance and shape
Conforming
beam diameter
Scan angle
Encoder cycle
number
Number of encoder
pulses
Command
resolution
Torque constant
Weight
(Reference)
For details about encoder cycle number, number of encoder pulses, and command resolution, see2.8.1. “Number
of Encoder Pulses”.
Environmental conditions
GM-1010 GM-1015
Φ8 to φ10 φ10 to φ15
±20 deg ±20 deg
1000 pulses/rotation 1500 pulses/rotation
8,192,000 pulses 12,288,000 pulses 12,288,000 pulses
0.77 μrad 0.51 μrad
0.0127 Nm/A 0.0226 Nm/A
200 g 300 g
GM-1020
φ15 to φ30
±20 deg
1500 pulses/rotation
0.51 μrad
0.0415Nm/A
600g
Operating temperature and humidity 0 to 50ºC, 90% RH or less (No condensation)
Storage temperature and humidity –20 to 60ºC, 90% RH or less (No condensation)
Note: The above operating temperature and humidity conditions depend on the operating and heat
radiation conditions.
Part names
Stopper
Motor cable
Encoder
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
Encoder cable
6

2.2. Controller (GC-201)
Performance and Dimensions
GC-201
Number of control axes 2
Control sampling 100 kHz
Maximum drive current Peak 10 A (each axis)
Interface RS-232C , High-speed serial communication(XY2-100)
Digital notch filter ×2
Notch filter
Weight 350 g
Environmental conditions
Operating temperature and humidity 0 to 50ºC, 90% RH or less (No condensation)
Storage temperature and humidity -20 to 60ºC, 90% RH or less (No condensation)
Digital low-pass filter ×1
Analog notch filter ×2
Note: The above operating temperature and humidity conditions depend on the operating and heat
radiation conditions.
Section names
Mounting screw
hole (M3 × 4)
Mounting screw
hole (φ3.5 × 4)
Heat radiation
frame
IF board
Digital board (upper)
Analog board (lower)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
7

φ
φ
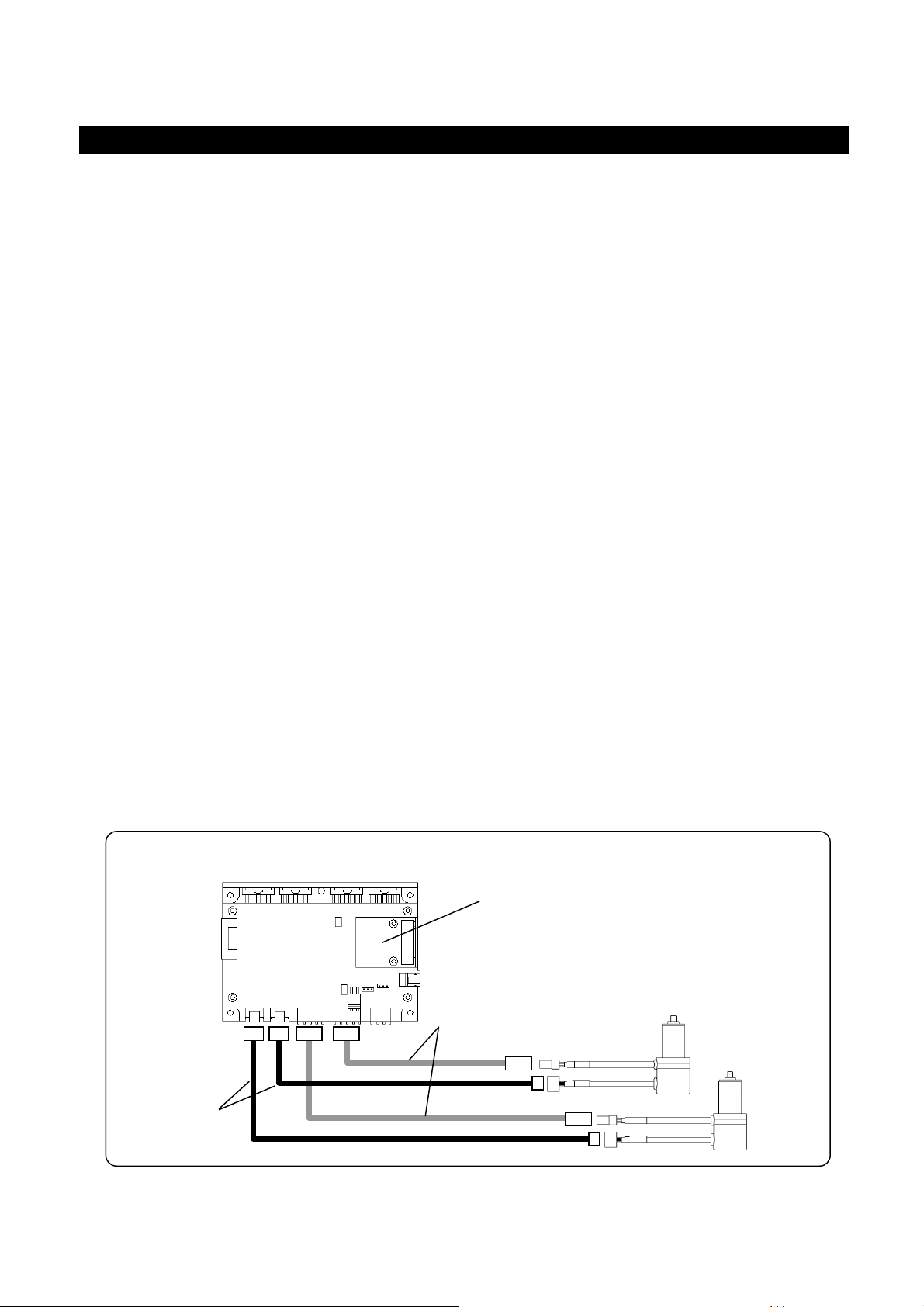
2.3. Dimensions
GM-1010
36 36 6
-0.005
φ5 -0.015
0
φ22 -0.03
GM-1015
33
32 (Clamp area)
Motor cable Encoder cable
36
46
6
-0.005
φ6 -0.015
-0
φ28 -003
33
42 (Clamp area)
Encoder cable
Motor cable
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
8
φ
GM-1020
Encoder Cable
43
42.7
56
Motor Cable
7.5
-0.005
51.4 (Clamp Area)
-0
φ7 -0.015
φ36 -003
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
9
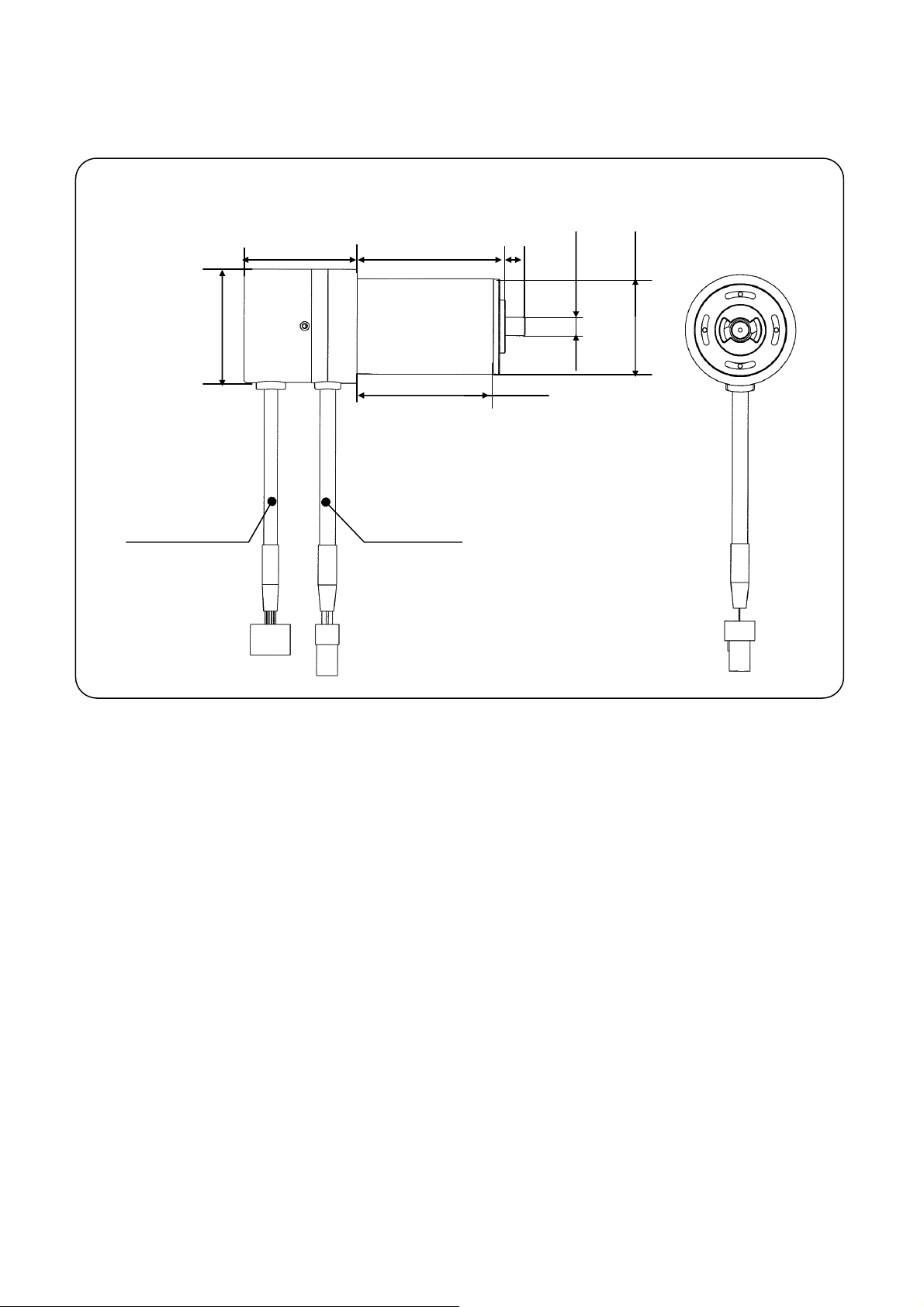
GC-201
118
7
10
4-M3
33
38
80
88
5
5
120
125
4-φ3.5
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
10
2.4. Power Supply
Power supply specifications
+24 V ± 10% (For motor drive) Peak 10 A × 2 axes
RMS 2.5 A × 2 axes
(RMS value differs according to operating conditions, the above conditions GM-1010, Ymirror、
±5°, 200Hz)
+5 V ± 5% (For control circuit) 2.8 A
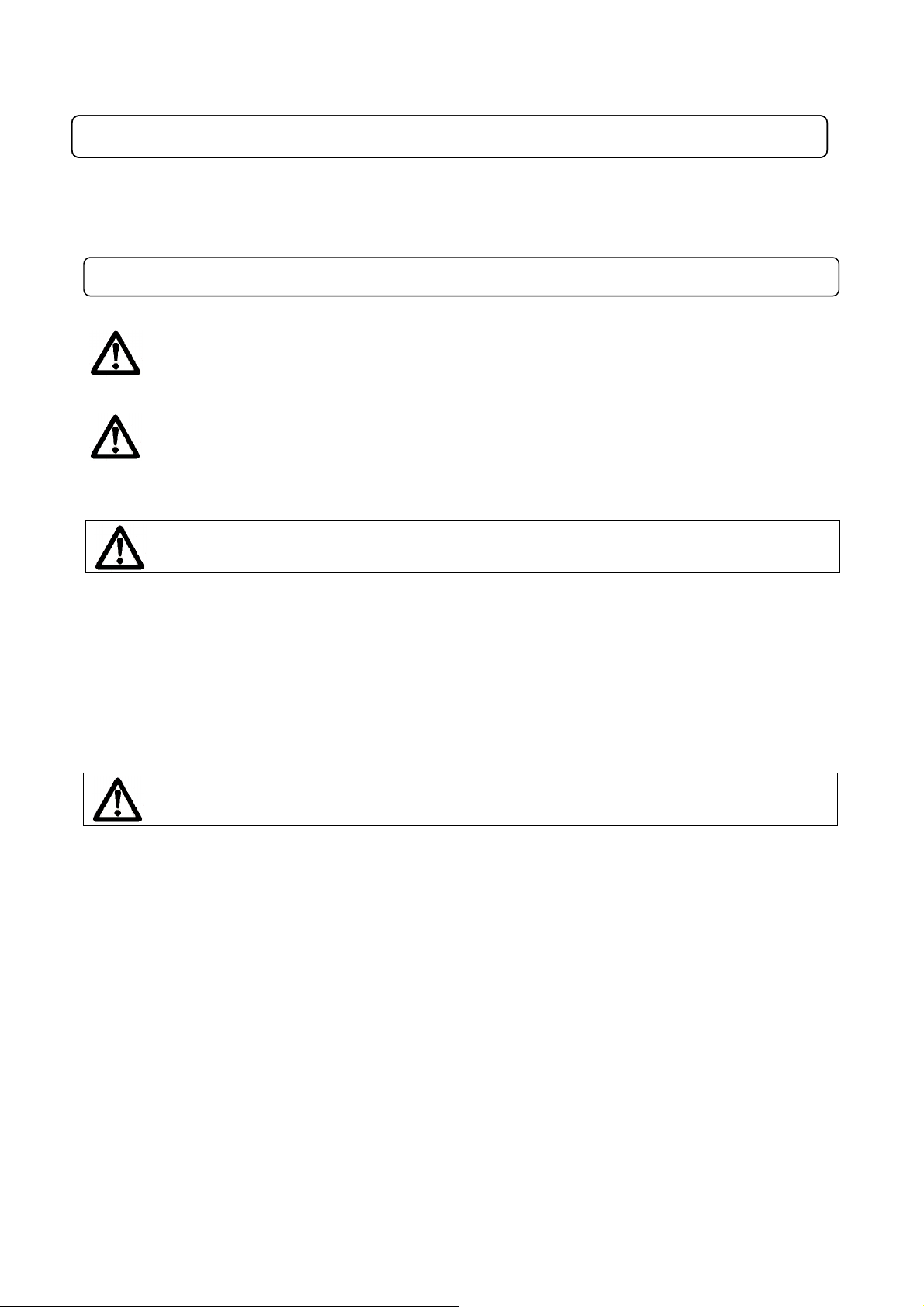
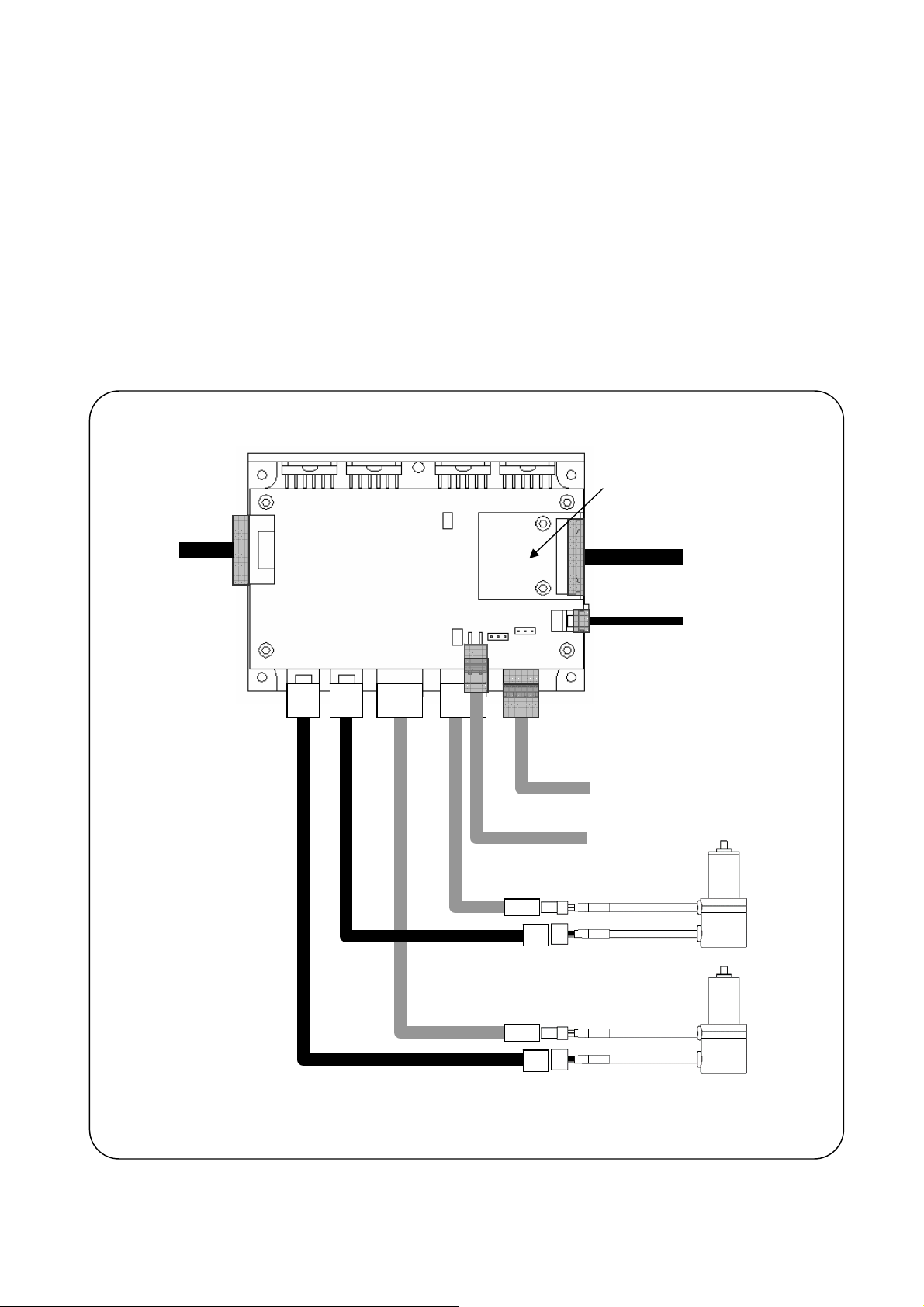
2.5. Connections
Digital
input/output
IF board
High-speed serial
communication
RS-232C
+24 V power
+5 V power
Axis 2
Axis 1
Galvano motor
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
11

Note:
Connecting the power +24 V, and GND in reverse will damage the GC-201 controller. Take
caution when connecting.
Connecting the power +5 V, and GND in reverse will damage the GC-201 controller. Take
caution when connecting.
+5V
+
-
+24V
--++
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
12
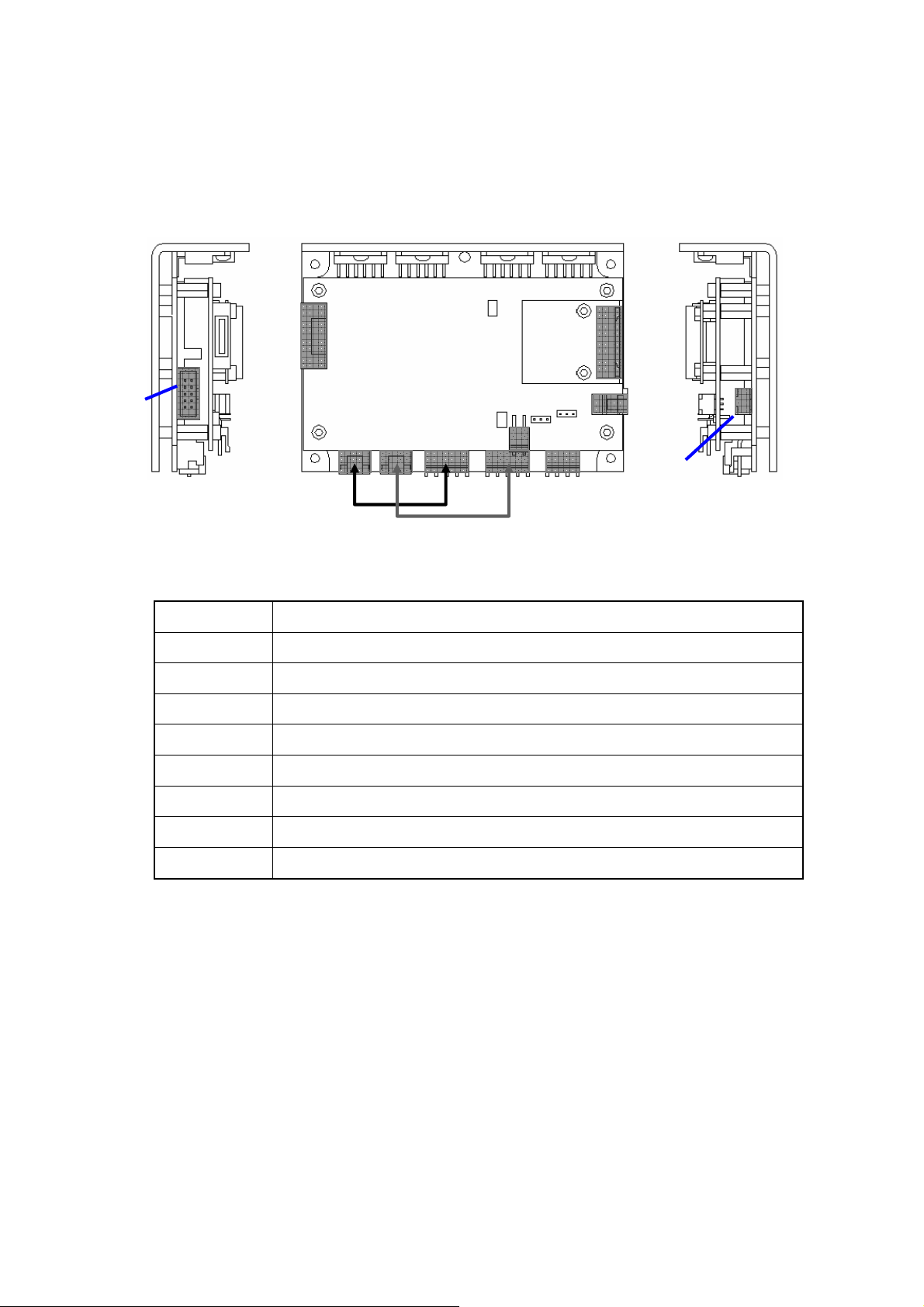
2.6. Connector and Pin Assignment
(Connector types)
⑦
⑥
⑧
③
⑤
④
⑨
①
②
①
②
③
④
⑤
⑥
Axis 1 motor encoder connector
Axis 2 motor encoder connector
+5 V power supply
+24 V power supply
RS-232C
High-speed serial communication
⑦
⑧
⑨
Digital input/output
Analog monitor
Fan power supply (+24 V)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
13
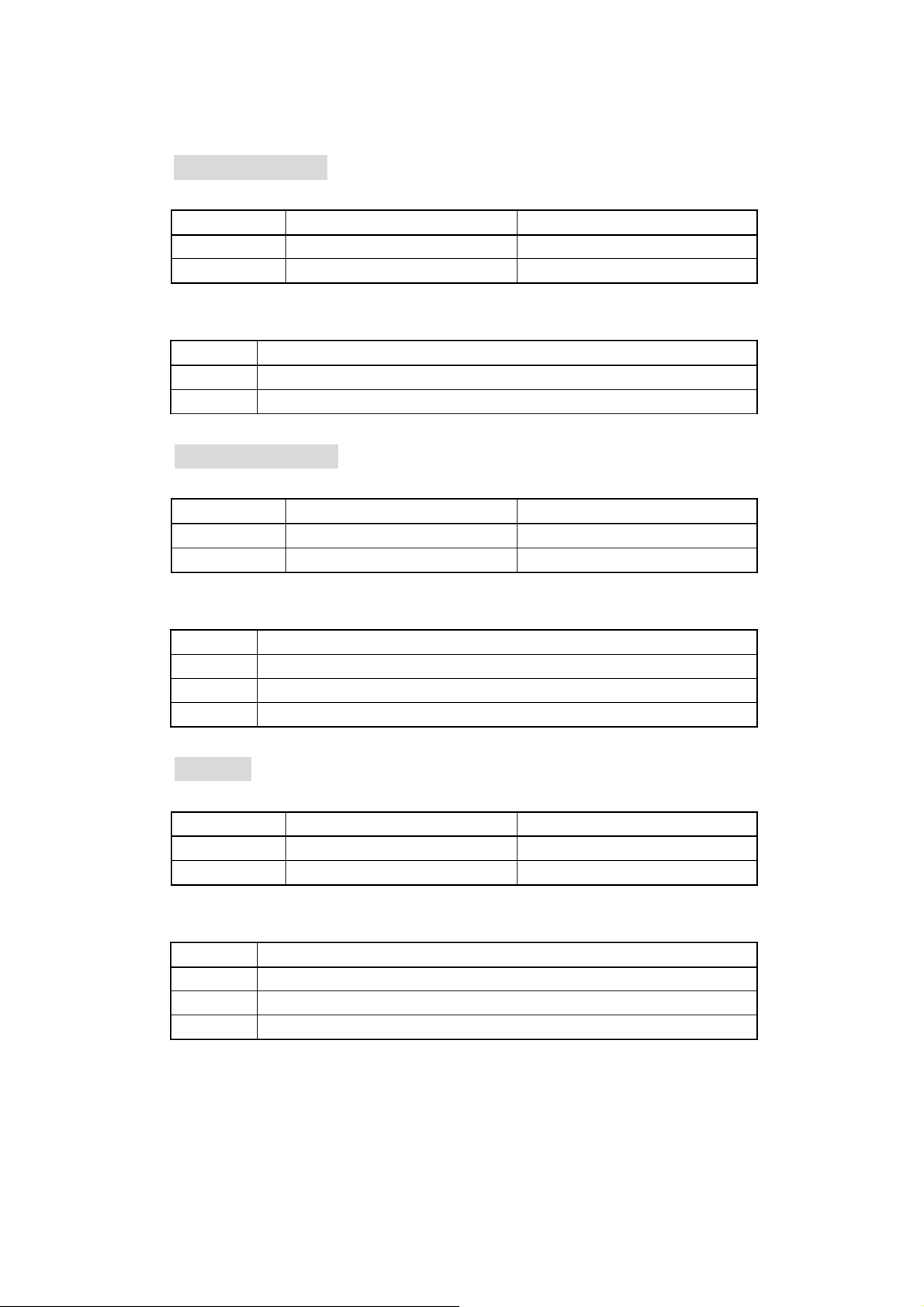
(Connector model number & pin assignment)
③ +5 V power supply
(Connector model number)
Connector Model No. Manufacturer
Board side S2P-VH JST
Cable side VHR-2N JST
(Connector pin assignment)
Pin No. Signal Description
1 +5 V
2 GND
④ +24 V power supply
(Connector model number)
Connector Model No. Manufacturer
Board side S4P-VH JST
Cable side VHR-4N JST
(Connector pin assignment)
Pin No. Signal Description
1 +24 V input for Axis 1
2 +24 V input for Axis 2
3,4 GND
⑤ RS-232C
(Connector model number)
Connector Model No. Manufacturer
Board side S03B-PASK-2 JST
Cable side PAP-03V-S JST
(Connector pin assignment)
Pin No. Signal Description
1 Send data (Signal level complying with RS-232C)
2 Receive data (Signal level complying with RS-232C)
3 GND
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
14
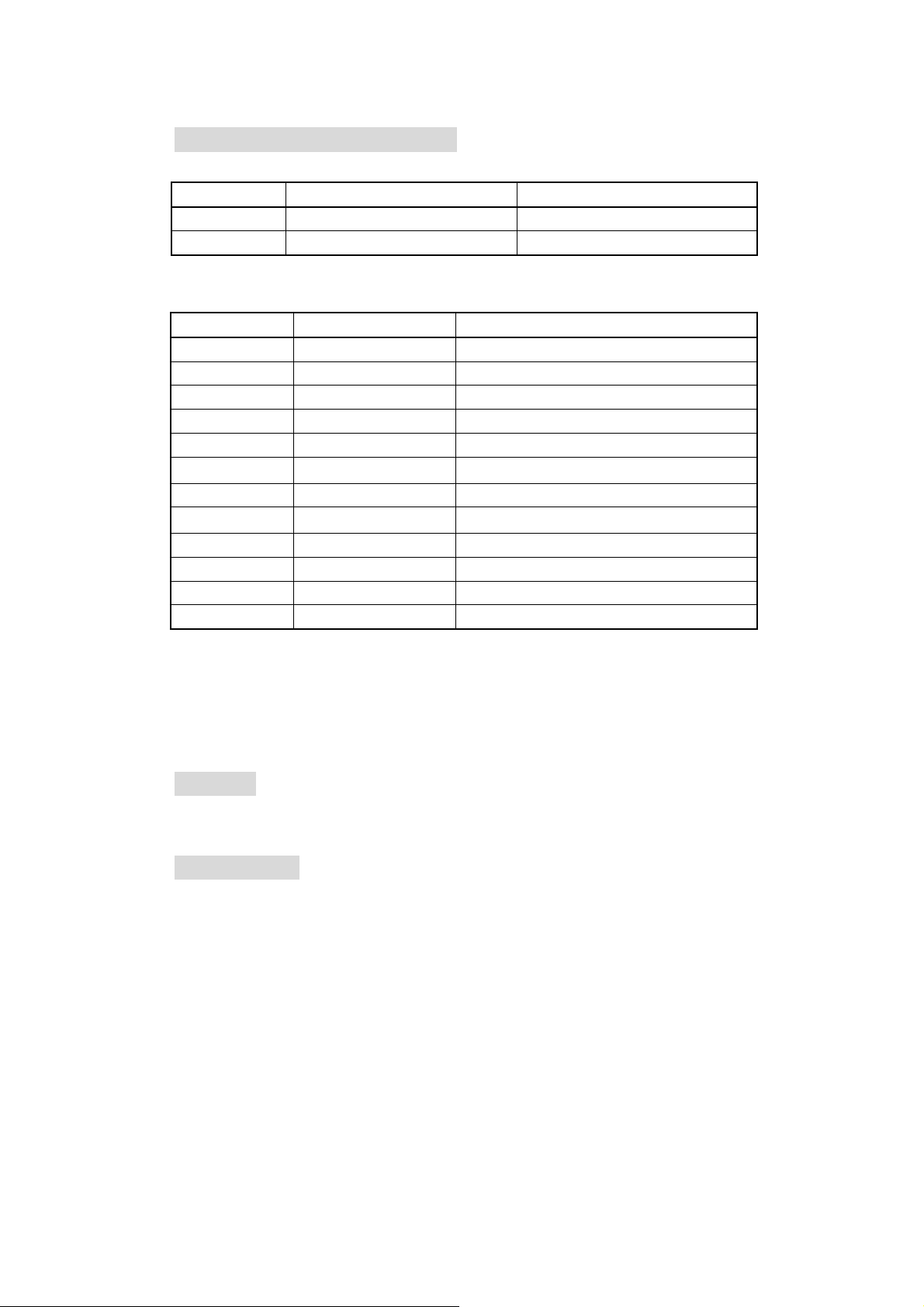
⑥ High-speed Serial Communication
(Connector model number)
Connector Model No. Manufacturer
Board side SM12B-PASS-1-TB JST
Cable side PAP-12V-S JST
(Connector pin assignment )
Pin No. Signal Name Signal Description
1 CLK- Clock (-)
2 CLK+ Clock (+)
3 FS- Frame sync (-)
4 FS+ Frame sync (+)
5 DAT(AXIS 1) - Axis 1 Target position data (-)
6
7 DAT(AXIS 2) - Axis 2 Target position data (-)
8
9 STS- Status (-)
10 STS+ Status (+)
11 GND System GND
12 FG Frame GND
DAT(AXIS 1)+
DAT(AXIS 2)+
Axis 1 Target position data (+)
Axis 2 Target position data (+)
The signal levels depend on the IF board.
GC-422 - Receiver: AM26LV32C (TI), Driver: SN75179B (TI)
GC-LVDS - Receiver: SN65LVDS32 (TI), Driver: SN65LVDS179 (TI)
⑦ Digital I/O
See 5.1. “Connector Pin Assignment”
⑧ Analog Monitor
See 5.1. “Connector Pin Assignment”
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
15

⑨ Cooling Fan Power Supply
(Connector model number)
Connector Model No. Manufacturer
Board side S04B-PASK-2 JST
Cable side PAP-04V-S JST
(Connector pin arrangement)
Pin No. Signal Description
1 +24 V Output
2 GND
3 (No connection)
4 (No connection)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
16
2.7. Optional Cables
Optional cables are prepared for power and communications cables.
Connector pin assignment for each cable as follows.
Verify details with your sales representative.
Option cables
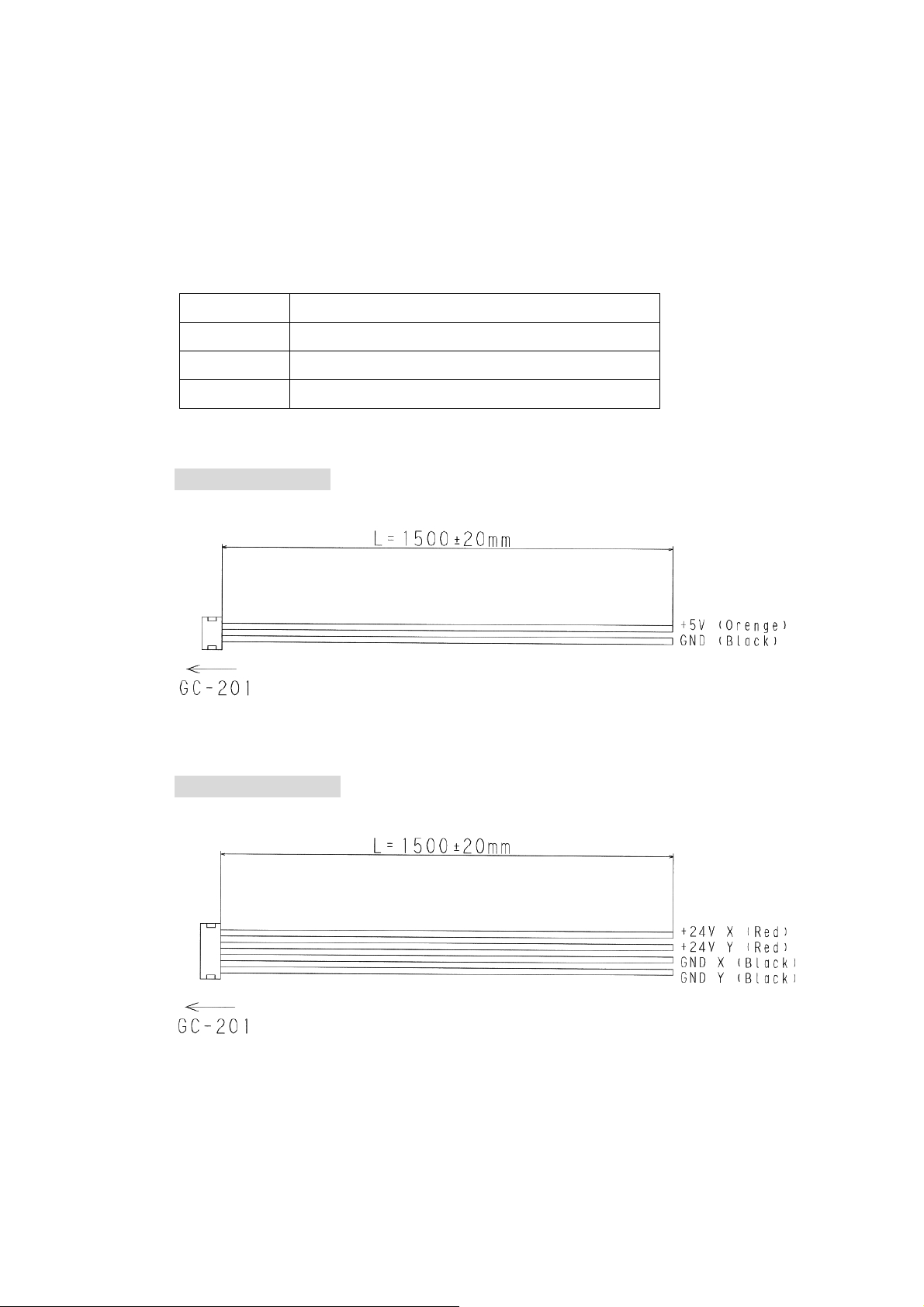
① Power cable (+5 V)
② Power cable (+24 V)
③ RS-232C cable
④ High-speed serial communication cable
① Power Cable +5 V
② Power Cable +24 V
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
17

③ RS-232C Cable
PC side (D-sub 9 pin)
Pin Signal
2 RX
3 TX
5 GND
④ High-Speed Serial Communication Cable
PC side (D-sub 25pin)
Pin Signal Pin Signal
1 Clock - 14 Clock +
2 FS - 15 FS +
3 Data (Axis 1) - 16 Data (Axis 1) +
4 Data (Axis 2) - 17 Data (Axis 2) +
5 Do not connect 18 Do not connect
6 Status - 19 Status +
7 Do not connect 20 Do not connect
8 Do not connect 21 Do not connect
9 Do not connect 22 Do not connect
10 Do not connect 23 GND
11 GND 24 GND
12 Do not connect 25 Do not connect
13 Do not connect
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
18

2.8. Control Specifications
The controller (GC-201) is operated by:
• RS-232C command input
• High-speed serial communication
Features
RS-232C
communication command input
- Raster scan and step movement etc.
can be performed easily.
- In order to obtain synchronization
with external equipment, operation
can be started with an external
trigger signal. (Fluctuating delays
may occur within the internal control
sampling time.)
High-speed serial communication
- Vector scans with control over the
desired locations of two axes are
possible. This is used in laser
marking etc.
- Complete synchronization with
external equipment can be obtained
in order to use high-speed serial
communication clock pulses by
controlling the controller.
- As it can be operated with XY2-100
communication specifications, a
controller compliant with XY2-100
can be connected.
Target position
command
Operation
setting
parameter
setting
Control clock
- A target position command input by an RS-232C communication command, or a target position
command from a high-speed serial communication can be mutually switched with a command. (See
2.8.5. “RS-232C Communication Command Input and High-Speed Communication Switching”)
RS-232C communication command High-speed serial communication
RS-232C communication command RS-232C communication command
Uses the controller GC-201 internal
circuit clock pulses
Uses high-speed serial
communication clock pulses
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
19

- With the default settings at shipping, power-on starts up the controller with in RS-232 Communication
Command Input mode.
- The parameter can be set to determine which mode the controller starts after power-on. (See 6.1.
“Setting Controller Start Up Mode”)
Note:
For start up when set to the High-Speed Serial Communication mode, in order to use high-speed
serial communication clock pulses internally, signal input by high-speed serial communication is
necessary at power-on. When there is no signal input, a Clock Lack error occurs. (See 10.2. “Errors”)
After an error occurs, and input of a high-speed serial communication signal begins correctly,
operation begins automatically from the high-speed serial communication signal.
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
20

2.8.1. Number of Encoder Pulses
This section explains the relationship between the galvano scanner motor rotating angle and the
number of encoder pulses.
Control commands and some of the parameter angle settings use the number of encoder pulses.
The controller divides one encoder cycle into 8,192, and this is the number of encoder pulses.
Depending on the type of encoder included on the motor, caution is necessary as the number of
pulses for the same specified angle can differ.
Many commands use pulses as a unit in the RS-232C communication command parameter data used
for operations.
In the case of the GM-1010 for example
1 rotation (360°) = 1,000 cycles = 1,000 × 8,192 = 8,192,000 pulses
1° (angle of equipment) = 8,192,000 pulses × 1 / 360 = 22,756 pulses
Resolution = 360° ÷ 8,192,000 pulses = 0.0000429° = 0.77 urad
Each motor is as follows.
Motor type GM-1010 GM-1015, GM-1020
Included encoder cycles / 1
rotation
Number of pulses 8,192,000 pulses 12,288,000 pulses
Command resolution (1 pulse) 0.77 urad 0.51 urad
360°
1,000 cycles 1,500 cycles
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
21

2.8.2. RS-232C command input
RS-232C command input allows the following:
• Operation setting
• Parameter setting
• Error processing
• Status check
(For details, see 8. “Commands”)
In case not using high-speed serial communication, RS-232C communication command input is enough
for the following function:
• Step movement
• Raster scan (Continuous oscillation of a certain angle at a fixed frequency)
(Communication specifications)
Wiring Cross wiring
Communication rate 38400 bps
Data length 8 bits
Stop bit 1
Parity None
Data format ASCII code
Delimiter code LF (0x0a) or CR (0x0d)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
22

(Command specifications)
In response to command send, the controller returns a reply with data.
The data contents depend on the command. (For details, see 8.2. “Command Details”)
Command send
A Axis No. C Command ID / Data Delimiter
Axis No.
1 or 2
Command
Command ID
Decimal, 3-digit
(See 7.1 for details)
Data
Added to command as
required (decimal)
E.g. Servo ON ID = 4 Data = 1
A1C004 / 1 (LF)
(ASCII code: 0x41 0x31 0x43 0x30 0x30 0x34 0x2f 0x31 0x0a)
A 1 C 0 0 4 / 1 (LF)
Command reply
A Axis No. C Command ID / Data Delimiter
Axis No.
1 or 2
Command
Command ID
Decimal, 3-digit
(See 7.1 for details)
Return value
Delimiter
LF or CR
Delimiter
LF or CR
E.g. Servo ON ID = 4 Data = 1
A1C004 / 1 (LF)
(ASCII code: 0x41 0x31 0x43 0x30 0x30 0x34 0x2f 0x31 0x0a)
A 1 C 0 0 4 / 1 (LF)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
23
Parameters of the GC-201 can be changed by the following sending method to the controller.
Also in response to parameters sent, the controller always returns a reply with data.
The data contents depend on the command. (For details, see 9.2. “Parameter Details”)
When a parameter is changed, in order to start up with the same setting the next time power is turned
on, it is necessary to write the changed parameter to the ROM.
(See 9.4. “Writing Parameters into ROM” for methods of writing to ROM with control software)
(Note: Carry out writing parameters to ROM only after thoroughly verifying the content. Depending on
the changed values, the controller may not start normally.)
Parameter send
A Axis No. P Parameter ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7.1 for details)
Parameter setting
Decimal
E.g. LQ gain parameter ID = 6 Data = 4500
A1P006 / 4500 (LF)
(ASCII code: 0x41 0x31 0x50 0x30 0x30 0x36 0x2f 0x34 0x35 0x30 0x30 0x0a)
A 1 P 0 0 6 / 4 5 0 0 (LF)
Parameter reply
A Axis No. P Parameter ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7.1 for details)
Parameter setting
successful / unsuccessful
0 or 1
Delimiter
LF or CR
Delimiter
LF or CR
E.g. LQ gain parameter ID = 6 Data = 4500
A1P006 / 4500 (LF)
(ASCII code: 0x41 0x31 0x50 0x30 0x30 0x36 0x2f 0x30 0x0a)
A 1 P 0 0 6 / 0 (LF)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
24
Writing parameters to ROM is also possible with commands via RS-232C.
When writing parameters to ROM, a reply that definitely contains data will be sent by a controller.
The content of data is different by a parameter. (For details, see 9.2. “Parameter Details”)
(Note: Carry out writing parameters to ROM only after thoroughly verifying the content. Depending on
the changed values, the controller may not start normally.)
Parameter ROM Write send
E Axis No. P Parameter ID / Data Delimiter
Axis No.
1 or 2
Parameter
Parameter ID
Decimal, 3-digit
(See 7.1 for details)
Parameter setting
Decimal
E.g. LQ gain parameter ID = 6 Data = 4500
E1P006 / 4500 (LF)
(ASCII code: 0x45 0x31 0x50 0x30 0x30 0x36 0x2f 0x34 0x35 0x30 0x30 0x0a)
E 1 P 0 0 6 / 4 5 0 0 (LF)
Delimiter
LF or CR
Parameter ROM Write reply
E Axis No. P Parameter ID / Data Delimiter
Axis No.
1 or 2
Parameter
Parameter ID
Decimal, 3-digit
(See 7.1 for details)
Parameter setting
successful / unsuccessful
0 or 1
E.g. LQ gain parameter ID = 6 Data = 4500
E1P006 / 4500 (LF)
(ASCII code: 0x45 0x31 0x50 0x30 0x30 0x36 0x2f 0x30 0x0a)
E 1 P 0 0 6 / 0 (LF)
Delimiter
LF or CR
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
25
A
1
A
1
2.8.3. High-speed serial communication
To control the mirror to an arbitrary position by marking or any other application, target position data
updated as required can be given to the controller by using high-speed serial communication.
By setting, the controller can be started up in the mode of tracking a target position specified by
high-speed serial communication. (For details, see 6.1. “Setting Controller Start Up Mode”)
(Communication specifications)
Base clock (CLK) 2 MHz
Frame sync (FS) 100 kHz
Data (DAT) 20 bits (Position data: 16 bits)
Status (STS) 20 bits
Transmission system Differential signal
Signal level
(Selectable by the optional IF board)
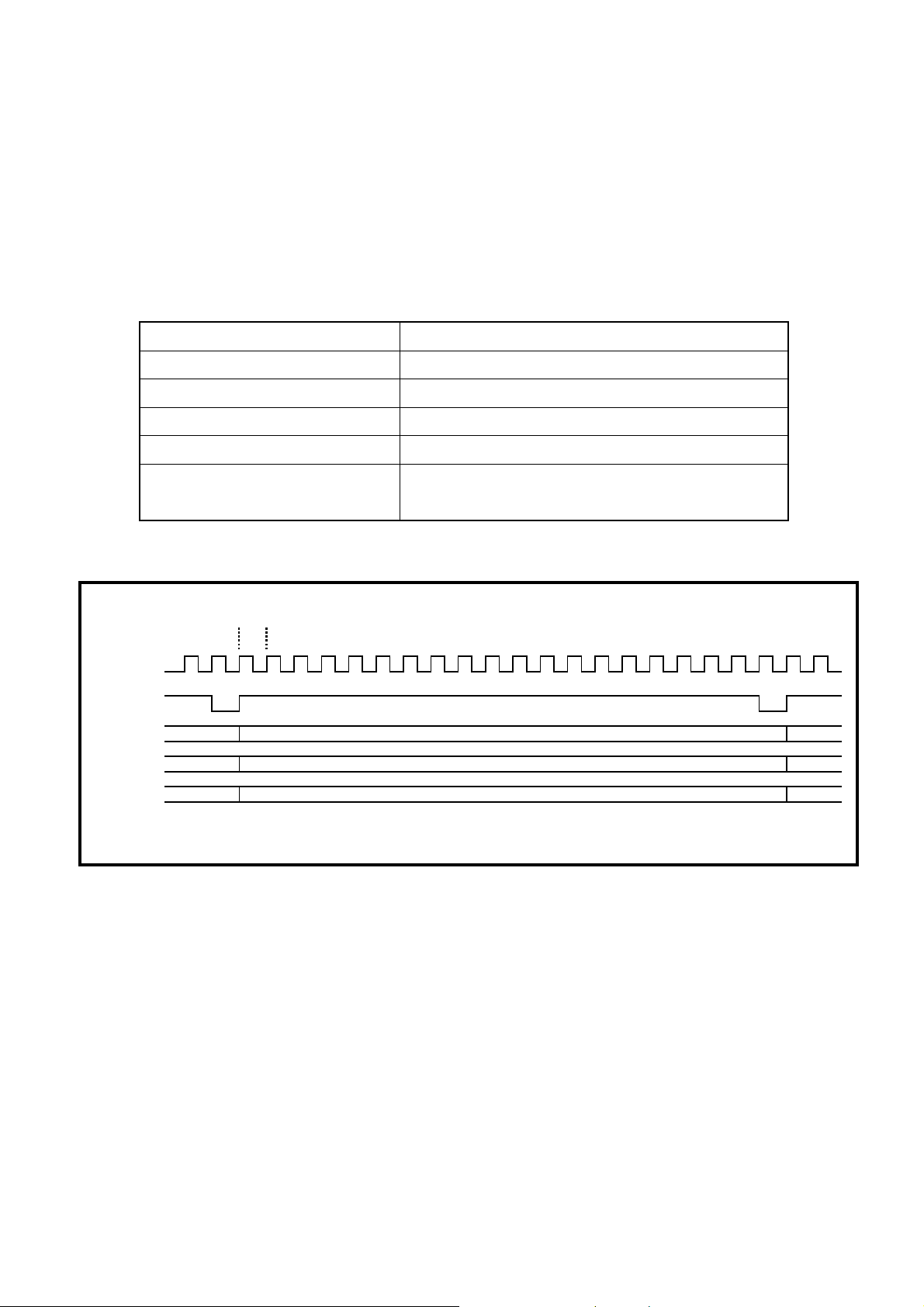
(Timing Diagram)
5V-TTL, LVDS
Timing Diagram
CLK
2MHz
1234567891011121314151617181920
FS
DAT (AXIS 1)
DAT (AXIS 2)
STS
AXIS 1 DATA -1 AXIS 1 DATA
AXIS 2 DATA -1 AXIS 2 DATA
Status -1 Status Status +1
Input Signal to GC-201 : CLK , FS , DAT
Ounput Signal from GC-201 : STS
As indicated in the above timing diagram, it is necessary to always continuously input the CLK, FS,
XIS 1 DATA +
XIS 2 DATA +
and DAT signals to the GC-201. In the event that the signal is disconnected, or the signal’s timing is
incorrect, the GC-201 will output an error signal (Clock Lack). (For details, See 10.2. “Errors”.)
When switching to high-speed serial communication mode, or starting up in high-speed serial
communication mode when turning on the controller’s power supply, input of the high-speed serial
communication signal (all of CLK, FS, and DAT) beforehand is necessary.
For the support of other communication specifications, contact the Sales Department.
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
26

(Target Position Data) DAT (AXIS1), DAT (AXIS 2)
It is possible to switch the length of data used as target position data from the DAT (AXIS1), DAT (AXIS
2) 20 bit (every 100 kHz) signals. Please set appropriately to match the signal specifications of the
scanner controller that outputs a high-speed serial communication signal, and other output equipment.
Note: The length of data input in the GC-201 is always 20 bit (every 100 kHz). The bits of the target
position data that get used and sent are switched from within 20 bit data.
When there is a big difference in the target position specified in the high-speed serial communication,
and the actual operation position, it is possible this parameter setting is incorrect. Please verify.
The data length of the target position data by the high-speed serial communication can be changed by
two following parameters.
(Target position data length)
Can be changed by 16 bit – 20 bit.
Parameter ID DATA
16: 16bit Data *
17: 17bit Data
67
(Data position)
The least significant bit position of the target position data of high-speed serial communication 20bit
data can be set by following parameter. The specified number of bits is shifted right, making the target
position data.
Parameter ID DATA
68
18: 18bit Data
19: 19bit Data
20: 20bit Data
0: 0bit position
1: 1bit position *
2: 2bit position
3: 3bit position
4: 4bit position
With the default settings at shipping, the setting is * (16 bit position data length, data least significant bit 1
bit position). This communication specification is compatible with XY2-100. When using the scanner
controller of XY2-100 specifications, please use this setting.
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
27
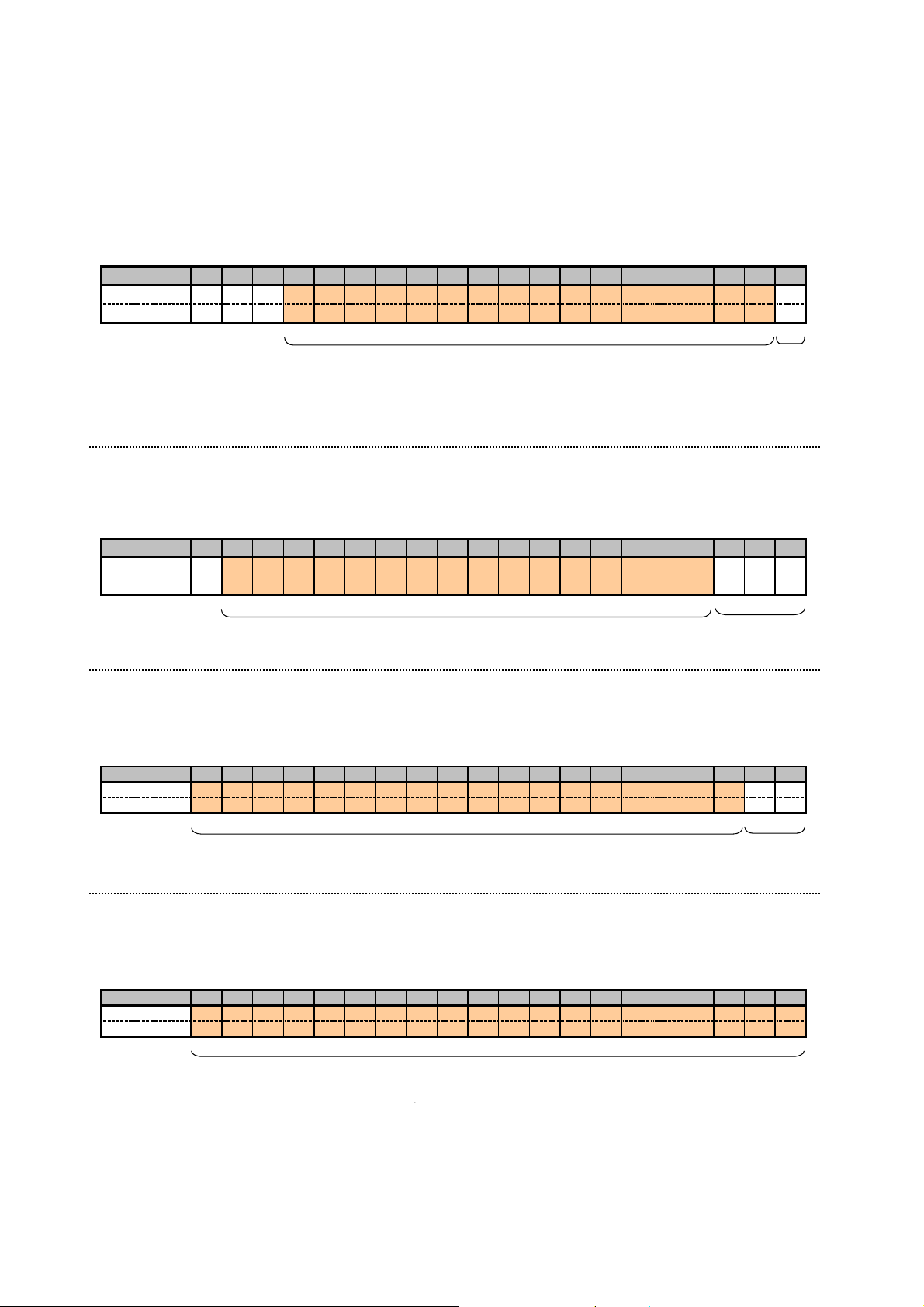
(Paramete
Examples of the settings are as follows.
(Example 1) Parameter ID = 67 16
Parameter ID = 68 1
XY2-100 specification compatible
Bit
DATA (AXIS 1)
DATA (AXIS 2)
1234567891011121314151617181920
N N ND15D14D13D12D11D10D9D8D7D6D5D4D3D2D1D0 N
N N ND15D14D13D12D11D10D9D8D7D6D5D4D3D2D1D0 N
(Parameter
16bit
パラメータ
(
ID = 67) (
Note: The above N bit data is not used. It does not matter if it is either 1 or 0.
(Example 2) Parameter ID = 67 16
Parameter ID = 68 3
1bit
(Parameter
パラメータ
ID = 68)
Bit
DATA (AXIS 1)
DATA (AXIS 2)
1234567891011121314151617181920
ND15D14D13D12D11D10D9D8D7D6D5D4D3D2D1D0 N N N
ND15D14D13D12D11D10D9D8D7D6D5D4D3D2D1D0 N N N
(Example 3) Parameter ID = 67 18
Parameter ID = 68 2
Bit
DATA (AXIS 1)
DATA (AXIS 2)
1234567891011121314151617181920
D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 N N
D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 N N
(Example 4) Parameter ID = 67 20
Parameter ID = 68 0
Bit
DATA (AXIS 1)
DATA (AXIS 2)
1234567891011121314151617181920
D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
16bit
パラメータ
(Parameter
(
18bit
パラメータ
(
(Parameter
ID = 67) (
ID = 67) (
(Parameter
(Parameter
3bit
パラメータ
2bit
パラメータ
ID = 68)
ID = 68)
20bit
パラメータ
(
ID = 67) (
r
(Parameter
0bit
パラメータ
ID = 68)
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
28

This section explains the motor rotating angle for the high-speed serial communication data.
Default settings have the following relationships.
Data 1 = 1 pulse (factory setting)
See 2.8.1. “Number of Encoder Pulses" for the relationship between the motor rotating angle and the
number of pulses.
・ In the case of 16 bit data
(GM-1010)
Maximum
position
0 pulse
position
Minimum
position
(GM-1015, GM-1020)
Maximum
position
High-speed communication
Target position data value
0xFFFF -32767 pulses -1.44 deg
0x8000 0 0
0x0000 +32768 pulses +1.44 deg
High-speed communication
Target position data value
0xFFFF -32767 pulses -0.96 deg
16bit
16bit
Motor
Number of pluses Motor rotating angle
Motor
Number of pluses Motor rotating angle
0 pulse
position
Minimum
position
Note: The motor rotating angle + direction when viewed from the rotation axis appear as clockwise.
When set to the factory default, rotation is only possible up to angles above.
If a greater angle is specified, set a magnification by using the following parameter.
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
0x8000 0 0
0x0000 +32768 pulses +0.96 deg
29

Parameter ID Data
13
(High-speed serial communication
conversion gain parameter)
E.g. For x2 (parameter ID = 13 setting: 2000), the following angle can be specified:
-1.44 × 2 deg ~ 1.44 × 2 deg (GM-1010)
-0.96 × 2 deg ~ 0.96 × 2 deg (GM-1015, 1020)
The command resolution will be two times
Magnification ×1000
CANON Digital Galvano Scanner System GM-1000 Series
Users Manual 1.20
30
 Loading...
Loading...