


SERIES
683XXC
SYNTHESIZED HIGH PERFORMANCE
SIGNAL GENERATOR
GPIB PROGRAMMING MANUAL
490 JARVIS DRIVE
MORGAN HILL, CA 95037-2809
P/N: 10370-10338
REVISION: A
PRINTED: JANUARY 1999
COPYRIGHT 1999 ANRITSU CO.

WARRANTY
The Anritsu product(s) listed on the title page is (are) warranted against defects in materials and
workmanship for one year from the date of shipment.
Anritsu’s obligation covers repairing or replacing products which prove to be defective during the
warranty period.Buyers shall prepay transportation charges for equipment returned to Anritsu for
warranty repairs. Obligation islimited to the originalpurchaser. Anritsuis not liable forconsequential damages.
LIMITATION OF WARRANTY
The foregoing warranty does not apply to Anritsu connectors that have failed due to normal wear.
Also, the warranty does not apply to defects resulting from improper or inadequate maintenance by
the Buyer,unauthorizedmodification or misuse, oroperationoutside of the environmentalspecifications of the product. No other warranty is expressed or implied, and the remedies provided herein
are the Buyer’s sole and exclusive remedies.
TRADEMARK ACKNOWLEDGEMENTS
Adobe Acrobat is a registered trademark of Adobe Systems Incorporated.
NOTICE
Anritsu Company has prepared this manual for use by Anritsu Company personnel and customers
as a guide for the proper installation, operation, and maintenance of Anritsu Company equipment
and computor programs. The drawings, specifications, and information contained herein are the
property of Anritsu Company, and any unauthorized use or disclosure of these drawings, specifications, and informationis prohibited; theyshall not bereproduced, copied, or used in whole orin part
as the basis for manufacture or sale of the equipment or software programs without the prior writtten consent of Anritsu Company.

MANUAL CHANGES
0$18$/
7LWOH Series 683XXC Synthesized High Performance Signal Generator GPIB Programming Manual
3DUW1XPEHU 10370-10338
5HY/WU'DWH A / January 1999
&+$1*(3$&.(7
3DUW1XPEHU 10900-00285
,16758&7,216
1. Make the manual changes listed below. The changes are listed in numerical order by page number.
Effectivity is all 683XXC models with Firmware Version 1.01 and above.
2. The replacement pages provided are for technical changes to the manual. The black bar or bars in the
replacement page margins shows the area in which the changes were made.
&+$1*( 0D\
Page 2-5
Replace with enclosed pages 2-5 and 2-6, Changed: May 1999.
Pages 2-52
Replace with enclosed pages 2-51 thru 2-58, Changed: May 1999.
Page 2-51A
Insert enclosed page 2-51A/2-52A after page 2-52, Changed: May 1999.
Page A- 1 5
Replace with enclosed pages A-15 and A-16, Changed: May 1999.
ECN: MI001082
683XXC PM C-1


Table of Contents
Chapter 1 - General GPIB Information
1-1 SCOPE OF MANUAL.................1-3
Electronic Manual ..................1-3
1-2 INTRODUCTION ...................1-3
1-3 IEEE-488 INTERFACE BUS DESCRIPTION ...1-5
Functional Elements.................1-6
Bus Structure.....................1-7
Data Bus Description ................1-7
Data Byte Transfer Control Bus Description ....1-8
General Interface Management Bus Description. . 1-9
Device Interface Function Capability .......1-10
Message Types ...................1-11
1-4 683XXC GPIB OPERATION.............1-13
Setting GPIB Operating Parameters .......1-13
Selecting the Interface Language .........1-13
Response to GPIB Interface Function Messages . 1-13
Chapter 2 - Programming with GPIB Commands
2-1 INTRODUCTION ...................2-3
2-2 COMMAND CODES .................2-3
2-3 DATA INPUT RESTRICTIONS............2-6
2-4 PARAMETER AND DATA ENTRY COMMANDS . . 2-7
Opening a Parameter ................2-7
Data Entry ......................2-7
Using the SYZ Command..............2-15
2-5 CW FREQUENCY COMMANDS ..........2-16
2-6 ANALOG AND STEP SWEEP COMMANDS....2-17
Sweep Range ....................2-17
Alternate Sweep ..................2-18
Sweep Triggering ..................2-18
Analog/Step Sweep Select .............2-20
Special Step Sweep .................2-22
2-7 FREQUENCY MARKER COMMANDS ......2-22
2-8 OUTPUT POWER LEVELING COMMANDS . . . 2-24
683XXC PM i

Table of Contents (Continued)
Linear or Logarithmic Power Level Selection . . . 2-24
RF Output Power Level Selection .........2-24
Alternate Sweep RF Output Power Level Selection2-24
Output Power Leveling ...............2-24
ALC Power Slope ..................2-27
Attenuator Decoupling ...............2-27
2-9 MODULATION COMMANDS............2-28
Amplitude Modulation ...............2-28
Frequency Modulation ...............2-29
Phase Modulation..................2-30
Pulse Modulation ..................2-31
2-10 MEASURE FUNCTION COMMANDS .......2-39
2-11 OUTPUT COMMANDS ...............2-40
2-12 STORED SETUP COMMANDS...........2-45
2-13 SRQ AND STATUS BYTE COMMANDS ......2-47
Status Bytes.....................2-47
SRQ Generation...................2-47
2-14 CONFIGURATION COMMANDS..........2-52
2-15 GROUP EXECUTE TRIGGER COMMANDS . . . 2-53
2-16 LIST SWEEP COMMANDS.............2-54
Accessing and Editing a List ............2-54
List Sweep Triggering ...............2-56
Generating a List Sweep ..............2-56
2-17 FAST-FREQUENCY-SWITCHING COMMANDS . 2-58
Loading the Frequency Table ...........2-58
2-18 POWER-OFFSET-TABLE COMMANDS ......2-62
Loading the Power-Offset Table ..........2-62
2-19 USER LEVEL CALIBRATION COMMANDS . . . 2-65
Editing the Table Data ...............2-69
2-20 MASTER-SLAVE OPERATION COMMANDS . . . 2-73
2-21 SELF TEST COMMAND ..............2-74
2-22 MISCELLANEOUS COMMANDS .........2-76
2-23 PROGRAM ERRORS ................2-77
Invalid Parameter .................2-77
Syntax ........................2-77
ii 683XXC PM

Table of Contents (Continued)
2-24 RESET PROGRAMMING AND DEFAULT
CONDITIONS ...................2-78
2-25 PROGRAMMING EXAMPLES ...........2-79
Appendix A - Index of GPIB Commands
A-1 INTRODUCTION...................A-1
683XXC PM iii/iv

Chapter 1
General GPIB Information
Table of Contents
1-1 SCOPE OF MANUAL.................1-3
Electronic Manual ..................1-3
1-2 INTRODUCTION ...................1-3
1-3 IEEE-488 INTERFACE BUS DESCRIPTION ...1-5
Functional Elements.................1-6
Bus Structure.....................1-7
Data Bus Description ................1-7
Data Byte Transfer Control Bus Description ....1-8
General Interface Management Bus Description. . 1-9
Device Interface Function Capability .......1-10
Message Types ...................1-11
1-4 683XXC GPIB OPERATION.............1-13
Setting GPIB Operating Parameters .......1-13
Selecting the Interface Language .........1-13
Response to GPIB Interface Function Messages . 1-13

Chapter 1
General GPIB Information
1-1
SCOPE OF MANUAL
This manual provides information for remote operation of the Series
683XXC Synthesized High Performance Signal Generator using commands sent from an external controller via the IEEE-488 General Purpose Interface Bus (GPIB). It includes the following:
A general description of the GPIB and the bus data transfer and
q
control functions.
A listing of the IEEE-488 Interface Function Messages recog-
q
nized by the signal generator with a description of its response.
A complete listing and description of all 683XXC GPIB com-
q
mands (i.e., Product Specific Commands) that can be used to control signal generator operation with programming examples.
This manual is intended to be used in conjunction with the Series
683XXC Synthesized High Performance Signal Generator Operation
Manual, P/N 10370-10337. Refer to that manual for general information about the 683XXC, including equipment set up and front panel
(manual mode) operating instructions.
Electronic
Manual
This manual is available on CD ROM as an Adobe
Acrobat Portable Document Format (*.pdf) file. The
file can be viewed using Acrobat Reader, a free program that is also included on the CD ROM. The file
is “linked” such that the viewer can choose a topic to
view from the displayed “bookmark” list and “jump”
to the manual page on which the topic resides. The
text can also be word-searched. Contact Anritsu
Customer Service for price and availability.
1-2
INTRODUCTION
This chapter provides a general description of the GPIB and the bus
data transfer and control functions. It also contains a listing of the
683XXC’s GPIB interface function subset capability and response to
IEEE-488 interface function messages.
The GPIB information presented in this chapter is general in nature.
For complete and specific information, refer to the following documents: ANSI/IEEE Std 488.1-1987 IEEE Standard Digital Interface
for Programmable Instrumentation and ANSI/IEEE Std 488.2-1987
IEEE Standard Codes, Formats, Protocols and Common Commands.
These documents precisely define the total specification of the mechanical and electrical interface, and of the data transfer and control
protocols.
683XXC PM 1-3

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
IE EE -488 B U S (16 L ines)
DEVICE A
A b le to ta lk , lis te n ,
and control
(e.g. CO M PUTER)
DEVICE B
A b le to ta lk a n d lis te n
(e.g. 683X XC
SIGNAL
GENERATOR)
DEVICE C
D a ta B u s
(8 signal lines)
D a ta B y te T ra n s fe r
Control Bus
(3 signal lines)
DATA LINES
HANDSHAKE Lines
O n ly a b le to lis te n
(e.g. O THER
IN STR UM ENT**)
DEVICE D
O n ly a b le to ta lk
(e.g. O THER
IN STR UM ENT**)
G eneral Interface
M anagem ent B us
(5 signal lines)
DATA INPUT/OUTPUT,
DIO 1 thru DIO 8
DAV - DATA VALID
NRFD - NOT READY FOR DATA*
NDAC - NO T DATA ACCEPTED*
IFC - INTERFACE CLEAR
ATN - ATTENTION
SRQ - SERVICE REQ UEST
REN - REMO TE ENABLE
E O I - E N D O R ID E N T IF Y
* NEG ATION IS REPRESENTED B Y
LOW STATE ON THESE TW O LINES
** IF U S E D
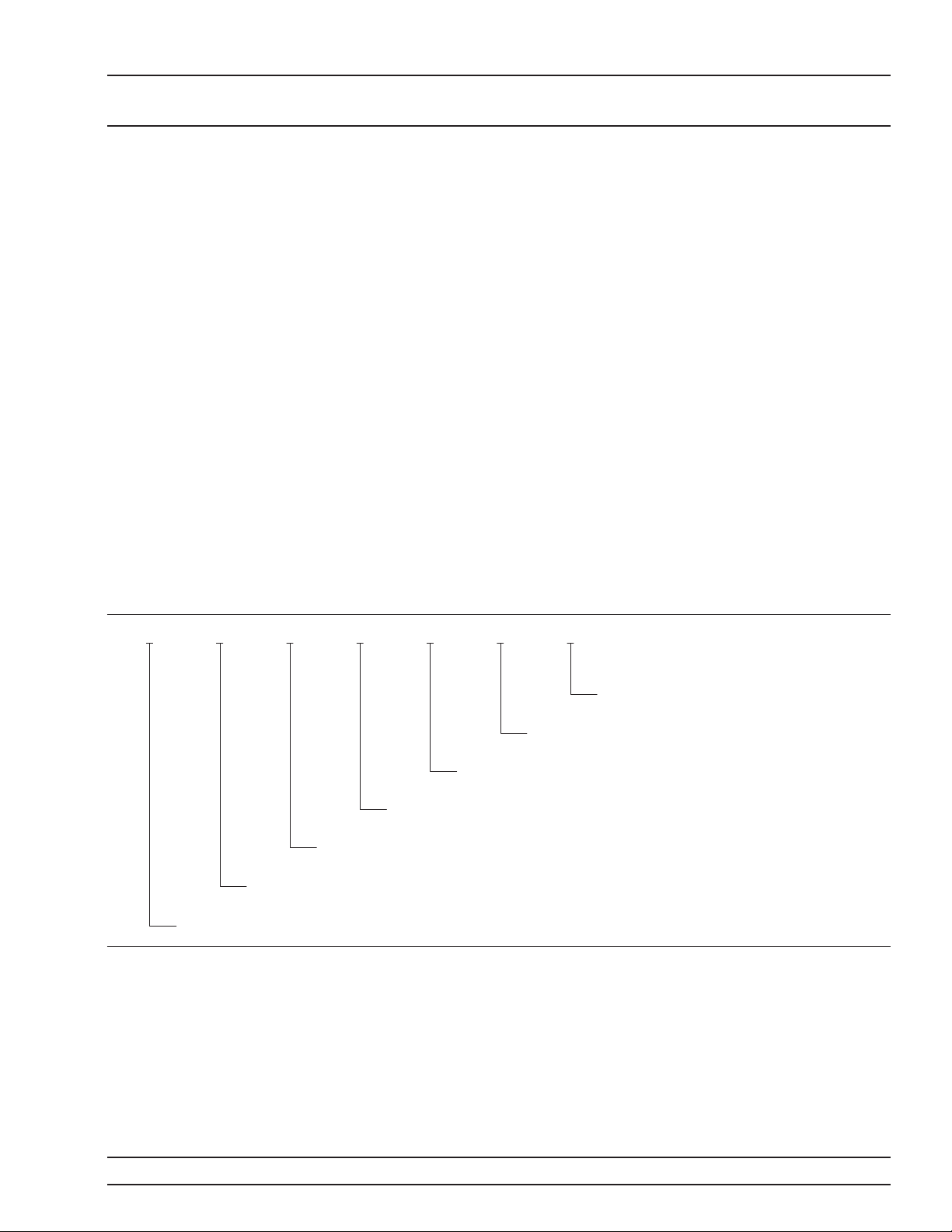
Figure 1-1. Interface Connections and GPIB Bus Structure
M anagem ent
C O N TR O L Lines
1-4 683XXC PM

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
1-3
IEEE-488 INTERFACE
BUS DESCRIPTION
The IEEE-488 General Purpose Interface Bus (GPIB) is an instrumentation interface for integrating instruments, computers, printers, plotters, and other measurement devices into systems. The GPIB uses 16
signal lines to effect transfer of information between all devices connected on the bus.
The following requirements and restrictions apply to the GPIB.
No more than 15 devices can be interconnected by one contiguous
q
bus; however, an instrumentation system may contain more than
one interface bus.
The maximum total cumulative cable length for one interface bus
q
may not exceed twice the number of devices connected (in meters), or 20 meters—whichever is less.
A maximum data rate of 1 Mb/s across the interface on any sig-
q
nal line.
Each device on the interface bus must have a unique address,
q
ranging from 00 to 30.
The devices on the GPIB are connected in parallel, as shown in Figure
1-1. The interface consists of 16 signal lines and 8 ground lines in a
shielded cable. Eight of the signal lines are the data lines, DIO 1 thru
DIO 8. These data lines carry messages (data and commands), one
byte at a time, among the GPIB devices. Three of the remaining lines
are the handshake lines that control the transfer of message bytes between devices. The five remaining signal lines are referred to as interface management lines.
The following paragraphs provide an overview of the GPIB including a
description of the functional elements, bus structure, bus data transfer
process, interface management bus, device interface function requirements, and message types.
683XXC PM 1-5

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
Functional
Elements
Effective communications between devices on the
GPIB requires three functional elements; a talker,a
listener, and a controller. Each device on the GPIB is
categorized as one of these elements depending on
its current interface function and capabilities.
Talker
A talker is a device capable of sending devicedependent data to another device on the bus when
addressed to talk. Only one GPIB device at a time
can be an active talker.
Listener
A listener is a device capable of receiving devicedependent data from another device on the bus
when addressed to listen. Any number of GPIB devices can be listeners simultaneously.
Controller
A controller is a device, usually a computer, capable
of managing the operation of the GPIB. Only one
GPIB device at a time can be an active controller.
The active controller manages the transfer of
device-dependent data between GPIB devices by
designating who will talk and who will listen.
System Controller
The system controller is the device that always retains ultimate control of the GPIB. When the system is first powered-up, the system controller is the
active controller and manages the GPIB. The system controller can pass control to a device, making
it the new active controller. The new active controller, in turn, may pass control on to yet another device. Even if it is not the active controller, the
system controller maintains control of the Interface
Clear (IFC) and Remote Enable (REN) interface
management lines and can thus take control of the
GPIB at anytime.
1-6 683XXC PM

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
Bus
Structure
The GPIB uses 16 signal lines to carry data and
commands between the devices connected to the
bus. The interface signal lines are organized into
three functional groups.
Data Bus (8 lines)
q
Data Byte Transfer Control Bus (3 lines)
q
General Interface Management Bus (5 lines)
q
The signal lines in each of the three groups are designated according to function. Table 1-1 lists these
designations.
Table 1-1. Interface Bus Signal Line Designations
Bus Type
Data Bus DIO1–DIO8 Data Input/Output, 1 thru 8
Data Byte
Transfer
Control Bus
General
Interface
Management
Bus
Signal Line
DAV
NRFD
NDAC
ATN
IFC
SRQ
REN
EOI
Name
Data Available
Not Ready For Data
Not Data Accepted
Attention
Interface Clear
Service Request
Remote Enable
End Or Identify
Function
Data Bus
Description
The data bus is the conduit for the transfer of data
and commands between the devices on the GPIB. It
contains eight bi-directional, active-low signal lines
—DIO 1 thru DIO 8. Data and commands are transferred over the data bus in byte-serial, bit-parallel
form. This means that one byte of data (eight bits) is
transferred over the bus at a time. DIO 1 represents
the least-significant bit (LSB) in this byte and
DIO 8 represents the most-significant bit (MSB).
Bytes of data are normally formatted in seven-bit
ASCII (American Standard Code for Information Interchange) code. The eighth (parity) bit is not used.
Each byte placed on the data bus represents either a
command or a data byte. If the Attention (ATN) interface management line is TRUE while the data is
transferred, then the data bus is carrying a bus
command which is to be received by every GPIB device. If ATN is FALSE, then a data byte is being
transferred and only the active listeners will receive
that byte.
683XXC PM 1-7

GENERAL GPIB IEEE-488 INTERFACE
1st Data Byte 2nd Data Byte
Valid
Not
Valid
Valid
Not
Valid
All
Ready
None
Ready
All
Ready
None
Ready
All
Accept
None
Accept
None
Accept
All
Accept
DIO1-DIO8
(composite)
DAV
NRFD
NDAC
INFORMATION BUS DESCRIPTION
Figure 1-2. Typical GPIB Handshake Operation
Data Byte
Transfer
Control Bus
Description
Control of the transfer of each byte of data on the
data bus is accomplished by a technique called the
“three-wire handshake”, which involves the three
signal lines of the Data Byte Transfer Control Bus.
This technique forces data transfers at the speed of
the slowest listener, which ensures data integrity in
multiple listener transfers. One line (DAV) is controlled by the talker, while the other two (NRFD and
NDAC) are wired-OR lines shared by all active listeners. The handshake lines, like the other GPIB
lines, are active low. The technique is described
briefly in the following paragraphs and is depicted
in Figure 1-2. For further information, refer to
ANSI/IEEE Std 488.1.
DAV (Data Valid)
This line is controlled by the active talker. Before
sending any data, the talker verifies that NDAC is
TRUE (active low) which indicates that all listeners
have accepted the previous data byte. The talker
then places a byte on the data lines and waits until
NRFD is FALSE (high) which indicates that all addressed listeners are ready to accept the information. When both NRFD and NDAC are in the proper
state, the talker sets the DAV line TRUE (active
low) to indicate that the data on the bus is valid
(stable).
1-8 683XXC PM
NRFD (Not Ready For Data)
This line is used by the listeners to inform the
talker when they are ready to accept new data. The
talker must wait for each listener to set the NRFD

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
line FALSE (high) which they will do at their own
rate. This assures that all devices that are to accept
the data are ready to receive it.
NDAC (Not Data Accepted)
This line is also controlled by the listeners and is
used to inform the talker that each device addressed
to listen has accepted the data. Each device releases
NDAC at its own rate, but NDAC will not go FALSE
(high) until the slowest listener has accepted the
data byte.
General
Interface
Management
Bus
Description
The general interface management bus is a group of
five signal lines used to manage the flow of information across the GPIB. A description of the function of
each of the individual control lines is provided below.
ATN (Attention)
The active controller uses the ATN line to define
whether the information on the data bus is a command or is data. When ATN is TRUE (low), the bus
is in the command mode and the data lines carry
bus commands. When ATN is FALSE (high), the bus
is in the data mode and the data lines carry devicedependent instructions or data.
EOI (End or Identify)
The EOI line is used to indicate the last byte of a
multibyte data transfer. The talker sets the EOI line
TRUE during the last data byte.
The active controller also uses the EOI line in conjunction with the ATN line to initiate a parallel poll
sequence.
IFC (Interface Clear)
Only the system controller uses this line. When IFC
is TRUE (low), all devices on the bus are placed in a
known, quiescent state (unaddressed to talk, unaddressed to listen, and service request idle).
REN (Remote Enable)
Only the system controller uses this line. When
REN is set TRUE (low), the bus is in the remote
mode and devices are addressed either to listen or to
talk. When the bus is in remote and a device is addressed, it receives instructions from the GPIB
rather than from its front panel. When REN is set
FALSE (high), the bus and all devices return to local
operation.
683XXC PM 1-9

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
SRQ (Service Request)
The SRQ line is set TRUE (low) by any device requesting service by the active controller.
Device
Interface
Function
Capability
An interface function is the GPIB system element
which provides the basic operational facility through
which a device can receive, process, and send messages. Each specific interface function may only
send or receive a limited set of messages within particular classes of messages. As a result, a set of interface functions is necessary to achieve complete
communications among devices on the GPIB.
ANSI/IEEE Std 488.1 defines each of the interface
functions along with its specific protocol.
ANSI/IEEE Std 488.2 specifies the minimum set of
IEEE 488.1 interface capabilities that each GPIB
device must have. This minimum set of interface
functions assures that the device is able to send and
receive data, request service, and repond to a device
clear message. Table 1-2 lists the interface function
capability of the series 683XXC signal generators.
Table 1-2. 683XXC Interface Function Capability
Function
Identifier
AH1 Acceptor Handshake Complete Capability
SH1 Source Handshake Complete Capability
Function 683XXC Capability
T6 Talker No Talk Only (TON)
L4 Listener No Listen Only (LON)
SR1 Service Request Complete Capability
RL1 Remote/Local Complete Capability
PP1 Parallel Poll Complete Capability
DC1 Device Clear Complete Capability
DT1 Device Trigger Complete Capability
C0, C1, C2,
C3, C28
E2 Tri-StateDrivers Three-state bus drivers
Controller Capability
Options
C0, No Capability;
C1, System Controller;
C2, Send IFC and Take Charge;
C3, Send REN;
C28, Send IF Messages
1-10 683XXC PM

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
Message
Types
There are three types of information transmitted
over the GPIB—interface function messages,
device-specific commands, and data and instrument
status messages.
Interface Function Messages
The controller manages the flow of information on
the GPIB using interface function messages, usually
called commands or command messages. Interface
function messages perform such functions as initializing the bus, addressing and unaddressing devices,
and setting device modes for remote or local operation.
There are two types of commands—multiline and
uniline. Multiline commands are bytes sent by the
active controller over the data bus (DIO1-DIO8)
with ATN set TRUE. Uniline commands are signals
carried by the individual interface management
lines.
The user generally has control over these commands; however, the extent of user control depends
on the implementation and varies with the specific
GPIB interface hardware and software used with
the external controller.
Device-Specific Commands
These commands are keywords or mnemonic codes
sent by the external controller to control the setup
and operation of the addressed device or instrument. The commands are normally unique to a particular instrument or class of instruments and are
described in its documentation.
Device-specific commands are transmitted over the
data bus of the GPIB to the device in the form of ASCII strings containing one or more keywords or
codes.They are decoded by the device’s internal con-
troller and cause the various instrument functions
to be performed.
Data and Instrument Status Messages
These messages are sent by the device to the external controller via the GPIB. They contain measurement results, instrument status, or data files that
the device transmits over the data bus in response
to specific requests from the external controller. The
contents of these messages are instrument specific
and may be in the form of ASCII strings or binary
data.
683XXC PM 1-11

GENERAL GPIB IEEE-488 INTERFACE
INFORMATION BUS DESCRIPTION
In some cases data messages will be transmitted
from the external controller to the device. For example, messages to load calibration data.
An SRQ (service request) is an interface function
message sent from the device to the external controller to request service from the controller, usually
due to some predetermined status condition or error.
To send this message, the device sets the SRQ line
of the General Interface Management Bus true,
then sends a status byte on the data bus lines.
An SRQ interface function message is also sent by
the device in response to a serial poll message from
the controller, or upon receiving an Output Status
Byte(s) command from the controller. The protocols
associated with the SRQ functions are defined in the
ANSI/IEEE Std 488.2 document.
The manner in which interface function messages
and device-specific commands are invoked in programs is implementation specific for the GPIB interface used with the external controller. Even though
both message types are represented by mnemonics,
they are implemented and used in different ways.
Normally, the interface function messages are sent
automatically by the GPIB driver software in response to invocation of a software function. For example, to send the IFC (Interface Clear) interface
fuction message, one would call the ibsic function of
the National Instruments software driver. On the
other hand, the command *RST (Reset) is sent in a
command string to the addressed device. In the case
of the National Instruments example, this would be
done by using the ibwrt function call.
1-12 683XXC PM

GENERAL GPIB 683XXC
INFORMATION GPIB OPERATION
1-4
683XXC GPIB
OPERATION
All Series 683XXC Synthesized High Performance Signal Generator
functions, settings, and operating modes (except for power on/standby)
are controllable using commands sent from an external controller via
the GPIB. When in the remote (GPIB) mode, the signal generator
functions both as a listener and a talker. The GPIB interface function
capability of the 683XXC is listed in Table 1-2 (page 1-10).
Setting GPIB
Operating
Parameters
Selecting the
Interface
Language
The 683XXC leaves the factory with the GPIB address value set to 5 and the data delimiting terminator set to carriage return and line feed (CR/LF). A
different address value can be entered from the
front panel using the Configure GPIB menu. Using
this same menu, the data delimiting terminator can
be changed to carriage return (CR) only. Refer to
Chapter 2 of the Series 683XXC Synthesized High
Performance Signal Generator Operation Manual
for the procedure.
Series 683XXC Synthesized High Performance Signal Generators with Option 19 can be remotely operated using one of two external interface languages
—Native or SCPI. The Native interface language
uses a set of 683XXC GPIB Product-Specific commands to control the instrument; the SCPI interface
language uses a set of the Standard Commands for
Programmable Instruments commands to control
the unit. Selecting which of these external interface
languages is to be used can be done from the front
panel using the Configure GPIB menu. Refer to
Chapter 2 of the Series 683XXC Synthesized High
Performance Signal Generator Operation Manual
for the procedure.
Response to
GPIB
Interface
Function
Messages
Table 1-3 (page 1-14) lists the GPIB Interface Function Messages that the 683XXC will recognize and
respond to. With the exception of the Device Clear
and Selected Device Clear messages, these messages affect only the operation of the 683XXC GPIB
interface. The signal generator's response for each
message is indicated.
Interface function messages are transmitted on the
GPIB data lines and interface management lines as
either unaddressed or addressed commands. The
manner in which these messages are invoked in programs is implementation dependent. For programming information, refer to the documentation
included with the GPIB Interface for the external
controller used.
683XXC PM 1-13

GENERAL GPIB 683XXC
INFORMATION GPIB OPERATION
Table 1-3. 683XXC Response to GPIB Interface Function Messages
Interface Function Message
Addressed
Command
683XXC Response
Device Clear (DCL)
Selected Device Clear
(SDC)
Go To Local (GTL) Yes Returnsthe 683XXC to local (front
Group Execute Trigger
(GET)
Interface Clear (IFC) No Stops the683XXC GPIB interface
Local Lockout (LLO) No Disables the frontpanel menu
Remote Enable (REN) No Places the 683XXC under remote
Serial-Poll Enable (SPE) No Outputs the serial-poll status byte.
Serial-Poll Disable (SPD) No Disables the serial-poll function.
Parallel-Poll Configure (PPC) Yes Respondsto a parallel-poll message
Parallel-Poll Unconfigure
(PPU)
No
Yes
Yes Executesa string of commands, if
No Disables the parallel-poll function.
Resets the 683XXC to itsdefault
state. (Equivalent to sending the
*
RST command.)
panel) control.
programmed.
from listening or talking. (Thefront
panel controls are not cleared.)
RETURN TO LOCALsoft-key.
(GPIB) control when it hasbeen addressed to listen.
(PPOLL) by setting assigned data
bus line to the logicalstate (1,0) that
indicates its correct SRQ status.
1-14 683XXC PM

Chapter 2
Programming with
GPIB Commands
Table of Contents
2-1 INTRODUCTION ...................2-3
2-2 COMMAND CODES .................2-3
2-3 DATA INPUT RESTRICTIONS............2-6
2-4 PARAMETER AND DATA ENTRY COMMANDS . . 2-7
Opening a Parameter ................2-7
Data Entry ......................2-7
Using the SYZ Command..............2-15
2-5 CW FREQUENCY COMMANDS ..........2-16
2-6 ANALOG AND STEP SWEEP COMMANDS....2-17
Sweep Range ....................2-17
Alternate Sweep ..................2-18
Sweep Triggering ..................2-18
Analog/Step Sweep Select .............2-20
Special Step Sweep .................2-22
2-7 FREQUENCY MARKER COMMANDS ......2-22
2-8 OUTPUT POWER LEVELING COMMANDS . . . 2-24
Linear or Logarithmic Power Level Operation . . 2-24
RF Output Power Level Selection .........2-24
Alternate Sweep RF Output Power Level
Selection ......................2-24
Output Power Leveling ...............2-24
ALC Power Slope ..................2-27
Attenuator Decoupling ...............2-27

Table of Contents (Continued)
2-9 MODULATION COMMANDS............2-28
Amplitude Modulation ...............2-28
Frequency Modulation ...............2-29
Phase Modulation..................2-30
Pulse Modulation ..................2-31
2-10 MEASURE FUNCTION COMMANDS .......2-39
2-11 OUTPUT COMMANDS ...............2-40
2-12 STORED SETUP COMMANDS...........2-45
2-13 SRQ AND STATUS BYTE COMMANDS ......2-47
Status Bytes.....................2-47
SRQ Generation...................2-47
2-14 CONFIGURATION COMMANDS..........2-52
2-15 GROUP EXECUTE TRIGGER COMMANDS . . . 2-53
2-16 LIST SWEEP COMMANDS.............2-54
Accessing and Editing a List ............2-54
List Sweep Triggering ...............2-56
Generating a List Sweep ..............2-56
2-17 FAST-FREQUENCY-SWITCHING COMMANDS . 2-58
Loading the Frequency Table ...........2-58
2-18 POWER-OFFSET-TABLE COMMANDS ......2-62
Loading the Power-Offset Table ..........2-62
2-19 USER LEVEL CALIBRATION COMMANDS . . . 2-65
Editing the Table Data ...............2-69
2-20 MASTER-SLAVE OPERATION COMMANDS . . . 2-73
2-21 SELF TEST COMMAND ..............2-74
2-22 MISCELLANEOUS COMMANDS .........2-76
2-23 PROGRAM ERRORS ................2-77
Invalid-Parameter .................2-77
Syntax ........................2-77
2-24 RESET PROGRAMMING AND DEFAULT
CONDITIONS ...................2-78
2-25 PROGRAMMING EXAMPLES ...........2-79
2-2 683XXC PM

Chapter 2
Programming with
GPIB Commands
2-1
2-2
INTRODUCTION
COMMAND CODES
This chapter provides information for remote operation of the Series
683XXC Synthesized High Performance Signal Generators via the
GPIB using 683XXC GPIB commands. All GPIB Product-Specific commands that are accepted and implemented by the 683XXC are listed
and described by function. Sample programs showing usage of the
commands are also included.
There are over four hundred and fifty GPIB Product-Specific commands that are accepted and implemented by the 683XXC. These
GPIB commands allow the user to program all front panel and menu
functions (except for power on/standby). Each GPIB command is a
two- or three-character mnemonic code that represents an instrument
command or parameter; for example: RST (reset).
Table 2-1, beginning on page 2-4, is a listing of all 683XXC GPIB command mnemonic codes grouped into functional categories. The listing
for each category includes references to the paragraph and page
number in this chapter where a complete description of that group of
commands can be found.
NOTE
Aquick way to determine the function ofany of the GPIB command codes listed inTable 2-1 istolook up the commandcode
of interest inAppendix A of thismanual. Appendix Ais analphabetical index of all 683XXC GPIB command mnemonic
codes. Abrief description of the function of each command is
also included.
683XXC PM 2-3

PROGRAMMING WITH COMMAND
GPIB COMMANDS CODES
Table 2-1. 683XXC GPIB Command Codes Listed by Function (1 of 3)
GPIB Command
Group Function
Parameter Entry
Commands
Data Entry/
DataTerminator
Commands
CW Frequency
Commands
Command Codes Para. Page
F0, F1, F2, F3, F4,F5, F6, F7, F8, F9, M0,
M1, M2, M3, M4, M5,M6, M7, M8, M9,
XL0, XL1, XL2, XL3, XL4,XL5, XL6, XL7,
XL8, XL9, DLF, DFF, DFM, SLF0, SLF1,
SLF2, SLF3, SLF4, SLF5, SLF6,SLF7,
SLF8, SLF9, SLM0, SLM1, SLM2,SLM3,
SLM4, SLM5, SLM6, SLM7, SLM8,SLM9,
SLDF, SDT, SNS, SWT, LOS, PDT, PNS,
ADP1, ADP2, AMR, AMS, ASD,FDV,
FMR, FMS, PHD, PHR, PHS,PER, PR,
PW, W1, W2, W3, W4, PDY, D1, D2, D3,
D4, PVT, SDD, SDE, SDL, SDS,SLP, SOF,
SLV, SLL1, SLL2, EGI,ADD, FRS, LDT,
SYZ, UP,DN, CLO
0 thru 9, –, .,ADR, CLR, DB, DM, GH, MH,
KH, HZ, SEC, MS, US,NS, PCT, RD, GV,
MV, KV, DV, PCV,RV, SPS, TMS, VT
CF0, CF1, CF2, CF3, CF4,CF5, CF6,
CF7, CF8, CF9, CM0, CM1,CM2, CM3,
CM4, CM5, CM6, CM7, CM8,CM9, SQF,
SQU, SQD, ACW
2-4 2-7
2-4 2-13,
2-14
2-5 2-16
Analog and Step
Sweep Commands
Frequency Marker
Commands
Output Power
Leveling
Commands
Modulation
Commands
SF1, SF3, FUL, DF0, DF1,DF5, DF6,
AFU, AF1, AF3, AD1, AD5,AD6, AUT,
HWT, EXT, TRG, TRS, RSS, SWP, SSP,
LIS, LGS, MAN, DU1, DU0,TSS, SP1,
SP0
ME1, ME0, MK0, IM1, VM1 2-7 2-22
LOG, LIN, L0, L1, L2,L3, L4, L5, L6, L7,
L8, L9, AL0, AL1, AL2,AL3, AL4, AL5,
AL6, AL7, AL8, AL9, RF1,RF0, LO1, LO0,
IL1, DL1, PL1, ELF, ELR, LV0, LSP, AT0,
AT1,ATT(xx), SL0, SL1, EGO
AM0, AM1, AM2, AM3, AM4,AM5, AM6,
AM7, AM8, AMW(x), FM0, FM1,FM2,
FM3, FM4, FM5, FM6, FM7,FM8, FM9,
FMN, FMW, FML, FMU, FWV(x), PH0,
PH1, PH2, PH3, PH4, PH5,PH6, PH7,
PH8, PHN, PHW, PHV(x), P0, IP, XP, P3,
P4, PC1, PC4, PMD(x), PTG(x),PTR, PTF,
GP, DPT, SD0, SD1, SQP, SW0, SW1,
SW2, SW3, SW4, SW5, SW6,SC0, SC1
2-6 2-17
2-8 2-24
2-9 2-28
2-4 683XXC PM

PROGRAMMING WITH COMMAND
GPIB COMMANDS CODES
Table 2-1. 683XXC GPIB Command Codes Listed by Function (2 of 3)
GPIB Command
Group Function
Measure Function
Commands
Output Commands*IDN?, OI, OFL, OFH, OF0,OF1, OF2,
Stored Setup
Commands
Service Request
and Status Byte
Commands
AMI, FMD, MOM, PM1, PM0 2-10 2-39
OF3, OF4, OF5, OF6, OF7,OF8, OF9,
OM0, OM1, OM2, OM3, OM4,OM5, OM6,
OM7, OM8, OM9, OL0, OL1,OL2, OL3,
OL4, OL5, OL6, OL7, OL8,OL9, OLO,
ODF, OPD, OPS, OSD, OSS, OST, OAD1,
OAD2, OAR, OAW, OAS, OAB, OAI, OAE,
OFD, OFR, OFW, OFK, OFS, OFI,OFE,
OPR, OPP,OPW,OW1, OW2, OW3, OW4,
ODP, OD1, OD2, OD3, OD4, ODD, ODE,
ODL, ODS, OMD, OPC, OPT, OP5, OP3,
OMM, OPHD, OPHR, OPHW, OPHM,
OPHS, OPHI, OPHE, OPM, OVN,OWT,
OSE, OEM, OES, OSB,OSM, OSR
SAF, SAM, SM, SSN(M
RSN(M
ES1, ES0, FB1, FB0, LE1,LE0, MB0,
MB1, MB2, PE1, PE0, SB1,SB0, SE1,
SE0, SQ1, SQ0, UL1, UL0,LS1, LS0, LA1,
LA0, EL1, EL0, II1, II0,CSB
Command Codes Para. Page
), RCF, RCM,
1-9
1-9
)
2-11 2-40
2-12 2-45
2-13 2-47
Configuration
Commands
Group Execute
Trigger (GET)
Commands
List Sweep
Commands
Fast-FrequencySwitching
Commands
Power-OffsetTable Commands
User Level
Calibration
Commands
BPN, BPP,EP0, EP1, FRS, PPO, PPC,
RC0, RC1, RT0, RT1, RO0, RO1, TR0,
TR1
GTC, GTD, GTF, GTL, GTO, GTS,GTT,
GTU, Y
LST, ELI(xxxx), ELN(x), LF, LP, LIB(xxxx),
LIE(xxxx), AUT, HWT, EXT, TRG, MNT, UP,
DN, LEA, CTL
000-999
), ZEL, ZS(X
ZL(X
ZPN(bbbb),
ZTL(bbbbnnnnD8D8D8.....D8)
PT0, PT1, PTC, PTL 2-18 2-62
LU0, LU1, LU2, LU3, LU4,LU5, LUS, LUR 2-19 2-65
000-999
),
2-14 2-52
2-15 2-53
2-16 2-54
2-17 2-58
683XXC PM 2-5
Changed: May 1999

PROGRAMMING WITH DATA INPUT
GPIB COMMANDS RESTRICTIONS
Table 2-1. 683XXC GPIB Command Codes Listed by Function (3 of 3)
2-3
DATA INPUT
RESTRICTIONS
GPIB Command
Group Function
Master-Slave
Operation
Commands
Self Test
Command
Miscellaneous
Commands
S0, S1 2-20 2-73
TST 2-21 2-74
ADD, CS0, CS1, DS0, DS1,RL, RST, SNR 2-22 2-76
Command Codes Para. Page
The 683XXC signal generator does not accept parameter or data entries in an exponential or scientific notation format. The accepted data
formats are as follows:
A decimal or integer format for entering parameters and data.
q
A binary-byte format for entering the status byte mask com-
q
mands (paragraph 2-13), the RCF and RCM stored-setup commands (paragraph 2-12), the ZTL fast-frequency-switching command (paragraph 2-17), the power-offset-table commands
(paragraph 2-18), and the LUR user level calibration command
(paragraph 2-19).
Programming Note: The signal generator only recognizes the following 65 characters:
q
The 52 upper- and lower-case alphabetic characters. (The
682XXC/
683XXC accepts both upper- and lower-case characters without
distinguishing between the cases).
q
The minus sign (–).
q
The comma (,).
q
The decimal point (.).
q
The numerals between 0 and 9.
All characters other than the 65 listed above are ignored and can be
interspersed between meaningful characters without ill effect. This
use of other characters can improve readability. For example, the two
command strings below are valid and interchangable.
“F12.754GHF27.792GHSF1SWPMK0L12DM”
“F1=2.754 GH, F2=7.792 GH, SF1, SWP, MK0, L1=2 DM”
2-6 683XXC PM

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
2-4
PARAMETER AND DATA
ENTRY COMMANDS
Table 2-2 lists the command mnemonic codes that open parameters for
data entry. The table also provides the range of values permitted for
each parameter and the data terminator mnemonic codes for each.
Tables 2-3 and 2-4 (pages 2-13 and 2-14) list the data entry and data
terminator command mnemonic codes.
Opening a
Parameter
Data Entry When a parameter is open for data entry, its value
All of the commands listed in Table 2-2 open a parameter for data entry. Once opened, a parameter
remains open until one of the following occurs:
Another parameter is opened.
q
A function other than video markers, intensity
q
markers, or output power leveling is commanded.
The CLO (close open parameter) command is
q
received.
can be changed as follows:
q
By sending a numeric value followed by the appropriate terminator code.
q
By incrementing or decrementing its value using an associated step size.
NOTE
An appropriate data terminator must be
usedtoterminate anumeric-parameterentry, and itmust immediately followthenumeric value. If it doesnot, a parameter entry error will result.
The parameter and data entry commands do not affect the signal generator’s output unless the parameter being changed is also the current
output parameter. The commands, therefore, may be used to change
the preset values of parameters without altering the 683XXC output.
Example: Assume that the 683XXC is executing an F3-F4 sweep from
3 GHz to 10 GHz. Changing the value of F1 to 3 GHz with the command string “F13GH” does not affect the current output of the signal
generator. However, changing the value of F4 with the command
string “F4 16.01 GH” alters the output of the 683XXC because it
changes the end point of the F3-F4 sweep to 16.01 GHz.
683XXC PM 2-7

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-2. Parameter Entry Commands (1 of 5)
MNEMONIC
CODE
F0
F1
F2
F3
F4
F5
F6
F7
F8
F9
M0
M1
M2
M3
M4
M5
M6
M7
M8
M9
XL0
XL1
XL2
XL3
XL4
XL5
XL6
XL7
XL8
XL9
PARAMETER VALUES
Opens the F0 parameter
Opens the F1 parameter
Opens the F2 parameter
Opens the F3 parameter
Opens the F4 parameter
Opens the F5 parameter
Opens the F6 parameter
Opens the F7 parameter
Opens the F8 parameter
Opens the F9 parameter
Opens the M0 parameter
Opens the M1 parameter
Opens the M2 parameter
Opens the M3 parameter
Opens the M4 parameter
Opens the M5 parameter
Opens the M6 parameter
Opens the M7 parameter
Opens the M8 parameter
Opens the M9 parameter
Opens the L0 parameter
Opens the L1 parameter
Opens the L2 parameter
Opens the L3 parameter
Opens the L4 parameter
Opens the L5 parameter
Opens the L6 parameter
Opens the L7 parameter
Opens the L8 parameter
Opens the L9 parameter
Dependent on the
frequency range of
the instrument
Dependent on the
frequency range of
the instrument
Dependent on the
power level range of
the instrument
TERMINA-
TOR
GH
MH
KH
HZ
GH
MH
KH
HZ
DM
(Logarithmic)
VT
(Linear)
DLF
DFF
DFM
Opens theDF parameter
Opens theDF parameter
Opens theDF parameter
Dependent on the
frequency range of
the instrument
GH
MH
KH
HZ
Slave Unit Frequencies
SLF0
SLF1
SLF2
SLF3
SLF4
SLF5
SLF6
SLF7
SLF8
SLF9
Opens the F0 parameter
Opens the F1 parameter
Opens the F2 parameter
Opens the F3 parameter
Opens the F4 parameter
Opens the F5 parameter
Opens the F6 parameter
Opens the F7 parameter
Opens the F8 parameter
Opens the F9 parameter
Dependent on the
frequency range of
the instrument
GH
MH
KH
HZ
2-8 683XXC PM

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-2. Parameter Entry Commands (2 of 5)
MNEMONIC
CODE
PARAMETER VALUES TERMINATOR
Slave Unit Frequencies
SLM0
SLM1
SLM2
SLM3
SLM4
SLM5
SLM6
SLM7
SLM8
SLM9
SLDF Opens theDF parameter for
SDT Opens the step sweep
SNS Opens the step sweep
SWT Opens the analogsweep,
Opens the M0 parameter
Opens the M1 parameter
Opens the M2 parameter
Opens the M3 parameter
Opens the M4 parameter
Opens the M5 parameter
Opens the M6 parameter
Opens the M7 parameter
Opens the M8 parameter
Opens the M9 parameter
the slave unit
dwell time parameter
number of steps parameter
step sweep, and CW ramp
time parameter
Dependent on the
frequency range of
the instrument
Dependent on the
frequency range of
the instrument
1msto99s MS
1 to 10,000 SPS
30 ms to 99s MS
GH
MH
KH
HZ
GH
MH
KH
HZ
SEC
SEC
LOS Opens the level offset
parameter
PDT Opens the power sweep
dwell time parameter
PNS Opens the power sweep
number of steps parameter
ADP1 Opens the internal AM %
depth parameter
ADP2 Opens the internal AM dB
depth parameter
AMR Opens the internalAM rate
parameter
+100 dB to –100 dB DB
1msto99sec MS
SEC
1 to 10,000 SPS
0% to 100% PCT
0dBto25dB DB
0.1 Hz to 1 MHzfor
sine wave;
0.1 Hz to 100 kHzfor
square, triangle, and
ramp waveforms
MH
KH
HZ
683XXC PM 2-9

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-2. Parameter Entry Commands (3 of 5)
MNEMONIC
CODE
AMS Opens the external AM %/V
ASD Opens the external AM
FDV Opens the internal FM
FMR Opens the internal FM rate
FMS Opens the external FM sen-
PARAMETER VALUES TERMINATOR
sensitivity parameter
dB/V sensitivity parameter
deviation parameter
parameter
sitivity parameter
0 %/V to 100 %/V PCV
0 dB/V to 25 dB/V DV
10 kHz to 20 MHzin
Locked, Locked LowNoise, and Unlocked
Narrow FM; 100 kHz
to 100 MHz in
Unlocked Wide FM
0.1 Hz to 1 MHzfor
sine wave;
0.1 Hz to 100 kHzfor
square, triangle, and
ramp waveforms
±
10 kHz/V to
±
20 MHz/V in Locked,
Locked Low-Noise,
and Unlocked Narrow
FM;±100 kHz/V to
±
100 MHz/V in
Unlocked Wide FM
MH
KH
MH
KH
HZ
KV
MV
PHD Opens the internalFM
deviation parameter
PHR Opens the internalFM rate
parameter
PHS Opens the externalFM
sensitivity parameter
PER Opens the internal pulse
period parameter
0.0025 to 5 radians in
F
M Narrow mode;
0.25 to 500 radians in
F
M Wide mode
0.1 Hz to 1 MHzfor
sine wave;
0.1 Hz to 100 kHzfor
square, triangle, and
ramp waveforms
±
0.0025 radians/V to
±
5 radians/V inFM
Narrow mode;
±
0.25 radians/V to
±
500 radians/V inFM
Wide mode
250 ns to 419 msat
40 MHz pulse clock
rate; 600 ns to 1.6sat
10 MHz pulse clock
rate
RD
MH
KH
HZ
RV
SEC
MS
US
NS
2-10 683XXC PM

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-2. Parameter Entry Commands (4 of 5)
MNEMONIC
CODE
PR Opens the internal pulse
PW, W1
W2
W3
W4
PDY, D1 Opens the internal pulse
D2
D3
D4
PARAMETER VALUES TERMINATOR
frequency parameter
Opens the internal pulse
width 1 parameter
Opens the internal pulse
width 2 parameter
Opens the internal pulse
width 3 parameter
Opens the internal pulse
width 4 parameter
delay 1 parameter
Opens the internal pulse
delay 2 parameter
Opens the internal pulse
delay 3 parameter
Opens the internal pulse
delay 4 parameter
2.385 Hz to 4 MHzat
40 MHz pulse clock
rate;
0.597 Hz to 1.66 MHz
at 10 MHz pulse clock
rate
25 ns to 419 msat
40 MHz pulse clock
rate; 100 ns to 1.6sat
10 MHz pulse clock
rate
0 to 419 ms at
40 MHz pulse clock
rate; 0 to 1.6 sat
10 MHz pulse clock
rate
100 ns to 419 msat
40 MHz pulse clock
rate; 300 ns to 1.6sat
10 MHz pulse clock
rate
MH
KH
HZ
SEC
MS
US
NS
SEC
MS
US
NS
SEC
MS
US
NS
SDD Opens the internal pulse
stepped delay mode step
size parameter
SDE Opens the internal pulse
stepped delay mode delay
1 stop parameter
SDL Opens the internal pulse
stepped delay mode dwelltime-per-step parameter
SDS Opens the internal pulse
stepped delay mode delay
1 start parameter
0 to 419 ms at
40 MHz pulse clock
rate; 0 to 1.6 sat
10 MHz pulse clock
rate
0 to 419 ms at
40 MHz pulse clock
rate; 0 to 1.6 sat
10 MHz pulse clock
rate
100ms to 10s SEC
0 to 419 ms at
40 MHz pulse clock
rate; 0 to 1.6 sat
10 MHz pulse clock
rate
SEC
MS
US
NS
SEC
MS
US
NS
MS
US
SEC
MS
US
NS
683XXC PM 2-11

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-2. Parameter Entry Commands (5 of 5)
MNEMONIC
CODE
PVT Opens the ALC power
SLP Opens the ALC power
SOF Opens the frequency
SLV, SLL1 Opens the main power level
SLL2 Opens the alternate sweep
EGI Opens the Reference Level
PARAMETER VALUES TERMINATOR
slope pivot point frequency
parameter
slope value parameter
offset parameter for the
slave unit (in a 360BVNA
configuration)
parameter (L1) for the slave
unit
power level parameter (L2)
for the slave unit
DAC setting parameter (in
external power leveling
mode)
Dependent on the frequency range of the
instrument
0 to 255 SPS
Dependent on the
frequency range of
the instrument
Dependent on the
power level range of
the instrument
Dependent on the
power level range of
the instrument
0 to 255 SPS
GH
MH
KH
HZ
GH
MH
KH
HZ
DM (Log)
VT (Linear)
DM (Log)
VT (Linear)
ADD Opens the GPIB address
parameter.
FRS Opens the frequency
scaling reference multiplier
parameter
LDT Opens the list sweep dwell
time parameter
SYZ Opens the step-size
parameter for updating
UP Increments the open
parameter by the step size
DN Decrements the open
parameter by the step size
CLO Closes the previously
opened parameter
1to30 ADR
0.1 to 14 TMS
1msto99s MS
SEC
Dependent on the
open parameter
N/A N/A
N/A N/A
N/A N/A
N/A
2-12 683XXC PM

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-3. Data Entry Commands
MNEMONIC
CODE
0, 1, 2, 3, 4,
5, 6, 7, 8, 9
– Change sign of input
. Decimal point
CLR Clear data entry
Numerals for parameter value entries
DESCRIPTION
683XXC PM 2-13

PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Table 2-4. Data Terminator Codes
MNEMONIC
CODE
ADR GPIBAddress
DB Decibels (dB)
DM dBm
GH GHz
MH MHz
KH kHz
HZ Hertz (Hz)
SEC Seconds
MS Milliseconds (ms)
US Microseconds (ms)
NS Nanoseconds (ns)
PCT Percent (%)
DESCRIPTION
RD Radians
GV GHz per volt (GHz/V)
MV MHz per volt(MHz/V)
KV kHz per volt (kHz/V)
DV Decibel pervolt (dB/V)
PCV Percent per volt(%/V)
RV Radians per volt (rad/V)
SPS Steps
TMS Times
VT Volts
2-14 683XXC PM
PROGRAMMING WITH PARAMETER AND DATA
GPIB COMMANDS ENTRY COMMANDS
Using the
SYZ
Command
Each 683XXC parameter has an associated step size
that can be used to increment or decrement its
value. Parameters that have common units share a
common step size. For example, the frequency parameters (F0-F9, M0-M9, and DF) have a common
step size as do the power level parameters (XL0XL9, L0-L9, and Level Offset). Other parameters,
such as analog sweep time, have individual step
sizes.
To set the step size for a parameter, first send the
command code to open the parameter, then send the
SYZ command. Now set the step size by sending a
numeric string with the proper terminator. When
the terminator is received, the step size is accepted
and the original parameter is again open for entry.
Figure 2-1 shows how the SYZ command can be
used to increment a parameter. In this example, the
F1 frequency parameter is set to 4 GHz, the step
size is set to 10 MHz, and F1 frequency is incremented three times by the value of the step size.
F1 4 GH SYZ 10 MH UP UP UP
Sets a step size of 10 MHz, ends the step-size entry,
and reopens the F1 parameter.
Opens the step-size parameter for F1.
Sets the F1 Parameter to 4 GHz.
Selects the F1 Parameter and opens it for entry.
Figure 2-1. Using the SYZ (Step Size) Command
Increments F1 from 4.02 GHz to 4.03 GHz.
Increments F1 from 4.01 GHz to 4.02 GHz.
Increments F1 from 4.00 GHz to 4.01 GHz.
683XXC PM 2-15

PROGRAMMING WITH CW FREQUENCY
GPIB COMMANDS COMMANDS
2-5
CW FREQUENCY
COMMANDS
Table 2-5 lists the CW frequency command mnemonic codes. These
commands call up each of the 20 preset (or previously set) CW frequencies. Each command causes its associated CW frequency to be
output and opens that frequency’s parameter for data entry.
The command, SQF, accesses the preset frequencies in sequential or-
der—that is, F0 to F9 and M0 to M9.
Table 2-5. CW Frequency Commands
MNEMONIC
CODE
CF0
CF1
CF2
CF3
CF4
CF5
CF6
CF7
CF8
CF9
CM0
CM1
CM2
CM3
CM4
CM5
CM6
CM7
CM8
CM9
Set CW mode at F0
Set CW mode at F1
Set CW mode at F2
Set CW mode at F3
Set CW mode at F4
Set CW mode at F5
Set CW mode at F6
Set CW mode at F7
Set CW mode at F8
Set CW mode at F9
Set CW mode at M0
Set CW mode at M1
Set CW mode at M2
Set CW mode at M3
Set CW mode at M4
Set CW mode at M5
Set CW mode at M6
Set CW mode at M7
Set CW mode at M8
Set CW mode at M9
FUNCTION OPENS FOR ENTRY
F0 parameter
F1 parameter
F2 parameter
F3 parameter
F4 parameter
F5 parameter
F6 parameter
F7 parameter
F8 parameter
F9 parameter
M0 parameter
M1 parameter
M2 parameter
M3 parameter
M4 parameter
M5 parameter
M6 parameter
M7 parameter
M8 parameter
M9 parameter
SQF Scan to the next higherpreset
CW frequency.
SQU Scan up to the next higher preset
CW frequency.
SQD Scan down to the next lower pre-
set CW frequency.
ACW Activates the currently scanned
frequency as CW.
CW frequency parameter
then selected
CW frequency parameter
then selected
CW frequency parameter
then selected
CW frequency parameter
then selected
2-16 683XXC PM

PROGRAMMING WITH ANALOG AND STEP
GPIB COMMANDS SWEEP COMMANDS
Programming Note: Signal generator response to a SQF command
depends on the state that the instrument is in at the time the command is received. For example, if the 683XXC is in a CW mode of operation with the current output frequency open for entry, the SQF
command (1) causes the output to change to the next sequential frequency and (2) opens that frequency’s parameter for data entry. However, if the instrument is in any other mode of operation, the SQF command causes it to switch to the last CW frequency that was output
and opens that parameter for data entry.
Figure 2-2 is an example of a CW frequency command string.
CF1 CF6 7 GH SQF
C loses the F6 param eter. P laces the 683XX C at the
preset (or previously set) C W F 7 param eter and opens
the F7 param eter for data entry.
2-6
ANALOG AND STEP
SWEEP COMMANDS
C loses the F1 param eter. P laces the 683XX C at the preset
(or previously set) C W F6 frequency and opens the F6
param eter for data entry. S ets the F6 frequency to 7 G H z.
Places the 683X X C at the preset (or previously set) C W
F1 frequency and opens the F1 param eter for data entry.
Figure 2-2. Example of a CW Frequency Command String
Table 2-6 (page 2-19) lists the analog and step sweep command mnemonic codes. These commands are divided into five subclasses and are
described in the following paragraphs.
Sweep Range Seven sweep ranges are available. The SF1 and SF3
commands select the sweep ranges of F1-F2 and
F3-F4 respectively; the FUL command selects a full
band sweep from the signal generator’s low frequency limit to its high frequency limit.
The DF0, DF1, DF5, and DF6 commands each select
a symmetrical frequency sweep around F0, F1, F5,
and F6 respectively. The width of the sweep is determined by the DF frequency parameter.
683XXC PM 2-17

PROGRAMMING WITH ANALOG AND STEP
GPIB COMMANDS SWEEP COMMANDS
Programming Examples:
Programming “F12GHF28GHSF1” sets F1 to
2 GHz, F2 to 8 GHz, and implements a F1-F2 frequency sweep.
Programming “DLF6GHF57GHDF5” sets DFto
6 GHz, F5 to 7 GHz, and implements a F5-DF frequency sweep.
Programming Note:
If the commanded sweep range is invalid, a parameter error (paragraph 2-23) will be generated, and the
output of the signal generator will not be altered.
A sweep range is invalid if (1) the analog sweep
start frequency is greater than the stop frequency,
or (2) the DF frequency parameter results in a sweep
that is outside the range of the instrument.
Alternate
Sweep
Sweep
Triggering
Six alternate sweep commands are available. If the
683XXC is sweeping when the alternate sweep command is received, the signal generator’s output will
alternate between the commanded sweep and the
sweep then being executed.
Programming Example:
Assume that the 683XXC had been previously programmed and was then executing an F1-F2 sweep.
Programming “AF3” would then activate the F3-F4
sweep and cause it to alternate with the F1-F2
sweep.
Programming Note:
An alternate sweep command will only be recognized when the 683XXC has been programmed to
sweep. It will be ignored at all other times.
Two modes of sweep triggering are available over
the bus—Automatic, External, and Single. The AUT
command selects automatic sweep triggering; the
HWT command selects external triggering; the EXT
command selects single sweep triggering.
When automatic sweep triggering is selected, the
sweep continually sweeps from its start frequency
(or power level) to its stop frequency (or power level)
with optimal retrace time.
2-18 683XXC PM

PROGRAMMING WITH ANALOG AND STEP
GPIB COMMANDS SWEEP COMMANDS
When external sweep triggering is selected, a single
sweep occurs when triggered by an external TTLcompatible clock pulse to the rear panel AUX I/O
connector.
When single sweep triggering is selected, a single
sweep starts when the TRG or TRS command is received. The RSS command resets the sweep to its
start frequency (or power level), whenever the command is received while a single sweep is in progress.
Table 2-6. Analog and Step Sweep Commands
MNEMONIC
CODE
SF1
SF3
FUL
DF0
DF1
DF5
DF6
AFU
AF1
AF3
AD1
AD5
AD6
AUT
HWT
EXT
TRG
TRS
RSS
FUNCTION
Sweep Range
Selects the F1-F2 sweep mode
Selects the F3-F4 sweep mode
Selects the Full Range sweepmode
Selects the F0-DF sweep mode
Selects the F1-DF sweep mode
Selects the F5-DF sweep mode
Selects the F6-DF sweep mode
Alternate Sweep
Selects Full Range alternate sweep
Selects F1-F2 alternate sweep
Selects F3-F4 alternate sweep
Selects F1-DF alternate sweep
Selects F5-DF alternate sweep
Selects F6-DF alternate sweep
Sweep Triggering
Selects Auto Trigger
Selects External Trigger
Selects Single Trigger
Triggers a Single Sweep
Triggers a Single Sweep
Resets a Sweep if inprogress
OPENS FOR
ENTRY
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
Analog/Step Sweep Select
SWP
SSP
LIS
LGS
MAN
DU1
DU0
TSS
SP1
SP0
Selects Analog Sweep
Selects Step Sweep (Linear)
Selects Linear Step Sweep (DefaultMode)
Selects Logarithmic Step Sweep
Selects Manual (Step) Sweep
Selects Dual Step Sweep mode
Deselects Dual Step Sweep mode
Steps to next point inDU1 mode
Special Step Sweep (Steps Not Equally Spaced)
Selects non-equally spaced step sweep
Deselects non-equally spaced step sweep
None
None
None
None
None
None
None
None
None
None
683XXC PM 2-19

PROGRAMMING WITH ANALOG AND STEP
GPIB COMMANDS SWEEP COMMANDS
Analog/Step
Sweep Select
Five commands are available—SWP selects an analog sweep, SSP and LIS select a linear step sweep,
LGS selects a logarithmic step sweep, and MAN selects a manual (step) sweep. The selected sweep
mode applies to all sweep ranges. Figure 2-3 shows
an example of a sweep command string.
Programming Notes:
Commanding either SWP or SSP does not, by itself,
provide a swept-frequency output. It only determines whether the swept-frequency output will be
an analog or step sweep. If, on the other hand, a
frequency sweep is being output by the signal generator when one of these commands is received, that
sweep will assume the commanded sweep mode.
The MAN command only provides for setting up the
683XXC for a manual sweep. It must be accompanied by the RL command to return the instrument to
local (front panel) control in order for the operator to
perform the manual sweep.
AUT SWP EXT TRS SSP TRSSF1
Selects analog sweep.
Selects Auto triggering.
Selects the F1-F2 sweep range.
Figure 2-3. Example of a Sweep Command String
Triggers a single sweep.
Selects linear step sweep.
Triggers a single sweep.
Selects the Single triggering mode.
2-20 683XXC PM

PROGRAMMING WITH ANALOG AND STEP
GPIB COMMANDS SWEEP COMMANDS
Dual Step Sweep Mode
The dual step sweep mode provides for generating
synchronized, step sweep outputs from two
683XXCs at a frequency offset. Figure 2-4 shows an
example of dual step sweep programming.
10 ! “DUAL”
20 CLEAR
30 DISP “ENTER # OF STEPS”
40 INPUT S
50 DISP “ENTER WAIT TIME [mS]
60 INPUT W
70 WAIT 100
80 DISP “ENTER ‘LO’ START FREQ [GHz]”
90 INPUT F1
100 DISP “ENTER ‘LO’ STOP FREQ [GHz]
110 INPUT F2
120 DISP “ENTER OFFSET [GHz]
130 INPUT F3
140 !
150 ! Initialize both 683XXC’s
160 !
170 OUTPUT 705 ;"CF1F1";F1;"GHF2";F2;
“GHSNS”;S;"SPSSSPEXTCLO"
180 OUTPUT 706 ;"CF1F1";F1+F3;"GHF2";
F2+F3;"GHSNS";S;"SPSSSPEXTCLO"
190 WAIT 1000
200 !
210 ! Set both to dual mode and enable
GET to end DWELL
220 !
230 SEND 7 ; CMD “%&” DATA “GTLDU1SF1"
EOL
240 WAIT 100
250 ! Trigger the sweep and wait for
retrace to finish
260 SEND 7 ; CMD “%&” DATA “TRS” EOL
270 WAIT 100
280 ! Listen address both 683XXC’s
290 SEND 7 ; CMD “%&”
300 FOR C+1 TO S+1
310 WAIT W
320 ! Trigger both to next point
330 TRIGGER 7
340 NEXT C
350 GOTO 260
Figure 2-4. Dual Step Sweep Programming Example
683XXC PM 2-21

PROGRAMMING WITH FREQUENCY
GPIB COMMANDS MARKER COMMANDS
Special Step
Sweep
For this example, assume afrequency sweep of 3 GHz to 10 GHz, with steps at 3,
6, 8, 9, and 10GHz.
Sample Coding in BASIC
10 OUTPUT 705; “ZL000 3GH 6GH 8GH 9GH 10GH ZEL”
20 OUTPUT 705; “F1 3GH F2 10GH SNS 4SPS”
30 OUTPUT 705; “SP1 SSP SF1"
This special step sweep provides for a step sweep
that has non-equally spaced steps. It can be used in
any of the available sweep ranges (F1-F2, F3-F4,
Full, F0-DF, F1-DF, F5-DF, and F6-DF). The start frequency in this sweep must be equal to the first frequency programmed with the ZL(X
(Table 2-17). The intermediate steps can be programmed to be any frequency within the range of
the programmed sweep.
Programming Note:
The SP1 command can be used with the dual step
sweep mode.
Figure 2-5 shows an example of special step sweep
programming.
000-999
) command
2-7
FREQUENCY MARKER
COMMANDS
Explanation of Code
Line 10 sets up thestep frequencies.
Line 20 sets start andstop frequencies and number of steps (frequency points – 1).
Line 30 set the signalgenerator to SP1, Step Sweep, and F1-F2 sweep range.
Figure 2-5. Special Step Sweep Programming Example
Table 2-7 lists the frequency marker command mnemonic codes. These
commands provide for (1) selecting a CW frequency as a potential
marker, (2) selecting a potential marker as an active marker, and (3)
individually turning markers on and off.
The ME1 command will enable a marker at the current frequency that
is open for update; the ME0 command will disable the same marker. If
a frequency parameter is not open, no action will be taken. The IM1
and VM1 commands will turn on their respective intensity and video
markers. The MK0 command will turn all markers off.
2-22 683XXC PM

PROGRAMMING WITH FREQUENCY
GPIB COMMANDS MARKER COMMANDS
Figure 2-6 shows an example of a frequency marker command string.
Table 2-7. Frequency Marker Commands
MNEMONIC
CODE
ME1 Enables a marker at theactive frequency
ME0 Disables the marker at theactive frequency None
MK0 Turns off markers. Enabled markers remain
IM1 Turns on the intensitymarker mode None
VM1 Turns on the video marker mode None
Programming Note: Only one marker mode can be active. Consequently, if the intensity marker mode is active and the video marker
mode is programmed, the displayed markers will change to video
markers. Either mode can be turned off with the MK0 command.
VM1 F1 ME0 F7 ME1 F4 ME1 MK0
FUNCTION
(F0-F9 or M0-M9)
enabled, but are not active
Turns both m arkers off, but leaves the F7 and F4 m arkers
enabled. T herefore, w hen V M 1 is next program m ed, tw o
frequency m arkers w ill reappear on the display provided
their frequencies are w ithin the 683X X C 's sw eep range.
OPENS FOR
ENTRY
None
None
Enables the F4 frequency m arker.
Enables the F7 frequency m arker.
D isables the F1 frequency m arker.
Turns on the video-m arker m ode.
Figure 2-6. Example of a Frequency Marker Command String
683XXC PM 2-23

PROGRAMMING WITH OUTPUT POWER
GPIB COMMANDS LEVELING COMMANDS
2-8
OUTPUT POWER
LEVELING COMMANDS
Table 2-8 lists the output power leveling command mnemonic codes.
These commands provide for (1) selecting linear or logarithmic power
level operation, (2) selecting an RF output power level, (3) leveling the
output power, and (4) turning the output power leveling off. In addition, commands are provided for the level offset, power level sweep,
ALC power slope, and step attenuator decoupling functions. Figure 2-7
(page 2-27) shows an example of an output power level command
string.
Linear or
Logarithmic
Power Level
Selection
RF Output
Power Level
Selection
Power level operations can be linear or logarithmic.
The command, LOG, selects logarithmic power level
operation. In logarithmic mode, power level entries
and outputs are in dBm and power level sweeps are
logarithmic. This is the default mode.
The command, LIN, selects linear power level operation. In linear mode, power level entries and outputs are in mV and power level sweeps are linear.
The commands, L0 thru L9, call up each of the preset (or previously set) output power levels. Each
command causes its associated RF power level to be
output and opens that power level’s parameter for
data entry. Each command will also deselect any
other previously programmed power level and will
turn off a power level sweep, if active.
Alternate
Sweep RF
Output
Power Level
Selection
Output
Power
Leveling
In the alternate sweep mode, the commands, AL0
thru AL9, call up each of the preset (or previously
set) L0 to L9 output power levels. Each command
causes its associated RF power level to be output
during the alternate sweep. Each command will also
deselect any other previously programmed alternate
sweep power level. The commands do not open the
L1 to L9 power level parameters for data entry. Use
the parameter entry commands, XL0 thru XL9 or L0
thru L9, to enter new power level values.
There are three output power leveling modes of operation—internal, external (detector or power meter), and fixed gain (leveling off). The IL1 command
selects the internal leveling mode. In this mode, a
signal from an internal level detector is used to level
the output power. This is the default mode.
The DL1 command selects the external (detector)
leveling mode; the PL1 command selects the external (power meter) leveling mode. In this mode, the
output power is leveled using a signal from an
2-24 683XXC PM

PROGRAMMING WITH OUTPUT POWER
GPIB COMMANDS LEVELING COMMANDS
external detector (power meter) connected to the
EXTERNAL ALC IN connector. In the external power
leveling mode, the parameter entry command EGI
provides for entering a setting for the Reference
Level DAC to control the ALC gain. The LV0 command selects the fixed gain (leveling off) mode. Each
command will also deselect any other previously
programmed output power leveling mode.
Programming Example:
Programming “PL1 EGI 140 SPS” selects external
leveling of the output power using a signal from an
external power meter and sets the Reference Level
DAC to 140.
Table 2-8. Power Leveling Commands (1 of 2)
MNEMONIC
CODE
LOG Selects logarithmic power level operation.
(This is the default mode.)
LIN Selects linear power level operation. None
L0
L1
L2
L3
L4
L5
L6
L7
L8
L9
AL0
AL1
AL2
AL3
AL4
AL5
AL6
AL7
AL8
AL9
Set RF output power levelto L0
Set RF output power levelto L1
Set RF output power levelto L2
Set RF output power levelto L3
Set RF output power levelto L4
Set RF output power levelto L5
Set RF output power levelto L6
Set RF output power levelto L7
Set RF output power levelto L8
Set RF output power levelto L9
Set alternate sweep RF outputlevel to L0
Set alternate sweep RF outputlevel to L1
Set alternate sweep RF outputlevel to L2
Set alternate sweep RF outputlevel to L3
Set alternate sweep RF outputlevel to L4
Set alternate sweep RF outputlevel to L5
Set alternate sweep RF outputlevel to L6
Set alternate sweep RF outputlevel to L7
Set alternate sweep RF outputlevel to L8
Set alternate sweep RF outputlevel to L9
FUNCTION
OPENS FOR
ENTRY
None
L0
L1
L2
L3
L4
L5
L6
L7
L8
L9
None
None
None
None
None
None
None
None
None
None
RF1 Turns on the RF output. (This is the default
mode.)
RF0 Turns off the RF output. None
None
683XXC PM 2-25

PROGRAMMING WITH OUTPUT POWER
GPIB COMMANDS LEVELING COMMANDS
Table 2-8. Power Leveling Commands (2 of 2)
MNEMONIC
CODE
LO1 Turns on the Level Offset function. The value of
the Level Offset parameter is added to the level
measured by the internal levelingloop. The
resultant power level value isdisplayed.
LO0 Turns off the Level Offset function. None
IL1 Selects internal leveling of the output power.
(This is the default mode.)
Deselects the DL1 or PL1leveling modes, if
previously programmed.
DL1 Selects external leveling of the output power,
using a signal from anexternal detector connected to the EXTERNAL ALC IN connector.
Deselects the IL1 or PL1leveling modes, if previously programmed.
PL1 Selects external leveling of theoutput power us-
ing a signal from anexternal power meter connected to the EXTERNAL ALC IN connector.
Deselects the IL1 and DL1levelingmodes, if
previously programmed.
FUNCTION
OPENS FOR
ENTRY
None
None
None
None
ELF Selects front panel external leveling input. None
ELR Selects rear panel external leveling input. None
LV0 Turns off leveling of the output power. None
LSP Selects thePower Sweep mode. The power
level will sweep as determinedby the preset (or
previously set) dwell-time and number-of-steps
parameters.
AT1 Selects ALC step attenuator decoupling. None
AT0 Deselects ALC step attenuator decoupling. None
ATT(xx) Sets step attenuator value to xx (´10 dB) in the
ALC step attenuator decouple mode.xx is an
unsigned integer between 00 (0dB attenuation)
and 11 (110 dB attenuation).
SL1 Turns on the ALC power slope function. None
SL0 Turns off the ALC power slopefunction. None
EGO Outputs the value of the Reference Level DAC
setting in external power levelingmode
None
None
None
2-26 683XXC PM

PROGRAMMING WITH OUTPUT POWER
GPIB COMMANDS LEVELING COMMANDS
ALC Power
Slope
Attenuator
Decoupling
The ALC power slope function provides for linearly
increasing or decreasing output power as the frequency increases to compensate for system, cable,
and waveguide variations due to changes in frequency. The SL1 command turns on the ALC power
slope function. The power slope value and the pivot
point frequency are changed using the SLP and PVT
parameter entry commands. The SL0 command
turns off the ALC power slope function.
Programming Example:
Programming “SL1 SLP 128 SPS PVT 2.0 GH”
turns on the ALC power slope function and sets the
power slope value to 128 and the pivot point frequency to 2 GHz.
The attenuator decoupling function provides for decoupling of the step attenuator (if equipped) from
the ALC system. The AT1 command decouples the
step attenuator, the ATT(xx) command provides for
setting the attenuation in 10 dB increments, and
the AT0 command deselects the attenuator decoupling function.
Programming Example:
Programming “AT1 ATT08” decouples the step
attenuator from the ALC system and sets the step
attenuator value to 80 dB.
RF0 L1 2 DM L2 12 DM PNS 10 SPS LSP RF1
Turns the RF output on.
Selects a level sweep.
Selects a power sweep and 10 steps.
Selects Level 2 and sets it for 12 dBm.
Selects Level 1 and sets it for 2 dBm.
Turns the RF output off.
Figure 2-7. Example of an Output Power Level Command String
683XXC PM 2-27

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
2-9
MODULATION
COMMANDS
Table 2-9 (page 2-33) lists the modulation command mnemonic codes.
These commands provide for AM, FM, FM, and pulse modulation of
the signal generator’s output signal using modulating signals from either the internal AM, FM, FM, and pulse generators or an external
source.
Amplitude
Modulation
Two AM modes are available—Linear and Log. In
Linear AM mode, sensitivity is variable from 0 %/V
to 100 %/V and the amplitude of the RF output
changes linearly as the AM input changes. In Log
mode, sensitivity is variable from 0 dB/V to 25 dB/V
and the amplitude of the RF output changes exponentially as the AM input changes.
Internal AM Function
The AM7 command turns on the internal AM function in Linear mode. The AM8 command turns on
the internal AM function in Log mode. In Linear
mode, the AM depth value is changed using the
ADP1 parameter entry command. In Log mode, the
AM depth value is changed using the ADP2 parameter entry command. The modulating waveform is
selected using the AMW(x) command and the AM
rate is set with the AMR command. The AM0 command turns off the AM function.
Programming Example:
Programming “AM8 ADP2 20 DB AMW7 AMR 10
KH” turns on the internal AM function in Log mode,
sets the AM depth to 20 dB, selects a triangle wave
as the modulating waveform, and sets the AM rate
to 10 kHz.
External AM Function
The AM1 command turns on the external AM function in Linear mode. The AM2 command turns on
the external AM function in Log mode. In Linear
mode, the external AM sensitivity value is changed
using the AMS parameter entry command. In Log
mode, the external AM sensitivity value is changed
using the ASD parameter entry command. The AM0
command turns off the AM function.
Programming Example:
Programming “AM1 AM3 AM5 AMS 90 PCV” turns
on the external AM function in Linear mode, selects
the front panel external AM input, selects an input
impedance of 50W, and sets the external AM sensitivity to 90 %/V.
2-28 683XXC PM

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Frequency
Modulation
Four FM modes are available—Locked, Locked
Low-Noise, Unlocked Narrow, and Unlocked Wide.
In the Locked and Locked Low-Noise FM modes,
frequency modulation of the output signal is accomplished by summing the modulating signal into the
FM control path of the YIG phase-lock loop. In
Locked FM mode, the maximum FM deviation is the
lesser of ±10 MHz or rate ´ 300 for 1 kHz to 8 MHz
rates; in Locked Low-Noise FM mode, the maximum
FM deviation is the lesser of ±10 MHz or rate ´ 3 for
50 kHz to 8 MHz rates.
In the Unlocked FM modes, the YIG phase-lock loop
is disabled to allow for peak FM deviations of up to
100 MHz. In the Unlocked Narrow FM mode,
frequency modulation is obtained by applying the
modulating signal to the fine tuning coil of the YIGtuned oscillator. Unlocked Narrow FM mode allows
maximum deviations of ±10 MHz for DC to 8 MHz
rates.
In the Unlocked Wide FM mode, frequency modulation is accomplished by applying the modulating signal to the main tuning coil of the YIG-tuned
oscillator. Unlocked Wide FM mode allows maximum deviations of ±100 MHz for DC to 100 Hz
rates.
Internal FM Function
The FM7 command turns on the internal FM function in Unlocked Narrow mode, the FM8 command
turns it on in Unlocked Wide mode, the FM9 command turns it on in Locked mode, and the FMN command turns it on in Locked Low-Noise mode. The
FM deviation value is changed using the FDV parameter entry command. The modulating waveform
is selected using the FWV(x) command and the internal FM rate is set using the FMR parameter entry command. The FM0 command turns off the FM
function.
Programming Example:
Programming “FM9 FDV 20 MH FWV1 FMR 100
KH” turns on the internal FM function in Locked
mode, sets the FM deviation to 20 MHz, selects a
sine wave as the modulating waveform, and sets the
FM rate to 100 kHz.
683XXC PM 2-29

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
External FM Function
The FM1 (or FMU) command turns on the external
FM function in Unlocked Narrow mode, the FMW
command turns it on in Unlocked Wide mode, the
FML command turns it on in Locked mode, and the
FM2 command turns it on in Locked Low-Noise
mode. The external FM sensitivity value is changed
using the FMS parameter entry command. The FM0
command turns off the FM function.
Programming Example:
Programming “ FMW FM4 FM6 FMS 50 MV” turns
on the external FM function in Unlocked Wide
mode, selects the rear panel FM input, selects an input impedance of 600W, and sets the external FM
sensitivity to 50 MHz/V.
NOTE
If the FMfunction (Option 6) isnot
installed in the signal generator,
the FM function commands produce syntax errors.
Phase
Modulation
Two FM modes are available—Narrow and Wide. In
Narrow FM mode, the maximum FM deviation is
the lesser of ±3 radians or ±5 MHz/rate for DC to
8 MHz rates. In Wide FM mode, the maximum FM
deviation is the lesser of ±400 radians or
±10 MHz/rate for DC to 1 MHz rates.
Internal FM Function
The PH7 command turns on the internal FM function in Narrow mode and the PH8 command turns it
on in Wide mode. The PHD parameter entry command is used to change the FM deviation value. The
modulating waveform is selected with the PHV(x)
command and the FM rate is set using the PHR
parameter entry command. The PH0 command
turns off the FM function.
Programming Example:
Programming “PH7 PHD 3 RD PHV1 PHR 200 KH”
turns on the internal FM function in Narrow mode,
sets the FM deviation to 3 radians, selects a sine
wave as the modulating waveform, and sets the FM
rate to 200 kHz.
External FM Function
The PH1 (or PHN) command turns on the external
FM function in Narrow mode and the PH2 (or PHW)
command turns it on Wide mode. The external FM
sensitivity value is changed using the PHS parameter entry command. The PH3 and PH4 commands
select front panel or rear panel external FM input.
2-30 683XXC PM

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Programming Example
Programming “PH2 PH4 PH5 PHS 50 RV” turns on
the external FM function in Wide mode, selects the
rear panel FM input, selects an input impedance of
50W, and sets the external FM sensitivity to
50 radians/V.
Pulse
Modulation
Two pulse modulation modes are available—Internal and External. In Internal mode, pulse modulation of the output signal is accomplished by using a
modulating signal from the internal pulse generator.
In External mode, pulse modulation of the output
signal is achieved using a modulating signal from
an external source.
The internal pulse generator has four pulse modes
—single, doublet (double pulse), triplet (triple
pulse), and quadruplet (quadruple pulse). Individual
pulse widths and delays can be set for each of the
pulses in a mode. The pulse generator has two clock
rates—40 MHz and 10 MHz. The 40 MHz clock rate
produces higher resolution pulses (25 ns) and allows
higher PRFs; the 10 MHz clock rate produces lower
resolution pulses (100 ns) and lower PRFs.
The internal pulse generator can be internally triggered, externally triggered, internally and externally triggered with delay, and gated. There is also a
composite trigger mode in which an external pulse
is summed with the internal pulse to pulse modulate the output signal. (Refer to Chapter 3 of the
683XXC Operation Manual for a description of each
trigger mode.)
Internal Pulse Modulation Function
The IPcommand turns on the internal pulse modu-
NOTE
At a 40 MHz pulse clock rate, the
pulse period mustbe 125 ns longer
than the pulse widths + delays;at a
10 MHz pulse clock rate, the pulse
period must be 500 ns longer than
the pulse widths + delays.
lation function. The internal pulse mode is selected
using the PMD(x) command and the internal pulse
trigger is selected using the PTG(x) command. The
pulse period can be set using the PER parameter entry command; the pulse frequency can be set using
the PR parameter entry command. Individual pulse
widths can be set using the W1 (or PW), W2, W3,
and W4 parameter entry commands. Individual
pulse delays can be set using the D1 (or PDY), D2,
D3, and D4 parameter entry commands. The P0 (or
SW0) command turns off the pulse modulation func-
tion.
683XXC PM 2-31

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Square wave pulse modulation of the output signal
by one of four internal modulating signals is available using the following commands:
SW1 turns on square wave pulse modulation
q
at 400 Hz.
SW2 (or SQP) turns on square wave pulse
q
modulation at 1 kHz.
SW3 turns on square wave pulse modulation
q
at 7.8125 kHz.
SW4 turns on square wave pulse modulation
q
at 27.8 kHz.
NOTE
Use the EP0and EP1 commands to
select the polarity of the signal
(TTL-low or TTL-high) that turns
theRFonduringpulsemodulation.
Programming Example:
Programming “IP PC4 PMD2 PTG1 PER 1 MS W1
2.5 US D2 10 US W2 2 US” turns on the internal
pulse modulation function; selects the 40 MHz pulse
clock rate, doublet pulse mode, and free run trigger
mode; and sets the pulse period to 1 ms, pulse
width1 to 2.5 ms, delay2 to 10 ms, and pulse width2
to 2 ms.
Stepped Delay Mode
The stepped delay mode automatically increments
or decrements the pulse delay 1 value according to
step delay parameters. Stepped delay mode is only
available when the triggering commands PTG3 (delayed) or PTG5 (triggered with delay) are specified.
The SD1 command turns on the stepped delay
mode. The pulse delay 1 start time can be set using
the SDS parameter entry command; the delay 1 stop
time can be set using the SDE parameter entry command. Use the SDD parameter entry command to
set the step size and the SDLparameter entry command to set the dwell-time-per-step. The SD0 command turns off the stepped delay mode.
Programming Notes:
Use the PTR and PTF commands in conjunction
with the pulse trigger commands PTG2 (gated),
PTG4 (triggered), and PTG5 (triggered with delay)
to specify whether the pulse generator is triggered
by the rising or falling edge of the external trigger
pulse. Use the P3 (or SW5) and P4 (or SW6) commands to select front panel or rear panel external
trigger pulse input.
2-32 683XXC PM

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
External Pulse Modulation Function
The XPcommand turns on the external pulse modulation function. The P3 (or SW5) and P4 (or SW6)
commands select front panel or rear panel external
pulse input. The PO (or SW0) command turns off
the pulse modulation function.
Table 2-9. Modulation Commands (1 of 6)
MNEMONIC
CODE
AM0 Turns off the internal or externalAM function.
(This is the default mode.)
AM1 Turns on theexternal AM function in Linear mode.
Disables the internal AM functionor the external AM function in
Log mode, had either ofthese modes been previously
programmed.
AM2 Turns on theexternal AM function in Log mode.
Disables the internal AM functionor the external AM function in
Linear mode, had either ofthese modes been previously
programmed.
AM3 Selects front panel external AM input.
AM4 Selects rear panel external AM input.
AM5 Selects external AM input impedance of 50W.
AM6 Selects external AM input impedance of 600W.
AM7 Turns on theinternal AM function in Linear mode.
Disables the external AM functionor the internal AM function in
Log mode, had either ofthese modes been previously
programmed.
FUNCTION
AM8 Turns on theinternal AM function in Log mode.
Disables the external AM functionor the internal AM function in
Linear mode, had either ofthese modes been previously
programmed.
AMW(x) Selects the internalAM waveform, where x = 1-sine wave,
2-square wave, 3-positive ramp, 4-negativeramp,
5-Gaussian noise, 6-uniform noise, 7-trianglewave.
FM0 Turns off the internal or external FM function.
(This is the default mode.)
683XXC PM 2-33

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Table 2-9. Modulation Commands (2 of 6)
MNEMONIC
CODE
FM1 Turns on the external FM function in Unlocked Narrow mode.
(The signal generator output isnot phase-locked.)
Disables the internal FM functionor the external FM function in
Unlocked Wide, Locked, or LockedLow-Noise mode, had any
of these modes been previouslyprogrammed.
FM2 Turns on the external FM function in Locked Low-Noise mode.
(The signal generator output isphase-locked.) Disables the
internal FM function or theexternal FM function in Unlocked
Narrow, Unlocked Wide, or Locked mode, had any of these
modes been previously programmed.
FM3 Selects front panel external FM input.
FM4 Selects rear panel external FM input.
FM5 Selects external FM input impedance of 50W.
FM6 Selects external FM input impedance of 600W.
FM7 Turns on the internal FM function in Unlocked Narrow mode.
(The signal generator output isnot phase-locked.)
Disables the external FM functionor the internal FM function in
Unlocked Wide, Locked, or LockedLow-Noise mode, had any
of these modes been previouslyprogrammed.
FUNCTION
FM8 Turns on the internal FM function in Unlocked Wide mode.
(The signal generator is notphase-locked.)
Disables the external FM functionor the internal FM function in
Unlocked Narrow, Locked, or Locked Low-Noise mode, had any
of these modes been previouslyprogrammed.
FM9 Turns on the internal FM function in Locked mode. (The signal
generator output is phase-locked.)
Disables the external FM functionor the internal FM function in
Unlocked Narrow, Unlocked Wide, or Locked Low-Noise mode,
had any of these modesbeen previously programmed.
FMN Turns on the internal FM function in Locked Low-Noise mode.
(The signal generator is phase-locked.)
Disables the external FM functionor the internal FM function in
Unlocked Narrow, Unlocked Wide, or Locked mode, had any of
these modes been previously programmed.
FMW Turns on the external FM function in Unlocked Wide mode.
(The signal generator output isnot phase-locked.)
Disables the internal FM functionor the external FM function in
Unlocked Narrow, Locked, or Locked Low-Noise mode, had any
of these modes been previouslyprogrammed.
2-34 683XXC PM

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Table 2-9. Modulation Commands (3 of 6)
MNEMONIC
CODE
FML Turns on the external FM function in Locked mode.
(The signal generator output isphase-locked.)
Disables the internal FM functionor the external FM function in
Unlocked Narrow, Unlocked Wide, or Locked Low-Noise mode,
had any of these modesbeen previously programmed.
FMU Same as FM1. Turns on the external FM function inUnlocked
Narrow mode. (The signal generatoroutput is not phaselocked.) Disables the internal FMfunction or the external FM
function in Unlocked Wide, Locked, or Locked Low-Noise
mode, had any of thesemodes been previously programmed.
FWV(x) Selects the internal FM waveform, where x = 1-sine wave,
2-square wave, 3-positive ramp, 4-negativeramp,
5-Gaussian noise, 6-uniform noise, 7-trianglewave
PH0 Turns off the internal or externalFM function. (This is the
default mode.)
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH1 Turns onthe externalFM function in Narrow mode.
Disables the internal
in Wide mode, had eitherof these modes been previously
programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
FUNCTION
F
M function or the externalFM function
PH2 Turns onthe externalFM function in Wide mode.
Disables the internalFM function or the externalFM function
in Narrow mode, had eitherof these modes been previously
programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH3 Selects front panel externalFM input.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH4 Selects rear panel externalFM input.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH5 Selects externalFM input impedance of 50W.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
683XXC PM 2-35

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Table 2-9. Modulation Commands (4 of 6)
MNEMONIC
CODE
PH6 Selects externalFM input impedance of 600W.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH7 Turns onthe internalFM function in Narrow mode.
Disables the externalFM function or the internalFM function in
Wide mode, had either ofthese modes been previously
programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PH8 Turns onthe internalFM function in Wide mode.
Disables the externalFM function or the internalFM function in
Narrow mode, had either ofthese modes been previously
programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PHN Same as PH1. Turns on theexternalFM function in Narrow
mode. Disables the internal
function in Wide mode, hadeither of these modes been
previously programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
FUNCTION
F
M function or the externalFM
PHW Same as PH2.Turns on the externalFM function in Wide
mode. Disables the internalFM function or the externalFM
function in Narrow mode, hadeither of these modes been
previously programmed.
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
PHV(x) Selects the internalFM waveform, where x = 1-sine wave,
2-square wave, 3-positive ramp, 4-negativeramp,
5-Gaussian noise, 6-uniform noise, 7-trianglewave
If theFM function (Option 6) isnot installed, this command
produces a syntax error.
P0 Turns off the internal or external pulse modulation function.
(This is the default mode.)
IP Turns on the internal pulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
XP Turns on the external pulse modulation function.
Disables the internal pulse modulationfunction, if previously
programmed.
2-36 683XXC PM

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Table 2-9. Modulation Commands (5 of 6)
MNEMONIC
CODE
P3 Selects frontpanel external pulse input to pulse modulate the
RF output signal or totrigger or gate the internal pulse
generator.
P4 Selects rearpanel external pulse input to pulse modulate the
RF output signal or totrigger or gate the internal pulse
generator.
PC1 Selects the 10 MHz internal pulse generator clock rate.
PC4 Selects the 40 MHz internal pulse generator clock rate.
PMD(x) Selects the internal pulse mode, where x = 1-single, 2-doublet,
3- triplet, 4-quadruplet.
PTG(x) Selects the internal pulse trigger, where x = 1-free run, 2-gated,
3-delayed, 4-triggered, 5-triggered with delay, 6-composite.
PTR Selects internal pulse triggering on the risingedge of an
external input. Active only whenpulse trigger is gated,
triggered, or triggered with delay.
PTF Selects internal pulse triggering onthe falling edge of an
external input. Active only whenpulse trigger is gated,
triggered, or triggered with delay.
FUNCTION
GP Sets the internal pulse mode to single, the internal pulse trigger
to gated, and turns onthe internal pulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
DPT Sets the internal pulse mode to single,the internal pulse trigger
to triggered with delay, and turns on the internal pulse
modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
SD0 Turns off the internal pulse stepped delay mode.
SD1 Turns onthe internal pulse stepped delay mode, if internal
pulse modulation is on andthe pulse trigger is “delayed” or
“triigger with delay.”
SQP Turns on internal 1 kHz square wave pulse modulation. Sets
the internal pulse width1 to500ms, PRF to 1 kHz,pulse mode
to single, pulse trigger tofree run, and turns on the internal
pulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
683XXC PM 2-37

PROGRAMMING WITH MODULATION
GPIB COMMANDS COMMANDS
Table 2-9. Modulation Commands (6 of 6)
MNEMONIC
CODE
SW0 Same as P0. Turns off the internal or external pulse modulation
function.
SW1 Turns on internal 400 Hz square wave pulse modulation. Sets
the internal pulse width1 to1.25ms, PRF to 400 Hz,pulse
mode to single, trigger tofree run, pulse clock rate to 40 MHz,
and turns on the internalpulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
SW2 Same as SQP. Turns on internal 1 kHz square wave pulse
modulation. Sets the internal pulsewidth1 to 500ms, PRF to
1 kHz, pulse mode tosingle, pulse trigger to free run, and turns
on the internal pulse modulationfunction.
Disables the external pulse modulationfunction, if previously
programmed.
SW3 Turns on internal 7.8125 kHz square wave pulse modulation.
Sets the internal pulse width1to 64ms, PRF to 7.8125 kHz,
pulse mode to single, pulsetrigger to free run, and turns on the
internal pulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
FUNCTION
SW4 Turns on internal 27.8 kHz square wave pulse modulation. Sets
the internal pulse width1 to18ms, PRF to 27.8 kHz,pulse
mode to single, pulse triggerto free run, pulse clock rate to
40 MHz, and turns onthe internal pulse modulation function.
Disables the external pulse modulationfunction, if previously
programmed.
SW5 Same as P3. Selects front panel external pulse input to pulse
modulate the RF output signalor to trigger or gate the internal
pulse generator.
SW6 Same as P4. Selects rear panel external pulse input to pulse
modulate the RF output signalor to trigger or gate the internal
pulse generator.
SC0 Turns SCANmodulation function off.If the SCAN Modulator
(Option 20) was not installed,this command produces a syntax
error.
SC1 Turns SCANmodulation function on. If the SCAN Modulator
(Option 20) was not installed,this command produces a syntax
error.
2-38 683XXC PM
PROGRAMMING WITH MEASURE
GPIB COMMANDS FUNCTION COMMANDS
2-10
MEASURE FUNCTION
COMMANDS
Table 2-10 lists the measure function commands. These commands
provide for measuring the following:
The actual modulation depth of the RF output signal, as caused
q
by an external AM signal connected to either the front panel or
rear panel AM IN connector.
The actual frequency deviation of the RF output signal, as caused
q
by an external FM signal connected to either the front panel or
rear panel FM IN connector.
The actual RF power of an external source, via a 560-7, 5400-71,
q
or 6400-71 Series Detector connected to the rear panel POWER
METER connector. (To make RF power measurements, Option 8
must be installed.)
Table 2-10. Measure Function Commands
MNEMONIC
CODE
AMI Turns on the AM Measurement mode. In this mode, the signal
generator measures the voltage ofthe external modulating signal and calculates the modulationdepth of the RF output signal.
The measurement results will besent to the controller upon receipt of the OMM command(Table 2-11).
When the AMI command isreceived, measurements will
continue to be taken untilthe mode is exited by receipt of the
MOM command.
FUNCTION
FMD Turns on the FM Measurement mode. Inthis mode, the signal
generator measures the voltage ofthe external modulating signal and calculates the peakfrequency deviation of the RF output signal.
The measurement results will besent to the controller upon receipt of the OMM command(Table 2-11).
When the FMD command isreceived, measurements will
continue to be taken untilthe mode is exited by receipt of the
MOM command.
MOM Turns off the AM and FM measurement modes.
PM1 Turns on the Power Measurement mode (Option 8), whereby
RF power can be measuredat an external source by a 560-7,
5400-71, or 4600-71 Series Detectorconnected to the rear
panel POWER METER connector.
The measurement results will besent to the controller upon receipt of the OPM command(Table 2-11).
Power measurements can be takensimultaneously with modulation measurements.
PM0 Turns off thePower Meter Measurement mode.
683XXC PM 2-39

PROGRAMMING WITH OUTPUT
GPIB COMMANDS COMMANDS
2-11
OUTPUT COMMANDS
Table 2-11 lists the output command mnemonic codes. These commands provide for the output of data from the signal generator to the
controller. Figure 2-8 (page 2-45) shows examples of output command
programming.
Table 2-11. Output Commands(1 of 6)
MNEMONIC
CODE
*
IDN? Causes the signal generator toreturn an identification string in
IEEE-488.2 specified <NR1> format (fourfields separated by
commas). The fields are:<Manufacturer>, <Model>,<Serial #>,
<Firmware revision level>; where theactual model number,
serial number, and firmware version of the 683XXC will be
passed.
OI Causes the signal generator to identify itself by sending the
following parameter information over thebus; model number,
low-end frequency, high-end frequency, minimumoutput power
level, maximum output power level,software revision number,
serial number, model prefix (A or B), and series (2 or 3).This
command can be used tosend parameter information to the
controller automatically, thus relieving the operator from having
to input the information manually. The string is 36 characters
long.
FUNCTION
OFL Returns the low-end frequency value (in MHz) to thecontroller.
OFH Returns the high-end frequency value (in MHz) to the control-
ler.
OF0 Returns the F0 frequency value (in MHz) to thecontroller.
OF1 Returns the F1 frequency value (in MHz) to thecontroller.
OF2 Returns the F2 frequency value (in MHz) to thecontroller.
OF3 Returns the F3 frequency value (in MHz) to thecontroller.
OF4 Returns the F4 frequency value (in MHz) to thecontroller.
OF5 Returns the F5 frequency value (in MHz) to thecontroller.
OF6 Returns the F6 frequency value (in MHz) to thecontroller.
OF7 Returns the F7 frequency value (in MHz) to thecontroller.
OF8 Returns the F8 frequency value (in MHz) to thecontroller.
OF9 Returns the F9 frequency value (in MHz) to thecontroller.
OM0 Returns the M0 frequency value (in MHz) to the controller.
2-40 683XXC PM

PROGRAMMING WITH OUTPUT
GPIB COMMANDS COMMANDS
Table 2-11. Output Commands(2 of 6)
MNEMONIC
CODE
OM1 Returns the M1 frequency value (in MHz) to the controller.
OM2 Returns the M2 frequency value (in MHz) to the controller.
OM3 Returns the M3 frequency value (in MHz) to the controller.
OM4 Returns the M4 frequency value (in MHz) to the controller.
OM5 Returns the M5 frequency value (in MHz) to the controller.
OM6 Returns the M6 frequency value (in MHz) to the controller.
OM7 Returns the M7 frequency value (in MHz) to the controller.
OM8 Returns the M8 frequency value (in MHz) to the controller.
OM9 Returns the M9 frequency value (in MHz) to the controller.
OL0 Returns the L0 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL1 Returns the L1 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
FUNCTION
OL2 Returns the L2 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL3 Returns the L3 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL4 Returns the L4 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL5 Returns the L5 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL6 Returns the L6 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL7 Returns the L7 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL8 Returns the L8 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OL9 Returns the L9 power value(in dBm when in log mode; in mV
when in linear mode) tothe controller.
OLO Returns the Level Offset power value (in dB when in log mode;
in mV when in linearmode) to the controller.
683XXC PM 2-41

PROGRAMMING WITH OUTPUT
GPIB COMMANDS COMMANDS
Table 2-11. Output Commands(3 of 6)
MNEMONIC
CODE
ODF Returns theDF frequency value (in MHz)to the controller.
OPD Returns the dwell time of the power sweep (in ms) to the
controller.
OPS Returns the number-of-steps of the power sweep tothe
controller.
OSD Returns the dwell time of the step sweep (in ms) to the
controller.
OSS Returns the number-of-steps of the step sweep tothe
controller.
OST Returns the sweep time value (in ms) to the controller.
OAD1 Returns the internal AM depth value (in%) to the controller.
OAD2 Returns the internal AM depth value (indB) to the controller.
OAR Returns the internal AM rate (in Hz) to the controller.
OAW Returns the name ofthe internal AM waveform (“SINE”,
“SQUARE WAVE”, “RAMP UP”, “RAMPDOWN”, “GAUSSIAN
NOISE”, “UNIFORM NOISE”, “TRIANGLE”) tothe controller.
FUNCTION
OAS Returns the external AM sensitivity value (in %/V)to the
controller.
OAB Returns the external AM sensitivity value (in dB)to the
controller.
OAI Returns the external AM impedance value (inW)tothe
controller.
OAE Returns the name of the AM source (“FRONT”,“REAR”,
“INTERNAL”) to the controller.
OFD Returns the internal FM deviation value (in Hz) to the
controller.
OFR Returns the internal FM rate (in Hz) to the controller.
OFW Returns the nameof the internal FM waveform (“SINE”,
“SQUARE WAVE”, “RAMP UP”, “RAMPDOWN”, “GAUSSIAN
NOISE”, “UNIFORM NOISE”, “TRIANGLE”) tothe controller.
OFK Returns the internal or external FM lock status (“UNLOCKED
NARROW”, “UNLOCKED WIDE”, “LOCKED”) tothe controller.
2-42 683XXC PM

PROGRAMMING WITH OUTPUT
GPIB COMMANDS COMMANDS
Table 2-11. Output Commands(4 of 6)
MNEMONIC
CODE
OFS Returns the external FM sensitivity value (in MHz/V) to the
controller.
OFI Returns the external FM impedance value (inW)tothe
controller.
OFE Returns the name of the FM source (“FRONT”, “REAR”,
“INTERNAL”) to the controller.
OPHD Returns the internalFM deviation value (in radians)to the
controller
OPHR Returns the internalFM rate (in Hz) tothe controller.
OPHW Returns the name of the internalFM waveform (“SINE”.
“SQUARE WAVE”, “RAMP UP”, “RAMPDOWN”, “GAUSSIAN
NOISE”, “UNIFORM NOISE”, “TRIANGLE”) tothe controller.
OPHM Returns theinternal or externalFM mode (“NARROW”,
“WIDE”) to the controller.
OPHS Returns the externalFM sensitivity value (in radians/V)to the
controller.
FUNCTION
OPHI Returns the externalFM impedance value (inW)tothe
controller.
OPHE Returns the name of theFM source (“FRONT”, “REAR”,
“INTERNAL”) to the controller.
OPR Returns the internal pulse frequency (in MHz) to the controller.
OPP Returns the internal pulse period (inms) to the controller.
OPW, OW1 Returns the internal pulse width1 value (inms) to the controller.
OW2 Returns the internal pulse width2 value (inms) to the controller.
OW3 Returns the internal pulse width3 value (inms) to the controller.
OW4 Returns the internal pulse width4 value (inms) to the controller.
ODP, OD1 Returns the internal pulse delay1value (inms) to the controller.
OD2 Returns the internal pulse delay2 value (inms) to the controller.
OD3 Returns the internal pulse delay3 value (inms) to the controller.
OD4 Returns the internal pulse delay4 value (inms) to the controller.
683XXC PM 2-43

PROGRAMMING WITH OUTPUT
GPIB COMMANDS COMMANDS
Table 2-11. Output Commands(5 of 6)
MNEMONIC
CODE
ODD Returns theinternal pulse stepped delay mode step size value
(inms) to the controller.
ODE Returns the internal pulse stepped delay mode delay 1 stop
value (inms) to the controller.
ODL Returns the internal pulse stepped delay mode dwell-time-per-
step value (in ms) tothe controller.
ODS Returns the internal pulse stepped delay mode delay 1 start
value (inms) to the controller.
OMD Returns the nameof the internal pulse mode (“SINGLE”, “DOU-
BLET”, “TRIPLET”,"QUADRUPLET") to the controller.
OPC Returns the internal pulse clock rate (in MHz) to the controller.
OPM Returns the internal power meter measurement value (in dBm)
to the controller.
OPT Returns the name of the internal pulse trigger (“FREE RUN”,
“GATED”,“DELAYED”, “TRIGGERED”, “TRIG WITHDELAY”,
“COMPOSITE”) to the controller.
FUNCTION
OP5 Returns the internal or external pulse polarity(“HIGH”, “LOW”)
to the controller.
OP3 Returns the name of the pulse source(“FRONT”, “REAR”,
“INTERNAL FRONT TRIG”, “INTERNALREAR TRIG”) to the
controller.
OMM 1. Returns the AM depth measurement value (in %) to the
controller, when the AMI command either has been or is also
programmed.
2. Returns the FM deviationmeasurement value (in MHz) to the
controller, when the FMD command either has been or is also
programmed.
OVN Returns the ROM version number to the controller.
OWT Returns the GPIBtermination status to the controller.
(0=CR; 1=CRLF)
OSE Returns the last GPIB syntax error to thecontroller.
OEM Returns the Extended SRQ Mask bytes (3 binary bytes) to the
controller.
OES Returns the GPIB Status bytes (3 binary bytes)to the controller.
2-44 683XXC PM

PROGRAMMING WITH STORED SETUP
GPIB COMMANDS COMMANDS
Table 2-11. Output Commands(6 of 6)
2-12
STORED SETUP
COMMANDS
MNEMONIC
CODE
OSB Returns the Primary GPIB Status byte to thecontroller.
OSM Returns the Primary SRQ Mask byte to the controller.
OSR Returns the self-test results (6 binary bytes) to the controller.
760 OUTPUT 705;"OF1"
770 ENTER 705;A
780 PRINT “F1 is set at ”;A;" MHz"
1050 OUTPUT 705;"OSS"
1060 ENTER 705;A
1070 PRINT “Step Sweep has ”;A;" Steps"
Figure 2-8. Output Command Programming Examples
Table 2-12 (page 2-46) lists the stored setup command mnemonic
codes. These commands provide for saving instrument setups and
recalling them for use.
FUNCTION
A current instrument setup can be saved to internal setup memory using the SSN(M
to nine instrument setups can be stored in this manner. The command
RSN(M
memory locations 1 to 9.
If more than nine instrument setups are needed, or if it is desirable to
store the setups in the controller instead of the signal generator memory, the 683XXC can be commanded to output and accept stored setups
over the bus.
The SAF command outputs the current instrument setup to the controller in a 4100-byte (approximately) binary data string. The controller stores the instrument setup. The RCF command readies the signal
generator to receive a new instrument setup recalled from the controller. Figure 2-9 shows an example of SAF and RCF command programming.
The SAM and RCM commands perform the same functions as described for the SAF and RCF commands, except that all of the stored
instrument setups are included in the binary data string along with
) recalls a stored instrument setup from internal setup
1 to 9
) command, where M = memory locations 1 to 9. Up
1 to 9
683XXC PM 2-45

PROGRAMMING WITH STORED SETUP
GPIB COMMANDS COMMANDS
the current instrument setup. For these commands, the binary data
string is approximately 41000 bytes long.
Table 2-12. Stored Setup Commands
MNEMONIC
CODE
SAF Outputs the current instrument setup to the controller.
SAM Outputs both the current instrument setup and all stored instru-
ment setups to the controller.
SM Recalls the next stored instrument setup in sequence.
SSN(M
RSN(M
) Saves the current instrument setupto internal setup memory
1-9
RCF Readies the683XXC to receive a new instrument setup re-
RCM Readies the 683XXC to receive a new instrument setup and
1-9
location M, whereM=1to9.
called from the controller.
new stored setups recalled fromthe controller.
) Recalls the instrument setup stored in internal setupmemory
location M, whereM=1to9.
FUNCTION
Programming Note: The SAF and SAM commands output binary
data. The data string is terminated with “EOI” on the last byte sent
(no CR or LF is sent).
10 DIM A$ [3000]
20 OUTPUT 705; “SAF”
30 ENTER 705 USING “#%, #%K”; A$ (Requires EOI
to be the terminator of the read.)
40 OUTPUT 705; “RCF”; A$ (A$ must follow the SAF.)
Figure 2-9. SAF and RCF Commands Programming Example
2-46 683XXC PM

PROGRAMMING WITH SRQ AND STATUS
GPIB COMMANDS BYTE COMMANDS
2-13
SRQ AND STATUS
BYTE COMMANDS
Table 2-13 (page 2-49) lists the Service Request (SRQ) and Status Byte
command mnemonic codes. These commands enable the signal generator to request service from the controller when certain, predefined conditions exist.
Status Bytes The 683XXC has three GPIB status bytes—the pri-
mary and two extended status bytes. Figure 2-10
shows the three status bytes and identifies the
status reporting function of each status byte bit.
Each status reporting bit, with the exception of primary status byte bit 6 (SRQ), is set when the condition on which it reports is detected. These changes
in status byte bit settings can be read by the controller as follows:
The contents of the primary status byte is re-
q
turned to the controller in response to a serial
poll or the OSB command.
The contents of the primary status byte and
q
the two extended status bytes are returned to
the controller in response to the OES command. Figure 2-11 (page 2-51) shows an example of OES command programming.
SRQ
Generation
The signal generator can generate GPIB service requests (SRQs) to report instrument status and syntax errors to the controller. The signal generator
will generate an SRQ if:
1. The SRQ generation function has been enabled
using the SQ1 command and,
2. One (or more) of the status reporting functions is
true and,
3. The primary status byte bit associated with the
true status reporting function has been enabled.
Bits in the primary status byte can be enabled by either of two methods. The first uses the FB1/FB0,
ES1/ES0, UL1/UL0, LE1/LE0, PE1/PE0, SE1/SE0,
and SB1/SB0 commands, described in Table 2-13, to
individually enable or disable each bit. The second
method uses a single 8-bit status byte mask (MB0)
to enable any or all of the primary status byte bits.
Figure 2-12 (page 2-51) shows examples of status
byte mask programming.
683XXC PM 2-47

PROGRAMMING WITH SRQ AND STATUS
GPIB COMMANDS BYTE COMMANDS
NOTE
Allstatusbyte bitsarelatched exceptforthose indicated withthe“*”. Once
set, an OES or OSB commandmustbe received before the condition will
be reset. The primary status byte bit 6 (SRQ) is cleared by a serial poll
only.
Primary Status Byte
Extended
Status
Byte 2
Bit 7
(128)
Primary status byte bit 0is set whenever one of the status conditions reported by
an extended status byte 1is true and the associated status bit is enabled. This
bit is cleared when thecontroller sends the OES command.
Primary status byte bit 7is set whenever one of the status conditions reported by
an extended status byte 2is true and the associated status bit is enabled. This
bit is cleared when thecontroller sends the OES command.
Primary status byte bit 6(SRQ) is not maskable. This bit is set by the SQ1 command and cleared by aserial poll.
Extended Status Byte 1
RF*
Leveled
Bit 7
(128)
SRQ Syntax
Bit 6
(64)
Not
Used
Bit 6
(64)
Error
Bit 5
(32)
Not
Used
Bit 5
(32)
Parameter
Range
Error
Bit 4
(16)
Not
Used
Bit 4
(16)
Lock
ErrorRFUnleveled
Bit 3
(8)
RF*
Locked
Bit 3
(8)
Self Test
Completed
Bit 2
(4)
Bit 2
(4)
End
of
Sweep
Bit 1
(2)
Modulation
Error
Bit 1
(2)
Extended
Status
Byte 1
Bit 0
(1)
Self Test
Failed
Bit 0
(1)
Extended status byte 1 bitsare enabled by the extended status byte 1 mask
command, MB1.
Extended status byte 1 bit0 (SelfTest Failed) and bit 2 (Self Test Complete)
should not be unmasked atthe same time.
Extended status byte 1 bit3 (RF Locked) is only used with the Model 360B interface. The setting of thisbit is blocked or unblocked by the commands, LS0 and
LS1 (See Table 2-13).
The setting of extended statusbyte 1 bit 7 (RF Leveled) is blocked and unblocked by the commands LA0and LA1 (See Table 2-13).
Extended Status Byte 2
Parameter*
Changed
Bit 7
(128)
Calibrate
Function
Finished
Bit 6
(64)
Not
Used
Bit 5
(32)
RF*
Unlocked
Bit 4
(16)
Crystal
Oven
Failure
Bit 3
(8)
Calibrate
Function
Failed
Bit 2
(4)
Not
Used
Bit 1
(2)
Extended status byte 2 bitsare enabled by the extended status byte 2 mask
command, MB2.
The setting of extended statusbyte 2 bit 4 (RF Unlocked) is blocked or unblocked by the commands, EL0and EL1 (See Table 2-13).
Extended status byte 2 bit7 (Parameter Changed) is only used with the Model
56100A interface. The setting of this bit is blocked or unblockedby the commands, II0 and II1 (SeeTable 2-13).
Figure 2-10. Primary and Extended Status Bytes
Not
Used
Bit 0
(1)
2-48 683XXC PM

PROGRAMMING WITH SRQ AND STATUS
GPIB COMMANDS BYTE COMMANDS
Table 2-13. SRQ and Status Byte Commands (1 of 2)
MNEMONIC
CODE
ES1 Enables an SRQ to be generated when Primary Status Byte bit
1 (End of Sweep) isset and SQ1 has been programmed.
ES0 Inhibits an SRQ from being generated when the End of Sweep
bit is set. This isthe default mode.
FB1 Enables an SRQ to be generated when Primary Status Byte bit
0 (Extended Status Byte 1)is set and SQ1 has been
programmed. The Extended Status Byte1 bit is set whenever
one (or more) of theunmasked status reporting functions in
Extended Status Byte 1 istrue.
FB0 Inhibits an SRQ from being generated when the Extended
Status Byte 1 bit isset. This is the default mode.
LE1 Enables an SRQ to be generated when Primary Status Byte bit
3 (Lock Error) is setand SQ1 has been programmed.
LE0 Inhibits an SRQ from being generated when the Lock Error bit
is set. This is thedefault mode.
MB0 Sets an 8-bit data mask that is used to enable specific bits of
the Primary Status Byte (Figure2-12). This enables any or all
of the bits (except forbit 6) in the Primary Status Byte to
generate an SRQ using one8-bit byte. This command can be
equivalent to sending ES1, FB1,LE1, PE1, SE1, SB1, and
UL1.
FUNCTION
MB1 Sets the enable mask byte for Extended Status Byte 1.
MB2 Sets the enable mask byte for Extended Status Byte 2.
PE1 Enables an SRQ to be generated when Primary Status Byte bit
4 (Parameter Range Error) isset and SQ1 has been programmed.
PE0 Inhibits an SRQ from being generated when the Parameter
Range Error bit is set.This is the default mode.
SB1 Enables an SRQ to be generated when Primary Status Byte bit
7 (Extended Status Byte 2)is set and SQ1 has been
programmed. The Extended Status Byte2 bit is set whenever
one (or more) of theunmasked status reporting functions in
Extended Status Byte 2 istrue.
SB0 Inhibits an SRQ from being generated when the Extended
Status Byte 2 bit isset. This is the default mode.
SE1 Enables an SRQ to be generated when Primary Status Byte bit
5 (Syntax Error) is setand SQ1 has been programmed.
683XXC PM 2-49

PROGRAMMING WITH SRQ AND STATUS
GPIB COMMANDS BYTE COMMANDS
Table 2-13. SRQ and Status Byte Commands (2 of 2)
MNEMONIC
CODE
SE0 Inhibits an SRQ from being generated when the Syntax Error
bit is set. This isthe default mode.
SQ1 Enables the SRQ generation function. This command allows a
status reporting function, that istrue and enabled, to pull the
SRQ line LOW (true) andrequest service from the controller.
SQ0 Disables the SRQ generation function. This is the default
mode.
UL1 Enables an SRQ to be generated when Primary Status Byte bit
2 (RF Unleveled) is setand SQ1 has been programmed.
UL0 Inhibits an SRQ from being generated when the RF Unleveled
bit is set. This isthe default mode.
LS1 Unblocks updating of the Extended Status Byte 1 bit 3 (RF
Locked). This bit is onlyused with the Model 360B interface.
LS0 Disables updating of the Extended Status Byte 1 bit 3. This is
the default setting.
LA1 Unblocks updating of the Extended Status Byte 1 bit 7 (RF
Leveled).
FUNCTION
LA0 Blocks updating of the Extended Status Byte 1 bit 7. This is the
default setting.
EL1 Unblocks updating of the Extended Status Byte 2 bit 4 (RF Un-
locked).
EL0 Blocks updating of the Extended Status Byte 2 bit 4. This is the
default setting because it isnormal for the RF to be
momentarily unlocked during sweeps andsweep retrace.
II1 Unblocks updating of the Extended Status Byte 2bit 7
(Parameter Changed). This bit isonly used with the Model
56100A interface. This bit is cleared when the 56100Asends
the OCP command (Output Last Parameter Changed).
II0 Disables updating of the Extended Status Byte 2bit 7. This is
the default setting.
CSB Clears all GPIB status bytes.
2-50 683XXC PM

PROGRAMMING WITH SRQ AND STATUS
GPIB COMMANDS BYTE COMMANDS
OUTPUT 705; “OES”
ENTER 705 USING “#, B”; A, B, C
MAIN = A
1EXT=B
2EXT=C
Figure 2-11. OES Command Programming Example
The 683XXC has a softwaremask that permits manipulation of the three status bytes over the bus. This manipulation is accomplished by sending the commandcodes MB0, MB1, MB2, or all three at once, followed by an argument that
assigns an on/off condition for each bit in the byte. Two examples are shownbelow:
EXTENDED STATUS BYTE 2
0
"1"
"2"
"4"
"8"
"16"
"32"
"64"
"128"
OR
PRIMAR Y
STATUS
BYTE
BIT 7
CALIBRATE FUNCTION FAILED
CRYSTAL OVEN FAILURE
RF UNLOCKED
CALIBRATE FUNCTION FINISHED
PARAMETER CHANGED
0
0
0
1
1
0
0
0
EXAMPLE #1
0
0
1
1
0
0
0
0
EXAMPLE #2
MASK BYTE 2
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
EXAMPLE #1:
MB2" (CHR $(24))
Sets bits 3 and 4in Mask Byte 2 to 1 and all other bits to 0, thus enabling bits 3 and 4in Extended Status Byte 2 to be
read from the bit 7position of the Primary Status Byte.
EXAMPLE #2:
MB2" (CHR $(12))
Sets bits 2 and 3in Mask Byte 2 to 1 and all other bits to 0, thus enabling bits 2 and 3in Extended Status Byte 2 to be
read from the bit 7position of the Primary Status Byte.
Figure 2-12. Status Byte Mask Programming Examples
683XXC PM 2-51
PROGRAMMING WITH CONFIGURATION
GPIB COMMANDS COMMANDS
2-14
CONFIGURATION
COMMANDS
Table 2-14 lists the configuration command mnemonic codes. These
commands permit selection/setting of the following system configuration items via the bus:
A +5V or –5V level for the rear panel retrace and bandswitch
q
blanking outputs.
A TTL-low or TTL-high signal to turn RF on during pulse
q
moduation.
Setting the frequency scaling reference multiplier value.
q
Normally-open or normally-closed contacts on the internal penlift
q
relay.
RF on or RF off during frequency switching in CW, step sweep,
q
and list sweep modes.
RF on or RF off during sweep retrace.
q
RF on or RF off at reset.
q
40 dB or 0 dB of attenuation when RF is switched off in units
q
with a step attenuator (Option 2).
The system configuration selections made with GPIB commands remain in effect when the instrument is returned to local control.
Table 2-14. Configuration Commands (1 of 2)
MNEMONIC
CODE
FUNCTION
BPN Selects a–5V level for the retrace and bandswitch blanking
outputs. (The retrace blanking outputsignal is available at pin
6 of the AUX I/Oconnector; the bandswitch blanking output
signal at pin 20 ofthe AUX I/O connector.)
BPP Selects a +5V levelfor the retrace and bandswitch blanking
outputs.
EP0 Selects TTL-lowto turn RF on during pulse modulation.
EP1 Selects TTL-highto turn RF on during pulse modulation.
FRS Permits setting the frequencyscaling reference multiplier
value. The multiplier value mustbe between 0.1 to 14 and
must be terminated with TMS.
Programming Example:
Programming “FRS 3 TMS” sets the frequency scaling
reference multiplier to 3.
This command affects all entered and displayed frequencies,
but does not affect the output of the instrument.
PPO Selects normally-open contacts on theinternal penlift relay.
(The penlift relay output, optionallyavailable at the rear panel,
is used to lift aplotter pen during retrace.)
PPC Selects normally-closedcontacts on the internal penlift relay.
2-52 683XXC PM
Changed: May 1999

PROGRAMMING WITH CONFIGURATION
GPIB COMMANDS COMMANDS
Table 2-14. Configuration Commands (2 of 2)
MNEMONIC
CODE
RC0 Selects RF to beoff during frequencyswitching in CW, step
sweep, and list sweep modes.
RC1 Selects RF to beon during frequency switching in CW, step
sweep, and list sweep modes.
RT0 Selects RF to be off during retrace.
RT1 Selects RF to be on during retrace.
RO0 Selects RFto be on at reset. (This is the default mode.)
RO1 Selects RFto be off at reset.
TR0 Sets 0dB of attenuation when RF is switched of fin units with
a step attenuator (Option 2)installed. If Option 2 is not in-
stalled, this command produces asyntax error.
TR1 Sets 40dB (minimum) of attenuation wnen RF is switched off
in units with a stepattenuator (Option 2) installed. This pro-
vides a better output sourcematch. If Option 2 is not installed,
this command produces a syntaxerror.
FUNCTION
683XXC PM 2-51A/2-52A
Changed: May 1999

PROGRAMMING WITH GROUP EXECUTE
GPIB COMMANDS TRIGGER COMMANDS
2-15
GROUP EXECUTE
TRIGGER COMMANDS
Table 2-15 lists the group execute trigger (GET) command mnemonic
codes. These commands let a GET bus message (Table 1-3) be used to
trigger certain signal generator functions and thus speed up bus operations.
In the default state, the 683XXC responds to a GET message by triggering a single sweep.
Table 2-15. Group Execute Trigger Commands
MNEMONIC
CODE
GTC Configures the 683XXC to executea SQF command (scan to
the next higher preset CWfrequency) each time a GET message is received.
GTD Configures the 683XXC to executea DN command (steps the
open parameter down by thestep size) each time a GET message is received.
GTF Configures the 683XXC to execute a fast-frequency-switching
step (Table 2-17) each time a GETmessage is received.
GTL Configures the 683XXC to execute a TSS command (steps to
the next point in adual step sweep mode) each time a GET
message is received.
FUNCTION
GTO Disables the GET functions.
GTS Configures the 683XXC to execute a TRS command (trigger
a single sweep) each timea GET message is re-ceived. This
is the default mode.
GTT Configures the 683XXC to execute a TSTcommand (execute
a complete signal generator selftest) each time a GET message is received.
GTU Configures the 683XXC to executea UP command(steps the
open parameter up by thestep size) each time a GET message is received.
Y Sending a “Y” is equivalent to sending a GET.
683XXC PM 2-53
Changed: May 1999

PROGRAMMING WITH LIST SWEEP
GPIB COMMANDS COMMANDS
2-16
LIST SWEEP
COMMANDS
Table 2-16 lists the list sweep command mnemonic codes. These commands provide for (1) placing the signal generator in list sweep mode,
(2) accessing up to four lists of 2000 frequency/power level sets, and (3)
generating a phase-locked step sweep of the list frequency/power level
sets.
In list sweep mode, up to four lists of 2000 non-sequential frequency/
power level sets can be stored and accessed. Alist index (0 thru 1999)
identifies each frequency/power level set in a list. When commanded,
the signal generator generates a phase-locked step sweep between the
specified list start index and list stop index.
Accessing
and Editing
a List
The command, LST, places the signal generator in
list sweep mode. The ELN(x) command is used to select which of the four lists is to be accessed. The first
list (list number 0) is the same list that is available
via local (front panel) control. This list is stored in
non-volatile RAM to perserve any settings after the
instrument is powered off. The other three lists (list
numbers 1, 2, and 3) are all stored in volatile RAM
and all settings are lost when power to the signal
generator is turned off. At power up, list numbers 1,
2, and 3 are set to their default state of 2000 index
entries of 5 GHz at 0 dBm.
The ELI(xxxx) command sets the list index for the
current list. Use the LF command to set the list frequencies starting at the list index and the LP command to set the list power levels starting at the list
index. Any number of frequencies and power levels
can follow these commands.
Another method of entering frequency and power
level information into the current list index is to use
the command, CTL, which copies the current CW
frequency and power level to the current list index.
Programming Example:
Programming “LST ELN1 ELI1234 LF 2 GH,
5 GH, 1 GH, 8 GH LP 2 DM, 9 DM, –3 DM,
–10 DM” places the signal generator in list sweep
mode, selects list number 1, and sets the list index
to 1234. List index 1234 is set to 2 GHz at 2 dBm,
list index 1235 is set to 5 GHz at 9 dBm, list index
1236 is set to 1 GHz at –3 dBm, and list index 1237
is set 8 GHz at –10 dBm.
2-54 683XXC PM
Changed: May 1999

PROGRAMMING WITH LIST SWEEP
GPIB COMMANDS COMMANDS
Table 2-16. List Sweep Commands
MNEMONIC
CODE
LST Places the 683XXC in List Sweep mode.
ELI(xxxx) Sets list index to xxxx, where xxxx = 4-digit integer between
0000 and 1999.
ELN(x) Sets list number to x, where x = 1-digit integer between 0 and
3.
LF Sets list frequencies starting at the list index. Any number of
frequencies can follow. This command does
value of the list index.
LP Sets list power levels starting at the list index. Any number of
power levels can follow. This command does
value of the list index.
LIB(xxxx) Sets the list start index to xxxx, where xxxx = 4-digit integer
between 0000 and 1999.
LIE(xxxx) Sets the list stop index to xxxx, where xxxx = 4-digit integer
between 0000 and 1999.
AUT Selects AutoTrigger
FUNCTION
not
change the
not
change the
HWT Selects External Trigger
EXT Selects Single Trigger
only
TRG Triggers a Single Sweep (
MNT Selects Manual Trigger
UP Increases list index by one (
DN Decreases list index by one (
LEA Learn List (This command initiates a process that examines
every index in the listand performs all calculations necessary
to set the frequency andpower levels.)
CTL Copy current CW frequency and power level to the currentlist
index.
in Single Triggermode)
only
in Manual Triggermode)
only
in Manual Triggermode)
683XXC PM 2-55
Changed: May 1999

PROGRAMMING WITH LIST SWEEP
GPIB COMMANDS COMMANDS
List Sweep
Triggering
Four different modes of triggering are available in
list sweep mode—automatic, external, single, and
manual. When automatic, external, or single trigger
mode is selected, the output sweeps between the
specified list start and stop indexes, dwelling at
each list index for the specified dwell time. When
manual trigger mode is selected, the list start index,
list stop index, and dwell time parameter are not
used. Instead, the list index is incremented using
the UPcommand or an external TTL trigger and is
decremented using the DN command.
The AUTcommand selects automatic sweep triggering and the HWT command selects external sweep
triggering. When external sweep trigger mode is selected, the output sweep recurs when triggered by
an external TTL-compatible clock pulse to the rear
panel AUX I/O connector. The EXT command selects
single list sweep triggering. When single sweep trigger mode is selected, a single list sweep starts when
the TRG command is received.
The MNTcommand selects the manual trigger
mode. In manual trigger mode, the list index is incremented by one each time the UP command is received or each time an external TTL trigger is
received. This list index is decremented by one each
time the DN command is received.
Generating a
List Sweep
Generating a list sweep involves selecting a sweep
range, a dwell-time-per-step, and a sweep trigger.
The list sweep range is defined by a list start index
and a list stop index. Use the LIB(xxxx) command to
set the list start index and the LIE(xxxx) command
to set the list stop index. The dwell-time-per-step of
the list sweep is changed using the LDT parameter
entry command. Select a trigger for the list sweep
using the list sweep trigger commands previously
described.
Programming Example:
Programming “LIB1234 LIE1237 EXT LDT 10
MS TRG” implements a list sweep from current list
index 1234 to index 1237 in single trigger mode with
a 10 ms dwell-time-per-step, then triggers a single
sweep.
2-56 683XXC PM
Changed: May 1999

PROGRAMMING WITH LIST SWEEP
GPIB COMMANDS COMMANDS
List Calculations
During the initial list sweep, the signal generator
performs calculations to set the frequency and
power levels. This causes the initial list sweep to
take longer than each subsequent sweep. The command, LEA, initiates a process that examines every
index in the current list and performs all the calculations necessary to set the frequency and power
levels. This lets the initial list sweep be as fast as
each subsequent sweep.
The list calculations are for the current list only.
Any changes to the current list or selection of another list requires the calculations to be performed
again. The calculations are stored only in volatile
RAM and are lost when power to the signal generator is turned off.
683XXC PM 2-57
Changed: May 1999

PROGRAMMING WITH FAST-FREQUENCYGPIB COMMANDS SWITCHING COMMANDS
2-17
FAST-FREQUENCYSWITCHING
COMMANDS
Table 2-17 lists the fast-frequency-switching command mnemonic
codes. These commands provide for reducing the time that it takes to
switch between CW frequencies.
In the fast-frequency-switching mode, up to 3202 frequencies can be
loaded into a table. A table pointer can then be set to point to a specific
frequency in the table and the signal generator commanded to switch
from that frequency through the following frequencies to the bottom of
the table.
Loading the
Frequency
Table
To load the frequency table, use the command
ZTLbbbbnnnnD8D8D8.....D8, where “bbbb” is the ta-
ble location where the frequency points are to start
loading, “nnnn” is the number of frequency points to
be loaded, and “D8” is the frequency of the frequency
point. Both “bbbb” and “nnnn” are 4 binary byte integers and “D8” is 8 binary bytes of an IEEE-754
double precision floating point number. The order of
the bytes in each field is most significant byte first.
NOTE
Use of the commands ZL(X
and ZS(
) limits the number of fre-
000-999
000-999
), ZEL,
quency points in the table to 1000.
Figures 2-13 thru 2-13b show an example of fast-frequency-switching
mode programming.
Table 2-17. Fast-Frequency-Switching Commands
MNEMONIC
CODE
ZPN Sets the table pointer(ZPNbbbb), where bbbb is the location
the pointer is to pointto.
ZTL Loads the frequency table (ZTLbbbbnnnnD8D8D8.....D8),
where bbbb is the tablelocation where the frequency points
are to start loading, nnnnis the number of frequencies to be
loaded, and D8 is thefrequency of the frequency point.
ZL(X
ZEL Ends frequency loading.
ZS(X
) Loads a CW frequency into the stack at location X. The
000-999
000-999
location is a number from000 to 999.
) Sets the stack pointer to point to location X. The location is a
number from 000 to 999.
FUNCTION
2-58 683XXC PM

PROGRAMMING WITH FAST-FREQUENCYGPIB COMMANDS SWITCHING COMMANDS
The following is an exampleof fast-frequency-switching mode programming. This is a IBM-PC based program using the
National Instruments NI-488.2 C languageinterface library (mcib.lib) and header (decl.h).
#include <stdio.h>
#include decl.h
#define BOARD_ID 0
void main()
{
Addr4882_t source_addr = 5,
device_addr[2] = {5, NOADDR};
double freq_list[2] = {600e6, 8e9},
*double_ptr;
int start_index,
num_freqs = 2,
*integer_ptr;
char command_str[50];
/** Clear the bus and take control.
**/
SendIFC(BOARD_ID);
if (ibsta & ERR)
{
exit (-1);
}
/** Set the remote enable line.
**/
EnableRemote(BOARD_ID, device_addr);
if (ibsta & ERR)
{
exit (-1);
}
/** Set the start index to an arbitrary starting point.
**/
start_index = 12;
/** Begin constructing the command.
**/
command_str[0] = Z; /** Start with the ZTL command. **/
command_str[1] = T;
command_str[2] = L;
integer_ptr = &start_index; /** Point to the start index. **/
command_str[3] = (char)(*(integer_ptr + 3)); /** Get the value of the fourth byte. **/
/** Data is LSB first on Intel based PCs. **/
command_str[4] = (char)(*(integer_ptr + 2)); /** Get the value of the third byte. **/
command_str[5] = (char)(*(integer_ptr + 1)); /** Get the value of the second byte. **/
command_str[6] = (char)(*integer_ptr); /** Get the value of the first byte. **/
NOTE: This program is continuedin Figure 2-13a.
Figure 2-13. Fast-Frequency-Switching Programming Example (1 of 3)
683XXC PM 2-59

PROGRAMMING WITH FAST-FREQUENCYGPIB COMMANDS SWITCHING COMMANDS
integer_ptr = &num_freqs; /** Point to the number of frequencies. **/
command_str[7] = (char)(*(integer_ptr + 3)); /** Get the value of the fourth byte. **/
command_str[8] = (char)(*(integer_ptr + 2)); /** Get the value of the third byte. **/
command_str[9] = (char)(*(integer_ptr + 1)); /** Get the value of the second byte. **/
command_str[10] = (char)(*integer_ptr); /** Get the value of the first byte. **/
double_ptr = &(freq_list[0]) /** Point to the first frequency. **/
command_str[11] = (char)(*(double_ptr + 7)); /** Get the value of byte 7. **/
/** Data is LSB first on Intel based PCs. **/
command_str[12] = (char)(*(double_ptr + 6)); /** Byte 6. **/
command_str[13] = (char)(*(double_ptr + 5)); /** Byte 5. **/
command_str[14] = (char)(*(double_ptr + 4)); /** Byte 4. **/
command_str[15] = (char)(*(double_ptr + 3)); /** Byte 3. **/
command_str[16] = (char)(*(double_ptr + 2)); /** Byte 2. **/
command_str[17] = (char)(*(double_ptr + 1)); /** Byte 1. **/
command_str[18] = (char)(*double_ptr ); /** Byte 0. **/
double_ptr = &(freq_list[1]) /** Point to the second frequency. **/
command_str[19] = (char)(*(double_ptr + 7)); /** Get the value of byte 7. **/
command_str[20] = (char)(*(double_ptr + 6)); /** Byte 6. **/
command_str[21] = (char)(*(double_ptr + 5)); /** Byte 5. **/
command_str[22] = (char)(*(double_ptr + 4)); /** Byte 4. **/
command_str[23] = (char)(*(double_ptr + 3)); /** Byte 3. **/
command_str[24] = (char)(*(double_ptr + 2)); /** Byte 2. **/
command_str[25] = (char)(*(double_ptr + 1)); /** Byte 1. **/
command_str[26] = (char)(*double_ptr ); /** Byte 0. **/
/** Send the command.
**/
Send(BOARD_ID, source_addr, command_str, 27, DABend);
if (ibsta & ERR)
{
exit (-1);
}
/** Set the pointer back to the start index.
**/
command_str[0] = Z; /** ZPN command. **/
command_str[1] = P;
command_str[2] = N;
integer_ptr = &start_index; /** Point to the start index. **/
command_str[3] = (char)(*(integer_ptr + 3)); /** Get the value of the fourth byte. **/
command_str[4] = (char)(*(integer_ptr + 2)); /** Get the value of the third byte. **/
command_str[5] = (char)(*(integer_ptr + 1)); /** Get the value of the second byte. **/
command_str[6] = (char)(*integer_ptr); /** Get the value of the first byte. **/
/** Send the command.
**/
Send(BOARD_ID, source_addr, command_str, 7, DABend);
if (ibsta & ERR)
{
exit (-1);
}
NOTE: This program is continuedin Figure 2-13b.
Figure 2-13a. Fast-Frequency-Switching Programming Example (2 of 3)
2-60 683XXC PM

PROGRAMMING WITH FAST-FREQUENCYGPIB COMMANDS SWITCHING COMMANDS
/** Send a trigger.
**/
Trigger(BOARD_ID, source_addr);
if (ibsta & ERR)
{
exit (-1);
}
/** Source is now outputting 600 MHz. **/
/** Send a trigger.
**/
Trigger(BOARD_ID, source_addr);
if (ibsta & ERR)
{
exit (-1);
}
/** Source is now outputting 8 GHz. **/
exit(0);
} /** End of main **/
Figure 2-13b. Fast-Frequency-Switching Programming Example (3 of 3)
683XXC PM 2-61
PROGRAMMING WITH POWER-OFFSETGPIB COMMANDS TABLE COMMANDS
2-18
POWER-OFFSETTABLE COMMANDS
Table 2-18 lists the power-offset-table command mnemonic codes.
These commands provide for maintaining a consistent power level at a
point within a test setup across the measurement frequencies. This
“flattening” of the test point power level is accomplished by summing a
power offset word (from the power offset table) with the signal generator’s normal power level DAC word at each frequency point.
The power-offset mode works in conjunction with the fast-frequencyswitching mode (paragraph 2-17). The frequency stack must be loaded
before loading the power-offset table because the frequency loading
sets the upper limit for the number of entries in the power-offset table.
The same pointer is used for both the frequency stack and the poweroffset table. Once the power-offset table is loaded, the PT1 command
turns on the power-offset mode; the PT0 command turns it off.
Loading the
Power-Offset
Table
To load the power-offset table, use the command,
PTL clch dldh....., where “clch” is the number of
power-offset words and “dldh” is a power-offset word.
Both “clch” and “dldh” are two-byte binary words
sent LOW byte first and HIGH byte second. The
power-offset word is in hundreths of a dB. Negative
power offsets use twos-complement representation.
To change a power-offset word in the table, use the
PTC dldh command, where “dldh” is the new poweroffset word for the current power level setting.
Programming Note:
Care must be taken to send the exact number of
power-offset words specified in the wordcount,
“clch”. If too few words are sent, the GPIB interface
may not respond properly.
Figures 2-14 and 2-14a show an example of power-offset mode programming.
Table 2-18. Power-Offset-Table Commands
MNEMONIC
CODE
PT0 Disable the Power Offset Table
PT1 Enable the Power Offset Table
PTC Change a Power Offset Table entry (PTC dldh), where dldh is
the new offset word for the current table entry.
PTL Load a Power Offset Table (PTLclch dldh ...), where clch is the
data word count and dldhis the data word.
FUNCTION
2-62 683XXC PM

PROGRAMMING WITH POWER-OFFSETGPIB COMMANDS TABLE COMMANDS
The following is an exampleof power-offset mode programming. This program is writtenfor use with an IBM-PC type
computer/controller containing an IOtech GPIBinterface.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
/* IOtech Driver488/LIB Subroutine Interface definitions... */
#include \ieee488\iotlib.h
#include \ieee488\iot_main.h
/* Define the device handles */
DevHandleT Synth,ieee;
void main()
{
char CmdString[10], DataString[40], String[40];
unsigned char XString[160];
int next_step,i,j;
/*************************************************************************/
/* Initialize the IOtech interface board and */
/* obtain the interfaces handle. */
#define ADDRESS 5
if((ieee=InitIeee488(btMP488CT, 21, -1, 0x02el, 7, 5, 1, 10000,0))==-1)
{
printf(Cannot initialize IEEE 488 system.\n)
exit(1);
}
if(( Synth=CreateDevice( ADDRESS, -1 ) )==-1)
{
printf(Cannot create Synth device.\n);
exit(1);
/* Set the device timeout so you dont wait forever if theres a problem */
TimeOut(Synth, 2000);
/* Handle the errors in the program */
Error(Synth,OFF);
/*************************************************************************/
/* Address the Synthesizer to listen */
NOTE: This program is continuedin Figure 2-14a.
Figure 2-14. Power-Offset Mode Programming Example (1 of 2)
683XXC PM 2-63

PROGRAMMING WITH POWER-OFFSETGPIB COMMANDS TABLE COMMANDS
strcpy(XString,"_?U%");
SendCmd(Synth,XString,strlen(XString));
Output(Synth,"RST");
Output(Synth,"GTF");
Output(Synth,"ZL000");
Output(Synth,"1 GH 2 GH 3 GH 4 GH 5 GH 6 GH 7 GH 8 GH 9 GH 10 GH");
Output(Synth,"ZEL");
/* Make a data array with the PTL command, the word count */
/* and the binary data in low-byte, high-byte order. */
DataString[0]=P;
DataString[1]=T;
DataString[2]=L;
DataString[3]=10; /* Low byte ten words */
DataString[4]=0; /* High byte */
DataString[5]=0; /* 0 */
DataString[6]=0;
DataString[7]=20; /* 276 */
DataString[8]=1;
DataString[9]=30; /* 542 */
DataString[10]=2;
DataString[11]=40; /* 808 */
DataString[12]=3;
DataString[13]=50; /* 1074 */
DataString[14]=4;
DataString[15]=60; /* 1340 */
DataString[16]=5;
DataString[17]=70; /* 1606 */
DataString[18]=6;
DataString[19]=80; /* 1872 */
DataString[20]=7;
DataString[21]=90; /* 2138 */
DataString[22]=8;
DataString[23]=100; /* 2404 */
DataString[24]=9;
/* Send the data with an EOI on the last byte */
SendEoi(Synth,DataString,25);
Output(Synth,"PT1");
Output(Synth,"ZS000");
for(next_step=0;next_step<10;next_step++)
{
Output(Synth,"Y");
printf(Press Enter for Next Frequency);
getchar();
}
} /* End of main() */
Figure 2-14a. Power-Offset Mode Programming Example (2 of 2)
2-64 683XXC PM

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
2-19
USER LEVEL
CALIBRATION
COMMANDS
Table 2-19 lists the user level calibration commands. These commands
provide for (1) activating individual user level calibration tables, (2)
sending the tables to the controller, and (3) recalling the tables from
the controller.
The user level (flatness correction) calibration function provides for
calibrating out path variations in a test setup. This is accomplished by
means of an entered power-offset table from a GPIB power meter or
calculated data. When the user level calibration table is activated, the
set power level is delivered to the point in the test setup where the
calibration was performed. Up to five user level calibration tables from
2 to 801 frequency points/table can be created and stored in signal
generator’s memory for recall. (Refer to Chapter 3 of the 683XXC Operation Manual for user level calibration procedures.)
The commands, LU1 thru LU5, each activate an individual user level
calibration table (#1 thru #5). The LU0 command turns off the active
user level calibration table. The LUS command sends all five tables of
user level calibration data to the controller where they are stored in a
binary data file. While stored in the file, the data can be edited (see
page 2-69). The LUR command readies the 683XXC to receive the five
tables of user level calibration data from the controller. Figures 2-15
thru 2-15b show an example program for saving and recalling user
level calibration tables.
Table 2-19. User Level Calibration Commands
MNEMONIC
CODE
LU0 Turns off theactive user level calibration table.
LU1 Activates userlevel calibration table #1.
Turns off any other active userlevel calibration table.
LU2 Activates userlevel calibration table #2.
Turns off any other active userlevel calibration table.
LU3 Activates userlevel calibration table #3.
Turns off any other active userlevel calibration table.
LU4 Activates userlevel calibration table #4.
Turns off any other active userlevel calibration table.
LU5 Activates userlevel calibration table #5.
Turns off any other active userlevel calibration table.
LUR Readies the 683XXC to receive five tablesof user level cali-
bration data from the controller.
LUS Sends all five tablesof user level calibration data to the con-
troller.
FUNCTION
683XXC PM 2-65

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
The following is an exampleprogram for saving and recalling user level calibration tables. This program uses the National Instruments NI-288.2 C language interfacelibrary (mcib.lib) and header (decl.h).
#include <stdio.h>
#include decl.h
void gpiberr(char *);
#define BOARD_ID 0
#define USER_LVL_SAVE 1
#define USER_LVL_RECALL 2
#define USER_LVL_NUM_BYTES 8232
void main()
{
Addr4882_t source_addr = 5
device_addr[2] = {5, NOADDR};
unsigned char user_lvl_tables[USER_LVL_NUM_BYTES];
init user_lvl_received,
user_input;
FILE *fp_user_lvl_data:
/** Clear the bus and take control.
**/
SendIFC(BOARD_ID);
if(ibsta & ERR)
gpiberr(SendIFC error);
/** Set the remote enable line.
**/
EnableRemote(BOARD_ID, device_addr);
if(ibsta & ERR)
gpiberr(EnableRemote error);
/** Prompt the user to save or recall the data.
**/
printf(1. Save the data from the source\n);
printf(2. Recall the data to the source\n);
printf(Option: );
scanf(%d,&user_input);
if(user_input == USER_LVL_SAVE)
{
NOTE: This program is continuedin Figure 2-15a.
Figure 2-15. Programming Example of Saving and Recalling User Level Calibration Tables (1 of 3)
2-66 683XXC PM

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
/** The LUS command tells the source to send the user level
** table data over the bus.
**/
Send(BOARD_ID, source_addr, LUS\r\n, 5L, DABend);
if(ibsta & ERR)
gpiberr(Send error);
/** Receive the user level table data.
**/
printf(Receiving data from the source\n);
Receive(BOARD_ID, source_addr, user_lvl_tables,
(long)USER_LVL_NUM_BYTES, STOPend);
if(ibsta & ERR)
gpiberr(Receive error);
user_lvl_received = ibcntl;
printf(Received %d bytes of user level data\n,
user_lvl_received);
/** Open binary data file and output the data.
**/
if((fp_user_lvl_data = fopen(userlvl.dat,"w+b")) == NULL)
{
printf(Cant open the userlvl.dat data file\n);
}
else
{
printf(Outputting to userlvl.dat in the current
directory\n);
fwrite(user_lvl_tables, sizeof(user_lvl_tables[0]),
USER_LVL_NUM_BYTES, fp_user_lvl_data);
}
}
else
{
/** Open the binary data file and read the data.
**/
if((fp_user_lvl_data = fopen(userlvl.dat,"rb")) == NULL)
{
printf(Cant open the userlvl.dat data file\n);
}
else
{
printf(Inputting from userlvl.dat in the current
directory\n);
fread(user_lvl_tables, sizeof(user_lvl_tables[0]),
USER_LVL_NUM_BYTES, fp_user_lvl_data);
}
NOTE: This program is continuedin Figure 2-15b.
Figure 2-15a. Programming Example of Saving and Recalling User Level Calibration Tables (2 of 3)
683XXC PM 2-67

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
/** The LUR command readies the source to receive the user
** level table data. Notice that there is no carriage
** return, line feed, or EOI sent with the LUR command.
**/
Send(BOARD_ID, source_addr, LUR, 3L, NULLend);
if(ibsta & ERR)
gpiberr(Send error; LUR);
/** The data is sent to the source immediately following the
** LUR command.
**/
printf(Sending %d bytes of data to the source\n,
USER_LVL_NUM_BYTES);
Send(BOARD_ID, source_addr, user_lvl_tables,
(long)USER_LVL_NUM_BYTES, DABend);
if(ibsta & ERR)
gpiberr(Send error; data);
}
fclose(fp_user_lvl_data);
exit(0);
}/** end of main **/
/****************************************************************************************
***Name: gpiberr
**Desc: Display error code and message for all GPIB operation
**Receives: errsta - the error string to display
**Returns: nothing
**/
void gpiberr(char *errstr)
{
printf(\n%s\nError code = %d\n,errstr,iberr);
}/** end of gpiberr **/
Figure 2-15b. Programming Example of Saving and Recalling User Level Calibration Tables (3 of 3)
2-68 683XXC PM

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
Editing the
Table Data
While stored in the binary data file of the controller,
the data of the five user level calibration tables can
be edited. An editor that can display the data file in
hexadecimal will be needed to perform the edit.
Types of Data Storage Methods
There are three types of data storage methods used
for user level calibration data. Each is described in
the following paragraphs. (The data item descriptions will refer back to these data types.)
Double:
8 bytes. Most significant byte first.
ANSI/IEEE-754 64-bit floating point format.
|S| E | F |
where:
S (1 bit) = sign bit, 0 positive, 1 negative
E (11 bits) = exponent, biased by 1023 base 10
F (52 bits) = fraction, 0 £F<1
value = [(–1) raised to the S power] ´
[2 raised to the (E – 1023) power] ´
[1+F]
Example:
801 is stored as 40 89 08 00 00 00 00 00, base 16.
S=0
E = 408 base 16 = 1032 base 10
F = 0.908 base 16 = 0.564453125 base 10
801=1´ 512 ´ 1.564453125
Integer:
4 bytes. Most significant byte first.
Stored as a signed integer. The sign bit is the most
significant bit. Negative numbers are stored in 2’s
complement form.
Example:
7025 is stored as 00 00 1B 71, base 16.
–7025 is stored as FF FF D4 8F, base 16 2’s com
plement.
Short:
2 bytes. Most significant byte first.
Stored as a signed short. The sign bit is the most
significant bit. Negative numbers are stored in 2’s
complement form.
Example:
350 is stored as 01 5E, base 16.
–350 is stored as FE A2, base 16.
683XXC PM 2-69

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
Data Item Descriptions
Each data item contained in the binary data file is
described below with the following information:
Data name
q
Description
q
Type of data storage
q
Offset into the data file for each user level
q
calibration table
Data units
q
Figure 2-16 (page 2-72) shows a printout of a section
of the data file that contains each of these data
items for user level calibration table #2.
Name: Start Frequency
Description: The starting frequency for each user
level calibration.
Type: Double
Offsets (base 16): Table #1 0006
Table #2 0674
Table #3 0CE2
Table #4 1350
Table #5 19BE
Units: mHz (millihertz)
Name: Stop Frequency
Description: The ending frequency for each user
level calibration.
Type: Double
Offsets (base 16): Table #1 000E
Table #2 067C
Table #3 0CEA
Table #4 1358
Table #5 19C6
Units: mHz (millihertz)
Name: Frequency Increment
Description: The frequency increment for 1 point.
This value = (stop frequency – start frequency) divided by the number of points.
Type: Double
Offset (base 16): Table #1 0016
Table #2 0684
Table #3 0CF2
Table #4 1360
Table #5 19CE
Units: mHz (millihertz)
2-70 683XXC PM

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
Name: Number of Points
Description: The number of frequency points.
Type: Double
Offsets (base 16): Table #1 001E
Table #2 068C
Table #3 0CFA
Table #4 1368
Table #5 19D6
Units: a value of1=1point
Name: Level Correction Offset
Description: This is the power level that is added
to the front panel power before the level correction
point table power levels are subtracted. It represents the maximum power deviations read during
the calibration.
Type: Integer
Offsets (base 16): Table #1 0026
Table #2 0694
Table #3 0D02
Table #4 1370
Table #5 19DE
Units: mdB (milli-dB)
Name: Level Correction Point Table
Description: These are the power level correction
values with respect to the maximum power deviation read during the calibration.
Type: Short (Array of 801 Points)
Offsets (base 16): Table #1 002A
Table #2 0698
Table #3 0D06
Table #4 1374
Table #5 19E2
Units: mdB (milli-dB)
683XXC PM 2-71

PROGRAMMING WITH USER LEVEL
GPIB COMMANDS CALIBRATION COMMANDS
000640 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
000650 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
000660 00 00 00 00 00 00 00 00 00 00 00 00 00 00 BA BE
000670 00 00 DA BE 42 7D 1A 94 A2 00 00 00 42 A2 30 9C
000680 E5 40 00 00 42 6D 1A 94 A2 00 00 00 40 22 00 00
000690 00 00 00 00 00 00 17 83 FF 11 FF 56 FF 56 FF 74
0006A0 FF 93 FF 9C FF F6 00 00 FF C4 D1 21 E8 37 00 00
0006B0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0006C0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
0006D0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
Printout Explanation
The printout shows a sectionof the user level calibration data file, in hexadecimal, that contains each of the dataitems for user level calibration table #2. The offset into the data file is
shown at the left inthe printout.
Offset
0674
: Start Frequency
42 7D 1A 94 A2 00 00 00
Offset
067C
: Stop Frequency
42 A2 30 9C E5 40 00 00
Offset
0684
: Frequency Increment
42 6D 1A 94 A2 00 00 00
Offset
068C
: Number of Points
40 22 00 00 00 00 00 00
Offset
0694
: Level Correction Offset
00 00 17 83
Offset
0698
FF 11
= –0.239 dB
FF 56
= –0.170 dB
FF 56
= –0.170 dB
FF 74
= –0.140 dB
FF 93
= –0.109 dB
FF 9C
= –0.100 dB
FF F6
= –0.010 dB
00 00
=0dB
FF C4
= –0.060 dB
= 6.016 dB
: Level Correction Point Table (9 points)
= 2 GHz
=10GHz
= 1 GHz
= 9 points
Figure 2-16. Printout of a Section of the User Level Calibration Binary Data File
2-72 683XXC PM

PROGRAMMING WITH MASTER-SLAVE
GPIB COMMANDS OPERATION COMMANDS
2-20
MASTER-SLAVE
OPERATION
COMMANDS
Table 2-20 lists the master-slave operation command mnemonic codes.
These commands provide for enabling two instruments (68XXXB
and/or 68XXXC) that are connected in a master-slave configuration to
produce CW and synchronized, swept output signals at a frequency
offset.
In a master-slave configuration, one instrument (the Master) controls
the other (the Slave) via interface cables between their rear panel AUX
I/O and SERIAL I/O connectors. The two units are phase-locked together by connecting them to the same 10 MHz reference time base.
(Refer to the 683XXC Operation Manual, Chapter 7—Use With Other
Instruments, for master-slave interconnection and operating instructions.)
The parameter entry commands, SLF0 - SLF9 and SLM0 - SLM9, are
used to set the F0 - F9 and M0 - M9 frequencies for the Slave unit; the
SLDF parameter entry command is used to set the DF parameter for
the Slave unit. The main output power level (L1) for the Slave unit is
set using the SLV or SLL1 parameter entry command; the alternate
sweep power level (L2) for the Slave unit is set using the SLL2 parameter entry command. The S1 command turns on the master-slave
mode of operation; the S0 command turns off the Master-Slave mode
of operation.
Programming Example:
Programming “SLF15GHSLF28GHSLL13DMS1” sets the
Slave unit F1 frequency to 5 GHz, its F2 frequency to 8 GHz, and its
output power level to 3 dBm and turns on the master-slave mode of
operation. Now, when the Master unit is programmed to perform a F1
to F2 sweep, the Slave unit will produce a synchronous 5 GHz to
8 GHz frequency sweep that has an output power level of 3 dBm.
Programming Note:
Use the SOF parameter entry command only to set the frequency
offset for a Slave unit that is (1) slave to a Master unit that is
connected to a 360B VNA in a source or dual-source configuration or
(2) slave to a Master unit that is programmed to perform nonsequential frequency step sweeps (refer to Special Step Sweep on page
2-22).
Table 2-20. Master-Slave Operation Commands
MNEMONIC
CODE
S0 Turns off the Master-Slave modeof operation.
S1 Turns on the Master-Slave mode of operation.
FUNCTION
683XXC PM 2-73

PROGRAMMING WITH SELF TEST
GPIB COMMANDS COMMAND
2-21
SELF TEST COMMAND
Table 2-21 lists the self test command mnemonic code. This command
provides for executing a signal generator self test.
When a TST command is received, the signal generator performs a self
test, then places a “P” (for pass) or a “F” (for fail) on the bus. It also
generates six self test results bytes. Figure 2-18 shows the six self test
results bytes and identifies the reporting function of each bit.
When self test is completed, bit 7 of Self Test Results Byte 6 and bit 2
of Extended Status Byte 1 are both set. If a failure(s) occurs during
self test, the Self Test Results Byte bit(s) reporting the failure(s) and
bit 0 of Extended Status Byte 1 are set.
The OSR command returns the six self test results bytes to the
controller. Figure 2-17 provides an example of self test command programming.
Programming Note: The “P or “F” character placed on the bus by the
signal generator self test must be cleared from the output buffer (read
by the controller) before another output command, such as OSR,is
sent. If it is not cleared, the first character of the next output will be
missing. Line 30 (Figure 2-17) shows clearing of the “P” or “F” character.
Table 2-21. Self Test Command
MNEMONIC
CODE
TST Executes a signal generator self test. Extended Status Byte 1
bit 0 is set ifself test fails; bit 2 is set when self test is
complete.
10 OUTPUT 705; “CSB”
20 OUTPUT 705; “TST”
30 ENTER 705; D$
40 DISP D$
50 OUTPUT 705; “OSR”
60 ENTER 705 USING “#,B”; A, B, C, D, E, F
70 DISP A; B; C; D; E; F
80 END
Figure 2-17. Self Test Command Programming Example
FUNCTION
2-74 683XXC PM

PROGRAMMING WITH SELF TEST
GPIB COMMANDS COMMAND
Self Test Results Byte 1
Sweep Time
Circuitry Failed
Bit 7
(128)
Self Test Results Byte 2
Not Locked
Indicator
Check Failed
Bit 7
(128)
Self Test Results Byte 3
Detector Log
Amp Circuitry
Failed
Bit 7
(128)
A18 Power
Supply is Not
Locked
Bit 6
(64)
Down Converter
is
Not Locked
Bit 6
(64)
Level Reference
Circuitry
Failed
Bit 6
(64)
Power Supply
Voltage(s) are
Out of Reg
Bit 5
(32)
YIG Loop
Circuitry is
Not Locked
Bit 5
(32)
Not Leveled
Detector
Circuitry Failed
Bit 5
(32)
Internal
AM
Failed
Bit 4
(16)
Coarse Loop
Circuitry is
Not Locked
Bit 4
(16)
Delta-F Ramp
Circuitry
Failed
Bit 4
(16)
AM
Meter
Failed
Bit 3
(8)
Fine Loop
Circuitry is
Not Locked
Bit 3
(8)
Center
Frequency
Circuitry Failed
Bit 3
(8)
DVM –10 Volt
Reference
Check Failed
Bit 2
(4)
High Stability
Crystal is
Not Locked
Bit 2
(4)
Marker Switch
Point
Circuitry Failed
Bit 2
(4)
DVM +10 Volt
Reference
Check Failed
Bit 1
(2)
Ext 10 MHz
is
Not Locked
Bit 1
(2)
Linearizer
Circuitry
Failed
Bit 1
(2)
DVM Ground
Offset Check
Failed
Bit 0
(1)
Oven
is
Not Ready
Bit 0
(1)
FM Loop
Gain
Circuitry Failed
Bit 0
(1)
Self Test Results Byte 4
3.3 - 5.5 GHz
Switch Filter
Section or
Level Detector
Circuitry Failed
Bit 7
(128)
2-3.3 GHz
Switch Filter
Section or
Level Detector
Circuitry Failed
Bit 6
(64)
Self Test Results Byte 5
32-40GHz
Section of
Switched
Doubler Module
Failed
Bit 7
(128)
Switched
Doubler Module
or Driver
Circuitry Failed
Bit 6
(64)
Self Test Results Byte 6
Self Test
is
Complete
Bit 7
(128)
Internal Pulse
Reference
Failed
Bit 6
(64)
Switch Filter
or
Level Detector
Circuitry Failed
0.01 - 2 GHz
Unleveled
Bit 5
(32)
Not Used Source
Quadrupler
Circuitry Failed
Bit 5
(32)
Internal
FM
Failed
RF Was Off
When Self Test
Bit 5
(32)
Range
Bit 4
(16)
Module
or Driver
Bit 4
(16)
Started
Bit 4
(16)
A10 Q5 or
Associated
Circuitry Failed
Bit 3
(8)
Modulator or
Driver Circuitry
on A9 Failed
Bit 3
(8)
Slope DAC or
Associated
Circuitry Failed
Bit 3
(8)
2 - 8.4 GHz
Range
Unleveled and
Not Locked
Bit 2
(4)
13.25 - 20 GHz
Switch Filter
Section or
Level Detector
Circuitry Failed
Bit 2
(4)
Sample and
Hold Circuitry
Failed
Bit 2
(4)
8.4 - 20 GHz
Range
Unleveled and
Not Locked
Bit 1
(2)
8.4 - 13.25 GHz
Switch Filter
Section or
Level Detector
Circuitry Failed
Bit 1
(2)
20-25GHz
Section of
Switched
Doubler Module
Failed
Bit 1
(2)
2-20GHz
Range
Unleveled and
Not Locked
Bit 0
(1)
5.5 - 8.4 GHz
Switch Filter
Section or
Level Detector
Circuitry Failed
Bit 0
(1)
25-32GHz
Section of
Switched
Doubler Module
Failed
Bit 0
(1)
Figure 2-18. Self Test Results Bytes
683XXC PM 2-75

PROGRAMMING WITH MISCELLANEOUS
GPIB COMMANDS COMMANDS
2-22
MISCELLANEOUS
COMMANDS
Table 2-22 is a list of miscellaneous command mnemonic codes that do
not fit into any of the other classifications. These commands provide
the following operations:
GPIB Address Change
q
CW Ramp
q
Secure Mode
q
Returning the 683XXC to local control
q
Instrument Reset
q
Serial Number Entry
q
Table 2-22. Miscellaneous Commands
MNEMONIC
CODE
ADD Permits changing of the instrument GPIB address. The
address must be between 1and 30 and must be terminated
with ADR.
Programming Example:
Programming “ADD 13 ADR“ changes the instrument GPIB
address to 13.
CS0 Turns off the CW ramp.
CS1 Turns on the CW ramp. This producesa repetitive 0V to 10V
ramp output to the rearpanel HORIZ OUT connector and pin
1 of the AUX I/Oconnector.
FUNCTION
DS0 Turns on the secure mode. This blanksthe front panel display
of all frequency, power level, and modulation parameters.
DS1 Turns off the secure mode and restores the front paneldisplay
of all frequency, power level, and modulation parameters.
RL Returns the 683XXC to local (front panel) control.
RST Resets the 683XXC to its default settings.
NOTE
Sending this command clears thecurrent instrument
setup. If this setup isneeded for future testing, save it
as a stored setup (paragraph2 -12) before sending
RST.
SNR Permits entry of the instrument serial number (SNRnnnnnnX).
The serial number, represented by nnnnnn,must be six
characters in length.
2-76 683XXC PM

PROGRAMMING WITH PROGRAM
GPIB COMMANDS ERRORS
2-23
PROGRAM ERRORS
Two types of errors can occur in bus programming—invalid-parameter
and syntax. These two error types are described in the following paragraphs.
InvalidParameter
Syntax Syntax errors are those that occur in the formula-
Invalid-parameter errors are those that cause the
signal generator to beep. These errors include:
Programming an analog frequency sweep
q
where the sweep start frequency is greater
than the stop frequency.
Attempting to enter a frequency, time, or
q
power level parameter that exceeds the limits
of the signal generator.
Failing to properly end a parameter entry with
q
a suitable terminator such as MH, DB, MS,
etc.
tion of a program statement, such as writing
“EXTTFS” instead of “EXTTRS”.
To prevent misinterpretation of command statements, the signal generator ignores all portions of
the command statement following the syntax error.
All commands are ignored until the signal generator
receives the Unlisten command (ASCII 63; “?” character) over the bus or until the signal generator is
addressed to talk.
683XXC PM 2-77

PROGRAMMING WITH RESET PROGRAMMING
GPIB COMMANDS AND DEFAULT CONDITIONS
2-24
RESET PROGRAMMING AND DEFAULT
CONDITIONS
Table 2-23 describes the five methods that can be used to reset the signal generator GPIB interface. They provide a means for quickly returning the 683XXC to its default (preprogrammed) operational state.
The default settings for the numeric frequency, sweep time, and power
level parameters are the same as those listed in Table 3-1 of the
683XXC Operation Manual.
Figure 2-19 provides an example of a recommended sequence for programming a reset command. Using this command sequence ensures
that all parameters and commands assume their preprogrammed
state each time reset is desired.
Table 2-23. Resetting the 683XXC GPIB Interface Circuits
Methods of Resetting
GPIB Interface Circuits
1. Pressing the front panel
menu RETURN TO
LOCAL soft-key.
2. Pressing the front panel
System menu RESET
soft-key.
Functions
Affected
Bus Messages Local
Instrument state does
not change.
Service Request Modes ES0, FB0, PE0, SB0,
SE0, SQ0, UL0, SB0
GTS
Local and Local Lockout
Default
Conditions
3. Sending the RST command over the bus.
4. Executing the interface
message Device Clear.
5. Turning power on and
off.
Same as 2 above Same as 2 above except
that the local bus message is not reset.
Same as 2 above. Same as 2 above except
that the local bus message is not reset.
Same as 2 above. Places the GPIB into the
power-on state. Instrument state does not
change.
2-78 683XXC PM

PROGRAMMING WITH PROGRAMMING
GPIB COMMANDS EXAMPLES
Sample Coding In Basic
10 CLEAR 705
20 OUTPUT 705; “FUL IL1 L1 10DM”
Explanation of Code
Line 10 sends the DeviceClear bus message.This message clears the signal generator GPIB interface.
Line 20 sends new frontpanel settings: Full Sweep, Internal Leveling, and Output
Power Level of 10 dBm.
Figure 2-19. Reset Programming Example
2-25
PROGRAMMING
EXAMPLES
Figures 2-20 thru 2-22, on the following pages, provide three examples
of GPIB programming using 683XXC command codes.
683XXC PM 2-79
 Loading...
Loading...