

Page 1
IM DLM6054-17EN
1st Edition
Digital Oscilloscope/
Mixed Signal Oscilloscope
DL6000/DLM6000 Series
Communication Interface
Page 2
i
IM DLM6054-17EN
Thank you for purchasing the DL6000/DLM6000 Series Digital Oscilloscope/Mixed Signal Oscilloscope
(DL6054/DL6104/DL6154/DLM6054/DLM6104, hereafter referred to as the DL6000/DLM6000). This
Communication Interface User’s Manual describes the functions and commands of the following
communication interfaces.
•
USB Interface
• Ethernet Interface (Optional)
• GB-IB Interface
To ensure correct use, please read this manual thoroughly before beginning operation.
After reading the manual, keep it in a convenient location for quick reference whenever a question
arises during operation.
The following manuals are provided for the DL6000/DLM6000. Please read all of them.
Manual Title Manual No. Description
DL6000/DLM6000 Series
Digital Oscilloscope/
Mixed Signal Oscilloscope
User’s Manual
IM DLM6054-01EN Explains all functions and procedures of the DL6000/
DLM6000 series excluding the communication
functions.
DL6000/DLM6000 Series
Digital Oscilloscope/
Mixed Signal Oscilloscope
Communication Interface User’s Manual
(in CD)
IM DLM6054-17EN This manual. Explains the communication interface
functions of the DL6000/DLM6000 series.
DL6000/DLM6000 Series
Digital Oscilloscope/
Mixed Signal Oscilloscope
Serial Bus Signal Triggering and
Analysis Function User’s Manual
IM DLM6054-51EN Explains the optional I2C bus signal, CAN bus
signal, LIN bus signal, SPI bus signal, and UART
bus signal triggering and analysis features and how
to use them.
DL6000/DLM6000 Series
Digital Oscilloscope/
Mixed Signal Oscilloscope
Power Supply Analysis Function User’s
Manual
IM DLM6054-61EN Explains the optional power supply analysis features
and how to use them.
Notes
• You can check the firmware version of your DL6000/DLM6000 on the overview screen. For
instructions on how to open the overview screen, see section 18.4 in the User’s Manual IM
701331-01E.
To upgrade to the latest firmware version, go to the following Web page, and then browse to the
download page.
http://tmi.yokogawa.com/service-support/downloads/
•
The contents of this manual are subject to change without prior notice as a result of continuing
improvements to the instrument’s performance and functions.
•
Every effort has been made in the preparation of this manual to ensure the accuracy of its
contents. However, should you have any questions or find any errors, please contact your nearest
YOKOGAWA dealer.
•
Copying or reproducing all or any part of the contents of this manual without the permission of
Yokogawa Electric Corporation is strictly prohibited.
1st Edition: October 2009 (YK)
All Rights Reserved, Copyright © 2009 Yokogawa Electric Corporation
Page 3

ii
IM DLM6054-17EN
USB Interface and Ethernet Interface
• The items below are needed on the PC to use the communication functions via the USB interface.
• DL Series Library (TMCTL)
• USB device driver for connecting the PC and the DL9000 series
• The items below are needed on the PC to use the communication functions via the Ethernet
interface.
•
DL Series Library (TMCTL)
To download the libraries and drivers listed above, go to the following Web page, and then browse
to the download page.
http://tmi.yokogawa.com/service-support/downloads/
Sample Programs
To download sample programs, go to the following Web page, and then browse to the download page.
http://tmi.yokogawa.com/service-support/downloads/
Trademarks
• DLM is pending trademark of Yokogawa Electric Corporation.
• Microsoft, MS-DOS, Visual C++, Windows, and Windows NT are registered trademarks of Microsoft
Corporation in the United States and/or other countries.
•
Adobe and Acrobat are trademarks of Adobe Systems Incorporated.
• For purposes of this manual, the TM and ® symbols do not accompany their respective trademark
names or registered trademark names.
•
Other company and product names are trademarks or registered trademarks of their respective
holders.
Revisions
1st Edition: October 2009
Page 4
iii
IM DLM6054-17EN
How to Use This Manual
Structure of This Manual
This user’s manual consists of the following sections.
Chapter 1 Overview of the USB Interface
Describes the functions and specifications of the USB interface.
Chapter 2 Overview of the Ethernet Interface (Optional)
Describes the functions and specifications of the Ethernet interface.
Chapter 3 Overview of the GP-IB Interface
Describes the functions and specifications of the GP-IB interface.
Chapter 4 Before Programming
Describes the syntax used to transmit commands.
Chapter 5 Command
Describes all the commands one by one.
Chapter 6 Status Reports
Describes the status byte, various registers, and queues.
Appendix
Describes reference material such as an ASCII character code table.
Page 5
iv
IM DLM6054-17EN
Symbols and Notations Used in This Manual
Communication Command Notation
In the detailed explanations of the communication commands in chapter 5, DLM6000-specific
commands are written in blue italics.
These commands are not available on the DL6000.
Safety Markings
The following markings are used in this manual.
CAUTION
Calls attentions to actions or conditions that could cause light injury to the user
or damage to the instrument or the user’s data, and precautions that can be
taken to prevent such occurrences.
Note
Calls attention to information that is important for proper operation of the
instrument.
Notation Used in the Procedural Explanations
On pages that describe the operating procedures in chapters 1 through 3, the following notations are
used to distinguish the procedures from their explanations.
Procedure
Carry out the procedure according to the step numbers. All procedures are
written with inexperienced users in mind; experienced users may not need to
carry out all the steps.
Explanation
This section describes the setup items and the limitations regarding the
procedures.
Notation of User Controls
Operation/Soft Key Names and Menu Items Set in Boldface
Boldface type indicates the names of user-controlled operation keys on the instrument panel, and soft key items
and menu items displayed on screen.
SHIFT+Panel Key
The SHIFT+Panel key means you will press the SHIFT key to turn ON the indicator of SHIFT key and then
press the panel key. The menu marked in purple above the pressed key appears on the screen.
Unit
k: Denotes “1000.” Example: 100 kS/s (sample rate)
K: Denotes “1024.” Example: 720 KB (file data size)
Symbols Used in the Syntax
The following table indicates symbols that are used in the syntax mainly in chapters 4 and 5. These
symbols are referred to as BNF (Backus-Naur Form) symbols. For details on the data, see pages 4-5
and 4-6.
Symbol Meaning Example Example of Input
< >
Defined value
CHANnel<x> <x> = 1 to 4 CHANNEL2
{}
Select from values given in { }
COUPling {AC|DC|DC50|GND} COUPLING AC
|
Exclusive OR
[]
Can be omitted
TRIGger [:SIMPle]:SLOPe TRIGger:SLOPe
How to Use This Manual
Page 6

v
IM DLM6054-17EN
Contents
How to Use This Manual .................................................................................................................. iii
Chapter 1 Overview of the USB Interface
1.1 Part Names and Functions ............................................................................................... 1-1
1.2 USB Interface Functions and Specications .................................................................... 1-2
1.3
Connection via the USB Interface .................................................................................... 1-4
1.4
Setting the DL6000/DLM6000 (USB) ............................................................................... 1-5
Chapter 2 Overview of the Ethernet Interface (Optional)
2.1 Part Names and Functions ............................................................................................... 2-1
2.2 Ethernet/VXI-11 Interface Features and Specications .................................................... 2-2
2.3
Connecting to the Ethernet/VXI-11 Interface .................................................................... 2-4
2.4
Setting the DL6000/DLM6000 (Network) ......................................................................... 2-5
Chapter 3 Overview of the GP-IB Interface
3.1 Part Names and Functions ............................................................................................... 3-1
3.2 Connecting the GP-IB Card .............................................................................................. 3-2
3.3
GP-IB Interface Functions ................................................................................................ 3-3
3.4
GP-IB Interface Specications ......................................................................................... 3-4
3.5
Setting the DL6000/DLM6000 (GP-IB) ............................................................................. 3-5
3.6
Responses to Interface Messages ................................................................................... 3-6
Chapter 4 Before Programming
4.1 Messages ......................................................................................................................... 4-1
4.2 Commands ....................................................................................................................... 4-3
4.3
Response ......................................................................................................................... 4-5
4.4
Data .................................................................................................................................. 4-6
4.5
Synchronization with the Controller .................................................................................. 4-8
Chapter 5 Commands
5.1 List of Commands ............................................................................................................ 5-1
5.2 ACQuire Group .......................................................................................................
........ 5-35
5.3 ANALysis Group ......................................................................................................
....... 5-36
5.4 ASETup Group ......................................................................................................
......... 5-58
5.5 CALibrate Group ......................................................................................................
...... 5-59
5.6 CHANnel Group ......................................................................................................
....... 5-60
5.7 CLEar Group ......................................................................................................
............ 5-62
5.8 COMMunicate Group ..................................................................................................... 5-63
5.9
CURSor Group ......................................................................................................
......... 5-65
5.10 DISPlay Group ......................................................................................................
......... 5-74
5.11 FILE Group .......................................................................................................
.............. 5-77
5.12 GONogo Group ......................................................................................................
........ 5-81
5.13 HCOPy Group ......................................................................................................
.......... 5-90
5.14 HISTory Group .......................................................................................................
......... 5-92
5.15 IMAGe Group ......................................................................................................
......... 5-101
5.16 INITialize Group .......................................................................................................
..... 5-102
5.17 LOGic Group ......................................................................................................
.......... 5-103
5.18 MATH Group................................................................................................................. 5-106
5.19
MEASure Group ......................................................................................................
......5-111
1
2
3
4
5
6
App
Index
Page 7

vi
IM DLM6054-17EN
Contents
5.20 REFerence Group ......................................................................................................
.. 5-120
5.21 SEARch Group .......................................................................................................
...... 5-121
5.22 SNAP Group .......................................................................................................
.......... 5-132
5.23 SSTart Group .......................................................................................................
......... 5-133
5.24 STARt Group ......................................................................................................
.......... 5-134
5.25 STATus Group ......................................................................................................
........ 5-135
5.26 STOP Group .......................................................................................................
.......... 5-136
5.27 SYSTem Group ......................................................................................................
...... 5-137
5.28 TELecomtest (Mask) Group ......................................................................................... 5-139
5.29
TIMebase Group ......................................................................................................
.... 5-143
5.30 TRIGger Group .......................................................................................................
...... 5-144
5.31 WAVeform Group .......................................................................................................
... 5-170
5.32 ZOOM Group .......................................................................................................
......... 5-173
5.33 Common Command Group .......................................................................................... 5-175
Chapter 6 Status Reports
6.1 Overview of the Status Report ......................................................................................... 6-1
6.2 Status Byte ......................................................................................................
................. 6-3
6.3 Standard Event Register .................................................................................................. 6-4
6.4
Extended Event Register .................................................................................................. 6-5
6.5
Output Queue and Error Queue ....................................................................................... 6-6
Appendix
Appendix 1 ASCII Character Codes ......................................................................................App-1
Appendix 2 Error Messages .................................................................................................. App-2
Appendix 3
Waveform Parameter Name Table ..................................................................... App-4
Appendix 4
Eye Pattern Parameter Name Table................................................................... App-5
Index
Page 8

1-1
IM DLM6054-17EN
Overview of the USB Interface
1
Chapter 1 Overview of the USB Interface
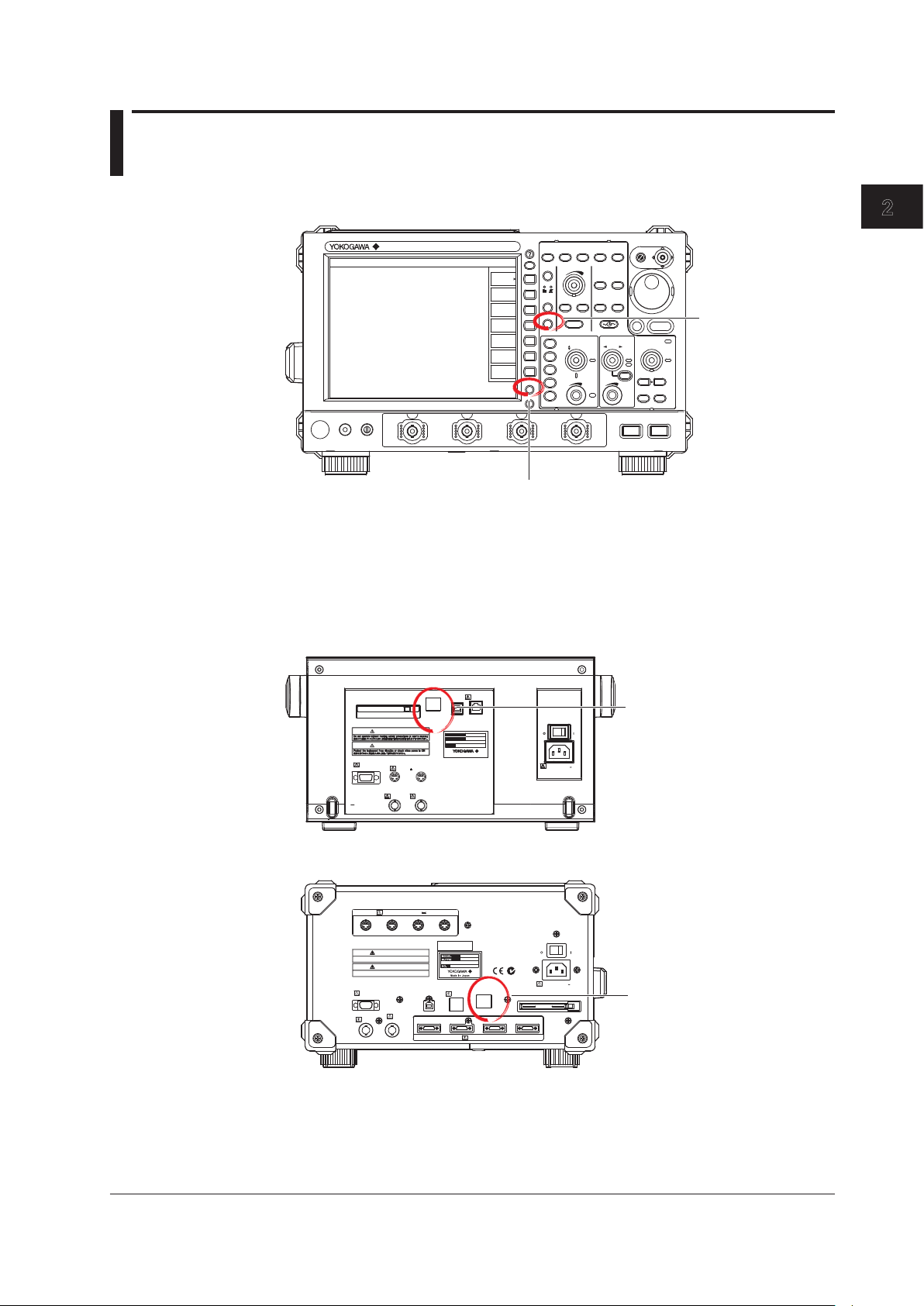
1.1 Part Names and Functions
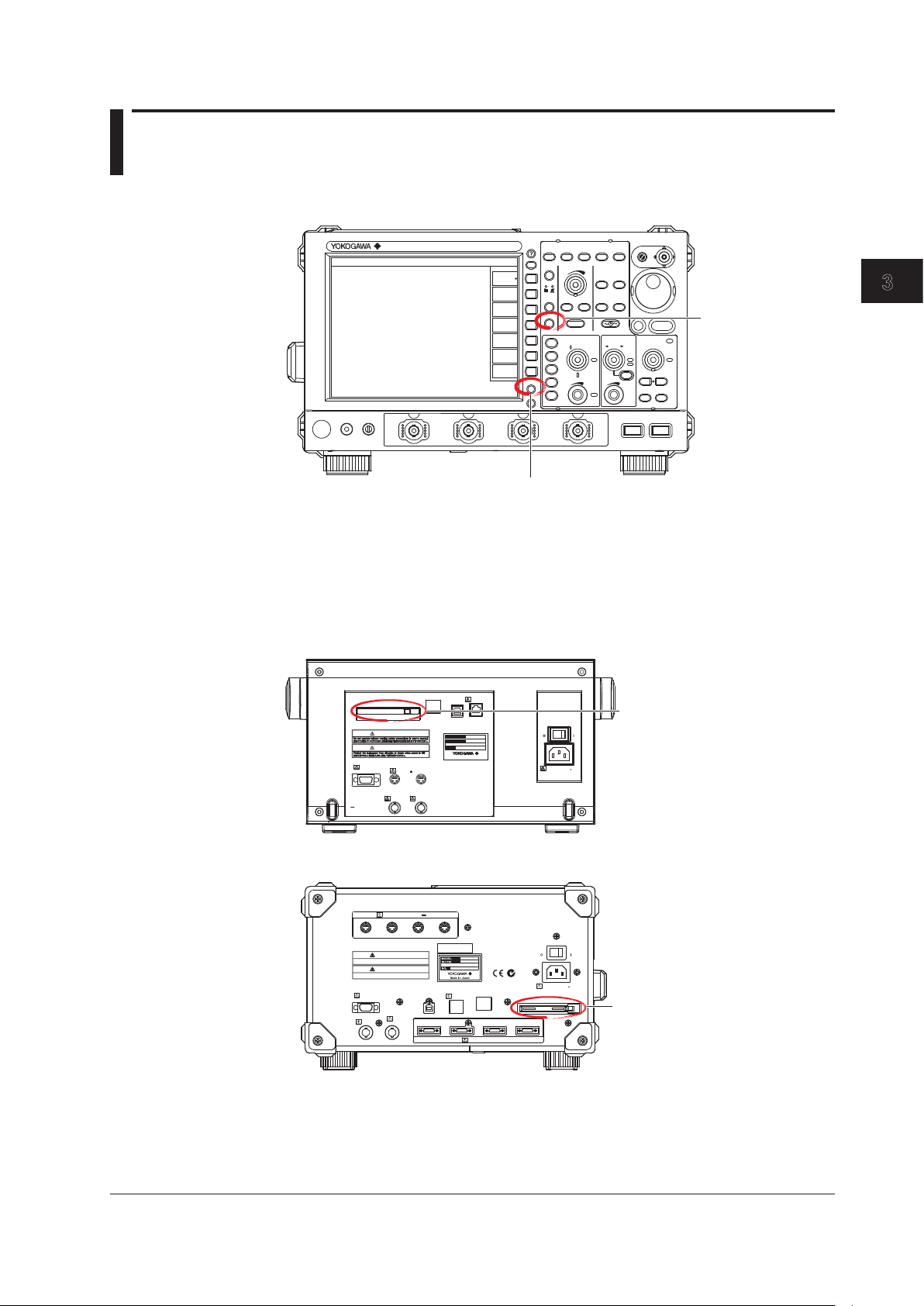
Front Panel
PRINT
FILE
UTILITY
DISPLAY
ACQUIRE
X - Y
VERTICAL
POSITION
PUSH
ODIV
PUSH
FINE
SCALE
HORIZONTAL
POSITION
TIME/DIV
PUSH
50%
0 s
TRIGGER
LEVEL
TRIG’D
PUSH
50%
ZOOM
EDGE
ENHANCED
MODE B TRIG
ACTION
GO / NO-GO
ZOOM1 ZOOM2
SEARCH
4
3
21
RUN / STOP
SHIFT
DELAY
1
2
3
4
LOGIC
ESC
CLEAR
SNAP
CURSOR
MEASURE
ANALYSIS
MATH/REF
FFTFFTMASK
MENU
AUTO
SETUP
SETUP
MENU
HISTORY
SINGLE
REST SE T
SYSTEM key
Press this key to select
the USB interface.
SHIFT + CLEAR key
Press this key to clear the remote mode
(controlled via communications) and enter the
local mode in which key operations are
enabled. However, this act is invalid if the
instrument has been set to Local Lockout mode
(see page 1-3) by the controller.
Rear Panel
WARNING
警告
CAUTION
注意
VIDEO OUT
(XGA)
PROBE POWER
( )
12 V DC
TRIG IN
TRIG OUT
ETHERNET
100BASE-TX
ACT
LINK
USB
GO/NOG O
MAIN POWER
OFF ON
100 - 120/2 20 - 24 0 V AC
300 VA MAX 50/60 H z
MODEL
NO.
SUFFIX
Made in Japan
No Auto-MDIX
WARNING
警告
Do not operate without reading safety precautions in user’s manual.
安全にご私用していただくために、取扱説明書に記載の注意事項を必ずお守りください。
CAUTION
注意
Protect the instrument from vibration or shock when power is ON.
故障を防ぐために、電源投入中は、振動/衝撃を避けてください。
PROBE POWER (±12 V DC
)
VIDEO OUT
(
XGA
)
TRIG IN
TRIG OUT
USB
GO/NOGO
ETHERNET
100BASE-TX
ACT
LINK
LOGIC PROBE
A
B C D
N20 0
MAIN POWER
OFF
ON
100 - 120/220 - 240 V AC
300 VA MAX 50/60 Hz
No Auto-MDIX
DL6000
DLM6000
USB interface connector
Connector used to connect the
DL6000/DLM6000 to the
controller (such as a PC) using a
USB cable.
USB interface connector
Connector used to connect the
DL6000/DLM6000 to the
controller (such as a PC) using a
USB cable.
Page 9

1-2
IM DLM6054-17EN
1.2 USB Interface Functions and Specifications
USB Interface Functions
Reception Function
You can specify the same settings as those specified by front panel key operations.
Receives output requests for measured and computed data, setup parameters of the panel, and
error codes.
Transmission Function
Outputs measured and computed data.
Outputs panel setup parameters and the status byte.
Outputs error codes that have occurred.
USB Interface Specifications
Electrical and mechanical specifications: Conforms to USB Rev. 2.0
Connector: Type B connector (receptacle)
Number of ports: 1
Power supply: Self-powered
PC system supported: PC running Windows 2000 or Windows XP with a standard USB
port (a separate device driver is needed to connect to a PC).
Data Rate
Controller: PC (Pentium4 3.4 GHz, USB2.0) and OS (Windows XP Professional
SP1)
Language used:
Visual C++
The table below lists the reference response times when outputting waveform data of analog signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 51 ms Approx. 0.469 s
125000 Approx. 193 ms Approx. 22.766 s
1250000 Approx. 1606 ms Approx. 224.890 s
2500000 Approx. 3188 ms Approx. 451.297 s
6250000 Approx. 7841 ms Approx. 1127.625 s
The table below lists the reference response times when outputting waveform data of logic signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 78 ms Approx. 0.141 s
125000 Approx. 625 ms Approx. 3.516 s
1250000 Approx. 5547 ms Approx. 34.531 s
2500000 Approx. 11156 ms Approx. 69.375 s
6250000 Approx. 27812 ms Approx. 173.266 s
Page 10
1-3
IM DLM6054-17EN
Overview of the USB Interface
1
1.2 USB Interface Functions and Specifications
Switching between Remote and Local Modes
When Switching from Local to Remote Mode
If the DL6000/DLM6000 receives a “:COMMunicate:REMote ON” command from the PC when it is
in the local mode, it switches to the remote mode.
•
REMOTE is displayed in the center of the upper section of the screen.
• All keys except the
SHIFT + CLEAR key are disabled.
•
Settings entered in local mode are retained even when the DL6000/DLM6000 switches to remote
mode.
When Switching from Remote to Local Mode
Pressing SHIFT + CLEAR in remote mode puts the instrument in local mode. However, this is void
when the DL6000/DLM6000 has received a “:COMMunicate:LOCKout ON” command from the PC
(local lockout condition). When the DL6000/DLM6000 receives a “:COMMunicate:REMote OFF”
command from the PC, the DL6000/DLM6000 switches to the local mode regardless of the local
lock condition.
•
REMOTE indication in the center of the upper section of the screen disappears.
• Key operations are enabled.
• Settings entered in remote mode are retained even when the DL6000/DLM6000 switches to local
mode.
Note
The USB interface cannot be used simultaneously with another interface (Ethernet or GP-IB interface).
Page 11

1-4
IM DLM6054-17EN
1.3 Connection via the USB Interface
Precautions to Be Taken When Making Connections
• Connect the USB cable by inserting the connector firmly into the USB connector.
• When connecting multiple devices using USB hubs, connect the DL9710L to the USB hub that is
closest to the controller.
•
Do not insert the USB cable into the GO/NO-GO output terminal. If you do, the instrument may
malfunction.
Page 12

1-5
IM DLM6054-17EN
Overview of the USB Interface
1
1.4 Setting the DL6000/DLM6000 (USB)
Procedure
UTILITY_Remote Control_UBS Menu
Press UTILITY, the Remote Control soft key, and then the USB soft key to display the following.
To remotely control the
DL6000/DLM6000 using
communication commands
through the USB port, select
USBTMC and then enable the
setting by restarting the
DL6000/DLM6000.
Note
• Only the communication interface selected by Remote Control is enabled. The DL6000/DLM6000 does
not accept commands that are transmitted to other unselected communication interfaces.
• To control the DL6000/DLM6000 remotely using communication commands through the USB port, select
“TMC” in the menu above, and carry out the procedure below.
• You must restart the DL6000/DLM6000 to activate the TMC or Mass Storage setting. Wait at least 10
seconds after you turn the power switch OFF, and then turn the switch back ON.
• Install YOKOGAWA’s TMC (Text and Measurement Class) driver into your PC. To obtain YOKOGAWA’
s USB TMC driver, contact your nearest YOKOGAWA dealer or access the following USB driver page
at our Web site and download it.
http://www.yokogawa.com/tm/tm-softdownload.htm
• Only use the USB TMC driver (or software) provided by YOKOGAWA.
• You cannot use keys to perform file operations when a PC is connected to the DL6000/DLM6000 and the
Mass Storage setting is enabled. You cannot use communication commands to perform file operations
either. To perform file operations, you must restart the DL6000/DLM6000 after disconnecting the PC or
enabling the TMC setting.
Page 13
2-1
IM DLM6054-17EN
Overview of the Ethernet Interface (Optional)
1
2
2.1 Part Names and Functions
Front Panel
PRINT
FILE
UTILITY
DISPLAY
ACQUIRE
X - Y
VERTICAL
POSITION
PUSH
ODIV
PUSH
FINE
SCALE
HORIZONTAL
POSITION
TIME/DIV
PUSH
50%
0 s
TRIGGER
LEVEL
TRIG’D
PUSH
50%
ZOOM
EDGE
ENHANCED
MODE B TRIG
ACTION
GO / NO-GO
ZOOM1 ZOOM2
SEARCH
4
3
21
RUN / STOP
SHIFT
DELAY
1
2
3
4
LOGIC
ESC
CLEAR
SNAP
CURSOR
MEASURE
ANALYSIS
MATH/REF
FFTFFTMASK
MENU
AUTO
SETUP
SETUP
MENU
HISTORY
SINGLE
REST SE T
SHIFT + CLEAR key
Press this key to switch from remote mode to
local mode and enable the front panel keys. This
key is disabled when the DL6000/DLM6000 has
been set to Local Lockout mode (see page 2-3)
by a controller.
SYSTEM key
Press this key to select
the Ethernet or VXI-11
interface.
Rear Panel
WARNING
警告
CAUTION
注意
VIDEO OUT
(XGA)
PROBE POWER
( )
12 V DC
TRIG IN
TRIG OUT
ETHERNET
100BASE-TX
ACT
LINK
USB
GO/NOG O
MAIN POWER
OFF ON
100 - 120/2 20 - 24 0 V AC
300 VA MAX 50/60 H z
MODEL
NO.
SUFFIX
Made in Japan
No Auto-MDIX
WARNING
警告
Do not operate without reading safety precautions in user’s manual.
安全にご私用していただくために、取扱説明書に記載の注意事項を必ずお守りください。
CAUTION
注意
Protect the instrument from vibration or shock when power is ON.
故障を防ぐために、電源投入中は、振動/衝撃を避けてください。
PROBE POWER (±12 V DC
)
VIDEO OUT
(
XGA
)
TRIG IN
TRIG OUT
USB
GO/NOGO
ETHERNET
100BASE-TX
ACT
LINK
LOGIC PROBE
A
B C D
N20 0
MAIN POWER
OFF
ON
100 - 120/220 - 240 V AC
300 VA MAX 50/60 Hz
No Auto-MDIX
DL6000
DLM6000
Ethernet port
This port is for connecting the
DL6000/DLM6000 to a controller
(such as a PC) using an
Ethernet cable.
Ethernet port
This port is for connecting the
DL6000/DLM6000 to a controller
(such as a PC) using an
Ethernet cable.
Chapter 2 Overview of the Ethernet Interface (Optional)
Page 14
2-2
IM DLM6054-17EN
2.2 Ethernet/VXI-11 Interface Features and Specifications
Ethernet/VXI-11 Interface Features
Reception Feature
The DL6000/DLM6000 reception feature allows you to specify the same settings through an
Ethernet connection that you can specify using the front panel keys.
The DL6000/DLM6000 can receive output requests for measu
red and computed data, panel setting
data, and error codes.
Transmission Feature
The DL6000/DLM6000 can transmit measured and computed data.
The DL6000/DLM6000 can transmit panel setting data and the status byte.
The DL6000/DLM6000 can transmit error codes when errors occur.
Ethernet/VXI-11 Interface Specifications
Electrical and mechanical
specifications
IEEE802.3 compliant
Simultaneous connections 1
Port number Ethernet: 10001/tcp
VXI-11: 10240/tcp, 10250/tcp, 111/tcp, and 111/udp
Data Transfer Rates
Controller: PC (Pentium 4 3.4-GHz) with Windows XP Professional SP1
Network adapter: Corega FEther PCI-TXL
Programming language: Visual C++
Ethernet Interface (/C8, /C9, /C10 and /C12 options)
The following table contains approximate waveform data response times for analog signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 16 ms Approx. 0.391 s
125000 Approx. 259 ms Approx. 19.063 s
1250000 Approx. 2313 ms Approx. 189.812 s
2500000 Approx. 4595 ms Approx. 379.750 s
6250000 Approx. 10400 ms Approx. 950.532 s
The following table contains approximate waveform data response times for logic signals.
Number of Data Points Double Word Data ASCII Data
2500 Approx. 31 ms Approx. 0.078 s
125000 Approx. 704 ms Approx. 3.530 s
1250000 Approx. 6768 ms Approx. 35.327 s
2500000 Approx. 14081 ms Approx. 70.952 s
6250000 Approx. 34523 ms Approx. 177.313 s
VXI-11 Ethernet Interface (/C8, /C9, /C10 and /C12 options)
The following table contains approximate waveform data response times for analog signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 31 ms Approx. 0.406 s
125000 Approx. 235 ms Approx. 19.172 s
1250000 Approx. 2286 ms Approx. 191.876 s
2500000 Approx. 4541 ms Approx. 383.012 s
6250000 Approx. 11150 ms Approx. 958.128 s
Page 15

2-3
IM DLM6054-17EN
Overview of the Ethernet Interface (Optional)
1
2
The following table contains approximate waveform data response times for logic signals.
Number of Data Points Double Word Data ASCII Data
2500 Approx. 31 ms Approx. 0.094 s
125000 Approx. 828 ms Approx. 3.906 s
1250000 Approx. 6938 ms Approx. 37.345 s
2500000 Approx. 13344 ms Approx. 74.143 s
6250000 Approx. 32126 ms Approx. 184.894 s
Switching between Remote and Local Modes
When Switching from Local to Remote Mode
The DL6000/DLM6000 switches to remote mode when it is in local mode and it receives a
:COMMunicate:REMote ON
command from the PC.
•
“REMOTE” appears at the top center of the screen.
• All keys except the
SHIFT + CLEAR key are disabled.
•
Settings entered in local mode are retained even when the DL6000/DLM6000 switches to remote
mode.
When Switching from Remote to Local Mode
When the DL6000/DLM6000 is in remote mode and you press SHIFT + CLEARCLEAR, the
DL6000/DLM6000 switches to Local mode, unless it has received a
:COMMunicate:LOCKout
ON
command from the PC, in which case pressing SHIFT + CLEARCLEAR will have no effect.
The DL6000/DLM6000 switches to local mode when it receives a
:COMMunicate:REMote OFF
command from the PC, regardless of the local lockout state.
•
The “REMOTE” indicator at the top center of the screen disappears.
• Key operations are enabled.
• Settings entered in remote mode are retained even when the DL6000/DLM6000 switches to local
mode.
Note
The Ethernet/VXI-11 interface cannot be used simultaneously with another interface (USB or GP-IB
interface).
User Authentication Feature
You must enter a user name and password to access the DL6000/DLM6000 through the Ethernet
interface. If the DL Series Library (TMCTL) version is 1.40 or later, the password is encrypted using the
MD5 algorithm (RSA Data Security, Inc. MD5 Message-Digest Algorithm) and then sent to the DL6000/
DLM6000.
Set the user name and password in the Remote Control setup screen in the DL6000/DLM6000
UTILITY menu. For instructions on how to set the user name and password, see section 2.4, “Setting
the DL6000/DLM6000 (Network).”
If you select VXI-11 in the Device menu of the Remote Control setup screen (explained later), the user
authentication setup menu will not appear in the Remote Control setup screen.
2.2 Ethernet/VXI-11 Interface Features and Specifications
Page 16

2-4
IM DLM6054-17EN
2.3 Connecting to the Ethernet/VXI-11 Interface
Connection Procedure
Connect a UTP (Unshielded Twisted-Pair) or STP (Shielded Twisted-Pair) cable that is connected to a
hub or other network device to the 100BASE-TX port on the DL6000/DLM6000 rear panel.
PC
DL6000/
DLM6000
Hub or router that supports 100BASE-TX
Straight UTP or STP cable
ETHERNET
100BASE-TX
ACT
LIN K
No Auto-MDIX
RJ-45 modular jack
100BASE-TX Ethernet port
LINK LED
Illuminates when a link is established
between the DL9500/DL9700 and another
device and the devices are capable of
communicating with each other
ACT LED
Blinks when packets are being sent
and received normally
Notes about Connections
• Be sure to connect the DL6000/DLM6000 to a PC through a hub using straight cables. The DL6000/
DLM6000 may not operate properly if you connect it to a PC directly using a cross cable.
•
If you use UTP cables (straight cables), make sure that they are category 5.
Page 17

2-5
IM DLM6054-17EN
Overview of the Ethernet Interface (Optional)
1
2
2.4 Setting the DL6000/DLM6000 (Network)
Procedure
UTILITY_Remote Control_Network Menu
Press UTILITY, the Remote Control soft key, and then the Network or Network(VXI-11) soft key to
display the following menu.
Select to use the
Ethernet interface.
Select to use the
VXI-11 interface.
Set the timeout value.
Set the timeout value.
Set the user name.
Set the password.
Note
• Only the interface that you select after pressing Remote Control is valid. The DL6000/DLM6000 does not
accept commands that are transmitted to other unselected communication interfaces.
• For details on how to operate the soft keyboard, see section 4.2, “Entering Values and Strings” in the
DL6000/DLM6000 User’s Manual (IM DLM6054-01EN).
• User names and passwords are case-sensitive.
Explanation
To use a controller to configure the same settings that you can configure using the DL6000/DLM6000
keys or to send setting parameters and waveform data to a controller, you must configure the settings
described below.
User Name and Password
The Ethernet interface has a user authentication feature. Set the DL6000/DLM6000 user name and
password in advance.
If you select VXI-11 in the Device menu of the Remote Control setup screen, the user authentication
setup menu will not appear in the Remote Control setup screen.
User Name
Set the user name using up to 30 characters. The default setting is “anonymous.”
Password
Set the password using up to 30 characters.
Page 18
2-6
IM DLM6054-17EN
Timeout Value
The DL6000/DLM6000 disconnects itself from the controller if it is not accessed for the period of time
that you specify using the timeout value.
TCP/IP
To use the Ethernet interface, you must specify the following TCP/IP settings.
• IP address
• Subnet mask
• Default gateway
For details on how to specify these settings, see section 14.2, “Setting Up the TCP/IP” in the DL6000/
DLM6000 User’s Manual (IM DLM6054-01EN).
Note
• The DL6000/DLM6000 terminates the connection if there is an error in the user authentication process.
• You do not need to enter a password when the user name is set to “anonymous.”
2.4 Setting the DL6000/DLM6000 (Network)
Page 19
3-1
IM DLM6054-17EN
Overview of the GP-IB Interface
1
2
3
3.1 Part Names and Functions
Front Panel
PRINT
FILE
UTILITY
DISPLAY
ACQUIRE
X - Y
VERTICAL
POSITION
PUSH
ODIV
PUSH
FINE
SCALE
HORIZONTAL
POSITION
TIME/DIV
PUSH
50%
0 s
TRIGGER
LEVEL
TRIG’D
PUSH
50%
ZOOM
EDGE
ENHANCED
MODE B TRIG
ACTION
GO / NO-GO
ZOOM1 ZOOM2
SEARCH
4
3
21
RUN / STOP
SHIFT
DELAY
1
2
3
4
LOGIC
ESC
CLEAR
SNAP
CURSOR
MEASURE
ANALYSIS
MATH/REF
FFTFFTMASK
MENU
AUTO
SETUP
SETUP
MENU
HISTORY
SINGLE
REST SE T
SYSTEM key
Press this key to select
the USB interface.
SHIFT + CLEAR key
Press this key to clear the remote mode
(controlled via communications) and enter the
local mode in which key operations are
enabled. However, this act is invalid if the
instrument has been set to Local Lockout mode
(see page 3-3) by the controller.
Rear Panel
WARNING
警告
CAUTION
注意
VIDEO OUT
(XGA)
PROBE POWER
( )
12 V DC
TRIG IN
TRIG OUT
ETHERNET
100BASE-TX
ACT
LINK
USB
GO/NOG O
MAIN POWER
OFF ON
100 - 120/2 20 - 24 0 V AC
300 VA MAX 50/60 H z
MODEL
NO.
SUFFIX
Made in Japan
No Auto-MDIX
WARNING
警告
Do not operate without reading safety precautions in user’s manual.
安全にご私用していただくために、取扱説明書に記載の注意事項を必ずお守りください。
CAUTION
注意
Protect the instrument from vibration or shock when power is ON.
故障を防ぐために、電源投入中は、振動/衝撃を避けてください。
PROBE POWER (±12 V DC
)
VIDEO OUT
(
XGA
)
TRIG IN
TRIG OUT
USB
GO/NOGO
ETHERNET
100BASE-TX
ACT
LINK
LOGIC PROBE
A
B C D
N20 0
MAIN POWER
OFF
ON
100 - 120/220 - 240 V AC
300 VA MAX 50/60 Hz
No Auto-MDIX
DL6000
DLM6000
PC card slot
Connect a GP-IB card to the
PC card slot
and connect to a controller
(such as a PC).
PC card slot
Connect a GP-IB card to the
PC card slot
and connect to a controller
(such as a PC).
Chapter 3 Overview of the GP-IB Interface
Page 20
3-2
IM DLM6054-17EN
3.2 Connecting the GP-IB Card
GP-IB Card
Use the NI PCMCIA-GPIB card by National Instruments.
GP-IB Cable
Use the GP-IB cable that comes with the GP-IB card.
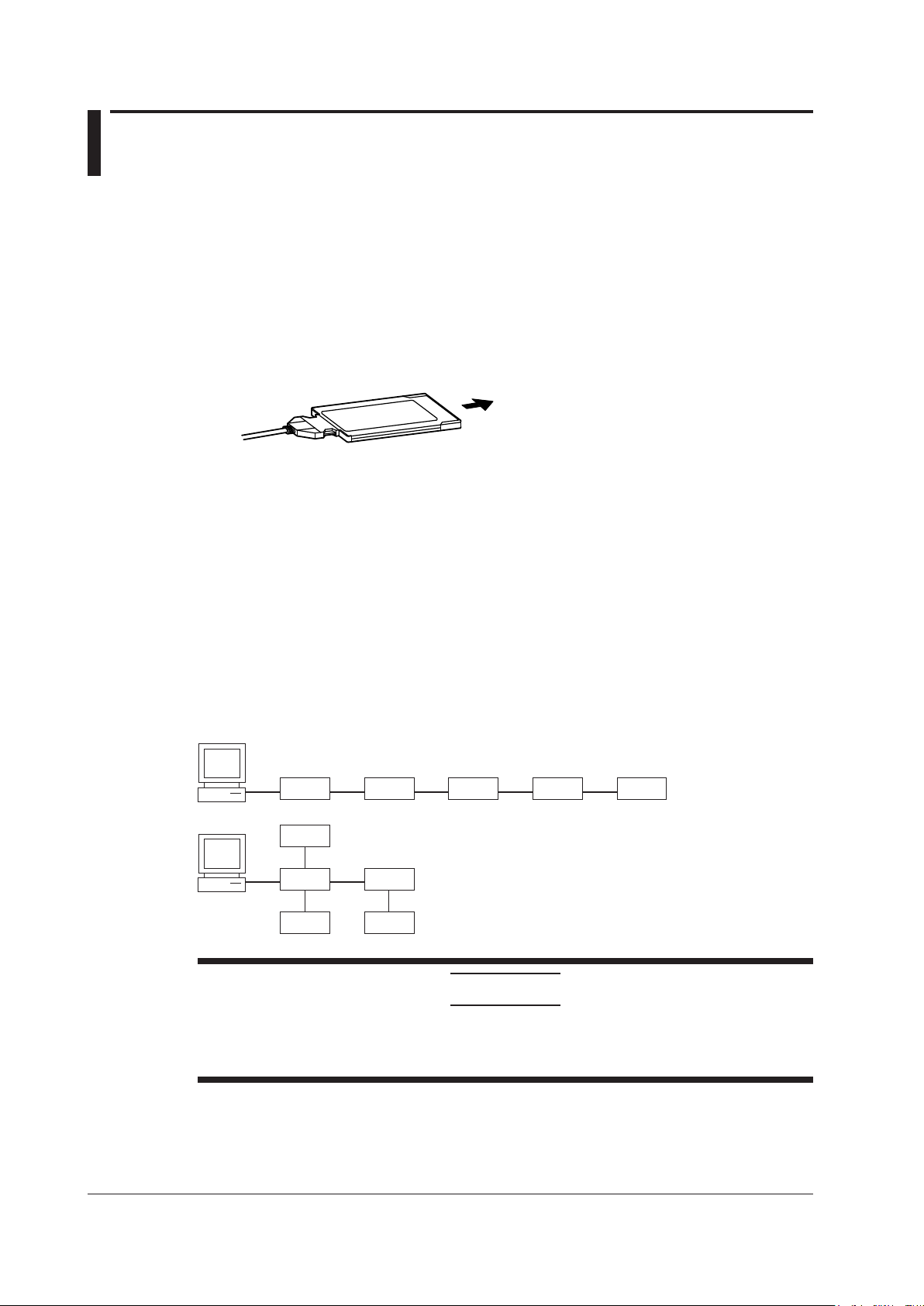
Connection Procedure
Insert the GP-IB card into the DL6000/DLM6000 PC card slot.
To the PC card slot of the DL6000/DLM6000
GP-IB card
GP-IB cable
Precautions to Be Taken When Making Connections
• For the handling of the GP-IB card, see the manual that comes with the GP-IB card.
• Attach the GP-IB correctly with the front face up.
• Connect the GP-IB card to the DL6000/DLM6000 PC card slot first. Then, turn the DL6000/
DLM6000 ON.
•
Multiple cables can be used to connect multiple devices. However, no more than 15 devices
including the controller can be connected on a single bus.
•
When connecting multiple devices, each device must have its own unique address.
• Use a cable of length 2 m or less for connecting the devices.
• Make sure the total cable length does not exceed 20 m.
• When communicating, have at least two-thirds of the devices turned ON.
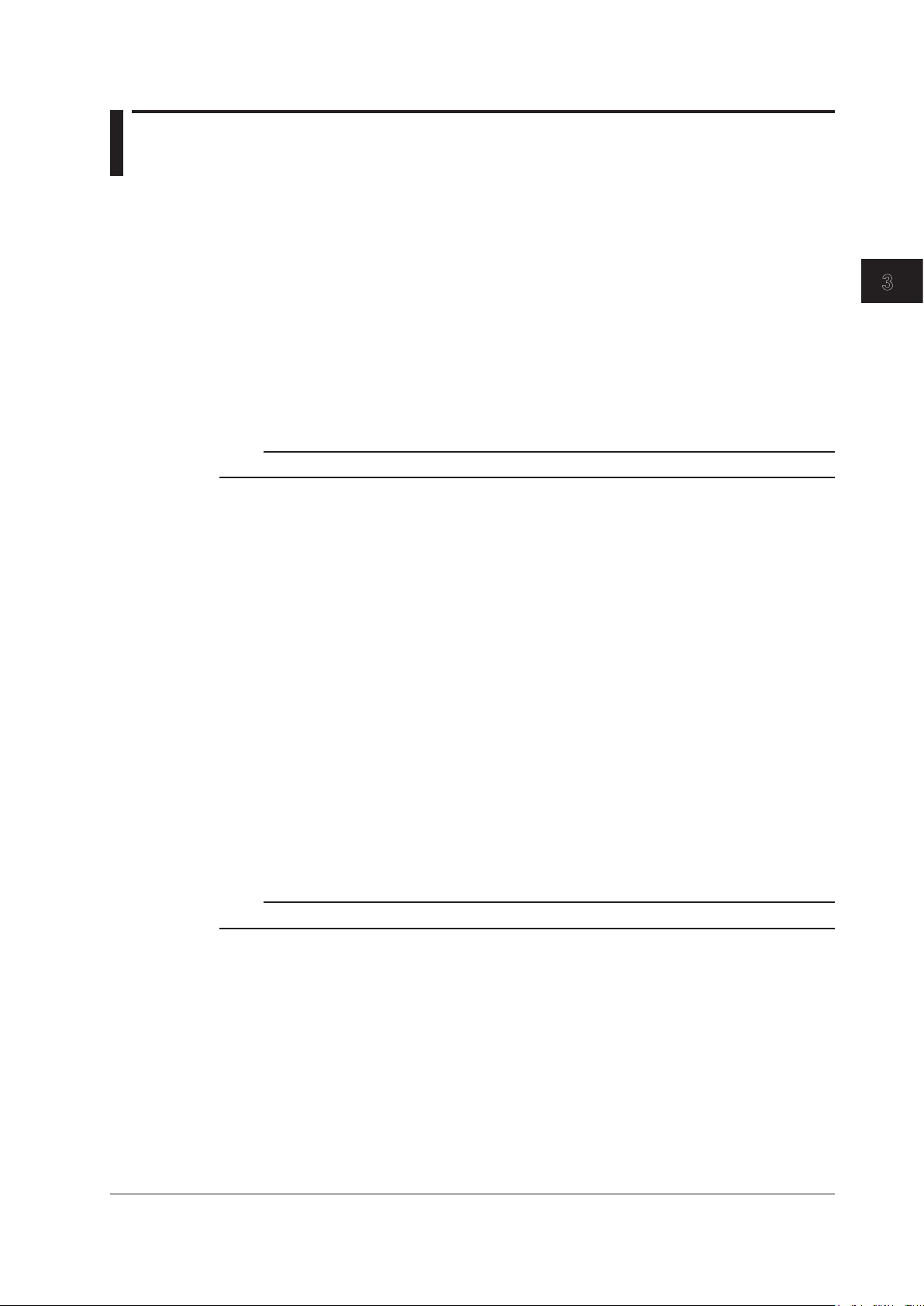
• When connecting multiple devices, connect them in a star or linear configuration (see the figure
below). Do not wire them in a loop or parallel configuration.
CAUTION
When connecting or disconnecting communication cables, make sure to turn OFF the PC and
the DL6000/DLM6000. Otherwise, erroneous operation or damage to the internal circuitry
may result.
Page 21
3-3
IM DLM6054-17EN
Overview of the GP-IB Interface
1
2
3
3.3 GP-IB Interface Functions
GP-IB Interface Functions
Listener Capability
• All of the information that you can set with the panel keys can be set through the GP-IB interface
except for turning ON/OFF the power and setting the communication parameters.
•
Receives commands from a controller requesting the output of setup information, waveform data,
and other information.
•
Also receives status report commands.
Talker Capability
Outputs setup information, waveform data, and other information.
Note
Listen-only, talk-only, and controller capabilities are not available on the DL6000/DLM6000.
Switching between Remote and Local Modes
When Switching from Local to Remote Mode
Receiving a REN (Remote Enable) message from the PC when the DL6000/DLM6000 is in the local
mode causes the DL6000/DLM6000 to switch to the remote mode.
•
REMOTE is displayed in the center of the upper section of the screen.
• All keys except the
SHIFT + CLEAR key are disabled.
•
Settings entered in local mode are retained even when the DL6000/DLM6000 switches to remote
mode.
When Switching from Remote to Local Mode
Pressing SHIFT + CLEAR in remote mode puts the DL6000/DLM6000 in local mode. However, this
act is invalid if the DL6000/DLM6000 has been set to Local Lockout mode (see page 3-6) by the
controller.
•
REMOTE indication in the center of the upper section of the screen disappears.
• Key operations are enabled.
• Settings entered in remote mode are retained even when the DL6000/DLM6000 switches to local
mode.
Note
The GP-IB interface cannot be used simultaneously with another interfaces (USB or network interfaces).
Page 22
3-4
IM DLM6054-17EN
3.4 GP-IB Interface Specifications
GP-IB Interface Specifications
Electrical and mechanical specifications: Conforms to IEEE St’d 488-1978
Functional specifications: See table below.
Protocol: Conforms to IEEE St’d 488.2-1992
Code used: ISO (ASCII) code
Mode: Addressable mode
Address setting: The address can be set in the range from 0 to 30 on
the GP-IB setting screen that is played using the MISC
menu.
Clear remote mode:
Remote mode can be cleared by pressing SHIFT +
CLEAR except when the DL6000/DLM6000 has been
set to Local Lockout mode by the controller.
Functional specifications
Function Subset Name Description
Source handshaking SH1 Full source handshaking capability
Acceptor handshaking AH1 Full acceptor handshaking capability
Talker T6 B
asic talker capability, serial polling, untalk on MLA (My
Listen Address), and no talk-only capability
Listener L4 Basic listener capability
, unlisten on MTA (My Talk
Address), and no listen-only capability.
Service request SR1 Full service request capability
Remote local RL1 Full remote/local capability
Parallel polling PP0 No parallel polling capability
Device clear DC1 Full device clear capability
Device trigger DT0 No device trigger capability
Controller C0 No controller capability
Electrical characteristics E1 Open collector
Data Rate
Controller: PC (Pentium4 3.4 GHz, USB 2.0), OS (Windows XP Professional SP1)
Language used: Visual C++
The table below lists the reference response times when outputting waveform data of analog signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 16 ms Approx. 0.390 s
125000 Approx. 344 ms Approx. 19.453 s
1250000 Approx. 3172 ms Approx. 194.516 s
2500000 Approx. 6282 ms Approx. 389.047 s
6250000 Approx. 15641 ms Approx. 971.985 s
The table below lists the reference response times when outputting waveform data of logic signals.
Number of Data Points Word Data ASCII Data
2500 Approx. 32 ms Approx. 0.078 s
125000 Approx. 859 ms Approx. 3.609 s
1250000 Approx. 8707 ms Approx. 36.172 s
2500000 Approx. 17365 ms Approx. 72.500 s
6250000 Approx. 43678 ms Approx. 182,000 s
Page 23

3-5
IM DLM6054-17EN
Overview of the GP-IB Interface
1
2
3
3.5 Setting the DL6000/DLM6000 (GP-IB)
Procedure
UTILITY_Remote Control_GP-IB Menu
Press UTILITY, the Remote Control soft key, and then the GPIB soft key to display the following
menu.
Select GP-IB.
Set the address.
Note
Only the communication interface selected by Remote Control is enabled. The DL6000/DLM6000 does not
accept commands that are transmitted to other unselected communication interfaces.
Explanation
Enter the following settings when using a controller to set information that can be specified through key
operation on the DL6000/DLM6000 or when outputting setting parameters or output waveform data to
the controller.
Setting the Address
Set the address of the DL6000/DLM6000 within the following range for the addressable mode.
0 to 30
Each device that can be connected via GP-IB has a unique address within the GP-IB system. This
address is used to distinguish the device from others. Therefore, when you connect the DL6000/
DLM6000 to a PC, for example, make sure to assign a unique address to the DL6000/DLM6000.
Note
Do not change the address while the controller is communicating with the DL6000/DLM6000 or other devices
over the GP-IB.
Page 24

3-6
IM DLM6054-17EN
3.6 Responses to Interface Messages
Responses to Interface Messages
Responses to a Uni-Line Message
• IFC (Interface Clear)
Clears the talker and listener functions. Stops output if data are being output.
• REN (Remote Enable)
Switches between the remote and local modes.
IDY (Identify) is not supported.
Responses to a Multi-Line Message (Address Command)
• GTL (Go To Local)
Switches to the local mode.
• SDC (Selected Device Clear)
• Clears the program message (command) being received and the output queue (see page 6-5).
• *OPC and *OPC? commands in execution are void.
• The *WAI and COMMunicate:WAIT commands are immediately terminated.
PPC (Parallel Poll Configure), GET(Group Execute Trigger), and TCT (Take Control) are not
supported.
Responses to a Multi-Line Message (Universal Command)
• LLO (Local Lockout)
Disables CLEAR on the front panel to prohibit switching to the local mode.
•
DCL (Device Clear)
Same operation as the SDC message.
• SPE (Serial Poll Enable)
Sets the talker function on all devices on the bus to serial polling mode. The controller polls the
devices in order.
•
SPD (Serial Poll Disable)
Clears the serial polling mode of the talker function on all devices on the bus.
PPU (Parallel Poll Unconfigure) is not supported.
What Are Interface Messages
Interface messages are also referred to as interface commands or bus commands. They are
commands that are issued by the controller. They are classified as follows:
Uni-Line Messages
A single control line is used to transmit uni-line messages. The following three types are available.
• IFC (Interface Clear)
• REN (Remote Enable)
• IDY (Identify)
Page 25
3-7
IM DLM6054-17EN
Overview of the GP-IB Interface
1
2
3
Multi-Line Messages
Eight data lines are used to transmit multi-line messages. The messages are classified as follows:
• Address Commands
These commands are valid when the instrument is designated as a listener or as a talker. The
following five types are available.
Commands that are valid on an instrument that is designated
as a listener
• GTL (Go To Local)
• SDC (Selected Device Clear)
• PPC (Parallel Poll Configure)
• GET (Group Execute Trigger)
Commands that are valid on an instrument that is designated as a talker
• TCT (Take Control)
• Universal commands
These commands are valid on all instruments regardless of the listener and talker designations.
The following five types are available.
•
LLO (Local Lockout)
• DCL (Device Clear)
• PPU (Parallel Poll Unconfigure)
• SPE (Serial Poll Enable)
• SPD (Serial Poll Disable)
In addition, listener address, talker address, and secondary commands are also considered interface
messages.
Interface messages
Uni-line
messages
Address
commands
Universal
commands
♦HIFC
♦HREN
IDY
♦HGTL
♦HSDC
PPC
GET
TCT
♦HLLO
♦HDCL
PPU
♦HSPE
♦HSPD
Listener
address
Talker
address
Secondary
commands
Multi-line messages
Interface messages that DL6000/DLM6000 supports are indicated with ♦ marks.
Note
The Differences between SDC and DCL
In multi-line messages, SDC messages are those that require talker or listener designation and DCL
messages are those that do not require the designation. Therefore, SDC messages are directed at a
particular instrument while DCL messages are directed at all instruments on the bus.
3.6 Responses to Interface Messages
Page 26
4-1
IM DLM6054-17EN
Before Programming
1
2
3
4
4.1 Messages
Program Message Unit Format
The program message unit format is shown below
,
<Program header>
<Program data>Space
<Program Header>
The program header indicates the command type. For
details, see page 4-3.
<Program Data>
If certain conditions are required in executing a
command, program data is added. A space (ASCII
code “20H”) separates the program data from the
header. If there are multiple sets of program data, they
are separated by commas (,).
For details, see page 4-5.
Example
:ACQuire:MODE NORMal<PMT>
Header Data
Response Messages
The response message format is shown belo.
<RMT>
;
<Response message unit>
<Response Message Unit>
A response message consists of one or more
response message units; each response message unit
corresponds to one response.
Response message units are separated by a semicolon
(;).
For details regarding the format of the response
message unit, see the next section.
Example
Unit Unit
:ACQUIRE:MODE NORMAL;HRMode 1<RMT>
<RMT>
A response message terminator. It is
NL^EOM
.
Messages
Messages are used to exchange information between
the controller and the instrument. Messages that are
sent from the controller to the instrument are called
program messages and messages that are sent
back from the instrument to the controller are called
response messages.
If a program message contains a message unit that
requests a response (a query), the instrument returns
a response message upon receiving the program
message. A single response message is always
returned in response to a single program message.
Program Messages
The program message format is shown below
<PMT>
;
<Program message unit>
<Program Message Unit>
A program message consists of zero or more
program message units; each unit corresponds to
one command. The instrument executes the received
commands in order.
Each program message unit is separated by a
semicolon (;).
For details regarding the format of the program
message unit, see the next section.
Example
Unit Unit
:ACQuire:MODE NORMal;HRMode 1<PMT>
<PMT>
PMT is a program message terminator. The following
three types are available.
NL
(New Line):
Same as LF (Line Feed). ASCII
code “0AH”
^EOM
:
The END message as defined by USBTMC
(The data byte that is sent simultaneously
with the END message is the last data of the
program message.)
NL^EOM
:
NL with an END message added
(NL is not included in the program
message.)
Chapter 4
Before Programming
Page 27

4-2
IM DLM6054-17EN
Response Message Unit Format
The response message unit format is shown belw.
,
<Response header>
<Response data>Space
<Response Header>
A response header sometimes precedes the response
data. A space separates the data from the header. For
details, see page 4-4.
<Response Data>
Response data contains the content of the response.
If there are multiple sets of response data, they are
separated by commas (,). For details, see page 4-5.
Example
1.25E-02<RMT> :ACQUIRE:MODE NORMAL<RMT>
HeaderData Data
If there are multiple queries in a program message,
responses are made in the same order as the queries.
In most cases, a single query returns a single response
message unit, but there are a few queries that return
multiple units. The first response message unit always
corresponds to the first query, but the n
th
response
unit may not necessarily correspond to the n
th
query.
Therefore, if you want to make sure that every
response is retrieved, divide the program messages
into individual messages.
Precautions to Be Taken when Transferring
Messages
• If a program message that does not contain a query
is sent, the next program message can be sent at
any time.
•
If a program message that contains a query is sent,
a response message must be received before the
next program message can be sent. If the next
program message is sent before the response
message is received in its entirety, an error occurs.
The response message that was not received is
discarded.
•
If the controller tries to receive a response message
when there is none, an error occurs. If the controller
tries to receive a response message before the
transmission of the program message is complete,
an error occurs.
•
If a program message containing multiple message
units is sent, and the message contains incomplete
units, the instrument attempts to execute the ones
that are believed to be complete. However, these
attempts may not always be successful. In addition,
if the message contains queries, the responses may
not be returned.
Deadlock
The instrument can store in its buffer program and
response messages of length 1024 bytes or more
(The number of available bytes varies depending on
the operating conditions). When both the transmit
and receive buffers become full at the same time, the
instrument can no longer continue to operate. This
state is called a deadlock. In this case, operation can
be resumed by discarding the program message.
Deadlock will not occur if the program message
(including the <PMT>) is kept below 1024 bytes.
Furthermore, deadlock never occurs if a program
message does not contain a query.
4.1 Messages
Page 28
4-3
IM DLM6054-17EN
Before Programming
1
2
3
4
4.2 Commands
• When Concatenating Commands of the Same
Group
The instrument stores the hierarchical level of the
command that is currently being executed, and
performs analysis on the assumption that the next
command sent will also belong to the same level.
Therefore, common header sections can be omitted
for commands belonging to the same group.
Example
:ACQuire:MODE NORMal;
INTERLeave 1<PMT>
•
When Concatenating Commands of Different
Groups
If the following command does not belong to the
same group, a colon (:) is placed in front of the
header (cannot be omitted).
Example
:ACQuire:MODE NORMal;:DISPlay:
FORMat SINGle<PMT>
•
When Concatenating Simple Headers
If a simple header follows another command, a
colon (:) is placed in front of the simple header
(cannot be omitted).
Example
:ACQuire:MODE NORMal;:
STARt<PMT>
•
When Concatenating Common Commands
Common commands that are defined in the
USBTMC-USB488 are independent of hierarchy.
Colons (:) are not needed before a common
command.
Example
:ACQuire:MODE NORMal;*CLS;
INTERLeave 1<PMT>
•
When Separating Commands with <PMT>
If a terminator is used to separate two commands,
each command is a separate message. Therefore,
the common header must be specified for each
command even when commands belonging to the
same command group are being concatenated.
Example
:ACQuire:MODE NORMal<PMT>:
ACQuire:INTERLeave 1<PMT>
Commands
There are three types of commands (program headers)
that are sent from the controller to the instrument.
They differ in their program header formats.
Common Command Header
Commands that are defined in the USBTMC-USB488
are called common commands. The header format of
a common command is shown below. An asterisk (*) is
always placed in the beginning of a cmmand.
*
<Mnemonic> ?
Common command example:
*CLS
Compound Header
Dedicated commands used by the instrument are
classified and arranged in a hierarchy according to
their functions. The format of a compound header is
shown below. A colon (:) must be used to specify a
lower hiearchy.
:
<Mnemonic> ?:
Compound header example:
:ACQuire:MODE
Simple Header
These commands are functionally independent and do
not have a hierarchy. The format of a simple header is
shownbelow.
<Mnemonic> ?:
Simple header example:
:STARt
Note
A <mnemonic> is a character string made up of
alphanumeric characters.
When Concatenating Commands
• Command Group
A command group is a group of commands that have
common compound headers arranged in a hierarchy.
A command group may contain sub-groups.
Example
Group of commands related to acquisition
:ACQuire:AVERage:COUNt
:ACQuire:MODE
:ACQuire:AVERage:EWEight
:ACQuire:REPetitive
:ACQuire:RLENgth
:ACQuire:INTERLeave
Page 29

4-4
IM DLM6054-17EN
Upper-Level Query
An upper-level query is a query in which a question
mark (?) is appended to the highest level command
of a group. Execution of an upper-level query allows
all settings that can be specified in the group to be
received at once. Some query groups which are
comprised of more than three hierarchical levels can
output all the lower level settings.
Example
:ACQUIRE? -> :ACQUIRE:AVERAGE:
COUNT 2;EWEIGHT 16;:ACQUIRE:
HRMODE 0;INTERLEAVE 0;
INTERPOLATE 1;MODE NORMAL;
REPETITIVE 0;RLENGTH 12500
The response to an upper-level query can be
transmitted as a program message back to the
instrument. In this way, the settings that existed when
the upper-level query was made can be restored.
However, some upper-level queries do not return setup
information that is not currently in use. It is important
to remember that not all the group’s information is
necessarily returned as part of a response.
Header Interpretation Rules
The instrument interprets the header that is received
according to the rules below.
•
Mnemonics are not case sensitive.
Example “
CURSor
” can also be written as “
cursor
”
or “
Cursor
.”
•
The lower-case section of the header can be
omitted.
Example “
CURSor
” can also be written as “
CURSO
”
or “
CURS
.”
•
The question mark (?) at the end of a header
indicates that it is a query. The question mark (?)
cannot be omitted.
Example
The shortest abbreviation for
CURSor?
is
CURS?
.
•
If the <x> (value) at the end of a mnemonic is
omitted, it is interpreted as a 1.
Example If “
CHANnel<x>
” is written as “
CHAN
,” it
means “
CHANnel1
.”
•
The section enclosed by braces ([]) can be
omitted.
Example
HISTory[:CURRent]:MODE
can also be
written as
HIST:MODE
.
However
, the last section enclosed by braces ([])
cannot be omitted in an upper-level query.
Example “
HISTory?
” and “
HISTory:CURRent?
”
are different queries.
4.2 Commands
Page 30

4-5
IM DLM6054-17EN
Before Programming
1
2
3
4
4.3 Response
Response
When the controller sends a message unit that has a
question mark (?) in its program header (query), the
instrument returns a response message to the query.
A response message is returned in one of the following
two forms.
•
Response Consisting of a Header and Data
If the response can be used as a program message
without any change, it is returned with a command
header attached.
Example
:ACQUire:MODE?<PMT>
-> :ACQUire:MODE NORMAL<RMT>
•
Response Consisting of Data Only
If the response cannot be used as a program
message unless changes are made to it (queryonly command), only the data section is returned.
However, there are query-only commands that
return responses with the header attached.
Example
:MEASure:TRACe1:AREA1:PTOPeak:
VALue?<PMT> -> 10.0E+00<RMT>
When You Wish to Return a Response without
a Header
Responses that return both header and data can be
set so that only the data section is returned. The
“
COMMunicate:HEADer
” command is used to do this.
Abbreviated Form
Normally, the lower-case section is removed from a
response header before the response is returned to
the controller. Naturally, the full form of the header can
also be used. For this, the “
COMMunicate:VERBose
”
command is used. The sections enclosed by braces
([]) are also omitted in the abbreviated form.
Page 31

4-6
IM DLM6054-17EN
4.4 Data
<Voltage>, <Time>, <Frequency>, and <Current>
<Voltage>, <Time>, <Frequency>, and <Current>
indicate decimal values that have physical significance.
<Multiplier> or <Unit> can be attached to the <NRf>
form that was described earlier. It is expressed in one
of the following forms.
Form Example
<NRf><Multiplier><Unit>
5MV
<NRf><Unit>
5E-3V
<NRf><Multiplier>
5M
<NRf>
5E-3
<Multiplier>
<Multipliers> which can be used are indicated
below.
Symbol Word Multiplier
EX Exa 10
18
PE Peta 10
15
T Tera 10
12
G Giga 10
9
MA Mega 10
6
K Kilo 10
3
M Milli 10
–3
U Micro 10
–6
N Nano 10
–9
P Pico 10
–12
F Femto 10
–15
A Ato 10
–18
<Unit>
<Units> that can be used are indicated below.
Symbol Word Meaning
V Volt Voltage
S Second Time
HZ Hertz Frequency
MHZ Megahertz Frequency
A Ampere Current
• <Multiplier> and <Unit> are not case sensitive.
• “U” is used to indicate micro “µ”.
•
“MA” is used for Mega to distinguish it from Milli.
The only exception is Megahertz which is expressed
as “MHZ.” Therefore, the “M (Milli)” multiplier cannot
be used for frequencies.
•
If both <Multiplier> and <Unit> are omitted, the
default unit is used.
•
Response messages are always expressed in the
<NR3> form. Response messages are returned
using the default unit without the <Multiplier> or
<Unit>.
Data
A data section comes after the header. A space must be
included between the header and the data. The data
contains conditions and values. Data is classified as below.
Data Meaning
<Decimal> A value expressed as a decimal number
(Example: Probe attenuation of CH1
-> CHANnel1:PROBe 100
)
<V
oltage><Time> A physical value
<Frequency> (Example: Time axis range
<Current>
-> TIMebase:TDIV 1US
)
<Register>
Register value expressed as binary, octal,
decimal or hexadecimal.
(Example: Extended event register value
-> STATUS:EESE #HFE
)
<Character Data>
Predefined character string (mnemonic).
Can be selected from { }.
(Example: Select the input coupling of CH1
-> CHANnel1:COUPling
{AC|DC|DC50|GND}
)
<Boolean>
Indicates ON and OFF. Set using ON,
OFF or a value
(Example: Turn ON the CH1 display
-> CHANnel1:DISPlay ON
)
<String data>
An arbitrary character string
(Example: Comment to a screen data output
-> MATH1:UNIT:USERdefine "VOLT"
)
<Filename>
Indicates a file name.
(Example: Save file name
−
> FILE:SAVE:WAVeform:NAME "CASE1"
)
<Block data>
Arbitrary 8-bit data
(Example: Response to acquired waveform data
-> #800000010ABCDEFGHIJ
)
<Decimal>
<Decimal> indicates a value expressed as a decimal
number, as shown in the table below. Decimal values
are given in the NR form as specified in the ANSI
X3.42-1975.
Symbol Meaning Example
<NR1> Integer
125-1 +1000
<NR2> Fixed-point number
125.0 -.90 +001.
<NR3> Floating-point number
125.0E+0 -9E-1 +.1E4
<NRf> Any of the forms <NR1> to <NR3> is allowed.
• The instrument can receive decimal values that are
sent from the controller in any of the forms, <NR1>
to <NR3>. This is represented by <NRf>.
•
For response messages that the instrument returns
to the controller, the form (<NR1> to <NR3> to be
used) is determined by the query. The same form is
used regardless of the size of the value.
•
For the <NR3> format, the “+” sign after the “E” can
be omitted. However, the “-” sign cannot be omitted.
•
If a value outside the setting range is entered, the
value is normalized so that it is just inside the range.
•
If a value has more significant digits than the
available resolution, the value is rounded.
Page 32

4-7
IM DLM6054-17EN
Before Programming
1
2
3
4
<Register>
<Register> indicates an integer, and can be expressed
in hexadecimal, octal, or binary as well as a decimal
number. It is used when each bit of the value has
a particular meaning. It is expressed in one of the
following forms.
Form Example
<NRf>
1
#H<Hexadecimal value made up of the digits
#H0F
0 to 9 and
A to F>
#Q<Octal value made up of the digits 0 to 7>
#Q777
#B<Binary value made up of the digits 0 and 1>
#B001100
• <Register> is not case sensitive.
• Response messages are always expressed as
<NR1>.
<Character Data>
<Character Data> is a specified string of character data
(a mnemonic). It is mainly used to indicate options
and is chosen from the character strings given in { }.
For interpretation rules, refer to “Header Interpretation
Rules” on page 4-4.
Form Example
{AC|DC|DC50|GND} AC
• As with the header, the “
COMMunicate:VERBose
”
command can be used to select whether to return
the response in the full form or in the abbreviated
form.
•
The “
COMMunicate:HEADer
” setting does not
affect the character data.
<Boolean>
<Boolean> is data that indicates ON or OFF. It is
expressed in one of the following forms.
Form Example
{ON|OFF|<NRf>}
ON
OFF 1 0
• When <Boolean> is expressed in the <NRf> form,
“OFF” is selected if the rounded integer value is 0,
and ON for all other cases.
•
A response message is always returned with a 1 if
the value is ON and 0 if the value is OFF.
<String data>
<String data> is not a specified character string like
<Character data>. It is an arbitrary character string.
The character string must be enclosed in single
quotation marks (') or double quotation marks (").
Form Example
<String data>
'ABC' "IEEE488.2-1987"
• If a character string contains a double quotation mark
('), the double quotation mark is replaced by two
double quotation marks (""). This rule also applies
to a single quotation mark within a character string.
•
A response message is always enclosed in double
quotation marks (").
•
<String data> is an arbitrary character string.
Therefore the instrument assumes that the
remaining program message units are part of the
character string if no single (') or double quotation
mark (") is encountered. As a result, no error is
detected if a quotation mark is omitted.
<Filename>
<Filename> is data that indicates a file name. It is
expressed in one of the following forms.
Form Example
{<NRf>|<Character data>|<String data
>}
1 CASE "CASE"
• <NRf> is rounded to an 8-digit integer and converted
to ASCII code. The result is the file name (example:
1
becomes
"00000001"
). Negative values are not
allowed.
•
Response messages are always returned in the
<String data> form.
•
For <Character data>, the first 12 characters
become the file name.
•
For <String data>, the first 259 characters become
the file name.
•
For a description of the number of characters of the
<String data> file name, see the DL9500/DL9700
User’s Manual.
<Block data>
<Block data> is arbitrary 8-bit data. It is only used in
response messages on the DL9500/DL9700. Below is
the syntax.
Form Example
#N<N-digit decimal number>
#800000010ABCDEFGHIJ
<Data byte sequence>
• #N
Indicates that the data is <Block data>. “N”
indicates the number of succeeding data bytes
(digits) in ASCII code characters.
•
<N-digit decimal number>
Indicates the number of bytes of data (example:
00000010
= 10 bytes).
•
<data byte sequence>
Expresses the actual data (example: ABCDEFGHIJ).
• Data is comprised of 8-bit values (0 to 255). This
means that the ASCII code “0AH,” which stands for
“NL,” can also be a code used for data. Hence, care
must be taken when programming the controller.
4.4 Data
Page 33

4-8
IM DLM6054-17EN
4.5 Synchronization with the Controller
• Using the COMMunicate:OVERlap command
The
COMMunicate:OVERlap
command enables (or
disables) overlap operation.
Example
:COMMunicate:OVERlap #HFFBF;:
FILE:LOAD:SETup:
EXECute "CASE1";:CHANnel1:
VDIV?<PMT>
“
COMMunicate:OVERlap #HFFBF
” enables
overlap operation on commands other than media
access. Because the overlap operation of file
loading is disabled, “
FILE:LOAD:SETup:EXECute
"CASE1"
” operates in the same way as a sequential
command. Therefore,
CHANnel1:
VDIV?
is not executed until the file loading is
complete.
•
Using the *OPC Command
The
*OPC
command sets the OPC bit, bit 0 of the
standard event register (see page 6-4), to 1 when
the overlap operation is completed.
Example
:COMMunicate:OPSE #H0040;
*ESE 1;
*ESR?;*SRE 32;:FILE:LOAD:SETup:
EXECute "CASE1";*OPC<PMT>
(Read the response to
*ESR?
)
(Wait for a service request)
:CHANnel1:VDIV?<PMT>
“
COMMunicate:OPSE
” is a command used to select
the “
*OPC
” target. Here, media access is specified.
“
*ESE 1
” and “
*SRE 32
” indicate that a service
request is generated only when the OPC bit is 1.
“
*ESR?
” clears the standard event register.
In the example above, “
CHANnel1:VDIV?
” is not
executed until a service request is generated.
Overlap Commands and Sequential Commands
There are two types of commands, overlap commands
and sequential commands. In the case of overlap
commands, the execution of the next command may
start before the execution of the previous command is
completed.
For example, if the next program message is
transmitted when specifying the V/div value and
querying the result, the response always returns the
most recent setting (5 V in this case).
:CHANnel1:VDIV 5V;VDIV?<PMT>
This is because the next command is forced to wait
until the processing of “
CHANnel1:VDIV
” itself
is completed. This type of command is called a
sequential command.
On the contrary, let us assume that you send the next
program message when you wish to load a file and
query the V/div value of the result.
:FILE:LOAD:SETup:EXECute "CASE1";:
CHANnel1:VDIV?
In this case, “
CHANnel1:VDIV?
” is executed before
the loading of the file is completed, and the V/div value
that is returned is the value before the file is loaded.
The act of executing the next command before the
processing of itself is completed such as with “
FILE:
LOAD:SETup:EXECute "CASE1"
” is called an
overlap operation. A command that operates in this
way is called an overlap command.
In such case, the overlap operation can be prevented
by using the methods below.
Synchronizing with Overlap Commands
• Using the *WAI Command
The
*WAI
command holds the subsequent
commands until the overlap command is completed.
Example
:COMMunicate:OPSE #H0040;:
FILE:LOAD:SETup:
EXECute "CASE1";*WAI;:
CHANnel1:VDIV?<PMT>
“
COMMunicate:OPSE
” is a command used to select
the “
*WAI
” target. Here, media access is specified.
Because “
*WAI
” is executed immediately before
“
CHANnel1:VDIV?
,” “
CHANnel1:VDIV?
” is not
executed until the file loading is complete.
Page 34

4-9
IM DLM6054-17EN
Before Programming
1
2
3
4
• Using the *OPC? Query
The
*OPC?
query generates a response when an
overlap operation is completed.
Example
:COMMunicate:OPSE #H0040;:FILE:
LOAD:SETup:EXECute "CASE1";
*OPC?<PMT>
(Read the response to
*OPC?
)
:CHANnel1:VDIV?<PMT>
“
COMMunicate:OPSE
” is a command used to
select the “
*OPC?
” target. Here, media access is
specified.
Because “
*OPC?
” does not generate a response
until the overlap operation is completed, the loading
of the file will have been completed by the time the
response to “
*OPC?
” is read.
Note
Most commands are sequential commands. Overlap
commands are indicated as overlap commands
in chapter 5. All other commands are sequential
commands.
Achieving Synchronization without Using
Overlap Commands
Even for sequential commands, synchronization is
sometimes required for non communication-related
reasons such as a trigger occurrence.
For example, if the next program message is
transmitted to make an inquiry about the waveform
data which has been acquired with the trigger mode
set to single, the
WAVeform:SEND?
command may
be executed regardless of whether the acquisition has
been completed or not and may result in command
execution error.
TRIGger:MODE SINGle;:STARt;:WAVeform:
SEND?<PMT>
In this case, the following method must be used to
synchronize with the end of the acquisition.
•
Using the STATus:CONDition? Query
The “
STATus:CONDition?
” query is used to query
the contents of the condition register (page 6-5).
Whether waveforms are being retrieved can be
determined by reading bit 0 of the condition register.
If bit 0 of the condition register is “1,” waveforms are
being retrieved. Otherwise, it is stopped.
Example
TRIGger:MODE SINGle;:STARt<PMT>
:STATus:CONDition?<PMT>
(Read the response. If bit 0 is 1, repeat
this command until it becomes 1.)
:WAVeform:SEND?<PMT>
The
WAVeform:SEND?
command will not be
executed until bit 0 of the condition register is set to
“0.”
•
Using the Extended Event Register
The changes in the condition register can be
reflected in the extended event register (page 6-5).
Example
:STATus:FILTer1 FALL;:
STATus:EESE 1;EESR?;*SRE 8;:
TRIGger:MODE SINGle;:STARt<PMT>
(Read the response to
STATus:EESR?
)
(Wait for a service request)
:WAVeform:SEND?<PMT>
The “
STATus:FILTer1 FALL
” command sets
the transition filter so that bit 0 (
FILTer1
) of the
extended event register is set to 1 when bit 0 of the
condition register changes from 1 to 0.
The “
:STATus:EESE 1
” command is used to
reflect only bit 0 of the extended event register to
the status byte.
T
he “
STATus:EESR?
” command is used to clear the
extended event register.
The “
*SRE 8
” command is used to generate a
service request solely on the cause of the extended
event register.
The “
WAVeform:SEND?
” command is not executed
until a service request is generated.
•
Using the COMMunicate:WAIT Command
The “
COMMunicate:WAIT
” command halts
communications until a specific event is generated.
Example
:STATus:FILTer1 FALL;:
STATus:EESR?;:TRIGger:
MODE SINGle<PMT>
(Read the response to
STATus:EESR?
)
:COMMunicate:WAIT 1;:WAVeform:
SEND?<PMT>
For a description of “
STATus:FILTer1 FALL
”
and “
STATus:EESR?
” see the previous section
regarding the extended event register.
The “
COMMunicate:WAIT 1
” command indicates
that the program will wait for bit 0 of the extended
event register to be set to “1.”
The
WAVeform:SEND?
command will not be
executed until bit 0 of the extended event register is
set to “1.”
4.5 Synchronization with the Controller
Page 35

5-1
IM DLM6054-17EN
Commands
1
2
3
4
5
5.1 List of Commands
Commnd Function Page
ACQuire Group
:ACQuire?
Queries all settings related to the waveform acquisition. 5-35
:ACQuire:AVERage?
Queries all settings related to averaging and the waveform acquisition count. 5-35
:ACQuire:AVERage:COUNt
Sets the waveform acquisition count of averaging mode or queries the
current setting.
5-35
:ACQuire:HRMode
Turns ON/OFF the high resolution mode or queries the current setting. 5-35
:ACQuire:INTERLeave
Turns ON/OFF interleave or queries the current setting. 5-35
:ACQuire:MODE
Sets the waveform acquisition mode or queries the current setting. 5-35
:ACQuire:REPetitive
Turns ON/OFF the repetitive sampling or queries the current setting. 5-35
:ACQuire:RLENgth
Sets the record length or queries the current setting. 5-35
:ACQuire:SAMPling
Sets or queries the sampling mode. 5-35
ANALysis Group
:ANALysis?
Queries all settings related to the analysis function. 5-36
:ANALysis:AHIStogram<x>?
Queries all settings related to the accumulated histogram function. 5-36
:ANALysis:AHIStogram<x>:
HORizontal
Sets the horizontal range of the accumulated histogram or queries the
current setting.
5-36
:ANALysis:AHIStogram<x>:
MEASure?
Queries all settings related automated measurement of the accumulated
histogram.
5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor?
Queries all settings related to cursor measurement of the accumulated
histogram.
5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor:BASic?
Queries all settings related to basic items of the cursor of the accumulated
histogram.
5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:ALL
Turns ON/OFF all basic items of the cursor of the accumulated histogram. 5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:C<x>?
Queries all settings related to the cursor of the accumulated histogram. 5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:C<x>:
STATe
Turns ON/OFF the cursor of the accumulated histogram or queries the
current setting.
5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:C<x>:
VALue?
Queries the measured value of the cursor of the accumulated histogram. 5-36
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:DC?
Queries all settings related to measured values between cursors of the
accumulated histogram.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:DC:STATe
Turns ON/OFF the measured values between cursors of the accumulated
histogram or queries the current setting.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor[:BASic]:DC:
VALue?
Queries the measured value between cursors of the accumulated histogram. 5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:CALCulation?
Queries all settings related to calculation items of the cursor of the
accumulated histogram.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:CALCulation:ALL
Turns ON/OFF all calculation items of the cursor of the accumulated
histogram.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:CALCulation:
DEFine<x>
Sets the equation of the calculation item of the cursor of the accumulated
histogram or queries the current setting.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:CALCulation:
STATe<x>
Turns ON/OFF the calculation item of the cursor of the accumulated
histogram or queries the current setting.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:CALCulation:
VALue<x>?
Queries the measured value of the calculation item of the cursor of the
accumulated histogram.
5-37
:ANALysis:AHIStogram<x>:
MEASure:CURSor:HLINkage
Turns ON/OFF the ΔV cursor link of the accumulated histogram or queries
the current setting.
5-38
Chapter 5 Commands
Page 36

5-2
IM DLM6054-17EN
Commnd Function Page
:ANALysis:AHIStogram<x>:
MEASure:CURSor:HPOSition<x>
Sets the ΔV cursor position of the accumulated histogram or queries the
current setting.
5-38
:ANALysis:AHIStogram<x>:
MEASure:CURSor:VLINkage
Turns ON/OFF the ΔT cursor link of the accumulated histogram or queries
the current setting.
5-38
:ANALysis:AHIStogram<x>:
MEASure:CURSor:VPOSition<x>
Sets the ΔT cursor position of the accumulated histogram or queries the
current setting.
5-38
:ANALysis:AHIStogram<x>:
MEASure:MODE
Sets the automated measurement mode of the accumulated histogram or
queries the current setting.
5-38
:ANALysis:AHIStogram<x>:
MEASure:PARameter?
Queries all settings related to the automated measurement of waveform
parameters of the accumulated histogram.
5-38
:ANALysis:AHIStogram<x>:
MEASure:PARameter:AREA<x>?
Queries all settings related to the area of the accumulated histogram. 5-38
:ANALysis:AHIStogram<x>:
MEASure:PARameter:AREA<x>:ALL
Turns ON/OFF all waveform parameters of the accumulated histogram. 5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:
AREA<x>:<Parameter>?
Queries all settings related to the waveform parameter of the accumulated
histogram.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:
AREA<x>:<Parameter>:STATe
Turns ON/OFF the waveform parameter of the accumulated histogram or
queries the current setting.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:
AREA<x>:<Parameter>:VALue?
Queries the automated measured value of the waveform parameter of the
accumulated histogram.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:CALCulation?
Queries all settings related to the calculation items of waveform parameters
of the accumulated histogram.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:CALCulation:
ALL
Turns ON/OFF all calculation items of the waveform parameters of the
accumulated histogram.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:CALCulation:
DEFine<x>
Sets the equation of the calculation items of the waveform parameter of the
accumulated histogram or queries the current setting.
5-39
:ANALysis:AHIStogram<x>:
MEASure:PARameter:CALCulation:
STATe<x>
Turns ON/OFF the calculation items of the waveform parameter of the
accumulated histogram or queries the current setting.
5-40
:ANALysis:AHIStogram<x>:
MEASure:PARameter:CALCulation:
VALue<x>?
Queries the automated measured value of the calculation items of the
waveform parameter of the accumulated histogram.
5-40
:ANALysis:AHIStogram<x>:
MEASure:PARameter:HRANge<x>
Sets the horizontal range of the waveform parameter of the accumulated
histogram or queries the current setting.
5-40
:ANALysis:AHIStogram<x>:
MEASure:PARameter:VRANge<x>
Sets the vertical range of the waveform parameter of the accumulated
histogram or queries the current setting.
5-40
:ANALysis:AHIStogram<x>:MODE
Sets the accumulated histogram mode or queries the current setting. 5-40
:ANALysis:AHIStogram<x>:TRACe
Sets the source trace of the accumulated histogram or queries the current
setting.
5-40
:ANALysis:AHIStogram<x>:
VERTical
Sets the vertical range of the accumulated histogram or queries the current
setting.
5-40
:ANALysis:AHIStogram<x>:WINDow
Sets the measurement target window of the accumulated histogram or
queries the current setting.
5-41
:ANALysis:FFT<x>?
Queries all settings related to the FFT computation function. 5-41
:ANALysis:FFT<x>:AVERage?
Queries all FFT analysis averaging settings. 5-41
:ANALysis:FFT<x>:AVERage:
EWEight
Sets or queries the attenuation constant of exponential averaging in FFT
analysis.
5-41
:ANALysis:FFT<x>:HORizontal?
Queries all settings related the horizontal axis of the FFT computation. 5-41
:ANALysis:FFT<x>:HORizontal:
CSPan?
Queries all settings related to the center and span of the horizontal axis of
the FFT computation.
5-41
:ANALysis:FFT<x>:HORizontal:
CSPan:CENTer
Sets the horizontal center of the FFT computation or queries the current
setting.
5-41
:ANALysis:FFT<x>:HORizontal:
CSPan:SPAN
Sets the horizontal span of the FFT computation or queries the current
setting.
5-41
:ANALysis:FFT<x>:HORizontal:
LRIGht?
Queries all settings related the left and right edges of the horizontal axis of
the FFT computation.
5-41
:ANALysis:FFT<x>:HORizontal:
LRIGht:RANGe
Sets the range of the horizontal left and right edges of the FFT computation
or queries the current setting.
5-41
5.1 List of Commands
Page 37

5-3
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:ANALysis:FFT<x>:HORizontal:
MODE
Sets the horizontal mode of the FFT computation or queries the current
setting.
5-42
:ANALysis:FFT<x>:LENGth
Sets the number of FFT points of the FFT computation or queries the current
setting.
5-42
:ANALysis:FFT<x>:MEASure?
Queries all settings related to the automated measurement of the FFT
computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer?
Queries all settings related to the marker cursor measurement of the FFT
computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer:BASic?
Queries all settings related to basic items of the marker cursor of the FFT
computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:ALL
Turns ON/OFF all basic items of the marker cursor of the FFT computation. 5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency?
Queries all settings related to the frequency value between marker cursors
of the FFT computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:STATe
Turns ON/OFF the frequency value between marker cursors of the FFT
computation or queries the current setting.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:
VALue?
Queries the frequency value between marker cursors of the FFT
computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV?
Queries all settings related to the power value between marker cursors of
the FFT computation.
5-42
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:STATe
Turns ON/OFF the power value between marker cursors of the FFT
computation or queries the current setting.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:VALue?
Queries the power value between marker cursors of the FFT computation. 5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>?
Queries all settings related to the frequency value of the marker cursor of the
FFT computation.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:
STATe
Turns ON/OFF the frequency value of the marker cursor of the FFT
computation or queries the current setting.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:
VALue?
Queries the frequency value of the marker cursor of the FFT computation. 5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:POSition<x>
{<NRf>}
Sets the marker cursor position of the FFT computation or queries the
current setting.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>?
Queries all settings related to the power value of the marker cursor of the
FFT computation.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:STATe
Turns ON/OFF the power value of the marker cursor of the FFT computation
or queries the current setting.
5-43
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:VALue?
Queries the power value of the marker cursor of the FFT computation. 5-44
:ANALysis:FFT<x>:MEASure:
MARKer:CALCulation?
Queries all settings related to calculation items of the marker cursor of the
FFT computation.
5-44
:ANALysis:FFT<x>:MEASure:
MARKer:CALCulation:ALL
Turns ON/OFF all calculation items of the marker cursor of the FFT
computation.
5-44
:ANALysis:FFT<x>:MEASure:
MARKer:CALCulation:DEFine<x>
Sets the equation of the calculation items of the marker cursor of the FFT
computation or queries the current setting.
5-44
:ANALysis:FFT<x>:MEASure:
MARKer:CALCulation:STATe<x>
Turns ON/OFF the calculation items of the marker cursor of the FFT
computation or queries the current setting.
5-44
:ANALysis:FFT<x>:MEASure:
MARKer:CALCulation:VALue<x>?
Queries the measured value of the calculation items of the marker cursor of
the FFT computation.
5-44
:ANALysis:FFT<x>:MEASure:MODE
Sets the automated measurement mode of the FFT computation or queries
the current setting.
5-44
:ANALysis:FFT<x>:MEASure:PEAK?
Queries all settings related to the peak value measurement of the FFT
computation.
5-44
:ANALysis:FFT<x>:MEASure:PEAK:
BASic?
Queries all settings related to basic items of the peak value of the FFT
computation.
5-44
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:ALL
Turns ON/OFF all basic items of the peak value of the FFT computation. 5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DFRequency?
Queries all settings related to the frequency value between peak values of
the FFT computation.
5-45
5.1 List of Commands
Page 38

5-4
IM DLM6054-17EN
Commnd Function Page
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DFRequency:STATe
Turns ON/OFF the frequency value between peak values of the FFT
computation or queries the current setting.
5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DFRequency:VALue?
Queries the frequency value between peak values of the FFT computation. 5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DV?
Queries all settings related to the power value between peak values of the
FFT computation.
5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DV:STATe
Turns ON/OFF the power value between peak values of the FFT
computation or queries the current setting.
5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:DV:VALue?
Queries the power value between peak values of the FFT computation. 5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:FREQuency<x>?
Queries all settings related to the peak frequency value of the FFT
computation.
5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:FREQuency<x>:STATe
Turns ON/OFF the peak frequency value of the FFT computation or queries
the current setting.
5-45
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:FREQuency<x>:VALue?
Queries the peak frequency value of the FFT computation. 5-46
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:RANGe<x>
Sets the measurement range of the peak value of the FFT computation or
queries the current setting.
5-46
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:V<x>?
Queries all settings related to the peak value of the FFT computation. 5-46
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:V<x>:STATe
Turns ON/OFF the peak value of the FFT computation or queries the current
setting.
5-46
:ANALysis:FFT<x>:MEASure:PEAK[:
BASic]:V<x>:VALue?
Queries the peak value of the FFT computation. 5-46
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation?
Queries all settings related to calculation items of the FFT computation. 5-46
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:ALL
Turns ON/OFF all calculation items of the FFT computation. 5-46
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:DEFine<x>
Sets the equation of the calculation item of the FFT computation or queries
the current setting.
5-46
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:STATe<x>
Turns ON/OFF the calculation items of the FFT computation or queries the
current setting.
5-47
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:VALue<x>?
Queries the measured value of the calculation item of the FFT computation. 5-47
:ANALysis:FFT<x>:MODE
Sets or queries the waveform display mode for FFT analysis. 5-47
:ANALysis:FFT<x>:RANGe
Sets the measurement source window used in the FFT computation or
queries the current setting.
5-47
:ANALysis:FFT<x>:RPOSition (Ref
Position)
Sets the center point of magnification of the vertical axis of the FFT
computation or queries the current setting.
5-47
:ANALysis::FFT<x>:TRACe
Sets or queries the source waveform for FFT analysis. 5-47
:ANALysis::FFT<x>:TYPE
Sets or queries the spectrum for FFT analysis. 5-47
:ANALysis:FFT<x>:VERTical?
Queries all settings related the vertical axis of the FFT computation. 5-48
:ANALysis:FFT<x>:VERTical:LEVel
Sets the display position of the vertical axis of the FFT computation or
queries the current setting.
5-48
:ANALysis:FFT<x>:VERTical:MODE
Sets the vertical axis mode of the FFT computation or queries the current
setting.
5-48
:ANALysis:FFT<x>:VERTical:
SENSitivity
Sets the vertical sensitivity of the FFT computation or queries the current
setting.
5-48
:ANALysis:FFT<x>:WINDow
Sets the window function of the FFT computation or queries the current
setting.
5-48
:ANALysis:TYPE<x>
Sets the analysis function type or queries the current setting. 5-48
:ANALysis:VTDisplay
Turns ON/OFF the VT waveform display or queries the current setting. 5-48
:ANALysis:WAIT<x>?
Waits for the completion of the automated measurement with a timeout
option.
5-48
:ANALysis:WPARameter<x>?
Queries all settings related to the waveform parameter measurement
function.
5-48
:ANALysis:WPARameter<x>:BIT<x>?
Queries all settings related to each logic bit of logic waveform parameter
measurement.
5-49
:ANALysis:WPARameter<x>:BIT<x>:
AREA<x>?
Queries all settings related to each area of logic waveform parameter
measurement.
5-49
:ANALysis:WPARameter<x>:BIT<x>:
AREA<x>:TYPE
Sets the logic waveform parameters for logic waveform parameter
measurement or queries the current setting.
5-49
:ANALysis:WPARameter<x>:
CALCulation
Sets the calculation items of the automated measurement of waveform
parameters or queries the current setting.
5-49
5.1 List of Commands
Page 39

5-5
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:ANALysis:WPARameter<x>:
HISTogram?
Queries all settings related to the histogram display of the waveform
parameter measurement.
5-49
:ANALysis:WPARameter<x>:
HISTogram:MEASure?
Queries all settings related to the automated measurement of the histogram
display of the waveform parameter measurement.
5-49
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor?
Queries all settings related to the cursor measurement on the histogram of
the waveform parameter measurement.
5-49
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:ALL
Turns ON/OFF all histogram cursors of waveform parameter measurement. 5-49
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:C<x>?
Queries all settings related to the cursor measurement on the histogram of
the waveform parameter measurement.
5-49
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:C<x>:
POSition
Sets the cursor position on the trend of the waveform parameter
measurement or queries the current setting.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:C<x>:
STATe
Turns ON/OFF the cursor on the histogram of the waveform parameter
measurement or queries the current setting.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:C<x>:
VALue?
Queries the measured value of the cursor on the histogram of the waveform
parameter measurement.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:DC?
Queries all settings related to the measurement between cursors on the
histogram of the waveform parameter measurement.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:DC:
STATe
Turns ON/OFF the measurement between cursors on the histogram of the
waveform parameter measurement or queries the current setting.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:DC:
VALue?
Queries the measured value between cursors on the histogram of the
waveform parameter measurement.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:CURSor:
LINKage
Turns ON/OFF the histogram cursor link of the waveform parameter
measurement or queries the current setting.
5-50
:ANALysis:WPARameter<x>:
HISTogram:MEASure:MODE
Sets the automated measurement mode of the histogram display of the
waveform parameter measurement or queries the current setting.
5-51
:ANALysis:WPARameter<x>:
HISTogram:MEASure:PARameter?
Queries all settings related to the automated measurement of histogram
parameters of the waveform parameter measurement.
5-51
:ANALysis:WPARameter<x>:
HISTogram:MEASure:PARameter:ALL
Turn ON/OFF all histogram parameters of the waveform parameter
measurement.
5-51
:ANALysis:WPARameter<x>:
HISTogram:MEASure:
PARameter:<Parameter>?
Queries all settings related to the histogram parameter of the waveform
parameter measurement.
5-51
:ANALysis:WPARameter<x>:
HISTogram:MEASure:
PARameter:<Parameter>:STATe
Turns ON/OFF the histogram parameter of the waveform parameter
measurement or queries the current setting.
5-51
:ANALysis:WPARameter<x>:
HISTogram:MEASure:
PARameter:<Parameter>:VALue?
Queries the measured value of the histogram parameter of the waveform
parameter measurement.
5-51
:ANALysis:WPARameter<x>:LIST?
Queries all settings related to the list display of the waveform parameter
measurement.
5-51
:ANALysis:WPARameter<x>:LIST:
ITEM?
Queries list display items of the waveform parameter measurement. 5-51
:ANALysis:WPARameter<x>:LIST:
MODE
Sets the list display mode of the waveform parameter measurement or
queries the current setting.
5-52
:ANALysis:WPARameter<x>:LIST:
SCRoll
Sets the scroll direction of the list display of the waveform parameter
measurement or queries the current setting.
5-52
:ANALysis:WPARameter<x>:LIST:
VALue?
Queries the automated measured value of the list display number of the
waveform parameter measurement.
5-52
:ANALysis:WPARameter<x>:MODE
Sets the mode of the waveform parameter measurement or queries the
current setting.
5-52
:ANALysis:WPARameter<x>:
TRACe<x>?
Queries all settings related to the trace of the waveform parameter
measurement.
5-52
:ANALysis:WPARameter<x>:
TRACe<x>:AREA<x>?
Queries all settings related to the area of the waveform parameter
measurement.
5-52
:ANALysis:WPARameter<x>:
TRACe<x>:AREA<x>:TYPE
Sets the waveform parameter of the waveform parameter measurement or
queries the current setting.
5-52
5.1 List of Commands
Page 40

5-6
IM DLM6054-17EN
Commnd Function Page
:ANALysis:WPARameter<x>:TRENd?
Queries all settings related to the trend display of the waveform parameter
measurement.
5-52
:ANALysis:WPARameter<x>:TRENd:
ASCale[:EXECute]
Executes the auto scaling of the trend display of the waveform parameter
measurement.
5-53
:ANALysis:WPARameter<x>:TRENd:
HRANge
Sets the target window for trend display of measured waveform parameters
or queries the current setting.
5-53
:ANALysis:WPARameter<x>:TRENd:
HSPan
Sets the horizontal span of the trend display of the waveform parameter
measurement or queries the current setting.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure?
Queries all settings related to the automated measurement of the trend
display of the waveform parameter measurement.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor?
Queries all settings related to the cursor measurement of the trend of the
waveform parameter measurement.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:ALL
Turns ON/OFF all cursors of the trend of the waveform parameter
measurement.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>?
Queries all settings related to the measured value of the cursor of the trend
of the waveform parameter measurement.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:POSition
Sets the cursor position of the trend of the waveform parameter
measurement or queries the current setting.
5-53
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:STATe
Turns ON/OFF the cursor of the trend of the waveform parameter
measurement or queries the current setting.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:VALue?
Queries the measured value of the cursor of the trend of the waveform
parameter measurement.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:DC?
Queries all settings related to the measurement between cursors on the
trend of the waveform parameter measurement.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:DC:STATe
Turns ON/OFF the measurement between cursors on the trend of the
waveform parameter measurement or queries the current setting.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:DC:VALue?
Sets the measured value between cursors on the trend of the waveform
parameter measurement or queries the current setting.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:LINKage
Turns ON/OFF the trend cursor link of the waveform parameter
measurement or queries the current setting.
5-54
:ANALysis:WPARameter<x>:TRENd:
MEASure:MODE
Sets the automated measurement mode of the trend of the waveform
parameter measurement or queries the current setting.
5-54
:ANALysis:WPARameter<x>:TRENd:
VERTical
Sets the vertical range of the trend of the waveform parameter measurement
or queries the current setting.
5-55
:ANALysis:XY<x>?
Queries all settings related to the XY display function. 5-55
:ANALysis:XY<x>:GATE?
Queries all settings related to the gate function of the XY display. 5-55
:ANALysis:XY<x>:GATE:ALEVel
Sets the active level of the gate of the XY display or queries the current
setting.
5-55
:ANALysis:XY<x>:GATE:
HYSTeresis<x>
Sets the hysteresis of the gate of the XY display or queries the current
setting.
5-55
:ANALysis:XY<x>:GATE:LEVel<x>
Sets the level of the gate of the XY display or queries the current setting. 5-55
:ANALysis:XY<x>:GATE:TRACe
Sets the gate trace of the XY display or queries the current setting. 5-55
:ANALysis:XY<x>:MEASure?
Queries all settings related to the automated measurement of the XY display. 5-55
:ANALysis:XY<x>:MEASure:CURSor?
Queries all settings related to the cursor measurement of the XY display. 5-55
:ANALysis:XY<x>:MEASure:CURSor:
XLINkage
Turns ON/OFF the ΔV cursor link on the XY display or queries the current
setting.
5-55
:ANALysis:XY<x>:MEASure:CURSor:
X<x>?
Queries all settings related to the ΔV cursor of the XY display. 5-56
:ANALysis:XY<x>:MEASure:CURSor:
X<x>:POSition
Sets the ΔV cursor position of the XY display or queries the current setting. 5-56
:ANALysis:XY<x>:MEASure:CURSor:
X<x>:VALue?
Queries the voltage value at the ΔV cursor of the XY display. 5-56
:ANALysis:XY<x>:MEASure:CURSor:
YLINkage
Turns ON/OFF the ΔT cursor link on the XY display or queries the current
setting.
5-56
:ANALysis:XY<x>:MEASure:CURSor:
Y<x>?
Queries all settings related to the ΔT cursor of the XY display. 5-56
:ANALysis:XY<x>:MEASure:CURSor:
Y<x>:POSition
Sets the ΔT cursor position of the XY display or queries the current setting. 5-56
:ANALysis:XY<x>:MEASure:CURSor:
Y<x>:VALue?
Queries the voltage value at the ΔT cursor of the XY display. 5-56
:ANALysis:XY<x>:MEASure:MODE
Sets the automated measurement mode of the XY display or queries the
current setting.
5-56
:ANALysis:XY<x>:MEASure:
XYINteg?
Queries all settings related to the integration of the XY display. 5-56
5.1 List of Commands
Page 41
5-7
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:ANALysis:XY<x>:MEASure:
XYINteg:LOOP
Sets the integration mode of the XY display or queries the current setting. 5-57
:ANALysis:XY<x>:MEASure:
XYINteg:POLarity
Sets the integration polarity of the XY display or queries the current setting. 5-57
:ANALysis:XY<x>:MEASure:
XYINteg:VALue?
Queries the integral value of the XY display. 5-57
:ANALysis:XY<x>:TRANge (Time
Range)
Sets the measurement range of the XY display or queries the current setting. 5-57
:ANALysis:XY<x>:WINDow
Sets the measurement source window of the XY display or queries the
current setting.
5-57
:ANALysis:XY<x>:XTRace
Sets the X-axis trace of the XY display or queries the current setting. 5-57
:ANALysis:XY<x>:YTRace
Sets the Y-axis trace of the XY display or queries the current setting. 5-57
ASETup Group
:ASETup:EXECute
Execute auto setup. 5-58
:ASETup:UNDO
Cancels auto setup that has been executed. 5-58
CALibrate Group
:CALibrate?
Queries all settings related to the calibration. 5-59
:CALibrate:EXECute
Executes calibration. 5-59
:CALibrate:MODE
Turns ON/OFF the auto calibration or queries the current setting. 5-59
CHANnel Group
:CHANnel<x>?
Queries all settings related to the channel. 5-60
:CHANnel<x>:BWIDth
Sets the input filter of the channel or queries the current setting. 5-60
:CHANnel<x>:COUPling
Sets the input coupling of the channel or queries the current setting. 5-60
:CHANnel<x>:DESKew
Sets the skew correction of the channel or queries the current setting. 5-60
:CHANnel<x>:DISPlay
Turns ON/OFF the display of the channel or queries the current setting. 5-60
:CHANnel<x>:INVert
Turns ON/OFF the inverted display of the channel or queries the current
setting.
5-60
:CHANnel<x>:LABel?
Queries all settings related to the waveform label of the channel. 5-60
:CHANnel<x>:LABel[:DEFine]
Sets the waveform label of channel or queries the current setting. 5-60
:CHANnel<x>:LABel:MODE
Turns ON/OFF the waveform label display of the channel or queries the
current setting.
5-60
:CHANnel<x>:LSCale?
Queries all the linear scaling settings of a channel. 5-60
:CHANnel<x>:LSCale:AVALue
:CHANnel<x>:LSCale:BVALue
Sets or queries an offset B value. 5-61
:CHANnel<x>:LSCale:MODE
Sets or queries the on/off status of linear scaling. 5-61
:CHANnel<x>:LSCale:UNIT
Sets or queries a unit that is attached to linear scaling results. 5-61
:CHANnel<x>:OFFSet
Sets the offset voltage of the channel or queries the current setting. 5-61
:CHANnel<x>:POSition
Sets the vertical position of the channel or queries the current setting. 5-61
:CHANnel<x>:PROBe?
Queries all settings related to the probe attenuation of the channel. 5-61
:CHANnel<x>:PROBe[:MODE]
Sets the probe attenuation of the channel or queries the current setting. 5-61
:Channal<x>:PROBe:AUTO?
Queries the probe attenuation of the channel when set to AUTO. 5-61
:CHANnel<x>:PZCalibrate[:
EXECute]
Execute the zero adjustment of the current probe of the channel. 5-61
:CHANnel<x>:VDIV
Sets the vertical sensitivity (V/div) of the channel or queries the current
setting.
5-61
5.1 List of Commands
Page 42

5-8
IM DLM6054-17EN
Commnd Function Page
CLEar Group
:CLEar
Clears traces. 5-62
COMMunicate Group
:COMMunicate?
Queries all settings related to communications. 5-63
:COMMunicate:HEADer
Sets whether to add a header to the response to a query (example
CHANNEL1:VOLTAGE:PROBE 10) or not add the header (example 10) or
queries the current setting.
5-63
:COMMunicate:LOCKout
Sets or clears local lockout. 5-63
:COMMunicate:OPSE (Operation
Pending Status Enable register)
Sets the overlap command that is used by the *OPC, *OPC?, and *WAI
commands or queries the current setting.
5-63
:COMMunicate:OPSR? (Operation
Pending Status Register)
Queries the value of the operation pending status register. 5-63
:COMMunicate:OVERlap
Sets the commands to operate as overlap commands or queries the current
setting.
5-63
:COMMunicate:REMote
Sets remote or local. ON is remote mode. 5-63
:COMMunicate:STATus?
Queries line-specific status. 5-64
:COMMunicate:VERBose
Sets whether to return the response to a query using full spelling (example
CHANNEL1:VOLTAGE:PROBE 10) or using abbreviation (example CHAN:
PROB 10) or queries the current setting.
5-64
:COMMunicate:WAIT
Waits for one of the specified extended events to occur. 5-64
:COMMunicate:WAIT?
Creates the response that is returned when the specified event occurs. 5-64
CURSor Group
:CURSor?
Queries all settings related to the cursor measurement. 5-65
:CURSor:DISPlay
Turns ON/OFF the cursor or queries the current setting. 5-65
:CURSor:HORizontal?
Queries all settings related to the ΔV cursors. 5-65
:CURSor:HORizontal:BASic?
Queries all settings related to basic items of the ΔV cursors. 5-65
:CURSor:HORizontal[:BASic]:ALL
Turns ON/OFF all basic items of the ΔV cursors. 5-65
:CURSor:HORizontal[:BASic]:DV?
Queries all settings related to the ∆V measurement of the ΔV cursors. 5-65
:CURSor:HORizontal[:BASic]:DV:
STATe
Turns ON/OFF the ∆V measurement of the ΔV cursors or queries the current
setting.
5-65
:CURSor:HORizontal[:BASic]:DV:
VALue?
Queries the voltage value between the ΔV cursors. 5-65
:CURSor:HORizontal[:BASic]:
LINKage
Turns ON/OFF the ΔV cursor link or queries the current setting. 5-65
:CURSor:HORizontal[:BASic]:
V<x>?
Queries all settings related to the ΔV cursor. 5-66
:CURSor:HORizontal[:BASic]:
V<x>:JUMP
Jumps the ΔV cursor to the center position of the zoom waveform. 5-66
:CURSor:HORizontal[:BASic]:
V<x>:POSition
Sets the ΔV cursor position or queries the current setting. 5-66
:CURSor:HORizontal[:BASic]:
V<x>:STATe
Turns ON/OFF the ΔV cursor or queries the current setting. 5-66
:CURSor:HORizontal[:BASic]:
V<x>:VALue?
Queries the voltage value at the ΔV cursor. 5-66
:CURSor:HORizontal:CALCulation?
Queries all settings related to calculation items of the ΔV cursors. 5-66
:CURSor:HORizontal:CALCulation:
ALL
Turns ON/OFF all calculation items of the ΔV cursors. 5-66
:CURSor:HORizontal:CALCulation:
DEFine<x>
Sets the equation of the calculation item of the ΔV cursor or queries the
current setting.
5-66
:CURSor:HORizontal:CALCulation:
STATe<x>
Turns ON/OFF the calculation item of the ΔV cursor or queries the current
setting.
5-66
:CURSor:HORizontal:CALCulation:
VALue<x>?
Queries the measured value of the calculation item of the ΔV cursor. 5-66
:CURSor:HORizontal:TRACe
Sets the source trace of the ΔV cursor or queries the current setting. 5-67
:CURSor:MARKer?
Queries all settings related to the marker cursors. 5-67
:CURSor:MARKer:CALCulation?
Queries all settings related to calculation items of the marker cursors. 5-67
:CURSor:MARKer:CALCulation:ALL
Turns ON/OFF all calculation items of the marker cursors. 5-67
:CURSor:MARKer:CALCulation:
DEFine<x>
Sets the equation of the calculation item of the marker cursors or queries the
current setting.
5-67
5.1 List of Commands
Page 43

5-9
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:CURSor:MARKer:CALCulation:
STATe<x>
Turns ON/OFF the calculation item of the marker cursors or queries the
current setting.
5-67
:CURSor:MARKer:CALCulation:
VALue<x>?
Queries the measured value of the calculation item of the marker cursors. 5-67
:CURSor:MARKer:CM<x>?
Queries all settings related to the marker cursor. 5-67
:CURSor:MARKer:CM<x>:ALL
Turns ON/OFF all items of the marker cursor. 5-67
:CURSor:MARKer:CM<x>:DT<x>?
Queries all settings related to the ∆T measurement of the cursor marker. 5-67
:CURSor:MARKer:CM<x>:DT<x>:
STATe
Turns ON/OFF the ∆T measurement of the maker cursor or queries the
current setting.
5-67
:CURSor:MARKer:CM<x>:DT<x>:
VALue?
Queries the ∆T value of the marker cursor. 5-67
:CURSor:MARKer:CM<x>:DV<x>?
Queries all settings related to the ∆V measurement of the cursor marker. 5-67
:CURSor:MARKer:CM<x>:DV<x>:
STATe
Turns ON/OFF the ∆V measurement of the maker cursor or queries the
current setting.
5-68
:CURSor:MARKer:CM<x>:DV<x>:
VALue?
Queries the ∆V value of the marker cursor. 5-68
:CURSor:MARKer:CM<x>:JUMP
Jumps the marker cursor to the center position of the zoom waveform. 5-68
:CURSor:MARKer:CM<x>:POSition
Sets the marker cursor position or queries the current setting. 5-68
:CURSor:MARKer:CM<x>:T?
Queries all settings related to the time measurement of the marker cursor. 5-68
:CURSor:MARKer:CM<x>:T:STATe
Turns ON/OFF the time measurement of the maker cursor or queries the
current setting.
5-68
:CURSor:MARKer:CM<x>:T:VALue?
Queries the time value at the marker cursor position. 5-68
:CURSor:MARKer:CM<x>:TRACe
Sets the source trace of the marker cursor or queries the current setting. 5-68
:CURSor:MARKer:CM<x>:V?
Queries all settings related to the voltage measurement of the marker cursor. 5-68
:CURSor:MARKer:CM<x>:V:STATe
Turns ON/OFF the voltage measurement of the maker cursor or queries the
current setting.
5-68
:CURSor:MARKer:CM<x>:V:VALue?
Queries the voltage value at the marker cursor position. 5-68
:CURSor:MARKer:FORM
Sets the marker cursor form or queries the current setting. 5-68
:CURSor:SERial?
Queries all settings related to the serial cursors. 5-68
:CURSor:SERial:SCURsor<x>?
Queries all settings related to the serial cursor. 5-69
:CURSor:SERial:SCURsor<x>:
ACTive
Sets the active level of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
BCOunt
Sets the bit length of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
BITRate
Sets the bit rate of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
BITorder
Sets the bit order of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
FORMat
Sets the display format of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
HYSTeresis
Sets the hysteresis of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:JUMP
Moves the serial cursor to the specified direction. 5-69
:CURSor:SERial:SCURsor<x>:LEVel
Sets the threshold level of the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:MODE
Turns ON/OFF the serial cursor or queries the current setting. 5-69
:CURSor:SERial:SCURsor<x>:
POSition
Sets the serial cursor position or queries the current setting. 5-70
:CURSor:SERial:SCURsor<x>:TRACE
Sets the trace of the serial cursor or queries the current setting. 5-70
:CURSor:SERial:SCURsor<x>:TRACK
Jumps the serial cursor onto the zoom waveform. 5-70
:CURSor:SERial:SCURsor<x>:
VALue?
Queries the measured value of the serial cursor. 5-70
:CURSor:TYPE
Sets the cursor type or queries the current setting. 5-70
:CURSor:VERTical?
Queries all settings related to the ΔT cursors. 5-70
:CURSor:VERTical:BASic?
Queries all settings related to basic items of the ΔT cursors. 5-70
:CURSor:VERTical[:BASic]:ALL
Turns ON/OFF all basic items of the ΔT cursors. 5-70
:CURSor:VERTical[:BASic]:DT?
Queries all settings related to the ∆T measurement of the ΔT cursors. 5-70
:CURSor:VERTical[:BASic]:DT:
STATe
Turns ON/OFF the ∆T measurement of the ΔT cursors or queries the current
setting.
5-70
:CURSor:VERTical[:BASic]:DT:
VALue?
Queries the ∆T value of the ΔT cursors. 5-70
5.1 List of Commands
Page 44
5-10
IM DLM6054-17EN
Commnd Function Page
:CURSor:VERTical[:BASic]:
LINKage
Turns ON/OFF the ΔT cursor link or queries the current setting. 5-70
:CURSor:VERTical[:BASic]:PERDt?
Queries all settings related to the 1/∆T measurement of the ΔT cursors. 5-70
:CURSor:VERTical[:BASic]:PERDt:
STATe
Turns ON/OFF the 1/∆T measurement of the ΔT cursors or queries the
current setting.
5-71
:CURSor:VERTical[:BASic]:PERDt:
VALue?
Queries the 1/∆T value of the ΔT cursors. 5-71
:CURSor:VERTical[:BASic]:T<x>?
Queries all settings related to the ΔT cursor. 5-71
:CURSor:VERTical[:BASic]:T<x>:
JUMP
Jumps to the center position of the zoom waveform of the ΔT cursor. 5-71
:CURSor:VERTical[:BASic]:T<x>:
POSition
Sets the ΔT cursor position or queries the current setting. 5-71
:CURSor:VERTical[:BASic]:T<x>:
STATe
Turns ON/OFF the ΔT cursor or queries the current setting. 5-71
:CURSor:VERTical[:BASic]:T<x>:
VALue?
Queries the time value at the ΔT cursor. 5-71
:CURSor:VERTical:CALCulation?
Queries all settings related to calculation items of the ΔT cursors. 5-71
:CURSor:VERTical:CALCulation:
ALL
Turns ON/OFF all calculation items of the ΔT cursors. 5-71
:CURSor:VERTical:CALCulation:
DEFine<x>
Sets the equation of the calculation item of the ΔT cursor or queries the
current setting.
5-71
:CURSor:VERTical:CALCulation:
STATe<x>
Turns ON/OFF the calculation item of the ΔT cursor or queries the current
setting.
5-71
:CURSor:VERTical:CALCulation:
VALue<x>?
Queries the measured value of the calculation item of the ΔT cursor. 5-71
:CURSor:VT?
Queries all settings related to the VT cursor. 5-72
:CURSor:VT:BASic?
Queries all settings related to basic items of the VT cursor. 5-72
:CURSor:VT[:BASic]:ALL
Turns ON/OFF all basic items of the VT cursor. 5-72
:CURSor:VT[:BASic]:GROup<x>?
Queries all settings related to the logic group of the VT cursor. 5-72
:CURSor:VT[:BASic]:GROup<x>:
BITorder
Sets the measurement bit order of the logic group of the VT cursor or queries
the current setting.
5-72
:CURSor:VT[:BASic]:GROup<x>:
FORMat
Sets the display format of the measured value of the logic group of the VT
cursor or queries the current setting.
5-72
:CURSor:VT[:BASic]:GROup<x>:
STATe
Turns ON/OFF the measured value of the logic group of the VT cursor or
queries the current setting.
5-72
:CURSor:VT[:BASic]:GROup<x>:
VALue?
Queries the measured value of the logic group of the VT cursor. 5-72
:CURSor:VT[:BASic]:POSition
Sets the VT cursor position or queries the current setting. 5-72
:CURSor:VT[:BASic]:T?
Queries all settings related to the time value of the VT cursor. 5-72
:CURSor:VT[:BASic]:T:STATe
Turns ON/OFF the time value of the VT cursor or queries the current setting. 5-72
:CURSor:VT[:BASic]:T:VALue?
Queries the time value at the VT cursor. 5-72
:CURSor:VT[:BASic]:V<x>?
Queries all settings related to the voltage value of the VT cursor. 5-72
:CURSor:VT[:BASic]:V<x>:STATe
Turns ON/OFF the voltage value of the VT cursor or queries the current
setting.
5-72
:CURSor:VT[:BASic]:V<x>:VALue?
Queries the voltage value at the VT cursor. 5-73
:CURSor:VT:CALCulation?
Queries all settings related to calculation items of the VT cursor. 5-73
:CURSor:VT:CALCulation:ALL
Turns ON/OFF all calculation items of the VT cursor. 5-73
:CURSor:VT:CALCulation:
DEFine<x>
Sets the equation of the calculation item of the VT cursor or queries the
current setting.
5-73
:CURSor:VT:CALCulation:STATe<x>
Turns ON/OFF the calculation item of the VT cursor or queries the current
setting.
5-73
:CURSor:VT:CALCulation:
VALue<x>?
Queries the measured value of the calculation item of the VT cursor. 5-73
:CURSor:VT:JUMP
Jumps the VT cursor to the center position of the zoom waveform. 5-73
5.1 List of Commands
Page 45

5-11
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
DISPlay Group
:DISPlay?
Queries all settings related to the display. 5-74
:DISPlay:ACCumulate?
Queries all settings related to the accumulated display of waveforms. 5-74
:DISPlay:ACCumulate:GRADe
Sets the accumulate mode or queries the current setting. 5-74
:DISPlay:ACCumulate:MODE
Turns ON/OFF the accumulate mode or queries the current setting. 5-74
:DISPlay:ACCumulate:
PERSistence?
Queries all settings related to persistence. 5-74
:DISPlay:ACCumulate:
PERSistence:COUNt
Sets the persistence count or queries the current setting. 5-74
:DISPlay:ACCumulate:
PERSistence:MODE
Sets the persistence mode or queries the current setting. 5-74
:DISPlay:ACCumulate:
PERSistence:TIME
Sets the persistence time or queries the current setting. 5-74
:DISPlay:BLIGht?
Queries all settings related to the backlight. 5-74
:DISPlay:BLIGht:AUTooff
Sets the function that automatically turns the backlight off or queries the
current setting.
5-74
:DISPlay:BLIGht:BRIGhtness
Sets the brightness of the backlight or queries the current setting. 5-74
:DISPlay:BLIGht:LCD
Turns ON/OFF the backlight or queries the current setting. 5-75
:DISPlay:BLIGht:TIMeout
Sets the timeout of the backlight or queries the current setting. 5-75
:DISPlay:COLor?
Queries all settings related to the waveform display color. 5-75
:DISPlay:COLor:{CHANnel<x>|LOGi
c|LSTate|MATH<x>|REFerence<x>}
Sets the color of the waveform or queries the current setting. 5-75
:DISPlay:FORMat
Sets the display format or queries the current setting. 5-75
:DISPlay:GRATicule
Sets the graticule (grid) or queries the current setting. 5-75
:DISPlay:INTENsity?
Queries all settings related to the intensity of the displayed items. 5-75
:DISPlay:INTENsity[:WAVeform]
Sets the intensity of the waveform or queries the current setting. 5-75
:DISPlay:INTENsity:{CURSor|GRID
|MARKer|ZBOX}
Sets the intensity of the display item or queries the current setting. 5-75
:DISPlay:INTERpolate
Sets the display interpolation format or queries the current setting. 5-75
:DISPlay:MAPPing?
Queries all settings related to the waveform mapping to the split screen. 5-75
:DISPlay:MAPPing[:MODE]
Sets the waveform mapping mode for the split screen or queries the current
setting.
5-76
:DISPlay:MAPPing:TRACe<x>
Sets the mapping of the waveform to the split screen or queries the current
setting.
5-76
:DISPlay:SVALue (Scale VALUE)
Sets or queries the on/off status of the scale value display. 5-76
:DISPlay:TRANslucent
Turns ON/OFF the translucent mode or queries the current setting. 5-76
5.1 List of Commands
Page 46

5-12
IM DLM6054-17EN
Commnd Function Page
FILE Group
:FILE?
Queries all settings related to the specified storage medium or internal
memory.
5-77
:FILE:DIRectory?
Queries all settings related to the specified storage medium. 5-77
:FILE[:DIRectory]:CDIRectory
(Change Directory)
Sets the current directory or queries the current setting. 5-77
:FILE[:DIRectory]:FREE?
Queries the free disk space in bytes on the specified storage medium. 5-77
:FILE[:DIRectory]:MDIRectory
(Make Directory)
Creates a directory under the specified directory. This is an overlap
command.
5-77
:FILE:INTernal?
Queries all settings related to the internal memory. 5-77
:FILE:INTernal:RECall:SETup[:
EXECute]
Executes the loading of the setup data from the internal memory. This is an
overlap command.
5-77
:FILE:INTernal:STORe?
Queries all settings related to the saving to the internal memory. 5-77
:FILE:INTernal:STORe:SETup?
Queries all settings related to the saving of the setup data to the internal
memory.
5-77
:FILE:INTernal:STORe:SETup:
COMMent<x>
Sets the comment to the setup data to be saved to the internal memory or
queries the current setting.
5-78
:FILE:INTernal:STORe:SETup:
DATE<x>?
Queries the date/time when the setup data was saved to the internal
memory.
5-78
:FILE:INTernal:STORe:SETup[:
EXECute]
Executes the saving of the setup data to the internal memory. This is an
overlap command.
5-78
:FILE:INTernal:STORe:SETup:
LOCK<x>
Turns ON/OFF the read-only attribute of the setup data in the internal
memory or queries the current setting.
5-78
:FILE:LOAD?
Queries all settings related to the loading of files on the specified storage
medium.
5-78
:FILE:LOAD:{BINary|ZPOLYGON|ZWA
Ve}?
Queries all settings related to the loading of specific data. 5-78
:FILE:LOAD:{BINary|MASK|SETup
|SNAP|SYMBol|ZPOLygon|ZWAVe}:
ABORt
Aborts the loading of specific data. 5-78
:FILE:LOAD:{BINary|MASK|SETup
|SNAP|SYMBol|ZPOLygon|ZWAVe}[:
EXECute]
Executes the loading of specific data. This is an overlap command. 5-78
:FILE:LOAD:BINary:REFerence
Sets the load destination of the binary data or queries the current setting. 5-78
:FILE:LOAD:{ZPOLygon|ZWAVe}:
ZONE
Sets the load destination of the zone data of specific data or queries the
current setting.
5-78
:FILE:SAVE?
Queries all settings related to the saving of data. 5-78
:FILE:SAVE:{AHIStogram|ASCii|BI
Nary|FFT|FLOat|SBUS|ZWAVe}?
Queries all settings related to the saving of specific data. 5-79
:FILE:SAVE:{AHIStogram|ASCii|BI
Nary|FFT|FLOat|SETup|SBUS|SNAP|
WPARameter|ZWAVe}:ABORt
Aborts the save operation of specific data. 5-79
:FILE:SAVE:{AHIStogram|ASCii|BI
Nary|FFT|FLOat|SETup|SBUS|SNAP|
WPARameter|ZWAVe}[:EXECute]
Executes the saving of specific data by specifying a file name. This is an
overlap command.
5-79
:FILE:SAVE:{AHIStogram|FFT|SBUS
}:ANALysis
Sets the trace of specific data to be saved or queries the current setting. 5-79
:FILE:SAVE:ANAMing
Sets the type of auto naming of file names of the saved data or queries the
current setting.
5-79
:FILE:SAVE:{ASCii|BINary|FLOat}
:COMPression
Sets the compression method for saving specific data or queries the current
setting.
5-79
:FILE:SAVE:{ASCii|BINary|FLOat}
:HISTory
Sets whether to save the entire data or the selected data of specific data or
queries the current setting.
5-79
:FILE:SAVE:{ASCii|BINary|FLOat}
:LENGth
Sets the size of waveform data to save for each type of data or queries the
current setting.
5-79
:FILE:SAVE:ASCii:RANGe
Sets the ASCII data saving range or queries the current setting. 5-80
:FILE:SAVE:{ASCii|BINary|FLOat}
:TRACe
Sets the trace of specific data to be saved or queries the current setting. 5-80
:FILE:SAVE:COMMent
Sets the comment of data to be saved or queries the current setting. 5-80
:FILE:SAVE:NAME
Sets the name of the data file to be saved or queries the current setting. 5-80
:FILE:SAVE:ZWAVe:ZONE
Sets the zone of the zone data to be saved or queries the current setting. 5-80
5.1 List of Commands
Page 47

5-13
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
GONogo Group
:GONogo?
Queries all settings related to GO/NO-GO determination. 5-81
:GONogo:ABORt
Aborts the GO/NO-GO determination. 5-81
:GONogo:ACTion?
Queries all settings related to the action taken when the determination result
is NO-GO and the criteria values.
5-81
:GONogo:ACTion:BUZZer
Sets whether to sound a buzzer when the determination result is NO-GO or
queries the current setting.
5-81
:GONogo:ACTion:HCOPy
Sets whether to print the screen image on the printer when the determination
result is NO-GO or queries the current setting.
5-81
:GONogo:ACTion:MAIL?
Queries all settings related to the mail transmission when the determination
is NO-GO.
5-81
:GONogo:ACTion:MAIL:INTerval
Sets the interval at which to send mail when the determination is NO-GO or
queries the current setting.
5-81
:GONogo:ACTion:MAIL:MODE
Sets whether to send mail when the determination is NO-GO or queries the
current setting.
5-81
:GONogo:ACTion:SAVE
Sets whether to save the waveform data to the storage medium when the
determination result is NO-GO or queries the current setting.
5-81
:GONogo:CONDition<x>
Sets the GO/NO-GO determination criteria or queries the current setting. 5-81
:GONogo:COUNt?
Queries the actual number of GO/NO-GO determinations. 5-81
:GONogo:EXECute
Executes the GO/NO-GO determination. This is an overlap command. 5-81
:GONogo:LOGic
Sets the GO/NO-GO determination logic or queries the current setting. 5-81
:GONogo:MODE
Sets the GO/NO-GO determination type or queries the current setting. 5-82
:GONogo:NGCount?
Queries the actual number of NO-GOs of the GO/NO-GO determination. 5-82
:GONogo:SCONdition? (Stop
Condition)
Queries all settings related to the determination termination condition. 5-82
:GONogo[:SCONdition]:NGCount
Sets the number of NO-GOs that terminates the GO/NO-GO determination
or queries the current setting.
5-82
:GONogo[:SCONdition]:STOPcount
Sets the acquisition count that terminates the GO/NO-GO determination or
queries the current setting.
5-82
:GONogo:TELecomtest?
Queries all settings related to mask test determination. 5-82
:GONogo:TELecomtest:SELect<x>?
Queries all settings related to the condition of the mask test determination. 5-82
:GONogo:TELecomtest:SELect<x>:
EYEPattern?
Queries all settings related to the eye pattern determination of the condition. 5-82
:GONogo:TELecomtest:SELect<x>:
EYEPattern:<Parameter>
Sets the upper and lower limits of the waveform parameter of the eye pattern
determination or queries the current setting.
5-82
:GONogo:TELecomtest:SELect<x>:
MASK?
Queries all settings related to the mask determination of the condition. 5-82
:GONogo:TELecomtest:SELect<x>:
MASK:ELEMent<x>?
Queries all settings related to the element used in the mask determination. 5-82
:GONogo:TELecomtest:SELect<x>:
MASK:ELEMent<x>:PSPCount (Sample
Point Count %)
Sets the upper and lower limits of the error rate for the number of sampled
data points of the element or queries the current setting.
5-83
:GONogo:TELecomtest:SELect<x>:
MASK:ELEMent<x>:PWCount (Wave
Count %)
Sets the upper and lower limits of the error rate for the number of
acquisitions of the element or queries the current setting.
5-83
:GONogo:TELecomtest:SELect<x>:
MASK:ELEMent<x>:SPCount (Sample
Point Count)
Sets the upper and lower limits of the number of sampled data points for the
element that results in error or queries the current setting.
5-83
:GONogo:TELecomtest:SELect<x>:
MASK:ELEMent<x>:WCOunt (Wave
Count)
Sets the upper and lower limits of the number of acquisitions for the element
that results in error or queries the current setting.
5-83
:GONogo:ZPARameter?
Queries all settings related to zone/parameter determination. 5-83
:GONogo:ZPARameter:SELect<x>?
Queries all settings related to the condition of the zone/parameter
determination.
5-83
:GONogo:ZPARameter:SELect<x>:
MODE
Sets the mode of the condition or queries the current setting. 5-84
:GONogo:ZPARameter:SELect<x>:
PARameter?
Queries all settings related to the condition parameter. 5-84
:GONogo:ZPARameter:SELect<x>:
PARameter:CATegory
Sets the parameter category or queries the current setting. 5-84
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>?
Queries all settings related to the FFT determination. 5-84
5.1 List of Commands
Page 48

5-14
IM DLM6054-17EN
Commnd Function Page
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:CALCulation<x>
Sets the upper and lower limits of the calculation item of the FFT
determination or queries the current setting.
5-84
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:PEAK?
Queries all settings related to the peak value of the FFT determination. 5-84
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:PEAK:
DFREquency
Sets the upper and lower limits between the peak frequencies of the FFT
determination or queries the current setting.
5-84
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:PEAK:DV
Sets the upper and lower limits between the peak voltages of the FFT
determination or queries the current setting.
5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:PEAK:
FREQuency<x>
Sets the upper and lower limits of the peak frequency of the FFT
determination or queries the current setting.
5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:FFT<x>:PEAK:V<x>
Sets the upper and lower limits of the peak voltage of the FFT determination
or queries the current setting.
5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure?
Queries all settings related to the determination using automated
measurement of waveform parameters (measure determination).
5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:BIT<x>?
Queries all settings related to each logic bit of measure determination. 5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:BIT<x>:
AREA<x>?
Queries all settings related to each area of measure determination. 5-85
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:BIT<x>:
AREA<x>:TYPE?
Queries all settings related to logic waveform parameters of measure
determination.
5-86
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:BIT<x>:
AREA<x>:TYPE:<parameter>
Sets the upper and lower limits of the logic waveform of measure
determination or queries the current setting.
5-86
:GONogo:ZPARameter:
SELect<x>:PARameter:MEASure:
CALCulation<x>
Sets the upper and lower limits of the calculation item of the measure
determination or queries the current setting.
5-86
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:STATistics
Sets the statistical value of the measure determination or queries the current
setting.
5-86
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:TRACe<x>?
Queries all settings related to the trace of the measure determination. 5-86
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:TRACe<x>:
AREA<x>?
Queries all settings related to the area of the measure determination. 5-87
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:TRACe<x>:
AREA<x>:TYPE?
Queries all settings related to the waveform parameters of the measure
determination.
5-87
:GONogo:ZPARameter:SELect<x>:
PARameter:MEASure:TRACe<x>:
AREA<x>:TYPE:<Parameter>
Sets the upper and lower limits of the waveform parameter of the measure
determination or queries the current setting.
5-87
:GONogo:ZPARameter:SELect<x>:
PARameter:XY<x>?
Queries all settings related to the XY determination. 5-87
:GONogo:ZPARameter:SELect<x>:
PARameter:XY<x>:XYINteg
Sets the upper and lower limits integral value of the XY determination or
queries the current setting.
5-88
:GONogo:ZPARameter:SELect<x>:
RECTangle?
Queries all settings related to the rectangle determination. 5-88
:GONogo:ZPARameter:SELect<x>:
RECTangle:HORizontal
Sets the horizontal position of the rectangle used in the rectangle
determination or queries the current setting.
5-88
:GONogo:ZPARameter:SELect<x>:
RECTangle:VERTical
Sets the vertical position of the rectangle used in the rectangle determination
or queries the current setting.
5-88
:GONogo:ZPARameter:SELect<x>:
TRACe
Sets the source trace of the zone/parameter determination or queries the
current setting.
5-88
:GONogo:ZPARameter:SELect<x>:
WAVE?
Queries all settings related to the wave determination. 5-88
:GONogo:ZPARameter:SELect<x>:
WAVE:EDIT<x>:EXIT
Exits the edit menu of the wave determination zone. 5-88
:GONogo:ZPARameter:SELect<x>:
WAVE:EDIT<x>:PART
Editing the portion of the zone of the wave determination. 5-89
:GONogo:ZPARameter:SELect<x>:
WAVE:EDIT<x>:WHOLe
Sets the editing of the entire zone of the waveform zone. 5-89
:GONogo:ZPARameter:SELect<x>:
WAVE:TRANge
Sets the determination range of the zone determination or queries the
current setting.
5-89
5.1 List of Commands
Page 49

5-15
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:GONogo:ZPARameter:SELect<x>:
WINDow
Sets the source window of the zone determination or queries the current
setting.
5-89
HCOPy Group
:HCOPy? (Hard COPY)
Queries all settings related to the output of screen data. 5-90
:HCOPy:ABORt
Aborts data output and paper feeding. 5-90
:HCOPy:DIRection
Sets the data output destination or queries the current setting. 5-90
:HCOPy:EXECute
Executes the data output. This is an overlap command. 5-90
:HCOPy:EXTPrinter?
Queries all settings related to the external printer output. 5-90
:HCOPy:EXTPrinter:TONE
Sets the half tone of the external printer output or queries the current setting. 5-90
:HCOPy:EXTPrinter:TYPE
Sets the type of output commands to send to the external printer or queries
the current setting.
5-90
:HCOPy:FILE?
Queries all settings related to file output. 5-90
:HCOPy:FILE:FORMat
Sets the file output image format or queries the current setting. 5-90
:HCOPy:FILE:SAVE?
Queries all settings related to the saving of file output. 5-90
:HCOPy:FILE:SAVE:ANAMing
Sets the type of auto naming of save destination file names or queries the
current setting.
5-90
:HCOPy:FILE:SAVE:CDIRectory
(Change Directory)
Sets the save destination directory name or queries the current setting. 5-91
:HCOPy:FILE:SAVE:NAME
Sets the save destination file name or queries the current setting. 5-91
:HCOPy:NETPrint?
Queries all settings related to network printer output or queries the current
setting.
5-91
:HCOPy:NETPrint:TONE
Sets the half tone for the network printer or queries the current setting. 5-91
:HCOPy:NETPrint:TYPE
Sets the output command type for the network printer or queries the current
setting.
5-91
:HCOPy:PRINter?
Queries all settings related to the built-in printer output. 5-91
:HCOPy:PRINter:HRMode
Turns ON/OFF the high resolution mode of the built-in printer output or
queries the current setting.
5-91
5.1 List of Commands
Page 50

5-16
IM DLM6054-17EN
Commnd Function Page
HISTory Group
:HISTory?
Queries all settings related to the history function. 5-92
:HISTory:CURRent?
Queries all settings related to the history function of the current waveform
(CH1 to 4, M1 to 8).
5-92
:HISTory[:CURRent]:DISPlay
Sets the start number and end number of the display record of the history
waveform or queries the current setting.
5-92
:HISTory[:CURRent]:DMODe
(Display Mode)
Sets the display mode of the history waveform or queries the current setting. 5-92
:HISTory[:CURRent]:MODE
Sets the highlight display mode of the history waveform or queries the
current setting.
5-92
:HISTory[:CURRent]:RECord
Sets the target record of the history waveform or queries the current setting. 5-92
:HISTory[:CURRent]:RECord?
MINimum
Queries the minimum record number of the history waveform. 5-92
:HISTory[:CURRent]:REPLay?
Queries all settings related to the replay function of the history function. 5-92
:HISTory[:CURRent]:REPLay:JUMP
Jumps the history waveform to the specified record number. 5-92
:HISTory[:CURRent]:REPLay:SPEed
Sets the replay speed of the history waveform or queries the current setting. 5-92
:HISTory[:CURRent]:REPLay:STARt
Starts the replay of the history waveform in the specified direction. 5-93
:HISTory[:CURRent]:REPLay:STOP
Stops the replay of the history waveform. 5-93
:HISTory[:CURRent]:SEARch?
Queries all settings related to the history search function. 5-93
:HISTory[:CURRent][:SEARch]:
ABORt
Aborts the history search. 5-93
:HISTory[:CURRent][:SEARch]:
EXECute
Executes the history search. This is an overlap command. 5-93
:HISTory[:CURRent][:SEARch]:
LOGic
Sets the history search logic or queries the current setting. 5-93
:HISTory[:CURRent][:SEARch]:
RESet
Resets the search conditions of the history search. 5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>?
Queries all settings related to the history search condition. 5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>:CONDition
Sets determination criteria of the history search condition or queries the
current setting.
5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>:MODE
Sets the mode of the history search condition or queries the current setting. 5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter?
Queries all settings related to the parameter of the history search condition. 5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:CATegory
Sets the parameter category or queries the current setting. 5-93
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>?
Queries all settings related to the FFT search. 5-94
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
CALCulation<x>
Sets the upper and lower limits of the calculation item of the FFT search or
queries the current setting.
5-94
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
PEAK?
Queries all settings related to the peak value of the FFT search. 5-94
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
PEAK:DFREquency
Sets the upper and lower limits between the peak frequencies of the FFT
search or queries the current setting.
5-94
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
PEAK:DV
Sets the upper and lower limits between the peak voltages of the FFT search
or queries the current setting.
5-94
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
PEAK:FREquency<x>
Sets the upper and lower limits of the peak frequency of the FFT search or
queries the current setting.
5-95
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:FFT<x>:
PEAK:V<x>
Sets the upper and lower limits of the peak voltage of the FFT search or
queries the current setting.
5-95
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure?
Queries all settings related to the search using automated measurement of
waveform parameters (measure search).
5-95
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
BIT<x>?
Queries all settings related to each logic bit of measure search. 5-95
5.1 List of Commands
Page 51

5-17
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
BIT<x>:AREA<x>?
Queries all settings related to each area of measure search. 5-95
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
BIT<x>:AREA<x>:TYPE?
Queries all settings related to logic waveform parameters of measure search. 5-95
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
BIT<x>:AREA<x>:TYPE:<parameter>
Sets the upper and lower limits of the logic waveform of measure search or
queries the current setting.
5-96
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
CALCulation<x>
Sets the upper and lower limits of the calculation item of the measure search
or queries the current setting.
5-96
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
TRACe<x>?
Queries all settings related to the trace of the measure search. 5-96
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
TRACe<x>:AREA<x>?
Queries all settings related to the area of the measure search. 5-96
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:MEASure:
TRACe<x>:AREA<x>:TYPE?
Queries all settings related to the waveform parameters of the measure
search.
5-96
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:
MEASure:TRACe<x>:AREA<x>:
TYPE:<Parameter>
Sets the upper and lower limits of the waveform parameter of the measure
search or queries the current setting.
5-97
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:XY<x>?
Queries all settings related to the XY search. 5-97
:HISTory[:CURRent][:SEARch]:
SELect<x>:PARameter:XY<x>:
XYINteg
Sets the upper and lower limits integral value of the XY search or queries the
current setting.
5-97
:HISTory[:CURRent][:SEARch]:
SELect<x>:RECTangle?
Queries all settings related to the rectangle search. 5-97
:HISTory[:CURRent][:SEARch]:
SELect<x>:RECTangle:HORizontal
Sets the horizontal position of the rectangle used in the rectangle search or
queries the current setting.
5-97
:HISTory[:CURRent][:SEARch]:
SELect<x>:RECTangle:VERTical
Sets the vertical position of the rectangle used in the rectangle search or
queries the current setting.
5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:TRACe
Sets the source trace of the history search or queries the current setting. 5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WAVE?
Queries all settings related to the search in the waveform zone (wave
search).
5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WAVE:EDIT<x>:EXIT
Exits the zone edit menu of the wave search. 5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WAVE:EDIT<x>:PART
Sets the editing of the portion of the zone of the wave search. 5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WAVE:EDIT<x>:WHOLe
Sets the editing of the entire zone of the wave search. 5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WAVE:TRANge
Sets the range over which to perform the wave search or queries the current
setting.
5-98
:HISTory[:CURRent][:SEARch]:
SELect<x>:WINDow
Sets the source window of the history search or queries the current setting. 5-99
:HISTory[:CURRent]:TIME?
Queries the time of the source record number of the history waveform. 5-99
:HISTory:REFerence<x>?
Queries all settings related to the history function of the reference. 5-99
:HISTory:REFerence<x>:DMODe
(Display Mode)
Sets the display mode of the history waveform of the reference or queries
the current setting.
5-99
:HISTory:REFerence<x>:MODE
Sets the highlight display mode of the history waveform of the reference or
queries the current setting.
5-99
:HISTory:REFerence<x>:RECord
Sets the source record of the history waveform of the reference or queries
the current setting.
5-99
5.1 List of Commands
Page 52

5-18
IM DLM6054-17EN
Commnd Function Page
:HISTory:REFerence<x>:RECord?
MINimum
Queries the minimum record number of the history waveform of the
reference.
5-99
:HISTory:REFerence<x>:REPLay?
Queries all settings related to the replay function of the history function of the
reference.
5-99
:HISTory:REFerence<x>:REPLay:
JUMP
Jumps to the specified record number of the history waveform of the
reference.
5-99
:HISTory:REFerence<x>:REPLay:
SPEed
Sets the replay speed of the history waveform of the reference or queries the
current setting.
5-99
:HISTory:REFerence<x>:REPLay:
STARt
Starts the replay of the history waveform of the reference. 5-100
:HISTory:REFerence<x>:REPLay:
STOP
Stops the replay of the history waveform of the reference. 5-100
:HISTory:REFerence<x>:TIME?
Queries the time of the source record number of the reference waveform. 5-100
IMAGe Group
:IMAGe?
Queries all settings related to the output of screen image data. 5-101
:IMAGe:FORMat
Sets the output format of the screen image data or queries the current
setting.
5-101
:IMAGe:SEND?
Queries the screen image data. 5-101
:IMAGe:TONE
Sets the tone of the screen image data or queries the current setting. 5-101
INITialize Group
:INITialize:EXECute
Execute the initialization. 5-102
:INITialize:UNDO
Cancels the initialization that was executed. 5-102
5.1 List of Commands
Page 53

5-19
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
LOGic Group
:LOGic?
Queries all settings related to the logic. 5-103
:LOGic:AWINdow?
Queries all settings related to analog waveform display. 5-103
:LOGic:AWINdow[:DISPlay]
Turns ON/OFF the analog waveform display or queries the current setting. 5-103
:LOGic:AWINdow:RATio
Sets the analog waveform display ratio or queries the current setting. 5-103
:LOGic:DESKew
Sets the skew correction of the logic signal or queries the current setting. 5-103
:LOGic:GROup<x>?
Queries all settings related to the logic group. 5-103
:LOGic:GROup<x>:BUNDle?
Queries all settings related to the bundle of the logic group. 5-103
:LOGic:GROup<x>:BUNDle:FORMat
Sets the display format (bus display) of the bundled value of the logic group
or queries the current setting.
5-103
:LOGic:GROup<x>:BUNDle:MODE
Sets the bundle mode of the logic group or queries the current setting. 5-103
:LOGic:GROup<x>:BUNDle:SYMBol
Sets the symbol item of the bundle value of each logic group. 5-103
:LOGic:GROup<x>:DISPlay
Turns ON/OFF the display of the logic group or queries the current setting. 5-103
:LOGic:GROup<x>:MAPPing
Sets the bit mapping of the logic group or queries the current setting. 5-104
:LOGic:GROup<x>:ORDer
Sets the displayed order of the logic group or queries the current setting. 5-104
:LOGic:GROup<x>:STATe
Turns ON/OFF the state display of the logic group or queries the current
setting.
5-104
:LOGic:LABel?
Queries all settings related to the label of the logic signal. 5-104
:LOGic:LABel:BNAMe?
Queries all settings related to the bit name of the logic signal. 5-104
:LOGic:LABel:BNAMe:{A<x>|B<x>|C
<x>|D<x>}
Sets the bit name of the logic signal or queries the current setting. 5-104
:LOGic:LABel:LNAMe?
Queries all settings related to the group name of the logic signal. 5-104
:LOGic:LABel:LNAMe:GROup<x>
Sets the group name of the logic signal or queries the current setting. 5-104
:LOGic:LABel:MODE
Turns ON/OFF the logic signal label or queries the current setting. 5-104
:LOGic:MODE
Turns ON/OFF the logic signal or queries the current setting. 5-104
:LOGic:POSition
Sets the vertical position of the logic signal or queries the current setting. 5-104
:LOGic:SCLock?
Queries all settings related to the state clock of the logic signal. 5-105
:LOGic:SCLock:POLarity
Sets the state clock polarity of the logic signal or queries the current setting. 5-105
:LOGic:SCLock:SOURce
Sets the state clock source of the logic signal or queries the current setting. 5-105
:LOGic:SIZE
Sets the display size of the logic signal or queries the current setting. 5-105
:LOGic:THReshold?
Queries all settings related to the threshold level of the logic signal. 5-105
:LOGic:THReshold:{PODA|PODB|POD
C|PODD}?
Queries all settings related to the threshold level of the specified pod (port). 5-105
:LOGic:THReshold:{PODA|PODB|POD
C|PODD}:TYPE
Sets the type of threshold level of the specified pod (port) or queries the
current setting.
5-105
:LOGic:THReshold:{PODA|PODB|POD
C|PODD}:USERlevel
Sets the threshold level of the specified pod (port) or queries the current
setting.
5-105
5.1 List of Commands
Page 54

5-20
IM DLM6054-17EN
Commnd Function Page
MATH Group
:MATH<x>?
Queries all settings related to the computation. 5-106
:MATH<x>:DA?
Queries all settings related to the D/A conversion. 5-106
:MATH<x>:DA:ARANging
Executes the auto range of the D/A conversion. 5-106
:MATH<x>:DA:BFORmat
Sets the binary format of D/A conversion or queries the current setting. 5-106
:MATH<x>:DA:HISTory:ABORt
Aborts the history computation of the D/A conversion. 5-106
:MATH<x>:DA:HISTory:EXECute
Executes the auto range of the D/A conversion. 5-106
:MATH<x>:DA:RESCaling?
Queries all settings related to the rescaling of the D/A conversion. 5-106
:MATH<x>:DA:RESCaling:AVALue
Sets rescaling coefficient A of the D/A conversion or queries the current
setting.
5-106
:MATH<x>:DA:RESCaling:BVALue
Sets rescaling offset B of the D/A conversion or queries the current setting. 5-106
:MATH<x>:ECOunt?
Queries all settings related to the edge count computation. 5-106
:MATH<x>:ECOunt:HYSTeresis
Sets the hysteresis of the edge detection level of the edge count computation
or queries the current setting.
5-106
:MATH<x>:ECOunt:POLarity
Sets the edge detection polarity of the edge count computation or queries
the current setting.
5-106
:MATH<x>:FILTer?
Queries all settings related to the filter. 5-106
:MATH<x>:FILTer:DELay?
Queries all settings related to the delay computation. 5-106
:MATH<x>:FILTer:DELay:TIME
Sets the delay value of the delay computation or queries the current setting. 5-107
:MATH<x>:FILTer:IIR?
Queries all settings related to the IIR filter computation. 5-107
:MATH<x>:FILTer:IIR:FORDer
(Filter Order)
Sets the filter order of the IIR filter computation or queries the current setting. 5-107
:MATH<x>:FILTer:IIR:HIPass?
Queries all settings related to the IIR high pass filter computation. 5-107
:MATH<x>:FILTer:IIR:HIPass:COFF
Sets the cutoff frequency of the IIR high pass filter computation or queries
the current setting.
5-107
:MATH<x>:FILTer:IIR:LOWPass?
Queries all settings related to the IIR low pass filter computation. 5-107
:MATH<x>:FILTer:IIR:LOWPass:
COFF
Sets the cutoff frequency of the IIR low pass filter computation or queries the
current setting.
5-107
:MATH<x>:FILTer:MAVG?
Queries all settings related to the moving average computation. 5-107
:MATH<x>:FILTer:MAVG:WEIGht
Sets the weight of the moving average computation or queries the current
setting.
5-107
:MATH<x>:FILTer:TYPE
Sets the filter type or queries the current setting. 5-107
:MATH<x>:IPOint? (Initial Point)
Queries all settings related to the computation reference point. 5-107
:MATH<x>:IPOint:JUMP
Moves the computation reference point to the specified position. 5-107
:MATH<x>:IPOint:POSition
Sets the computation reference point or queries the current setting. 5-108
:MATH<x>:LABel?
Queries all settings related to the label of the computed waveform. 5-108
:MATH<x>:LABel[:DEFine]
Sets the label of the computed waveform or queries the current setting. 5-108
:MATH<x>:LABel:MODE
Turns ON/OFF the label display of the computed waveform or queries the
current setting.
5-108
:MATH<x>:OPERation
Sets the operator or queries the current setting. 5-108
:MATH<x>:SCALe?
Queries all settings related to scaling. 5-108
:MATH<x>:SCALe:CENTer
Sets the offset of the computed waveform or queries the current setting. 5-108
:MATH<x>:SCALe:MODE
Sets the scaling mode or queries the current setting. 5-108
:MATH<x>:SCALe:SENSitivity
Sets the vertical sensitivity of the computed waveform or queries the current
setting.
5-109
:MATH<x>:SELect
Sets the display option or queries the current setting. 5-109
:MATH<x>:THReshold<x>
Sets the edge detection level of the count computation or queries the current
setting.
5-109
:MATH<x>:UNIT?
Queries all settings related to the computation unit. 5-109
:MATH<x>:UNIT[:DEFine]
Sets the computation unit or queries the current setting. 5-109
:MATH<x>:UNIT:MODE
Sets the automatic/manual addition of the computation unit or queries the
current setting.
5-109
:MATH<x>:USERdefine?
Queries all settings related to user-defined math or queries the current
setting.
5-109
:MATH<x>:USERdefine:ARANging
Executes auto ranging for user-defined math. 5-109
:MATH<x>:USERdefine:AVERage?
Queries all averaging settings for user-defined computation. 5-109
:MATH<x>:USERdefine:AVERage:
EWEight
Sets or queries the attenuation constant of exponential averaging in userdefined computation.
5-109
:MATH<x>:USERdefine:AVERage:
MODE
:MATH<x>:USERdefine:CONStant<x>
Sets a user-defined math constant or queries the current setting. 5-110
5.1 List of Commands
Page 55

5-21
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:MATH<x>:USERdefine:DEFine
Sets a user-defined math equation or queries the current setting. 5-110
:MATH<x>:USERdefine:FILTer<y>?
Queries all filter settings for user-defined computation. 5-110
:MATH<x>:USERdefine:FILTer<y>:
BAND
Sets or queries the filter band (frequency band) for user-defined computation. 5-110
:MATH<x>:USERdefine:FILTer<y>:
CUToff<z>
Sets or queries the cutoff frequency for user-defined computation. 5-110
:MATH<x>:USERdefine:FILTer<y>:
TYPE
Sets or queries the filter type for user-defined computation. 5-110
:MATH<x>:USERdefine:HISTory:
ABORt
Cancels history computation for user-defined math. 5-110
:MATH<x>:USERdefine:HISTory:
EXECute
Executes history computation for user-defined math. 5-110
MEASure Group
:MEASure?
Queries all settings related to the automated measurement of waveform
parameters.
5-111
:MEASure:BIT<x>?
Queries all settings related to each logic bit. 5-111
:MEASure:BIT<x>:AREA<x>?
Queries all settings related to each area. 5-111
:MEASure:BIT<x>:AREA<x>:ALL
Turns ON/OFF all logic waveform parameters. 5-111
:MEASure:BIT<x>:
AREA<x>:<parameter>?
Queries all settings related to logic waveform parameters. 5-111
:MEASure:BIT<x>:
AREA<x>:<parameter>:COUNt?
Queries the count for continuous statistical processing of logic waveform
parameters.
5-111
:MEASure:BIT<x>:AREA<x>:<parame
ter>:{MAXimum|MEAN|MINimum|SDEV
iation}?
Queries each statistical value of logic waveform parameters. 5-111
:MEASure:BIT<x>:
AREA<x>:<parameter>:STATe
Turns ON/OFF the logic waveform parameters or queries the current setting. 5-111
:MEASure:BIT<x>:
AREA<x>:<parameter>:VALue?
Queries automatically measured values of logic waveform parameters. 5-112
:MEASure:BIT<x>:AREA<x>:DELay:
MEASure?
Queries all settings related to the measurement conditions for the source
waveform of delay measurement between channels.
5-112
:MEASure:BIT<x>:AREA<x>:DELay:
MEASure:COUNt
Sets the edge detection count for the source waveform of delay
measurement between channels or queries the current setting.
5-112
:MEASure:BIT<x>:AREA<x>:DELay:
MEASure:POLarity
Sets the polarity of the source waveform of delay measurement between
channels or queries the current setting.
5-112
:MEASure:BIT<x>:AREA<x>:DELay:
REFerence?
Queries all settings related to the reference waveform of delay measurement
between channels.
5-112
:MEASure:BIT<x>:AREA<x>:DELay:
REFerence:COUNt
Sets the edge detection count for the reference waveform of delay
measurement between channels or queries the current setting.
5-112
:MEASure:BIT<x>:AREA<x>:DELay:
REFerence:POLarity
Sets the polarity of the reference waveform of delay measurement between
channels or queries the current setting.
5-113
:MEASure:BIT<x>:AREA<x>:DELay:
REFerence:TRACe
Sets the trace for the reference waveform of delay measurement between
channels or queries the current setting.
5-113
:MEASure:BIT<x>:AREA<x>:DELay:
SOURce
Sets the reference of delay measurement between channels or queries the
current setting.
5-113
:MEASure:CALCulation?
Queries all settings related to calculation items. 5-113
:MEASure:CALCulation:ALL
Turns ON/OFF all calculation items. 5-113
:MEASure:CALCulation:COUNt<x>?
Queries the statistical processing count of the calculation item. 5-113
:MEASure:CALCulation:DEFine<x>
Sets the equation of the calculation item or queries the current setting. 5-113
:MEASure:CALCulation:{MAXimum<x
>|MEAN<x>|MINimum<x>|SDEViation
<x>}?
Queries the statistical value of the calculation item. 5-113
:MEASure:CALCulation:STATe<x>
Turns ON/OFF the calculation item or queries the current setting. 5-113
:MEASure:CALCulation:VALue<x>?
Queries the automated measured value of the calculation item. 5-114
:MEASure:CONTinuous?
Queries all settings related to the continuous statistical processing. 5-114
:MEASure:CONTinuous:COUNt
Sets the continuous statistical processing count or queries the current
setting.
5-114
5.1 List of Commands
Page 56

5-22
IM DLM6054-17EN
Commnd Function Page
:MEASure:CONTinuous:RESTart
Restarts the continuous statistical processing. 5-114
:MEASure:CYCLe?
Queries all settings related to the cycle statistical processing. 5-114
:MEASure:CYCLe:ABORt
Aborts the execution of the cycle statistical processing. 5-114
:MEASure:CYCLe:EXECute
Executes the cycle statistical processing. This is an overlap command. 5-114
:MEASure:CYCLe:TRACe
Sets the cycle source trace of the continuous statistical processing count or
queries the current setting.
5-114
:MEASure:DISPlay
Turns ON/OFF the display of the automated measurement of waveform
parameters or queries the current setting.
5-114
:MEASure:HISTory:ABORt
Aborts the execution of the statistical processing of the history data. 5-114
:MEASure:HISTory:EXECute
Executes the statistical processing of the history data. This is an overlap
command.
5-114
:MEASure:MODE
Sets the mode of the automated measurement of waveform parameters or
queries the current setting.
5-114
:MEASure:THReshold?
Queries all settings related to the threshold levels of the automated
measurement of waveform parameters.
5-115
:MEASure:THReshold:TRACe<x>?
Queries the threshold levels of the trace. 5-115
:MEASure:THReshold:TRACe<x>:
AUTO
Sets the detection mode when the auto setting of the threshold level is
enabled or queries the current setting.
5-115
:MEASure:THReshold:TRACe<x>:
LHYSteresis?
Queries all settings related to the level and hysteresis of the threshold level. 5-115
:MEASure:THReshold:TRACe<x>:
LHYSteresis:HYSTeresis
Sets the hysteresis of the threshold level or queries the current setting. 5-115
:MEASure:THReshold:TRACe<x>:
LHYSteresis:LEVel
Sets the level of the threshold level or queries the current setting. 5-115
:MEASure:THReshold:TRACe<x>:
MODE
Sets the setup mode of the threshold level or queries the current setting. 5-115
:MEASure:THReshold:TRACe<x>:
ULOWer?
Queries all settings related to the upper and lower limits of the threshold
level.
5-116
:MEASure:THReshold:TRACe<x>:
ULOWer:RANGe
Sets the upper and lower limits of the threshold level or queries the current
setting.
5-116
:MEASure:TRACe<x>?
Queries all settings related to the trace. 5-116
:MEASure:TRACe<x>:AREA<x>?
Queries all settings related to the area. 5-116
:MEASure:TRACe<x>:AREA<x>:ALL
Turns ON/OFF all waveform parameters. 5-116
:MEASure:TRACe<x>:
AREA<x>:<Parameter>?
Queries all settings related to the waveform parameter. 5-116
:MEASure:TRACe<x>:
AREA<x>:<Parameter>:COUNt?
Queries the continuous statistical processing count of the waveform
parameter.
5-116
:MEASure:TRACe<x>:AREA<x>:<Para
meter>:{MAXimum|MEAN|MINimum|SD
EViation}?
Queries the statistical value of the waveform parameter. 5-116
:MEASure:TRACe<x>:
AREA<x>:<Parameter>:STATe
Turns ON/OFF the waveform parameter or queries the current setting. 5-117
:MEASure:TRACe<x>:
AREA<x>:<Parameter>:VALue?
Queries the automated measured value of the waveform parameter. 5-117
:MEASure:TRACe<x>:AREA<x>:
DELay:MEASure?
Queries all settings related to the measurement conditions of the source
waveform of the delay measurement between channels.
5-117
:MEASure:TRACe<x>:AREA<x>:
DELay:MEASure:COUNt
Sets the edge detection count of the source waveform of the delay
measurement between channels or queries the current setting.
5-117
:MEASure:TRACe<x>:AREA<x>:
DELay:MEASure:POLarity
Sets the polarity of the source waveform of the delay measurement between
channels or queries the current setting.
5-117
:MEASure:TRACe<x>:AREA<x>:
DELay:REFerence?
Queries all settings related to the reference waveform of the delay
measurement between channels.
5-117
:MEASure:TRACe<x>:AREA<x>:
DELay:REFerence:COUNt
Sets the edge detection count of the reference waveform of the delay
measurement between channels or queries the current setting.
5-118
:MEASure:TRACe<x>:AREA<x>:
DELay:REFerence:POLarity
Sets the polarity of the reference waveform of the delay measurement
between channels or queries the current setting.
5-118
:MEASure:TRACe<x>:AREA<x>:
DELay:REFerence:TRACe
Sets the trace of the reference waveform of the delay measurement between
channels or queries the current setting.
5-118
:MEASure:TRACe<x>:AREA<x>:
DELay:SOURce
Sets the reference of the delay measurement between channels or queries
the current setting.
5-118
:MEASure:TRACe<x>:DPRoximal?
Queries all settings related to the distal and proximal values. 5-118
:MEASure:TRACe<x>:DPRoximal:
MODE
Sets the unit of the distal and proximal values or queries the current setting. 5-118
:MEASure:TRACe<x>:DPRoximal:
PERCent
Sets the distal and proximal values as a percentage or queries the current
setting.
5-119
5.1 List of Commands
Page 57

5-23
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:MEASure:TRACe<x>:DPRoximal:
UNIT
Sets the distal and proximal values in the specified unit or queries the current
setting.
5-119
:MEASure:TRACe<x>:METHod
Sets the method for detecting the High/Low level for automated
measurement of waveform parameters or queries the current setting.
5-119
:MEASure:TRANge<x> (Time Range)
Sets the measurement range or queries the current setting. 5-119
:MEASure:WAIT?
Waits for the completion of the automated measurement with a timeout
option.
5-119
:MEASure:WINDow<x>
Sets the measurement source window of the area or queries the current
setting.
5-119
REFerence Group
:REFerence<x>?
Queries all settings related to the reference. 5-120
:REFerence<x>:LABel?
Queries all settings related to the waveform label of the reference. 5-120
:REFerence<x>:LABel[:DEFine]
Sets the waveform label of the reference or queries the current setting. 5-120
:REFerence<x>:LABel:MODE
Turns ON/OFF the waveform label display of the reference or queries the
current setting.
5-120
:REFerence<x>:LOAD
Loads the waveform to the reference. 5-120
:REFerence<x>:POSition
Sets the vertical position of the reference or queries the current setting. 5-120
:REFerence<x>:SELect
Sets the waveform (computation or reference) to the computation channel
or queries the current setting.
5-120
SEARch Group
:SEARch<x>?
Queries all settings related to the search function. 5-121
:SEARch<x>:ABORt
Aborts the search. 5-121
:SEARch<x>:CLOCk?
Queries all settings related to the clock channel. 5-121
:SEARch<x>:CLOCk:POLarity
Sets the polarity of the clock channel or queries the current setting. 5-121
:SEARch<x>:CLOCk:SOURce
Sets the clock trace of the search or queries the current setting. 5-121
:SEARch<x>:DECimation
Sets the decimation detection of the skip mode or queries the current setting. 5-121
:SEARch<x>:EXECute
Executes the search. This is an overlap command. 5-122
:SEARch<x>:HOLDoff
Sets the hold off detection or queries the current setting. 5-122
:SEARch<x>:LOGic
Sets the search logic or queries the current setting. 5-122
:SEARch<x>:MARK
Turns ON/OFF the search mark or queries the current setting. 5-122
:SEARch<x>:POLarity
Sets the search polarity or queries the current setting. 5-122
:SEARch<x>:SELect
Sets the detection waveform number of the search function and queries the
position that corresponds to the detection waveform number.
5-122
:SEARch<x>:SELect? MAXimum
Queries the detection count of the search function. 5-122
:SEARch<x>:SLOGic?
Queries all settings related to the logic search. 5-122
:SEARch<x>:SLOGic:CLOCk?
Queries all settings related to the logic search clock. 5-122
:SEARch<x>:SLOGic:CLOCk:
POLarity
Sets the polarity of the clock of the logic search or queries the current
setting.
5-123
:SEARch<x>:SLOGic:CLOCk:SOURce
Sets the clock for the logic search or queries the current setting. 5-123
:SEARch<x>:SLOGic:POLarity
Sets the logic search polarity or queries the current setting. 5-123
:SEARch<x>:SLOGic:SOURce
Sets the logic search source or queries the current setting. 5-123
:SEARch<x>:SLOGic:SPATtern?
(Serial Pattern)
Queries all settings related to logic serial pattern search. 5-123
:SEARch<x>:SLOGic:SPATtern:
CLOCk?
Queries all settings related to the clock for the logic serial pattern search. 5-123
:SEARch<x>:SLOGic:SPATtern:
CLOCk:MODE
Enables/disables the clock for the logic serial analysis pattern search or
queries the current setting.
5-123
:SEARch<x>:SLOGic:SPATtern:
CLOCk:POLarity
Sets the polarity of the clock trace of the logic serial pattern search or
queries the current setting.
5-123
:SEARch<x>:SLOGic:SPATtern:
CLOCk:SOURce
Sets the clock trace for the logic serial pattern search or queries the current
setting.
5-124
:SEARch<x>:SLOGic:SPATtern:CS
Enables/disables the chip select for the logic serial analysis pattern search
or queries the current setting.
5-124
:SEARch<x>:SLOGic:SPATtern:
LATCh?
Queries all settings related to the latch for the logic serial pattern search. 5-124
:SEARch<x>:SLOGic:SPATtern:
LATCh:POLarity
Sets the polarity of the latch trace of the logic serial pattern search or queries
the current setting.
5-124
5.1 List of Commands
Page 58

5-24
IM DLM6054-17EN
Commnd Function Page
:SEARch<x>:SLOGic:SPATtern:
LATCh:TRACe
Sets the latch trace for the logic serial pattern search or queries the current
setting.
5-124
:SEARch<x>:SLOGic:SPATtern[:
SETup]?
Queries all settings related to the setup for the logic serial pattern search. 5-124
:SEARch<x>:SLOGic:SPATtern[:
SETup]:BITRate
Sets the bit rate for the logic serial pattern search or queries the current
setting.
5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:CLEar
Clears (Don't care) all patterns of the logic serial pattern search. 5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:DATA?
Queries all settings related to the data for the logic serial pattern search. 5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:DATA:ACTive
Sets the active trace level of the data for the logic serial pattern search or
queries the current setting.
5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:DATA:TRACe
Sets the trace of the data for the logic serial pattern search or queries the
current setting.
5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:HEXA
Sets the pattern of the logic serial pattern search in hexadecimal notation. 5-125
:SEARch<x>:SLOGic:SPATtern[:
SETup]:PATTern
Sets the pattern of the logic serial pattern search in binary notation, or
queries the current setting.
5-125
:SEARch<x>:SLOGic:STATe?
Queries all settings related to the logic state search. 5-125
:SEARch<x>:SLOGic:STATe:BIT?
Queries all settings related to the bits of the logic state search. 5-126
:SEARch<x>:SLOGic:STATe:BIT:{A<
x>|B<x>|C<x>|D<x>}
Sets the truth conditions for each bit of the logic state search or queries the
current setting.
5-126
:SEARch<x>:SLOGic:STATe:BIT:
CLEar
Clears (Don't care) all truth conditions for each bit of the logic serial pattern
search.
5-126
:SEARch<x>:SLOGic:STATe:BIT:
LOGic
Sets the logic of the logic state search or queries the current setting. 5-126
:SEARch<x>:SLOGic:STATe:
GROup<x>?
Queries all settings related to each group of the logic state search. 5-126
:SEARch<x>:SLOGic:STATe:
GROup<x>:CLEar
Clears (Don't care) all truth conditions for each group of the logic serial
pattern search.
5-126
:SEARch<x>:SLOGic:STATe:
GROup<x>:CONDition
Sets the determination condition for each group of the logic state search or
queries the current setting.
5-126
:SEARch<x>:SLOGic:STATe:
GROup<x>:DATA<x>
Sets the comparison data for each group of the logic state search or queries
the current setting.
5-126
:SEARch<x>:SLOGic:STATe:
GROup<x>:HEXA
Sets the truth conditions for each group of the logic serial pattern search in
hexadecimal notation.
5-127
:SEARch<x>:SLOGic:STATe:
GROup<x>:PATTern
Sets the truth condition for each group of the logic state search in binary
notation or queries the current setting.
5-127
:SEARch<x>:SLOGic:STATe:
GROup<x>:SYMBol
Sets the symbol item for each group of the logic state search. 5-127
:SEARch<x>:SLOGic:STATe:TYPE
Sets the setting method of the logic state search or queries the current
setting.
5-127
:SEARch<x>:SLOGic:WIDTh?
Queries all settings of the logic pulse width search. 5-127
:SEARch<x>:SLOGic:WIDTh:MODE
Sets the determination mode of the logic pulse width search or queries the
current setting.
5-127
:SEARch<x>:SLOGic:WIDTh:TIME<x>
Sets the pulse width of the logic pulse width search or queries the current
setting.
5-127
:SEARch<x>:SLOGic:WIDTh:TYPE
Sets the logic pulse width search type or queries the current setting. 5-128
:SEARch<x>:SMODe
Sets the skip mode or queries the current setting. 5-128
:SEARch<x>:SPATtern? (Serial
Pattern)
Queries all settings related to the serial pattern search. 5-128
:SEARch<x>:SPATtern:CLOCk?
Queries all settings related to clock of the serial pattern search. 5-128
:SEARch<x>:SPATtern:CLOCk:MODE
Enables/Disables the clock of the serial pattern search or queries the current
setting.
5-128
:SEARch<x>:SPATtern:CLOCk:
POLarity
Sets the polarity of the clock trace of the serial pattern search or queries the
current setting.
5-128
:SEARch<x>:SPATtern:CLOCk:
SOURce
Sets the clock trace of the serial pattern search or queries the current
setting.
5-128
:SEARch<x>:SPATtern:CS
Enables/Disables the chip select of the serial pattern search or queries the
current setting.
5-128
:SEARch<x>:SPATtern:LATCh?
Queries all settings related to latch of the serial pattern search. 5-128
:SEARch<x>:SPATtern:LATCh:
POLarity
Sets the polarity of the latch trace of the serial pattern search or queries the
current setting.
5-128
:SEARch<x>:SPATtern:LATCh:TRACe
Sets the latch trace of the serial pattern search or queries the current setting. 5-129
5.1 List of Commands
Page 59

5-25
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:SEARch<x>:SPATtern:SETup?
Queries all settings related to setup of the serial pattern search. 5-129
:SEARch<x>:SPATtern[:SETup]:
BITRate
Sets the bit rate of the serial pattern search or queries the current setting. 5-129
:SEARch<x>:SPATtern[:SETup]:
CLEar
Clears the entire pattern of the serial pattern search (to don’t care). 5-129
:SEARch<x>:SPATtern[:SETup]:
DATA?
Queries all settings related to data of the serial pattern search. 5-129
:SEARch<x>:SPATtern[:SETup]:
DATA:ACTive
Sets the active level of the data trace of the serial pattern search or queries
the current setting.
5-129
:SEARch<x>:SPATtern[:SETup]:
DATA:TRACe
Sets the data trace of the serial pattern search or queries the current setting. 5-129
:SEARch<x>:SPATtern[:SETup]:
HEXA
Sets the pattern of the serial pattern search in hexadecimal notation. 5-129
:SEARch<x>:SPATtern[:SETup]:
PATTern
Sets the pattern of the serial pattern search in binary notation or queries the
current setting.
5-129
:SEARch<x>:SPOint
Sets the search start position or queries the current setting. 5-130
:SEARch<x>:STRace
Sets the search source trace or queries the current setting. 5-130
:SEARch<x>:TRACe<x>?
Queries all settings related to the search conditions of the trace. 5-130
:SEARch<x>:TRACe<x>:CONDition
Sets the condition to be satisfied for the trace or queries the current setting. 5-130
:SEARch<x>:TRACe<x>:HYSTeresis
Sets the hysteresis of the trace or queries the current setting. 5-130
:SEARch<x>:TRACe<x>:LEVel
Sets the threshold level of the trace or queries the current setting. 5-130
:SEARch<x>:TYPE
Sets the search type or queries the current setting. 5-130
:SEARch<x>:WIDTh?
Queries all settings related to the pulse width search. 5-130
:SEARch<x>:WIDTh:MODE
Sets the pulse width determination mode or queries the current setting. 5-130
:SEARch<x>:WIDTh:TIME<x>
Sets the pulse width of the pulse width search or queries the current setting. 5-131
:SEARch<x>:WIDTh:TYPE
Sets the pulse width search type or queries the current setting. 5-131
SNAP Group
:SNAP
Executes the snapshot. 5-132
SSTart Group
:SSTart?
Starts the waveform acquisition with the trigger mode set to single. If the
waveform acquisition stops within the specified time period, 0 is returned at
that point.
5-133
STARt Group
:STARt
Starts the waveform acquisition. 5-134
STATus Group
:STATus?
Queries all settings related to the communication status function. 5-135
:STATus:CONDition?
Queries the contents of the condition register. 5-135
:STATus:EESE
Sets the extended event enable register or queries the current setting. 5-135
:STATus:EESR?
Queries the content of the extended event register and clears the register. 5-135
:STATus:ERRor?
Queries the error code and message information (top of the error queue). 5-135
:STATus:FILTer<x>
Sets the transition filter or queries the current setting. 5-135
:STATus:QENable
Sets whether to store messages other than errors to the error queue or
queries the current setting.
5-135
:STATus:QMESsage
Sets whether or not to attach message information to the response to the
"STATus:ERRor?" query or queries the current setting.
5-135
:STATus:SPOLl? (Serial Poll)
Executes serial polling. 5-135
5.1 List of Commands
Page 60

5-26
IM DLM6054-17EN
Commnd Function Page
STOP Group
:STOP
Stops the waveform acquisition. 5-136
SYSTem Group
:SYSTem?
Queries all settings related to the system. 5-137
:SYSTem:CLICk
Turns ON/OFF the click sound or queries the current setting. 5-137
:SYSTem:CLOCk?
Queries all settings related to the date, time, and time difference with respect
to GMT.
5-137
:SYSTem:CLOCk:DTIMe
Sets the date, time, and time difference with respect to GMT or queries the
current setting.
5-137
:SYSTem:CLOCk:MODE
Turns ON/OFF the date, time, and time difference with respect to GMT or
queries the current setting.
5-137
:SYSTem:FORMat:IMEMory[:
EXECute]
Formats the internal memory. 5-137
:SYSTem:FORMat:SDELete[:EXECute]
(Sure Delete)
Clears and formats the internal memory. 5-137
:SYSTem:LANGuage
Sets the message language or queries the current setting. 5-137
:SYSTem:MFSize
Sets the menu font size or queries the current setting. 5-137
:SYSTem:MLANguage
Sets the menu language or queries the current setting. 5-137
:SYSTem:OCANcel (Offset Cancel)
Sets or queries whether or not the specified offset voltage will be applied to
measurement and computation (on/off).
5-137
:SYSTem:OVERview
Displays system information. 5-137
:SYSTem:USBKeyboard
Sets the USB keyboard type or queries the current setting. 5-138
TELecomtest (Mask) Group
:TELecomtest?
Queries all settings related to the mask test. 5-139
:TELecomtest:CATegory
Sets the mask test type or queries the current setting. 5-139
:TELecomtest:DISPlay
Turns ON/OFF the mask test display or queries the current setting. 5-139
:TELecomtest:EYEPattern?
Queries all settings related to the eye pattern. 5-139
:TELecomtest:EYEPattern:ALL
Turns ON/OFF all eye pattern parameters. 5-139
:TELecomtest:
EYEPattern:<Parameter>?
Queries all settings related to the waveform parameter of the eye pattern. 5-139
:TELecomtest:
EYEPattern:<Parameter>:STATe
Turns ON/OFF the waveform parameter of the eye pattern or queries the
current setting.
5-139
:TELecomtest:
EYEPattern:<Parameter>:VALue?
Queries the waveform parameter value of the eye pattern. 5-139
:TELecomtest:EYEPattern:
TLEVels?
Queries all settings related to the threshold level of the eye pattern. 5-139
:TELecomtest:EYEPattern:
TLEVels:MODE
Sets the unit of the threshold level of the eye pattern or queries the current
setting.
5-139
:TELecomtest:EYEPattern:
TLEVels:PERCent
Sets the threshold level of the eye pattern as a percentage or queries the
current setting.
5-140
:TELecomtest:EYEPattern:
TLEVels:UNIT
Sets the threshold level of the eye pattern in UNIT or queries the current
setting.
5-140
:TELecomtest:EYEPattern:VDARk
Sets the dark level (zero light level) or queries the current setting. 5-140
:TELecomtest:MASK?
Queries all settings related to the mask test. 5-140
:TELecomtest:MASK:ELEMent<x>?
Queries all settings related to the element used in the mask test. 5-140
:TELecomtest:MASK:ELEMent<x>:
ALL
Turns ON/OFF all items of the element. 5-140
:TELecomtest:MASK:ELEMent<x>:
PSPCount? (Sample Point Count %)
Queries the settings related to the error rate for the number of sampled data
points of the element.
5-140
:TELecomtest:MASK:ELEMent<x>:
PSPCount:STATe
Turns ON/OFF the measurement of the error rate for the number of sampled
data points of the element or queries the current setting.
5-140
:TELecomtest:MASK:ELEMent<x>:
PSPCount:VALue?
Queries the error rate for the number of sampled data points of the element. 5-140
:TELecomtest:MASK:ELEMent<x>:
PWCount? (Wave Count %)
Queries the settings related to the error rate for the acquisition count of the
element.
5-140
:TELecomtest:MASK:ELEMent<x>:
PWCount:STATe
Turns ON/OFF the measurement of the error rate for the acquisition count of
the element or queries the current setting.
5-141
:TELecomtest:MASK:ELEMent<x>:
PWCount:VALue?
Queries the error rate for the acquisition count of the element. 5-141
5.1 List of Commands
Page 61

5-27
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:TELecomtest:MASK:ELEMent<x>:
SPCount? (Sample Point Count)
Queries the settings related to the number of sampled data points for the
element that results in error.
5-141
:TELecomtest:MASK:ELEMent<x>:
SPCount:STATe
Turns ON/OFF the measurement of the number of sampled data points for
the element that results in error or queries the current setting.
5-141
:TELecomtest:MASK:ELEMent<x>:
SPCount:VALue?
Queries the number of sampled data points for the element that resulted in
error.
5-141
:TELecomtest:MASK:ELEMent<x>:
WCOunt? (Wave Count)
Queries the settings related to the acquisition count for the element that
results in error.
5-141
:TELecomtest:MASK:ELEMent<x>:
WCOunt:STATe
Turns ON/OFF the measurement of the acquisition count for the element
that results in error or queries the current setting.
5-141
:TELecomtest:MASK:ELEMent<x>:
WCOunt:VALue?
Queries the acquisition count for the element that resulted in error. 5-141
:TELecomtest:MMODe
Turns ON/OFF the computed waveform or queries the current setting. 5-142
:TELecomtest:TRACe
Sets the source trace of the mask test or queries the current setting. 5-142
:TELecomtest:TRANge (Time Range)
Sets the measurement range of the mask test or queries the current setting. 5-142
:TELecomtest:WINDow
Sets the measurement source window of the mask test or queries the current
setting.
5-142
TIMebase Group
:TIMebase?
Queries all settings related to the time base. 5-143
:TIMebase:SRATe? (Sample RATE)
Queries the sample rate or queries the current setting. 5-143
:TIMebase:TDIV
Sets the T/div value or queries the current setting. 5-143
TRIGger Group
:TRIGger?
Queries all settings related to the trigger. 5-144
:TRIGger:ACTion?
Queries all settings related to action-on-trigger. 5-144
:TRIGger:ACTion:ACQCount
Sets the action count of action-on-trigger or queries the current setting. 5-144
:TRIGger:ACTion:BUZZer
Sets whether to sound a buzzer when an action is activated or queries the
current setting.
5-144
:TRIGger:ACTion:HCOPy
Sets whether or not to output screen image data (ON/OFF) when an action
is activated, or queries the current setting.
5-144
:TRIGger:ACTion:MAIL?
Queries all settings related to the mail transmission when an action is
activated.
5-144
:TRIGger:ACTion:MAIL:INTerval
Sets the interval at which to send mail when an action is activated or queries
the current setting.
5-144
:TRIGger:ACTion:MAIL:MODE
Sets whether to send mail when an action is activated or queries the current
setting.
5-144
:TRIGger:ACTion:MODE
Sets the action-on-trigger mode or queries the current setting. 5-144
:TRIGger:ACTion:SAVE
Sets whether to save the waveform data to the storage medium (ON/OFF)
when an action is activated or queries the current setting.
5-144
:TRIGger:ACTion:STARt
Starts the action-on-trigger. 5-144
:TRIGger:ACTion:STOP
Stops the action-on-trigger. 5-144
:TRIGger:BTRigger?
Queries all B trigger condition settings. 5-144
:TRIGger:BTRigger:COMBination
Sets or queries the trigger combination. 5-144
:TRIGger:BTRigger:COUNt
Sets or queries the number of times condition B must be met for the A->B(n)
trigger.
5-145
:TRIGger:BTRigger:DELay
Sets or queries the delay time for condition B for the A Delay B trigger. 5-145
:TRIGger:BTRigger:EDGE
:TRIGger:BTRigger:EDGE:SLOPe
Sets or queries the B edge trigger slope. 5-145
:TRIGger:BTRigger:EDGE:SOURce
Sets or queries the B edge trigger source. 5-145
:TRIGger:CLOCk?
Queries all settings related to the clock channel. 5-145
:TRIGger:CLOCk:POLarity
Sets the polarity of the clock channel or queries the current setting. 5-145
:TRIGger:CLOCk:SOURce
Sets the source waveform of the clock channel or queries the current setting. 5-145
:TRIGger:DELay?
Queries all settings related to the trigger delay. 5-145
:TRIGger:DELay[:TIME]
Sets the delay value the trigger delay or queries the current setting. 5-145
:TRIGger:EDGE?
Queries all edge trigger settings. 5-145
:TRIGger:EDGE:COUPling
Sets or queries the edge trigger source trigger coupling. 5-146
:TRIGger:EDGE:HFRejection
(HighFrequencyREJECTION)
Sets or queries the on/off status of the trigger source low-pass filter (HF
rejection) for edge triggering.
5-146
5.1 List of Commands
Page 62

5-28
IM DLM6054-17EN
Commnd Function Page
:TRIGger:EDGE:HYSTeresis
Sets or queries the noise rejection setting for the edge trigger source trigger
level.
5-146
:TRIGger:EDGE:LEVel
Sets or queries the edge trigger source trigger level. 5-146
:TRIGger:EDGE:PROBe
Sets or queries the external trigger source probe setting for edge triggering. 5-146
:TRIGger:EDGE:SLOPe
Sets or queries the trigger source trigger slope (the polarity when window is
set to ON) for edge triggering.
5-146
:TRIGger:EDGE:SOURce
Sets or queries the edge trigger source. 5-146
:TRIGger:EDGE:WIDTh
Sets or queries the edge trigger source window width. 5-147
:TRIGger:EDGE:WINDow
Sets or queries the edge trigger source window. 5-147
:TRIGger:EINTerval?
Queries all settings related to the event interval. 5-147
:TRIGger:EINTerval:EVENt<x>?
Queries all settings related to the event. 5-147
:TRIGger:EINTerval:EVENt<x>:
CLOCk?
Queries all settings related to the clock channel of the event. 5-147
:TRIGger:EINTerval:EVENt<x>:
CLOCk:POLarity
Sets the polarity of the clock channel of the event or queries the current
setting.
5-147
:TRIGger:EINTerval:EVENt<x>:
CLOCk:SOURce
Sets the source waveform of the clock channel of the event or queries the
current setting.
5-148
:TRIGger:EINTerval:EVENt<x>:
ESTate?
Queries all settings related to the edge/state trigger. 5-148
:TRIGger:EINTerval:EVENt<x>:
ESTate:POLarity
Sets the polarity of the edge/state trigger or queries the current setting. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic?
Queries all settings related to the logic trigger of the event. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic:CLOCk?
Queries all settings related to the logic trigger clock. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic:CLOCk:POLarity
Sets the polarity of the logic trigger clock or queries the current setting. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic:CLOCk:SOURce
Sets the clock source of the logic trigger or queries the current setting. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic:ESTate?
Queries all settings related to the edge/state trigger of the logic. 5-148
:TRIGger:EINTerval:EVENt<x>:
LOGic:ESTate:POLarity
Sets the polarity of the edge/state trigger of the logic or queries the current
setting.
5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:ESTate:SOURce
Sets the edge/state trigger source of the logic or queries the current setting. 5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern? (Serial Pattern)
Queries all settings related to the logic serial pattern trigger of each event. 5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:BITRate
Sets the bit rate for the logic serial pattern trigger or queries the current
setting.
5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CLEar
Clears (set to don't care) all patterns of the logic serial pattern trigger. 5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CLOCk?
Queries all settings related to the clock for the logic serial pattern trigger. 5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CLOCk:MODE
Enables/disables the clock for the logic serial analysis pattern trigger or
queries the current setting.
5-149
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CLOCk:POLarity
Sets the polarity of the clock trace of the logic serial pattern trigger or queries
the current setting.
5-150
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CLOCk:SOURce
Sets the clock trace for the logic serial pattern trigger or queries the current
setting.
5-150
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:CS
Enables/disables the chip select for the logic serial analysis pattern trigger or
queries the current setting.
5-150
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:DATA?
Queries all settings related to the data for the logic serial pattern trigger. 5-150
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:DATA:ACTive
Sets the active level of the data for the logic serial pattern trigger or queries
the current setting.
5-150
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:DATA:SOURce
Sets the data rate for the logic serial pattern trigger or queries the current
setting.
5-151
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:HEXA
Sets the pattern of the logic serial pattern trigger in hexadecimal notation. 5-151
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:LATCh?
Queries all settings related to the latch for the logic serial pattern trigger. 5-151
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:LATCh:POLarity
Sets the polarity of the latch trace of the logic serial pattern trigger or queries
the current setting.
5-151
5.1 List of Commands
Page 63

5-29
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:LATCh:SOURce
Sets the latch trace for the logic serial pattern trigger or queries the current
setting.
5-151
:TRIGger:EINTerval:EVENt<x>:
LOGic:SPATtern:PATTern
Sets the pattern of the logic serial pattern trigger in binary notation, or
queries the current setting.
5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe?
Queries all settings related to the logic state trigger. 5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:BIT?
Queries all settings related to the bit of the logic state trigger. 5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:BIT:{A<y>|B<y>|C<y>
|D<y>}
Sets the condition to be satisfied for the bit of the logic state trigger or
queries the current setting.
5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:BIT:CLEar
Clears the entire condition to be satisfied for the bit of the logic state trigger
(set to don’t care) or queries the current setting.
5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:BIT:LOGic
Sets the logic of the logic state trigger or queries the current setting. 5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>?
Queries all settings related to the group of the logic state trigger. 5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>:CLEar
Clears the entire condition to be satisfied for the group of the logic state
trigger (set to don’t care) or queries the current setting.
5-152
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>:CONDition
Sets the determination condition for the group of the logic state trigger or
queries the current setting.
5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>:HEXA
Sets the condition to be satisfied for the group of the logic state trigger in
hexadecimal notation.
5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>:PATTern
Sets the condition to be satisfied for the group of the logic state trigger in
binary notation or queries the current setting.
5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:GROup<x>:SYMBol
Sets the symbol item for each group of the logic state trigger. 5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:STATe:TYPE
Sets the setup type of the logic state trigger or queries the current setting. 5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:WIDTh?
Queries all settings related to the logic pulse width trigger. 5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:WIDTh:MODE
Sets the determination mode of the logic pulse width trigger or queries the
current setting.
5-153
:TRIGger:EINTerval:EVENt<x>:
LOGic:WIDTh:POLarity
Sets the polarity of the logic pulse width trigger or queries the current setting. 5-154
:TRIGger:EINTerval:EVENt<x>:
LOGic:WIDTh:SOURce
Sets the trigger source of the logic pulse width trigger or queries the current
setting.
5-154
:TRIGger:EINTerval:EVENt<x>:
LOGic:WIDTh:TIME<x>
Sets the logic pulse width of the pulse width trigger or queries the current
setting.
5-154
:TRIGger:EINTerval:EVENt<x>:
SPATtern? (Serial Pattern)
Queries all settings related to the serial pattern trigger of the event. 5-154
:TRIGger:EINTerval:EVENt<x>:
SPATtern:BITRate
Sets the bit rate of the serial pattern trigger or queries the current setting. 5-154
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CLEar
Clears the entire pattern of the serial pattern trigger (to don’t care). 5-154
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CLOCk?
Queries all settings related to clock of the serial pattern trigger. 5-154
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CLOCk:MODE
Enables/Disables the clock of the serial pattern trigger or queries the current
setting.
5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CLOCk:POLarity
Sets the polarity of the clock trace of the serial pattern trigger or queries the
current setting.
5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CLOCk:SOURce
Sets the clock trace of the serial pattern trigger or queries the current setting. 5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:CS
Enables/Disables the chip select of the serial pattern trigger or queries the
current setting.
5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:DATA?
Queries all settings related to data of the serial pattern trigger. 5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:DATA:ACTive
Sets the active level of the data of the serial pattern trigger or queries the
current setting.
5-155
:TRIGger:EINTerval:EVENt<x>:
SPATtern:DATA:SOURce
Sets the data trace of the serial pattern trigger or queries the current setting. 5-155
5.1 List of Commands
Page 64

5-30
IM DLM6054-17EN
Commnd Function Page
:TRIGger:EINTerval:EVENt<x>:
SPATtern:HEXA
Sets the pattern of the serial pattern trigger in hexadecimal notation. 5-156
:TRIGger:EINTerval:EVENt<x>:
SPATtern:LATCh?
Queries all settings related to latch of the serial pattern trigger. 5-156
:TRIGger:EINTerval:EVENt<x>:
SPATtern:LATCh:POLarity
Sets the polarity of the latch trace of the serial pattern trigger or queries the
current setting.
5-156
:TRIGger:EINTerval:EVENt<x>:
SPATtern:LATCh:SOURce
Sets the latch trace of the serial pattern trigger or queries the current setting. 5-156
:TRIGger:EINTerval:EVENt<x>:
SPATtern:PATTern
Sets the pattern of the serial pattern trigger in binary notation or queries the
current setting.
5-156
:TRIGger:EINTerval:EVENt<x>:
STATe?
Queries all settings related to condition to be satisfied of the event. 5-156
:TRIGger:EINTerval:EVENt<x>:
STATe:CHANnel<x>
Sets the condition to be satisfied of the channel or queries the current
setting.
5-157
:TRIGger:EINTerval:EVENt<x>:
STATe:LOGic
Sets the logic of the condition to be satisfied or queries the current setting. 5-157
:TRIGger:EINTerval:EVENt<x>:
TYPE
Sets the trigger type of the event or queries the current setting. 5-157
:TRIGger:EINTerval:EVENt<x>:
WIDTh?
Queries all settings related to the pulse width trigger of the event. 5-157
:TRIGger:EINTerval:EVENt<x>:
WIDTh:MODE
Sets the determination mode of the pulse width trigger or queries the current
setting.
5-157
:TRIGger:EINTerval:EVENt<x>:
WIDTh:POLarity
Sets the polarity of the pulse width trigger or queries the current setting. 5-158
:TRIGger:EINTerval:EVENt<x>:
WIDTh:SOURce
Sets the trigger source of the pulse width trigger or queries the current
setting.
5-158
:TRIGger:EINTerval:EVENt<x>:
WIDTh:TIME<x>
Sets the pulse width of the pulse width trigger or queries the current setting. 5-158
:TRIGger:EINTerval:MODE
Sets the determination mode of the event interval or queries the current
setting.
5-158
:TRIGger:EINTerval:TIME<x>
Sets the interval time of the event interval or queries the current setting. 5-158
:TRIGger:EINTerval:TRY?
Queries all settings related to the event interval trial. 5-158
:TRIGger:EINTerval:TRY:MODE
Sets the trial mode or queries the current setting. 5-159
:TRIGger:EINTerval:TRY:SELect
Sets the source event of the trial mode or queries the current setting. 5-159
:TRIGger:ENHanced?
Queries all settings related to the enhanced trigger. 5-159
:TRIGger:ENHanced:SPATtern?
(Serial Pattern)
Queries all settings related to the serial pattern trigger. 5-159
:TRIGger:ENHanced:SPATtern:
BITRate
Sets the bit rate of the serial pattern trigger or queries the current setting. 5-159
:TRIGger:ENHanced:SPATtern:
CLEar
Clears the entire pattern of the serial pattern trigger (to don’t care). 5-159
:TRIGger:ENHanced:SPATtern:
CLOCk?
Queries all settings related to clock of the serial pattern trigger. 5-159
:TRIGger:ENHanced:SPATtern:
CLOCk:MODE
Enables/Disables the clock of the serial pattern trigger or queries the current
setting.
5-159
:TRIGger:ENHanced:SPATtern:
CLOCk:POLarity
Sets the polarity of the clock trace of the serial pattern trigger or queries the
current setting.
5-159
:TRIGger:ENHanced:SPATtern:
CLOCk:SOURce
Sets the clock trace of the serial pattern trigger or queries the current setting. 5-159
:TRIGger:ENHanced:SPATtern:CS
Enables/Disables the chip select of the serial pattern trigger or queries the
current setting.
5-159
:TRIGger:ENHanced:SPATtern:
DATA?
Queries all settings related to data of the serial pattern trigger. 5-160
:TRIGger:ENHanced:SPATtern:
DATA:ACTive
Sets the active level of the data of the serial pattern trigger or queries the
current setting.
5-160
:TRIGger:ENHanced:SPATtern:
DATA:SOURce
Sets the data trace of the serial pattern trigger or queries the current setting. 5-160
:TRIGger:ENHanced:SPATtern:HEXA
Sets the pattern of the serial pattern trigger in hexadecimal notation. 5-160
:TRIGger:ENHanced:SPATtern:
LATCh?
Queries all settings related to latch of the serial pattern trigger. 5-160
:TRIGger:ENHanced:SPATtern:
LATCh:POLarity
Sets the polarity of the latch trace of the serial pattern trigger or queries the
current setting.
5-160
5.1 List of Commands
Page 65

5-31
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:TRIGger:ENHanced:SPATtern:
LATCh:SOURce
Sets the latch trace of the serial pattern trigger or queries the current setting. 5-160
:TRIGger:ENHanced:SPATtern:
PATTern
Sets the pattern of the serial pattern trigger in binary notation or queries the
current setting.
5-160
:TRIGger:ENHanced:TV?
Queries all settings related to the TV trigger. 5-160
:TRIGger:ENHanced:TV:COUPling?
Queries the trigger coupling of the TV trigger. 5-161
:TRIGger:ENHanced:TV:CUSTomize
Turns ON/OFF the sync guard function of the TV trigger or queries the
current setting.
5-161
:TRIGger:ENHanced:TV:FIELd
Sets the field of the TV trigger or queries the current setting. 5-161
:TRIGger:ENHanced:TV:FRAMe
Sets the frame skip function of the TV trigger or queries the current setting. 5-161
:TRIGger:ENHanced:TV:{HDTV|NTSC
|PAL|SDTV|USERdefine}?
Queries all settings related to the TV trigger mode. 5-161
:TRIGger:ENHanced:
TV:{HDTV|NTSC|PAL|SDTV}:
HFRejection?
(HighFrequencyREJECTION)
Queries the low pass filter (HF rejection) of the TV trigger. 5-161
:TRIGger:ENHanced:TV:{HDTV|NTSC
|PAL|SDTV|USERdefine}:LINE
Sets the line for activating the TV trigger or queries the current setting. 5-161
:TRIGger:ENHanced:TV:{HDTV|NTSC
|PAL|SDTV|USERdefine}:POLarity
Sets the input polarity of the TV trigger or queries the current setting. 5-161
:TRIGger:ENHanced:TV:LEVel
Sets the trigger level of the TV trigger or queries the current setting. 5-161
:TRIGger:ENHanced:TV:SGUard
Sets the sync guard of the TV trigger or queries the current setting. 5-162
:TRIGger:ENHanced:TV:SOURce
Sets the trigger source of the TV trigger or queries the current setting. 5-162
:TRIGger:ENHanced:TV:TYPE
Sets the input type of the TV trigger or queries the current setting. 5-162
:TRIGger:ENHanced:TV:
USERdefine:DEFinition
Sets the user-defined resolution or queries the current setting. 5-162
:TRIGger:ENHanced:TV:
USERdefine:HFRejection
(HighFrequencyREJECTION)
Sets the user-defined low pass filter (HF rejection) or queries the current
setting.
5-162
:TRIGger:ENHanced:TV:
USERdefine:HSYNc (Hsync Freq)
Sets the user-defined horizontal sync signal or queries the current setting. 5-162
:TRIGger:ESTate?
Queries all settings related to the edge/state trigger. 5-162
:TRIGger:ESTate:EOR?
Queries all settings related to the OR trigger. 5-162
:TRIGger:ESTate:EOR:CHANnel<x>
Sets the channel polarity of the OR trigger or queries the current setting. 5-162
:TRIGger:ESTate:POLarity
Sets the polarity of the edge/state trigger or queries the current setting. 5-163
:TRIGger:ESTate:SOURce
Sets the trigger source of the edge/state trigger or queries the current
setting.
5-163
:TRIGger:HOLDoff
Sets the hold off time or queries the current setting. 5-163
:TRIGger:LOGic?
Queries all settings related to the logic trigger. 5-163
:TRIGger:LOGic:CLOCk?
Queries all settings related to the logic trigger clock. 5-163
:TRIGger:LOGic:CLOCk:POLarity
Sets the polarity of the logic trigger clock or queries the current setting. 5-163
:TRIGger:LOGic:CLOCk:SOURce
Sets the clock source of the logic trigger or queries the current setting. 5-163
:TRIGger:LOGic:ESTate?
Queries all settings related to the edge qualify/state trigger of the logic. 5-163
:TRIGger:LOGic:ESTate:POLarity
Sets the polarity of the edge qualify/state trigger of the logic or queries the
current setting.
5-163
:TRIGger:LOGic:ESTate:SOURce
Sets the edge qualify/state trigger source of the logic or queries the current
setting.
5-163
:TRIGger:LOGic:SPATtern? (Serial
Pattern)
Queries all settings related to logic serial pattern trigger. 5-164
:TRIGger:LOGic:SPATtern:BITRate
Sets the bit rate for the logic serial pattern trigger or queries the current
setting.
5-164
:TRIGger:LOGic:SPATtern:CLEar
Clears (set to don't care) all patterns of the logic serial pattern trigger. 5-164
:TRIGger:LOGic:SPATtern:CLOCk?
Queries all settings related to the clock for the logic serial pattern trigger. 5-164
:TRIGger:LOGic:SPATtern:CLOCk:
MODE
Enables/disables the clock for the logic serial analysis pattern trigger or
queries the current setting.
5-164
5.1 List of Commands
Page 66

5-32
IM DLM6054-17EN
Commnd Function Page
:TRIGger:LOGic:SPATtern:CLOCk:
POLarity
Sets the polarity of the clock trace of the logic serial pattern trigger or queries
the current setting.
5-164
:TRIGger:LOGic:SPATtern:CLOCk:
SOURce
Sets the clock trace for the logic serial pattern trigger or queries the current
setting.
5-164
:TRIGger:LOGic:SPATtern:CS
Enables/disables the chip select for the logic serial analysis pattern trigger or
queries the current setting.
5-164
:TRIGger:LOGic:SPATtern:DATA?
Queries all settings related to the data for the logic serial pattern trigger. 5-164
:TRIGger:LOGic:SPATtern:DATA:
ACTive
Sets the active level of the data for the logic serial pattern trigger or queries
the current setting.
5-164
:TRIGger:LOGic:SPATtern:DATA:
SOURce
Sets the data rate for the logic serial pattern trigger or queries the current
setting.
5-164
:TRIGger:LOGic:SPATtern:HEXA
Sets the pattern of the logic serial pattern trigger in hexadecimal notation. 5-165
:TRIGger:LOGic:SPATtern:LATCh?
Queries all settings related to the latch for the logic serial pattern trigger. 5-165
:TRIGger:LOGic:SPATtern:LATCh:
POLarity
Sets the polarity of the latch trace of the logic serial pattern trigger or queries
the current setting.
5-165
:TRIGger:LOGic:SPATtern:LATCh:
SOURce
Sets the latch trace for the logic serial pattern trigger or queries the current
setting.
5-165
:TRIGger:LOGic:SPATtern:PATTern
Sets the pattern of the logic serial pattern trigger in binary notation, or
queries the current setting.
5-165
:TRIGger:LOGic:STATe?
Queries all settings related to the logic state trigger. 5-165
:TRIGger:LOGic:STATe:BIT?
Queries all settings related to the bit of the logic state trigger. 5-165
:TRIGger:LOGic:STATe:BIT:{A<x>|
B<x>|C<x>|D<x>}
Sets the condition to be satisfied for the bit of the logic state trigger or
queries the current setting.
5-165
:TRIGger:LOGic:STATe:BIT:CLEar
Clears the entire condition to be satisfied for the bit of the logic state trigger
(set to don’t care) or queries the current setting.
5-165
:TRIGger:LOGic:STATe:BIT:LOGic
Sets the logic of the logic state trigger or queries the current setting. 5-165
:TRIGger:LOGic:STATe:GROup<x>?
Queries all settings related to the group of the logic state trigger. 5-166
:TRIGger:LOGic:STATe:GROup<x>:
CLEar
Clears the entire condition to be satisfied for the group of the logic state
trigger (set to don’t care) or queries the current setting.
5-166
:TRIGger:LOGic:STATe:GROup<x>:
CONDition
Sets the determination condition for the group of the logic state trigger or
queries the current setting.
5-166
:TRIGger:LOGic:STATe:GROup<x>:
HEXA
Sets the condition to be satisfied for the group of the logic state trigger in
hexadecimal notation.
5-166
:TRIGger:LOGic:STATe:GROup<x>:
PATTern
Sets the condition to be satisfied for the group of the logic state trigger in
binary notation or queries the current setting.
5-166
:TRIGger:LOGic:STATe:GROup<x>:
SYMBol
Sets the symbol item for each group of the logic state trigger. 5-166
:TRIGger:LOGic:STATe:TYPE
Sets the setup type of the logic state trigger or queries the current setting. 5-166
:TRIGger:LOGic:WIDTh?
Queries all settings related to the logic pulse width trigger. 5-166
:TRIGger:LOGic:WIDTh:MODE
Sets the determination mode of the logic pulse width trigger or queries the
current setting.
5-166
:TRIGger:LOGic:WIDTh:POLarity
Sets the polarity of the logic pulse width trigger or queries the current setting. 5-167
:TRIGger:LOGic:WIDTh:SOURce
Sets the trigger source of the logic pulse width trigger or queries the current
setting.
5-167
:TRIGger:LOGic:WIDTh:TIME<x>
Sets the logic pulse width of the pulse width trigger or queries the current
setting.
5-167
:TRIGger:MODE
Sets the trigger mode or queries the current setting. 5-167
:TRIGger:POSition
Sets the trigger position or queries the current setting. 5-167
:TRIGger:SCOunt (Single(N)
Count)
Sets the number of times the trigger is to be activated when the trigger mode
is Single(N) or queries the current setting.
5-167
:TRIGger:SOURce?
Queries all settings related to the trigger source. 5-167
:TRIGger:SOURce:CHANnel<x>?
Queries all settings related to the channel of the trigger source. 5-167
:TRIGger:SOURce:CHANnel<x>:
COUPling
Sets the trigger coupling of the channel or queries the current setting. 5-167
:TRIGger:SOURce:
CHANnel<x>:HFRejection
(HighFrequencyREJECTION)
Sets the low pass filter (HF rejection) of the channel or queries the current
setting.
5-167
:TRIGger:SOURce:CHANnel<x>:
HYSTeresis
Sets the hysteresis of the channel or queries the current setting. 5-168
5.1 List of Commands
Page 67

5-33
IM DLM6054-17EN
Commands
1
2
3
4
5
Commnd Function Page
:TRIGger:SOURce:CHANnel<x>:
LEVel
Sets the trigger level of the channel or queries the current setting. 5-168
:TRIGger:SOURce:CHANnel<x>:
STATe
Sets the condition to be satisfied of the channel or queries the current
setting.
5-168
:TRIGger:SOURce:CHANnel<x>:
WIDTh
Sets the window trigger width of the channel or queries the current setting. 5-168
:TRIGger:SOURce:CHANnel<x>:
WINDow
Turns ON/OFF the window of the channel or queries the current setting. 5-168
:TRIGger:SOURce:EXTernal?
Queries all settings related to the external trigger. 5-168
:TRIGger:SOURce:EXTernal:LEVel
Sets the trigger level of the external trigger or queries the current setting. 5-168
:TRIGger:SOURce:EXTernal:PROBe
Sets the probe attenuation of the external trigger or queries the current
setting.
5-169
:TRIGger:SOURce:LOGic
Sets the trigger source logic or queries the current setting. 5-169
:TRIGger:TYPE
Sets the trigger type or queries the current setting. 5-169
:TRIGger:WIDTh?
Queries all settings related to the pulse width trigger. 5-169
:TRIGger:WIDTh:MODE
Sets the determination mode of the pulse width trigger or queries the current
setting.
5-169
:TRIGger:WIDTh:POLarity
Sets the polarity of the pulse width trigger or queries the current setting. 5-169
:TRIGger:WIDTh:SOURce
Sets the trigger source of the pulse width trigger or queries the current
setting.
5-169
:TRIGger:WIDTh:TIME<x>
Sets the pulse width of the pulse width trigger or queries the current setting. 5-169
WAVeform Group
:WAVeform?
Queries all information about the waveform data. 5-170
:WAVeform:BITS?
Queries the bit length of the waveform data specified by ":WAVeform:
TRACe".
5-170
:WAVeform:BYTeorder
Sets the transmission order when using word format of two bytes or more or
queries the current setting.
5-170
:WAVeform:END
Sets the last data point of the waveform specified by :WAVeform:TRACe or
queries the current setting.
5-170
:WAVeform:FORMat
Sets the format of the data to be transmitted or queries the current setting. 5-170
:WAVeform:LENGth?
Queries the total number of points of the waveform specified by ":WAVeform:
TRACe".
5-170
:WAVeform:OFFSet?
Queries the offset value when converting the waveform data specified by :
WAVeform:TRACe to physical values.
5-170
:WAVeform:POSition?
Queries the vertical axis position used for converting to voltage when RBYTe
is specified with: WAVeform:FORMat.
5-170
:WAVeform:RANGe?
Queries the range value when converting the waveform data specified by :
WAVeform:TRACe to physical values.
5-170
:WAVeform:RECord
Sets the target record number for the commands in the WAVeform group or
queries the current setting.
5-171
:WAVeform:RECord? MINimum
Queries the minimum record number of the history of the target channel. 5-171
:WAVeform:SEND?
Queries the waveform data specified by "
:WAVeform:TRACe
". 5-171
:WAVeform:SIGN?
Queries the existence of a sign when querying the waveform data specified
by :WAVeform:TRACe using binary data.
5-171
:WAVeform:SRATe? (Sample RATE)
Queries the sample rate of the record specified by :WAVeform:RECord. 5-172
:WAVeform:STARt
Sets the first data point of the waveform specified by :WAVeform:TRACe or
queries the current setting.
5-172
:WAVeform:TRACe
Sets the target waveform or queries the current setting. 5-172
:WAVeform:TRIGger?
Queries the trigger position of the record specified by :WAVeform:RECord. 5-172
:WAVeform:TYPE?
Queries the acquisition mode of the waveform specified by
:WAVeform:
TRACe
.
5-172
5.1 List of Commands
Page 68

5-34
IM DLM6054-17EN
Commnd Function Page
ZOOM Group
:ZOOM?
Queries all settings related to the waveform zoom. 5-173
:ZOOM:ALLocation<x>?
Queries all settings related to the zoom source waveform. 5-173
:ZOOM:ALLocation<x>:ALLon
Sets all waveforms to be zoomed. 5-173
:ZOOM:ALLocation<x>:TRACe<x>
Turns ON/OFF the trace you wish to zoom or queries the current setting. 5-173
:ZOOM:FORMat<x>
Sets the display format of the zoom waveform or queries the current setting. 5-173
:ZOOM:HLINkage
Turns ON/OFF the horizontal link or queries the current setting. 5-173
:ZOOM:HORizontal<x>?
Queries all settings related to the horizontal zoom. 5-173
:ZOOM:HORizontal<x>:ASCRoll?
Queries all settings related to the auto scroll function. 5-173
:ZOOM:HORizontal<x>:ASCRoll:
JUMP
Moves the zoom center position to the left or right edge of the main screen. 5-173
:ZOOM:HORizontal<x>:ASCRoll:
SPEed
Sets the auto scroll speed or queries the current setting. 5-173
:ZOOM:HORizontal<x>:ASCRoll:
STARt
Starts auto scrolling. 5-173
:ZOOM:HORizontal<x>:ASCRoll:
STOP
Stops auto scrolling. 5-173
:ZOOM:HORizontal<x>:MAG
Sets the horizontal zoom magnification or queries the current setting. 5-173
:ZOOM:HORizontal<x>:POSition
Sets the horizontal zoom center position or queries the current setting. 5-174
:ZOOM:MODE
Sets the zoom waveform display format or queries the current setting. 5-174
:ZOOM:VERTical<x>?
Queries all settings related to the vertical zoom. 5-174
:ZOOM:VERTical<x>:MAG
Sets the vertical zoom magnification or queries the current setting. 5-174
:ZOOM:VERTical<x>:POSition
Sets the vertical zoom position or queries the current setting. 5-174
:ZOOM:VERTical<x>:TRACe
Sets the trace you wish to display on the vertical zoom screen or queries the
current setting.
5-174
:ZOOM:VLINkage
Turns ON/OFF the vertical link or queries the current setting. 5-174
Common Command Group
*CAL? (CALibrate)
Performs calibration and queries the result. 5-175
*CLS (CLear Status)
Clears the standard event register, extended event register, and error queue. 5-175
*ESE (standard Event Status
Enable register)
Sets the standard event enable register or queries the current setting. 5-175
*ESR? (standard Event Status
Register)
Queries the standard event register and clears the register. 5-175
*IDN? (IDeNtify)
Queries the instrument model. 5-175
*OPC (OPeration Complete)
Sets bit 0 (OPC bit) of the standard event register to 1 upon the completion
of the specified overlap command.
5-175
*OPC? (OPeration Complete)
If *OPC? is transmitted and the specified overlap command is completed,
ASCII code 1 is returned.
5-176
*OPT? (OPTion)
Queries the installed options. 5-176
*PSC (Power-on Status Clear)
Sets whether or not to clear the registers below at power on or queries the
current setting. The register is cleared when the value rounded to an integer
is a non-zero value.
5-176
*RST (ReSeT)
Initializes the settings. 5-176
*SRE (Service Request Enable
register)
Sets the service request enable register or queries the current setting. 5-176
*STB? (STatus Byte)
Queries the status byte register. 5-176
*TST?
Performs a self-test and queries the result. The self test involves internal
memory tests.
5-176
*WAI (WAIt)
Holds the subsequent command until the completion of the specified overlap
operation.
5-177
5.1 List of Commands
Page 69

5-35
IM DLM6054-17EN
Commands
1
2
3
4
5
5.2 ACQuire Group
:ACQuire?
Function Queries all settings related to the waveform
acquisition.
Syntax :ACQuire?
:ACQuire:AVERage?
Function Queries all settings related to averaging and the
waveform acquisition count.
Syntax
:ACQuire:AVERage?
:ACQuire:AVERage:COUNt
Function Sets the waveform acquisition count of averaging
mode or queries the current setting.
Syntax
:ACQuire:AVERage:COUNt {<NRf>}
:ACQuire:AVERage:COUNt?
<NRf> = 2 to 1024 in 2n steps
Example
:ACQUIRE:AVERAGE:COUNT 2
:ACQUIRE:AVERAGE:COUNT? -> :ACQUIRE:
AVERAGE:COUNT 2
:ACQuire:HRMode
Function Turns ON/OFF the high resolution mode or queries
the current setting.
Syntax
:ACQuire:HRMode {<Boolean>}
:ACQuire:HRMode?
Example
:ACQUIRE:HRMODE ON
:ACQUIRE:HRMODE? -> :ACQUIRE:HRMODE 1
:ACQuire:INTERLeave
Function Turns ON/OFF interleave or queries the current
setting.
Syntax
:ACQuire:INTERLeave {<Boolean>}
:ACQuire:INTERLeave?
Example
:ACQUIRE:INTERLEAVE ON
:ACQUIRE:INTERLEAVE? -> :ACQUIRE:
INTERLEAVE 1
:ACQuire:MODE
Function Sets the waveform acquisition mode or queries the
current setting.
Syntax
:ACQuire:MODE {AVERage|ENVelope|NORMal}
:ACQuire:MODE?
Example
:ACQUIRE:MODE NORMAL
:ACQUIRE:MODE? -> :ACQUIRE:MODE NORMAL
:ACQuire:REPetitive
Function Turns ON/OFF the repetitive sampling or queries the
current setting.
Syntax
:ACQuire:REPetitive {<Boolean>}
:ACQuire:REPetitive?
Example
:ACQUIRE:REPETITIVE ON
:ACQUIRE:REPETITIVE? -> :ACQUIRE:
REPETITIVE 1
:ACQuire:RLENgth
Function Sets the record length or queries the current setting.
Syntax
:ACQuire:RLENgth {<NRf>}
:ACQuire:RLENgth?
<NRf> = See the DL6000/DLM6000 User’s Manual.
Example
:ACQUIRE:RLENGTH 6250000
:ACQUIRE:RLENGTH?
-> :ACQUIRE:RLENGTH 6250000
:ACQuire:SAMPling
Function Sets or queries the sampling mode.
Syntax
:ACQuire:SAMPling {REAL|INTerpolate|REP
etitive}
:ACQuire:SAMPling?
Example
:ACQUIRE:SAMPLING REAL
:ACQUIRE:SAMPLING? -> :ACQUIRE:SAMPLING
REAL
Page 70

5-36
IM DLM6054-17EN
5.3 ANALysis Group
:ANALysis?
Function Queries all settings related to the analysis function.
Syntax
:ANALysis?
:ANALysis:AHIStogram<x>?
Function Queries all settings related to the accumulated
histogram function.
Syntax
:ANALysis:AHIStogram<x>?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:HORizontal
Function Sets the horizontal range of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:HORizontal
{<NRf>,<NRf>}
:ANALysis:AHIStogram<x>:HORizontal?
<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:AHISTOGRAM1:HORIZONTAL 0,1
:ANALYSIS:AHISTOGRAM1:HORIZONTAL?
-> :ANALYSIS:AHISTOGRAM1:
HORIZONTAL 0.000E+00,0.000E+00
:ANALysis:AHIStogram<x>:MEASure?
Function Queries all settings related automated measurement
of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor?
Function Queries all settings related to cursor measurement of
the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor:BASic?
Function Queries all settings related to basic items of the
cursor of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor:BASic?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:ALL
Function Turns ON/OFF all basic items of the cursor of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:ALL ON
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>?
Function Queries all settings related to the cursor of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of C<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>:STATe
Function Turns ON/OFF the cursor of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>:STATe {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>:STATe?
<x> of
AHIStogram<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:C1:STATE ON
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:C1:STATE? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
BASIC:C1:STATE 1
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>:VALue?
Function Queries the measured value of the cursor of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:C<x>:VALue?
<x> of
AHIStogram<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:C1:VALUE? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
BASIC:C1:VALUE 1.000E+00
Page 71

5-37
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC?
Function Queries all settings related to measured values
between cursors of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC:STATe
Function Turns ON/OFF the measured values between cursors
of the accumulated histogram or queries the current
setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC:STATe {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC:STATe?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:DC:STATE ON
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:DC:STATE? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:BASIC:DC:
STATE 1
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC:VALue?
Function Queries the measured value between cursors of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
CURSor[:BASic]:DC:VALue?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
BASIC:DC:VALUE? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
BASIC:DC:VALUE 1.000E+00
:ANALysis:AHIStogram<x>:MEASure:
CURSor:CALCulation?
Function Queries all settings related to calculation items of the
cursor of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
CURSor:CALCulation:ALL
Function Turns ON/OFF all calculation items of the cursor of
the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:ALL ON
:ANALysis:AHIStogram<x>:MEASure:
CURSor:CALCulation:DEFine<x>
Function Sets the equation of the calculation item of the cursor
of the accumulated histogram or queries the current
setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:DEFine<x> {<String>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:DEFine<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of DEFine<x> = 1 to 4
<String> = Up to 128 characters
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:DEFINE1 "C1"
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:DEFINE1? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:DEFINE1 "C1"
:ANALysis:AHIStogram<x>:MEASure:
CURSor:CALCulation:STATe<x>
Function Turns ON/OFF the calculation item of the cursor of
the accumulated histogram or queries the current
setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:STATe<x> {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:STATe<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of STATe<x> = 1 to 4
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:STATE1 ON
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:STATE1? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:STATE1 1
:ANALysis:AHIStogram<x>:MEASure:
CURSor:CALCulation:VALue<x>?
Function Queries the measured value of the calculation item of
the cursor of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
CALCulation:VALue<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of VALue<x> = 1 to 4
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:VALUE1? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:CURSOR:
CALCULATION:VALUE1 1.000E+00
5.3 ANALysis Group
Page 72

5-38
IM DLM6054-17EN
:ANALysis:AHIStogram<x>:MEASure:
CURSor:HLINkage
Function Turns ON/OFF the ΔV cursor link of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
HLINkage {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
HLINkage?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
HLINKAGE ON
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
HLINKAGE? -> :ANALYSIS:AHISTOGRAM1:
MEASURE:CURSOR:HLINKAGE 1
:ANALysis:AHIStogram<x>:MEASure:
CURSor:HPOSition<x>
Function Sets the ΔV cursor position of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
HPOSition<x> {<NRf>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
HPOSition<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of HPOSition<x> = 1 or 2
<NRf> = –5 to 5 div
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
HPOSITION1 1
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
HPOSITION1? -> :ANALYSIS:AHISTOGRAM1:
MEASURE:CURSOR:
HPOSITION1 1.000E+00
:ANALysis:AHIStogram<x>:MEASure:
CURSor:VLINkage
Function Turns ON/OFF the ΔT cursor link of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
VLINkage {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
VLINkage?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
VLINKAGE ON
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
VLINKAGE? -> :ANALYSIS:AHISTOGRAM1:
MEASURE:CURSOR:VLINKAGE 1
:ANALysis:AHIStogram<x>:MEASure:
CURSor:VPOSition<x>
Function Sets the ΔT cursor position of the accumulated
histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:CURSor:
VPOSition<x> {<NRf>}
:ANALysis:AHIStogram<x>:MEASure:CURSor:
VPOSition<x>?
<x> of
AHIStogram<x> = 1 and 2
<x> of VPOSition<x> = 1 and 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
VPOSITION1 1
:ANALYSIS:AHISTOGRAM1:MEASURE:CURSOR:
VPOSITION1? -> :ANALYSIS:AHISTOGRAM1:
MEASURE:CURSOR:
VPOSITION1 1.000E+00
:ANALysis:AHIStogram<x>:MEASure:MODE
Function Sets the automated measurement mode of the
accumulated histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:MODE
{CURSor|OFF|PARameter}
:ANALysis:AHIStogram<x>:MEASure:MODE?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
MODE CURSOR
:ANALYSIS:AHISTOGRAM1:MEASURE:MODE?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
MODE CURSOR
:ANALysis:AHIStogram<x>:MEASure:
PARameter?
Function Queries all settings related to the automated
measurement of waveform parameters of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>?
Function Queries all settings related to the area of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>?
<x> of
AHIStogram<x> = 1 and 2
<x> of AREA<x> = 1 or 2
5.3 ANALysis Group
Page 73

5-39
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:ALL
Function Turns ON/OFF all waveform parameters of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:ALL {<Boolean>}
<x> of
AHIStogram<x> = 1 or 2
<x> of AREA<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:ALL ON
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>?
Function Queries all settings related to the waveform
parameter of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>?
<x> of
AHIStogram<x> = 1 or 2
<x> of AREA<x> = 1 or 2
<Parameter> =
{MAXimum|MEAN|MEDian|
MINimum|PEAK|RMS|SD2integ|SD3integ|
SDEViation|SDINteg}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>:STATe
Function Turns ON/OFF the waveform parameter of the
accumulated histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>:
STATe {<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>:STATe?
<x> of
AHIStogram<x> = 1 or 2
<x> of AREA<x> = 1 or 2
<Parameter> = {MAXimum|MEAN|MEDian|
MINimum|PEAK|RMS|SD2integ|SD3integ|
SDEViation|SDINteg}
Example
(The following is an example for the maximum value
of area 1.)
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:MAXIMUM:STATE ON
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:MAXIMUM:STATE?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:MAXIMUM:STATE 1
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>:VALue?
Function Queries the automated measured value of the
waveform parameter of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:AREA<x>:<Parameter>:VALue?
<x> of
AHIStogram<x> = 1 or 2
<x> of AREA<x> = 1 or 2
<Parameter> = {MAXimum|MEAN|MEDian|
MINimum|PEAK|RMS|SD2integ|SD3integ|
SDEViation|SDINteg}
Example
(The following is an example for the maximum value
of area 1.)
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:MAXIMUM:VALUE?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:AREA1:MAXIMUM:VALUE 1.000E+00
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation?
Function Queries all settings related to the calculation items of
waveform parameters of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation?
<x> = 1 or 2
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:ALL
Function Turns ON/OFF all calculation items of the waveform
parameters of the accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:ALL ON
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:DEFine<x>
Function Sets the equation of the calculation items of the
waveform parameter of the accumulated histogram or
queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:
DEFine<x> {<String>}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:DEFine<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of DEFine<x> = 1 to 4
<String> = Up to 128 characters
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:DEFINE1 "MEAN"
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:DEFINE1?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:DEFINE1 "MEAN"
5.3 ANALysis Group
Page 74

5-40
IM DLM6054-17EN
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:STATe<x>
Function Turns ON/OFF the calculation items of the waveform
parameter of the accumulated histogram or queries
the current setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:STATe<x>
{<Boolean>}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:STATe<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of STATe<x> = 1 to 4
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:STATE1 ON
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:STATE1?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:STATE1 1
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:VALue<x>?
Function Queries the automated measured value of the
calculation items of the waveform parameter of the
accumulated histogram.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:CALCulation:VALue<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of VALue<x> = 1 to 4
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:VALUE1?
-> :ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:CALCULATION:VALUE1 1.000E+00
:ANALysis:AHIStogram<x>:MEASure:
PARameter:HRANge<x>
Function Sets the horizontal range of the waveform parameter
of the accumulated histogram or queries the current
setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:HRANge<x> {<NRf>,<NRf>}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:HRANge<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of HRANge<x> = 1 or 2
<NRf> = –5 to 5 div
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:HRANGE1 1,2
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:HRANGE1? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:PARAMETER:
HRANGE1 2.000E+00,1.000E+00
:ANALysis:AHIStogram<x>:MEASure:
PARameter:VRANge<x>
Function Sets the vertical range of the waveform parameter
of the accumulated histogram or queries the current
setting.
Syntax
:ANALysis:AHIStogram<x>:MEASure:
PARameter:VRANge<x> {<NRf>,<NRf>}
:ANALysis:AHIStogram<x>:MEASure:
PARameter:VRANge<x>?
<x> of
AHIStogram<x> = 1 or 2
<x> of VRANge<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:VRANGE1 1,2
:ANALYSIS:AHISTOGRAM1:MEASURE:
PARAMETER:VRANGE1? -> :ANALYSIS:
AHISTOGRAM1:MEASURE:PARAMETER:
VRANGE1 2.000E+00,1.000E+00
:ANALysis:AHIStogram<x>:MODE
Function Sets the accumulated histogram mode or queries the
current setting.
Syntax
:ANALysis:AHIStogram<x>:MODE
{HORizontal|VERTical}
:ANALysis:AHIStogram<x>:MODE?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:MODE HORIZONTAL
:ANALYSIS:AHISTOGRAM1:MODE?
-> :ANALYSIS:AHISTOGRAM1:MODE HORIZONTAL
:ANALysis:AHIStogram<x>:TRACe
Function Sets the source trace of the accumulated histogram
or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:TRACe {<NRf>}
:ANALysis:AHIStogram<x>:TRACe?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS:AHISTOGRAM1:TRACE 1
:ANALYSIS:AHISTOGRAM1:TRACE?
-> :ANALYSIS:AHISTOGRAM1:TRACE 1
:ANALysis:AHIStogram<x>:VERTical
Function Sets the vertical range of the accumulated histogram
or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:VERTical
{<NRf>,<NRf>}
:ANALysis:AHIStogram<x>:VERTical?
<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:AHISTOGRAM1:VERTICAL 1,2
:ANALYSIS:AHISTOGRAM1:VERTICAL?
-> :ANALYSIS:AHISTOGRAM1:
VERTICAL 2.000E+00,1.000E+00
5.3 ANALysis Group
Page 75

5-41
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:AHIStogram<x>:WINDow
Function Sets the measurement target window of the
accumulated histogram or queries the current setting.
Syntax
:ANALysis:AHIStogram<x>:WINDow {MAIN|
Z1|Z2}
:ANALysis:AHIStogram<x>:WINDow?
<x> = 1 or 2
Example
:ANALYSIS:AHISTOGRAM1:WINDOW MAIN
:ANALYSIS:AHISTOGRAM1:WINDOW?
-> :ANALYSIS:AHISTOGRAM1:WINDOW MAIN
:ANALysis:FFT<x>?
Function Queries all settings related to the FFT computation
function.
Syntax
:ANALysis:FFT<x>?
<x> = 1 or 2
:ANALysis:FFT<x>:AVERage?
Function Queries all FFT analysis averaging settings.
Syntax
:ANALysis:FFT<x>:AVERage?
<x> = 1 or 2
:ANALysis:FFT<x>:AVERage:EWEight
Function Sets or queries the attenuation constant of
exponential averaging in FFT analysis.
Syntax
:ANALysis:FFT<x>:AVERage:EWEight
{<NRf>}
:ANALysis:FFT<x>:AVERage:EWEight?
<x> = 1 or 2
<NRf> = 2 to 1024 (in 2n steps)
Example
:ANALYSIS:FFT1:AVERAGE:EWEIGHT 2
:ANALYSIS:FFT1:AVERAGE:EWEIGHT? -> :
ANALYSIS:FFT1:AVERAGE:EWEIGHT 2
:ANALysis:FFT<x>:HORizontal?
Function Queries all settings related the horizontal axis of the
FFT computation.
Syntax
:ANALysis:FFT<x>:HORizontal?
<x> = 1 or 2
:ANALysis:FFT<x>:HORizontal:CSPan?
Function Queries all settings related to the center and span of
the horizontal axis of the FFT computation.
Syntax
:ANALysis:FFT<x>:HORizontal:CSPan?
<x> = 1 or 2
:ANALysis:FFT<x>:HORizontal:CSPan:
CENTer
Function Sets the horizontal center of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:HORizontal:CSPan:
CENTer {<Frequency>}
:ANALysis:FFT<x>:HORizontal:CSPan:
CENTer?
<x> = 1 or 2
<Frequency> = 0 to 250 G (Hz)
Example
:ANALYSIS:FFT1:HORIZONTAL:CSPAN:
CENTER 1HZ
:ANALYSIS:FFT1:HORIZONTAL:CSPAN:CENTER?
-> :ANALYSIS:FFT1:HORIZONTAL:CSPAN:
CENTER 1.000E+00
:ANALysis:FFT<x>:HORizontal:CSPan:
SPAN
Function Sets the horizontal span of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:HORizontal:CSPan:
SPAN {<Frequency>}
:ANALysis:FFT<x>:HORizontal:CSPan:SPAN?
<x> = 1 or 2
<Frequency> = 0 to 250 G (Hz)
Example
:ANALYSIS:FFT1:HORIZONTAL:CSPAN:
SPAN 1HZ
:ANALYSIS:FFT1:HORIZONTAL:CSPAN:SPAN?
-> :ANALYSIS:FFT1:HORIZONTAL:CSPAN:
SPAN 1.000E+00
:ANALysis:FFT<x>:HORizontal:LRIGht?
Function Queries all settings related the left and right edges of
the horizontal axis of the FFT computation.
Syntax
:ANALysis:FFT<x>:HORizontal:LRIGht?
<x> = 1 or 2
:ANALysis:FFT<x>:HORizontal:LRIGht:
RANGe
Function Sets the range of the horizontal left and right edges
of the FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:HORizontal:LRIGht:
RANGe {<Frequency>,<Frequency>}
:ANALysis:FFT<x>:HORizontal:LRIGht:
RANGe?
<x> = 1 or 2
<Frequency> = 0 to 250 G (Hz)
Example
:ANALYSIS:FFT1:HORIZONTAL:LRIGHT:
RANGE 1HZ,2HZ
:ANALYSIS:FFT1:HORIZONTAL:LRIGHT:RANGE?
-> :ANALYSIS:FFT1:HORIZONTAL:LRIGHT:
RANGE 2.000E+00,1.000E+00
5.3 ANALysis Group
Page 76

5-42
IM DLM6054-17EN
:ANALysis:FFT<x>:HORizontal:MODE
Function Sets the horizontal mode of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:HORizontal:MODE {AUTO|
CSPan|LRIGht}
:ANALysis:FFT<x>:HORizontal:MODE?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:HORIZONTAL:MODE AUTO
:ANALYSIS:FFT1:HORIZONTAL:MODE?
-> :ANALYSIS:FFT1:HORIZONTAL:MODE AUTO
:ANALysis:FFT<x>:LENGth
Function Sets the number of FFT points of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:LENGth {<NRf>}
:ANALysis:FFT<x>:LENGth?
<x> = 1 or 2
<NRf> = 2500, 6250, 12500, 25000, 62500, 125000,
or 250000
Example
:ANALYSIS:FFT1:LENGTH 2500
:ANALYSIS:FFT1:LENGTH? -> :ANALYSIS:
FFT1:LENGTH 2500
:ANALysis:FFT<x>:MEASure?
Function Queries all settings related to the automated
measurement of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:MARKer?
Function Queries all settings related to the marker cursor
measurement of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
MARKer:BASic?
Function Queries all settings related to basic items of the
marker cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer:BASic?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:ALL
Function Turns ON/OFF all basic items of the marker cursor of
the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
ALL ON
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency?
Function Queries all settings related to the frequency value
between marker cursors of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:STATe
Function Turns ON/OFF the frequency value between marker
cursors of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:
STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:STATe?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKer:BASIC:
DFREQUENCY:STATE ON
:ANALYSIS:FFT1:MEASURE:MARKer:BASIC:
DFREQUENCY:STATE? -> :ANALYSIS:FFT1:
MEASURE:MARKer:BASIC:DFREQUENCY:STATE 1
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:VALue?
Function Queries the frequency value between marker cursors
of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DFRequency:VALue?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKer:BASIC:
DFREQUENCY:VALUE? -> :ANALYSIS:FFT1:
MEASURE:MARKer:BASIC:DFREQUENCY:
VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV?
Function Queries all settings related to the power value
between marker cursors of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV?
<x> = 1 or 2
5.3 ANALysis Group
Page 77

5-43
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:STATe
Function Turns ON/OFF the power value between marker
cursors of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:STATe?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:DV:
STATE ON
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:DV:
STATE? -> :ANALYSIS:FFT1:MEASURE:
MARKER:BASIC:DV:STATE 1
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:VALue?
Function Queries the power value between marker cursors of
the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:DV:VALue?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:DV:
VALUE? -> :ANALYSIS:FFT1:MEASURE:
MARKER:BASIC:DV:VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>?
Function Queries all settings related to the frequency value of
the marker cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:STATe
Function Turns ON/OFF the frequency value of the marker
cursor of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:
STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:STATe?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
FREQUENCY1:STATE ON
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
FREQUENCY1:STATE? -> :ANALYSIS:FFT1:
MEASURE:MARKER:BASIC:FREQUENCY1:STATE 1
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:VALue?
Function Queries the frequency value of the marker cursor of
the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:FREQuency<x>:VALue?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
FREQUENCY1:VALUE? -> :ANALYSIS:FFT1:
MEASURE:MARKER:BASIC:FREQUENCY1:
VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:POSition<x> {<NRf>}
Function Sets the marker cursor position of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:POSition<x> {<NRf>}
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:POSition<x>?
<x> of FFT<x> = 1 or 2
<x> of POSition<x> = 1 or 2
<NRf> = –5 to 5 (div)
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
POSITION1 1
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:
POSITION1? -> :ANALYSIS:FFT1:MEASURE:
MARKER:BASIC:POSITION1 1.000E+00
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>?
Function Queries all settings related to the power value of the
marker cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:STATe
Function Turns ON/OFF the power value of the marker cursor
of the FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:STATe?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:V1:
STATE ON
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:V1:
STATE? -> :ANALYSIS:FFT1:MEASURE:
MARKER:BASIC:V1:STATE 1
5.3 ANALysis Group
Page 78
5-44
IM DLM6054-17EN
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:VALue?
Function Queries the power value of the marker cursor of the
FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
MARKer[:BASic]:V<x>:VALue?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:BASIC:V1:
VALUE? -> :ANALYSIS:FFT1:MEASURE:
MARKER:BASIC:V1:VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation?
Function Queries all settings related to calculation items of the
marker cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:ALL
Function Turns ON/OFF all calculation items of the marker
cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:ALL ON
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:DEFine<x>
Function Sets the equation of the calculation items of the
marker cursor of the FFT computation or queries the
current setting.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:DEFine<x> {<String>}
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:DEFine<x>?
<x> of FFT<x> = 1 or 2
<x> of DEFine<x> = 1 to 4
<String> = Up to 128 characters
Example
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:DEFINE1 "V(F1)"
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:DEFINE1? -> :ANALYSIS:FFT1:
MEASURE:MARKER:CALCULATION:
DEFINE1 "V(F1)"
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:STATe<x>
Function Turns ON/OFF the calculation items of the marker
cursor of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer:C
ALCulation:STATe<x> {<Boolean>}
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:STATe<x>?
<x> of FFT<x> = 1 or 2
<x> of ST
ATe<x> = 1 to 4
Example
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:STATE1 ON
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:STATE1? -> :ANALYSIS:FFT1:
MEASURE:MARKER:CALCULATION:STATE1 1
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:VALue<x>?
Function Queries the measured value of the calculation items
of the marker cursor of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:MARKer:
CALCulation:VALue<x>?
<x> of FFT<x> = 1 or 2
<x> of V
ALue<x> = 1 to 4
Example
:ANALYSIS:FFT1:MEASURE:MARKER:
CALCULATION:VALUE1? -> :ANALYSIS:FFT1:
MEASURE:MARKER:CALCULATION:
VALUE1 1.000E+00
:ANALysis:FFT<x>:MEASure:MODE
Function Sets the automated measurement mode of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:MODE {MARKer|
OFF|PEAK}
:ANALysis:FFT<x>:MEASure:MODE?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:MODE MARKER
:ANALYSIS:FFT1:MEASURE:MODE?
-> :ANALYSIS:FFT1:MEASURE:MODE MARKER
:ANALysis:FFT<x>:MEASure:PEAK?
Function Queries all settings related to the peak value
measurement of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
PEAK:BASic?
Function Queries all settings related to basic items of the peak
value of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:BASic?
<x> = 1 or 2
5.3 ANALysis Group
Page 79
5-45
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:ALL
Function Turns ON/OFF all basic items of the peak value of the
FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
ALL ON
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DFRequency?
Function Queries all settings related to the frequency value
between peak values of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DFRequency?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DFRequency:STATe
Function Turns ON/OFF the frequency value between peak
values of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DFRequency:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DFRequency:STATe?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
DFREQUENCY:STATE ON
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
DFREQUENCY:STATE? -> :ANALYSIS:FFT1:
MEASURE:PEAK:BASIC:DFREQUENCY:STATE 1
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DFRequency:VALue?
Function Queries the frequency value between peak values of
the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DFRequency:VALue?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
DFREQUENCY:VALUE? -> :ANALYSIS:FFT1:
MEASURE:PEAK:BASIC:DFREQUENCY:
VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DV?
Function Queries all settings related to the power value
between peak values of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DV?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DV:STATe
Function Turns ON/OFF the power value between peak values
of the FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DV:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DV:STATe?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:DV:
STATE ON
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:DV:
STATE? -> :ANALYSIS:FFT1:MEASURE:PEAK:
BASIC:DV:STATE 1
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:DV:VALue?
Function Queries the power value between peak values of the
FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
DV:VALue?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:DV:
VALUE? -> :ANALYSIS:FFT1:MEASURE:PEAK:
BASIC:DV:VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:FREQuency<x>?
Function Queries all settings related to the peak frequency
value of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
FREQuency<x>?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:FREQuency<x>:STATe
Function Turns ON/OFF the peak frequency value of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:F
REQuency<x>:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
FREQuency<x>:STATe?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
FREQUENCY1:STATE ON
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
FREQUENCY1:STATE? -> :ANALYSIS:FFT1:
MEASURE:PEAK:BASIC:FREQUENCY1:STATE 1
5.3 ANALysis Group
Page 80

5-46
IM DLM6054-17EN
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:FREQuency<x>:VALue?
Function Queries the peak frequency value of the FFT
computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
FREQuency<x>:VALue?
<x> of FFT<x> = 1 or 2
<x> of FREQuency<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
FREQUENCY1:VALUE? -> :ANALYSIS:FFT1:
MEASURE:PEAK:BASIC:FREQUENCY1:
VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:RANGe<x>
Function Sets the measurement range of the peak value of the
FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
RANGe<x> {<NRf>,<NRf>}
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
RANGe<x>?
<x> of FFT<x> = 1 or 2
<x> of RANGe<x> = 1 or 2
<NRf> = –5 to 5 div
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
RANGE1 0,1
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:
RANGE1? -> :ANALYSIS:FFT1:MEASURE:
PEAK:BASIC:RANGE1 1.000E+00,0.000E+00
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:V<x>?
Function Queries all settings related to the peak value of the
FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
V<x>?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:V<x>:STATe
Function Turns ON/OFF the peak value of the FFT computation
or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
V<x>:STATe {<Boolean>}
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
V<x>:STATe?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:V1:
STATE ON
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:V1:
STATE? -> :ANALYSIS:FFT1:MEASURE:PEAK:
BASIC:V1:STATE 1
:ANALysis:FFT<x>:MEASure:
PEAK[:BASic]:V<x>:VALue?
Function Queries the peak value of the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK[:BASic]:
V<x>:VALue?
<x> of FFT<x> = 1 or 2
<x> of V<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:BASIC:V1:
VALUE? -> :ANALYSIS:FFT1:MEASURE:PEAK:
BASIC:V1:VALUE 1.000E+00
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation?
Function Queries all settings related to calculation items of the
FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation?
<x> = 1 or 2
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:ALL
Function Turns ON/OFF all calculation items of the FFT
computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:ALL ON
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:DEFine<x>
Function Sets the equation of the calculation item of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:DEFine<x> {<String>}
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:DEFine<x>?
<x> of FFT<x> = 1 or 2
<x> of DEFine<x> = 1 to 4
<String> = Up to 128 characters
Example
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:DEFINE1 "V(P1)"
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:DEFINE1? -> :ANALYSIS:FFT1:
MEASURE:PEAK:CALCULATION:
DEFINE1 "V(P1)"
5.3 ANALysis Group
Page 81

5-47
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:STATe<x>
Function Turns ON/OFF the calculation items of the FFT
computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:STATe<x> {<Boolean>}
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:STATe<x>?
<x> of FFT<x> = 1 or 2
<x> of ST
ATe<x> = 1 to 4
Example
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:STATE1 ON
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:STATE1? -> :ANALYSIS:FFT1:
MEASURE:PEAK:CALCULATION:STATE1 1
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:VALue<x>?
Function Queries the measured value of the calculation item of
the FFT computation.
Syntax
:ANALysis:FFT<x>:MEASure:PEAK:
CALCulation:VALue<x>?
<x> of FFT<x> = 1 or 2
<x> of V
ALue<x> = 1 to 4
Example
:ANALYSIS:FFT1:MEASURE:PEAK:
CALCULATION:VALUE1? -> :ANALYSIS:FFT1:
MEASURE:PEAK:CALCULATION:
VALUE1 1.000E+00
:ANALysis:FFT<x>:MODE
Function Sets or queries the waveform display mode for FFT
analysis.
Syntax
:ANALysis:FFT<x>:MODE
{AVERage|MAXHold|NORMal}
:ANALysis:FFT<x>:MODE?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:MODE AVERAGE
:ANALYSIS:FFT1:MODE? -> :ANALYSIS:FFT1:
MODE AVERAGE
:ANALysis:FFT<x>:RANGe
Function Sets the measurement source window used in the
FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:RANGe {MAIN|Z1|Z2}
:ANALysis:FFT<x>:RANGe?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:RANGE MAIN
:ANALYSIS:FFT1:RANGE? -> :ANALYSIS:
FFT1:RANGE MAIN
:ANALysis:FFT<x>:RPOSition (Ref
Position)
Function Sets the center point of magnification of the vertical
axis of the FFT computation or queries the current
setting.
Syntax
:ANALysis:FFT<x>:RPOSition {<NRf>}
:ANALysis:FFT<x>:RPOSition?
<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:FFT1:RPOSITION 1
:ANALYSIS:FFT1:RPOSITION? -> :ANALYSIS:
FFT1:RPOSITION 1.000E+00
:ANALysis::FFT<x>:TRACe
Function Sets or queries the source waveform for FFT
analysis.
Syntax
:ANALysis::FFT<x>:TRACe {<NRf>}
:ANALysis::FFT<x>:TRACe?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS::FFT1:TRACE 1
:ANALYSIS::FFT1:TRACE? -> :ANALYSIS::
FFT1:TRACE 1
:ANALysis::FFT<x>:TYPE
Function Sets or queries the spectrum for FFT analysis.
Syntax
:ANALysis::FFT<x>:TYPE {CH_MAG,<NRf>|CS
_IMAG,<NRf>|CS_LOGMAG,<NRf>|CS_MAG,<NRf
>|CS_PHASE,<NRf>|CS_REAL,<NRf>|
LS_IMAG|LS_LOGMAG|LS_MAG|LS_PHASE|LS_RE
AL|PS_LOGMAG|PS_MAG|PSD_LOGMAG|
PSD_MAG|RS_LOGMAG|RS_MAG|TF_IMAG,<NRf>|
TF_LOGMAG,<NRf>|TF_MAG,<NRf>|TF_PHASE,<
NRf>|TF_REAL,<NRf>}
:ANALysis::FFT<x>:TYPE?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS::FFT1:TYPE CH_MAG,1
:ANALYSIS::FFT1:TYPE? -> :ANALYSIS:
FFT1:TYPE CH_MAG,1
Description
This command results in an error on models that are
not equipped with the user-defined computation
option.
•
When the spectrum is set to (CH_MAG|CS_IMAG|
CS_LOGMAG|CS_MAG|CS_PHASE|CS_REAL|T
F_IMAG|TF_LOGMAG|TF_MAG|TF_PHASE|TF_
REAL), use <NRf> to select the second waveform
under analysis.
5.3 ANALysis Group
Page 82

5-48
IM DLM6054-17EN
:ANALysis:FFT<x>:VERTical?
Function Queries all settings related the vertical axis of the
FFT computation.
Syntax
:ANALysis:FFT<x>:VERTical?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:VERTICAL? -> :ANALYSIS:
FFT1:VERTICAL:
LEVEL 1.000E+00;MODE AUTO;
SENSITIVITY 1.000E+00
:ANALysis:FFT<x>:VERTical:LEVel
Function Sets the display position of the vertical axis of the
FFT computation or queries the current setting.
Syntax
:ANALysis:FFT<x>:VERTical:LEVel {<NRf>}
:ANALysis:FFT<x>:VERTical:LEVel?
<x> = 1 or 2
<NRf> = –1.000E+31 to 1.000E+31 (dBV)
Example
:ANALYSIS:FFT1:VERTICAL:LEVEL 1
:ANALYSIS:FFT1:VERTICAL:LEVEL?
-> :ANALYSIS:FFT1:VERTICAL:
LEVEL 1.000E+00
:ANALysis:FFT<x>:VERTical:MODE
Function Sets the vertical axis mode of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:VERTical:MODE {AUTO|
MANual}
:ANALysis:FFT<x>:VERTical:MODE?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:VERTICAL:MODE AUTO
:ANALYSIS:FFT1:VERTICAL:MODE?
-> :ANALYSIS:FFT1:VERTICAL:MODE AUTO
:ANALysis:FFT<x>:VERTical:
SENSitivity
Function Sets the vertical sensitivity of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:VERTical:SENSitivity
{<NRf>}
:ANALysis:FFT<x>:VERTical:SENSitivity?
<x> = 1 or 2
<NRf> = 0 to 1.000E+31 (dBV)
Example
:ANALYSIS:FFT1:VERTICAL:SENSITIVITY 1
:ANALYSIS:FFT1:VERTICAL:SENSITIVITY?
-> :ANALYSIS:FFT1:VERTICAL:S
ENSITIVITY 1.000E+00
:ANALysis:FFT<x>:WINDow
Function Sets the window function of the FFT computation or
queries the current setting.
Syntax
:ANALysis:FFT<x>:WINDow {FLATtop|
HANNing|RECTangle}
:ANALysis:FFT<x>:WINDow?
<x> = 1 or 2
Example
:ANALYSIS:FFT1:WINDOW FLATTOP
:ANALYSIS:FFT1:WINDOW? -> :ANALYSIS:
FFT1:WINDOW FLATTOP
:ANALysis:TYPE<x>
Function Sets the analysis function type or queries the current
setting.
Syntax
:ANALysis:TYPE<x> {AHIStogram|FFT|
WPARameter|XY|OFF}
:ANALysis:TYPE<x>?
<x> = 1 or 2
Example
:ANALYSIS:TYPE1 AHISTOGRAM
:ANALYSIS:TYPE1? -> :ANALYSIS:
TYPE1 AHISTOGRAM
:ANALysis:VTDisplay
Function Turns ON/OFF the VT waveform display or queries
the current setting.
Syntax
:ANALysis:VTDisplay {<Boolean>}
:ANALysis:VTDisplay?
Example
:ANALYSIS:VTDISPLAY ON
:ANALYSIS:VTDISPLAY? -> :ANALYSIS:
VTDISPLAY 1
:ANALysis:WAIT<x>?
Function Waits for the completion of the automated
measurement with a timeout option.
Syntax
ANALysis:WAIT<x>? {<NRf>}
<x> = 1 or 2
<NRf> = 1 to 360000 (timeout value, in units of 10
ms)
Example
ANALYSIS:WAIT1? 100 ->:ANALYSIS:WAIT1 1
Description If the execution of the automated measurement
completes within the timeout value, 0 is returned; if
it is not complete or automated measurement is not
being executed, 1 is returned. Even if the timeout
value is set long, 0 is returned when the execution of
the automated measurement is complete.
:ANALysis:WPARameter<x>?
Function Queries all settings related to the waveform
parameter measurement function.
Syntax
:ANALysis:WPARameter<x>?
<x> = 1 or 2
I
5.3 ANALysis Group
Page 83

5-49
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:WPARameter<x>:BIT<x>?
Function Queries all settings related to each logic bit of logic
waveform parameter measurement.
Syntax
: ANALysis:WPARameter<x>:BIT<x>?
<x> of WPARameter<x> = 1 or 2
<x> of BIT<x> = 1 to 32 (On 16-bit models, you can
set the x in BIT<x> to a value from 1 to 8 or 17 to 24.)
:ANALysis:WPARameter<x>:BIT<x>:
AREA<x>?
Function Queries all settings related to each area of logic
waveform parameter measurement.
Syntax
: ANALysis:WPARameter<x>:BIT<x>:
AREA<x>?
<x> of WP
ARameter<x> = 1 or 2
<x> of BIT<x> = 1 to 32 (On 16-bit models, you can
set the x in BIT<x> to a value from 1 to 8 or 17 to 24.)
<x> of
AREA<x> = 1 or 2
:ANALysis:WPARameter<x>:BIT<x>:
AREA<x>:TYPE
Function Sets the logic waveform parameters for logic
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:BIT<x>:AREA<x>:
TYPE {AVGPeriod|DELay|DT|DUTYcycle|
ENUMber|FREQuency|NWIDth|PERiod|
PWIDth}
:ANALysis:WPARameter<x>:BIT<x>:AREA<x>:
TYPE?
<x> of WP
ARameter<x> = 1 or 2
<x> of BIT<x> = 1 to 32 (On 16-bit models, you can
set the x in BIT<x> to a value from 1 to 8 or 17 to 24.)
<x> of
AREA<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:BIT1:AREA1:
TYPE PERIOD
:ANALYSIS:WPARAMETER1:BIT1:AREA1:TYPE?
->: ANALYSIS:WPARAMETER1:BIT1:AREA1:
TYPE PERIOD
:ANALysis:WPARameter<x>:CALCulation
Function Sets the calculation items of the automated
measurement of waveform parameters or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:CALCulation
{<NRf>}
:ANALysis:WPARameter<x>:CALCulation?
<x> = 1 or 2
<NRf> = 1 to 4
Example
:ANALYSIS:WPARAMETER1:CALCULATION 1
:ANALYSIS:WPARAMETER1:CALCULATION?
-> :ANALYSIS:WPARAMETER1:CALCULATION 1
:ANALysis:WPARameter<x>:HISTogram?
Function Queries all settings related to the histogram display
of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram?
<x> = 1 or 2
:ANALysis:WPARameter<x>:HISTogram:
MEASure?
Function Queries all settings related to the automated
measurement of the histogram display of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure?
<x> = 1 or 2
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor?
Function Queries all settings related to the cursor
measurement on the histogram of the waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor?
<x> = 1 or 2
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:ALL
Function Turns ON/OFF all histogram cursors of waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>HISTogram:
MEASure:CURSor:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:ALL ON
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>?
Function Queries all settings related to the cursor
measurement on the histogram of the waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
5.3 ANALysis Group
Page 84

5-50
IM DLM6054-17EN
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>:POSition
Function Sets the cursor position on the trend of the waveform
parameter measurement or queries the current
setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:C<x>:POSition {<NRf>}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:C<x>:POSition?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
<NRf> = –5 to 5 (div)
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:POSITION ON
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:POSITION?
-> :ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:POSITION 1.000E+00
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>:STATe
Function Turns ON/OFF the cursor on the histogram of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:C<x>:
STATe {<Boolean>}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:C<x>:STATe?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:STATE ON
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:STATE? -> :ANALYSIS:
WPARAMETER1:HISTOGRAM:MEASURE:CURSOR:
C1:STATE 1
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>:VALue?
Function Queries the measured value of the cursor on the
histogram of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:C<x>:VALue?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:C1:VALUE? -> :ANALYSIS:
WPARAMETER1:HISTOGRAM:MEASURE:CURSOR:
C1:VALUE 1.000E+00
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:DC?
Function Queries all settings related to the measurement
between cursors on the histogram of the waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:DC?
<x> = 1 or 2
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:DC:STATe
Function Turns ON/OFF the measurement between cursors
on the histogram of the waveform parameter
measurement or queries the current setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:DC:STATe {<Boolean>}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:DC:STATe?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:DC:STATE ON
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:DC:STATE? -> :ANALYSIS:
WPARAMETER1:HISTOGRAM:MEASURE:CURSOR:
DC:STATE 1
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:DC:VALue?
Function Queries the measured value between cursors on the
histogram of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:DC:VALue?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:DC:VALUE? -> :ANALYSIS:
WPARAMETER1:HISTOGRAM:MEASURE:CURSOR:
DC:VALUE 1.000E+00
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:LINKage
Function Turns ON/OFF the histogram cursor link of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:LINKage {<Boolean>}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:CURSor:LINKage?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:LINKAGE ON
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:CURSOR:LINKAGE? -> :ANALYSIS:
WPARAMETER1:HISTOGRAM:MEASURE:CURSOR:
LINKAGE 1
5.3 ANALysis Group
Page 85

5-51
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:WPARameter<x>:HISTogram:
MEASure:MODE
Function Sets the automated measurement mode of the
histogram display of the waveform parameter
measurement or queries the current setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:MODE {CURSor|OFF|PARameter}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:MODE?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:MODE CURSOR
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:MODE? -> :ANALYSIS:WPARAMETER1:
HISTOGRAM:MEASURE:MODE CURSOR
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter?
Function Queries all settings related to the automated
measurement of histogram parameters of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter?
<x> = 1 or 2
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:ALL
Function Turn ON/OFF all histogram parameters of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>HISTogram:
MEASure:PARameter:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:ALL ON
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>?
Function Queries all settings related to the histogram
parameter of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>?
<x> = 1 or 2
<Parameter> = {MEAN|PEAK|SD3integ|
SDEViation|SDINteg}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>:STATe
Function Turns ON/OFF the histogram parameter of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>:STATe
{<Boolean>}
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>:STATe?
<x> = 1 or 2
<Parameter> = {MEAN|PEAK|SD3integ|
SDEViation|SDINteg}
Example (The following is an example for the average value.)
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:MEAN:STATE ON
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:MEAN:STATE?
-> :ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:MEAN:STATE 1
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>:VALue?
Function Queries the measured value of the histogram
parameter of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:HISTogram:
MEASure:PARameter:<Parameter>:VALue?
<x> = 1 or 2
<Parameter> = {MEAN|PEAK|SD3integ|
SDEViation|SDINteg}
Example (The following is an example for the average value.)
:ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:MEAN:VALUE?
-> :ANALYSIS:WPARAMETER1:HISTOGRAM:
MEASURE:PARAMETER:MEAN:VALUE 1.000E+00
:ANALysis:WPARameter<x>:LIST?
Function Queries all settings related to the list display of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:LIST?
<x> = 1 or 2
:ANALysis:WPARameter<x>:LIST:ITEM?
Function Queries list display items of the waveform parameter
measurement.
Syntax
:ANALysis:WPARameter<x>:LIST:ITEM?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:LIST:ITEM?
-> :ANALYSIS:WPARAMETER1:LIST:
ITEM "LOW(C1)"
5.3 ANALysis Group
Page 86
5-52
IM DLM6054-17EN
:ANALysis:WPARameter<x>:LIST:MODE
Function Sets the list display mode of the waveform parameter
measurement or queries the current setting.
Syntax
:ANALysis:WPARameter<x>:LIST:
MODE {STATistic|TRENd}
:ANALysis:WPARameter<x>:LIST:MODE?
<x>=1 or 2
Example
:ANALYSIS:WPARAMETER1:LIST:MODE
STATISTIC
:ANALYSIS:WPARAMETER1:LIST:MODE?
-> : ANALYSIS:WPARAMETER1:LIST:
MODE STATISTIC
:ANALysis:WPARameter<x>:LIST:SCRoll
Function Sets the scroll direction of the list display of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:LIST:SCRoll
{HORizontal|VERTical}
:ANALysis:WPARameter<x>:LIST:SCRoll?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:LIST:
SCROLL HORIZONTAL
:ANALYSIS:WPARAMETER1:LIST:SCROLL?
-> :ANALYSIS:WPARAMETER1:LIST:
SCROLL HORIZONTAL
:ANALysis:WPARameter<x>:LIST:VALue?
Function Queries the automated measured value of the
list display number of the waveform parameter
measurement.
Syntax
:ANALysis:WPARameter<x>:LIST:
VALue? {<NRf>|MAXimum}
<x> = 1 or 2
<NRf> = 1 to 100000
Example
:ANALYSIS:WPARAMETER1:LIST:VALUE? 1
-> :ANALYSIS:WPARAMETER1:LIST:
VALUE 1,1.000E+00
Description
• If the measurement is not possible, "NAN (Not A
Number" is returned.
•
If the value of the list display number is not present,
"NAN (Not A Number)" is returned.
• If MAXimum is specified, the maximum list display
number is selected.
:ANALysis:WPARameter<x>:MODE
Function Sets the mode of the waveform parameter
measurement or queries the current setting.
Syntax
:ANALysis:WPARameter<x>:MODE
{HISTogram|LIST|TRENd}
:ANALysis:WPARameter<x>:MODE?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:MODE HISTOGRAM
:ANALYSIS:WPARAMETER1:MODE?
-> :ANALYSIS:WPARAMETER1:MODE HISTOGRAM
:ANALysis:WPARameter<x>:TRACe<x>?
Function Queries all settings related to the trace of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRACe<x>?
<x> of WPARameter<x> = 1 or 2
<x> of TRACe<x> = 1 to 8
:ANALysis:WPARameter<x>:TRACe<x>:
AREA<x>?
Function Queries all settings related to the area of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRACe<x>:
AREA<x>?
<x> of WP
ARameter<x> = 1 or 2
<x> of TRACe<x> = 1 to 8
<x> of AREA<x> = 1 or 2
:ANALysis:WPARameter<x>:TRACe<x>:
AREA<x>:TYPE
Function Sets the waveform parameter of the waveform
parameter measurement or queries the current
setting.
Syntax
:ANALysis:WPARameter<x>:TRACe<x>:
AREA<x>:TYPE {<Parameter>}
:ANALysis:WPARameter<x>:TRACe<x>:
AREA<x>:TYPE?
<x> of WP
ARameter<x> = 1 or 2
<x> of TRACe<x> = 1 to 8
<x> of AREA<x> = 1 or 2
<Parameter> = {AVGPeriod|BURSt|CMEan|CRMS|
CSDeviation|DELay|DT|DUTYcycle|ENUMber|FALL|
FREQuency|HIGH|HILow|LOW|MAXimum|MEAN|
MINimum|NOVershoot|NWIDth|PERiod|POVershoot|
PTOPeak|PWIDth|RISE|RMS|SDEViation|TYCInteg|
TYINteg|V1|V2}
Example
:ANALYSIS:WPARAMETER1:TRACE1:AREA1:
TYPE BURST
:ANALYSIS:WPARAMETER1:TRACE1:AREA1:
TYPE? -> :ANALYSIS:WPARAMETER1:TRACE1:
AREA1:TYPE BURST
:ANALysis:WPARameter<x>:TRENd?
Function Queries all settings related to the trend display of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd?
<x> = 1 or 2
5.3 ANALysis Group
Page 87

5-53
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:WPARameter<x>:TRENd:
ASCale[:EXECute]
Function Executes the auto scaling of the trend display of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:
ASCale[:EXECute]
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:ASCALE:
EXECUTE
:ANALysis:WPARameter<x>:TRENd:HRANge
Function Sets the target window for trend display of measured
waveform parameters or queries the current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:
HRANge {MAIN|Z1|Z2}
:ANALysis:WPARameter<x>:TRENd:HRANge?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:HRANGE MAIN
:ANALYSIS:WPARAMETER1:TREND:HRANGE? ->
:ANALYSIS:WPARAMETER1:TREND:HRANGE MAIN
:ANALysis:WPARameter<x>:TRENd:HSPan
Function Sets the horizontal span of the trend display of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:HSPan
{<NRf>}
:ANALysis:WPARameter<x>:TRENd:HSPan?
<x> = 1 or 2
<NRf> = 1 to 100000
Example
:ANALYSIS:WPARAMETER1:TREND:HSPAN 1
:ANALYSIS:WPARAMETER1:TREND:HSPAN?
-> :ANALYSIS:WPARAMETER1:TREND:HSPAN 1
:ANALysis:WPARameter<x>:TRENd:
MEASure?
Function Queries all settings related to the automated
measurement of the trend display of the waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure?
<x> = 1 or 2
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor?
Function Queries all settings related to the cursor
measurement of the trend of the waveform parameter
measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor?
<x> = 1 or 2
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:ALL
Function Turns ON/OFF all cursors of the trend of the
waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:ALL {<Boolean>}
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:ALL ON
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>?
Function Queries all settings related to the measured value
of the cursor of the trend of the waveform parameter
measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:POSition
Function Sets the cursor position of the trend of the waveform
parameter measurement or queries the current
setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>:POSition {<NRf>}
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>:POSition?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
<NRf> = –5 to 5 div
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:C1:POSITION 1
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:C1:POSITION? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:
CURSOR:C1:POSITION 1.000E+00
CURSOR:C1:STATE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:
CURSOR:C1:STATE 1
5.3 ANALysis Group
Page 88

5-54
IM DLM6054-17EN
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:STATe
Function Turns ON/OFF the cursor of the trend of the
waveform parameter measurement or queries the
current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>:STATe {<Boolean>}
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>:STATe?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:C1:STATE ON
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:C1:STATE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:
CURSOR:C1:STATE 1
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:C<x>:VALue?
Function Queries the measured value of the cursor of the trend
of the waveform parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:C<x>:VALue?
<x> of WP
ARameter<x> = 1 or 2
<x> of C<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:C1:VALUE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:
CURSOR:C1:VALUE 1.000E+00
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:DC?
Function Queries all settings related to the measurement
between cursors on the trend of the waveform
parameter measurement.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:DC?
<x> of WP
ARameter<x> = 1 or 2
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:DC:STATe
Function Turns ON/OFF the measurement between cursors on
the trend of the waveform parameter measurement or
queries the current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:DC:STATe {<Boolean>}
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:DC:STATe?
<x> of WP
ARameter<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:DC:STATE ON
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:DC:STATE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:CURSOR:DC:
STATE 1
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:DC:VALue?
Function Sets the measured value between cursors on the
trend of the waveform parameter measurement or
queries the current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:
MEASure:CURSor:DC:VALue?
<x> of WP
ARameter<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:DC:VALUE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:CURSOR:DC:
VALUE 1.000E+00
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:LINKage
Function Turns ON/OFF the trend cursor link of the waveform
parameter measurement or queries the current
setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:LINKage {<Boolean>}
:ANALysis:WPARameter<x>:TRENd:MEASure:
CURSor:LINKage?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:LINKAGE ON
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
CURSOR:LINKAGE? -> :ANALYSIS:
WPARAMETER1:TREND:MEASURE:CURSOR:
LINKAGE 1
:ANALysis:WPARameter<x>:TRENd:
MEASure:MODE
Function Sets the automated measurement mode of the trend
of the waveform parameter measurement or queries
the current setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:MEASure:
MODE {CURSor|OFF}
:ANALysis:WPARameter<x>:TRENd:MEASure:
MODE?
<x> = 1 or 2
Example
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
MODE CURSOR
:ANALYSIS:WPARAMETER1:TREND:MEASURE:
MODE? -> :ANALYSIS:WPARAMETER1:TREND:
MEASURE:MODE CURSOR
5.3 ANALysis Group
Page 89

5-55
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:WPARameter<x>:TRENd:
VERTical
Function Sets the vertical range of the trend of the waveform
parameter measurement or queries the current
setting.
Syntax
:ANALysis:WPARameter<x>:TRENd:VERTical
{<NRf>,<NRf>}
:ANALysis:WPARameter<x>:TRENd:VERTical?
<x> = 1 or 2
<NRf> = –1.000E+31 to 1.000E+31 (div)
Example
:ANALYSIS:WPARAMETER1:TREND:
VERTICAL 1,2
:ANALYSIS:WPARAMETER1:TREND:VERTICAL?
-> :ANALYSIS:WPARAMETER1:TREND:
VERTICAL 2.000E+00,1.000E+00
:ANALysis:XY<x>?
Function Queries all settings related to the XY display function.
Syntax
:ANALysis:XY<x>?
<x> = 1 or 2
:ANALysis:XY<x>:GATE?
Function Queries all settings related to the gate function of the
XY display.
Syntax
:ANALysis:XY<x>:GATE?
<x> = 1 or 2
:ANALysis:XY<x>:GATE:ALEVel
Function Sets the active level of the gate of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:GATE:ALEVel {HIGH|LOW}
:ANALysis:XY<x>:GATE:ALEVel?
<x> = 1 or 2
Example
:ANALYSIS:XY1:GATE:ALEVEL HIGH
:ANALYSIS:XY1:GATE:ALEVEL?
-> :ANALYSIS:XY1:GATE:ALEVEL HIGH
:ANALysis:XY<x>:GATE:HYSTeresis<x>
Function Sets the hysteresis of the gate of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:GATE:HYSTeresis<x>
{<NRf>}
:ANALysis:XY<x>:GATE:HYSTeresis<x>?
<x> of XY<x> = 1 or 2
<x> of HYST
eresis<x> = 1 to 8
<NRf> = 0 to 4 (div)
Example
:ANALYSIS:XY1:GATE:HYSTERESIS1 1
:ANALYSIS:XY1:GATE:HYSTERESIS1?
-> :ANALYSIS:XY1:GATE:
HYSTERESIS1 1.000E+00
:ANALysis:XY<x>:GATE:LEVel<x>
Function Sets the level of the gate of the XY display or queries
the current setting.
Syntax
:ANALysis:XY<x>:GATE:LEVel<x> {<NRf>,<V
oltage>,<Current>}
:ANALysis:XY<x>:GATE:LEVel<x>?
<x> of XY<x> = 1 or 2
<x> of LEV
el<x> = 1 to 8
<NRf>, <Voltage>, and <Current> = See the DL6000/
DLM6000 User’s Manual.
Example
:ANALYSIS:XY1:GATE:LEVEL1 1
:ANALYSIS:XY1:GATE:LEVEL1?
-> :ANALYSIS:XY1:GATE:LEVEL1 1.000E+00
:ANALysis:XY<x>:GATE:TRACe
Function Sets the gate trace of the XY display or queries the
current setting.
Syntax
:ANALysis:XY<x>:GATE:TRACe {<NRf>|OFF}
:ANALysis:XY<x>:GATE:TRACe?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS:XY1:GATE:TRACE 1
:ANALYSIS:XY1:GATE:TRACE? -> :ANALYSIS:
XY1:GATE:TRACE 1
:ANALysis:XY<x>:MEASure?
Function Queries all settings related to the automated
measurement of the XY display.
Syntax
:ANALysis:XY<x>:MEASure?
<x> = 1 or 2
:ANALysis:XY<x>:MEASure:CURSor?
Function Queries all settings related to the cursor
measurement of the XY display.
Syntax
:ANALysis:XY<x>:MEASure:CURSor?
<x> = 1 or 2
:ANALysis:XY<x>:MEASure:CURSor:
XLINkage
Function Turns ON/OFF the ΔV cursor link on the XY display
or queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:
XLINkage {<Boolean>}
:ANALysis:XY<x>:MEASure:CURSor:
XLINkage?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:CURSOR:
XLINkAGE ON
:ANALYSIS:XY1:MEASURE:CURSOR:XLINkAGE?
-> :ANALYSIS:XY1:MEASURE:CURSOR:
XLINkAGE 1
5.3 ANALysis Group
Page 90

5-56
IM DLM6054-17EN
:ANALysis:XY<x>:MEASure:CURSor:X<x>?
Function Queries all settings related to the ΔV cursor of the XY
display.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:X<x>?
<x> of XY<x> = 1 or 2
<x> of X<x> = 1 or 2
:ANALysis:XY<x>:MEASure:CURSor:X<x>:
POSition
Function Sets the ΔV cursor position of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:X<x>:
POSition {<NRf>}
:ANALysis:XY<x>:MEASure:CURSor:X<x>:
POSition?
<x> of XY<x> = 1 or 2
<x> of X<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:XY1:MEASURE:CURSOR:X1:
POSITION 1
:ANALYSIS:XY1:MEASURE:CURSOR:X1:
POSITION?
-> :ANALYSIS:XY1:MEASURE:CURSOR:X1:
POSITION 1.000E+00
:ANALysis:XY<x>:MEASure:CURSor:X<x>:
VALue?
Function Queries the voltage value at the ΔV cursor of the XY
display.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:X<x>:
VALue?
<x> of XY<x> = 1 or 2
<x> of X<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:CURSOR:X1:VALUE?
-> :ANALYSIS:XY1:MEASURE:CURSOR:X1:
VALUE 1.000E+00
:ANALysis:XY<x>:MEASure:CURSor:
YLINkage
Function Turns ON/OFF the ΔT cursor link on the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:
YLINkage {<Boolean>}
:ANALysis:XY<x>:MEASure:CURSor:
YLINkage?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:CURSOR:
YLINkAGE ON
:ANALYSIS:XY1:MEASURE:CURSOR:YLINkAGE?
-> :ANALYSIS:XY1:MEASURE:CURSOR:
YLINkAGE 1
:ANALysis:XY<x>:MEASure:CURSor:Y<x>?
Function Queries all settings related to the ΔT cursor of the XY
display.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:Y<x>?
<x> of XY<x> = 1 or 2
<x> of Y<x> = 1 or 2
:ANALysis:XY<x>:MEASure:CURSor:Y<x>:
POSition
Function Sets the ΔT cursor position of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:Y<x>:
POSition {<NRf>}
:ANALysis:XY<x>:MEASure:CURSor:Y<x>:
POSition?
<x> of XY<x> = 1 or 2
<x> of
Y<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:ANALYSIS:XY1:MEASURE:CURSOR:Y1:
POSITION 1
:ANALYSIS:XY1:MEASURE:CURSOR:Y1:
POSITION? -> :ANALYSIS:XY1:MEASURE:
CURSOR:Y1:POSITION 1.000E+00
:ANALysis:XY<x>:MEASure:CURSor:Y<x>:
VALue?
Function Queries the voltage value at the ΔT cursor of the XY
display.
Syntax
:ANALysis:XY<x>:MEASure:CURSor:Y<x>:
VALue?
<x> of XY<x> = 1 or 2
<x> of
Y<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:CURSOR:Y1:VALUE?
-> :ANALYSIS:XY1:MEASURE:CURSOR:Y1:
VALUE 1.000E+00
:ANALysis:XY<x>:MEASure:MODE
Function Sets the automated measurement mode of the XY
display or queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:MODE {CURSor|
OFF|XYINteg}
:ANALysis:XY<x>:MEASure:MODE?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:MODE CURSOR
:ANALYSIS:XY1:MEASURE:MODE?
-> :ANALYSIS:XY1:MEASURE:MODE CURSOR
:ANALysis:XY<x>:MEASure:XYINteg?
Function Queries all settings related to the integration of the
XY display.
Syntax
:ANALysis:XY<x>:MEASure:XYINteg?
<x> = 1 or 2
5.3 ANALysis Group
Page 91

5-57
IM DLM6054-17EN
Commands
1
2
3
4
5
:ANALysis:XY<x>:MEASure:XYINteg:LOOP
Function Sets the integration mode of the XY display or queries
the current setting.
Syntax
:ANALysis:XY<x>:MEASure:XYINteg:LOOP
{CLOSe|OPEN}
:ANALysis:XY<x>:MEASure:XYINteg:LOOP?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:XYINTEG:
LOOP CLOSE
:ANALYSIS:XY1:MEASURE:XYINTEG:LOOP?
-> :ANALYSIS:XY1:MEASURE:XYINTEG:
LOOP CLOSE
:ANALysis:XY<x>:MEASure:XYINteg:
POLarity
Function Sets the integration polarity of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:MEASure:XYINteg:
POLarity {CCW|CW}
:ANALysis:XY<x>:MEASure:XYINteg:
POLarity?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:XYINTEG:
POLARITY CCW
:ANALYSIS:XY1:MEASURE:XYINTEG:POLARITY?
-> :ANALYSIS:XY1:MEASURE:XYINTEG:
POLARITY CCW
:ANALysis:XY<x>:MEASure:XYINteg:
VALue?
Function Queries the integral value of the XY display.
Syntax
:ANALysis:XY<x>:MEASure:XYINteg:VALue?
<x> = 1 or 2
Example
:ANALYSIS:XY1:MEASURE:XYINTEG:VALUE?
-> :ANALYSIS:XY1:MEASURE:XYINTEG:
VALUE 1.000E+00
:ANALysis:XY<x>:TRANge (Time Range)
Function Sets the measurement range of the XY display or
queries the current setting.
Syntax
:ANALysis:XY<x>:TRANge {<NRf>,<NRf>}
:ANALysis:XY<x>:TRANge?
<x> = 1 or 2
<NRf> = –5 to 5 div
:ANALysis:XY<x>:WINDow
Function Sets the measurement source window of the XY
display or queries the current setting.
Syntax
:ANALysis:XY<x>:WINDow {MAIN|Z1|Z2}
:ANALysis:XY<x>:WINDow?
<x> = 1 or 2
Example
:ANALYSIS:XY1:WINDOW MAIN
:ANALYSIS:XY1:WINDOW? -> :ANALYSIS:XY1:
WINDOW MAIN
:ANALysis:XY<x>:XTRace
Function Sets the X-axis trace of the XY display or queries the
current setting.
Syntax
:ANALysis:XY<x>:YTRace {<NRf>}
:ANALysis:XY<x>:YTRace?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS:XY1:YTRACE 1
:ANALYSIS:XY1:YTRACE? -> :ANALYSIS:XY1:
YTRACE 1
:ANALysis:XY<x>:YTRace
Function Sets the Y-axis trace of the XY display or queries the
current setting.
Syntax
:ANALysis:XY<x>:YTRace {<NRf>}
:ANALysis:XY<x>:YTRace?
<x> = 1 or 2
<NRf> = 1 to 8
Example
:ANALYSIS:XY1:YTRACE 1
:ANALYSIS:XY1:YTRACE? -> :ANALYSIS:XY1:
YTRACE 1
5.3 ANALysis Group
Page 92

5-58
IM DLM6054-17EN
5.4 ASETup Group
:ASETup:EXECute
Function Execute auto setup.
Syntax
:ASETup:EXECute
Example
:ASETUP:EXECUTE
:ASETup:UNDO
Function Cancels auto setup that has been executed.
Syntax
:ASETup:UNDO
Example
:ASETUP:UNDO
Page 93

5-59
IM DLM6054-17EN
Commands
1
2
3
4
5
5.5 CALibrate Group
:CALibrate?
Function Queries all settings related to the calibration.
Syntax
:CALibrate?
Example
:CALIBRATE? -> :CALIBRATE:MODE AUTO
:CALibrate:EXECute
Function Executes calibration.
Syntax
:CALibrate:EXECute
Example
:CALIBRATE:EXECUTE
:CALibrate:MODE
Function Turns ON/OFF the auto calibration or queries the
current setting.
Syntax
:CALibrate:MODE {AUTO|OFF}
:CALibrate:MODE?
Example
:CALIBRATE:MODE AUTO
:CALIBRATE:MODE? -> :CALIBRATE:
MODE AUTO
Page 94

5-60
IM DLM6054-17EN
5.6 CHANnel Group
:CHANnel<x>?
Function Queries all settings related to the channel.
Syntax
:CHANnel<x>?
<x> = 1 to 4
:CHANnel<x>:BWIDth
Function Sets the input filter of the channel or queries the
current setting.
Syntax
:CHANneL<x>:BWIDth {<Frequency>|FULL}
:CHANneL<x>:BWIDth?
<x> = 1 to 4
<Frequency> = See the DL6000/DLM6000 User’s
Manual
Example
:CHANNEL1:BWIDTH FULL
:CHANNEL1:BWIDTH? -> :CHANNEL1:
BWIDTH FULL
:CHANnel<x>:COUPling
Function Sets the input coupling of the channel or queries the
current setting.
Syntax
:CHANneL<x>:COUPling {AC|DC|DC50|GND}
:CHANneL<x>:COUPling?
<x> = 1 to 4
Example
:CHANNEL1:COUPLING GND
:CHANNEL1:COUPLING? -> :CHANNEL1:
COUPLING GND
:CHANnel<x>:DESKew
Function Sets the skew correction of the channel or queries
the current setting.
Syntax
:CHANneL<x>:DESKew {<Time>}
:CHANneL<x>:DESKew?
<x> = 1 to 4
<Time> = –80 to 80 ns in 10-ps steps
Example
:CHANNEL1:DESKEW 1NS
:CHANNEL1:DESKEW? -> :CHANNEL1:
DESKEW 1.000E-09
:CHANnel<x>:DISPlay
Function Turns ON/OFF the display of the channel or queries
the current setting.
Syntax
:CHANneL<x>:DISPlay {<Boolean>}
:CHANneL<x>:DISPlay?
<x> = 1 to 4
Example
:CHANNEL1:DISPLAY ON
:CHANNEL1:DISPLAY? -> :CHANNEL1:
DISPLAY 1
:CHANnel<x>:INVert
Function Turns ON/OFF the inverted display of the channel or
queries the current setting.
Syntax
:CHANneL<x>:INVert {<Boolean>}
:CHANneL<x>:INVert?
<x> = 1 to 4
Example
:CHANNEL1:INVERT ON
:CHANNEL1:INVERT -> :CHANNEL1:INVERT 1
:CHANnel<x>:LABel?
Function Queries all settings related to the waveform label of
the channel.
Syntax
:CHANneL<x>:LABel?
<x> = 1 to 4
Example
:CHANNEL1:LABEL? -> :CHANNEL1:LABEL:
DEFINE "CH1";MODE 0
:CHANnel<x>:LABel[:DEFine]
Function Sets the waveform label of channel or queries the
current setting.
Syntax
:CHANneL<x>:LABel[:DEFine] {<String>}
:CHANneL<x>:LABel[:DEFine]?
<x> = 1 to 4
<String> = Up to 8 characters
Example
:CHANNEL1:LABEL:DEFINE "CH1"
:CHANNEL1:LABEL:DEFINE? -> :CHANNEL1:
LABEL:DEFINE "CH1"
:CHANnel<x>:LABel:MODE
Function Turns ON/OFF the waveform label display of the
channel or queries the current setting.
Syntax
:CHANneL<x>:LABel:MODE {<Boolean>}
:CHANneL<x>:LABel:MODE?
<x> = 1 to 4
Example
:CHANNEL1:LABEL:MODE ON
:CHANNEL1:LABEL:MODE? -> :CHANNEL1:
LABEL:MODE 1
:CHANnel<x>:LSCale?
Function Queries all the linear scaling settings of a channel.
Syntax
:CHANnel<x>:LSCale?
<x> = 1 to 4
:CHANnel<x>:LSCale:AVALue
Function Sets or queries a scaling coefficient A value.
Syntax :CHANnel<x>:LSCale:AVALue {<NRf>}
:CHANnel<x>:LSCale:AVALue?
<x> = 1 to 4
<NRf> = –1.0000E+31 to 1.0000E+31
Example
:CHANNEL1:LSCALE:AVALUE 10
:CHANNEL1:LSCALE:AVALUE? -> :CHANNEL1:
LSCALE:AVALUE 10.0000E+00
Page 95

5-61
IM DLM6054-17EN
Commands
1
2
3
4
5
:CHANnel<x>:PROBe?
Function Queries all settings related to the probe attenuation
of the channel.
Syntax
:CHANneL<x>:PROBe?
<x> = 1 to 4
Example
:CHANNEL1:PROBE? -> :CHANNEL1:PROBE:
MODE 1
:CHANnel<x>:PROBe[:MODE]
Function Sets the probe attenuation of the channel or queries
the current setting.
Syntax
:CHANneL<x>:PROBe[:MODE] {<NRf>|AUTO|
C1|C10|C100}
:CHANneL<x>:PROBe[:MODE]?
<x> = 1 to 4
<NRf> = 1,2,5,10,20,50,100,200,500,1000
Example
:CHANNEL1:PROBE:MODE 1
:CHANNEL1:PROBE:MODE? -> :CHANNEL1:
PROBE:MODE 1
:Channal<x>:PROBe:AUTO?
Function Queries the probe attenuation of the channel when
set to AUTO.
Syntax
:Channal<x>:PROBe:AUTO?
<x> = 1 to 4
Example
:CHANNEL1:PROBE:AUTO? -> :CHANNEL1:
PROBE:AUTO 1
:CHANnel<x>:PZCalibrate[:EXECute]
Function Execute the zero adjustment of the current probe of
the channel.
Syntax
:CHANnel<x>:PZCalibrate[:EXECute]
<x> = 1 to 4
Example
:CHANNEL1:PZCALIBRATE:EXECUTE
:CHANnel<x>:VDIV
Function Sets the vertical sensitivity (V/div) of the channel or
queries the current setting.
Syntax
:CHANnel<x>:VDIV {<Voltage>|<Current>}
:CHANnel<x>:VDIV?
<x> = 1 to 4
<Voltage> and <Current> = See the DL6000/
DLM6000 User’s Manual.
Example
:CHANNEL1:VDIV 5V
:CHANNEL1:VDIV? -> :CHANNEL1:
VDIV 5.000E+00
:CHANnel<x>:LSCale:BVALue
Function Sets or queries an offset B value.
Syntax
:CHANnel<x>:LSCale:BVALue {<NRf>}
:CHANnel<x>:LSCale:BVALue?
<x> = 1 to 4
<NRf> = –1.0000E+31 to 1.0000E+31
Example
:CHANNEL1:LSCALE:BVALUE 10
:CHANNEL1:LSCALE:BVALUE? -> :CHANNEL1:
LSCALE:BVALUE 10.0000E+00
:CHANnel<x>:LSCale:MODE
Function Sets or queries the on/off status of linear scaling.
Syntax
:CHANnel<x>:LSCale:MODE {<Boolean>}
:CHANnel<x>:LSCale:MODE?
<x> = 1 to 4
Example
:CHANNEL1:LSCALE:MODE ON
:CHANNEL1:LSCALE:MODE? -> :CHANNEL1:
LSCALE:MODE 1
:CHANnel<x>:LSCale:UNIT
Function Sets or queries a unit that is attached to linear scaling
results.
Syntax
:CHANnel<x>:LSCale:UNIT {<String>}
:CHANnel<x>:LSCale:UNIT?
<x> = 1 to 4
<String> = Up to four characters
Example
:CHANNEL1:LSCALE:UNIT “ EU”
:CHANNEL1:LSCALE:UNIT? -> :CHANNEL1:
LSCALE:UNIT “ EU”
Description
You can only use the characters and symbols that
appear on the DL6000/DLM6000 soft keyboard.
Assignment of a unit never affects the scale value.
:CHANnel<x>:OFFSet
Function Sets the offset voltage of the channel or queries the
current setting.
Syntax
:CHANneL<x>:OFFSet
{<Voltage>|<Current>}
:CHANneL<x>:OFFSet?
<x> = 1 to 4
<V
oltage> and <Current> = See the DL6000/
DLM6000 User’s Manual.
Example
:CHANNEL1:OFFSET 1V
:CHANNEL1:OFFSET? -> :CHANNEL1:
OFFSET 1.000E+00
:CHANnel<x>:POSition
Function Sets the vertical position of the channel or queries the
current setting.
Syntax
:CHANneL<x>:POSition {<NRf>}
:CHANneL<x>:POSition?
<x> = 1 to 4
<NRf> = –4 to 4 (div)
Example
:CHANNEL1:POSITION 1
:CHANNEL1:POSITION? -> :CHANNEL1:
POSITION 1.000E+00
5.6 CHANnel Group
Page 96

5-62
IM DLM6054-17EN
5.7 CLEar Group
:CLEar
Function Clears traces.
Syntax
:CLEar
Example
:CLEAR
Page 97

5-63
IM DLM6054-17EN
Commands
1
2
3
4
5
:COMMunicate?
Function Queries all settings related to communications.
Syntax
:COMMunicate?
:COMMunicate:HEADer
Function Sets whether to add a header to the response to a
query (example CHANNEL1:VOLTAGE:PROBE 10)
or not add the header (example 10) or queries the
current setting.
Syntax
:COMMunicate:HEADer {<Boolean>}
:COMMunicate:HEADer?
Example
:COMMUNICATE:HEADER ON
:COMMUNICATE:HEADER? -> :COMMUNICATE:
HEADER 1
:COMMunicate:LOCKout
Function Sets or clears local lockout.
Syntax
:COMMunicate:LOCKout {<Boolean>}
:COMMunicate:LOCKout?
Example
:COMMUNICATE:LOCKOUT ON
:COMMUNICATE:LOCKOUT? -> :COMMUNICATE:
LOCKOUT 1
Description
This command is dedicated to the USB and Ethernet
interface (option).
:COMMunicate:OPSE (Operation Pending
Status Enable register)
Function Sets the overlap command that is used by the *OPC,
*OPC?, and *WAI commands or queries the current
setting.
Syntax
:COMMunicate:OPSE <Register>
:COMMunicate:OPSE?
<Register> = 0 to 65535, :COMMunicate:OVERlap
See the command diagram.
Example
:COMMUNICATE:OPSE 65535
:COMMUNICATE:OPSE? -> :COMMUNICATE:
OPSE 2400
Description
In the above example, all bits are set to 1 to make all
overlap commands applicable. However, bits fixed
to 0 are not set to 1. Thus, the response to the query
indicates 1 for bits 5, 6, 8, and 11 only.
:COMMunicate:OPSR? (Operation Pending
Status Register)
Function Queries the value of the operation pending status
register.
Syntax
:COMMunicate:OPSR?
Example
:COMMUNICATE:OPSR? -> 0
Description For details on the operation pending status register,
see the figure for the :COMMunicate:OVERlap
command.
5.8 COMMunicate Group
The commands in this group deal with communications. There are no front panel keys that correspond to the commands in this
group.
:COMMunicate:OVERlap
Function Sets the commands to operate as overlap commands
or queries the current setting.
Syntax
:COMMunicate:OVERlap <Register>
:COMMunicate:OVERlap?
<Register> = 0 to 65535
Example
:COMMUNICATE:OVERLAP 65535
:COMMUNICATE:OVERLAP? -> :COMMUNICATE:
OVERLAP 2400
Description
• In the above example, all bits are set to 1 to make
all overlap commands applicable. However, bits
fixed to 0 are not set to 1. Thus, the response to
the query indicates 1 for bits 5, 6, 8, and 11 only.
•
For the description of how to synchronize the
program using :COMMunicate:OVERlap, see page
4-7.
• In the above example, bits 5, 6, 8, and 11 are set to
1 to make all overlap commands applicable.
Operation pending status register/overlap enable
register
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0 0 0 SCH 0 0 HST 0 ACS 0 0 0 0 0PRN
When bit 5 (PRN) = 1:
Built-in printer operation not complete
When bit 6 (ACS) = 1:
Access to the medium not complete.
When bit 8 (HST) = 1:
History search execution not complete
When bit 11 (SCH) = 1:
Search execution not complete
:COMMunicate:REMote
Function Sets remote or local. ON is remote mode.
Syntax
:COMMunicate:REMote {<Boolean>}
:COMMunicate:REMote?
Example
:COMMUNICATE:REMOTE ON
:COMMUNICATE:REMOTE? -> :COMMUNICATE:
REMOTE 1
Description
This command is dedicated to the USB and Ethernet
interface (option).
Page 98

5-64
IM DLM6054-17EN
:COMMunicate:STATus?
Function Queries line-specific status.
Syntax
:COMMunicate:STATus?
Example
:COMMUNICATE:STATUS? -> :COMMUNICATE:
STATUS 0
Description
The meaning of each status bit is as follows:
Bit GP-IB
0 Unrecoverable transmission error
1 Always 0
2 Always 0
3 or greater Always 0
For USB and Ethernet communications, 0 is always
returned.
The status bit is set when the corresponding cause
occurs and cleared when it is read.
:COMMunicate:VERBose
Function Sets whether to return the response to a query using
full spelling (example CHANNEL1:VOLTAGE:PROBE
10) or using abbreviation (example CHAN:PROB 10)
or queries the current setting.
Syntax
:COMMunicate:VERBose {<Boolean>}
:COMMunicate:VERBose?
Example
:COMMUNICATE:VERBOSE ON
:COMMUNICATE:VERBOSE? -> :COMMUNICATE:
VERBOSE 1
:COMMunicate:WAIT
Function Waits for one of the specified extended events to
occur.
Syntax
:COMMunicate:WAIT <Register>
<Register> = 0 to 65535 (extended event register,
see page 6-5.)
Example
:COMMUNICATE:WAIT 65535
Description For the description of how to synchronize the program
using
:COMMunicate:WAIT
, see page 4-8.
:COMMunicate:WAIT?
Function Creates the response that is returned when the
specified event occurs.
Syntax
:COMMunicate:WAIT? <Register>
<Register> = 0 to 65535 (extended event register,
see page 6-5.)
Example
:COMMUNICATE:WAIT? 65535 -> 1
5.8 COMMunicate Group
Page 99
5-65
IM DLM6054-17EN
Commands
1
2
3
4
5
5.9 CURSor Group
:CURSor?
Function Queries all settings related to the cursor
measurement.
Syntax
:CURSor?
:CURSor:DISPlay
Function Turns ON/OFF the cursor or queries the current
setting.
Syntax
:CURSor:DISPlay {<Boolean>}
:CURSor:DISPlay?
Example
:CURSOR:DISPLAY ON
:CURSOR:DISPLAY? -> :CURSOR:DISPLAY 1
:CURSor:HORizontal?
Function Queries all settings related to the ΔV cursors.
Syntax
:CURSor:HORizontal?
:CURSor:HORizontal:BASic?
Function Queries all settings related to basic items of the ΔV
cursors.
Syntax
:CURSor:HORizontal:BASic?
:CURSor:HORizontal[:BASic]:ALL
Function Turns ON/OFF all basic items of the ΔV cursors.
Syntax
:CURSor:HORizontal[:BASic]:ALL
{<Boolean>}
Example
:CURSOR:HORIZONTAL:BASIC:ALL ON
:CURSor:HORizontal[:BASic]:DV?
Function Queries all settings related to the ∆V measurement of
the ΔV cursors.
Syntax
:CURSor:HORizontal[:BASic]:DV?
:CURSor:HORizontal[:BASic]:DV:STATe
Function Turns ON/OFF the ∆V measurement of the ΔV
cursors or queries the current setting.
Syntax
:CURSor:HORizontal[:BASic]:DV:STATe
{<Boolean>}
:CURSor:HORizontal[:BASic]:DV:STATe?
Example
:CURSOR:HORIZONTAL:BASIC:DV:STATE ON
:CURSOR:HORIZONTAL:BASIC:DV:STATE?
-> :CURSOR:HORIZONTAL:BASIC:DV:STATE 1
:CURSor:HORizontal[:BASic]:DV:VALue?
Function Queries the voltage value between the ΔV cursors.
Syntax
:CURSor:HORizontal[:BASic]:DV:VALue?
Example
:CURSOR:HORIZONTAL:BASIC:DV:VALUE?
-> :CURSOR:HORIZONTAL:BASIC:DV:
VALUE 1.000E+00
:CURSor:HORizontal[:BASic]:LINKage
Function Turns ON/OFF the ΔV cursor link or queries the
current setting.
Syntax
:CURSor:HORizontal[:BASic]:
LINKage {<Boolean>}
:CURSor:HORizontal[:BASic]:LINKage?
Example
:CURSOR:HORIZONTAL:BASIC:LINKAGE ON
:CURSOR:HORIZONTAL:BASIC:LINKAGE?
-> :CURSOR:HORIZONTAL:BASIC:LINKAGE 1
Page 100

5-66
IM DLM6054-17EN
:CURSor:HORizontal[:BASic]:V<x>?
Function Queries all settings related to the ΔV cursor.
Syntax
:CURSor:HORizontal[:BASic]:V<x>?
<x> = 1 or 2
:CURSor:HORizontal[:BASic]:V<x>:JUMP
Function Jumps the ΔV cursor to the center position of the
zoom waveform.
Syntax
:CURSor:HORizontal[:BASic]:V<x>:
JUMP {Z1|Z2}
<x>=1 or 2
Example
:CURSOR:HORIZONTAL:BASIC:V1:JUMP Z1
:CURSor:HORizontal[:BASic]:V<x>:
POSition
Function Sets the ΔV cursor position or queries the current
setting.
Syntax
:CURSor:HORizontal[:BASic]:V<x>:
POSition {<NRf>}
:CURSor:HORizontal[:BASic]:V<x>:
POSition?
<x> = 1 or 2
<NRf> = –4 to 4 (div)
Example
:CURSOR:HORIZONTAL:BASIC:V1:POSITION 1
:CURSOR:HORIZONTAL:BASIC:V1:POSITION?
-> :CURSOR:HORIZONTAL:BASIC:V1:
POSITION 1.000E+00
:CURSor:HORizontal[:BASic]:V<x>:
STATe
Function Turns ON/OFF the ΔV cursor or queries the current
setting.
Syntax
:CURSor:HORizontal[:BASic]:V<x>:STATe
{<Boolean>}
:CURSor:HORizontal[:BASic]:V<x>:STATe?
<x> = 1 or 2
Example
:CURSOR:HORIZONTAL:BASIC:V1:STATE ON
:CURSOR:HORIZONTAL:BASIC:V1:STATE?
-> :CURSOR:HORIZONTAL:BASIC:V1:STATE 1
:CURSor:HORizontal[:BASic]:V<x>:
VALue?
Function Queries the voltage value at the ΔV cursor.
Syntax
:CURSor:HORizontal[:BASic]:V<x>:VALue?
<x> = 1 or 2
Example
:CURSOR:HORIZONTAL:BASIC:V1:VALUE?
-> :CURSOR:HORIZONTAL:BASIC:V1:
VALUE 1.000E+00
:CURSor:HORizontal:CALCulation?
Function Queries all settings related to calculation items of the
ΔV cursors.
Syntax
:CURSor:HORizontal:CALCulation?
:CURSor:HORizontal:CALCulation:ALL
Function Turns ON/OFF all calculation items of the ΔV cursors.
Syntax
:CURSor:HORizontal:CALCulation:
ALL {<Boolean>}
Example
:CURSOR:HORIZONTAL:CALCULATION:ALL ON
:CURSor:HORizontal:CALCulation:
DEFine<x>
Function Sets the equation of the calculation item of the ΔV
cursor or queries the current setting.
Syntax
:CURSor:HORizontal:CALCulation:
DEFine<x> {<String>}
:CURSor:HORizontal:CALCulation:
DEFine<x>?
<x> = 1 to 4
<String> = Up to 128 characters
Example
:CURSOR:HORIZONTAL:CALCULATION:
DEFINE1 "V1"
:CURSOR:HORIZONTAL:CALCULATION:DEFINE1?
-> :CURSOR:HORIZONTAL:CALCULATION:
DEFINE1 "V1"
:CURSor:HORizontal:CALCulation:
STATe<x>
Function Turns ON/OFF the calculation item of the ΔV cursor
or queries the current setting.
Syntax
:CURSor:HORizontal:CALCulation:
STATe<x> {<Boolean>}
:CURSor:HORizontal:CALCulation:
STATe<x>?
<x> = 1 to 4
Example
:CURSOR:HORIZONTAL:CALCULATION:
STATE1 ON
:CURSOR:HORIZONTAL:CALCULATION:STATE1?
-> :CURSOR:HORIZONTAL:CALCULATION:
STATE1 1
:CURSor:HORizontal:CALCulation:
VALue<x>?
Function Queries the measured value of the calculation item of
the ΔV cursor.
Syntax
:CURSor:HORizontal:CALCulation:
VALue<x>?
<x> = 1 to 4
Example
:CURSOR:HORIZONTAL:CALCULATION:VALUE1?
-> :CURSOR:HORIZONTAL:CALCULATION:
VALUE1 0.000E+00
5.9 CURSor Group
 Loading...
Loading...