

Page 1
Adept SmartMotion
12 3
RS-422/485
XUSR
XSYS
SF
XMCP
1.1
SmartController CS
LANHPE
OFF
24V 5A
ON
RS-232/TERM
XFP
HDES
XDIO
Eth 10/100
*S/N 3561-XXXXX*
SW1
Device Net
SmartServo
XDC1 XDC2
-+ -+
1234
OK
R
1.2
Adept SmartController CS with sMI6 Motion Interface Module
24V
R
F2 DE2 F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
Installation Guide
Page 2
Page 3
Adept SmartMotion
12 3
RS-422/485
XUSR
XSYS
SF
XMCP
1.1
SmartController CS
LANHPE
OFF
24V 5A
ON
RS-232/TERM
XFP
HDES
XDIO
Eth 10/100
*S/N 3561-XXXXX*
SW1
Device Net
SmartServo
XDC1 XDC2
-+ -+
1234
OK
R
1.2
Adept SmartController CS with sMI6 Motion Interface Module
24V
R
F2 DE2 F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
5960 Inglewood Drive • Pleasanton, CA 94588 • USA • Phone 925.245.3400 • Fax 925.960.0452
Otto-Hahn-Strasse 23 • 44227 Dortmund • Germany • Phone 49.231.75.89.40 • Fax 49.231.75.89.450
Block 5000 Ang Mo Kio Avenue 5 • #05-12 Techplace II • Singapore 569870 • Phone +65.6755 2258 • Fax +65.6755 0598
Installation Guide
P/N: 02170-000, Rev. C
February, 2013
Page 4

The information contained herein is the property of Adept Technology, Inc., and shall not be reproduced in whole or in part without prior written approval of Adept Technology, Inc. The information herein is subject to change without notice and should not be construed as a commitment by
Adept Technology, Inc. This manual is periodically reviewed and revised.
Adept Technology, Inc., assumes no responsibility for any errors or omissions in this document.
Critical evaluation of this manual by the user is welcomed. Your comments assist us in preparation
of future documentation. Please email your comments to: techpubs@adept.com.
Copyright
Adept, the Adept logo, the Adept Technology logo, AdeptVision, AIM, Blox, Bloxview,
FireBlox, Fireview, HexSight, Meta Controls, MetaControls, Metawire, Soft Machines, and Visual
Brain on Board is a registered trademark of Adept Technology, Inc. in Germany.
Adept ACE, Adept sDIO, Adept SmartController CX, Adept SmartController EX,
Adept SmartMotion, Adept SmartVision EX, AdeptSight, eV+, and V+
2003, 2013, 2013 by Adept Technology, Inc. All rights reserved.
Machines are registered trademarks of Adept Technology, Inc.
are trademarks of Adept Technology, Inc.
Any trademarks from other companies used in this publication
are the property of those respective companies.
Printed in the United States of America
Page 5

Table of Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1 Product Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
System Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Adept SmartMotion Hardware Overview . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Adept sMI6 Motion Interface Module . . . . . . . . . . . . . . . . . . . . . . . 12
Motion Interface Kit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Reading and Training for Users and Operators . . . . . . . . . . . . . . . . . . . . . . 12
System Safeguards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Safety Features on Front Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Computer Controlled Robots and Motion Devices . . . . . . . . . . . . 13
Manually Controlled Robots and Motion Devices . . . . . . . . . . . . . 13
Other Computer Controlled Devices . . . . . . . . . . . . . . . . . . . . . . . . 13
Program Security . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Overspeed Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Voltage Interruptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Inappropriate Uses of the Adept SmartController . . . . . . . . . . . . . . . . . . . . 14
1.3 Warnings, Cautions, and Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4 How Can I Get Help? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Related Manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 System Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Overview of Installation Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Adept sMI6 Connectors and Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Adept sMI6 LED Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Adept sMI6 Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3 System Cable Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Adept sMI6 Hardware Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
sMI6 Digital Input Logic Voltage Configuration . . . . . . . . . . . . . . . . . . . . . . 21
2.5 Proper Wiring and Electrical Design Practices . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Enclosure for SmartController and sMI6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 Installing the Adept SmartController . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.8 Installing the Adept sMI6 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.9 Installing MP6 Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Rail Mounting the MP6 Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Panel Mounting the MP6 Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Plug-In Opto Modules on the MP6-M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Adept SmartMotion Installation Guide, Rev. C 5
Page 6

Table of Contents
2.10 MP6 Machine (MP6-M) Panel Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.11 MP6 Servo (MP6-S) Panel Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.12 MP6 Encoder (MP6-E) Panel Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Optical Isolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Input Current Requirements (OT, HM) . . . . . . . . . . . . . . . . . . . . . . . . 31
Input Voltage Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Output Current Requirements (MP6-M, HPE and BR, External). . . . 32
User-Supplied Logic Power (Internal). . . . . . . . . . . . . . . . . . . . . . . . . 32
Overtravel Limit Switches (Input). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Home Switch (Input) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Brake Release (Output) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
High Power Enable (Output) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Drive Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Optical Isolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
MP6-S Input Current Requirements (Drive Fault) . . . . . . . . . . . . . . . 35
MP6-S Output Current Requirements (Drive Enable) . . . . . . . . . . . . 35
Connecting the Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Drive Enable (Output) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Delay Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Drive Fault (Input) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Command Drive (Output) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Encoder Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Connecting Power to the Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Encoder Power Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Encoder Cable Length (User Supplied) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Connecting the Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Encoder Input Circuitry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Single-Ended Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3 Software Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2 Phase 1 - Preparation for Software Configuration. . . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Phase 2 - Load Device Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4 Phase 3 - Configure SmartServo Network Map. . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5 Phase 4 - Create Software Specification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.6 Phase 5 - Testing the System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.7 Motion Control Application Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Technical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.1 Dimensions for sMI6 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 Dimensions for Mounting sMI6 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 MP6 to sMI6 Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 Adept SmartMotion Installation Guide, Rev. C
Page 7

Table of Contents
4.4 Typical Input and Output Circuits in sMI6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Input Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Output Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5 Emergency Stop Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Adept SmartMotion Installation Guide, Rev. C 7
Page 8

Page 9

List of Figures
Figure 1-1. Adept sMI6 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 2-1. Close-up of sMI6 LED Labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
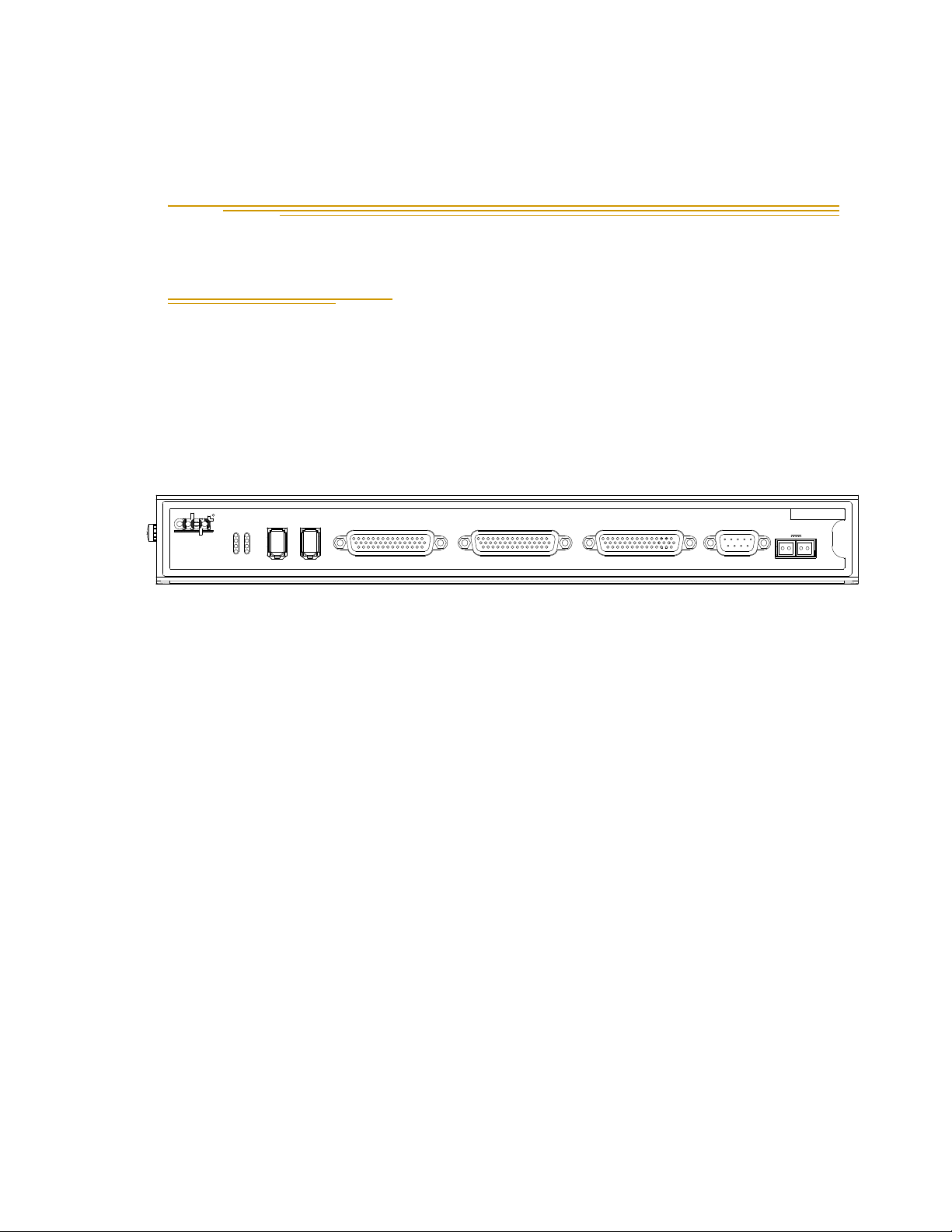
Figure 2-2. Adept sMI6 Module Front Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 2-3. Adept SmartMotion System Cable Diagram . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 2-4. Opening the sMI6 Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 2-5. Location of Jumpers on Main PCA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 2-6. MP6-S Panel – Layout and Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 2-7. MP6-E Panel – Layout and Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 2-8. MP6-M Panel – Layout and Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 2-9. Typical System Wiring for One Axis of Motion . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 2-10. Encoder Input Circuitry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 2-11. Encoder Input Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 2-12. Single-Ended Encoder Wiring Using Inverted Outputs . . . . . . . . . . . . . . . . . 42
Figure 2-13. Single-Ended Encoder Wiring Using Non-Inverted Outputs . . . . . . . . . . . . . 42
Figure 3-1. SmartMotion System Installed to Control a User Mechanism . . . . . . . . . . . . 43
Figure 4-1. Dimensions for sMI6 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Figure 4-2. Rack Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Figure 4-3. Panel Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Figure 4-4. Table Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Figure 4-5. Typical Input Circuit in sMI6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Figure 4-6. Typical Output Circuit in sMI6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Figure 4-7. Category 3 E-Stop Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figure 4-8. Category 1 E-Stop Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Adept SmartMotion Installation Guide, Rev. C 9
Page 10
Page 11
1.1 Product Description
24V
R
F2 DE2 F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
The Adept SmartMotion product consists of a hardware and software package that
provides high-performance coordinated motion control for industrial automation devices.
Adept SmartMotion includes the sMI6 motion interface module and the Adept
SmartController, communicating via the SmartServo network, Adept’s distributed
controls network built on IEEE 1394. Completely integrated V+ software provides the
same high-level motion instructions that are used for Adept robots. The sMI6 supports up
to six axes of motion control per module.
Figure 1-1. Adept sMI6 Module
Introduction 1
System Overview
Adept SmartMotion has been designed to function as an integral part of Adept’s control
system. Typical components include an Adept SmartController (CS or CX model), one or
more sMI6 modules, MP6 panels, a manual control pendant, a desktop or laptop PC, and
a user-supplied mechanism with servomotors, encoders, and amplifiers. Additional
options such as Adept-supplied robots and vision systems are available.
Adept SmartMotion is intended to provide complete motion control of user-supplied
mechanisms. Users retain the flexibility of selecting the drive components that are best
suited for their applications. Adept SmartMotion can interface to industry standard drive
components including most servo amplifiers and optical encoders. Motion-related I/O
signals can utilize voltage levels chosen by the user.
Adept SmartMotion Hardware Overview
There are two major hardware components of the system, in addition to the
SmartController:
• Adept sMI6 Motion Interface Module
• Motion Interface Kit, includes MP6 panels and interface cables (this kit is optional)
Adept SmartMotion Installation Guide, Rev. C 11
Page 12
Chapter 1 - Introduction
Adept sMI6 Motion Interface Module
The Adept sMI6 Motion Interface module is a six-channel unit that runs the Adept
SmartMotion product. The sMI6 module is a stand-alone unit designed to control a total
of six motion axes or external encoders. Each sMI6 module has six servo drive outputs, six
incremental encoder inputs, and digital I/O for machine and amplifier control.
Motion Interface Kit
The Motion Interface Kit includes the three Motion-interface Panels (MP6-E, MP6-M, and
MP6-S) that serve as the interface between the sMI6 module and the user’s hardware. The
MP6 panels provide mounting sockets for I/O modules used in conjunction with the
dedicated discrete input/output signals. The MP6 panels also provide detachable
barrier-type screw terminal strips and 9-Pin D connectors for all field wiring terminations.
Interface cables (3 meter) for connecting the sMI6 to the MP6 panels are included in the
kit.
NOTE: The Motion Interface Kit is optional, but it is recommended for
typical installations. Customers who do not order this option must
provide similar functionality.
1.2 Safety
WARNI NG : See the Adept SmartController User’s Guide
for additional safety information.
Reading and Training for Users and Operators
Adept systems can include computer-controlled mechanisms that are capable of moving
at high speeds and exerting considerable force. Like all robot and motion systems, and
most industrial equipment, they must be treated with respect by the user and the operator.
This manual should be read by all personnel who operate or maintain Adept systems, or
who work within or near the workcell.
We recommend you read the American National Standard for Industrial Robot Systems -
Safety Requirements, published by the Robotic Industries Association (RIA), in conjunction
with the American National Standards Institute. The publication, ANSI/RIA R15.06 1992, contains guidelines for robot system installation, safeguarding, maintenance,
testing, start-up, and operator training.
We also recommend you read the European Standard EN 60204, Safety of Machinery –
Electrical Equipment of Machines, particularly if the country of use requires a CE-certified
installation. (See the Adept SmartController User’s Guide for ordering information for
national and international standards.)
This manual assumes that the user has attended an Adept training course, or at least has a
basic working knowledge of the system. The user should provide the necessary additional
training for all personnel who will be working with the system.
12 Adept SmartMotion Installation Guide, Rev. C
Page 13
There are several warnings in this manual that say only skilled or instructed persons
should attempt certain procedures. These are defined as:
• Skilled persons have technical knowledge or sufficient experience to enable them
to avoid the dangers which electricity may create (engineers and technicians).
• Instructed persons are adequately advised or supervised by skilled persons to
enable them to avoid the dangers which electricity may create (operating and
maintenance staff).
System Safeguards
Safeguards should be an integral part of robot or motion workcell design, installation,
operator training, and operating procedures.
Adept systems have various communication features to aid in constructing system
safeguards. These include the emergency stop circuitry and digital input and output lines.
Some of these features are described in the Adept SmartController User’s Guide.
Safety Features on Front Panel
Safety
The optional Front Panel has important safety features, including the
indicator, the
AUTO/MANUAL keyswitch, and the EMERGENCY STOP switch. If you
HIGH POWER
choose not to use the Front Panel, you should provide similar safety features by using the
connectors on the SmartController. Refer to the Adept SmartController User’s Guide for
more information.
WARNI NG : Entering the workcell when the
HIGH POWER
light is on can result in severe injury. This warning applies
to each of the next three sections.
Computer Controlled Robots and Motion Devices
Adept systems are computer controlled, and the program that is currently running the
robot or motion device may cause it to move at times or along paths you may not
anticipate. When the
HIGH POWER light is illuminated, do not enter the workcell because
the robot or motion device might move unexpectedly.
Manually Controlled Robots and Motion Devices
Adept robots and other motion devices can also be controlled manually when the
POWER
light on the Front Panel is illuminated. When this light is lit, motion can be
HIGH
initiated from the system keyboard or from the optional Manual Control Pendant (MCP).
If you have to enter the workcell when this light is lit, press the
MAN/HALT button on the
MCP. This will prevent anyone else from initiating unexpected motion from the system
keyboard.
Other Computer Controlled Devices
In addition, Adept systems can be programmed to control equipment or devices other
than the robot or main motion device. The program controlling these other devices may
cause them to operate unexpectedly. Make sure that safeguards are in place to prevent
personnel from entering the workcell when a program is running.
Adept SmartMotion Installation Guide, Rev . C 13
Page 14

Chapter 1 - Introduction
Adept Technology highly recommends the use of additional safety features such as light
curtains, safety gates, or safety floor mats to prevent entry to the workcell while
POWER
is enabled. These devices can be connected using the emergency stop circuitry.
Program Security
HIGH
Programs and data stored in memory can be changed by trained personnel using the V+
+
commands and instructions documented in the V
manuals. To prevent unauthorized
alteration of programs, you should restrict access to the keyboard. This can be done by
+
placing the keyboard in a locked cabinet. Alternatively, the V
+
be used in your programs to restrict access to the V
command prompt.
ATTACH instruction can
Overspeed Protection
Overspeed protection for a robot or motion system has to be taken into account during
system integration by the integrator or end-user. Overspeed protection is not guaranteed
+
by the controller hardware alone. The V
system software offers some overspeed
protection capabilities.
Voltage Interruptions
If the power supply to the controller is interrupted, the passive E-stop output will be
automatically turned on (opened). In addition, the High Power, Brake Release, and Drive
Enable signals will be turned off. You must ensure that these signals are used to prevent a
hazardous condition.
Inappropriate Uses of the Adept SmartController
The Adept SmartController is intended for use as a component sub-assembly of a
complete industrial automation system. The SmartController sub-assembly must be
installed inside a suitable enclosure. Installation and usage must comply with all safety
instructions and warnings in this manual. Installation and usage must also comply with
all applicable local or national statutory requirements and safety standards.The
SmartController sub-assembly is not intended for use in any of the following situations:
• In hazardous (explosive) atmospheres
• In mobile, portable, marine, or aircraft systems
• In residential installations
• In situations where the SmartController sub-assembly may come into contact with
liquids.
• In situations where the SmartController sub-assembly will be subject to extremes
of heat or humidity. See the specifications for allowable temperature and humidity
ranges.
See the Adept SmartController User’s Guide for any additional restrictions.
14 Adept SmartMotion Installation Guide, Rev. C
Page 15
1.3 Warnings, Cautions, and Notes
There are four levels of special alert notation used in this manual. In descending order of
importance, they are:
DANGER: This indicates an imminently hazardous
situation which, if not avoided, will result in death or
serious injury.
WARNI NG : This indicates a potentially hazardous
situation which, if not avoided, could result in serious
injury or major damage to the equipment.
Safety
CAUTION: This indicates a situation which, if not avoided,
could result in minor injury or damage to the equipment.
NOTE: This provides supplementary information, emphasizes a point or
procedure, or gives a tip for easier operation.
Adept SmartMotion Installation Guide, Rev . C 15
Page 16
Chapter 1 - Introduction
1.4 How Can I Get Help?
Refer to the How to Get Help Resource Guide (Adept P/N 00961-00700) for details on
getting assistance with your Adept software and hardware. This document is available on
the Adept Documentation Library CD-ROM that is shipped with all systems.
Additionally, you can access information sources on Adept’s corporate Web site:
http://www.adept.com
1.5 Related Manuals
This manual covers the installation of an Adept SmartMotion system. There are additional
manuals that cover software configuration, programming the system, reconfiguring
installed components, and adding other optional components. Refer to the following
manuals for additional information your Adept system.
NOTE: Al l of the manuals in Table 1-1 are available on the Adept
Documentation Library CD-ROM provided with each system.
(Previously this was known as the Knowledge Express CD-ROM.)
Table 1-1. Related Manuals
Manual Title Description
Adept SmartMotion
Developer’s Guide
Adept SmartController
User’s Guide
AdeptWindows Installation
Guide and AdeptWindows
Online Help
Instructions for Adept
Utility Programs
V+ Operating System User’s
Guide
V+ Language User’s Guide Describes the V
Describes the software configuration process for the Adept
SmartMotion product. See Chapter 3 for more information.
The Adept SmartMotion Developer’s Guide is provided as an
online HTML document with a Table of Contents, Search, and
Index features to navigate the document. If you do not see these
features when you are viewing a topic, click the SHOW TOC
icon that displays in the upper left corner of each page.
Contains complete information on the installation and
operation of the Adept SmartController and the optional sDIO
product.
Describes complex network installations, installation and use of
NFS server software, and the AdeptWindows DDE software.
Describes the utility programs used for advanced system
configurations, system upgrades, file copying, and other
system configuration procedures.
Describes the V
operations, monitor commands, and monitor command
programs.
control system.
+
operating system, including disk file
+
language and programming of an Adept
16 Adept SmartMotion Installation Guide, Rev. C
Page 17

System Installation 2
2.1 Overview of Installation Process
This section provides a summary of the major steps involved with installing a Adept
SmartMotion system.
1. Verify that the default hardware configuration for the sMI6 module is correct for
your application. The area to look at is:
• Digital Input Logic Voltage - see page 21.
If you need to change these settings, you will have to open the chassis and install
or move jumpers.
2. Review the proper field wiring practices. See Section 2.5 on page 23.
3. Select an enclosure for the SmartController and sMI6 chassis. See Section 2.6 on
page 24.
NOTE: Refer to the system cable diagram in Figure 2-3 on page 20 for the
remaining steps in this process.
4. Install the SmartController and peripherals. See Section 2.7 on page 25.
5. Install the sMI6 module. See Section 2.8 on page 25.
6. Install mounting rails for the three MP6 panels, then mount the three MP6 panels
on the rails. See Section 2.9 on page 26.
7. Connect cables from the sMI6 to the MP6-M, MP6-S, and MP6-E panels.
8. Install wiring to user equipment from the MP6-M and MP6-S panels. Also select
and install opto-modules. See Section 2.10 on page 31 and Section 2.11 on page
35.
9. Install wiring to user encoders from the MP6-E. See Section 2.12 on page 38.
When the above process is complete, the next step is to use the CONFIG_C and SPEC
utility programs to configure the software for your system. An overview for this process is
located in Chapter 3.
Adept SmartMotion Installation Guide, Rev. C 17
Page 18
Chapter 2 - System Installation
6
5
3
S
US
Note: early sMI6 Module LED labels
had DF instead of F for fault conditions,
and NET instead of STATUS. The
functionality is identical for both
versions.
2.2 Adept sMI6 Connectors and Indicators
Adept sMI6 LED Descriptions
F6DE
F5DE
E
STAT
F3DE
Figure 2-1. Close-up of sMI6 LED Labels
The LEDs on the sMI6 are two-color devices - they can display either green or red.
Table 2-1. sMI6 LED Functions
LED Name Color Function Description
Fx (1-6) Solid Red Indicates a Fault condition exists on channel x
(1-6). Possible causes are Drive Fault,
Overtravel, quadrature error, or broken wire.
DEx (1-6) Solid Green Indicates a Drive Enable signal has been
asserted for channel x (1-6).
ES Solid Red Indicates an E-Stop signal has been asserted
from the sMI6.
HPE Solid Green Indicates the High Power Enable signal has
been asserted.
STATUS Solid Red Boot up or microprocessor problem (set by the
sMI6 hardware, other patterns are software
generated)
Slow Blinking Green Normal operation, high power OFF
Fast Blinking Green Normal operation, high power ON
Fast Blinking Red An error caused High Power to be disabled.
+
message for source of error.
See V
Fast Blinking Red/Green Triggered by utility for identifying a node on
the 1394 network
Short blink red, long blink
red, off, then repeat
If this pattern appears at boot-up, it means the
SDRAM has failed and the unit must be
returned to Adept.
18 Adept SmartMotion Installation Guide, Rev. C
Page 19

Adept sMI6 Connectors and Indicators
24V
R
F2 DE2 F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
Figure 2-2. Adept sMI6 Module Front Panel
Adept sMI6 Connectors
1. SmartServo 1.1 and 1.2
These are SmartServo ports. Port 1.1 or 1.2 connects to the SmartController. The other port can
connect to an additional sMI6 module or an optional sDIO.
2. XENCODER connector
Connects to the MP6-E Panel to communicate signals to and from encoders.
3. XMACHINE connector
Connects to the MP6-M Panel to communicate machine signals, such as overtravel, home,
brake release, etc.
4. XSERVO connector
Connects to the MP6-S Panel to communicate servo signals, such as drive enable, drive fault,
etc.
5. XANL connector
Reserved for future use.
6. 24VDC connectors
Connects user-supplied 24VDC power from the SmartController to the sMI6 connector. The
XDC1 and XDC2 connectors are interchangeable - you can use either one.
Adept SmartMotion Installation Guide, Rev . C 19
Page 20

Chapter 2 - System Installation
STOP
R
1 2 3
RS-422/485
XUSR
XSYS
SF
XMCP
1.1
SmartController CS
LANHPE
OFF
24V 5A
ON
RS-232/TERM
XFP
HDES
XDIO
Eth 10/100
*S/N 3561-XXXXX*
SW1
Device Net
SmartServo
XDC1 XDC2
- + - +
1 2 3 4
OK
R
1.2
IEEE 1394
Cable
24VDC Power from
Controller (XDC2)
to sMI6 (XDC1)
sMI6 Module
24V
R
DF2 DE2 DF6 DE6
DF1 DE1
ES HPE
STATUS
DF5 DE5
DF4 DE4
DF3 DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
MCP
24V 5V
SmartController
MP6-E MP6-M MP6-S
Front Panel
Ethernet (Eth 10/100) to PC
Controller (XMCP) to MCP
Controller (XFP) to
Front Panel (XFP)
User-Supplied
Ground Wires
MCP Adapter Cable
24VDC Power from
User-Supplied
Power Supply to
Controller (XDC1)
5VDC Power from User-Supplied
Power Supply to MP6-E and MP6-M
User-Supplied
Power Supply
Desktop or Laptop PC
Terminator
Installed
Motion-interface Panel - SERVO (MP6-S)
S
E
R
V
O
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6
CHAN5
ANALOG
PWR
SPARE
P1
Motion-interface Panel - ENCODER (MP6-E)
E
N
C
O
D
E
R
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6 RESVD
CHAN5
ENC PWR
P1
M
A
C
H
I
N
E
HPE
P1
CHAN1
CHAN2
CHAN3
CHAN4
SPARE
CHAN5
CHAN6
LOGIC
PWR
BRAKE-BR1
BRAKE-BR2
BRAKE-BR3
BRAKE-BR4
BRAKE-BR5
BRAKE-BR6
HIGH POWER ENABLE-HPE
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
2.3 System Cable Diagram
Figure 2-3. Adept SmartMotion System Cable Diagram
20 Adept SmartMotion Installation Guide, Rev. C
Page 21

2.4 Adept sMI6 Hardware Configuration
sMI6 Digital Input Logic Voltage Configuration
The sMI6 can be configured to operate with either a 5V (min 3.0V, max 5.7V) or a 12/24V
(min 8.75V, max 27.5V) logic interface. This affects the Home, Overtravel, and Drive Fault
signals. The sMI6 is normally shipped configured for 12V input, and must be
reconfigured if you decide to operate at 5V. After you configure the sMI6 voltage option,
then you must install the MP6 Machine and Servo panels accordingly.
NOTE: Refer to Figure 4-5 on page 53 for a typical input circuit in the
sMI6.
The input voltage is determined by jumpers on the main printed circuit assembly (PCA)
inside the chassis. To reconfigure the sMI6 for 5V logic operation, follow this procedure.
1. Verify that the sMI6 is disconnected from the 24VDC power source.
2. Remove the cover of the chassis by removing three screws at the back of the
chassis. See Figure 2-4.
Adept sMI6 Hardware Configuration
3. Install jumpers for each channel that you are using. See Figure 2-5 on page 22.
4. Reinstall the cover on the chassis.
Figure 2-4. Opening the sMI6 Chassis
Adept SmartMotion Installation Guide, Rev . C 21
Page 22

Chapter 2 - System Installation
Jumpers for Overtravel signals,
channels 1 to 6
Jumpers for Home signals,
channels 1 to 6
Jumpers for Drive Fault signals,
channels 1 to 6
No jumper = 12/24 V logic (factory default)
Jumper installed = 5 V logic
Digital Input Logic Voltage Configuration
Figure 2-5. Location of Jumpers on Main PCA
22 Adept SmartMotion Installation Guide, Rev. C
Page 23

Adept sMI6 Hardware Configuration
2.5 Proper Wiring and Electrical Design Practices
Designing a high-performance servo system requires attention to electrical design. Adept
SmartMotion is designed to respond to high-resolution encoder inputs, up to 32 MHz
count rate. Most drive amplifiers, DC power supplies, and brush-type motors are
potential sources of high-frequency electrical noise. Other equipment in the workcell can
also generate noise. Proper system wiring, and especially grounding, is very important to
a successful installation. The function of proper grounding is two-fold: first, to reduce the
risk of electrical shock from faults in your high-voltage equipment; and second, to help
shield from electro-magnetic and radio frequency interference (EMI and RFI).
All connections of Adept SmartMotion signals to user-supplied hardware are made via
connectors on the three MP6 panels. For proper operation, you must use good wiring
practices. Follow the general guidelines presented below. In addition, observe all
applicable local and national safety codes.
Be sure to:
• Verify that all equipment, including motor drives (amplifiers), the robot
mechanism, and the SmartController and sMI6 chassis, are properly grounded.
• Ensure that all three MP6 Ground terminals are connected to the user-supplied
ground point.
• Ensure that the MP6 DIN-mounting rail is connected to the user-supplied ground
point.
• Use only one ground point (star ground system) and keep all ground wires as
short as possible. For best results, use braided ground straps for ground
connections. (Braid has lower high-frequency impedance, for a given
cross-sectional area.)
• Use shielded twisted-pair cable for all encoder connections and analog drive
signals, and preferably for all signals.
• Use separate cables for every encoder and motor drive. Route digital signals,
motor power, and encoder signal cables separately from one another.
• Locate noise inducing devices away from the controller and other Adept
SmartMotion hardware.
• Provide noise-free regulated power for all Adept SmartMotion hardware.
• Maintain the integrity of optical isolation by using power sources other than the
Adept controller to power all signals from user-supplied equipment.
• Size all wire according to recognized electrical standards and applicable codes.
• Use proper arc suppression devices on all relay and solenoid coils.
• Adept recommends using power line filters to help prevent electrical noise from
the drive amplifiers “contaminating” the AC power lines, and vice-versa.
Adept SmartMotion Installation Guide, Rev . C 23
Page 24

Chapter 2 - System Installation
2.6 Enclosure for SmartController and sMI6
The Adept SmartController and the Adept sMI6 module should be installed in a suitable
enclosures. All of the equipment can be installed in one enclosure, or the sMI6 and
associated components can be placed in a separate enclosure near the user’s equipment;
see Note below. Enclosures can be very beneficial in helping protect the controller, sMI6
chassis, and associated peripherals and wiring from noise problems and other hazards
that are typical in many industrial settings.
NOTE: While the sMI6 and MP6 panels should be installed in an
enclosure for protection, they can be installed, along with the third-party
servo amplifiers, in a remote location closer to the user’s mechanism. The
interface between the SmartController system and the sMI6 module is via
the SmartServo network using an IEEE 1394 cable.
The enclosure must provide the internal environmental conditions (temperature,
humidity, etc.) required by the equipment. The enclosure must also meet all local and
national safety codes after the equipment is installed. The Emergency Stop circuitry must
be incorporated into the setup of the enclosure.
It is a good idea to select an enclosure that is large enough so the three MP6 panels can be
installed in the same enclosure as the other equipment. The enclosure is also a good place
to install additional user equipment such as power supplies, DIN mounting rails, wiring
terminal strips, etc.
Make sure to keep low-voltage control signal wiring away from high-voltage wiring to
avoid interference and noise problems.
24 Adept SmartMotion Installation Guide, Rev. C
Page 25

2.7 Installing the Adept SmartController
Refer to the System Cable Diagram in Figure 2-3 on page 20 and to the Adept
SmartController User’s Guide to install the SmartController and related peripherals. A
brief summary is presented here.
1. Mount the SmartController in the workcell according to the instructions in the
Adept SmartController User’s Guide.
2. Install the Compact Flash.
3. Install the user-supplied ground wire from the ground screw on the side of the
controller chassis to ground.
4. Install the user-supplied 24VDC power to the controller. Power must be turned
off.
5. Connect the optional Adept Front Panel.
6. Connect the MCP.
7. Connect the user-supplied PC and install the AdeptWindows user interface on
the PC.
Installing the Adept sMI6 Module
2.8 Installing the Adept sMI6 Module
Refer to the System Cable Diagram in Figure 2-3 on page 20.
1. Mount the sMI6 module in the workcell. The mounting options include rack
mounting, panel mounting, and table mounting. See Section 4.2 on page 48 for
dimension drawings of the different mounting brackets.
You can also stack-mount the sMI6 directly above the SmartController with
combining brackets. See the Stacking Components section in the Adept
SmartController User’s Guide. The sMI6 has the same dimensions as the sDIO
module that is shown there.
2. Connect an IEEE 1394 cable from the SmartController to the sMI6.
3. Connect a user-supplied ground wire from the ground screw on the side of the
sMI6 chassis to ground. The ground wire must be less than 3 meters long.
4. Connect a 24VDC cable from the SmartController to the sMI6. The DC power
cable must be less than 10 meters long.
Adept SmartMotion Installation Guide, Rev . C 25
Page 26

Chapter 2 - System Installation
2.9 Installing MP6 Panels
The three 6-channel Motion-interface Panels (MP6-M, MP6-S, and MP6-E) serve as the
interface between the sMI6 module and the user’s hardware. The MP6-M panel also
provides mounting sockets for up to seven Opto-22 output modules. Figure 2-6, Figure
2-7, and Figure 2-8 show the layout and dimensions of the MP6 panels. Figure 2-9 on page
30 shows a typical system wiring for one axis of motion. One set of MP6 panels is required
for every sMI6.
WARNI NG : The six removable connectors on the MP6-M
are purposely not keyed so they can be interchanged for
diagnostic purposes. It is important that these connectors
are not interchanged during normal operation. Doing so
can cause unstable operation which could result in serious
equipment damage and injury to personnel.
Rail Mounting the MP6 Panels
The MP6 panels are designed to be installed on DIN-style industrial mounting rails. The
MP6 panels will fit on these types of rails:
TS 35 Symmetrical 35mm x 7.5mm
TS 35 Symmetrical 35mm x 15mm
TS 32 Asymmetrical 32mm x 15mm
DIN rail hardware is available from many vendors, including:
•Weidmüller
• Allen-Bradley
•Phoenix
Install the mounting rails in the workcell in a location that is easily accessible and close
enough to the Adept SmartController so the motion interface cables can reach between the
controller and the MP6 panels. One of the best places to install the mounting rails is in the
same enclosure as the controller.
A variety of other DIN-rail mountable hardware is available from the vendors listed
above, including terminal blocks, end brackets, opto-isolation systems (for voltage-level
shifting and additional current drive) and power supplies.
26 Adept SmartMotion Installation Guide, Rev. C
Page 27

Installing the Adept sMI6 Module
Panel Mounting the MP6 Panels
If you do not want to use DIN-rail mounting, you can use panel (screw) mounting instead.
1. Remove and discard the MP6 mounting enclosures. This is done by removing two
screws on either end of each unit, then sliding out the printed circuit assembly
(PCA).
2. Use the four mounting holes provided on each MP6 panel to mount the PCA with
appropriate screws.
WARNI NG : Be sure to use suitable stand-offs or spacers
and comply with national and local electrical regulations
regarding spacing and insulation.
Plug-In Opto Modules on the MP6-M
The plug-in opto-isolator output modules are standard Opto-22 Generation-4 single-point
type, or equivalent. These modules have built-in indicator LEDs and are individually
fused. The mounting panels are supplied from Adept without I/O modules so you can
choose the type of modules (AC, DC, voltage range) which best suit your particular
application.
See Section 2.10 for more detailed information on the opto modules.
Adept SmartMotion Installation Guide, Rev . C 27
Page 28

Chapter 2 - System Installation
P1
33
50
17
Motion-interface Panel - SERVO (MP6-S)
P1
S
E
R
108mm
(4.25")
S
E
R
V
O
CHAN2
CHAN4
CHAN6
V
O
CHAN1
34
18
1
1
DE1
DF1
6
9
5
CHAN1 to 6
136.5mm
(5.375")
CD1
CHAN3
CHAN5
ANALOG PWR
Figure 2-6. MP6-S Panel – Layout and Dimensions
P1
33
50
17
Motion-interface Panel - ENCODER (MP6-E)
P1
E
N
C
O
108mm
(4.25")
D
E
N
C
O
D
E
R
CHAN2
CHAN4
CHAN6 RESVD
E
R
CHAN1
CHAN3
CHAN5
ENC PWR
SPARE
ANALOG
PWR
1 +12V
2 RTN
3 –12V
4 SHD/GND
34
18
1
1
5
6
9
112mm
(4.4")
ENC PWR
CHAN1 to 6
Figure 2-7. MP6-E Panel – Layout and Dimensions
28 Adept SmartMotion Installation Guide, Rev. C
1 PWR
2 RTN
3 SHD
4 GND
Page 29

3
LOGIC PWR
+
4 GND
3 SHD
2 5VRTN
1 5V
Installing the Adept sMI6 Module
M
A
C
H
I
N
34
18
1
LOGIC
PWR
CHAN1
E
108mm
(4.25")
BRAKE-BR1
MACHINE
OVERTRAVEL
50
33
17
P1
SPARE
206.4mm
(8.125")
CHAN4
CHAN1 to 3
9 SHD
8 BR–
7 BR+
6 HM–
5 HM+
4 OT–
3
1 OT
CHAN2
HAN
HOME
BRAKE-BR4
OVERTRAVEL
BRAKE-BR2
HOME
BRAKE-BR5
OVERTRAVEL
BRAKE-BR3
HOME
BRAKE-BR6
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
3 GND
2 HPE–
1 HPE+
CHAN5
CHAN6
HPE
HPE
4 SHD
Figure 2-8. MP6-M Panel – Layout and Dimensions
1 OT+
2
3
4 OT–
5 HM+
6 HM–
7 BR+
8 BR–
9 SHD
CHAN4 to 6
Adept SmartMotion Installation Guide, Rev . C 29
Page 30

Chapter 2 - System Installation
Customer's Hardware
Adept SmartMotion Hardware
Drive Amplifier
(Typical)
1
Drive
Enable
DE+
DE–
2
+FD4
DF–
5
Drive
Fault
+
+
Drive
Enable
Drive
Fault
1
High Power
Enable
HPE+
HPE–
2
MP6-S
MP6-M
Output
Input
1
Brake
Release
OT+
2
3
Positive
Overtravel
OT–
4
5
Negative
Overtravel
HM+
HM–
6
7
Home
BR+
BR–
8
Output
1
2
3
4
PWR
RTN
SHD
GND
9
SHD
Input
Input
Output
+
–
Typical
wiring for
one of six
axes
L1
L2
+
–
User I/O
Power Supply
User Power Supply
MP6-E
A–
A+
B+
B–
I+
I–
Encoder
+
–
Pin numbers
typical for encoder
channels 1 to 6
3
1
2
4
5
6
7
8
9
SHD
1
2
3
4
PWR
RTN
SHD
GND
+
–
User
Power
Supply
for Encoders
+
–
Brake Solenoid
PWR
RTN
Note: Opto-modules shown
as simplified equivalent
circuit only.
Line Filter
(recommended)
*
*
Commutating diode must be
used on all inductive loads.
(typical 1N4005)
Command
Signal
CD+
CD–
SHD
Analog Command
7
8
3
M
Motor
Output
Typical
wiring for
one of six
axes
User Logic
Power Supply
User-Supplied
Jumper
Emergency-Stop Power Cutoff
To SmartController
XUSR Connector
See pages 54 and 55 for e xamples of
this circuitry for various categories of
application safety requirements.
30 Adept SmartMotion Installation Guide, Rev. C
Figure 2-9. Typical System Wiring for One Axis of Motion
Page 31

MP6 Machine (MP6-M) Panel Wiring
2.10 MP6 Machine (MP6-M) Panel Wiring
The MP6-M is used to interface to the machine (robot or motion mechanism). It provides
two digital inputs and one digital output for each of six channels (Channels 1 to 6). See
Figure 2-8 on page 29 for the location of the various connectors.
• digital input for Overtravel (OT)
• digital input for Home Switch (HM)
• digital output for Brake Release (BR)
The MP6-M also has one independent output for high power enable (HPE).
The function of the MP6-M is to provide convenient interconnect points and to perform
voltage level-shifting of some signals, for example, to interface 120VAC or 230VAC user
circuits to the HPE output.
Optical Isolation
All signals (input and output) are isolated inside the sMI6 module. Additional isolation
for the output channels (6 for Brake Release (BR), one for High Power Enable) is provided
on the MP6-M using Opto-22 modules. The main functions of the Opto-22 modules on the
output channels of the MP6-M are to give enhanced current drive capability, and allow
flexibility in connecting to a variety of voltage levels.
Input Current Requirements (OT, HM)
The inputs on the MP6-M are connected directly to the sMI6. Therefore, the input
specifications for the MP6-M are the same as for the MP6-S. See Table 2-2.
Table 2-2. Digital Input Specifications (sMI6 module)
Operational voltage range 0 to 24 VDC
“Off” state voltage range 0 to 3 VDC
“On” state voltage range 10 to 24 VDC
Operational current range
“Off” state current range
“On” state current range
Typical threshold current, per channel
Impedance (V
Current at V
in/Iin
= +24 VDC Iin 20 mA
in
Turn on response time (hardware
Turn off response time (hardware
a
The input current specifications are provided for reference; voltage sources are typically used
a
a
a
a
) 1.3 K minimum
b
)
b
)5 µsec maximum
0 to 20 mA
0 to 1.2 mA
7 to 20 mA
10 mA
5 µsec maximum
to drive the inputs.
b
The software scan rate depends on Servo software, and is currently 1 ms.
Adept SmartMotion Installation Guide, Rev . C 31
Page 32

Chapter 2 - System Installation
Input Voltage Configuration
See “sMI6 Digital Input Logic Voltage Configuration” on page 21.
Output Current Requirements (MP6-M, HPE and BR, External)
The digital outputs (HPE and BR) on the MP6-M are optically-isolated via Opto-22
modules. (Therefore, the output specifications for the MP6-M are different than the
MP6-S.) Select an appropriate plug-in single-channel module from the “Generation 4”
(G4) range manufactured by Opto-22. (Compatible modules are also made by other
manufacturers.)
Modules are available for various external voltages to suit the user’s equipment, including
12V DC and 24V DC, and 110VAC and 230VAC. See Table 2-3 for specifications of some
commonly-used modules. (See the manufacturer’s documentation for any parameters or
module types not listed.) You must provide logic-power to connect to and from the
Opto-22 modules. The logic input current required depends on the number, voltage, and
type of Opto-22 modules.
The Opto-22 DC output modules can each supply from 0.5 to 3 Amps to the user’s
external equipment. The total current actually required for outputs will depend on the
user-supplied external equipment (relays, solenoids, limit switches, etc.).
Table 2-3. Digital Output Specifications for HPE and BR (Opto-22 module, typical)
Opto-22 module type G4ODC5 G4ODC5A G4OAC5 G4OAC5A
Operating voltage range 5 - 60 VDC 5 - 200
VDC
Current rating @45°C ambient
@70°C ambient
3 A
2 A
1 A
0.55 A
12 - 140
VAC
—
1.5 A
24 - 280
VAC
—
1.5 A
Output voltage drop maximum 1.6 V 1.6 V 1.6 V peak 1.6 V peak
a
Off-state leakage @max voltage 1 mA 1 mA 5 mA rms
Turn-on time (hardware), max
Turn-off time (hardware), max
Logic voltage range (V
) 2.4-8 VDC 2.4-8 VDC 4-8 VDC 4-8 VDC
cc
c
c
50 µs 100 µs 1/2 cycle 1/2 cycle
50 µs 750 µs 1/2 cycle 1/2 cycle
5 mA rms
Logic input current 12mA@5V 12mA@5V 12mA@5V 12mA@5V
a
At 60 Hz, 140VAC
b
At 60 Hz, 280VAC (2.5 mA rms at 60 Hz, 120VAC)
c
The software scan rate depends on Servo software, and is currently 1 ms.
User-Supplied Logic Power (Internal)
b
The Opto-22 opto-isolator modules also require logic voltage to interface with the Adept
sMI6 module. This voltage must be provided by the user at the PWR terminals. The power
supply voltage should be the same as the logic voltage rating of the Opto 22 output
module. For example: 5V logic voltage Opto 22 requires a 5V logic user-supplied power
supply. Use of shielded, twisted-pair cable is recommended. Allow 12mA per output
channel (a total 0.1A for 7 modules) for each MP6-M.
32 Adept SmartMotion Installation Guide, Rev. C
Page 33

MP6 Machine (MP6-M) Panel Wiring
Overtravel Limit Switches (Input)
One Overtravel Limit switch input is provided for each axis. (Two normally-closed
switches must be wired in series or normally-open switches in parallel for one input.)
These inputs can be used to help protect the mechanical hardware when the end of axis
travel is reached. Each switch should be normally closed, and open only when an
overtravel condition is reached. If any of the overtravel switches is opened on an active
channel, the controller will disable High Power.
The input polarity for the overtravel inputs is configurable using the SPEC program.
The presence of an Overtravel signal will prevent the successful completion of the Drive
Enable sequence. Any unused Overtravel inputs on active channels must be configured to
provide a “no fault” condition. In most industrial situations there will be considerable
electrical noise in the operating environment. An unterminated input may not function as
anticipated. Adept recommends that you install a shorting wire between the MP6-M
terminals of any unused overtravel inputs.
NOTE: Refer to Figure 4-5 on page 53 for a typical input circuit in the
sMI6.
Home Switch (Input)
The Home Switch inputs are used during the calibration sequence of each axis. These
inputs can be activated anywhere within the travel of the axis, however, it is
advantageous to locate the home switch just inside one of the overtravel limit switches.
The input polarity of the Home input is configurable using the SPEC program. You
should design the home switch so that it remains active all the way through one of the
overtravel limits, then Adept SmartMotion will always be able to calibrate the axis.
Brake Release (Output)
The Brake Release (BR) signals are provided to control external safety brakes. These
signals are asserted to release the brakes after the drive has been successfully enabled. The
output modules are on (conduct) when in the “Brake Released” condition.
NOTE: Refer to Figure 4-6 on page 53 for a typical output circuit in the
sMI6.
High Power Enable (Output)
One High Power Enable (HPE) signal is provided for the entire system. (If you have more
than one sMI6 module, the signal is internally connected in parallel to every sMI6.) The
HPE signal drives the user-supplied power contactor for the motor drive-amplifiers. The
output is controlled via the Emergency Stop circuitry in the controller. The High Power
Enable signal is accessible on the HPE terminal block of the MP6-M.
Adept SmartMotion Installation Guide, Rev . C 33
Page 34

Chapter 2 - System Installation
Table 2-4. MP6-M Connector Terminal Assignments (Typical, 1 of 6)
Pin
Signal
Abbrev. Description
Signal
Typ e
Default Mode of
Operation
1 OT+ Overtravel(+) input Open on overtravel
2 — (Connected to terminal 3)
3 — (Connected to terminal 2)
a
a
—
—
(configurable using
SPEC program)
4 OT– Overtravel (return) return
5 HM+ Home Switch(+) input Closed at home
6 HM– Home Switch (return) return
(configurable using
SPEC program)
7 BR+ Brake Release (+) output Closed in brake
8 BR– Brake Release (return) return
released condition (not
configurable)
9 SHD Shield shield ——
a
Pins 2 and 3 are connected to each other to help you connect a normally-closed switch in
series, if you have separate OT signals from the limit switches at each end of the axis. Use
them if you need, otherwise make no connection.
Table 2-5. MP6-M Opto Power (Logic) Connectors (one per MP6-M)
Signal
Pin
Abbrev. Description
1 +PWR If using Opto-22 G4ODC5 or G4OAC5 series modules: 5V.
2 RTN Common (return) for the above voltage
3 SHD Shield for power cable
4 GND Ground for all MP6-M shield connections. Connect this to
your ground point.
34 Adept SmartMotion Installation Guide, Rev. C
Page 35

2.11 MP6 Servo (MP6-S) Panel Wiring
The MP6-S is used to interface to the Servo Drive amplifiers. It provides one digital input
(drive fault, DF) and one digital output (drive enable, DE) for each of six channels
(channels 1 to 6). It also provides one analog output (command drive, CD) for each of six
channels. The function of the MP6-S is to interconnect the signals from user circuits to the
sMI6 module.
Drive Compatibility
The Adept SmartMotion control system is compatible with most industry-standard motor
drives that accept a ±10 Volt analog input signal for current (torque) or velocity
commands. In addition, Adept SmartMotion provides two discrete I/O signals that are
dedicated to specific functions supported by most commercially available motor drives. In
summary, each motion channel supports the following drive signals:
• analog output (±10V) for Command Drive (CD)
• digital output (to the drive) for Drive Enable (DE)
• digital input (from the drive) to monitor for a Drive Fault (DF)
MP6 Servo (MP6-S) Panel Wiring
Optical Isolation
The digital signals, Drive Enable and Drive Fault, are optically isolated. No additional
isolation is required on the MP6-S. The MP6-S does not use Opto-22 modules. Note that
the Analog Output is not optically isolated in the sMI6 module, unlike in previous
versions of the Adept Motion Interface products.
MP6-S Input Current Requirements (Drive Fault)
The digital inputs on the MP6-S are connected directly to the sMI6. Therefore, the input
specifications for the MP6-S are the same as for the MP6-M. See Table 2-2 on page 31.
MP6-S Output Current Requirements (Drive Enable)
The digital outputs on the MP6-S are connected directly to the sMI6. Therefore, the output
specifications for the MP6-S are different than the MP6-M. See Table 2-6.
Table 2-6. Digital Output Specifications for Drive Enable Signal
Operating voltage range 5 to 24 VDC
Operational current range, per channel I
V
across output in ON condition V
drop
100 mA
out
0.85 V at 100 mA
drop
0.80 V at 10 mA
V
drop
Output-off leakage current I
Turn-on response time (hardware
Turn-off response time (hardware
a
The software scan rate depends on Servo software, and is currently 1 ms.
a
)
a
) 200 µsec maximum
600 µA
out
3 µsec maximum
Adept SmartMotion Installation Guide, Rev . C 35
Page 36

Chapter 2 - System Installation
Connecting the Drives
Each channel (1 to 6) has a 9-pin female D-connector that connects to the user’s
equipment. All six connectors have the same pin assignments (see Table 2-4 on page 34).
Refer to Figure 2-6 for the physical location of each connector. All signal nomenclature is
defined as viewed from the controller. Thus, an output is controlled by the Adept
controller and an input is monitored by the Adept controller.
Table 2-7. MP6-S Connector Pin Assignments (Typical, 1 of 6)
Pin
Signal
Abbrev. Description
Signal
Type Mode of Operation
1 DE+ Drive Enable (+) output Not configurable –
2 DE– Drive Enable (return) return
On to enable drive
4 DF+ Drive Fault (+) input Configurable using
5 DF– Drive Fault (return) return
SPEC program
7 CD+ DAC Command (+) output ±10V, configurable
using SPEC program
8 CD– DAC Command (return) return
3SHD Shield
a
shield ——
6 Not connected
9 Not connected
a
If two separate cables are used for Command signals and Drive signals, then their shields
should be tied together at Pin 3 SHD.
36 Adept SmartMotion Installation Guide, Rev. C
Page 37

MP6 Servo (MP6-S) Panel Wiring
Drive Enable (Output)
The Drive Enable signals (DE+, DE–) are outputs to the drives which command the drives
to enable motor power. These signals are activated as part of the power enable sequence,
after the High Power Enable signal has been activated. Refer to the SPEC program for
complete details on the power enable sequence and software-timing parameters.
The Drive Enable output logic is set to normally open (closed/on to enable drive). The
signal polarity is not user configurable. However, the user can provide an external circuit,
such as a relay, to change the polarity if required.
Delay Time
Refer to the SPEC program for information on setting the delay time for ignoring an
amplifier fault immediately after the amplifier has been enabled with a Drive Enable
signal.
Drive Fault (Input)
The Drive Fault input (DF+, DF–) is used to indicate a drive fault, such as
over-temperature, over-current, etc., and causes all drives to power down via the Drive
Enable signals. This input is configurable via software (SPEC program) so that a fault is
declared in either a voltage-present or voltage-absent condition. Thus, this input can also
be used to monitor a “drive ready” signal. Drive Fault inputs are only monitored while
Drive Enable is on, therefore, drive faults on unused channels are not monitored.
The presence of a drive fault will prevent the successful completion of the Drive Enable
sequence. Any unused Drive Fault inputs on active channels must be configured to
provide a “no fault” condition. In many industrial situations there will be considerable
electrical noise in the operating environment. An unterminated input may not function as
anticipated. Adept recommends that you install a shorting wire between the MP6-S pins
of any unused Drive Fault inputs.
Command Drive (Output)
The Command Drive outputs (CD+, CD–) provide a command signal to each of the
drives. Maximum output is ± 10 Volts into a 10K ohm input resistance. These analog
outputs are rated at 100 mA (max) per channel. Short-circuit protection is provided by a
100 ohm internal current limiting resistor. Refer to the SPEC program for complete details
on configuring this signal.
A separate tie point for the cable shield is provided to help minimize electrical noise. The
shield should normally be left floating at the amplifier end. For the shield to be effective,
you must connect the GND terminal of the MP6-M Opto Pwr connector to a suitable
ground point.
Separate + and – outputs are provided for each of the six CD (Command Drive) outputs.
You should use a separate twisted-pair wire for each CD pair. Do not use a “common”
wire to connect the negative outputs as this will seriously reduce the noise-immunity of
the system.
Adept SmartMotion Installation Guide, Rev . C 37
Page 38

Chapter 2 - System Installation
2.12 MP6 Encoder (MP6-E) Panel Wiring
Encoder Compatibility
The MP6-E is used to interface to the encoders. It supports up to six encoder channels,
with differential input (A, B and Index) for each encoder. Each channel is designed to
interface directly to encoders which use industry standard AB quadrature outputs and an
optional zero-index channel. The encoder input circuitry is compatible with encoders
using differential line driver outputs (RS-422 signal, +5VDC). (Alternatively, 5V
single-ended outputs may be used, but they will be much more sensitive to external
electrical noise. For information on compatibility with other types of encoders, please
consult Adept Customer Service.) Adept strongly recommends using differential
encoders, with index pulse.
Each of the six encoder channels has its own 9-pin female D-connector located on the
MP6-E. Refer to Figure 2-7 on page 28 for the physical location of each connector.
Connecting Power to the Encoders
All encoder inputs for the sMI6 use a scheme similar to an RS-422 differential receiver
based on industry standard 75175 integrated circuits. The difference is that a custom
resistor network and two differential receivers are used on each of the A and B inputs.
This scheme allows for the detection of broken or shorted encoder wiring. See Figure 2-11
on page 41 for a schematic.
The encoder inputs for the previous Adept MI6 product are optically isolated at the MI6
module. This provided the ability to use different power supplies for different channels
with no common ground. Although this provided some noise immunity, it was at the
expense of a slower input pulse rate due to the slow switching speed of the optical inputs.
To provide higher encoder pulse rates, the sMI6 was designed with standard RS-422
receivers to replace these optical isolation components.
In order to maintain compatibility with the Adept MI6, all encoder power must be
supplied by an external source. Power for each encoder can be supplied from
independent power supplies or from one common power supply. However, all encoder
power supply commons must be connected together and must be connected to the sMI6's
24V power input common. Encoder power should be supplied from a source that remains
on when High Power and/or Drive Enable is off. This eliminates the need to re-calibrate
the mechanism after High Power has been cycled off.
Adept strongly recommends using shielded, twisted-pair cable for all encoder and power
connections. The MP6-E can be used to distribute power to the encoders. The power,
voltage, and current required depend upon the encoders chosen by the user. If one
common power supply is being used for all encoder channels, the power source is
connected to the “Encoder Pwr” terminal on the lower section of the MP6-E. The encoder
power supply should not be used to power other equipment, because this may cause
electrical interference to the encoder signals.
If separate power is desired for any of the encoder channels (for example, if any of your
encoders require different supply voltages), power connections must be made directly to
that encoder. The encoder input circuitry on the MP6-E does not require power from an
external supply.
38 Adept SmartMotion Installation Guide, Rev. C
Page 39

MP6 Encoder (MP6-E) Panel Wiring
Adept recommends using a linear power supply instead of a switching power supply. If a
switching power supply is used, make sure to meet the minimum current requirements.
Encoder Power Grounding
Because the 75175 input circuits on the sMI6 have a common-mode input range of +/-12V,
the nominal differential signal swing of 0 to 5V must remain within common-mode input
range. Since a separate power supply is used to power the encoder RS-422 (or
single-ended) drivers, the common of the separate supplies must share a common ground
reference with the voltage supply into the sMI6. Thus, it is very important that the
common signals for these separate supplies be connected to the common of the 24V
plug-in terminal on the front of the sMI6.
If an older MI6-based system is being retrofitted with the sMI6, a modification to the
encoder power supply circuit may need to be made to provide this common power
supply connection. In some cases, new wiring must be provided. For example, the
Yaskawa Sigma amplifiers provide an “SG” or signal ground wire in the “CN” connector
that may not have been needed on the MI6. Since this SG ground must now be connected
to the sMI6 common for differential-signal common-mode reference, a new connection
might have to be made.
The DC power supply common for the internal voltages, including the 5V for the
differential receivers, is connected to the frame ground of the sMI6 internally. The shield
for the sMI6/MP6E cable is also connected to frame ground at the sMI6 XENCODER
connector. Thus, one can sometimes provide the common ground reference at the MP6E
Encoder Power terminal block by connecting pin 2, User's Encoder Power Supply Return
“RTN”, to pin 3 Cable Shield “SHD”. See Table 2-8 and Figure 2-10 on page 41. This
Terminal can thus serve as the common ground wiring point on an encoder power system
of separate encoder voltage sources.
Table 2-8. MP6-E Power Connectors (one per MP6-E)
Signal
Pin
1 PWR Encoder voltage supply
2 RTN Common (return) for the above voltage
3 SHD Shield for power cable
4 GND Ground for all MP6-E shield connections. Connect this to your
Abbrev. Description
ground point.
Encoder Cable Length (User Supplied)
Because encoders are not supplied with the system and output circuitry varies between
different encoders, it is not possible for Adept to specify a maximum cable length.
However, it is good practice to keep the encoder cable length to a minimum. This practice
helps to improve noise immunity and reduces the risk of encoder signal problems.
Adept SmartMotion Installation Guide, Rev . C 39
Page 40

Chapter 2 - System Installation
Connecting the Encoders
Each encoder channel has its own 9-pin D-connector. The connectors are intentionally not
keyed and can be interchanged for diagnostic purposes, provided that no attempt is made
to enable the associated axis. The pin assignment for each connector is detailed in Ta bl e
2-9. For best protection against noise, use shielded twisted-pair cable. The shield should
encase only those signals associated with that particular encoder channel. A separate
terminal is provided for connection of the shield. To avoid creating a “ground loop,” the
shield should normally be left floating (not connected) at the encoder end, unless the
encoder body is electrically isolated from the equipment it is mounted to.
Table 2-9. Encoder Channel Pin Assignments (Channel 1 to 6)
Pin Number Encoder Signal Pin Number Encoder Signal
1A +6Index +
2A –7Index –
3 Cable Shield 8 +Power
4B +9Power Com
5B –
Encoder Input Circuitry
All incremental-encoder input circuits are identical. Standard hardware configurations of
the sMI6 support RS-422 +5VDC signal levels in a differential mode. Adept strongly
recommends using differential encoders for maximum noise immunity. Using differential
encoders also enables the Encoder failure detection system to function. However, Adept
SmartMotion hardware is compatible with single-ended and open-collector outputs.
Schematics to connect these types of encoders are located in Figure 2-12 and Figure 2-13.
NOTE: If you use single-ended inputs, say by connecting the encoder's A
signal to the sMI6's “A-” input as in earlier MI6 systems, then you must
now connect the opposite polarity signal, “A+” in this example, to the
encoder and sMI6 power supply common.
If an older MI6-based system is being retrofitted with the sMI6, the connections of any
single-ended encoder signals must be modified in the customer wiring. The unused
differential signal input on A, B or Index, must be connected to the encoder power
common. For example, the standard wiring scheme was to connect the encoder
single-ended A to Adept's A-, the encoder B to B- and encoder Index to Index-. For this
example, the Adept A+, B+, and Index+ signals must be connected to Power Com in the
user wiring, say at the 9-pin connector, for the single-ended encoder to work on the sMI6.
See Table 2-9.
The encoder signals pass directly through the MP6-E to the sMI6 module. All encoder
inputs use RS-422 receivers on the differential inputs. Figure 2-10 and Figure 2-11
illustrate the input circuit for each encoder channel. The A, B, and Index signals are then
digitally filtered to improve noise immunity.
40 Adept SmartMotion Installation Guide, Rev. C
Page 41

MP6 Encoder (MP6-E) Panel Wiring
sMI6
5V
A
A
5V
B
B
I
I
A+
A–
B+
B–
5V
I+
I–
+PWR
SHLD
Adept sMI6/
MP6-E Cable
SHLD
MP6-E
A+
A–
B+
B–
I+
I–
PWR
RTN
SHD
PWR
RTN
SHD
GND
Pin numbers
typical for encoder
channels 1 to 6
1
2
4
5
6
7
8
9
3
1
2
3
4
User-Supplied
Jumper
Encoder
+
–
+
–
User's
Encoder
Power
Supply
Figure 2-10. Encoder Input Circuitry
DIFFERENTIAL DETECTION WITH INVERSION/PULLUP/PULLDOWN FOR BROKEN-WIRE DETECTENCODER QUADRATURE INPUTS
5%
10K
R0603
R0603
5VD
U31
8
VCC
6
A
7
B
5
GND
SN75176B
R91
D
R0603
1K
R0603
R0603
R0603
R0603
R0603
R0603
R0603
R0603
R0603 R0603
R410
R408
R409
R411
R414
R412
R413
R415
R93
10K
5%
R94
10K
5%
5%
1K
1K
5%
1K
5%
5%
1K
1K
5%
5%
1K
5%
1K
1K
5%
ENC_A1+1/D8
R-1210
R439
220
5%
ENC_A1-1/D8
1/D8 ENC_B1+
R-1210
R440
220
5%
ENC_B1-1/D8
ENCODER INDEX DIFFERENTIAL INPUT W/BIDIRECTIONAL COMM CAPABILITY FOR SERIAL ABSOLUTE ENCODERS
1/D7 ENC_Z1+
R-1210
R92
220
5%
ENC_Z1-1/D7
R0603
10K
5%
4
D
3
DE
1
R
2
RE
5%
5%
10K
R376R377
R0603
ENC_DIR_Z1 10/C3
5%
10K
R0603
R381
R378R375
10K
5%
R0603
ENC_Z1 10/C5
R379
10K
5%
R0603
5%
10K
R380
R0603
R382
10K
5%
R0603
5%
10K
R325
4
2
1
6
7
10
9
14
15
12
8
EN1
EN2
1A
1B
2A
2B
3A
3B
4A
4B
GND
5VD
U58
75175
16
VCC
3
ENC_A1 10/C5
1Y
5
ENC_A1 10/C3
2Y
11
3Y
13
4Y
D
ENC_B1
10/C5
10/C3ENC_B1
Figure 2-11. Encoder Input Schematic
Adept SmartMotion Installation Guide, Rev . C 41
Page 42

Chapter 2 - System Installation
MP6-E
sMI6
Pin numbers
typical for encoder
channels 1 to 6
3
1
2
4
5
6
7
8
9
SHD
1
2
3
4
PWR
RTN
SHD
GND
+
–
User's
Encoder
Power
Supply
PWR
RTN
A–
A+
B+
B–
I+
I–
+
–
Encoder,
single-ended
I
A
B
Adept sMI6/
MP6-E Cable
SHLD
User-Supplied
Jumper
Note: this configuration will be highly sensitive to noise.
A–
A+
A
A
5V
B+
B–
I+
I–
+PWR
SHLD
5V
5V
B
B
I
I
Single-Ended Encoders
Figure 2-12. Single-Ended Encoder Wiring Using Inverted Outputs
sMI6
5V
A
A
5V
B
B
I
I
A+
A–
B+
B–
5V
I+
I–
+PWR
SHLD
Note: this configuration will be highly sensitive to noise.
MP6-E
1
A+
2
A–
4
B+
5
B–
6
I+
7
I–
Adept sMI6/
MP6-E Cable
SHLD
PWR
Pin numbers
typical for encoder
channels 1 to 6
RTN
SHD
PWR
RTN
SHD
GND
8
9
3
1
2
3
4
User-Supplied
Jumper
Encoder,
single-ended*
A
B
I
+
–
User's
+
Encoder
–
Power
Supply
*Note: this configuration leads to inversion of the encoder channel
signals. Remember this when using the SPEC program to specify
the Zero-Index configuration.
42 Adept SmartMotion Installation Guide, Rev. C
Figure 2-13. Single-Ended Encoder Wiring Using Non-Inverted Outputs
Page 43

Software Configuration 3
Motion-interfacePanel - SERVO (MP6-S)
S
E
R
V
O
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6
CHAN5
ANALOG
PWR
SPARE
P1
Motion-interfacePanel - ENCODER (MP6-E)
E
N
C
O
D
E
R
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6 RESVD
CHAN5
ENCPWR
P1
M
A
C
H
I
N
E
HPE
P1
CHAN1
CHAN2
CHAN3
CHAN4
SPARE
CHAN5
CHAN6
LOGIC
PWR
BRAKE-BR1
BRAKE-BR2
BRAKE-BR3
BRAKE-BR4
BRAKE-BR5
BRAKE-BR6
HIGHPOWER ENABLE-HPE
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
123
RS-422/485
XUSR
XSYS
SF
XMCP
1.1
SmartControllerCS
LANHPE
OFF
24V 5A
ON
RS-232/TERM
XFP
HDES
XDIO
Eth10/100
*S/N3561-XXXXX*
SW1
DeviceNet
SmartServo
XDC1XDC2
-+ -+
1234
OK
R
1.2
MP6-E
MP6-M
MP6-S
User Amplifier
User Mechanism
SmartController
Desktop or Laptop PC
24V
R
F2DE2 F6DE6
F1DE1
ESHPE
STATUS
F5DE5
F4DE4
F3DE3
-+ -+
s
XMACHINEXENCODER
MI6
*S/N3564-XXXXX*
SmartServo
XSERVO
1.1 1.2
XANL
XDC1XDC2
0.5A
sMI6 Module
3-CN5
3-CN6
MOTOR3
SENSOR3
2-CN5
2-CN6
MOTOR3
SENSOR3
1-CN5
1-CN6
MOTOR3
SENSOR3
CN7
CN2CN3
CN4
GENERALIO PULSEOUT CONTROLIO
F1 F2P. G.
--F.G.
3.1 Introduction
After the Adept SmartMotion system hardware has been installed (see Figure 3-1), and
the wiring completed, you will be ready to start the software configuration process. This
chapter provides an overview of this process.
For complete information on the process, refer to the Adept SmartMotion Developer’s
Guide which can be obtained by searching the Adept Documentation Library (formerly
Knowledge Express) available from the following sources:
• Adept Documentation Library CD-ROM that was shipped with your system
+
Software CD MANUALS directory
•V
•Adept website (www.adept.com/main/services/index.asp)
Figure 3-1. SmartMotion System Installed to Control a User Mechanism
Adept SmartMotion Installation Guide, Rev. C 43
Page 44

Chapter 3 - Software Configuration
3.2 Phase 1 - Preparation for Software Configuration
To prepare for the software configuration process, you should read the SmartMotion
Developer’s Guide for the following topics:
• Adept SmartMotion: Key Concepts
• Introduction to Servo Parameters
• SPEC Program: Overview and Main Menu
• Managing SPEC Data
NOTE: The SmartMotion Developer's Guide is provided as an online HTML
document with a Table of Contents, Search, and Index features to
navigate the document. If you do not see these features when you are
viewing a topic, click the SHOW TOC icon that displays in the upper left
corner of each page in the Developer's Guide.
3.3 Phase 2 - Load Device Modules
Select and load the proper device modules using the CONFIG_C utility. For instructions,
see the topic Loading Device Modules in the Adept SmartMotion Developer's Guide.
3.4 Phase 3 - Configure SmartServo Network Map
Use the SPEC program to configure robots and motors on the Adept SmartServo network
(a distributed controls network based on IEEE 1394). This enables the user’s mechanism to
communicate with devices in the Adept SmartMotion system.
Configuration includes specifying the number of motors in the robot, mapping the motors
to hardware drive channels, and establishing the relationship of the joints to the axes of
the device module.
For instructions, see the documentation for the Robot Options and Configuration menu
option available in the Adept SmartMotion Developer's Guide.
3.5 Phase 4 - Create Software Specification
Create the software specification for each mechanism in your system. This includes
specifying parameters for initialization, tuning, calibration, motion, trajectory generation,
and other information required to operate your system.
For detailed instructions, see the Creating the Software Specification topic available in
the SmartMotion Developer's Guide.
44 Adept SmartMotion Installation Guide, Rev. C
Page 45

Then you can optimize your mechanism by fine tuning the performance using the servo
tuning features in SPEC. For details, see the Step-by-Step Tuning Process topic in the
SmartMotion Developer's Guide.
3.6 Phase 5 - Testing the System
Adept SmartMotion software provides diagnostic tools and tests that you can use to
adjust the tuning and optimize the performance of your SmartMotion system. For details
on the Test and Troubleshooting process, see the topic Adept SmartMotion: Test and
Troubleshooting in the Adept SmartMotion Developer's Guide.
This phase can help you quickly test and troubleshoot a mechanism during development
and after installation. Many of these tests can help identify tuning adjustments that can
provide substantial performance improvements even if there are no obvious system
problems. Use the diagnostic tests to evaluate all I/O signals, DAC outputs, encoder and
motor signs, etc.
Phase 5 - Testing the System
3.7 Motion Control Application Development
After you have configured and tested the SmartMotion system, you can create your
motion control application using the Adept V
The following applications and tools are available:
+
library of motion commands see the V+ Language Reference Guide
V
AdeptWindows see the AdeptWindows User’s Guide
Adept DeskTop see the Adept DeskTop documentation
AIM MotionWare application see the AIM MotionWare Users’s Guide
Advanced Servo Library see the ASL Reference Guide
Unique Kinematic Device Modules see the Device Modules documentation
AdeptVision sAVI and AIM VisionWare
for integrated vision applications
Extensive Documentation for all products
on the Adept Documentation Library CD
+
development environment.
see the AdeptVision Reference Guide and
the VisionWare User’s Guide
see the Adept Documentation FAQs
Adept SmartMotion Installation Guide, Rev . C 45
Page 46

Page 47

Technical Specifications 4
24V
.094
R
.118
F2 DE2 F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
3.29
186.5
328.9
-+ -+
s
41.6
XMACHINEXENCODER
MI6
*S/N3564-XXXXX*
SmartServo
5.5
4.4
XSERVO
1.1 1.2
XANL
XDC1 XDC2
0.5A
4.1 Dimensions for sMI6 Module
Figure 4-1. Dimensions for sMI6 Module
Adept SmartMotion Installation Guide, Rev. C 47
Page 48

Chapter 4 - Technical Specifications
14.0
2X M3 x 6MM
BOTH SIDES
14.2
3.6
TYP.
16.0
482.8
2X 40356-00003
6.1
43.9
190.0
31.8
462.0
2.2
R 3.6
R 3.6
6.6
273.9
14.0
27.6
359.6
346.4
2X 40356-00000
16.0
4X M3 x 6MM
18.0
186.5
10.0
4.2 Dimensions for Mounting sMI6 Module
Figure 4-2. Rack Mounting
Figure 4-3. Panel Mounting
48 Adept SmartMotion Installation Guide, Rev. C
Page 49

Dimensions for Mounting sMI6 Module
4X 40356-00001
378.6
29.5
16.0
14.3
4X M3 x 6MM
BOTH SIDES
R 3.6
21.6
24.1
391.8
121.0
121.0
12.1
24.9
1.9
Figure 4-4. Table Mounting
Adept SmartMotion Installation Guide, Rev . C 49
Page 50

Chapter 4 - Technical Specifications
4.3 MP6 to sMI6 Cables
Table 4-1 shows the pinout for the cable that connects between the XSERVO connector on
the sMI6 module and the MP6-S panel.
Table 4-1. Pinout for MP6-S
MP6-S
sMI6 Pin
5 2 DE1+ 36 27 DE4+
20 3 DE1– 37 28 DE4–
10 4 DF1+ 12 29 DF4+
11 5 DF1– 13 30 DF4–
1 6 CD1+ 3 31 CD4+
2 7 CD1– 4 32 CD4–
6 8 DE2+ 33
7 9 DE2– 8 34 DE5+
25 10 DF2+ 23 35 DE5–
26 11 DF2– 27 36 DF5+
16 12 CD2+ 28 37 DF5–
17 13 CD2– 18 38 CD5+
Pin Signal sMI6 Pin
126
MP6-S
Pin Signal
21 14 DE3+ 19 39 CD5–
22 15 DE3– 38 40 DE6+
40 16 DF3+ 39 41 DE6–
41 17 DF3– 42 42 DF6+
31 18 CD3+ 43 43 DF6–
33 19 CD3– 34 44 CD6+
20 35 45 CD6–
21 46
22 47
14 23 not used 48
29 24 not used 9 49 SP1+
44 25 not used 24 50 SP1–
Shell Shell Shield
50 Adept SmartMotion Installation Guide, Rev. C
Page 51

Dimensions for Mounting sMI6 Module
Table 4-2 shows the pinout for the cable that connects between the XMACHINE
connector on the sMI6 module and the MP6-M panel.
Table 4-2. Pinout for MP6-M
MP6-M
sMI6 Pin
1 2 OT1+ 9 27 OT4–
3 3 OT1– 23 28 HM4+
17 4 HM1+ 24 29 HM4–
18 5 HM1– 38 30 BR4+
32 6 BR1+ 39 31 BR4–
33 7 BR1– 32
4 8 OT2+ 33
5 9 OT2– 34
19 10 HM2+ 10 35 OT5+
20 11 HM2– 11 36 OT5–
34 12 BR2+ 25 37 HM5+
35 13 BR2– 26 38 HM5–
Pin Signal sMI6 Pin
1 8 26 OT4+
MP6-M
Pin Signal
6 14OT3+ 40 39BR5+
7 15OT3– 41 40BR5–
21 16 HM3+ 12 41 OT6+
22 17 HM3– 14 42 OT6–
36 18 BR3+ 27 43 HM6+
37 19 BR3– 29 44 HM6–
20 42 45 BR6+
21 44 46 BR6–
22 47
23 48
15 24 HPE+ 16 49 SP2+
30 25 HPE– 31 50 SP2–
Shell Shell Shield
Adept SmartMotion Installation Guide, Rev . C 51
Page 52

Chapter 4 - Technical Specifications
Table 4-3 shows the pinout for the cable that connects between the XENCODER
connector on the sMI6 module and the MP6-E panel.
Table 4-3. Pinout for MP6-E
MP6-E
sMI6 Pin
1 2 A1+ 7 26 A4+
2 3 A1– 8 27 A4–
16 4 B1+ 23 28 B4+
18 5 B1– 24 29 B4–
31 6 Z1+ 37 30 Z4+
32 7 Z1– 38 31 Z4–
38A2+ 32
49A2– 33
19 10 B2+ 34
20 11 B2– 9 35 A5+
33 12 Z2+ 10 36 A5–
34 13 Z2– 25 37 B5+
Pin Signal sMI6 Pin
14 26 38 B5–
15 39 39 Z5+
MP6-E
Pin Signal
16 40 40 Z5–
17 11 41 A6+
5 18 A3+ 12 42 A6–
6 19 A3– 27 43 B6+
21 20 B3+ 28 44 B6–
22 21 B3– 41 45 Z6+
35 22 Z3+ 42 46 Z6–
36 23 Z3– 14 47 Serial I/O_3
13 24 EPWR 15 48 Serial I/O_4
43 25 EPWR 29 49 Serial I/O_1
44 50 Serial I/O_2
Shell Shell Shield
a
Serial I/O functionality to be added in future release.
a
a
a
a
52 Adept SmartMotion Installation Guide, Rev. C
Page 53

4.4 Typical Input and Output Circuits in sMI6
Input Circuits
The circuit in Figure 4-5 is typical of all digital inputs on the sMI6 (3 per axis, 18 total):
•Home Switch
• Overtravel
•Drive Fault
Emergency Stop Circuits
5%
2%
C74
0.1UF
C-0805
JP_5V_ENA
25 26
D10
BAS16L
TLP281-4
1
2
U54
3.3VD
R353
5%
16
15
3.3K
R0603
DR_FLT1
D
10/D3
1/C5
1/C5
DR_FLT1+
DR_FLT1-
R124
560
R-0805
R122
2.7K
R-2010
Figure 4-5. Typical Input Circuit in sMI6
Output Circuits
The circuit in Figure 4-6 is typical of all digital outputs on the sMI6 (2 per axis + 3, 15
total):
•Drive Enable
• Brake Release
• High Power Enable (HPE)
•Spares
3.3VD
10/C1 BRE1
R42
200
R-0805
5%
1
2
U16
TLP281-4
16
15
R162
4.7K
R0603
3
LP395FLT
2
Q7
1
5%
BRE1+
2
TVS10
27V
1
BRE1-
1/D5
1/D5
Figure 4-6. Typical Output Circuit in sMI6
4.5 Emergency Stop Circuits
• Figure 4-7 on page 54 shows a Category 3 E-Stop circuit that can be created using a
PILZ PNOZ1 relay.
• Figure 4-8 on page 55 shows a Category 1 E-Stop circuit that can be created to cut
off power to the user amplifier.
Adept SmartMotion Installation Guide, Rev . C 53
Page 54

Chapter 4 - Technical Specifications
Logic cyclic
check state
machines
Channel 1
Channel 2
ES1
ES2
Internal Connections
User Supplied Connections
E-Stop, High Power On/Off, and MANUAL/AUTO Controls for
CIM-2 Version of SmartController
FM
Front Panel
E-Stop
Enable
MCP
Channel 1
ESTOPSRC
Channel 2
User E-Stop Indication
User E-Stop and
Gate Interlock
(Jumper closed when
not used, MUST open
both channels
independently if used.)
ESTOPSRC
ES1
ES2
ES2
ES1
User Manual / Auto Indication
(Manual = Open)
MCP4
Enable
Switch
Manual/Auto
Enable
MM1
MM1
MM2
MM2
XUSER-22
XUSER-23
XUSER-10
XUSER-9
XUSER-17
XUSER-16
XUSER-3
XUSER-4
XUSER-20
XUSER-21
XUSER-8
XUSER-7
XUSER-15
XUSER-14
XUSER-1
XUSER-2
XFP-1
XFP-9
XFP-2
XFP-10
XUSER-6
XUSER-5
XUSER-18
XUSER-19
XSYS-9
XSYS-1
XSYS-7
XSYS-6
XSYS-3
XSYS-2
XSYS-5
Muted Safety Gate
- Active in auto mode
only
(Jumper closed when
not used)
ESTOPSRC
E-Stop
Auto 2
E-Stop
Manual 1
XSYS signals go to PDU or MAI-2 when required (No User Connection)
E-Stop
Reset
E-Stop
Auto 1
E-Stop
Manual 2
24 V
5 V
V
+
High
Power request
High
Power
On / Off
4.7
0.24V
XFP-6XFP-5
XFP-14
XFP-13
-
+
V
+
burned out
bulb notify
(prevents High
Power enable)
HP Light
Enable)
6V, 1.2 W
bulb
Front Panel
24 V
Front Panel
MM1
XFP-3
XFP-4
XFP-11 XFP-12
MM2
Manual/Auto Keyswitch
- Manual = Open (|)
- Manual => (<250 mm/s)
- Auto => 100%
24 V
5 V
Front
Panel
System
Power
LED
XFP-7
XFP-15
Grn
~
=
K1.1
K3.1
K2.1
K3.2
K1.2
K2.2
G1
+
F1
K1 K2
K3
A1
(L+)
PILZ© PNOZ1
Safety
Relay
Jumper
See Note
Jumper
See Note
See Note
Note: These three functions:
Line E-Stop, Muted Safety Gate,
and MCP Enable, will only be
sensed by software. They will not
turn off High Power directly.
Example CE EN954-1 Category 3 Emergency Stop
circuit for Auto Mode showing PILZ
©
PNOZ1 safety relay
used to "cyclically check" the normally closed feedback
contacts of redundant, positive drive, power contactors
on a user amplifier.
24 VDC
0 VDC
A2
(L-)
T11
T12
T12
T22
X1
X2
K1A
K2A
T33
T34
13 23 33 41
14
K1A
Auto
Reset
K2A
24 34 42
K1
K2
+
HPE provides
reset based on
V+ High Power
Enable
HPE
MP6-M
–
L3
L3L2L2
L1
L1
Fuses F1
User Amplifier
K1A
Contactor
Q1
Main
Isolator
K2A
Contactor
Line E-Stop
(External User
E-Stop system)
Figure 4-7. Category 3 E-Stop Circuit
54 Adept SmartMotion Installation Guide, Rev. C
Page 55

Emergency Stop Circuits
Logic cyclic
check state
machines
Channel 1
Channel 2
ES1
ES2
Internal Connections
User Supplied Connections
E-Stop, High Power On/Off, and MANUAL/AUTO Controls for
CIM-2 Version of SmartController
FM
Front Panel
E-Stop
Enable
MCP
Channel 1
ESTOPSRC
Channel 2
User E-Stop Indication
User E-Stop and
Gate Interlock
(Jumper closed when
not used, MUST open
both channels
independently if used.)
ESTOPSRC
ES1
ES2
ES2
ES1
User Manual / Auto Indication
(Manual = Open)
MCP4
Enable
Switch
Manual/Auto
Enable
MM1
MM1
MM2
MM2
XUSER-22
XUSER-23
XUSER-10
XUSER-9
XUSER-17
XUSER-16
XUSER-3
XUSER-4
XUSER-20
XUSER-21
XUSER-8
XUSER-7
XUSER-15
XUSER-14
XUSER-1
XUSER-2
XFP-1
XFP-9
XFP-2
XFP-10
XUSER-6
XUSER-5
XUSER-18
XUSER-19
XSYS-9
XSYS-1
XSYS-7
XSYS-6
XSYS-3
XSYS-2
XSYS-5
Muted Safety Gate
- Active in auto mode
only
(Jumper closed when
not used)
ESTOPSRC
E-Stop
Auto 2
E-Stop
Manual 1
XSYS signals go to PDU or MAI-2 when required (No User Connection)
E-Stop
Reset
E-Stop
Auto 1
E-Stop
Manual 2
24 V
5 V
V
+
High
Power request
High
Power
On / Off
4.7
0.24V
XFP-6XFP-5
XFP-14
XFP-13
-
+
V
+
burned out
bulb notify
(prevents High
Power enable)
HP Light
Enable)
6V, 1.2 W
bulb
Front Panel
24 V
Front Panel
MM1
XFP-3
XFP-4
XFP-11 XFP-12
MM2
24 V
5 V
Front
Panel
System
Power
LED
XFP-7
XFP-15
Grn
Jumper
See Note
Jumper
See Note
See Note
Note: These three functions:
Line E-Stop, Muted Safety Gate,
and MCP Enable, will only be
sensed by software. They will not
turn off High Power directly.
24 VDC
0 VDC
KA
+
HPE
MP6-M
–
Example CE EN495-1 Category B or 1
Emergency Stop circuit for Auto Mode,
showing simple power cutoff to
User Amplifier's High Power section.
This will enable High Power when
V+ calls for it.
L2
L2
L1
L1
User Amplifier
KA
Line E-Stop
(External User
E-Stop system)
Figure 4-8. Category 1 E-Stop Circuit
Adept SmartMotion Installation Guide, Rev. C 55
Page 56

Page 57

Index
A
application development, motion control 45
B
Brake Release signals, for sMI6 33
C
Cat-1 E-Stop circuit, for sMI6 55
Cat-3 E-Stop circuit, for sMI6 54
Command Drive
signals on MP6-S 37
Customer Service assistance 16
D
device modules, loading 44
digital input
specifications 31
digital input logic, voltage configuration 21
digital output specifications 32
dimensions
sMI6 module 47
sMI6 module mounting 48
drive compatibility for sMI6 35
Drive Enable
output signals on MP6-S 37
Drive Fault
signals on MP6-S 37
E
EN 60204 12
enclosure for sMI6 chassis 24
encoder
cable length, MP6-E 39
channel pin assignments on MP6-E 40
compatibility with sMI6 38
connecting power 38
connecting to MP6-E 40
input circuitry 40
input schematic 41
power grounding 39
single-ended 42
E-Stop circuits, for sMI6 53
H
High Power Enable, output with sMI6 33
Home Switch, inputs with sMI6 33
How Can I Get Help? 16
I
installation
MP6 panels 26
SmartController 25
sMI6 module 25
L
logic power, user-supplied 32
M
motion control application development 45
Motion Interface Kit, description 12
MP6 panels
mounting information 26–27
MP6-E
cable pinouts 52
configuration 38–42
layout and dimensions 28
power connectors 39
MP6-M
configuration 31–34
connector terminal assignments 34
input/output current requirements 31
layout and dimensions 29
plug-in opto modules 27
MP6-S
configuration 35–37
connector pin assignments 36
input/output current requirements 35
layout and dimensions 28
O
optical isolation
MP6-M 31
MP6-S 35
Overtravel Limit switches, installation with
sMI6 33
P
panel mounting
MP6 panels 27
sMI6 48
plug-in opto modules on MP6-M 27
Adept SmartMotion Installation Guide Rev. C 57
Page 58

Index
R
rack mounting, sMI6 48
rail mounting, MP6 Panels 26
related manuals 16
Robotic Industries Association 12
robotic safety 12
S
safety 12
SmartController
installation 25
SmartMotion
hardware overview 11
system cable diagram 20
SmartServo network map 44
sMI6
typical input circuit 53
typical output circuit 53
sMI6 module
connector descriptions 19
digital input logic voltage
configuration 21
dimensions 47
enclosure for chassis 24
encoder configuration 38–42
installation 25
LED functions 18
logic voltage jumpers on PCA 22
mounting dimensions 48
opening the chassis 21
proper wiring practices 23
system wiring diagram 30
sMI6 to MP6 cables
pinouts 50
software configuration
creating specification 44
preparation for 44
specifications
digital input 31
digital output 32
system overview 11
system safeguards 13
T
table mounting, sMI6 49
U
user-supplied logic power 32
W
wiring
proper practices for sMI6 23
58 Adept SmartMotion Installation Guide Rev. C
Page 59

Page 60

5960 Inglewood Drive
Pleasanton, CA 94588
925•245•3400
P/N: 02170-000, Rev. C
 Loading...
Loading...