


现货库存、技术资料、百科信息、热点资讯,精彩尽在鼎好!
TLC32047C, TLC32047I
Data Manual
Wide-Band Analog Interface Circuit
SLAS049A
April 1995
Printed on Recycled Paper
IMPORTANT NOTICE
T exas Instruments (TI) reserves the right to make changes to its products or to discontinue any
semiconductor product or service without notice, and advises its customers to obtain the latest
version of relevant information to verify , before placing orders, that the information being relied
on is current.
TI warrants performance of its semiconductor products and related software to the specifications
applicable at the time of sale in accordance with TI’s standard warranty . T esting and other quality
control techniques are utilized to the extent TI deems necessary to support this warranty.
Specific testing of all parameters of each device is not necessarily performed, except those
mandated by government requirements.
Certain applications using semiconductor products may involve potential risks of death,
personal injury , or severe property or environmental damage (“Critical Applications”).
TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, INTENDED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT APPLICATIONS, DEVICES
OR SYSTEMS OR OTHER CRITICAL APPLICATIONS.
Inclusion of TI products in such applications is understood to be fully at the risk of the customer.
Use of TI products in such applications requires the written approval of an appropriate TI officer .
Questions concerning potential risk applications should be directed to TI through a local SC
sales office.
In order to minimize risks associated with the customer’s applications, adequate design and
operating safeguards should be provided by the customer to minimize inherent or procedural
hazards.
TI assumes no liability for applications assistance, customer product design, software
performance, or infringement of patents or services described herein. Nor does TI warrant or
represent that any license, either express or implied, is granted under any patent right, copyright,
mask work right, or other intellectual property right of TI covering or relating to any combination,
machine, or process in which such semiconductor products or services might be or are used.
Copyright 1995, Texas Instruments Incorporated

Contents
Introduction 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Features 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Functional Block Diagrams 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminal Assignments 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminal Functions 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Detailed Description 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Internal Timing Configuration 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Input 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A/D Band-Pass Filter, Clocking, and Conversion Timing 2-4. . . . . . . . . . . . . . . . . . . . . . . .
A/D Converter 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Output 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D/A Low-Pass Filter, Clocking, and Conversion Timing 2-4. . . . . . . . . . . . . . . . . . . . . . . . .
D/A Converter 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial Port 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Synchronous Operation 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
One 16-Bit Word 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Two 8-Bit Bytes 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Synchronous Operating Frequencies 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Asynchronous Operation 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
One 16-Bit Word 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Two 8-Bit Bytes 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Asynchronous Operating Frequencies 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operation of TLC32047 With Internal Voltage Reference 2-7. . . . . . . . . . . . . . . . . . . . . . .
Operation of TLC32047 With External Voltage Reference 2-7. . . . . . . . . . . . . . . . . . . . . .
Reset 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Loopback 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Communications Word Sequence 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DR Word Bit Pattern 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Primary DX Word Bit Pattern 2-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Secondary DX Word Bit Pattern 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page
iii

Reset Function 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power-Up Sequence 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AIC Register Constraints 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AIC Responses to Improper Conditions 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operation With Conversion Times Too Close Together 2-12. . . . . . . . . . . . . . . . . . . . . . . .
More Than One Receive Frame Sync Occurring Between
Two Transmit Frame Syncs – Asynchronous Operation 2-12. . . . . . . . . . . . . . . . . .
More than One Transmit Frame Sync Occurring Between Two Receive
Frame Syncs – Asynchronous Operation 2-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
More than One Set of Primary and Secondary DX Serial Communications
Occurring Between Two Receive Frame
Syncs – Asynchronous Operation 2-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
System Frequency Response Correction 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(sin x)/x Correction 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(sin x)/x Roll-Off for a Zero-Order Hold Function 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Correction Filter 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Correction Results 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TMS320 Software Requirements 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifications 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Absolute Maximum Ratings Over Operating Free-Air Temperature Range 3-1. . . . . . . . .
Recommended Operating Conditions 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electrical Characteristics 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
total device 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
power supply rejection and crosstalk attenuation 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
serial port 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
receive amplifier input 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
transmit filter output 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
receive and transmit system distortion specifications 3-3. . . . . . . . . . . . . . . . . . . . . . . . .
receive channel signal-to-distortion ratio 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
transmit channel signal-to-distortion ratio 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
receive and transmit gain and dynamic range 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
receive channel band-pass filter transfer function 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . .
receive and transmit channel low-pass filter transfer function 3-5. . . . . . . . . . . . . . . . . .
Operating Characteristics (Noise) 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timing Requirements 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter Measurement Information – Timing Diagrams 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . .
TMS32047 – Processor Interface 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Typical Characteristics 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Applications Information 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page
iv

List of Illustrations
Figure Page
1–1 Dual-Word (Telephone Interface) Mode 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–2 Word Mode 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–3 Byte Mode 1-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–1 Asynchronous Internal Timing Configuration 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 Primary and Secondary Communications Word Sequence 2-8. . . . . . . . . . . . . . .
2–3 Reset on Power-Up Circuit 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–4 Conversion Times Too Close Together 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–5 More Than One Receive Frame Sync Between Two Transmit Frame Syncs 2-13
2–6 More Than One Transmit Frame Sync Between Two Receive Frame Syncs 2-13
2–7 More Than One Set of Primary and Secondary DX Serial Communications
Between Two Receive Frame Syncs 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–8 First-Order Correction Filter 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–1 IN+ and IN– Gain Control Circuitry 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–2 Dual-Word (Telephone Interface) Mode Timing 4-2. . . . . . . . . . . . . . . . . . . . . . . . . .
4–3 Word Timing 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–4 Byte-Mode Timing 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–5 Shift-Clock Timing 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4–6 TMS32010/TMS320C15–TLC32047 Interface Circuit 4-4. . . . . . . . . . . . . . . . . . . .
4–7 TMS32010/TMS320C15–TLC32047 Interface Timing 4-5. . . . . . . . . . . . . . . . . . . .
5–1 D/A and A/D Low-Pass Filter Response Simulation 5-1. . . . . . . . . . . . . . . . . . . . . .
5–2 D/A and A/D Low-Pass Filter Response 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–3 D/A and A/D Low-Pass Group Delay 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–4 A/D Band-Pass Response 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–5 A/D Band-Pass Filter Response Simulation 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–6 A/D Band-Pass Filter Group Delay 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–7 A/D Channel High-Pass Filter 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–8 D/A (sin x)/x Correction Filter Response 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–9 D/A (sin x)/x Correction Filter Response 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–10 D/A (sin x)/x Correction Error 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–11 A/D Band-Pass Group Delay 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–12 D/A Low-Pass Group Delay 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–13 A/D Signal-to-Distortion Ratio vs Input Signal 5-7. . . . . . . . . . . . . . . . . . . . . . . . . . .
5–14 A/D Gain Tracking 5-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5–15 D/A Converter Signal-to-Distortion Ratio vs Input Signal 5-8. . . . . . . . . . . . . . . . .
5–16 D/A Gain Tracking 5-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
v

List of Illustrations (continued)
Figure Page
5–17 A/D Second Harmonic Distortion vs Input Signal 5-9. . . . . . . . . . . . . . . . . . . . . . . .
5–18 D/A Second Harmonic Distortion vs Input Signal 5-9. . . . . . . . . . . . . . . . . . . . . . . .
5–19 A/D Third Harmonic Distortion vs Input Signal 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . .
5–20 D/A Third Harmonic Distortion vs Input Signal 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . .
6–1 AIC Interface to the TMS32020/C25 Showing Decoupling Capacitors
and Schottky Diode 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6–2 External Reference Circuit for TLC32047 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi

List of Tables
Table Page
2–1 Mode-Selection Function Table 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–2 Primary DX Serial Communication Protocol 2-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–3 Secondary DX Serial Communication Protocol 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . .
2–4 AIC Responses to Improper Conditions 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–5 (sin x)/x Roll-Off Error 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–6 (sin x)/x Correction Table for f
4–1 Gain Control Table 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
= 8000 Hz and fs = 9600 Hz 2-16. . . . . . . . . . . . . . . .
s
vii


1 Introduction
The TLC32047 wide-band analog interface circuit (AIC) is a complete analog-to-digital and digital-to-analog
interface system for advanced digital signal processors (DSPs) similar to the TMS32020, TMS320C25, and
TMS320C30. The TLC32047 offers a powerful combination of options under DSP control: three operating
modes [dual-word (telephone interface), word, and byte] combined with two word formats (8 bits and 16 bits)
and synchronous or asynchronous operation. It provides a high level of flexibility in that conversion and
sampling rates, filter bandwidths, input circuitry , receive and transmit gains, and multiplexed analog inputs
are under processor control.
This AIC features a
• band-pass switched-capacitor antialiasing input filter
• 14-bit-resolution A/D converter
• 14-bit-resolution D/A converter
• low-pass switched-capacitor output-reconstruction filter
The antialiasing input filter comprises eighth-order and fourth-order CC-type (Chebyshev/elliptic
transitional) low-pass and high-pass filters, respectively. The input filter is implemented in switchedcapacitor technology and is preceded by a continuous time filter to eliminate any possibility of aliasing
caused by sampled data filtering. When low-pass filtering is desired, the high-pass filter can be switched
out of the signal path. A selectable auxiliary differential analog input is provided for applications where more
than one analog input is required.
The output-reconstruction filter is an eighth-order CC-type (Chebyshev/elliptic transitional low-pass filter)
followed by a second-order (sin x)/x correction filter and is implemented in switched-capacitor technology .
This filter is followed by a continuous-time filter to eliminate images of the sample data signal. The on-board
(sin x)/x correction filter can be switched out of the signal path using digital signal processor control.
The A/D and D/A architectures ensure no missing codes and monotonic operation. An internal voltage
reference is provided to ease the design task and to provide complete control over the performance of the
IC. The internal voltage reference is brought out to REF . Separate analog and digital voltage supplies and
ground are provided to minimize noise and ensure a wide dynamic range. The analog circuit path contains
only differential circuitry to keep noise to a minimum. The exception is the DAC sample-and-hold, which
utilizes pseudo-differential circuitry.
The TLC32047C is characterized for operation from 0
operation from –40
°C to 85°C.
°C to 70°C, and the TLC32047I is characterized for
1–1
1.1 Features
• 14-Bit Dynamic Range ADC and DAC
• 16-Bit Dynamic Range Input With Programmable Gain
• Synchronous or Asynchronous ADC and DAC Sampling Rates Up to 25,000 Samples Per
Second
• Programmable Incremental ADC and DAC Conversion Timing Adjustments
• T ypical Applications
– Speech Encryption for Digital Transmission
– Speech Recognition and Storage Systems
– Speech Synthesis
– Modems at 8-kHz, 9.6-kHz, and 16-kHz Sampling Rates
– Industrial Process Control
– Biomedical Instrumentation
– Acoustical Signal Processing
– Spectral Analysis
– Instrumentation Recorders
– Data Acquisition
• Switched-Capacitor Antialiasing Input Filter and Output-Reconstruction Filter
• Three Fundamental Modes of Operation: Dual-Word (Telephone Interface), Word, and Byte
• 600-mil Wide N Package
• Digital Output in Twos Complement Format
• CMOS Technology
FUNCTION TABLE
DATA
FORMAT
16-bit format Dual-word
16-bit format Word mode Word mode DATA-DR/CONTROL = V
8-bit format
(2 bytes
required)
1–2
SYNCHRONOUS
(CONTROL
REGISTER
BIT D5 = 1)
(telephone
interface) mode
Byte mode Byte mode DATA-DR/CONTROL = V
ASYNCHRONOUS
(CONTROL
REGISTER
BIT D5 = 0)
Dual-word
(telephone
interface) mode
FORCING CONDITION
DATA-DR/CONTROL = 0 to 5 V
FSD
/WORD-BYTE = 0 to 5 V
FSD
/WORD-BYTE = V
FSD
/WORD-BYTE = V
CC–
(5 V nom)
CC+
CC–
(–5 V nom)
CC–
(–5 Vnom)
(–5 Vnom)
DIRECT
INTERFACE
TMS32020,
TMS320C25,
TMS320C30
TMS32020,
TMS320C25,
TMS320C30,
indirect
interface to
TMS320C10
(see Figure 7)
TMS320C17
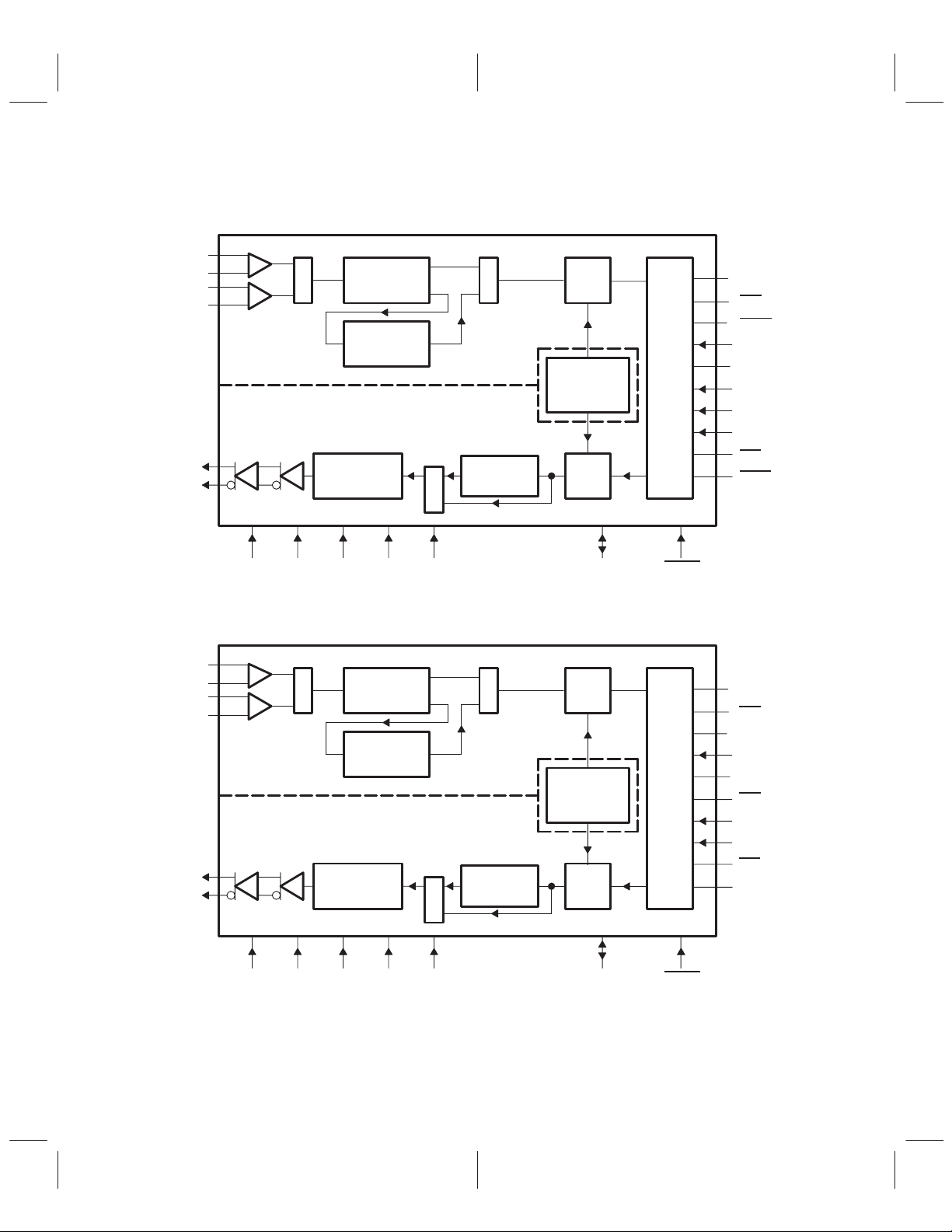
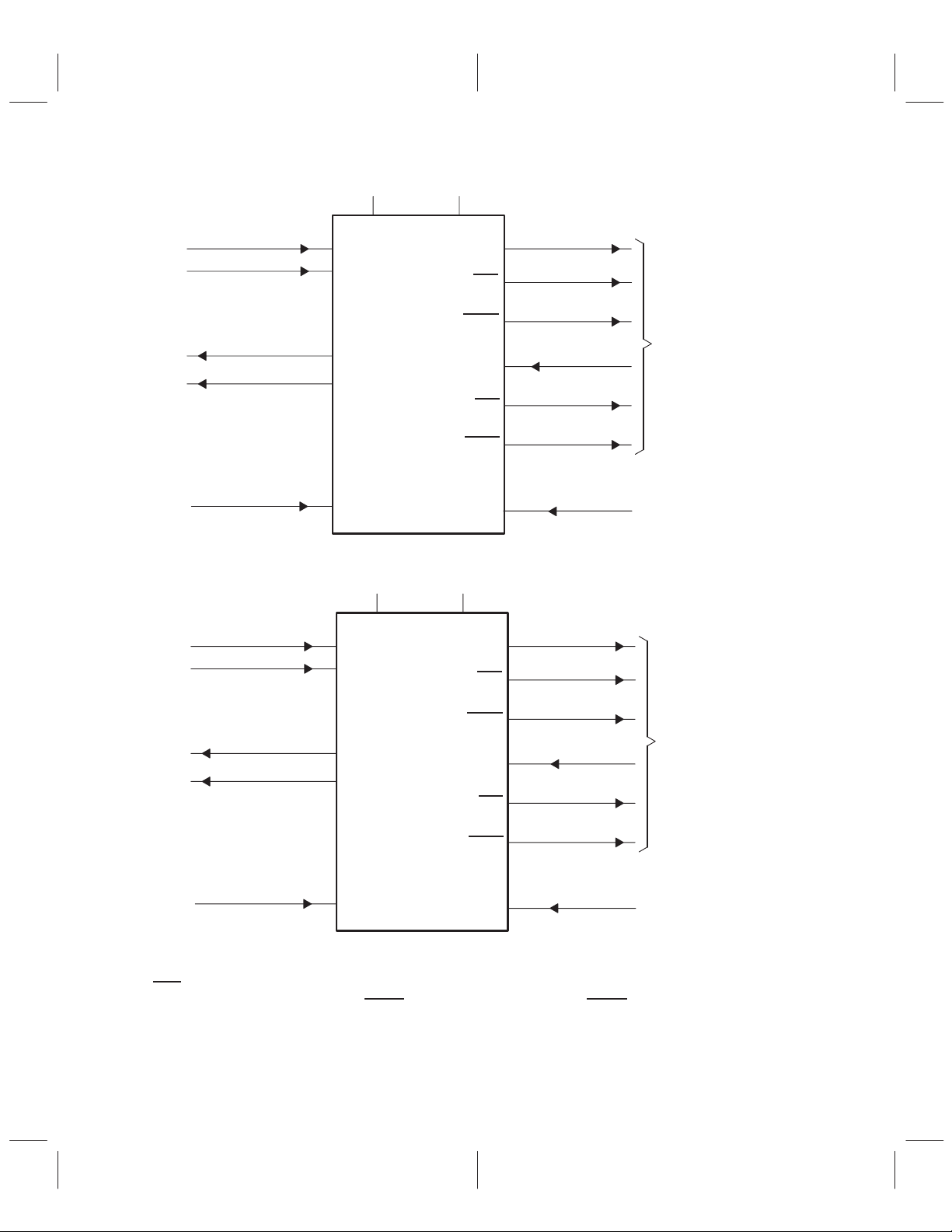
1.2 Functional Block Diagrams
WORD OR BYTE MODE
26
IN +
IN –
AUX IN +
AUX IN –
OUT +
OUT –
25
24
23
Receive Section
Transmit Section
22
21
M
U
X
Low-Pass
High-Pass
Low-Pass
Filter
Filter
Filter
M
U
A/D
X
Serial
Port
Internal
Voltage
Reference
M
U
(sin x)/x
Correction
D/A
5
DR
4
FSR
3
EODR
6
MSTR CLK
10
SHIFT CLK
1
WORDBYTE
13
CONTROL
12
DX
14
FSX
11
EODX
X
IN +
IN –
AUX IN +
AUX IN –
OUT +
OUT –
20 19 17, 18 9 7 8 2
ANLGVCC–VCC+
GND
DGTL
GND
V
DD
(Digital)
DUAL-WORD (TELEPHONE INTERFACE) MODE
26
25
24
23
Receive Section
M
U
Low-Pass
Filter
High-Pass
Filter
Transmit Section
22
21
Low-Pass
Filter
M
U
X
20 19 17, 18 9 7 8 2
ANLGVCC–VCC+
GND
DGTL
GND
V
DD
(Digital)
M
U
XX
(sin x)/x
Correction
A/D
Internal
Voltage
Reference
D/A
RESETREF
Serial
Port
RESETREF
5
DR
4
FSR
3
D11 OUT
6
MSTR CLK
10
SHIFT CLK
1
FSD
13
DATA-DR
12
DX
14
FSX
11
D10 OUT
1–3
FRAME SYNCHRONIZATION FUNCTIONS
TLC32047 Function
Receiving serial data on DX from processor to internal DAC FSX low
Transmitting serial data on DR from internal ADC to processor , primary communications FSR low
Transmitting serial data on DR from DATA-DR to processor, secondary communications in
dual-word (telephone interface) mode only
–5 V5 V
20 19
Serial Data Out
DR
FSR
5
4
Analog In
26
25
IN+
IN–
V
CC+
TLC32047
V
CC–
Frame Sync Output
FSD low
Analog Out
22
21
1
OUT+
OUT–
FSD
D11OUT
DX
FSX
D10OUT
DATA-DR
3
12
Serial Data In
14
11
Secondary Communication (see Table above)
Serial Data Input
13
16-Bit Format TTL
or CMOS Logic Levels
TMS32020,
TMS320C25,
TMS320C30,
or Equivalent
16-Bit DSP
TTL or CMOS
Logic Levels
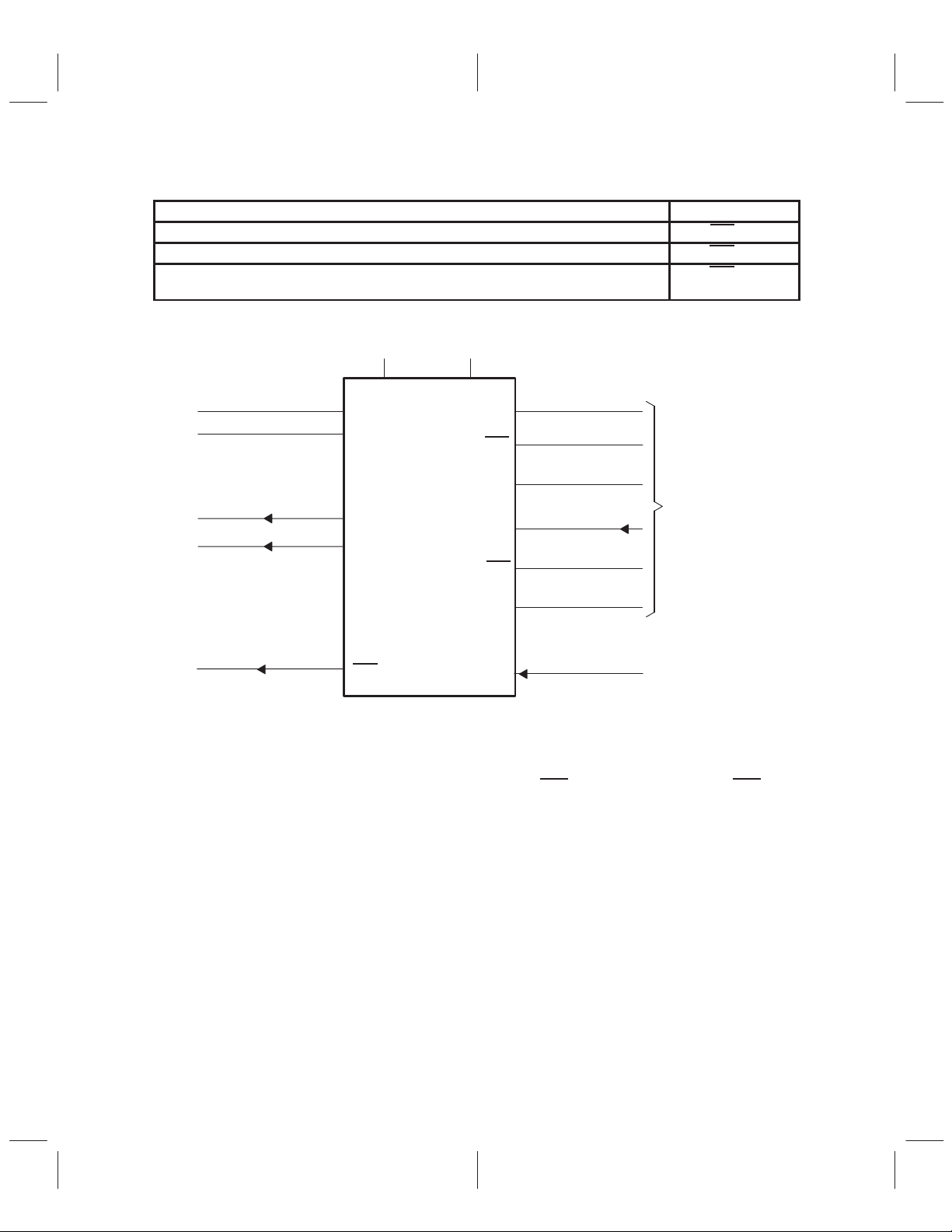
Figure 1–1. Dual-Word (Telephone Interface) Mode
When the DATA-DR/CONTROL input is tied to a logic signal source varying between 0 and 5 V, the
TLC32047 is in the dual-word (telephone interface) mode. This logic signal is routed to the DR line for input
to the DSP only when terminal 1, data frame synchronization (FSD
), outputs a low level. The FSD pulse
duration is 16 shift clock pulses. Also, in this mode, the control register data bits D10 and D11 appear on
D10OUT and D1 1OUT, respectively, as outputs.
1–4
Analog In
20 19
26
IN+
25
IN–
V
CC+
TLC32047
–5 V5 V
V
CC–
DR
FSR
Serial Data Out
5
4
Analog Out
(5 V nom)
Analog In
Analog Out
V
CC+
22
OUT+
21
OUT–
1
WORD-BYTE
26
IN+
25
IN–
22
OUT+
21
OUT–
CONTROL
Figure 1–2. Word Mode
–5 V5 V
20 19
V
CC+
TLC32047
V
CC–
EODR
DX
FSX
EODX
DR
FSR
EODR
DX
FSX
3
Serial Data In
12
14
11
13
Serial Data Out
5
4
3
Serial Data In
12
14
TMS32020,
TMS320C25,
TMS320C30,
or Equivalent
16-Bit DSP
TTL or CMOS
Logic Levels
V
CC–
(–5 V nom)
TMS320C17
or Equivalent
8-Bit Serial
Interface
(2 Bytes Required)
TTL or CMOS
Logic Levels
11
13
V
CC–
(–5 V nom)
V
CC–
(–5 V nom)
1
WORD-BYTE
EODX
CONTROL
Figure 1–3. Byte Mode
The word or byte mode is selected by first connecting the DATA-DR/CONTROL input to V
FSD
/WORD-BYTE becomes an input and can then be used to select either word or byte transmission
formats. The end-of-data transmit (EODX
) and the end-of-data receive (EODR) signals on terminals 1 1 and
CC–.
3, respectively, are used to signal the end of word or byte communication (see the Terminal Functions
section).
1–5
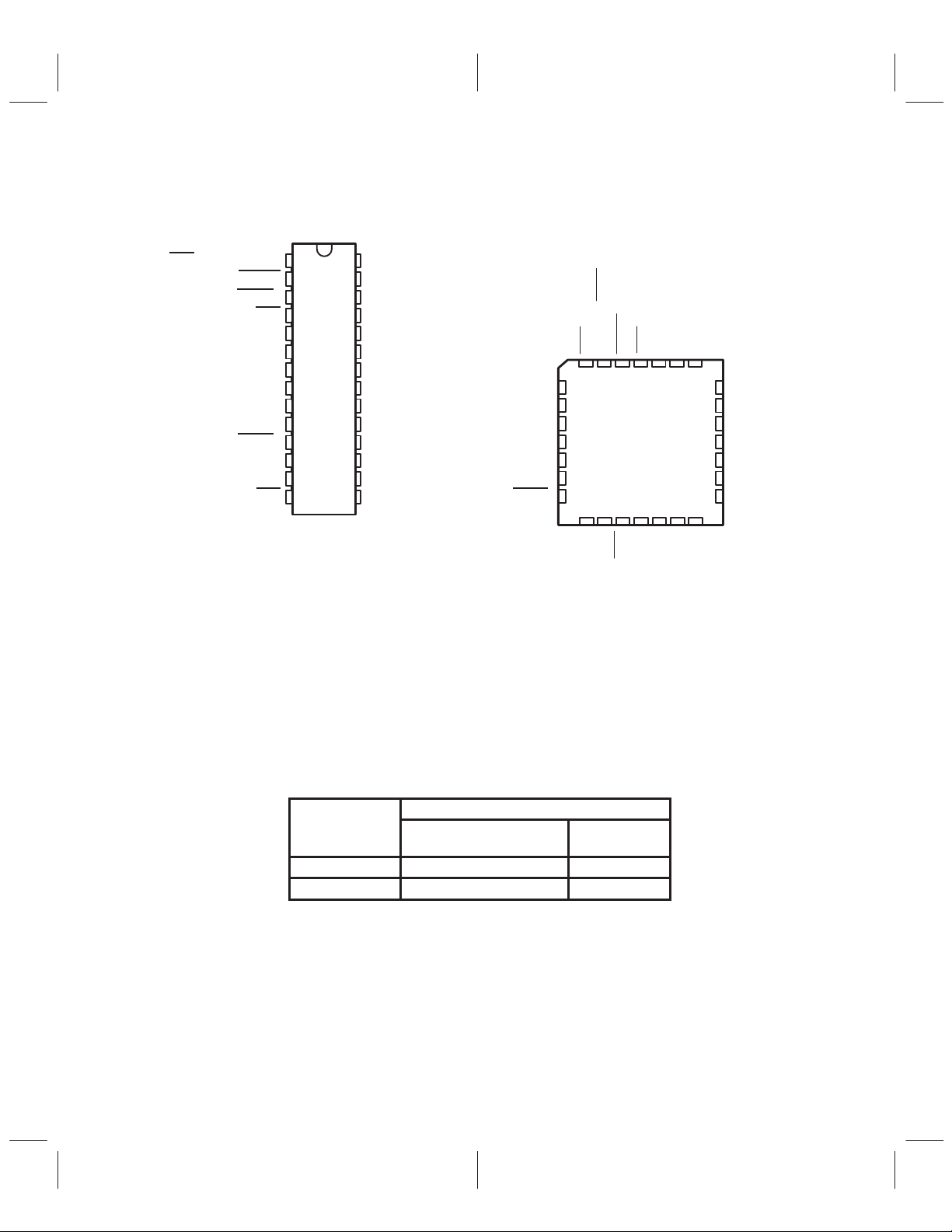
1.3 Terminal Assignments
†
28
27
26
25
24
23
22
21
20
19
18
17
16
15
NU
NU
IN+
IN–
AUX IN+
AUX IN–
OUT+
OUT–
V
V
ANLG GND
ANLG GND
NU
NU
/WORD-BYTE
FSD
RESET
D11OUT/EODR
FSR
MSTR CLK
V
REF
DGTL GND
SHIFT CLK
D10OUT/EODX
DATA-DR/CONTROL
FSX
N PACKAGE
(TOP VIEW)
‡
1
2
‡
3
4
DR
5
6
7
DD
8
9
10
‡
11
DX
12
‡
13
14
CC+
CC–
DR
MSTR CLK
V
DD
REF
DGTL GND
SHIFT CLK
D10OUT/EODX
FN PACKAGE
(TOP VIEW)
‡
‡
FSD/WORD-BYTE
NUNUIN+
RESET
FSR
D11OUT/EODR
321
4
5
6
7
8
9
10
‡
11
12 13
‡
DX
28 27
26
14 15 16 1718
NU
NU
FSX
ANLG GND
25
IN–
24
AUX IN+
23
AUX IN–
22
OUT+
21
OUT–
20
V
CC+
19
V
CC–
ANLG GND
DATA-DR/CONTROL
NU - Nonusable; no external connection should be made to these pins.
†
600-mil wide
‡
The portion of the terminal name to the left of the slash is used for the dual-word (telephone interface) mode.
The portion of the terminal name to the right of the slash is used for word-byte mode.
1.4 Ordering Information
AVAILABLE OPTIONS
PACKAGED DEVICES
1–6
T
A
0°C to 70°C TLC32047CFN TLC32047CN
–40°C to 85°C TLC32047IFN TLC32047IN
PLASTIC CHIP CARRIER
(FN)
PLASTIC DIP
(N)
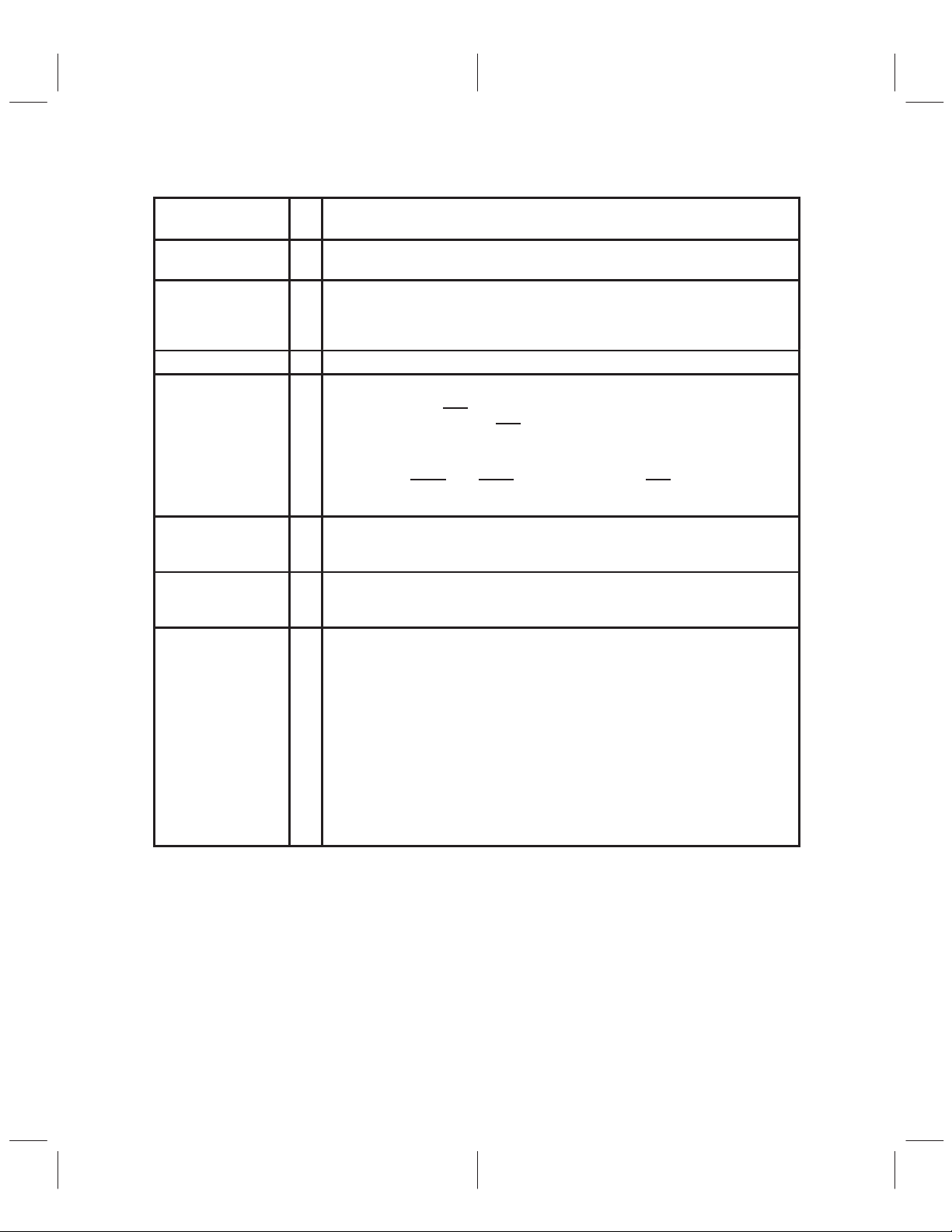
1.5 Terminal Functions
I/O
DESCRIPTION
TERMINAL
NAME NO.
ANLG GND 17,18 Analog ground return for all internal analog circuits. ANLG GND is internally connected
AUX IN+ 24 I Noninverting auxiliary analog input stage. AUX IN+ can be switched into the band-pass
AUX IN– 23 I Inverting auxiliary analog input (see the above AUX IN+ description).
DATA-DR 13 I The dual-word (telephone interface) mode, selected by applying an input logic level
CONTROL When CONTROL is tied to V
DR 5 O DR is used to transmit the ADC output bits from the AIC to the TMS320 serial port. This
DX 12 I DX is used to receive the DAC input bits and timing and control information from the
D10OUT 11 O In the dual-word (telephone interface) mode, bit D10 of the control register is output to
EODX End of data transmit. During the word-mode timing, a low-going pulse occurs on EODX
to DGTL GND.
filter and ADC path via software control. If the appropriate bit in the control register is
a 1, the auxiliary inputs replace the IN+ and IN– inputs. If the bit is a 0, the IN+ and IN–
inputs are used (see the DX Serial Data Word Format).
between 0 and 5 V to DA T A-DR, allows DATA-DR to function as a data input. The data
is then framed by the FSD
communication. The functions FSD
selection (see Table 2–1).
WORD-BYTE, EODR
used to select either the word or byte mode (see Function Table).
transmission of bits from the AIC to the TMS320 serial port is synchronized with the
SHIFT CLK signal.
TMS320. This serial transmission from the TMS320 serial port is synchronized with the
SHIFT CLK signal.
D10OUT . When the device is reset, bit D10 is initialized to 0 (see DX Serial Data W ord
Format). The output update is immediate upon changing bit D10.
immediately after the 16 bits of DAC and control or register information have been
transmitted from the TMS320 serial port to the AIC. EODX can be used to interrupt a
microprocessor upon completion of serial communications. Also, EODX can be used
to strobe and enable external serial-to-parallel shift registers, latches, or external FIFO
RAM and to facilitate parallel data bus communications between the DSP and the
serial-to-parallel shift registers. During the byte-mode timing, EODX goes low after the
first byte has been transmitted from the TMS320 serial port to the AIC and is kept low
until the second byte has been transmitted. The TMS320C17 can use this low-going
signal to differentiate first and second bytes.
signal and transmitted as an output to DR during secondary
, and EODX are valid in this mode. FSD/WORD-BYTE is then
, D11OUT, and D10OUT are valid with this mode
, the device is in the word or byte mode. The functions
CC–
1–7
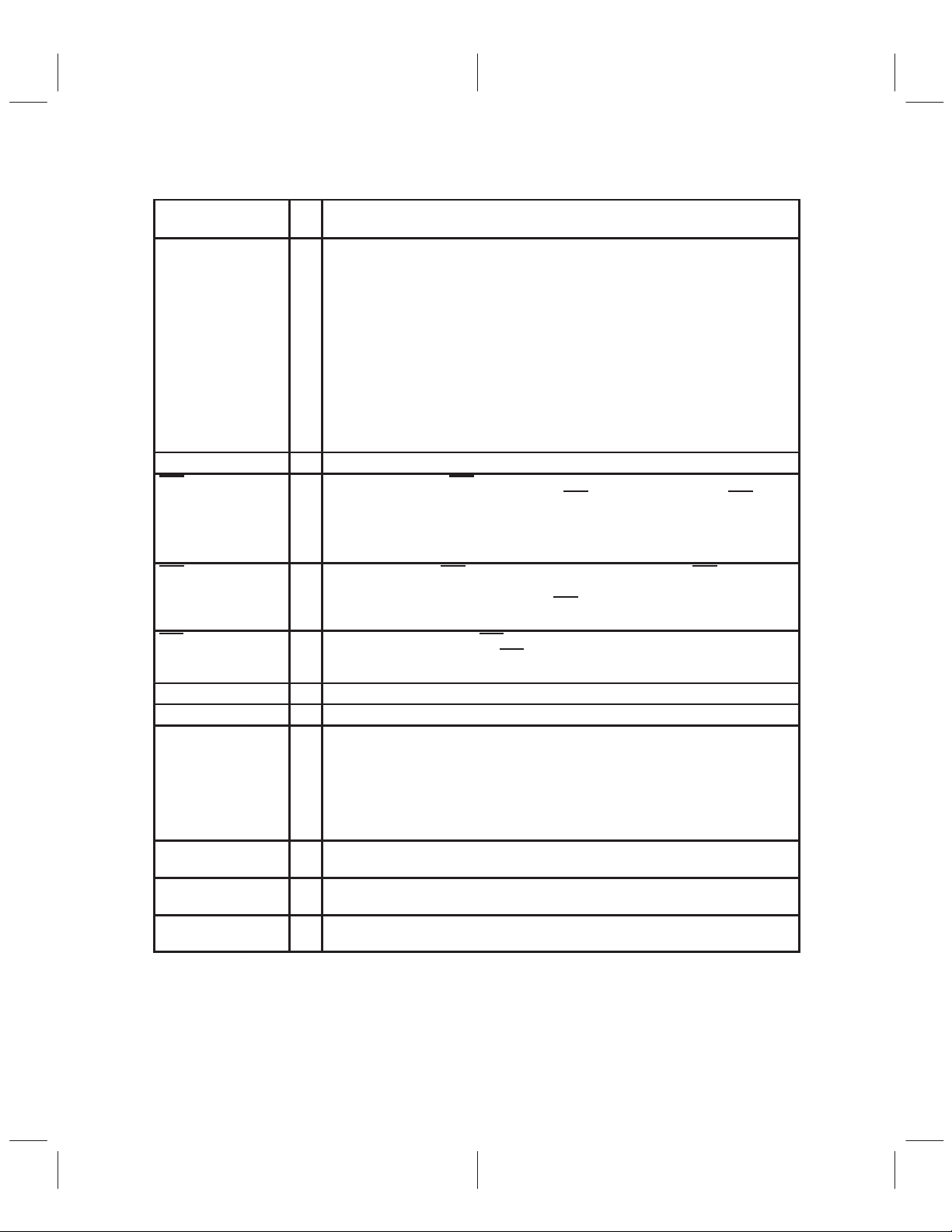
1.5 Terminal Functions (continued)
I/O
DESCRIPTION
TERMINAL
NAME NO.
D11OUT 3 O In the dual-word (telephone interface) mode, bit D11 of the control register is output to
EODR End of data receive. During the word-mode timing, a low-going pulse occurs on EODR
DGTL GND 9 Digital ground for all internal logic circuits. Not internally connected to ANLG GND.
FSD 1 O Frame sync data. The FSD output remains high during primary communication. In the
WORD-BYTE I WORD-BYTE allows differentiation between the word and byte data format (see
FSR 4 O Frame sync receive. FSR is held low during bit transmission. When FSR goes low, the
FSX 14 O Frame sync transmit. When FSX goes low, the TMS320 serial port begins transmitting
IN+ 26 I Noninverting input to analog input amplifier stage
IN– 25 I Inverting input to analog input amplifier stage
MSTR CLK 6 I Master clock. MSTR CLK is used to derive all the key logic signals of the AIC, such as
OUT+ 22 O Noninverting output of analog output power amplifier. OUT+ drives transformer hybrids
OUT– 21 O Inverting output of analog output power amplifier. OUT– is functionally identical with and
REF 8 I/O Internal voltage reference is brought out on REF . An external voltage reference can be
D11OUT. When the device is reset, bit D11 is initialized to 0 (see DX Serial Data W ord
Format). The output update is immediate upon changing bit D1 1.
immediately after the 16 bits of A/D information have been transmitted from the AIC to
the TMS320 serial port. EODR can be used to interrupt a microprocessor upon
completion of serial communications. Also, EODR can be used to strobe and enable
external serial-to-parallel shift registers, latches, or external FIFO RAM, and to facilitate
parallel data bus communications between the DSP and the serial-to-parallel shift
registers. During the byte-mode timing, EODR goes low after the first byte has been
transmitted from the AIC to the TMS320 serial port and is kept low until the second byte
has been transmitted. The TMS320C17 can use this low-going signal to differentiate
between first and second bytes.
dual-word (telephone interface) mode, the FSD
during secondary communication.
DATA-DR/CONTROL and Table 2-1 for details).
TMS320 serial port begins receiving bits from the AIC via DR of the AIC. The most
significant DR bit is present on DR before FSR
Internal Timing Configuration Diagrams).
bits to the AIC via DX of the AIC. FSX
Sections and Internal Timing Configuration Diagrams).
the shift clock, the switched-capacitor filter clocks, and the A/D and D/A timing signals.
The internal timing configuration diagram shows how these key signals are derived. The
frequencies of these signals are synchronous submultiples of the master clock
frequency to eliminate unwanted aliasing when the sampled analog signals are
transferred between the switched-capacitor filters and the ADC and DAC converters
(see the Internal Timing Configuration).
or high-impedance loads directly in a differential or a single-ended configuration.
complementary to OUT+.
applied to REF to override the internal voltage reference.
is held low during bit transmission (see Serial Port
output is identical to the FSX output
goes low (see Serial Port Sections and
1–8
1.5 Terminal Functions (continued)
I/O
DESCRIPTION
TERMINAL
NAME NO.
RESET 2 I Reset. A reset function is provided to initialize T A, TA ’, TB, RA, RA ’, RB (see Figure 2-1),
SHIFT CLK 10 O Shift clock. SHIFT CLK is obtained by dividing the master clock signal frequency by four .
V
V
V
DD
CC+
CC–
7 Digital supply voltage, 5 V ±5%
20 Positive analog supply voltage, 5 V ±5%
19 Negative analog supply voltage, –5 V ±5%
and the control registers. This reset function initiates serial communications between
the AIC and DSP. The reset function initializes all AIC registers, including the control
register. After a negative-going pulse on RESET
provide a 16-kHz data conversion rate for a 10.368-MHz master clock input signal. The
conversion rate adjust registers, TA ’ and RA ’, are reset to 1. The CONTROL register bits
are reset as follows (see AIC DX Data Word Format section):
D11 = 0, D10 = 0, D9 = 1, D7 = 1, D6 = 1, D5 = 1, D4 = 0, D3 = 0, D2 = 1
The shift clock (SCLK) is held high during RESET
This initialization allows normal serial-port communication to occur between the AIC
and the DSP.
SHIFT CLK is used to clock the serial data transfers of the AIC.
, the AIC registers are initialized to
.
1–9

1–10
2 Detailed Description
V
WORD
V
V
BYTE
Table 2–1. Mode-Selection Function Table
DATA-DR/
CONTROL
Data in
(0 to 5 V)
Data in
(0 to 5 V)
CC–
†
DATA-DR/CONTROL has an internal pulldown resistor to –5 V, and FSD/WORD-BYTE has an internal pullup resistor
to 5 V.
FSD/
WORD-BYTE
FSD out
(0 to 5 V)
FSD out
(0 to 5 V)
CC+
CC–
CONTROL
REGISTER
BIT (D5)
1
0
1
0
1
0
OPERATING
MODE
Dual-Word
(Telephone
Interface)
Dual-Word
(Telephone
Interface)
SERIAL
CONFIGURATION
Synchronous,
One 16-Bit Word
Asynchronous,
One 16-bit Word
Synchronous,
One 16-Bit Word
Asynchronous,
One 16-bit Word
Synchronous,
Two 8-Bit Bytes
Asynchronous,
Two 8-Bit Bytes
DESCRIPTION
Terminal functions DATA-DR†,
†
FSD
, D11OUT, and D10OUT are
applicable in this configuration.
FSD
is asserted during
secondary communication, but
the FSR
is not asserted.
However, FSD
during primary communication.
Terminal functions DATA-DR†,
†
FSD
, D11OUT, and D10OUT are
applicable in this configuration.
FSD
is asserted during
secondary communication, but
the FSR
However, FSD
during primary communication. If
secondary communications occur
while the A/D conversion is being
transmitted from DR, FSD
go low, and data from DATA-DR
cannot go onto DR.
Terminal functions CONTROL†,
WORD-BYTE†, EODR
EODX
configuration.
Terminal functions CONTROL†,
WORD-BYTE†, EODR
EODX
configuration.
Terminal functions CONTROL†,
WORD-BYTE†, EODR
EODX
configuration.
Terminal functions CONTROL†,
WORD-BYTE†, EODR
EODX
configuration.
remains high
is not asserted.
remains high
cannot
, and
are applicable in this
, and
are applicable in this
, and
are applicable in this
, and
are applicable in this
2–1

2.1 Internal Timing Configuration (see Figure 2–1)
All the internal timing of the AIC is derived from the high-frequency clock signal that drives the master clock
input. The shift clock signal, which strobes the serial port data between the AIC and DSP, is derived by
dividing the master clock input signal frequency by four.
The TX(A) counter and the TX(B) counter, which are driven by the master clock signal, determine the D/A
conversion timing. Similarly , the RX(A) counter and the RX(B) counter determine the A/D conversion timing.
In order for the low-pass switched-capacitor filter in the D/A path (see Functional Block Diagram) to meet
its transfer function specifications, the frequency of its clock input must be 432 kHz. If the clock frequency
is not 432 kHz, the filter transfer function frequencies are frequency-scaled by the ratios of the clock
frequency to 432 kHz:
Absolute Frequency (kHz)
+
432
To obtain the specified filter response, the combination of master clock frequency and the TX(A) counter
and the RX(A) counter values must yield a 432-kHz switched-capacitor clock signal. This 432-kHz clock
signal can then be divided by the TX(B) counter to establish the D/A conversion timing.
The transfer function of the band-pass switched-capacitor filter in the A/D path (see Functional Block
Diagram) is a composite of its high-pass and low-pass transfer functions. When the shift clock frequency
(SCF) is 432 kHz, the high-frequency roll-off of the low-pass section meets the band-pass filter transfer
function specification. Otherwise, the high-frequency roll-off is frequency-scaled by the ratio of the
high-pass section’s SCF clock to 432 kHz (see Figure 5–5). The low-frequency roll-off of the high-pass
section meets the band-pass filter transfer function specification when the A/D conversion rate is 24 kHz.
If not, the low-frequency roll-off of the high-pass section is frequency-scaled by the ratio of the A/D
conversion rate to 24 kHz.
The TX(A) counter and the TX(B) counter are reloaded each D/A conversion period, while the RX(A) counter
and the RX(B) counter are reloaded every A/D conversion period. The TX(B) counter and the RX(B) counter
are loaded with the values in the TB and RB registers, respectively . Via software control, the TX(A) counter
Normalized Frequency SCF f
can be loaded with the T A register, the T A register less the TA
By selecting the T A register less the TA
an amount of time that equals T A
option is executed, the upcoming conversion timing occurs later by an amount of time that equals
register
TA
′ times the signal period of the master clock. Thus, the D/A conversion timing can be advanced or
′ register option, the upcoming conversion timing occurs earlier by
′ times the signal period of the master clock. If the T A register plus the T A′
′ register, or the T A register plus the T A′ register.
retarded. An identical ability to alter the A/D conversion timing is provided. However, the RX(A) counter can
be programmed via software control with the RA register, the RA register less the RA
register plus the RA
′ register.
The ability to advance or retard conversion timing is particularly useful for modem applications. This feature
allows controlled changes in the A/D and D/A conversion timing and can be used to enhance signal-to-noise
performance, to perform frequency-tracking functions, and to generate nonstandard modem frequencies.
If the transmit and receive sections are configured to be synchronous, then the low-pass and band-pass
switched-capacitor filter clocks are derived from the TX(A) counter. Also, both the D/A and A/D conversion
timings are derived from the TX(A) counter and the TX(B) counter. When the transmit and receive sections
are configured to be synchronous, the RX(A) counter, RX(B) counter, RA register, RA
registers are not used.
clock
(kHz)
′ register, or the RA
′ register, and RB
(1)
2–2

XTAL
OSC
20.736 MHZ
41.472 MHZ
TMS320 DSP
Transmit Section
D/A Conversion
Timing
Receive Section
A/D Conversion
Timing
MASTER CLOCK
TA Register
(5 Bits)
See Table 2-3
Adder/Subtractor
6
12
TX (A) Counter
(6 Bits)
RA Register
(5 Bits)
See Table 2-3
Adder/Subtractor
6
12
RX (A) Counter
(6 Bits)
5.184 MHz
10.368 MHz
TA′ REGISTER
(6 Bits)
2s-Complement TA
See Table 2-3
†
D1 D0 SELECT
0
0
TA
0
1
TA + TA′
1
0
TA – TA′
1
1
TA
See Table 2-2
Divide By 2
864 kHz
RA′ Register
(6 Bits)
2s-Complement RA
See Table 2-3
†
D1 D0 SELECT
0
0
RA
0
1
RA + RA′
1
0
RA – RA′
1
1
See Table 2-2
RA
Divide By 2
864 kHz
432 kHz
432 kHz
Divide By 4
TB Register
(6 Bits)
See Table 2-3
TX (B) Counter
RB Register
(6 Bits)
See Table 2-3
RX (B) Counter
SHIFT CLOCK
1.296 MHz
2.592 MHz
SCF CLOCK
Low-Pass Filter,
(sin x)/x Filter
7.20 kHz for TB = 60
8.00 kHz for TB = 54
9.60 kHz for TB = 45
14.4 kHz for TB = 30
16.0 kHz for TB = 27
24.0 kHz for TB = 18
D/A Conversion
Frequency
SCF CLOCK
Low-Pass Filter
7.20 kHz for RB = 60
8.00 kHz for RB = 54
9.60 kHz for RB = 45
14.4 kHz for RB = 30
16.0 kHz for RB = 27
24.0 kHz for RB = 18
High-Pass Filter,
A/D Conversion
Frequency
†
These control bits are described in the DX Serial Data Word Format section.
NOTES: A. Tables 2–2 and 2–3 (pages 2–9 and 2–10) are primary and secondary communication protocols,
respectively.
B. In synchronous operation, RA, RA’, RB, RX(A), and RX(B) are not used. T A, T A’, TB, TX(A), and TX(B) are
used instead.
C. Items in italics refer only to frequencies and register contents, which are variable. A crystal oscillator driving
20.736 MHz into the TMS320-series DSP provides a master clock frequency of 5.184 MHz. The TLC32047
produces a shift clock frequency of 1.296 MHz. If the TX(A) register contents equal 6, the SCF clock
frequency is then 432 kHz, and the D/A conversion frequency is 432 kHz ÷ T(B).
Figure 2–1. Asynchronous Internal Timing Configuration
2–3

2.2 Analog Input
Two pairs of analog inputs are provided. Normally , the IN+ and IN– input pair is used; however, the auxiliary
input pair, AUX IN+ and AUX IN–, can be used if a second input is required. Since sufficient common-mode
range and rejection are provided, each input set can be operated in differential or single-ended modes. The
gain for the IN+, IN–, AUX IN+, and AUX IN– inputs can be programmed to 1, 2, or 4 (see T able 4–1). Either
input circuit can be selected via software control. Multiplexing is controlled with the D4 bit (enable/disable
AUX IN+ and AUX IN–) of the secondary DX word (see T able 2–3). The multiplexing requires a 2-ms wait
at SCF = 432 kHz (see Figure 5–3) for a valid output signal. A wide dynamic range is ensured by the
differential internal analog architecture and the separate analog and digital voltage supplies and grounds.
2.3 A/D Band-Pass Filter, A/D Band-Pass Filter Clocking, and A/D Conversion
Timing
The receive-channel A/D high-pass filter can be selected or bypassed via software control (see Functional
Block Diagram). The frequency response of this filter is on page 3-5. This response results when the
switched-capacitor filter clock frequency is 432 kHz and the A/D sample rate is 24 kHz. Several possible
options can be used to attain a 432-kHz switched-capacitor filter clock. When the filter clock frequency is
not 432 kHz, the low-pass filter transfer function is frequency-scaled by the ratio of the actual clock
frequency to 432 kHz (see Typical Characteristics section). The ripple bandwidth and 3-dB low-frequency
roll-off points of the high-pass section are 450 Hz and 300 Hz, respectively . However, the high-pass section
low-frequency roll-off is frequency-scaled by the ratio of the A/D sample rate to 24 kHz.
Figure 2–1 and the DX Serial Data Word Format sections of this data manual indicate the many options for
attaining a 432-kHz band-pass switched-capacitor filter clock. These sections indicate that the RX(A)
counter can be programmed to give a 432-kHz band-pass switched-capacitor filter clock for several master
clock input frequencies.
The A/D conversion rate is attained by frequency-dividing the band-pass switched-capacitor filter clock with
the RX(B) counter. Unwanted aliasing is prevented because the A/D conversion rate is an integer
submultiple of the band-pass switched-capacitor filter sampling rate, and the two rates are synchronously
locked.
2.4 A/D Converter
Fundamental performance specifications for the receive channel ADC circuitry are on pages 3-2 and 3-3
of this data manual. The ADC circuitry, using switched-capacitor techniques, provides an inherent
sample-and-hold function.
2.5 Analog Output
The analog output circuitry is an analog output power amplifier. Both noninverting and inverting amplifier
outputs are brought out of the IC. This amplifier can drive transformer hybrids or low-impedance loads
directly in either a differential or single-ended configuration.
2.6 D/A Low-Pass Filter, D/A Low-Pass Filter Clocking, and D/A Conversion
Timing
The frequency response of these filters is on page 3-5. This response results when the low-pass
switched-capacitor filter clock frequency is 432 kHz (see Equation 1). Like the A/D filter, the transfer function
of this filter is frequency-scaled when the clock frequency is not 432 kHz (see Typical Characteristics
section). A continuous-time filter is provided on the output of the low-pass filter to eliminate the periodic
sample data signal information, which occurs at multiples of the 432-kHz switched-capacitor clock
feedthrough.
The D/A conversion rate is attained by frequency-dividing the 432-kHz switched-capacitor filter clock with
the T(B) counter. Unwanted aliasing is prevented because the D/A conversion rate is an integer submultiple
of the switched-capacitor low-pass filter sampling rate, and the two rates are synchronously locked.
2–4

2.7 D/A Converter
Fundamental performance specifications for the transmit channel DAC circuitry are on pages 3-3 and 3-4.
The DAC has a sample-and-hold function that is realized with a switched-capacitor ladder.
2.8 Serial Port
The serial port has four possible configurations summarized in the function table on page 1-2. These
configurations are briefly described below.
• The transmit and receive sections are operated asynchronously, and the serial port interfaces
directly with the TMS320C17. The communications protocol is two 8-bit bytes.
• The transmit and receive sections are operated asynchronously, and the serial port interfaces
directly with the TMS32020, TMS320C25, and TMS320C30. The communications protocol is
one 16-bit word.
• The transmit and receive sections are operated synchronously, and the serial port interfaces
directly with the TMS320C17. The communications protocol is two 8-bit bytes.
• The transmit and receive sections are operated synchronously, and the serial port interfaces
directly with the TMS32020, TMS320C25, TMS320C30, or two SN74299 serial-to-parallel shift
registers, which can interface in parallel to the TMS32010, TMS320C15, to any other digital
signal processor, or to external FIFO circuitry. The communications protocol is one 16-bit word.
2.9 Synchronous Operation
When the transmit and receive sections are operated synchronously, the low-pass filter clock drives both
low-pass and band-pass filters (see Functional Block Diagram). The A/D conversion timing is derived from
and equal to the D/A conversion timing. When data bit D5 in the control register is a logic 1, transmit and
receive sections are synchronous. The band-pass switched-capacitor filter and the A/D converter timing are
derived from the TX(A) counter, the TX(B) counter , and the T A and T A’ registers. In synchronous operation,
both the A/D and the D/A channels operate from the same frequencies. The FSX
identical during primary communication, but FSR
there is no new A/D conversion result.
is not asserted during secondary communication because
and the FSR timing is
2.9.1 One 16-Bit Word [Dual-Word (Telephone Interface) or Word Mode]
The serial port interfaces directly with the serial ports of the TMS32020, TMS320C25, and the TMS320C30,
and communicates in one 16-bit word. The operation sequence is as follows:
1. FSX
2. One 16-bit word is transmitted and one 16-bit word is received.
3. FSX
4. EODX
If the device is in the dual-word (telephone interface) mode, FSD
communication period and enables the data word received at the DA TA-DR/CONTROL input to be routed
to the DR line. The secondary communication period occurs four shift clocks after completion of primary
communications.
and FSR are brought low by the TLC32047 AIC.
and FSR are brought high.
and EODR emit low-going pulses one shift clock wide. EODX and EODR are valid in the
word or byte mode only .
goes low during the secondary
2–5

2.9.2 Two 8-Bit Bytes (Byte Mode)
The serial port interfaces directly with the serial port of the TMS320C17 and communicates in two 8-bit
bytes. The operation sequence is as follows:
1. FSX
and FSR are brought low.
2. One 8-bit word is transmitted and one 8-bit word is received.
3. EODX
and EODR are brought low.
4. FSX and FSR emit positive frame-sync pulses that are four shift clock cycles wide.
5. One 8-bit byte is transmitted and one 8-bit byte is received.
6. FSX
7. EODX
and FSR are brought high.
and EODR are brought high.
2.9.3 Synchronous Operating Frequencies
The synchronous operating frequencies are determined by the following equations.
Switched capacitor filter (SCF) frequencies (see Figure 2–1):
-
Low pass SCF clock frequency (DńA and AńD channels)
-
High pass SCF clock frequency (AńD channel)+AńD conversion frequency
master clock frequency
+
T(A) 2
Conversion frequency (AńD and DńA channels)
-
Low pass SCF clock frequency
+
master clock frequency
+
T(A) 2 T(B)
T(B)
NOTE: T(A), T(B), R(A), and R(B) are the contents of the TA, TB, RA, and RB registers, respectively.
2.10 Asynchronous Operation
When the transmit and the receive sections are operated asynchronously , the low-pass and band-pass filter
clocks are independently generated from the master clock. The D/A and the A/D conversion timing is also
determined independently .
D/A timing is set by the counters and registers described in synchronous operation, but the RA and RB
registers are substituted for the T A and TB registers to determine the A/D channel sample rate and the A/D
path switched-capacitor filter frequencies. Asynchronous operation is selected by control register bit D5
being zero.
2.10.1 One 16-Bit Word (Word Mode)
The serial port interfaces directly with the serial ports of the TMS32020, TMS320C25, and TMS320C30 and
communicates with 16-bit word formats. The operation sequence is as follows:
1. FSX
2. One 16-bit word is transmitted or one 16-bit word is received.
3. FSX
4. EODX
2.10.2 Two 8-Bit Bytes (Byte Mode)
The serial port interfaces directly with the serial port of the TMS320C17 and communicates in two 8-bit
bytes. The operating sequence is as follows:
or FSR are brought low by the TLC32047 AIC.
or FSR are brought high.
or EODR emit low-going pulses one shift clock wide. EODX and EODR are valid in either
the word or byte mode only .
1. FSX
or FSR are brought low by the TLC32047 AIC.
2. One byte is transmitted or received.
2–6

3. EODX or EODR are brought low.
4. FSX or FSR are brought high for four shift clock periods and then brought low.
5. The second byte is transmitted or received.
6. FSX
7. EODX
or FSR are brought high.
or EODR are brought high.
2.10.3 Asynchronous Operating Frequencies
The asynchronous operating frequencies are determined by the following equations.
Switched-capacitor filter frequencies (see Figure 2–1):
Low pass DńA SCF clock frequency
Low pass AńD SCF clock frequency
High pass SCF clock frequency (AńD channel)+AńD conversion frequency
-
-
-
master clock frequency
+
+
T(A) 2
master clock frequency
R(A) 2
Conversion frequency:
-
DńA conversion frequency
AńD conversion frequency
Low pass DńA SCF clock frequency
+
Low pass AńD SCF clock frequency (for low pass receive filter)
+
-
T(B)
-
R(B)
(3)
NOTE: T(A), T(B), R(A), and R(B) are the contents of the TA, TB, RA, and RB registers, respectively.
2.11 Operation of TLC32047 With Internal Voltage Reference
The internal reference of the TLC32047 eliminates the need for an external voltage reference and provides
overall circuit cost reduction. The internal reference eases the design task and provides complete control
of the IC performance. The internal reference is brought out to REF. To keep the amount of noise on the
reference signal to a minimum, an external capacitor can be connected between REF and ANLG GND.
(2)
2.12 Operation of TLC32047 With External Voltage Reference
REF can be driven from an external reference circuit. This external circuit must be capable of supplying
250
µA and must be protected adequately from noise and crosstalk from the analog input.
2.13 Reset
A reset function is provided to initiate serial communications between the AIC and DSP and to allow fast,
cost-effective testing during manufacturing. The reset function initializes all AIC registers, including the
control register. After a negative-going pulse on RESET
, the AIC is initialized. This initialization allows
normal serial port communications activity to occur between AIC and DSP (see AIC DX Data Word Format
section). After a reset, TA=TB=RA=RB=18 (or 12 hexadecimal), TA
′=RA′=01 (hexadecimal), the A/D
high-pass filter is inserted, the loop-back function is deleted, AUX IN+ and AUX IN – are disabled, the
transmit and receive sections are in synchronous operation, programmable gain is set to 1, the on-board
(sin x)/x correction filter is not selected, D10 OUT is set to 0, and D11 OUT is set to 0.
2.14 Loopback
This feature allows the circuit to be tested remotely . In loopback, OUT+ and OUT– are internally connected
to IN+ and IN–. The DAC bits (D15 to D2), which are transmitted to DX, can be compared with the ADC bits
(D15 to D2) received from DR. The bits on DR equal the bits on DX. However, there is some dif ference in
these bits due to the ADC and DAC output offsets.
The loopback feature is implemented with digital signal processor control by transmitting a logic 1 for data
bit D3 in the DX secondary communication to the control register (see Table 2–3).
2–7

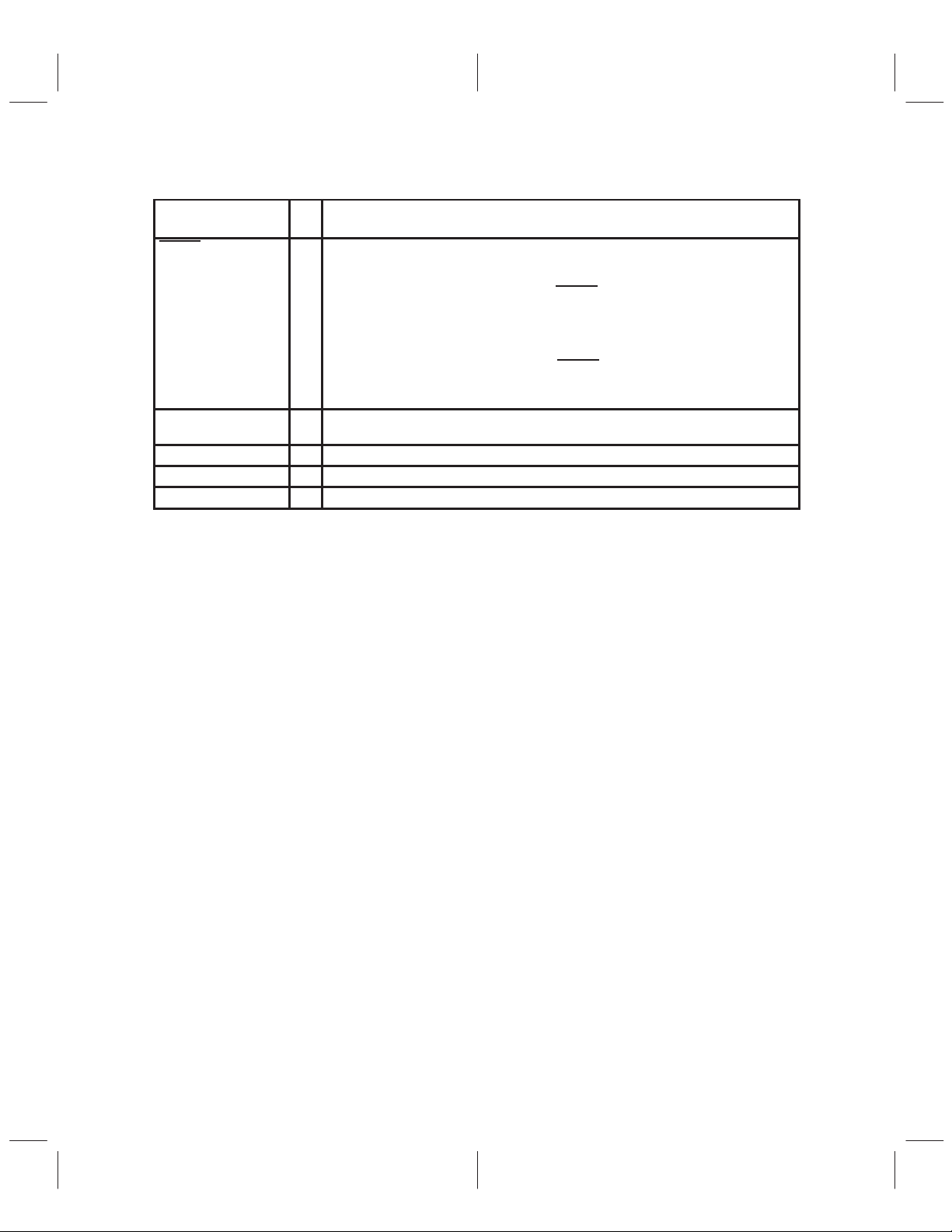
2.15 Communications Word Sequence
In the dual-word (telephone interface) mode, there are two data words that are presented to the DSP or µP
from DR. The first data word is the ADC conversion result occurring during the FSR time, and the second
is the serial data applied to DATA-DR during the FSD time. FSR is not asserted during secondary
communications and FSD is not asserted during primary communications.
FSX
DX
FSR
FSD
DR
Primary
Communications
DX-14 Bits Digital 11
From DSP to DAC
Input for D/A
Conversion
2s Complement Output
From ADC to the DSP
2s Complement Output
From ADC to the DSP
16 bits 16 bits
4 Shift
Clocks
Secondary
Communications
DX-14 Bits Digital XX
From DSP
Input for Register
Program
16 bits Digital From
DATA-DR to DR
Data From DATA-DR
to the DSP
TLC32047
TLC32047
TLC32047
Dual-Word
(Telephone Interface)
Mode Only
TLC32047
Dual-Word
(Telephone Interface)
Mode Only
TLC32047
Dual-Word
(Telephone Interface)
Mode Only
Figure 2–2. Primary and Secondary Communications Word Sequence
2.15.1 DR Word Bit Pattern
A/D MSB
1st bit sent A/D LSB
↓ ↓
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
The data word is the 14-bit conversion result of the receive channel to the processor in 2s complement
format. With 16-bit processors, the data is 16 bits long with the two LSBs at zero. Using 8-bit processors,
the data word is transmitted in the same order as one 16-bit word, but as two bytes with the two LSBs of
the second byte set to zero.
2–8

2.15.2 Primary DX W ord Bit Pattern
A/D OR D/A MSB
1st bit sent 1st bit sent of 2nd byte A/D or D/A LSB
↓ ↓↓
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Table 2–2. Primary DX Serial Communication Protocol
FUNCTIONS D1 D0
D15 (MSB)-D2 → DAC Register.
TA → TX(A), RA → RX(A) (see Figure 2–1).
TB → TX(B), RB → RX(B) (see Figure 2–1).
D15 (MSB)-D2 → DAC Register.
TA+TA′ → TX(A), RA+RA′ → RX(A) (see Figure 2–1).
TB → TX(B), RB → RX(B) (see Figure 2–1).
The next D/A and A/D conversion period is changed by the addition of TA′ and RA′ master clock cycles,
in which TA′ and RA′ can be positive, negative, or zero (refer to Table 2–4, AIC Responses to Improper
Conditions).
D15 (MSB)-D2 → DAC Register.
TA–TA′ → TX(A), RA–RA′ → RX(A) (see Figure 2–1).
TB → TX(B), RB → RX(B) (see Figure 2–1).
The next D/A and A/D conversion period is changed by the subtraction of TA ′ and RA′ master clock cycles,
in which TA′ and RA′ can be positive, negative, or zero (refer to Table 2–4, AIC Responses to Improper
Conditions).
D15 (MSB)-D2 → DAC Register.
TA → TX(A), RA → RX(A) (see Figure 2–1).
TB → TX(B), RB → RX(B) (see Figure 2–1).
After a delay of four shift cycles, a secondary transmission follows to program the AIC to operate in the
desired configuration. In the telephone interface mode, data on DATA-DR is routed to DR (Serial Data
Output) during secondary transmission.
NOTE: Setting the two least significant bits to 1 in the normal transmission of DAC information (primary communications)
to the AIC initiates secondary communications upon completion of the primary communications. When the
primary communication is complete, FSX
the secondary communication. The timing specifications for the primary and secondary communications are
identical. In this manner, the secondary communication, if initiated, is interleaved between successive primary
communications. This interleaving prevents the secondary communication from interfering with the primary
communications and DAC timing. This prevents the AIC from skipping a DAC output. FSR
secondary communications activity. However, in the dual-word (telephone interface) mode, FSD
during secondary communications but not during primary communications.
remains high for four shift clock cycles and then goes low and initiates
is not asserted during
0 0
0 1
1 0
1 1
is asserted
2–9

2.15.3 Secondary DX Word Bit Pattern
D/A MSB
1st bit sent 1st bit sent of 2nd byte D/A LSB
↓ ↓↓
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Table 2–3. Secondary DX Serial Communication Protocol
FUNCTIONS D1 D0
D13 (MSB)-D9 → TA , 5 bits unsigned binary (see Figure 2–1).
D6 (MSB)-D2 → RA, 5 bits unsigned binary (see Figure 2–1).
D15, D14, D8, and D7 are unassigned.
D14 (sign bit)-D9 → TA′, 6 bits 2s complement (see Figure 2–1).
D7 (sign bit)-D2 → RA′, 6 bits 2s complement (see Figure 2–1).
D15 and D8 are unassigned.
D14 (MSB)-D9 → TB, 6 bits unsigned binary (see Figure 2–1).
D7 (MSB)-D2 → RB, 6 bits unsigned binary (see Figure 2–1).
D15 and D8 are unassigned.
D2 = 0/1 deletes/inserts the A/D high-pass filter.
D3 = 0/1 deletes/inserts the loopback function.
D4 = 0/1 disables/enables AUX IN+ and AUX IN–.
D5 = 0/1 asynchronous/synchronous transmit and receive sections.
D6 = 0/1 gain control bits (see Table 4–1).
D7 = 0/1 gain control bits (see Table 4–1).
D9 = 0/1 delete/insert on-board second-order (sin x)/x correction filter
D10 = 0/1 output to D10OUT [dual-word (telephone interface) mode]
D11 = 0/1 output to D11OUT [dual-word (telephone interface) mode]
D8, D12–D15 are unassigned.
0 0
0 1
1 0
1 1
2.16 Reset Function
A reset function is provided to initiate serial communications between the AIC and DSP. The reset function
initializes all AIC registers, including the control register. After power has been applied to the AIC, a
negative-going pulse on RESET
rate for a 10.368-MHz master clock input signal. Also, the pass-bands of the A/D and D/A filters are 300 Hz
to 7200 Hz and 0 Hz to 7200 Hz, respectively . Therefore, the filter bandwidths are 66% of those shown in
the filter transfer function specification section. The AIC, excepting the control register, is initialized as
follows (see AIC DX Data Word Format section):
INITIALIZED VALUE (HEX)TA12
The control register bits are reset as follows (see Table 2–3):
D1 1 = 0, D10 = 0, D9 = 1, D7 = 1, D6 = 1, D5 = 1, D4 = 0, D3 = 0, D2 = 1
This initialization allows normal serial port communications to occur between the AIC and the DSP. If the
transmit and receive sections are configured to operate synchronously and the user wishes to program
different conversion rates, only the TA, TA
receive timing are synchronously derived from these registers (see the Terminal Functions and DX Serial
Data Word Format sections).
Figure 2–3 shows a circuit that provides a reset on power-up when power is applied in the sequence given
in the Power-Up Sequence section. The circuit depends on the power supplies reaching their recommended
values a minimum of 800 ns before the capacitor charges to 0.8 V above DGTL GND.
2–10
initializes the AIC registers to provide a 16-kHz A/D and D/A conversion
REGISTER
′, and TB register need to be programmed. Both transmit and
TA′01TB12RA12RA′01RB
12

TLC32047
VCC+
RESET
VCC–
5 V
200 kΩ
0.5 µF
–5 V
Figure 2–3. Reset on Power-Up Circuit
2.17 Power-Up Sequence
T o ensure proper operation of the AIC and as a safeguard against latch-up, it is recommended that Schottky
diodes with forward voltages less than or equal to 0.4 V be connected from V
V
to DGTL GND. In the absence of such diodes, power is applied in the following sequence: ANLG GND
CC–
and DGTL GND, V
CC–
, then V
and VDD. Also, no input signal is applied until after power-up.
CC+
to ANLG GND and from
CC–
2.18 AIC Register Constraints
The following constraints are placed on the contents of the AIC registers:
1. TA register must be
2. TA register must be
3. TA
′ register can be either positive, negative, or zero.
4. RA register must be
5. RA register must be ≥ 5 in byte mode (WORD/BYTE = Low).
′ register can be either positive, negative, or zero.
6. RA
7. (TA register
8. (RA register
± TA′ register) must be > 1.
± RA′ register) must be > 1.
9. TB register must be
10. RB register must be ≥ 15.
≥ 4 in word mode (WORD/BYTE= High).
≥ 5 in byte mode (WORD/BYTE= Low).
≥ 4 in word mode (WORD/BYTE = High).
≥ 15.
2.19 AIC Responses to Improper Conditions
The AIC has provisions for responding to improper conditions. These improper conditions and the response
of the AIC to these conditions are presented in T able 2–4. The general procedure for correcting any improper
operation is to apply a reset and reprogram the registers to the proper value.
2–11

Table 2–4. AIC Responses to Improper Conditions
g g
g() g
g g
g() g
g
gg
g
ggg
gy
IMPROPER CONDITION AIC RESPONSE
TA register + TA′ register = 0 or 1 Reprogram TX(A) counter with TA register value
TA register – TA′ register = 0 or 1
TA register + TA′ register < 0 MODULO 64 arithmetic is used to ensure that a positive value is loaded
RA register + RA′ register = 0 or 1 Reprogram RX(A) counter with RA register value
RA register – RA′ register = 0 or 1
RA register + RA′ register = 0 or 1 MODULO 64 arithmetic is used to ensure that a positive value is loaded
TA register = 0 or 1 AIC is shut down. Reprogram TA or RA registers after a reset.
RA register = 0 or 1
TA register < 4 in word mode The AIC serial port no longer operates. Reprogram TA or RA registers
TA register < 5 in byte mode
RA register < 4 in word mode
RA register < 5 in byte mode
TB register < 15 ADC no longer operates
RB register < 15 DAC no longer operates
AIC and DSP cannot communicate Hold last DAC output
into TX(A) counter, i.e., T A register + T A′ register + 40 hex is loaded into
TX(A) counter.
into RX(A) counter, i.e., RA register + RA′ register + 40 hex is loaded
into RX(A) counter.
after a reset.
2.20 Operation With Conversion Times Too Close Together
If the difference between two successive D/A conversion frame syncs is less than 1/25 kHz, the AIC
operates improperly . In this situation, the second D/A conversion frame sync occurs too quickly, and there
is not enough time for the ongoing conversion to be completed. This situation can occur if the A and B
registers are improperly programmed or if the A + A
adjusting the conversion period via the A + A
requirement. See Figure2–4.
t
1
Frame Sync
or FSR)
(FSX
′ register result is too small. When incrementally
′ register options, the designer should not violate this
t
2
2.21 More Than One Receive Frame Sync Occurring Between Two Transmit
Frame Syncs – Asynchronous Operation
When incrementally adjusting the conversion period via the A + A′ or A – A′ register options, a specific
protocol is followed. The command to use the incremental conversion period adjust option is sent to the AIC
during an FSX
conversion period A or conversion period B may be adjusted. For both transmit and receive conversion
periods, the incremental conversion period adjustment is performed near the end of the conversion period.
If there is sufficient time between t
receive conversion period A. Otherwise, the adjustment is performed during receive conversion period B.
The adjustment command only adjusts one transmit conversion period and one receive conversion period.
T o adjust another pair of transmit and receive conversion periods, another command must be issued during
a subsequent FSX
2–12
Ongoing Conversion
t2 – t1 ≤ 1/25 kHz
Figure 2–4. Conversion Times Too Close Together
frame sync. The ongoing conversion period is then adjusted; however, either receive
and t2, the receive conversion period adjustment is performed during
1
frame (see Figure 2–5).

FSX
FSR
t
1
Transmit Conversion Period
Receive Conversion
Period A
Receive Conversion
Period B
Figure 2–5. More Than One Receive Frame Sync Between T wo Transmit Frame Syncs
2.22 More Than One Transmit Frame Sync Occurring Between Two Receive
Frame Syncs – Asynchronous Operation
When incrementally adjusting the conversion period via the A + A′ or A – A′ register options, a specific
protocol must be followed. For both transmit and receive conversion periods, the incremental conversion
period adjustment is performed near the end of the conversion period. The command to use the incremental
conversion period adjust options is sent to the AIC during an FSX
conversion period is then adjusted. However, three possibilities exist for the receive conversion period
adjustment as shown in Figure 2–6. When the adjustment command is issued during transmit conversion
period A, receive conversion period A is adjusted if there is sufficient time between t
sufficient time between t
and t2, receive conversion period B is adjusted. The third option is that the receive
1
portion of an adjustment command can be ignored if the adjustment command is sent during a receive
conversion period, which is adjusted due to a prior adjustment command. For example, if adjustment
commands are issued during transmit conversion periods A, B, and C, the first two commands may cause
receive conversion periods A and B to be adjusted, while the third receive adjustment command is ignored.
The third adjustment command is ignored since it was issued during receive conversion period B, which
already is adjusted via the transmit conversion period B adjustment command.
t
1
FSX
Transmit
Conversion
Period B
FSR
Transmit
Conversion
Period A
t
2
frame sync. The ongoing transmit
and t2. If there is not
1
Transmit
Conversion
Period C
Receive Conversion Period BReceive Conversion Period A
Figure 2–6. More Than One Transmit Frame Sync Between Two Receive Frame Syncs
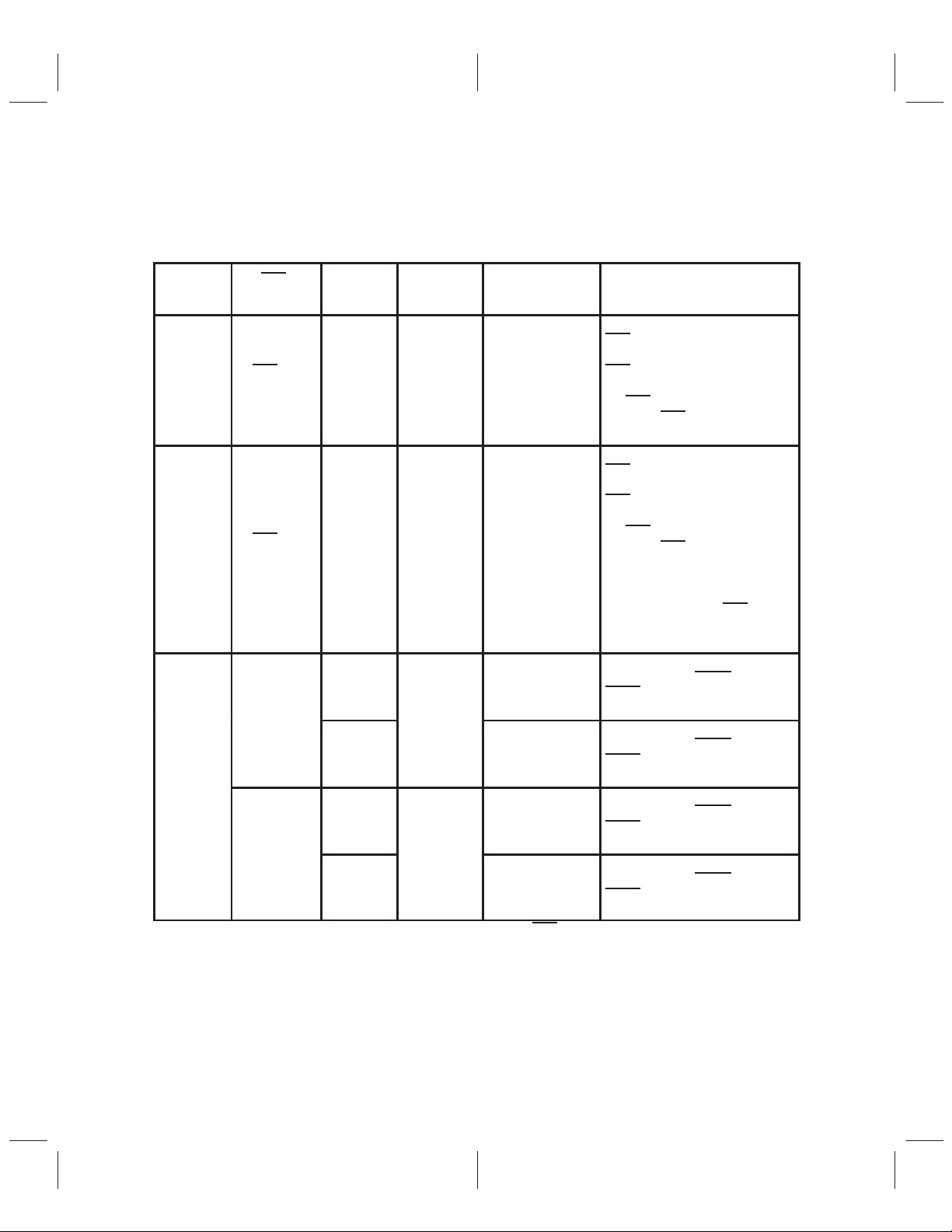
2.23 More than One Set of Primary and Secondary DX Serial Communications
Occurring Between Two Receive Frame Syncs (See DX Serial Data Word
Format section) – Asynchronous Operation
The TA, TA′, TB, and control register information that is transmitted in the secondary communication is
accepted and applied during the ongoing transmit conversion period. If there is sufficient time between t
and t2, the TA, RA′, and RB register information, sent during transmit conversion period A, is applied to
receive conversion period A. Otherwise, this information is applied during receive conversion period B. If
RA, RA
′, and RB register information has been received and is being applied during an ongoing conversion
period, any subsequent RA, RA
disregarded. See Figure 2–7.
′, or RB information received during this receive conversion period is
2–13
1

t
FSX
FSR
SecondaryPrimary
Transmit
Conversion
Preload A
Receive
Conversion
Period A
1
Transmit
Conversion
Preload B
t
2
Receive
Conversion
Period B
SecondaryPrimarySecondaryPrimary
Transmit
Conversion
Preload C
Figure 2–7. More Than One Set of Primary and Secondary DX Serial Communications
Between T wo Receive Frame Syncs
2.24 System Frequency Response Correction
The (sin x)/x correction for the DAC zero-order sample-and-hold output can be provided by an on-board
second-order (sin x)/x correction filter (see Functional Block Diagram). This (sin x)/x correction filter can be
inserted into or omitted from the signal path by digital-signal-processor control (data bit D9 in the DX
secondary communications). When inserted, the (sin x)/x correction filter precedes the switched-capacitor
low-pass filter. When the TB register (see Figure 2–1) equals 15, the correction results of Figures 5–8, 5–9,
and 5–10 can be obtained.
The (sin x)/x correction can also be accomplished by disabling the on-board second-order correction filter
and performing the (sin x)/x correction in digital signal processor software. The system frequency response
can be corrected via DSP software to
This correction is accomplished with a first-order digital correction filter, that requires seven TMS320
instruction cycles. With a 200-ns instruction cycle, seven instructions represent an overhead factor of 1.1%
and 1.3% for sampling rates of 8 and 9.6 kHz, respectively (see the (sin x)/x Correction Section for more
details).
± 0.1 dB accuracy to a band edge of 3000 Hz for all sampling rates.
2.25 (sin x)/x Correction
If the designer does not wish to use the on-board second-order (sin x)/x correction filter, correction can be
accomplished in digital signal processor (DSP) software. (sin x)/x correction can be accomplished easily
and efficiently in digital signal processor software. Excellent correction accuracy can be achieved to a band
edge of 3000 Hz by using a first-order digital correction filter. The results shown below are typical of the
numerical correction accuracy that can be achieved for sample rates of interest. The filter requires seven
instruction cycles per sample on the TMS320 DSP. With a 200-ns instruction cycle, nine instructions per
sample represents an overhead factor of 1.4% and 1.7% for sampling rates of 8000 Hz and 9600 Hz,
respectively. This correction adds a slight amount of group delay at the upper edge of the 300-Hz to 3000-Hz
band.
2.26 (sin x)/x Roll-Off for a Zero-Order Hold Function
The (sin x)/x roll-off error for the AIC DAC zero-order hold function at a band-edge frequency of 3000 Hz
for the various sampling rates is shown in Table 2–5 (see Figure 5–10).
2–14

Table 2–5. (sin x)/x Roll-Off Error
f
)
sin π f/f
(Hz
s
7200 –2.64
8000 –2.11
9600 –1.44
14400 –0.63
16000 –0.50
19200 –0.35
25000 –0.21
Error = 20 log
f = 3000 Hz
(dB)
π f/f
s
s
The actual AIC (sin x)/x roll-off is slightly less than the figures above because the AIC has less than 100%
duty cycle hold interval.
2.27 Correction Filter
T o externally compensate for the (sin x)/x roll-off of the AIC, a first-order correction filter can be implemented
as shown in Figure 2–8.
+
u (i +
1)
X
Σ
+
y(i +
1)
(1 – p1) p2
p1
X
Z
– 1
Figure 2–8. First-Order Correction Filter
The difference equation for this correction filter is:
y
= p2 ⋅ (1 – p1) ⋅ u
(i + 1)
(i + 1)
+ p1 ⋅ y
(i) (4)
where the constant p1 determines the pole locations.
The resulting squared magnitude transfer function is:
| H (f) |
2
⋅ (1–p1)
2
=
1–2 ⋅ p1 ⋅ cos (2π f/fs) + (p1)
(p2)
2
2
(5)
2.28 Correction Results
Table 2-6 shows the optimum p values and the corresponding correction results for 8000-Hz and 9600-Hz
sampling rates (see Figures 5–8, 5–9, and 5–10).
2–15

Table 2–6. (sin x)/x Correction Table for fs = 8000 Hz and fs = 9600 Hz
()
()
f (Hz)
s
s
ROLL-OFF ERROR (dB) ROLL-OFF ERROR (dB)
fs = 8000 Hz
p1 = –0.14813
p2 = 0.9888 p2 = 0.9951
300 –0.099 –0.043
600 –0.089 –0.043
900 –0.054 0
1200 –0.002 0
1500 0.041 0
1800 0.079 0.043
2100 0.100 0.043
2400 0.091 0.043
2700 –0.043 0
3000 –0.102 –0.043
fs = 9600 Hz
p1 = –0.1307
2.29 TMS320 Software Requirements
The digital correction filter equation can be written in state variable form as follows:
y
= y
(i+1)
× k1 + u
(i)
where
k1 = p1
k2 = (1 – p1)p2
y(i) is the filter state
u(i+1)
The coefficients k1 and k2 must be represented as 16-bit integers. The SACH instruction (with the proper
shift) yields the correct result. With the assumption that the TMS320 processor page pointer and memory
configuration are properly initialized, the equation can be executed in seven instructions or seven cycles
with the following program:
ZAC
LT K2
MPY U
LTA K1
MPY Y
APAC
SACH (dma), (shift)
(i+1)
× k2
2–16

3 Specifications
3.1 Absolute Maximum Ratings Over Operating Free-Air Temperature Range
(Unless Otherwise Noted)
†
Supply voltage range, V
Supply voltage range, V
Supply voltage range, V
Output voltage range, V
Input voltage range, V
(see Note 1) –0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . .
CC+
(see Note 1) –0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . .
CC–
–0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DD
–0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
O
–0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I
Digital ground voltage range –0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range: TLC32047C 0°C to 70°C. . . . . . . . . . . . . . . . . . .
TLC32047I –40°C to 85°C. . . . . . . . . . . . . . . . . .
Storage temperature range –40°C to 125°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Case temperature for 10 seconds: FN package 260°C. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds: N package 260°C. . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These
are stress ratings only and functional operation of the device at these or any other conditions beyond those indicated
under “recommended operating conditions” is not implied. Exposure to absolute-maximum-rated conditions for
extended periods may affect device reliability.
NOTE 1: Voltage values for maximum ratings are with respect to V
CC–
.
3–1

3.2 Recommended Operating Conditions
Operating free-air temperature range, T
°C
I
y
mA
I
y
mA
250
ppm/°C
MIN NOM MAX UNIT
Supply voltage, V
Supply voltage, V
Digital supply voltage, VDD (see Note 2) 4.75 5 5.25 V
Digital ground voltage with respect to ANLG GND, DGTL GND 0 V
Reference input voltage, V
High-level input voltage, V
Low-level input voltage, VIL (see Note 3) 0 0.8 V
Load resistance at OUT+ and/or OUT–, R
Load capacitance at OUT+ and/or OUT–, C
MSTR CLK frequency (see Note 4) 5 10.368 MHz
Analog input amplifier common mode input voltage (see Note 5) ±1.5 V
A/D or D/A conversion rate 25 kHz
p
NOTES: 2. Voltages at analog inputs and outputs, REF , V
digital inputs and outputs and VDD are with respect to DGTL GND.
3. The algebraic convention, in which the least positive (most negative) value is designated minimum, is used
in this data manual for logic voltage levels only.
4. The band-pass switched-capacitor filter (SCF) specifications apply only when the low-pass section SCF
clock is 432 kHz and the high-pass section SCF clock is 24 kHz. If the low-pass SCF clock is shifted from
432 kHz, the low-pass roll-off frequency shifts by the ratio of the low-pass SCF clock to 432 kHz. If the
high-pass SCF clock is shifted from 24 kHz, the high-pass roll-off frequency shifts by the ratio of the
high-pass SCF clock to 24 kHz. Similarly, the low-pass switched-capacitor filter (SCF) specifications apply
only when the SCF clock is 432 kHz. If the SCF clock is shifted from 432 kHz, the low-pass roll-off frequency
shifts by the ratio of the SCF clock to 432 kHz.
5. This range applies when (IN+ – IN–) or (AUX IN+ – AUX IN–) equals ± 6 V.
(see Note 2) 4.75 5 5.25 V
CC+
(see Note 2) –4.75 –5 –5.25 V
CC–
(see Note 2) 2 4 V
ref(ext)
IH
L
L
p
TLC32047C 0 70
A
TLC32047I –40 85
CC+
, and V
are with respect to ANLG GND. Voltages at
CC–
2 V
300 Ω
DD
100 pF
V
°
3.3 Electrical Characteristics Over Recommended Operating Free-Air
Temperature Range, V
CC+
= 5 V, V
= –5 V, VDD = 5 V (Unless
CC–
Otherwise Noted)
3.3.1 Total Device, MSTR CLK Frequency = 5.184 MHz, Outputs Not Loaded
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
V
High-level output voltage VDD = 4.75 V, IOH = –300 µA 2.4 V
OH
V
Low-level output voltage VDD = 4.75 V, IOL = 2 mA 0.4 V
OL
Supply current from
CC+
V
CC+
Supply current from
CC–
V
CC –
I
Supply current from V
DD
V
Internal reference output voltage 3 3.3 V
ref
Temperature coefficient of
α
Vref
internal reference voltage
r
Output resistance at REF 100 kΩ
o
†
All typical values are at TA = 25°C.
3–2
TLC32047C 35
TLC32047I
TLC32047C –35
TLC32047I
DD
–40
40
7 mA
pp
°

3.3.2 Power Supply Rejection and Crosstalk Attenuation
g
CC+ CC
yg
g
dB
V
CC
V
CC
su ly voltage
f
Idle channel, su ly
30
l
200 mV
dB
CMRR
j,,
See Note 6
55
dB
r
,,
100
kΩ
V
g
1580mV
gg
L
,
±3
V
V
gg
R
600 Ω
±6
V
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
V
or V– supply voltage
rejection ratio, receive channel
or
+
rejection ratio, transmit channe
(single-ended)
Crosstalk attenuation, transmit-to-receive
(single-ended)
†
All typical values are at TA = 25°C.
pp
–
f = 0 to 30 kHz
f = 30 kHz to 50 kHz
= 0 to 30 kHz
f = 30 kHz to 50 kHz
Idle channel, supply
si
nal at 200 mV p-p
measured at DR (ADC
output)
pp
signal at
measured at OUT+
pp
p-p
3.3.3 Serial Port
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
V
OH
V
OL
I
I
I
I
C
i
C
o
†
All typical values are at TA = 25°C.
High-level output voltage IOH = –300 µA 2.4 V
Low-level output voltage IOL = 2 mA 0.4 V
Input current ±10 µA
Input current, DATA-DR/CONTROL ±100 µA
Input capacitance 15 pF
Output capacitance 15 pF
3.3.4 Receive Amplifier Input
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
A/D converter offset error (filters in) 10 70 mV
Common-mode rejection ratio at IN+, IN–, or
AUX IN+, AUX IN–
i
†
All typical values are at TA = 25°C.
NOTE 6: The test condition is a 0-dBm, 1-kHz input signal with a 24-kHz conversion rate.
Input resistance at IN+, IN– or AUX IN+,
AUX IN–, REF
30
45
45
80 dB
3.3.5 Transmit Filter Output
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
OO
OM
†
All typical values are at TA = 25°C.
Output offset voltage at OUT+ or OUT–
(single-ended relative to ANLG GND)
Maximum peak output voltage swing across R
RL at OUT+ or OUT– (single-ended)
Maximum peak output voltage swing between
OUT+ and OUT– (differential output)
≥ 300 Ω,
Offset voltage = 0
≥
L
,
3–3

3.3.6 Receive and Transmit Channel System Distortion, SCF Clock
dB
V
0.1 dB to –24 dB
g
dB
dB
V
dB
g
dB
PARAMETER
TEST CONDITIONS
UNIT
A/D ch
distortion ratio
Frequency = 432kHz (see Note 7)
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Attenuation of second harmonic of
A/D input signal
Attenuation of third and higher
harmonics of A/D input signal
Attenuation of second harmonic of
D/A input signal
Attenuation of third and higher
harmonics of D/A input signal
†
All typical values are at TA = 25°C.
single-ended 70
differential
single-ended
differential 57 65
single-ended 70
differential
single-ended
differential 57 65
= –
I
= –0 dB to –24
I
62 70
65
62 70
65
3.3.7 Receive Channel Signal-to-Distortion Ratio (see Note 7)
Av = 1 V/V
MIN MAX MIN MAX MIN MAX
VI = –6 dB to –0.1 dB 56
VI = –12 dB to –6 dB 56 56
VI = –18 dB to –12 dB 53 56 56
annel signal-to-
‡
Av is the programmable gain of the input amplifier.
§
Measurements under these conditions are unreliable due to overrange and signal clipping.
NOTE 7: The test condition is a 1-kHz input signal with a 24-kHz conversion rate. The load impedance for the DAC is
600 Ω. Input and output voltages are referred to V
VI = –24 dB to –18 dB 47 53 56
VI = –30 dB to –24 dB 41 47 53
VI = –36 dB to –30 dB 35 41 47
VI = –42 dB to –36 dB 29 35 41
VI = –48 dB to –42 dB 23 29 35
VI = –54 dB to –48 dB 17 23 29
ref
‡
Av = 2 V/V
.
‡
Av = 4 V/V
§ §
‡
§
dB
3–4

3.3.8 Transmit Channel Signal-to-Distortion Ratio (see Note 7)
I
l
reference is 0 dB
PARAMETER TEST CONDITIONS MIN MAX UNIT
VI = –6 dB to –0.1 dB 58
VI = –12 dB to –6 dB 58
VI = –18 dB to –12 dB 56
VI = –24 dB to –18 dB 50
D/A channel signal-to-distortion ratio
NOTE 7: The test condition is a 1-kHz input signal with a 24-kHz conversion rate. The load impedance for the DAC is
600 Ω. Input and output voltages are referred to V
VI = –30 dB to –24 dB 44
VI = –36 dB to –30 dB 38
VI = –42 dB to –36 dB 32
VI = –48 dB to –42 dB 26
VI = –54 dB to –48 dB 20
.
ref
dB
3.3.9 Receive and Transmit Gain and Dynamic Range (see Note 8)
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
Transmit gain tracking error VO = –48 dB to 0 dB signal range ±0.05 ±0.25 dB
Receive gain tracking error VI = –48 dB to 0 dB signal range ±0.05 ±0.25 dB
NOTE 8: Gain tracking is relative to the absolute gain at 1 kHz and 0 dB (0 dB relative to V
3.3.10 Receive Channel Band-Pass Filter Transfer Function, SCF f
Input (IN+ – IN–) is a
PARAMETER
Filter gain
†
All typical values are at TA = 25°C.
‡
The MIN, TYP , and MAX specifications are given for a 432-kHz SCF clock frequency . A slight error in the 432-kHz SCF
can result from inaccuracies in the MSTR CLK frequency, resulting from crystal frequency tolerances. If this frequency
error is less than 0.25%, the ADJUSTMENT ADDEND should be added to the MIN, TYP , and MAX specifications, where
K1 = 100 × [(SCF frequency – 432 kHz)/432 kHz]. For errors greater than 0.25%, see Note 9.
NOTE 9: The filter gain outside of the pass band is measured with respect to the gain at 1 kHz. The filter gain within the
pass band is measured with respect to the average gain within the pass band. The pass bands are 450 Hz
to 10.95 kHz and 0 to 10.95 kHz for the band-pass and low-pass filters, respectively. For switched-capacitor
filter clocks at frequencies other than 432 kHz, the filter response is shifted by the ratio of switched-capacitor
filter clock frequency to 432 kHz.
TEST
CONDITION
nput signa
±3-V Sine Wave
FREQUENCY ADJUSTMENT MIN
f ≤ 150 Hz K1 × 0 dB –33 –29 –25
f = 300 Hz K1 × –0.26 dB –4 –2 –1
f = 450 Hz to 9300 Hz K1 × 0 dB –0.25 0 0.25
f = 9300 Hz to 9900 Hz K1 × 0 dB –0.3 0 0.3
f = 9900 Hz to 10950 Hz K1 × 0 dB –0.5 0 0.5
f = 11.4 kHz K1 × 2.3 dB –2 –0.5
f = 12 kHz K1 × 2.7 dB –16 –14
f ≥ 13.2 kHz K1 × 3.2 dB –40
f ≥ 15 kHz K1 × 0 dB –60
‡
(see Note 9)
).
ref
clock
TYP
= 432 kHz,
†
MAX UNIT
dB
3–5

3.3.11 Receive and Transmit Channel Low-Pass Filter Transfer Function,
I
l
reference is 0 dB
,
rms
Receive noise (see Note 10)
Inputs grounded, gain
1
SCF f
PARAMETER
Filter gain
†
All typical values are at TA = 25°C.
‡
The MIN, TYP , and MAX specifications are given for a 432-kHz SCF clock frequency . A slight error in the 432-kHz SCF
may result from inaccuracies in the MSTR CLK frequency, resulting from crystal frequency tolerances. If this frequency
error is less than 0.25%, the ADJUSTMENT ADDEND should be added to the MIN, TYP , and MAX specifications, where
K1 = 100 × [(SCF frequency – 432 kHz)/432 kHz]. For errors greater than 0.25%, see Note 9.
NOTE 9: The filter gain outside of the pass band is measured with respect to the gain at 1 kHz. The filter gain within the
pass band is measured with respect to the average gain within the pass band. The pass bands are 450 Hz
to 10.95 kHz and 0 to 10.95 kHz for the band-pass and low-pass filters, respectively. For switched-capacitor
filter clocks at frequencies other than 432 kHz, the filter response is shifted by the ratio of switched-capacitor
filter clock frequency to 432 kHz.
= 432 kHz (see Note 9)
clock
TEST
CONDITION
f = 0 Hz to 9300 Hz K1 × 0 dB –0.25 0 0.25
f = 9300 Hz to 9900 Hz K1 × 0 dB –0.3 0 0.3
nput signa
f = 9900 Hz to 10950 Hz K1 × 0 dB –0.5 0 0.5
f = 11.4 kHz K1 × 2.3 dB –5 –2 –0.5
f = 12 kHz K1 × 2.7 dB –16 –14
f ≥ 13.2 kHz K1 × 3.2 dB –40
f ≥ 15 kHz K1 × 0 dB –60
FREQUENCY
RANGE
ADJUSTMENT
ADDEND
‡
MIN TYP†MAX UNIT
dB
3.4 Operating Characteristics Over Recommended Operating Free-Air
Temperature Range, V
3.4.1 Receive and Transmit Noise (Measurement Includes Low-Pass and Band-Pass
Switched-Capacitor Filters)
PARAMETER TEST CONDITIONS MIN TYP†MAX UNIT
broadband with (sin x)/x 280 500
Transmit
noise
†
All typical values are at TA = 25°C.
NOTE 10: The noise is computed by statistically evaluating the digital output of the A/D converter.
broadband without (sin x)/x
0 to 12 kHz with (sin x)/x
0 to 12 kHz without (sin x)/x 240 400
= 5 V, V
CC+
DX = input = 00000000000000,
constant input code
CC–
p
= –5 V, VDD = 5 V
=
250 450
250 400
300 500 µV rms
18 dBrnc0
µV
3–6

3.5 Timing Requirements
3.5.1 Serial Port Recommended Input Signals
PARAMETER MIN MAX UNIT
t
c(MCLK)
t
r(MCLK)
t
f(MCLK)
t
su(DX)
t
h(DX)
NOTE 11: RESET pulse duration is the amount of time that the reset pin is held below 0.8 V after the power supplies have
3.5.2 Serial Port – AIC Output Signals, CL = 30 pF for SHIFT CLK Output, CL = 15 pF
t
c(SCLK)
t
f(SCLK)
t
r(SCLK)
t
d(CH-FL)
t
d(CH-FH)
t
d(CH-DR)
t
d(CH-EL)
t
d(CH-EH)
t
f(EODX)
t
f(EODR)
t
d(CH-EL)
t
d(CH-EH)
t
d(MH-SL)
t
d(MH-SH)
†
Typical values are at TA = 25°C.
Master clock cycle time 95 ns
Master clock rise time 10 ns
Master clock fall time 10 ns
Master clock duty cycle 25% 75%
RESET pulse duration (see Note 11) 800 ns
DX setup time before SCLK↓ 20 ns
DX hold time after SCLK↓ t
reached their recommended values.
c(SCLK)/4
For All Other Outputs
PARAMETER MIN TYP†MAX UNIT
Shift clock (SCLK) cycle time 380 ns
Shift clock (SCLK) fall time 3 8 ns
Shift clock (SCLK) rise time 3 8 ns
Shift clock (SCLK) duty cycle 45 55 %
Delay from SCLK↑ to FSR/FSX/FSD↓ 30 ns
Delay from SCLK↑ to FSR/FSX/FSD↑ 35 90 ns
DR valid after SCLK↑ 90 ns
Delay from SCLK↑ to EODX/EODR↓ in word mode 90 ns
Delay from SCLK↑ to EODX/EODR↑ in word mode 90 ns
EODX fall time 2 8 ns
EODR fall time 2 8 ns
Delay from SCLK↑ to EODX/EODR↓ in byte mode 90 ns
Delay from SCLK↑ to EODX/EODR↑ in byte mode 90 ns
Delay from MSTR CLK↑ to SCLK↓ 65 170 ns
Delay from MSTR CLK↑ to SCLK↑ 65 170 ns
ns
3–7

3–8

4 Parameter Measurement Information
V
V
±full scale
Anal
= AUX IN+ – AUX IN–
V
V
±half scale
Anal
ANLG GND
= AUX IN+ ANLG GND
R
fb
IN +
or
AUX IN+
IN –
or
AUX IN–
R
R
Rfb = R for D6 = 1 and D7 = 1
Rfb = 2R for D6 = 1 and D7 = 0
Rfb = 4R for D6 = 0, and D7 = 1
+
–
D6 = 0 and D7 = 0
–
+
R
fb
To MUX
Figure 4–1. IN+ and IN– Gain Control Circuitry
Table 4–1. Gain Control Table (Analog Input Signal Required for
= ±6
‡§
†
RESULT
Full-Scale Bipolar A/D Conversion Twos Complement)
INPUT
CONFIGURATIONS
Differential configuration
og input = IN+ – IN–
Single-ended configuration
og input= IN+ –
†
V
CC+
‡
VID = Differential Input Voltage, VI = Input voltage referenced to ground with IN– or AUX IN– connected to ground.
§
In this example, V
exceed 0.1 dB below full scale.
=
p
= AUX IN+ – ANLG GND
= 5 V, V
= –5 V, VDD = 5 V
CC–
is assumed to be 3 V. In order to minimize distortion, it is recommended that the analog input not
ref
–
CONTROL REGISTER BITS
D6 D7
1 1
0 0
–
1 0 VID = ±3 V ±full scale
0 1 VID = ±1.5 V ±full scale
1 1
0 0
1 0 VI = ±3 V ±full scale
0 1 VI = ±1.5 V ±full scale
ANALOG A/D CONVERSION
INPUT
ID
= ±3
I
4–1
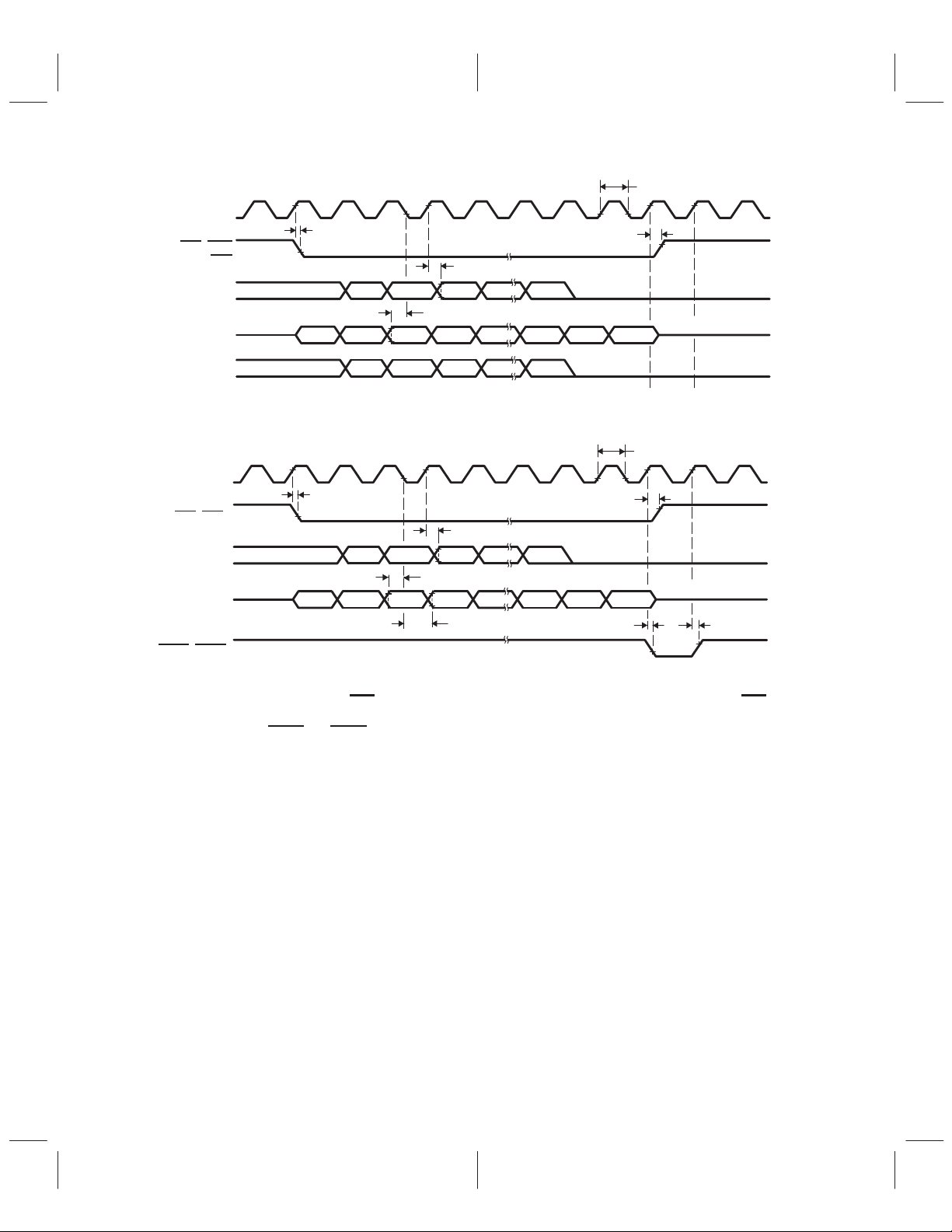
SHIFT
CLK
FSX, FSR,
FSD
DR
DX
8 V
td
(CH-FL)
tsu
(DX)
8 V
tc
(SCLK)
2 V2 V
td
(CH-DR)
D13D14D15
D12
td
(CH-FH)
8 V
D0D1D2D11
2 V2 V
2 V
D0D1D2D11D12D13D14D15
Don’t Care
DATA-DR
D15 D14 D13 D12 D2 D1 D0
D11
Figure 4–2. Dual-Word (Telephone Interface) Mode Timing
tc
(SCLK)
2 V2 V
2 V
D0D1D2D11
D0D1D2D11D12D13D14D15
8 V
Don’t Care
td
2 V
(CH-EH)
FSX
EODX
SHIFT
CLK
, FSR
, EODR
DR
DX
2 V2 V
(DX)
8 V
td
(CH–DR)
D12
D13D14D15
th
(DX)
td
(CH-FL)
†
‡
8 V
tsu
8 V
td (CH-FH)
td
(CH-EL)
Figure 4–3. Word Timing
†
The time between falling edges of FSR is the A/D conversion period and the time between falling edges of FSX is the
D/A conversion period.
‡
In the word format, EODX
is 20 shift-clocks wide, giving a four-clock period setup time between data words.
and EODR go low to signal the end of a 16-bit data word to the processor. The word-cycle
4–2

2 V
2 V
c (SCLK)
t
2 V 2 V
2 V
r (SCLK)
t
d (CH-FH)
t
d (CH-FL)
t
8 V
d (CH-FH)
t
2 V 2 V
D1 D0
d (CH-DR)
t
d (CH-EH)
t
D12 D11D8
Don’t Care
d (CH-EL)
t
h (DX)
t
D13 D9D15 D14 D0D2 D1
8 V
Figure 4–4. Byte-Mode Timing
2 V
f (SCLK)
t
2 V
CLK
SHIFT
8 V
d (CH-FL)
t
FSR,
FSX
D15 D14 D13 D9 D8 D7 D6 D2
DR
su (DX)
t
DX
EODX
EODR,
The time between falling edges of FSR is the A/D conversion period, and the time between fallling edges of FSX is the D/A conversion period.
In the byte mode, when EODX or EODR is high, the first byte is transmitted or received, and when these signals are low, the second byte is
transmitted or received. Each byte-cycle is 12 shift-clocks long, allowing for a four-shift-clock setup time between byte transmissions.
†
‡
4–3

MSTR CLK
td
(MH-SH)
td
(MH-SL)
SHIFT CLK
Figure 4–5. Shift-Clock Timing
4.1 TMS32047 – Processor Interface
SN74LS74
2D
SN74LS299
S1
Q
SN74LS299SN74LS138
G2
S0
G1
A-H
S1
G2
S0
G1
A-H
CLK
CLK
Q
H
SR
H
SR
DEN
G1
A0/PA0
A1/PA1
A2/PA2
TMS32010 TLC32047
D0-D15
Y1
A
Y0
B
C
D8-D15
D0-D7D0-D15
C2
SN74LS74
C1
1D
FSX
DX
SHIFT
CLK
DR
4–4
WE
CLK
OUT
INT
Figure 4–6. TMS32010/TMS320C15–TLC32047 Interface Circuit
MSTR
CLK
EODX

CLK OUT
DEN
S0,G1
D0–D15
CLK OUT
WE
SN74LS138 Y1
SN74LS299 CLK
D0–D15
Figure 4–7. TMS32010/TMS320C15–TLC32047 Interface Timing
Valid
(a) IN INSTRUCTION TIMING
Valid
(b) OUT INSTRUCTION TIMING
4–5

4–6

5 Typical Characteristics
SC
(
)
0.4
TA = 25°C
Input = ± 3 V Sine Wave
0.2
0
– 0.2
Pass Band Magnitude – dB
– 0.4
D/A AND A/D LOW-PASS FILTER
RESPONSE SIMULATION
– 0.6
0369
Normalized Frequency
Figure 5–1
D/A AND A/D LOW-PASS FILTER
RESPONSE SIMULATION
0
See Figure 2-1
for Pass Band
– 10
Detail
– 20
– 30
– 40
– 50
Magnitude – dB
– 60
– 70
– 80
– 90
0 3 6 9 12 15 18
Figure 5–2
12 15
TA = 25°C
Input = ± 3 V Sine Wave
21 24 27 30
NOTE : Absolute Frequency (kHz)
Normalized Frequency
+
Ff
clock
kHz
432
5–1

D/A AND A/D LOW-PASS GROUP DELAY
SC
(
)
0.6
TA = 25°C
Input = ±3 V Sine Wave
0.5
0.4
0.3
Group Delay – ms
0.2
0
0369
f – Frequency – kHz
Figure 5–3
A/D BAND-PASS RESPONSE
0.4
High-Pass SCF f
TA = 25°C
Input = ±3 V Sine Wave
0.2
0
– 0.2
Pass Band Magnitude – dB
– 0.4
– 0.6
0369
clock
f – Frequency – kHz
Figure 5–4
12 15
= 24 kHz
12 15
NOTE : Absolute Frequency (kHz)
5–2
Normalized Frequency
+
Ff
clock
kHz
432

A/D BAND-PASS FILTER RESPONSE SIMULATION
SC
(
)
0
– 10
– 20
– 30
– 40
– 50
Magnitude – dB
– 60
– 70
– 80
High-Pass SCF
f
= 24 kHz
clock
TA = 25°C
Input = ± 3 V Sine Wave
– 90
0 3 6 9 12 15 18
A/D BAND-PASS FILTER GROUP DELAY
1.0
0.9
0.8
0.6
0.5
0.4
Group Delay – ms
0.2
0.1
0
0 1.2 2.4 3.6 4.8 6 7.2
21 24 27 30
f – Frequency – kHz
Figure 5–5
High-Pass SCF f
TA = 25°C
Input = ±3 V Sine Wave
f – Frequency – kHz
clock
8.4 9.6 10.8 12
= 24 kHz
NOTE : Absolute Frequency (kHz)
Figure 5–6
Normalized Frequency
+
Ff
clock
kHz
432
5–3

A/D CHANNEL HIGH-PASS FILTER
SC
(
)
20
TA = 25°C
Input = ± 3 V Sine Wave
10
0
– 10
– 20
– 30
Magnitude – dB
– 40
– 50
– 60
0 150 300 450 600 750 900
Normalized Frequency
10501200 13501500
Figure 5–7
D/A (sin x)/x CORRECTION FILTER RESPONSE
4
2
0
– 2
Magnitude – dB
– 4
– 6
0 3 6 9 12 15 18
NOTE : Absolute Frequency (kHz)
5–4
TA = 25°C
Input = ± 3 V Sine Wave
f – Frequency – kHz
Figure 5–8
Normalized Frequency
+
21 24 27 30
Ff
432
clock
kHz

D/A (sin x)/x CORRECTION FILTER RESPONSE
(
)
325
TA = 25°C
Input = ± 3 V Sine Wave
260
sµ
195
130
Group Delay –
65
0
0 3 6 9 12 15 18
D/A (sin x)/x CORRECTION ERROR
2
TA = 25°C
1.6
Input = ± 3 V Sine Wave
1.2
0.8
0.4
0
– 0.4
Magnitude – dB
– 0.8
– 1.2
– 1.6
– 2
0 1.5 3 4.5 6 7.5 9
21 24 27 30
f – Frequency – kHz
Figure 5–9
(sin x) /x Correction
Error
28.8 kHz (sin x) /x
Distortion
10.5 12 13.5 15
f – Frequency – kHz
NOTE : Absolute Frequency (kHz)
Figure 5–10
Normalized Frequency
+
SCFf
clock
kHz
432
5–5

A/D BAND-PASS GROUP DELAY
760
Low-pass SCF f
720
µs
680
640
600
560
520
480
A/D Band-pass Group Delay –
440
High-pass SCF f
TA = 25°C
Input = ± 3 V Sine Wave
clock
clock
= 144 kHz
= 8 kHz
400
0.4 0.8 1.2 1.6 2.0
0
f – Frequency – Hz
Figure 5–11
D/A LOW-PASS GROUP DELAY
560
520
µs
480
440
400
360
320
280
A/D Band-pass Group Delay –
240
200
Low-pass SCF f
TA = 25°C
Input = ± 3 V Sine Wave
0 0.4 0.8 1.2 1.6 2.0
f – Frequency – Hz
Figure 5–12
clock
2.4 2.8 3.2 3.6
= 144 kHz
2.4 2.8 3.2 3.6
5–6
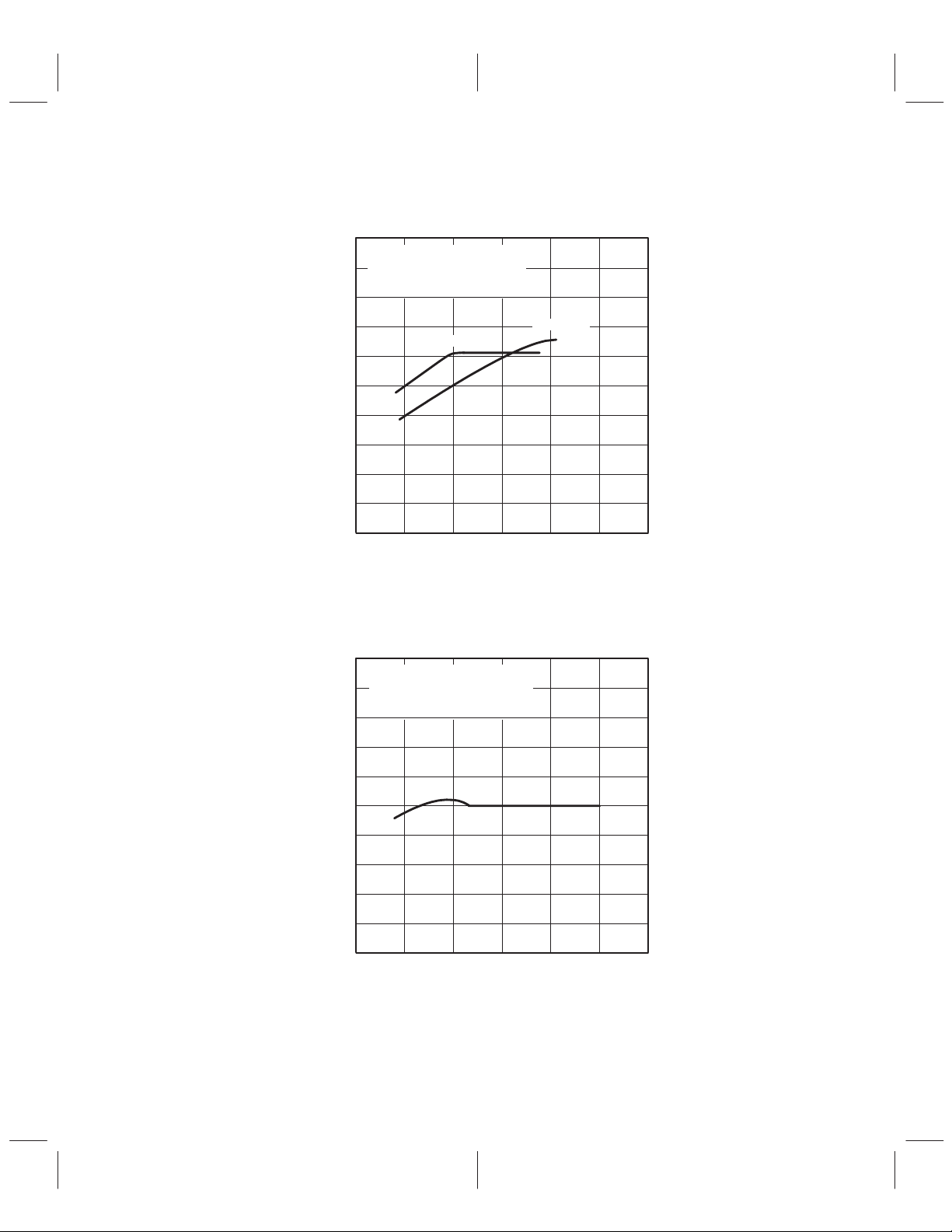
A/D SIGNAL-TO-DISTORTION RATIO
vs
INPUT SIGNAL
100
1-kHz Input Signal
90
16-kHz Conversion Rate
TA = 25°C
80
70
60
50
40
30
Signal-To-Distortion Ratio – dB
20
10
0
– 50 – 40 – 30 – 20 – 10 0 10
Gain = 4
Input Signal Relative to V
Gain = 1
ref
– dB
Figure 5–13
A/D GAIN TRACKING
(GAIN RELATIVE TO GAIN AT 0-dB INPUT SIGNAL)
0.5
1-kHz Input Signal
0.4
16-kHz Conversion Rate
TA = 25°C
0.3
0.2
0.1
0.0
– 0.1
Gain Tracking – dB
– 0.2
– 0.3
– 0.4
– 0.5
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
Figure 5–14
ref
– dB
5–7

D/A CONVERTER SIGNAL-TO-DISTORTION RATIO
vs
INPUT SIGNAL
100
1-kHz Input Signal Into 600 Ω
90
16-kHz Conversion Rate
TA = 25°C
80
70
60
50
40
30
Signal-To-Distortion Ratio – dB
20
10
0
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
ref
– dB
Figure 5–15
D/A GAIN TRACKING (GAIN RELATIVE TO GAIN
AT 0-dB INPUT SIGNAL)
0.5
1-kHz Input Signal Into 600 Ω
0.4
16-kHz Conversion Rate
TA = 25°C
0.3
5–8
0.2
0.1
0.0
– 0.1
Gain Tracking – dB
– 0.2
– 0.3
– 0.4
– 0.5
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
Figure 5–16
ref
– dB

A/D SECOND HARMONIC DISTORTION
vs
INPUT SIGNAL
– 100
Second Harmonic Distortion – dB
1-kHz Input Signal
16-kHz Conversion Rate
– 90
TA = 25°C
– 80
– 70
– 60
– 50
– 40
– 30
– 20
– 10
0
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
ref
Figure 5–17
D/A SECOND HARMONIC DISTORTION
vs
INPUT SIGNAL
– 100
1-kHz Input Signal Into 600 Ω
– 90
16-kHz Conversion Rate
TA = 25°C
– 80
– dB
– 70
– 60
– 50
– 40
– 30
– 20
Second Harmonic Distortion – dB
– 10
0
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
ref
Figure 5–18
– dB
5–9

A/D THIRD HARMONIC DISTORTION
vs
INPUT SIGNAL
– 1000
– 90
Third Harmonic Distortion – dB
1-Hz Input Signal
16-kHz Conversion Rate
TA = 25°C
– 80
– 70
– 60
– 50
– 40
– 30
– 20
– 10
0
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
ref
Figure 5–19
D/A THIRD HARMONIC DISTORTION
vs
INPUT SIGNAL
– 100
1-kHz Input Signal Into 600 Ω
– 90
16-kHz Conversion Rate
TA = 25°C
– 80
– dB
5–10
– 70
– 60
– 50
– 40
– 30
Third Harmonic Distortion – dB
– 20
– 10
0
– 50 – 40 – 30 – 20 – 10 0 10
Input Signal Relative to V
ref
Figure 5–20
– dB

6 Application Information
TMS32020/C25
CLKOUT
FSX
DX
FSR
DR
CLKR
CLKX
C = 0.2 µF, Ceramic
Figure 6–1. AIC Interface to the TMS32020/C25 Showing Decoupling
†
Thomson Semiconductors
TLC32047
MSTR CLK
FSX
DX
FSR
DR
SHIFT CLK
VCC +
REF
ANLG GND
VCC –
V
DD
DGTL GND
Capacitors and Schottky Diode
V
CC
R
500 Ω
TL431
C
BAT 42
†
3 V Output
0.01 µF
5 V
C
†
C
– 5 V
5 V
0.1 µF
AD
2500 Ω
D
FOR: VCC = 12 V, R = 7200 Ω
VCC = 10 V, R = 5600 Ω
VCC = 0 V, R = 1600 Ω
Figure 6–2. External Reference Circuit for TLC32047
6–1

6–2

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...