

Programmable single-phase energy metering IC
Features
■ Measures active, reactive, and apparent
energies
■ Current, voltage RMS and instantaneous
measurement
■ Frequency measurement
■ Ripple-free active energy pulsed output
■ Live and neutral monitoring for tamper
detection
■ Fast and simple one-point digital calibration
over the whole current range
■ Integrated linear voltage regulators for digital
and analog supply
■ Selectable RC or crystal oscillator
■ Supports 50 - 60 Hz - IEC62052-11, IEC62053-
2x specifications
■ Less than 0.1% error in the 1000:1 range
■ Precision voltage reference: 1.23 V with 30
ppm/°C max
Description
The STPM10 is designed for effective
measurement of active, reactive and apparent
energy in a power line system using current
transformer and shunt sensors. The device can
be implemented for peripheral measurement in a
microcontroller-based single-phase or poly-phase
energy meter. The STPM10 consists of two main
sections: analog and digital. The analog part is
composed of preamplifier and first-order sigmadelta A/D converter blocks, a band-gap voltage
reference and low-drop voltage regulator. The
digital part is composed of system control,
oscillator, hard-wired DSP and SPI interface.
There is also an internal volatile memory, which is
Table 1. Device summary
STPM10
with tamper detection
TSSOP20
controlled through the SPI by means of a
dedicated command set. The configured bits are
used for configuration and calibration purposes.
From a pair of sigma-delta output signals
produced by the analog section, the DSP unit
computes the amount of active, reactive and
apparent energy consumed, as well as the RMS
and instantaneous voltage and current values.
The results of the computation are available as
pulse frequencies and states on the digital
outputs of the device, or as data bits in a data
stream, which can be read from the device by
means of the SPI interface. The system bus
interface is also used for temporary programming
of bits of internal volatile memory. The STPM10
generates an output signal with a pulse frequency
proportional to the energy, and this signal is used
in the calibration phase of the energy metering
application.
Order code Temperature range Package Packaging
STPM10BTR - 40 to 85 °C TSSOP20 (tape and reel) 2500 parts per reel
June 2011 Doc ID 17728 Rev 3 1/51
www.st.com
51

Contents STPM10
Contents
1 Schematic diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Pin configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.1 Measurement error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.2 ADC offset error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.3 Gain error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.4 Power supply DC and AC rejection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.5 Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Typical performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7 Theory of operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7.1 General operation description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7.2 Analog inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7.3 ΣΔ A/D converters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
7.4 Zero-crossing detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
7.5 Period and line voltage measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7.6 Power supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
7.7 Load monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.8 Error detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.9 Tamper detection module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.9.1 Detailed operational description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
7.10 Phase compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.11 Clock generator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.11.1 RC startup procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.12 Resetting the STPM10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.13 Using the STPM10 in microcontroller-based meters . . . . . . . . . . . . . . . . 24
2/51 Doc ID 17728 Rev 3

STPM10 Contents
7.14 Energy to frequency conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.15 Status bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.16 Programming the STPM10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.16.1 Data records . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.17 Configuration bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.18 Mode signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.19 SPI interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7.20 Remote reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7.21 Reading data records . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.22 Writing procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.22.1 Interfacing the standard 3-wire SPI with the STPM10 SPI . . . . . . . . . . 36
7.23 Energy calculation algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
7.23.1 Active power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7.23.2 Reactive power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.23.3 Apparent power and RMS values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
7.24 STPM10 calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
8 Application design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
9 Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
10 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Doc ID 17728 Rev 3 3/51

List of tables STPM10
List of tables
Table 1. Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Table 3. Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Table 4. Thermal data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Table 5. Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 6. Gain of voltage and current channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Table 7. Configuration of current sensors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Table 8. No-load detection thresholds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Table 9. LED pin configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Table 10. Status bit description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 11. Configuration bit map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 12. Mode signal description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 13. Working point settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 14. Device constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 15. Resistor divider ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 16. Current channel typical components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 17. Footprint data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 18. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4/51 Doc ID 17728 Rev 3

STPM10 List of figures
List of figures
Figure 1. Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 2. Pin connections (top view) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 3. Supply current vs. supply voltage, T
Figure 4. RC oscillator frequency vs. V
CC
Figure 5. RC oscillator: frequency jitter vs. temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 6. Analog voltage regulator: line - load regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 7. Digital voltage regulator: line - load regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 8. Voltage channel linearity at different V
Figure 9. Power supply AC rejection vs. V
Figure 10. Power supply DC rejection vs. V
Figure 11. Error over dynamic range gain dependence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 12. Primary current channel linearity at different V
Figure 13. Gain response of ΔΣ A/D converters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 14. First-order ΣΔ A/D converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 15. ZCR signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 16. LIN and BFR signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 17. Band-gap temperature variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 18. Timings of tamper module - Primary channel selected. . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 19. Timings of tamper module - Secondary channel selected . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 20. Different oscillator circuits with (a) quartz, (b) internal oscillator, (c) external source . . . . . 23
Figure 21. STPM10 data records map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 22. Timing for providing remote reset request . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 23. Data record reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figure 24. Timing for data record reading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Figure 25. Timing for writing configuration and mode bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figure 26. Active energy computation diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 27. STPM10 reference schematic with one current transformer and one shunt. . . . . . . . . . . . 45
Figure 28. TSSOP20 footprint recommended data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
= 25 °C (f = 4.194 MHz, 8.192 MHz). . . . . . . . . . . . 13
A
, R = 12 kΩ, TA = 25 °C . . . . . . . . . . . . . . . . . . . . . . . . . . 13
voltages. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
CC
Doc ID 17728 Rev 3 5/51

Schematic diagram STPM10
1 Schematic diagram
Figure 1. Block diagram
VCC
VIP
VIN
IIN1
IIP2
IIN2
VSS
VDDA VDDD
Voltage Ref
+
4
-
Gain: 8-32
IIPI
+
-
Gain: 8-32
ΔΣ A/D
Tamper
Linear Vregs
ΔΣ A/D
φ
VO
56-bit
Configurators
DSP
Energies
and
RMS Values
Energy to Freq
Converters
LED
WDG
+
-
Registers
Oscillator
and
SPI Interface
SDA/TDSYNSCSSCL/NCCLKOUTCLKIN
ZCR
AM00176v1
6/51 Doc ID 17728 Rev 3
STPM10 Pin configuration
2 Pin configuration
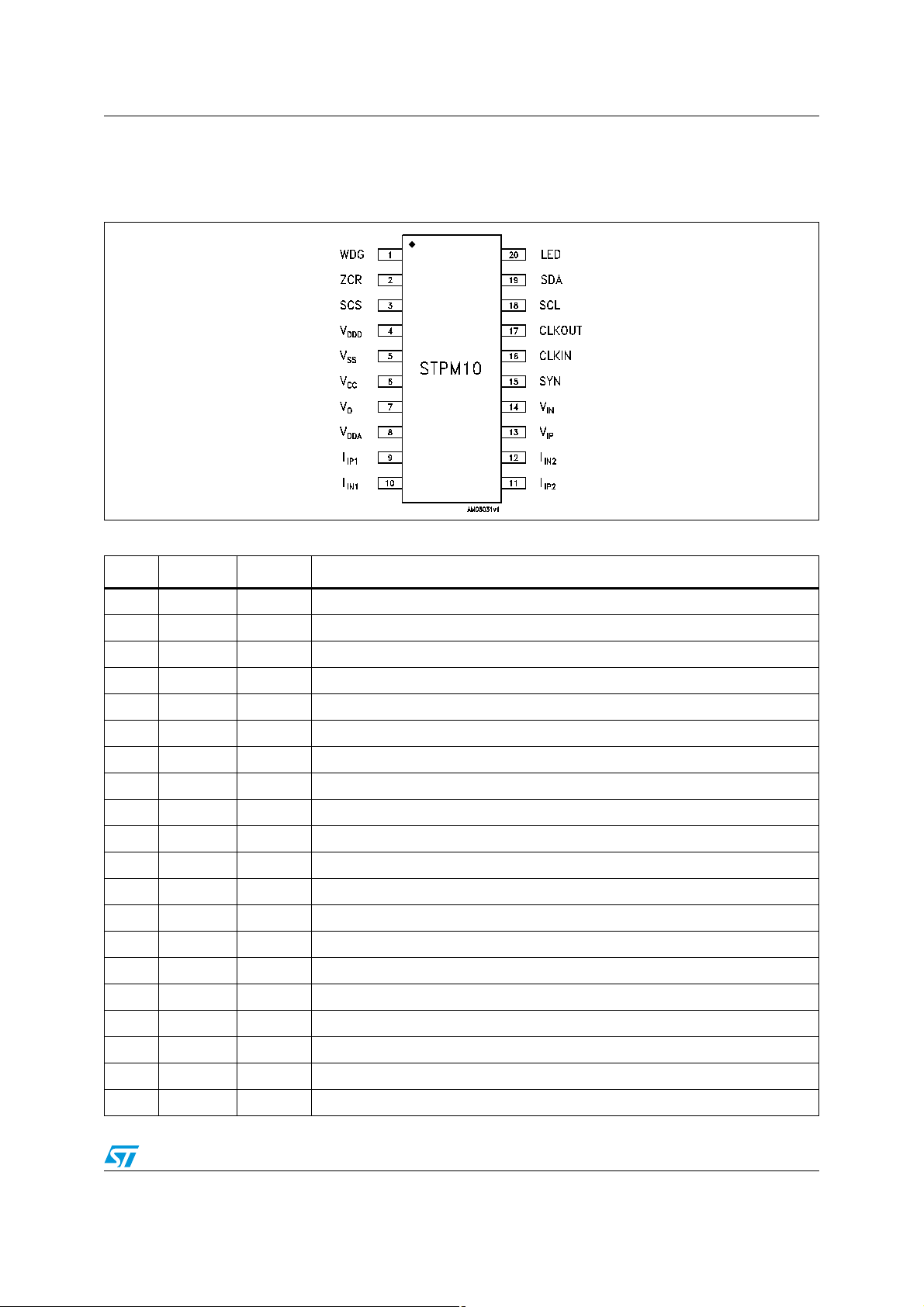
Figure 2. Pin connections (top view)
Table 2. Pin description
Pin Symbol Type
(1)
1 WDG D O Watchdog
2 ZCR D O Zero-crossing signal
3 SCS D IN SPI interface Enable pin
4V
5V
6V
7V
8V
9I
10 I
11 I
12 I
13 V
14 V
DDD
SS
CC
O
DDA
IP1
IN1
IP2
IN2
IP
IN
A OUT 1.8 V output of internal low drop regulator which supplies the digital core
GND Ground
P IN Supply voltage
P OUT Output of internal low drop regulator
A OUT 3 V output of internal low drop regulator which supplies the analog part
A IN Positive input of primary current channel
A IN Negative input of primary current channel
A IN Positive input of secondary current channel
A IN Negative input of secondary current channel
A IN Positive input of voltage channel
A IN Negative input of voltage channel
15 SYN D I/O SPI interface pin
Description
16 CLKIN A IN Crystal oscillator input
17 CLKOUT A OUT Crystal oscillator output
18 SCL D I/O SPI interface clock pin
19 SDA D I/O SPI interface data pin
20 LED D O Active energy pulsed output
1. A: analog, D: digital, P: power
Doc ID 17728 Rev 3 7/51

Maximum ratings STPM10
3 Maximum ratings
Table 3. Absolute maximum ratings
Symbol Parameter Value Unit
V
I
V
V
CC
PIN
ID
IA
DC input voltage -0.3 to 6 V
Current on any pin (sink/source) ± 150 mA
Input voltage at digital pins (SCS, ZCR, WDG, SYN, SDA,
SCL, LED)
Input voltage at analog pins (I
IP1
, I
, I
, I
IN1
, VIP, VIN) -0.7 to 0.7 V
IP2
IN2
-0.3 to V
+ 0.3 V
CC
ESD Human body model (all pins) ± 3.5 kV
T
T
OP
T
J
STG
Operating ambient temperature - 40 to 85 °C
Junction temperature - 40 to 150 °C
Storage temperature range - 55 to 150 °C
Note: Absolute maximum ratings are those values beyond which damage to the device may occur.
Functional operation under these condition is not implied.
Table 4. Thermal data
Symbol Parameter Value Unit
R
thJA
1. This value is based on a single-layer PCB, JEDEC standard test board.
Thermal resistance junction-to-ambient 114.5
(1)
°C/W
8/51 Doc ID 17728 Rev 3
STPM10 Electrical characteristics
4 Electrical characteristics
VCC = 5 V, TA = 25 °C,100 nF to 1 µF between V
and V
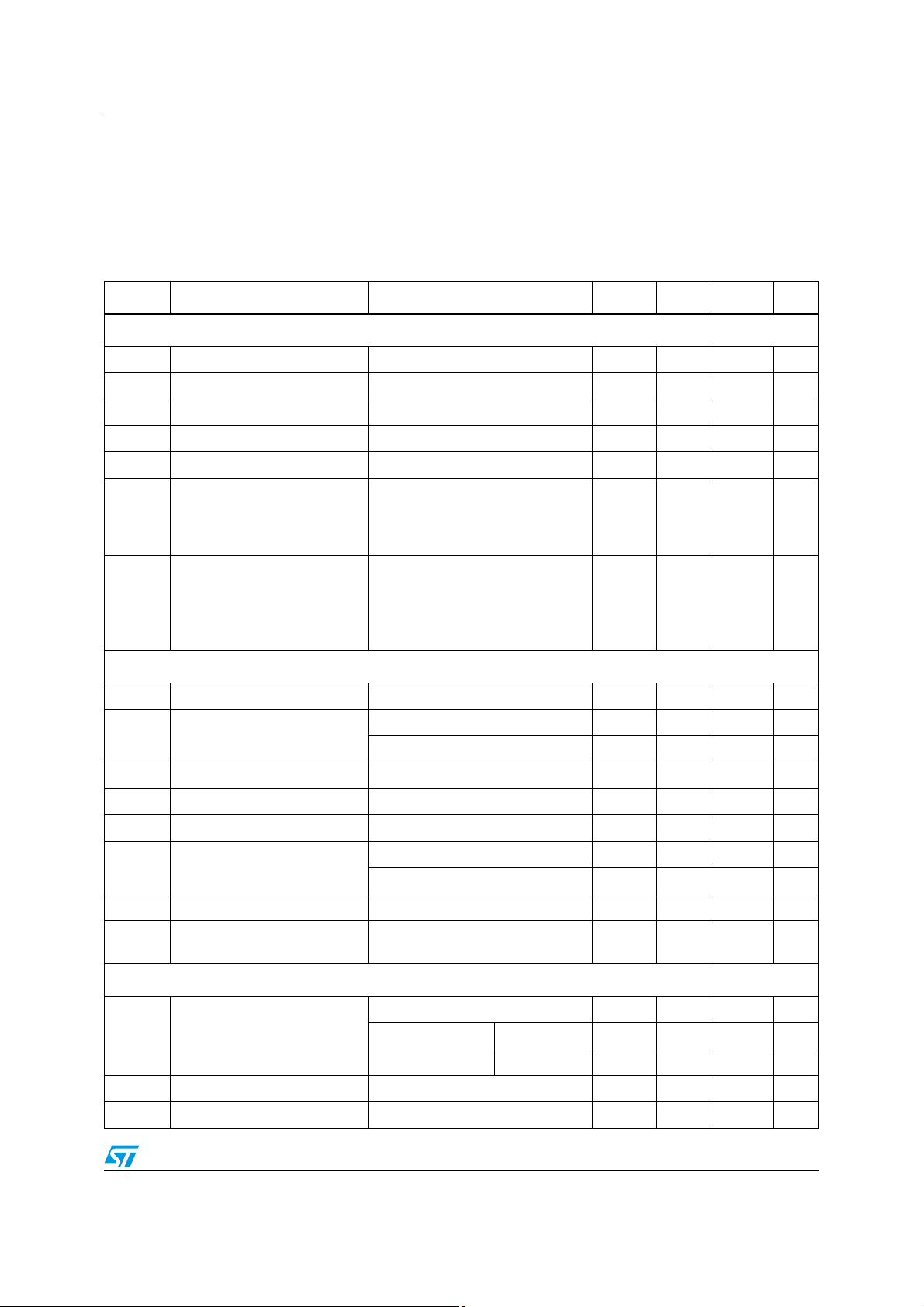
Table 5. Electrical characteristics
, 100 nF to 1 µF between VCC and VSS unless otherwise specified.
SS
and VSS, 100 nF to 1 µF between V
DDA
Symbol Parameter Test conditions Min. Typ. Max. Unit
Energy measurement accuracy
f
e
e
e
Effective bandwidth Limited by digital filtering (-3 dB) 4 800 Hz
BW
Accuracy of active power Over 1 to 1000 of dynamic range 0.1 %
AW
Accuracy of reactive power Over 1 to 1000 of dynamic range 0.1 %
RW
Accuracy of apparent power Over 1 to 500 of dynamic range 0.1 %
SW
SNR Signal-to-noise ratio Over the entire bandwidth 52 db
PSRR
Power supply DC rejection
DC
Voltage signal: 200 mV
Current signal: 10 mV
f
= 4.194 MHz
CLK
rms
rms
/50Hz
/50Hz
0.2 %
VCC=3.3V±10%, 5V±10%
PSRR
Power supply AC rejection
AC
Voltage signal: 200 mV
Current signal: 10 mV
f
= 4.194 MHz
CLK
=3.3 V+0.2 V
V
CC
VCC=5.0 V+0.2 V
rms
rms
/50 Hz
rms
/50 Hz
rms
1@100 Hz
1@100 Hz
0.1 %
General section
DDD
V
I
Operating supply voltage 3.165 5.5 V
CC
Supply current. Configuration
CC
registers cleared
POR Power on reset on V
V
V
f
CLK
f
LINE
I
LATCH
Analog inputs (I
V
f
ADC
f
SPL
Analog supply voltage 2.85 3.00 3.15 V
DDA
Digital supply Voltage 1.725 1.80 1.875 V
DDD
Oscillator clock frequency
Nominal line frequency 45 65 Hz
Current injection latch-up
immunity
, I
IP1
IN1
Maximum input signal levels
MAX
A/D converter bandwidth 10 kHz
A/D sampling frequency F
4 MHz; V
8 MHz; V
CC
=5 V 3 4 mA
CC
=5 V 5 6 mA
CC
2.5 V
MDIV bit=0 4.000 4.194 MHz
MDIV bit=1 8.000 8.192 MHz
300 mA
, I
, I
, VIP, VIN)
IP2
IN2
Voltage channel -0.3 +0.3 V
Gain 8X -0.15 +0.15 V
Current channels:
Gain 32X -0.035 +0.035
/4 Hz
CLK
Doc ID 17728 Rev 3 9/51

Electrical characteristics STPM10
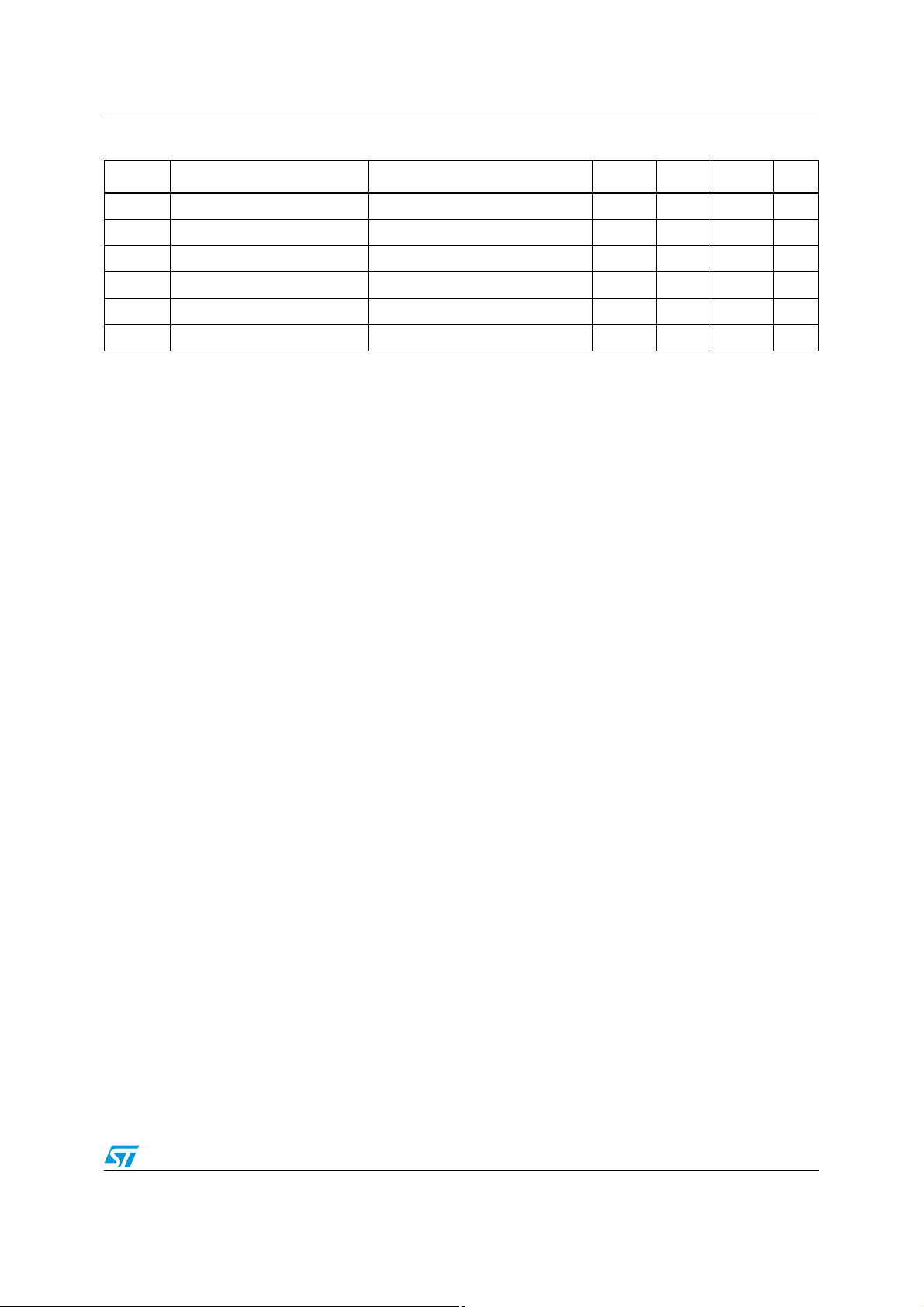
Table 5. Electrical characteristics (continued)
Symbol Parameter Test conditions Min. Typ. Max. Unit
V
Z
Z
G
I
Amplifier offset ±20 mV
OFF
VIP, VIN impedance
IP
I
, I
, I
, I
IN
IP1
IN1
Current channels gain error ±10 %
ERR
Voltage channel leakage
VL
current
IP2
impedance
IN2
Over the total operating voltage
range
Over the total operating voltage
range
Channel disabled (PST=0 to 1
Current channel leakage
I
IL
current
CH2 disabled if CSEL=0; CH1
disabled if CSEL=1) or device off
Input enabled -10 10 µA
Digital I/O Characteristics (SDA, CLKIN, CLKOUT, SCS, SYN, LED)
SDA, SCS, SYN, LED 0.75V
V
Input high voltage
IH
CLKIN 1.5
SDA, SCL, SYN, LED 0.25V
V
V
V
I
t
Input low voltage
IL
Output high voltage IO=-2 mA VCC-0.4 V
OH
Output low voltage IO=+2 mA 0.4 V
OL
Pull up current 15 µA
UP
Transition time C
TR
CLKIN 0.8
=50 pF 10 ns
LOAD
Crystal oscillator (see circuit Figure 19)
100 400 kΩ
100 kΩ
-1 1 µA
-1 1 µA
CC
CC
V
V
I
Input current on CLKIN 1 µA
I
R
External resistor 1 4 MΩ
P
Cp External capacitors 22 pF
4.00 4.194
f
CLK
I
CLKIN
R
t
Nominal output frequency
8.00 8.192
Settling current f
Settling resistor 12 kΩ
SET
Frequency jitter 1 ns
JIT
= 4 MHz 40 60 µA
CLK
On chip reference voltage
Reference voltage 1.23 V
V
REF
Reference accuracy ±1 %
Temperature coefficient After calibration 30 50
T
C
SPI interface timing
F
SCLKr
Data read speed After calibration 32 MHz
10/51 Doc ID 17728 Rev 3
MHz
ppm/
°C
STPM10 Electrical characteristics
Table 5. Electrical characteristics (continued)
Symbol Parameter Test conditions Min. Typ. Max. Unit
F
SCLKw
t
t
DH
t
ON
t
OFF
t
SYN
Data write speed 100 kHz
Data setup time 20 ns
DS
Data hold time 0 ns
Data driver on time 20 ns
Data driver off time 20 ns
SYN active width 2/f
CLK
s
Doc ID 17728 Rev 3 11/51

Terminology STPM10
5 Terminology
5.1 Measurement error
The error associated with the energy measurement made by the STPM10 is defined as:
Percentage error = [STPM10 (reading) - true energy] / true energy
5.2 ADC offset error
This is the error due to the DC component associated with the analog inputs of the A/D
converters. Due to the internal automatic DC offset cancellation, the STPM10 measurement
is not affected by DC components in the voltage and current channel. The DC offset
cancellation is implemented in the DSP.
5.3 Gain error
The gain error is gain due to the signal channel gain amplifiers. This is the difference
between the measured ADC code and the ideal output code. The difference is expressed as
percentage of the ideal code.
5.4 Power supply DC and AC rejection
This parameter quantifies the STPM10 measurement error as a percentage of the reading
when the power supplies are varied. For the PSRRAC measurement, a reading at two
nominal supply voltages (3.3 and 5 V) is taken. A second reading is obtained with the same
input signal levels when an AC (200 mV
Any error introduced by this AC signal is expressed as a percentage of the reading. For the
PSRRDC measurement, a reading at two nominal supply voltages (3.3 and 5 V) is taken. A
second reading is obtained with the same input signal levels when the supplies are varied ±
10%. Any error introduced is again expressed as a percentage of the reading.
/100 Hz) signal is introduced on the supplies.
RMS
5.5 Conventions
The lowest analog and digital power supply voltage is called VSS, which represents system
ground (GND). All voltage specifications for digital input/output pins are referred to GND.
Positive currents flow into a pin. Sinking current refers to the current flowing into the pin, and
thus it is positive. Sourcing current means that the current is flowing out of the pin, so it is
negative.
Timing specifications of signals treated by the digital control part are relative to CLKOUT.
This signal is provided by the 4.194 MHz nominal-frequency crystal oscillator or from the
internal RC oscillator. An external source of 4.194 MHz or 8.192 MHz can also be used.
Timing specifications of signals from the SPI interface are relative to the SCL, and there is
no direct relationship between the clock (SCL) of the SPI interface and the clock of the DSP
block. A positive logic convention is used in all equations.
12/51 Doc ID 17728 Rev 3

STPM10 Typical performance characteristics
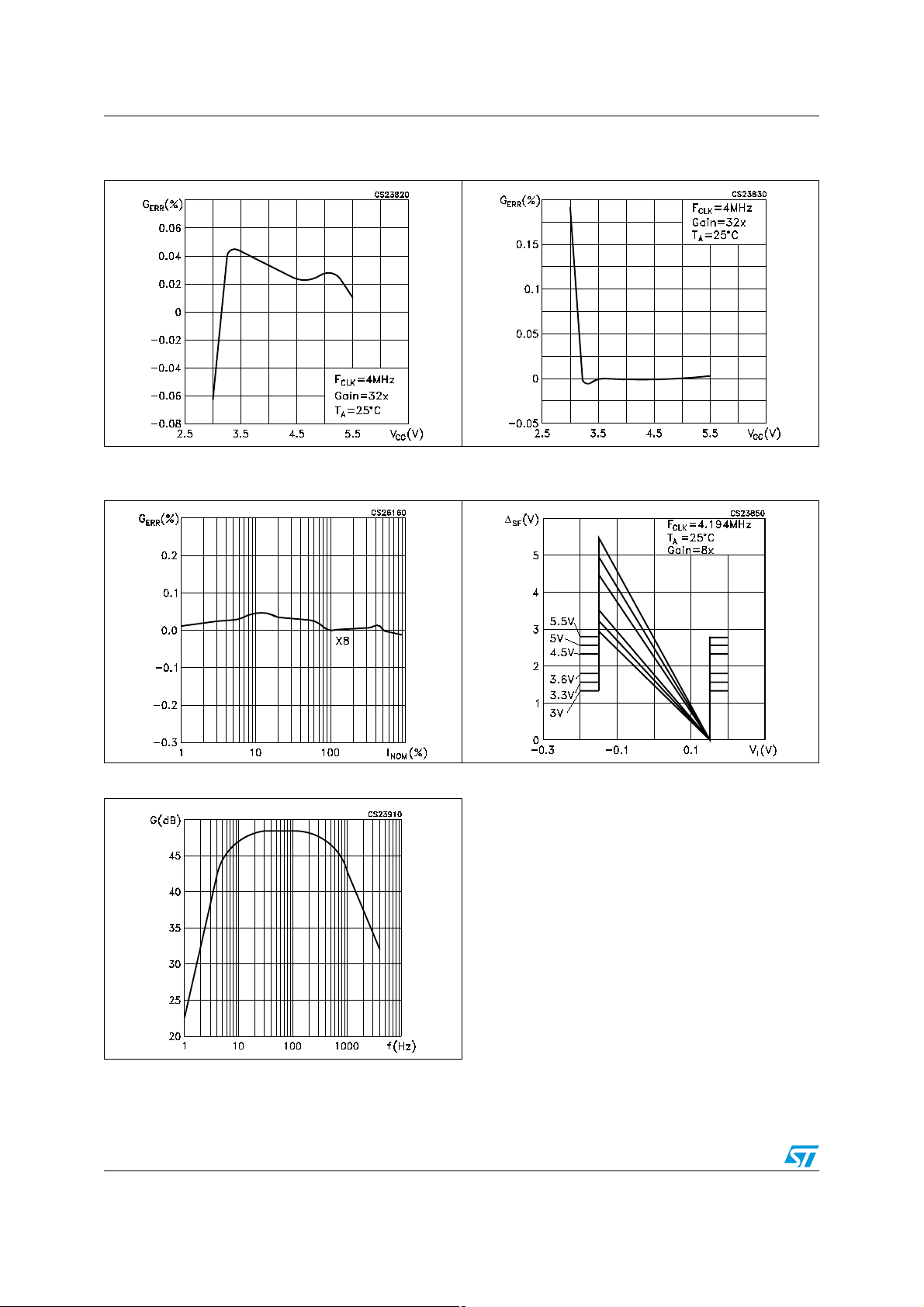
6 Typical performance characteristics
Figure 3. Supply current vs. supply voltage,
T
= 25 °C (f = 4.194MHz, 8.192MHz)
A
Figure 5. RC oscillator: frequency jitter vs.
temperature
Figure 4. RC oscillator frequency vs. V
R = 12 kΩ, T
= 25 °C
A
CC
,
Figure 6. Analog voltage regulator: line - load
regulation
Figure 7. Digital voltage regulator: line - load
regulation
Doc ID 17728 Rev 3 13/51
Figure 8. Voltage channel linearity at
different V
voltages
CC
Typical performance characteristics STPM10
Figure 9. Power supply AC rejection vs. V
CC
Figure 11. Error over dynamic range gain
dependence
Figure 10. Power supply DC rejection vs. V
CC
Figure 12. Primary current channel linearity at
different V
CC
Figure 13. Gain response of ΔΣ A/D converters
14/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
7 Theory of operation
7.1 General operation description
The STPM10 is capable of performing measurements of active, reactive and apparent
energy, RMS and instantaneous voltage and current values, and line frequency information.
Most of the functions are fully programmable using internal configuration bits accessible
through the SPI interface. The STPM10 works as a peripheral in microcontroller-based
metering systems. The ZCR and WDG pins are used to provide zero-crossing and watchdog information, and the SPI pins are used to communicate with the microcontroller.
The STPM10 includes volatile internal registers that hold the useful information for the
metering system. Two kinds of active energy are available: wide-band active energy (AW)
which includes all harmonic content (also called type 0) and fundamental active energy
(AF), limited to the 1st harmonic (also called type 1). This latter energy value is obtained by
filtering type 0 active energy. Both the two active energies are stored in up-down counting
accumulator registers with a 20-bit length. Reactive and apparent energies are also
available with a 20-bit accumulation.
The STPM10 also provides the RMS values for voltage and current. Due to the modest
dynamic variation of the voltage, the RMS value is stored with a resolution of 11 bits, while
the RMS current value has a resolution of 16 bits. The instantaneous (momentary) sampled
value of voltage and current are also available with a resolution of 11 and 16 bits,
respectively. The line frequency value is stored with a resolution of 14 bits.
Due to the proprietary energy computation algorithm, the STPM10 calibration is quick and
simple, allowing calibration at only one point over the entire current range.
The configuration and calibration parameters must be downloaded in the internal nonvolatile memory of STPM10 at power-up.
7.2 Analog inputs
Input amplifiers
The STPM10 has one fully differential voltage input channel and two fully differential current
input channels.
The voltage channel consists of a differential amplifier with a gain of 4. The maximum
differential input voltage for the voltage channel is ± 0.3 V.
The two current channels are multiplexed (see Chapter 7.9 for details) to provide a single
input to a preamplifier with a gain of 4. The output of this preamplifier is connected to the
input of a programmable gain amplifier (PGA) with possible gain selections of 2 and 8. The
total gain of the current channels are then 8 and 32. The gain selections are made by writing
to the gain register, and they can be different for the two current channels. If the tamper
function is not used, the secondary current can be disabled.
The maximum differential input voltage is dependent on the selected gain, in accordance
with Ta bl e 6 .
Doc ID 17728 Rev 3 15/51

Theory of operation STPM10
Table 6. Gain of voltage and current channels
Voltage channels Current channels
Gain Max input voltage (V) Gain Max input voltage (V)
4 ±0.30
8X ±0.15
32X ±0.035
The gain register is included in the device configuration register with the address name
PST. The table below shows the gain configuration according to the register values:
Table 7. Configuration of current sensors
Primary Secondary
Gain Sensor Gain Sensor PST TMP
8 CT Disabled Disabled 0 0
32 Shunt Disabled Disabled 1 0
8
CT
8 32 Shunt 1 1
8CT0 1
Configuration
Bits
Configuration
Bits
Note: If the device is used in configuration PST = 1, TMP = 1 (primary channel with CT, secondary
channel with Shunt), the shunt Ks must always be equal to one fourth of the current
transformer Ks.
Both the voltage and current channels implement an active offset correction architecture
which provides the benefit of avoiding any offset compensation.The analog voltage and
current signals are processed by the Σ Δ analog-to-digital converters, which feed the hardwired DSP. The DSP implements an automatic digital offset cancellation that makes it
possible to avoid any manual offset calibration on the analog inputs.
7.3 ΣΔ A/D converters
Analog-to-digital conversion in the STPM10 is carried out using two first-order Σ Δ
converters. The device performs A/D conversions of analog signals on two independent
channels in parallel. The current channel is multiplexed as a primary or secondary current
channel in order to perform the tamper function, if enabled. The converted Σ Δ signals are
supplied to the internal hard-wired DSP unit, which filters and integrates these signals in
order to boost the resolution and to yield all the necessary signals for the computations.
A Σ Δ modulator converts the input signal into a continuous serial stream of 1’s and 0’s at a
rate determined by the sampling clock. In the STPM10, the sampling clock is equal to
f
/4.
CLK
The 1-bit DAC in the feedback loop is driven by the serial data stream. The DAC output is
subtracted from the input signal. If the loop gain is high enough, the average value of the
DAC output (and therefore the bit stream) can approach that of the input signal level. When
a large number of samples are averaged, a very precise value for the analog signal is
obtained. This averaging is carried out in the DSP section, which implements decimation,
16/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
integration and DC offset cancellation of the supplied Σ Δ signals. The gain of the
decimation filters is 1.004 for the voltage channel and 0.502 for the current channel. The
resulting signal has a resolution of 11 bits per voltage channel and 16 bits per current
channel.
Figure 14. First-order ΣΔ A/D converter
f
/4
CLK
Integrator
Output digital signal
Input analog signal
+
Σ
∫
-
DAC
7.4 Zero-crossing detection
The STPM10 has a zero-crossing detector circuit on the voltage channel which can be used
by application for synchronization of some utility equipment in the event of zero-crossing of
the line voltage. This circuit produces the internal signal ZCR which has a rising edge every
time the line voltage crosses zero, and a negative edge every time the voltage reaches its
positive or negative peak. The ZCR signal is then at twice the line voltage frequency. The
ZCR signal is available on the ZCR pin.
Figure 15. ZCR signal
Doc ID 17728 Rev 3 17/51

Theory of operation STPM10
7.5 Period and line voltage measurement
The period module measures the period of the base frequency of the voltage channel and
checks if the voltage signal frequency is within the f
LIN signal is produced, which is low when the line voltage is rising, and high when the line
voltage is falling. This means that the LIN signal is the sign of dv/dt. With further elaboration,
the ZCR signal is also produced. On the trailing edge of LIN (line frequency) the period
counter starts counting up pulses of the f
on the status bit register (see Tab le 10 ).
If the counted number of pulses between two trailing edges of LIN is higher than 2
the counting is never stopped (no LIN trailing edge) this means that the base frequency is
lower than f
Figure 16. LIN and BFR signals
/217 Hz and a BFR (base frequency range) error flag is set.
CLK
/4 reference signal. The LIN signal is available
CLK
CLK
/217 to f
/215 band. To do this, the
CLK
15
, or if
If the number of pulses counted between two trailing edges of LIN is lower than 213, the
base frequency exceeds the limit (this means it is higher than f
error must be repeated three consecutive times in order to set the BFR error flag.
For example, with a 4.194304 MHz oscillator frequency and MDIV bit clear (or 8.192 MHz
with MDIV set), f
/4 is 1.048576 MHz. If the line frequency is 30 Hz, the counted f
CLK
pulses between two LIN trailing edges are 34952, more than 2
The BFR low frequency limit is then:
f
/217 = 4194304/131072 = 32 Hz
CLK
18/51 Doc ID 17728 Rev 3
/215). In this case, the
CLK
15
(32768 pulses).
CLK
/4

STPM10 Theory of operation
With the same clock frequency, if the line frequency is 130 Hz, the f
two LIN trailing edges are 8066, less than 2
f
/215 = 4194304/32768 = 128 Hz.
CLK
The BFR flag is also set if the register value of the RMS voltage drops below 64. BFR is
cleared when the register value goes above 128. The BFR, then, also gives information
about the presence of the line voltage within the meter.
When the BFR error is set, the computation of power is zero unless the FRS bit is set.
In fact, the effect of the BFR bit can be overridden by setting FRS configuration bit.
It means that if FRS is set and BFR is also set, all the energy computation is carried on as
BFR was cleared. In this case then p=u*i, where u could be zero or not (if BFR was set
because voltage RMS register value is below 64).
When the line frequency re-enters the nominal band, the BFR flag is automatically reset.
This BFR error flag is also assembled as part of the 8-bit status register (see Ta bl e 10 ).
7.6 Power supply
The main STPM10 supply pin is the VCC pin. From the VCC pin two linear regulators
provide the necessary voltage for the analog part VDDA (3 V) and for the digital part VDDD
(1.8 V).
The VSS pin represents the reference point for all the internal signals. A 100 nF low ESR
capacitor should be connected between VCC and VSS, VDDA and VSS, VDDD and VSS.
All these capacitors must be located very close to the device.
/4 pulses between
13
(8192). The BFR high frequency limit is then:
CLK
The STPM10 contains a power on reset (POR) detection circuit. If the VCC supply is less
than 2.5 V, then the STPM10 goes into an inactive state, all the functions are blocked and a
reset condition is asserted. This is useful to ensure correct device operation at power-up
and during power-down. The power supply monitor has built-in hysteresis and filtering,
which give a high degree of immunity from false triggering due to noisy supplies.
A band-gap voltage reference (VBG) of 1.23 V ±1% is used as the reference voltage level
source for the two linear regulators and for the A/D converters. Also, this module produces
several bias currents and voltages for all other analog modules. The band-gap voltage can
be compensated regardless of the temperature variations with the BGTC bits.
Figure 17. Band-gap temperature variation
1,29
1,29
1,28
1,28
1,27
1,27
1,26
1,26
1,25
1,25
1,24
1,24
VBG
VBG
1,23
1,23
1,22
1,22
1,21
1,21
1,20
1,20
-40 0 40 80
-40 0 40 80
Temperature °C
Temperature °C
BGTC=0
BGTC=0
BGTC=1
BGTC=1
BGTC=2
BGTC=2
BGTC=3
BGTC=3
100
100
Doc ID 17728 Rev 3 19/51

Theory of operation STPM10
7.7 Load monitoring
The STPM10 includes a no-load condition detection circuit with adjustable threshold. This
circuit monitors the voltage and the current channels and, when the measured voltage is
below the set threshold, the internal signal BIL becomes high. Information about this signal
is also available in the status bit BIL.
The no-load condition occurs when the product of the VRMS and IRMS register values is
below a given value. This value can be set with the LTCH configuration bits. Four different
no-load threshold values can be chosen according to the two configuration bits LTCH (see
Ta bl e 8 ).
When a no-load condition occurs (BIL=1) the integration of power is suspended and the
tamper module is disabled. The BIL signal can be accessed only through the SPI interface.
Table 8. No-load detection thresholds
LTCH K
0800
1 1600
2 3200
3 6400
7.8 Error detection
In addition to the no-load condition and the line frequency band, the integration of power can
also be suspended due to an error detected on the source signals.
There are two kinds of error-detection circuits involved. The first checks all the Σ Δ signals
from the analog part if any is stacked at 1 or 0 within the 1/128 of f
In case of a detected error, the corresponding Σ Δ signal is replaced with an idle Σ Δ signal,
which represents a constant value of 0. All error and other resolved flags are treated as bits
of a device status and can be read out by means of the SPI interface.
Another error condition occurs if LED pin output signals are different from the internal
signals that drive them. This can occur if some of these pins are forced to GND or to some
other imposed voltage value. In this case, the internal status bit PIN is activated, providing
the information that some hardware problem has been detected.
LT CH
period of observation.
CLK
7.9 Tamper detection module
The STPM10 is able to measure the current in both live and neutral wire with a time domain
multiplexing approach on a unique sigma delta modulator. This mechanism is adopted to
implement anti-tamper function. If this function is selected (see Ta bl e 7), the live and neutral
wire currents are monitored; when the difference between the two measurements exceeds a
rated threshold the STPM10 enters the "tamper state", while in "normal state" the two
measurements are below the threshold.
In particular, both channels are not observed all the time, rather a time multiplex mechanism
is used. During the observation time of each channel, its active energy is calculated. A
tamper condition occurs when the absolute value of the difference between the two active
20/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
energy values is greater than a certain percentage of the averaged energy during the
activated tamper module (see Equation 1).
This percentage value can be selected between two different values (12.5 % and 6.25 %)
according to the value of the configuration bit CRIT.
The tamper condition is detected when the following formula is satisfied:
Equation 1
EnergyCH1 - EnergyCH2 > K
where K
can be 12.5 % or 6.25 %.
CRIT
(EnergyCH1 + EnergyCH2)/2;
CRIT
The detection threshold is much higher than the accuracy difference of the current channels,
which should be less than 0.2 %, but, some headroom should be left for possible transition
effect, due to accidental synchronism of actual load current change with the rhythm of taking
the energy samples.
The tamper circuit works if the energies associated with the two current channels are both
positive or negative, if the two energies have different sign, the tamper is on all the time
however, the channel with the associated higher power is selected for the final computation
of energy.
When internal signals are not good enough to perform the calculations, i.e. line period is out
or range or ΔΣ signals from analog section are stacked at high or low logic level, or no load
condition is activated, the tamper module is disabled and its state is preset to normal.
7.9.1 Detailed operational description
The meter is initially set to normal state, i.e. tamper not detected.In this condition the
primary channel is selected for final integration of energy. In such state the values of both
load currents should not differ more than the accuracy difference of the channels does.
Sixty-four periods of line voltage is used as a tamper checking period.
After 24 periods of line voltage two internal signals MUX and INH are changed in order to
enable secondary current channel and to freeze the last power and RMS values of primary
current channel. The following 16 periods of line frequency are used for tamper detection
integration. During this gap, the final energy calculation does not use the signal from
selected channel but the frozen values.
Four line periods after the INH switch, the integration of power from secondary current
channel is started and lasts four periods. Additional four line periods later MUX signal is
switched back to primary current channel and the integration for tamper detection is started.
The timings of MUX and INH signals are shown in Figure 18 below.
Figure 18. Timings of tamper module - Primary channel selected
MUX Ch1Ch2Ch1Ch1
INH
Tampe rpowerintegrators B A
Cycles 444424 24
Doc ID 17728 Rev 3 21/51

Theory of operation STPM10
When the secondary channel is selected to be integrated by the final energy integrator, the
MUX and INH signals change according to Figure 19 below.
Figure 19. Timings of tamper module - Secondary channel selected
This means that energy of four periods from secondary channel followed by energy of four
periods from primary channel is sampled within the tamper module. From these two
samples, called B and A respectively, the criteria of tamper is calculated and the channel
with higher current is selected, resulting in a new tamper state. If four consecutive new
results of criteria happen, i.e. after elapsed 5.12 s at 50 Hz, the meter will enter into tamper
state. Thus, the channel with the higher current will be selected for the energy calculation. If
samples of power A and B would have different signs, the Tamper would be on all the time
but, the channel with bigger power would be still selected for the final integration of energy.
If a tamper status has been detected, the multiplex ratio will be 56:8 if the primary channel
energy is greater than the secondary one, otherwise it will be 8:56.
The detected tamper condition is stored in the BIT status bit. If BIT = 0 tamper is not
detected, if BIT = 1 a tamper condition has been detected. In standalone mode the BIT flag
is also available in the SDATD pin.
7.10 Phase compensation
The STPM10 does not introduce any phase shift between the voltage and current channel.
However, the voltage and current signals come from transducers, which could have inherent
phase errors. For example, a phase error of 0.1° to 0.3° is not uncommon for a current
transformer (CT). These phase errors can vary from part to part, and they must be corrected
in order to perform accurate power calculations. The errors associated with phase mismatch
are particularly noticeable at low power factors. The STPM10 provides a means of digitally
calibrating these small phase errors by introducing delays on the voltage or current signal.
The amount of phase compensation can be set using the 4 bits of the phase calibration
register (CPH).
The default value of this register is at a value of 0, which gives 0° phase compensation.
When the 4 bits give a CPH of 15 (1111) the compensation introduced is +0.576°. This
compensates the phase shift usually introduced by the current sensor, while the voltage
sensor, normally a resistor divider, does not introduce any delay. The resolution step of the
phase compensation is 0.038°.
7.11 Clock generator
All the internal timing of the STPM10 is based on the CLKOUT signal. This signal can be
generated in three different ways:
22/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
1. RC: this oscillator mode can be selected using the RC configuration bit. If RC = 1, the
STPM10 runs using the RC oscillator. A resistor connected between CLKIN and
ground sets the RC current. For 4 MHz operation, the recommended settling resistor is
12 kΩ. The oscillator frequency can be compensated using the CRC configuration bit.
2. Quartz: If RC = 0, the oscillator works with an external crystal. The recommended
circuit is depicted in Figure 20 (b).
3. External clock: by keeping RC=0, it is also possible to feed the CLKOUT pin with an
external oscillator signal.
Figure 20. Different oscillator circuits with (a) quartz, (b) internal oscillator, (c) external source
The clock generator is powered from an analog supply and is responsible for two tasks. The
first is to retard the turn-on of some function blocks after POR in order to help smooth the
start of the external power supply circuitry by keeping off all major loads. The second task of
the clock generator is to provide all necessary clocks for the analog and digital parts. During
this task, the MDIV configuration bit is used to inform the device about the nominal
frequency value of CLKOUT. Two nominal frequency ranges are expected to be from 4.000
MHz to 4.194 MHz (MDIV = 0) or from 8.000 MHz to 8.192 MHz (MDIV = 1).
7.11.1 RC startup procedure
To use the device with RC oscillator the configuration bit RC (see Ta b le 1 1) must be set.
Since the default configuration is for a crystal oscillator, when a RC oscillator is used instead
and the device is supplied for the very first time it is not internally clocked and consequently
the DSP is inactive. In this condition it is not possible to set RC or any other configuration bit.
The following SPI procedure can be run in order to set the RC bit and provide the clock to
the device:
● Set the mode signal BANK;
● Perform a software reset;
● Read the registers: BANK mode signal should be checked and the records should
show something (not 000000F0);
● Clear the mode signal BANK;
● DO NOT perform a reading, and write configuration bit RC;
In this way the RC oscillator is started. If the registers are read again, it can be seen that RC
bit is set and BANK is cleared. Once the RC startup procedure is complete, the device is
clocked and active. For details on mode signals refer to Chapter 7.18, for SPI operations
refer to Chapter 7.19.
Doc ID 17728 Rev 3 23/51

Theory of operation STPM10
7.12 Resetting the STPM10
The STPM10 has no reset pin. The device is automatically reset by the POR circuit when
the V
providing a dedicated command (see Section 7.19 for remote reset command details).
In case of reset caused by the POR circuit, all clocks and both DC buffers in the analog part
are kept off for about 30 ms, as well as all blocks of the digital part, except for the SPI
interface, which is held in a reset state for about 125 ms after a reset condition.
When a reset is performed through SPI, no delayed turn-on is generated.
Resetting the STPM10 causes all the functional modules of the STPM10 to be cleared,
including the volatile memory.
The reset through SPI (remote reset request) normally takes place during production
testing.
crosses the 2.5 V value, but it can also be reset through the SPI interface by
CC
7.13 Using the STPM10 in microcontroller-based meters
The STPM10 can be used in microcontroller-based energy meters.
The SPI pins (SCS, SCL, SDA, SYN) are used for communication purposes, allowing the
microcontroller to write and read the internal STPM10 registers.
The zero-crossing signal is available at the ZCR pin (see Section 7.4 for details about the
ZCR signal).
The WDG pin provides the watchdog signal (DOG). The DOG signal generates a 16 ms
long positive pulse every 1.6 seconds. Generation of these pulses can be suspended if data
are read in intervals shorter than 1.6 s. The DOG signal is actually a watchdog reset signal
which can be used to control operation of an on-board microcontroller. It is set to high
whenever the VDDA voltage is below 2.5 V, but after VDDA goes above 2.5 V this signal
starts running.
It is expected that an application microcontroller should access the data in the metering
device on a regular basis at least 1/s (recommended is 32/s). Every latching of results in the
metering device requested from the microcontroller also resets the watchdog. If latching
requests are not 1.6 seconds from one another, an active high pulse on WDG is produced,
because the device assumes that the microcontroller is not operating properly. An
application can use this signal either to control the reset pin of its microcontroller, or it can
be tied to an interrupt pin. The latter option is recommended for a battery-backup application
which can enter a sleep mode due to power-down conditions, and should not be reset by a
metering device as it would exit from sleep mode.
7.14 Energy to frequency conversion
The STPM10 provides energy to frequency conversion both for calibration and energy
readout purposes. In fact, one convenient way to verify the meter calibration is to provide a
pulse train signal with 50% duty cycle whose frequency signal is proportional to the active
energy under steady load conditions. In this case, the user chooses a certain number of
pulses on the LED pin that correspond to 1 kWh. This value is called P.
Let us consider the case in which the LED pin is configured to be driven from internal signal
AW (active energy) whose frequency is proportional to the active energy. The signal AW is
24/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
taken from the 11th bit of the active energy register, and consequently a relationship
between the LSB value of the active energy register and the number of pulses provided per
each kWh (P) can be defined as:
Equation 2
1000
=
k
AW
[]
11
⋅
P2
Wh
Due to the innovative and proprietary power calculation algorithm, the frequency signal is
not affected by any ripple at twice the line frequency. This feature strongly reduces the
calibration time of the meter.
In a practical example where the desired P is 64000 pulses/kWh (=17.7 Hz*kW), we have:
Equation 3
k
=7.63*10-6 Wh
AW
This means that the reading of 0x00001 in the active energy register represents 7.63 µWh,
while 0xFFFFF represents 8 Wh.
The LED pin can be driven from AW (active energy wide band), AF (active energy limited at
fundamental), RW (reactive energy) or SW (apparent energy) according to the value of the
KMOT bit.
In this case, since the LED pin is driven by signals different from that of AW, some other
relationship between the LSB of the register and the number of pulses per kWh provided by
the meter (P) must be defined:
Equation 4
k
= 4*kAW [Wh]
AF
k
= 2*kAW [VARh]
RW
k
= kAW [VAh]
SW
Table 9. LED pin configuration
KMOT (2 bits) Signal available on LED pin # of pulses
0 AW Type0* P [kWh]
1 AF Type1* P [kWh]
2 RW P [kVARh]
3 SW P [kVAh]
Doc ID 17728 Rev 3 25/51

Theory of operation STPM10
7.15 Status bits
The STPM10 includes 8 status bits which provide information about the current status of the
meter. The status bits are the following:
Table 10. Status bit description
Bit # Name Description Condition
0 BIL No-load condition
1BCFΣ Δ signals status
2 BFR Line frequency range
3 BIT Tamper condition
4 MUX Current channel selection
5 LIN Trend of the line voltage
6 PIN Output pin check
7 HLT Data validity
BIL = 0: No-load condition not detected
BIL = 1: No-load condition detected
BCF = 0: Σ Δ signals active
BCF = 1: One or both Σ Δ signals are stacked
BFR = 0: Line frequency within the 45 Hz - 65 Hz range
BFR = 1: Line frequency out of range
BIT = 0: Tamper not detected
BIT = 1: Tamper detected
MUX = 0: Primary current channels selected by the tamper
module
MUX = 1: Secondary current channels selected by the tamper
module
LIN = 0: Line voltage going from the minimum to the maximum
value. (dv/dt > 0)
LIN = 1: Line voltage going from the maximum to the minimum
value. (dv/dt < 0)
PIN = 0: Output pins are consistent with the data
PIN = 1: Output pins are different with the data, this means an
output pin is forced to 1 or 0
HLT = 0: Data records reading are valid.
HLT = 1: Data records are not valid. A reset occurred and a
restart is in progress
All these signal can be read through the SPI interface. See
details on the status bit location in the STPM10 data records.
26/51 Doc ID 17728 Rev 3
Section 7.15: Status bits for

STPM10 Theory of operation
7.16 Programming the STPM10
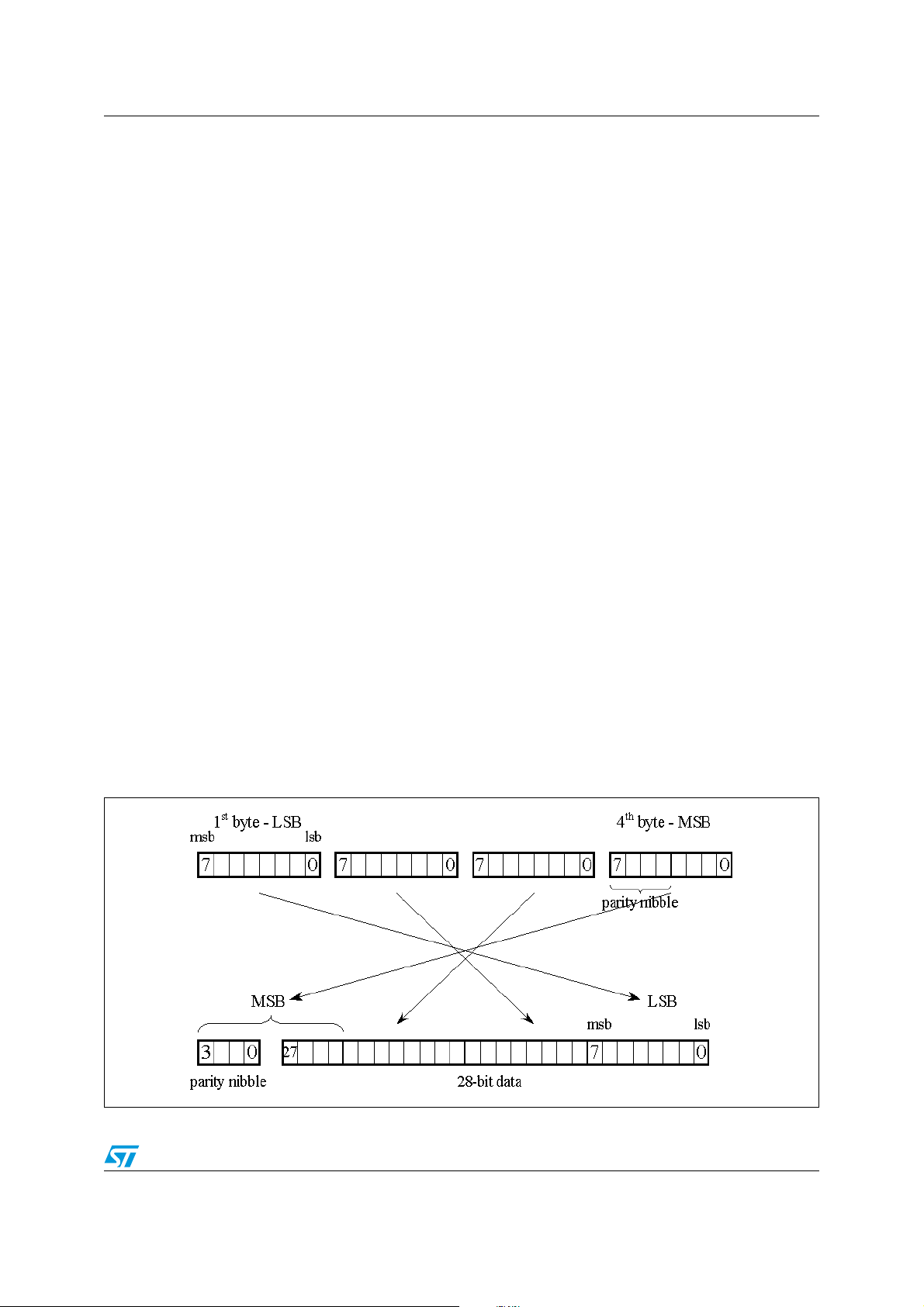
7.16.1 Data records
The STPM10 has 8 internal data record registers. Every data record consists of a 4-bit
parity code and 28-bit data value where the parity code is computed from the data value,
which makes a total of 32 bits, or 4 bytes.
Figure 21 shows the data record structure with the name of the contained information. Each
bit of parity nibble is defined as odd parity of all seven corresponding bits of data nibbles.
The first 6 registers are read-only, except for the 8-bit mode signals in the DFP register (the
mode signals are described later in this paragraph). The last two registers are CFL and
CFH.
Figure 21. STPM10 data records map
20 bit
DAP
4 bit
parity
20 bit 8 bit
1bit
type0 active energy
1bit 1bit
6 bit
Status
DRP
DSP
DFP
DEV
DMV
CFL
CFH
parity
parity
parity
parity
parity
parity
parity
p
p
uMOM
msb lsb
7.17 Configuration bits
All the configuration bits that control the operation of the device (CFL and CFH data records)
can be written in a temporary way. The configuration bit values are written in the so-called
volatile memory, which are simple latches that hold the configuration data until the power is
on or until a reset condition occurs (both POR and remote reset).
reactive energy
apparent energy
type 1 energy
iRMSuRMS
iMOM
lower part of configurators
upper part of configurators
11 bit 16 bit
upper f(u)0 1
lower f(u)
mode signals
As indicated in the data records table, the configuration bits are 56.
Doc ID 17728 Rev 3 27/51

Theory of operation STPM10
Each configuration bit can be written by sending a byte command to STPM10 through its
SPI interface. The procedure to write the configuration bits is described in
interface
Table 11. Configuration bit map
Address
6-bit
binary
000000 0 - 1 Reserved
000001 1 MDIV 1
000010 2 RC 1
000011 3 - 1 Reserved
000100 4 - 1 Reserved
000101 5 PST 1
000110 6 - 1 Reserved
DEC
Name
.
n. of
bits
Measurement frequency range selection:
- MDIV=0: 4.000 MHz to 4.194 MHz
- MDIV=1: 8.000 MHz to 8.192 MHz
Type of internal oscillator selection:
- RC=0:crystal oscillator,
- RC=1:RC oscillator
Current channel sensor type and gain:
If TMP=0
PST=0: primary is CT x8, secondary is not used, no tamper
PST=1: primary is shunt x32, secondary is not used, no tamper
If TMP=1
PST=0: primary is CT x8, secondary is CT x8, tamper
PST=1: primary is CT x8, secondary is shunt x32, tamper
Description
(1)
Section 7.19: SPI
000111 7 TMP 1 Tamper enable
Power calculation when BFR=1
001000 8 FRS 1
- FRS=0: energy accumulation is frozen, power is set to zero;
- FRS=1: normal energy accumulation and power computation (p=u*i);
Bit sequence output during record data reading selection:
001001 9 MSBF 1
- MSBF=0: MSB first
- MSBF=1: LSB first
This bit swaps the information stored in the type0 (first 20 bits of DAP register)
and type1 (first 20 bits of DFP register) active energy.
001010 10 FUND 1
- FUND = 0: type 0 contains wide-band active energy, type1 contains
fundamental active energy
- FUND = 1: type 0 contains fundamental active energy, type1 contains wideband active energy
001100 12
No-load condition threshold as product between V
LTCH=0 800
001101 13
(1)
LT CH 2
LTCH=1 1600
LTCH=2 3200
LTCH=3 6400
001110 14
Selection of pulses for LED:
KMOT=0 Type 0 Active Energy
001111 15
KMOT 2
(1)
KMOT=1 Type 1 Active Energy
KMOT=2 Reactive Energy
KMOT=3 Apparent Energy
RMS
and I
RMS
:
28/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
Table 11. Configuration bit map (continued)
Address
n. of
bits
6-bit
binary
Name
DEC
010000 16 - 1 Reserved
-
1 Reserved010001 17
010010 18
BGTC 2 Band-gap temperature compensation bits. See Figure 17 for details.
010011 19
(1)
010100 20
010101 21
010110 22
010111 23
CPH 4
(1)
4-bit unsigned data for compensation of phase error, 0°+0.576°.
16 values are possible with a compensation step of 0.0384°. When CPH=0 the
compensation is 0°, when CPH=15 the compensation is 0.576°.
011000 24
011001 25
011010 26
8-bit unsigned data for voltage channel calibration.
011011 27
CHV 8
011100 28
256 values are possible. When CHV is 0 the calibrator is at -12.5% of the
nominal value. When CHV is 255 the calibrator is at +12.5%. The calibration
step is then 0.098%.
011101 29
Description
(1)
011110 30
011111 31
100000 32
100001 33
100010 34
100011 35
100100 36
100101 37
100110 38
100111 39
101000 40
101001 41
101010 42
101011 43
101100 44
101101 45
101110 46
101111 47
(1)
(1)
(1)
CHP 8
CHS 8
8-bit unsigned data for primary current channel calibration.
256 values are possible. When CHP is 0 the calibrator is at -12.5% of the
nominal value. When CHP is 255 the calibrator is at +12.5%. The calibration
step is then 0.098%.
8-bit unsigned data for secondary current channel calibration.
256 values are possible. When CHS is 0 the calibrator is at -12.5% of the
nominal value. When CHS is 255 the calibrator is at +12.5%. The calibration
step is then 0.098%.
Doc ID 17728 Rev 3 29/51

Theory of operation STPM10
Table 11. Configuration bit map (continued)
Address
6-bit
binary
DEC
Name
n. of
bits
Description
(1)
110000 48
CRC 2
110001 49
110010 50 - 1 Reserved
110011 51 - 1 Reserved
110100 52 - 1 Reserved
110101 53 CRIT 1
110110 54 - 1 Reserved
110111 55 - 1 Reserved (always set to 1 after production testing of die)
1. IMPORTANT: This bit represents the MSB of the decimal value indicated in the description column.
(1)
2-bit unsigned data for calibration of RC oscillator. (see Tabl e 5 )
CRC=0, or CRC=3 cal=0%
CRC=1, cal=+10%;
CRC=2, cal=-10%.
Selection of tamper threshold:
CRIT=0: 12,5% / CRIT=1: 6,25%
As indicated above, the STPM10 includes 56 CFG bits. The CFG bits are not retained when
the STPM10 supply is not available and they are cleared when a POR occurs, but they are
not cleared when a remote reset command (RRR) is sent through SPI.
Normally, some of these bits must be loaded during power-up of the application. From the
microcontroller, it could also reload the configuration and calibration values after power-on
restart.
7.18 Mode signals
The STPM10 includes 8 mode signals located in the DFP data record. 3 of these are used
only for internal testing purposes while 5 are useful to change some of the operations of the
STPM10. The mode signals are not retained when the STPM10 supply is not available and
they are cleared when a POR occurs, but they are not cleared when a remote reset
command (RRR) is sent through SPI.
The mode signals bit can be written using the normal writing procedure of the SPI interface
(see
Section 7.19).
Table 12. Mode signal description
Bit #
0 BANK
1 Reserved
2 Reserved
3 Reserved
30/51 Doc ID 17728 Rev 3
Signal
name
Bit
value
0
Used for RC startup procedure
1 1111000x F0 or F1
Status
Binary
command
0111000x 70 or 71
Hex
command
STPM10 Theory of operation
Table 12. Mode signal description (continued)
4 CSEL
5 Reserved
6 Reserved
0 Current channel 1 selected when tamper is disabled 0111 100x 78 or 79
1 Current channel 2 selected when tamper is disabled 1111 100x F8 or F9
7 Precharge 1
Swap the 32-bit data record readings. From
1,2,3,4,5,6,7,8, to 5,6,7,8,1,2,3,4 and vice-versa
– CSEL: In normal operation, if the anti-tamper module is not activated (see PST
configuration bits) the STPM10 selects channel 1 as the source of current
information. For debug or calibration purposes it is possible to select channel 2 as the
source of the current channel signal when the tamper module is disabled. This is
done by setting the CSEL mode bit.
–
Precharge: This command swaps the sequence of data records read, allowing the
reading of the last four data records first, and the first four second. The reading
sequence is 5, 6, 7, 8, 1, 2, 3, 4. Unlike the other mode signals, the precharge
command is not retained inside the STPM10, but should be sent each time before the
reading of the data records.
BANK: it is used to activate RC oscillator (see Chapter 7.11.1).
–
7.19 SPI interface
The SPI interface supports a simple serial protocol, which is implemented to enable
communication between some master system (microcontroller or PC) and the device.
Three tasks can be performed with this interface:
– remote resetting of the device
– reading data records
– writing the mode bits and the configuration bits
1111111x FF
Four pins of the device are dedicated to this purpose: SCS, SYN, SCL and SDA.
SCS, SYN and SCL are all input pins, while SDA can be input or output according to
whether the SPI is in write or read mode. A high-level signal for these pins means a voltage
level higher than 0.75 x VCC, while a low-level signal means a voltage value lower than 0.25
x VCC.
The internal registers are not directly accessible. Instead, 32 bits of transmission latches are
used to pre-load the data before being read or written to the internal registers.
The condition in which SCS, SYN and SCL inputs are set to high level determines the idle
state of the SPI interface, and no data transfer occurs.
– SCS: enables SPI operation when low.
– SYN: operates different functions according to the status of the SCS pin. When
SCS is low, the SYN pin status selects if the SPI is in read (SYN = 1) or write
mode (SYN = 0). When the SCS is high and SYN is also high, the results of the
input or output data are transferred to the transmission latches.
– SCL: basically the clock pin of the SPI interface. This pin function is also controlled
by the SCS status. If SCS is low, SCL is the input of the serial bit synchronization
Doc ID 17728 Rev 3 31/51

Theory of operation STPM10
0
clock signal. When SCS is high, SCL is also high, determining the idle state of the
SPI.
– SDA: the data pin. If SCS is low, the operation of SDA is dependent on the status
of the SYN pin. If SYN is high, SDA is the output of the serial bit data (read mode).
If SYN is low, SDA is the input of the serial bit data signal (write mode). If SCS is
high, SDA is the input of the idle signal.
Any pin above has an internal weak pull-up mechanism of nominal 15 µA. This means that
when a pin is not forced by external signals, the state of the pin is logic high. A high state of
any input pin described above is considered an idle (not active) state. For the SPI to operate
correctly, the STPM10 must be correctly supplied as described in
Section 7.6: Power supply.
An idle state of the SPI module is recognized when the signals of pins SYN, SCS, SCL and
SDA are in a logic high state. Any SPI operation should start from this idle state.
When SCS is active (low), signal SDATD should change its state at trailing edge of signal
SCLNLC and the signal SDATD should be stable at next leading edge of signal SCLNLC.
The first valid bit of SDATD is always started with activation of signal SCLNLC.
7.20 Remote reset
The timing diagram of this operation is shown in Figure 22. The time step can be as short as
30 ns.
The internal reset signal is called RRR. Unlike the POR, the RRR signal does not cause the
30 ms delayed restart of the analog module, and the 120 ms delay in the restart of the digital
module. This signal does not clear the mode signals.
Figure 22. Timing for providing remote reset request
SCS
SCS
SYN
SYN
SCLNLC
SCLNLC
SDATD
SDATD
t1t2t3t4t5t6t
(1)
7
t8t9t
1
1. All time intervals must be longer than 30 ns. t7 → t8 is the reset time; this interval must be longer than 30 ns also.
32/51 Doc ID 17728 Rev 3
STPM10 Theory of operation
7.21 Reading data records
A microcontroller is able to read all measurement results and all system signals
(configuration, calibration, status, mode). Again, the time step can be as short as 30 ns.
There are two phases of reading, called latching and shifting.
Latching is used to sample results into transmission latches. The transmission latches are
the flip-flops that hold the data in the SPI interface. This is done with the active pulse on
SYN when SCS is idle. The length of the pulse on SYN must be longer than 2 periods of the
measurement clock, i.e. more than 500 ns at 4 MHz.
The shifting starts when SCS become active. In the beginning of this phase, another much
shorter pulse (30 ns) on SYN should be applied in order to ensure that an internal
transmission serial clock counter is reset to zero. An alternative way is to extend the pulse
on SYN into the second phase of reading. After this reset is done, a 32 serial clocks-perdata record should be applied. Up to 8 data records can be read this way. This procedure
can be aborted at any time through deactivation of SCS (see
The first read-out byte of the data record is the least significant byte (LSB) of the data value
and, of course, the fourth byte is the most significant byte (MSB) of the data value. Each
byte can be further divided into a pair of 4-bit nibbles, referred to as the most and least
significant nibble (MSN, LSN). This division makes sense with the MSB of the data value
because its MSN holds the parity code rather than useful data.
Figure 24).
The sequence of the data record during the read operation is fixed. Normally, an application
reads the 1st through the 6th data record; the 7th and 8th data record would be read only
when it needs to fetch the configuration data. However, an application may apply a
precharge command (see
Ta bl e 1 2) prior to the reading phase. This command forces the
device to respond with the sequence 5th - 8th, 1st - 4th. Such a change of sequence can be
used to skip the first four data records.
The timing diagram of the reading operation is shown in
and beginning of the shifting phase of the first byte (0x5F) of the first data record, and the
end of reading. Also, both alternatives for resetting the internal transmission serial clock
counter are shown in signal SYN.
Figure 23. Data record reconstruction
Figure 24. One can see the latching
Doc ID 17728 Rev 3 33/51

Theory of operation STPM10
Figure 24. Timing for data record reading
SCS
SCS
f(read)
1st byte
1st byte
f(read)
last bit of 32nd byte
last bit of 32nd byte
SYN
SYN
SCLNLC
SCLNLC
SDATD
SDATD
t1t
2
t
t
3
t
t
4
6
5
t1 → t2: Latching phase. Interval value > 2/f
t2 → t3: Data latched, SPI idle. Interval value > 30 ns
t
→ t4: Enable SPI for read operation. Interval value > 30 ns
3
t
→ t5: Serial clock counter is reset. Interval value > 30 ns
4
t
→ t6: SPI reset and enabled for read operation. Interval value > 30 ns
5
t
: Internal data transferred to SDA
7
t
: SDA data is stable and can be read
8
The system that reads the data record from the STPM10 should check the integrity of each
data record. If the check fails, the reading should be repeated, but this time only the shifting
should be applied. Otherwise, new data would be latched into transmission latches and the
one incorrectly read would be lost.
Normally, each byte is read out as the most significant bit (MSB) first. But this can be
changed by setting the MSBF configuration bit in the STPM10 CFL data record. If this is
done, each byte is read out as the least significant bit (LSB) first.
7.22 Writing procedure
Each writable bit (configuration and mode bits) has its own 6-bit absolute address. For the
configuration bits, the 6-bit address value corresponds to its decimal value, while for the
mode bits the addresses are the ones indicated in
t7t
8
CLK
Section 7.18: Mode signals.
In order to change the state of a latch, one must send a byte of data to the STPM10, which
is the normal way to send data via SPI. This byte consists of 1-bit data to be latched (MSB),
followed by the 6-bit address of the destination latch, followed by 1-bit don't care data (LSB),
which makes a total of 8 bits of command byte.
For example, if we want to set configuration bit 47 (part of the secondary current channel
calibrator) to 0, we must convert the decimal 47 to its 6-bit binary value: 101111. The byte
command is then composed as follows:
34/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
1 bit DATA value+6-bits address+1 bit (0 or 1) as depicted in Figure 25. In this case the
binary command is 01011111 (0x5F), which is the one depicted, or 01011110 (0x5E):
Figure 25. Timing for writing configuration and mode bits
→ t2 (> 30 ns): SPI out of idle state
t
1
t
→ t3 (> 30 ns): SPI enabled for write operation
2
t
: data value is placed in SDA
3
t
: SDA value is stable and shifted into the device
4
t
→ t5 (> 10 µs): writing clock period
3
t
→ t5: 1 bit data value
3
t
→ t6: 6 bit address of the destination latch
5
t
→ t7: 1 bit EXE command
6
t
: end of SPI writing
8
t
: SPI enters idle state
9
The same procedure should be applied for the mode signals, but in this case the 6-bit
address must be taken from
Ta bl e 1 2 .
The LSB of the command is also called the EXE bit because instead of the data bit value,
the corresponding serial clock pulse is used to generate the necessary latching signal. This
way the writing mechanism does not need the measurement clock in order to operate, which
makes the operation of SPI module of STPM10 completely independent from the rest of
device logic except for the signal POR.
Commands for changing system signals should be sent during active signals SCS and SYN,
as shown in
Figure 25. The SYN must be put low in order to disable the SDA output driver of
the STPM10 and make the SDA an input pin. A string of commands can be sent within one
period of active SCS and SYN signals, or a command can be followed by reading the data
record. However, in this case, the SYN should be deactivated in order to enable the SDA
output driver, and a SYN pulse should be applied before activation of the SCS in order to
latch the data.
Doc ID 17728 Rev 3 35/51

Theory of operation STPM10
7.22.1 Interfacing the standard 3-wire SPI with the STPM10 SPI
Due to the fact that a 2-wire SPI is implemented in the STPM10, it is clear that sending any
command from a standard 3-wire SPI would require a 3-wire to 2-wire interface, which
should produce a proper signal on SDA from host signals SDI, SDO and SYN. The need for
a single-gate 3-state buffer could be avoided through an emulation of SPI just to send some
commands. On a microcontroller this would be done by performing the following steps:
1. Disable the SPI module
2. Set the SDI pin, which is connected to SDA as an output
3. Activate SYN first, and then SCS
4. Apply a new bit value to SDI, and activate SCL
5. Deactivate SCL
6. Repeat the previous two steps seven times to complete a one byte transfer
7. Repeat the previous three steps for any remaining byte transfers
8. Set the SDI pin as an input
9. Deactivate SCS and SYN
10. Enable the SPI module
In case of a precharge command (0xFF), the emulation above is not necessary. Due to the
pull-up device on the SDA pin of the STPM10, the processor needs to perform the following
steps:
1. Activate SYN first in order to latch the results
2. After at least 1 µs, activate SCS
3. Write one byte to the transmitter of SPI (this produces 8 pulses on SCL with SDI=1)
4. Deactivate SYN
5. Optionally read the data records (the sequence of reading is altered)
6. Deactivate SCS
7.23 Energy calculation algorithm
Within the STPM10, the computing section of the measured active power uses a completely
new patented signal processing approach. This approach allows the device to reach high a
level of performance in terms of accuracy.
The signals, coming from the sensors, for the instantaneous voltage are calculated as
follows:
Equation 5
v(t) = V•sin ωt
where V is the peak voltage and
The instantaneous current is calculated using:
Equation 6
i(t) = I • sin (ωt + ϕ)
36/51 Doc ID 17728 Rev 3
ω is related to the line frequency.

STPM10 Theory of operation
where I is the peak current, ω is related to the line frequency and ϕ is the phase difference
between voltage and current.
7.23.1 Active power
In the STPM10, after the pre-conditioning and the A/D conversion, the digital voltage signal
(which is dynamically more stable with respect to the current signal) is processed by a
differentiator stage which transforms:
Equation 7
v(t) → v’(t) = dv/dt = V ⋅ ω ⋅ cos ωt − [see Figure 26 - 5]
the resulting signal, together with the pre-processed and digitalized current signal:
Equation 8
i(t) = I ⋅ sin(ωt + ϕ); [see Figure 26 - 6]
are then available for the calculation process. These digital signals are also provided to two
additional stages, which then integrate of themselves, obtaining:
Equation 9
dv/dt → v(t) = V ⋅sin ωt; [see Figure 26 - 7]
Equation 10
i(t) →
∫
[see
Figure 26 - 8]
dt)t(i)t(I ϕ+ω⋅
I
−=⋅=
ω
)tcos(
Doc ID 17728 Rev 3 37/51

Theory of operation STPM10
Figure 26. Active energy computation diagram
At this point four signals are available. By combining (pairing) them by means of two
multiplying stages, two results are obtained:
Equation 11
dv
)t(p
/
1
[see Figure 26 - 9]
Equation 12
/
[see Figure 26 - 10]
After these two operations, another stage performs the subtraction between the results p
and p
38/51 Doc ID 17728 Rev 3
dt
2
and a division by 2, obtaining the active power:
1
dt)t(i
∫
)t(i)t(v)t(p
−=⋅⋅=
=⋅=
cosIV
ϕ⋅⋅
−
2
cosIV
ϕ⋅⋅
2
−
2
)t2cos(IV
ϕ+ω⋅⋅
2
)t2cos(IV
ϕ+ω⋅⋅
2

STPM10 Theory of operation
Equation 13
−
/
)t(p
=
/
12
2
[see Figure 26 - 11]
In this way, the AC part V•I•cos(2
power.
The absence of any AC component allows for a very fast calibration procedure. It requires
only the setting of (using the internal device programming registers) the voltage and current
sensor conversion constants, using the effective voltage and current (V
provided by the device’s built-in communication port, avoiding the time-averaged readings of
the active power or the need for line synchronization.
7.23.2 Reactive power
The reactive power is produced using the previously-computed signals. In case of shunt
sensor the voltage signal is derived while the current signal is not. A first computation is to
multiply the DS value of the integrated voltage channel with the value of the integrated
current channel, which yields:
Equation 14
′
=
1
∫
))t(p)t(p(
=
cosIV
ϕ⋅⋅
2
ωt + ϕ)/2 has been removed from the instantaneous
, I
rms
I
⎛
)tsinV()t(I)t(v)t(Idt)t(v)t(Q
−⋅ω=⋅=⋅
⎜
ω
⎝
tcos(
VI
⎞
=
ϕ+ω
⎟
⎠
()
2
ω
) readings
rms
)t2sin(sin
ϕ+ω−ϕ⋅
The second is to multiply the filtered DS value of the voltage channel with the value of the
filtered current channel:
Equation 15
′
=
2
From the above results, Q1(t) is proportional to 1/ω, while Q2(t) is proportional to ω. The
correct reactive power would result from the following formula:
Equation 16
1
Q
2
Since the above computation would need significant additional circuitry, the reactive power
in the STPM10 is calculated using only the Q1(t) multiplied by
Equation 17
)t(Q)t(Q
21
VI1
⋅+ω⋅⋅= sin
ω
2
ϕ=
VI
)tsin(ItcosV)t(i)t(v)t(Q
()
2
)t2sin(sin
ϕ+ω+ϕ⋅ω⋅=ϕ+ω⋅ωω=⋅
ω, which means:
Doc ID 17728 Rev 3 39/51

Theory of operation STPM10
1
)t(Q
2
)t(Q
13
VI
()
2
The reactive power, then, presents a ripple at twice the line frequency. Since the average
value of a sinusoid is 0, this ripple does not contribute to the reactive energy calculation over
time. Moreover, in the STPM10 the reactive power is not used for meter calibration or to
generate the stepper pulses, so this ripple does not affect the overall system performance.
7.23.3 Apparent power and RMS values
The RMS values are calculated starting from the following formulas:
Equation 18
T
1
2
dt)t(I
∫
T
0
Multiplying Equation 18 by ω, the I
Equation 19
I
=
2
⋅ω
value is obtained:
RMS
)t2sin(sin
ϕ+ω−ϕ⋅=ω⋅⋅=
I
RMS
I
=
2
The RMS voltage value is obtained by:
Equation 20
V
RMS
T
1
2
∫
T
0
V
dt)t(v
==
2
For the apparent power, another value is produced:
Equation 21
T
1
2
′
∫
T
0
V
dt)t(v
ω⋅
=
2
Multiplying Equation 18 and Equation 21, the apparent power is produced:
Equation 22
40/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
S =
=
⋅
2
⋅ω
V
I
VI
ω⋅
2
2
The DSP then performs the integration of the computed powers into energies. These
integrators are implemented as up/down counters and they can roll over. 20-bit output buses
of the counters are assigned as the most significant part of the energy data records. It is the
responsibility of an application to read the counters at least every second, to avoid missing
any rollover.
7.24 STPM10 calibration
Energy meters based on the STPM10 device can be calibrated in a fast and simple way. The
calibration is essentially based on the single calibration of the voltage and current channel
considering their RMS values rather than on the frequency of the output pulse signal. When
the two channels are calibrated, all the other measurements are calibrated too. This allows
the calibration to be performed in only one point, thereby shortening the production time of
the meter.
This procedure is possible due to the following key factors:
● The device comprises two independent meter channels for line voltage and current,
respectively. Each channel includes its own digital calibrator, to adjust the RMS in the
range of ±12.5% in 256 steps, and a digital filter, to remove any signal DC component.
None of the final results are subject to the calibration procedure because they are
achieved from such corrected signals by mathematical modules implemented by hardwired DSP.
● The device computes different kinds of energies: active, reactive and apparent. The
active energy is produced without the 2nd harmonic of the line frequency. It also
computes RMS values of measured voltage and current.
● The device produces an energy output pulse signal, but information can also be read
through the serial port interface (SPI) and communication channel.
● The device has an embedded memory of 56 bits, used for configuration and calibration
purposes. The values of these bits can be read, or they can be changed temporarily
through the SPI communication channel.
Let's consider the basic information needed to start the calibration procedure:
Table 13. Working point settings
Line RMS voltage V
Line RMS current I
Power sensitivity P LED: P=128000 pulses/kWh
Shunt sensor KS0.42 mv/A
Parameter Value
230 V
n
5 A
n
The typical STPM10 parameters and constants are also known (see Ta b le 1 4).
Doc ID 17728 Rev 3 41/51

Theory of operation STPM10
Table 14. Device constants
Parameter Value Tolerance
Internal reference voltage V
Internal calculation frequency f
Amplification of voltage ADC A
Amplification of current ADC A
Gain of differentiator G
Gain of integrator G
Gain of decimation filter G
RMS voltage record length B
RMS current record length B
Constant D
As shown in Ta bl e 1 4 , only analog parameters are the object of calibration because they
introduce a certain error. Voltage ADC amplification A
according to the sensors used.
The calibration algorithm first calculates the voltage divider ratio and, as a final result, the
correction parameters, called K
and Ki, which applied to STPM10 voltage and current
v
measures compensate the small tolerances of the analog components that affect energy
calculation.
BG
M
V
DIF
INT
DF
V
UD
1.23 V ± 2%
223 Hz ± 50 ppm
4± 1%
I
8, 16, 24, 32 ± 2%
0.6135
0.815
1.004
11
2
16
I
2
17
2
is constant, while Ai is chosen
v
Since K
and Ki calibration parameters are the decimal representation of the corresponding
v
configuration bytes CHV and CHP or CHS (respectively, the voltage channel, primary
current channel and secondary current channel calibration bytes), at the end of calibration,
CHV and CHP or CHS (according to the current channel under calibration, primary or
secondary, respectively) the bits' values are obtained.
In the following procedure CHV, CHP and CHS are indicated as C
Through hard-wired formulas, K
steps, according to the value of C
and Ki tune measured values varying from 0.75 to 1, in 256
v
and Ci (from 0 to 255).
v
and Ci.
v
To obtain the greatest correction dynamic, initially calibrators are set in the middle of the
range, thus obtaining a calibration range of 12.5% per voltage or current channel:
Calibrator value
K
= Ki = 0.875
v
C
= Cv = 128
i
In this way, it is possible to tune K
= 0 generates a correction factor of -12.5% (K
correction factor of +12.5% (K
Based on the above, the following formulas relating to K
and Ki to obtain a precise measurement: for example Cv
v
= 1), and so on.
v
K
= (C
v,i
v,i
C
= 1024 * K
v,i
= 0.75) and Cv = 255 determines a
v
,i and Cv,i are obtained:
v
/ 128) * 0.125 + 0.75
- 768
v,i
42/51 Doc ID 17728 Rev 3

STPM10 Theory of operation
The calibration procedure outputs Cv and Ci values, which allow the above power sensitivity
of the meter.
This sensitivity is used to calculate target frequency at the LED pin for nominal voltage and
current values:
X
= f * 64
F
with:
f = PM * I
From the values above and for both chosen amplification factor A
* Vn / 3600000
n
= 32 and initial calibration
I
data, the following target values can be calculated:
Target RMS reading for a given I
X
= In * KS * AI * Ki * G
I
Target RMS reading for a given V
:
n
* GDF * G
INT
:
n
X
= f * BV * BI * DUD / (fM * XI) = 852
V
* BI / (VBG * 1000) = 1573
DIF
The output of the voltage divider is then:
V
= (XV * VBG)/ (2 * G
DIV
Choosing R
V
and VIP) value is obtained:
LINE
Indicating, with I
= 500 Ω (connected between VI and VSS), the R1 resistor (connected between
2
and VA, the real readings on the STPM10 RMS voltage and current
A
registers, and with X
R
= R2 * (Vn - V
1
and XV ideal values of RMS current and voltage readings already
I
* AV * Kv * GDF * G
DIF
) / V
DIV
DIV
* BV)= 145.6 mV
INT
= 789.3 Ω
calculated, the final values for calibrators can be calculated as:
X
= (Kv * VA) / 0.875
V
X
= (Ki * IA) / 0.875
I
If the computed final calibration data would fall out of the calibration data range, the energy
meter should be recognized as bad, or the given presumptions and calculations above
should be checked. Otherwise, if the final data of the calibrators would be written into the
energy meter, the RMS readings should be very close to the target values I and V, and the
frequency of the LED output should be very close to the target value f.
Doc ID 17728 Rev 3 43/51
Application design STPM10
8 Application design
The choice of the external components in the transduction section of the application is a
crucial point in the application design, affecting the precision and the resolution of the whole
system.
Among the several considerations, a compromise has to be found between the following
needs:
1. Maximize the signal to noise ratio in the voltage channel,
2. Choose the current to voltage conversion ratio Ks and the voltage divider ratio in a way
that calibration can be achieved (please refer to AN2299)
3. Choose Ks to take advantage of the whole current dynamic range according to desired
maximum current and resolution.
To maximize the signal to noise ratio of the current channel the voltage divider resistors ratio
should be as close as possible to those shown in
Table 15. Resistor divider ratio
Function Component Parameter Value Unit
Ta bl e 1 5.
Line voltage interface Resistor divider
The
Figure 27 below shows a reference schematic for an application with the following
R to R ratio V
R to R ratio V
=230V 1650
RMS
=110V 830
RMS
V/V
properties:
● P = 64000 imp/kWh
● I
● I
NOM
MAX
= 5 A
= 60 A.
Typical values for the current sensors sensitivity, also used in the reference schematic
below, are shown in
Ta bl e 1 6.
Table 16. Current channel typical components
Function Component Parameter Value Unit
Line current interface
Current shunt
Current to voltage conversion ratio Ks
Rogowsky coil 0.13
0.425
mV/ACurrent transformer 1.7
Note: If the device is used in configuration PST = 1, TMP = 1 (primary channel with CT, secondary
channel with Shunt), the shunt Ks must always be equal to one fourth of the current
transformer Ks.
Additional considerations on the application design, suggestions for noise and crosstalk
reduction can be found in the AN2317.
44/51 Doc ID 17728 Rev 3

STPM10 Application design
Figure 27. STPM10 reference schematic with one current transformer and one shunt
6/40 6$$!
$
2
K
,%$
#,+).
39.
40
6).
6)0
)).
))0
7
6$$
#
M
#
N
#
#
M
M
7
5
-/.
-/0
3#3
6$$$
633
6##
6/40
6$$!
))0
)).
340-
3$!4$
3#,.,#
#,+/54
*
#/.!
2
-
9
3
3(5.4
#4
%8
2 K
2
2
2 K
2 K
2 K
2
K
&
6
.
6
#
.
#
.
,
M
,
M
2
K
2
-
2
-
2
K
2
2
#
.
#
.
$
$
2
2
#
.
2
K
2
2
#
M
-(Z
#
0
6$$
$
6
#
0
".W
Doc ID 17728 Rev 3 45/51

Package mechanical data STPM10
9 Package mechanical data
In order to meet environmental requirements, ST offers these devices in different grades of
ECOPACK
specifications, grade definitions and product status are available at:
ECOPACK
®
packages, depending on their level of environmental compliance. ECOPACK®
®
is an ST trademark.
www.st.com.
46/51 Doc ID 17728 Rev 3

STPM10 Package mechanical data
TSSOP20 mechanical data
mm. inch.
Dim.
Min. Typ. Max. Min. Typ. Max.
A 1.2 0.047
A1 0.05 0.15 0.002 0.004 0.006
A2 0.8 1 1.05 0.031 0.039 0.041
b 0.19 0.30 0.007 0.012
c0.09 0.20 0.004 0.0079
D 6.4 6.5 6.6 0.252 0.256 0.260
E 6.2 6.4 6.6 0.244 0.252 0.260
E1 4.3 4.4 4.48 0.169 0.173 0.176
e 0.65 BSC 0.0256 BSC
K0° 8°0° 8°
L 0.45 0.60 0.75 0.018 0.024 0.030
A2
A
A1
b
e
K
c
L
E
D
E1
PIN 1 IDENTIFICATION
1
0087225C
Doc ID 17728 Rev 3 47/51

Package mechanical data STPM10
Tape & reel TSSOP20 mechanical data
mm. inch.
Dim.
Min. Typ. Max. Min. Typ. Max.
A 330 12.992
C 12.8 13 .2 0.504 0.519
D 20.2 0.795
N60 2.362
T 22.4 0.882
Ao 6.8 7 0.268 0.276
Bo 6.9 7.1 0.272 0.280
Ko 1.7 1.9 0.067 0.075
Po 3.9 4.1 0.153 0.161
P 11.9 12.1 0.468 0.476
48/51 Doc ID 17728 Rev 3

STPM10 Package mechanical data
Figure 28. TSSOP20 footprint recommended data
Table 17. Footprint data
A7.260.286
B4.930.194
C0.360.014
D0.650.025
E6.210.244
Values
mm. inch.
Doc ID 17728 Rev 3 49/51

Revision history STPM10
10 Revision history
Table 18. Document revision history
Date Revision Changes
31-Aug-2010 1 Initial release.
Modified: Table 5 on page 9, 7.9: Tamper detection module on page 20.
25-Nov-2010 2
09-Jun-2011 3 Modified: Table 5 on page 9.
Added: 7.11.1: RC startup procedure on page 23 and 8: Application design on
page 44.
50/51 Doc ID 17728 Rev 3

STPM10
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2011 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
Doc ID 17728 Rev 3 51/51
 Loading...
Loading...