

Page 1

Handbuch | DE
CX20x3
Embedded-PC
14.01.2021 | Version: 1.0
Page 2

Page 3

Inhaltsverzeichnis
Inhaltsverzeichnis
1 Hinweise zur Dokumentation....................................................................................................................5
1.1 Symbolerklärung................................................................................................................................6
1.2 Ausgabestände der Dokumentation ..................................................................................................7
2 Zu Ihrer Sicherheit.....................................................................................................................................8
2.1 Bestimmungsgemäße Verwendung ..................................................................................................8
2.2 Personalqualifikation .........................................................................................................................8
2.3 Sicherheitshinweise...........................................................................................................................9
3 Transport und Lagerung.........................................................................................................................10
4 Produktübersicht.....................................................................................................................................11
4.1 Aufbau .............................................................................................................................................13
4.2 Typenschild .....................................................................................................................................14
4.3 Ausführungen ..................................................................................................................................15
4.4 Architekturübersicht.........................................................................................................................16
5 Schnittstellenbeschreibung....................................................................................................................17
5.1 USB 3.1 (X100, X101, X102, X103) ................................................................................................17
5.2 Ethernet RJ45 (X000, X001) ...........................................................................................................18
5.3 DVI-D (X200) ...................................................................................................................................19
5.4 Optionale Schnittstellen...................................................................................................................20
5.4.1 DVI-D (N010) ................................................................................................................... 20
5.4.2 DisplayPort (N011) .......................................................................................................... 21
5.4.3 RS232 (N030).................................................................................................................. 22
5.4.4 RS422/RS485 (N031)...................................................................................................... 23
5.4.5 EtherCAT-Slave (B110) ................................................................................................... 24
5.4.6 PROFIBUS (x310) ........................................................................................................... 25
5.4.7 CANopen (x510) .............................................................................................................. 26
5.4.8 PROFINET RT (x930)...................................................................................................... 27
6 Inbetriebnahme........................................................................................................................................28
6.1 Passendes CX2100-Netzteil auswählen .........................................................................................28
6.2 Montage...........................................................................................................................................29
6.2.1 Netzteil anstecken ........................................................................................................... 30
6.2.2 Riegelclips montieren ...................................................................................................... 30
6.2.3 Zulässige Einbaulagen beachten..................................................................................... 31
6.2.4 Auf Tragschiene befestigen ............................................................................................. 33
6.2.5 CFast-Karte ein- und ausbauen....................................................................................... 34
6.2.6 Passive EtherCAT-Klemmen montieren .......................................................................... 35
6.3 Spannungsversorgung ....................................................................................................................36
6.3.1 Embedded-PC anschließen............................................................................................. 37
6.4 Einschalten ......................................................................................................................................38
6.5 Ausschalten .....................................................................................................................................38
7 Konfiguration ...........................................................................................................................................39
7.1 Beckhoff Device Manager starten ...................................................................................................39
7.2 Windows 10 IoT Enterprise .............................................................................................................40
7.2.1 Jumbo-Frames aktivieren ................................................................................................ 40
CX20x3 3Version: 1.0
Page 4

Inhaltsverzeichnis
7.2.2 NIC-Teaming einstellen ................................................................................................... 42
7.2.3 Beckhoff Echtzeittreiber wiederherstellen........................................................................ 44
7.3 TwinCAT..........................................................................................................................................45
7.3.1 Strukturansicht................................................................................................................. 45
7.3.2 Zielsysteme suchen ......................................................................................................... 46
7.3.3 Embedded-PC scannen................................................................................................... 48
7.3.4 EtherCAT-Kabelredundanz konfigurieren........................................................................ 49
7.3.5 Hardware-Watchdog einsetzen ....................................................................................... 52
8 NOVRAM...................................................................................................................................................53
8.1 Retain-Handler anlegen...................................................................................................................54
8.2 Variablen anlegen und verknüpfen..................................................................................................56
8.3 Schreibgeschwindigkeit des Retain-Handlers .................................................................................58
8.4 Variablen unter dem Retain-Handler löschen..................................................................................59
9 Fehlerbehandlung und Diagnose...........................................................................................................60
9.1 Diagnose-LEDs ...............................................................................................................................60
9.1.1 K-Bus ............................................................................................................................... 60
9.1.2 E-Bus ............................................................................................................................... 63
9.2 Störungen ........................................................................................................................................64
10 Pflege und Wartung.................................................................................................................................65
10.1 Batterie wechseln ............................................................................................................................65
10.2 Lüfterkassette wechseln ..................................................................................................................67
10.3 Embedded-PC reinigen ...................................................................................................................68
11 Außerbetriebnahme.................................................................................................................................69
11.1 Leitungen entfernen.........................................................................................................................69
11.2 Embedded-PC demontieren ............................................................................................................70
12 Technische Daten ....................................................................................................................................71
13 Anhang .....................................................................................................................................................73
13.1 Zubehör ...........................................................................................................................................73
13.2 Zertifizierungen................................................................................................................................74
13.3 Support und Service ........................................................................................................................75
Tabellenverzeichnis ................................................................................................................................76
Abbildungsverzeichnis ...........................................................................................................................78
CX20x34 Version: 1.0
Page 5

Hinweise zur Dokumentation
1 Hinweise zur Dokumentation
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- und
Automatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.
Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der Dokumentation und der
nachfolgenden Hinweise und Erklärungen unbedingt notwendig.
Das Fachpersonal ist verpflichtet, für jede Installation und Inbetriebnahme die zu dem betreffenden Zeitpunkt
veröffentliche Dokumentation zu verwenden.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produkte
alle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungen
und Normen erfüllt.
Disclaimer
Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiter
entwickelt.
Wir behalten uns das Recht vor, die Dokumentation jederzeit und ohne Ankündigung zu überarbeiten und zu
ändern.
Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche auf
Änderung bereits gelieferter Produkte geltend gemacht werden.
Marken
Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT G®, EtherCAT G10®, EtherCAT P®, Safety over EtherCAT®,
TwinSAFE®, XFC®, XTS® und XPlanar® sind eingetragene und lizenzierte Marken der Beckhoff Automation
GmbH.
Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann
zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
Patente
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und
Patente:
EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702
mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff
Automation GmbH, Deutschland
Copyright
© Beckhoff Automation GmbH & Co. KG, Deutschland.
Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind
verboten, soweit nicht ausdrücklich gestattet.
Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmusteroder Geschmacksmustereintragung vorbehalten.
CX20x3 5Version: 1.0
Page 6
Hinweise zur Dokumentation
1.1 Symbolerklärung
In der Dokumentation werden folgende Warnhinweise verwendet. Lesen und befolgen Sie die
Warnhinweise.
Warnhinweise, die vor Personenschäden warnen:
GEFAHR
Es besteht eine Gefährdung mit hohem Risikograd, die den Tod oder eine schwere Verletzung zur Folge
hat.
WARNUNG
Es besteht eine Gefährdung mit mittlerem Risikograd, die den Tod oder eine schwere Verletzung zur Folge
haben kann.
VORSICHT
Es besteht eine Gefährdung mit geringem Risikograd, die eine leichte Verletzung zur Folge haben kann.
Warnhinweise, die vor Sach- oder Umweltschäden warnen:
HINWEIS
Es besteht eine mögliche Gefährdung für Umwelt und Geräte.
Hinweise, die weitere Informationen oder Tipps anzeigen:
Dieser Hinweis gibt wichtige Informationen, die beim Umgang mit dem Produkt oder der Software
helfen. Es besteht keine unmittelbare Gefahr für Produkt, Mensch und Umwelt.
CX20x36 Version: 1.0
Page 7

1.2 Ausgabestände der Dokumentation
Version Änderungen
1.0 erste Version
Hinweise zur Dokumentation
CX20x3 7Version: 1.0
Page 8

Zu Ihrer Sicherheit
2 Zu Ihrer Sicherheit
Lesen Sie das Sicherheitskapitel und halten Sie die Hinweise ein, um sich vor Personenschäden und
Sachschäden zu schützen.
Haftungsbeschränkungen
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und SoftwareKonfigurationen ausgeliefert. Eigenmächtige Umbauten und Änderungen der Hard- oder SoftwareKonfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind verboten und bewirken den
Haftungsausschluss der Beckhoff Automation GmbH & Co. KG.
Darüber hinaus werden folgende Punkte aus der Haftung der Beckhoff Automation GmbH & Co. KG
ausgeschlossen:
• Nichtbeachtung dieser Dokumentation.
• Nichtbestimmungsgemäße Verwendung.
• Einsatz von nicht ausgebildetem Fachpersonal.
• Verwendung nicht zugelassener Ersatzteile.
2.1 Bestimmungsgemäße Verwendung
Der Embedded-PC- ist ein modulares Steuerungssystem und ist für die Montage auf einer Hutschiene
vorgesehen. Das System ist skalierbar, so dass je nach Aufgabenstellung die PC-Grundmodule, Netzteile,
Systemmodule und Erweiterungsmodule zusammengesteckt und in den Schaltschrank oder Klemmenkasten
eingebaut werden.
Der Embedded-PC wird zusammen mit Busklemmen dazu benutzt, um digitale und analoge Signale von
Sensoren aufzunehmen und an Aktoren auszugeben oder an übergeordnete Steuerungen weiterzuleiten.
Der Embedded-PC ist für ein Arbeitsumfeld entwickelt, welches der Schutzklasse IP20 genügt. Es besteht
Fingerschutz und Schutz gegen feste Fremdkörper bis 12,5 mm, jedoch kein Schutz gegen Wasser. Der
Betrieb der Geräte in nasser und staubiger Umgebung ist nicht gestattet, sofern nicht anders angegeben.
Die angegebenen Grenzwerte für elektrische- und technische Daten müssen eingehalten werden.
Nicht bestimmungsgemäße Verwendung
Der Embedded-PC ist nicht für den Betrieb in folgenden Bereichen geeignet:
• In explosionsgefährdeten Bereichen.
• In Bereichen mit einer aggressiven Umgebung, die z.B. mit aggressiven Gasen oder Chemikalien
angereichert ist.
• Im Wohnbereich. Im Wohnbereich müssen die entsprechenden Normen und Richtlinien für
Störaussendungen eingehalten und die Geräte in Gehäuse oder Schaltkästen mit entsprechender
Schirmdämpfung eingebaut werden.
2.2 Personalqualifikation
Alle Arbeitsschritte an der Beckhoff Soft- und Hardware dürfen nur vom Fachpersonal mit Kenntnissen in der
Steuerungs- und Automatisierungstechnik durchgeführt werden. Das Fachpersonal muss über Kenntnisse in
der Administration des eingesetzten Industrie-PCs und des jeweils eingesetzten Netzwerks verfügen.
Alle Eingriffe müssen mit Kenntnissen in der Steuerungs-Programmierung durchgeführt werden und das
Fachpersonal muss die aktuellen Normen und Richtlinien für das Automatisierungsumfeld kennen.
CX20x38 Version: 1.0
Page 9

Zu Ihrer Sicherheit
2.3 Sicherheitshinweise
Folgende Sicherheitshinweise müssen während der Montage, der Arbeit mit Netzwerken und der Arbeit mit
Software beachtet werden.
Montage
• Arbeiten Sie nicht an Geräten unter Spannung. Schalten Sie immer die Spannungsversorgung für das
Gerät ab bevor Sie es montieren, Störungen beheben oder Wartungsarbeiten durchführen. Sichern Sie
das Gerät gegen ein unbeabsichtigtes Einschalten ab.
• Beachten Sie die Unfallverhütungsvorschriften, die für Ihre Maschine zutreffend sind (z.B. die BGV A 3,
Elektrische Anlagen und Betriebsmittel).
• Achten Sie auf einen normgerechten Anschluss und vermeiden Sie Gefahren für das Personal.
Verlegen Sie die Daten- und Versorgungsleitungen normgerecht und achten Sie auf die korrekte
Anschlussbelegung.
• Beachten Sie die für Ihre Anwendung zutreffenden EMV-Richtlinien.
• Vermeiden Sie die Verpolung der Daten- und Versorgungsleitungen, da dies zu Schäden an den
Geräten führen kann.
• In den Geräten sind elektronische Bauteile integriert, die Sie durch elektrostatische Entladung bei
Berührung zerstören können. Beachten Sie die Sicherheitsmaßnahmen gegen elektrostatische
Entladung entsprechend DIN EN 61340-5-1/-3.
Arbeiten mit Netzwerken
• Beschränken Sie den Zugriff zu sämtlichen Geräten auf einen autorisierten Personenkreis.
• Ändern Sie die standardmäßig eingestellten Passwörter und verringern so das Risiko, dass Unbefugte
Zugriff erhalten. Ändern Sie regelmäßig die verwendeten Passwörter.
• Schützen Sie die Geräte mit einer Firewall.
• Wenden Sie die Vorgaben zur IT-Sicherheit nach der IEC 62443 an, um den Zugriff und die Kontrolle
auf Geräte und Netzwerke einzuschränken.
Arbeiten mit der Software
• Verwenden Sie eine aktuelle Sicherheitssoftware. Die sichere Funktion des PCs kann durch
Schadsoftware wie Viren oder Trojaner gefährdet werden.
• Die Empfindlichkeit eines PCs gegenüber Schadsoftware steigt mit der Anzahl der installierten bzw.
aktiven Software.
• Deinstallieren oder deaktivieren Sie nicht benötigte Software.
Weitere Informationen zum sicheren Umgang mit Netzwerken und Software finden Sie im BeckhoffInformation System:
http://infosys.beckhoff.com
Dokumentationstitel
IPC Security Guideline
CX20x3 9Version: 1.0
Page 10
Transport und Lagerung
3 Transport und Lagerung
Transport
HINWEIS
Kurzschluss durch Feuchtigkeit
Feuchtigkeit kann sich bei Transporten in kalter Witterung oder bei extremen Temperaturunterschieden bilden.
Achten Sie darauf, dass sich keine Feuchtigkeit im Embedded-PC niederschlägt (Betauung) und gleichen
Sie ihn langsam der Raumtemperatur an. Schalten Sie den Embedded-PC bei Betauung erst nach einer
Wartezeit von mindestens 12 Stunden ein.
Trotz des robusten Aufbaus sind die eingebauten Komponenten empfindlich gegen starke Erschütterungen
und Stöße. Schützen Sie den Embedded-PC bei Transporten vor:
• großer mechanischer Belastung und
• benutzen Sie für den Versand die Originalverpackung.
Tab.1: Abmessungen und Gewichte der einzelnen Module.
CX2033 CX2043
Abmessungen (B x H x T) 144 mm x 99 mm x 91 mm
Gewicht ca. 1165 g ca. 1230 g
Lagerung
• Bei Lagertemperaturen oberhalb von 60°C entnehmen Sie die Batterie aus dem Embedded-PC.
Lagern Sie die Batterie getrennt vom Embedded-PC in einer trockenen Umgebung bei einer
Temperatur im Bereich von 0°C bis 30°C.
Das voreingestellte Datum und die Uhrzeit gehen verloren, wenn Sie die Batterie entnehmen.
• Lagern Sie den Embedded-PC in der Originalverpackung.
CX20x310 Version: 1.0
Page 11
Produktübersicht
4 Produktübersicht
Die CX2000 Produktfamilie besteht aus einzelnen Modulen, die zu einem individuellen Embedded-PC,
zusammengesteckt werden können.
Die CX2000 Produktfamilie besteht aus,
• CPU-Grundmodulen,
• CX2100-Netzteilen,
• System- Feldbus- und Erweiterungsmodulen.
CPU-Grundmodul
Das CPU-Grundmodul ist ein vollwertiger PC und ist zusammen mit einem CX2100-Netzteil als
kleinstmögliche Konfiguration einsatzbereit. Die Grundausstattung des Embedded PCs CX20x3 beinhaltet:
• einen CFast-Karteneinschub,
• zwei unabhängige GBit-Ethernet-Schnittstellen,
• vier USB-3.0-Schnittstellen,
• sowie eine DVI-D-Schnittstelle.
Das CPU-Grundmodul verfügt intern über 128 kB NOVRAM als persistenten Datenspeicher und kann als
Alternative zu einem Netzteil mit kapazitiver USV oder externem Akkupack genutzt werden. Bei einem
Spannungsausfall werden wichtige Daten ins NOVRAM gespeichert und stehen nach einem Neustart wieder
zur Verfügung. Als Betriebssystem kann Microsoft Windows 10 IoT Enterprise 2019 LTSC oder TwinCAT/
BSD eingesetzt werden.
Erweiterungsmodule
Das CPU-Grundmodul kann bei Bedarf erweitert und auf diese Weise mit zusätzlichen Schnittstellen oder
Speichermedien ausgestattet werden. An das CPU-Grundmodul können links bis zu vier Module des Typs
CX2500-xxxx angesteckt werden. Die Ansteckreihenfolge spielt dabei keine Rolle.
Rechts können Module des Typs CX2550 (z. B. Festplatten/SSD-Module) und ein Netzteil vom Typ CX2100xxxx angesteckt werden. Beim Embedded-PC CX20x3 sind rechtsseitig maximal zwei Lanes verfügbar.
Somit können rechtseitig ein Festplattenmodul (CFast, SSD) und ein Erweiterungsmodul angesteckt werden.
Eine andere Kombination aus zwei Erweiterungsmodulen ist auch möglich, dann ist aber kein CFast- oder
Festplattenmodul mehr ansteckbar.
Tab.2: Verfügbare Erweiterungsmodule für den CX20x3.
Modul Beschreibung
CX2500-0020 Audio-Schnittstelle, 3 x 3,5-mm-Klinkenstecker, Line-In, Mic-In, Line-Out
CX2500-0030 Serielle Schnittstelle RS232, 2 x D-Sub-Stecker, 9-polig
CX2500-0031 Serielle Schnittstelle RS422/RS485, 2 x D-Sub-Buchse, 9-polig
CX2500-0060 Ethernetmodul, 2 x Ethernet, 10/100/1000 MBit/s
CX2500-0061 Power-over-Ethernet-Modul (PoE), 1 x RJ45, 10/100/1000 MBit/s
CX2500-0070 USB-3.0-Modul, 4 x USB 3.0, Typ A
CX2500-M310 Feldbusmaster-Modul PROFIBUS, 1 x D-Sub-Buchse, 9-polig
CX2500-B310 Feldbusslave-Modul PROFIBUS, 1 x D-Sub-Buchse, 9-polig
CX2500-M510 Feldbusmaster-Modul CANopen, 1 x D-Sub-Stecker, 9-polig
CX2500-B510 Feldbusslave-Modul CANopen, 1 x D-Sub-Stecker, 9-polig
CX2550-0010 Modul für CFast-Einschub
CX2550-0020 Modul für 2½-Zoll-HDD/-SSD
CX2550-0179 1 x USB Extended 1.1
CX2550-0279 1 x USB Extended 2.0
CX20x3 11Version: 1.0
Page 12
Produktübersicht
Optionsschnittstelle
Das CPU-Grundmodul kann ab Werk mit einer Optionsschnittstelle bestellt werden. Die Optionsschnittstelle
kann nicht nachgerüstet werden.
Tab.3: Verfügbare Optionsschnittstellen für den CX20x3.
CX20x3-xxxx Optionsschnittstellen
CX20x3-N010 DVI-D, zusätzliche DVI-D-Buchse für Clone und Extended Display Mode.
CX20x3-N011 DisplayPort, zusätzlicher DisplayPort für Clone und Extended Display Mode
CX20x3-N030 RS232, D-Sub-Stecker, 9-polig.
CX20x3-N031 RS422/RS485, D-Sub-Buchse, 9-polig.
CX20x3-M112 2 x EtherCAT-Master, RJ45.
CX20x3-B110 EtherCAT-Slave, EtherCAT IN und OUT (2 x RJ45).
CX20x3-M310 PROFIBUS-Master, D-Sub-Buchse, 9-polig.
CX20x3-B310 PROFIBUS-Slave, D-Sub-Buchse, 9-polig.
CX20x3-M510 CANopen-Master, D-Sub-Stecker, 9-polig.
CX20x3-B510 CANopen-Slave, D-Sub-Stecker, 9-polig.
CX20x3-M930 PROFINET RT, Controller, Ethernet (2 x RJ-45).
CX20x3-B930 PROFINET RT, Device, Ethernet (2 x RJ-45-Switch).
CX2100-Netzteile
Die CX2100-Netzteile versorgen das CPU-Grundmodul und alle weiteren Module mit Spannung. An die
Netzteile können auf der rechten Seite Busklemmen (K-Bus) oder EtherCAT-Klemmen (E-Bus) angereiht
werden. Die Netzteile stehen in vier verschiedenen Ausführungen zur Verfügung:
• CX2100-0014: E-Bus-/K-Bus-Netzteil mit automatischer Umschaltung und passiver Ablüftung.
• CX2100-0914: E-Bus-/K-Bus-Netzteil mit automatischer Umschaltung und integrierter Ladeelektronik
für einen externen Akkupack.
• CX2100-0024: E-Bus-/K-Bus-Netzteil mit automatischer Umschaltung und aktiver Kühlung. Das
Netzteil ist galvanisch getrennt und UPS-OCT-fähig.
Alle Netzteilvarianten verfügen über ein beleuchtetes, reflexarmes LC-Display mit zwei Zeilen zu je 16
Zeichen für die Anzeige von Statusmeldungen. Mit Hilfe von Anwenderprogrammen kann das Display auch
für die Anzeige applikationsspezifischer Texte genutzt werden.
Software
In Kombination mit der Automatisierungssoftware TwinCAT wird der Embedded-PC CX20x3 zu einer
leistungsfähigen IEC 61131-3 SPS mit bis zu vier Anwender-Tasks. In Verbindung mit EtherCAT und
TwinCAT können sehr schnelle Steuerungsvorgänge im Mikrosekundenbereich (XFC eXtreme Fast Control
Technology) durchgeführt werden.
Zusätzlich können auch Motion Control Aufgaben mit theoretisch 256 Achsen ausgeführt werden. Je nach
erforderlicher Abtastzeit ist die Ansteuerung von mehreren Servoachsen möglich, wobei selbst
Sonderfunktionen wie Fliegende Säge, Elektronisches Getriebe und Kurvenscheibe realisierbar sind.
Neben den in Echtzeit ausgeführten Steuerungsaufgaben sorgt die Verwaltung im TwinCAT-Echtzeitkern
dafür, dass genügend Zeit für die Benutzeroberfläche (HMI) bleibt. Durch die hohe Grafikleistung des in die
CPU integrierten Grafikkerns können auch anspruchsvolle Visualisierungen mit modernen
Benutzeroberflächen realisiert werden.
CX20x312 Version: 1.0
Page 13
4.1 Aufbau
Produktübersicht
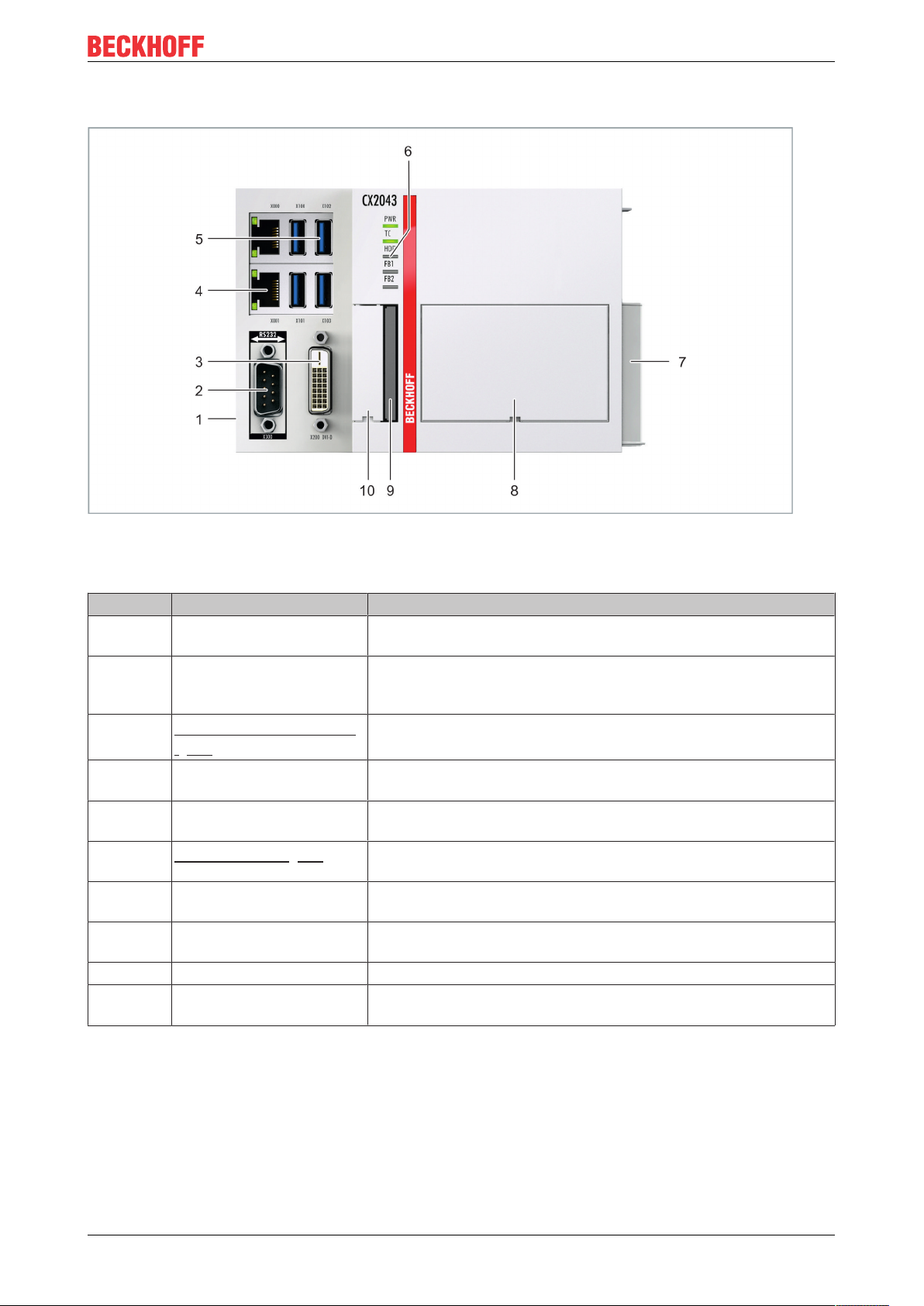
Abb.1: Beispielaufbau eines Embedded-PCs CX2043 mit aktiver Kühlung.
Tab.4: Legende zum Aufbau des CPU-Grundmoduls
Nr. Komponente Beschreibung
1 Hochpoliger Anschluss
(links)
2 Optionsschnittstelle (X300). Platz für Schnittstellen wie z.B. RS232, EtherCAT, CANopen oder
3
4 Ethernet-Schnittstellen
5 USB-Schnittstellen (X100,
6
7 Hochpoliger Anschluss
8 Lüfterkassette (unter der
9 CFast-Kartenslot. Steckplatz für industrietaugliche CFast-Karten.
10 Batteriefach (unter der
DVI-D-Schnittstelle (X200).
[}19]
RJ45 (X000, X001).
X101, X102, X103).
Diagnose-LEDs. [}60]
(rechts)
Frontklappe).
Frontklappe).
Erweiterung durch Systemmodule und Feldbusmodule des Typs
CX2500.
andere. Die Optionsschnittstelle muss ab Werk vorbestellt werden
und kann nicht nachträglich nachgerüstet werden.
Schnittstelle für einen Monitor oder Panel.
Für den Anschluss an lokale Netzwerke, Internet oder EtherCAT.
Schnittstellen für Peripheriegeräte wie Maus, Tastatur oder USBSpeicher.
Diagnose-LEDs für Spannungsversorgung, TwinCAT, CFast-Karte
und für die Optionsschnittstelle.
Anschluss für Erweiterungsmodule des Typs CX2550 und für
Netzteile des Typs CX2100.
Die Lüfterkassette ist beim CX2043 standardmäßig vorhanden. Der
CX2033 kann ab Werk mit aktiver Kühlung bestellt werden.
Spannungsversorgung für die batteriegepufferte Uhr für Zeit und
Datum.
CX20x3 13Version: 1.0
Page 14
Produktübersicht
4.2 Typenschild
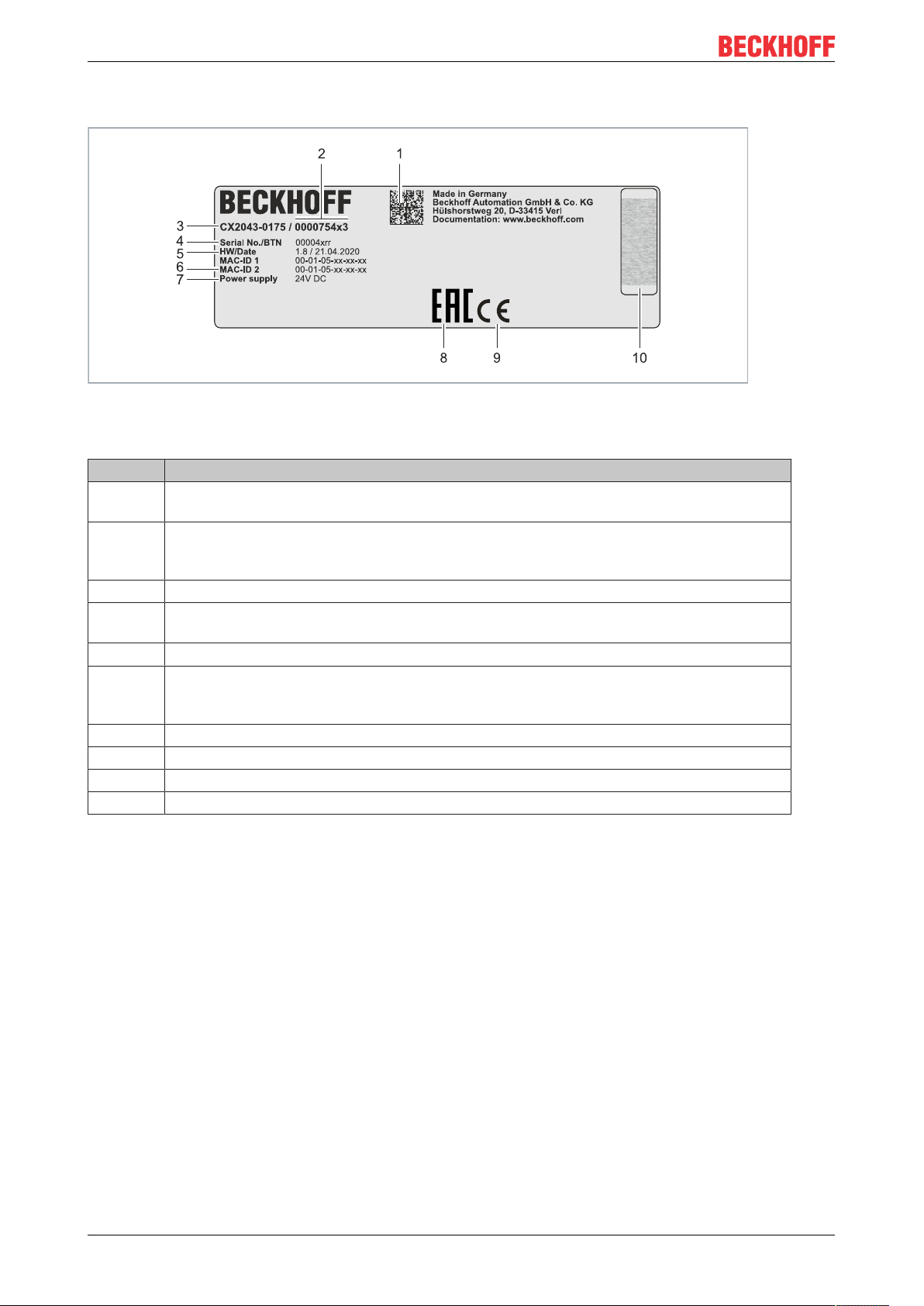
Abb.2: Typenschild Beispielansicht.
Tab.5: Informationen auf dem Typenschild.
Nr. Beschreibung
1 Maschinenlesbare Information in Form eines Data-Matrix-Codes (DMC, Code-Schema
ECC200) der von Ihnen zur besseren Identifikation und Verwaltung genutzt werden kann.
2 Variantennummer zur Identifikation der Embedded-PC Konfiguration. Mit dieser Nummer
kann die exakte Konfiguration aus Embedded-PC, Betriebssystem, Optionen und
TwinCAT nachbestellt werden.
3 Produktbezeichnung zu Identifikation des Embedded-PCs
4 Seriennummer/ Beckhoff Traceability Number (BTN) zur eindeutigen Identifizierung des
Produkts.
5 Hardwarestand und Herstelldatum.
6 MAC-Adressen der eingebauten Ethernet-Schnittstellen. Der Hostname wird aus CX- und
den letzten drei Byte der MAC-Adresse gebildet. Bespiel: Aus der MAC-Adresse:
00-01-05-aa-bb-cc ergibt sich der Hostname CX-aabbcc.
7 Spannungsversorgung 24VDC
8 EAC-Zulassung
9 CE-Konformität
10 Lizenzaufkleber für Betriebssystem (optional).
CX20x314 Version: 1.0
Page 15
Produktübersicht
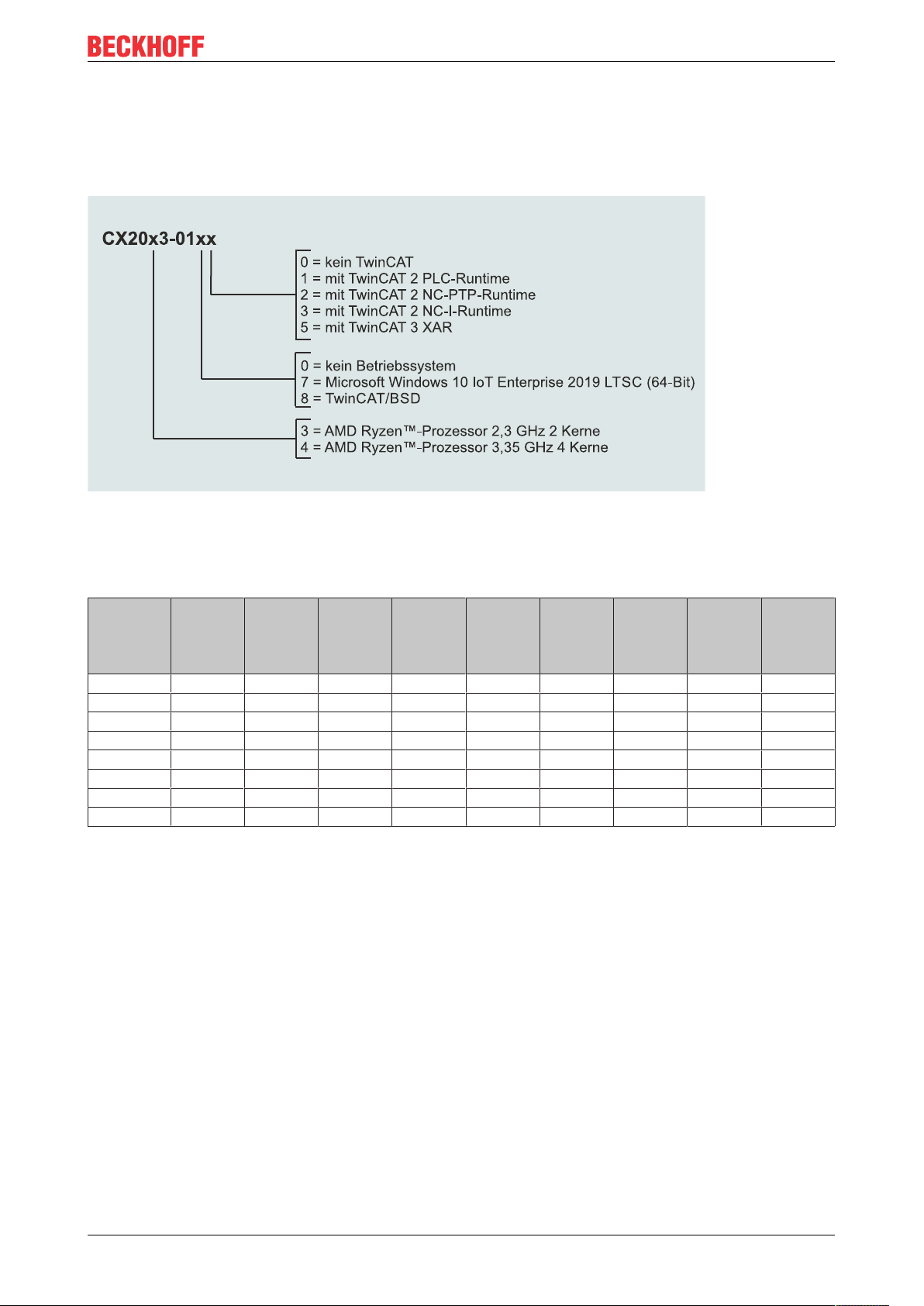
4.3 Ausführungen
Das CPU-Grundmodul kann mit unterschiedlichen Hardware- und Softwareoptionen bestellt werden.
Benutzen Sie diese Übersicht und die Angaben auf dem Typenschild, um festzustellen mit welcher
Hardware, welchem Betriebssysteme und welcher TwinCAT-Version das CPU-Grundmodul ausgestattet ist.
Abb.3: Bezeichnungssystematik des CPU-Grundmoduls.
Das CPU-Grundmodul CX2033 und CX2043 ist mit folgenden Softwareoptionen erhältlich:
Tab.6: Bestellangaben CX20x3.
Modul kein
Betriebssystem
CX20x3-0100 X - - - X - - - CX20x3-0160 - X - - X - - - CX20x3-0161 - X - - - X - - CX20x3-0162 - X - - - - X - CX20x3-0163 - X - - - - - X CX20x3-0170 - - X - X - - - CX20x3-0175 - - X - - - - - X
CX20x3-0185 - - - X - - - - X
Windows
10 IoT Enterprise
2016 LTSC
32 Bit
Windows
10 IoT Enterprise
2016 LTSC
64 Bit
TwinCAT/
BSD
kein
TwinCAT
TwinCAT 2
PLCRuntime
TwinCAT 2
NC-PTPRuntime
TwinCAT 2
NC-IRuntime
TwinCAT 3
XAR
Ein Embedded-PC CX20x3 mit TwinCAT/BSD setzt eine CFast-Karte mit einer Kapazität von mindestens
20GB voraus. Für Microsoft Windows 10 IoT Enterprise ist eine CFast-Karte mit einer Kapazität von
mindestens 40GB erforderlich.
CX20x3 15Version: 1.0
Page 16
Produktübersicht
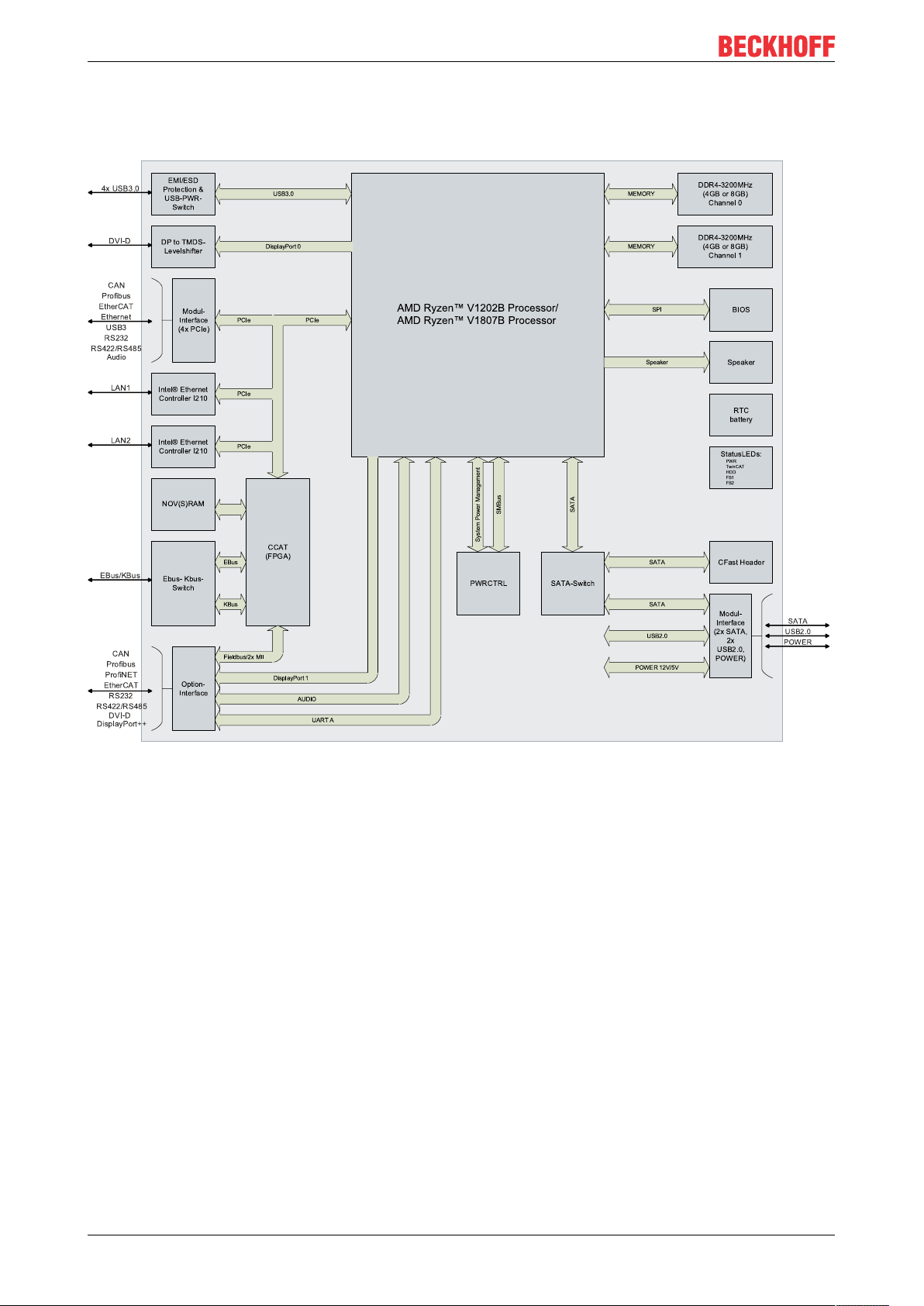
4.4 Architekturübersicht
Die Embedded-PCs der CX20x3 Familie verfügen alle über die gleiche Architektur.
Die Embedded-PCs CX20x3 basieren auf der AMD Zen-Mikroarchitektur. Folgende CPUs werden
eingesetzt:
• AMD Ryzen™ V1202B (Dualcore),
• AMD Ryzen™ V1807B (Quadcore),
Zusätzlich zu dem Rechenwerk sind in der CPU der Speichercontroller und der Grafikcontroller
untergebracht. Im Dualcore-Prozessor wird die AMD Radeon™ Vega 3 Graphics und im QuadcoreProzessor die AMD Radeon™ Vega 11 Graphics eingesetzt. Der Speicher ist direkt an den
Speichercontroller angeschlossen. Es gibt die Embedded-PCs in zwei Speicherausbaustufen: 8GB und
16GB DDR4 RAM. Der Speicherausbau muss ab Werk bestellt werden.
Die CPU stellt alle benötigten Schnittstellen bereit:
• je 1PCIe Lane für den Intel® i210 Gigabit Ethernet Controller (zweimal vorhanden)
• 4x USB 3.0
• DVI-D-Schnittstelle (zweite Schnittstelle optional CX20x3-N010).
• 1 PCIe zum FPGA für K-/E-Bus und NOVRAM.
• 4 PCIe Lanes über den hochpoligen Anschluss (links).
• 2x SATA intern über den hochpoligen Anschluss (rechts).
• 2x USB intern über den hochpoligen Anschluss (rechts).
Bei den Schnittstellen (USB, DVI, und LAN) handelt es sich um Standardschnittstellen. An diesen
Schnittstellen können Geräte angeschlossen und betrieben werden, die den entsprechenden Standard
erfüllen.
CX20x316 Version: 1.0
Page 17
Schnittstellenbeschreibung
5 Schnittstellenbeschreibung
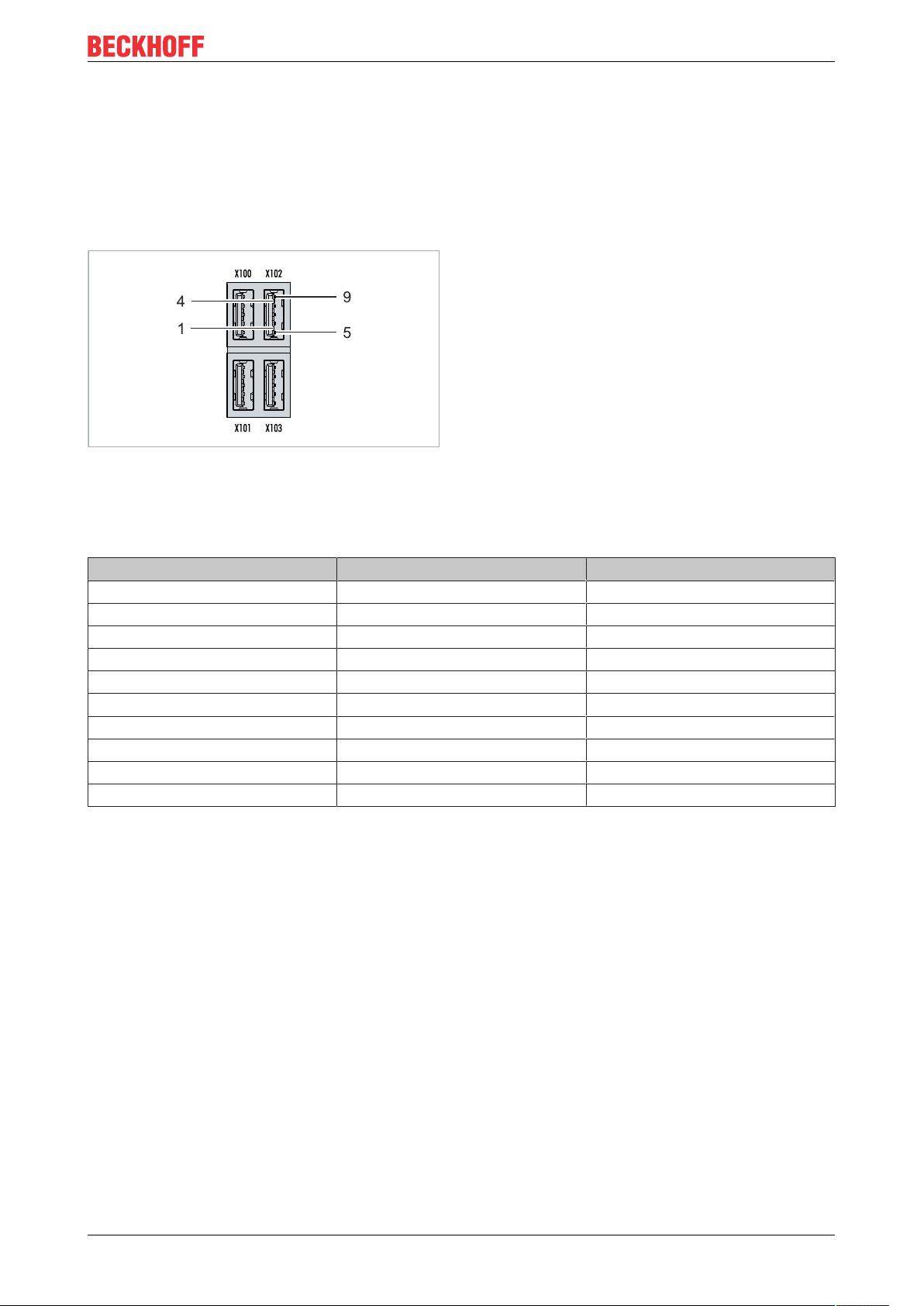
5.1 USB 3.1 (X100, X101, X102, X103)
Der Embedded-PC verfügt über vier unabhängige USB-Schnittstellen. Hier können Tastaturen, Mäuse,
Touchscreens und andere Eingabegeräte sowie Datenspeicher angeschlossen werden.
Abb.4: USB-Schnittstellen X100, X101, X102, X103.
Die USB-Schnittstellen sind vom Typ A und entsprechen der USB 3.1 Gen. 1 Spezifikation.
Tab.7: USB-Schnittstellen (X100, X101, X102, X103), PIN-Belegung.
Pin Belegung Typische Zuordnung
1 VBUS Red
2 D- White
3 D+ Green
4 GND Black
5 StdA_SSRX− Blue
6 StdA_SSRX+ Yellow
7 GND_DRAIN N/A
8 StdA_SSTX− Purple
9 StdA_SSTX+ Orange
Shell Shield Drain Wire
Achten Sie auf die Leistungsaufnahme der angeschlossenen Geräte. Es können pro Schnittstelle nicht mehr
als 900mA und 4,5W Leistung abgegeben werden. Die USB-Schnittstellen unterstützen Datenraten von bis
zu 5Gbit/s.
CX20x3 17Version: 1.0
Page 18
Schnittstellenbeschreibung
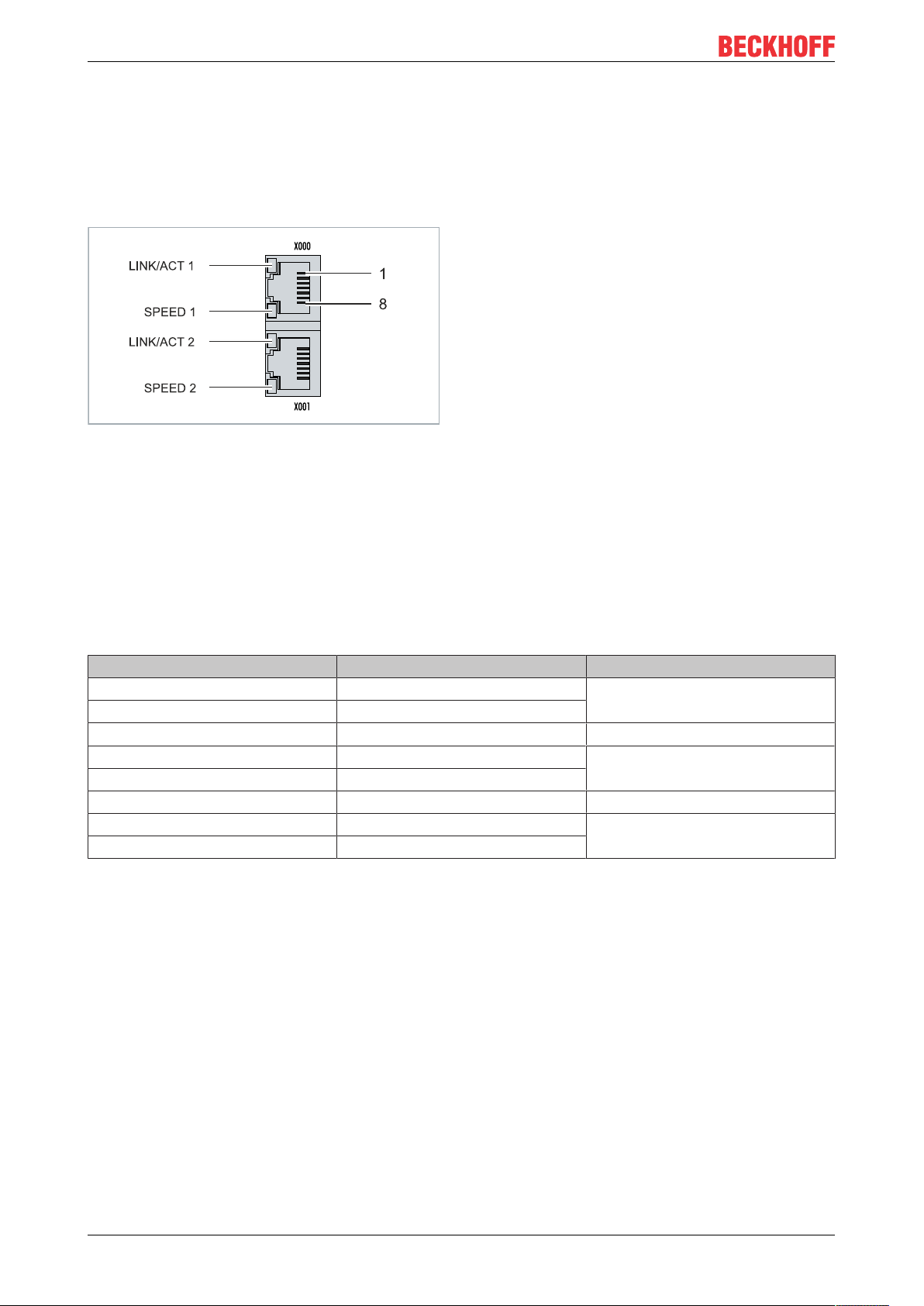
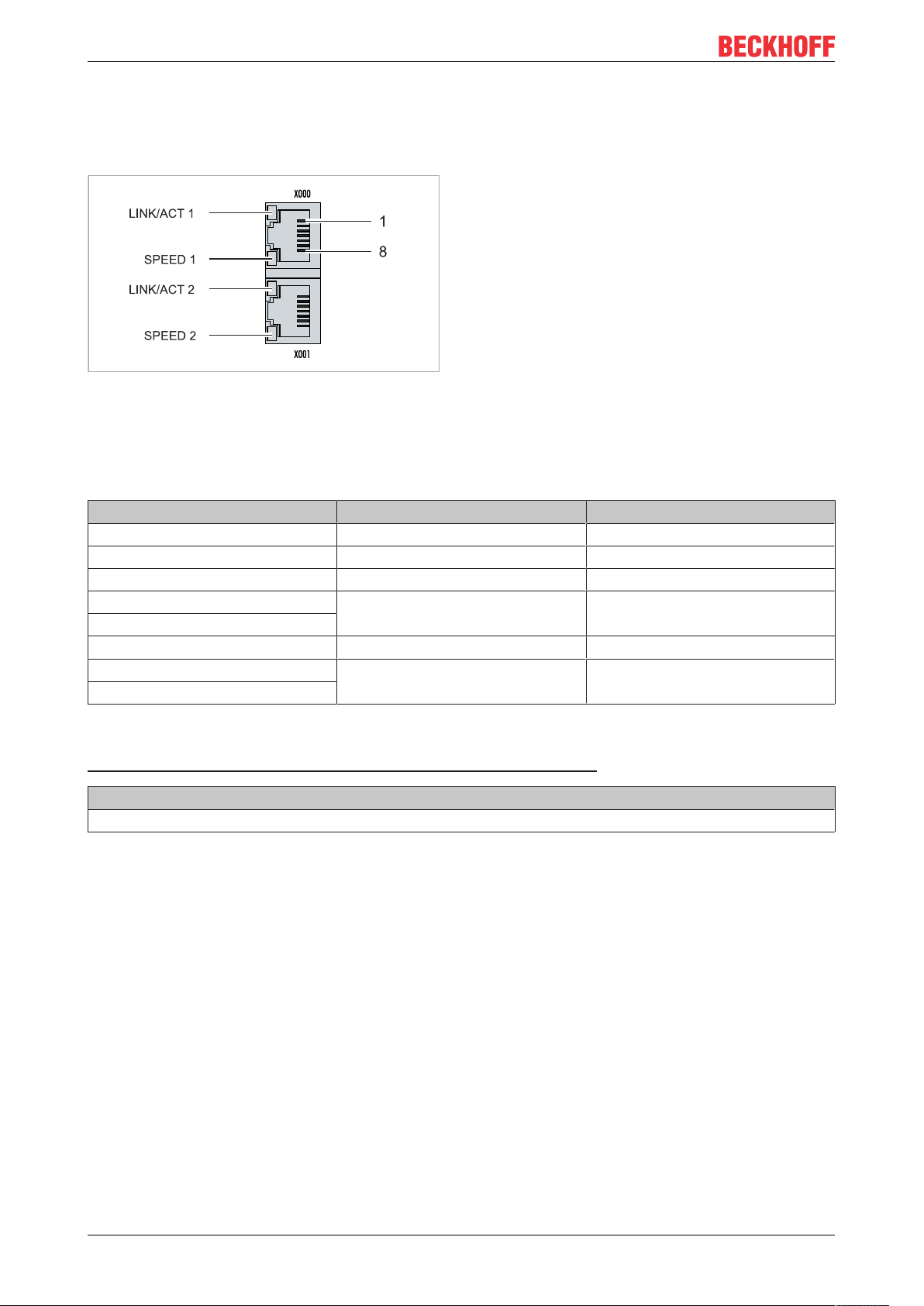
5.2 Ethernet RJ45 (X000, X001)
Beide Ethernet-Schnittstellen sind voneinander unabhängig und es ist kein Switch integriert. Die
unabhängigen Ethernet-Schnittstellen lassen sich unterschiedlich konfigurieren. Im Auslieferungszustand
sind die Ethernet-Schnittstellen (X000, X001) für EtherCAT-Kommunikation konfiguriert.
Beachten Sie, dass für eine Linientopologie ein zusätzlicher Switch erforderlich ist.
Abb.5: Ethernet-Schnittstellen X000, X001.
Beide Ethernet-Schnittstellen erreichen Geschwindigkeiten von 10 / 100 / 1000 MBit. Die LEDs an der linken
Seite der Schnittstellen zeigen den Status der Verbindung an. Die obere LED (LINK/ACT) zeigt an, ob die
Schnittstelle mit einem Netzwerk verbunden ist. Ist dies der Fall leuchtet die LED grün auf. Wenn Daten auf
der Schnittstelle übertragen werden, blinkt die LED.
Die untere LED (SPEED) zeigt die Geschwindigkeit der Verbindung an. Bei einer Geschwindigkeit von 10
Mbit leuchtet die LED nicht. Ist die Geschwindigkeit 100 Mbit, leuchtet die LED grün. Ist die Geschwindigkeit
1000 Mbit (Gigabit) leuchtet die LED rot.
Tab.8: Ethernet-Schnittstelle X000 und X001, PIN-Belegung.
PIN Signal Beschreibung
1 T2 + Paar 2
2 T2 3 T3 + Paar 3
4 T1 + Paar 1
5 T1 6 T3 - Paar 3
7 T4 + Paar 4
8 T4 -
CX20x318 Version: 1.0
Page 19
Schnittstellenbeschreibung
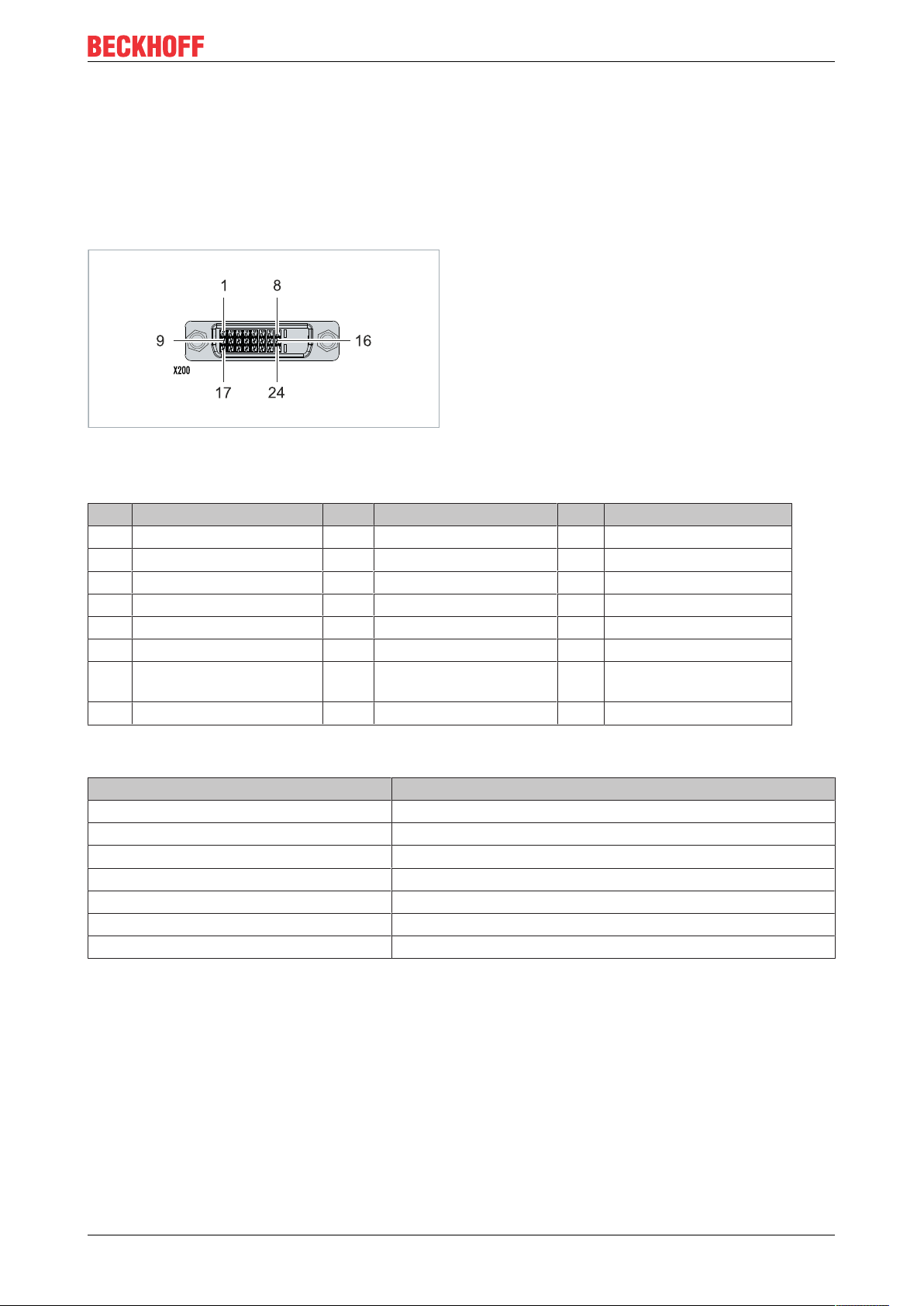
5.3 DVI-D (X200)
Die DVI-D-Schnittstelle (X200) überträgt digitale Daten und eignet sich für den Anschluss an digitale
Displays. Wenn die Optionsschnittstelle N010 (DVI-D-Schnittstelle) eingesetzt wird, kann die erste DVI-I
Schnittstelle entweder im VGA- oder DVI-Modus betrieben werden. Die Auflösung am Bildschirm oder
Beckhoff Control Panel ist abhängig von der Entfernung zum Anzeigegerät. Die maximale Entfernung
beträgt 5 m. Beckhoff bietet verschiedene Panels mit integrierter „DVI-Verlängerung" an. Damit ist eine
Kabellänge bis zu 50 Metern möglich.
Abb.6: DVI-D-Schnittstelle X200.
Tab.9: DVI-D-Schnittstelle X200, PIN-Belegung.
Pin Belegung Pin Belegung Pin Belegung
1 TMDS Data 2- 9 TMDS Data 1- 17 TMDS Data 02 TMDS Data 2+ 10 TMDS Data 1+ 18 TMDS Data 0+
3 TMDS Data 2/4 Shield 11 TMDS Data 1/3 Shield 19 TMDS Data 0/5 Shield
4 not connected 12 not connected 20 not connected
5 not connected 13 not connected 21 not connected
6 DDC Clock 14 + 5V Power 22 TMDS Clock Shield
7 DDC Data 15 Ground ( +5V, Analog H/
V Sync)
8 Analog Vertical Sync 16 Hot Plug Detect 24 TMDA Clock -
Tab.10: DVI-D-Schnittstelle X200, Auflösung am Bildschirm.
Auflösung in Pixel Entfernung der Schnittstelle vom Monitor
1920 x 1200 5 m
1920 x 1080 5 m
1600 x 1200 5 m
1280 x 1024 5 m
1024 x 768 5 m
800 x 600 5 m
640 x 480 5 m
23 TMDS Clock +
Der Embedded-PC unterstützt nach dem DVI-Standard auch höhere Auflösungen. Auf dem Embedded-PC
kann eine maximale Auflösung von 2560 x 1440 Pixeln eingestellt werden. Ob diese Auflösung erreicht wird,
ist abhängig vom eingesetzten Monitor, der Kabelqualität und der Kabellänge.
CX20x3 19Version: 1.0
Page 20
Schnittstellenbeschreibung
5.4 Optionale Schnittstellen
Eine Optionsschnittstelle ist eine zusätzliche Schnittstelle, die ab Werk mit vielfältigen Signalformen bestückt
werden kann und den Embedded-PC über die Grundausstattung hinaus um erweitert. Die
Optionsschnittstelle muss im Vorfeld bestellt werden und kann nicht nachträglich in das Gerät eingebaut
werden.
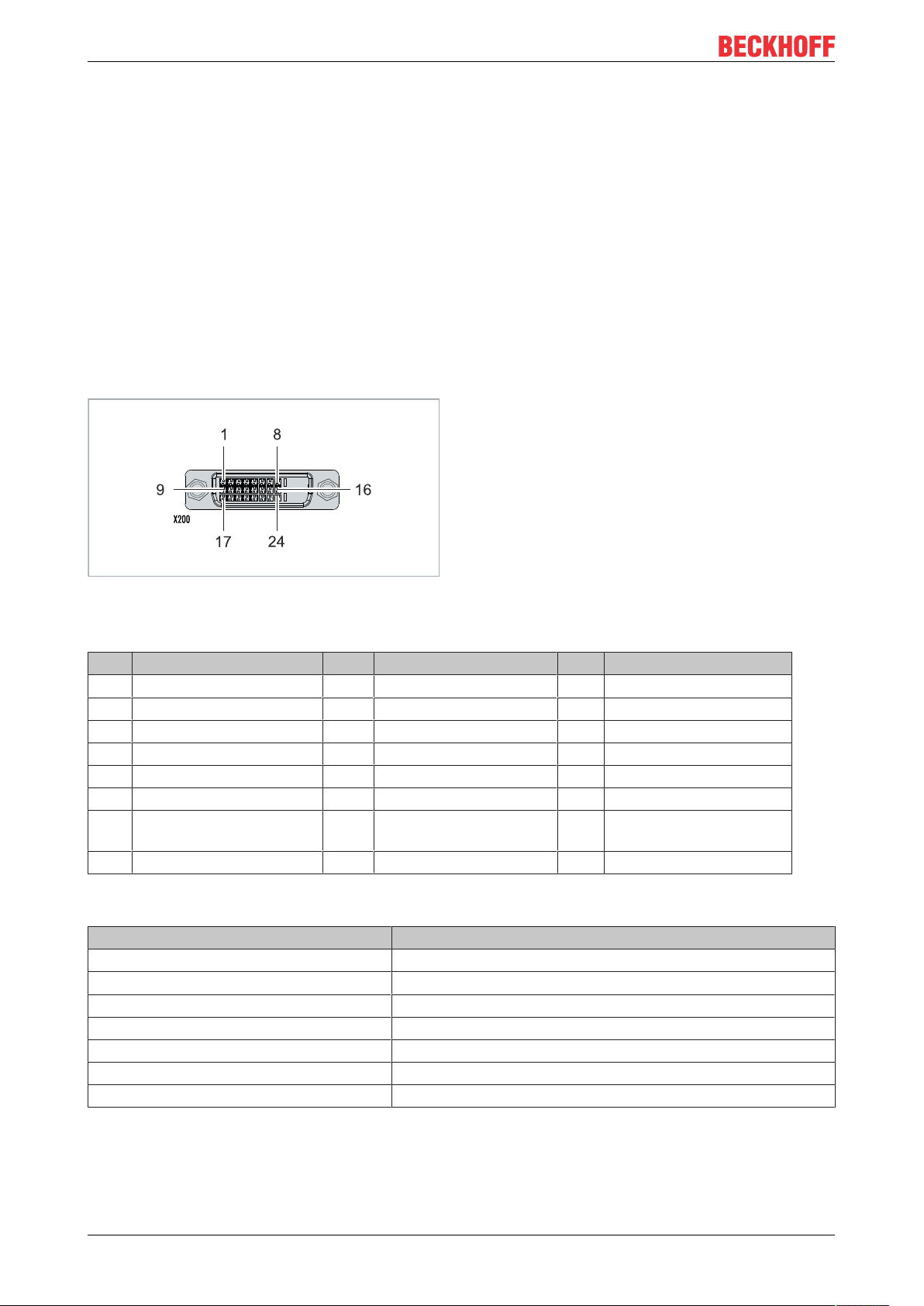
5.4.1 DVI-D (N010)
Die DVI-D-Schnittstelle (X300) überträgt digitale Daten und eignet sich für den Anschluss an digitale
Displays. Wenn die Optionsschnittstelle N010 (DVI-D-Schnittstelle) eingesetzt wird, kann die erste DVI-I
Schnittstelle entweder im VGA- oder DVI-Modus betrieben werden. Die Auflösung am Bildschirm oder
Beckhoff Control Panel ist abhängig von der Entfernung zum Anzeigegerät. Die maximale Entfernung
beträgt 5 m. Beckhoff bietet verschiedene Panels mit integrierter „DVI-Verlängerung" an. Damit ist eine
Kabellänge bis zu 50 Metern möglich.
Abb.7: DVI-D-Schnittstelle X300.
Tab.11: DVI-D-Schnittstelle X300, PIN-Belegung.
Pin Belegung Pin Belegung Pin Belegung
1 TMDS Data 2- 9 TMDS Data 1- 17 TMDS Data 02 TMDS Data 2+ 10 TMDS Data 1+ 18 TMDS Data 0+
3 TMDS Data 2/4 Shield 11 TMDS Data 1/3 Shield 19 TMDS Data 0/5 Shield
4 not connected 12 not connected 20 not connected
5 not connected 13 not connected 21 not connected
6 DDC Clock 14 + 5V Power 22 TMDS Clock Shield
7 DDC Data 15 Ground ( +5V, Analog H/
V Sync)
8 Analog Vertical Sync 16 Hot Plug Detect 24 TMDA Clock -
Tab.12: DVI-D-Schnittstelle X300, Auflösung am Bildschirm.
Auflösung in Pixel Entfernung der Schnittstelle vom Monitor
1920 x 1200 5 m
1920 x 1080 5 m
1600 x 1200 5 m
1280 x 1024 5 m
1024 x 768 5 m
800 x 600 5 m
640 x 480 5 m
23 TMDS Clock +
Der Embedded-PC unterstützt nach dem DVI-Standard auch höhere Auflösungen. Auf dem Embedded-PC
kann eine maximale Auflösung von 2560 x 1440 Pixeln eingestellt werden. Ob diese Auflösung erreicht wird,
ist abhängig vom eingesetzten Monitor, der Kabelqualität und der Kabellänge.
CX20x320 Version: 1.0
Page 21
Schnittstellenbeschreibung
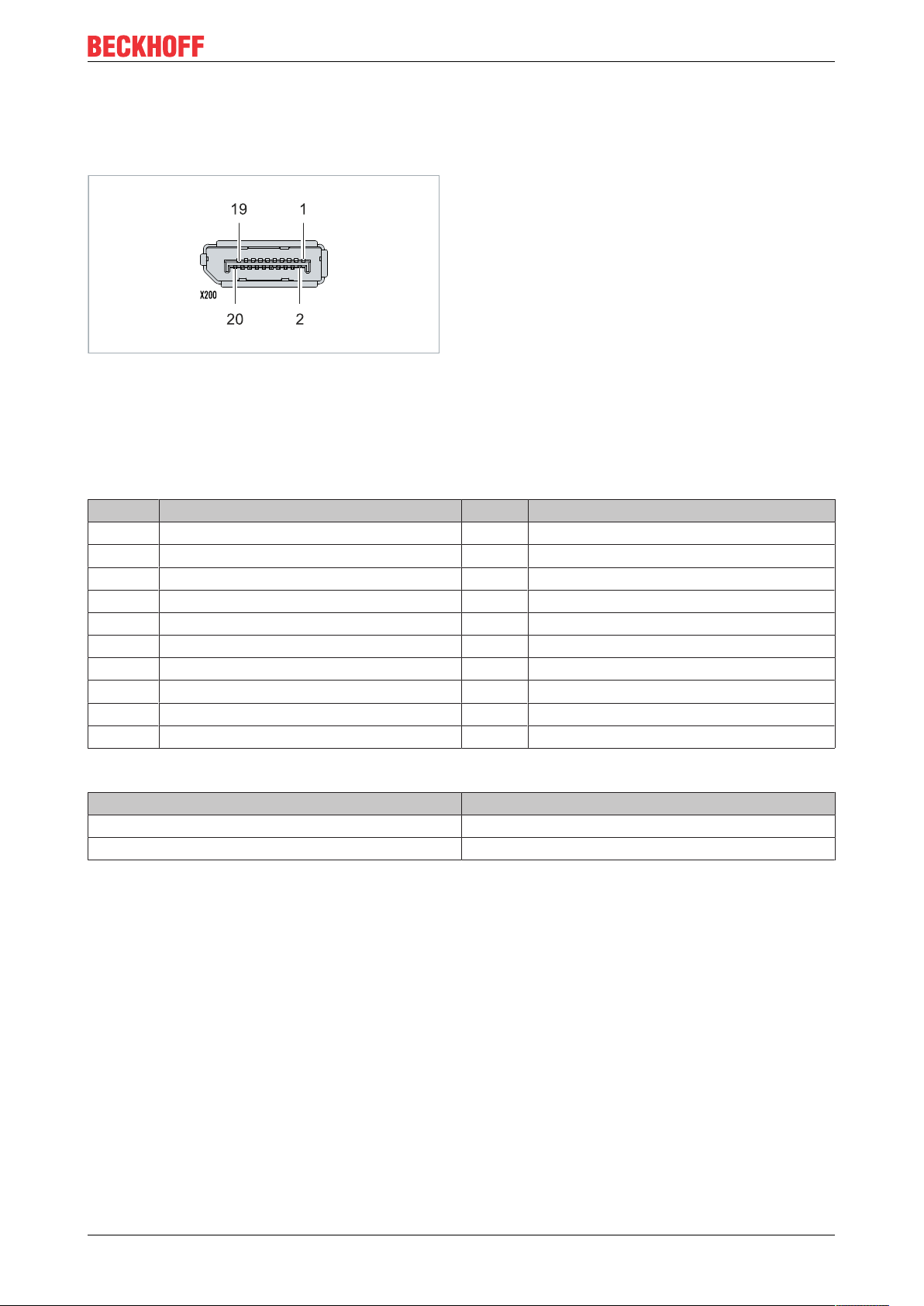
5.4.2 DisplayPort (N011)
Der DisplayPort überträgt gleichzeitig Bild-und Tonsignale und ist dafür geeignet Panels oder Monitore an
den Embedded-PC anzuschließen.
Abb.8: DisplayPort X300.
Auf dem Embedded-PC ist der DisplayPort in der Version 1.1a (DisplayPort++) verbaut. Dadurch können
Adapter von DisplayPort auf DVI-D oder von DisplayPort auf HDMI benutzt werden, um auch Monitore ohne
DisplayPort an den Embedded-PC anschließen zu können.
Tab.13: DisplayPort, PIN-Belegung.
Pin Belegung Pin Belegung
1 LVDS-Lane 0+ 2 Masse
3 LVDS-Lane 0- 4 LVDS-Lane 1+
5 Masse 6 LVDS-Lane 17 LVDS-Lane 2+ 8 Masse
9 LVDS-Lane 2- 10 LVDS-Lane 3+
11 Masse 12 LVDS-Lane 313 Config 1 14 Config 2
15 AUX-Channel+ 16 Masse
17 AUX-Channel- 18 Hot Plug-Detection
19 Stromversorgung: Masse 20 Stromversorgung: 3,3 V / 500 mA
Tab.14: DisplayPort X300, Auflösung am Bildschirm.
Schnittstelle Auflösung in Pixel
DisplayPort max. 2560x1600@60Hz
DisplayPort mit Adapter, DisplayPort auf DVI-D max. 1600x1200@60Hz
CX20x3 21Version: 1.0
Page 22
Schnittstellenbeschreibung
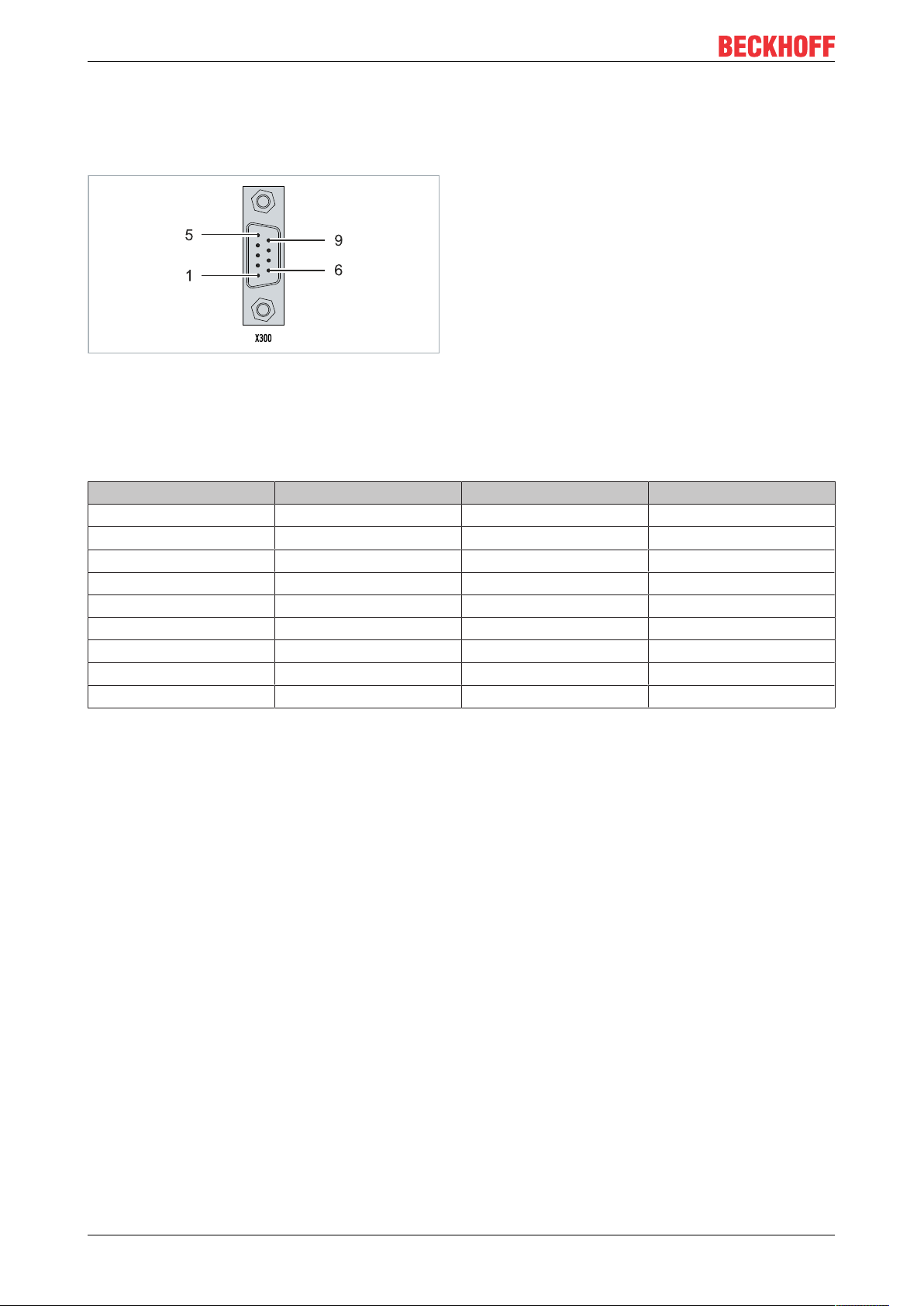
5.4.3 RS232 (N030)
Die Optionsschnittstelle N030 stellt eine RS232-Schnittstelle (X300) bereit. Die RS232-Schnittstelle ist auf
einem 9-poligen D-Sub-Stecker ausgeführt.
Abb.9: RS232-Schnittstelle X300.
Die maximale Baudrate auf beiden Kanälen beträgt 115 kBit. Die Einstellung der Schnittstellenparameter
erfolgt über das Betriebssystem oder kann aus dem SPS-Programm heraus gesteuert werden.
Tab.15: RS232-Schnittstelle X300, PIN-Belegung.
PIN Signal Typ Beschreibung
1 DCD Signal in Data Carrier Detected
2 RxD Signal in Receive Data
3 TxD Signal out Transmit Data
4 DTR Signal out Data Terminal Ready
5 GND Ground Ground
6 DSR Signal in Dataset Ready
7 RTS Signal out Request to Send
8 CTS Signal in Clear to Send
9 DCD Signal in Data Carrier Detected
CX20x322 Version: 1.0
Page 23
Schnittstellenbeschreibung
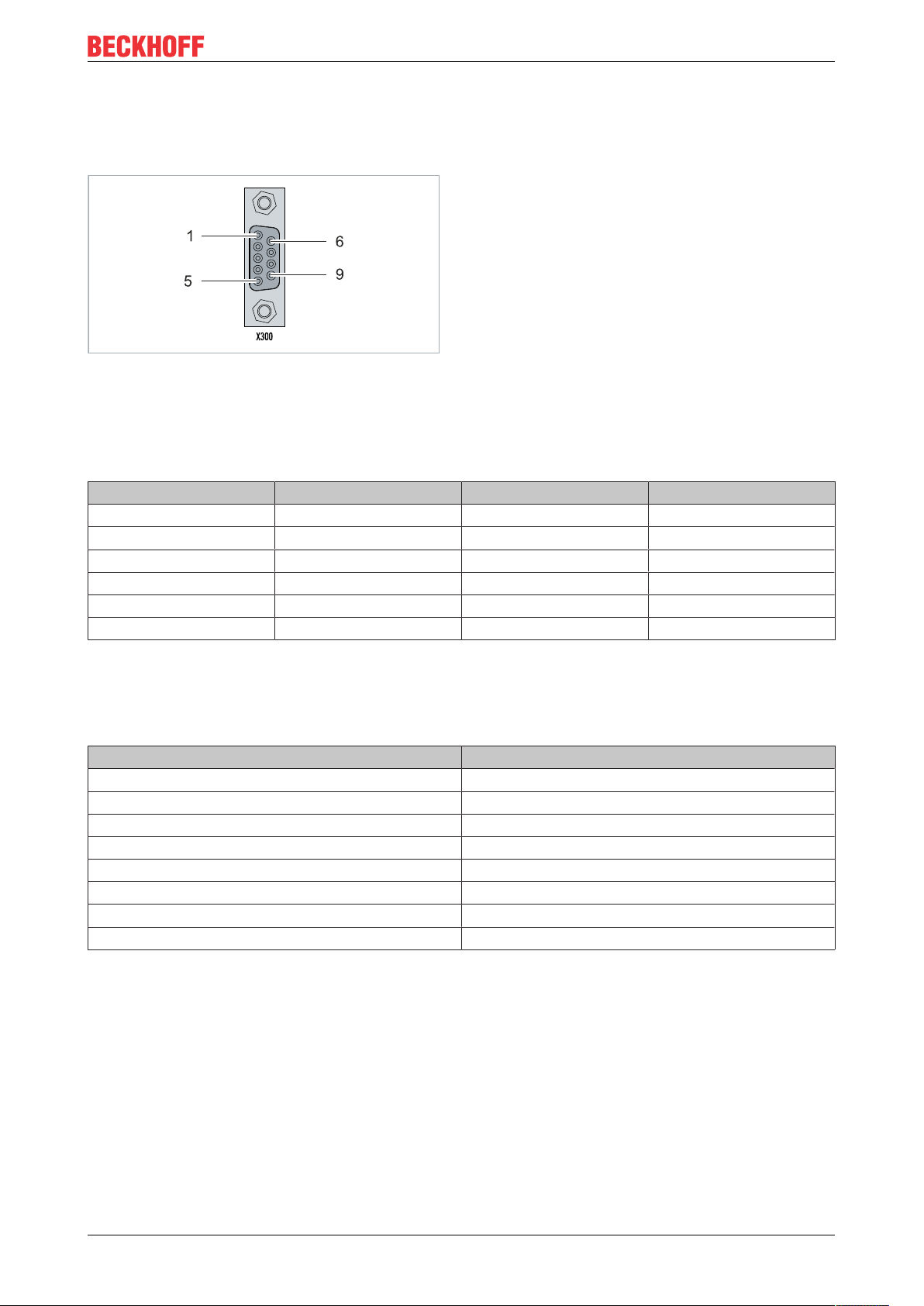
5.4.4 RS422/RS485 (N031)
Die Optionsschnittstelle N031 stellt eine RS422- bzw. RS 485-Schnittstelle (X300) bereit. Die Schnittstelle ist
auf einer 9-poligen D-Sub-Buchse ausgeführt.
Abb.10: RS485-Schnittstelle X300.
Die maximale Baudrate auf beiden Kanälen beträgt 115 kBit. Die Einstellung der Schnittstellenparameter
erfolgt über das Betriebssystem oder kann aus dem SPS-Programm heraus gesteuert werden.
Tab.16: RS422/485-Schnittstelle, PIN-Belegung.
PIN Signal Typ Beschreibung
2 TxD+ Data-Out + Transmit 422
3 RxD+ Data-In + Receive 422
5 GND Ground Ground
6 VCC VCC +5V
7 TxD- Data-Out - Transmit 422
8 RxD- Data-In - Receive 422
Für RS 485 muss Pin 2 und 3 (Data +) sowie Pin7 und 8 (Data -) verbunden werden.
Die Schnittstelle ist standardmäßig bei Auslieferung wie folgt parametriert:
Tab.17: Standardeinstellung, RS485 ohne Echo mit Endpunkt (Terminiert).
Funktion Status
Echo on aus
Echo off an
Auto send on an
Always send on aus
Auto receive on an
Always receive on aus
Term on an
Term on An
Andere Konfigurationen für die RS485-Schnittstelle
Ab Werk können auch andere Konfigurationen für die RS485-Schnittstelle bestellt werden. Folgende
Optionen stehen zur Verfügung:
• N031-0001 RS485 mit Echo, Endpunkt (Terminiert).
• N031-0002 RS485 ohne Echo, Stichleitung (ohne Terminierung).
• N031-0003 RS485 mit Echo, Stichleitung (ohne Terminierung).
• N031-0004 RS422 Full Duplex Endpunkt (Terminiert).
Eine RS485-Schnittstelle kann nicht nachträglich konfiguriert werden und muss immer passend ab Werk
bestellt werden.
CX20x3 23Version: 1.0
Page 24
Schnittstellenbeschreibung
5.4.5 EtherCAT-Slave (B110)
Embedded-PCs der neueren Generation können ab Werk mit einer EtherCAT-Slave-Schnittstelle (B110)
bestellt werden. Auf den Geräten wird die Optionsschnittstelle B110 als X300 bezeichnet.
Abb.11: EtherCAT-Slave-Schnittstelle X300.
An die obere LAN-Schnittstelle wird das ankommende EtherCAT Signal angeschlossen. Die untere LANSchnittstelle leitet das Signal an andere EtherCAT-Slave-Geräte weiter.
Tab.18: EtherCAT-Slave-Schnittstelle X300, PIN-Belegung.
PIN Signal Beschreibung
1 TD + Transmit +
2 TD - Transmit 3 RD + Receive +
4 connected reserviert
5
6 RD - Receive 7 connected reserviert
8
Für die Optionsschnittstelle EtherCAT-Slave (B110) steht auf der Beckhoff Homepage eine Dokumentation
mit weiterführender Information zum Download bereit:
https://www.beckhoff.de/german/download/epc.htm?id=71003127100362
Dokumentationstitel
CXxxx0-B110 Optionsschnittstelle EtherCAT-Slave.
CX20x324 Version: 1.0
Page 25

Schnittstellenbeschreibung
5.4.6 PROFIBUS (x310)
Pin 6 überträgt 5 VDC und Pin 5 GND für den aktiven Abschlusswiderstand. Diese dürfen auf keinen Fall für
andere Funktionen benutzt werden, da dies zu Zerstörung des Gerätes führen kann.
Pin 3 und Pin 8 übertragen die Signale des PROFIBUS. Diese dürfen auf keinen Fall getauscht werden, da
sonst die Kommunikation gestört ist.
Abb.12: PROFIBUS-Schnittstelle X310.
Die Profibus Busleitung wird über einen 9poligen D-Sub mit folgender Belegung angeschlossen:
Tab.19: PROFIBUS-Schnittstelle X310, PIN-Belegung.
Pin Belegung
1 Schirmung
2 nicht benutzt
3 RxD/TxD-P
4 nicht benutzt
5 GND
6 +5V
DC
7 nicht benutzt
8 RxD/TxD-N
9 nicht benutzt
Tab.20: Leitungsfarben der PROFIBUS Leitung.
PROFIBUS Leitung D-Sub
B rot Pin 3
A grün Pin 8
Für die Optionsschnittstelle PROFIBUS (x310) steht auf der Beckhoff Homepage eine Dokumentation mit
weiterführender Information zum Download bereit:
https://www.beckhoff.de/german/download/epc.htm?id=71003127100362
Dokumentationstitel
CXxxx0-x310 Optionsschnittstelle Profibus.
CX20x3 25Version: 1.0
Page 26

Schnittstellenbeschreibung
5.4.7 CANopen (x510)
Abb.13: CANopen-Schnittstelle X510.
Die CAN Busleitung wird über einen 9polige D-sub-Stecker mit folgender Belegung angeschlossen:
Tab.21: CANopen-Schnittstelle X510, PIN-Belegung.
Pin Belegung
1 nicht benutzt
2 CAN low (CAN-)
3 CAN Ground (intern verbunden mit Pin 6)
4 nicht benutzt
5 Schirm
6 CAN Ground (intern verbunden mit Pin 3)
7 CAN high (CAN+)
8 nicht benutzt
9 nicht benutzt
Für die Optionsschnittstelle CANopen (x510) steht auf der Beckhoff Homepage eine Dokumentation mit
weiterführender Information zum Download bereit:
https://www.beckhoff.de/german/download/epc.htm?id=71003127100362
Dokumentationstitel
CXxxx0-x510 Optionsschnittstelle CANopen.
CX20x326 Version: 1.0
Page 27

Schnittstellenbeschreibung
5.4.8 PROFINET RT (x930)
Abb.14: PROFINET RT-Schnittstelle X300.
Tab.22: PROFINET RT-Schnittstelle, PIN-Belegung.
PIN Signal Beschreibung
1 TD + Transmit +
2 TD - Transmit 3 RD + Receive +
4 connected reserviert
5
6 RD - Receive 7 connected reserviert
8
CX20x3 27Version: 1.0
Page 28

Inbetriebnahme
6 Inbetriebnahme
6.1 Passendes CX2100-Netzteil auswählen
Das CPU-Grundmodul benötigt für die Spannungsversorgung ein Netzteil des Typs CX2100-0xxx. Stecken
Sie das Netzteil rechts an den hochpoligen Anschluss am CPU-Grundmodul an.
Tab.23: Passende Netzteile für den CX20x3 Embedded-PC.
CPU-Grundmodul Netzteile
CX2033 CX2100-0014 (130 W, ab HW-Version: 2.4)
CX2043
Der Embedded-PC CX2033 kann ab Werk mit einer aktiven Kühlung (CX2900-0301) bestellt werden, um in
senkrechter oder liegender Einbaulage betrieben werden zu können. Der Embedded-PC CX2043 wird
standardmäßig aktiv gekühlt und kann dadurch in senkrechter oder liegender Einbaulage betrieben werden.
Aufbau der Netzteilklemme
CX2100-0914 (100 W, externer Akkupack
einsetzbar)
CX2100-0024 (240 W)
Abb.15: Embedded-PC CX2043 mit Netzteil CX2100-0014, Aufbau der Netzteilklemme.
Tab.24: Legende zum Aufbau der Netzteilklemme.
Nr. Beschreibung Nr. Beschreibung
1 Diagnose-LEDs 5 0 V, Versorgung Busklemmen
2 Klemmenbus (K- oder E-Bus) 6 Klemmenentriegelung
3 +24 V und 0 V, für CPU-Grundmodul 7 PE, Federkraftklemme
4 +24 V, Versorgung Busklemmen 8 +24 V, 0 V, PE, für Powerkontakte
CX20x328 Version: 1.0
Page 29

6.2 Montage
Inbetriebnahme
Abb.16: Embedded-PC CX2033, Abmessungen.
Abb.17: Embedded-PC CX2043, Abmessungen.
CX20x3 29Version: 1.0
Page 30

Inbetriebnahme
6.2.1 Netzteil anstecken
Das CPU-Grundmodul benötigt für die Spannungsversorgung ein Netzteil des Typs CX2100-0xxx. Stecken
Sie das Netzteil rechts über den hochpoligen Anschluss an das CPU-Grundmodul an.
Gehen Sie folgt vor:
1. Wählen Sie das passende Netzteil, wie im Kapitel Passendes CX2100-Netzteil auswählen [}28].
2. Stecken Sie das Netzteil rechts an das CPU-Grundmodul.
ð Als Nächstes können Sie die Riegelclips montieren.
6.2.2 Riegelclips montieren
Im Regelfall ist die Verbindung zwischen den Modulen stark genug. Es kann aber vorkommen, dass das
CPU-Grundmodul und die angesteckten Module Erschütterungen, Vibrationen oder Stößen ausgesetzt
werden. Mit Hilfe von Riegelclips lassen sich die Module sicher miteinander verbinden.
Montieren Sie die Riegelclips wie folgt:
1. Stecken Sie die Riegelclips auf der Ober- und Unterseite zwischen die Kühlrippen.
2. Stecken Sie die Riegelclips, wie auf dem nachfolgenden Bild gezeigt, zwischen die Kühlrippen Ihrer
Geräte.
ð Sie haben die Riegelclips erfolgreich montiert, wenn diese nicht hervorstehen und eine Ebene mit den
Kühlrippen Ihrer Module bilden.
Wenn alle Module verriegelt sind, können als nächstes die Geräte auf die Tragschiene montiert werden.
CX20x330 Version: 1.0
Page 31

Inbetriebnahme
6.2.3 Zulässige Einbaulagen beachten
HINWEIS
Überhitzung
Bei einer falsch gewählten Einbaulage und nicht eingehaltenen Mindestabständen kann der Embedded-PC
überhitzen. Halten Sie die maximale Umgebungstemperatur von 60°C und die Montagevorschriften ein.
Montieren Sie den Embedded-PC waagerecht im Schaltschrank auf einer Tragschiene, damit die Wärme
optimal abgeführt wird. Nur Embedded-PCs mit einer aktiven Kühlung können auch senkrecht oder liegend
betrieben werden.
Tab.25: Embedded-PC CX20x3, Einbaulage abhängig von der Kühlung.
Embedded-PCs Waagerechte Einbaulage Senkrechte und liegende Ein-
baulage
CX2033 X CX2043 mit aktiver Kühlung X X
CX2033 mit Lüfteroption CX2900-0301 X X
Beachten Sie folgende Vorgaben für den Schaltschrank:
• Betreiben Sie den Embedded-PC nur bei Umgebungstemperaturen von -25 °C bis 60 °C. Messen Sie
dazu die Temperatur unter dem Embedded-PC in einem Abstand von 30 mm zu den Kühlrippen, um
die Umgebungstemperatur korrekt zu ermitteln.
• Halten Sie die Mindestabstände von 30 mm ober- und unterhalb des Embedded-PCs ein.
• Weitere elektrische Geräte beeinflussen die Wärmeentwicklung im Schaltschrank. Wählen Sie eine
passende Schaltschrankgröße abhängig vom Anwendungsfall oder sorgen Sie dafür, dass
überschüssige Wärme aus dem Schaltschrank abtransportiert wird.
Zulässige Einbaulage ohne Lüfter
Der Embedded-PC muss waagerecht auf die Tragschiene montiert werden. Die Lüftungsöffnungen befinden
sich auf der Gehäuseunter- und Gehäuseoberseite. Auf diese Weise kommt ein optimaler Luftstrom
zustande, der den Embedded-PC in vertikaler Richtung durchströmt. Zusätzlich ist ein Freiraum von
mindestens 30 mm oberhalb und unterhalb des Embedded-PCs erforderlich, um eine ausreichende
Belüftung zu gewährleisten.
Abb.18: Embedded-PC CX20x3, waagerechte Einbaulage.
CX20x3 31Version: 1.0
Page 32

Inbetriebnahme
Wenn Vibrationen und Stöße in der gleichen Richtung verlaufen wie die Tragschiene, muss der EmbeddedPC zusätzlich mit einer Halterung fixiert werden, damit er nicht verrutscht.
Zulässige Einbaulagen mit Lüfter
Nur Embedded-PCs mit einer aktiven Kühlung können senkrecht oder liegend auf der Tragschiene montiert
werden. Ohne aktive Kühlung wird der Embedded-PC in senkrechter und liegender Position nicht
ausreichend belüftet.
Auch mit einer aktiven Kühlung müssen die Umgebungstemperaturen von -25 bis 60 °C und die
Mindestabstände von 30 mm oberhalb und unterhalb des Embedded-PCs eingehalten werden. Fixieren Sie
den Embedded-PC zusätzlich mit einer Halterung, damit er nicht von der Hutschiene abrutscht.
Achten Sie darauf, dass Busklemmen, die an den Embedded-PCs angeschlossenen werden, für den
senkrechten oder liegenden Betrieb ausgelegt sind.
CX20x332 Version: 1.0
Page 33

Inbetriebnahme
6.2.4 Auf Tragschiene befestigen
Das Gehäuse ist so konstruiert, dass der Embedded-PC an die Tragschiene gehalten und auf diese
eingerastet werden kann.
Voraussetzungen:
• Tragschiene von Typ TS35/7.5 oder TS35/15 nach DIN EN 60715.
Befestigen Sie den Embedded-PC wie folgt auf der Tragschiene:
1. Entriegeln Sie die Halteriegel mit einem Schraubendreher an der Ober- und Unterseite.
2. Setzen Sie den Embedded-PC frontal auf die Tragschiene. Drücken Sie den Embedded-PC leicht an die
Tragschiene bis es leise klickt und der Embedded-PC eingerastet ist.
3. Verriegeln Sie anschließend wieder die Halteriegel.
ð Sie haben den Embedded-PC erfolgreich montiert. Überprüfen Sie nochmal die korrekte Montage und ob
der Embedded-PC an der Tragschiene eingerastet ist.
CX20x3 33Version: 1.0
Page 34

Inbetriebnahme
6.2.5 CFast-Karte ein- und ausbauen
Datenverlust
CFast-Karten werden im Betrieb stark beansprucht und müssen viele Schreibzyklen und extreme
Umweltbedingungen aushalten. CFast-Karten anderer Hersteller können ausfallen, was zu Datenverlust führt.
Verwendet Sie ausschließlich industrietaugliche CFast-Karten die von Beckhoff geliefert werden.
Eine CFast- Karte ist ein nicht volatiler Speicher. Daten, die spannungsausfallsicher gespeichert werden
sollen, müssen auf der CFast-Karte gespeichert werden. Die gelieferten CFast-Karten von Beckhoff sind
industrietaugliche CFast-Karten mit einer erhöhten Anzahl an Schreibzyklen und einem erweiterten
Temperaturbereich ( +85°C).
Die Auswurfmechanik wird nach dem Push-Push-Prinzip betätigt. Im Folgenden wird gezeigt, wie die CFastKarten ein- und ausgebaut werden.
Voraussetzungen:
• Das CPU-Grundmodul muss ausgeschaltet sein. Die CFast-Karten dürfen nur im ausgeschalteten
Zustand ein- oder ausgebaut werden.
CFast-Karte ausbauen
1. Drücken Sie leicht auf die CFast-Karte.
Die Karte wird mit einem leisen Klicken entriegelt.
2. Die Karte wird um ca. 4 mm aus dem Gehäuse gehoben. Ziehen Sie die Karte heraus.
CFast-Karte einbauen
1. Schieben Sie die CFast-Karte in den CFast-Kartenslot.
2. Die CFast-Karte rastet mit einem leisen Klicken ein.
ð Die Karte sitzt richtig, wenn sie bündig mit der Frontseite des Gerätegehäuses abschließt.
CX20x334 Version: 1.0
Page 35

Inbetriebnahme
6.2.6 Passive EtherCAT-Klemmen montieren
Falsch montierte passive EtherCAT-Klemmen
Das E-Bus Signal zwischen einem Embedded-PC und den EtherCAT-Klemmen kann durch falsch
montierte passive EtherCAT-Klemmen geschwächt werden.
Montieren Sie passive EtherCAT-Klemmen nicht direkt an das Netzteil.
EtherCAT-Klemmen, die nicht aktiv am Datenaustausch teilnehmen, werden als passive Klemmen
bezeichnet. Dadurch haben passive EtherCAT-Klemmen kein Prozessabbild und benötigen keinen Strom
aus dem Klemmbus (E-Bus).
Passive EtherCAT-Klemmen (z.B. eine EL9195) können Sie in TwinCAT erkennen. Die EtherCAT-Klemme
wird im Strukturbaum ohne Prozessabbild angezeigt und der Wert in der Spalte „E-Bus (mA)“ verändert sich
im Vergleich zu der vorangehenden EtherCAT-Klemme nicht.
Abb.19: Passive EtherCAT-Klemme in TwinCAT identifizieren.
In den technischen Daten einer EtherCAT-Klemme können Sie unter dem Eintrag „Stromaufnahme aus dem
E-Bus“ nachlesen, ob eine bestimmte EtherCAT-Klemme Strom aus dem Klemmbus (E-Bus) benötigt.
Die folgende Abbildung zeigt die zulässige Montage einer passiven EtherCAT-Klemme. Die passive
EtherCAT-Klemme wurde nicht direkt an das Netzteil angereiht.
Abb.20: Passive EtherCAT-Klemmen, zulässige Montage.
CX20x3 35Version: 1.0
Page 36

Inbetriebnahme
6.3 Spannungsversorgung
HINWEIS
Schäden an den Embedded-PCs
Die Embedded-PCs können während der Verdrahtung beschädigt werden. Schließen Sie die Leitungen für
die Spannungsversorgung nur im spannungsfreien Zustand an.
Für die Spannungsversorgung des Netzteils ist eine externe Spannungsquelle erforderlich, die eine 24 V
Gleichspannung (-15 % / +20 %) bereitstellt.
Verkabeln Sie den Embedded-PC im Schaltschrank entsprechend der Norm EN 60204-1:2006
Schutzkleinspannungen (PELV = Protective Extra Low Voltage):
• Die Leiter “PE“ und “0 V“ der Spannungsquelle für ein CPU-Grundmodul müssen auf dem gleichen
Potential liegen (im Schaltschrank verbunden).
• Die Norm EN 60204-1:2006 Abschnitt 6.4.1:b: schreibt vor, dass eine Seite des Stromkreises oder ein
Punkt der Energiequelle dieses Stromkreises an das Schutzleitersystem angeschlossen werden muss.
Anschlussbeispiel mit CPU-Grundmodul CX2033 und Netzteil CX2100-0014:
Abb.21: Anschlüsse für Systemspannung (Us) und Powerkontakte (Up).
Tab.26: Legende zum Anschlussbeispiel.
Nr. Beschreibung
1 Die oberen Federkraftklemmen mit der Bezeichnung “24 V“ und “0 V“ versorgen das CPU-
Grundmodul und den Klemmenbus (Datenübertragung über K- oder E-Bus) mit Spannung.
2 Die Federkraftklemmen mit der Bezeichnung “+“, “-“ und “PE“ versorgen die Busklemmen
über die Powerkontakte mit Spannung und die an den Busklemmen angeschlossenen
Sensoren oder Aktoren.
Sicherung
• Beachten Sie bei der Dimensionierung der Sicherung für die Systemspannung (Us) die max.
Leistungsaufnahme des Embedded-PCs (siehe: Technische Daten [}71])
• Sichern Sie Powerkontakte (Up) mit einer Sicherung von max. 10A (träge) ab.
Spannungsversorgung unterbrechen / abschalten
Um den Embedded-PC abzuschalten darf nicht die Masse (0 V) getrennt werden, da sonst je nach Gerät der
Strom über den Schirm weiterfließt und der Embedded-PC oder die Peripherie beschädigt wird.
Trennen Sie immer die 24 V Leitung. An dem Embedded-PC angeschlossene Geräte mit eigener
Stromversorgung (z.B. ein Panel) müssen für “PE“ und „0 V“ das gleiche Potential wie der Embedded-PC
haben (keine Potentialdifferenz).
CX20x336 Version: 1.0
Page 37

Inbetriebnahme
6.3.1 Embedded-PC anschließen
Die Leitungen einer externen Spannungsquelle werden mit Federkraftklemmen am Netzteil verbunden.
Beachten Sie die erforderlichen Leiterquerschnitte und Abisolierlängen.
Tab.27: Erforderliche Leiterquerschnitte und Abisolierlängen.
Leiterquerschnitt 0,5 ... 2,5 mm
2
AWG 20 ... AWG 14
Abisolierlänge 8 ... 9 mm 0.33 inch
Abb.22: Anschlussbeispiel mit einem CX2033.
Schließen Sie den Embedded-PC wie folgt an:
1. Öffnen Sie eine Federkraftklemme, indem Sie mit einem Schraubendreher oder einem Dorn leicht in die
viereckige Öffnung über der Klemme drücken.
2. Der Draht kann nun ohne Widerstand in die runde Klemmenöffnung eingeführt werden.
3. Durch Rücknahme des Druckes schließt sich die Klemme automatisch und hält den Draht sicher und
dauerhaft fest.
ð Sie haben die Spannungsquelle erfolgreich an die Netzteilklemme angeschlossenen, wenn die beiden
oberen LEDs der Netzteilklemme grün aufleuchten.
Die linke LED (Us 24V) zeigt die Versorgung des CPU-Grundmoduls und des Klemmenbusses an. Die
rechte LED (Up 24V) zeigt die Versorgung der Busklemmen über die Powerkontakte an.
CX20x3 37Version: 1.0
Page 38

Inbetriebnahme
6.4 Einschalten
Stellen Sie sicher, dass Sie den Embedded-PC fertig konfiguriert haben, bevor Sie den Embedded-PC
einschalten.
Schalten Sie den Embedded-PC wie folgt ein:
1. Überprüfen Sie, ob alle Erweiterungs-, System- und Feldbusmodule richtig angeschlossenen sind.
2. Überprüfen Sie, ob Sie das passende CX2100-Netzteil und die richtige Einbaulage ausgewählt haben.
3. Kontrollieren Sie, ob der Embedded-PC richtig auf der Hutschiene befestigt ist und alle erforderlichen
Busklemmen angesteckt sind.
4. Schalten Sie erst danach die externe Stromversorgung für das Netzteil ein.
ð Der Embedded-PC startet automatisch, sobald Sie die externe Stromversorgung für das Netzteil
einschalten. Das vorinstallierte Betriebssystem wird gestartet und alle angesteckten Erweiterungs-,
System- und Feldbusmodule werden konfiguriert.
6.5 Ausschalten
Datenverlust
Wenn Sie den Embedded-PC im laufenden Betrieb ausschalten, können Daten auf der CFast-Karte
oder anderen Festplatten verloren gehen.
Trennen Sie den Embedded-PC nicht im laufenden Betrieb von der Stromversorgung.
Schalten Sie den Embedded-PC wie folgt aus:
1. Beenden Sie ordnungsgemäß alle laufenden Programme, wie z.B. die Steuerungssoftware auf dem
Embedded-PC.
2. Fahren Sie das Betriebssystem herunter.
3. Schalten Sie erst zum Schluss die externe Stromversorgung für das Netzteil ab, damit der EmbeddedPC ausgeschaltet wird.
CX20x338 Version: 1.0
Page 39

Konfiguration
7 Konfiguration
7.1 Beckhoff Device Manager starten
Mit dem Beckhoff Device Manager kann ein Industrie-PC per Fernzugriff mit Hilfe eines Webbrowsers
konfiguriert werden. Abhängig von der Imageversion erfolgt der Zugriff über unterschiedliche Protokolle und
erfordert unterschiedliche Portfreigaben. Bei älteren Imageversionen erfolgt der Zugriff über das HTTPProtokoll und Port 80 (TCP). Aktuellere Imageversionen verwenden HTTPS und Port 443 (TCP).
Voraussetzungen:
• Host-PC und Embedded-PC müssen sich im gleichen Netzwerk befinden. Die Netzwerkfirewall muss
abhängig von der Version des Betriebssystems, den Zugriff über Port 80 (HTTP) oder Port 443
(HTTPS) zulassen.
• IP-Adresse oder Hostname des Embedded-PCs.
Tab.28: Zugangsdaten zum Beckhoff Device Manager bei Auslieferung.
Benutzername Passwort
Administrator 1
Starten Sie den Beckhoff Device Manager wie folgt:
1. Öffnen Sie einen Webbrowser auf dem Host-PC.
2. Geben Sie die IP-Adresse oder den Hostnamen des Industrie-PCs im Webbrowser ein, um den Beckhoff
Device Manager zu starten.
• Beispiel mit IP-Adresse: https://169.254.136.237/config
• Beispiel mit Hostnamen: https://CX-16C2B8/config
3. Geben Sie den Benutzernamen und das Passwort ein. Die Startseite erscheint:
ð Navigieren Sie weiter im Menü und konfigurieren Sie den Industrie-PC. Beachten Sie, dass Änderungen
erst nach einer Bestätigung wirksam werden. Gegebenenfalls muss der Industrie-PC neu gestartet
werden.
CX20x3 39Version: 1.0
Page 40

Konfiguration
7.2 Windows 10 IoT Enterprise
7.2.1 Jumbo-Frames aktivieren
Standardisierte Ethernet-Frames haben eine Größe von 1518 Byte. Ethernet-Frames die größer als 1518
Byte sind, werden als Jumbo-Frames bezeichnet. Typischerweise werden Jumbo-Frames eingesetzt, um
große Datenmengen zu übertragen. Für einige Anwendungen, wie z.B. für Videokameras können JumboFrames sinnvoll sein.
Jumbo-Frames werden von den Ethernet-Schnittstellen (X000, X001) nur dann unterstützt, wenn der original
Intel®-Treiber installiert ist.
Voraussetzungen:
• Laden Sie den original Intel®-Treiber unter: https://downloadcenter.intel.com/de herunter.
• Installieren Sie den original Intel®-Treiber. Beachten Sie, dass damit der echtzeitfähige Treiber von
Beckhoff gelöscht wird.
• Prüfen Sie, ob ihre eingesetzten Peripheriegeräte Jumbo-Frames unterstützen.
Aktivieren Sie Jumbo Frames wie folgt:
1. Klicken Sie unter Start > Control Panel > Hardware and Sound auf Device Manager.
2. Klicken Sie doppelt auf die Schnittstelle und danach auf die Registerkarte Advanced.
CX20x340 Version: 1.0
Page 41

Konfiguration
3. Klicken Sie unter Settings auf Jumbo Packet und unter Value auf die Option 4088 Bytes oder 9014
Bytes.
ð Sie haben Jumbo-Frames erfolgreich aktiviert und können größere Datenmengen übertragen.
CX20x3 41Version: 1.0
Page 42

Konfiguration
7.2.2 NIC-Teaming einstellen
Bei NIC-Teaming werden mehrere physische Netzwerkkarten zu einer Gruppe zusammengefasst und damit
eine Redundanz erzeugt. Durch die Redundanz werden Störungen bei Netzwerkkarten oder in der
Verkabelung abgefangen und der Datentransfer durch andere Teilnehmer in der Gruppe übernommen.
Voraussetzungen:
• Laden Sie den original Intel®-Treiber unter: https://downloadcenter.intel.com/de herunter.
• Installieren Sie den original Intel®-Treiber für den Netzwerkadapter. Beachten Sie, dass damit der
echtzeitfähige Treiber von Beckhoff gelöscht wird.
NIC-Teaming wird wie folgt eingestellt:
1. Klicken Sie unter Start > Control Panel > Hardware and Sound auf Device Manager.
2. Klicken Sie doppelt auf die Schnittstelle.
3. Klicken Sie auf die Registerkarte Teaming.
4. Klicken Sie auf die Schaltfläche New Team und folgen Sie der Installationsanleitung.
CX20x342 Version: 1.0
Page 43

5. Klicken Sie unter Select a team type auf die Option Adapter Fault Tolerance
Konfiguration
6. Klicken Sie auf die Schaltfläche Next und schließen Sie die Installation ab.
ð Sie haben erfolgreich NIC-Teaming für Ihre Ethernet-Schnittstellen eingestellt. Sie können weitere
Einstellungen unter der Registerkarte Settings festlegen oder verändern.
CX20x3 43Version: 1.0
Page 44

Konfiguration
7.2.3 Beckhoff Echtzeittreiber wiederherstellen.
Der Beckhoff Echtzeittreiber kann wiederhergestellt werden, wenn Sie den Echtzeitreiber deinstalliert oder
den originalen Intel®-Treiber für z.B. Jumbo-Frames oder NIC-Teaming installiert haben. In diesem Kapitel
wird gezeigt, wie Sie mit TcRteInstall.exe den Beckhoff Echtzeittreiber wiederherstellen können. Die
TcRteInstall.exe befinden sich standardmäßig im TwinCAT-Verzeichnis.
Voraussetzungen:
• Die TcRteInstall.exe finden Sie bei einer TwinCAT 2 Standardinstallation unter: C:\TwinCAT\Io
\TcRteInstall.exe
• Und bei einer TwinCAT 3 Standardinstallation unter: C:\TwinCAT\3.1\System\TcRteInstall.exe
Gehen Sie wie folgt vor:
1. Klicken Sie doppelt auf die Datei TcRteInstall.exe.
Der Installationsdialog erscheint und zeigt die kompatiblen Ethernet-Schnittstellen unter Compatible
diveces an.
2. Markieren Sie die Ethernet-Schnittstellen, für die Sie den Beckhoff Echtzeittreiber wiederherstellen
wollen und klicken Sie auf Install.
ð Der Beckhoff Echtzeittreiber wird installiert. Die Ethernet-Schnittstellen mit installiertem Beckhoff
Echtzeittreiber werden unter Installed and ready to use devices (realtime capable) angezeigt.
CX20x344 Version: 1.0
Page 45

Konfiguration
1
6
2
3
4
5
7.3 TwinCAT
7.3.1 Strukturansicht
Sie können das Kapitel Strukturansicht als Beispiel dazu benutzen, um ein Projekt ohne tatsächlich
vorhandene Hardware anzulegen. Alle Geräte und Komponenten eines Embedded-PCs müssen dabei
manuell in TwinCAT 3 angefügt werden.
Die kleinstmögliche Konfiguration eines Embedded-PCs CX20x0, bestehend aus CPU-Grundmodul und
Netzteil CX2100-0004, wird unter TwinCAT 3 wie folgt in der Strukturansicht angelegt:
Abb.23: Embedded-PC CX20x0 in der Strukturansicht von TwinCAT 3, mit angereihten EtherCAT-Klemmen
(links) oder Busklemmen (rechts).
Die Konfiguration in der Strukturansicht unterscheidet sich je nachdem ob EtherCAT-Klemmen oder
Busklemmen an den Embedded-PC angesteckt werden.
Tab.29: Legende zur Strukturansicht.
Nr. Beschreibung
1 Der Embedded-PC CX20x0 mit EtherCAT-Klemmen wird als EtherCAT-
Master eingefügt. Unter den Inputs bzw. Outputs werden Variablen für
Diagnosezwecke gelistet.
2 EtherCAT-Klemmen (E-Bus) werden unter dem Buskoppler EK1200 in der
Strukturansicht angezeigt.
3 Das Netzteil für den Embedded-PC CX20x0 erscheint unter einem USB-
Device. Auch das Netzteil verfügt über Variablen für Diagnosezwecke.
4 Der CX20x0 verfügt über NOVRAM, um maximal 128 kB Daten sicher zu
speichern. An dieser Stelle wird der NOVRAM-Handler angelegt und
anschließend werden die retain Variablen konfiguriert.
5 Wenn Busklemmen (K-Bus) zusammen mit einem Embedded-PC CX20x0
verwendet werden, wird der Buskoppler (CX-BK) zusammen mit den
Busklemmen eingefügt.
CX20x3 45Version: 1.0
Page 46

Konfiguration
7.3.2 Zielsysteme suchen
Bevor Sie mit den Geräten arbeiten können, müssen Sie Ihren lokalen Rechner mit dem Zielgerät verbinden.
Danach können Sie mit Hilfe der IP-Adresse oder dem Host Namen nach Geräten suchen.
Der lokale PC und die Zielgeräte müssen mit dem gleichen Netzwerk oder direkt über ein Ethernet Kabel
miteinander verbunden werden. In TwinCAT kann auf diese Weise nach allen Geräten gesucht und
anschließend projektiert werden.
Voraussetzungen für diesen Arbeitsschritt:
• TwinCAT 3 muss sich im Config Mode befinden.
• IP-Adresse oder Host Name des Gerätes.
Suchen Sie nach den Geräten wie folgt:
1. Klicken Sie oben im Menü auf File > New > Project und erstellen Sie ein neues TwinCAT XAE Projekt.
2. Klicken Sie links in der Strukturansicht auf SYSTEM und dann auf Choose Target.
3. Klicken Sie auf Search (Ethernet).
4. Tippen Sie im Feld Enter Host Name / IP den Host Namen oder die IP-Adresse des Gerätes ein und
drücken Sie [Enter].
5. Markieren Sie das gefundene Gerät und klicken Sie auf Add Route.
Das Fenster Logon Information erscheint.
CX20x346 Version: 1.0
Page 47

Konfiguration
Geben Sie im Feld User Name und im Feld Password den Benutzernahmen und das Passwort für den
CX ein und klicken Sie auf OK.
Als Standard ist bei den CXen folgende Information eingestellt:
User name: Administrator Password: 1
6. Klicken Sie auf Close, wenn Sie keine weiteren Geräte suchen wollen und schließen damit das Add
Route Fenster.
Das neue Gerät wird im Fenster Choose Target System angezeigt.
7. Markieren Sie das Gerät welches Sie als Zielsystem festlegen wollen und klicken Sie auf OK.
ð Sie haben erfolgreich in TwinCAT nach einem Gerät gesucht und das Gerät als Zielsystem eingefügt. In
der Menüleiste wird das neue Zielsystem mit dem Host Namen angezeigt.
Mit dieser Vorgehensweise können Sie nach allen verfügbaren Geräten suchen und auch jederzeit
zwischen den Zielsystemen wechseln. Als nächstes können Sie das Gerät in TwinCAT in die
Strukturansicht anfügen.
CX20x3 47Version: 1.0
Page 48

Konfiguration
7.3.3 Embedded-PC scannen
In diesem Arbeitsschritt wird gezeigt, wie Sie einen Embedded-PC in TwinCAT scannen und anschließend
weiter konfigurieren.
Voraussetzungen für diesen Arbeitsschritt:
• Ausgewähltes Zielgerät.
Fügen Sie den Embedded-PC wie folgt ein:
1. Starten Sie TwinCAT und öffnen Sie ein leeres Projekt.
2. Klicken Sie links in der Strukturansicht mit rechter Maustaste auf I/O Devices.
3. Klicken Sie im Kontextmenü auf Scan.
4. Wählen Sie Geräte, die Sie verwenden wollen und bestätigen die Auswahl mit OK.
Es stehen immer Geräte zur Auswahl, die tatsächlich verfügbar sind.
Bei Embedded-PCs mit angeschlossenen Busklemmen (K-Bus) wird ein Buskoppler Device (CX-BK)
angezeigt.
Bei EtherCAT-Klemmen (E-Bus) wird der EtherCAT-Koppler automatisch angefügt.
5. Bestätigen Sie die Anfrage mit Ja, um nach Boxen zu suchen.
6. Klicken Sie bei der Anfrage, ob FreeRun aktiviert werden soll, auf Ja.
ð Der Embedded-PC wurde erfolgreich in TwinCAT gescannt und wird in der Strukturansicht mit den Ein-
und Ausgängen angezeigt.
Im Kapitel Strukturansicht wird gezeigt, wie Embedded-PCs mit angeschlossenen Bus- oder EtherCATKlemmen angezeigt werden.
CX20x348 Version: 1.0
Page 49

Konfiguration
7.3.4 EtherCAT-Kabelredundanz konfigurieren.
Der Embedded-PC verfügt über zwei unabhängige Ethernet-Schnittstellen, die für die EtherCATKabelredundanz benutzt werden können. Die Kabelredundanz bietet Ausfallsicherheit bei der Verkabelung.
Damit wird die EtherCAT-Kommunikation durch Kabelbrüche oder abgesteckte LAN-Kabel nicht gestört.
Abb.24: Beispielkonfiguration eines CX20x3 mit EtherCAT-Kabelredundanz.
Störungen bei den einzelnen Klemmen werden durch die Kabelredundanz jedoch nicht abgefangen.
Tab.30: Kabelredundanz, Hardware für Beispielkonfiguration.
Typ Beschreibung
Embedded-PC CX2020 Ist der EtherCAT-Master in dem Beispiel.
Buskoppler EK1110 EtherCAT-Verlängerung, dient dazu einen EtherCAT-Strang
um bis zu 100 m zu verlängern.
Buskoppler EK1100 Der Buskoppler leitet das EtherCAT-Signal an
angeschlossene EtherCAT-Klemmen weiter.
EtherCAT-Klemmen Beliebig viele EtherCAT-Klemmen, die an den Embedded-
PC CX20x0 und den Buskoppler angereiht werden.
Voraussetzungen:
• Bei TwinCAT 2 müssen Sie das Supplement TS622x | TwinCAT EtherCAT Redundancy auf dem
Embedded-PC installieren und lizensieren:
http://www.beckhoff.de/forms/twincat3/warenkorb.aspx?lg=de&title=TS622x-EtherCATRedundancy&version=1.0.2
• Bei TwinCAT 3 ist das Supplement bereits enthalten und muss nur lizensiert werden.
• Hardware als EtherCAT-Ring verkabelt (siehe Abb.: Kleinstmögliche Konfiguration für EtherCATKabelredundanz) und in TwinCAT angefügt.
Konfigurieren Sie die EtherCAT-Kabelredundanz wie folgt:
CX20x3 49Version: 1.0
Page 50

Konfiguration
1. Klicken Sie links in der Strukturansicht auf den EtherCAT-Master.
2. Klicken Sie auf die Registerkarte EtherCAT und anschließend auf Advanced Settings.
3. Klicken Sie links im Strukturbaum auf Redundancy.
4. Klicken Sie auf die Option Second Adapter und anschließend auf die Schaltfläche Search.
CX20x350 Version: 1.0
Page 51

Konfiguration
5. Wählen Sie den passenden LAN-Anschluss entsprechend Ihrer Verkabelung am Embedded-PC.
6. Bestätigen Sie die Einstellungen mit OK.
ð Sie haben die Kabelredundanz erfolgreich konfiguriert. Unter der Registerkarte Online werden die
EtherCAT-Slaves angezeigt, die für die Kabelredundanz konfiguriert wurden.
Unter State wird der Status der einzelnen EtherCAT-Slaves angezeigt. Wenn z.B. die Kabelverbindung
zwischen Buskoppler EK1100 und EK1110 unterbrochen wird, ändert sich der Status der Buskoppler.
Unter Status erscheint dann die Meldung „LINK_MIS B“ und „LINK_MIS A“.
Obwohl die Verbindung zwischen den Buskopplern unterbrochen ist, haben die EtherCAT-Klemmen, die
am Buskoppler EK1100 angeschlossenen sind, keine Störung.
Wird die Kabelverbindung an gleicher Stelle ohne Kabelredundanz unterbrochen, wird bei den Klemmen
unter Status eine Störung angezeigt.
CX20x3 51Version: 1.0
Page 52

Konfiguration
7.3.5 Hardware-Watchdog einsetzen
Der Funktionsbaustein FB_PcWatchdog_BAPI aktiviert einen Hardware-Watchdog auf dem Embedded-PC.
Der Watchdog kann dafür eingesetzt werden, um Systeme automatisch neu zu starten, die in eine
Endlosschleife gelaufen sind oder bei denen die SPS stehen geblieben ist.
Der Watchdog wird mit bExecute = TRUE und nWatchdogTimeS >= 1s aktiviert.
Wenn der Watchdog einmal aktiviert wurde, muss der Funktionsbaustein zyklisch und in kürzeren Abständen
aufgerufen werden als nWatchdogTimeS, da bei Ablauf der eingestellten Zeit unter nWatchdogTimeS der
Embedded-PC automatisch neu startet.
HINWEIS
Unerwünschter Neustart
Der Watchdog startet den Embedded-PC neu, sobald die eingestellte Zeit bei nWatchdogTimeS abläuft.
Beachten Sie dieses Verhalten und schalten Sie den Watchdog aus, wenn Sie Breakpoints verwenden,
einen SPS-Reset bzw. Urlöschen durchführen, TwinCAT stoppen, in den Konfig-Mode wechseln oder die
Konfiguration aktivieren.
Voraussetzungen:
• Tc2_System Bibliothek.
• TwinCAT v3.1.0
• Ein bereits erstelltes PLC-Projekt in TwinCAT.
Den Funktionsbaustein in TwinCAT lokalisieren:
1. Klicken Sie in der Strukturansicht auf PLC > PLC-Projekt > References doppelt auf den Eintrag
Tc2_System.
Der Library Manager erscheint.
2. Klicken Sie unter Tc2_System > POUs > SYSTEM +TIME auf den Funktionsbaustein
FB_PcWatchdog_BAPI.
ð Die Beschreibung des Funktionsbausteins finden Sie anschließend unter der Registerkarte
Documentation oder in der Bibliotheksbeschreibung unter: FB_PcWatchDog_BAPI. Falls erforderlich,
können Sie die Tc2_System Bibliothek über die Schaltfläche Add Library im Library Manager
nachinstallieren.
CX20x352 Version: 1.0
Page 53

NOVRAM
8 NOVRAM
Das NOVRAM kann dazu verwendet werden, um wichtige Variablenwerte, wie z.B. Betriebsdaten oder
Zählerstände bei einem Spannungsausfall sicher zu speichern. Die Speichergröße des NOVRAMs ist
beschränkt und eignet sich für kleinere Datenmengen bis zu einer Größe von maximal 63 kB.
In diesem Kapitel wird gezeigt, wie das NOVRAM unter in TwinCAT 3 verwendet wird.
Funktionsweise
Das NOVRAM (Non-Volatile Random Access Memory) ist ein spezieller Speicherbaustein der dazu
verwendet wird, um wichtige Daten sicher zu speichern. Das NOVRAM besteht aus zwei Bereichen. Einem
volatilen Speicher und einem non-volatilen Speicher.
TwinCAT schreibt nur in den volatilen Speicher des NOVRAMs. Bei einem Spannungsausfall werden die
Daten automatisch aus dem volatilen Speicher in den non-volatilen Speicher kopiert. Die dafür notwendige
Energie liefert ein Kondensator. Sobald die Spannungsversorgung wieder vorhanden ist, werden die Daten
automatisch in den volatilen Speicher zurückkopiert und können in TwinCAT weiterverwendet werden.
Abb.25: Verhalten der Steuerung ohne und mit NOVRAM.
Speichergröße
Das NOVRAM hat eine Speichergröße von 128 kB. Aus Gründen der Datenkonsistenz können jedoch
effektiv weniger als 63 kB Daten im NOVRAM gesichert werden. Die Daten werden zyklisch und
wechselweise nach dem Doppelpufferprinzip gespeichert, um damit das Risiko von Dateninkonsistenz zu
vermeiden.
Voraussetzungen
Entwicklungsumgebung Zielplattformen Hardware Einzubindende
SPS-Bibliotheken
TwinCAT 3.1 Build: 4020 PC oder CX (x86, x64,
ARM)
CX20x3 53Version: 1.0
CX9020, CX20x0,
CX20x2, CX20x3
Tc2_IoFunctions
Page 54

NOVRAM
8.1 Retain-Handler anlegen
Unter TwinCAT 3 ab Build 4020 wird ein Delta-Algorithmus benutzt, um Daten im NOVRAM zu speichern.
Der Algorithmus speichert nicht alle Variablen auf einmal, sondern sucht nach Änderungen (Deltas) im
Vergleich zum letzten Zyklus und speichert nur veränderte Variablen im NOVRAM.
Um den Delta-Algorithmus zu nutzen, muss in TwinCAT 3 ein Retain-Handler angelegt werden und die
relevanten Variablen in der SPS mit dem Schlüsselwort VAR_RETAIN deklariert werden.
Neu an dieser Methode ist, dass keine Funktionsbausteine benutzt werden müssen. Der Retain Handler
speichert Daten in das NOVRAM und stellt sie nach einem Spannungsausfall wieder bereit.
In diesem Kapitel wird beschrieben, wie Sie den Retain-Handler in TwinCAT 3 anlegen. Der Retain Handler
speichert Daten in das NOVRAM und stellt sie wieder bereit. Dadurch bleiben wichtige Variablenwerte, wie
z.B. Betriebsdaten oder Zählerstände, auch nach einem Neustart oder Spannungsausfall erhalten.
Voraussetzungen für diesen Arbeitsschritt:
• TwinCAT 3.1 Build: 4020.
• Ein in TwinCAT ausgewähltes Zielgerät.
Legen Sie den Retain-Handler wie folgt an:
1. Klicken Sie links in der Strukturansicht mit der rechten Maustaste auf Devices.
2. Klicken Sie im Kontextmenü auf Scan.
3. Wählen Sie Device (NOV-DP-RAM) und bestätigen Sie die Auswahl mit OK.
4. Klicken Sie auf Ja, um nach Boxen zu suchen.
CX20x354 Version: 1.0
Page 55

5. Klicken Sie links in der Strukturansicht auf Device (NOV-DP-RAM) und anschließend auf die
Registerkarte Generic NOV-DP-RAM Device.
NOVRAM
6. Klicken Sie auf die Option PCI.
7. Klicken Sie in der Strukturansicht mit rechter Maustaste auf Device (NOV-DP-RAM) und danach auf
Add New Item.
8. Wählen Sie den Retain Handler und klicken Sie auf OK.
ð Sie haben erfolgreich einen Retain-Handler in TwinCAT angelegt.
Im nächsten Schritt können Sie Retain-Variablen in der SPS anlegen und mit dem Retain-Handler
verknüpfen.
CX20x3 55Version: 1.0
Page 56

NOVRAM
8.2 Variablen anlegen und verknüpfen
Nachdem Sie einen Retain-Handler in TwinCAT angelegt haben, können Sie in der SPS Variablen
deklarieren und mit einem Retain-Handler verknüpfen. Die Variablen müssen in der SPS mit dem
Schlüsselwort VAR_RETAIN gekennzeichnet werden.
Voraussetzung für diesen Arbeitsschritt:
• Ein SPS-Projekt angelegt in TwinCAT.
Legen Sie Variablen wie folgt an:
1. Legen Sie die Variablen in Ihrem SPS-Projekt in einem VAR RETAIN-Bereich an.
2. Klicken Sie oben auf der Symbolleiste auf Build und dann auf Build Solution.
3. Klicken Sie links in der Strukturansicht auf Ihre PLC Instance und anschließend auf die Registerkarte
Data Area.
CX20x356 Version: 1.0
Page 57

4. Wählen Sie unter Retain Hdl den Retain Handler, den Sie angelegt haben.
ð Nachdem Sie einen Retain-Handler als Ziel ausgewählt haben, werden die Symbole in der
Strukturansicht verknüpft und ein Mapping erzeugt.
In der Strukturansicht werden die Variablen aus der SPS unter dem Retain-Handler angelegt und sind
mit den Variablen aus der SPS Instanz verknüpft.
NOVRAM
Eine bestehende Verknüpfung wird mit einem Pfeilsymbol angezeigt.
CX20x3 57Version: 1.0
Page 58

NOVRAM
8.3 Schreibgeschwindigkeit des Retain-Handlers
Der Retain-Handler benötigt eine bestimmte Zeit, um nach Änderungen (Deltas) in den Variablen zu suchen
und diese ins NOVRAM zu speichern.
Die folgenden Diagramme geben einen Überblick darüber, wie lange der Retain-Handler benötigt, um eine
bestimmte Datenmenge ins NOVRAM zu speichern. Benutzen Sie die Diagramme und wählen Sie ihre
Taskzykluszeit so, dass eine bestimmte Datenmenge innerhalb der gewählten Taskzykluszeit ins NOVRAM
gespeichert wird.
Abb.26: Retain-Handler Schreibgeschwindigkeit, bis 63 kB in 512 Byte-Schritten.
Abb.27: Retain-Handler Schreibgeschwindigkeit, bis 8 kB in 64 Byte-Schritten.
CX20x358 Version: 1.0
Page 59

NOVRAM
8.4 Variablen unter dem Retain-Handler löschen
Wenn Variablen in der SPS gelöscht werden, dann wird die Verknüpfung mit dem Retain-Handler
aufgehoben. Die Variablen werden aber unter dem Retain-Handler weiter angezeigt und werden nicht
gelöscht.
Diese Variablen müssen unter TwinCAT 3 manuell gelöscht werden.
Voraussetzungen für diesen Arbeitsschritt:
• Mit VAR_RATAIN deklarierte Variablen wurden in der SPS gelöscht.
Löschen Sie Variablen unter dem Retain-Handler wie folgt:
1. Die Variable GVL_Retain.iNt unter dem Retain-Handler soll gelöscht werden.
2. Klicken Sie links in der Strukturansicht mit der rechten Maustaste auf den Retain-Handler.
3. Klicken Sie im Kontextmenü auf Optimize Retain Variables.
ð Die Variable unter dem Retain-Handler wird gelöscht.
CX20x3 59Version: 1.0
Page 60

Fehlerbehandlung und Diagnose
9 Fehlerbehandlung und Diagnose
9.1 Diagnose-LEDs
Anzeige LED Bedeutung
PWR Spannungsversorgung
Die Power LED leuchtet bei Anschluss an ein Netzteil mit eingeschalteter
Spannungsversorgung (grün).
Die SUSV ist aktiv (violett).
Bootloader wird gestartet und läuft ohne Fehler (Die Farben rot und gelb
leuchten für eine Sekunde auf).
TC TwinCAT Status-LED
TwinCAT ist im Run-Modus (grün)
TwinCAT ist im Stop-Modus (rot)
TwinCAT ist im Konfig-Modus (blau)
HDD Read/Write CFast-Karte
(rot) Zeigt einen Zugriff auf die CFast- Karte an.
FB1 Status-LED1 für Feldbus (Funktion wird bei der Feldbusschnittstelle
beschrieben)
FB2 Status-LED2 für Feldbus (Funktion wird bei der Feldbusschnittstelle
beschrieben)
9.1.1 K-Bus
Die angeschlossenen Busklemmen werden vom Netzteil auf Fehler überprüft. Die rote LED „K-BUS ERR“ ist
aus, wenn keine Fehler vorhanden sind. Die rote LED „K-BUS ERR“ blinkt, wenn Fehler im Bereich der
Busklemmen vorhanden sind.
Tab.31: Diagnose-LEDs im K-Bus-Modus.
Anzeige LED Bedeutung
Us 24V Spannungsversorgung für CPU-Grundmodul. Die LED leuchtet
grün bei korrekter Spannungsversorgung.
Up 24V Spannungsversorgung für Klemmenbus. Die LED leuchtet grün
bei korrekter Spannungsversorgung.
K-BUS RUN Diagnose K-Bus. Die grüne LED leuchtet, um den fehlerfreien
Betrieb anzuzeigen. Fehlerfrei bedeutet, dass auch die
Kommunikation mit dem Feldbussystem fehlerfrei läuft.
K-BUS ERR Diagnose K-Bus. Die rote LED blinkt zur Fehleranzeige. Die rote
LED blinkt mit zwei unterschiedlichen Frequenzen.
Durch die Frequenz und Anzahl des Blinkens kann der Fehlercode und das Fehlerargument ermittelt
werden. Ein Fehler wird durch die LED „K-BUS ERR“ in einer festen Reihenfolge angezeigt.
Tab.32: K-BUS ERR LED, Reihenfolge der Fehleranzeige durch die LED.
Reihenfolge Bedeutung
Schnelles Blinken Start der Sequenz
Erste langsame Sequenz Fehlercode
Keine Anzeige Pause, die LED ist aus
Zweite langsame Sequenz Fehlerargument
Zählen Sie, wie oft die rote LED K-BUS ERR blinkt, um den Fehlercode und das Fehlerargument zu
ermitteln. Bei dem Fehlerargument zeigt die Anzahl der Impulse die Position der letzten Busklemme vor dem
Fehler an. Passive Busklemmen, wie zum Beispiel eine Einspeiseklemme, werden nicht mitgezählt.
CX20x360 Version: 1.0
Page 61

Fehlerbehandlung und Diagnose
Tab.33: K-BUS ERR LED, Fehlerbeschreibung und Abhilfe.
Fehlercode Fehlerargument Beschreibung Abhilfe
Ständiges,
konstantes
Blinken
3 Impulse 0 K-Bus-Kommandofehler. • Keine Busklemme gesteckt.
4 Impulse 0 K-Bus-Datenfehler,
n Bruchstelle hinter
5 Impulse n K-Bus-Fehler bei
6 Impulse 0 Fehler bei der
1 Interner Datenfehler. Hardware-Reset des Embedded-PCs (aus -
8 Interner Datenfehler. Hardware-Reset des Embedded-PCs (aus-
7 Impulse 0 Prozessdatenlängen der
EMV Probleme. • Spannungsversorgung auf Unter- oder
Überspannungsspitzen kontrollieren.
• EMV-Maßnahmen ergreifen.
• Liegt ein K-Bus-Fehler vor, kann durch
erneutes Starten (Aus- und
Wiedereinschalten des Netzteils) der
Fehler lokalisiert werden.
• Eine der Busklemmen ist defekt,
angehängte Busklemmen halbieren und
prüfen ob der Fehler bei den übrigen
Busklemmen noch vorhanden ist. Dieses
Vorgehen wiederholen, bis die defekte
Busklemme lokalisiert ist.
Kontrollieren, ob die Busendklemme 9010
Bruchstelle hinter dem
Netzteil.
Busklemme n.
Register-Kommunikation
mit Busklemme n.
Initialisierung.
Soll- und Ist-Konfiguration
stimmen nicht überein.
gesteckt ist.
Prüfen, ob die Busklemme n+1 hinter dem
Netzteil richtig gesteckt ist, gegebenenfalls
tauschen.
Busklemme an Stelle n tauschen.
Embedded-PC tauschen.
und wieder einschalten).
und wieder einschalten).
Konfiguration und Busklemmen auf
Konsistenz prüfen.
Bei manchen Fehlern geht die LED „K-BUS ERR“ nicht aus, obwohl der Fehler beseitigt wurde. Schalten Sie
die Spannungsversorgung für das Netzteil aus und wieder ein, damit die LED nach der Fehlerbeseitigung
ausgeschaltet wird.
CX20x3 61Version: 1.0
Page 62

Fehlerbehandlung und Diagnose
State-Variable
In TwinCAT gibt es unter dem Buskoppler die Variable State, für die K-Bus-Diagnose.
Abb.28: Status-Variable für Fehlerbehandlung und Diagnose unter TwinCAT.
Ist der Wert „0“ so arbeitet der K-Bus synchron und ohne Fehler. Sollte der Wert <> „0“ sein, kann ein Fehler
vorliegen. Es kann aber auch nur ein Hinweis sein, das zum Beispiel der K-Bus-Zyklus länger dauert, als die
verwendete Task. Damit ist er dann nicht mehr synchron zu der Task. Die Task-Zeit sollte schneller als 100
ms sein. Wir empfehlen eine Task-Zeit kleiner 50 ms. Typischerweise liegt die K-Bus-Update-Zeit zwischen
einer und fünf ms.
Tab.34: Beschreibung der Werte bei der State-Variable.
Bit Beschreibung
Bit 0 K-Bus-Fehler.
Bit 1 Klemmenkonfiguration hat sich seit dem Start geändert.
Bit 2 Prozessabbildlängen stimmen nicht überein.
Bit 8 (noch) keine gültigen Eingänge.
Bit 9 K-Bus ist im Inputupdate noch nicht fertig.
Bit 10 K-Bus ist im Output-Update noch nicht fertig.
Bit 11 Watchdog.
Bit 15 azyklische K-Bus-Funktion aktiv (z.B. K-Bus-Reset).
Liegt ein K-Bus-Fehler vor, kann dieser über den Funktionsbaustein IOF_DeviceReset (in der
TcIoFunctions.lib) zurückgesetzt werden.
CX20x362 Version: 1.0
Page 63

Fehlerbehandlung und Diagnose
9.1.2 E-Bus
Die angeschlossenen EtherCAT-Klemmen werden vom Netzteil überprüft. Im E-Bus-Modus leuchtet die LED
„L/A“. Wenn Daten übertragen werden, blinkt die LED „L/A“.
Tab.35: Diagnose-LEDs im K-Bus-Modus.
Anzeige LED Bedeutung
Us 24 V Spannungsversorgung für CPU-Grundmodul. Die LED
leuchtet grün bei korrekter Spannungsversorgung.
Up 24 V Spannungsversorgung für Klemmenbus. Die LED
leuchtet grün bei korrekter Spannungsversorgung.
L / A aus E-Bus nicht angeschlossen.
an E-Bus angeschlossen / Kein Datenverkehr.
blinkt E-Bus angeschlossen / Datenverkehr auf dem E-Bus.
CX20x3 63Version: 1.0
Page 64

Fehlerbehandlung und Diagnose
9.2 Störungen
Tab.36: Mögliche Störungen und ihre Beseitigung.
Störung Ursache Maßnahmen
keine Funktion nach Starten des
Embedded-PCs.
Der Embedded-PC bootet nicht
vollständig.
Rechner bootet, Software wird
gestartet, aber Steuerung arbeitet
nicht einwandfrei.
Fehler bei Zugriff auf CFast-Karte. Fehlerhafte CFast-Karte,
Embedded-PC funktioniert nur
teilweise oder nur zeitweise.
Uhrzeit und Datum werden nicht
mehr gespeichert.
Lüfter dreht nicht. Lüfter defekt. Lüfterkassette wechseln.
CX20x0 mit Windows Embedded
Compact 7 findet keine neue
Hardware (z.B.
Erweiterungsmodule).
• Fehlende Stromversorgung des
Embedded-PCs
• Andere Ursachen.
Festplatte beschädigt (z.B. durch
Abschalten bei laufender
Software), Setupeinstellungen
fehlerhaft, andere Ursachen.
Fehlerursache liegt bei der
Software oder bei Anlagenteilen
außerhalb des Embedded-PCs.
fehlerhafter Karteneinschub.
Komponenten im Embedded-PC
defekt.
Die Lebensdauer der Batterie ist
überschritten
Der Embedded-PC sucht nur beim
ersten Start nach neuer Hardware
am PCI-Bus.
1. Sicherung prüfen.
2. Anschlussspannung messen
und Steckerbelegung prüfen.
3. Beckhoff Support anrufen.
1. Setupeinstellungen prüfen.
2. Beckhoff Support anrufen.
Rufen Sie den Maschinen- oder
Softwarehersteller an.
1. Mit einer anderen CFast-Karte
den Karteneinschub prüfen.
2. Beckhoff Support anrufen.
Beckhoff Support anrufen.
Batterie wechseln.
Löschen Sie den Ordner
„Documents and Setting“ auf der
CFast-Karte.
Siehe: Nach neuer Hardware
suchen
Bitte notieren Sie sich vor Kontaktaufnahme mit dem Service oder Support folgende Angaben:
1. Genaue Gerätebezeichnung CXxxxx-xxxx.
2. Seriennummer.
3. Hardwarestand.
4. evtl. vorhandene Schnittstellen (N030, N031, B110, ...).
5. eingesetzte TwinCAT Version.
6. evtl. weitere eingesetzte Komponenten / Software.
Der Support / Service in Ihrem Land kann Ihnen am schnellsten helfen. Bitte kontaktieren Sie daher Ihren
regionalen Ansprechpartner. Schauen Sie auf unserer Webseite: www.beckhoff.de nach oder fragen Sie
Ihren Vertriebspartner.
CX20x364 Version: 1.0
Page 65

Pflege und Wartung
10 Pflege und Wartung
10.1 Batterie wechseln
HINWEIS
Explosionsgefahr
Eine falsch eingelegte Batterie kann explodieren und den Embedded-PC beschädigen.
Verwenden Sie nur Originalbatterien und achten Sie unbedingt darauf, dass die Plus- und Minuspole der
Batterie korrekt eingelegt sind.
Die Batterie muss alle 5 Jahre gewechselt werden. Ersatzbatterien können beim Beckhoff Service bestellt
werden. Bei dem Embedded-PC wird eine Batterie vom Typ CR2032 (3V, 225mAh) eingesetzt.
Das Batteriefach befindet sich unter der Frontklappe. Die Batterie puffert die Uhrzeit und das Datum. Die
Uhrzeit und das Datum werden zurückgesetzt, sobald die Batterie entfernt wird. Beachten Sie dieses
Verhalten für Ihre Hard- und Softwarekonfiguration und stellen Sie die Uhrzeit und das Datum nach dem
Wechsel im BIOS neu ein. Alle anderen Einstellungen im BIOS werden nicht verändert und bleiben erhalten.
Voraussetzungen:
• Der Embedded-PC ist ausgeschaltet.
Wechseln Sie die Batterie wie folgt:
1. Hebeln Sie die Frontklappe mit einem Schraubendreher auf und entfernen Sie die Frontklappe.
CX20x3 65Version: 1.0
Page 66

Pflege und Wartung
2. Ziehen die Batterie an der Auswurflasche vorsichtig aus der Halterung.
3. Schieben Sie die neue Batterie in das Batteriefach. Der Pluspol zeigt dabei nach links in Richtung der
DVI-I Schnittstelle.
ð Der Batteriewechsel ist abgeschlossen. Schließen Sie die Frontklappe und stellen Sie das Datum und
die Uhrzeit im BIOS neu ein.
CX20x366 Version: 1.0
Page 67

Pflege und Wartung
10.2 Lüfterkassette wechseln
Lebensdauer
Die Lüfterkassette muss alle 5 Jahre gewechselt werden. Weitere Lüfterkassetten können beim
Beckhoff Service bestellt werden.
Wechseln Sie die Lüfterkassette beim CX20x3 wenn:
• die Lüfterkassette 5 Jahre im Betrieb war
• oder sich der Lüfter langsamer als 1000 U/min dreht.
Bei einem Embedded-PC CX20x3 wird die Lüfterdrehzahl abhängig von der Temperatur geregelt.
Tab.37: Lüfterregelung und Lüfterdrehzahl beim CX20x3 abhängig von der Temperatur.
Temperatur Lüfterregelung Lüfterdrehzahl
bei 35 °C 0 % 1500 U/min
35 °C … 61,25 °C 0 % … 100 %, linear geregelt 1500 U/min…5900 U/min, linear
geregelt
ab 61,25 °C 100 % 5900 U/min
Benutzen Sie die IPC-Diagnose und überwachen Sie die Lüfterdrehzahl, um eine Funktionsstörung des
Lüfters zu ermitteln.
Der Zugriff auf den Lüfterstatus wird in der Dokumentation zum Beckhoff Device Manager
beschrieben:https://infosys.beckhoff.com/content/1031/devicemanager/index.html?
id=8733183011738041650
Wechseln Sie die Lüfterkassette wie folgt:
1. Öffnen Sie die Frontklappe mit einem Schraubendreher.
2. Ziehen Sie die alte Lüfterkassette aus dem Gehäuse.
3. Schieben Sie die neue Lüfterkassette mit den Kontakten voran in das Gehäuse. Die Führungsschienen
am Lüfter passen zu den Führungsschienen im Gehäuse.
ð Schließen Sie die Frontklappe. Sie haben die Lüfterkassette erfolgreich gewechselt, wenn der Lüfter
wieder anläuft.
CX20x3 67Version: 1.0
Page 68

Pflege und Wartung
10.3 Embedded-PC reinigen
VORSICHT
Stromschlaggefahr
Unter Spannung stehende Geräte oder Teile können zu Stromschlägen führen. Trennen Sie den Embedded-PC vor der Reinigung von der Spannungsversorgung.
Reinigen Sie ausschließlich das Gehäuse des Embedded-PCs. Verwenden Sie dafür einen feuchten,
weichen Putzlappen. Sorgen Sie dafür, dass die Lüftungsschlitze des Geräts immer frei sind und nicht
verstopfen.
Die folgenden Reinigungsmittel und -materialien sind ungeeignet und können zu Schäden führen:
• ätzende Reinigungsmittel
• Lösungsmittel
• Scheuermittel
• harte Gegenstände
CX20x368 Version: 1.0
Page 69

Außerbetriebnahme
11 Außerbetriebnahme
11.1 Leitungen entfernen
HINWEIS
Elektrische Spannung
Eine eingeschaltete Spannungsversorgung kann während der Demontage zu Schäden an den EmbeddedPCs führen. Schalten Sie die Spannungsversorgung für die Embedded-PCs während der Demontage ab.
Bevor Sie den Embedded-PC demontieren, müssen Sie den Embedded-PC herunterfahren und die
Spannungsversorgung abschalten. Erst danach können Sie alle Leitungen entfernen. Entfernen Sie auch
alle Leitungen von der ersten Klemme nach der Netzteilklemme.
Voraussetzungen:
• Beenden Sie ihre Software und fahren Sie den Embedded-PC herunter.
• Schalten Sie die Spannungsversorgung ab.
Entfernen Sie die Leitungen wie folgt:
1. Entfernen Sie die Verkabelung vom Embedded-PC.
2. Entfernen Sie die Verkabelung von der ersten Klemme neben der Netzteilklemme.
3. Ziehen Sie an der orangefarbenen Lasche und ziehen Sie damit die erste Klemme nach der
Netzeilklemme nach vorne heraus.
ð Der Embedded-PC kann im nächsten Schritt von der Hutschiene genommen und demontiert werden.
CX20x3 69Version: 1.0
Page 70

Außerbetriebnahme
11.2 Embedded-PC demontieren
In diesem Kapitel wird gezeigt, wie Sie den Embedded-PC demontieren und damit von der Hutschiene
nehmen.
Voraussetzungen:
• Alle Leitungen wurden vom Embedded-PC entfernt.
Demontieren Sie den Embedded-PC wie folgt:
1. Lösen Sie die Hutschienenbefestigung, indem Sie die Haken mit einem Schraubendreher nach außen
drücken.
2. Ziehen Sie an der orangefarbenen Lasche, die sich an der Netzteilklemme befindet und nehmen Sie das
Gerät vorsichtig von der Hutschiene.
ð Sie haben den Embedded-PC erfolgreich demontiert.
Entsorgung
Zur Entsorgung muss das Gerät auseinandergebaut und vollständig zerlegt werden. Elektronikbestandteile
sind entsprechend der nationalen Elektronikschrottverordnung zu entsorgen.
CX20x370 Version: 1.0
Page 71

Technische Daten
12 Technische Daten
Tab.38: Technische Daten, Abmessungen und Gewichte.
CX2033 CX2043
Abmessungen (B x H x T) 144mm x 99mm x 91mm
Gewicht ca. 1165g ca. 1230g
Tab.39: Technische Daten, allgemeine Daten.
Technische Daten CX2042
Prozessor AMD Ryzen™ V1202B 2,3 GHz, 2
Cores
Arbeitsspeicher 8 GB DDR4-RAM (optional erweiterbar)
Flash-Speicher Einschub für CFast-Karte, Karte nicht enthalten
NOVRAM integriert 128 kB
Spannungsversorgung 24 V DC (-15 %/+20 %)
max. Leistungsaufnahme 42W 70W
Spannungsfestigkeit 500 V (Versorgung / interne Elektronik)
Betriebssystem Microsoft Windows 10 IoT Enterprise LTSC, TwinCAT/BSD
Steuerungssoftware TwinCAT-2-Runtime, TwinCAT-3-Runtime (XAR)
Diagnose LED 1 x Power, 1 x TC-Status, 1 x Flash-Zugriff, 2 x Bus-Status
Uhr interne, batteriegepufferte Uhr für Zeit und Datum (Batterie austauschbar)
Zulassungen CE
AMD Ryzen™ V1807B 3,35 GHz, 4
Cores
Tab.40: Technische Daten, I/O-Klemmen.
Technische Daten Beschreibung
I/O-Anschluss via Netzteil (E-Bus oder K-Bus, automatische Erkennung)
Stromversorgung für I/O-
Klemmen
Strombelastung
Powerkontakte
Prozessdaten K-Bus max. 2048 Byte In und 2048 Byte Output
max. Anzahl der Klemmen
(K-Bus)
max. Anzahl der Klemmen
(E-Bus)
Tab.41: Technische Daten, Umgebungsbedingungen.
Technische Daten Beschreibung
Umgebungstemperatur im
Betrieb
Umgebungstemperatur
bei Lagerung
Relative Feuchte 95% ohne Betauung
Schwingungsfestigkeit gemäß EN 60068-2-6
Schockfestigkeit gemäß EN 60068-2-27
EMV-Festigkeit gemäß EN 61000-6-2
EMV-Aussendung gemäß EN 61000-6-4
Schutzart IP 20
max. 2A
max. 10 A
64 (255 mit K-Bus-Verlängerung)
bis zu 65534 Klemmen.
-25° C ... +60° C
-40° C ... +85° C
siehe Hinweise unter: Transport und Lagerung [}10]
CX20x3 71Version: 1.0
Page 72

Technische Daten
Tab.42: Technische Daten, Grafikspezifikationen.
Technische Daten CX2033 CX2043
Grafik AMD Radeon™ Vega 3 Graphics AMD Radeon™ Vega 11 Graphics
Shader Model 6.4
DirectX 12
OpenGL 4.6
Tab.43: Technische Daten, Schnittstellen.
Technische Daten Beschreibung
LAN 2 x RJ 45, 10/100/1000 MBit/s
USB 4 x USB 3.0 mit je 900 mA, Typ A
DVI-D Auflösung am Monitor in Pixel:
640 x 480 bis 1920 x 1200
Tab.44: Technische Daten, Optionsschnittstellen.
Technische Daten Beschreibung
DVI-D Auflösung am Monitor in Pixel: 640 x 480 bis 1920 x 1200
DisplayPort Auflösung am Monitor in Pixel: max. 2560x1600
RS232 D-Sub-Stecker, 9-polig
Potenzialtrennung 500 V
RS422/RS485 D-Sub-Stecker, 9-polig
Potenzialtrennung 500 V
EtherCAT-Slave 2 x RJ 45, EtherCAT IN und OUT
100 MBaud
PROFIBUS D-Sub-Stecker, 9-polig
9,6 kBaud bis 12MBaud
CANopen D-Sub-Stecker, 9-polig
10 kBaud bis 1.000 kBaud
PROFINET RT 2 x RJ-45-Switch
CX20x372 Version: 1.0
Page 73

13 Anhang
13.1 Zubehör
Tab.45: CFast-Karten.
Bestellnummer Beschreibung
CX2900-0038 40-GB-CFast-Karte, 3D-Flash, erweiterter Temperaturbereich
CX2900-0040 80-GB-CFast-Karte, 3D-Flash, erweiterter Temperaturbereich
CX2900-0042 160-GB-CFast-Karte, 3D-Flash, erweiterter Temperaturbereich
Tab.46: HDD/SSD.
Bestellnummer Beschreibung
CX2900-0401 Festplatte, SATA, 2½ Zoll, 1 TB
CX2900-0503 Solid-State-Disk SSD, SATA, 3D-Flash, 2½ Zoll, 240 GB
CX2900-0504 Solid-State-Disk SSD, SATA, 3D-Flash, 2½ Zoll, 480 GB
CX2900-0505 Solid-State-Disk SSD, SATA, 3D-Flash, 2½ Zoll, 960 GB
Anhang
größere Kapazitäten auf Anfrage
Tab.47: Ersatzbatterie CX-Systeme.
Bestellnummer Beschreibung
CX1900-0102 Ersatzbatterie, passend für CX10x0, CX50x0, CX51x0, CX52x0, CX90x0,
CX20xx, CX8100 und CX7000
– Lithium-Knopfzelle Typ CR2032, 3 V/225 mAh
Tab.48: Weitere Ersatzteile.
Bestellnummer Beschreibung
CX2900-0101 Gehäuse-Verriegelungsclips (schwarz) für CX20xx- und CX52x0-Serie.
10 Verriegelungssets zu je zwei Clips.
CX2900-0102 Abdeckung für linksseitigen Busstecker, 5 Stück
CX2900-0103 Ersatzlüfterkassette für CX2040, CX2042, CX2062, CX2072 und CX2020,
CX2030 mit Lüfteroption.
– Kassette bestehend aus Gehäuse und Lüfter 60 mm
– einfacher Austausch im Feld durch kabellose Montage
– Gewicht: ca. 30 g
– Abmessungen (B x H x T): 66 x 67 x 16 mm
CX2900-0104 Steckersatz (Ersatzteil) zur Verbindung von USV-Modul CX2100-0914 und
Akkupack CX2900-0192
CX2900-0105 Ersatzhaube für 2½-Zoll-SSD/HDD-Modul CX2550-0020
CX2900-0106 Ersatzrahmen für 2½-Zoll-SSD/HDD-Modul CX2550-0020
CX20x3 73Version: 1.0
Page 74

Anhang
13.2 Zertifizierungen
Prinzipiell sind alle Produkte der Embedded-PC-Familie CE, UL und EAC zertifiziert. Da sich aber die
Produktfamilie ständig weiterentwickelt, kann hier keine Auflistung angegeben werden. Die aktuelle
Auflistung der zertifizierten Produkte kann auf der Internetseite www.beckhoff.de unter Embedded-PC
nachgelesen werden.
FCC Approvals for the United States of America
FCC: Federal Communications Commission Radio Frequency Interference Statement
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to
Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful
interference when the equipment is operated in a commercial environment. This equipment generates, uses,
and can radiate radio frequency energy and, if not installed and used in accordance with the instruction
manual, may cause harmful interference to radio communications. Operation of this equipment in a
residential area is likely to cause harmful interference in which case the user will be required to correct the
interference at his own expense.
FCC Approval for Canada
FCC: Canadian Notice
This equipment does not exceed the Class A limits for radiated emissions as described in the Radio
Interference Regulations of the Canadian Department of Communications.
CX20x374 Version: 1.0
Page 75

Anhang
13.3 Support und Service
Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine
schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur
Verfügung stellt.
Beckhoff Support
Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz
einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:
• Support
• Planung, Programmierung und Inbetriebnahme komplexer Automatisierungssysteme
• umfangreiches Schulungsprogramm für Beckhoff Systemkomponenten
Hotline: +49(0)5246/963-157
Fax: +49(0)5246/963-9157
E-Mail: support@beckhoff.com
Beckhoff Service
Das Beckhoff Service-Center unterstützt Sie rund um den After-Sales-Service:
• Vor-Ort-Service
• Reparaturservice
• Ersatzteilservice
• Hotline-Service
Hotline: +49(0)5246/963-460
Fax: +49(0)5246/963-479
E-Mail: service@beckhoff.com
Weitere Support- und Serviceadressen finden Sie auf unseren Internetseiten unter http://www.beckhoff.de.
Beckhoff Firmenzentrale
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Deutschland
Telefon: +49(0)5246/963-0
Fax: +49(0)5246/963-198
E-Mail: info@beckhoff.com
Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unseren
Internetseiten:
http://www.beckhoff.de
Dort finden Sie auch weitere Dokumentationen zu Beckhoff Komponenten.
CX20x3 75Version: 1.0
Page 76

Tabellenverzeichnis
Tabellenverzeichnis
Tab. 1 Abmessungen und Gewichte der einzelnen Module. .................................................................. 10
Tab. 2 Verfügbare Erweiterungsmodule für den CX20x3. ...................................................................... 11
Tab. 3 Verfügbare Optionsschnittstellen für den CX20x3....................................................................... 12
Tab. 4 Legende zum Aufbau des CPU-Grundmoduls ............................................................................ 13
Tab. 5 Informationen auf dem Typenschild............................................................................................. 14
Tab. 6 Bestellangaben CX20x3. ............................................................................................................. 15
Tab. 7 USB-Schnittstellen (X100, X101, X102, X103), PIN-Belegung. .................................................. 17
Tab. 8 Ethernet-Schnittstelle X000 und X001, PIN-Belegung. ............................................................... 18
Tab. 9 DVI-D-Schnittstelle X200, PIN-Belegung..................................................................................... 19
Tab. 10 DVI-D-Schnittstelle X200, Auflösung am Bildschirm. .................................................................. 19
Tab. 11 DVI-D-Schnittstelle X300, PIN-Belegung..................................................................................... 20
Tab. 12 DVI-D-Schnittstelle X300, Auflösung am Bildschirm. .................................................................. 20
Tab. 13 DisplayPort, PIN-Belegung. ......................................................................................................... 21
Tab. 14 DisplayPort X300, Auflösung am Bildschirm. .............................................................................. 21
Tab. 15 RS232-Schnittstelle X300, PIN-Belegung. .................................................................................. 22
Tab. 16 RS422/485-Schnittstelle, PIN-Belegung. ..................................................................................... 23
Tab. 17 Standardeinstellung, RS485 ohne Echo mit Endpunkt (Terminiert). ........................................... 23
Tab. 18 EtherCAT-Slave-Schnittstelle X300, PIN-Belegung. ................................................................... 24
Tab. 19 PROFIBUS-Schnittstelle X310, PIN-Belegung. ........................................................................... 25
Tab. 20 Leitungsfarben der PROFIBUS Leitung....................................................................................... 25
Tab. 21 CANopen-Schnittstelle X510, PIN-Belegung. .............................................................................. 26
Tab. 22 PROFINET RT-Schnittstelle, PIN-Belegung. ............................................................................... 27
Tab. 23 Passende Netzteile für den CX20x3 Embedded-PC. .................................................................. 28
Tab. 24 Legende zum Aufbau der Netzteilklemme. .................................................................................. 28
Tab. 25 Embedded-PC CX20x3, Einbaulage abhängig von der Kühlung. ............................................... 31
Tab. 26 Legende zum Anschlussbeispiel. ................................................................................................ 36
Tab. 27 Erforderliche Leiterquerschnitte und Abisolierlängen. ................................................................. 37
Tab. 28 Zugangsdaten zum Beckhoff Device Manager bei Auslieferung. ................................................ 39
Tab. 29 Legende zur Strukturansicht. ....................................................................................................... 45
Tab. 30 Kabelredundanz, Hardware für Beispielkonfiguration.................................................................. 49
Tab. 31 Diagnose-LEDs im K-Bus-Modus. ............................................................................................... 60
Tab. 32 K-BUS ERR LED, Reihenfolge der Fehleranzeige durch die LED. ............................................. 60
Tab. 33 K-BUS ERR LED, Fehlerbeschreibung und Abhilfe. ................................................................... 61
Tab. 34 Beschreibung der Werte bei der State-Variable. ......................................................................... 62
Tab. 35 Diagnose-LEDs im K-Bus-Modus. ............................................................................................... 63
Tab. 36 Mögliche Störungen und ihre Beseitigung. .................................................................................. 64
Tab. 37 Lüfterregelung und Lüfterdrehzahl beim CX20x3 abhängig von der Temperatur........................ 67
Tab. 38 Technische Daten, Abmessungen und Gewichte........................................................................ 71
Tab. 39 Technische Daten, allgemeine Daten. ......................................................................................... 71
Tab. 40 Technische Daten, I/O-Klemmen................................................................................................. 71
Tab. 41 Technische Daten, Umgebungsbedingungen.............................................................................. 71
Tab. 42 Technische Daten, Grafikspezifikationen. ................................................................................... 72
Tab. 43 Technische Daten, Schnittstellen. ............................................................................................... 72
Tab. 44 Technische Daten, Optionsschnittstellen..................................................................................... 72
CX20x376 Version: 1.0
Page 77

Tabellenverzeichnis
Tab. 45 CFast-Karten. .............................................................................................................................. 73
Tab. 46 HDD/SSD..................................................................................................................................... 73
Tab. 47 Ersatzbatterie CX-Systeme. ........................................................................................................ 73
Tab. 48 Weitere Ersatzteile....................................................................................................................... 73
CX20x3 77Version: 1.0
Page 78

Abbildungsverzeichnis
Abbildungsverzeichnis
Abb. 1 Beispielaufbau eines Embedded-PCs CX2043 mit aktiver Kühlung............................................ 13
Abb. 2 Typenschild Beispielansicht......................................................................................................... 14
Abb. 3 Bezeichnungssystematik des CPU-Grundmoduls....................................................................... 15
Abb. 4 USB-Schnittstellen X100, X101, X102, X103.............................................................................. 17
Abb. 5 Ethernet-Schnittstellen X000, X001............................................................................................. 18
Abb. 6 DVI-D-Schnittstelle X200............................................................................................................. 19
Abb. 7 DVI-D-Schnittstelle X300............................................................................................................. 20
Abb. 8 DisplayPort X300......................................................................................................................... 21
Abb. 9 RS232-Schnittstelle X300............................................................................................................ 22
Abb. 10 RS485-Schnittstelle X300............................................................................................................ 23
Abb. 11 EtherCAT-Slave-Schnittstelle X300............................................................................................. 24
Abb. 12 PROFIBUS-Schnittstelle X310. ................................................................................................... 25
Abb. 13 CANopen-Schnittstelle X510. ...................................................................................................... 26
Abb. 14 PROFINET RT-Schnittstelle X300............................................................................................... 27
Abb. 15 Embedded-PC CX2043 mit Netzteil CX2100-0014, Aufbau der Netzteilklemme........................ 28
Abb. 16 Embedded-PC CX2033, Abmessungen. ..................................................................................... 29
Abb. 17 Embedded-PC CX2043, Abmessungen. ..................................................................................... 29
Abb. 18 Embedded-PC CX20x3, waagerechte Einbaulage...................................................................... 31
Abb. 19 Passive EtherCAT-Klemme in TwinCAT identifizieren. ............................................................... 35
Abb. 20 Passive EtherCAT-Klemmen, zulässige Montage. ...................................................................... 35
Abb. 21 Anschlüsse für Systemspannung (Us) und Powerkontakte (Up)................................................. 36
Abb. 22 Anschlussbeispiel mit einem CX2033.......................................................................................... 37
Abb. 23 Embedded-PC CX20x0 in der Strukturansicht von TwinCAT 3, mit angereihten EtherCAT-
Klemmen (links) oder Busklemmen (rechts)................................................................................ 45
Abb. 24 Beispielkonfiguration eines CX20x3 mit EtherCAT-Kabelredundanz. ......................................... 49
Abb. 25 Verhalten der Steuerung ohne und mit NOVRAM....................................................................... 53
Abb. 26 Retain-Handler Schreibgeschwindigkeit, bis 63 kB in 512 Byte-Schritten................................... 58
Abb. 27 Retain-Handler Schreibgeschwindigkeit, bis 8 kB in 64 Byte-Schritten....................................... 58
Abb. 28 Status-Variable für Fehlerbehandlung und Diagnose unter TwinCAT......................................... 62
CX20x378 Version: 1.0
Page 79

Page 80

Mehr Informationen:
www.beckhoff.de/cx20x3
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Deutschland
Telefon: +49 5246 9630
info@beckhoff.de
www.beckhoff.de
 Loading...
Loading...