

Yaskawa Sigma Mini Servo System Product Catalog Supplement

Sigma Mini Servo System Product Catalog Supplement
Sigma Mini Servo System
Product Catalog Supplement

Table of Contents
SGMM Sigma Mini Servo System
SGMM Ratings & Specifications......................................................................5 - 6
SGMM Speed/Torque Curves...............................................................................7
SGMM Dimensions..........................................................................................8 - 9
SGMM Selection/Ordering Information........................................................10 - 14
SGDF Sigma Mini Servo Amplifier
SGDF Ratings & Specifications...................................................................15 - 17
SGDF Dimensions ..............................................................................................18
SGDF Internal Connection Diagrams..........................................................19 - 22
Overload Characteristics.....................................................................................23
Cable Specifications and Peripheral Devices..............................................24 - 26
3

Table of Contents
NOTES:
Super High Power Rate Series
SGMM Sigma Mini Servo System
SGMM Servomotors
Design Features
1. Compact
Small sized motor
!
Two frame sizes: up to 27.1oz-in. peak torque.
Smaller installation space for more compact machine designs.
High torque to inertia ratio.
2. High Speed and Power
High power rating
!
High power is achieved by minimizing the inertia of the motor.
This increases the acceleration/deceleration rate and reduces positioning time.
Maximum rotation speed of 5000rpm
!
Increases maximum rotation speed and shortens positioning time.
Rated speed of 3000rpm
!
3. Encoder
2048 PPR incremental encoder (standard)
!
4. Enclosure
Totally enclosed, self-cooled IP55 (not including shaft).
!
Vibration resistance: 5G.
!
5. Application Emphasis
Semiconductor equipment
!
Chip mounters
!
Robots
!
Packaging
!
6. Certified International Standards
CE compliance.
!
- With Incremental Encoder
Rated Output: 10W, 20W
For Additional Information Page(s)
SGMM Ratings & Specifications
SGMM Speed/Torque Curves
SGMM Dimensions
SGMM Selection/Ordering Information
SGDF Ratings & Specifications
6
7
8 - 9
10 - 14
15 - 17
SGMM
5
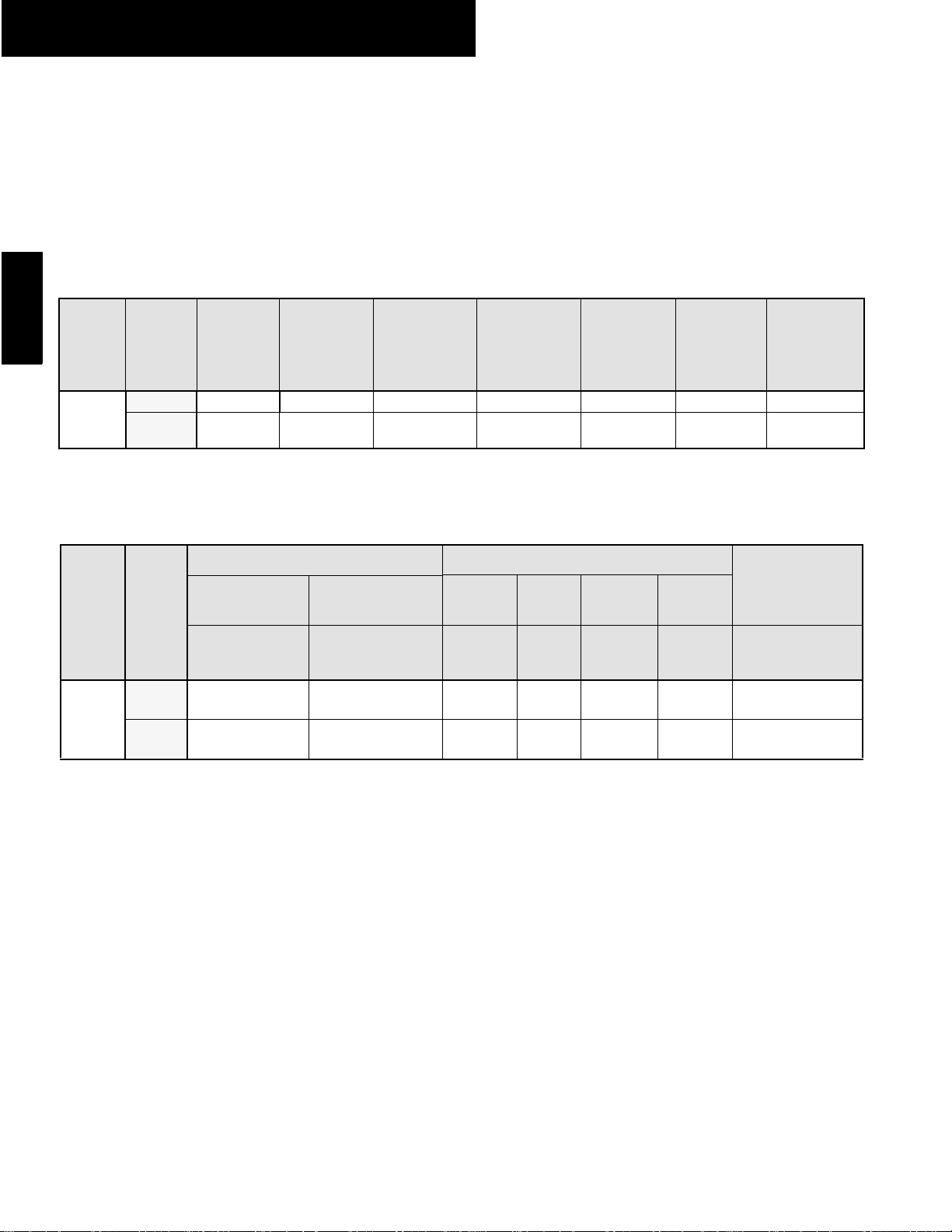
SGMM Sigma Mini Servo System
Servomotor Ratings and Specifications
Time Rating: Continuous
Insulation: Class B
Vibration: 15µm or less
Withstand Voltage: 1000VAC
Insulation Resistance: 500VDC
SGMM
10MΩ
minimum
Enclosure: Totally-enclosed, self-cooled
Ambient Temperature: 0 to 40ºC
Ambient Humidity: 20 to 80%
(non-condensing)
Rated Rotation Speed: 3000rpm
Max. Rotation Speed: 5000rpm
Excitation: Permanent magnet
Drive Method: Direct drive
Mounting: Flange-mounted
Applicable Encoder:
Incremental encoder 2048PPR
Applied
Voltage
24VDC
Applied
Voltage
24VDC
M O T O R :
SGMM-
"
A1
"
A2
Rate
Output
W (hp)
10 (0.013) 4.5 (0.0318) 13.5 (0.0955) 2.1 6.0 90000 2.9
20 (0.027)
Rated
Torque
oz • in (N • m)
9.02
(0.0637)
Instantaneous
Peak Torque
oz • in (N • m)
27.1 (0.191) 2.0 5.7 120000 7.4
Continuous
Rated Current
A
rms
*Values when se rvomotor is combined with SGDF servo amplifier
MOTOR
SGMM-
"
A1
"
A2
Moment of Inertia (JM)
Motor without Brake Motor with Brake
2
oz • in • s
(kgf • m
0.0501
(0.00354)
0.0776
(0.00548)
-3
)
oz • in • s
(kgf • m
×
10
2
-4
×
10
2
× 10
2
× 10
0.069
(0.00487)
0.0967
(0.00683)
-4
Capacity Torque
-3
)
Holding Brake (at 20°C)
kg
W
2 0.325 320 0.075
2.6 0.65 221.5 0.108
• m
f
*
.
Maximum
Peak
.Current
A
rms
Coil
Resis-
tance
Ω
*
Rated
Angular
Acceleration
rad/s
Rated
Current
A
2
Allowable Load
Inertia (J
oz • in • s
(kg • m
(0.1064)
Rated
Power Rating
KW/s
)
L
2
-3
×
10
2
-4
)
×
10
1.5072
2.4832
(0.164)
6
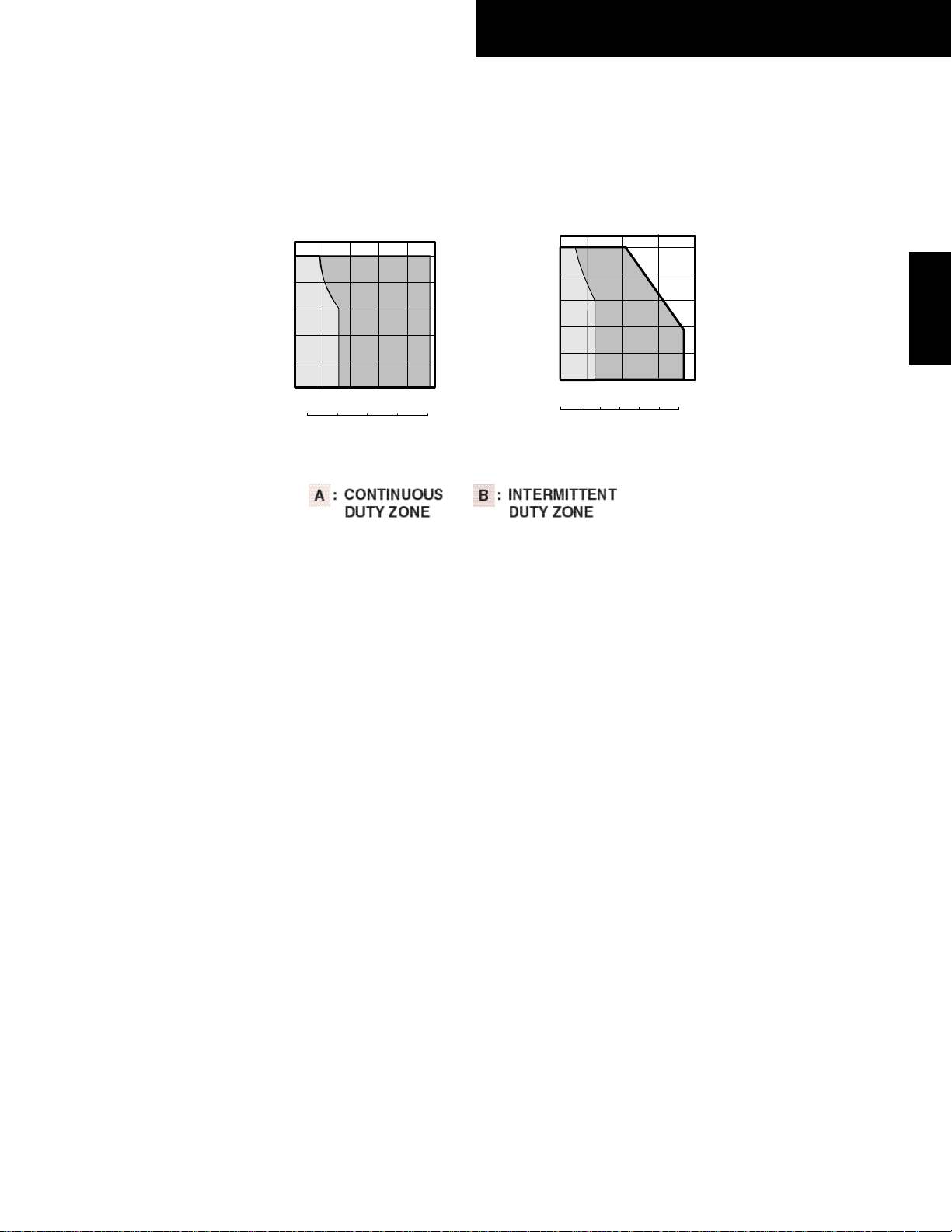
SGMM Sigma Mini Servo System
Speed / Torque Curves
24V Servomotors
SGMM - A1S
5000
4000
3000
2000
SPEED (rpm)
1000
A
0
0 0.02 0.04 0.06 0.08 0.10
TORQUE (N · m)
0 0.2 0.4 0.6 0.8
TORQUE (lb · in)
SGMM - A2S
5000
4000
3000
B
2000
SPEED (rpm)
1000
0
0 0.05 0.1 0.15 0.2
B
A
TORQUE (N · m)
0 0.5 1.0 1.5
TORQUE (oz · in)
SGMM
7
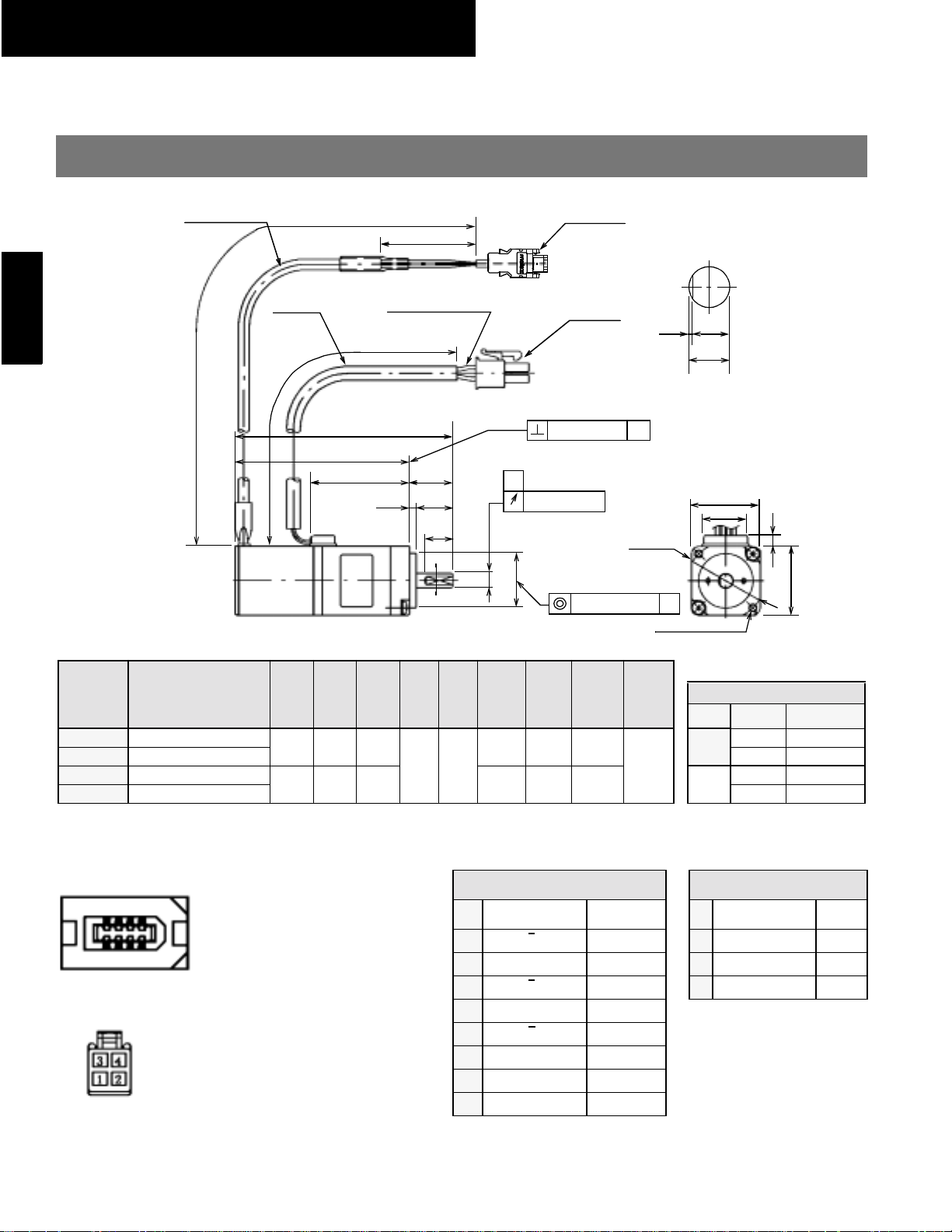
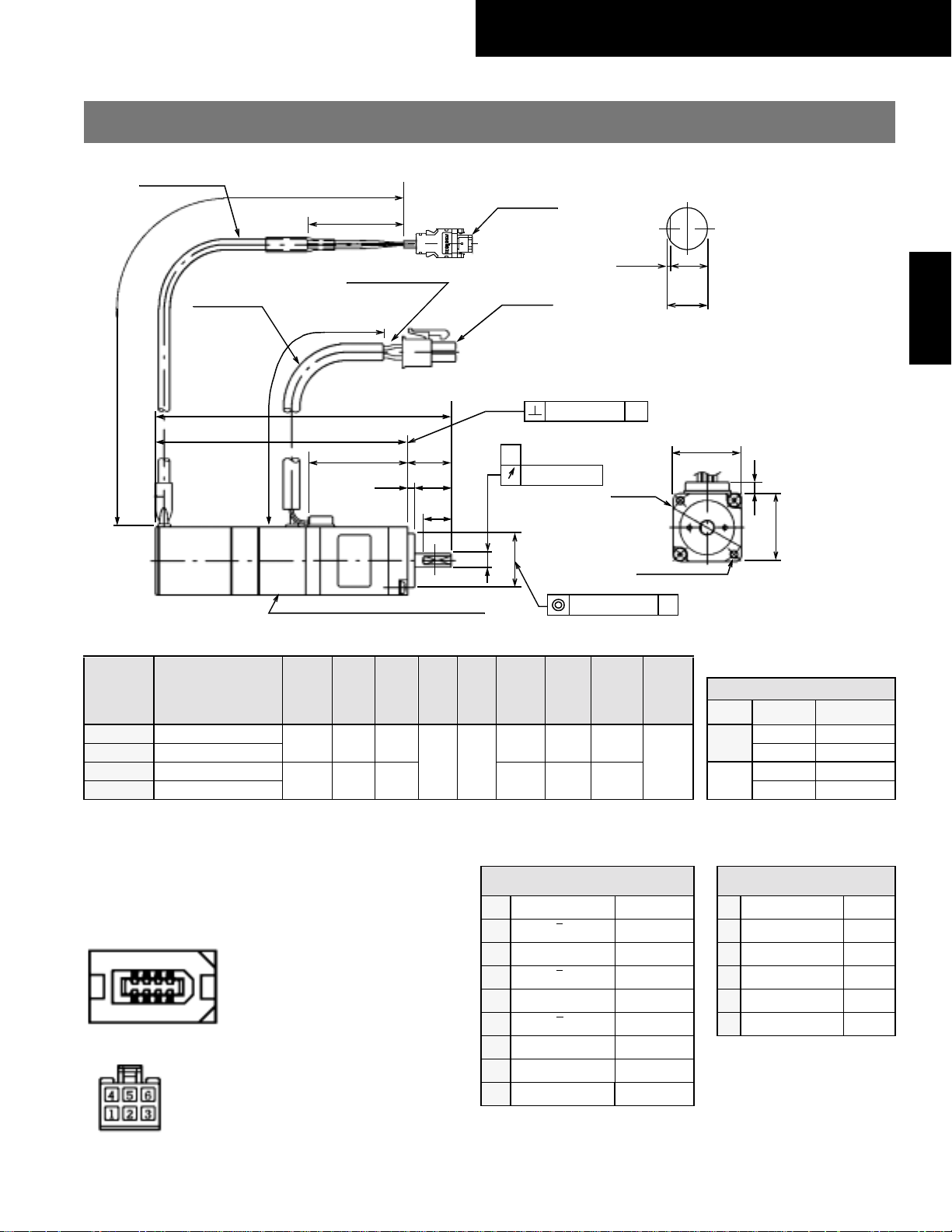
SGMM Sigma Mini Servo System
Dimensions in inches (mm)
(1) 2048PPR Increm ental E ncoder, without Brake
•10W (0.013hp), 20W (0.027hp)
Encoder Cable
UL20276
SGMM
11.81 (300) ±1.18 (30)
1.38 (35)
Encoder Plug
Protective Tube
0.20 (Φ5)
Φ
(black)
11.81 (300) ±1.18 (30)
Motor Leads, AWG24
UL10095
L
LL
1.04
1.44
0.63 (16)
0.197
(5)
Type
SGMM-
A1S312
A1S313
A2S312
A2S313
Without Flat Seat
With Flat Seat
Without Flat Seat
With Flat Seat
LM
0.10 (2.5)
L LL LM *ΦS
2.76
2.13
(70)
(54)
(26.5)
3.15
2.52
(80)
(64)
(36.5)
Note: The detector uses a 2048PPR incremental encoder.
The allowable load is applied to the shaft end.
Connector Specifications
Encoder Plug
1 7
2 8
Motor Plug
Plug 55101-0800 (Molex Japan)
Connected to:
Socket: 54280-0600
Receptacle: 5557-04R (Molex)
Terminal: 5556T
Connected to:
Socket: 5559-04P
Terminal: 5558T
Motor Plug
0.02 (0.5)
Cross-section Y - Y
(with flat seat)
0.0016 (0.04) A
A
0.53 (13.5)
0.39 (10)
Y
Y
ΦLB
0.0133
0.787
(20)
0.0266
1 Chan nel A Outp ut Blue 1 Phase U Red
2 Channel A Ouput Blue/Black 2 Phase V White
3 Chan nel B Outp ut Yellow 3Phase W Blue
4 Channel B Output Yellow/Black 4 FG (Frame Ground) Green
5 Chan nel C Outp ut G ree n
6 Channel C Output Green/Black
7 0V (Power Supply) Grey
8 +5V (Power Supply) Red
9 FG (Frame Ground) Orange
0.0008 (0.002)
1.10 (Φ28)
Φ
LB
S
Φ
Φ
*
**
Output
Approx
W
(hp)
(10)
(120)
(20)
(160)
Incremental Encoder Connection Motor Connection
Mass
0z (g)
4.23
5.64
0.0016 (Φ0.04)
Φ
Allowable
Allowable
Radial
Load
lb (N)
7.7
(34.3)
9.9
(44.1)
A
2 × M3 tap screws
depth: 0.20 (5)
Thrust
Load
lb (N)
3.3
(14.7)
0.18 (4.5)
S
Φ
0.98 (25)
0.63 (16)
0.14 (4)
Specified Tolerances
Diameter Tolerance
0.197in
*ΦS
5.000mm
**ΦLB
0.787in
20mm
0.98 (25)
-0.0001 -0.0005
+0.000 -0.008
+0.0004 -0.0001
+0.000 -0.013
8
SGMM Sigma Mini Servo System
(2) 2048PPR Incremental Encoder, with Brake
•10W (0.013hp), 20W (0.027hp)
Encoder Cable
UL20276
11.81 (300) ±1.18 (30)
1.38 (35)
Encoder Plug
Motor Leads, AWG24
Protective Tube
0.20 (Φ5)
Φ
(black)
11.81 (300) ±1.18 (30)
UL10095
L
LL
1.04
(26.5)
1.44
(36.5)
0.63 (16)
0.53 (13.5)
0.39 (10)
Y
Y
0.197
(5)
Type
SGMM-
A1S312C
A1S313C
A2S312C
A2S313C
QK L LL LM *ΦS
Without Flat Seat
With Flat Seat
Without Flat Seat
With Flat Seat
LM
0.10 (2.5)
Magnetic brake Non-excitation operaton
DC power supply: 24V
Maximu m ca pacity: 3W
3.72
4.27
3.09
(78.5)
3.64
(92.5)
(94.5)
(108.5)
Note: The detector uses a 2048PPR incremental encoder.
The allowable load is applied to the shaft end.
Connector Specifications
ΦLB
0.787
(20)
Motor Plug
S
Φ
*
Output
0.0133
0.0266
0.0016 (0.04) A
A
0.0008 (0.02)
LB
Φ
**
W
(hp)
(10)
(20)
0.0016 (Φ0.04)
Φ
Approx
Mass
0z (g)
7.23
(205)
9.17
(260)
0.02 (0.5)
Cross-section Y - Y
(with flat seat)
1.10 (Φ28)
Φ
2 × M3 tap screws
depth: 0.20 (5)
A
Allowable
Radial
Load
lb (N)
Allowable
Thrust
Load
lb (N)
7.7
(34.3)
9.9
3.3
(14.7)
(44.1)
0.18
(4.5)
S
Φ
0.98 (25)
0.14 (4)
0.98 (25)
Specified Tolerances
Diameter Tolerance
0.197in
*ΦS
5.000mm
**ΦLB
0.787in
20mm
SGMM
-0.0001 -0.000 5
+0.000 -0.008
+0.0004 -0.000 1
+0.000 -0.013
Encoder Plug
1 7
2 8
Motor Plug
Plug 55101-0800 (Molex Japan)
Connected to:
Socket: 54280-0800
Receptacle: 5557-06R (Molex)
Terminal: 5556T
Connected to:
Socket: 5559-06P
Terminal: 5558T
Incremental Encoder Connection Motor Connection
1 Channel A Ouput Blue 1 Phase U Red
2 Channel A Ouput Blue/Black 2 Phase V White
3 Channel B Output Yellow 3Phase W Blue
4 Channel B Output Yellow/Black 4 FG (Frame Ground) Green
5 Channel C Output Green 5 Brake Terminal Black
6 Channel C Output Green/Blac k 6 Brake Terminal Black
7 0V (Power Supply) Grey
8 +5V (Power Supply) Red
9 FG (Frame Ground) Orange
9
 Loading...
Loading...