

Page 1

Weather Sensor
FD12P
USER'S GUIDE
M210296en-A
May 2002
Page 2

PUBLISHED BY
Vaisala Oyj Phone (int.): +358 9 8949 1
P.O. Box 26 Fax: +358 9 8949 2227
FIN-00421 Helsinki
Finland
Visit our Internet pages at http://www.vaisala.com/
© Vaisala 2002
No part of this manual may be reproduced in any form or by any means,
electronic or mechanical (including photocopying), nor may its contents be
communicated to a third party without prior written permission of the copyright
holder.
The contents are subject to change without prior notice.
Please observe that this manual does not create any legally binding obligations for
Vaisala towards the customer or end user. All legally binding commitments and
agreements are included exclusively in the applicable supply contract or
Conditions of Sale.
Page 3

_________________________________________________________________________________
Table of Contents
CHAPTER 1
GENERAL INFORMATION ..........................................................................11
About This Manual..................................................................11
Contents of This Manual......................................................11
Version Information................................................................12
Related Manuals .....................................................................12
Safety .......................................................................................12
General Safety Considerations............................................12
Product Related Safety Precautions ...................................13
Safety Summary ............................................................. 13
Ground the Equipment ...................................................13
Radio Frequency Interference Statement (USA) ...........15
ESD Protection .................................................................... 15
Trademarks .............................................................................16
Warranty ..................................................................................16
CHAPTER 2
PRODUCT OVERVIEW ................................................................................ 17
Introduction.............................................................................17
Hardware Structure .............................................................17
Sensing Elements ..........................................................19
Electronics Enclosure .....................................................20
Structural Elements ........................................................ 20
Operating Principle ..............................................................21
Using FD12P .......................................................................22
Equipment Nomenclature ......................................................23
Specifications .........................................................................24
Mechanical Specifications ...................................................24
Electrical Specifications.......................................................24
Optical Specifications ..........................................................25
Capabilities and Limitations ..................................................26
Visibility Measurement Specifications .................................26
Weather Sensing Specifications..........................................26
Environmental Specifications ..............................................27
CHAPTER 3
INSTALLATION ............................................................................................ 29
Organizing Installation ...........................................................29
Location and Orientation .......................................................30
Grounding and Lightning Protection....................................32
Equipment Grounding..........................................................32
Internal Grounding ............................................................... 34
VAISALA _________________________________________________________________________ 3
Page 4

User's Guide _______________________________________________________________________
Grounding for Testing Purposes......................................... 34
Grounding Remote Units and Communication Cable......... 34
Cable Selection ...................................................................... 35
Line Power Cabling............................................................. 35
Communication Cable......................................................... 35
Unloading and Unpacking..................................................... 36
Unpacking Procedure ......................................................... 36
Storage Information ............................................................ 36
Installation Procedures ......................................................... 37
Constructing the Foundation............................................... 37
Mounting When Casting the Pad................................... 38
Mounting to an Existing Surface.................................... 38
Assembling the FD12P ....................................................... 40
Attaching the DTS14B Temperature Sensor to the Mast ... 41
Connecting Cables.............................................................. 43
Basic Wiring ................................................................... 43
Communication Cable EMC-shielding........................... 46
Connecting a Background Luminance Sensor or a
Day/Night Switch to FD12P ........................................... 48
Communication Options ..................................................... 50
Serial Communications Settings.................................... 50
Serial Transmission RS-232.......................................... 50
Serial Multipoint Transmission RS-485 ......................... 51
Modem DMX21 .............................................................. 52
Indicators and Manual Controls..................................... 54
Indicators .................................................................. 54
Manual Controls ....................................................... 54
Analog Transmission ..................................................... 55
Connecting the Maintenance Terminal.......................... 55
Startup Testing.................................................................... 56
Initial Settings...................................................................... 56
CHAPTER 4
OPERATION ................................................................................................ 59
Introduction ............................................................................ 59
User Commands in Normal Operation................................. 59
Markings Used in This Manual ............................................. 61
Entering/Exiting the Command Mode .................................. 61
OPEN Command ................................................................ 61
CLOSE Command .............................................................. 62
Automatic Message Sending ................................................ 62
Message Types................................................................... 63
Message 0 ..................................................................... 64
Message 1 ..................................................................... 64
Message 2 ..................................................................... 65
Message 3 ..................................................................... 65
Message 4 ..................................................................... 66
Messages 5 and 6 ......................................................... 66
Message 7 ..................................................................... 68
Message Polling ..................................................................... 69
FD12P Command Set............................................................. 70
HELP Command ................................................................. 70
______________________________________________________ M210296en-A
4
Page 5

_________________________________________________________________________________
MES Command ...................................................................71
AMES Command............................................................71
Weather Related Commands ..............................................73
WPAR Command ........................................................... 73
WSET Command ...........................................................73
Precipitation Limit......................................................74
Weather Update Delay..............................................74
Haze Limit .................................................................74
Rain Intensity Scale................................................... 75
Violent Rain Limit ......................................................75
Heavy Rain Limit .......................................................75
Light Rain Limit.......................................................... 75
Drizzle Limit...............................................................75
Heavy Drizzle Limit....................................................76
Light Drizzle Limit ......................................................76
Snow Limit.................................................................76
Heavy Snow Limit......................................................76
Light Snow Limit ........................................................76
Snow Pellets Limit .....................................................77
Snow Grains Limit .....................................................77
Ice Crystals Limit .......................................................77
Hail Limit.................................................................... 77
DRD Scale................................................................. 77
Warm Limit ................................................................77
PRW Command..............................................................77
CLRS Command ............................................................78
WHIS Command.............................................................78
System Configuration Commands....................................... 79
PAR Command............................................................... 79
CONF Command............................................................80
BAUD Command ............................................................84
BLSC Command.............................................................84
Maintenance Commands..................................................... 85
STA Command ...............................................................85
CAL Command ...............................................................87
TCAL Command.............................................................87
CLEAN Command .......................................................... 88
CHEC Command............................................................89
FREQ Command ............................................................ 89
DRY and WET Commands ............................................89
AN Command .................................................................90
Analog Output Commands ..................................................91
Analog Output Calibration ..............................................91
Data Scaling ................................................................... 92
Hardware Check.............................................................92
Other Commands ................................................................93
TIME Command .............................................................93
DATE Command ............................................................93
RESET Command .......................................................... 94
CHAPTER 5
FUNCTIONAL DESCRIPTION .....................................................................95
General.....................................................................................95
Optical Measurement .............................................................96
VAISALA _________________________________________________________________________ 5
Page 6

User's Guide _______________________________________________________________________
Optical Arrangement ........................................................... 96
FDT12B Transmitter Unit .................................................... 96
FDR12 Receiver Unit .......................................................... 98
Additional Measurements ..................................................... 99
General ............................................................................... 99
DRI21 Interface Board ........................................................ 99
DRD12 Rain Detector ....................................................... 100
DTS14B Temperature Sensor .......................................... 101
FDP12 Control Unit .............................................................. 101
Measurement Signal Processing........................................ 103
Optical Signal Processing................................................. 103
DRD12 Signal Processing ................................................ 104
Algorithm Description ......................................................... 105
Visibility ............................................................................. 105
Detecting Precipitation ...................................................... 106
Precipitation Intensity........................................................ 106
Precipitation Accumulation ............................................... 107
Present Weather ............................................................... 108
Precipitation Types ...................................................... 108
Liquid Precipitation ................................................. 109
Frozen Precipitation................................................ 110
Mixed Precipitation ................................................. 111
Unknown Precipitation ............................................ 111
Visibility Types ............................................................. 111
Fog.......................................................................... 111
Haze and Mist......................................................... 112
Weather Classes ......................................................... 112
Weather Code Selection .............................................. 113
Applications.......................................................................... 113
Internal Monitoring .............................................................. 114
Built-in Tests ..................................................................... 114
Memory Tests ................................................................... 115
Signal Monitoring .............................................................. 115
Hardware Monitoring......................................................... 115
Contamination Monitoring................................................. 116
CHAPTER 6
MAINTENANCE ......................................................................................... 117
General.................................................................................. 117
Cleaning ................................................................................ 118
Cleaning Lenses and Hoods............................................. 118
Cleaning DRD12 Rain Detector........................................ 118
Calibration ............................................................................ 119
General ............................................................................. 119
Visibility Calibration........................................................... 119
Calibration Check Procedure....................................... 120
Calibration Procedure .................................................. 123
Calibrating the DTS14B Temperature Sensor............. 124
Removing and Replacing.................................................. 126
Removing and Replacing Optical Units ....................... 126
Removing and Replacing the DRD12 Rain Detector .. 129
______________________________________________________ M210296en-A
6
Page 7

_________________________________________________________________________________
Calibrating FD12P Weather Sensor after Unit
Replacement ................................................................130
CHAPTER 7
TROUBLESHOOTING................................................................................133
Warnings ...............................................................................133
Troubleshooting Examples..................................................133
Message Indicating Warning or Alarm .............................133
Message Missing ............................................................... 134
Visibility Value is Missing...................................................135
Visibility Value is Continuously Too Good ......................... 135
Visibility is Constantly Too Low .........................................136
FDP12 Reports Precipitation When There Is None........... 136
FD12P Reports Frozen Precipitation during Rain ............. 136
Have Jumper Settings Been Changed? ............................137
Values for Internal Monitoring.............................................137
Getting Help ..........................................................................140
Return Instructions...............................................................140
APPENDIX A
NWS AND WMO CODES USED IN FD12P ...............................................143
The NWS Codes ....................................................................143
APPENDIX B
JUMPER SETTINGS AND INTERNAL WIRING........................................147
CPU Board.............................................................................149
DC-Regulator.........................................................................149
DRI21 Interface Board ..........................................................149
APPENDIX C
TRANSMITTER AND RECEIVER TEST POINTS .....................................151
INDEX .........................................................................................................153
List of Figures
Figure 1 FD12P Weather Sensor Site ....................................................18
Figure 2 DRD12 Rain Detector and DTS14B Temperature Sensor .......19
Figure 3 FD12P Block Diagram ..............................................................21
Figure 4 Recommended Location for the FD12P ................................... 31
Figure 5 FD12P Equipment Grounding ..................................................33
Figure 6 Casting a Concrete Foundation................................................37
Figure 7 Constructing the FD12P Foundation ........................................ 39
Figure 8 Tilting the Pole Mast ................................................................. 41
Figure 9 DTS14B and the Sensor Holder Assembly to Mast .................42
Figure 10 Connecting Internal Grounding.................................................43
Figure 11 Cabling Principle.......................................................................44
Figure 12 Line Voltage and ON/OFF Switches.........................................45
Figure 13 Electronics Enclosure Feedthroughs........................................46
Figure 14 Cable Grounding Instructions ...................................................47
VAISALA _________________________________________________________________________ 7
Page 8

User's Guide _______________________________________________________________________
Figure 15 Wiring the Connector for the LM11 Background Luminance
Meter ........................................................................................ 49
Figure 16 Wiring the Day/Night Photo Switch .......................................... 50
Figure 17 Communication Option ............................................................ 51
Figure 18 RS-485 Communication Option ............................................... 52
Figure 19 Wiring the Modem.................................................................... 53
Figure 20 Analog Current Loop Option .................................................... 55
Figure 21 FD12P Optical System............................................................. 96
Figure 22 FDT12B Transmitter Block Diagram........................................ 97
Figure 23 FDR12 Receiver Block Diagram .............................................. 98
Figure 24 DRI21 Block Diagram in the FD12P Application.................... 100
Figure 25 DRD12 Block Diagram........................................................... 101
Figure 26 FDP12 Control Unit Block Diagram ....................................... 102
Figure 27 Optical Raw Data (in Rain) .................................................... 103
Figure 28 Optical Signal Amplitude Distribution (in Rain) ...................... 104
Figure 29 DRD12 Surface Signal (Heavy Rain Beginning).................... 104
Figure 30 Precipitation Type Determination Principle ............................ 109
Figure 31 Assembling the FDA13 Calibrator.......................................... 122
Figure 32 DTS14 Sensor Holder Assembly to Mast .............................. 125
Figure 33 Removing the Optical Units ................................................... 127
Figure 34 Replacing the Optical Units.................................................... 128
Figure 35 Removing the DRD12 Rain Detector ..................................... 129
Figure 36 Basic Electronics Enclosure Wiring ....................................... 148
Figure 37 Test Points, Transmitter......................................................... 151
Figure 38 Test Points, Receiver ............................................................. 152
List of Tables
Table 1 Manual Revisions..................................................................... 12
Table 2 Related Manuals ...................................................................... 12
Table 3 Basic Set .................................................................................. 23
Table 4 Options..................................................................................... 23
Table 5 Mains Cable Selection ............................................................. 35
Table 6 Communication Cable Lengths................................................ 35
Table 7 Transmit Frequencies of the DMX21 Modem Board ............... 53
Table 8 LED Indicators of the DMX21 Modem ..................................... 54
Table 9 Manual Controls of the DMX21 Modem................................... 54
Table 10 Default Communication Settings.............................................. 57
Table 11 Commands for Changing the Default Settings ........................ 57
Table 12 Commands for Displaying and Changing the Parameters ...... 57
Table 13 Settings and Corresponding Commands................................. 60
Table 14 Routine Command for Maintenance ........................................ 60
Table 15 Status Report Command ......................................................... 60
Table 16 Transmitter Status Correspondence between MITRAS and
FD12P ...................................................................................... 67
Table 17 Receiver Status Correspondence between MITRAS and FD12P67
Table 18 HELP Command Sets .............................................................. 70
Table 19 Commands for Displaying or Setting Weather Analysis
Parameters............................................................................... 73
______________________________________________________ M210296en-A
8
Page 9

_________________________________________________________________________________
Table 20 Commands for Displaying System Parameters and Editing the
Current System Configuration ..................................................79
Table 21 Maintenance Commands..........................................................85
Table 22 Hardware Error Texts ...............................................................86
Table 23 Hardware Warning Texts ..........................................................86
Table 24 Parameters for Optical Measurement.....................................131
Table 25 Parameters for DRD12 Precipitation Detector .......................131
Table 26 Parameters for DTS14 Temperature Sensor..........................131
Table 27 Updating Parameters..............................................................131
Table 28 Parameters and Commands...................................................132
Table 29 Values for Internal Monitoring.................................................138
Table 30 Internal Weather Types, NWS Code .....................................143
Table 31 WMO SYNOP Codes (4680, W
Table 32 WMO SYNOP Codes (4680, W
Table 33 WMO SYNOP Codes (4680, W
) ......................................143
aWa
) ......................................144
aWa
) ......................................144
aWa
Table 34 WMO Code Table 4678. Codes Used by FD12P ...................145
Table 35 CPU Board Jumpers...............................................................149
Table 36 CPU Board Connectors ..........................................................149
Table 37 DC-regulator Connectors........................................................149
Table 38 DRI21 Interface Board Jumpers ............................................. 149
Table 39 DRI21 Interface Board Connectors ........................................150
Table 40 Electronics Enclosure/Transducer Cable Signals ..................150
Table 41 Transmitter Test Points........................................................... 151
Table 42 Receiver Test Points............................................................... 152
VAISALA _________________________________________________________________________ 9
Page 10

User's Guide _______________________________________________________________________
This page intentionally left blank.
______________________________________________________ M210296en-A
10
Page 11

Chapter 1 _________________________________________________________ General Information
CHAPTER 1
GENERAL INFORMATION
About This Manual
This manual is a general information source as well as a detailed
operational guide to the FD12P Weather Sensor.
Contents of This Manual
This manual consists of the following chapters:
- Chapter 1, General Information, provides important safety, revision
history, contact, and warranty information for the product.
- Chapter 2, Product Overview, introduces the FD12P Weather
Sensor features, advantages, and the product nomenclature.
- Chapter 3, Installation, provides you with information to help you
install this product.
- Chapter 4, Operation, contains information needed to operate this
product.
- Chapter 5, Functional Description, gives a functional description on
the product.
- Chapter 6, Maintenance, describes the overall maintenance of the
product.
- Chapter 7, Troubleshooting, deals with troubleshooting
information.
- Appendix A, NWS and WMO Codes Used in FD12P
- Appendix B, Jumper Settings and Internal Wiring
- Appendix C, Transmitter and Receiver Test Points
VAISALA ________________________________________________________________________ 11
Page 12

User's Guide _______________________________________________________________________
Version Information
Table 1 Manual Revisions
Manual Code Description
FD12P-U106en-1.2 Weather Sensor, User's Guide
M210296en-A This manual.
Related Manuals
Table 2 Related Manuals
Manual Code Manual Name
DMX21T0496-1.1 DMX21 CCITT Modem
LM11T0545-1.2 LM11 Background Luminance Meter
Safety
WARNING
CAUTION
General Safety Considerations
Throughout the manual, important safety considerations are
highlighted as follows:
Warning alerts you to a serious hazard. If you do not read and follow
instructions very carefully at this point, there is a risk of injury or
even death.
Caution warns you of a potential hazard. If you do not read and
follow instructions carefully at this point, the product could be
damaged or important data could be lost.
NOTE
______________________________________________________ M210296en-A
12
Note highlights important information on using the product.
Page 13
Chapter 1 _________________________________________________________ General Information
Product Related Safety Precautions
The FD12P Weather Sensor delivered to you has been tested for
safety and approved as shipped from the factory. Note the following
precautions:
WARNING
CAUTION
WARNING
Ground the product, and verify outdoor installation grounding
periodically to minimize shock hazard.
Do not modify the unit. Improper modification can damage the
product or lead to malfunction.
Safety Summary
The following are general safety precautions must be observed during
all phases of installation, operation and maintenance.
Neglecting to follow these precautions or specific warnings and
cautions elsewhere in this manual violates safety standards of design,
manufacture and intended use of the instrument. Vaisala Oyj. and its
Subsidiaries do not answer for the consequences if the customer
neglects to follow these requirements.
Ground the Equipment
To minimize the hazard of electrical shock, follow accurately the
installation procedure in Chapter 3, Installation, on page 29.
NOTE
VAISALA ________________________________________________________________________ 13
Note that the chassis of the FD12P Weather Sensor must be
connected to a good electrical earth. The instrument is equipped with
a three-conductor AC power cable. Be sure that the earth wire of the
cable is connected to an electrical ground.
There is also a grounding clamp at the bottom of the electronics
enclosure of Weather Sensor FD12P. Good grounding with a 16-mm
2
Page 14

User's Guide _______________________________________________________________________
cable must be provided. Besides increasing safety, this also protects
the Weather Sensor against lightning induced voltages.
To prevent operator injury or damage to the Weather Sensor, check
that the LINE VOLTAGE SETTING is correct before connecting the
line power (See Figure 12 on page 45.) Also ensure that the line power
outlet is provided with a protective ground contact.
WARNING
WARNING
WARNING
Do not operate in an explosive atmosphere.
Do not operate the equipment in the presence of flammable gases or
fumes. Operation of any electrical instrument in such an environment
constitutes a definite safety hazard.
Do not service or adjust alone.
Do not attempt internal service or adjustment unless another person,
capable of rendering first aid and resuscitation, is present.
Keep away from live circuits.
Component replacement or internal adjustments must be made by
qualified maintenance personnel. Operating personnel must not
remove instrument covers. Do not remove or replace any components
with the power cable connected. Under certain conditions, dangerous
voltages may exist even with the power cable disconnected. To avoid
injuries disconnect power, and discharge all circuits before touching
them.
WARNING
______________________________________________________ M210296en-A
14
Do not substitute parts or modify the instrument.
Because of the danger of introducing additional hazards, do not
modify or substitute parts in the instrument. Contact Vaisala or its
authorized representative for repairs to ensure that safety features are
maintained.
Page 15
Chapter 1 _________________________________________________________ General Information
CAUTION
The component boards including CMOS microchips should be
transported and stored in conductive packages. Although new CMOS
devices are protected against overvoltage damages caused by static
electric discharge of the operator, careful handling is recommended:
the operator should be properly grounded. Unnecessary handling of
component boards should be avoided.
Radio Frequency Interference Statement (USA)
The United States Federal Communications Commission (in 47 CFR
15.838) has specified that the following notice must be brought to the
attention of users of this kind of a product in the USA:
Federal communications commission radio frequency interference
statement
This equipment generates and uses radio frequency energy and if not
installed and used properly, that is in strict accordance with the
manufacturer's instructions, may cause interference to radio and
television reception. The Weather Sensor is designed to provide
reasonable protection against such interference in an airport
installation. However, there is no guarantee that interference will not
occur in a particular installation. If this equipment causes
interference to radio or television reception, which can be determined
by turning the equipment off and on, the user is encouraged to try to
correct the interference by one or more of the following measures:
- reorient the receiving antenna
- relocate this device with respect to the receiver
- move this device away from the receiver
If necessary, the user should consult the dealer or an experienced
radio/television technician for additional suggestions.
ESD Protection
Electrostatic Discharge (ESD) can cause immediate or latent damage
to electronic circuits. Vaisala products are adequately protected
against ESD for their intended use. However, it is possible to damage
the product by delivering electrostatic discharges when touching,
removing, or inserting any objects inside the equipment housing.
VAISALA ________________________________________________________________________ 15
Page 16

User's Guide _______________________________________________________________________
To make sure you are not delivering high static voltages yourself, take
the following precautions:
- Handle ESD sensitive components on a properly grounded and
protected ESD workbench. When this is not possible, ground
yourself to the equipment chassis before touching the boards.
Ground yourself with a wrist strap and a resistive connection cord.
When neither of the above is possible, touch a conductive part of
the equipment chassis with your other hand before touching the
boards.
- Always hold the boards by the edges and avoid touching the
component contacts.
Trademarks
Intel® is a registered trademark of the Intel Corporation in the U.S.
and other countries.
Warranty
For certain products Vaisala normally gives a limited one-year
warranty. Please observe that any such warranty may not be valid in
case of damage due to normal wear and tear, exceptional operating
conditions, negligent handling or installation, or unauthorized
modifications. Please see the applicable supply contract or conditions
of sale for details of the warranty for each product.
______________________________________________________ M210296en-A
16
Page 17

Chapter 2 ___________________________________________________________Product Overview
CHAPTER 2
PRODUCT OVERVIEW
This chapter introduces the FD12P Weather Sensor features,
advantages, and the product nomenclature.
Introduction
The FD12P Weather Sensor is an intelligent, multi-variable sensor for
automatic weather stations and airport weather observing systems.
The sensor combines the functions of a forward scatter visibility meter
and a present weather sensor. In addition, the sensor can measure the
intensity and amount of both liquid and solid precipitation.
The FD12P can be used to automatically determine the visibility and
precipitation related weather codes in the World Meteorological
Organization (WMO) standard SYNOP and METAR messages. The
sensor can also be employed as an observer's aid in a semi-automatic
weather observing system. The sensor is also suitable for other
weather observing systems providing valuable information, for
example, to road and harbor authorities.
The versatility of the FD12P is achieved with a unique operating
principle. The FD12P measures precipitation water content with a
capacitive device and combines this information with optical scatter
and temperature measurements. These three independent
measurements together provide data sufficient for an accurate
evaluation of current visibility and weather type.
Hardware Structure
The structural basis of the FD12P is the pole mast that supports the
transducer crossarm (FDC115). The crossarm contains the optical
VAISALA ________________________________________________________________________ 17
Page 18

User's Guide _______________________________________________________________________
units, FDT12B Transmitter and FDR12 Receiver. The DRD12 Rain
Detector is fastened to the crossarm. The electronics enclosure with
the main data processing and interface units is mounted to the pole
mast as seen in Figure 1 below.
0201-085
Figure 1 FD12P Weather Sensor Site
The following numbers are related to Figure 1 above:
1 = Transducer crossarm
2 = DRD12 Rain Detector
3 = DTS14 Temperature Sensor
4 = Pole mast
5 = Electronics enclosure
The FD12P Weather Sensor consists of three parts: sensing elements,
electronics enclosure, and structural elements. They are described in
detail on the next page.
______________________________________________________ M210296en-A
18
Page 19

Chapter 2 ___________________________________________________________Product Overview
Sensing Elements
The FDT12B Transmitter emits pulses of near infrared light. It is
permanently tilted 16.5º downwards. The optical power is stabilized
by a closed hardware loop. The unit also includes a receiver circuit for
monitoring lens contamination.
The FDR12 Receiver measures the scattered part of the FDT12B light
beam. The FDR12 contains also an additional light transmitter for
monitoring lens contamination. Like the transmitter, the receiver is
also tilted 16.5º downwards. Therefore, the receiver unit measures
light scattered at an angle of 33°.
The DRD12 Rain Detector outputs a signal proportional to the amount
of water on two RainCap™ sensing elements. These elements consist
of thin wires protected by an insulating glass coating. The presence of
water changes the capacitance of the elements. The combined
capacitance of the plates is measured by the DRD12 electronics.
Integrated heating resistors keep the elements dry when, for example,
fog and melt snow fall on them. The Rain Detector is protected by a
windshield to decrease the effect of wind on the measurement results.
The DRD12 is illustrated in Figure 2 below.
The DTS14B Temperature Sensor is a Pt100 thermistor that is used to
measure the crossarm temperature. See Figure 2 below.
0201-086
Figure 2 DRD12 Rain Detector and DTS14B Temperature
Sensor
VAISALA ________________________________________________________________________ 19
Page 20

User's Guide _______________________________________________________________________
The following numbers refer to Figure 2 on page 19:
1 = Two RainCapTM elements
2 = DRD12 Rain Detector
3 = Wind shield
4 = Assembly clamp
5 = DTS14 Temperature sensor
Electronics Enclosure
The FDP12 Control Unit is the main data processor and
communication unit of the FD12P.
The DRI21 Interface Board is a Vaisala, general-purpose sensor
interface, with several analog and digital input channels. In the
FD12P, one of the DRI21 Interface Board channels is used for
measuring the crossarm temperature and the DRD12 analog signal. In
addition, the DRI21 controls the DRD12 heating and reads the
precipitation ON/OFF status.
The FDW13 Mains Power Supply converts the mains voltage to
24 VAC power for the FDS12 regulator and the heater elements. The
FDW13 includes also the mains voltage selector and the mains
ON/OFF switch, which also functions as an automatic fuse.
The FDS12 DC Voltage Regulatorconverts the AC or DC input
voltage (min. 18 V) to 12 VDC power used by FD12P electronics. The
FDS12 also includes one relay used to control heater power.
The DMX21 Modem (optional) is a standard, 300-baud modem used
only in the leased line mode with the FD12P.
The FDE12 Backup Temperature Sensor is included.
Structural Elements
The structural elements include the pole mast with a standard height
of 2 meters and the FDC115 Transducer Crossarm with a length of
1.5 meters, which is also the total width of the FD12P.
______________________________________________________ M210296en-A
20
Page 21

Chapter 2 ___________________________________________________________Product Overview
Operating Principle
The FD12P Weather Sensor is a microprocessor controlled, intelligent
sensor combining optical forward scatter measurement, capacitive
precipitation sensing, and temperature measurement. The main units
of the FD12P are shown in Figure 3 below.
9502-091
Figure 3 FD12P Block Diagram
The FD12P evaluates Meteorological Optical Range (MOR) by
measuring the intensity of infrared light scattered at an angle of 33°.
The scatter measurement is converted to the visibility value (MOR)
after a careful analysis of the signal properties. Special processing is
used in case of precipitation.
The FD12P software detects precipitation droplets from rapid changes
in the scatter signal. The droplet data is used to estimate optical
precipitation intensity and amount. In addition to the optical signal,
the analog output of the DRD12 Rain Detector is used to estimate the
precipitation intensity and type.
VAISALA ________________________________________________________________________ 21
Page 22

User's Guide _______________________________________________________________________
The output of the DRD12 is proportional to the water amount on the
capacitive sensing surfaces while the optical intensity is proportional
to the total volume of the reflecting particles. The ratio of optical and
capacitive intensities is used to determine the basic precipitation type.
The crossarm temperature (TS) is measured with the DTS14B
Temperature Sensor connected to the DRI21 interface card. The
temperature data together with the optical signal profile and the
DRD12 surface sensor data are used to determine the actual weather
code.
The software performs all signal analyses in the FD12P except the
DRD12 Rain ON/OFF status, which is hardware-based and is used as
an auxiliary parameter. The FD12P has a fixed program that is divided
into tasks executed under control of a real-time operating system
kernel. Each task is like an endless loop with a limited function. The
operating system kernel controls the timing of the tasks and the
interactions between the tasks.
Using FD12P
The FD12P is typically used as a component of a weather observing
system. The final weather message (SYNOP, METAR) is then coded
in the central unit of a weather observation system (for example,
Vaisala MILOS 500) or by a human observer using the FD12P as an
observation aid.
The FD12P output is a digital serial interface, which can be
configured into two different operating modes: the sensor can be set to
send a data message automatically at selected intervals, or the FD12P
can be polled by the host computer. The same serial line is also used
as an operator interface.
The operator controls and checks the operation of the FD12P by using
a maintenance terminal. A set of built-in commands and test routines
is provided for configuring and monitoring the multiple functions of
the FD12P.
The standard data messages contain a status character for indicating
faults detected by the internal diagnostics. If the error status is set, the
operator can view a special status message. It contains detailed results
of the diagnostics and a written description of the fault. Using this
information, the operator can take corrective action or provide the
maintenance personnel with valuable advice.
______________________________________________________ M210296en-A
22
Page 23

Chapter 2 ___________________________________________________________Product Overview
Equipment Nomenclature
The standard equipment nomenclature and common names are listed
in Table 3 and Table 4 below.
Table 3 Basic Set
Type Name Description
FDC115 Transducer Crossarm Optics, analog, monitoring
assembly
FDT12B Transmitter
FDR12 Receiver
16614ZZ Crossarm Cable
FDB12 Electronics Enclosure Power, conversions, interfacing
assembly
FDP12 Processor Board
FDS12 DC Voltage Regulator
FDW13 Mains Power Supply
DRI21 Interface Board
16615ZZ Transducer Cable
16737ZZ I/O Bus Cable
DRD12 Rain Detector
FD30513 Pole Mast Standard 2-m mast
13145 Base Plate and
Installation Set
Table 4 Options
Type Name Description
FDA13 Visibility Calibration Set
FD45094 Maintenance cable RS232 cable with 9-pin D-
connector.
Termbox-48 Mains and Signal
Junction Box
FD12MODEM Modem Option For remote communication.
FD12PLM11 LM11 Option For ambient light
16616ZZ Extended Transducer
Cable
Adapting/extending the local
cable. Contains heavy-duty
transient protection circuitry.
measurement.
For optional high-mast
mounting.
VAISALA ________________________________________________________________________ 23
Page 24

User's Guide _______________________________________________________________________
Specifications
Mechanical Specifications
- Dimensions: 2.3 m × 1.6 m × 0.6 m (H × W × D)
- Weight: 35 kg, excluding the installation plate for the pole
mast
- Mounting: on a concrete foundation with three ∅16-mm
bolts
- Material: anodized aluminum, natural gray
Electrical Specifications
- Mains supply: 115/230 VAC ± 20 %, 45 ... 65 Hz
- Maximum power consumption: 35 W + 100 W defrosting
heaters (in cold weather)
The sensor electronics:
- Lock-in amplifier
- LED power stabilizer
- Contamination monitor
- Lens heater
The control unit:
- Intel 8031 microprocessor
- Program memory, 64 Kbytes
- Read/write memory, 32 Kbytes
Outputs:
- Serial data line may be used either as RS-232 level signals or
interfaced via an optional data modem
- RS-485 (2-wire)
- 4 - 20 mA analog current (sink) output
______________________________________________________ M210296en-A
24
Page 25

Chapter 2 ___________________________________________________________Product Overview
The output data:
- Automatic or polled data message
- Visibility, present weather, precipitation and status data
- Automatic message type and interval is selectable at 15
seconds to n × 15 seconds (n < 18) intervals
The analog visibility output:
- Selectable range and mode (linear or logarithmic)
- Status control bit for remote alarm relay, etc.
- Alarms and warnings (hardware failures, visibility limits)
Optical Specifications
Operating principle:
- Forward scatter at an angle of 33o and capacitive rain sensor.
The light transmitter:
- Light source: near-infrared LED
- Peak wavelength: 875 nm
- Modulation frequency: 2.3 kHz
- Transmitter lens diameter: 71 mm
- Reference photodiode: for light source control
- Backscatter photodiode: for contamination and blockage
measurement
The light receiver:
- Photodiode: PIN 6 DI
- Spectral response: max. responsivity at 850 nm, 0.55 A/W
(in range 550 ... 1050 nm over 0.3 A/W)
- Reception lens diameter: 71 mm
- Backscatter light source: near-infrared LED for
contamination and blockage measurement
VAISALA ________________________________________________________________________ 25
Page 26

User's Guide _______________________________________________________________________
Capabilities and Limitations
Visibility Measurement Specifications
Measurement range of Meteorological Optical Range (MOR):
- 10 ... 50 000 m according to a 5 % Contrast Threshold
Definition
Accuracy:
- ± 10 %, range 10 ... 10 000 m
- ± 20 %, range 10 000 ... 50 000 m
Instrument consistency:
- + 4 %
Update interval:
- 15 seconds
Weather Sensing Specifications
Precipitation detection sensitivity:
- 0.05 mm/h or less, within 10 minutes
Weather type identification:
- 11 different types of precipitation
- Fog (mist) and haze (smoke, sand)
Weather type reporting:
- WMO code table 4680 (with some additions from code table
4677)
- Code letters for precipitation, NWS
- WMO code table 4678 (supported codes are shown in Table
34 on page 145).
______________________________________________________ M210296en-A
26
Page 27

Chapter 2 ___________________________________________________________Product Overview
Precipitation intensity measurement:
- Range 0.00 ... 999 mm/h
- Accuracy ± 30 % (range 0.5 ... 20 mm/h, liquid precipitation)
Environmental Specifications
Operating temperature range:
- − 40 ... +55 oC
Operating humidity range:
- Up to 100 % RH
Wind speed:
- Up to 60 m/s (standard mast)
Sun orientation:
- Direct and reflected sunlight into the light receiver must be
avoided.
VAISALA ________________________________________________________________________ 27
Page 28

User's Guide _______________________________________________________________________
This page intentionally left blank.
______________________________________________________ M210296en-A
28
Page 29

Chapter 3 ________________________________________________________________ Installation
CHAPTER 3
INSTALLATION
This chapter provides you with information to help you install this
product.
NOTE
Before installation, read section Product Related Safety Precautions
on page 13.
Organizing Installation
Before you begin to install the FD12P Weather Sensor, make a plan of
the installation steps. The following is an example of how to organize
the installation process.
1. Surveying the site:
- Find the most representative measurement site.
- Determine orientation of the Weather Sensor.
2. Cabling plan is required for the following:
- Grounding cabling layout and cable type.
- Power supply cabling layout and cable type.
- Modem/signal cabling layout and cable type.
3. Ordering the construction materials and cables.
4. Digging for cables and foundation.
5. Casting the concrete:
- Prepare concrete blocks by using a casting mold.
- Cast the fixing bolts in their places at the same time.
VAISALA ________________________________________________________________________ 29
Page 30

User's Guide _______________________________________________________________________
6. Installing the base plate and the pole mast:
- Install the base plate with the bolts on the concrete block.
- Level the plate.
- Mount the pole mast on the base plate.
- Mount the junction box to the pole mast (optional). Junction
boxes are available from Vaisala.
7. Connecting cables:
- Connect the mains and signal cables of the site to the junction
box or have them ready for direct connection to the sensor.
8. Final installation:
- Install the electronics enclosure and the crossarm of the
FD12P to the pole mast.
- Connect the power and signal cables of the FD12P.
- Connect the modem/signal line to the host computer, display,
etc.
9. Start-up tests for the system.
Location and Orientation
The main requirements for the location of the FD12P are as follows:
1. Place the FD12P at a site where the measurements will be
representative of the surrounding weather conditions.
The ideal site has a minimum clearance of 100 meters from all
large buildings and other constructions that generate heat and/or
obstruct precipitation droplets. Also avoid shading of trees as
this may cause changes in the microclimate.
2. Make sure the site is free of obstacles and reflective surfaces,
which disturb the optical measurements and act as obvious
sources of contamination.
There must not be any obstacles in the line-of-sight of the
transmitter and receiver units (see Figure 4 on page 31). If the
transmitter beam is reflected from obstacles back to the receiver
unit, the sensor will indicate too low MOR values as the
reflected signal cannot be distinguished from the real scatter
signal. Reflections are detected by rotating the sensor crossarm.
They will change depending on the crossarm orientation. Also
the visibility reading will change accordingly.
______________________________________________________ M210296en-A
30
Page 31
Chapter 3 ________________________________________________________________ Installation
The receiver and transmitter optics should not point towards
powerful light sources or, in bright daylight, reflective surfaces
such as snow or sand. The receiver should point north in the
Northern Hemisphere and south in the Southern Hemisphere.
The receiver circuit may become saturated in bright light, and
the built-in diagnostics will indicate a warning. Intense light can
generate false contamination alarms from the transmitter unit.
Bright daylight will also increase the noise level in the receiver.
The transmitter and receiver should face away from any obvious
source of contamination such as spray from passing vehicles.
Dirty lenses will cause the sensor to report too high visibility
values. Excessive contamination is automatically detected by the
sensor.
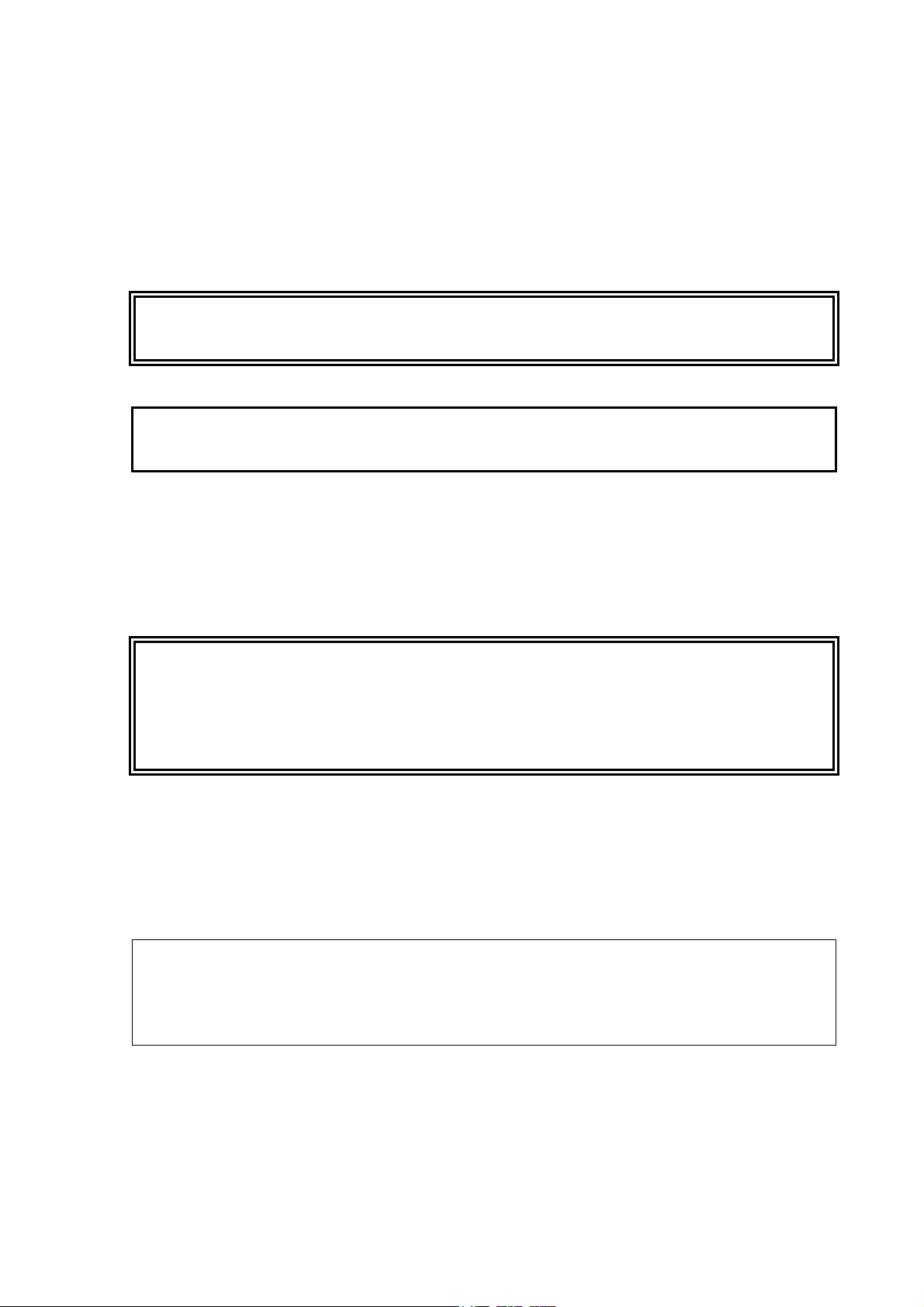
Harmful reflections are typically avoided if the transmitter beam
is directed towards a surface, which will reflect most of the light
away from the sensor. The distance of 6 meters shown in Figure
4 below is only for guidance; it is not an absolute requirement.
There should be no flashing lights near the sensor. A flashing
light can cause errors in detecting precipitation towards
No obstacles or reflecting surfaces
Figure 4 Recommended Location for the FD12P
The following numbers refer to Figure 4 above.
0110-178
1 = Transmitter
2 = Receiver
VAISALA ________________________________________________________________________ 31
Page 32

User's Guide _______________________________________________________________________
3. Power supply and communication lines must be available.
When the site for the FD12P is selected, take into consideration
the available power supply and communication lines. This
influences the amount of work and accessories needed and thus,
the actual installation costs.
Grounding and Lightning Protection
Equipment Grounding
Equipment grounding protects the electrical modules of the FD12P,
for example, against lightning and prevents radio frequency
interference. The FD12P equipment is grounded using a jacketed
grounding cable and conductive grounding rod(s).
The FD12P must be grounded by means of the grounding clamp,
which is located under the cable flange (See Figure 5 on page 33). A
16-mm² jacketed grounding cable is connected to the clamp.
Depending on the need, one to four copper-sheathed steel rods are
driven into the ground. If several rods are needed, the alignment from
the foot of the base plate must be radial.
The grounding principles are the following:
- The grounding rod must be isntalled as close to the pole mast
as possible to minimize the length of the grounding cable.
The grounding cable can be also cast inside the concrete base.
- The length of the grounding rod depends on the local
groundwater level. The lower end of the grounding rod must
continuously touch moist soil.
The grounding quality can be checked with a georesistance meter. The
resistance must be less than 10 ohms. This way the lowest possible
resistance is achieved.
The junction box must be also grounded via the grounding cables in
the same way as the electronics enclosure (Figure 5 on page 33). The
junction box is optional.
______________________________________________________ M210296en-A
32
Page 33

Chapter 3 ________________________________________________________________ Installation
0111-001
Figure 5 FD12P Equipment Grounding
The following numbers refer to Figure 5 above:
1 = Electronics enclosure
2 = Junction box (optional)
3 = Mains cable
4 = Cable tubing
5 = Grounding rods
6 = Signal cable
7 = 16 mm² grounding cables
8 = Grounding clamp
VAISALA ________________________________________________________________________ 33
Page 34

User's Guide _______________________________________________________________________
Internal Grounding
The electronics enclosure and the bottom plate of the FD12P are
secured by a 1.5-mm², yellow-green ground cable and the crossarm is
grounded through the transducer cable shield. The other parts of the
crossarm are in galvanic contact with each other.
CAUTION
When installing the FD12P, the grounding flat connector must be
plugged to the ground terminal socket, which is located beside the
MIL-connector in the crossarm. See instructions in section
Assembling the FD12P on page 40 and Figure 10 on page 43.
Grounding for Testing Purposes
The FD12P is provided with a two-meter mains cable. The cable has a
grounded plug. The plug must be connected only to an outlet that has
a ground terminal. This grounding is sufficient when the instrument is
used indoors, for example, for testing purposes.
Grounding Remote Units and Communication Cable
Remote units, such as, the PC data logger, must be grounded and
protected against lightning.
WARNING
______________________________________________________ M210296en-A
34
A lightning strike through a communication wire can cause a voltage
surge dangerous to life at remote sites if the remote units are not
properly grounded.
Page 35

Chapter 3 ________________________________________________________________ Installation
Cable Selection
Line Power Cabling
The FD12P is supplied with a two-meter power cable. If a local
terminal for 115/230 VAC power supply is not available, use an
extended mains cable from the FD12P to the nearest power source.
This cable should be armored and of underground type. The armored
reinforcing acts as a mechanical shield and also provides protection
against lightning. Ground the cable screen at both ends.
The recommended mains wire cross sections are shown in Table 5
below for mains voltage 230 VAC. For 115 VAC, divide the
maximum distances by four.
Table 5 Mains Cable Selection
Maximum
Distance from
Voltage Source
2 km 1.5 mm
4 km 2.5 mm
8 km 4.0 mm
One-wire
Cross-section
Area
2
2
2
Nearest
AWG-gauge
No 15 AWG 10 mm
No 13 AWG 14 mm
No 11 AWG 18 mm
Typical Nonarmored Cable
Diameter
NOTE
Cables with diameters more than 12 mm require a separate junction
box which is also available from Vaisala.
Communication Cable
The FD12P provides the RS-232C, RS-485, CCITT V.21 modem, and
analog transmission interfaces. Consider your needs for
communication before the installation. The communication method
depends on the distance between the computer or display and the
FD12P and the number of the FD12P sensors. Table 6 below describes
the possibilities.
Table 6 Communication Cable Lengths
Cable Length One FD12P Several FD12Ps on line
< 150 m RS-232 RS-485, modem
< 500 m RS-485, modem RS-485, modem
> 500 m Modem Modem
VAISALA ________________________________________________________________________ 35
Page 36

User's Guide _______________________________________________________________________
For a modem and RS signal cable, use a screened, 2 × 0.22-mm²
twisted pair cable with a minimum diameter of 5 mm. For details, see
section Communication Options on page 50.
Unloading and Unpacking
The contents of the delivery in question are specified in the packing
list included with the delivery documents. The FD12P equipment is
normally delivered in three cases containing the following parts:
- Crossarm FDC115 containing the optics.
- Electronics enclosure FDB12 with radiation shield.
- Pole mast.
Two persons can easily move the cases from a truck to the installation
site.
NOTE
Handle gently the case containing the optical parts. Do not drop either
end of the case.
Unpacking Procedure
1. Read the packing list supplied within the delivery documents.
Compare the packing list against the purchase order to make
sure that the shipment is complete.
2. Open the covers.
3. In case of any discrepancies or damage, contact the supplier.
4. Place the packing materials and covers back in the cases and
store them for possible reshipment.
Storage Information
Store the FD12P in its packages in dry conditions, not in the open air.
The storage conditions are as follows:
- Temperature −40 oC ... 70 oC.
- Relative humidity up to 95 %.
______________________________________________________ M210296en-A
36
Page 37

Chapter 3 ________________________________________________________________ Installation
Installation Procedures
Constructing the Foundation
Cast a concrete foundation or use an existing construction that is level
and rigid. The recommended minimum dimensions for the foundation
are illustrated in Figure 6 below. It is easiest to mount the foundation
screws while casting the pad. If the pad was casted earlier, drill three
holes into the concrete for the wedge bolts.
0110-179
Figure 6 Casting a Concrete Foundation
VAISALA ________________________________________________________________________ 37
Page 38

User's Guide _______________________________________________________________________
The following numbers and letters refer to Figure 6 on page 37:
A = Watertight plastic for conducting rainwater away
(recommended)
1 = Concrete block
2 = Surface horizontal to ±0.5°
3 = Ground level
4 = Reinforcing steel
5=
The Installation Set included in the FD12P delivery contains the
required equipment both for mounting when casting the pad and
mounting to an existing surface. Use the triangle shaped template as
an auxiliary device and remove it before mounting the base plate.
Reinforcing steel or use steel mesh 150 × 150 mm
Mounting When Casting the Pad
1. Fasten the three reinforcing plates to the lower end of the
foundation screws with six M16 nuts. See Figure 7 (C, top view)
on page 39.
2. Fix the template to the upper ends of the foundation screws with
six nuts.
3. Embed the assembly in the concrete foundation as shown in
Figure 7 on page 39.
4. After the concrete has set, remove the template.
Mounting to an Existing Surface
1. Drill three, ∅20-mm holes using the template, minimum depth
65 mm. Refer to Figure 7 on page 39.
2. Remove the template.
3. Clean the holes.
4. Fasten the foundation screws to the wedge bolts by hand.
5. Protect the tops of the screws with two nuts tightened together.
6. Then place the wedge bolt and foundation screw combinations
in the holes, wedge bolts down, and hammer the combinations
down.
7. Tighten the foundation screws as tight as possible.
______________________________________________________ M210296en-A
38
Page 39

Chapter 3 ________________________________________________________________ Installation
0110-180
Figure 7 Constructing the FD12P Foundation
VAISALA ________________________________________________________________________ 39
Page 40

User's Guide _______________________________________________________________________
The following numbers and letters refer to Figure 7 on page 39:
A = Mounting when casting the pad
1 = A10.5 DIN125, 4 pieces
2 = M10 x 30 DIN933, 4 pieces
3 = A17 DIN125, 3 pieces
4 = M16 DIN934, 3 pieces
5 = Template
6 = Foundation screw M16 x 250, 3 pieces
7 = Base level
B = Mounting to an existing surface
6 = Foundation screw M16 x 250, 3 pieces
8 = Template
9 = Wedge bolt M16, 3 pieces
C = Top view
10 = M10, 4 pieces
11 = Baseplate
Assembling the FD12P
1. Mount the base plate and level it with the six M16 nuts.
2. Mount the pole mast pedestal and the tilting support on the base
plate with four M10 bolts (Figure 7 on page 39, C, top view).
3. Attach the electronics enclosure to the pole mast with two
clamps and four M6 Allen screws.
4. Tilt the mast. See Figure 8 on page 41.
5. Feed the crossarm cable and temperature sensor DTS14B cables
inside the pole mast.
6. Check that a thin rubber gasket is on the insertion neck of the
crossarm.
7. Connect the crossarm cable plug to the MIL-connector (see
Figure 10 on page 43).
8. Connect the grounding flat connector to the other pin of the
ground terminal socket as shown in Figure 10 on page 43.
______________________________________________________ M210296en-A
40
Page 41

Chapter 3 ________________________________________________________________ Installation
0110-181
Figure 8 Tilting the Pole Mast
The following numbers refer to Figure 8 above:
1 = Pole mast. For tilting, loosen the upper and remove the lower
M10 × 100 bolts.
2 = Tilting supporters. To be installed under the fastening screws.
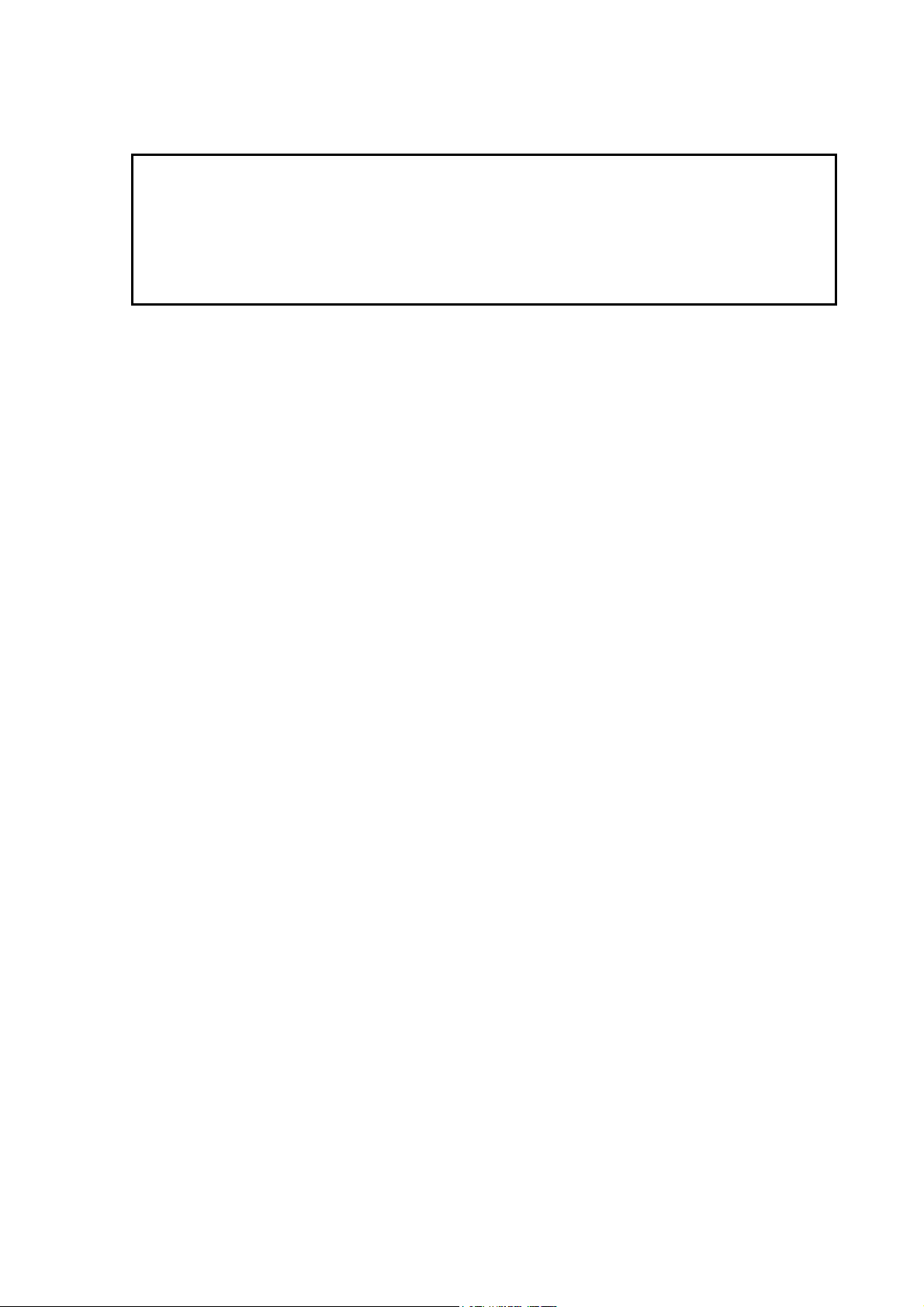
Attaching the DTS14B Temperature Sensor to the Mast
To attach the DTS14B Temperature Sensor to the mast, do the
following:
1. Pull the DTS14B temperature sensor out of the side hole of the
mast.
2. Then attach the holder to the mast in the following way:
- Open the fixing screw fully (part 3 below).
- Push the screw head to the holder with you finger.
- Put the holder to the hole in the mast pole.
- Slide the holder upwards as long as it goes and hold it there.
- Tighten the fixing screw firmly.
VAISALA ________________________________________________________________________ 41
Page 42
User's Guide _______________________________________________________________________
- Insert the crossarm to the pole mast and lock it in the right
position with two 8-mm bolts.
- Erect the mast.
- Lift the DRD12 Rain Detector to an upright position. Tighten
the clamp.
0201-088
Figure 9 DTS14B and the Sensor Holder Assembly to Mast
The following numbers refer to Figure 9 above:
1 = Sensor holder
2=DTS14
3 = Fixing screw
______________________________________________________ M210296en-A
42
Page 43

Chapter 3 ________________________________________________________________ Installation
0110-182
Figure 10 Connecting Internal Grounding
The following numbers refer to Figure 10 above:
1 = Crossarm
2 = Ground terminal socket
3 = Grounding flat connector
4 = Pole mast
5 = MIL-connector
Connecting Cables
Basic Wiring
To do the basic wiring, do the following:
1. The electronics enclosure includes a power cable. Remove the
plug.
VAISALA ________________________________________________________________________ 43
Page 44

User's Guide _______________________________________________________________________
If you use another, longer cable, make sure to connect the wires
in a correct way, especially the protective ground wire (usually
yellow-green). Refer to Figure 11 below.
2. Connect the power cord to the screw terminals in a junction box
or bring the power line directly to the electronics enclosure. The
selected method depends on the thickness of the power cable,
which should be checked before the installation. The electronics
enclosure has a cable outlet with a diameter of 10 - 12 mm.
3. Feed Neutral N (normally blue) and protective earth PE
(normally yellow-green) via separate conductors.
4. Feed the communication cable through one of the two cable
feedthroughs. For cable shield connections, see instructions in
section Communication Cable EMC-shielding on page 46.
5. Wire the communication cable according to instructions in
section Communication Options on page 50.
9509-011
Figure 11 Cabling Principle
______________________________________________________ M210296en-A
44
Page 45

Chapter 3 ________________________________________________________________ Installation
NOTE
If the line voltage used differs from 230 V (the initial setting at the
factory), check the voltage setting of the FDW13 Mains Power
Supply (alternatives 115 VAC and 230 VAC). You can find the line
voltage setting switch on the left side of the FDW13 unit (see Figure
12 below).
0110-183
Figure 12 Line Voltage and ON/OFF Switches
The following numbers are related to Figure 12 above:
1 = Electronics enclosure
2 = Pole mast
3 = DMX21 modem
4 = DC regulator FDW13
5 = ON/OFF switch
6 = Line voltage setting
7 = FD12P control unit
VAISALA ________________________________________________________________________ 45
Page 46
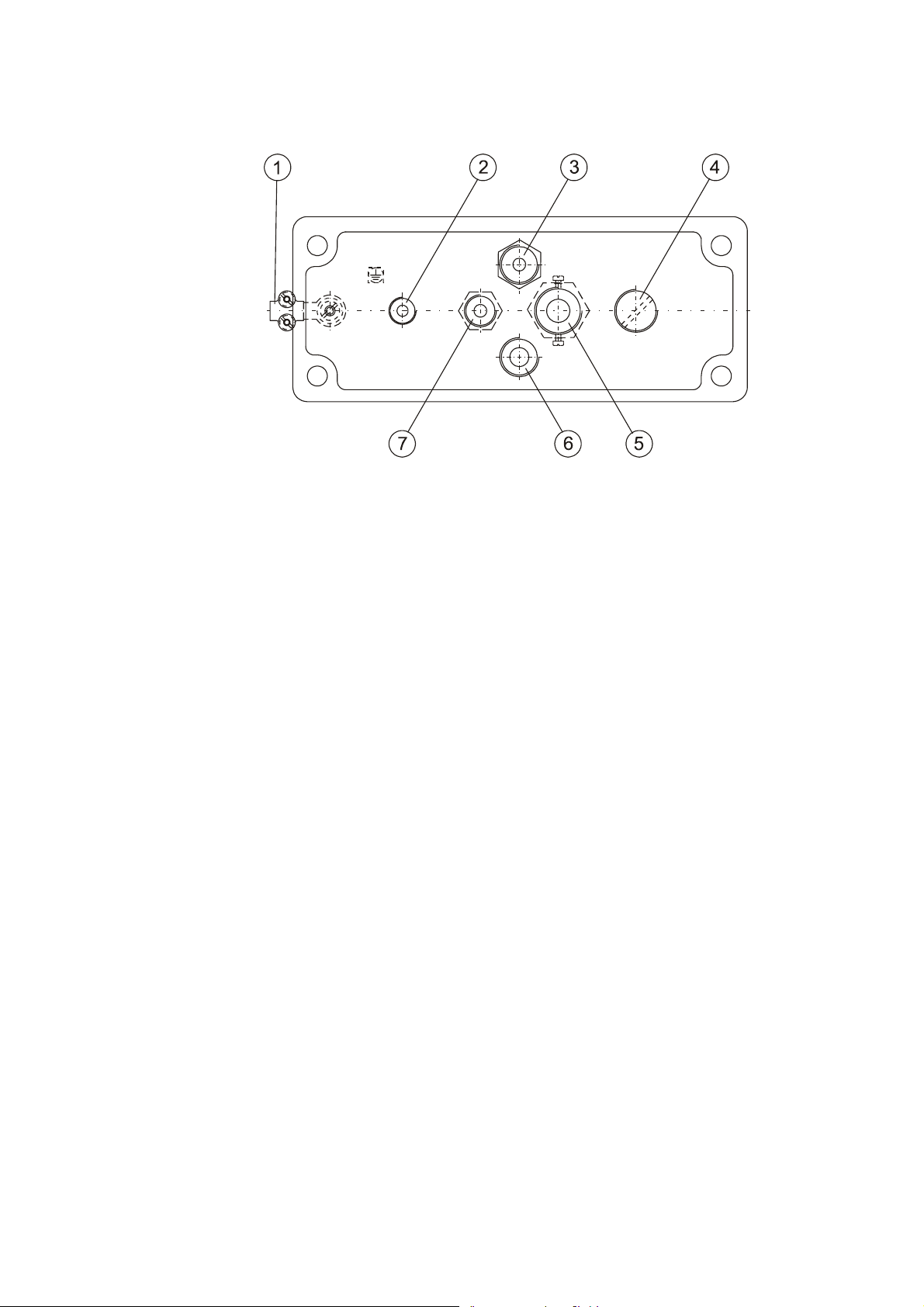
User's Guide _______________________________________________________________________
0110-184
Figure 13 Electronics Enclosure Feedthroughs
The following numbers refer to Figure 13 above:
1 = Grounding
2 = DTS14 cable feedthrough
3 = Temperature sensor (TE)
4 = Cap (Pg 13.5) of optional opening for the LM11
background luminance meter
5 = Main power cable
6 = FDC115 transducer cable feedthrough
7 = Standard communication cable feedthrough
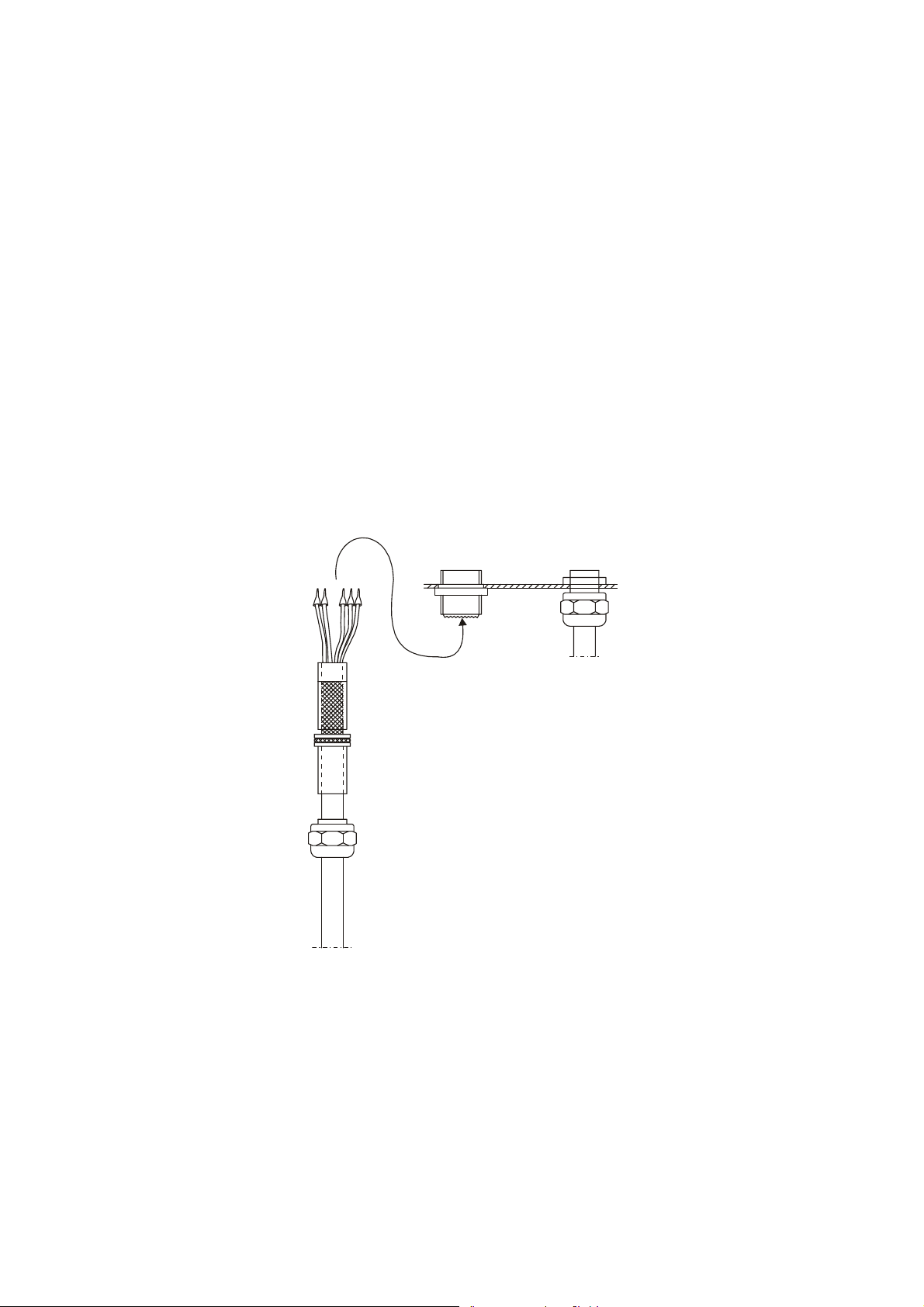
Communication Cable EMC-shielding
The electronics enclosure has one cable outlet for a cable diameter
from Ø7 to Ø10 mm, which is reserved for a signal or modem cable.
Although the shielding of the cable may be just grounded after cable
inlet, an efficient procedure against RF-interference requires special
care. Ground the cable gland to keep EMI levels within specifications.
For a proper RF-grounding of any jacketed cable, the instructions are
the following:
1. Lead the signal cable through the cable inlet. If the field cable is
thicker than 10 mm, use a separate signal junction box. See
Figure 14 on page 47.
2. Strip 80 mm of the cable sheath leaving approximately 40 mm
of the shield.
______________________________________________________ M210296en-A
46
Page 47
Chapter 3 ________________________________________________________________ Installation
3. Remove the cap of the cable gland, including the rubber cylinder
and the metal rings. Slide the cap with rubber cylinder onto the
cable.
4. For a thin cable, add a shrinkable tube to increase cable
diameter.
5. Slide two metal rings on the shielding and squeeze it evenly
between the rings.
6. Secure with a shrinkable tube.
7. Tighten the cable with the cable gland and proceed with the
wiring.
8. Connect the signal cable to the screw terminals in the electronics
enclosure.
9. Ground the signal cable with the same method at both ends.
0205-006
Figure 14 Cable Grounding Instructions
VAISALA ________________________________________________________________________ 47
Page 48

User's Guide _______________________________________________________________________
Connecting a Background Luminance Sensor or a Day/Night Switch to FD12P
The FD12P Weather Sensor supports two different methods for
ambient light sensing. The Background Luminance Meter LM11 can
be connected to the FD12P for accurate ambient light measurement.
The LM11 sensor and necessary wiring are included in option
FD12PLM11 (see Figure 15 on page 49 for the wiring details). The
background luminance measurement is typically used in the RVR
systems.
The LM11 output frequency is measured with the DRI21 interface
board and then converted into background luminance by the FD12P
software. The conversion uses a scaling factor, which needs to be
configured by the user. For details, see section BLSC Command on
page 84.
In certain applications it is necessary to calculate night visibility
separately using a formula that differs from MOR. In these cases a
simple day/night photo switch is sufficient for discerning between day
and night ambient light conditions. The switch can be connected to the
serial line control input on the FDP12 processor board. For wiring
details, see Figure 16 on page 50.
Positive voltage is interpreted as a night condition and the background
luminance value in the FD12P output message is set to 0. Negative
voltage or an open circuit is interpreted as a day condition and the
luminance value is set to 1. For details, see section BLSC Command
on page 84.
______________________________________________________ M210296en-A
48
Page 49

Chapter 3 ________________________________________________________________ Installation
9610-006
Figure 15 Wiring the Connector for the LM11 Background
Luminance Meter
VAISALA ________________________________________________________________________ 49
Page 50

User's Guide _______________________________________________________________________
NOTE
9610-007
Figure 16 Wiring the Day/Night Photo Switch
Communication Options
Serial Communications Settings
The factory default settings of the FD12P serial communications port
are 300 baud. Even parity is 7 data bits, 1 stop bit.
Serial Transmission RS-232
For the RS-232 communication, connect the signal wires to screw
terminal X18 (CTR lines not needed) at CPU board FDP12. See
Figure 17 on page 51.
______________________________________________________ M210296en-A
50
Page 51

Chapter 3 ________________________________________________________________ Installation
9509-013
Figure 17 Communication Option
The Vaisala recommendation for the maximum length of the RS-232
cable is 150 m (500 ft).
Serial Multipoint Transmission RS-485
The RS-485 transmission standard allows several FD12Ps to
communicate (half duplex) with the host computer using a single
twisted pair. For the RS-485 communication, connect the signal wires
to 4-pin screw connector X21 at the CPU board. See Figure 18 on
page 52.
In the multidrop configuration, where several FD12P Weather Sensors
are on the same communication line, units are differentiated by an ID.
Set a different unit ID to each FD12P with the CONF command. Set
FD12 P to the polling mode with the AMES 0 2 command. The host
system must ask data messages by polling each FD12P.
VAISALA ________________________________________________________________________ 51
Page 52

User's Guide _______________________________________________________________________
9509-014
Figure 18 RS-485 Communication Option
Modem DMX21
The Modem DMX21 is a CCITT V.21 modem, operating at 300 bps.
Connect the signal wires to MODEM LINE 1 and 2, and screw
terminals 7 and 9 on Interface board 16127FD. See the wiring diagram
in Figure 19 on page 53.
In the multidrop configuration, where several FD12P Weather Sensors
are on the same modem line, the units are differentiated by an ID. Set
a different unit ID to each FD12P with the CONF command. In the
multidrop configuration, only one FD12P modem carrier can be active
at the time. To set the modem carrier under the FD12P software
control, set jumper X2 to position 1-3 in the modem interface board as
shown in Figure 19 on page 53. If the X2 jumper is in position 3-4 and
if the unit ID is not set, FD12P keeps the modem carrier signal on all
the time. Set the FD12P to the polling mode with the AMES 0 2
command. The host system must ask data messages by polling each
FD12P.
______________________________________________________ M210296en-A
52
Page 53

Chapter 3 ________________________________________________________________ Installation
9509-012
Figure 19 Wiring the Modem
Usually, the modem of the FD12P operates in the answer mode, and
the modem of the host computer in the originate mode. In the standard
FD12P system, the S3 switch on the DMX21 board is in the DOWN
position and the answer mode is selected. When the switch is in the
UP position, the originate mode is selected. The transit frequencies of
the DMX21 modem are presented in Table 7 below.
Table 7 Transmit Frequencies of the DMX21 Modem Board
Originate Mode Answer Mode
TXD 0 1 0 1
CCITT 1180 980 1850 1650
VAISALA ________________________________________________________________________ 53
Page 54

User's Guide _______________________________________________________________________
Indicators and Manual Controls
This section describes the alternatives of the indicators and manual
controls available in the FD12P DMX21 modem.
Indicators
The LED indicators of the DMX21 modem are listed and described in
Table 8 below.
Table 8 LED Indicators of the DMX21 Modem
LED Indicator Description
LED V16 R Ring indicator, normally off.
LED V17 ON LINE Normally lit when the S2 switch is in the UP position.
The line, however, is permanently connected by
jumper connections. The V17 LED may also be off
although the modem is online. The S2 switch in the
DOWN position switches the V17 LED off.
LeV18 CD Indicates when a carrier frequency is detected. To
make date interchange possible, the modems must
first detect the carrier frequency.
LED V19 TxD Transmitted data stream when the data is 1, the LED
is lit.
LED V20 RxD Received data stream. When the received data is 1,
the LED is lit.
Manual Controls
The manual controls and their positions are listed and described in
Table 9 below.
Table 9 Manual Controls of the DMX21 Modem
Control Position Description
S2
S1
S3
¹
The ORIG mode may also be used depending on the host computer modem. When they
operate in the ORIGINATE mode, the modem of FD12 P should be set in the ANSWER
mode and vice versa.
UP Line relay permanently on (recommended
position).
MIDDLE Line relay controlled by software (switched lines).
DOWN Line relay permanently off.
UP
MIDDLE Software-readable switch (recommended
position).
DOWN
UP ORIG mode permanently on.
MIDDLE ORIG/ANSWER modes under software control.
DOWN ANSWER mode permanently on (normally
used).¹
______________________________________________________ M210296en-A
54
Page 55

Chapter 3 ________________________________________________________________ Installation
Analog Transmission
For 4-20 mA analog visibility measurement only two wires are
needed. Do the following:
1. Connect the voltage supply either from remote or internal supply
(from +Vb = 12 V or +V
100 ohm).
2. Connect the signal wire to screw connector X20 pin 3 "sink" at
the CPU board. In the drawing, a remote voltage supply is used
and the return signal is wired from pin 4 "gnd". See Figure 20
below.
For more information of the analog output port functioning and
configuring, see section Analog Output Commands on page 91.
= 23 V) to resistor R (for example,
bb
9607-007
Figure 20 Analog Current Loop Option
Connecting the Maintenance Terminal
Any computer equipped with a terminal emulation software or a
VT100 compatible terminal with the RS-232 serial interface can be
used as a maintenance terminal for the FD12P. The optional
maintenance cable provides a 9-pin D-connector for the computer and
a 3-pin connector for the FD12P.
VAISALA ________________________________________________________________________ 55
Page 56

User's Guide _______________________________________________________________________
To connect the maintenance terminal, do the following:
1. Disconnect the serial line screw connector or modem interfacing
cable (or the RS-485) from X18.
2. Plug the maintenance cable into X18.
3. Refer to Figure 17 on page 51 (RS-232).
Startup Testing
Before closing the cover of the electronics enclosure, a short startup
must be done as follows:
1. Connect a terminal via serial line to the sensor (See sections
Serial Transmission RS-232 on page 50 or Connecting the
Maintenance Terminal on page 55). Set the terminal baud rate to
300 and set the data frame to contain 7 data bits and 1 stop bit,
even parity.
2. Turn on the main switch at the power supply FDW13.
3. Check that the red LED on the CPU board is lit for a few
seconds, after which the green LED should start blinking. If not,
continue with troubleshooting.
4. After startup, the FD12P outputs:
VAISALA FD 12P V1.XX 19YY-MM-DD SN
(ID is also included, if configured.)
5. Wait for one minute and enter the command mode with the
OPEN command. Check with the STA command that no
hardware errors or warnings are detected.
6. Enter the automatic message mode by typing CLOSE and check
that a message appears every 15 seconds in the display.
Initial Settings
The FD12P Weather Sensor is typically interfaced to a host computer
or a data logger in an automatic weather observing system. After the
physical connection has been made, the communication details can be
configured in the FD12P software. Suitable communication settings
depend on the implementation of the whole system.
By default the sensor transmits a new ASCII data message through the
serial line every 15 seconds. The user can change the interval and
______________________________________________________ M210296en-A
56
Page 57
Chapter 3 ________________________________________________________________ Installation
message type. The sensor can also be used in a polled mode, that is, a
data message is only sent when the host computer requests one with a
special command. In addition, the baud rate of the serial line can be
changed to a higher value. The default communications settings are
listed in Table 10 below.
Table 10 Default Communication Settings
Setting Default
Baud rate 300 baud (7E1)
Polled or automatic mode,
message type
Sensor ID No ID set
Automatic mode, message 2
interval 15
In multipoint communication where several sensors share the same
communication line, the FD12P should be used in the polled mode
and individual sensors must have distinct identifiers (ID).
The baud rate should not be changed if the optional 300-baud modem
is used.
The commands for changing the default settings are listed in Table 11
below. Detailed descriptions of the commands can be found in
Chapter 4 on page 59.
Table 11 Commands for Changing the Default Settings
Operation Command
Baud rate selection BAUD
Polled or automatic mode, message type setting AMES
Sensor ID configuration CONF
The FD12P has also several changeable parameters, which control the
operation of the present weather algorithm and precipitation
measurement. The factory set parameter values have been found
appropriate in tests and usually do not need to be changed. However,
there may be conditions where other parameter values give better
results.
The commands for displaying and changing the parameters are listed
in Table 12 below.
Table 12 Commands for Displaying and Changing the
Parameters
Operation Command
Parameter listing WPAR
Parameter change WSET
VAISALA ________________________________________________________________________ 57
Page 58

User's Guide _______________________________________________________________________
Local practice may require changes, especially in the precipitation
intensity limits and the haze threshold value. For details, see the
description of the WSET command in section WSET Command on
page 73.
When the precipitation intensity and amount measurement is not
factory calibrated, higher accuracy can be achieved by adjusting a
scaling factor with the WSET command. The new scaling factor can
be calculated by comparing the FD12P against a reference rain gauge.
For details, see the description of the WSET command in section
WSET Command on page 73.
______________________________________________________ M210296en-A
58
Page 59

Chapter 4 _________________________________________________________________ Operation
CHAPTER 4
OPERATION
This chapter contains information needed to operate this product.
Introduction
The FD12P Weather Sensor is a fully automatic instrument for
continuous weather measurement. Normally, the FD12P Weather
Sensor is either set to send a data message automatically or it is polled
by a host computer. In addition, a set of user commands is provided
for configuring and monitoring the system performance. These
commands can be given in the command mode. See section
Entering/Exiting the Command Mode on page 61.
The FD12P Weather Sensor has seven different standard message
formats for data message output. The FD12P presents the weather
type using the World Meteorological Organization (WMO) code table
4680 (WaWa Present Weather reported from an automatic weather
station). Code numbers 77 (snow grains), 78 (ice crystals), and 89
(hail) are from the code table 4677 because the types are not included
in the code table 4680. In addition, the United States National
Weather Service (NWS) abbreviations are available. The list of NWS
and WMO codes is presented in Appendix A on page 143.
User Commands in Normal Operation
User intervention is not required in the normal operation of the FD12P
Weather Sensor. Operator commands are used only in the initial setup and during routine maintenance. Several commands are also
available for troubleshooting.
VAISALA ________________________________________________________________________ 59
Page 60
User's Guide _______________________________________________________________________
When the sensor has been installed, the user may need to change some
of the default settings. For details, see section Initial Settings on page
56.
Table 13 below lists the settings and the corresponding commands.
Table 13 Settings and Corresponding Commands
Operation Command
Baud rate BAUD
Polled or automatic mode, message type
setting
Sensor ID CONF
Weather algorithm parameters WSET
AMES
Table 14 below lists the routine maintenance commands.
Table 14 Routine Command for Maintenance
Operation Command
Sensor cleaning CLEAN
(optional)
Visibility calibration CHEC, CAL
Temperature calibration FREQ, TCAL
Weather algorithm parameters WSET
The standard output messages contain a status character, which
presents the results of the internal diagnostics to the host computer or
the user. If the sensor indicates a warning or an alarm in a standard
output message, the host computer or the user can obtain a detailed
status report by using a special command (STA). The status report can
also be polled (message 3) in place of the standard data message.
Usually, the detailed status information is sufficient for locating the
fault.
Table 15 below lists the status report command.
Table 15 Status Report Command
Operation Command
Getting a status report STA
______________________________________________________ M210296en-A
60
Page 61
Chapter 4 _________________________________________________________________ Operation
Markings Used in This Manual
The general format of the command is the following:
COMMAND parl...parn ↵
where
Command = An FD12P command given by the user
parl...parn = Possible parameters of the command
↵↵↵↵
= Symbolizes pressing the ENTER key
NOTE
All the command parameters are separated from each other by a
space character. Every user command must be ended with ENTER,
illustrated in this manual by ↵↵↵↵.
The system output is illustrated as Courier type font, for example,
BACKSCATTER INCREASED
Entering/Exiting the Command Mode
Before any commands can be given to the FD12P, the communication
line in the FD12P has to be assigned to the operator. Otherwise, it is
assigned to automatic messages or polled communication. The user
assigns the command mode with the OPEN command.
OPEN Command
If no device identifier (id) is defined, type
OPEN ↵
↵
↵↵
If id is defined, for example as A, type
OPEN A ↵
If id is defined but forgotten, type
OPEN ^C ↵
where ^ is the control key.
VAISALA ________________________________________________________________________ 61
↵.
↵↵
↵
↵↵
Page 62

User's Guide _______________________________________________________________________
The FD12P answers
LINE OPENED FOR OPERATOR COMMANDS
If no input is given within 60 seconds, the FD12P closes the line
automatically.
CLOSE Command
Line can be released to automatic data messages by typing
CLOSE ↵
The FD12P answers
LINE CLOSED
↵
↵↵
Automatic Message Sending
In the automatic (CLOSEd) mode, the FD12P sends the predefined
message at selected intervals. The automatic message is selected by
the AMES command.
AMES Message_number Message_interval ↵↵↵↵
where
Message_number
- The valid range is 0 ... 7, refers to section Message Types on
page 63.
- Selects the corresponding message. Any negative message
number is converted to 0.
- If only the message number is given, the previous message
interval setting is used.
______________________________________________________ M210296en-A
62
Page 63
Chapter 4 _________________________________________________________________ Operation
Message_interval
- Given in multiples of 15 seconds (= measuring interval).
Therefore, intervals 15, 30, 45 ... are valid. Other intervals
are converted to multiples of 15 seconds. The maximum
sending interval is 255 seconds (4 minutes 15 seconds).
For example, typing
AMES 1 60 ↵
selects message number 1 to be sent once in a minute.
Messages can also be displayed in the command mode with the MES
command, described in section MES Command on page 71.
Message Types
All the data messages are of fixed length and the data is in fixed
fields. Message 2 is intended to be used as the standard present
weather message. The length of the status message depends on the
possible alarm and warning states.
The FD12P adds frame strings to the polled and automatic messages.
The content of the frame strings is presented in the following:
!FD id"message body#-*
where
!
FD = FD12P sensor identifier
id = Unit identifier 2 characters, if ID is not defined
"
#
-*
= Start of heading (ASCII 1, non-printable character, in
terminal screen typically seen as the □ mark)
= Space character
characters space and 1 are shown
= Start of text (ASCII 2, non-printable character)
= End of text (ASCII 3, non-printable character)
= CR + LF (ASCII 13 + ASCII 10)
VAISALA ________________________________________________________________________ 63
Page 64

User's Guide _______________________________________________________________________
NOTE
The contents of messages 0, 1, 2, 5, 6, and 7 are illustrated as follows:
10 6800 110.96 <- The first row is the output.
↓↓ ↓ ↓
--------- offset frequency ìììì Field
------- one minute average visibility íííídescriptions
- 1=hardware error, 2= hardware warning îîîî
- 1= alarm 1 2= alarm 2
Example with frames
□FD 1□10 6800 110.96□
!FD 1"10 6800 110.96#-*
012345678901234567890123456
NUMBERS mark the character positions
.
Message 0
Message 0 displays only the one-minute average visibility truncated to
19900 and the offset frequency of the optical measurement hardware.
00 680 0 126.87
------- offset frequency
------- one minute average visibility
- 1=hardware error, 2= hardware warning
- 1= visibility alarm 1, 2= visibility alarm 2
An example with frames is as follows:
□FD 1□00 6800 126.87□
!FD 1"00 6800 126.87#-*
012345678901234567890123456
Message 1
Message 1 displays the instant precipitation type and the optical
(volume) intensity. The intensity can be integrated to rain sum, but not
snow.
00 6839 52 0.3
------- visi bility one minute average, max 50000m
- 1=hardware error, 2= hardware warning
- 1= visibility ala rm 1, 2= visibility alarm 2
------ precipitation (volume) intensity, mm/h
--- instan t precipitation type, 0 ... 99
______________________________________________________ M210296en-A
64
Page 65

Chapter 4 _________________________________________________________________ Operation
An example with frames is as follows:
FD 100 6839 52 0.3
!FD 1"00 6839 52 0.3#-*
0123456789012345678901234567
Message 2
Message 2 is intended as the standard present weather message used
in data loggers or display units and it is set as default at the factory.
00 6839 7505 L 52 61 61 0 .33 12.16 0
------- c umulative water
------- p recipitation (volume)
intensity,mm/h
--- one hour present weather code, 0...99
--- 15 minute p resent weather code, 0...99
--- ins tant present weather code, 0 ... 99
---- instan t present weather, NWS codes
------ visi bility ten minute average, max 50000m
------ visib ility one minute average, max 50000m
- 1=hardware error, 2= hardware warning
- 1= visibility ala rm 1, 2= visibility alarm 2
-----cumulative snow
sum,0...999mm
sum,0...999mm
An example with frames is as follows:
FD 100 6839 75 05 L 52 61 61 0.33 12.16 0
!FD 1"00 6839 7505 L 52 61 61 0.3 3 12.16 0#-*
012345678901234567890123456789012345 67890123456789012345
Message 3
Message 3 is the same as the status message obtained by using the
STA command. Refer to Table 22 on page 86 for possible error texts.
FD12P STATUS
SIGNAL 0. 39 OFFSET 126.83 DR IFT 0.14
REC. BACKSCATT ER 1281 CHANGE -1
TR. BACKSCATTE R 10.3 CHANGE 0.1
TE 2.7 VBB 19.4 VH 0.6
LEDI 5.6
P15 15.1 M15 -15.0 BGND -0.1
AMBL 0.1 D UTY 1.6
DRI21 MEASUREM ENTS
TS 1.8 DRD INST 811 DRY 915.6
HARDWARE :
OK
VAISALA ________________________________________________________________________ 65
Page 66

User's Guide _______________________________________________________________________
Message 4
Message 4 is for hardware monitoring. The same data line is obtained
by using the FREQ command.
0.51 126.82 0.91 15 3 5 2.7 5.6 1280 19.5 1.8 819
>FREQ
SIGNAL+ OFFSET DIST SWID MAXI O WID TE LEDI BACKS VBB TS DRD
0.59 126.83 0.91 17 2 6 2.7 5.6 1280 19.4 1.8 816
817
0.59 126.83 0.91 17 2 6 2.7 5.6 1280 19.4 1.8
Messages 5 and 6
Messages 5 and 6 are for MITRAS transmissometer message
emulation in VAISALA RVR systems.
An example of MES 5 is provided below:
"ID 1 V 1050 CV ////// B ///// S0101 -*#
--- <CR> <LF><ETX>
-- receive r 2 status
(two spa ces)
-- receiver 1 sta tus
-- trans mitter status
-- S, status hea ding
------ bac kground luminance value
cd/m2(option)
-- B, background luminance heading
------- (contamination) compensated visibility
(reserved, not supported by FD12P)
--- CV, compensated visibility heading
------- non-compensated visibility m
-- V, visibility heading
-- unit ID (one character on ly)
-- ID, start indic ator
- <STX>
"ID 1 V 1050 CV ////// B ///// S0101 -*#
123456789012345678901234567890123456 7890123
An example of MES 6 is provided below:
"ID 1 V 4550 B ///// S4101 -*#
--- <C R><LF><ETX>
-- receiv er 2 status
-- receive r 1 status
-- tran smitter status
-- S, status h eading
------ ba ckground luminance value cd/m
-- B, background luminance heading
------- non-compensated visibility m
-- V, visibility heading
-- unit ID (one character on ly)
-- ID, start indic ator
- <STX>
2
"ID 1 V 4550 B ///// S4101 -*#
123456789012345678901234567890123
The status is in hexadecimal notation.
______________________________________________________ M210296en-A
66
Page 67

Chapter 4 _________________________________________________________________ Operation
The status bits emulate the MITRAS status as shown in Table 16 and
Table 17 below.
Table 16 Transmitter Status Correspondence between
MITRAS and FD12P
BIT MITRAS FD12P
0 MEAS MODE ON
1 ECON MODE OFF
2 OPTICAL SURFACE TRB warning or alarm
3 POWER SUPPLY VBB (power supply)
4 HEATING VH (lens heater current)
5 FLASH LAMP LEDI (LED intensity control)
6 BL METER BL meter interface (DRI21)
connected
7 MEASUREM. LOOP SIGNAL -
Table 17 Receiver Status Correspondence between
MITRAS and FD12P
BIT MITRAS FD12P
0 MEAS MODE ON
1SPARE
2 OPTICAL SURFACE REC. BACKSCATTER
warning or alarm
3 POWER SUPPLY ±15 V status
4 HEATING
OK = OFF
5 CALIBRATION AMBL
6 TEST
OK = OFF
7SPARE
The MITRAS polling command is the following:
P<sp><ID><cr><lf>
VAISALA ________________________________________________________________________ 67
Page 68

User's Guide _______________________________________________________________________
Message 7
Message 7 is meant mainly for aviation specific purposes. The
message contents are as follows:
00 6839 7505 L 52 61 61 0.33 12.16 0 23.4 12345
------background
luminance cd/m
------ surface temperature
----- cumulative snow sum
------- cumulative water sum
------- precipitation water intensity,mm/h
(1 minute average)
--- one hour present weather code, 0 ... 99
--- 15 minute present weather code, 0 ... 99
--- instant present weather code, 0 ... 99
---- instant present weather, NWS codes
------ visibility ten minute average, max 50000m
------ visibility one minute average, max 50000m
- 1=hardware error, 2= hardware warning
- 1= visibility alarm 1, 2= visibility alarm 2
-RA , instant METAR weather codes
RERA , recent METAR weather (RE criteria used)
An example with frames is as follows:
FD 100 6839 7505 R 61 61 61 0.33 12.16 0 23.4 /////
-RA
RERA
!FD 1"00 6839 7505 R 61 61 61 0.33 12.16 0 23.4 /////-*
-RA-*
RERA-*
#-*
2
Message 7 consists of four lines. METAR present weather codes are
output on the second and third lines. These lines are not of fixed
length because METAR codes can be combined in many ways. The
METAR codes may also be left out but the lines of the message are
always terminated by a carriage return and line feed characters.
The background luminance value displays the measured luminance in
cd/m², if the Vaisala LM11 Background Luminance Meter is attached
to the FD12P (option FD12PLM11). If a day/night switch is
connected to the processor board, the background luminance value
displays the switch state (1 = day, 0 = night).
______________________________________________________ M210296en-A
68
Page 69

Chapter 4 _________________________________________________________________ Operation
Message Polling
In the polled (CLOSEd) mode, the FD12P sends a data message when
the host computer transmits a polling command. The message polling
mode is selected by the following command:
AMES Message_number Message_interval ↵↵↵↵
where
Message_number
- The valid range is 0 ... 7, refer to section Message Types on
page 63.
- Selects the corresponding message as the default polled
message. Any negative message number is converted to 0.
Message_interval
- Negative or zero interval is used to disable the automatic
sending. This is used when messages are polled.
For example, AMES 0 0 ↵ selects message 0, and cancels the
automatic sending.
The polling command format is the following:
<ENQ> FD <SP> id <SP> message_number <CR>
where
<ENQ> = ASCII character 05 hex
<SP> = ASCII character 20 hex (space)
id = Selected in the configuration
message_
= Optional
number
If only one FD12P unit in on the line and no id is set, the command
format is the following:
<ENQ> FD <CR>
When the FD12P unit number two (id = 2) is polled for message
number 3, the command format is the following:
<ENQ> FD <SP> 2 <SP> 3 <CR>
VAISALA ________________________________________________________________________ 69
Page 70

User's Guide _______________________________________________________________________
This format is also used when several devices are on the same line.
Use character 1 as the id if the id has not been set but a specific
message type is polled.
The FD12P does not echo the polling character string.
The answer message format is the following:
<SOH> FD <SP> id <STX> text <ETX><CR><LF>
The id field always contains two characters. If only one character has
been set as the id, the sensor will output an <SP> as the first character
in the field.
When there are several devices on the same line, the polled unit turns
the modem (DMX21) carrier on after it has acknowledged the request.
When the carrier is switched on, additional characters will appear
before the <SOH> (01 hex) character. The FD12P waits about 100 ms
after turning the carrier on before it starts to send the message. When
the FD12P has sent the message, it turns the carrier off. This will also
generate additional characters, which have to be ignored by the host.
FD12P Command Set
HELP Command
The operator receives information about available commands by
typing
HELP ↵
The HELP command sets are listed in Table 18 below.
Table 18 HELP Command Sets
Command Description
OPEN Assigns the line for operator commands
CLOSE Releases the line for automatic messages
MES Displays data message
AMES Number Interval
STA Displays status
PAR Parameter message
WPAR Weather parameter message
PRW Present weather message
CONF Password
CLEAN Sets clean references
Automatic message
(with parameters Number and Interval)
Updates configuration
______________________________________________________ M210296en-A
70
Page 71

Chapter 4 _________________________________________________________________ Operation
Command Description
CHEC Displays average signal
CAL Calibrator_frequency
CLRS Clears precipitation sums
ACAL Analog output calibration
TIME hh mm ss
DATE yyyy mm dd
BAUD rate par
AN channel
DAC data
RESET Hardware reset by watchdog
WHIS Present weather history
WSET PRW reference values
DRY ON Sets DRD dry offset
WET ON Sets DRD wet scale
BLSC Sets/Displays background luminance scale
Calibration
Sets/displays system time
Sets/displays system date
Baud rate setting
(Rate 300, 1200, 4800, 9600)
(Par E(7E1) or N(8N1)
Analog channel
(0,1,3,8 ... 15 or ANALOG ID)
(Without DATA = SWEEP)
MES Command
After opening the line for operator commands (see section
Entering/Exiting the Command Mode on page 61), a data message can
be displayed using the MES command. There are eight messages
available for different uses and they numbered from 0 to 7. Refer to
section Message Types on page 63 for message type descriptions.
The command format is the following:
MES Message_number ↵↵↵↵
with a valid range from 0 to 7. For example, when choosing the data
message number 2, type
MES 2 ↵
AMES Command
The AMES command defines the message, which the FD12P
transmits as the automatic message or as the default polled message.
Messages can also be displayed by the MES command, described in
MES Command on page 71.
VAISALA ________________________________________________________________________ 71
Page 72

User's Guide _______________________________________________________________________
The format of the AMES command is the following:
AMES Message_number Message_interval
where
Message_number
- The valid range is 0 to 7.
- Selects the corresponding message. Any negative message
number is converted to 0.
- The message number is also the default number for the MES
command and polling.
- If only the message number is given, the previous interval
setting is used.
Message_interval
- Given in multiples of 15 seconds (= the measuring interval).
Therefore intervals 15, 30, 45 ... are valid. Other intervals are
converted to integer multiples of 15 seconds. The maximum
sending interval is 255 seconds (4 minutes 15 seconds).
- Negative or zero interval ignores the automatic sending. This
is used when messages are polled. Refer to section Message
Polling on page 69 for details.
For example, typing
AMES 1 60 ↵
selects message number 1 to be sent once in a minute.
Typing
AMES 0 0 ↵
selects message 0, and cancels the automatic sending.
The AMES command without parameters displays the current
selection and it is the following:
AMES ↵↵↵↵
______________________________________________________ M210296en-A
72
Page 73

Chapter 4 _________________________________________________________________ Operation
Weather Related Commands
To display or set the weather analysis parameters and results, use the
commands listed in Table 19 below.
Table 19 Commands for Displaying or Setting Weather
Analysis Parameters
Command Parameters and Results
WPAR Weather parameter message
WSET Prw reference values
PRW Present weather message
CLRS Clear precipitation sums
WHIS Present weather history
WPAR Command
Use the WPAR command to display the present weather analysis
parameters. Typing WPAR ↵ displays the following output:
WEATHER PARAMETERS
PRECIPITATION LIMIT 40
WEATHER UPDATE DELAY 6
HAZE LIMIT 9000
RAIN INTENSITY SCALE 0.80
VIOLENT RAIN LIMIT 50
HEAVY RAIN LIMIT 8.0
LIGHT RAIN LIMIT 2.0
DRIZZLE LIMIT 15
HEAVY DRIZZLE LIMIT 30
LIGHT DRIZZLE LIMIT 3
WARM LIMIT 8.0
SNOW LIMIT 5.0
HEAVY SNOW LIMIT 600
LIGHT SNOW LIMIT 1200
SNOW PELLETS LIMIT 30
SNOW GRAINS LIMIT 20
ICE CRYSTALS LIMIT 40
HAIL LIMIT 300
DRD SCALE 1.5
DRD DRY OFFSET 900.0
DRD WET SCALE 0.0016
WSET Command
The WSET command is used to modify the present weather analysis
parameters.
The command asks for one parameter at a time, showing the
parameter name and the current setting. Accept the current value by
pressing ENTER. You can give a new value by typing the value
before pressing ENTER.
VAISALA ________________________________________________________________________ 73
Page 74

User's Guide _______________________________________________________________________
Type
WSET↵
and the output is as follows:
SET PRESENT WEATHER PARAMETERS
PRECIPITATION LIMIT ( 40)
WEATHER UPDATE DELAY ( 6)
HAZE LIMIT ( 9000)
RAIN INTENSITY SCALE ( 0.80)
VIOLENT RAIN LIMIT ( 50)
HEAVY RAIN LIMIT ( 8)
LIGHT RAIN LIMIT ( 2)
DRIZZLE LIMIT ( 15)
HEAVY DRIZZLE LIMIT ( 30)
LIGHT DRIZZLE LIMIT ( 3)
SNOW LIMIT ( 5.0)
HEAVY SNOW LIMIT ( 600)
LIGHT SNOW LIMIT ( 1200)
SNOW PELLETS LIMIT ( 30)
SNOW GRAINS LIMIT ( 20)
ICE CRYSTALS LIMIT ( 40)
HAIL LIMIT ( 300)
DRD SCALE ( 1.5)
WARM LIMIT ( 8.0)
The parameters are described in detail below.
Precipitation Limit
The Precipitation limit parameter is the threshold of accumulated
particle magnitudes (in FD12P internal units) that reports the
precipitation on state. The typical parameter value is 40. The smaller
value represents a more sensitive operation and faster response at the
beginning of an event.
Weather Update Delay
The Weather update delay parameter is a time as multiple of 15
seconds, during which the instant precipitation type is not changed.
The intensity may change faster.
Haze Limit
The Haze limit parameter specifies the visibility threshold for
reporting haze or mist. When the visibility is between 1000 m and the
Haze limit, the FD12P will report either haze or mist depending on the
air humidity.
______________________________________________________ M210296en-A
74
Page 75

Chapter 4 _________________________________________________________________ Operation
Rain Intensity Scale
The Rain intensity scale parameter is multiplied by the measured raw
intensity, which gives the reported precipitation intensity (optical).
The rain amount is scaled with the same coefficient because the
amount is a direct integral of 15-second intensities.
The typical value for the Rain intensity scale is 0.8. as the optimal
value is complex to determine; it depends on the optical, optoelectronic, and electronic parameters. No applicable factory
calibration method has been developed yet.
The precipitation measurement can be calibrated by comparing the
FD12P rain amount to measurements made with a suitable reference
rain gauge. Make the comparison after a few rainfalls with 5 mm or
more of total accumulated rain. A new scaling factor can be calculated
using the following formula:
Newscale = Oldscale × (Ref_Amount/FD12P_Amount)
where
Oldscale = Old value of Rain Intensity Scale
Ref_Amount = Amount measured with the reference rain gauge
FD12P_Amount = Corresponding amount measured by the FD12P
Violent Rain Limit
The Violent rain limit parameter defines the minimum rain intensity
(mm/h), when the intensity is violent.
Heavy Rain Limit
The Heavy rain limit parameter defines the minimum rain intensity
(mm/h), when the intensity is heavy.
Light Rain Limit
The Light rain limit parameter specifies the maximum rain intensity
(mm/h), when the intensity is light. If the rain intensity is between the
above heavy and light limits, it is moderate.
Drizzle Limit
The Drizzle limit parameter refers to the maximum drop size (in
FD12P internal units), which can be detected as drizzle. The typical
value is 15, which has been found to be the optical signal from a 0.5
mm diameter droplet measured by typical FD12P hardware. The
VAISALA ________________________________________________________________________ 75
Page 76

User's Guide _______________________________________________________________________
parameter value relates to the square of droplet radius. The
relationship is the following:
X = 240× R
2
where
X = Parameter value
R = Droplet radius
Parameter value 30 would correspond to about a 0.7-mm droplet
diameter.
Heavy Drizzle Limit
The Heavy drizzle limit parameter refers to the minimum number of
drizzle droplets detected in 15 seconds. They must be detected before
drizzle becomes heavy (dense).
Light Drizzle Limit
The Light drizzle limit parameter defines the maximum number of
droplets detected in 15 seconds, when drizzle is light.
Snow Limit
The Snow limit parameter specifies the minimum ratio of optical
precipitation intensity to surface sensor (DRD12) precipitation
intensity, when the precipitation is snow. A half of this value is used
for separating sleet and ice pellets.
The typical value for Snow limit is 5. A smaller value directs the
FD12P to report more wet precipitation as snow.
Heavy Snow Limit
The Heavy snow limit parameter defines the minimum visibility (m)
on a two-minute average in heavy snow.
Light Snow Limit
The Light snow limit parameter defines the maximum visibility (m) on
a two-minute average in light snow. If snow is detected and the twominute visibility average is between the above heavy and light snow
limits, snow intensity is moderate.
______________________________________________________ M210296en-A
76
Page 77

Chapter 4 _________________________________________________________________ Operation
Snow Pellets Limit
The Snow pellets limit parameter specifies the minimum particle size
(in FD12P internal units), which is detected as snow pellets.
(Additional internal criteria are used before the precipitation type is
determined to be snow pellets.)
Snow Grains Limit
The Snow grains limit parameters refers to the maximum particle size
(in FD12P internal units), which is detected as snow grains.
Ice Crystals Limit
The Ice crystals limit parameters defines the maximum particle size
(in FD12P internal units), which is detected as ice crystals.
(Additional internal criteria are used before the precipitation type is
determined to be ice crystals.)
Hail Limit
The Hail limit parameters refers to the minimum particle size (in
FD12P internal units), which is detected as hail. (Additional internal
criteria are used before the precipitation type is determined to be hail.)
DRD Scale
The DRD scale parameter is the scaling factor for the calculated
intensity of the DRD12 surface sensor. The typical value for this
parameter is 1.5. The value is also good for a very clean DRD12.
When the DRD12 becomes dirty after some precipitation events, it
becomes more sensitive, especially for light rain. Thus, a smaller
value of the scale could be used.
Warm Limit
The Warm limit parameter defines a more flexible, maximum snow
reporting temperature limit, which is required in some areas. The
nominal value is +8 °C.
PRW Command
The Present Weather command (PRW) command, displays a verbal
format message.
VAISALA ________________________________________________________________________ 77
Page 78

User's Guide _______________________________________________________________________
When you type
PRW↵
the system output is the following:
PRESENT WEATHER
MODERATE DRIZZLE
VISIBILITY 7161 m AVE 10 MIN 7533
RAIN INTENSITY 0.16 mm/h CUMULATIVE SUM 12.16
SNOW INTENSITY 0.0 mm/h CUMULATIVE SUM 0
TEMPERATURE 2.7
TS 1.8
DRD SUM 22.04
CLRS Command
The CLRS command resets (to 0.00) the cumulative sums of
precipitation. This resetting can also be done in the protocol mode by
the host computer, using the following command format:
<ESC> FD id C <CR>
Then the FD12P responds to the accepted command with the
following ASCII character:
<ACK> (06 hex)
WHIS Command
The WHIS command displays the instant precipitation type codes
(NWS) for one hour.
Type
WHIS↵
to get the results shown on the next page.
PRW HISTORY
LLLLLLLLLLLLLLLLR-R-R-R-R-R-R-RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR- R R R R R R R- R- R- R- R- R- R- R- R- R- R- R- R - R- R- R- RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR-R-R-R-R-R-RRRRRRR-R-R-R-R-R-R-R-R-R-R-RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- RR- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R- R-
>
______________________________________________________ M210296en-A
78
Page 79
Chapter 4 _________________________________________________________________ Operation
System Configuration Commands
Table 20 below lists the commands that can be used to display system
parameters and to edit current system configuration.
Table 20 Commands for Displaying System Parameters and
Editing the Current System Configuration
Command Description
PAR Parameter message
CONF password
BAUD rate par Set baud rate (rate 300,1200,2400,4800,9600)
BLSC Set/display background luminance scale
Update configuration
Par E (7E1), N (8N1)
PAR Command
The current system parameters can be displayed by using the PAR, the
System Parameters, command.
When you type
PAR ↵
the system output is shown on the next page.
SYSTEM PARAMETERS
VAISALA FD12P V 1.83 1999-11-19 SN: 46401
ID STRING:
AUTOMATIC MESSAGE 2 INTERVAL 15
ALARM LIMIT 1 0
ALARM LIMIT 2 0
OFFSET REF 130.50
CLEAN REFERENCIES
TRANSMITTER 8.9 RECEIVER 1769
CONTAMINATION WARNING LIMITS
TRANSMITTER 1.5 RECEIVER 200
CONTAMINATION ALARM LIMITS
TRANSMITTER 5.0 RECEIVER 500
SIGNAL SCALE 1 1.485 SCALE 0 0.000
TE OFFSET 58.5
TS SCALE 1 0.058 SCALE 0 -58.969
ANALOG VISIBILITY MAX 20000 MIN 10
LINEAR MODE
ANALOG OUTPUT SCALE 1 0.143 SCALE 0 713.00
VAISALA ________________________________________________________________________ 79
Page 80

User's Guide _______________________________________________________________________
CONF Command
The configuration command, CONF, is used to set or update system
parameters and to adjust certain calibrations, reference values, and
limits. You can limit the use of this command by protecting it with a
password. New parameter values are saved in the non-volatile
memory (EEPROM).
The CONF command displays the parameters one by one and asks for
a new value. In most cases, the current value is shown as the default
value. The parameter is not updated if the user only presses the ↵↵↵↵ key.
You can modify the following system parameters using the CONF
command:
- Vis Alarm Limits
- Offset Freq Reference
- Temperature TE Scale
- Password Characters
- Unit Id Characters (2)
- References And Limits for Contamination Monitoring
- Analog Output Minimum Visibility
- Analog Output Maximum Visibility
- Analog Output Lin/Log
To prevent unauthorized change of the system parameters, a four-
character password can be set at the beginning of the CONF setting.
You can also modify the password then. When you do not want to set
or modify the password, press ↵↵↵↵ .
When a password has been set in the previous session, the command
format is the following:
CONF password ↵
To change the password, type
CONF password N ↵ (N stands for new).
NOTE
______________________________________________________ M210296en-A
80
You must also know the previous password.
Page 81

Chapter 4 _________________________________________________________________ Operation
When no password has been set, the command format is the
following:
CONF ↵
The system response to the CONF command is presented below (The
bold text refers to user actions.)
CONF. PASSWORD (4 CHARS MAX)
UPDATE CONFIGURATION PARAMETERS
UNIT ID (2 CHAR) ( 1)
SET REFERENCE PARAMETERS ( 25.9)
TE
OFFSET
OFFSET REFERENCE UPDATED
ALARM LIMIT 1 ( 1000)
ALARM LIMIT 2
ALARM LIMIT 2 UPDATED
TRANSMITTER CONTAMINATION
LIMITS
WARNING LIMIT
WARNING LIMIT UPDATED
ALARM LIMIT ( 5.0)
RECEIVER CONTAMINATION LIMITS
WARNING LIMIT ( 100)
ALARM LIMIT
ALARM LIMIT UPDATED
ANALOG OUTPUT MODE
0 = LINEAR1=LN(0)
ANALOG OUTPUT RANGE
MAX VISIBILITY ( 10000)
MIN VISIBILITY ( 50)
END OF CONFIGURATION
( 127.48) Y
( 200) 300
( 1.0) 1.5
( 500) 600
The questions asked by the system are described below.
First the system asks for a new password:
CONF. PASSWORD (4 CHARACTERS MAX)
This question is asked when there is no valid password or the existing
password is updated. If updating is requested by the N parameter and
an empty line is given for an answer, the password is removed.
Otherwise, the user gives a new password to the system.
The system asks the following:
UPDATE CONFIGURATION PARAMETERS
UNIT ID (2 CHAR)( 1)
If the FD12P unit is named by one- or two-character ID codes, the
OPEN and POLLING commands use it as a parameter. The ID code is
VAISALA ________________________________________________________________________ 81
Page 82

User's Guide _______________________________________________________________________
also included in the data message heading. ID 1 is used as a default in
the message heading if no other ID is given. The current ID can be
removed by pressing " - " as an answer to the question.
In the multidrop configuration, where several FD12 Weather Sensors
are on the same communication line, the units are differentiated by the
ID.
The next CONF parameters are hardware- or system-dependent. They
can be changed from the factory set values for better performance or
maintenance purposes. The example configuration session is
explained in the following.
The single point calibration of the TE backup temperature
measurement can be done by giving the temperature.
SET REFERENCE PARAMETERS
TE ( 25.9)
The default value is the current temperature. If it is not correct, a new
value must be typed as the answer. The new value is used to correct
the internal TE scaling factor. The TE temperature is used as a backup
in FD12P. The temperature is used in the visibility measurement to
control the precipitation effect correction algorithm. Snow and rain
have a different kind of effect on the scattering signal when it is used
for the visibility calculation.
The currently measured offset value (not a parameter) is shown in the
brackets (see next page).
OFFSET ( 127.48) Y
OFFSET REFERENCE UPDATED
After receiving Y as an answer, the system accepts the offset
frequency to be the reference parameter for hardware monitoring. The
parameter value is further compared with the current value to detect
drift or other failure in the optical signal measurement electronics.
The visibility alarm limits are checked. Limit 1 is expected to be
higher than Limit 2. The limit values are expressed in meters.
ALARM LIMIT 1 ( 1000)
ALARM LIMIT 2
ALARM LIMIT 2 UPDATED
______________________________________________________ M210296en-A
82
( 200) 300
Page 83

Chapter 4 _________________________________________________________________ Operation
In the above example, alarm Limit 2 receives a new value, 300 m.
When the visibility now weakens below Limit 2, then the data
message (0 to 2) data status is set to 2. The visibility alarm is not
shown in the status message.
The backscatter/contamination control is done by comparing the
current values of backscatter signal with the reference values given
with the CLEAN command. The limits given here are limits for the
change in backscatter signals.
TRANSMITTER CONTAMINATION LIMITS
WARNING LIMIT
WARNING LIMIT UPDATED
ALARM LIMIT ( 5.0)
( 1.0) 1.5
The transmitter values are expressed in volt (V). The measurement
range is 0 to 13 V, where 0 V is a blocked lens. The limit value is
given as a positive value although the signal becomes smaller when
contamination increases.
A contamination change of 5 V represents about a 10 % decrease in
the transmitter's lens transmittance (as also does the same increase in
the visibility indication).
RECEIVER CONTAMINATION LIMITS
WARNING LIMIT ( 300)
ALARM LIMIT
ALARM LIMIT UPDATED
( 500) 600
The receiver values are expressed in hertz (Hz). The measurement
range is from 0 to 10000 Hz, where 10000 Hz is a blocked lens.
A contamination change of 500 Hz represents about a 10 % decrease
in the receiver's lens transmittance.
The analog output mode and visibility range are set last. In the
logarithmic mode, the minimum visibility must be different from 0 as
LN(0) is not defined.
ANALOG OUTPUT MODE
0 = LINEAR1=LN(0)
ANALOG OUTPUT RANGE
MAX VISIBILITY ( 10000)
MIN VISIBILITY ( 50)
END OF CONFIGURATION
VAISALA ________________________________________________________________________ 83
Page 84

User's Guide _______________________________________________________________________
BAUD Command
The baud rate and communication type can be changed by typing
following the operator command:
BAUD value communication_ type
The baud rates are 300, 1200, 2400, 4800, and 9600. The
communication types are E (7E1) and N (8N1).
The new value is saved in EEPROM and it is used also after reset or
power up. The default baud rate set at the factory is 300 baud (7E1).
Defining the communication type is optional. It does not change if the
baud rate is changed. Other baud rates than 300 baud are not allowed
with the DMX21 modem.
The BAUD command displays the current baud rate and
communication type. For an example, see the following:
BAUD RATE: 300 E71
BLSC Command
The Vaisala LM11 Background Luminance sensor can be connected
to the FD12P for ambient light measurement. Each LM11 sensor has
an individual scaling coefficient, which is defined at the factory. The
scaling coefficient is written on a label in the LM11 sensor. This
coefficient should be configured to the FD12P for correct scaling of
the measured background luminance values.
The BLSC command is used to set or display the background
luminance scale.
When you type
BLSC↵
↵
↵↵
it displays the current background luminance scale.
When you type
BLSC Scaling_factor ↵
↵
↵↵
it sets the new background luminance scale.
______________________________________________________ M210296en-A
84
Page 85
Chapter 4 _________________________________________________________________ Operation
If the LM11 is not connected, the scaling factor should be negative.
Value -1.0 has been set at the factory as the default value. If a positive
value is used, the sensor expects a signal from the LM11.
For an example, see the following:
>blsc
BL SCALE -1.000
>blsc 10.4
BL SCALE 10.400
If a day/night switch is connected to the serial line control input on the
FDP12 processor board, the FD12P can read the switch state and
report it as a background luminance value of 1 (day) or 0 (night). The
FD12P firmware will read the switch if the background luminance
scaling factor is set to 0.
Maintenance Commands
The maintenance commands are listed in Table 21 below.
Table 21 Maintenance Commands
Command Description
STA
CAL Calibrator_frequency
TCAL
CLEAN
CHEC
FREQ
DRY ON
WET ON
AN CHANNEL
STA Command
The STA command displays the results from the built-in test system
as a status message. Message 3 gives the same status message as the
STA command.
Displays status.
Calibration.
Temperature measurement calibration.
Sets clean references.
Displays average signal.
Displays internal signals.
Sets DRD12 dry offset.
Sets DRD wet scale.
Analog channel (0,1,3,8 ... 15 or ANALOG ID).
When you type
STA ↵
↵
↵↵
the system output is the following:
VAISALA ________________________________________________________________________ 85
Page 86

User's Guide _______________________________________________________________________
SIGNAL 0.39 OFFSET 126.83 DRIFT 0.14
REC. BACKSCAT TER 1281 CHANGE -1
TR. BACKSCATT ER 10.3 CHANGE 0.1
TE 2.7 VBB 19.4 VH 0.6
LEDI 5.6
P15 15.1 M15 -15.0 BGND -0.1
AMBL 0.1 DUTY 1.6
DRI21 MEASURE MENTS
TS 1.8 DRD INST 811 DRY 915.6
HARDWARE :
OK
An asterisk (*) before a value indicates an exceeded limit.
In the end, there are verbal comments on the combined errors
detected. These comments can be one or many of the following listed
in Table 22 below.
Table 22 Hardware Error Texts
Error text Description
BACKSCATTER HIGH
TRANSMITTER ERROR
+15 V POWER ERROR
OFFSET ERROR
SIGNAL ERROR
RECEIVER ERROR
DATA RAM ERROR
EEPROM ERROR
The receiver or transmitter contamination signal
has increased more than the ALARM limit given
in the configuration.
The LEDI signal is more than 7 V or less than
-8 V.
The receiver/transmitter power is less than 14 V
or more than 16 V.
The offset frequency is zero (cable is
disconnected).
The signal frequency is less than 50 % of the
offset frequency.
Too low signal detected in the receiver
backscatter measurement.
The error is in RAM read/write check.
This is an EEPROM checksum error.
The hardware warning texts are listed in Table 23 below.
Table 23 Hardware Warning Texts
Warning text Description
BACKSCATTER
INCREASED
TRANSMITTER
INTENSITY LOW
RECEIVER
SATURATED
OFFSET DRIFTED
LENS HEATER OFF
DRI21 NOT
______________________________________________________ M210296en-A
86
The receiver or transmitter contamination signal
has increased more than the WARNING limit
selected in the configuration.
The LEDI signal is less than -3 V.
The AMBL signal is less than -9 V.
The offset has drifted more than ±5 Hz from the
reference value.
No current flowing to lens heaters.
The DRI21 board cannot be detected.
Page 87

Chapter 4 _________________________________________________________________ Operation
Warning text Description
CONNECTED
TS SENSOR ERROR
DRD12 ERROR
LUMINANCE SENSOR
ERROR
TE SENSOR ERROR
VISIBILITY NOT
CALIBRATED
The DTS14B measurement is off limits.
The DRD12 analog signal is close to zero.
The LM11 signal is zero (not checked if the BLSC
is negative).
Box temperature sensor TE measurement is off
limits.
The visibility calibration coefficient has not been
changed from the default value.
CAL Command
The CAL command is used to calibrate the visibility measurement.
The calibration is done by using opaque glass plates with known
scatter properties.
The command type is the following:
CAL Calibrator_signal_value ↵↵↵↵
Type, for example, the following:
CAL 985 ↵
↵
↵↵
The calibrator signal value is printed on the labels of the glass plates.
Typically, the signal is close to 1000 Hz. The FD12P calculates a new
scaling factor and stores it in the non-volatile memory (EEPROM).
Refer to section Calibration on page 119 for instructions.
TCAL Command
The TCAL command is used to calibrate the sensor crossarm
temperature (TS) measurement. Only 0 °C temperature is important in
its accuracy because it is used in the identification of freezing rain.
When you type
TCAL ↵
↵
↵↵
the command displays the current scaling factors.
Without a parameter, the command displays the current scaling factors
and current TS.
When you type
TCAL TS ↵
VAISALA ________________________________________________________________________ 87
↵
↵↵
Page 88

User's Guide _______________________________________________________________________
the command initializes the two-point calibration sequence, where two
temperatures must be simulated.
When you type
TCAL TS DTS14B_temperature ↵
↵
↵↵
a single-point calibration to the TS is made. That is, the scaling factor
TS 0 is adjusted by the command routine.
The following command
TCAL TS 0.0 ↵
↵
↵↵
makes a zero calibration, if the temperature sensor DTS14B is in an
ice bath or otherwise at a temperature of 0 °C .
The following command
TCAL TS 0.0581 -59.0 ↵
↵
↵↵
sets both scaling factors.
The system output is as follows:
DRI TEMPERATURE SCALES
TS 1 0.0581 TS 0 -59.0000 TS 2.8
CLEAN Command
The CLEAN command has no parameters and it is used to set the
clean references for contamination control. This command is given
during maintenance procedures after cleaning the lenses or after
replacing the transmitter or receiver board.
When you type
CLEAN ↵
the FD12P output is as follows:
______________________________________________________ M210296en-A
88
↵
↵↵
CLEAN REFERENCES
TRANSMITTER 12.0
RECEIVER 1402
UPDATED
Page 89

Chapter 4 _________________________________________________________________ Operation
CHEC Command
The CHEC command is used in the visibility calibration procedure to
display the two-minute average signal frequency in hertz. The
command has no parameters.
The display is terminated by pressing ESC. Pressing any other key
will pause the display. In the beginning, the eight-location buffer is
filled with the first value. The buffer is used to calculate the average
When the FDA13 calibrator is installed, the value displayed in the
message should be the same as printed on the calibrator glass plate. In
clear air the value should be near zero.
When you type
CHEC ↵
↵
↵↵
the output is the following:
SCALED FREQUENCY AVE (2 MIN)
999.9938
999.9880
>
FREQ Command
The FREQ command is for hardware monitoring. Message 4 gives the
same data line as the FREQ command.
An example of the output is the following:
>freq
SIGNAL+ OFFSET DIST SWID MAXI OWID TE LEDI BACKS VBB TS DRD
0.03 129.79 1.0042424.4 5.3 1303 19.5 23.1 900
0.03 129.79 1.0042424.4 5.3 1303 19.5 23.1 900
A new line is printed every 15 seconds. The command output is
terminated by pressing the ESC key. The first line is a title line with
the signal names.
DRY and WET Commands
The DRY and WET commands are used to check and adjust the
operation of the Rain Detector DRD12 analog signal measurement.
VAISALA ________________________________________________________________________ 89
Page 90

User's Guide _______________________________________________________________________
The DRY command is used to set the dry signal end of the DRD12
signal normalization calculation.
When you type
DRY ↵
↵
↵↵
the output is, for example, the following:
DRD DRY OFFSET 915.6
The DRY OFFSET value must be between 850 and 980 when the
DRD12 hardware operates normally. The DRY command shows this
parameter. The parameter is set by the DRY ON command.
When you type
DRY ON ↵
↵
↵↵
the WET command without a parameter shows the scaling factor that
normalizes the DRD12 signal change from the dry state to the wet
state to 1.00. A typical value is 0.0015. An example is shown in the
following:
WET ↵
DRD WET SCALE 0.00169
The WET ON command is used to set the parameter. The DRD12
measuring surfaces must be coated with a wet cloth or immersed in
water, when the WET ON command is given. An example of the
command is given below:
WET ON ↵
AN Command
The AN command can be used continuously to display the selected
analog monitor channel. The channel ID can be used as a parameter,
instead of the channel number. Thus, the AN AMBL command is the
same as AN 12.
The message consists of the raw binary number from the A/D
converter and the corresponding scaled and filtered value.
______________________________________________________ M210296en-A
90
Page 91

Chapter 4 _________________________________________________________________ Operation
Type
AN AMBL ↵
WAITING FOR MULTIPLEXER
ANALOG INPUT, AMBL
118 0.1
119 0.3
↵
↵↵
Analog Output Commands
Analog Output Calibration
The DAC output voltage is converted to current, 0 to 22 mA unscaled.
This current is then software-calibrated to give 4 mA at the minimum
visibility and 20 mA at the maximum visibility. The minimum and
maximum visibility values are set in the configuration session. A
hardware error is indicated by 0 mA.
The ACAL command sets two-bit values, 4000 and 800, to the
digital-to-analog converter. The corresponding currents measured by a
multimeter must be given as answers to the questions asked in the
commands. The analog output scaling factors, which define the
bits/mA relation, are then calculated by the software. The scaling
factors are Scale 0 and Scale 1. The FD12 calculates them as follows:
Scale 0 = 4×((4000-800)/(high current - low current))
The bit value that gives 4 mA. Scale 1 depends on the mode.
In linear mode:
Scale 1 = bits16mA / (maximum vis - minimum vis)
In logarithmic mode:
Scale 1 = (ln(max vis) - ln(min vis)) / bits16mA
bits16mA = (3200 / (high current - low current)) × 16
VAISALA ________________________________________________________________________ 91
Page 92

User's Guide _______________________________________________________________________
When you type
ACAL ↵
↵
↵↵
the command gives, for example, the following output:
MEASURED CURRENT (mA) 22.16
MEASURED CURRENT (mA) 4.52
Data Scaling
The FD12 scales the visibility value to a binary number for the DAC
( = DACBITS) so that the minimum visibility corresponds to the
4 mA-calibrated value and maximum visibility to the 20 mAcalibrated value.
In linear mode:
DACBITS = (visibility - min visibility) × scale 1 + scale 0
In logarithmic mode:
DACBITS = (ln(visibility) - ln(min visibility)) × scale 1 + scale 0
If visibility is less than minimum visibility then
DACBITS = bits4mA = scale 0
If visibility is more than maximum visibility then
DACBITS = bits 20mA
Hardware Check
The DAC bit value from 0 to 4095 can be given as a parameter. The
value does not change until you press ESC. When the DAC command
has been given without a parameter, the analog output sweeps slowly
from 0 to maximum and from 0 until you press the ESC key.
For example:
DAC 800 ↵
______________________________________________________ M210296en-A
92
↵
↵↵
Page 93
Chapter 4 _________________________________________________________________ Operation
Other Commands
TIME Command
The TIME command is useful for maintenance purposes.
To display the current system time, type
TIME ↵
↵
↵↵
The system output is, for example, the following:
10:11:12
To set the time, use the following command:
TIME hh mm ss ↵↵↵↵
NOTE
where
hh = Hours
mm = Minutes
ss = Seconds
Reset the time after a power break.
DATE Command
The DATE command is used to display the current date.
Type
DATE ↵
To set a new system date, use the command:
DATE yyyy mm dd ↵↵↵↵
↵
↵↵
where
yyyy = Year
mm = Month
dd = Day
VAISALA ________________________________________________________________________ 93
Page 94

User's Guide _______________________________________________________________________
RESET Command
The RESET command makes the hardware reset by the watchdog
circuitry.
The command format is the following:
RESET ↵
↵
↵↵
______________________________________________________ M210296en-A
94
Page 95
Chapter 5 _______________________________________________________ Functional Description
CHAPTER 5
FUNCTIONAL DESCRIPTION
This chapter gives a functional description on the product.
General
The FD12P Weather Sensor is an optical sensor that measures
visibility (meteorological optical range, MOR, and precipitation
intensity and type. The FD12P measures visibility using the forward
scatter measurement principle. Light scatters from particles whose
diameter is in the order of magnitude of the light wavelength. The
amount of scatter is proportional to the attenuation of the light beam.
Larger particles behave as reflectors and refractors and their effect on
the MOR must be handled separately. Usually, these particles are
precipitation droplets. The FD12P optical arrangement allows for
individual droplets to be detected from rapid signal changes. The
FD12P software calculates the precipitation intensity by analyzing the
amplitudes of these changes. This intensity estimate is proportional to
the volume of the precipitation droplets.
The optical signal also contains some information about the
precipitation type but not enough for reliable identification. Additional
information is needed, especially in conditions where the precipitation
is very light or the weather is windy. As the extra parameter, the
FD12P measures an estimate of the water content of precipitation with
the DRD12 rain detector. In rain, the water equivalent and the volume
are equal. However, in snow the optical volume estimate is about ten
times larger. This difference of approximately one decade is used to
discern between rain and snow.
VAISALA ________________________________________________________________________ 95
Page 96

User's Guide _______________________________________________________________________
Optical Measurement
Optical Arrangement
0110-185
Figure 21 FD12P Optical System
The following numbers refer to Figure 21 above:
1 = FDT12 transmitter
2 = FDR12 receiver
3 = Sample volume
The FD12P measures light scattered at an angle of 33°. This angle
produces stable response in various types of natural fog. Precipitation
droplets scatter light in a different manner than fog. Thus, their
contribution to visibility must be analyzed separately. The FD12P can
detect and measure precipitation droplets from the optical signal and
use this information in processing the scatter measurement results.
The FD12P has a small sample volume of about 0.1 liters (see Figure
21 above). This enables independent particles to be measured even at
quite heavy precipitation intensities. The signal levels from even the
smallest droplets can also be detected.
FDT12B Transmitter Unit
The transmitter unit consists of an infrared LED, control and
triggering circuits, LED intensity monitor, backscatter receiver, and
analog multiplexer.
______________________________________________________ M210296en-A
96
Page 97

Chapter 5 _______________________________________________________ Functional Description
9611-002
Figure 22 FDT12B Transmitter Block Diagram
The transmitter unit electronics pulses the IR-LED at a frequency of
2.3 kHz. One PIN-photodiode monitors the transmitted light intensity.
The transmit level measurement is used to automatically keep the
LED's intensity at a preset value. The "LEDI" feedback voltage is
channeled through the analog multiplexer to the CPU for monitoring.
The feedback loop compensates for temperature and aging effects of
the light-emitting diode. On the other hand, the active compensation
slightly accelerates the LED aging. For this reason, the initial LED
current is set to a value, which guarantees several years of
maintenance-free operation.
A reset pulse (RES) from the FDR12 Receiver synchronizes the IRLED timing with the receiver's lock-in amplifier. The CPU can also
delay the transmitter firing for a special out-of-phase measurement.
This feature is used in measuring the internal noise level (offset) of the
circuitry.
VAISALA ________________________________________________________________________ 97
Page 98

User's Guide _______________________________________________________________________
An extra photodiode measures the light scattered backwards from the
lens, other objects, or contaminants. This signal as well as several
internal signals are monitored via MUX-line.
The CPU board supplies only one voltage Vb = 10 - 13 V for both the
transmitter and receiver. This is used for heating the lenses, for the
transmitter LED heating and for producing both +5 V digital and
+15 V analog supplies. The +15 V supply is located on the FDT12B
board.
FDR12 Receiver Unit
The Receiver Unit consists of a light receiver, preamplifier, voltage to
frequency converter, backscatter measurement light source LED, and
some control and timing electronics.
9611-003
Figure 23 FDR12 Receiver Block Diagram
The receiving PIN photodiode senses the transmitted light pulses
scattered from the aerosol particles. The signal voltage is filtered and
detected by a phase-sensitive, lock-in amplifier synchronized with the
transmitter.
______________________________________________________ M210296en-A
98
Page 99

Chapter 5 _______________________________________________________ Functional Description
The lock-in circuits take two samples of the background level and one
sample of the active signal level while the transmitter LED is lit. The
difference between the sampled voltages is amplified and then
converted into frequency.
The frequency signal is buffered by a differential line driver and sent
to the CPU board for accurate counting.
An ambient light level as high as 30 kcd/m2 does not influence the
detection of the photo diode, neither does it saturate the A4 preamplifier. The Ali signal (proportional to the ambient light) is led to
the CPU for monitoring.
An extra IR-LED is needed for backscatter or contaminant
measurement. The light level is sampled and converted into frequency
using the same method of detection described with the scattering
signal measurement.
Additional Measurements
General
The FD12P includes the DRD12 Rain Detector for estimating the
water content of precipitation and the DTS14B Temperature Sensor
for measuring the sensor crossarm temperature (TS). Both additional
sensors are measured using the DRI21 Interface Board, which is
coupled on the FD12P PICOBUS.
DRI21 Interface Board
The DRI21 is a Vaisala general-purpose sensor interface with several
analog and digital input channels. One of the DRI21 temperature input
channels (Pt100) is used to measure the crossarm temperature
(DTS14B). One 10-bit analog input channel is used to measure the
DRD12 analog signal. In addition, the DRI21 controls the DRD12
heating and reads the rain ON/OFF status.
VAISALA ________________________________________________________________________ 99
Page 100

User's Guide _______________________________________________________________________
9807-031
Figure 24 DRI21 Block Diagram in the FD12P Application
DRD12 Rain Detector
The DRD12 analog signal is proportional to the water amount on the
sensing surfaces. Water on the DRD12 changes the capacitance of the
sensor elements. The capacitance of the elements controls the output
frequency of an oscillator. This frequency is amplified and also
converted into a voltage signal for direct analog measurement. With
dry surfaces, the DRD12 outputs about 3 V and with totally wet
surfaces 1 V. Refer to Figure 29 on page 104, section DRD12 Signal
Processing on page 104.
A droplet detector monitors the voltage signal. When a new droplet
hits the DRD12 sensing surface, the voltage changes rapidly and the
detector circuit reacts. The detector triggers a delay circuit, which
controls the precipitation ON/OFF output. When new droplets are
detected often enough, the delay circuit output will stay constantly on.
The voltage signal is measured once a second by an analog channel of
the DRI21 interface board. In addition, the precipitation (ONN/OFF
signal) is read with a digital input.
_____________________________________________________ M210296en-A
100
 Loading...
Loading...