

Page 1

Installation Guide
for
Linux
Page 2

Contents
Ubuntu 16.04 LTS ............................................................................................................................. 3
1. Development Environment ........................................................................................................ 3
2. Compile the Driver .................................................................................................................... 3
2.1. Compilation tool and kernel sources ............................................................................................ 3
2.2. Compile the Driver ........................................................................................................................ 3
3. Load the Driver .......................................................................................................................... 4
Mint 18.03 ......................................................................................................................................... 4
1. Development Environment ........................................................................................................ 4
2. Compile the Driver .................................................................................................................... 4
2.1. Compilation tool and kernel sources ............................................................................................ 4
2.2. Compile the Driver ........................................................................................................................ 5
3. Load the Driver .......................................................................................................................... 5
Raspberry Pi3 ................................................................................................................................... 5
1. Development Environment ........................................................................................................ 5
2. Compile the Driver .................................................................................................................... 6
2.1. Compile Kernel source ................................................................................................................. 6
2.1.1. Download and Install Tools ................................................................................................... 6
2.1.2. Get Kernel source ................................................................................................................. 6
2.1.3. Modify Kernel ........................................................................................................................ 6
2.1.4. Compile the Kernel ............................................................................................................... 6
2.2. Compile the Driver Source ........................................................................................................... 7
3. Load the Driver .......................................................................................................................... 7
Kali 2018.1 ........................................................................................................................................ 8
1. Development Environment ........................................................................................................ 8
2. Compile the Driver .................................................................................................................... 8
2.1. Install the Kernel Header File ....................................................................................................... 8
2.1.1. Update the Software Source ................................................................................................. 8
2.1.2. Install the Kernel Header File ............................................................................................... 8
2.1.3. Compile Driver Source ........................................................................................................ 10
3. Load the Driver ........................................................................................................................ 10
Use the Graphical Interfac e ........................................................................................................... 11
Use the Command Line .................................................................................................................. 14
1. Identify the Device ................................................................................................................... 14
2. Create the Interface ................................................................................................................ 14
3. Change the Interface Status to Up .......................................................................................... 14
4. Start wpa_supplicant in the background ................................................................................. 14
I
Page 3
4.1. Scan Wireless Networks (SSID)................................................................................................. 15
4.2. Connect to the AP ...................................................................................................................... 15
4.3. Enable DHCP client .................................................................................................................... 17
II
Page 4
$ apt-get install gcc
Ubuntu 16.04 LTS
1. Development Environment
The development enviro nment in Ubuntu is required as follows:
Development Environment
OS Ubuntu 16.04 LTS
Kernel version 4.13.0-36-generic
Gcc version 5.4.0
2. Compile the Driver
2.1. Compilati on tool and ke rnel sources
Before you compile the driver, please make sure you have the correct compile tool and
kernel sources. In Ubuntu 16.04 LTS, we can install compile tool gcc by com mand “apt-get
install gcc”
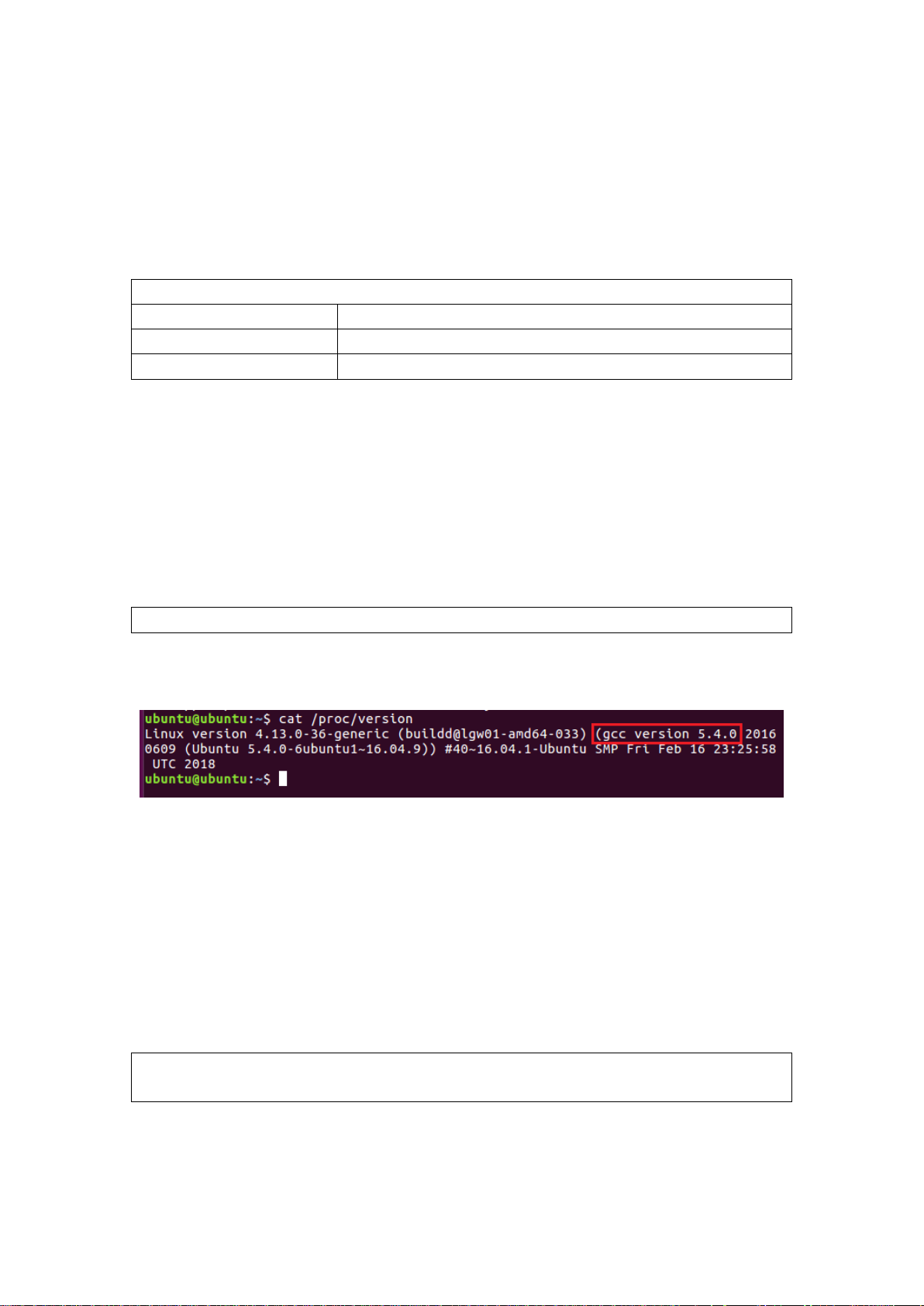
Note: We recommend you install the same version tool to compile the driver.
For example:
According to the command “cat /proc/version”, you could see your Ubuntu 16.04 LTS
system is compiled by gcc5.4.0. By default, gcc5.4.0 is already installed in Ubuntu 16.04
LTS, you could use gcc5.4.0 to compile the driv er direc t ly.
Generally, compatible kernel headers are already built in Ubuntu 16.04 LTS, so you don’t
need to separately download and compile the kernel sources. However, if no related
kernel headers are integr ated in your system, please install the kernel sources first.
2.2. Compile the Driver
Use Terminal to go to the driver directory and run the following commands to com pi l e the
driver.
$ make clean
$ make
After compiling, you can see a name of the chip.ko file is stored in the directory of the
driver.
3
Page 5
/kernel/drivers/net/wireless/ #[kernel
$ lsmod
Development Environment
OS
Mint 18.03
Kernel version
4.10.0-38.generic
$ apt-get install gcc
3. Load the Driver
Here we show the 88x2bu.ko wireless driver loading process as an example. Run the
following command to load the driver.
$ sudo cp 88x2bu.ko /lib/modules/[kernel version]
version] is the directory name of the system kernel version
$ sudo depmod –a
$ sudo modprobe 88x2bu
Or directly use insmod to load the dr iv er.
$ sudo insmod 88x2bu.ko
After loading the driver, run the following command to check i f the driver is successfully
loaded.
Mint 18.03
1. Development Environment
The development enviro nment in Mint is required as follows:
Gcc version 5.4.0
2. Compile the Driver
2.1. Compilati on tool and ke rnel sources
Before you compile the driver, please make sure you have the correct compile tool and
kernel sources. In Mint, w e can install compile tool gcc by command “apt -get install gcc”
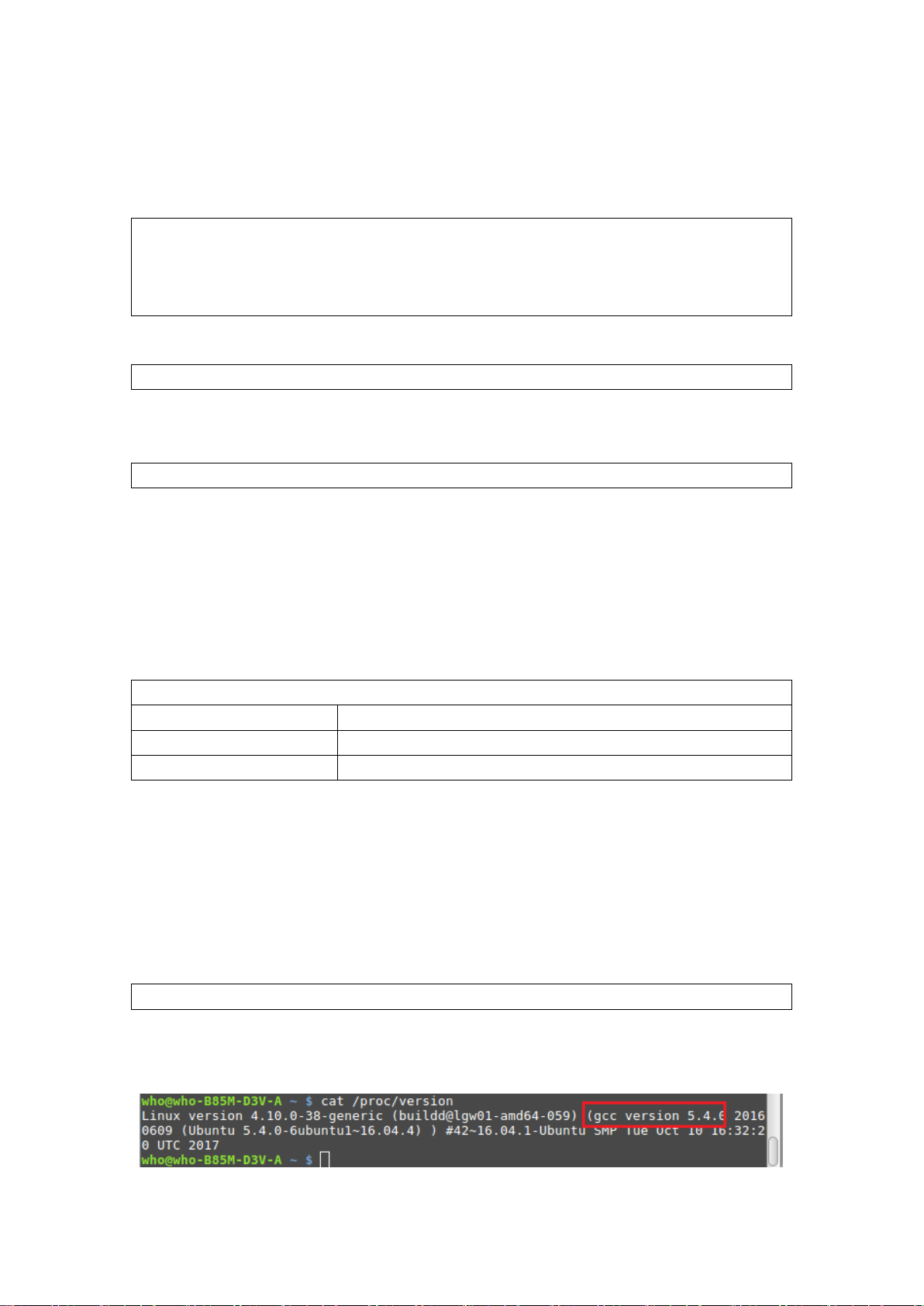
Note: We recommend you install the same version tool to compile the driver.
For example:
4
Page 6
Development Environment
Hardware version of
development board
According to the command “cat /proc/version”, you could see your Mint system is
compiled by gcc5.4.0, so we should use gcc5.4.0 to compile the driver.
Generally, compatible kernel headers are already built in Mint, so you don’t need to
separately download and compile the kernel sources. However, if no related kernel
headers are integrated in your system, please install the kernel sources first .
2.2. Compile the Driver
Use Terminal to go to the driver directory and run the following commands to compile the
driver.
$ make clean
$ make
After compiling, you can see a name of the chip.ko file is stored in the directory of the
driver.
3. Load the Driver
Here we show the 88x2bu.ko wireless driver loading process as an example. Run the
following command to load the driver.
$ sudo cp 88x2bu.ko /lib/ mo dules/[kernel version]/kernel/drivers/ net/wireless/
$ sudo depmod -a
$ sudo modprobe 88x2bu
Or directly use insmod to load the dr iv er.
$ sudo insmod 88x2bu.ko
After loading the driver, run the following command to check if the driver is successfully
loaded.
$ lsmod
Raspberry Pi3
1. Development Environment
The development enviro nment in Raspberry Pi 3 is required as follows
OS 6.3.0-18-rpi-deb9u1
Kernel version 4.9.80-v7
5
Raspberry Pi 3 Model B
Page 7

$ sudo apt-get install git bc
2. Compile the Driver
Before you compile the driver, please make sure you have the correct compile tool and
kernel sources.
2.1. Compile Kernel sourc e
Here we illustrate the instr uct ion s for local building to compile the driver for Linux.
2.1.1. Download and Install Tools
Note: Before local building, make sure your raspberrypi system is connected to the
internet.
Install Git, bc and other r el ated tools.
2.1.2. Get Kernel source
Click the following links to dow nload raspberrypi kernel source and other relat ed t ool s.
https://github.com/raspberrypi/linux
https://github.com/raspberrypi/tools
Before local building, make sure if you need to update the kernel. I f y our adapter supports
the current kernel version, you don’t need to update the kernel, and just download the
kernel sources of this v ersion. I f you hav e to up dat e t he kerne l, cho ose the ker nel s ource s
of the desired version. He r e w e dow nload the version 4.9 kernel sources.
Create Linux-src directory in the local user’s root directory to store k ernel sources. If you
have installed Git, you can use Git to obtain Linux kernel sources from Github; if you
directly download the .z ip file, use the following jar command to decompress this file.
$ sudo jar –xf XXX.zip
Note: It is recommended not to use the unzip software to decompress the .zip file.
2.1.3. Modify Kernel
Run the following commands to modify Linux kernel. You can also modify the kernel
according to your demand s.
$ cd linux /* go the directory of kernel sources */
$ KERNEL=kernel7
$ make bcm2709_defcon f ig
Note: The instructions for Raspberry Pi3 and other versions of Raspberry are slightly
different, for details of other versions, please refer to the instructions on Raspberry official
website.
2.1.4. Compile the Kernel
Run the following commands to compile and install the kernel and related device tree. It
6
Page 8

$ sudo cp arch/arm/boot / zI mag e / boot/$KERNEL.img
$ make
may take a few minutes.
$ make –j4 zImage modules dtbs
$ sudo make modules_install
$ sudo cp arch /arm/boot/ dts/*.dtb /boot/
$ sudo cp arch/arm/boot/ dts/overlays/*.dtb* /boot/ ov erlays/
$ sudo cp arch/arm/boot/ dts/overlays/README /boot / overlays/
Note: “-j4” ref ers to usi ng Raspberry Pi3 and 4 to compile to accelerate the compilation
process.
Power off the development board of Raspberry Pi3 and then run the following command
to confirm the kernel version.
$ uname –a
or
$ cat /proc/version
2.2. Compile the Driver Source
Go to the driver’s directory, open the Makefile file to support Raspb erry Pi3. By def ault, the
CONFIG_PLATFORM_I386_PC macro is enabled. Set the value for
CONFIG_PLATFORM_BCM2709 to y, and set the value for
CONFIG_PLATFORM_I386_PC to n.
CONFIG_PLATFORM_BCM2709 = y
CONFIG_PLATFORM_I386_PC = n
CONFIG_PLATFORM _ANDROID_X86 = n
After setting the parameters, use Terminal to go to the directory in which the d r iv er sour ce
file is stored. Run the follow ing commands to compile the driver.
$ make clean
3. Load the Driver
Here we show the 8192eu.ko wireless driver loading process as an example. Run the
following command to load the driver.
$ sudo cp 8192eu.ko /lib/mo dules/[kernel version]/kernel/drivers/net/wireless/
$ sudo depmod -a
$ sudo modprobe 8192 eu
Or directly use insmod to load the dr iv er.
$ sudo insmod 8192eu.ko
After loading the driver, run the following command to check if the driver is successfully
loaded.
7
Page 9

Development Environment
OS
Kali 2018.1
$ sudo apt-get install l inux-headers-$(uname -r)
$ lsmod
Kali 2018.1
1. Development Environment
The development enviro nment in Kali 2018.1 is required as follows.
Kernel Source V ers ion 4.14.0-kali3-amd64
2. Compile the Driver
2.1. Install the Kernel Header File
Before compiling the driver in Kali 2018, make sure you have installed and compiled the
right Linux header file. Follow t he instructions to install and compile the Linux header file.
2.1.1. Update the Software Source
Run the following commands to update the software source and relat ed t ools.
$ sudo apt-get clean
$ sudo apt-get update
$ sudo apt-get upgrade
2.1.2. Install the Kernel Header File
1) Method 1: Run the follow i ng command to install the kernel header file.
After running this command, the system will automatically find the matched kernel header
file to download and install it. If the Kali server is updated, you may not find the specific file,
in this case, you can manual ly download and install the header file.
2) Method 2: Manually Download and Compile to Install
Find the matched kernel header file in the download source of your Kali softwar e.
Click the following link to go to the official website to download Linux header file and
related tools.
8
Page 10

$ sudo dpkg -i linux-header-4.14.0-kali3-amd64_4.14.17-1kali_amd64.deb
$ dpkg-query -s linux-headers-$(uname -r)
http://http.kali.org/kali/pool/main/l/linux
Check the system version of Kali
$ uname -r
The system version we used here is shown as below.
Download and compile linux-kbuild
In the Kali download links, find the linux-kbuild file of your system. Here we choose
linux-kbuild-4.14_4.14.17.-1kali_a md6 4. deb as an example.
After downloading the file, use Terminal to go to the directory and run the following
command to install the file.
$ sudo dpkg -i linux-kbuild-4.14_4.14.17-1kali_amd64.deb
Download and compile linux-header-common
In the Kali download links, find the linux-header-common file of your system. Here we
choose linux-header-4.14.0-kali3-common_4.14.17-1kali_all.deb as an example.
After downloading the file, use Terminal to go to the directory and run the following
command to install the file.
Run the following command to check if the kernel header file is successfully installed.
After the linux-header is successfully installed, run the following command to display the
9
Page 11

$ make
detailed linux-hea der information.
Check the /lib/modules/<kernel-version>/ directory and you will see a build link file.
2.1.3. Compile Driver Source
Use Terminal to go to the driver directory. Run the following commands to compile the
driver.
$ make clean
After compiling, you can see a name of the chip.ko file is stored in the directory of the
driver.
3. Load the Driver
Here we show the 88x2bu.ko wireless driver loading process as an example. Run the
following command to load the driver.
$ sudo cp 88x2bu.ko /lib/mo dules/[kernel version]/kernel/drivers/ net /wireless/
$ sudo depmod -a
$ sudo modprobe 88x2bu
Or directly use insmod to load the dr iv er.
$ sudo insmod 88x2bu.ko
After loading the driver, run the following command to check if the driver is successfully
loaded.
$ lsmod
10
Page 12

Use the Graphical Interface
Ubuntu, Mint, Raspberry Pi and Kali all provide friendly graphical interface. After the
adapter driver is successfully installed, you can use the graphical interface to manage
your wireless settings. The interfaces for different system version are slightly different and
here we use the interfaces for Ka l i 2018.1 as an example for illustration.
1. After successfully loading the driver, you will see a network connection icon in the
task bar. Choose Wi-Fi Not Connected > Wi-Fi Settings to display the available
wireless networks.
11
Page 13

2. Select TP-Link_D003_5G and enter its password to conn ect to this network.
3. After connecting to this net work, you can check its detailed wireless settings.
12
Page 14

13
Page 15

$ lsusb
$ ifconfig
$ ifconfig wlan1 up
$ killall wpa_supplicant
Use the Command Line
You can use commands to manage your wireless setting in Linux. Here we use the
interfaces for Kali 2018.1 as an example for illustration.
1. Identify the Device
Inert the USB wireless adapter, and run the following command to check if the adapter is
identified.
2. Create the Interface
Run the following comm and to check if the wireless network interface is created.
3. Change the Interface Status to U p
Check if the WLAN interface is up. If not, run the following command. Here we use wlan1
as an example.
If it failed to change to up, r un t he following command to set the state again.
$ rfkill unbloc k wif i
$ ifconfig wlan1 up
4. Start wpa_supplicant in the background
Run the following command:
$ wpa_supplicant –Dnl80211 –iwlan1 –c ./ wpa_0_8.conf -B
Note: wpa_0_8.conf is a file in the current driver directory, go to the driver directory when
running the command.
If the command above is not effective, run the following command to end the
wpa_supplicant procedure and then run the above command again.
If your Linux kernel does not support 802.11, run the following command.
14
$ wpa_supplicant -Dwext -iwlan0 -c ./wpa_0_8.conf -B
Page 16

of the desired AP. The SSID is in double quotation marks and then as a whole
4.1. Scan Wireless Networks (SSID)
Run the following commands.
$ wpa_cli –p /var/ r un/ w pa_supplicant scan
$ wpa_cli –p /var/ run/wpa_supplicant scan_results
4.2. Connect to the AP
1) Open
Run the following commands
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
$ wpa_cli –p /var/ run/wpa_supplicant ap_scan 1
$ wpa_cli –p /var/ run/wpa_supplicant add_network
$ wpa_cli –p /var/ run/wp a_supplica nt set_netw ork 0 ssid '"tp link"' //t plink is the SSID
enclosed by single quot at ion marks.
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 key_mgmt NONE
$ wpa_cli –p /var/ run/wpa_supplicant select_network 0
2) WEP40 with open sy st em
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
$ wpa_cli –p /var/ run/wpa_supplicant ap_scan 1
$ wpa_cli –p /var/ run/wpa_supplicant add_network
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 ssid '"tplink" '
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 key_mgmt NO N E
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_key0 1234567890
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_tx_keyidx 0
$ wpa_cli –p /var/ run/wpa_supplicant select_network 0
3) WEP40 with shared key
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
$ wpa_cli –p /var/ run/wpa_supplicant ap_scan 1
$ wpa_cli –p /var/ run/wpa_supplicant add_network
$ wpa_cli –p /var/ r un/ wpa_supplicant set_network 0 ssid '"tplink"'
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 key_mgmt NO N E
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_key0 1234567890
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_tx_ keyid x 0
15
Page 17

$ wpa_cli –p /var/ run/wpa_supplicant select_network 0
$ wpa_cli –p /var/ run/wpa_supplicant ap_scan 1
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 auth_alg SH AR ED
4) WEP 104 with open system
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
$ wpa_cli -p /var/run/ wpa_supplicant ap_scan 1
$ wpa_cli -p /var/run/wpa_supplicant add_network
$ wpa_cli -p /var/run/ wpa_supplicant set_network 0 ssid '"tplink"'
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 key_mgmt NO N E
$ wpa_cli -p /var/run/ wpa_supplicant set_network 0 wep_key0
12345678901234567890123456
$ wpa_cli -p /var/run/ wpa_supplicant set_network 0 wep_tx_ k eyidx 0
$ wpa_cli -p /var/run/ wpa_supplicant select_network 0
5) WEP 104 with open sy st em
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
$ wpa_cli –p /var/ run/wpa_supplicant ap_scan 1
$ wpa_cli –p /var/run/wpa_supplicant add_ net w ork
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 ssid '"tplink" '
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 key_mgmt NO N E
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_key0
12345678901234567890123456
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 wep_tx_ keyid x 0
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 auth_alg SH AR ED
$ wpa_cli –p /var/ run/wpa_supplicant select_network 0
Note:
If the WEP key is ASCII, run the following command:
#WEP40: wpa_cli -p/var/run/wpa_supplica nt set _network 0 wep_key0 '"12345"'
#WEP104: wpa_cli -p/var/run/wpa_supplicant set _network 0 wep_key0
'"1234567890123"'
If the index for WEP key is 0-3, run the following command
#wpa_cli -p/var/run/wpa_supplicant set_n et work 0 wep_keyX
12345678901234567890123456
#wpa_cli -p/var/run/wpa_supplicant set_net w ork 0 wep_tx_keyidx X
6) TIKP/AES
$ wpa_cli –p /var/ run/wpa_supplicant remove_network 0
16
Page 18

$ wpa_cli –p /var/ run/wpa_supplicant select_network 0
$ wpa_cli –p /var/ run/wpa_supplicant add_network
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 ssid '"tplink" '
$ wpa_cli –p /var/ run/wpa_supplicant set_network 0 psk '"12 345678"'
4.3. Enable DHCP client
Run the following command
$ dhclient wlan1
After running the command, the adapter will get an IP assigned by the AP. Then you can
run the ping command to check if the wireless connection is successful.
Note:
1. Run the commands under the root ac count .
2. If you use ifconfig command to confirm you have obtained the IP address and use
ping command to confirm you wireless connection is successful, but the internet is
still unavailable, you can run the following commands to change the default system
17
Page 19

gateway to the router’s LAN IP.
$ route del default wlan0 //Delete the default gat eway of wlan0
$ route add default gw 192.168.1.1 //Add the router’s LAN IP as the default gateway.
18
 Loading...
Loading...