

Beckhoff CX1010-0020, CX1010-0010, CX1010-0011, CX1010-0012, CX1010-0021 Hardware Documentation
...Page 1

Hardware documentation
for CX1010 Embedded PC
CX1010-0xxx
CX1010-Nxxx
version: 1.4
date: 2008.10.26
Page 2

Page 3

Table of contents
Table of contents
1. Foreword
Notes on the documentation 3
Safety instructions 4
Documentation issue status 6
2. Product overview 7
Product overview 7
System overview 8
Basic modules 11
Technical data 11
Configurations 12
Connections 13
Battery compartment 15
Compact Flash slot 16
Compact Flash card 17
Memory overview 18
PC 104 Bus 20
System interfaces 22
Technical data 22
Connectors CX1010-N010 25
Connectors CX1010-N020 27
Connectors CX1010-N030/40 28
Connectors CX1010-N031/41 29
Connectors CX1010-N060 33
Power supply units 35
Overview power supply units 35
Technical data CX1100-0001 36
Technical data CX1100-0002 37
Technical data CX1100-0012 38
Technical data CX1100-0003 39
Technical data CX1100-0013 40
Technical data CX1100-0004 41
Technical data CX1100-0014 42
Connectors CX1100-0001 43
Connectors CX1100-00x2 44
Connectors CX1100-00x3 45
Connectors CX1100-00x4 46
LCD Display 47
3. Transport 48
Unpacking, installation and transport 48
Embedded-PC 1
Page 4

Table of contents
4. Assembly and connecting 49
Mechanical assembly 49
Dimensions 49
Mechanical assembly of basic module 57
Mechanical assembly of fieldbus connectors 60
Inbetriebnahme 62
Start-up procedure 62
BIOS Setup 63
Standard CMOS Features 65
IDE Primary Master 67
IDE Primary Slave 69
Advanced BIOS Features 71
Advanced Chipset Features 74
Integrated Peripherals 76
Power Management Setup 78
IRQ Wakeup Events 79
PnP / PCI Configuration 81
IRQ Resources 82
DMA Resources 83
Memory Resources 84
PC Health Status 85
5. Error handling and diagnostics 86
CPU basic module 86
LED CPU basic module 86
Power supply units 87
LED CX1100-0001 87
LED CX1100-0002 88
LED CX1100-0012 90
LED CX1100-0003 92
LED CX1100-0013 95
LED CX1100-0004 98
LED CX1100-0014 99
Faults 100
6. Removal and disposal 101
Removal and disposal 101
7. Appendix 104
Accessories 104
Certifications 105
Support and service 106
2 Embedded-PC
Page 5

Foreword
1. Foreword
Notes on the Documentation
This description is only intended for the use of trained specialists in control and automation engineering who are
familiar with the applicable national standards. It is essential that the following notes and explanations are followed
when installing and commissioning these components.
Liability Conditions
The responsible staff must ensure that the application or use of the products described satisfy all the requirements for
safety, including all the relevant laws, regulations, guidelines and standards.
The documentation has been prepared with care. The products described are, however, constantly under
development. For that reason the documentation is not in every case checked for consistency with performance data,
standards or other characteristics. None of the statements of this manual represents a guarantee (Garantie) in the
meaning of § 443 BGB of the German Civil Code or a statement about the contractually expected fitness for a
particular purpose in the meaning of § 434 par. 1 sentence 1 BGB. In the event that it contains technical or editorial
errors, we retain the right to make alterations at any time and without warning. No claims for the modification of
products that have already been supplied may be made on the basis of the data, diagrams and descriptions in this
documentation.
© This documentation is copyrighted. Any reproduction or third party use of this publication, whether in whole or in
part, without the written permission of Beckhoff Automation GmbH, is forbidden.
Embedded-PC 3
Page 6

Foreword
Safety Instructions
Safety Rules
The responsible staff must ensure that the application or use of the products described satisfy all the requirements for
safety, including all the relevant laws, regulations, guidelines and standards.
State at Delivery
All the components are supplied in particular hardware and software configurations appropriate for the application.
Modifications to hardware or software configurations other than those described in the documentation are not
permitted, and nullify the liability of Beckhoff Automation GmbH.
Personnel Qualification
This description is only intended for the use of trained specialists in control and automation engineering who are
familiar with the applicable national standards.
Description of safety symbols
The following safety symbols are used in this operating manual. They are intended to alert the reader to the
associated safety instructions
Danger
This symbol is intended to highlight risks for the life or health of personnel.
Warning
This symbol is intended to highlight risks for equipment, materials or the environment.
Note
This symbol indicates information that contributes to better understanding.
Operator's obligation to exercise diligence
The operator must ensure that
· the product is only used for its intended purpose.
· the product is only operated in sound condition and in working order.
· the instruction manual is in good condition and complete, and always available for reference at the location where
the products are used.
· the product is operated only by suitably qualified and authorized personnel.
· the personnel is instructed regularly about relevant occupational safety and environmental protection aspects, and is
familiar with the operating manual and in particular the safety notes contained herein.
4 Embedded-PC
Page 7

Foreword
National regulations depending on the machine type
Depending on the type of machine and plant in which the product is used, national regulations governing the
controllers of such machines will apply, and must be observed by the operator. These regulations cover, amongst
other things, the intervals between inspections of the controller. The operator must initiate such inspections in good
time.
Operator requirements
Read the operating instructions
All users of the product must have read the operating instructions for the system they work with.
System know-how
All users must be familiar with all accessible functions of the product.
Embedded-PC 5
Page 8

Foreword
Documentation Issue Status
Version Changes
1.4 annotations to network ports changed
1.3 BIOS changes added
1.2 system interfaces CX1200-xxxx removed
1.1 system interfaces CX1010-N070 and CX1010-N080 renamed
1.0 version at start of series production
0.0.1 preliminarily version
6 Embedded-PC
Page 9

Product overview
2. Product overview
Appropriate Use
The CX1010 device series is a modular control system designed for top-hat rail installation. The system is scalable,
so that the required modules can be assembled and installed in the control cabinet or terminal box as required.
Only switch the PC off after closing the software
Before the Embedded PC is switched off, the software currently running on it should be stopped properly in order to
avoid data loss on the hard disk. Please read the section on “Switching off”.
Switch off all system components and uncouple the Industrial PC from the system if the PC is not used for control
purposes, e.g. during a function test. Disconnect the device by pulling the first terminal after the power supply unit
(CX1100-002 and CX1100-002) (optional) and the fieldbus connectors.
System components that have been switched off must be secured against being switched on again.
The power supply unit of the Embedded PC requires a 24 V DC supply.
Danger
Do not exchange any parts when under power!
When components are being fitted or removed, the supply voltage must be switched off.
Software knowledge
Warning
Mandatory software knowledge!
Every user must be familiar with any of the functions of the software installed on the PC that he can reach.
Embedded-PC 7
Page 10

Product overview
System overview
The system
With the CX series of Embedded PCs Beckhoff has combined PC technology and modular I/O level to form a top-hat
rail unit in the control cabinet. The CX1020 extends the CX product family by a version with higher CPU performance.
The CX1020 enables direct connection of Bus Terminals and EtherCAT terminals.
While the CX1000 features an 266 MHz AMD Geode processor, the CX1010 is equipped with a 500 MHz AMD®
Geode LX 800Intel(r) CPU. It is an energy-saving device that operates with ultra-low core voltage and features low
thermal power dissipation of only 8 W TDP (thermal design power). As a result, no fan is required despite the
compact design of the CX1010 Embedded PC. Since Compact Flash is used as boot and memory medium, no
rotating media are required in the controller. This is an important aspect for increasing the MTBF (Mean Time
Between Failures) of the overall system.
The case and assembly concept of the CX1010 is similar to that of its smaller brother, the CX1000:
It also consists of several components that can be assembled by the user. The simplest configuration consists of a
CPU module and a multi-functional power supply unit. The PC104 bus is used for the connection between these and
all other CX components, although in the CX1020 this was extended with EtherCAT signals. The basic CPU module
is equipped with one RJ-45 socket.
Like the CX1000, the CX1020 can be expanded with optional system interfaces. A DVI-I (=DVI-D + VGA) output, two
USB-2.0 interfaces, up to four RS232 interfaces and audio are available. The four RS232 interfaces feature optodecoupling and can optionally be implemented as RS422/RS.
The same reusability also applies to the multi-functional power supplied units (CX1100-000x) of the CX1020: one
without I/O terminal connection, one with K-Bus connection, one with K-Bus and IP-Link connection for IP-67protected Fieldbus Box modules, and a power supply unit with direct connection facility for Beckhoff EtherCAT
Terminals.
EtherCAT as a fast I/O system
The CX1010 Embedded PC was developed for optimum interaction with EtherCAT. The Ethernet interface of the
CPU module is not primarily intended for EtherCAT operation. The EtherCAT connection is established via the
EK1110 (EtherCAT) extension terminal. The power supply CX1100-0004 establishes the possibility to connect E-Bus
Terminal to the CPU Module.
8 Embedded-PC
Page 11

Product overview
Interestingly, EtherCAT offers several options for connecting conventional fieldbus systems to the CX1010:
either as a CX1500 module directly at the CPU or as an EtherCAT device in terminal form. The PROFIBUS master is
available either as a CX1500-M310 or as a EL6731 EtherCAT terminal. Both types offer the same performance
characteristics - e.g. both support PROFIBUS DP-V2. In practice, this means that the PROFIBUS master can be
positioned exactly where it is required within a machine. It no longer has to be implemented as a plug-in card in the
IPC or a master controller in the control cabinet.
PLC, Motion Control, interpolation and visualisation
As a top-hat rail IPC and in conjunction with the TwinCAT software from Beckhoff, the CX1010 offers the same
functionality as large Industrial PCs. In terms of PLC, up to four virtual IEC 61131 CPUs can be programmed with up
to four tasks each, with a minimum cycle time of 50 µs. All IEC 61131-3 languages can be used.
Moreover, all TwinCAT functionalities are available for Motion Control applications:
In theory, up to 256 axes can be controlled. In addition to simple point-to-point movements, more complex multi-axis
functions such as "electronic gearbox", "cam plates" and "flying saw" can be implemented. In contrast to the CX1000,
due to its higher CPU performance the CX1010 can now also execute interpolating 3D path movements and
DIN66025 programs.
In addition to real-time execution of control tasks, the TwinCAT real-time kernel ensures that enough time remains for
the user interface (HMI), to communicate with the real-time components via software interfaces such as ADS or OPC.
For the CX1010 the same basic principle applies: it is a programming tool for all controllers.
The complete programming of PLC, Motion Control and visualization is transferable to all PC controls from Beckhoff,
which is reassuring in cases where it becomes apparent during a project that more processing power is required after
all. In this case a system with higher performance can be used.
Basic CPU module
Further system interfaces or fieldbus connections can be added to the basic CPU module. The CPU module requires
a CX1100 type power supply module.
All CX1500 fieldbus modules and all CX1100 power supply units from the CX1000 series can be used in combination
with the CX1010.
The CX1100-0004 power supply unit offers a direct interface between the CX1010 and the EtherCAT Terminals. The
combination of CX1010, EtherCAT and TwinCAT enables cycle and response times of less than 1 millisecond.
The CPU module is available in several variants. These relate to:
- System interface configuration: as an option, a DVI and two USB Interfaces can be added to the combination of the
Ethernet RJ 45 port that is always present.
- Operating system: There is a choice between "Microsoft Windows CE.NET" or "Microsoft Windows XP Embedded".
- Pre-installed TwinCAT software: CX1010 can be pre-installed without a TwinCAT system, with TwinCAT CE PLC,
TwinCAT CE NC PTP or TwinCAT CE NCI, or with the associated full version of the individual TwinCAT levels for
PLC and Motion Control.
System interfaces
Further system interfaces for serial communication (2x RS 232 or RS422, RS485), 2 x USB 2.0 interfaces, video
output (DVI +) , CF card reader/writer or audio signals can be ordered separately.
Fieldbus interfaces
All CX1500 fieldbus modules and all CX1100 power supply units from the CX1000 series can be used in combination
with the CX1010.
The fieldbus interfaces are currently available as master and slave versions for the following fieldbuses:
Beckhoff Lightbus, Profibus DP, CANopen, DeviceNet or SERCOS interface (only master)
The master fieldbus connections enable a CX1020 system to use Beckhoff fieldbus components (such as Bus
Coupler, Bus Terminal Controller or Drive Technology) as local control components for complex systems.
Slave fieldbus connections enable the CX1020 system to be used as a subordinate distributed control system for
complex or modular systems.
Note:
Documentation describing the fieldbus connections is available separately.
Embedded-PC 9
Page 12

Product overview
The software
In combination with the TwinCAT automation software, the CX1010 Industrial PC becomes a powerful IEC 61131-3
PLC with up to four user tasks. Additionally, Motion Control tasks can also be executed. Depending on the required
cycle time, several servo axes can be controlled. Even special functions such as flying saw, electronic gearbox and
cam plate can be realized.
The CX1010 system is programmed in the same way as other bus controllers:
Remote programming via Ethernet
This option is used if the basic unit is equipped with “Windows CE.NET”. In this case, the system is programmed via
a laptop or a desktop PC, which is connected to the CX1020 via Ethernet (network or crossover cable). The
programs are developed on the laptop with a standard TwinCAT software licence and then loaded into the target
device.
Visualization
The Beckhoff OPC server is available for interfacing with SCADA packets, if the two operating system variants
“Windows CE.NET” or “Windows XP Embedded” are used. In other words, the CX1010 also offers straightforward
visualization and simultaneous control in real-time on a single system.
10 Embedded-PC
Page 13

Product overview
Basic modules
Dimensions:
The basic configuration of the CX1010 includes a 64 MB Compact Flash card. One Ethernet RJ 45 interface is also
part of the basic configuration. All other CX family components can be connected via the PC104 interface that is
available on both sides. The passive cooling module is included in the scope of supply. For power supply one of the
system power supply modules (CX1100-000x) is needed)
Technical data CX1010-xxxx
Processor Processor AMD Geode® LX 800, 500 MHz clock frequency
Internal Flash Memory 64 MByte Compact Flash card
Internal Memory 256 MByte DDR-RAM
Interfaces 1 x RJ45 (Ethernet)
Diagnose LED 1 x Power, 1 x LAN Link/Activty, 1 x TC, 1 x Flash-Access
Expansion slot 1 x Compact Flash type I+ II insert with eject mechanism
Clock internal battery-backed clock for time and date
Operating system Microsoft Windows CE.NET or Microsoft Windows XP Embedded
Control software TwinCAT PLC Runtime , TwinCAT NC PTP Runtime or TwinCAT NCI
Runtime
System bus 16 Bit ISA (PC104 Standard)
Power supply via system bus (through power supply module CX1100-000x)
Dimensions (W x H x D) 58 mm x 120 mm x 91 mm
Max. power loss 8 W (including CX1010-N0xx system interfaces)
Wight app. 355 g
Operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst / ESD conforms to EN 61000-6-2/EN 61000-6-4
protection class IP 20
0° C ... +50° C / -25° C ... +85° C
Embedded-PC 11
Page 14

Product overview
Configurations
The Basic CPU-Module can be ordered with different hardware and software variations. As operating systems there
are "Windows CE.NET" and "Windows XP Embedded" available. The TwinCAT automation software transforms a
CX1020 system into powerful PLC and Motion Control system that can be operated with or without visualisation.
The order identifier of the basic CPU module is derived as follows:
Following CX1020 configurations are available:
Modul
CX10100000
CX10100010
CX10100011
CX10100012
CX10100100
CX10100110
CX10100111
CX10100112
CX10100020
DVI /
USB
no
operating
system
Windows
CE
Windows
XPE
without
TwinCAT
TwinCAT
PLC
Runtime
TwinCAT
NC PTP
Runtime
- X - - X - -
- - X - X - -
- - X - - X -
- - X - - - X
X X - - X - -
X - X - X - -
X - X - - X -
X - X - - - X
- - - X X - -
CX10100021
CX10100022
CX10100120
CX10100121
CX10100122
X1010 Systems with Windows XP Embedded require a Compact Flash card with a capacity of al least 1 GB.
Note:
For detailed information about the software images see the CX10x0 Software Documentation.
- - - X - X -
- - - X - - X
X - - X X - -
X - - X - X -
X - - X - - X
12 Embedded-PC
Page 15

Product overview
Connections
The basic CPU module is available with different hardware and software options. It is supplied from the power supply
unit, so that only the connections are described here.
Basic CPU module with 2 Ethernet RJ 45 interfaces:
RJ 45 interface (socket):
Assignment of the RJ45 interface:
PIN Signal Description
1 TD + Transmit +
2 TD - Transmit -
3 RD + Receive +
4
5
6 RD - Receive -
7
8
TD & RD are exchanged at the hubs or between two PCs.
Schematic structure of the network components:
Connected not used
Connected not used
The CX1010 features two MAC blocks. The first one (MAC1) operates the left network interfaces for the standard IP
network. This port is also used for PLC programming.
The second block (MAC2) operates the extended PC104 bus. The second physical network connection can be
utilized via additional system interfaces. This requires either a CX1100-0004 power supply unit or a CX1020-N060
system interface. A connection to the E-bus for EtherCAT terminals is realized via the power supply unit. The
CX1010-N060 interface establishes the Ethernet connection, thereby making a further network interface available.
Embedded-PC 13
Page 16

Product overview
Operating system perspective:
The operating system only sees the connections for the network interface. The internal connection via the PC104 bus
extension is shown as the second interface. If no expansion module is connected, the line is reported as not
connected. When the CX1100-0004 power supply unit is connected Windows XPe reports "restricted or no
connection" This behavior is normal, since Windows itself does not use this interface, and therefore no IP address is
allocated. If the CX1020-N060 extension is connected, the connection behaves like a 'normal' network port.
Note
The network ports are only for communication with standard network. Do not connect to
telecommunication circuits.
Basic CPU module with DVI/USB interface:
In addition to the Ethernet port, this basic module also features DVI/USB interfaces. The pin assignment of the basic
CPU module with two USB and a DVI-I interface is explained under the associated CX1010-N 010 system interface.
Applicable to all basic CPU modules:
LED
The green power LED (PWR) is on if the basic CPU module is connected correctly to a live power supply unit.
Compact Flash slot
Further information can be found under Compact Flash slot.
PC 104 Bus
The PC 104 bus is a standardized bus with 104 ISA signals for compact embedded systems.
14 Embedded-PC
Page 17

Product overview
Battery compartment
The battery compartment is located on the left-hand side of the CPU module, between the two Ethernet ports.
It can be opened with the aid of a screwdriver (proceed carefully in order to avoid damage).
The battery is a CR2032 type from Panasonic
with the following specification:
Battery type Electrical properties (at 20° C)
CR2032 3.0 V 225 mAh 0.20 mA 20.0 mm 3.20 mm 3.1 g
Danger
nominal
voltage
nominal
capacity
Standard
charge
continuous
load
Diameter Height Weight
Dimensions
Replace Battery Part. No. CR2032 manufactured by Sanyo or Panasonic
Only. Use of Another Battery May Present A Risk Of Fire Or Explosion.
WARNING, Battery may explode if mistreated. Do Not Recharge,
Disassemble or Dispose of in fire.
Note
The battery must be changed every 5 years.
Spare batteries can be ordered from Beckhoff Service.
Embedded-PC 15
Page 18

Product overview
Compact Flash slot
A Compact Flash slot is provided at the front of module. This enables an additional Compact Flash memory medium
(format I or II) to be operated. The change - in case of the Basic CPU module CF slot - is only allowed while the
system is powered down - otherwise the system could crash. In case of using the CF-slot extension (CXxxxx-A001)
the CF card can be removed after signing out the media from the system. The card can be removed for maintenance
or to extend the system storage capacity. The Compact Flash cards (CF cards) are available as accessories with
different storage capacities.
As example the following pictures show the handling of the CF cards with a CX1000 system. Activating the eject
mechanism below the slot with a screwdriver causes the card to be ejected by approx. 4 mm (FIGURE 1), so that it
can be pulled out (FIGURE 2). If the card is pushed in (FIGURE 3), the eject mechanism will re-engage. The card is
positioned correctly, if it is located approx. 1 mm lower than the front of the housing.
FIG1: Ejecting the CF card
FIG2: Removing the CF card
FIG3: Inserting the CF card
Warning
The Compact Flash slot is a memory interface, not an I/O type CF slot.
16 Embedded-PC
Page 19

Product overview
Compact-Flash card
The Compact Flash card (CF card) is a non-volatile memory medium.
Data to be retained in the event of a power failure should be saved on the CF card. The CF card operates similar to a
hard disk.
Warning
It is recommended only use CF cards supplied by Beckhoff Automation GmbH.
The CF cards are made for industrial use. They possess a higher number of read / write cycles
and an enhance temperature range (up to + 85°C).
A proper operation of the CX-System can only be guaranteed with the use of CF cards from
Beckhoff Automation GmbH!
Embedded-PC 17
Page 20

Product overview
Adapter RAM Hardware address overview
available memory addresses CX1020: D0000-DFFFF (hex)
Base Address
(hex)
D0000 D0FFF 1000 R/W CX1100-0002/3 Dual Ported RAM
D1000 D100F 10 R/W CX1100 Auxiliary Control Block( LCD
D1010 D101F 10 R/W CX1100-0900 UPS Control Block
D2000 D3FFF 2000 R/W CX1100 Non Volatile RAM
D4000 D5FFF 2000 R/W CX1500-M310 Profibus Master
D6000 D7FFF 2000 R/W CX1500-M510 CANopen Master
D8000 D9FFF 2000 R/W CX1500-M520 DeviceNet Master
DA000 DBFFF 2000 R/W CX1500-M200 Lightbus Master
DC000 DDFFF 2000 R/W CX1500-M750 Sercos Master
For some fieldbus connections (all Slave modules) the base addresses are mapped in the memory region upper
DFFFF(hex). So this modules must be ordered with other base addresses. The same situation takes place if more
than two or more master modules of same type are used (for more see note below). The order numbers for the
modules are:
End Address
(hex) Size(Bytes)(hex)
Access
Type Description
Display, misc. registers)
DPRAM
DPRAM
DPRAM
DPRAM
DPRAM
order number alternative ISA-address
Master connection
CX1500-Mxxx-0001 D4000
CX1500-Mxxx-0002 D6000
CX1500-Mxxx-0003 D8000
CX1500-Mxxx-0004 DA000
CX1500-Mxxx-0005 DC000
Slave connection
CX1500-Bxxx-0001 D4000
CX1500-Bxxx-0002 D6000
CX1500-Bxxx-0003 D8000
CX1500-Bxxx-0004 DA000
CX1500-Bxxx-0005 DC000
Replace xxx with the following number for the requested fieldbus system:
200 for Lightbus
310 for Profibus
510 for CAN-open
520 for DeviceNet
750 for Sercos (only Master connection available)
18 Embedded-PC
Page 21

Product overview
Note
Two connection modules (master or slave) can be used simultaneously.
If more than two connections are needed call Beckhoff Automation GmbH for further information.
Embedded-PC 19
Page 22

Product overview
PC/104 Bus
The PC 104 bus is a standardized bus with 104 ISA signals for compact embedded systems.
For the functionality of the CX1020 modules eight further signals have been added ( here marked with color).
Pin assignment of 16 Bit PC 104 Bus:
Pin
Number
1 IOCHCHK* GND GND GND
2 SD7 RESETDRV SBHE* MEMCS16*
3 SD6 +5V LA23 IOCS16*
4 SD5 IRQ9 LA22 IRQ10
5 SD4 -5V LA21 IRQ11
Row A
Row B Row C4 Row D4
6 SD3 DRQ2 LA20 IRQ12
7 SD2 -12V LA19 IRQ13
8 SD1 ENDXFR* LA18 IRQ14
9 SD0 +12V LA17 DACK0*
10 IOCHRDY (KEY)² MEMR* DRQ0
11 AEN SMEMW* MEMW* DACK5*
12 SA19 SMEMR* SD8 DRQ5
13 SA18 IOW* SD9 DACK6*
14 SA17 IOR* SD10 DRQ6
15 SA16 DACK3* SD11 DACK7*
16 SA15 DRQ3 SD12 DRQ7
17 SA14 DACK1* SD13 +5V
18 SA13 DRQ1 SD14 MASTER*
19 SA12 REFRESH* SD15 GND
20 SA11 SYSCLK (KEY)² GND
21 SA10 IRQ7 -- --
22 SA9 IRQ6 -- --
23 SA8 IRQ5 -- --
24 SA7 IRQ4 -- --
25 SA6 IRQ3 -- --
26 SA5 DACK2* -- --
27 SA4 TC -- --
28 SA3 BALE -- --
29 SA2 +5V -- --
30 SA1 OSC -- --
31 SA0 GND -- --
32 GND GND -- --
Remarks:
20 Embedded-PC
Page 23

Product overview
1. B10 and C19 are key locations.
2. Signal timing and function are as specified in ISA specification.
3. Signal source/sink current differ from ISA values.
4. in the specification the pins are counted from 0 to 19
Assignment on the 8 additional pins
Pin number (yellow fields)
Row C
Row D
1 LAN TX- LAN TX+
2 LAN RX- LAN RX+
3 USB D- USB D+
4 SMBDAT SMBCLK
Note:
Further information to PC104 Bus can be found in the datasheet or under http://www.pc104.org.
Embedded-PC 21
Page 24

Product overview
System interfaces
Technical Data
Dimensions:
22 Embedded-PC
Page 25

Product overview
Like for the CX1000, a number of optional interface modules are available for the basic CX1010 CPU module that
can be installed ex works. The following interfaces are available:
CX1010-N010 DVI / USB Module
CX1010-N020 Audio interfaces
CX1010-N030/40 serial interface for RS323
CX1010-N031/41 serial interface for RS422 / RS485
CX1010-N060 Ethernet-interface
The CX1010-N010 option can be connected to Beckhoff Control Panels or standard monitors with DVI or VGA input
via the DVI or USB interfaces.Devices such as printer, scanner, mouse, keyboard, mass storage, CR-RW etc. can be
connected via the USB 2.0 interfaces. Multimedia capability is realized via the CX1010-N020 audio interface. The
modules CX1010-N030 and CX1010-N040 offer a total of four serial RS232 interfaces with a maximum transfer
speed of 115 kbaud. These four interfaces can be implemented in pairs as RS422/RS485, in which casethey are
identified as CX1010-N031 and CX1010-N041 respectively.The system interfaces cannot be retrofitted or expanded
in the field. They are supplied ex factory in the specified configuration and cannot be separated from the CPU
module. The system interfaces run through the internal PC104 bus, so that further CX components can
be connected. The power supply of the system interface modules is ensured via the internal PC104 bus.
Embedded-PC 23
Page 26

Product overview
CX1010-N030
Technical data CX1010-N010 CX1010-N020
Interfaces 1 x DVI +
2 x USB 2.0
max. 100 mA
Line IN,
MIC IN,
Line OUT
CX1010-N040
1 x COM1+2, RS232
1 x COM3+4, RS232
per port
Connection type DVI-I 29-pin
socket +
3,5 mm socket for
jack plug
2 x D-Sub plug 9-pin 2 x D-Sub plug 9-pin
2 USB Ports
type A
Properties DVI-I interface
also carries
out VGA
signals (DVIA)
built-in PC-Beeper
Line OUT output,
max. 200 mW,
suitable for
earphones
max. baud rate
115 kbaud,
can not be used
simultaneously with
N031/N041
Power supply via system bus (Through CX1100-000x power supply module)
Dimensions 19 mm x 100 mm x 51 mm
Operating
0 °C ... +55 °C
temperature
Storage
-25 °C ... +85 °C
temperature
Relative humidity 95% no condensations
CX1010-N031
CX1010-N041
1 x COM1+2, RS422/RS485
1 x COM3+4,RS422/RS485
max. baud rate 115 kbaud,
can not be used simultaneously with
N030/N040
Vibration/Shock
conforms to EN 60068-2-6 / EN 60068-2-27/29
resistance
EMC resistance
conforms to EN 61000-6-2/EN 61000-6-4
burst / ESD
Protection class IP 20
weight app. 80 g
Technical data CX1010-N060
Interfaces 1 x Ethernet 10/100 Mbit
Connection type 1 x RJ45
Properties network connection for enhanced PC104 Bus
Power supply via system bus (through CX1100-000x power supply module)
Dimensions 19 mm x 100 mm x 51 mm
Operating
0 °C ... +55 °C
temperature
Storage
-25 °C ... +85 °C
temperature
Relative
95% no condensations
humidity
Vibration/Shock
conforms to EN 60068-2-6 / EN 60068-2-27/29
resistance
EMC resistance
conforms to EN 61000-6-2/EN 61000-6-4
burst / ESD
Protection class IP 20
weight app. 80 g
24 Embedded-PC
Page 27

Product overview
CX1010-N010 connections
This module features a DVI-I and two USB interfaces.
DVI-I interface
The DVI-I interface transfers analog and digital data and is suitable for connection to analog graphics cards with 15
pin D-Sub connector and digital graphics cards with DVI-D output. The resolution at the screen or the Beckhoff
Control Panel depends on the distance (maximum 5 m).
The DVI interface uses VGA signals, so that the connection of CRT VGA monitors to the CX1000 system using a DVI
to VGA adapter is also possible.
This adapter is available as an accessory.
DVI-I socket:
Pin Assignment Pin Assignment Pin Assignment
1 TMDS Data 2- 9 TMDS Data 1- 17 TMDS Data 0-
2 TMDS Data 2+ 10 TMDS Data 1+ 18 TMDS Data 0+
3 TMDS Data 2/4 Shield 11 TMDS Data 1/3 Shield 19 TMDS Data 0/5 Shield
4 not connected 12 not connected 20 not connected
5 not connected 13 not connected 21 not connected
6 DDC Clock 14 + 5V Power 22 TMDS Clock Shield
7 DDC Data 15 Ground ( +5V, Analog H/V Sync) 23 TMDS Clock +
8 Analog Vertical Sync 16 Hot Plug Detect 24 TMDA Clock -
Embedded-PC 25
Page 28

Product overview
Assignment cross
Pin Assignment
C1 Analog Red Video Out
C2 Analog Green Video Out
C3 Analog Blue Video Out
C4 Analog Horizontal Sync
Resolution at the monitor:
Resolution in Pixel Distance of the interface from the monitor
1600 x 1200 5 m
1280 x 1024 5 m
1024 x 768 5 m
800 x 600 5 m
640 x 480 5 m
USB interface:
The USB socket is a type A socket. The USB interface complies to USB 2.0 specification
Pin Assignment Typical Assignment
1 VBUS Red
2 D- White
3 D+ Green
4 GND Black
Shell Shield Drain Wire
26 Embedded-PC
Page 29

Product overview
CX1020-N020 connections
This system interface provides the audio interface for the CX1020 system. Two inputs, "LINE IN" and "MIC IN", are
available. The "LINE OUT" connection is used as output for audio signals. It can also be used for connecting
headphones with a maximum output of 200 mW. It also features a PC beeper. The audio interfaces are accessed via
the operating system. "Windows XPe" offers an option for switching the audio module to surround mode.
The 3.5 mm sockets are designed for jack plugs.
Standard / stereo mode:
The audio module operates in stereo mode as standard, using stereo outputs/inputs and a single-channel input for
the microphone. The inputs should be connected as indicated. The pin assignments are described below.
Line In / Line Out stereo jack plugs:
Pin assignment Line In /Line Out:
Signal Assignment
L left channel
R right channel
Ground ground
The left channel is transferred via the tip of the jack plug, the right channel via the first ring. The remainder of the
sleeve is used for signal ground.
Mic In mono jack plug:
The only existing channel is transferred via the tip, the remainder of the sleeve is used for signal ground.
Embedded-PC 27
Page 30

Product overview
CX1010-N030/40 connections
The CX1010-N030 system interface features two RS232 interfaces, COM1 and COM2 (9 pin Sub-D plug connector).
If there is need for more than two serial interfaces two further RS232 interfaces, COM3 and COM4 (9 pin Sub-D plug
connector) can be added to the system via the system interface CX1010-N40. The maximum baud rate on all
channels is 115 kBit. The pin assignment for all interfaces is equal and described below. The interface parameter can
be set in the operating system or in the PLC program.
RS232 COM interface (connector):
Pin assignment COM interface:
PIN Signal Type Description
1 DCD Signal in Data Carrier Detected
2 RxD Signal in Receive Data
3 TxD Signal out Transmit Data
4 DTR Signal out Data Terminal Ready
5 GND Ground Ground
6 DSR Signal in Dataset Ready
7 RTS Signal out Request to Send
8 CTS Signal in Clear to Send
9 RI Signal in Ring Indicator
Note
The system interface CX1010-N30 can only be used instead and not simultaneously with
system interface CX1010-N031.
The system interface CX1010-N40 can only be used instead and not simultaneously with
system interface CX1010-N041.
28 Embedded-PC
Page 31

Product overview
CX1020-N031/41 connections
The CX1010-N031 system interface features two RS422 / RS 485 interfaces, COM1 and COM2 (9 pin Sub-D plug
connector). If there is need for more than two serial interfaces two further RS422 / RS485 interfaces, COM3 and
COM4 (9 pin Sub-D plug connector) can be added to the system via the system interface CX1010-N41. The
maximum baud rate on all channels is 115 kBit. The pin assignment for all interfaces is equal and described below.
The interface parameter can be set in the operating system or in the PLC program.
RS232 COM interface (connector):
Pin assignment COM interface:
PIN Signal Type Description
2 TxD+ Data-Out + Transmit 422
3 RxD+ Data-In + Receive 422
5 GND Ground Ground
6 VCC VCC +5V
7 TxD- Data-Out - Transmit 422
8 RxD- Data-In - Receive 422
For RS 485 Pin 2 and 3 ( Data +) as well as Pin7 and 8 (Data -) have to be connected..
Embedded-PC 29
Page 32

Product overview
Setting the interface parameter
If the system interface CX1010-N031/N041 resides at the end of the CX1010-system block, it is easy to access the
dip switches. The dip switches for the configuration of the RS485/422 interfaces can be found at the left side of the
module. If you remove the grey cover you can see the switch:
The upper switch sets the parameters for the upper interface, the lower switch sets the parameter for the lower
interface. The system must be powered down, if the settings of the switches are changed! The settings for default
use should be mentioned by ordering the interface module.
Settings DIP switches RS485:
RS485 without Echo, End-Point ( Terminated) DEFAULT setting
DIP Status Function
1 off Echo on
2 on Echo off
3 on Auto send on
4 off Always send on
5 on Auto receive on
6 off Always receive on
7 on Term on
8 on Term on
RS485 with Echo, End-Point ( Terminated)
DIP Status Function
1 on Echo on
2 off Echo off
30 Embedded-PC
Page 33

Product overview
3 on Auto send on
4 off Always send on
5 off Auto receive on
6 on Always receive on
7 on Term on
8 on Term on
RS485 without Echo, Drop-Point ( without Termination)
DIP Status Function
1 off Echo on
2 on Echo off
3 on Auto send on
4 off Always send on
5 off Auto receive on
6 on Always receive on
7 off Term on
8 off Term on
RS485 with Echo, Drop-Point ( without Termination)
DIP Status Function
1 on Echo on
2 off Echo off
3 on Auto send on
4 off Always send on
5 off Auto receive on
6 on Always receive on
7 off Term on
8 off Term on
Setting DIP-Switches RS422:
RS422 full duplex end point
DIP Status Function
1 on Echo on
2 off Echo off
3 off Auto send on
4 on Always send on
5 off Auto receive on
6 on Always receive on
7 on Term on
8 on Term on
Embedded-PC 31
Page 34

Product overview
Note
The system interface CX1010-N31 can only be used instead and not at the same time with
system interface CX1010-N030.
The system interface CX1010-N41 can only be used instead and not at the same time with
system interface CX1010-N040.
32 Embedded-PC
Page 35

Product overview
CX1020-N060 connections
The CX1010-N060 system interface provides a further network interface. It can only be used if the CX1100-0004
power supply unit is not connected, since in this case the only internal interface available is used for connecting the
Ethernet port. (Details see Basic module description.)
RJ 45 interface (socket):
Assignment of the RJ45 interface, Port 1:
PIN Signal Description
1 TD + Transmit +
2 TD - Transmit -
3 RD + Receive +
4
5
6 RD - Receive -
7
8
TD & RD are exchanged at the hubs or between two PCs.
connected not used
connected not used
Warning
The CX1020-N060 system interface may only be mounted on the right
module. The setup is shown in the following figures.
Proper mounting position:
The interface is located between the CPU module and the power supply unit.
, directly at the CPU
Embedded-PC 33
Page 36

Product overview
Incorrect mounting position:
The interface is located to the left of the CPU module, in series with the other system interfaces.
Warning
The connected network cable must not have a length of more than 15 meters!
Note
The CX1010-N060 system interface can only be used in place of
supply unit, not at the same time
.
the CX1100-0004 power
34 Embedded-PC
Page 37

Product overview
Power supply units
CX1100-000x | Power supply units and I/O interfaces
A choice of four power supply modules is available for use with a CX10x0 system. The power supply of all other
system components is ensured via the internal PC104 bus; no separate supply lines are required. However, the
CX1100 components offer further important characteristics that go beyond a pure power supply: an integrated
NOVRAM enables the fail-safe storage of process data, an LCD display with two lines of 16 characters each is used
for displaying system and user messages. A 4 + 1 keypad enables user input without additional keyboard or input
panel. Local I/O signals are connected via the CX1100-0002 power supply variant, to which all Beckhoff Bus
Terminals can be connected, or via CX1100-0003, which in addition to the Bus Terminals enables the connection of
Extension Box IExxxx type Beckhoff Fieldbus Box modules. The option to connect Bus Terminals or a fieldbus Box
creates a control system with a very variable, expandable I/O level with large signal variety. The I/O data are stored
in a DPRAM, which is accessible by the CPU via the system bus. The power supply units of the CX system can be
changed in the field: If, for example, local I/O via Bus Terminals is required, CX1100-0001 can be replaced with
CX1100-0002 in the field. EtherCAT terminals can be connected via the CX1100-0004 power supply unit. The I/O
data are stored directly in the main memory of the CX1100-0004 CPU; a DPRAM is no longer required. The CX1100-
0004 power supply unit for EtherCAT terminals can not
module.
be connected in conjunction with the basic CX1000 CPU
The technical data are provided with the individual power supply unit specifications:
CX1100-0001 (no field bus)
CX1100-0002 (K-Bus)
CX1100-0012 (K-Bus for CX1030 and CX10x0 for alternative installation positions)
CX1100-0003 (K-Bus, IP-Link)
CX1100-0013 (K-Bus, IP-Link for CX1030 and CX10x0 for alternative installation positions)
CX1100-0004 (E-Bus)
CX1100-0014 (E-Bus for CX1030 and CX10x0 for alternative installation positions)
An overview of the power supply architecture and a detailed description of the general system components such as
GCB, ACB, NOVRAM, display and keypad can be found in the documentation for the power supply units.
Embedded-PC 35
Page 38

Product overview
Technical data CX1100-0001
Dimensions:
One of power supply modules can be selected for a CX10x0 system. The power supply of all other system
components is ensured via the internal PC104 bus; no separate supply lines are required. However, the CX1100
components offer further important characteristics that go beyond a pure power supply: an integrated NOVRAM
enables the fail-safe storage of process data, an LCD display with two lines of 16 characters each is used for
displaying system and user messages.
The power supply CX1100-N001 has no I/O interfaces.
Technical data CX1100-0001
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2
!
Dielectric strength 500 V
Max. power consumption 2.5 W
Recommended fuse at 24 V 4 A
connection type 1 x Open Pluggable Connector, 5-pin
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
I/O-DPRAM -
(supply / internal electronics)
eff
Diagnose LED 1 x PWR
Dimensions (W x H x D) 45 mm x 100 mm x 91 mm
weight app.180 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst / ESD conforms to EN 61000-6-2 / EN 61000-6-4
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
36 Embedded-PC
Page 39

Product overview
Technical data CX1100-0002
Dimensions:
Technical data CX1100-0002
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
(supply / internal electronics)
eff
Max. power consumption 3.5 W
Recommended fuse at
4 A
24 V
K-bus connection yes (adapter terminal)
E-bus connection -
IP-Link connection -
K-bus power supply to 1.75 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
I/O-DPRAM 2 kByte
Diagnose LED 1 x PWR, 1 x I/O Run, 1 x 1/O Err
Dimensions (W x H x D) 40 mm x 100 mm x 91 mm
weight app.250 g
operating/storage
0° C ... +55° C / -25° C ... +85° C
temperature
Relative humidity 95% no condensation
Vibration/shock
conforms to EN 60068-2-6 / EN 60068-2-27/29
resistance
EMC resistance burst /
conforms to EN 61000-6-2 / EN 61000-6-4
ESD
protection class IP 20
Embedded-PC 37
Page 40

Product overview
Technical data CX1100-0012
Dimensions:
Technical data CX1100-0012
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
Max. power consumption 3.5 W
Recommended fuse at
24 V
K-bus connection yes (adapter terminal)
E-bus connection -
IP-Link connection -
K-bus power supply to 1.75 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
I/O-DPRAM 2 kByte
4 A
(supply / internal electronics)
eff
Diagnose LED 1 x PWR, 1 x I/O Run, 1 x 1/O Err
Dimensions (W x H x D) 40 mm x 100 mm x 91 mm
weight app.250 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock
resistance
EMC resistance burst /
ESD
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
conforms to EN 60068-2-6 / EN 60068-2-27/29
conforms to EN 61000-6-2 / EN 61000-6-4
38 Embedded-PC
Page 41

Product overview
Technical data CX1100-0003
Dimensions:
Technical data CX1100-0003
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
Max. power consumption 4 W
Recommended fuse at 24 V 4 A
K-bus connection yes (adapter terminal)
E-bus connection -
IP-Link connection yes
K-bus power supply to 1.75 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
I/O-DPRAM 4 kByte
(supply / internal electronics)
eff
Diagnose LED 1 x PWR, 1 x I/O Run, 1 x 1/O Err
Dimensions (W x H x D) 58 mm x 100 mm x 91 mm
weight app.350 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst /
ESD
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
conforms to EN 61000-6-2 / EN 61000-6-4
Embedded-PC 39
Page 42

Product overview
Technical data CX1100-0013
Dimensions:
Technical data CX1100-0013
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
Max. power consumption 4 W
Recommended fuse at 24 V 4 A
K-bus connection yes (adapter terminal)
E-bus connection -
IP-Link connection yes
K-bus power supply to 1.75 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
I/O-DPRAM 4 kByte
(supply / internal electronics)
eff
Diagnose LED 1 x PWR, 1 x I/O Run, 1 x 1/O Err
Dimensions (W x H x D) 58 mm x 100 mm x 91 mm
weight app.350 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst / ESD conforms to EN 61000-6-2 / EN 61000-6-4
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
40 Embedded-PC
Page 43

Product overview
Technical data CX1100-0004
Dimensions:
With the CX1100-0004 power supply EtherCAT Terminals can be connected to the CX1020-System. With CX11000004 the I/O data are stored directly in the main memory of the CPU; a DPRAM is no longer required. The CX11000004 power supply unit for EtherCAT Terminals can only be connected in conjunction with the basic CX1020 CPU
module.
Technical data CX1100-0004
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
Max. power consumption 3.5 W
Recommended fuse at 24 V 4 A
K-bus connection -
E-bus connection yes (adapter terminal)
E-bus power supply to 2 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
(supply / internal electronics)
eff
I/O-DPRAM -
Diagnose LED 1 x PWR, 1 x L/A Run, 1 x RUN
Dimensions (W x H x D) 40 mm x 100 mm x 91 mm
weight app.250 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst / ESD conforms to EN 61000-6-2 / EN 61000-6-4
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
Embedded-PC 41
Page 44

Product overview
Technical data CX1100-0014
Dimensions:
The CX1100-0014 power supply is designed for CX1030.
With the CX1100-0014 power supply EtherCAT Terminals can be connected to the CX10x0-System. With CX11000004 the I/O data are stored directly in the main memory of the CPU; a DPRAM is no longer required. The CX1100-
0014 power supply unit for EtherCAT Terminals can not
module.
Technical data CX1100-0014
Power supply 24 VDC (-15%/+20%) To meet the UL requirements use a 4 A fuse or a power
supply that has to satisfy NEC class 2!
Dielectric strength 500 V
Max. power consumption 3.5 W
Recommended fuse at 24 V 4 A
E-bus connection yes (adapter terminal)
E-bus power supply to 2 A
connection type Cage-Clamp (adapter terminal)
NOVRAM 8 kByte
Display FSTN display 2 lines x 16 characters of text, illuminated
(supply / internal electronics)
eff
be connected in conjunction with the basic CX1000 CPU
I/O-DPRAM -
Diagnose LED 1 x PWR, 1 x L/A Run, 1 x RUN
Dimensions (W x H x D) 40 mm x 100 mm x 91 mm
weight app.250 g
operating/storage
temperature
Relative humidity 95% no condensation
Vibration/shock resistance conforms to EN 60068-2-6 / EN 60068-2-27/29
EMC resistance burst / ESD conforms to EN 61000-6-2 / EN 61000-6-4
protection class IP 20
0° C ... +55° C / -25° C ... +85° C
42 Embedded-PC
Page 45

Product overview
CX1100-0001 connections
This power supply unit does not have an I/O interface. The power supply is therefore connected through the 5-pin
open pluggable connector. The power supply unit supplies all further system components with a voltage of 24 V DC (15 %/+20%) via the PC104 bus. The dielectric strength of the power supply unit is 500 V
The integrated NOVRAM permits storage of process data that is safe against power failure.
rms
.
Pin Allocation Open Style Connector:
Pin Assignmnet
1
2
3
4
5
+24 V DC
0 V DC
GROUND
reserved / don't use
reserved / don't use
LED:
With proper connection of the power supply unit and with power supply turned on, the power LED (PWR) lights up
green. In the case of a short-circuit, it lights up red.
Embedded-PC 43
Page 46

Product overview
CX1100-00x2 connections
This power supply unit is equipped with an I/O interface, which permits connection of the Beckhoff Bus Terminals.
The power is supplied via the upper spring-loaded terminals labelled “24V” and “0V”.
The supply voltage feeds the CX system and supplies a voltage of 24 V DC (-15 %/+20%) to the Bus Terminals via
the K-Bus. The dielectric strength of the power supply unit is 500 V
on, a further power supply is necessary for the Bus Terminals. This is provided by means of the power contacts,
which are not connected to the power supply.
The integrated NOVRAM permits storage of process data that is safe against power failure.
. Since the K-Bus does no more than pass data
rms
CX1100-0002 for CX1000, CX1010 und CX1020 CX1100-0012 for CX1030
LED:
With proper connection of the power supply unit and with power supply turned on, the power LED (PWR) lights up
green. In the case of a short-circuit, it lights up red.
The I/O LEDs display the operation status of the Bus Terminals. Error-free start-up of the configuration is signalled by
the red "I/O ERR" LED being extinguished. If the ”I/O ERR" LED blinks, an error in the area of the terminals is
indicated. The error code can be determined from the frequency and number of blinks.
PE power contacts
The ”PE" power contact must not be used for other potentials.
44 Embedded-PC
Page 47

Product overview
CX1100-00x3 connections
This power supply unit permits not only the connection of the Beckhoff Bus Terminals, but also the serial connection
of the Beckhoff fieldbus box modules of the type extension box IExxxx. The power is supplied via the upper springloaded terminals labeled “24V” and “0V”.
The supply voltage feeds the CX system and, over the K-Bus, the Bus Terminals. Since the K-Bus does no more
than pass data on, a further power supply is necessary for the Bus Terminals. This is provided by means of the
power contacts, which are not connected to the power supply.
CX1100-0003 for CX1000, CX1010 und CX1020 CX1100-0013 for CX1030
Fieldbus connection:
Plug the IP link connector into the respective connections, i.e. one fibre-optic cable each into IN (x03) and OUT (x04).
You then connect the other end with the corresponding IP link interface of the extension box. The connection must be
made so that the output of the fieldbus connection is connected to the input of the extension box and vice versa.
LED:
With proper connection of the power supply unit and with power supply turned on, the power LED (PWR) lights up
green. In the case of a short-circuit, it lights up red. The I/O LEDs display the operation status of the Bus Terminals.
Error-free start-up of the configuration is signaled by the red "I/O ERR" LED being extinguished. If the ”I/O ERR" LED
blinks, an error in the area of the terminals is indicated. The error code can be determined from the frequency and
number of blinks.
PE power contacts
The ”PE" power contact must not be used for other potentials.
Embedded-PC 45
Page 48

Product overview
CX1100-00x4 connections
This power supply unit is equipped with an I/O interface, which permits connection of the Beckhoff Bus Terminals.
The power is supplied via the upper spring-loaded terminals labeled “24V” and “0V”.
The supply voltage feeds the CX system and supplies a voltage of 24 V DC (-15 %/+20%) to the Bus Terminals via
the E-Bus. The dielectric strength of the power supply unit is 500 V
on, a further power supply is necessary for the Bus Terminals. This is provided by means of the power contacts,
which are not connected to the power supply.
The integrated NOVRAM permits storage of process data that is safe against power failure.
. Since the E-Bus does no more than pass data
rms
CX1100-0004 for CX1000, CX1010 und CX1020 CX1100-0014for CX1030
LED:
With proper connection of the power supply unit and with power supply turned on, the power LED (PWR) lights up
green. In the case of a short-circuit, it lights up red.
PE power contacts
The ”PE" power contact must not be used for other potentials.
Note
Note
This power supply is designed for use with CX1020 systems only. Operation with CX1000
systems is not possible because the EtherCAT protocol is not implemented / designed in the
hardware of the CX1000 systems.
The power supply CX1100-0004 can only be used instead and not simultaneously with system
interface CX1020-N060
Warning
It is important to keep attention to the hardware revision of the power supply. Power supplies
with a hardware revision > 2.0 only work with CX1020 systems with a hardware revision > 2.1
!
46 Embedded-PC
Page 49

Product overview
LC Display
The LC Display of the power supply units has two rows of 16 characters each and is used for displaying system and
user messages.
"Index-Group/Offset" Specification for the LC Display
ADS Port 300
Index
Group
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0x00005000
+ DeviceID
Index Offset Access
0xFFFF90FF R&W
0xFFFF91FF R&W
0xFFFF92FF R&W
0xFFFF93FF R&W
0xFFFF94FF R&W
0xFFFF95FF R&W
0xFFFF96FF R&W
0xFFFF97FF R&W
Data
type
Phys.
unit
Def.
range
Description Remarks
Cursor OFF
Cursor ON
Cursor blink
OFF
Cursor blink
ON
Display OFF
Display ON
Backlight OFF
Backlight ON
0x00005000
+ DeviceID
0x00005000
+ DeviceID
0xFFFFA0FF R&W
0xFFFF00FF R&W
Write Text line
1
Write Text line
2
Embedded-PC 47
Page 50

Transport
3. Transport
Unpacking, installation and transport
The specified storage conditions must be adhered to (see "Technical data").
Dimensions and weight of the individual modules:
Dimensions (W x H x D): 19 x 100 x 91 mm (system interface) , 96 x 112 x 99 mm (basic module) and 58 x 100 x 91
mm (power supply unit with I/O interface)
Weight: 80 g (system interface) to 550 g (basic module)
Unpacking
Proceed as follows to unpack the unit:
1. Remove packaging.
2. Do not discard the original packaging. Keep it for future relocation.
3. Check the delivery for completeness by comparing it with your order.
4. Please keep the associated paperwork. It contains important information for handling the unit.
5. Check the contents for visible shipping damage.
6. If you notice any shipping damage or inconsistencies between the contents and your order, you should notify
Beckhoff Service.
Warning Danger of damage to the unit!
During transport in cold conditions, or if the unit is subjected to extreme temperature swings,
condensation on and inside the unit must be avoided.
Prior to operation, the unit must be allowed to slowly adjust to room temperature. Should
condensation occur, a delay time of approximately 12 hours must be allowed before the unit is
switched on.
Installation
The devices are designed for installation in control cabinets. You will find installation instructions in the chapter
mechanical mounting.
Shipping and relocation
Despite the robust design of the unit, the components are sensitive to strong vibrations and impacts. During
transport, your computer should therefore be protected from excessive mechanical stress. Therefore, please use the
original packaging.
48 Embedded-PC
Page 51

Assembly and connecting
4. Assembly and connecting
Mechanical assembly
Dimensions
The CX1000 product range is characterized by small overall installed size and high modularity. For project planning
purposes, a CPU module, a power supply unit and the associated system interfaces and fieldbus interfaces have to
be provided. The overall width of the application is made up of the individual modules. With a height of 100 mm, the
module dimensions exactly match those of the Beckhoff Bus Terminals. Together with the lowered connector
surfaces, this means that it can be used in a standard terminal box with a height of 120 mm.
Warning
To ensure cooling to the device in operation it is important keep the safety distances. Details see
installation position below.
CX1010 Basic CPU-module:
Embedded-PC 49
Page 52

Assembly and connecting
CX1010-N0x0 System interfaces:
50 Embedded-PC
Page 53

Assembly and connecting
CX1100-000x power supply units:
CX1100-0001
power supply without I/O-interface
CX1100-0002
power supply with I/O-interface (K-Bus-connection)
Embedded-PC 51
Page 54

Assembly and connecting
Abmessungen in mm: 39 x 100 x 91
CX1100-0003
power supply with I/O-interface (K-Bus-connection and IP Link)
Abmessungen in mm: 58 x 100 x 91
CX1100-0004
power supply with I/O-interface (E-Bus-connection)
52 Embedded-PC
Page 55

Assembly and connecting
CX1100-09x0 UPS Modules:
CX1100-0900
CX1100-0910
Embedded-PC 53
Page 56

Assembly and connecting
CX1100-0920
54 Embedded-PC
Page 57

Assembly and connecting
CX1500-Mxxx und CX1500-Bxxx fieldbus connections
All modules for the fieldbus connections (master and slave) have the dimensions (W x H x D) 38 mm x 100 mm x 91
mm.
CX1500-Bxxx
Embedded-PC 55
Page 58

Assembly and connecting
CX1500-Mxxx
56 Embedded-PC
Page 59

Assembly and connecting
Mechanical assembly of the basic module
The installation of the modules takes place in three steps:
1. The sequence of the modules
The basic CPU module with system interfaces, which are factory-installed on the left side, is extended with the power
supply unit on the right and with the fieldbus connection (master or slave) left side if available.
2. Assembly of the CPU and the power supply unit
The individual modules are simply plugged together. The PC104 connector plugs should be handled carefully in order
to avoid damage. When correctly assembled, no significant gap can be seen between the attached housings.
3. Engaging on the top-hat rail
On the bottom of the modules, there is a white tension strap, which is connected with a latching mechanism. These
tension straps must be pulled down before attaching to the top-hat rail. This can be done using an ordinary
screwdriver and a slight turn.
Embedded-PC 57
Page 60

Assembly and connecting
Then fix the CX1010 block on the top hat-rail using the latching straps. You should hear a soft click.
Do not force the module or apply
excessive pressure!
Only apply pressure at insensitive points of the housing (edges). Never apply pressure on the display, the buttons or
movable parts of the CX10x0 system.
After successful latching on the top-hat rail the straps should be pushed back to their original position.
Note:
A locking mechanism prevents the individual housings from being pulled off again. Detailed information relating to
disassembly of the CX1010 configuration from the top-hat rail can be found on page "Removal and disposal".
Installation position:
Correct installation position:
The high-performance CX1010 system generates a significant amount of heat, which is dissipated via a passive
ventilation system. This system requires the unit to be mounted correctly. Ventilation openings are located at the top
and bottom of the housing. The system therefore has to be installed horizontally. This ensures optimum air flow.
58 Embedded-PC
Page 61

Assembly and connecting
Incorrect installation positions:
The CX1010 system must not be operated vertically on the top-hat rail. A vertical position would lead to insufficient
CPU ventilation, since the ventilation openings are located on the top and bottom of the housing. Installation of the
system on its side would also lead to inadequate ventilation.
Embedded-PC 59
Page 62

Assembly and connecting
Mechanical installation of the fieldbus connection
Installation of a fieldbus connection involves several steps:
1. Removing the cover of the basic CX1020 module
In order to be able to connect the fieldbus to the basic CX1020 module, the cover of the basic CX1000/CX1020
module has to be removed first. This is achieved by applying slight pressure on the cover.
2. Assembly and connection to the CX1010 configuration
Since the CX1000 configuration is already positioned on the top-hat rail, the assembly first has to be pushed onto the
top-hat rail. To this end the latching mechanism has to be released by pulling the white straps downwards.
The assembly is connected to the existing CX1000/CX1020 configuration by simply plugging the two units together.
Care must be taken that the plug of the PC104 interface is not damaged.
When correctly assembled, no significant gap can be seen between the attached housings. Finally, the white straps
are returned to their original position, so that the locking mechanism engages.
60 Embedded-PC
Page 63

Assembly and connecting
3. Install cover
If the connection area does not have a closing cover on the left-hand side, the cover that was previously removed
should be pressed over the connections until it audibly engages.
Note:
If the CX1000/CX1020 configuration is not positioned on the top-hat rail, it is possible to connect the assembly with
the CX1000/CX1020 configuration first and then latch the whole module onto the top-hat rail. The installation is
described in section Installation and wiring.
Note:
A locking mechanism prevents the individual housings from being pulled off again.
Embedded-PC 61
Page 64

Assembly and connecting
Inbetriebnahme
Switching the PC on and off
Switching on
The power supply for the basic CPU module comes from the power supply unit. The basic CPU module starts
automatically when the power supply unit is connected to the mains.
Switching on for the first time
When you switch on the PC for the first time, the pre-installed operating system (optional) will be started.
Switching off
The Embedded PC switches off when the power supply unit is switched off. The control software typically running on
Embedded PCs should be shut down or stopped correctly. A user who may not close software may also not switch
the Embedded PC off, since data can be lost from the hard disk by switching off while software is running.
Once the software has been stopped, the operating system can be shut down. Only then should the power supply be
interrupted.
62 Embedded-PC
Page 65

Assembly and connecting
Note on using the setup
Warning
Within the individual setup pages, F6 can be used for loading fail-safe defaults, and F7 for optimised default values
for the individual setup entries. These default values are applied irrespective of whether the board was previously
booted successfully with a particular setup setting. The situation is different if the defaults are called from the TOP
menu. Once a setup setting that subsequently led to successful booting was saved, both menu items will load these
values as defaults for the setup pages. See also "Load Fail-Safe Defaults" and "Load Optimized Defaults".
Beckhoff Automation GmbH supplies the CX1020 systems pre-configured, which means they
are READY FOR USE!
The BIOS settings should only be modified by appropriately trained staff
Under Windows CE the BIOS should not be changed at all, since the operating system is
adapted to the hardware configuration. Any change in the addresses or interrupts would lead to
unstable system behaviour or even crashing.
.
Top menu
Phoenix – AwardBIOS CMOS Setup Utility
► Standard CMOS Features ► PC Health Status
► Advanced BIOS Features Load Fail-Save Defaults
► Advanced Chipset Features Load Optimized Defaults
► Integrated Peripherals Set Passwort
► Power Management Setup Save & Exit Setup
► PnP/PCI Configuration Exit Without Saving
ESC: Quit ↑ ↓
→ ← Select Item
F10: Save & Exit Setup
"Brief description of the function selected above"
A „►“ sign in front of the menu item indicates that a submenu is available. A „x“ sign in front of a menu item indicates
that a setting option is available that first has to be activated via a higher-level setting.
Load Fail-Save Defaults
This option is used for absolute security settings. It is not suitable for continuous operation, but can be useful if the
PC malfunctions.
Load Optimized Defaults
This option is used for setting optimum values as recommended by the manufacturer.
Set Passwort
Here you can enter a setup password for preventing unauthorised invoking of the BIOS.
Save & Exit Setup
This option is used to save the settings and exit setup. Input: Y (Please note: enter Z with German keyboard).
Embedded-PC 63
Page 66

Assembly and connecting
Exit Without Saving
Quit setup without saving the settings. Setting: Y (Please note: enter Z with German keyboard).
64 Embedded-PC
Page 67

Assembly and connecting
Standard CMOS Features
This menu is used for setting the date, time, hard disks, graphics mode and start-up behaviour. At the same time,
information about the memory configuration determined by the system is provided. The memory configuration
information cannot be changed. The setting options for date, time, graphics mode and start-up behaviour are
described below. A new menu opens for setting the hard disk data.
Phoenix – AwardBIOS CMOS Setup Utility
Standard CMOS Features
Date (mm:dd:yy) Mon, Jan 30 2006 Item Help
Time (hh:mm:ss) 11 : 11 : 00
► IDE Primary Master [ None]
► IDE Primary Slave [ None]
Halt On [All, But Keyboard]
Base Memory 640K
Extended Memory 228352K
Total Memory 229376K
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
Date (mm:dd:yy)
Options:
mm … month
dd … day
yy … year
Time (hh:mm:ss)
Options:
hh … hours
mm … minutes
ss … seconds
Halt On
This parameter can be used for stopping the boot process in the event of errors. Errors may be ignored. This menu
item is used to configure the settings.
Options:
All Errors (stop for all types of error)
No Errors (ignore all errors and continue system start-up)
All , But Keyboard (missing keyboard is ignored)
Base Memory
This option is used for displaying the conventional memory (0 KB to 640 KB) in order to indicate whether it was
Embedded-PC 65
Page 68

Assembly and connecting
detected by the POST.
Extended Memory
Available memory from the first MB to the maximum memory capacity.
Total Memory
This is the total of base memory, extended memory and other memory.
66 Embedded-PC
Page 69

Assembly and connecting
IDE Primary Master
This menu is used for setting the data of the first hard disk connected to the IDE bus as master. The hard disk data
(size, number of cylinders, heads, sectors, pre-compensation and home position of the heads when the disk is
switched off) are displayed automatically for the connected hard disk.
Phoenix – AwardBIOS CMOS Setup Utility
IDE Primary Master
IDE HDD Auto-Detection [Press Enter] Item Help
IDE Primary Master [Auto]
Access Mode [Auto]
Capacity 0 MB
Cylinder
Head 0
Precomp 0
Landing Zone 0
Sector 0
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
IDE HDD Auto-Detection:
Automatic detection of the hard disk is initiated by pressing the <Enter> key. After a few seconds the physical data of
the connected hard disk should be displayed in the lower section of the menu.
IDE Primary Master:
This parameter is used for configuring the IDE bus. The following options are available:
None (no hard disk connected to this bus connection)
Auto (auto-detection during each boot process)
Manual (the hard disk is addressed with the set parameters)
Access Mode:
This option can be used to select the operating system for the hard disk. Setting options: CHS, LBA, LARGE, or Auto.
Auto is the recommended setting. Normal (standard) mode supports hard disks with a capacity of up to 528 MB. This
mode uses positions for data access that are specified via cylinders (CYLS), heads, and sectors. The older LBA
(Logical Block Addressing) mode can support hard disks with a capacity of up to 8.4 GB. This mode uses a different
method for calculating the position disk data to be accessed. It translates cylinders, heads and sectors into a logical
address for the data location. Large hard disks support this mode. The BIOS supports the INT 13h extension function
that enables the LBA mode to manage hard disk drives with a capacity of more than 8.4 GB. If the number of
cylinders (CYLs) on the hard disk exceeds 1024 and DOS cannot support it, or if your operating system does not
support LBA mode, LARGE mode should be selected. The following options are available for setting the hard disk
access mode:
CHS
LBA
Embedded-PC 67
Page 70

Assembly and connecting
LARGE
Auto
The following parameters are automatically determined and displayed.
Capacity
Storage capacity of the hard disk. This value is calculated from the individual hard disk parameters.
Cylinder
Define or set the number of cylinders. Depending on the BIOS version and the manufacturer it varies between 1,024
and 16,384 cylinders.
Head
Define or set the number of heads. The number is between 1 and 16 heads.
Precomp
Write pre-compensation, required for older hard disks. This parameter specifies the cylinder from which a difference
in the information density is to be expected.
Landing Zone
This parameter defines the so-called landing zone or park cylinder. This is the resting position for the hard disk head
when the hard disk motor is switched off.
Sector
Define or set the number of sectors per track. Up to 63 sectors are supported, for Phoenix up to 64.
68 Embedded-PC
Page 71

Assembly and connecting
IDE Primary Slave
This menu is used for setting the data of the first hard disk connected to the IDE bus as master. The hard disk data
(size, number of cylinders, heads, sectors, pre-compensation and home position of the heads when the disk is
switched off) are displayed automatically for the connected hard disk.
Phoenix – AwardBIOS CMOS Setup Utility
IDE Primary Slave
IDE HDD Auto-Detection [Press Enter] Item Help
IDE Primary Slave [Auto]
Access Mode [Auto]
Capacity 0 MB
Cylinder
Head 0
Precomp 0
Landing Zone 0
Sector 0
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
IDE HDD Auto-Detection:
Automatic detection of the hard disk is initiated by pressing the <Enter> key. After a few seconds the physical data of
the connected hard disk should be displayed in the lower section of the menu.
IDE Primary Slave:
This parameter is used for configuring the IDE bus. The following options are available:
None (no hard disk connected to this bus connection)
Auto (auto-detection during each boot process)
Manual (the hard disk is addressed with the set parameters)
Access Mode:
This option can be used to select the operating system for the hard disk. Setting options: CHS, LBA, LARGE, or Auto.
Auto is the recommended setting. Normal (standard) mode supports hard disks with a capacity of up to 528 MB. This
mode uses positions for data access that are specified via cylinders (CYLS), heads, and sectors. The older LBA
(Logical Block Addressing) mode can support hard disks with a capacity of up to 8.4 GB. This mode uses a different
method for calculating the position disk data to be accessed. It translates cylinders, heads and sectors into a logical
address for the data location. Large hard disks support this mode. The BIOS supports the INT 13h extension function
that enables the LBA mode to manage hard disk drives with a capacity of more than 8.4 GB. If the number of
cylinders (CYLs) on the hard disk exceeds 1024 and DOS cannot support it, or if your operating system does not
support LBA mode, LARGE mode should be selected. The following options are available for setting the hard disk
access mode:
CHS
LBA
Embedded-PC 69
Page 72

Assembly and connecting
LARGE
Auto
The following parameters are automatically determined and displayed.
Capacity
Storage capacity of the hard disk. This value is calculated from the individual hard disk parameters.
Cylinder
Define or set the number of cylinders. Depending on the BIOS version and the manufacturer it varies between 1,024
and 16,384 cylinders.
Head
Define or set the number of heads. The number is between 1 and 16 heads.
Precomp
Write pre-compensation, required for older hard disks. This parameter specifies the cylinder from which a difference
in the information density is to be expected.
Landing Zone
This parameter defines the so-called landing zone or park cylinder. This is the resting position for the hard disk head
when the hard disk motor is switched off.
Sector
Define or set the number of sectors per track. Up to 63 sectors are supported, for Phoenix up to 64.
70 Embedded-PC
Page 73

Assembly and connecting
Advanced BIOS Features
This menu is used for setting the data of the first hard disk connected to the IDE bus as master. The hard disk data
(size, number of cylinders, heads, sectors, pre-compensation and home position of the heads when the disk is
switched off) are displayed automatically for the connected hard disk.
Phoenix – AwardBIOS CMOS Setup Utility
Advanced BIOS Features
CPU Internal Cache [Enabled] Item Help
First Boot Device [HDD-0]
Second Boot Device [USB-HDD]
Third Boot Device [Disabled]
Boot Other Device [Enabled]
Boot Up NumLock Status [On]
Gate A20 Option [Fast]
Typematic Rate Setting [Disabled]
Typematic Rate (Chars/Sec) 6
Typmatic Delay (Msec) 250
Security Option [Setup]
OS Select For DRAM > 64 MB [Non-OS2]
Full Screen Logo [Disabled]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
CPU Internal Cache
Here you can disable the internal CPU cache.
First Boot Device
Here you can specify which drive should boot first. Set the drive to be used as boot drive. Options:
LS120 (LS-Drive)
HDD-0 (hard disc 1)
CDROM (CD-drive)
HDD-1 (hard disc 2)
ZIP100 (Zip-Drive)
USB-FDD (USB-Floppy)
USB-ZIP (USB Zip-Drive)
USB-CDROM (USB CDROM)
LAN (network)
Disabled (disabled)
This setting is used for booting, if the first boot device is not available. Options:
LS120 (LS-Drive)
HDD-0 (hard disc 1)
CDROM (CD-Laufwerk)
Embedded-PC 71
Page 74

Assembly and connecting
HDD-1 (hard disc 2)
ZIP100 (Zip-Drive)
USB-FDD (USB-Floppy)
USB-ZIP (USB Zip-Drive)
USB-CDROM (USB CDROM)
LAN (network)
Disabled (disabled)
Third Boot Device
This setting is used for booting, if the first and second boot device are not available. Options:
LS120 (LS-Drive)
HDD-0 (hard disc 1)
CDROM (CD-Laufwerk)
HDD-1 (hard disc 2)
ZIP100 (Zip-Drive)
USB-FDD (USB-Floppy)
USB-ZIP (USB Zip-Drive)
USB-CDROM (USB CDROM)
LAN (network)
Disabled (disabled)
Boot Other Device
This option offers two choices: Enabled or Disabled. The standard setting is Enabled. The Enabled setting enables
the BIOS to try all three types, i.e. "First Boot Device", "Second Boot Device" or "Third Boot Device".
Boot Up NumLock Status
State of the numeric keypad. With On it is activated, with Off not.
Gate A20 Option
Defines how the memory above 1MB is accessed. This should be set to Fast, in order to activate access through the
chipset. With the Normal setting it is accessed via the keyboard controller. This option may speed up older
computers. The first 64 K Block above 1 MB can be accessed in standard mode via address line A20. DOS will
anchor itself there, if DOS=High is inserted in Config.sys.
Typematic Rate Setting
This parameter is used to specify whether the options Keyboard Typematic Speed, Delay Before Keys Repeat,
Typematic Rate or Typematic Delay are available. If Disabled, the values are set to 6 characters per second, with a
keyboard delay of 250 ms. The settings can also be specified via the operating system.
Typematic Rate (Chars/Sec)
Specifies the repetition rate of the keyboard when a key is pressed. The options are 6, 8, 10, 12, 15, 20, 24 or 30
characters/second.
Typmatic Delay (Msec)
This value determines when the key function is activated after a key is pressed. The options are 250, 500, 750 or
1000 milliseconds.
Security Option
This parameter specifies the option for which a password applies. If the SYSTEM option is selected, a password has
to be entered during PC start-up. If the SETUP option is selected, a password is only required for accessing the
BIOS.
OS Select For DRAM > 64 MB
For OS/2 systems with more than 64 MB RAM, option OS/2 should be used.
72 Embedded-PC
Page 75

Assembly and connecting
Full Screen Logo
This option can be used to specify that the start logo should fill the whole screen during booting, thereby hiding the
start data. Setting options: Enabled, Disabled
Embedded-PC 73
Page 76

Assembly and connecting
Advanced Chiset Features
This menu offers the possibility to change memory settings. Be careful: wrong settings here can risk the system
stability.
Phoenix – AwardBIOS CMOS Setup Utility
Advanced Chipset Features
CPU Frequency [AUTO] Item Help
Memory Frequency
X
CAS Latency [AUTO]
Interleave Select [LOI]
Video Memory Size [16 M]
Output Display [Panel & CRT]
Flat Panel Configuration [Press Enter]
100 MHz
[Enabled]
Onboard Audio [Enabled]
Onboard USB2.0 [Enabled]
Onboard IDE [Enabled]
Overcurent reporting [Enabled]
Port 4 assignment [Not used]
Memory Hole At 15M-16M [Disabled]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
CPU Frequency
This option allows to set the clock frequency of the system bus. Settings are: Auto, 200 MHz, 333 MHz, 400 MHz,
433 MHz, 500 MHz.
Memory Frequency
This option allows to set the clock frequency of the memory. If CPU clock frequency is set to auto no options are
available.
CAS Latency
If synchronous DRAM is installed the number of clock cycles depends on CAS timing of the DRAM. Possible settings
are 2 or 3 cycles. Settings are: Auto*, 1.5, 2.0, 2.5, 3.0 und 3.5.
Interleave Select
LOI / HOI
Video Memory Size
Disable / 8 M / 16 M (*)
Output Display
Flat Panel / TV Output / CRT / Panel & CRT
Flat Panel Configuration
Here a menu for panel configuration can be opened (only if flat panel is selected above).
74 Embedded-PC
Page 77

Assembly and connecting
Onboard Audio
The onboard audio controller can be switched on or off here. Setting options: Auto, Disabled .
Onboard USB 2.0
The board contains a USB 2.0 chipset with support for USB 2.0. The option can be switched on or off here.
Onboard IDE
If this option is enabled, the IDE controller of the board can be used. If an ATAPI-CD-ROM drive is used and
integrated with the secondary IDE channel, hard disk access is not slowed down.
Over current reporting
This option enables / disables the warning if over current occurs.
Port 4 assignment
Host / Device / Not Used
Memory Hole AT 15M - 16M
To avoid memory conflicts between system and extension cards you can reserve the area for system or extension
cards.
Embedded-PC 75
Page 78

Assembly and connecting
Integrated Peripherals
This menu is used for setting the system interfaces.
Phoenix – AwardBIOS CMOS Setup Utility
Integrated Peripherals
Master Drive PIO Mode [Auto] Item Help
Slave Drive PIO Mode [Auto]
IDE Primary Master UDMA [Auto]
IDE Primary Slave UDMA [Auto]
IDE DMA transfer access [Enabled]
IDE HDD Block Mode [Enabled]
Onboard Serial Port 1 [3E8/IRQ11]
Onboard Serial Port 2 [2E8/IRQ10]
UART Mode Select [Normal]
RxD , DxD Active Hi, Lo
IR Transmission Delay Enabled
UR2 Duplex Mode Half
Use IR Pins IR-Rx2Tx2
Watch Dog Timer Select [Disabled]
Onboard Serial Port 3 [3E8/IRQ11]
Onboard Serial Port 4 [2E8/IRQ10]
GPIO 4-5-6-7 1-1-1-1
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
Master PIO Mode
PIO refers to the concept of programmed input and output. Instead of the BIOS issuing an instruction sequence for
initiating a data transfer from or to the hard disk, PIO enables the BIOS to notify the controller what task should be
executed. The task is then fully handled by the controller and the CPU. Your system supports five PIO modes, 0
(standard) to 4, with the main difference relating to timing. If "Auto" (automatic) is selected, the BIOS will assess your
drive and automatically specify the optimum PIO mode. Auto: The BIOS automatically sets the system value
depending on the timing of your hard disk drive. Mode 0-4: You can select a mode suitable mode that matches the
timing your hard drive.
Slave PIO Mode
PIO refers to the concept of programmed input and output. Instead of the BIOS issuing an instruction sequence for
initiating a data transfer from or to the hard disk, PIO enables the BIOS to notify the controller what task should be
executed. The task is then fully handled by the controller and the CPU. Your system supports five PIO modes, 0
(standard) to 4, with the main difference relating to timing. If "Auto" (automatic) is selected, the BIOS will assess your
drive and automatically specify the optimum PIO mode. Auto: The BIOS automatically sets the system value
depending on the timing of your hard disk drive. Mode 0-4: You can select a mode suitable mode that matches the
timing your hard drive.
IDEPrimary Master UDMA
This option is used to configure the Ultra-DMA/33 mode of your hard disk. Setting options: Auto, Enabled, Disabled.
The option should be set to Enabled.
76 Embedded-PC
Page 79

Assembly and connecting
IDE Primary Slave UDMA
This option is used to configure the Ultra-DMA/33 mode of your hard disk. Setting options: Auto, Enabled, Disabled.
The option should be set to Enabled.
IDE DMA Transfer access
This option is used to set the DMA transfer function of the IDE-hard disk. Options are: Enabled, Disabled.
IDE HDD Block Mode
This option is used to activate block mode for IDE hard disks. If your drive supports this mode and this option is
activated, the system will read the number of blocks per request from the configuration sector of the hard disk. The
recommended setting is Enabled, although it should be noted that this is not suitable for older hard disks.
Onboard Serial Port 1
Configuration of the serial interface settings: IRQ11 (used for the first serial port), Disabled (no interrupt is used).
Setting options: Auto, 3F8/IRQ4, 2F8/IRQ3, 3E8/IRQ4 oder 2E8/IRQ3 ..
Onboard Serial Port 2
Configuration of the serial interface settings: IRQ10 (used for the second serial port), Disabled (no interrupt is used).
Setting options: Auto, 3F8/IRQ4, 2F8/IRQ3, 3E8/IRQ4 oder 2E8/IRQ3..
UART Mode Select
Mode for driver of the serial interface:
normal for RS-232 serial interface
ASKIR for Amplitude keyed shift interface for IR devices
IrDA for IrDA-interface
RxD, TxD Active
Settings cannot be changed in standard mode. This option is used for setting IR transmission/reception to High or
Low.
IR Transmission Delay
If this option is activated, transmission is delayed. Setting options: Enabled, Disabled.
UR2 Duplex Mode
This option is used for configuring infrared devices. Setting options: Full or Half. Please refer to the IR device manual
regarding the duplex mode setting.
Use IR Pins
This option is identical to the TxD, RxD Active option. The required information can be found in the documentation for
your IR device.
Watch Dog Timer Select
Here the timer for the watchdog will be set: Disabled, 10 Sec, 20 Sec, 30 Sec, 40 Sec, 1 Min, 2 Min,4 Min)
Onboard Serial Port 3
Configuration of the serial interface settings: IRQ11 (used for the third serial port), Disabled (no interrupt is used).
Setting options: Auto, 3F8/IRQ11, 2F8/IRQ11, 3E8/IRQ11 oder 2E8/IRQ11 .
Onboard Serial Port 4
Configuration of the serial interface settings: IRQ11 (used for the fourth serial port), Disabled (no interrupt is used).
Setting options: Auto, 3F8/IRQ10, 2F8/IRQ10, 3E8/IRQ10 oder 2E8/IRQ10.
Embedded-PC 77
Page 80

Assembly and connecting
Power Management Setup
This menu is used for power management settings.
Phoenix – AwardBIOS CMOS Setup Utility
Power Management Setup
ACPI Suspend Type [S1(POS)] Item Help
Power Management [Disabled]
** PM Timers **
Standby Mode Disabled
Suspend Mode Disabled
HDD Power Down [Disabled]
Modem Use IRQ [N/A]
Soft-Off by PWR-BTTN [Instant-Off]
Power-On by Alarm [Disabled]
Time (hh:mm:ss) Alarm 0
IRQ Wake Events [Press Enter]
0
0
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
ACPI Suspend Type
This option offers two possibilities: S1 (POS) and S3 (STR). ACPI normally has six states: system S0, S2, S3, S4,
S5. For more information see BIOS-Inside / ACPI-Funktionen.
S1 (POS) Power on Suspend: The sleep mode S1 has a very low reactivation latency. In this state no system
context get lost (CPU oder Chipsatz)
S3 (STR) Suspend to RAM: The state S3 is a deeper sleep mode. It has a low reactivation latency. All system
context except the memory context get lost.
Power Management
Settings: Disabled (no energy saving function used), Min Saving (this setting is activated after 40 minutes and offers
the lowest energy saving level), Max Saving (this setting offers the highest energy saving level).
HDD Power Down
This setting controls how long a hard disk must be left idle before it spins down. The default is "Disabled". (Disabled,
1 / 5 / 10/ 15 30 / 45 Sec. / 1 Min )
Modem Use IRQ
This option is used for specifying the interrupt line (IRQ) of a modem (if present). Activity on this line causes the
computer to 'wake up' in order to receive a fax, for example. Setting options: NA (no allocation), 3 (allocated), 4, 5, 7,
9, 10, 11
Soft-Off by PWR-BTTN
Here you can set the action of the power button: Delay 4 sec.: you have to press the power button longer than 4 sec
to shut the system down. Instant-Off: PC shutdown immediately.
Power On by Alarm
Up to three timers can be set to restart system.
IRQ Wake Events
Here a menu can be opened to select the IRQs for system wakeup.
78 Embedded-PC
Page 81

Assembly and connecting
IRQ Wakeup Events
Here you can set the interrupts for events system wakeup if system is in suspend mode.
Phoenix – AwardBIOS CMOS Setup Utility
IRQ Wakeup Events
IRQ1 (Keyboard) [OFF] Item Help
IRQ3 (COM 2) [OFF]
IRQ4 (COM 1) [OFF]
IRQ5 (LPT 2) [OFF]
IRQ6 (Floppy Disk) [OFF]
IRQ7 (LPT 1) [OFF]
IRQ8 (RTC Alarm) [OFF]
IRQ9 (IRQ2 Redir) [OFF]
IRQ10 (Reserved) [OFF]
IRQ11 (Reserved) [OFF]
IRQ12 (PS/2 Mouse) [OFF]
IRQ13 (Coprocessor) [OFF]
IRQ14 (Hard Disk) [OFF]
IRQ15 (Reserved) [OFF]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
IRQ1 (Keyboard)
[ON /OFF]
IRQ3 (COM 2)
[ON /OFF]
IRQ4 (COM 1)
[ON /OFF]
IRQ5 (LPT 2)
[ON /OFF]
IRQ6 (Floppy Disk)
[ON /OFF]
IRQ7 (LPT 1)
[ON /OFF]
IRQ8 (RTC Alarm)
[ON /OFF]
IRQ9 (IRQ2 Redir)
[ON /OFF]
IRQ10 (Reserved)
[ON /OFF]
IRQ11 (Reserved)
[ON /OFF]
Embedded-PC 79
Page 82

Assembly and connecting
IRQ12 (PS/2 Mouse)
[ON /OFF]
IRQ13 (Coprocessor)
[ON /OFF]
IRQ14 (Hard Disk)
[ON /OFF]
IRQ15 (Reserved)
[ON /OFF]
80 Embedded-PC
Page 83

Assembly and connecting
PnP/PCI Configurations
This menu is used for configuring the PCI bus and Plug and Play Management.
Phoenix – AwardBIOS CMOS Setup Utility
PnP/PCI Configurations
PNP OS Installed [Yes] Item Help
Init Display First [Onboard]
Reset Configuartion Data [Enabled]
Resources Controlled By [Manual]
► IRQ Resources [Press Enter]
► DMA Resources [Press Enter]
► Memory Resources [Press Enter]
PCI/VGA Palette Snoop [Disabled]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
Init Display First
This option selects the primary graphic card. Either a card in PCI-Slot or in AGP-Slot. Options: "First PCI" or
"OnboardAGP".
Reset Configuration Data
If activated, the option ensures that the BIOS deletes the information relating to built-in components and their
resources and reconfigures them (all settings are reset). Setting options: Enabled, Disabled.
Resources Controlled By
Specifies whether the PnP settings should be assigned via setup or automatically. Auto should be used, if there are
no problems with IRQ or DMA assignments.
IRQ Resources
If these resources are set manually, each system interrupt should be assigned a type, depending on the type of
device using the interrupt.
DMA Resources
If these resources are set manually, each DMA (0 upto 7) can be mapped to PCI/ISA PnP or Legacy ISA.
Memory Resources
If memory areas are to be protected for use by the operating system, an area can be set here.
PCI/VGA Palette Snoop
Used by multimedia video cards. This function should be switched on (Enabled), depending on the card. It is
switched off by default.
Embedded-PC 81
Page 84

Assembly and connecting
IRQ Resources
This menu is used for disabling interrupts for free allocation to PCI slots.
Phoenix – AwardBIOS CMOS Setup Utility
IRQ Resources
IRQ-7 assigned to [PCI Device] Item Help
IRQ-12 assigned to [PCI Device]
IRQ-15 assigned to [PCI Device]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
IRQ-n assigned to ( n = {3,4,5,7,9,10,11,12,14,15} )
This parameter is used for disabling (reserving) an interrupt for free allocation. If the setting [PCI Device] is used, the
interrupt is allocated dynamically.
82 Embedded-PC
Page 85

Assembly and connecting
[
]
I
DMA Resources
Each DMA Channel (0, 1, 3, 5, 6 und 7) can be assigned to one BUS (PCI/ISA PnP oder ISA).
Phoenix – AwardBIOS CMOS Setup Utility
DMA Resources
DMA-0 assigned to
DMA-1 assigned to [PCI/ISA PnP]
DMA-3 assigned to [PCI/ISA PnP] Menu Level ►
DMA-5 assigned to [PCI/ISA PnP]
DMA-6 assigned to [PCI/ISA PnP] Legacy ISA for devices
DMA-7 assigned to [PCI/ISA PnP] compliant with the
original PC AT bus
specification, PCI/ISA
PnP for devices
compliant with the
Plug and Play standard
whether designed fot
PCI or ISA bus
architecture
PCI/ISA PnP
tem Help
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
DMA-n assigned to ( n = {0,1,3,5,6,7} )
The bus for the DMA Channel can be assigned (PCI/ISA PnP oder ISA Legacy).
Embedded-PC 83
Page 86

Assembly and connecting
Memory Resources
This menu can be used to specify a memory area for peripherals. The area is precisely defined through a base
address and length.
Phoenix – AwardBIOS CMOS Setup Utility
Memory Resources
Reserved Base [D000] Item Help
Reserved Memory Length [64K]
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
Reserved Base
Start address of the reserved area. N/A (not available), D000, D400, D800 or DC00 can be selected as addresses.
Reserved Memory Length
Size of the memory area in KB. 8K, 16K, 32K or 64K can be set.
84 Embedded-PC
Page 87
Assembly and connecting
PC Health Status
This menu is used for displaying the settings for CPU and motherboard temperatures, power supply, and fan speed.
Phoenix – AwardBIOS CMOS Setup Utility
PC Health Status
Shutdown Temperature
Temp. CPU
Temp. Board
VCORE
VCORESB
+12 V
VCCMEM
VIO
+5 V
Fan1 Speed
[Disabled] Item Help
70°C
59°C
1.21V
1.24V
12.75V
2.57V
3.39V
5.29V
0
↑ ↓ → ← :Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:Help
F5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults
Shutdown Temperature
Emergency temperature system is shutting down. (60°C / 140°F, 65°C / 149°F, 70°C / 158°F, Disabled)
Temp. CPU
Temperature of the CPU.
The maximum operating temperature is 85°C. A warning should be given, if temperature rises higher than 85° C. If
the temperature rises higher than 95° C the system should be shut down. The position of the sensors is shown in
diagram below.
Temp. Board
Temperature sensor 1 of the system board of the CX1010. The maximum operating temperature is 80°C. A warning
should be given, if temperature rises higher than 80° C. If the temperature rises higher than 85° C the system should
be shut down. The position of the sensors is shown in diagram below.
VCORE
Operating power of the porcessor core.
VCORSB
Standby power of processor core.
+12 V
Supply voltage, 12 V.
VCCMEM
Power supply of memory.
VIO
Power supply of outputs.
+5 V
Supply voltage, 5 V.
Fan1 Speed
Rotation Fan 1 (0 though no fan connected)
Embedded-PC 85
Page 88
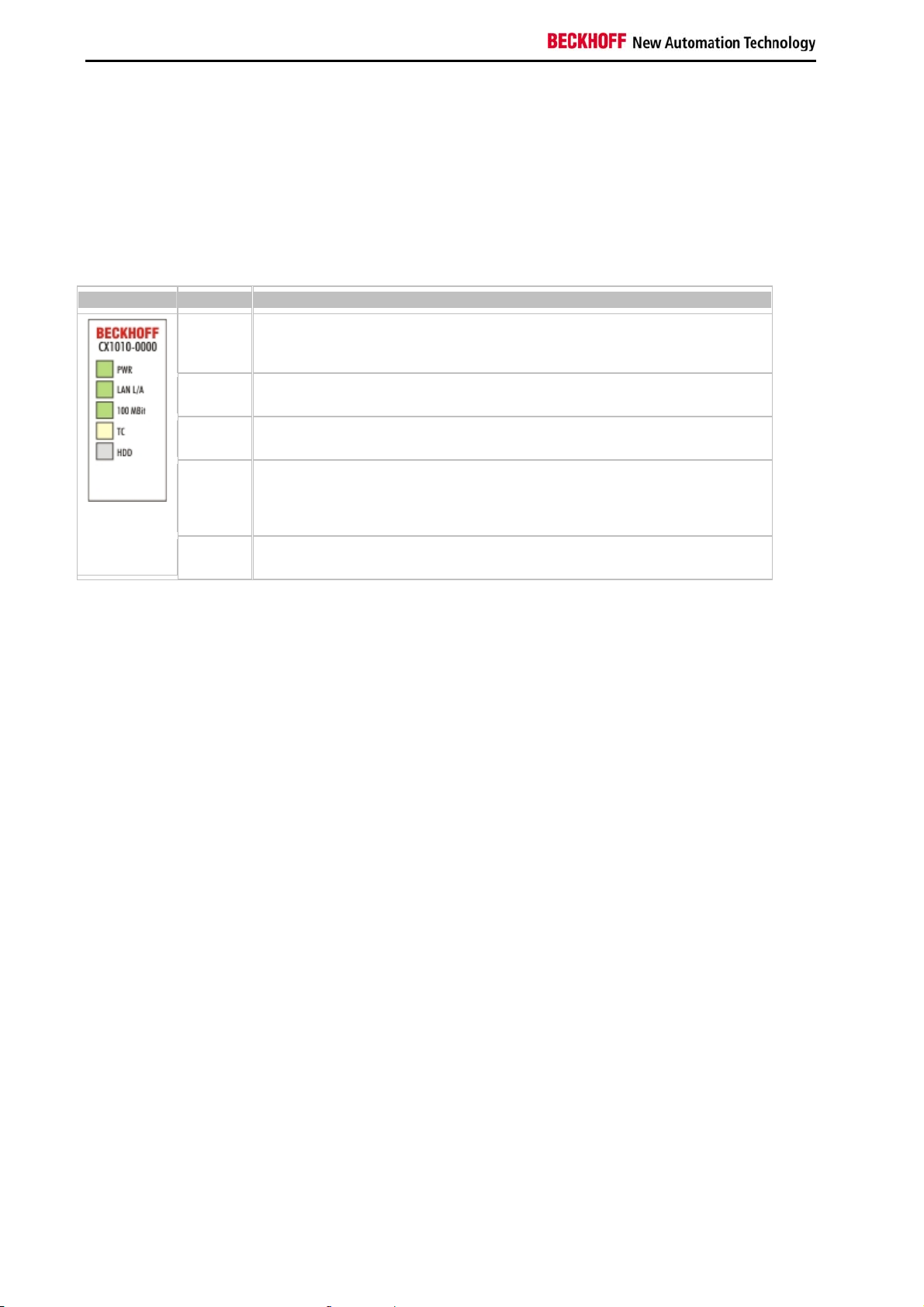
Error handling and diagnostics
5. Error handling and diagnostics
CPU basic module
LEDs Basic CPU-Module
Anzeige LED Bedeutung
PWR Power supply
The Power LED comes on when the device is connected to a live power supply
unit.
LAN L/A LAN L/A (LINK/ ACTIVITY), lights green in network is connected.
Flashes green by net work activity.
100
MBit
TC TwinCAT Status LED
HDD Read/Write Compact Flash (red)
Network link speed 100 MBit LED lights up green.
TwinCAT is in Run-Mode (green)
TwinCAT is in Stop-Modus (red)
TwinCAT is in Config-Mode (blue)
Indicates access to the CF card.
86 Embedded-PC
Page 89

Error handling and diagnostics
Power supply units
CX1100-0001 power supply LEDs
Display LED Meaning
Power The LED lights up green when the power supply is correct, but red if there is a
short circuit.
Embedded-PC 87
Page 90

Error handling and diagnostics
CX1100-0002 power supply LEDs
After switching on, the power supply immediately checks the connected Bus Terminal configuration. Error-free startup is signalled by the red "I/O ERR” LED being extinguished. If the ”I/O ERR" LED blinks, an error in the area of the
terminals is indicated. The error code can be determined from the frequency and number of blinks. This permits rapid
rectification of the error.
Display LED Meaning
Power Power supply
The LED lights up green when the power supply is correct, but red if there is a
short circuit.
I/O
Run
I/O
Error
The I/O error LED blink code
Fast blinking Start of the error code
First slow sequence
Second slow sequence
K-Bus diagnostics
The green LED lights up in order to indicate fault-free operation. "Fault-free"
means that the communication with the fieldbus system is also running.
K-Bus diagnostics
The red LED flashes to indicate an error. The red LED blinks with two different
frequencies.
Error code
Error code argument
LEDs for K-Bus diagnosis
Error code
Error code
Persistent,
continuous
blinking
argument Description Remedy
EMC problems - Check power supply for overvoltage or
undervoltage peaks
- Implement EMC measures
- If a K-Bus error is present, it can be
localised by a restart of the power supply
(by switching it off and then on again)
1 pulse
2 pulses
3 pulses
4 pulses
0 EEPROM checksum error Revert to the manufacturer’s setting
1 Code buffer overflow Insert fewer Bus Terminals. The
programmed configuration has too many
entries in the table
2 Unknown data type Software update required for the power
supply
0 Programmed configuration
has an incorrect table entry
n (n > 0) Table comparison (Bus
Terminal n)
0 K-Bus command error - No Bus Terminal inserted
0 K-Bus data error, break
behind the power supply
n Break behind Bus Terminal n Check whether the Bus End Terminal 9010
Check programmed configuration for
correctness
Incorrect table entry
- One of the Bus Terminals is defective;
halve the number of Bus Terminals
attached and check whether the error is still
present with the remaining Bus Terminals.
Repeat until the defective Bus Terminal is
located.
Check whether the n+1 Bus Terminal is
correctly connected; replace if necessary.
is connected.
88 Embedded-PC
Page 91

Error handling and diagnostics
5 pulses
n K-Bus error in register
Exchange the nth bus terminal
communication with Bus
Terminal n
9 pulses
0 Checksum error in Flash
Revert to the manufacturer’s setting
program
n (n>0) Bus Terminal n is not
consistent with the
Revert to the manufacturer's setting which
will clear the boot project.
configuration that existed
when the boot project was
created
14 pulses
n nth Bus Terminal has the
wrong format
Start the power supply again, and if the
error occurs again then exchange the Bus
Terminal.
15 pulses
n Number of Bus Terminals
Start the power supply up again.
is no longer correct
16 pulses
n Length of the K-Bus data is
Start the power supply up again.
no longer correct
Error code argument
The number of pulses indicates the position of the last Bus Terminal before the fault. Passive Bus Terminals, such as
a power feed terminal, are not included in the count.
In the case of some errors, rectification does not cause the power supply to leave the blink sequence. The power
supply can only be restarted by switching its supply voltage off and on again.
Note:
The supply voltage of the power supply unit, which is necessary to supply power to the CX1000 system, must not be
interrupted in the middle of operation. Switching off the supply voltage to the power supply unit refers here to the
power supply on the power contacts.
Embedded-PC 89
Page 92

Error handling and diagnostics
CX1100-0012 power supply LEDs
After switching on, the power supply immediately checks the connected Bus Terminal configuration. Error-free startup is signaled by the red "I/O ERR” LED being extinguished. If the ”I/O ERR" LED blinks, an error in the area of the
terminals is indicated. The error code can be determined from the frequency and number of blinks. This permits rapid
rectification of the error.
Display LED Meaning
Power Power supply
The LED lights up green when the power supply is correct, but red if there is a
short circuit.
I/O
Run
I/O
Error
The I/O error LED blink code
Fast blinking Start of the error code
First slow sequence
Second slow sequence
K-Bus diagnostics
The green LED lights up in order to indicate fault-free operation. "Fault-free"
means that the communication with the fieldbus system is also running.
K-Bus diagnostics
The red LED flashes to indicate an error. The red LED blinks with two different
frequencies.
Error code
Error code argument
LEDs for K-Bus diagnosis
Error code
Error code
Persistent,
continuous
blinking
argument Description Remedy
EMC problems - Check power supply for overvoltage or
undervoltage peaks
- Implement EMC measures
- If a K-Bus error is present, it can be
localised by a restart of the power supply
(by switching it off and then on again)
1 pulse
2 pulses
3 pulses
4 pulses
0 EEPROM checksum error Revert to the manufacturer’s setting
1 Code buffer overflow Insert fewer Bus Terminals. The
programmed configuration has too many
entries in the table
2 Unknown data type Software update required for the power
supply
0 Programmed configuration
has an incorrect table entry
n (n > 0) Table comparison (Bus
Terminal n)
0 K-Bus command error - No Bus Terminal inserted
0 K-Bus data error, break
behind the power supply
n Break behind Bus Terminal n Check whether the Bus End Terminal 9010
Check programmed configuration for
correctness
Incorrect table entry
- One of the Bus Terminals is defective;
halve the number of Bus Terminals
attached and check whether the error is still
present with the remaining Bus Terminals.
Repeat until the defective Bus Terminal is
located.
Check whether the n+1 Bus Terminal is
correctly connected; replace if necessary.
is connected.
90 Embedded-PC
Page 93

Error handling and diagnostics
5 pulses
n K-Bus error in register
Exchange the nth bus terminal
communication with Bus
Terminal n
9 pulses
0 Checksum error in Flash
Revert to the manufacturer’s setting
program
n (n>0) Bus Terminal n is not
consistent with the
Revert to the manufacturer's setting which
will clear the boot project.
configuration that existed
when the boot project was
created
14 pulses
n nth Bus Terminal has the
wrong format
Start the power supply again, and if the
error occurs again then exchange the Bus
Terminal.
15 pulses
n Number of Bus Terminals
Start the power supply up again.
is no longer correct
16 pulses
n Length of the K-Bus data is
Start the power supply up again.
no longer correct
Error code argument
The number of pulses indicates the position of the last Bus Terminal before the fault. Passive Bus Terminals, such as
a power feed terminal, are not included in the count.
In the case of some errors, rectification does not cause the power supply to leave the blink sequence. The power
supply can only be restarted by switching its supply voltage off and on again.
Note:
The supply voltage of the power supply unit, which is necessary to supply power to the CX1000 system, must not be
interrupted in the middle of operation. Switching off the supply voltage to the power supply unit refers here to the
power supply on the power contacts.
Embedded-PC 91
Page 94

Error handling and diagnostics
CX1100-0003 power supply LEDs
After switching on, the power supply immediately checks the connected Bus Terminal configuration. Error-free startup is signalled by the red "I/O ERR” LED being extinguished. If the ”I/O ERR" LED blinks, an error in the area of the
terminals is indicated. The error code can be determined from the frequency and number of blinks. This permits rapid
rectification of the error. Though the power supply supports two bus systems both bus errors are reported by the "I/OErr" LED. An error ob K-Bus is reported by rapid blinking. One long flash (app. 2 sec.) reports errors on IP-Link-bus.
Display LED Meaning
Power Power supply
The LED lights up green when the power supply is correct, but red if there is a
short circuit.
I/O
Run
I/O
Error
K-Bus diagnostics / IP-Link diagnostics
The green LED lights up in order to indicate fault-free operation. "Fault-free"
means that the communication with the fieldbus system is also running.
K-Bus diagnostics / IP-Link diagnostics
The red LED flashes to indicate an error. The red LED blinks with two different
frequencies.
LEDs for K-Bus diagnosis
The I/O error LED blink code
Fast blinking Start of the error code
First slow sequence
Second slow sequence
LEDs for K-Bus diagnosis
Error code
Error code
Persistent,
continuous
blinking
argument Description Remedy
EMC problems - Check power supply for overvoltage or
Error code
Error code argument
undervoltage peaks
- Implement EMC measures
- If a K-Bus error is present, it can be
localised by a restart of the power supply
(by switching it off and then on again)
1 pulse
2 pulses
3 pulses
4 pulses
0 EEPROM checksum error Revert to the manufacturer’s setting
1 Code buffer overflow Insert fewer Bus Terminals. The
programmed configuration has too many
entries in the table
2 Unknown data type Software update required for the power
supply
0 Programmed configuration
has an incorrect table entry
n (n > 0) Table comparison (Bus
Terminal n)
0 K-Bus command error - No Bus Terminal inserted
0 K-Bus data error, break
behind the power supply
n Break behind Bus Terminal Check whether the Bus End Terminal 9010
Check programmed configuration for
correctness
Incorrect table entry
- One of the Bus Terminals is defective;
halve the number of Bus Terminals
attached and check whether the error is still
present with the remaining Bus Terminals.
Repeat until the defective Bus Terminal is
located.
Check whether the n+1 Bus Terminal is
correctly connected; replace if necessary.
92 Embedded-PC
Page 95

Error handling and diagnostics
n is connected.
5 pulses
9 pulses
14 pulses
15 pulses
16 pulses
Error code argument
The number of pulses indicates the position of the last Bus Terminal before the fault. Passive Bus Terminals, such as
a power feed terminal, are not included in the count.
In the case of some errors, rectification does not cause the power supply to leave the blink sequence. The power
supply can only be restarted by switching its supply voltage off and on again.
n K-Bus error in register
communication with Bus
Terminal n
0 Checksum error in Flash
program
n (n>0) Bus Terminal n is not
consistent with the
configuration that existed
when the boot project was
created
n nth Bus Terminal has the
wrong format
n Number of Bus Terminals
is no longer correct
n Length of the K-Bus data is
no longer correct
Exchange the nth bus terminal
Revert to the manufacturer’s setting
Revert to the manufacturer's setting which
will clear the boot project.
Start the power supply again, and if the
error occurs again then exchange the Bus
Terminal.
Start the power supply up again.
Start the power supply up again.
Note:
The supply voltage of the power supply unit, which is necessary to supply power to the CX-System, must not be
interrupted in the middle of operation. Switching off the supply voltage to the power supply unit refers here to the
power supply on the power contacts.
LEDs for IP-Link-Bus-Diagnosis
After a long flash (app.. 2 sec.) an IP-Link-Bus error has occurred. The following tables describe the error codes and
help to find the reason for the error. IP-Link errors most often turn out to be a result of inappropriate use of the optical
fiber.
I/O Err Description Remedy
off No data exchange Module in synchronous mode or - activate
Profibus cyclic data
1 0 EEPROM checksum error Set manufacturer’s setting with the KS2000
software
2 Reserved -
3 Break location has been recognized interruption before the master's receiver
3 n Break location has been recognized n-th module before the master's receiver
3 n m Break location has been recognized (n*10)+m-th module before the master's receiver
4 n Too many faulty telegrams have been
detected (more than 25%)
The optical fiber wiring in front of the nth
extension module should be checked
5 n Register access to complex modules has
failed
11 n Complex module working incorrectly Exchange the nth module
12 n More than 120 modules in the ring Connect fewer modules
13 n nth module unknown Firmware update required
off Module is exchanging data no error
Check the nth module
Embedded-PC 93
Page 96

Error handling and diagnostics
Note
If an error occurs on both terminal busses (K-Bus and IP-Link-Bus) the error on K-Bus is reported
at first. The IP-Link-Bus error is reported as second. Both error codes are introduced by their
typical blink signal.
94 Embedded-PC
Page 97

Error handling and diagnostics
CX1100-0013 power supply LEDs
After switching on, the power supply immediately checks the connected Bus Terminal configuration. Error-free startup is signaled by the red "I/O ERR” LED being extinguished. If the ”I/O ERR" LED blinks, an error in the area of the
terminals is indicated. The error code can be determined from the frequency and number of blinks. This permits rapid
rectification of the error. Though the power supply supports two bus systems both bus errors are reported by the "I/OErr" LED. An error ob K-Bus is reported by rapid blinking. One long flash (app. 2 sec.) reports errors on IP-Link-bus.
Display LED Meaning
Power Power supply
The LED lights up green when the power supply is correct, but red if there is a
short circuit.
I/O
Run
I/O
Error
K-Bus diagnostics / IP-Link diagnostics
The green LED lights up in order to indicate fault-free operation. "Fault-free"
means that the communication with the fieldbus system is also running.
K-Bus diagnostics / IP-Link diagnostics
The red LED flashes to indicate an error. The red LED blinks with two different
frequencies.
LEDs for K-Bus diagnosis
The I/O error LED blink code
Fast blinking Start of the error code
First slow sequence
Second slow sequence
LEDs for K-Bus diagnosis
Error code
Error code
Persistent,
continuous
blinking
argument Description Remedy
EMC problems - Check power supply for overvoltage or
Error code
Error code argument
undervoltage peaks
- Implement EMC measures
- If a K-Bus error is present, it can be
localised by a restart of the power supply
(by switching it off and then on again)
1 pulse
2 pulses
3 pulses
4 pulses
0 EEPROM checksum error Revert to the manufacturer’s setting
1 Code buffer overflow Insert fewer Bus Terminals. The
programmed configuration has too many
entries in the table
2 Unknown data type Software update required for the power
supply
0 Programmed configuration
has an incorrect table entry
n (n > 0) Table comparison (Bus
Terminal n)
0 K-Bus command error - No Bus Terminal inserted
0 K-Bus data error, break
behind the power supply
n Break behind Bus Terminal Check whether the Bus End Terminal 9010
Check programmed configuration for
correctness
Incorrect table entry
- One of the Bus Terminals is defective;
halve the number of Bus Terminals
attached and check whether the error is still
present with the remaining Bus Terminals.
Repeat until the defective Bus Terminal is
located.
Check whether the n+1 Bus Terminal is
correctly connected; replace if necessary.
Embedded-PC 95
Page 98

Error handling and diagnostics
n is connected.
5 pulses
9 pulses
14 pulses
15 pulses
16 pulses
Error code argument
The number of pulses indicates the position of the last Bus Terminal before the fault. Passive Bus Terminals, such as
a power feed terminal, are not included in the count.
In the case of some errors, rectification does not cause the power supply to leave the blink sequence. The power
supply can only be restarted by switching its supply voltage off and on again.
n K-Bus error in register
communication with Bus
Terminal n
0 Checksum error in Flash
program
n (n>0) Bus Terminal n is not
consistent with the
configuration that existed
when the boot project was
created
n nth Bus Terminal has the
wrong format
n Number of Bus Terminals
is no longer correct
n Length of the K-Bus data is
no longer correct
Exchange the nth bus terminal
Revert to the manufacturer’s setting
Revert to the manufacturer's setting which
will clear the boot project.
Start the power supply again, and if the
error occurs again then exchange the Bus
Terminal.
Start the power supply up again.
Start the power supply up again.
Note:
The supply voltage of the power supply unit, which is necessary to supply power to the CX-System, must not be
interrupted in the middle of operation. Switching off the supply voltage to the power supply unit refers here to the
power supply on the power contacts.
LEDs for IP-Link-Bus-Diagnosis
After a long flash (app.. 2 sec.) an IP-Link-Bus error has occurred. The following tables describe the error codes and
help to find the reason for the error. IP-Link errors most often turn out to be a result of inappropriate use of the optical
fiber.
I/O Err Description Remedy
off No data exchange Module in synchronous mode or - activate
Profibus cyclic data
1 0 EEPROM checksum error Set manufacturer’s setting with the KS2000
software
2 Reserved -
3 Break location has been recognized interruption before the master's receiver
3 n Break location has been recognized n-th module before the master's receiver
3 n m Break location has been recognized (n*10)+m-th module before the master's receiver
4 n Too many faulty telegrams have been
detected (more than 25%)
The optical fiber wiring in front of the nth
extension module should be checked
5 n Register access to complex modules has
failed
11 n Complex module working incorrectly Exchange the nth module
12 n More than 120 modules in the ring Connect fewer modules
13 n nth module unknown Firmware update required
off Module is exchanging data no error
Check the nth module
96 Embedded-PC
Page 99

Error handling and diagnostics
Note
If an error occurs on both terminal busses (K-Bus and IP-Link-Bus) the error on K-Bus is reported
at first. The IP-Link-Bus error is reported as second. Both error codes are introduced by their
typical blink signal.
Embedded-PC 97
Page 100

Error handling and diagnostics
CX1100-0004 power supply LEDs
Display LED Meaning
PWR power supply
The LED lights up green when the power supply is correct, but red if
there is a short circuit.
L/A
RUN
off E-Bus is not connected
on E-Bus is connected / no data traffic on E-bus
blink E-Bus is connected / data traffic on E-bus
Indicates the state of the EtherCAT bus:
off INIT
blink PRE-OPERATIONAL
(frequency: 200 ms on / 200 ms off)
single
flash
on OPERATIONAL
flickering BOOTSTRAP
double
flash
triple
flash
SAVE-OPERATIONAL
(frequency: 200 ms on / 1000ms off)
(frequency: 50 ms on / 50 ms off)
reserved for future use
(frequency: 200 ms on / 200 ms off / 200 ms on / 1000 ms off)
reserved for future use
(frequency: 200 ms on / 200 ms off / 200 ms on / 200 ms off / 200 ms
on / 1000 ms off)
quadruple
flash
The functions for L/A and RUN LED are available in hardware revision > 2.0. The LEDs have no function in older
revisions.
reserved for future use
(frequency: 200 ms on / 200 ms off / 200 ms on / 200 ms off / 200 ms
on / 200 ms off / 200 ms on / 1000 ms off)
98 Embedded-PC
 Loading...
Loading...