


S-Touch®: advanced touchscreen controller
Features
■ 6 GPIOs
■ 1.8 - 3.3 V operating voltage
■ Integrated 4-wire touchscreen controller
■ Interrupt output pin
■ Wakeup feature on each I/O
■ SPI and I
■ Up to 2 devices sharing the same bus in I
mode (1 address line)
■ 6-input 12-bit ADC
■ 128-depth buffer touchscreen controller
■ Touchscreen movement detection algorithm
■ 25 kV air-gap ESD protection (system level)
■ 4 kV HBM ESD protection (device level)
2
C interface
2
C
STMPE610
with 6-bit port expander
QFN16
(3x3mm)
Description
The STMPE610 is a GPIO (general purpose
input/output) port expander able to interface a
main digital ASIC via the two-line bidirectional bus
2
(I
C). A separate GPIO expander is often used in
mobile multimedia platforms to solve the
problems of the limited amount of GPIOs typically
available on the digital engine.
Applications
■ Portable media players
■ Game consoles
■ Mobile and smartphones
■ GPS
Table 1. Device summary
Order code Package Packaging
STMPE610QTR QFN16 Tape and reel
The STMPE610 offers great flexibility, as each I/O
can be configured as input, output or specific
functions. The device has been designed with
very low quiescent current and includes a wakeup
feature for each I/O, to optimize the power
consumption of the device.
A 4-wire touchscreen controller is built into the
STMPE610. The touchscreen controller is
enhanced with a movement tracking algorithm to
avoid excessive data, 128 x 32 bit buffer and a
programmable active window feature.
September 2011 Doc ID 15432 Rev 4 1/56
www.st.com
56

Contents STMPE610
Contents
1 STMPE610 functional overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Pin configuration and functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Pin functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 I2C and SPI interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Interface selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4 I2C interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.1 I2C features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2 Data input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.3 Read operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.4 Write operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5 SPI interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1 SPI protocol definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.1 Register read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.2 Register write . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.1.3 Termination of data transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2 SPI timing modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.1 SPI timing definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6 STMPE610 registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
7 System and identification registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
8 Interrupt system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
9 Analog-to-digital converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
10 Touchscreen controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
10.1 Driver and switch control unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
10.2 Touch detect delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2/56 Doc ID 15432 Rev 4

STMPE610 Contents
11 Touchscreen controller programming sequence . . . . . . . . . . . . . . . . . 40
12 GPIO controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
12.0.1 Power-up reset (POR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
13 Maximum rating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
13.1 Recommended operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
14 Electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
15 Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
16 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Doc ID 15432 Rev 4 3/56
STMPE610 functional overview STMPE610
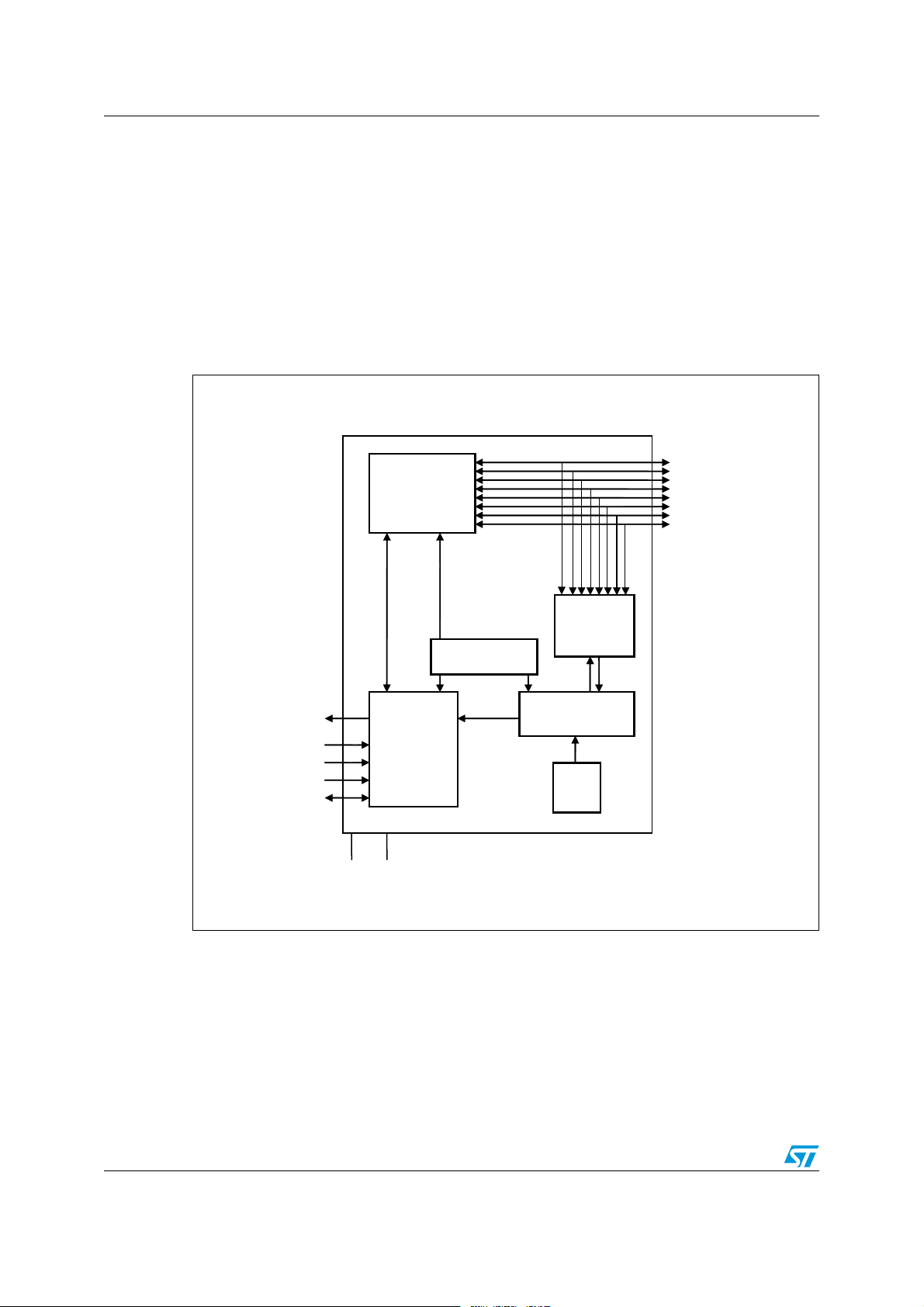
1 STMPE610 functional overview
The STMPE610 consists of the following blocks:
2
● I
C and SPI interface
● Analog-to-digital converver (ADC)
● Touchscreen controller (TSC)
● Driver and switch control unit
● GPIO controller
Figure 1. STMPE610 functional block diagram
).4
$ATAIN
!$ATAOUT
3#,+#,+
3$!4
#3
'0)/
CONTROLLER
)#30)
'.$
INTERFACE
6##
2#OSCILLATOR
3WITCHES
ANDDRIVERS
!$# 43#
62%&
43#4OUCHSCREENCONTROLLER
'0)/
!$#).
-/$%
2EF2EF
4/56 Doc ID 15432 Rev 4
!-6
STMPE610 Pin configuration and functions
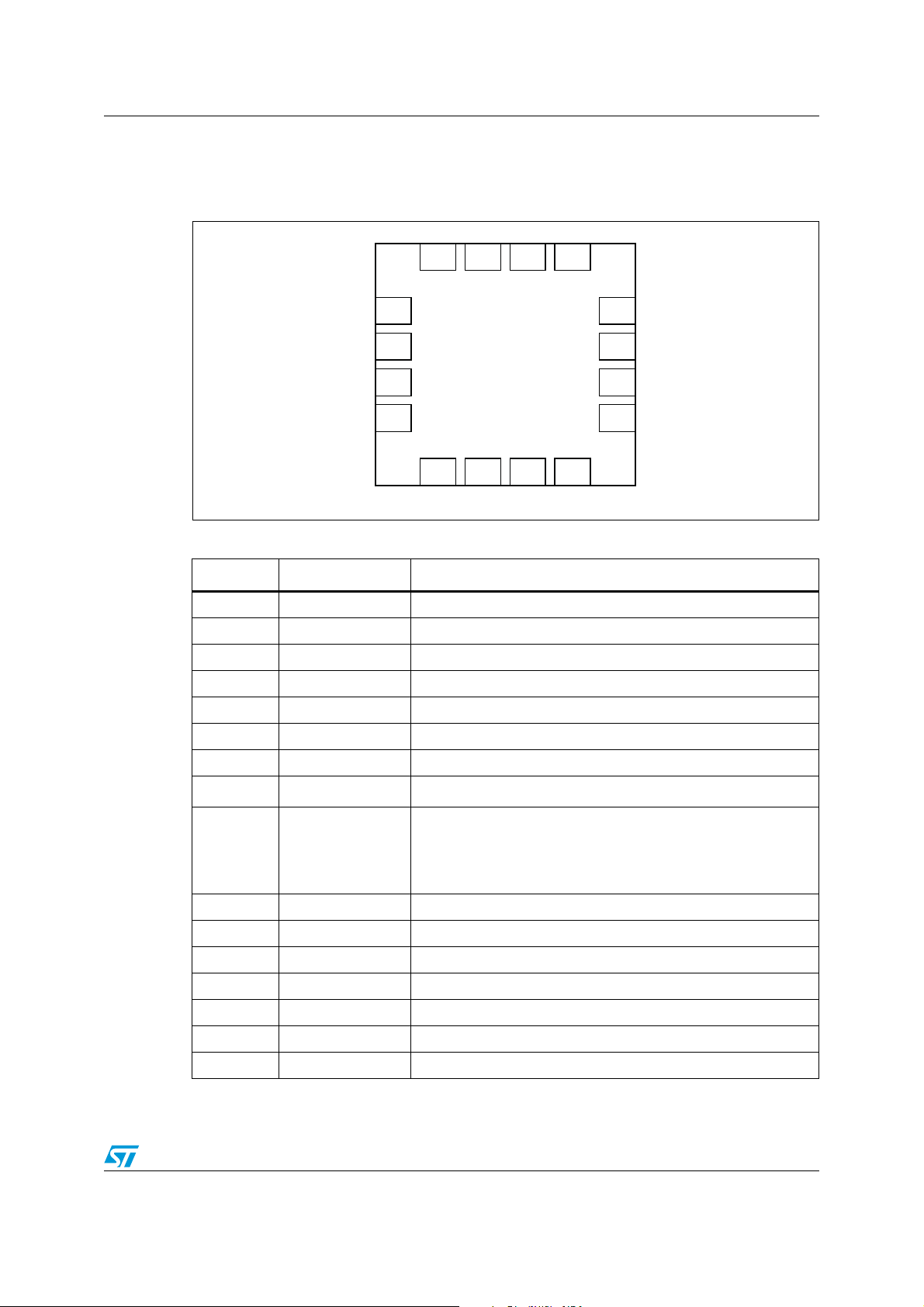
2 Pin configuration and functions
Figure 2. STMPE610 pin configuration (top through view)
12 11 10 9
13
14
STMPE610
15
16
1 2 3 4
Table 2. Pin assignments
Pin Name Function
1 Y- Y-/GPIO-7
2 INT Interrupt output (VCC domain, open drain)
2
3 A0/Data Out I
4SCLKI
5SDATI
6V
7 Data in SPI Data In (V
8NC
CC
C address in Reset, Data out in SPI mode (VCC domain)
2
C/SPI clock (VCC domain)
2
C data/SPI CS (VCC domain)
1.8 −3.3 V supply voltage
domain)
CC
−
8
7
6
5
MODE
9Mode
10 GND Ground
11 IN2 IN2/GPIO-2
12 IN3 IN3/GPIO-3
13 X+ X+/GPIO-4
14 Vio Supply for touchscreen driver and GPIO
15 Y+ Y+/GPIO-5
16 X- X-/GPIO-6
In RESET state, MODE selects the type of serial interface
"0" - I2C
"1" - SPI
Doc ID 15432 Rev 4 5/56

Pin configuration and functions STMPE610
2.1 Pin functions
The STMPE610 is designed to provide maximum features and flexibility in a very small pincount package. Most of the pins are multi-functional. The following table shows how to
select the pin’s function.
Table 3. IN2, IN3 pin configuration
GPIO_AF = 1 GPIO_AF = 0
Pin / control
register
ADC control 1 bit
1 = don’t care
IN2 GPIO-2 ADC External reference +
IN3 GPIO-3 ADC External reference -
Table 4. X, Y pin configuration
GPIO_AF = 1 GPIO_AF = 0
Pin / control
register
TSC control 1 bit
0 = don’t care
X+ GPIO-4 ADC TSC X+
ADC control 1 bit
1 = 0
TSC control 1 bit
0 = 0
ADC control 1 bit
1 = 1
TSC control 1 bit
0 = 1
Y+ GPIO-5 ADC TSC Y+
X- GPIO-6 ADC TSC X-
Y- GPIO-7 ADC TSC Y-
6/56 Doc ID 15432 Rev 4

STMPE610 I2C and SPI interface
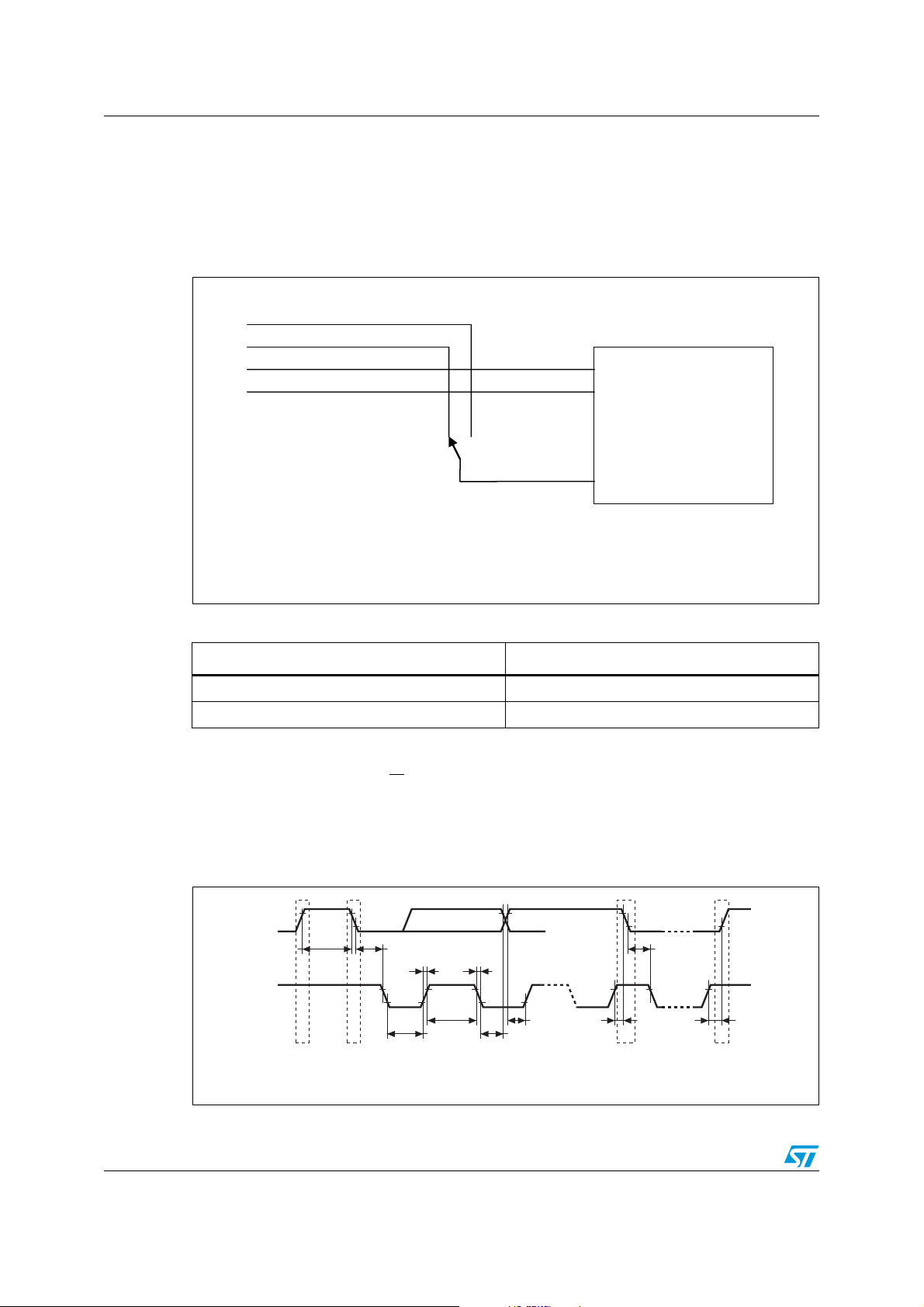
3 I2C and SPI interface
3.1 Interface selection
The STMPE610 interfaces with the host CPU via a I2C or SPI interface. The pin IN_1 allows
the selection of interface protocol at reset state.
Figure 3. STMPE610 interface
DIN
SPI I/F
module
DOUT
CLK
CS
SDAT
2
I C I/F
module
Table 5. Interface selection pins
Pin I2C function SPI function Reset state
3 Address 0 Data out CPHA for SPI
4 Clock Clock
5 SDATA CS CPOL_N for SPI
7
9MODEI
SCLK
A0
−
MUX
unit
−
Data in
2
C set to ‘0’ Set to ‘1’ for SPI
−
Doc ID 15432 Rev 4 7/56
I2C interface STMPE610
SC
SC
V
4 I2C interface
The addressing scheme of STMPE610 is designed to allow up to 2 devices to be connected
to the same I
Figure 4. STMPE610 I
LK
Table 6. I
2
C bus.
2
C interface
LK
2
C address
ADDR0 Address
STMPE610
AM00753
00x82
10x88
For the bus master to communicate to the slave device, the bus master must initiate a Start
condition and be followed by the slave device address. Accompanying the slave device
adress, is a read/write bit (R/W
match occurs on the slave device address, the corresponding device gives an acknowledge
on the SDA during the 9
th
). The bit is set to 1 for read and 0 for write operation. If a
bit time. If there is no match, it deselects itself from the bus by not
responding to the transaction.
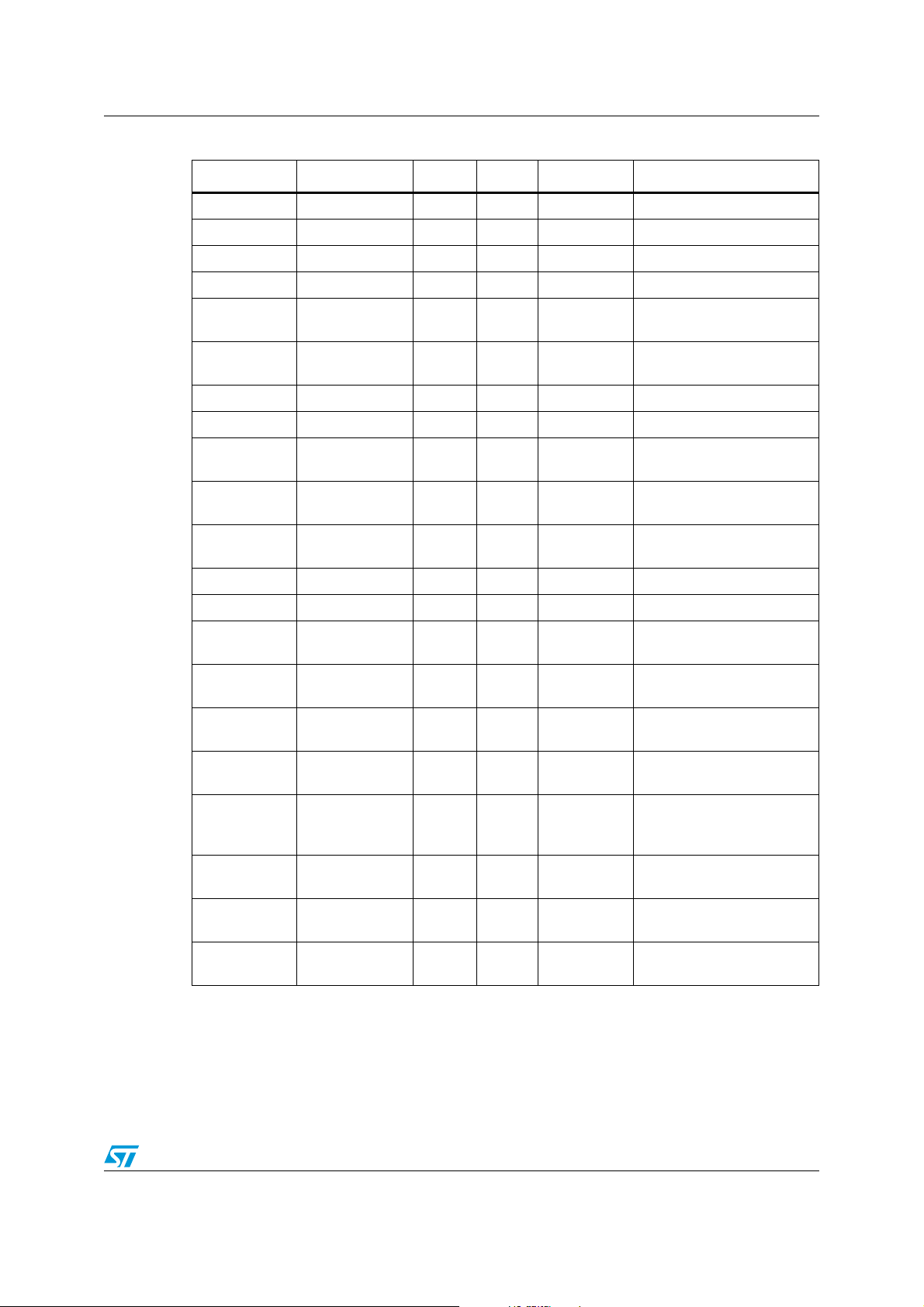
Figure 5. I
SDA
SCL
2
C timing diagram
tHD:STAtBUF
SP
tHD:STA
tHIGH
tLOW
tF
tSU:DAT
tHD:DAT
SR
tSU:STOtSU:STA
P
AI00589
tR
8/56 Doc ID 15432 Rev 4

STMPE610 I2C interface
Table 7. I2C timing
Symbol Parameter Min Typ Max Unit
f
SCL
t
LOW
t
HIGH
t
F
t
HD:STA
t
SU:STA
t
SU:DAT
t
HD:DAT
t
SU:STO
t
BUF
SCL clock frequency 0
Clock low period 1.3
Clock high period 600
SDA and SCL fall time
START condition hold time (after this
period the first clock is generated)
START condition setup time (only relevant
for a repeated start period)
Data setup time 100
Data hold time 0
STOP condition setup time 600
Time the bus must be free before a new
transmission can start
4.1 I2C features
The features that are supported by the I2C interface are listed below:
2
● I
C slave device
● Operates at 1.8 V
● Compliant to Philips I
● Supports standard (up to 100 Kbps) and fast (up to 400 Kbps) modes
2
C specification version 2.1
−
−−
−−
−−
600
600
−−
−−
−−
−−
−−
1.3
−−
400 kHz
µs
ns
300 ns
ns
ns
ns
µs
ns
µs
Start condition
A Start condition is identified by a falling edge of SDATA while SCLK is stable at high state.
A Start condition must precede any data/command transfer. The device continuously
monitors for a Start condition and does not respond to any transaction unless one is
encountered.
Stop condition
A Stop condition is identified by a rising edge of SDATA while SCLK is stable at high state. A
Stop condition terminates communication between the slave device and the bus master. A
read command that is followed by NoAck can be followed by a Stop condition to force the
slave device into idle mode. When the slave device is in idle mode, it is ready to receive the
2
next I
C transaction. A Stop condition at the end of a write command stops the write
operation to registers.
Acknowledge bit
The acknowledge bit is used to indicate a successful byte transfer. The bus transmitter
releases the SDATA after sending eight bits of data. During the ninth bit, the receiver pulls
Doc ID 15432 Rev 4 9/56

I2C interface STMPE610
the SDATA low to acknowledge the receipt of the eight bits of data. The receiver may leave
the SDATA in high state if it does not acknowledge the receipt of the data.
4.2 Data input
The device samples the data input on SDATA on the rising edge of the SCLK. The SDATA
signal must be stable during the rising edge of SCLK and the SDATA signal must change
only when SCLK is driven low.
Table 8. Operating modes
Mode Byte Programming sequence
Read ≥1
Write ≥1
Start, Device address, R/W
Restart, Device address, R/W
If no Stop is issued, the Data Read can be continuously performed. If
the register address falls within the range that allows an address autoincrement, then the register address auto-increments internally after
every byte of data being read.
Start, Device address, R/W
Write, Stop
If no Stop is issued, the Data Write can be continuously performed. If
the register address falls within the range that allows address autoincrement, then the register address auto-increments internally after
every byte of data being written in. For those register addresses that
fall within a non-incremental address range, the address will be kept
static throughout the entire write operation. Refer to the memory map
table for the address ranges that are auto and non-increment.
= 0, Register address to be read
= 1, Data Read, Stop
= 0, Register address to be written, Data
10/56 Doc ID 15432 Rev 4

STMPE610 I2C interface
Figure 6. Read and write modes (random and sequential)
One byte
Read
More than one byte
Read
One byte
Write
More than one byte
Read
Start
Start
Start
Start
Device
Address
Device
Address
Device
Address
Device
Address
Master
Slave
4.3 Read operation
R/W=0
R/W=0
R/W=0
R/W=0
Ack
Ack
Ack
Ack
Reg
Address
Reg
Address
Reg
Address
Reg
Address
Ack
Ack
Ack
Ack
Restart
Address
Restart
Data
to be
written
Data to
Write
Device
Address
Device
Ack
Data to
Ack
Write + 1
R/W=1
R/W=1
Stop
Data
Ack
Read
Data
Ack
Read
Ack
Write + 2
Data to
No Ack
Ack
Stop
Data
Read + 1
Ack
Stop
Ack
Data
Read + 2
Stop
No Ack
A write is first performed to load the register address into the Address Counter but without
sending a Stop condition. Then, the bus master sends a reStart condition and repeats the
Device Address with the R/W bit set to 1. The slave device acknowledges and outputs the
content of the addressed byte. If no additional data is to be read, the bus master must not
acknowledge the byte and terminates the transfer with a Stop condition.
If the bus master acknowledges the data byte, then it can continue to perform the data
reading. To terminate the stream of data bytes, the bus master must not acknowledge the
last output byte, and be followed by a Stop condition. If the address of the register written
into the Address Counter falls within the range of addresses that has the auto-increment
function, the data being read will be coming from consecutive addresses, which the internal
Address Counter automatically increments after each byte output. After the last memory
address, the Address Counter 'rolls-over' and the device continues to output data from the
memory address of 0x00. Similarly, for the register address that falls within a non-increment
range of addresses, the output data byte comes from the same address (which is the
address referred by the Address Counter).
Acknowledgement in read operation
For the above read command, the slave device waits, after each byte read, for an
acknowledgement during the ninth bit time. If the bus master does not drive the SDA to a
low state, then the slave device terminates and switches back to its idle mode, waiting for
the next command.
Doc ID 15432 Rev 4 11/56

I2C interface STMPE610
4.4 Write operations
A write is first performed to load the register address into the Address Counter without
sending a Stop condition. After the bus master receives an acknowledgement from the slave
device, it may start to send a data byte to the register (referred by the Address Counter).
The slave device again acknowledges and the bus master terminates the transfer with a
Stop condition.
If the bus master needs to write more data, it can continue the write operation without
issuing the Stop condition. Whether the Address Counter autoincrements or not after each
data byte write depends on the address of the register written into the Address Counter.
After the bus master writes the last data byte and the slave device acknowledges the receipt
of the last data, the bus master may terminate the write operation by sending a Stop
condition. When the Address Counter reaches the last memory address, it 'rolls-over' to the
next data byte write.
12/56 Doc ID 15432 Rev 4

STMPE610 SPI interface
5 SPI interface
The SPI interface in STMPE610 uses a 4-wire communication connection (DATA IN, DATA
OUT, CLK, CS). In the diagram, “Data in” is referred to as MOSI (master out slave in) and
“DATA out” is referred to as MISO (master in slave out).
5.1 SPI protocol definition
The SPI (serial peripheral interface) follows a byte sized transfer protocol. All transfers begin
with an assertion of CS_n signal (falling edge). The protocol for reading and writing is
different and the selection between a read and a write cycle is dependent on the first
captured bit on the slave device. A '1' denotes a read operation and a '0' denotes a write
operation. The SPI protocol defined in this section is shown in Figure 3.
The following are the main features supported by this SPI implementation.
● Support of 1 MHz maximum clock frequency.
● Support for autoincrement of address for both read and write.
● Full duplex support for read operation.
● Daisy chain configuration support for write operation.
● Robust implementation that can filter glitches of up to 50 ns on the CS_n and SCL pins.
● Support for all 4 modes of SPI as defined by the CPHA, CPOL bits on SPICON.
5.1.1 Register read
The following steps need to be followed for register read through SPI.
1. Assert CS_n by driving a '0' on this pin.
2. Drive a '1' on the first SCL launch clock on MOSI to select a read operation.
3. The next 7 bits on MOSI denote the 7-bit register address (MSB first).
4. The next address byte can now be transmitted on the MOSI. If the autoincrement bit is
set, the following address transmitted on the MOSI is ignored. Internally, the address is
incremented. If the autoincrement bit is not set, then the following byte denotes the
address of the register to be read next.
5. Read data is transmitted by the slave device on the MISO (MSB first), starting from the
launch clock following the last address bit on the MOSI.
6. Full duplex read operation is achieved by transmitting the next address on MOSI while
the data from the previous address is available on MISO.
7. To end the read operation, a dummy address of all 0's is sent on MOSI.
Doc ID 15432 Rev 4 13/56

SPI interface STMPE610
5.1.2 Register write
The following steps need to be followed for register write through SPI.
1. Assert CS_n by driving a '0' on this pin.
2. Drive a '0' on the first SCL launch clock on MOSI to select a write operation.
3. The next 7 bits on MOSI denote the 7-bit register address (MSB first).
4. The next byte on the MOSI denotes data to be written.
5. The following transmissions on MOSI are considered byte-sized data. The register
address to which the following data is written depends on whether the autoincrement
bit in the SPICON register is set. If this bit has been set previously, the register address
is incremented for data writes.
5.1.3 Termination of data transfer
A transfer can be terminated before the last launch edge by deasserting the CS_n signal. If
the last launch clock is detected, it is assumed that the data transfer is successful.
5.2 SPI timing modes
The SPI timing modes are defined by CPHA and CPOL,CPHA and CPOL are read from the
"SDAT" and "A0" pins during power-up reset. The following four modes are defined
according to this setting.
Table 9. SPI timing modes
CPOL_N (SDAT pin) CPOL CPHA (ADDR pin) Mode
1000
1011
0102
0113
The clocking diagrams of these modes are shown in ON reset. The device always operates
in mode 0. Once the bits are set in the SPICON register, the mode change takes effect on
the next transaction defined by the CS_n pin being deasserted and asserted.
5.2.1 SPI timing definition
Table 10. SPI timing specification
Symbol Description
CS_n falling to
t
CSS
t
CL
first capture
clock
Clock low
period
Timing
Min Typ Max
1
500
−−
−−
Unit
µs
ns
t
CH
14/56 Doc ID 15432 Rev 4
Clock high
period
500
−−
ns

STMPE610 SPI interface
Table 10. SPI timing specification (continued)
Timing
Symbol Description
Launch clock
t
LDI
t
LDO
t
DI
t
CCS
t
CSH
t
CSCL
t
CSZ
to MOSI data
valid
Launch clock
to MISO data
valid
Data on MOSI
valid
Last clock
edge to CS_n
high
CS_n high
period
CS_n high to
first clock edge
CS_n high to
tri-state on
MISO
Min Typ Max
−−
−−
1
1
2
300
1
−−
−−
−−
−−
−−
20 ns
330 µs
Unit
µs
µs
µs
ns
µs
Figure 7. SPI timing specification
Doc ID 15432 Rev 4 15/56

STMPE610 registers STMPE610
6 STMPE610 registers
This section lists and describes the registers of the STMPE610 device, starting with a
register map and then provides detailed descriptions of register types.
Table 11. Register summary map table
Address Register name Bit Type Reset value Function
0x00 CHIP_ID 16 R 0x0811 Device identification
Revision number
0x02 ID_VER 8 R 0x03
0x03 SYS_CTRL1 8 R/W 0x00 Reset control
0x04 SYS_CTRL2 8 R/W 0x0F Clock control
0x08 SPI_CFG 8 R/W 0x01 SPI interface configuration
0x09 INT_CTRL 8 R/W 0x00 Interrupt control register
0x0A INT_EN 8 R/W 0x00 Interrupt enable register
0x0B INT_STA 8 R 0x10 interrupt status register
0x0C GPIO_EN 8 R/W 0x00
0x0D GPIO_INT_STA 8 R 0x00
0x01 for engineering sample
0x03 for final silicon
GPIO interrupt enable
register
GPIO interrupt status
register
0x0E ADC_INT_EN 8 R/W 0x00
0x0F ADC_INT_STA 8 R 0x00 ADC interrupt status register
0x10 GPIO_SET_PIN 8 R/W 0x00 GPIO set pin register
0x11 GPIO_CLR_PIN 8 R/W 0x00 GPIO clear pin register
0x12 GPIO_MP_STA 8 R/W 0x00
0x13 GPIO_DIR 8 R/W 0x00 GPIO direction register
0x14 GPIO_ED 8 R/W 0x00 GPIO edge detect register
0x15 GPIO_RE 8 R/W 0x00 GPIO rising edge register
0x16 GPIO_FE 8 R/W 0x00 GPIO falling edge register
0x17 GPIO_AF 8 R/W 0x00 Alternate function register
0x20 ADC_CTRL1 8 R/W 0x9C ADC control
0x21 ADC_CTRL2 8 R/W 0x01 ADC control
0x22 ADC_CAPT 8 R/W 0xFF
0x30 ADC_DATA_CH0 16 R 0x0000 ADC channel 0
0x32 ADC_DATA_CH1 16 R 0x0000 ADC channel 1
ADC interrupt enable
register
GPIO monitor pin state
register
To initiate ADC data
acquisition
16/56 Doc ID 15432 Rev 4
STMPE610 STMPE610 registers
Table 11. Register summary map table (continued)
Address Register name Bit Type Reset value Function
0x38 ADC_DATA_CH4 16 R 0x0000 ADC channel 4
0x3A ADC_DATA_CH5 16 R 0x0000 ADC channel 5
0x3C ADC_DATA_CH6 16 R 0x0000 ADC channel 6
0x3E ADC_DATA_CH7 16 R 0x0000 ADC channel 7
0x40 TSC_CTRL 8 R/W 0x90
0x41 TSC_CFG 8 R/W 0x00
0x42 WDW_TR_X 16 R/W 0x0FFF Window setup for top right X
0x44 WDW_TR_Y 16 R/W 0x0FFF Window setup for top right Y
0x46 WDW_BL_X 16 R/W 0x0000
0x48 WDW_BL_Y 16 R/W 0x0000
0x4A FIFO_TH 8 R/W 0x00
0x4B FIFO_STA 8 R/W 0x20 Current status of FIFO
0x4C FIFO_SIZE 8 R 0x00 Current filled level of FIFO
0x4D TSC_DATA_X 16 R 0x0000
0x4F TSC_DATA_Y 16 R 0x0000
0x51 TSC_DATA_Z 8 R 0x0000
4-wire touchscreen
controller setup
Touchscreen controller
configuration
Window setup for bottom left
X
Window setup for bottom left
Y
FIFO level to generate
interrupt
Data port for touchscreen
controller data access
Data port for touchscreen
controller data access
Data port for touchscreen
controller data access
0x52 TSC_DATA_XYZ 32 R 0x00000000
0x56
0x57 TSC_DATA 8 R 0x00
0x58 TSC_I_DRIVE 8 R/W 0x00
0x59 TSC_SHIELD 8 R/W 0x00
TSC_FRACT_X
YZ
8 RW 0x00
Doc ID 15432 Rev 4 17/56
Data port for touchscreen
controller data access
Select the range and
accuracy of the pressure
measurement
Data port for touchscreen
controller data access
Touchscreen controller drive
I
Touchscreen controller
shield

System and identification registers STMPE610
7 System and identification registers
Table 12. System and identification registers map
Address Register name Bit Type Reset Function
0x00 CHIP_ID 16 R 0x0811 Device identification
Revision number
0x02 ID_VER 8 R 0x03
0x03 SYS_CTRL1 8 R/W 0x00 Reset control
0x04 SYS_CTRL2 8 R/W 0x0F Clock control
0x08 SPI_CFG 8 R/W 0x01 SPI interface configuration
CHIP_ID Device identification
Address: 0x00
Type: R
Reset: 0x0811
0x01 for engineering sample
0x03 for final silicon
Description: 16-bit device identification
ID_VER Revision number
Address: 0x02
Type: R
Reset: 0x03
Description: 16-bit revision number
SYS_CTRL1 Reset control
76543 2 1 0
RESERVED SOFT_RESET HIBERNATE
Address: 0x03
Type: R/W
Reset: 0x00
Description: The reset control register enables to reset the device
[7:2] RESERVED
[1] SOFT_RESET: Reset the STMPE610 using the serial communication interface
[0] HIBERNATE: Force the device into hibernation mode.
Forcing the device into hibernation mode by writing ‘1’ to this bit would disable the hot-key
feature. If the hot-key feature is required, use the default auto-hibernation mode.
18/56 Doc ID 15432 Rev 4

STMPE610 System and identification registers
SYS_CTRL2 Clock control
76543 2 1 0
----RESERVEDGPIO_OFFTSC_OFFADC_OFF
Address: 0x04
Type: R/W
Reset: 0x0F
Description: This register enables to switch off the clock supply
[7:3] RESERVED
[2] GPIO_OFF: Switch off the clock supply to the GPIO
1: Switches off the clock supply to the GPIO
[1] TSC_OFF: Switch off the clock supplyto the touchscreen controller
1: Switches off the clock supply to the touchscreen controller
[0] ADC_OFF: Switch off the clock supply to the ADC
1: Switches off the clock supply to the ADC
SPI_CFG SPI interface configuration
76543 2 1 0
RESERVED AUTO_INCR SPI_CLK_MOD1 SPI_CLK_MOD0
Address: 0x08
Type: R/W
Reset: 0x01
Description: SPI interface configuration register
[7:3] RESERVED
[2] AUTO_INCR:
This bit defines whether the SPI transaction follows an addressing scheme that internally
autoincrements or not
[1] SPI_CLK_MOD1:
This bit reflects the value of the SCAD/A0 pin during power-up reset
[0] SPI_CLK_MOD0:
This bit reflects the value of the SCAD/A0 pin during power-up reset
Doc ID 15432 Rev 4 19/56

Interrupt system STMPE610
8 Interrupt system
The STMPE610 uses a 2-tier interrupt structure. The ADC interrupts and GPIO interrupts
are ganged as a single bit in the “interrupt status register”. The interrupts from the
touchscreen controller can be seen directly in the interrupt status register.
Figure 8. Interrupt system diagram
GPIO
interrupt
status
GPIO
interrupt
enable
ADC
interrupt
status
ADC
interrupt
enable
FIFO status
TSC touch
Interrupt
status
AND
Interrupt
enable
AND
AND
20/56 Doc ID 15432 Rev 4
AM00752V2

STMPE610 Interrupt system
INT_CTRL Interrupt control register
76543 2 1 0
RESERVED INT_POLARITY INT_TYPE GLOBAL_INT
Address: 0x09
Type: R/W
Reset: 0x00
Description: The interrupt control register is used to enable the interruption from a system-related
interrupt source to the host.
[7:3] RESERVED
[2] INT_POLARITY: This bit sets the INT pin polarity
1: Active high/rising edge
0: Active low/falling edge
[1] INT_TYPE: This bit sets the type of interrupt signal required by the host
1: Edge interrupt
0: Level interrupt
[0] GLOBAL_INT: This is master enable for the interrupt system
1: Global interrupt
0: Stops all interrupts
INT_EN Interrupt enable register
76543 2 1 0
GPIO ADC RESERVED FIFO_EMPTY FIFO_FULL FIFO_0FLOW FIFO_TH TOUCH_DET
Address: 0x0A
Type: R/W
Reset: 0x00
Description: The interrupt enable register is used to enable the interruption from a system related
interrupt source to the host.
[7] GPIO: Any enabled GPIO interrupts
[6] ADC: Any enabled ADC interrupts
[5] RESERVED
[4] FIFO_EMPTY: FIFO is empty
[3] FIFO_FULL: FIFO is full
[2] FIFO_OFLOW: FIFO is overflowed
[1] FIFO_TH: FIFO is equal or above threshold value
[0] TOUCH_DET: Touch is detected
Doc ID 15432 Rev 4 21/56

Interrupt system STMPE610
INT_STA Interrupt status register
76543 2 1 0
GPIO ADC RESERVED FIFO_EMPTY FIFO_FULL FIFO_OFLOW FIFO_TH TOUCH_DET
Address: 0x0B
Type: R
Reset: 0x10
Description: The interrupt status register monitors the status of the interruption from a particular
interrupt source to the host. Regardless of whether the INT_EN bits are enabled, the
INT_STA bits are still updated. Writing '1' to this register clears the corresponding
bits. Writing '0' has no effect.
[7] GPIO: Any enabled GPIO interrupts
[6] ADC: Any enabled ADC interrupts
[5] RESERVED
[4] FIFO_EMPTY: FIFO is empty
[3] FIFO_FULL: FIFO is full
[2] FIFO_OFLOW: FIFO is overflowed
[1] FIFO_TH: FIFO is equal or above threshold value.
This bit is set when FIFO level equals to threshold value. It will only be asserted again if FIFO
level drops to < threshold value, and increased back to threshold value.
[0] TOUCH_DET: Touch is detected
22/56 Doc ID 15432 Rev 4

STMPE610 Interrupt system
GPIO_INT_EN GPIO interrupt enable register
76543 2 1 0
IEG[x]
Address: 0x0C
Type: R/W
Reset: 0x10
Description: The interrupt status register monitors the status of the interruption from a particular
interrupt source to the host. Regardless of whether the IER bits are enabled, the ISR
bits are still updated. Writing '1' to this register clears the corresponding bits. Writing
'0' has no effect.
[7:0] IEG[x]: Interrupt enable GPIO mask (where x = 7 to 0)
1: Writing ‘1’ to the IE[x] bit enables the interruption to the host
GPIO_INT_STA GPIO interrupt status register
76543 2 1 0
ISG[x]
Address: 0x0D
Type: R/W
Reset: 0x00
Description: The GPIO interrupt status register monitors the status of the interruption from a
particular GPIO pin interrupt source to the host. Regardless of whether or not the
GPIO_STA bits are enabled, the GPIO_STA bits are still updated. The ISG[7:0] bits
are the interrupt status bits corresponding to the GPIO[7:0] pins. Writing '1' to this
register clears the corresponding bits. Writing '0' has no effect.
[7:0] ISG[x]: GPIO interrupt status (where x = 7 to 0)
Read:
Interrupt status of the GPIO[x]. Reading the register will clear any bits that have been set to '1'
Write:
Writing to this register has no effect
Doc ID 15432 Rev 4 23/56

Analog-to-digital converter STMPE610
9 Analog-to-digital converter
An 8-input,12-bit analog-to-digital converter (ADC) is integrated in the STMPE610. The ADC
can be used as a generic analog-to-digital converter, or as a touchscreen controller capable
of controlling a 4-wire resistive touchscreen.
AddINT_EN
Table 13. ADC controller register summary table
Address Register name Size Description
0x20 ADC_CTRL1 8 ADC control
0x21 ADC_CTRL2 8 ADC control
0x22 ADCCapture 8 To initiate ADC data acquisition
0x30 ADC_DATA_CH0 8 ADC channel 0 (IN3/GPIO-3)
0x32 ADC_DATA_CH1 8 ADC channel 1 (IN2/GPIO-2)
0x38 ADC_DATA_CH4 8 ADC channel 4 (TSC)
0x3A ADC_DATA_CH5 8 ADC channel 5 (TSC)
0x3C ADC_DATA_CH6 8 ADC channel 6 (TSC)
0x3E ADC_DATA_CH7 8 ADC channel 7 (TSC)
24/56 Doc ID 15432 Rev 4

STMPE610 Analog-to-digital converter
ADC_CTRL1 ADC control 1
76543210
RESERVED SAMPLE_TIME2 SAMPLE_TIME1 SAMPLE_TIME0 MOD_12B RESERVED REF_SEL RESERVED
Address: 0x20
Type: R/W
Reset: 0x9C
Description: ADC control register
[7] RESERVED
[6:4] SAMPLE_TIMEn: ADC conversion time in number of clock
000: 36
001: 44
010: 56
011: 64
100: 80
101: 96
110: 124
111: Not valid
[3] MOD_12B: Selects 10 or 12-bit ADC operation
1: 12 bit ADC
0: 10 bit ADC
[2] RESERVED
[1] REF_SEL: Selects between internal or external reference for the ADC
1: External reference
0: Internal reference
[0] RESERVED
ADC_CTRL2 ADC control 2
76543 2 1 0
RESERVED ADC_FREQ_1 ADC_FREQ_0
Address: 0x21
Type: R/W
Reset: 0x01
Description: ADC control.
[7] RESERVED
[6] RESERVED
[5] RESERVED
[4] RESERVED
[3] RESERVED
[2] RESERVED
Doc ID 15432 Rev 4 25/56

Analog-to-digital converter STMPE610
[1:0] ADC_FREQ: Selects the clock speed of ADC
00: 1.625 MHz typ.
01: 3.25 MHz typ.
10: 6.5 MHz typ.
11: 6.5 MHz typ.
ADC_CAPT ADC channel data capture
76543 2 1 0
CH[7:0]
Address: 0x22
Type: R/W
Reset: 0xFF
Description:
To initiate ADC data acquisition
[7:0] CH[7:0]: ADC channel data capture
Write '1' to initiate data acquisition for the corresponding channel. Writing '0' has no effect.
Reads '1' if conversion is completed. Reads '0' if conversion is in progress.
ADC_DATA_CHn ADC channel data registers
11109876543 2 1 0
DATA[11:0]
Address: Add address
Type: R/W
Reset: 0x0000
Description:
ADC data register 0-7 (DATA_CHn=0 -7)
[11:0] DATA[11:0]: ADC channel data
If TSC is enabled, CH3-0 is used for TSC and all readings to these channels give 0x0000
The ADC in STMPE610 operates on an internal RC clock with a typical frequency of
6.5 MHz. The total conversion time in ADC mode depends on the "SampleTime" setting,
and the clock division field 'Freq'.
The following table shows the conversion time based on 6.5 MHz, 3.25 MHz and 1.625 MHz
clock.
26/56 Doc ID 15432 Rev 4

STMPE610 Analog-to-digital converter
Table 14. ADC conversion time
Sample time
setting
Conversion time
in ADC clock
6.5 MHz
(154 ns)
3.25 MHz
(308 ns)
1.625 MHz
000 36 5.5 µs (180 kHz) 11 µs (90 kHz) 22 µs (45 kHz)
001 44 6.8 µs (147 kHz) 13.6 µs (74 kHz) 27 µs (36 kHz)
010 56 8.6 µs (116 kHz) 17.2 µs (58 kHz) 34.4 µs (29 kHz)
011 64 9.9 µs (101 kHz) 19.8 µs (51 kHz) 39.6 µs (25 kHz)
100 80 12.3 µs (81.5 kHz) 24.6 µs (41 kHz) 49.2 µs (20 kHz)
101 96 14.8 µs (67.6 kHz) 28.8 µs (33 kHz) 59.2 µs (17 kHz)
110 124 19.1 µs (52.3 kHz) 38.2 µs (26 kHz) 56.4 µs (13 kHz)
(615 ns)
Doc ID 15432 Rev 4 27/56

Touchscreen controller STMPE610
10 Touchscreen controller
The STMPE610 is integrated with a hard-wired touchscreen controller for 4-wire resistive
type touchscreen. The touchscreen controller is able to operate completely autonomously,
and will interrupt the connected CPU only when a pre-defined event occurs.
Figure 9. Touchscreen controller block diagram
Movement
&
window tracking
FIFO
FIFO
&
interrupt control
10.1 Driver and switch control unit
The driver and switch control unit allows coordination of the ADC and the MUX/switch. With
the coordination of this unit, a stream of data is produced at a selected frequency.
The touchscreen drivers can be configured with 2 current ratings: 20 mA or 50 mA. In the
case where multiple touch-down on the screen is causing a short, the current from the driver
is limited to these values. Tolerance of these current setting is +/- 25%.
Movement tracking
The "Tracking Index" in the TSC_CTRL register specifies a value, which determines the
distance between the current touch position and the previous touch position. If the distance
is shorter than the tracking index, it is discarded.
10/12 bit
ADC
Driver
&
switch control
Switch
&
drivers
s
The tracking is calculated by summation of the horizontal and vertical movement. Movement
is only reported if:
(Current X - Previously Reported X) + (Current Y - Previously Reported Y) > Tracking Index
If pressure reporting is enabled (X/Y/Z), an increase in pressure will override the movement
tracking and report the new data set, even if X/Y is within the previous tracking index. This is
to ensure that a slow touch will not be discarded.
If pressure data is not used, select X/Y mode in touchscreen data acquisition. (Opmode field
in TSCControl register).
28/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller
Window tracking
The -WDW_X and WDW_Y registers allow to pre-set a sub-window in the touchscreen such
that any touch position that is outside the sub-window will be discarded.
Figure 10. Window tracking
Top right coordinates
Active window
Bottom left coordinates
FIFO
FIFO has a depth of 128 sectors. This is enough for 128 sets of touch data at maximum
resolution (2 x 12 bits). FIFO can be programmed to generate an interrupt when it is filled to
a pre-determined level.
Sampling
The STMPE610 touchscreen controller has an internal 180 kHz, 12-bit ADC able to execute
autonomous driving/sampling. Each "sample" consists of 4 ADC readings that provide the X
and Y locations, as well as the touch pressure.
Figure 11. Sampling
Drive X
ADC
takes X reading
Settling
period
Drive Y
Settling
period
ADC
takes Y reading
Doc ID 15432 Rev 4 29/56

Touchscreen controller STMPE610
Sampling time calculation
The equation for a complete sampling cycle is described below.
Figure 12. Sampling time calculation
-
-
Settling Time
Sampling X
Settling Time
Sampling Y
Settling Time
To uch Detect Delay
A complete sampling cycle
Sampling Z
To uch Detect Delay
Time taken for sampling;
- Touch Detect Delay x 2 + Settling Time x 3 + (AVE_CTRL x ADC_SAMPLE_TIME) x 3 for X/Y/Z mode
- Touch Detect Delay x 2 + Settling Time x 2 + (AVE_CTRL x ADC_SAMPLE_TIME) x 2 for X/Y mode
AM08681V3
Oversampling and averaging function
The STMPE610 touchscreen controller can be configured to oversample by 2/4/8 times and
provide the averaged value as final output. This feature helps to reduce the effect of
surrounding noise.
Table 15. Touchscreen controller register summary table
Address Register name Bit Type Function
0x40 TSC_CTRL 8 R/W 4-wire touchscreen controller setup
0x41 TSC_CFG 8 R/W TSC configuration register
0x42 WDW_TR_X 16 R/W Window setup for top right X
0x44 WDW_TR_Y 16 R/W Window setup for top right Y
0x46 WDW_TR_X 16 R/W Window setup for bottom left X
0x48 WDW_TR_Y 16 R/W Window setup for bottom left Y
0x4A FIFO_TH 8 R/W FIFO level to generate interrupt
0x4B FIFO_CTRL_STA 8 R/W Current status of FIFO
0x4C FIFO_SIZE 8 R Current filled level of FIFO
0x4D TSC_DATA_X 16 R Data port for TSC data access
0x4F TSC_DATA_Y 16 R Data port for TSC data access
30/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller
Table 15. Touchscreen controller register summary table
Address Register name Bit Type Function
0x51 TSC_DATA_Z 8 R Data port for TSC data access
0x52 TSC_DATA_XYZ 32 R Data port for TSC data access
0x56 TSC_FRACT_Z 8 R/W TSC_FRACT_Z
0x57 TSC_DATA 8 R TSC data access port
0x58 TSC_I_DRIVE 8 R/W TSC_I_DRIVE
0x59 TSC_SHIELD 8 R/W TSC_SHIELD
TSC_CTRL Touchscreen controller control register
76543 2 1 0
TSC_STA TRACK OP_MOD EN
Address: 0x40
Type: R/W
Reset: 0x90
Description: 4-wire touchscreen controller (TSC) setup.
[7] TSC_STA: TSC status
Reads '1' when touch is detected
Reads '0' when touch is not detected
Writing to this register has no effect
[6:4] TRACK: Tracking index
000: No window tracking
001: 4
010: 8
011: 16
100: 32
101: 64
110: 92
111: 127
[3:1] OP_MOD: TSC operating mode
000: X, Y, Z acquisition
001: X, Y only
010: X only
011: Y only
100: Z only
This field cannot be written on, when EN = 1
[0] EN: Enable TSC
Doc ID 15432 Rev 4 31/56

Touchscreen controller STMPE610
TSC_CFG Touchscreen controller configuration register
76543 2 1 0
AVE_CTRL_1 AVE_CTRL_0
TOUCH_DET
_DELAY_2
Address: 0x41
Type: R/W
Buffer:
Reset:
Description: Touchscreen controller configuration register.
[7:6] AVE_CTRL_1/0: Average control
00=1 sample
01=2 samples
10=4 samples
11=8 samples
[5:3] TOUCH_DET_DELAY_2/1/0: Touch detect delay
000 - 10 µs
001 - 50 µs
010 = 100 µs
011 = 500 µs
100=1ms
101=5ms
110 = 10 ms
111 = 50 ms
[2:0] SETTLING: Panel driver settling time
000 = 10 µs
001 = 100 µs
010 = 500 µs
011=1ms
100=5ms
101 = 10 ms
110 = 50 ms
111=100ms
1. For large panels (> 6”), a capacitor of 10 nF is recommended at the touchscreen terminals for noise filtering.
In this case, settling time of 1 ms or more is recommended.
TOUCH_DET
_DELAY_1
TOUCH_DET
_DELAY_0
(1)
SETTLING_2 SETTLING_1 SETTLING_0
32/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller
10.2 Touch detect delay
Touch Detect Delay is an additional method used to compensate for the time it takes for the
panel voltage to be pulled high during a non-touch condition.
For example, the way it works to detect a touch:
X+ is pulled high and Y+ is driven low. After Touch Detect Delay is expired the level of X+ is
read. If no touch, X+ is high. If there is a touch, X+ is low.
If the initial voltage of X+ is low before being pulled high by the internal resistor, especially if
a filtering capacitor is connected, this time needs to be compensated. The Touch Delay
setting provides time for the voltage to be pulled high in a non-touch condition and avoids a
false report of a touch condition.
Normally the Touch Detect Delay needs to be long enough to allow the voltage to rise to V+
in a non-touch condition and this will depend on the presence of external filtering capacitors.
For more details on recommendation of Touch Detect delay register setting, refer to
STMPE811 Application Note (AN2825 ST document).
Doc ID 15432 Rev 4 33/56

Touchscreen controller STMPE610
WDW_TR_X Window setup for top right X
7 6543 2 1 0
TR_X [11:0]
Address: 0x42
Type: R/W
Reset: 0x0FFF
Description:
Window setup for top right X coordinates
[11:0] TR_X: bit 11:0 of top right X coordinates
WDW_TR_Y Window setup for top right Y
7 6543 2 1 0
TR_Y [11:0]
Address: 0x44
Type: R/W
Reset: 0x0FFF
Description:
Window setup for top right Y coordinates
[11:0] TR_X: bit 11:0 of top right Y coordinates
WDW_BL_X Window setup for bottom left X
7 6543 2 1 0
BL_X [11:0]
Address: 0x46
Type: R/W
Reset: 0x0000
Description:
Window setup for bottom left X coordinates
[11:0] BL_X: bit 11:0 of bottom left X coordinates
WDW_BL_Y Window setup for bottom left Y
7 6543 2 1 0
BL_Y [11:0]
Address: 0x48
Type: R/W
Reset: 0x0000
Description:
34/56 Doc ID 15432 Rev 4
Window setup for bottom left Y coordinates
[11:0] BL_X: bit 11:0 of bottom left Y coordinates

STMPE610 Touchscreen controller
FIFO_TH FIFO threshold
76543 2 1 0
FIFO_TH
Address: 0x4A
Type: R/W
Reset: 0x00
Description:
Triggers an interrupt upon reaching or exceeding the threshold value. This field must not be set
as zero.
[7:0] FIFO_TH: Touchscreen controller FIFO threshold
FIFO_CTRL_STA FIFO threshold
765432 1 0
FIFO_OFLOW FIFO_FULL FIFO_EMPTY FIFO_TH_TRIG RESERVED FIFO_RESET
Address: 0x4B
Type: R/W
Reset: 0x20
Description:
Current status of FIFO..
[7] FIFO_OFLOW:
Reads 1 if FIFO is overflow
[6] FIFO_FULL:
Reads 1 if FIFO is full
[5] FIFO_EMPTY:
Reads 1 if FIFO is empty
[4] FIFO_TH_TRIG:
0 = Current FIFO size is still below the threshold value
1 = Current FIFO size is at or beyond the threshold value
[3:1] RESERVED
[0] FIFO_RESET:
Write '0' : FIFO put out of reset mode
Write '1' : Resets FIFO. All data in FIFO will be cleared.
When TSC is enabled, FIFO resets automatically.
Doc ID 15432 Rev 4 35/56

Touchscreen controller STMPE610
FIFO_SIZE FIFO size
76543 2 1 0
RESERVED FIFO_SIZE
Address: 0x4C
Type: R
Reset: 0x00
Description: Current number of samples available
[7:0] FIFO_SIZE: Number of samples available
TSC_DATA_X TSC_DATA_X
11109876543 2 1 0
DATAY[11:0]
Address: 0x4D
Type: R
Reset: 0x0000
Description: Bit 11:0 of Y dataTSC_DATA_Y
[11:0] DATAY[11:0]: Bit 11:0 of Y data
TSC_DATA_Y
11109876543 2 1 0
DATAY[11:0]
Address: 0x4F
Type: R
Reset: 0x0000
Description: Bit 11:0 of Y data
[11:0] DATAY[11:0]: bit 11:0 of Y data
TSC_DATA_Z TSC_DATA_Z
76543 2 1 0
DATAZ[7:0]
Address: 0x51
Type: R
Reset: 0x0000
Description: Bit 7:0 of Z data
[7:0] DATAZ[7:0]: bit 7:0 of Z data
36/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller
TSC_DATA Touchscreen controller DATA
76543 2 1 0
DATA
Address: 0x57 (auto-increment), 0xD7 (non-auto-increment)
Type: R
Reset: 0x00
Description: Data port for TSC data access
[11:0] DATA: data bytes from TSC FIFO
The data format from the TSC_DATA register depends on the setting of "OpMode" field in
TSC_CTRL register. The samples acquired are accessed in "packed samples". The size of
each "packed sample" depends on which mode the touchscreen controller is operating in.
The TSC_DATA register can be accessed in 2 modes:
● Autoincrement
● Non autoincrement
To access the 128-sets buffer, the non autoincrement mode should be used.
Table 16. Touchscreen controller DATA register
TSC_CTRL in
operation
mode
000 4 [11:4] of X
001 3 [11:4] of X
010 2 [11:4] of X [3:0] of X - -
011 2 [11:4] of Y [3:0] of Y - -
100 1 [7:0] of Z - - -
Number of
bytes to read
from
TSC_DATA
Byte0 Byte1 Byte2 Byte3
[3:0] of X
[11:8] of Y
[3:0] of X
[11:8] of Y
[7:0] of Y [7:0] of Z
[7:0] of Y -
Doc ID 15432 Rev 4 37/56

Touchscreen controller STMPE610
TSC_FRACTION_Z Touchscreen controller FRACTION_Z
76543 2 1 0
RESERVED FRACTION_Z
Address: 0x56
Type: R
Reset: 0x00
Description: This register allows to select the range and accuracy of the pressure measurement
[7:3] RESERVED
[2:0] FRACTION_Z:
000: Fractional part is 0, whole part is 8
001: Fractional part is 1, whole part is 7
010: Fractional part is 2, whole part is 6
011: Fractional part is 3, whole part is 5
100: Fractional part is 4, whole part is 4
101: Fractional part is 5, whole part is 3
110: Fractional part is 6, whole part is 2
111: Fractional part is 7, whole part is 1
TSC_I_DRIVE Touchscreen controller drive I
76543 2 1 0
RESERVED DRIVE
Address: 0x58
Type: R/W
Reset: 0x00
Description: This register sets the current limit value of the touchscreen drivers
[7:1] RESERVED
[0] DRIVE: maximum current on the touchscreen controller (TSC) driving channel
0: 20 mA typical, 35 mA max
1: 50 mA typical, 80 mA max
38/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller
TSC_SHIELD Touchscreen controller shield
76543 2 1 0
RESERVED X+ X- Y+ Y-
Address: 0x59
Type: R
Reset: 0x00
Description: Writing each bit would ground the corresponding touchscreen wire
[7:4] RESERVED
[3:0] SHIELD[3:0]:
Write 1 to GND X+, X-, Y+, Y- lines
Doc ID 15432 Rev 4 39/56

Touchscreen controller programming sequence STMPE610
11 Touchscreen controller programming sequence
The following are the steps to configure the touchscreen controller (TSC):
a) Disable the clock gating for the touchscreen controller and ADC in the SYS_CFG2
register.
b) Configure the touchscreen operating mode and the window tracking index.
c) A touch detection status may also be enabled through enabling the corresponding
interrupt flag. With this interrupt, the user is informed through an interrupt when
the touch is detected as well as lifted.
d) Configure the TSC_CFG register to specify the “panel voltage settling time”, touch
detection delays and the averaging method used.
e) A windowing feature may also be enabled through TSCWdwTRX, TSCWdwTRY,
TSCWdwBLX and TSCWdwBLY registers. By default, the windowing covers the
entire touch panel.
f) Configure the TSC_FIFO_TH register to specify the threshold value to cause an
interrupt. The corresponding interrupt bit in the interrupt module must also be
enabled. This interrupt bit should be masked off during data fetching from the
FIFO in order to prevent an unnecessary trigger of this interrupt. Upon completion
of the data fetching, this bit can be re-enabled
g) By default, the FIFO_RESET bit in the TSC_FIFO_CTRL_STA register holds the
FIFO in Reset mode. Upon enabling the touchscreen controller (through the EN
bit in TSC_CTRL), this FIFO reset is automatically deasserted. The FIFO status
may be observed from the TSC_FIFO_CTRL_STA register or alternatively through
the interrupt.
h) Once the data is filled beyond the FIFO threshold value, an interrupt is triggered
(assuming the corresponding interrupt is being enabled). The user is required to
continuously read out the data set until the current FIFO size is below the
threshold, then, the user may clear the interrupt flag. As long as the current FIFO
size exceeds the threshold value, an interrupt from the touchscreen controller is
sent to the interrupt module. Therefore, even if the interrupt flag is cleared, the
interrupt flag will automatically be asserted, as long as the FIFO size exceeds the
threshold value.
i) The current FIFO size can be obtained from the TSC_FIFO_Sz register. This
information may assists the user in how many data sets are to be read out from
the FIFO, if the user intends to read all in one shot. The user may also read a data
set by a data set.
j) The TSC_DATA_X register holds the X-coordinates. This register can be used in
all touchscreen operating modes.
k) The TSC_DATA_Y register holds the Y-coordinates. TSC_DATA_Y register holds
the Y-coordinates.
l) The TSC_DATA_Z register holds the Z value. TSC_DATA_Z register holds the Z-
coordinates.
m) The TSCDATA_XYZ register holds the X, Y and Z values. These values are
packed into 4 bytes. This register can only be used when the touchscreen
operating mode is 000 and 001. This register is to facilitate less byte read.
n) For the TSC_FRACT_Z register, the user may configure it based on the
touchscreen panel resistance. This allows the user to specify the resolution of the
40/56 Doc ID 15432 Rev 4

STMPE610 Touchscreen controller programming sequence
Z value. With the Z value obtained from the register, the user simply needs to
multiply the Z value with the touchscreen panel resistance to obtain the touch
resistance.
o) The TSC_DATA register allows facilitation of another reading format with minimum
2
I
C transaction overhead by using the non autoincrement mode (or equivalent
mode in SPI). The data format is the same as TSC_DATA_XYZ, with the
exception that all the data fetched are from the same address.
p) Enable the EN bit of the TSC_CTRL register to start the touch detection and data
acquisition.
q) During the auto-hibernate mode, a touch detection can cause a wake-up to the
device only when the TSC is enabled and the touch detect status interrupt mask is
enabled.
r) In order to prevent confusion, it is recommended that the user not mix the data
fetching format (TSC_DATA_X, TSC_DATA_Y, TSC_DATA_Z, TSC_DATA_XYZ
and TSC_DATA) between one reading and the next.
s) It is also recommended that the user should perform a FIFO reset and TSC
disabling when the ADC or TSC setting are reconfigured.
Doc ID 15432 Rev 4 41/56

GPIO controller STMPE610
12 GPIO controller
A total of 6 GPIOs are available in the STMPE610 port expander device. Most of the GPIOs
share physical pins with some alternate functions. The GPIO controller contains the
registers that allow the host system to configure each of the pins into either a GPIO, or one
of the alternate functions. Unused GPIOs should be configured as outputs to minimize
power consumption.
A group of registers are used to control the exact function of each of the 6 GPIOs. The
registers and their respective addresses are listed in the following table.
Table 17. GPIO control registers
Address Register name
0x10 GPIO_SET_PIN 8 Set pin register
0x11 GPIO_CLR_PIN 8 Clear pin state
0x12 GPIO_MP_STA 8 Monitor pin state
0x13 GPIO_DIR 8 Set pin direction
0x14 GPIO_ED 8 Edge detect status
0x15 GPIO_RE 8
0x16 GPIO_FE 8
0x17 GPIO_ALT_FUNCT 8 Alternate function register
Size
(bit)
Function
Rising edge detection
enable
Falling edge detection
enable
All GPIO registers are named as GPIO-x, where x represents the functional group.
76543 2 1 0
GPIO-7 GPIO-6 GPIO-5 GPIO-4 GPIO-3 GPIO-2 RESERVED RESERVED
GPIO_SET_PIN GPIO set pin register
Address: 0x10
Type: R/W
Reset: 0x00
Description: GPIO set pin register.
Writing 1 to this bit causes the corresponding GPIO to go to 1 state.
Writing 0 has no effect.
42/56 Doc ID 15432 Rev 4

STMPE610 GPIO controller
GPIO_CLR_PIN Clear pin state register
Address: 0x11
Type: R/W
Reset: 0x00
Description: GPIO clear pin state register.
Writing ‘1’ to this bit causes the corresponding GPIO to go to 0 state.
Writing ‘0’ has no effect.
GPIO_MP_STA GPIO monitor pin state register
Address: 0x12
Type: R/W
Reset: 0x00
Description: GPIO monitor pin state.
Reading this bit yields the current state of the bit. Writing has no effect.
GPIO_DIR GPIO set pin direction
Address: 0x13
Type: R/W
Reset: 0x00
Description: GPIO set pin direction register.
Writing ‘0’ sets the corresponding GPIO to input state, and ‘1’ sets it to output state.
All bits are ‘0’ on reset.
GPIO_ED_STA GPIO edge detect status
Address: 0x14
Type: R/W
Reset: 0x00
Description: GPIO edge detect status register. An edge transition has been detected.
Doc ID 15432 Rev 4 43/56

GPIO controller STMPE610
GPIO_RE Rising edge register
Address: 0x15
Type: R/W
Reset: 0x00
Description: GPIO rising edge detection enable register.
Setting this bit to ‘1’ would enable the detection of the rising edge transition.
The detection would be reflected in the GPIO edge detect status register.
GPIO_FE Falling edge detection enable register
Address: 0x16
Type: R/W
Reset: 0x00
Description: Setting this bit to ‘1’ would enable the detection of the falling edge transition.
The detection would be reflected in the GPIO edge detect status register.
GPIO_ALT_FUNCT Alternate function register
Address: 0x17
Type: R/W
Reset: 0x0F
Description: Alternate function register. "‘0’ sets the corresponding pin to function as
touchscreen/ADC, and ‘1’ sets it into GPIO mode.
On power-up reset, all GPIOs are set as input.
Power supply
The STMPE610 GPIO operates from a separate supply pin (VIO). This dedicated supply pin
provides a level-shifting feature to the STMPE610. The GPIO remains valid until V
removed.
The host system may choose to turn off V
not allowed to turn off supply to V
, while keeping the Vcc supplied.
IO
The touchscreen is always powered by V
supply while keeping VIO supplied. However it is
cc
. For better resolution and noise immunity, VIO
IO
above 2.8 V is advised.
IO
is
12.0.1 Power-up reset (POR)
The STMPE610 is equipped with an internal POR circuit that holds the device in reset state,
until the V
44/56 Doc ID 15432 Rev 4
supply input is valid. The internal POR is tied to the VIO supply pin.
IO

STMPE610 Maximum rating
13 Maximum rating
Stressing the device above the ratings listed in the “Absolute maximum ratings” table may
cause permanent damage to the device. These are stress ratings only, and operation of the
device at these or any other conditions above those indicated in the operating sections of
this specification is not implied. Exposure to absolute maximum rating conditions for
extended periods may affect device reliability.
Table 18. Absolute maximum ratings
Symbol Parameter Value Unit
V
V
ESD ESD protection on each GPIO pin (air discharge) 4 kV
T
Supply voltage 4.5 V
CC
GPIO supply voltage 4.5 V
IO
T Operating temperature -40 - 85 °C/W
Storage temperature -65 - 155 °C/W
STG
T
Thermal resistance junction-ambient 96 °C/W
J
13.1 Recommended operating conditions
Table 19. Power consumption
Symbol Parameter Test condition
Vcc I/O supply voltage
V
IO
I
CC-active
I
IO-active
I
IO-active
Core supply voltage 1.65
Core supply current
I/O supply current
I/O supply current
Vio >= Vcc
Touchscreen
controller at 100 Hz
sampling
=1.8− 3.3 V
V
CC
Touchscreen
controller at 100 Hz
sampling
=1.8V
V
IO
Touchscreen
controller at 100 Hz
sampling
VIO=3.3V
Val ue
Min Typ Max
1.65
−
−
−
−
−
0.5 1.0 uA
0.8 1.2 mA
2.0 2.8 mA
3.6 V
3.6 V
Unit
I
CC-
hibernate
Core supply current
Hibernate state, no
I2C/SPI activity
VCC=1.8V
Doc ID 15432 Rev 4 45/56
−
0.5 1 uA

Maximum rating STMPE610
Table 19. Power consumption (continued)
Val ue
Symbol Parameter Test condition
Hibernate state, no
I2C/SPI activity
=1.8− 3.3 V
V
I
IO-
hibernate
I/O supply current
IO
Hibernate state, no
I2C/SPI activity
=3.3V
V
IO
Min Typ Max
−
−
0.5 1 µA
1.0 3.0 µA
Unit
46/56 Doc ID 15432 Rev 4

STMPE610 Electrical specifications
14 Electrical specifications
Table 20. DC electrical characteristics (-40 ° C to 85 ° C, all GPIOs comply to JEDEC
standard JESD-8-7)
Val ue
Symbol Parameter Test condition
Min Typ Max
Unit
V
V
V
V
V
(I2C/SPI)
V
(I2C/SPI)
Input voltage low state VIO=1.8 − 3.3 V -0.3 V
IL
Input voltage high state VIO=1.8 − 3.3 V 0.80 V
IH
V
Output voltage low state
OL
Output voltage high
OH
state
OL
Output voltage low state
Output voltage high
OH
state
= 1.8 V,
IO
IOL= 4 mA
= 3.3 V,
V
IO
IOL= 8 mA
V
= 1.8 V,
CC
= 4 mA
I
OL
VCC = 3.3 V,
= 8 mA
I
OL
0.85 V
0.85 V
Table 21. AC electrical characteristics (-40 ° C to 85 ° C)
Symbol Parameter Test condition
CLKI2C
CLKSPI
I2C maximum SCLK VCC= 1.8 - 3.3 V 400
max
=1.8V 800
V
SPI maximum clock
max
CC
= 3.3 V 1000
V
CC
0.20 V
−
VIO+0.3V V
−
IO
-0.3 V
IO
-0.3 V
CC
0.15 V
−
−−
0.15 V
−
VCC+0.3V V
−
Val ue
Min Typ Max
−−
−−
−−
IO
IO
CC
V
V
V
V
Unit
kHz
kHz
kHz
Doc ID 15432 Rev 4 47/56

Electrical specifications STMPE610
Table 22. ADC specification (-40 ° C to 85 ° C)
Val ue
Parameter Test condition
Min Typ Max
Unit
Full-scale input span 0
Absolute input range
Input capacitance
Leakage current
Resolution
No missing codes 11
Integral linearity error
Offset error
Gain error
Noise Including internal V
Power supply rejection ratio
Throughput rate
ref
Table 23. Switch drivers specification
Parameter Test condition
−
−−
−
−
−
25
0.1
12
V
ref
VCC+0.2 V
−
−
−
−
−
−
−
−
−
−
Min Typ Max
±4 ±6bits
±5 ±7LSB
±14 ±18 LSB
70
50
180
Val ue
−
−
−
V
pF
µA
bits
bits
µVrms
dB
ksps
Unit
ON resistance X+, Y+
ON resistance X-, Y-
Drive current Duration 100 ms
Table 24. Voltage reference specification
Parameter Test condition
Internal reference voltage 2.45 2.50 2.55 V
Internal reference drift
Internal reference ON
Output impedance
Internal reference OFF
48/56 Doc ID 15432 Rev 4
−
−
−−
Min Typ Max
−
−
−
5.5
7.3
Val u e
25
300
1
−
−
50 mA
−
−
−
Ω
Ω
Unit
Ppm/C
Ω
GΩ

STMPE610 Package mechanical data
15 Package mechanical data
In order to meet environmental requirements, ST offers these devices in different grades of
ECOPACK
specifications, grade definitions and product status are available at: www.st.com.
ECOPACK
®
packages, depending on their level of environmental compliance. ECOPACK®
®
is an ST trademark.
Figure 13. Package outline for QFN16 (3 x 3 x 1 mm) - 0.50 mm pitch
1. Drawing not to scale.
7185330_F
Doc ID 15432 Rev 4 49/56

Package mechanical data STMPE610
Table 25. Package mechanical data for QFN16 (3x3x 1 mm) - 0.50 mm pitch
Symbol
Min Typ Max
A 0.800.901.00
A1
−
Millimeters
0.02 0.05
A3
b 0.180.250.30
D
D2 1.55 1.70 1.80
E
E2 1.55 1.70 1.80
e
K
L 0.300.400.50
r0.09
Figure 14. Recommended footprint for QFN16 (3 x 3 x 1 mm) - 0.50 mm pitch
−
−
−
−
−
0.20
3.00
3.00
0.50
0.20
−
−
−
−
−
−−
50/56 Doc ID 15432 Rev 4

STMPE610 Package mechanical data
Table 26. Footprint dimensions
Millimeters
Symbol
Min Typ Max
A
B
C
D
E
F
G
−
−
−
−
−
−
−
3.8
3.8
0.5
0.3
0.8
1.5
0.35
−
−
−
−
−
−
−
Doc ID 15432 Rev 4 51/56

Package mechanical data STMPE610
Figure 15. Carrier tape for QFN16 (3 x 3 x 1 mm) - 0.50 mm pitch
52/56 Doc ID 15432 Rev 4
7875978

STMPE610 Package mechanical data
Figure 16. Reel information for QFN16 (3 x 3 x 1 mm) - 0.50 mm pitch
7875978_14
Doc ID 15432 Rev 4 53/56

Package mechanical data STMPE610
Figure 17. Marking specifications
54/56 Doc ID 15432 Rev 4

STMPE610 Revision history
16 Revision history
Table 27. Document revision history
Date Revision Changes
07-Apr-2009 1 Initial release.
Removed “Temperature sensor” from Section 1, Figure 1 and
23-Sep-2009 2
12-Mar-2010 3 Updated: Title of the document and ESD value in Ta bl e 1 8 .
09-Sep-2011 4
Figure 8.
Updated: In the SYS_CTRL2 register, the 3rd bit is reserved.
Added new section: Section 10.2: Touch detect delay
Updated V
parameter description: Ta b le 1 9
CC
Doc ID 15432 Rev 4 55/56

STMPE610
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2011 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
56/56 Doc ID 15432 Rev 4
 Loading...
Loading...