

Page 1

查询UCC2541PWPG4供应商
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
FEATURES
On-Chip Predictive Gate Drivet for
D
High-Efficiency Synchronous Buck
Operation
D Dual ±3-A TrueDrivet Outputs
D On-Board Programmable Oscillator with
1-MHz Frequency Operation
D TR Input for Sequencing Operation
D Overcurrent Protection using a Parallel
Average Current Mode Control Loop
D 3 Modes to Support 2.7-V to 35-V Input Bias
D Reverse Current Protection for Output Stage
D User Programmable Shutdown Using SS Pin
D ±1.0% Initial Tolerance Bandgap Reference
D High Bandwidth Error Amplifiers
D Thermally Enhanced HTSSOP 20-Pin
PowerPADt Package and QFN−32 Pin
D Synchronization Input
D Supports Pre-Bias Applications
SIMPLIFIED APPLICATION DIAGRAM
UCC2541
RSET
1
2
3
4
5
6
7
8
9
10
REF
G2C
SYNCIN
RAMP
GND
VEA−
CEA−
COMP
TR
SWS
BST
G1
SW
VDD
PGND
G2
VDRV
G2S
SS
20
19
18
17
16
15
14
13
12
11TR Input
APPLICATIONS
D
High Efficiency Non-Isolated Converters
Requiring Advanced Features such as
Pre-Bias Support and Tracking Capability
D Point-of-Load Modules for Servers, Telecom,
and Data communication Equipments
D Good for Input Voltages of 3.3 V, 5.0 V,
12.0 V, or Intermediate Bus Voltages
DESCRIPTION
The UCC2541 is a synchronous buck PWM
controller for high current and low output voltage
applications.
For higher efficiency, it incorporates the Predictive
Gate Drivet technology that virtually eliminates
body diode conduction losses in synchronous
rectifiers.
VIN
VOUT
Predictive Gate Drive, TrueDrive and PowerPAD are trademarks of Texas Instruments Incorporated.
!"#$ % &'!!($ #% )'*+&#$ ,#$(!,'&$% &!" $ %)(&&#$% )(! $.( $(!"% (/#% %$!'"($%
%$#,#!, 0#!!#$1- !,'&$ )!&(%%2 ,(% $ (&(%%#!+1 &+',(
$(%$2 #++ )#!#"($(!%-
www.ti.com
Copyright 2004, Texas Instruments Incorporated
1
Page 2

C
V
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
DESCRIPTION (CONT.)
The UCC2541 is available in the extended temperature range of –40°C to 105°C and is offered in thermally
enhanced PowerPADt 20-pin HTSSOP (PWP) or 32-pin quad flatpack (RHB) package. This space saving
package with standard 20-pin TSSOP footprint has a drastically lower thermal resistance of 1.4°C/W θ
accommodate the dual high-current drivers on board.
JC
to
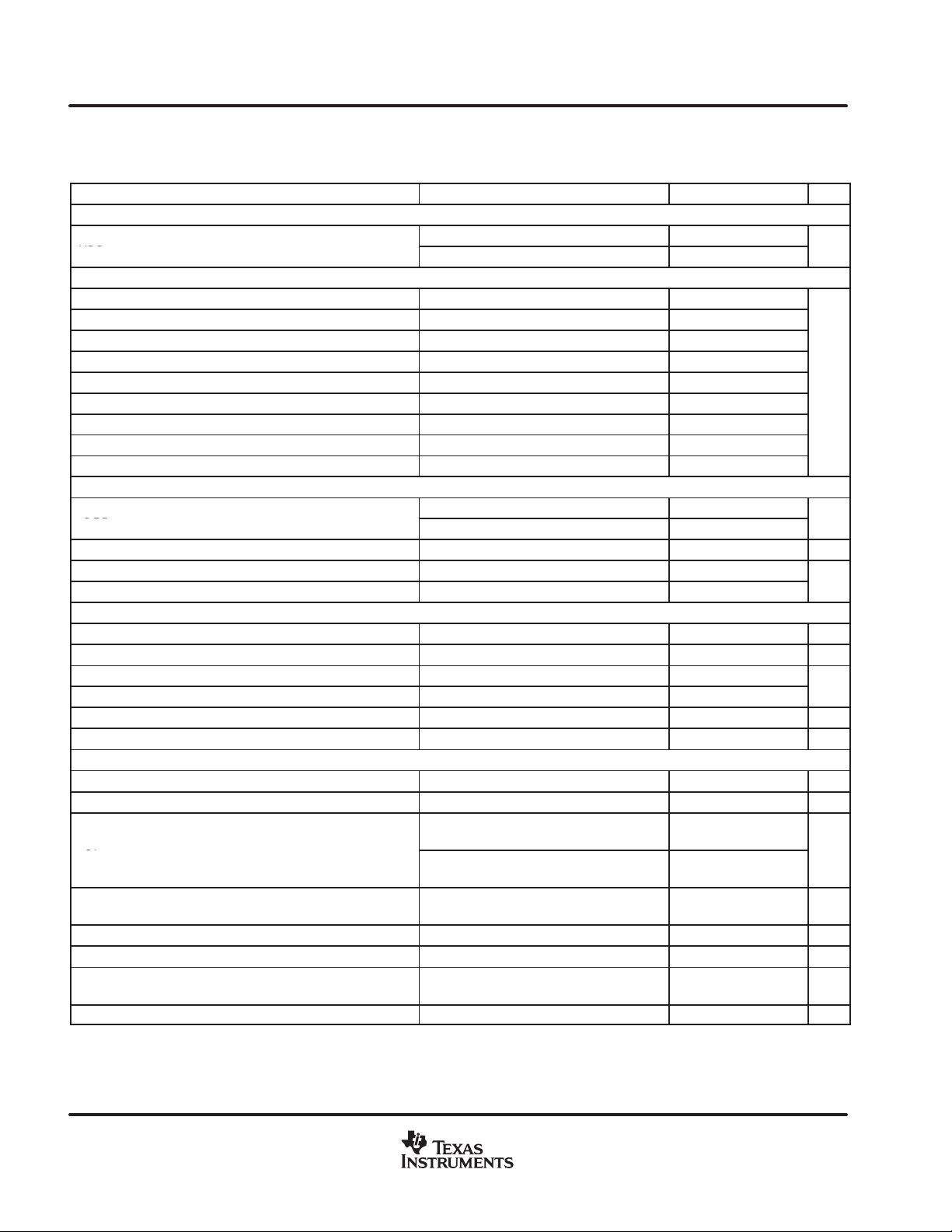
ABSOLUTE MAXIMUM RATINGS
over operating free-air temperature range (unless otherwise noted)
Supply voltage range, VDD 36 V
Supply current, I
Analog input voltages
Sink current (peak), I
Source current (peak), I
Operating junction temperature range, T
Storage temperature, T
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 300
(1)
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only,
and functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions”
is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
(2)
All voltages are with respect to GND. Currents are positive into, and negative out of the specified terminal.
VDD
OUT_SINK
OUT_SOURCE
J
stg
VDD 50 mA
CEA−, COMP, G2C, RAMP, SS, TR, VEA− −0.3 to 3.6
VDRV −0.3 to 9
G1, BST SW−0.3 to SW+9
SW, SWS −1 to 36
G2, G2S −1 to 9
SYNCIN −0.3 to 8.0
G1, G2 3.5
G1, G2 −3.5
(1)(2)
UCC2541 UNIT
−55 to 150
−65 to 150
RECOMMENDED OPERATING CONDITIONS
MIN TYP MAX UNIT
Supply voltage, VDD Mode 1 8.5 35
Supply voltage, VDRV Mode 2 4.75 9.00
Supply voltage, REF Mode 3 3.0 3.3 3.6
Supply voltage bypass, C
Reference bypass capacitor, C
VDRV bypass capacitor, C
BST−SW bypass capacitor, C
Timer current resistor range, R
PWM ramp capacitor range, C
Turn-off capacitor range, C
COMP pin load range, R
Junction operating temperature, T
VDD
REF
VDRV
BST−SW
RSET
RAMP
G2C
LOAD
J
1.0 2.2
0.1 1.0 2.2
0.2
0.1
10 50 kΩ
100 680
120 1000
6.5 kΩ
−40 105 °C
V
A
°C
V
µF
pF
2
www.ti.com
Page 3

TA = T
PWP PACKAGE
RHB PACKAGE
ORDERING INFORMATION
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
J
−40°C to +105°C UCC2541PWP UCC2541RHB
(1)
The PWP and RHB packages are also available at 73 devices per tube and taped and reeled at
3,000 devices per reel. Add an R suffix to the device type (i.e., UCC2541PWPR). See
the application section of the data sheet for PowerPAD drawing and layout information.
HTSSOP−20 (PWP)
Bulk Bulk
(1)
CONNECTION DIAGRAM
(TOP VIEW)
RSET
REF
G2C
SYNCIN
RAMP
GND
VEA−
CEA−
COMP
TR
1
2
3
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11
SWS
BST
G1
SW
VDD
PGND
G2
VDRV
G2S
SS
RSET
VREF
G2C
SYNCIN
RAMP
GND
VEA−
CEA−
NCNCNCNCNC
32
31
1
2
3
4
5
6
7
8
QFN−32 (RHB)
(TOP VIEW)
30
29
28
SWS
27
BST
26
BST
25
(1)
24
23
22
21
20
19
18
17
G1
G1
SW
VDD
PGND
PGND
G2
G2
9
COMP
NC − No internal connection
NOTE: The PowerPADt is not directly connected to any lead of the package, but is thermally connected to the substrate of the device. The
exposed dimension is 1.3 mm x 1.7 mm for the PWP package and 3.25 mm x 3.25 mm for the RHB package. However, the tolerances
can be +1.05 mm / −0.05 mm (+41 mils / −2 mils) due to position and mold flow variation.
10
TR
11
NC
12
NC
13
SS
14
G2S
15
NC
16
VDRV
THERMAL INFORMATION
PACKAGE
FAMILY
PowerPAD
HTSSOP−20
Quad Flatpack
QFN−32
PACKAGE
DESIGNATOR
PWP
RHB
θ
(°C/W)
JA
(with PowerPAD)
22.3 to 32.6
(500 to 0 LFM)
22.3 to 32.6
(500 to 0 LFM)
θ
(°C/W)
JC
(without PowerPAD)
19.9 1.4 125°C
19.9 1.4 125°C
θ
(°C/W)
JC
(with PowerPAD)
MAXIMUM DIE
TEMPERATURE
www.ti.com
3
Page 4
V
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
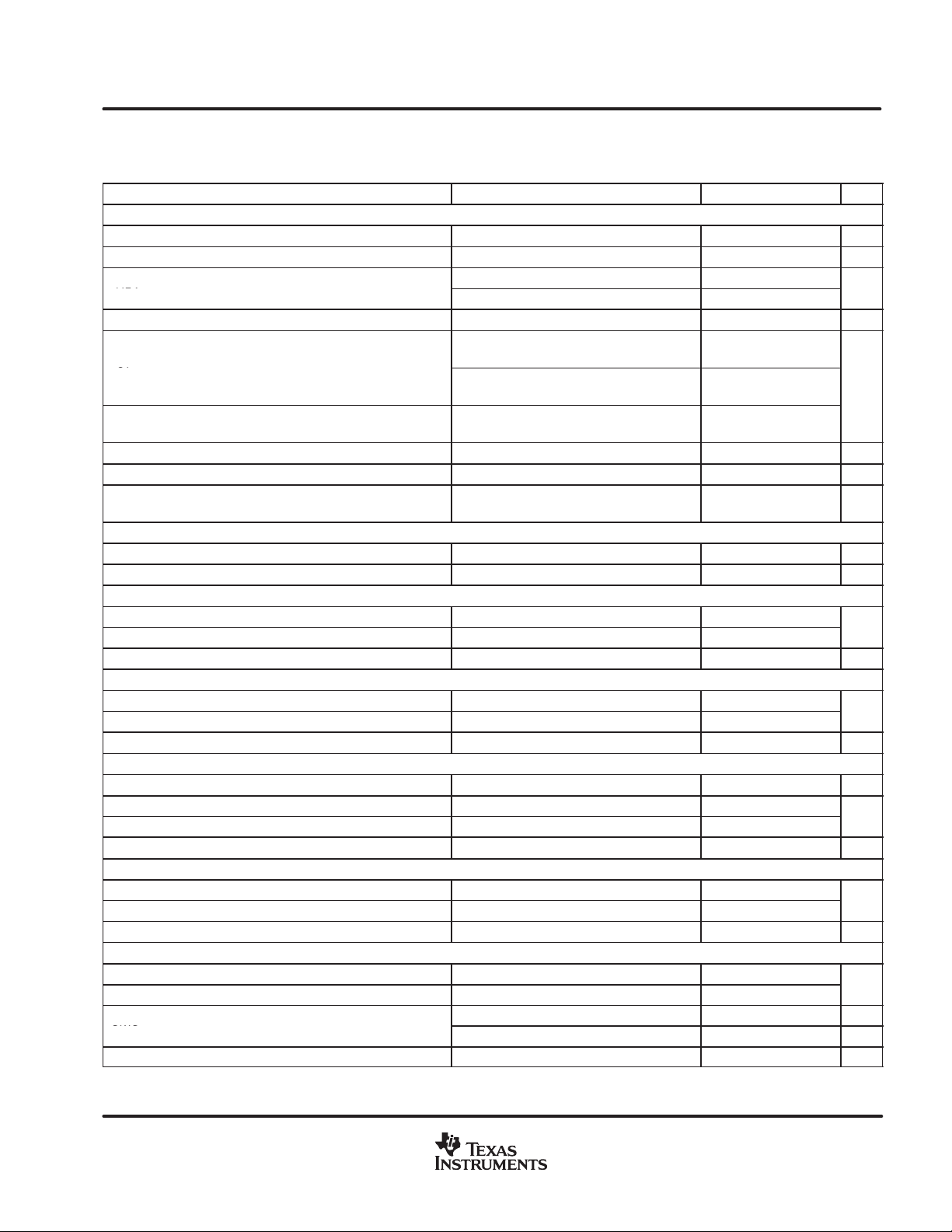
ELECTRICAL CHARACTERISTICS
VDD = 12 V, 1-µF capacitor from VDD to GND, 1-µF capacitor from BST to SW, 1-µF capacitor from REF to GND, 0.1-µF and 2.2-µF capacitors
from VDRV to PGND, C
RAMP
= 517 pF, R
= 10 kΩ, TA = TJ = −40°C to 105°C, (unless otherwise noted).
SET
PARAMETER
OVERALL
I
VDD
UNDERVOLTAGE LOCKOUT
V
VDD
V
VDD
V
VDD
V
VDRV
V
VDRV
V
VDRV
V
REF
V
REF
V
REF
VOLTAGE REFERENCE (REF)
V
REF
I
SC
OscillatorPWM (RAMP)
f
SW
D
MIN
V
RAMP
t
DEAD
I
RAMP
CURRENT ERROR AMPLIFIER
V
CEA+
GBW Gain bandwidth
V
OL
V
OH
A
VOL
I
BIAS
I
SINK
CMR Common mode input range
(3)
Ensured by design. Not production tested.
Operating current
Start threshold voltage MODE 1 8.0 8.5 9.0
Stop threshold voltage MODE 1 7.5 8.0 8.5
Hysteresis MODE 1 0.3 0.5 0.8
Start threshold voltage MODE 2 4.30 4.65 4.85
Stop threshold voltage MODE 2 4.0 4.3 4.6
Hysteresis MODE 2 0.15 0.35 0.55
Start threshold voltage MODE 3 V
Stop threshold voltage MODE 3 2.2 2.5 2.8
Hysteresis MODE 3 0.15 0.35 0.55
Reference output voltage
Short circuit current V
Line regulation 5.25 V ≤ V
Load regulation 0 mA ≤ I
Oscillator frequency 270 300 330 kHz
Minimum duty cycle 0%
Offset voltage 0.10 0.25 0.50
Oscillator peak voltage 1.7 2.0 2.3
G1 deadtime at maximum duty cycle ratio 150 175 200 ns
Ramp charge current R
Offset voltage Total variation 45 50 55 mV
(3)
Low-level output voltage
High-level output voltage
Open loop 60 100 160 dB
Bias current −200 −80 −10 nA
Sink current
(3)
TEST CONDITIONS MIN TYP MAX UNIT
DC, after G2 timeout 5 8 10
C
= 2.2 nF
LOAD
= V
VDD
VDRV
TA = 25°C 3.28 3.30 3.35
Total variation
= 0 V, TA = 25°C 10 13 20 mA
REF
≤ 7.2 V 0 1.5 15
DRV
≤ 5 mA 0 30 70
REF
= 10 kΩ −325 −300 −275 µA
RSET
I
COMP
V
VEA−
I
COMP
V
VEA−
I
COMP
V
VEA−
V
COMP
V
VEA−
= 0 A, V
= 2.0 V
= 100 µA, V
= 1 V
= 0 A, V
= 1 V
= 1.0 V, V
= 1 V
CEA−
CEA−
CEA−
CEA−
= 3.3 V,
= 1.5 V
= 0 V,
= 1.5 V,
9 18 30
2.5 2.8 3.2
3.2 3.3 3.4
3 4 MHz
0.1
0 0.60 0.90
2.2 2.5 3.0 V
0.30 0.80 1.70 mA
0 2 V
mA
V
V
mV
V
V
4
www.ti.com
Page 5
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
ELECTRICAL CHARACTERISTICS
VDD = 12 V, 1-µF capacitor from VDD to GND, 1-µF capacitor from BST to SW, 1-µF capacitor from REF to GND, 0.1-µF and 2.2-µF capacitors
from VDRV to PGND, C
RAMP
= 517 pF, R
= 10 kΩ, TA = TJ = −40°C to 105°C, (unless otherwise noted)
SET
PARAMETER
VOLTAGE ERROR AMPLIFIER
V
SS_OFF
V
TR_OFF
V
VEA+
GBW Gain bandwidth
V
OL
V
OH
A
VOL
I
BIAS
I
SINK
CURRENT SET
I
OUT
V
RSET
SYNCHRONIZATION AND SHUTDOWN TIMER (SYNCIN, G2C)
I
CHG(G2C)
SOFT-START (SS)
I
CH(SS)
I
DSCH(SS)
DRIVE REGULATOR (VDRV)
V
VDRV
I
SC
G2S GATE DRIVE SENSE
I
G2S
SWS SWITCH NODE SENSE
I
SWS
(3)
Ensured by design. Not production tested.
Offset voltage from soft-start input V
Offset voltage from tracking input VTR = 1.0 V −10 10 mV
Threshold voltage (from VEA− to COMP)
(3)
Low-level output voltage
High-level output voltage
Open loop 60 100 140 dB
Bias current −500 −250 −50 nA
Sink current
Output current R
R
voltage R
SET
Timer threshold 2.3 2.5 2.7
SYNCIN threshold 1.50 1.65 1.80
Shutdown timer charge current R
Charge current R
Discharge current R
Discharge/shutdown threshold 0.35 0.45 0.55 V
Output voltage 6.87 7.20 7.53 V
Line regulation 9 V ≤ V
Load regulation −5 mA ≤ I
Short-circuit current 15 30 50 mA
G2S rising threshold voltage V
G2S falling threshold voltage V
Current V
SWS rising threshold voltage V
SWS falling threshold voltage V
Current
Negative threshold voltage −0.5 −0.3 −0.1 V
TEST CONDITIONS MIN TYP MAX UNIT
= V
COMP
0°C ≤ TA ≤ 105°C 1.485 1.500 1.515
Total variation
I
COMP
V
VEA−
I
COMP
V
VEA−
I
COMP
V
VEA−
V
COMP
V
VEA−
RSET
RSET
RSET
RSET
RSET
SWS
SWS
G2S
G2S
G2S
V
SWS
Outputs disabled
VEA−, VSS−
= 0 A, V
= 2.0 V,
= 100 µA, V
= 1 V, VTR = 0 V
= 0 A, V
= 1 V
= 1.0 V, V
= 1.0 V, VTR = 0 V
= 10 kΩ −158 −150 −142 µA
= 10 kΩ 1.42 1.50 1.58 V
= 10 kΩ −325 −300 −275 µA
= 10 kΩ −230 −200 −170
= 10 kΩ 45 70 100
≤ 35 V 0 50 100
VDD
≤ 0 mA 0 50 100
VDRV
= 0 V 1.90 2.25 3.10
= 0 V 1.00 1.25 1.30
= 0 V −0.70 −0.50 −0.37 mA
= 0 V 1.90 2.25 2.90
= 0 V 1.0 1.2 1.3
= 0 V −1.8 −1.3 −0.9 mA
= 1.5 V 0.40 0.75 1.00 V
1.47 1.50 1.53
3 4 MHz
= 3.3 V,
CEA−
= 0 V,
CEA−
CEA−
CEA−
= 0 V
= 0 V,
0 0.60 0.9
2.2 2.5 3.0
0.30 0.80 1.70 mA
−1.0 1.0 µA
0.1
V
V
V
µA
mV
V
V
www.ti.com
5
Page 6
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
ELECTRICAL CHARACTERISTICS
VDD = 12 V, 1-µF capacitor from VDD to GND, 1-µF capacitor from BST to SW, 1-µF capacitor from REF to GND, 0.1-µF and 2.2-µF capacitors
from VDRV to PGND, C
RAMP
= 517 pF, R
= 10 kΩ, TA = TJ = −40°C to 105°C, (unless otherwise noted)
SET
PARAMETER
G1 MAIN OUTPUT
R
SINK
R
SRC
I
SINK
I
SRCE
t
RISE
t
FALL
G2 SYNCHRONOUS RECTIFIER OUTPUT
R
SINK
I
SINK
I
SRC
t
RISE
t
FALL
V
OH
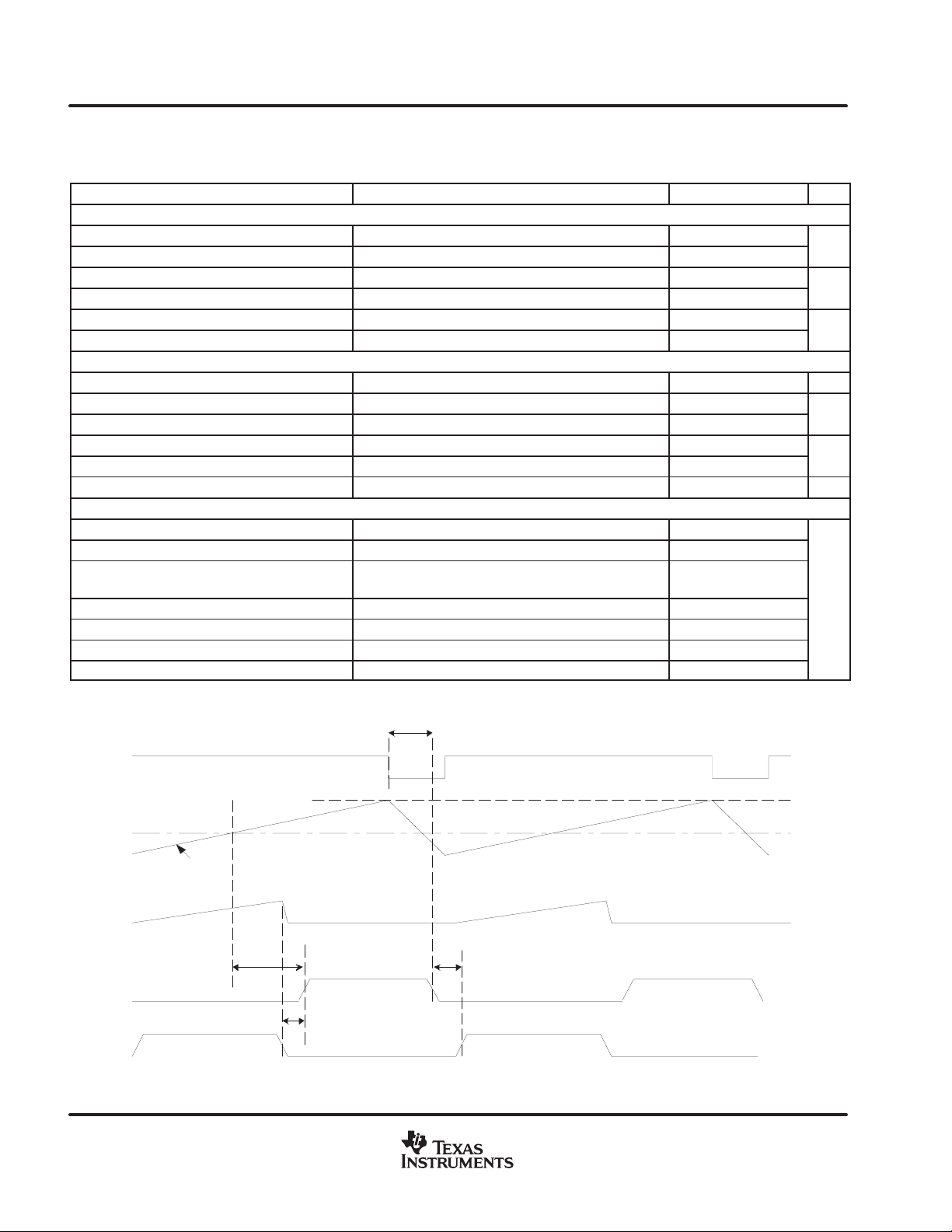
DEADTIME DELAY (see Figure 1)
t
ON(G1)
t
OFF(G1)
t
ON(G2)
t
OFF(G2)
t
ON(G2)
t
ON(G2)
t
OFF(G2)
t
OFF(G2)
(3)
Ensured by design. Not production tested.
Sink resistance VSW = 0 V, V
Source resistance VSW = 0 V, V
Sink current
Source current
Rise time C
Fall time C
Sink resistance VG2 = 0.3 V 5 15 30 Ω
Sink current
Source current
Rise time C
Fall time C
High-level output voltage, G2 VSW = GND 6.2 6.7 7.5 V
RAMP rising to G1 rising 90 115 130
SYNCIN falling to G1 falling 50 70 90
Delay control resolution 3.5 5.0 6.5
G2 on-time minimum wrt G1 falling −24
G2 on-time maximum wrt G1 falling 62
G2 off-time minimum wrt G1 rising −68
G2 off-time maximum wrt G1 rising 10
(3)
(3)
(3)
(3)
TEST CONDITIONS MIN TYP MAX UNIT
= 6 V, VG1 = 0.3 V 0.3 0.7 1.3
BST
= 6 V, VG1 = 5.7 V 10 25 45
BST
VSW = 0 V, V
VSW = 0 V, V
= 2.2 nF, from G1 to SW 12 25
LOAD
= 2.2 nF, from G1 to SW 12 25
LOAD
VG2 = 3.25 V 3
VG2 = 3.25 V −3
= 2.2 nF, from G2 to PGND 12 25
LOAD
= 2.2 nF, from G2 to PGND 12 25
LOAD
t
OFF,G1
= 6 V, VG1 = 3.0 V 3
BST
= 6 V, VG1 = 3.0 V −3
BST
Ω
A
ns
A
ns
ns
CLK
2.0V
V
ERR
RAMP
G2C
G1
G2
t
ON,G1
t
OFF,G2
t
ON,G2
Figure 1. Predictive Gate Drive Timing Diagram
6
www.ti.com
Page 7
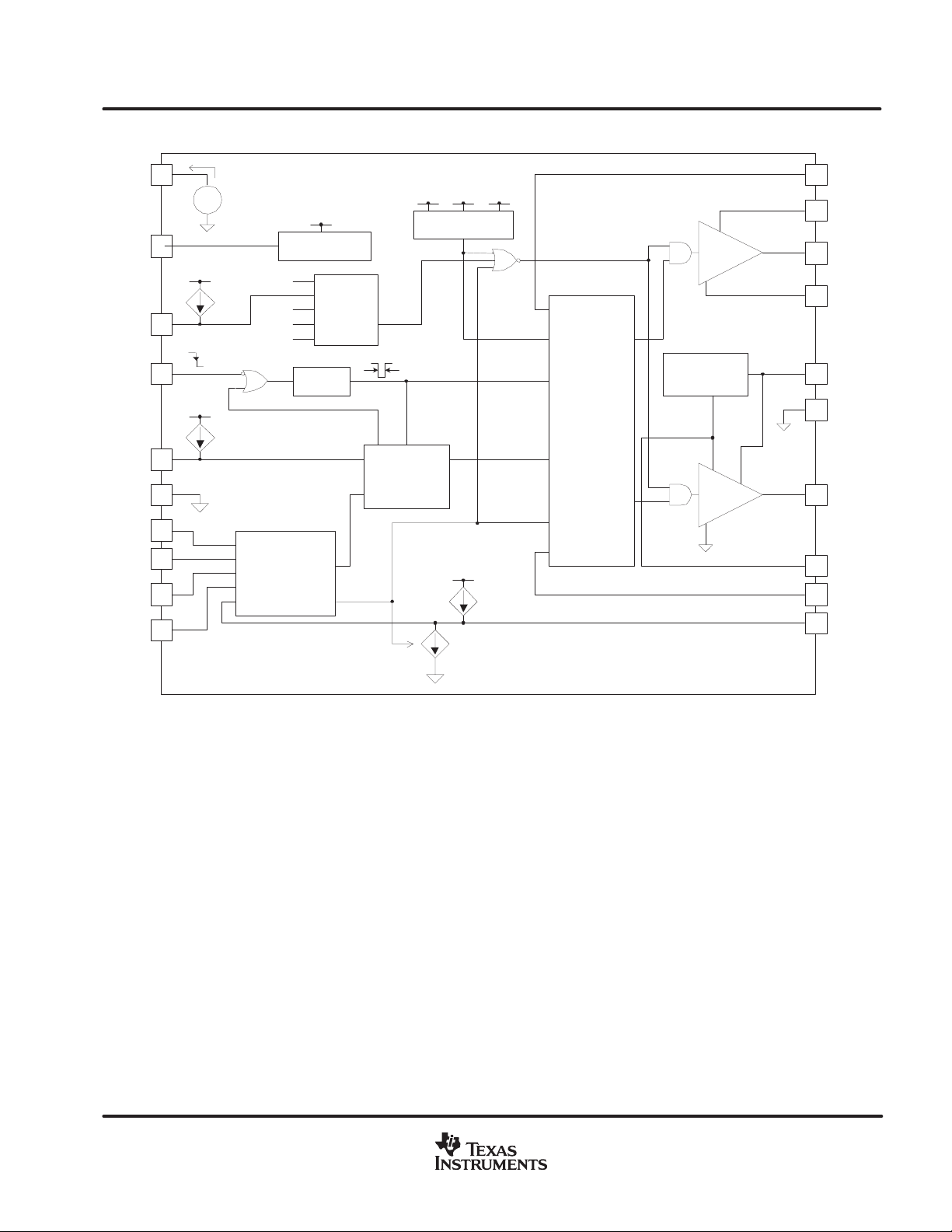
FUNCTIONAL BLOCK DIAGRAM
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
RSET
REF
G2C
SYNCIN
RAMP
GND
VEA−
CEA−
COMP
TR
10
1
2
3
4
5
6
7
8
9
+
−
VREF
VREF
I
SET
1.5V
VREF
2 I
SET
2 I
SET
AMPLIFIERS
FAULT LOGIC
REFERENCE
G1D
GLO
G2
UVLO
ERROR
AND
V
DRV
G2 TIMER
CLK
GEN
RAMP
VERR
G2TO
OSCILLATOR
PWM LOGIC
HUP
100ns
RAMP
&
VREF
UVLO
CLK
VREF
1.73 I
VDDVDRV
1.33 I
SET
UVLO
PWM
SET
GLO
PREDICTIVE
LOGIC
PWR
G1D
DRIVE
REGULATOR
BIAS
PWR
PGND
HIGH SIDE
DRIVER
PGND
LOW SIDE
DRIVER
20
19
18
17
16
15
14
13
12
11
SWS
BST
G1
SW
VDD
PGND
G2
VDRV
G2S
SS
www.ti.com
7
Page 8
I/O
DESCRIPTION
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
PIN ASSIGNMENTS
TERMINAL
NAME NO.
BST 19 I
CEA− 8 I Inverting input of the current error amplifier used for output current regulation.
COMP 9 I Output of the voltage and current error amplifiers for compensation.
G1 18 O High-side gate driver output that swings between SW and BST.
G2 14 O Low-side gate driver output that swings between PGND and VDRV.
G2C 3 I
G2S 12 I
GND 6 −
PGND 15 − Ground return for the G2 driver. Connect PGND to the pc-board ground plane with several vias.
RAMP 5 I Input pin to connect timing capacitor to GND to generate the oscillator PWM ramp.
(1)
REF
RSET 1 I
SS 11 I
SYNCIN 4 I Input pin for timing signal. Tie to logic high (V
SW 17 − G1 driver return connection.
SWS 20 I
TR 10 I Tracking input to the voltage error amplifier. Connect to REF when not used.
VDD 16 I
VDRV 13 I
VEA− 7 I Inverting input of the voltage error amplifier used for output voltage regulation.
(1)
REF is an input in Mode 3 only.
2 I/O
Floating G1 driver supply pin. VHI is fed by an external Schottky diode during the SR MOSFET on time. Bypass
BST to SW with an external capacitor.
Timer pin to turn off synchronous rectifier. The capacitor connected to this pin programs the maximum duration
that G2 is allowed to stay HIGH.
Used by the predictive deadtime controller for sensing the SR MOSFET gate voltage to set the appropriate deadtime.
Ground for internal circuitry. GND and PGND should be tied together under the device. See layout guidelines for
further details.
3.3-V reference pin. All analog control circuits are powered from this 3.3-V rail. Bypass this pin with at least 0.1
µF of capacitance for REF loads that are 0 mA to −1 mA. Bypass this pin with at least 1 µF of capacitance if it is
used as an input (Mode 3) or if it has large or pulsating loads.
Pin to program timer currents for G2C, RAMP, SS charge and SS discharge. This pin generates a current proportional to the value of the external resistor connected from RSET pin to GND. RSET range is 10 kΩ to 50 kΩ (giving a programmable nominal ISET range of 30 µA to 150 µA, respectively).
Soft start and shutdown pin. Connect a capacitor to GND to set the soft-start time. Add switch to GND for immediate shutdown functionality.
) when not used.
REF
Used by the predictive controller to sense SR body-diode conduction. Connect to SR MOSFET drain close to the
MOSFET package.
Power supply pin to the device and input to the internal VDRV drive regulator. Normal VDD range is from 4.5 V to
36 V. Bypass the pin with at least 1 µF of capacitance.
Output of the drive regulator and power supply pin for the G2 driver. VDRV is also the supply voltage for the internal logic and control circuitry.
8
www.ti.com
Page 9

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
The UCC2541 is a high-efficiency synchronous buck controller that can be used in many point-of-load
applications.
CEA− and VEA− pins: Current Limit and Hiccup Mode
Typical power supply load voltage versus load current is shown in Figure 2. This figure shows steady state
operation for no-load to overcurrent shutdown (soft-start retry is not depicted in the diagram). During the voltage
regulation conditions, the voltage error amplifier output is lower than the current error amplifier, allowing the
voltage error amplifier to control operation. During the current limit conditions, the current error amplifier output
is lower than the voltage error amplifier, allowing the current error amplifier to control operation. The boundary
between voltage and current control occurs when the difference between CEA− and VEA− tries to exceed
50 mV.
Current limiting begins to occur when the difference between CEA− and VEA− exceeds 50 mV. For currents
that exceed this operating condition, the UCC2541 controls the converter to operate as a pure current source
until the output voltage falls to half of its rated steady state level. Then the UCC2541 sets both G1 and G2 outputs
to LOW and it latches a fault that discharges the soft-start voltage at 30% of its charging rate. The UCC2541
inhibits a retry until the soft-start voltage falls below 0.5 V. A functional diagram of the voltage and current error
amplifiers is shown in Figure 3.
V
REG
Limited
Current
− Load Voltage − V
LOAD
V
Shutdown
I
− Load Current − A
LOAD
Figure 2. Typical Power Supply Load Voltage vs Current
UDG−04053
www.ti.com
9
Page 10
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
From Power MOSFET
Switch Node
CST
R
S
R
SS
LOAD
TR
0.7 V
+
1.5 V
+
+
+
+
50 mV
+
Z
FV
Z
IV
Voltage
Error
Amplifier
Current
Error
Amplifier
R
FV
R
FI
R
C
C
1.5 V
FV
FI
ZFV
1.5 R
+
Inverting
Amplifier
V
ERR
Modulator
COMP
UCC2541
to
9
C
R
R
I1
V1
VEA−
7
CEA−
8
C
R
I2
R
V2
FIR
ZIV
Figure 3. Error Amplifier Configuration
Component selection includes setting the voltage regulation threshold, then the current limit threshold, as
described below.
Voltage vs. Current Programming (refer to Figure 3):
R
1. Determine the ratio
2. Sense resistor
V
offset = 50 mV (typ).
CEA+
V1
R
V2
+
R
S
3. Arbitrarily select either R
V
+
V
VEA*
R
ǒ
V1
1 )
R
V2
or RV2 so that the smallest of the two resistors is between 6.5 kΩ and 20 kΩ.
V1
LOAD(reg)
) Threshold Voltage
V
Ǔ
offset voltage
CEA)
I
S(max)
* 1V+
, where I
V
LOAD(reg)
1.5 V (typ)
S(max)
* 1V
is the current limit level,
Then calculate the value of the other resistor using the equation in the first step.
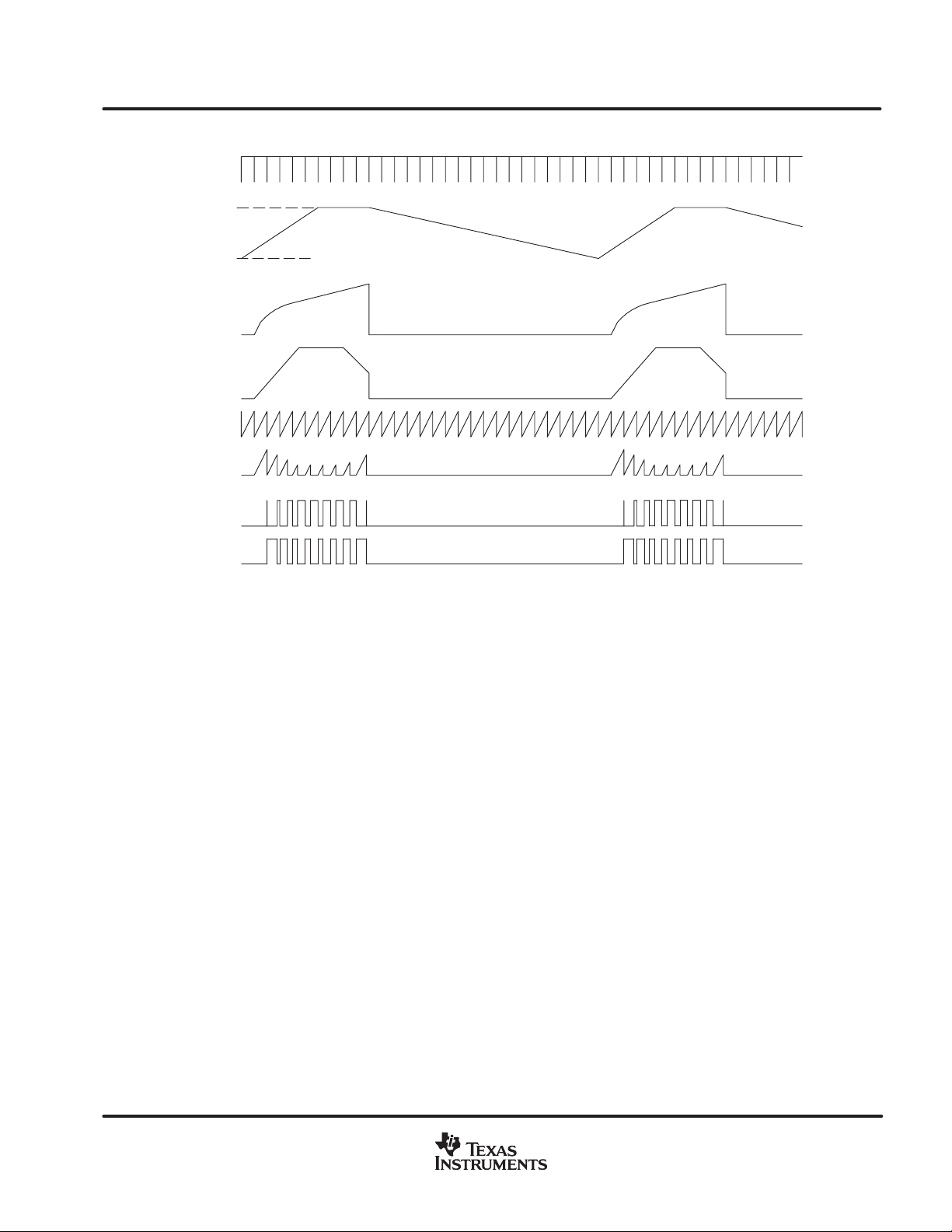
If the converter is in a current-limit condition and the output voltage falls below half of the regulated output
voltage, the UCC2541 enters into a hiccup (restart-retry) mode. Figure 4 shows typical signals during hiccup
mode.
10
www.ti.com
Page 11
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
SYNCIN
3.3 V
SS
0.5 V
I
LOAD
V
LOAD
RAMP
G2C
G1
G2
Figure 4. Typical Hiccup Mode waveforms
COMP, VEA− and CEA− pins: Voltage and Current Error Amplifiers
From no-load to full rated load operating conditions, the UCC2541 operates as a voltage mode controller . Above
the programmed rated current, there are two levels of over current protection; constant current limit and
overcurrent reset/retry. This section gives suggestions on how to design the voltage controller and current
controller so that they interact with one another in a stable fashion. Refer to the functional diagram of the voltage
and current error amplifiers in Figure 3. The voltage error amplifier in the figure shows three non-inverting inputs.
The lowest of the three non-inverting inputs (1.5 V, SS and TR) is summed with the inverting input to achieve
the voltage error signal. The lowest of the two outputs drives the inverting stage which in turn, drives the
modulator.
During steady state voltage control operation, the feedback elements in the current loop have no effect on the
loop stability. When current limit occurs, the voltage error amplifier effectively shuts OFF and the current error
amplifier takes control. During steady state current limit operation, the negative feedback elements in the
voltage error amplifier loop become positive feedback elements in the current error amplifier loop. In order for
the current error amplifier to be stable, the impedances in the feedback path of the current error amplifier must
be lower than the impedances in the feedback path of the voltage error amplifier. This means that resistors in
the current error amplifier negative feedback path must be less than the resistors in the voltage error amplifier
negative feedback path. Also capacitors in the current error amplifier negative feedback path must be larger
than capacitors in the negative feedback path of the voltage error amplifier negative feedback path.
(Capacitance is really an admittance value rather than an impedance value). This concept is illustrated in
Figure 3.
UDG−04046
In order for the current loop to be stable in Figure 3, ||Z
can be achieved if R
< RFV and C
FI
FI
> CFV.
www.ti.com
|| must be less than ||ZFV|| over all frequencies. This
IV
11
Page 12

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
Another issue that can occur during current limit operation is modulator stability. In order for the modulator to
be stable, the rising slope of the current ripple measured at the COMP pin must be smaller than the rising slope
that is measured at the RAMP pin. This can be met either in the selection of the ratio of ||Z
the addition of a capacitor in parallel to R
In some applications, this current and voltage error amplifier configuration may lead to difficulties with startup
at turn on and with restarting after current limit hiccup operation. A small capacitor from CEA− to ground can
filter this node to alleviate this issue. This capacitor is shown as C
Stable Dynamic Current Loop Design (refer to Figure 3):
1. Using any favorite approach, design the voltage error amplifier for stable voltage mode design. Use at least
15 kΩ for any resistors in the negative feedback path of the voltage error amplifier (between pins 9 and 7).
This does not apply to resistance values between the power supply output voltage and pin 7; it also does
not apply to resistance values between ground and pin 7.
2. The goal is to design the current limit control loop so that it drives the converter to maintain 50 mV between
the VEA− pin and the CEA− pin during current-limit conditions. Select the current sense element and the
voltage divider ratios for the VEA− pin to ground and the CEA− pin to ground to provide the desired current
limit level.
and CFI, such as C
FI
, in Figure 3.
FIR
in Figure 3.
ST
|| to ||ZFV||, or by
IV
3. Place the same configuration of components in the negative feedback path of the current error amplifier
(between pins 9 and 8), that are in the negative feedback path of the voltage error amplifier (between pins
9 and 7). However, use resistors with values that are 67% of the corresponding resistors that are between
pins 9 and 7 and use capacitors that are 150% of the corresponding capacitors that are between pin 9 and
pin 7.
4. Check the COMP signal. If it is unstable, place a capacitor (or increase the capacitance) between pins 9
and 8 in order to attenuate the current ripple. Raise the value of the capacitor until the COMP pin voltage
becomes stable. Compare the COMP voltage with the RAMP voltage. With stable operation, the rising slope
of the COMP voltage ripple is less than the rising slope of the RAMP pin.
12
www.ti.com
Page 13

(1)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
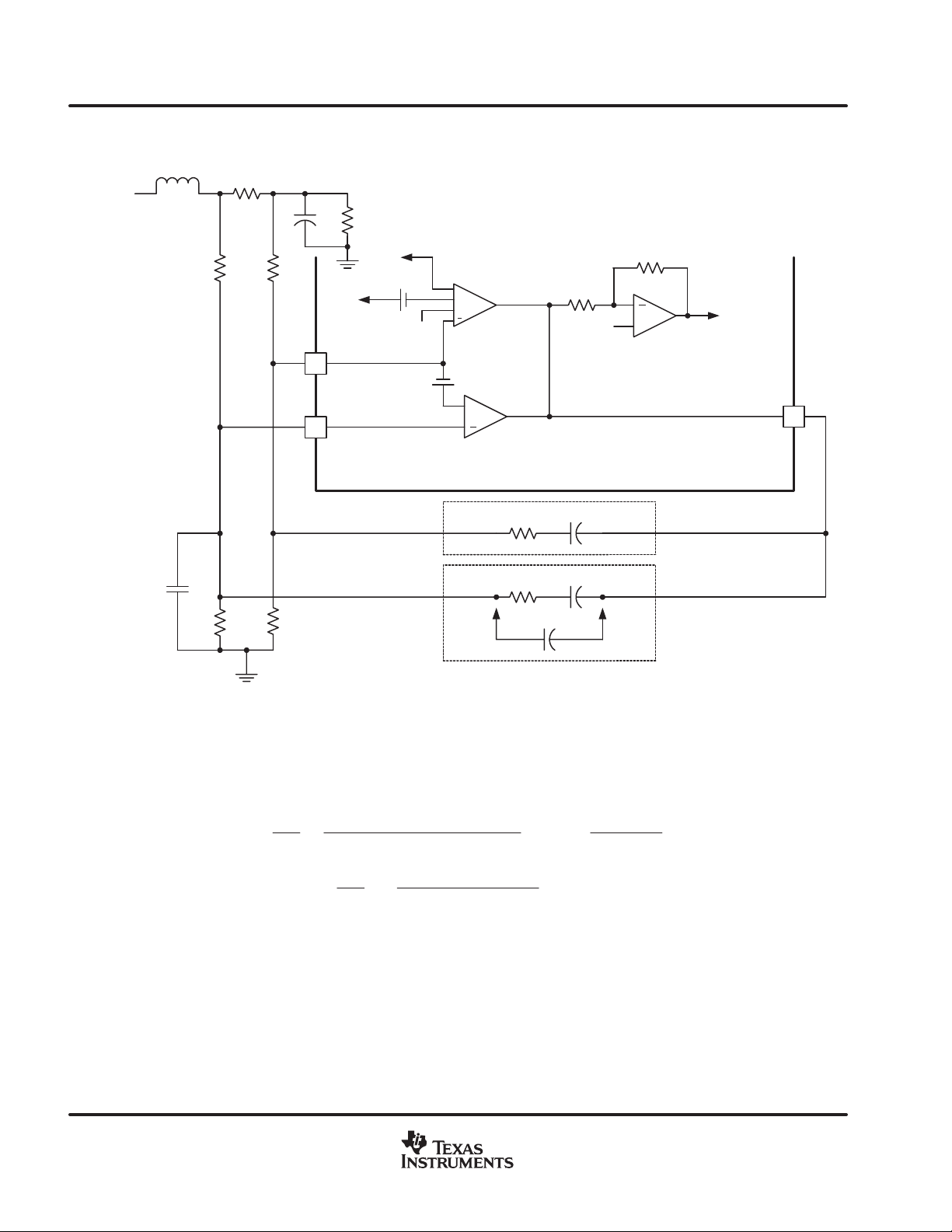
RSET, RAMP, G2C, SS pins: Programming the Timer Currents
Set the base current to the timers with a resistor between RSET and GND. The block diagram of the UCC2541
shows the interaction of the RSET pin and the dependent current sources for the RAMP, G2C and SS features.
The RSET pin is a voltage source; the current of the RSET pin is reflected and multiplied by a gain and distributed
to the RAMP (gain = 2), G2C (gain = 2) and SS (charge gain = 1.33, net discharge gain = 0.4). The resistance
applied to the RSET pin and GND should be in the range of 10 kΩ < R
are programmed by the selection of capacitors tied between each of their respective pins and GND.
G2C pin: G2 Timer for Output Stage Reverse Current Protection
3
G2C
2 y I
RSET
2.5 V
G2 Timeout
Comparator
+
*G1D
< 50 kΩ. RAMP, G2C and SS timers
RSET
G2C
Latch
SQ
R
Q
D
G2TO
C
G2C
GLO
G2
UVLO
*G1 with delay, but not blanked
UDG−04047
Figure 5. Functional diagram of the G2 Timer
The G2C pin programs the maximum duration of the synchronous rectifier to facilitate low or zero duty ratio
operation. Figure 5 shows the functional diagram. This function is programmed by connecting a capacitor
between the G2C pin and GND. The capacitor on G2C should be slightly larger than the capacitor on the RAMP
pin. For best results, program the typical G2 time limit to be between 1.5 and 3 times the switching period (T).
Notice that when the G2 timer reaches its limit, both G1 and G2 are forced to a LOW output. This feature
prevents the current in the output inductor from excessive negative excursions during zero-duty ratio conditions.
Program the G2 time-out (G2TO) duration using equation (1):
C
G2C
+
2 V
R
RSET
RSET
G2 Timeout Duration
G2C Timer Threshold
, Farads
where
D V
D 1.5 T < G2 Timeout Duration < 3T
RSET
= 1.5 V(typ)
S
D G2C Timer Threshold = 2.5 V (typ)
www.ti.com
13
Page 14

(2)
(3)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
RAMP pin: Oscillator and PWM Ramp
The RAMP pin serves two purposes: (1) a capacitor on this pin sets the oscillator charging time to program the
frequency of operation for the converter and (2) the peak voltage on RAMP defines the gain of the PWM
modulator. The UCC2541 has a leading edge modulator that compares the error output with the RAMP voltage.
A diagram of the oscillator and PWM modulator is shown in Figure 6.
The current charging the capacitor from RAMP to ground is equal to 2 x I
edge modulation, a switching cycle can be considered to begin when the oscillator ramp reaches 2.0 V. This
voltage level triggers the negative-going clock signal which enables the RAMP discharge transistor and
simultaneously sends a G1 turn-off command to the PWM control. The internal clock signal is held low for
approximately 100 ns, and this sets the maximum desired value for the capacitor on the RAMP pin. Note that
the RAMP discharge transistor must also sink 2 x I
2 y I
RSET
5
RAMP
ENA
CLK
CLK
Figure 6. Oscillator and PWM Modulator
The oscillator frequency is programmed by proper selection of the resistor connected to RSET (pin 1) and the
capacitor connected to RAMP (pin 5). With RSET selected within the preferred range of 10 kΩ to 50 kΩ the
RAMP capacitor C
can be selected from:
RAMP
GEN
V
ERR
2.0 V
while it is discharging the external RAMP capacitor.
RSET
PWM
COMPARATOR
0.25V
+
OSC RAMP
COMPARATOR
+
−
4
SYNCIN
PWM
LATCH
−
S
+
Q
R
Q
D
. In the UCC2541, with leading
RSET
PWM
1
ǒ
1.5
RAMP
I
RAMP
I
RSET
+
Ǔ
ǒ
V
V
RAMP(pk)
C
where fsw is the desired switching frequency, and R
derived by summing the time required for a linear current source to change the RAMP capaitor with the internal
delay of approximately 100 ns. The constant term 1.5 is equal to:
ǒ
14
f
SW
RSET
* 100 ns
R
SET
Ǔ
Ǔ
is the resistor connected to pin 1. This expression is
SET
www.ti.com
Page 15

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
The UCC2541 can be synchronized to an external source if an external SYNCIN signal (falling edge) is applied
to pin 4 before the oscillator reaches 2.0 V. The internal circuitry uses the falling edge on SYNCIN to generate
the 100-ns internal clock signal and turn off G1. The free-running frequency programmed by the internal
oscillator/RAMP capacitor should be approximately 20% lower than an intended external sync frequency. The
SYNCIN pin should be tied to V
900
800
if not used.
REF
OSCILLATOR FREQUENCY
vs
TIMING RESISTOR
700
600
500
400
300
− Oscillator Frequency − kHz
200
SW
f
100
0
10 20 30 40 50
150 pF
680 pF
V
VDD
270 pF
390 pF
− Timing Resistor − kΩ
Figure 7
VDD, VDRV, VREF and BST pins: Modes of Operation
Depending on the available bias voltage for the UCC2541, the startup, shutdown, and restart conditions are
different. There are three distinct configurations or modes of biasing the UCC2541. The mode is detected and
latched into an internal register during power-up when VREF crosses 2 V. The register is cleared when VDD,
VDRV and VREF are simultaneously less than 1 V. A summary of the modes and their programming
requirements are listed in Table 1.
Table 1. Modes and Programming Requirements
V
Mode
1 8.5 to 36 VDD [16] V
2 4.75 to 8.5 VDRV [13] V
3 3.0 to 3.6 VREF [2] V
BIAS
Range (V)
Bias Pin
UVLO ON
(V)
= 8.5 V
VDD
= 4.65 V
VDRV
= 2.8 V
REF
UVLO OFF
(V)
= 8.0
VDD
= 4.3
VDRV
= 2.5
REF
www.ti.com
Mode Requirement
at Power-Up and
V
VREF
VDD
VDRV
REF
ǒ
u
V
VDRV
ǒ
u
V
VDD
ǒ
u
V
VDD
V
V
V
= 2 V
and V
and V
and V
REF
REF
VDRV
Remarks
Ǔ
Widest line operation
Ǔ
Needs regulated bias and low
Ǔ
VTH power MOSFETs
15
Page 16

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
VDD, VDRV, VREF and BST pins: Modes of Operation (cont.)
D Mode 1, or normal operation requires the availability of a bias of 8.5 V or higher for the device. Here, the
bias drives the VDD pin. The low-side drive bias, V
and it directly draws current from the VDD pin. The high-side driver bias is a flying capacitor that is charged
from the VDRV pin through the G2 pin, when G2 is HI, via a diode between G2 and BST. The UCC2541
operates in Mode 1 if V
range of bias voltages, operational from 8.5 V < V
have a 12 V
bias supply already available.
DC
VDD
> (V
VDRV
and V
VREF
D Mode 2 is suitable for applications where the bias is typically 5 V (between 4.5 V and 8.0 V). The bias
voltage is applied to the VDRV terminal of the UCC2541. The high-side driver bias is a flying capacitor that
is charged from the VDRV pin through the G2 pin, when G2 is HI. Bias voltage to the VDD pin is obtained
through an external voltage-doubler charge pump. If the system uses low threshold voltage power
MOSFETs, VDD can be directly tied to the VDRV pin. The bias voltage could be either a bus converter output
or an auxiliary supply.
D Mode 3 is for synchronous buck converter applications where the bias voltage is a regulated 3.3-V source.
This is a common main output voltage in multiple output power converters. The bias voltage is applied to
the VREF pin of the UCC2541. The UCC2541 operates in Mode 3 if it detects (V
when V
Assorted combinations of modes and biasing schemes are shown in Figure 7 through Figure 12. In Mode 1 and
Mode 2, the bias voltage can either be an independent auxiliary supply or it can be supplied by the power stage
voltage, as shown in Figure 7 through Figure 11. A regulated auxiliary supply must be used with Mode 3 because
the tolerance of the VREF voltage is the control tolerance of the UCC2541. In Mode 3, the regulated auxiliary
supply can be independent of the power supply input voltage (as shown in Figure 12), or the regulated auxiliary
supply can be the same source as the power supply input voltage.
rises above 2 V.
VREF
= 7 V, is generated from an internal linear regulator
VDRV
) when V
< 35 V. This mode is compatible with systems that
VDD
rises above 2 V. Mode 1 permits the widest
VREF
> V
VREF
VDRV
and VDD)
16
www.ti.com
Page 17

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
UCC2541
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
2
C2 C3 C4
C1
D1
8.5 V ≤ V
Q1
Q2
VDD
≤ 35 V
Figure 8. Mode 1 With Combined Power/Bias for Input Voltages Between 8.5 V and 35 V
UCC2541
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
2
C2 C3 C4
C1
D1
AUX Bias
8.5 V ≤ V
≤ 35 V
VDD
0 V ≤ VIN ≤ 35 V
Q1
Q2
UDG−04038
UDG−04039
Figure 9. Mode 1 With Separate Power/ Bias Voltages Between 8.5 V and 35 V
www.ti.com
17
Page 18

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
UCC2541
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
D2
D4
2
C2 C3 C4
C1
D1
C5
4.75 V ≤ V
D3
Q1
Q2
Bias and Power
≤ 8.0 V
VDRV
Figure 10. Mode 2 With Common Bias and Power Input Voltages Between 4.75 V and 8.0 V
AUX BiasUCC2541
4.75 V ≤ V
0 V ≤ VIN ≤ 35 V
Q1
Q2
VDRV
≤ 8.0 V
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
D2
D4
D3
2
C2 C3 C4
C1
D1
C5
UDG−04040
UDG−04041
18
Figure 11. Mode 2 With Separate Power/ Bias (4.75 V and 8.0 V)
www.ti.com
Page 19

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
UCC2541
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
2
C2 C3 C4
C1
D1
AUX Bias
4.75 V ≤ V
≤ 8.0 V
VDRV
0 V ≤ VIN ≤ 35 V
Q1
(Low VTH)
Q2
(Low VTH)
UDG−04042
Figure 12. Mode 2 With Auxiliary Biasing for Bias Voltages Between 4.75 V and 8.0 V and Logic Level or
Low Threshold Power MOSFET Transistors
UCC2541
Predictive
Logic
Drive (7.2 V)
Regulator
VREF (3.3 V)
Regulator
High−Side
Driver
Low−Side
Driver
VDD
VDRV
VREF
BST
G1
SWS
SW
G2
G2S
PGND
16
13
19
18
20
17
14
12
15
2
C2 C4
C1
D1
C5
Regulated 3.3-VDC Bias
D3D2
DC or Pulse Train
1.8 V ≤ VIN ≤ 5 V
Q1
(Low VTH)
Q2
(Low VTH)
Figure 13. Mode 3 With Regulated 3.3-VDC Bias, Low Threshold Power MOSFETs
www.ti.com
UDG−04043
19
Page 20

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
Figure 14 illustrates a combined operational mode (referred to as Mode 4) which allows a converter operating
from intermediate bus voltages ranging from 6 V to >14 V to safely cross the boundary between Mode 1 and
Mode 2 operation. A simple circuit utilizing an NPN transistor , zener diode, and resistor allows the circuit to start
under the control of Mode 2 UVLO thresholds. Once the power stage is operational VDD is pumped up by D2
and D3 and the internal VDRV regulator raises VDRV to 7.2 V, shutting off the NPN transitor. The zener clamp
on the NPN base prevents VDRV voltage rating from being exceeded during 12-V startup. It should be noted
the circuit will run down to input voltages below 3.5 V, shutting o ff when VDRV has fallen to its turn-off threshold
of 4.3 V.
D2 D3
1
2
3
4
5
6
7
8
UCC2541
RSET
REF
G2C
SYNCIN
RAMP
GND
VEA−
CEA−
SWS
BST
G1
SW
VDD
PGND
G2
VDRV
20
19
18
17
16
15
14
13
D1
6.2V
5k
VIN = 6−14V
VOUT
20
10
9
COMP
TR
G2S
SS
12
11
Figure 14. Mode 4 Operation
www.ti.com
Page 21

(4)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
Charge Pump Capacitor Selection
Capacitors C1 through C5 are all part of a charge distribution network that allows the UCC2541 to pass charge
to the MOSFET gates of Q1 and Q2 (all reference designators in this section refer to the schematics in Figure 8
through Figure 13). This section gives guidelines on selecting the values of C1 through C5 so that the converter
functions properly. Specific capacitor values may need to be larger than the recommended value due to
MOSFET characteristics, diode D1 – D4 characteristics and closed-loop converter performance. All three
modes of operation require a charge pump capacitor and diode, C1 and D1, in order to drive the high-side power
MOSFET. Modes 2 and 3 require additional charge pump capacitors and diodes in order to supply voltage to
VDD. In general, all charge pump diodes should be Schottky diodes in order to have low forward voltage and
high speed. The charge pump capacitors should be ceramic capacitors with low effective series resistance
(ESR), such as X5R or X7R capacitors.
The value of the charge pump capacitor C1 depends on the power MOSFET gate charge and capacitance, the
voltage level of the Miller plateau threshold, the forward drop of D1 and the closed-loop response time. The
unloaded high-side gate driver typically draws 2 nC of charge per rising edge plus 30 µA of direct current from
C1. Usually, the unloaded high−side gate driver load is miniscule compared to the gate charge requirements
of the high-side power MOSFET, Q1. Typical values for C1 are approximately 50 to 100 times the input
capacitance (C
where C1 does not have sufficient time to fully recharge. If C1 is excessively large, its ESR and ESL prevents
it from recharging during transients, including the start-up transient.
) of MOSFET Q1. This usually allows for transient operation at extremely large duty ratio,
ISS
Capacitors C2 through C5 are then selected based on the direction of charge transfer and the requirements of
the UCC2541. Selection guidelines are shown in Table 2. Keep in mind that each converter design may require
adjustments for larger capacitor ratios than those that are suggested in Table 2. The selection process begins
at the left side of Table 2 and progresses towards the right side of the table, which is the reverse order of the
charge flow during the first few cycles of start-up. If iteration is required in the design process, review the
progression of the capacitors in the order from left to right that is shown in the table.
Table 2. Charge Pump and Bias Capacitor Selection Guidelines
Mode
1 C1 > 50 C
2 C1 > 50 C
3 C1 > 50 C
High-Side Drive
Capacitor (≥ 0.1 µF)
ISS
ISS
ISS
For Modes 2 and 3, the VDD filter capacitor, C4, in Table 2 must supply the I
VDRV Filter
Capacitor
C3 > 2 × C1 C2 > 0.1 µF C4 > 1 µF n/a
C3 > 2 × C1 C2 > 0.1 µF C4 > 1 µF, 2 × C3 C5 > 2 × C4
C4 > 1 µF
2 × C1
VREF Filter
Capacitor
C2 > 1.0 µF C4 > 1 µF, 2 × C1 C5 > 2 × C4
VDD Filter
Capacitor
VDD
VDD Charging
Capacitor
idle current to the UCC2541
(approximately 11 mA) plus the charge to drive the gates G1 and G2. Capacitor C4 must be large enough to
sustain adequate operating voltages during start-ups and other transients under the full operational I
current. Knowing the operating frequency and the MOSFET gate charges (QG), the average I
current can
VDD
VDD
be estimated as:
I
VDD
D where f
+ I
VDD(idle)
is switching frequency
S
ǒ
)
QG1) Q
G2
Ǔ
f
S
In order to prevent noise problems, C4 must be at least 1 µF. Furthermore, it needs to be large enough to pass
charge along to the power MOSFET gates. Thus C4 often needs to have at least twice the capacitance of the
VDRV filter capacitor, as shown in Table 2.
www.ti.com
21
Page 22

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
Output Stage
The UCC2541 includes dual gate drive outputs and each is capable of ±3-A peak current. The pull-up/ pull-down
circuits of the driver are bipolar and MOSFET transistors in parallel. High-side and low-side dual drivers provide
a true 3-A high-current capability at the MOSFET’s Miller Plateau switching region where it is most needed. The
peak output current rating is the combined current from the bipolar and MOSFET transistors. The output
resistance is the R
saturation voltage of the bipolar transistor.
The output drivers can switch from VDD to GND. Each output stage also provides a very low impedance to
overshoot and undershoot. This means that in many cases, external-schottky-clamp diodes are not required.
The outputs are also designed to withstand 500-mA reverse current without either damage to the device or logic
upset.
of the MOSFET transistor when the voltage on the driver output is less than the
DS(on)
For additional information on drive current requirements at MOSFET’s Miller plateau region, refer to the Power
Supply Seminar SEM−1400
[3]
.
Predictive Gate DriveTM Technology
The Predictive Gate Drive technology maximizes efficiency by minimizing body diode conduction. It utilizes
a digital feedback system to detect body diode conduction, and adjusts the deadtime delays to minimize the
conduction time interval. This closed loop system virtually eliminates body diode conduction while adjusting for
different MOSFETs, temperature, and load dependent delays. Since the power dissipation is minimized, a
higher switching frequency can be utilized, allowing for a smaller component size. Precise gate timing at the
nanosecond level reduces the reverse recovery time of the synchronous rectifier MOSFET body diode, which
reduces reverse recovery losses seen in the main (high-side) MOSFET. Finally, the lower power dissipation
results in increased reliability.
19 BST
G1
18
17
SW
Predictive
Logic
VDRV
20
12
SWS
G2S
14
G2
15
PGND
Figure 15.
For additional information on Predictive Gate Drive control and efficiency comparisons to earlier adaptive
delay and adaptive control techniques, refer to the Application Note SLUA285
22
www.ti.com
[1]
.
UDG−02149
Page 23

(5)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
VDD and IDD
Although quiescent VDD current is low, total supply current is higher, depending on output gate drive
requirements and the programmed oscillator frequency. Total VDD current (I
current and the average output currents of G1 and G2, as described in equation (5). Knowing the operating
frequency and the MOSFET gate charge (Q
I
+ QG f
G
S
), average driver output current, per gate, can be calculated from:
G
where
D f
is switching frequency
S
To prevent noise problems, connect a 1-µF ceramic capacitor between the VDD and GND pins. Place the 1-µF
ceramic capacitor as close to the UCC2541 as possible. This capacitor is in addition to any electrolytic energy
storage capacitors that may be used in the bias supply design.
Soft-Start and Tracking Features
Separate pins are provided for the soft-start feature and the tracking feature. Soft-start or tracking (sequencing)
can be easily implemented with this configuration using a minimum number of external components. During a
power-up transient, the converter output tracks the lower of the SS voltage, the TR voltage or a 1.5-V internal
reference, provided the system is not in current limit. In other words, the voltage control loop is closed during
power-up, provided the system is not current limited. Figure 16 shows the UCC2541 configured for soft-start
operation. For applications that do not use the tracking feature, connect the TR pin to either SS or REF, as shown
in the figure. Remote shutdown and sequential power-up can be easily implemented as a transistor switch
across C
SS
.
) is the sum of quiescent VDD
VDD
C
SS
TR
SS
VEA−
10
11
7
HUP
REF (3.3 V)
1.33 y I
RSET
0.7 V
1.73 y I
+
1.5 V
RSET
UVLO
+
+
+
50 mV
+
Figure 16. Using the Soft-Start Feature
UCC2541
Voltage
Error
Amplifier
COMP
To Positive Input of
Current Error Amplifier
UDG−04045
www.ti.com
23
Page 24

(6)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
The soft-start interval begins when the UCC2541 recognizes that the appropriate voltage (see Mode 1, 2 or 3)
is above the UVLO level. The voltage of C
3.3V. Regulation should be reached when the soft-start voltage reaches about 2.2 V (1.5 V plus a diode drop).
Select a C
C
capacitor value using equation (5) to program a desired soft-start duration, ∆tSS.
SS
+ 1.33
SS
V
R
RSET
SET
Dt
DV
SS
+ 1.33
SS
If a UVLO fault is encountered, both outputs of the UCC2541 are disabled and the soft-start pin (SS) is
discharged to GND. The UCC2541 does not retry until the UVLO fault is cleared.
Using the TR pin, the UCC2541 can be programmed to track another converter output voltage. If the voltage
to be tracked is between 0 V and 3.3 V, simply connect the TR pin to the voltage to be tracked with a resistor
that is approximately equal to the DC impedance that is connected to the VEA− terminal (R
If the voltage is above that range, use a voltage divider, again with an equivalent resistance that approximately
equals the DC impedance that is connected to the VEA− terminal. Other strategies can be used to achieve
sequential, ratiometric or simultaneous power supply tracking
An implementation of sequential sequencing using TPS3103K33
in Figure 17. Applications where the loads include a processor with a core voltage of 1.5 V and I/O ports that
require 3.3 V can require sequential sequencing in order to resolve system level bus contention problems during
start-up. In this circumstance the core must power-up first, then after an initialization period of 130 ms, the ports
are allowed to power-up. This is illustrated in Figure 18.
From dc Power Source
TPS3103K33
VDD
RESET
GND
PFO
MR
PFI
then linearly increases until it is clamped at the REF voltage of
SS
1.5 V
R
C
SS
1 kΩ
SET
Dt
SS
2.2 V
UCC2541
SS
1.6 kΩ
Farads
[4]
.
[2]
in a multiple output power supply
G1TR
G2
|| RV2, in Figure 3).
V1
I/O
3.3 V
[4]
is shown
24
10 kΩ
C
SS
UCC2541
REF
TR
SS
G1
G2
Figure 17. Sequencing a Multiple Output Post Regulated Power Supply
www.ti.com
Core
1.5 V
UDG−04061
Page 25

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
Regulation loss due to
loss of primary line
voltage
3.3
V − Voltage − V
1.5
1.43
0
V
CORE
130 ms
V
I/O
t − Time
UDG−04061
Figure 18.
Using the TR pin, the UCC2541 can be programmed to ratio-metrically track another converter output voltage
[4]
Ratio-metric tracking is when the ratio of the output voltages is constant from zero volts to the point where one
or more of the outputs lock into regulation. The TR pin is easier to use for tracking than the SS pin because the
external currents that would be applied to the SS pin may interfere with SS discharge currents and fault recovery.
It should be understood that the voltage that is being tracked must lag the bias voltages (VDD, VDRV and REF)
on start-up and lead the bias voltages during shutdown. Furthermore, the output that is being tracked must not
reach its steady state DC level before the output that is tracking reaches its steady state DC level. Figure 18
illustrates the concept of programming an output voltage V
M
Main Power Supply
(Leader)
+
V
M
M
, to ratio-metrically track another output, VM.
C
V
M
(Leader)
V
C
M
C
(Tracker)
(a)
ratio−metric
sequencing
.
Core Power Supply
(Trader)
UCC2541
7TR
Tracking Ratio
V
M
M
M
+
V
C
M
C
ǒ
A
T
Ǔ
^
M
M
M
C
M
M
M
C
(Leader)
V
C
(Tracker)
V
M
(Leader)
V
C
(Tracker)
(b)
simultaneous
sequencing
(c)
ratio−metric
sequencing
UDG−04061
Figure 19. Ratio−Metric Tracking
www.ti.com
25
Page 26

(7)
(8)
(9)
(10)
(11)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
The general circuit to program the UCC2541 to track the leader supply voltage by the tracking ratio AT is shown
in Figure 20. To program the tracking profile gains G
that is listed below. The special case of simultaneous sequencing for V
R
= RV1 and RT2= RV2, GT2 is not needed. In many other cases, the circuit can be simplified with the removal
T1
of the operational amplifier for G
and the Zener clamping diode. If an operational amplifier is necessary, it
T2
should be capable of rail to rail operation and usually low voltage bias; the TLV271 is an inexpensive solution
for both of those requirements. Notice that the tracking circuit in Figure 20 also has a soft-start capacitor, C
The soft-start capacitor is useful for limiting the time between short-circuit retry attempts and it can prevent
overshoot when recovering from a fault that is experienced in only the tracking supply but not the main supply.
Ratio-Metric Tracking Design Procedure (see Figures 22 and 23)
1. Determine the tracking ratio, AT.
M
A
where MC and MM are the soft-start slopes of VC and VM, respectively.
C
+
T
M
M
and GT2, follow the ratio-metric tracking design procedure
T1
> 1.5V is the simplest to design; set
M
SS
.
2. Determine G
+
G
V
.
V
R
V2
RV1) R
V2
where RV2 and RV1are selected when designing the voltage control loop.
3. Test G
a. If G
G
if necessary when VM ≤ 1.5 V or ATGV > 1.
T2
is needed, set GT2 so that both equations (8) and (9) apply.
T2
R
T2
+ 1)
F1
R
F2
so that both of the following apply:
G
+
T2
b. If G
4. Set G
T1
+
G
T1
5. Select R
1.5 V
ǒ
V
M
is not needed, set GT2 = 1.
T2
.
AT G
G
T2
and R
T1
G
V
Ǔ
T1
+
so that R
T2
and G
R
T2
RT1) R
T1
T2
T2
|| R
u
T2
ǒ
AT G
≈ R
V1
|| R
Ǔ
V
to minimize offset differences.
V2
26
www.ti.com
Page 27

9
Z
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
R
F2
TLV271
G
+
T1
RT1) R
*D
needed only if VMGT1GT2 > 3 V
R
F1
+
R
T1
R
T2
R
T2
T2
GT2+ 1 )
Use GT2 stage if
ATGV > 1 OR if
VMGT1 ≤ 1.5 V at
steady-state
*D
Z
3.3 V
CSS
R
F1
R
F2
Rectified Secondary Voltage
UCC2541
G1TR
G2
SS
VEA−
R
V1
R
V2
Determined by voltage loop design
+
G
V
R
V2
RV1) R
Main
Power
Supply
(Leader)
nV
0 V
V2
+
V
M
IN
+
V
C
UDG−0405
Figure 20. Programming the UCC2541 to Track Another Output
More elaborate power supply sequencing and tracking can easily be implemented by extending the above
techniques. Consult Reference [4] for further information.
The following schematic shows an example POL (point of load) converter capable of delivering 20 A at 2.5 V
from an unregulated IBC (intermediate bus converter) providing 9 V to14 V. In this application, the UCC2541
is configured to operate in Mode 1, and the converter turns ON when the UCC2541 UVLO threshold of 8.5 V
is exceeded. The upper input voltage rating is limited by the MOSFET and capacitor voltage ratings, not the
UCC2541. For lower current requirements from 10 A to15 A a single lower MOSFET would suffice.
www.ti.com
27
Page 28

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
VIN=9−14V
22uF
22uF
Q1:
HAT2168H
0.18uF
1N5819
VOUT=2.5V
0.0032
2.2uH
POSCAP
2 x 330uF
Q2: 2 x
1uF
HAT2165H
0.39uF
787
17.8k
0.22uF
2.2nF
17.8k
IC through PowerPAD
GND and PGND tied together under
20
SWS
UCC2541
RSET
1
10k
19
18
17
16
15
14
13
12
G1
BST
REF
2
0.1uF
G2C
3
SW
SYNCIN
4
680pF
VDD
RAMP
5
470pF
PGND
GND
6
270pF
G2
VEA−
7
15k
3.3nF
VDRV
CEA−
8
8.2k
G2S
COMP
9
6.8nF
Figure 21. 20-A POL (Point of Load) Converter
11
SS
TR
10
26.7k26.7k
1nF
28
www.ti.com
Page 29

(12)
(13)
(14)
(15)
(16)
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
APPLICATION INFORMATION
In the 20-A converter the output current is sensed by R4. The UCC2541 limits output current when the CEA−
(pin 8) exceeds the V
up by the reciprocal of the output feedback divider ratio given by:
− (pin 7) by 50 mV . To select the current sense resistor the 50-mV signal must be gained
EA
R8
R8 ) R9
For this 2.5-V output, the divider ratio is 0.6, and the following calculation can determine the typical voltage
across the sense resistor to begin current limit operation:
RSNS
ǒ
PP
SNS
RSNS
+ V
1
*
f
S
+
1.2 IL
+ I
V
The peak inductor ripple current should also be considered in R
inductor current calculated during the OFF-time of the converter:
dI
with VO=2.5 V, VIN=12 V, fS=300 kHz, and L1=2.2 µH. In this design IL1, peak =21.5 A.
For a 20-A converter with current limiting at 20% overload the sense resistor can be calculated as:
R
With this value of sense resistor the average power dissipation can be calculated to be:
P
Low value current sense resistors are commonly available in 1-W surface mount packages, so two packages
should be paralleled to meet the power dissipation requirements in high current designs, and the final value used
will be a compromise of available components. In surface mount applications a Kelvin connection to the sense
resistor is not easily attainable, so the connection resistance from the sense resistors to the PCB must be
included in the effective sense resistance.
R12
+
R12 ) R10
+
R4
V
O
VIN f
V
RSNS
2
R
OUT
1
50 mV + 83.3 mV
0.6
V
O
Ǔ
+ 3A
S
PEAK
L
83.3 mV
+
1.2 21.5 A
+ 20 A2 3.2 mW + 1.28 W
SNS
PP
+ 3.2 mW
selection, and is 1/2 the peak-to-peak
SNS
The voltage and current feedback component magnitudes were ratioed according to the discussion in section,
COMP, VEA− AND CEA− pin: V oltage and Current Error Amplifiers. In this application, the optional component
CFIR was not needed. However , a 1-nF capacitor (CST in Figure 3) was needed to filter the C
the converter to start at turn on and to restart after current limit hiccup operation.
www.ti.com
− signal to allow
EA
29
Page 30

0
RAMP CURRENT
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
THERMAL INFORMATION
The useful temperature range of a controller that contains high-current output drivers is greatly affected by the
drive power requirements of the load and the thermal characteristics of the device package. In order for a power
driver to be useful over a particular temperature range the package must allow for the efficient removal of the
heat produced while keeping the junction temperature within rated limits. The UCC2541 is available in the 20-pin
HTSSOP PowerPADt package and also the 32-pin QFN PowerPAD
TM
The PowerPAD
offers the most effective means of removing the heat from the semiconductor junction and
therefore long term reliability improvement. As illustrated in [5], the PowerPAD packages offer a leadframe die
pad that is exposed at the base of the package. This pad is soldered to the copper on the PC board directly
underneath the device package, reducing the θjc down to 2°C/W. Data is presented in [5] to show that the power
dissipation can be quadrupled in the PowerP ADt configuration when compared to the standard packages. The
PC board must be designed with thermal lands and thermal vias to complete the heat removal subsystem, as
summarized in [6] to realize a significant improvement in heat−sinking over standard non-PowerPADt surface
mount packages.
TYPICAL CHARACTERISTICS
TM
package.
3.40
3.35
3.30
− Reference Voltage − V
3.25
VREF
V
3.20
−50
OUTPUT REFERENCE VOLTAGE
vs
TEMPERATURE
0
TJ − Junction Temperature − °C
50 100 150
Figure 22
vs
TEMPERATURE
−275
−285
−295
−305
− Ramp Current − µA
RAMP
I
−315
−325
−50 0 50 100 15
TJ − Junction Temperature − °C
R
Figure 23
RSET
= 10 kΩ
30
www.ti.com
Page 31

0
REGULATOR OUTPUT VOLTAGE
OSCILLATOR FREQUENCY
0
CURRENT ERROR AMPLIFIER OFFSET
0
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
TYPICAL CHARACTERISTICS
I
G2C/IRAMP
1.1
I
G2C/IRAMP
1.0
I
G2C/IRAMP
0.9
0.8
µA/µA
0.7
0.6
0.5
ISS/I
ISS/I
−50 0 50 100 150
, R
, R
, R
RAMP
, R
RAMP
TJ − Junction Temperature − °C
AND ISS/I
vs
TEMPERATURE
= 10 kΩ
RSET
= 50 kΩ
RSET
= 10 kΩ
RSET
= 50 kΩ
RSET
RAMP
Figure 24
vs
7.6
MODE 1
7.4
7.2
− Regulator Output Voltage − V
7.0
VDRV
V
6.8
−50 0 50 100 15
TEMPERATURE
TJ − Junction Temperature − °C
Figure 25
vs
TEMPERATURE
600
550
500
450
400
350
− Oscillator Frequency − kHz
300
SW
f
250
200
−50 0 50 100 15
C = 450 pF
C = 270 pF
TJ − Junction Temperature − °C
Figure 26
vs
55
53
51
49
47
− Current Error Amplifier Offset Voltage − m V
CEA−
V
45
−50 0 50 100 15
TEMPERATURE
TJ − Junction Temperature − °C
Figure 27
www.ti.com
31
Page 32

INVERTING AMPLIFIER GAIN AND PHASE
CURRENT ERROR AMPLIFIER GAIN AND PHASE
VOLTAGE ERROR AMPLIFIER GAIN AND PHASE
SLUS621A − AUGUST 2004 − SEPTEMBER 2005
SYNCIN THRESHOLD VOLTAGE
vs
1.80
TEMPERATURE
TYPICAL CHARACTERISTICS
5
vs
FREQUENCY
0
1.75
1.70
1.65
− Timing Signal Voltage − V
1.60
SYNCHIN
1.55
V
1.50
−50 0 50 100 150
TJ − Junction Temperature − °C
Figure 28
vs
FREQUENCY
120
100
80
Gain
0
−45
Gain − dB
−5
−10
−15
−20
−25
120
100
0
Phase
Gain
10 k 100 M1 k 1 M
100 k 10 M
f − Frequency − Hz
−45
−90
−135
−180
−225
−270
Phase − °
Figure 29
vs
FREQUENCY
Gain
80
0
−45
60
Gain − dB
40
20
−20
−40
Phase
0
100 1 k 10 M 100 M10
f − Frequency − Hz
100 k 1 M10 k1
Figure 30
32
−90
−135
−180
www.ti.com
Phase − °
60
40
Gain − dB
20
0
−20
−40
−90
Phase − °
Phase
−135
−180
100 1 k 10 M 100 M10 100 k 1 M10 k1
f − Frequency − Hz
Figure 31
Page 33

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
TYPICAL CHARACTERISTICS
OPERATING CURRENT (DC)
vs
12
10
8
BIAS VOLTAGE
6
− Bias Current − mA
4
VDD
I
2
0
5 1525304003510 20
V
− Bias Voltage − V
VDD
Figure 32
5.0 V/div.
5.0 V/div.
t − Time − 20 ns/div
Figure 33. Predictive Gate Drive − G2 Falling
www.ti.com
33
Page 34

SLUS621A − AUGUST 2004 − SEPTEMBER 2005
RELATED PRODUCTS
UCC27223 High Efficiency Predictive Synchronous Buck Driver with Enable
D
D UCC2540 High-Efficiency Secondary-Side Synchronous Buck PWM Converter
D TPS40070/1 High-Efficiency Midrange Input Synchronous Buck Controller With Voltage Feed-Forward
REFERENCES
1. Application Note, Predictive Gate DriveE FAQ, by Steve Mappus (SLUA285)
2. Datasheet, TPS3103K33 Ultra-Low Supply Current/Supply Voltage Supervisory Circuits, (SLVS363)
3. Power Supply Seminar SEM−1400 Topic 2: Design And Application Guide For High Speed MOSFET Gate
Drive Circuits, by L. Balogh, (SLUP133)
4. Power Supply Seminar SEM1600 Topic 2: Sequencing Power Supplies in Multiple Voltage Rail
Environments, by D. Daniels, D. Gehrke, and M. Segal, (SLUP224)
5. Technical Brief, PowerPAD Thermally Enhanced Package, (SLMA002)
6. Application Brief, PowerPAD Made Easy, (SLMA004)
34
www.ti.com
Page 35

www.ti.com
35
Page 36

www.ti.com
36
Page 37

10 11
TR SS
www.ti.com
37
Page 38

VIN=9−14V
22uF
22uF
VOUT=2.5V
2 x 330uF
0.0032
POSCAP
787
2.2nF
17.8k
20
SWS
19
BST
Q1:
HAT2168H
0.18uF
18
G1
2.2uH
1N5819
17
SW
16
VDD
1uF
15
PGND
Q2: 2 x
HAT2165H
14
G2
13
VDRV
0.39uF
12
G2S
17.8k
0.22uF
11
SS
IC through PowerPAD
GND and PGND tied together under
UCC2541
RSET
1
10k
0.1uF
REF
2
G2C
3
SYNCIN
4
680pF
RAMP
5
470pF
GND
6
270pF
VEA−
7
15k
3.3nF
CEA−
8
8.2k
COMP
9
6.8nF
TR
10
26.7k26.7k
1nF
Page 39

www.ti.com
39
Page 40

PACKAGE OPTION ADDENDUM
www.ti.com
21-Nov-2005
PACKAGING INFORMATION
Orderable Device Status
(1)
Package
Type
Package
Drawing
Pins Package
Qty
Eco Plan
UCC2541PWP ACTIVE HTSSOP PWP 20 70 Green (RoHS &
no Sb/Br)
UCC2541PWPG4 ACTIVE HTSSOP PWP 20 70 Green (RoHS &
no Sb/Br)
UCC2541PWPR ACTIVE HTSSOP PWP 20 2000 Green (RoHS &
no Sb/Br)
UCC2541PWPRG4 ACTIVE HTSSOP PWP 20 2000 Green (RoHS &
no Sb/Br)
UCC2541RHBR ACTIVE QFN RHB 32 3000 Green (RoHS &
no Sb/Br)
UCC2541RHBT ACTIVE QFN RHB 32 250 Green (RoHS &
no Sb/Br)
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in
a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
(2)
Lead/Ball Finish MSL Peak Temp
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
(3)
(2)
Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS) or Green (RoHS & no Sb/Br) - please check
http://www.ti.com/productcontent for the latest availability information and additional product content details.
TBD: The Pb-Free/Green conversion plan has not been defined.
Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements
for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered
at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.
Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame
retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
(3)
MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder
temperature.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is
provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the
accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take
reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on
incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited
information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI
to Customer on an annual basis.
Addendum-Page 1
Page 41

Page 42

Page 43

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,
enhancements, improvements, and other changes to its products and services at any time and to discontinue
any product or service without notice. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete. All products are sold subject to TI’s terms
and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI
deems necessary to support this warranty . Except where mandated by government requirements, testing of all
parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for
their products and applications using TI components. To minimize the risks associated with customer products
and applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,
copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process
in which TI products or services are used. Information published by TI regarding third-party products or services
does not constitute a license from TI to use such products or services or a warranty or endorsement thereof.
Use of such information may require a license from a third party under the patents or other intellectual property
of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is without
alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction
of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for
such altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that
product or service voids all express and any implied warranties for the associated TI product or service and
is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Following are URLs where you can obtain information on other Texas Instruments products and application
solutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DSP dsp.ti.com Broadband www.ti.com/broadband
Interface interface.ti.com Digital Control www.ti.com/digitalcontrol
Logic logic.ti.com Military www.ti.com/military
Power Mgmt power.ti.com Optical Networking www.ti.com/opticalnetwork
Microcontrollers microcontroller.ti.com Security www.ti.com/security
Telephony www.ti.com/telephony
Video & Imaging www.ti.com/video
Wireless www.ti.com/wireless
Mailing Address: Texas Instruments
Post Office Box 655303 Dallas, Texas 75265
Copyright 2005, Texas Instruments Incorporated
Page 44

Copyright © Each Manufacturing Company.
All Datasheets cannot be modified without permission.
This datasheet has been download from :
www.AllDataSheet.com
100% Free DataSheet Search Site.
Free Download.
No Register.
Fast Search System.
www.AllDataSheet.com
 Loading...
Loading...